SISTEMA DE PROJEÇÃO PESSOAL PARA NAVEGAÇÃO EM...
133
SISTEMA DE PROJEÇÃO PESSOAL PARA NAVEGAÇÃO EM AMBIENTES VIRTUAIS Diego de Jesus Penaforte Parreiras Dissertação de Mestrado apresentada ao Programa de Pós-graduação em Engenharia Civil, COPPE, da Universidade Federal do Rio de Janeiro, como parte dos requisitos necessários à obtenção do título de Mestre em Engenharia Civil. Orientadores: José Luis Drummond Alves Gerson Gomes Cunha Rio de Janeiro Julho de 2011
Transcript of SISTEMA DE PROJEÇÃO PESSOAL PARA NAVEGAÇÃO EM...

SISTEMA DE PROJEÇÃO PESSOAL PARA NAVEGAÇÃO EM AMBIENTES
VIRTUAIS
Diego de Jesus Penaforte Parreiras
Dissertação de Mestrado apresentada ao
Programa de Pós-graduação em Engenharia
Civil, COPPE, da Universidade Federal do Rio
de Janeiro, como parte dos requisitos necessários
à obtenção do título de Mestre em Engenharia
Civil.
Orientadores: José Luis Drummond Alves
Gerson Gomes Cunha
Rio de Janeiro
Julho de 2011
SISTEMA DE PROJEÇÃO PESSOAL PARA NAVEGAÇÃO EM AMBIENTES
VIRTUAIS
Diego de Jesus Penaforte Parreiras
DISSERTAÇÃO SUBMETIDA AO CORPO DOCENTE DO INSTITUTO ALBERTO
LUIZ COIMBRA DE PÓS-GRADUAÇÃO E PESQUISA DE ENGENHARIA
(COPPE) DA UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COMO PARTE
DOS REQUISITOS NECESSÁRIOS PARA A OBTENÇÃO DO GRAU DE MESTRE
EM CIÊNCIAS EM ENGENHARIA CIVIL.
Examinada por:
________________________________________________
Prof. José Luis Drummond Alves, D. Sc.
________________________________________________
Prof. Gerson Gomes Cunha, D. Sc.
________________________________________________
Prof. Luiz Landau, D. Sc.
________________________________________________
Prof. Jorge Roberto Lopes Dos Santos, Ph. D.
RIO DE JANEIRO, RJ - BRASIL
JULHO DE 2011

iii
Parreiras, Diego de Jesus Penaforte
Sistema de projeção pessoal para navegação em
ambientes virtuais / Diego de Jesus Penaforte Parreiras. –
Rio de Janeiro: UFRJ/COPPE, 2011.
XIV, 119 p.: il.; 29,7 cm.
Orientadores: José Luis Drummond Alves
Gerson Gomes Cunha
Dissertação (mestrado) – UFRJ/ COPPE/ Programa de
Engenharia Civil, 2011.
Referencias Bibliográficas: p. 111-119
1. Realidade Virtual de Projeção 2. Realidade
Aumentada Espacial 3. Ambientes Virtuais. 4 museus.
Virtuais. I. Alves, José Luis Drummond et al. II.
Universidade Federal do Rio de Janeiro, COPPE,
Programa de Engenharia Civil. III. Titulo.

iv
DEDICATÓRIA
Dedico este trabalho a meu pai e minha mãe, cujos conselhos
indispensáveis, auxílios valorosos e amor incondicional me
permitiram conseguir alcançar mais este objetivo.

v
AGRADECIMENTOS
Agradeço a Deus pela vida e oportunidades de crescimento, a
meus pais, pois, sem eles não seria o que eu sou hoje, à minha
noiva pela paciência e apoio incondicional, ao prof. José Luis
Drummond Alves pelo auxilio nas horas difíceis, ao prof. Gerson
Cunha (também orientador) pelo conhecimento que sempre
dividiu com generosidade, à Maria Célia pelo auxílio
indispensável e à FAPERJ pela bolsa de estudos que me
possibilitou desenvolver essa pesquisa.

vi
Resumo da Dissertação apresentada à COPPE/UFRJ como parte dos requisitos
necessários para a obtenção do grau de Mestre em Ciências (M.Sc.)
SISTEMA DE PROJEÇÃO PESSOAL PARA NAVEGAÇÃO EM AMBIENTES
VIRTUAIS
Diego de Jesus Penaforte Parreiras
Julho/2011
Orientadores: José Luis Drummond Alves
Gerson Gomes Cunha
Programa: Engenharia Civil
Este trabalho expõe a metodologia de desenvolvimento e construção do sistema de
projeção pessoal para navegação em ambientes virtuais, que consiste em um capacete
adaptado para a projeção de um cenário virtual com o qual o usuário pode interagir, tendo
os movimentos de sua cabeça rastreados, atualizando seu ponto de vista em relação a esse
cenário virtual, em tempo real. Este experimento se baseia nas tecnologias chamadas de
realidade virtual de projeção, e realidade aumentada espacial, que trabalham as dinâmicas
da interação do usuário com o mundo virtual, através de projetores, e busca uma
alternativa mais simples e menos custosa para navegação por cenários virtuais. Também
faz uma analise da técnica proposta nesse trabalho, aplicada ao cenário virtual do Museu
nacional da UFRJ (MN UFRJ) que compõe o projeto “Dinossauros do Brasil: Exposição
virtual no Museu Nacional – Dinos-virtuais” e no museu virtual Dom João VI com o fim
de avaliar a usabilidade do sistema para fins de treinamento e entretenimento.

vii
Abstract of Dissertation presented to COPPE/UFRJ as a partial fulfillment of the
requirements for the degree of Master of Science (M.Sc.)
PERSONAL PROJECTION SISTEM FOR VIRTUAL ENVIRONMENTS
NAVIGATION
Diego de Jesus Penaforte Parreiras
July /2011
Advisors: José Luis Drummond Alves
Gerson Gomes Cunha
Department: Civil Engineering
This dissertation displays the methodology of development and assembly of the
personal projection system for virtual environments navigation that is a headpiece
adaptation to project a virtual scenario with which the user may interact, by having his
head movements tracked and thus updating its view in relation to this virtual scene in real
time. This experiment is based on technology called projection which virtual reality,
spatial augmented reality, two technologies that work the dynamics of the User
interaction with the virtual world, through projectors, and seeks an alternative simpler
and less costly for virtual environments navigation. Also makes an analysis of the
proposed technique in this work, applied to virtual scenery of the National Museum at
UFRJ (MN UFRJ) that compose the project " Brazilian Dinosaurs: Virtual exhibition at
the National Museum – Dines virtuosi” and in the Dom João VI virtual museum, with
training and entertainment purposes..

viii
SUMÁRIO
1– INTRODUÇÃO .......................................................................................................... 1
1.1 – Problema proposto.......................................................................................3
1.2 – Hipótese.......................................................................................................4
1.3 – Justificativas e relevância do projeto..........................................................4
1.4 – Objetivos......................................................................................................7
2 – CONCEITOS E DISPOSITIVOS ............................................................................ 8
2.1 – Realidade Virtual .......................................................................................... 8
2.2 – Realidade Aumentada ................................................................................. 20
2.3 – Motores de Jogos.........................................................................................22
2.4 – Quest3D......................................................................................................26
2.5 – Wii Remote ................................................................................................. 27
2.6 – Freetrack ..................................................................................................... 27
3 – O ESTADO DA ARTE ............................................................................................ 29
3.1 – Panoramas ................................................................................................... 31
3.2 – Cave ............................................................................................................ 32
3.3 – Imax ............................................................................................................ 35
3.4 – Shader Lamps ............................................................................................. 36
3.5 – Pinturas Aumentadas .................................................................................. 39
3.6 – A Vitrine Virtual ......................................................................................... 42
3.7 – Being There ................................................................................................ 44
3.8 – Ilamps: projetores móveis ........................................................................... 46
3.9 – Mesa Virtual ............................................................................................... 49
3.10 – O Quarto Luminoso .................................................................................. 51
3.11 – IDome ....................................................................................................... 52
4 – METODOLOGIA .................................................................................................... 54
4.1 – Sistema Pessoal de Projeção: Dispositivo de rastreamento da Cabeça ...... 54
4.2 – Funcionamento do sistema com o Quest3D ............................................... 74
4.3 – Aprimorando o conjunto............................................................................81
4.4 – Construção do Museu virtual Dom João VI .............................................. 86
5 – RESULTADOS........................................................................................................93
5.1 – Estudo de caso do Museu Nacional da UFRJ.......................................................93
5.2 – Usabilidade: estudo de caso do Museu Dom João VI............................................98
ix
5.3 – comparação teórica do sistema Pessoal de Projeção com outros sistemas de
Realidade Virtual de projeção e Realidade Aumentada
Espacial..........................................................................................................................102
6 – CONSIDERAÇÕES FINAIS .......................................................................... ......105
7 – TRABALHOS FUTUROS ................................................................................... .108
8 – REFERÊNCIAS BIBLIOGRÁFICAS ................................................................ 111
x
ÍNDICE DE FIGURAS
Figura 1 – exemplo de mundo virtual.................................................................................9
Figura 2a – cluster de computadores.................................................................................13
Figura 2b – supercomputador............................................................................................13
Figura 3 – seis graus de liberdade.....................................................................................15
Figura 4a – HMD e Gloves...............................................................................................17
Figura 4b – a esfera virtual................................................................................................17
Figura 4c – data suit..........................................................................................................17
Figura 5a – desenho esquemático data glove....................................................................18
Figura 5b – foto da data glove..........................................................................................18
Figura 6a – luva com exoesqueleto para force feedback..................................................19
Figura 6b – luva traduzindo para o usuário a sensação de toque no mundo virtual.........19
Figura 7 - Continuum de Migram......................................................................................20
Figura 8a e 8b– realidade aumentada com marcadores fiduciais......................................22
Figura 9 – esquema de funcionamento do Quest3D.........................................................26
Figura 10a – Nintendo Wii Remote..................................................................................27
Figura 10b – usuário jogando com o Wii Remote............................................................27
Figura 11a – interface do Freetrack..................................................................................28
Figura 11b – LEDS............................................................................................................28
Figura 12 – imagem esquemática de um panorama............................................................31
Figura 13a – usuário dentro da CAVE..............................................................................33
Figura 13b – CAVE da USP..............................................................................................33
Figura 13c – CAVE com dois usuários.............................................................................33
Figura 14 – desenho esquematico dos cinemas IMAX.....................................................35
Figura 15a – vaso neutro de argila.....................................................................................37
Figura 15b – vaso com pinturas projetadas pelo sistema Shader
Lamps................................................................................................................................37
Figura 15c – vaso com outras texturas..............................................................................37
Figura 16a – Taj Mahal: áreas iluminadas pelo primeiro
projector.............................................................................................................................38
Figura 16b – modelo Taj Mahal texturizado......................................................................38
Figura 16c – Sombras Virtuais...........................................................................................38
Figura 16d e 15d - modelo físico do Taj Mahal de
madeira...............................................................................................................................38

xi
Figura 17 – desenho esquemático de pinturas aumentadas...............................................40
Figura 18a – pintura de Michelangelo para a criação de Adão.........................................41
Figura 18b – esboço de Michelangelo para a criação de Adão.........................................41
Figura 19a – Detalhes da Capela Sistina...........................................................................41
Figura 19b – Aplicação das pinturas aumentadas no museu.............................................41
Figura 20 – lustração de aplicações da Virtual Showcase em museus..............................42
Figura 21a preenchimento dos ossos reais com musculos e tecidos virtuais.....................43
Figura 21b – grupos musculares diferentes são aumentados.............................................43
Figura 22a – modelo 3D virtual do ambiente a ser aumentado.........................................45
Figura 22b e 22c – exemplos de aplicação Being
there...................................................................................................................................45
Figura 22d – outra textura projetada no mesmo ambiente Being
there...................................................................................................................................45
Figura 23 – projetores palm size........................................................................................47
Figura 24 – projetor de mão na aplicação
Ilamps.................................................................................................................................48
Figura 25a – exemplo da projeção utilizando o RFIG.......................................................49
Figura 25b – esquema de aplicação do RFIG....................................................................49
Figura 25c – aplicação real do RFIG em funcionamento..................................................49
Figura 26a – desenho esquemático de uma mesa virtual...................................................50
Figura 26b – exemplo de mesa virtual multitoch.............................................................50
Figura 27 – Sistema de Projeção Esférico.........................................................................53
Figura 28 – ilustração da idéia inicial do capacete............................................................55
Figura 29 – ilustração do sistema de projeção completo...................................................55
Figura 30a – modelo de montagem 3 Dots Cap................................................................58
Figura 30b – modelo de montagem 3 Dots clip.................................................................58
Figura 30c – modelo de montagem 4 Dots Cap................................................................58
Figura 31a – desenho esquematico da montagem em épura do modelo 4 Dots Cap........58
Figura 31b – vista lateral da montagem do four Dots
Cap....................................................................................................................................58
Figura 31c – vista frontal da montagem do 4 Dots Cap....................................................58
Figura 32 – desenho esquematico do circuito em paralelo para o modelo: 3 Dots
Cap....................................................................................................................................59
Figura 33 – camera A4Tech PK 335.................................................................................61
xii
Figura 34a e 34b – modelo improvisado para o track 3 Dots Cap....................................61
Figura 35 – utilização do Freetrack....................................................................................65
Figura 36 – interface com as opções disponíveis na aba global........................................66
Figura 37 – interface com as opções disponíveis na aba...................................................67
Figura 38 – curvas que auxiliam na setagem dos canais, no padrão.................................68
Figura 39 – curvas que auxiliam na setagem dos canais, ajustadas..................................68
Figura 40a – sistema captando interferência das luzes do ambiente.................................69
Figura 40b – captação ideal das luzes dos LEDs sem interferência..................................69
Figura 41ae 41b – Desmontagem da camera para remoção do filtro I.R..........................70
Figura 42 – Câmera com filtro improvisado por filme fotográfico...................................70
Figura 43 – montagem improvisada com os LEDs infravermelho....................................71
Figura 44 – modelo do projetor utilizado no projeto.........................................................71
Figura 45 – teste fracassado com o projetor......................................................................72
Figura 46 – museu de paleontologia, funcionando no Quest3D.......................................76
Figura 47 – canais, ou módulos, que compõem o cenário virtual......................................77
Figura 48 – canais que compõem a walk trought camera..................................................78
Figura 49 – canal “rotation vector” da walktrought camera..............................................79
Figura 50 – canais que compõem o” rotation vector” da walktrought camera, com o canal
right click mouse down aberto...........................................................................................80
Figura 51a – modelo do capacete escolhido com os LEDs adaptados e instalados..........82
Figura 51b – projetor e capacete com sua regulagem sendo removida.............................82
Figura51c – projetor montado no espaço interno do capacete..........................................82
Figura 51d – capacete pronto para ser usado.....................................................................82
Figura 52a – modelo head-tracking final completo..........................................................83
Figura 52b – modelo head-tracking completo visto de frente..........................................83
Figura 52c – demonstração de adaptação para a passagem dos
fios.....................................................................................................................................83
Figura 52d – capacete em funcionamento, em conjunto com o Wii Remote....................83
Figuras 53a, 53b e 53c – detalhes da parte interna do capacete.......................................84
Figura 54 – regulagem do sistema.....................................................................................85
Figura 55 – utilização do sistema Freetrack.......................................................................85
Figura 56 – usuário navegando pelo cenário virtual do museu de paleontologia..............86
Figura 57 – pinturas que fazem parte do acervo do museu Dom João VI.........................87
Figura 58 – modelagem do museu Dom João VI..............................................................88
xiii
Figura 59a e 59b – cenário virtual correspondente ao Museu Dom João VI no
Quest3D...........................................................................................................................89
Figura 60 – texturas..........................................................................................................89
Figura 61 – interface do Quest3D....................................................................................91
Figura 62a e 62b – navegando pelo museu virtual em chamas........................................92
Figura 64a, 64b e 64c – movimentos realizados pela cabeça do usuário.........................93
Figura 65a, 65b e 65c – movimentos captados pelo sistema...........................................93
Figuras 66a e 66b – usuário testando o museu de paleontologia da UFRJ......................96
Figuras. 67a e 67b – captura da tela do museu de paleontologia no
Quest3D..........................................................................................................................96
Figura 68 – usuário do NCD testando o sistema pessoal de
projeção..........................................................................................................................100
Figura 69a e 69b – museu D. João VI em chamas, o ponto de partida, e saídas de
emergência.....................................................................................................................100
Figura 70 – Mouse 3D...................................................................................................108
Figura 71 – Wii power glove.........................................................................................109
Figura 72 – simulação da mesa virtual com o sistema pessoal de projeção..................109
Figura 73– simulação com o usuário em pé...................................................................109
Figura 74 – Teste da caneta com
LEDs..............................................................................................................................109
xiv
ÍNDICE DE TABELAS
Tabela 1 – Voltagem e corrente eletrica de acordo com a cor do LED.............................59
Tabela 2 – tipos de câmeras utilizadas pelo Freetrack .......................................61, 62 e 63
1
1– INTRODUÇÃO
Recentemente foi lançado o filme TRON: O LEGADO (DISNEY 2010) onde o
personagem principal do filme Kevin Flynn (interpretado pelo ator norte-americano Jeff
Bridges) criou um dispositivo que pode transferi-lo por completo para o mundo virtual,
que no contexto do filme é chamado de “grade” (the grid). Lá ele pode se mover e
interagir com programas de computador, como se fossem pessoas reais.
O cinema de ficção cientifica já há algum tempo vem utilizando o mundo virtual como
fonte de roteiros impressionantes, onde o homem pode visitar esse mundo fantástico
chamado “cyberspace” (GUIMARÃES, 2006), o PASSAGEIRO DO FUTURO e
MATRIX são outros exemplos. Isso se deve, continua GUIMARÃES (2006), ao fato de
que nesse outro mundo, o homem busca satisfazer seus anseios, e aspirações.
A imersão completa no mundo virtual como vista em TRON ainda não foi possível, mas
essa tecnologia conhecida como realidade virtual permite uma imersão quase completa.
Onde o usuário interage com o mundo virtual, e tem a sensação de fazer parte deste,
com o efeito deste mundo sobre seus sentidos produzido por meio de dispositivos
especiais.
Vem se desenvolvendo a passos largos, e tem se popularizado na mesma proporção em
que seu custo se torna cada vez menor. Segundo BRAGA (2001), o avanço tecnológico
vem possibilitando aos computadores pessoais tornarem-se cada vez mais rápidos,
fazendo com que a Realidade Virtual deixe de ser objeto de estudo somente dos grandes
centros de pesquisa, passando a ser utilizada também, por usuários comuns. “Um
exemplo deste fato são os computadores, que há décadas atrás ocupavam uma sala
inteira para ter a mesma capacidade de processamento que hoje está no desktop”.
(PARREIRAS, 2009)
2
Outros exemplos são os games, que reproduzem o mundo real com uma impressionante
habilidade, em tempo real, e com recursos de interatividade cada vez mais complexos.
(PARREIRAS, 2009). Os aparatos tecnológicos vêm cada vez mais ganhando espaço no
cotidiano das pessoas, sendo assim, os mundos digitais e virtuais também participam
dessa aproximação (FARIA, 2003)
Segundo RASKAR et al., (2001) Tradicionalmente, as técnicas de computação gráfica
como a realidade virtual, tentatavam "capturar" o mundo real, e em seguida, reproduzi-
lo visualmente no computador. Nos anos posteriores, o trabalho foi o de inserir objetos
virtuais no mundo real, como a tecnologia da Realidade Aumentada. Recentemente, a
nova tendência é usar projetores de luz para projetar imagens do mundo virtual
diretamente no mundo real.
Seguindo essa tendência, apresentamos nessa dissertação uma técnica que denominamos
Sistema Pessoal de Projeção para Ambientes de Realidade Virtual, que combina
técnicas de projeção e Realidade Virtual, e tenta tirar vantagem das técnicas da chamada
Realidade Virtual de Projeção, e da Realidade Aumentada Espacial, que segundo,
RASKAR et al., (2001) “ambas tem por objetivo incorporação de gráficos
tridimensionais gerados por computador e animação diretamente no mundo real à nossa
volta”.
Esse sistema de projeção que propomos, permite o rastreamento do posicionamento da
cabeça do usuário, e projeta em tempo real um cenário virtual, com o qual esse usuário
interage, navegando como se estivesse imerso neste ambiente, tendo seu ponto de vista
atualizado de acordo com seus movimentos realizados com a cabeça. Também
exploramos as potencialidades dos Games Engines, para fins Non Game, isto é,
testamos os motores construtores de jogos eletrônicos para fins fora dos jogos, com os
cenários utilizados neste trabalho sendo construídos no Game Engine Quest 3D, uma
poderosa ferramenta, que é atualmente utilizado para varias aplicações que envolvem
cenários virtuais.
Como objeto de estudos, aplicamos a técnica ao museu virtual do Museu Nacional
(MN-UFRJ), correspondente ao projeto “Dinossauros do Brasil: Exposição virtual no
Museu Nacional – Dinos-virtuais”, que foi desenvolvido através de uma parceria entre o

3
Setor de Paleovertebrados do Departamento de Geologia e Paleontologia, Nacional
(PV/DGP/MN/UFRJ) o Laboratório de Tecnologias da Informação e da Comunicação
(LATEC/UFRJ) e o Grupo de Realidade Virtual do Laboratório de Métodos
Computacionais, Coordenação dos Programas de Pós-Graduação de Engenharia
(GRVA/LAMCE/COPPE/UFRJ). Geramos um modelo a partir de pinturas do museu
Dom João VI, EBA/UFRJ, que representa uma exposição virtual de pinturas referentes
a este acervo, simulando um ambiente de museu em chamas, para que pudéssemos
testar o sistema pessoal de projeção em uma situação de treinamento. Este museu
compõe o projeto chamado das bases iconográficas à iconografia digital: um passeio
virtual pelo museu Dom João VI da UFRJ.
Procuramos com este trabalho, reproduzir o que chamamos de “ponto de vista do
mineiro”, isto é, a forma como uma pessoa imersa em uma mina visualiza o ambiente ao
seu redor, por intermédio de um único ponto de luz situado em sua cabeça, e com isto,
produzir condições trabalho que podem ser aproveitadas para treinamentos para a área
da engenharia, e outras áreas, onde se tenham indivíduos trabalhando sob essas
condições. Também descrevemos de forma resumida, as técnicas existentes de
Realidade Virtual de Projeção, e da realidade aumentada espacial, nas quais nos
baseamos para a composição desse experimento.
1.1- Problema proposto
A busca de caixas–pretas no fundo do oceano, de aviões acidentados no mar, têm sido
realizadas com o auxílio de robôs, onde esses possuem a capacidade de submergir a
grandes profundidades, para que técnicos à distância possam navegar pelo fundo do
mar. Realizam esta tarefa com auxilio do foco de luz proporcionado pelo robô,
possuindo esse único foco para visualizar todo o ambiente, e realizar a tarefa. Situação
semelhante à do mergulhador, esteja este mergulhando no fundo do mar, ou de um rio,
ou lagoa, tambem possuindo esse foco único de luz. Foco este que apenas desvela a
porção do ambiente por onde passa, estando assim o restante semi ou completamente
escuro. Tambem ocorre este fato com explorador de cavernas, que possui o foco de luz
posicionado na cabeça, e apenas vê a porção que esta luz capta, tendo que trabalhar sem
boa parte da visão periférica. Bombeiros que adentrem um local de incendio, com muita
fumaça, ou sem luz elétrica, tambem podem passar por este mesmo tipo de condições de
4
visão. Tambem ocorre este fato com o mineiro, que possui àquele capacete
característico, com uma lanterna adaptada, onde apenas ilumina esta área captada pela
lanterna, e para onde este direciona seu ponto de vista. O mergulhador que explora
cavernas submersas, também se vê por vezes na mesma situação, e com altíssimo risco
para com sua vida.
Como se observa não são poucas as situações em que se tém este tipo de iluminação,
para desempenho de algum tipo de trabalho, exploração ou pesquisa, o que requer uma
certa habilidade dos técnicos que realizam estas tarefas, e das pessoas que realizem
passeios, em ambientes que utilizam a “luz de mineiro”, ou “visão de mineiro”.
Porém, o treinamento para algumas dessas situações faz-se dificil, como por exemplo o
caso dos mergulhadores exploradores de cavernas, que trabalham por vezes em uma
condição perigosíssima, em cavernas submersas, condição difícil de ser reproduzida
para treinamentos desses exploradores, e em passeios recreativos, devido a
complexidade do ambiente, e periculosidade, à qual as pessoas estariam expostas.
1.2 – Hipótese
Sendo assim, a hipótese levantada neste trabalho, é a de que a realidade virtual de
projeção pode se apresentar como uma solução de baixo custo e baixa complexidade,
porem interessante e criativa, para reproduzir o “ponto de vista do mineiro‟, para fins de
treinamentos, entretenimento e pesquisa.
1.3 - Justificativas e relevância do projeto
Este trabalho torna-se relevante pela pesquisa de novas formas de interação com
mundos virtuais para fins de visualização e treinamentos para a área da engenharia, a
principio, área correspondente ao local onde desenvolvemos as pesquisas para esta
dissertação, e para outras áreas, acadêmicas, profissionais e de entretenimento, assim,
buscando novas ferramentas, que possam vir a solucionar problemas, que não sejam
facilmente resolvidos através de outros meios. Nesse mesmo contexto, este trabalho
5
também busca meios de reduzirem-se os custos da tecnologia chamada realidade virtual,
ainda pouco acessível devido aos altos custos de equipamentos e complexidade destes..
Apóia-se no poder das tecnologias de realidade virtual como potencializadora de
diversas áreas, apresentando recursos poderosos de visualização, execução de tarefas,
treinamento ou simulações, quando estas são caras, ou inviáveis de serem reproduzidas
em laboratório com outros dispositivos, ou em campo, representando perigos e
necessitando de complexa infra-estrutura.
Também se justifica pela pesquisa de novas formas de interação homem-máquina,
visando encontrar formas mais intuitivas de se realizar essa interação, tornando o
usuário mais livre para navegar pelo espaço virtual, e possibilitando a inclusão de
pessoas que possuam dificuldades e limitações, sejam estas de ordem física ou
psicológica, democratizando o acesso às tecnologias da informação.
Explora um ponto de visão específico e comum às diversas situações, o “ponto de vista
do mineiro”, e realiza estudos de como a Realidade Virtual pode explorar esse ponto de
vista para treinamentos e aquisição de habilidades, específicas e necessárias para os
tipos de trabalhos que podem ser realizados neste tipo de condições.
Também é relevante por buscar novas formas de interação entre o visitante e a
exposição no contexto dos museus, com o intuito de enriquecer essa interação, e
proporcionar meios mais atraentes de acesso ao acervo de museus, de forma a atrair
mais visitantes, ao mesmo tempo em que tornar a aquisição de cultura mais natural e
efetiva e prazerosa.
Os museus são uma fonte inestimável de conhecimento. Segundo OLIVEIRA et al.,
(2008) “um dos objetivos dos museus na atualidade é o de promover a aproximação e a
compreensão pública da ciência e da tecnologia mediante atividades e experiências”.
Em um país como o Brasil, em que grande parte de sua população não tem acesso a
bens culturais, dizem BRAGA, (2007) e MARINS et al., (2008) que os museus
representam uma inestimável oportunidade de inclusão cultural e social.

6
Mas atualmente, as chamadas mídias digitais, são muito mais atraentes, principalmente
aos jovens. A internet se tornou um meio muito mais poderoso e possui um apelo muito
maior para aquisição de informações, pois na “rede” se podem acessar vídeos,
animações, textos interativos, realizar cursos a distancia, sendo assim, adquirir
conhecimento de forma por vezes mais lúdica do que nos tradicionais salões da
museologia. Este fato é confirmado por MARINS et al., (2008) que afirma “As
tecnologias digitais favorecem novas formas de acesso à informação e,
conseqüentemente à educação, exteriorizando e alterando funções cognitivas humanas
como a memória, e a imaginação”.
Sendo assim, os administradores dos museus têm encontrado, para enfrentar essa
competição contra os meios multimidiáticos, uma importante aliada, no uso das técnicas
de realidade virtual. Através dessas técnicas, é possível simular o ambiente do museu
virtualmente, e fazer com que o visitante dessa representação, se sinta como se estivesse
passeando pelo espaço físico real do museu. Para PASTORINO et al., (2009) realidade
virtual pode ajudar a criar um ambiente onde os usuários serão capazes de aprender
através da exploração, para se familiarizar com o uso de objetos, guiados por agentes
virtuais através da história de uma exposição. LEPOURAS et al., (2008) ratifica as
vantagens da realidade virtual para os museus: reduzir custos, quando a utilização do
objeto e do ambiente real for mais dispendiosa que a simulação; possibilitar que se faça
coisas que são impossíveis de serem feitas no mundo real, acelerar o aprendizado;
integrar habilidades e conhecimento; aumentar a retenção através do realismo”. Assim,
nesse contexto, buscamos com este trabalho incrementar a usabilidade da realidade
virtual com os museus.
Este experimento se baseia no poder potencializador do ensino, proporcionado pela
realidade virtual, e busca novos meios, e possibilidades de explorar essa tecnologia em
beneficio de todos, para que todos possam ter acesso a ela, e todos sejam estimulados,
através dela, à aquisição de cultura, treinamentos, e entretenimento.
Por fim esta pesquisa torna-se relevante, pela busca no poder dos games para aplicações
científicas, e por explorar seu potencial já comprovado para o aprendizado e aquisições
de habilidades por parte de seus usuários, que realizam tarefas, cumprem objetivos e
metas estipuladas, progredindo com prazer e divertimento.
7
Também proporciona campo para mais pesquisas e estudos no campo da Realidade
virtual de projeção, que podem motivar mais trabalhos científicos, para outros que
queiram aprimorar e desenvolver essa técnica, e que desejem também incorporar outras
técnicas, melhorando e completando o desempenho desta, e tornando-a mais
interessante e mais eficiente.
1.4 - Objetivos
O objetivo principal deste trabalho é a criação de um sistema de realidade virtual,
baseado nos sistemas de Realidade Virtual de projeção, e de Realidade Aumentada
Espacial, que seja consideravelmente mais barato e menos complexo do que as
tecnologias de realidade virtual de projeção existentes, para simular um ambiente
correspondente à “visão de mineiro”, onde um único foco de luz ilumina o ambiente,
tendo que se trabalhar com um campo de visão limitado.
Como objetivos secundários, podemos citar seu intento em ilustrar uma aplicação non-
game para o game engine Quest3D, e assim demonstrar como os games podem ser
utilizados para fins fora dos jogos e entretenimento, como fins como aquisição de
cultura, treinamentos e pesquisas científicas.
A procura de formas alternativas aos dispositivos não convencionais para aplicações de
realidade virtual, como o HMD e CAVE, por estes serem caros em demasia e
complexos para utilização comum.
Buscar por fim, formas para interação entre os visitantes de exposições, particularmente
às disponibilizadas por museus, que sejam mais interessantes e instigantes, para que
estas possam ser mais atrativos, e continuarem a ser centros modernos de aquisição de
cultura e conhecimento.
8
2 – CONCEITOS E DISPOSITIVOS
2.1- Realidade Virtual
O termo Virtual Reality (VR) em português Realidade Virtual, é creditado a Jaron
Lanier (ESPINHEIRA, 2004; BARILLI, 2007 ), que nos anos 80 sentiu a necessidade de
um termo para diferenciar as simulações tradicionais por computação dos mundos
digitais que ele experimentava.. A VR começou na indústria de simulação, com os
simuladores de vôo que a Força Aérea dos Estados Unidos passou a construir depois da
Segunda Guerra Mundial (ESPINHEIRA, 2004). Têm crescido rapidamente, devido ao
grande desenvolvimento dos computadores e tecnologias, que proporcionam simulações
cada vez melhores (TORI et al., 2006).
A realidade virtual (VR) concentra conhecimentos de diversas áreas, e por ser uma área
multidisciplinar, torna-se difícil de conceituar. KIRNER, (2004) e BARILLI, (2007)
citando Cunha (2001), consideram RV como sendo o “nome genérico que representa
uma tecnologia sobre a qual estão sendo agrupados meios através dos quais o usuário
pode livremente visualizar, explorar/manipular e interagir com dados”.
Existem muitas definições de realidade virtual, envolvendo aspectos gerais ou conceitos
tecnológicos. Uma definição, considerando as discussões apresentadas até agora e que
será adotada para esse trabalho, é a proposta por TORI et al., (2006, apud Burdea,
1994;Vince, 1995, 2004; Kirner, 1996): “Realidade virtual é uma interface avançada de
usuário, para aplicações computacionais, que permite ao usuário a movimentação
(navegação) e interação em tempo real, em um ambiente tridimensional, podendo fazer
uso de dispositivos multisensoriais, para atuação,”. Assim, entende-se por navegação, o
processo de deslocamento por parte do usuário, representado por seu avatar dentro do
ambiente virtual (PINHO et al., 2006)
A Realidade Virtual (VR) envolve tecnologias revolucionárias para o desenvolvimento
de aplicações, em função de novas possibilidades oferecidas para interfaceamento, com
o uso de dispositivos multisensoriais, navegação em espaços tridimensionais, e imersão

9
no contexto da aplicação e interação em tempo real (BARILLI, 2007). Pois como
conceitua ESPINHEIRA, et al., (2004): “a Realidade Virtual é a forma de interface
mais natural entre o computador e o ser humano. a Interação Homem-Computador
(IHC)”. Para apoiar essa questão afirma BRAGA, (2001): “essa interface é considerada
como sendo a mais avançada até agora disponível, pois busca levar ao usuário sensações
que lhe dão informações sobre o mundo virtual como se ele realmente existisse”.
Figura 1: exemplo de mundo virtual. Cenário da Candelária de 1955. criação do autor
.
As aplicações de VR (figura 1) envolvem situações, ou locações, que seriam muito
caras, ou muito inviáveis, ou perigosas para as pessoas interagirem diretamente. (SINES,
1999). Ela oferece cenários gerados por computador, que são seguros, realistas,
controláveis, altamente reproduzíveis, e mais baratos, em geral do que as aplicações em
seus respectivos cenários reais
De fato, o realismo presentemente alcançado nas aplicações de realidade virtual tem
sido tão grande, que esta técnica é empregada no tratamento de fobias, como o medo de
alturas. (BURDEA et al., 2003). Pode ser visto em: http://www.virtuallybetter.com/
acessado em 12/03/2009.
2.1.1 Interface

10
Interface é uma palavra que costuma estar presente nas definições de realidade virtual,
como observado. Denomina-se interface a toda parte do sistema com a qual o usuário
mantém contato ao utilizá-lo. Esse contato pode dar-se de forma passiva ou ativa. A
interface abrange hardware (teclados, mouse, monitor, impressora etc.), acessórios tais
como luva, capacete, headphone etc. E software que é o programa computacional
(BARILLI, apud Prates & Barbosa 2003). Para ilustrar, OLIVEIRA, et al., (2008) cita
o filme Mynorit Report, em que o ator Tom Cruise, manipula botões e objetos
virtuais projetados no ar.
2.1.2 Interação
Outra palavra que está presente nas definições de VR é a interação. A idéia de
interação está ligada com a capacidade de o computador detectar as entradas do usuário
e modificar instantaneamente o mundo virtual e as ações sobre ele de acordo com a
vontade desse usuário (ESPINHEIRA, 2004). Neste contexto, certos dispositivos
conectam ações do usuário com elementos de cena do ambiente virtual (MACHADO et
al., 2006). As formas clássicas de interação se dividem em navegação, seleção e
manipulação (PINHO et al.,2006).
Assim, segundo PINHO et al., (2006) a Interação inclui as técnicas que se utilizam dos
chamados dispositivos não convencionais, que transmitem os dados de forma mais
natural, como se partissem estes, diretamente do corpo do usuário, isto é mãos, braços,
ou cabeça e dos suportes e dispositivos convencionais como mouse e teclado. Na
primeira, Head Mounted Displays, Luvas, roupas especiais, transmitem os comandos do
usuário para seu avatar e para tanto se faz necessário que o sistema de realidade virtual
possua funções de suporte ao rastreamento das mãos e da direção do olhar (ponto de
vista do usuário), reconhecimento de gestos. No segundo caso, inclui o uso de botões,
Joysticks, pedais, etc. Usar controles físicos para interagir com um mundo virtual como
um guidão em um simulador de carro, representa a interação indireta, pois o usuário não
age como agiria no mundo real. (PINHO et al., 2006)
Para que a idéia de interação seja mais bem compreendida, remontamos aos tempos do
Sensorama, um simulador em formato de cabine, com som estereofônico e visão
estereoscópica, acrescido de vibração criada por dispositivos mecânicos e odor

11
simulado por produtos químicos, possuindo até vento gerado por ventiladores.
(GUIMARÃES 2006) Este dispositivo, introduziu uma experiência imersiva inovadora
(TORI et al., 2006) que na opinião de GUIMARÃES apud GRAU(2003), é considerada
uma experiência imersiva mais não interativa. Isto porque se projetavam filmes
previamente gravados, que não poderiam ser modificados por comando algum do
expectador.
Os filmes (desenhos animados ou efeitos especiais) gerados por computador, em si
também não são considerados interativos, por serem gravações que não permitem nem a
navegação e nem a interação do usuário em tempo real, e por este fato, não são
considerados realidade virtual (TORI et al., 2006).
2.1.3 Imersão
“A intenção da VR mais básica, é a imersão, no sentido de o individuo se sentir
transportado para o mundo virtual, como se estivesse, com efeito, dentro dele,
envolvido, esquecendo-se completamente do mundo real” (BRAGA, 2007).
BRAGA (2007) cita GERSON CUNHA (2007) que afirma: “quando um jogador de um
vídeo game, inclina a cabeça para não levar um tiro que só existe em sua tela, este está
perfeitamente imerso no ambiente virtual”.
A Realidade Virtual pode ser classificada, em função do senso de presença do usuário,
em imersiva ou não imersiva (TORI ET al., 2006 ;BARILLI, 2007). Esta é imersiva,
quando o usuário é transportado predominantemente para o domínio da aplicação,
através de dispositivos multisensoriais, que permitem a interação entre ele e o mundo
virtual, como capacete HMD, Booms, Shutter-Glasses, ou CAVEs e seus dispositivos.
Quanto maior a sensação de presença dentro do mundo virtual, maior a imersão. É
categorizada como não-imersiva, quando o usuário é transportado parcialmente ao
mundo virtual, com os dispositivos como monitor, mouse, joystick, ou projeção.
Considera-se que o usuário vivencia a experiência através de uma janela, pois ainda
pode perceber o mundo real, e por vezes, esse ainda é predominante. TORI et al., 2006;
PINHO et al., 2006; BARILLI, 2007).
2.1.4 Cyberspace
12
Para PINHO et al., (2006) o “ambiente virtual” nada mais é do que um cenário onde os
usuários de um sistema de realidade virtual podem navegar e interagir dinamicamente.
Um ambiente virtual pode ser projetado para simular tanto um ambiente imaginário
quanto um ambiente real. GUIMARÃES (2006), cita o termo “espaço de síntese”, pois
esse autor trata o mundo virtual como um espaço sintético, que pode ser criado e
modificado pelo ser humano. Este conceito relaciona-se com a idéia de cyberspace ou
“cyber-espaço”, onde NETTO et al., (2002) elucida que é um termo utilizado para
designar uma representação gráfica de dados abstraídos dos bancos de dados de todos os
computadores do sistema humano, como uma rede universal, onde se poderia “entrar”, e
explorar esses dados de maneira multisensorial, como se fosse um outro mundo, uma
outra fronteira.
Esse ambiente virtual ou tridimensional, ou cyberspace deverá estar preenchido de
objetos virtuais que terão certos atributos a eles associados como: a geometria, cores,
texturas, iluminação, características dinâmicas, restrições físicas e atributos acústicos.
Em geral, os objetos virtuais podem ser classificados como estáticos ou dinâmicos,
dependendo da capacidade de movimentação(TORI et al., 2006).
2.1.5 Avatar
Qualquer que seja o ambiente virtual que se contemple, este é povoado por objetos, os
quais podem ser fixos como prédios, casas, ou mesas e cadeiras, ou moveis como
carros, nuvens e personagens. Nestes últimos, encontram-se os humanos virtuais e
animais (BARILLI et al., apud Thalmannet al. 1999). E segundo MODESTO, et al
(2006) podem-se classificar os humanos virtuais em duas categorias distintas: Agentes
Virtuais e Avatares. VELHO, et al (2001) elucida que avatar é uma representação
gráfica de uma pessoa real no ambiente virtual, junto com seu comportamento. O avatar
pode ter diferentes formas: humanos, animais, cartuns, formas geométricas, imagem real
obtida de uma câmera, etc. VELHO continua elucidando que Agente virtual é uma
aplicação que tem comportamento autônomo, como os adversários do jogador em um
game. Esses não necessariamente precisam ser representados por uma entidade gráfica.
MODESTO et al (2006) citando BADLER (1997) ainda traduz essa questão de outro
ângulo, onde considera agente virtual como um ser humano virtual que é criado e
13
controlado por software e avatar é o ser humano virtual controlado por um participante
“vivo”.
2.1.6 Supercomputadores Gráficos
Uma das maiores barreiras em realidade virtual é a chamada “demanda computacional”
para a geração e multi-exibição de imagens realistas em tempo real (SOARES et al.,
2006). Os computadores usados para suportar sistemas de realidade virtual variam de
computadores pessoais, equipados com placas gráficas adequadas, até estações de
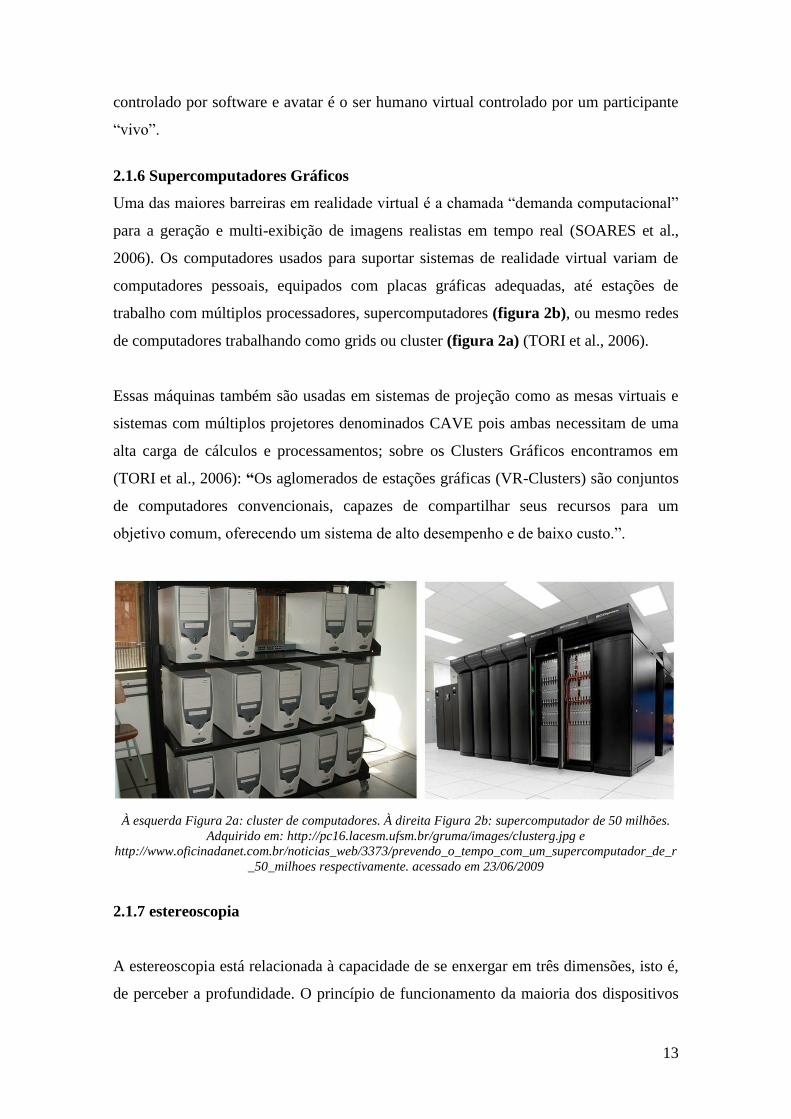
trabalho com múltiplos processadores, supercomputadores (figura 2b), ou mesmo redes
de computadores trabalhando como grids ou cluster (figura 2a) (TORI et al., 2006).
Essas máquinas também são usadas em sistemas de projeção como as mesas virtuais e
sistemas com múltiplos projetores denominados CAVE pois ambas necessitam de uma
alta carga de cálculos e processamentos; sobre os Clusters Gráficos encontramos em
(TORI et al., 2006): “Os aglomerados de estações gráficas (VR-Clusters) são conjuntos
de computadores convencionais, capazes de compartilhar seus recursos para um
objetivo comum, oferecendo um sistema de alto desempenho e de baixo custo.”.
À esquerda Figura 2a: cluster de computadores. À direita Figura 2b: supercomputador de 50 milhões.
Adquirido em: http://pc16.lacesm.ufsm.br/gruma/images/clusterg.jpg e
http://www.oficinadanet.com.br/noticias_web/3373/prevendo_o_tempo_com_um_supercomputador_de_r
_50_milhoes respectivamente. acessado em 23/06/2009
2.1.7 estereoscopia
A estereoscopia está relacionada à capacidade de se enxergar em três dimensões, isto é,
de perceber a profundidade. O princípio de funcionamento da maioria dos dispositivos

