SIMULADOR PARA SISTEMAS COGNITIVOS VOLTADO PARA … · Atualmente os sistemas cognitivos interagem...
6
SIMULADOR PARA SISTEMAS COGNITIVOS VOLTADO PARA ROB ´ OTICA SOCIAL Jos´ e Pedro. R. Belo * , Roseli A. F. Romero * , Helio Azevedo *† * Instituto de Ciˆ encias Matem´aticas e de Computa¸ c˜ao, Universidade de S˜ao Paulo Av. Trabalhador S˜ ao-Carlense, 400 – S˜ao Carlos, SP – Brasil † Centro de Tecnologia da Informa¸ c˜ao Renato Archer Rodovia Dom Pedro I (SP-65), Km 143,6 – Campinas, SP – Brasil Email: [email protected], [email protected], [email protected] Abstract— The consolidation of social robotics requires the availability of a reference environment to develop, evaluate and compare the performance of the cognitive modeling used to control the robotic agent. The elabo- ration of a real reference environment demands large facility with high cost for most of the research labs. As an alternative path, this paper presents a cognitive system simulator named “Robot House Simulator” (RHS). The RHS provides a residence where a robot and a human character interact socially with increasing levels of cog- nitive processing. This simulator is an integral part of the reference environment for the evaluation of cognitive models, named as the “Cognitive Model Development Environment”, currently under development at the “Robot Learning Laboratory of USP - S˜ao Carlos. Keywords— robotic simulator, social robotic, robotic ontology, cognitive architecture. Resumo— A consolida¸ c˜ao da rob´otica social possui como requisito a disponibiliza¸ c˜ao de ambiente de referˆ encia para desenvolver, avaliar e comparar o desempenho da modelagem cognitiva utilizada para modelar o agente rob´otico. A elabora¸c˜ao de um ambiente de referˆ encia real demanda instala¸c˜ ao de grande porte com custo elevado para a maioria dos laborat´orios de pesquisa. Como caminho alternativo, este artigo apresenta um simulador de sistemas cognitivos denominado Robot House Simulator (RHS). O RHS disponibiliza uma residˆ encia onde um robˆ o e um personagem humano interagem socialmente com n´ ıveis crescentes de processamento cognitivo. Esse simulador ´ e parte integrante do ambiente de referˆ encia para avalia¸c˜ao de modelos cognitivos denominado Cognitive Model Development Environment, atualmente em desenvolvimento no Laborat´ orio de Aprendizado de Robˆ os da USP - S˜ao Carlos. Palavras-chave— simulador rob´otico, rob´otica social, ontologia rob´otica, plataformas rob´ oticas. 1 Introdu¸c˜ ao Os sistemas rob´ oticos, inicialmente restritos a am- bientes estruturados e atividades repetitivas em ambiente fabril, tˆ em evolu´ ıdo rapidamente para atuar em ambientes n˜ ao estruturados visando uma parceria direta com seres humanos. A rob´ otica social busca desenvolver sistemas computacionais para uma maior aproxima¸c˜ ao entre robˆ os e seres humanos atuando em ambientes comuns ou indus- triais. Para ambientes comuns, a rob´ otica social visa criar agentes rob´ oticos para apoiar os huma- nos fisicamente ou socialmente permitindo uma vida confort´ avel e autˆ onoma. Para a ind´ ustria, a pesquisa est´ a direcionando para um futuro onde humanos e robˆ os ir˜ ao compartilhar espa¸co para realizar tarefas do processo fabril em conjunto. Este cen´ ario de robˆ os onipresentes demanda o equacionamento de diversos desafios. Parte dos desafios se encontram em um campo crescente da rob´ otica conhecido como “Rob´ otica Social”. A partir do momento no qual os robˆ os passam a inte- ragir diretamente com seres humanos, ´ e desej´ avel que a comunica¸ c˜ ao seja realizada no mesmo n´ ıvel cognitivo. A ´ area da ciˆ encia cognitiva pode ajudar a atender a esse requisito. Trata-se de uma sub´ a- rea da Inteligˆ encia Artificial que objetiva a pes- quisa dos processos associados ao conhecimento realizado pela mente humana. Atualmente os sistemas cognitivos interagem diretamente nos sensores e atuadores presentes no robˆ o. Essa abordagem possui como desvantagem exigir que o especialista se envolva em quest˜ oes f´ ı- sicas do robˆ o, como movimento, s´ ıntese de voz, vi- s˜ ao, controle de eixos, etc. Estas quest˜ oes desviam o pesquisador do foco principal que ´ e capacitar o robˆ o a interagir socialmente atrav´ es da constru¸c˜ ao de modelos para