Simplificações de Forças e...
20
Simplificações de Forças e Binários Prof. Ettore Baldini-Neto
Transcript of Simplificações de Forças e...

Simplificações de Forças e Binários
Prof. Ettore Baldini-Neto

• Algumas vezes é conveniente reduzir um sistema de forças e momentos binários atuando em um corpo por um sistema equivalente mais simples, que consiste de uma força resultante e de um momento binário resultante atuando em relação a um dado ponto.
• Um sistema é equivalente quando os efeitos externos produzidos por ele sobre o corpo são os mesmos que aqueles causados pelas forças e momentos binários originiais.
• Neste contexto, os efeitos externos referem-se a movimentos de translação/rotação caso o corpo esteja livre para se mover, ou à reação em suportes se o corpo estiver fixo.

Entendendo melhor..
160 CHAPTER 4 FORCE SYSTEM RESULTANTS
4
4.7 Simplification of a Force and CoupleSystem
Sometimes it is convenient to reduce a system of forces and couple momentsacting on a body to a simpler form by replacing it with an equivalent system,consisting of a single resultant force acting at a specific point and a resultantcouple moment.A system is equivalent if the external effects it produces ona body are the same as those caused by the original force and couplemoment system. In this context, the external effects of a system refer to thetranslating and rotating motion of the body if the body is free to move, or itrefers to the reactive forces at the supports if the body is held fixed.
For example, consider holding the stick in Fig. 4–34a, which issubjected to the force F at point A. If we attach a pair of equal butopposite forces F and –F at point B, which is on the line of action of F,Fig. 4–34b, we observe that –F at B and F at A will cancel each other,leaving only F at B, Fig. 4–34c. Force F has now been moved from A to Bwithout modifying its external effects on the stick; i.e., the reaction at thegrip remains the same. This demonstrates the principle of transmissibility,which states that a force acting on a body (stick) is a sliding vector sinceit can be applied at any point along its line of action.
We can also use the above procedure to move a force to a point that is noton the line of action of the force. If F is applied perpendicular to the stick, asin Fig. 4–35a, then we can attach a pair of equal but opposite forces F and –Fto B, Fig. 4–35b. Force F is now applied at B, and the other two forces, F at Aand –F at B, form a couple that produces the couple moment ,Fig. 4–35c. Therefore, the force F can be moved from A to B provided acouple moment M is added to maintain an equivalent system. This couplemoment is determined by taking the moment of F about B. Since M isactually a free vector, it can act at any point on the stick. In both cases thesystems are equivalent which causes a downward force F and clockwisecouple moment M = Fd to be felt at the grip.
M = Fd
F F
F!FAB
(a)
AB
F
(b) (c)
Fig. 4–34
F F
!FA
d
(a)
FF
m " Fd
(b) (c)
Fig. 4–35
160 CHAPTER 4 FORCE SYSTEM RESULTANTS
4
4.7 Simplification of a Force and CoupleSystem
Sometimes it is convenient to reduce a system of forces and couple momentsacting on a body to a simpler form by replacing it with an equivalent system,consisting of a single resultant force acting at a specific point and a resultantcouple moment.A system is equivalent if the external effects it produces ona body are the same as those caused by the original force and couplemoment system. In this context, the external effects of a system refer to thetranslating and rotating motion of the body if the body is free to move, or itrefers to the reactive forces at the supports if the body is held fixed.
For example, consider holding the stick in Fig. 4–34a, which issubjected to the force F at point A. If we attach a pair of equal butopposite forces F and –F at point B, which is on the line of action of F,Fig. 4–34b, we observe that –F at B and F at A will cancel each other,leaving only F at B, Fig. 4–34c. Force F has now been moved from A to Bwithout modifying its external effects on the stick; i.e., the reaction at thegrip remains the same. This demonstrates the principle of transmissibility,which states that a force acting on a body (stick) is a sliding vector sinceit can be applied at any point along its line of action.
We can also use the above procedure to move a force to a point that is noton the line of action of the force. If F is applied perpendicular to the stick, asin Fig. 4–35a, then we can attach a pair of equal but opposite forces F and –Fto B, Fig. 4–35b. Force F is now applied at B, and the other two forces, F at Aand –F at B, form a couple that produces the couple moment ,Fig. 4–35c. Therefore, the force F can be moved from A to B provided acouple moment M is added to maintain an equivalent system. This couplemoment is determined by taking the moment of F about B. Since M isactually a free vector, it can act at any point on the stick. In both cases thesystems are equivalent which causes a downward force F and clockwisecouple moment M = Fd to be felt at the grip.
M = Fd
F F
F!FAB
(a)
AB
F
(b) (c)
Fig. 4–34
F F
!FA
d
(a)
FF
m " Fd
(b) (c)
Fig. 4–35
160 CHAPTER 4 FORCE SYSTEM RESULTANTS
4
4.7 Simplification of a Force and CoupleSystem
Sometimes it is convenient to reduce a system of forces and couple momentsacting on a body to a simpler form by replacing it with an equivalent system,consisting of a single resultant force acting at a specific point and a resultantcouple moment.A system is equivalent if the external effects it produces ona body are the same as those caused by the original force and couplemoment system. In this context, the external effects of a system refer to thetranslating and rotating motion of the body if the body is free to move, or itrefers to the reactive forces at the supports if the body is held fixed.
For example, consider holding the stick in Fig. 4–34a, which issubjected to the force F at point A. If we attach a pair of equal butopposite forces F and –F at point B, which is on the line of action of F,Fig. 4–34b, we observe that –F at B and F at A will cancel each other,leaving only F at B, Fig. 4–34c. Force F has now been moved from A to Bwithout modifying its external effects on the stick; i.e., the reaction at thegrip remains the same. This demonstrates the principle of transmissibility,which states that a force acting on a body (stick) is a sliding vector sinceit can be applied at any point along its line of action.
We can also use the above procedure to move a force to a point that is noton the line of action of the force. If F is applied perpendicular to the stick, asin Fig. 4–35a, then we can attach a pair of equal but opposite forces F and –Fto B, Fig. 4–35b. Force F is now applied at B, and the other two forces, F at Aand –F at B, form a couple that produces the couple moment ,Fig. 4–35c. Therefore, the force F can be moved from A to B provided acouple moment M is added to maintain an equivalent system. This couplemoment is determined by taking the moment of F about B. Since M isactually a free vector, it can act at any point on the stick. In both cases thesystems are equivalent which causes a downward force F and clockwisecouple moment M = Fd to be felt at the grip.
M = Fd
F F
F!FAB
(a)
AB
F
(b) (c)
Fig. 4–34
F F
!FA
d
(a)
FF
m " Fd
(b) (c)
Fig. 4–35
A força F foi movida de A para B sem modificar seus efeitos externos sobre o bastão, ou seja, a reação no ponto de contato é a mesma.
Este fato demonstra o princípio da transmissibilidade que diz que a força F é um vetor deslizante desde que pode ser aplicada em qualquer ponto sob sua linha de ação no bastão.

