Subgrupos geom´etricos e seus comensuradores em grupos de ... · Introdu¸c˜ao Os grupos de...
100
Subgrupos geom´ etricos e seus comensuradores em grupos de tran¸ cas de superf´ ıcie Oscar Eduardo Ocampo Uribe Dissertac ¸ ˜ ao apresentada ao Instituto de Matem ´ atica e Estat ´ ıstica da Universidade de S ˜ ao Paulo para obtenc ¸ ˜ ao do t ´ ıtulo de Mestre em Ci ˆ encias Programa:Matem´atica Orientador: Prof. Dr. Daciberg Lima Gon¸ calves Durante o desenvolvimento deste trabalho o autor recebeu aux´ ılio financeiro da CAPES/CNPq S˜ao Paulo, mar¸ co de 2009
Transcript of Subgrupos geom´etricos e seus comensuradores em grupos de ... · Introdu¸c˜ao Os grupos de...
-
Subgrupos geométricos e seus
comensuradores em grupos
de tranças de superf́ıcie
Oscar Eduardo Ocampo Uribe
Dissertação apresentada
ao
Instituto de Matemática e Estat́ıstica
da
Universidade de São Paulo
para
obtenção do t́ıtulo
de
Mestre em Ciências
Programa: Matemática
Orientador: Prof. Dr. Daciberg Lima Gonçalves
Durante o desenvolvimento deste trabalho o autor recebeu aux́ılio financeiro da
CAPES/CNPq
São Paulo, março de 2009
-
Subgrupos geométricos e seus
comensuradores em grupos
de tranças de superf́ıcie
Este exemplar corresponde à redação
final da dissertação devidamente corrigida
e defendida por Oscar Eduardo Ocampo Uribe
e aprovada pela Comissão Julgadora.
Banca Examinadora:
• Prof. Dr. Daciberg Lima Gonçalves (orientador) - IME-USP.
• Prof. Dr. Tomas Edson Barros - DM-UFSCar.
• Prof. Dr. Oziride Manzoli Neto - ICMC-USP.
-
Resumo
Seja BmM o grupo de tranças com m cordas sobre uma superf́ıcie M e seja N
uma subsuperf́ıcie de M . Estudaremos inicialmente condições necessárias e suficientes
para as quais BnN é um subgrupo de BmM (m podendo ser diferente de n), isto é,
se considerarmos a inclusão i : N →֒ M , queremos estabelecer condições sobre M e N
para que a aplicação induzida i∗ : BnN → BmM seja injetora. Em seguida, sob certas
hipóteses para N e M calcularemos o comensurador, normalizador e centralizador de
BnN em BmM , sendo esse o objetivo principal desta dissertação.
Palavras chave: Grupos de tranças; subgrupos geométricos; comensurador; sequência
de Fadell-Neuwirth; grupos de tranças de superf́ıcie.
-
Abstract
Let Bm(M) be the braid group with m strings on a surface M and let N be a
subsurface of M . We will study the necessary and sufficient conditions out of which
Bn(N) is a subgroup of Bm(M) (m can be different of n), it means, if we consider
the inclusion i : N →֒ M , we would like to establish conditions for M and N for
the induced application i∗ : BnN → BmM should be injective. After that, under
some certain conditions for M and N we will calculate the commensurator, normalizer
and centralizer of Bn(N) in Bm(M), being this one the principal objective of this work.
Keywords: Braid groups; geometric subgroups; commensurator; Fadell-Neuwirth se-
quence; surface braid groups.
i
-
Sumário
Introdução v
1 Preliminares 1
1.1 Grupos de tranças de superf́ıcies e espaços de configuração . . . . . . . 1
1.2 Torção . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
1.3 O subgrupo comensurador . . . . . . . . . . . . . . . . . . . . . . . . . 9
2 Resultados básicos 13
2.1 Centros e superf́ıcies grandes . . . . . . . . . . . . . . . . . . . . . . . . 13
2.2 Subsuperf́ıcies . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
2.3 Centros dos grupos de tranças do cilindro e do toro . . . . . . . . . . . 19
3 Comensurador, normalizador e centralizador de π1N em π1M 25
3.1 Grafos de grupos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
3.2 Demonstrações . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
4 Comensurador, normalizador, e centralizador de BnD em BmM 38
4.1 Definições e resultados . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
4.2 Demonstrações . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
5 Comensurador, normalizador, e centralizador de BnN em BmM 50
5.1 Ação de π1N sobre Π1(M \ {P0}) . . . . . . . . . . . . . . . . . . . . . 51
5.2 Prova do Teorema 5.1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
ii
-
6 Considerações finais 75
6.1 Casos remanescentes . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
6.1.1 A esfera S2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
6.1.2 O plano projetivo P 2 . . . . . . . . . . . . . . . . . . . . . . . . 77
6.1.3 Outros casos interessantes . . . . . . . . . . . . . . . . . . . . . 78
6.1.4 Casos remanescentes (como subgrupos geométricos) . . . . . . . 79
6.2 Subgrupos geométricos . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
6.2.1 Alguns casos particulares . . . . . . . . . . . . . . . . . . . . . . 81
7 Anexo 83
Referências Bibliográficas 88
iii
-
Agradecimentos
Gostaria de agradecer ao professor Daciberg pela orientação, disponibilidade e conhe-
cimentos transmitidos e ao professor John Guaschi, da Universidade de Caen, pela
motivação no estudo da teoria de tranças, pelas discussões dos assuntos da dissertação
tanto na sua estada no Brasil como à distância, assim como pela incansável revisão
desta dissertação.
Agradeço ao professor Raul Ferraz por sua valiosa ajuda em algumas questões
algébricas. Aos professores e alunos do grupo de topologia algébrica do IME, em
particular às professoras Lućılia Borsari e Fernanda Cardona, e ao Anderson por suas
pertinentes correções de português.
Quero registrar também minha gratidão à professora Débora Tejada, da Universidad
Nacional de Colombia, por me “apresentar” à topologia algébrica.
Fico eternamente agradecido à minha famı́lia, cujo apoio e ajuda foram impres-
cind́ıveis para esta conquista.
Finalmente, a todas as pessoas e amigos que de uma forma ou outra colaboraram
neste processo quero lhes dizer obrigado e “muchas gracias a todos”.
iv
-
Introdução
Os grupos de tranças do plano E2 foram definidos por Artin [1], e muito estudados
em [2, 3]. Posteriormente, eles foram generalizados usando a definição dada por Fox
(com a noção de espaço de configuração) a espaços topológicos arbitrários [15]. Em [5],
Birman provou que se M r é uma variedade conexa de dimensão r ≥ 3, então a teoria de
tranças é de pouco interesse, no sentido da Proposição 1.2 deste trabalho. Os grupos de
tranças de superf́ıcies compactas, conexas sem bordo tem sido amplamente estudados;
tais grupos são finitamente apresentados, e apresentações destes foram inicialmente
obtidas em [5, 30].
O grupo de m-tranças de uma superf́ıcie M surge da seguinte forma: escolha um
conjunto P(m) de m pontos distinguidos sobre M . Construa tranças sobre M × I as
quais começam em P(m) × 0 e terminam em P(m) × 1. A composição de tranças é
definida por concatenação e re-escalamento. As deformações permitidas são homoto-
pias de cordas individuais que, durante estas, cordas distintas nunca se intersectam.
Existe um homomorfismo natural do grupo de tranças BmM no grupo simétrico de m
elementos, e seu núcleo é o grupo de tranças puras PBmM .
Este trabalho estuda certos subgrupos de BmM e PBmM . Se H é um subgrupo de
um grupo G, denotaremos por NG(H), ZG(H) o normalizador e o centralizador de H
em G, respectivamente. O comensurador de H em G, denotado por CG(H), é formado
pelos elementos g ∈ G tais que gHg−1 ∩H tem ı́ndice finito em gHg−1 e em H . Nosso
principal interesse será estudar os seguintes objetos: o comensurador, normalizador e
centralizador em BmM do grupo de tranças BnN de certas subsuperf́ıcies N ⊂ M .
Para isto, dividimos este trabalho em sete caṕıtulos. No Caṕıtulo 1 revisaremos
v
-
algumas noções gerais da teoria de tranças, assim como resultados conhecidos sobre
apresentações destes grupos, a existência de elementos de torção e a identificação dos
casos especiais onde sabe-se que BmM é finito. No final deste caṕıtulo faremos uma
discussão sobre o subgrupo comensurador de um grupo dado.