as atividades a serem executadas no ambiente alvo. Nesse contexto, a reprodu¸ c˜ ao dos experimentos realizados possui um alto custo devido a complexidade na duplica¸c˜ ao do ambiente considerado, que muitas vezes utiliza um robˆ o pro- priet´ ario inacess´ ıvel a outros grupos. Uma quest˜ ao adicional que pode ser levan- tada ´ e a ausˆ encia de benchmarks e simulado- res apropriados para valida¸c˜ ao de modelos asso- ciados a sistemas que envolvem rob´ otica social. Esse aspecto foi ressaltado no relat´ orio A Road- map for U.S. Robotics: From Internet to Robotics (RoboticsVO, 2013), que apresenta sugest˜ oes de ambientes de referˆ encias completos com o objetivo de desenvolver, avaliar e comparar o desempenho comrela¸c˜ ao a uma aplica¸c˜ ao ou implementa¸c˜ ao particular. Esse relat´ orio prop˜ oe a constru¸ c˜ ao de um ambiente urbano completo denominado Robot City, em que os habitantes fazem parte da expe- riˆ encia e contribuem no processo de avalia¸ c˜ ao. Esse ambiente, semelhante aos criados pelo XIII Simp´osio Brasileiro de Automa¸ c˜ ao Inteligente Porto Alegre – RS, 1 o – 4 de Outubro de 2017 ISSN 2175 8905 51
Transcript of SIMULADOR PARA SISTEMAS COGNITIVOS VOLTADO PARA … · Atualmente os sistemas cognitivos interagem...

SIMULADOR PARA SISTEMAS COGNITIVOS VOLTADO PARA ROBOTICASOCIAL
Jose Pedro. R. Belo∗ , Roseli A. F. Romero∗ , Helio Azevedo∗ †
∗Instituto de Ciencias Matematicas e de Computacao, Universidade de Sao PauloAv. Trabalhador Sao-Carlense, 400 – Sao Carlos, SP – Brasil
†Centro de Tecnologia da Informacao Renato ArcherRodovia Dom Pedro I (SP-65), Km 143,6 – Campinas, SP – Brasil
Email: [email protected], [email protected], [email protected]
Abstract— The consolidation of social robotics requires the availability of a reference environment to develop,evaluate and compare the performance of the cognitive modeling used to control the robotic agent. The elabo-ration of a real reference environment demands large facility with high cost for most of the research labs. As analternative path, this paper presents a cognitive system simulator named “Robot House Simulator” (RHS). TheRHS provides a residence where a robot and a human character interact socially with increasing levels of cog-nitive processing. This simulator is an integral part of the reference environment for the evaluation of cognitivemodels, named as the “Cognitive Model Development Environment”, currently under development at the “RobotLearning Laboratory of USP - Sao Carlos.
Keywords— robotic simulator, social robotic, robotic ontology, cognitive architecture.
Resumo— A consolidacao da robotica social possui como requisito a disponibilizacao de ambiente de referenciapara desenvolver, avaliar e comparar o desempenho da modelagem cognitiva utilizada para modelar o agenterobotico. A elaboracao de um ambiente de referencia real demanda instalacao de grande porte com custo elevadopara a maioria dos laboratorios de pesquisa. Como caminho alternativo, este artigo apresenta um simuladorde sistemas cognitivos denominado Robot House Simulator (RHS). O RHS disponibiliza uma residencia ondeum robo e um personagem humano interagem socialmente com nıveis crescentes de processamento cognitivo.Esse simulador e parte integrante do ambiente de referencia para avaliacao de modelos cognitivos denominadoCognitive Model Development Environment, atualmente em desenvolvimento no Laboratorio de Aprendizado deRobos da USP - Sao Carlos.
Palavras-chave— simulador robotico, robotica social, ontologia robotica, plataformas roboticas.
1 Introducao
Os sistemas roboticos, inicialmente restritos a am-bientes estruturados e atividades repetitivas emambiente fabril, tem evoluıdo rapidamente paraatuar em ambientes nao estruturados visando umaparceria direta com seres humanos. A roboticasocial busca desenvolver sistemas computacionaispara uma maior aproximacao entre robos e sereshumanos atuando em ambientes comuns ou indus-triais. Para ambientes comuns, a robotica socialvisa criar agentes roboticos para apoiar os huma-nos fisicamente ou socialmente permitindo umavida confortavel e autonoma. Para a industria,a pesquisa esta direcionando para um futuro ondehumanos e robos irao compartilhar espaco pararealizar tarefas do processo fabril em conjunto.