14
estereoscópicos é o oferecimento de imagens distintas aos olhos esquerdo e direito do
observador, na chamada “visão binocular” (SISCOUTTO et al., 2006). O cérebro
processa e unem essas imagens, proporcionando sensação de profundidade, tal qual
quando se observa um objeto real.
2.1.8 Frame Rate
Esse é outro fator importante quanto à parte visual da VR. Referimo-nos ao número de
quadros por segundo que aparecem no vídeo, ou seja, a velocidade que é transmitida aos
olhos do usuário, de forma que este tenha a visão com fluidez das simulações e
animações. Filmes projetados para o cinema apresentam aproximadamente 24 quadros
por segundo, enquanto os projetados para TV apresentam aproximadamente 30 quadros
por segundo. Em RV, busca-se uma taxa entre 15 e 22 quadros por segundo, mas esta
taxa pode variar dependendo do tipo de interação utilizado no sistema. (MACHADO et
al., 2006)
2.1.9 Rendering
Rendering é uma terminologia da computação gráfica. Depois de estipulados materiais,
pré-definidas as texturas ou cores para os objetos, e colocada luz na cena, o programa
calcula a cor de cada pixel na imagem final, levando em conta todas as simulações e
animações. Este processo é chamado de rendering. O resultado final é um arquivo de
imagem 2D, pronto para ser usado ou editado em um programa gráfico 2D (editor de
imagens), ou ser exibido frame a frame em um filme, animação ou aplicação em tempo
real, como um game.(ESPINHEIRA et al., 2004)
2.1.10 Tracker
Muitas aplicações, tais quais navegação, o rastreamento da trajetória de mísseis,
robótica, biomecânica, realidade virtual, necessitam do conhecimento e orientação de
posição de objetos em tempo real, dentro de algum ponto no tempo e no espaço.
(BURDEA, et al., apud Hightower, Borriello, 2001)
“O hardware que possui o propósito de medir em tempo real a mudança da posição e da
orientação 3D do objeto em aplicações de VR é chamado Tracker” (BURDEA, et al.,
15
2003). Aplicações de VR geralmente medem o movimento da cabeça do usuário, mãos
ou membros, para o controle da visão, locomoção, e manipulação de objeto, para criar a
sensação de presença no mundo virtual. Assim, ao movimentar-se o usuário tem seu
deslocamento reconhecido pelo dispositivo e uma atualização do ambiente virtual é
efetuada (MACHADO et al., 2006; BURDEA, et al., 2003).
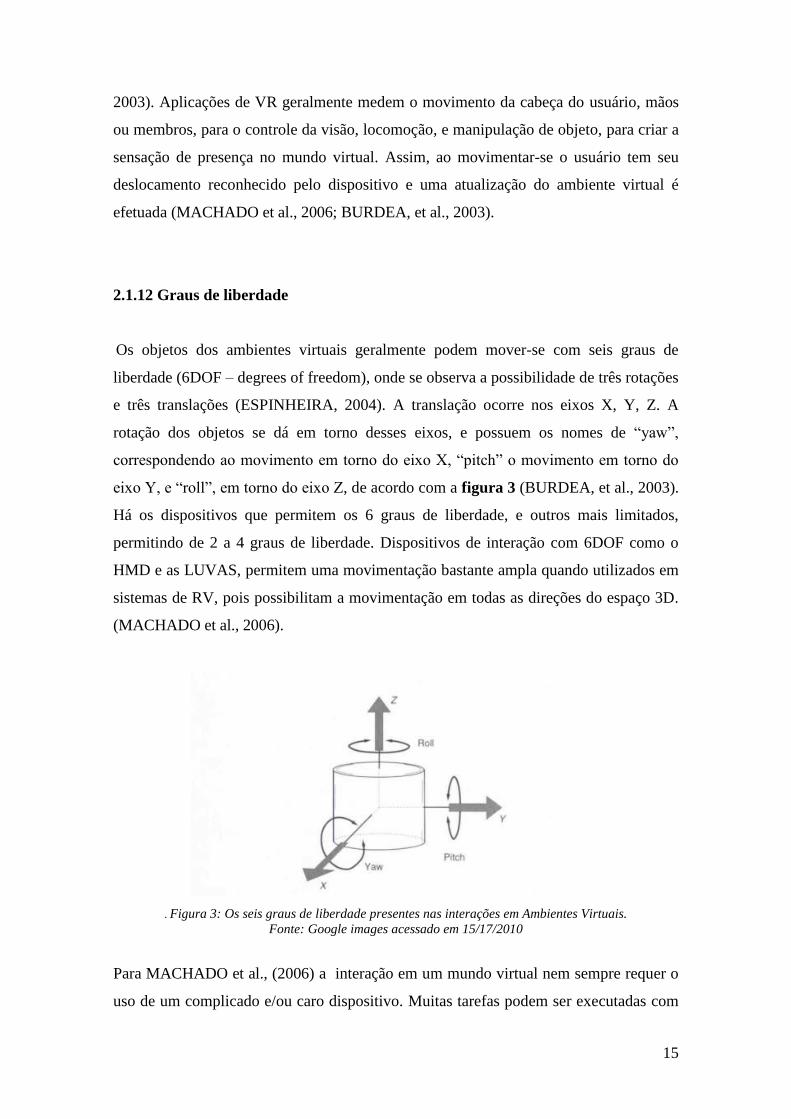
2.1.12 Graus de liberdade
Os objetos dos ambientes virtuais geralmente podem mover-se com seis graus de
liberdade (6DOF – degrees of freedom), onde se observa a possibilidade de três rotações
e três translações (ESPINHEIRA, 2004). A translação ocorre nos eixos X, Y, Z. A
rotação dos objetos se dá em torno desses eixos, e possuem os nomes de “yaw”,
correspondendo ao movimento em torno do eixo X, “pitch” o movimento em torno do
eixo Y, e “roll”, em torno do eixo Z, de acordo com a figura 3 (BURDEA, et al., 2003).
Há os dispositivos que permitem os 6 graus de liberdade, e outros mais limitados,
permitindo de 2 a 4 graus de liberdade. Dispositivos de interação com 6DOF como o
HMD e as LUVAS, permitem uma movimentação bastante ampla quando utilizados em
sistemas de RV, pois possibilitam a movimentação em todas as direções do espaço 3D.
(MACHADO et al., 2006).
. Figura 3: Os seis graus de liberdade presentes nas interações em Ambientes Virtuais.
Fonte: Google images acessado em 15/17/2010
Para MACHADO et al., (2006) a interação em um mundo virtual nem sempre requer o
uso de um complicado e/ou caro dispositivo. Muitas tarefas podem ser executadas com
16
simples dispositivos com 2DOF, como um mouse ou um joystick. Apesar de limitar as
possibilidades de movimento, estes dispositivos reduzem o tempo de resposta do
sistema (seus eventos são mais rapidamente processados) e são fáceis de serem
utilizados. Porém, continua MACHADO elucidando, que algumas empresas procuram
modificar o projeto do mouse padrão para que este possa funcionar com sensores de
trajetória de 6DOF ou 3DOF.
2.1.13 Dispositivos não convencionais
O uso de equipamentos não convencionais para realidade virtual tem por objetivo
ampliar a sensação de realidade transmitida pelo sistema ao usuário. Aqui se entende
por equipamentos convencionais, as interfaces chamadas não imersivas, como mouse,
teclado, joystick, e monitor de computador (TORI et al., 2006).
Os equipamentos não convencionais são desenvolvidos para estimular principalmente o
sentido visual, (BRAGA, 2007) mas podem também estimular o sentido auditivo e tátil,
devendo também responder às intervenções do usuário em tempo real, de forma a
garantir o grau de imersão. Cada sentido do corpo humano requer um tempo de resposta
limite, para que a percepção do usuário não seja afetada negativamente (LUZ et al.,
2006). Um dos equipamentos mais populares e icônicos da VR é o capacete HMD
(Head Mounted Display) (figura 4a) ou dispositivo BOOM – Binocular Omni-
Orientation Monitor; mas há as luvas, que permitem detectar a posição e o movimento
das mãos do usuário no mundo virtual; também há os floor suported displays que são
estruturas geralmente da altura de um homem, que possuem uma espécie de guindaste,
estrutura apóia o HMD, livrando a cabeça do usuário de seu incomodo peso (BURDEA
et al., 2003). Existe a roupa, ou Data Suit (figura 4c) que capta os movimentos do corpo
inteiro do usuário, transmitindo-os para o seu avatar no mundo virtual. E a
VirtualSphere (figura 4b)que permite ao usuário caminhar ou ate mesmo correr para
qualquer direção no mundo virtual.

17
Canto superior à esquerda figura 4a: HMD e gloves. Canto inferior à esquerda figura 4b: a esfera
virtual, que permite ao usuário caminhar o até correr no mundo virtual. À direita figura 4c: data suit,
roupa que permite rastrear os movimentos do corpo do usuário. e transmiti-los ao seu avatar. Adquirido
em: http://electronics.howstuffworks.com/gadgets/virtual-reality
Existe a chamada realidade virtual de projeção, que se baseia não em displays com telas,
mas em displays de projeção, isto é, realizados com projetores. Mas abordaremos esse
tronco da VR mais profundamente em capitulo à parte, pois representa o cerne de nosso
trabalho. Há os Hand Suported Displays, que são displays para computação gráfica
pessoais, não conectados a nenhuma estrutura, e que a pessoa segura com as duas mãos
como uma espécie de binóculo, olhando no interior de suas duas telas, podendo
observar o mundo virtual. Por fim, existe a realidade virtual baseada em monitores,
como os monitores de computador tradicionais, que pode ser incrementada com óculos
estereoscópicos.
O capacete HMD tem a função de ser imersivo, isolando o usuário do mundo real. Seu
projeto envolve dois pequenos displays de cristal líquido com dispositivos óticos para
fornecer um ponto focal confortável e propiciar visão estereoscópica. (TORI et al., 2006
, NETTO et al., 2002). A imersão se dá por uma interface de navegação referenciada na
posição da cabeça, com cada olho recebendo um ponto de vista ligeiramente diferente,
de forma estereoscópica (BARILLI, 2007). Os movimentos da cabeça do usuário são
captados e armazenados por uma unidade eletrônica, e enviados a um computador

18
hospedeiro, neste caso uma estação de trabalho gráfica. O computador usa os dados do
Tracker para calcular o novo ponto de vista do usuário da cena virtual, e renderiza
assim, atualizando a imagem (BURDEA et al., 2003).
HMDs, apesar de sua ampla adoção, tem limitações importantes. Entre elas, o peso e
incomodo de carregar um sistema de vídeo na cabeça; a dificuldade em suprir o usuário
com imagens de alta resolução, tendo em vista que a retina humana tem uma resolução
não-linear, concentrada no centro da retina; o descompasso entre o movimento visto
pelo olho e o sentido pelo sistema vestibular, que freqüentemente provoca enjôos e
náuseas; e a dificuldade de integrar, de maneira imersiva, sensores para a posição dos
membros e do corpo do usuário. (PINHANEZ, 2006)
As luvas de dados (figuras 5a e 5b) são utilizadas em sistemas para reconhecer e
capturar os movimentos dos dedos e da mão do usuário. MACHADO et al., (2006)
esclarece que na maioria dos equipamentos disponíveis são utilizados sensores
mecânicos ou de fibra ótica, sendo que as versões mais populares de luvas de dados
utilizam fibra-ótica. Seu uso consiste em um fio de fibra ótica com junções. Quando a
junta é movida o cabo dobra-se reduzindo a passagem de luz por ele. Essas variações de
luz são calculadas e transmitidas para o computador.
Figuras 5a e 5b, desenho esquemático e foto da data glove respectivamente.
2.1.14 Dispositivos hápticos
Os dispositivos hápticos, ou de Force feedback, são dispositivos que dão ao usuário, um
retorno mecânico, para que este tenha alguma resposta física com relação a sua
interação com o ambiente virtual (figura 6b). (TORI et al., 2006). Variam desde os
19
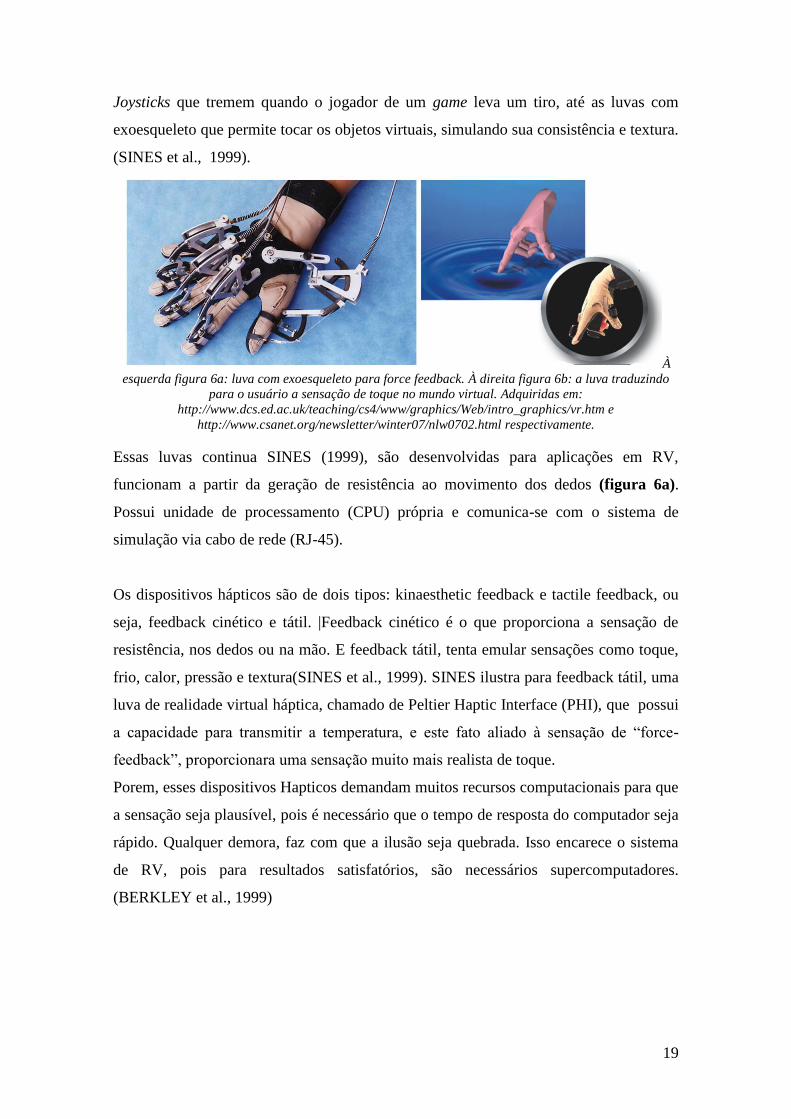
Joysticks que tremem quando o jogador de um game leva um tiro, até as luvas com
exoesqueleto que permite tocar os objetos virtuais, simulando sua consistência e textura.
(SINES et al., 1999).
À
esquerda figura 6a: luva com exoesqueleto para force feedback. À direita figura 6b: a luva traduzindo
para o usuário a sensação de toque no mundo virtual. Adquiridas em:
http://www.dcs.ed.ac.uk/teaching/cs4/www/graphics/Web/intro_graphics/vr.htm e
http://www.csanet.org/newsletter/winter07/nlw0702.html respectivamente.
Essas luvas continua SINES (1999), são desenvolvidas para aplicações em RV,
funcionam a partir da geração de resistência ao movimento dos dedos (figura 6a).
Possui unidade de processamento (CPU) própria e comunica-se com o sistema de
simulação via cabo de rede (RJ-45).
Os dispositivos hápticos são de dois tipos: kinaesthetic feedback e tactile feedback, ou
seja, feedback cinético e tátil. |Feedback cinético é o que proporciona a sensação de
resistência, nos dedos ou na mão. E feedback tátil, tenta emular sensações como toque,
frio, calor, pressão e textura(SINES et al., 1999). SINES ilustra para feedback tátil, uma
luva de realidade virtual háptica, chamado de Peltier Haptic Interface (PHI), que possui
a capacidade para transmitir a temperatura, e este fato aliado à sensação de “force-
feedback”, proporcionara uma sensação muito mais realista de toque.
Porem, esses dispositivos Hapticos demandam muitos recursos computacionais para que
a sensação seja plausível, pois é necessário que o tempo de resposta do computador seja
rápido. Qualquer demora, faz com que a ilusão seja quebrada. Isso encarece o sistema
de RV, pois para resultados satisfatórios, são necessários supercomputadores.
(BERKLEY et al., 1999)
20
2.2 - Realidade aumentada
Em artigo entitulado “A Survey of Augmented Reality” (AZUMA, 1997) reuniu-se
conceitos, termos, dispositivos e sistemas do que se convencionou chamar de “realidade
aumentada”.
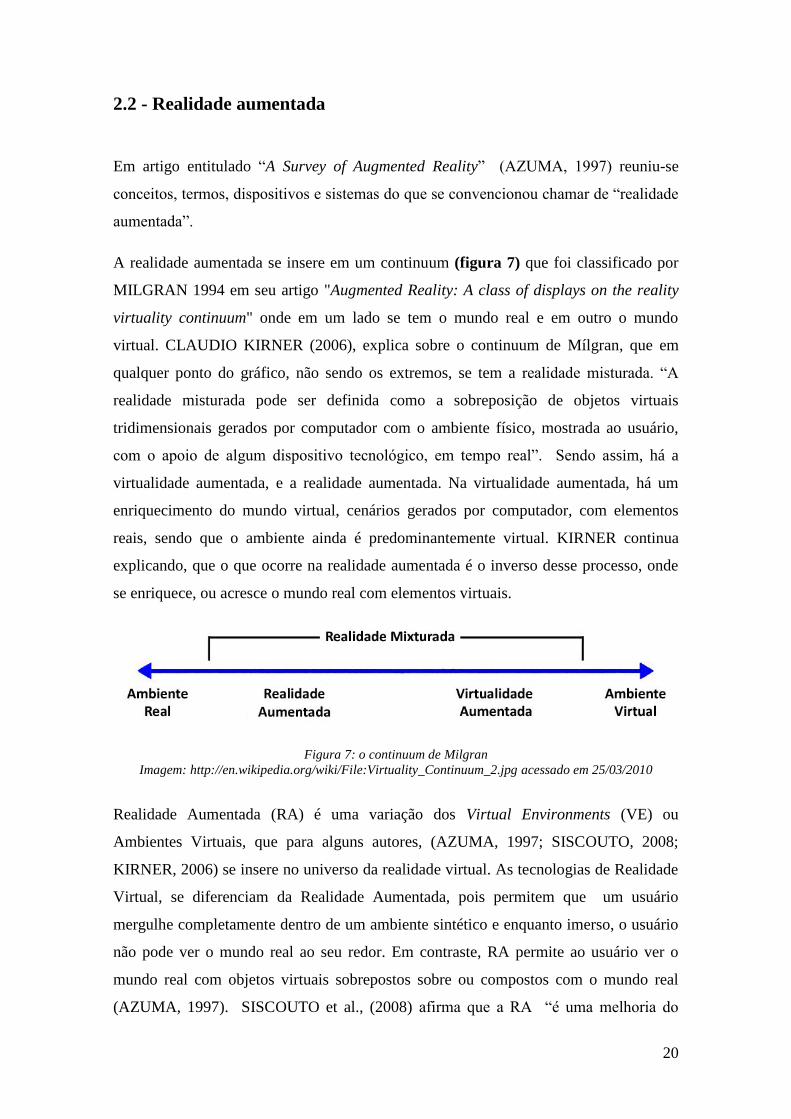
A realidade aumentada se insere em um continuum (figura 7) que foi classificado por
MILGRAN 1994 em seu artigo "Augmented Reality: A class of displays on the reality
virtuality continuum" onde em um lado se tem o mundo real e em outro o mundo
virtual. CLAUDIO KIRNER (2006), explica sobre o continuum de Mílgran, que em
qualquer ponto do gráfico, não sendo os extremos, se tem a realidade misturada. “A
realidade misturada pode ser definida como a sobreposição de objetos virtuais
tridimensionais gerados por computador com o ambiente físico, mostrada ao usuário,
com o apoio de algum dispositivo tecnológico, em tempo real”. Sendo assim, há a
virtualidade aumentada, e a realidade aumentada. Na virtualidade aumentada, há um
enriquecimento do mundo virtual, cenários gerados por computador, com elementos
reais, sendo que o ambiente ainda é predominantemente virtual. KIRNER continua
explicando, que o que ocorre na realidade aumentada é o inverso desse processo, onde
se enriquece, ou acresce o mundo real com elementos virtuais.
Figura 7: o continuum de Milgran
Imagem: http://en.wikipedia.org/wiki/File:Virtuality_Continuum_2.jpg acessado em 25/03/2010
Realidade Aumentada (RA) é uma variação dos Virtual Environments (VE) ou
Ambientes Virtuais, que para alguns autores, (AZUMA, 1997; SISCOUTO, 2008;
KIRNER, 2006) se insere no universo da realidade virtual. As tecnologias de Realidade
Virtual, se diferenciam da Realidade Aumentada, pois permitem que um usuário
mergulhe completamente dentro de um ambiente sintético e enquanto imerso, o usuário
não pode ver o mundo real ao seu redor. Em contraste, RA permite ao usuário ver o
mundo real com objetos virtuais sobrepostos sobre ou compostos com o mundo real
(AZUMA, 1997). SISCOUTO et al., (2008) afirma que a RA “é uma melhoria do

21
mundo real com textos, imagens e objetos virtuais, gerados por computador” e
PARREIRAS (apud CUNHA, 2008, SISCOUTO et al., 2004 ; SISCOUTO et al.,
2008) completa que esses objetos virtuais são inseridos em um ambiente real, em
tempo real, e com interatividade. SISCOUTO et al., (2008) desenvolve esse assunto
ainda mais, no sentido que esses objetos virtuais inseridos no mundo real, devem
parecer coexistir com os objetos reais, de forma que se tenha a perfeita noção de que
eles existem. KIRNER, et al., (2006) e SISCOUTO et al., (2008) dizem que para isso,
devem possuir registro, isto é, sua posição deve estar calculada e deve reagir às entradas
(interação) do usuário, sendo atualizadas como se o usuário pudesse efetivamente
manipular o objeto. E essa interação do usuário com o objeto virtual deve acontecer em
tempo real. Pode ser aplicado a todos os sentidos, incluindo audição, tato e olfato.
KIRNER et al.,( 2006 )e BRAGA, (2007) resumem os pontos chave para se ter uma
aplicação em RA, que são: combinar-se objetos reais e virtuais no ambiente real;
executar-se essa interação em tempo real; alinhar-se objetos reais e virtuais entre si;
(Registros em 3D), e possibilidade de aplicação a todos os sentidos, incluindo audição,
tato e cheiro.
As aplicações de RA são varias, e a mais popular, é a realizada com os chamados
“marcadores fiduciais” (Figuras 8a e 8b), que são objetos utilizados no campo de visão
de um sistema de imagem (câmeras, webcams), e que aparecem na imagem produzida,
para utilização como um ponto de referência ou de uma medida. Pode ser algo colocado
dentro ou sobre o assunto da imagem, uma marca ou conjunto de marcas no retículo de
um instrumento óptico. Esses marcadores fiduciais, quando aplicados a realidade
aumentada, possuem códigos visuais, que são interpretados pelo computador, e que
além de realizarem o registro do objeto virtual, permitem diversos tipos de interações,
como por exemplo, exibirem objetos aumentados diferentes, quando a câmera visualize
marcadores diferentes (PARREIRAS, 2009).
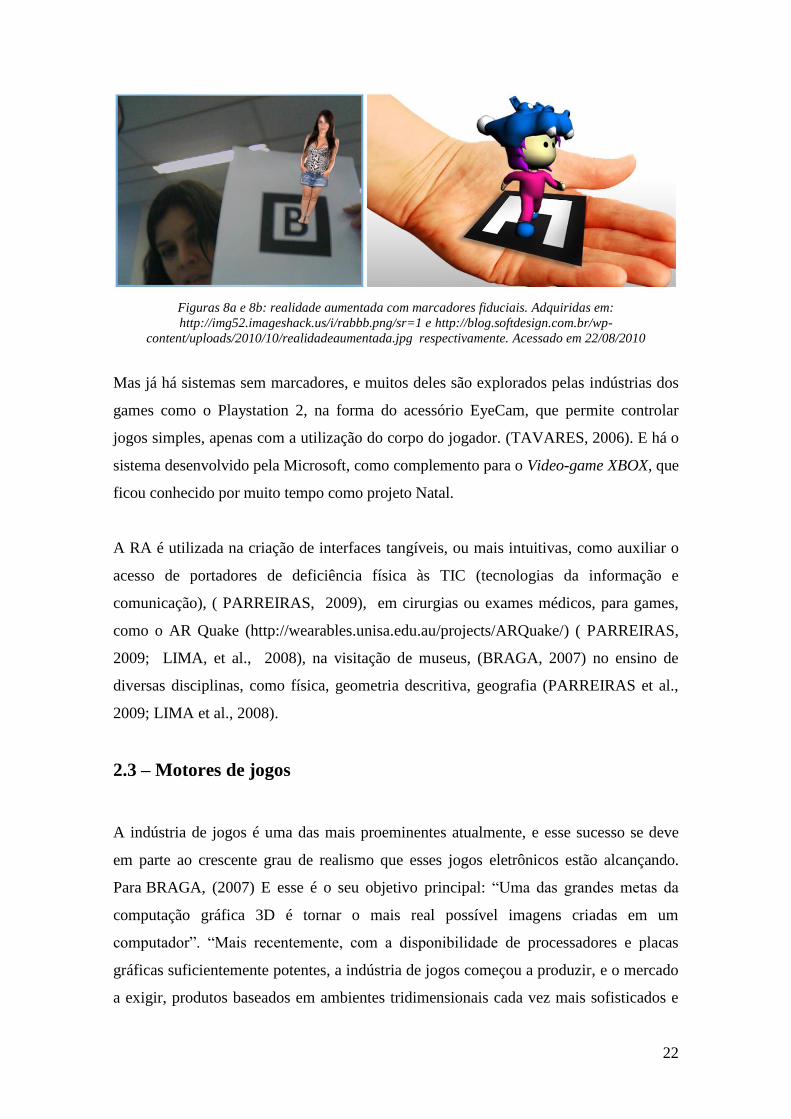
22
Figuras 8a e 8b: realidade aumentada com marcadores fiduciais. Adquiridas em:
http://img52.imageshack.us/i/rabbb.png/sr=1 e http://blog.softdesign.com.br/wp-
content/uploads/2010/10/realidadeaumentada.jpg respectivamente. Acessado em 22/08/2010
Mas já há sistemas sem marcadores, e muitos deles são explorados pelas indústrias dos
games como o Playstation 2, na forma do acessório EyeCam, que permite controlar
jogos simples, apenas com a utilização do corpo do jogador. (TAVARES, 2006). E há o
sistema desenvolvido pela Microsoft, como complemento para o Video-game XBOX, que
ficou conhecido por muito tempo como projeto Natal.
A RA é utilizada na criação de interfaces tangíveis, ou mais intuitivas, como auxiliar o
acesso de portadores de deficiência física às TIC (tecnologias da informação e
comunicação), ( PARREIRAS, 2009), em cirurgias ou exames médicos, para games,
como o AR Quake (http://wearables.unisa.edu.au/projects/ARQuake/) ( PARREIRAS,
2009; LIMA, et al., 2008), na visitação de museus, (BRAGA, 2007) no ensino de
diversas disciplinas, como física, geometria descritiva, geografia (PARREIRAS et al.,
2009; LIMA et al., 2008).
2.3 – Motores de jogos
A indústria de jogos é uma das mais proeminentes atualmente, e esse sucesso se deve
em parte ao crescente grau de realismo que esses jogos eletrônicos estão alcançando.
Para BRAGA, (2007) E esse é o seu objetivo principal: “Uma das grandes metas da
computação gráfica 3D é tornar o mais real possível imagens criadas em um
computador”. “Mais recentemente, com a disponibilidade de processadores e placas
gráficas suficientemente potentes, a indústria de jogos começou a produzir, e o mercado
a exigir, produtos baseados em ambientes tridimensionais cada vez mais sofisticados e
23
realistas, o que os torna cada vez mais similares a aplicações de RV” (BIANCHINI et
al., 2006). E BIANCHINI ainda acrescenta que as características do meio, como
resolução, processamento e memória, são conscientemente explorados para a obtenção
de resultados melhores.
Para acompanhar essa evolução, basta olhar para algumas décadas atrás, onde um
triângulo, um quadrado, ou uma bolinha poderiam representar naves, raquetes, ou
bichinhos comilões. Como se pode ver em Pong (Atari, 1972), Tank (Kee Games,
1974), (TAVARES, R, 2006).
Sendo assim, a complexidade dos games e esse grau de realismo aumentaram de tal
maneira, que para aos desenvolvedores de jogos ficou impraticável desenvolver todo o
código desses jogos, com qualidade e nos prazos estipulados. Assim, a saída foi a
criação dos Motores de Jogos (BIANCHINI et al., 2006).
O Game Engine, ou Motor de Jogos, em síntese significa um conjunto de componentes
de software integráveis e reutilizáveis, que fornecem serviços utilizados em um jogo
eletrônico. (BIANCHINI et al.,2006; NAKAMURA et al., 2006). Portanto, Game
Engine é o componente central do software para todos os aplicativos que usam gráficos
3D em tempo real, tais como jogos de vídeo eletrônicos (computadores e consoles) e
outras aplicações interativas que contêm gráficos 2D ou 3D de renderização ( Sharkawi
et al., 2008).
Pode-se fazer uma analogia entre os toolkits e os Game Engines para jogos. Nos dois
casos, o objetivo principal é o reaproveitamento de código, reduzindo o tempo de
desenvolvimento através da adoção de soluções previamente implementadas e testadas.
(BIANCHINI et al., 2006)
O Game Engine 3D muitas vezes vem em pacotes chamados System Development
Kit(SDK) em português kit de desenvolvimento de sistema. O SDK geralmente contém
diversas funcionalidades de base para os desenvolvedores criarem as suas aplicações
como renderização (chamado "processador") do motor, sistema de física, o sistema de
mídia, criação de scripts, Inteligência Artificial (IA) e capacidade de rede.
(SHARKAWI et al., 2008), O processador é o render, que mostra o jogo funcionando
24
em tempo real. Esta função é a parte mais importante no motor (porque é onde o motor
será julgado pelos usuários). O sistema de física simula efeitos físicos do jogo, colisões,
contatos. O sistema de mídia gerencia os sons, vídeos e animações do jogo. O sistema
de AI é responsável pelas reações do jogo e dos personagens não-jogador (NPC) dentro
dele, que devem interagir com o usuário e segundo (LEPOURAS et al., 2005) imitar o
pensamento e a vontade humanos. (SHARKAWI et al., 2008).
2.3.1 Tipos de Motores de Jogos
Sobre os tipos de Motores de Jogos, propõe-se recorrer ao trabalho de BURKHARD et
al., (2005), que classificou e citou alguns dos games existentes. Segundo o autor, esses
Motores podem ser divididos em duas categorias: código aberto e de código fechado. A
diferença é que os de código aberto permitem a qualquer pessoa ter acesso e modificar
sua programação original. Os de código fechado, geralmente sistemas comerciais, não
possuem essa possibilidade. Motores de jogo código aberto são, geralmente, escritos
por amadores ou são motores comerciais antigos. Segundo BURKHARD et al., (2005)
BURKHARD et al., (2005) ainda elucida que os Motores de código fechado são cheios
de recursos, e existem um ou mais jogos completos baseados em cada um destes
engines citados. Isto está em contraste com a maioria dos motores amadores acima
mencionados, que geralmente, por carência de recursos, precisam ser combinado com
outras bibliotecas e ferramentas para que se possa criar um jogo jogável.
2.3.2 Aplicações Não baseadas em Jogos
. Ao mesmo tempo em que os jogos eletrônicos passaram a utilizar resultados originados
de pesquisas de RV, com adaptações e soluções próprias, recentemente o fenômeno
inverso tem ocorrido. Ferramentas criadas para jogos têm sido utilizadas para a
prototipagem de projetos de RV, principalmente em pesquisas acadêmicas, reduzindo-se
os custos das mesmas. BIANCHINI(2006) afirma que essa convergência das duas áreas
foi um processo natural, devido às suas similaridades como a necessidade de resposta
em tempo real, gráficos 3D imersivos, simulação física e metáforas simples para
navegação. Jogos multi-jogador e ambientes virtuais colaborativos têm ainda mais
25
similaridades. (BIANCHINI et al., 2006). A realidade virtual persegue o realismo, para
criar mundos cada vez mais próximos da realidade, assim como os games.
Os motores de jogo 3D (Game Engine) oferecem uma série de características que não
podem ser facilmente ignoradas para a criação de ambientes de RV pois possuem
facilidades em um ambiente altamente customizável, onde se pode criar o cenario
virtual interativo praticamente todo. (LEPOURAS et al., 2005).
Mas não apenas a RV é um campo de estudo que se aproveita das chamadas Aplicações
não baseadas em Jogos. Vários campos se beneficiam como a seguir:
Visualização: A primeira e mais direta aplicação de jogos é em visualização científica.
Forças armadas estão utilizando engines comerciais de jogos eletrônicos e criando seus
próprios engines para a visualização e simulação de determinadas situações
(BIANCHINI et al., 2006). Medicina e veterinária: um simulador de cirurgia elaborado
está sendo desenvolvido no Instituto Politécnico Rensselaer. Este simulador permitirá
que os cirurgiões manipulem órgãos humanos virtuais em tempo real, permitindo-lhes
adquirir competências fundamentais sem o uso de cadáveres ou pôr em risco vidas
humanas. O objetivo final do projeto é criar um ser humano virtual completo
(ARANGO et al., 2008 ). Cura de fobias: BIANCHINI et al., (2006) cita PERTAUB e
BAKER (2001) que desenvolveram uma aplicação baseada em jogos e ambientes
virtuais para auxiliar pessoas a superar seu medo de falar em público. Neste jogo, ao
invés de um paciente falar para um público de pessoas reais, este é submetido a uma
simulação em um ambiente onde várias representações de pessoas geradas por
computador fazem o papel de público. Educação: instituições acadêmicas, bem como
empresas privadas de formação e educação, recentemente começaram a explorar o
potencial das engines para games multi-player comerciais disponíveis no mercado r
para o desenvolvimento de ambientes virtuais para fins de instrução. (ARANGO et al.,
2008), isso se dá, porque segundo MARINS et al., (2008) apud Gee (2004) e Clark
(2006), os games aplicados em atividades educativas, embora sejam bastante
complexos, principalmente para os iniciantes, seus jogadores aprendem sem
professores, pois os games estimulam a aprender e gostar de aprender o jogo.

26
2.4 - Quest 3D
Quest 3D é um Motor de Jogos comercial, que disponibiliza potentes ferramentas para
desenvolvimento de mundos virtuais.
O Quest já é um programa utilizado com sucesso em Aplicações Fora dos Jogos, para
fins de visualização de protótipos, complexos arquitetônicos, simulações na indústria
petrolífera, e também é utilizado nas pesquisas do GRVA/LAMCE, onde suas
potencialidades têm exploradas para aplicações de realidade virtual, e até mesmo
realidade aumentada.
Possui sistema próprio de física, de simulação de colisões, suporta shaders avançados
como o normal mapping, bump mapping, simula roupas e tecidos, possui simulações de
fogo e água convincentes, também simula multidões e possui um “WeatherSystem”, que
simula efeitos atmosféricos e a iluminação do dia e noite, com representação de todos os
dias do ano. (MEDEIROS, 2010)
Sua característica que mais nos atraiu, foi o fato de possuir programação orientada a
objeto, o que nos permite uma boa utilização do programa sem a necessidade de
conhecimentos avançados em programação. (MEDEIROS, 2010) Seu sistema funciona
com um modelo de “blocos” (figura 9), onde cada um possui rotinas pré-programadas
para desempenhar determinada função, a semelhança dos toolkits, onde esses blocos
chamados Canais, se comunicam com outros blocos de mesma função ou funções
diferentes, assim construindo um sistema de programação maior.
Figura 9 : esquema de funcionamento do Quest3D; à esquerda, temos o exemplo de channel, canal que
possui rotinas pré-programadas. E à direita, o esquema de comunicação entre os canais.

27
Cada canal se comunica com os outros por meio de relação pai-filho, onde as funções
que estiverem associadas à um determinado canal pai, estão subordinadas ao seu
funcionamento e diretrizes, e este pai, sendo filho de outro canal também lhe está
subordianado e assim por diante. As relações de comando e subordinação, e as ligacões
entre os canais são representados por linhas com setas. As linhas indicam as relações, e
as setas o fluxo da dependência.
2.5 - WII Remote
Este controle, pertence ao video game Nintendo Wii, e é bastante popular, por captar os
gestos dos jogadores de forma mais intuitiva que os controles tradicionais (figura 10).
Possui um sensor de posição interno, que permite rastrear sua posição em relação ao
video game, e consequentemente , a posição da mão do jogador.
À esquerda figura: 10a: o Nintendo Wii Remote. À direita figura 10b: aplicações do Wii Remote
permitem jogar games de forma mais intuitiva.
http://electronics.howstuffworks.com/gadgets/virtual-reality-pictures4.htm acessado em 26/03/2009
Este é equipado com uma câmera que capta apenas a luz do tipo infra-vermelho,
utilizada para aplicações de tracking IR.
2.6 - Freetrack
Freetrack é um sistema de captura de movimentos baseado em sistema óptico, para
plataforma Windows, lançado sob a licença GNU General Public License, que pode ser
usado com câmeras baratas comuns (figura 11a). Seu foco principal é o
acompanhamento dos movimentos da cabeça, para utilizações em realidade virtual,
simulação, jogos de vídeo game, modelagem 3D, desenho assistido por computador e
computação de mãos-livres em geral para melhorar a acessibilidade do computador. O
rastreamento dos movimentos é tão sensível, que um simples movimento da cabeça já é

28
suficiente, e sendo assim, o usuário não precisa desviar os olhos da tela. A câmera
capta um sistema de pontos luminosos usado pelo usuário e esses pontos precisam ser
isolados da luz de fundo por meio de filtragem física ou de software. É um dispositivo
que permite movimentação com seis graus de liberdade (6DOF). Dispositivos de vídeo
compatíveis com Windows, como webcams são suportadas, bem como um apoio
especial para a câmera Nintendo Wii Remote e câmeras NaturalPoint (TrackIR,
SmartNav e OptiTrack). (FREETRACK 2010)
A câmera é responsável por captar a posição dos pontos luminosos, para que o
computador possa atualizar sua posição em tempo real. Com o Freetrack os dados do
rastreamento da cabeça podem ser enviados diretamente a outros programas, usando a
sua própria interface aberta na área de trabalho do Windows. Freetrack também pode
emular o mouse, teclado e joystick (via PPJoy) se um programa não oferece suporte a
uma interface direta.
À esquerda figura 11a: interface do Freetrack. À direita figura 11b: LEDs adquiridas em:
http://en.wikipedia.org/wiki/File:Freetrack_210_screenshot.jpg e
http://skwnow.blogspot.com/2010_09_01_archive.html respectivamente. acessados em 10/11/2009 e
09/12/2009.
Os pontos iluminados são conseguidos com LEDs (Light Emitting Diode) traduzido
como diodo emissor de luz (figura 11b). Esses LEDs podem ser de luz comum ou
Infra-Vermelho(LED emissor), tipo de luz não visivel a olho nú. O LED é um diodo
semicondutor (junção P-N) que quando energizado emite luz visível por isso nome
Diodo Emissor de Luz. A luz não é monocromática (como em um laser), mas consiste
de uma banda espectral relativamente estreita e é produzida pelas interacções
energéticas do elétron.