Um rápido estudo sobre superf́ıcies e subsuperf́ıcies, com relação aos grupos de
tranças, será abordado no Caṕıtulo 2. Mostraremos que para quase todas as superficies
compactas (tem um numero finito e pequeno de exceções), o centro do grupo de tranças
é trivial. Seja BmM o grupo de tranças com m cordas sobre uma superf́ıcie M e seja
N uma subsuperf́ıcie de M . Estabeleceremos condições necessárias e suficientes para
as quais BnN é um subgrupo de BmM (m podendo ser diferente de n); tais subgrupos
são conhecidos como subgrupos geométricos de BmM . Também no segundo caṕıtulo
descreveremos os centros dos grupos de tranças do cilindro e do toro.
Nos três caṕıtulos seguintes desta dissertação concentraremos nossa atenção no
estudo dos subgrupos comensurador, normalizador e centralizador de BnN em BmM ,
sempre com a condição que nenhuma componente conexa deM \N seja um disco. Para
isso usamos três ferramentas (teorias) distintas que foram separadas em caṕıtulos.
No Caṕıtulo 3 usamos teoria de grafos de grupos para calcular tais subgrupos no
caso em que m = n = 1 e sem mais condições para M e N . Já no Caṕıtulo 4 introduzi-
remos a noção de túnel geométrico sobre uma superf́ıcie para calcular estes subgrupos
com a condição que M seja uma superf́ıcie orientada diferente da esfera e N seja um
disco mergulhado em M . No Caṕıtulo 5 consideraremos M uma superf́ıcie grande e N
tal que, além de M \N não ter componentes conexas que sejam discos, não seja um
colarinho de Möbius em M . Como antes, introduziremos um novo objeto geométrico
que chamaremos de interbraid e sob as condições mencionadas, com ajuda de um certo
grupóide, calcularemos os subgrupos comensurador, normalizador e centralizador em
BmM do grupo de tranças BnN .
Já no Caṕıtulo 6, comentaremos alguns casos remanescentes, deixando claro quais
foram os varios casos não considerados no artigo [27], base deste trabalho. Revisamos
também alguns subgrupos geométricos do grupo fundamental de uma superf́ıcie, bem
vi
-
como uma relação de certos subgrupos do grupo de tranças de uma superf́ıcie M com
o grupo fundamental de uma superf́ıcie perfurada obtida a partir de M .
Para finalizar, no último caṕıtulo, provaremos um par de resultados obtidos no
trabalho dos comensuradores quando o grupo é π1M , onde M é uma superf́ıcie com-
pacta. Neste caṕıtulo temos também uma aplicação, dos subgrupos comensuradores
calculados, à teoria de representações de grupos unitária. Esta aplicação foi inspirada
no trabalho de D. Rolfsen ([29]) relacionado com os grupos comensuradores de grupos
de tranças clássicos.
vii
-
Caṕıtulo 1
Preliminares
Neste caṕıtulo estabeleceremos alguns conceitos básicos na teoria de tranças, bem como
outros resultados algébricos necessários para o bom desenvolvimento deste trabalho.
Para uma leitura inicial desta teoria recomendamos [24, 26], livros que involvem as-
pectos geométricos e algébricos, usando pontos de vista diferentes.
1.1 Grupos de tranças de superf́ıcies e espaços de
configuração
Seja M uma variedade topológica e escolhamos {P1, P2, ..., Pm}, m pontos distintos
em M . Por todo este trabalho convencionaremos que os pontos escolhidos sempre
pertencem ao interior de M . Uma trança com m cordas sobre M , baseada em
(P1, P2, ..., Pm), é uma m-upla b = (b1, b2, ..., bm) de caminhos, bi : [0, 1] −→ M , tais
que
1) bi(0) = Pi e bi(1) ∈ {P1, ..., Pm}, para todo i ∈ {1, ..., m},
2) bi(t) 6= bj(t), para todos i, j ∈ {1, ..., m} i 6= j, e para todo t ∈ [0, 1].
Daremos, a seguir, uma outra definição de trança sobre uma superf́ıcie M em ter-
mos de uma coleção de cordas sobre o produto M × [0, 1]. Como antes, escolhamos
{P1, P2, ..., Pm}, m pontos distintos em M , e denotemos, para i = 1, 2, . . . , n, Pi × {0}
1
-
1.1 Grupos de tranças de superf́ıcies e espaços de configuração 2
sobre M × {0} por Ai e Pi × {1} sobre M × {1} por Bi. Agora, juntemos n cordas
entre os pontos {A1, . . . , Am} e {B1, . . . , Bm} em M × [0, 1], mas com a condição que
para qualquer superf́ıcie de ńıvel dada M ×{t}, com 0 ≤ t ≤ 1, existam exatamente m
pontos de interseção. Esta configuração de m cordas é chamada uma m-trança em M .
Proposição 1.1. As duas definições de tranças dadas são equivalentes.
Demonstração: Sejam M uma superf́ıcie e escolhamos m pontos distintos em M ,
digamos {P1, P2, ..., Pm}. Seja b = (b1, b2, ..., bm) uma trança com m cordas, então
bi : [0, 1] −→ M é um caminho em M , para todo i ∈ {1, . . . , m}. Cada caminho bi,
para i ∈ {1, . . . , m}, pode ser visto como uma corda em M × [0, 1] que começa em
Pi × {0} e termina em bi(1) × {1}, parametrizando pela altura, assim:
di(t) = (bi(t), t), para todo t ∈ [0, 1].
Temos assim uma coleção {d1, . . . , dm}, formada por m cordas em M × [0, 1], entre
os pontos {(P1, 0), (P2, 0), ..., (Pm, 0)} e os pontos {(b1(1), 1), (b2(1), 1), ..., (bm(1), 1)}.
Pela Condição 2) temos que bi(t) 6= bj(t), para todo i, j ∈ {1, . . . , m} e para todo
t ∈ [0, 1], portanto para qualquer superf́ıcie de ńıvel dada M × {t}, com 0 ≤ t ≤ 1,
existem somente m pontos de interseção. Logo, tal configuração de cordas é uma
m-trança sobre M .
Reciprocamente, dada uma m-trança sobre M , pela definição em termos de uma
coleção de cordas sobre o produto M × [0, 1], é claro que se projetarmos M × [0, 1]
sobre M × {0}, a coleção de cordas define uma coleção de caminhos satisfazendo as
condições 1) e 2) descritas na definição inicial.
Dada umam-trança sobreM baseada em (P1, P2, ..., Pm), digamos b = (b1, b2, ..., bm),
podemos associar uma permutação de {P1, P2, ..., Pm}, que chamaremos de permutação
de tranças associada a b, assim: Pi 7→ bi(1), para todo i ∈ {1, . . . , m}. Tal aplicação é
de fato uma permutação pois bi(1) 6= bj(1), para todo i, j ∈ {1, . . . , m} em virtude da
Condição 2) estabelecida na definição de tranças.
-
1.1 Grupos de tranças de superf́ıcies e espaços de configuração 3
Existe uma noção natural de homotopia de tranças. Diremos que duas tranças com
m cordas sobre M , digamos a = (a1, . . . , am), b = (b1, . . . , bm), e mesma permutação τ
são homotópicas se existirem m aplicações continuas
Fi : [0, 1] × [0, 1] −→ M, 1 ≤ i ≤ m, tais que,
• para todo 0 ≤ t ≤ 1 e para todo 1 ≤ i ≤ m tem-se que Fi(t, 0) = ai(t) e
Fi(t, 1) = bi(t),
• para todo 0 ≤ s ≤ 1 e para todo 1 ≤ i ≤ m tem-se que Fi(0, s) = Pi e Fi(1, s) =
ai(1) = bi(1),
e tais que se definimos csi : [0, 1] −→ M por csi (t) = Fi(t, s), então c
s = {cs1, . . . , csm} é
uma trança (com permutação τ) para cada 0 ≤ s ≤ 1.
Homotopia de tranças é uma relação de equivalência, o grupo de tranças com m
cordas sobre M (com ponto base (P1, . . . , Pm)) é o grupo
BmM = BmM(P1, . . . , Pm)
de classes de homotopia de tranças baseadas em (P1, . . . , Pm). A operação de grupo
é a concatenação de tranças, generalizando a construção do grupo fundamental. De
fato, para m = 1 temos claramente
B1(M)(P1) = π1(M,P1).
Para m > 1 é útil considerar a classe de tranças puras, que tem a propriedade
bi(1) = Pi. Estas formam um subgrupo de BmM que denotaremos por
PBmM = PBmM(P1, . . . , Pm)
e o chamaremos o grupo de tranças puras com m cordas sobre M (com ponto base
(P1, . . . , Pm)).
Seja Σm o grupo de permutações de {P1, . . . , Pm}. Existe um epimorfismo natural
σ : BmM −→ Σm; seu núcleo é o grupo de tranças puras, portanto temos uma sequência
exata
1 // PBmM // BmMσ
// Σm // 1.