Este cenario de robos onipresentes demandao equacionamento de diversos desafios. Parte dosdesafios se encontram em um campo crescente darobotica conhecido como “Robotica Social”. Apartir do momento no qual os robos passam a inte-ragir diretamente com seres humanos, e desejavelque a comunicacao seja realizada no mesmo nıvelcognitivo. A area da ciencia cognitiva pode ajudara atender a esse requisito. Trata-se de uma suba-rea da Inteligencia Artificial que objetiva a pes-quisa dos processos associados ao conhecimentorealizado pela mente humana.
Atualmente os sistemas cognitivos interagemdiretamente nos sensores e atuadores presentes norobo. Essa abordagem possui como desvantagemexigir que o especialista se envolva em questoes fı-sicas do robo, como movimento, sıntese de voz, vi-sao, controle de eixos, etc. Estas questoes desviamo pesquisador do foco principal que e capacitar orobo a interagir socialmente atraves da construcaode modelos para as atividades a serem executadasno ambiente alvo. Nesse contexto, a reproducaodos experimentos realizados possui um alto custodevido a complexidade na duplicacao do ambienteconsiderado, que muitas vezes utiliza um robo pro-prietario inacessıvel a outros grupos.
Uma questao adicional que pode ser levan-tada e a ausencia de benchmarks e simulado-res apropriados para validacao de modelos asso-ciados a sistemas que envolvem robotica social.Esse aspecto foi ressaltado no relatorio A Road-map for U.S. Robotics: From Internet to Robotics(RoboticsVO, 2013), que apresenta sugestoes deambientes de referencias completos com o objetivode desenvolver, avaliar e comparar o desempenhocom relacao a uma aplicacao ou implementacaoparticular. Esse relatorio propoe a construcao deum ambiente urbano completo denominado RobotCity, em que os habitantes fazem parte da expe-riencia e contribuem no processo de avaliacao.
Esse ambiente, semelhante aos criados pelo
XIII Simposio Brasileiro de Automacao Inteligente
Porto Alegre – RS, 1o – 4 de Outubro de 2017
ISSN 2175 8905 51

DARPA para o Grand Challenge (DARPA, 2014)e Robotics Challenge (DARPA, 2015), apresentaum custo elevado e inacessıvel para a maioria dosgrupos de pesquisa. Uma estrategia alternativa e ouso de simuladores ao inves de cenarios complexosenvolvendo construcoes, ruas, atores e auditoresde forma semelhante ao utilizado nas competicoesdo DARPA.
Neste artigo, e proposto um simulador paraum ambiente de validacao de sistemas cognitivosaplicados em robotica social. O simulador cogni-tivo e denominado Robot House Simulator (RHS).Distinto dos simuladores roboticos classicos, o focoe garantir a interacao social do agente roboticoque envolve entre outros aspectos: reacao a recep-cao de comandos, avaliacao de emocoes, reconheci-mento de pessoas, capacidade de tomar decisoes eaprendizado. O simulador RHS e parte integrantede um projeto maior intitulado Cognitive ModelDevelopment Environment (CMDE), atualmenteem desenvolvimento no Laboratorio de Aprendi-zado de Robos (LAR) da USP – Sao Carlos.
O presente trabalho esta organizado da se-guinte maneira. Na Secao 2 e apresentado o es-tado da arte de pesquisas em simuladores robo-ticos,. Na Secao 3, a pesquisa proposta e des-crita, posicionando o simulador robotico no am-biente em desenvolvimento, CMDE e detalhandoalguns aspectos de sua implementacao. Na Se-cao 4, e apresentada a metodologia utilizada parao desenvolvimento do simulador robotico mencio-nado. Finalmente, alguns resultados preliminaressao apresentados na Secao 5, seguido de uma brevediscussao e de trabalhos futuros.
2 Trabalhos Relacionados
O foco principal deste artigo envolve o uso de si-muladores para agentes roboticos atuarem na arearobotica social, modelando aspectos da interacaoentre humanos e robos. A utilizacao de simula-dores em sistemas roboticos nao e recente, comoexemplo, o simulador Player (PlayerStage, 2017),que foi disponibilizado em 2001. Contudo, essae uma area de pesquisa ativa, principalmentequando consideramos sistemas cognitivos aplica-dos em robotica social. Um mapeamento siste-matico realizado considerando o perıodo de 2012a 2016, nas bases Scopus e Web of Science, re-velou 1375 referencias associadas ao tema (Stringde busca: (simulat*) AND (robot*)). Esse volumesignificativo esta associado a importancia de simu-ladores, em sistemas roboticos, viabilizando a va-lidacao da implementacao antes de integrar o novosistema a um robo real. Alem disto, e interessanteevitar a utilizacao de robos desnecessariamente,pois a vida util dos mesmos decai lentamente como uso, implicando em desgaste do robo, muitas ve-zes, prejudicando o desempenho do algoritmo outecnica a ser testada (Echeverria et al., 2012; Kuo
et al., 2013).
