
SISTEMA AUTOMÁTICO PARA EL MONITOREO Y CONTROL DEL ...
100
SISTEMA AUTOMÁTICO PARA EL MONITOREO Y CONTROL DEL SUMINISTRO Y CONSUMO DE COMBUSTIBLE PARA MAQUINARIA AGRÍCOLA DE PIZARRO JIMÉNEZ LTDA. WILLIAM ANDRES MARTINEZ RAMIREZ DIEGO FABIAN PIZARRO SANCHEZ UNIVERSIDAD DE SAN BUENAVENTURA –CALI FACULTAD DE INGENIERÍA PROGRAMA DE INGENIERÍA ELECTRÓNICA SANTIAGO DE CALI 2013
Transcript of SISTEMA AUTOMÁTICO PARA EL MONITOREO Y CONTROL DEL ...

SISTEMA AUTOMÁTICO PARA EL MONITOREO Y CONTROL DEL SUMINISTRO Y CONSUMO DE COMBUSTIBLE PARA MAQUINARIA
AGRÍCOLA DE PIZARRO JIMÉNEZ LTDA.
WILLIAM ANDRES MARTINEZ RAMIREZ DIEGO FABIAN PIZARRO SANCHEZ
UNIVERSIDAD DE SAN BUENAVENTURA –CALI FACULTAD DE INGENIERÍA
PROGRAMA DE INGENIERÍA ELECTRÓNICA SANTIAGO DE CALI
2013

SISTEMA AUTOMÁTICO PARA EL MONITOREO Y CONTROL DEL SUMINISTRO Y CONSUMO DE COMBUSTIBLE PARA MAQUINARIA
AGRÍCOLA DE PIZARRO JIMÉNEZ LTDA.
WILLIAM ANDRES MARTINEZ RAMIREZ DIEGO FABIAN PIZARRO SANCHEZ
TRABAJO DE GRADO
DIRECTOR DAVID ESCOBAR
INGENIERO ELÉCTRÓNICO
UNIVERSIDAD DE SAN BUENAVENTURA –CALI FACULTAD DE INGENIERÍA
PROGRAMA DE INGENIERÍA ELECTRÓNICA SANTIAGO DE CALI
2013
Nota de Aceptación Aprobado por el comité de grado en cumplimiento de los requisitos exigidos por la “Universidad de San Buenaventura de Cali” para optar el título de ingeniero electrónico.
______________________________ Ing. David Escobar
Director del proyecto
______________________________ Ing. Juan Carlos Cruz Jurado
______________________________ Ing. Carlos Mauricio Betancourt Jurado Santiago de Cali, mayo de 2013
RESUMEN Este proyecto fue desarrollado por los estudiantes Diego Fabián Pizarro Sánchez y William Andrés Martínez Ramírez, actuando como director del proyecto, Ingeniero David Escobar. Se llevó a cabo en los departamentos de Risaralda, Cauca y Valle del Cauca, lugar de operaciones de la maquinaria agrícola de la empresa PIZARRO JIMÉNEZ LTDA. Se tomó como centro principal de operaciones los ingenios Azucareros donde labora dicha maquinaria. PIZARRO JIMÉNEZ LTDA. No contaba con un sistema que permitiera tener control sobre el combustible que consumen las máquinas con las cuales opera la empresa. En busca de hacerse más competitiva en el sector donde se desempeña, adoptó estrategias de trabajo y funcionamiento con el fin de garantizar la prestación de su servicio y del buen aprovechamiento de sus recursos para el cumplimiento de su misión. Dentro de dichas estrategias se implementó un sistema automático que permite controlar de manera eficaz el abastecimiento del combustible en las máquinas, ya que el costo aplicado a este ítem representa el 30% de los costos operativos. Se implementó un sistema de control de combustible confiable, integrando recursos tecnológicos para lograr una solución a la problemática alrededor de la auditoria de combustibles. Palabras clave: Maquinaria agrícola, Pizarro Jiménez LTDA, Combustible, Sistema automático, controlar,
GLOSARIO Alternador: Máquina eléctrica capaz de transformar energía mecánica en energía eléctrica, genera corriente alterna mediante el principio de inducción. Amperaje: intensidad de una corriente eléctrica, medida en amperios. Cristal oscilador: es implementado como componente de control de frecuencia de circuitos osciladores, convirtiendo las vibraciones mecánicas en voltajes eléctricos a una frecuencia específica. Esto ocurre debido al efecto "piezoeléctrico". Frecuencia: Magnitud que permite medir el número de repeticiones por unidad de tiempo de cualquier fenómeno o suceso periódico. Según el S.I (Sistema Internacional), la frecuencia se mide en hercios (Hz). GPS: SPG o GPS (Global Positioning System: sistema de posicionamiento global) o NAVSTAR, GPS (Navigation System Timing and Ranging, Global Positioning System). Este sistema tiene como objetivo determinar las coordenadas espaciales de puntos respecto a un sistema de referencia mundial para lograr ubicar con precisión objetos, vehículos o personas. Desarrollado, instalado y operado por el departamento de defensa de los Estados Unidos GPRS: (General Packet Radio Services) es una técnica de conmutación de paquetes, que es integrable y opera con la estructura actual de las redes GSM. Permite velocidades de datos de hasta 115 Kbps. Sus ventajas son múltiples, y se aplican fundamentalmente a las transmisiones de datos que produzcan tráfico "a ráfagas", es decir, discontinuo. Por ejemplo, Internet y mensajería. Consigue utilizar a la vez diversos canales, y aprovechar espacios disponibles para las transmisiones de diversos usuarios. Por tanto, no se requiere de un circuito dedicado para cada usuario conectado. Por tanto se suprime el concepto de tiempo de conexión, dando paso al de cantidad de información transmitida. El cliente podrá ser facturado por los paquetes realmente enviados y recibidos. El ancho de banda podrá ser entregado bajo demanda, en función de las necesidades de la comunicación. Horómetro: Dispositivo que registra número de horas de trabajo de un motor o un equipo. Son usados para el control de intervenciones de mantenimiento preventivo en máquinas y llevar el registro de horas laboradas por el equipo. I/O: (input/output) Entradas/Salidas. Memoria: dispositivo o sistema dedicado a almacenar datos.
Microcontrolador: circuito integrado o chip programable, capaz de ejecutar las órdenes grabadas en su memoria. Incluye en su interior las tres unidades funcionales de una computadora: CPU, Memoria y Unidades de E/S. Open-source: código abierto es el término con el que se conoce al software distribuido y desarrollado libremente. Pimpina: recipiente fabricado generalmente en plástico, con el propósito de almacenar combustible. PWM: en inglés pulse-widthmodulation; modulación por anchura de pulsos es una técnica de modulación en la que se modifica el ciclo de trabajo de una señal periódica para, entre otras cosas, variar la velocidad de un motor. Ralentí: número mínimo de revoluciones por minuto (RPM) que trabaja un motor de combustión interna cuando a este no se le está ejerciendo ninguna acción de aceleración. Por lo general se encuentra entre 700 y 900 RPM Revoluciones por minuto (R.P.M): Unidad de frecuencia que indica el número de rotaciones o vueltas que completa cada minuto un cuerpo que gira alrededor de un eje RS232: (Recommended Standard 232, también conocido como Electronic Industries Alliance RS-232C) es una interfaz que designa una norma para el intercambio de una serie de datos binarios entre un DTE (Equipo terminal de datos) y un DCE (Data Communication Equipment, Equipo de Comunicación de datos), aunque existen otras en las que también se utiliza la interfaz RS-232. Sensor: un sensor es un dispositivo capaz de detectar magnitudes físicas o químicas, llamadas variables de instrumentación, y transformarlas en variables eléctricas. Las variables de instrumentación pueden ser por ejemplo: temperatura, intensidad lumínica, distancia, aceleración, inclinación, desplazamiento, presión, fuerza, torsión, humedad, pH, etc. Sensor de nivel tipo capacitivo: es un dispositivo sensor eléctrico que tiene la capacidad de reaccionar ante materiales metálicos y no metálicos. Su funcionamiento consiste en dos placas paralelas con una constante dieléctrica en medio de ellas, cuando algún material se presenta en medio de estas dos placas su campo eléctrico disminuye o aumenta.
Sistemas embebidos: son dispositivos usados para controlar equipos, operación de maquinarias o plantas industriales completas. El término “embebido” (también se lo conoce como “incrustado” o “embutido”) está caracterizando que esos circuitos integrados son una parte integral del sistema en que se encuentran. Lo interesante de que un sistema sea “embebido” es que puede estar de tal forma incrustado, puede quedar tan oculto a nuestros ojos, que la presencia de tales “chips” no resulte nada obvia a quien lo mira. TTL: es la sigla en inglés de transistor-transistor logic, es decir, "lógica transistor a transistor". Es una tecnología de construcción de circuitos electrónicos digitales y los elementos de entrada y salida del dispositivo, son transistores bipolares. USART: (Universal Synchronous/Asynchronous Receiver-Transmitter). Transmisor-Receptor Asíncrono/Síncrono Universal. Periférico para la transmisión de datos en formato serie, utilizando técnicas de transmisión sincrónica o asincrónica, según se configure el periférico. La característica más destacable de este tipo de periféricos es que utiliza solamente dos terminales para el envío y recepción de datos, en cualquiera de los dos modos de trabajo.
CONTENIDO
INTRODUCCIÓN ............................................................................... 13
Objetivo general .................................................................................................................. 17
Objetivos específicos ......................................................................................................... 17
1. MAQUINARIA PESADA EN GENERAL ....................................... 18
1.2 CLASIFICACIÓN DE LA MAQUINARIA .................................................................................. 18
1.3 CONDICIONES Y LUGAR DE TRABAJO .................................................................................. 21
1.4 ESTUDIOS PREVIOS Y DATOS DE CONSUMO ....................................................................... 21
1.5 ESTUDIOS Y MEDICIONES DE CAMPO ................................................................................. 22
2. TECNOLOGÍA PROPUESTA ........................................................ 35
2.1 GPS ................................................................................................................................... 35
2.2 GPRS (GENERAL PACKET RADIO SERVICES) ......................................................................... 36
2.3 MICROCONTROLADOR ....................................................................................................... 37
2.4 SENSOR CAPACITIVO ......................................................................................................... 39
3. DISEÑO E IMPLEMENTACIÓN ELECTRÓNICA .......................... 40
3.1 REQUERIMIENTOS ....................................................................................................... 40
3.2 COMPONENTES A ESCOGER ............................................................................................... 40
4. DISEÑO DE LA TARJETA DE DESARROLLO ............................ 52
4.1 MÓDULO DE FUENTE DE ALIMENTACIÓN 5 VOLTS .............................................................. 52
4.2 MÓDULO DE CIRCUITOS ADECUADORES DE NIVELES DE VOLTAJE ....................................... 54
4.3 MÓDULO DE COMUNICACIÓN ............................................................................................ 56
5. PROGRAMACIÓN ......................................................................... 58
5.1 REQUERIMIENTOS DE PROGRAMA ..................................................................................... 58
5.2 ESTRUCTURA DEL PROGRAMA ........................................................................................... 58
5.3 PROGRAMA ....................................................................................................................... 59
6. PRUEBAS REALIZADAS ............................................................. 66
6.1 MENSAJE DE TEXTO CADA 6 HORAS ................................................................................... 66
6.2 MENSAJE DE TEXTO ALARMA TANQUE DE LA MÁQUINA .................................... 66
6.3 MENSAJE DE TEXTO ALARMA TANQUE ABASTECEDOR ..................................... 67
6.4 MENSAJE DE TEXTO CADA HORA ........................................................................................ 67
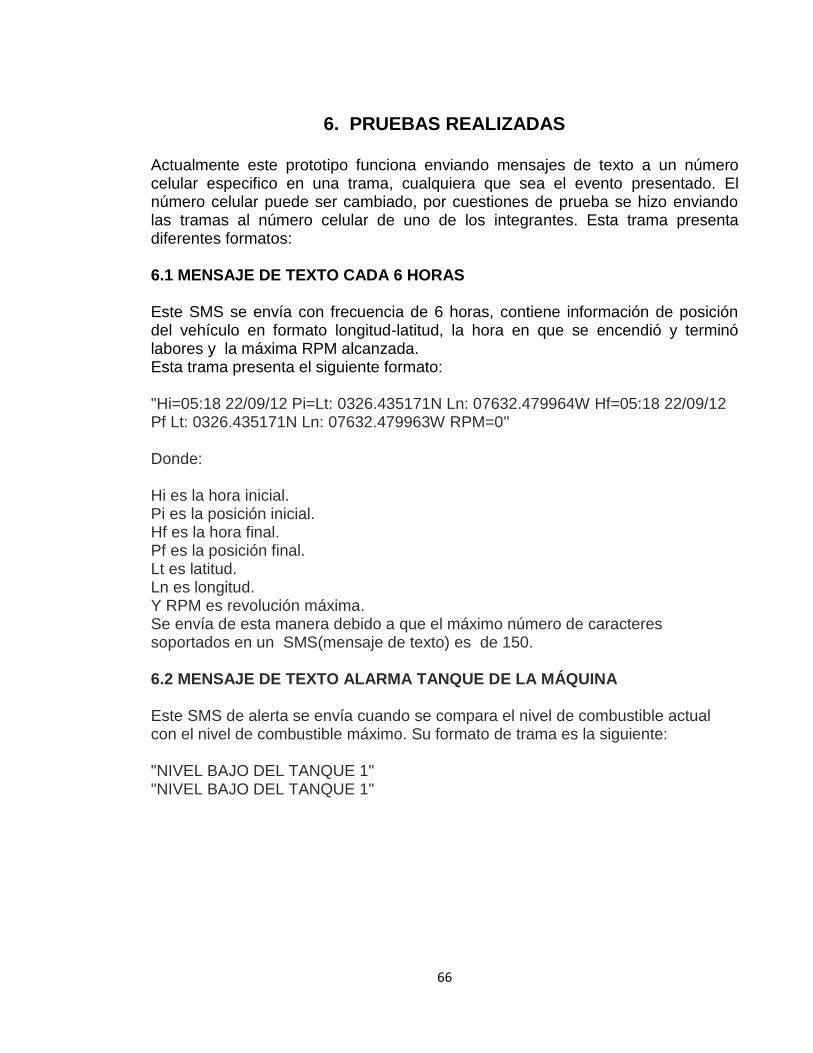
7. DIAGRAMAS ESQUEMÁTICOS ................................................... 68
CONCLUSIONES .............................................................................. 71
BIBLIOGRAFÍA ................................................................................. 72
ANEXOS ............................................................................................ 75
INDICE DE FIGURAS
FIGURA 1. ESQUEMA GENERAL DE ABASTECIMIENTO ...................................................................................... 14
FIGURA 2. MAQUINARIA PESADA ..................................................................................................................... 18
FIGURA 3.MAQUINARIA SEMIPESADO .............................................................................................................. 19
FIGURA 4.MAQUINA CATERPILLAR RETROEXCAVADORA CAT 416D ................................................................. 22
FIGURA 5. MÉTODO DE ABASTECIMIENTO ....................................................................................................... 24
FIGURA 6. AHORRO DE LA COMPAÑÍA POR EQUIPO ANUALMENTE ................................................................ 30
FIGURA 7. PORCENTAJE DE AHORRO POR MÁQUINA ANUALMENTE ............................................................... 30
FIGURA 8.ALTERNADOR CATERPILLAR RETROEXCAVADORA CAT 416D .......................................................... 31
FIGURA 9.SEÑAL RPM OSCILOSCOPIO............................................................................................................... 32
FIGURA 10.SENSOR NIVEL CATERPILLAR RETROEXCAVADORA CAT416D ......................................................... 32
FIGURA 11.MICROCONTROLADOR PIC 18F8720 ............................................................................................... 41
FIGURA 22. PIC 18F252 ..................................................................................................................................... 41
FIGURA 12.DISTRIBUCIÓN DE PINES MAX232 ................................................................................................... 42
FIGURA 13. LM358 ............................................................................................................................................ 42
FIGURA 14.CRISTAL DE CUARZO DE VALOR 32 MEGA HERTZ ........................................................................... 43
FIGURA 15. OPTOACOPLADOR 4N35 ................................................................................................................ 44
FIGURA 16.REGULADOR LM2575 ...................................................................................................................... 45
FIGURA 17.SKYPATROL TT8750 ......................................................................................................................... 46
FIGURA 21. GPS TRACKER GSM/GPRS ............................................................................................................... 47
FIGURA 18.SENSOR CAPACITIVO TIPO SONDA DUT-E A5 ................................................................................. 48
FIGURA 19.BOMBA SURTIDORA DE COMBUSTIBLE TROY ................................................................................. 49
FIGURA 20. MEDIDOR DE FLUJO DE COMBUSTIBLE GPI .................................................................................. 49
FIGURA 23. ESQUEMA GENERAL DE FUNCIONAMIENTO .................................................................................. 50
FIGURA 24.DIAGRAMA DE CONEXIÓN FUENTE CONMUTADA.......................................................................... 53
FIGURA 25.DIAGRAMA ESQUEMÁTICO MÓDULO FUENTE CONMUTADA ........................................................ 54
FIGURA 26.DIAGRAMA ESQUEMÁTICO DEL CIRCUITO ADECUADOR PARA EL SENSOR DE NIVEL DE LA
MÁQUINA ................................................................................................................................................. 55
FIGURA 27.DIAGRAMA ESQUEMÁTICO DEL CIRCUITO ADECUADOR PARA RPM ............................................. 56
FIGURA 28.MÓDULO DE COMUNICACIÓN POR USART-RS232 ......................................................................... 57
FIGURA 29. DISEÑO TARJETA DE DESARROLLO ................................................................................................. 68
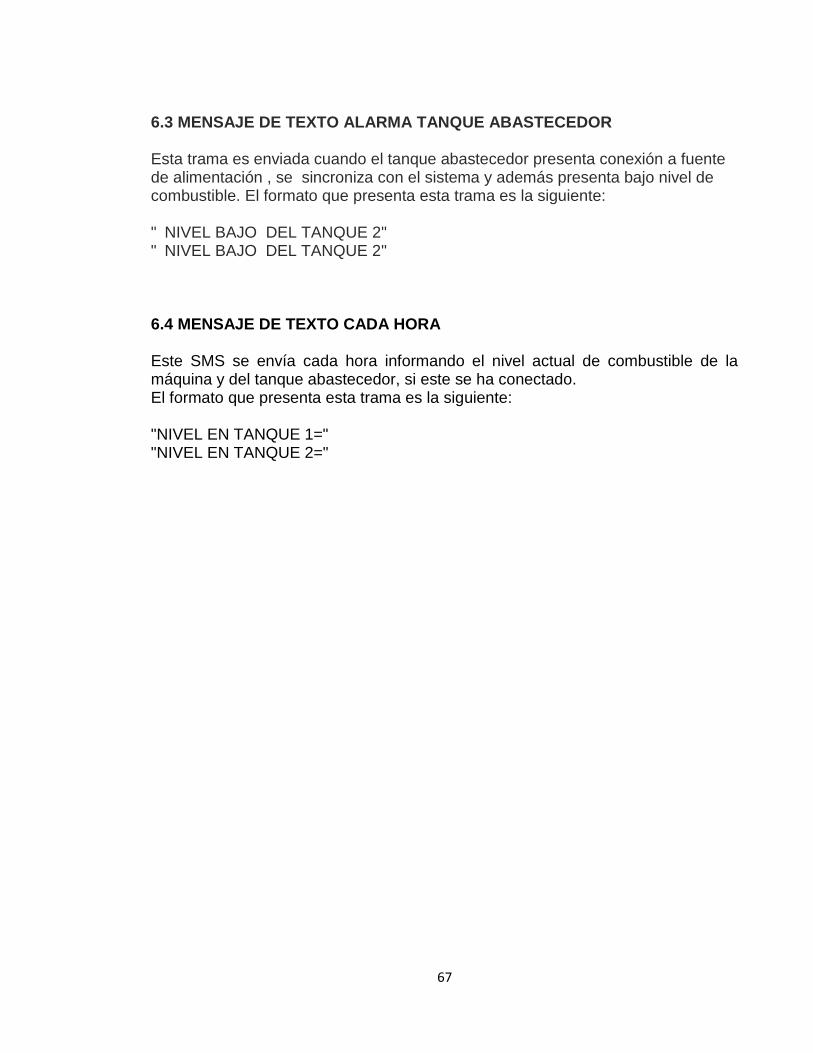
FIGURA 30. TARJETA DE DESARROLLO, VISTA DE COMPONENTES ................................................................... 69
FIGURA 31. TARJETA DE DESARROLLO, COMPONENTES Y RUTEO DE PISTAS CONDUCTORAS. ....................... 69
FIGURA 32. TARJETA DE DESARROLLO IMPRESA CON COMPONENTES ............................................................ 70
INDICE DE TABLAS
TABLA 1. TABLA GENERAL CON BASE EN LOS DATOS REGISTRADOS HORAS LABORADAS ............................... 21
TABLA 2. TABLA GENERAL CON BASE EN LOS DATOS REGISTRADOS COMBUSTIBLE CONSUMIDO ................. 21
TABLA 3. ESPECIFICACIONES CATERPILLAR 416D .............................................................................................. 23
TABLA 4.DATOS OBTENIDOS DE CONSUMO DE COMBUSTIBLE Y GALONES POR HORA (GAL/HORA) .............. 25
TABLA 5. DATOS OBTENIDOS CON PRUEBA REALIZADA ................................................................................... 26
TABLA 6.COMPARACIÓN DE PROMEDIOS. ........................................................................................................ 27
TABLA 7.HORAS LABORADAS AL AÑO, GALONES CONSUMIDOS Y COSTO ASUMIDO CON PROMEDIO DE 2,8
GALONES POR HORA ................................................................................................................................ 27
TABLA 8.HORAS LABORADAS AL AÑO, GALONES CONSUMIDOS Y COSTO ASUMIDO CON PROMEDIO DE 2,5
GALONES POR HORA ................................................................................................................................ 28
TABLA 9. MEDICIONES SENSOR TIPO FLOTADOR .............................................................................................. 33
TABLA 10. RELACIÓN RPM-AMPLITUD RESPECTO AL RUIDO ELECTROMAGNÉTICO. RELACIÓN SEÑAL RUIDO33
TABLA 11.RELACIÓN DE VOLTAJES ENTRADA-SALIDA ....................................................................................... 55
INDICE DE DIAGRAMAS
DIAGRAMA 1.CLASIFICACION SEGÚN LA FUENTE DE ENERGÍA ........................................................................ 20
DIAGRAMA 2.CLASIFICACION SEGÚN LAS OPERACIONES QUE REALIZAN ........................................................ 20
DIAGRAMA 3. EXPLICACIÓN LLC GPRS .............................................................................................................. 37
13
INTRODUCCIÓN
Actualmente la empresa Pizarro Jiménez Ltda. Cuenta con cinco (5) máquinas agrícolas tipo pesado, cargador de ruedas, marcas Volvo, Komatsu y Caterpillar, que se encuentran trabajando para el Ingenio Risaralda en las áreas de compostaje, patios de caña, calderas y lagunas de evacuación de material de desecho. La maquinaria es empleada en el área de patios para el cargue y descargue de caña de azúcar que llega al ingenio proveniente de las zonas de cultivo; esta área es la encargada de procesar la caña de azúcar. En el área de calderas, la maquinaria es empleada para el suministro del bagazo resultante del proceso de la caña en patios a la caldera, que es la encargada de producir la energía del ingenio Risaralda. En el área de compostaje la maquinaria es la encargada del cargue, descargue y recolección del material orgánico provenientes de las áreas de Patios de caña y lagunas de material de desecho (hoja de caña, bagazo, lodo).
Para el abastecimiento de combustible de dicha maquinaria la empresa en el momento cuenta con una persona que es la encargada de recolectar y abastecer la maquinaria, dicho proceso se realizaba de la siguiente forma:
● Desplazamiento desde el ingenio del encargado hacia la estación de
combustible, para el abastecimiento de las pimpinas que son las utilizadas en este momento por la empresa para dicho proceso.
● Abastecimiento del combustible desde la estación, este se realiza recolectando en pimpinas, estas son transportadas en un vehículo desde la estación hasta el Ingenio Risaralda, ubicado a 4 kilómetros de distancia aproximadamente.
● Las pimpinas con combustible son almacenadas en un sitio especial en el ingenio para después ser suministradas a la maquinaria.
● El combustible es abastecido las máquinas de forma manual desde la pimpina a la máquina.
● Dependiendo del nivel de combustible que en el momento tiene la máquina, así mismo es abastecido con el número de pimpinas que son de capacidad aproximada de 4,5 a 5 galones.
14
Figura 1. Esquema general de abastecimiento
Fuente: Los autores
Teniendo en cuenta el anterior esquema de abastecimiento y suministro de combustible para el funcionamiento de la maquinaria con la que se cuenta, se hizo el análisis de las posibles pérdidas cualitativas respecto al combustible que se puede presentar durante la logística este proceso.
● Desfase entre la cantidad suministrada a las pimpinas y la cantidad
facturada por la empresa suministradora del A.C.P.M. ● Cantidades perdidas en el lugar de almacenamiento y pérdidas por posible
fraude. ● Mal suministro del combustible hacia la maquinaria; se presenta en el
momento de evacuar la pimpina en el tanque de la máquina; el combustible
15
no tiene un conducto que entre directamente al tanque, por tal motivo parte del combustible es derramado por fuera del reservorio.
● No se cuenta con un control de consumo de combustible unitario por labor realizada en el área de trabajo específica, pérdidas de combustible que se puedan presentar por fugas, malos acoples entre las mangueras, rupturas en los tanques de almacenamiento o posibles fraudes.
