
Separação de Componentes de Sequência para Sincronização ... · 2. Algoritmos de...
85
Universidade Federal da Bahia Escola Politécnica Programa de Pós-Graduação em Engenharia Elétrica Luiz Henrique Santos Silva Separação de Componentes de Sequência para Sincronização em Geração Distribuída Salvador 2015
Transcript of Separação de Componentes de Sequência para Sincronização ... · 2. Algoritmos de...
Universidade Federal da Bahia
Escola Politécnica
Programa de Pós-Graduação em Engenharia Elétrica
Luiz Henrique Santos Silva
Separação de Componentes de Sequênciapara Sincronização em Geração
Distribuída
Salvador
2015
i
Universidade Federal da Bahia
Departamento de Engenharia Elétrica
Pós-Graduação em Engenharia Elétrica
Luiz Henrique Santos Silva
Separação de Componentes de Sequênciapara Sincronização em Geração
Distribuída
Dissertação submetida ao Programa de
Pós-Graduação em Engenharia Elétrica
da Universidade Federal da Bahia como
parte dos requisitos necessários para ob-
tenção do grau de Mestre em Engenharia
Elétrica.
Orientador: Prof. Dr. Fabiano Fragoso
Costa.
Área de Concentração: Processamento da Informação e Energia.
Linha de Pesquisa: Sistemas Elétricos de Potência.
Salvador, Bahia, Brasil
©Luiz H. S. Silva, Dezembro de 2015

ii
Silva, Luiz Henrique Santos.
Técnicas de Estimação de Componentes em Seqüência
Aplicadas em Sistemas de Sincronização de Geração Distri-
buída
67 páginas
Dissertação (Mestrado) - Escola Politécnica da Univer-
sidade Federal da Bahia. Departamento de Engenharia Elé-
trica.
1. Geração Distribuída
2. Algoritmos de Sincronização
3. Phase Locked Loop
4. Estimação de Componentes em Sequência
iii
LUIZ HENRIQUE SANTOS SILVA
SEPARAÇÃO DE COMPONENTES DE SEQUÊNCIA
PARA SINCRONIZAÇÃO EM GERAÇÃO DISTRIBUÍDA
Dissertação apresentada ao Programa de Pós-Graduação em Engenharia Elétrica, Escola
Politécnica, Universidade Federal da Bahia - UFBA, como requisito para obtenção do grau
de Mestre em Engenharia Elétrica.
Aprovada em 18 de Dezembro de 2015
Prof. Dr. Fabiano Fragoso CostaMembro Titular Interno
Orientador
Prof. Dr. Fernando Augusto MoreiraMembro Titular Interno
Coordenador do PPGEE
Prof. Dr. Elber Paz de SouzaMembro Titular Externo
Prof. Dr. Alfeu Joãozinho Sguarezi FilhoMembro Titular Externo

iv
Dedico a minha família, alicerce da minha vida.

v
As pessoas não carecem de força, carecem de determinação.
Victor Hugo
vi
Agradecimentos
Primeiramente gostaria de agradecer a Deus por ter estado comigo em todos os
momentos de minha vida, sobretudo, nos dias mais tempestuosos.
Preciso agradecer também a minha família, alicerce de minha vida, pelo carinho,
confiança e apoio que dedicaram a mim todos esses anos.
A todos do grupo de pesquisa Labefea da Universidade Federal da Bahia por
terem tornado essa jornada tão leve e agradável, especialmente ao amigo Hugo Cotrim
pelo apoio e companheirismo.
Um agradecimento especial ao professor Fabiano Fragoso Costa pela amizade,
orientação e incentivo nas pesquisas.
Agradeço ao Professor Alfeu Joãozinho Sguarezi Filho pelo suporte dado na ob-
tenção de dados experimentais apresentados nesta dissertação.
Aos amigos Leonardo Kalls, Mariana Varela, Igor Ribeiro e Roberto Santana por
tornarem meus dias sempre mais alegres e divertidos.
A Capes pelo apoio financeiro.
Por fim, gostaria de agradecer a todos que doaram do seu tempo, recursos e que
contribuíram de alguma forma para a realização deste trabalho, que Deus vos abençoe
grandemente!

vii
Resumo
O presente trabalho apresenta uma técnica de sincronização baseada em uma
separação de componentes em sequência com objetivo de garantir o adequado funciona-
mento dos sistemas de controle dos conversores de potência utilizados em geração dis-
tribuída. A metodologia proposta utiliza o algoritmo dos mínimos quadrados recursivo
ponderado (MQRP) e, diferentemente de outras técnicas de sincronização já publicadas,
não se empregam filtros lineares com funções de transferências bem definidas para re-
jeição de interferências harmônicas ou de componentes desbalanceados. Portanto, não é
necessário fazer um compromisso entre velocidade da resposta e a largura de banda do
filtro a fim de compensar distúrbios associados a operação da rede elétrica. O algoritmo
dos mínimos quadrados é adaptado para atuar nas amostras das tensões vα e vβ e se-
para as contribuições das sequências positiva e negativa em um sistema de coordenadas
estacionárias. Com intuito de tornar o método robusto a distorções harmônicas e capaz
de rejeitar componentes CC, propõe-se realizar uma expansão do vetor de regressores
do modelo para o sinal de tensão da rede. O desempenho da técnica de sincronização
é avaliada através de simulações que reproduzem as condições mais adversas na opera-
ção dos sistemas elétricos como afundamentos de tensão e distorções harmônicas. Além
disso, realiza-se a validação do método proposto através de um arranjo experimental
onde o algoritmo foi embarcado em um processador digital de sinais e testado em ten-
sões geradas por uma fonte programável. Os resultados demonstraram, além da eficácia,
a simplicidade de sua realização.
Palavras-chave: Algoritmos de Sincronização, Estimação de Componentes em Sequên-
cia, Geração Distribuída e Minímos Quadrados.

viii
Abstract
This paper presents a synchronization technique based on a separation of components
in sequence in order to ensure proper operation of the power converters’ control systems
used in distributed generation. The proposed technique makes use of a weighted recursive
least-squares (WRLS) algorithm and, unlike other synchronization methods, does not
employ filters to reject harmonic interference or unbalanced components. Therefore, it
is not necessary to have a tradeoff between response speed and frequency bandwidth to
compensate for disorders associated with the power grid operation. The least-squares
algorithm is adapted to act on samples of the voltages vα and vβ and separates the
contributions of the positive and negative sequences onto the stationary coordinates
system. To improve the method performance with regards to harmonic rejection and
make it able to eliminate DC components, it is proposed a regressor expansion of the
voltage model. The technique is evaluated by means of simulations which reproduce
adverse conditions as voltage sags and harmonic distortion. Furthermore, a experimental
setup has been mounted to embed the technique into a digital signal processor board
to test it on signals produced by a programable power supplier. The results show its
simplicity and effectiveness.
Keywords: Synchronization Algorithms, Components Estimation in Sequence, Dis-
tributed Generation and Least Squares.
Lista de Figuras
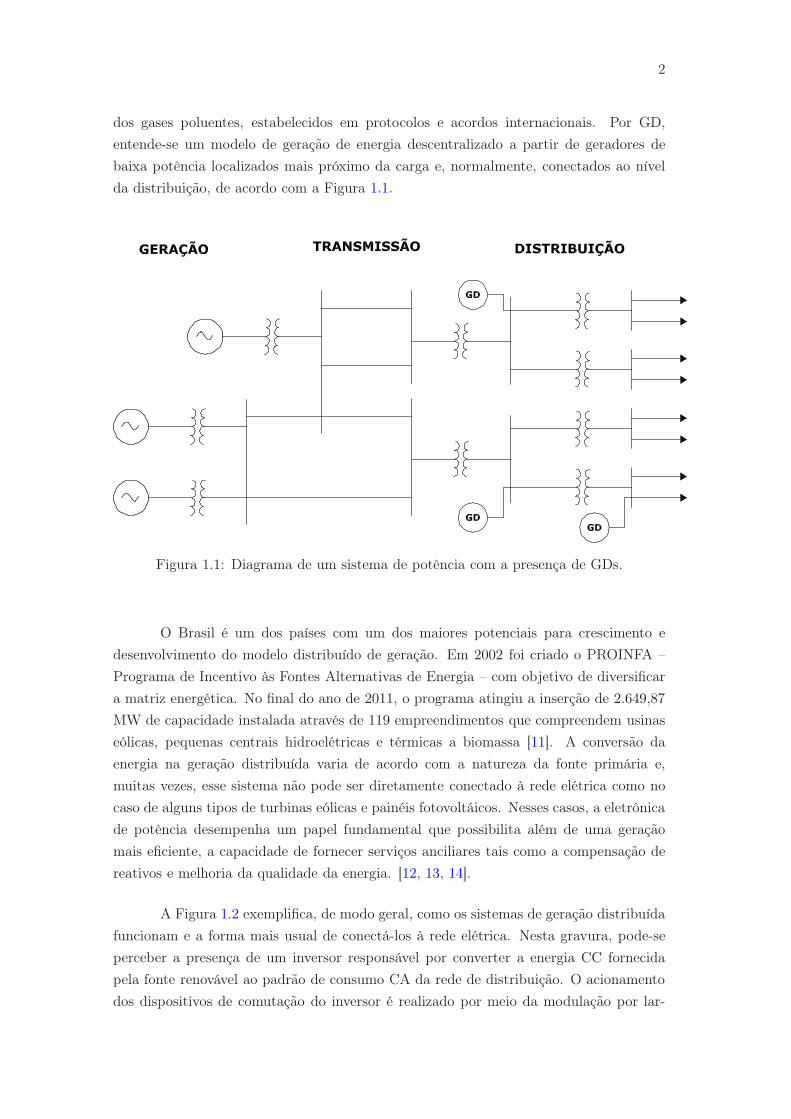
1.1 Diagrama de um sistema de potência com a presença de GDs. . . . . . . . 2
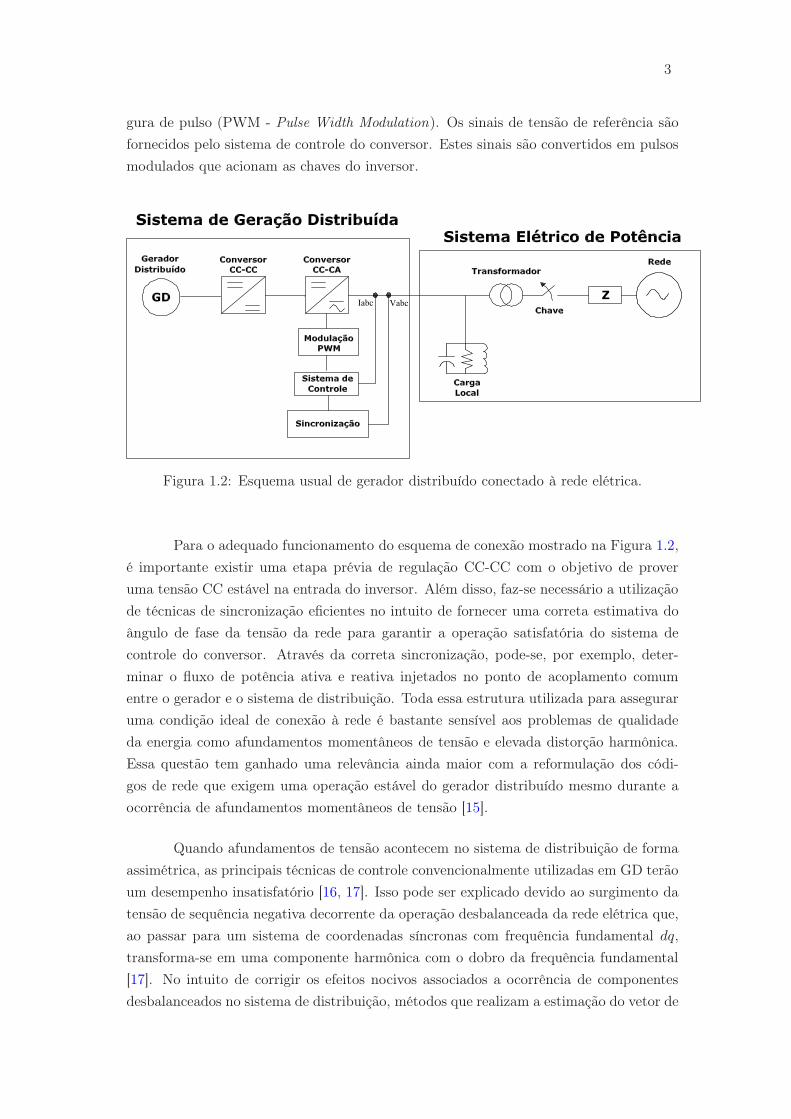
1.2 Esquema usual de gerador distribuído conectado à rede elétrica. . . . . . . 3
2.1 Diagrama em blocos do SRF-PLL [1]. . . . . . . . . . . . . . . . . . . . . 7
2.2 Vetor tensão de sequência positiva expresso sobre um SRF-PLL [2]. . . . . 8
2.3 Diagrama em blocos do SRF-PLL linearizado [1]. . . . . . . . . . . . . . . 10
2.4 Vetor de tensão composto sobre um SRF-PLL [3]. . . . . . . . . . . . . . . 11
2.5 Rede de desacoplamento do DSRF-PLL [4]. . . . . . . . . . . . . . . . . . 16
2.6 Diagrama de controle do DSRF-PLL [4]. . . . . . . . . . . . . . . . . . . . 16
2.7 Diagrama em blocos do ESRF-PLL [5]. . . . . . . . . . . . . . . . . . . . . 18
2.8 Diagrama em blocos do EPLL [6]. . . . . . . . . . . . . . . . . . . . . . . . 18
2.9 Diagrama em blocos do SOGI-QSG [7]. . . . . . . . . . . . . . . . . . . . . 20
2.10 Diagrama em blocos do DSOGI-PLL [7]. . . . . . . . . . . . . . . . . . . . 22
3.1 Componentes de sequência localizadas no plano αβ. . . . . . . . . . . . . . 26
3.2 Estrutura do método de sincronização proposto. . . . . . . . . . . . . . . . 34
3.3 Sistema trifásico equilibrado. . . . . . . . . . . . . . . . . . . . . . . . . . 35
3.4 Componentes de sequência estimados a partir de um sistema balanceado. . 35
x
3.5 Sistema trifásico com afundamento na fase A. . . . . . . . . . . . . . . . . 36
3.6 Componentes de sequência estimadas a partir de um sistema desbalanceado. 37
4.1 Sinal monofásico de tensão com harmônico de 2° ordem. . . . . . . . . . . 40
4.2 Sinal de monofásico de tensão com o harmônico de 11° ordem. . . . . . . . 40
4.3 Comparação entre a estimação do 2° e 11° harmônico. . . . . . . . . . . . 41
4.4 Curva de suportabilidade adotada pelo Brasil - ONS/ANEEL [8]. . . . . . 42
4.5 Rede de distribuição desequilibrada (afundamento na fase A). . . . . . . . 43
4.6 Sequência positiva na frequência fundamental calculada pelo extrator. . . 43
4.7 Tensões de eixo direto e em quadratura. . . . . . . . . . . . . . . . . . . . 44
4.8 Compação entre a frequência estimada com e sem o extrator. . . . . . . . 45
4.9 Erro do ângulo de fase estimado. . . . . . . . . . . . . . . . . . . . . . . . 45
4.10 Ângulo de fase estimado através do algoritmo de extração de sequência. . 46
4.11 Estimação da frequência realizada pelo método proposto e o GDSC-PLL. . 46
4.12 Erro do ângulo de fase apresentado pelo método proposto e o GDSC-PLL. 47
4.13 Rede de distribuição desbalanceada e com distorção harmônica. . . . . . . 48
4.14 Sequência positiva na frequência fundamental calculada pelo extrator. . . 49
4.15 Componente em quadratura. . . . . . . . . . . . . . . . . . . . . . . . . . . 49
4.16 Estimação da frequência. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
4.17 Erro do ângulo de fase estimado. . . . . . . . . . . . . . . . . . . . . . . . 51
4.18 Ângulo de fase estimado através do algoritmo de extração de sequência. . 51
4.19 Estimação da frequência realizada pelo método proposto e o GDSC-PLL. . 52
4.20 Erro do ângulo de fase apresentado pelo método proposto e o GDSC-PLL. 52
xi
4.21 Montagem experimental realizado no laboratório da UFABC. . . . . . . . 53
4.22 Rede de distribuição desbalanceada com harmônico. . . . . . . . . . . . . 54
4.23 Sequência positiva calculada pelo extrator. . . . . . . . . . . . . . . . . . . 54
4.24 Componente em quadratura. . . . . . . . . . . . . . . . . . . . . . . . . . . 55
4.25 Estimação da frequência. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
4.26 Ângulo de fase estimado através do algoritmo de extração de sequência. . 56
Lista de Tabelas
2.1 Capacidade de rejeição de harmônicos no PSC em αβ . . . . . . . . . . . . 20
3.1 Comparação para o caso desbalanceado. . . . . . . . . . . . . . . . . . . . 37
4.1 Comparação do desempenho dos métodos de sincronização. . . . . . . . . 47
4.2 Comparação do desempenho dos métodos de sincronização. . . . . . . . . 53
Lista de Nomenclaturas e Símbolos
ANEEL Agência Reguladora de Energia Elétrica
APF All Pass Filter
CA Corrente Alternada
CC Corrente Contínua
DSP Digital Signal Processor
DSC − PLL Delayed Signal Cancelation
DKE German Commission for Electrical, Electronic and Information Technologies
DSOGI − PLL Dual Second Ordem Generalized Integrator
DSRF − PLL Double Synchronous Reference Frame PLL
EDSC − PLL Extended Delayed Signal Cancelation PLL
ESRF − PLL Extended Synchronous Reference Frame PLL
EPLL Enhanced PLL
FMM Filtro de Média Movél
FPGA Field Programmable Gate Array
GD Geração Distribuída
xiv
GDSC − PLL Generalized Dalayed Signal Cancelation
IEEE Institute of Eletrical and Electronic Engineering
IEC International Electrotechnical Commission .
ISC Instantaneous Symmetrical Components
LPF Low Pass Filter
MCCF − PLL Multiple Complex Coefficient Filter
MQRP Mínimos Quadrados Recursivo Ponderado
PCC Ponto de Acoplamento Comum
PI Proporcional e Integral
PLL Phase Locked Loop
PROINFA Programa de Incentivo às Fontes Alternativas de Energia
PSC Positive Signal Calculator
PWM Pulse Width Modulation
QSG Quadrature Signal Generator
RTFC Ride Through Capability
ONS Operador Nacional do Sistema
SOGI Second Order Generalized Integrator
SV FT Space Vector Fourier Transform
SRF − PLL Synchronous Reference Frame PLL
[va,vb,vc]T Fasores de uma Tensão Trifásica
[v+a ,v+
b ,v+c ]
T Fasores de uma Tensão Trifásica
xv
vd,vq Componentes de Tensão de Eixo Direto e Quadratura
ωff - Compensação Feed Forward
w′ - Frequência de Ressonância do DSOGI
θ′
- Posição Angular de um Vetor
θ′
- Estimação da Posição Angular de um Vetor
ωc - Largura de Banda
ξ - Fator de Amortecimento.
y[k] - Sinal Analisado no Domínio do Tempo Discreto.
y[k] - Sinal Estimado Obtido Através de um Modelo Discreto.
L - Ordem do Modelo.
N - Número de Amostras do Sinal
K - Ganho de Kalman.
P - Matriz de Covariância.
e0 - Erro a Priori de Modelagem do Sinal de Dados
e - Erro a Posteriori de Modelagem do Sinal de Dados
v[N ] - Erro Quadrático de um Modelo para N Amostras
Sumário
1 Introdução 1
1.1 Objetivo Geral . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.1.1 Objetivos Específicos . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.2 Organização Textual . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2 Revisão Bibliográfica 6
2.1 PLL em Referencial Síncrono . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.2 PLL em Referencial Síncrono Duplo . . . . . . . . . . . . . . . . . . . . . 13
2.2.1 Desacoplamento de Sinais no DSRF-PLL . . . . . . . . . . . . . . 15
2.3 PLL’s Baseados na Teoria dos Componentes Simétricos Instantâneos . . . 17
2.3.1 PLL com Dois Integradores Generalizados de Segunda Ordem . . . 19
2.4 Métodos de Sincronização Publicados Recentemente . . . . . . . . . . . . 22
3 Separação de Sequência Baseada em Algoritmo dos Mínimos Quadrados 25
3.1 Algoritmo de Estimação dos Componentes de Sequência . . . . . . . . . . 25
3.2 Algoritmo dos Mínimos Quadrados . . . . . . . . . . . . . . . . . . . . . . 28
3.3 Separação de Sequências Utilizando o MQRP . . . . . . . . . . . . . . . . 31
xvii
3.4 Validação da Técnica Proposta . . . . . . . . . . . . . . . . . . . . . . . . 34
4 Resultados 39
4.1 Resultados de Simulação . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
4.1.1 Teste Dinâmico do Algoritmo MQRP . . . . . . . . . . . . . . . . . 39
4.1.2 Rede Desbalanceada . . . . . . . . . . . . . . . . . . . . . . . . . . 42
4.1.3 Rede desbalanceada com harmônicos . . . . . . . . . . . . . . . . . 48
4.2 Resultados Experimentais . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
5 Considerações Finais e Trabalhos Futuros 57
5.1 Trabalhos Futuros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
Referências Bibliográficas 60
A MQR - Demonstração 66
Capítulo 1
Introdução
O crescimento do consumo de energia elétrica, aliado à redução das reservas de combustí-
veis fósseis, têm incentivado o surgimento de pesquisas por diferentes fontes alternativas
que proporcionam menos impactos ambientais e mais diversidade da matriz energética
nacional. Nesse contexto, os avanços científicos e tecnológicos na geração de eletrici-
dade através de energias renováveis possibilitam uma expansão dos sistemas de geração
distribuída (GD) conectados à rede elétrica em todo mundo.
O debate sobre problemas ambientais e o consenso mundial sobre a promoção
do desenvolvimento em bases sustentáveis contribui para o aumento do interesse pela
utilização de fontes de energia renováveis. Entre essas fontes, a tecnologia de geração
solar fotovoltaica experimenta um crescimento bastante expressivo devido a sua disponi-
bilidade abundante e custos de conexão com a rede decrescentes. Por esses motivos, essa
modalidade de geração possui uma forte penetração na rede de distribuição de países
como a Alemanha, Espanha, China e EUA [9]. Outro tipo de fonte de energia renovável
de grande destaque é a eólica. Atualmente, cinco países da União Europeia - Espanha,
Portugal, Irlanda, Alemanha e Dinamarca - possuem mais de 5% de sua demanda por
eletricidade produzida através dessa modalidade de energia renovável [10]. No caso do
Brasil, a geração eólica é responsável pela produção de 6579 GWh, correspondendo um
pouco mais que 1% de todo o consumo de energia elétrica no país [11].
A inclusão de novas fontes leva a uma mudança na configuração dos sistemas
de potência tradicionais. Estes normalmente são constituídos por grandes centrais ge-
radoras, sejam elas térmicas, ou no caso do Brasil, usinas hidroelétricas, cuja energia é
transmitida aos centros de consumo por meio de extensas linhas de transmissão. Esse
modelo de geração centralizada passa incluir as fontes de geração distribuída (GD) de-
vido aos benefícios associados a sua utilização, dentro os quais, a diversificação da matriz
energética e o desempenho ambiental no que se refere à redução das taxas de emissão
2
dos gases poluentes, estabelecidos em protocolos e acordos internacionais. Por GD,
entende-se um modelo de geração de energia descentralizado a partir de geradores de
baixa potência localizados mais próximo da carga e, normalmente, conectados ao nível
da distribuição, de acordo com a Figura 1.1.
Figura 1.1: Diagrama de um sistema de potência com a presença de GDs.
O Brasil é um dos países com um dos maiores potenciais para crescimento e
desenvolvimento do modelo distribuído de geração. Em 2002 foi criado o PROINFA –
Programa de Incentivo às Fontes Alternativas de Energia – com objetivo de diversificar
a matriz energética. No final do ano de 2011, o programa atingiu a inserção de 2.649,87
MW de capacidade instalada através de 119 empreendimentos que compreendem usinas
eólicas, pequenas centrais hidroelétricas e térmicas a biomassa [11]. A conversão da
energia na geração distribuída varia de acordo com a natureza da fonte primária e,
muitas vezes, esse sistema não pode ser diretamente conectado à rede elétrica como no
caso de alguns tipos de turbinas eólicas e painéis fotovoltáicos. Nesses casos, a eletrônica
de potência desempenha um papel fundamental que possibilita além de uma geração
mais eficiente, a capacidade de fornecer serviços anciliares tais como a compensação de
reativos e melhoria da qualidade da energia. [12, 13, 14].
A Figura 1.2 exemplifica, de modo geral, como os sistemas de geração distribuída
funcionam e a forma mais usual de conectá-los à rede elétrica. Nesta gravura, pode-se
perceber a presença de um inversor responsável por converter a energia CC fornecida
pela fonte renovável ao padrão de consumo CA da rede de distribuição. O acionamento
dos dispositivos de comutação do inversor é realizado por meio da modulação por lar-
3
gura de pulso (PWM - Pulse Width Modulation). Os sinais de tensão de referência são
fornecidos pelo sistema de controle do conversor. Estes sinais são convertidos em pulsos
modulados que acionam as chaves do inversor.
Figura 1.2: Esquema usual de gerador distribuído conectado à rede elétrica.
Para o adequado funcionamento do esquema de conexão mostrado na Figura 1.2,
é importante existir uma etapa prévia de regulação CC-CC com o objetivo de prover
uma tensão CC estável na entrada do inversor. Além disso, faz-se necessário a utilização
de técnicas de sincronização eficientes no intuito de fornecer uma correta estimativa do
ângulo de fase da tensão da rede para garantir a operação satisfatória do sistema de
controle do conversor. Através da correta sincronização, pode-se, por exemplo, deter-
minar o fluxo de potência ativa e reativa injetados no ponto de acoplamento comum
entre o gerador e o sistema de distribuição. Toda essa estrutura utilizada para assegurar
uma condição ideal de conexão à rede é bastante sensível aos problemas de qualidade
da energia como afundamentos momentâneos de tensão e elevada distorção harmônica.
Essa questão tem ganhado uma relevância ainda maior com a reformulação dos códi-
gos de rede que exigem uma operação estável do gerador distribuído mesmo durante a
ocorrência de afundamentos momentâneos de tensão [15].
Quando afundamentos de tensão acontecem no sistema de distribuição de forma
assimétrica, as principais técnicas de controle convencionalmente utilizadas em GD terão
um desempenho insatisfatório [16, 17]. Isso pode ser explicado devido ao surgimento da
tensão de sequência negativa decorrente da operação desbalanceada da rede elétrica que,
ao passar para um sistema de coordenadas síncronas com frequência fundamental dq,
transforma-se em uma componente harmônica com o dobro da frequência fundamental
[17]. No intuito de corrigir os efeitos nocivos associados a ocorrência de componentes
desbalanceados no sistema de distribuição, métodos que realizam a estimação do vetor de
4
tensão de sequência positiva têm sido desenvolvidos no intuito de manter os conversores
em operação e, consequentemente, atender os requisitos de conexão [18].
O presente trabalho propõe a utilização de uma técnica para a extração da sequên-
cia positiva baseada em mínimos quadrados no intuito de auxiliar o sistema de sincroni-
zação na correta estimação do ângulo de fase do vetor tensão na rede elétrica. O método
atua nas amostras das tensões vα e vβ e separa as contribuições das sequências positiva e
negativa em um sistema de coordenadas estacionárias. O algoritmo proposto é capaz de
mitigar harmônicos de baixa ordem, inclusive o segundo harmônico associado a operação
desbalanceada nas tensões do sistema de distribuição, por meio da mesma estrutura e
com a mesma velocidade de qualquer harmônico de ordem superior. Além disso, realiza
a rejeição de componentes CC das tensões sob análise de forma eficiente. Por fim, a
técnica de sincronização foi testada no software Matlab© em diferentes condições de
operação no intuito de avaliar o seu desempenho perante a problemas de qualidade da
energia como afundamentos de tensão e distorções harmônicas.
1.1 Objetivo Geral
O objetivo desta dissertação é propor um método de sincronização que seja capaz de
realizar uma correta estimação do ângulo de fase do vetor de tensão sequência positiva
para garantir adequado funcionamento do sistema de controle dos conversores utilizados
em geração distribuída.
1.1.1 Objetivos Específicos
• Utilizar o algoritmo dos mínimos quadrados recursivo ponderado (MQRP) no apri-
moramento da estimação do ângulo de fase do vetor de tensão sequência positiva
da rede elétrica;
• Analisar o desempenho da metodologia proposta levando em consideração condi-
ções de operação desfavoráveis para a sincronização como afundamentos momentâ-
neos de tensão e elevadas taxas de distorção harmônica nos sistemas de distribuição.
Para tal, deve-se desenvolver uma plataforma de teste em ambiente Matlab© a
fim de avaliar a eficiência da técnica proposta diante de distúrbios oriundos da
operação desbalanceada da rede elétrica;
• Avaliar o desempenho dinâmico do algoritmo MQRP na estimação de componentes
harmônicos de qualquer ordem demonstrando a sua capacidade em detectá-los
rapidamente;
5
• Aumentar o vetor de regressores do modelo para o sinal de tensão da rede no
intuito de tornar a técnica robusta a distorções harmônicas e capaz de rejeitar
componentes CC oriundos das tensões medidas no sistema de potência simulado;
• Desenvolver um arranjo experimental a fim de validar os pressupostos teóricos
assumidos na etapa de simulação.
1.2 Organização Textual
Para alcançar os objetivos descritos nas seções anteriores, organizou-se esta dissertação
da seguinte maneira:
O capítulo 2 realiza uma descrição da importância em se estimar a frequência e
ângulo de fase do vetor tensão de sequência positiva para o adequado funcionamento dos
sistemas de controle dos geradores distribuídos. Nessa seção foram apresentados alguns
dos algoritmos de sincronização mais citados na literatura, evidenciando suas vantagens
e deficiências além de destacar o seu comportamento perante distúrbios na rede elétrica.
O capítulo 3 apresenta um eficiente método de decomposição em componentes
simétricas capaz de eliminar os efeitos dos desbalanços e distorções harmônicas presentes
no ponto de acoplamento comum entre rede e gerador distribuído.
No capítulo 4 foram desenvolvidos diferentes cenários de simulação a fim de re-
produzir as condições operacionais que os sistemas de sincronização estão submetidos.
Realizou-se também uma comparação do desempenho entre o algoritmo proposto com a
versão generalizada do método do sinal atrasado (GDSC-PLL) no intuito de demonstrar
a eficiência do método sugerido.
Por fim, as conclusões e sugestões para trabalhos futuros são apresentados no
capítulo 5.
Capítulo 2
Revisão Bibliográfica
No que se refere à conexão dos geradores distribuídos à rede, a detecção do ângulo de
fase do vetor tensão de sequência positiva (FFPS) é um aspecto importante na atuação
de um sincronizador. A determinação precisa deste ângulo é utilizada para realizar a
correta sincronização da corrente injetada pelo inversor com a tensão da rede elétrica
de modo a controlar o fluxo de potência ativa e reativa entre o gerador e o sistema de
distribuição [19, 20].
Nos últimos anos, vários métodos para a estimação deste ângulo têm sido de-
senvolvidos e aperfeiçoados. Dentre estes, as técnicas de detecção de valores de pico e
passagem por zero de tensão são as mais simples de implementação e possuem um bom
desempenho quando o conjunto trifásico de senoides é balanceado. Porém, não são efi-
cazes em condições de harmônicos significativos ou desequilíbrios associados à operação
da rede elétrica [16]. Essa questão ganha um destaque ainda maior com a reformulação
de regras que exigem a operação do gerador distribuído mesmo em situações de afun-
damentos momentâneos de tensão. Isso é o que se chama de capacidade de tolerância
de falta, ou do inglês RTFC (Ride Through Fault Capability). Vale salientar que os
principais normatizadores como IEEE (Institute of Electrical and Electronic Enginee-
ring), IEC (International Electrotechnical Commission) e o DKE (German Commission
for Electrical, Electronic and Information Technologies of DIN and VDE ) atualmente
prescrevem regras de tolerância somente para geradores eólicos, mas com o aumento da
penetração dos sistemas fotovoltaicos na rede, espera-se que normas sejam adaptadas e
estendidas para este tipo de geração. No Brasil, o Operador Nacional do Sistema (ONS)
prescreve as normas de RTFC através do Submódulo 3.6 que se encontra na referência
[8]. Portanto, a detecção rápida e precisa do ângulo de fase do vetor tensão é essencial
para manter os conversores em operação e, consequentemente, atender os requisitos de
conexão [21, 7].
7
Como alternativa aos métodos de sincronização citados anteriormente, as técnicas
baseadas em PLLs (Phase-Locked Loop) vêm sendo amplamente utilizadas na literatura
correlata para realizar a detecção do ângulo de fase devido à precisão do seu sincro-
nismo. Adaptações desses PLL’s foram realizadas com objetivo de atender a sistemas de
distribuição submetidos a condições de distorção harmônica e afundamento de tensão.
Neste capítulo será explicado o princípio de funcionamento do PLL em referencial
síncrono (SRF-PLL–Synchronous Reference Frame PLL) e o seu comportamento diante
tensões trifásicas desbalanceadas. Vale destacar que o estudo desta técnica é essencial
para o entendimento de outros algoritmos de sincronização. Além disso, o PLL em
um sistema de referência síncrono duplo (DSRF-PLL - Double Synchronous Reference
Frame PLL) e os PLL’s baseados na teoria de componentes simétricas de Fortescue são
também abordados. Em relação a esses métodos, explicam-se os princípios de operação
e os desempenhos associados a problemas de qualidade da energia presentes nos sistemas
de distribuição como afundamentos e distorções harmônicas. Por último, no final deste
capítulo é apresentada uma breve revisão sobre os métodos de sincronização publicados
mais recentemente.
2.1 PLL em Referencial Síncrono
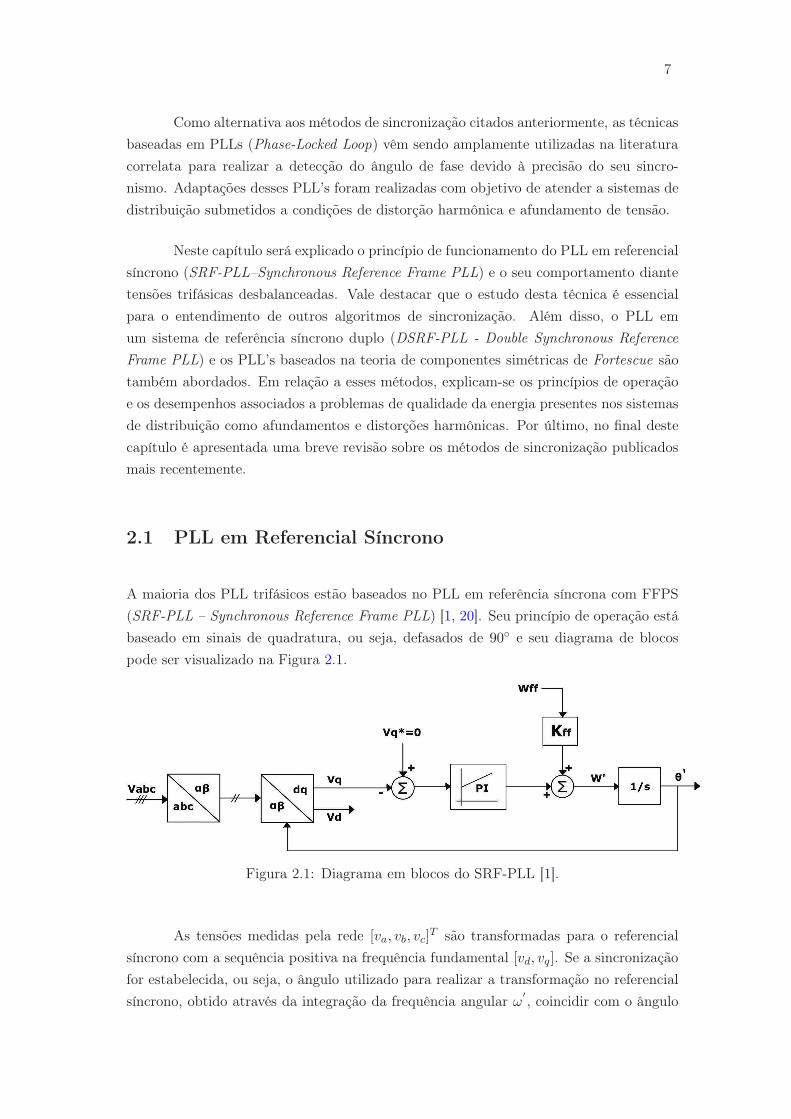
A maioria dos PLL trifásicos estão baseados no PLL em referência síncrona com FFPS
(SRF-PLL – Synchronous Reference Frame PLL) [1, 20]. Seu princípio de operação está
baseado em sinais de quadratura, ou seja, defasados de 90◦ e seu diagrama de blocos
pode ser visualizado na Figura 2.1.
Figura 2.1: Diagrama em blocos do SRF-PLL [1].
As tensões medidas pela rede [va, vb, vc]T são transformadas para o referencial
síncrono com a sequência positiva na frequência fundamental [vd, vq]. Se a sincronização
for estabelecida, ou seja, o ângulo utilizado para realizar a transformação no referencial
síncrono, obtido através da integração da frequência angular ω′
, coincidir com o ângulo

