Sistemas de Controle 2 -...
29
Sistemas de Controle 2 Cap.9 – Projeto por Intermédio do Lugar das Raízes Pontifícia Universidade Católica de Goiás Escola de Engenharia Prof. Dr. Marcos Lajovic Carneiro
Transcript of Sistemas de Controle 2 -...
Sistemas de Controle 2Cap.9 – Projeto por Intermédio do Lugar das Raízes
Pontifícia Universidade Católica de Goiás
Escola de Engenharia
Prof. Dr. Marcos Lajovic Carneiro
AED Cap.8
• 8.8 – Lugar das Raízes Generalizado– Exercício de Avaliação 8.7
• 8.9 – Lugar das Raízes para sistemas com Retroação Positiva– Exercício de Avaliação 8.8
• 8.10 – Sensibilidade dos Pólos– Exercício de Avaliação 8.9
Data de entrega: dia da prova 2 - 08/04
2

AED - Final do semestre
• Controle PID físico
Assistir vídeos:
Algoritmo PID: Básicohttps://www.youtube.com/watch?v=7BDjZYGHupE&feature=youtu.be
Arduino+PID
https://www.youtube.com/watch?v=txftR4TqKYA
3

AED - Final do semestre
• Controle PID físico – apresentação dia 10/06
Construir uma aplicação com Controle PID
- Controle de temperatura
- Controle de posição
- Controle de luminosidade
- Controle de pressão
- Etc.
4

5
Introdução ao Controle PID

Controle PID – Analógico com AmpOp
6
Sistemas de Controle 2Prof. Dr. Marcos Lajovic Carneiro
Cap.9 – Projeto por Intermédio do Lugar das Raízes
9. Projeto por Intermédio do Lugar das Raízes
9.1 Introdução
9.2 Melhorando o Erro de Estado Estacionário Através da Compensação em Cascata
9.3 Melhorando a Resposta Transitória Através da Compensação em Cascata
9.4 Melhorando o Erro de Estado Estacionário e a Resposta Transitória
9.5 Compensação por Retroação
9.6 Realização Física da Compensação
Bibliografia principal:
Engenharia de Sistemas de Controle – Norman S. Nise

9.1 Introdução
Através do ajuste do ganho podemos deslocar os pólos e então alterar: Resposta transitória Estabilidade do sistema
Contudo, através do ajuste de ganho estamos limitados ao lugar das raízes.
Aperfeiçoando a Resposta Transitória
O projeto de sistemas de controle em alguns casos podem ser melhorados se pudermos utilizar um ponto que está fora do lugar das raízes.
Exemplo:Ultrapassagem percentual e tempo de assentamento desejados estão em B.
Contudo, B não faz parte do lugar das raízes
9.1 Introdução
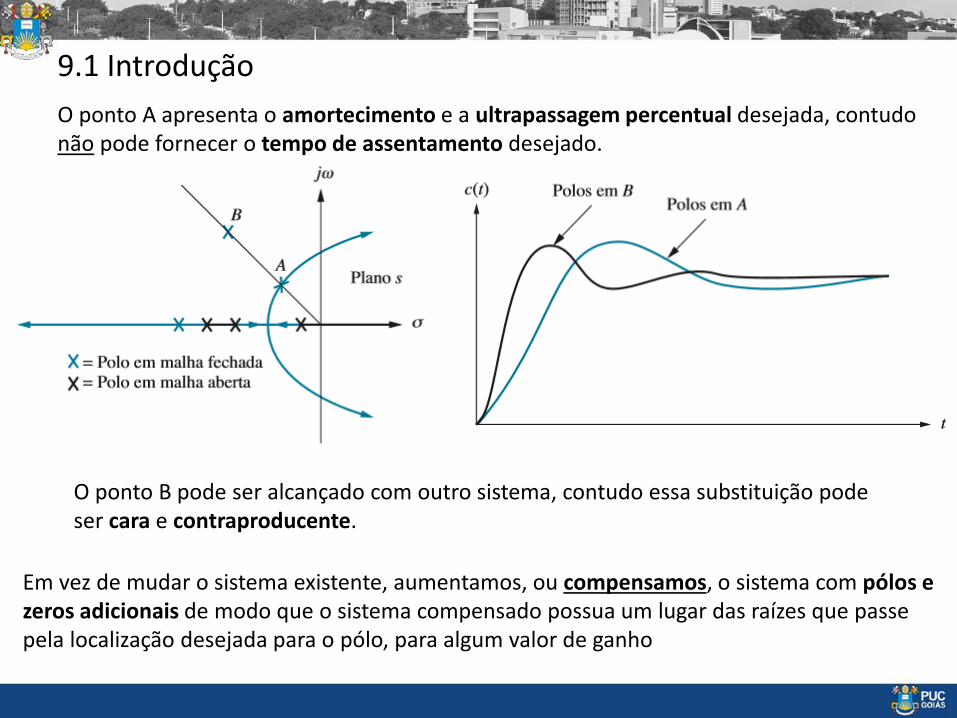
O ponto A apresenta o amortecimento e a ultrapassagem percentual desejada, contudo não pode fornecer o tempo de assentamento desejado.