29
3 – O ESTADO DA ARTE
Em meados dos anos 50, quando Morton Heilig ansiava sobre um futuro para o cinema,
e imaginava tal espetáculo provendo a audiência com sensações em primeira pessoa,
sem o saber estava galgando o que hoje se conhece por Realidade Virtual (TAVARES,
2006 apud Packer, 2001). TAVARES (2006), afirma que tais sensações atualmente se
encontram “tecnologicamente potencializadas”, no sentido que as placas gráficas e
dispositivos tecnológico nos proporcionem essas sensações, de modo que nem Heiling,
nem a comunidade de RV poderiam ter sonhado.
Atualmente, a realidade virtual vai alem da imagem popular do usuário portando um
HMD (PINHANEZ, C. 2006). Segundo BIMBER et al., (2005), a comunidade que
estuda a realidade virtual, tem se orientado naturalmente no sentido contrário a
utilização de Head Mounted Displays (HMDs) e na direção dos chamados spatial
displays, ou displays espaciais.
Na Realidade Virtual de projeção, também conhecida como Realidade Artificial,
categoria de RV criada nos anos 70 por Myron Krueger (ESPINHEIRA, 2004). O
usuário está fora do mundo virtual, mas pode interagir com seus elementos. “O sistema
de RV de Projeção, VIDEOPLACE, criado por Krueger nesta época capturava a
imagem do(s) usuário(s) e projetava-a numa grande tela que representava um mundo
virtual”.
Fato semelhante tem ocorrido com a Realidade Aumentada. Novas abordagens tem
levado a realidade aumentada alem dos “hand-held” displays, (BIMBER et al., 2005)
método esse onde o usuário apenas segura um marcador e manipula o objeto,
permitindo novas aplicações para diversas áreas, como museus, “edutainment”,
pesquisa, industria e comunidade artística. Essas novas abordagens, tem sido facilitadas
pelo decréscimo do custo, e aumento da viabilidade das tecnologias de projeção,
computadores pessoais e hardware, principalmente em relação às placas de
processamento gráfico (BIMBER et al., 2005). Sobre essas facilidades. SOARES et al.,

30
(2006) acrescenta: “Novos sistemas de telas permitem que o contraste das imagens seja
melhorado e os problemas de junção de imagens de diversos projetores em uma mesma
tela sejam reduzidos”.
PINHANEZ, C (2006 apud Krueger, 1990) afirma que: “os primeiros ambientes de RA
foram criados com projetores, pelo pioneiro Myron Krueger, que na década de 70 criou
uma série de demonstrações de espaços aumentados com projetores e sistemas de visão
computacional”.
Para BIMBER et al., (2005) spatial augmented reality (SAR), ou realidade aumentada
espacial, é uma tecnologia que explora elementos ópticos e projetores de vídeo, assim
como renderings interativos, associados a técnicas de calibração de displays espaciais.
Onde displays espaciais; continua BIMBER et al., (2005) se pode entender como
displays que se utilizam de projeções de imagens diretamente na superfície de objetos
ao invés de expô-las em telas de projeção. E continua afirmando que “com a (SAR) se
pode superar limitações tecnológicas e ergonômicas impostas pelos sistemas de
realidade aumentada”.
Hoje em dia existem diversos sistemas de projeção para realidade virtual e aumentada,
dentre eles a tela panorâmica, a mesa virtual e a Caverna Digital. Todos eles
apresentam suas vantagens: de propiciar imersão total ou parcial; de poder trabalhar
com cenas virtuais em tamanho real, ou seja, em escala 1:1; e de permitir a participação
simultânea de um conjunto de pessoas.
Essa tendência da Realidade Virtual e da Realidade Aumentada em se inclinar para os
sistemas de projeção foi fator determinante na escolha do tema e direcionamento das
pesquisas referentes a este trabalho, pois buscou-se uma vertente que estivesse em
sintonia com o estado atual dessas ciências, e que fosse possível acrescentar e contribuir
com sua corrente atual. Assim, a seguir, o atual estado da Realidade Virtual de Projeção,
e da Realidade Aumentada Espacial.

31
3.1 Panoramas
“A definição básica da tela panorâmica (fig12), consiste de uma tela usualmente plana,
ou curva, cobrindo 180 graus, onde são projetadas partes da cena em seqüência, por
vários projetores alimentados por um supercomputador”. (...) (TORI et al., 2006;
ESPINHEIRA, 2004). Cobrem um grande campo de visão, e são chamados de power-
walls, ou quando chegam a tocar o chão também são conhecidos como Infinity-walls .
(SOARES et al., 2006)
Figura 12: imagem esquemática de um panorama
Os panoramas são muito eficientes para grandes públicos e são bem aceitos dentro da
comunidade de RV. Porém apresentam dificuldades nas junções das imagens dos
diversos projetores necessários para sintetizar estas imagens. Para se minimizar esse
problema na junção das imagens, é necessário um trabalho de sincronização e de
tratamento das imagens faz com que as emendas sejam imperceptíveis, permitindo
navegações panorâmicas por qualquer ambiente virtual (TORI et al., 2006) Porém esse
trabalho é complicado, exigindo horas e profundo conhecimento técnico. Exemplos de
telas panorâmicas podem ser vistos em empresas como Pyramid e Trimension.

32
3.2 CAVE
No inicio dos anos 90, telas de projeção que cercavam o espectador tornaram-se muito
populares (BIMBER et al., 2005). Uma das que mais atraia a atenção do publico, é a
chamada (Cave Automatic Virtual Environment), ou simplesmente CAVE. (BRAGA,
2007; KIRNER et al., 2006).
“O primeiro sistema cúbico de projeção (CAVE) no mundo foi desenvolvido na
Universidade de Illinois em Chicago, no Electronic Visualization Laboratory. Sua
primeira proposta foi a colocação de monitores de vídeo ao redor da cabeça do usuário,
mas logo se percebeu que telas e projetores seriam bem mais práticos e eficientes”.
(SOARES et al., 2006). De acordo com BRAGA (2007) “O termo Caverna, é uma
alusão à alegoria da Caverna de Platão, relacionando- se, com o fato de que a realidade
que é vista é outra, que não a própria realidade”.
Diversos autores (BIMBER et al., 2005; BARILLI, 2007; BRAGA, 2007; KIRNER, et
al., 2006) descrevem a CAVE como uma espécie de Sala de tamanho variável, mas
sempre relativamente pequena, onde são projetados gráficos em três dimensões, em suas
paredes, chão e teto (figuras 13a e 13b), que são compostas de telas de projeção ou
outro suporte, podendo ser visualizadas pelas pessoas dentro da caverna, através de um
dispositivo (óculos estereoscópico, capacetes especiais) ou simplesmente a olho nu.
Essas projeções ocorrem de forma que os usuários possam explorar e interagir com
objetos, pessoas virtuais e outros componentes, como se fizessem parte de um ambiente
virtual, trazendo desta forma a sensação de imersão. O movimento das pessoas é
captado via sensores de posição que atualizam as imagens projetadas, e modificando o
ponto de vista dos usuários. Utiliza, também, som estereoscópico, gerando sensações
bastante reais, e permite através de outros dispositivos, como os de force feedback,
estímulos à sentidos como o tato.
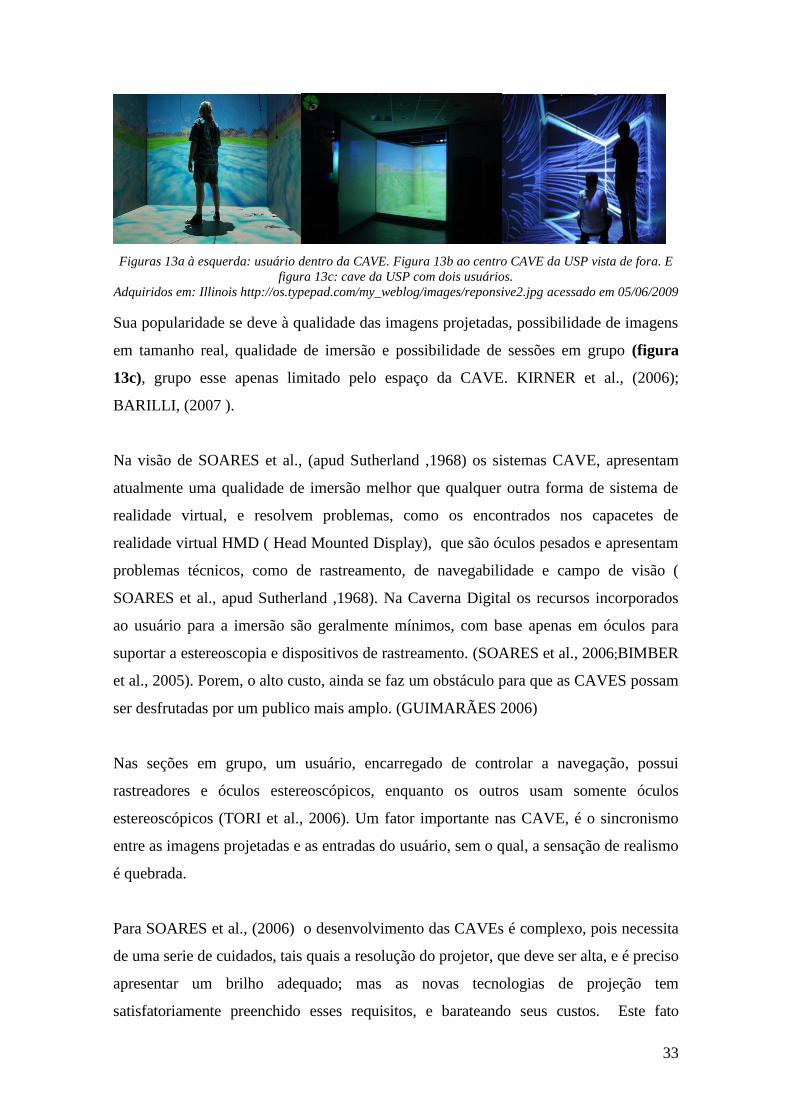
33
Figuras 13a à esquerda: usuário dentro da CAVE. Figura 13b ao centro CAVE da USP vista de fora. E
figura 13c: cave da USP com dois usuários.
Adquiridos em: Illinois http://os.typepad.com/my_weblog/images/reponsive2.jpg acessado em 05/06/2009
Sua popularidade se deve à qualidade das imagens projetadas, possibilidade de imagens
em tamanho real, qualidade de imersão e possibilidade de sessões em grupo (figura
13c), grupo esse apenas limitado pelo espaço da CAVE. KIRNER et al., (2006);
BARILLI, (2007 ).
Na visão de SOARES et al., (apud Sutherland ,1968) os sistemas CAVE, apresentam
atualmente uma qualidade de imersão melhor que qualquer outra forma de sistema de
realidade virtual, e resolvem problemas, como os encontrados nos capacetes de
realidade virtual HMD ( Head Mounted Display), que são óculos pesados e apresentam
problemas técnicos, como de rastreamento, de navegabilidade e campo de visão (
SOARES et al., apud Sutherland ,1968). Na Caverna Digital os recursos incorporados
ao usuário para a imersão são geralmente mínimos, com base apenas em óculos para
suportar a estereoscopia e dispositivos de rastreamento. (SOARES et al., 2006;BIMBER
et al., 2005). Porem, o alto custo, ainda se faz um obstáculo para que as CAVES possam
ser desfrutadas por um publico mais amplo. (GUIMARÃES 2006)
Nas seções em grupo, um usuário, encarregado de controlar a navegação, possui
rastreadores e óculos estereoscópicos, enquanto os outros usam somente óculos
estereoscópicos (TORI et al., 2006). Um fator importante nas CAVE, é o sincronismo
entre as imagens projetadas e as entradas do usuário, sem o qual, a sensação de realismo
é quebrada.
Para SOARES et al., (2006) o desenvolvimento das CAVEs é complexo, pois necessita
de uma serie de cuidados, tais quais a resolução do projetor, que deve ser alta, e é preciso
apresentar um brilho adequado; mas as novas tecnologias de projeção tem
satisfatoriamente preenchido esses requisitos, e barateando seus custos. Este fato
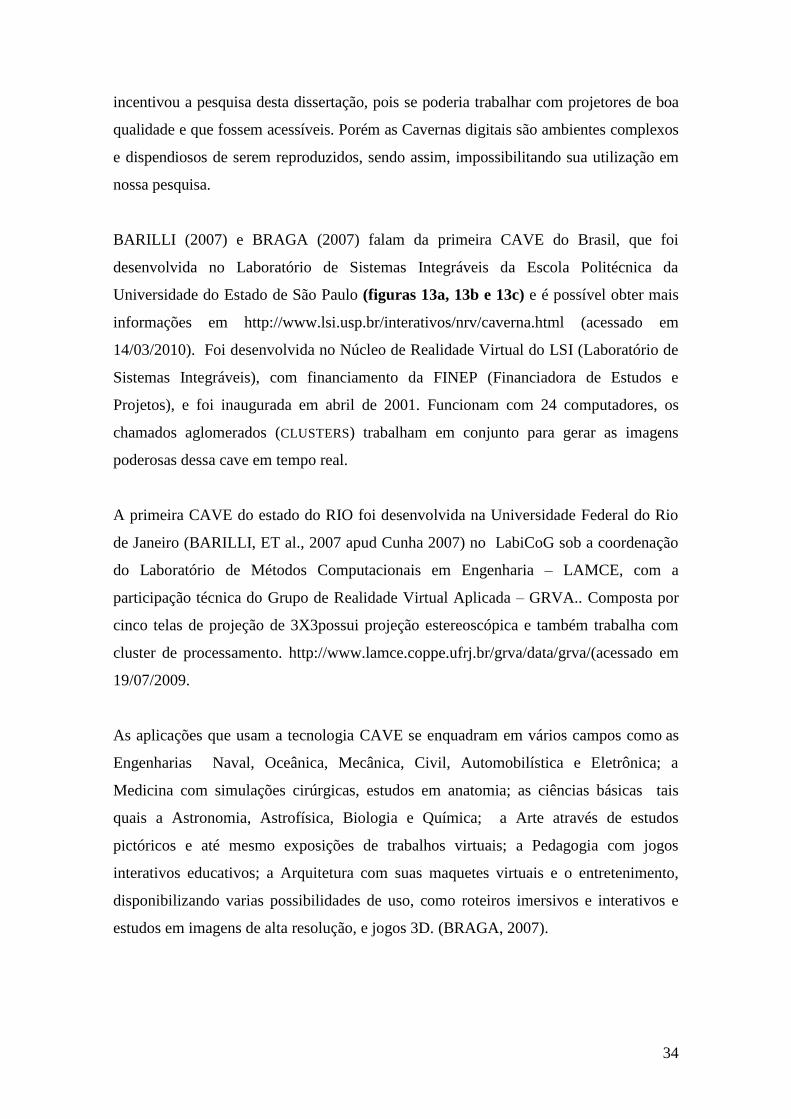
34
incentivou a pesquisa desta dissertação, pois se poderia trabalhar com projetores de boa
qualidade e que fossem acessíveis. Porém as Cavernas digitais são ambientes complexos
e dispendiosos de serem reproduzidos, sendo assim, impossibilitando sua utilização em
nossa pesquisa.
BARILLI (2007) e BRAGA (2007) falam da primeira CAVE do Brasil, que foi
desenvolvida no Laboratório de Sistemas Integráveis da Escola Politécnica da
Universidade do Estado de São Paulo (figuras 13a, 13b e 13c) e é possível obter mais
informações em http://www.lsi.usp.br/interativos/nrv/caverna.html (acessado em
14/03/2010). Foi desenvolvida no Núcleo de Realidade Virtual do LSI (Laboratório de
Sistemas Integráveis), com financiamento da FINEP (Financiadora de Estudos e
Projetos), e foi inaugurada em abril de 2001. Funcionam com 24 computadores, os
chamados aglomerados (CLUSTERS) trabalham em conjunto para gerar as imagens
poderosas dessa cave em tempo real.
A primeira CAVE do estado do RIO foi desenvolvida na Universidade Federal do Rio
de Janeiro (BARILLI, ET al., 2007 apud Cunha 2007) no LabiCoG sob a coordenação
do Laboratório de Métodos Computacionais em Engenharia – LAMCE, com a
participação técnica do Grupo de Realidade Virtual Aplicada – GRVA.. Composta por
cinco telas de projeção de 3X3possui projeção estereoscópica e também trabalha com
cluster de processamento. http://www.lamce.coppe.ufrj.br/grva/data/grva/(acessado em
19/07/2009.
As aplicações que usam a tecnologia CAVE se enquadram em vários campos como as
Engenharias Naval, Oceânica, Mecânica, Civil, Automobilística e Eletrônica; a
Medicina com simulações cirúrgicas, estudos em anatomia; as ciências básicas tais
quais a Astronomia, Astrofísica, Biologia e Química; a Arte através de estudos
pictóricos e até mesmo exposições de trabalhos virtuais; a Pedagogia com jogos
interativos educativos; a Arquitetura com suas maquetes virtuais e o entretenimento,
disponibilizando varias possibilidades de uso, como roteiros imersivos e interativos e
estudos em imagens de alta resolução, e jogos 3D. (BRAGA, 2007).
35
3.3 IMAX
A grande característica do IMAX é uma projeção que permite a utilização de telas
gigantes, que podem ser planas, ou em forma de cúpulas. As cúpulas, no caso do
cinema, fornecem uma tela hemisférica, abrangendo o cinema todo (figura 14)
HAUGUENAUER et al, (2008) e PINHANEZ (2006)afirmam que “em ambos os
casos, o efeito de imersão é poderoso, pois a tela é grande o bastante para preencher seu
campo de visão e, ao fazer isto, melhora a sensação de movimento “.
Figura 14: desenho esquematico dos cinemas IMAX. Adiquirida em:
http://www.nrm.se/en/menu/visitthemuseum/cosmonova/technicaldescription.5715_en.html acessado em
15/09/2009
Os projetores para filmes IMAX tambem são gigantescos e são bem diferentes dos
projetores de cinema normais, inclusive no peso, chedando a pesar 1.800 Kg, o peso de
um pequeno carro. Isto se deve, pois devem possuir estrutura para trabalhar com um
rolo de filme grande e pesado. Este rolo de filme é diferenciado, para que a tela de
enormes proporções seja preenchida por uma imagem nítida e para isto, os filmes
IMAX são gravados e impressos em filmes de 70mm, atraves de cameras especiais.
Para as aplicações de RV, o IMAX cria situações em que se busca um alto grau de
imersão visual, sem, no entanto, atrapalhar a experiência com aparatos ligados à cabeça
do usuário como no caso dos HMDs. Em particular, o sentido de imersão é amplificado
pelo estímulo da visão periférica (PINHANEZ, 2006 ). E ao contrario dos HMDs, esses
sistemas com telas gigantes não apresentam o típico atraso entre o movimento da cabeça
do usuário e os gráficos exibidos nas telas (ibid 2006). Porem, o mesmo autor alerta,
36
que o maior problema das aplicações do tipo IMAX para RV, é que o usuário fica
bastante limitado no sentido motor, pois geralmente o espaço para movimentação é
bastante pequeno.
3.4 Shader Lamps
Shader Lamps ou lâmpadas de Shader, fazem parte de um conceito que pretende criar
um novo paradigma na computação gráfica em que se tentam simular as propriedades
físicas do objeto, tais quais sua cor, textura e maneira de refletir a luz, através de
imagens projetadas.
Na pratica, tem-se um objeto neutro, isto é, sem suas propriedades físicas visuais, cor,
textura, brilho (figura 15a). Este objeto pode ser a principio, de qualquer tipo, e nele se
projetam imagens diretamente sobre a sua superfície que emulam essas propriedades,
originais do objeto, ou outras alternativas (figuras 15b e 15c). (BIMBER et al., 2005).
Como a idéia consiste em iluminar o objeto, banhando-o dessa forma com suas
propriedades visuais, contidas na imagem projetada, convencionou-se chamar o sistema
de Shader Lamps (BIMBER et al., 2005), fazendo referencia ao conceito de “Shader”
que na computação gráfica, é o elemento que descreve essas propriedades visuais nos
elementos 3D.
Essa imagem projetada, alem de representar imagens alternativas ao visual do objeto,
podem representar sobre a superfície animações, ou alternar os Shader, sobre o mesmo
objeto (RASKAR et al., 2001;BIMBER et al., 2005) Vamos considerar o efeito
produzido no vaso (figura 15a).
Para BIMBER et al., (2005) quando nos projetamos imagens de objetos 3D em
superfícies físicas, com efeito nós introduzimos esses objetos virtuais 3D no mundo real
que nos cerca. Nos displays tradicionais para projeção, esses objetos aparecem de forma
plana, em telas de projeção comuns. Contudo, uma vez que se compreende a relação
entre o projetor e a geometria que ele vai iluminar, podem-se projetar corretamente
imagens de objetos virtuais em objetos geométricos de varias formas.
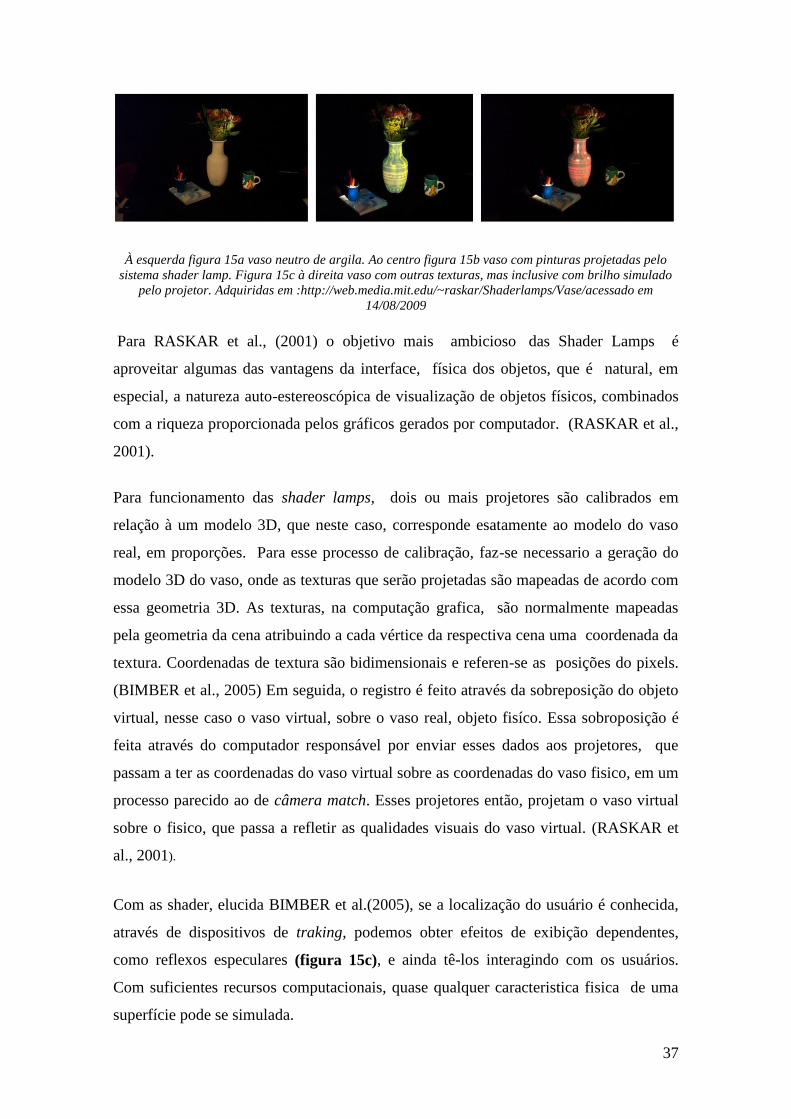
37
À esquerda figura 15a vaso neutro de argila. Ao centro figura 15b vaso com pinturas projetadas pelo
sistema shader lamp. Figura 15c à direita vaso com outras texturas, mas inclusive com brilho simulado
pelo projetor. Adquiridas em :http://web.media.mit.edu/~raskar/Shaderlamps/Vase/acessado em
14/08/2009
Para RASKAR et al., (2001) o objetivo mais ambicioso das Shader Lamps é
aproveitar algumas das vantagens da interface, física dos objetos, que é natural, em
especial, a natureza auto-estereoscópica de visualização de objetos físicos, combinados
com a riqueza proporcionada pelos gráficos gerados por computador. (RASKAR et al.,
2001).
Para funcionamento das shader lamps, dois ou mais projetores são calibrados em
relação à um modelo 3D, que neste caso, corresponde esatamente ao modelo do vaso
real, em proporções. Para esse processo de calibração, faz-se necessario a geração do
modelo 3D do vaso, onde as texturas que serão projetadas são mapeadas de acordo com
essa geometria 3D. As texturas, na computação grafica, são normalmente mapeadas
pela geometria da cena atribuindo a cada vértice da respectiva cena uma coordenada da
textura. Coordenadas de textura são bidimensionais e referen-se as posições do pixels.
(BIMBER et al., 2005) Em seguida, o registro é feito através da sobreposição do objeto
virtual, nesse caso o vaso virtual, sobre o vaso real, objeto fisíco. Essa sobroposição é
feita através do computador responsável por enviar esses dados aos projetores, que
passam a ter as coordenadas do vaso virtual sobre as coordenadas do vaso fisico, em um
processo parecido ao de câmera match. Esses projetores então, projetam o vaso virtual
sobre o fisico, que passa a refletir as qualidades visuais do vaso virtual. (RASKAR et
al., 2001).
Com as shader, elucida BIMBER et al.(2005), se a localização do usuário é conhecida,
através de dispositivos de traking, podemos obter efeitos de exibição dependentes,
como reflexos especulares (figura 15c), e ainda tê-los interagindo com os usuários.
Com suficientes recursos computacionais, quase qualquer caracteristica fisica de uma
superfície pode se simulada.
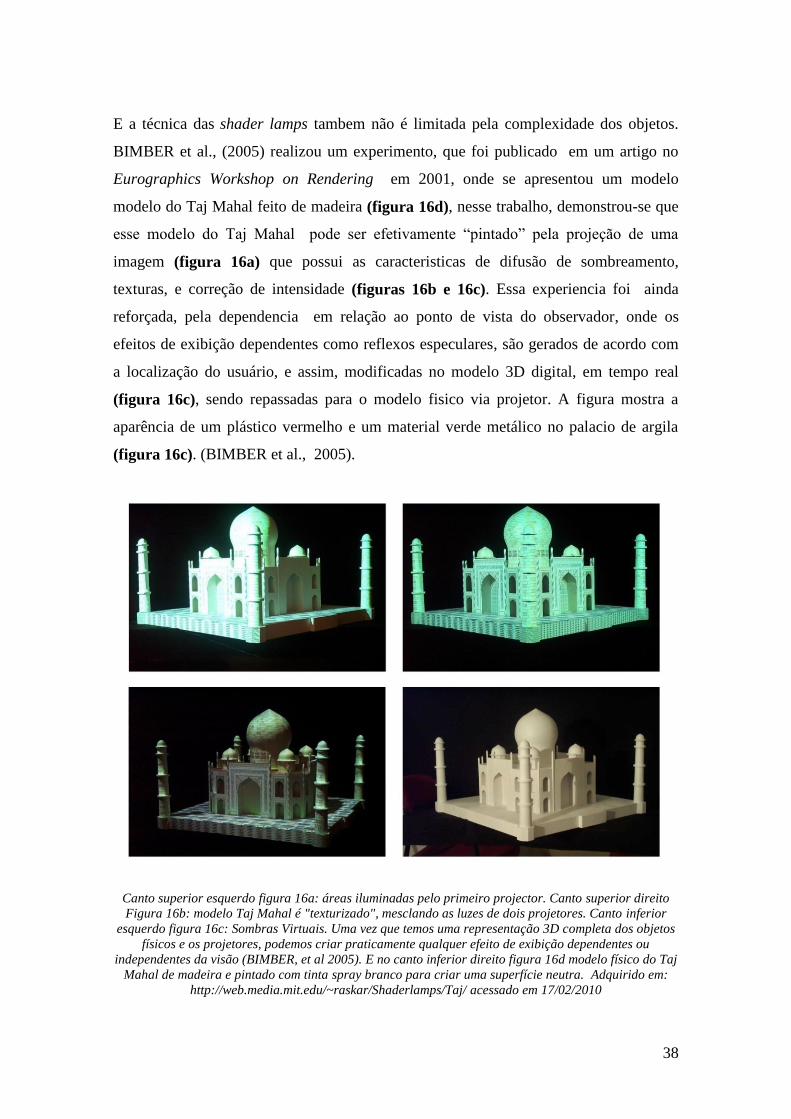
38
E a técnica das shader lamps tambem não é limitada pela complexidade dos objetos.
BIMBER et al., (2005) realizou um experimento, que foi publicado em um artigo no
Eurographics Workshop on Rendering em 2001, onde se apresentou um modelo
modelo do Taj Mahal feito de madeira (figura 16d), nesse trabalho, demonstrou-se que
esse modelo do Taj Mahal pode ser efetivamente “pintado” pela projeção de uma
imagem (figura 16a) que possui as caracteristicas de difusão de sombreamento,
texturas, e correção de intensidade (figuras 16b e 16c). Essa experiencia foi ainda
reforçada, pela dependencia em relação ao ponto de vista do observador, onde os
efeitos de exibição dependentes como reflexos especulares, são gerados de acordo com
a localização do usuário, e assim, modificadas no modelo 3D digital, em tempo real
(figura 16c), sendo repassadas para o modelo fisico via projetor. A figura mostra a
aparência de um plástico vermelho e um material verde metálico no palacio de argila
(figura 16c). (BIMBER et al., 2005).
Canto superior esquerdo figura 16a: áreas iluminadas pelo primeiro projector. Canto superior direito
Figura 16b: modelo Taj Mahal é "texturizado", mesclando as luzes de dois projetores. Canto inferior
esquerdo figura 16c: Sombras Virtuais. Uma vez que temos uma representação 3D completa dos objetos
físicos e os projetores, podemos criar praticamente qualquer efeito de exibição dependentes ou
independentes da visão (BIMBER, et al 2005). E no canto inferior direito figura 16d modelo físico do Taj
Mahal de madeira e pintado com tinta spray branco para criar uma superfície neutra. Adquirido em:
http://web.media.mit.edu/~raskar/Shaderlamps/Taj/ acessado em 17/02/2010
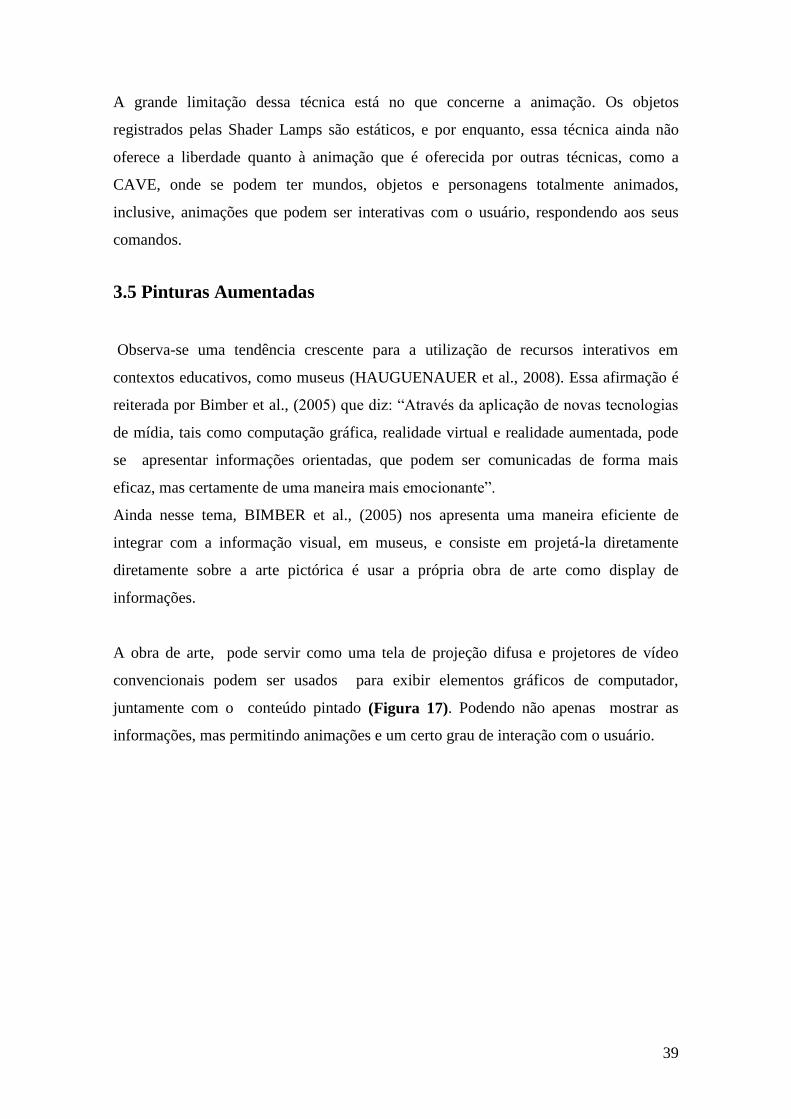
39
A grande limitação dessa técnica está no que concerne a animação. Os objetos
registrados pelas Shader Lamps são estáticos, e por enquanto, essa técnica ainda não
oferece a liberdade quanto à animação que é oferecida por outras técnicas, como a
CAVE, onde se podem ter mundos, objetos e personagens totalmente animados,
inclusive, animações que podem ser interativas com o usuário, respondendo aos seus
comandos.
3.5 Pinturas Aumentadas
Observa-se uma tendência crescente para a utilização de recursos interativos em
contextos educativos, como museus (HAUGUENAUER et al., 2008). Essa afirmação é
reiterada por Bimber et al., (2005) que diz: “Através da aplicação de novas tecnologias
de mídia, tais como computação gráfica, realidade virtual e realidade aumentada, pode
se apresentar informações orientadas, que podem ser comunicadas de forma mais
eficaz, mas certamente de uma maneira mais emocionante”.
Ainda nesse tema, BIMBER et al., (2005) nos apresenta uma maneira eficiente de
integrar com a informação visual, em museus, e consiste em projetá-la diretamente
diretamente sobre a arte pictórica é usar a própria obra de arte como display de
informações.
A obra de arte, pode servir como uma tela de projeção difusa e projetores de vídeo
convencionais podem ser usados para exibir elementos gráficos de computador,
juntamente com o conteúdo pintado (Figura 17). Podendo não apenas mostrar as
informações, mas permitindo animações e um certo grau de interação com o usuário.
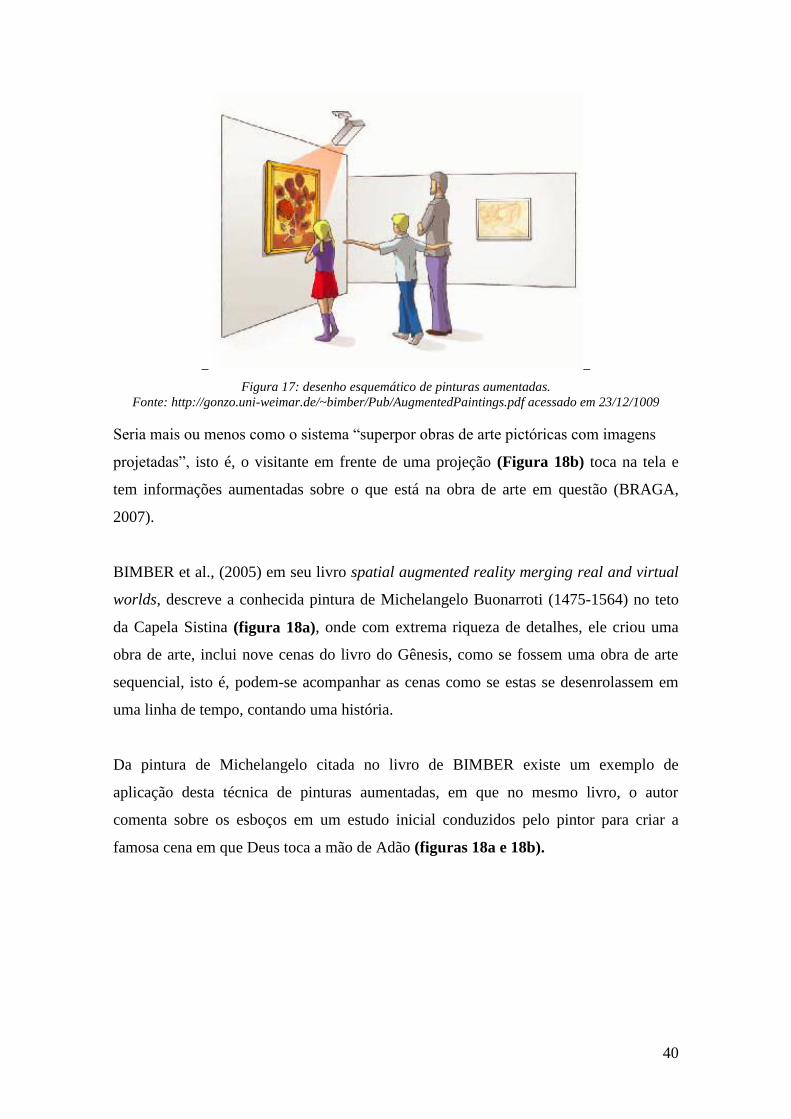
40
_ _
Figura 17: desenho esquemático de pinturas aumentadas.
Fonte: http://gonzo.uni-weimar.de/~bimber/Pub/AugmentedPaintings.pdf acessado em 23/12/1009
Seria mais ou menos como o sistema “superpor obras de arte pictóricas com imagens
projetadas”, isto é, o visitante em frente de uma projeção (Figura 18b) toca na tela e
tem informações aumentadas sobre o que está na obra de arte em questão (BRAGA,
2007).
BIMBER et al., (2005) em seu livro spatial augmented reality merging real and virtual
worlds, descreve a conhecida pintura de Michelangelo Buonarroti (1475-1564) no teto
da Capela Sistina (figura 18a), onde com extrema riqueza de detalhes, ele criou uma
obra de arte, inclui nove cenas do livro do Gênesis, como se fossem uma obra de arte
sequencial, isto é, podem-se acompanhar as cenas como se estas se desenrolassem em
uma linha de tempo, contando uma história.
Da pintura de Michelangelo citada no livro de BIMBER existe um exemplo de
aplicação desta técnica de pinturas aumentadas, em que no mesmo livro, o autor
comenta sobre os esboços em um estudo inicial conduzidos pelo pintor para criar a
famosa cena em que Deus toca a mão de Adão (figuras 18a e 18b).
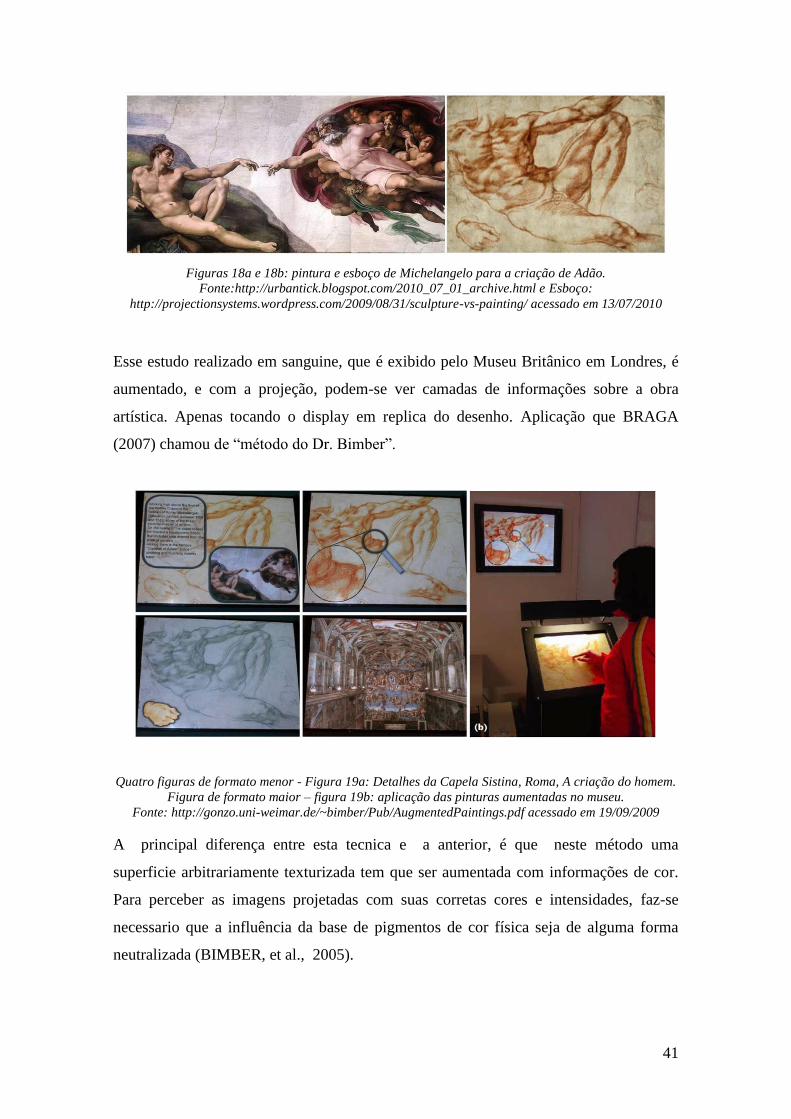
41
Figuras 18a e 18b: pintura e esboço de Michelangelo para a criação de Adão.
Fonte:http://urbantick.blogspot.com/2010_07_01_archive.html e Esboço:
http://projectionsystems.wordpress.com/2009/08/31/sculpture-vs-painting/ acessado em 13/07/2010
Esse estudo realizado em sanguine, que é exibido pelo Museu Britânico em Londres, é
aumentado, e com a projeção, podem-se ver camadas de informações sobre a obra
artística. Apenas tocando o display em replica do desenho. Aplicação que BRAGA
(2007) chamou de “método do Dr. Bimber”.
Quatro figuras de formato menor - Figura 19a: Detalhes da Capela Sistina, Roma, A criação do homem.
Figura de formato maior – figura 19b: aplicação das pinturas aumentadas no museu.
Fonte: http://gonzo.uni-weimar.de/~bimber/Pub/AugmentedPaintings.pdf acessado em 19/09/2009
A principal diferença entre esta tecnica e a anterior, é que neste método uma
superficie arbitrariamente texturizada tem que ser aumentada com informações de cor.
Para perceber as imagens projetadas com suas corretas cores e intensidades, faz-se
necessario que a influência da base de pigmentos de cor física seja de alguma forma
neutralizada (BIMBER, et al., 2005).