160 CHAPTER 4 FORCE SYSTEM RESULTANTS
4
4.7 Simplification of a Force and CoupleSystem
Sometimes it is convenient to reduce a system of forces and couple momentsacting on a body to a simpler form by replacing it with an equivalent system,consisting of a single resultant force acting at a specific point and a resultantcouple moment.A system is equivalent if the external effects it produces ona body are the same as those caused by the original force and couplemoment system. In this context, the external effects of a system refer to thetranslating and rotating motion of the body if the body is free to move, or itrefers to the reactive forces at the supports if the body is held fixed.
For example, consider holding the stick in Fig. 4–34a, which issubjected to the force F at point A. If we attach a pair of equal butopposite forces F and –F at point B, which is on the line of action of F,Fig. 4–34b, we observe that –F at B and F at A will cancel each other,leaving only F at B, Fig. 4–34c. Force F has now been moved from A to Bwithout modifying its external effects on the stick; i.e., the reaction at thegrip remains the same. This demonstrates the principle of transmissibility,which states that a force acting on a body (stick) is a sliding vector sinceit can be applied at any point along its line of action.
We can also use the above procedure to move a force to a point that is noton the line of action of the force. If F is applied perpendicular to the stick, asin Fig. 4–35a, then we can attach a pair of equal but opposite forces F and –Fto B, Fig. 4–35b. Force F is now applied at B, and the other two forces, F at Aand –F at B, form a couple that produces the couple moment ,Fig. 4–35c. Therefore, the force F can be moved from A to B provided acouple moment M is added to maintain an equivalent system. This couplemoment is determined by taking the moment of F about B. Since M isactually a free vector, it can act at any point on the stick. In both cases thesystems are equivalent which causes a downward force F and clockwisecouple moment M = Fd to be felt at the grip.
M = Fd
F F
F!FAB
(a)
AB
F
(b) (c)
Fig. 4–34
F F
!FA
d
(a)
FF
m " Fd
(b) (c)
Fig. 4–35
160 CHAPTER 4 FORCE SYSTEM RESULTANTS
4
4.7 Simplification of a Force and CoupleSystem
Sometimes it is convenient to reduce a system of forces and couple momentsacting on a body to a simpler form by replacing it with an equivalent system,consisting of a single resultant force acting at a specific point and a resultantcouple moment.A system is equivalent if the external effects it produces ona body are the same as those caused by the original force and couplemoment system. In this context, the external effects of a system refer to thetranslating and rotating motion of the body if the body is free to move, or itrefers to the reactive forces at the supports if the body is held fixed.
For example, consider holding the stick in Fig. 4–34a, which issubjected to the force F at point A. If we attach a pair of equal butopposite forces F and –F at point B, which is on the line of action of F,Fig. 4–34b, we observe that –F at B and F at A will cancel each other,leaving only F at B, Fig. 4–34c. Force F has now been moved from A to Bwithout modifying its external effects on the stick; i.e., the reaction at thegrip remains the same. This demonstrates the principle of transmissibility,which states that a force acting on a body (stick) is a sliding vector sinceit can be applied at any point along its line of action.
We can also use the above procedure to move a force to a point that is noton the line of action of the force. If F is applied perpendicular to the stick, asin Fig. 4–35a, then we can attach a pair of equal but opposite forces F and –Fto B, Fig. 4–35b. Force F is now applied at B, and the other two forces, F at Aand –F at B, form a couple that produces the couple moment ,Fig. 4–35c. Therefore, the force F can be moved from A to B provided acouple moment M is added to maintain an equivalent system. This couplemoment is determined by taking the moment of F about B. Since M isactually a free vector, it can act at any point on the stick. In both cases thesystems are equivalent which causes a downward force F and clockwisecouple moment M = Fd to be felt at the grip.
M = Fd
F F
F!FAB
(a)
AB
F
(b) (c)
Fig. 4–34
F F
!FA
d
(a)
FF
m " Fd
(b) (c)
Fig. 4–35
160 CHAPTER 4 FORCE SYSTEM RESULTANTS
4
4.7 Simplification of a Force and CoupleSystem
Sometimes it is convenient to reduce a system of forces and couple momentsacting on a body to a simpler form by replacing it with an equivalent system,consisting of a single resultant force acting at a specific point and a resultantcouple moment.A system is equivalent if the external effects it produces ona body are the same as those caused by the original force and couplemoment system. In this context, the external effects of a system refer to thetranslating and rotating motion of the body if the body is free to move, or itrefers to the reactive forces at the supports if the body is held fixed.
For example, consider holding the stick in Fig. 4–34a, which issubjected to the force F at point A. If we attach a pair of equal butopposite forces F and –F at point B, which is on the line of action of F,Fig. 4–34b, we observe that –F at B and F at A will cancel each other,leaving only F at B, Fig. 4–34c. Force F has now been moved from A to Bwithout modifying its external effects on the stick; i.e., the reaction at thegrip remains the same. This demonstrates the principle of transmissibility,which states that a force acting on a body (stick) is a sliding vector sinceit can be applied at any point along its line of action.
We can also use the above procedure to move a force to a point that is noton the line of action of the force. If F is applied perpendicular to the stick, asin Fig. 4–35a, then we can attach a pair of equal but opposite forces F and –Fto B, Fig. 4–35b. Force F is now applied at B, and the other two forces, F at Aand –F at B, form a couple that produces the couple moment ,Fig. 4–35c. Therefore, the force F can be moved from A to B provided acouple moment M is added to maintain an equivalent system. This couplemoment is determined by taking the moment of F about B. Since M isactually a free vector, it can act at any point on the stick. In both cases thesystems are equivalent which causes a downward force F and clockwisecouple moment M = Fd to be felt at the grip.
M = Fd
F F
F!FAB
(a)
AB
F
(b) (c)
Fig. 4–34
F F
!FA
d
(a)
FF
m " Fd
(b) (c)
Fig. 4–35
Quando o ponto de apoio não está na linha de ação da força
As forças F em A e -F em B formam um binário que produz o momento M=F.d.
Portanto, a força F pode ser movida de A para B desde que seja adicionado um momento M para manter o sistema equivalente. Este momento é calculado tomando-se a ação de F em relação ao ponto B.
Como M é um vetor livre ele pode atuar em qualquer ponto do bastão.

