Sensores - Instituto de Matemática e Estatística | …adao/SENSORES1.pdfser detectado por essa...
43
1 SENSORES São dispositivos que são sensíveis à um fenômeno físico (luz, temperatura, impedância elétrica etc.) e que transmitem um sinal para um dispositivo de medição ou controle.
Transcript of Sensores - Instituto de Matemática e Estatística | …adao/SENSORES1.pdfser detectado por essa...

1
SENSORES
São dispositivos que são sensíveis à um fenômeno físico (luz, temperatura, impedância elétrica etc.) e que transmitem um sinal para um dispositivo de medição ou controle.

2
SENSORES•Acelerômetro
•Sensore de temperatura
•Sensore de luminosidade
•Chave de fim de curso
•Interruptor de lâminas
•Sensor potenciômetro
•Strain Gauge
•Encoder incremental
•Encoder absoluto
•Tacogerador
•Sensor de distância sonar e ultrassônico
•Sensor câmera

3
ACELERÔMETROO princípio básico de funcionamento por trás deste acelerômetro é o sistema de massa e mola. As molas, enquanto dentro da sua região linear, são governadas pela lei de Hooke, que diz que o deslocamento da mola é proporcional à força aplicada, ou seja, F=kx, onde k é uma constante inerente à mola.

4
ACELERÔMETRO
Outro princípio físico envolvido é a segunda lei de Newton, que relaciona força com massa e aceleração através da equação F=ma.
Igualando as duas equações obtém-se ma=kx, e portanto pode-se perceber que uma aceleração a causa um deslocamento da massa de x=(ma)/k, ou, alternativamente, se a massa sofeu um deslocamento x, significa que a massa está sob uma aceleracão de a=(kx)/m.

5
ACELERÔMETRO
Note que este acelerômetro só mede a aceleração ao longo da mola. Este é, portanto, um acelerômetro de eixo único. Para cada eixo ao longo do qual quer-se medir a aceleração é necessário um sistema como este.

6
ACELERÔMETRO

7
SENSOR DE TEMPERATUA

8
SENSOR DE TEMPERATURA
São fabricados a partir de um elemento resistor termicamente sensível. Apresentam variação de resistência ôhmica em relação a temperatura submetida. Quando aumenta a temperatura a resistência diminui.

Sensor de LuminosidadeLDR (do inglês Light Dependent Resistor ou em português Resistor Variável Conforme Incidência De Luz) é um tipo de resistor cuja resistência varia conforme a intensidade de radiação eletromagnética do espectro visível que incide sobre ele.

10
CHAVES FIM DE CURSO
São interruptores que são acionados por uma peça que esteja sendo monitorada.
A chave fim de curso tem um atuador que é acionado pelo objeto a ser detectado e que, por sua vez, atua um contato elétrico que irá enviar a informação.
.

11
Objeto a ser detectado Contato elétrico que enviaráa informação

12

13
INTERRUPTOR DE LAMINAS.
Conhecido como reed-switch (em inglês), compõe-se de duas lâminas de ferro próximas, dentro de um pequeno envoltório de vidro.
Ao se aproximar um imã ou solenóide as duas lâminas se encostam, fechando os contatos externos.

14
INTERRUPTOR DE LAMINAS.

15
INTERRUPTOR DE LAMINAS.
Medição da Velocidade:
Instalando-se um imã na periferia de uma roda, que gira poucos milímetros em frente ao interruptor de lâminas, este fechará os contatos a cada volta.
Se o interruptor de lâminas for ligado a uma tensão contínua, gerará pulsações numa freqüência proporcional à rotação da roda.

16
SENSORES POTENCIOMÉTRICOS
É um sensor que mede a rotação de um eixo. O princípio de funcionamento se baseia na variação de resistência de um potenciômetro (resistor variáveL) conectado mecanicamente a um eixo para monitorar sua posição.
MOVIMENTOS DE ROTAÇÃO DE UM EIXO
Em uma articulação de um braço mecânico por exemplo, são utilizados potenciômetros de rotação com um ângulo máximo de rotação de quase 360º. Estes potenciômetros, conectados como divisor resistivo, apresentam uma variação linear da tensão de saída com a rotação do eixo.

