SPDS/PSC – FILTROS FIR I - fenix.tecnico.ulisboa.pt · Filtros FIR com fase linear: têm resposta...
26
© Gonçalo Tavares, Moisés Piedade 1 SPDS/PSC – FILTROS FIR I Excitando um filtro com a sequência unitária obtém-se na saída a resposta ao impulso Nesta figura, a resposta dura 10T s , o atraso do filtro é 5T s e o sistema pode ser representado pelo filtro digital com resposta ao impulso finita FIR (Finite Impulse Response) cuja estrutura (transversal) é (N=11) A saída y(n) só depende da entrada actual x(n) e das N-1 entradas anteriores: A função de sistema é (aplicando a transformada Z) Sistema (filtro digital) n x n y 0 1 2 3 4 5 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1 n y tempo, s nT tempo, s nT 1 0 1 2 3 " 6 7 8 9 10 duração atraso 1 0 () () ( ) N i yn hi xn i − = = ⋅ − ∑ 1 1 0 0 () () () () () () () N N i i i i Yz Yz hi Xz z Hz hi z Xz − − − − = = = ⋅ ⋅ ⇒ = = ⋅ ∑ ∑
Transcript of SPDS/PSC – FILTROS FIR I - fenix.tecnico.ulisboa.pt · Filtros FIR com fase linear: têm resposta...
© Gonçalo Tavares, Moisés Piedade1
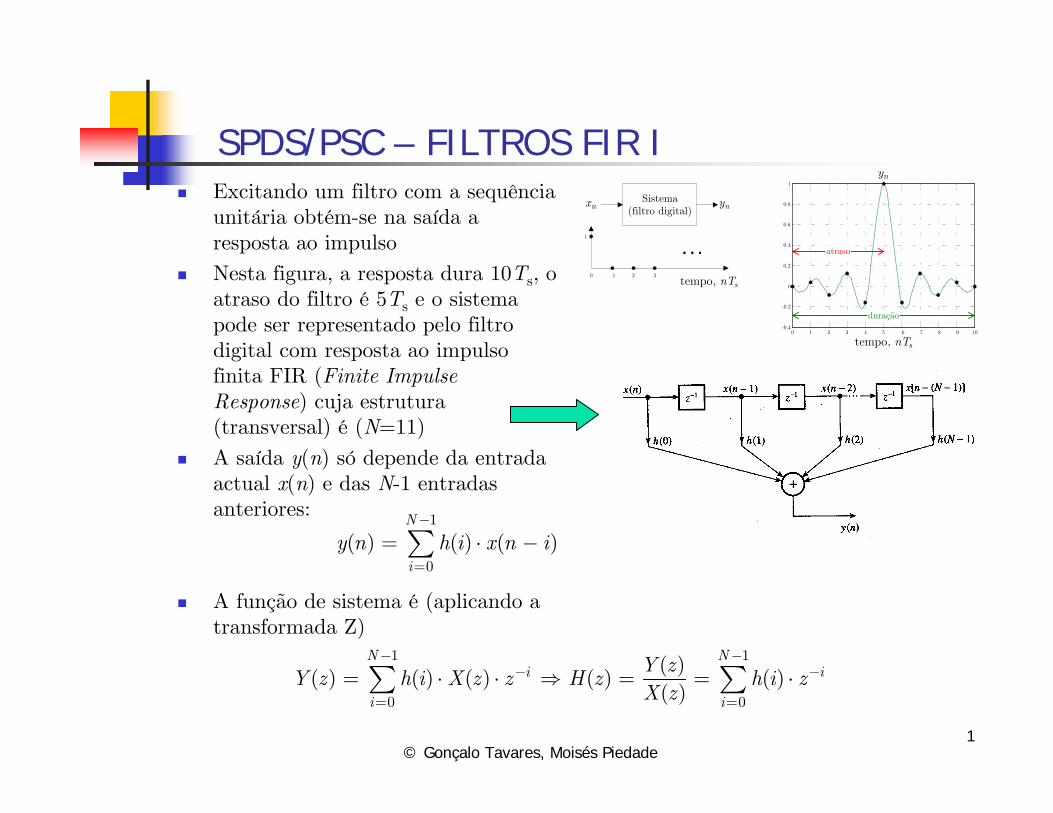
SPDS/PSC – FILTROS FIR I Excitando um filtro com a sequência unitária obtém-se na saída a resposta ao impulso
Nesta figura, a resposta dura 10Ts, o atraso do filtro é 5Ts e o sistema pode ser representado pelo filtro digital com resposta ao impulso finita FIR (Finite ImpulseResponse) cuja estrutura (transversal) é (N=11)
A saída y(n) só depende da entrada actual x(n) e das N-1 entradas anteriores:
A função de sistema é (aplicando a transformada Z)
Sistema(filtro digital)nx ny
0 1 2 3 4 5-0.4
-0.2
0
0.2
0.4
0.6
0.8
1ny
tempo, snT
tempo, snT
1
0 1 2 3
6 7 8 9 10
duração
atraso
1
0
( ) ( ) ( )N
i
y n h i x n i−
== ⋅ −∑
1 1
0 0
( )( ) ( ) ( ) ( ) ( )
( )
N Ni i
i i
Y zY z h i X z z H z h i z
X z
− −− −
= == ⋅ ⋅ ⇒ = = ⋅∑ ∑

© Gonçalo Tavares, Moisés Piedade2
SPDS/PSC – FILTROS FIR IIVantagens:1. Podem ser projectados com fase linear
2. Podem ser realizados como recursivos ou não-recursivos
3. Permite realizar qualquer função de filtragem através do dimensionamento dos coeficientes
4. Os FIR não-recursivos são sempre estáveis ⇒ ideais para processamento de sinal adaptativo
5. Erros numéricos são pequenos nos FIR não-recursivos
Desvantagens:1. Baixa selectividade ⇒ necessário N muito grande2. Atraso nem sempre é um número inteiro de períodos de amostragem
Característica de fase
111
100
1 10
( 1 )( )( ) ( )
NNji N
Nji i
N Ni
h N j zh i zH z h i z
z z
−−− + −
−=− =
− −=
− − ⋅⋅= ⋅ = =
∑∑∑
polinómio em potências positivas de
z ⇒ N-1 zeros
N-1 pólos em z=0, no interior do círculo
unitário
1( )
0
( ) ( ) ( ) sj Tsz e
Nj j nT
n
H z H j e h n eω
ϕ ω ωω=
−−
== = ⋅∑1
01
