SISTEMAS DE CONTROLE AUTOMÁTICO PARA SERVO … · ajustáveis de equipamentos e de...
6
SISTEMAS DE CONTROLE AUTOMÁTICO PARA SERVO-VENTILADORES EM TERAPIA RESPIRATÓRIA Mariana Bacelar Figueiredo - PG Prof. Dr. Takashi Yoneyama - PQ Resumo O trabalho tem por objetivo trazer o resultado de uma extensa pesquisa bibliográfica acerca do projeto de controladores para ventiladores mecânicos artificiais. Através da especificação de parâmetros ajustáveis de equipamentos e de características do sistema fisiológico humano, chega-se a uma série de requisitos de desempenho para um controlador automático que venha a desempenhar a função de estabilização da ventilação alveolar do paciente entubado. Devido a característica não-linear do sistema respiratório, de variações temporais dos parâmetros utilizados no modelo e da variabilidade desses parâmetros entre os indivíduos, foi escolhido a estratégia de controle adaptativa, que é simulada e discutida.. Abstract The present work brings the result of an extensive bibliographic research about controller design for artificial mechanic ventilators for use in patients under influence of neuro-muscular inhibitors. Some requirements about stability, robustness and performance are made for the controller after an analysis of which parameters are adjustable in the equipments used today in hospitals and which are the measurable parameters in the human respiratory system. The respiratory physiological system is defined as non- linear, with the parameters used in the models varying in time and with a large range of variation of the parameters when comparing different individuals. Because of this definition, the adaptive control strategy is pointed as the most suitable one for the proposed project and an example of a project is simulated. 1. INTRODUÇÃO Pela ISO 5359, o ventilador pulmonar é um dispositivo automático conectado às vias aéreas com o objetivo de aumentar ou prover a ventilação do paciente. Atualmente, a tendência da indústria é a produção de respiradores reguláveis através dos controles diretos, que são: volume corrente, freqüência respiratória, a relação I/E (Inspiração / Expiração), entre outros. Alguns sistemas inteligentes, com o uso de malha-fechada em sistemas ventilatórios estão disponíveis desde meados da década de 70. Porém o objetivo desses controladores automáticos existentes são basicamente de manter constantes os níveis de fluxo, pressão ou volumes entregues ao paciente, em valore pré-determinados, quando o paciente pode exercer parte do esforço respiratório ou durante o processo de desmame do paciente ao aparelho ventilatório. Exemplos desses modos de ventilação são a ventilação mandatória minuto, MMV (do inglês Mandatory Minute Ventilation) e a ventilação assistida proporcional, PAV (do inglês Proportional Assist Ventilation), disponíveis em diversos equipamentos no mercado. Porém esses controladores têm como parâmetros de entrada a ser comparado com os valores de referência, apenas parâmetros monitorados de volume tidal (mL), taxa respiratória (número de respirações por minuto), ventilação minuto (L/min), pressão (cmH 2 0), e ventilação alveolar. Porém esse tipo de malha -fechada não monitora os sinais vitais do paciente, e portanto, garante apenas o volume ou pressão entregues, dependendo do caso, mas não garante se esse volume ou pressão entregues estão sendo suficientes para garantir efetivamente um fornecimento adequado de oxigênio para a respiração celular do paciente. A proposta deste trabalho de pesquisa não visa, portanto, a implementação de uma malha fechada como as disponíveis no mercado hoje, mas sim, garantir a oxigenação celular adequada ao paciente, via realimentação em malha-fechada da monitoração de parâmetros tal como pressão parcial de oxigênio no sangue arterial. Outras abordagens seriam possíveis utilizando-se saturação de oxigênio no sangue, fração expirada de gás carbônico, entre outros.
Transcript of SISTEMAS DE CONTROLE AUTOMÁTICO PARA SERVO … · ajustáveis de equipamentos e de...