Sistema de forças e de momentos binários4.7 SIMPLIFICATION OF A FORCE AND COUPLE SYSTEM 161
4
System of Forces and Couple Moments. Using the abovemethod, a system of several forces and couple moments acting on abody can be reduced to an equivalent single resultant force acting at apoint O and a resultant couple moment. For example, in Fig. 4–36a, O isnot on the line of action of , and so this force can be moved to pointO provided a couple moment is added to the body.Similarly, the couple moment should be added to thebody when we move to point O. Finally, since the couple moment Mis a free vector, it can just be moved to point O. By doing this, we obtainthe equivalent system shown in Fig. 4–36b, which produces the sameexternal effects (support reactions) on the body as that of the force andcouple system shown in Fig. 4–36a. If we sum the forces and couplemoments, we obtain the resultant force and the resultantcouple moment Fig. 4–36c.
Notice that is independent of the location of point O; however,depends upon this location since the moments and aredetermined using the position vectors and Also note that isa free vector and can act at any point on the body, although point O isgenerally chosen as its point of application.
We can generalize the above method of reducing a force and couplesystem to an equivalent resultant force acting at point O and aresultant couple moment by using the following two equations.
(4–17)
The first equation states that the resultant force of the system isequivalent to the sum of all the forces; and the second equation statesthat the resultant couple moment of the system is equivalent to the sumof all the couple moments plus the moments of all the forces about point O. If the force system lies in the x–y plane and any couplemoments are perpendicular to this plane, then the above equationsreduce to the following three scalar equations.
©MO©M
FR = ©F
(MR)O = ©MO + ©M
(MR)O
FR
(MR)Or2.r1
M2M1
(MR)OFR
(MR)O = M + M1 + M2,FR = F1 + F2
F2
M2 = r2 * F2
M1 = r1 * FF1
O
F1
(a)
F2
r2
r1
M
(b)
O(c)
!
O
F1
F2
M
M2 ! r2 " F2
M1 ! r1 " F1
FR
MRO
!
u
Fig. 4–36
(4–18)
Here the resultant force is determined from the vector sum of its twocomponents and (FR)y.(FR)x
(FR)x = ©Fx
(FR)y = ©Fy
(MR)O = ©MO + ©M
4.7
SIM
PLIF
ICAT
ION
OF
AFO
RCE
AN
DC
OU
PLE
SYST
EM1
61
4
Syst
em o
f Fo
rces
and
Cou
ple
Mom
ents
.U
sing
the
abo
ve
met
hod,
a sy
stem
of
seve
ral
forc
es a
nd c
oupl
e m
omen
ts a
ctin
g on
a
body
can
be
redu
ced
to a
n eq
uiva
lent
sin
gle
resu
ltan
t fo
rce
acti
ng a
t a
poin
tOan
d a
resu
ltan
t cou
ple
mom
ent.
For
exam
ple,
in F
ig.4
–36a
,Ois
not
on t
he li
ne o
f ac
tion
of
,and
so
this
for
ce c
an b
e m
oved
to
poin
t
Opr
ovid
ed a
cou
ple
mom
ent
is a
dded
to
the
body
.
Sim
ilarl
y,th
e co
uple
mom
ent
shou
ld b
e ad
ded
to t
he
body
whe
n w
e m
ove
to p
oint
O.F
inal
ly,s
ince
the
coup
le m
omen
t M
is a
free
vec
tor,
it c
an ju
st b
e m
oved
to p
oint
O.B
y do
ing
this
,we
obta
in
the
equi
vale
nt s
yste
m s
how
n in
Fig
.4–3
6b,w
hich
pro
duce
s th
e sa
me
exte
rnal
eff
ects
(su
ppor
t rea
ctio
ns)
on th
e bo
dy a
s th
at o
f the
forc
e an
d
coup
le s
yste
m s
how
n in
Fig
.4–3
6a.I
f w
e su
m t
he f
orce
s an
d co
uple
mom
ents
,we
obta
in th
e re
sult
ant f
orce
an
d th
e re
sult
ant
coup
le m
omen
t Fi
g.4–
36c.
Not
ice
that
is
inde
pend
ent o
f the
loca
tion
of p
oint
O;h
owev
er,
depe
nds
upon
th
is
loca
tion
sinc
e th
e m
omen
ts
and
are
dete
rmin
ed u
sing
the
posi
tion
vect
ors
and
Als
o no
te th
atis
a fr
ee v
ecto
r an
d ca
n ac
t at
any
poi
nton
the
bod
y,al
thou
gh p
oint
Ois
gene
rally
cho
sen
as it
s po
int o
f app
licat
ion.
We
can
gene
raliz
e th
e ab
ove
met
hod
of r
educ
ing
a fo
rce
and
coup
le
syst
em t
o an
equ
ival
ent
resu
ltan
t fo
rce
acti
ng a
t po
int
Oan
d a
resu
ltan
t cou
ple
mom
ent
by u
sing
the
follo
win
g tw
o eq
uati
ons.
(4–1
7)
The
fir
st e
quat
ion
stat
es t
hat
the
resu
ltant
for
ce o
f th
e sy
stem
is
equi
vale
nt t
o th
e su
m o
f al
l th
e fo
rces
;and
the
sec
ond
equa
tion
stat
es
that
the
resu
ltant
cou
ple
mom
ent o
f the
sys
tem
is e
quiv
alen
t to
the
sum
of a
ll th
e co
uple
mom
ents
pl
us th
e m
omen
ts o
f all
the
forc
es
abou
t po
int
O.I
f th
e fo
rce
syst
em li
es in
the
x–y
plan
e an
d an
y co
uple
mom
ents
are
per
pend
icul
ar t
o th
is p
lane
,th
en t
he a
bove
equ
atio
ns
redu
ce to
the
follo
win
g th
ree
scal
ar e
quat
ions
.
©M
O©
MF R=
©F
(MR
) O=
©M
O+
©M
(MR
) OF R
(MR
) Or 2
.r 1
M2
M1
(MR
) OF R
(MR
) O=
M+
M1+
M2,F R
=F 1
+F 2
F 2M
2=
r 2*
F 2M
1=
r 1*
FF 1
O
F 1
(a)
F 2
r 2
r 1
M
(b)
O(c
)
!
O
F 1
F 2
M
M2
!r 2
"F 2
M1
!r 1
"F 1
F R
MR
O
!
u
Fig.
4–36
(4–1
8)
Her
e th
e re
sulta
nt f
orce
is
dete
rmin
ed f
rom
the
vec
tor
sum
of
its t
wo
com
pone
nts
and
(FR
) y.
(FR
) x
(FR
) x=
©F x
(FR
) y=
©F y
(MR
) O=
©M
O+
©M
4.7 SIMPLIFICATION OF A FORCE AND COUPLE SYSTEM 161
4
System of Forces and Couple Moments. Using the abovemethod, a system of several forces and couple moments acting on abody can be reduced to an equivalent single resultant force acting at apoint O and a resultant couple moment. For example, in Fig. 4–36a, O isnot on the line of action of , and so this force can be moved to pointO provided a couple moment is added to the body.Similarly, the couple moment should be added to thebody when we move to point O. Finally, since the couple moment Mis a free vector, it can just be moved to point O. By doing this, we obtainthe equivalent system shown in Fig. 4–36b, which produces the sameexternal effects (support reactions) on the body as that of the force andcouple system shown in Fig. 4–36a. If we sum the forces and couplemoments, we obtain the resultant force and the resultantcouple moment Fig. 4–36c.
Notice that is independent of the location of point O; however,depends upon this location since the moments and aredetermined using the position vectors and Also note that isa free vector and can act at any point on the body, although point O isgenerally chosen as its point of application.
We can generalize the above method of reducing a force and couplesystem to an equivalent resultant force acting at point O and aresultant couple moment by using the following two equations.
(4–17)
The first equation states that the resultant force of the system isequivalent to the sum of all the forces; and the second equation statesthat the resultant couple moment of the system is equivalent to the sumof all the couple moments plus the moments of all the forces about point O. If the force system lies in the x–y plane and any couplemoments are perpendicular to this plane, then the above equationsreduce to the following three scalar equations.
©MO©M
FR = ©F
(MR)O = ©MO + ©M
(MR)O
FR
(MR)Or2.r1
M2M1
(MR)OFR
(MR)O = M + M1 + M2,FR = F1 + F2
F2
M2 = r2 * F2
M1 = r1 * FF1
O
F1
(a)
F2
r2
r1
M
(b)
O(c)
!
O
F1
F2
M
M2 ! r2 " F2
M1 ! r1 " F1
FR
MRO
!
u
Fig. 4–36
(4–18)
Here the resultant force is determined from the vector sum of its twocomponents and (FR)y.(FR)x
(FR)x = ©Fx
(FR)y = ©Fy
(MR)O = ©MO + ©M
4.7 SIMPLIFICATION OF A FORCE AND COUPLE SYSTEM 161
4
System of Forces and Couple Moments. Using the abovemethod, a system of several forces and couple moments acting on abody can be reduced to an equivalent single resultant force acting at apoint O and a resultant couple moment. For example, in Fig. 4–36a, O isnot on the line of action of , and so this force can be moved to pointO provided a couple moment is added to the body.Similarly, the couple moment should be added to thebody when we move to point O. Finally, since the couple moment Mis a free vector, it can just be moved to point O. By doing this, we obtainthe equivalent system shown in Fig. 4–36b, which produces the sameexternal effects (support reactions) on the body as that of the force andcouple system shown in Fig. 4–36a. If we sum the forces and couplemoments, we obtain the resultant force and the resultantcouple moment Fig. 4–36c.
Notice that is independent of the location of point O; however,depends upon this location since the moments and aredetermined using the position vectors and Also note that isa free vector and can act at any point on the body, although point O isgenerally chosen as its point of application.
We can generalize the above method of reducing a force and couplesystem to an equivalent resultant force acting at point O and aresultant couple moment by using the following two equations.
(4–17)
The first equation states that the resultant force of the system isequivalent to the sum of all the forces; and the second equation statesthat the resultant couple moment of the system is equivalent to the sumof all the couple moments plus the moments of all the forces about point O. If the force system lies in the x–y plane and any couplemoments are perpendicular to this plane, then the above equationsreduce to the following three scalar equations.
©MO©M
FR = ©F
(MR)O = ©MO + ©M
(MR)O
FR
(MR)Or2.r1
M2M1
(MR)OFR
(MR)O = M + M1 + M2,FR = F1 + F2
F2
M2 = r2 * F2
M1 = r1 * FF1
O
F1
(a)
F2
r2
r1
M
(b)
O(c)
!
O
F1
F2
M
M2 ! r2 " F2
M1 ! r1 " F1
FR
MRO
!
u
Fig. 4–36
(4–18)
Here the resultant force is determined from the vector sum of its twocomponents and (FR)y.(FR)x
(FR)x = ©Fx
(FR)y = ©Fy
(MR)O = ©MO + ©M
4.7 SIMPLIFICATION OF A FORCE AND COUPLE SYSTEM 161
4
System of Forces and Couple Moments. Using the abovemethod, a system of several forces and couple moments acting on abody can be reduced to an equivalent single resultant force acting at apoint O and a resultant couple moment. For example, in Fig. 4–36a, O isnot on the line of action of , and so this force can be moved to pointO provided a couple moment is added to the body.Similarly, the couple moment should be added to thebody when we move to point O. Finally, since the couple moment Mis a free vector, it can just be moved to point O. By doing this, we obtainthe equivalent system shown in Fig. 4–36b, which produces the sameexternal effects (support reactions) on the body as that of the force andcouple system shown in Fig. 4–36a. If we sum the forces and couplemoments, we obtain the resultant force and the resultantcouple moment Fig. 4–36c.
Notice that is independent of the location of point O; however,depends upon this location since the moments and aredetermined using the position vectors and Also note that isa free vector and can act at any point on the body, although point O isgenerally chosen as its point of application.
We can generalize the above method of reducing a force and couplesystem to an equivalent resultant force acting at point O and aresultant couple moment by using the following two equations.
(4–17)
The first equation states that the resultant force of the system isequivalent to the sum of all the forces; and the second equation statesthat the resultant couple moment of the system is equivalent to the sumof all the couple moments plus the moments of all the forces about point O. If the force system lies in the x–y plane and any couplemoments are perpendicular to this plane, then the above equationsreduce to the following three scalar equations.
©MO©M
FR = ©F
(MR)O = ©MO + ©M
(MR)O
FR
(MR)Or2.r1
M2M1
(MR)OFR
(MR)O = M + M1 + M2,FR = F1 + F2
F2
M2 = r2 * F2
M1 = r1 * FF1
O
F1
(a)
F2
r2
r1
M
(b)
O(c)
!
O
F1
F2
M
M2 ! r2 " F2
M1 ! r1 " F1
FR
MRO
!
u
Fig. 4–36
(4–18)
Here the resultant force is determined from the vector sum of its twocomponents and (FR)y.(FR)x
(FR)x = ©Fx
(FR)y = ©Fy
(MR)O = ©MO + ©M

