Soluções das Equações de Campo de Einstein para...
82
Soluções das Equações de Campo de Einstein para Fluidos Perfeitos Estáticos com Simetria Esférica Ivo Daher Orientador: James E. F. Skea Rio de Janeiro, julho de 2008. Universidade do Estado do Rio de Janeiro Pós-Graduação em Física Dissertação de Mestrado PPGF-M.04/08
Transcript of Soluções das Equações de Campo de Einstein para...
Soluções das Equações de Campo de
Einstein para Fluidos Perfeitos Estáticos
com Simetria Esférica
Ivo Daher
Orientador: James E. F. Skea
Rio de Janeiro, julho de 2008.
Universidade do Estado do Rio de Janeiro Pós-Graduação em Física
Dissertação de Mestrado PPGF-M.04/08

Livros Grátis
http://www.livrosgratis.com.br
Milhares de livros grátis para download.

i
Dissertação de Mestrado submetida à Universidade do Estado do Rio de Janeiro
sob orientação do Pesquisador Dr. James E. F. Skea para obtenção do título de Mestre
em Física por
Ivo Martins Daher

ii
A meus queridos pais, Jorge e Luzia.
iii
Agradecimentos
A Deus, Aquele que esteve e está comigo em todos os momentos.
Aos meus pais pelo amor incondicional.
Aos meus fantásticos irmãos, Alex e Kevin, pela infinita cumplicidade e
amizade!
Aos meus avós, tios e primos: minha família, inesgotável fonte de confiança.
Ao meu orientador, Jim, pela sua dedicação, atenção e enorme boa vontade em
transmitir conhecimento.
Ao Luís Antônio por sua imensa colaboração.
Aos meus amigos que estiveram por perto todo o tempo.
A todos aqueles do PPGF - UERJ e da biblioteca do IF que sempre colaboraram.
Ao apoio financeiro da CAPES.

iv
Resumo
Nesta dissertação, procuramos soluções exatas das equações de campo de
Einstein em Relatividade Geral que descrevem um fluido perfeito em um espaço-tempo
estático com simetria esférica.
A técnica utilizada para encontrar essas soluções é o algoritmo de Kovacic, que
pode ser aplicado a equações diferenciais ordinárias lineares e homogêneas de segunda
ordem com coeficientes racionais. Esse algoritmo é capaz de nos dar soluções fechadas
em termos de funções liouvillianas, se tal equação tiver esse tipo de solução.
Para esse fim, vários sistemas de coordenadas foram investigados até encontrar o
que fosse mais adequado à aplicação do algoritmo.
Impondo que a função da métrica 11g seja racional, ficamos com uma equação
diferencial linear e homogênea de segunda ordem que tem coeficientes racionais. Nesse
trabalho, as formas arbitradas foram:
( ) ( )( )( )
( ) ( )( ) ( )
111
1
111
1 2
1 211
1
1 211
1 2
,4
,4
e4
4
x zg
x x Z
x zg
x x Z x Z
x z x zg
x x Z
x z x zg
x x Z x Z
−Α= −−
−Α= −− −
− −Α= −−
− −Α= −− −
onde x é uma coordenada espacial da métrica e 1 2 1 2, , , Z e Zz zΑ são parâmetros dos
modelos.
Depois de obter soluções analíticas, verificamos se elas satisfazem determinadas
condições físicas e, então, poderiam ser utilizadas como modelos de estrelas de nêutrons
sem rotação (estrelas de alta densidade).

v
Abstract
In this work we study static perfect fluid space-times with spherical symmetry
within the framework of General Relativity using a coordinate system in which the
equation of pressure isotropy is a linear first-order ordinary differential equation in
terms of one of the functions of the metric, and a linear second-order differential
equation in the other metric function.
Imposing a rational ansatz for the metric function 11g , we obtain an ordinary
differential equation for the remaining metric function which is linear, homogeneous
and of second-order with rational coefficients. The ansätze proposed by us are:
( )( )( )( )
( )( )( )( )
111
1
111
1 2
1 211
1
1 211
1 2
,4
,4
and4
4
x zg
x x Z
x zg
x x Z x Z
x z x zg
x x Z
x z x zg
x x Z x Z
−Α= −−
−Α= −− −
− −Α= −−
− −Α= −− −
where x is a spacial coordinate and 1 2 1 2, , , Z and Zz zΑ are parameters of the models.
These ansätze produce exactly the type of differential equation whose closed-
form liouvillian solutions, if such exist, can be found by applying Kovacic's algorithm.
After applying this algorithm we verified if the solutions satisfy physical
conditions which mean they could be used as models for non-rotating neutron stars,
where the relativistic effects of the high density are expected to be important.

vi
Índice
Introdução ....................................................................................................................... 1 1. Relatividade Geral ...................................................................................................... 4
1.1. Espaços-Tempos Estáticos com Simetria Esférica ................................................ 8 2. Fluidos Perfeitos ......................................................................................................... 9
2.1.Outros Sistemas de Coordenadas ......................................................................... 12 2.2.Ansätze ................................................................................................................. 15
3.Algoritmo de Kovacic ................................................................................................ 17
3.1.Introdução à Teoria de Galois Diferencial ........................................................... 17 3.2.Descrição do Algoritmo ....................................................................................... 19
4.Aplicação do Algoritmo............................................................................................. 26
4.1.Ansatz 1-1 ............................................................................................................. 26 4.2.Ansatz 1-2 ............................................................................................................. 30 4.3.Ansatz 2-1 ............................................................................................................. 31 4.4.Ansatz 2-2 ............................................................................................................. 35
5.Soluções e Análise Física ........................................................................................... 39
5.1.Ansatz 1-1 ............................................................................................................. 39 5.2.Ansatz 1-2 ............................................................................................................. 47 5.3.Ansatz 2-2 ............................................................................................................. 50
6.Conclusão ................................................................................................................... 55 Apêndices ....................................................................................................................... 57
Apêndice A - Introdução à Álgebra ............................................................................ 57 Apêndice B - Teoremas Utilizados pelo Algoritmo de Kovacic ................................ 67
Referências .................................................................................................................... 69
vii
Lista de figuras
Tensor Energia-Momento. ............................................................................................. 6 Ansatz 1-1
Pressão para N = 0. ...................................................................................................... 40 Densidade e pressão para N = 0. ................................................................................. 40 Estabilidade Radial com N = 0. ................................................................................... 40 Causalidade com N = 0. .............................................................................................. 40 Pressão para N =2. ....................................................................................................... 41 Densidade e pressão para N = 2. ................................................................................. 41 Estabilidade Radial com N = 2. ................................................................................... 42 Causalidade com N = 2. .............................................................................................. 42 Pressão para N =3. ....................................................................................................... 43 Densidade e pressão para N = 3. ................................................................................. 43 Estabilidade Radial com N = 3. ................................................................................... 43 Causalidade com N =3. ............................................................................................... 43
Ansatz 1-2
Grandezas com 2 1 1 20, 2,7, 0,1 e 5C u V V= = − = = − . ............................................... 49
Grandezas com 2 1 1 20, 14, 1 e 20C u V V= = − = = − . .................................................. 49
Grandezas com 1 1 1 20, 4,7, 0,1 e 5C u V V= = − = = − . ................................................ 49
Grandezas com 1 1 1 20, 18, 1 e 20C u V V= = − = = − . .................................................. 49
Ansatz 2-2
Solução 1 com 1 4Z = . ................................................................................................ 51
Solução 1 com 1 5Z = − . .............................................................................................. 51
Solução 2 com 1 10Z = . ............................................................................................... 52
Solução 2 com 1 90Z = − . ............................................................................................ 52
viii
Lista de tabelas Tabela 1 - ( )f x . .......................................................................................................... 44
Tabela 2 - ρ . ............................................................................................................... 44
Tabela 3 - p . ............................................................................................................... 45
1
Introdução
Nesta dissertação, procuramos soluções exatas das equações de campo de
Einstein que descrevem um fluido perfeito com simetria esférica num espaço-tempo
estático e que podem ser usadas na modelagem exata de configurações esféricas de
matéria de alta densidade.
As soluções das equações de Einstein descrevem o espaço-tempo através de suas
métricas, nas quais são escritas todas as componentes do tensor métrico, que
simbolizam matematicamente a geometria do espaço-tempo.
Soluções exatas permitem que sejam estudadas as propriedades físicas dos
espaços-tempos descritos sem recorrer à integração numérica de uma equação
diferencial ordinária. Tal fato possibilita a análise da dependência de aspectos físicos
em parâmetros que podem aparecer nesse tipo de solução.
O ponto de partida para o estudo de fluidos perfeitos com simetria esférica é a
escolha de um sistema de coordenadas que represente o espaço-tempo estático no qual
as simetrias sejam bem aproveitadas.
A opção do sistema de coordenadas feita nesta dissertação levou em conta a
transformação de Buchdahl [1] para uma métrica adequada à descrição de objetos que
apresentam simetria esférica. Com esta escolha, a equação de isotropia de pressão tem a
forma de uma equação diferencial ordinária linear e homogênea em duas de suas
funções, sendo para uma delas de primeira ordem e, para outra, de segunda ordem.
Para obter soluções de fluidos perfeitos com simetria esférica de forma fechada,
o caminho mais comum seguido pelos artigos publicados em torno do assunto [2,3]
parte de um ansatz (palavra vinda do alemão, que significa "proposição" ou "forma
proposta") para um coeficiente da métrica e procura pelo outro coeficiente métrico. Esse
caminho significa tentar resolver uma equação diferencial que pode ser de primeira ou
segunda ordem, de acordo com o coeficiente da métrica sobre o qual foi imposto o
ansatz.
2
Dentro desse método, a escolha mais tradicional é impor a forma do coeficiente
métrico que reduz a equação diferencial à primeira ordem e, então, resolvê-la
encontrando o outro coeficiente métrico. A opção pela análise da equação de primeira
ordem se deve, basicamente, por ser mais simples de encontrar sua solução.
Já que a equação de primeira ordem foi investigada mais a fundo do que a de
segunda ordem, optamos por analisar as conseqüências da imposição do ansatz para o
coeficiente métrico que implicaria na equação diferencial de segunda ordem e estudar
essa equação.
A solução para a equação de primeira ordem tem um parâmetro livre adicional
(vindo da integração), enquanto que a nossa abordagem resolvendo uma equação de
segunda ordem poderá apresentar dois parâmetros livres adicionais (constantes de
integração).
Na procura dessas soluções fechadas nessas equações, optamos por propor
ansätze de forma que os coeficientes da equação diferencial em questão fossem funções
racionais e, desse modo, pudéssemos fazer uso do algoritmo de Kovacic [4]. Por função
racional entendemos razão de polinômios.
Para que representem um fluido perfeito com simetria esférica num espaço-
tempo estático e descrevam modelos de estrelas de seu centro, 0r = , até sua superfície,
sr r= , a densidade, ( )rρ , e a pressão, ( )p r , escritas aqui em função da coordenada
radial, r, devem satisfazer, pelo menos, as seguintes condições [5,6]:
1. (0)p e (0)ρ finitas (I.1)
2. ( ) 0p r ≥ (I.2)
3. ( ) ( )r p rρ ≥ (I.3)
4. ( )
0dp r
dr≤ e
( )0
d r
dr
ρ ≤ (I.4)
5. ( )
0( )
dp r
d rρ≥ (I.5)
3
6. ( )
1( )
dp r
d rρ< (I.6)
7. ( ) 0sp r = , (0, )sr ∈ ∞ (I.7)
Soluções que satisfazem a condição (1) são chamadas regulares no centro.
A condição (2) é imposta já que não estamos considerando matéria exótica. O
mesmo se aplica à densidade.
Com a condição (3), estamos excluindo matéria ultrabárica. É a chamada
condição de energia fraca.
Para ser estável com respeito a perturbações radiais, a pressão e a densidade não
podem aumentar no sentido do centro até a superfície da estrela - condição (4).
A condição (5) pode ser entendida como uma implicação da condição (4), mas
também é conseqüência do fato de que a velocidade do som no meio ( )12
sv dp dρ=
não deve ser imaginária. Espera-se também que sv não seja maior que a velocidade da
luz ( 1sv < em unidades naturais, que iremos adotar), que seria uma violação da
causalidade - condição (6).
Na hipótese da condição (7) não ser satisfeita em determinada solução, a métrica
designada por esta pode descrever apenas uma camada finita da estrela, não a
representando por inteiro. Nesse caso, ela pode ser unida, a partir de determinada
superfície, a outra solução que apresente ( ) 0sp r = .
A condição para a densidade no centro, (0)ρ , será avaliada na expansão em
série de Laurent antes da aplicação do algoritmo, pois simplificará sua aplicação
posterior ao fixar uma das constantes do ansatz proposto para 11g . Todas as outras serão
avaliadas após a obtenção da solução da equação de isotropia de pressão, quando
teremos conhecido todas as funções da métrica.
4
1. Relatividade Geral
A Teoria da Relatividade Geral aponta a extensão do princípio da relatividade de
referenciais em movimento uniforme (Relatividade Restrita) para a relatividade do
movimento mesmo entre referenciais acelerados. A idéia central é o Princípio de
Equivalência, o qual diz que sistemas acelerados e sistemas sujeitos a campos
gravitacionais são equivalentes [7,8].
Vamos, inicialmente, definir a notação adotada ao longo deste trabalho:
Convenção de Soma de Einstein: quando aparecem dois índices literais repetidos,
está implícita a soma sobre todos os valores possíveis desses índices, a não ser que
seja dito o contrário.
Índices latinos com letras minúsculas têm valores que vão de zero a três (zero
representa a coordenada tipo-tempo).
Índices latinos com letras maiúsculas representam valores que vão de um a três,
simbolizando as três coordenadas espaciais.
Uma linha ( ) ′ representa diferenciação total com respeito à variável independente
explícita da função que recebe esse símbolo.
Serão usadas unidades relativísticas onde 1c G= = , com c sendo a velocidade da
luz no vácuo e G a constante gravitacional.
As grandezas da Relatividade Geral que serão abordadas no desenvolvimento
estão apresentadas a seguir.
O Tensor Métrico é utilizado para expressar o conceito de intervalo do espaço-
tempo. Ele pode aparecer nas seguintes formas:
• Covariante: ijg
• Contravariante: ijg
• Misto: i ij jg δ=

5
onde ijδ é o delta de Kronecker.
Esse tensor descreve a métrica pela relação com o quadrado do elemento de
linha através de:
2
i j ij i jij i j j ids g dx dx g dx dx dx dxδ= = =
Os Símbolos de Christoffel são derivados do tensor métrico e existem de duas
maneiras:
Do primeiro tipo: 1
2lj jklk
ljk k j l
g gg
x x x
∂ ∂ ∂Γ = + − ∂ ∂ ∂ (1.1)
Do segundo tipo:
i iljk ljkgΓ = Γ (1.2)
O Tensor de Curvatura (ou tensor de Riemann-Christoffel) descreve a
mudança num vetor quando este é transportado paralelamente num contorno fechado.
Ele pode ser escrito em termos do símbolo de Christoffel:
lljil m l m lik
ijk ik jm ij kmj k
Rx x
∂Γ∂Γ= − + Γ Γ − Γ Γ∂ ∂
(1.3)
Contraindo o primeiro e o terceiro índices do tensor de Riemann, definimos as
componentes covariantes do Tensor de Ricci:
k km
ij ikj mikjR R g R= = (1.4)
A partir do tensor de Ricci, podemos, ainda, definir o Escalar de Ricci
contraindo seus dois índices:
i iji ijR R g R= = (1.5)
As componentes covariantes do Tensor de Einstein são definidas por:
12ij ij ijG R g R= − (1.6)