SISTEMAS DE CONTROLE AUTOMÁTICO PARA SERVO-VENTILADORES EM TERAPIA RESPIRATÓRIA
Mariana Bacelar Figueiredo - PG
Prof. Dr. Takashi Yoneyama - PQ
Resumo
O trabalho tem por objetivo trazer o resultado de uma extensa pesquisa bibliográfica acerca do projeto de controladores para ventiladores mecânicos artificiais. Através da especificação de parâmetros ajustáveis de equipamentos e de características do sistema fisiológico humano, chega-se a uma série de requisitos de desempenho para um controlador automático que venha a desempenhar a função de
estabilização da ventilação alveolar do paciente entubado. Devido a característica não-linear do sistema respiratório, de variações temporais dos parâmetros utilizados no modelo e da variabilidade desses parâmetros entre os indivíduos, foi escolhido a estratégia de controle adaptativa, que é simulada e
discutida..
Abstract
The present work brings the result of an extensive bibliographic research about controller design for artificial mechanic ventilators for use in patients under influence of neuro-muscular inhibitors. Some requirements about stability, robustness and performance are made for the controller after an analysis of which parameters are adjustable in the equipments used today in hospitals and which are the measurable parameters in the human respiratory system. The respiratory physiological system is defined as non-linear, with the parameters used in the models varying in time and with a large range of variation of the parameters when comparing different individuals. Because of this definition, the adaptive control strategy is pointed as the most suitable one for the proposed project and an example of a project is simulated.
1. INTRODUÇÃO
Pela ISO 5359, o ventilador pulmonar é um dispositivo automático conectado às vias aéreas com o objetivo de aumentar ou prover a ventilação do paciente. Atualmente, a tendência da indústria é a produção de respiradores reguláveis através dos controles diretos, que são: volume corrente, freqüência respiratória, a relação I/E (Inspiração / Expiração), entre outros. Alguns sistemas inteligentes, com o uso de malha-fechada em sistemas ventilatórios estão disponíveis desde meados da década de 70. Porém o objetivo desses controladores automáticos existentes são basicamente de manter constantes os níveis de fluxo, pressão ou volumes entregues ao paciente, em valore pré-determinados, quando o paciente pode exercer parte do esforço respiratório ou durante o processo de desmame do paciente ao aparelho ventilatório. Exemplos desses modos de ventilação são a ventilação mandatória minuto, MMV (do inglês Mandatory Minute Ventilation) e a ventilação assistida proporcional, PAV (do inglês Proportional Assist Ventilation), disponíveis em diversos equipamentos no mercado. Porém esses controladores têm como parâmetros de entrada a ser comparado com os valores de referência, apenas parâmetros monitorados de volume tidal (mL), taxa respiratória (número de respirações por minuto), ventilação minuto (L/min), pressão (cmH20), e ventilação alveolar. Porém esse tipo de malha-fechada não monitora os sinais vitais do paciente, e portanto, garante apenas o volume ou pressão entregues, dependendo do caso, mas não garante se esse volume ou pressão entregues estão sendo suficientes para garantir efetivamente um fornecimento adequado de oxigênio para a respiração celular do paciente. A proposta deste trabalho de pesquisa não visa, portanto, a implementação de uma malha fechada como as disponíveis no mercado hoje, mas sim, garantir a oxigenação celular adequada ao paciente, via realimentação em malha -fechada da monitoração de parâmetros tal como pressão parcial de oxigênio no sangue arterial. Outras abordagens seriam possíveis utilizando-se saturação de oxigênio no sangue, fração expirada de gás carbônico, entre outros .