8
de fase das tensões trifásicas da rede, os componentes vd e vq aparecerão como sinais
constantes. Esse objetivo de controle é alcançado através do ajuste do controlador pro-
porcional e integral que atua sobre o componente em quadratura vq até torná-lo igual a
zero. Dessa forma, quando vq atinge o valor zero, o controlador PI realizará a modifi-
cação da posição angular do PLL para que o eixo d fique alinhado com o vetor tensão,
conforme pode-se visualizar na Figura 2.2. A frequência ωff - compensação feed forward
- é acrescentada a fim de tornar a estabilização do sistema mais rápida principalmente
na sua inicialização [17].
Figura 2.2: Vetor tensão de sequência positiva expresso sobre um SRF-PLL [2].
Para analisar o sistema mostrado na Figura 2.1, é necessário, inicialmente, definir
o conjunto de tensões trifásicas [va, vb, vc]T . Na equação (2.1), utiliza-se uma notação
genérica a fim de representar todas as condições associadas a operação desequilibrada
da rede elétrica, de acordo com a referência [3].
[~Vabc
]=
va
vb
vc
=
∞∑
n=1
(~V +nabc + ~V −n
abc + ~V 0nabc), (2.1)
Na equação (2.1) os vetores ~V +nabc , ~V −n
abc e ~V 0nabc representam os componentes de
sequência positiva, negativa e zero através dos subscritos +n, −n e 0n, respectivamente.
De tal modo que:
[~V +nabc
]= V +n
cos(nωt+ φ+n)
cos(nωt− 2π3+ φ+n)
cos(nωt+ 2π3+ φ+n)
, (2.2)

9
[~V −nabc
]= V −n
cos(nωt+ φ−n)
cos(nωt+ 2π3+ φ−n)
cos(nωt− 2π3+ φ−n)
, (2.3)
[~V 0nabc
]= V 0n
cos(nωt+ φ0n)
cos(nωt+ φ0n)
cos(nωt+ φ0n)
, (2.4)
Com intuito de investigar os efeitos dos desbalanços e distorções harmônicas no
sistema de sincronização é elaborado um estudo em que se deseja comparar o desempenho
do SRF-PLL na estimação da frequência e do ângulo de fase das tensões na rede em duas
condições de operação: equilibrada e desbalanceada. Em primeira análise, considera-
se o caso de um sinal elétrico balanceado e para simplificar o estudo, sem perda de
generalidade, escolhe-se o ângulo de fase inicial definido na fase A igual a zero.
[~Vabc
]=
va
vb
vc
= V +1
cos(ωt)
cos(ωt− 2π3)
cos(ωt+ 2π3)
. (2.5)
O vetor tensão da equação (2.5) pode ser expresso em um referencial estacionário
de modo a obter:
[~Vαβ
]=
[vα
vβ
]= [Tαβ ]~Vabc = V +1
[cos(ωt)
sen(ωt)
], (2.6)
em que:
[Tαβ ] =2
3
[1 −1
2−1
2
0√3
2−
√3
2
], (2.7)
O vetor tensão no domínio αβ da equação (2.6) pode ser transformado para um
referencial de coordenadas girante através de uma rotação no sentido positivo à frequência
fundamental em relação a uma posição angular arbitrária θ′
, tem-se que:
[~Vdq
]=
[vd
vq
]= [Tdq]~Vαβ = V +1
[cos(ωt− θ
′
)
sen(ωt− θ′
)
]= V +1
[cos(∆θ)
sen(∆θ)
], (2.8)

10
a matriz transformação adotada é a seguinte:
[Tdq] =
[cos(θ
′
) sen(θ′
)
− sen(θ′
) cos(θ′
)
], (2.9)
O controlador PI utilizado nesse sistema de sincronização atua sobre a compo-
nente em quadratura com objetivo de tornar seu valor nulo. Dessa forma, realiza-se um
alinhamento entre o eixo direto com o vetor tensão da rede de tal maneira que θ′ ≈ ωt.
Na equação (2.10) pode-se notar o resultado para os componentes de tensão vq e vd os
quais possuem valores constantes, conforme esperado.
[~Vdq
]=
[vd
vq
]≈ V +1
[1
0
]. (2.10)
Para o projeto do controlador PI é necessário realizar o cálculo das constan-
tes proporcional e integral. Considera-se que para pequenos valores de ∆θ, o termo
sen(∆θ) ≈ ∆θ. Dessa forma, pode-se realizar uma aproximação linear sobre a compo-
nente em quadratura vq da seguinte maneira:
[vq] ≈ V +1(ωt− θ′
) ⇒ [Vq(s)] = V +1[Ψ(s)−Θ′
(s)] ⇒ [Vq(s)] = V [E(s)], (2.11)
em que Vq(s), Ψ(s), Θ′
(s) e E(s) são as transformadas de Laplace de vq, ωt, θ′
e
ε = ωt − θ′
, respectivamente. A partir da equação (2.11) pode-se apresentar o novo
diagrama de blocos linearizado do SRF-PLL mostrado na Figura 2.3.
Figura 2.3: Diagrama em blocos do SRF-PLL linearizado [1].
Através do diagrama linearizado da Figura 2.3 é possível extrair as seguintes
funções de transferência:
[Θ
′
(s)
Ψ(s)
]=
2ξωcs+ ω2c
s2 + 2ξωcs+ ω2c
, (2.12)
11
[E(s)
Ψ(s)
]=
s2
s2 + 2ξωcs+ ω2c
, (2.13)
em que,
[ωc] =√
kiV +1, (2.14)
[ξ] =Kp
2
√V +1
Ki
. (2.15)
ωc é a largura de banda e ξ é o fator de amortecimento do sistema de controle.
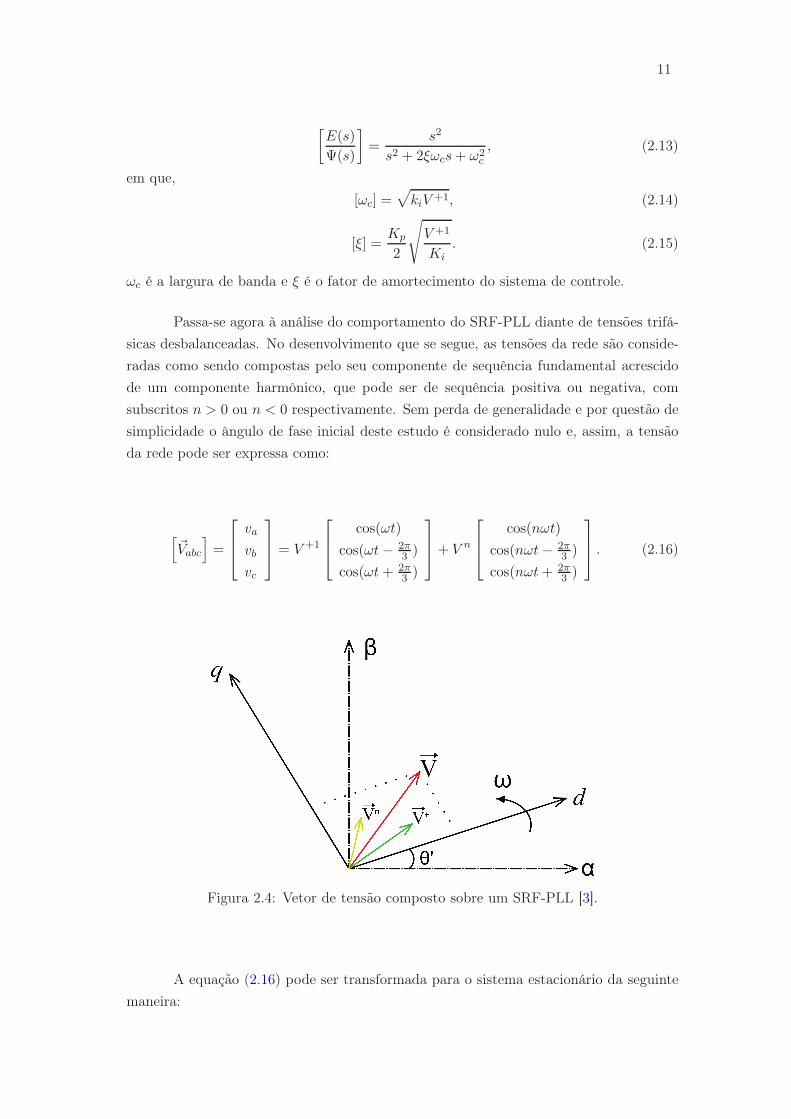
Passa-se agora à análise do comportamento do SRF-PLL diante de tensões trifá-
sicas desbalanceadas. No desenvolvimento que se segue, as tensões da rede são conside-
radas como sendo compostas pelo seu componente de sequência fundamental acrescido
de um componente harmônico, que pode ser de sequência positiva ou negativa, com
subscritos n > 0 ou n < 0 respectivamente. Sem perda de generalidade e por questão de
simplicidade o ângulo de fase inicial deste estudo é considerado nulo e, assim, a tensão
da rede pode ser expressa como:
[~Vabc
]=
va
vb
vc
= V +1
cos(ωt)
cos(ωt− 2π3)
cos(ωt+ 2π3)
+ V n
cos(nωt)
cos(nωt− 2π3)
cos(nωt+ 2π3)
. (2.16)
Figura 2.4: Vetor de tensão composto sobre um SRF-PLL [3].
A equação (2.16) pode ser transformada para o sistema estacionário da seguinte
maneira:

12
[~Vαβ
]= [Tαβ ]~Vabc = V +1
[cos(ωt)
sen(ωt)
]+ V n
[cos(nωt)
sen(nωt)
]. (2.17)
O vetor tensão da equação (2.17) pode ser expresso sobre um sistema de coorde-
nadas síncronas que gira no sentido anti-horário da seguinte forma:
[~Vdq
]= [Tdq]~Vαβ = V +1
[cos(ωt− θ
′
)
sen(ωt− θ′
)
]+ V n
[cos(nωt− θ
′
)
sen(nωt− θ′
)
]. (2.18)
O segundo termo da equação (2.18) pode ser entendido como uma perturbação na
estimativa das magnitudes dos vetores vd e vq. Nesse caso, o SRF tenderá a se acoplar
não ao vetor composto e sim a FFPS, porém sujeito a perturbações decorrentes dos
componente harmônicos como ilustra a Figura 2.4
[~Vdq
]≈ V +1
[1
0
]+ V n
[cos[(n− 1)ωt]
sen[(n − 1)ωt]
]. (2.19)
Dessa forma, pela análise da equação (2.19) pode-se notar que as componentes
de tensão em coordenadas síncronas (vd e vq) não se comportarão mais como sinais CC,
devido a presença de termos harmônicos. Quanto maior for a amplitude das componentes
harmônicas, maior será a oscilação apresentada pelo ângulo θ′, contribuindo para elevar
o erro na estimação de fase realizada pelo SRF-PLL.
Uma forma de amenizar os erros causados por essas oscilações seria reduzir a
largura de banda do controlador. Isso funciona bem para oscilações causadas por harmô-
nicos de ordem mais elevada. No entanto, esse procedimento falha quando os sinais de
tensão da rede são desbalanceados ou contêm harmônicos de menor ordem, além do que,
essa solução implica uma resposta dinâmica do controlador mais lenta [1, 7]. O caso
mais crítico é em situações em que ocorrem faltas assimétricas, em virtude da existência
do componente de tensão de sequência negativa que, ao ser passado para um referencial
síncrono com a FFPS, transforma-se em uma componente harmônica com o dobro da
frequência fundamental, produzindo um erro de estimação de fase considerável [4, 22].
Neste caso, mesmo com a redução da largura de banda do SRF-PLL não é possível eli-
minar completamente as oscilações associadas à estimação do ângulo de fase da tensão
na rede elétrica. Para esclarecer o que foi dito anteriormente, substituindo n = −1 no
termo oscilante da equação (2.19), podemos escrevê-la da seguinte maneira:

13
[~Vdq
]= V +1
[1
0
]+ V −1
[cos(−2ωt)
sen(−2ωt)]
]. (2.20)
Na equação (2.20) pode-se observar um termo oscilante com o dobro da frequência
fundamental associado a operação desbalanceada dos sistemas elétricos de potência, o
qual não é possível eliminar mesmo com a redução da largura de banda do controlador.
Com objetivo de obter melhores resultados sob condição de sinais desbalanceados as
técnicas de sincronização devem realizar a separação da componente de sequência positiva
e negativa de modo a eliminar o efeito das oscilações de dupla frequência presente no
SRF-PLL.
2.2 PLL em Referencial Síncrono Duplo
No intuito de contornar as limitações do PLL em referencial síncrono, propõe-se um
desacoplador dinâmico em [23, 24] que possibilita isolar os componentes de sequência
positiva e negativa. Esse esquema é denominado de PLL em referencial síncrono duplo
(DSRF-PLL - Double Synchronous Reference Frame PLL). A ideia do referido método
é representar o vetor tensão em dois sistemas de coordenadas síncronas, um girando em
sentido positivo e o outro em sentido negativo.
Para entender o funcionamento do DSRF-PLL considerou-se que as tensões da
rede estão apenas desequilibradas em sua frequência fundamental, ou seja, a situação
mais crítica na operação do SRF-PLL e escrevendo a mesma em um referencial estacio-
nário pode ser obtido:
[~Vαβ
]= [Tαβ ]~Vabc = V +1
[cos(ωt)
sen(ωt)
]+ V −1
[cos(−ωt+ φ−1)
sen(−ωt+ φ−1)
]. (2.21)
Transformando a equação (2.21) para um referencial síncrono duplo em que o
primeiro sistema gira no sentido positivo ω (anti-horário), o qual ocupa uma posição
angular θ′
. Analogamente um segundo sistema realizará um giro no sentido negativo
−ω (horário) de modo a ocupar uma posição angular −θ′
. Por fim, a expressão do vetor
tensão sobre este sistema de coordenadas duplo fica igual a:

14
[~V +
dq
]=
[v+dv+q
]= [T+
dq]~Vαβ = V +1
[cos(ωt− θ
′
)
sen(ωt− θ′
)
]+ V −
[cos(−ωt+ φ−1 − θ
′
)
sen(−ωt+ φ−1 − θ′
)
].
(2.22)
[~V −dq
]=
[v−dv−q
]= [T−
dq]~Vαβ = V +1
[cos(ωt+ θ
′
)
sen(ωt+ θ′
)
]+ V −
[cos(−ωt+ φ−1 + θ
′
)
sen(−ωt+ φ−1 + θ′
)
],
(2.23)
em que [T−dq1] = [T+
dq1]T .
O sistema de detecção do ângulo θ′
descrito nesta seção funciona de forma pare-
cida ao da Figura 2.3, considerando que a largura de banda utilizada para funcionamento
do sistema seja suficientemente reduzida, então, pode-se considerar que θ′ ≈ ωt e as
equações (2.22) e (2.23) podem ser reescritas como:
[~V +1
dq
]=
[v+dv+q
]≈ V +1
[1
ωt− θ′
]+ V −1
[cos(−2ωt+ φ−1)
sen(−2ωt+ φ−1)]
], (2.24)
[~V −1
dq
]=
[v−dv−q
]≈ V +1
[cos(2ωt)
sen(2ωt)]
]+ V −1
[cos(φ−1)
sen(φ−1)
]. (2.25)
Pela análise da equação (2.24) pode-se perceber que o vetor tensão expresso no
sistema de coordenadas dq+ possui um termo constante em seu componente de sequên-
cia positiva enquanto o componente de sequência negativa apresenta um termo oscilante
na frequência 2ω. Analogamente pode-se notar que quando o vetor tensão da rede é
expresso no sistema de coordenadas dq−, possui um termo constante em seu componente
de sequência negativa e um termo oscilante na frequência 2ω em seu componente de
sequência positiva. Como já foi dito na seção 2.1, reduzir a largura de banda do PLL
não se mostrou um solução eficaz para mitigar o efeito da operação desbalanceada da
rede elétrica. Observando esse comportamento foi proposto em [4] um sistema de desa-
coplamento para as senóides das equações (2.24) e (2.25) possibilitando uma detecção
precisa da amplitude e da posição angular do vetor tensão de sequência positiva, de forma
a aprimorar de maneira satisfatória o desempenho do sistema em condições puramente
desbalanceadas.