Adicionalmente los costos administrativos se discriminan así:
● Transporte por alquiler de vehículo encargado de hacer los
desplazamientos al lugar de abastecimiento de pimpinas y suministro de la maquinaria.
● Combustible consumido por dicho vehículo. ● Operario encargado de esta labor.
En la actualidad la empresa Pizarro Jiménez Ltda. Busca la forma de hacerse más competitiva en el sector donde se desempeña; Como medio para obtener esta competitividad busca adoptar estrategias de trabajo y funcionamiento con el fin de garantizar la prestación de su servicio y del buen aprovechamiento y optimización de sus recursos para el cumplimiento de su misión.
Dentro de las estrategias que desean adoptar, que abarcan ámbitos administrativos, logísticos, legales está la implementación de un sistema tecnológico que permita controlar de manera eficaz el abastecimiento del combustible en las máquinas, ya que el costo aplicado a este ítem representa una de las cargas más significativas en la operación de la empresa, aproximadamente el 30% de los costos de operación. Obtener la información para el desarrollo e integración de una solución electrónica automática encargada del monitoreo y control del suministro y consumo de combustible para maquinaria agrícola en Pizarro Jiménez Ltda. Para la cual se hicieron los cálculos y estudios previos de consumo y los dispositivos a utilizar.
Se visitó el lugar donde labora la maquinaria agrícola de Pizarro Jiménez Ltda. El Ingenio Risaralda, en el área de Compostaje. Se ubican las zonas de trabajo, las distancias recorridas durante la realización de cada labor, la disponibilidad de los equipos, el manejo del suministro de combustible a cada máquina. Se identificó el manejo que se le da a cada equipo, como el manejo ambiental y residual que se maneja al momento del abastecimiento de este. Se hicieron los análisis pertinentes para cada caso. Teniendo esto en cuenta se procedió a buscar las estadísticas llevadas, se encontró que en el periodo que comprende enero de 2011 hasta agosto 31 de 2011, el total de horas laboradas por los 5 equipos disponibles es de 5.865 y el total de galones de combustible consumidos es de 15.528. Con estos datos se procede a sacar un promedio diario y mensual. Esto se detalla en las tablas 1 y 2. Son datos estimados manualmente del cual no se
16
tiene un estimativo específico o preciso de consumo, se tomaron los datos a partir del control de los horómetros de cada máquina y el consumo de combustible de acuerdo a los registros presentados por la empresa que abastece ACPM a la empresa. Para el desarrollo del sistema de control se investigó sobre los sensores indispensables para el montaje, se hicieron los análisis tanto teóricos como prácticos que tienen por objetivo la aplicación de la tecnología electrónica para la solución e implementación en el sistema de control automático, se analizaron ventajas y desventajas de los diferentes tipos de sensores sus problemas tanto prácticos como de ensamble y se llegó a la conclusión de cuál debería ser el sensor a implementar.
17
OBJETIVOS
Objetivo general
Desarrollar e integrar una solución electrónica automática, encargada del monitoreo y control del suministro y consumo de combustible para maquinaria agrícola en Pizarro Jiménez Ltda.
Objetivos específicos
Reconocer el lugar y las condiciones de trabajo de la maquinaria agrícola de Pizarro Jiménez Ltda.
Registrar datos de horas de trabajo y consumible consumido.
Conocer el consumo promedio diario, semanal y mensual que tienen las máquinas agrícolas de Pizarro Jiménez Ltda.
Investigar tecnologías electrónicas que se puedan aplicar para el desarrollo del sistema automático.
Implementar la integración de tecnologías electrónicas, con el fin de obtener la aplicación del sistema automático.
Implementar los recursos teóricos y prácticos suministrados a lo largo de la carrera de ingeniería electrónica en este proyecto.
Obtener el ahorro económico propuesto a la empresa Pizarro Jiménez Ltda. con el desarrollo del prototipo.

18
1. MAQUINARIA PESADA EN GENERAL La definición de maquinaria pesada, es referida a todo tipo de maquinaria a motor a explosión por combustión, para cualquier trabajo pesado que puede ser construcción, minería, y carga, La maquinaria pesada es una clase de maquinaria que utiliza un gran consumo de combustible para funcionar operada por un conductor, y es utilizada para realizar tareas como el movimiento de tierra, levantamiento de objetos pesados, demolición, excavación o el transporte de material. Para la mayoría de obras civiles que se desarrollan en nuestras sociedades, requieren de la utilización de maquinaria pesada que permite realizar trabajos a menor tiempo, mayor escala y de menor costo económico.
1.2 CLASIFICACIÓN DE LA MAQUINARIA La maquinaria según la relación de Peso/volumen es decir según su capacidad se clasifica de la siguiente manera: 1.2.1 Maquinaria pesada. Maquinaria de grandes proporciones geométricas comparado con vehículos livianos, tienen peso y volumetría considerada; requiere de un operador capacitado porque varía la operación según la maquinaria; se utiliza en movimientos de tierra de grandes obras de ingeniería civil y en obras de minería a cielo abierto. Ejemplos Grúas, excavadoras, tractor, etc.
Figura 2. MAQUINARIA PESADA
Fuente: CATALOGO MAQUINARIA PESADA PJ LTDA
19
1.2.2 maquinaria semipesado. Son maquinarias de tamaño mediano utilizados generalmente en la construcción por ejemplo: Camión volqueta, carros Cisternas o Aguateros, camiones escalera. El peso y volumen de estas unidades es mediano.
Figura 3.MAQUINARIA SEMIPESADO
Fuente: CATALOGO MAQUINARIA PESADA PJ LTDA
20
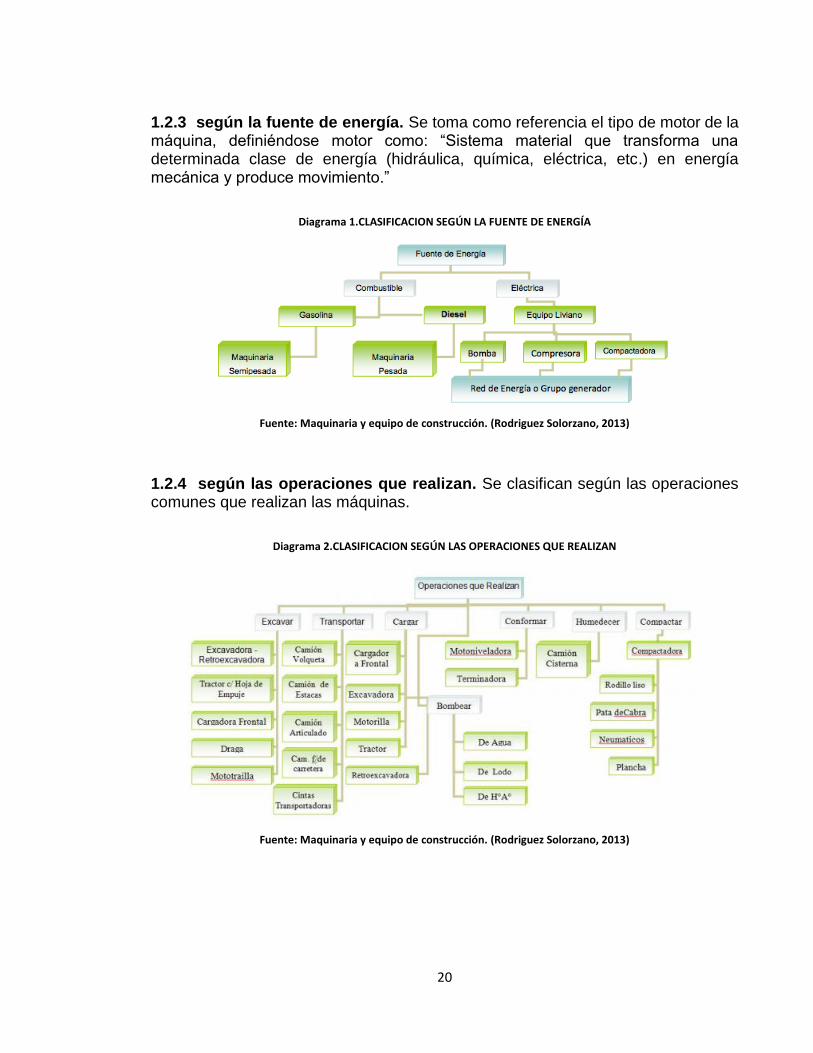
1.2.3 según la fuente de energía. Se toma como referencia el tipo de motor de la máquina, definiéndose motor como: “Sistema material que transforma una determinada clase de energía (hidráulica, química, eléctrica, etc.) en energía mecánica y produce movimiento.”
Diagrama 1.CLASIFICACION SEGÚN LA FUENTE DE ENERGÍA
Fuente: Maquinaria y equipo de construcción. (Rodriguez Solorzano, 2013)
1.2.4 según las operaciones que realizan. Se clasifican según las operaciones comunes que realizan las máquinas.
Diagrama 2.CLASIFICACION SEGÚN LAS OPERACIONES QUE REALIZAN
Fuente: Maquinaria y equipo de construcción. (Rodriguez Solorzano, 2013)
21
1.3 CONDICIONES Y LUGAR DE TRABAJO
Reconocer el lugar y las condiciones de trabajo de la maquinaria agrícola de Pizarro Jiménez Ltda. fue uno de los principales objetivos al momento de realizar este proyecto, se visitó el lugar donde labora la maquinaria agrícola; el Ingenio Risaralda, en el área de compostaje
● Se ubican las zonas de trabajo, las distancias recorridas durante la realización de cada labor, la disponibilidad de los equipos, el manejo del suministro de combustible a cada máquina.
● Se identificó el manejo que se le da a cada equipo, como el manejo ambiental y residual que se maneja al momento del abastecimiento de este. Se hicieron los análisis pertinentes para cada caso.
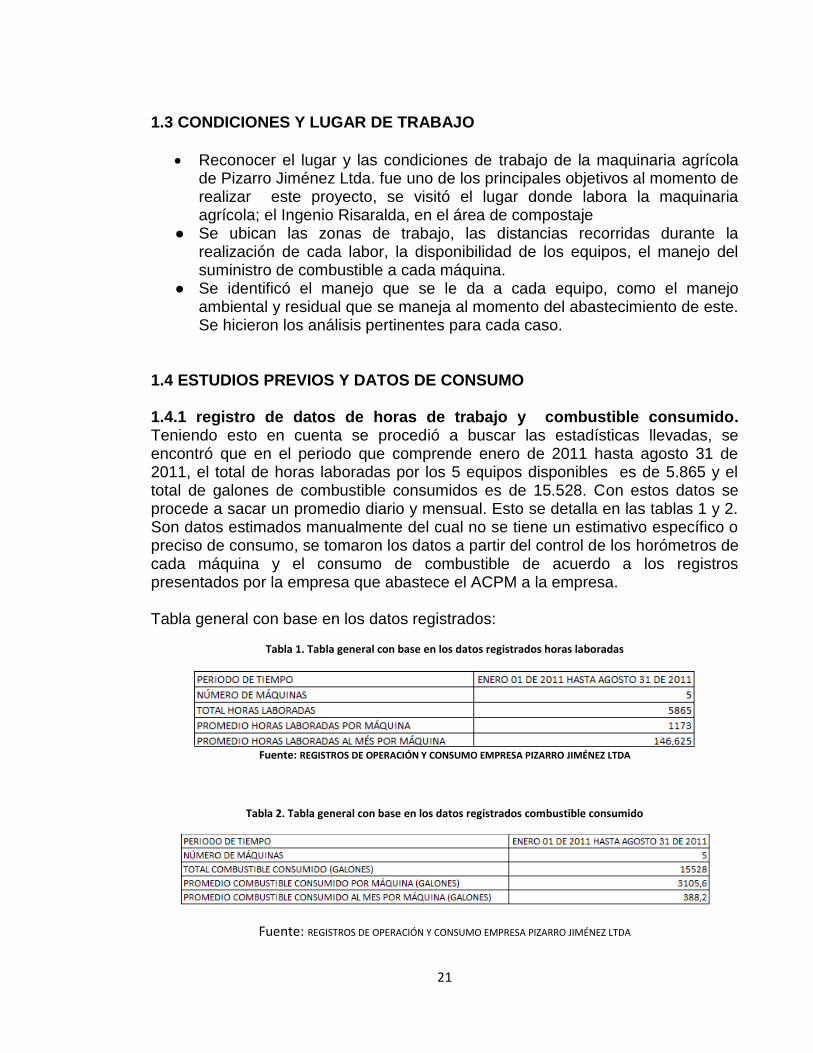
1.4 ESTUDIOS PREVIOS Y DATOS DE CONSUMO 1.4.1 registro de datos de horas de trabajo y combustible consumido. Teniendo esto en cuenta se procedió a buscar las estadísticas llevadas, se encontró que en el periodo que comprende enero de 2011 hasta agosto 31 de 2011, el total de horas laboradas por los 5 equipos disponibles es de 5.865 y el total de galones de combustible consumidos es de 15.528. Con estos datos se procede a sacar un promedio diario y mensual. Esto se detalla en las tablas 1 y 2. Son datos estimados manualmente del cual no se tiene un estimativo específico o preciso de consumo, se tomaron los datos a partir del control de los horómetros de cada máquina y el consumo de combustible de acuerdo a los registros presentados por la empresa que abastece el ACPM a la empresa. Tabla general con base en los datos registrados:
Tabla 1. Tabla general con base en los datos registrados horas laboradas
Fuente: REGISTROS DE OPERACIÓN Y CONSUMO EMPRESA PIZARRO JIMÉNEZ LTDA
Tabla 2. Tabla general con base en los datos registrados combustible consumido
Fuente: REGISTROS DE OPERACIÓN Y CONSUMO EMPRESA PIZARRO JIMÉNEZ LTDA
22
1.5 ESTUDIOS Y MEDICIONES DE CAMPO Debido que se requiere estudiar el consumo de combustible en las maquinas
como variable principal, es necesario estudiar variables secundarias (nivel de
combustible en el tanque de depósito, RPM mínima y máxima alcanzada, carga
máxima y mínima que soporta la máquina) que afectan directamente el consumo
de combustible. También se requiere conocer variables que parecen pequeñas,
pero si ocupan largos periodos de tiempo, afectan en un nivel mayor la variable
principal que se quiere determinar; tal como el tiempo de ralentí o “tiempo muerto”.
Para identificar estas variables y medirlas se pueden emplear métodos
experimentales establecidos, también se pueden aprovechar instrumentos que
facilitan la medición de alguna de las variables.
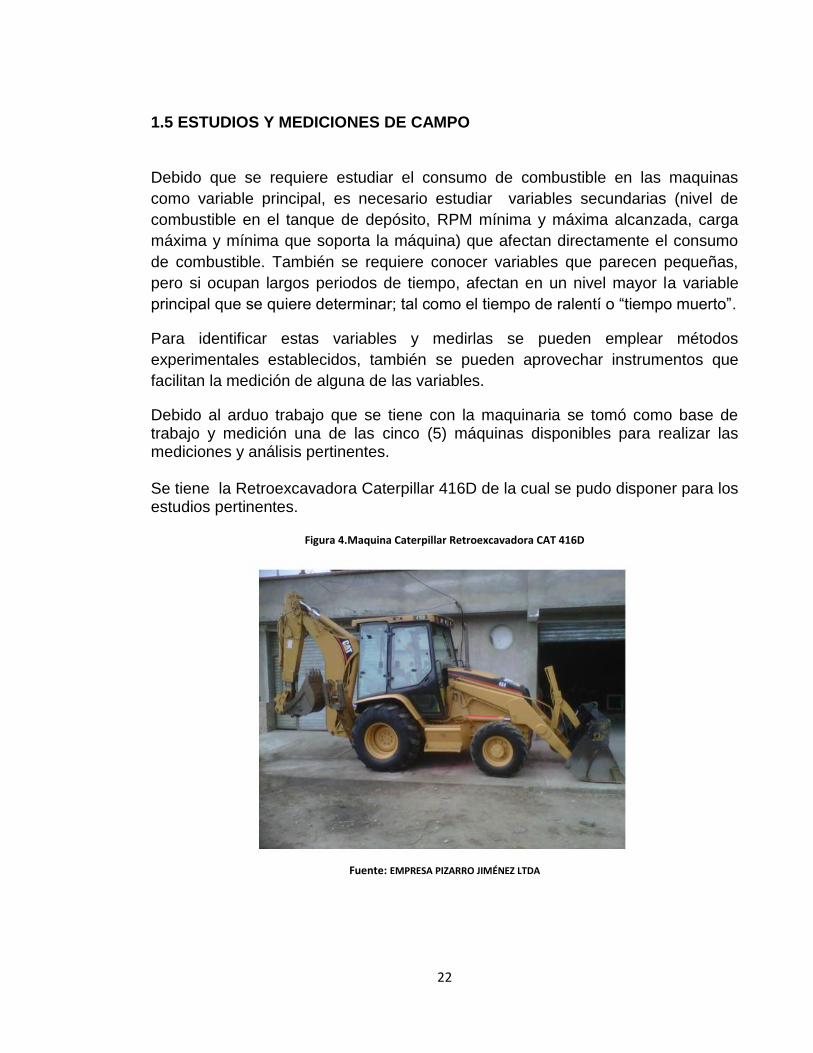
Debido al arduo trabajo que se tiene con la maquinaria se tomó como base de trabajo y medición una de las cinco (5) máquinas disponibles para realizar las mediciones y análisis pertinentes. Se tiene la Retroexcavadora Caterpillar 416D de la cual se pudo disponer para los estudios pertinentes.
Figura 4.Maquina Caterpillar Retroexcavadora CAT 416D
Fuente: EMPRESA PIZARRO JIMÉNEZ LTDA
23
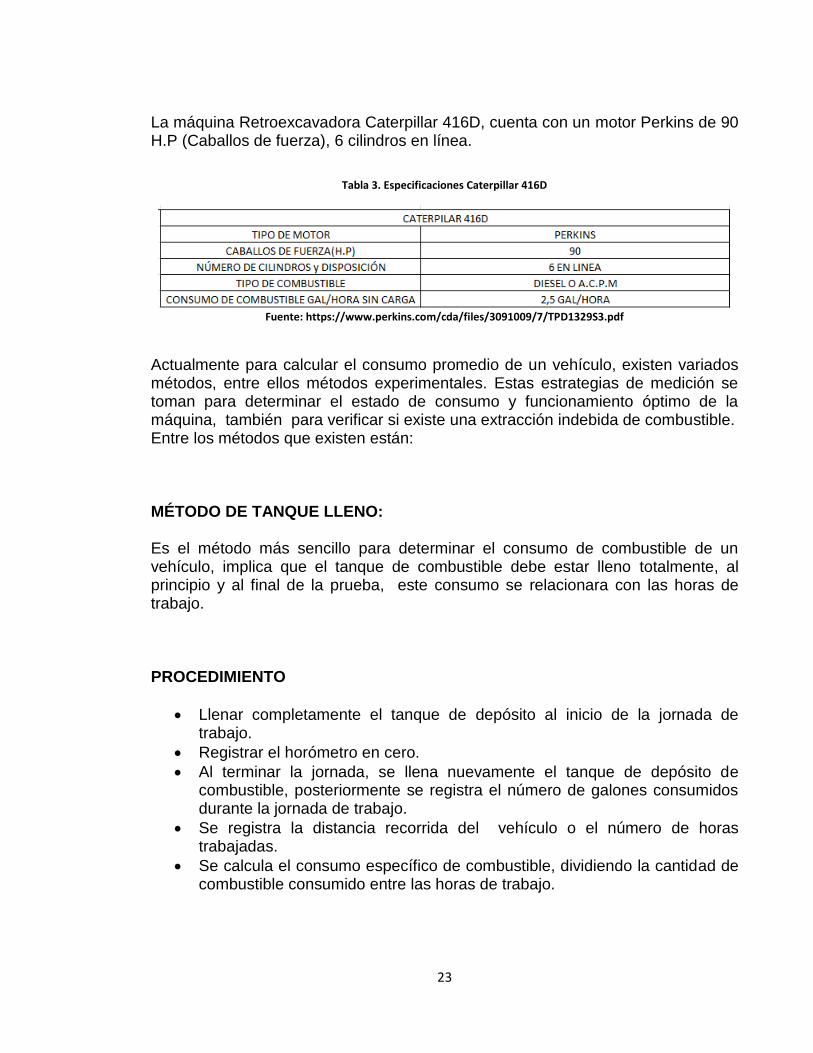
La máquina Retroexcavadora Caterpillar 416D, cuenta con un motor Perkins de 90 H.P (Caballos de fuerza), 6 cilindros en línea.
Tabla 3. Especificaciones Caterpillar 416D
Fuente: https://www.perkins.com/cda/files/3091009/7/TPD1329S3.pdf
Actualmente para calcular el consumo promedio de un vehículo, existen variados métodos, entre ellos métodos experimentales. Estas estrategias de medición se toman para determinar el estado de consumo y funcionamiento óptimo de la máquina, también para verificar si existe una extracción indebida de combustible. Entre los métodos que existen están: MÉTODO DE TANQUE LLENO: Es el método más sencillo para determinar el consumo de combustible de un vehículo, implica que el tanque de combustible debe estar lleno totalmente, al principio y al final de la prueba, este consumo se relacionara con las horas de trabajo. PROCEDIMIENTO
Llenar completamente el tanque de depósito al inicio de la jornada de trabajo.
Registrar el horómetro en cero.
Al terminar la jornada, se llena nuevamente el tanque de depósito de combustible, posteriormente se registra el número de galones consumidos durante la jornada de trabajo.
Se registra la distancia recorrida del vehículo o el número de horas trabajadas.
Se calcula el consumo específico de combustible, dividiendo la cantidad de combustible consumido entre las horas de trabajo.
24
Este procedimiento se debe realizar varias veces, como tiempo mínimo, una semana. Tiempo considerable para obtener datos de todas las actividades normales que se realizan y en condiciones diferentes de trabajo del vehículo. (Universidad Politécnica Saleciana-Ecuador, 2013)
Figura 5. Método de abastecimiento
Fuente: Los autores
25
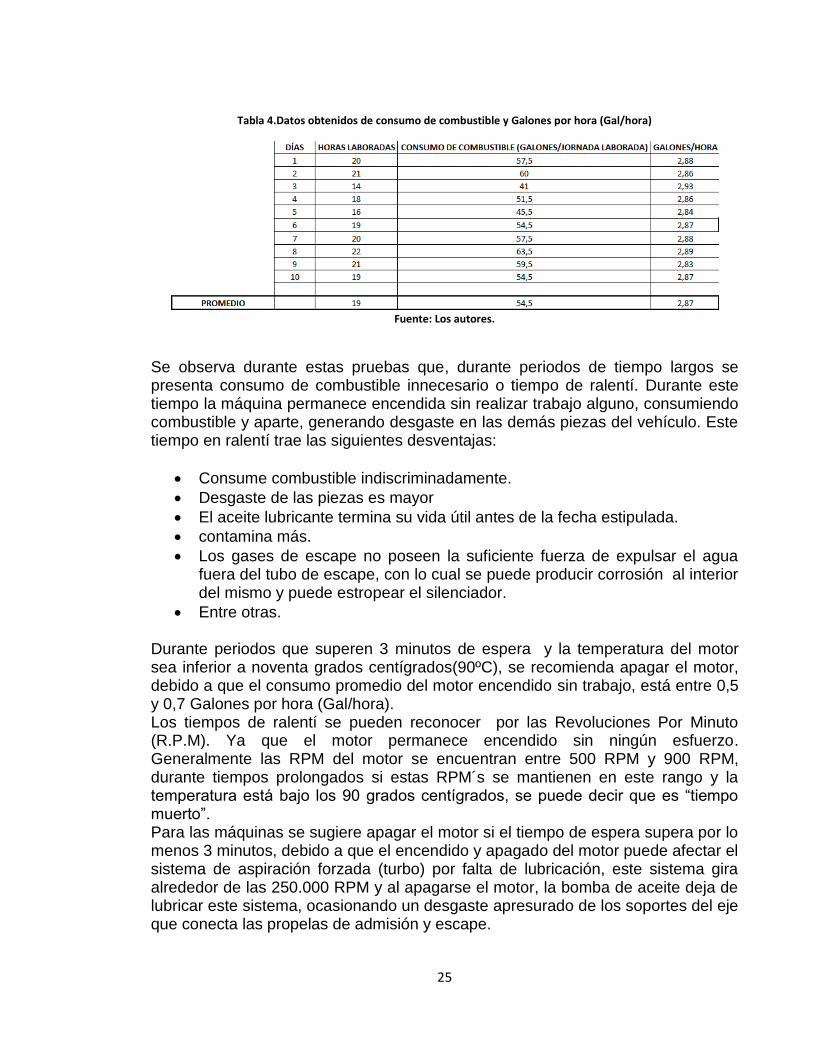
Tabla 4.Datos obtenidos de consumo de combustible y Galones por hora (Gal/hora)
Fuente: Los autores.
Se observa durante estas pruebas que, durante periodos de tiempo largos se presenta consumo de combustible innecesario o tiempo de ralentí. Durante este tiempo la máquina permanece encendida sin realizar trabajo alguno, consumiendo combustible y aparte, generando desgaste en las demás piezas del vehículo. Este tiempo en ralentí trae las siguientes desventajas:
Consume combustible indiscriminadamente.
Desgaste de las piezas es mayor
El aceite lubricante termina su vida útil antes de la fecha estipulada.
contamina más.
