Sistemas de Polinomios,ˆ Analise Num´ ´erica e Aplicac¸ oes.˜gregorio/papers/polinomios.pdf ·...
34
Sistemas de Polin ˆ omios, An ´ alise Num ´ erica e Aplicac ¸ ˜ oes. Gregorio Malajovich Departamento de Matem´atica Aplicada Universidade Federal do Rio de Janeiro gregorio@ufrj.br XXVIII CNMAC, S˜ ao Paulo, 12 a 15 de Setembro de 2005. Apoios: Acordo Fran¸ ca-Brasil 1
Transcript of Sistemas de Polinomios,ˆ Analise Num´ ´erica e Aplicac¸ oes.˜gregorio/papers/polinomios.pdf ·...

Sistemas de Polinomios,Analise Numerica e Aplicacoes.
Gregorio Malajovich
Departamento de Matematica Aplicada
Universidade Federal do Rio de Janeiro
XXVIII CNMAC, Sao Paulo, 12 a 15 de Setembro de 2005.
Apoios:
Acordo Franca-Brasil
1

Sistemas de Polinomios
f1(z) =∑
a∈A1f1
a za1
1 za2
2 . . . zann
...
fn(z) =∑
a∈Anfn
a za1
1 za2
2 . . . zann
Os suportes A1, A2, . . . , An sao subconjuntos finitos de (Z+)n.
Procuramos todos os zeros z tais que:
f1(z) = f2(z) = . . . = fn(z) = 0
Nesta conferencia, vamos nos preocupar apenas com os zeros
isolados, e tais que detDf(z) 6= 0.
2
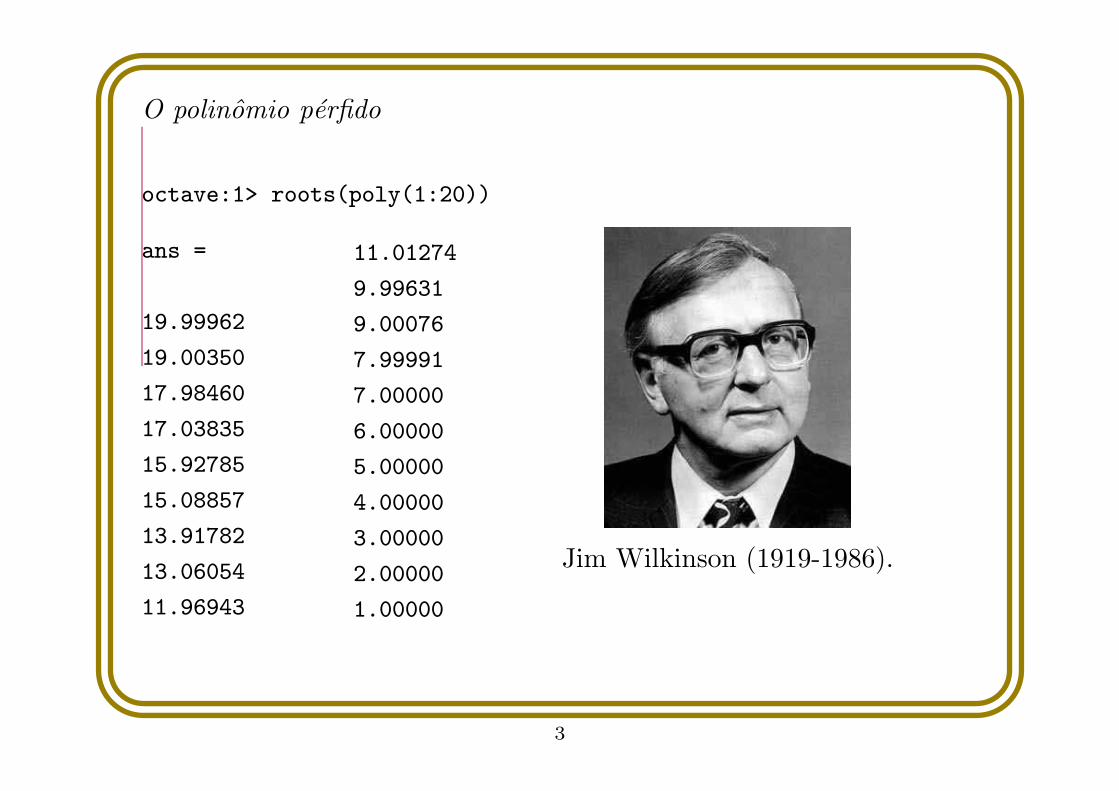
O polinomio perfido
octave:1> roots(poly(1:20))
ans =
19.99962
19.00350
17.98460
17.03835
15.92785
15.08857
13.91782
13.06054
11.96943
11.01274
9.99631
9.00076
7.99991
7.00000
6.00000
5.00000
4.00000
3.00000
2.00000
1.00000
Jim Wilkinson (1919-1986).
3
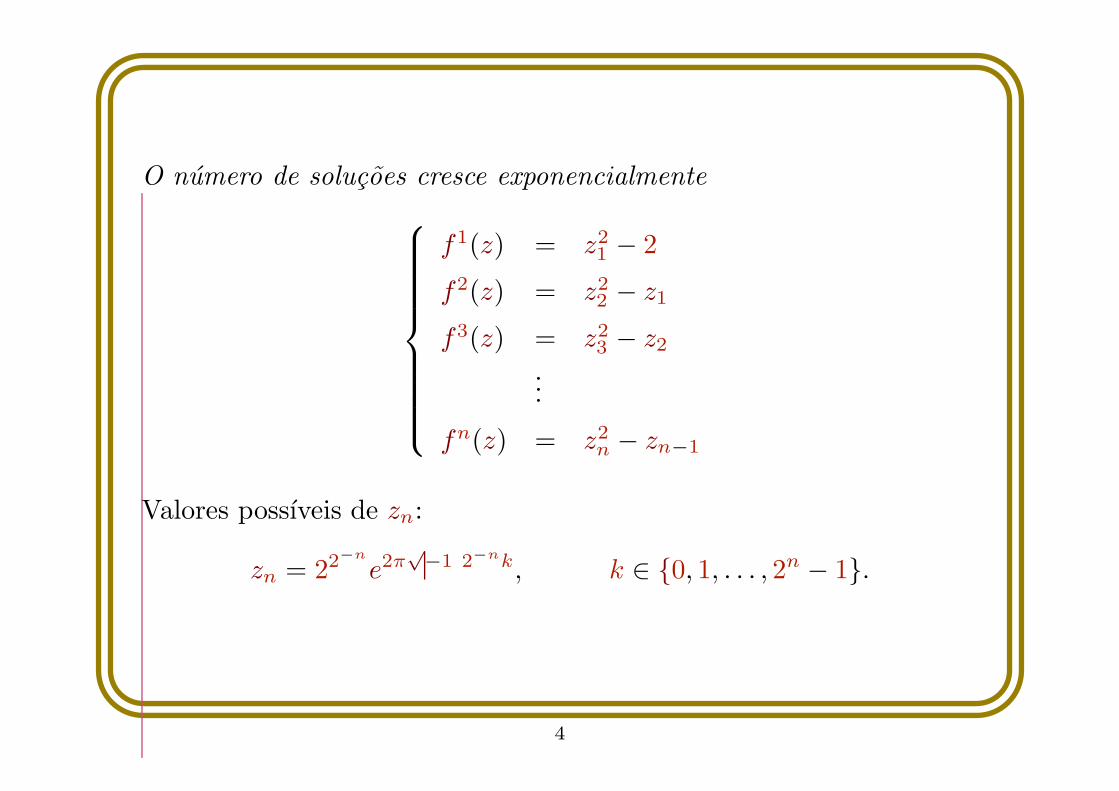
O numero de solucoes cresce exponencialmente
f1(z) = z21 − 2
f2(z) = z22 − z1
f3(z) = z23 − z2
...
fn(z) = z2n − zn−1
Valores possıveis de zn:
zn = 22−n
e2π√−1 2−nk, k ∈ {0, 1, . . . , 2n − 1}.
4