O ponto B pode ser alcançado com outro sistema, contudo essa substituição pode ser cara e contraproducente.
Em vez de mudar o sistema existente, aumentamos, ou compensamos, o sistema com pólos e zeros adicionais de modo que o sistema compensado possua um lugar das raízes que passe pela localização desejada para o pólo, para algum valor de ganho
9.1 Introdução
Melhorar o Erro de Estado Estacionário
Utilidade dos compensadores:
Aperfeiçoar a Resposta Transitória
Muitas vezes o simples ajuste do ganho degrada o erro de estado estacionário ou a ultrapassagem percentual. Os compensadores permitem atender a todas especificações ao mesmo tempo.
Mover lugar geométrico das raízes para o local desejado.
• Resposta transitória Pode ser melhorada com a inserção de uma derivação.
• Erro de estado estacionário Pode ser melhorado com a inserção de um integrador.
• Aumento do ganho Reduz o erro de estado estacionário, porém aumenta ultrapassagem percentual.
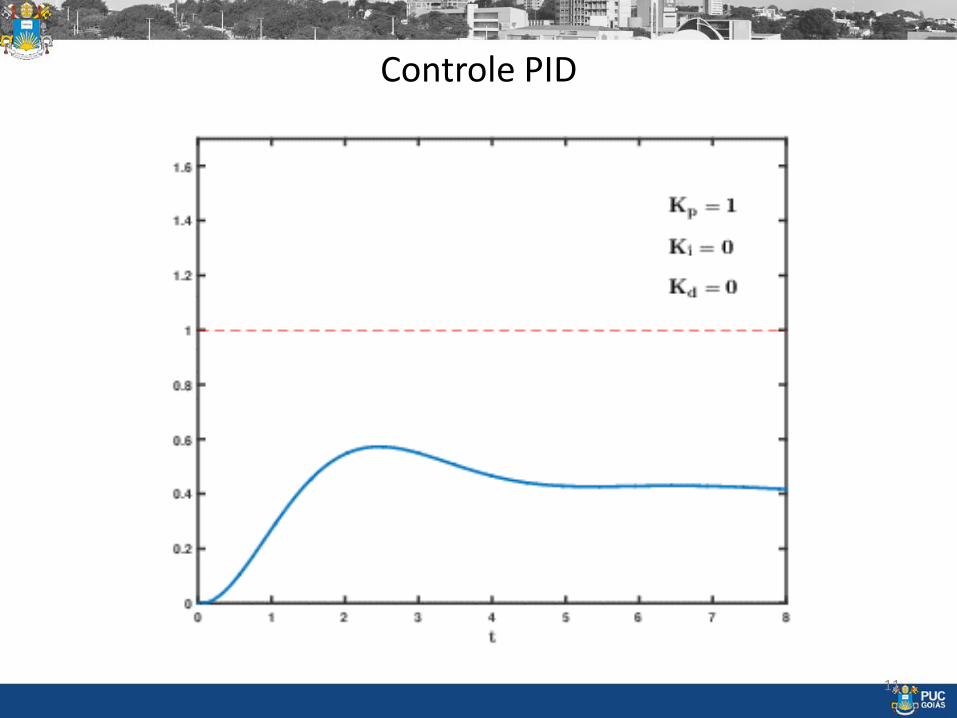
Controle PID
11

9.1 Introdução
Compensadores:
Compensadores ideais Utilizam integração ou derivação pura para melhorar a resposta do sistema. Implementados com estruturas ativas (gastam energia).
Usam amplificadores e fontes adicionais
Compensador ideal (ativo) (integração ou derivação pura)Vantagem:
Erro pode ser reduzido a zero.Desvantagem:
Gastam energia, usam amplificadores e fontes adicionais
Compensador sem integração ou derivação pura (passivo)Vantagem:
São passivos (usam resistores e capacitores).Mais baratos, não usam fontes adicionais.
Desvantagem: Erro de estado estacionário não é forçado a zero.