Los gases de escape no poseen la suficiente fuerza de expulsar el agua fuera del tubo de escape, con lo cual se puede producir corrosión al interior del mismo y puede estropear el silenciador.
Entre otras. Durante periodos que superen 3 minutos de espera y la temperatura del motor sea inferior a noventa grados centígrados(90ºC), se recomienda apagar el motor, debido a que el consumo promedio del motor encendido sin trabajo, está entre 0,5 y 0,7 Galones por hora (Gal/hora). Los tiempos de ralentí se pueden reconocer por las Revoluciones Por Minuto (R.P.M). Ya que el motor permanece encendido sin ningún esfuerzo. Generalmente las RPM del motor se encuentran entre 500 RPM y 900 RPM, durante tiempos prolongados si estas RPM´s se mantienen en este rango y la temperatura está bajo los 90 grados centígrados, se puede decir que es “tiempo muerto”. Para las máquinas se sugiere apagar el motor si el tiempo de espera supera por lo menos 3 minutos, debido a que el encendido y apagado del motor puede afectar el sistema de aspiración forzada (turbo) por falta de lubricación, este sistema gira alrededor de las 250.000 RPM y al apagarse el motor, la bomba de aceite deja de lubricar este sistema, ocasionando un desgaste apresurado de los soportes del eje que conecta las propelas de admisión y escape.
26
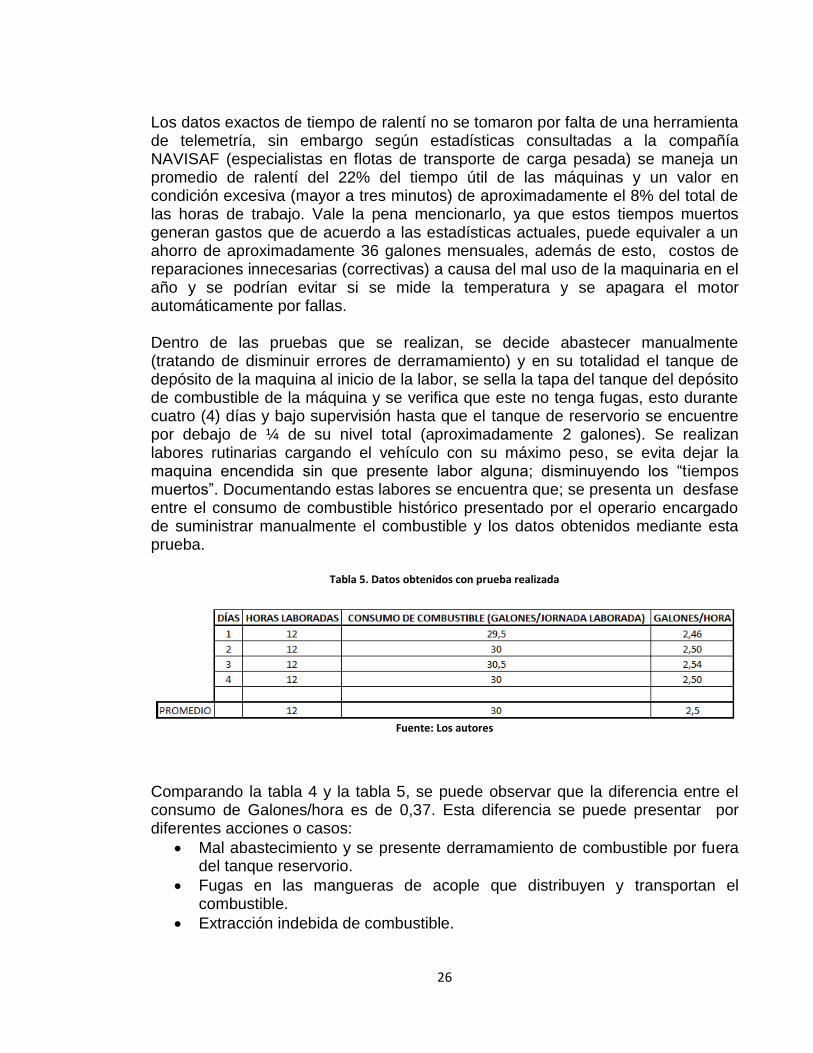
Los datos exactos de tiempo de ralentí no se tomaron por falta de una herramienta de telemetría, sin embargo según estadísticas consultadas a la compañía NAVISAF (especialistas en flotas de transporte de carga pesada) se maneja un promedio de ralentí del 22% del tiempo útil de las máquinas y un valor en condición excesiva (mayor a tres minutos) de aproximadamente el 8% del total de las horas de trabajo. Vale la pena mencionarlo, ya que estos tiempos muertos generan gastos que de acuerdo a las estadísticas actuales, puede equivaler a un ahorro de aproximadamente 36 galones mensuales, además de esto, costos de reparaciones innecesarias (correctivas) a causa del mal uso de la maquinaria en el año y se podrían evitar si se mide la temperatura y se apagara el motor automáticamente por fallas. Dentro de las pruebas que se realizan, se decide abastecer manualmente (tratando de disminuir errores de derramamiento) y en su totalidad el tanque de depósito de la maquina al inicio de la labor, se sella la tapa del tanque del depósito de combustible de la máquina y se verifica que este no tenga fugas, esto durante cuatro (4) días y bajo supervisión hasta que el tanque de reservorio se encuentre por debajo de ¼ de su nivel total (aproximadamente 2 galones). Se realizan labores rutinarias cargando el vehículo con su máximo peso, se evita dejar la maquina encendida sin que presente labor alguna; disminuyendo los “tiempos muertos”. Documentando estas labores se encuentra que; se presenta un desfase entre el consumo de combustible histórico presentado por el operario encargado de suministrar manualmente el combustible y los datos obtenidos mediante esta prueba.
Tabla 5. Datos obtenidos con prueba realizada
Fuente: Los autores
Comparando la tabla 4 y la tabla 5, se puede observar que la diferencia entre el consumo de Galones/hora es de 0,37. Esta diferencia se puede presentar por diferentes acciones o casos:
Mal abastecimiento y se presente derramamiento de combustible por fuera del tanque reservorio.
Fugas en las mangueras de acople que distribuyen y transportan el combustible.
Extracción indebida de combustible.
27
Esta diferencia se hace notoria cuando las jornadas de labor se extienden por largos periodos de tiempo donde el consumo de combustible se hace mayor. Se procede a hacer una comparación en una jornada de 12 horas con los diferentes promedios y se obtiene la diferencia entre estos. Se escoge tomar este tiempo de 12 horas debido a que se observa, que en este tiempo se consume casi la totalidad de combustible que se puede almacenar en el tanque de depósito de la máquina (32 galones aproximadamente).
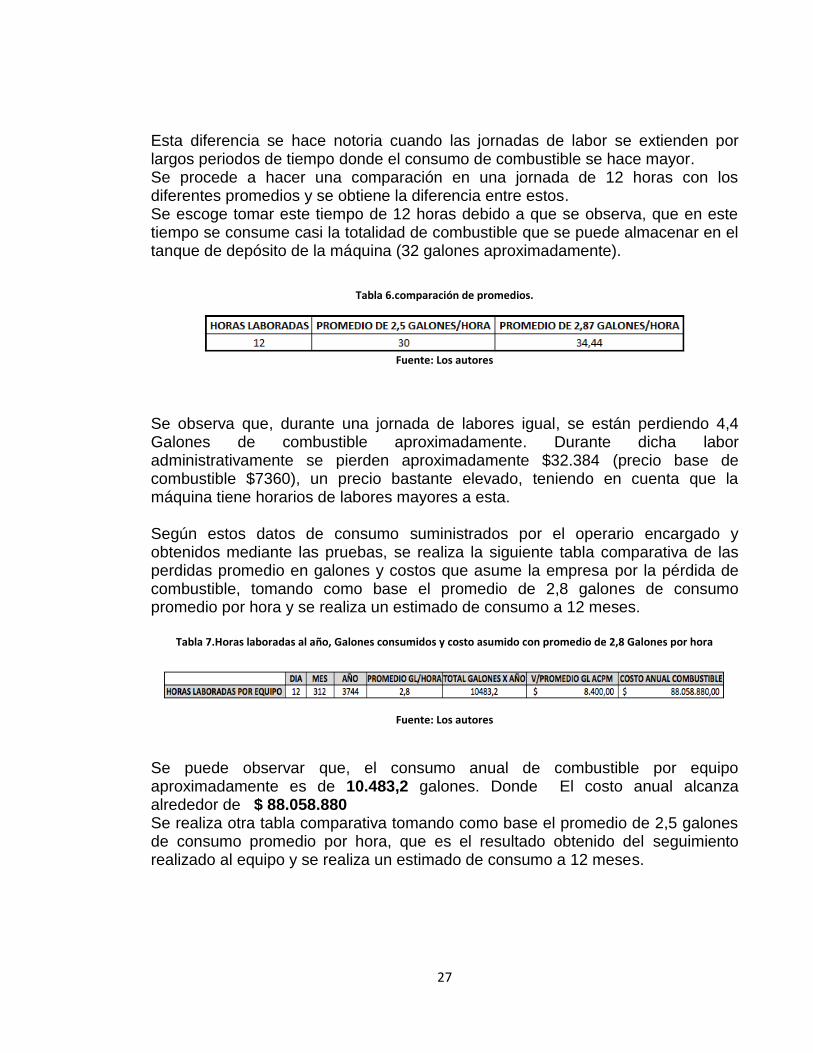
Tabla 6.comparación de promedios.
Fuente: Los autores
Se observa que, durante una jornada de labores igual, se están perdiendo 4,4 Galones de combustible aproximadamente. Durante dicha labor administrativamente se pierden aproximadamente $32.384 (precio base de combustible $7360), un precio bastante elevado, teniendo en cuenta que la máquina tiene horarios de labores mayores a esta. Según estos datos de consumo suministrados por el operario encargado y obtenidos mediante las pruebas, se realiza la siguiente tabla comparativa de las perdidas promedio en galones y costos que asume la empresa por la pérdida de combustible, tomando como base el promedio de 2,8 galones de consumo promedio por hora y se realiza un estimado de consumo a 12 meses.
Tabla 7.Horas laboradas al año, Galones consumidos y costo asumido con promedio de 2,8 Galones por hora
Fuente: Los autores
Se puede observar que, el consumo anual de combustible por equipo aproximadamente es de 10.483,2 galones. Donde El costo anual alcanza alrededor de $ 88.058.880 Se realiza otra tabla comparativa tomando como base el promedio de 2,5 galones de consumo promedio por hora, que es el resultado obtenido del seguimiento realizado al equipo y se realiza un estimado de consumo a 12 meses.
28
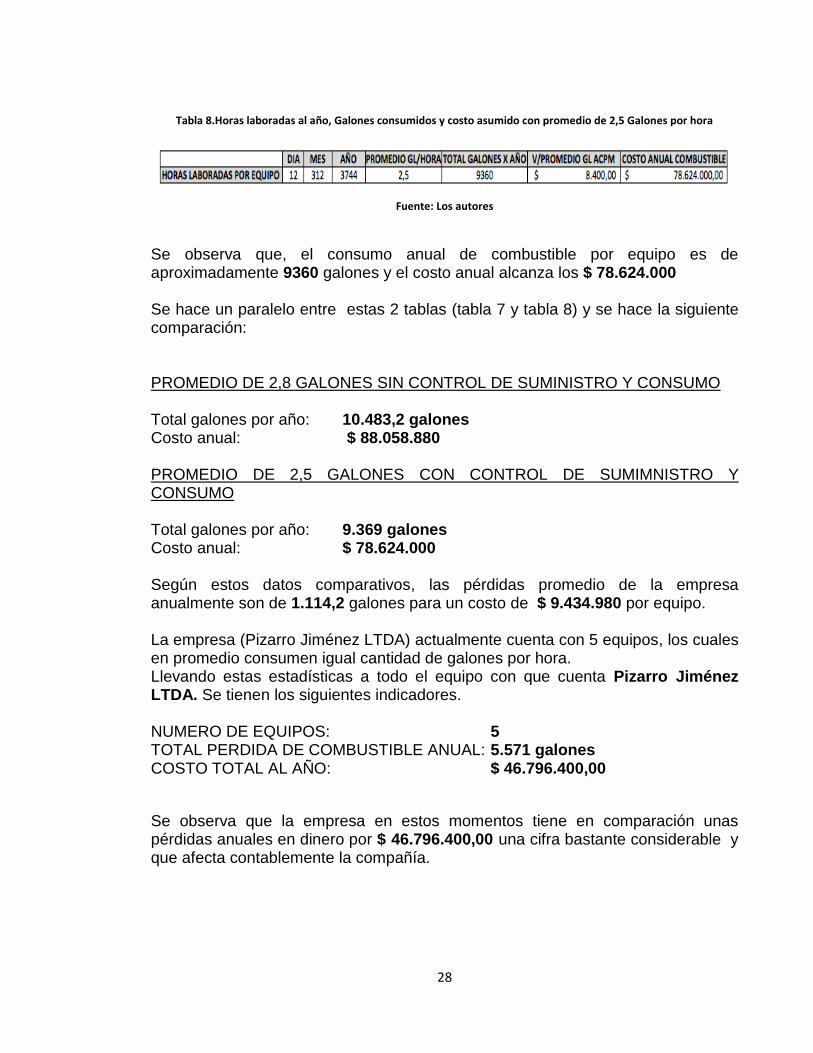
Tabla 8.Horas laboradas al año, Galones consumidos y costo asumido con promedio de 2,5 Galones por hora
Fuente: Los autores
Se observa que, el consumo anual de combustible por equipo es de aproximadamente 9360 galones y el costo anual alcanza los $ 78.624.000 Se hace un paralelo entre estas 2 tablas (tabla 7 y tabla 8) y se hace la siguiente comparación: PROMEDIO DE 2,8 GALONES SIN CONTROL DE SUMINISTRO Y CONSUMO Total galones por año: 10.483,2 galones Costo anual: $ 88.058.880 PROMEDIO DE 2,5 GALONES CON CONTROL DE SUMIMNISTRO Y CONSUMO Total galones por año: 9.369 galones Costo anual: $ 78.624.000 Según estos datos comparativos, las pérdidas promedio de la empresa anualmente son de 1.114,2 galones para un costo de $ 9.434.980 por equipo. La empresa (Pizarro Jiménez LTDA) actualmente cuenta con 5 equipos, los cuales en promedio consumen igual cantidad de galones por hora. Llevando estas estadísticas a todo el equipo con que cuenta Pizarro Jiménez LTDA. Se tienen los siguientes indicadores. NUMERO DE EQUIPOS: 5 TOTAL PERDIDA DE COMBUSTIBLE ANUAL: 5.571 galones COSTO TOTAL AL AÑO: $ 46.796.400,00
Se observa que la empresa en estos momentos tiene en comparación unas pérdidas anuales en dinero por $ 46.796.400,00 una cifra bastante considerable y que afecta contablemente la compañía.
29
Con la implementación del sistema automático para monitoreo y control del suministro y consumo de combustible, la empresa tendría el siguiente costo por equipo discriminados así:
Dispositivos e implementación electrónica.
Dispositivo de comunicación SkyPatrol. COSTO PROMEDIO TOTAL: $ 500.000 Equipo de abastecimiento de combustible:
Bomba surtidora
Digital fuel meter
Tanque surtidor
Sensor capacitivo tipo sonda.
COSTO PROMEDIO TOTAL: $ 2.800.000 El costo-beneficio que obtendrá la empresa con la implementación del sistema automático para monitoreo y control del suministro y consumo de combustible es el siguiente: IMPLEMENTACION DE CONTROL DE SUMINISTRO POR EQUIPO: $ 500.000 NUMERO DE EQUIPOS: 5 COSTO TOTAL: $ 2.500.000 EQUIPO DE ABASTECIMIENTO DE COMBUSTIBLE: $ 2.800.000 ADMINISTRACION Y MANTENIMIENTO DE PROYECTO ANUAL: $ 3.000.000 COSTO TOTAL PROYECTO: $ 8.300.000,00 Tomando los resultados obtenidos, la empresa (Pizarro Jiménez LTDA) donde los costos por perdida de combustibles son alrededor de $ 46.796.400,00 tendría un ahorro en dinero anual por valor de $ 38.496.400. Teniendo en cuenta que la implementación del sistema de control de suministro es un gasto único por equipo.
30
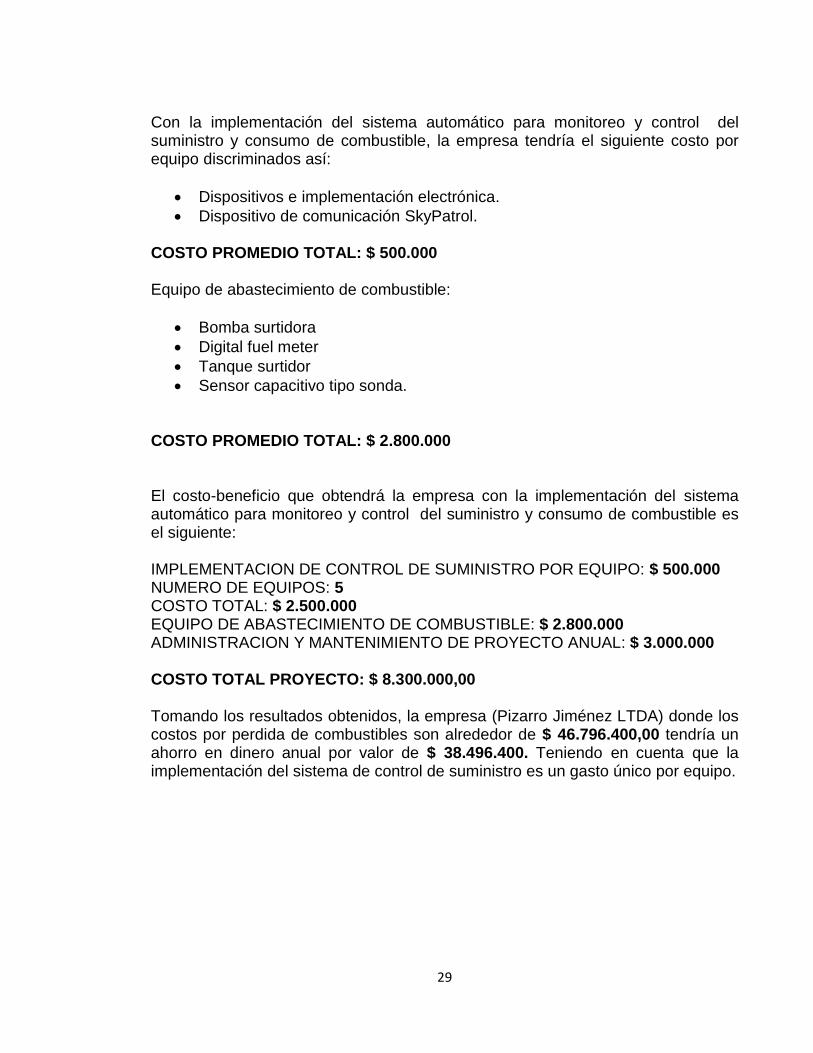
Figura 6. Ahorro de la compañía por equipo Anualmente
Fuente: Los Autores
Figura 7. Porcentaje de ahorro por máquina anualmente
Fuente: Los Autores
En la figura 10. Se puede observar que implementando el dispositivo, anualmente se obtendrá un beneficio o ahorro del 11% de los costos que se venían asumiendo anteriormente. Esta inversión podría recuperarse a lo largo de un año, debido a que los costos del proyecto no son demasiado elevados. En el tema ambiental el proyecto es beneficioso porque se reducirán al máximo los derramamientos de combustible, estos derramamientos ocasionan contaminación si son vertidos en alguna afluente de agua, además la compañía por consumir un número menor de combustible, estaría de cierta manera ayudando el medio ambiente, de igual forma se estaría cumpliendo con las políticas ambientales de

31
los clientes de la empresa, los cuales en sus normas de políticas de calidad y ambiental son exigentes con este tema. 1.5.1 análisis y mediciones prácticas para investigación de dispositivos electrónicos a utilizar. La Señal de RPM, se puede obtener del Alternador de la máquina. Tomando la señal justo antes de la entrada del porta-diodos y el regulador de voltaje. Se hicieron las diferentes mediciones en el alternador para tomar tanto la señal en frecuencia, voltaje y corriente de salida dependiendo de sus RPM.
Figura 8.Alternador Caterpillar Retroexcavadora CAT 416D
Fuente: EMPRESA PIZARRO JIMÉNEZ LTDA
Fuente: Los autores
32
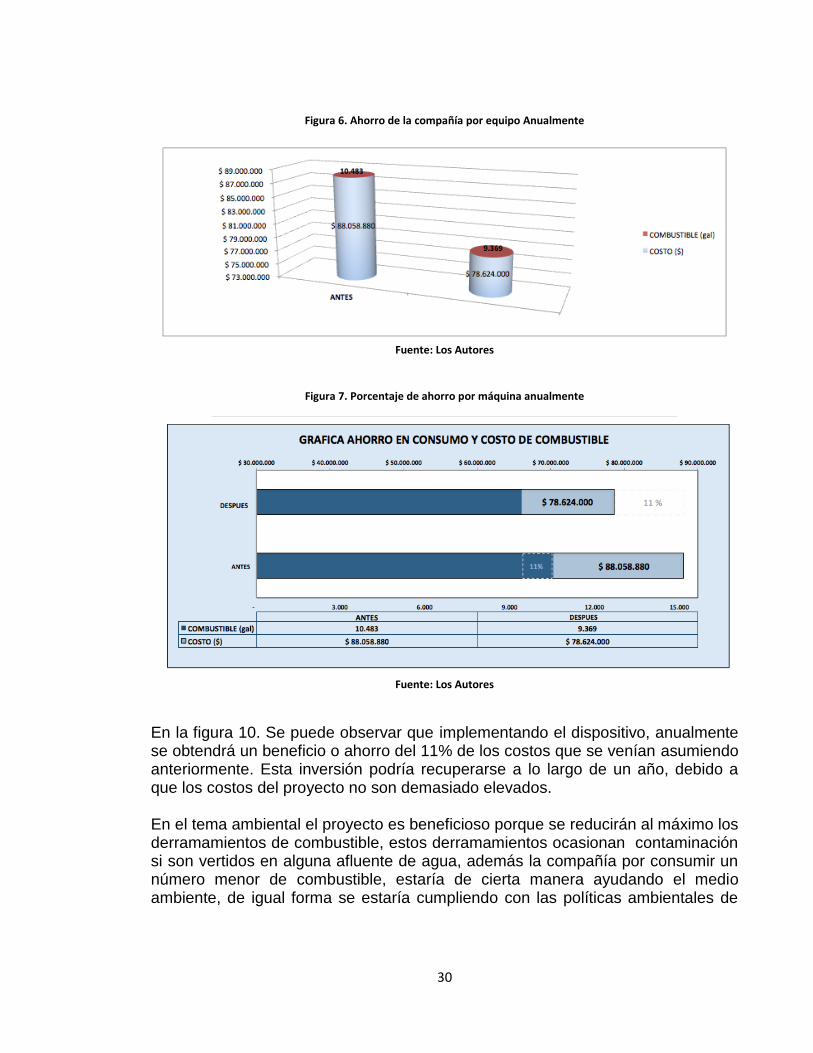
Figura 9.Señal RPM osciloscopio
Fuente: Los autores
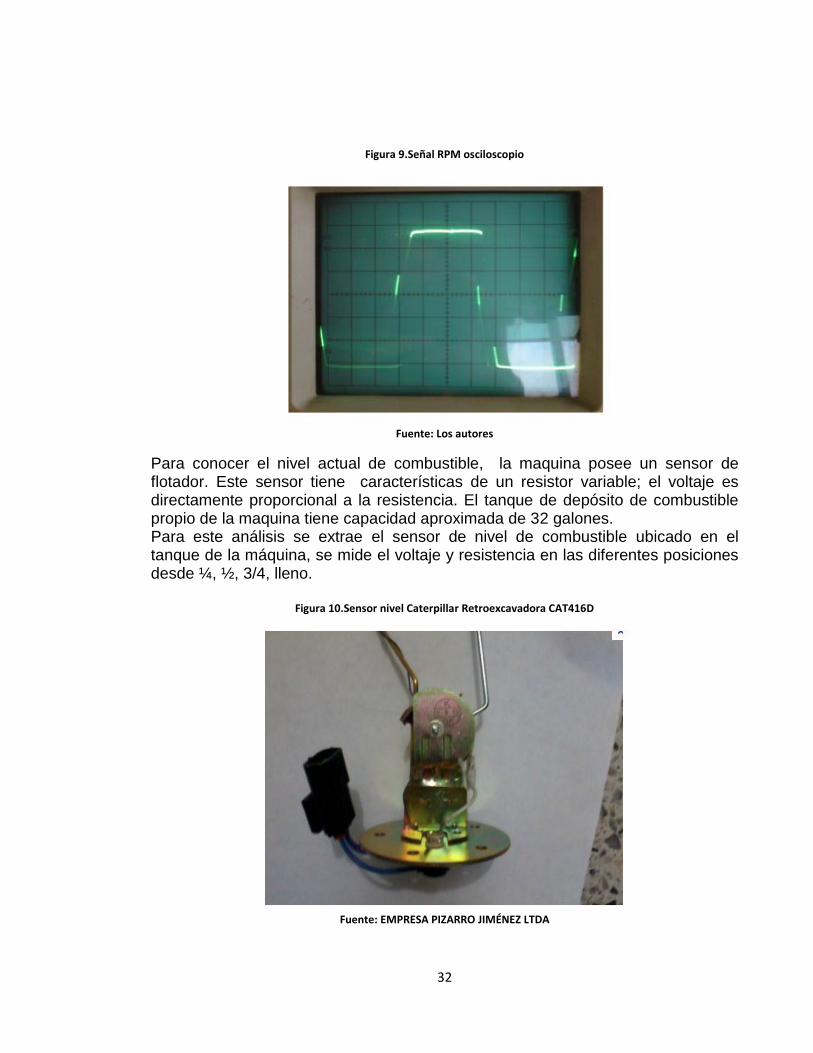
Para conocer el nivel actual de combustible, la maquina posee un sensor de flotador. Este sensor tiene características de un resistor variable; el voltaje es directamente proporcional a la resistencia. El tanque de depósito de combustible propio de la maquina tiene capacidad aproximada de 32 galones. Para este análisis se extrae el sensor de nivel de combustible ubicado en el tanque de la máquina, se mide el voltaje y resistencia en las diferentes posiciones desde ¼, ½, 3/4, lleno.