17


19
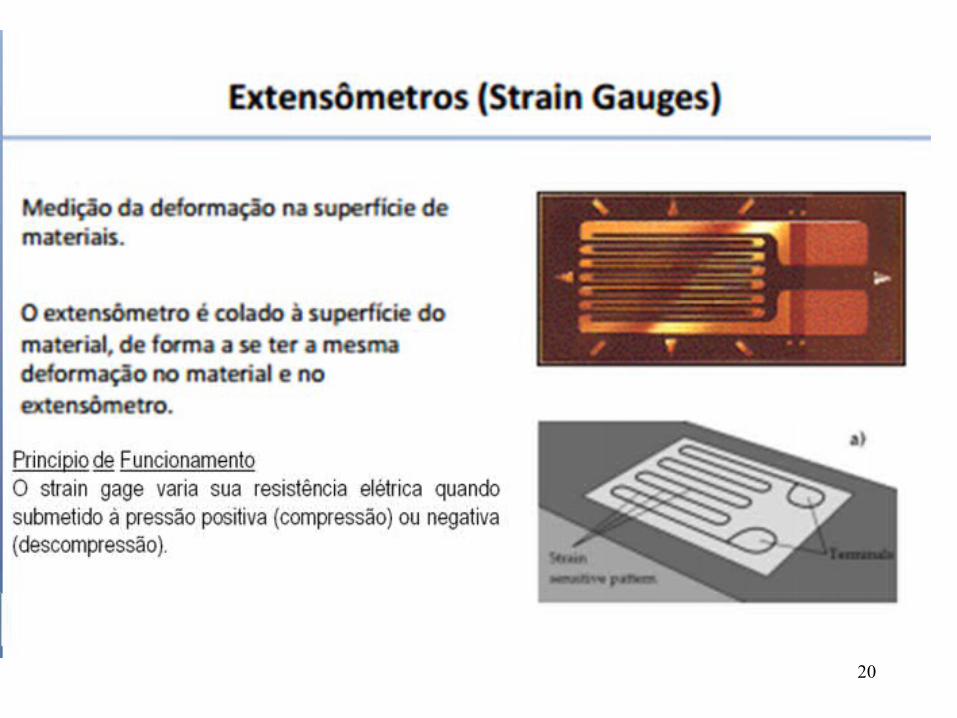
Strain Gage
O strain-gage ou extensômetro elétrico, é um resistor elétrico que muda sua resistência
quando sofre deformação.
20

21

22
Com a variação da resistência do strain gage a tensão de saída é altera permitindo medir grandezas ( ex: força aplicada ) que causaram a deformação do material

23

24

25
ENCODER INCREMENTAL
Mede a posição angular de um eixoO princípio de funcionamento baseia-se na interrupção de um feixe luminoso que incide sobre um sensor óptico por meio de um disco fixo ao eixo. Este disco possui regiões transparentes e opacas para o feixe luminoso, distribuídos igualmente pela circunferência.

26
ENCODER INCREMENTALO disco possui 2, 4, 36, 180, 360, 500, 720, 1000,1024, 1800, 3000, 10000 regiões transparentes (pulsos por revolução (volta no disco)) de acordo com o tipo de disco utilizado.
27
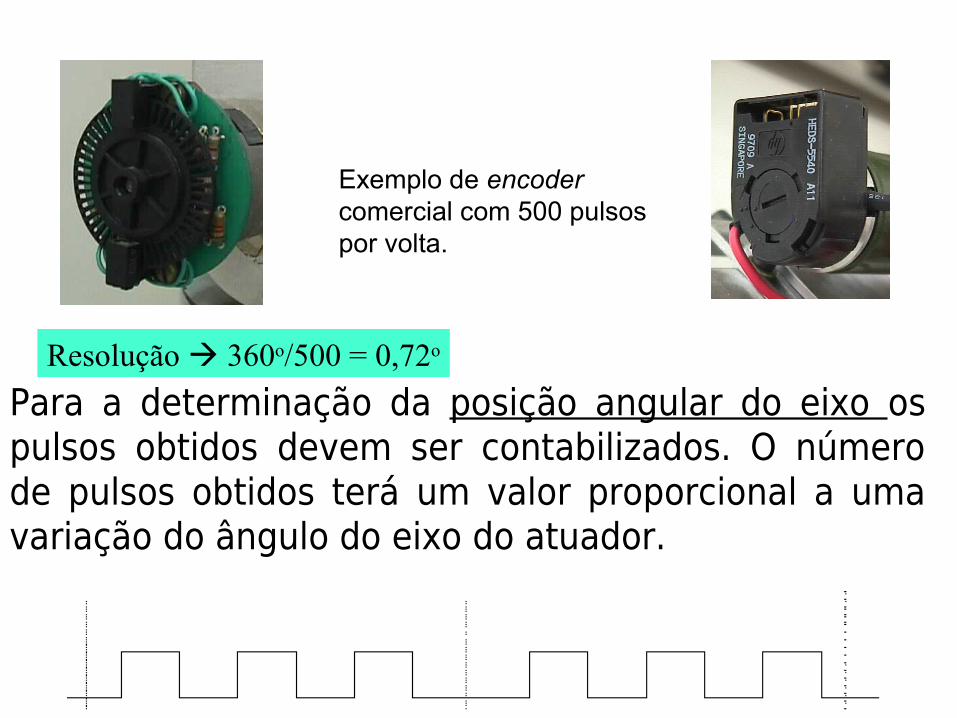
Exemplo de encoder comercial com 500 pulsos por volta.
Para a determinação da posição angular do eixo os pulsos obtidos devem ser contabilizados. O número de pulsos obtidos terá um valor proporcional a uma variação do ângulo do eixo do atuador.
Resolução 360o/500 = 0,72o

