Ri a8
26
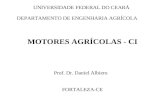
1 CEFET-RN / Curso Superior de Tecnologia em Automação Industrial / Redes Industriais –Aula 08 Arquitetura do Foundation FieldBus H1 – Baixa Velocidade H2 – Alta Velocidade HSE – High Speed Ethernet 1. Enquanto o Profibus PA tem uma forte penetração no mercado europeu, os mercados americano e asiático tendem a adotar o Foundation Fieldbus (FF) como solução para barramentos de processo. 2. A tecnologia do FF substitui a fiação tradicional de 4 a 20mA como método de transmissão de dados entre instrumentos e controladores, mantendo as suas características positivas como alimentação e comunicação na mesma fiação e possibilidade de uso em áreas classificadas. 3. A tecnologia do FF é fruto do trabalho da Fieldbus Foundation, criada em 1994, a partir da fusão das organizações concorrentes WordlFIP e ISP. O FF faz parte da padronização definida pela IEC 61158-2 4. A idéia básica é disponibilizar um padrão internacional de barramento de campo para uso em instrumentos de processo em áreas classificadas. 5. Inicialmente foram especificados três tipos de barramento: • H1: Para instrumentos de processo em áreas classificadas • H2: Interligação de instrumentos em geral • HSE: Interligação dos barramentos H1 via Linking Devices
-
Upload
redesinforma -
Category
Education
-
view
1.879 -
download
6
description
Transcript of Ri a8

1
CEFET-RN / Curso Superior de Tecnologia em Automação Industrial / Redes Industriais – Aula 08
Arquitetura do Foundation FieldBus
H1 – Baixa Velocidade H2 – Alta VelocidadeHSE – High Speed Ethernet
1. Enquanto o Profibus PA tem uma forte penetração no mercado europeu, os mercados americano e asiático tendem a adotar o Foundation Fieldbus (FF) como solução para barramentos de processo.
2. A tecnologia do FF substitui a fiação tradicional de 4 a 20mA como método de transmissão de dados entre instrumentos e controladores, mantendo as suas características positivas como alimentação e comunicação na mesma fiação e possibilidade de uso em áreas classificadas.
3. A tecnologia do FF é fruto do trabalho da Fieldbus Foundation, criada em 1994, a partir da fusão das organizações concorrentes WordlFIP e ISP. O FF faz parte da padronização definida pela IEC 61158-2
4. A idéia básica é disponibilizar um padrão internacional de barramento de campo para uso em instrumentos de processo em áreas classificadas.
5. Inicialmente foram especificados três tipos de barramento:
• H1: Para instrumentos de processo em áreas classificadas
• H2: Interligação de instrumentos em geral
• HSE: Interligação dos barramentos H1 via Linking Devices

2
CEFET-RN / Curso Superior de Tecnologia em Automação Industrial / Redes Industriais – Aula 08
Proposta do Foundation FieldBus
Ser uma solução para aplicações em controle de processos e não só um meio de transmissão de dados digitais.
Interconexão de instrumentos de campo, como sensores, atuadores e controladores, na automação de processos e de manufaturas.
Intrinsecamente seguro.
Distribuição das ações de controle entre os instrumentos através dos blocos de função.
1. Esta tecnologia geralmente é usada em novos sistemas de automação ou ampliação de sistemas existentes, visando uma redução dos custos de instalação, redução dos tempos de implantação e aumento da confiabilidade, com incremento de novas funcionalidades nos instrumentos.
2. Além da comunicação entre os instrumentos o FF permite distribuir as ações de controle entres estes, eliminando a necessidade de controladores para o processo.
3. O FF tira vantagem da emergente inteligência dos dispositivos de campo e modernas tecnologias de comunicação digital permitindo aos usuários usufruírem de:
• Redução de fiação pelo seu compartilhamento entre vários dispositivos;
• Comunicação de múltiplas variáveis de processo de um único instrumento;
• Diagnósticos avançados;• Interoperabilidade entre dispositivos de diferentes fornecedores;• Implementação de técnicas de controle avançado no campo;• Redução do tempo de partida de uma planta;• Integração mais simples;• Maior integridade dos dados e confiabilidade devido a ausência
de erros de conversão D/A e A/D e verificação de erros de transmissão.