Parte I: Aplicacoes de Polinomios
Paris, outubro de 1906.
5
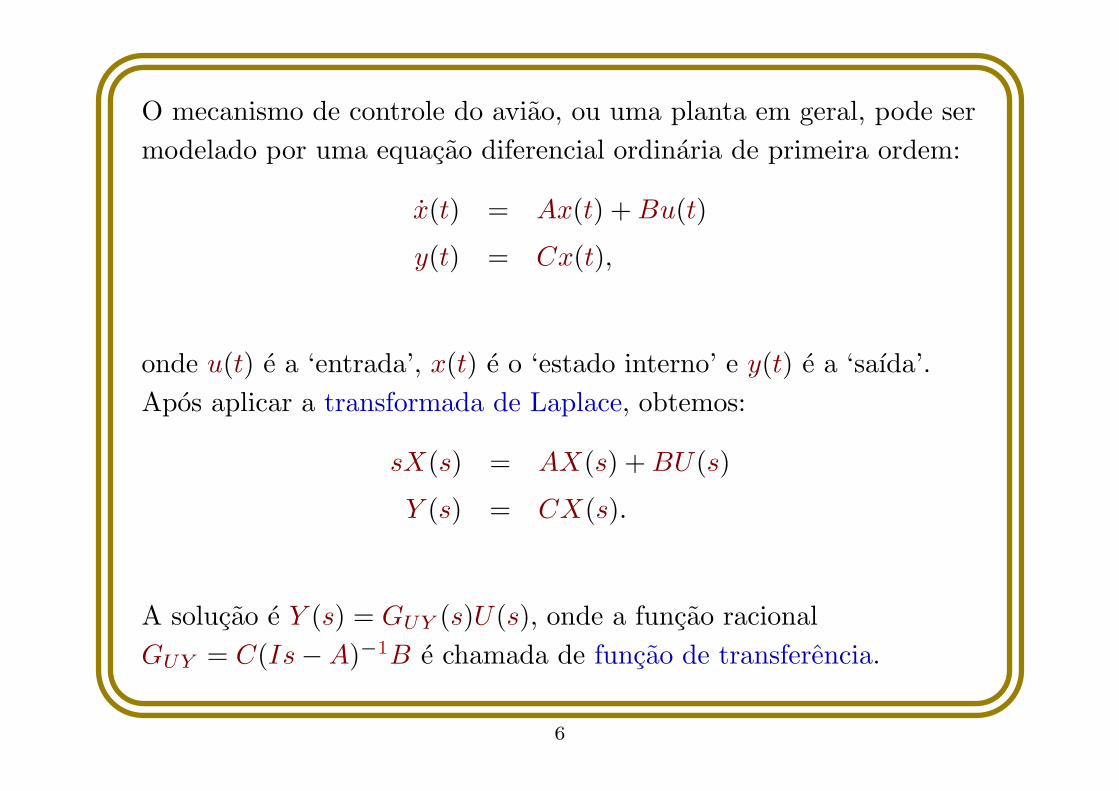
O mecanismo de controle do aviao, ou uma planta em geral, pode ser
modelado por uma equacao diferencial ordinaria de primeira ordem:
x(t) = Ax(t) + Bu(t)
y(t) = Cx(t),
onde u(t) e a ‘entrada’, x(t) e o ‘estado interno’ e y(t) e a ‘saıda’.
Apos aplicar a transformada de Laplace, obtemos:
sX(s) = AX(s) + BU(s)
Y (s) = CX(s).
A solucao e Y (s) = GUY (s)U(s), onde a funcao racional
GUY = C(Is − A)−1B e chamada de funcao de transferencia.
6

A solucao e Y (s) = GUY (s)U(s), onde a funcao racional
GUY = C(Is − A)−1B e chamada de funcao de transferencia.
Se um dos polos da funcao racional GUY (s) estiver a direita do eixo
real, acontecera um desastre:
Entrada u(t) Saıda y(t)
7
Outro exemplo: separadores Gas-Oleo-Agua como os utilizados em
plataformas off-shore podem ser modelados por equacoes diferenciais
ordinarias com 81 variaveis.
8

