Rio de Janeiro - Tese de Doutorado-B-numerada · 2019. 8. 2. · COPPE-Universidade Federal do Rio...
97
PGMEC PROGRAMA FRANCISCO EDUARDO MOURÃO SABOYA DE PÓS-GRADUAÇÃO EM ENGENHARIA MECÂNICA ESCOLA DE ENGENHARIA UNIVERSIDADE FEDERAL FLUMINENSE Tese de Doutorado INTERAÇÃO FLUIDO-ESTRUTURA EM SISTEMAS DE TUBULAÇÕES CONDUZINDO LÍQUIDOS VIA MÉTODO DE GLIMM ROGERIO GOMES DA ROCHA DEZEMBRO DE 2011
Transcript of Rio de Janeiro - Tese de Doutorado-B-numerada · 2019. 8. 2. · COPPE-Universidade Federal do Rio...

PGMEC PROGRAMA FRANCISCO EDUARDO MOURÃO SABOYA DE PÓS-GRADUAÇÃO EM ENGENHARIA MECÂNICA ESCOLA DE ENGENHARIA UNIVERSIDADE FEDERAL FLUMINENSE
Tese de Doutorado
INTERAÇÃO FLUIDO-ESTRUTURA EM
SISTEMAS DE TUBULAÇÕES
CONDUZINDO LÍQUIDOS VIA MÉTODO
DE GLIMM
ROGERIO GOMES DA ROCHA
DEZEMBRO DE 2011

ROGERIO GOMES DA ROCHA
INTERAÇÃO FLUIDO-ESTRUTURA EM SISTEMAS DE
TUBULAÇÕES CONDUZINDO LÍQUIDOS VIA
MÉTODO DE GLIMM
Tese de Doutorado apresentado no Programa Francisco Eduardo Mourão Saboya de Pós-graduação em Engenharia Mecânica da UFF como parte dos requisitos para a obtenção do título de Doutor em Ciências em Engenharia Mecânica
Orientador : Felipe Bastos de Freitas Rachid ( PGMEC/UFF )
UNIVERSIDADE FEDERAL FLUMINENSE NITERÓI, 28 DE DEZEMBRO DE 2011

INTERAÇÃO FLUIDO-ESTRUTURA EM SISTEMAS DE
TUBULAÇÕES CONDUZINDO LÍQUIDOS VIA
MÉTODO DE GLIMM
ROGERIO GOMES DA ROCHA
Tese de Doutorado aprovada em sua forma final pela Banca Examinadora formada pelos professores:
Prof. Felipe Bastos de Freitas Rachid (D.Sc.) Universidade Federal Fluminense
(Orientador)
Prof. Antônio Lopes Gama (D.Sc.) Universidade Federal Fluminense
Prof. Heraldo Silva da Costa Mattos (D.Sc.) Universidade Federal Fluminense
Prof. Maria Laura Martins Costa(D.Sc.) Universidade Federal Fluminense
Prof. Lavinia Maria Sanabio Alves Borges(D.Sc.) COPPE-Universidade Federal do Rio de Janeiro
Prof. Luiz Nelio Henderson Guedes de Oliveira(D.Sc.) IP-Universidade do Estado do Rio de Janeiro

Dedicatória Aos Meus Pais, Rosa e David

Agradecimentos Ao amigo, professor e competente orientador Felipe Bastos de Freitas
Rachid, pelo estímulo, ensinamentos e orientação constante e dedicada.
À Universidade Federal Fluminense, ao PGMEC, seus dirigentes,
professores e funcionários, por propiciarem as condições e o ambiente para a minha
formação.
Aos meus pais Rosa e David pelo apoio, incentivo e carinho.
Aos meus filhos Maria Clara e Rogerio pela motivação.
À minha esposa Ana Raquel pelo apoio, incentivo, paciência e carinho.
Aos amigos Adaílson e Bruno pela colaboração e constante apoio.
Aos colegas alunos pelo constante estímulo.

Resumo
Este trabalho apresenta um procedimento numérico para obtenção de soluções
aproximadas para problemas de interação fluido-estrutura (IFE) unidimensionais
utilizados em análises de transientes em sistemas de tubulações conduzindo líquidos.
Os problemas de IFE considerados aqui são problemas de valor inicial e de contorno
caracterizados por um sistema de equações diferenciais parciais hiperbólicas que
descrevem, simultaneamente, a propagação de ondas de pressão no líquido e de ondas
de esforços axiais e cisalhantes, num mesmo plano no tubo. Através da utilização de
uma técnica de decomposição do operador, o termo de fluxo é separado do termo de
fonte, dando margem a uma sequência de problemas mais simples formados por um
sistema de equações diferencias parciais hiperbólicas homogêneas e um sistema de
equações diferenciais ordinárias no tempo. O procedimento numérico é construído
avançando-se no tempo sequencialmente através destes sistemas de equações
empregando-se o método de Glimm e o método de Gear, respectivamente. Para
implementar o método de Glimm, são utilizadas soluções analíticas dos problemas de
Riemann associados. As condições de contorno são adequadamente incorporadas ao
método de Glimm, formulando-se e resolvendo-se analiticamente problemas de
Riemann não clássicos para as extremidades dos tubos. O procedimento numérico
proposto é validado contra dados experimentais disponíveis na literatura para dois
sistemas de tubulações fechados, nos quais os transientes são induzidos através do
impacto de uma barra em uma de suas extremidades.
Palavras-chave: Interação fluido-estrutura, Método de Glimm, Decomposição do Operador, Problemas de Riemann, Equações Hiperbólicas.

Abstract
This work presents a numerical procedure for obtaining approximated
solutions for one-dimensional fluid–structure interaction (FSI) models, which are used
in transient analyses of liquid-filled piping systems. The FSI model considered herein
is formed by a system of hyperbolic partial differential equations and describes,
simultaneously, pressure waves propagating in the liquid as well as axial, shear and
bending waves traveling in the pipe walls. By taking advantage of an operator
splitting technique, the flux term is split away from the source one, giving rise to a
sequence of simpler problems formed by a set of homogeneous hyperbolic differential
equations and by a set of ordinary differential equations in time. The numerical
procedure is constructed by advancing in time sequentially through these sets of
equations by employing Glimm’s method and Gear’s stiff method, respectively. To
implement Glimm’s method, analytical solutions for the associated Riemann
problems are presented. The boundary conditions are properly accounted for in
Glimm’s method by formulating and analytically solving suitable (non-classical)
Riemann problems for the pipe’s ends. The proposed numerical procedure is used to
obtain numerical approximations for the well-known eight- equation FSI model for
two closed piping systems, in which transients are generated by the impact of a rod
onto one of the ends. The obtained numerical results are compared with experimental
data available in the literature and very good agreement is found.
Keywords: Fluid-structure interaction, Glimm’s method, Operator splitting, Riemann problem, Hiperbolic equations.

Sumário Lista de Figuras………………………………………………………………………..i Nomenclatura......………………………………………………………………….....iv CAPÍTULO 1 Introdução.....................................................................................................................1 CAPÍTULO 2 Equações do Modelo.....................................................................................................9 CAPÍTULO 3 Problemas de Impacto: Condições Iniciais e de Contorno.........................................16 CAPÍTULO 4 Método Numérico de Solução.....................................................................................23 4.1 – Autovalores – Velocidades de Onda..................................................................23 4.2 – Técnica de Decomposição do Operador............................................................25 4.3 – Problemas de Riemann Associados...................................................................26 4.4 – Problemas de Riemann não Clássicos............................................................... 34 4.4.1 – Impacto Axial................................................................................................. 35 4.4.2 – Joelho...............................................................................................................43 4.5 – Método de Glimm e Esquema Numérico do Termo de Fonte...........................52 CAPÍTULO 5 Resultados e Discussão...............................................................................................57 CAPÍTULO 6 Conclusões e Sugestões............................................................................................. 75 APÊNDICE A..........................................................................................................78 Momento Fletor em Função das Deformações Axiais REFERÊNCIAS BIBLIOGRÁFICAS..................................................................80

i
Lista de Figuras
Figura 2.1 Representação do segmento de tubo com os movimentos e 11
esforços a que se encontra submetido
Figura 3.1 Configurações experimentais dos problemas de impacto 19
parcialmente reproduzidos de Fan & Tijsseling (1992) (a)
e Tijsseling et al. (1996) (b): (a) configuração de tubo
reto e (b) configuração de um joelho
Figura 4.1 Representação da solução do Problema de Riemann vinculado 32
às componetes de onda axial (a) e de cisalhamento e de flexão
(b) no plano kz t para 0oz
Figura 4.2 Representação das soluções dos Problemas de Riemann não 39
clássicos vinculados ao impacto na extremidade do tubo no
plano kz t para 1 0z
Figura 4.3 Representação da solução do Problema de Riemann não 45
clássico definido no joelho no plano kz t em 1 1z L e 2 0z
Figura 4.4 Representação da discretização do domínio espacial e do 53
posicionamento dos problemas de Riemann clássicos
(interior do domínio) não clássicos (contornos)
Figura 5.1 Histórico experimental e numérico da pressão na localização 61
PT1 (para N 75;150;450) (a) e nas localizações PT3 e PT5
(para N 150) (b) da configuração de tubo reto (vide Fig. 3.1(a))
com CFLN 0.4

ii
Figura 5.2 Histórico experimental e numérico de deformação axial média 63
na localização SGA (a) e SGD (b) da configuração de tubo reto
(vide Fig. 3.1(a)) com N 150 e CFLN 0.4
Figura 5.3 Histórico experimental e numérico de velocidade axial na 64
localização LDV da configuração de tubo reto (vide Fig. 3.1(a))
para N 75;150;450 com CFLN 0.4 (a) e para CFLN 0.1;0.2;0.4
com N 150 (b)
Figura 5.4 Histórico experimental e numérico da pressão na localização 66
PT1 (para 1 2N N 138 41; 276 82 ; 414 123 ) (a) e nas
localizações PT5 e PT6 (b) da configuração de um joelho
(vide Fig. 3.2(a)) com CFLN 0.4
Figura 5.5 Histórico experimental e numérico de deformação axial 68
média na localização SGA (a) e SGE (b) da configuração
de um joelho (vide Fig. 3.2(a)) com 1 2N N 138 41 e
CFLN 0.4
Figura 5.6 Histórico experimental e numérico de velocidade axial 69
na localização LDV da configuração de um joelho
(vide Fig. 3.2(a)) para 1 2N N 138 41; 276 82 ; 414 123
com CFLN 0.4 (a) e para CFLN 0.1;0.2;0.4 com
1 2N N 138 41 (b)
Figura 5.7 Histórico experimental e numérico do momento fletor 71
na localização SGA da configuração de um joelho
(vide Fig. 3.2(a)) para 1 2N N 138 41; 276 82 ; 414 123
com CFLN 0.4 (a) e para CFLN 0.1;0.2;0.4 com
1 2N N 138 41 (b)

iii
Figura 5.8 Histórico experimental e numérico do momento fletor na 72
localização SGE da configuração de um joelho (vide Fig. 3.2(a))
para 1 2N N 138 41; 276 82 ; 414 123 com CFLN 0.4 (a) e
para CFLN 0.1;0.2;0.4 com 1 2N N 138 41 (b)

iv
Nomenclatura
fA área da seção transversal do fluido
pA área da seção transversal do tubo
lc coeficiente de atrito viscoso
e espessura de parede do tubo
E módulo de Young
f fator de fricção de Darcy-Weisbach
yF força de cisalhamento
zF força axial no tubo
G módulo de cisalhamento
pI segundo momento de área da seção transversal do tubo
k número de tubos
2 coeficiente de cisalhamento do material do tubo
K módulo de compressibilidade
*K módulo de bulk modificado
kL comprimento do k-ésimo tubo
f velocidade de onda axial do fluido
p velocidade de onda axial do tubo
xM momento fletor
coeficiente de Poisson
P pressão do líquido
R raio interno do tubo xR velocidade rotacional na direção x
f massa específica do fluido
p massa específica do tubo
yU velocidade linear na direção y
zU velocidade axial do tubo

v
V velocidade do líquido 0
rV velocidade da haste
rY impedância da haste
kz direção da linha de centro do tubo

1
Capítulo 1
Introdução
Sistemas de tubulação para transporte de líquidos estão submetidos a severos
carregamentos transientes sempre que mudanças na quantidade de movimento do
fluido ou na estrutura da tubulação são abruptamente induzidas devido a ações
planejadas ou acidentais. As fontes típicas de transientes são fechamento de válvula,
partida e parada de bombas, perda de refrigerante em circuitos de reatores nucleares,
assim como vibrações induzidas por equipamentos operacionais instalados na linha e
terremotos.
Para prever com precisão as cargas hidrodinâmicas no fluido, bem como os
níveis de tensões e as vibrações na tubulação, pesquisas experimentais e teóricas têm
mostrado que as análises dos movimentos do fluido e da tubulação devem ser
conduzidas simultaneamente de forma acoplada. Esse tipo de abordagem é referido na
literatura como interação fluido-estrutura (IFE) e tem sido objeto de intensa pesquisa
nos últimos anos, conforme tem sido documentado em uma série de artigos de revisão
sucessivos de Wiggert (1986, 1996), Tijsseling (1996) e Wiggert & Tijsseling (2001).
Dentro do contexto da IFE em sistemas de tubulações, três mecanismos de
acoplamento foram identificados como sendo responsáveis pela transferência de

2
energia mecânica entre o fluido e a tubulação: acoplamento de atrito, acoplamento de
Poisson e acoplamento de junção. Enquanto os dois primeiros mecanismos de
acoplamento são distribuídos ao longo da extensão da tubulação, o último ocorre em
pontos localizados, tais como curvas, cotovelos, válvulas, junções do tipo “T” e de
outros tipos. O acoplamento de atrito é induzido pelas tensões transientes de
cisalhamento do fluido no lado interno das paredes da tubulação e é, em geral, menos
importante do que os outros dois mecanismos de acoplamento. O acoplamento de
Poisson é responsável pela interação entre os pulsos de pressão no fluido e ondas de
tensão axial nas paredes da tubulação, como resultado do acoplamento entre as
tensões circunferenciais e axiais na tubulação devido ao coeficiente de Poisson.
Finalmente, o acoplamento de junção, que é o mais significativo de todos, ocorre em
locais discretos, onde forças desequilibradas de pressão aparecem devido à variações
na quantidade de movimento linear do fluido. Em sistemas de tubulação flexíveis, o
acoplamento de Poisson e, especialmente, o acoplamento de junção podem criar
vibrações localizadas, dando origem à existência e interação de diferentes tipos de
propagação de onda de esforços mecânicos na tubulação, tais como esforços axiais e
de cisalhamento bem como os momentos de flexão e torção.
As ondas longitudinais de pressão são essencialmente os carregamentos
hidrodinâmicos relevantes, sendo sempre incorporados nos modelos de IFE
unidimensionais transiente. Estes modelos são descritos por equações diferenciais
parciais hiperbólicas e são classificados de acordo com o seu número de equações,
que por sua vez, refletem os esforços que são considerados na tubulação, quando o
comportamento do material do tubo é considerado linear e elástico. O modelo de
quatro equações é o modelo transiente mais simples de IFE e é baseado no trabalho
pioneiro de Skalak (1956). Este modelo representa apenas a existência de ondas de