3
CEFET-RN / Curso Superior de Tecnologia em Automação Industrial / Redes Industriais – Aula 08
Foundation Fieldbus e o Modelo OSI
1. As especificações do protocolo FF podem ser divididas em três camadas: física, comunicação e aplicações do usuário.
2. Na camada de comunicação, que pode ser comparada a camada 2 e 7 do modelo OSI estão as especificações da:
• FMS: Fieldbus Message Specification
• FAS: Fieldbus Access Sublayer
• DATA LINK LAYER: Camada de enlace de dados
3. A camada de aplicação do usuário está no topo da camada sete e émuitas vezes chamada de camada “oito” do modelo OSI, apesar de formalmente não ser incluída neste modelo. Esta camada estabelece uma interface entre o software de aplicação e os dispositivos de campo.

4
CEFET-RN / Curso Superior de Tecnologia em Automação Industrial / Redes Industriais – Aula 08
Estrutura do Telegrama F.F.
Cada camada é responsável por uma quantidade de bytes enviados.
1. Os dados que trafegam no barramento podem ser desdobrados em várias partes, originados em cada camada do protocolo.
2. As aplicações do usuário são definidas através de blocos de função e descrição de dispositivos (device description). Dependendo de que blocos são implementados em um dispositivo, o usuário tem acesso a vários serviços.

5
CEFET-RN / Curso Superior de Tecnologia em Automação Industrial / Redes Industriais – Aula 08
Camada Física no Foundation Fieldbus
Tipos de BarramentoH1 – Baixa Velocidade
31,25 kb/s, 1900m, 32 nós*
H2 – Alta Velocidade1/2,5 Mb/s, 750/500m, 127 nós*
HSE – High SpeedEthernet
100 Mb/s, uso de Linking Devices
Codificação Manchester (Síncrona)
Preâmbulos e caracteres delimitadores
Meio FísicoPar trançado com/semblindagemFibra ótica (HSE)Rádio (em desenvolvimento)
Topologia FísicaBarramento com Spurs ou Estrela(H1)
1. O barramento H1 segue as especificações da norma IEC 61158-2 e ISA S50.02.
2. O comprimento máximo de 1900 metros deve incluir as derivações “spurs”. Com até 4 repetidores é possível alcançar 9500m usando cabo par trançado com blindagem.
3. O uso de multicabos ou cabos sem blindagem diminuem a distâncias permitidas.
4. São necessários terminadores de rede. Os terminadores são circuitos RC com um resistor de 100 ohms 1/4W um capacitor dimensionado para passar o sinal de 31,25kHz.
5. O barramento H1 pode suportar:
• 2 a 32 dispositivos que não são alimentados pelo barramento ou
• 2 a 12 dispositivos alimentados pelo barramento ou
• 2 a 6 dispositivos alimentados pelo barramento em uma área intrinsecamente segura.
6. O barramento H2 não chegou a ser implementado como inicialmente pensado, sendo substituído pelo barramento HSE.
7. O barramento HSE, em 100 Mbps, faz uso de “linking devices” para comunicar se com um barramento H1 em 31,25 kbps.

6
CEFET-RN / Curso Superior de Tecnologia em Automação Industrial / Redes Industriais – Aula 08
Codificação no Foundation Fieldbus
1. A comunicação é serial, síncrona, half-duplex, com codificação manchester.
2. É usado o esquema de codificação Manchester bifásico com quatros estados de codificação: 0, 1, N+ e N-.
3. São usados preâmbulos e dados delimitadores para sinalizar o inicio e fim de uma transmissão e sincronizar o clock dos dispositivos.
4. Os estados “N+” e “N-” são usados nas seqüências delimitadoras de início e fim de quadro.

7
CEFET-RN / Curso Superior de Tecnologia em Automação Industrial / Redes Industriais – Aula 08
Sinalização no Foundation Fieldbus H1
1. Na linha sempre há uma tensão entre 9 e 32 volts usada para a alimentação dos instrumentos.
2. O sinal de dados é uma tensão de 1,0 volts modulada sobre a tensão de alimentação.
3. O dispositivo transmissor gera esta modulação de tensão variando a sua corrente entre 15 e 20mA medidos pico a pico.
4. A fiação deve ser isolada, sem aterramento, sendo opcional o aterramento do ponto central de um dos terminadores.