9.2 Melhorando o Erro de Estado Estacionário Através da Compensação em Cascata
Compensação Integral Ideal Controlador Proporcional-e-Integral (PI)
Sistema de Controle Proporcional
Suprimem o erro diretamente
Sistema de Controle Integral
Suprimem a integral do erro
Sistema de Controle Derivativo
Suprimem a derivada do erro
Compensador por atraso de fase Compensador em cascata que não usa integração pura
9.2 Melhorando o Erro de Estado Estacionário Através da Compensação em Cascata
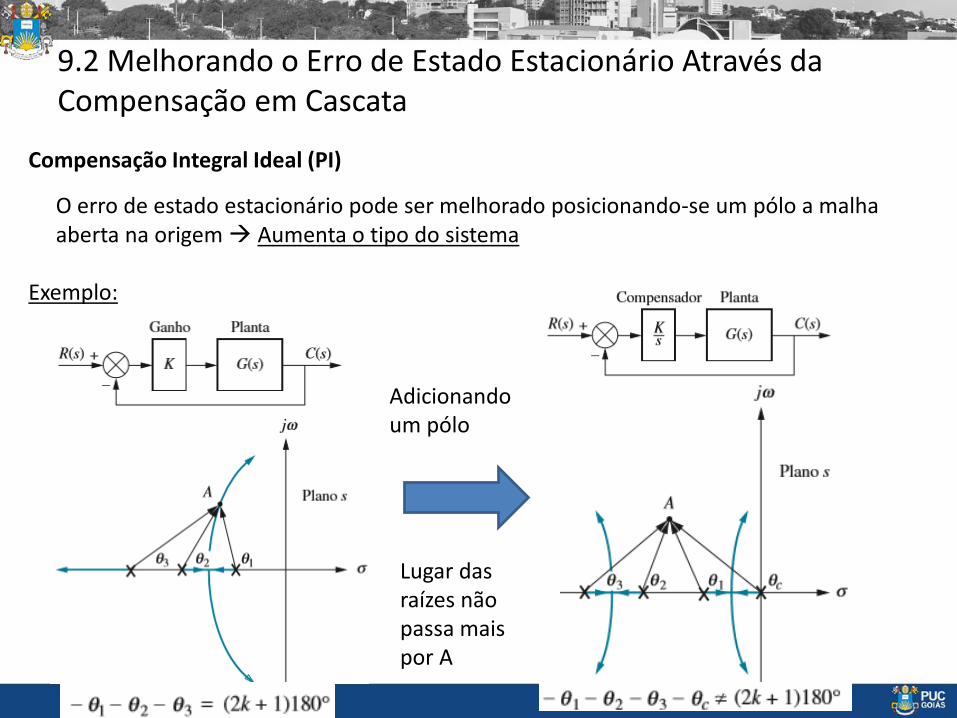
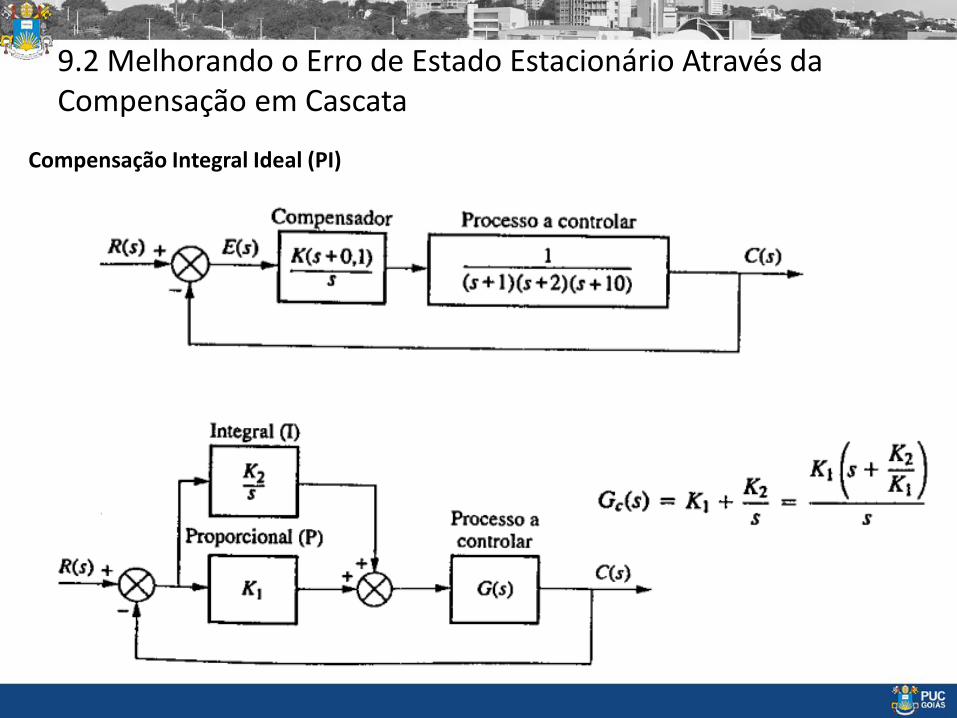
Compensação Integral Ideal (PI)
O erro de estado estacionário pode ser melhorado posicionando-se um pólo a malha aberta na origem Aumenta o tipo do sistema