Tabela 1: Exemplos de ferramentas de simulacaoNome Descricao LicencaStage Multi-robos, generico, somente
interface 2D.GNU GPL
Gazebo Multi-robos, generico, realista. Apache2.0DRCSim Para a competicao DARPA,
como base o Gazebo.Apache2.0
Webots Robotica movel, realista, pes-quisa.
Propria
MORSE Multi-robos, generico, pes-quisa, realista.
BSD
OpenHRP Voltado para humanoides. EclipseRoboDK Voltado para a industria. PropriaSimSpark Multi-robos, generico, pes-
quisa.GNU GPL
4DV-Sim Agricultura, industria, segu-ranca e urbanismo.
Propria
Actin Prototipagem, treinamento eferramenta de vendas.
Propria
ARS Generico, prog. em Python. BSDV-REP Multi-robos, generico, realista,
controle distribuıdo.Propria/GNU GPL
SIGVerse Multi-agentes, IHR, realista,comp. na nuvem.
GNU GPL
Segundo Echeverria et al. (2012), para as vali-dacoes em robos serem uteis, as simulacoes devemprover fidelidade suficiente ao robo real. Comoexemplo de um simulador desse tipo tem-se o Vir-tual Robot Experimentation Plataform (V-REP)(Rohmer et al., 2013). O V-REP tambem simpli-fica o equacionamento da simulacao viabilizandoa rapida verificacao de sistemas.
Como contraponto ao desenvolvimento de si-muladores totalmente realistas, temos inumerosoutros trabalhos focados em um determinado as-pecto fısico (Echeverria et al., 2012). Por exem-plo, em Kuo et al. (2013), e implementado ummetodo de aprendizagem de marcha para roboshumanoides. Para testar e validar o algoritmo foielaborado um simulador que modela a aplicacaode forcas somente dos membros inferiores do robo.
Mattingly et al. (2012) apresentaram umaabordagem alternativa para a simulacao robotica.Uma biblioteca Unity (Unity, 2017) e disponibi-lizada para modelar ambientes reais com efeitosfısicos, de forma semelhante aos recursos encon-trados em simuladores roboticos, como o Webots(Cyberbotics, 2017) e V-REP. No estudo em ques-tao, foi mencionada a opcao pelo Unity devido asua flexibilidade e facilidade de uso.
Uma importante classe de simuladores agrupaaplicativos direcionados para areas especıficas,como medicina ou industria, ou ainda mais res-trita, direcionada para um modelo especıficode sistema robotico. Desde 2000, a utiliza-cao de robos em cirurgias minimamente inva-sivas vem crescendo substancialmente (Abboudiet al., 2013). Com o intuito de facilitar cirurgiasauxiliadas por robos, diversas plataformas surgi-ram e, com elas, pesquisas direcionadas em iden-tificar o potencial dos simuladores no treinamentoe certificacao de cirurgioes (Finnegan et al., 2012)(Lee et al., 2012) (Abboudi et al., 2013).
XIII Simposio Brasileiro de Automacao Inteligente
Porto Alegre – RS, 1o – 4 de Outubro de 2017
52

No setor industrial, Baizid et al. (2016) argu-mentaram que, com a necessidade de manipula-dores roboticos na industria, houve um aumentonos requisitos relacionados ao desenvolvimento detarefas robotizadas, demandando tecnicas mais in-tuitivas e rapidas. Eles propuseram um sistema,denominado Industrial Robotics Simulation De-sign Planning and Optimization platform (IRo-Sim), que integra funcionalidades de plataformasde prototipagem, objetivando facilitar a modela-gem e simulacao de robos industriais, como exem-plo: robos para soldagem e pintura automotiva.
O desenvolvimento de robos de servico, capa-zes de atuar diretamente em um ambiente comseres humanos, tem impulsionado o crescimentoda area de IHR. Como exemplo de simulado-res para IHR, temos o simulador Modular Open-Robots Simulation Engine (MORSE) (Echeverriaet al., 2012), que se apresenta como alternativa autilizacao de robos reais em laboratorios de pes-quisa. Em Hwang et al. (2016), o MORSE e uti-lizado em um experimento que avalia uma novaarquitetura para robotica social.
A questao de imersao usuarios, via interfacesfısicas, em tarefas que envolvem IHR e tratadaem Inamura and Tan (2012), no qual e propostauma plataforma aprimorada do SIGVerse (Tanand Inamura, 2012), que permite varios usuariosingressarem no mundo virtual, por meio de oculosde realidade virtual e do sensor Microsoft Kinect.O SIGVerse permite que um usuario participe dasimulacao em tempo real, controlando um avatarproprio no mundo virtual.