8
CEFET-RN / Curso Superior de Tecnologia em Automação Industrial / Redes Industriais – Aula 08
FF com Topologia Física em Barramento
1. A figura mostra uma rede FF em topologia barramento com spurs, com detalhes das derivações e terminações com o cabo par trançado.
2. A fonte de alimentação é especial, pois deve ter sua impedância de saída casada com a impedância do meio de transmissão.
3. Fontes comuns devem ser condicionadas instalando-se indutores em série. Sem este condicionamento os dispositivos não transmitirão seus dados devido a baixa impedância da fonte.
4. Estima-se que 70% de tempos de não funcionamento de barramentos de campo devem-se a problemas físicos. Estes problemas são agravados em redes como o FF, na qual a rede também é responsável pela alimentação elétrica dos dispositivos.

9
CEFET-RN / Curso Superior de Tecnologia em Automação Industrial / Redes Industriais – Aula 08
FF com Topologia Física em Estrela
1. A topologia em árvore é bastante comum quando substituímos um sistema que usava a tecnologia 4-20mA. Trata-se de uma mistura entre barramento e estrela.
2. As ligações são concentradas em um dispositivo passivo, chamado de caixa de junção, de onde parte a ligação para o computador utilizado para configuração e supervisão do sistema.
3. Chama-se a atenção para a localização dos terminadores. Os spurs, devido ao curto comprimento não necessitam de terminações.

10
CEFET-RN / Curso Superior de Tecnologia em Automação Industrial / Redes Industriais – Aula 08
Camada de Comunicação do FF
Camada de enlace de dados (DLL)Controla o acesso ao meio via um programador determinístico para o barramento chamado de LAS (Link Active Scheduler).
Tipos de DispositivosBásicos (Basic Device)
Não podem vir a ser o LAS
Mestre (Link Master)Podem tornar-se o LAS
Pontes (Bridges)Interconectam diferentes barramentos.
1. A camada de comunicação do FF corresponde as camadas dois e sete do modelo OSI
2. O barramento fieldbus não tem um mestre, mas um dispositivo responsável pelo controle de comunicação do barramento chamado de LAS.
3. O LAS é responsável por habilitar os dispositivos a enviarem seus dados de maneira ordenada.
4. Para o envio de dados ciclicamente, o LAS envia um comando, chamado CD, a cada elemento da rede, permitindo a publicação de seus dados.
5. Nenhum dispositivo pode acessar a rede sem a permissão do LAS.
6. O modelo produtor-consumidor é utilizado, pois os dados enviados por um dispositivo (publisher) podem ser usados por todos os demais (consumidor).

11
CEFET-RN / Curso Superior de Tecnologia em Automação Industrial / Redes Industriais – Aula 08
Camada de Comunicação do FF
Comunicação ProgramadaO LAS possui os tempos em que devem ser transmitidos ciclicamente os dados dos dispositivos.
Emite para o dispositivo uma mensagem de compilação de dados (Compel Data). Ao receber o CD o dispositivo envia o dado a todos os demais dispositivos.
Aqueles configurados para receber o dado são chamados de “subscriber”.
Modelo Produtor-Consumidor
1. Há dois tipos de comunicação implementadas: Programada e não programada. Esta denominação refere-se a periodicidade da comunicação.
2. As mensagens programadas ou cíclicas ou periódicas são usadas para informação que necessitem de atualização regular e periódica entre os dispositivos como variáveis de processo e controle.
3. A técnica usada para transferência de informação no barramento é conhecido como modelo produtor-sonsumidor.
4. Baseado na programação predefinida pelo usuário, o LAS garante apermissão para cada dispositivo por vez ao barramento.
5. Uma vez que o dispositivo recebe a permissão para acessar o barramento, ele “publica” sua informação.
6. Todos os outros dispositivos podem, então, escutar a informação publicada e gravá-la na sua memória, tornando-se um consumidor ou assinante, se ele necessitar dessa informação para o seu uso.
7. Dispositivos que não necessitam dessa informação simplesmente ignoram a informação “publicada”.