Exemplo:
Adicionando um pólo
Lugar das raízes não passa mais por A
9.2 Melhorando o Erro de Estado Estacionário Através da Compensação em Cascata
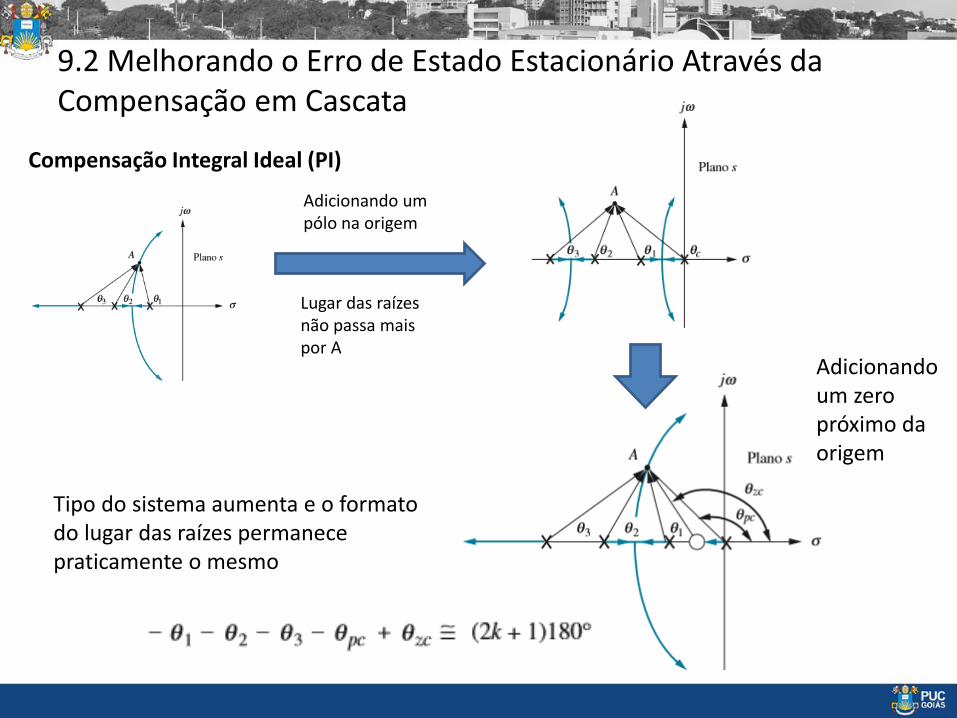
Compensação Integral Ideal (PI)
Adicionando um pólo na origem
Lugar das raízes não passa mais por A
Adicionando um zero próximo da origem
Tipo do sistema aumenta e o formato do lugar das raízes permanece praticamente o mesmo
9.2 Melhorando o Erro de Estado Estacionário Através da Compensação em Cascata
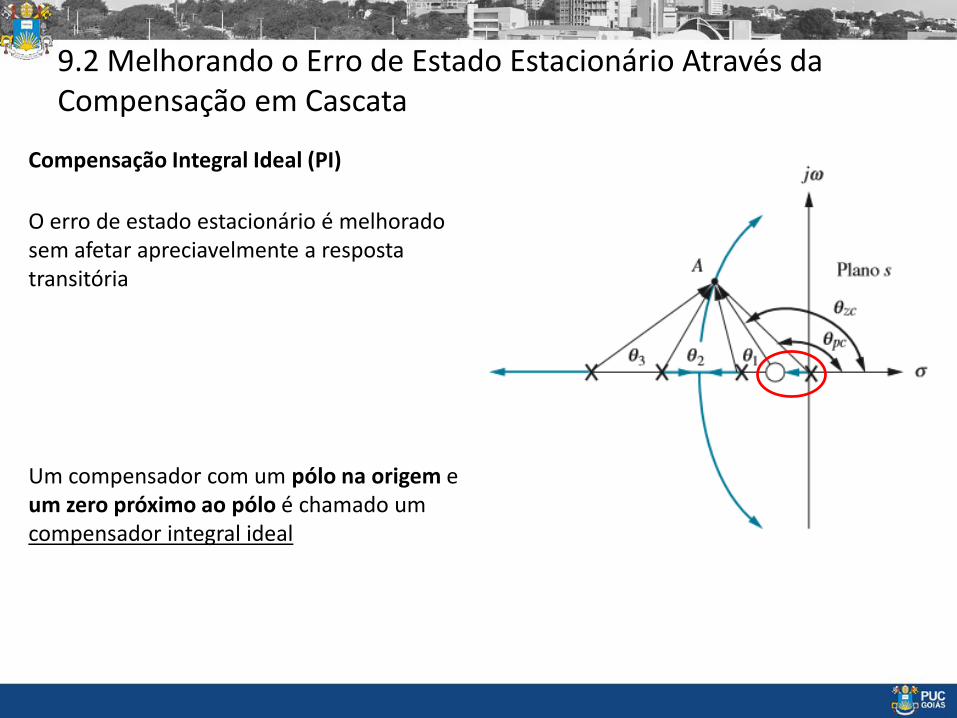
Compensação Integral Ideal (PI)
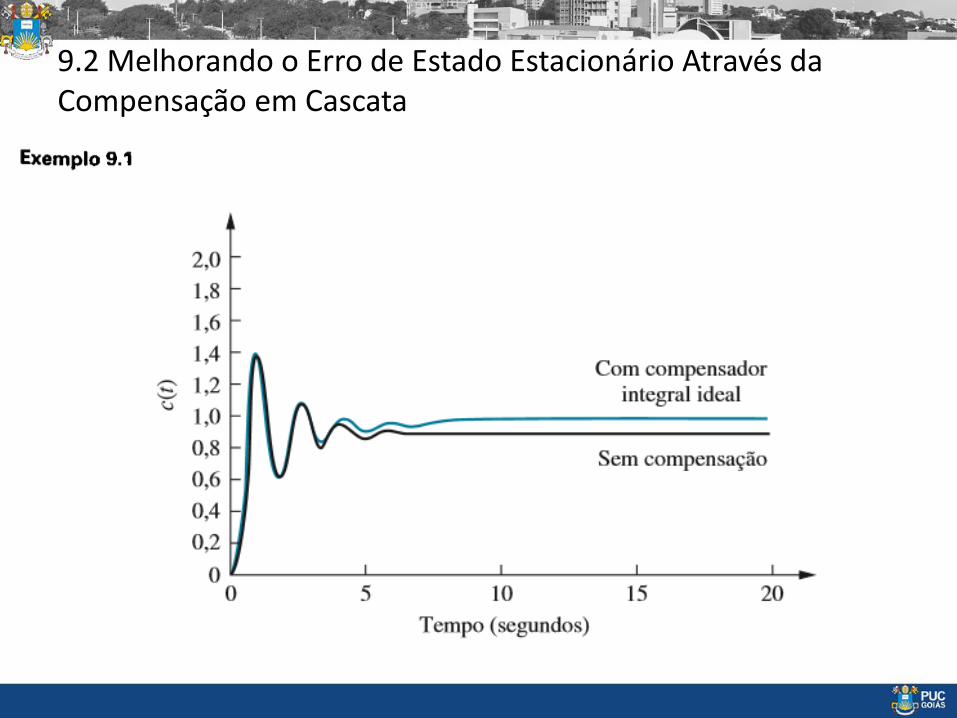
O erro de estado estacionário é melhorado sem afetar apreciavelmente a resposta transitória