-
1.1 Grupos de tranças de superf́ıcies e espaços de configuração 4
Observemos que, se M é uma variedade conexa de dimensão pelo menos dois,
então BmM e PBmM não dependem (a menos de isomorfismo) da escolha dos pontos
P1, . . . , Pm. Uma m-trança naturalmente dá lugar a m caminhos diferentes em M sob a
aplicação b 7→ (b1, . . . , bm). No caso das tranças puras tais caminhos são laços, portanto
existe um homomorfismo natural
θ : PBmM −→ π1(M,P1) × · · · × π1(M,Pm) ∼= π1(Mm, (P1, . . . , Pm)),
onde Mm denota o produto cartesiano de M , m vezes.
A seguinte proposição é provada em [5].
Proposição 1.2. Se M é uma variedade conexa com dim(M) > 2, a aplicação θ é um
isomorfismo. Para dim(M) = 2, θ é sobrejetora.
Tal prova usa a noção de espaços de configuração para descrever grupos de tranças
(ver [12, 15, 24].) Denotemos por FmM o espaço de configuração de pontos ordenados
de M , em outras palavras, FmM = (Mm \ V ), onde V é a grande diagonal, formada
pelas m-uplas x = (x1, . . . , xm) tais que xi = xj , para algum i 6= j. Se M é uma
superf́ıcie temos que FmM é uma variedade de dimensão 2m. Da própria definição de
FmM temos claramente um isomorfismo
PBmM ∼= π1(FmM).
Por causa da Proposição 1.2, a teoria de tranças (como feita aqui) é de pouco
interesse para dimensão ≥ 3 e concentraremos nossa atenção sobre dimensão dois, isto
é, grupos de tranças de superf́ıcies.
No restante deste trabalho, M denotará uma superf́ıcie conexa, podendo ser
com bordo, assim como não orientável. Para evitar patologias assumiremos
que M é compacta, ou pelo menos que é uma variedade compacta “perfu-
rada”, ou seja, M é homeomorfa a uma 2-variedade compacta, eventualmente com um
conjunto finito de pontos removidos do interior de M .
Existe uma ação natural de Σm sobre FmM , que permuta as coordenadas. Esta
ação é livre e portanto FmM é um revestimento de FmM/Σm. Denotaremos o espaço
-
1.1 Grupos de tranças de superf́ıcies e espaços de configuração 5
de órbitas, chamado de espaço de configuração de pontos não ordenados (ou espaço de
m-uplas não ordenadas), por
F̂mM = FmM/Σm.
Podemos ver o grupo de tranças completo como o grupo fundamental
BmM ∼= π1(F̂mM).
A inclusão PBmM ⊆ BmM pode ser interpretada como a aplicação induzida pela
aplicação de revestimento FmM −→ F̂mM , que tem fibra Σm. Fox e Neuwirth perce-
beram que BmD2, o grupo de m-tranças do disco D2, coincide com o grupo de tranças
de Artin.
Uma das ferramentas mais usadas quando se estudam grupos de tranças é a fibração
de Fadell-Neuwirth e suas generalizações, ver por exemplo [12, 19, 24]. Como observado
em [12], se M é uma variedade e 1 ≤ n < m, a aplicação ρ : FmM −→ FnM definida
por
ρ(x1, . . . , xm) = (x1, . . . , xn)
é uma fibração (localmente trivial) com fibra
Fm−n(M \ {P1, . . . , Pn}).
Dáı temos uma sequência longa exata de grupos de homotopia destes espaços.
A superf́ıcie perfurada M \{P1, . . . , Pm−1} (m ≥ 2) tem o mesmo tipo de homotopia
de um complexo 1-dimensional. Mostraremos que isto é verdade:
πk(FmM) ∼= πk(Fm−1M) ∼= · · · ∼= πk(M), k ≥ 3,
e π2(FmM) ⊆ π2(Fm−1M) ⊆ · · · ⊆ π2(M).
De fato, a sequência longa exata em homotopia associada com a fibração de Fadell-
Neuwirth para n = m− 1 tem a forma
· · · −→ πk+1(Fm−1M) −→ πk(M \ {P1, . . . , Pm−1}) −→ πk(FmM)
-
1.1 Grupos de tranças de superf́ıcies e espaços de configuração 6
−→ πk(Fm−1M) −→ πk−1(M \ {P1, . . . , Pm−1}) −→ · · ·
Se k = 2, temos um monomorfismo π2(FmM) −→ π2(Fm−1M). Se k > 2, temos um
isomorfismo πk(FmM) −→ πk(Fm−1M). Daqui segue o resultado desejado.
Como casos excepcionais na teoria geral temos a esfera S2 e o plano projetivo P 2,
já que estas são as únicas superf́ıcies que existem com grupos de homotopia não triviais
para ńıveis altos.
Proposição 1.3. Suponha que M é uma superf́ıcie conexa, M 6= S2, P 2 e k ≥ 2.
Então, πk(FmM) e πk(F̂mM) são grupos triviais.
Demonstração: Como FmM −→ F̂mM é uma aplicação de revestimento é suficiente
provar a proposição para FmM . Mas isto segue pelas observações feitas acima, já que
πk(M) = {1} para k ≥ 2.
Juntando isto com a fibração de Fadell-Neuwirth obtemos a seguinte, que chama-
remos de sequência exata de tranças puras:
Proposição 1.4. Suponha que M é uma superf́ıcie conexa, M 6= S2, P 2, e 1 ≤ n < m.
Existe uma sequência exata
1 // PBm−n(M \ {P1, . . . , Pn}) // PBmMρ∗
// PBnM // 1 .
Demonstração: Segue imediatamente da sequência longa exata de grupos de homo-
topia associada com a fibração de Fadell-Neuwirth.
Observação 1.5. 1. No caso da superf́ıcie S2 a sequência exata da Proposição 1.4
é também válida se n ≥ 3, e para a superf́ıcie P 2 é válida se n ≥ 2.
2. A aplicação ρ∗ da Proposição 1.4 pode ser vista como a induzida por uma aplicação
geométrica que esquece as últimas m− n cordas da trança.
3. É provado em [18] que a sequência exata de tranças puras, para M superf́ıcie
compacta, orientável, conexa e de genus maior ou igual a dois cinde se, e somente
-
1.2 Torção 7
se, n = 1. No caso em que M = P 2, em [19], é provado que tal sequência não
cinde se n ≥ 3. Além disso, se n ≥ 3 é provado que Fm(P2) −→ Fn(P
2) não
admite seção.
Sejam Σn o grupo de permutações de {P1, . . . , Pn} e Σm−n o grupo de permutações
de {Pn+1, . . . , Pm}. A aplicação de Fadell-Neuwirth proporciona uma fibração (local-
mente trivial)
ρ̂ : FmM/(Σn × Σm−n) −→ FnM/Σn = F̂nM,
com fibra (Fm−nM \ {P1, . . . , Pn})/Σm−n = F̂m−nM \ {P1, . . . , Pn}. Portanto:
Proposição 1.6. Suponha que M é uma superf́ıcie conexa, M 6= S2, P 2 e 1 ≤ n < m.
Existe uma sequência exata
1 // Bm−n(M \ {P1, . . . , Pn}) // σ−1(Σn × Σm−n) // BnM // 1 .
Observamos que Σn×Σm−n se identifica a um subgrupo de Σm, e que σ−1(Σn×Σm−n)
se denota por Bn,m−n(M).
1.2 Torção
Exceto para M = S2, P 2, o espaço de configuração F̂m(M) é um espaço de Eilenberg-
MacLane, ou seja, um espaço do tipo K(π, 1) com π = Bm(M) e portanto é um espaço
classificante para Bm(M). Usando a Proposição 2.2 e o Corolário 2.5 do Caṕıtulo
VIII de [7], temos que para um grupo com elementos de ordem finita o seu espaço
classificante é um complexo de dimensão infinita. Como F̂m(M) tem dimensão finita,
então temos a seguinte,
Proposição 1.7. Se M é uma superf́ıcie conexa, M 6= S2, P 2, então seus grupos de
tranças Bm(M) não tem elementos de ordem finita.
Os grupos de tranças de S2 e P 2 tem torção (com a exceção do grupo trivial B1(S2)).
Faremos uma rápida revisão disso seguindo [13, 33]. Para S2 tomemos todos os pontos
-
1.2 Torção 8
base num disco D2 ⊆ S2 e sejam σ1, . . . , σm−1 os geradores de trança padrão para
Bm(D2). Eles geram as relações de tranças clássicas
(∗)
σiσj = σjσi, |i− j| ≥ 2;
σiσi+1σi = σi+1σiσi+1, 1 ≤ i ≤ m− 2.