12
CEFET-RN / Curso Superior de Tecnologia em Automação Industrial / Redes Industriais – Aula 08
Comunicação Programada no FF
LAS
abc
Dado a
Dado a
Dado a
CD(a)
FieldBus
Mensagem
Publisher Subscriber Subscriber

13
CEFET-RN / Curso Superior de Tecnologia em Automação Industrial / Redes Industriais – Aula 08
Camada de Comunicação do FF
Comunicação Não ProgramadaTodos os dispositivos tem uma chance de enviar mensagens não programadas entre as mensagens programadas.
O LAS emite uma mensagem de permissão (Pass Token) a todos os dispositivos.
Com a posse do PT um dispositivo pode enviar mensagens a qualquer outro dispositivo ou a toda a rede.
1. Os dispositivos também podem enviar dados de outra forma. O LAS envia, entre as comunicações programadas, uma permissão para envio de dados extras, de uma forma não cíclica.
2. Os dados podem ter como destino um elemento da rede específico ou todos eles.

14
CEFET-RN / Curso Superior de Tecnologia em Automação Industrial / Redes Industriais – Aula 08
Comunicação Não Programada no FF
LAS
xyz
Dado Dado
PT(x)
FieldBus
Mensagem
Dispositivo X
Dispositivo Y
1. O LAS envia a permissão PT para cada dispositivo por vez ao barramento entre os intervalos de tempo da comunicação programada.
2. Uma vez que o dispositivo X recebe a permissão para acessar o barramento, ele envia sua informação ao destinatário Y.

15
CEFET-RN / Curso Superior de Tecnologia em Automação Industrial / Redes Industriais – Aula 08
Resumo das Funções do LAS
Manter uma lista dos dispositivos ativos na rede (LiveList).
Sincronizar os relógios dos dispositivos através de uma mensagem específica. (Time Distribution).
Enviar a mensagem para envio programado dos dados (Compel Data).
Enviar a permissão de comunicação não programada aos dispositivos ativos (Pass token).
1. Também é responsabilidade do LAS conhecer os elementos ativos na rede (Live List) e a sincronização de seus relógios.
2. Após cada ciclo o LAS envia um comando PN (Probe Node) a um dispositivo com o objetivo de verificar a sua integridade. O elemento deve enviar uma resposta PR (Probe Response). Se o elemento não responder três perguntas consecutivas ele é retirado do Live List.
3. A sincronização dos relógios é fundamental para o envio de dados em função do tempo. O LAS envia periodicamente um comando TD com o seu horário que deve ser usado por todos os elementos da rede.

16
CEFET-RN / Curso Superior de Tecnologia em Automação Industrial / Redes Industriais – Aula 08
Subcamada de Acesso ao Barramento
Usa a DLL para prover serviços para a camada de especificação de mensagens no barramento (FMS).
Os serviços são chamados de Relacionamento de Comunicação Virtual (VCR)
Tipos de serviçosCliente Servidor
Mensagens não programadas entre dois dispositivos.De posse do PT, um dispositivo (cliente) solicita um dado a um outro (servidor).O servidor responderá quando estiver de posse do PT.Usado para ajustes de setpoints, reconhecimento de alarmes e downloads.
1. A camada de aplicação no FF é dividida em duas subcamadas: a subcamada de acesso ao barramento (FAS) e a especificação de mensagens no barramento (FMS).
2. A subcamada de acesso ao barramento efetua a programação de sua “agenda” implementando vários serviços entre o LAS e os demais dispositivos do barramento.

17
CEFET-RN / Curso Superior de Tecnologia em Automação Industrial / Redes Industriais – Aula 08
Subcamada de Acesso ao Barramento
Tipos de serviçosDistribuição de Informes
Mensagens não programadas entre grupos de dispositivos.De posse do PT um dispositivo envia dados para um grupo de endereçosdefinidos para este serviço.Usado para notificação de alarmes para os sistemas de supervisão e históricos de variáveis.
Produtor ConsumidorMensagens programadas entre vários dispositivos.De posse do CD, o dispositivo publicará os seus dados a todos os demais.Os demais dispositivos são chamados de assinantes (subscribers).Usado para publicação dos valores de entrada e saída dos instrumentos.