0
( ) sin( )( ) arctan
( ) cos( )
N
snN
sn
h n nT
h n nT
ωϕ ω
ω
−
=−
=
⎛ ⎞⎟⎜ ⎟⋅⎜ ⎟⎜ ⎟⎜ ⎟⎜= − ⎟⎜ ⎟⎜ ⎟⎟⎜ ⋅ ⎟⎜ ⎟⎜ ⎟⎝ ⎠
∑
∑
© Gonçalo Tavares, Moisés Piedade3
Soluções: (exercício…)Soluções: (exercício…)
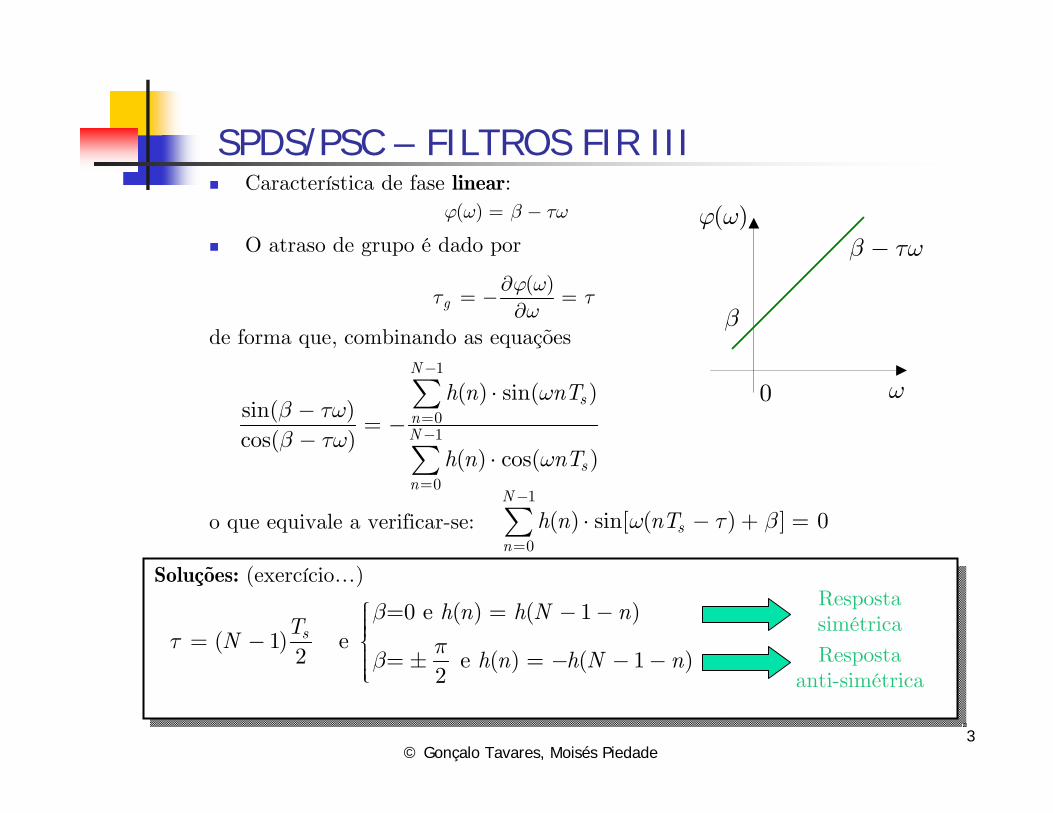
SPDS/PSC – FILTROS FIR IIICaracterística de fase linear:
O atraso de grupo é dado por
de forma que, combinando as equações
o que equivale a verificar-se:
( )g
ϕ ωτ τ
ω∂
= − =∂
( )ϕ ω β τω= −
1
01
0
( ) sin( )sin( )cos( )
( ) cos( )
N
snN
sn
h n nT
h n nT
ωβ τωβ τω
ω
−
=−
=
⋅−
= −−
⋅
∑
∑1
0
( ) sin[ ( ) ] 0N
sn
h n nTω τ β−
=⋅ − + =∑
=0 e ( ) ( 1 )( 1) e
2 = e ( ) ( 1 )2
sh n h N n
TN
h n h N n
βτ π
β
⎧ = − −⎪⎪⎪= − ⎨⎪ ± = − − −⎪⎪⎩
β
ω
( )ϕ ωβ τω−
0
Resposta simétrica
Resposta anti-simétrica
© Gonçalo Tavares, Moisés Piedade4
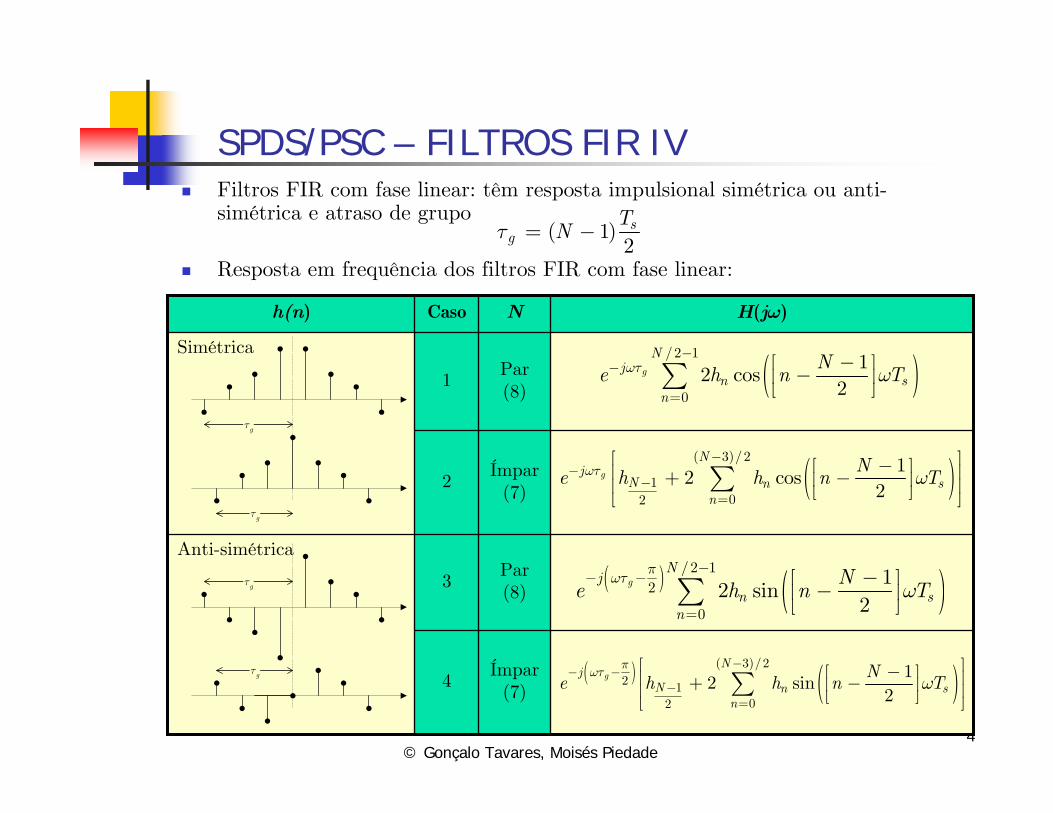
SPDS/PSC – FILTROS FIR IVFiltros FIR com fase linear: têm resposta impulsional simétrica ou anti-simétrica e atraso de grupo
Resposta em frequência dos filtros FIR com fase linear:
( 1)2s
gT
Nτ = −
Ímpar(7)
4
Par (8)
3
Anti-simétrica
Ímpar(7)
2
Par (8)
1
Simétrica
H(jω)NCasoh(n)
( )/2 1
0
12 cos
2g
Nj
n sn
Ne h n Tωτ ω
−−
=
−⎡ ⎤−⎢ ⎥⎣ ⎦∑
( )( 3)/2
102
12 cos
2g
Nj
N n sn
Ne h h n Tωτ ω
−−
−=
⎡ ⎤−⎡ ⎤⎢ ⎥+ −⎢ ⎥⎢ ⎥⎣ ⎦⎣ ⎦∑
( ) ( )/2 1
2
0
12 sin
2g
Nj
n sn
Ne h n T
πωτω
−− −
=
−⎡ ⎤−⎢ ⎥⎣ ⎦∑
( ) ( )( 3)/2
2 102
12 sin
2g
Nj
N n sn
Ne h h n T
πωτω
−− −
−=
⎡ ⎤−⎡ ⎤⎢ ⎥+ −⎢ ⎥⎢ ⎥⎣ ⎦⎣ ⎦∑
τg
τg
τg
τg
© Gonçalo Tavares, Moisés Piedade5
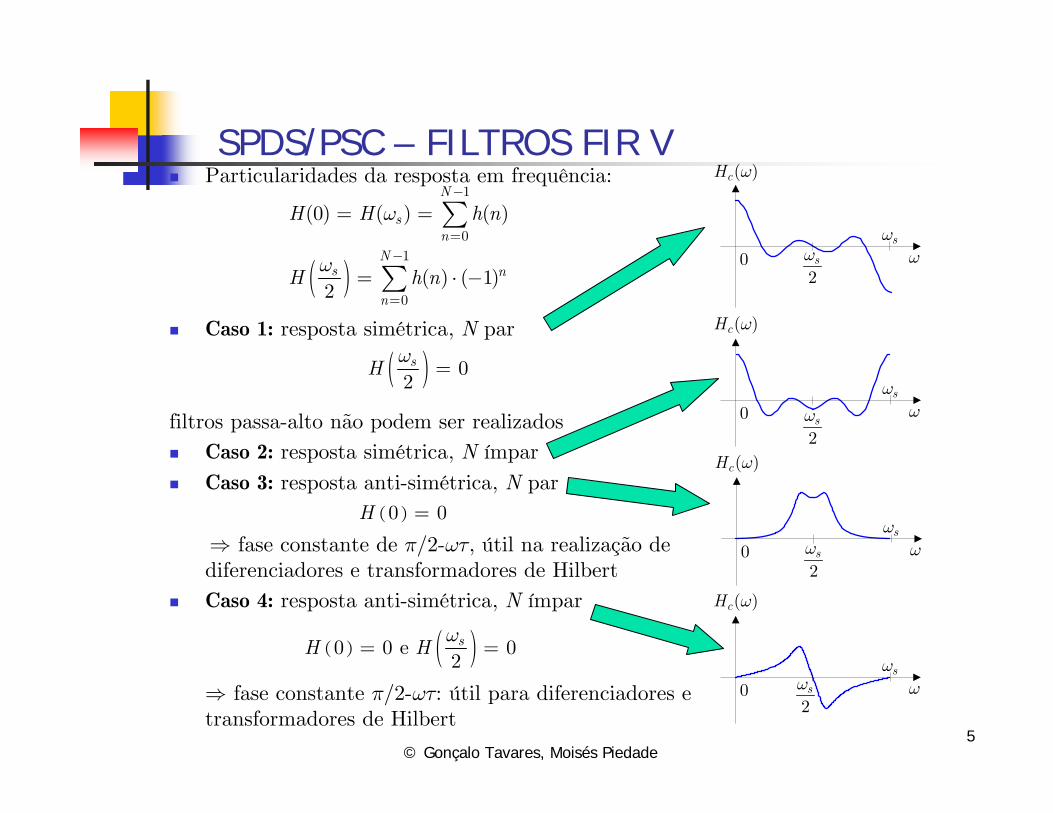
SPDS/PSC – FILTROS FIR VParticularidades da resposta em frequência:
Caso 1: resposta simétrica, N par
filtros passa-alto não podem ser realizadosCaso 2: resposta simétrica, N ímpar
Caso 3: resposta anti-simétrica, N par
⇒ fase constante de π/2-ωτ, útil na realização de diferenciadores e transformadores de HilbertCaso 4: resposta anti-simétrica, N ímpar
⇒ fase constante π/2-ωτ: útil para diferenciadores e transformadores de Hilbert
2sω
( )cH ω
0 ωsω
2sω
( )cH ω
0 ωsω
2sω
( )cH ω
0 ωsω
2sω
( )cH ω
0 ωsω
( )
1
01
0
(0) ( ) ( )
( ) ( 1)2
N
sn
Ns n
n
H H h n
H h n
ω
ω
−
=−
=
= =
= ⋅ −
∑
∑
( ) 02sH
ω=
( )0 0H =
( ) ( )0 0 e 02sH H
ω= =
© Gonçalo Tavares, Moisés Piedade6
SPDS/PSC – PROJECTO DE FILTROS FIR IMétodos:1. Desenvolvimento em série de Fourier
2. Amostragem da resposta em frequência (recursivo e não-recursivo)
3. Métodos de optimização numérica1. Desenvolvimento em série de Fourier
H(jω) é periódica em ω, com período ωs e pode ser aproximada pela série de Fourier
H(jω) é não-causal e infinita logo origina um filtro não-causal com resposta impulsional infinita
Truncando a série: h(n)=0 para |n|>(N-1)/2 com N ímpar, obtém-se
de forma que a função de sistema
é causal.