6
Pode ser provado que o tensor de Einstein apresenta simetria em relação aos seus
dois índices e que sua derivada covariante é nula [8].
O Tensor Energia-Momento é utilizado para descrever a densidade de energia
e momento contidos em uma superfície e o fluxo de energia e de momento através dessa
superfície. Ele é a fonte do campo gravitacional na Relatividade Geral, análogo à massa
(ou sua densidade) da Teoria de Newton. Podemos identificar suas componentes da
seguinte forma:
Figura 1. Componentes do Tensor Energia Momento.
Ainda podemos separar o fluxo de momento em 2 partes: as componentes
11 22 33, , T T T indicam a pressão e as outras componentes, a viscosidade.
Assim como o tensor de Einstein, o tensor energia-momento apresenta simetria
em relação aos seus índices e derivada covariante nula, esse segundo aspecto originário
da conservação local de energia e momento. Cabe apontar também que Fluxo de
Energia e Densidade de Momento significam a mesma coisa fato evidente pela simetria
mencionada.
A Teoria da Relatividade Geral relaciona a métrica de um sistema de
coordenadas (através do tensor de Einstein), em outras palavras, a geometria, à matéria
ao observar que tanto o tensor energia-momento como o tensor de Einstein têm
divergente nulo. Esse fato sugere que:
ij ijG Tκ= (1.7)
7
Para determinar a constante κ recorremos à proposição de que a Teoria da
Relatividade Geral deve se reduzir à Teoria da Relatividade Restrita na ausência de
campos gravitacionais. Indo mais além, podemos dizer que a Relatividade Geral deve
tornar-se aproximadamente a Relatividade Restrita para campos gravitacionais fracos.
O resultado aparece quando chegamos à comparação da componente zero-zero
da equação (1.7) com a equação de Poisson para o potencial gravitacional na Teoria
Newtoniana. Em unidades relativísticas podemos reescrever a equação (1.7) como:
8ij ijG Tπ= (1.8)
Além do tensor de Einstein e do momento-energia, o tensor métrico ijg também
apresenta divergente nulo. Portanto, pode ser acrescentado um múltiplo constante desse
termo a qualquer um dos lados da equação (1.8) que não será alterada a propriedade do
divergente nulo.
Com essa última proposição, obtemos finalmente a equação da Relatividade
Geral que sintetiza a interação da matéria com a geometria:
8ij ij ijG g Tπ+ Λ = (1.9)
onde Λ é a constante cosmológica. Esta é a conhecida Equação de Campo de
Einstein.
Usualmente, se não estamos levando em conta efeitos na escala cosmológica,
como é o nosso caso, assumimos 0Λ = , uma vez que se existir uma constante
cosmológica, essa constante deve ter valor extremamente pequeno. Assim sendo,
podemos entender a Equação de Campo de Einstein como a equação (1.8).
Tendo em mente as definições (1.1) - (1.6), podemos perceber claramente o
caráter não-linear da equação (1.8). Fundamentalmente por esse motivo, as Equações de
Campo de Einstein apresentam poucas soluções exatas com interpretação física em
termos de distribuição de matéria: se não houver restrições impostas ao tensor energia-
momento qualquer métrica é uma solução da equação (1.8); porém, se tivermos
8
interessados em um tensor energia-momento que possa descrever um objeto com
interpretação física, as soluções, de fato, restringem-se a um grupo pequeno.
1.1. Espaços-Tempos Estáticos com Simetria Esférica
Apesar de consideravelmente simples, sistemas com simetria esférica são
fisicamente relevantes já que muitos objetos importantes em astrofísica são
aproximadamente esféricos.
Para uma métrica ser dita estática é sempre possível escolher um sistema de
coordenadas tal que os coeficientes 0Ig são nulos.
Na ausência de massa (Relatividade Restrita), uma maneira de escrever a
métrica de Minkowski que mostra explicitamente as simetrias esférica e estática é:
² ² ² ² ²ds dt dr r d= − − Ω
onde ² ² sen² ²d d dθ θ φΩ = + .
Já para descrever espaços-tempos estáticos com simetria esférica nos quais
apareçam efeitos gravitacionais, devemos admitir que os coeficientes métricos podem
depender de r. Para corresponder a essa intenção, o procedimento mais freqüente é
adotar as coordenadas de Schwarzschild [9].
Nas coordenadas de Schwarzschild, a métrica é diagonal, isto é, os únicos
elementos não-nulos são os que pertencem à diagonal principal, que podemos escrever
como 0ijg = se i j≠ . Sua métrica é representada por:
( )2 ( ) 2 ( ) 2 2 2 2 2senr rds e dt e dr r d dν λ θ φ= − − + (1.10)
seguindo a convenção com assinatura do tipo ( ), , ,+ − − − .
9
2. Fluidos Perfeitos
De maneira geral, um fluido é um tipo específico do continuum, que, por sua
vez, é um conjunto de partículas tão numeroso que se torna impossível estudar a
dinâmica de cada partícula separadamente, e a descrição desse tipo de meio se dá
através de uma média entre as partículas para grandezas como densidade de energia,
densidade de momento, temperatura, pressão, entre outras [7].
Diversas situações interessantes à astrofísica podem ser modeladas como fontes
de fluidos perfeitos. Em geral, podemos dizer que fluido é uma substancia que pode se
deformar continuamente. Podemos dizer ainda que um fluido é caracterizado pela
fraqueza das forças que evitam os deslizamentos entre os elementos formadores desse
meio flexível quando comparadas às forças de atração e repulsão entre tais elementos.
Um fluido perfeito é definido como aquele em que todas as forças paralelas à
superfície de contato entre os componentes desse meio são nulas só havendo força na
direção determinada pela linha que une os elementos adjacentes, a qual razão por
unidade de área chamamos pressão.
Situando estes conceitos na Teoria da Relatividade Geral, definimos um fluido
perfeito como um meio em que a viscosidade e a condução de calor são nulas em um
sistema de coordenadas que se move juntamente com o fluido. Essa é uma
generalização de gás ideal da Termodinâmica Clássica.
O fato de não haver condução de calor quer dizer que só pode haver fluxo de
energia se houver fluxo de partículas. Logo, num referencial co-móvel com o fluido,
teremos 0 0 0i iT T= = . A ausência de viscosidade acarreta que as componentes IJT , com
I J≠ também são nulas num referencial co-móvel.
Como podemos notar, essas duas condições fazem com que o tensor energia-
momento descrito em um sistema de coordenas que se move junto com o fluido seja
bastante simplificado, que passa a ser descrito por três grandezas: a quadri-velocidade, a
densidade e a pressão.
Então, finalmente apresentamos o Tensor Energia-Momento para um fluido
perfeito escrito em um referencial co-móvel:
10
( )ij i j ijT p u u g pρ= + −
onde i
i dxu
ds= é a quadri-velocidade do meio.
Vamos, então, apresentar o desenvolvimento para escrever a equação de
isotropia de pressão fazendo uso das coordenadas de Scharzschild.
Como estamos estudando fluidos perfeitos estáticos, podemos supor que
( )1,0,0,0iu = .
O tensor energia-momento misto é:
( ) i i ij j jT p u u pρ δ= + − .
Agora, para 0i j= = , escrevemos:
( )0 0 0 0 0 0T p u u pρ δ= + − .
Como 00 1u u = e 0
0 1δ = :
0 0T ρ=
Para quaisquer outras combinações de i e j, teremos:
0iju u =
e então
i ij jT pδ= − para i ou j 0≠ .
Assim, concluímos que as únicas outras componentes não-nulas do tensor
energia-momento são:
AAT p= −
onde a convenção de soma de Einstein está suspensa.
Podemos escrever então:
1 2 3 1 2 3T T T= = (2.1)

11
Como 8a a
b bG Tπ= , temos que a relação (2.1) implica em:
1 2 3 1 2 3G G G= =
A definição do tensor de Einstein misto:
12
a a ab b bG R Rδ= −
nos leva a:
1 2 3 1 2 3 1 2 3 1 2 3G G G R R R= = → = =
Para obtermos os tensores de Ricci mistos basta fazermos:
a acb cbR g R=
e usando a definição do tensor de Ricci covariante:
1 1 1 1 1 1
a a ba abR g R g R= =
Como estamos usando uma métrica diagonal, os termos não-nulos aparecem
quando 1a = :
1 11 11 1 11 1 1 1 11 1 1
1
bbb c b c bb
b bc b cb
R g R gx x
∂Γ∂Γ= = − + Γ Γ − Γ Γ ∂ ∂
Os símbolos de Christoffel do segundo tipo não-nulos para a métrica (1.10) são:
1 00
´
2
eν λν −
Γ =
0 01
´
2
νΓ =
1 11
´
2
λΓ =
2 3 12 13
1
rΓ = = Γ
1 22 re λ−Γ = −
3 23 ctg( )θΓ =
1 2 33 sen ( )r e λθ −Γ = −
2 33 sen( )cos( )θ θΓ = −
que apresentam simetria em relação à troca dos índices covariantes (índices inferiores).

12
Então obtemos:
21 1
´ ´ ´ ´ ´
2 4 4R e
rλ ν λ ν λ ν−
= − − + + −
Analogamente para 2 2R e 3 3R :
2 2 3 2 3
´ ´1
2 2
r e r eR r e R
λ λλλ ν− −
− − = − − − + =
Assim, 1 2 1 2R R= implica em:
2
2
11
2 4 4 2 2
r e r ee e
r r
λ λλ λν λ ν λ ν λ ν− −
− −′′ ′ ′ ′ ′ ′ ′ − + + − = − − +
que é a equação de pressão isotrópica – assim denominada pois tem seu ponto de partida
na relação (2.1) – em um fluido perfeito com simetria esférica nas coordenadas de
Schwarzschild.
Para a métrica (1.10), a equação de isotropia de pressão, como vemos acima, não
é linear. Então, procuramos outra forma da métrica para a qual esta equação seja linear
de forma que tenhamos melhores meios de obter suas soluções.
2.1.Outros Sistemas de Coordenadas
Uma alternativa para obtermos uma equação diferencial linear é a utilização da
transformação de coordenadas de Buchdahl [1]:
2
( )2
( )
( )
1 2 ( )
r
r
x r
x e
xw x e
ν
λ
ς−
≡
≡− ≡
Nesse sistema de coordenadas o quadrado do elemento de linha fica escrito
como:

13
( )2 2 2 2 2 2 21
sen ( )4 1 2
ds dt dx xd x dx xw
ζ θ θ φ= − − −−
Desta maneira, a equação de isotropia de pressão assume a seguinte forma:
1(1 2 ) ( ) 02xw xw w wζ ζ ζ′′ ′ ′ ′− − + − = (2.2)
A equação (2.2) é linear tanto para w como para ζ , separadamente, sendo de
primeira ordem em w e de segunda para ζ . Assumindo uma forma para a componente
00g do tensor métrico (e conseqüentemente para a função ζ ), poderíamos estudar a
equação de primeira ordem para w . Porém esta abordagem já foi analisada em trabalhos
anteriores [2,3] e, por isso, optamos por estudar a equação de segunda ordem.
Sendo uma equação diferencial ordinária linear e homogênea de segunda ordem
em ζ , a equação (2.2) pode ser investigada usando o algoritmo de Kovacic [4] desde
que os seus coeficientes sejam funções racionais.
Após refletir um pouco, podemos ver que para satisfazer esta última condição,
basta que w seja uma função racional, o que significa que o coeficiente métrico 11g
também será. Para tentar evidenciar essa afirmação, podemos reescrever a equação (2.2)
como:
01 2 2(1 2 )
xw w w
xw xwζ ζ ζ′ ′+′′ ′− − =
− − (2.2a)
Seguindo neste caminho, podemos ver que as posições dos pólos da equação
(2.2a) dependem da escolha da forma de w . Como veremos posteriormente, o cálculo
desses pólos é fundamental para a aplicação do algoritmo de Kovacic.
Naturalmente, pensamos em escrever w como uma função racional com as
seguintes formas
( )
( )11 0
2
0 1
ou
NNn
nnnn
M Mm
m mm m
x za xP
wP b x x Z
==
= =
−= = Α
−
∏∑
∑ ∏.
onde N e M são os graus do numerador e denominador de w, respectivamente.
14
Acontece que tanto com a primeira forma acima (dita expandida) como com a
segunda (dita fatorada), os pólos de (2.2a) são difíceis de calcular.
Como nosso alvo é exclusivamente a equação de segunda ordem, para contornar
essa dificuldade procuramos novas formas da métrica que preservassem a linearidade da
equação diferencial em ζ , não importando que a equação de primeira ordem não fosse
mais linear. Ao mesmo tempo, também é de nosso interesse que os pólos gerados para a
equação de isotropia de pressão fossem mais simples de calcular, o que torna a
aplicação do algoritmo mais factível.
Um outro comentário pertinente nesse momento é a respeito da coordenada x
proposta na transformação de Buchdahl. Como 2x r≡ , fazendo uso de polinômios nessa
coordenada estamos, automaticamente, desprezando as potências ímpares na função
racional 11g e, aparentemente, fazendo uma proposição menos geral.
Por esse motivo, investigamos a volta para coordenadas em r no lugar de x.
Apesar de ganharmos termos (e parâmetros), esta alteração mostrou-se ineficaz, uma
vez que, inesperadamente, todos os coeficientes das potências ímpares em r mostravam-
se nulos nos casos em que equação de isotropia de pressão apresentou soluções
liouvillianas e com interpretação física. Já que a única conseqüência da inclusão de
potências ímpares de r, aparentemente, era complicar a análise, consideramos que x é a
melhor opção para o nosso objeto de estudo. Essa característica merece mais atenção em
uma investigação futura.
Por fim, chegamos a uma métrica julgada mais apropriada à investigação da
equação de isotropia de pressão usando a coordenada x de Buchdahl, porém com 11g
numa forma que conduz a pólos mais simples da equação (2.2a).
A transformação adotada em relação às coordenadas de Schwarzschild é
2
( )2
( )
( ) ( )
( )
r
r
x r
f x e x
F x e
ν
λ
ζ
≡
≡ =≡

15
Desta maneira, a métrica fica escrita como:
2 2 2 2 2 2 2sen ( )4
Fds f dt dx xd x d
xθ θ φ= − − −
e a equação de isotropia de pressão:
( )2 2 24 2 0x Ff x F f F F F f′ ′′′ ′− − − + = . (2.3)
Então, a partir de um ansatz na forma de uma função racional para F podemos
estudar a equação diferencial ordinária linear e homogênea de segunda ordem
encontrada para f através do algoritmo de Kovacic, pois com F racional teremos
assegurado que os coeficientes da equação diferencial também serão funções racionais.
Com a adoção dessa métrica, temos que a densidade é descrita por:
2
2
2xF F F
xFρ
′ + −= (2.4)
Já a pressão, pode ser escrita de duas formas:
( )4 1xf F f
pxFf
′− + −= − (2.5a)
( )
2
4 2 2xFf xF F f F fp
F f
′′ ′ ′ ′− + − += − (2.5b)
2.2.Ansätze
Para investigar a forma que a equação de isotropia de pressão assume de acordo
com 11g , poderíamos escrever os polinômios da função racional F na forma expandida
ou na forma fatorada.
Testamos as duas formas e constatamos que a utilização da forma fatorada
facilita a aplicação do algoritmo de Kovacic, uma vez que seus pólos ficam mais
evidentes e simples de calcular.
Então, propomos quatro ansätze para F:
1. 1
1
x z
x Z
−Α−
(Ansatz 1-1)

16
2. ( )( )
1
1 2
x z
x Z x Z
−Α− −
(Ansatz 1-2)
3. ( )( )1 2
1
x z x z
x Z
− −Α
− (Ansatz 2-1)
4. ( )( )( )( )
1 2
1 2
x z x z
x Z x Z
− −Α
− − (Ansatz 2-2)
onde 1 2 1 2, , , e z z Z ZΑ são constantes.
Ansätze para graus maiores no numerador e denominador de F fazem com que a
aplicação do algoritmo se torne extremamente trabalhosa pois a equação diferencial
ganha novos pólos.
Os passos desenvolvidos para as funções propostas estão apresentados em
seqüência.

17
3.Algoritmo de Kovacic
Neste capítulo, além da descrição do algoritmo, será feita uma breve introdução
à Teoria de Galois Diferencial onde serão apresentadas algumas definições importantes
à compreensão do funcionamento do algoritmo de Kovacic [10,11,12,13].
3.1.Introdução à Teoria de Galois Diferencial
Um corpo diferencial ( ),k δ é um corpo k equipado com uma derivação δ em k.
Escrevemos também ( )ny em vez de ( )n yδ e , ,y y′ ′′… ao invés de ( ) ( )2, ,y yδ δ … .
O corpo das constantes | 0c k c′∈ = é denotado por C. Por uma equação diferencial
( ) 0L y = sobre k sempre queremos dizer uma equação diferencial linear homogênea
ordinária
( ) ( ) ( )11 1 0( ) ... 0 .n n
n iL y y a y a y a y a k−− ′= + + + + = ∈
A seguir, vamos estudar soluções de ( ) 0L y = em uma extensão do corpo
diferencial k. Uma extensão de um corpo diferencial ( ),k δ é um corpo diferencial
( ),K ∆ , tal que K é uma extensão de k e ∆ uma extensão da derivação δ em k em uma
derivação K. O grupo de Galois diferencial ( )G K k da extensão diferencial K do corpo
k é o conjunto de k-automorfismos (ou seja, automorfismos que deixam os elementos de
k fixos) de K que comutam com a derivação K. Existe uma única maneira de estender a
derivação em k em uma derivação em uma extensão diferencial.
Definição 1.1 Uma extensão diferencial ( ),K ∆ de um corpo ( ),k δ é uma
extensão liouvilliana se existe uma torre de corpos
0 1 ... mk K K K K= ⊂ ⊂ ⊂ =