+ H
S
R−1
W U Y
SeparadorControlador
Controlador
Para tentar controlar o separador de modo a aproximar uma meta de
producao w(t), precisamos ‘fechar a malha’ com um certo
controlador. Decidir a estabilidade do sistema global
separador-controlador e um problema difıcil, que pode envolver
polinomios de grau alto (100 ou 1000).
9

Movimentos rıgidos do espaco.
Composicao de Rotacao e Translacao:
x1
x2
x3
7→
y1
y2
y3
=
cos θ − sin θ 0
sen θ cos θ 0
0 0 1
x1
x2
x3
7→
z1
z2
z3
=
y1
y2
y3
+
t1
t2
t3
Representacao matricial:
x1
x2
x3
1
7→
z1
z2
z3
1
=
cos θ − sin θ 0 t1
sen θ cos θ 0 t2
0 0 1 t3
0 0 0 1
x1
x2
x3
1
10

Manipulador 6R
5 hastes articuladas. Controla-se os angulos entre as hastes.
Uso: brinquedo, laboratorio, industria.
11

Plataforma Stewart
Duas plataformas triangulares, ligada por hastes pneumaticas.
Uso: simulador de voo, manipulacao de objetos pesados.
12
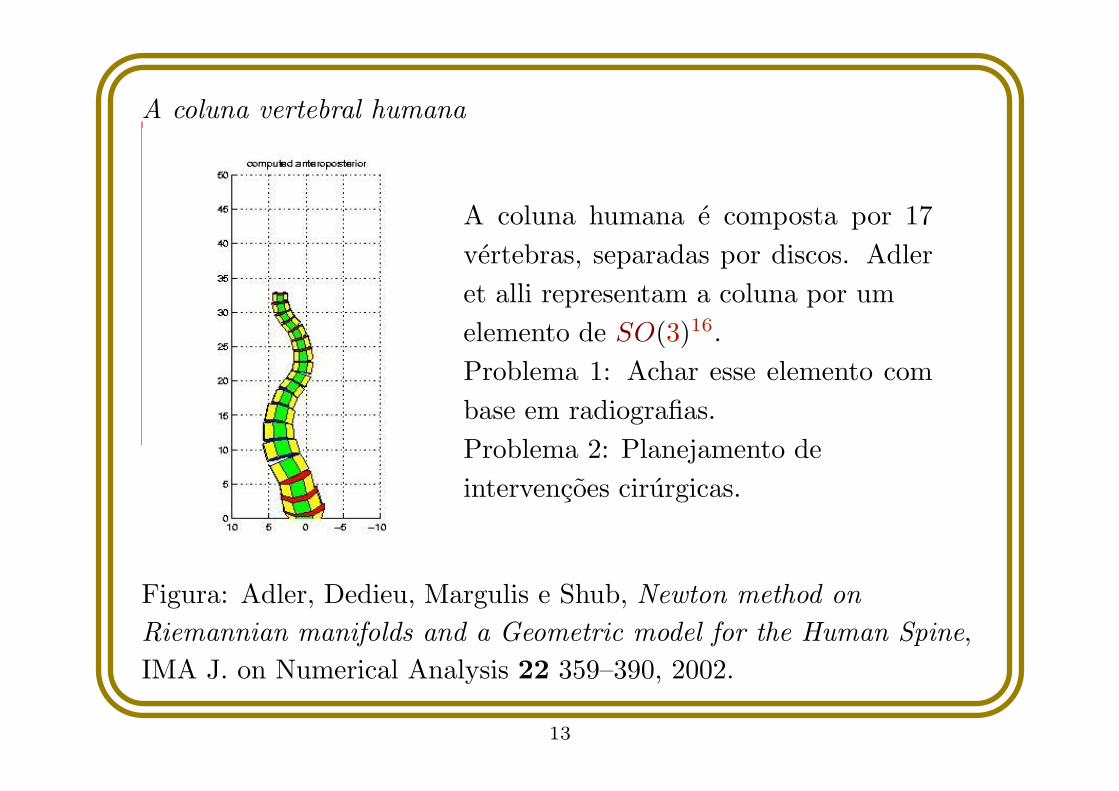
A coluna vertebral humana
A coluna humana e composta por 17
vertebras, separadas por discos. Adler
et alli representam a coluna por um
elemento de SO(3)16.
Problema 1: Achar esse elemento com
base em radiografias.
Problema 2: Planejamento de
intervencoes cirurgicas.
Figura: Adler, Dedieu, Margulis e Shub, Newton method on
Riemannian manifolds and a Geometric model for the Human Spine,
IMA J. on Numerical Analysis 22 359–390, 2002.
13