Devido a característica não-linear do sistema respiratório, de variações temporais dos parâmetros utilizados no modelo e da grande variabilidade desses parâmetros entre os indivíduos, as alternativas adaptativa e robusta se mostram a princípio, mais indicadas para investimento de esforços iniciais de projetos. Como a maior parte dos controladores encontrados na literatura foram de alguma forma baseados na técnica de controle adaptativo, esta é a estratégia de controle adotada no desenvolvimento deste trabalho. Alguns projetos de controladores podem ser encontrados em LAUBSCHER et al. 1994 [4], NEBOT e VALDÉS 1997 [6], STADLER et al. 2002 [8], entre outros. A maior dificuldade de implementação de tais controladores tem sido apontado como a rigidez das normas mundiais para este setor. No Brasil a norma da ABNT para ventiladores pulmonares de uso medicinal é a NBR-13763 12/1996, que foi baseada na ISO 5359.
2. ANÁLISE DE ESTRATÉGIAS DE CONTROLE
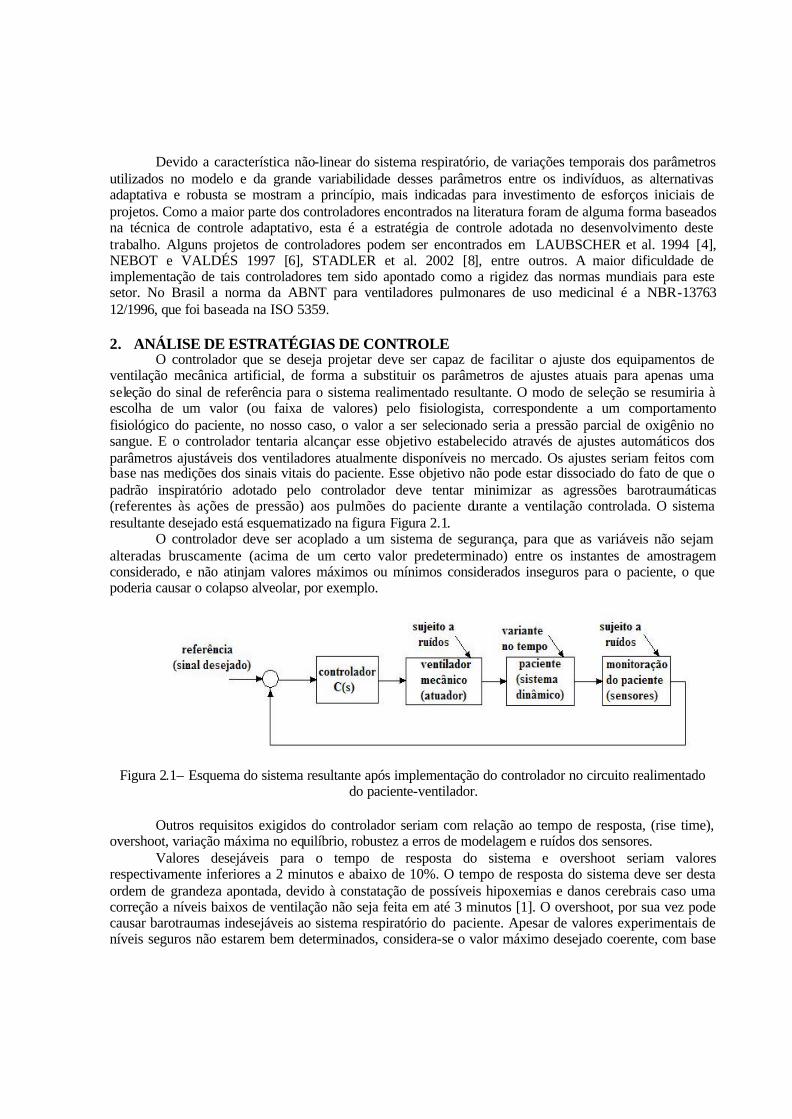
O controlador que se deseja projetar deve ser capaz de facilitar o ajuste dos equipamentos de ventilação mecânica artificial, de forma a substituir os parâmetros de ajustes atuais para apenas uma seleção do sinal de referência para o sistema realimentado resultante. O modo de seleção se resumiria à escolha de um valor (ou faixa de valores) pelo fisiologista, correspondente a um comportamento fisiológico do paciente, no nosso caso, o valor a ser selecionado seria a pressão parcial de oxigênio no sangue. E o controlador tentaria alcançar esse objetivo estabelecido através de ajustes automáticos dos parâmetros ajustáveis dos ventiladores atualmente disponíveis no mercado. Os ajustes seriam feitos com base nas medições dos sinais vitais do paciente. Esse objetivo não pode estar dissociado do fato de que o padrão inspiratório adotado pelo controlador deve tentar minimizar as agressões barotraumáticas (referentes às ações de pressão) aos pulmões do paciente durante a ventilação controlada. O sistema resultante desejado está esquematizado na figura Figura 2.1.