3
tensão axial nas paredes da tubulação (Stuckenbruck et al, 1985; Wiggert et al, 1985)
e pode ser visto como um caso particular do trabalho de Walker e Philips (1977),
quando a inércia radial não-dominante da parede do tubo é desprezada. Além de
esforços axiais, o modelo de oito equações (que é na verdade um subproduto do
modelo de quatorze equações) é capaz de descrever os movimentos laterais e de
rotação induzidos por forças de cisalhamento e momentos fletores atuando em um
plano. Quando, em adição a esses esforços, forças de cisalhamento e momentos
fletores ortogonais a este plano são considerados, junto com torção no eixo
longitudinal, obtém-se o modelo de quatorze equações (Wiggert et al., 1987). Este
modelo permite a análise de sistemas tridimensionais de tubulação e representa o mais
completo modelo unidimensional de IFE existente até o presente momento para
escoamentos internos em tubulações (Wiggert e Tijsseling, 2001).
Excetuando algumas classes de modelos transientes simples de IFE para os
quais o comportamento mecânico elástico e linear das tubulações é tratado como uma
premissa básica, soluções analíticas, como as apresentadas por Li et al. (2003) e
Tijsseling (2003, 2009) tornam-se praticamente inviáveis e, portanto, soluções
numéricas devem ser fornecidas. Restringindo-se o foco às soluções transientes no
domínio do tempo, o método dos elementos finitos (MEF) (Belytschko et al, 1986;
Sreejith et al, 2004), o método das características (MC) (Wiggert et al, 1985, 1987;
Fan e Tijsseling, 1992.;Tijsseling, et al., 1996; Zhang et al., 1999) e uma combinação
desses métodos (MC-MEF) (Ahmadi e Keramat, 2010) foram propostas nos últimos
anos para resolver esses modelos. O MC, no entanto, é aquele mais ampla e
sistematicamente aplicado aos problemas de IFE. Este método é de fácil
implementação e permite o tratamento de condições de contorno lineares e não

4
lineares de uma maneira direta. O MC é de fato o método numérico de melhor relação
custo-benefício, eficiência e precisão para equações hiperbólicas quasi-lineares.
O MC tem sido utilizado por vários pesquisadores para investigar diferentes
problemas associados a estes modelos de IFE. Wiggert et al. utilizaram o MC para
resolver os modelos de quatro equações (Wiggert et al., 1985) e de quatorze equações
(Wiggert et al., 1987) com o intuito de investigar o efeito de restrição do movimento
dos joelhos sobre as respostas de pressão em sistemas de tubulações confinados a um
plano e mais de um plano, respectivamente. Uma comparação destas simulações com
testes de laboratório realizados naquela ocasião foi utilizada para validar esses
modelos pela primeira vez. Freitas Rachid e Stuckenbruck (1989) e Freitas Rachid et
al. (1991) estenderam o modelo de quatro equações para tratar, respectivamente, os
comportamentos viscoelástico e elasto-viscoplástico das paredes da tubulação. O MC
foi empregado em conjunto com uma técnica de decomposição do operador para
resolver as equações do modelo. Para investigar os efeitos da IFE na presença de
cavitação, Fan e Tijsseling (1992) e Tijsseling, et al. (1996) usaram o MC para
resolver, respectivamente, os modelos de quatro equações e de oito equações,
juntamente com um modelo de cavidade de vapor concentrado (Streer & Wylie,
1993). Problemas de impacto de uma haste foram considerados para uma tubulação
reta e um sistema de tubulação com um joelho, os quais foram totalmente
instrumentados e monitorados. Boa concordância entre os dados computacionais e
experimentais foi observada, validando seus modelos como um todo.
As deficiências do MC aparecem quando aplicações práticas em engenharia,
envolvendo fenômenos lineares e não lineares, são vislumbradas. Em sistemas de
tubulação industriais complexos, a aplicação dos modelos de IFE para múltiplos tubos
requer ajustes nas propriedades do fluido e do tubo, de modo a obter uma relação

5
inteira entre as velocidades das ondas e, assim, evitar os efeitos indesejáveis de
interpolações numéricas no tempo ou no espaço (Wiggert et al., 1985; Fan e
Tijsseling, 1992; Tijsseling, et al., 1996). Tais problemas podem comprometer
definitivamente o uso do MC, especialmente quando várias famílias de ondas estão
presentes como acontece com o modelo de IFE de quatorze equações (Wiggert et al.,
1987). Quando fenômenos não lineares estão presentes, tais como o comportamento
inelástico com dano das paredes do tubo e escoamentos bifásicos, as velocidades de
ondas não são mais constantes, mas variam significativamente de um ponto a outro
dentro do domínio. Em tais situações o MC introduz uma dispersão e atenuação
numérica excessivas na solução, inviabilizando sua utilização como técnica de
aproximação numérica.
Ao reconhecer a necessidade de novas estratégias numéricas capazes de lidar
com estes novos desafios, Freitas Rachid e Costa Mattos (1998) propuseram a
utilização do método de Glimm (Glimm, 1965) em conjunto com uma técnica de
decomposição do operador para resolver o modelo de quatro equações, que foi
estendido para lidar com o comportamento elasto-viscoplástico com dano da parede
da tubulação. Empregando-se um modelo de dano contínuo (Lemaitre e Chaboche,
1990; Lemaitre, 1987), a degradação da parede dos tubos, induzida por deformações
inelásticas, foi incorporada nas equações constitutivas do material do tubo para prever
a integridade estrutural dos sistemas de tubulação. A incorporação do dano altera
drasticamente as velocidades de onda no tubo e no fluido, transformando as equações
hiperbólicas quasi-lineares em não lineares (Freitas Rachid e Costa Mattos, 1999). O
método de Glimm foi escolhido devido à sua já comprovada eficiência em lidar com
sistemas de equações hiperbólicas não lineares unidimensionais, nas quais
descontinuidades abruptas (de ordem zero e um) nas variáveis dependentes estão

6
presentes (Sod, 1977; Marchesin e Paes Leme, de 1983; Collela, 1992), como ocorre
com o dano e as velocidades das ondas (Freitas Rachid e Costa Mattos, 1998). Em um
artigo mais recente, Freitas Rachid (2006) empregou o modelo formulado em Freitas
Rachid e Costa Mattos, (1998) para investigar a integridade estrutural de um sistema
de tubulação simples articulado no plano. No trabalho, foi demonstrado que a alta
flexibilidade da tubulação e a forma como a tubulação é ancorada pode introduzir um
aumento substancial no crescimento do dano e alterar a sua distribuição ao longo das
tubulações.
Como uma alternativa para o emprego do MC, dois anos mais tarde, Gale e
Tiselj (2008) propuseram o uso de um esquema numérico do tipo upwind, com uma
correção limitadora de fluxo de segunda ordem, para resolver o modelo de IFE de oito
equações. Os autores consideraram o escoamento bifásico com termos convectivos
como a principal motivação para seu trabalho, tendo em conta acidentes em usinas de
energia nuclear ocasionados pela perda de refrigerante nos circuitos de refrigeração do
reator. Depois de validar seu procedimento numérico contra os dados experimentais
de Tijsseling, et al. (1996), eles investigaram a influência do tratamento de curvas
como joelhos de forma suave ou abrupta na resposta transiente de um sistema de
tubulação.
A implementação do método Glimm, também conhecido como o método da
escolha aleatória, exige o conhecimento prévio da solução do problema de Riemann
associado com a parte homogênea do sistema de equações hiperbólicas. A solução
deste problema pode ser alcançada tanto analiticamente quanto de forma aproximada
através de resolutores de Riemann (Roe, 1981; Harten et al, 1983;. Osher, 1984). Uma
vez que o problema de Riemann é um problema de valor inicial, o método de Glimm é
aplicado mais diretamente a problemas de valor inicial. Sua aplicação a problemas de

7
valores de contorno e inicial tem sido feita de forma satisfatória para algumas classes
de condições de contorno, por meio do estabelecimento de estados fictícios nas
fronteiras (Toro, 1999; Freitas Rachid e Costa Mattos, 1998). No entanto, esse
procedimento pode falhar ao lidar adequadamente com outros tipos de condições de
contorno, especialmente aquelas que envolvem relações complexas entre um número
significativo de variáveis dependentes, como ocorre nos modelos de IFE de oito e
quatorze equações.
Para superar tal dificuldade, problemas de Riemann não clássicos nos
contornos são propostos e resolvidos analiticamente neste trabalho para o modelo IFE
de oito equações para acomodar as condições de contorno de forma adequada. Ao
contrário dos problemas clássicos de Riemann, estes problemas de Riemann não
clássicos têm dados iniciais que são desconhecidos, os quais devem ser determinados
juntamente com estados intermediários. Isto é feito através da imposição de choques
estacionários com o auxílio das relações de salto de Rankine-Hugoniot. Simulações
numéricas realizadas com o procedimento de solução de aproximação proposto, o
qual constitui a principal contribuição deste trabalho para o avanço do
conhecimentona na área, são comparados e validados utilizando-se os dados
experimentais de Fan e Tijsseling (1992) e Tijsseling, et al. (1996) para os testes de
impacto de uma haste em um tubo reto e uma configuração de um joelho,
respectivamente.
Tendo em conta que soluções exatas são raras para sistemas de tubulação
complexos (com mais de um tubo) (Tijsseling, 2009) e se tornam indisponíveis
quando os efeitos dispersivos estão presentes (como ocorre nos modelos de oito e
quatorze equações), restam como alternativas para validar novos métodos numéricos
ou o uso de soluções precisas obtidas por outros métodos numéricos diferentes ou

8
dados experimentais. Embora os dados experimentais não sejam isentos de erros e
ruídos, foram adotados como opção para validação do método numérico proposto
neste trabalho, pois: a) já foram utilizados em outros trabalhos com esse mesmo
propósito (Gale e Tiselj, 2008) e; b) os dados de Fan e Tijsseling (1992) e Tijsseling,
et al. (1996) são de alta qualidade e foram disponibilizados na web (Tijsseling, 2010),
o que permite uma comparação mais confiável.
No capítulo subsequente é apresentado o modelo de oito equações de IFE, o
qual é conveninetemente reescrito na forma canônica de lei de conservação para a
apresentação da metodologia de aproximação numérica proposta no trabalho. No
terceiro capítulo são apresentadas as condições iniciais e de contorno para os
problemas de impacto de uma haste numa das extremidades da tubulação, para os
quais os dados experimentais disponíveis na literatura são utilizados para validar a
metodologia numérica proposta. O quarto capítulo é reservado à apresentação da
metodologia numérica proposta contemplando os detalhes de natureza teórica e
prática da técnica de decomposição do operador, do método de Glimm, assim como a
formulação e solução analítica dos problemas de Riemann clássicos e não clássicos
empregados como ferramentas básicas no contexto do método de Glimm. No quinto
capítulo são apresentados os resultados computacionais obtidos com a metologia
numérica proposta para dois problemas de impacto de uma haste sobre uma das
extremidades da tubulação, para os quais se dispõe de dados experimentais. Uma
comparação efetiva entre os resultados computacionais e experimentais é apresentada
para diferentes variáveis dependentes do problema em pontos distintos do domínio.
Finalmente, no sexto e último capítulo são apresentadas as principais conclusões e um
conjunto de sugestões relacionadas ao desenvolvimento de futuros trabalhos.

9
Capítulo 2
Equações do Modelo
Considerando-se que os sistemas de tubulações utilizados no transporte de
líquido são compostos de membros esbeltos, a descrição do escoamento transiente do
líquido no interior do tubo é usualmente descrita por teorias de comprimentos de onda
longos (Lighthill, 1978; Wylie e Streeter, 1993), dando origem a modelos uni-
dimensionais. Neste contexto, considere o escoamento não permanente de um líquido
confinado em um tubo reto de parede fina (sendo R o raio interno e e a espessura da
parede) para o qual ambos os movimentos do fluido e do tubo são relevantes. O
líquido, cuja massa específica é f , é considerado como sendo ligeiramente
compressível com módulo de compressibilidade K . Admite-se que o escoamento
ocorre com baixos números de Mach, de modo que os termos convectivos podem ser
desprezados nas equações de conservação de massa e quantidade de movimento linear
para o fluido. O atrito no escoamento do fluido é levado em consideração por meio do
fator de frição de Darcy-Weisbach f para escoamentos permanentes.
Admite-se também que a parede do tubo, cuja massa específica é p , está
submetida a pequenas deformações e encontra-se sob estado plano de tensão com
simetria de resolução. Além disso, considera-se que o material do tubo é isotrópico e
apresenta um comportamento mecânico elástico linear, de forma que suas

10
propriedades mecânicas relevantes são o módulo de Young E , o coeficiente de
Poisson e o módulo de cisalhamento G .
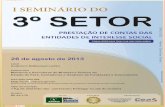
O sistema de tubulações é composto por k tubos retos cujos comprimentos
valem kL . Para cada tubo é atribuído um sistema de eixos ortogonais k k kx y z ,
sendo kz o eixo posicionado na linha de centro do tubo, conforme ilustrado na Fig.
2.1. Admite-se como premissa básica que todos os k tubos estão em um mesmo plano
(digamos, o plano k ky z ) e seus movimentos também se encontram restritos a este
plano apenas. Os movimentos axiais do líquido e do tubo na direção kz são
caracterizados pela velocidade do líquido V e a velocidade axial do tubo zU ,
fundamentalmente induzidos pela pressão do fluido P e pela força axial no tubo zF .
O tubo pode estar também submetido a movimentos laterais (na direção ky ) e de
flexão (na direção kx ) representados pelas velocidades linear e rotacional yU e xR ,
devido à força de cisalhamento yF e ao momento fletor xM , respectivamente. Por
simplicidade, esforços de torção não são levados em consideração e a pressão é
admitida permanecer acima da pressão de vapor do líquido, descartando-se a
ocorrência de cavitação. Além disso, flambagem, assim como os modos lobares de
alta frequência da tubulação são supostos não serem excitados pela interação dinâmica
fluido-estrutura. Forças de Coriolis e centrífugas induzidas pelo escoamento do fluido
não são levadas em consideração uma vez que as velocidades típicas do escoamento
do líquido são relativamente pequenas, geralmente inferiores a 10 m/s.