15
2.2.1 Desacoplamento de Sinais no DSRF-PLL
O desacoplamento proposto em [4] parte de uma demonstração mais genérica onde deseja-
se desacoplar dois sinais quaisquer sejam eles de sequência positiva ou negativa. Dessa
forma, o vetor tensão da rede pode ser reescrito da seguinte maneira:
[~Vαβ
]= V n
[cos(nωt+ φn)
sen(nωt+ φn)
]+ V m
[cos(mωt+ φm)
sen(mωt+ φm)
], (2.26)
em que m e n podem ser positivos ou negativos para indicar componentes de sequência
positiva ou negativa respectivamente.
Assumindo a existência de dois sistemas de referência genéricos que ocupam
respectivamente as posições angulares nθ′ e mθ′, sendo θ′ o ângulo detectado pelo PLL,
a expressão nesses dois sistemas será:
[~V ndq
]=
[vndvnq
]= V n
[cos(n(ωt− θ
′
) + φn)
sen(n(ωt− θ′
) + φn)
]+ V m
[cos(mωt− nθ
′
+ φm)
sen(mωt− nθ′
+ φm)
],
(2.27)
[~V mdq
]=
[vmdvmq
]= V n
[cos(nωt−mθ
′
+ φn)
sen(nωt−mθ′
+ φn)
]+ V m
[cos(m(ωt− θ
′
) + φm)
sen(m(ωt− θ′
) + φm)
].
(2.28)
Se a sincronização ocorre então θ′ ≈ ωt e as equações (2.27) e (2.28) tornam-se:
[~V ndq
]=
[vndvnq
]=
[V n cos(φn)
V n sen(φn)
]+ V m cos(φm)
[cos((n−m)ωt)
− sen((n −m)ωt)
]
+V m sen(φm)
[sen((n−m)ωt)
cos((n−m)ωt)
]. (2.29)
[~V mdq
]=
[vmdvmq
]=
[V m cos(φm)
V m sen(φm)
]+ V n cos(φn)
[cos((n −m)ωt)
sen((n−m)ωt)
]
+V n sen(φn)
[− sen((n−m)ωt)
cos((n −m)ωt)
]. (2.30)

16
Pode-se notar através da análise da equação (2.29) e (2.30) que as amplitudes das
oscilações dos sinais nos eixos do sistema de referência dqn coincidem com o valor médio
dos sinais nos eixos do sistema de referência dqm e vice-versa. Através dessa observação
foi projetada uma rede de desacoplamento mostrada na Figura 2.5.
Figura 2.5: Rede de desacoplamento do DSRF-PLL [4].
Os sinais vmd e vmq são os valores médios da senóide do sistema de referência dqm
obtidos através de um filtro passa-baixa (LPF - Low Pass Filter) com uma realimentação
cruzada. A Figura 2.6 mostra uma rede de desacoplamento projetada com base nas
equações (2.22) e (2.23) fazendo n = +1 e m = −1.
Figura 2.6: Diagrama de controle do DSRF-PLL [4].
Esse tipo de PLL possui como principal vantagem a eliminação da componente de
17
dupla frequência associada a operação desbalanceada da rede elétrica, no entanto, essa
proposta não consegue atenuar de maneira eficiente as possíveis componentes harmônicas
de baixa ordem (tais como 3◦ e 5◦), mesmo estreitando a banda de passagem do con-
trolador. Portanto, o DSRF-PLL não é capaz de garantir que a estimação do ângulo de
fase do vetor de tensão da rede elétrica esteja livre de oscilações. Com intuito de corrigir
esse problema propõe-se em [3] uma extensão do DSRF-PLL denominado de MSRF-
PLL (Multiple Synchonous Reference Frame PLL), baseado em múltiplos sistemas de
desacoplamento, no entanto, essa solução elevou muito a complexidade do sistema de
controle e a sua respectiva capacidade de processamento computacional para execução
das operações associadas às malhas de desacoplamento, tornando-se uma opção pouco
eficiente.
2.3 PLL’s Baseados na Teoria dos Componentes Simétricos
Instantâneos
Vários métodos de sincronização têm sido sugeridos na literatura em que se baseiam
na extração da tensão de sequência positiva, particularmente utilizando a teoria dos
componentes simétricos instantâneos (ISC - Instantaneous Symmetrical Components).
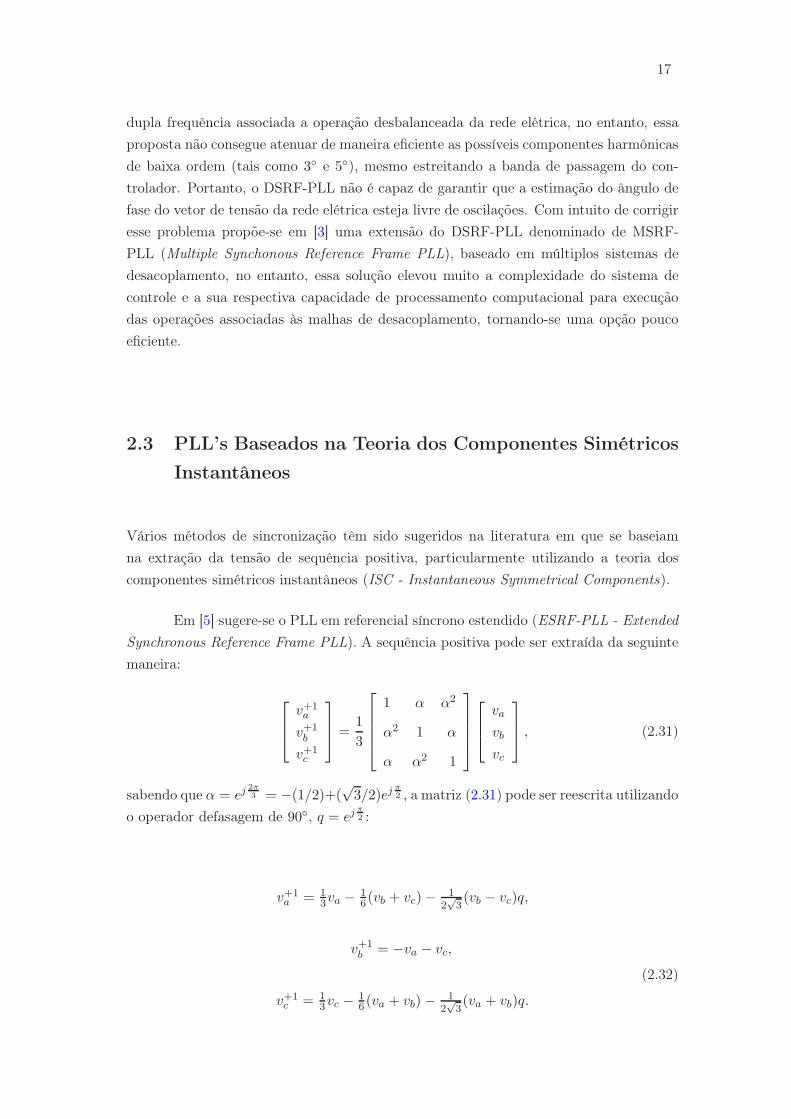
Em [5] sugere-se o PLL em referencial síncrono estendido (ESRF-PLL - Extended
Synchronous Reference Frame PLL). A sequência positiva pode ser extraída da seguinte
maneira:
v+1a
v+1
b
v+1c
=
1
3
1 α α2
α2 1 α
α α2 1
va
vb
vc
, (2.31)
sabendo que α = ej2π3 = −(1/2)+(
√3/2)ej
π2 , a matriz (2.31) pode ser reescrita utilizando
o operador defasagem de 90◦, q = ejπ2 :
v+1a = 1
3va − 1
6(vb + vc)− 1
2√3(vb − vc)q,
v+1
b = −va − vc,
(2.32)
v+1c = 1
3vc − 1
6(va + vb)− 1
2√3(va + vb)q.
18
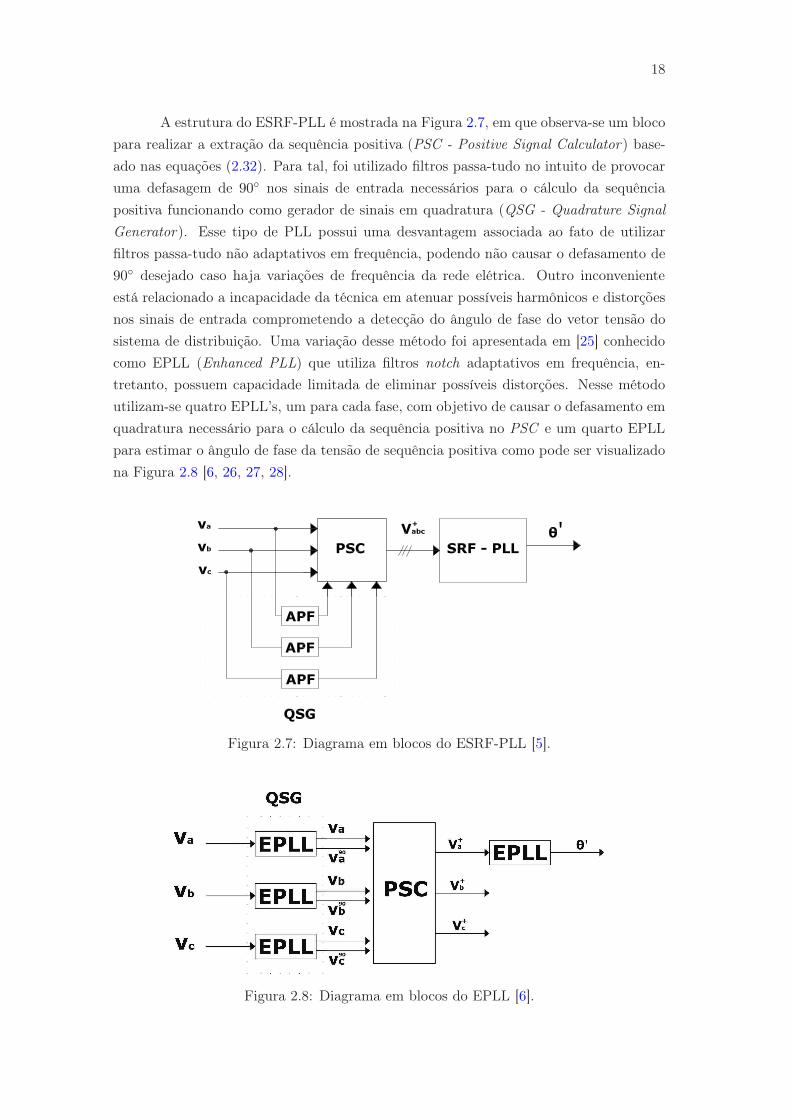
A estrutura do ESRF-PLL é mostrada na Figura 2.7, em que observa-se um bloco
para realizar a extração da sequência positiva (PSC - Positive Signal Calculator) base-
ado nas equações (2.32). Para tal, foi utilizado filtros passa-tudo no intuito de provocar
uma defasagem de 90◦ nos sinais de entrada necessários para o cálculo da sequência
positiva funcionando como gerador de sinais em quadratura (QSG - Quadrature Signal
Generator). Esse tipo de PLL possui uma desvantagem associada ao fato de utilizar
filtros passa-tudo não adaptativos em frequência, podendo não causar o defasamento de
90◦ desejado caso haja variações de frequência da rede elétrica. Outro inconveniente
está relacionado a incapacidade da técnica em atenuar possíveis harmônicos e distorções
nos sinais de entrada comprometendo a detecção do ângulo de fase do vetor tensão do
sistema de distribuição. Uma variação desse método foi apresentada em [25] conhecido
como EPLL (Enhanced PLL) que utiliza filtros notch adaptativos em frequência, en-
tretanto, possuem capacidade limitada de eliminar possíveis distorções. Nesse método
utilizam-se quatro EPLL’s, um para cada fase, com objetivo de causar o defasamento em
quadratura necessário para o cálculo da sequência positiva no PSC e um quarto EPLL
para estimar o ângulo de fase da tensão de sequência positiva como pode ser visualizado
na Figura 2.8 [6, 26, 27, 28].
Figura 2.7: Diagrama em blocos do ESRF-PLL [5].
Figura 2.8: Diagrama em blocos do EPLL [6].
19
2.3.1 PLL com Dois Integradores Generalizados de Segunda Ordem
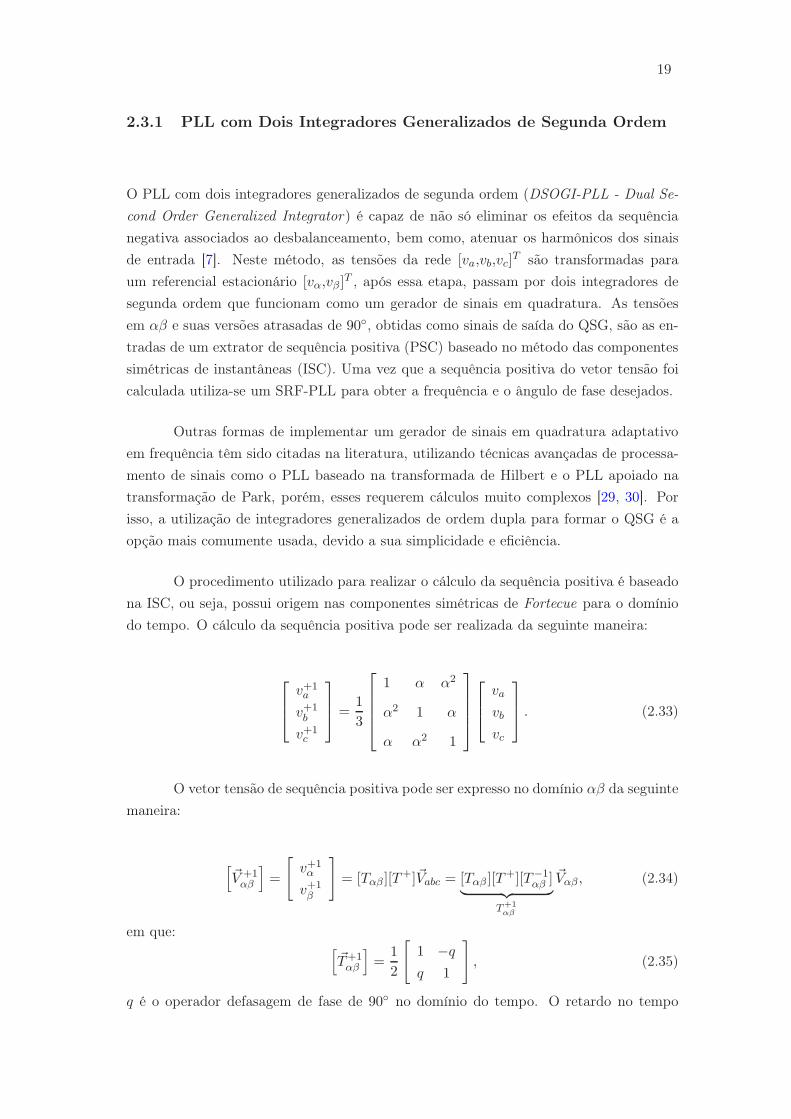
O PLL com dois integradores generalizados de segunda ordem (DSOGI-PLL - Dual Se-
cond Order Generalized Integrator) é capaz de não só eliminar os efeitos da sequência
negativa associados ao desbalanceamento, bem como, atenuar os harmônicos dos sinais
de entrada [7]. Neste método, as tensões da rede [va,vb,vc]T são transformadas para
um referencial estacionário [vα,vβ]T , após essa etapa, passam por dois integradores de
segunda ordem que funcionam como um gerador de sinais em quadratura. As tensões
em αβ e suas versões atrasadas de 90◦, obtidas como sinais de saída do QSG, são as en-
tradas de um extrator de sequência positiva (PSC) baseado no método das componentes
simétricas de instantâneas (ISC). Uma vez que a sequência positiva do vetor tensão foi
calculada utiliza-se um SRF-PLL para obter a frequência e o ângulo de fase desejados.
Outras formas de implementar um gerador de sinais em quadratura adaptativo
em frequência têm sido citadas na literatura, utilizando técnicas avançadas de processa-
mento de sinais como o PLL baseado na transformada de Hilbert e o PLL apoiado na
transformação de Park, porém, esses requerem cálculos muito complexos [29, 30]. Por
isso, a utilização de integradores generalizados de ordem dupla para formar o QSG é a
opção mais comumente usada, devido a sua simplicidade e eficiência.
O procedimento utilizado para realizar o cálculo da sequência positiva é baseado
na ISC, ou seja, possui origem nas componentes simétricas de Fortecue para o domínio
do tempo. O cálculo da sequência positiva pode ser realizada da seguinte maneira:
v+1a
v+1
b
v+1c
=
1
3
1 α α2
α2 1 α
α α2 1
va
vb
vc
. (2.33)
O vetor tensão de sequência positiva pode ser expresso no domínio αβ da seguinte
maneira:
[~V +1
αβ
]=
[v+1α
v+1
β
]= [Tαβ ][T
+]~Vabc = [Tαβ ][T+][T−1
αβ ]︸ ︷︷ ︸T+1
αβ
~Vαβ, (2.34)
em que:[~T+1
αβ
]=
1
2
[1 −q
q 1
], (2.35)
q é o operador defasagem de fase de 90◦ no domínio do tempo. O retardo no tempo

20
introduzido pelo operador q está associado a frequência fundamental, portanto, o com-
portamento para o enésimo harmônico das tensões de entrada é dado por:
[~V +nαβ
]=
1
2
[1 −|n|q|n|q 1
][vnα
vnβ
], q = e−j π
2 . (2.36)
em que o sinal n representa se o vetor tensão é de sequência positiva ou negativa. O
PSC não modifica a sequência. Portanto, se um vetor de sequência negativa é aplicado
ao PSC, na saída deste haverá um vetor de mesma sequência multiplicado por um ganho
complexo. A tabela 2.1 mostra de forma reduzida os ganhos complexos para alguns
harmônicos de ambas as sequências.
Tabela 2.1: Capacidade de rejeição de harmônicos no PSC em αβ .
Ordem do Harmônico (n) Seq. Positiva + Seq. Negativa -
1◦ 1∠0◦ 0
2◦ 1√2∠− 45◦ 1√
2∠45◦
3◦ 0 1∠0◦
4◦ 1√2∠45◦ 1√
2∠− 45◦
5◦ 1∠0◦ 0
... ... ...
Para gerar os sinais em quadratura o DSOGI-PLL utiliza integradores genera-
lizados de segunda ordem (SOGI - Second Order Generalized Integrator) [31, 32]. A
estrutura do SOGI pode ser visualizada na Figura 2.9 e as suas funções de transferências
possuem as seguintes expressões:
Figura 2.9: Diagrama em blocos do SOGI-QSG [7].
D(s) =v′
v(s) =
kω′
s
s2 + kω′s+ ω′2, (2.37)

21
Q(s) =qv
′
v(s) =
kω′2
s2 + kω′s+ ω′2, (2.38)
em que w′ é a frequência de ressonância e k é o fator de amortecimento.
Considerando que v é um sinal senoidal com frequência w na entrada do SOGI-
QSG, então, suas saídas podem ser representadas na forma fasorial através de suas
funções de transferência (equações (2.37) e (2.38)), de onde se obtém:
V′
= DV , (2.39)
em que:
|D| = kωω′
√(kωω′)2 + (ω2 − ω′2)′2
, (2.40)
∠D = arctan(ω
′2 − ω2
kωω′). (2.41)
Da mesma forma:
qV′
= QV , (2.42)
em que:
|Q| = ω′
ω|D|, (2.43)
∠Q = ∠D − π
2. (2.44)
A estrutura completa do DSOGI-PLL é apresentada na Figura 2.10. As tensões
da rede são inicialmente transformadas para um referencial estacionário αβ, em que cada
componente passa por um SOGI-QSG a fim de se obter os sinais em quadratura que são
a entrada para o PSC (extrator de sequência positiva) e, por fim, os sinais v+α e v+β são
transferidos para um SRF-PLL. Um aspecto importante a ser analisado no DSOGI-PLL
é o erro na estimação da sequência positiva quando a frequência da rede (ω) difere da
nominal (ω′
), fazendo o retardo no tempo imposto pelo operador q não corresponda a
exatamente 90◦. Para compensar esse efeito é realizada uma realimentação da frequência
ângular ω′
com objetivo de tornar o PLL adaptativo em frequência. Entretanto, essa
realimentação dificulta a escolha dos parâmetros da malha de controle que garantem a
estabilidade do sistema.
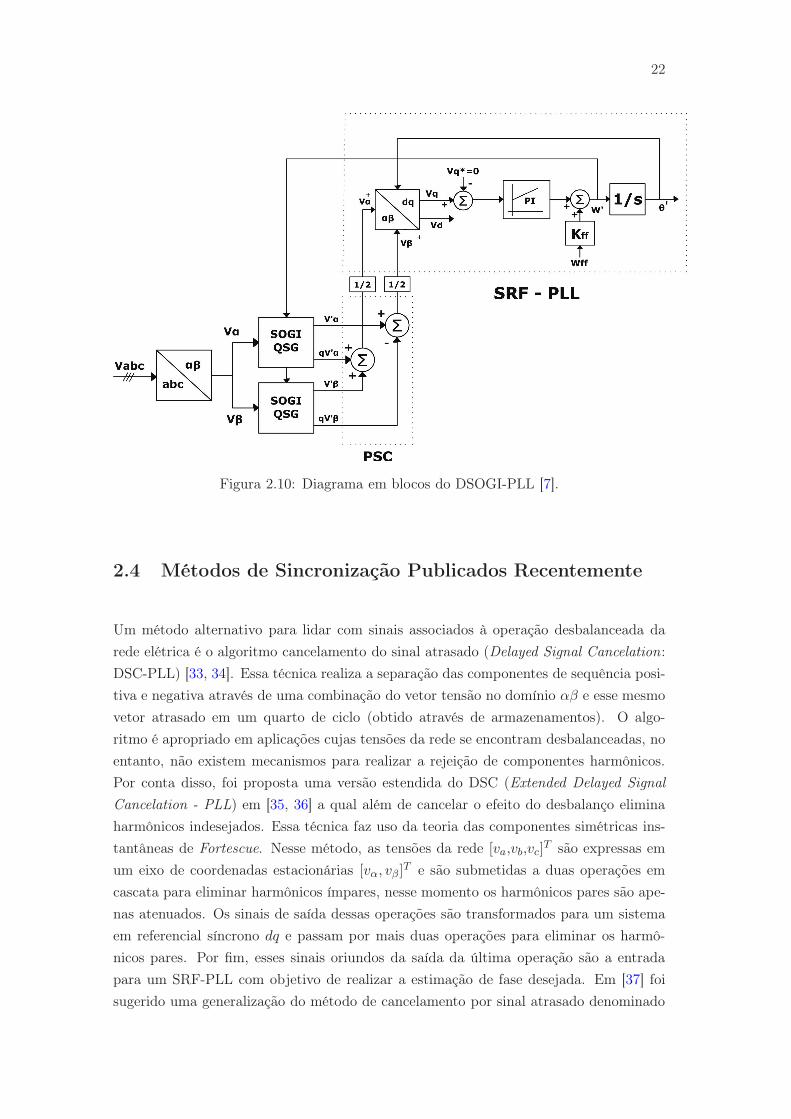
22
Figura 2.10: Diagrama em blocos do DSOGI-PLL [7].
2.4 Métodos de Sincronização Publicados Recentemente
Um método alternativo para lidar com sinais associados à operação desbalanceada da
rede elétrica é o algoritmo cancelamento do sinal atrasado (Delayed Signal Cancelation:
DSC-PLL) [33, 34]. Essa técnica realiza a separação das componentes de sequência posi-
tiva e negativa através de uma combinação do vetor tensão no domínio αβ e esse mesmo
vetor atrasado em um quarto de ciclo (obtido através de armazenamentos). O algo-
ritmo é apropriado em aplicações cujas tensões da rede se encontram desbalanceadas, no
entanto, não existem mecanismos para realizar a rejeição de componentes harmônicos.
Por conta disso, foi proposta uma versão estendida do DSC (Extended Delayed Signal
Cancelation - PLL) em [35, 36] a qual além de cancelar o efeito do desbalanço elimina
harmônicos indesejados. Essa técnica faz uso da teoria das componentes simétricas ins-
tantâneas de Fortescue. Nesse método, as tensões da rede [va,vb,vc]T são expressas em
um eixo de coordenadas estacionárias [vα, vβ]T e são submetidas a duas operações em
cascata para eliminar harmônicos ímpares, nesse momento os harmônicos pares são ape-
nas atenuados. Os sinais de saída dessas operações são transformados para um sistema
em referencial síncrono dq e passam por mais duas operações para eliminar os harmô-
nicos pares. Por fim, esses sinais oriundos da saída da última operação são a entrada
para um SRF-PLL com objetivo de realizar a estimação de fase desejada. Em [37] foi
sugerido uma generalização do método de cancelamento por sinal atrasado denominado
23
de GDSC-PLL (Generalized Dalayed Signal Cancelation) capaz de obter tanto o vetor
tensão de sequência positiva na frequência fundamental, quanto quaisquer componentes
harmônicos de sequência positiva ou negativa. Isso é possível através de transformações
matemáticas que empregam cálculos aritméticos simples baseados no armazenamento de
valores passados. Um esquema adaptativo em frequência dessa técnica pode ser encon-
trado em [38]. A implementação digital do GDSC-PLL em FPGA (Field Programmable
Gate Array) é discutida nos seguintes artigos [39, 40]. E uma forma de reduzir o tempo
de convergência do algoritmo GDSC-PLL é demonstrado em [41].
Outra estratégia para realizar a extração do vetor de sequência positiva está
baseada na utilização de um filtro de múltiplos coeficientes complexos (Multiple Complex
Coefficient Filter - MCCF-PLL) a qual é discutida em [42]. A referida técnica não utiliza
a teoria das componentes simétricas instantâneas de Fortescue, entretanto, consegue
obter qualquer componente de sequência positiva e negativa de forma rápida e precisa.
Nesse caso não foi necessário diminuir a largura de banda para eliminar harmônicos de
ordem mais elevada como é feito em outros métodos, o que tornaria a estimação da fase
realizada pelo SRF-PLL mais lenta.
Alternativamente às técnicas acima descritas, que extraem a sequência positiva
para, então, fornecê-la a um PLL de referência síncrona, alguns trabalhos tentam rejei-
tar harmônicos ou desbalanceamentos por meio de filtros inseridos no laço interno de
controle do PLL, como proposto em [43]. Esse trabalho propõe a utilização de um FMM
(Filtro de Média Móvel) em conjunto com um sistema de avanço de fase para compen-
sação do atraso dinâmico no laço de controle do PLL. Outro exemplo de utilização de
FMM’s para aprimorar a dinâmica do PLL foi desenvolvido em [44], no qual o desempe-
nho desta técnica é refinado por meio de um interpolador linear. Em [45], apresenta-se
um FMM acrescido à sua estrutura um componente proporcional. Tal componente não
provoca atraso de fase e não afeta a estabilidade do sistema. O FMM modificado é ca-
paz de eliminar harmônicos de baixa ordem, com uma largura de banda elevada, o que
significa boa resposta dinâmica. Os critérios de análise e performance, bem como dire-
trizes de projeto de PLL baseados em filtros de média móvel são discutidos na referência
bibliográfica [46].
Um tipo de PLL que se destacou devido a sua capacidade de realizar uma rápida
e eficiente filtragem de sinais são aqueles baseados nos filtros de Kalman. O sistema de
energia elétrica sujeito a distúrbios de tensão pode ser inicialmente modelado via variáveis
de estado interpretando-o como um processo estocástico, com respectivo tratamento
estatístico, a partir de então obtêm-se os ângulos de fase instantâneos que são utilizados
para estimar a frequência fundamental, dispensando técnicas auxiliares para sua detecção
ou alteração da frequência de amostragem [47, 48, 49, 50]. Entretanto, uma dificuldade
inerente aos filtros de Kalman reside na obtenção dos parâmetros: matriz de covariância