18
onde 1iK + é uma extensão simples do corpo iK , que é dada adicionando-se um
elemento iη ao corpo iK , obtendo-se assim ( )i iK η , tal que uma das afirmativas a
seguir é satisfeita:
i. iη é algébrica em iK , ou
ii. ( )i iKδ η ∈ (extensão por uma integral, ou seja, , i iu u Kη = ∈∫ ), ou
iii. ( )i i iKδ η η ∈ (extensão pela exponencial de uma integral, ou seja,
, u
i ie u Kη ∫= ∈ ).
Podemos classificar uma solução ( ) 0L y = de três formas, conforme esteja
contida em:
1. k, o corpo dos coeficientes, será chamado de solução racional,
2. uma extensão algébrica de k, será chamada se solução algébrica,
3. uma extensão liouvilliana de k será chama de solução liouvilliana
Por solução liouvilliana, entende-se uma solução através de uma função que
pode ser construída por composição de funções exponenciais, logaritmos, polinômios,
radicais, integrais dessas funções e exponenciais dessas integrais.
Definição 1.2 Seja ( ) 0L y = uma equação diferencial homogênea de ordem n
com coeficientes em k. Seja K uma extensão de um corpo diferencial k. Então, K é uma
extensão Picard-Vessiot (EPV) de k para ( ) 0L y = se:
1. 1,..., nK k y y= , a extensão do corpo diferencial k, gerada por 1,..., ny y onde
1,..., ny y é um conjunto fundamental de soluções de ( ) 0L y = .
2. K e k têm o mesmo corpo de constantes.
A EPV faz o papel de um corpo de decomposição para ( ) 0L y = . Uma EPV
existe e é única para isomorfismos diferenciais se o corpo de constantes k for
algebricamente fechado com característica zero (exemplo: corpo dos complexos ℂ ).
Estaremos sempre assumindo que o corpo dos coeficientes satisfaz essas condições. Por
19
definição, o grupo de Galois diferencial ( )G L de ( ) 0L y = é o grupo de Galois
diferencial de K k , onde K é uma EPV de k para ( ) 0L y = e, como ( )G L pode ser
representado fielmente como um subgrupo de ( , )GL n C (matrizes n n× com
coeficientes em C), para cada ( )G Lσ ∈ temos 1
( )n
i ij ijy c yσ
==∑ , onde ijc C∈ . Pode-
se provar que escolhas diferentes para a base 1 2, ,..., ny y y levam a representações
equivalentes. Utilizando o teorema E.2, podemos limitar nossas considerações a
equações diferenciais com ( ) ( , )G L SL n C⊆ , onde ( , )SL n C é o grupo de matrizes n n×
invertíveis com determinante igual à unidade.
3.2.Descrição do Algoritmo
Estaremos à procura de soluções para equação de isotropia de pressão (2.3)
expressas em termos de funções liouvillianas, uma vez que tais soluções podem ser
escritas de uma forma fechada. Para esse fim, fazemos a seguinte definição de uma
equação diferencial ordinária integrável:
Definição
Uma equação diferencial ordinária linear e homogênea de segunda ordem com
coeficientes que são funções racionais é integrável se suas soluções são liouvillianas.
O algoritmo de Kovacic é um procedimento que calcula essas soluções
liouvillianas contando que a equação diferencial seja integrável. Reciprocamente, se a
equação diferencial for não-integrável, o algoritmo indica essa conclusão.
Estamos interessados na equação diferencial ordinária linear e homogênea de
segunda ordem que pode ser escrita como:
( ) ( ) 0y b x y c x y′′ ′+ + = (3.1)
onde ( )y y x= .
Com a mudança de variável:

20
1( )exp d
2y x b xξ
= −
∫
a equação (3.1) é transformada na sua forma reduzida (ou canônica):
0gξ ξ′′ − = (3.2)
onde 21 1( ) ( ) ( ) ( )
2 4g g x b x b x c x′= = + − .
Ainda, fazendo outra transformação de variável,
vξξ
′=
a equação (3.2) é transformada na equação de Riccati:
2v v g′ + = (3.3)
O algoritmo baseia-se nos dois seguintes fatos:
1. A classificação dos subgrupos algébricos de ( )2,SL ℂ : o grupo de Galois da
equação (3.2) está contido em ( )2,SL ℂ , e precisamos saber quando a componente
identidade do grupo de Galois é solúvel e abeliana.
2. A conhecida transformação de (3.2) em uma equação de Riccati, onde ( )g x∈ℂ .
Então, a equação (3.2) é integrável se, e somente se, a equação (3.3) tem uma
solução algébrica, isto é, v é solução de uma equação polinomial ( ) 0f v = com
coeficientes em ( )xℂ . O ponto chave é que o grau, n, de ( )f v , pertence ao
conjunto max 1,2,4,6,12 .L =
A determinação do conjunto L de todos os possíveis valores para n é o Primeiro
Passo do algoritmo. Observamos que para 4, 6 e 12n n n= = = , o grupo de Galois de
(3.2) é finito. O Segundo e o Terceiro Passos são destinados à computação do
polinômio ( )f υ , se ele existir. Se o algoritmo não terminar com êxito, isto é, se a
equação (3.3) não tiver solução algébrica, então a equação (3.2) é não-integrável e seu
grupo de Galois é ( )2,SL ℂ .

21
Existem diversas notações e convenções para o algoritmo de Kovacic. A versão
aqui apresentada segue [12,13].
Seja ( )
( )
s xg
t x= , com ( ), ( )s x t x polinômios relativamente primos, e ( )t x mônico.
Definimos a seguinte função h sobre o conjunto max 1,2,4,6,12 :L =
(1) 1, (2) 2, (4) 3, (6) 2, (12) 1h h h h h= = = = = .
3.2.1.Primeiro Passo
Se ( ) 1t x = , colocamos 0m= ; senão, fatoramos ( )t x em polinômios mônicos
relativamente primos:
21 2( ) ( ) ( ) ( ),m
mt x t x t x t x= …
onde it não tem raízes múltiplas e 1mt ≠ .
Então:
1.1 Seja ′Γ o conjunto das raízes de ( )t x , isto é, os pontos singulares no plano
complexo finito, e seja ′Γ = Γ ∪ ∞ o conjunto de todos os pontos singulares. Então,
a ordem em um ponto singular c ′∈Γ é ( )o c i= se c é uma raiz de multiplicidade i
de ( )t x . A ordem no infinito é definida como ( )( ) max 0,4 deg( ) deg( )o s t∞ = + − .
Chamamos m+ o maior valor entre as ordens dos pontos singulares em Γ , e iΓ o
conjunto dos pontos singulares de ordem i m+≤ .
1.2 Se 2m+ ≥ então escrevemos ( )2 2cardγ = Γ ; senão 2 0γ = . Então computamos:
23
ímpar
card kk m
k
γ γ+≤ ≤
= + Γ
∪

22
1.3 Para os pontos singulares de ordem 1 ou 2, 1 2c∈Γ ∪ Γ , computamos as partes
principais de g:
( ) ( )2 1(1)c cg x c x c Oα β− −= − + − + ,
para c ′∈Γ , e
2 3 4( )g x x O xα β− − −∞ ∞= + + ,
para o ponto no infinito.
Definimos 1+4c cα∆ = .
1.4 Montamos o subconjunto L′ de todos os valores possíveis para o grau do
polinômio mínimo ( )f v usando as regras:
a. 1 L′⊂ se 2γ γ=
b. 2 L′⊂ se 2γ ≥
c. 4,6,12 L′⊂ se 2m+ ≤ .
1.5 A seguir temos os três casos mutuamente exclusivos
1.5.1 Se 2m+ > , então L L′= .
1.5.2 Se 2m+ ≤ e 1 2, cc∀ ∈Γ ∪ Γ ∆ ∈ℚ , então L L′= .
1.5.3 Se os casos (1.5.1) e (1.5.2) não são satisfeitos, então 4,6,12L L′= − .
1.6 Se L = ∅ , então a equação (3.2) é não-integrável e tem grupo de Galois ( )2,SL ℂ ;
senão escrevemos n para o menor valor em L.
Para o Segundo e Terceiro Passos do algoritmo consideramos fixo o valor de n.
3.2.2.Segundo Passo
2.1. Se ∞ tem ordem 0, escrevemos o conjunto:
( ) | 0, ,E h n k k n∞ = = … .

23
2.2. Se c tem ordem 1, então ( )cE nh n= .
2.3. Se 1n = , para cada c de ordem 2, definimos:
( ) ( )1 11 , 1
2 2c c cE
= + ∆ − ∆
2.4. Se 2n ≥ , para cada c de ordem 2 definimos:
( )( )2 | 0, ,
2c c
h nE n n j j n
= ∩ − − ∆ =
ℤ …
Se algum conjunto cE for nulo e n não for o maior elemento de L, escolhemos o
próximo elemento de L e voltamos para o Segundo Passo. Se n for o maior elemento de
L, a equação diferencial (3.2) não tem solução liouvilliana.
2.5. Se 1n = , para casa ponto singular de ordem 2υ , com 1υ > , computamos os
números cα e cβ definidos (a menos de um sinal) pelas seguintes condições:
Se c ′∈Γ ,
( ) ( ) ( ) ( )( )21 1
,2
i
c i c cig x c x c x c O x c
υυ υ υα µ β−− − − − −
= = − + − + − + − ∑ ,
e escrevemos
( ) ( )1
,2:
i
c c i cig x c x c
υυα µ−− −
== − + −∑ .
Se c = ∞ ,
( )232 3 4
,0
iii
g x x x O xυυ υ υα µ β−− − −
∞ ∞ ∞= = + − + ∑ ,
e escrevemos
32,0
: iii
g x xυυα µ−−
∞ ∞ ∞== +∑ .
Então, para cada c computamos
1
: 1 ,2
cc
c
Eβυ ε εα
= + = ±

24
e a função sinal sobre cE é definida por
1
sign2
c
c
βυ ε εα
+ =
,
sendo +1 se 0cβ = .
2.6. Se 2n = , para cada c de ordem υ , com 3υ ≥ , escrevemos cE υ= .
3.2.3.Terceiro Passo
3.1. Para n fixo, tentamos obter elementos ( )c ce
∈Γ=e no produto cartesiano cc
E∈Γ∏ ,
tal que:
i. 1
( ) :( )
ccd n e
h n∈Γ
= − ∑e é um inteiro não-negativo,
ii. Se 2n = ou 6n = , então existe em e um número par de elementos que são
inteiros ímpares.
iii. Se 4n = , então e tem pelo menos dois elementos não divisíveis por 3 e a
soma de todos os elementos não divisíveis por 3 é divisível por 3.
Se nenhum elemento e for obtido, selecionamos o próximo valor de n em L e
voltamos para o Segundo Passo; se n já é o maior valor em L, o grupo de Galois é
( )2,SL ℂ , ou seja, a equação (3.2) é não-integrável.
3.2. Para cada e acima tentamos obter uma função racional Q e um polinômio P, tal que
i. ( )21
1
1sign
( )
cn c cc
c
eQ e g
h n x c νν
δ>
′∈Γ∈ Γ
= +−
∑ ∑∪
, onde 1nδ é o delta de
Kronecker.
ii. P é um polinômio de grau ( )d e que, sem perda de generalidade, pode
sempre ser escolhido mônico, e seus coeficientes são encontrados como as
soluções do, em geral superdeterminado, sistema de equações:
25
( )( )1
1 1
0,
1 , 0,
.i i i i
n
P
P P QP n i i gP n i
P P
−
− +
=
′= − − − − + ≥ ≥= −
Se um par ( )( ), ( )P x Q x acima é encontrado, então a equação (3.2) e a equação
de Riccati (3.3) tem uma solução algébrica, v, dada por qualquer raiz v da equação:
( )0
( ) 0!
n iii
Pf v v
n i=
= =−
∑ (3.4)
Se nenhum par acima for encontrado tomamos o próximo valor em L e voltamos
para o Segundo Passo. Se n for o maior valor em L, então a equação (3.2) é não
integrável e o grupo de Galois é ( )2,SL ℂ .

26
4.Aplicação do Algoritmo
Neste capítulo será apresentada a aplicação do algoritmo de Kovacic descrito no
capítulo 3 para a respectiva equação de isotropia de pressão obtida segundo cada um dos
quatro ansätze propostos com o intuito de verificar se tais equações possuem soluções
fechadas na forma de funções liouvillianas.
4.1.Ansatz 1-1
Nosso primeiro ansatz é 1
1
( )x z
F xx Z
−= Α−
.
Podemos, desde já, investigar a densidade:
( ) ( )
( )
2 21 1 1 1 1 1
2
1
1 3 2( )
x z z Z x z z Zx
x z xρ
Α − + − Α − + Α −=
Α −
fazendo sua expansão em série de Taylor em torno de 0x =
1 01 1
1
( 0) ( )z Z
x x o xz
ρ −Α −= = +Α
.
Para que seja garantida a regularidade central da densidade, devemos ter
1 1
1
0z Z
z
Α − =Α
que implica em 1
1
Z
zΑ = .
Deste modo, a equação de isotropia de pressão fica:
( )( ) ( ) ( )1 1 1 1 1 1 1 14 2 0z x z x Z f z Z z f Z z f′′ ′− − + − + − = (4.1)
4.1.1.Primeiro Passo
Para a equação (4.1), o polinômio ( )t x escreve-se como:
( )( ) 2
1 1( )t x x z x Z = − −

27
1.1 As raízes de ( )t x são 1, 1z Z′Γ = e suas ordens são 1 1( ) ( ) 2o z o Z= = . A ordem do
ponto no infinito é ( ) 2o ∞ = .
Temos ainda 2m+ = e 2 1 1, ,z ZΓ = ∞ .
1.2 2 3γ γ= =
1.3 Agora fazemos a expansão de g em torno dos elementos de 2Γ :
( )( )
( ) ( )2 11 11 1
1 1 1
25 11
16 8
z Zg x z x z o
z z Z
− −−= − + − +−
( )( )
( ) ( )2 11 11 1
1 1 1
23 11
16 8
z Zg x Z x Z o
z z Z
− −−= − − − − +−
( )2 2
2 3 41 1 1 1 1 1
1 1
3 21 1
4 4
z Z z z Z Zg x x o x
z z
− − −− − −= + +
Dessas expansões, computamos as partes principais de g:
( )1 1
1 1
1 1 1
25 e
16 8z z
z Z
z z Zα β −= =
−
( )1 1
1 1
1 1 1
23 e
16 8Z Z
z Z
z z Zα β −= − = −
−
2 2
1 1 1 1 1 1
1 1
3 2 e
4 4
z Z z z Z Z
z zα β∞ ∞
− − −= =
1.4 Como 2, 3 2 e 2 2mγ γ γ += = ≥ = ≤ , definimos o subconjunto 1,2,4,6,12L′ = .
1.5 Neste momento, esse item não tem relevância.
1.6 Com 1n = , vamos para o Segundo Passo.
4.1.2.Segundo Passo
Como todas as raízes têm ordem 2, começamos no item 2.3.
2.3. Como estamos em 1n = , para cada uma das três raízes de ordem 2, definimos:
28
1
1
1 1 1 1
1 1
1 5,
4 4
1 3,
4 4
2 21 11 , 1
2 2
z
Z
E
E
z Z z ZE
z z∞
= −
=
− − = + −
Os itens 2.4 a 2.6, não se aplicam nesse caso.
4.1.3.Terceiro Passo
3.1. O produto cartesiano ccE
∈Γ∏ é:
1 1 1 1 1 1
1 1 1
1 1 1 1 1
1 1
2 2 21 1 1 1 1 3 1 5 11 , , , 1 , , , 1 , , ,
2 4 4 2 4 4 2 4 4
2 2 21 5 3 1 1 1 11 , , , 1 , , , 1
2 4 4 2 4 4 2
z Z z Z z Z
z z z
z Z z Z z
z z
− − − + − + − +
− − + − − −
1
1
1 1 1 1
1 1
1 3, , ,
4 4
2 21 5 1 1 5 31 , , , 1 , ,
2 4 4 2 4 4
Z
z
z Z z Z
z z
− −
− − + +
Os candidatos a ( )d e são os elementos do seguinte conjunto:
1 1 1 1 1 1 1 1
1 1 1 1
1 1 1 1 1 1 1 1
1 1 1 1
2 2 2 21 1 1 11 , , 2 , 3 ,
2 2 2 2
2 2 2 21 1 1 11 , , 2 , 3
2 2 2 2
z Z z Z z Z z Z
z z z z
z Z z Z z Z z Z
z z z z
− − − − − − − + − +
− − − − + − − − −
Para dar prosseguimento à investigação da condição i do item 3.1, é útil fazer
uma redefinição dos parâmetros como:
( )21 12Z N z≡ − .
Assim o conjunto dos candidatos a ( )d e fica:

29
3 3 2 2 1 1, , , , , , ,
2 2 2 2 2 2 2 2
N N N N N N N N + − + − − +− − −
onde podemos observar que qualquer desses elementos só poderá ser um inteiro não-
negativo para N ∈ℤ .
Podemos, então, reescrever a equação de isotropia de pressão com o parâmetro
N:
( ) ( ) ( ) ( )2 2 21 1 14 2 2 1 1 0x z N z x f z N f N f ′′ ′− − + − − − − = (4.2)
Como sabemos que N deve ser um inteiro para que possamos ter a condição a
respeito ( )d e (grau do polinômio mínimo associado) satisfeita, podemos procurar
soluções da equação (4.2) para um intervalo de valores de N. Podemos notar também
que o conjunto dos candidatos a ( )d e é simétrico para N, quer dizer, trocando N por -N
obtemos o mesmo conjunto. Analogamente, poderíamos dizer o mesmo sobre a equação
(4.2), já que o N só aparece elevado ao quadrado. Assim, em vez de trabalhar com o
conjunto dos números inteiros, podemos nos restringir ao dos naturais, sem perda de
generalidade nas soluções.
Usando o solucionador de equações diferenciais do software de álgebra
computacional Maple [19], descobrimos diretamente que a equação (4.2) sempre tem
solução liouvilliana evitando, assim, a necessidade de aplicar o algoritmo de Kovacic
neste caso.