O controlador deve ser acoplado a um sistema de segurança, para que as variáveis não sejam alteradas bruscamente (acima de um certo valor predeterminado) entre os instantes de amostragem considerado, e não atinjam valores máximos ou mínimos considerados inseguros para o paciente, o que poderia causar o colapso alveolar, por exemplo.
Figura 2.1– Esquema do sistema resultante após implementação do controlador no circuito realimentado
do paciente-ventilador.
Outros requisitos exigidos do controlador seriam com relação ao tempo de resposta, (rise time), overshoot, variação máxima no equilíbrio, robustez a erros de modelagem e ruídos dos sensores.
Valores desejáveis para o tempo de resposta do sistema e overshoot seriam valores respectivamente inferiores a 2 minutos e abaixo de 10%. O tempo de resposta do sistema deve ser desta ordem de grandeza apontada, devido à constatação de possíveis hipoxemias e danos cerebrais caso uma correção a níveis baixos de ventilação não seja feita em até 3 minutos [1]. O overshoot, por sua vez pode causar barotraumas indesejáveis ao sistema respiratório do paciente. Apesar de valores experimentais de níveis seguros não estarem bem determinados, considera-se o valor máximo desejado coerente, com base
no fato de resultados de experimentos com controladores com um overshoot de 8% terem sido considerados satisfatórios por fisiologistas [4].
É desejável ainda o uso de um observador de estados a fim de que valores estimados de medições possam ser usados em casos de valores momentaneamente inválidos de sinais amostrados devido a falhas sensoriais. Para tal seria necessário a utilização de uma abordagem baseada em um modelo do sistema.
Considerando os requisitos apontados nesta seção e ao grande número de controlados utilizando a estratégia adaptativa, admite-se sendo esta a escolha natural para uma primeira tentativa de projeto. 3. IMPLEMENTAÇÃO DA ESTRATÉGIA DE CONTROLE ADAPTATIVO
3.1. Modelo utilizado Para projetar um controlador útil para um equipamento de ventilação mecânica artificial,
escolheu-se o modelo de trocas gasosas do oxigênio entre as vias aéreas superiores e o sangue arterial pulmonar. Apesar deste modelo não poder ser usado diretamente, pelo fato da pressão parcial do oxigênio não poder ser medida facilmente no sangue arterial pulmonar, considera-se este modelo suficiente para termos de estudos preliminares, como este trabalho se propõe. O ideal seria acrescentar o modelo das trocas gasosas dos tecidos até os tecidos extremais do corpo, onde a saturação do oxigênio é facilmente medida com o oxímetro de pulso, a uma taxa de amostragem da ordem de poucos segundos.
Portanto, o modelo utilizado é o modelo não linear obtido através do conjunto de equações descritos em Kuoo et al [11]. Assumindo ainda que pequenas variações da ventilação total do paciente
( )EV& , provoque pequenas variações na pressão parcial alveolar de oxigênio e na concentração de oxigênio no sangue arterial, e desconsiderando este efeito sobre a concentração de oxigênio no sangue venoso, o modelo não linear obtido está descrito pela equação (3.1-1) e ( 3.1-7). O modelo linearizado utilizado para a determinação da ordem dos polinômios do modelo ARX equivalente é dado pela equação ( 3.1-8). A aproximação por meio da expansão em série de Taylor foi usada para linearizar este sistema e a notação utilizada para as constantes estão definidas em ( 3.1-2) a ( 3.1-6).