Os trabalhos mencionados oferecem uma vi-sao do estado da arte sobre simuladores roboticos.Esta visao e essencial para situar o presente tra-balho no ecossistema de simuladores, entretantonao revela ferramentas de simulacao disponıveisna comunidade. Na Tabela 1, sao apresentadasalgumas das ferramentas disponıveis, bem comocomo suas principais caracterısticas, as areas deatuacao e tipo de arquitetura. A caracterıstica“realista”, por exemplo, diz respeito a intencao dasimulacao ser verossımil com a realidade, repre-sentando a dinamica dos corpos, por exemplo.
Nesta tabela encontra-se o simulador o Stage(PlayerStage, 2017), que simula objetos 2D combaixa fidelidade para uma grande populacao derobos. Sua liberacao ocorreu em 2001, represen-tando um dos primeiros simuladores roboticos decodigo aberto.
Inicialmente vinculado ao Player, o Gazebo(Gazebo, 2017) e um simulador 3D de alta fideli-dade para uma pequena populacao de robos. Deri-vado do Gazebo, o simulador DARPA Robotics Si-mulator tem como objetivo oferecer um ambientede simulacao voltado para o desafio DARPA Ro-botics challenge (DRC) (DARPA, 2015). Ele cata-lisa o desenvolvimento de tecnologias para opera-coes de contingencia em instalacoes, que sofreram
danos devido a ocorrencia de desastres.Na grande maioria dos trabalhos apresenta-
dos, pode-se observar que existe um esforco emcriar e utilizar tecnicas alternativas ao empregode robos reais em todas as fases do desenvolvi-mento. Os motivos que justificam essa estrategiaenglobam desde reducao de custos ate o aprimora-mento do ensino e treinamento. Contudo, pode-seafirmar que apenas seis simuladores sao direcio-nados para IHR, sendo somente um para roboticasocial (Hwang et al., 2016). Alem disso, somenteo sentido de visao e o considerado na simulacao.O simulador RHS, proposto no presente trabalho,amplia a utilizacao dos sentidos acrescentando au-dicao, tato, paladar e olfato, sendo os dois ultimosineditos em simuladores roboticos.
3 Cognitive Model DevelopmentEnvironment
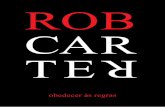
O simulador RHS e parte integrante da arqui-tetura em desenvolvimento no LAR, denomi-nada Cognitive Model Development Environment(CMDE). O objetivo do CMDE e minimizar o es-forco na fase de validacao de sistemas que atuemna area de robotica social viabilizando um con-junto de missoes e acoes exercitados como parteda validacao cognitiva. Basicamente, a arquite-tura CMDE, apresentada na Figura 1, consiste dedois nos de processamento. O primeiro, RHS, re-presenta o simulador de modelos cognitivos. Osegundo no implementa o “Sistema Cognitivo”(Langley et al., 2009) que sera alvo de validacaopelo ambiente. Naturalmente, apos o desenvolve-dor concluir os testes com o simulador, o sistemadefinitivo deve migrar para um robo real com o mı-nimo de alteracoes, considerando que ambos des-tinos utilizem o mesmo protocolo de comunicacao.
Figura 1: CMDE
Outro elemento presente na Figura 1 que me-rece atencao especial e o protocolo de comunica-cao. Este protocolo e aderente a ontologia Ont-Cog(Azevedo and Romero, 2016), que por sua veze baseada na norma 1872-2015 (IEEE StandardOntologies for Robotics and Automation, 2015). Afuncao da OntCog e padronizar a comunicacao en-tre os sensores presentes em um sistema robotico
XIII Simposio Brasileiro de Automacao Inteligente
Porto Alegre – RS, 1o – 4 de Outubro de 2017
53

e a arquitetura cognitiva associada. Alem disto,ela tem como objetivo modelar os sentidos presen-tes no ser humano, a saber: visao, audicao, tato,olfato e paladar.
4 Simulador RHS
Os simuladores roboticos classicos nao validam as-pectos cognitivos presentes no sistema robotico.Longe de ser uma deficiencia, esse requisito naoe atendido simplesmente pelo fato que os simula-dores tradicionais tem por objetivo serem fidedig-nos a determinado modelo de robo, considerandoo comportamento fısico de cada sensor e atuador,bem como, a atualizacao sincronizada do ambi-ente de acordo com a evolucao da simulacao. Deforma distinta, o simulador RHS minimiza os as-pectos particulares associados a movimentacao fı-sica do agente robotico para priorizar os aspectoscognitivos inerentes a robotica social.