Figura 10.Sensor nivel Caterpillar Retroexcavadora CAT416D
Fuente: EMPRESA PIZARRO JIMÉNEZ LTDA
33
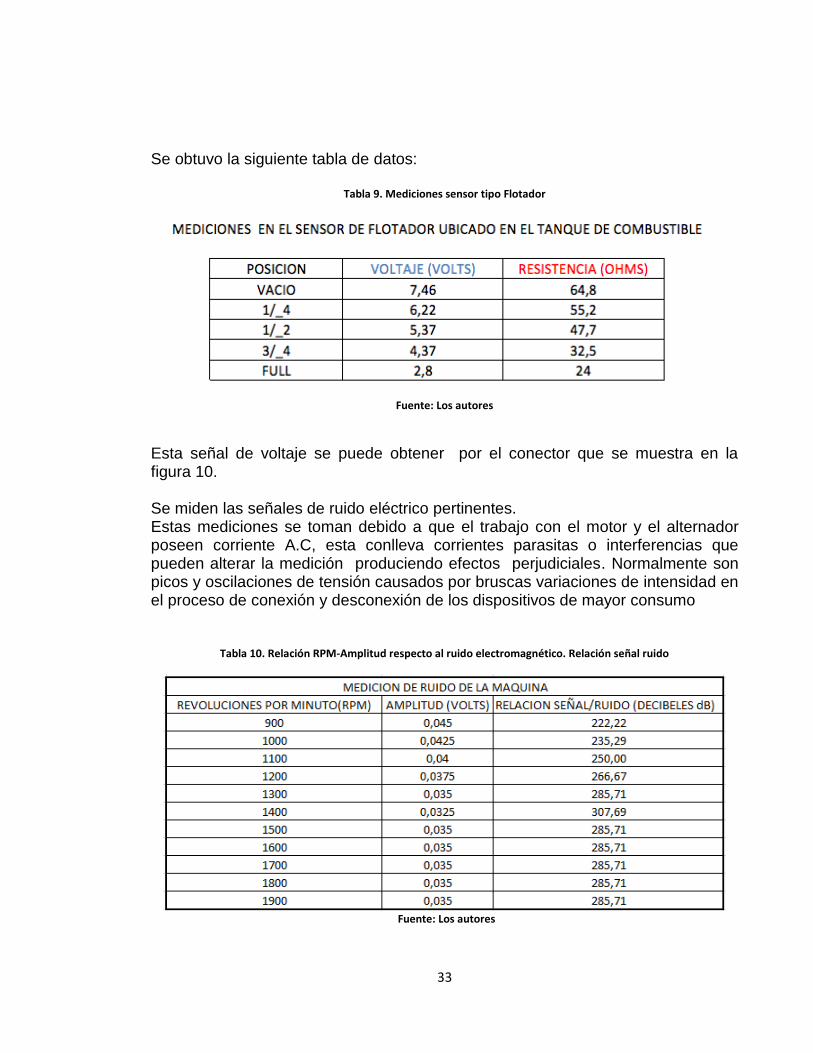
Se obtuvo la siguiente tabla de datos:
Tabla 9. Mediciones sensor tipo Flotador
Fuente: Los autores
Esta señal de voltaje se puede obtener por el conector que se muestra en la figura 10. Se miden las señales de ruido eléctrico pertinentes. Estas mediciones se toman debido a que el trabajo con el motor y el alternador poseen corriente A.C, esta conlleva corrientes parasitas o interferencias que pueden alterar la medición produciendo efectos perjudiciales. Normalmente son picos y oscilaciones de tensión causados por bruscas variaciones de intensidad en el proceso de conexión y desconexión de los dispositivos de mayor consumo
Tabla 10. Relación RPM-Amplitud respecto al ruido electromagnético. Relación señal ruido
Fuente: Los autores

34
La toma de esta medición es importante, ya que cuando se requiera diseñar el
sistema automático, se deberá tomar en cuenta la disminución de señales no
deseadas debido a que el ruido eléctrico no se puede eliminar.
35
2. TECNOLOGÍA PROPUESTA Actualmente en el mercado existen algunas compañías nacionales y extranjeras que ofrecen un producto similar con la misma tecnología. Entre sus servicios ofrecidos está el de controlar el consumo de combustible y dar a este ítem optimización para la viabilidad de desempeño de la compañía que adquiere su bien o servicio. Cabe mencionar algunas de estas empresas consultadas:
http://www.viziongps.com/index.html (Argentina).
http://www.siscootsas.com.co/sistemas-control.html (Colombia).
http://www.safcontrol.com/ (Colombia)
http://fuelcheck.net/ (Guatemala). El valor agregado o la parte diferente que se pretende con este proyecto es que haya supervisión y control desde el instante en que es abastecido con combustible el vehículo, con un sistema móvil independiente que puede abastecer la flota cuando esta lo requiera.
Después de analizados los datos obtenidos, es necesario implementar un dispositivo electrónico de monitoreo y control de suministro y consumo de combustible que cuente con las siguientes tecnologías y características: 2.1 GPS Sistema global de posicionamiento (GPS) permite determinar información precisa acerca de la posición y velocidad de un objeto en cualquier lugar del mundo y en cualquier condición meteorológica. GPS es un sistema espacial de radio navegación que consta de 24 satélites que circunvalan la tierra a una altura aproximada de 20.200 Km sincronizados entre sí bajo una misma hora, las estaciones receptoras terrestres reciben al menos 3 de ellos y de acuerdo a la hora actual y la diferencia de hora en la trama recibida de ellos calcula su propia posición. (Casanova M., 2002) (Pozo ruiz, 2000) ( Huerta, Mangiaterra, Noguera, 2005) 2.1.1 Funcionamiento del GPS. Para lograr esta información, cada uno de los 24 satélites emite una señal a los receptores en tierra. GPS determina la localización al computar la diferencia entre el tiempo en que una señal es enviada y el tiempo en que es recibida. Los satélites GPS llevan consigo relojes atómicos que proveen información precisa en cuanto al tiempo. Con la información de los satélites el receptor puede computar su propia posición tridimensional. El receptor utiliza cuatro satélites para computar latitud, longitud, altura y tiempo.
36
Partiendo de este sistema, el Dispositivo GPS brinda información a cerca de
donde está, sin embargo, no se sabe dónde está localizado. Para que sea
localizado, la información debe ser comunicada para que alguien más conozca la
posición del dispositivo.
Los dispositivos integran un dispositivo de GPS con un teléfono celular para que transmita su ubicación a una central que la despliega en un mapa digital. De esta manera se obtiene una posición final con un error aproximado de 20 metros. (Casanova M., 2002) (Pozo ruiz, 2000) ( Huerta, Mangiaterra, Noguera, 2005) 2.1.2 niveles de servicio GPS. El GPS proporciona dos niveles diferentes de servicio que separan el uso civil del militar:
Servicio de Posicionamiento Estándar (SPS, Standard Positioning Service). Precisión normal de posicionamiento civil obtenida con la utilización del código C/A de frecuencia simple.
Servicio de Posicionamiento Preciso (PPS, Precise Positioning Service). Este posicionamiento dinámico es el de mayor precisión, basado en el código P de frecuencia dual, y solo está accesible para los usuarios autorizados. (Casanova M., 2002) (Pozo ruiz, 2000) ( Huerta, Mangiaterra, Noguera, 2005)
2.1.3 aplicaciones de los GPS. Los campos de desempeño o de aplicación de los sistemas de posicionamiento son amplios, tanto en sistemas de ayuda de navegación, como en modelización espacio-atmosférico y terrestre o aplicaciones que requieran alta precisión en la medida del tiempo. (Pozo ruiz, 2000), (Lorenzi, 1998), (Colombia) (Casanova M., 2002) ( Huerta, Mangiaterra, Noguera, 2005) 2.2 GPRS (GENERAL PACKET RADIO SERVICES) Es una técnica usada para la conmutación de paquetes, con la capacidad de integrarla con la estructura actual de las redes GSM. Esta tecnología permite unas velocidades de datos de hasta 115 Kbps, posee numerosas ventajas. Fundamentalmente se aplica a las transmisiones de datos que produzcan tráfico "a ráfagas", es decir, discontinuo. Por ejemplo, Internet y mensajería. GPRS utiliza a la vez diversos canales, y aprovecha los "huecos" disponibles para las transmisiones de diversos usuarios. Por ello, no se necesita un circuito dedicado para cada usuario conectado como en GSM. De esta forma desaparece el concepto de tiempo de conexión, dejando paso al de cantidad de información transmitida: El cliente podrá ser facturado por los paquetes realmente enviados y recibidos. El ancho de banda podrá ser entregado bajo demanda, en función de las necesidades de la comunicación. (Valencia)
37
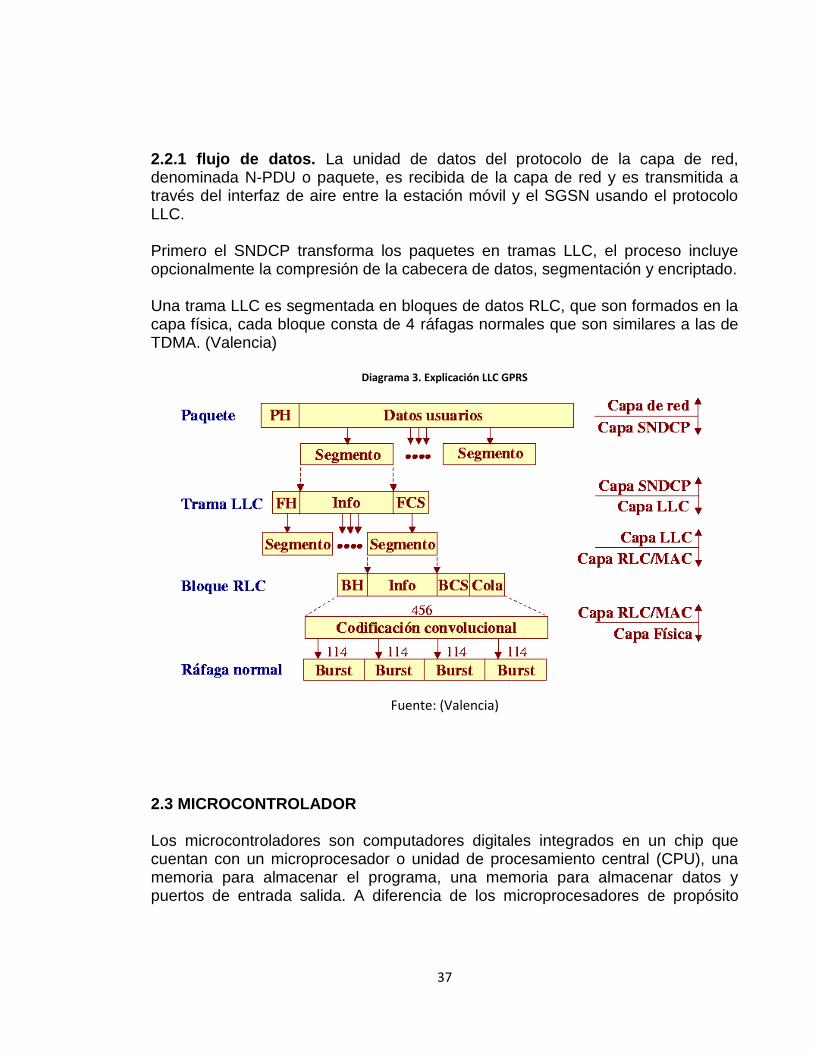
2.2.1 flujo de datos. La unidad de datos del protocolo de la capa de red, denominada N-PDU o paquete, es recibida de la capa de red y es transmitida a través del interfaz de aire entre la estación móvil y el SGSN usando el protocolo LLC. Primero el SNDCP transforma los paquetes en tramas LLC, el proceso incluye opcionalmente la compresión de la cabecera de datos, segmentación y encriptado. Una trama LLC es segmentada en bloques de datos RLC, que son formados en la capa física, cada bloque consta de 4 ráfagas normales que son similares a las de TDMA. (Valencia)
Diagrama 3. Explicación LLC GPRS
Fuente: (Valencia)
2.3 MICROCONTROLADOR Los microcontroladores son computadores digitales integrados en un chip que cuentan con un microprocesador o unidad de procesamiento central (CPU), una memoria para almacenar el programa, una memoria para almacenar datos y puertos de entrada salida. A diferencia de los microprocesadores de propósito
38
general, como los que se usan en los computadores PC, los microcontroladores son unidades autosuficientes y más económicas. El funcionamiento de los microcontroladores está determinado por el programa almacenado en su memoria. Este puede escribirse en distintos lenguajes de programación. Además, la mayoría de los microcontroladores actuales pueden programarse repetidas veces. Por las características mencionadas y su alta flexibilidad, los microcontroladores son ampliamente utilizados como el cerebro de una gran variedad de sistemas embebidos que controlan máquinas, componentes de sistemas complejos, como aplicaciones industriales de automatización y robótica, demótica, equipos médicos, sistemas aeroespaciales, e incluso dispositivos de la vida diaria como automóviles, hornos de microondas, teléfonos y televisores. Frecuentemente se emplea la notación µC o las siglas MCU (por microcontroller unit para Referirse a los microcontroladores. (Angulo Usategui, 2008) (Torres, 2007) 2.3.1 Características del microcontrolador. 2.3.1.1 Unidad de procesamiento central (CPU). Típicamente de 8 bits, pero también las hay de 4, 32 y hasta 64 bits con arquitectura Harvard, con memoria y bus de datos separada de la memoria y bus de instrucciones de programa, o arquitectura de von Neumann, también llamada arquitectura Princeton, con memoria y bus de datos y memoria y bus de programa compartidas. (Angulo Usategui, 2008) (Torres, 2007) 2.3.1.2 Memoria de programa. Es una memoria ROM (Read-Only Memory), EPROM (Electrically Programmable ROM), EEPROM (Electrically Erasable/Programmable ROM) o Flash que almacena el código del programa que típicamente puede ser de 1 kilobyte a varios megabytes. (Angulo Usategui, 2008) (Torres, 2007) 2.3.1.3 Memoria de datos. Es una memoria RAM (Random Access Memory) que típicamente puede ser de 1, 2 4, 8, 16, 32 kilobytes. (Angulo Usategui, 2008) (Torres, 2007) 2.3.1.4 Generador del reloj. Usualmente es un cristal de cuarzo de frecuencias que genera una señal oscilatoria de entre 1 a 40 MHz, o también resonadores o circuitos RC. 2.3.1.5 Interfaz de entrada/salida. Puertos paralelos, seriales (UARTs, Universal Asynchronous Receiver/Transmitter), I2C (Inter-Integrated Circuit), Interfaces de Periféricos Seriales (SPIs, Serial Peripheral Interfaces), Red de Área de
39
Controladores (CAN,Controller Area Network), USB (Universal Serial Bus). (Angulo Usategui, 2008) (Torres, 2007) 2.3.1.6 Otras opciones.
Conversores Análogo-Digitales (A/D, analog-to-digital). para convertir un nivel de voltaje en un cierto pin a un valor digital manipulable por el programa del microcontrolador. (Angulo Usategui, 2008) (Torres, 2007)
● Moduladores por Ancho de Pulso (PWM, Pulse-Width Modulation).
para generar ondas cuadradas de frecuencia fija pero con ancho de pulso modificable. (Torres, 2007), (Angulo Usategui, 2008)
2.4 SENSOR CAPACITIVO Es un tipo de sensor eléctrico que reacciona ante metales y no metales que al aproximarse a la superficie activa sobrepasan una determinada capacidad. Su principio asemeja a un capacitor o condensador teniendo dos placas paralelas y en medio de las placas un material dieléctrico. (Ingenieria), (mes) 2.4.1 Sensor de nivel tipo capacitivo. El medidor de nivel capacitivo mide la capacidad del condensador formado por el electrodo sumergido en el líquido y las paredes del tanque. La capacidad del conjunto depende linealmente del nivel del líquido. En fluidos no conductores se emplea un electrodo normal y la capacidad total del sistema se compone de la del líquido, la del gas superior y la de las conexiones superiores. En fluidos conductores el electrodo está aislado usualmente con teflón interviniendo las capacidades adicionales entre el material aislante y el electrodo en la zona del líquido y del gas. (Ingenieria), (mes)
40
3. DISEÑO E IMPLEMENTACIÓN ELECTRÓNICA
3.1 REQUERIMIENTOS
● GPS de precisión en las medidas de las coordenadas, recibe información de cuatro satélites
● GPRS con frecuencia quad band, para compatibilidad con las cuatro (4). ● Microcontrolador con dos (2) puertos USART para permitir la conexión con
GPS, GPRS, Un (1) puerto análogo para la conexión del sensor de nivel, Conversor análogo-digital para procesamiento de señales, capacidad de memoria para futuras expansiones.
● Frecuencias de uso común en el sistema global para comunicaciones móviles.
● Sensor de nivel capacitivo tipo sonda para combustible en depósitos de vehículos y recipientes fijos, rango de alimentación de 10 a 50 volts, posibilidad de extender o alargar la sonda.
● Depósito de combustible fijo de capacidad aproximada 300 galones. 3.2 COMPONENTES A ESCOGER Aquí se analizan los posibles dispositivos a usar. A pesar de que estos dispositivos poseen la misma tecnología, algunos ofrecen servicio técnico y demás garantías para el buen funcionamiento del producto. Esto es un ítem importante para la escogencia de los dispositivos a implementar. También se tiene en cuenta la facilidad de adquisición dentro del país y costo. Se explica su función. 3.2.1 Microcontrolador PIC18F8720. Producido por la empresa Microchip, este microcontrolador pertenece a la familia de PIC 18FXX20, que presenta la más alta gama de memoria de programa flash incluida en el chip (on chip) de hasta 168 Kilobyte o 65.535 palabras o instrucciones, además de una grande memoria RAM y EEPROM, hasta 2048 bytes de RAM y 1048 byte de EEPROM. Posee una interfaz de memoria externa para programa de 2 Megabyte, en caso de que los 128 Kilobyte sean insuficientes. Contiene cinco (5) módulos CCP (capture/compare/PWM), para maximizar la flexibilidad en aplicaciones de control, 16 canales para el conversor A/D, 68 pines de entrada/salida (input/output), 18 fuentes de interrupción, 9 puertos de entrada/salida(A, B, C, D, E, F, G, H, I, J). Cinco (5) temporizadores, Este microcontrolador cuenta con dos (2) puertos USART compatibles con RS 232 y RS 485.
41
Figura 11.microcontrolador PIC 18F8720
Fuente: Los autores
3.2.2 MICROCONTROLADOR PIC 18F252. Microcontrolador de 8 bits de alto desempeño, memoria de programa flash 32 kB, SRAM 1536 Bytes, EEPROM de datos 256 Bytes, ADC de 10 bits y 5 canales.
Figura 12. PIC 18F252
Fuente: (Microchip Technology, 2013)
Este microcontrolador fue el que finalmente se escogió para la tarjeta de desarrollo porque además de poseer las mismas características de programación del microcontrolador PIC 18F8720, su fácil asequibilidad en el mercado Colombiano y su bajo costo lo hace el microcontrolador apropiado para el proyecto.
42
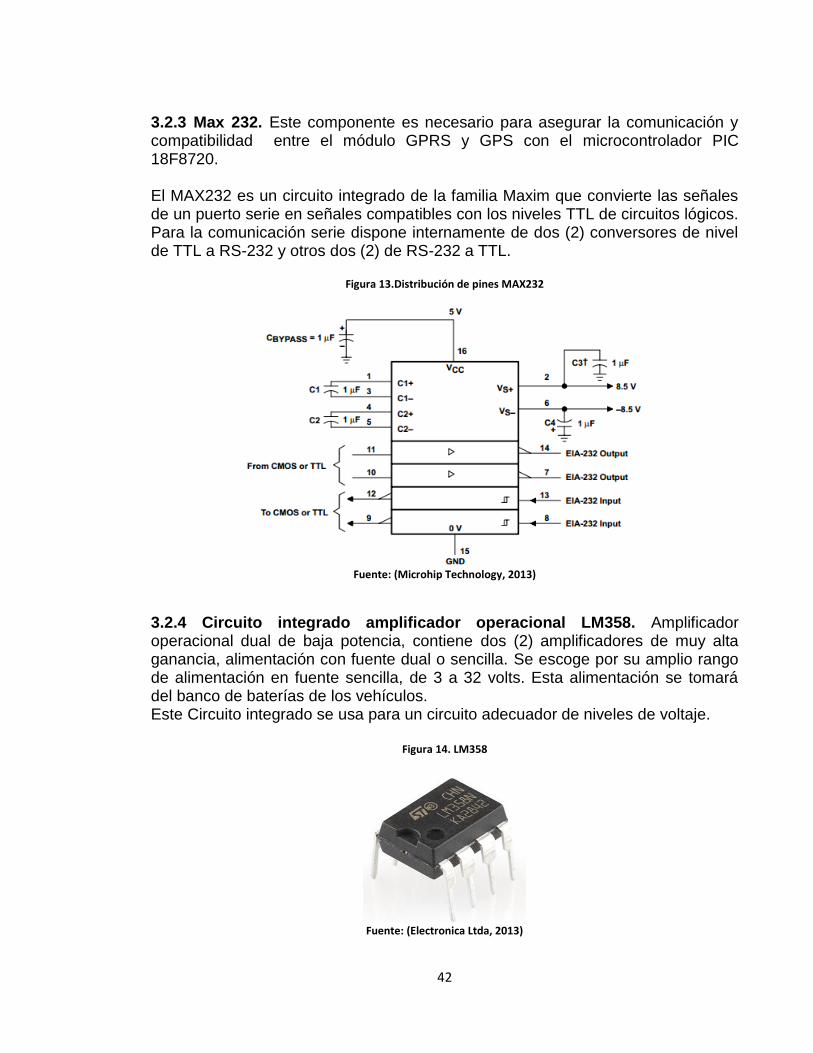
3.2.3 Max 232. Este componente es necesario para asegurar la comunicación y compatibilidad entre el módulo GPRS y GPS con el microcontrolador PIC 18F8720. El MAX232 es un circuito integrado de la familia Maxim que convierte las señales de un puerto serie en señales compatibles con los niveles TTL de circuitos lógicos. Para la comunicación serie dispone internamente de dos (2) conversores de nivel de TTL a RS-232 y otros dos (2) de RS-232 a TTL.
Figura 13.Distribución de pines MAX232
Fuente: (Microhip Technology, 2013)
3.2.4 Circuito integrado amplificador operacional LM358. Amplificador operacional dual de baja potencia, contiene dos (2) amplificadores de muy alta ganancia, alimentación con fuente dual o sencilla. Se escoge por su amplio rango de alimentación en fuente sencilla, de 3 a 32 volts. Esta alimentación se tomará del banco de baterías de los vehículos. Este Circuito integrado se usa para un circuito adecuador de niveles de voltaje.
Figura 14. LM358
Fuente: (Electronica Ltda, 2013)
43
3.2.5 Cristal de cuarzo 32 mega Hertz. Estos dispositivos están formados por una fina lámina de cuarzo situada entre dos electrodos y se rigen bajo el fenómeno piezoeléctrico, que consiste en que la aplicación de una tensión eléctrica produce una deformación del cristal, mientras que la deformación del cristal genera una tensión eléctrica. Esta característica se aprovecha en electrónica para producir tensiones alternas con una gran estabilidad de frecuencia ya que ésta depende directamente del grueso de la lámina de cuarzo. Se escoge esté cristal para tener unas buenas bases de tiempo de conversión, tiempo de programa y tiempo de interrupciones en el microcontrolador.
Figura 15.Cristal de cuarzo de valor 32 Mega Hertz
Fuente: los autores.