Se as forças estiverem no plano xy e os momentos perpendiculares a este plano as equações anteriores reduzem-se à
4.7 SIMPLIFICATION OF A FORCE AND COUPLE SYSTEM 161
4
System of Forces and Couple Moments. Using the abovemethod, a system of several forces and couple moments acting on abody can be reduced to an equivalent single resultant force acting at apoint O and a resultant couple moment. For example, in Fig. 4–36a, O isnot on the line of action of , and so this force can be moved to pointO provided a couple moment is added to the body.Similarly, the couple moment should be added to thebody when we move to point O. Finally, since the couple moment Mis a free vector, it can just be moved to point O. By doing this, we obtainthe equivalent system shown in Fig. 4–36b, which produces the sameexternal effects (support reactions) on the body as that of the force andcouple system shown in Fig. 4–36a. If we sum the forces and couplemoments, we obtain the resultant force and the resultantcouple moment Fig. 4–36c.
Notice that is independent of the location of point O; however,depends upon this location since the moments and aredetermined using the position vectors and Also note that isa free vector and can act at any point on the body, although point O isgenerally chosen as its point of application.
We can generalize the above method of reducing a force and couplesystem to an equivalent resultant force acting at point O and aresultant couple moment by using the following two equations.
(4–17)
The first equation states that the resultant force of the system isequivalent to the sum of all the forces; and the second equation statesthat the resultant couple moment of the system is equivalent to the sumof all the couple moments plus the moments of all the forces about point O. If the force system lies in the x–y plane and any couplemoments are perpendicular to this plane, then the above equationsreduce to the following three scalar equations.
©MO©M
FR = ©F
(MR)O = ©MO + ©M
(MR)O
FR
(MR)Or2.r1
M2M1
(MR)OFR
(MR)O = M + M1 + M2,FR = F1 + F2
F2
M2 = r2 * F2
M1 = r1 * FF1
O
F1
(a)
F2
r2
r1
M
(b)
O(c)
!
O
F1
F2
M
M2 ! r2 " F2
M1 ! r1 " F1
FR
MRO
!
u
Fig. 4–36
(4–18)
Here the resultant force is determined from the vector sum of its twocomponents and (FR)y.(FR)x
(FR)x = ©Fx
(FR)y = ©Fy
(MR)O = ©MO + ©M
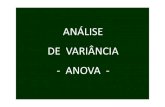
Exemplo 1 (*): Substitua as forças e os sistemas binários pelos sistemas resultantes equivalentes.EXAMPLE 4.14
4.7 SIMPLIFICATION OF A FORCE AND COUPLE SYSTEM 163
4
0.2 m 0.3 m
4 kN 5 kN
3 kN
O
(a)
543
30!
0.1 m
0.1 m
Fig. 4–37
(c)
(FR)y " 6.50 kN
(MR)O " 2.46 kN #m
(FR)x " 5.598 kN
FR
uO
Replace the force and couple system shown in Fig. 4–37a by anequivalent resultant force and couple moment acting at point O.
Using the Pythagorean theorem, Fig. 4–37c, the magnitude of isFR
Its direction is
Ans.
Moment Summation. The moments of 3 kN and 5 kN aboutpoint O will be determined using their x and y components. Referringto Fig. 4–37b, we have
u = tan-1a (FR)y
(FR)xb = tan-1a 6.50 kN
5.598 kNb = 49.3°
u
This clockwise moment is shown in Fig. 4–37c.
NOTE: Realize that the resultant force and couple moment in Fig. 4–37c will produce the same external effects or reactions at thesupports as those produced by the force system, Fig 4–37a.
a
b Ans.= -2.46 kN # m = 2.46 kN # m- A45 B (5 kN) (0.5 m) - (4 kN)(0.2 m)
(MR)O = (3 kN)sin 30°(0.2 m) - (3 kN)cos 30°(0.1 m) + A35 B (5 kN) (0.1 m) + (MR)O = ©MO;
SOLUTIONForce Summation. The 3 kN and 5 kN forces are resolved into theirx and y components as shown in Fig. 4–37b. We have
= -6.50 kN = 6.50 kNT(FR)y = (3 kN)sin 30° - A45 B (5 kN) - 4 kN+ c(FR)y = ©Fy;
= 5.598 kN:(FR)x = (3 kN)cos 30° + A35 B (5 kN):+ (FR)x = ©Fx;
Ans.FR = 21FR2x2 + 1FR2y2 = 215.598 kN22 + 16.50 kN22 = 8.58 kN
(3 kN)cos 30!
(3 kN)sin 30!
y
x
0.2 m 0.3 m
4 kN
(5 kN)
O
(b)
45
35
(5 kN)
0.1 m
0.1 m

Exemplo 2: A estrutura abaixo está submetida a um momento de binário M e às forças F1 e F2. Substitua-os por um sistema equivalente tendo o ponto O como referência.
4.7 SIMPLIFICATION OF A FORCE AND COUPLE SYSTEM 165
4
The structural member is subjected to a couple moment M andforces and in Fig. 4–39a. Replace this system by an equivalentresultant force and couple moment acting at its base, point O.
SOLUTION (VECTOR ANALYSIS)The three-dimensional aspects of the problem can be simplified byusing a Cartesian vector analysis. Expressing the forces and couplemoment as Cartesian vectors, we have
Force Summation.
Ans.
Moment Summation.
Ans.
The results are shown in Fig. 4–39b.
= 5-166i - 650j + 300k6 N # m= 1-400j + 300k2 + 102 + 1-166.4i - 249.6j2
MRO= 1- 400j + 300k2 + 11k2 * 1- 800k2+ 3 i j k
-0.15 0.1 1-249.6 166.4 0
3MRO= M + rC * F1 + rB * F2
MRO= ©M + ©MO
= 5-250i + 166j - 800k6 NFR = F1 + F2 = -800k - 249.6i + 166.4jFR = ©F;
M = -500 A45 B j + 500 A35 Bk = 5-400j + 300k6 N # m
= 300 N c {-0.15i + 0.1j} m21-0.15 m22 + 10.1 m22 d = 5-249.6i + 166.4j6 N= 1300 N2a rCB
rCBb
F2 = 1300 N2uCB
F1 = 5-800k6 N
F2F1
EXAMPLE 4.16
F1 ! 800 N0.1 m
F2 ! 300 N
0.15 m
rB
1 m
y
C
53
4
M ! 500 N " m
O
x
(a)
z
rC
B
Fig. 4–39
yx
z
MRO
FR
(b)
O
4.7 SIMPLIFICATION OF A FORCE AND COUPLE SYSTEM 165
4
The structural member is subjected to a couple moment M andforces and in Fig. 4–39a. Replace this system by an equivalentresultant force and couple moment acting at its base, point O.
SOLUTION (VECTOR ANALYSIS)The three-dimensional aspects of the problem can be simplified byusing a Cartesian vector analysis. Expressing the forces and couplemoment as Cartesian vectors, we have
Force Summation.
Ans.
Moment Summation.
Ans.
The results are shown in Fig. 4–39b.
= 5-166i - 650j + 300k6 N # m= 1-400j + 300k2 + 102 + 1-166.4i - 249.6j2
MRO= 1- 400j + 300k2 + 11k2 * 1- 800k2+ 3 i j k
-0.15 0.1 1-249.6 166.4 0
3MRO= M + rC * F1 + rB * F2
MRO= ©M + ©MO
= 5-250i + 166j - 800k6 NFR = F1 + F2 = -800k - 249.6i + 166.4jFR = ©F;
M = -500 A45 B j + 500 A35 Bk = 5-400j + 300k6 N # m
= 300 N c {-0.15i + 0.1j} m21-0.15 m22 + 10.1 m22 d = 5-249.6i + 166.4j6 N= 1300 N2a rCB
rCBb
F2 = 1300 N2uCB
F1 = 5-800k6 N
F2F1
EXAMPLE 4.16
F1 ! 800 N0.1 m
F2 ! 300 N
0.15 m
rB
1 m
y
C
53
4
M ! 500 N " m
O
x
(a)
z
rC
B
Fig. 4–39
yx
z
MRO
FR
(b)
O
Até aqui somente...

• Um corpo pode estar sujeito a um carregamento que está distribuído sobre uma superfície
• Exemplos: pressão do vento sobre um outdoor, pressão da água sobre um tanque etc.
• Pressão indica a intendisidade da carga.
• No SI. N/m2=Pa
Redução de um carregamento distribuído simples

