S m a r t H o t S p o t -...
19
Universidade Federal do Rio Grande do Norte Instituto Metrópole Digital Projeto SmartMetropolis WP4 – Infraestrutura Smart HotSpot Relatório de Atividades T3 NatalRN, Brasil Outubro/2016
Transcript of S m a r t H o t S p o t -...
Universidade Federal do Rio Grande do Norte Instituto Metrópole Digital
Projeto SmartMetropolis WP4 – Infraestrutura
Smart HotSpot
Relatório de Atividades T3
NatalRN, Brasil Outubro/2016
1
Equipe Técnica Docentes Prof. MSc. Aluizio Ferreira da Rocha Neto IMD/UFRN Discentes Rafael Pereira Clemente Ramon Santos Malaquias Thais Alves de Freitas
2
SUMÁRIO
1 Introdução 4
2 Sensoriamento 4 2.1 Sistema de monitoramento interno 4 2.2 Equipamentos utilizados 4
2.2.1 Sensor de Gás MQ2 Inflamável e Fumaça 4 2.2.2 Sensor de luminosidade 5 2.2.3 Sensor de temperatura e umidade DHT22 6 2.2.4 Plataforma computacional BeagleBone Black 7
3 Monitoramento 8 3.1 Plataformas Guardião Cloud e ThingSpeak.com 8 3.2 Sistema de Gerenciamento PoleManager 9
4 Estrutura 14 4.1 Dimensionamento de cabos e conexões 14 4.2 Instalação do protótipo 16
5 Redes 16 5.1 Descrição 16 5.2 Topologia de Rede 17
5.2.1 Protocolos de Roteamento 18
6 Conclusões 19
7 Referências 19
3
1 Introdução
Este é o terceiro relatório do projeto do Smart Hotspot, solução de poste autonômico como plataforma de conectividade, sensoriamento e monitoramento por câmeras para cidades inteligentes.
Nesta etapa do projeto, tevese como objetivo o aperfeiçoamento do poste, no que diz
respeito a sua estrutura, bem como o seu funcionamento. Foi feito um sistema de monitoramento interno do poste, baseado em sensores, bem como estudos sobre plataformas de gerenciamento com a criação de um software próprio capaz de realizar a administração da solução e coleta dos dados. Além disso, realizaramse estudos a fim de determinar a topologia de rede a ser aplicada.
2 Sensoriamento
2.1 Sistema de monitoramento interno
Nesta parte do projeto, desenvolvemos um sistema de sensoriamento para a parte interna da caixa de acomodação dos equipamentos indoor, a fim de garantir segurança e confiabilidade na sua utilização. Continuando o que tinha sido iniciado na etapa anterior, foi acrescentado a este sistema o sensor de gás e fumaça MQ2, sensor de umidade e temperatura DHT22 e um sensor de luminosidade, os quais serão detalhados na seção seguinte.
O sistema de sensoriamento será acoplado em uma caixa impressa em 3d, que suporta diversas condições de temperatura e ambiente. O objetivo desta montagem foi usar os sensores de gás e fumaça e o de umidade e temperatura para evitar danos espontâneos, devido a clima e ambiente com altas temperaturas, e o sensor de luminosidade controlará os momento de abertura da caixa, sendo enviada uma notificação ao sistema toda vez que a caixa for verificada.
2.2 Equipamentos utilizados
2.2.1 Sensor de Gás MQ2 Inflamável e Fumaça
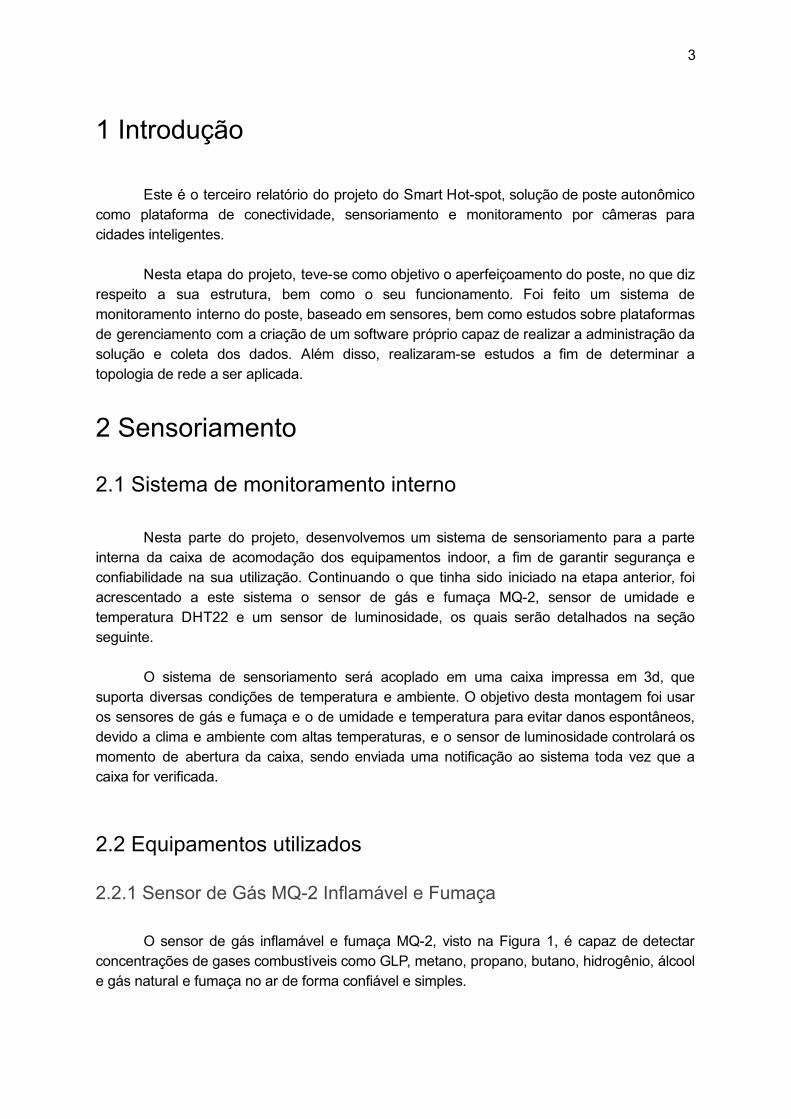
O sensor de gás inflamável e fumaça MQ2, visto na Figura 1, é capaz de detectar concentrações de gases combustíveis como GLP, metano, propano, butano, hidrogênio, álcool e gás natural e fumaça no ar de forma confiável e simples.
4
Quando a concentração de gases fica acima do nível ajustado pelo potenciômetro, a saída digital D0, fica em estado alto, e se abaixo do nível, fica em estado baixo e para ter uma noção melhor da concentração, foi usada sua saída analógica A0 e conectada a um conversor AD no microcontrolador.
Figura 1 : Sensor de Gás MQ2.