/2
/2
1( ) ( ) com ( ) ( )
s
s s
s
j nT j nT
sn
H j h n e h n H j e dω
ω ω
ω
ω ω ωω
∞−
=−∞ −
= ⋅ = ⋅∑ ∫
( ) ( ) n
n
H z h n z∞
−
=−∞= ⋅∑
( 1)/2
1
( ) (0) [ ( ) ( ) ]N
n n
n
H z h h n z h n z−
−
== + − ⋅ + ⋅∑
12'( ) ( )
N
H z z H z−
−=

© Gonçalo Tavares, Moisés Piedade7
SPDS/PSC – PROJECTO DE FILTROS FIR II
1, ( )
0, 2
c
sc
H jω ω
ω ωω ω
≤⎧⎪⎪⎪= ⎨⎪ ≤ ≤⎪⎪⎩
/2
/2
1( ) ( ) com ( ) ( )
s
s s
s
j nT j nT
sn
H j h n e h n H j e dω
ω ω
ω
ω ω ωω
∞− −
=−∞ −
= ⋅ = ⋅∑ ∫
1, ( )
0, 2
c
sc
H jω ω
ω ωω ω
≤⎧⎪⎪⎪= ⎨⎪ ≤ ≤⎪⎪⎩
Exemplo: Projecto de filtro FIR ideal passa-baixo
Os coeficientes obtêm-se de
e a função de sistema é:
A ondulação na banda de passagem tem
um valor máximo que é quase independente
de N ⇒ fenómeno de Gibbs
N elevado ⇒ aumenta a frequência mas
não reduz a amplitude da ondulação
Conclusão: método pouco eficiente
Exemplo: Projecto de filtro FIR ideal passa-baixo
Os coeficientes obtêm-se de
e a função de sistema é:
A ondulação na banda de passagem tem
um valor máximo que é quase independente
de N ⇒ fenómeno de Gibbs
N elevado ⇒ aumenta a frequência mas
não reduz a amplitude da ondulação
Conclusão: método pouco eficiente
1, ( )
0, 2
c
ideal sc
H jω ω
ω ωω ω
≤⎧⎪⎪⎪= ⎨⎪ ≤ ≤⎪⎪⎩
1 sin( )( )
c
s
c
c sj nT
s
n Th n e d
n
ωω
ω
ωω
ω π−
= =∫
( )( 1)/21
2
1
sin( )'( )
NNc s c s n n
n
T n TH z z z z
nω ω
π π
−−− −
=
⎡ ⎤⎢ ⎥= + +⎢ ⎥⎣ ⎦
∑
0 0.125 0.25 0.375 0.50
0.4
0.8
1.2
7N =
15N =
31N =
/ sω ω
/4c sω ω=
1.0
'( )H jw

© Gonçalo Tavares, Moisés Piedade8
Exemplo: (janela rectangular do exemplo anterior)
Janela com lobo principal largo e lobos
secundários grandes. A selectividade e a
ondulação do filtro resultante dependemdestes factores
Exemplo: (janela rectangular do exemplo anterior)
Janela com lobo principal largo e lobos
secundários grandes. A selectividade e a
ondulação do filtro resultante dependemdestes factores
SPDS/PSC – PROJECTO DE FILTROS FIR IIICorrecção da série de Fourier com janelas (windowing)
A truncatura abrupta da série de Fourier provoca oscilações de grande amplitude na atenuação do filtro. É preferível reduzir os coeficientes de forma progressiva, através da multiplicação por janelas
A resposta em frequência do filtro inicial é modificada pois resulta da convolução na frequência de H(jω) com W(jω)
0, 0,.... 1(̂ ) ( ) ( ) com ( )
0, outros
n Nh n h n w n w n
≠ = −⎧⎪⎪= ⋅ = ⎨⎪⎪⎩
/2
/2
ˆ( ) ( ) ( ) ( ) ( )s
s
w
H j H j W j H j W j j dω
ω ω ω λ ω λ λ−
= ⊗ = −∫
1, 0, , 1( )
0, outros
n Nw n
= −⎧⎪⎪= ⎨⎪⎪⎩
… 1 12
0
sin( /2)( )
/2s
s
N Nj T sjn T
sn
N TW j e e
N Tωω ω
ωω
− −−−
== =∑
0 sω/2sω/s Nω
ω
lobo principal
lobos secundários
( )W jω20N =
© Gonçalo Tavares, Moisés Piedade9
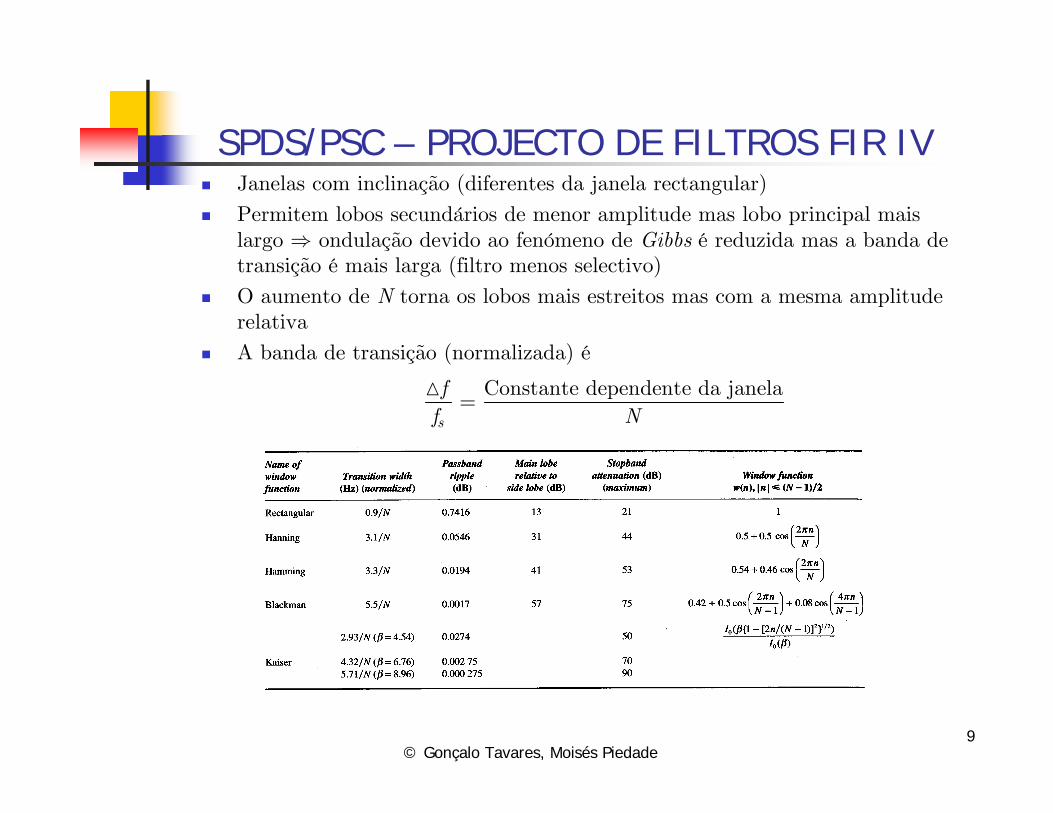
SPDS/PSC – PROJECTO DE FILTROS FIR IVJanelas com inclinação (diferentes da janela rectangular)
Permitem lobos secundários de menor amplitude mas lobo principal mais largo ⇒ ondulação devido ao fenómeno de Gibbs é reduzida mas a banda de transição é mais larga (filtro menos selectivo)