Carregamento uniforme junto a um eixo.4.9 REDUCTION OF A SIMPLE DISTRIBUTED LOADING 183
4
4.9 Reduction of a Simple DistributedLoading
Sometimes, a body may be subjected to a loading that is distributed overits surface. For example, the pressure of the wind on the face of a sign, thepressure of water within a tank, or the weight of sand on the floor of astorage container, are all distributed loadings.The pressure exerted at eachpoint on the surface indicates the intensity of the loading. It is measuredusing pascals Pa (or ) in SI units or in the U.S. Customarysystem.
Uniform Loading Along a Single Axis. The most commontype of distributed loading encountered in engineering practice isgenerally uniform along a single axis.* For example, consider the beam(or plate) in Fig. 4–48a that has a constant width and is subjected to apressure loading that varies only along the x axis. This loading can bedescribed by the function . It contains only one variablex, and for this reason, we can also represent it as a coplanar distributedload. To do so, we multiply the loading function by the width b m ofthe beam, so that , Fig. 4-48b. Using the methods ofSec. 4.8, we can replace this coplanar parallel force system with asingle equivalent resultant force acting at a specific location on thebeam, Fig. 4–48c.
Magnitude of Resultant Force. From Eq. 4–17the magnitude of is equivalent to the sum of all the forces in thesystem. In this case integration must be used since there is an infinitenumber of parallel forces dF acting on the beam, Fig. 4–48b. Since dF isacting on an element of length dx, and w(x) is a force per unit length,then In other words, the magnitude of dF isdetermined from the colored differential area dA under the loadingcurve. For the entire length L,
(4–19)
Therefore, the magnitude of the resultant force is equal to the total area Aunder the loading diagram, Fig. 4–48c.
FR = LLw1x2 dx = LA
dA = A+ TFR = ©F;
dF = w1x2 dx = dA.
FR
1FR = ©F2,FR
w(x) = p(x)b N/m
p = p(x) N/m2
lb/ft2N/m2
*The more general case of a nonuniform surface loading acting on a body is consideredin Sec. 9.5.
p
L
p ! p(x)
x
(a)
C
x
FR
b
Fig. 4–48
x
w
O
Lx
dx
dF ! dAw ! w(x)
(b)
x
w
O
C A
Lx
FR
(c)
dF = p(x)bdx
= w(x)dx
F =
Z
Lw(x)dx =
Z
Ada = Area
4.9 REDUCTION OF A SIMPLE DISTRIBUTED LOADING 183
4
4.9 Reduction of a Simple DistributedLoading
Sometimes, a body may be subjected to a loading that is distributed overits surface. For example, the pressure of the wind on the face of a sign, thepressure of water within a tank, or the weight of sand on the floor of astorage container, are all distributed loadings.The pressure exerted at eachpoint on the surface indicates the intensity of the loading. It is measuredusing pascals Pa (or ) in SI units or in the U.S. Customarysystem.
Uniform Loading Along a Single Axis. The most commontype of distributed loading encountered in engineering practice isgenerally uniform along a single axis.* For example, consider the beam(or plate) in Fig. 4–48a that has a constant width and is subjected to apressure loading that varies only along the x axis. This loading can bedescribed by the function . It contains only one variablex, and for this reason, we can also represent it as a coplanar distributedload. To do so, we multiply the loading function by the width b m ofthe beam, so that , Fig. 4-48b. Using the methods ofSec. 4.8, we can replace this coplanar parallel force system with asingle equivalent resultant force acting at a specific location on thebeam, Fig. 4–48c.
Magnitude of Resultant Force. From Eq. 4–17the magnitude of is equivalent to the sum of all the forces in thesystem. In this case integration must be used since there is an infinitenumber of parallel forces dF acting on the beam, Fig. 4–48b. Since dF isacting on an element of length dx, and w(x) is a force per unit length,then In other words, the magnitude of dF isdetermined from the colored differential area dA under the loadingcurve. For the entire length L,
(4–19)
Therefore, the magnitude of the resultant force is equal to the total area Aunder the loading diagram, Fig. 4–48c.
FR = LLw1x2 dx = LA
dA = A+ TFR = ©F;
dF = w1x2 dx = dA.
FR
1FR = ©F2,FR
w(x) = p(x)b N/m
p = p(x) N/m2
lb/ft2N/m2
*The more general case of a nonuniform surface loading acting on a body is consideredin Sec. 9.5.
p
L
p ! p(x)
x
(a)
C
x
FR
b
Fig. 4–48
x
w
O
Lx
dx
dF ! dAw ! w(x)
(b)
x
w
O
C A
Lx
FR
(c)
A intensidade da força resultante é igual à area total A sob o diagrama de carregamento.

Posição da força resultante
• Como dF produz um momento de força dM=xdF=xw(x)dx em relação ao ponto O, para o comprimento inteiro podemos escrever.
4.9 REDUCTION OF A SIMPLE DISTRIBUTED LOADING 183
4
4.9 Reduction of a Simple DistributedLoading
Sometimes, a body may be subjected to a loading that is distributed overits surface. For example, the pressure of the wind on the face of a sign, thepressure of water within a tank, or the weight of sand on the floor of astorage container, are all distributed loadings.The pressure exerted at eachpoint on the surface indicates the intensity of the loading. It is measuredusing pascals Pa (or ) in SI units or in the U.S. Customarysystem.
Uniform Loading Along a Single Axis. The most commontype of distributed loading encountered in engineering practice isgenerally uniform along a single axis.* For example, consider the beam(or plate) in Fig. 4–48a that has a constant width and is subjected to apressure loading that varies only along the x axis. This loading can bedescribed by the function . It contains only one variablex, and for this reason, we can also represent it as a coplanar distributedload. To do so, we multiply the loading function by the width b m ofthe beam, so that , Fig. 4-48b. Using the methods ofSec. 4.8, we can replace this coplanar parallel force system with asingle equivalent resultant force acting at a specific location on thebeam, Fig. 4–48c.
Magnitude of Resultant Force. From Eq. 4–17the magnitude of is equivalent to the sum of all the forces in thesystem. In this case integration must be used since there is an infinitenumber of parallel forces dF acting on the beam, Fig. 4–48b. Since dF isacting on an element of length dx, and w(x) is a force per unit length,then In other words, the magnitude of dF isdetermined from the colored differential area dA under the loadingcurve. For the entire length L,
(4–19)
Therefore, the magnitude of the resultant force is equal to the total area Aunder the loading diagram, Fig. 4–48c.
FR = LLw1x2 dx = LA
dA = A+ TFR = ©F;
dF = w1x2 dx = dA.
FR
1FR = ©F2,FR
w(x) = p(x)b N/m
p = p(x) N/m2
lb/ft2N/m2
*The more general case of a nonuniform surface loading acting on a body is consideredin Sec. 9.5.
p
L
p ! p(x)
x
(a)
C
x
FR
b
Fig. 4–48
x
w
O
Lx
dx
dF ! dAw ! w(x)
(b)
x
w
O
C A
Lx
FR
(c)
�x̄F = �Z
Lxw(x)dx
x̄ =
RL xw(x)dxRL w(x)dx

x̄ =
RA xdaRA da
x̄ =
RL xw(x)dxRL w(x)dx
Esta coordenada localiza o centro geométrico ou centróide da área sob o carregamento distribuído.
Técnicas de integração para determinar a posição do centróide encontram-se no Capítulo 9.
Uma vez que a posição é determinada, a força resultante passa necessariamente por este ponto na superfície da viga. A força resultante neste caso possui uma intensidade igual ao volume sob a curva de carregamento p=p(x) e uma linha de ação que passa pelo centro geométrico (centróide) deste volume.

Exemplo 1: Determine a intensidade da força resultante equivalente que age sobre o eixo da figura abaixo.
4.9 REDUCTION OF A SIMPLE DISTRIBUTED LOADING 185
4
EXAMPLE 4.21
Determine the magnitude and location of the equivalent resultantforce acting on the shaft in Fig. 4–49a.
w ! (60 x2)N/m
(a)
dA ! w dx
2 mx dx
Ox
240 N/m
w
Fig. 4–49
(b)
Ox
w
C
x ! 1.5 m
FR ! 160 N
SOLUTIONSince is given, this problem will be solved by integration.
The differential element has an area ApplyingEq. 4–19,
Ans.
The location of measured from O, Fig. 4–49b, is determined fromEq. 4–20.
Ans.
NOTE: These results can be checked by using the table on the insideback cover, where it is shown that for an exparabolic area of length a,height b, and shape shown in Fig. 4–49a, we have
= 3412 m2 = 1.5 mA = ab
3=
2 m1240 N>m23
= 160 N and x = 34
a
= 1.5 m
x = LAx dA
LAdA
= L2 m
0x160x22 dx
160 N=
60¢x4
4≤ `
0
2 m
160 N=
60¢24
4- 04
4≤
160 N
FRx
= 160 N
FR = LAdA = L
2 m
060x2 dx = 60¢x3
3≤ `
0
2 m
= 60¢23
3- 03
3≤+ T FR = ©F;
dA = w dx = 60x2 dx.
w = w1x2
4.9 REDUCTION OF A SIMPLE DISTRIBUTED LOADING 185
4
EXAMPLE 4.21
Determine the magnitude and location of the equivalent resultantforce acting on the shaft in Fig. 4–49a.
w ! (60 x2)N/m
(a)
dA ! w dx
2 mx dx
Ox
240 N/m
w
Fig. 4–49
(b)
Ox
w
C
x ! 1.5 m
FR ! 160 N
SOLUTIONSince is given, this problem will be solved by integration.
The differential element has an area ApplyingEq. 4–19,
Ans.
The location of measured from O, Fig. 4–49b, is determined fromEq. 4–20.
Ans.
NOTE: These results can be checked by using the table on the insideback cover, where it is shown that for an exparabolic area of length a,height b, and shape shown in Fig. 4–49a, we have
= 3412 m2 = 1.5 mA = ab
3=
2 m1240 N>m23
= 160 N and x = 34
a
= 1.5 m
x = LAx dA
LAdA
= L2 m
0x160x22 dx
160 N=
60¢x4
4≤ `
0
2 m
160 N=
60¢24
4- 04
4≤
160 N
FRx
= 160 N
FR = LAdA = L
2 m
060x2 dx = 60¢x3
3≤ `
0
2 m
= 60¢23
3- 03
3≤+ T FR = ©F;
dA = w dx = 60x2 dx.
w = w1x2