42
3.6 a vitrine virtual
Os responsáveis por museus tem aprendido, o conceito de “edutainment”,
(RAPEEPISAM et al 2006) onde seus visitantes não desejam apenas se instruir, mas se
divertir, ou aprender se divertindo. Isto se deve, à competição que estas instituições
enfrentam com parques e outros locais de lazer (BIMBER et al., 2005). Os museus já se
apropriam de tecnologias como multimidia realidade virtual, e realidade aumentada,
como formas mais interessantes de disponibilizar seus conteúdos (MARINS et
al.,2008), e prossegue MARINS dizendo que “as novas tecnologias digitais permitem
estabelecer um diálogo interativo, que implica na mudança de um paradigma
conservador, que se reduzia à simples observação da coleção por parte do visitante “.
Sendo assim, técnicas de narrativa interativa digital estão sendo usadas em combinação
com novas formas de interfaces, como realidade virtual e realidade aumentada (Bimber
et al., 2005) e através dessas tecnologias aliadas ao “edutainment”, surgiu o conceito de
se contar historias, o Digital Storytelling, (Bimber et al., 2005) que alia o conteúdo
proprio do museu, às possibilidades virtuais, possibilitando uma maior interação e
tornando a experiência do aprendizado mais interessante. Há tambem nesse contexto, a
introdução do conceito dos hands-ons,( MARINS et al., 2008), onde a manipulação do
conteúdo ou parte dele pelo usuário se faz necessária para a experiência do aprendizado.
Figura 20: lustração de aplicações da Virtual Showcase em museus. A Virtual Showcase segue o mesmo
principio de uma vitrine real, fato este que faz com que a vitrine virtual seja compatível com exposições
em museus tradicionais.
Nesse contexto, pesquisadores vem desenvolvendo uma aplicação que utiliza espelhos e
projetores chamada The Virtual Showcase, ou Vitrine Virtual (Bimber et al., 2005)
(figura 20) onde artefatos científicos e culturais são colocadas em seu interior,
permitindo seu aumento com gráficos tridimensionais. Dentro do Virtual Showcase,
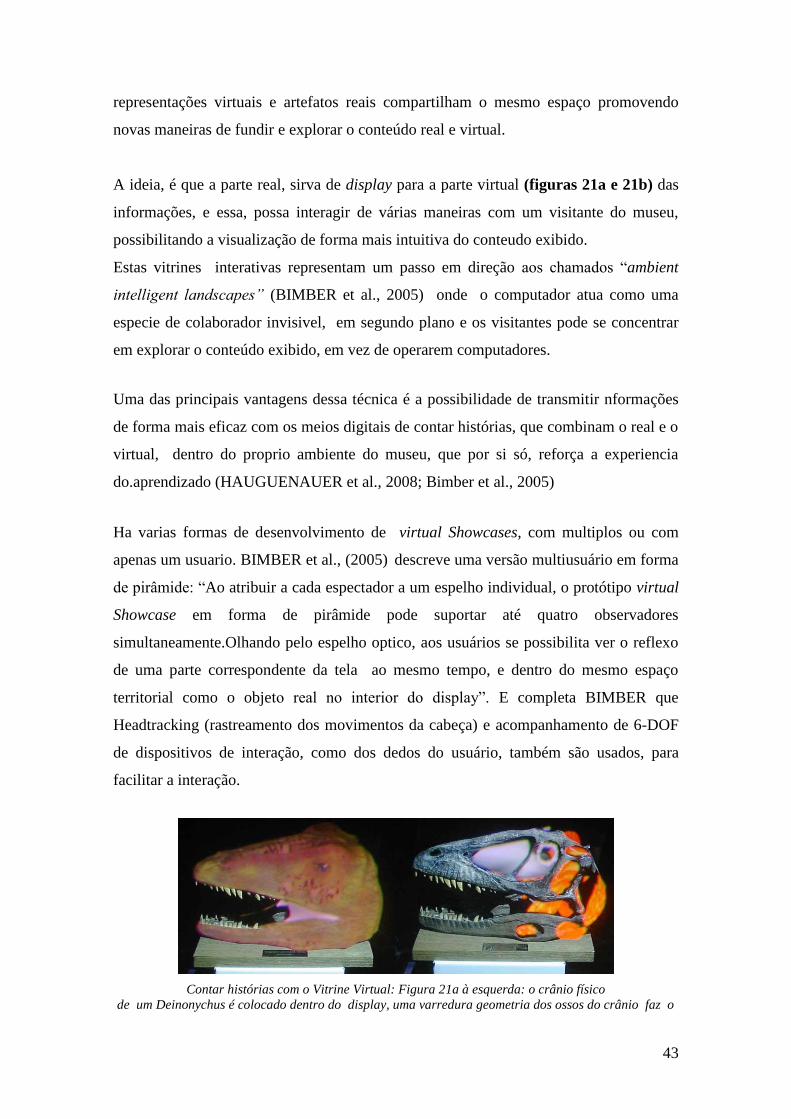
43
representações virtuais e artefatos reais compartilham o mesmo espaço promovendo
novas maneiras de fundir e explorar o conteúdo real e virtual.
A ideia, é que a parte real, sirva de display para a parte virtual (figuras 21a e 21b) das
informações, e essa, possa interagir de várias maneiras com um visitante do museu,
possibilitando a visualização de forma mais intuitiva do conteudo exibido.
Estas vitrines interativas representam um passo em direção aos chamados “ambient
intelligent landscapes” (BIMBER et al., 2005) onde o computador atua como uma
especie de colaborador invisivel, em segundo plano e os visitantes pode se concentrar
em explorar o conteúdo exibido, em vez de operarem computadores.
Uma das principais vantagens dessa técnica é a possibilidade de transmitir nformações
de forma mais eficaz com os meios digitais de contar histórias, que combinam o real e o
virtual, dentro do proprio ambiente do museu, que por si só, reforça a experiencia
do.aprendizado (HAUGUENAUER et al., 2008; Bimber et al., 2005)
Ha varias formas de desenvolvimento de virtual Showcases, com multiplos ou com
apenas um usuario. BIMBER et al., (2005) descreve uma versão multiusuário em forma
de pirâmide: “Ao atribuir a cada espectador a um espelho individual, o protótipo virtual
Showcase em forma de pirâmide pode suportar até quatro observadores
simultaneamente.Olhando pelo espelho optico, aos usuários se possibilita ver o reflexo
de uma parte correspondente da tela ao mesmo tempo, e dentro do mesmo espaço
territorial como o objeto real no interior do display”. E completa BIMBER que
Headtracking (rastreamento dos movimentos da cabeça) e acompanhamento de 6-DOF
de dispositivos de interação, como dos dedos do usuário, também são usados, para
facilitar a interação.
Contar histórias com o Vitrine Virtual: Figura 21a à esquerda: o crânio físico
de um Deinonychus é colocado dentro do display, uma varredura geometria dos ossos do crânio faz o
44
registro da parte virtual, para a contrapartida real,e preenche os ossos reais com musculos e tecidos
virtuais. Figura 21b à esquerda grupos musculares diferentes são aumentados.
Adquirida em: http://www.nsf.gov/od/lpa/news/02/tip021022.htm acessado em 14/07/2010
Para BIMBER et al., (2005) futuras Melhorias de hardware vão preparar o caminho para
futuros desenvolvimentos com projetores inteligentes. Chips gráficos, por exemplo,
serão mais poderosos do que nunca. Projetores de última geração vão continuar a
aumentar fatores de qualidade, como brilho, resolução, E seu tamanho será tão
pequeno, que serão tão discretos como lampadas.
3.7 Being There
BIMBER et al., (2005) apresenta esse sistema de Realidade Aumentada, para incorporar
gráficos 3D em um ambiente interno com vários projetores. Neste sistema que tambem
funciona em tempo real, pode-se aplicar virtualmente
texturas sobre objetos reais (figuras 22b 22c e 22d), e simular suas propriedades, à
meneira das shader lamps.
Esse sistema, tambem proporciona interação, atraves de dispositivos especiais; na figura
vemos a simulação virtual de efeitos de pintura sobre a superficie, pela simples
manipulação física direta de um objeto que emula as caracteristicas de um
"pincel"(figura 22c). RASKAR et al.,(2001) complementa: “Atraves de um dispositivo
chamado HiBall tracker para seguir a posição do “brush” de spray virtual, em conjunto
com rastreadores da posição do usuario, projetam-se imagens sobre a superfície dos
objetos, que permanecem registrados de acordo com esses dados”. Então, podemos ver
na imagem que o usuário pinta na parede utilizando elementos que não estão
fisicamente lá.
Este exemplo mostra a utilidade de poder mover-se fisicamente ao redor de objetos
virtuais, que dá ao usuário uma maneira natural de interação espacial com o ambiente
virtual. (RASKAR et al., 2001)
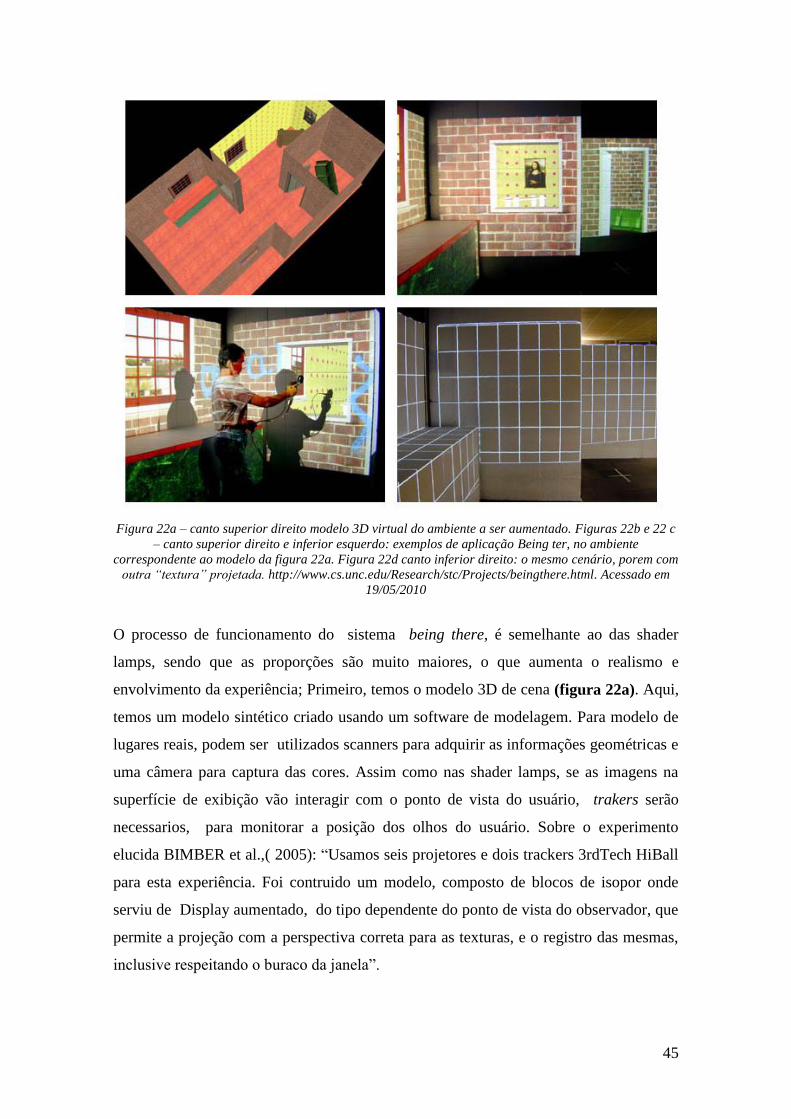
45
Figura 22a – canto superior direito modelo 3D virtual do ambiente a ser aumentado. Figuras 22b e 22 c
– canto superior direito e inferior esquerdo: exemplos de aplicação Being ter, no ambiente
correspondente ao modelo da figura 22a. Figura 22d canto inferior direito: o mesmo cenário, porem com
outra “textura” projetada. http://www.cs.unc.edu/Research/stc/Projects/beingthere.html. Acessado em
19/05/2010
O processo de funcionamento do sistema being there, é semelhante ao das shader
lamps, sendo que as proporções são muito maiores, o que aumenta o realismo e
envolvimento da experiência; Primeiro, temos o modelo 3D de cena (figura 22a). Aqui,
temos um modelo sintético criado usando um software de modelagem. Para modelo de
lugares reais, podem ser utilizados scanners para adquirir as informações geométricas e
uma câmera para captura das cores. Assim como nas shader lamps, se as imagens na
superfície de exibição vão interagir com o ponto de vista do usuário, trakers serão
necessarios, para monitorar a posição dos olhos do usuário. Sobre o experimento
elucida BIMBER et al.,( 2005): “Usamos seis projetores e dois trackers 3rdTech HiBall
para esta experiência. Foi contruido um modelo, composto de blocos de isopor onde
serviu de Display aumentado, do tipo dependente do ponto de vista do observador, que
permite a projeção com a perspectiva correta para as texturas, e o registro das mesmas,
inclusive respeitando o buraco da janela”.

46
Utiliza-se tecnicas como a renderização em tempo real, ou o rendering em etapas, para
armazenar, visualizar e transformar a interação do usuário com o objeto na forma digital
(BIMBER et al., 2005).
Um ponto em que o o projeto Being There, se diferencia das SHADER LAMPS, é
quanto a qualidade do modelo a ser pintado. Em vez de construir uma réplica exata do
modelo para a projeção, são realizadas versões simplificadas. Por exemplo, estruturas
primárias dos interiores das construções e objetos arctetônicos de tamanho medio
(paredes, colunas, armários, mesas, etc). Como se viu na Figura 22d a tela é feita de
blocos de isopor de construção, onde mantêm-se as principais características
arquitetônicas que correspondem ao modelo físico, simplesmente para manter as
qualidades estereoscópicas do ambiente de projeção, sendo que os outros detalhes,
como tijolos, papel de parede, entre outros, são dados pela imagem projetada que deve
ser dependente do ponto de vista do observador (BIMBER et al., 2005).
A grande vantagem desta técnica em relação às outras, é quanto a mobilidade. Os
projetores estão espalhados por todo o ambiente, e sendo assim, o usuário pode
caminhar livremente, sem as limitações de espaço e mobilidade impostas pelas CAVEs
ou IMAX, e com grau de imersão superior aos panoramas pois segundo BIMBER et
al., (2005) as simulasções de interiores de espaços arquitetônicos são bem convincentes
e proporciona um alto grau de imersão. E continua BIMBER, “a colocação estratégica
de projetores para permitir completa iluminação e evitando sombras do usuário o dos
objetos em cena é crítica”.
3.8 ILAMPS
A maioria dos sistemas de RA continuam a utilizar projetores estáticos em uma
configuração de instalação semi-permanente, na qual pode haver um processo de
calibração significativa antes utilizar o sistema (BIMBER et al., 2005).
Mas os projetores cada vez mais compactos, estão possibilitando muito mais
flexibilidade em seu uso, e trazendo a tona a possibilidade de novas aplicações. Dentre
essas, estão as chamadas “estilo mouse”, pois o ponto de projeção (projetor), encontra-
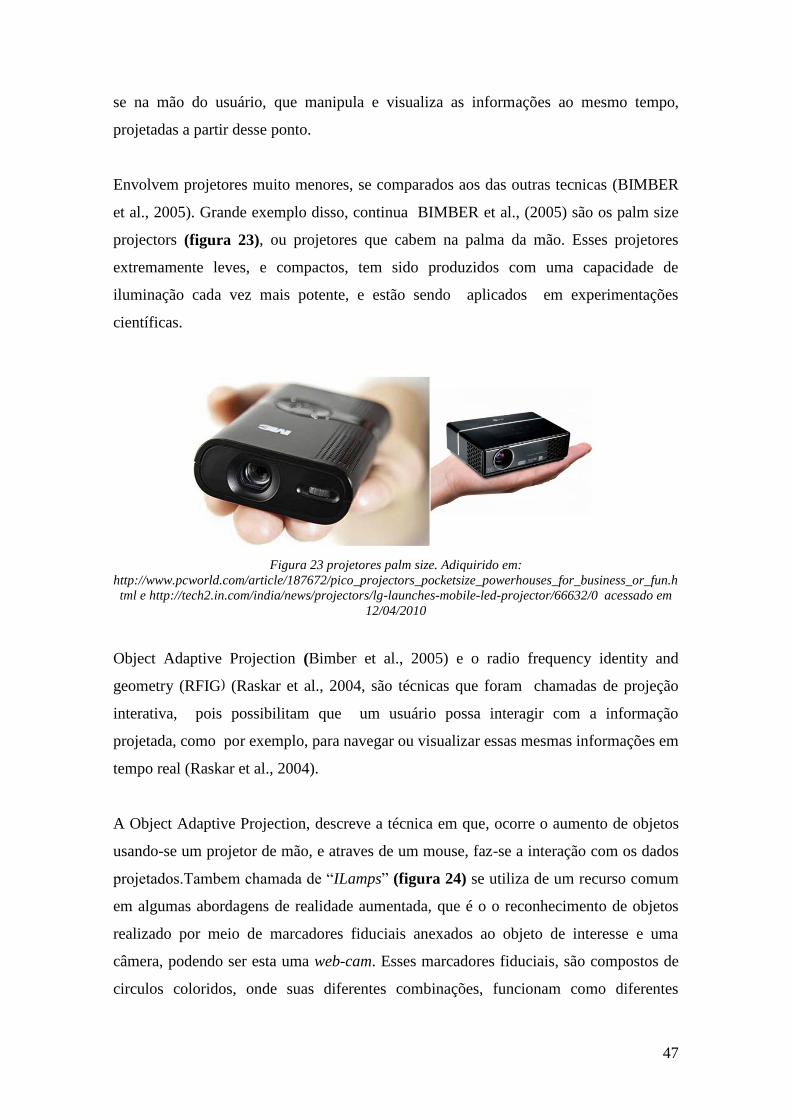
47
se na mão do usuário, que manipula e visualiza as informações ao mesmo tempo,
projetadas a partir desse ponto.
Envolvem projetores muito menores, se comparados aos das outras tecnicas (BIMBER
et al., 2005). Grande exemplo disso, continua BIMBER et al., (2005) são os palm size
projectors (figura 23), ou projetores que cabem na palma da mão. Esses projetores
extremamente leves, e compactos, tem sido produzidos com uma capacidade de
iluminação cada vez mais potente, e estão sendo aplicados em experimentações
científicas.
Figura 23 projetores palm size. Adiquirido em:
http://www.pcworld.com/article/187672/pico_projectors_pocketsize_powerhouses_for_business_or_fun.h
tml e http://tech2.in.com/india/news/projectors/lg-launches-mobile-led-projector/66632/0 acessado em
12/04/2010
Object Adaptive Projection (Bimber et al., 2005) e o radio frequency identity and
geometry (RFIG) (Raskar et al., 2004, são técnicas que foram chamadas de projeção
interativa, pois possibilitam que um usuário possa interagir com a informação
projetada, como por exemplo, para navegar ou visualizar essas mesmas informações em
tempo real (Raskar et al., 2004).
A Object Adaptive Projection, descreve a técnica em que, ocorre o aumento de objetos
usando-se um projetor de mão, e atraves de um mouse, faz-se a interação com os dados
projetados.Tambem chamada de “ILamps” (figura 24) se utiliza de um recurso comum
em algumas abordagens de realidade aumentada, que é o o reconhecimento de objetos
realizado por meio de marcadores fiduciais anexados ao objeto de interesse e uma
câmera, podendo ser esta uma web-cam. Esses marcadores fiduciais, são compostos de
circulos coloridos, onde suas diferentes combinações, funcionam como diferentes

48
codigos, que são interpretados por um computador e repassados para o projetor. Esses
marcadores fiduciais, permitem milhares de distintas codificações, e são usados para
calcular a posição da câmera (posição e orientação) e, portanto, a oposição do projetor
(Bimber et al., 2005).
Figura 24: projetor de mão na aplicação Ilamp.
Desde que o sistema esteja totalmente calibrado, utilizam-se quatro pontos coplanares
em posição conhecida do computador, em um cálculo baseado em homografia, para que
o computador possa calcular pose a pose, a posição da câmera calibrada. Pose a pose, é
uma terminologia utilizada na animação, (Williams, 2009) e se refere aos frames
captados pela camera, em que levando-se em consideração a velocidade da projeção,
seja de 24 frames por segundo, ou 30 frames por segundo, ou 15, variação que depende
da camera, cada pose representa cada frame, unidade do video captado pela camera.
O sistema pode utilizar múltiplos marcadores, em conjunto com esses pontos
coplanares, ou um único marcador, e a experiência funciona melhor na imediação
desses pontos.
As desvantagens do sistema são: a projeção é pobre no escuro ou superfícies brilhantes
e podem ser afetados pela luz ambiente (BIMBER et al., 2005).
Raskar et al.,(2004) publicou um artigo no 31th Internacional conference on computer
grafics and interactive techniques em que descreveram uma técnica que se baseia em
uma aplicação sem fio que foi chamada de radio frequency identity and geometry
(RFIG) pelos autores, ) traduzido como identidade e geometria por rádio frequência.
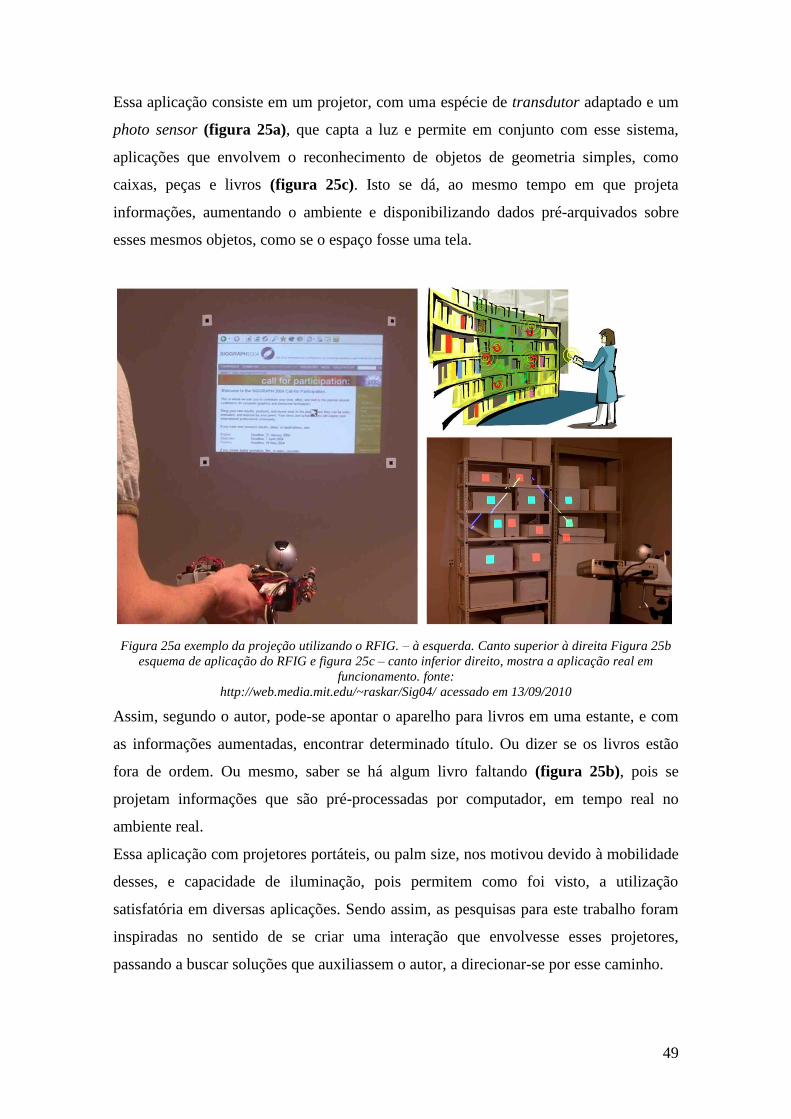
49
Essa aplicação consiste em um projetor, com uma espécie de transdutor adaptado e um
photo sensor (figura 25a), que capta a luz e permite em conjunto com esse sistema,
aplicações que envolvem o reconhecimento de objetos de geometria simples, como
caixas, peças e livros (figura 25c). Isto se dá, ao mesmo tempo em que projeta
informações, aumentando o ambiente e disponibilizando dados pré-arquivados sobre
esses mesmos objetos, como se o espaço fosse uma tela.
Figura 25a exemplo da projeção utilizando o RFIG. – à esquerda. Canto superior à direita Figura 25b
esquema de aplicação do RFIG e figura 25c – canto inferior direito, mostra a aplicação real em
funcionamento. fonte:
http://web.media.mit.edu/~raskar/Sig04/ acessado em 13/09/2010
Assim, segundo o autor, pode-se apontar o aparelho para livros em uma estante, e com
as informações aumentadas, encontrar determinado título. Ou dizer se os livros estão
fora de ordem. Ou mesmo, saber se há algum livro faltando (figura 25b), pois se
projetam informações que são pré-processadas por computador, em tempo real no
ambiente real.
Essa aplicação com projetores portáteis, ou palm size, nos motivou devido à mobilidade
desses, e capacidade de iluminação, pois permitem como foi visto, a utilização
satisfatória em diversas aplicações. Sendo assim, as pesquisas para este trabalho foram
inspiradas no sentido de se criar uma interação que envolvesse esses projetores,
passando a buscar soluções que auxiliassem o autor, a direcionar-se por esse caminho.