18
CEFET-RN / Curso Superior de Tecnologia em Automação Industrial / Redes Industriais – Aula 08
FF e as Aplicações do Usuário
O controle do processo é efetuado a partir de um modelo de blocos de função distribuídos entre os dispositivos.
Objeto BlocoClasses: Função (AI, PID, AO, TOT, etc)
TransdutorFísico
Objeto AlarmeObjeto EventoObjeto HistóricoObjeto Display
Cada Bloco tem um TAG definido pelo usuário.
1. Todas as funções e dados de um dispositivo FF estão definidos em três tipos de blocos (Físico, Transdutor e Função).
2. Cada dispositivo tem pelo menos um bloco Físico, podendo ter um ou mais blocos de Função e Transdutor.
3. O bloco Físico descreve as características do dispositivo, como identificador (TAG), fabricante, número de série, versão de firmwareetc.
4. O bloco Função descreve quais são as funções do dispositivo e como elas serão acessadas. A especificação do FF define vários tipos de blocos de função:
- AI: Entrada analógica- AO: Saída analógica- PID: Controlador Proporcional-Integral e Derivativo.- TOT: Totalizadores- DI: Entrada digital- DO: Saída digital
5. O bloco Transdutor contem informações necessárias para transformar a medição efetuada pelo sensor em uma grandeza física equivalente. Contém dados sobre o tipo de sensor do instrumento e sua calibração.
6. Além dos objetos blocos, o FF especifica outros objetos responsáveis por outros tipos de serviços para o usuário.
7. A configuração do sistema através destes blocos pre-programadospermite que o usuário final economize tempo de programação e permite que dispositivos sejam substituídos sem grandes traumas, já que o substutituto terá os mesmos blocos do dispositivo substituído.

19
CEFET-RN / Curso Superior de Tecnologia em Automação Industrial / Redes Industriais – Aula 08
Configurando uma Rede FF
Interligação de Blocos através de um configurador
1. A configuração dos instrumentos FIELDBUS consiste basicamente nainterligação lógica dos diversos blocos funcionais implementados em cada dispositivo da rede através de um software configurador, além da definição dos parâmetros de controle de cada bloco. São definidos também as conexões indicadoras de alarme e diversos eventos que podem ocorrer na malha de controle.
2. Na figura temos a representação genérica de um bloco funcional que possui suas entradas, saídas e parâmetros de controle; fazendo uma referência aos níveis de protocolo observa-se que este tipo de configuração envolve apenas a camada superior, ou seja, a camada do usuário; nenhuma preocupação é tomada com relação à forma como se procederá a comunicação (solicitação de token, etc.) nem tampouco como será entregue a comunicação ao nível físico.
3. O protocolo de comunicação é tratado internamente pelos próprios blocos funcionais que são responsáveis tanto pelas comunicações cíclicas (publicações de parâmetros para supervisão e links) quanto pelas comunicações acíclicas (notificações de alarmes/eventos, informações de diagnóstico e de display, etc.).

20
CEFET-RN / Curso Superior de Tecnologia em Automação Industrial / Redes Industriais – Aula 08
Exemplo FF 1 – Controle de vazão
Vazão de Água
FT-123
FIC-123
FCV-123
AIAI
PIDPID
AOAO
1. Neste exemplo mostra-se como montar uma configuração FIELDBUSque realize a lógica de controle de vazão de água usando um controlador PID.
2. Fisicamente serão necessários dois instrumentos FIELDBUS : um transmissor de pressão diferencial (FT-123) que irá ler a vazão da tubulação, e um conversor de sinal fieldbus para corrente, cujo sinal de saída (4 a 20mA) irá alimentar um atuador de campo (a válvula FCV-123) que fará o controle da vazão.
3. Além dos instrumentos será necessária uma interface para a configuração que pode ser uma placa de rede FF para instalação em um PC ou uma placa de interface para um controlador lógico programável, também chamado de “bridge” ou ainda um “linkingdevice”.
4. O controlador PID não existe fisicamente. Sua função está embutida em um bloco de função PID no conversor FF/corrente.