Especificações:
Tensão de operação: 5v Sensibilidade ajustável por potenciômetro Comparador LM393 LED indicador para tensão LED indicador para saída digital Dimensões 32 x 20 x 15mm
Pinagem
Saída analógica(A0) Saída digital(D0) GND: GND VCC: 5V
2.2.2 Sensor de luminosidade
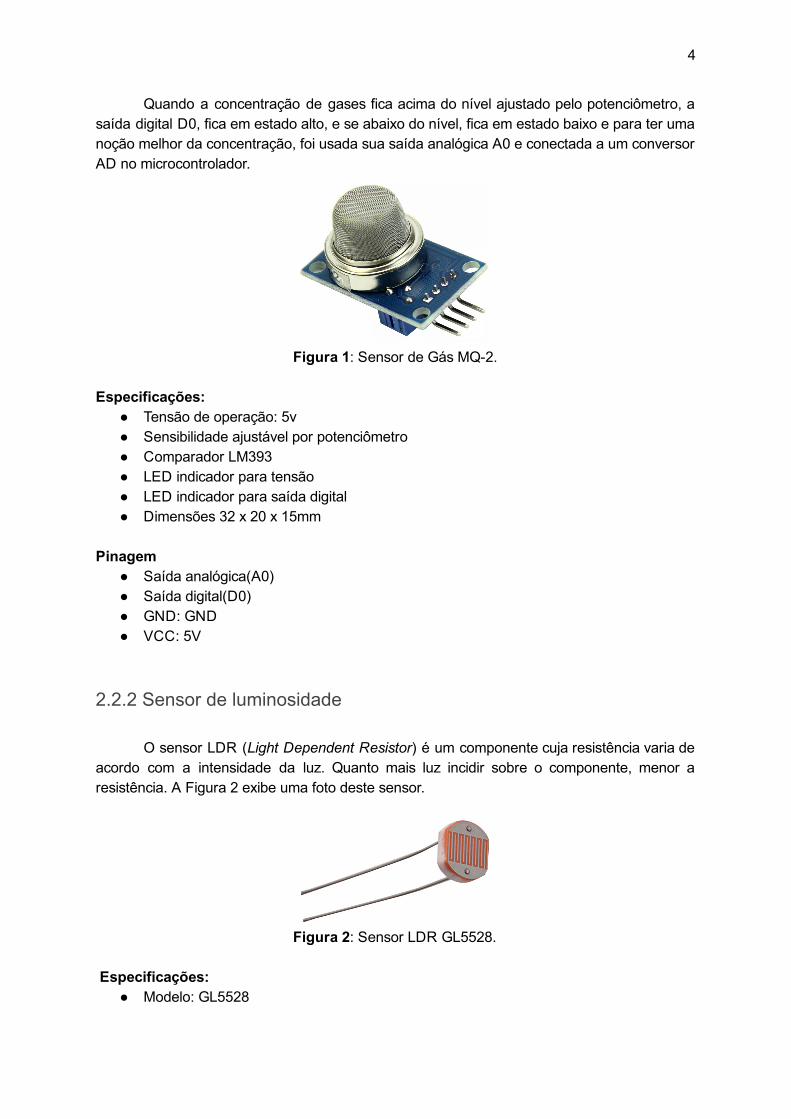
O sensor LDR ( Light Dependent Resistor ) é um componente cuja resistência varia de acordo com a intensidade da luz. Quanto mais luz incidir sobre o componente, menor a resistência. A Figura 2 exibe uma foto deste sensor.
Figura 2 : Sensor LDR GL5528.
Especificações:
Modelo: GL5528
5
Diâmetro: 5mm Tensão máxima: 150VDC Potência máxima: 100mW Tensão de operação: 30ªC a 70ªC Espectro: 540mm Comprimento com terminais: 32mm Resistência no Escuro: 1 Mohm Resistência na luz: 1020komh
2.2.3 Sensor de temperatura e umidade DHT22
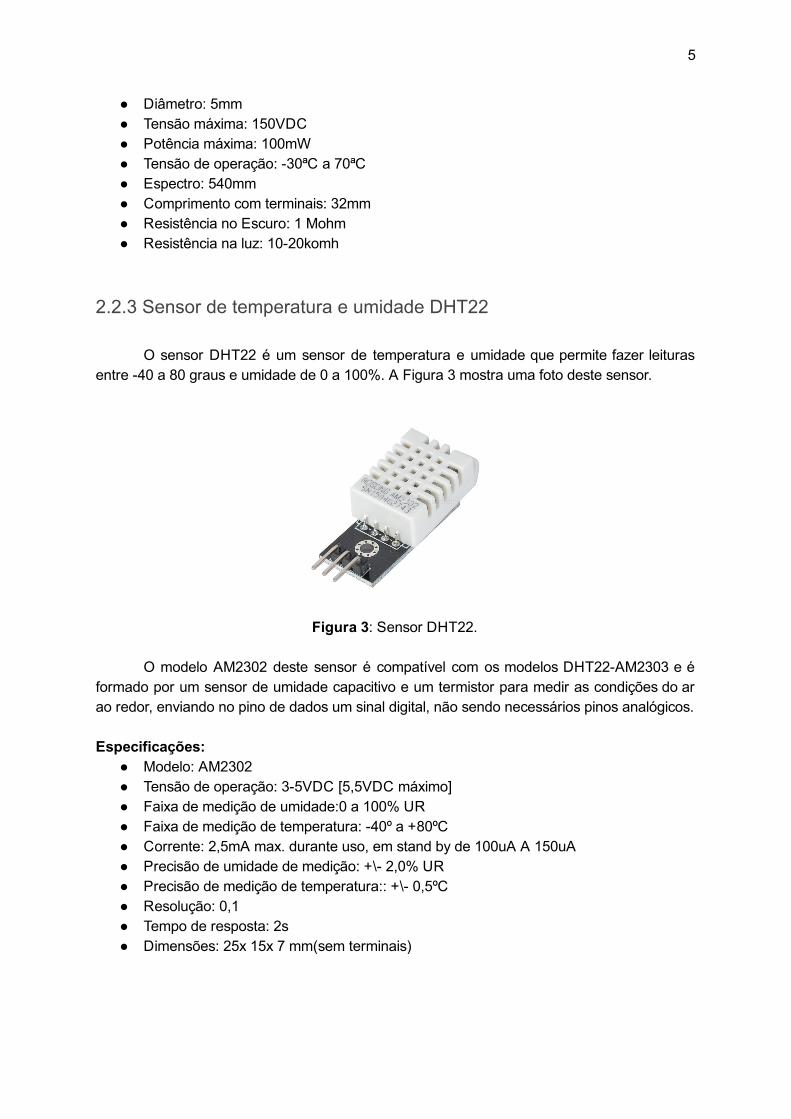
O sensor DHT22 é um sensor de temperatura e umidade que permite fazer leituras entre 40 a 80 graus e umidade de 0 a 100%. A Figura 3 mostra uma foto deste sensor.
Figura 3 : Sensor DHT22.
O modelo AM2302 deste sensor é compatível com os modelos DHT22AM2303 e é
formado por um sensor de umidade capacitivo e um termistor para medir as condições do ar ao redor, enviando no pino de dados um sinal digital, não sendo necessários pinos analógicos.
Especificações:
Modelo: AM2302 Tensão de operação: 35VDC [5,5VDC máximo] Faixa de medição de umidade:0 a 100% UR Faixa de medição de temperatura: 40º a +80ºC Corrente: 2,5mA max. durante uso, em stand by de 100uA A 150uA Precisão de umidade de medição: +\ 2,0% UR Precisão de medição de temperatura:: +\ 0,5ºC Resolução: 0,1 Tempo de resposta: 2s Dimensões: 25x 15x 7 mm(sem terminais)
6
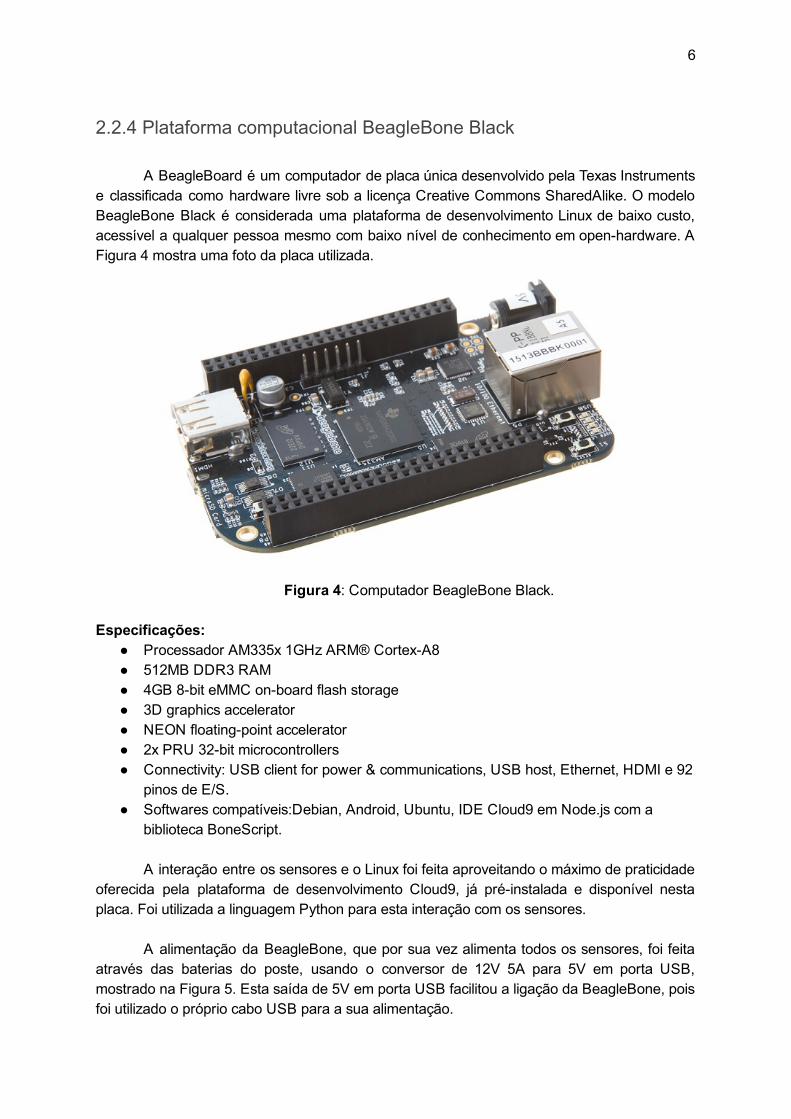
2.2.4 Plataforma computacional BeagleBone Black A BeagleBoard é um computador de placa única desenvolvido pela Texas Instruments
e classificada como hardware livre sob a licença Creative Commons SharedAlike. O modelo BeagleBone Black é considerada uma plataforma de desenvolvimento Linux de baixo custo, acessível a qualquer pessoa mesmo com baixo nível de conhecimento em openhardware. A Figura 4 mostra uma foto da placa utilizada.