Exemplo 2: Um carregamento distribuído de p=800x Pa atua sobre a superfície superior da viga mostrada abaixo. Determine a intensidade e a posição da força resultante equivalente.
186 CHAPTER 4 FORCE SYSTEM RESULTANTS
4
A distributed loading of Pa acts over the top surface ofthe beam shown in Fig. 4–50a. Determine the magnitude and locationof the equivalent resultant force.
p = (800x)
EXAMPLE 4.22
(a)
p
7200 Pa
x
9 m
0.2 m
y
p = 800x Pa
x
Fig. 4–50
w ! 160x N/m
(b)
9 m
x
w 1440 N/m
x
C
FR ! 6.48 kN
3 mx ! 6 m
(c)
SOLUTIONSince the loading intensity is uniform along the width of the beam(the y axis), the loading can be viewed in two dimensions as shown inFig. 4–50b. Here
At note that Although we may again applyEqs. 4–19 and 4–20 as in the previous example, it is simpler to use thetable on the inside back cover.
The magnitude of the resultant force is equivalent to the area of thetriangle.
Ans.
The line of action of passes through the centroid C of this triangle.Hence,
Ans.
The results are shown in Fig. 4–50c.
NOTE: We may also view the resultant as acting through thecentroid of the volume of the loading diagram in Fig. 4–50a.Hence intersects the x–y plane at the point (6 m, 0). Furthermore,the magnitude of is equal to the volume under the loadingdiagram; i.e.,
Ans.FR = V = 1217200 N>m2219 m210.2 m2 = 6.48 kN
FR
FR
p = p1x2FR
x = 9 m - 1319 m2 = 6 m
FR
FR = 1219 m211440 N>m2 = 6480 N = 6.48 kN
w = 1440 N>m.x = 9 m,
= 1160x2 N>mw = 1800x N>m2210.2 m2
186 CHAPTER 4 FORCE SYSTEM RESULTANTS
4
A distributed loading of Pa acts over the top surface ofthe beam shown in Fig. 4–50a. Determine the magnitude and locationof the equivalent resultant force.
p = (800x)
EXAMPLE 4.22
(a)
p
7200 Pa
x
9 m
0.2 m
y
p = 800x Pa
x
Fig. 4–50
w ! 160x N/m
(b)
9 m
x
w 1440 N/m
x
C
FR ! 6.48 kN
3 mx ! 6 m
(c)
SOLUTIONSince the loading intensity is uniform along the width of the beam(the y axis), the loading can be viewed in two dimensions as shown inFig. 4–50b. Here
At note that Although we may again applyEqs. 4–19 and 4–20 as in the previous example, it is simpler to use thetable on the inside back cover.
The magnitude of the resultant force is equivalent to the area of thetriangle.
Ans.
The line of action of passes through the centroid C of this triangle.Hence,
Ans.
The results are shown in Fig. 4–50c.
NOTE: We may also view the resultant as acting through thecentroid of the volume of the loading diagram in Fig. 4–50a.Hence intersects the x–y plane at the point (6 m, 0). Furthermore,the magnitude of is equal to the volume under the loadingdiagram; i.e.,
Ans.FR = V = 1217200 N>m2219 m210.2 m2 = 6.48 kN
FR
FR
p = p1x2FR
x = 9 m - 1319 m2 = 6 m
FR
FR = 1219 m211440 N>m2 = 6480 N = 6.48 kN
w = 1440 N>m.x = 9 m,
= 1160x2 N>mw = 1800x N>m2210.2 m2
186 CHAPTER 4 FORCE SYSTEM RESULTANTS
4
A distributed loading of Pa acts over the top surface ofthe beam shown in Fig. 4–50a. Determine the magnitude and locationof the equivalent resultant force.
p = (800x)
EXAMPLE 4.22
(a)
p
7200 Pa
x
9 m
0.2 m
y
p = 800x Pa
x
Fig. 4–50
w ! 160x N/m
(b)
9 m
x
w 1440 N/m
x
C
FR ! 6.48 kN
3 mx ! 6 m
(c)
SOLUTIONSince the loading intensity is uniform along the width of the beam(the y axis), the loading can be viewed in two dimensions as shown inFig. 4–50b. Here
At note that Although we may again applyEqs. 4–19 and 4–20 as in the previous example, it is simpler to use thetable on the inside back cover.
The magnitude of the resultant force is equivalent to the area of thetriangle.
Ans.
The line of action of passes through the centroid C of this triangle.Hence,
Ans.
The results are shown in Fig. 4–50c.
NOTE: We may also view the resultant as acting through thecentroid of the volume of the loading diagram in Fig. 4–50a.Hence intersects the x–y plane at the point (6 m, 0). Furthermore,the magnitude of is equal to the volume under the loadingdiagram; i.e.,
Ans.FR = V = 1217200 N>m2219 m210.2 m2 = 6.48 kN
FR
FR
p = p1x2FR
x = 9 m - 1319 m2 = 6 m
FR
FR = 1219 m211440 N>m2 = 6480 N = 6.48 kN
w = 1440 N>m.x = 9 m,
= 1160x2 N>mw = 1800x N>m2210.2 m2

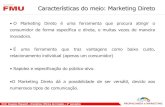
Exemplo 3: O material granular exerce um carregamento distribuído sobre a viga como mostra a figura abaixo. Determine a intensidade e a posição da resultante equivalente dessa carga.
4.9 REDUCTION OF A SIMPLE DISTRIBUTED LOADING 187
4
EXAMPLE 4.23
The granular material exerts the distributed loading on the beam asshown in Fig. 4–51a. Determine the magnitude and location of theequivalent resultant of this load.
SOLUTIONThe area of the loading diagram is a trapezoid, and therefore thesolution can be obtained directly from the area and centroid formulasfor a trapezoid listed on the inside back cover. Since these formulasare not easily remembered, instead we will solve this problem byusing “composite” areas. Here we will divide the trapezoidal loadinginto a rectangular and triangular loading as shown in Fig. 4–51b. Themagnitude of the force represented by each of these loadings is equalto its associated area,
The lines of action of these parallel forces act through the centroid oftheir associated areas and therefore intersect the beam at
The two parallel forces and can be reduced to a single resultantThe magnitude of is
Ans.
We can find the location of with reference to point A, Fig. 4–51band 4–51c. We require
c
Ans.
NOTE: The trapezoidal area in Fig. 4–51a can also be divided intotwo triangular areas as shown in Fig. 4–51d. In this case
and
NOTE: Using these results, show that again and x = 4 ft.FR = 675 lb
x4 = 9 ft - 1319 ft2 = 6 ft
x3 = 1319 ft2 = 3 ft
F4 = 1219 ft2150 lb>ft2 = 225 lb
F3 = 1219 ft21100 lb>ft2 = 450 lb
x = 4 ft
x16752 = 312252 + 4.514502+ MRA= ©MA;
FR
FR = 225 + 450 = 675 lb+ TFR = ©F;
FRFR.F2F1
x2 = 1219 ft2 = 4.5 ft
x1 = 1319 ft2 = 3 ft
F2 = 19 ft2150 lb>ft2 = 450 lb
F1 = 1219 ft2150 lb>ft2 = 225 lb
9 ft
BA
(b)
50 lb/ft
50 lb/ft
F1 F2
x1x2
BA
(c)
FR
x
F3 F4
50 lb/ft
x3
9 ftx4
(d)
100 lb/ftA
100 lb/ft
50 lb/ft
9 ft
B
A
(a)
Fig. 4–51
4.9 REDUCTION OF A SIMPLE DISTRIBUTED LOADING 187
4
EXAMPLE 4.23
The granular material exerts the distributed loading on the beam asshown in Fig. 4–51a. Determine the magnitude and location of theequivalent resultant of this load.
SOLUTIONThe area of the loading diagram is a trapezoid, and therefore thesolution can be obtained directly from the area and centroid formulasfor a trapezoid listed on the inside back cover. Since these formulasare not easily remembered, instead we will solve this problem byusing “composite” areas. Here we will divide the trapezoidal loadinginto a rectangular and triangular loading as shown in Fig. 4–51b. Themagnitude of the force represented by each of these loadings is equalto its associated area,
The lines of action of these parallel forces act through the centroid oftheir associated areas and therefore intersect the beam at
The two parallel forces and can be reduced to a single resultantThe magnitude of is
Ans.
We can find the location of with reference to point A, Fig. 4–51band 4–51c. We require
c
Ans.
NOTE: The trapezoidal area in Fig. 4–51a can also be divided intotwo triangular areas as shown in Fig. 4–51d. In this case
and
NOTE: Using these results, show that again and x = 4 ft.FR = 675 lb
x4 = 9 ft - 1319 ft2 = 6 ft
x3 = 1319 ft2 = 3 ft
F4 = 1219 ft2150 lb>ft2 = 225 lb
F3 = 1219 ft21100 lb>ft2 = 450 lb
x = 4 ft
x16752 = 312252 + 4.514502+ MRA= ©MA;
FR
FR = 225 + 450 = 675 lb+ TFR = ©F;
FRFR.F2F1
x2 = 1219 ft2 = 4.5 ft
x1 = 1319 ft2 = 3 ft
F2 = 19 ft2150 lb>ft2 = 450 lb
F1 = 1219 ft2150 lb>ft2 = 225 lb
9 ft
BA
(b)
50 lb/ft
50 lb/ft
F1 F2
x1x2
BA
(c)
FR
x
F3 F4
50 lb/ft
x3
9 ftx4
(d)
100 lb/ftA
100 lb/ft
50 lb/ft
9 ft
B
A
(a)
Fig. 4–51
4.9 REDUCTION OF A SIMPLE DISTRIBUTED LOADING 187
4
EXAMPLE 4.23
The granular material exerts the distributed loading on the beam asshown in Fig. 4–51a. Determine the magnitude and location of theequivalent resultant of this load.
SOLUTIONThe area of the loading diagram is a trapezoid, and therefore thesolution can be obtained directly from the area and centroid formulasfor a trapezoid listed on the inside back cover. Since these formulasare not easily remembered, instead we will solve this problem byusing “composite” areas. Here we will divide the trapezoidal loadinginto a rectangular and triangular loading as shown in Fig. 4–51b. Themagnitude of the force represented by each of these loadings is equalto its associated area,
The lines of action of these parallel forces act through the centroid oftheir associated areas and therefore intersect the beam at
The two parallel forces and can be reduced to a single resultantThe magnitude of is
Ans.
We can find the location of with reference to point A, Fig. 4–51band 4–51c. We require
c
Ans.
NOTE: The trapezoidal area in Fig. 4–51a can also be divided intotwo triangular areas as shown in Fig. 4–51d. In this case
and
NOTE: Using these results, show that again and x = 4 ft.FR = 675 lb
x4 = 9 ft - 1319 ft2 = 6 ft
x3 = 1319 ft2 = 3 ft
F4 = 1219 ft2150 lb>ft2 = 225 lb
F3 = 1219 ft21100 lb>ft2 = 450 lb
x = 4 ft
x16752 = 312252 + 4.514502+ MRA= ©MA;
FR
FR = 225 + 450 = 675 lb+ TFR = ©F;
FRFR.F2F1
x2 = 1219 ft2 = 4.5 ft
x1 = 1319 ft2 = 3 ft
F2 = 19 ft2150 lb>ft2 = 450 lb
F1 = 1219 ft2150 lb>ft2 = 225 lb
9 ft
BA
(b)
50 lb/ft
50 lb/ft
F1 F2
x1x2
BA
(c)
FR
x
F3 F4
50 lb/ft
x3
9 ftx4
(d)
100 lb/ftA
100 lb/ft
50 lb/ft
9 ft
B
A
(a)
Fig. 4–51
4.9 REDUCTION OF A SIMPLE DISTRIBUTED LOADING 187
4
EXAMPLE 4.23
The granular material exerts the distributed loading on the beam asshown in Fig. 4–51a. Determine the magnitude and location of theequivalent resultant of this load.
SOLUTIONThe area of the loading diagram is a trapezoid, and therefore thesolution can be obtained directly from the area and centroid formulasfor a trapezoid listed on the inside back cover. Since these formulasare not easily remembered, instead we will solve this problem byusing “composite” areas. Here we will divide the trapezoidal loadinginto a rectangular and triangular loading as shown in Fig. 4–51b. Themagnitude of the force represented by each of these loadings is equalto its associated area,
The lines of action of these parallel forces act through the centroid oftheir associated areas and therefore intersect the beam at
The two parallel forces and can be reduced to a single resultantThe magnitude of is
Ans.
We can find the location of with reference to point A, Fig. 4–51band 4–51c. We require
c
Ans.
NOTE: The trapezoidal area in Fig. 4–51a can also be divided intotwo triangular areas as shown in Fig. 4–51d. In this case
and
NOTE: Using these results, show that again and x = 4 ft.FR = 675 lb
x4 = 9 ft - 1319 ft2 = 6 ft
x3 = 1319 ft2 = 3 ft
F4 = 1219 ft2150 lb>ft2 = 225 lb
F3 = 1219 ft21100 lb>ft2 = 450 lb
x = 4 ft
x16752 = 312252 + 4.514502+ MRA= ©MA;
FR
FR = 225 + 450 = 675 lb+ TFR = ©F;
FRFR.F2F1
x2 = 1219 ft2 = 4.5 ft
x1 = 1319 ft2 = 3 ft
F2 = 19 ft2150 lb>ft2 = 450 lb
F1 = 1219 ft2150 lb>ft2 = 225 lb
9 ft
BA
(b)
50 lb/ft
50 lb/ft
F1 F2
x1x2
BA
(c)
FR
x
F3 F4
50 lb/ft
x3
9 ftx4
(d)
100 lb/ftA
100 lb/ft
50 lb/ft
9 ft
B
A
(a)
Fig. 4–51