30
4.2.Ansatz 1-2
A próxima alternativa que iremos estudar é ( )( )
1
1 2
( )x z
F xx Z x Z
−= Α− −
.
A análise da expansão da densidade no centro nos indica que para este ser finita
no centro devemos ter 1 2
1
Z Z
zΑ = − . Podemos, então escrever a equação de isotropia de
pressão como:
( )( )( ) ( )( )( )
21 1 1 2 1 1 1 1 2 1 2
1 1 2 1
4 2 2
0
z x z x Z x Z f z x xz z Z Z Z Z f
Z z Z z f
′′ ′ − − − + − + + − +
− − − =(4.3)
Como veremos no próximo capítulo, Maple consegue obter a solução geral da
equação (4.3), sendo sempre uma solução liouvilliana. Portanto, não há necessidade de
usar do algoritmo de Kovacic.

31
4.3.Ansatz 2-1
A alternativa que vamos testar em seguida será: ( )( )
( )1 2
1
( )x z x z
F xx Z
− −= Α
−.
Como fizemos anteriormente, antes de iniciar a aplicação do algoritmo, vamos
analisar o comportamento da densidade em 0x = . Dessa análise, inferimos que para
esta grandeza ser finita no centro, devemos ter: 1
1 2
Z
z zΑ = − . Com este valor, podemos
escrever a equação de isotropia de pressão:
( ) ( )( ) ( )( )( ) ( ) ( )
21 2 1 2 1 1 2 1 1 1 2 1 2
2 2 21 1 1 2 1 2 1 1 2 1 2 1 2 1
4 2 2
2 0
z z x z x z x Z f z z x xZ Z z z z z f
Z x Z z z z z x Z z z z z z z Z f
′′ ′ − − − − − + + − +
− + + − − + + + − =
(4.4)
4.3.1.Primeiro Passo
Fazendo a redução da equação diferencial (4.4), obtemos o polinômio ( )t x :
( ) ( )( ) 2
1 2 1( )t x x z x z x Z = − − − .
1.1. As raízes de ( )t x são 1, 2, 1z z Z′Γ = e suas ordens são 1 2 1( ) ( ) ( ) 2o z o z o Z= = =
enquanto a ordem do ponto no infinito é ( ) 3o ∞ = .
Com esses dados, escrevemos: 3m+ = e 2 1 2 1, ,z z ZΓ = e 3Γ = ∞ .
1.2. 2 3 e γ γ= = 4
1.3. Expandindo em torno dos pontos singulares de ordem 2, temos:
( )( ) ( )1 1
21 1 1 2 2 1
1 1 2 1 1
2 3 25 e
16 8z z
z z Z z z Z
z z z z Zα β
− + −= =
− −
( )( )( )2 2
22 2 1 1 1 1
2 2 1 2 1
2 3 25 e
16 8z z
z z Z z z Z
z z z z Zα β
− + += =
− −

32
( ) ( ) ( )( )( )1 1
23 21 1 2 1 1 2 1 1 2 1 2
1 2 1 1 2 1
2 4 23 e
16 8Z Z
Z z z Z z z Z z z z z
z z z Z z Zα β
− + + + − += − =
− −
1.4. O conjunto L′ fica, então, definido: 2L′ = .
1.5. Como o caso (1.5.1) é satisfeito, L L′= .
1.6. Então, aplicamos o Segundo Passo com nosso menor (e único) valor possível para
2n = .
4.3.2.Segundo Passo
2.4. Para cada ponto de ordem 2 definimos os conjuntos:
1 2
1
1,2,5
1,2,3
z z
Z
E E
E
= = −
=
2.6. Para o pólo de ordem 3, escrevemos:
3E∞ =
4.3.3.Terceiro Passo
3.1. Os candidatos a ( )d e são os elementos do seguinte conjunto:
11 9 7 5 3 1 1
6, , 5, , 4, , 3, , 2, , 1, ,0, ,12 2 2 2 2 2 2
− − − − − − − − − − − −
Entre estes, temos somente dois elementos que satisfazem as condições (i) e (ii):
0 e 1. Cada um deles gerados por uma única família.
3.2. Para essas duas famílias montamos a função racional ( )Q x :
( ) ( )( )( )( )
( )( ) ( )( )
21 1 2 1 1 2 1 2
0
1 1 2
21 1 1 2 1 2
1
1 1 2
2 3
2
2
2
a
a
x Z z z x Z z z z zQ
x Z x z x z
x Z x Z z z z zQ
x z x Z x Z
+ − − − + +=
− − −
− + − + +=
− − −
33
Para 2n = , a equação de recorrência para ( )P x obtida do sistema de equações
do item (ii) gera a seguinte equação diferencial:
( ) ( )2 32 2 2 23 3 3 4 3 2 0P QP Q Q g P Q Q Q Q gQ P′′′ ′′ ′′ ′′ ′+ + + + + + + − = (4.5)
Porém, a esta altura, não precisamos tentar resolver essa equação diferencial
uma vez que já sabemos que grau deve ter o polinômio P de acordo com o valor de
( )d e . Então, para a equação obtida da família que tem ( ) 0d =e , fazemos 2( ) 1P x = − e
reescrevemos (4.5):
( ) ( ) ( ) ( )
( ) ( ) ( )
2 3 2 2 2 21 2 1 1 1 1 2 1 2 1 1 1 2 2 1 1 2 1 2
2 2 2 3 2 2 3 2 2 2 21 2 1 1 1 2 1 2 2 1 1 2 1 1 2 2 1 2 1 2
2 3 3 3 9
6 3 2 0
z z Z x Z Z z z z z x Z z z z z Z z z z z
z z x Z z z z z z z Z z z z z z z z z z z
− + + + − + + − + +
+ + + + − + + + + = (4.6)
Resolver a equação (4.6) significa que queremos achar relações entre as
constantes 1 2 1, e Z z z que a tornem válidas para qualquer valor de x. Então, começamos
a analisar o coeficiente de grau 3 em x. Para que este coeficiente seja nulo, temos que
21
122
Zz z= . Substituindo esse valor na equação (4.6), o novo coeficiente de 2x ,
( ) ( )2 21 2 2 1 2 112 2Z z z Z z Z− − , é nulo para qualquer uma das condições abaixo:
11 2 2 1 20, 0, ou
2
ZZ z z Z z= = = =
Os casos 1 20 ou 0Z z= = não são relevantes porque acarretam em uma
densidade infinita no centro; 2 1z Z= implica em uma redução nos graus do ansatz, caso
que não é de nosso interesse nessa dissertação; substituindo 12 2
Zz = na condição que
obtemos do coeficiente de 3x , obtemos 1 1z Z= , que descartamos pelo mesmo motivo
do caso anterior.
A outra opção é a equação obtida da família com ( ) 1d =e . Para este caso
fazemos 2( )P x x k= − + , k é constante, e reescrevemos (4.5):
34
( ) ( ) ( )( ) ( ) ( )
( )
3 2 2 21 2 1 1 1 1 2 2 1 2 1 1 1 2 2
3 2 2 31 2 1 2 1 2 1 2 1 2 1 1 1 2 1 2 2
2 2 21 2 1 1 2 2 1 2 1 1
2 3 2 3 3
2 2
2
z z Z k x Z z k z z z k z z k x Z k z z z z
z z z z z z k z z z z x Z k z z z z z z
z z z z z z kz z z z
− + − + − − + + +
− + − + + + + + + +
− + + − + ( ) ( )2 2 22 2 1 2 1 22 0z z z z z z+ + + =
(4.7)
Semelhantemente ao que acontece para a equação (4.6), a equação (4.7) só pode
ser satisfeita se 1 2Z z= ou 1 1Z z= , que, como afirmado anteriormente, não é de nosso
interesse nesse trabalho.
Como 2n = é o maior valor dentro do conjunto L, podemos afirmar que a
equação (4.4) não tem solução liouvilliana.

35
4.4.Ansatz 2-2
O último ansatz que iremos analisar é ( )( )( )( )
1 2
1 2
( )x z x z
F xx Z x Z
− −= Α
− −.
Estudando a densidade em 0x = , observamos que para que seja finita nesse
ponto, devemos ter 1 2
1 2
Z Z
z zΑ = . Com essa substituição, a equação de isotropia de pressão
passa a ser escrita como:
( )( )( )( ) ( ) ( )( ) ( ) ( ) ( ) ( )
( ) ( ) ( )
21 2 1 2 1 2 1 2 1 2 1 2 1 2 1 2
21 2 1 2 1 2 1 2 1 2 1 2 1 2 1 2 1 2 1 2
2 21 2 1 2 1 2 1 1 2 2 1 2 1 2 1 2
4 2 2
2
0
z z x z x z x Z x Z f z z z z Z Z x Z Z z z x
Z Z z z z z Z Z f Z Z z z x z z Z Z Z Z z z x
z z Z Z z z z Z Z z Z Z Z Z z z f
′′ − − − − − + − − + − +
′ − + − + + − + + − +
− + − + − + + + =
(4.8)
4.4.1.Primeiro Passo
Começamos escrevendo o polinômio ( )t x da equação (4.8):
( )( )( ) ( ) 2
1 2 1 1( )t x x z x z x Z x Z = − − − −
1.1. As raízes de ( )t x são 1, 2, 1, 2z z Z Z′Γ = . Suas ordens são:
1 2 1 2( ) ( ) ( ) ( ) 2o z o z o Z o Z= = = =
A ordem do ponto no infinito é ( ) 2o ∞ = . Com esses dados, escrevemos: 2m+ = e
2 1 2 1 2, , , ,z z Z ZΓ = ∞ .
1.2. 2γ γ= = 4 .
1.3. As partes principais das expansões de g em torno de seus pólos estão computadas a
seguir:
1 2 1 2
1 2 1 2
1 2
5 5 3 3 , , , e
16 16 16 16 4z z Z Z
z z Z Z
z zα α α α α∞
−= = = − = − = .

36
1.4. 1,2,4,6,12L′ = .
1.5. Este item não é importante por enquanto.
1.6. Começamos o Segundo Passo com 1n = .
4.4.2.Segundo Passo
2.3. Como estamos tratando 1n = , para cada uma das cinco raízes de ordem 2,
definimos:
1 2
1 3,
4 4z zE E
= =
1 2
1 5,
4 4Z ZE E
= = −
1 2 1 2
1 2 1 2
1 12 , 2
2 2
Z Z Z ZE
z z z z∞
= + − − −
4.4.3.Terceiro Passo
3.1. Fazemos o produto cartesiano 1 2 1 2z z Z ZE E E E E∞× × × × e aplicamos a seguinte
redefinição de parâmetros
( )2 1 22
1
2z z
Z NZ
= − .
Dessa forma, 1 1
,2 2
E N N∞
= + −
e podemos escrever o conjunto dos
candidatos a ( )d e :
7 6 5 4 3 2 1 1, , , , , , , , ,
2 2 2 2 2 2 2 2 2
1 1 2 3 4 5 6 7 , , , , , , , ,
2 2 2 2 2 2 2 2 2
N N N N N N N N N
N N N N N N N N N
+ + + + + + + −− − − − − − − −
+ − − − − − − −

37
Após esse procedimento, a continuação da aplicação do algoritmo é ilimitada,
uma vez que para cada valor de N ∈ℕ (e não ℤ , pela mesma justificativa do caso do
ansatz 1-1) o procedimento vai decorrer de uma forma. Com auxílio do Maple, fizemos
o estudo para 0, 1, 2, 3 e 4N = .
Com a substituição desses valores para N em ( )d e , vemos que os possíveis
graus do polinômio P são 0, 1 e 2, que significam, respectivamente:
21 1 0 1 1 01, e P P x a P x a x a= − = − + = − + + .
3.2. As formas de 1P são, então, substituídas na equação algébrica em x de 1P− obtida
pelo sistema de equações nesse item do algoritmo. Impondo que os coeficientes de x da
equação resultante sejam nulos, obtemos relações entre os parâmetros necessárias para
que a equação de isotropia de pressão tenha uma solução liouvilliana. Cabe ressaltar
que, entre as relações obtidas, são descartadas:
1. 1 1 2 ou Z z z= , pois reduz o grau do ansatz;
2. 1 1 2, z ou z 0Z = , pois implica em densidade central infinita.
A próxima passagem é substituir as relações encontradas novamente em 0P e 1P
para obter v que, como estamos com 1n = , escrevemos como 0
1
P
P− . Com v, obtemos ξ
fazendo a transformação inversa 0
1
exp dP
xP
ξ = − ∫ e então, finalmente, a solução da
equação diferencial:
0
1
1 ( )( ) exp ( )d exp d
2 2
P b xf x b x x x
Pξ
= − = − +
∫ ∫ .

38

39
5.Soluções e Análise Física
O algoritmo de Kovacic gera apenas uma solução para a equação diferencial de
segunda ordem (3.1). Dada uma solução, 1y , de (3.1), uma segunda solução, 2y , é [14]:
( )
2 12
1
exp bdxy y dx
y
−= ∫∫ (5.1)
e a solução geral será uma combinação linear de 1y e 2y , ou seja:
1 1 2 2y C y C y= +
Podemos ver pela forma de (5.1) que, se 1y é liouvilliana, 2y também é pois
pode ser escrita em termos de funções elementares e um número finito de integrais.
5.1.Ansatz 1-1
Podemos resolver a equação (4.2) sem aplicar o último passo do algoritmo até o
final, bastando utilizar a redefinição de variáveis ( )21 12Z N z= − . Utilizando a notação
padrão para funções hipergeométricas 1 1( ,..., ; ... ; )p q p qF a a b b z , a solução geral dessa
equação é
( )( )
( ) ( ) ( )( )
21
1 2 12
1
212 2
2 1 1 2 12
1
21 1 1( ) , ; ;
2 2 2 1
21 2 1 2 , ; ;
2 2 2 1
x z NN Nf x C F
z N
x z NN NC z N x z N F
z N
+ −+ − = − + −
+ − − + − − −
(5.2)
Utilizando (2.5a) e (2.5b) obtemos as formas gerais para a densidade e a pressão,
que são, respectivamente:
( )
21
221
31
2
x zN
N x zρ −−=
− − (5.3)