24
de ruído de processamento e matriz de covariância de medição os quais não seguem uma
sistemática bem definida, todavia pode-se observar as sugestões descritas em [51].
Por fim, o próximo capítulo dessa dissertação apresenta uma técnica de sincroni-
zação baseada em mínimos quadrados capaz de realizar a extração da sequência positiva
e negativa, ajudando o SRF-PLL a estimar de maneira eficiente a frequência e o ângulo
de fase da rede elétrica. O método proposto elimina o efeito das oscilações associadas
a operação desbalanceada da rede, bem como, apresenta uma boa rejeição de harmôni-
cos. Nesse caso não foi necessário realizar o armazenamento de valores passados como
ocorre em outros algoritmos o que torna o processamento rápido e a alocação de memória
reduzida facilitando a implementação em hardware.
Capítulo 3
Separação de Sequência Baseada em
Algoritmo dos Mínimos Quadrados
Neste capítulo será apresentado um método para extração de sequência positiva na
frequência fundamental aplicado a sincronização de sistemas de geração distribuída.
A técnica proposta utiliza o algoritmo dos mínimos quadrados recursivo ponderado
(MQRP) para separar a sequência positiva e negativa em um sistema de coordenadas es-
tacionárias. Por fim, a sequência positiva é recriada com objetivo de servir como entrada
de um PLL em referencial síncrono. A referida técnica já foi utilizada no contexto de um
controle de um restaurador dinâmico de tensão (DVR) em [52, 53]. No presente traba-
lho, além de aplicá-la ao problema de sincronização, também, propõe-se sua adaptação
a fim de torná-la mais robusta a distorções harmônicas através da expansão do vetor de
regressores do modelo para o sinal de tensão da rede. Vale ressaltar que o método não
se baseia em filtros passa-baixa para rejeição de harmônicos. Portanto, não é necessário
fazer um compromisso entre velocidade da resposta e a largura de banda do filtro a fim
de compensar distúrbios relacionados a operação desequilibrada do sistema de distri-
buição. Obviamente, este não compromisso oferece a possibilidade de estipular bandas
de frequência maiores para o PI no laço do PLL síncrono, melhorando seu desempenho
transitório. No final deste capítulo, o método proposto é testado no software Matlab©
no intuito de comprovar a sua eficiência na extração das componentes de sequência em
sinais desbalanceados produzidos sinteticamente por um gerador trifásico.
3.1 Algoritmo de Estimação dos Componentes de Sequência
A técnica de estimação dos componentes de sequência utilizada neste trabalho opera nas
tensões vα e vβ, que são extraídas dos valores instantâneos das tensões de fase va, vb e
26
vc, por meio da transformação em eixo estacionário definida na equação (2.7).
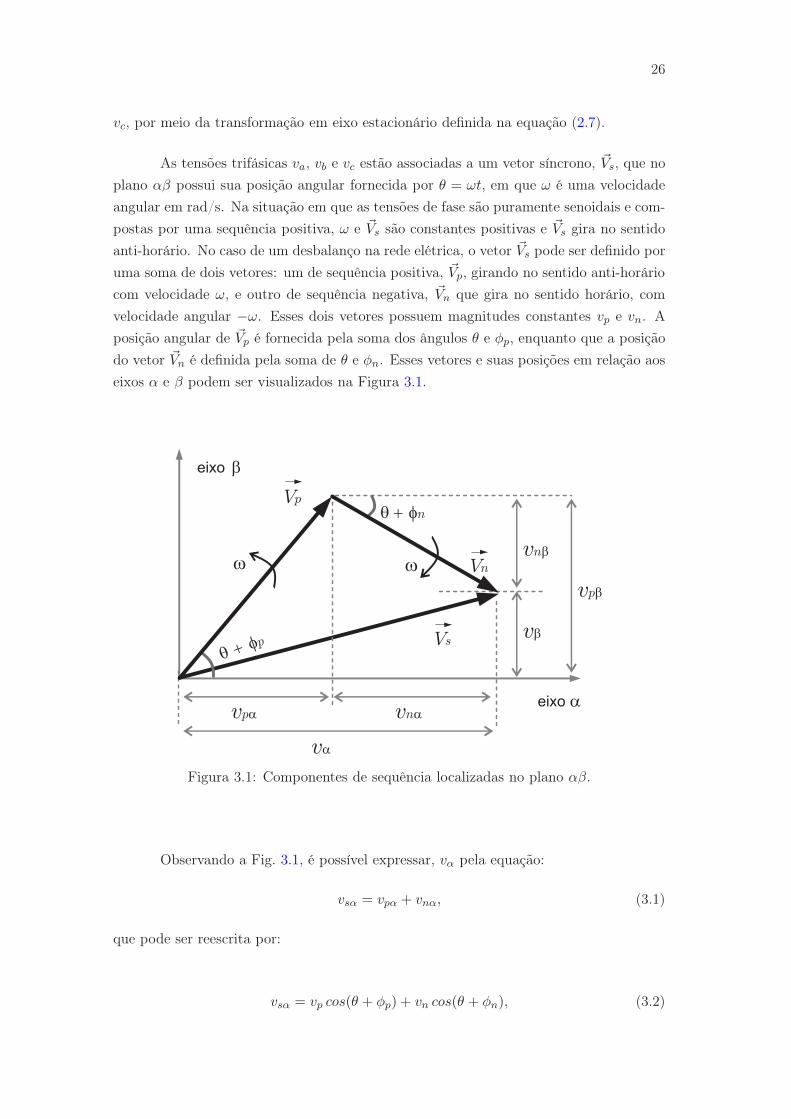
As tensões trifásicas va, vb e vc estão associadas a um vetor síncrono, ~Vs, que no
plano αβ possui sua posição angular fornecida por θ = ωt, em que ω é uma velocidade
angular em rad/s. Na situação em que as tensões de fase são puramente senoidais e com-
postas por uma sequência positiva, ω e ~Vs são constantes positivas e ~Vs gira no sentido
anti-horário. No caso de um desbalanço na rede elétrica, o vetor ~Vs pode ser definido por
uma soma de dois vetores: um de sequência positiva, ~Vp, girando no sentido anti-horário
com velocidade ω, e outro de sequência negativa, ~Vn que gira no sentido horário, com
velocidade angular −ω. Esses dois vetores possuem magnitudes constantes vp e vn. A
posição angular de ~Vp é fornecida pela soma dos ângulos θ e φp, enquanto que a posição
do vetor ~Vn é definida pela soma de θ e φn. Esses vetores e suas posições em relação aos
eixos α e β podem ser visualizados na Figura 3.1.
Figura 3.1: Componentes de sequência localizadas no plano αβ.
Observando a Fig. 3.1, é possível expressar, vα pela equação:
vsα = vpα + vnα, (3.1)
que pode ser reescrita por:
vsα = vp cos(θ + φp) + vn cos(θ + φn), (3.2)

27
Analogamente, vβ é fornecido por:
vsβ = vpβ + vnβ, (3.3)
que, alternativamente, pode ser expressa por:
vsβ = vp sen(θ + φp)− vn sen(θ + φn). (3.4)
Pode-se notar que as equações (3.2) e (3.4) separam as contribuições das sequên-
cias positivas e negativas nos eixos αβ. No entanto, ainda é necessária uma expansão
dos senos e cossenos para transformar a estimação das contribuições em um problema
linear. Dessa forma, expandindo-se os cossenos e senos, obtém-se:
vsα = (vpα0 + vnα0)cos(ωt) + (−vpβ0 + vnβ0)sen(ωt), (3.5)
vsβ = (vpβ0 − vnβ0)cos(ωt) + (vpα0 − vnα0)sen(ωt), (3.6)
em que vpα0 = vpcosφp, vpβ0 = vpsenφp, vnα0 = vncosφn e vnβ0 = vnsenφn. De forma
mais compacta, estas equações podem ser reescritas como:
vsα = Xc1cos(ωt) +Xs
1sin(ωt), (3.7)
vsβ = Y c1 cos(ωt) + Y s
1 sin(ωt), (3.8)
considerando que:
Xc1 = vpcosφp + vncosφn = vpα0 + vnα0
Xs1 = −vpsinφp + vnsinφn = −vpβ0 + vnβ0
Y c1 = vpsinφp − vnsinφn = vpβ0 − vnβ0
Y s1 = vpcosφp − vncosφn = vpα0 − vnα0.
(3.9)
As equações (3.7) e (3.8) mostram que os parâmetros Xc1, X
s1 , Y
c1 e Y s
1 são lineares
para vα e vβ. Assim essa dissertação propõe utilizar o algoritmo dos mínimos quadrados
em sua forma recursiva e ponderada (MQRP) a fim de calcular os parâmetros dos valores
instantâneos de vα e vβ. Na próxima seção, apresenta-se uma breve fundamentação
teórica do algoritmo dos mínimos quadrados para integrá-lo à técnica de separação de
sequência apresentada neste trabalho.

28
3.2 Algoritmo dos Mínimos Quadrados
De acordo com o que foi abordado em [54], o algoritmo de mínimos quadrados é uma
técnica de estimação paramétrica utilizada para resolver o seguinte problema: deseja-se
ajustar uma função modelo y a um conjunto de N amostras de uma grandeza y qualquer.
O ajuste deve minimizar a soma dos erros quadráticos das diferenças entre os valores
das amostras e da função modelo. Se o ajuste resultar da estimação de parâmetros dos
quais a função depende linearmente, o algoritmo de mínimos quadrados é dito linear.
Suponha que um sinal y[k], k = 1,2, · · · , N , é modelado por:
y[k] = ϕ1[k]ρ1 + ϕ2[k]ρ2 + ........ + ϕL[k]ρL. (3.10)
O modelo y[k] depende linearmente dos L parâmetros ρ. A equação (3.10) pode ser
reescrita de forma mais compacta da seguinte maneira:
y[k] = ρTkϕk, (3.11)
em que ρk é o vetor de parâmetros a ser determinado, fornecido no instante k por:
ρTk = ρ1 ρ2 · · · ρL, (3.12)
e ϕk é um vetor de regressores ou funções regressoras, expresso por:
ϕTk = ϕ1[k] ϕ2[k] · · · ϕL[k]. (3.13)
No método de mínimos quadrados, os parâmetros são estimados de forma a mi-
nimizarem o erro quadrático v que pode ser definido por:
v[N ] =
N∑
i=1
(y[i]− y[i])2 . (3.14)
A solução desse problema é muito bem conhecida e é fornecida por [55]:
ρ =(MTM
)−1MTy, (3.15)
em que y é o vetor cujo os elementos são as amostras do sinal y e a matriz dos regressores
M é fornecida por:

29
M =
ϕ1[1] ϕ2[1] · · · ϕL[1]
ϕ1[2] ϕ2[2] · · · ϕL[2]...
. . ....
ϕ1[k] ϕ2[k] · · · ϕL[k]
. (3.16)
O produto(MTM
)−1MT se chama pseudoinversa. A estimação fornecida na
equação (3.15) é dita solução em batelada, ou solução em lote. Ela utiliza de uma única
vez todas as amostras do sinal analisado. A grande desvantagem desta estimação é o
esforço computacional requerido para calcular a pseudoinversa, principalmente quando
a ordem da matriz M é elevada. Para aplicações em que se deseja atualizar a estimativa
a cada nova leitura de uma amostra, algoritmos em batelada, em geral, não são uma
boa alternativa. Isso motivou uma linha de pesquisa na qual se busca recursivamente a
atualização da solução em (3.15).
O primeiro passo para implementação de um algoritmo baseado em mínimos
quadrados recursivo é estimar no tempo inicial, um conjunto de parâmetros para a
função modelo y. A estimação inicial gera o chamado erro a priori ou de predição,
descrito como:
e0[k + 1] = y[k + 1]− y0[k + 1]. (3.17)
O sobrescrito em y[k+1] na equação (3.17) indica que sua predição é realizada utilizando
o vetor de parâmetros conhecido no instante anterior,ou seja, no instante discreto k.
Desse modo:
y0[k + 1] = ρTkϕk. (3.18)
O algoritmo de mínimos quadrados recursivo atualiza a estimativa dos parâme-
tros através de uma combinação linear formada pelo erro de predição e os parâmetros
estimados no tempo k da seguinte maneira:
ρk+1 = ρk +Kke0[k + 1]. (3.19)
em que o ganho Kk é fornecido por (ver apêndice A):
Kk =Pkϕk
ϕTkPkϕk + 1
. (3.20)
P é uma matriz de dimensão L × L, chamada matriz de covariância. Antes de iniciar
30
o algoritmo, ela deve ser estimada. Sua projeção para o tempo k + 1 ocorre de acordo
com a equação (ver apêndice A):
Pk+1 = Pk −Pkϕkϕ
TkPk
1 +ϕTkPkϕk
. (3.21)
As equações (3.17), (3.19), (3.20) e (3.21) devem ser utilizadas no laço principal
do algoritmo de mínimos quadrados. O algoritmo é iniciado com a estimativa do vetor
de parâmetros ρ e da matriz de covariância P. Chamando o valor inicial do vetor de
parâmetros de ρ0, a predição para o primeiro valor de y é:
y[1] = ϕT0 ρ1
= ϕT0
[ρ0 +K0
(y[1]−ϕ
T0 ρ0
)]
= ϕT0
[ρ0 +
P0ϕ0
ϕT0P0ϕ0 + 1
(y[1]−ϕ
T0 ρ0
)]. (3.22)
Se P for uma matriz de valores elevados, então ϕT0 P0ϕ0 >> 1. Deste modo, a última
igualdade em (3.22) pode ser aproximada por:
y[1] ≈ ϕT0 ρ0 +ϕ
T0 P0ϕ0
(ϕ
T0 P0ϕ0
)−1y[1]−ϕ
T0 P0ϕ0
(ϕ
T0 P0ϕ0
)−1ϕ
T0 ρ0
≈ y[1]. (3.23)
Portanto, escolhendo-se valores elevados para os elementos de P, a primeira estimativa
do vetor de parâmetros ρ, praticamente não afeta o valor estimado para y.
Em situações em que os parâmetros a serem estimados variem no decorrer do
tempo, o método dos mínimos quadrados recursivo não é adequado. Como pode ser ob-
servado na equação (3.14), o estimador de mínimos quadrados pondera de forma idêntica
os erros cometidos pelo modelo em todos os tempos. Em outras palavras, num conjunto
de N pontos, a primeira observação possui o mesmo peso da enésima. No intuito de cor-
rigir essa deficiência foi desenvolvido um método de cálculo da matriz P onde adotou-se
uma ponderação sobre as observações mais recentes de tal forma que as mesmas exerçam
uma influência maior no cálculo do erro total, pois elas contêm informações mais atuali-
zadas. Então, para tanto, deve-se ponderar a soma dos v erros quadráticos da seguinte
maneira:
v(N) =
N∑
i=1
λN−i (y[i]− y[i])2 , (3.24)
em que λ é conhecido como fator de esquecimento e deve pertencer ao intervalo: 0 <

31
λ < 1. Ele modifica as expressões de atualização para o ganho K e para a matriz de
covariância P da seguinte maneira [55, 56]:
Kk =Pkϕk
ϕTkPkϕk + λ
, (3.25)
Pk+1 =1
λ
(Pk −
PkϕkϕTkPk
1 +ϕTkPkϕk
). (3.26)
O algoritmo de mínimos quadrados recursivo ponderado (MQRP) é resumido no
seguinte conjunto de equações:
Kk =Pkϕk
ϕTkPkϕk+λ
e0[k + 1] = y[k + 1]− y0[k + 1]
ρk+1 = ρk +Kke0[k + 1]
Pk+1 =1
λ
(Pk − Pkϕkϕ
TkPk
1+ϕTkPkϕk
).
(3.27)
Deve-se notar que o algoritmo descrito em (3.27) é determinístico. Não se faz
nenhuma consideração estatística sobre os ruídos que eventualmente o sinal de dados
contenha, ou sobre a matriz de covariância P. Ao contrário de outras abordagens como
o algoritmo de Kalman que possui em sua estrutura, a descrição estatística dos ruídos
associados ao sinal de dados, e também fornece uma interpretação estatística da matriz
de covariância P ??.
3.3 Separação de Sequências Utilizando o MQRP
O método de separação de sequência exposto na secção 1.1 está baseado na projeção
do vetor tensão da rede sobre um sistema de coordenadas estacionárias. No entanto, é
necessário realizar uma expansão dos senos e cossenos das equações (3.2) e (3.4) para
tornar o problema linear, viabilizando a utilização do algoritmo MQRP na estimação
dos parâmetros Xc1 , X
s1 , Y
c1 e Y s
1 .
A explicação apresentada nesta secção se restringe a demonstrar a aplicação do
algoritmo na estimação dos parâmetros associados à projeção do vetor tensão sobre o
eixo α. No entanto, um procedimento idêntico deve ser utilizado no intuito de determinar

32
os parâmetros associados a projeção do vetor tensão sobre o eixo β. Portanto, a equação
(3.2) pode ser compactamente reescrita através da seguinte notação:
vα[k] = ρTkϕk. (3.28)
O vetor de parâmetros é representado por ρk e pode ser expresso da seguinte
maneira:
ρk = [1 Xc1 Xs
1 · · · XcL Xs
L]T . (3.29)
Na equação (3.29), os parâmetros XcL e Xs
L estão relacionados a uma determinada
interferência harmônica que se deseja eliminar. O regressor unitário, além de rejeitar
qualquer componente CC presente no sinal, também se presta ao propósito de absorver
a energia de harmônicos não contemplados pelo modelo de vα, como argumentado em
[57, 58]. A presença de harmônicos não previstos pelo modelo podem causar oscilações
nos parâmetros estimados. O vetor de regressores, ϕk pode ser escrito da seguinte forma:
ϕk =
1
cos(ω∆t)
sen(ω∆t)
· · ·cos(Lω∆t)
sen(Lω∆t)
. (3.30)
A diferença entre o sinal vα[k] e seu modelo vα[k] em um dado instante tk é
denominado de erro de predição o qual é utilizado para que o algoritmo possa melhorar
a estimativa dos parâmetros procurados podendo ser expresso por:
e0[k + 1] = vα[k + 1]− v0α[k + 1], (3.31)
Através da combinação linear dos parâmetros estimados para um passo de tempo
k e do erro expresso na equação (3.31), o algoritmo MQRP atualiza a estimativa para
os parâmetros em k + 1 de acordo com (verificar apêndice):
ρk+1 = ρk +Kke0[k + 1], (3.32)