Os mesmos σi podem ser tomados como geradores de Bm(S2), eles ainda satisfa-
zem as relações (∗). A palavra σ1σ2 · · ·σm−1σm−1 · · ·σ2σ1 pode ser vista como uma
trança (pura) na qual P1 circula ao redor dos pontos P2, . . . , Pm, enquanto esses pontos
permanecem fixos. Esta trança é homotópica à trança identidade, portanto temos a
relação adicional
σ1σ2 · · ·σm−1σm−1 · · ·σ2σ1 = 1.
É mostrado em [13] que esta relação junto com (∗) são relações que definem Bm(S2).
O elemento τ = σ1σ2 · · ·σm−1 tem ordem 2m em Bm(S2), ver [13, 26].
Para o plano projetivo tomemos os σi como acima, correspondentes ao disco com os
pontos base no interior, e seja ρj uma trança na qual o ponto base Pj percorre um laço
não trivial em P 2 enquanto os outros pontos base permanecem fixos. Em [33], tem-se
uma descrição precisa e uma prova que Bm(P2) é apresentado pelos 2m− 1 geradores
σ1, . . . , σm−1, ρ1, . . . , ρm e relações (∗) junto com
σiρj = ρjσi, j 6= i, i+ 1,
ρi = σiρi+1σi,
σ2i = ρ−1i+1ρ
−1i ρi+1ρi,
ρ21 = σ1σ2 · · ·σm−1σm−1 · · ·σ2σ1.
O elemento τ como definido acima, mas considerado como um elemento de Bm(P2),
de novo tem ordem 2m, além disso tal elemento gera o centro de Bm(P2), ver [33].
Temos assim o teorema de Van Buskirk, que para cada m ≥ 2, o grupo de tranças de
superf́ıcie BmM tem elementos de ordem finita se, e somente se, M = S2 ou P 2.
Além disso é provado que os unicos grupos de tranças finitos são B1(P2), B2(P
2),
B2(S2), B3(S
2) e claramente B1(S2) que é trivial. De fato:
-
1.3 O subgrupo comensurador 9
• B2(S2) é isomorfo a Z2,
• B3(S2) tem ordem 12, é isomorfo ao produto semi-direto Z3 ⋊ Z4, onde a ação é
a não trivial,
• B1(P2) é isomorfo a Z2,
• B2(P2) é grupo de ordem 16, isomorfo ao grupo dos quaternios generalizados
Q16 e cujo subgrupo de tranças puras é isomorfo com o grupo dos quatêrnios
{±1,±i,±j,±k}.
Logo, para m ≥ 3 temos que Bm(P2) e Bm+1(S
2) são grupos infinitos.
1.3 O subgrupo comensurador
Vamos enunciar, sem prova, algumas propriedades básicas que envolvem ı́ndices de
um subgrupo. A seguinte definição, assim como as propriedades enunciadas a seguir
sem prova, são encontradas em [28]. Sejam G um grupo e H um subgrupo de G.
Escolhamos um elemento de cada classe lateral à esquerda de H , e denotemos por T o
conjunto resultante de representantes de classes laterais à esquerda. Então, G é união
disjunta
G =⋃
t∈T
tH
e todo elemento de G pode ser unicamente escrito na forma th, com t ∈ T, h ∈ H . O
conjunto T é chamado uma transversal à esquerda de H em G. Notemos que |T | é igual
à cardinalidade do conjunto de classes laterais à esquerda de H . As vezes é conveniente
escolher 1, o elemento neutro, como representante da classe lateral à esquerda de H ,
de modo que 1 ∈ T .
Proposição 1.8. Sejam K ≤ H ≤ G. Se T é uma transversal à esquerda de H em G
e U é uma transversal à esquerda de K em H, então TU é uma transversal à esquerda
de K em G. Assim,
[G : K] = [G : H ] · [H : K].
-
1.3 O subgrupo comensurador 10
Especializando ao caso K = {1}, obtemos o famoso Teorema de Lagrange.
Teorema 1.9. Se G é um grupo e H é um subgrupo de G, então |G| = [G : H ] · |H| .
Se G é finito, então [G : H ] = |G| / |H| . Portanto, a ordem de um subgrupo sempre
divide a ordem do grupo se o último é finito.
Proposição 1.10. Sejam H e K subgrupos de um grupo G.
(i) |HK| · |H ∩K| = |H| · |K|, portanto [H : H ∩ K] = |HK| / |K| se H e K são
finitos.
(ii) [G : H ∩K] ≤ [G : H ] · [G : K], com igualdade se os ı́ndices [G : H ] e [G : K] são
finitos e coprimos.
Como consequência da Proposição 1.10 (ii) temos a seguinte proposição.
Proposição 1.11. A interseção de um conjunto finito de subgrupos, cada um deles de
ı́ndice finito, é por sua vez de ı́ndice finito.
Proposição 1.12. Se G é um grupo ćıclico infinito e {1} 6= H ≤ G, então [G : H ] é
finito.
Sejam G um grupo e H um subgrupo de G. O conjunto formado pelos elementos
g ∈ G tais que gHg−1 ∩H tem ı́ndice finito em gHg−1 e em H , é um subgrupo de G
chamado o subgrupo comensurador de H em G, que denotaremos por CG(H).
Claramente, se H é um subgrupo de ordem finita em G, ou H é normal em G, ou
se G é abeliano, então CG(H) = G. Dáı segue que se H = Z(G), o centro de G, ou se
H = [G,G], o subgrupo comutador de G, então temos, nesses casos, que CG(H) = G.
Em particular temos que ZG(Z(G)) = NG(Z(G)) = CG(Z(G)) = G.
Denotemos por ZG(H), e NG(H) o centralizador de H em G, e o normalizador de
H em G, respectivamente. Seja g ∈ ZG(H), então gh = hg para todo h ∈ H , dáı,
ghg−1 = h para todo h ∈ H e portanto g ∈ NG(H). Tomemos agora f ∈ NG(H),
então fHf−1 = H , e portanto fHf−1 ∩H = H que obviamente tem ı́ndice finito em
H e em fHf−1. Logo, f ∈ CG(H). Provamos assim a seguinte
-
1.3 O subgrupo comensurador 11
Proposição 1.13.
ZG(H) ⊆ NG(H) ⊆ CG(H).
Proposição 1.14. Sejam G um grupo e H,F subgrupos de G tais que F ≤ H. Se F
tem ı́ndice finito em H, então
CG(H) = CG(F ).
Demonstração: Seja g ∈ CG(F ), portanto F1 = gFg−1 ∩ F tem ı́ndice finito em
F e em gFg−1. Seja H1 = gHg−1 ∩ H , provemos que H1 tem ı́ndice finito em H e
em gHg−1. Pela Proposição 1.11 temos que [H : F1] é finito. Temos também que
[H : H1][H1 : F1] = [H : F1], donde segue que [H : H1] é finito. De forma similar
prova-se que [gHg−1 : H1] é finito. Portanto, g ∈ CG(H).
A outra inclusão prova-se em forma completamente análoga.
Vamos relacionar, a seguir, sequência exata de grupos com certos subgrupos co-
mensuradores.
Teorema 1.15. Consideremos uma sequência exata
1 // G1 // G2φ
// G3 // 1 .
Suponhamos que G1 ≤ G2 e sejam H2 ⊆ G2 um subgrupo, H3 = φ(H2), e H1 = H2∩G1.
Então,
φ(CG2(H2)) ⊆ CG3(H3),
CG2(H2) ∩G1 ⊆ CG1(H1).
Demonstração: Seja g ∈ CG2(H2). Escrevemos
F2 = H2 ∩ gH2g−1.
Sejam h1, . . . , hk ∈ H2 tais que
H2 = F2 ∪ h1F2 ∪ · · · ∪ hkF2.
-
1.3 O subgrupo comensurador 12
Então,
φ(H2) = H3 = φ(F2) ∪ φ(h1)φ(F2) ∪ · · · ∪ φ(hk)φ(F2).
Portanto, φ(F2) tem ı́ndice finito em H3. Ainda mais,
φ(F2) = φ(H2 ∩ gH2g−1) ⊆ φ(H2) ∩ φ(gH2g
−1) = H3 ∩ φ(g)H3φ(g)−1,
assim H3 ∩ φ(g)H3φ(g)−1 tem ı́ndice finito em H3. Similarmente, H3 ∩ φ(g)H3φ(g)
−1
tem ı́ndice finito em φ(g)H3φ(g)−1. Portanto, φ(g) ∈ CG3(H3).
Seja g ∈ CG2(H2) ∩H1. Escrevemos
F2 = H2 ∩ gH2g−1.
Sejam h1, . . . , hk ∈ H2 tais que
H2 = F2 ∪ h1F2 ∪ · · · ∪ hkF2.
Assumimos que
hiF2 ∩H1 6= ∅, para i = 1, . . . , l,
hiF2 ∩H1 = ∅, para i = l + 1, . . . , k.