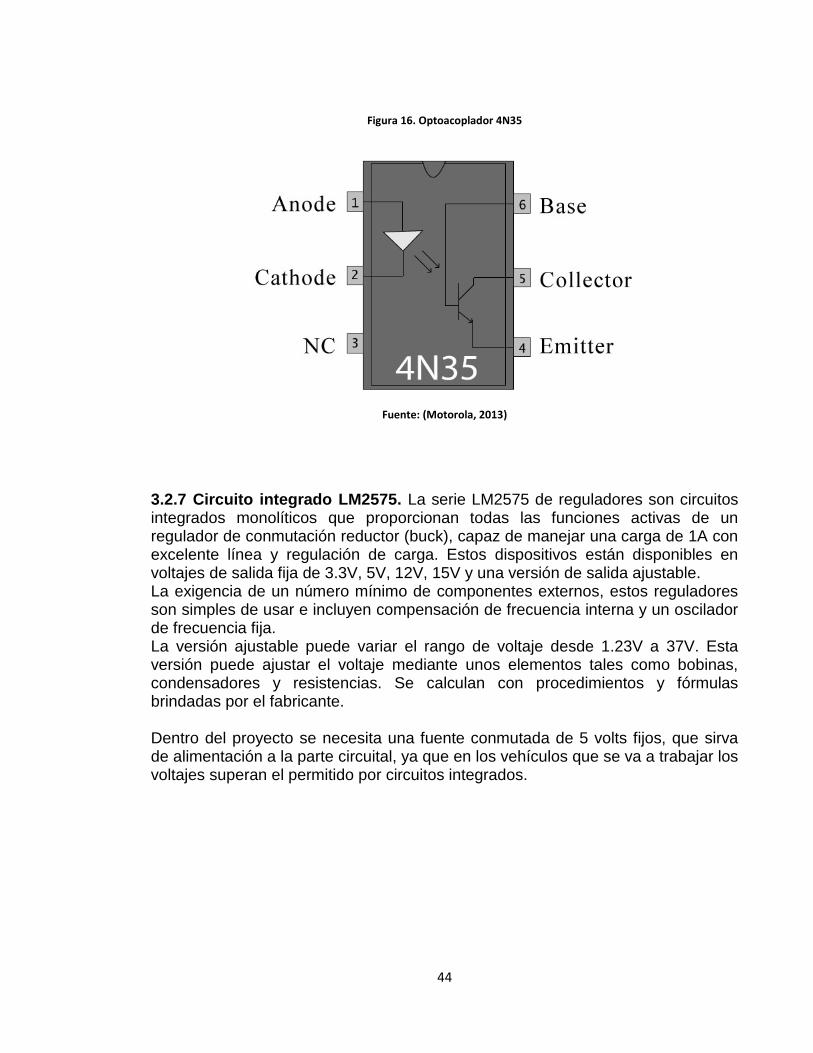
3.2.6 Opto acoplador 4N35. Consiste en un diodo emisor de luz infrarrojos de arseniuro de galio ópticamente acoplado a un detector de silicio monolítico fototransistor. De propósito general en circuitos de conmutación, Circuitos de regulación de la retroalimentación. Dentro del proyecto tendrá la función de proteger contra corto circuito el circuito adecuador de niveles RPM además de proteger el PIC 18F8720 por sobrevoltajes que se presenten en el circuito adecuador de RPM.
44
Figura 16. Optoacoplador 4N35
Fuente: (Motorola, 2013)
3.2.7 Circuito integrado LM2575. La serie LM2575 de reguladores son circuitos integrados monolíticos que proporcionan todas las funciones activas de un regulador de conmutación reductor (buck), capaz de manejar una carga de 1A con excelente línea y regulación de carga. Estos dispositivos están disponibles en voltajes de salida fija de 3.3V, 5V, 12V, 15V y una versión de salida ajustable. La exigencia de un número mínimo de componentes externos, estos reguladores son simples de usar e incluyen compensación de frecuencia interna y un oscilador de frecuencia fija. La versión ajustable puede variar el rango de voltaje desde 1.23V a 37V. Esta versión puede ajustar el voltaje mediante unos elementos tales como bobinas, condensadores y resistencias. Se calculan con procedimientos y fórmulas brindadas por el fabricante. Dentro del proyecto se necesita una fuente conmutada de 5 volts fijos, que sirva de alimentación a la parte circuital, ya que en los vehículos que se va a trabajar los voltajes superan el permitido por circuitos integrados.

45
Figura 17.Regulador LM2575
Fuente: (Texas Instrument, 2013)
3.2.7 SkyPatrol tt8750. Este dispositivo GPS se basa en tecnología GSM/GPRS, con la finalidad de enviar y recibir información de manera oportuna, en tiempo real y de forma precisa con cualquier servidor IP. Su programación orientada a eventos se realiza por medio de comandos AT. Debido a que este dispositivo depende de la red celular para enviar y recibir los datos, tiene la capacidad de almacenar información si llega a estar fuera del área de cobertura, permitiendo transmitirla posteriormente. 3.2.7.1 Características. Las principales características del SkyPatrol son:
● Servicio de transmisión de paquetes vía GPRS (UDP/TCP). ● Tecnología GSM (Capacidad de Voice/SMS). ● Batería Interna recargable Li-Ión (3 Horas Autonomía). ● Dos (2) entradas digitales. ● Una (1) salida digital. ● Entrada de detección de ignición. ● Programación de eventos, software de programación SkyConfig. ● Quad-Band operando en 850/900/1800/1900 MHz ● Frecuencia de envió de mensajes: 1 minuto. ● Almacenamiento de información: 4,000 registros. ● Configuración de Hasta 25 Geocercas. ● Interfaz de configuración: RS232 y SMS. Figura 22. SkyPatrol TT8750
46
Figura 18.Skypatrol TT8750
Fuente: (GPS, 2013)
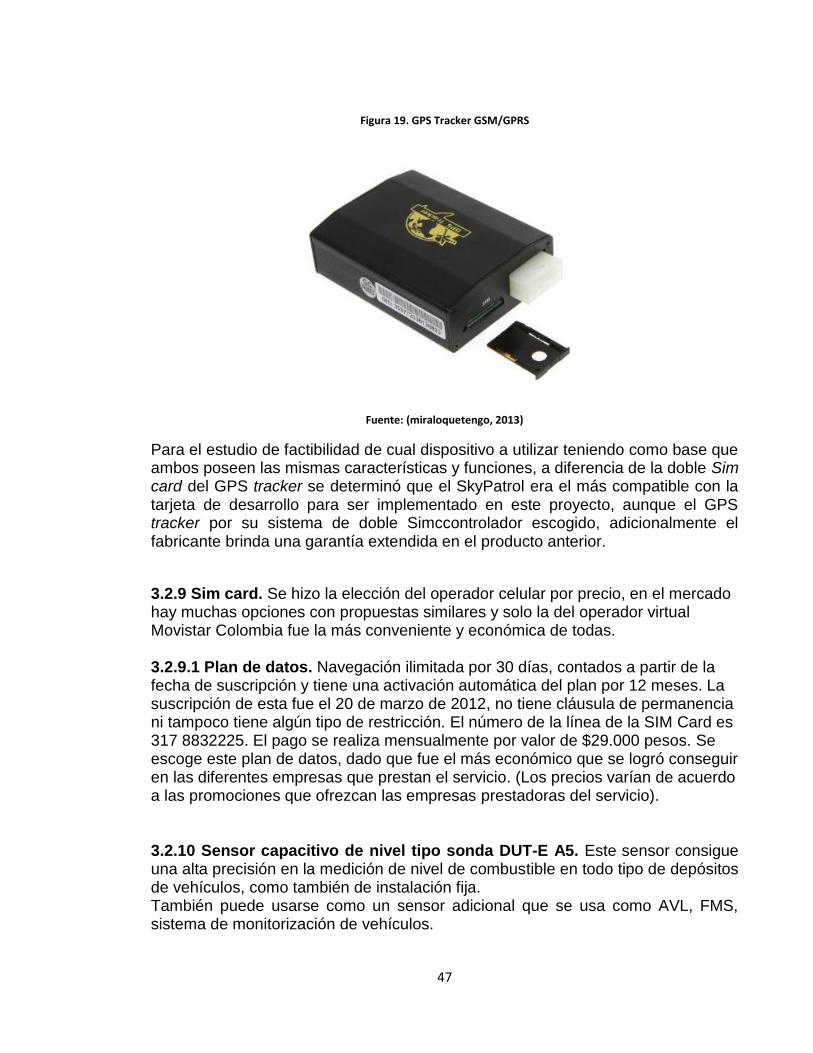
3.2.8 GPS Tracker GSM GPRS. Este dispositivo GPS al igual que el SkyPatrol se basa en tecnología GSM/GPRS, con la finalidad de enviar y recibir información de manera oportuna, en tiempo real y de forma precisa con cualquier servidor IP. A diferencia del SkyPatrol este posee sistema de doble SIM card, la cual permite mayor cobertura ya que en Colombia en ciertas partes la señal es baja o nula dependiendo del sistema operador que se tenga en el momento.
47
Figura 19. GPS Tracker GSM/GPRS
Fuente: (miraloquetengo, 2013)
Para el estudio de factibilidad de cual dispositivo a utilizar teniendo como base que ambos poseen las mismas características y funciones, a diferencia de la doble Sim card del GPS tracker se determinó que el SkyPatrol era el más compatible con la tarjeta de desarrollo para ser implementado en este proyecto, aunque el GPS tracker por su sistema de doble Simccontrolador escogido, adicionalmente el fabricante brinda una garantía extendida en el producto anterior.
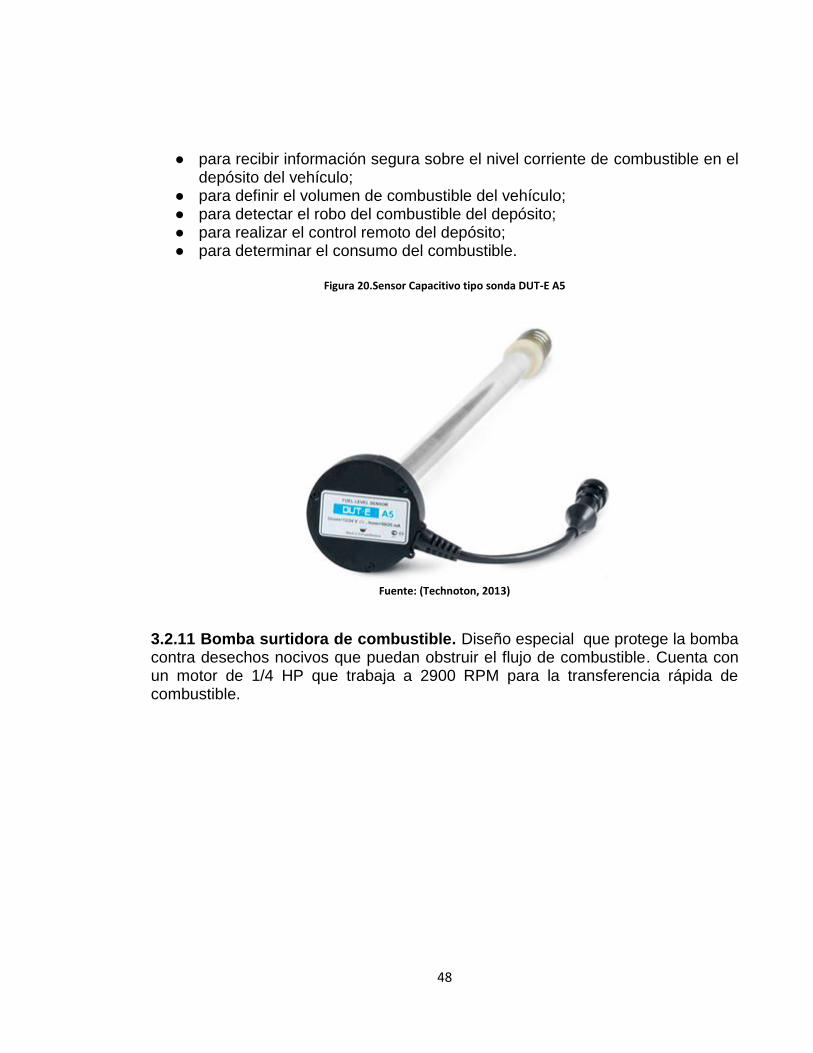
3.2.9 Sim card. Se hizo la elección del operador celular por precio, en el mercado hay muchas opciones con propuestas similares y solo la del operador virtual Movistar Colombia fue la más conveniente y económica de todas. 3.2.9.1 Plan de datos. Navegación ilimitada por 30 días, contados a partir de la fecha de suscripción y tiene una activación automática del plan por 12 meses. La suscripción de esta fue el 20 de marzo de 2012, no tiene cláusula de permanencia ni tampoco tiene algún tipo de restricción. El número de la línea de la SIM Card es 317 8832225. El pago se realiza mensualmente por valor de $29.000 pesos. Se escoge este plan de datos, dado que fue el más económico que se logró conseguir en las diferentes empresas que prestan el servicio. (Los precios varían de acuerdo a las promociones que ofrezcan las empresas prestadoras del servicio). 3.2.10 Sensor capacitivo de nivel tipo sonda DUT-E A5. Este sensor consigue una alta precisión en la medición de nivel de combustible en todo tipo de depósitos de vehículos, como también de instalación fija. También puede usarse como un sensor adicional que se usa como AVL, FMS, sistema de monitorización de vehículos.
48
● para recibir información segura sobre el nivel corriente de combustible en el depósito del vehículo;
● para definir el volumen de combustible del vehículo; ● para detectar el robo del combustible del depósito; ● para realizar el control remoto del depósito; ● para determinar el consumo del combustible.
Figura 20.Sensor Capacitivo tipo sonda DUT-E A5
Fuente: (Technoton, 2013)
3.2.11 Bomba surtidora de combustible. Diseño especial que protege la bomba contra desechos nocivos que puedan obstruir el flujo de combustible. Cuenta con un motor de 1/4 HP que trabaja a 2900 RPM para la transferencia rápida de combustible.

49
Figura 21.Bomba surtidora de combustible TROY
Fuente: (Amazon.com, 2013)
3.2.12 Medidor de flujo de combustible great electronic digital fuel meter. Este medidor básico de flujo funciona bien con gasolina, diesel y kerosene. La medición puede hacerla en litro o galones. El rango de flujo es de 3 a 50 GPM (Galones por Minuto), la presión con que funciona es de 21 bares o 300 PSI. Tiene una precisión de aproximadamente 5% en la medida.
Figura 22. Medidor de flujo de combustible GPI
Fuente: (Alibaba.com, 2013)
50
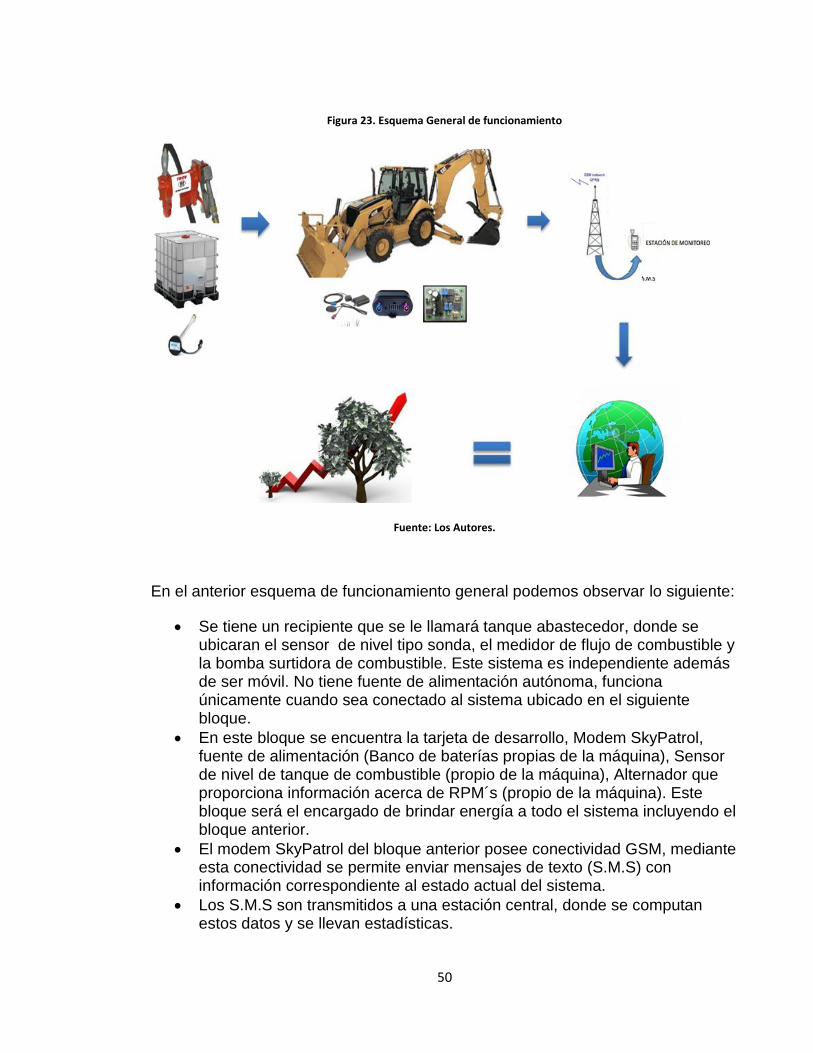
Figura 23. Esquema General de funcionamiento
Fuente: Los Autores.
En el anterior esquema de funcionamiento general podemos observar lo siguiente:
Se tiene un recipiente que se le llamará tanque abastecedor, donde se ubicaran el sensor de nivel tipo sonda, el medidor de flujo de combustible y la bomba surtidora de combustible. Este sistema es independiente además de ser móvil. No tiene fuente de alimentación autónoma, funciona únicamente cuando sea conectado al sistema ubicado en el siguiente bloque.
En este bloque se encuentra la tarjeta de desarrollo, Modem SkyPatrol, fuente de alimentación (Banco de baterías propias de la máquina), Sensor de nivel de tanque de combustible (propio de la máquina), Alternador que proporciona información acerca de RPM´s (propio de la máquina). Este bloque será el encargado de brindar energía a todo el sistema incluyendo el bloque anterior.
El modem SkyPatrol del bloque anterior posee conectividad GSM, mediante esta conectividad se permite enviar mensajes de texto (S.M.S) con información correspondiente al estado actual del sistema.
Los S.M.S son transmitidos a una estación central, donde se computan estos datos y se llevan estadísticas.

51
De esta manera se obtiene un crecimiento económico favorable para la compañía Pizarro Jiménez LTDA.
52
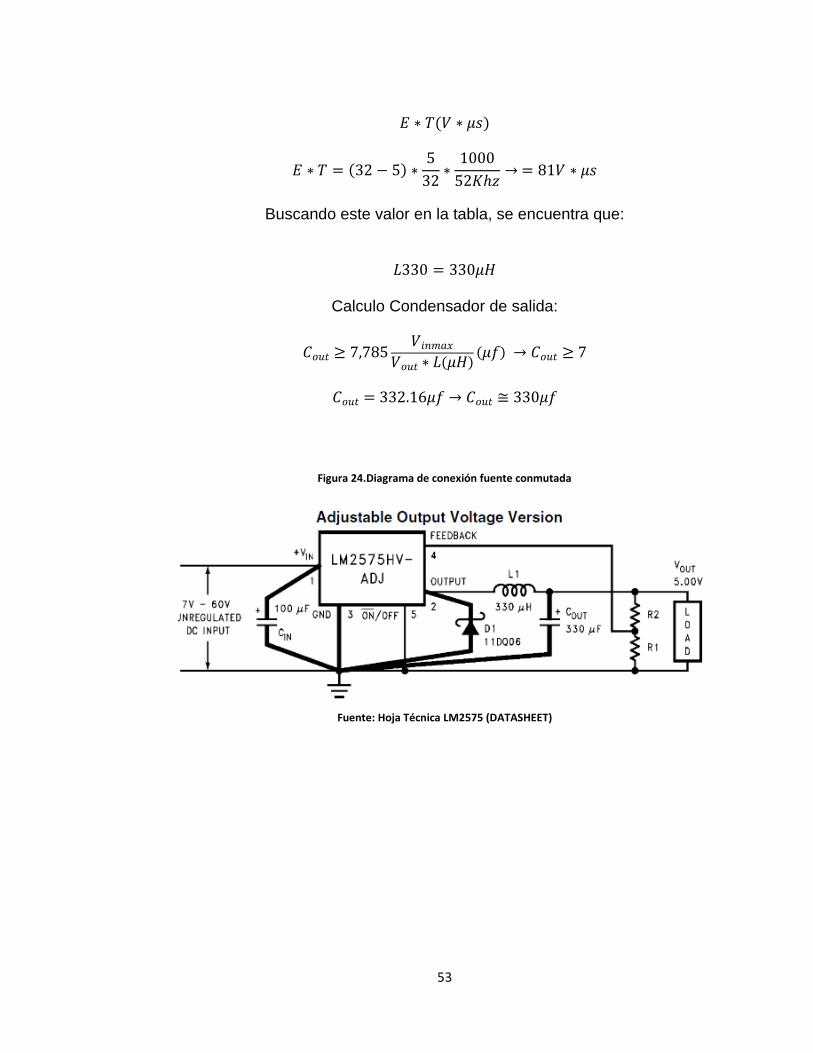
4. DISEÑO DE LA TARJETA DE DESARROLLO Escogida la tecnología a implementar y los elementos adecuados, se procedió a hacer el respectivo diseño de la tarjeta de desarrollo la cual incluye diferentes módulos. 4.1 MÓDULO DE FUENTE DE ALIMENTACIÓN 5 VOLTS Este módulo es necesario para la parte de alimentación de los diferentes circuitos integrados y PIC de la tarjeta de desarrollo. Se cuenta con la batería propia del vehículo o máquina que proporciona un voltaje aproximado de 12.5 volts, este no es apropiado para usarlo como fuente de alimentación para los circuitos integrados; cuyo máximo voltaje es de 5 volts. Razón por la cual se procede a diseñar una fuente conmutada (switcheada), donde se escogió el regulador de voltaje LM2575. Este regulador junto con otros componentes permite obtener un valor de voltaje apto para suministrar a los circuitos integrados y microcontrolador PIC de la tarjeta de desarrollo. Los cálculos realizados del valor de la bobina y valor del capacitor se tomaron de la hoja técnica (datasheet) que provee el fabricante en tablas.
Para calcular :
(
)
(
) (
)
Se calcula la bobina:
53
Buscando este valor en la tabla, se encuentra que:
Calculo Condensador de salida:
Figura 24.Diagrama de conexión fuente conmutada
Fuente: Hoja Técnica LM2575 (DATASHEET)
54
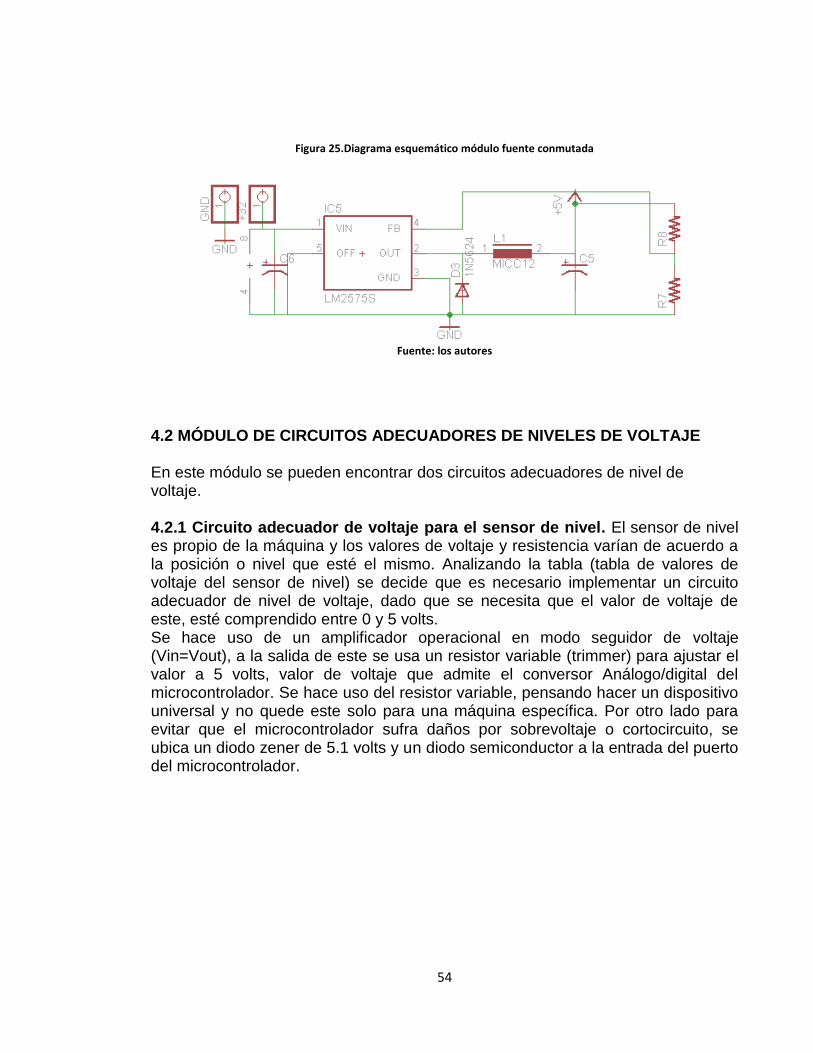
Figura 25.Diagrama esquemático módulo fuente conmutada
Fuente: los autores
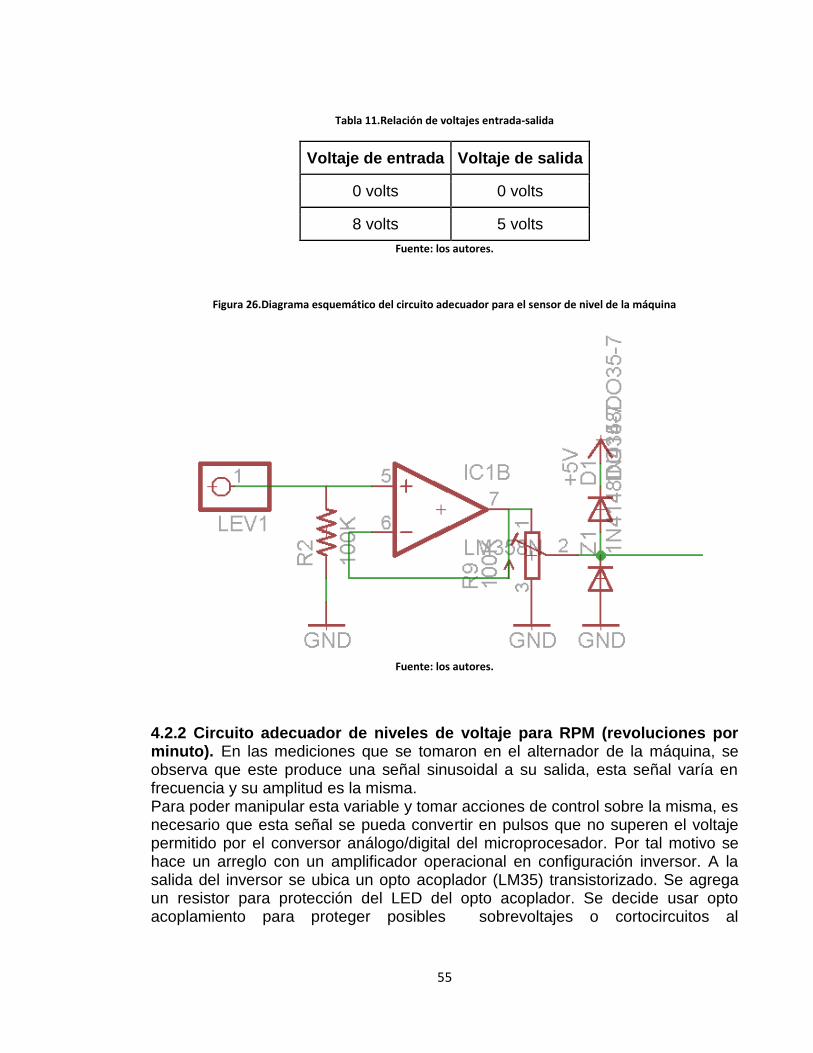
4.2 MÓDULO DE CIRCUITOS ADECUADORES DE NIVELES DE VOLTAJE En este módulo se pueden encontrar dos circuitos adecuadores de nivel de voltaje. 4.2.1 Circuito adecuador de voltaje para el sensor de nivel. El sensor de nivel es propio de la máquina y los valores de voltaje y resistencia varían de acuerdo a la posición o nivel que esté el mismo. Analizando la tabla (tabla de valores de voltaje del sensor de nivel) se decide que es necesario implementar un circuito adecuador de nivel de voltaje, dado que se necesita que el valor de voltaje de este, esté comprendido entre 0 y 5 volts. Se hace uso de un amplificador operacional en modo seguidor de voltaje (Vin=Vout), a la salida de este se usa un resistor variable (trimmer) para ajustar el valor a 5 volts, valor de voltaje que admite el conversor Análogo/digital del microcontrolador. Se hace uso del resistor variable, pensando hacer un dispositivo universal y no quede este solo para una máquina específica. Por otro lado para evitar que el microcontrolador sufra daños por sobrevoltaje o cortocircuito, se ubica un diodo zener de 5.1 volts y un diodo semiconductor a la entrada del puerto del microcontrolador.