( ) ( ) ( ) ( )12222
2221863)( PaOK
EaIaAa
A eQKVtOPOPOPVdt
OPdOV ∆−−−∆−+∆−=
∆⋅ &&
(3.1-1)
20 OVc A= ( 3.1-2)
AVc &=1 ( 3.1-3)
222 OPOPc aI −= ( 3.1-4)
13 863QKc = ( 3.1-5)
24 Kc = ( 3.1-6)
( ) ( ) ( ) ( )2
0
3
0
22
0
12 241 PaOcEa
a ecc
Vcc
OPcc
dtOPd ∆−−−∆+∆−=
∆ &
( 3.1-7)
( ) ( ) ( )Eaa V
cc
OPcc
dtOPd &∆+∆−=
∆
0
22
0
12
( 3.1-8)
Para a discretização do modelo, foi utilizado o método de Euler, por ter sido o método considerado mais imediato e que posteriormente se mostrou suficiente para os propósitos, de forma que o modelo discretizado resultante está descrito na equação ( 3.1-9), onde T é o tempo de discretização.

)()(1)1(0
22
0
12 kVT
cc
kOPTcc
kOP Eaa&∆
+∆
−=+∆
( 3.1-9)
Para a simulação, foram usados os valores das variáveis dadas em Timischl [2]. O tempo de discretização foi modificada em diferentes tentativas de simulação, a fim de investigar o comportamento do estimador paramétrico e do regulador auto sintonizável com essa variação do período de amostragem
dos sinais do paciente. Os valores das demais variáveis usadas foram: aV& =5.6 lBTPS/min; VaO2=2.5 lBTPS; P iO2=150 mmHg; PaO2=100 mmHg; K1=0.2 lSTPD/l; K2=0.046 1/mmHg; Q=6 l/min.
3.2. Implementação da estimação paramétrica e lei de controle A estimação paramétrica usada foi a de mínimos quadrados recursiva (RLS), usando o modelo
ARX. O método de estimação dos mínimos quadrados é tal que o parâmetro θ estimado é o valor de θ que minimiza o erro de estimação quadrático dada pela função custo a seguir.
( )∑=
⋅−=Θt
t
T ttytV1
2)()(
21),( θφ
( 3.2-1)
A lei de controle de mínima variância (MV) é obtida através da minimização do custo quadrático com o termo quadrático como sendo a diferença entre o valor de referencia para a saída e o valor medido para a mesma, isto é, o erro de rastreamento. Essa função custo a ser minimizada pode ser dada por:
( )∑=
+−+=Θt
tref ktyktytV
1
2)()(21),(
( 3.2-2)
Onde k é o tempo de atraso do sistema, de tal forma que o modelo ARX fica definido segundo a equação abaixo:
)()(
1)()()()(
11
1
ktwqA
ktuqAqBkty +++=+
−−
−
( 3.2-3)
A seguinte equação de Diophantine deve ser resolvida: )()()(1 111 −−−− += qGqqFqA k ( 3.2-4)
A versão adaptativa desse algoritmo utiliza os valores estimados de GeBF ˆˆˆ . Para o caso simulado, temos que as variáveis do algoritmo e a equação final do controle usadas foram: Atraso k=1;
1)( 1 =−qF ; 101)( agqG ==− ; mmHgy alno 100min = ; )1(
)(ˆ)(ˆ
ˆ)1(1
1
1
min +−=+ nynbna
b
ynu alno .