Um compensador com um pólo na origem e um zero próximo ao pólo é chamado um compensador integral ideal

9.2 Melhorando o Erro de Estado Estacionário Através da Compensação em Cascata
9.2 Melhorando o Erro de Estado Estacionário Através da Compensação em Cascata
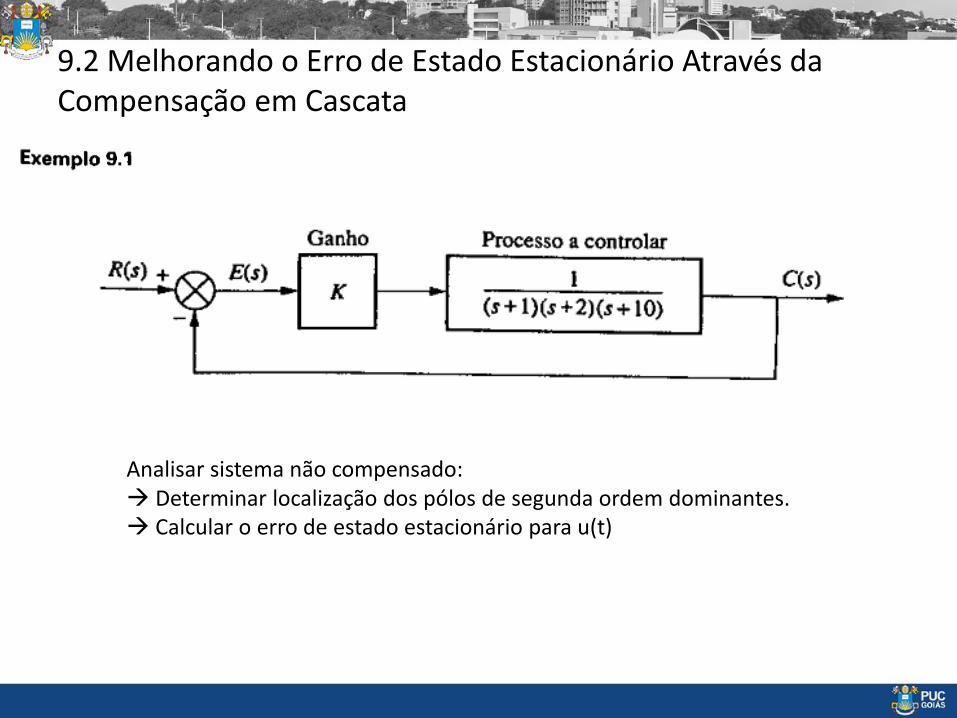
Analisar sistema não compensado: Determinar localização dos pólos de segunda ordem dominantes. Calcular o erro de estado estacionário para u(t)

9.2 Melhorando o Erro de Estado Estacionário Através da Compensação em Cascata
• Relação de amortecimento = 0,174• Cálculo da reta radial:
𝜃 = tan−11 − 0.1742
0.174
𝜃 = 79.97°
180° − 𝜃 = 100,02°𝜃

Calculando reta radial a partir da relação de amortecimento
𝜃 = tan−11 − 0.1742