55
Tabla 11.Relación de voltajes entrada-salida
Voltaje de entrada Voltaje de salida
0 volts 0 volts
8 volts 5 volts
Fuente: los autores.
Figura 26.Diagrama esquemático del circuito adecuador para el sensor de nivel de la máquina
Fuente: los autores.
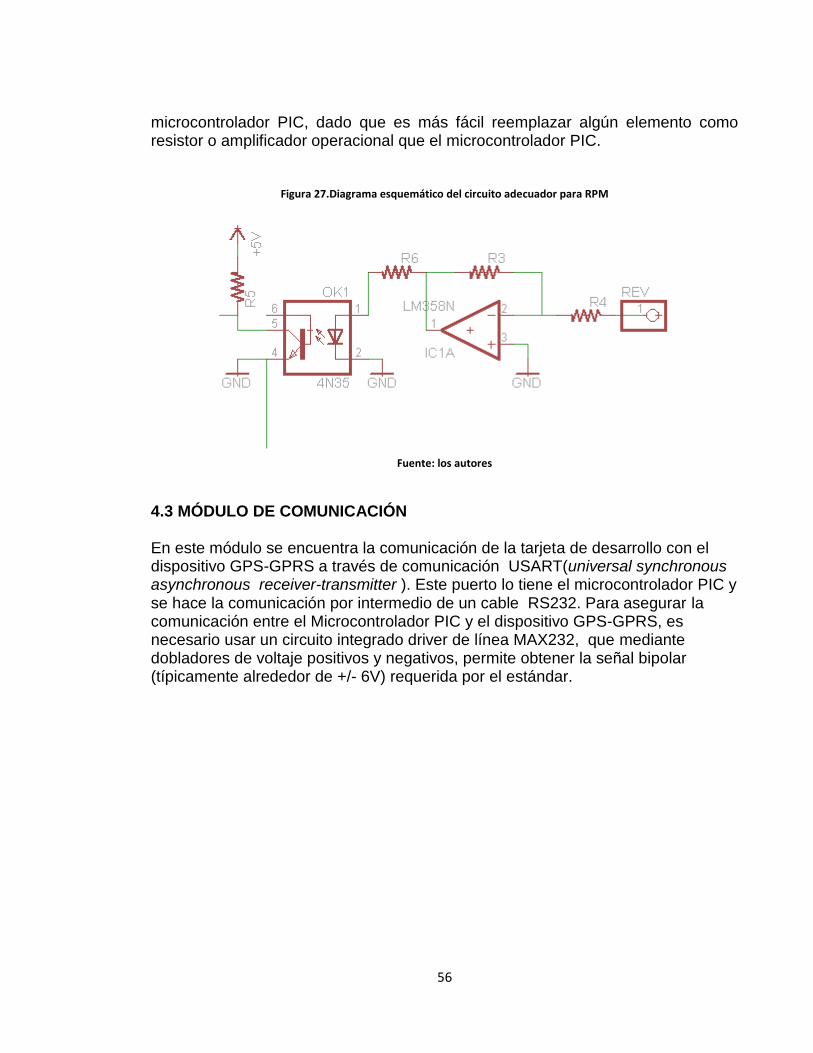
4.2.2 Circuito adecuador de niveles de voltaje para RPM (revoluciones por minuto). En las mediciones que se tomaron en el alternador de la máquina, se observa que este produce una señal sinusoidal a su salida, esta señal varía en frecuencia y su amplitud es la misma. Para poder manipular esta variable y tomar acciones de control sobre la misma, es necesario que esta señal se pueda convertir en pulsos que no superen el voltaje permitido por el conversor análogo/digital del microprocesador. Por tal motivo se hace un arreglo con un amplificador operacional en configuración inversor. A la salida del inversor se ubica un opto acoplador (LM35) transistorizado. Se agrega un resistor para protección del LED del opto acoplador. Se decide usar opto acoplamiento para proteger posibles sobrevoltajes o cortocircuitos al
56
microcontrolador PIC, dado que es más fácil reemplazar algún elemento como resistor o amplificador operacional que el microcontrolador PIC.
Figura 27.Diagrama esquemático del circuito adecuador para RPM
Fuente: los autores
4.3 MÓDULO DE COMUNICACIÓN En este módulo se encuentra la comunicación de la tarjeta de desarrollo con el dispositivo GPS-GPRS a través de comunicación USART(universal synchronous asynchronous receiver-transmitter ). Este puerto lo tiene el microcontrolador PIC y se hace la comunicación por intermedio de un cable RS232. Para asegurar la comunicación entre el Microcontrolador PIC y el dispositivo GPS-GPRS, es necesario usar un circuito integrado driver de línea MAX232, que mediante dobladores de voltaje positivos y negativos, permite obtener la señal bipolar (típicamente alrededor de +/- 6V) requerida por el estándar.

57
Figura 28.Módulo de comunicación por USART-RS232
Fuente: los autores
58
5. PROGRAMACIÓN
La programación se realizó en el programa PIC-C. Es un compilador de la empresa CCs, Inc. ofrece una suite completa de herramientas integradas para desarrollar y depurar aplicaciones embebidas que se ejecutan en microcontroladores PIC ® MCU y dsPIC ® DSC. El corazón de esta suite de herramientas de desarrollo es la CCS. Inteligente optimización de código de compilador de C que libera a los desarrolladores y los lleva a concentrarse en la funcionalidad de diseño en lugar de tener que convertirse en un experto en arquitectura de MCU. 5.1 REQUERIMIENTOS DE PROGRAMA Se requiere que el programa haga lo siguiente:
● Cada minuto haga monitoreo del tanque de combustible de la máquina y almacene esta información.
● Cada 10 minutos promedia y compara esta información, si el nivel del tanque de combustible está en el 5% del nivel total o por debajo, se envía un mensaje de texto (SMS) con alerta de abastecimiento.
● Cada hora envía un SMS con información de identificación del vehículo, posición, hora y nivel de combustible.
● Cada 6 horas envía un SMS con la posición inicial, posición final, hora inicial, hora final y máxima RPM alcanzada.
● Envíe mensaje de texto SMS del nivel de combustible en el tanque abastecedor cuando presente conexión con el sistema alojado en cada vehículo.
5.2 ESTRUCTURA DEL PROGRAMA Para obtener resultados eficientes se decide dar una estructura al programa, la cual tenga un tiempo base y tiempo de programa, el tiempo de programa debe ser menor al tiempo base.
● Tiempo de base =1 segundo ● Tiempo de programa =10 milisegundos
Definidos los tiempos se definen los datos de entrada, salida y proceso.
● Entradas: lectura de nivel de tanque abastecedor si está conectado, lectura de nivel del tanque de la máquina, lee GPS, GPRS, lee las RPM.
● Proceso: almacenamiento de datos, evaluación de los datos, toma decisión. ● Salidas: Envío de mansajes activos (SMS) con información de monitoreo.
59
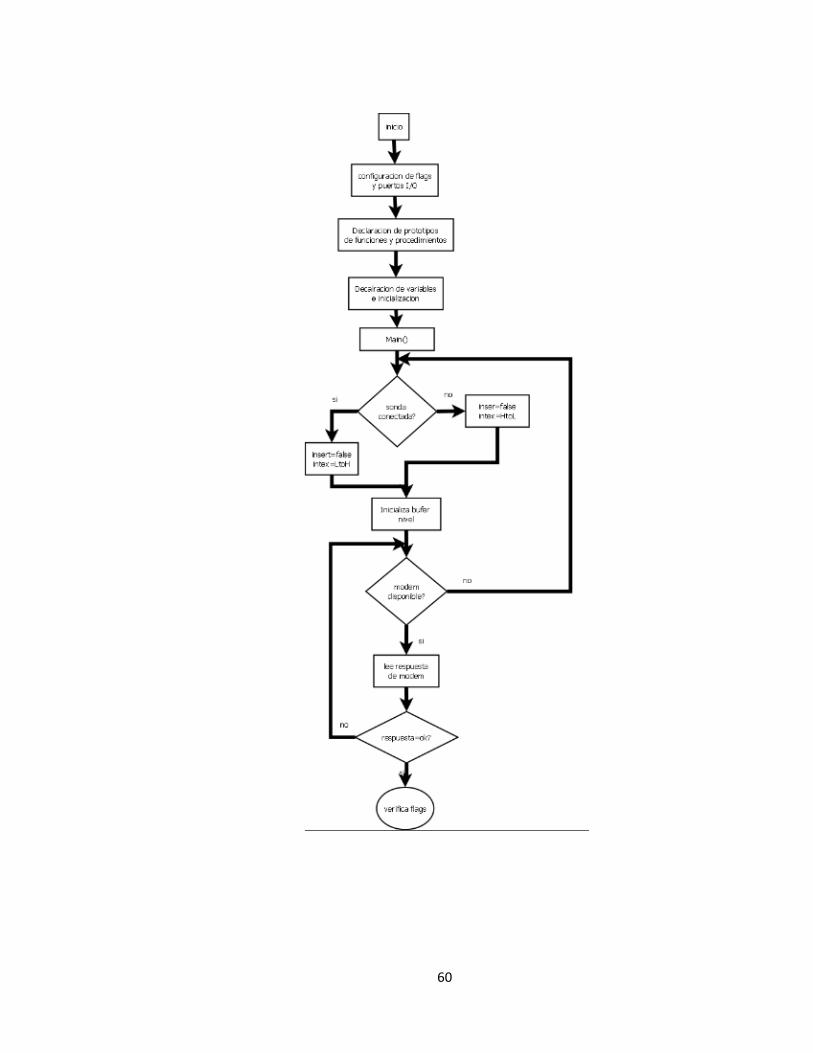
5.3 PROGRAMA En este programa se encuentran diferentes secciones, cada una de ellas con un propósito dentro del sistema. 5.3.1 Programa principal. Dentro del programa principal se ubicaron las variables y la configuración respectiva de los puertos, los prototipos de funciones que se usaran. Dentro de la función principal (main), se pregunta si existe conexión del tanque abastecedor, se puede saber si hay sensor de nivel tipo sonda. Si este está conectado se hace reconocimiento de flanco, pasa de un estado bajo “L”, a un estado alto “H”. Si no existe la conexión se pasa el flanco a nivel bajo “L”. Se hace inicializar el buffer de nivel. Se cuestiona sobre el estado del modem. Si este se encuentra disponible, se lee la respuesta que este modem genera. Si el modem no se encuentra disponible se retorna a preguntar por el estado de conexión del sensor de nivel tipo sonda. Se pregunta si la respuesta del modem es satisfactoria. Si la respuesta es satisfactoria se pasa a verificar los flags (banderas auxiliares), de lo contrario retorna a cuestionar por la disponibilidad del modem.
60
61
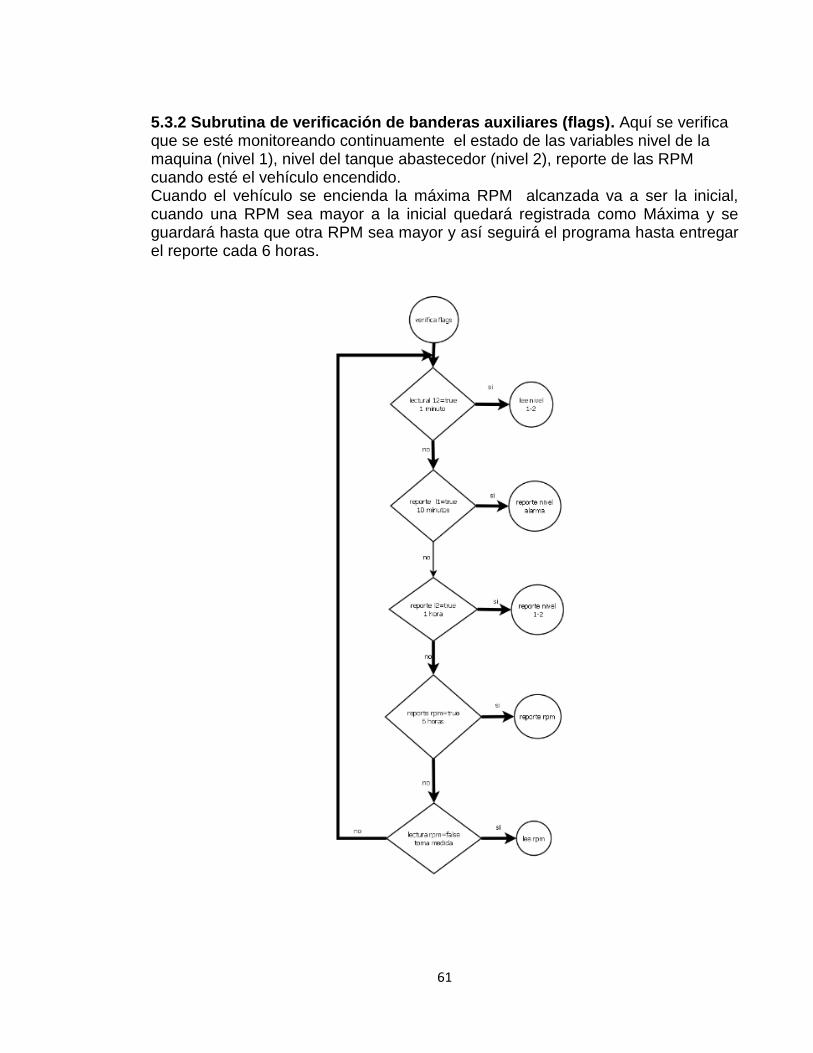
5.3.2 Subrutina de verificación de banderas auxiliares (flags). Aquí se verifica que se esté monitoreando continuamente el estado de las variables nivel de la maquina (nivel 1), nivel del tanque abastecedor (nivel 2), reporte de las RPM cuando esté el vehículo encendido. Cuando el vehículo se encienda la máxima RPM alcanzada va a ser la inicial, cuando una RPM sea mayor a la inicial quedará registrada como Máxima y se guardará hasta que otra RPM sea mayor y así seguirá el programa hasta entregar el reporte cada 6 horas.
62
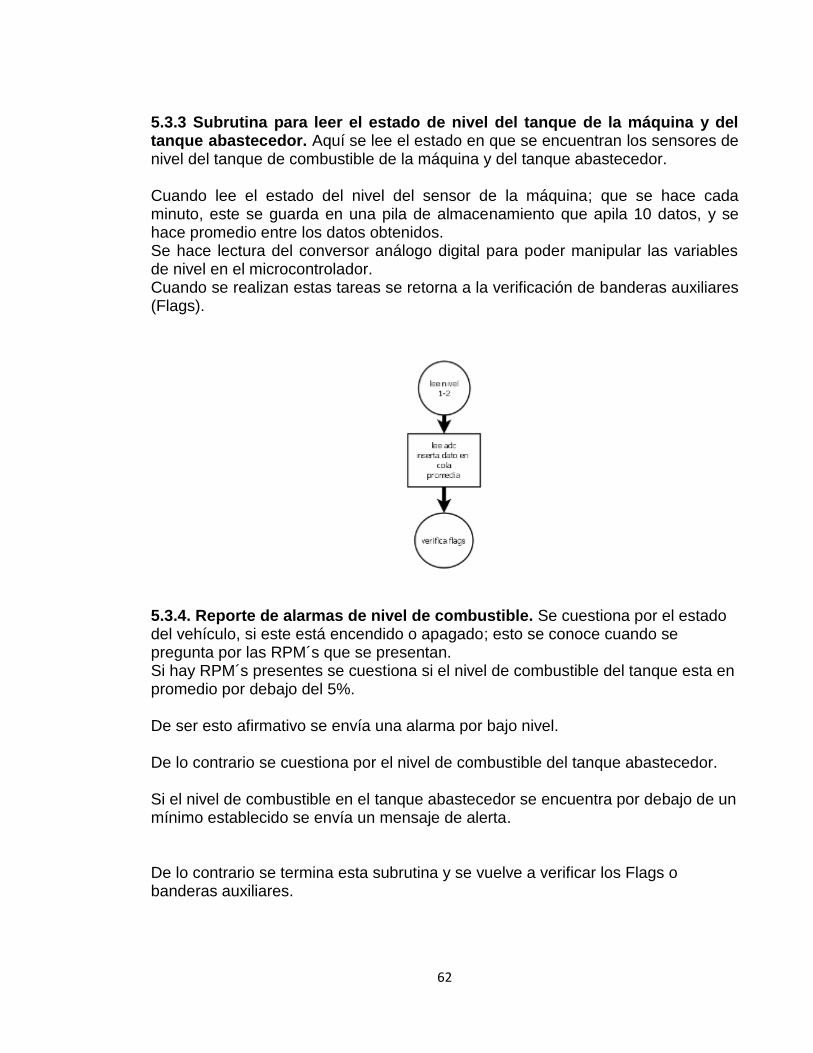
5.3.3 Subrutina para leer el estado de nivel del tanque de la máquina y del tanque abastecedor. Aquí se lee el estado en que se encuentran los sensores de nivel del tanque de combustible de la máquina y del tanque abastecedor. Cuando lee el estado del nivel del sensor de la máquina; que se hace cada minuto, este se guarda en una pila de almacenamiento que apila 10 datos, y se hace promedio entre los datos obtenidos. Se hace lectura del conversor análogo digital para poder manipular las variables de nivel en el microcontrolador. Cuando se realizan estas tareas se retorna a la verificación de banderas auxiliares (Flags).
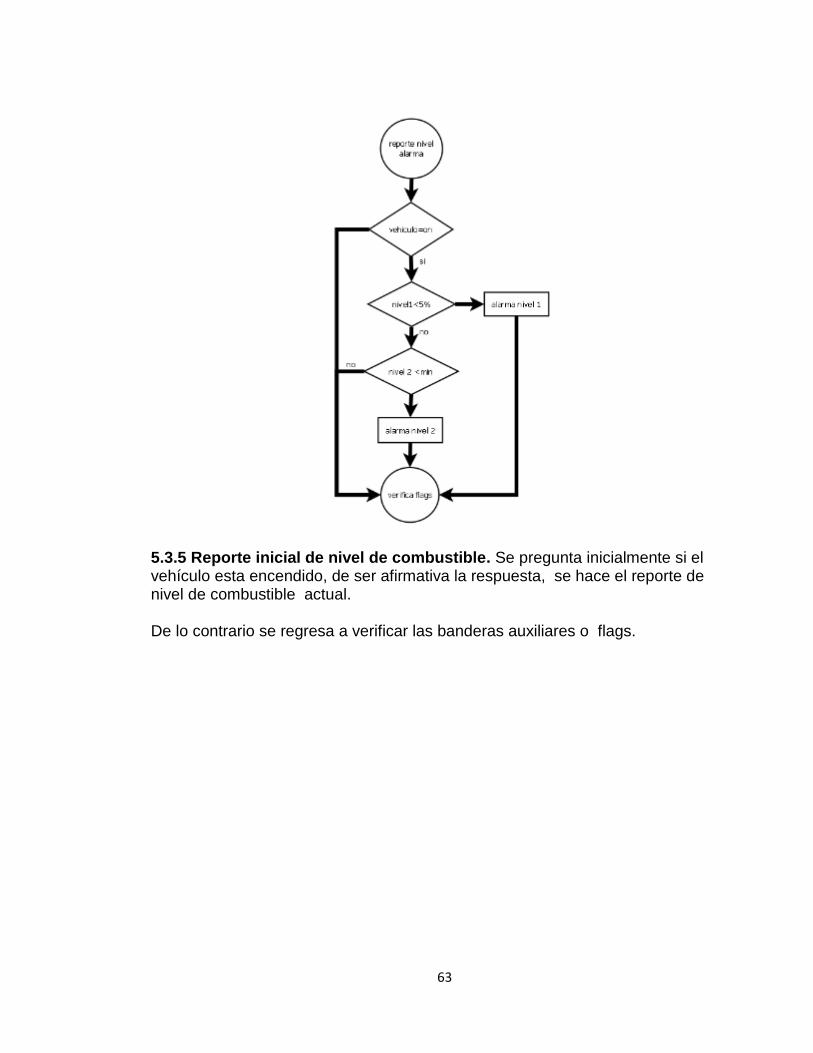
5.3.4. Reporte de alarmas de nivel de combustible. Se cuestiona por el estado del vehículo, si este está encendido o apagado; esto se conoce cuando se pregunta por las RPM´s que se presentan. Si hay RPM´s presentes se cuestiona si el nivel de combustible del tanque esta en promedio por debajo del 5%. De ser esto afirmativo se envía una alarma por bajo nivel. De lo contrario se cuestiona por el nivel de combustible del tanque abastecedor. Si el nivel de combustible en el tanque abastecedor se encuentra por debajo de un mínimo establecido se envía un mensaje de alerta. De lo contrario se termina esta subrutina y se vuelve a verificar los Flags o banderas auxiliares.
63
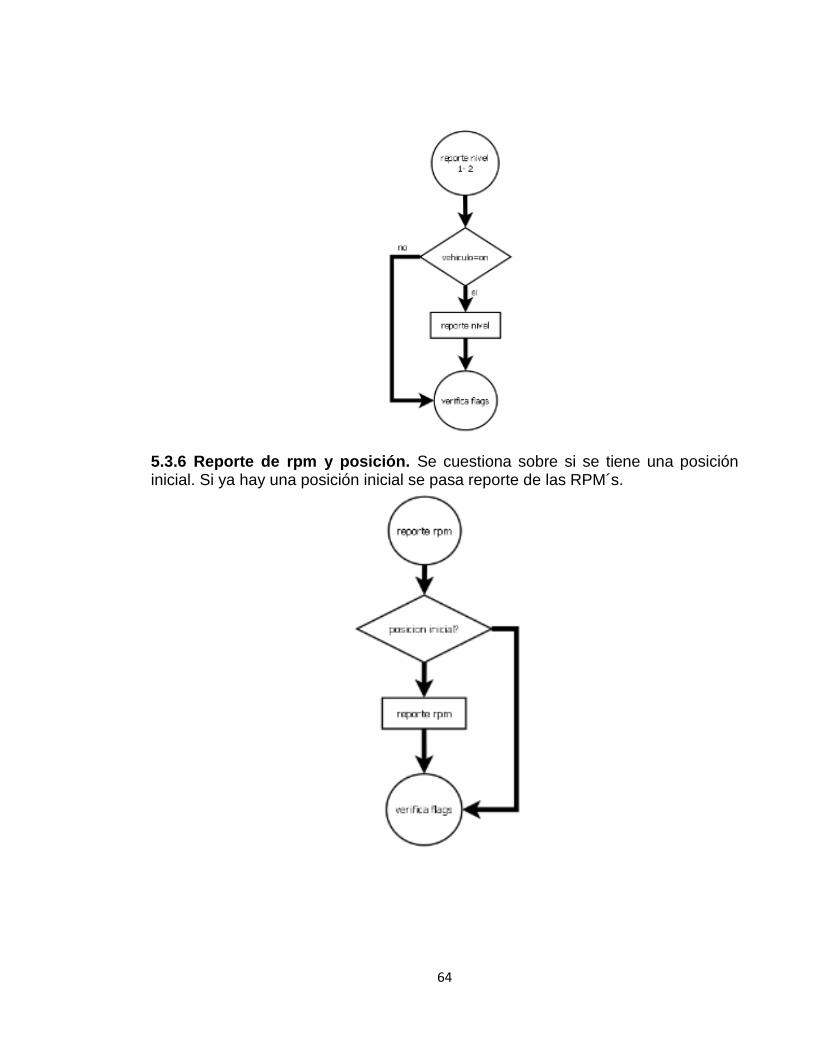
5.3.5 Reporte inicial de nivel de combustible. Se pregunta inicialmente si el vehículo esta encendido, de ser afirmativa la respuesta, se hace el reporte de nivel de combustible actual. De lo contrario se regresa a verificar las banderas auxiliares o flags.