4. RESULTADOS E CONCLUSÃO
O objetivo fundamental do regulador projetado é acompanhar o sinal de saída (pressão parcial de oxigênio no sangue arterial pulmonar) nominal estipulada inicialmente, dado também um valor de entrada inicial não muito afastado do valor de equilíbrio, pois o modelo utilizado nesta simulação funciona para pequenas variações.
Algumas simulações foram feitas alterando-se o tempo de amostragem (T), que caracteriza o período em que os dados do paciente são coletados, limitação da variação máxima do sinal de controle por passo (delta_u), e o fator de esquecimento (lambda), que é um peso para a relevância das informações anteriores utilizadas pelo estimador.
O sinal de controle não pode variar muito bruscamente entre um passo e outro devido ao risco de causar barotraumas no paciente, porém, esta limitação irá causar um aumento significativo no tempo de resposta do controlador à variações do sinal nominal. Outra limitação para o sinal de controle usada foi a de fixar valores máximos e mínimos admissíveis, pois ambos os casos representam altíssimos riscos para
o paciente, além de não ser fisicamente possível, um valor de fluxo de ar negativo, por exemplo. A faixa de valores escolhida foi de 50% acima e 50% abaixo do valor inicial setado.
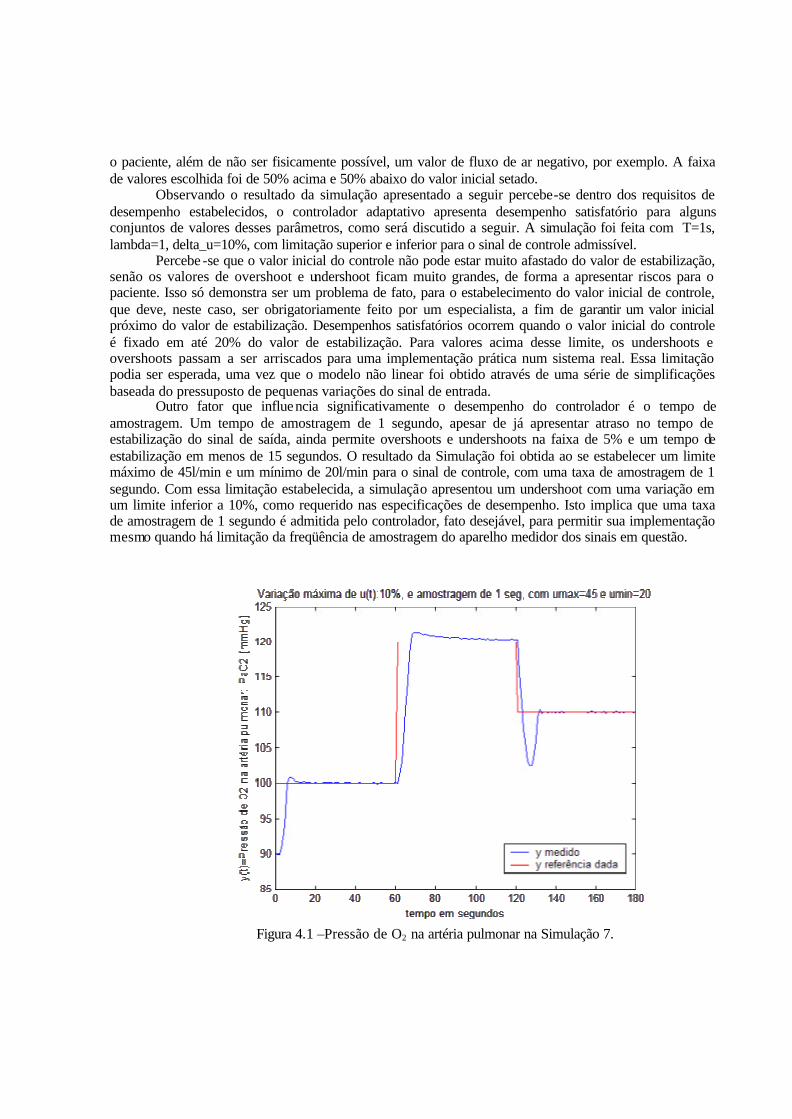
Observando o resultado da simulação apresentado a seguir percebe-se dentro dos requisitos de desempenho estabelecidos, o controlador adaptativo apresenta desempenho satisfatório para alguns conjuntos de valores desses parâmetros, como será discutido a seguir. A simulação foi feita com T=1s, lambda=1, delta_u=10%, com limitação superior e inferior para o sinal de controle admissível.