Simplificações Adicionais para um sistema de forças e binários.
Um sistema de forças pode ser simplificado a um sistema equivalente resultante desde que as linhas de ação de FR e MR0 sejam perpendiculares entre si. Por conta disto, somente sistemas de forças que são concorrentes, paralelas e coplanares podem ser simplificados.
170 CHAPTER 4 FORCE SYSTEM RESULTANTS
4
4.8 Further Simplification of a Force andCouple System
In the preceding section, we developed a way to reduce a force and couplemoment system acting on a rigid body into an equivalent resultant force
acting at a specific point O and a resultant couple moment .Theforce system can be further reduced to an equivalent single resultant forceprovided the lines of action of and are perpendicular to eachother. Because of this condition, only concurrent, coplanar, and parallelforce systems can be further simplified.
Concurrent Force System. Since a concurrent force system isone in which the lines of action of all the forces intersect at a commonpoint O, Fig. 4–40a, then the force system produces no moment aboutthis point. As a result, the equivalent system can be represented by asingle resultant force acting at O, Fig. 4–40b.FR = ©F
(MR)OFR
(MR)OFR
Coplanar Force System. In the case of a coplanar force system,the lines of action of all the forces lie in the same plane, Fig. 4–41a, andso the resultant force of this system also lies in this plane.Furthermore, the moment of each of the forces about any point O isdirected perpendicular to this plane. Thus, the resultant moment
and resultant force will be mutually perpendicular,Fig. 4–41b. The resultant moment can be replaced by moving theresultant force a perpendicular or moment arm distance d awayfrom point O such that produces the same moment aboutpoint O, Fig. 4–41c. This distance d can be determined from the scalarequation .(MR)O = FRd = ©MO or d = (MR)O>FR
(MR)OFR
FR
FR(MR)O
FR = ©F
F2
FR
F2
F4 F3
O O
(a) (b)
!
Fig. 4–40
Sistema de forças concorrentes:
Como forças concorrentes são aquelas cujas linhas de ação interceptam-se em um ponto comum O, existe um torque em relação a este ponto.

Sistema de forças coplanares
Neste caso, as linhas de ação das forças estão todas no mesmo plano, assim como a força resultante. Além disso os torques produzidos por cada uma das forças ao redor de um ponto O, serão perpendiculares ao plano, assim como o torque resultante. Neste caso, as linhas de ação de FR e MR serão mutuamente perpendiculares. Podemos desclocar FR da distância d (d = M0R/FR) que é perpendicular a O.
4.8 FURTHER SIMPLIFICATION OF A FORCE AND COUPLE SYSTEM 171
4
Parallel Force System. The parallel force system shown in Fig. 4–42aconsists of forces that are all parallel to the z axis. Thus, the resultantforce at point O must also be parallel to this axis, Fig. 4–42b.The moment produced by each force lies in the plane of the plate, and sothe resultant couple moment, , will also lie in this plane, along themoment axis a since and are mutually perpendicular. As aresult, the force system can be further reduced to an equivalent singleresultant force , acting through point P located on the perpendicular baxis, Fig. 4–42c. The distance d along this axis from point O requires
.(MR)O = FRd = ©MO or d = ©MO>FR
FR
(MR)OFR
(MR)O
FR = ©F
z
F1 F2
F3O
(a)
z
a O
bb
(b)
FR ! "F
FR ! "F
z
O
d
(c)
a
P
(MR)O
! !
Fig. 4–42
(a) (b) (c)
O
(MR)O
FR
OFR
O d
F3
F4 F1
F2
! !
Fig. 4–41

Sistema de forças paralelas
Neste caso, as linhas de ação das forças são paralelas ao eixo z, assim como a força resultante. Além disso os torques produzidos por cada uma das forças estarão no plano da placa junto ao eixo a, assim como o torque resultante. Neste caso, as linhas de ação de FR e MR serão mutuamente perpendiculares. Pode-se deslocar FR até o ponto P situado em d. (d=MR/FR)
4.8 FURTHER SIMPLIFICATION OF A FORCE AND COUPLE SYSTEM 171
4
Parallel Force System. The parallel force system shown in Fig. 4–42aconsists of forces that are all parallel to the z axis. Thus, the resultantforce at point O must also be parallel to this axis, Fig. 4–42b.The moment produced by each force lies in the plane of the plate, and sothe resultant couple moment, , will also lie in this plane, along themoment axis a since and are mutually perpendicular. As aresult, the force system can be further reduced to an equivalent singleresultant force , acting through point P located on the perpendicular baxis, Fig. 4–42c. The distance d along this axis from point O requires
.(MR)O = FRd = ©MO or d = ©MO>FR
FR
(MR)OFR
(MR)O
FR = ©F
z
F1 F2
F3O
(a)
z
a O
bb
(b)
FR ! "F
FR ! "F
z
O
d
(c)
a
P
(MR)O
! !
Fig. 4–42
(a) (b) (c)
O
(MR)O
FR
OFR
O d
F3
F4 F1
F2
! !
Fig. 4–41