O aumento de N torna os lobos mais estreitos mas com a mesma amplitude relativa
A banda de transição (normalizada) é
Constante dependente da janela
s
ff N
=

© Gonçalo Tavares, Moisés Piedade10
SPDS/PSC – PROJECTO DE FILTROS FIR V
janela ( )w n 1020 log ( )W jωConclusões sobre o método: desenvolvimento em série de Fouriercom correcção por janela
Aplicação muito simples. O método écomputacionalmente eficiente
Falta de flexibilidade. Apenas a janela de Kaiser permite alguma flexibilidade na troca de banda de transição por ondulação na banda de passagem
Devido à convolução entre H(jω) e W(jω), as frequências que definem a banda de passagem e de atenuação não podem ser especificadas com precisão
O aumento de N torna os lobos mais estreitos mas com a mesma amplitude relativa
Pode ser difícil obter h(n) analiticamente, a partir da série de Fourier, o que torna inviável a aplicação do método
© Gonçalo Tavares, Moisés Piedade11
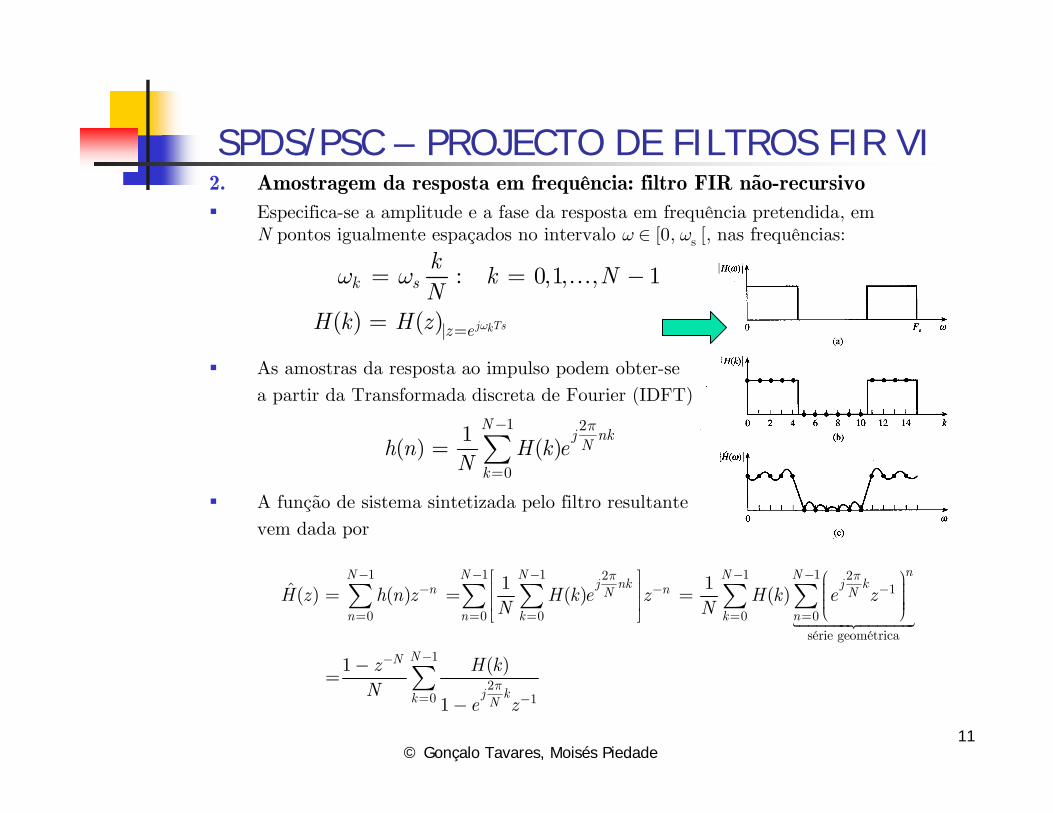
SPDS/PSC – PROJECTO DE FILTROS FIR VI2. Amostragem da resposta em frequência: filtro FIR não-recursivo
Especifica-se a amplitude e a fase da resposta em frequência pretendida, emN pontos igualmente espaçados no intervalo ω ∈ [0, ωs [, nas frequências:
As amostras da resposta ao impulso podem obter-se
a partir da Transformada discreta de Fourier (IDFT)
A função de sistema sintetizada pelo filtro resultante
vem dada por
|
: 0,1, , 1
( ) ( ) j Tsk
k s
z e
kk N
NH k H z ω
ω ω
=
= = −
=
…
1 2
0
1( ) ( )
Nj nkN
k
h n H k eN
π−
== ∑
1 1 1 1 12 21
0 0 0 0 0
série geométrica
1
20 1
1 1ˆ( ) ( ) ( ) ( )
1 ( ) =
1
nN N N N Nj nk j kn nN N
n n k k n
NN
j kk N
H z h n z H k e z H k e zN N
z H kN
e z
π π
π
− − − − −− − −
= = = = =
−−
= −
⎡ ⎤ ⎛ ⎞⎟⎜⎢ ⎥= = = ⎟⎜ ⎟⎢ ⎥ ⎜ ⎟⎝ ⎠⎣ ⎦
−
−
∑ ∑ ∑ ∑ ∑
∑
© Gonçalo Tavares, Moisés Piedade12
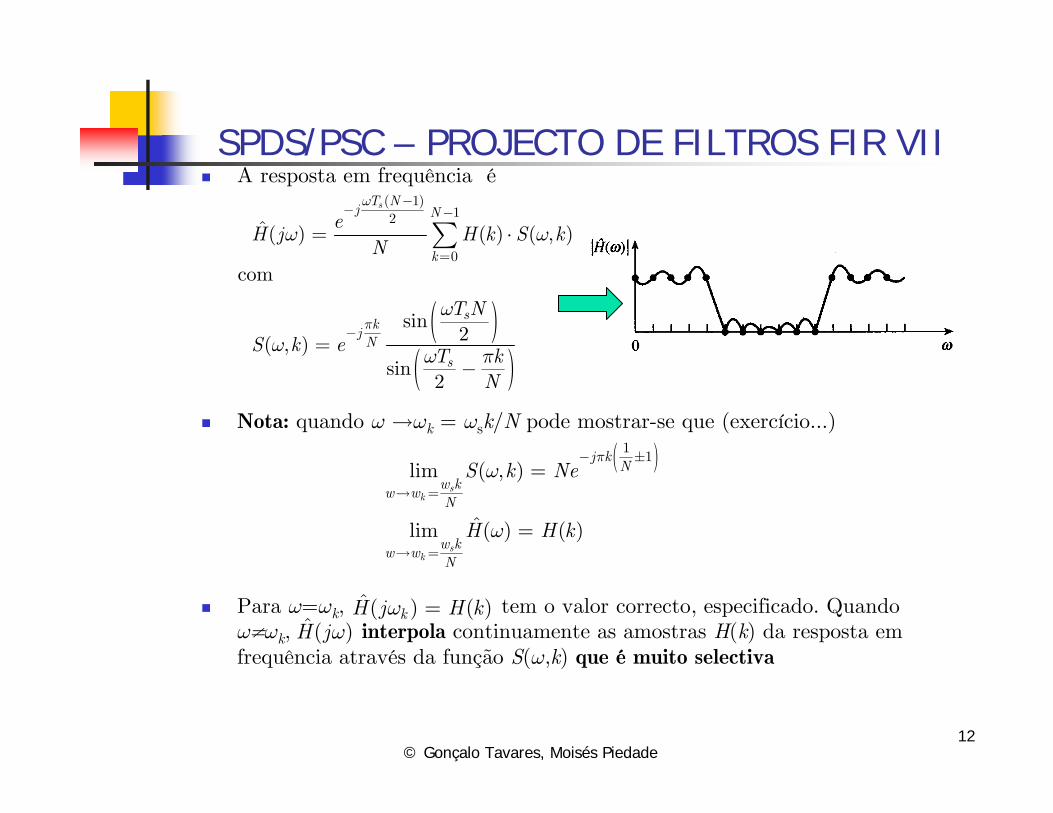
SPDS/PSC – PROJECTO DE FILTROS FIR VIIA resposta em frequência é
Nota: quando ω →ωk = ωsk/N pode mostrar-se que (exercício...)
Para ω=ωk, tem o valor correcto, especificado. Quando ω≠ωk, interpola continuamente as amostras H(k) da resposta em frequência através da função S(ω,k) que é muito selectiva
( )( )
( 1)12
0
ˆ ( ) ( ) ( , )
com
sin2 ( , )
sin2
sT Nj N
k
sk
jN
s
eH j H k S k
N
T N
S k e T kN
ω
π
ω ω
ω
ω ω π
−− −
=
−
= ⋅
=−
∑
( )11
lim ( , )
ˆlim ( ) ( )
sk
sk
j kN
w kw w
N
w kw w
N
S k Ne
H H k
πω
ω
− ±
→ =
→ =
=
=
ˆ ( )H jωˆ ( ) ( )kH j H kω =
© Gonçalo Tavares, Moisés Piedade13
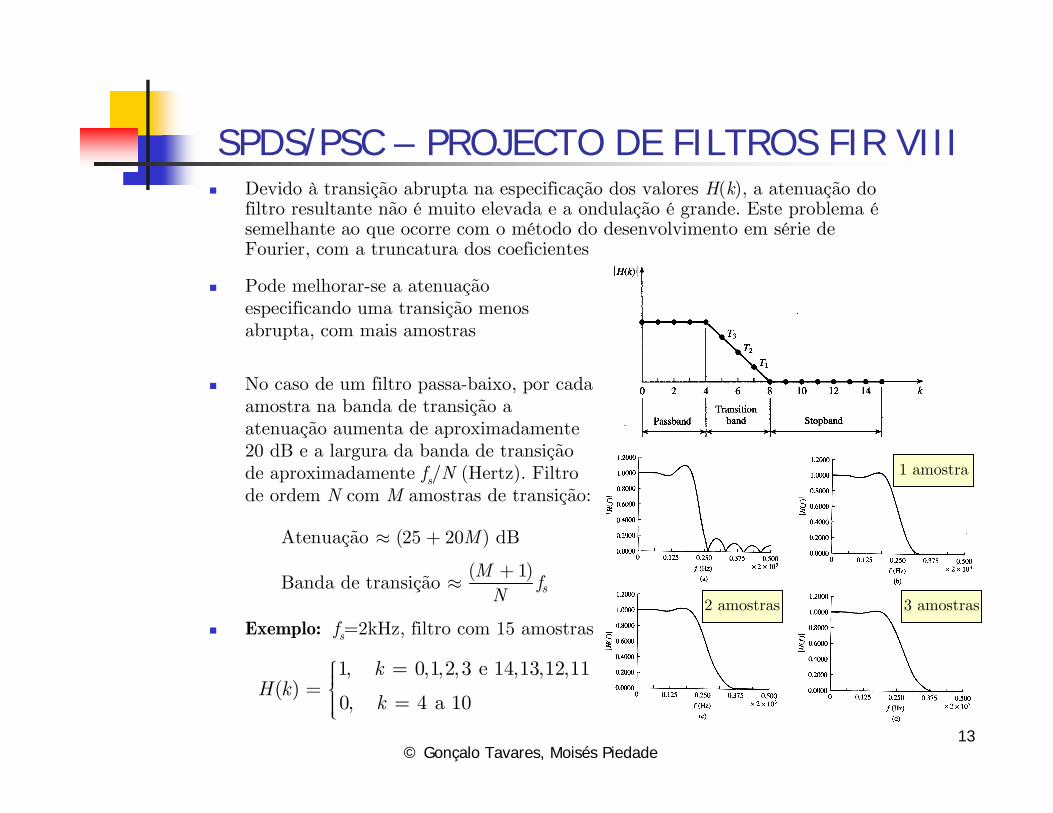
SPDS/PSC – PROJECTO DE FILTROS FIR VIIIDevido à transição abrupta na especificação dos valores H(k), a atenuação do filtro resultante não é muito elevada e a ondulação é grande. Este problema ésemelhante ao que ocorre com o método do desenvolvimento em série de Fourier, com a truncatura dos coeficientes