Percebe -se que o valor inicial do controle não pode estar muito afastado do valor de estabilização, senão os valores de overshoot e undershoot ficam muito grandes, de forma a apresentar riscos para o paciente. Isso só demonstra ser um problema de fato, para o estabelecimento do valor inicial de controle, que deve, neste caso, ser obrigatoriamente feito por um especialista, a fim de garantir um valor inicial próximo do valor de estabilização. Desempenhos satisfatórios ocorrem quando o valor inicial do controle é fixado em até 20% do valor de estabilização. Para valores acima desse limite, os undershoots e overshoots passam a ser arriscados para uma implementação prática num sistema real. Essa limitação podia ser esperada, uma vez que o modelo não linear foi obtido através de uma série de simplificações baseada do pressuposto de pequenas variações do sinal de entrada.
Outro fator que influencia significativamente o desempenho do controlador é o tempo de amostragem. Um tempo de amostragem de 1 segundo, apesar de já apresentar atraso no tempo de estabilização do sinal de saída, ainda permite overshoots e undershoots na faixa de 5% e um tempo de estabilização em menos de 15 segundos. O resultado da Simulação foi obtida ao se estabelecer um limite máximo de 45l/min e um mínimo de 20l/min para o sinal de controle, com uma taxa de amostragem de 1 segundo. Com essa limitação estabelecida, a simulação apresentou um undershoot com uma variação em um limite inferior a 10%, como requerido nas especificações de desempenho. Isto implica que uma taxa de amostragem de 1 segundo é admitida pelo controlador, fato desejável, para permitir sua implementação mesmo quando há limitação da freqüência de amostragem do aparelho medidor dos sinais em questão.
Figura 4.1 –Pressão de O2 na artéria pulmonar na Simulação 7.
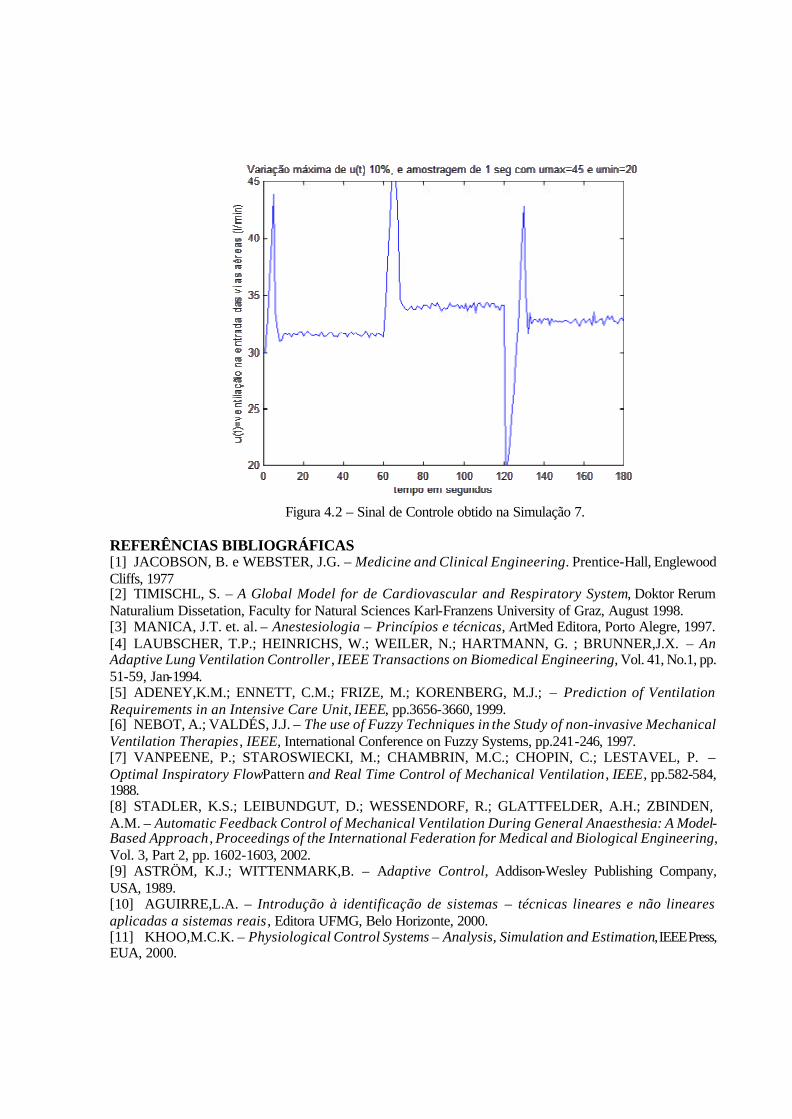