11
Figura 2.1 – Representação do segmento de tubo com os movimentos e
esforços a que se encontra submetido.
Desprezando-se os efeitos gravitacionais e as inércias radiais do líquido e da
parede do tubo, as equações do modelo de oito equações (Wiggert e Tijsseling, 2001)
para descrever a IFE em sistemas de tubulações, resumem-se, em coordenadas
Eulerianas a:
* *2 0z
k k
P V UK vK
t z z
, (2.1)
1( )
4z z
f k
V P fV U V U
t z R
, (2.2)
1( )
8
z zf z z
p p k p
fU FV U V U
t A z e
, (2.3)
0z z
pp
k
RAF U PA E
t z e t
, (2.4)

12
2 2y y
xp p
k
F UGA GA R
t z
, (2.5)
10
( )
y y
p p f f k
U F
t A A z
, (2.6)
0x x
pk
M REI
t z
, (2.7)
1 1x xy
p p k p p
R MF
t I z I
, (2.8)
para ( , ) (0, ) (0, )k kz t L nas quais:
*
221 (1 )
KK
RKeE
, 2 2(1 )
(4 3 )
,
2(1 )
EG
4 4( )4pI R e R
, 2 2( )pA R e R , 2fA R .
Nas expressões acima, *K é módulo de bulk modificado, 2 denota o
coeficiente de cisalhamento do material do tubo (Cowper, 1966), pI é o segundo
momento de área da seção transversal do tubo e, finalmente, pA e fA representam as
áreas de seção transversais do tubo e do fluido, respectivamente.
A primeira (Eq. (2.1)) e a segunda (Eq. (2.2)) expressões referem-se aos
princípios de conservação de massa e quantidade de movimento linear na direção
axial para o fluido, enquanto que as Eqs. (2.3) e (2.4) referem-se ao princípio de
conservação de quantidade de movimento linear na direção axial e a relação tensão-
deformação para o tubo, respectivamente. Estas quatro primeiras equações formam a
componente axial do modelo e são acoplados por intermédio do coeficiente de

13
Poisson que figura nas Eqs. (2.1) e (2.4). Os termos nos segundos membros das Eqs.
(2.2) e (2.3) retratam o atrito na parede interna do tubo, a qual é um esforço interno no
contexto do sistema fluido-tubo. As quatro últimas equações, Eqs. (2.5) a (2.8), são
oriundas da teoria de viga de Timoshenko para os movimentos laterais do tubo, que
compreendem os esforços de cisalhamento e de flexão e seus movimentos
correspondentes. As componentes de cisalhamento e de flexão do movimento do tubo
são acopladas através dos termos que figuram nos membros direitos das Eqs. (2.5) e
(2.8).
Objetivando-se facilitar a apresentação da metologia numérica apresentada no
quarto capítulo, o sistema de equações formado pelas Eqs. (2.1)-(2.8) pode ser
algebricamente manipulado e reescrito na forma canônica de lei de conservação:
( ) ( ) em (0, ) (0, ),kk
Lt z
U
F U S U (2.9)
na qual 8U é a quantidade conservada, 8 8( ) : F U F é o termo de fluxo e
8 8( ) : S U S é o termo de fonte/sorvedouro. Por uma questão de conveniência,
esses vetores são decompostos nas componentes axial, de cisalhamento e de flexão,
i.e., T( , , )a s bU U U U , T( , , )a s bF F F F e T( , , )a s bS S S S com ,a aU F e 4a S
e ,s bU U , ,s bF F , s S e 2b S , os quais assumem as seguinte formas:
T( , , , ) ,a z zP V U FU (2.10)
T( , ) ,s y yF UU (2.11)
T( , ) ,b x xM RU (2.12)

14
( ) ,a a a a a F F U A U (2.13)
( ) ,s s s s s F F U A U (2.14)
( ) ,b b b b b F F U A U (2.15)
T(0, ( ) / 4 , ( ) / 8 ,0) ,a z z z zf pf V U V U R f V U V U e S (2.16)
2 T( ) ( ,0) ,s s b xpGA R S S U (2.17)
T( ) (0, ) ,b b s yp pI F S S U (2.18)
nas quais as matrizes 4 4a A , 2 2 e s b A A valem:
* *
1
1 1
0 2 0
0 0 0
0 0 0
0 0
a f
p p
K K
A
A ; (2.19)
20
0s pGA
A ; 1 1
0
0pb
p p
EI
I
A ; (2.20)
com
1
p p f fA A
; *
p
RK A
e ; (2 )pA E
Na forma da Eq.(2.9), e com base na decomposição adotada dos seus termos,
ao se inspecionar os termos de fluxo e fonte/sorvedouro vale a pena observar que as
componentes de cisalhamento e de flexão não interagem com a axial na direção kz .
Esta característica motiva a decomposição da variável dependente U , em termos de
a U , s U e b U , bem como os termos do fluxo F e de fonte/sorvedouro S , tal como

15
apresentado nas Eqs. (2.10) a (2.18). A razão para se adotar esta decomposição ficará
clara mais tarde, na ocasião da apresentação da metodologia numérica proposta.

16
Capítulo 3
Problemas de Impacto:
Condições Iniciais e de Contorno
Embora a metodologia numérica proposta neste trabalho para aproximar a
solução de problemas de IFE em sistemas de tubulações descritos pela Eq.(2.9) se
aplique indistintamente as condições iniciais e de contorno a que está submetida, neste
capítulo restringir-se-á a descrição dessas condições para os problemas de impacto de
uma haste numa das extremidades da tubulação. A opção por esse problema em
particular está associada pela existência de dados experimentais disponíveis na
literatura, os quais serão utilizados para validar a metodologia numérica como um
todo no quinto capítulo.
Os problemas de impacto de uma haste numa as extremidades da tubulação
são experimentos que foram concebidos por Fan e Tijsseling (1992) e Tijsseling, et al.
(1996) como uma alternativa experimental ao ensaio clássico numa instalação
reservatório-tubo-válvula (Wiggert et al., 1985; Simpson, 1986). Embora estes
problemas não tenham nenhuma importância do ponto de vista prático na engenharia,
eles provaram ser de grande valor como testes de referência para validar modelos de
IFE, e outros assuntos correlatos, incluindo cavitação e métodos numéricos. Quando
comparada com a instalação reservatório-tubo-válvula, no qual transientes são

17
gerados pelo fechamento da válvula, os experimentos propostos pelos autores
eliminam características complexas e indesejáveis como distribuição de estado
estacionário inicial, características do fechamento da válvula e influências do suporte
do tubo (Tijsseling , 1993).
Duas configurações experimentais do problema de impacto foram
consideradas pelos autores, representando diferentes tipos de acoplamento entre fluido
e os movimentos do tubo. Na primeira configuração, doravante denominada de
configuração de tubo reto, um único tubo reto cujas dimensões principais (em mm)
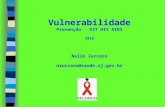
são reproduzidas na Fig. 3.1(a) foi usado por Fan e Tijsseling (1992). Na segunda, um
arranjo de tubulação mais complexo, designado daqui por diante como configuração
de um joelho, é formado por dois tubos em linha reta, conectados por um joelho de
90º, e foi proposta por Tijsseling, et al. (1996), conforme ilustrado na Fig. 3.1(b),
parcialmente reproduzida a partir de seu trabalho. Em ambos os sistemas de
tubulações, os tubos são fechados nas duas extremidades e preenchidos com água
pressurizada. Para eliminar a influência dos suportes da tubulação, os sistemas de
tubulação foram suspensos por fios longos no teto do labortório, para que pudessem
se movimentar livremente no plano horizontal k ky z . Os transientes foram gerados
no sistema por meio do impacto de uma haste sólida de aço em uma das extremidades
do tubo, como indicado nas Figs. 3.1(a) e 3.1(b).
Qualquer que seja a configuração experimental considerada, as condições
iniciais para estes problemas são aquelas em que a pressão inicial do fluido e a força
axial são uniformes ao longo do(s) tubo(s):
0z y xV U U R (3.1)
0P P (3.2)

18
0z
fF A P (3.3)
0y xF M (3.4)
nas quais P , V , zU zF , yF , yU , xM e xR são avaliados em ( , 0)kz t , para
[0, ]k kz L , com {1,2}k , e 0P refere-se à pressão inicial dentro do(s) tubo(s).
O impacto da haste ocorre axialmente de forma centrada, de modo que ele não
gera movimento lateral. Após o contato da haste com a extremidade e do tubo, ondas
de tensão axial na parede da tubulação e ondas de pressão no fluido são então geradas,
interagindo umas com as outras devido ao acoplamento de Poisson. Devido à sua
configuração, apenas essas ondas axiais estarão presentes na configuração de tubo
reto. No entanto, na configuração de um joelho, no momento em que estas ondas
atingem o joelho, ondas de esforço cortante, bem como ondas de flexão são geradas,
tornando um padrão de interação de ondas muito mais complexo do que os
observados na configuração do tubo reto.
Enquanto a haste e o tubo estão em contato, as condições de contorno
adequadas para o impacto da haste na direção axial na extremidade a montante do
tubo 1k , são:
zV U , (3.5)
01( )
zz z
f r r
UA P Y U V F m
t
, (3.6)
1 0y
y UF m
t
, (3.7)
1 0x
x x RM I
t
, (3.8)

19
(a)
(b)
Figura 3.1 – Configurações experimentais dos problemas de impacto
parcialmente reproduzidos de Fan & Tijsseling (1992) (a) e Tijsseling et al. (1996)
(b): (a) configuração de tubo reto e (b) configuração de um joelho.

20
nas quais P , V , zU zF , yF , yU , xM e xR e suas derivadas parciais no tempo são
avaliados em 1( 0, )z t , 0rV representa a velocidade da haste antes do impacto, 1m e
1xI são a massa do plug final de fechamento do tubo 1k e seu momento de
inércia em relação ao eixo 1x e rY , ( )r r r rY A E , é a impedância da haste. O
segundo termo no lado esquerdo da Eq. (3.6) representa a força de contato entre a
haste e o tubo. Quando pela primeira vez a força de contato deixa de ser de natureza
compressiva, ou seja, 01( 0, )z
rU z t V , a haste e o tubo se separam e são mantidos
separados a partir desse instante em diante. Após a separação, as condições de
contorno são as de uma extremidade fechada livre que são apresentadas a seguir.
As condições de contorno de uma extremidade fechada livre de massa lm do
tubo k-ésimo tubo são:
zV U , (3.9)
zz
f l
UA P F m
t
, (3.10)
0y
yl
UF m
t
, (3.11)
0x
x xl
RM I
t
, (3.12)
nas quais as variáveis dependentes P , V , zU zF , yF , yU , xM e xR e suas derivadas
parciais no tempo são avaliados em ( 0, )kz t ou ( , )k kz L t , se a extremidade à
montante ou a extremidade à jusante do tubo k-ésimo tubo é considerado. O subscrito
l em lm e xlI assume o valor 1l para a extremidade à montante ou o valor 2l para
a extremidade à jusante. Os sinais e nas Eqs. (3.10)-(3.12) são válidos para as

21
extremidades à montante e à jusante, respectivamente. Embora os efeitos inerciais das
peças finais não sejam dominantes, eles não são desprezíveis e, portanto, são levados
em consideração nas equações de contorno, conforme sugerido por Tijsseling (1993) e
Tijsseling et al. (1996).
O acoplamento de junção entre os movimentos lateral e axial ocorre no
joelho de 90° (ver Fig. 3b), que é considerado rígido. Estendendo-se os comprimentos
de ambos os tubos, 1k e 2k , de forma a incorporar parte das dimensões do
joelho, como mostrado na Fig. 3.1(b), não só a inércia de rotação como também a
inércia linear do joelho pode ser desprezada, resultando no seguinte conjunto de
equações de contorno (Tijsseling, et al. , 1996):
1 1 2( , ) ( 0, )P z L t P z t , (3.13)
1 1 2( )( , ) ( )( 0, )z zV U z L t V U z t , (3.14)
1 1 2( , ) ( 0, )z yU z L t U z t , (3.15)
1 1 2( )( , ) ( )( 0, )z yfA P F z L t F z t , (3.16)
1 1 2( ( , ) ( 0, )f z yA P F z L t F z t , (3.17)
1 1 2( , ) ( 0, )y zU z L t U z t , (3.18)
1 1 2( , ) ( 0, )x xM z L t M z t , (3.19)
1 1 2( , ) ( 0, )x xR z L t R z t . (3.20)
Além de expressar a compatibilidade entre os movimentos dos tubos
contíguos, as equações acima expressam os fatos que a perda de carga é desprezível
(Eq. (3.13)) e que a continuidade é satisfeita através do joelho (Eq. (3.14)).

22
Apesar do amortecimento estrutural não estar presente nas condições de
contorno para os problemas de impacto da haste apresentados anteriormente, ele está
presente em sistemas reais de tubulações industriais onde se encontram, por exemplo,
máquinas de fluxo e, portanto, é importante considerá-lo nas análises de IFE. Forças
externas devido ao amortecimento viscoso em suportes de tubulações, tais como
aquelas expressas em termos das velocidades lineares ( zzc U ou y
yc U ) ou das
velocidades angulares ( xxc R ) (em que lc (com { , , }l x y z ) representa o coeficiente
de amortecimento viscoso) podem ser incorporadas nas condições de contorno e
tratadas numericamente sem quaisquer dificuldades adicionais.

23
Capítulo 4
Método Numérico de Solução
Antes de se apresentar o procedimento numérico aqui proposto para se obter
uma solução aproximada do problema de valor inicial e de contorno caracterizado
pela Eq. (2.9), juntamente com as condições iniciais dadas pelas Eqs. (3.1) a (3.4) e as
condições de contorno dadas pelas Eqs. (3.5) a (3.20), é conveniente explorar seus
autovalores. Como será visto mais adiante neste capítulo, a determinação dos
autovalores do sistema definido pela Eq. (2.9) é importante não só para classificá-lo
matematicamente, como também para definir a escolha da abordagem mais adequada
para resolvê-lo.
4.1 Autovalores –Velocidades de Onda
As equações do modelo definidas pela Eq. (2.9), juntamente com suas formas
particulares dadas pelas Eqs. (2.10) a (2.18), formam um sistema unidimensional de
equações diferenciais parciais. Este sistema é do tipo hiperbólico uma vez que seus
autovalores são reais e os autovetores associados geram o espaço no qual ele está
imerso (Smoller, 1983). Seus autovalores são obtidos a partir de,

24
8det( ) 0 A 1 , (4.1)
na qual d dA F U e 81 são matrizes 8×8 que representam as matrizes Jacobiana e
identidade, respectivamente. Uma vez que a matriz Jacobiana A tem uma estrutura de
bloco diagonal,
4 2 4 2
2 4 2 2
2 4 2 2
a
s
b
A 0 0
A 0 A 0
0 0 A
, (4.2)
na qual 4 4 a a ad d A F U , s s sd dA F U e 2 2 b b bd d A F U
representam as matrizes Jacobianas associadas com as componentes de onda axial
(vide Eq. (2.19).) e de ondas de cisalhamento e de flexão (vide Eq. (2.20).), então a
Eq. (4.1) reduz-se a seguinte equação polinomial característica em termos de :
4 2 2det( )det( )det( ) 0a s b A 1 A 1 A 1 , (4.3)
na qual 41 e 21 são matrizes identidades 4×4 e 2×2.
Como esperado, a expressão acima mostra que as componentes de onda axiais,
de cisalhamento e de flexão não estão acopladas ao longo do domínio (0, )kL . O
acoplamento entre estas ondas ocorre apenas nas extremidades do tubo, o que permite
resolver estes problemas de forma independente, exceto nos contornos. Um cálculo
direto de Eq. (4.3) revela que as frentes de onda axiais no fluido e no tubo se
propagam com as seguintes velocidades:

25
2 4 2 214
2f f pc c , (4.4)
2 4 2 214
2p f pc c , (4.5)
na qual 2 * f fc K , 2 p pc E e 2 2 2 22f p fc c c , com /f pR e ,
enquanto que as frentes de onda das componentes de cisalhamento e de flexão se
propagam com as seguintes velocidades:
2s pGA , (4.6)
/b pE . (4.7)
Como as expressões sob os radicais nas Eqs. (4.4) a (4.7) são sempre
positivas, os autovalores do sistema são positivos. Além disso, é possível mostrar que
os autovetores associados são linearmente independentes, o que permite afirmar que o
sistema dado pela Eq. (2.9) é hiperbólico.
4.2 Técnica de Decomposição do Operador
Uma maneira de se obter uma aproximação numérica para a Eq. (2.9) consiste
em explorar a decomposição aditiva do operador matemático para resolver uma
sequência de subproblemas mais simples ao invés de se resolver um único problema
complexo. A principal atração de esquemas de decomposição do operador está no fato
de que se pode lançar mão dos melhores métodos numéricos existentes para cada
subproblema.