40
( ) ( )
( )( )
2 21
21
4 2 1
2
x z N f N fp
x z N f
′+ − + − = −− −
(5.4)
A densidade no centro ( )( )
2
21
13( 0)
2
Nx
z Nρ
−= = −
− nos indica que 1 0z < para que
esse valor seja positivo, independentemente do valor de N, uma vez que o parâmetro
( )( )
2
2
1
2
N
N
−
− é sempre positivo, a não ser se 1N = , quando é nulo. Podemos ver também
que 1 0
limz
ρ→
= ∞ . Outra característica da densidade que podemos mencionar é que ela só é
nula quando x → ∞ .
5.1.1. Ansatz 1-1 com 0N =
As funções para este caso são:
( )1
1
2
2
x zF
x z
−=
−
2 21 1 2 1 1 1 1 1
32 2 ln 3 2 2
2f C x z C x z x z x z x z x z
= − + − − + − + − +
( )
1
2
1
31
2
x z
x zρ −=
−
( ) ( )
( )( )
11 2 1 1 1
1
11 2 1 1 1
1
32 ln 2 2
2 2
32 ln 2 2
2 2
x zC C x z x z x z
x zp
x zC C x z x z x z
x z
+ + − − + − − − − = + + − − + − − + −
A seguir, mostramos os gráficos para a densidade e a pressão com 1 2 3C C = e
nos intervalos 15 1 e 0 4z x− < < − < < :
41
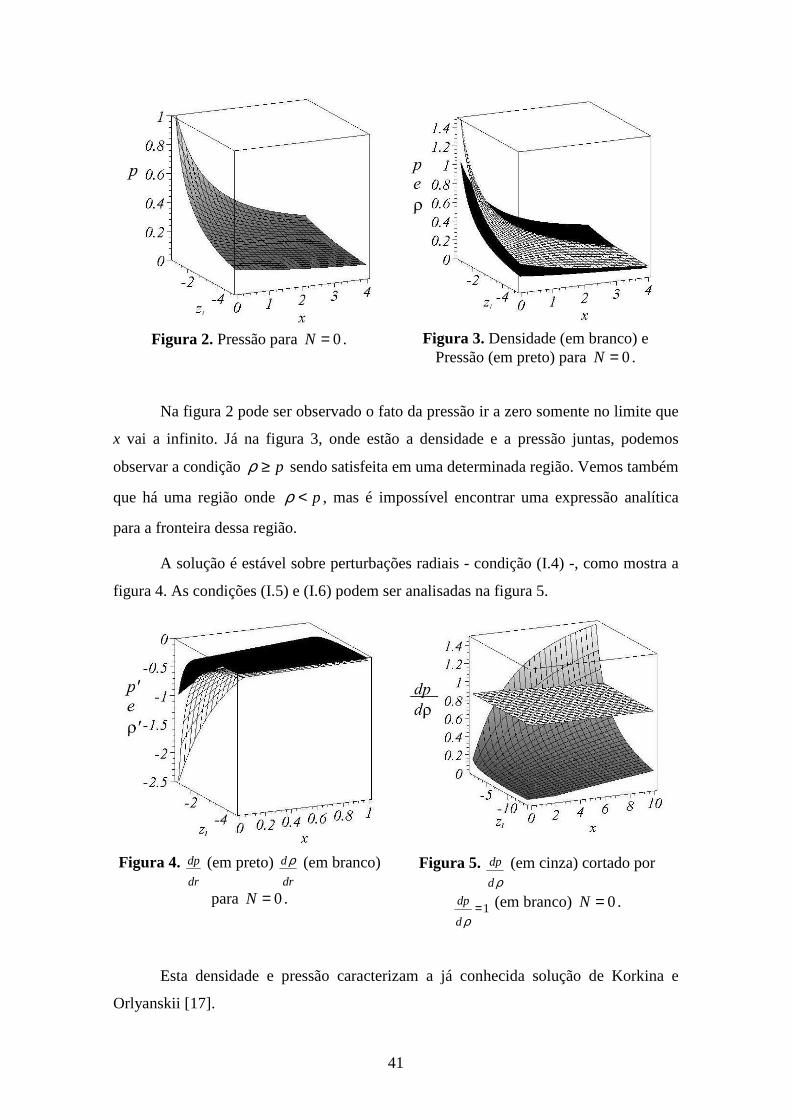
Figura 2. Pressão para 0N = .
Figura 3. Densidade (em branco) e
Pressão (em preto) para 0N = .
Na figura 2 pode ser observado o fato da pressão ir a zero somente no limite que
x vai a infinito. Já na figura 3, onde estão a densidade e a pressão juntas, podemos
observar a condição pρ ≥ sendo satisfeita em uma determinada região. Vemos também
que há uma região onde pρ < , mas é impossível encontrar uma expressão analítica
para a fronteira dessa região.
A solução é estável sobre perturbações radiais - condição (I.4) -, como mostra a
figura 4. As condições (I.5) e (I.6) podem ser analisadas na figura 5.
Figura 4. dp
dr
(em preto) ddr
ρ (em branco)
para 0N = .
Figura 5. dp
dρ (em cinza) cortado por
1dp
dρ= (em branco) 0N = .
Esta densidade e pressão caracterizam a já conhecida solução de Korkina e
Orlyanskii [17].
42
5.1.2. Ansatz 1-1 com 1N =
As principais funções são:
1F = 1 2f C x C= + 0ρ = 1
1 2
4Cp
C x C=
+
A função F se reduz a 1, não estando dentro do nosso objetivo a análise desse
tipo de solução.
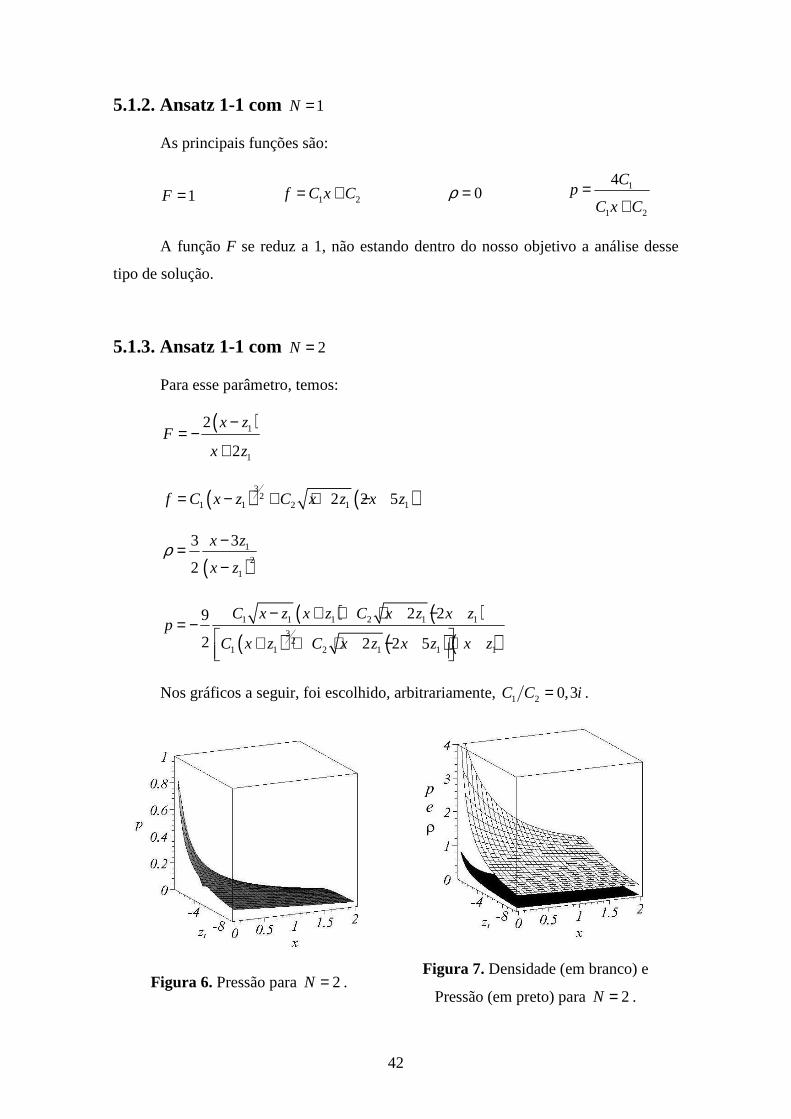
5.1.3. Ansatz 1-1 com 2N =
Para esse parâmetro, temos:
( )1
1
2
2
x zF
x z
−= −
+
( ) ( )32
1 1 2 1 12 2 5f C x z C x z x z= − + + −
( )
1
2
1
33
2
x z
x zρ −=
−
( ) ( )
( ) ( ) ( )1 1 1 2 1 1
32
1 1 2 1 1 1
2 29
2 2 2 5
C x z x z C x z x zp
C x z C x z x z x z
− + + + −= −
+ + + − +
Nos gráficos a seguir, foi escolhido, arbitrariamente, 1 2 0,3C C i= .
Figura 6. Pressão para 2N = .
Figura 7. Densidade (em branco) e
Pressão (em preto) para 2N = .
43
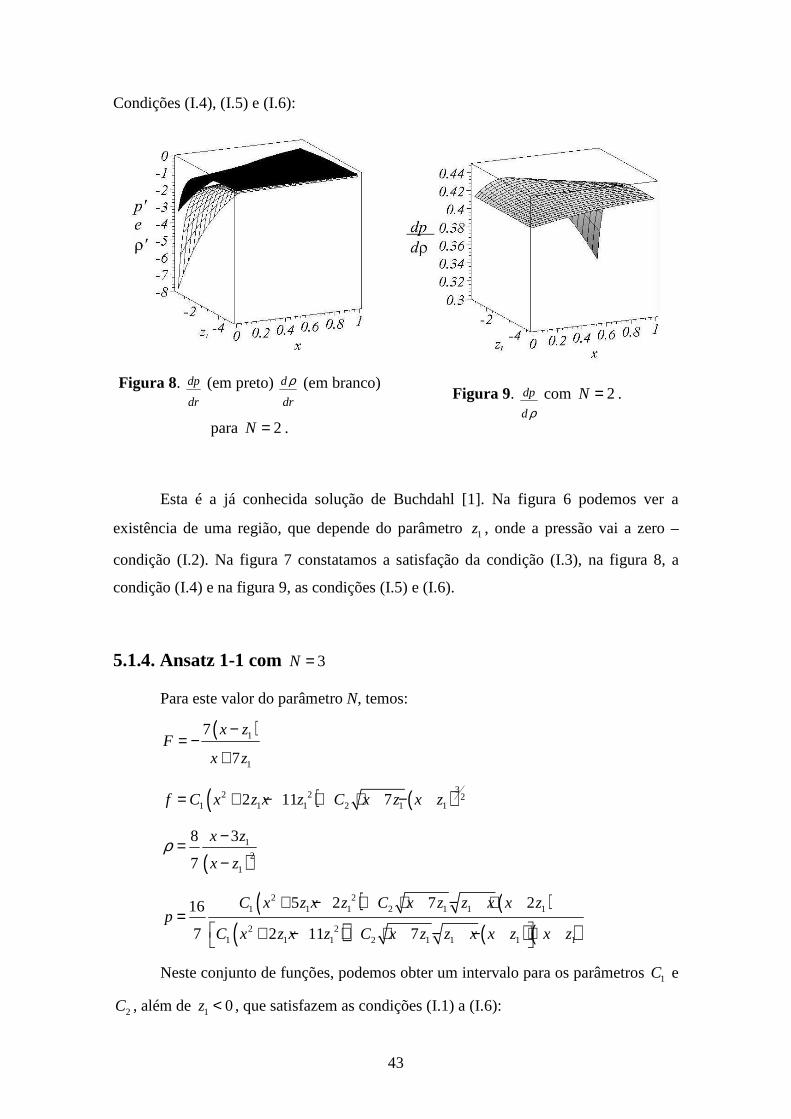
Condições (I.4), (I.5) e (I.6):
Figura 8. dp
dr
(em preto) ddr
ρ (em branco)
para 2N = .
Figura 9. dp
dρ com 2N = .
Esta é a já conhecida solução de Buchdahl [1]. Na figura 6 podemos ver a
existência de uma região, que depende do parâmetro 1z , onde a pressão vai a zero –
condição (I.2). Na figura 7 constatamos a satisfação da condição (I.3), na figura 8, a
condição (I.4) e na figura 9, as condições (I.5) e (I.6).
5.1.4. Ansatz 1-1 com 3N =
Para este valor do parâmetro N, temos:
( )1
1
7
7
x zF
x z
−= −
+
( ) ( )32 2 21 1 1 2 1 12 11 7f C x z x z C x z x z= + − + + −
( )
1
2
1
38
7
x z
x zρ −=
−
( ) ( )
( ) ( ) ( )
2 21 1 1 2 1 1 1
2 21 1 1 2 1 1 1 1
5 2 7 216
7 2 11 7
C x z x z C x z z x x zp
C x z x z C x z z x x z x z
+ − + + − +=
+ − + + − − +
Neste conjunto de funções, podemos obter um intervalo para os parâmetros 1C e
2C , além de 1 0z < , que satisfazem as condições (I.1) a (I.6):
44
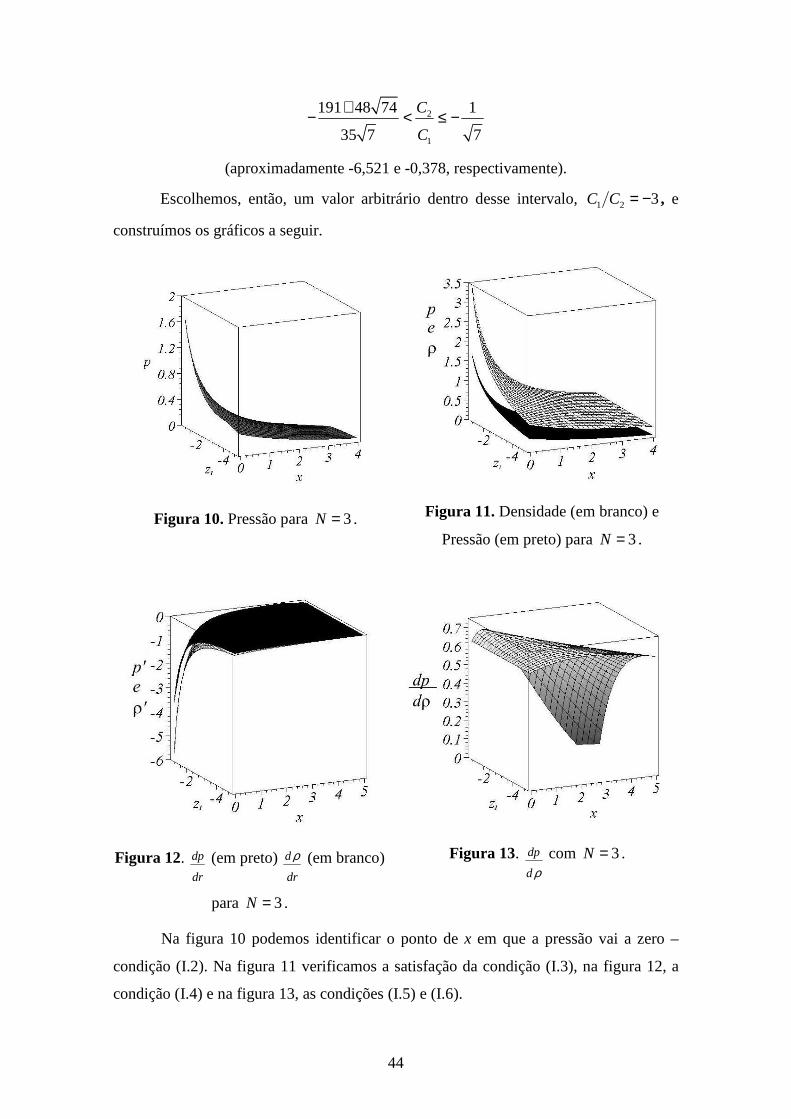
2
1
191 48 74 1
35 7 7
C
C
+− < ≤ −
(aproximadamente -6,521 e -0,378, respectivamente).
Escolhemos, então, um valor arbitrário dentro desse intervalo, 1 2 3C C = − , e
construímos os gráficos a seguir.
Figura 10. Pressão para 3N = .
Figura 11. Densidade (em branco) e
Pressão (em preto) para 3N = .
Figura 12. dp
dr
(em preto) ddr
ρ (em branco)
para 3N = .
Figura 13. dp
dρ com 3N = .
Na figura 10 podemos identificar o ponto de x em que a pressão vai a zero –
condição (I.2). Na figura 11 verificamos a satisfação da condição (I.3), na figura 12, a
condição (I.4) e na figura 13, as condições (I.5) e (I.6).
45
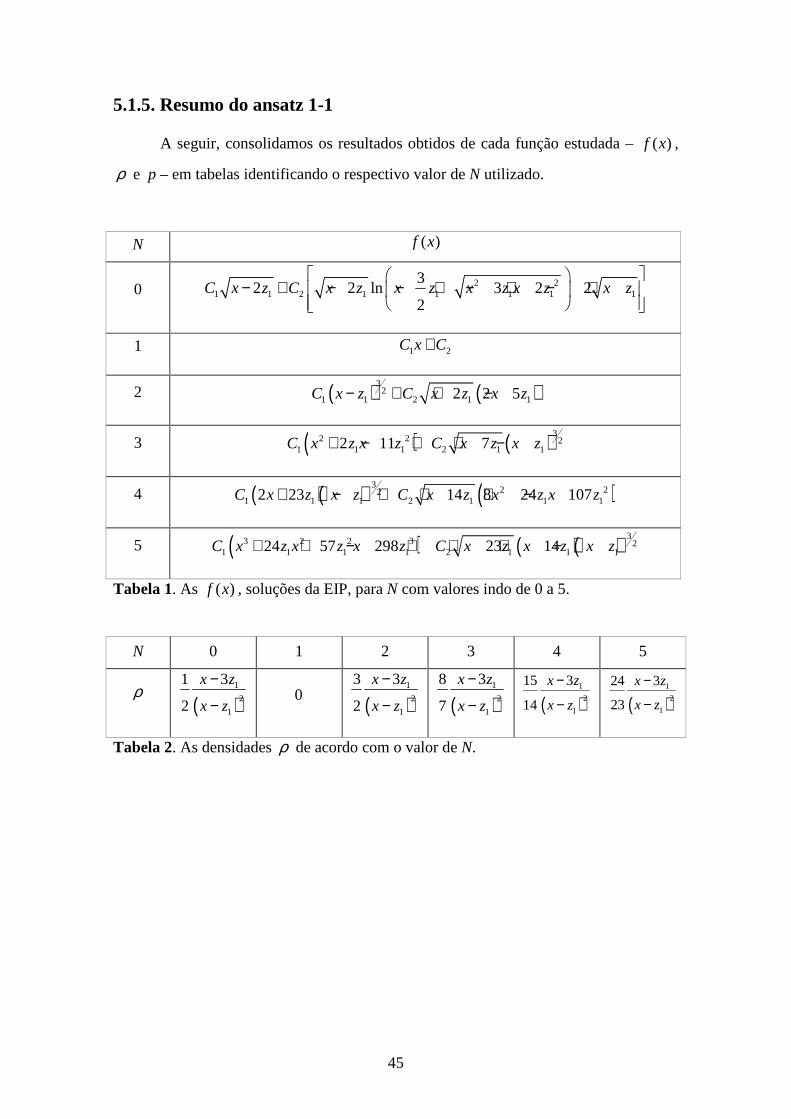
5.1.5. Resumo do ansatz 1-1
A seguir, consolidamos os resultados obtidos de cada função estudada – ( )f x ,
ρ e p – em tabelas identificando o respectivo valor de N utilizado.
N ( )f x
0 2 21 1 2 1 1 1 1 1
32 2 ln 3 2 2
2C x z C x z x z x z x z x z
− + − − + − + − +
1 1 2C x C+
2 ( ) ( )32
1 1 2 1 12 2 5C x z C x z x z− + + −
3 ( ) ( )32 2 21 1 1 2 1 12 11 7C x z x z C x z x z+ − + + −
4 ( )( ) ( )3 2 221 1 1 2 1 1 12 23 14 8 24 107C x z x z C x z x z x z+ − + + + −
5 ( ) ( )( )33 2 2 3 21 1 1 1 2 1 1 124 57 298 23 14C x z x z x z C x z x z x z+ + − + + + −
Tabela 1. As ( )f x , soluções da EIP, para N com valores indo de 0 a 5.
N 0 1 2 3 4 5
ρ ( )
1
2
1
31
2
x z
x z
−
− 0 ( )
1
2
1
33
2
x z
x z
−
−
( )1
2
1
38
7
x z
x z
−
−
( )1
2
1
315
14
x z
x z
−
−
( )1
2
1
324
23
x z
x z
−
−
Tabela 2. As densidades ρ de acordo com o valor de N.
46
N p
0
( )( )
( ) ( )
11 2 1 1 1
1
11 2 1 1 1
1
32 ln 2 2
2 2
32 ln 2 2
2 2
x zC C x z x z x z
x z
x zC C x z x z x z
x z
+ + − − + − − − − + + − − + − − + −
1 1
1 2
4C
C x C+
2 ( ) ( )
( ) ( ) ( )1 1 1 2 1 1
32
1 1 2 1 1 1
2 29
2 2 2 5
C x z x z C x z x z
C x z C x z x z x z
− + + + −−
+ + + − +
3 ( ) ( )
( ) ( ) ( )
2 21 1 1 2 1 1 1
2 21 1 1 2 1 1 1 1
5 2 7 216
7 2 11 7
C x z x z C x z z x x z
C x z x z C x z z x x z x z
+ − + + − +−
+ − + + − − +
4 ( ) ( )
( ) ( ) ( )
2 2 2 21 1 1 1 2 1 1 1
2 2 2 21 1 1 1 2 1 1 1 1
2 29 59 14 8 56 1925
14 2 21 23 14 8 24 107
C x z x z x z C x z x z x z
C x z x z x z C x z x z x z x z
− + + + + + −−
− + − + + + − +
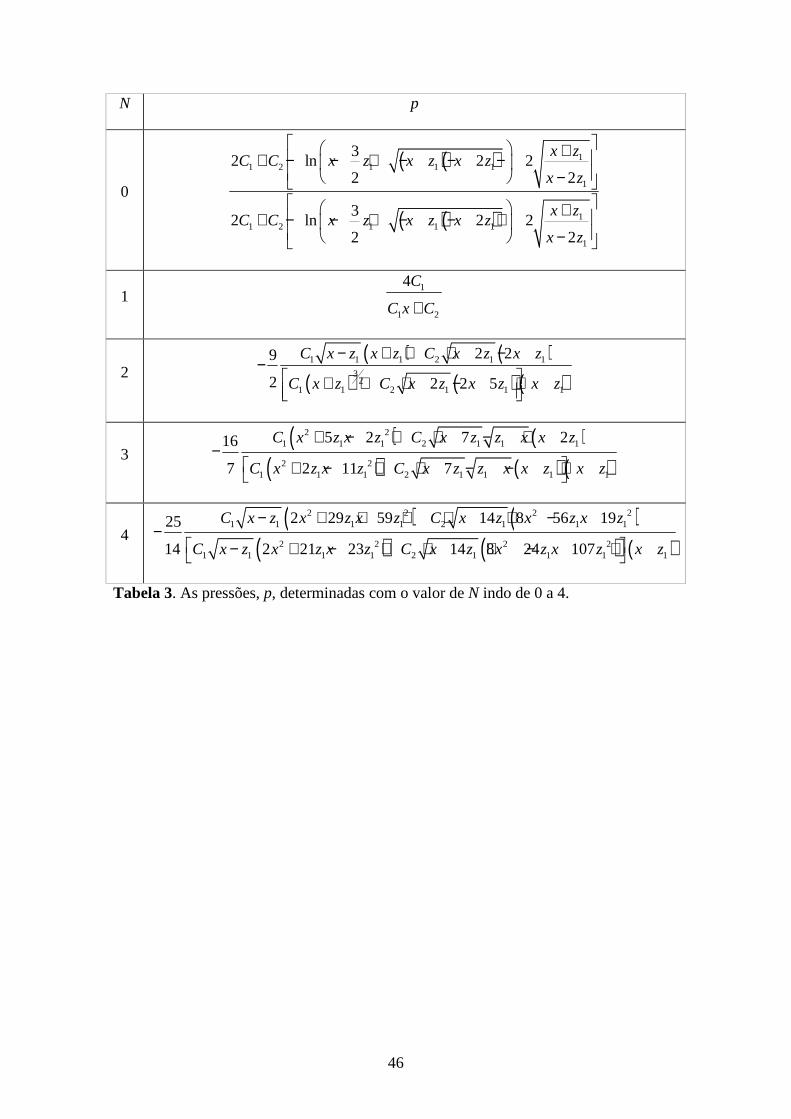
Tabela 3. As pressões, p, determinadas com o valor de N indo de 0 a 4.