Parte II: Sistemas de Polinomios e analise de algoritmos
R=1/k
dL Em 1a aproximacao:
dL/dt∝= R = 1/k.
Logo,
dt/dL∝= k.
Integrando,
#Segmentos∝=
∫
kdL.
Esta parte: trabalho conjunto com J-P. Dedieu e M. Shub, Found. of
Computational Mathematics 5 No 2, pp 145-171, Apr 2005.
14

Programacao linear, formulacao primal-dual:
(P) Minimizar cT x
t.q. Ax − s = b
si ≥ 0, i = 1, . . . , m
(D) Maximizar bT y
t.q. AT y = c
yi ≥ 0, i = 1, . . . , m
Convencoes:
• m > n ≥ 1.
• A is m × n de posto n.
• b 6∈ ImA.
• c 6= 0.
• x ∈ Rn, y, s ∈ R
m
sao as incognitas.
15

Barreira logarıtmica
(P) Min cT x − µ∑
mi=1 log si
t.q. Ax − s = b
si ≥ 0, i = 1, . . . , m
(D) Max bT y + µ∑
mi=1 log si
t.q. AT y = c
yi ≥ 0, i = 1, . . . , m
Multiplicadores de Lagrange aplicados ao problema Primal: Seja
f(x, s) = cT x − µ∑
mi=1 log si:
∇f =
[
cT ,− µ
s1, . . . ,− µ
sm
]
= yT
A −I
Multiplicadores de Lagrange: y1, . . . , ym.
16

O caminho central
∇f =
[
cT ,− µ
s1, . . . ,− µ
sm
]
= yT
A −I
Ax − s = b Restricoes do Primal
AT y = c Primeiras m igualdades
siyi = µ, i = 1, . . . , m Ultimas m igualdades
O caminho central
Primal
Dual
Primal-Dual
e
{(x(µ), s(µ))}{y(µ)}
{(x(µ), s(µ), y(µ))}
para µ ∈ [0,∞]. µ = siyi ≥ 0 e chamado de gap de dualidade.
17

Acao da mudanca de sinal εi ∈ {−1; +1}m.
(P) Min cT x
t.q. Ax − s = b
siεi ≥ 0, i = 1, . . . , m
(D) Max bT y
t.q. AT y = c
yiεi ≥ 0, i = 1, . . . , m
Uma mudanca de sinal troca o sinal das linhas de A e b. Nem toda
mudanca de sinal produz um polıtopo viavel, com um caminho
central bem definido.
Teorema [DMS 2005] Sejam m > n ≥ 1. Sejam A matriz
m × n de posto n, b ∈ Rm e 0 6= c ∈ Rn com (A, b) em posicao
geral. Entao a curvatura total media do caminho central primal
dos polıtopos estritamente viaveis definidos por (A, b) e menor
ou igual que 2π(n − 1).
18

3
21
Lema [Buck, 1943 ?] O complemento de m hiperplanos gerais em
Rn e a uniao de
m − 1
n
componentes compactos com volume
6= 0.
19