Podemos assumir também que hi ∈ H1, para i = 1, . . . , l. Então,
H1 = (F2 ∩H1) ∪ h1(F2 ∩H1) ∪ · · · ∪ hl(F2 ∩H1).
Ainda mais,
F2 ∩H1 = H2 ∩ gH2g−1 ∩H1 = H1 ∩ gH1g
−1.
Assim, H1 ∩ gH1g−1 tem ı́ndice finito em H1. Similarmente, H1 ∩ gH1g
−1 tem ı́ndice
finito em gH1g−1. Portanto, g ∈ CG1(H1).
-
Caṕıtulo 2
Resultados básicos
Neste caṕıtulo mostraremos primeiro que o centro do grupo de tranças de uma grande
famı́lia de superf́ıcies compactas é trivial. Em segundo lugar, seja M uma superf́ıcie e
N o fecho de um subconjunto aberto de M , estabeleceremos condições sobre as quais
o morfismo induzido ψ : BnN −→ BmM é injetor ou sobrejetor. No caso em que tal
morfismo ψ é injetor podemos pensar que BnN é subgrupo de BmM , tais subgrupos
são conhecidos como subgrupos geométricos de BmM . Finalmente, descreveremos o
centro dos grupos de tranças do cilindro e do toro.
2.1 Centros e superf́ıcies grandes
O centro Z(G) de um grupo G é o subgrupo de elementos que comutam com todos
os elementos do grupo. Chow ([10]) provou que os grupos Bm = Bm(D2) tem centro
ćıclico infinito, para m ≥ 2, cujo gerador é o elemento τ = σ1σ2 · · ·σm−1. Alguns
outros grupos de tranças de superf́ıcie também têm centros não triviais: aqueles de
S2 (ver [16]), P 2 (ver [33]), assim como do toro, da garrafa de Klein e do anel. Se
τ = σ1σ2 · · ·σm−1, então o elemento τm é central em Bm(S
2), ver [16].
Seja M uma superf́ıcie Riemanniana conexa, não compacta e contável, ou seja, M
pode ser expressa como uma união
13
-
2.1 Centros e superf́ıcies grandes 14
M =⋃∞n=0Mn, Mn ⊆ IntMn+1,
onde cada Mn é um domı́nio compacto e uma subvariedade de M , com bordo não vazio.
Chamaremos M de superf́ıcie aberta. Por outra lado, diremos que uma superf́ıcie é
abeliana se seu grupo fundamental é abeliano, e respectivamente, uma superf́ıcie será
não abeliana se seu grupo fundamental é não abeliano. As definições anteriores são
encontradas em [23].
Notemos que a fronteira de uma superf́ıcie aberta M é vazia. Uma classificação das
superf́ıcies abelianas é dada em [23, Teorema 4.3]:
Propriedades 2.1. Seja M uma superf́ıcie abeliana, temos que
a) se M é compacta e ∂M = φ, então M é uma esfera, toro, ou plano projetivo real;
b) se M é compacta e ∂M 6= φ, então M é uma faixa de Möbius ou um anel;
c) se M é aberta, então M é uma faixa de Möbius sem bordo ou um anel sem bordo.
Definição 2.2. Uma superf́ıcie compactaM será chamada grande se M 6= S2, P 2, D2, T 2,
S1 × I, faixa de Möbius, ou garrafa de Klein.
A seguinte proposição oferece uma caracterização de tais superf́ıcies que permite
um tratamento algébrico.
Proposição 2.3. Sejam M uma superf́ıcie compacta e q ∈ M . M é grande se, e
somente se, seu grupo fundamental π1(M, q) não tem subgrupo abeliano de ı́ndice finito.
Demonstração: Suponhamos que M é uma superf́ıcie compacta grande, vamos su-
por também que existe G subgrupo abeliano de π1(M, q) de ı́ndice finito. Dáı existe
p : MG −→ M espaço de revestimento de M , com q̃ ∈MG, p(q̃) = q e tal que π1(MG, q̃)
é isomorfo a G. Como M é compacta e [π1(M, q) : G] é finito, então MG é compacta
com π1(MG, q̃) abeliano, e portanto deve ser uma das seguintes superf́ıcies abelianas
S2, P 2, T 2, D2, S1 × I, ou a faixa de Möbius.
Já que M é um complexo simplicial compacto e [π1(M, q) : G] = k é finito, então
vale a seguinte equação, envolvendo a caracteŕıstica de Euler da superf́ıcie e o ı́ndice
k (k ≥ 1 em Z),
-
2.1 Centros e superf́ıcies grandes 15
χ(MG) = k · χ(M).
Se MG = S2, então χ(MG) = 2 e como consequência ou χ(M) = 1 e k = 2, ou
χ(M) = 2 e k = 1. No primeiro caso teremos que M pode ser o disco ou o plano
projetivo, e no segundo caso teremos que M é a esfera.
Se MG = P2, D2, então χ(MG) = 1 e como consequência χ(M) = 1 = k. Logo,
M é o plano projetivo P 2 ou o disco D2, pois M é compacta, com grupo fundamental
abeliano e com χ(M) = 1.
Se MG = T2, S1 × I, ou a faixa de Möbius, então χ(MG) = 0 e como consequência
χ(M) = 0 ou [π1(M, q) : G] = 0, mas este último caso não pode acontecer pois o ı́ndice
é um inteiro maior ou igual a 1. Logo, M deve ser uma das seguintes superf́ıcies
T 2, S1 × I, faixa de Möbius, ou garrafa de Klein.
Em qualquer caso teremos que M não é superf́ıcie compacta grande o que é um
absurdo. Logo, π1(M, q) não tem subgrupo abeliano de ı́ndice finito.
Reciprocamente, suponhamos que π1(M, q) não tem subgrupo abeliano de ı́ndice
finito. Portanto, M não pode ser superf́ıcie abeliana, basta então mostrar que a garrafa
de Klein K tem subgrupo abeliano de ı́ndice finito. Consideremos o grupo fundamental
da garrafa de Klein π1(K, q) dado pela seguinte apresentação
π1(K, q) =< a, b : abab−1 = 1 >,
e consideremos o subgrupo de π1(K, q) gerado por {a, b2}. Sabemos que para os gera-
dores de π1(K, q) vale que
bsar = a(−1)srbs, com s, r ∈ Z.
Usando esta igualdade mostra-se que o subgrupo, gerado por {a, b2}, do grupo funda-
mental da garrafa de Klein é normal e abeliano. Além disso, esse subgrupo é de ı́ndice
2 em π1(K, q).
Como consequência M 6= S2, P 2, D2, T 2, S1 × I, faixa de Möbius, ou garrafa de
Klein.
-
2.2 Subsuperf́ıcies 16
São poucas as superf́ıcies compactas cujo grupo de tranças tem centro não trivial,
como mostra a seguinte proposição
Proposição 2.4. Seja M uma superf́ıcie compacta grande. Então, o centro Z(Bm(M))
é um grupo trivial.
Demonstração: (Igual à prova dada em ([6])) Primeiro, provemos por indução sobre
m que Z(PBm(M)) = {1}. O caso m = 1: por [23, Teorema 4.4], temos que as únicas
superf́ıcies cujos grupos fundamentais têm centros não triviais são P 2, S1 × I, T 2, a
faixa de Möbius, e a garrafa de Klein.
Sejam m > 1 e M superf́ıcie compacta grande. Consideremos a seguinte sequência
exata,
1 // π1(M \ {P1, . . . , Pm−1}) // PBmMρ∗
// PBm−1M // 1 .
Como ρ∗ é sobrejetora, leva o centro de PBm(M) no centro de PBm−1(M), e por
indução, Z(PBm−1(M)) = {1}. Como a sequência acima é exata e Z(PBm(M)) está
contido no núcleo de ρ∗, então Z(PBm(M)) ≤ π1(M \ {P1, ..., Pm−1}), ainda mais
Z(PBm(M)) ≤ Z(π1(M \ {P1, ..., Pm−1})). Mas este último grupo tem centro trivial,
logo Z(PBm(M)) = {1}.
Agora, seja g ∈ Z(Bm(M)). Existe um inteiro k > 0 tal que gk ∈ PBm(M). Então,
gk ∈ Z(PBm(M)), e assim gk = 1. Pela Proposição 1.7, g = 1.
2.2 Subsuperf́ıcies
Uma subsuperf́ıcie N de uma superf́ıcie M é o fecho de um subconjunto aberto de
M . Por simplicidade assumiremos que toda componente da fronteira de N é uma
componente da fronteira de M ou pertence ao interior de M .
Seja P1 ∈ N . A inclusão N ⊆M induz um homomorfismo
ψ : π1(N,P1) −→ π1(M,P1).
O seguinte resultado envolvendo este homomorfismo é encontrado em [27].