33
em que Kk é um ganho fornecido por:
Kk =Pkϕk
ϕTkPkϕk + λ
, (3.33)
e Pk é a chamada matriz de covariância. A maneira que esta matriz é atualizada deter-
mina a eficiência da adaptabilidade do algoritmo a mudanças nos parâmetros estimados.
Neste trabalho, adota-se a técnica de ponderação com fator de esquecimento λ, que
resulta na atualização de Pk+1 conforme:
Pk+1 =1
λ
(Pk −
PkϕkϕTkPk
1 +ϕTkPkϕk
). (3.34)
Desse modo, o MQRP é um algoritmo que minimiza o somatório, S, dos erros
ponderados por λ, entre as amostras 1 até N de vα e de seu modelo vα por meio da
equação:
S(N) =
N∑
i=1
λN−i (vα[i]− vα[i])2 . (3.35)
Em se tratando de algoritmo recursivo é necessário inicializá-lo antes de proceder
a primeira iteração. Por fim, quando os parâmetros Xc1,X
s1 , Y
c1 e Y s
1 forem determinados,
a magnitude da sequência vp e vn juntamente com seus valores iniciais de fase φp e φn
podem ser calculados através das seguintes relações:
vpα0 = vpcosφp = 1
2(Xc
1 + Y s1 ),
vpβ0 = vpsenφp =1
2(Y c
1 −Xs1),
vnα0 = vpcosφn = 1
2(Xc
1 − Y s1 ),
vnβ0 = vnsenφn = −1
2(Y c
1 +Xs1).
(3.36)
e então:
vp =√
v2pα0 + v2pβ0, (3.37)
vn =√
v2nα0 + v2nβ0. (3.38)
a fase inicial pode ser obtida por:
φp = acos
(vpα0vp
), (3.39)
φn = asin
(vnβ0vn
). (3.40)
34
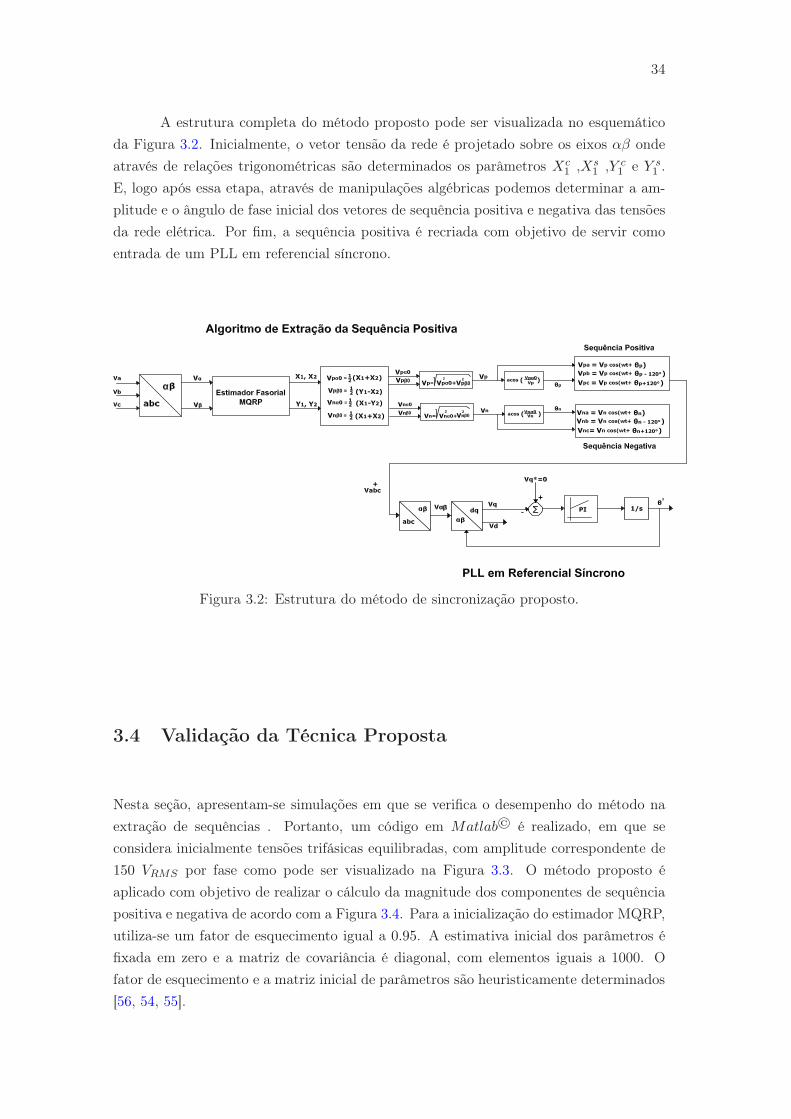
A estrutura completa do método proposto pode ser visualizada no esquemático
da Figura 3.2. Inicialmente, o vetor tensão da rede é projetado sobre os eixos αβ onde
através de relações trigonométricas são determinados os parâmetros Xc1 ,Xs
1 ,Y c1 e Y s
1 .
E, logo após essa etapa, através de manipulações algébricas podemos determinar a am-
plitude e o ângulo de fase inicial dos vetores de sequência positiva e negativa das tensões
da rede elétrica. Por fim, a sequência positiva é recriada com objetivo de servir como
entrada de um PLL em referencial síncrono.
Figura 3.2: Estrutura do método de sincronização proposto.
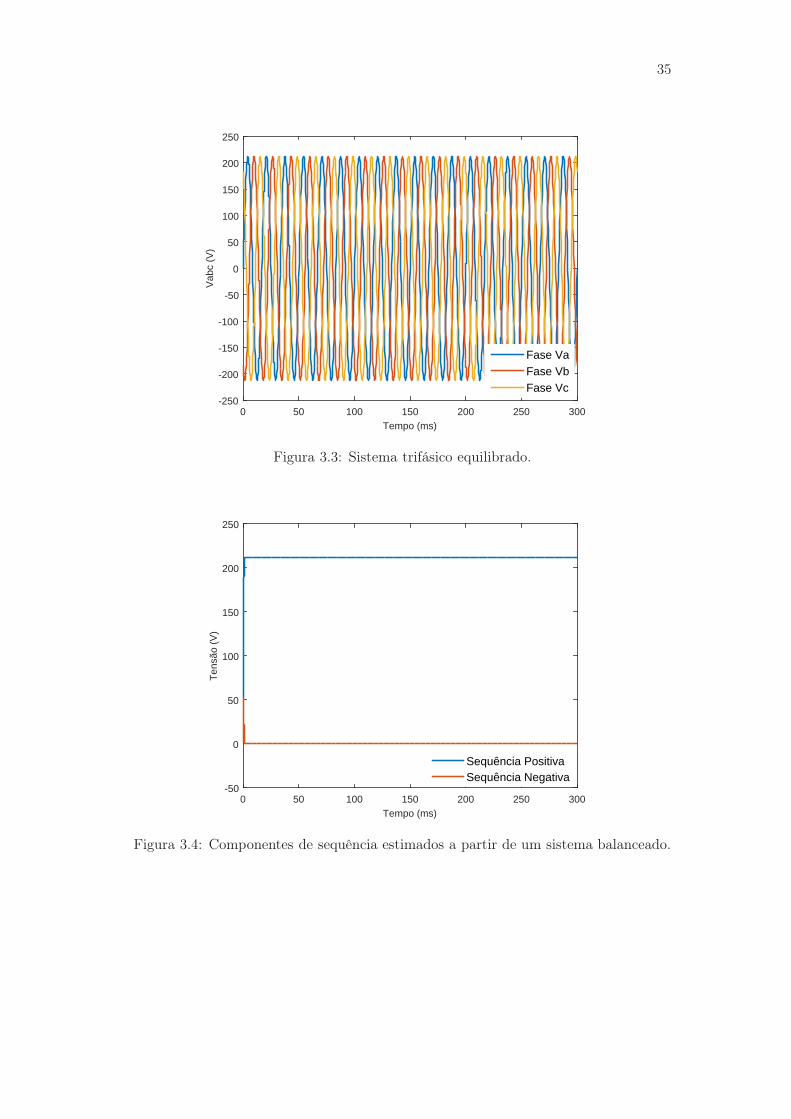
3.4 Validação da Técnica Proposta
Nesta seção, apresentam-se simulações em que se verifica o desempenho do método na
extração de sequências . Portanto, um código em Matlab© é realizado, em que se
considera inicialmente tensões trifásicas equilibradas, com amplitude correspondente de
150 VRMS por fase como pode ser visualizado na Figura 3.3. O método proposto é
aplicado com objetivo de realizar o cálculo da magnitude dos componentes de sequência
positiva e negativa de acordo com a Figura 3.4. Para a inicialização do estimador MQRP,
utiliza-se um fator de esquecimento igual a 0.95. A estimativa inicial dos parâmetros é
fixada em zero e a matriz de covariância é diagonal, com elementos iguais a 1000. O
fator de esquecimento e a matriz inicial de parâmetros são heuristicamente determinados
[56, 54, 55].
35
Tempo (ms)0 50 100 150 200 250 300
Vab
c (V
)
-250
-200
-150
-100
-50
0
50
100
150
200
250
Fase VaFase VbFase Vc
Figura 3.3: Sistema trifásico equilibrado.
Tempo (ms)0 50 100 150 200 250 300
Ten
são
(V)
-50
0
50
100
150
200
250
Sequência PositivaSequência Negativa
Figura 3.4: Componentes de sequência estimados a partir de um sistema balanceado.
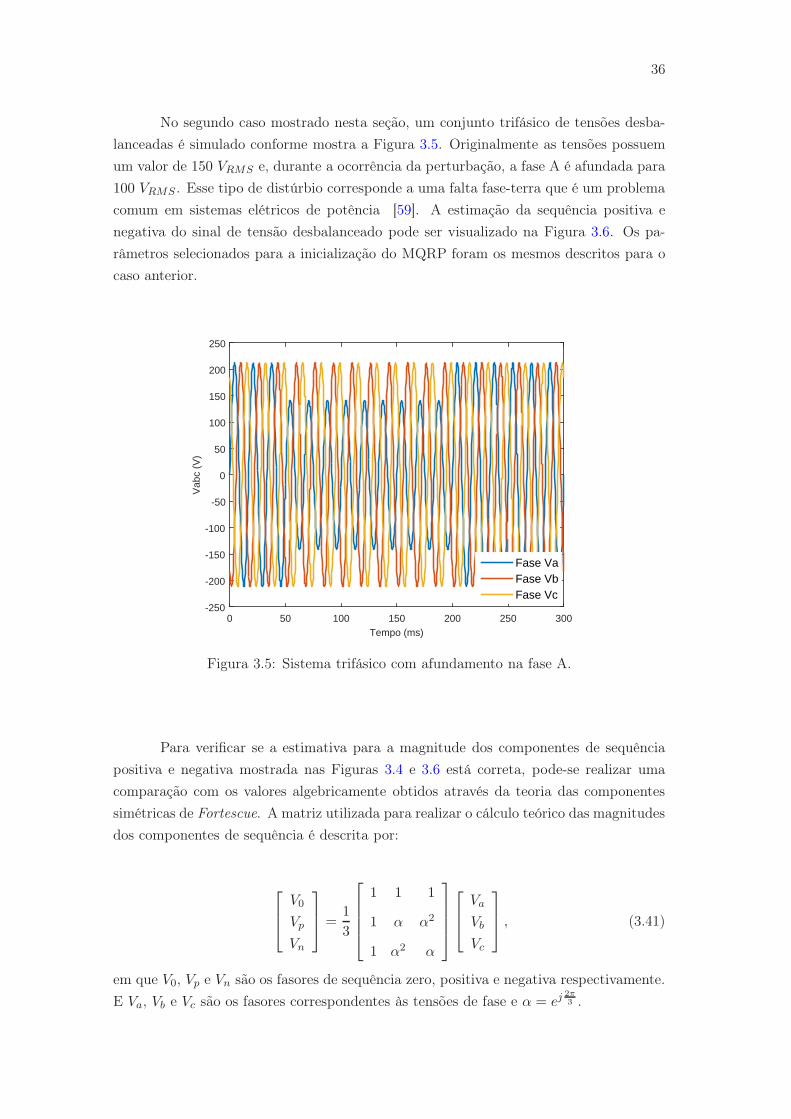
36
No segundo caso mostrado nesta seção, um conjunto trifásico de tensões desba-
lanceadas é simulado conforme mostra a Figura 3.5. Originalmente as tensões possuem
um valor de 150 VRMS e, durante a ocorrência da perturbação, a fase A é afundada para
100 VRMS . Esse tipo de distúrbio corresponde a uma falta fase-terra que é um problema
comum em sistemas elétricos de potência [59]. A estimação da sequência positiva e
negativa do sinal de tensão desbalanceado pode ser visualizado na Figura 3.6. Os pa-
râmetros selecionados para a inicialização do MQRP foram os mesmos descritos para o
caso anterior.
Tempo (ms)0 50 100 150 200 250 300
Vab
c (V
)
-250
-200
-150
-100
-50
0
50
100
150
200
250
Fase VaFase VbFase Vc
Figura 3.5: Sistema trifásico com afundamento na fase A.
Para verificar se a estimativa para a magnitude dos componentes de sequência
positiva e negativa mostrada nas Figuras 3.4 e 3.6 está correta, pode-se realizar uma
comparação com os valores algebricamente obtidos através da teoria das componentes
simétricas de Fortescue. A matriz utilizada para realizar o cálculo teórico das magnitudes
dos componentes de sequência é descrita por:
V0
Vp
Vn
=
1
3
1 1 1
1 α α2
1 α2 α
Va
Vb
Vc
, (3.41)
em que V0, Vp e Vn são os fasores de sequência zero, positiva e negativa respectivamente.
E Va, Vb e Vc são os fasores correspondentes às tensões de fase e α = ej2π3 .
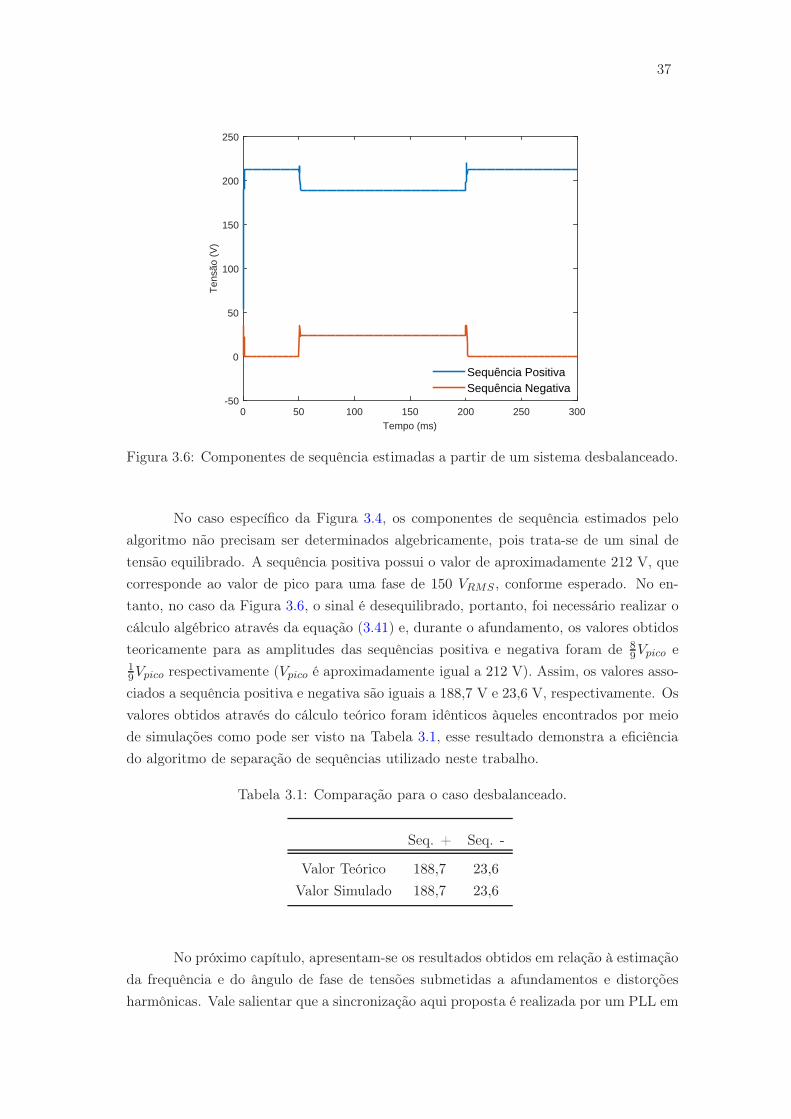
37
Tempo (ms)0 50 100 150 200 250 300
Ten
são
(V)
-50
0
50
100
150
200
250
Sequência PositivaSequência Negativa
Figura 3.6: Componentes de sequência estimadas a partir de um sistema desbalanceado.
No caso específico da Figura 3.4, os componentes de sequência estimados pelo
algoritmo não precisam ser determinados algebricamente, pois trata-se de um sinal de
tensão equilibrado. A sequência positiva possui o valor de aproximadamente 212 V, que
corresponde ao valor de pico para uma fase de 150 VRMS , conforme esperado. No en-
tanto, no caso da Figura 3.6, o sinal é desequilibrado, portanto, foi necessário realizar o
cálculo algébrico através da equação (3.41) e, durante o afundamento, os valores obtidos
teoricamente para as amplitudes das sequências positiva e negativa foram de 8
9Vpico e
1
9Vpico respectivamente (Vpico é aproximadamente igual a 212 V). Assim, os valores asso-
ciados a sequência positiva e negativa são iguais a 188,7 V e 23,6 V, respectivamente. Os
valores obtidos através do cálculo teórico foram idênticos àqueles encontrados por meio
de simulações como pode ser visto na Tabela 3.1, esse resultado demonstra a eficiência
do algoritmo de separação de sequências utilizado neste trabalho.
Tabela 3.1: Comparação para o caso desbalanceado.
Seq. + Seq. -
Valor Teórico 188,7 23,6
Valor Simulado 188,7 23,6
No próximo capítulo, apresentam-se os resultados obtidos em relação à estimação
da frequência e do ângulo de fase de tensões submetidas a afundamentos e distorções
harmônicas. Vale salientar que a sincronização aqui proposta é realizada por um PLL em
38
referência síncrona que opera no componente de sequência positivo extraído pela técnica
discutida neste capítulo.
Capítulo 4
Resultados
Neste capítulo, apresentam-se simulações com objetivo de analisar a dinâmica do algo-
ritmo MQRP na estimação de harmônicos de diferentes ordens. Além disso, testes são
realizados no intuito de avaliar o desempenho da técnica de sincronização proposta em
estimar corretamente a frequência e o ângulo de fase da tensão da rede elétrica. Nessa
situação, investigam-se a capacidade de rejeição de componentes harmônicos e a tolerân-
cia em relação a afundamentos e desbalanços nas tensões do sistema de distribuição. Por
fim, a validação da técnica proposta é realizada através de um arranjo experimental em
que o algoritmo foi embarcado em um processador digital de sinais e testado em tensões
geradas por uma fonte programável. A frequência de amostragem utilizada corresponde
a 3 kHz. Nas subseções que se seguem, serão apresentados os resultados obtidos.
4.1 Resultados de Simulação
4.1.1 Teste Dinâmico do Algoritmo MQRP
Nesta seção, analisa-se o desempenho dinâmico do algoritmo MQRP na estimação de
harmônicos de diferentes ordens. Inicialmente um gerador monofásico com tensão igual
a 1 p.u. e frequência de 60 Hz foi simulado sinteticamente através do software Matlab©
e, no tempo igual a 50 ms é adicionado um componente harmônico de segunda ordem
com amplitude de 0.1 p.u. Para a inicialização do algoritmo MQRP, utiliza-se um fator
de esquecimento igual 0,95, a estimativa inicial do vetor de parâmetros mostrado equação
(3.29) é fixada em zero e a matriz de covariância é selecionada para ser diagonal de forma
que os elementos da diagonal principal correspondam a 1000. O fator de esquecimento e
a matriz inicial de parâmetros são heuristicamente determinados. O resultado da estima-
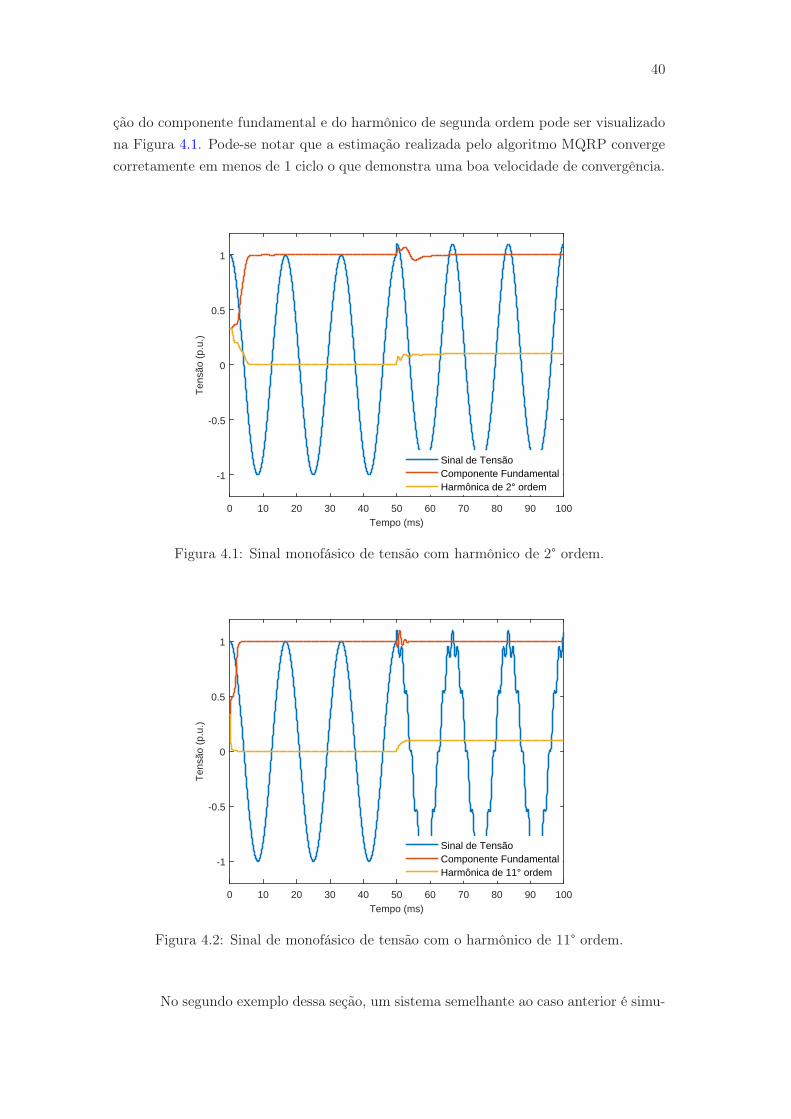
40
ção do componente fundamental e do harmônico de segunda ordem pode ser visualizado
na Figura 4.1. Pode-se notar que a estimação realizada pelo algoritmo MQRP converge
corretamente em menos de 1 ciclo o que demonstra uma boa velocidade de convergência.
Tempo (ms)0 10 20 30 40 50 60 70 80 90 100
Ten
são
(p.u
.)
-1
-0.5
0
0.5
1
Sinal de TensãoComponente FundamentalHarmônica de 2° ordem
Figura 4.1: Sinal monofásico de tensão com harmônico de 2° ordem.
Tempo (ms)0 10 20 30 40 50 60 70 80 90 100
Ten
são
(p.u
.)
-1
-0.5
0
0.5
1
Sinal de TensãoComponente FundamentalHarmônica de 11° ordem
Figura 4.2: Sinal de monofásico de tensão com o harmônico de 11° ordem.
No segundo exemplo dessa seção, um sistema semelhante ao caso anterior é simu-
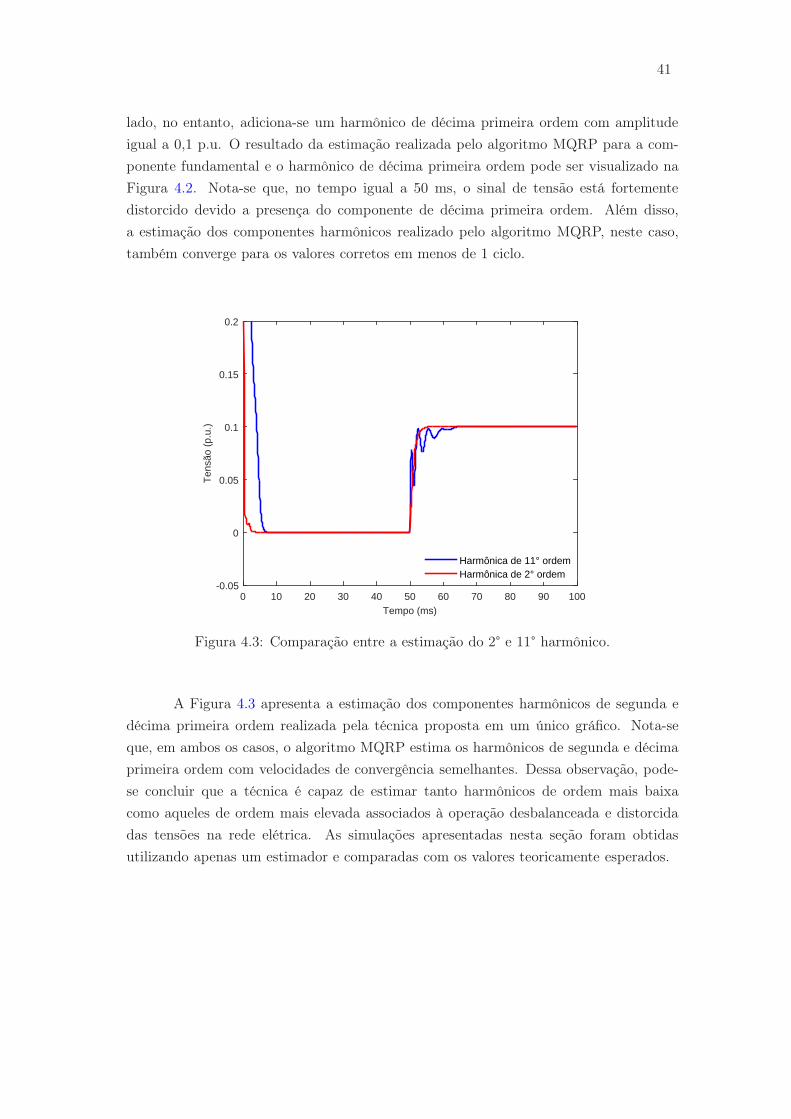
41
lado, no entanto, adiciona-se um harmônico de décima primeira ordem com amplitude
igual a 0,1 p.u. O resultado da estimação realizada pelo algoritmo MQRP para a com-
ponente fundamental e o harmônico de décima primeira ordem pode ser visualizado na
Figura 4.2. Nota-se que, no tempo igual a 50 ms, o sinal de tensão está fortemente
distorcido devido a presença do componente de décima primeira ordem. Além disso,
a estimação dos componentes harmônicos realizado pelo algoritmo MQRP, neste caso,
também converge para os valores corretos em menos de 1 ciclo.
Tempo (ms)0 10 20 30 40 50 60 70 80 90 100
Ten
são
(p.u
.)
-0.05
0
0.05
0.1
0.15
0.2
Harmônica de 11° ordemHarmônica de 2° ordem
Figura 4.3: Comparação entre a estimação do 2° e 11° harmônico.
A Figura 4.3 apresenta a estimação dos componentes harmônicos de segunda e
décima primeira ordem realizada pela técnica proposta em um único gráfico. Nota-se
que, em ambos os casos, o algoritmo MQRP estima os harmônicos de segunda e décima
primeira ordem com velocidades de convergência semelhantes. Dessa observação, pode-
se concluir que a técnica é capaz de estimar tanto harmônicos de ordem mais baixa
como aqueles de ordem mais elevada associados à operação desbalanceada e distorcida
das tensões na rede elétrica. As simulações apresentadas nesta seção foram obtidas
utilizando apenas um estimador e comparadas com os valores teoricamente esperados.
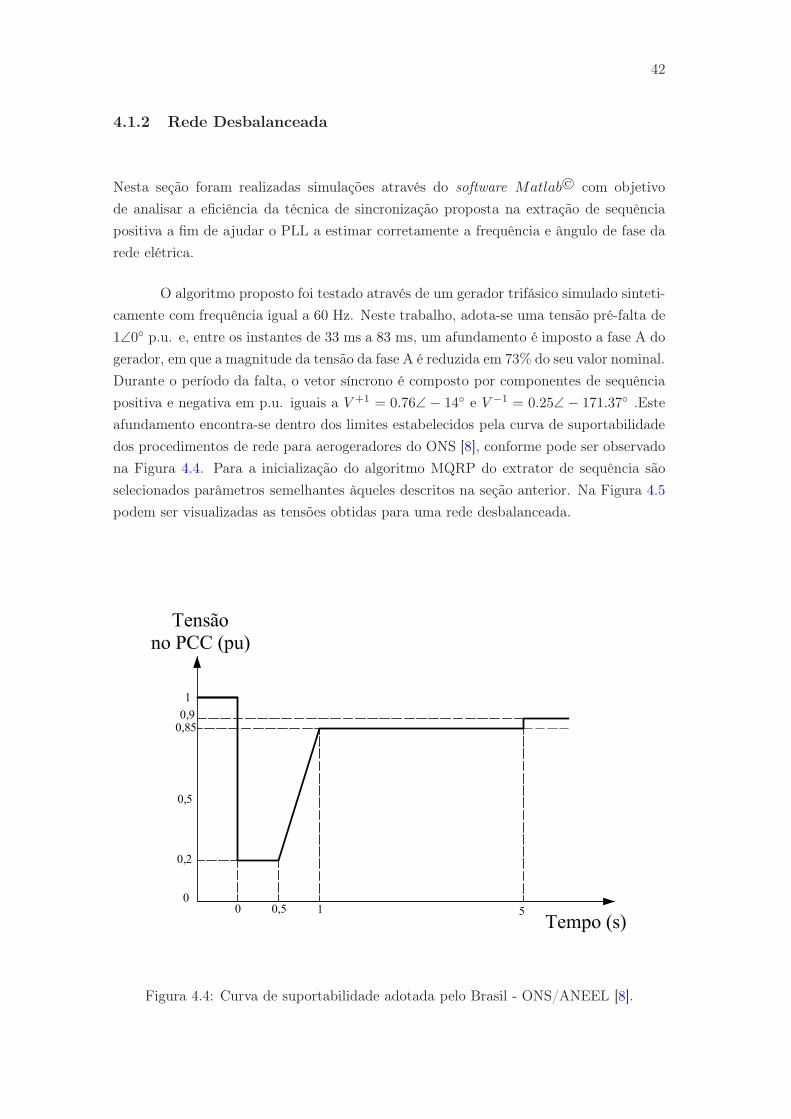
42
4.1.2 Rede Desbalanceada
Nesta seção foram realizadas simulações através do software Matlab© com objetivo
de analisar a eficiência da técnica de sincronização proposta na extração de sequência
positiva a fim de ajudar o PLL a estimar corretamente a frequência e ângulo de fase da
rede elétrica.
O algoritmo proposto foi testado através de um gerador trifásico simulado sinteti-
camente com frequência igual a 60 Hz. Neste trabalho, adota-se uma tensão pré-falta de
1∠0◦ p.u. e, entre os instantes de 33 ms a 83 ms, um afundamento é imposto a fase A do
gerador, em que a magnitude da tensão da fase A é reduzida em 73% do seu valor nominal.
Durante o período da falta, o vetor síncrono é composto por componentes de sequência
positiva e negativa em p.u. iguais a V +1 = 0.76∠ − 14◦ e V −1 = 0.25∠ − 171.37◦ .Este
afundamento encontra-se dentro dos limites estabelecidos pela curva de suportabilidade
dos procedimentos de rede para aerogeradores do ONS [8], conforme pode ser observado
na Figura 4.4. Para a inicialização do algoritmo MQRP do extrator de sequência são
selecionados parâmetros semelhantes àqueles descritos na seção anterior. Na Figura 4.5
podem ser visualizadas as tensões obtidas para uma rede desbalanceada.
Figura 4.4: Curva de suportabilidade adotada pelo Brasil - ONS/ANEEL [8].
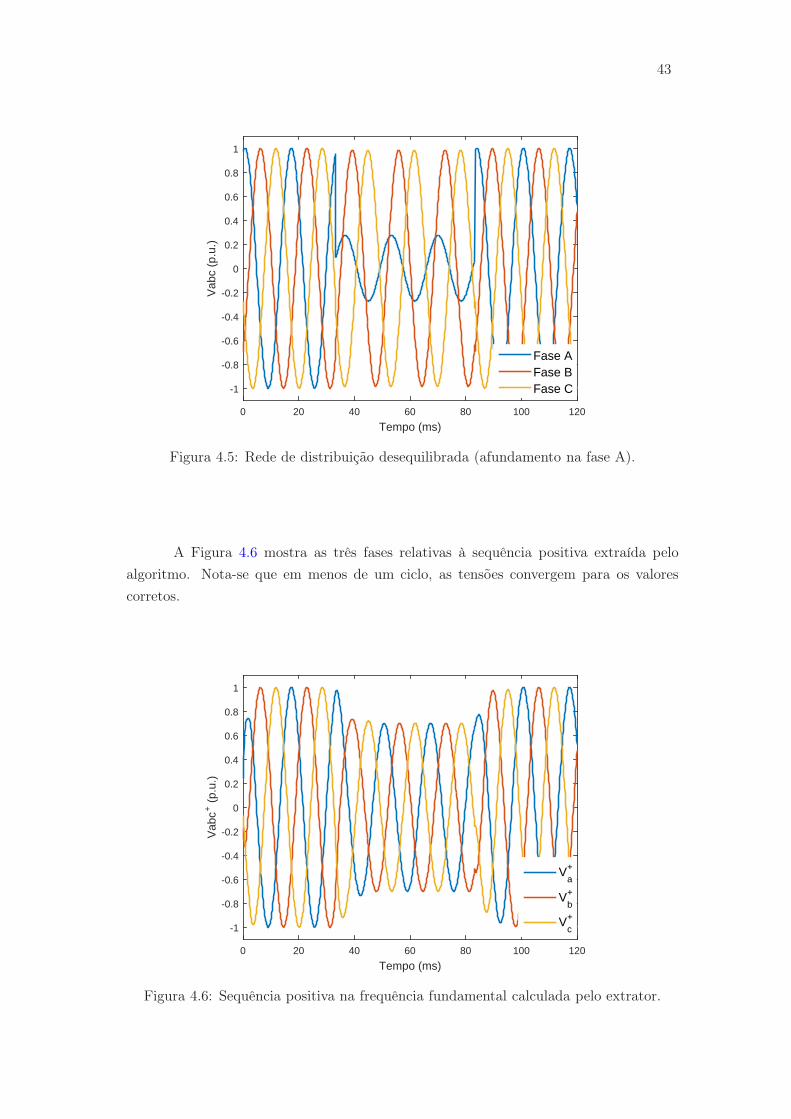
43
Tempo (ms)0 20 40 60 80 100 120
Vab
c (p
.u.)
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
Fase AFase BFase C
Figura 4.5: Rede de distribuição desequilibrada (afundamento na fase A).
A Figura 4.6 mostra as três fases relativas à sequência positiva extraída pelo
algoritmo. Nota-se que em menos de um ciclo, as tensões convergem para os valores
corretos.
Tempo (ms)0 20 40 60 80 100 120
Vab
c+ (
p.u.
)
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
V+a
V+b
V+c
Figura 4.6: Sequência positiva na frequência fundamental calculada pelo extrator.
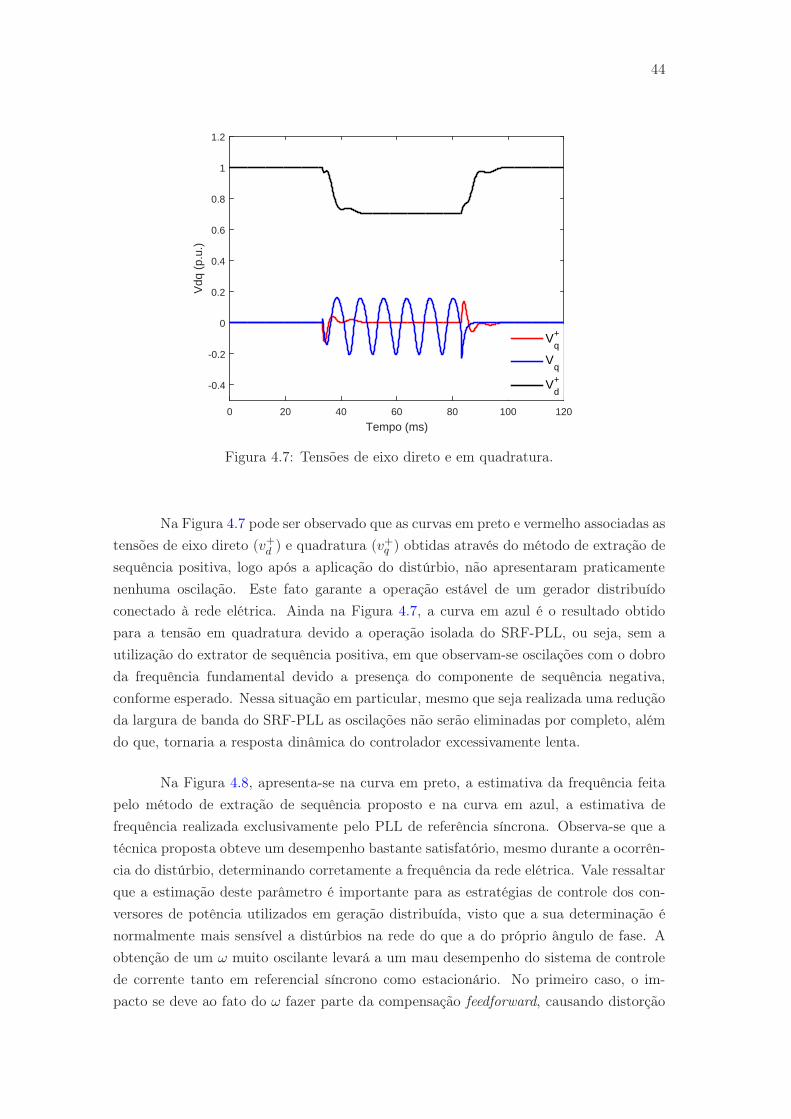
44
Tempo (ms)0 20 40 60 80 100 120
Vdq
(p.
u.)
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
1.2
Vq+
Vq
Vd+
Figura 4.7: Tensões de eixo direto e em quadratura.
Na Figura 4.7 pode ser observado que as curvas em preto e vermelho associadas as
tensões de eixo direto (v+d ) e quadratura (v+q ) obtidas através do método de extração de
sequência positiva, logo após a aplicação do distúrbio, não apresentaram praticamente
nenhuma oscilação. Este fato garante a operação estável de um gerador distribuído
conectado à rede elétrica. Ainda na Figura 4.7, a curva em azul é o resultado obtido
para a tensão em quadratura devido a operação isolada do SRF-PLL, ou seja, sem a
utilização do extrator de sequência positiva, em que observam-se oscilações com o dobro
da frequência fundamental devido a presença do componente de sequência negativa,
conforme esperado. Nessa situação em particular, mesmo que seja realizada uma redução
da largura de banda do SRF-PLL as oscilações não serão eliminadas por completo, além
do que, tornaria a resposta dinâmica do controlador excessivamente lenta.
Na Figura 4.8, apresenta-se na curva em preto, a estimativa da frequência feita
pelo método de extração de sequência proposto e na curva em azul, a estimativa de
frequência realizada exclusivamente pelo PLL de referência síncrona. Observa-se que a
técnica proposta obteve um desempenho bastante satisfatório, mesmo durante a ocorrên-
cia do distúrbio, determinando corretamente a frequência da rede elétrica. Vale ressaltar
que a estimação deste parâmetro é importante para as estratégias de controle dos con-
versores de potência utilizados em geração distribuída, visto que a sua determinação é
normalmente mais sensível a distúrbios na rede do que a do próprio ângulo de fase. A
obtenção de um ω muito oscilante levará a um mau desempenho do sistema de controle
de corrente tanto em referencial síncrono como estacionário. No primeiro caso, o im-
pacto se deve ao fato do ω fazer parte da compensação feedforward, causando distorção
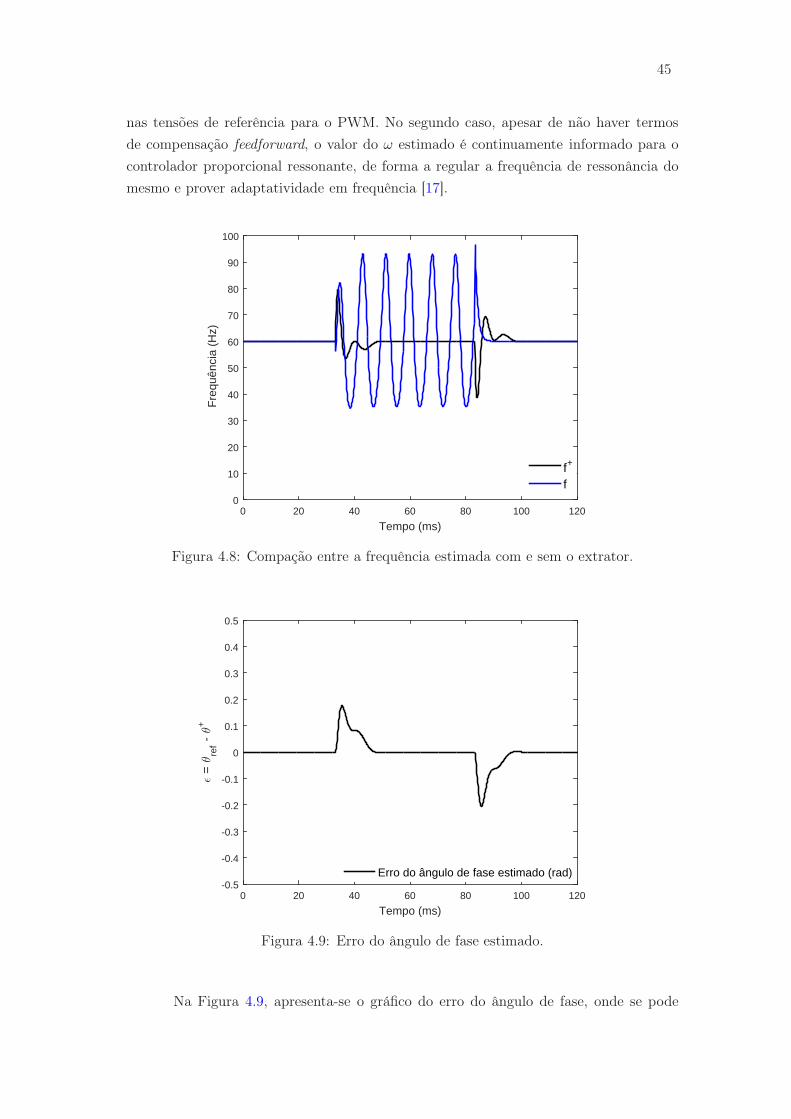
45
nas tensões de referência para o PWM. No segundo caso, apesar de não haver termos
de compensação feedforward, o valor do ω estimado é continuamente informado para o
controlador proporcional ressonante, de forma a regular a frequência de ressonância do
mesmo e prover adaptatividade em frequência [17].
Tempo (ms)0 20 40 60 80 100 120
Fre
quên
cia
(Hz)
0
10
20
30
40
50
60
70
80
90
100
f+
f
Figura 4.8: Compação entre a frequência estimada com e sem o extrator.
Tempo (ms)0 20 40 60 80 100 120
ǫ =
θre
f - θ
+
-0.5
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
0.5
Erro do ângulo de fase estimado (rad)
Figura 4.9: Erro do ângulo de fase estimado.
Na Figura 4.9, apresenta-se o gráfico do erro do ângulo de fase, onde se pode
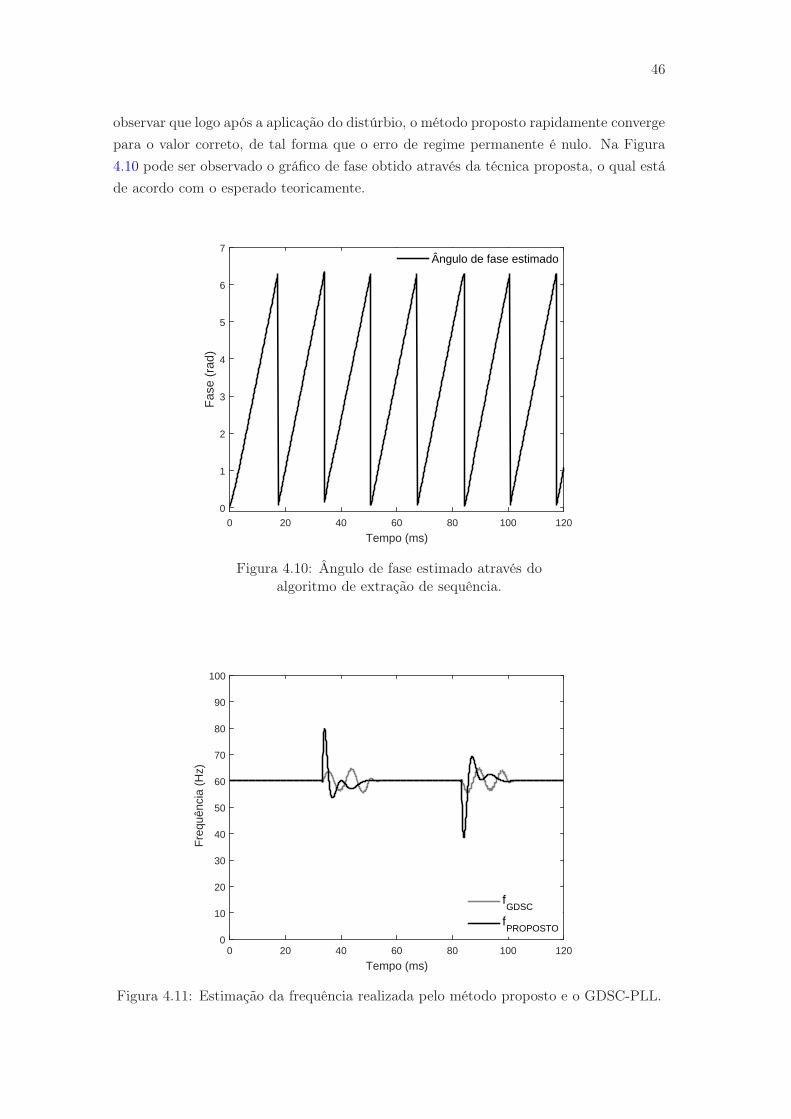
46
observar que logo após a aplicação do distúrbio, o método proposto rapidamente converge
para o valor correto, de tal forma que o erro de regime permanente é nulo. Na Figura