50
3.9 Mesa Virtual
BIMBER (2005) afirma que Os Head Mounted Displays (HMDS) e os ambientes
compostos por telas como as cavernas, são dispositivos de RV que buscam envolver por
completo quem neles se insere, e conseguintemente cercar o espectador com gráficos,
preenchendo o campo de vista do usuário, com a intenção de isolá-los do mundo real.
Para alcançar este tipo de imersão, no entanto, esses dispositivos encapsular o usuário
do mundo real, tornando difícil ou mesmo impossível em muitos
casos de combiná-los com ambientes de trabalho habitual.
Uma tecnologia de projeção e exibição, que por ser menos imersiva, se enquadra melhor
para apoiar integração da VR em locais de trabalho é a intitulada Table-like display
devices ou dispositivos de projeção em mesas, as chamadas mesas virtuais (figuras 26a
e 26b). Podem permitir que o usuário simultaneamente perceba o mundo real
circundante ao trabalhar com um ambiente virtual (BIMBER et al., 2005). O autor,
afirma que essa tecnologia representa uma espécie de fusão, entre a realidade virtual e
aumentada.
Pesquisando sobre uma definição de mesa virtual, encontramos em (TORI et al., 2006),
a seguinte: “A mesa virtual consiste de uma base horizontal ou inclinada de vidro ou
plástico, onde é projetada uma imagem que pode possuir efeitos estereoscópicos, de
forma que o usuário possa visualizar e manipular objetos à sua frente em três dimensões
com o uso de óculos estereoscópicos. Uma variação da mesa virtual consiste em ter dois
planos perpendiculares, dando maior campo de visão e realismo”.
Figuras 26a (à direita). Desenho esquemático de uma mesa virtual, que é composta por projetor,
sensores infra-vermelhos, rastreadores de posição do usuário, espelhos, e dispositivos sonoros. Figura
26b (à esquerda) exemplo de mesa virtual multitotch http://thegadgethubs.com/?attachment_id=16
acessado em 05/10/2010
51
Essa tecnologia permite a exibição de vários tipos de informações, onde a mesa virtual
funciona à maneira de uma tela de computador, podendo assim suportar animações de
vários tipos, gráficos 3D, jogos virtuais, ao mesmo tempo em que permite a interação
com o usuário. No entanto essa técnica não influenciou muito as pesquisas para essa
dissertação, devido ao baixo grau de imersão, pois no que tange a museus LEPOURAS
et al., ( 2005)
Afirma que “nenhuma experiência pode se comparar ao fato de se estar presente nos
museus, e que os sistemas imersivos de RV, transmitem uma sensação de presença
plausível.”
3.10 O quarto luminoso
Permite a visualização gráfica e interação em cada uma das superficies do interior de
um espaço arquitetônico. UNDERKOFFLER et al., (2001) completa: quarto luminoso
apud (UNDERKOFFLER97) é um ambiente parcialmente imersivo, onde se projetam
e, em seguida, se geram imagens 2D em superfícies planas em uma sala para aumentar
o ambiente do usuário.
O quarto luminoso, se diferencia do sistema Being there, pois diferentemente deste, não
se aumenta todo o espaço, apenas uma parte, ( parede, pilastra, mesa), que funciona à
semelhança de tela de computador, permitindo a interação com o usuario.
Para exemplificar, . UNDERKOFFLER descreve uma aplicação, que consiste em
colocar um grande tabuleiro de xadrez projetado em qualquer lugar da à parede, onde se
aciona um sistema, que faz com que o tabuleiro de xadrez seja rapidamente preenchido
com peças animadas; Atraves de um sistema de captura de gestos, pode-se mover o
tabuleiro virtual, ou as peças, com as mãos, o que induz as peças a passar às novas
posições apropriadas.
Apesar das claras semelhanças, esse sistema se difere dos sistemas como CAVE, Mesa
digital, e SHADER LAMPS em alguns aspectos chave. Para começãr, a intenção do
Quarto luminoso, é 'pintar' os objetos físicos e superfícies que constituem o mundo real,
como os outros, mas não intenta utilizar qualquer aparato como capacetes ou luvas,
52
libertando-se destes, e tendo apenas os artefatosd fisicos como mediadores entre o
usuario e o mundo virtual. (UNDERKOFFLER et al., 1999). Sendo assim, só se utiliza
dos sistemas de rastreamento que captem as partes do corpo do usuário de forma
natural, sem nenhum dispositivo nestas acoplado.
3.11 IDome
Já se citou os ambientes virtuais compostos por uma tela plana, os panoramas, por multi
telas planas, a CAVE, as projeções em ambientes arquitetônicos, being there e até
ambiente virtual composto por uma super tela de projeção, o IMAX. Em nossas
pesquisas, descobrimos mais uma variante desses sistemas, que pode ser classificado na
categoria de RV de projeção. No artigo intitulado IDome: Immersive gaming with the
Unity3D game engine, BOURKE ( 2009) descreve o IDome, que se enquadra na
categoria dos sistemas de projeção compostos por telas em formato de domos, ou
hemisférios.
Como mostrado no IMAX, existem variações dos sistemas imersivos, como os sistemas
de projeção semi-esféricos, que ao invés de possuírem uma tela plana, possuem uma
tela esférica e a projeção é feita por um projetor disposto entre o usuário e a tela. Estes
sistemas apresentam algumas vantagens por não possuir descontinuidades de imagem,
porém a presença do projetor impede que o usuário se aproxime muito da tela.
(SOARES et al., 2006)
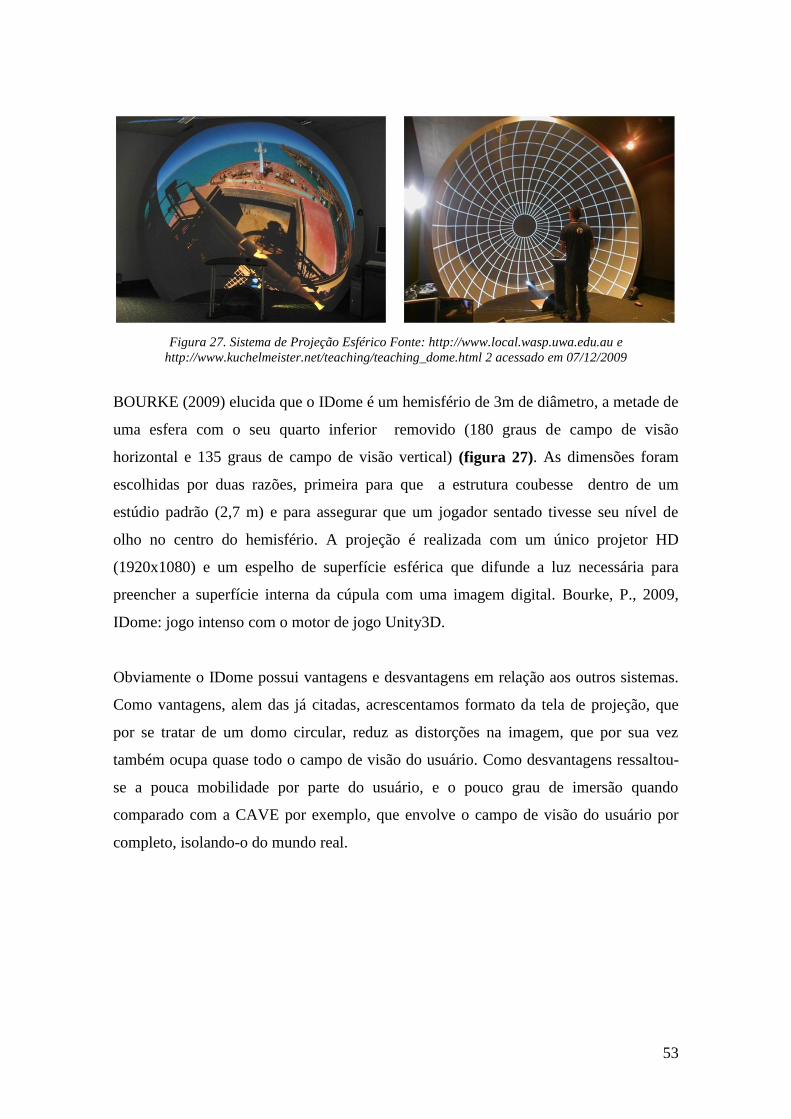
53
Figura 27. Sistema de Projeção Esférico Fonte: http://www.local.wasp.uwa.edu.au e
http://www.kuchelmeister.net/teaching/teaching_dome.html 2 acessado em 07/12/2009
BOURKE (2009) elucida que o IDome é um hemisfério de 3m de diâmetro, a metade de
uma esfera com o seu quarto inferior removido (180 graus de campo de visão
horizontal e 135 graus de campo de visão vertical) (figura 27). As dimensões foram
escolhidas por duas razões, primeira para que a estrutura coubesse dentro de um
estúdio padrão (2,7 m) e para assegurar que um jogador sentado tivesse seu nível de
olho no centro do hemisfério. A projeção é realizada com um único projetor HD
(1920x1080) e um espelho de superfície esférica que difunde a luz necessária para
preencher a superfície interna da cúpula com uma imagem digital. Bourke, P., 2009,
IDome: jogo intenso com o motor de jogo Unity3D.
Obviamente o IDome possui vantagens e desvantagens em relação aos outros sistemas.
Como vantagens, alem das já citadas, acrescentamos formato da tela de projeção, que
por se tratar de um domo circular, reduz as distorções na imagem, que por sua vez
também ocupa quase todo o campo de visão do usuário. Como desvantagens ressaltou-
se a pouca mobilidade por parte do usuário, e o pouco grau de imersão quando
comparado com a CAVE por exemplo, que envolve o campo de visão do usuário por
completo, isolando-o do mundo real.
54
4 – METODOLOGIA
4.1 - Sistema pessoal de projeção: Dispositivo de rastreamento da
cabeça
Estudando das aplicações de realidade Virtual de projeção e realidade aumentada
espacial assim como através de conversas com orientadores, pensou-se um modelo que
pudesse solucionar o problema proposto nessa dissertação, e responder a hipótese
levantada.
Dos exemplos estudados, têm-se no projetor de bolso, uma solução viável para
experiências com Realidade Virtual de projeção, devido ao baixo custo destes, em
relação aos projetores maiores, e dificuldade de manuseio destes em relação à aqueles.
A luminosidade dos projetores menores também foi inspiradora para o trabalho, visto
que têm sido lançados no mercado, projetores palm sized, com luminosidades cada vez
mais potentes.
Assim, nos inspiramos nos exemplos de Realidade Virtual de Projeção e Realidade
Aumentada Espacial para buscar um modelo que pudesse emular a „visão do mineiro‟,
onde o usuário tivesse a sensação de estar com um capacete de mineiro, e que este se
traduzisse na única possibilidade visual para o cenário, que no caso deste trabalho, será
virtual.
Analisamos a princípio, uma forma de interação semelhante aos ambientes Being there,
onde com um cenário virtual pre-modelado em 3D, construiria-se a réplica no mundo
real, para que esta réplica, servisse de superfície de projeção. Projetar-se-iam as
imagens sobrepostas ao cenário virtual, com este tendo o registro destas imagens feito
via computador. Assim, o usuário poderia caminhar pelo cenário real, projetando o
cenário virtual a semelhança do mineiro, que apenas vê o ponto em que a luz toca. O
problema é que os ambientes Being there, segundo nossas pesquisas, funcionam bem
com ambientes arquitetonicos, limitando muito os ambientes a serem utilizados.
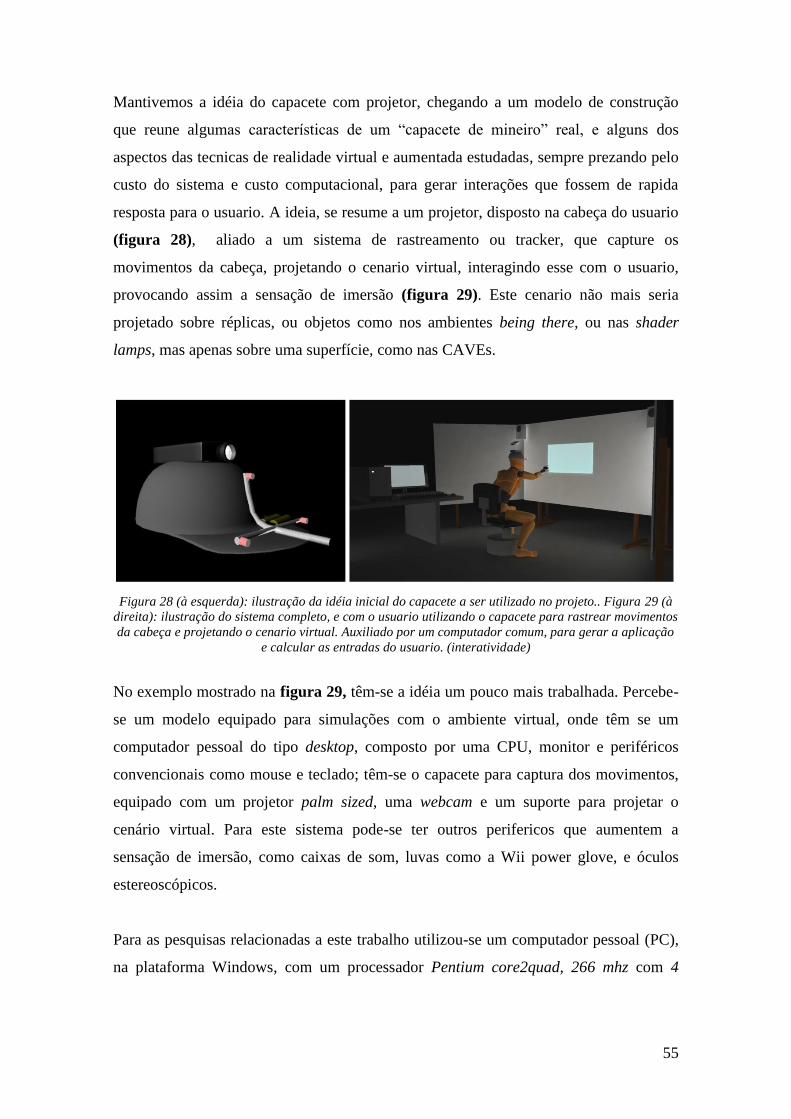
55
Mantivemos a idéia do capacete com projetor, chegando a um modelo de construção
que reune algumas características de um “capacete de mineiro” real, e alguns dos
aspectos das tecnicas de realidade virtual e aumentada estudadas, sempre prezando pelo
custo do sistema e custo computacional, para gerar interações que fossem de rapida
resposta para o usuario. A ideia, se resume a um projetor, disposto na cabeça do usuario
(figura 28), aliado a um sistema de rastreamento ou tracker, que capture os
movimentos da cabeça, projetando o cenario virtual, interagindo esse com o usuario,
provocando assim a sensação de imersão (figura 29). Este cenario não mais seria
projetado sobre réplicas, ou objetos como nos ambientes being there, ou nas shader
lamps, mas apenas sobre uma superfície, como nas CAVEs.
Figura 28 (à esquerda): ilustração da idéia inicial do capacete a ser utilizado no projeto.. Figura 29 (à
direita): ilustração do sistema completo, e com o usuario utilizando o capacete para rastrear movimentos
da cabeça e projetando o cenario virtual. Auxiliado por um computador comum, para gerar a aplicação
e calcular as entradas do usuario. (interatividade)
No exemplo mostrado na figura 29, têm-se a idéia um pouco mais trabalhada. Percebe-
se um modelo equipado para simulações com o ambiente virtual, onde têm se um
computador pessoal do tipo desktop, composto por uma CPU, monitor e periféricos
convencionais como mouse e teclado; têm-se o capacete para captura dos movimentos,
equipado com um projetor palm sized, uma webcam e um suporte para projetar o
cenário virtual. Para este sistema pode-se ter outros perifericos que aumentem a
sensação de imersão, como caixas de som, luvas como a Wii power glove, e óculos
estereoscópicos.
Para as pesquisas relacionadas a este trabalho utilizou-se um computador pessoal (PC),
na plataforma Windows, com um processador Pentium core2quad, 266 mhz com 4
56
gigabites de memória ram, e uma placa grafica com um gigabite de memoria para
processamento dos graficos 3D
O metodo científico utilizado neste trabalho foi o método de tentativa e erro, onde a
partir do problema proposto, pesquisou-se soluções para este problema, testando-se
estas propostas, e partindo do que funcionasse para prosseguimento da pesquisa.
Os fatores para escolha de um sistema de rastreamento dizem respeito a sensibilidade,
fidelidade aos movimentos e usabilidade. Todos os Trackers 3D independente da
tecnologia que se utilizem, possuem alguns parâmetros de desempenho comuns, tais
quais acuidade, “jitter”, “drift”, e “latência”. (BURDEA et al., 2003). Esses parâmetros
auxiliam a medir a eficácia do Tracker para a captura dos movimentos.
A acuidade representa a diferença entre a posição do objeto virtual e a posição reportada
pelos cálculos do “Tracker”. Quanto maior a acuidade, menor a diferença entre estes
fatores, e melhor a simulação para o usuário. (BURDEA et al., 2003)
“jitter” representa a mudança de posição no objeto mesmo quando o dispositivo
responsável pelo rastreamento esta parado. Um Tracker sem jitter deve relatar um valor
constante se o dispositivo de rastreamento esta parado durante certo tempo qualquer.
Esse jitter, quando não minimizado, provoca efeitos indesejados na simulação, como
tremores, saltos, e movimentos inesperados. (BURDEA et al., 2003). Normalmente os
Trackers possuem algum valor de jittering, mesmo que mínimo.
“drift” representa o crescente aparecimento de comandos indesejados durante a
simulação, como saltos ou tremores, ou ate mesmo deslocamentos pelo cenário que não
foram comandados pelo usuário. Não notamos esse problema em nossos experimentos
com o Freetrack. (BURDEA et al., 2003).
A latência é o atraso de tempo entre a ação e o resultado. No caso do Tracker 3D, a
latência é o tempo entre o sistema perceber a mudança na posição do Tracker, e
transmiti-la ao objeto 3D. Alguns HMDs possuem alta latência, com um grande atraso
entre a mudança de posição da cabeça do usuário, e consequente mudança de seu ponto
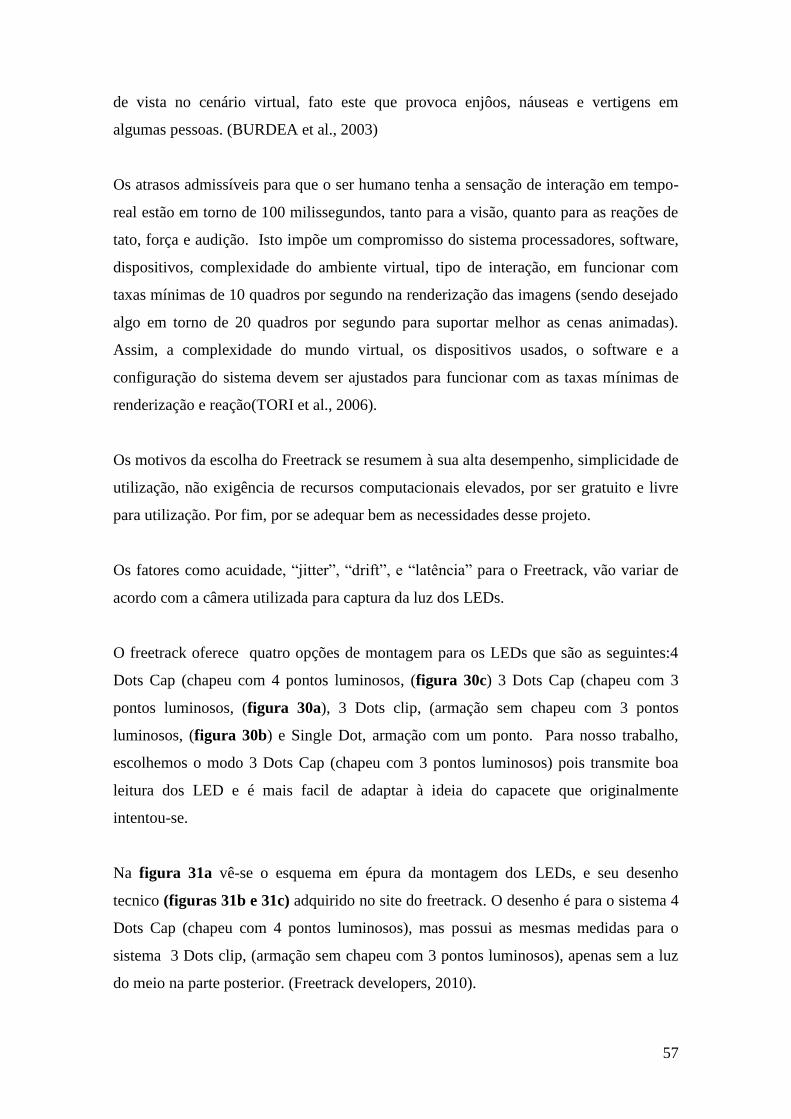
57
de vista no cenário virtual, fato este que provoca enjôos, náuseas e vertigens em
algumas pessoas. (BURDEA et al., 2003)
Os atrasos admissíveis para que o ser humano tenha a sensação de interação em tempo-
real estão em torno de 100 milissegundos, tanto para a visão, quanto para as reações de
tato, força e audição. Isto impõe um compromisso do sistema processadores, software,
dispositivos, complexidade do ambiente virtual, tipo de interação, em funcionar com
taxas mínimas de 10 quadros por segundo na renderização das imagens (sendo desejado
algo em torno de 20 quadros por segundo para suportar melhor as cenas animadas).
Assim, a complexidade do mundo virtual, os dispositivos usados, o software e a
configuração do sistema devem ser ajustados para funcionar com as taxas mínimas de
renderização e reação(TORI et al., 2006).
Os motivos da escolha do Freetrack se resumem à sua alta desempenho, simplicidade de
utilização, não exigência de recursos computacionais elevados, por ser gratuito e livre
para utilização. Por fim, por se adequar bem as necessidades desse projeto.
Os fatores como acuidade, “jitter”, “drift”, e “latência” para o Freetrack, vão variar de
acordo com a câmera utilizada para captura da luz dos LEDs.
O freetrack oferece quatro opções de montagem para os LEDs que são as seguintes:4
Dots Cap (chapeu com 4 pontos luminosos, (figura 30c) 3 Dots Cap (chapeu com 3
pontos luminosos, (figura 30a), 3 Dots clip, (armação sem chapeu com 3 pontos
luminosos, (figura 30b) e Single Dot, armação com um ponto. Para nosso trabalho,
escolhemos o modo 3 Dots Cap (chapeu com 3 pontos luminosos) pois transmite boa
leitura dos LED e é mais facil de adaptar à ideia do capacete que originalmente
intentou-se.
Na figura 31a vê-se o esquema em épura da montagem dos LEDs, e seu desenho
tecnico (figuras 31b e 31c) adquirido no site do freetrack. O desenho é para o sistema 4
Dots Cap (chapeu com 4 pontos luminosos), mas possui as mesmas medidas para o
sistema 3 Dots clip, (armação sem chapeu com 3 pontos luminosos), apenas sem a luz
do meio na parte posterior. (Freetrack developers, 2010).
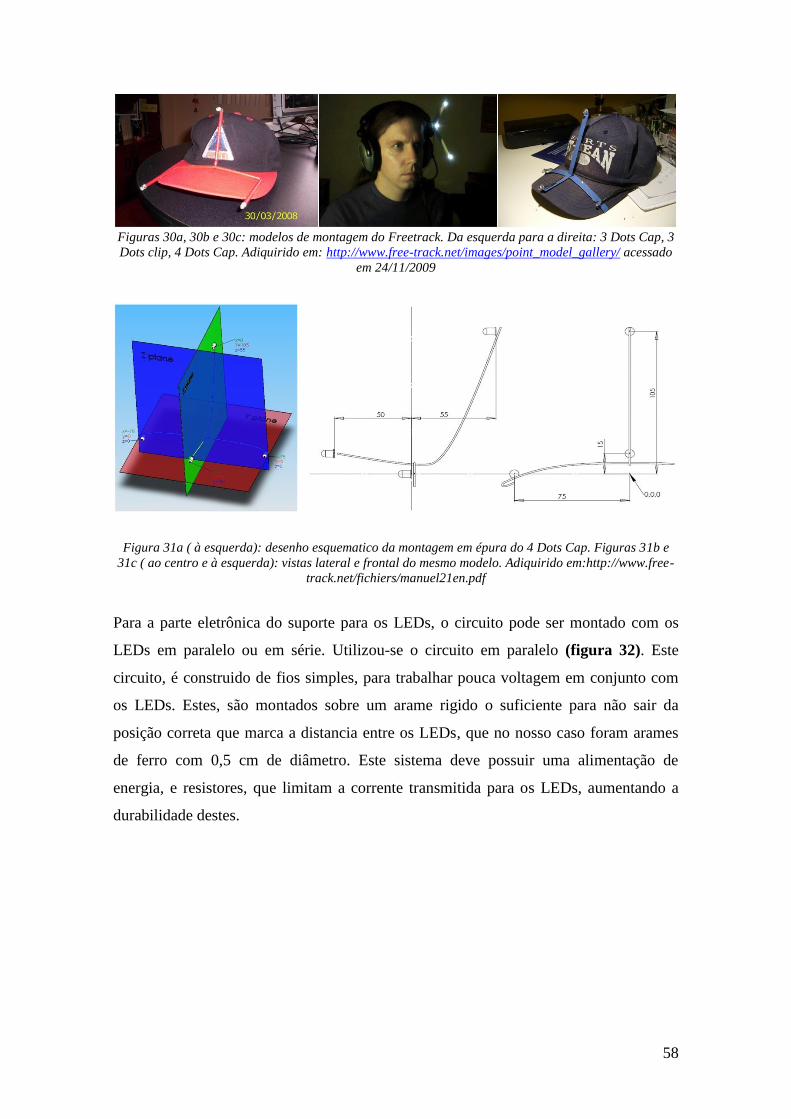
58
Figuras 30a, 30b e 30c: modelos de montagem do Freetrack. Da esquerda para a direita: 3 Dots Cap, 3
Dots clip, 4 Dots Cap. Adiquirido em: http://www.free-track.net/images/point_model_gallery/ acessado
em 24/11/2009
Figura 31a ( à esquerda): desenho esquematico da montagem em épura do 4 Dots Cap. Figuras 31b e
31c ( ao centro e à esquerda): vistas lateral e frontal do mesmo modelo. Adiquirido em:http://www.free-
track.net/fichiers/manuel21en.pdf
Para a parte eletrônica do suporte para os LEDs, o circuito pode ser montado com os
LEDs em paralelo ou em série. Utilizou-se o circuito em paralelo (figura 32). Este
circuito, é construido de fios simples, para trabalhar pouca voltagem em conjunto com
os LEDs. Estes, são montados sobre um arame rigido o suficiente para não sair da
posição correta que marca a distancia entre os LEDs, que no nosso caso foram arames
de ferro com 0,5 cm de diâmetro. Este sistema deve possuir uma alimentação de
energia, e resistores, que limitam a corrente transmitida para os LEDs, aumentando a
durabilidade destes.
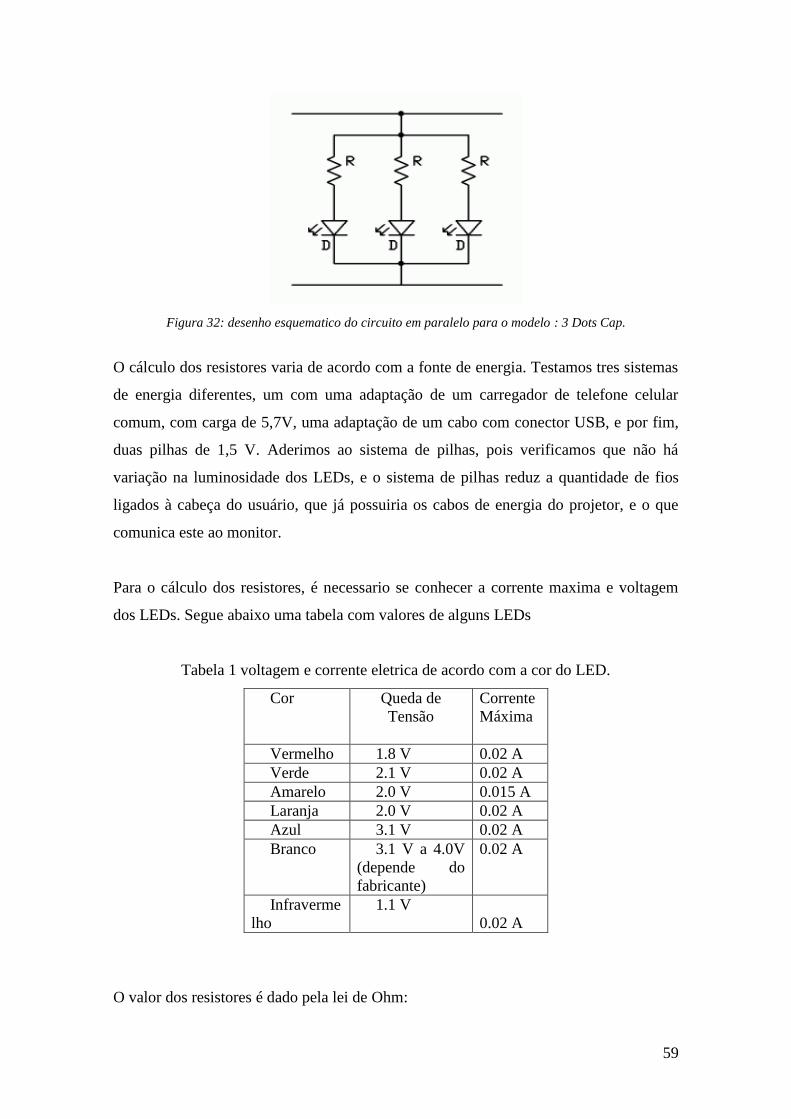
59
Figura 32: desenho esquematico do circuito em paralelo para o modelo : 3 Dots Cap.
O cálculo dos resistores varia de acordo com a fonte de energia. Testamos tres sistemas
de energia diferentes, um com uma adaptação de um carregador de telefone celular
comum, com carga de 5,7V, uma adaptação de um cabo com conector USB, e por fim,
duas pilhas de 1,5 V. Aderimos ao sistema de pilhas, pois verificamos que não há
variação na luminosidade dos LEDs, e o sistema de pilhas reduz a quantidade de fios
ligados à cabeça do usuário, que já possuiria os cabos de energia do projetor, e o que
comunica este ao monitor.
Para o cálculo dos resistores, é necessario se conhecer a corrente maxima e voltagem
dos LEDs. Segue abaixo uma tabela com valores de alguns LEDs
Tabela 1 voltagem e corrente eletrica de acordo com a cor do LED.
Cor Queda de
Tensão
Corrente
Máxima
Vermelho 1.8 V 0.02 A
Verde 2.1 V 0.02 A
Amarelo 2.0 V 0.015 A
Laranja 2.0 V 0.02 A
Azul 3.1 V 0.02 A
Branco 3.1 V a 4.0V
(depende do
fabricante)
0.02 A
Infraverme
lho
1.1 V
0.02 A
O valor dos resistores é dado pela lei de Ohm:
60
Sendo R o valor da resistencia que se intenta calcular, e I o valor da corrente maxima
suportada pelo Led dada em “ampéres”, V corresponde à voltagem total da alimentação
de energia, (pilha, carregador de celular) decrecido da voltagem do led. Assim, para o
LED vermelho que utilizamos, com uma fonte de energia composta por duas pilhas de
1,5 V, tem-se a necessidade de tres resistores de 60000 ohms, um para cada LED de
acordo com o modelo de Track que escolhemos. Não nos aprofundamos nessa questão,
visto que o pesquisador não possui formação em eletrônica, a intenção consiste em
apenas relatar a construção basica do modelo.
Iniciamos as pesquisas com Leds vermelhos, sendo que esta cor dos LEDs foi
selecionada, pois as cores amarelo e vermelho, possuem um ângulo de radiação maior, e
sendo assim, são melhor captadas pelo freetrack do que as cores chamadas “frias”,
como azul ou verde.. Os LEDs devem ser de 5mm, exigência do manual de
funcionamento do programa, e tambem trabalha com LEDs de alta intensidade.
Para os testes com esses LEDs, desenvolveu-se um suporte adaptado sobre um boné
comum (figuras 34a e 34b), para que pudessemos iniciar os experimentos com a
captura dos movimentos da cabeça. Como essa fase do projeto foi experimental,
procurou-se construir um modelo o mais simples possível, sendo esse bastante
improvisado. Esse primeiro suporte é composto pela armação de arames que suporta os
LEDs, sendo esses arames de ferro e possuindo 0,5 cm de diâmetro como já foi
relatado, a fiação composta de fios de cobre com bitola de 1,5mm. Por fim um suporte
de plástico para pilhas de 1,5v, com uma adaptação para que comporte o suporte para as
duas pilhas de 1,5 V, (figuras 34a e 34b), opção escolhida para a alimentação desse
sistema.
Para a montagem deste suporte, foi importante que o arame ficasse na posição marcada,
distando as distâncias corretas específicadas para os LEDs, caso contrário, o
desempenho do Freetrack é baixo, ou até mesmo não funciona. Sendo assim, os arames
foram selecionados de forma que fossem maleáveis o baltante para serem postos na
61
posição, e rígidos o suficiente para não sairem dela, durante o processo de navegação
com o capacete.
À esquerda Figura33:camera A4Tech PK 335. Ao centro e à direita, figuras 34a e 34b : modelo
improvisado para o track 3 Dots Cap.
Buscou-se a seguir qual seria o modelo de web-cam, que mais se adaptaria às
necessidades do projeto, das que são reconhecidas pelo freetrack. Levantou-se os dados
sobre os modelos reconhecidos, segundo lista existente no site do freetrack,
http://www.free-track.net/english/ (acessado em 12/12/2009) e produziu-se a tabela
representada logo abaixo:
Tabela 2 tipos de câmeras utilizadas pelo Freetrack
câmera Taxa de
fps
valor Filtro IR Gasto
computaciona
l de CPU
Area de
visualização
Nintendo
Wii
Remote
100fps
constant
e
Approx. $80
USD
Sem filtro IR Praticamente
nenhum gasto
Microsoft
TravelCa
m
30 fps
constant
e
Approx. $30
USD
Necessária a
remoção do
filtro para bom
funcionamento
.
Pouco gasto
de CPU
Excelente
campo de
visualização
de 640x480,
com boa área
para
movimentaçã
o dos LEDs
Logitech
QuickCam
30fps
oscilante
Approx $9
USD
Necessária
remoção,
Muito gasto
de CPU
Excelente
campo de
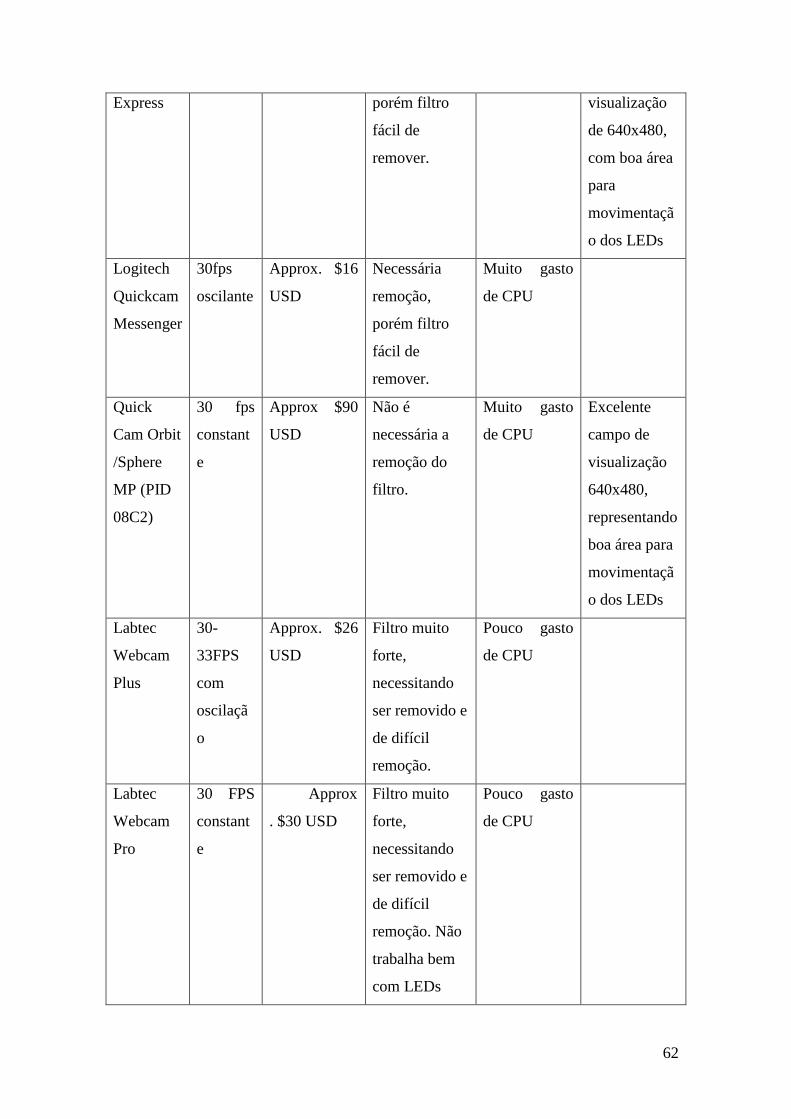
62
Express porém filtro
fácil de
remover.
visualização
de 640x480,
com boa área
para
movimentaçã
o dos LEDs
Logitech
Quickcam
Messenger
30fps
oscilante
Approx. $16
USD
Necessária
remoção,
porém filtro
fácil de
remover.
Muito gasto
de CPU
Quick
Cam Orbit
/Sphere
MP (PID
08C2)
30 fps
constant
e
Approx $90
USD
Não é
necessária a
remoção do
filtro.
Muito gasto
de CPU
Excelente
campo de
visualização
640x480,
representando
boa área para
movimentaçã
o dos LEDs
Labtec
Webcam
Plus
30-
33FPS
com
oscilaçã
o
Approx. $26
USD
Filtro muito
forte,
necessitando
ser removido e
de difícil
remoção.
Pouco gasto
de CPU
Labtec
Webcam
Pro
30 FPS
constant
e
Approx
. $30 USD
Filtro muito
forte,
necessitando
ser removido e
de difícil
remoção. Não
trabalha bem
com LEDs
Pouco gasto
de CPU
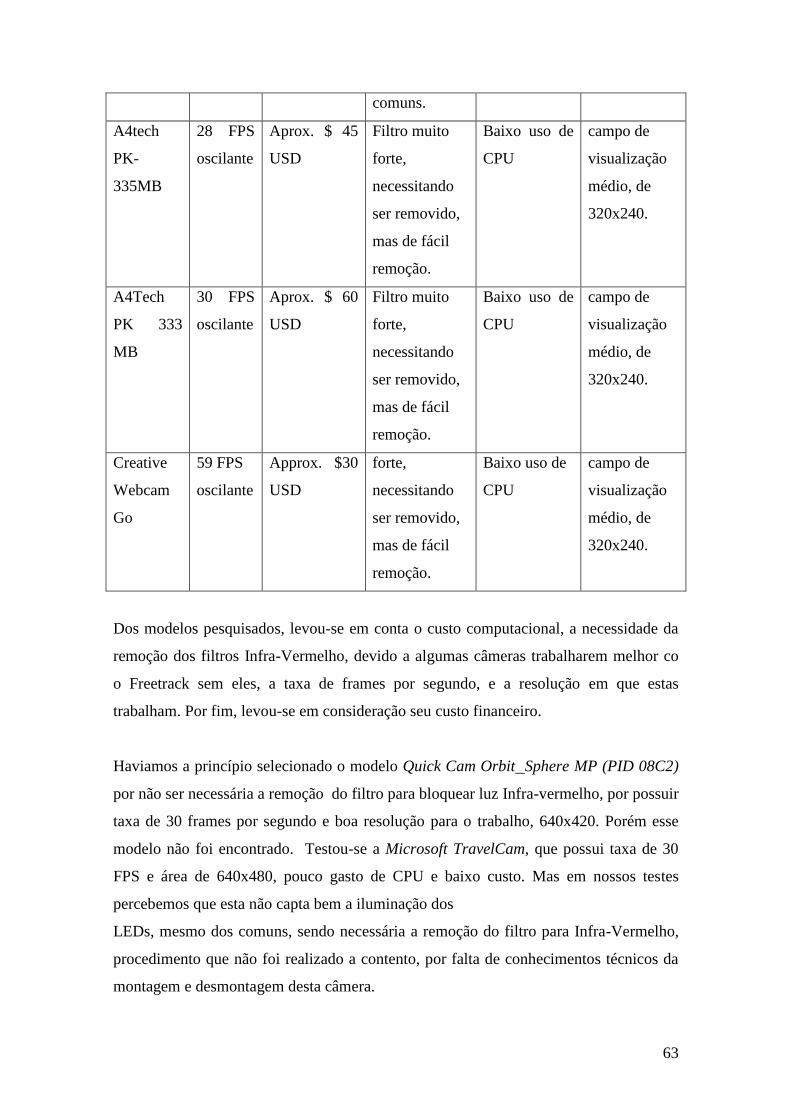
63
comuns.
A4tech
PK-
335MB
28 FPS
oscilante
Aprox. $ 45
USD
Filtro muito
forte,
necessitando
ser removido,
mas de fácil
remoção.
Baixo uso de
CPU
campo de
visualização
médio, de
320x240.
A4Tech
PK 333
MB
30 FPS
oscilante
Aprox. $ 60
USD
Filtro muito
forte,
necessitando
ser removido,
mas de fácil
remoção.
Baixo uso de
CPU
campo de
visualização
médio, de
320x240.
Creative
Webcam
Go
59 FPS
oscilante
Approx. $30
USD
forte,
necessitando
ser removido,
mas de fácil
remoção.
Baixo uso de
CPU
campo de
visualização
médio, de
320x240.
Dos modelos pesquisados, levou-se em conta o custo computacional, a necessidade da
remoção dos filtros Infra-Vermelho, devido a algumas câmeras trabalharem melhor co
o Freetrack sem eles, a taxa de frames por segundo, e a resolução em que estas
trabalham. Por fim, levou-se em consideração seu custo financeiro.
Haviamos a princípio selecionado o modelo Quick Cam Orbit Sphere MP (PID 08C2)
por não ser necessária a remoção do filtro para bloquear luz Infra-vermelho, por possuir
taxa de 30 frames por segundo e boa resolução para o trabalho, 640x420. Porém esse
modelo não foi encontrado. Testou-se a Microsoft TravelCam, que possui taxa de 30
FPS e área de 640x480, pouco gasto de CPU e baixo custo. Mas em nossos testes
percebemos que esta não capta bem a iluminação dos
LEDs, mesmo dos comuns, sendo necessária a remoção do filtro para Infra-Vermelho,
procedimento que não foi realizado a contento, por falta de conhecimentos técnicos da
montagem e desmontagem desta câmera.

64
Testou-se a Logitech QuickCam Express, que possui baixíssimo custo e boa área para
movimentar-se os LEDs, mas exige muito processamento do computador, tornando a
aplicação lenta em demasia com auto nível de latência, quebrando a ilusão de se
navegar pelo cenário em tempo real. O problema pode ser resolvido com uma CPU mais
potente, mas isto limitaria o uso do capacete à necessidade de computadores potentes.
O modelo Labtec Webcam Plus também foi testado, apresentando uma taxa
considerável para o trabalho, de até 33 frames por segundo, representando boa fluidez
dos movimentos. Porém esta câmera apresentou “jitter” acentuado, que comprometeu a
fluidez da movimentação e percalços gerados por movimentos estranhos aos realizados
pelo usuário. Também possui um filtro Infra Vermelho fortíssimo, que atrapalha a
visualização dos LEDs, mesmo os comuns, e este filtro, também não pode ser removido
por falta de conhecimentos técnicos.
Por fim testou-se o modelo A4tech PK-335MB(figura 33), que captou a contento a luz
dos LEDs, possui uma taxa de frames por segundo por volta de 28, com pouca
oscilação, baixo preço, e possui baixa taxa de “jitering”.
O projetor utilizado foi o Poket Projector PK20 da MITSUBISHI (figura 44), que nos
foi cedido pelo GRVA/LAMCE/COPPE para os testes e pesquisas.
A câmera deve estar corretamente instalada no computador, antes de se iniciar o
aplicativo do Freetrack. Em nosso trabalho, a plataforma utilizada foi Windows.
Iniciou-se a configuração do freetrack, que reconhece a web-cam automaticamente após
o programa ser aberto (figura 35), assim que esta estiver com seus drivers,
corretamente instalados no computador. Na interface do Freetrack tem-se a marcação da
taxa de frames por segundo, e jitter por segundo, onde a primeira deve ser superior a 25,
para que se possa trabalhar, sendo acima de 30 o ideal para a fluidez dos movimentos, e
a taxa de jitter deve ser inferior a 10 para que não haja percalços aos movimentos. Essas
taxas vão depender da câmera que esteja sendo utilizada para captura dos movimentos,
sendo que alem dessa variação, também possuem a caracteristica de serem estáveis em
umas, e oscilantes em outras, variando de índices baixos a valores mais altos,
dificultando a fluidez dos movimentos. Para o modelo de nossa câmera conseguimos
uma taxa oscilante de 20 a 28 frames por segundo, e jitter variando de 10 a 0 (figura

65
34). Quando as melhores taxas para navegação são alcançadas, o proprio programa
avisa, tornando os números referentes aos frames por segundo e jitter por segundo da
cor verde. Também há as configurações para cada tipo de câmera, onde se configura a
resolução, tyaxas de frames por segundo, brilho e contraste.
Figura 35: utilização do Freetrack, com o programa funcionando e demonstrando as taxas de” jittering”
por segundo e frames por segundo.
Após a configuração, deve-se ajustar os movimentos de rotação e translação no proporio
freetrack, para encontrar o equilibrio entre a sensibilidade do sistema e os movimentos
da cabeça. Essa calibração é importante, pois se não for realizada a contento, torna
quase impossível a navegação utilizando o freetrack, que não traduz corretamente os
movimentos captados pela câmera. Observou-se a existência de três etapas de
configuração de sensibilidade, o que possibilita uma sensibilidade bastante apurada do
sistema.
Na interface do Freetrack, na aba “CAM‟, há um crânio virtual (figura 35), que
demonstra como o software está interpretando os movimentos realizados pela cabeça do
usuário. Este serve como referência para a regulagem do sistema.
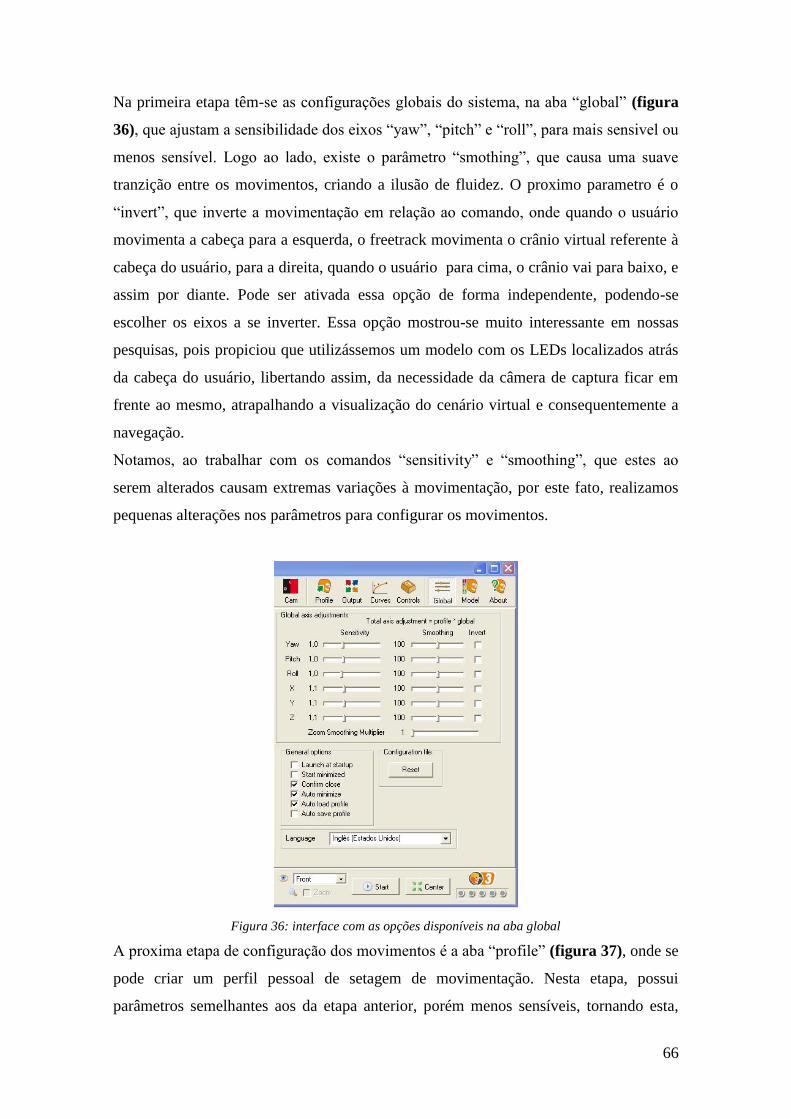
66
Na primeira etapa têm-se as configurações globais do sistema, na aba “global” (figura
36), que ajustam a sensibilidade dos eixos “yaw”, “pitch” e “roll”, para mais sensivel ou
menos sensível. Logo ao lado, existe o parâmetro “smothing”, que causa uma suave
tranzição entre os movimentos, criando a ilusão de fluidez. O proximo parametro é o
“invert”, que inverte a movimentação em relação ao comando, onde quando o usuário
movimenta a cabeça para a esquerda, o freetrack movimenta o crânio virtual referente à
cabeça do usuário, para a direita, quando o usuário para cima, o crânio vai para baixo, e
assim por diante. Pode ser ativada essa opção de forma independente, podendo-se
escolher os eixos a se inverter. Essa opção mostrou-se muito interessante em nossas
pesquisas, pois propiciou que utilizássemos um modelo com os LEDs localizados atrás
da cabeça do usuário, libertando assim, da necessidade da câmera de captura ficar em
frente ao mesmo, atrapalhando a visualização do cenário virtual e consequentemente a
navegação.
Notamos, ao trabalhar com os comandos “sensitivity” e “smoothing”, que estes ao
serem alterados causam extremas variações à movimentação, por este fato, realizamos
pequenas alterações nos parâmetros para configurar os movimentos.
Figura 36: interface com as opções disponíveis na aba global
A proxima etapa de configuração dos movimentos é a aba “profile” (figura 37), onde se
pode criar um perfil pessoal de setagem de movimentação. Nesta etapa, possui
parâmetros semelhantes aos da etapa anterior, porém menos sensíveis, tornando esta,

67
uma etapa de ajustes finos à movimentação. o processo de configuração da
movimentação é realizado de maneira semelhante ao da etapa anterior, permitindo
também a inversão dos movimentos. O precesso de calibração foi realizado no método
de ajuste e teste, até que se encontrasse uma movimentação que fosse satisfatória.
Quando esta fosse alcançada, basta salvar um perfil, que guarda as informações de
configuração, não necessitando uma nova setagem a cada vez que o sistema fosse
utilizado.
Figura 37 interface com as opções disponíveis na aba profile.
A ultima etapa da configuração da aba “curves”, onde existem curvas que podem gerar
efeitos interessantes à movimentação(figura 38 e 39), e suavisar de forma não linear os
movimentos. Aprofundando essa questão, tem-se que os movimentos humanos são
realizados de forma não linear, ou seja, possuem aceleração e desaceleração que variam
não lineramente, princípio que os animadores na computação gráfica 3D e nos desenhos
animados 2D, chamam de “ease in” e “ease out”. (WILLIAMS 2006). Assim a correta
configuração dessas curvas, para cada eixo de rotação e de translação, pode emular esse
efeito, tornando a movimentação pelo mundo virtual mais orgânica e ainda mais
realista.

68
Figura 38: curvas que auxiliam na regulagem dos canais “yaw”, “pitch” e “roll” em seu padrão, assim
que instalamos e abrimos o Freetrack pela primeira vez.
Figura 39: curvas que auxiliam na regulagem dos canais “yaw”, “pitch” e “roll” ajustadas para dar um
efeito interessante à movimentação pelo cenário virtual,
O processo de calibração nesta etapa tambem foi realizado pelo metodo de ajuste e
teste, até que se alcançasse uma movimentação satisfatória.
Ao realizar-se os testes após feita essa configuração, foram feitos os primeiros testes
com o Freetrack e o “tracker” que construimos. Percebeu-se que o freetrack captou os
movimentos da cabeça, porem, com grande interferência. Notou-se que nesse sistema
com LEDs comuns, e webcam, é extremamente sensivel à luz ambiente, tanto quanto à
luz do LED, confundindo o monitoramento dos LEDs pelo sistema (figuras 40a e 40b),
e assim, impossibilitando o rastreamento da posição da cabeça do usuário pelo
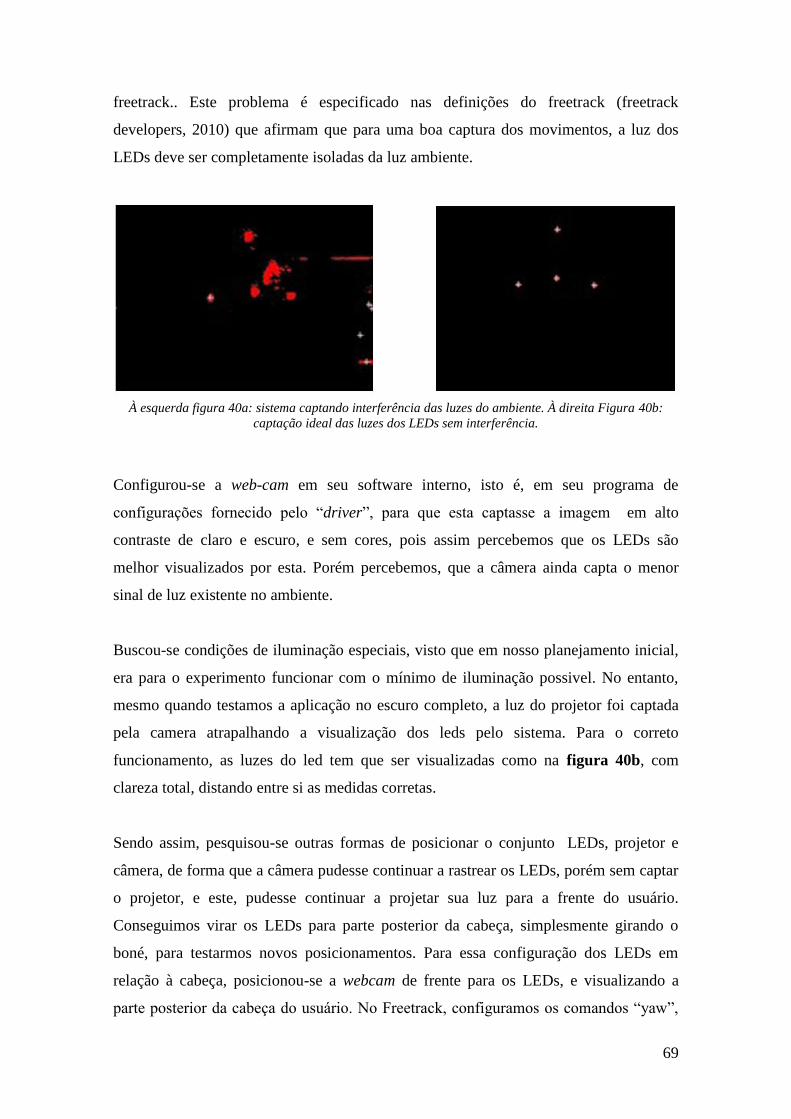
69
freetrack.. Este problema é especificado nas definições do freetrack (freetrack
developers, 2010) que afirmam que para uma boa captura dos movimentos, a luz dos
LEDs deve ser completamente isoladas da luz ambiente.
À esquerda figura 40a: sistema captando interferência das luzes do ambiente. À direita Figura 40b:
captação ideal das luzes dos LEDs sem interferência.
Configurou-se a web-cam em seu software interno, isto é, em seu programa de
configurações fornecido pelo “driver”, para que esta captasse a imagem em alto
contraste de claro e escuro, e sem cores, pois assim percebemos que os LEDs são
melhor visualizados por esta. Porém percebemos, que a câmera ainda capta o menor
sinal de luz existente no ambiente.
Buscou-se condições de iluminação especiais, visto que em nosso planejamento inicial,
era para o experimento funcionar com o mínimo de iluminação possivel. No entanto,
mesmo quando testamos a aplicação no escuro completo, a luz do projetor foi captada
pela camera atrapalhando a visualização dos leds pelo sistema. Para o correto
funcionamento, as luzes do led tem que ser visualizadas como na figura 40b, com
clareza total, distando entre si as medidas corretas.
Sendo assim, pesquisou-se outras formas de posicionar o conjunto LEDs, projetor e
câmera, de forma que a câmera pudesse continuar a rastrear os LEDs, porém sem captar
o projetor, e este, pudesse continuar a projetar sua luz para a frente do usuário.
Conseguimos virar os LEDs para parte posterior da cabeça, simplesmente girando o
boné, para testarmos novos posicionamentos. Para essa configuração dos LEDs em
relação à cabeça, posicionou-se a webcam de frente para os LEDs, e visualizando a
parte posterior da cabeça do usuário. No Freetrack, configuramos os comandos “yaw”,
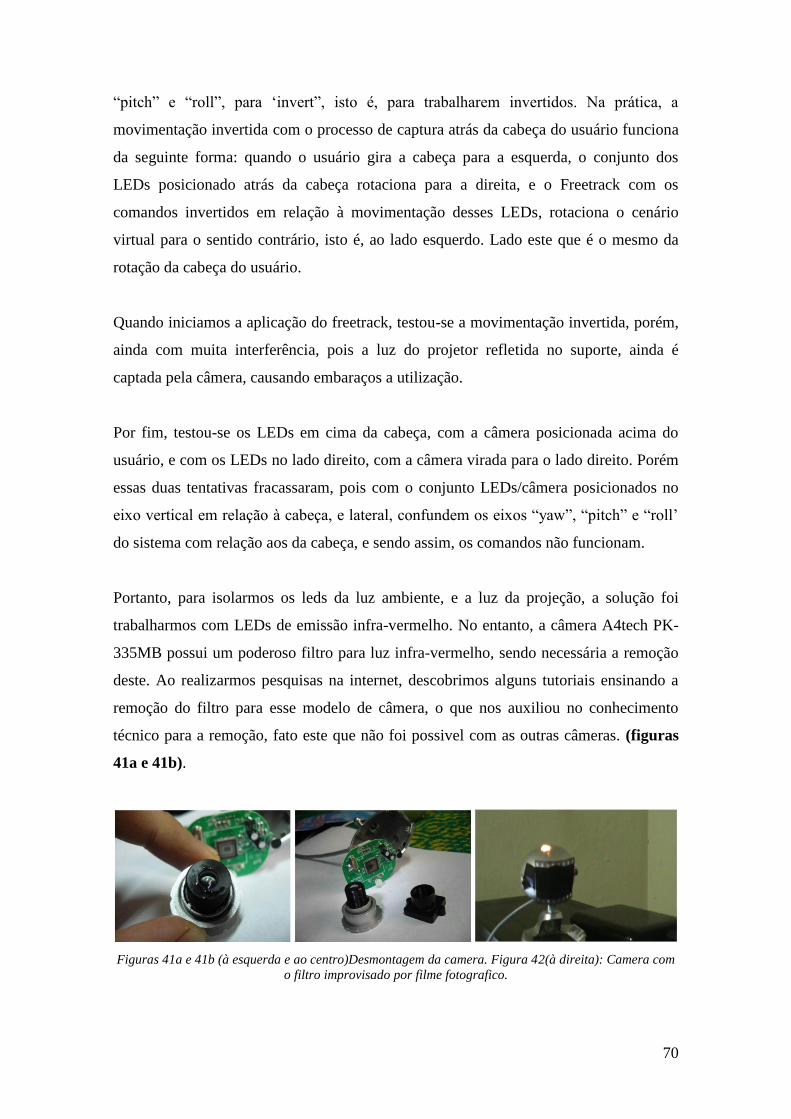
70
“pitch” e “roll”, para „invert”, isto é, para trabalharem invertidos. Na prática, a
movimentação invertida com o processo de captura atrás da cabeça do usuário funciona
da seguinte forma: quando o usuário gira a cabeça para a esquerda, o conjunto dos
LEDs posicionado atrás da cabeça rotaciona para a direita, e o Freetrack com os
comandos invertidos em relação à movimentação desses LEDs, rotaciona o cenário
virtual para o sentido contrário, isto é, ao lado esquerdo. Lado este que é o mesmo da
rotação da cabeça do usuário.
Quando iniciamos a aplicação do freetrack, testou-se a movimentação invertida, porém,
ainda com muita interferência, pois a luz do projetor refletida no suporte, ainda é
captada pela câmera, causando embaraços a utilização.
Por fim, testou-se os LEDs em cima da cabeça, com a câmera posicionada acima do
usuário, e com os LEDs no lado direito, com a câmera virada para o lado direito. Porém
essas duas tentativas fracassaram, pois com o conjunto LEDs/câmera posicionados no
eixo vertical em relação à cabeça, e lateral, confundem os eixos “yaw”, “pitch” e “roll‟
do sistema com relação aos da cabeça, e sendo assim, os comandos não funcionam.
Portanto, para isolarmos os leds da luz ambiente, e a luz da projeção, a solução foi
trabalharmos com LEDs de emissão infra-vermelho. No entanto, a câmera A4tech PK-
335MB possui um poderoso filtro para luz infra-vermelho, sendo necessária a remoção
deste. Ao realizarmos pesquisas na internet, descobrimos alguns tutoriais ensinando a
remoção do filtro para esse modelo de câmera, o que nos auxiliou no conhecimento
técnico para a remoção, fato este que não foi possivel com as outras câmeras. (figuras
41a e 41b).
Figuras 41a e 41b (à esquerda e ao centro)Desmontagem da camera. Figura 42(à direita): Camera com
o filtro improvisado por filme fotografico.
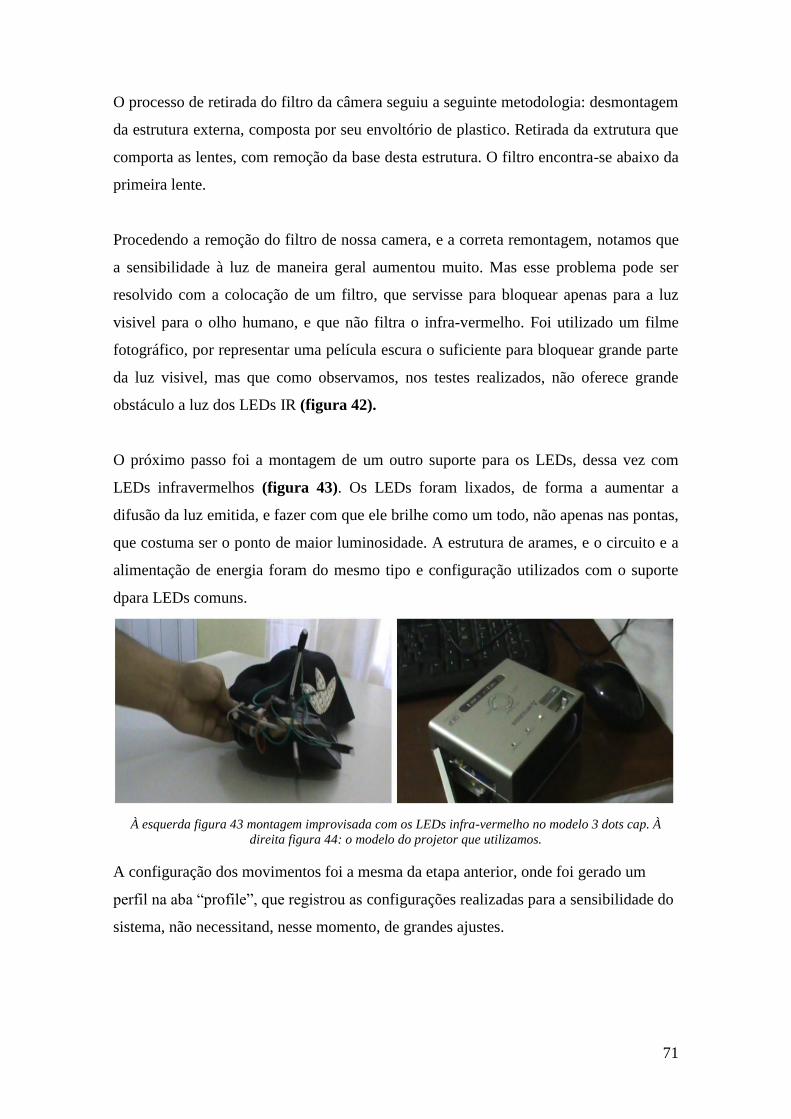
71
O processo de retirada do filtro da câmera seguiu a seguinte metodologia: desmontagem
da estrutura externa, composta por seu envoltório de plastico. Retirada da extrutura que
comporta as lentes, com remoção da base desta estrutura. O filtro encontra-se abaixo da
primeira lente.
Procedendo a remoção do filtro de nossa camera, e a correta remontagem, notamos que
a sensibilidade à luz de maneira geral aumentou muito. Mas esse problema pode ser
resolvido com a colocação de um filtro, que servisse para bloquear apenas para a luz
visivel para o olho humano, e que não filtra o infra-vermelho. Foi utilizado um filme
fotográfico, por representar uma película escura o suficiente para bloquear grande parte
da luz visivel, mas que como observamos, nos testes realizados, não oferece grande
obstáculo a luz dos LEDs IR (figura 42).
O próximo passo foi a montagem de um outro suporte para os LEDs, dessa vez com
LEDs infravermelhos (figura 43). Os LEDs foram lixados, de forma a aumentar a
difusão da luz emitida, e fazer com que ele brilhe como um todo, não apenas nas pontas,
que costuma ser o ponto de maior luminosidade. A estrutura de arames, e o circuito e a
alimentação de energia foram do mesmo tipo e configuração utilizados com o suporte
dpara LEDs comuns.
À esquerda figura 43 montagem improvisada com os LEDs infra-vermelho no modelo 3 dots cap. À
direita figura 44: o modelo do projetor que utilizamos.
A configuração dos movimentos foi a mesma da etapa anterior, onde foi gerado um
perfil na aba “profile”, que registrou as configurações realizadas para a sensibilidade do
sistema, não necessitand, nesse momento, de grandes ajustes.