26
O procedimento para avançar a solução do tempo nt para o tempo
1n nt t t é realizado resolvendo-se sequencialmente um conjunto de
subproblemas hiperbólicos homogêneos, seguido por um conjunto de equações
diferenciais ordinárias no tempo. Admitindo-se que exista uma aproximação para
( , , )( , )a s bkz tU U U no tempo nt t , isto é, ( , , ) ( )a s b n
kzU U U , os problemas de valor
inicial e de contorno governados pelo seguinte conjunto de equações homogêneas
hiperbólicas são resolvidos,
( ) em (0, ) (0, ),j
j jk
k
Lt z
U
F U 0 (4.8)
( ) em para { , , }j j n nkz t t j a s b U U , (4.9)
com condições de contorno dadas pelas Eqs. (3.5)-(3.20), para obter uma aproximação
intermediária 1( )j nkzU . Na sequência, este campo é então usado como condição
inicial para o problema de valor inicial formado pelo seguinte conjunto de equações
diferenciais ordinárias no tempo:
( ) ; ( ) ; ( )a s b
a a s b b s
t t t
U U U
S U S U S U , (4.10)
1( , , ) ( , , ) ( ) em a s b a s b n nkz t t U U U U U U . (4.11)
Finalmente, a solução das equações. (4.10) juntamente com (4.11) fornece as
aproximações desejadas 1( , , ) ( )a s b nkzU U U para os ( , , )( , )a s b
kz tU U U no instante
de tempo 1nt t .

27
4.3 Problemas de Riemann Associados
O método numérico proposto para construir uma aproximação para os
subproblemas dados pelas Eqs. (4.8) e (4.9) baseia-se na solução dos problemas
Riemann associados. O problema de Riemann (centrado em k oz z no tempo ot t )
associado com a Eq. (4.8) é um problema de valor inicial com dados iniciais
descontinuos da forma (Smoller, 1983; Toro, 1999):
( ) para { , , }j
j j
k
j a s bt z
U
F U 0 , (4.12)
, se , ( , )
, se .
jL k oj
k o jR k o
z zz t t
z z
UU
U (4.13)
Nas expressões acima, jLU e j
RU , para { , , }j a s b , são estados arbitrários
constantes, que são definidos à esquerda e à direita de k oz z e em ot t . Por
exemplo, para j a , T( , , , )a z zL L L L LP V U FU e T( , , , )a z z
R R R R RP V U FU .
Analogamente, para j s , T( , )s y yL L LF UU e T( , )s y y
R R RF UU e para j b ,
T( , )b x xL L LM RU e T( , )b x x
R R RM RU .
Uma vez que o problema dado pelas Eqs. (4.12) e (4.13) é invariante sob a
transformação de escala ( )k k oz z z e ( )ot t t , com > 0, sua solução
depende apenas da razão ( ) / ( )k o oz z t t Em outras palavras, ela é da forma
ˆ( , ) ( )j jkz t U U , para { , , }j a s b e ot t , onde ˆ :j nU é uma função contínua
por partes em que 4n para j a e 2n para j s ou j b . Por uma questão de

28
simplicidade e sem perda de generalidade, admitir-se-á a partir de agora que 0oz e
0ot , salvo indicação em contrário.
A solução (generalizada) deste problema específico é construída conectando-
se o estado à esquerda jLU ao estado à direita j
RU através de estados intermediários
que devem ser determinados. Devido à linearidade de j F , para { , , }j a s b , esses
estados devem ser conectados por ondas de choque (descontinuidades de contato).
Cada choque deve satisfazer a condição de salto de Rankine-Hugoniot (Smoller,
1983) expressa da seguinte forma:
s[ ] [ ( )]j j jU F U , (4.14)
na qual [ ] : R L representa o salto de através de estados adjacentes (à direita
R e à esquerda L ) e s representa a velocidade de propagação do choque. Levando-
se as Eqs. (2.13) a (2.15) na Eq. (4.14) resulta:
( - s )[ ]j jn A 1 U 0 , (4.15)
na qual 4n para j a e 2n para j s ou j b . Uma vez que se buscam
soluções não triviais ([ ]j U 0 ), s na Eq. (4.15) corresponde aos autovalores dados
pelas Eqs. (4.4) a (4.7), para { , , }j a s b , nas respectivas regiões do plano kz t , para
0 e 0 . Ou seja, para j a , f ou p ; para j s , s e j b ,
b . Além disso, uma vez que ( - s )jnA 1 tem posto igual a três para j a e igual

29
a um para j s e j b , pode-se eliminar a linha dependente e reescrever a Eq.
(4.15) como:
[ ] para { , , }j j j a s b B U 0 , (4.16)
onde 3 4(s)a a B B , 1 2(s)s s B B e 1 2(s)b b B B têm as seguintes
formas:
* *
2 2 2
s 2 0
(s) 0 (s ) 2 0
0 0 s 1
af f
p p
K K
c c
A
B , (4.17)
2(s) sspGAB ; (s) sb
pEIB . (4.18)
As Eqs. (4.15) e (4.16), juntamente com (4.17) e (4.18) são sistematicamente
utilizadas para construir a solução clássica (bem como a não clássica) dos problemas
de Riemann que são empregados na solução numérica apresentada neste trabalho.
Considerando-se que p f , a solução do problema de Riemann vinculado à
componente axial ( i a ) é construída conectando-se ao estado à esquerda aLU um
estado intermediário *aLU com o choque de velocidade s p utilizando-se a Eq.
(4.16) (vide Fig. 4.1(a));
* *
s ; (s )
pa a a a a
L L p L L
U U B U U 0 . (4.19)

30
Ao estado *aLU conecta-se um segundo estado intermediário **a U agora com o
choque de velocidade s f utilizando também a Eq.(4.16) (vide Fig. 4.1(a));
* ** ** *
s ; (s )
fa a a a a
L f L
U U B U U 0 . (4.20)
Similarmente, conecta-se ao estado à direita aRU um estado intermediário
*aRU por intermédio do choque de velocidade s p com a Eq. (4.16) (vide Fig.
4.1(a));
* * ; ( )p
a a a a aR R p R R
ss
U U B U U 0 . (4.21)
Finalmente, os estados **a U e *aRU são conectados com o choque de velocidade
fs com a Eq. (4.16) (vide Fig. 4.1(a));
** * * ** ; ( )f
a a a a aR f R
ss
U U B U U 0 . (4.22)
Quando todas estas relações de choque conectando os estados aLU → *a
LU →
**a U → *aRU → a
RU são reunidas, o seguinte sistema algébrico linear de equações é
obtido para * ** * T 12( , , )a a a aL R x U U U , que são justamente os estados
intermediários com * * * * * T( , , ( ) , ( ) )a z zL L L L LP V U FU , ** ** ** ** ** T( , , ( ) , ( ) )a z zP V U FU e
* * * * * T( , , ( ) , ( ) )a z zR R R R RP V U FU :
a a aH x b (4.23)

31
na qual 12 12a H e 12a b valem:
3 4 3 4
3 4
3 4
3 4 3 4
(s )
(s ) (s )
(s ) (s )
(s )
ap
a af fa
a af f
ap
B 0 0
B B 0H
0 B B
0 0 B
, (4.24)
T
3 3(s ) , , , (s )a a a a ap L p R b B U 0 0 B U . (4.25)
Na expressão anterior, 3 43 4
0 é a matriz nula e 3
3 0 é o vetor nulo.
A resolução do sistema de equações dado por Eq.(4.23) fornece a solução
(única) do problema de Riemann generalizado associado às componentes de onda
axiais (independentemente de quão afastados estejam os estados à esquerda e à
direita) que pode ser expressa como:
*
**
*
, se s
, se s s
ˆ ( ) ,se s s
, se s s
, se s
aL p
aL p f
a af f
aR f p
aR p
U
U
U U
U
U
. (4.26)
A Fig. 4.1(a) apresenta as regiões no plano kz t para 0oz e 0ot onde a solução
acima é definida.
Conforme mencionado anteriormente, as componentes de onda axiais, de
cisalhamento e de flexão não estão acopladas no interior do domínio. Como

32
resultado, os problemas de Riemann para essas componentes de onda são todos
independentes e por isso podem ser resolvidos separadamente.
(a)
(b)
Figura 4.1 – Representação da solução do Problema de Riemann vinculado às
componetes de onda axial (a) e de cisalhamento e de flexão (b) no plano kz t para
0oz .

33
Como os padrões das componentes de onda de cisalhamento e de flexão são similares,
as construções das soluções dos respectivos problemas de Riemann compartilham da
mesma estrutura e, por isso, serão apresentadas em conjunto.
A solução desses problemas de Riemann associados é construída conectando-
se ao estado à esquerda jLU um estado intermediário *j U com o choque de
velocidade s j , para { , }j s b utilizando-se a Eq. (4.16) (vide Fig. 4.1(b));
* *
s ; (s )
jj j j j j
L j L
U U B U U 0 . (4.27)
Ao estado *j U conecta-se o estado à direita jRU agora com o choque de
velocidade s j , para { , }j s b , utilizando-se também a Eq. (4.16) (vide Fig.
4.1(b));
* *
s ; (s )
jj j j j j
R j R
U U B U U 0 . (4.28)
Quando estas duas relações de choque conectando os estados jLU → *j U →
jRU são reunidas, o seguinte sistema algébrico linear de equações é obtido para
* 2j j x U , para { , }j s b , que é justamente o estado intermediário com
* * * T(( ) , ( ) )s y yF UU se j s ou * * * T(( ) , ( ) )b x xM RU se j b :
j j jH x b (4.29)
na qual 2 2j H e 2j b , para { , }j s b , valem:

34
( )
( )
jjj
jj
s
s
BH
B, (4.30)
T(s ) , (s )j j j j j
j L j R b B U B U . (4.31)
A resolução do sistema de equações dado pela Eq. (4.29) fornece a solução
(única) do problema de Riemann generalizado associado às componentes de onda de
cisalhamento e de flexão (independentemente de quão afastados estejam os estados à
esquerda e à direita) que pode ser expressa como:
*
, se s
ˆ ( ) ,se s s
, se s
jL j
j jj j
jR j
U
U U
U
. (4.32)
A Fig. 4.1(b) apresenta as regiões no plano kz t para 0oz onde a solução acima
está definida.
4.4 Problemas de Riemann não Clássicos
Para impor as condições de contorno adequadamente, problemas de Riemann
não clássicos são formulados e resolvidos nesta seção para as condições de contorno
descritas pelas Eqs. (3.5) a (3.8), Eqs. (3.9) a (3.12) e Eqs. (3.13) a (3.20), as quais
descrevem o impacto axial numa extremidade do tubo, uma extremidade fechada livre
e o joelho. Os problemas de Riemann não clássicos são problemas de valor inicial
com os dados iniciais descontínuos que, em contraste com os problemas de Riemann
clássicos, não são conhecidos a priori.

35
4.4.1 Impacto Axial
Devido às suas características particulares, a condição de contorno de impacto
axial não acopla as componentes de onda axiais, de cisalhamento e de flexão, de
modo que os problemas de Riemann não clássicos para essas componentes de onda
também são independentes. Assim, o problema não clássico de Riemann para a
condição de contorno de impacto pode ser postulado separadamente como:
1
( ) para { , , }j
j j j a s bt z
U
F U 0 , (4.33)
**1
1
1
, se , ( , )
, se .
jL oj
o jR o
z zz t t
z z
UU
U (4.34)
Nas expressões acima, **jLU e j
RU , para { , , }j a s b , são estados arbitrários
constantes, que são definidos à esquerda e à direita de 1 0z e em ot t . Por exemplo,
para j a , ** ** ** ** ** T( , , ( ) , ( ) )a z zL L L L LP V U FU e T( , , , )a z z
R R R R RP V U FU . Analogamente,
para j s , ** ** ** T(( ) , ( ) )s y yL L LF UU e T( , )s y y
R R RF UU e para j b ,
** ** ** T(( ) , ( ) )b x xL L LM RU e T( , )b x x
R R RM RU . É importante salientar que o estado à
esquerda é apenas parcialmente conhecido ou desconhecido e, portanto, precisa ser
determinado completamente.
Uma vez que o problema caracterizado pelas Eqs. (4.33) e (4.34) é invariante
sob a transformação de escala ( )k k oz z z e ( )ot t t , com > 0, sua solução
depende apenas da razão ( ) / ( )k o oz z t t Em outras palavras, ela é da forma

36
1ˆ( , ) ( )j jz t U U , para { , , }j a s b e ot t , onde ˆ :j nU é uma função
contínua por partes em que 4n para j a e 2n para j s ou j b .
Considerando-se que p f , a solução do problema de Riemann vinculado a
componente axial ( i a ) é construída conectando-se, da direita para a esquerda, o
estado à direita aRU um estado intermediário *a
RU com o choque de velocidade
s p utilizando-se a Eq. (4.16) (vide ilustração à esquerda da Fig. 4.2);
* *
s ; (s )
pa a a a a
R R p R R
U U B U U 0 . (4.35)
Ao estado *aRU conecta-se outro estado intermediário **a
RU agora com o
choque de velocidade s f utilizando também a Eq.(4.16) (vide ilustração à
esquerda da Fig. 4.2);
* ** * **
s ; (s )
fa a a a a
R R f R R
U U B U U 0 . (4.36)
Finalmente, para completar a solução, os estados **aRU e *a
LU devem ser
coerentemente conectados. Isso é feito impondo-se um choque estacionário (um
choque com velocidade s 0 ) a Eq. (4.15) (vide ilustração à esquerda da Fig. 4.2);
** ** ** **0s
; a a a a aR L R L
U U A U U 0 . (4.37)

37
As equações restantes são providas pelas condições de contorno dadas pelas
Eqs. (3.5) e (3.6) enquanto a condição 01( 0, )z
rU z t V prevalecer, ou pelas Eqs.
(3.9) e (3.10), após essa condição ser violada pela primeira vez. Introduzindo-se uma
aproximação de segunda ordem de diferenças finitas para o termo de inércia;
1 1 11
3 ( 0, ) 4 ( 0, ) ( 0, 2 )( 0, )
2
z z zz U z t U z t t U z t tUz t
t t
, (4.38)
as condições de contorno dadas pelas Eqs. (3.5) e (3.6) ou pelas Eqs. (3.9) e (3.10)
podem ser reescritas em termos de um sistema linear de equações para o estado
desconhecido ** ** ** ** ** T( , , ( ) , ( ) )a z zL L L L LP V U FU como:
(1) ** (1)a a aL L LA U c , (4.39)
na qual a matrix (1) 2 4aL
A e o vetor (1) 2aL c valem:
1 0
(1)
1
0 3 2 1 , enquanto ( ) (0) ,
0 1 1 0
0 3 2 1 , caso contrário.
0 1 1 0
f r z nr
aL
f
A Y m tU V
A m t
A (4.40)
0 11 0
(1)
11
2 4( ) (0) ( ) (0), enquanto ( ) (0) ,
0
2 4( ) (0) ( ) (0), caso contrário.
0
z n z nr r z n
r
aL
z n z n
Y V m t U UU V
m t U U
c (4.41)