47
5.2.Ansatz 1-2
O ansatz ( )( )
1
1 2
( )x z
F xx Z x Z
−= Α− −
com a condição 1 2
1
Z Z
zΑ = − para a
densidade ser regular no centro gera uma equação de isotropia de pressão (4.3) em que
pode ser dispensada a aplicação do algoritmo de Kovacic. Isto ocorre pois o integrador
do Maple (dsolve) foi capaz de calcular a solução geral:
( ) ( )1 1 2( ) 2 E x E xf x x z C e C e− = − + (5.5)
onde ( )
( ) ( ) ( )
21 1 1 1 2 1 2
1 1 2 1
4 2( ) d
2 2
x z z z Z Z Z ZE x x
z x Z x Z x z
− − + +=
− − −∫ .
Já que ( )E x é uma integral de uma função algébrica em x, ( )E x é liouvilliana.
Podemos escrever ainda ( )E x em termos de integrais elípticas:
1 1 2 1 2 1 2
2 1 1 1 2 1 1 1 1
( ) , , 1,x z z Z x z Z z Z
E x KZ z z Z Z z z z Z
− − − − = − Π − − − − −
F (5.6)
com ( )( )
( )1 1 1 2
21 1 1 1 2 1 2 1 1
2 2
4 2
z Z z ZK
z z z Z Z Z Z Z z
− −=
− + + − e e ΠF são as integrais elípticas
incompletas do primeiro e terceiro tipo, respectivamente, definidas conforme [15] por:
2 2 2 0
d( , )
1 1
z tz k
t k t=
− −∫F
( )
2 2 2 2 0
d( , , )
1 1 1
z tz n k
nt t k tΠ =
− − −∫
A densidade para este caso escreve-se como:
( ) ( )
( )
2 21 1 1 1 2 1 2 1 1 2 1 1 2
2
1 2 1
3 5 3 3z x z z Z Z Z Z x z Z Z z Z Z
Z Z x zρ
− + + − + + − =−
(5.7)
Em geral, a forma para a pressão é bastante complicada, mas nos casos 1 0C =
ou 2 0C = ela é simplificada, passando a ser uma expressão puramente algébrica:

48
( ) ( )( )( )
( ) ( )( )
2 2 21 1 1 1 2 1 2 1 1 2
1 2 1 1
2 21 2 1 2 1 1 1 2 1 2
1 2 1 1
3 2 2 2
2
4 2
2
z x z z Z Z Z Z x z Z Zp
Z Z x z x z
x x Z Z Z Z z z Z Z Z Z
Z Z x z x z
− + + − + + = − +− −
− + + − + +±
− −
(5.8)
com o sinal ± aplicado de acordo com 1 0C = ou 2 0C = , respectivamente.
Podemos obter expressões ainda mais simples impondo 0K = na equação (5.6)
ao fazer 2 12Z z= . Com essa condição, reconstituímos a conhecida solução IV de
Tolman [16] que tem:
( )( )
2 21 1 1 1 1
2
1 1
3 7 6 3
2
x z Z x z z Z
Z x zρ
− + + −=
− e
( )1 1
1 1
3 2
2
x z Zp
Z x z
− −= −−
e satisfaz toda as condições físicas dadas nas equações (I.1) a (I.6).
Voltando à análise das soluções (5.7) e (5.8), a primeira etapa foi o estudo da
expansão em série de Laurent dessas grandezas em torno do ponto 0x = . Para facilitar
o progresso nessa direção, observamos que seria vantajoso fazer duas redefinições dos
parâmetros:
1. 1 1 21 1 2
1 1 1; ; z Z Zu U U= = =
2. 1 1 1 21 2 1 2
1 1 1 2
2 2; ;
2 2
u V u VU U Z Z
u V u V
− −= = ⇒ = =− −
.
Dessa forma, até 1ª ordem em x, as expansões em torno de 0x = para a
densidade e a pressão são escritas respectivamente como:
( ) ( )( ) 21 2 1 1 1 2
3 5( )
2 4sL V V u V u V x o xρ = − + − + + + (5.9)
( ) ( ) ( )2 21 1 2 1 2 1 1 2 1 2 1 1 2 1 2 1 2
1 12 ( )
2 4sLp u V V VV u V V VV u VV V V VV x o x = − + + ± − − + + ± − ± − + − +
(5.10)
Para satisfazer as condições físicas (I.1) e (I.2), 0 e 0( ) ( )pρ devem ser positivas.
Então, olhamos os termos constantes das expansões (5.9) e (5.10) e inferimos que:

49
( )1 2 1 2
30 0
2V V V V− + ≥ → + ≤ e
( )1 1 2 1 2
1
2u V V VV≤ + ± − .
Podemos impor também ( ) ( )r p rρ ≥ – condição (I.3) – desde 0x = , que nos fornece:
( )1 1 2 1 22u V V VV> + ± − .
A condição (I.4) nos diz que a densidade e a pressão devem ser decrescentes, o
que direciona nossa atenção para os coeficientes de x das expansões em série acima,
implicando em:
( )( )1 1 1 2 0u V u V+ + ≥ e
( )( )1 1 2 1 1 2 1 2 0u VV u V V VV− + + − ≥∓ ∓
Podemos obter outra relação útil estudando o limite da pressão em x → ∞ . Uma
vez que a pressão em 0x = é positiva, de (5.8), desde que 1 0z < , podemos concluir que
se (0) 0p > e lim 0x
p→∞
< , existe um valor de x, sx digamos, no qual ( ) 0sp x = ,
definindo a superfície da estrela. Temos:
( )( ) ( )( )1 1 1 2 1 1 1 2
1 1
3lim 0
4x
u V u V u V u Vp
u u→∞
− − − −= − → >
A investigação da condição a respeito de dp
dρ só pôde ser feita numericamente e,
ainda assim, não gerou nenhuma condição adicional a respeito dos parâmetros em
questão.
A seguir, vamos explicitar gráficos com parâmetros escolhidos de acordo com a
análise feita, onde a legenda seguida será:
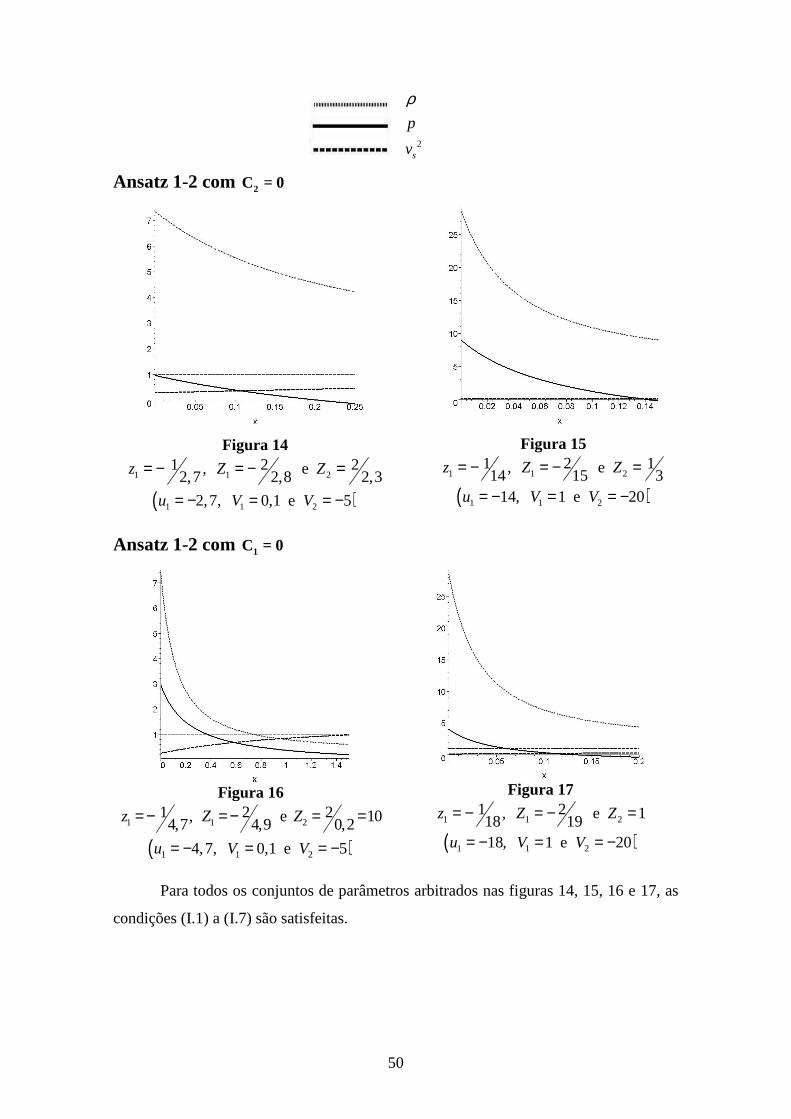
50
2s
p
v
ρ
Ansatz 1-2 com 2C = 0
Figura 14
1 1 21 2 2, e 2,7 2,8 2,3z Z Z= − = − =
( )1 1 22,7, 0,1 e 5u V V= − = = −
Figura 15
1 1 21 2 1, e 14 15 3z Z Z= − = − =
( )1 1 214, 1 e 20u V V= − = = −
Ansatz 1-2 com 1C = 0
Figura 16
1 1 21 2 2, e 104,7 4,9 0,2z Z Z= − = − = =
( )1 1 24,7, 0,1 e 5u V V= − = = −
Figura 17
1 1 21 2, e 118 19z Z Z= − = − =
( )1 1 218, 1 e 20u V V= − = = −
Para todos os conjuntos de parâmetros arbitrados nas figuras 14, 15, 16 e 17, as
condições (I.1) a (I.7) são satisfeitas.

51
5.3.Ansatz 2-2
Neste caso, temos ansatz ( )( )( )( )
1 2
1 2
( )x z x z
F xx Z x Z
− −= Α
− − com as condições
1 2
1 2
Z Z
z zΑ = e ( )2 1 2
2
1
2z z
Z NZ
= − .
Dentro do intervalo de parâmetros escolhido a ser analisado, conseguimos obter
algumas soluções fechadas através do algoritmo de Kovacic, porém nenhuma delas
cumpre todas as condições para terem interpretação física de acordo com nossas
imposições. Vamos apresentar dois casos em que é impossível encontrar valores dos
parâmetros em que são satisfeitas seis das sete condições, falhando apensas em 1dp
dρ< .
A inclusão da segunda parte solução usando (5.1) certamente é possível e ainda
é liouvilliana. Porém, por haver a presença de derivadas de ( )f x na pressão, esta se
torna uma expressão muito complicada e a análise das condições físicas, mesmo perto
do centro, fica inviável com nossos recursos. Portanto, concentramos nossa análise nas
soluções particulares com 2 0C = .
Solução 1
Para 3N = , 1 2z z= e o conjunto de relações entre os parâmetros:
( ) ( ) ( )21 1 0 1 1 1
2 1 1 5 4 2 , 57 40 2 , 5 4 2
7 49 7a Z a Z z Z
= − ± = − ± = − ±
onde a presença do sinal ± é originada em uma equação de segundo grau presente nos
coeficientes de x da equação em 1P− , obtemos a já conhecida solução de Durgapal e
Fuloria [2].
Com essa relação, podemos calcular as grandezas relevantes
( )
( ) ( )
2
1
1 1
7 5 4 2
7 57 40 2
x ZF
x Z x Z
+ ± = −
− + ±
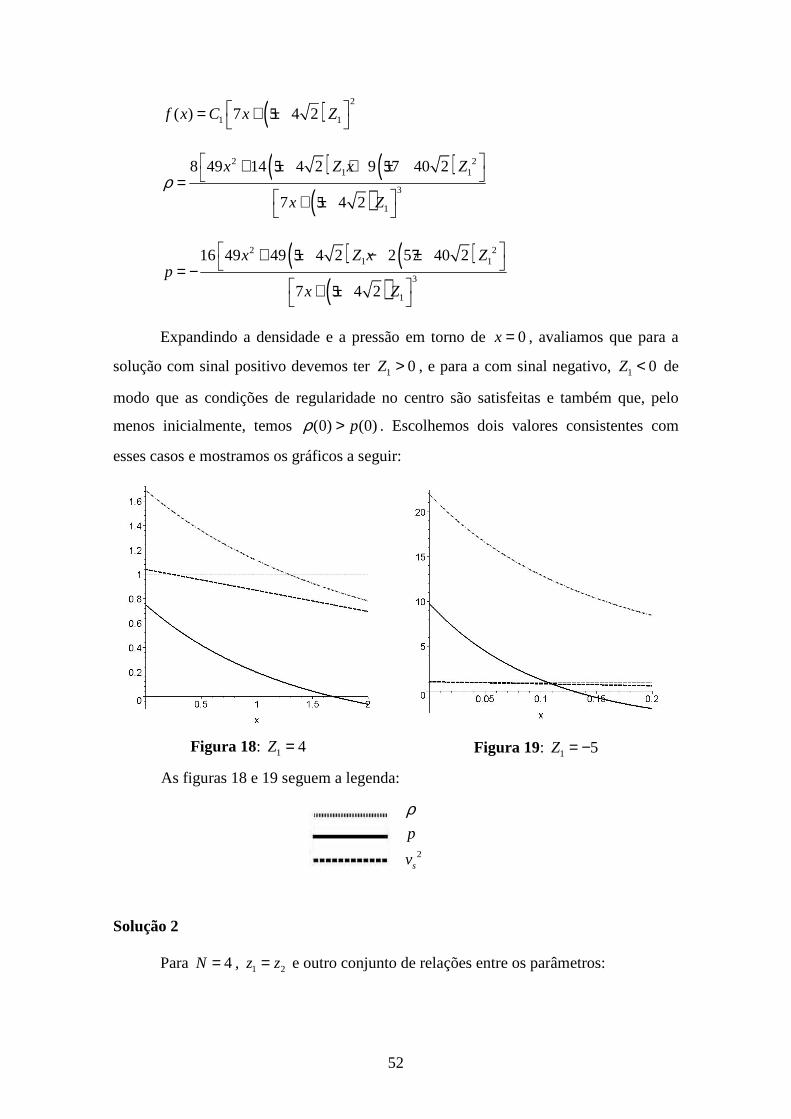
52
( ) 2
1 1( ) 7 5 4 2f x C x Z = + ±
( ) ( )
( )2 2
1 1
3
1
8 49 14 5 4 2 9 57 40 2
7 5 4 2
x Z x Z
x Zρ
+ ± + ± =
+ ±
( ) ( )
( )2 2
1 1
3
1
16 49 49 5 4 2 2 57 40 2
7 5 4 2
x Z x Zp
x Z
+ ± − ± = −
+ ±
Expandindo a densidade e a pressão em torno de 0x = , avaliamos que para a
solução com sinal positivo devemos ter 1 0Z > , e para a com sinal negativo, 1 0Z < de
modo que as condições de regularidade no centro são satisfeitas e também que, pelo
menos inicialmente, temos (0) (0)pρ > . Escolhemos dois valores consistentes com
esses casos e mostramos os gráficos a seguir:
Figura 18: 1 4Z =
Figura 19: 1 5Z = −
As figuras 18 e 19 seguem a legenda:
2s
p
v
ρ
Solução 2
Para 4N = , 1 2z z= e outro conjunto de relações entre os parâmetros:

53
( ) ( ) ( )21 1 0 1 1 1
1 1 1 5 39 , 32 5 39 , 5 39
14 392 28a Z a Z z Z
= − ± = − ± = − ±
onde, novamente, o sinal ± é devido a uma equação de segundo grau entre os
parâmetros nos coeficientes de x da equação em 1P− , obtemos uma nova solução.
As grandezas relevantes calculadas estão a seguir:
( )
( ) ( )
2
1
1 1
28 32 39
2 28 32 5 39
x ZF
x Z x Z
+ ± = −
− + ±
( ) ( ) 221
1 1( ) 39 5 28 5 39196
Cf x Z x x Z = − ± + ±
( ) ( )
( )2 2
1 1
3
1
6 3920 196 11 2 39 3 669 103 39
28 5 39
x Z x Z
x Zρ
+ ± + ± =
+ ±
( ) ( )
( )2 2
1 1
3
1
2 19600 700 13 4 39 4451 697 39
28 5 39
x Z x Zp
x Z
+ ± − ± = −
+ ±
Fazendo a análise como no caso anterior, a expansão da densidade e da
pressão em torno de 0x = nos mostra que para termos estas grandezas regulares no
centro e (0) (0)pρ > , a solução com sinal positivo deve ter 1 0Z > , e a com sinal
negativo, 1 0Z < . Escolhemos dois valores consistentes para 1Z e expomos os gráficos
com a seguinte legenda:
2s
p
v
ρ
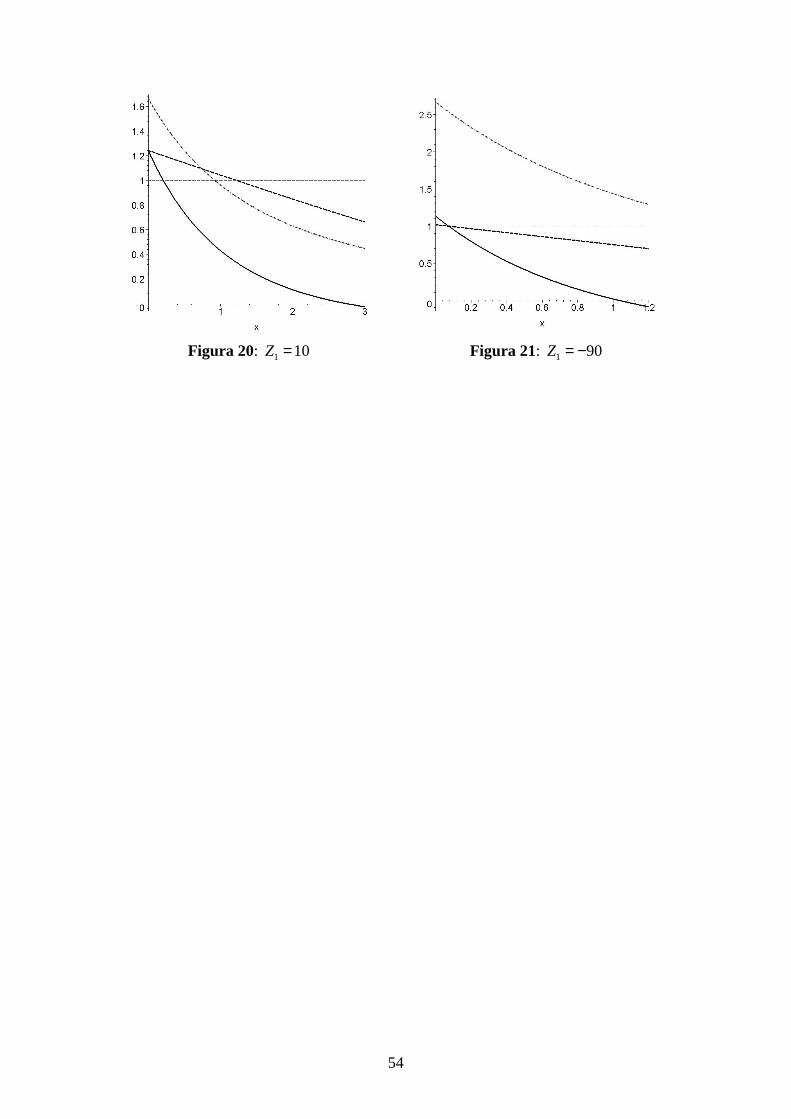
54
Figura 20: 1 10Z =
Figura 21: 1 90Z = −
55
6.Conclusão
A alternativa de se procurar soluções para a equação de isotropia de pressão para
fluidos perfeitos estáticos com simetria esférica, trabalhando com a equação diferencial
linear e homogênea de segunda ordem, se mostrou válida uma vez que, com esse
método, foi possível a obtenção de soluções inéditas na literatura, conforme [6].
Para o ansatz 1-1, as novas soluções são vistas na equação (5.2) - explicitadas
para diferentes valores de N na tabela 1. Para o ansatz 1-2, a equação (5.5) e para o
ansatz 2-2, a solução 2.
Devemos ressaltar também a importância do algoritmo de Kovacic. Por meio
dessa ferramenta fomos capazes de apontar que realmente não existe solução
liouvilliana para uma métrica conforme o ansatz 2-1 e de determinar relações entre
parâmetros iniciais, tanto para o ansatz 1-1 como para o 2-2, que tornavam a equação
diferencial integrável.
O interesse fundamental em soluções com interpretação física que satisfaçam as
condições apresentadas na introdução eleva a importância dos resultados obtidos. Além
disso, cabe observar que a imposição da regularidade na densidade central tornou a
investigação da equação de isotropia mais eficiente em todos os casos, não só com
ansatz 1-2, no qual não foi necessária a aplicação do algoritmo.
Será interessante comparar as equações de estado das soluções exatas com as
provenientes de modelos fenomenológicos de matéria de alta densidade publicados na
literatura. É possível que, fixando os parâmetros nas soluções, as soluções se
aproximem de algum modelo.
Outra oportunidade que pode ser explorada no futuro é a investigação de ansätze
com graus mais altos no numerador e denominador de ( )F x . O que pode se ganhar com
essa alternativa é, além de aumentar a generalidade, um maior número de parâmetros.
Porém o processo provavelmente é pouco fértil dada a complexidade da análise e da
aplicação do algoritmo de Kovacic, uma vez que acrescenta-se também raízes no
polinômio ( )t x , calculado no Primeiro Passo do algoritmo, complicando os cálculos
para o seu desenvolvimento.

56
Nos casos do ansatz 1-1 e 2-2, onde foi feita uma redefinição dos parâmetros em
termos de N, inteiro, o valor máximo assumido na investigação para este termo pode ser
maior em relação ao limite que impusemos (4N = ) por questões de simplificação e
eficiência na análise.
Também poderíamos ampliar a esfera de aplicação dos modelos encontrados
incluindo a constante cosmológica nas equações de estados sem houvesse mudança na
equação de isotropia, compartilhando, portanto, as mesmas soluções. Como a equação
(2.1) é válida para qualquer fluido perfeito estático com simetria esférica, estando este
em escala cosmológica ou não, é suficiente usar a equação (1.9) e então redefinir as
grandezas como:
e p pρ ρπ πΛ Λ= − = −8 8
ɶ ɶ .

57
Apêndices
Apêndice A - Introdução à Álgebra
Neste apêndice serão apresentados conceitos de álgebra clássica.
Seja A um conjunto não vazio onde estejam definidas duas operações as quais
chamaremos de soma e produto em A e denotaremos por + e ⋅ .
Assim,
( ):
,
A A A
a b a b
+ × →+֏
e ( ):
,
A A A
a b a b
⋅ × →⋅֏
Chamaremos o conjunto A equipado com + e ⋅ de anel, e esse anel será
denotado por ( ); ,A + ⋅ , se as seis seguintes condições são verificadas para quaisquer que
seja , ,a b c A∈ .
A.1) ( ) ( )a b c a b c+ + = + + (associativa da soma)
A.2) 0 A∃ ∈ tal que 0 0a a a+ = + = (existência de elemento neutro para a soma)
A.3) x A∀ ∈ existe um único y A∈ , denotado por y x= − , tal que 0x y y x+ = + =
(existência de elemento inverso aditivo)
A.4) a b b a+ = + (comutatividade da soma)
A.5) ( ) ( )a b c a b c⋅ ⋅ = ⋅ ⋅ (associativa do produto)
A.6) ( )
( );a b c a b a c
a b c a c b c
⋅ + = ⋅ + ⋅
+ ⋅ = ⋅ + ⋅ (distributiva à esquerda e à direita)
Além dessas seis supracitadas condições, podemos citar outras características
importantes que um anel pode apresentar:

58
Se um anel ( ); ,A + ⋅ satisfaz a propriedade
A.7) 1 ,0 1A∃ ∈ ≠ , tal que 1 1 ,x x x A⋅ = ⋅ ∀ ∈ , dizemos que ( ); ,A + ⋅ é um anel com
unidade 1.
Se um anel ( ); ,A + ⋅ satisfaz a propriedade
A.8) , ,x y A x y y x∀ ∈ ⋅ = ⋅ , dizemos que ( ); ,A + ⋅ é um anel comutativo.
Se um anel ( ); ,A + ⋅ satisfaz a propriedade
A.9) , , 0 0 ou 0x y A x y x y∈ ⋅ = ⇒ = = , dizemos que ( ); ,A + ⋅ é um anel sem
divisores de zero.
Se ( ); ,A + ⋅ for um anel comutativo, com unidade e sem divisores de zero,
dizemos que ( ); ,A + ⋅ é um domínio de integridade.
E, finalmente, se um domínio de integridade ( ); ,A + ⋅ satisfizer a propriedade:
A.10) , 0,x A x y A∀ ∈ ≠ ∃ ∈ tal que 1x y y x⋅ = ⋅ = , dizemos que ( ); ,A + ⋅ é um corpo.
Seja ( ); ,A + ⋅ um anel e B um subconjunto não vazio de A. Então B é um subanel
de A se, e somente se, as seguintes condições são verificadas:
I. 0 B∈ (o elemento neutro pertence a B)
II. ,x y B x y B∈ ⇒ − ∈ (B é fechado para a diferença)
III. ,x y B x y B∈ ⇒ ⋅ ∈ (B é fechado para o produto)
Seja A um anel e seja I um subanel de A. Dizemos que I é um ideal à esquerda
de A se,
IVa. , ,a x I a A x I⋅ ∈ ∀ ∈ ∀ ∈ (ou simbolicamente A I I⋅ ⊂ ).
Analogamente definimos um ideal a direita J de um anel A como sendo um
subanel de A satisfazendo a condição
IVb. , ,x a J x J a J⋅ ∈ ∀ ∈ ∀ ∈ (ou simbolicamente J A J⋅ ⊂ ).
59
Se I for um ideal simultaneamente à direita e à esquerda de um anel A, dizemos
que I é um ideal de A, isto é
V. e A I I I A I⋅ ⊂ ⋅ ⊂ .
Se o anel A for comutativo, então as condições (IVa), (IVb) e (V) são
equivalentes e as três noções acima coincidem.
Claramente 0 e A são ideais de A (ditos ideais triviais de A). Os ideais não
triviais de A são chamados ideais próprios de A.
Seja F um corpo. Definiremos agora uma operação que leva cada inteiro n e
cada elemento a F∈ em um elemento de F denotado por na. Chamamos esses
elementos de múltiplos integrais de a. Agora consideramos os múltiplos integrais da
identidade e de F. Examinaremos em particular o conjunto de inteiros n tais que,
0ne= ; denotamos este conjunto por A e o chamamos de aniquilador de e.
Dois casos podem ocorrer: ou o aniquilador consiste apenas do inteiro zero e
neste caso dizemos que F tem característica zero (e F contém uma cópia do corpo ℚ ),
ou o aniquilador consiste de múltiplos de p, onde p é um número primo, e, neste caso,
dizemos que F tem característica p.
A.1 Homomorfismos
Sejam A e B dois conjuntos e φ uma operação dada por
( ): , ( )A B a A a Bφ φ→ ∀ ∈ ∈ . Se ( )A Bφ = , dizemos que φ é um mapeamento
sobrejetivo, ou uma função sobrejetiva. Se tivermos 1 2 1 2( ) ( )a a a aφ φ= ⇔ = , dizemos
que φ é um mapeamento injetivo . Se φ for simultaneamente sobrejetivo e injetivo,
dizemos que φ é bijetivo .
Tratando agora de anéis, chamamos de Homomorfismo de 1R em 2R um mapa
φ de 1R em 2R tal que 1,a b R∀ ∈ temos
( ) ( ) ( )a b a bφ φ φ+ = + e ( ) ( ) ( )ab a bφ φ φ=

60
Um homomorfismo sobrejetivo é chamado de epimorfismo; um homomorfismo
que é injetivo é chamado de monomorfismo e um homomorfismo que é bijetivo é
chamado de isomorfismo. O Kernel (núcleo) de um homomorfismo φ de um anel 1R
em um anel 2R é o conjunto de elementos em 1R mapeados por φ sobrejetivamente no
elemento zero de 2R . Se 2R for igual a 1R , então os homomorfismos são chamados de
endomorfismos e os isomorfismos de automorfismos.
Teorema A.1 O subcorpo primo (não tem subcorpos a não ser ele próprio) de um
corpo de característica zero é isomorfo ao corpo dos números racionais ℚ , e o
subcorpo primo de um corpo de característica p é isomorfo ao corpo pZ .
A.2 Espaços Vetoriais
Seja F um corpo; um espaço vetorial F é um conjunto V equipado com uma lei
de composição que chamaremos de adição e uma operação que leva todo elemento α
de F e todo elemento x de V em um elemento xα de V, tal que as seguintes condições
são satisfeitas:
I. Os elementos de V formam um grupo abeliano sobre a operação de adição
II. Para todos os elementos , Fα β ∈ e todos os elementos ,x y V∈ temos:
( )( )( ) ( )
;
;
;
x x x
x y x y
x x
α β α βα α αα β αβ
+ = +
+ = +
=
ex x= (onde e é a identidade de F).
A.3 Polinômios
Seja R um anel comutativo com identidade e. Chamaremos ( )P R o anel dos
polinômios com coeficientes em R. Definimos também o grau de um polinômio não-

61
nulo ( )0 1 2, , ,f a a a= … com coeficientes em R, como o maior inteiro n tal que na é
diferente de zero; denotamos o grau de f por f∂ . Se ( )0, , ,Nf a a= … … é um polinômio
não-nulo de grau N, chamamos Na o coeficiente principal de f. Se este coeficiente for a
identidade e de R, dizemos que f é um polinômio mônico e escrevemos
1 0Nf x a x a= + + +…
Seja F um corpo; um polinômio f com coeficientes em F é divisível por outro
polinômio d, e d é chamado de fator de f se existe um polinômio q tal que f qd= . O
polinômio f é chamado de irredutível se não existe fator d tal que 0 d f< ∂ < ∂ . Então
os únicos fatores de um polinômio irredutível f são os polinômio constantes e os
produtos de f por polinômios constantes.
Teorema A.2 Seja f qualquer polinômio e seja d um polinômio diferente de zero com
coeficientes em F. Então existem dois únicos polinômios q e r com coeficientes em F tal
que f qd r= + (q é chamado de quociente e r de resto) e r d∂ < ∂ .
Teorema A.3 Sejam f e g quaisquer dois polinômios diferentes de zero com coeficientes
em F. Então existe um único polinômio h com coeficientes em F tal que
1. h é um fatos para f e g;
2. se k é qualquer polinômio que é fator para f e g, então k é um fator para h. Além
disso, existem polinômios a e b com coeficientes em F tal que h af bg= + .
O polinômio h descrito acima é chamado de Maior Fator Comum ou Máximo
Divisor Comum (MDC) de f e g. Se o MDC de f e g for o polinômio constante e,
dizemos que f e g são relativamente primos.
A.4 Extensões de Corpos
Seja F um subcorpo de E. A dimensão de E sobre F, quando considerado com
um espaço vetorial, é o grau de E sobre F e é denotada por ( ):E F .