21
CEFET-RN / Curso Superior de Tecnologia em Automação Industrial / Redes Industriais – Aula 08
Estratégia de Controle do Exemplo 1
FT-123
FCV-123
FCV-123
FT-123
1. Na estratégia de controle são visualizados os blocos utilizados e suas interligações. Esta estratégia é montada no software de configuração e enviada para os dispositivos através de um procedimento chamado de “download”.
2. Em cada instrumento físico são obrigatórios o uso dos blocos de RESOURCE (RES) e TRANSDUTOR (TRD). O uso dos blocos DISPLAY (DSP) é vinculado a existência de display local em cada instrumento.
3. Os blocos de função necessários são a entrada analógica (AI) do FT-123 que irá disponibilizar a vazão medida para o bloco PID do FCV-123 e um bloco de saída analógica (AO) que irá enviar o valor de abertura da válvula de controle.

22
CEFET-RN / Curso Superior de Tecnologia em Automação Industrial / Redes Industriais – Aula 08
Parametrização dos Blocos do Exemplo 1
1. O Trabalho de configuração dos instrumentos Fieldbus, consiste dentre outras coisas, na parametrização dos blocos funcionais que serão utilizados pelos instrumentos.
2. Na figura a esquerda podemos ver o como o software de configuração mostra os blocos de cada instrumento existentes na rede.
3. Na figura a direita, entramos dentro do bloco AI. Em geral, todo bloco funcional possui uma entrada para algum tipo de variável (seja de um elemento sensor ou simplesmente uma variável de saída de outro bloco).
4. Na figura é destacado dois parâmetros que podem causar alguma confusão. Trata-se dos parâmetros de escalonamento da variável de entrada (XD_SCALE) e de saída (OUT_SCALE) presente no bloco.
5. Estes parâmetros fazem a conversão de valores de entrada ou saída para valores em unidades de engenharia.
6. No caso, o bloco AI tem como entrada um sinal de pressão diferencial de 0 a 200 polegadas de água. Este sinal sofre uma operação de raiz quadrada (L_TYPE) sendo disponibilizado na saída como um sinal de vazão entre 0 a 150 m3/h.

23
CEFET-RN / Curso Superior de Tecnologia em Automação Industrial / Redes Industriais – Aula 08
Exemplo FF 2 – Controle de Temperatura
Controladores PID em cascata
SPTemp Erro PID
Temperatura
Válvula
PIDVazão
Vaso
SPVazão Erro
VazãoTemp
% Abertura
Controlador Primário
Controlador Secundário
1. O controle em cascata é uma técnica avançada de controle onde são empregados dois controladores onde o secundário ou escravo recebe seu setpoint do primário ou mestre.
2. Esta técnica é usada para melhorar a rejeição a distúrbios e o desempenho do sistema reduzindo as constantes de tempo de malha fechada.
3. A figura ilustra o caso de controle de temperatura dentro de um vaso que contém uma substância aquecida com vapor.
4. A vazão de vapor é controlada por uma válvula de controle modulando a sua abertura a partir do sinal do controlador secundário.
5. São ilustrados controladores PID, mas a prática recomenda que o controlador secundário seja apenas proporcional, já que erros de offsetnão são importantes nesta etapa.
6. Já o controlador primário deve ser proporcional-integral para eliminar os erros de off-set na variável final de controle, a temperatura.

24
CEFET-RN / Curso Superior de Tecnologia em Automação Industrial / Redes Industriais – Aula 08
Estratégia de Controle do Exemplo 2
AI
PID
AI
PID AO CAS
IN
IN
SP
TT100
TIC100
FT101
FIC101 FCV101
TIC100.OUT
Produto
Vapor
Produto Aquecido
1. O FF foi criado para permitir que mesmo controles em cascata em dois ou três níveis fossem implementados totalmente dentro dos instrumentos de campo.
2. No exemplo são usados três instrumentos, um transmissor de temperatura (TT100), um transmissor de vazão (FT101) e uma válvula de controle (FCV101) em um mesmo segmento de rede FF H1.
3. Na estratégia de controle, o controlador PID de temperatura é configurado usando um bloco de função do instrumento de medição de temperatura tendo a sua saída cascateada com o setpoint do controlador de vazão, implementado, por sua vez no instrumento de medição de vazão.
4. São usados os blocos de função AI dos instrumentos de processo para disponibilização das variáveis medidas e um bloco de função AO para estabelecer o valor de abertura da válvula de controle.
5. O barramento FF H1, usando os seus serviços de comunicação será o responsável por transferir os dados entre os blocos de função localizados em instrumentos diferentes.
6. O setpoint será definido na estação de supervisão ou interface homem máquina, onde também usará os serviços de comunicação do FF para a disponibilização de alarmes e tendências, e ainda eventuais reconfigurações.