4.10 pode ser observado o gráfico de fase obtido através da técnica proposta, o qual está
de acordo com o esperado teoricamente.
Tempo (ms)0 20 40 60 80 100 120
Fas
e (r
ad)
0
1
2
3
4
5
6
7Ângulo de fase estimado
Figura 4.10: Ângulo de fase estimado através doalgoritmo de extração de sequência.
Tempo (ms)0 20 40 60 80 100 120
Fre
quên
cia
(Hz)
0
10
20
30
40
50
60
70
80
90
100
fGDSC
fPROPOSTO
Figura 4.11: Estimação da frequência realizada pelo método proposto e o GDSC-PLL.
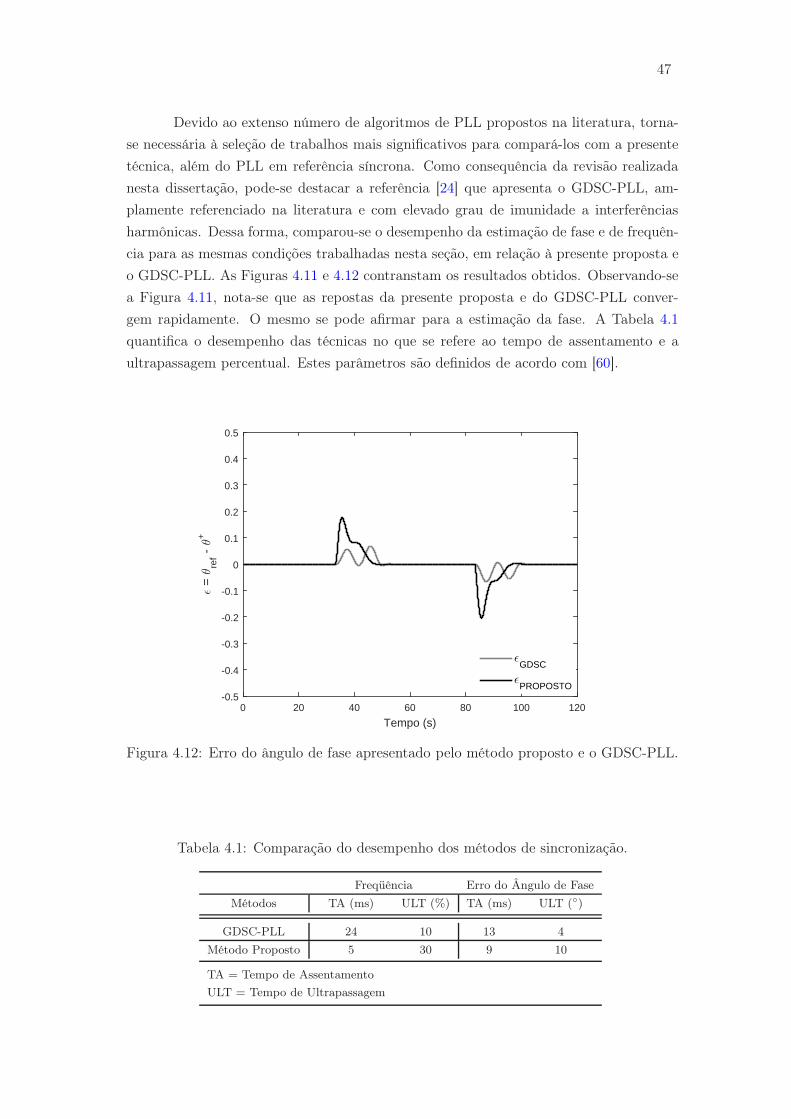
47
Devido ao extenso número de algoritmos de PLL propostos na literatura, torna-
se necessária à seleção de trabalhos mais significativos para compará-los com a presente
técnica, além do PLL em referência síncrona. Como consequência da revisão realizada
nesta dissertação, pode-se destacar a referência [24] que apresenta o GDSC-PLL, am-
plamente referenciado na literatura e com elevado grau de imunidade a interferências
harmônicas. Dessa forma, comparou-se o desempenho da estimação de fase e de frequên-
cia para as mesmas condições trabalhadas nesta seção, em relação à presente proposta e
o GDSC-PLL. As Figuras 4.11 e 4.12 contranstam os resultados obtidos. Observando-se
a Figura 4.11, nota-se que as repostas da presente proposta e do GDSC-PLL conver-
gem rapidamente. O mesmo se pode afirmar para a estimação da fase. A Tabela 4.1
quantifica o desempenho das técnicas no que se refere ao tempo de assentamento e a
ultrapassagem percentual. Estes parâmetros são definidos de acordo com [60].
Tempo (s)0 20 40 60 80 100 120
ǫ =
θre
f - θ
+
-0.5
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
0.5
ǫGDSC
ǫPROPOSTO
Figura 4.12: Erro do ângulo de fase apresentado pelo método proposto e o GDSC-PLL.
Tabela 4.1: Comparação do desempenho dos métodos de sincronização.
Freqüência Erro do Ângulo de Fase
Métodos TA (ms) ULT (%) TA (ms) ULT (◦)
GDSC-PLL 24 10 13 4
Método Proposto 5 30 9 10
TA = Tempo de Assentamento
ULT = Tempo de Ultrapassagem
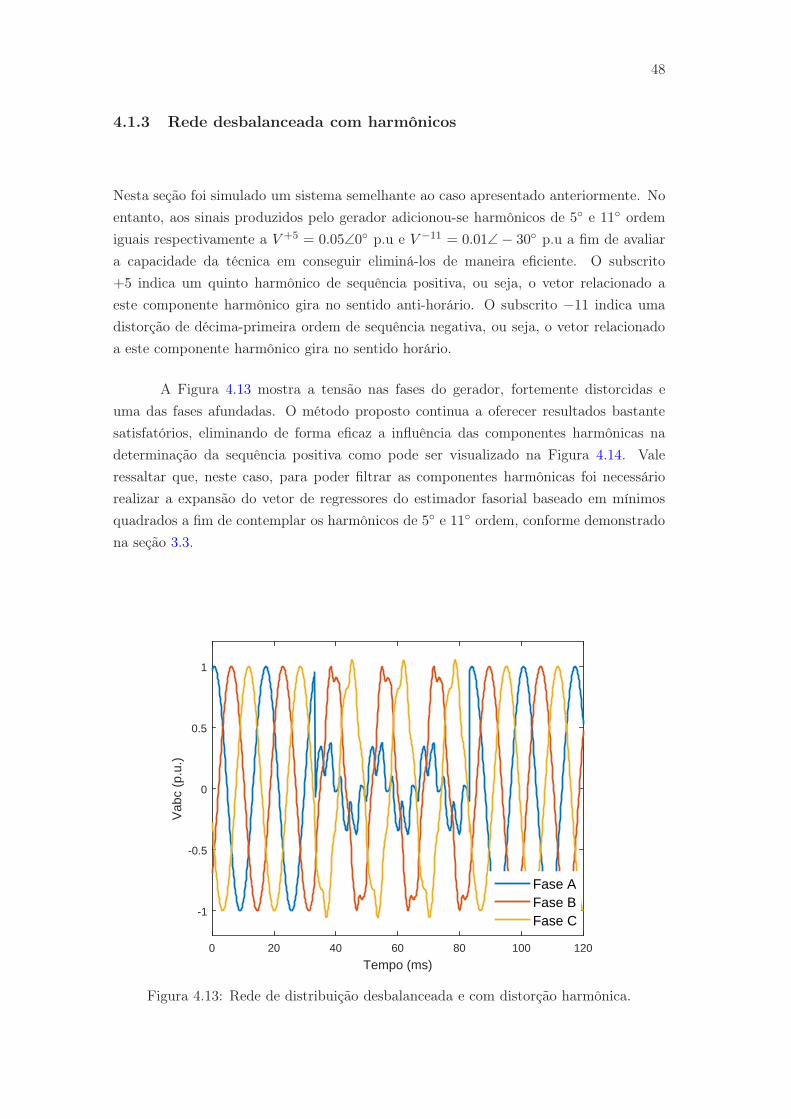
48
4.1.3 Rede desbalanceada com harmônicos
Nesta seção foi simulado um sistema semelhante ao caso apresentado anteriormente. No
entanto, aos sinais produzidos pelo gerador adicionou-se harmônicos de 5◦ e 11◦ ordem
iguais respectivamente a V +5 = 0.05∠0◦ p.u e V −11 = 0.01∠ − 30◦ p.u a fim de avaliar
a capacidade da técnica em conseguir eliminá-los de maneira eficiente. O subscrito
+5 indica um quinto harmônico de sequência positiva, ou seja, o vetor relacionado a
este componente harmônico gira no sentido anti-horário. O subscrito −11 indica uma
distorção de décima-primeira ordem de sequência negativa, ou seja, o vetor relacionado
a este componente harmônico gira no sentido horário.
A Figura 4.13 mostra a tensão nas fases do gerador, fortemente distorcidas e
uma das fases afundadas. O método proposto continua a oferecer resultados bastante
satisfatórios, eliminando de forma eficaz a influência das componentes harmônicas na
determinação da sequência positiva como pode ser visualizado na Figura 4.14. Vale
ressaltar que, neste caso, para poder filtrar as componentes harmônicas foi necessário
realizar a expansão do vetor de regressores do estimador fasorial baseado em mínimos
quadrados a fim de contemplar os harmônicos de 5◦ e 11◦ ordem, conforme demonstrado
na seção 3.3.
Tempo (ms)0 20 40 60 80 100 120
Vab
c (p
.u.)
-1
-0.5
0
0.5
1
Fase AFase BFase C
Figura 4.13: Rede de distribuição desbalanceada e com distorção harmônica.
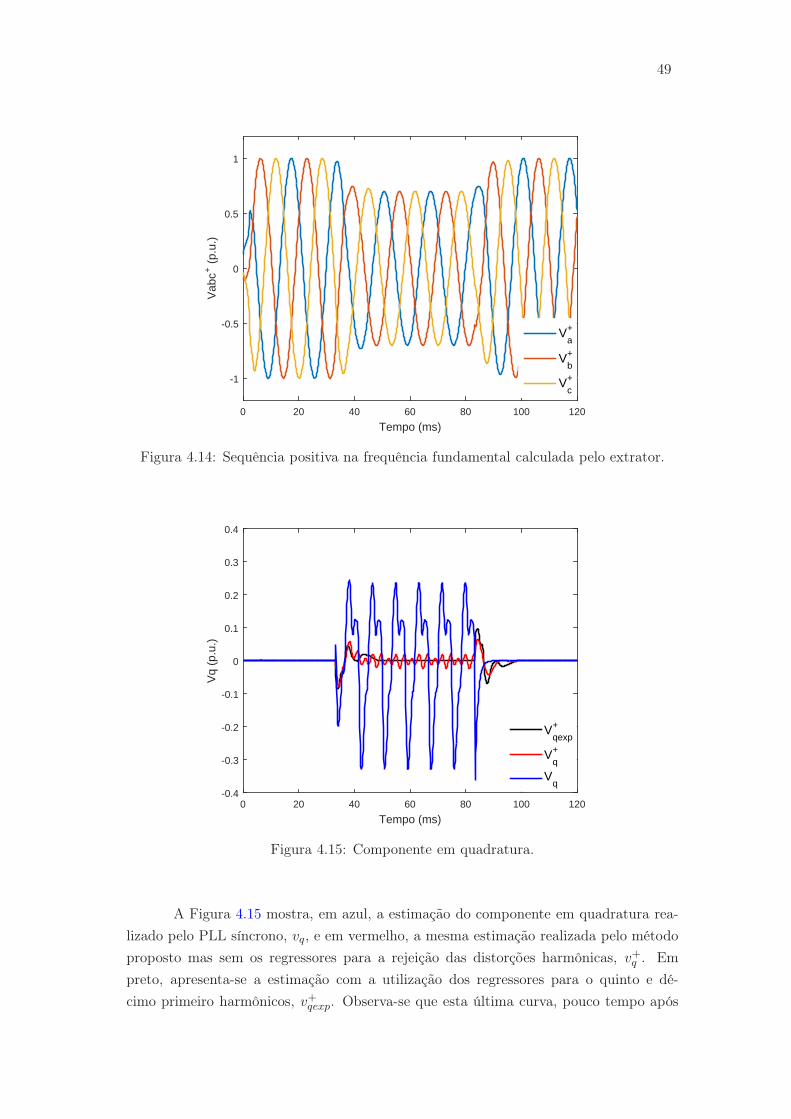
49
Tempo (ms)0 20 40 60 80 100 120
Vab
c+ (
p.u.
)
-1
-0.5
0
0.5
1
V+a
V+b
V+c
Figura 4.14: Sequência positiva na frequência fundamental calculada pelo extrator.
Tempo (ms)0 20 40 60 80 100 120
Vq
(p.u
.)
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
Vqexp+
Vq+
Vq
Figura 4.15: Componente em quadratura.
A Figura 4.15 mostra, em azul, a estimação do componente em quadratura rea-
lizado pelo PLL síncrono, vq, e em vermelho, a mesma estimação realizada pelo método
proposto mas sem os regressores para a rejeição das distorções harmônicas, v+q . Em
preto, apresenta-se a estimação com a utilização dos regressores para o quinto e dé-
cimo primeiro harmônicos, v+qexp. Observa-se que esta última curva, pouco tempo após
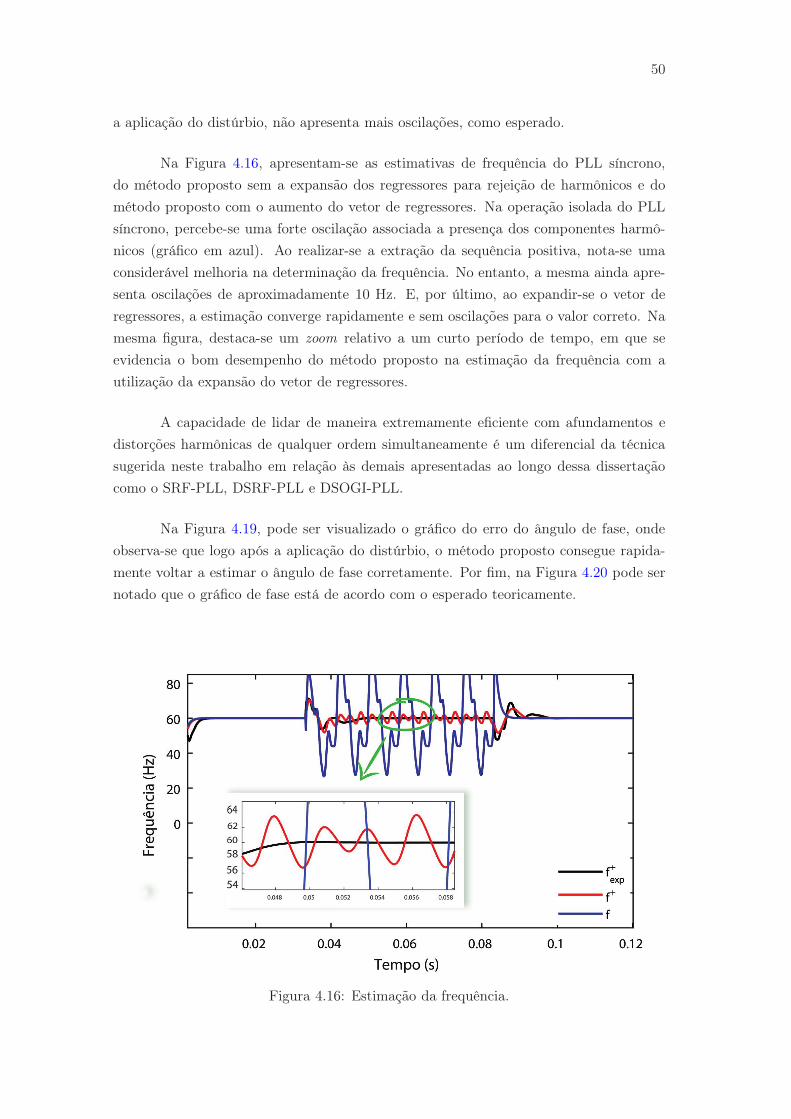
50
a aplicação do distúrbio, não apresenta mais oscilações, como esperado.
Na Figura 4.16, apresentam-se as estimativas de frequência do PLL síncrono,
do método proposto sem a expansão dos regressores para rejeição de harmônicos e do
método proposto com o aumento do vetor de regressores. Na operação isolada do PLL
síncrono, percebe-se uma forte oscilação associada a presença dos componentes harmô-
nicos (gráfico em azul). Ao realizar-se a extração da sequência positiva, nota-se uma
considerável melhoria na determinação da frequência. No entanto, a mesma ainda apre-
senta oscilações de aproximadamente 10 Hz. E, por último, ao expandir-se o vetor de
regressores, a estimação converge rapidamente e sem oscilações para o valor correto. Na
mesma figura, destaca-se um zoom relativo a um curto período de tempo, em que se
evidencia o bom desempenho do método proposto na estimação da frequência com a
utilização da expansão do vetor de regressores.
A capacidade de lidar de maneira extremamente eficiente com afundamentos e
distorções harmônicas de qualquer ordem simultaneamente é um diferencial da técnica
sugerida neste trabalho em relação às demais apresentadas ao longo dessa dissertação
como o SRF-PLL, DSRF-PLL e DSOGI-PLL.
Na Figura 4.19, pode ser visualizado o gráfico do erro do ângulo de fase, onde
observa-se que logo após a aplicação do distúrbio, o método proposto consegue rapida-
mente voltar a estimar o ângulo de fase corretamente. Por fim, na Figura 4.20 pode ser
notado que o gráfico de fase está de acordo com o esperado teoricamente.
Figura 4.16: Estimação da frequência.
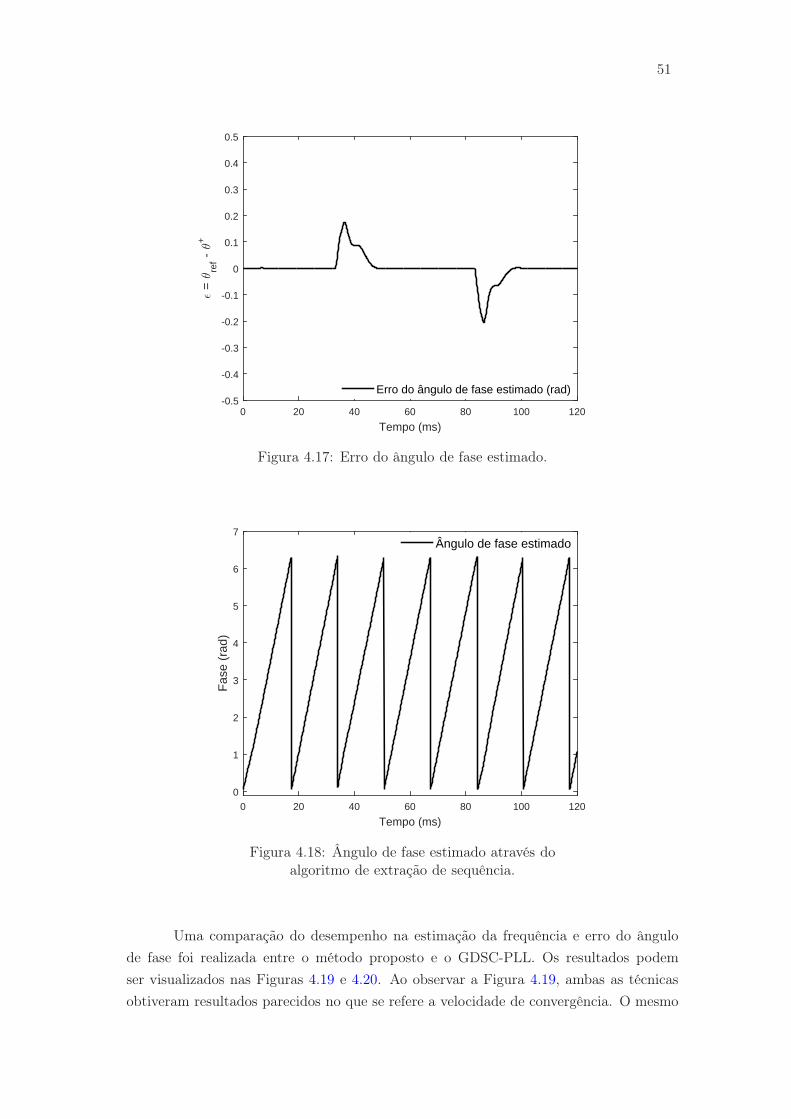
51
Tempo (ms)0 20 40 60 80 100 120
ǫ =
θre
f - θ
+
-0.5
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
0.5
Erro do ângulo de fase estimado (rad)
Figura 4.17: Erro do ângulo de fase estimado.
Tempo (ms)0 20 40 60 80 100 120
Fas
e (r
ad)
0
1
2
3
4
5
6
7Ângulo de fase estimado
Figura 4.18: Ângulo de fase estimado através doalgoritmo de extração de sequência.
Uma comparação do desempenho na estimação da frequência e erro do ângulo
de fase foi realizada entre o método proposto e o GDSC-PLL. Os resultados podem
ser visualizados nas Figuras 4.19 e 4.20. Ao observar a Figura 4.19, ambas as técnicas
obtiveram resultados parecidos no que se refere a velocidade de convergência. O mesmo
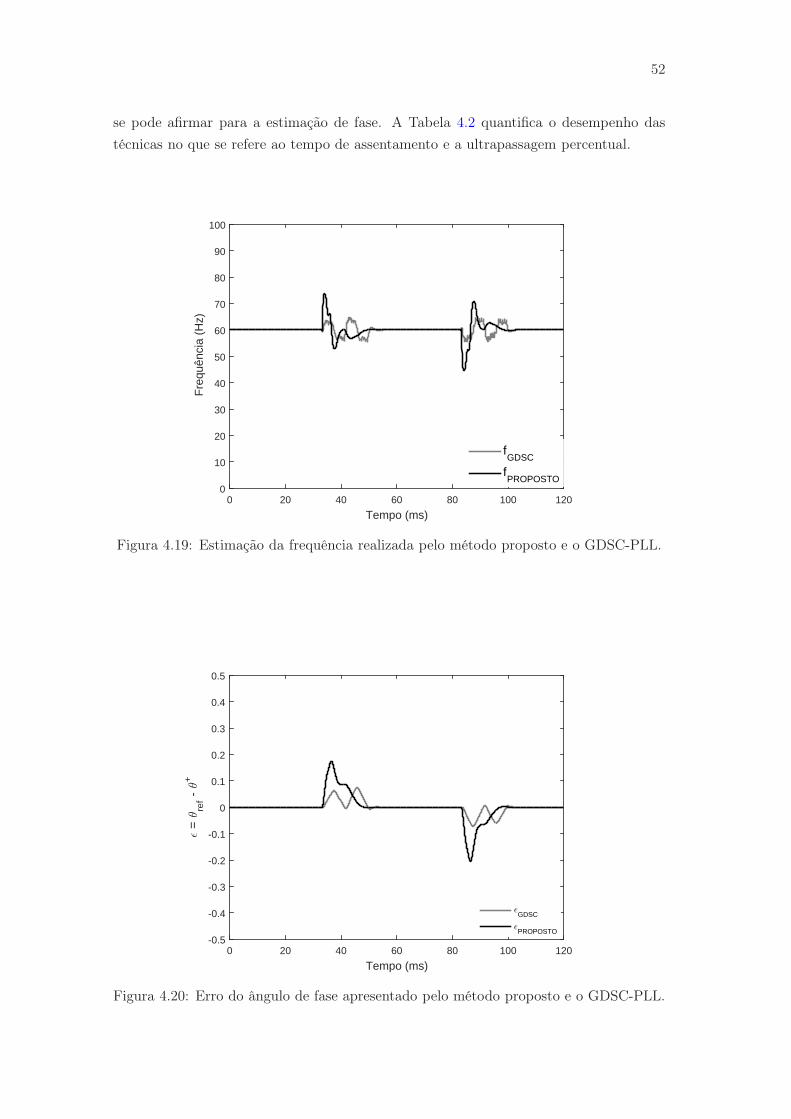
52
se pode afirmar para a estimação de fase. A Tabela 4.2 quantifica o desempenho das
técnicas no que se refere ao tempo de assentamento e a ultrapassagem percentual.
Tempo (ms)0 20 40 60 80 100 120
Fre
quên
cia
(Hz)
0
10
20
30
40
50
60
70
80
90
100
fGDSC
fPROPOSTO
Figura 4.19: Estimação da frequência realizada pelo método proposto e o GDSC-PLL.
Tempo (ms)0 20 40 60 80 100 120
ǫ =
θre
f - θ
+
-0.5
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
0.5
ǫGDSC
ǫPROPOSTO
Figura 4.20: Erro do ângulo de fase apresentado pelo método proposto e o GDSC-PLL.
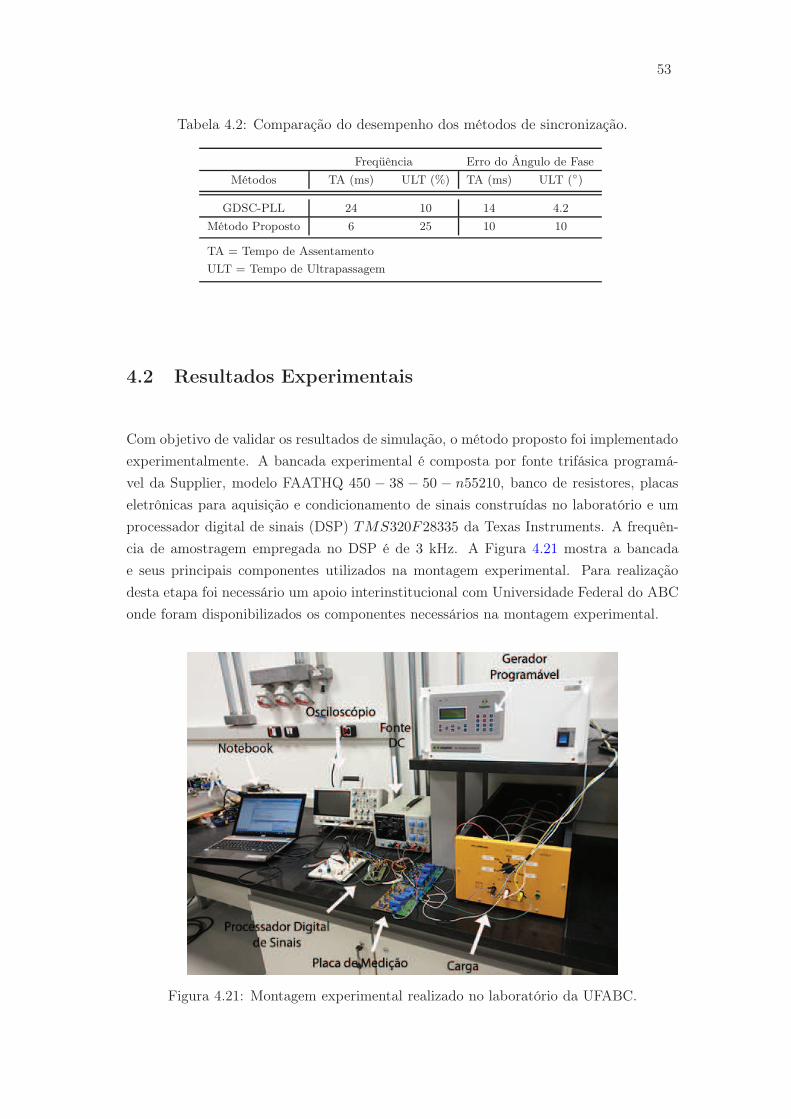
53
Tabela 4.2: Comparação do desempenho dos métodos de sincronização.
Freqüência Erro do Ângulo de Fase
Métodos TA (ms) ULT (%) TA (ms) ULT (◦)
GDSC-PLL 24 10 14 4.2
Método Proposto 6 25 10 10
TA = Tempo de Assentamento
ULT = Tempo de Ultrapassagem
4.2 Resultados Experimentais
Com objetivo de validar os resultados de simulação, o método proposto foi implementado
experimentalmente. A bancada experimental é composta por fonte trifásica programá-
vel da Supplier, modelo FAATHQ 450 − 38 − 50 − n55210, banco de resistores, placas
eletrônicas para aquisição e condicionamento de sinais construídas no laboratório e um
processador digital de sinais (DSP) TMS320F28335 da Texas Instruments. A frequên-
cia de amostragem empregada no DSP é de 3 kHz. A Figura 4.21 mostra a bancada
e seus principais componentes utilizados na montagem experimental. Para realização
desta etapa foi necessário um apoio interinstitucional com Universidade Federal do ABC
onde foram disponibilizados os componentes necessários na montagem experimental.
Figura 4.21: Montagem experimental realizado no laboratório da UFABC.
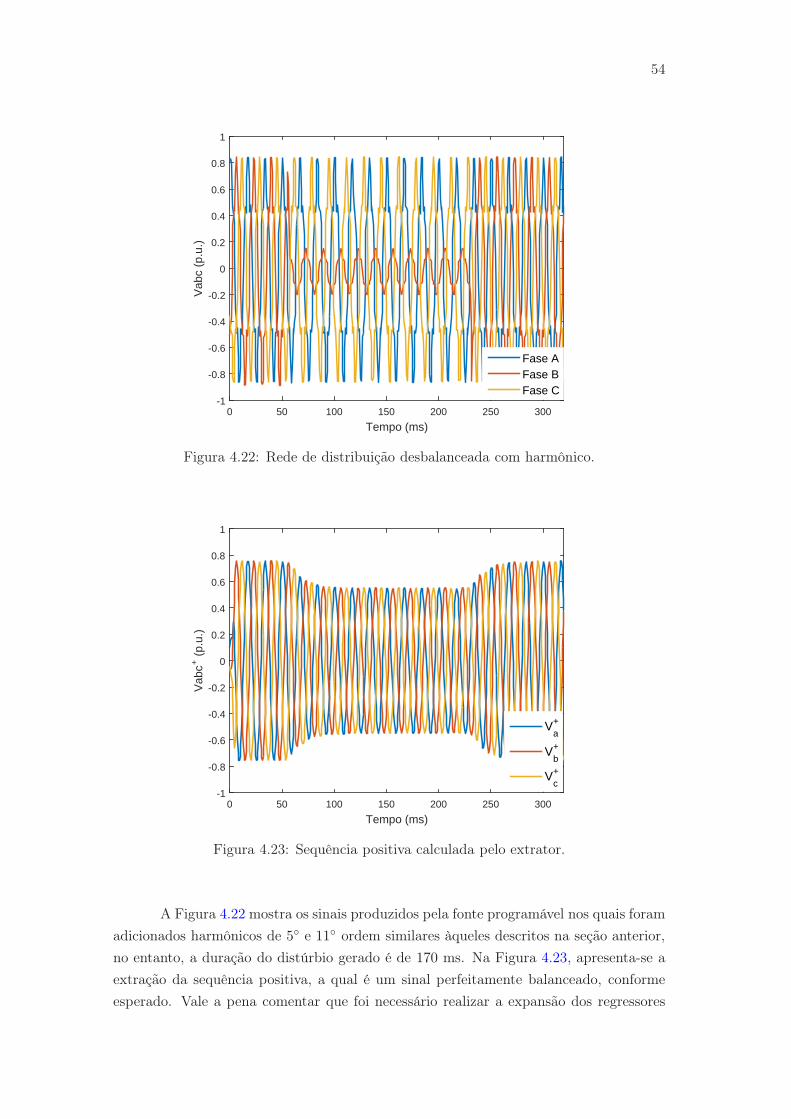
54
Tempo (ms)0 50 100 150 200 250 300
Vab
c (p
.u.)
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
Fase AFase BFase C
Figura 4.22: Rede de distribuição desbalanceada com harmônico.
Tempo (ms)0 50 100 150 200 250 300
Vab
c+ (
p.u.
)
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
V+a
V+b
V+c
Figura 4.23: Sequência positiva calculada pelo extrator.
A Figura 4.22 mostra os sinais produzidos pela fonte programável nos quais foram
adicionados harmônicos de 5◦ e 11◦ ordem similares àqueles descritos na seção anterior,
no entanto, a duração do distúrbio gerado é de 170 ms. Na Figura 4.23, apresenta-se a
extração da sequência positiva, a qual é um sinal perfeitamente balanceado, conforme
esperado. Vale a pena comentar que foi necessário realizar a expansão dos regressores
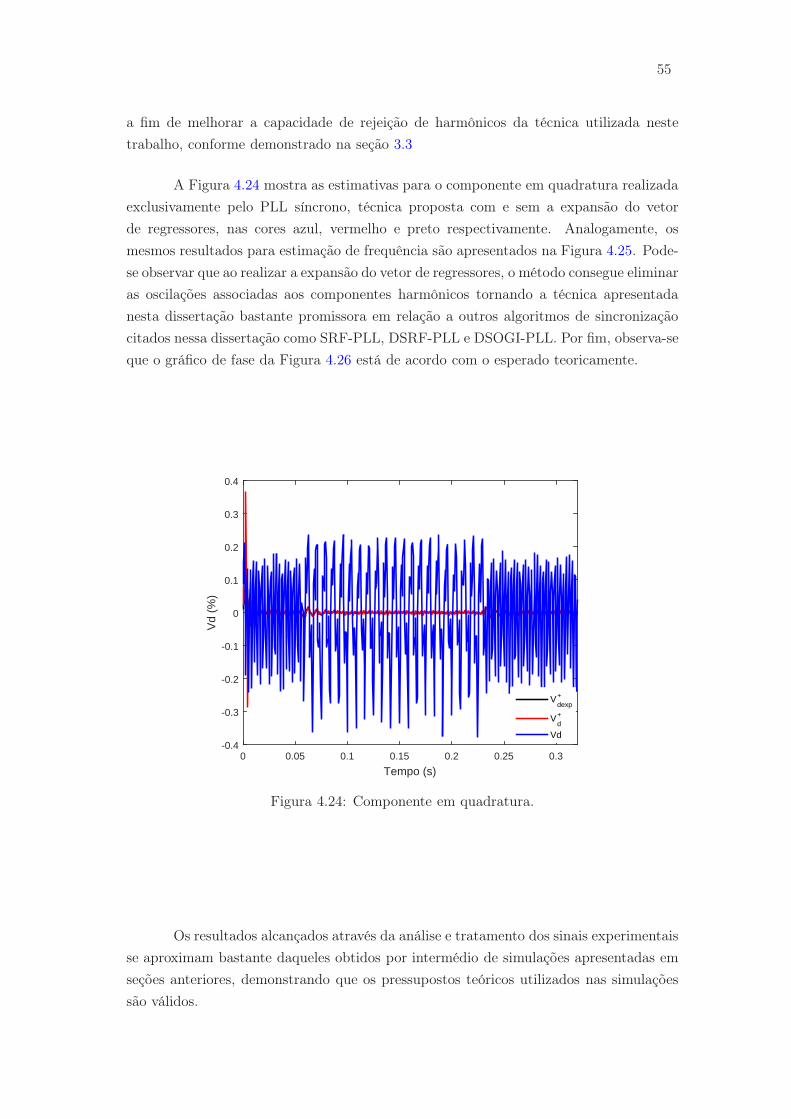
55
a fim de melhorar a capacidade de rejeição de harmônicos da técnica utilizada neste
trabalho, conforme demonstrado na seção 3.3
A Figura 4.24 mostra as estimativas para o componente em quadratura realizada
exclusivamente pelo PLL síncrono, técnica proposta com e sem a expansão do vetor
de regressores, nas cores azul, vermelho e preto respectivamente. Analogamente, os
mesmos resultados para estimação de frequência são apresentados na Figura 4.25. Pode-
se observar que ao realizar a expansão do vetor de regressores, o método consegue eliminar
as oscilações associadas aos componentes harmônicos tornando a técnica apresentada
nesta dissertação bastante promissora em relação a outros algoritmos de sincronização
citados nessa dissertação como SRF-PLL, DSRF-PLL e DSOGI-PLL. Por fim, observa-se
que o gráfico de fase da Figura 4.26 está de acordo com o esperado teoricamente.
Tempo (s)0 0.05 0.1 0.15 0.2 0.25 0.3
Vd
(%)
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
Vdexp+
Vd+
Vd
Figura 4.24: Componente em quadratura.
Os resultados alcançados através da análise e tratamento dos sinais experimentais
se aproximam bastante daqueles obtidos por intermédio de simulações apresentadas em
seções anteriores, demonstrando que os pressupostos teóricos utilizados nas simulações
são válidos.
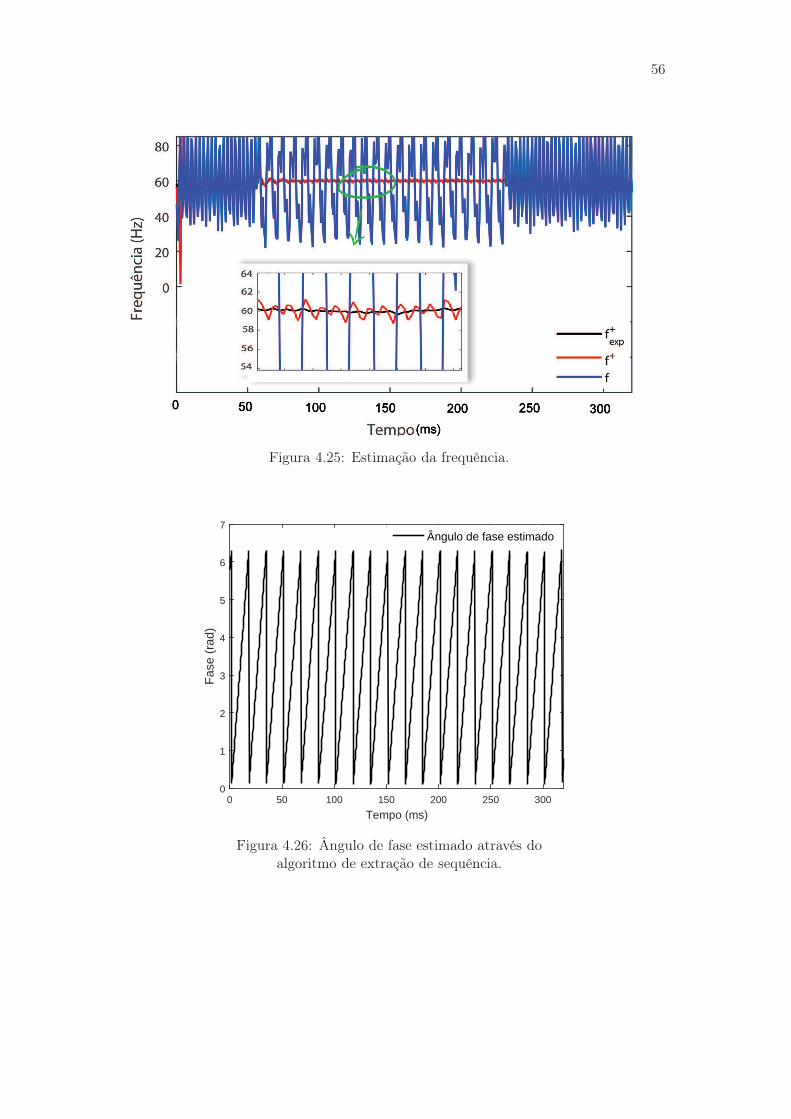
56
Figura 4.25: Estimação da frequência.
Tempo (ms)0 50 100 150 200 250 300
Fas
e (r
ad)
0
1
2
3
4
5
6
7Ângulo de fase estimado
Figura 4.26: Ângulo de fase estimado através doalgoritmo de extração de sequência.
Capítulo 5
Considerações Finais e Trabalhos
Futuros
Neste trabalho foi proposto um método para detecção do vetor tensão de sequência
positiva na frequência fundamental no intuito de tornar o PLL em referencial síncrono
mais robusto a problemas de qualidade da energia. Verificou-se através de consultas à
literatura e simulações que algumas técnicas de sincronização podem fornecer referências
inadequadas de frequência e fase necessárias para o controle dos conversores em condições
anormais de operação da rede elétrica. Dentre as principais, estão os desbalanços e
distorções harmônicas que, usualmente, acontecem no sistema de distribuição.
No capítulo 2 desta dissertação, apresentam-se alguns dos métodos de sincroni-
zação mais citados na literatura de modo a analisar o desempenho em atenuar os efeitos
dos desequilíbrios e distorções harmônicas na estimação da frequência e fase das tensões
na rede elétrica. Dentre os métodos estudados, o que possui a implementação mais difun-
dida é o PLL baseado em referencial síncrono. É comum se aprimorar a resposta deste
tipo de PLL a componentes harmônicos de ordem mais elevada, por meio da redução
da largura de banda do controlador. No entanto, esse procedimento não é eficaz quando
os sinais de tensão são desbalanceados ou contêm harmônicos de menor ordem, além de
implicar em uma resposta dinâmica do controlador mais lenta. No caso específico de fal-
tas assimétricas, aparecerá um componente harmônico de sequência negativa, que ao ser
rotacionado para um referencial síncrono, transforma-se em um componente harmônico
com o dobro da frequência fundamental, produzindo um erro na estimação de ângulo de
fase considerável.
As demais técnicas estudadas possuem mecanismos de separação dos componen-
tes em sequência no intuito de mitigar os efeitos dos desbalanços. No entanto, não
58
apresentam um desempenho satisfatório em relação a rejeição de harmônicos como é o
caso do DSRF-PLL. O DSOGI-PLL, na maioria dos casos, tem um desempenho melhor
que o SRF-PLL e o DSRF-PLL. Contudo, em algumas situações, principalmente quando
ocorrem saltos de fase, esses métodos têm uma dinâmica lenta. Além disso, nenhum dos
métodos citados anteriormente é capaz de rejeitar sinais de off-set.
O capítulo 3 consiste na proposição de uma técnica de sincronização baseada
em uma separação de componentes de sequência efetuado por um algoritmo de mínimos
quadrados recursivo ponderado (MQRP). Através de uma simples análise geométrica, o
MQPR desassocia as contribuições das sequências positiva e negativa nos eixos estaci-
onários. A extração da componente positiva não possui nenhum bloco dinâmico, que
seja descrito por equações diferenciais e, portanto, não impõe relação de compromisso
entre a velocidade de sua resposta e a capacidade de rejeitar interferências provenientes
de harmônicos ou desequilíbrios nas tensões da rede, ao contrário de abordagens que
utilizam filtros lineares notch ou de média móvel.
No capítulo 4, no qual os resultados são apresentados, o método proposto demos-
trou robustez frente a situações adversas de operação da rede devido a sua capacidade de
rejeição de componentes desbalanceados e de harmônicos. Vale ressaltar que a expansão
do vetor de regressores foi de fundamental importância para melhorar o desempenho em
relação a compensação de harmônicos. O tempo de resposta apresentado pelo referido
algoritmo de sincronização foi satisfatório e sua implementação não depende de arma-
zenamento de valores passados, tornando o processamento leve e alocação de memória
reduzida em relação a outras técnicas o que facilita a implementação em hardware.
5.1 Trabalhos Futuros
As principais sugestões de melhoria futura deste trabalho estão associadas a:
• Estudar técnicas monofásicas de sincronização devido a elevada integração da ge-
ração distribuída de baixa potência que, usualmente, está conectada à rede através
de uma única fase;
• O método de extração da sequência positiva proposto, nesta dissertação, depende
fortemente do desempenho da estimação fasorial dos vetores vα e vβ. Portanto, po-
dem ser estudadas outras técnicas de estimação fasorial, além do algoritmo MQRP,
como variações da transformada de Fourier ou a wavelet a fim de obter melhor de-
sempenho em relação a velocidade de convergência e estabilidade numérica;
• Tornar o método proposto adaptativo em frequência. Para isso, algumas possibili-