38
Quando todas as relações dadas pelas Eqs. (4.35) a (4.37) e (4.39) conectando
os estados **aLU → **a
RU → *aRU → a
RU são reunidas, o seguinte sistema algébrico
de equações lineares é obtido para (1) ** ** * T 12( , , )a a a aL L R R x U U U , que são justamente
os estados intermediários com ** ** ** ** ** T( , , ( ) , ( ) )a z zL L L L LP V U FU ,
** ** ** ** ** T( , , ( ) , ( ) )a z zR R R R RP V U FU e * * * * * T( , , ( ) , ( ) )a z z
R R R R RP V U FU :
(1) (1) (1)a a aL L LH x b (4.42)
na qual (1) 12 12aL
H e (1) 12aL b valem:
(1)3 4 3 4
3 4(1)
3 4
3 4 3 4
(s ) (s )
(s )
aL
a a
aL a a
f f
ap
A 0 0
A A 0H
0 B B
0 0 B
, (4.43)
T(1) (1)3 3, , , (s )a a a a
L L p R b c 0 0 B U . (4.44)
Na expressão anterior, 3 43 4
0 é a matriz nula e 3
3 0 é o vetor nulo.
A resolução do sistema de equações dado por Eq.(4.42) fornece a solução
(única) do problema de Riemann não clássico generalizado associado às componentes
de onda axiais (independentemente de quão afastados estejam os estados à esquerda e
à direita) que pode ser expressa como:

39
**
**
*
, se s 0
, se s sˆ ( )
, se s s
, se s
aL
aR f fa
aR f p
aR p
U
UU
U
U
. (4.45)
A ilustração à esquerda da Fig. 4.2 apresenta as regiões no plano kz t para 1 0z e
0ot onde a solução acima é definida.
Figura 4.2 – Representação das soluções dos Problemas de Riemann não clássicos
vinculados ao impacto na extremidade do tubo no plano kz t para 1 0z .
Como a estrutura dos problemas de Riemann não clássicos para o impacto vinculados
às componentes de onda de cisalhamento ( j s ) e de flexão ( j b ) é similar, a
construção da solução desses problemas será apresentada em conjunto.
A solução desses problemas de Riemann não clássicos vinculados ao
cisalhamento e à flexão é construída conectando-se, da direita para a esquerda, o

40
estado à direita jRU a um estado intermediário *j
RU com o choque de velocidade
s j , para { , }j s b , utilizando-se a Eq. (4.16) (vide ilustração à direita da Fig.
4.2);
* *
s ; (s )
jj j j j j
R R j R R
U U B U U 0 . (4.46)
Finalmente, para completar a construção da solução os estados *jRU e **j
LU
devem ser conectados coerentemente. Isto é feito impondo-se um choque estacionário
(um choque com velocidade s 0 ) utilizando-se a Eq. (4.15), conforme mostrado na
ilustração à direita da Fig. 4.2;
* ** * **s 0
; j j j j jR L R L
U U A U U 0 . (4.47)
As equações restantes são providas pelas condições de contorno dadas pelas
Eq. (3.11) para j s e pela Eq. (3.12) para j b . Introduzindo-se uma aproximação
de segunda ordem de diferenças finitas para os termos de inércia;
1 1 11
3 ( 0, ) 4 ( 0, ) ( 0, 2 )( 0, )
2
y y yy U z t U z t t U z t tUz t
t t
, (4.48)
1 1 11
3 ( 0, ) 4 ( 0, ) ( 0, 2 )( 0, )
2
x x xx R z t R z t t R z t tRz t
t t
, (4.49)
as condições de contorno dadas pelas Eqs. (3.11) e (3.12) podem ser reescritas em
termos de um sistema linear de equações para o estado desconhecido **jLU para

41
{ , }j s b , com ** ** ** T(( ) , ( ) )s y yL L LF UU se j s e ** ** ** T(( ) , ( ) )b x x
L L LM RU se j b
como:
(1) ** (1)j j jL L LA U c , (4.50)
na qual a matrix (1) 1 2jL
A e o vetor (1) 1jL c valem:
1(1)
1
1 3 2 , para ,
1 3 2 , para .j
L x
m t j s
I t j b
A (4.51)
11(1)
11
2 4( ) (0) ( ) (0) , para ,
2 4( ) (0) ( ) (0) , para .
y n y n
jL x n x n
m t U U j s
m t R R j b
c (4.52)
Quando todas as relações dadas pelas Eqs. (4.46), (4.47) e (4.50) conectando
os estados **jLU → *j
RU → jRU são reunidas, o seguinte sistema algébrico de
equações lineares é obtido para (1) ** * T 4( , )j j jL L R x U U , para { , }j s b , que são
justamente os estados intermediários com ** ** ** T(( ) , ( ) )s y yL L LF UU e
* * * T(( ) , ( ) )s y yR R RF UU para j s , e ** ** ** T(( ) , ( ) )b x x
L L LM RU e
* * * T(( ) , ( ) )b x xR R RM RU para j b :
(1) (1) (1)j j jL L LH x b (4.53)
na qual (1) 4 4jL
H e (1) 4jL b valem:

42
(1)1 2
(1)
1 2
(s )
jL
j j jL
ij
A 0
H A A
0 B
, (4.54)
T(1) (1)2, , (s )j j j j
L L j R b c 0 B U . (4.55)
Na expressão anterior, 1 21 2
0 é a matriz nula e 2
2 0 é o vetor nulo e { , }j s b .
A solução do sistema de equações dado por Eq.(4.53) fornece a solução
(única) do problema de Riemann não clássico generalizado de impacto axial associado
às componentes de onda de cisalhamento e de flexão (independentemente de quão
afastados estejam os estados à esquerda e à direita) que pode ser expressa, para
{ , }j s b , como:
**
*
, se s 0ˆ ( ) , se s 0 s
, se s
jL
j jR j
jR j
U
U U
U
. (4.56)
A ilustração à direita da Fig. 4.2 apresenta as regiões no plano 1z t para 1 0z e
0ot onde a solução acima é definida.
Os problemas de Riemann não clássicos para as condições de contorno
caracterizadas pelas extremidades livres para os tubos 1k e 2k é semelhante aos
apresentados anteriormente e, por isso, não serão apresentados neste trabalho.

43
4.4.2 Joelho
Considerando-se que o joelho é uma junção que acopla as componentes de
onda axiais, de cisalhamento e de flexão, os problemas de Riemann não clássicos para
as extremidades dos tubos conectados ao joelho devem ser resolvidos
simultaneamente para essas componentes de onda. Em outras palavras, no joelho
existem dois problemas de Riemann não clássicos interconectados: um para a
extremidade do tubo à montante 1k e outro para a extremidade do tubo à jusante
2k . Esses problemas também são problemas de valor inicial com dados iniciais
descontínuos e são formulados como:
1
( ) para { , , }j
j j j a s bt z
U
F U 0 , (4.57)
1 11
1 1
, se , ( , )
, se .
jLj
o j IR
z Lz t t
z L
UU
U (4.58)
2
( ) para { , , }j
j j j a s bt z
U
F U 0 , (4.59)
22
2
, se 0, ( , )
, se 0.
j OLj
o jR
zz t t
z
UU
U (4.60)
Nas expressões acima, jLU e j
RU , para { , , }j a s b , são estados arbitrários
conhecidos definidos à esquerda de 1 1z L e à direita de 2 0z em ot t ,
respectivamente. Por outro lado, j IRU e j O
LU , para { , , }j a s b , são estados
desconhecidos definidos à direita de 1 1z L (à entrada do joelho) e à esquerda de
2 0z (à saída do joelho) em ot t . Para j a T( , , , )a z zL L L L LP V U FU ,

44
T( , , , )a z zR R R R RP V U FU , T( , , ( ) , ( ) )a I I I z I z I
R R R R RP V U FU , a OL U
T( , , ( ) , ( ) )O O z O z OL L L LP V U F ; para j s T( , )s y y
L L LF UU , T( , )s y yR R RF UU ,
T(( ) , ( ) )s I y I y IR R RF UU e T(( ) , ( ) )s O y O y O
L L LF UU ; para j b T( , )b x xL L LM RU ,
T( , )b x xR R RM RU , T(( ) , ( ) )b I x I x I
R R RM RU e T(( ) , ( ) )b O x O x OL L LM RU .
Notando-se que as Eqs. (4.57) a (4.60) são invariantes sob a transformação de
escala ( )k k oz z z (para {1,2}k e 1oz L para 1k e 0oz para 2k ) e
( )ot t t , com > 0, sua solução depende apenas da razão ( ) / ( )k o oz z t t
Em outras palavras, ela é da forma ˆ( , ) ( )j jkz t U U , para { , , }j a s b e ot t , onde
ˆ :j nU é uma função contínua por partes em que 4n para j a e 2n para
j s ou j b .
Considerando-se que p f , a solução do problema de Riemann vinculado à
componente axial ( j a ) centrada em 1 1z L é construída conectando-se, da esquerda
para a direita, o estado à esquerda aLU a um estado intermediário *a
LU com o choque
de velocidade s p utilizando-se a Eq. (4.16) (vide Fig. 4.3);
* *
s ; (s )
pa a a a a
L L p L L
U U B U U 0 . (4.61)
Ao estado *aLU conecta-se outro estado intermediário **a
LU agora com o
choque de velocidade s f utilizando também a Eq.(4.16) (vide Fig. 4.3);
* ** ** *
s ; (s )
fa a a a a
L L f L L
U U B U U 0 . (4.62)

45
Figura 4.3 – Representação da solução do Problema de Riemann não clássico
definido no joelho no plano kz t em 1 1z L e 2 0z .
Na sequência, os estados **aLU e a I
RU são coerentemente conectados. Isso é feito
impondo-se um choque estacionário (um choque com velocidade s 0 ) com a Eq.
(4.15) (vide Fig. 4.3);
** **0s
; a a I a a a IL R L R
U U A U U 0 . (4.63)
Lançando mão do mesmo raciocínio, a solução das componentes de
cisalhamento e de flexão do problema ( { , }j s b ) centrado em 1 1z L é construída
conectando-se, da esquerda para a direita, o estado à esquerda jLU um estado
intermediário *jLU com o choque de velocidade s j , para { , }j s b utilizando-se
a Eq. (4.16) (vide Fig. 4.3);

46
* *
s ; (s )
jj j j j j
L L j L L
U U B U U 0 . (4.64)
Na sequência, os estados *jLU e j I
RU são coerentemente conectados, para { , }j s b .
Isso é feito impondo-se um choque estacionário (um choque com velocidade s 0 )
com a Eq. (4.15) conforme ilustrado na Fig. 4.3;
* *0s
; j j I j j j IL R L R
U U A U U 0 . (4.65)
De forma análoga, a solução do problema de Riemann vinculado à
componente axial ( j a ) centrada em 2 0z é construída conectando-se, da direita
para a esquerda, o estado à direita aRU um estado intermediário *a
RU com o choque
de velocidade s p utilizando-se a Eq. (4.16) (vide Fig. 4.3);
* *
s ; (s )
pa a a a a
R R p R R
U U B U U 0 . (4.66)
Ao estado *aRU conecta-se outro estado intermediário **a
RU agora com o
choque de velocidade s f utilizando a Eq.(4.16) (vide Fig. 4.3);
* ** * **
s ; (s )
fa a a a a
R R f R R
U U B U U 0 . (4.67)

47
Na sequência, os estados **aRU e a O
LU são coerentemente conectados. Isso é feito
impondo-se um choque estacionário (um choque com velocidade s 0 ) com a Eq.
(4.15) (vide Fig. 4.3);
** **0s
; a a O a a O aR L L R
U U A U U 0 . (4.68)
Lançando mão do mesmo raciocínio, a solução das componentes de
cisalhamento e de flexão do problema ( { , }j s b ) centrado em 2 0z é construída
conectando-se, da direita para a esquerda, o estado à direita jRU a um estado
intermediário *jRU com o choque de velocidade s j , para { , }j s b utilizando-se
a Eq. (4.16) (vide Fig. 4.3);
* *
s ; (s )
jj j j j j
R R j R R
U U B U U 0 . (4.69)
Na sequência, os estados *jRU e j O
LU são coerentemente conectados, para { , }j s b .
Isso é feito impondo-se um choque estacionário (um choque com velocidade s 0 )
com a Eq. (4.15) conforme ilustrado na Fig. 4.3;
* *0s
; j j O j j j OR L R L
U U A U U 0 . (4.70)
Para completar a solução dos problemas, os estados j IRU e j O
LU , para
{ , , }j a s b , devem ser conectados. Isso é feito considerando-se as condições de

48
contorno para o joelho fornecidas pelas Eqs. (3.13) a (3.20). Reescrevendo essas
equações na forma matricial para as estados desconhecidos a IRU , na I
RU , a OLU e na O
LU ,
com T 4( , )na I s I b IR R R U U U e T 4( , )na O s O b O
L L L U U U , obtém-se:
a a a I a na na O a a a OI R O L O L E U E U E U 0 ; (4.71)
na na na I na na na O na a a OI R O L O L E U E U E U 0 ; (4.72)
na qual
1 0 0 0 0 0 0 0
0 0 0 0 0 0 ;
0 0 1 0 0 1 0 0
0 0 1 1 0 0 0
f fa a a aI I
f
A A
A
E E (4.73)
1 0 0 0 1 0 0 0
0 0 0 1 0 0 ;
0 0 0 0 0 0 1 0
0 0 0 0 0 0 0 1
f fa a na naO I
A A
E E (4.74)
0 0 1 0 0 0 0
0 0 1 0 0 0 0 0 ;
0 0 0 0 0 1 0 0
0 0 0 0 0 0 0 1
f
na na na aO O
A
E E (4.75)
Quando todas as relações dadas pelas Eqs. (4.61)-(4.72) conectando os estados
jLU → *j
LU → **aLU → j I
RU → j OLU → **a
RU → *aRU → j
RU são agrupadas, para
{ , , }j a s b , o seguinte sistema algébrico de equações lineares para
(1,2) (1) (2) T 40, ( , , , , , )a I na I na O a O
R L R R R L L L x U U U U U U , com (1) * * ** T( , , )a na aR L L LU U U U