-
2.2 Subsuperf́ıcies 17
Proposição 2.5. Seja N uma subsuperf́ıcie conexa de M tal que π1(N,P1) 6= {1}. O
homomorfismo ψ : π1(N,P1) −→ π1(M,P1) é injetor se, e somente se, nenhuma das
componentes conexas do fecho M \N de M \N é um disco.
Sejam P1, . . . , Pn ∈ N , e sejam Pn+1, . . . , Pm ∈ M \ N . A inclusão N ⊆ M induz
um morfismo
ψ : BnN −→ BmM,
que geometricamente coloca m− n cordas verticais a mais nos pontos Pn+1, . . . Pm.
Proposição 2.6. Seja M 6= S2, P 2, e seja N tal que nenhuma das componentes
conexas de M \N é um disco. Então, o morfismo ψ : BnN −→ BmM é injetor.
Observação 2.7. A Proposição anterior é provada em [17], no caso particular em que
N é um disco.
Demonstração: Seja ψ̃n : PBnN −→ PBnM o morfismo induzido pela inclusão
N ⊆ M . Provaremos que ψ̃n é injetora por indução sobre n. O caso n = 1 é
uma consequência da Proposição 2.5, pois ψ̃1 : PB1N −→ PB1M é exatamente
ψ̃1 : π1(N, p) −→ π1(M, p), para p ∈ N , que é um monomorfismo.
Seja n > 1. Pela Proposição 2.5, a inclusão N \{P1, . . . , Pn−1} ⊆M \{P1, . . . , Pn−1}
induz um monomorfismo
α : π1(N \ {P1, . . . , Pn−1}) −→ π1(M \ {P1, . . . , Pn−1}).
O seguinte diagrama é comutativo:
1 // π1(N \ {P1, . . . , Pn−1}) //
α
��
PBnNρ
//
ψ̃n��
PBn−1N //
ψ̃n−1��
1
1 // π1(M \ {P1, . . . , Pn−1}) // PBnMρ
// PBn−1M // 1.
Por indução, ψ̃n−1 é injetora. Pelo lema dos cinco, ψ̃n é injetora também. Seja
ψ̃ : PBnN −→ PBmM o morfismo induzido pela inclusão N ⊆ M . O seguinte
-
2.2 Subsuperf́ıcies 18
diagrama é comutativo:
PBnNψ̃
//
id
PBmM
ρ
��
PBnNψ̃n
// PBnM.
O morfismo ψ̃n é injetor, assim ψ̃ é injetora também. Seja ι : Σn −→ Σm a inclusão,
ι identifica Σn ao primeiro fator do subgrupo Σn ×Σm−n de Σm. O seguinte diagrama
comuta,
1 // PBnN //
ψ̃��
BnNσ
//
ψ��
Σn //
ι
��
1
1 // PBmM // BmM // Σm // 1.
Tanto ψ̃ como ι são injetoras, portanto, pelo lema dos cinco, ψ é injetora.
As seguintes duas proposições são encontradas em [4].
Proposição 2.8. Seja M uma superf́ıcie compacta, conexa, orientável de genus maior
ou igual a 1, possivelmente com fronteira, e seja N uma subsuperf́ıcie conexa de M .
O homomorfismo ψ : π1(N,P1) −→ π1(M,P1) é sobrejetor se, e somente se, todas as
componentes conexas do fecho M \N de M \N são discos.
Proposição 2.9. Seja M uma superf́ıcie compacta, conexa, orientável de genus maior
ou igual a 1 possivelmente com fronteira, e seja N uma subsuperf́ıcie conexa de M
tal que todas as componentes conexas de M \N são discos. Então, o morfismo ψ :
BnN −→ BnM é sobrejetor.
Sejam N1, . . . , Nr as componentes conexas de M \N . Para i = 1, . . . , r escrevemos
Pi = {Pn+1, . . . , Pm} ∩Ni.
Teorema 2.10. Seja M 6= S2, P 2. O morfismo ψ : BnN −→ BmM é injetor se, e
somente se, para todo i = 1, . . . , r, Ni não é um disco ou Pi 6= ∅.
-
2.3 Centros dos grupos de tranças do cilindro e do toro 19
Demonstração: Suponhamos que existe i ∈ {1, . . . , r} tal que Ni é um disco e tal
que Pi = ∅. Consideremos o seguinte diagrama comutativo:
π1(N \ {P2, . . . , Pn}) //
ψ��
BnN
ψ
��
π1(M \ {P2, . . . , Pm}) // BmM.
Por [12], o morfismo π1(N \ {P2, . . . , Pn}) −→ BnN é injetor. Por outra parte,
M \ (N ∪ {Pn+1, . . . , Pm}) = (M \ {P2, . . . , Pm}) \ (N \ {P2, . . . , Pn}) e como Pi = ∅,
então o fecho da diferença de conjuntos tem pelo menos uma componente conexa que
é um disco, a saber Ni, e portanto o morfismo
ψ : π1(N \ {P2, . . . , Pn}) −→ π1(M \ {P2, . . . , Pm})
é não injetor. Logo, ψ : BnN −→ BmM não é injetora.
Suponhamos agora que Ni não é um disco ou Pi 6= ∅, para todo i = 1, . . . , r.
Consideremos o seguinte diagrama comutativo:
BnNψ
// Bn(M \ {Pn+1, . . . , Pm})
��
BnN // BmM.
Pela Proposição 2.6, o morfismo ψ : BnN −→ Bn(M \ {Pn+1, . . . , Pm}) é injetor.
Por [12], o morfismo Bn(M \{Pn+1, . . . , Pm}) −→ BmM é injetor. Assim, ψ : BnN −→
BmM é injetor.
2.3 Centros dos grupos de tranças do cilindro e do
toro
Inicialmente, seja C um cilindro, descreveremos o centro de BmC. Assumiremos que
C = {z ∈ C | 1 ≤ |z| ≤ 2}, e que Pi = 1 +i
m+ 1
-
2.3 Centros dos grupos de tranças do cilindro e do toro 20
para i = 1, . . . , m. Seja di : [0, 1] −→ C o caminho definido por
di(t) =
(1 +
i
m+ 1
)e2πit, para t ∈ [0, 1].
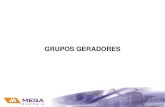
Seja α o elemento de PBmC representado por d = (d1, . . . , dm) (ver Figura 2.1).
Figura 2.1:
Proposição 2.11. Com as condições acima, o centro de BmC é o subgrupo ćıclico
infinito gerado por α.
Demonstração: Sejam D = {z ∈ C | |z| ≤ 2} e P0 = 0. A inclusão C ⊆
D \ {P0} induz um isomorfismo BmC −→ Bm(D \ {P0}). Identificaremos esses dois
grupos de tranças através deste isomorfismo. Seja Σm+1 o grupo de permutaçoẽs de
{P0, P1, . . . , Pm}, e seja Σm o grupo de permutações de {P1, . . . , Pm}.
Consideremos o morfismo σ : Bm+1D −→ Σm+1. Pela Proposição 1.6 temos a
seguinte sequência exata:
1 // Bm(D \ {P0}) // σ−1(Σm) // π1(D,P0) // 1.
Ainda mais, π1(D,P0) = {1}. Assim, a inclusão D \ {P0} ⊆ D induz um isomorfismo
Bm(D \ {P0}) −→ σ−1(Σm). A imagem de α por este isomorfismo é o elemento de
-
2.3 Centros dos grupos de tranças do cilindro e do toro 21
Bm+1D, denotado por α̃, representado pela trança b̃ = (P0, d1, . . . , dm). Por [10], temos
que
Z(Bm+1D) = Z(PBm+1D),
e este grupo é o subgrupo ćıclico infinito gerado por α̃.
Para m ≥ 1 temos que o centro de σ−1(Σm) está contido no centro de PBm+1D.
De fato, a aplicação σ−1(Σm) −→ Bm+1D, como na Proposição 1.6, é um epimorfismo.
Logo, Z(σ−1(Σm)) ≤ Z(Bm+1(D)) ≤ PBm+1(D). Da inclusão, PBm+1D ⊆ σ−1(Σm)
segue que o centro de σ−1(Σm) está contido no centro de PBm+1D. Por outra parte,
α̃ ∈ σ−1(Σm) e é central. Portanto, o centro de Bm+1D está contido no centro de
σ−1(Σm). Como consequência temos que o centro de σ−1(Σm) é igual ao centro de
Bm+1D, que é o subgrupo ćıclico infinito gerado por α̃.
Assim, pelo isomorfismo Bm(D\{P0}) −→ σ−1(Σm), temos que o centro de BmC =
Bm(D \ {P0}) é o subgrupo ćıclico infinito gerado por α.