59
dades precisam ser estudadas. A primeira seria realizar uma retroalimentação da
frequência estimada na saída do PLL. No entanto, essa solução pode causar insta-
bilidade no sistema de malha fechada. Uma alternativa para resolver este problema
seria a utilização de uma estrutura em cascata constituída por dois blocos de PLL’s.
O primeiro bloco realizaria a estimação da frequência da componente de sequência
positiva que deve ser utilizada como uma entrada para o segundo bloco responsável
por determinar o ângulo de fase da rede elétrica.
Referências Bibliográficas
[1] V. Kaura and V. Blasko. Operation of a phase locked loop system under distorted
utility conditions. IEEE Transactions on Industry Applications, 33(1):58–63, Jan
1997.
[2] P. E. H. Souza. Métodos de extração do vetor tensão de sequência positiva na
frequência fundamental. Master’s thesis, Universidade Federal de Pernambuco -
UFPE, 2008.
[3] P. Rodriguez. Aportaciones a los acondicionadores activos de corriente en deriva-
ción para redes trifásicas de cuatro hilos. PhD thesis, Universitat Politecnica de
Catalunya - Barcelona, 2005.
[4] P. Rodriguez, J. Pou, J. Bergas, J.I. Candela, R.P. Burgos, and D. Boroyevich.
Decoupled double synchronous reference frame pll for power converters control.
IEEE Transactions on Power Electronics, 22(2):584–592, March 2007.
[5] G.C. Paap. Symmetrical components in the time domain and their application to
power network calculations. IEEE Transactions on Power Systems, 15(2):522–528,
May 2000.
[6] M. Karimi-Ghartemani and H. Karimi. Processing of symmetrical components in
time-domain. IEEE Transactions Power System, 22(2):572–579, May 2007.
[7] P. Rodriguez, R. Teodorescu, I. Candela, A.V. Timbus, M. Liserre, and F. Blaabjerg.
New positive-sequence voltage detector for grid synchronization of power converters
under faulty grid conditions. In IEEE Power Electronics Specialists Conference,
pages 1–7, June 2006.
[8] Operador Nacional do Sistema Elétrico ONS. Submódulo 3.6 - requisitos técnicos
mínimos para a conexão à rede básico. Technical report, Agosto 2009.
[9] J. V. Appen, M. Braun, T. Stetz, K. Diwold, and D. Geibel. Time in the sun:
The challenge of high pv penetration in the german electric grid. IEEE Power and
Energy Magazine, 11(2):55–64, March 2013.
61
[10] European Wind Energy Associantion - EWEA. Pure Power - Wind Energy Scena-
rios up to 2030, March 2008.
[11] Empresa de Pesquisas Enegéticas -EPE. Pure Power - Wind Energy Scenarios up
to 2030, 2014.
[12] F. Blaabjerg, Z. Chen, and S.B. Kjaer. Power electronics as efficient interface
in dispersed power generation systems. IEEE Transactions on Power Electronics,
19(5):1184–1194, Sept 2004.
[13] A. M. H. Fainan. Converter-interfaced distributed generation – grid interconnection
issues. Master’s thesis, CHALMERS UNIVERSITY OF TECHNOLOGY, 2007.
[14] G. Joos, B.T. Ooi, D. McGillis, F.D. Galiana, and R. Marceau. The potential of
distributed generation to provide ancillary services. In Power Engineering Society
Summer Meeting, volume 3, pages 1762–1767 vol. 3, 20 July 2000.
[15] R. S. Silva. Desempenho de geradores distribuídos durante curtos-circuitos consi-
derando requisitos de suportabilidade a afundamentos de tensão. Master’s thesis,
Universidade Estadual de Campinas - UNICAMP, 2012.
[16] A. Timbus, M. Liserre, R. Teodorescu, and F. Blaabjerg. Synchronization methods
for three phase distributed power generation systems - an overview and evaluation.
In IEEE Power Electronics Specialists Conference, pages 2474–2481, June 2005.
[17] J. P. Arruda. Métodos de sincronização de conversores em sistemas de geração
distribuída. Master’s thesis, Universidade Federal de Pernambuco - UFPE, 2008.
[18] Q. C. Zhong and T. Hornik. Control of Power Inverters in Renewable Energy and
Smart Grid Integration. John Wiley Sons, Ltd., Publication, February 2013.
[19] J. Svensson. Synchronisation methods for grid-connected voltage source converters.
IEEE Proceedings Generation, Transmission and Distribution, 148(3):229–235, May
2001.
[20] S. K. Chung. Phase-locked loop for grid-connected three-phase power conversion
systems. IEEE Proceedings Electric Power Applications, 147(3):213–219, May 2000.
[21] A.V. Timbus, T. Teodorescu, F. Blaabjerg, M. Liserre, and P. Rodriguez. Pll
algorithm for power generation systems robust to grid voltage faults. In IEEE
Power Electronics Specialists Conference, pages 1–7, June 2006.
[22] S. K. Chung. A phase tracking system for three phase utility interface inverters.
IEEE Transactions on Power Electronics, 15(3):431–438, May 2000.
[23] P. Rodriguez, J. Pou, J. Bergas, I. Candela, R. Burgos, and D. Boroyevich. Dou-
ble synchronous reference frame pll for power converters control. In IEEE Power
Electronics Specialists Conference, pages 1415–1421, June 2005.
62
[24] E. P. Souza. Uma Abordagem Vetorial para a Detecção em Tempo Real de Com-
ponentes Harmônicas de Sequência Positiva e Negativa em Sinais Trifásicos. PhD
thesis, Universidade Federal de Campina Grande - UFCG, 2012.
[25] M. Karimi-Ghartemani and M.R. Iravani. A method for synchronization of power
electronic converters in polluted and variable-frequency environments. IEEE Tran-
sactions on Power Systems, 19(3):1263–1270, Aug 2004.
[26] D. Yazdani, A. Bakhshai, G. Joos, and M. Mojiri. A nonlinear adaptive synchroni-
zation technique for grid-connected distributed energy sources. IEEE Transactions
Power Electronic, 23(4):2181–2186, July 2008.
[27] M. Mojiri, M. Karimi-Ghartemani, and A. Bakhshai. Time-domain signal analysis
using adaptive notch filter. IEEE Transactions Signal Processing, 55(1):85–93, Jan.
2007.
[28] D. Yazdani, M. Mojiri, A. Bakhshai, and G. Jóos. A fast and accurate synchro-
nization technique for extraction of symmetrical components. IEEE Transactions
Power Electronic, 24(3):674–684, March 2011.
[29] M. Saitou, N. Matsui, and T. Shimizu. A control strategy of single-phase active
filter using a novel d-q transformation. In IEEE Industry Applications Conference,
volume 2, pages 1222–1227, Oct 2003.
[30] S.M. Silva, B.M. Lopes, B.J.C. Filho, R.P. Campana, and W.C. Bosventura. Per-
formance evaluation of pll algorithms for single-phase grid-connected systems. In
IEEE Industry Applications Conference, volume 4, pages 2259–2263, Oct 2004.
[31] R.I. Bojoi, G. Griva, V. Bostan, M. Guerriero, F. Farina, and F. Profumo. Current
control strategy for power conditioners using sinusoidal signal integrators in synch-
ronous reference frame. IEEE Transactions on Power Electronics, 20(6):1402–1412,
Nov 2005.
[32] Y. Xiaoming, W. Merk, H. Stemmler, and J. Allmeling. Stationary-frame genera-
lized integrators for current control of active power filters with zero steady-state
error for current harmonics of concern under unbalanced and distorted operating
conditions. IEEE Transactions on Industry Applications, 38(2):523–532, Mar 2002.
[33] J. Svensson, M. Bongiorno, and A. Sannino. Practical implementation of delayed
signal cancellation method for phase-sequence separation. IEEE Transactions on
Power Delivery, 22(1):18–26, Jan 2007.
[34] M. Bongiorno, J. Svensson, and A. Sannino. Effect of sampling frequency and
harmonics on delay-based phase-sequence estimation method. IEEE Transactions
on Power Delivery, 23(3):1664–1672, July 2008.
63
[35] F. Bradaschia, J.P. Arruda, H. Souza, G.M.S. Azevedo, F.A.S. Neves, and M.C.
Cavalcanti. A method for extracting the fundamental frequency positive-sequence
voltage vector based on simple mathematical transformations. In IEEE Power Elec-
tronics Specialists Conference, pages 1115–1121, June 2008.
[36] H.E.P. Souza, F. Bradaschia, F.A.S. Neves, M.C. Cavalcanti, G.M.S. Azevedo,
and J.P. de Arruda. A method for extracting the fundamental-frequency positive-
sequence voltage vector based on simple mathematical transformations. IEEE Tran-
sactions on Industrial Electronics, 56(5):1539–1547, May 2009.
[37] F.A.S. Neves, M.C. Cavalcanti, H.E.P. de Souza, F. Bradaschia, E.J. Bueno,
and M. Rizo. A generalized delayed signal cancellation method for detecting
fundamental-frequency positive-sequence three-phase signals. IEEE Transactions
on Power Delivery, 25(3):1816–1825, July 2010.
[38] F.A.S. Neves, H.E.P. de Souza, M.C. Cavalcanti, F. Bradaschia, and E.J. Bu-
eno. Digital filters for fast harmonic sequence component separation of unbalan-
ced and distorted three-phase signals. IEEE Transactions on Industrial Electronics,
59(10):3847–3859, Oct 2012.
[39] F. Y. Wang and W. Y. Li. Analysis and digital implementation of cascaded delayed-
signal-cancellation pll. Power Electronics, IEEE Transactions on, 26(4):1067–1080,
April 2011.
[40] P.S.B. Nascimento, H.E.P. de Souza, F.A.S. Neves, and L.R. Limongi. Fpga imple-
mentation of the generalized delayed signal cancelation - phase locked loop method
for detecting harmonic sequence components in three-phase signals. IEEE Transac-
tions on Industrial Electronics, 60(2):645–658, Feb 2013.
[41] Y.N. Batista, H.E.P. de Souza, F.A.S. Neves, R.F. Dias Filho, and F. Bradaschia.
Variable structure generalized delayed signal cancellation pll to improve convergence
time. IEEE Transactions on Industrial Electronics, PP(99):1–1, 2015.
[42] X. Guo, W. Wu, and Z. Chen. Multiple-complex coefficient-filter-based phase-locked
loop and synchronization technique for three-phase grid-interfaced converters in dis-
tributed utility networks. IEEE Transactions on Industrial Electronics, 58(4):1194–
1204, April 2011.
[43] S. Golestan, J. M. Guerrero, and A. M. Abusorrah. Maf-pll with phase-lead com-
pensator. IEEE Transactions Industrial Electronic, 62(6):3691–3695, April 2015.
[44] L. Wang, Q. Jiang, L. Hong, C. Zhang, and Y. Wei. A novel phase-locked loop
based on frequency detector and initial phase angle detector. Power Electronics,
IEEE Transactions on, 28(10):4538–4549, Oct 2013.
64
[45] J. Wang, J. Liang, F. Gao, L. Zhang, and Z. Wang. A method to improve the
dynamic performance of moving average filter-based pll. IEEE Transactions Power
Electronic, 30(10):5978–5990, Oct 2015.
[46] S. Golestan, M. Ramezani, J.M. Guerrero, F.D. Freijedo, and M. Monfared. Moving
average filter based phase-locked loops: Performance analysis and design guidelines.
IEEE Transactions on Power Electronics, 29(6):2750–2763, June 2014.
[47] R. Cardoso, R.F. Camargo, H. Pinheiro, and H.A. Grundling. Kalman filter based
synchronization methods. In IEEE Power Electronics Specialists Conference, pages
1–7, June 2006.
[48] V.M. Moreno, M. Liserre, A. Pigazo, and A. Dell’Aquila. A comparative analy-
sis of real-time algorithms for power signal decomposition in multiple synchronous
reference frames. IEEE Transactions on Power Electronics, 22(4):1280–1289, July
2007.
[49] A. Pigazo and V.M. Moreno. 3φ −3ω signal model for power system harmonics
and unbalance identification using kalman filtering. IEEE Transactions on Power
Delivery, 23(2):1260–1261, April 2008.
[50] P.K. Dash and S. Hasan. A fast recursive algorithm for the estimation of frequency,
amplitude, and phase of noisy sinusoid. IEEE Transactions on Industrial Electro-
nics, 58(10):4847–4856, Oct 2011.
[51] D. Simon. Kalman filtering. Embedded Systems Programming Magazine, page 72–79,
June 2001.
[52] D. A. Fernandes, S. R. Naidu, and C. A. E. Jr. Coura. Instantaneous sequence-
component resolution of 3-phase variables and its application to dynamic voltage
restoration. IEEE Trans. Instr. Meas., 58(8):2580–2587, Aug. 2009.
[53] D. A. Fernandes, F. F. Costa, and M. A. Vitorino. A method for averting saturation
from series transformers of dynamic voltage restorers. IEEE Trans. Power Deliv.,
29(5):2239–2247, Oct. 2014.
[54] F. F. Costa. Estimação de Harmônicos e Inter-Harmônicos em Sistemas Elétrico.
PhD thesis, Universidade Federal de Campina Grande, 2005.
[55] L. A. Aguirre. Introdução à identificação de sistemas -Técnicas lineares e não line-
ares aplicadas a sistemas: Teoria e Aplicação. UFMG, Fevereiro 2015.
[56] M. K. Silva. Estimação de Fasores Baseada na Transformada Wavelet para Uso na
Proteção de Distância de Linhas de Transmissão. PhD thesis, Universidade Federal
de Campina Grande - UFCG, 2009.
65
[57] L.A.L. Almeida and A.C.de C. Lima. Covariance management based rls algorithm
for phasor estimation in severely noisy systems. IEEE Transactions on Power De-
livery, 13(4):1067–1072, Oct 1998.
[58] M.S. Sachdev and M. Nagpal. A recursive least error squares algorithm for power
system relaying and measurement applications. IEEE Transactions on Power Deli-
very, 6(3):1008–1015, Jul 1991.
[59] J. R. Cabral. Análise númerica de curto circuito utilizando componentes simétricas
e componentes de fases para obter Índices de afundamento de tensão. Master’s
thesis, Universidade Federal do Rio Grande do Sul - UFRGS, 2010.
[60] R.C. Dorf and R.H. Bishop. Sistemas de Controle Modernos. 11a ed. edition, 2010.