Pode melhorar-se a atenuação especificando uma transição menos abrupta, com mais amostras
No caso de um filtro passa-baixo, por cada amostra na banda de transição a atenuação aumenta de aproximadamente 20 dB e a largura da banda de transição de aproximadamente fs/N (Hertz). Filtro de ordem N com M amostras de transição:
Exemplo: fs=2kHz, filtro com 15 amostras
1 amostra
3 amostras2 amostras
1, 0,1,2,3 e 14,13,12,11( )
0, 4 a 10
kH k
k
=⎧⎪⎪= ⎨⎪ =⎪⎩
Atenuação (25 20 ) dB
( 1)Banda de transição s
M
Mf
N
≈ +
+≈
© Gonçalo Tavares, Moisés Piedade14
SPDS/PSC – PROJECTO DE FILTROS FIR IX2. Amostragem da resposta em frequência: filtro FIR recursivo
Quando as banda de interesse do filtro (i.e., passagem de sinal) ocupam uma fracção pequena do intervalo ω ∈ [0, ωs/2[, muitos dos N-1 valores de H(k) (função especificada) são nulos. No entanto, em geral, os h(n) não são nulos e têm de ser tidos em conta no cálculo não-recursivo do filtro de acordo com:
A representação alternativa:
permite concluir que o filtro pode ser realizado como a cascata de um filtro pente(comb filter) com um filtro que é a soma de N filtros recursivos de 1ª ordem, com coeficientes complexos ej2πk/N
Os N zeros do filtro pente cancelam os pólos do filtro recursivo de forma que de facto se tem um FIR
Na prática, devido à utilização de palavras de comprimento finito, este cancelamento não é perfeito pelo que o filtro resultante é de facto um IIR (resposta impulsional infinita), potencialmente instável
1
0
ˆ( ) ( )N
n
n
H z h n z−
−
== ∑
1
20 1
filtro recursivo
1 ( )ˆ( )
1
NN
j kk Ncomb filter
z H kH z
Ne z
π
−−
= −
−=
−∑
© Gonçalo Tavares, Moisés Piedade15
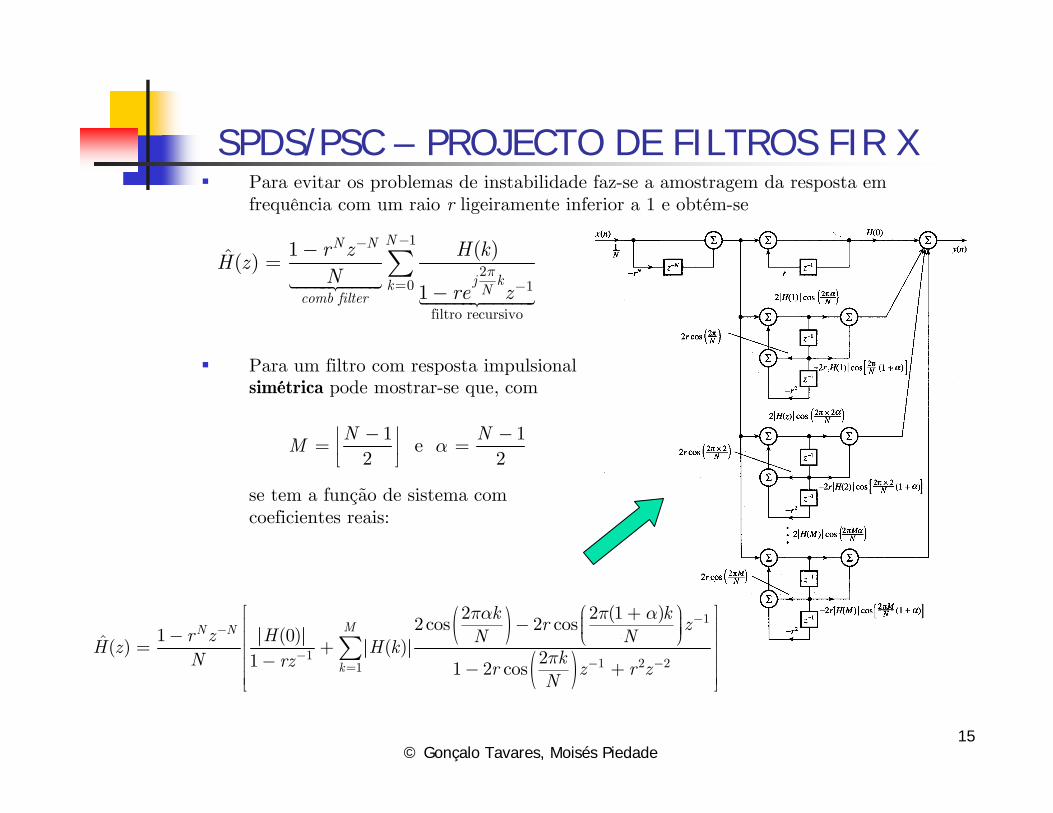
SPDS/PSC – PROJECTO DE FILTROS FIR XPara evitar os problemas de instabilidade faz-se a amostragem da resposta em frequência com um raio r ligeiramente inferior a 1 e obtém-se
1
20 1
filtro recursivo
1 ( )ˆ( )
1
NN N
j kk Ncomb filter
r z H kH z
Nre z
π
−−
= −
−=
−∑
Para um filtro com resposta impulsionalsimétrica pode mostrar-se que, com
se tem a função de sistema com coeficientes reais:
( )( )
1
11 2 21
2 2 (1 )2cos 2 cos
1 (0)ˆ( ) ( ) 21 1 2 cos
MN N
k
k kr z
r z H N NH z H k kN rz r z r z
N
πα π α
π
−−
−− −=
⎡ ⎛ + ⎞ ⎤⎟⎜−⎢ ⎥⎟⎜ ⎟− ⎝ ⎠⎢ ⎥= +⎢ ⎥−⎢ ⎥− +⎢ ⎥⎣ ⎦
∑
1 1 e
2 2N N
M α− −⎢ ⎥= =⎢ ⎥
⎣ ⎦
© Gonçalo Tavares, Moisés Piedade16
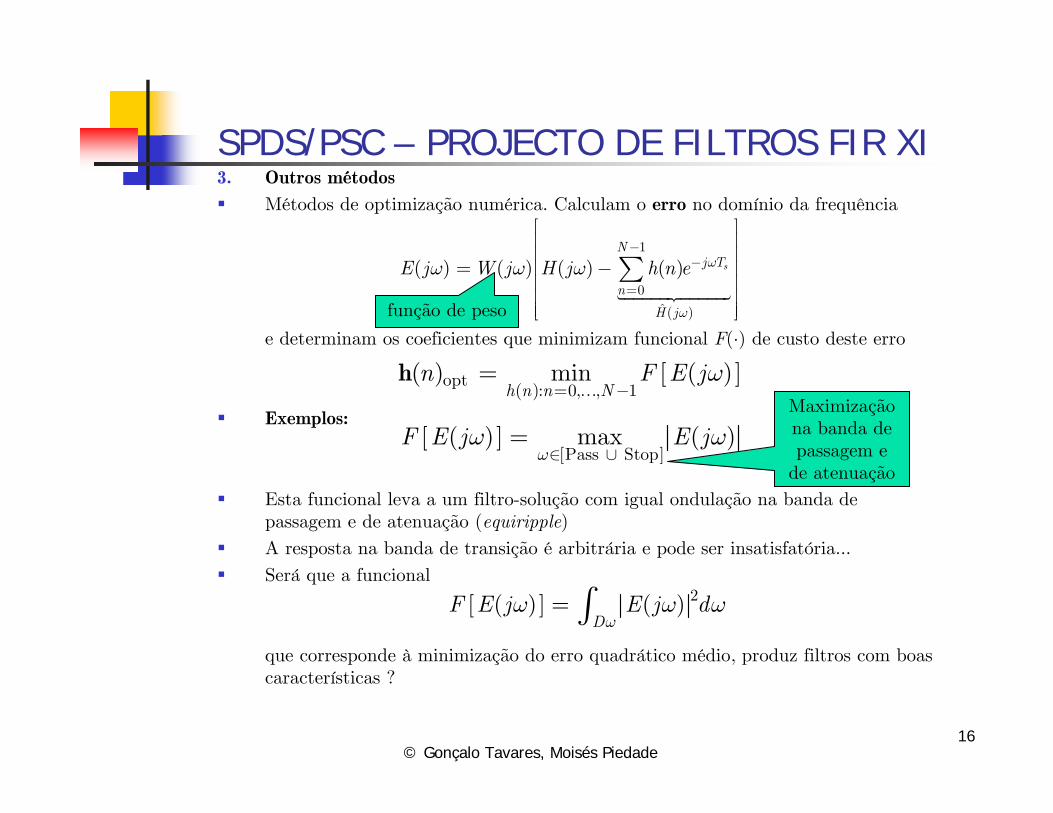
SPDS/PSC – PROJECTO DE FILTROS FIR XI3. Outros métodos
Métodos de optimização numérica. Calculam o erro no domínio da frequência
e determinam os coeficientes que minimizam funcional F(·) de custo deste erro
Exemplos:
Esta funcional leva a um filtro-solução com igual ondulação na banda de passagem e de atenuação (equiripple)A resposta na banda de transição é arbitrária e pode ser insatisfatória...
Será que a funcional
que corresponde à minimização do erro quadrático médio, produz filtros com boas características ?