Vamos descrever agora o centro de BmT , onde T é um toro. Assumiremos que
T = R2/Z2.
Denotemos por (x, y) a classe de equivalência de (x, y). Assumiremos que
Pi =
(i+ 1
m+ 3,i+ 1
m+ 3
), para i = 1, . . . , m.
Sejam ai : [0, 1] −→ T o caminho definido por
ai(t) =
(i+ 1
m+ 3− t,
i+ 1
m+ 3
), para t ∈ [0, 1].
e bi : [0, 1] −→ T o caminho definido por
bi(t) =
(i+ 1
m+ 3,i+ 1
m+ 3− t
), para t ∈ [0, 1].
Sejam α o elemento de PBmT representado por a = (a1, . . . , am) (ver Figura 2.2),
e β o elemento de PBmT representado por b = (b1, . . . , bm).
-
2.3 Centros dos grupos de tranças do cilindro e do toro 22
Figura 2.2:
Proposição 2.12. Com as condições acima, o centro de BmT é o subgrupo gerado por
α e β, e é um grupo abeliano livre de posto 2.
Demonstração: Provaremos a Proposição 2.12 em quatro passos. Seja Zm o subgrupo
de PBmT gerado por α e β.
Passo 1. Zm é um grupo abeliano livre de posto 2. Por [5, Teorema 5], α e β
comutam, assim Zm é um grupo abeliano. Consideremos a seguinte sequência exata
1 // PBm−1(T \ {P1}) // PBmTρ∗
// π1(T, P1) // 1 .
O grupo π1(T, P1) é um grupo abeliano livre de posto 2 e (ρ∗(α), ρ∗(β)) é uma base de
π1(T, P1), assim Zm também é um grupo abeliano livre de posto 2.
Passo 2. Zm ⊆ Z(BmT ).
Seja D = [ 1m+3
, m+2m+3
] × [ 1m+3
, m+2m+3
] ⊆ T . Pela Proposição 2.6, a inclusão D ⊆ T
induz um monomorfismo BmD −→ BmT . Logo, o seguinte diagrama é comutativo:
1 // PBmD //
��
BmDσ
//
��
Σm // 1
1 // PBmT // BmTσ
// Σm // 1.
Assim, BmT é gerado por PBmT ∪BmD. Por [5, Teorema 5], α comuta com todos
os elementos de PBmT . Seja C =(R ×
[1
m+3, m+2m+3
])/Z ⊆ T . Pela Proposição 2.6, a
-
2.3 Centros dos grupos de tranças do cilindro e do toro 23
inclusão C ⊆ T induz um monomorfismo BmC −→ BmT . Mais ainda, α ∈ BmC e
BmD ⊆ BmC. Pela Proposição 2.11, Z(BmC) é o subgrupo ćıclico infinito gerado por
α. Portanto, α comuta com todos os elementos de BmD. Isto mostra que α ∈ Z(BmT ).
Similarmente, β ∈ Z(BmT ).
Passo 3. Z(PBmT ) ⊆ Zm. Provaremos o Passo 3 por indução sobre m. Seja
m = 1. Então, PB1T = π1(T, P1) = Z1. Assim, Z(PB1T ) = Z1.
Sejam m > 1 e g ∈ Z(PBmT ). Consideremos a seguinte sequência exata:
1 // π1(T \ {P1, . . . , Pm−1}) // PBmTρ∗
// PBm−1T // 1 .
Temos ρ∗(g) ∈ Z(PBm−1T ). Por indução Z(PBm−1T ) ⊆ Zm−1. Ainda mais, ρ∗(Zm) =
Zm−1. Assim, podemos escolher h ∈ Zm tal que ρ∗(h) = ρ∗(g). Escreveremos g′ = gh−1.
Então g′ ∈ Z(PBmT ) e g′ ∈ π1(T \ {P1, . . . , Pm−1}) (já que ρ∗(g
′) = 1). Assim,
g′ ∈ Z(π1(T \ {P1, . . . , Pm−1})) = {1}, e assim g′ = gh−1 = 1, e portanto g = h ∈ Zm.
Passo 4. Z(BmT ) ⊆ PBmT . Seja g ∈ BmT . Suponhamos que existem i, j ∈
{1, . . . , m}, i 6= j, tais que σ(g)(Pi) = Pj , e provemos que g 6∈ Z(BmT ). Seja
αi ∈ PBmT representada por (P1, . . . , Pi−1, ai, Pi+1, . . . , Pm), onde Pk denota o caminho
constante sobre Pk para k = 1, . . . , m e ai é como acima. Consideremos a seguinte
sequência exata:
1 // PBm−1T \ {Pi} // PBmTρi∗
// π1(T, Pi) // 1 .
Então, ρi∗(αi) 6= 1 e ρi∗(gαig−1) = 1 (ver Figura 2.3). Assim gαig
−1 6= αi, e portanto
g 6∈ Z(BmT ).
-
2.3 Centros dos grupos de tranças do cilindro e do toro 24
Figura 2.3:
-
Caṕıtulo 3
Comensurador, normalizador e
centralizador de π1N em π1M
Seja N uma subsuperf́ıcie de uma superf́ıcie conexa M . Dizemos que N é um colarinho
de Möbius em M , se N é um cilindro S1×I e M \N tem duas componentes N1, N2 com
uma delas, digamos N1, uma faixa de Möbius (ver Figura 3.1). Então, M0 = N ∪ N1
será chamada a faixa de Möbius tendo como colarinho N em M .
Figura 3.1: Colarinho de Möbius.
Sejam G um grupo e H um subgrupo de G. Denotamos por
• CG(H) o comensurador de H em G,
• NG(H) o normalizador de H em G, e
25
-
26
• ZG(H) o centralizador de H em G.
Neste caṕıtulo consideramos uma subsuperf́ıcie N de M tal que nenhuma compo-
nente conexa de M \N é um disco e portanto π1(N,P0) é isomorfo com um subgrupo
de π1(M,P0), com P0 ∈ N . Para evitar sobrecarregar a notação diremos simplesmente
que π1(N,P0) é subgrupo de π1(M,P0) e escrevemos
π1M = π1(M,P0) e π1N = π1(N,P0).
Teorema 3.1. Sejam M uma superf́ıcie conexa e N uma subsuperf́ıcie de M tal que
nenhuma componente conexa de M \N é um disco.
(i) Se M não é grande ou se π1N = {1}, então Cπ1M(π1N) = π1M .
(ii) Se M é grande, π1N 6= {1} e N não é um colarinho de Möbius em M , então
Cπ1M(π1N) = π1N.
(iii) Se M é grande e N é um colarinho de Möbius em M , então
Cπ1M(π1N) = π1M0,
onde M0 é a faixa de Möbius tendo como colarinho N em M .
Corolário 3.2. (i) Se M é um cilindro, um toro, ou uma faixa de Möbius, então
Cπ1M(π1N) = Nπ1M(π1N) = Zπ1M(π1N) = π1M.
(ii) Se M é grande, N não é um colarinho de Möbius em M , π1N 6= {1}, e N não é
grande, então
Cπ1M(π1N) = Nπ1M(π1N) = Zπ1M(π1N) = π1N.
(iii) Se M e N são superf́ıcies grandes, então
Cπ1M(π1N) = Nπ1M(π1N) = π1N,
Zπ1M(π1N) = Z(π1N) = {1}.
-
3.1 Grafos de grupos 27
(iv) Se M é grande e N é um colarinho de Möbius em M , então
Cπ1M(π1N) = Nπ1M(π1N) = Zπ1M(π1N) = π1M0,
onde M0 é a faixa de Möbius tendo como colarinho N em M .
3.1 Grafos de grupos
Antes de provar o Teorema 3.1, vejamos alguns resultados de grafos de grupos. Um
grafo (orientado) Γ é formado pelos seguintes dados:
1. Um conjunto V (Γ) de vértices.
2. Um conjunto A(Γ) de setas.
3. Uma aplicação s : A(Γ) −→ V (Γ) chamada origem, e uma aplicação t : A(Γ) −→
V (Γ) chamada fim.
Um grafo de grupos G(Γ) sobre Γ é formado pelos seguintes dados:
1. Um grupo Gv, para todo v ∈ V (Γ).
2. Um grupo Ga, para todo a ∈ A(Γ).
3. Dois monomorfismos φa,s : Ga −→ Gs(a) e φa,t : Ga −→ Gt(a), para todo a ∈ A(Γ).
Uma exposição geral sobre grafos de grupos pode ser encontrada em [32]. Seja T
uma árvore maximal de Γ. O grupo fundamental π1(G(Γ), T ) de G(Γ) baseado em T é
o grupo (abstrato) dado pela seguinte apresentação: o conjunto gerador de π1(G(Γ), T )
é
{ea; a ∈ A(Γ)} ∪ (⋃
v∈V (Γ)
Gv),
onde {ea; a ∈ A(Γ)} é um conjunto abstrato em correspondência um a um com A(Γ).