72
Nos testes sem projetor, notamos que o sistema do freetrack captou bem os leds infra-
vermelho, e não mais recebeu a interferência da luz ambiente, sendo resolvidos os
problemas quanto a interferências na movimentação.
Porém, ao fazer-se um teste com o projetor, percebeu-se que a luz deste é captada pela
webcam, mesmo com o filtro de filme fotográfico, pois o foco de sua emissão era forte
o suficiente para atravessar o filtro . Isto faz com que apareçam quatro pontos de luz, ao
inves de tres, ou um único e gigante ponto(figura 45) e o sistema não funciona. Esta
tentativa foi realizada com os LEDs posicionados para a frente do usuário, então
experimentou-se o mesmo procedimento, desta vez com os LEDs posicionados para a
parte de trás do usuário, seguindo o mesmo processo descrito na etapa anterior, feito
com LEDs comuns.
Com essa configuração dos LEDs, resolveu-se quase que completamente o problema da
interferência da luz do projetor. O sistema funcionou considerávelmente melhor do que
com os LEDs Infra- Vermelhos para a frente da cabeça do usuário, e o sistema de LEDs
comum. Porém ocasionalmente, a webcam ainda capta a luz do projetor refletida, ainda
que em níveis mínimos, causando pequenas interferências à movimentação. Estas
somadas ao “jittering”, comum a maioria das câmeras, acaba por tornar-se um problema
para a navegação, obrigando-nos a buscar um sistema de filtragem, ou de captura das
luzes Infra Vermelho mais complexo.
Figura 45: teste fracassado com o projetor, pois o Freetrack captava a luz do projetor, causando
embaraço à captura da posição dos LEDs.
73
Iniciamos os testes com Wii Remote, que por captar apenas o Infra Vermelho, acaba por
não ser influenciado pela luz ambiente. Isto elimina a necessidade de filtros, ou remoção
de filtros de qualquer especie. Tambem proporciona solução para o problema da luz do
projetor ser captada pelo freetrack, uma vez que a camera do Wii remote como ja foi
dito não percebe essa luz. Outra vantagem na utilização do Wii remote, constitui o fato
desse dispositivo não despender nenhum custo computacional, e por atingir uma taxa de
até 100 frames por segundo, o que torna os problemas como Jitering, ou atrazos em
relação aos comandos do usuario e a atualização do render em tempo real quase nulos.
Um problema encontrado foi a comunicação do Wii Remote com o Windows, que é
feita via Bluetooth. O Bluetooth provê uma maneira de conectar e trocar informações
entre dispositivos como telefones celulares, notebooks, computadores, impressoras,
câmeras digitais e consoles de videogames digitais através de uma frequência de rádio
de curto alcance. A configuração dessa comunicação é feita atraves de softwares
gerenciadores de bluetooth para windows, que são instalados e passam a reconhecer os
dispositivos bluetoth conectados e comunicar estes aos equipamentos que enviam
dados, como o wii remote. Uma vez que essa comunicação esteja estabelecida, o
freetrack passa a reconhecer o Wii Remote em sua lista de câmeras disponíveis, e a
aplicação funciona normalmente. Os problemas desse sistema estão no fato da
dificuldade de configuração e instalação dos dispositivos Bluetooth, e na falta de
reconhecimento do controle Wii Remote pelo Freetrack, uma vez que toda a
configuração Bluetooth tem que ser ajustada corretamente para esse funcionar, e no fato
de alguns dos gerenciadores para dispositivos Bluetooth serem comerciais, limitando
um pouco o acesso a essa tecnologia.
O Wii, não necessita de configurações quanto a captura da luz, tais quais brilho,
contraste, ou gama, visto que trabalha apenas com o Infra Vermelho. Também não
possibilita configurações quanto a resolução e taxas de frames por segundo. Trabalha
sempre com a mesma resolução, e uma taxa que varia de 180 a 200 frames por segundo,
tornando-se uma excelente opção para este trabalho, por reduzir a necessidade de
configurações e permitir um movimento altamente fluido. Também alcança essas taxas
sem apresentar nenhum gasto computacional para a CPU do computador.
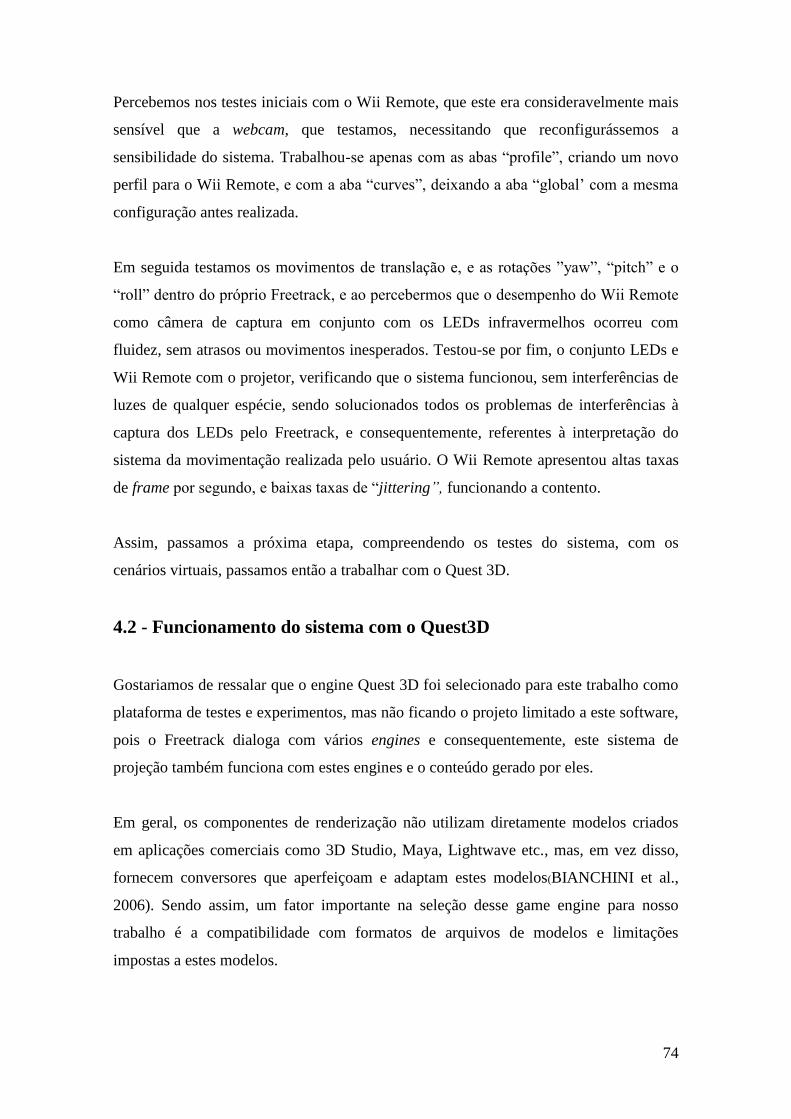
74
Percebemos nos testes iniciais com o Wii Remote, que este era consideravelmente mais
sensível que a webcam, que testamos, necessitando que reconfigurássemos a
sensibilidade do sistema. Trabalhou-se apenas com as abas “profile”, criando um novo
perfil para o Wii Remote, e com a aba “curves”, deixando a aba “global‟ com a mesma
configuração antes realizada.
Em seguida testamos os movimentos de translação e, e as rotações ”yaw”, “pitch” e o
“roll” dentro do próprio Freetrack, e ao percebermos que o desempenho do Wii Remote
como câmera de captura em conjunto com os LEDs infravermelhos ocorreu com
fluidez, sem atrasos ou movimentos inesperados. Testou-se por fim, o conjunto LEDs e
Wii Remote com o projetor, verificando que o sistema funcionou, sem interferências de
luzes de qualquer espécie, sendo solucionados todos os problemas de interferências à
captura dos LEDs pelo Freetrack, e consequentemente, referentes à interpretação do
sistema da movimentação realizada pelo usuário. O Wii Remote apresentou altas taxas
de frame por segundo, e baixas taxas de “jittering”, funcionando a contento.
Assim, passamos a próxima etapa, compreendendo os testes do sistema, com os
cenários virtuais, passamos então a trabalhar com o Quest 3D.
4.2 - Funcionamento do sistema com o Quest3D
Gostariamos de ressalar que o engine Quest 3D foi selecionado para este trabalho como
plataforma de testes e experimentos, mas não ficando o projeto limitado a este software,
pois o Freetrack dialoga com vários engines e consequentemente, este sistema de
projeção também funciona com estes engines e o conteúdo gerado por eles.
Em geral, os componentes de renderização não utilizam diretamente modelos criados
em aplicações comerciais como 3D Studio, Maya, Lightwave etc., mas, em vez disso,
fornecem conversores que aperfeiçoam e adaptam estes modelos(BIANCHINI et al.,
2006). Sendo assim, um fator importante na seleção desse game engine para nosso
trabalho é a compatibilidade com formatos de arquivos de modelos e limitações
impostas a estes modelos.

75
Outro fator é fazer-se a seleção do engine, baseado nas competências da equipe, pois há
engines que são feitos para se explorar as capacidades dos programadores, dando pouca
ou nenhuma margem para quem apenas domina o lado artístico, como modeladores,
animadores, e artistas de computação gráfica em geral. Outros Games Engines, já
favorecem esses artistas, com ferramentas já programadas, apresentando um toolkit, para
criação de mundos virtuais, porem, sem privilegiar muito os programadores, esses
engines possuem limitações quanto ao que se pode realizar, não permitindo a expansão
muito alem do que ele já oferece. Assim, optou-se pelo Quest3D, pelo fato de privilegiar
tanto programadores como artistas da computação gráfica em geral, pois possui
programação orientada por objeto, (MEDEIROS, 2010) o que facilita o trabalho destes
últimos, classe à qual o pesquisador desta dissertação se inclui. Nesse sistema, há
muitos benefícios, pois, para o usuário não há necessidade de escrever linhas de código
para criar aplicações, e conseqüentemente, o trabalho de preocupar-se com seus
respectivos erros de sintaxe é nulo. Por fim, pelo fato de ser um engine completo, com
sistema de física próprio, iluminação e vários outros sistemas que facilitam muito a
criação de aplicações de realidade virtual.
Um terceiro fator consiste no fato do pesquisador e realizador deste trabalho já haver
trabalhado com o Quest3D em outra ocasião PARREIRAS (2010), e possuir relativo
domínio deste engine, o que facilitaria e aceleraria o processo de criação de modelos
que fossem necessários a pesquisa, e realizar ajustes,
Outras razões para a escolha deste engine incluem oferecer suporte à maioria dos
modeladores comerciais como 3DS MAX, MAYA, XSI, e também ao modelador não
comercial, o BLENDER (http://www.blender.org/ acessado em 14/06/2009).
O modelo para os testes preliminares nos foi cedido pelo GRVA/LAMCE/COPPE e faz
parte do projeto “Dinossauros do Brasil: Exposição virtual no Museu Nacional – Dinos-
virtuais” (figura 46), que foi desenvolvido através de uma parceria entre o Setor de
Paleovertebrados do Departamento de Geologia e Paleontologia, Museu Nacional
(PV/DGP/MN/UFRJ) o Laboratório de Tecnologias da Informação e da Comunicação
(LATEC/UFRJ) e o Grupo de Realidade Virtual do Laboratório de Métodos
Computacionais da coordenação dos Programas de Pós- Graduação de Engenharia
(GRVA/LAMCE/COPPE/UFRJ) MONERAT (2011)
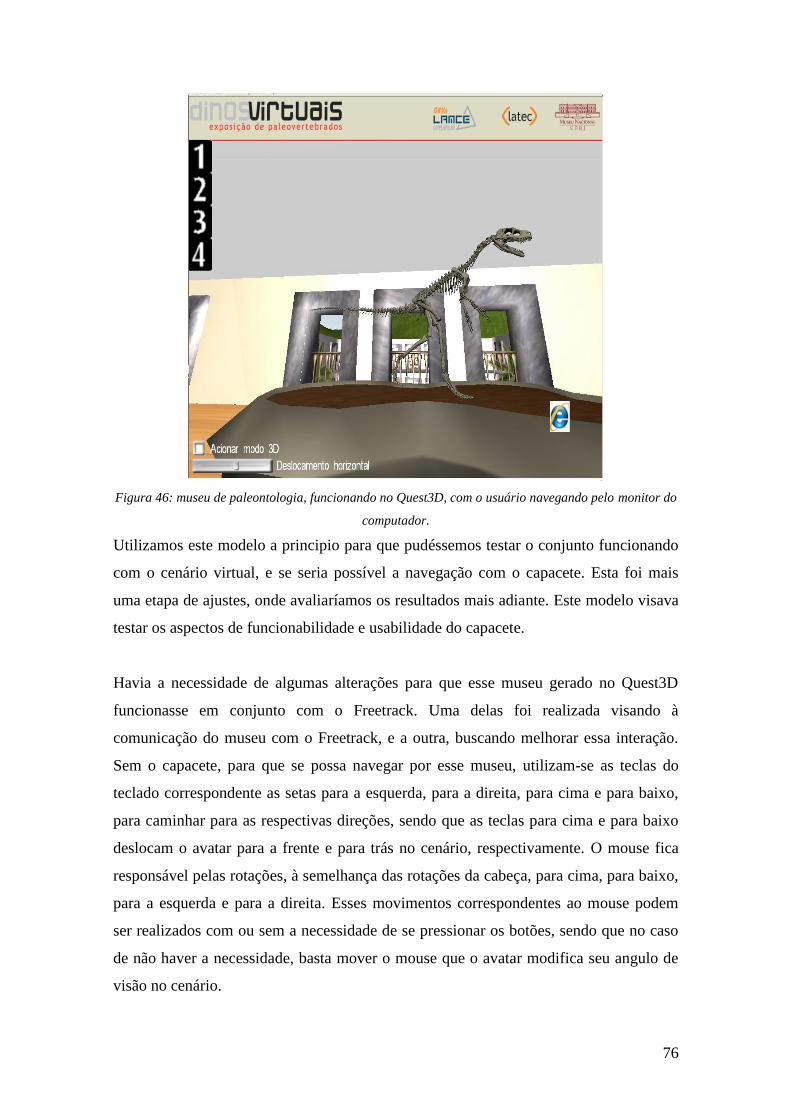
76
Figura 46: museu de paleontologia, funcionando no Quest3D, com o usuário navegando pelo monitor do
computador.
Utilizamos este modelo a principio para que pudéssemos testar o conjunto funcionando
com o cenário virtual, e se seria possível a navegação com o capacete. Esta foi mais
uma etapa de ajustes, onde avaliaríamos os resultados mais adiante. Este modelo visava
testar os aspectos de funcionabilidade e usabilidade do capacete.
Havia a necessidade de algumas alterações para que esse museu gerado no Quest3D
funcionasse em conjunto com o Freetrack. Uma delas foi realizada visando à
comunicação do museu com o Freetrack, e a outra, buscando melhorar essa interação.
Sem o capacete, para que se possa navegar por esse museu, utilizam-se as teclas do
teclado correspondente as setas para a esquerda, para a direita, para cima e para baixo,
para caminhar para as respectivas direções, sendo que as teclas para cima e para baixo
deslocam o avatar para a frente e para trás no cenário, respectivamente. O mouse fica
responsável pelas rotações, à semelhança das rotações da cabeça, para cima, para baixo,
para a esquerda e para a direita. Esses movimentos correspondentes ao mouse podem
ser realizados com ou sem a necessidade de se pressionar os botões, sendo que no caso
de não haver a necessidade, basta mover o mouse que o avatar modifica seu angulo de
visão no cenário.

77
No Quest3D, esses movimentos são de responsabilidade da câmera. Para entender como
isso ocorre, devemos demonstrar como se apresenta a estrutura de programação
referente ao cenário virtual em questão. Como se observa na figura 47 tem-se os
“channels” ou canais, já citados, formando a rede de fluxo de informações que circulam
entre os módulos “pai” e os módulos “filhos”, segundo dinâmica já explicada no inicio
deste trabalho.
Figura 47: canais, ou módulos, que compõem o cenário virtual do museu de Paleovertebrados da UFRJ
Tem-se os módulos responsáveis por gerar os modelos 3D correspondentes, no caso
deste museu, aos dinossauros, às paredes, placas, plantas, árvores, grades, degraus da
escada, corrimões, e tudo o mais que faça parte do mundo virtual. Esses objetos foram
exportados de outros softwares de modelagem, gerando os módulos automaticamente no
Quest3D, onde esses blocos ou módulos contêm as informações referentes à sua
geometria, como numero de faces, vértices, arestas e texturas, como bump mapping,
specular e cor difusa.
Ha os módulos correspondentes a renderização da cena, outros que são responsáveis
pelos objetos de colisão, outros que geram o sistema de céu, nuvens e luz do sol
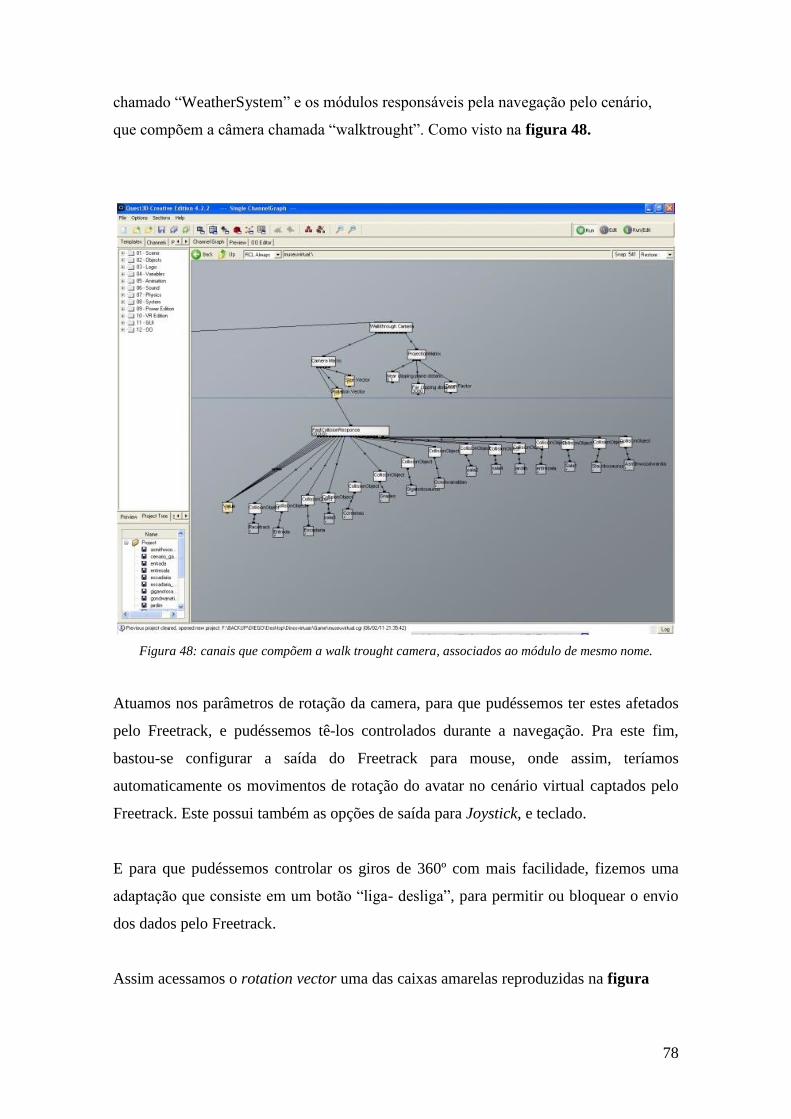
78
chamado “WeatherSystem” e os módulos responsáveis pela navegação pelo cenário,
que compõem a câmera chamada “walktrought”. Como visto na figura 48.
Figura 48: canais que compõem a walk trought camera, associados ao módulo de mesmo nome.
Atuamos nos parâmetros de rotação da camera, para que pudéssemos ter estes afetados
pelo Freetrack, e pudéssemos tê-los controlados durante a navegação. Pra este fim,
bastou-se configurar a saída do Freetrack para mouse, onde assim, teríamos
automaticamente os movimentos de rotação do avatar no cenário virtual captados pelo
Freetrack. Este possui também as opções de saída para Joystick, e teclado.
E para que pudéssemos controlar os giros de 360º com mais facilidade, fizemos uma
adaptação que consiste em um botão “liga- desliga”, para permitir ou bloquear o envio
dos dados pelo Freetrack.
Assim acessamos o rotation vector uma das caixas amarelas reproduzidas na figura
79
49. Esta caixa possui essa cor, pois para efeito de organização ela concentra outros
canais, que estão relacionados a um mesmo canal “pai”, para que estes não aumentem
muito o volume de objetos na tela, estão assim organizados “dentro”, por assim dizer,
do rotation vector. Ao clicarmos no canal rotation vector, os canais que o compõem são
mostrados em uma tela à parte (figura 49).
Figura 49: canal “rotation vector” da walktrought camera, aberto, e mostrando os canais que compõem
seu funcionamento interno.
No canal on right mouse down (figura 49), temos os parâmetros que permitem ou não
que o sistema acesse a programação referente à rotação, sendo que para a programação
original do museu de paleontologia, este acesso é realizado via botão direito do mouse.
Assim, quando este é pressionado e segurado, pode-se efetuar a rotação no cenário,
Modificamos os parâmetros para assinalamos uma tecla do teclado (figura 50), e assim,
ao pressionar a tecla control, o sistema de rastreamento para de funcionar, e é possível
se modificar a posição da cabeça, sem modificar o ponto de vista do usuário. Pode-se

80
então, ter maior controle da navegação. Esta modificação consistiu em associar uma
tecla do teclado, no caso a tecla control, na opção “use keyboard information”,
Figura 50: canais que compõem o "rotation vector” da walktrought camera, com o canal right click
mouse down aberto, para as regulagens de utilização do cenário virtual com o Freetrack e com o sistema
pessoal de projeção.
Assim, quando o usuário pressiona a tecla control, o sistema para de receber o sinal do
Freetrack, e assim, pode-se movimentar a cabeça livremente, sem atualizar o ponto de
vista do usuário, no cenário virtual. Pode-se assim, acomodar a cabeça em relação ao
Wii Remote, sem causar problemas à navegação.
Testou-se a navegação pelo cenário virtual da exposição de Paleovertebrados, com o
sistema de rastreamento da cabeça e o projetor, para avaliarmos a funcionalidade do
sistema. Testou-se com sucesso a navegação pelo ambiente virtual, sem percalços e
óbices à movimentação. Porém o conjunto: projetor, suporte para os LEDs, e suporte
para pilhas, era muito improvisado, necessitando melhorias.
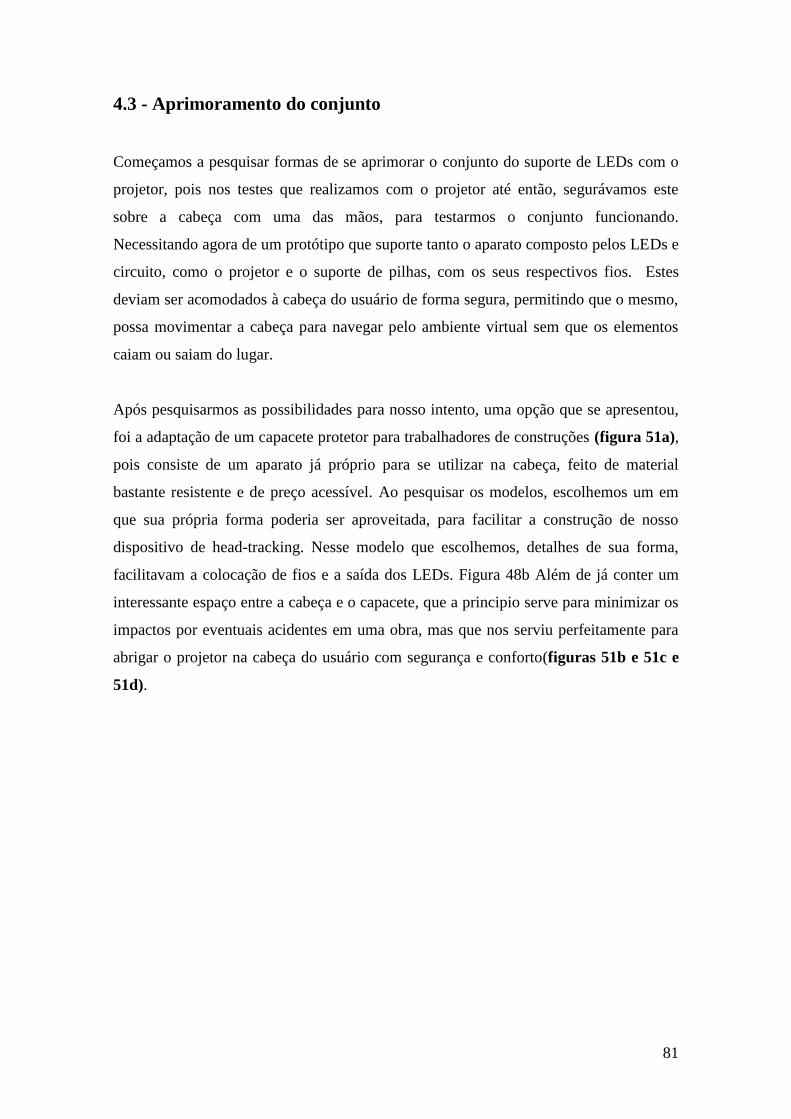
81
4.3 - Aprimoramento do conjunto
Começamos a pesquisar formas de se aprimorar o conjunto do suporte de LEDs com o
projetor, pois nos testes que realizamos com o projetor até então, segurávamos este
sobre a cabeça com uma das mãos, para testarmos o conjunto funcionando.
Necessitando agora de um protótipo que suporte tanto o aparato composto pelos LEDs e
circuito, como o projetor e o suporte de pilhas, com os seus respectivos fios. Estes
deviam ser acomodados à cabeça do usuário de forma segura, permitindo que o mesmo,
possa movimentar a cabeça para navegar pelo ambiente virtual sem que os elementos
caiam ou saiam do lugar.
Após pesquisarmos as possibilidades para nosso intento, uma opção que se apresentou,
foi a adaptação de um capacete protetor para trabalhadores de construções (figura 51a),
pois consiste de um aparato já próprio para se utilizar na cabeça, feito de material
bastante resistente e de preço acessível. Ao pesquisar os modelos, escolhemos um em
que sua própria forma poderia ser aproveitada, para facilitar a construção de nosso
dispositivo de head-tracking. Nesse modelo que escolhemos, detalhes de sua forma,
facilitavam a colocação de fios e a saída dos LEDs. Figura 48b Além de já conter um
interessante espaço entre a cabeça e o capacete, que a principio serve para minimizar os
impactos por eventuais acidentes em uma obra, mas que nos serviu perfeitamente para
abrigar o projetor na cabeça do usuário com segurança e conforto(figuras 51b e 51c e
51d).

82
Canto superior direito Figura 51a: modelo do capacete escolhido com os LEDs adaptados e instalados.
Canto superior esquerdo figura 51b: projetor e capacete com sua regulagem sendo removida. Canto
inferior esquerdo figura51c: projetor montado no espaço interno do capacete. E no canto inferior
esquerdo figura 51d: capacete montado, com o projetor e regulagem instalados e pronto para ser usado.
Bastou que adaptássemos seu suporte regulável, que prende o capacete à cabeça do
usuário (figura51c), para possuir mais uma regulagem nos furos, para que assim,
quando puséssemos o projetor na cabeça do usuário, este possuísse maior amplitude de
movimentos, com mais segurança. Com essa alteração o conjunto capacete e projetor
(figura 52a) ficaram mais estáveis. Percebemos ao usar o capacete com o projetor, que
o peso deste conjunto não é desconfortável, e permite uma liberdade de movimentos
para a cabeça considerável após a referida adaptação, limitado apenas pelos fios, de
alimentação de energia do projetor e de ligação do projetor ao computador.