Figura 4 : Computador BeagleBone Black.
Especificações:
Processador AM335x 1GHz ARM® CortexA8 512MB DDR3 RAM 4GB 8bit eMMC onboard flash storage 3D graphics accelerator NEON floatingpoint accelerator 2x PRU 32bit microcontrollers Connectivity: USB client for power & communications, USB host, Ethernet, HDMI e 92
pinos de E/S. Softwares compatíveis:Debian, Android, Ubuntu, IDE Cloud9 em Node.js com a
biblioteca BoneScript.
A interação entre os sensores e o Linux foi feita aproveitando o máximo de praticidade oferecida pela plataforma de desenvolvimento Cloud9, já préinstalada e disponível nesta placa. Foi utilizada a linguagem Python para esta interação com os sensores.
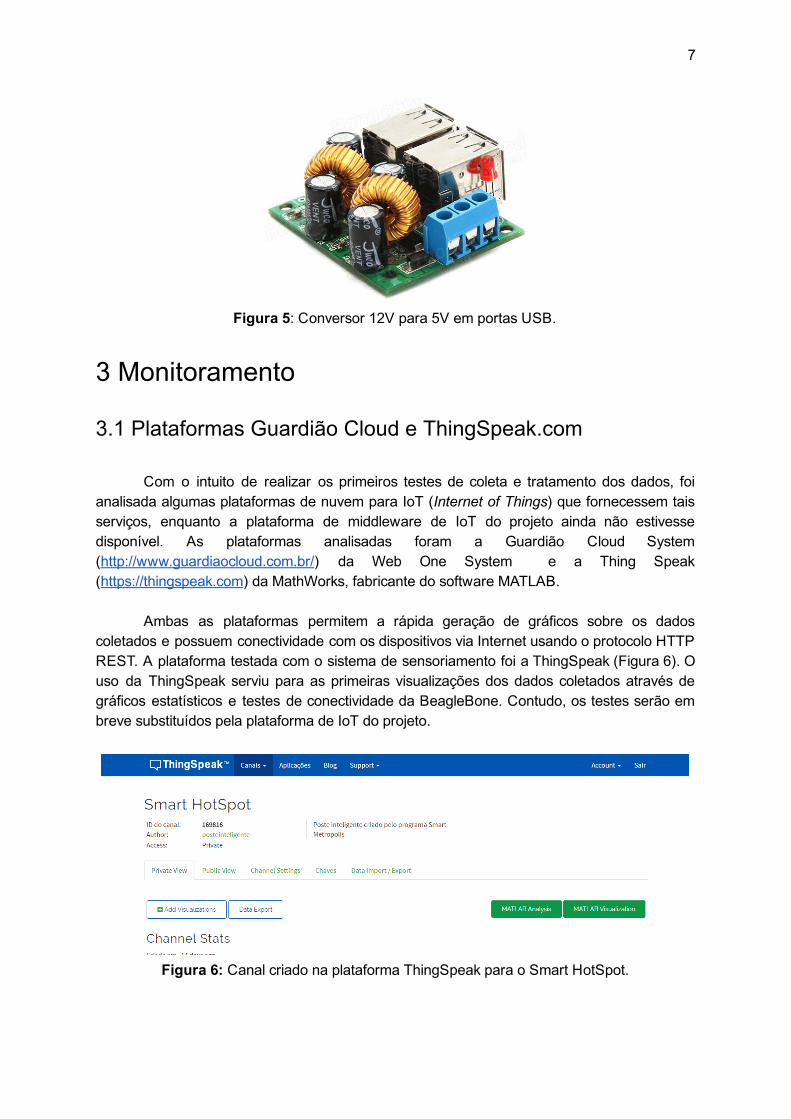
A alimentação da BeagleBone, que por sua vez alimenta todos os sensores, foi feita
através das baterias do poste, usando o conversor de 12V 5A para 5V em porta USB, mostrado na Figura 5. Esta saída de 5V em porta USB facilitou a ligação da BeagleBone, pois foi utilizado o próprio cabo USB para a sua alimentação.
7
Figura 5 : Conversor 12V para 5V em portas USB.
3 Monitoramento
3.1 Plataformas Guardião Cloud e ThingSpeak.com
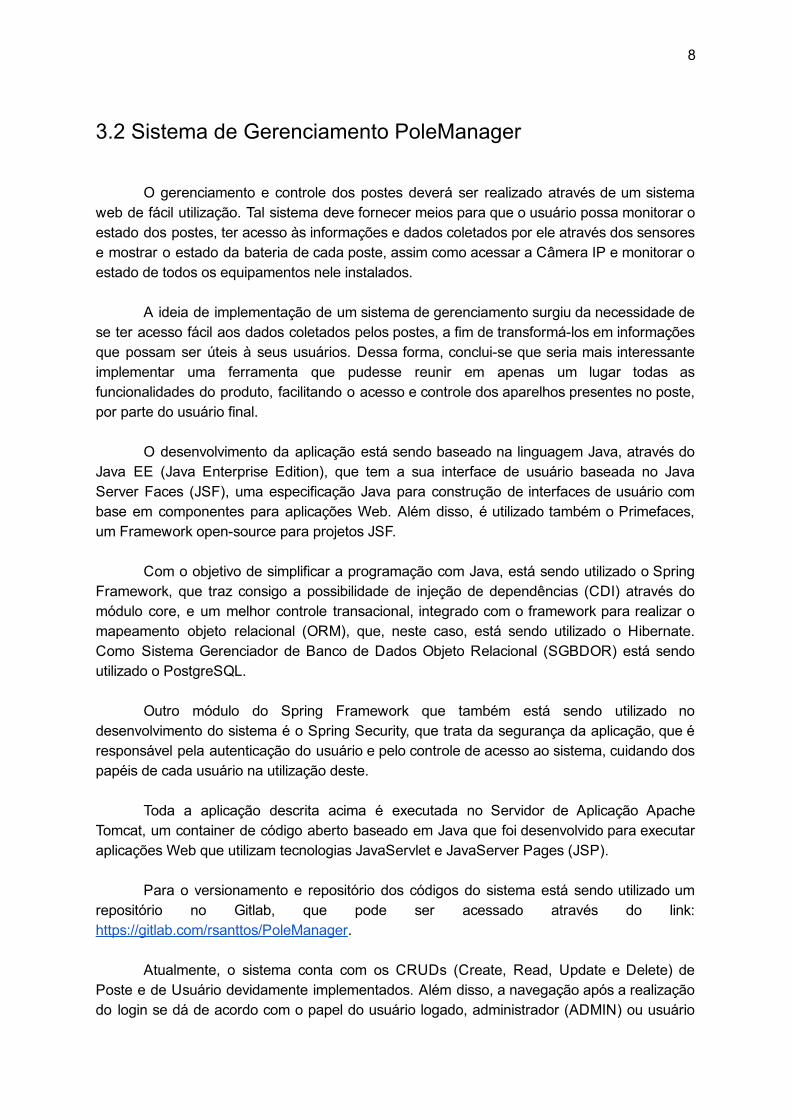
Com o intuito de realizar os primeiros testes de coleta e tratamento dos dados, foi analisada algumas plataformas de nuvem para IoT ( Internet of Things ) que fornecessem tais serviços, enquanto a plataforma de middleware de IoT do projeto ainda não estivesse disponível. As plataformas analisadas foram a Guardião Cloud System ( http://www.guardiaocloud.com.br/ ) da Web One System e a Thing Speak ( https://thingspeak.com ) da MathWorks, fabricante do software MATLAB.