No contexto do CMDE, o simulador cognitivoRHS possui as seguintes caracterısticas: simulacaofocada em aspectos cognitivos; protocolo de comu-nicacao aderente a ontologia OntCog ; sequenciacrescente de dificuldade de tarefas; inclusao e re-mocao de personagens; e permitir que um usuarioassuma o papel de um personagem.
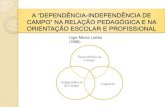
Figura 2: Estados do agente robotico.
Como forma de acelerar a implementacaodo simulador foi selecionada a ferramenta Unity(Unity, 2017) de desenvolvimento de jogos. Con-siderando nosso foco em robotica social e cienciacognitiva, as ferramentas de jogos oferecem carac-terısticas interessantes, como por exemplo, estru-turas graficas para representar objetos e simulacaoda dinamica de corpos rıgidos. Em particular, essaferramenta tambem oferece uma curva suave deaprendizado, bibliotecas com modelos prontos1,boa documentacao, alem de versao gratuita coma maioria dos recursos presentes na versao comer-cial.
A interface do simulador utiliza um protocolobidirecional aderente a ontologia OntCog, con-forme apresentado na Figura 1. O objetivo deutilizacao da OntCog e padronizar a comunicacaoentre os sensores presentes no sistema robotico ea arquitetura cognitiva associada. Nesse cenario,
1www.assetstore.unity3d.com
o sistema cognitivo recebe do simulador informa-coes referentes aos sentidos do robo, processa eenvia comandos que atuam no robo, presente noambiente simulado.
Na Figura 2, sao apresentados os estados queo robo pode assumir no simulador. O robo ini-cia no estado “inativo” e a mudanca para o estado“ativo”ocorre quando o usuario do simulador esco-lhe um cenario de simulacao. Essa selecao disparaa mudanca e tambem envia uma mensagem parao sistema cognitivo, com todos os atributos asso-ciados aos sentidos que mudaram de valor desdeo ultimo envio. Atualmente, o unico cenario dis-ponıvel e composto de uma residencia com sala ecozinha. Vamos explorar a evolucao dos estadosdo robo, considerando que o humano e o robo este-jam presentes na sala. Como exemplo, o usuario,incorporando o personagem humano, interage como robo “requisitando um cafe”. Imediatamente osimulador reflete a mudanca no ambiente, trans-mitindo para o sistema cognitivo no “canal” dosentido audicao a frase “eu quero um cafe”.
O sistema cognitivo deve processar esse pe-dido, com todas as informacoes presentes nos “ca-nais” dos outros sentidos. Em seguida, deve pro-duzir a sequencia de acoes para atender ao de-sejo do personagem humano. Considerando umhappy path, uma possıvel sequencia de acoes seria:movimentar ate a cozinha; preparar cafe; pegarbandeja; servir cafe. Naturalmente, para simpli-ficar a apresentacao, essas acoes sao de alto nıveldevendo ser decompostas em acoes basicas de co-nhecimento previo do sistema cognitivo.
Ao receber uma acao basica, o simuladormuda para o estado “Processa acao” e executa aacao desejada. Considerando a acao “movimentarate a cozinha”, o robo deve se encaminhar paracozinha, enviando informacoes de alteracao dossentidos, continuamente, para o sistema cognitivoconforme se movimenta. Ao concluir a acao ba-sica, o sistema robotico retorna ao estado “ativo”.
E interessante observar que a complexidadedas missoes deve ser crescente, ou seja, a valida-cao ocorre, inicialmente, sem a introducao de pro-blemas. Posteriormente, a mesma missao podeser repetida com uma complexidade maior, in-cluindo problemas como: ausencia de cafe ou ban-deja, odor alterado do cafe, alteracao da posicaoinicial do personagem humano ou porta fechadano retorno da cozinha. Todos esses eventos seraoenviados diretamente ao sistema cognitivo, atra-ves do canal adequado e deverao ter o tratamentoapropriado sob pena de invalidar a validacao.
5 Resultados
O desenvolvimento do simulador esta dividido nasseguintes etapas: 1. levantamento dos requisitos,2. projeto do simulador, 3. implementacao dosimulador, 4. teste unitario do simulador e 5. in-
XIII Simposio Brasileiro de Automacao Inteligente
Porto Alegre – RS, 1o – 4 de Outubro de 2017
54

tegracao com arquitetura cognitiva. Atualmente,o foco esta no etapa 3. implementacao do simula-dor, que tem por objetivo implementar o cenario,o robo e o personagem humano conforme deta-lhado nos proximos paragrafos.
Na etapa 3, testes iniciais foram realizadoscom a criacao do ambiente e agentes (robotico ehumano), alem da elaboracao de uma missao sim-ples de pegar e levar um pacote de biscoito parao avatar humano. Ambos os agentes sao dotadosde juntas e esqueletos que podem ser manipula-dos atraves de animacoes, facilitando a simulacaode seus movimentos. O personagem humano foicriado com o uso da ferramenta Adobe Fuse CC(Adobe, 2017). Essa ferramenta permite geren-ciar inumeros aspectos humanos, incluindo roupase acessorios.