25
CEFET-RN / Curso Superior de Tecnologia em Automação Industrial / Redes Industriais – Aula 08
Arquitetura Foundation FieldBus HSE
H1
As-I/DeviceNet/DP/etc
HSE (High Speed Ethernet)
DispositivosHSE Linking
Device
Dispositivos H1
PLC
E/SGateway
Analyzers
Linking Device
Dispositivos H1 eConvencionais
1. High-Speed Ethernet (HSE) é o “backbone” do FF rodando em 100Mbits/s usando hardware Ethernet. Assim como o FF H1, o FF HSE também é um padrão IEC 61158, só que do tipo 5.
2. Os dispositivos FF H1 são ligados a este backbone via dispositivos chamados de “linking devices”. Estes dispositivos geralmente têm de um a quatro canais de comunicação H1.
3. O HSE permite a interligação dos vários segmentos de redes FF H1possibilitando a troca de dados entre eles e aumentando a sua capacidade em número de nós e alcance físico.
4. Cada segmento H1 tem seu próprio LAS localizado, geralmente, no próprio “linking device”. Esta característica permite que os segmentos de rede H1 continuem operando mesmo se há alguma anomalia no “backbone” HSE.
5. A principio o HSE é uma rede de controle, interligando CLPs, gateways para outros protocolos e “linking devices”, mas há a expectativa de disponibilização de dispositivos de campo com portas de comunicação HSE para uso em áreas não classificadas.

26
CEFET-RN / Curso Superior de Tecnologia em Automação Industrial / Redes Industriais – Aula 08
Foundation FieldBus HSE
Uso das camadas de aplicação e de usuário do FF H1Mesmo software de configuraçãoDiferenças na segurança intrinseca e alimentaçãoMapeamento das funções de camada de aplicação via UDP/IP
Tendência de interface no próprio dispositivo de campo para ambientes não classificados.Possibilidade de redundância
Obrigatória para tráfego de mensagens de controle
1. FF HSE usa as mesmas camadas de aplicação e usuário do FF H1sendo totalmente interoperacional.
2. Fisicamente não é possível a alimentação elétrica pelo mesmo cabo de rede como no H1, apesar de que há estudos para usar o padrão IEEE 802.3af que distribui tensão elétrica DC nos pares não usados do cabo UTP de 4 pares da ethernet.
3. Os “linking devices” executam as funções especificadas na camada de enlace do padrão FF, no entanto, ao invés de mapear as funções usando o barramento H1, HSE mapeia as funções FF para os protocolos UDP e IP em datagramas levados pela Ethernet 100BaseT.
4. Isto significa que podem ser usados o hardware disponível para Ethernet onde as condições permitirem. Sob condições adversas, como excesso de ruído, vibrações e temperaturas extremas o hardware dedicado a Ethernet Industrial é uma opção.
5. HSE é projetado para fornecer tolerância a faltas usando redundância de cabeamento. Se o HSE for ser usado como parte de um controlador em malha fechada (com realimentação), a entrega de mensagens em tempo real é crítica. Onde a mensagem referente a esta malha de controle trafegue, o segmento de cabo deve ser redundante.
6. O esquema de redundância do HSE entra em ação mesmo sem falhas no cabeamento. Ele atua quando não consegue entregar uma das mensagens críticas.
7. A redundância do HSE faz com que uma mensagem seja enviada por todos os segmento de um barramento ao mesmo tempo. Somente uma será usada pelo destinatário, mas a outra é interceptada como ummétodo de gerenciar a redundância. Uma falha no recebimento da mensagem redundante indica uma eventual falha neste segmento.