Ambas as plataformas permitem a rápida geração de gráficos sobre os dados coletados e possuem conectividade com os dispositivos via Internet usando o protocolo HTTP REST. A plataforma testada com o sistema de sensoriamento foi a ThingSpeak (Figura 6). O uso da ThingSpeak serviu para as primeiras visualizações dos dados coletados através de gráficos estatísticos e testes de conectividade da BeagleBone. Contudo, os testes serão em breve substituídos pela plataforma de IoT do projeto.
Figura 6: Canal criado na plataforma ThingSpeak para o Smart HotSpot.
8
3.2 Sistema de Gerenciamento PoleManager O gerenciamento e controle dos postes deverá ser realizado através de um sistema
web de fácil utilização. Tal sistema deve fornecer meios para que o usuário possa monitorar o estado dos postes, ter acesso às informações e dados coletados por ele através dos sensores e mostrar o estado da bateria de cada poste, assim como acessar a Câmera IP e monitorar o estado de todos os equipamentos nele instalados.
A ideia de implementação de um sistema de gerenciamento surgiu da necessidade de
se ter acesso fácil aos dados coletados pelos postes, a fim de transformálos em informações que possam ser úteis à seus usuários. Dessa forma, concluise que seria mais interessante implementar uma ferramenta que pudesse reunir em apenas um lugar todas as funcionalidades do produto, facilitando o acesso e controle dos aparelhos presentes no poste, por parte do usuário final.
O desenvolvimento da aplicação está sendo baseado na linguagem Java, através do
Java EE (Java Enterprise Edition), que tem a sua interface de usuário baseada no Java Server Faces (JSF), uma especificação Java para construção de interfaces de usuário com base em componentes para aplicações Web. Além disso, é utilizado também o Primefaces, um Framework opensource para projetos JSF.
Com o objetivo de simplificar a programação com Java, está sendo utilizado o Spring
Framework, que traz consigo a possibilidade de injeção de dependências (CDI) através do módulo core, e um melhor controle transacional, integrado com o framework para realizar o mapeamento objeto relacional (ORM), que, neste caso, está sendo utilizado o Hibernate. Como Sistema Gerenciador de Banco de Dados Objeto Relacional (SGBDOR) está sendo utilizado o PostgreSQL.
Outro módulo do Spring Framework que também está sendo utilizado no
desenvolvimento do sistema é o Spring Security, que trata da segurança da aplicação, que é responsável pela autenticação do usuário e pelo controle de acesso ao sistema, cuidando dos papéis de cada usuário na utilização deste.