0.174
𝜃 = 79.97°
180° − 𝜃 = 100,02°

9.2 Melhorando o Erro de Estado Estacionário Através da Compensação em Cascata
• Relação de amortecimento = 0,174• Reta radial em 100,02°• Ponto de encontro: −0.694 ± 𝑗3.926 com K=164,6• Terceiro polo em -11.61• Kp=8,23
• Erro:
𝐾𝑝 =164,6
1𝑥2𝑥10= 8.23
9.2 Melhorando o Erro de Estado Estacionário Através da Compensação em Cascata
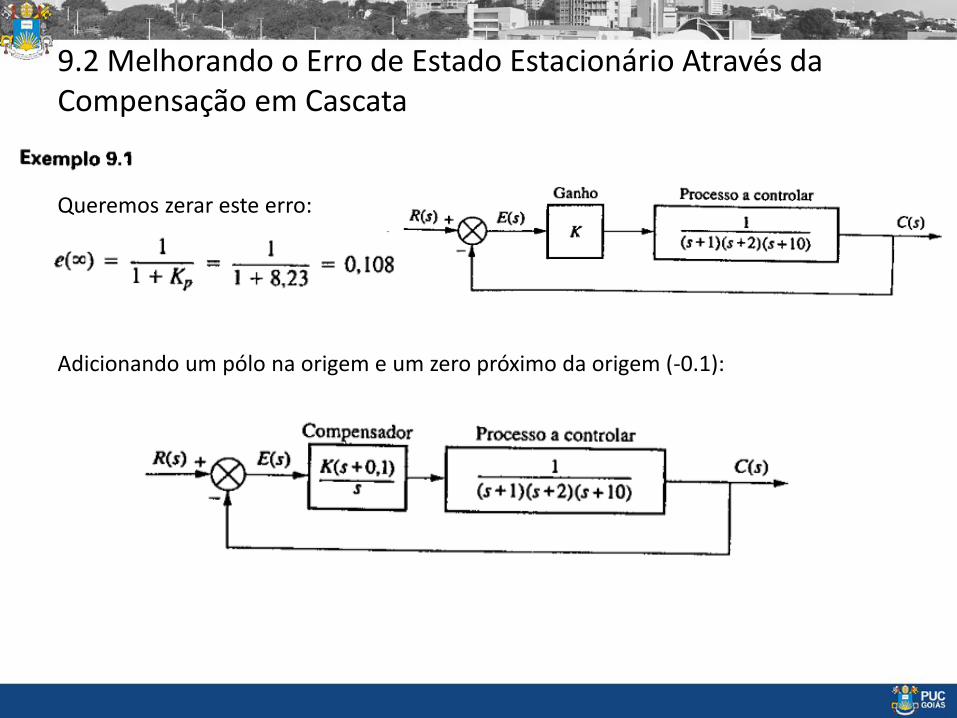
Queremos zerar este erro:
Adicionando um pólo na origem e um zero próximo da origem (-0.1):
9.2 Melhorando o Erro de Estado Estacionário Através da Compensação em Cascata
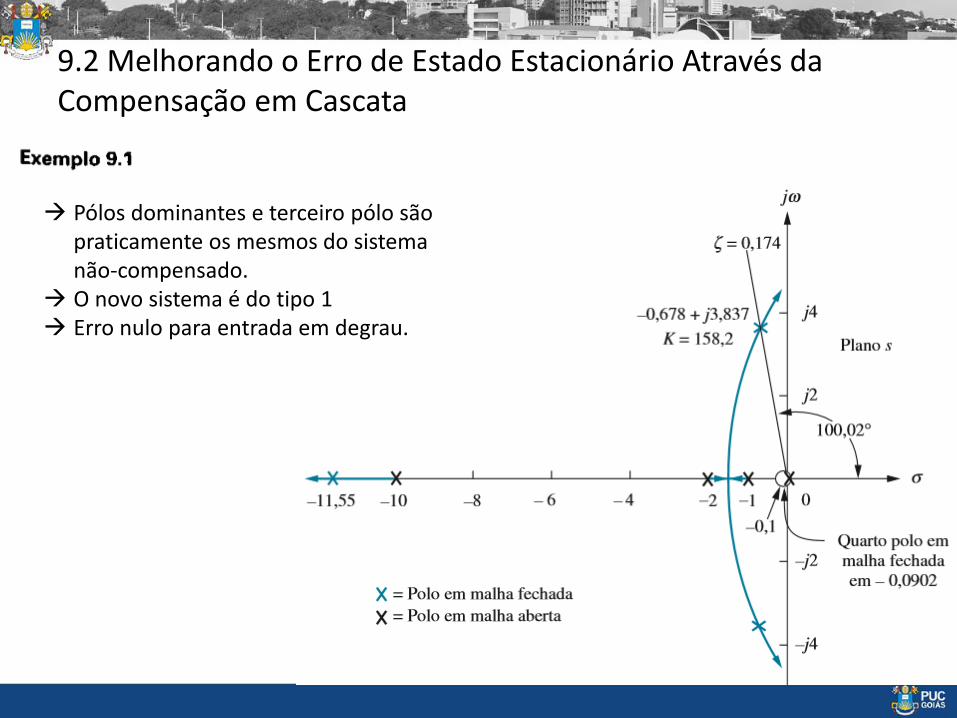
Pólos dominantes e terceiro pólo são praticamente os mesmos do sistema não-compensado.