Exemplo 3: Substitua o sistema de forças e momentos de binário que agem sobre a viga da figura abaixo por uma força resultante equivalente, e encontre sua linha de ação que intercepta a viga, medida a partir do ponto O.
174 CHAPTER 4 FORCE SYSTEM RESULTANTS
4
Replace the force and couple moment system acting on the beam inFig. 4–44a by an equivalent resultant force, and find where its line ofaction intersects the beam, measured from point O.
EXAMPLE 4.17
SOLUTION
Force Summation. Summing the force components,
From Fig. 4–44b, the magnitude of is
Ans.
The angle is
Ans.
Moment Summation. We must equate the moment of aboutpoint O in Fig. 4–44b to the sum of the moments of the force andcouple moment system about point O in Fig. 4–44a. Since the line ofaction of acts through point O, only produces a momentabout this point. Thus,
a
Ans.d = 2.25 m
- [8 kN A35 B ] (0.5 m) + [8 kN A45 B ](4.5 m)
2.40 kN(d) = -(4 kN)(1.5 m) - 15 kN #m+(MR)O = ©MO;
(FR)y(FR)x
FR
u = tan-1a2.40 kN4.80 kN
b = 26.6°
u
FR = 214.80 kN22 + 12.40 kN22 = 5.37 kN
FR
(FR)y = -4 kN + 8 kN A45 B = 2.40 kNc+ c(FR)y = ©Fy;
(FR)x = 8 kN A35 B = 4.80 kN::+ (FR)x = ©Fx;
(a)
O
4 kN
15 kN!m
8 kN
345
1.5 m 1.5 m 1.5 m 1.5 m
0.5 m
y
x
Fig. 4–44
(b)
d
O
FR
(FR)x " 4.80 kN(FR)y " 2.40 kNu
174 CHAPTER 4 FORCE SYSTEM RESULTANTS
4
Replace the force and couple moment system acting on the beam inFig. 4–44a by an equivalent resultant force, and find where its line ofaction intersects the beam, measured from point O.
EXAMPLE 4.17
SOLUTION
Force Summation. Summing the force components,
From Fig. 4–44b, the magnitude of is
Ans.
The angle is
Ans.
Moment Summation. We must equate the moment of aboutpoint O in Fig. 4–44b to the sum of the moments of the force andcouple moment system about point O in Fig. 4–44a. Since the line ofaction of acts through point O, only produces a momentabout this point. Thus,
a
Ans.d = 2.25 m
- [8 kN A35 B ] (0.5 m) + [8 kN A45 B ](4.5 m)
2.40 kN(d) = -(4 kN)(1.5 m) - 15 kN #m+(MR)O = ©MO;
(FR)y(FR)x
FR
u = tan-1a2.40 kN4.80 kN
b = 26.6°
u
FR = 214.80 kN22 + 12.40 kN22 = 5.37 kN
FR
(FR)y = -4 kN + 8 kN A45 B = 2.40 kNc+ c(FR)y = ©Fy;
(FR)x = 8 kN A35 B = 4.80 kN::+ (FR)x = ©Fx;
(a)
O
4 kN
15 kN!m
8 kN
345
1.5 m 1.5 m 1.5 m 1.5 m
0.5 m
y
x
Fig. 4–44
(b)
d
O
FR
(FR)x " 4.80 kN(FR)y " 2.40 kNu

Exemplo 4: O guincho mostrado na figura está sujeito a três forças coplanares. Substitua esse carregamento por uma força resultante equivalente e diga onde a linha de ação intercepta a coluna AB e a lança BC.
4.8 FURTHER SIMPLIFICATION OF A FORCE AND COUPLE SYSTEM 175
4
EXAMPLE 4.18
The jib crane shown in Fig. 4–45a is subjected to three coplanar forces.Replace this loading by an equivalent resultant force and specifywhere the resultant’s line of action intersects the column AB andboom BC.
SOLUTIONForce Summation. Resolving the 250-lb force into x and y componentsand summing the force components yields
As shown by the vector addition in Fig. 4–45b,
Ans.
Ans.
Moment Summation. Moments will be summed about point A.Assuming the line of action of intersects AB at a distance y from A,Fig. 4–45b, we have
a
Ans.
By the principle of transmissibility, can be placed at a distance xwhere it intersects BC, Fig. 4–45b. In this case we have
a
Ans.x = 10.9 ft
+ 250 lb A35 B111 ft2 - 250 lb A45 B18 ft2= 175 lb 15 ft2 - 60 lb 13 ft2325 lb 111 ft2 - 260 lb 1x2+MRA= ©MA;
FR
y = 2.29 ft
= 175 lb 15 ft2 - 60 lb 13 ft2 + 250 lb A35 B111 ft2 - 250 lb A45 B18 ft2325 lb 1y2 + 260 lb 102+MRA= ©MA;
FR
u = tan-1a260 lb325 lb
b = 38.7° u
FR = 2(325 lb)2 + (260 lb)2 = 416 lb
FRy= -250 lb A45 B - 60 lb = -260 lb = 260 lbT+ cFRy
= ©Fy;
FRx= -250 lb A35 B - 175 lb = -325 lb = 325 lb;:+ FRx
= ©Fx;
6 ft
y
x
5 ft
175 lb60 lb
(a)
250 lb
5 43
3 ft 5 ft 3 ftB
C
A
Fig. 4–45
y
(b)
x
x
FR
FR
y
C
A
260 lb
325 lb
260 lb
325 lbB
u
4.8 FURTHER SIMPLIFICATION OF A FORCE AND COUPLE SYSTEM 175
4
EXAMPLE 4.18
The jib crane shown in Fig. 4–45a is subjected to three coplanar forces.Replace this loading by an equivalent resultant force and specifywhere the resultant’s line of action intersects the column AB andboom BC.
SOLUTIONForce Summation. Resolving the 250-lb force into x and y componentsand summing the force components yields
As shown by the vector addition in Fig. 4–45b,
Ans.
Ans.
Moment Summation. Moments will be summed about point A.Assuming the line of action of intersects AB at a distance y from A,Fig. 4–45b, we have
a
Ans.
By the principle of transmissibility, can be placed at a distance xwhere it intersects BC, Fig. 4–45b. In this case we have
a
Ans.x = 10.9 ft
+ 250 lb A35 B111 ft2 - 250 lb A45 B18 ft2= 175 lb 15 ft2 - 60 lb 13 ft2325 lb 111 ft2 - 260 lb 1x2+MRA= ©MA;
FR
y = 2.29 ft
= 175 lb 15 ft2 - 60 lb 13 ft2 + 250 lb A35 B111 ft2 - 250 lb A45 B18 ft2325 lb 1y2 + 260 lb 102+MRA= ©MA;
FR
u = tan-1a260 lb325 lb
b = 38.7° u
FR = 2(325 lb)2 + (260 lb)2 = 416 lb
FRy= -250 lb A45 B - 60 lb = -260 lb = 260 lbT+ cFRy
= ©Fy;
FRx= -250 lb A35 B - 175 lb = -325 lb = 325 lb;:+ FRx
= ©Fx;
6 ft
y
x
5 ft
175 lb60 lb
(a)
250 lb
5 43
3 ft 5 ft 3 ftB
C
A
Fig. 4–45
y
(b)
x
x
FR
FR
y
C
A
260 lb
325 lb
260 lb
325 lbB
u
4.8 FURTHER SIMPLIFICATION OF A FORCE AND COUPLE SYSTEM 175
4
EXAMPLE 4.18
The jib crane shown in Fig. 4–45a is subjected to three coplanar forces.Replace this loading by an equivalent resultant force and specifywhere the resultant’s line of action intersects the column AB andboom BC.
SOLUTIONForce Summation. Resolving the 250-lb force into x and y componentsand summing the force components yields
As shown by the vector addition in Fig. 4–45b,
Ans.
Ans.
Moment Summation. Moments will be summed about point A.Assuming the line of action of intersects AB at a distance y from A,Fig. 4–45b, we have
a
Ans.
By the principle of transmissibility, can be placed at a distance xwhere it intersects BC, Fig. 4–45b. In this case we have
a
Ans.x = 10.9 ft
+ 250 lb A35 B111 ft2 - 250 lb A45 B18 ft2= 175 lb 15 ft2 - 60 lb 13 ft2325 lb 111 ft2 - 260 lb 1x2+MRA= ©MA;
FR
y = 2.29 ft
= 175 lb 15 ft2 - 60 lb 13 ft2 + 250 lb A35 B111 ft2 - 250 lb A45 B18 ft2325 lb 1y2 + 260 lb 102+MRA= ©MA;
FR
u = tan-1a260 lb325 lb
b = 38.7° u
FR = 2(325 lb)2 + (260 lb)2 = 416 lb
FRy= -250 lb A45 B - 60 lb = -260 lb = 260 lbT+ cFRy
= ©Fy;
FRx= -250 lb A35 B - 175 lb = -325 lb = 325 lb;:+ FRx
= ©Fx;
6 ft
y
x
5 ft
175 lb60 lb
(a)
250 lb
5 43
3 ft 5 ft 3 ftB
C
A
Fig. 4–45
y
(b)
x
x
FR
FR
y
C
A
260 lb
325 lb
260 lb
325 lbB
u
Atenção: Estudar os exemplos 4.19 (pág.128) e 4.20 (pág. 129) livro do Hibbeler 12a edição.






![Aula10 [Modo de Compatibilidade] - Unespdocs.fct.unesp.br/.../dmec/olivete/lfa/arquivos/Aula10.pdf · 2016-08-28 · Microsoft PowerPoint - Aula10 [Modo de Compatibilidade] Author:](https://static.fdocumentos.com/doc/165x107/5fae67ceb14ed0465544dd52/aula10-modo-de-compatibilidade-2016-08-28-microsoft-powerpoint-aula10-modo.jpg)