Toda a aplicação descrita acima é executada no Servidor de Aplicação Apache
Tomcat, um container de código aberto baseado em Java que foi desenvolvido para executar aplicações Web que utilizam tecnologias JavaServlet e JavaServer Pages (JSP).
Para o versionamento e repositório dos códigos do sistema está sendo utilizado um
repositório no Gitlab, que pode ser acessado através do link: https://gitlab.com/rsanttos/PoleManager .
Atualmente, o sistema conta com os CRUDs (Create, Read, Update e Delete) de Poste e de Usuário devidamente implementados. Além disso, a navegação após a realização do login se dá de acordo com o papel do usuário logado, administrador (ADMIN) ou usuário
9
(USER). Esse controle de acesso acontece em virtude das regras de negócio do sistema, que seguem abaixo:
Apenas o usuário administrador pode cadastrar ou desativar um usuário; Apenas o usuário administrador pode cadastrar ou deletar um poste; O usuário administrador tem acesso à listagem de todos os usuários cadastrados no
sistema, porém não pode alterar a senha destes; O usuário administrador tem acesso à listagem de todos os postes cadastrados no
sistema; O usuário administrador tem acesso à uma página de dashboard que mostra a
posição real em um mapa e a listagem de todos os postes cadastrados no sistema; O usuário "user" tem acesso à listagem de todos os postes cadastrados no sistema
que lhe pertencem; O usuário "user" tem acesso aos detalhes (situação da bateria, imagem da câmera,
dados do sensoriamento e do sinal de internet) de cada um dos postes cadastrados no sistema que lhe pertencem;
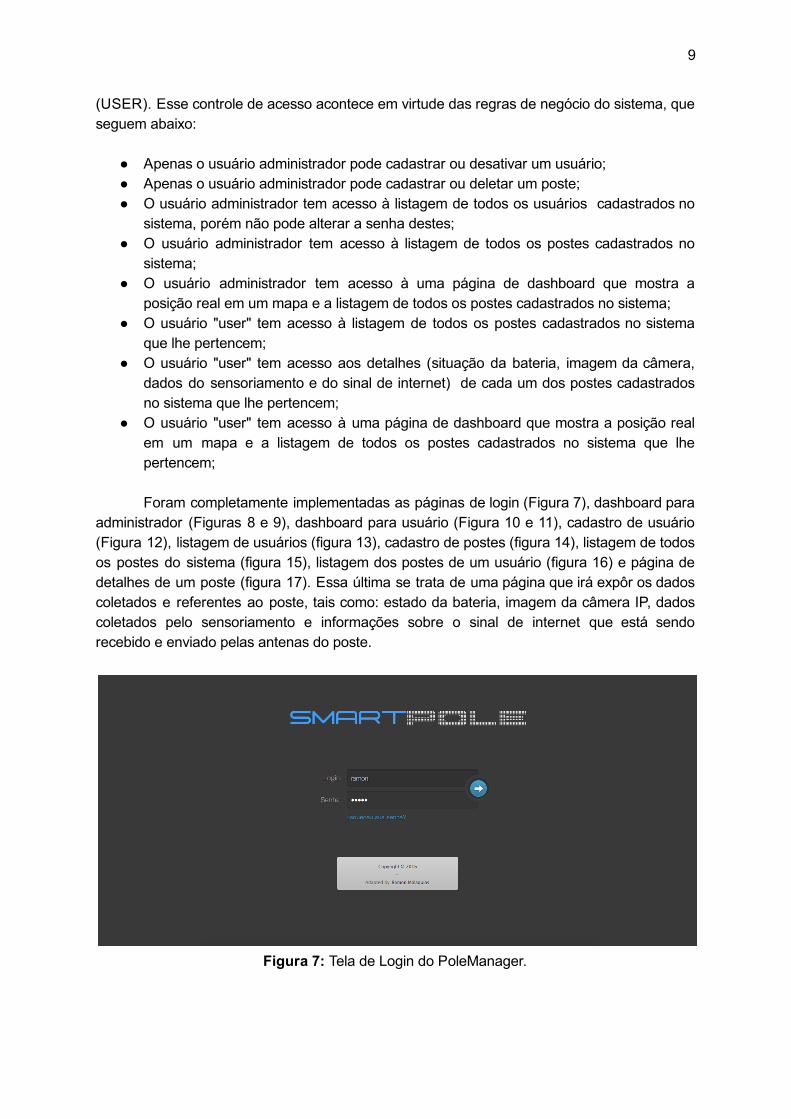
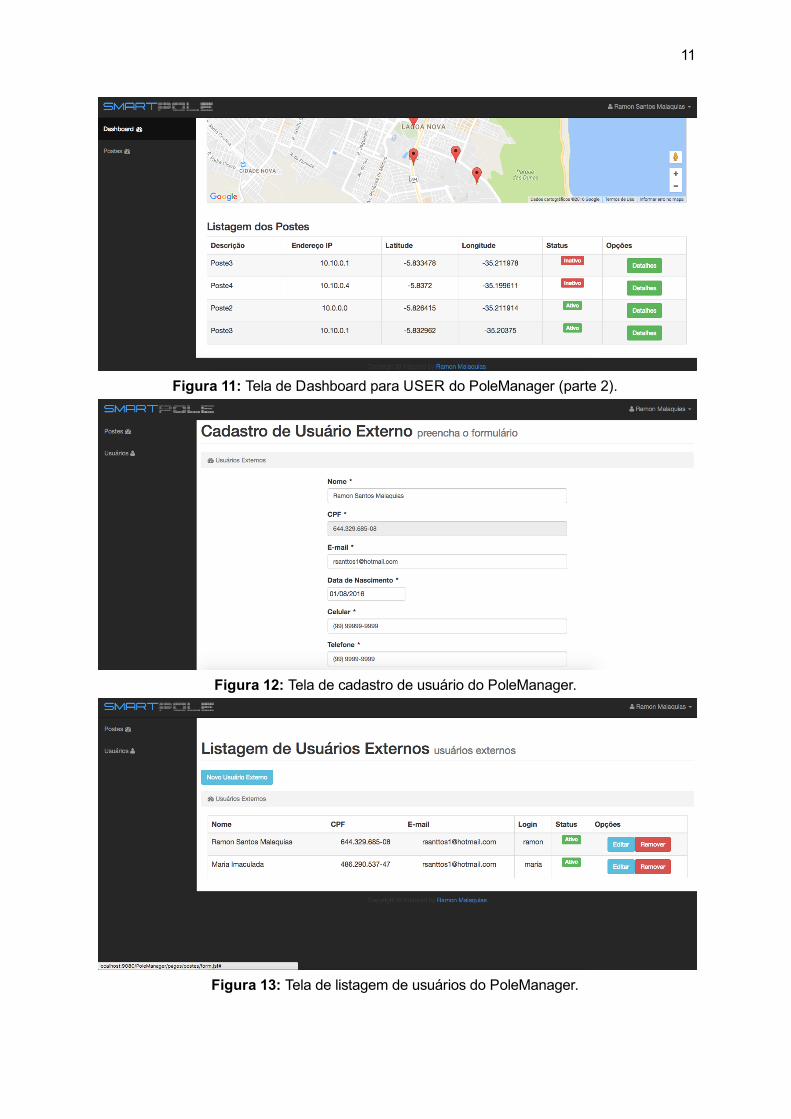
O usuário "user" tem acesso à uma página de dashboard que mostra a posição real em um mapa e a listagem de todos os postes cadastrados no sistema que lhe pertencem; Foram completamente implementadas as páginas de login (Figura 7), dashboard para
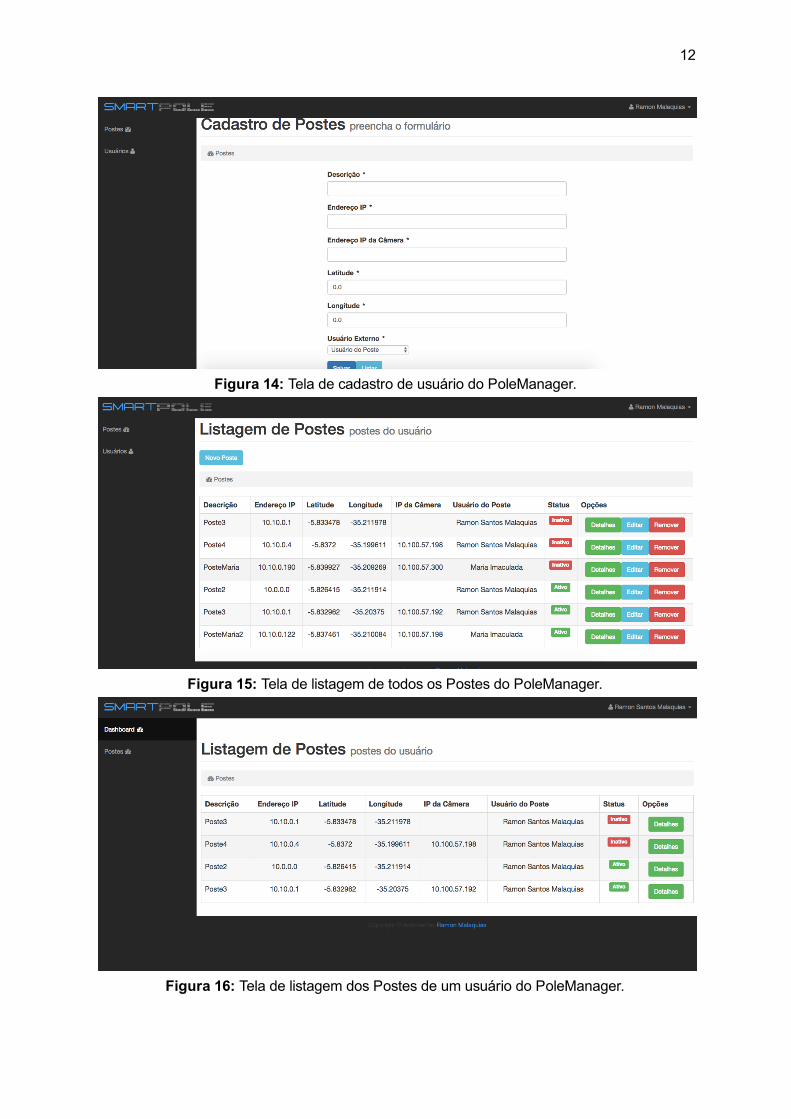
administrador (Figuras 8 e 9), dashboard para usuário (Figura 10 e 11), cadastro de usuário (Figura 12), listagem de usuários (figura 13), cadastro de postes (figura 14), listagem de todos os postes do sistema (figura 15), listagem dos postes de um usuário (figura 16) e página de detalhes de um poste (figura 17). Essa última se trata de uma página que irá expôr os dados coletados e referentes ao poste, tais como: estado da bateria, imagem da câmera IP, dados coletados pelo sensoriamento e informações sobre o sinal de internet que está sendo recebido e enviado pelas antenas do poste.
Figura 7: Tela de Login do PoleManager.