O novo sistema é do tipo 1 Erro nulo para entrada em degrau.
9.2 Melhorando o Erro de Estado Estacionário Através da Compensação em Cascata
9.2 Melhorando o Erro de Estado Estacionário Através da Compensação em Cascata
Compensação Integral Ideal (PI)
9.2 Melhorando o Erro de Estado Estacionário Através da Compensação em Cascata
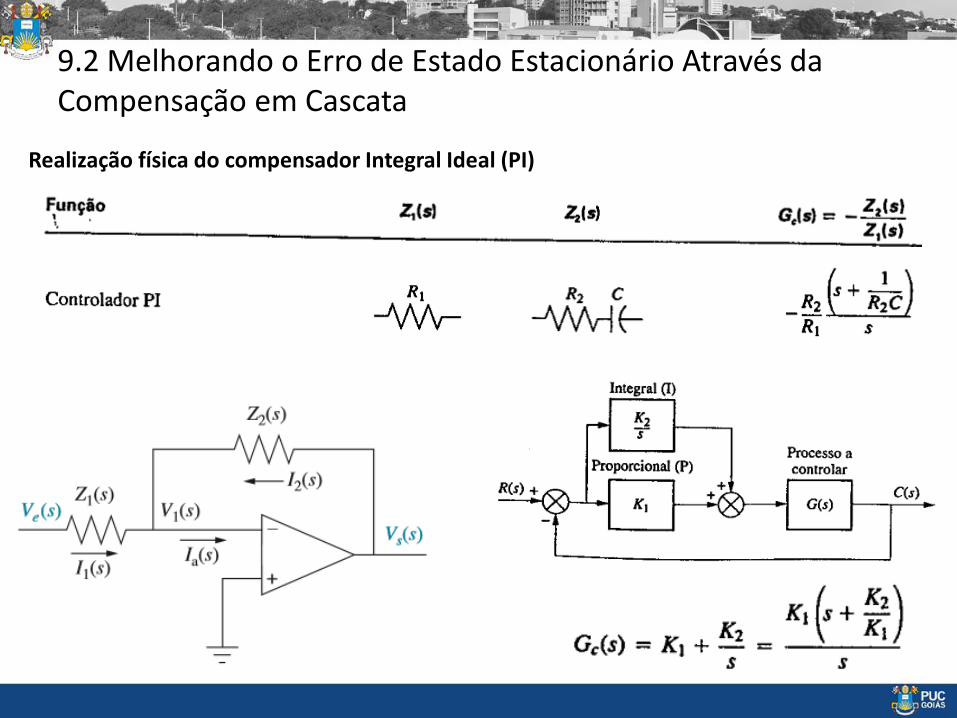
Realização física do compensador Integral Ideal (PI)
9.2 Melhorando o Erro de Estado Estacionário Através da Compensação em Cascata
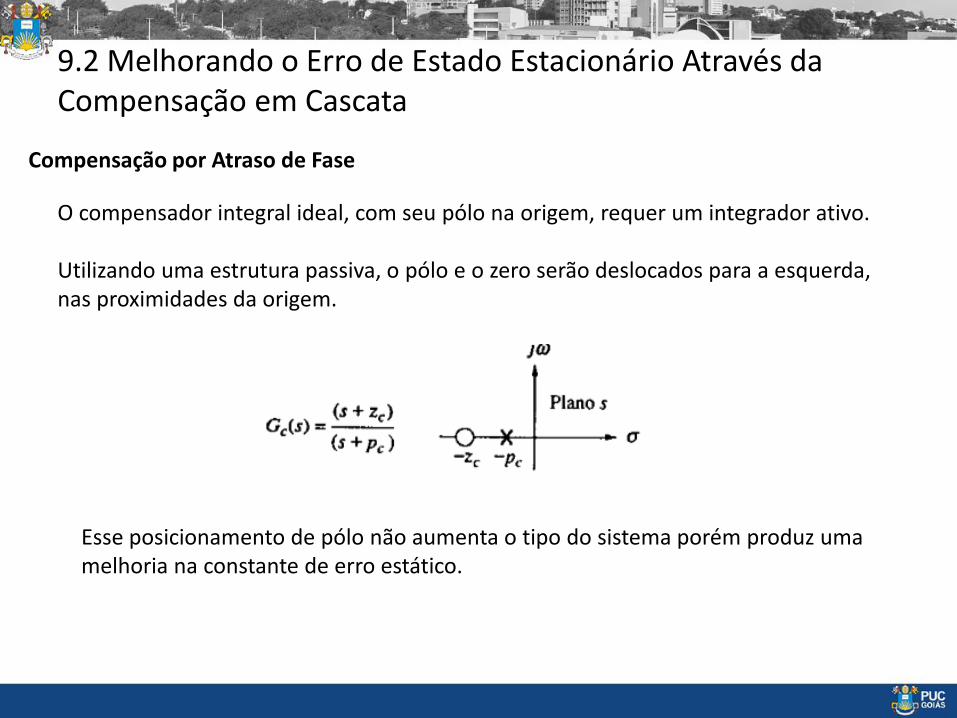
Compensação por Atraso de Fase
O compensador integral ideal, com seu pólo na origem, requer um integrador ativo.