64
5.3.6 Reporte de rpm y posición. Se cuestiona sobre si se tiene una posición inicial. Si ya hay una posición inicial se pasa reporte de las RPM´s.
65
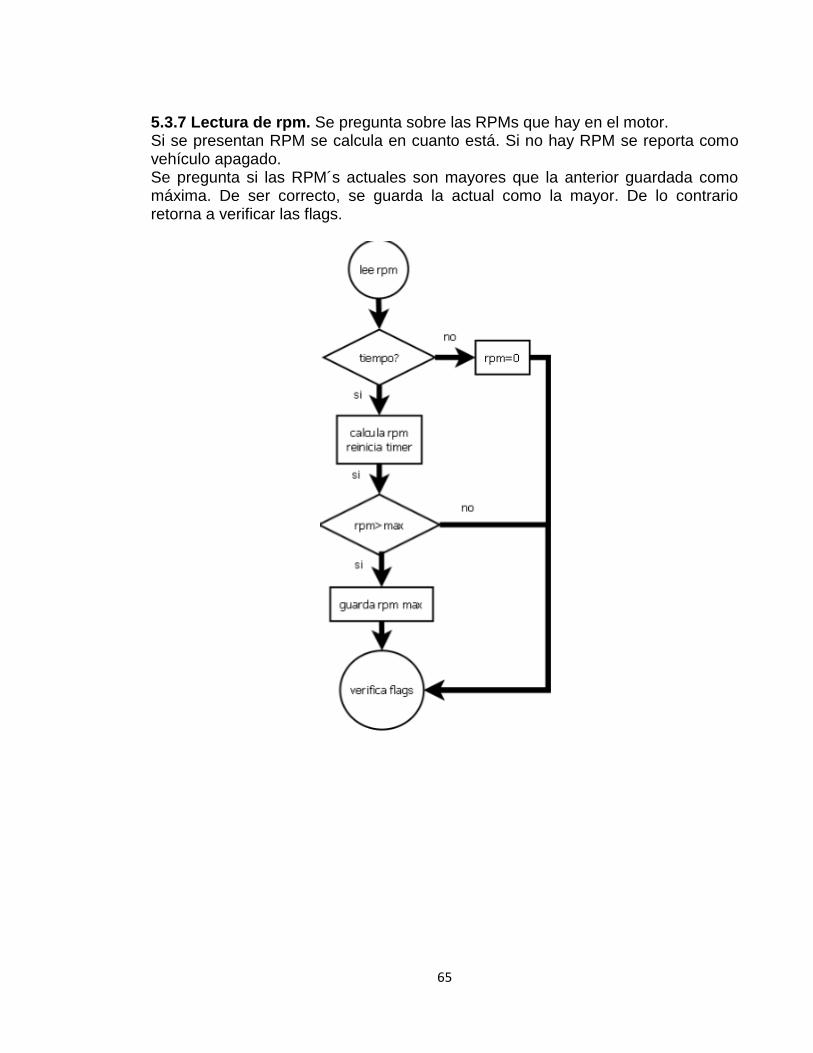
5.3.7 Lectura de rpm. Se pregunta sobre las RPMs que hay en el motor. Si se presentan RPM se calcula en cuanto está. Si no hay RPM se reporta como vehículo apagado. Se pregunta si las RPM´s actuales son mayores que la anterior guardada como máxima. De ser correcto, se guarda la actual como la mayor. De lo contrario retorna a verificar las flags.
66
6. PRUEBAS REALIZADAS Actualmente este prototipo funciona enviando mensajes de texto a un número celular especifico en una trama, cualquiera que sea el evento presentado. El número celular puede ser cambiado, por cuestiones de prueba se hizo enviando las tramas al número celular de uno de los integrantes. Esta trama presenta diferentes formatos: 6.1 MENSAJE DE TEXTO CADA 6 HORAS Este SMS se envía con frecuencia de 6 horas, contiene información de posición del vehículo en formato longitud-latitud, la hora en que se encendió y terminó labores y la máxima RPM alcanzada. Esta trama presenta el siguiente formato: "Hi=05:18 22/09/12 Pi=Lt: 0326.435171N Ln: 07632.479964W Hf=05:18 22/09/12 Pf Lt: 0326.435171N Ln: 07632.479963W RPM=0" Donde: Hi es la hora inicial. Pi es la posición inicial. Hf es la hora final. Pf es la posición final. Lt es latitud. Ln es longitud. Y RPM es revolución máxima. Se envía de esta manera debido a que el máximo número de caracteres soportados en un SMS(mensaje de texto) es de 150. 6.2 MENSAJE DE TEXTO ALARMA TANQUE DE LA MÁQUINA Este SMS de alerta se envía cuando se compara el nivel de combustible actual con el nivel de combustible máximo. Su formato de trama es la siguiente: "NIVEL BAJO DEL TANQUE 1" "NIVEL BAJO DEL TANQUE 1"
67
6.3 MENSAJE DE TEXTO ALARMA TANQUE ABASTECEDOR Esta trama es enviada cuando el tanque abastecedor presenta conexión a fuente de alimentación , se sincroniza con el sistema y además presenta bajo nivel de combustible. El formato que presenta esta trama es la siguiente: " NIVEL BAJO DEL TANQUE 2" " NIVEL BAJO DEL TANQUE 2" 6.4 MENSAJE DE TEXTO CADA HORA Este SMS se envía cada hora informando el nivel actual de combustible de la máquina y del tanque abastecedor, si este se ha conectado. El formato que presenta esta trama es la siguiente: "NIVEL EN TANQUE 1=" "NIVEL EN TANQUE 2="
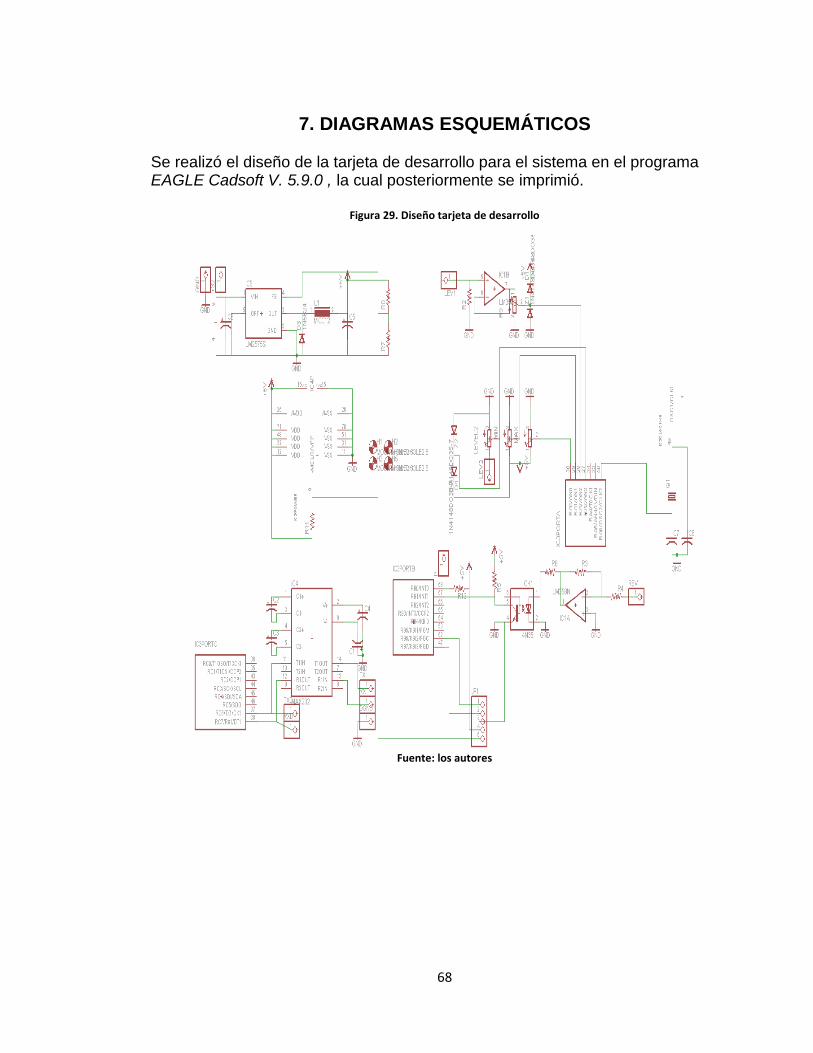
68
7. DIAGRAMAS ESQUEMÁTICOS Se realizó el diseño de la tarjeta de desarrollo para el sistema en el programa EAGLE Cadsoft V. 5.9.0 , la cual posteriormente se imprimió.
Figura 29. Diseño tarjeta de desarrollo
Fuente: los autores
69
Figura 30. Tarjeta de desarrollo, vista de componentes
Fuente: los autores
Figura 31. Tarjeta de desarrollo, componentes y ruteo de pistas conductoras.
Fuente: los autores

70
Figura 32. Tarjeta de desarrollo impresa con componentes
Fuente: los autores
71
CONCLUSIONES
Los resultados que se obtuvieron del sistema de control automático, han sido muy positivos ya que cumplen con los objetivos propuestos al inicio del proyecto, además de permitir a la empresa introducir esta tecnología de control, siendo una ventaja en la operación y prestación de sus servicios.
Implementando el sistema de control de combustible en la maquinaria pesada de la empresa, los resultados del consumo de ACPM de los equipos se podrán controlar de una forma más precisa y eficaz siendo estos resultados beneficiosos para la empresa desde la optimización de costos operativos.
Es claro que gran parte de los costos operativos de estos equipos pesados son el combustible, por lo que este sistema, es una de las mejores opciones para la actualización, automatización y control de este, la cual puede generar un gran ahorro implantando una tecnología a bajo costo y confiable.
El control de acceso, elaborado para el sistema desarrollado en este proyecto, es totalmente seguro, y permite que no haya suministros fraudulentos que haga posible la alteración del ingreso y salida de combustible.
Los sistemas y dispositivos utilizados en este proyecto son totalmente asequibles y fáciles de adquirir a nivel nacional, presentan una gran ventaja al ser compatibles en la tecnología propuesta para el desarrollo del sistema.
Para la implementación de este sistema en todos los equipos de diferentes referencias de marca y modelo, se debe tener en cuenta su funcionamiento básico, como son las RPM´s del motor, tipo de motor, medidor y sensor de tanques de combustibles, tipo de trabajo, voltajes a nivel eléctrico, esto permite establecer la compatibilidad, los requisitos normativos en la instalación del dispositivo.
El control de abastecimiento de combustible proporciona grandes ventajas a la empresa, al poder obtener los datos del ingreso a la maquinaria de combustible y la salida del tanque abastecedor en un tiempo mínimo y poder ser llevados a una base de datos correspondiente siendo la base para la incorporación de nuevas funciones que finalmente permite hacer un control exclusivo de los medidores y controladores identificando tanqueos fraudulentos, fugas, robos entre otros.