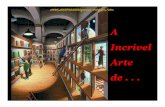
Figura 3: Agente robotico executando acao“pegarpacote de biscoito”.
As animacoes representam uma peca funda-mental para o simulador. Elas permitem darmaior naturalidade aos agentes simulados, alem deviabilizar a rotacao de juntas e movimentacao demembros por meio de scripts ou animacoes pro-prias. Ate o momento, foram utilizadas anima-coes que permitem ao agente andar para frente,de lado, de costas, virar, acenar, sentar, pegar ob-jetos e se manter em pe parado.
Na Figura 3, e apresentado um robo em umacozinha executando a acao (dentre varias defini-das na missao) de pegar um pacote de biscoitos.Vale notar a riqueza de objetos no ambiente pro-vido pelo cenario utilizado. Todos os objetos saoindependentes do cenario, passıveis de manipula-cao, permitindo que o robo interaja com objetosde forma a atender a comandos gerados pelo sis-tema cognitivo.
No vıdeo disponibilizado no Youtube 2 e apre-sentado uma previa de uma sequencia de simula-cao em que o personagem humano solicita ao roboum pacote de biscoito. Durante o processo de si-mulacao, todos os sentidos do robo serao usadospara o execucao da missao.
2www.youtube.com/watch?v=cXH7n4jD8y8
6 Conclusoes
Neste artigo, foi proposto o simulador, denomi-nado Robot House Simulator, RHS, para utiliza-cao na area de robotica social. O foco desse si-mulador e modelar aspectos cognitivos gerados apartir da captura de informacoes do ambiente dis-ponibilizados para o sistema cognitivo atraves dossentidos do robo. Esse simulador e parte inte-grante do ambiente de referencia para avaliacaode modelos cognitivos, CMDE, atualmente em de-senvolvimento no Laboratorio de Aprendizado deRobos da USP - Sao Carlos.
As vantagens do simulador RHS e que ele pro-porciona que interacoes entre humano e robo se-jam realizadas. Deste modo, ele possibilita a rea-lizacao das seguintes acoes: acelerar o processo deimplementacao de sistemas cognitivos em robos,viabilizar a reproducao de experimentos associa-dos a sistemas cognitivos, permitir a comparacaoentre implementacoes distintas e apoiar a instala-cao de cursos de IHR com foco em robotica social.
Um aspecto importante deste trabalho e a in-clusao de sensores para odor e sabor. Os robos dis-ponıveis no mercado nao oferecem sensores paraesses sentidos. A inclusao desses sentidos foi re-alizada considerando dois aspectos. O primeiroesta diretamente associado a robotica social queinsere os robos em atividades que exigem essa fun-cionalidade, em particular, limpeza domestica emanuseio de alimentos. O segundo aspecto estaassociado a uma caracterıstica basica dos simu-ladores: capacidade de habilitar testes com dis-positivos que ainda nao estao disponıveis ou temalto custo de aquisicao e operacao. Assim, esseinclusao permite a realizacao de pesquisas em sis-temas robotizados ainda nao disponibilizados fisi-camente.
Nao existe, ainda na literatura, um simuladorque contemple os varios sentido do robo, somenteo sentido de visao tem sido considerado nos si-muladores existentes. Nesta primeira versao doRHS, o simulador contempla o modelamento deambientes residencias, tais como, sala e cozinha.As etapas futuras de desenvolvimento envolvem:a inclusao de outros comodos , edifıcios e ruas; ainclusao de sentidos ausentes em seres humanos,p.ex. aceleracao, radioatividade ou eletromagne-tismo; melhorar a interface do usuario com o usode realidade aumentada; e permitir que mais deum usuario atue em diferentes avatares humanosinstanciados no simulador.
Agradecimentos
Os autores agradecem a CAPES, ao CNPq e aFAPESP por terem financiado parcialmente estapesquisa.
XIII Simposio Brasileiro de Automacao Inteligente
Porto Alegre – RS, 1o – 4 de Outubro de 2017
55

Referencias
Abboudi, H., Khan, M. S., Aboumarzouk, O.,Guru, K. A., Challacombe, B., Dasgupta,P. and Ahmed, K. (2013). Current statusof validation for robotic surgery simulators asystematic review, BJU INTERNATIONAL111(2): 194–205.
Adobe (2017). Criar modelos e personagens3D, http://www.adobe.com/br/products/
fuse.html. Acesso em: 26 jan. 2017.