49
12 , * * * T 4( , )na s bL L LU U U , (2) ** * * T 12( , , )a na a
L R R R U U U U e
* * * T 4( , )na s bR R RU U U , é obtido:
(1,2) (1,2) (1,2), , ,R L R L R LH x b , (4.76)
na qual (1,2) 40 40,R L
H e (1,2) 40,R L b valem:
(1)12 12
(1,2), ,
(2)12 12
aR L
na naR L L I O R
aR L
A A 0
H A A A
0 A A
, (4.77)
T(1,2) (1) (2), 16, ,R L R Lb c 0 c , (4.78)
com 12 1212 12
0 sendo a matriz nula, 16
16 0 sendo o vetor nulo e:
3 4 3 4
, 3 4(1) 3 4
3 4
3 43 4
(s )
(s )
(s )(s )
ap
nas b
R aaff
a
0 0B
B 00A
0 BB
0 A0
, (4.79)
3 4 3 4 3 4 3 4
3 4 3 4 3 4 3 4
3 4 3 4 3 4 3 4
3 4 3 4 3 4
aL
a
0 0 0 0
0 0 0 0A
0 0 0 0
A 0 0 0
, (4.80)
3 4 3 4
3 4 3 43 4
3 4 3 43 4
3 4 3 43 4
na
naL
0 0A
0 00A
0 00
0 00
, (4.81)

50
3 4 3 4 3 4
3 4 3 4 3 4 3 4
3 4 3 4 3 4 3 4
3 4 3 4 3 4 3 4
a
aR
0 0 0 A
0 0 0 0A
0 0 0 0
0 0 0 0
, (4.82)
3 4 3 43 4
3 4 3 43 4
3 4 3 43 4
3 4 3 4
naR
na
0 00
0 00A
0 00
0 0A
, (4.83)
4 4 4 4 4 4
4 4,
4 4
4 4 4 4 4 4
na
a a a na a aI O O
I O na na na na na aI O O
na
0 A 0 0
E 0 E EA
0 E E E
0 0 A 0
, (4.84)
3 43 4
3 4(2)
3 4,3 4
3 43 4
(s )(s )
(s )
(s )
a
aaff
L nas b
ap
00AB0B
A0B0
B00
, (4.85)
T(1), 3 3(s ) , (s ) , ,a a na na
R p L s b L c B U B U 0 0 , (4.86)
T(2)3 3 ,, , (s ) , (s )na na a a
L s b R p R c 0 0 B U B U . (4.87)
Nas expressões acima, 4 4na A e 2 4,(s )na
s b B são tais que:
2 2
2 2
sna
b
A 0A
0 A, (4.88)
1 2,
1 2
(s )(s )
(s )
sna s
s b bb
B 0B
0 B, (4.89)
Resolvendo-se o sistema de equações definido na Eq. (4.76) obtém-se a
solução (única) dos problemas de Riemann não clássicos interconectados para a

51
extremidade à jusante do tubo 1k ( 1 1z L ) e a extremidade à montante do tubo
2k ( 2 0z ). A solução do problema de Riemann não clássico centrado em 1 1z L
(para as componentes de onda axiais, de cisalhamento e de flexão) é representada na
ilustração à esquerda da Fig. 4.3 e sumarizada abaixo:
*
**
, se s
, se s sˆ ( )
, se s s 0
, se s 0
aL p
aL p fa
aL f
a IR
U
UU
U
U
, (4.90)
*
, se s com { , }
ˆ ( ) , se s s 0 com { , }
, se s 0 com { , }
jL j
j jL j
j IR
j s b
j s b
j s b
U
U U
U
, (4.91)
enquanto que a solução do problema de Riemann não clássico centrado em 2 0z
(para as componentes de onda axiais, de cisalhamento e de flexão) é representada na
ilustração à direita da Fig. 4.3 e dada por:
*
, se s 0 com { , }ˆ ( ) , se s 0 s com { , }
, se s com { , }
j OL
j jR j
jR j
j s b
j s b
j s b
U
U U
U
, (4.92)
**
*
, se s 0
, se s 0 sˆ ( )
, se s s
, se s
a OL
aR fa
aR f p
aR p
U
UU
U
U
, (4.93)

52
4.5 Método de Glimm e Esquema Numérico do Termo de Fonte
O problema caracterizado pelas Eqs. (4.8) e (4.9) é resolvido numericamente
usando o método de Glimm (Glimm, 1965; Smoller, 1983; Toro, 1999). O método
Glimm tem sido usado para resolver problemas unidimensionais não lineares
hiperbólicos devido à sua eficiência já comprovada não só em tratar os dados iniciais
descontinuos, mas também em capturar soluções que apresentam descontinuidades de
ordem zero ou um (Marchesin e Paes Leme, de 1983; Sod, 1977; Freitas Rachid et al,
1994;. Freitas Rachid e Costa Mattos, 1998; Toro, 1999). Este método numérico
preserva a magnitude e a posição das ondas de choque, com uma incerteza da largura
da malha espacial. Tais características, que não são encontradas em procedimentos
numéricos habituais (como por exemplo, elementos finitos e diferenças finitas), são
umas das principais atrações para a utilização do método Glimm em modelos de IFE.
Para implementar os esquemas numéricos descritos na seção 4.2, discretiza-se,
por uma questão de simplicidade, os domínios espaciais [0, ]kL em kN células
computacionais de tamanho uniforme 1 2 1 2k k k ki iz L N z z
, com
1 2( 1)k i
z i z
e 1 2k iz i z
, para 1, , ki N , de tal forma que o centro das
células estão posicionados em ( 1 2)k iz i z , para {1,2}k , conforme ilustrado
na Fig. 4.4.
Para empregar o método de Glimm, admite-se, sem perda de generalidade, que
existe uma aproximação dos dados iniciais no instante de tempo nt por funções
contínuas por partes da seguinte forma:

53
Figura 4.4 – Representação da discretização do domínio espacial e do
posicionamento dos problemas de Riemann clássicos (interior do domínio) não
clássicos (contornos).
,( , ) (( ) , )j n j n j nk k i k iz t z tU U U , (4.94)
para 0, 1ki N , com {1,2}k e { , , }j a s b , nos quais os valores atribuídos a
0i e 1ki N são, por definição, os valores das variáveis nas extremidades à
montante e à jusante dos tubos, i.e., 0(( ) , ) ( 0, )j n j nk i kz t z t U U e
1(( ) , ) ( , )k
j n j nk i N k kz t z L t U U .
As aproximações acima dão origem, para cada dois degraus consecutivos i e
1i , a problemas de Riemann que foram descritos na seção passada pelas Eqs. (4.12)
e (4.13) e para os problemas de Riemann clássicos e pelas Eqs. (4.33), (4.34), (4.57) a

54
(4.60) para os problemas de Riemann não clássicos. Quando nas Eqs. (4.13), (4.34),
(4.58) e (4.60) ot é substituído por nt , oz é substituído por 1 2( )k iz e os estados
correspondentes à esquerda **( , e )j j j OL L LU U U e à direita **( , e )j j j I
R R RU U U são
substituídos por ,j n
k iU e , 1j n
k iU , respectivamente, os dados iniciais no contexto da
aproximação dada pela Eq. (4.94) se escreve como:
, 1 2
, 1 1 2
, para ( ) ,( , )
, para ( ) .
j nk i k k ij n
k j nk i k i k
z zz t
z z
UU
U (4.95)
Denotando-se , 1 2ˆ ( )j
k i U a solução generalizada desses problemas de
Riemann apresentados nas Eqs. (4.26), (4.32), (4.45), (4.56), (4.90), (4.91), (4.92) e
(4.93) a aproximação para a solução da Eq. (4.8) com Eq. (4.9) no tempo 1nt é
finalmente obtida na seguinte forma:
, 1 21,
, 1 2
ˆ ( ), se 0 1 2,( )
ˆ ( (1 ) ), se 1 2 1,
j n n nk ij j n
k k i j n n nk i
z tz
z t
UU U
U (4.96)
para 1 2 1 2( ) ( )k i k k iz z z , com 0, , 1ki N , onde n é uma sequência de
números escolhidos aleatoriamente no intervalo [0, 1] de uma forma uniforme.
No procedimento, o instante de tempo 1nt é calculado de tal forma que a
condição de Courant-Friedrichs-Levy (CFL) (Smoller, 1983; Toro, 1999) é sempre
satisfeita:

55
1 CFL
max
n n N zt t t
, (4.97)
onde max
é a máxima (em valor absoluto) velocidade de propagação de onda j ,
com , com { , , , }j f p s b , e o coeficiente CFL CFLN satisfaz:
CFL0 1 2N . (4.98)
O valor do limite superior do coeficiente CFL é uma condição necessária para
convergência e, por isso, varia de acordo com cada método numérico. Essa condição
estabelece que um método numérico é convergente somente se seu domínio numérico
de dependência contém o verdadeiro domínio da dependência associado com as
equações diferenciais parciais (Leveque, 2002). Para o método de Glimm em
particular, a restrição dada pela Eq. (4.98) garante que nenhuma interação de onda
ocorrerá em problemas de Riemann adjacentes (Toro, 1999). Em geral, quanto mais
próximo CFLN é de seu limite superior, mais eficiente o esquema de avanço no tempo
se torna. Embora o MC não faça uso da solução do problema de Riemann, ele tem um
valor limite superior para CFLN igual a 1.
Uma característica importante do método de Glimm e que impacta diretamente
na qualidade da solução numérica é o uso explícito da solução do problema de
Riemann. Esta solução é exata e retém toda a estrutura de onda associada ao problema
físico. Como resultado, descontinuidades abruptas, assim como os efeitos decorrentes
de velocidades de onda fortemente variáveis são naturalmente capturados pela solução
numérica. Este fato capacita seu uso em casos de aplicações não lineares, tais como
em escoamentos com cavitação (Freitas Rachid, 2003) e análise de integridade

56
estrutural (Freitas Rachid, 2006) nos quais as velocidades de propagação de onda
podem apresentar gradientes severos. Aspectos associados à convergência do método
de Glimm, que é de primeira ordem, podem ser encontrados em (Smoller, 1983).
Para obter uma aproximação numérica para o problema descrito pelas Eqs.
(4.10) e (4.11) o método de Gear (Gear, 1971) é empregado. Este método é um
esquema numérico tradicional de múltiplos passos de até quinta ordem. Apesar de ser
linear, o sistema de equações diferenciais ordinárias caracterizado pela Eq. (4.10) é
rígido, o que justifica o emprego do método de Gear, a fim de se assegurar precisão e
estabilidade.

57
Capítulo 5
Resultados e Discussão
Visando-se validar o procedimento numérico aqui proposto, os resultados
experimentais de dois problemas de impacto de uma haste numa das extremidades de
uma tubulação publicadas por Fan e Tijsseling (1992) e Tijsseling, et al. (1996), e
disponibilizados em (Tijsseling, 2010), foram utilizados. As configurações
experimentais de ambos os testes foram apresentadas nas Figs. 3.1(a) e 3.1(b). Os
tubos, cujo raio interno e espessura valem R 26.01 mm e e 3.945 mm, foram
amplamente instrumentados e monitorados com transdutores de pressão piezoelétricos
(PT), strain gauges (SG) e vibrômetros de Doppler a laser (LDV). Estes instrumentos,
estrategicamente posicionados ao longo das tubulações como indicado nas Figs. 3.1(a)
e 3.1(b), mediram e gravaram em períodos regulares de cerca de 8 µs, a pressão do
fluido, a deformação axial do tubo e velocidade axial do tubo, respectivamente.
As posições dos instrumentos, as quais se fazem referências neste trabalho,
juntamente com as principais dimensões dos tubos são indicados em milímetros nas
Figs. 3.1(a) e 3.1(b). Estas figuras, que não foram representadas em escala, foram
parcialmente reproduzidas de (Tijsseling, 1993 e Tijsseling, et al, 1996). Detalhes da
instrumentação utilizada nos experimentos, como os tipos de equipamentos,

58
frequências de corte e incertezas podem ser encontradas em Tijsseling (1993),
Tijsseling et al (1996) e Fan (1989).
Em cada posição do strain gauge (SG), quatro strain gauges de três vias (axial,
circunferencial e de cisalhamento) são posicionados equidistantes ao redor da
circunferência do tubo: superior (local 1), inferior (local 3) e laterais (locais 2 e 4)
como indicado nas Figs. 3.1(a) e 3.1(b). A deformação axial média z
(4 ( )
14z i
zi
), a qual é calculada com base nas medidas experimentais em torno
da circunferência do tubo, pode ser avaliada, teoricamente, através da força axial e da
pressão (por meio da tensão circunferencial) através da equação constitutiva para o
material do tubo:
1.
zz
p
F RP
E A e
(5.1)
Da mesma forma, o momento fletor do modelo teórico xM pode ser acessado
através das medidas de deformação axial na parte superior (local 1) e na parte inferior
(local 3) (vide Figs. 3.1(a) e 3.1(b)) do tubo por meio da seguinte relação constitutiva
(vide Apêndice A):
(1) (3) .2( )
pxz z
EIM
R e
(5.2)
O material da tubulação tem uma massa específica igual a p 7985kg/m3,
módulo de Young igual a E 168GPa e coeficiente de Poisson 0.29. Os tubos são
preenchidos com água à temperatura ambiente com f 999kg/m3 e K = 2.14 GPa.

59
Embora o atrito no fluido não seja tão importante nestes testes, ele é considerado no
modelo teórico utilizando-se um fator de atrito constante f 0.01. As propriedades
da haste em ambos os testes são as mesmas: rR 25.37mm, r 7848kg/m3 e
rE 200GPa. No entanto, a velocidade de impacto da haste é 0rV 0.739m/s na
configuração de tubo reto e 0rV 0.809m/s no teste da configuração de um joelho. A
pressão estática absoluta da água em ambas as configurações é 0P 2.0MPa, o que é
alto o suficiente para prevenir a ocorrência de cavitação em qualquer região do
líquido. As massas da tampa e do plug nas extremidades do tubo são 1m 1.287kg e
2m 0.2925kg para a configuração do tubo reto e 1m 1.312 kg e 2m 0.3258kg
para a configuração um joelho. Para essas propriedades do material, as velocidades de
frente de onda, associadas com as componentes axiais para o fluido e o tubo, bem
como as componentes de cisalhamento e de flexão, valem: f 1353.50m/s,
p 4617.53m/s, s 1767.20m/s e b 4586.88m/s.
Seguindo a estratégia de Tijsseling, et al. (1996), a massa do joelho não é
levada em conta explicitamente. Ela é parcialmente incorporada nos comprimentos
dos tubos, conforme indicado na Fig. 3.1(b). Além disso, o momento de inércia do
plug e da tampa são desconsiderados, o que equivale a assumir que xlI 0, para
{1,2}l nas Eqs. (3.8) e (3.12).
O desempenho do método numérico proposto é inicalmente investigado,
comparando as suas previsões com os resultados experimentais da configuração de
tubo reto. Devido ao seu arranjo, existem apenas ondas axiais viajando na tubulação.
Por isso essa configuração constitui a situação mais simples e pode ser considerado
um pré-requisito para o modelo numérico, a fim de habilitá-lo a outras situações

60
complexas, em que as ondas axiais são acopladas com as ondas de cisalhamento e de
flexão nas fronteiras.
O histórico experimental e numérico da pressão nas posições PT1, PT3 e PT5
na configuração de tubo reto (vide Fig. 3.1(a)) são apresentados na Fig. 5.1. Para
avaliar a precisão e a exatidão da técnica numérica proposta, testes de convergência
foram realizados considerando-se diferentes números de células: N 75, N 150 e
N 450. Isto é equivalente a considerar discretizações espaciais da ordem de
z 60.0 mm, z 30.0 mm e z = 10.0 mm, respectivamente. Os resultados
obtidos, os quais foram simulados com CFLN 0.4 fornecem passos de tempo de
t 5.20μs, t 2.60μs e t 0.87μs respectivamente, são apresentados na Fig.
5.1(a) juntamente com a curva experimental na localização espacial PT1. Muito
embora os resultados numéricos estejam quase sobrepostos, pode-se ver que de
N 75 para N 150 as soluções numéricas tendem a convergir para aquela com
N 450. Com N 150 e N 450 praticamente não há diferença visível entre essas
respostas. Além disso, as respostas numéricas apresentam uma excelente
concordância quando comparadas com a resposta experimental. Esse tipo de
concordância também é observada com os históricos de tempo experimental e
numérico da pressão nos locais PT3 e PT5, como pode ser visto na Fig. 5.1(b). Os
resultados numéricos com N 150 são capazes de reproduzir com grande nível de
detalhe os picos de pressão (em ambos os locais PT3 e PT5) originados pelo
acoplamento de junção nas extremidades do tubo, assim como pelo acoplamento de
Poisson em toda a extensão do tubo.
Esta concordância global entre os resultados experimentais e numéricos
também foi observada por Tijsseling (1993) que empregou o MC como método
numérico.