Todos los recursos teóricos y prácticos suministrados a lo largo de la carrera, permitieron el diseño e implementación del sistema de control automático. Estas bases fueron de gran importancia para la ejecución de este proyecto.
El sistema automático tienen la posibilidad de poder integrar a futuro un software de adquisición de datos por medio de GPRS. Este se podría desarrollar o bien contratarse con una empresa que ya preste el servicio.
72
BIBLIOGRAFÍA Huerta, Mangiaterra, Noguera, E. (2005). GPS Posicionamiento Satelital. Rosario: UNR editora-
Universidad Nacional de Rosario.
Alibaba.com, I. (2013). Alibaba. Obtenido de http://spanish.alibaba.com/product-tp/gpi-tm200-n-
digital-pvc-water-meter-20-200-gpm--126929169.html
Amazon.com, I. (2013). Amazon. Obtenido de http://www.amazon.com/Troy-TFTP20-Heavy-
Diesel-Transfer/dp/B002O1841A
Angulo Usategui, J. M. (2008). ds PIC diseño práctico de aplicaciones . Mcgraw hill.
Casanova M., L. (2002). Topografia plana. En L. Casanova M., Topografia plana (págs. 10-1, 10-11).
Mérida, Venezuela: Taller de publicaciones ULA (Universidad Los Andes).
Colombia, T. (s.f.). Tecnoproject. Recuperado el 17 de Abril de 2013, de
http://www.tecnoprojectltda.com: http://www.tecnoprojectltda.com/QUEESGPS.htm
Custom Computer, S. (s.f.). Custom Computer Services, Inc. Recuperado el 15 de Abril de 2013, de
http://www.ccsinfo.com/content.php?page=compexamples
Electronica Ltda, S. (2013). Sigma Electronica. Obtenido de
http://www.sigmaelectronica.net/lm358-p-627.html
GPS, H. (2013). Horus GPS. Obtenido de http://www.horusgps.com/new/servicios/dispositivo-de-
monitoreo-vehicular/attachment/skypatrol-tt8750
Grimaney, J. c. (s.f.). SCRIBD. Recuperado el 15 de ABRIL de 2013, de
http://es.scribd.com/doc/2634841/DEFINICIONES-BASICAS-DE-CONTRO
GSM, s. (s.f.). www.gsmspain.com. Recuperado el 17 de Abril de 2013, de
http://www.gsmspain.com/glosario/?palabra=GPRS
Ingenieria, F. (s.f.). http://www.fi.uba.ar/. Recuperado el 15 de Abril de 2013, de Facultad de
ingenieria de Buenos Aires:
http://materias.fi.uba.ar/7609/material/S0303MedicionNivel1.pdf
Joyanes Aguilar, L. (2000). Programación en C++ Algoritmos, estructuras de datos y objetos.
Madrid: Mc Graw Hill.
73
Lorenzi, S. (1998). Circuitos para receptores GPS: Soluciones para un posicionamiento más preciso.
Mundo Electrónico, 48-50.
mes, s. (s.f.). www.mes-sigma.net. Recuperado el 15 de Abril de 2013, de mes-sigma:
http://www.mes-sigma.net/Cursos/images/Sensores%20Capacitivos.pdf
Microchip Technology, I. (10 de 04 de 2013). Microchip. Obtenido de
http://ww1.microchip.com/downloads/en/DeviceDoc/39564c.pdf
Microhip Technology, I. (2013). Microchip. Obtenido de
http://www.datasheetcatalog.org/datasheet/texasinstruments/max232.pdf
miraloquetengo. (2013). Mira lo que tengo. Obtenido de
http://www.miraloquetengo.com/tienda/179-gps-tracker-localizador-rastreador-gps-
espia-gsm-gprs.html
Motorola, I. (2013). datasheetcatalog. Obtenido de
http://pdf.datasheetcatalog.com/datasheet/motorola/4N35.pdf
Pozo ruiz, A. (2000). Sistema GPS: descripción, análisis de errores, aplicaciones y futuro. Mundo
electronico, 54-59. Obtenido de POZO RUIZ, A. Sistema GPS: descripción, análisis de
errores, aplicaciones y futuro. En: Mundo Electrónico. Febrero 2000. no. 306, p. 54-59.
ISSN: 0300-3787
Rodriguez Solorzano, E. (2013). wordpress. Obtenido de
http://erods.files.wordpress.com/2012/12/maquinaria-equipo-construcciong2222222.pdf
Technoton, J. (2013). JV Technoton. Obtenido de http://www.jv-technoton.com/data/dc/DUT-
E_Manual_de_instrucciones_ver.1.0.pdf
Texas Instrument, i. (2013). Texas Instruments. Obtenido de
http://www.ti.com/lit/ds/symlink/lm2575-n.pdf
Torres, M. (26 de Abril de 2007). Pontificia Universidad Catolica de Chile. Recuperado el 15 de Abril
de 2013, de http://www.ing.puc.cl/:
http://web.ing.puc.cl/~mtorrest/downloads/pic/tutorial_pic.pdf
Universidad Politécnica Saleciana-Ecuador. (15 de 04 de 2013). Obtenido de
http://dspace.ups.edu.ec/bitstream/123456789/92/6/Capitulo1.pdf
Valencia, U. (s.f.). www.uv.es. Recuperado el 16 de Abril de 2013, de Universitat de Valencia:
www.uv.es/~montanan/redes/trabajos/GPRS.doc
Villalobos S., J. A. (1996). Diseño y Manejo De Estructuras De Datos en C. Bogotá: Mc Graw Hill.

74
75
ANEXOS
HOJA TÉCNICA PIC 18F8720
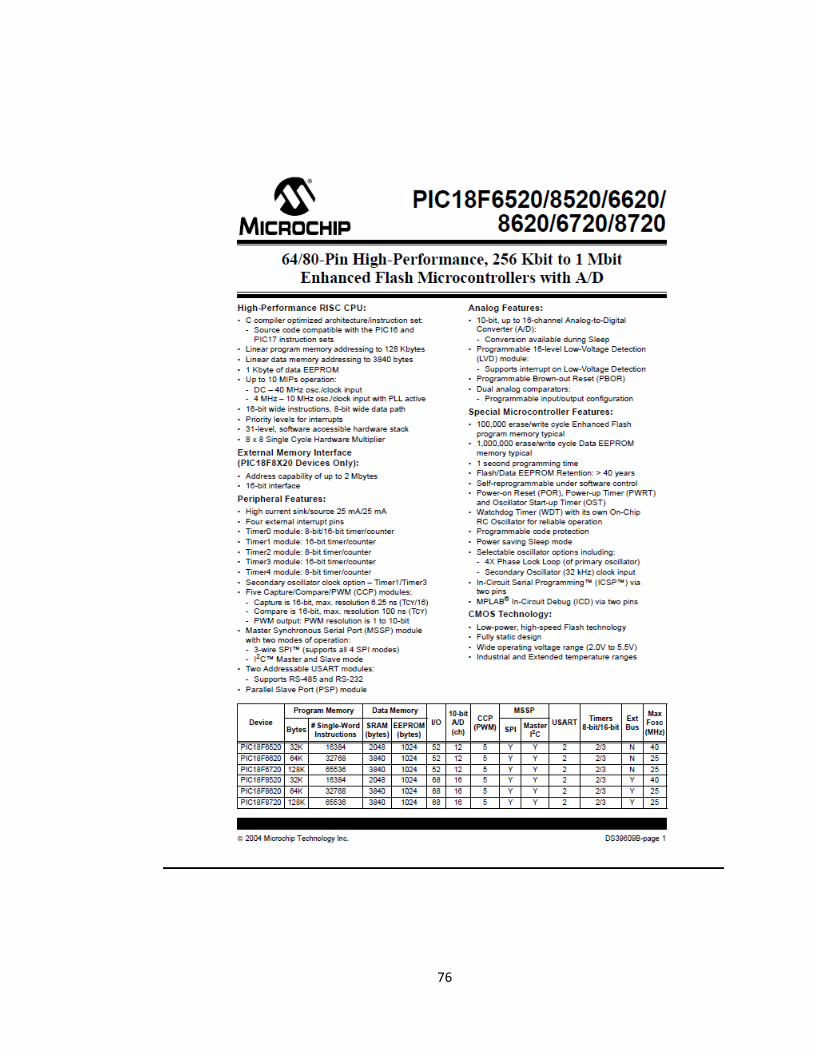
76
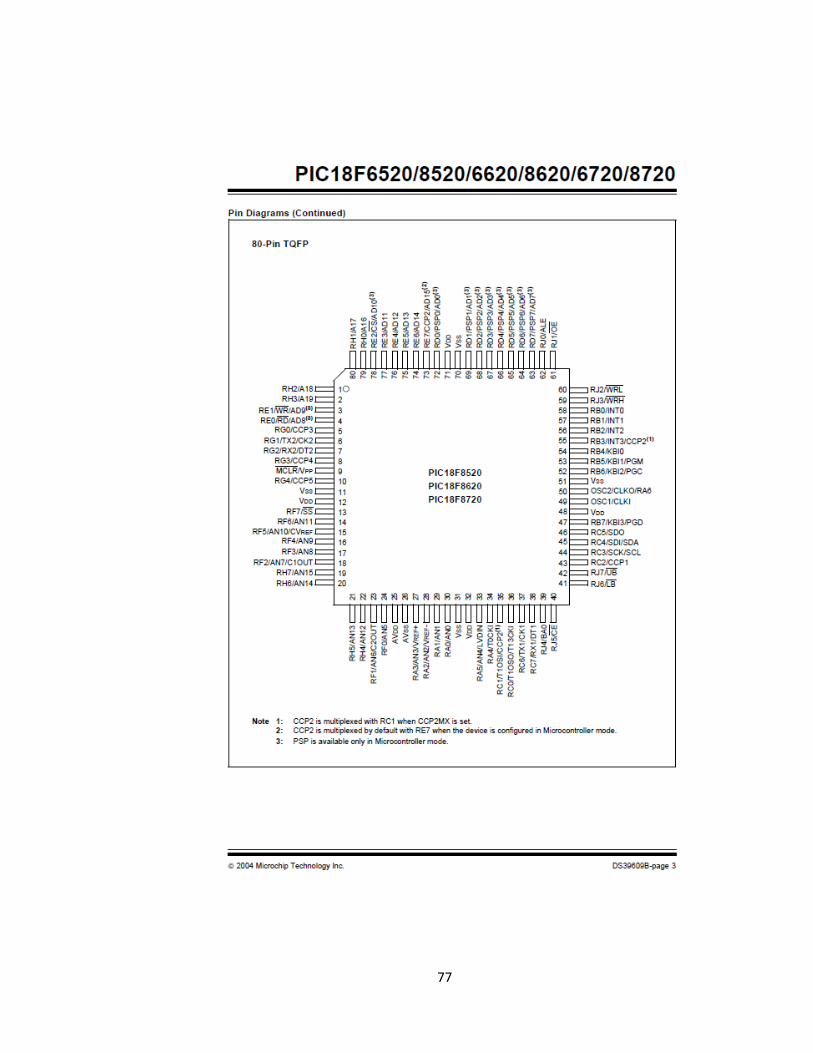
77
78
HOJA TÉCNICA PIC 18F252
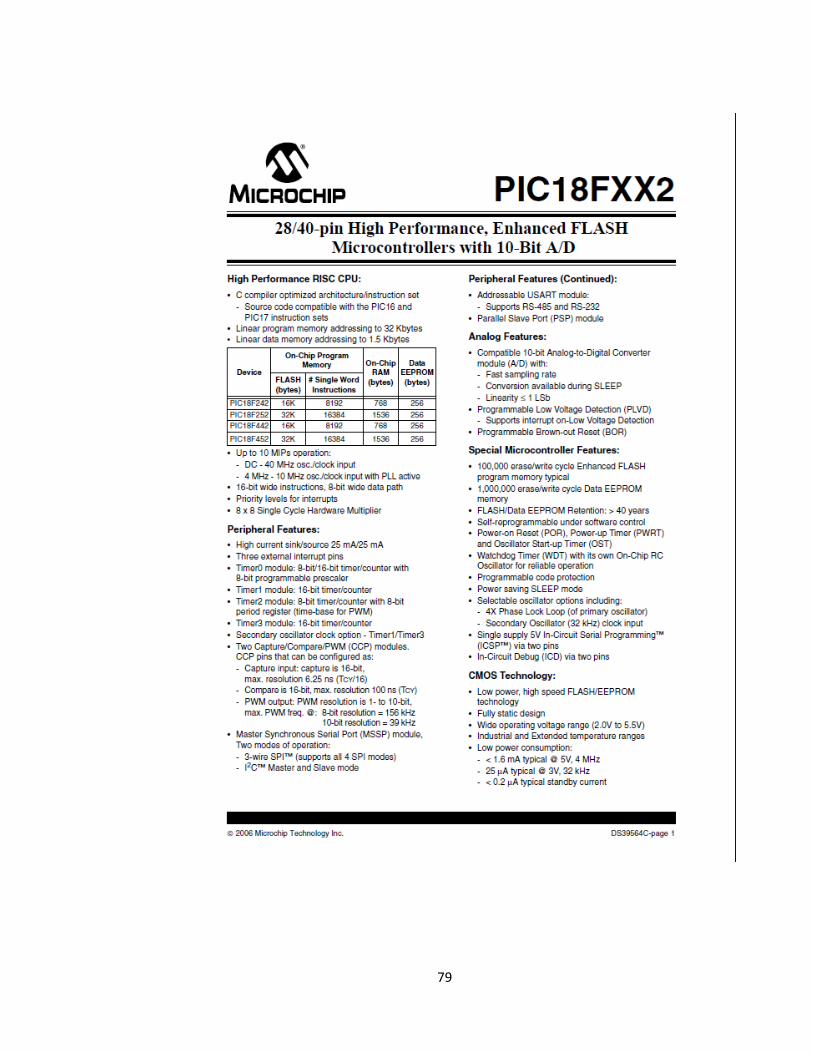
79
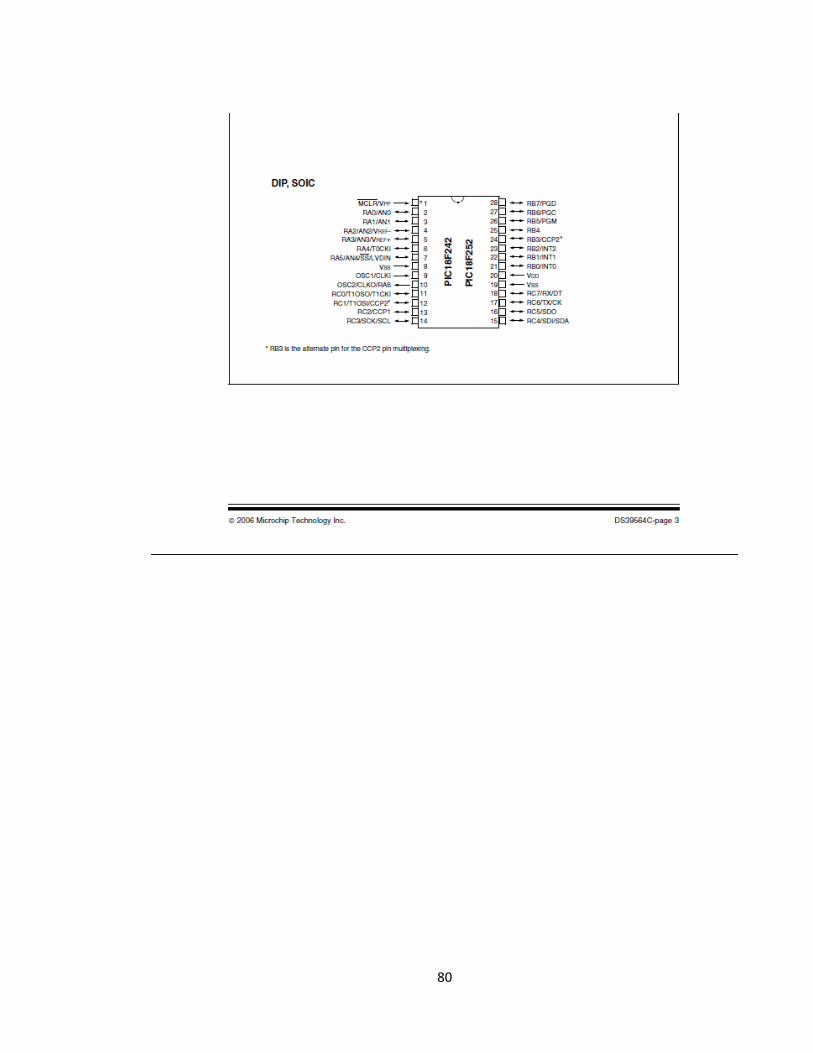
80
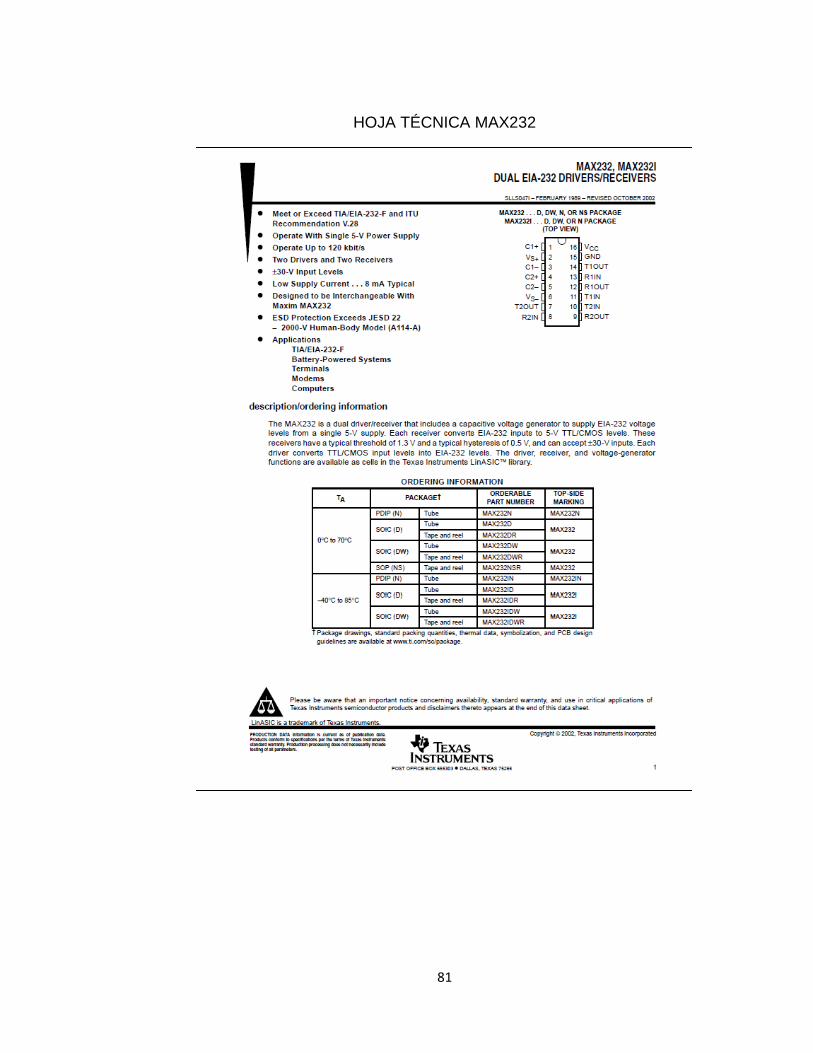
81
HOJA TÉCNICA MAX232
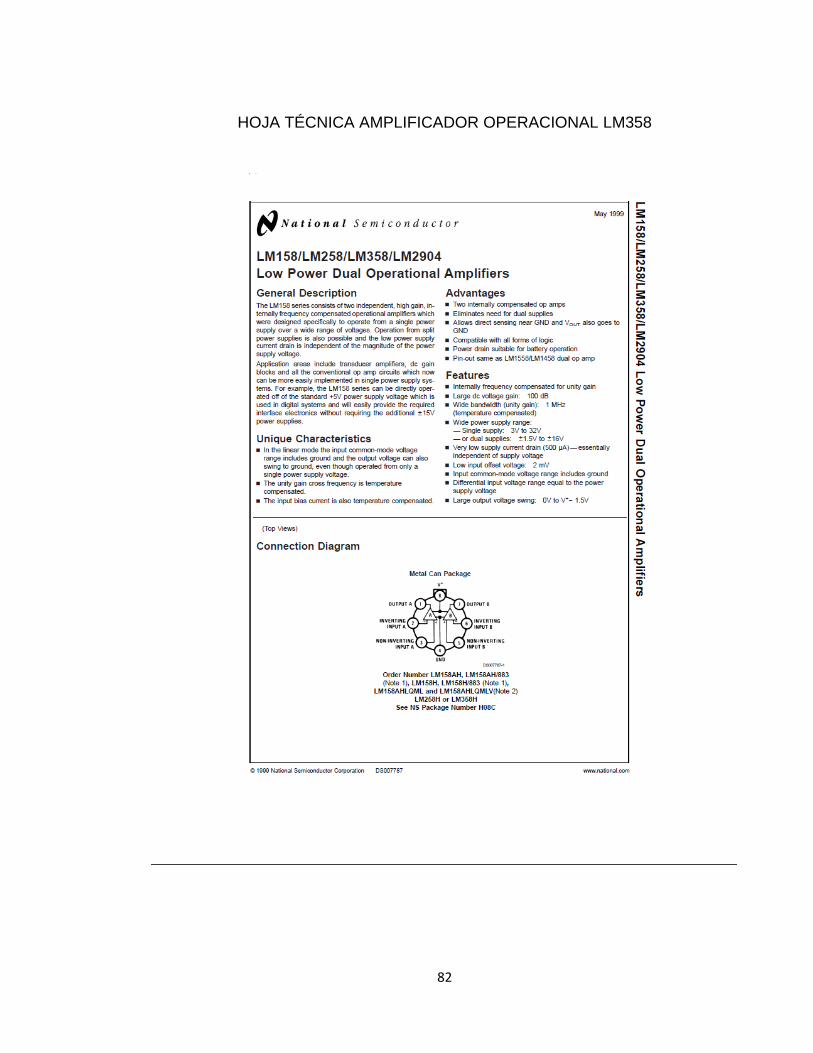
82
HOJA TÉCNICA AMPLIFICADOR OPERACIONAL LM358
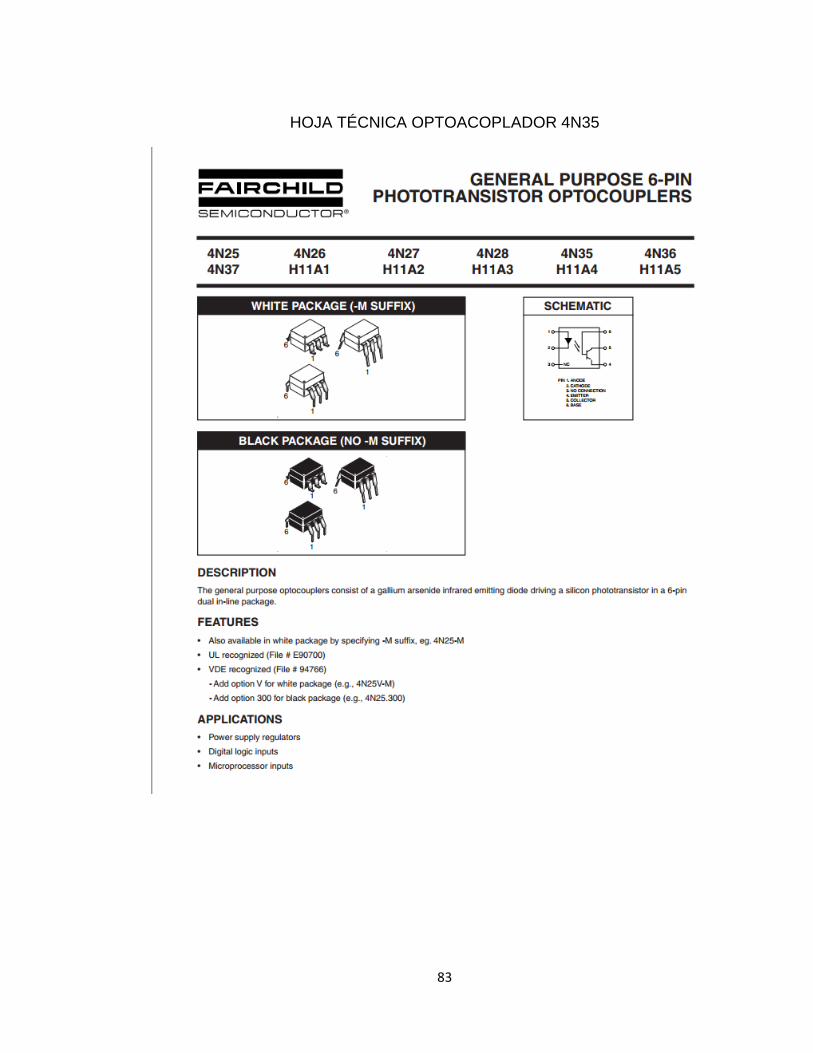
83
HOJA TÉCNICA OPTOACOPLADOR 4N35
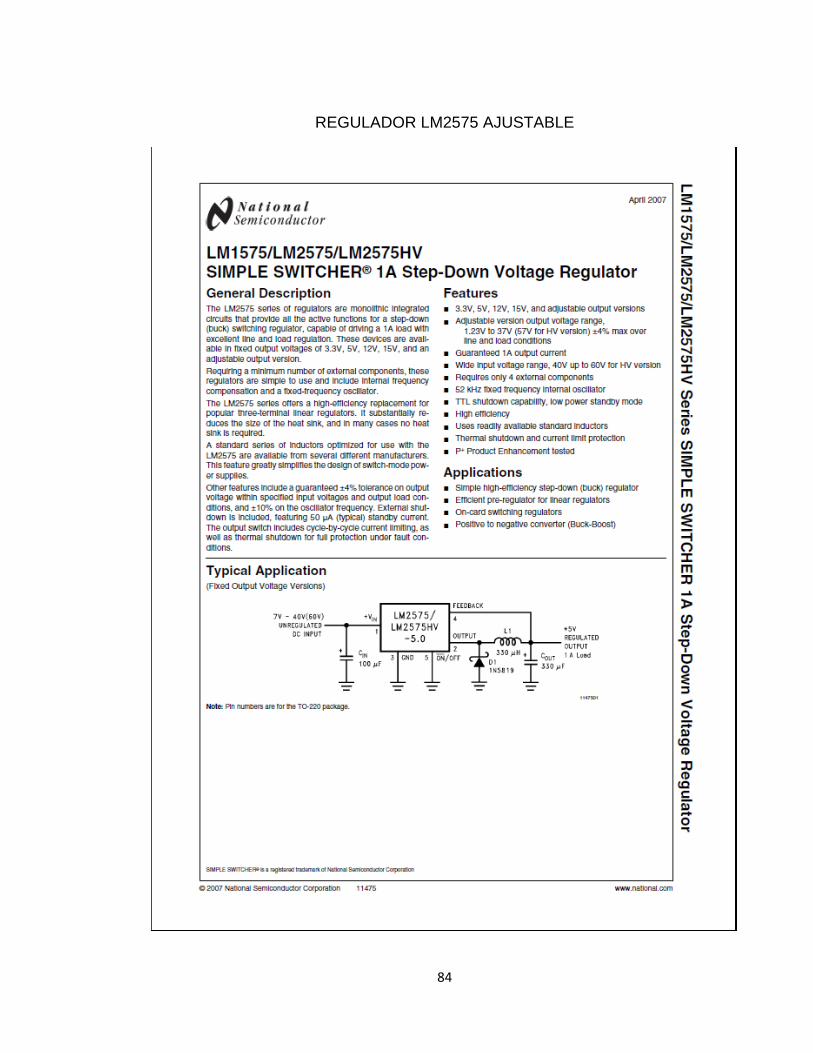
84
REGULADOR LM2575 AJUSTABLE
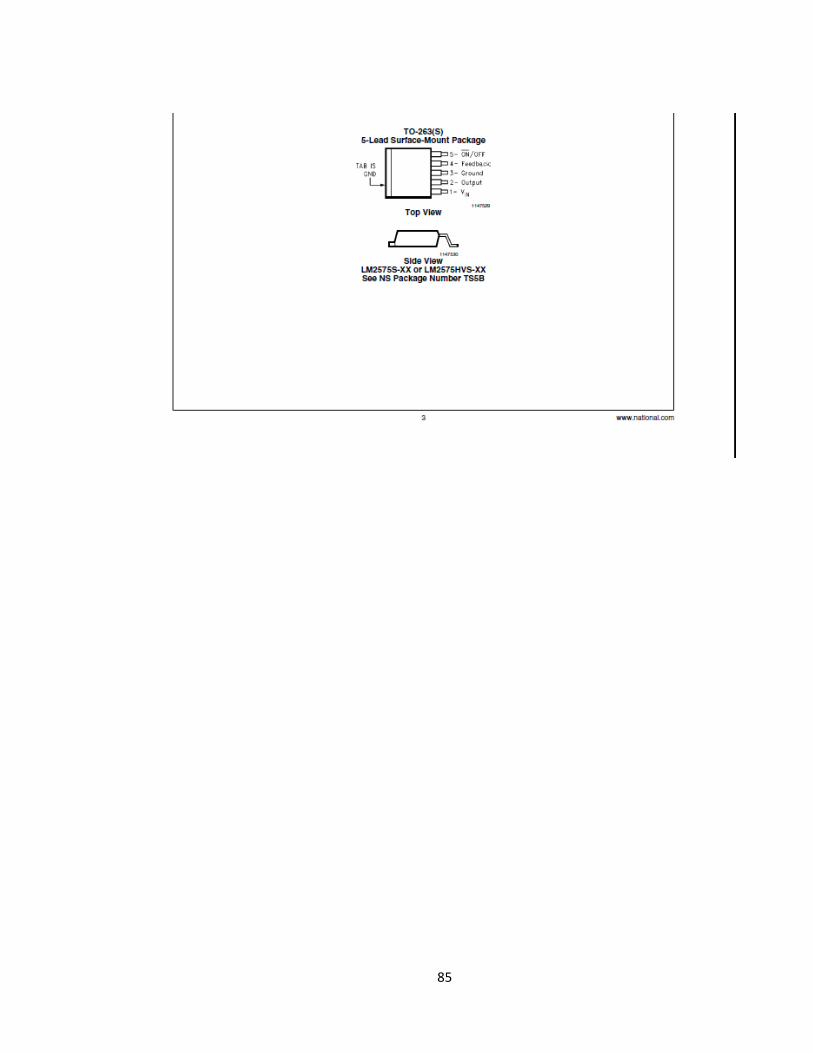
85
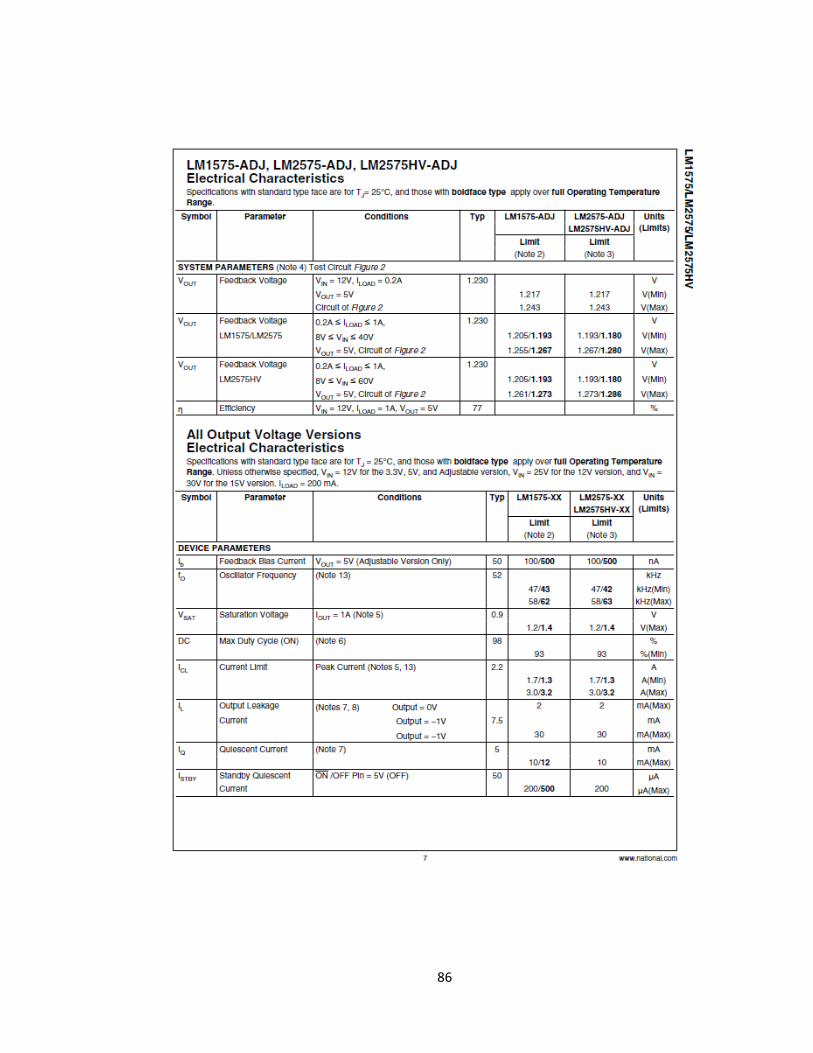
86
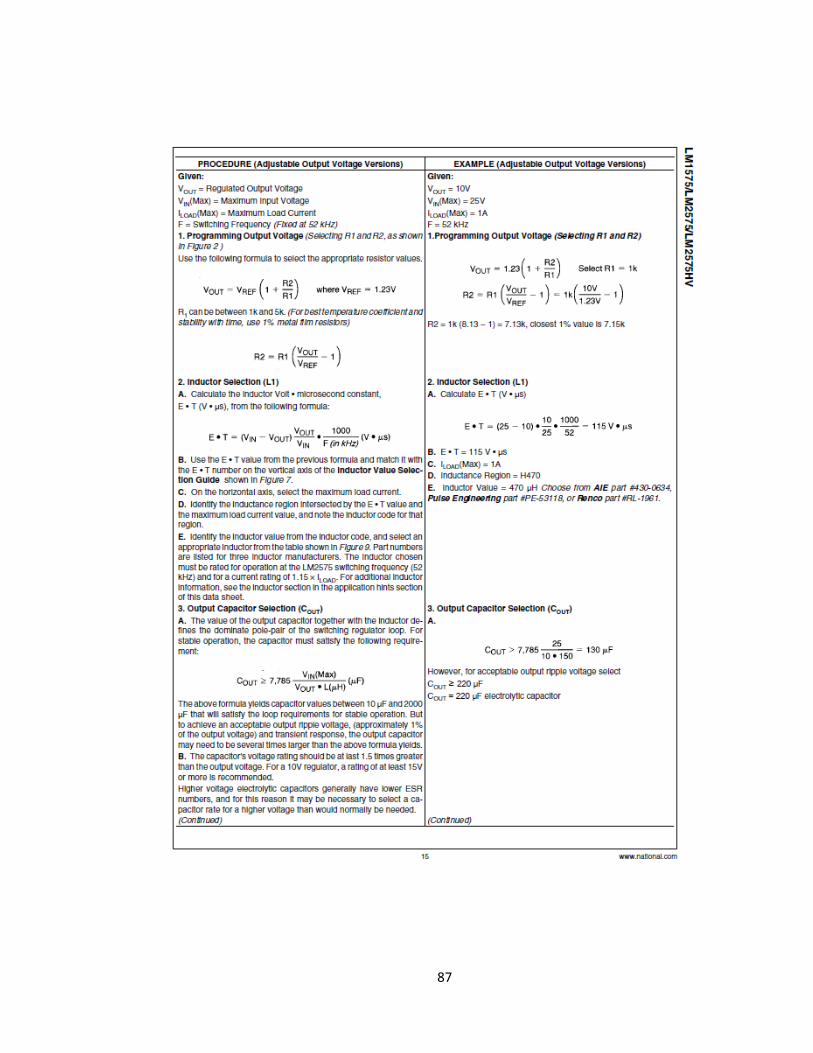
87
88
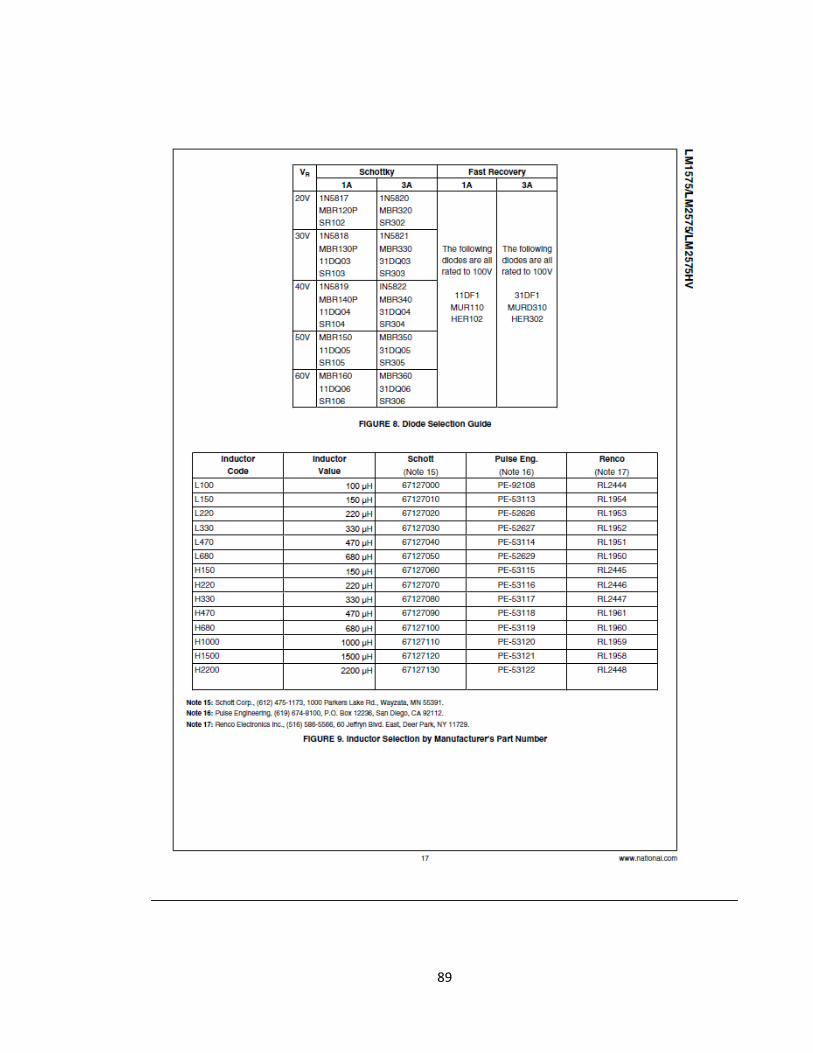
89
90
CÓDIGO FUENTE
91
92
93
94
95
96
97
98
99

100


