Figura 4.2 – Sinal de Controle obtido na Simulação 7.
REFERÊNCIAS BIBLIOGRÁFICAS [1] JACOBSON, B. e WEBSTER, J.G. – Medicine and Clinical Engineering. Prentice-Hall, Englewood Cliffs, 1977 [2] TIMISCHL, S. – A Global Model for de Cardiovascular and Respiratory System, Doktor Rerum Naturalium Dissetation, Faculty for Natural Sciences Karl-Franzens University of Graz, August 1998. [3] MANICA, J.T. et. al. – Anestesiologia – Princípios e técnicas, ArtMed Editora, Porto Alegre, 1997. [4] LAUBSCHER, T.P.; HEINRICHS, W.; WEILER, N.; HARTMANN, G. ; BRUNNER,J.X. – An Adaptive Lung Ventilation Controller , IEEE Transactions on Biomedical Engineering, Vol. 41, No.1, pp. 51-59, Jan-1994. [5] ADENEY,K.M.; ENNETT, C.M.; FRIZE, M.; KORENBERG, M.J.; – Prediction of Ventilation Requirements in an Intensive Care Unit, IEEE, pp.3656-3660, 1999. [6] NEBOT, A.; VALDÉS, J.J. – The use of Fuzzy Techniques in the Study of non-invasive Mechanical Ventilation Therapies , IEEE, International Conference on Fuzzy Systems, pp.241-246, 1997. [7] VANPEENE, P.; STAROSWIECKI, M.; CHAMBRIN, M.C.; CHOPIN, C.; LESTAVEL, P. – Optimal Inspiratory FlowPattern and Real Time Control of Mechanical Ventilation , IEEE, pp.582-584, 1988. [8] STADLER, K.S.; LEIBUNDGUT, D.; WESSENDORF, R.; GLATTFELDER, A.H.; ZBINDEN, A.M. – Automatic Feedback Control of Mechanical Ventilation During General Anaesthesia: A Model-Based Approach , Proceedings of the International Federation for Medical and Biological Engineering, Vol. 3, Part 2, pp. 1602-1603, 2002. [9] ASTRÖM, K.J.; WITTENMARK,B. – Adaptive Control, Addison-Wesley Publishing Company, USA, 1989. [10] AGUIRRE,L.A. – Introdução à identificação de sistemas – técnicas lineares e não lineares aplicadas a sistemas reais , Editora UFMG, Belo Horizonte, 2000. [11] KHOO,M.C.K. – Physiological Control Systems – Analysis, Simulation and Estimation, IEEE Press, EUA, 2000.