28
Para determinação do ângulo de rotação do eixo do atuador e também da direção de rotação é necessário a utilização de um sensor adicional.
Fase A
Fase B
Movimento em sentido horário:primeiro fase A, depois fase B.
Movimento em sentido anti-horário:primeiro fase B depois fase A

29
ENCODER ABSOLUTO
A principal diferença é que neste caso o disco já está codificado em binário . A este disco, estão-lhe associados LEDs (emissor de luz) e fototransistores (elementos sensíveis a luz).
A leitura dos fototransistores será 1 ou 0 consoante a intensidade do feixe de luz, ou seja, luz fraca ou nula para os casos da parte escura do disco (1) ou luz forte (0).

30
ENCODER ABSOLUTO
Assim irá ser gerado um código binário que permite saber o ângulo de rotação do disco.

31
•A resolução depende do número de anéis utilizados no disco.
•A figura abaixo mostra um disco contendo 4 anéis contendo 16 seções de arcos (contendo cada seção um arranjo diferente de furos).
Resolução 360o/16 = 22,5o

32
ENCODER

Tacogerador
Ímã permanente
Bobina rotativa
Mede a velocidade angular de um eixo
É essencialmente um pequeno gerador de eletricidade em que , quanto mais rápido a bobina é girada, maior a força eletromotriz nela induzida
Se as conexões elétricas forem feitas à bobina e a saída levada a um voltímetro (medidor de tensão), então a leitura do voltímetro estará relacionada à velocidade angular da bobina.
A forma mais comum de utilização
é a ligação direta ao eixo do motor
que se deseja medir a velocidade.

34

Sensor de Distância ultrassônico e SonarO sensor ultrasônico em muitos casos são os olhos de um robô. Ele é
capaz de detectar a distância obstáculos que estão a frente de um robô móvel, possibilitando assim uma manobra nos movimentos antes que ocorra uma colisão.

Sensor de Distância ultrassônico e SonarO princípio de operação desses sensores é exatamente o mesmo do sonar.
O pequeno comprimento de onda das vibrações ultrassônicas faz com que elas reflitam em pequenos objetos, podendo ser captadas por um sensor colocado em posição apropriada

Sensor de Distância ultrassônico e SonarO comprimento de onda usado e portanto a freqüência são muito importantes, pois ele determina as dimensões mínimas do objeto que pode ser detectado. Um sinal de 1000 Hz, por exemplo, teria 34 cm de comprimento de onda, sendo esse o tamanho do menor objeto que poderia ser detectado por essa freqüência, considerando-se uma velocidade aproximada do som de 340 m/s.

Sensor de Distância ultrassônico e Sonar

39
CARACTERÍSTICAS DOS SENSORES
Erro– é a diferença absoluta entre o valor real do sinal de saída entregue pelo sensor e o sinal ideal que este deveria fornecer para esse valor da grandeza física.

CARACTERÍSTICAS DOS SENSORES
• Linearidade –se para variações iguais da grandeza física medida obtém-se variações iguais do sinal entregue, então define-se o sensor como linear.
V(v)
)(rad
radvs 5,0
max

CARACTERÍSTICAS DOS SENSORES
• Sensibilidade – É a capacidade de perceber mudança. – É a relação entre o sinal elétrico entregue na
saída e a grandeza física medida.

CARACTERÍSTICAS DOS SENSORES
• Range – Quanto consegue medir. – São todos os níveis de amplitude da grandeza
física medida nos quais se supõe que o sensor pode operar dentro da precisão especificada.

CARACTERÍSTICAS DOS SENSORES
• Resolução – o menor incremento da grandeza física medida que provoca uma mudança no sinal de saída do sensor.
V(v)
)(rad2 4 6 8
123
Res=2 rad
10