Teorema [DMS 2005] Sejam m > n ≥ 1. Sejam A matriz
m × n de posto n, b ∈ Rm e 0 6= c ∈ Rn com (A, b) em posicao
geral. Entao a curvatura total media do caminho central primal
dos polıtopos estritamente viaveis definidos por (A, b) e menor
ou igual que 2π(n − 1).
Pelo Lema de Buck, basta mostrar que:
Teorema: Sejam m > n ≥ 1. Sejam A uma matriz m × n de posto
n, b ∈ Rm e 0 6= c ∈ Rn com (A, b) em posicao geral. Entao a
curvatura total da uniao dos caminhos centrais primais dos polıtopos
estritamente viaveis definidos por (A, b) e menor ou igual que
2π(n − 1)
m − 1
n
.
20

Curvatura e comprimento
Seja {γ(t) : t ∈ I} ⊂ RN uma curva parametrizada pelo comprimento
de arco. Entao a sua curvatura total e definida por:
K =
∫
I
‖γ′′(t)‖ dt
Logo a curvatura total e o comprimento da curva de Gauss
{γ′(t) : t ∈ I} ⊂ SN−1.
21
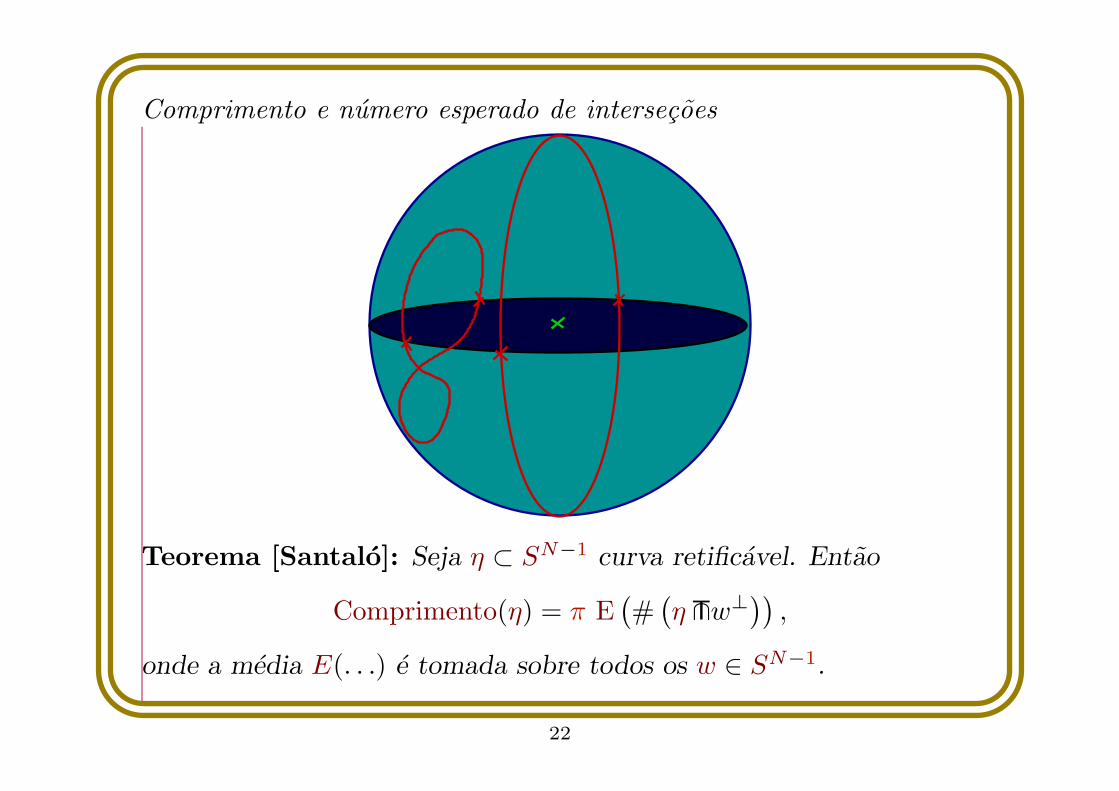
Comprimento e numero esperado de intersecoes
Teorema [Santalo]: Seja η ⊂ SN−1 curva retificavel. Entao
Comprimento(η) = π E(#
(η ∩Tw⊥))
,
onde a media E(. . .) e tomada sobre todos os w ∈ SN−1.
22