83
Canto superior direito Figura 52a: modelo head-tracking final completo. Canto superior esquerdo
figura 52b:modelo head-tracking completo visto de frente. Canto inferior esquerdo figura
52c:demonstração de adaptação para a passagem dos fios de ligação do projetor com o computador.
E no canto inferior esquerdo figura 52d: capacete em funcionamento, em conjunto com o Wii Remote.
Realizou-se também adaptações na parte rígida do capacete, para fixação do suporte de
pilhas na parte interna do capacete, com um botão liga/desliga (figuras 53a e 53b),
Aberturas de dissipação de calor para o projetor na parte frontal, local que coincide com
a abertura de dissipação de calor do próprio projetor, e uma abertura para conexão dos
fios de alimentação de energia e entrada dos dados do computador, para o projetor,
adaptado também para sua aba flexível. A abertura para a saída da luz do projetor foi
pensada de forma a deixar passar essa luz sem bloqueios, e sem que nenhuma das
estruturas do capacete interfira na projeção.
Iniciamos a construção do suporte com os LEDs infravermelho, dessa vez adaptados
para nosso novo capacete. Os arames foram do mesmo material e espessura dos outros
protótipos, fixados com adesivo epóxi, com seu respectivo conjunto de fios e resistores
(figuras 53a, 53b e 53c), respeitando a anatomia do capacete, e nos valendo dela,
aproveitando seus detalhes e espaço da melhor forma possível (figuras 51a, 51c, 53a
53b e 53c). Desta maneira, utilizou-se dos três vãos existentes na parte superior do
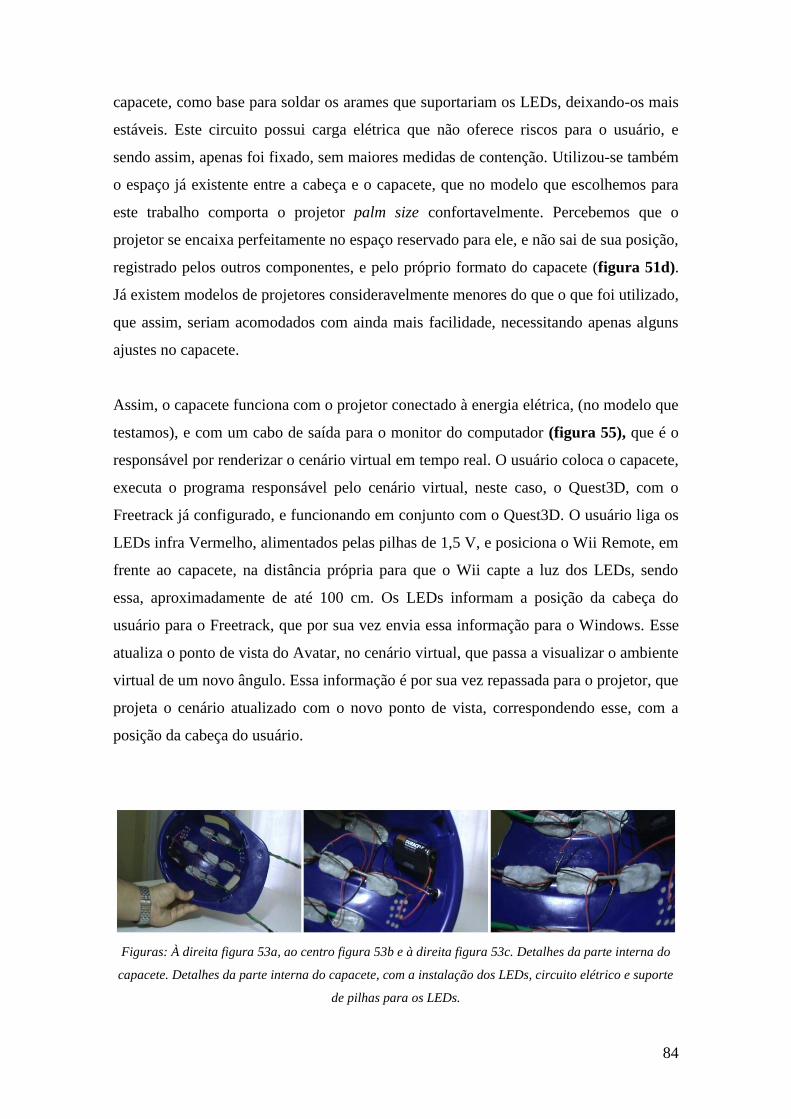
84
capacete, como base para soldar os arames que suportariam os LEDs, deixando-os mais
estáveis. Este circuito possui carga elétrica que não oferece riscos para o usuário, e
sendo assim, apenas foi fixado, sem maiores medidas de contenção. Utilizou-se também
o espaço já existente entre a cabeça e o capacete, que no modelo que escolhemos para
este trabalho comporta o projetor palm size confortavelmente. Percebemos que o
projetor se encaixa perfeitamente no espaço reservado para ele, e não sai de sua posição,
registrado pelos outros componentes, e pelo próprio formato do capacete (figura 51d).
Já existem modelos de projetores consideravelmente menores do que o que foi utilizado,
que assim, seriam acomodados com ainda mais facilidade, necessitando apenas alguns
ajustes no capacete.
Assim, o capacete funciona com o projetor conectado à energia elétrica, (no modelo que
testamos), e com um cabo de saída para o monitor do computador (figura 55), que é o
responsável por renderizar o cenário virtual em tempo real. O usuário coloca o capacete,
executa o programa responsável pelo cenário virtual, neste caso, o Quest3D, com o
Freetrack já configurado, e funcionando em conjunto com o Quest3D. O usuário liga os
LEDs infra Vermelho, alimentados pelas pilhas de 1,5 V, e posiciona o Wii Remote, em
frente ao capacete, na distância própria para que o Wii capte a luz dos LEDs, sendo
essa, aproximadamente de até 100 cm. Os LEDs informam a posição da cabeça do
usuário para o Freetrack, que por sua vez envia essa informação para o Windows. Esse
atualiza o ponto de vista do Avatar, no cenário virtual, que passa a visualizar o ambiente
virtual de um novo ângulo. Essa informação é por sua vez repassada para o projetor, que
projeta o cenário atualizado com o novo ponto de vista, correspondendo esse, com a
posição da cabeça do usuário.
Figuras: À direita figura 53a, ao centro figura 53b e à direita figura 53c. Detalhes da parte interna do
capacete. Detalhes da parte interna do capacete, com a instalação dos LEDs, circuito elétrico e suporte
de pilhas para os LEDs.
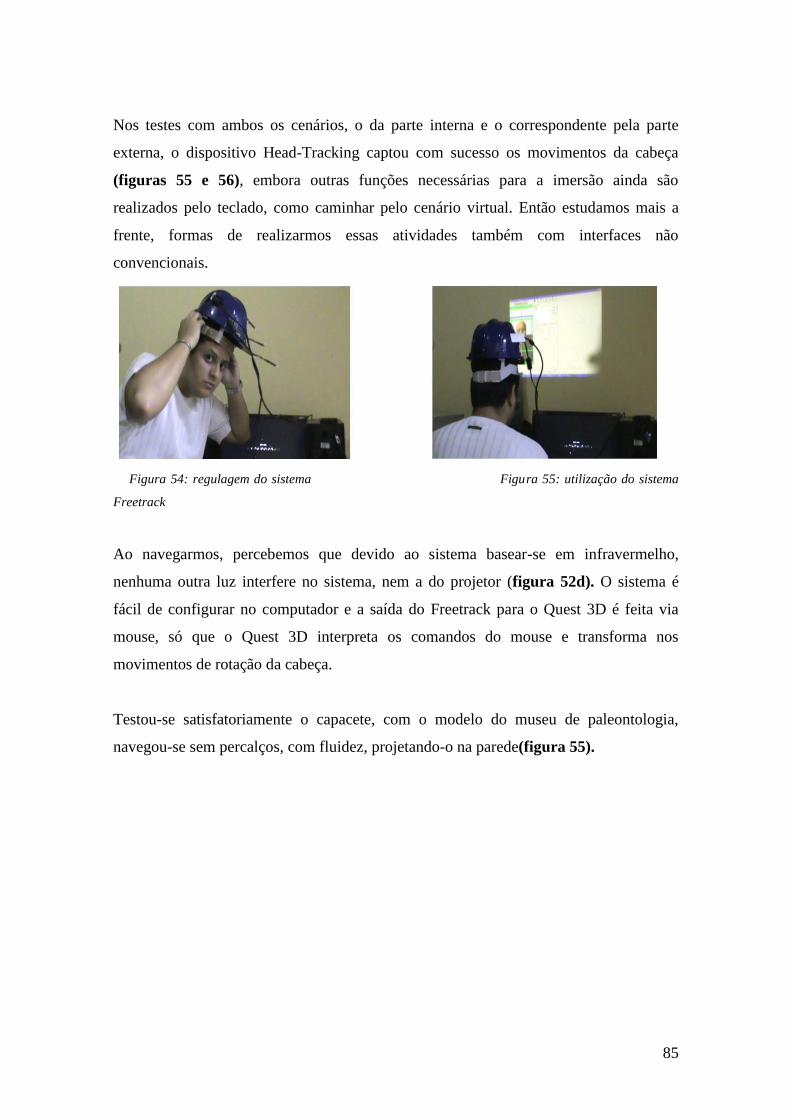
85
Nos testes com ambos os cenários, o da parte interna e o correspondente pela parte
externa, o dispositivo Head-Tracking captou com sucesso os movimentos da cabeça
(figuras 55 e 56), embora outras funções necessárias para a imersão ainda são
realizados pelo teclado, como caminhar pelo cenário virtual. Então estudamos mais a
frente, formas de realizarmos essas atividades também com interfaces não
convencionais.
Figura 54: regulagem do sistema Figura 55: utilização do sistema
Freetrack
Ao navegarmos, percebemos que devido ao sistema basear-se em infravermelho,
nenhuma outra luz interfere no sistema, nem a do projetor (figura 52d). O sistema é
fácil de configurar no computador e a saída do Freetrack para o Quest 3D é feita via
mouse, só que o Quest 3D interpreta os comandos do mouse e transforma nos
movimentos de rotação da cabeça.
Testou-se satisfatoriamente o capacete, com o modelo do museu de paleontologia,
navegou-se sem percalços, com fluidez, projetando-o na parede(figura 55).
86
Figura 56: usuário navegando pelo cenário virtual do museu de paleontologia virtual, e testando o
sistema pessoal de projeção, com auxilio do Wii Remote, projetando a aplicação virtual em um suporte
branco.
Neste exemplo agora já testamos o nosso sistema pessoal de projeção com um suporte
mais preparado, no caso um quadro branco, preparado pra fazermos a experiência do
sistema pessoal de projeção. Ainda estamos trabalhando com o Museu Nacional
(MN/UFRJ), e aqui temos o modelo novamente funcionando, percebendo que a luz do
projetor não causa embaraço a navegação, pois essa não é captada pelo Nintendo Wii
Remote, e sendo assim o Freetrack captou a luz infravermelho satisfatoriamente
possibilitando a navegação pelo cenário virtual, em conjunto com a projeção no suporte.
4.4 - Construção do museu Dom João VI
Então a partir desta etapa, para efeito de um estudo mais aprofundado da utilidade do
modelo do capacete, construiu-se outro modelo que retratasse uma situação mais
específica, que ilustrasse como o sistema pessoal de projeção poderia ser eficazmente
utilizado em treinamentos direcionados a certos serviços e tarefas.
87
Com este modelo intentou-se criar uma situação, para avaliar se o sistema pode com
efeito ser utilizado para fins de treinamentos, ou reproduzir situações úteis, para
diversos fins.
Também incluímos esta etapa da pesquisa nesta dissertação, para dar uma noção de
como são construídos os mundos virtuais no Quest3D, para auxiliar futuros trabalhos e
futuros pesquisadores que venham a trabalhar com esse sistema.
Criou-se um modelo em Quest3D que simulasse uma rota de fuga em situação de
incêndio. Este cenário compreende uma virtualização do museu Dom João VI da UFRJ,
como um cenário de incêndio, representando as condições de baixa visibilidade, com
poucas opções de saídas, em meio as chamas. Intentou-se assim, reproduzir um
ambiente em que o bombeiro possuísse apenas a “visão de mineiro” para se locomover
pelo ambiente.
Primeira etapa do trabalho consistiu na pesquisa e recolhimento de material sobre
museu. Este modelo foi gerado com pinturas reais pertencentes ao acervo do museu
Dom João em conjunto com outras de outras coleções (figura 57), simulando o
ambiente de uma exposição.
Figura 57: pinturas que fazem parte do acervo do museu Dom João VI.
Como em GUIMARÃES (2006) e em PARREIRAS et al., (2010), a concepção dos
trabalhos relativos á criação do espaço virtual, inicia-se a partir da maquete digital,
neste caso, utilizando o software 3d Max. O software 3D Max foi escolhido, pois
segundo GUIMARÃES (2006) este software proporciona qualidade escalar e facilita a
inclusão de detalhes. Assim, o cenário foi construído através da modelagem poligonal,
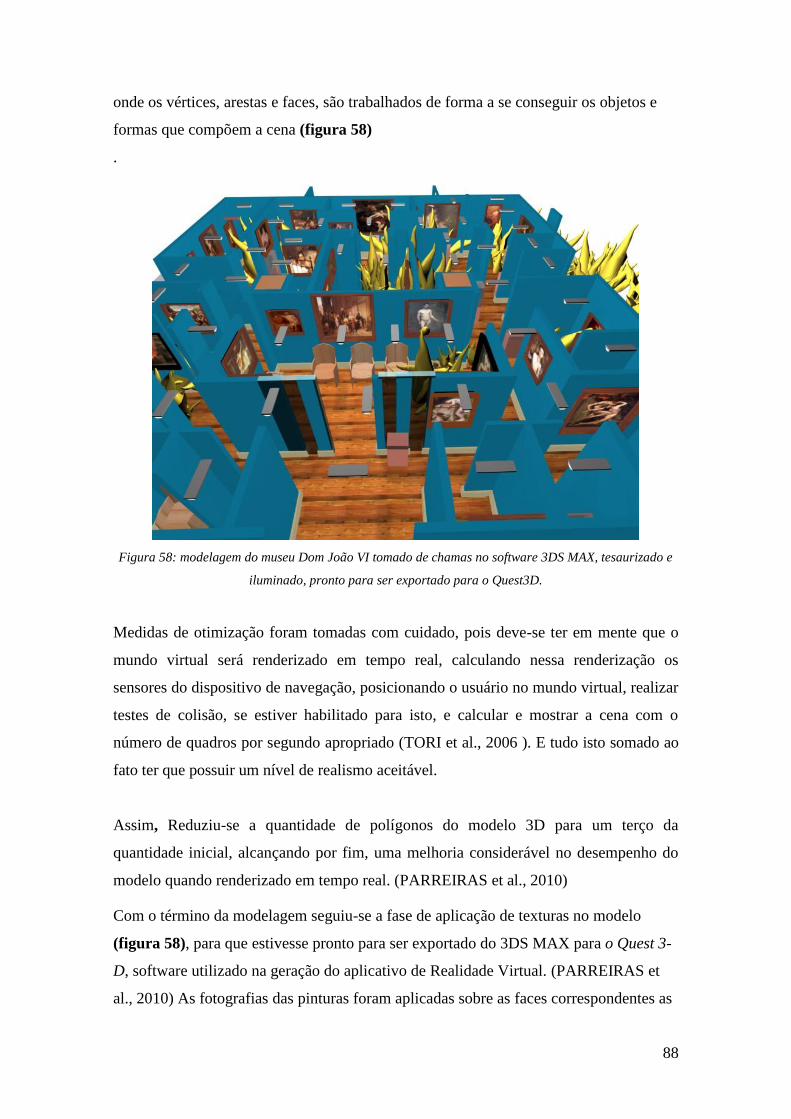
88
onde os vértices, arestas e faces, são trabalhados de forma a se conseguir os objetos e
formas que compõem a cena (figura 58)
.
Figura 58: modelagem do museu Dom João VI tomado de chamas no software 3DS MAX, tesaurizado e
iluminado, pronto para ser exportado para o Quest3D.
Medidas de otimização foram tomadas com cuidado, pois deve-se ter em mente que o
mundo virtual será renderizado em tempo real, calculando nessa renderização os
sensores do dispositivo de navegação, posicionando o usuário no mundo virtual, realizar
testes de colisão, se estiver habilitado para isto, e calcular e mostrar a cena com o
número de quadros por segundo apropriado (TORI et al., 2006 ). E tudo isto somado ao
fato ter que possuir um nível de realismo aceitável.
Assim, Reduziu-se a quantidade de polígonos do modelo 3D para um terço da
quantidade inicial, alcançando por fim, uma melhoria considerável no desempenho do
modelo quando renderizado em tempo real. (PARREIRAS et al., 2010)
Com o término da modelagem seguiu-se a fase de aplicação de texturas no modelo
(figura 58), para que estivesse pronto para ser exportado do 3DS MAX para o Quest 3-
D, software utilizado na geração do aplicativo de Realidade Virtual. (PARREIRAS et
al., 2010) As fotografias das pinturas foram aplicadas sobre as faces correspondentes as

89
pinturas no cenário virtual, simulando assim o ambiente da exposição. Nesta versão do
museu Dom João, ainda não possuiu animações ou simulações, por ser uma versão de
teste para o sistema de projeção pessoal, e sendo assim, não temos a simulação do fogo,
mas objetos representativos do fogo e de sua localização no cenário virtual (figuras 59a
e 59b). Mas em novas versões, testar-se-á simulações e animações, inclusive com a
progressão do fogo em movimento.
.
Figura 59a e 59b: cenário virtual correspondente ao Museu Dom João VI, com sua estrutura física
composta pelas suas paredes, chão e teto, e os objetos, quadros e objetos expostos, porém tomado de
chamas amarelas, simulando a ocorrência de um incêndio, para os testes de funcionabilidade do sistema
pessoal de projeção.
Buscou-se medidas de otimização do modelo, reduzindo-se o tamanho dos arquivos das
texturas (figura 60), com relação ao numero de bytes, e deixando estas em um formato
de 512 bytes, pois este tamanho mantém as características visuais da textura com
qualidade, e consiste em um numero potência de 2, fato este, que facilita os cálculos a
serem realizados pelo computador durante a renderização. (PARREIRAS et al., 2010)
Figura 60: texturas que foram fotografadas do mundo real e trabalhadas em editores de imagem, para
que ficassem em formatos mais fáceis e mais leves para o modelo virtual.
90
A qualidade da textura também depende da distância do ponto de observação. Uma
textura de altíssima definição parecerá boa quando vista de muito perto, mas é
substituída por outras versões progressivamente menores, 512x512, 256x256, 128x128,
64x64, 32x32 e 16x16 pixels e mais leves, que mantém suas características principais,
quando vista mais ao longe. Esse processo se chama Mapeamento MIP (BIANCHINI et
al., 2006).
Nível de detalhes (LOD- Level of Details) é uma técnica que faz com que os objetos
tenham representações em níveis de detalhamento condizentes com a distância. Quanto
mais longe, mais simplificada será a representação, sendo substituído o modelo por
modelos mais simples e mais leves.
Na exportação do modelo do software 3D MAX para o software Quest 3-D, O formato
de arquivo COLLADA, do 3D MAX, estava resultando em objetos muito deslocados.
Por isso, utilizamos o formato DirectX, que minimizou esses problemas, apenas
colocando algumas partes do modelo fora da escala.
As colisões com a parede do museu, segundo TORI et al., (2006) podem gastar muito
processamento, mas é resolvida com uso de técnicas simplificadas, como o
envolvimento dos objetos por volumes invisíveis usados para testes rápidos de colisão,
como esferas e cilindros. Assim, um grande bloco envolve os objetos do museu,
incluindo todos os detalhes. Mas não são criados blocos menores de colisão para esses
detalhes. Conforme a técnica descrita por TORI, “Este procedimento não detecta
colisão, mas sim o risco de colisão. Isto faz com que as técnicas mais refinadas para a
detecção efetiva sejam usadas somente quando necessário, economizando tempo de
processamento.”
Utilizou-se uma walktrought camera, já fornecida pelo Quest3D, a semelhança do
Museu Nacional, e esta, após terem sido feitas as colisões do chão e paredes do museu,
caminha pelo museu, representando o ponto de vista do avatar (figura 61).
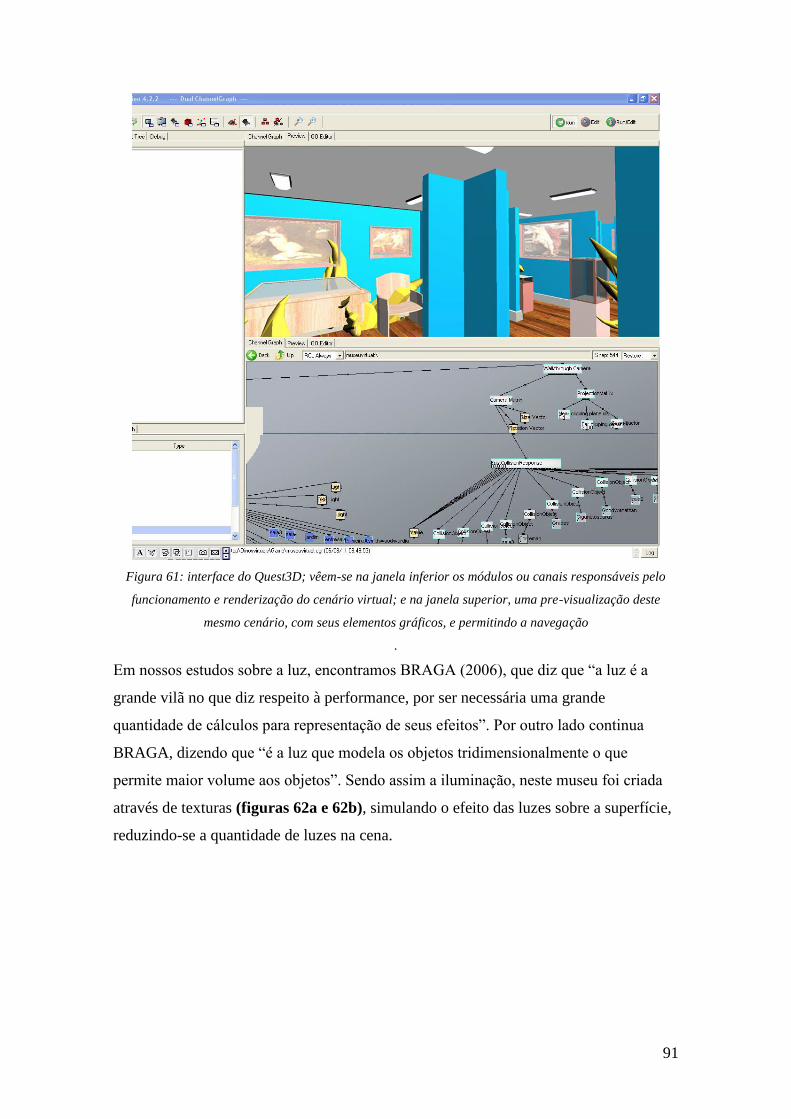
91
Figura 61: interface do Quest3D; vêem-se na janela inferior os módulos ou canais responsáveis pelo
funcionamento e renderização do cenário virtual; e na janela superior, uma pre-visualização deste
mesmo cenário, com seus elementos gráficos, e permitindo a navegação
.
Em nossos estudos sobre a luz, encontramos BRAGA (2006), que diz que “a luz é a
grande vilã no que diz respeito à performance, por ser necessária uma grande
quantidade de cálculos para representação de seus efeitos”. Por outro lado continua
BRAGA, dizendo que “é a luz que modela os objetos tridimensionalmente o que
permite maior volume aos objetos”. Sendo assim a iluminação, neste museu foi criada
através de texturas (figuras 62a e 62b), simulando o efeito das luzes sobre a superfície,
reduzindo-se a quantidade de luzes na cena.
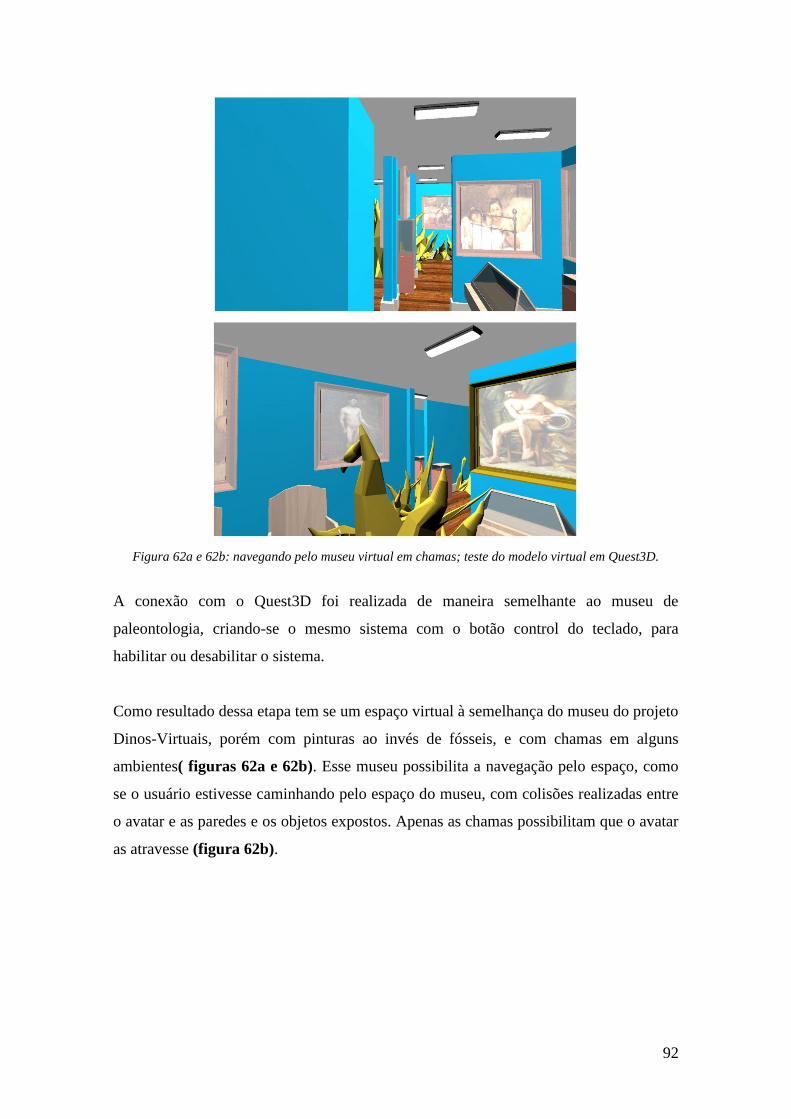
92
Figura 62a e 62b: navegando pelo museu virtual em chamas; teste do modelo virtual em Quest3D.
A conexão com o Quest3D foi realizada de maneira semelhante ao museu de
paleontologia, criando-se o mesmo sistema com o botão control do teclado, para
habilitar ou desabilitar o sistema.
Como resultado dessa etapa tem se um espaço virtual à semelhança do museu do projeto
Dinos-Virtuais, porém com pinturas ao invés de fósseis, e com chamas em alguns
ambientes( figuras 62a e 62b). Esse museu possibilita a navegação pelo espaço, como
se o usuário estivesse caminhando pelo espaço do museu, com colisões realizadas entre
o avatar e as paredes e os objetos expostos. Apenas as chamas possibilitam que o avatar
as atravesse (figura 62b).
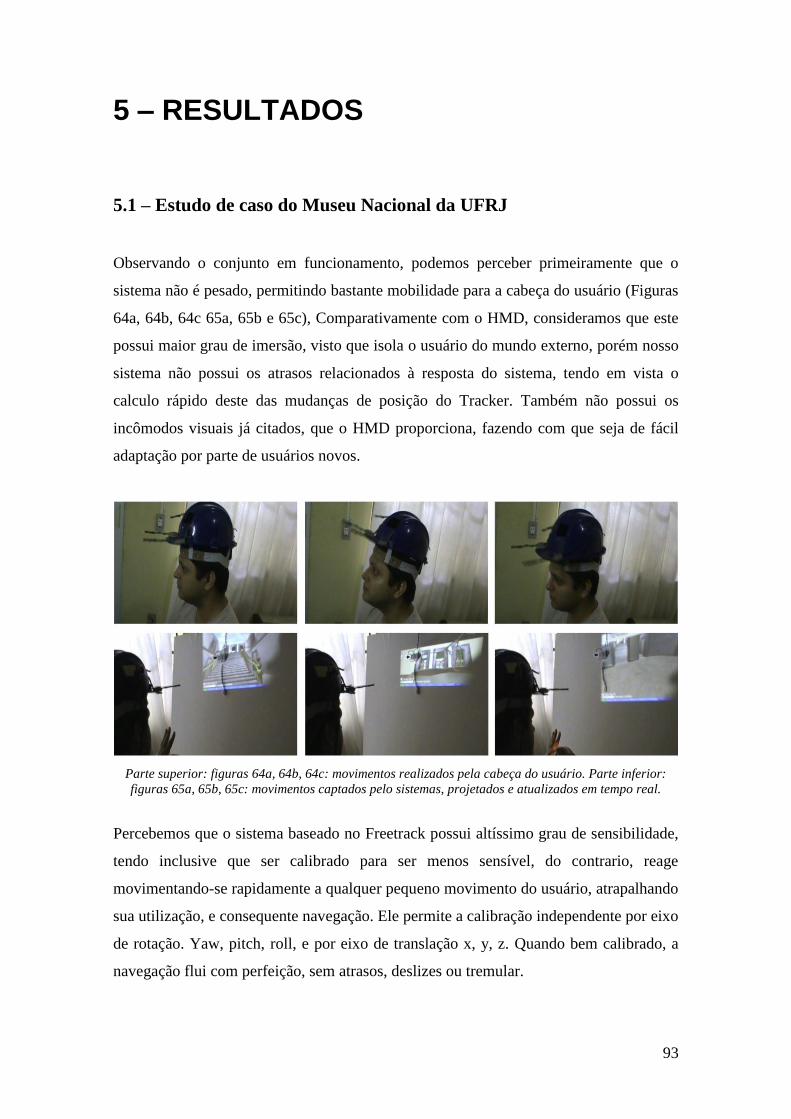
93
5 – RESULTADOS
5.1 – Estudo de caso do Museu Nacional da UFRJ
Observando o conjunto em funcionamento, podemos perceber primeiramente que o
sistema não é pesado, permitindo bastante mobilidade para a cabeça do usuário (Figuras
64a, 64b, 64c 65a, 65b e 65c), Comparativamente com o HMD, consideramos que este
possui maior grau de imersão, visto que isola o usuário do mundo externo, porém nosso
sistema não possui os atrasos relacionados à resposta do sistema, tendo em vista o
calculo rápido deste das mudanças de posição do Tracker. Também não possui os
incômodos visuais já citados, que o HMD proporciona, fazendo com que seja de fácil
adaptação por parte de usuários novos.
Parte superior: figuras 64a, 64b, 64c: movimentos realizados pela cabeça do usuário. Parte inferior:
figuras 65a, 65b, 65c: movimentos captados pelo sistemas, projetados e atualizados em tempo real.
Percebemos que o sistema baseado no Freetrack possui altíssimo grau de sensibilidade,
tendo inclusive que ser calibrado para ser menos sensível, do contrario, reage
movimentando-se rapidamente a qualquer pequeno movimento do usuário, atrapalhando
sua utilização, e consequente navegação. Ele permite a calibração independente por eixo
de rotação. Yaw, pitch, roll, e por eixo de translação x, y, z. Quando bem calibrado, a
navegação flui com perfeição, sem atrasos, deslizes ou tremular.
94
Percebemos que o museu ficou bastante leve no aspecto de renderização em tempo real,
funcionando muito bem com o Freetrack e com o capacete que reage satisfatoriamente,
tendo o cenário reagindo à captura de movimentos realizada pelo Tracker composto
pelos LEDs de infravermelho. Não exige muito de recursos computacionais, pois como
os game engines são projetados para criar gráficos 3D mais realistas, com menos
sobrecarga dos computadores, temos um ambiente com grau aceitável de realismo e
excelente tempo de resposta para o usuário.
O calor produzido pelo projetor é dissipado em parte pelo próprio mecanismo do
projetor, e eliminado pelos orifícios criados para saída do calor. Sendo assim, o capacete
não aquece em demasia, a cabeça do usuário.
Percebemos também que o conjunto com o projetor ficou bastante leve, não
apresentando muitos prejuízos a mobilidade da cabeça apenas sendo limitado pelos fios
que ligam o projetor ao monitor, infelizmente nesse nosso modelo sendo um problema
necessário. Problema relativamente incômodo, porque têm se os fios de curto alcance,
também atrapalhando um pouco a mobilidade e tornando o sistema um pouco mais
complexo. Observando a navegação do Freetrack em conjunto com o capacete, isto é,
com o sistema pessoal de projeção, percebemos que ele funciona como uma espécie de
uma “bolha de luz”, onde se enxerga apenas onde o projetor aponta, onde está seu foco
luminoso. Este prossegue iluminando como o capacete de mineiro, ou seja, para onde se
olha, para onde se aponta aquela luz esta o foco visível, não sendo possível observar
aquilo que não esta no foco de luz. Este fato limita bastante a capacidade visual e foca
bastante a visão do individuo, fazendo com que ele tenha que ter uma certa habilidade
para manejar o sistema. Porem se esquece dessa dificuldade com um tempo de uso do
sistema, conforme o usuário vai se acostumando com essa forme de visualização,
navegando pelo cenário com mais habilidade, e com mais tranquilidade.
Também como já foi dito utilizamos em conjunto com nosso sistema, algumas teclas do
teclado, as teclas correspondentes as setas para frente e para trás, sendo que o giro
correspondente à cabeça do avatar, ficou sendo todo de responsabilidade do capacete,
tendo seus movimentos captados pelo Freetrack via Wii e LEDs infravermelho.
Notamos na navegação pelo cenário que o cenário renderiza em tempo real de forma
bem satisfatória, não apresentando nenhum tipo de atraso com relação aos movimentos

95
do usuário, alias funcionando de maneira bastante rápida, sendo necessária mais uma
redução da sensibilidade dos movimentos de rotação da cabeça, sendo efetuada dentro
do próprio Freetrack, nas configurações antes citadas.
Outro problema encontrado enquanto utilizamos o sistema para navegar pelo Museu
Nacional, foi o alcance do sistema. Com o Wii Remote, tivemos um alcance bastante
limitado, com os LEDs sendo reconhecidos apenas a uma distância de aproximadamente
80 cm do Wii Remote. A partir dessa distância, os LEDs não são mais captados pelo
Wii, e o Freetrack deixa de rastrear seus movimentos, atrapalhando, ou encerrando a
navegação. Outro problema técnico, ocorre quando o usuário gira a cabeça, pois um dos
LEDs acaba sendo eclipsado pela cabeça, passando o Wii a não mais rastrear os pontos
corretamente. Este problema ocorreu diversas vezes, sendo solucionado por mais uma
adaptação no capacete, que consistiu em afastar os LEDs o máximo possível da cabeça,
para que esta não ficasse em nenhum momento obstruindo a identificação dos LEDs
pela câmera, e deixando de causar assim, obstáculos a navegação.
Observamos também ao caminhar pelo museu, que o foco que o projetor capta do
cenário virtual é um ponto de vista bastante interessante, pois compreende uma área
visual relativamente grande do cenário, e não atrapalhando o entendimento deste por
parte do usuário. Assim, possibilitando clareza no entendimento deste, não produzindo
mais prejuízos a utilização do sistema. Este ângulo de visão pode ser ajustado na
“walktroughtcamera”, para maior, ou menor, compreendendo a visualização de uma
porção maior do cenário, ou uma porção menor, respectivamente.
Percebemos que nosso botão liga-desliga funcionou satisfatoriamente, facilitando a
navegação. Quando quiséssemos atualizar a posição da cabeça em relação ao cenário,
bastava que cortássemos a comunicação deste com o Freetrack, pressionando a tecla do
teclado control, e assim, podendo movimentar a cabeça, sem atualizar o ponto de vista
virtual. Utilizando-se desse recurso, pode-se manipular melhor o ponto de vista com o
cenário, quando fosse necessário, facilitando os giros de 360º.
Notamos em nosso trabalho, em nosso passeio virtual pelo museu, que os objetos
podem ser analisados, pode se navegar, e observá-los de todos os pontos (Figuras 66a e
66b), facilitado pelo fato de se liberar as mãos do usuário, e por possibilitar uma analise
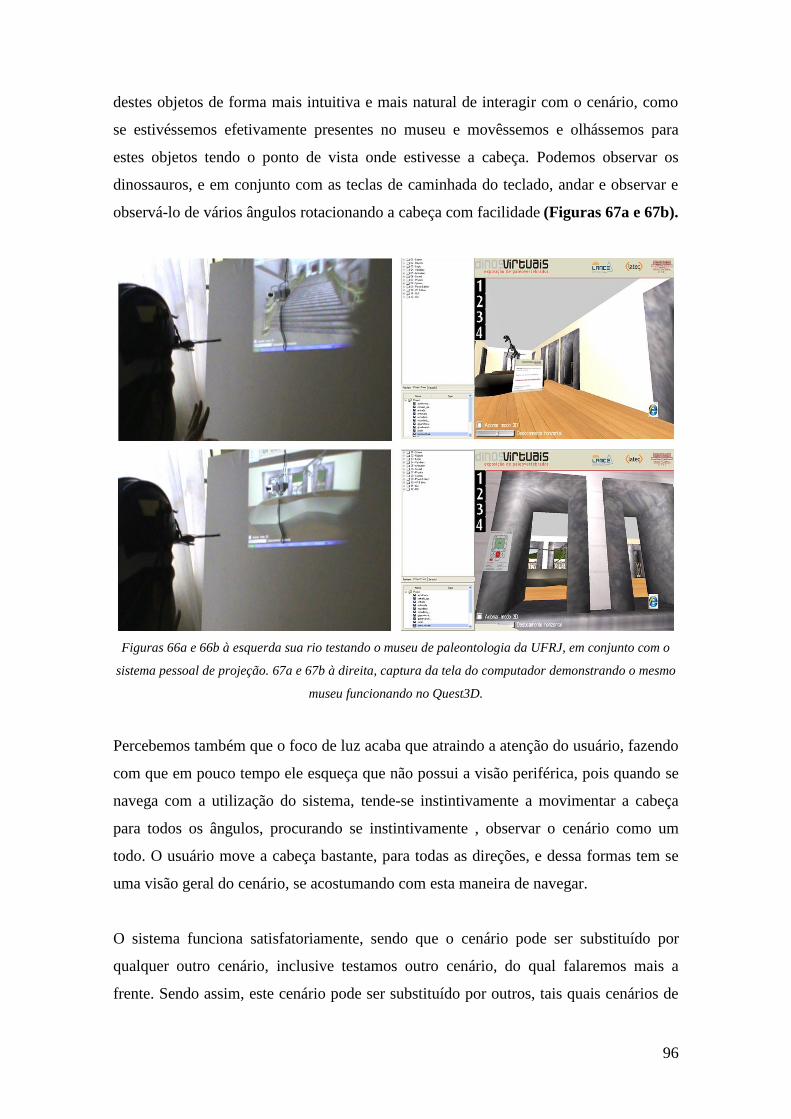
96
destes objetos de forma mais intuitiva e mais natural de interagir com o cenário, como
se estivéssemos efetivamente presentes no museu e movêssemos e olhássemos para
estes objetos tendo o ponto de vista onde estivesse a cabeça. Podemos observar os
dinossauros, e em conjunto com as teclas de caminhada do teclado, andar e observar e
observá-lo de vários ângulos rotacionando a cabeça com facilidade (Figuras 67a e 67b).
Figuras 66a e 66b à esquerda sua rio testando o museu de paleontologia da UFRJ, em conjunto com o
sistema pessoal de projeção. 67a e 67b à direita, captura da tela do computador demonstrando o mesmo
museu funcionando no Quest3D.
Percebemos também que o foco de luz acaba que atraindo a atenção do usuário, fazendo
com que em pouco tempo ele esqueça que não possui a visão periférica, pois quando se
navega com a utilização do sistema, tende-se instintivamente a movimentar a cabeça
para todos os ângulos, procurando se instintivamente , observar o cenário como um
todo. O usuário move a cabeça bastante, para todas as direções, e dessa formas tem se
uma visão geral do cenário, se acostumando com esta maneira de navegar.
O sistema funciona satisfatoriamente, sendo que o cenário pode ser substituído por
qualquer outro cenário, inclusive testamos outro cenário, do qual falaremos mais a
frente. Sendo assim, este cenário pode ser substituído por outros, tais quais cenários de

97
cavernas onde se pode ter um passeio virtual exploratório de cavernas com este cenário
previamente modelado, se pode observar as pedras, e formações rochosas, pode-se
adicionar desenhos de culturas primitivas, em fim, todos os elementos que podem
auxiliar a simular o efeito de um passeio exploratório em uma caverna, inclusive, dadas
as potencialidades do quest3D, com qualidade bastante realista, dependendo da
qualidade do modelo gerado. O ponto em questão, é que em conjunto com o sistema
pessoal de projeção, o efeito seja bastante interessante, podendo se aproveitar desse
ponto de vista, que seria o ponto de vista do mineiro, ou de um explorador de cavernas,
tornando a experiência mais atrativa. No ambiente real, a pessoa com o capacete de
mineiro veria da caverna a porção que o capacete estivesse iluminando, perdendo
informações na área correspondente à visão periférica, e sendo assim, nos observamos
que o sistema pessoal de projeção aproxima a interação com o mundo virtual deste
efeito, pois o individuo apenas olha para onde o projetor esta iluminando.
Se a experiência ocorrer em um local completamente escuro, com local previamente
preparado para a projeção desse sistema, vai potencializar a utilização deste, fazendo
com que o usuário fique ainda mais focado na porção iluminada pelo projetor,
fortalecendo ainda mais a experiência.
Este cenário pode ser substituído pelo fundo do mar, por exemplo, a semelhança de um
mar profundo, ser adornado com peixes, com rochas com o solo, com restos de navios,
com restos de destroços, fazendo com que a experiência seja também bastante
interessante, fazendo com que o foco de luz, o foco do projetor de a sensação de que a
pessoa esta imersa neste ambiente e mergulhando efetivamente apenas enxergando a
parte onde o projetor estará iluminando e apenas enxergando a porção do cenário para
onde o capacete estará virado, trazendo a oportunidade de promover treinamentos de
mergulho, treinamentos para resgates de objetos, ou de pessoas, caixas pretas de aviões,
dispositivos, cabos submarinos para a industria do petróleo, em fim, qualquer situação
que envolva uma procura de objetos, ou de dispositivos, ou operações a serem
realizadas no fundo de rios, ou lagos ou mares, com visibilidade baixa ou águas turvas.
Esse sistema proporciona o treinamento, pois dada a complexidade dos modelos que
podem ser gerados, e realismo destes, associados ao potencial do Quest3d de gerar
simulações e animações, pode se ter um treinamento bastante interessante com o
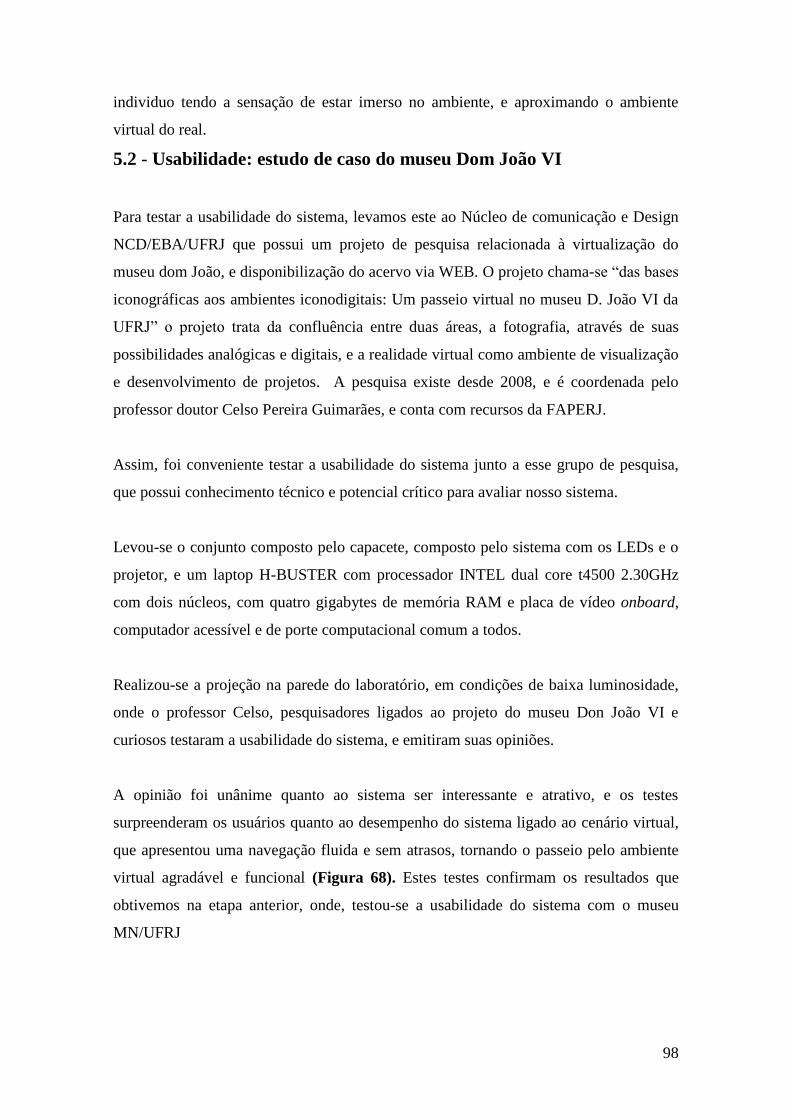
98
individuo tendo a sensação de estar imerso no ambiente, e aproximando o ambiente
virtual do real.
5.2 - Usabilidade: estudo de caso do museu Dom João VI
Para testar a usabilidade do sistema, levamos este ao Núcleo de comunicação e Design
NCD/EBA/UFRJ que possui um projeto de pesquisa relacionada à virtualização do
museu dom João, e disponibilização do acervo via WEB. O projeto chama-se “das bases
iconográficas aos ambientes iconodigitais: Um passeio virtual no museu D. João VI da
UFRJ” o projeto trata da confluência entre duas áreas, a fotografia, através de suas
possibilidades analógicas e digitais, e a realidade virtual como ambiente de visualização
e desenvolvimento de projetos. A pesquisa existe desde 2008, e é coordenada pelo
professor doutor Celso Pereira Guimarães, e conta com recursos da FAPERJ.
Assim, foi conveniente testar a usabilidade do sistema junto a esse grupo de pesquisa,
que possui conhecimento técnico e potencial crítico para avaliar nosso sistema.
Levou-se o conjunto composto pelo capacete, composto pelo sistema com os LEDs e o
projetor, e um laptop H-BUSTER com processador INTEL dual core t4500 2.30GHz
com dois núcleos, com quatro gigabytes de memória RAM e placa de vídeo onboard,
computador acessível e de porte computacional comum a todos.
Realizou-se a projeção na parede do laboratório, em condições de baixa luminosidade,
onde o professor Celso, pesquisadores ligados ao projeto do museu Don João VI e
curiosos testaram a usabilidade do sistema, e emitiram suas opiniões.
A opinião foi unânime quanto ao sistema ser interessante e atrativo, e os testes
surpreenderam os usuários quanto ao desempenho do sistema ligado ao cenário virtual,
que apresentou uma navegação fluida e sem atrasos, tornando o passeio pelo ambiente
virtual agradável e funcional (Figura 68). Estes testes confirmam os resultados que
obtivemos na etapa anterior, onde, testou-se a usabilidade do sistema com o museu
MN/UFRJ

99
Testou-se satisfatoriamente a navegação, com os movimentos da cabeça dos usuários,
por menores que fossem, sendo transmitidos pelo Freetrack, e com o botão liga-desliga
oferecidos pelo sistema sendo utilizado a contento pelos usuários, que se adaptaram
rapidamente à navegação com o sistema.
Dois problemas foram relatados pelos usuários, um consiste na necessidade dos fios,
que ligam o projetor ao computador e à rede elétrica, causando incômodo no usuário
durante sua utilização do sistema. Outro foi citado em relação ao Wii Remote, que no
modelo que testamos deve ficar situado na frente do usuário, para captar
satisfatoriamente o sinal luminoso emitido pelos LEDs, sendo assim, ficando
exatamente sobre a área onde o cenário virtual era projetado, tornando-se um incômodo
à visualização da projeção, e um embaraço à experiência. Foi importante o relato deste
problema, pois já estamos testando formas de posicionar os LEDs na parte de trás da
cabeça, eliminando a necessidade do Wii ficar em frente à projeção.
Para validação do sistema para fins de treinamento, propomos um exercício para os
usuários: Como o Museu Don João não possui espaço físico, sendo sua existência a
existência da coleção que compõe o acervo, criamos um espaço virtual que atendesse
aos propósitos dessa pesquisa. Em sua configuração, o museu assemelha-se a um
labirinto, com pinturas nas paredes, o que dificulta ainda mais ao usuário definir sua
localização. Certos locais foram acrescentadas chamas, simbolizando que o usuário não
poderia passar por ali, tendo que encontrar o caminho seguro até a saída de emergência.
Esta tarefa, deveria ser realizada em certo tempo limitado, significando falha, o fato de a
tarefa exceder esse tempo pré marcado.