10
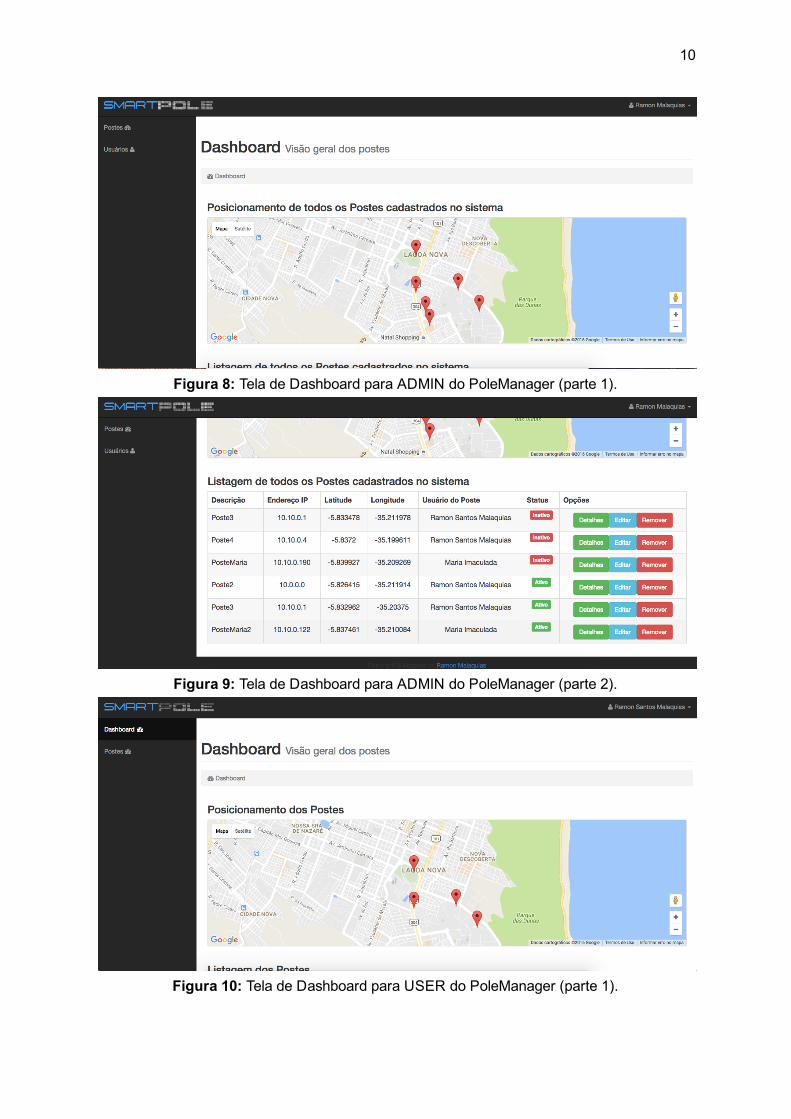
Figura 8: Tela de Dashboard para ADMIN do PoleManager (parte 1).
Figura 9: Tela de Dashboard para ADMIN do PoleManager (parte 2).
Figura 10: Tela de Dashboard para USER do PoleManager (parte 1).
11
Figura 11: Tela de Dashboard para USER do PoleManager (parte 2).
Figura 12: Tela de cadastro de usuário do PoleManager.
Figura 13: Tela de listagem de usuários do PoleManager.
12
Figura 14: Tela de cadastro de usuário do PoleManager.
Figura 15: Tela de listagem de todos os Postes do PoleManager.
Figura 16: Tela de listagem dos Postes de um usuário do PoleManager.
13
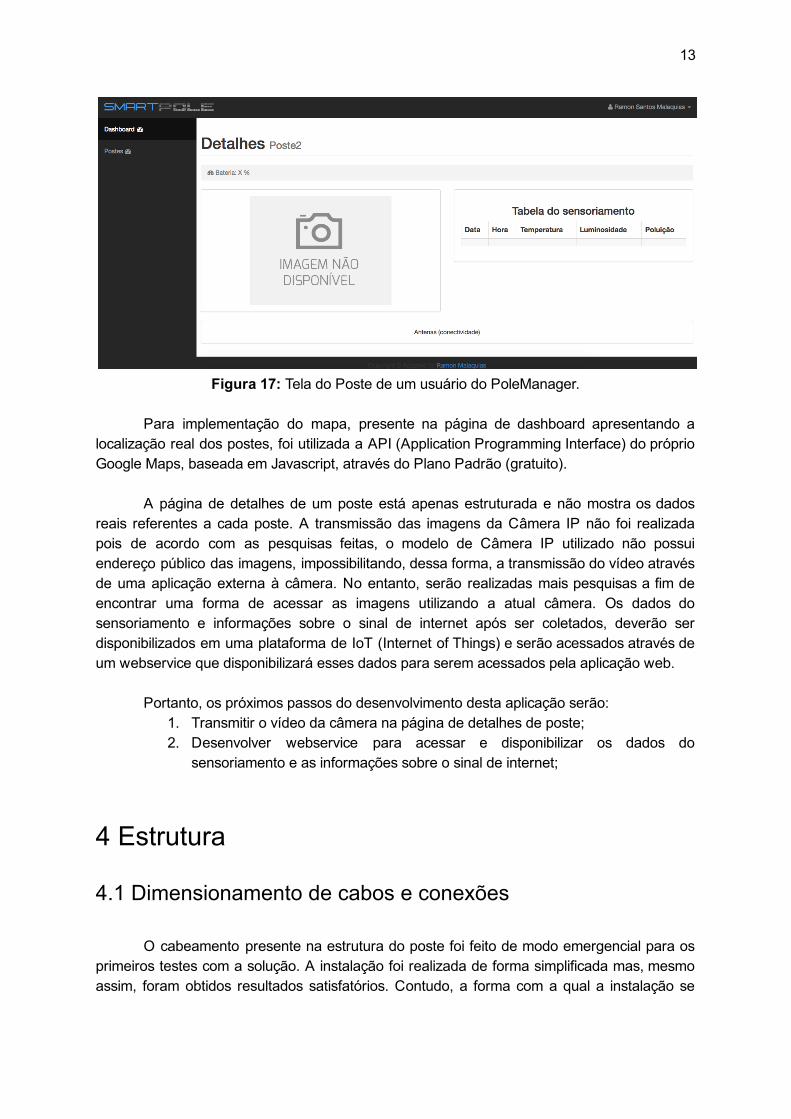
Figura 17: Tela do Poste de um usuário do PoleManager.
Para implementação do mapa, presente na página de dashboard apresentando a
localização real dos postes, foi utilizada a API (Application Programming Interface) do próprio Google Maps, baseada em Javascript, através do Plano Padrão (gratuito).
A página de detalhes de um poste está apenas estruturada e não mostra os dados
reais referentes a cada poste. A transmissão das imagens da Câmera IP não foi realizada pois de acordo com as pesquisas feitas, o modelo de Câmera IP utilizado não possui endereço público das imagens, impossibilitando, dessa forma, a transmissão do vídeo através de uma aplicação externa à câmera. No entanto, serão realizadas mais pesquisas a fim de encontrar uma forma de acessar as imagens utilizando a atual câmera. Os dados do sensoriamento e informações sobre o sinal de internet após ser coletados, deverão ser disponibilizados em uma plataforma de IoT (Internet of Things) e serão acessados através de um webservice que disponibilizará esses dados para serem acessados pela aplicação web.
Portanto, os próximos passos do desenvolvimento desta aplicação serão: 1. Transmitir o vídeo da câmera na página de detalhes de poste; 2. Desenvolver webservice para acessar e disponibilizar os dados do
sensoriamento e as informações sobre o sinal de internet;
4 Estrutura
4.1 Dimensionamento de cabos e conexões
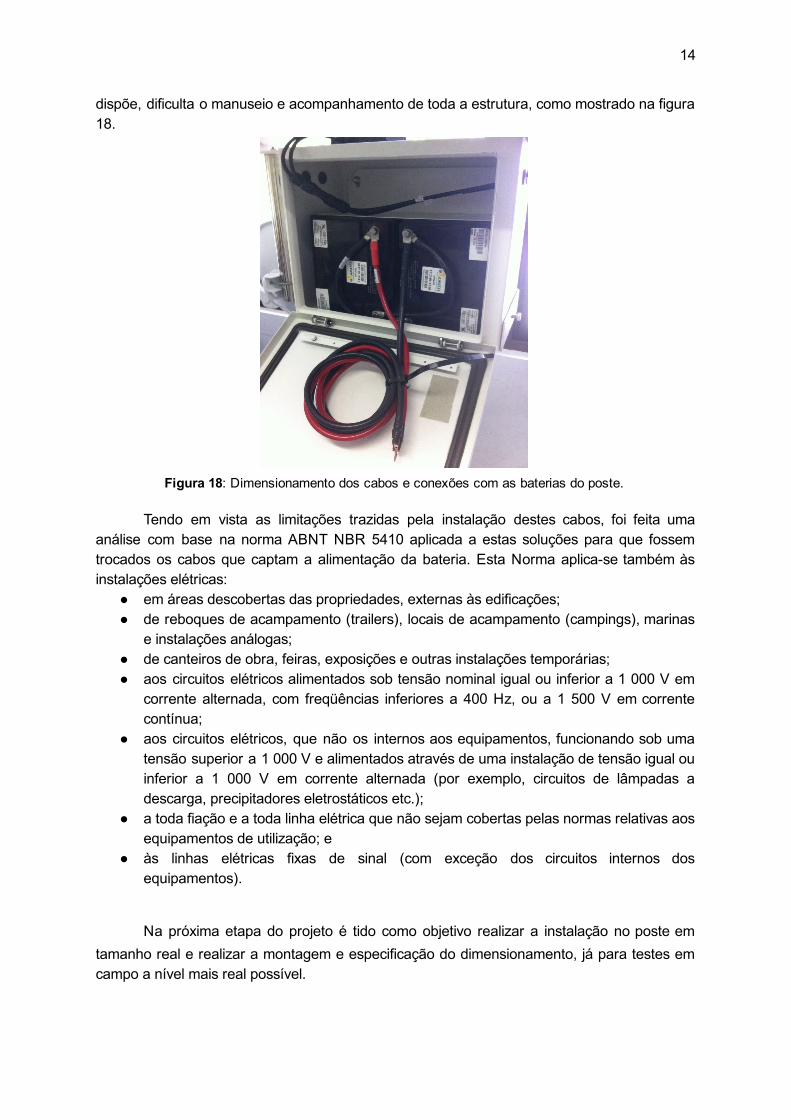
O cabeamento presente na estrutura do poste foi feito de modo emergencial para os primeiros testes com a solução. A instalação foi realizada de forma simplificada mas, mesmo assim, foram obtidos resultados satisfatórios. Contudo, a forma com a qual a instalação se
14
dispõe, dificulta o manuseio e acompanhamento de toda a estrutura, como mostrado na figura 18.