Numero esperado de intersecoes e numero de zeros
Ax − s = b
AT y = c
siyi = µ, i = 1, . . . , m
O caminho central
Ax − s = 0
AT y = 0
siyi + siyi = 1, i = 1, . . . , m
Derivada das eq. acima
uT x + vT s = 0, i = 1, . . . , m}
Intersecao com u⊥
µ > 0, si > 0, yi > 0 } Outras restricoes
O numero de zeros complexos das equacoes acima e menor ou igual
que 2(n − 1)
m − 1
n
.
23

Parte III: Contagem de Zeros
F
Pn =
(Cn+1)∗
∼ , onde z ∼ w ⇔ ∃λ ∈ C∗ : z = λw.
24

Topologia de Zariski
Um conjunto fechado em Pn e um conjunto da forma
V (f1, . . . , fm) = {z ∈ Pn : f1(z) = . . . = fm(z) = 0}.Um conjunto aberto e o complementar de um conjunto fechado.
Um conjunto fechado e irredutıvel quando nao pode ser decomposto
como a uniao de dois fechados nao contidos um no outro.
Uma variedade e um conjunto fechado irredutıvel.
25

Grau de uma variedade
V
Se V ⊂ Pm e uma variedade de dimensao m − n, entao um espaco
linear generico de dimensao n corta V em um numero finito D de
pontos. O numero D e chamado de grau da variedade V .
26

O numero de zeros e o grau de uma variedade
Seja A(Z+)n, com m = #A finito. A variedade de Veronese e
definida por:
VA = {(za1 : za2 : . . . : zam) : z ∈ (C∗)n} ⊂ Pm−1
O numero de solucoes isoladas de
f1(z) =∑
a∈A1fa za1
1 za2
2 . . . zann
...
fn(z) =∑
a∈Anfa za1
1 za2
2 . . . zann
para coeficientes f ia genericos e precisamente o grau de VA.
Teorema [Kushnirenko] Esse numero e n! Vol Conv(A).
27

Formas de volume e formas simpleticas
Se escrevemos z = x + iy, entao:
〈z, z′〉H =∑
j zj z′j =
⟨
x
y
,
x′
y′
⟩
R +√−1
Forma simpletica:
η=∑
jdxj∧dyj
︷ ︸︸ ︷∑
j xj y′j − yj x
′j
Forma de Volume = det〈·, ·〉 =1
n!η ∧ η ∧ . . . ∧ η︸ ︷︷ ︸
n vezes
28