61
(a)
(b)
Figura 5.1 – Histórico experimental e numérico da pressão na localização PT1 (para
N 75;150;450) (a) e nas localizações PT3 e PT5 (para N 150) (b) da configuração
de tubo reto (vide Fig. 3.1(a)) com CFLN 0.4.

62
As deformações axiais médias em função do tempo nas posições SGA e SGD
(vide Fig. 3.1(a)) são apresentadas nas Figs. 5.2a e 5.2b, respectivamente. Os
resultados numéricos apresentados em ambas as figuras foram computados com
N 150 e CFLN 0.4 e foram calculados com o auxílio da Eq. (5.1). Como pode ser
visto, a primeira e maior queda de deformação é precisamente detectada (em
amplitude e fase) pelo método numérico em ambos os locais SGA e SGD.
Para investigar a influência do tamanho da discretização N e do parâmetro
CFL CFLN sobre a resposta numérica, foi apresentado nas Figs. 5.3(a) e 5.3(b)
histórico de velocidades axiais na localização LDV (vide Fig. 3.1(a)) para os
resultados experimental e numérico. Na Fig. 5.3(a) pode-se ver que à medida que o a
discretização é refinada de N 75 para N 450, a solução numérica tende a se
ajustar melhor à curva experimental, especialmente após os primeiros 15 ms. No
entanto, a redução do parâmetro CFL de CFLN 0.4 para CFLN 0.1 introduz um
pequeno ou quase nenhum efeito sobre comportamento das respostas numéricas
durante o período de 20 ms de simulação. Conforme será visto mais adiante, para a
configuração de um joelho, esse tipo de comportamento ainda permanece válido para
a velocidade axial, mas muda drasticamente para o momento fletor.
Com o objetivo de analisar o desempenho do método numérico proposto em
uma situação mais complexa, a configuração de um joelho (vide Fig. 3.1(b)) é agora
considerada. Neste arranjo de tubulação, quando as ondas de pressão e tensão axial
induzidas pelo impacto alcançam o joelho, ondas de cisalhamento e de flexão são
geradas em ambos os tubos 1 e 2. Após serem refletidas nas extremidades fechadas,
essas ondas dão origem a um padrão bastante complexo de interação de onda quando
comparado com a configuração de tubo reto. A natureza altamente dispersiva das
ondas de cisalhamento e de flexão (caracterizada pelos termos fontes na Eq. (2.9))

63
(a)
(b)
Figura 5.2 – Histórico experimental e numérico de deformação axial média na
localização SGA (a) e SGD (b) da configuração de tubo reto (vide Fig. 3.1(a)) com
N 150 e CFLN 0.4.

64
(a)
(b)
Figura 5.3 – Histórico experimental e numérico de velocidade axial na localização
LDV da configuração de tubo reto (vide Fig. 3.1(a)) para N 75;150;450 com
CFLN 0.4 (a) e para CFLN 0.1;0.2;0.4 com N 150 (b).

65
introduz um mecanismo ainda mais complexo de interação entre essas famílias de
ondas.
Outra característica nova, que aparece quando a configuração de um joelho é
considerada, é a necessidade de se assegurar um mesmo passo de tempo para ambos
os tubos. Tal característica pode ser um aspecto complicador em sistemas de
tubulação com um grande número de tubos de diferentes comprimentos, se um mesmo
espaçamento da malha z deve ser utilizado para todos os tubos, como ocorre quando
o MC é empregado. Para sistemas de tubulação como a configuração de um joelho
aqui considerado, deve-se garantir que a razão 1 2L L é bem aproximada pela
razão 1 2N N , na qual 1N e 2N são números inteiros positivos. Tijsseling, et al. (1996)
utilizaram em suas simulações 1 2N N 138 41 para aproximar 1 2L L . Isto é
equivalente a admitir que 1L 4.51m e 2L 1.34m, como foi feito por Gale e Tiselj
(2008), com um erro absoluto desprezível em z , i.e., 1 1 2 2L N L N , da ordem de
1.77 m. É importante ressaltar que, em contraste com o MC, o método numérico
proposto neste trabalho não está restrito ao uso de uma mesmo k k kz L N para
todos os tubos. Nesse caso, basta atribuir valores ligeiramente diferentes para o
parâmetro CFL CFLN para cada tubo a fim de garantir um mesmo passo de tempo.
O histórico experimental e numérico da pressão nas localizações PT1, PT5
PT6 da configuração de um joelho (vide Fig. 3.1(b)) são apresentados na Fig. 5.4. A
Fig. 5.4(a) exibe as respostas numéricas de pressão na localização PT1 obtida com
1 2N N 138 41, 276 82 , e 414 123 , conferindo z 32.7mm, z 16.3mm e
z 10.9mm, respectivamente. As simulações numéricas foram realizadas com
CFLN 0.4, dando origem a passos de tempo de t 2.83 s, t 1.41 s e
t 0.94 s, respectivamente. Como pode ser visto na Fig. 5.4(a), a malha mais

66
(a)
(b)
Figura 5.4 – Histórico experimental e numérico da pressão na localização PT1 (para
1 2N N 138 41; 276 82 ; 414 123 ) (a) e nas localizações PT5 e PT6 (b) da
configuração de um joelho (vide Fig. 3.2(a)) com CFLN 0.4.

67
grosseira ( 1 2N N 138 41) é capaz de reproduzir muito bem a curva experimental.
Além disso, quando o tamanho da malha (ou do passo de tempo) é refinado as
soluções numéricas tendem a se sobrepor, demonstrando que a convergência vai ser
alcançada. A muito boa concordância entre os resultados experimentais e numéricos
observada para a pressão perto da extremidade de impacto (local PT1) também é
verificada nos locais PT5 e PT6 (vide Fig. 5.4(b)). O mesmo comportamento foi
observado por Tijsseling et al. (1996) e Gale e Tiselj (2008) que usaram o MC e um
método upwind característico de segunda ordem, respectivamente.
A concordância entre os resultados experimentais e numéricos é também
observada para a deformação média axial nas localizações SGA e SGE (vide Fig.
3.1(b)), como pode ser notado nas Figs. 5.5(a) e 5.5(b), respectivamente. Os
resultados numéricos em ambas as figuras foram obtidos com 1 2N N 138 41 e
CFLN 0.4, através da Eq. (5.1), com base nos dados computados de pressão e a força
axial nessas localizações.
Conforme foi feito para a configuração de tubo de reto, o efeito do tamanho da
malha 1 2N N e do parâmetro CFL CFLN sobre a resposta numérica também é
investigado para a configuração de um joelho. Para isso, os resultados experimentais e
numéricos são plotados juntos para os históricos de velocidade axial na localização
LDV (vide Fig. 3.1(b)) nas Figs. 5.6(a) e 5.6(b). Como pode ser visto na Fig. 5.6(a),
na qual CFLN 0.4 foi usado para todas as simulações numéricas, a resposta associada
com 1 2N N 138 41 é capaz de reproduzir com grande exatidão e um nível
significativo de precisão o resultado experimental, na medida em que os resultados
numéricos encontram-se quase sobrepostos. Por outro lado, a redução do parâmetro
CFL de CFLN 0.4 para CFLN 0.1 tende a degradar um pouco a solução numérica.

68
(a)
(b)
Figura 5.5 – Histórico experimental e numérico de deformação axial média na
localização SGA (a) e SGE (b) da configuração de um joelho (vide Fig. 3.2(a)) com
1 2N N 138 41 e CFLN 0.4.

69
(a)
(b)
Figura 5.6 – Histórico experimental e numérico de velocidade axial na localização
LDV da configuração de um joelho (vide Fig. 3.2(a)) para
1 2N N 138 41; 276 82 ; 414 123 com CFLN 0.4 (a) e para CFLN 0.1;0.2;0.4 com
1 2N N 138 41 (b).

70
As Figs. 5.7 e 5.8 apresentam as histórias experimental e numérica do
momento fletor xM nas localizações SGA e SGE, respectivamente (vide Fig. 3.1(b)).
As curvas experimentais são obtidas indiretamente por meio das respostas axiais de
deformação nas partes superior e inferior do tubo, de acordo com Eq. (5.2). Na Figs.
5.7(a) e 5.8(a) os resultados numéricos são plotadas para 1 2N N 138 41, 276 82 e
414 123 , com CFLN 0.4. Por outro lado, as Figs. 5.7(b) e 5.8(b) mostram as
respostas numéricas para CFLN 0.4, 0.2 e 0.1, com 1 2N N 138 41. Pode-se
observar nas Figs. 5.7(a) e 5.8(a), que as soluções numéricas apresentam uma boa
concordância com a curva experimental tanto em fase quanto em amplitude, para os
três tamanhos de malha empregados na simulação. Quanto mais refinado é o tamanho
de malha, mais a solução numérica se ajusta à curva experimental.
Em contraste ao que foi notado para a velocidade axial (vide Fig.5.3(b) ), a
redução do passo de tempo induzida pelo parâmetro CFL CFLN introduz uma
degradação significativa na solução numérica do momento fletor, como pode ser
observado nas Figs. 5.7 e 5.8. Esta característica pode ser atribuída à presença dos
termos fonte na Eq. (2.9). Uma vez que os termos de fonte associados com as ondas
de cisalhamento e de flexão (vide Eqs. (2.17) e (2.18)) são preponderantes, eles são
responsáveis pelo comportamento dispersivo dessas ondas que não é observado nas
ondas axiais. Por outro lado, a aproximação numérica destes termos é realizada no
segundo passo da técnica de decomposição do operador (Eqs. (4.10) e (4.11)) usando
o método Gear. Para um tamanho fixo de malha, a redução do parâmetro CFLN
implica em um aumento do número de vezes que o segundo passo da técnica de
decomposição do operador é executado.

71
(a)
(b)
Figura 5.7 – Histórico experimental e numérico do momento fletor na localização
SGA da configuração de um joelho (vide Fig. 3.2(a)) para 1 2N N 138 41; 276 82 ;
414 123 com CFLN 0.4 (a) e para CFLN 0.1;0.2;0.4 com 1 2N N 138 41 (b).

72
(a)
(b)
Figura 5.8 – Histórico experimental e numérico do momento fletor na localização
SGE da configuração de um joelho (vide Fig. 3.2(a)) para 1 2N N 138 41; 276 82 ;
414 123 com CFLN 0.4 (a) e para CFLN 0.1;0.2;0.4 com 1 2N N 138 41 (b).

73
Assim, uma possível explicação para a deterioração geral das respostas dos momentos
fletores, na medida em que o parâmetro NCFL é reduzido, é a propagação de erros de
truncamento, especialmente para instantes de tempo mais longos.
O comportamento descrito anteriormente poderia também ser associado com a
natureza do modelo empregado. Quando o raio de curvatura do joelho cR é levado em
conta no modelo, termos fonte extras aparecem na Eq. (2.9), tendo cR no
denominador (Wiggert e Tijsseling, 2001; Gale e Tiselj, 2008). Uma vez que estes
termos extras tendem a atenuar o caráter dispersivo das ondas de cisalhamento e
flexão, tal modelo é conhecido como modelo de curva suave por Gale e Tiselj (2008),
em contraste com o modelo de curva abrupta utilizado neste trabalho. O modelo de
curva abrupta é um caso particular do modelo de curva suave e é recuperado quando
no limite cR . No entanto, as comparações estabelecidas por Gale e Tiselj (2008)
entre os modelos de curva suave e abrupta demonstraram que estas abordagens dão
resultados quase indistinguíveis para a configuração um joelho, porque o raio de
curvatura do joelho é aproximadamente do mesmo tamanho do raio do tubo e
significativamente menor do que o comprimento do sistema de tubulação.
Apesar do método de Glimm ser apenas de primeira ordem, a boa
concordância entre os resultados experimentais e numéricos observados nas respostas
dos momentos fletores valida o procedimento numérico proposto neste documento
como um todo. Este resultado capacita a sua utilização em outras aplicações
complexas de problemas de IFE unidimensional em que termos não lineares estão
presentes. Além de preservar com grande precisão a fase e amplitude das respostas, o
procedimento numérico proposto demanda baixo custo de armazenamento e baixo
esforço computacional. Vale a pena mencionar que o período de 20 ms de simulação
para o problema de impacto da haste na configuração de um joelho (com CFLN 0.4 e

74
1 2N N 138 41) demorou cerca de 1 minuto em um processador Pentium 4 de 2.8
GHz.