1
0ˆ( )
( ) ( ) ( ) ( ) s
Nj T
n
H j
E j W j H j h n e ω
ω
ω ω ω−
−
=
⎡ ⎤⎢ ⎥⎢ ⎥
= −⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
∑
[ ]opt( ): 0, , 1
( ) min ( )h n n N
n F E jω= −
=h…
função de peso
[ ][Pass Stop]
( ) max ( )F E j E jω
ω ω∈ ∪
=Maximização na banda de passagem e
de atenuação
[ ] 2( ) ( )D
F E j E j dω
ω ω ω= ∫
© Gonçalo Tavares, Moisés Piedade17
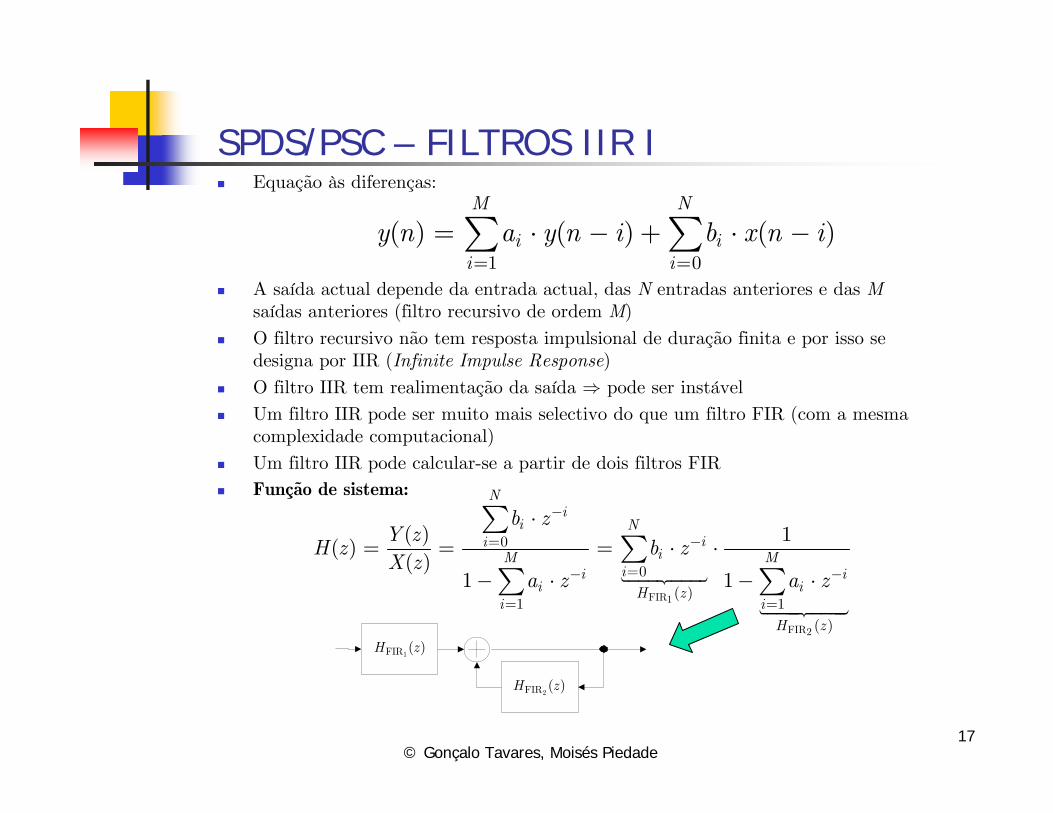
Equação às diferenças:
A saída actual depende da entrada actual, das N entradas anteriores e das Msaídas anteriores (filtro recursivo de ordem M)
O filtro recursivo não tem resposta impulsional de duração finita e por isso se designa por IIR (Infinite Impulse Response)
O filtro IIR tem realimentação da saída ⇒ pode ser instávelUm filtro IIR pode ser muito mais selectivo do que um filtro FIR (com a mesma complexidade computacional)
Um filtro IIR pode calcular-se a partir de dois filtros FIRFunção de sistema:
SPDS/PSC – FILTROS IIR I
1 0
( ) ( ) ( )M N
i ii i
y n a y n i b x n i= =
= ⋅ − + ⋅ −∑ ∑
FIR1
FIR2
0
0
( )1 1
( )
( ) 1( )
( )1 1
Ni
i Nii
iM Mii i
i iH zi i
H z
b zY z
H z b zX z
a z a z
−
−=
=− −
= =
⋅= = = ⋅ ⋅
− ⋅ − ⋅
∑∑
∑ ∑
1FIR ( )H z
2FIR ( )H z

© Gonçalo Tavares, Moisés Piedade18
SPDS/PSC – FILTROS IIR IIDiagrama de fluxo de sinal:Por inspecção de H(z) obtém-se a forma directa ITrocando a ordem da ligação em cadeia e associando as variáveis na linha de atraso obtém-se a forma directa II(número mínimo de atrasos)
Forma directa II(com M < N)
Forma directa I(com M < N)
1z−
0b
1z−
1z−
1z−
1z−
1b
2b
Nb
1
1a
1Ma −
Ma1Nb −
( )x n ( )y n
( )x n N−
( )y n M−
1z−
0b
1z−
1z−
1z−
1z−
1b
2b
Nb
1
1a
1Ma −
Ma 1Nb −
( )x n ( )y n
0b
1z−
1z−
1b
Mb
Nb
1
1a
1Ma −
Ma
1Nb −
( )x n ( )y n
1Mb −
1z−
© Gonçalo Tavares, Moisés Piedade19
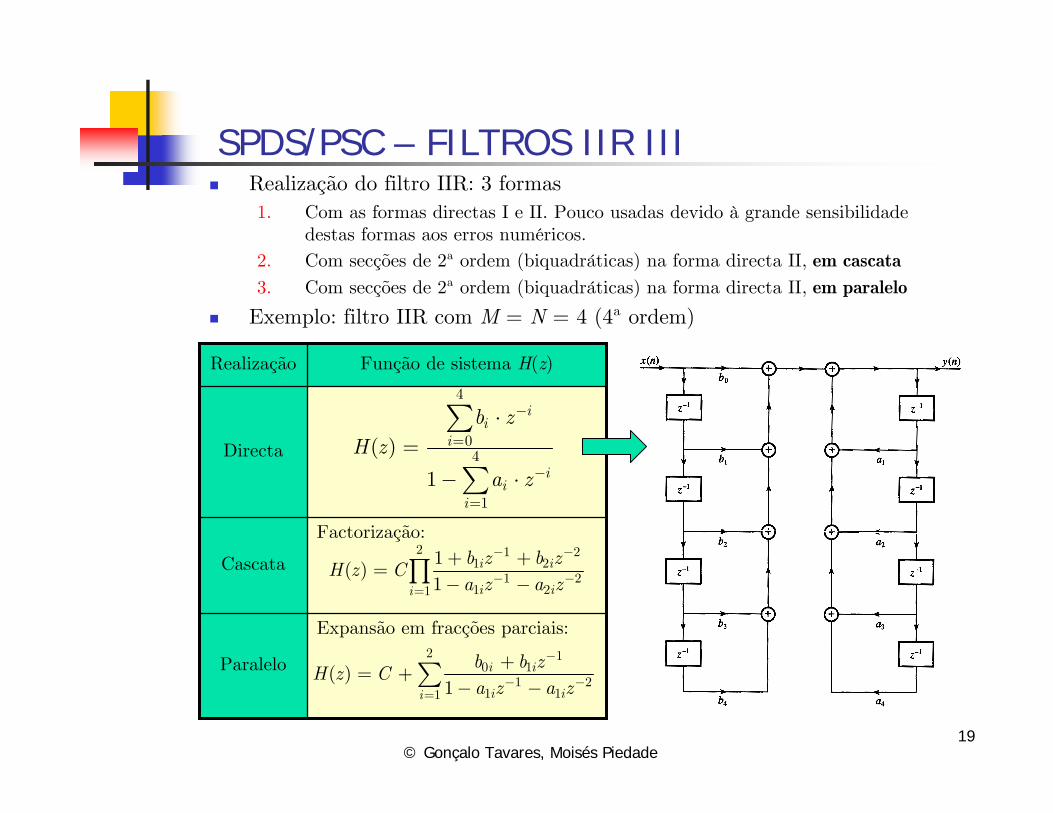
SPDS/PSC – FILTROS IIR III
Expansão em fracções parciais:
Paralelo
Factorização:
Cascata
Directa
Função de sistema H(z)Realização
4
04
1
( )
1
ii
i
ii
i
b zH z
a z
−
=
−
=
⋅=
− ⋅
∑
∑
Realização do filtro IIR: 3 formas1. Com as formas directas I e II. Pouco usadas devido à grande sensibilidade
destas formas aos erros numéricos. 2. Com secções de 2ª ordem (biquadráticas) na forma directa II, em cascata3. Com secções de 2ª ordem (biquadráticas) na forma directa II, em paralelo
Exemplo: filtro IIR com M = N = 4 (4ª ordem)
2 1 21 2
1 21 21
1( )
1i i
i ii
b z b zH z C
a z a z
− −
− −=
+ +=
− −∏
2 10 1
1 21 11
( )1
i i
i ii
b b zH z C
a z a z
−
− −=
+= +
− −∑
© Gonçalo Tavares, Moisés Piedade20
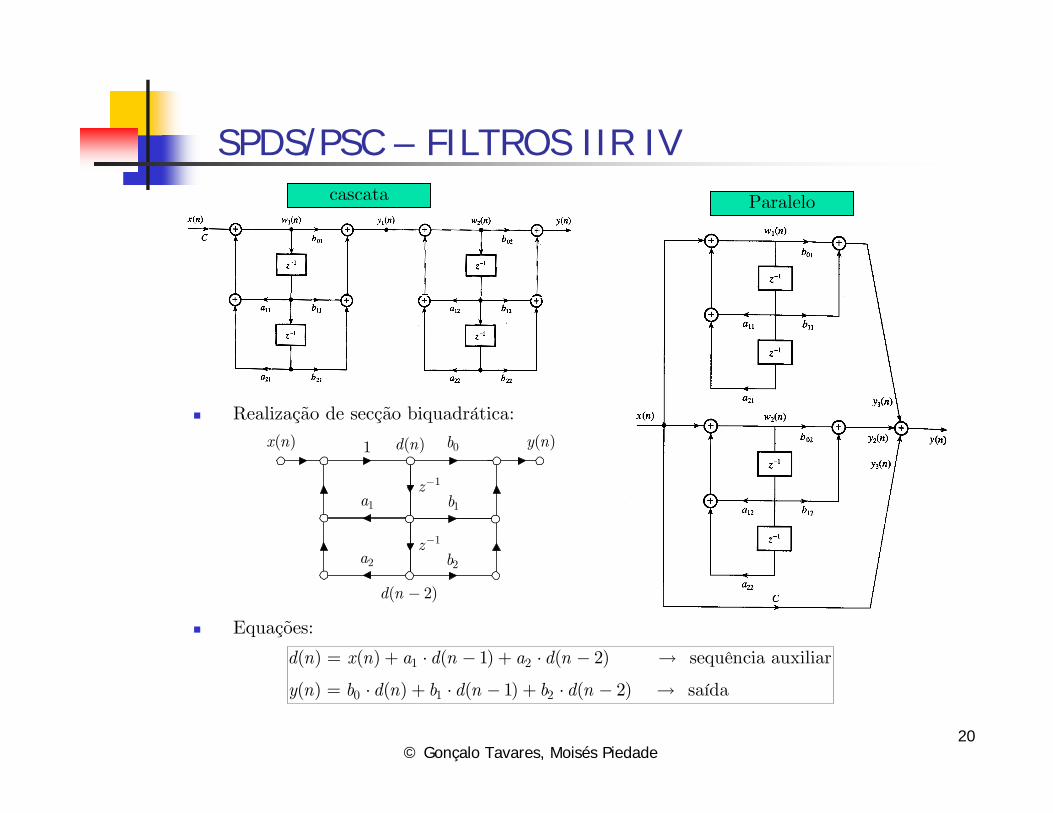
Realização de secção biquadrática:
Equações:
SPDS/PSC – FILTROS IIR IV
0b
1z−
1b
2b
1
1a
2a
( )x n ( )y n
1z−
( )d n
( 2)d n −
Paralelocascata
1 2
0 1 2
( ) ( ) ( 1) ( 2) sequência auxiliar
( ) ( ) ( 1) ( 2) saída
d n x n a d n a d n
y n b d n b d n b d n
= + ⋅ − + ⋅ − →
= ⋅ + ⋅ − + ⋅ − →

© Gonçalo Tavares, Moisés Piedade21
Necessáriopara mantera energia!