Fubini-Study
Comecamos com o potencial em Cm:
g(z) =1
2log ‖z‖2 =
1
2log
∑
x2j + y2
j
Aplicamos o operador − 12dJ∗d, e obtemos a 2-forma:
η = −1
2dJ∗d g(z) =
∑
jdxj ∧ dyj∑
x2j + y2
j
+∑
j(xjdxj+yjdyj)∧∑
j(−xjdyj+yjdxj)
(∑
x2j + y2
j )2
(1) η e invariante por rotacao.
(2) Quando z = (1, 0, . . . , 0),
η = dx2 ∧ dy2 + . . . + dxm ∧ dym.
A forma de volume n-dimensional e:
1
n!(η∧n
z )TzV .
29
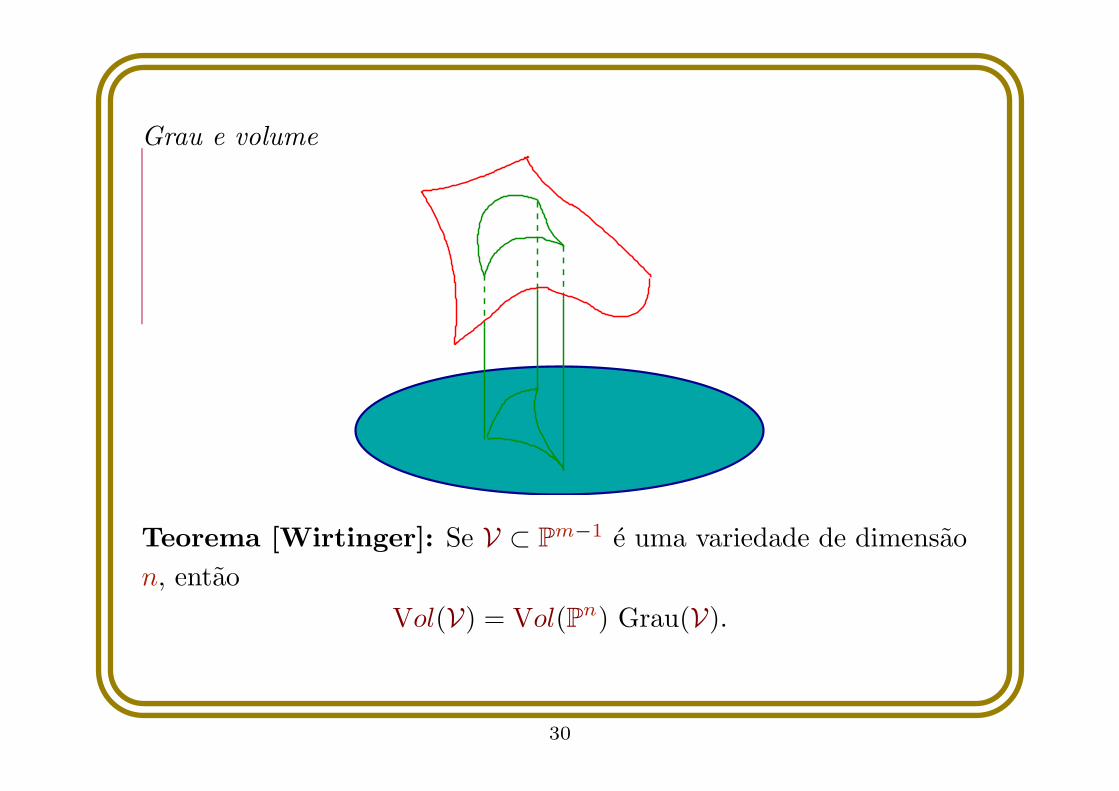
Grau e volume
Teorema [Wirtinger]: Se V ⊂ Pm−1 e uma variedade de dimensao
n, entao
Vol(V) = Vol(Pn) Grau(V).
30

A aplicacao momento
0
1
2
0 1 2 3 4
A aplicacao
z 7→∑
a∈Aa|za|2∑
a∈A|za|2
preserva volume (vezes uma constante πn), e cobre ConvA. Logo
Vol(VA) = πnVol(ConvA).
31
Prova do Teorema de Kushnirenko
f1(z) =∑
a∈A1fa za1
1 za2
2 . . . zann
...
fn(z) =∑
a∈Anfa za1
1 za2
2 . . . zann
#Zeros = deg(VA) por definicao.
= Vol(VA)/Vol(Pn) pelo T. de Wirtinger.
= Vol(Conv(A)) πn
Vol(Pn) pela aplicacao momento.
= n! Vol(Conv(A)) usando Vol(Pn) = πn
n!.
32

Comentarios finais:
(1) Para contar o numero de zeros de um sistema geral
f1(z) =∑
a∈A1f1
a za1
1 za2
2 . . . zann
...
fn(z) =∑
a∈Anfn
a za1
1 za2
2 . . . zann ,
onde os suportes A1, . . . , An sao diferentes, precisamos de uma
generalizacao do volume usual, chamada de volume misto:
=+a b a ab
ab b
2
2
33
(2) Resolver sistemas de polinomios exige uma combinacao de
metodos e resultados de varias areas da matematica, que incluem
mas nao se restringem a (por ordem alfabetica): algebra, algebra
linear computacional, analise numerica, combinatoria, complexidade,
geometria algebrica, geometria algebrica tropical, geometria convexa,
otimizacao, probabilidade, teoria da eliminacao, etc...
(3) Conferencias e escolas sobre o assunto: ja realizamos duas escolas
latino-americanas sobre sistemas de polinomios, e pretendemos
organizar uma terceira. Mais informacoes na minha pagina:
www.labma.ufrj.br/∼gregorio
.
34