Figura 18 : Dimensionamento dos cabos e conexões com as baterias do poste.
Tendo em vista as limitações trazidas pela instalação destes cabos, foi feita uma
análise com base na norma ABNT NBR 5410 aplicada a estas soluções para que fossem trocados os cabos que captam a alimentação da bateria. Esta Norma aplicase também às instalações elétricas:
em áreas descobertas das propriedades, externas às edificações; de reboques de acampamento (trailers), locais de acampamento (campings), marinas
e instalações análogas; de canteiros de obra, feiras, exposições e outras instalações temporárias; aos circuitos elétricos alimentados sob tensão nominal igual ou inferior a 1 000 V em
corrente alternada, com freqüências inferiores a 400 Hz, ou a 1 500 V em corrente contínua;
aos circuitos elétricos, que não os internos aos equipamentos, funcionando sob uma tensão superior a 1 000 V e alimentados através de uma instalação de tensão igual ou inferior a 1 000 V em corrente alternada (por exemplo, circuitos de lâmpadas a descarga, precipitadores eletrostáticos etc.);
a toda fiação e a toda linha elétrica que não sejam cobertas pelas normas relativas aos equipamentos de utilização; e
às linhas elétricas fixas de sinal (com exceção dos circuitos internos dos equipamentos).
Na próxima etapa do projeto é tido como objetivo realizar a instalação no poste em
tamanho real e realizar a montagem e especificação do dimensionamento, já para testes em campo a nível mais real possível.
15
4.2 Instalação do protótipo
Nesta etapa do projeto, o conjunto de peças que compõem o poste está sendo instalado no estacionamento do Instituto Metrópole Digital. Já foram escolhidas a base para as antenas, a base para o poste e o local de instalação para melhor aproveitamento das informações a fim de chegar a resultados mais realistas.
5 Redes
5.1 Descrição
Como o meio de transmissão em redes wireless se dá pelo ar, características como, alcance e velocidade variam bastantes, dependendo não apenas do tipo de antenas utilizadas e potência dos transmissores, como também dos obstáculos e interferências presentes no ambiente. Munidos destes conceitos iniciais, exploraremos alguns aspectos fundamentais, a serem aplicados em nosso contexto, para que obtenhase confiabilidade à rede Smart Hotspot .
A escolha da antena, seu tipo e qualidade, são importantes quando desejase criar
redes longas e de alto desempenho. As antenas têm como função primordial, propagar sinal pelo ambiente, irradiandoo em certa direção. As antenas escolhidas para conectar a torre principal ao nosso Smart Hotspot é do tipo dipole com chapa refletora, popularmente chamada de antena ou painel setorial.
Estas antenas setoriais concentram a transmissão em um ângulo menor, sendo 43° na
polaridade horizontal e 41° na polaridade vertical e, com grau de elevação na horizontal e vertical de 15°. Ou seja, o grau de abertura da antena permite determinar que outros equipamentos de rádio, instalados dentro do raio de alcance da antena, levandose em conta o ângulo de irradiação nas polarizações horizontal e vertical, possam estabelecer comunicação entre si. Enquanto o grau de elevação define, em altura, o posicionamento de ambos os equipamentos para que estabeleçase o enlace entre ambos os rádios.
Tomouse como base os equipamentos que compõem o protótipo e que estavam a
disposição para realização de testes e análises. Tais análises poderiam ter sido aplicadas a quaisquer equipamentos, desde que contemplem ajustes em suas configurações que permitam as condições descritas.
Quando um grande número de hosts estão interconectados, podem ocorrer
problemas, como por exemplo, congestionamento no tráfego e sobrecarga de recursos. Analisar os aspectos destas redes, a fim de otimizálas, são muito importantes, pois possibilita que mesmo às redes com alto número de transmissões, para que a infraestrutura que propomos, funcione bem, com desempenho satisfatório.
16
A partir disso e, tomando como base estudos feitos em nosso modelo, simulando um contexto de situação real, propõemse os seguintes aspectos para a rede Smart Hotspot .
5.2 Topologia de Rede
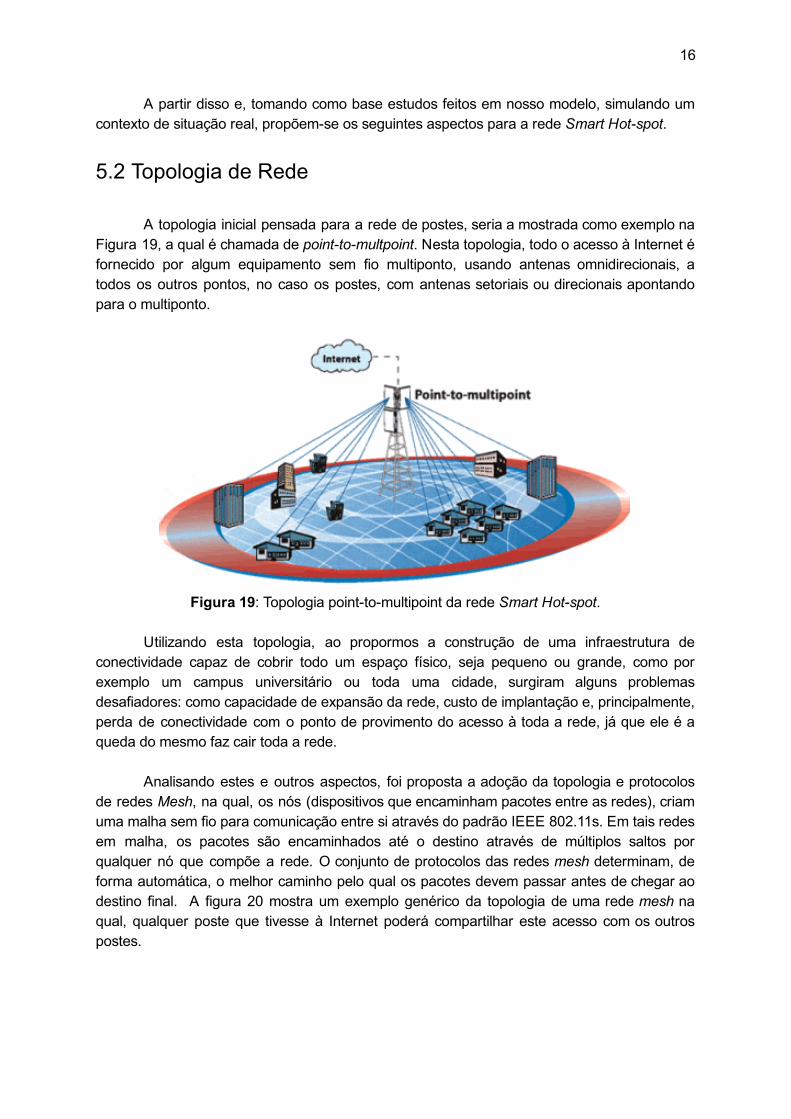
A topologia inicial pensada para a rede de postes, seria a mostrada como exemplo na Figura 19, a qual é chamada de pointtomultpoint . Nesta topologia, todo o acesso à Internet é fornecido por algum equipamento sem fio multiponto, usando antenas omnidirecionais, a todos os outros pontos, no caso os postes, com antenas setoriais ou direcionais apontando para o multiponto.