Apêndice A
MQR - Demonstração
A obtenção da expressão recursiva para o método de mínimos quadrados, inicia-se com
a manipulação algébrica da expressão (3.15) para se obter a equação:
ρk =
(k∑
i=1
ϕi−1ϕTi−1
)−1 k∑
i=1
y[i]ϕi−1, (A.1)
em que k representa um tempo amostrado tk qualquer. A equação (A.1) pode ser reescrita
como:
ρk = Pk
k∑
i=1
y[i]ϕi−1, (A.2)
em que
P−1
k =
k∑
i=1
ϕi−1ϕTi−1. (A.3)
Da equação (A.2), obtém-se:
ρk+1 = Pk+1
k+1∑
i=1
y[i]ϕi−1, (A.4)
e da equação (A.3)
P−1
k+1=
k+1∑
i=1
ϕi−1ϕTi−1 = P
−1
k +ϕkϕTk . (A.5)
Considerando, agora a identidade:
k+1∑
i=1
y[i]ϕi−1 =
k∑
i=1
y[i]ϕi−1 + y[k + 1]ϕk +ϕkϕTk ρk −ϕkϕ
Tk ρk. (A.6)

67
Os dois somatórios na equação (A.6) podem ser substituídos, utilizando-se as equações
(A.2) e (A.4), de tal modo que:
k+1∑
i=1
y[i]ϕi−1 = P−1
k+1ρk+1 = Pkρk + y[k + 1]ϕk −ϕkϕ
Tk ρk +ϕkρ
Tkϕk =
P−1
k ρk +ϕkρTkϕk +ϕk
(y[k + 1]−ϕ
Tk ρk
). (A.7)
Observe que para a construção da equação (A.7), a seguinte relação é utilizada:
ϕkϕTk ρk = ϕkρ
Tkϕk. (A.8)
Então, substitui-se Pk na equação (A.7) (utilizando a equação (A.5)) e considerando-se
a equação (3.17) para substituir y[k + 1], obtém-se:
P−1
k+1ρk+1 =
(P
−1
k+1−ϕkϕ
Tk
)ρk +ϕkϕ
Tk ρk
+ϕk
(e0[k + 1] + y0[k + 1]− ρ
Tkϕk
)(A.9)
e desenvolvendo-se a equação (A.9), obtém-se:
ρk+1 = ρk +Pk+1ϕke0[k + 1]. (A.10)
Apesar da equação (A.10) possuir uma forma recursiva, sua aplicação em um algoritmo
recursivo é ainda inconveniente, pois é necessário encontrar uma fórmula recursiva para
a matriz P . Para isso deve-se considerar o lema da inversão:
Seja P uma matriz de dimensão (L× L) e ϕ um vetor de dimensão L, então:
(P
−1 +ϕϕT)−1
= P− PϕϕTP
1 +ϕTPϕ(A.11)
Das equações (A.5) e (A.11), obtém-se a formula recursiva para a matriz P:
Pk+1 = Pk −Pkϕkϕ
TkPk
1 +ϕTkPkϕk
(A.12)
Utilizando a equação (A.12), o produto Kk = Pk+1ϕk, pode ser escrito como:
Kk =Pkϕk
ϕTkPkϕk + 1
, (A.13)
e substituindo Kk em (A.10), obtém-se:
ρk+1 = ρk +Kke0[k + 1]. (A.14)




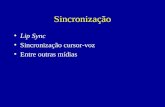





![Arquitetura de Sistemas Distribuídos - Módulo 3: Sincronização em Sistemas Distribuídos 1 Sincronização em Sistemas Distribuídos Módulo 4 [C10,C13,T3]](https://static.fdocumentos.com/doc/165x107/552fc105497959413d8c035a/arquitetura-de-sistemas-distribuidos-modulo-3-sincronizacao-em-sistemas-distribuidos-1-sincronizacao-em-sistemas-distribuidos-modulo-4-c10c13t3.jpg)