SPDS/PSC – PROJECTO DE FILTROS IIR IMétodos:1. Conservação da resposta ao impulso
2. Transformada Z adaptada
3. Transformação bilinear
1. Conservação da resposta ao impulsoa) Determinar a resposta ao impulso do filtro analógico pretendido (protótipo)
b) Amostrar esta resposta com período Ts e obter a resposta h(n) para n>0
c) Obter a função de transferência como a transformada Z de h(n)
Se o filtro analógico tiver apenas pólos simples (P pólos)
Se houver pólo complexo então:
1
1 1 1
10 1 1
( ) ( ) ( )
( ) 1
si i s
i s
i s
P P Pt nTi s t s nT
A i s iii i i
P Pis nT n
s i s sTn i i
AH s h t Ae h n T Ae
s s
AH z T Ae z T
e z
− =
= = =
∞−
−= = =
= → = → =−
⎛ ⎞⎟⎜ ⎟→ = ⋅ =⎜ ⎟⎜ ⎟⎜ −⎝ ⎠
∑ ∑ ∑
∑ ∑ ∑
L
Z
( ) i s i i ss T j T
i i i is j z e e σ ωσ ω += + → = =
analógico estável: 0 1 digital estáveli izσ < → < →
© Gonçalo Tavares, Moisés Piedade22
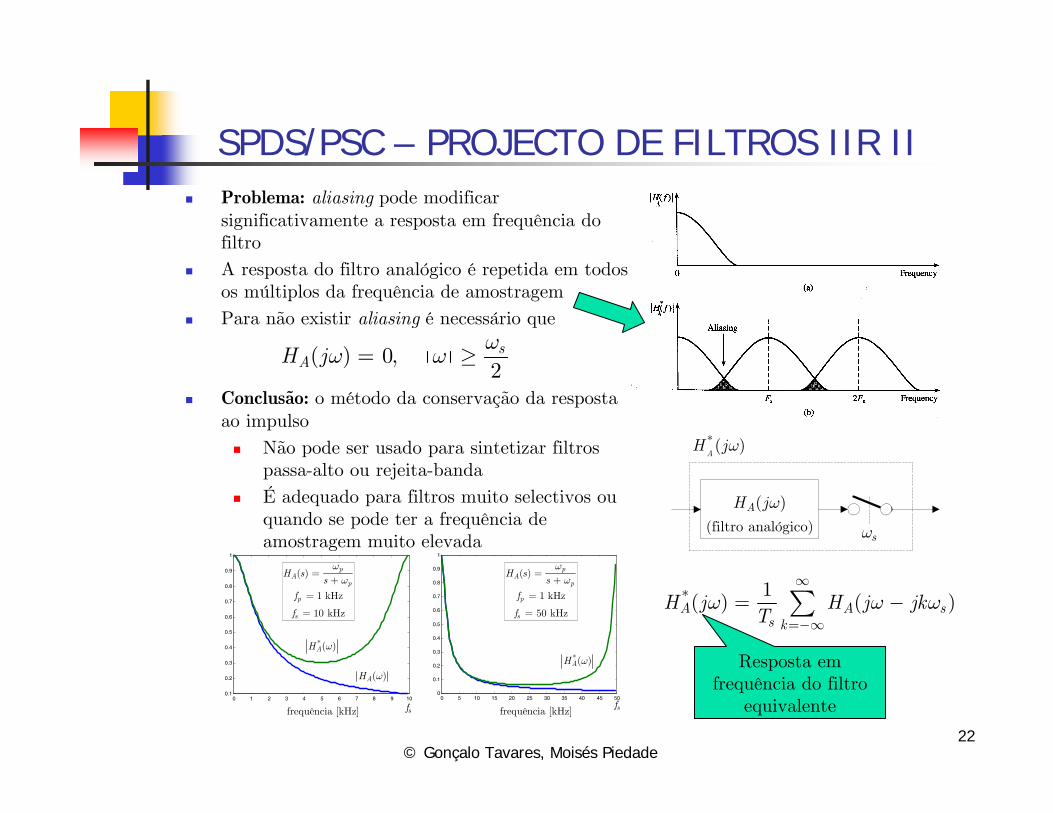
SPDS/PSC – PROJECTO DE FILTROS IIR IIProblema: aliasing pode modificar significativamente a resposta em frequência do filtro
A resposta do filtro analógico é repetida em todos os múltiplos da frequência de amostragem
Para não existir aliasing é necessário que
Conclusão: o método da conservação da resposta ao impulso
Não pode ser usado para sintetizar filtros passa-alto ou rejeita-banda
É adequado para filtros muito selectivos ou quando se pode ter a frequência de amostragem muito elevada
(filtro analógico)
( )AH jω
sω
* ( )A
H jω
* 1( ) ( )A A s
s k
H j H j jkT
ω ω ω∞
=−∞= −∑
( ) 0, 2s
AH jω
ω ω= ≥
Resposta em frequência do filtro
equivalente0 5 10 15 20 25 30 35 40 45 50
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0 1 2 3 4 5 6 7 8 9 100.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
frequência [kHz]
( )
1 kHz
10 kHz
pA
p
p
s
H ss
f
f
ωω
=+
=
=
( )
1 kHz
50 kHz
pA
p
p
s
H ss
f
f
ωω
=+
=
=
( )AH ω
*( )AH ω*( )AH ω
sfsffrequência [kHz]

© Gonçalo Tavares, Moisés Piedade23
SPDS/PSC – PROJECTO DE FILTROS IIR III2. Transformada Z adaptada (MZT-Matched Z Transform)
O método da transformada Z adaptada transforma directamente os pólos e os zeros do filtro analógico HA(s) em pólos e zeros do filtro digital H(z)
a) Determinar os pólos e zeros do filtro analógico pretendido
b) Transformar os pólos e zeros de acordo com:
Pólo/zero real:
Pólos/zeros complexos conjugados:
1 1 sTs e zαα − −+ ⎯⎯→ −
( ) 2 1 2 22 + 1 2 cos( )s sT Tss e T z e zα αα β β− − − −+ ⎯⎯→ − +
Exemplo: Calcular o filtro digital equivalente em termos da MZT ao filtro de Butterworth de 2ªordem com frequência de corte ωp a -3dB
Filtro de Butterworth de 2ª ordem normalizado:
O filtro analógico desnormalizado é:
Então:
Pela MZT, o filtro digital vem:
Exemplo: Calcular o filtro digital equivalente em termos da MZT ao filtro de Butterworth de 2ªordem com frequência de corte ωp a -3dB
Filtro de Butterworth de 2ª ordem normalizado:
O filtro analógico desnormalizado é:
Então:
Pela MZT, o filtro digital vem:
21,2
1ˆ ˆ ˆ( ) 2 1 ( 1 )
2BH s s s s j= + + → = − ±2
2 2ˆ
1( )
ˆ( ) 2p
pA sB p ps
H sH s s s
ω
ωω ω=
= =+ +
( )2 2 2222p
p ps s sω
ω ω α β α β+ + = + + → = =
2
21 22
( )
1 2 cos2
p s
p s