75
Capítulo 6
Conclusões e Sugestões
Um procedimento numérico completo, baseado no método de Glimm e numa
técnica de decomposição de operadores, foi proposto para obter soluções aproximadas
para o modelo de interação fluido-estrutura (IFE) de oito equações, utilizado em
análises de transiente em sistemas de tubulação conduzindo líquidos. Movimentos
axiais do sistema fluido-tubo, bem como movimentos laterais e de flexão do tubo são
levados em consideração pelo modelo de IFE, que é regido por um sistema de
equações hiperbólicas não homogêneas. Com o auxílio da técnica de decomposição
do operador, o sistema de equações é decomposto em duas partes de tal maneira que a
parte puramente hiperbólica (a homogênea) é isolada da parte meramente evolutiva no
tempo (a não homogênea). Para avançar com a solução no tempo, os termos
homogêneo e não homogêneo são numericamente resolvidos sequencialmente,
empregando-se o método Glimm e método de Gear, respectivamente. Para aplicar
adequadamente as condições de contorno no contexto do método de Glimm,
problemas de Riemann não clássicos para as extremidades dos tubos foram
formulados e resolvidos analiticamente.
Entre outras metodologias numéricas existentes que são empregadas
usualmente para resolver equações hiperbólicas unidimensionais, o método de Glimm

76
é reconhecido como sendo um dos que melhor capta e preserva a presença de
descontinuidades nas variáveis dependentes e em suas derivadas. Embora o método de
Glimm tenha sido originalmente concebido para o tratamento de problemas de valor
inicial, a estratégia aqui proposta de construção de problemas de Riemann não
clássicos para incorporar as condições de contorno se mostrou extremamente eficaz e
eficiente.
Tendo em vista a complexidade física do fenômeno descrito pelo modelo de
IFE, uma concordância global muito boa foi encontrada entre os resultados
experimentais e numéricos, tanto em magnitude quanto em fase, para praticamente
todas as principais variáveis (pressão, deformação axial, velocidade axial e momento
fletor). O método de Glimm é facilmente implementado e exige esforço
computacional baixo. Além disso, é adequado para o tratamento de sistemas de
tubulação com múltiplos tubos (com diferentes propriedades geométricas e físicas), na
medida em que não requer o uso de uma malha uniforme e igual para todos os tubos, a
fim de se obter um passo de tempo comum.
As características acima mencionadas tornam o método de Glimm uma
ferramenta numérica promissora no campo de análise de IFE em sistemas de
tubulações. Além disso, a extensão do método para incorporar outros fenômenos
complexos lineares e não lineares (como, ondas de torção na parede da tubulação,
cavitação, fluxos de duas fases e comportamentos inelásticos com dano da parede do
tubo para a realização de análises de integridade estrutural) podem ser facilmente
implementados empregando-se a mesma metodologia e estrutura aqui apresentados.
Como sugestões de continuidade direta deste trabalho recomenda-se a
implementação:

77
a) de outras técnicas numéricas, em substituição ao método de Glimm, que
também se baseiam na solução do problema de Riemann, mas que possuem
ordem superior, como por exemplo, o esquema MUSCL-Hancok (Monotonic
Centred Scheme for Conservation Laws) que é de segunda ordem (Toro,
1999);
b) do termo de atrito transiente caracterizado por (Vitkosky et al. ,2001);
( ) ( ) ( ) ( )( )
4 2
z z z zz
fk
V U V U k V U V Uf sign V U
R t z
(6.1)
na qual
0.0567
**
8
log(15.29 /(Re)
0.006566, se Re<2000
, sendo 12.86, se 2000 Re<102
(Re)
2 ( )onde Re é o número de Reynolds, Re= .
zf
Ck C
R V U
em substituição ao atrito de regime permanente descrito apenas pela primeira
parcela da expressão anterior. O emprego do atrito unidimensional transiente,
com dependência na frequência do movimento do líquido no interior do tubo,
além de descrever de forma mais realista o atrito no fluido, exerce uma
influência significativa nas respostas das ondas de pressão mediante a
introdução de mecanismos de dispersão e atenuação, especialmente quando no
sistema de tubulação em apreço há diversas inversões do movimento do
líquido confinado nos tubos (Brunome et al, 1991a, 1991b, 1995; Silva-Araya
& Chaudry, 1997; Wiggert & Tijsseling, 2001).

78
Apêndice A
Momento Fletor em função das Deformações Axiais
O objetivo deste apêndice é deduzir a expressão dada pela Eq. (5.2), a qual
permite calcular o momento fletor em termos das deformações axiais na parede do
tubo, mas precisamente das medidas na parte superior (localização 1) e na parte
inferior (localização 3) da circunferência do tubo (vide Fig. (3.1)).
As deformações axiais nas localizações 1 e 3 não são em geral iguais. De fato,
a diferença entre elas é que permite a determinação do momento fletor na direção
kx , xM , conforme demonstrado abaixo . Considerando-se a representação dos eixos
na Fig. 2.1, a tensão axial no tubo (na diração kz ) devido ao momento fletor, BM
z ,
pode ser relacionada com esse na direção kx , xM , de acordo com:
x
BM
zp
M y
I (A.1)
na qual y é medido a partir da linha de centro do tubo. Entretanto, a tensão axial no
tubo não é devida a somente ao momento fletor na direção kx , mas também ao
esforço axial zF . Como o modelo empregado é linear, o princípio da superposição

79
pode ser aplicado. Assim, as tensões axiais globais, na superfície superior e na
superfície inferior do tubo, podem ser escritas como:
( ) ( )
( ( )) ( ( ))
BM N
z z z
BM N
z z z
y R e y R e
y R e y R e
(A.2)
na qual a tensão axial devido ao esforço axial é caracterizada por N zz pF A .
Invocando-se a relação tensão-deformação para um material elástico e linear;
z z
RE P
e
(A.3)
pode-se usar a Eq. (A.3) para reescrever a Eq. (A.2) como:
( )( )
( )( ( ))
xN
z zp
xN
z zp
R M R eE y R e P
e I
R M R eE y R e P
e I
(A.4)
Finalmente, as Eq. (A.4) podem ser combinadas para expressar o momento
fletor na direção kx em termos das deformações axiais ( )z y R e e
( ( ))z y R e :
(1) (3)
2( )px
z z
EIM
R e
(A.5)
na qual, por definição, (1) ( ( ))z z y R e e (3) ( ( ))z z y R e são as
deformações axiais na parte superior e inferior da circunferência externa do tubo.

80
Referências Bibliográficas
Ahmadi, A.and Keramat, A., Investigation of Fluid-Structure Interection with Various
Types of Junction Coupling. Journal of Fluids and Structures, Vol. 26, pp. 1123-
1141, 2010.
Belytschko, T. B., Karabin, M. and Lin, J. I.,Fluid-Structure Interaction in
Waterhammer Response of Flexible Piping. ASME Journal of Pressure Vessel
Technology, Vol. 108, pp.249-255, 1986.
Brunone, B., Golia, U. M. and Greco, M., Some Remarks on the Momentum Equation
for Fast Transientes. Proceedings of International Conerence on Hydraulic
Transients with Water Hammer Column Separation, IAHR, Delft, The
Netherlands, pp. 201-209, 1991a.
Brunone, B., Golia, U. M. and Greco, M., Modeling of Fast Transients by Numerical
Methods. Proceedings of International Conference on Hydraulic Transients with
Water Hammer Column Separation, IAHR, Delft, The Netherlands, pp. 273-
280, 1991b.
Brunone, B., Golia, U. M. and Greco, M., Effects of Two-Dimensionality on Pipe
Transients Modeling. Journal of Hydraulic Engineering, ASCE, Vol. 121(12),
pp. 906-912, 1995.
Collela, P., Glimm’s Method for Gas Dynamics, SIAM J. Sci. Stat. Comput., Vol. 3,
No. 1, pp. 76-110, 1982.
Cowper, G. R., The Shear Coefficient in Timoshenko´s Beam Theory. ASME Journal
of Applied Mechanics, Vol. 33, pp.335-340, 1966.
Fan, D., Fluid-Structure Interaction in Internal Flows. Ph.D. Thesis, Departament of
Civil Engineering, The University of Dundee, UK, 1989.
Fan, D. and Tijsseling, A. S., Fluid-Structure Interection with Cavitation in Transient
Pipe Flows. ASME Journal of Fluids Engineering, Vol. 114, pp. 268-274, 1992.
Freitas Rachid, F.B. and Stuckenbruck, S., Transients in Liquid and Structure in
Viscoelastic Pipes. In: Proceedings of the BHRA 6th International Conference
on Pressure Surges, pp. 69-84, Oct., Cambridge,1989.

81
Freitas Rachid, F.B., Costa Mattos, H. and Stuckenbruck, S., Fluid-Structure
Interaction in Elasto-Viscoplastic Piping Systems. In: Proceedings of the 1st
ASME/JSME Joint Fluids Engineering Conference, pp. 65-73, Portland,1991.
Freitas Rachid, F. B., Costa Mattos, H. and Saldanha da Gama, R.M., Modelling of
Hidraulic Transients in Damageable Elasto-Viscoplastic Piping Systems.
Applied Mathematical Modelling Vol. 18, pp. 207-215,1994.
Freitas Rachid, F. B. and Costa Mattos, H., Modelling of Pipeline Integrity Taking
Into Account the Fluid-Structure Interaction. International Journal for
Numerical Methods in Fluids, Vol. 28, pp. 337-355, 1998.
Freitas Rachid, F. B. and Costa Mattos, H., On the Suitability of the Low Mach
Number Assumption in the Modelling of the Damage Induced by Pressure
Transients in Pipe Systems. ASME Journal of Fluids Engineering, Vol. 121, pp.
112-117, 1999.
Freitas Rachid, F. B., A Thermodynamically Consistent Model for Cavitating Flows
of Compressible Fluids. International Journal of Non-Linear Mechanics, Vol.
38(7), pp. 1007-1018, 2003.
Freitas Rachid, F. B., Structural Integrity of Flexible Piping Systems Conveying
Liquids. Journal of Pressure Vessel Technology, Vol.128, pp.341-347, 2006.
Gale, J. and Tiselj, I., Gudonov’s Method for Simulatinons of Fluid-Structure
Interaction in Piping Systems. Journal of Pressure Vessel Technology. Vol.130,
031304-1 – 0313304-12, 2008.
Gear, C. W., Numerical Initial Value Problems in Ordinary Differential Equations.
Prentice-Hall, Englewood Cliffs, New Jersey, 1971.
Glimm, J., Solutions in the Large for Nonlinear Hyperbolic Systems, Commum. Pure
Appl. Math., Vol. 18, pp. 697-715, 1965.
Harten, A., Lax, P. D. and van Leer, B., On Upstream Differencing and Gudonov-
Type Schemes for Hiperbolic Conservation Laws. SIAM Rewiew, Vol. 25, No.
1, pp. 35-61, 1983.
Lemaitre, J., Formulation Unifiée des Lois d’Évolutions d’Endommagement.
Comptes-Rendus de l’Académie des Sciences de Paris, t.305, série II, pp. 1125-
1130, 1987.
Lemaitre, J. and Chaboche, J. L., Mechanics of Solid Materials. Cambridge
University Press, London, 1990.

82
Leveque, R. J., Finite Volume Methods for Hyperbolic Problems. Cambridge
University Press, London, 2002.
Li, Q. S., Yang, K. and Zhang, L., Analytical Solution for Fluid-Structure Interection
in Liquid-Filled Pipes Subjected to Impact-Induced Water Hammer. ASCE
Journal of Engineering Mechanics. Vol. 129(12), pp.1408-1417, 2003.
Lighthill, J., Waves in Fluids. Cambridge University Press, London, 1978.
Marchesin, D. and Paes-Leme, P. J., Shocks in Gas Pipelines. SIAM Journal of
Science and Statistical Computations, Vol. 4, pp. 105-116, 1983.
Osher, S., Riemann Solvers, the Entropy Condition and Difference Aproximations.
SIAM Journal of Numerical Analysis, Vol. 21(2), pp. 217-235, 1984.
Roe, P. L., Aproximate Riemann Solvers, Parameter Vectors and Difference Schemes.
Journal of Computational Physics, Vol. 43, pp. 357-372, 1981.
Silva-Araya, W. F. and Chaudhry, M. H., Computation of Energy Dissipation in
Transient Flow. Journal of Hydraulic Engineering, ASCE, Vol. 123(92), pp.
108-115, 1997.
Simpson, A. S., Large Water Hammer Pressure due to Column Separation in Sloping
Pipes. Ph.D. Thesis, Departament of Civil Engineering, The University of
Michigan, Ann Arbor, 1986.
Skalak, R., An Extension of the Theory of Water Hammer. Transactions of the
ASME, Vol. 78, pp. 105-116, 1956.
Smoller, J., Shock Waves and Reaction-Diffusion Equations. Springer-Verlag, New
York, 1983.
Sod, G. A., A Numerical Study of a Converging Cylindrical Shock. Journal of Fluid
Mechanics, Vol. 83, pp. 785-794, 1977.
Sreejith, B., Jayaraj, K., Ganesan, N., Padmanabhan, C., Chellapandi, P. and Selvaraj,
P., Finite Element Analysis of Fluid-Structure Interaction in Pipeline Systems.
Nuclear Engineering and Design, Vol 227, 313-322, 2004.
Stuckenbruck, S., Wiggert, D. C. and Otwell, R. S., The Influence of Pipe Motion on
Acoustic Wave Propagation. ASME Journal of Fluids Engineering, Vol. 107,
pp. 518-522, 1985.
Tijsseling, A. S. and Lavooij, C. S. W., Waterhammer with Fluid-Structure
Interaction. Appl. Sci. Res. 47, 273-285, 1990.

83
Tijsseling, A. S., Fluid-Structure Interaction in Case of Water Hammer with
Cavitation. Ph.D. Thesis, Faculty of Civil Engineering, Delft University of
Technology, The Netherlands, 1993.
Tijsseling, A. S., Fluid-Structure Interaction in Liquid-Filled Pipe Systems: a Review.
Journal of Fluids and Structures, Vol. 10, pp. 109-146, 1996.
Tijsseling, A. S., Vardy, A. E. and Fan, D., Fluid-Structure Interaction and Cavitation
in a Single-Elbow Pipe System. Journal of Fluids and Structures, Vol. 10, pp.
395-420, 1996.
Tijsseling, A. S., Exact Solution of linear Hyperbolic four-equation system in axial
liquid-pipe vibration. Journal of Fluids and Structures, Vol. 18, pp.179-196,
2003.
Tijsseling, A. S., Exact Computation of the Axial Vibration of Two Coupled Liquid-
Filled Pipes. In: Proceedings of the 2009 ASME Pressure Vessels and Piping
Division Conference, PVP2009-77250, Prague, Czech Republic, 2009.
Tijsseling, A. S., Fluid-Structure Interaction in Liquid-Filled Pipes. Experimental
Data. Personal Web Page at http://www.win.tue.nl/fsi/, Acessed in October of
2010.
Toro, E. F., Riemann Solvers and Numerical Methods for Fluid Dynamics. Springer-
Verlag, Berlim, 1999.
Vitkosky, J. P., Bergant, A., Simpson, A. R. and Lambert, M. F., Systematic
Evaluation of One-Dimensional Unsteady Friction Models in Simple Pipelines.
Journal of Hydraulic Engineering, Vol. 132, (7), pp. 696-708, 2001.
Walker, J. S. and Phillips, J. N., Pulse Propagation in Fluid-Filled Tubes. ASME
Journal of Applied Mechnaics, Vol. 8, pp.31-35, 1977.
Wiggert, D. C., Otwell, R.S. and Hatfield, F.J., The Effect of Elbow Restraint on
Pressure Transients. ASME Journal of Fluids Engineering, Vol. 107, pp. 402-
406, 1985.
Wiggert, D. C., Coupled Transient Flow and Structural Motion in Liquid-Filled
Piping Systems: a Survey. In: Proceedings of the ASME Pressure Vessels and
Piping Conference, 86-PVP-$, Chicago, 1986.
Wiggert, D. C., Hatfield, F. J. and Stuckenbruck, S., Analysis of Liquid and Structural
Transients by the Method of Characteristics. ASME Journal of Fluids
Engineering, Vol. 109, pp. 161-165, 1987.

84
Wiggert, D. C., Fluid Transients in Flexible Piping Systems: a Perspective in Recent
Developments. In: Proceedings of the 18th IAHR Symposium on Hydraulic
Machinery and Cavitation, pp. 58-67, Valencia, Spain, 1996.
Wiggert, D. C. and Tijsseling, A.S., Fluid Transients and Fluid-Structures Interaction
in Flexible Liquid-Filled Piping. ASME Applied Mechanics Reviews Vol 54(5),
pp. 455-481, 2001.
Wylie, E. B. and Streeter, V. L., Fluids Transients in Systems. Prentice Hall, New
York, 1993.
Zhang, L., Tijsseling, A. S. and Vardy, A. E., FSI Analysis of Liquid-Filled Pipes.
Journal of Sound and Vibration, Vol. 224(1), pp. 69-99, 1999.