Figura 19 : Topologia pointtomultipoint da rede Smart Hotspot .
Utilizando esta topologia, ao propormos a construção de uma infraestrutura de
conectividade capaz de cobrir todo um espaço físico, seja pequeno ou grande, como por exemplo um campus universitário ou toda uma cidade, surgiram alguns problemas desafiadores: como capacidade de expansão da rede, custo de implantação e, principalmente, perda de conectividade com o ponto de provimento do acesso à toda a rede, já que ele é a queda do mesmo faz cair toda a rede.
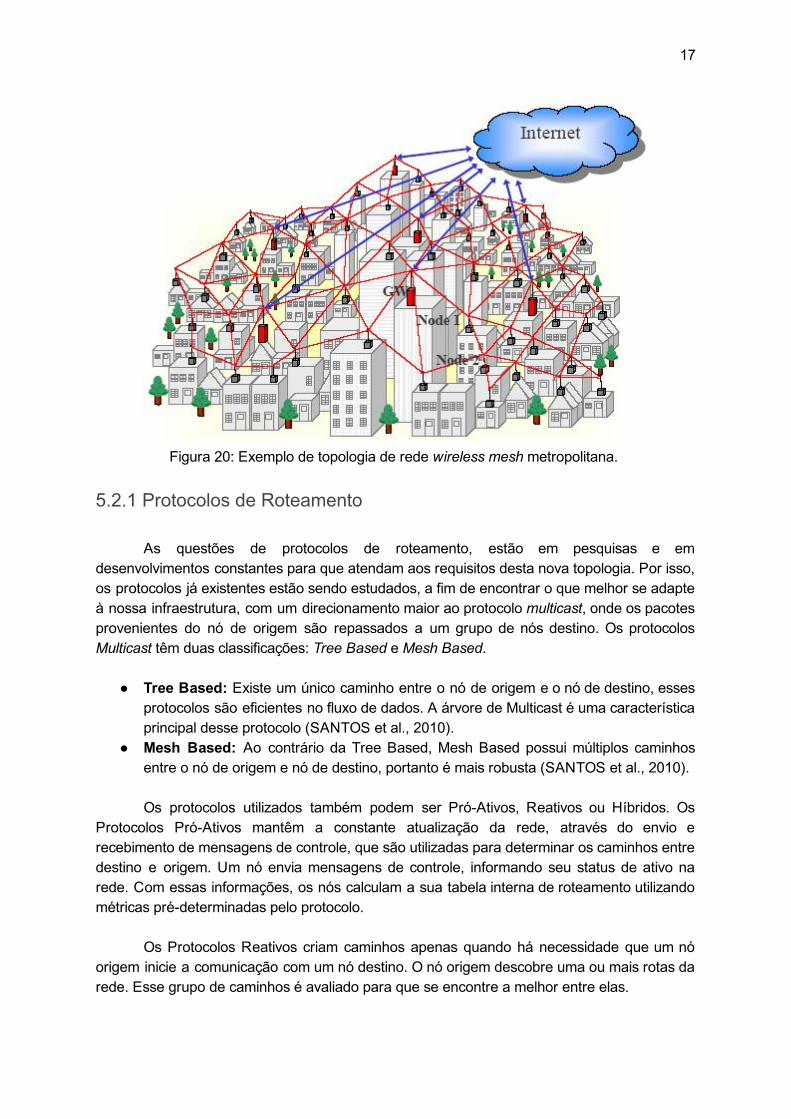
Analisando estes e outros aspectos, foi proposta a adoção da topologia e protocolos de redes Mesh , na qual, os nós (dispositivos que encaminham pacotes entre as redes), criam uma malha sem fio para comunicação entre si através do padrão IEEE 802.11s. Em tais redes em malha, os pacotes são encaminhados até o destino através de múltiplos saltos por qualquer nó que compõe a rede. O conjunto de protocolos das redes mesh determinam, de forma automática, o melhor caminho pelo qual os pacotes devem passar antes de chegar ao destino final. A figura 20 mostra um exemplo genérico da topologia de uma rede mesh na qual, qualquer poste que tivesse à Internet poderá compartilhar este acesso com os outros postes.
17
Figura 20: Exemplo de topologia de rede wireless mesh metropolitana.
5.2.1 Protocolos de Roteamento
As questões de protocolos de roteamento, estão em pesquisas e em desenvolvimentos constantes para que atendam aos requisitos desta nova topologia. Por isso, os protocolos já existentes estão sendo estudados, a fim de encontrar o que melhor se adapte à nossa infraestrutura, com um direcionamento maior ao protocolo multicast , onde os pacotes provenientes do nó de origem são repassados a um grupo de nós destino. Os protocolos Multicast têm duas classificações: Tree Based e Mesh Based .
Tree Based: Existe um único caminho entre o nó de origem e o nó de destino, esses
protocolos são eficientes no fluxo de dados. A árvore de Multicast é uma característica principal desse protocolo (SANTOS et al., 2010).
Mesh Based: Ao contrário da Tree Based, Mesh Based possui múltiplos caminhos entre o nó de origem e nó de destino, portanto é mais robusta (SANTOS et al., 2010).
Os protocolos utilizados também podem ser PróAtivos, Reativos ou Híbridos. Os
Protocolos PróAtivos mantêm a constante atualização da rede, através do envio e recebimento de mensagens de controle, que são utilizadas para determinar os caminhos entre destino e origem. Um nó envia mensagens de controle, informando seu status de ativo na rede. Com essas informações, os nós calculam a sua tabela interna de roteamento utilizando métricas prédeterminadas pelo protocolo.
Os Protocolos Reativos criam caminhos apenas quando há necessidade que um nó origem inicie a comunicação com um nó destino. O nó origem descobre uma ou mais rotas da rede. Esse grupo de caminhos é avaliado para que se encontre a melhor entre elas.
18
Os Protocolos Híbridos contêm características de ambos os protocolos, PróAtivos e Reativos. Em uma rede em que os nós estão ativos, a tabela de roteamento precisa estar sempre atualizada. Porém os nós podem com o tempo ficarem menos ativos, passando a ser Reativo.
6 Conclusões
Os resultados alcançados até o momento para a solução do poste inteligente são bastante animadores, pois é possível observar que a proposta tem grande potencial de aplicabilidade e aceitação.
Como atividades para o próximo entregável, temos: Testes de uso da solução com a plataforma de IoT escolhida para o SmartMetropolis; Desenvolvimento de um protótipo de produto final para o sistema de sensoriamento
com BeagleBone; e Finalização do desenvolvimento do sistema de monitoramento e controle da solução.
7 Referências [1] BEAGLEBONE BLACK. Disponível em: <https://www.beagleboard.org/black/>. Acesso em: 18 de Outubro de 2016; [2] TANENBAUM, Andrew S; DAVID, Wetherall. Redes de Computadores. 5. ed. São Paulo: Pearson Prentice Hall, 2011. [3] MORIMOTO, Carlos Eduardo. Redes, guia prático: ampliada e atualizada . 2. ed. Porto Alegre: Sul Editores, 2011. [4] THINGSPEAK. Disponível em: <https:/www.thingspeak.com//>. Acesso em: 18 de Outubro de 2016.