Utilizando uma estrutura passiva, o pólo e o zero serão deslocados para a esquerda, nas proximidades da origem.
Esse posicionamento de pólo não aumenta o tipo do sistema porém produz uma melhoria na constante de erro estático.
9.2 Melhorando o Erro de Estado Estacionário Através da Compensação em Cascata
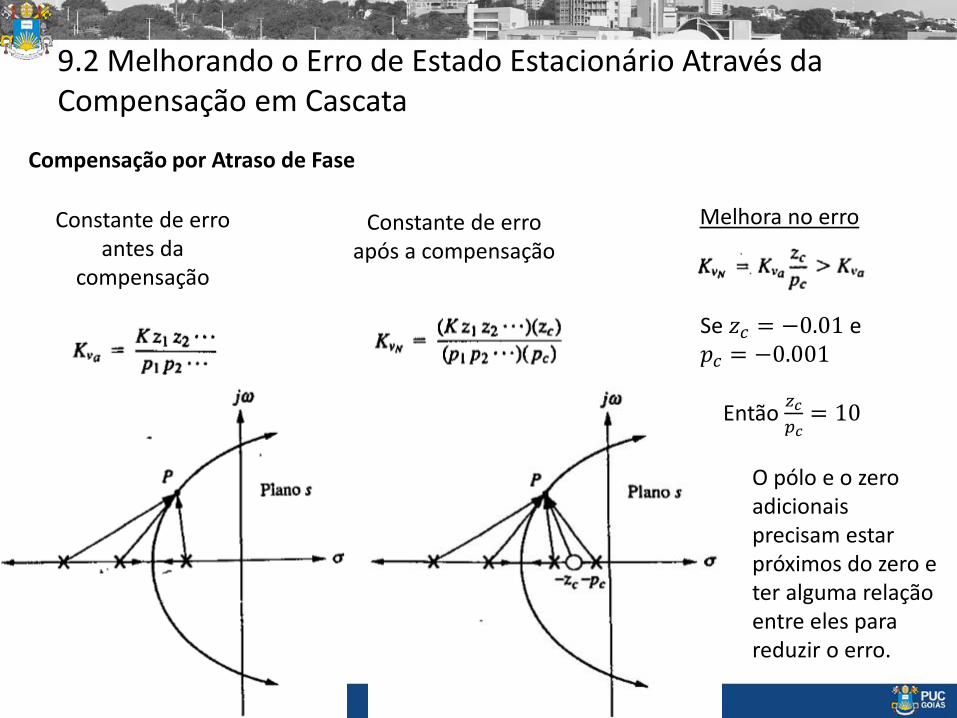
Compensação por Atraso de Fase
Constante de erro antes da
compensação
Constante de erro após a compensação
Melhora no erro
Se 𝑧𝑐 = −0.01 e 𝑝𝑐 = −0.001
Então 𝑧𝑐
𝑝𝑐= 10
O pólo e o zero adicionais precisam estar próximos do zero e ter alguma relação entre eles para reduzir o erro.

9.2 Melhorando o Erro de Estado Estacionário Através da Compensação em Cascata
Realização física da compensação por Atraso de Fase passiva