62
Teorema A.4 Se F é um subcorpo de E e E é um subcorpo de K, então
( ) ( )( ): : :K F K E E F= .
A.5 Extensões Simples
Seja E um corpo, F um subcorpo de E e S um subconjunto de E. A adição dos
elementos de S ao corpo F é um extensão de F; se essa extensão S consistir de apenas
um elemento α , então chamamos ( ) ( )F S F α= de extensão simples.
Teorema A.5 Seja E um corpo, F um subcorpo de E e Eα ∈ . Então
1. ( )F α é isomorfo ao corpo [ ]R F de funções racionais com coeficientes em F, ou
2. ( )F α coincide com o anel [ ]R α de polinômios em α com coeficientes em F.
No segundo caso existe um único polinômio mônico irredutível mα em ( )P F -
polinômio mínimo - tal que um polinômio f em ( )P F tem α como raiz se, e somente
se, for um múltiplo de mα . Ainda, ( )( ) :F F mαα = ∂ .
A.6 Extensões Algébricas
Seja K um corpo e M K⊃ uma extensão de K. Dizemos que u M∈ é algébrico
sobre K se ( ) 0f P K∃ ∈ − tal que ( ) 0f u = . ( )K u é uma extensão finita de K se, e
somente se, u é algébrico sobre K. Se ( )( ) :K u K n= , então 2 11, , , , nu u u −… é uma
base de ( )K u sobre K (quando ( )K u for considerado como espaço vetorial sobre K), e
em particular [ ]( )K u K u= .
Teorema C.6 Seja E uma extensão finita de um corpo F. Então ela é algébrica, ou seja,
os elementos Eα ∈ adicionados satisfazem (são solução) de um polinômio em ( )P F .
63
A.7 Fatoração de Polinômios
Seja L uma extensão de um corpo K, e p um polinômio em ( )P K . Dizemos que
o polinômio p se fatora completamente em L se p for um polinômio constante ou se
existem elementos 1, , , k Lα α α ∈… tal que
( )( ) ( )1 2 kp c x x xα α α= − − −… ,
onde c K∈ é o coeficiente da indeterminada de maior grau. A extensão L de K é
chamada de corpo de decomposição para p sobre K se
1. o polinômio p se fatora completamente em L e
2. o polinômio p não se fatora completamente em E onde E é qualquer subcorpo de L
incluindo K diferente de L. Obviamente L é gerado sobre K pelas raízes de p em L.
Teorema A.7 Sejam F e F ′ corpos, τ um isomorfismo de F em F' e Pτ a extensão
canônica de τ para ( )P F . Seja f um polinômio em ( )P F . Se K e K' são corpos de
decomposição para f e ( )P fτ sobre F e F', respectivamente, então existe um
isomorfismo 1τ de K em K' tal que 1( ) ( )a aτ τ= para todo a F∈ .
A.8 Extensões separáveis
Um polinômio irredutível com coeficientes em um corpo F é considerado
separável se não existem raízes repetidas em um corpo de decomposição; um
polinômio arbitrário é separável se todos os seus fatores irredutíveis são separáveis. Por
exemplo, se a é qualquer elemento de F, o polinômio ( )2x a− certamente tem uma raiz
repetida, mas é separável, pois seu único fator irredutível x a− não tem. Um corpo F é
chamado de perfeito se não existem polinômios inseparáveis com coeficientes em F.
Seja F um subcorpo de E. Um elemento Eα ∈ que é algébrico sobre F é
chamado de separável sobre F se seu polinômio mínimo ,Fmα sobre F é separável.
Uma extensão algébrica E de um corpo F é chamada uma extensão separável se todo
elemento de E for separável sobre F.
64
Teorema A.8 Todos os corpos de característica zero são perfeitos.
Corolário A.1 Todo corpo finito é perfeito.
A.9 Corpos Algebricamente Fechados
Seja C um corpo. Dizemos que C é algebricamente fechado se todo polinômio
não constante ( )f P C∈ tem uma raiz em C (e então ( )P C é um corpo de
decomposição). Equivalentemente, podemos dizer que C é algebricamente fechado se
apenas polinômios irredutíveis possuírem grau um em ( )P C - por exemplo, o corpo dos
complexos, ℂ .
Seja F um corpo. Uma extensão C de F é chamada fecho algébrico de F se for
algébrica sobre F e algebricamente fechada. Ou seja, o fecho algébrico de um corpo é
sua "menor" extensão algebricamente fechada.
A.10 Grupo de Galois
O grupo de Galois ( )G L K de uma extensão L de um corpo K é o grupo de
todos os automorfismos do corpo L que deixa os elementos de K fixos, ou seja, K-
automorfismos.
Seja ( )1
n
ii
f X a=
= −∏ no corpo de decomposição L. Sabemos que os elementos
de ( )G L K mapeiam raízes de f em raízes de f, ou seja, mapeiam o conjunto
1 2, , , nα α α… nele mesmo. Como eles são automorfismos, eles definem permutações
em 1 2, , , nα α α… . Como [ ]1, , nL K α α= … , um elemento de ( )G L K é unicamente
determinado por sua ação em 1 2, , , nα α α… . Então, a partir das definições, podemos
ver que o grupo de Galois ( )G L K de f consiste nas permutações σ de 1 2, , , nα α α…
com a propriedade
[ ] ( ) ( )1 1 1, , , , , 0 , , 0n n nP F X X P Pα α σα σα∈ = ⇒ =… … … .

65
A.10.1 Solubilidade de Equações
Seja f um polinômio. Dizemos que a equação ( ) 0f X = é solúvel (pela
extração de radicais) se existe uma torre
0 1 2 mF F F F F= ⊂ ⊂ ⊂ ⊂…
tal que
1. [ ]1 1, imi i iF F Fι ια α− −= ∈ ;
2. mF contém um corpo de decomposição para f.
Teorema A.9 (Galois, 1832) Seja F um corpo de característica zero (por exemplo, ℂ ).
A equação 0f = é solúvel se, e somente se, o grupo de Galois de f é solúvel.
Vemos, então, que o aspecto central da teoria clássica de equações é a teoria de
Galois, na qual temos o teorema acima como um dos resultados. Para equações
diferenciais, queremos saber se podemos escrever a solução geral de uma equação
diferencial de segunda ordem linear como uma função envolvendo somente os
coeficientes da equação diferencial, integrais e exponenciais. Em geral, a resposta é não.
Questões como essas são a origem da Teoria de Galois Diferencial.
A.11 Exemplos
Exemplo 1
O polinômio 2 1x x− + se fatora completamente no anel ( )P ℂ
( ) ( )2 1 11 1 3 1 3
2 2x x x i x i
− + = − + − −
Pegamos o subcorpo de ℂ dado pela adição de ( )11 3
2i+ e ( )1
1 32
i− a ℚ ,
mas este subcorpo pode ser obtido igualmente apenas com adição de 3i ; então

66
( )3iℚ é um corpo de decomposição para 2 1x x− + sobre ℚ . Sabendo que
( )3i ≠ℚ ℚ , pois ( )( )3 3 : 1i i≠ ⇒ >ℚ ℚ ℚ , mas como 3i é raiz do polinômio de
segunda ordem ( )( ) ( )( )2 3 ( ) 3 : 2 3 : 2x P i i+ ∈ ⇒ ≤ ⇒ =ℚ ℚ ℚ ℚ ℚ , então podemos
expressar um elemento ( )3iα ∈ℚ como 3a biα = + pois 1, 3i é uma base para
( )3iℚ .
Exemplo 2
Seja F K⊂ corpos, ( ) e 3F K i= =ℚ ℚ , sabemos que ( )3i ⊂ℚ ℂ . Temos
que K é um corpo de decomposição do polinômio 2 1x x− + sobre F. Então K é uma
extensão normal de F e K é uma extensão separável de F pois corpos com característica
zero não tem extensões inseparáveis. Provamos também que ( ): 2K F = ; então, o gripo
de Galois de K sobre F tem ordem 2. Como 1, 3i é uma base para K sobre F, todo
elemento x K∈ pode ser expressado unicamente na forma ( )3x a b i= + , onde
,a b∈ℚ . Como 3i é raiz do polinômio 2 3x + em ( )P F , quaisquer F-automorfismos
de k tem que mapear 3i em uma outra raiz deste polinômio em K, ou seja, em 3i ou
em 3i− . Então, os dois elementos do grupo de Galois são os automorfismo e ε τ
dados por
( ) ( )3 3a i a b iε + = +
e
( ) ( )3 3a i a b iτ + = − .
67
Apêndice B - Teoremas Utilizados pelo
Algoritmo de Kovacic
Vamos apresentar em uma ordem dialética os principais teoremas utilizados para
a construção do algoritmo de Kovacic.
O teorema a seguir nos mostra uma restrição que a equação diferencial linear e
homogênea de segunda ordem deve satisfazer para que seu grupo de Galois esteja
contido em (2, )SL ℂ .
Teorema B.1 O grupo de Galois diferencial G de uma equação diferencial com
coeficientes p e q em um corpo diferencial K da forma
0z pz qz′′ ′+ + = (B.1)
está contido em (2, )SL ℂ se, e somente se, ndp d′= , onde n∈ℤ e d K∈ .
O teorema para uma equação diferencial geral pode ser visto em [18].
Em particular, para uma equação diferencial do tipo:
0y gy′′ − = (B.2)
temos (2, )G SL⊆ ℂ .
Cabe lembrar que usando a transformação de variável 1
exp2
y z p
= −
∫ é
sempre possível transformar uma dada equação diferencial (B.1) em uma equação (B.2)
sem alterar o caráter liouvilliano das soluções.
Para estudar a integrabilidade da equação (B.2), o algoritmo de Kovacic
classifica o seu grupo de Galois diferencial. Essa classificação será dada pelo próximo
teorema:
68
Teorema B.2 O grupo de Galois diferencial G da equação (B.2) é um subgrupo
algébrico de (2, )SL ℂ com uma das formas a seguir:
i. G pode ser colocado na forma triangular e a equação (B.2) é redutível e tem uma
solução do tipo w
e∫ , onde ( )w x∈ℂ (caso 1n = ).
ii. G é imprimitivo e a equação (B.2) tem uma solução do tipo w
e∫ onde w é algébrico
de grau 2 em ( )xℂ (caso 2n = ).
iii. G é imprimitivo e finito e a equação (B.2) tem uma solução algébrica do tipo w
e∫ ,
onde w é algébrico de grau 4, 6 ou 12 em ( )xℂ (casos 4, 6, 12n = ).
iv. (2, )G SL= ℂ e a equação (B.2) não tem solução liouvilliana.
Então temos a seguinte proposição:
Proposição B.1 A equação (B.2) tem soluções liouvillianas se, e somente se, o seu
grupo de Galois diferencial for um subgrupo algébrico próprio de (2, )SL ℂ diferente
de (2, )SL ℂ .
Dizemos que uma equação diferencial linear é (Picard-Vessiot) integrável (ou
solúvel) se conseguimos obter sua extensão Picard-Vessiot K L⊂ e, então, sua solução
geral pela adição em K de integrais, exponenciais de integrais ou funções algébricas de
elementos de K. A terminologia usual é que a extensão Picard-Vessiot é liouvilliana, e
pode-se provar que uma equação diferencial linear é integrável se, e somente se, a
componente identidade do grupo de Galois é um grupo solúvel.
69
Referências [1] H A Buchdahl. Phys. Rev., 116 (1959), 1027
[2] Senovilla J M M e Skea J E F. Regular solutions based on density distributions,
QMC preprint, 1989.
[3] Skea J E F. New exact solutions of Einstein’s Field equations for spherically
Symmetric Static Perfect Fluids, QMC preprint, 1989.
[4] A J Maciejewski, J-M Strelcyn e M Szydlowski. Nonintegrability of Bianc
VIII Hamiltonian System, Journal of Math Physics, Vol. 42, Number 4, 2001.
[5] Michael R Finch. The Painleve-Gambier Equation and The Relativistic Static
Fluid Sphere, PhD Thesis, University of Sussex, 1987.
[6] M S R Delgaty e K. Lake. Physical Acceptability of Isolated, Static, Spherically
Symmetric, Perfect Fluid Solutions of Einstein's Equations. arXiv:gr-
qc/9809013, v1, 1998.
[7] Bernard F Schutz. A First course in General Relativity, Cambridge University
Press, First Edition, Cambridge, 1986.
[8] R D’Inverno. Introducing Einstein’s Relativity, Oxford University Press, First
Edition, Oxford, 1992.
[9] K. Schwarzschild. Sitz. Deut. Akad. Wiss. Math.-Phys. Berlin 23 (Jan. 1916)
189.
[10] A Duval e M Loday-Richaud, AAECC 3, 211-246 (1992).
[11] F Ulmer e J-A Weil, Note on Kovacic’s Algorithm, J. Symb. Comp., 22, 179-
200, 1996.
[12] J Morales-Ruiz, Differential Galois Theory and Non-integrability of
Hamiltonian Systems (Progress in Math., Birkhäuser, 1999).
[13] Luis Antonio A Coelho. Sobre a Integrabilidade de Sistemas Hamiltonianos
Provenientes de Modelos Cosmológicos, Dissertação de Mestrado, Universidade
do Estado do Rio de Janeiro, 2005.
[14] G Arfken. Mathematical Methods for Physicists, Academic Press, First Edition,
San Diego, 1985.
70
[15] Abramowitz M, Stegun I A. Handbook of Mathematical Functions with
Formulas, Graphs and Mathematical Tables, First Edition, Dover, 1964.
[16] R C Tolman. Static Solutions of Einstein's Field Equations for Spheres of Fluid,
Phys. Rev. 55, 364 - 373 (1939)
[17] M P Korkina e O Yu Orlyanskii. The Ukranian Journal of Physics 36 no. 8
(1991) 885.
[18] F. Ulmer e J.-A. Weil. Note on Kovacic’s Algorithm, Journal of Symbolic
Computation, 22, 179-200, 1996.
[19] Waterloo Maple Inc., Maple 9.01. Jul 9 2003, Build ID 137227.
Livros Grátis( http://www.livrosgratis.com.br )
Milhares de Livros para Download: Baixar livros de AdministraçãoBaixar livros de AgronomiaBaixar livros de ArquiteturaBaixar livros de ArtesBaixar livros de AstronomiaBaixar livros de Biologia GeralBaixar livros de Ciência da ComputaçãoBaixar livros de Ciência da InformaçãoBaixar livros de Ciência PolíticaBaixar livros de Ciências da SaúdeBaixar livros de ComunicaçãoBaixar livros do Conselho Nacional de Educação - CNEBaixar livros de Defesa civilBaixar livros de DireitoBaixar livros de Direitos humanosBaixar livros de EconomiaBaixar livros de Economia DomésticaBaixar livros de EducaçãoBaixar livros de Educação - TrânsitoBaixar livros de Educação FísicaBaixar livros de Engenharia AeroespacialBaixar livros de FarmáciaBaixar livros de FilosofiaBaixar livros de FísicaBaixar livros de GeociênciasBaixar livros de GeografiaBaixar livros de HistóriaBaixar livros de Línguas

Baixar livros de LiteraturaBaixar livros de Literatura de CordelBaixar livros de Literatura InfantilBaixar livros de MatemáticaBaixar livros de MedicinaBaixar livros de Medicina VeterináriaBaixar livros de Meio AmbienteBaixar livros de MeteorologiaBaixar Monografias e TCCBaixar livros MultidisciplinarBaixar livros de MúsicaBaixar livros de PsicologiaBaixar livros de QuímicaBaixar livros de Saúde ColetivaBaixar livros de Serviço SocialBaixar livros de SociologiaBaixar livros de TeologiaBaixar livros de TrabalhoBaixar livros de Turismo