pT
p s T
H zT
e z e zω
ω
ω
ω− −− −
=⎛ ⎞⎟⎜− +⎟⎟⎜⎝ ⎠

© Gonçalo Tavares, Moisés Piedade24
SPDS/PSC – PROJECTO DE FILTROS IIR IV
Conclusões:O método MZT e o método da conservação da resposta ao impulso conduzem a filtros digitais H(z) com o mesmo denominador (mesmos pólos)
Tal como o método da conservação da resposta ao impulso, o eixo de frequências 0 ≤ f <∞ (no domínio analógico) é comprimido ao intervalo de frequências de interesse 0 ≤ f < fs/2 o que leva a distorção da resposta em frequência do filtro digital (devido a aliasing)
O filtro digital tende a ser menos selectivo do que o analógico
O método é também sensível aos problemas de aliasing e não pode ser utilizado para filtros passa-alto e rejeita-banda
0 5 10 15 20 25 30 35 40 45 500
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0 1 2 3 4 5 6 7 8 9 100
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
2
2 2( )2
1 kHz
10 kHz
pA
p p
p
s
H ss s
f
f
ωω ω
=+ +
=
=
sffrequência [kHz]
2
2 2( )2
1 kHz
50 kHz
pA
p p
p
s
H ss s
f
f
ωω ω
=+ +
=
=
( )AH ω( )H ω
sffrequência [kHz]
© Gonçalo Tavares, Moisés Piedade25
SPDS/PSC – PROJECTO DE FILTROS IIR V
[ ]0
00( ) ( ) ( ) ( ) ( 1) ( 1) ( )
2
s
s s
t nTt t nT T s
t
Ty t y t x d y n y n x n x nτ τ
== −
= + ⎯⎯⎯⎯⎯→ − − = − +∫
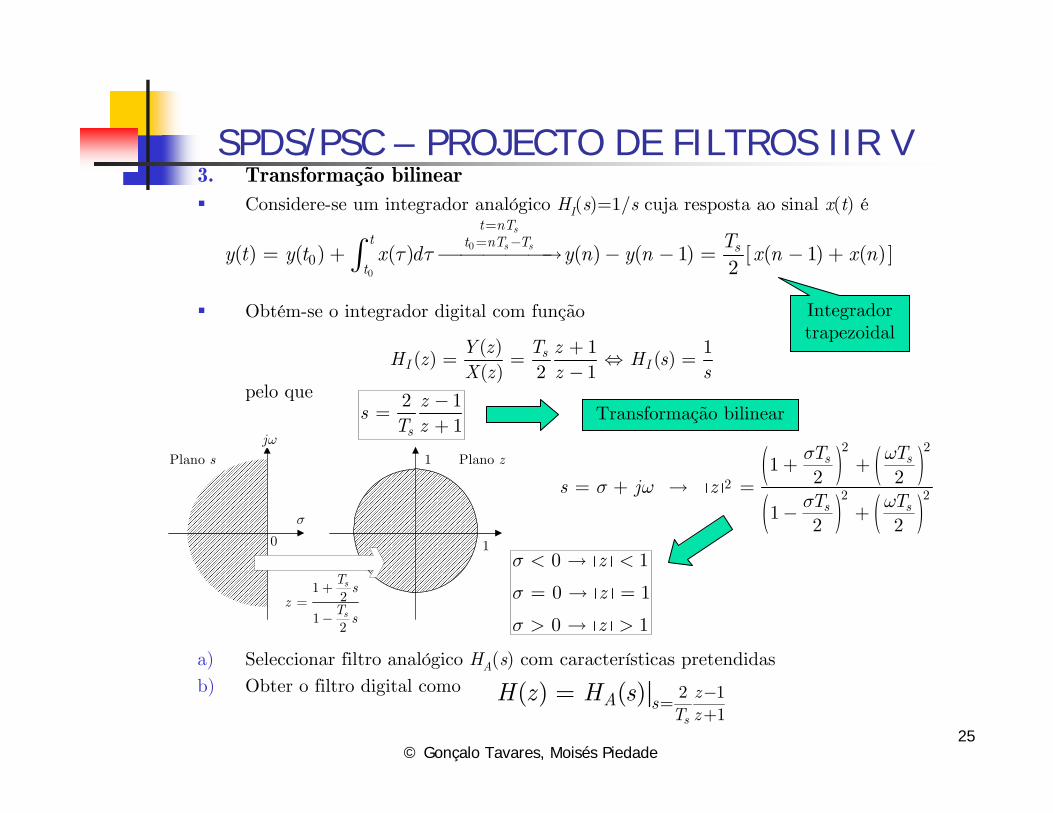
3. Transformação bilinearConsidere-se um integrador analógico HI(s)=1/s cuja resposta ao sinal x(t) é
Obtém-se o integrador digital com função
pelo que
a) Seleccionar filtro analógico HA(s) com características pretendidas
b) Obter o filtro digital como
Integradortrapezoidal
( ) 1 1( ) ( )
( ) 2 1s
I IY z T z
H z H sX z z s
+= = ⇔ =
−2 1
1s
zs
T z−
=+
Transformação bilinear
2 11
( ) ( )s
zA sT z
H z H s −=
+=
( ) ( )( ) ( )
2 2
22 2
12 2
12 2
s s
s s
T T
s j zT T
σ ω
σ ωσ ω
+ += + → =
− +
Plano z Plano s
jω
σ
0
1
1
12
12
s
s
Ts
z Ts
+=
−
0 1
0 1
0 1
z
z
z
σ
σ
σ
< → <
= → =
> → >
© Gonçalo Tavares, Moisés Piedade26
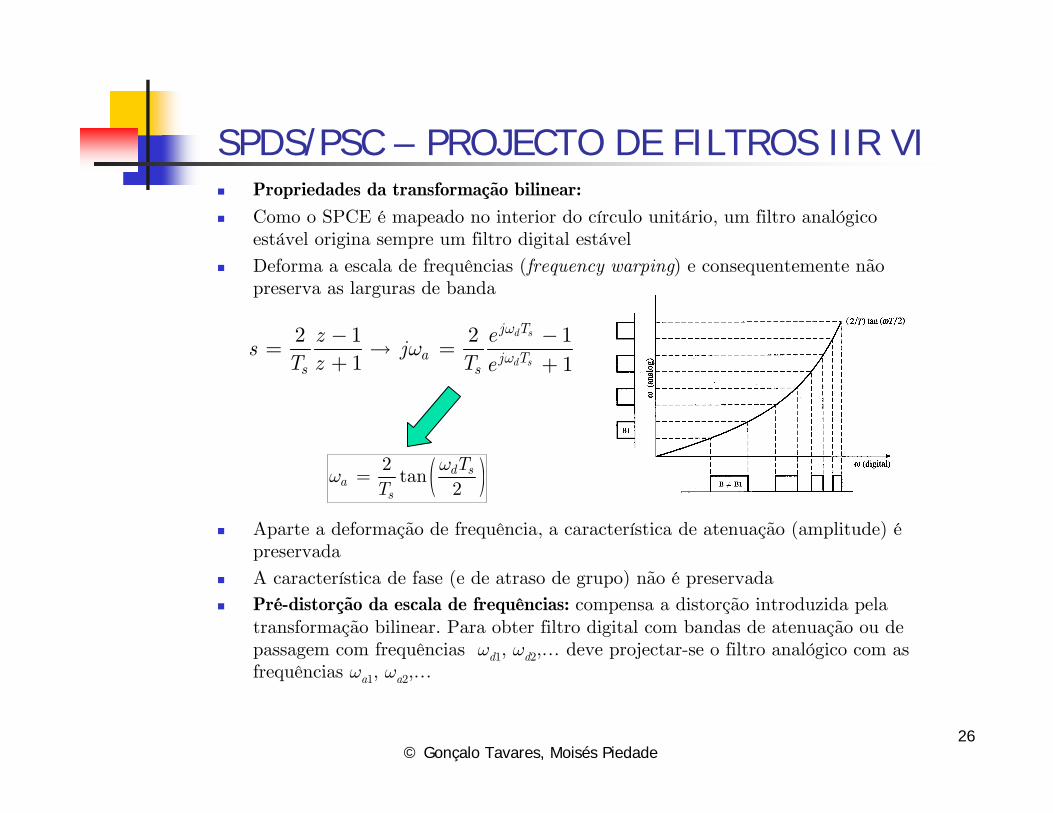
SPDS/PSC – PROJECTO DE FILTROS IIR VIPropriedades da transformação bilinear:Como o SPCE é mapeado no interior do círculo unitário, um filtro analógico estável origina sempre um filtro digital estável
Deforma a escala de frequências (frequency warping) e consequentemente não preserva as larguras de banda
Aparte a deformação de frequência, a característica de atenuação (amplitude) épreservada
A característica de fase (e de atraso de grupo) não é preservadaPré-distorção da escala de frequências: compensa a distorção introduzida pela transformação bilinear. Para obter filtro digital com bandas de atenuação ou de passagem com frequências ωd1, ωd2,… deve projectar-se o filtro analógico com as frequências ωa1, ωa2,…
2 1 2 11 1
d s
d s
j T
a j Ts s
z es j
T z T e
ω
ωω− −
= → =+ +
( )2tan
2d s
as
TT
ωω =

![Notas de Aula - feis.unesp.br · Filtros Digitais tipo FIR 5 M´etodo do Janelamento Seja a resposta impulsiva de um fi ltro ideal h d [n]. Deseja-se aproxima-la por uma resposta](https://static.fdocumentos.com/doc/165x107/5bbbf97b09d3f292388b7b94/notas-de-aula-feisunespbr-filtros-digitais-tipo-fir-5-metodo-do-janelamento.jpg)