100
Figura 68 usuário do NCD testando o sistema pessoal de projeção para navegação em ambientes
virtuais, e navegando pelo cenário do museu D. João VI em chamas, procurando a saída de emergência.
Notamos que os usuários tiveram certa dificuldade para encontrar as saídas de
emergência (Figura 69b) nas primeiras tentativas, porém, com seu desempenho
aumentando rapidamente à medida que repetiam a tarefa. Mesmo com os usuários
iniciando a tarefa de pontos diferentes no cenário, notou-se que a memorização da
planta ocorreu, após múltiplas seções, tornando a tarefa fácil de ser realizada no tempo
proposto, demonstrando uma clara aquisição de habilidade por parte dos utilizadores, e
a eficácia do sistema.
Figura 69a e 69b cenário do museu D. João VI em chamas, o ponto de partida do cenário, e uma das
saídas de emergência respectivamente.
Consideramos o experimento satisfatório, pois o sistema pessoal de projeção por
congregar aspectos dos games e da Realidade Virtual se mostrou interessante e atrativo

101
para a navegação pelo cenário virtual, atraindo o interesse dos usuários. Estes ficavam
largo tempo navegando, imersos no cenário, mas cima de tudo imerso na tarefa que
estavam desempenhando, que apesar de ser uma tarefa simples, tornou-se entretenedora,
envolvendo os usuários do sistema.
O auxilio de sons, aumentam a sensação de imersão dada a multisensoriedade da
experiência. Testou-se um arquivo com efeito sonoro de incêndio, tocando não no
cenário virtual, mas através de um reprodutor na plataforma Windows, sendo executado
concomitantemente à simulação, através de caixas de som comuns, ligadas ao
computador portátil. Percebeu-se que com o cenário escuro, e os sons ambientais, o
usuário rapidamente se esquece do ambiente a sua volta, integrando-se ao cenário
virtual. Este som, provoca um efeito psicológico, aumentando a dificuldade em executar
a tarefa, e incrementando assim o realismo da experiência. Observamos o potencial
desse sistema para a execução de tarefas que possam ser maçantes e de difícil
aprendizado, pois a atratividade do sistema possibilita que o aprendizado seja mais
agradável, tornando a assimilação da tarefa a ser realizada menos penosa, à semelhança
de se estar jogando um “jogo eletrônico”, onde o objetivo final, ou um dos objetivos
seja a conclusão da tarefa, levando o usuário, se este conclui o objetivo, ou objetivos, a
conquistar a habilidade necessária para conclusão da tarefa, mesmo que em níveis
mínimos.
O freetrack por ser um software bastante flexível, e por trabalhar e dialogar com varias
plataformas de games e games engines, inclusive servindo para a navegação no próprio
Windows, possibilitando que o nosso modelo possa ser usado em conjunto com outras
plataformas. Potencializa os serious games, ou games sérios, que são criados para fins
de treinamentos, para simulações, para fins educativos, médicos ou educação a
distância, para citar alguns. Sendo este ponto, mais um ponto favorável à utilização
deste sistema, fato de o Freetrack não estar limitado ao quest3D, não se limita aos
nossos modelos ou outros modelos gerados no Quest3d, sendo que esses modelos
podem ser aproveitados de outras plataformas. Assim, esse sistema pode ser aproveitado
como uma alternativa de baixo custo às simulações nas caves, ou ao HMD, ou aos
outros dispositivos de realidade virtual. O fato de não estar limitado à tela o que
provoca um grau de imersão um pouco melhor, do que se o individuo estivesse limitado

102
a essa, e assim, tornando a interação com esses serious games uma interação mais
interessante.
O sistema pessoal de projeção potencializa esses treinamentos, aproveitando-se do
potencial dos próprios games para fins de aprendizado, onde o jogador consegue
realizar tarefas, ou adquirir habilidades, ou assimilar conhecimentos enquanto se
diverte, segundo o conceito do edutainment, aspecto esse chave dos serious games, onde
o jogo torna a aquisição de conhecimento ou habilidade, uma tarefa prazerosa. E nesse
contexto, o sistema pessoal de projeção incrementa esse modelo, traz mais uma
ferramenta que fortalece os serious games, por ser um aparato interessante para o uso
em conjunto com os serious games tornando-os ainda mais interessantes.
5.3 - Comparação teórica do sistema pessoal com outros sistemas de
RV de projeção e RA espacial
Em comparação com as pinturas aumentadas já existentes em museus, o sistema de
projeção pessoal possui a vantagem da imersão no ambiente virtual, já que nas pinturas
aumentadas, a aplicação é realizada com base apenas na pintura, e no outro, pode
recriar-se até ambientes inteiros, com outros artefatos e pinturas, que por sua vez
também podem dispor informações em um nível que não é possível se ter em museus
físicos. Com isso, o sistema pessoal de projeção não se perde a vantagem de se estar
envolvido pelo ambiente do museu, como nas pinturas aumentadas e nas Vitrines
Virtuais, fato esse que como já foi dito,reforça a experiência do aprendizado. Com
relação às Vitrines Virtuais, o sistema pessoal de projeção apresentou também a
possibilidade de analise dos objetos como constatamos pelo passeio virtual no museu de
paleontologia da UFRJ, onde com nossos experimentos, pudemos observar os
dinossauros por todos os ângulos , passeando pelo museu. A diferença esta no fato do
sistema pessoal de projeção poder apresentar situações mais complexas, que seriam
impraticáveis, ou muito mais caras nas Vitrines Virtuais. Como por exemplo, as
animações complexas, onde no sistema pessoal de projeção poderia se ter esses
dinossauros animados com riqueza de detalhes e sons, imersos em seu próprio

103
ambiente, à semelhança de um “parque dos dinossauros” virtual. Para alcançar esse
feito, depender-se-ia apenas do talento artístico e técnico de designers, modeladores,
animadores, e ilustradores, ao invés de se ter que gastar uma fortuna montando se
estruturas que pudessem dar vida a essa experiência em uma Vitrine Virtual.
Nosso experimento quando comparado as shader lamps, possui mais uma vez a
vantagem das animações complexas, onde dificilmente se teria um personagem, por
exemplo, completamente animado, interagindo com o usuário nesse sistema. Nosso
sistema permite essa possibilidade, e muito mais, pois como já foi citado, os ambientes
virtuais possuem a possibilidade de ter carros, pessoas, pássaros, nuvens, em fim, vários
elementos animados que reforçam a sensação de realismo do ambiente virtual, e a
principio, não se pode ter com os objetos iluminados pelas shader lamps, ou nos
ambientes proporcionados pelos Being there. Se tais possibilidades forem alcançadas,
não estamos dizendo que são impossíveis, seriam mais dispendiosas de recursos (tempo,
técnicas, dinheiro, estruturas), do que no sistema pessoal de projeção, que por ser
baseado no engine Quest 3D, já possui todas essas funcionalidades praticamente prontas
para o criador dos ambientes virtuais. Sobre os ambientes Being there e os objetos
iluminados pelas shader lamps pesa o fato da estereoscopia natural, que é inerente aos
objetos do mundo real. Mas o sistema pessoal de projeção foi pensado de forma que
nada obste a utilização de óculos estereoscópicos em conjunto com o capacete, e de
fato, já estamos testando uma versão do passeio interno do Museu Nacional da UFRJ
com recursos de estereoscopia. Há também a possibilidade de se caminhar pelo
ambiente gerado pelo being there, onde o usuário tem liberdade total de movimentos.
Porem nossa aplicação se baseia em comunicação via infravermelho e os controles Wii
são sem fio. Portanto é possível se adaptar a posição dos LEDs para cima da cabeça,
onde o Freetrack interprete essa posição como posição inicial. Sendo assim, passa a
basear-se nessa posição para calcular a posição do avatar do usuário. Assim, é possível
testar-se novas possibilidades, onde o usuário possa ter mais liberdade em relação ao
ambiente. Por ultimo, em nossa técnica não há o incomodo dos usuários passarem na
frente dos projetores ou projetarem sombras no cenário como acontece com as técnicas
being there e shader lamps. E os cálculos para se ter o ponto de vista do usuário em
relação ao cenário virtual baseado em sua posição, são muito menos dispendiosos em
recursos computacionais se comparado aos ambientes being there.
104
As Ilamps são uma técnica que muito se assemelha a nossa, porem como acontece às
outras, possui também suas vantagens e desvantagens. Como BRAGA (2007) afirmou,
o sentido predominante para a sensação de imersão nas aplicações de RV é o da visão e
sendo assim, nossa técnica tem um ponto superior às Ilamps, no fato de o projetor esta
localizado na cabeça e não nas mãos. Primeiramente, em nossa experiência as mãos
ficam livres, para desenvolver outras formas de interação. Depois, o projetor na cabeça,
funciona em conjunto com a visão, pois para onde o usuário olha, está, o foco do
projetor. Nas Ilamps, deve-se apontar o projetor para onde se olha, tornando-se esse fato
algo que depende da habilidade do usuário, introduzindo mais um óbice à imersão.
Os panoramas também permitem ao espectador/usuário de caminhar por eles, com
liberdade de movimento. No entanto em relação a nossa técnica, seus custos são muito
mais dispendiosos, pois utilizam projetores muito maiores e por vezes mais de um
projetor.
Nossa técnica se comparada aos ambientes CAVE, perde em muitos pontos. Como já
foi dito, as CAVE são consideradas os mais completos ambientes de realidade virtual e
permitem tanto a interação do usuário através de vários dispositivos, como a imersão
quase total, pois cerca o campo visual isolando-o do mundo real. Também permite uma
liberdade de movimentos para caminhar dentro dos limites da cave, podendo realizar
aplicações com usuários em pé ou sentados. E permite multiusuários. De fato, com
nossa técnica, a imersão não é como a proporcionada pela cave, pois por mais que o
usuário esteja em um ambiente escuro, como testamos, ainda mantém certo vinculo com
o mundo real. Mas o ponto positivo de nossa técnica em relação a CAVE é certamente
em relação aos custos. A CAVE, essa maravilha da RV, necessita de vários projetores e
no mínimo de alguns computadores no sistema cluster, que se aliam ao dispositivo de
rastreamento da cabeça do usuário, Parando por aqui, seu orçamento já é exorbitante. Se
forem acrescentar equipamentos que possibilitem uma interação maior, como luvas ou
outros dispositivos seu custo só vai aumentando espantosamente. Por isso que
GUIMARÃES (2006) afirma que as CAVEs são para poucos. Nosso sistema, ao
contrario, intenta a democratização das tecnologias de RV. Baseado em programas e
equipamentos simples, não se limita apenas às grandes corporações ou unidades de
pesquisa. Pode ser montado em diversos museus, ou em exposições, eventos, com
extrema facilidade, possibilitando acesso a todos a essa tecnologia. Nosso modelo
permite também a inclusão de outros equipamentos que proporcionem a interação de
105
outras partes do corpo, como o mouse 3D, ou luvas mais baratas como a Wii Power
glove, com certo grau de imersão e uma interação razoável.
6 – CONSIDERAÇÕES FINAIS
Neste trabalho apresentamos um problema relacionado ao que chamamos de “visão de
mineiro”, que compreende a visão que a pessoa possui quando se encontra em uma
situação em que há um único ponto luminoso, colocado em sua cabeça. Propomos esta
questão por ser uma questão visual comum a diversas áreas, que desempenham tarefas
sob esse tipo de condições luminosas. Estas situações compreendem os casos de
exploração de cavernas, minas, procura de objetos ou de pessoas no fundo do mar,
trabalhos em dutos, consertos de cabos submarinos, explorações no fundo de rios, ou
lagos, só para citar algumas situações.
Apresentamos a hipótese da realidade virtual de projeção se apresentar eficaz para
recriar essas condições de visibilidade, para fins de treinamentos, pesquisas e passeios
nesse tipo de ambiente.
O foco da contribuição deste trabalho consiste em pesquisar formas de facilitar o
aprendizado e a execução de tarefas, e tornar essas tarefas prazerosas, aumentando o
rendimento dos indivíduos, seja para treinamento, aprendizado ou pesquisa.
Pesquisamos os diferentes tipos de realidade virtual de projeção, e realidade aumentada
espacial, buscando soluções que nos auxiliassem a solucionar o problema proposto, e
responder satisfatoriamente à hipótese, com essas pesquisas, montou-se um modelo que
se chamou sistema pessoal de projeção para navegação em ambientes virtuais. Esse
sistema de projeção consistiu em uma adaptação de um capacete de proteção para
trabalhadores de construção civil, acrescido de uma estrutura de metal que suporta
LEDs de emissão de luz Infra-Vermelho, que é captada por um sistema de captura de
movimentos óptico gratuito, chamado de Freetrack, captando assim os movimentos da
cabeça do usuário e transmitindo-os para um cenário virtual construído no motor de
106
games Quest3D. Assim, quando o usuário movimenta sua cabeça, o cenário virtual
também se movimenta, atualizando o ponto de vista do usuário como se este estivesse
imerso no cenário virtual. Concomitantemente, o capacete projeta este mesmo cenário
em um suporte qualquer, através de um projetor palm sized, ou seja, do tamanho da
palma da mão, instalado confortavelmente neste mesmo capacete, indicando com a
projeção, a porção do cenário que o usuário esta vendo, e simulando assim, o efeito da
“visão do mineiro”, ou “ponto de vista do mineiro”, que apenas vê do cenário a porção
que a luz de seu capacete mostra.
Atendemos assim a hipótese e testamos o sistema primeiro no museu de
Paleovertebrados da UFRJ, com o passeio virtual dinossauros do Brasil, verificando seu
funcionamento, e depois construindo num cenário mais específico correspondente a
uma rota de fuga em situação de incêndio no museu Dom João VI, também da UFRJ,
constando do acervo de pinturas, gravuras e desenhos deste museu.
Testamos com sucesso o sistema pessoal de projeção para fins de treinamento, através
da rota de fuga, percebendo que os indivíduos que utilizam o sistema com o museu
Dom João VI, adquiriram progressivamente a habilidade de encontrar a saída mais
próxima em um tempo menor.
Este trabalho também buscou demonstrar as potencialidade de um motor de jogos, no
caso o Quest3D, para fins fora dos jogos de entretenimento, neste caso, um fim
cientifico, com sua utilização em cenários virtuais utilizados nesta pesquisa.
Por fim, buscamos ressaltar a utilidade dessa técnica para os museus. No passeio virtual
que realizamos, tanto pelo museu de Paleovertebrados quanto com o museu Dom João,
temos boa mobilidade pelo espaço, sem percalços ou problemas quanto à comunicação
entre o usuário e o computador. Nos ambientes, o usuário pode interagir com os objetos,
andar, modificar, analisar.
Percebeu-se como se pode alcançar soluções pouco complexas e de custo acessível para
experimentos ligados a área de realidade Virtual, onde com dispositivos simples
realizou-se um sistema eficaz para diversas aplicações.
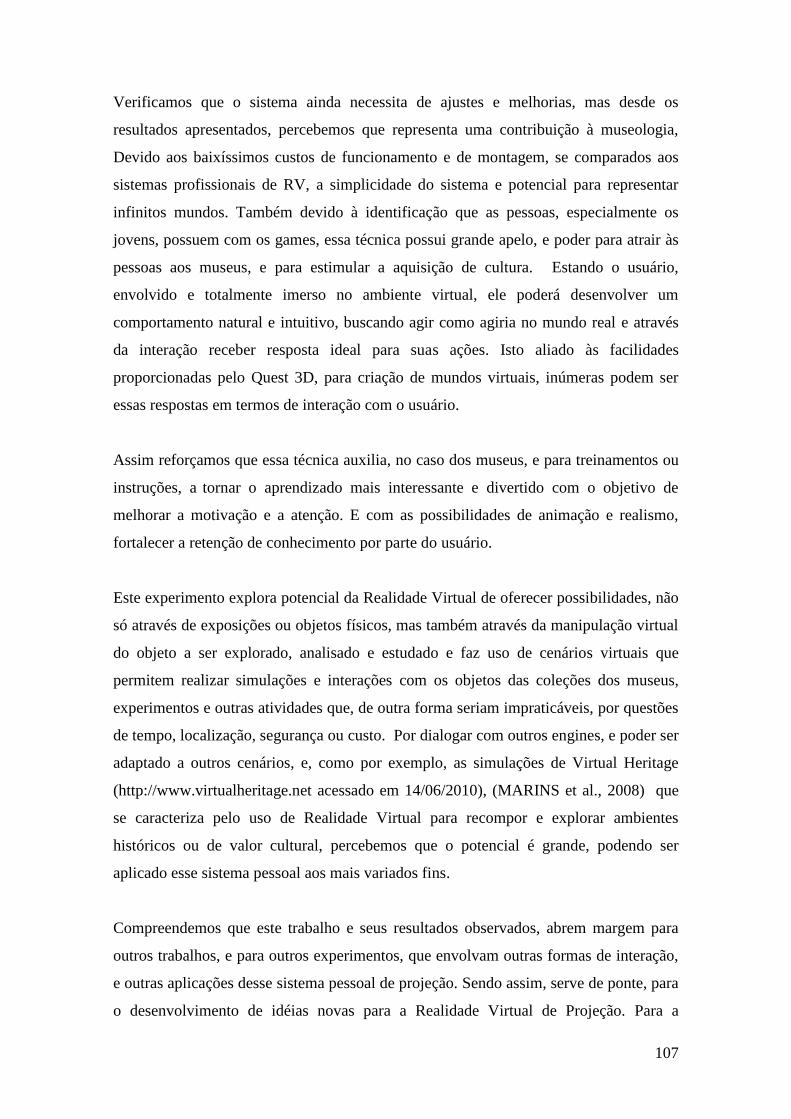
107
Verificamos que o sistema ainda necessita de ajustes e melhorias, mas desde os
resultados apresentados, percebemos que representa uma contribuição à museologia,
Devido aos baixíssimos custos de funcionamento e de montagem, se comparados aos
sistemas profissionais de RV, a simplicidade do sistema e potencial para representar
infinitos mundos. Também devido à identificação que as pessoas, especialmente os
jovens, possuem com os games, essa técnica possui grande apelo, e poder para atrair às
pessoas aos museus, e para estimular a aquisição de cultura. Estando o usuário,
envolvido e totalmente imerso no ambiente virtual, ele poderá desenvolver um
comportamento natural e intuitivo, buscando agir como agiria no mundo real e através
da interação receber resposta ideal para suas ações. Isto aliado às facilidades
proporcionadas pelo Quest 3D, para criação de mundos virtuais, inúmeras podem ser
essas respostas em termos de interação com o usuário.
Assim reforçamos que essa técnica auxilia, no caso dos museus, e para treinamentos ou
instruções, a tornar o aprendizado mais interessante e divertido com o objetivo de
melhorar a motivação e a atenção. E com as possibilidades de animação e realismo,
fortalecer a retenção de conhecimento por parte do usuário.
Este experimento explora potencial da Realidade Virtual de oferecer possibilidades, não
só através de exposições ou objetos físicos, mas também através da manipulação virtual
do objeto a ser explorado, analisado e estudado e faz uso de cenários virtuais que
permitem realizar simulações e interações com os objetos das coleções dos museus,
experimentos e outras atividades que, de outra forma seriam impraticáveis, por questões
de tempo, localização, segurança ou custo. Por dialogar com outros engines, e poder ser
adaptado a outros cenários, e, como por exemplo, as simulações de Virtual Heritage
(http://www.virtualheritage.net acessado em 14/06/2010), (MARINS et al., 2008) que
se caracteriza pelo uso de Realidade Virtual para recompor e explorar ambientes
históricos ou de valor cultural, percebemos que o potencial é grande, podendo ser
aplicado esse sistema pessoal aos mais variados fins.
Compreendemos que este trabalho e seus resultados observados, abrem margem para
outros trabalhos, e para outros experimentos, que envolvam outras formas de interação,
e outras aplicações desse sistema pessoal de projeção. Sendo assim, serve de ponte, para
o desenvolvimento de idéias novas para a Realidade Virtual de Projeção. Para a

108
engenharia em si, possui grande potencial para potencializar a visualização de
simulações e protótipos, auxiliando análises de forma intuitiva e natural, propiciando
uma gama de possibilidades de aplicação deste modelo.
7 – TRABALHOS FUTUROS
Esse experimento possui inúmeras vertentes de trabalho e abre possibilidade para outras
pesquisas. Para começar testaremos nossa técnica com os recursos da estereoscopia,
como já dissemos, com o intuito de analisar seus impactos sobre a sensação de imersão.
Como o controle da caminhada pelo museu ainda é feito via teclado, pretendemos
utilizar outros recursos, mais intuitivos e que se enquadrem mais no escopo das
interfaces não convencionais. Para tal fim, primeiramente testaremos um dispositivo
chamado mouse 3D (figura 70), que na definição de TORI et al.,(2006) tem a função de
permitir a movimentação do usuário pelo mundo virtual. Sua posição e orientação são
monitoradas de forma parecida com aquela usada no capacete. E segundo
RAYMAEKERS et al., (1999) um mouse 3D também é muito bom para a realização de
movimentos precisos de um mundo virtual em 3D. Além disso, o navegador também
possui botões que são usados para executar funções especiais como agarrar objetos
tocados por um ícone controlado pelo navegador. Criaremos assim, interações que a
principio não existem nos modelos virtuais do museu da UFRJ, para explorarmos mais
as funcionalidades do mouse 3D, como abrir e fechar portas e acender e apagar luzes.
Figura 70: mouse 3D

109
Para tal, faz-se necessário estudo e experimentações de colocação dos LEDs em outras
posições, em relação ao capacete, para podermos buscar outros tipos de aplicação para
esta mesma técnica, de forma a dar mais mobilidade ao usuário. Como a simular uma
virtual table (figura 72), colocando os LEDs atrás da cabeça do usuário, e assim
eliminando a necessidade de o controle de Wii ficar em frente ao suporte de projeção.
Figura 72 (à esquerda) simulação da mesa virtual com o sistema pessoal de projeção. Figura 73 (à
direita) simulação com o usuário em pé, e os LEDs sendo captados por trás da cabeça.
Já estamos testando a funcionalidade de uma caneta, que também possui funcionamento
baseado em LED de infravermelho e controle de Wii (figura 74), e pensamos em uma
maneira de adaptá-la ao nosso sistema. Essa caneta, constitui um projeto do professor
Johnny Chang Lee, Ph.D em Human-Computer Interatuem
http://johnnylee.net/projects/wii/ e que permite se interaja com uma aplicação qualquer,
sendo projetada em qualquer suporte. Já conseguimos através de alguns programas
disponibilizados pelo próprio professor, interagir com o Google Earth, sendo este
projetado em um suporte. Basta agora adaptarmos ao nosso sistema pessoal de projeção,
e ao museu virtual.
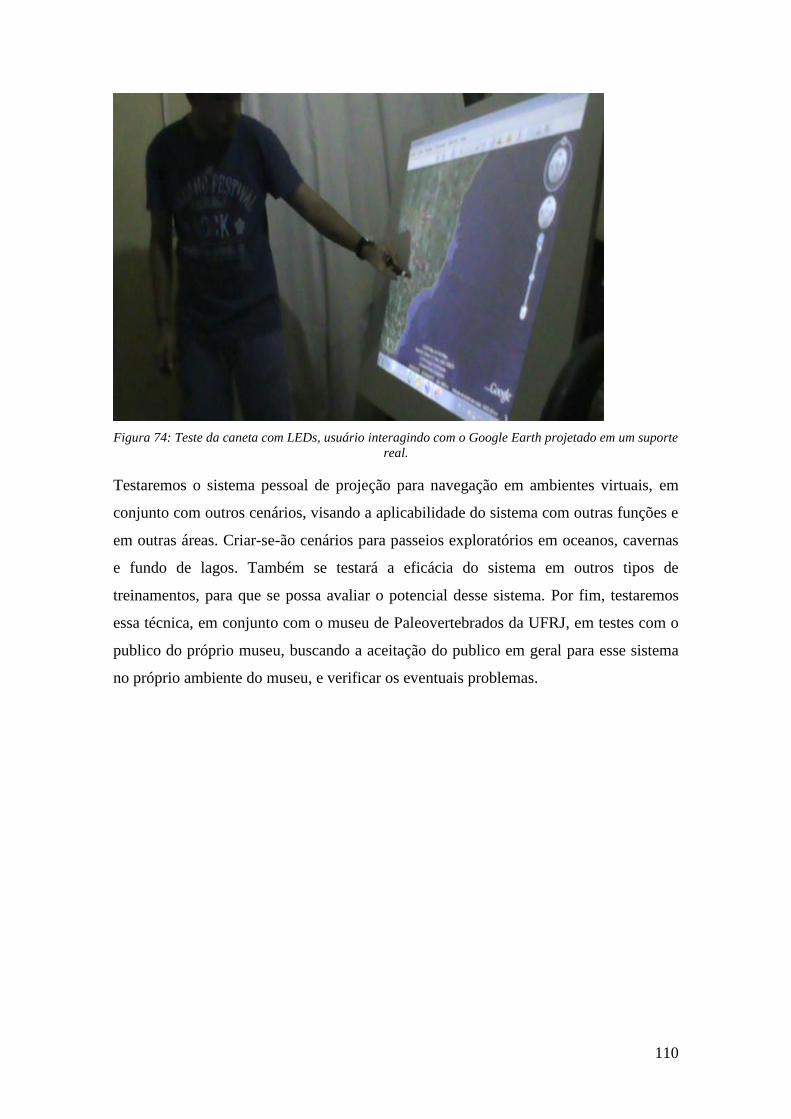
110
Figura 74: Teste da caneta com LEDs, usuário interagindo com o Google Earth projetado em um suporte
real.
Testaremos o sistema pessoal de projeção para navegação em ambientes virtuais, em
conjunto com outros cenários, visando a aplicabilidade do sistema com outras funções e
em outras áreas. Criar-se-ão cenários para passeios exploratórios em oceanos, cavernas
e fundo de lagos. Também se testará a eficácia do sistema em outros tipos de
treinamentos, para que se possa avaliar o potencial desse sistema. Por fim, testaremos
essa técnica, em conjunto com o museu de Paleovertebrados da UFRJ, em testes com o
publico do próprio museu, buscando a aceitação do publico em geral para esse sistema
no próprio ambiente do museu, e verificar os eventuais problemas.
111
8 – REFERÊNCIAS BIBLIOGRÁFICAS
ARANGO, F., AZIZ, E., ESCHE, S. K., CHASSAPIS, C., 2008, A Review of
Applications of Computer Games in Education and Training, in 38th ASEE/IEEE
Frontiers in Education Conference, T4A-6October 22 – 25, , Saratoga Springs, NY
ARAUJO, M. C. M., 2010, Uso de Técnicas de Engenharia Reversa para Reconstrução
Tridimensional de Fósseis Através de Fotografias, Dissertação de M.Sc., COPPE,
Universidade Federal do Rio de Janeiro, Rio de Janeiro, RJ, Brasil.
ARAUJO, T. C. M., ROSSI, A. M. G., 2002, o real, o virtual e a internet na era
da informação., In: VI Iberoamerican Congress of Digital Graphics, , Caracas. VI
Iberoamerican Congress of Digital Graphics, 2002 ., pp.28-30
AZUMA, R. T. 1997 “A Survey of Augmented Reality”
In Presence: Teleoperators and Virtual Environments 6, 4 (August 1997), pp. 355-385.
BANDYOPADHYAY, D., RASKAR, R., FUCHS, H.2001 Dynamic Shader Lamps :
Painting on Movable Objects., Proceedings of the IEEE and ACM International
Symposium on Augmented Reality (ISAR'01) IEEE Computer Society Washington, DC, USA
2001.
BADCOE, I., 1995, The Computer Game Industry: Current State of Play,Virtual
Reality, Springer-Verlag London Ltd, vol 5 pp. 204 -214
BARILLI, E. C. V. C., 2007 Aplicação de Métodos e Técnicas de Realidade Virtual
para Apoiar Processos Educativos a Distância que Exijam o Desenvolvimento de
Habilidades Motoras. tese de D.Sc., Universidade Federal Do Rio de Janeiro, Rio de
Janeiro, RJ, Brasil.
BASTOS, N. C., TEICHRIEB, V., KELNER, J., 2006, Interação com Realidade Virtual
e Aumentada, Fundamentos de Realidade Virtual, livro pré-simpósio, 7º symposium on

112
virtual reality, pp.2-20, Belém, maio.
BERKLEY, J. et all, 1999, Banded Matrix Approach to Finite
Element Modeling for Soft Tissue Simulation, Virtual Reality, Springer-Verlag London
Ltd , Volume 4, Number 3, setembro, 203-212,
BIANCHINI, R. C. JUNIOR, J. L.B. CUZZIOL, JACOBER, M. E. NAKAMURA, R.
TORI, R. 2006, Jogos Eletrônicos e Realidade Virtual, Fundamentos de Realidade
Virtual, livro pré-simpósio, 7º symposium on virtual reality, pp.2-20, Belém, maio.
BIMBER, O., RASKAR, R., 2005 spatial augmented reality merging real and virtual
words, A K Peter LTD, www.spatialar.com.
BOURKE, P., 2009, IDome: Immersive gaming with the Unity3D game engine, in
Proceedings of the Computer Games & Allied Technology CGAT09 , Research
Publishing Services, Singapore, 12 Maio, 2009
BOWMAN, D., A., KOLLER, D. HODGES, L., F., 1998 A Methodology for the
Evaluation of Travel Techniques for Immersive Virtual environments Virtual Reality,
Springer-Verlag London Ltd, vol 3:PP. 20-131
BRAGA, I. F., 2007, Realidade Aumentada em Museus; um Estudo de Caso: as
Batalhas do Museu Nacional de Belas Artes, Tese de D.Sc., COPPE, Universidade
Federal do Rio de Janeiro, Rio de Janeiro, RJ, Brasil.
BRAGA, L. A. F., 2006, Simulação de Rota de Fuga e Sinalização
utilizando Multi-agentes e Realidade Virtual, Tese de D.Sc., COPPE, Universidade
Federal do Rio de Janeiro, Rio de Janeiro, RJ, Brasil.
BRAGA, M., 2001, Realidade Virtual e Educação, REVISTA DE BIOLOGIA E
CIÊNCIAS DA TERRA, Volume 1 - Número 1
BURDEA, G., C., COIFFET, P., 2003 Virtual Reality Technology, 2nd Edition,
Winley

113
BURKHARD C. W¨UNSCHE, B. KOT, GITS, A. , AMOR, R. , HOSKING, J. ,
GRUNDYA, J. 2005, Framework for Game Engine Based Visualisations, in
Proceedings of Image and Vision Computing New Zealand 2005, Novembro. 2005
CAVAZZA, M., 2000, AI in Computer Games: Survey and Perspectives, Virtual
Reality, Springer-Verlag London Ltd, vol 5 pp. 223-235
CHEN, C., CZERWINSKI, M., MACREDIE, R., 1998 Human Factors in Virtual
Environments, Virtual Reality, Springer-Verlag London Ltd, vol 3 pp. 223-225
CHURCHILL, E., SNOWDON, D., 1999, Guest Editorial – Collaborative Virtual
Environments Virtual Reality, Springer-Verlag London Ltd, vol 4 pp. 1-3
CONCI , A. AZEVEDO, R. 2003, Teoria Da Computação Gráfica, Editora Campus,
Rio de Janeiro RJ Brasil
DARGIE, J., 2007, Modeling Techniques: Movies vs. Games, ACM, SIGGRAPH
Computer Graphics , Volume 41 Issue 2, Maio 2007
ESPINHEIRA, R. A. A., 2004, Arquitetura Digital - A Realidade Virtual, Suas
Aplicações e Possibilidades, Dissertação de M.Sc., COPPE, Universidade Federal do
Rio de Janeiro, Rio de Janeiro, RJ, Brasil.
FARIA, M. L. 2003“A visualidade dos jogos virtuais como fomentadoras de um
imaginário tecnológico” in Actas de Diseño, Diseño en Palermo. Encuentro
Latinoamericano de Diseño. Universidad de Palermo
FERREIRA, M.A.G.,V.,PELLEGRINO, S., R., M., 2006, Modelagem 3D, Fundamentos
de Realidade Virtual, livro pré-simpósio, 7º symposium on virtual reality, pp246-264,
Belém, maio
GIAILORENZO, V. , BANERJEE, P. , CONROY, L. , FRANKE, J., 1999,
Application of Virtual Reality in Hospital Facilities Design Virtual Reality, Springer-
Verlag London Ltd, vol 4 pp. 223-234.
114
GUIMARÃES, C. P., 2006, Realidade Virtual e Visualidade da Imagem, Tese de D.Sc.,
COPPE, Universidade Federal do Rio de Janeiro, Rio de Janeiro, RJ, Brasil.
GUIMARAES, C. P. ; PARREIRAS, D. J. P. 2009. Realidade Virtual e Design: uma
aplicação de realidade aumentada como ferramenta potencializadora para o design. In:
4º CIDI CONGIC Congresso Nacional de Iniciação Científica em Design da
Informação, 2009, Rio de Janeiro.
HANNS, D, K., 2006, Estratégias de Imersão: O Corpo como Interface., Fundamentos de
Realidade Virtual, livro pré-simpósio, 7º symposium on virtual reality, pp284-287,
Belém, maio
HAUGUENAUER, C. J. CUNHA, G.G et al, 2008, Projeto Museu Virtual: Criação de
Ambientes Virtuais e Objetos de Aprendizagem com Recursos e Técnicas de Realidade
Virtual, Revista Realidade Virtual, Volume 1- no 1- Janeiro/abril de 2008
HOFFMAN, H. G., HOLLANDER, A., SCHRODER, K., ROUSSEAU, S., FURNESS,
T. ,1998, Physically Touching and Tasting Virtual Objects Enhances the Realism of
Virtual Experiences Virtual Reality, Springer-Verlag London Ltd, vol 3, pp.226-234,
JÚNIOR, N. C., GARCIA, M. B., MEIGUINS, B. S., NETTO A.V. CATERIANO, P.
S. H., 2006, Modelagem e Programação de Ambientes Virtuais Interativos,
Fundamentos de Realidade Virtual, livro pré-simpósio, 7º symposium on virtual reality,
pp.2-20, Belém, maio.
KIRNER, C., TORI, R., 2006, Fundamentos de Realidade Aumentada, Fundamentos de
Realidade Virtual, livro pré-simpósio, 7º symposium on virtual reality, pp.2-20, Belém,
maio.
LANKOVIC, L.,2000, Games Development in VRML, Virtual Reality, Springer-
Verlag London Ltd, vol 5 pp. 195-203
115
LIMA, Á. J. R.. CUNHA, G. G., HAGUENAUER, C. J., 2008, Realidade Aumentada
Aplicada ao Ensino, Revista Realidade Virtual, Volume 1- no 1- Janeiro/Junho de 2008
LEPOURAS, G., VASSILAKIS, C. 2005, Virtual museums for all: employing game
technology for edutainment. Virtual Reality springer- Verlag, London. Vol 8: pp.96–
106
LUZ, R. P. KIRNER, T. G., 2006, Processo de Desenvolvimento de Sistemas de
Realidade Virtual, Fundamentos de Realidade Virtual, livro pré-simpósio, 7º symposium
on virtual reality, pp.2-20, Belém, maio.
MACHADO, L. S., CARDOSO, A., 2006, Dispositivos de Entrada e Saída para
Sistemas de Realidade Virtual, Fundamentos de Realidade Virtual, livro pré-simpósio, 7º
symposium on virtual reality, pp.2-20, Belém, maio.
MANNINEN T. (2000) Multimedia Game Engine as Distributed Conceptualisation and
Prototyping Tool - Contextual Virtual Prototyping. In proceedings of IMSA2000
Conference, November 19-23, Las Vegas, Nevada, USA, IASTED/ACTA Press
MARINS, V., HAUGUENAUER, C. J. CUNHA, G.G., 2008, “Imersão e interatividade
em Ambientes Virtuais de Aprendizagem para Educação a Distância, com uso de
Games e Realidade Virtual”, Revista Realidade Virtual Volume 1- nº 2- maio/agosto de
2008
MARINS, V., HAUGUENAUER, C. J. CUNHA, G.G., Filho F.C., 2008,
“Aprendizagem em Museus com Uso de Tecnologias Digitais e Realidade Virtual”
Revista Realidade Virtual Volume Volume 1- no 1- Janeiro/Junho de 2008
MATEEVITSI, V., SFAKIANOS, M., LEPOURAS, G., VASSILAKIS, C., 2008 A
Game-Engine Based Virtual Museum Authoring and Presentation System., in: 3rd
International Conference on Digital Interactive Media in Entertainment and Arts,
Athens, Greece.

116
MEDEIROS, R., L., 2010, Construção De Um Visualizador Para Simulações
Computacionais Ambientais, Dissertação de M.Sc., COPPE, Universidade Federal do
Rio de Janeiro, Rio de Janeiro, RJ, Brasil.
MILGRAM, P.; TAKEMURA, H., UTSUMI, A., KISHINO, F. (1994). "Augmented
Reality: A class of displays on the reality-virtuality continuum". In: Proceedings of
Telemanipulator and Telepresence Technologies. pp. 2351–34. Retrieved 2007-03-15.
MODESTO, F. A. C., BREGA, J. R. F., GARCIA, M. B., MEIGUINS, B. S.,
SEMENTILLE, A. C., RODELLO, I. A., JUNIOR, R. D. S., 2006, Humanos Virtuais e
Avatares, Fundamentos de Realidade Virtual, livro pré-simpósio, 7º symposium on
virtual reality, pp.2-20, Belém, maio.
NETTO, A. V., MACHADO, L. S., OLIVEIRA, M. C. F., 2002, Realidade Virtual -
Definições, Dispositivos e Aplicações, SÃO CARLOS - SP: ICMC/USP, 2002
(NOTAS DIDÁTICAS).
OLIVEIRA, A. S. MOTTA, R. A. S., OLIVEIRA S. B. et al., 2008. “Interação Por
Objetos Tangíveis em uma Discoteca Virtual", Boletim Técnico da Faculdade de
Tecnologia de São Paulo, v. 25, p. 52-52, 2008.
PARREIRAS, D. J. P., 2009, Realidade Aumentada e Interatividade: o Quebra Cabeça
Virtual, revista realidade virtual, Volume 2- no 2- Julho/Dezembro de 2009
PARREIRAS, D. J. P. ; GOMES, J. V. P.,. 2009, Realidade Aumentada e
Sensoriamento Remoto: Tecnologias aplicadas ao ensino da geografia. In: 30º
CILANCE Congresso Ibero Latino Americano de Métodos Computacionais em
Engenharia, 2009, Búzios.
PARREIRAS, D. J. P , Haguenauer, C., 2010, Análise da Utilização do Software Quest
3D na Modelagem de Ambientes Virtuais para Museus, Revista Realidade Virtual,
Volume 3- no 2- Julho/Dezembro de 2010..
117
PASTORINO, L., HAGUENAUER, C. J., LOHMANN, A. 2009
Uso de VRML na Modelagem de Ambientes Virtuais, Revista Realidade Virtual,
Volume 2- no 1- Janeiro/Junho de 2009
PETRIDIS, P., WHITE, M., MOURKOUSIS, N., et al., 2005, Exploring and
Interacting with Virtual Museums, In: Proceedings of Computer Applications and
Quantitative Methods in Archaeology (CAA), Tomar, Portugal, Mar.
PINHANEZ, C. 2006, Interfaces Não-Convencionais, Fundamentos de Realidade
Virtual, livro pré-simpósio, 7º symposium on virtual reality, pp.2-20, Belém, maio.
PINHO, M. S. REBELO, I. B. 2006, Interação em Ambientes Virtuais Imersivos,
Fundamentos de Realidade Virtual, livro pré-simpósio, 7º symposium on virtual reality,
pp.2-20, Belém, maio.
RAJANI, R., PERRY, M., 1999, The Reality Medical Work: The Case for a New
Perspective on Telemedicine Virtual Reality, Springer-Verlag London Ltd, vol 4 pp.
243-249
RAPEEPISAM, K.; WONG,K.W.; FUNG, C. C.; DEPICKERE, A. 2006, Similarities
and differences between “learn through play” and “edutainment”. 2006, Perth,
Australia. Proceedings of: Australasian conference on interactive entertainment,
Australia Murdoch University, 2006. p. 28-32.
RASKAR, R., BEARDSLEY, P., VAN BAAR, J.,2004, High-precision RFID Location
Sensing RFIG Lamps: Interacting with a Self-describing World via Photo sensing
Wireless Tags and Projectors., in 31 conference on computer graphics and interactive
techniques, Siggraph, 2004, Los Angeles, USA, 2004
RASKAR, R., LOW, K.,L., 2001, Interacting with Spatially Augmented Reality,
MITSUBISHI ELECTRIC RESEARCH LABORATORIES INC., First ACM International

118
Conference on Virtual Reality, Computer Graphics and Visualization in Africa
(AFRIGRAPH), November 2001.
RASKAR, R. WELCH, G. LOW, K. 2001, Shader Lamps: Animating Real Objects
With Image-Based Illumination, Mitsubishi Electric Research Laboratories, Inc.,
Eurographics Workshop on Rendering, London, England, June 25-27, 2001
RAYMAEKERS, C., DE WEYER, T., CONINX, K., VAN REETH, F.,
FLERACKERS, E., 1999, ICOME: An Immersive Collaborative 3D Object Modeling
Environment Virtual Reality, Springer-Verlag London Ltd, vol 4 pp. 265-274
RINALDI, L. C. A., KUBO, M. M., RODELLO, I. A., SEMENTILLE, A. C., TORI, R.,
BREGA, J. R. F., 2006, Ambientes Virtuais Distribuídos e Compartilhados,
Fundamentos de Realidade Virtual, livro pré-simpósio, 7º symposium on virtual reality,
pp.2-20, Belém, maio.
SHARKAWI, K.H., UJANG, M.U. ABDUL-RAHMAN, A., 2008, 3D Navigation
System For Virtual Reality Based On 3D Game Engine The International Archives of
the Photogrammetric, Remote Sensing and Spatial Information Sciences. Vol. XXXVII.
Part B4. Beijing 2008 pp. 513-517
SINES, R., DAS, B., 1999, Peltier Haptic Interface (PHI) for Improved Sensation of
Touch in Virtual Environments, Virtual Reality, Springer-Verlag London Ltd, vol 4 pp.
260-264
SISCOUTO, R., COSTA, R., 2008, Realidade Virtual e Aumentada: uma abordagem
tecnológica. Sociedade Brasileira de Computação SBC.
SISCOUTTO, R., A., SZENBERG, F., TORI, R., RAPOSO A., B., CELES W.,
GATTASS, M., 2006, Estereoscopia , Fundamentos de Realidade Virtual, livro pré-
simpósio, 7º symposium on virtual reality, pp221-245, Belém, maio
SOARES, L. P., CABRAL, M. C., ZUFFO, M. K., 2006, Sistemas Avançados de
119
Realidade Virtual, Fundamentos de Realidade Virtual, livro pré-simpósio, 7º symposium
on virtual reality, pp.2-20, Belém, maio.
TAVARES, R., 2006, A Representação Do Corpo Humano Nos Ambientes Virtuais,
Fundamentos de Realidade Virtual, livro pré-simpósio, 7º symposium on virtual reality,
pp266-283, Belém, maio
TORI, R., KIRNER, C., 2006, Fundamentos de Realidade Virtual, Fundamentos de
Realidade Virtual, livro pré-simpósio, 7º symposium on virtual reality, pp.2-20, Belém,
maio.
TRENHOLME, D., SMITH, S. P., 2008, Computer game engines for developing first-
person virtual environments, Virtual Reality springer- Verlag, London.
UNDERKOFFLER, J., ULLMER, B. ISHII, H. 1999, Emancipated Pixels: Real-World
Graphics In The Luminous Room. in the Proceedings of SIGGRAPH „99, 13 de agosto,
1999
VELHO, A. L. P. A. L., 2001, Mundos Virtuais e Jogos por Computador: PONG – Um
Estudo de Caso, Instituto de Matemática Pura e Aplicada, Laboratório VISGRAF,
Technical Report, TR-01-02 September 2001
WATT, A., MADDOCK, S., 1995, Computer Games Technology and Higher
Education, Virtual Reality, Springer-Verlag London Ltd, vol 5 pp.185-194