Azevedo, H. and Romero, R. A. F. (2016). Inter-face for communication between the roboticand cognitive systems through the use of acognitive ontology, COGNITIVE 2016, Cur-ran Associates, Inc., Roma, Italy, pp. 1–3.
Baizid, K., Cukovic, S., Iqbal, J., Yousnadj, A.,Chellali, R., Meddahi, A., Devedzic, G. andGhionea, I. (2016). Irosim: Industrial robo-tics simulation design planning and optimi-zation platform based on cad and knowled-geware technologies, Robotics and Computer-Integrated Manufacturing 42: 121–134.
Cyberbotics (2017). Webots robot simulator,https://www.cyberbotics.com/. Acessoem: 30 jan. 2017.
DARPA (2014). The darpa grand challenge:Ten years later, http://www.darpa.mil/
news-events/2014-03-13. Acesso em: 24jan. 2017.
DARPA (2015). What is the DARPA RoboticsChallenge (DRC)?, http://archive.darpa.mil/roboticschallengetrialsarchive/
about/index.html. Acesso em: 24 jan.2017.
Echeverria, G. b., Lemaignan, S. b. c., Degroote,A. b., Lacroix, S. b., Karg, M., Koch, P.,Lesire, C. and Stinckwich, S. f. (2012). Simu-lating complex robotic scenarios with morse,7628 LNAI: 197–208.
Finnegan, K. T., Meraney, A. M., Staff, I. andShichman, S. J. (2012). da vinci skills simu-lator construct validation study: Correlationof prior robotic experience with overall scoreand time score simulator performance, URO-LOGY 80(2): 330–335.
Gazebo (2017). Gazebo, http://gazebosim.org.Acesso em: 24 jan. 2017.
Hwang, E., Lee, S., Lim, Y. and Choi, J. (2016). A3d simulation for social human-robot interac-tion with ontology-based robot knowledge,Ubiquitous Robots and Ambient Intelligence(URAI), 2016 13th International Conferenceon, IEEE, pp. 214–216.
IEEE Standard Ontologies for Robotics and Auto-mation (2015).
Inamura, T. and Tan, J. T. C. (2012). Long-termlarge scale human-robot interaction platformthrough immersive vr system-development ofrobocup@ home simulator, System Integra-tion (SII), 2012 IEEE/SICE InternationalSymposium on, IEEE, pp. 242–247.
Kuo, P.-H., Ho, Y.-F., Lee, K.-F., Tai, L.-H.and Li, T.-H. S. (2013). Development ofhumanoid robot simulator for gait learningby using particle swarm optimization, Sys-tems, Man, and Cybernetics (SMC), 2013IEEE International Conference on, IEEE,pp. 2683–2688.
Langley, P., Laird, J. E. and Rogers, S. (2009).Cognitive architectures: Research issuesand challenges, Cognitive Systems Research10(2): 141–160.
Lee, J. Y., Mucksavage, P., Kerbl, D. C., Huynh,V. B., Etafy, M. and McDougall, E. M.(2012). Validation study of a virtual realityrobotic simulator-role as an assessment tool?,JOURNAL OF UROLOGY 187(3): 998–1002.
Mattingly, W. A., Chang, D.-j., Paris, R., Smith,N., Blevins, J. and Ouyang, M. (2012). Ro-bot design using unity for computer gamesand robotic simulations, Computer Games(CGAMES), 2012 17th International Confe-rence on, IEEE, pp. 56–59.
PlayerStage (2017). The Player Project, http://playerstage.sourceforge.net. Acesso em:30 jan. 2017.
RoboticsVO (2013). A roadmap for u.s. ro-botics: From internet to robotics, https:
//robotics-vo.us/sites/default/files/
2013%20Robotics%20Roadmap-rs.pdf.Acesso em: 31 jan. 2017.
Rohmer, E., Singh, S. P. and Freese, M. (2013).V-rep: A versatile and scalable robot simula-tion framework, Intelligent Robots and Sys-tems (IROS), 2013 IEEE/RSJ InternationalConference on, IEEE, pp. 1321–1326.
Tan, J. T. C. and Inamura, T. (2012). Sigverse-a cloud computing architecture simulationplatform for social human-robot interac-tion, Robotics and Automation (ICRA), 2012IEEE International Conference on, IEEE,pp. 1310–1315.
Unity (2017). Unity Manual, http://docs.
unity3d.com/Manual/index.html. Acessoem: 25 jan. 2017.
XIII Simposio Brasileiro de Automacao Inteligente
Porto Alegre – RS, 1o – 4 de Outubro de 2017
56




![Jogos cognitivos[1]](https://static.fdocumentos.com/doc/165x107/5571ff1949795991699ca1ed/jogos-cognitivos1.jpg)