As relações de π1(G(Γ), T ) são:
1. as relações de Gv, para todo v ∈ V (Γ),
-
3.1 Grafos de grupos 28
2. ea = 1, para todo a ∈ A(T ),
3. e−1a · φa,s(g) · ea = φa,t(g), para todo a ∈ A(Γ) e para todo g ∈ Ga.
Existe um morfismo φv : Gv −→ π1(G(Γ), T ), para todo v ∈ V (Γ). Por [32], este
morfismo é injetor, portanto podemos pensar que Gv ≤ π1(G(Γ), T ).
O grupo fundamental π1(Γ, T ) de Γ baseado em T tem a seguinte apresentação: o
conjunto gerador de π1(Γ, T ) é {ea; a ∈ A(Γ)}, o conjunto de relações de π1(Γ, T ) é
{ea = 1; a ∈ A(T )}.
Seja p : Γ̃ −→ Γ o revestimento universal de Γ. Seja G(Γ̃) o grafo de grupos sobre
Γ̃ definido como segue.
1. Gṽ = Gp(ṽ), para todo ṽ ∈ V (Γ̃).
2. Gã = Gp(ã), para todo ã ∈ A(Γ̃).
3. φã,s = φp(ã),s e φã,t = φp(ã),t, para todo ã ∈ A(Γ̃).
Fixemos uma seção S : T −→ Γ̃ de p sobre T . Estendemos S a uma seção S :
A(Γ) −→ A(Γ̃) como segue. Seja a ∈ A(Γ). Então, S(a) é o único levantamento de a
tal que t(S(a)) = S(t(a)).
Definimos uma ação de π1(Γ, T ) sobre π1(G(Γ̃), Γ̃) como segue. Notemos que
π1(G(Γ̃), Γ̃) é gerado pela⋃ṽ∈V (Γ̃)Gṽ, pois Γ̃ é uma árvore. Sejam ṽ ∈ V (Γ̃), g̃ ∈
Gṽ, e u ∈ π1(Γ, T ). Então,
u(g̃) = g̃ ∈ Gu(ṽ).
Consideremos o correspondente produto semidireto
π1(G(Γ̃), Γ̃) ⋊ π1(Γ, T ).
Por [32], existe um isomorfismo
π1(G(Γ), T ) −→ π1(G(Γ̃), Γ̃) ⋊ π1(Γ, T ),
-
3.1 Grafos de grupos 29
que envia Gv isomorficamente sobre GS(v), para todo v ∈ V (Γ), e que manda ea sobre
ea, para todo a ∈ A(Γ). Portanto, podemos assumir que
π1(G(Γ), T ) = π1(G(Γ̃), Γ̃) ⋊ π1(Γ, T ),
que Gv = GS(v), para todo v ∈ V (Γ) e que Ga = GS(a), para todo a ∈ A(Γ).
Sejam G = π1(G(Γ), T ) e G̃ = π1(G(Γ̃), Γ̃). O revestimento universal de G(Γ) é o
grafo Γ̄ definido como segue:
V (Γ̄) = (V (Γ̃) × G̃)/ ∼ ,
onde ∼ é a relação de equivalência definida por
(ṽ1, g̃1) ∼ (ṽ2, g̃2) se ṽ1 = ṽ2 = ṽ e g̃−12 g̃1 ∈ Gṽ.
Denotamos por [ṽ, g̃] a classe de equivalência de (ṽ, g̃).
A(Γ̄) = (A(Γ̃) × G̃)/ ∼ ,
onde ∼ é a relação de equivalência definida por
(ã1, g̃1) ∼ (ã2, g̃2) se ã1 = ã2 = ã e g̃−12 g̃1 ∈ Gã.
Denotamos por [ã, g̃] a classe de equivalência de (ã, g̃).
A aplicação origem s : A(Γ̄) −→ V (Γ̄) é definida por
s([ã, g̃]) = [s(ã), g̃],
para ã ∈ A(Γ̃) e para g̃ ∈ G̃. A aplicação fim t : A(Γ̄) −→ V (Γ̄) é definida por
t([ã, g̃]) = [t(ã), g̃],
para ã ∈ A(Γ̃) e para g̃ ∈ G̃. Por [32], Γ̄ é uma árvore.
O grupo G atua sobre Γ̄ como segue, lembramos que G = π1(G(Γ̃), Γ̃) ⋊ π1(Γ, T ).
Sejam u ∈ π1(Γ, T ), h̃, g̃ ∈ G̃ e sejam ṽ ∈ V (Γ̃), ã ∈ A(Γ̃). Então,
h̃([ṽ, g̃]) = [ṽ, h̃g̃], h̃([ã, g̃]) = [ã, h̃g̃],
-
3.2 Demonstrações 30
u([ṽ, g̃]) = [u(ṽ), ug̃u−1], u([ã, g̃]) = [u(ã), ug̃u−1].
O subgrupo de isotropia de um vértice v̄ ∈ V (Γ̄) é
Isot(v̄) = {g ∈ G; g(v̄) = v̄}.
O subgrupo de isotropia de uma seta ā ∈ A(Γ̄) é
Isot(ā) = {g ∈ G; g(ā) = ā}.
Sejam v ∈ V (Γ) e a ∈ A(Γ). Por [32],
Isot([S(v), 1]) = Gv, Isot([S(a), 1]) = Ga.
3.2 Demonstrações
Nessa seção provaremos o Teorema 3.1, para isso precisaremos da teoria de grafos de
grupos desenvolvida na seção anterior. Agora, voltamos as nossas suposições iniciais.
Se M é o plano projetivo P 2 o resultado do Teorema 3.1 é claramente válido. Su-
ponhamos que M é uma superf́ıcie (possivelmente com bordo) distinta da esfera e do
plano projetivo, e que N é uma subsuperf́ıcie de M tal que nenhuma das componentes
conexas de M \N é um disco. Sem perda de generalidade, podemos assumir também
que N não é um disco. Sejam N1, . . . , Nr as componentes conexas de M \N .
Definamos um grafo Γ como segue. Seja
V (Γ) = {v0, v1, . . . , vr}.
Para i ∈ {1, . . . , r}, fixamos um conjunto abstrato Ai(Γ) em correspondência um a um
com as componentes conexas de N ∩Ni. Fazemos
A(Γ) =r⋃
i=1
Ai(Γ).
Se a ∈ Ai(Γ), então s(a) = v0 e t(a) = vi.
-
3.2 Demonstrações 31
Definimos um grafo de grupos G(Γ) sobre Γ como segue. Seja i ∈ {1, . . . , r}.
Fixamos um ponto Pi ∈ Ni e fazemos
Gvi = Gi = π1(Ni, Pi).
Fixamos um ponto P0 ∈ N e fazemos
Gv0 = G0 = π1(N,P0).
Seja a ∈ Ai(Γ). Denotamos por Ca a componente conexa de N∩Ni que corresponde
a a. O conjunto Ca é uma componente fronteira de N e Ni. Fixamos um ponto Pa ∈ Ca
e fazemos
Ga = π1(Ca, Pa) ≃ Z.
Fixemos um caminho γa,s : [0, 1] −→ N de P0 até Pa. Este caminho induz um
monomorfismo φa,s : Ga −→ G0. Fixemos um caminho γa,t : [0, 1] −→ Ni de Pi até Pa.
Este caminho induz um monomorfismo φa,t : Ga −→ Gi.
Fixemos uma seta ai ∈ Ai(Γ), para todo i ∈ {1, . . . , r}. Consideremos o grafo T
definido como segue:
1. V (T ) = {v0, v1, . . . , vr},
2. A(T ) = {a1, . . . , ar},
3. s(ai) = v0 e t(ai) = vi, para todo i ∈ {1, . . . , r}.
O grafo T é uma árvore maximal de Γ. Escrevemos
γa = γa,sγ−1a,t , βa = γaγ
−1ai,
para todo a ∈ Ai(Γ). Para i = 1, . . . , r, o caminho γai induz um morfismo
ψi : Gi = π1(Ni, Pi) −→ π1(M,P0).
Denotamos por ψ0 : G0 = π1(N,P0) −→ π1(M,P0) o morfismo induzido pela inclusão
N ⊆M .
O seguinte teorema é uma versão do teorema de Van Kampen.
-
3.2 Demonstrações 32
Teorema 3.3. A aplicação
{ea; a ∈ A(Γ)} −→ π1(M,P0)
ea 7−→ βa
e os morfismos ψi : Gi −→ π1(M,P0) (i = 0, 1, . . . , r) induzem um isomorfismo
ψ : π1(G(Γ), T ) −→ π1(M,P0).
Seja Γ̄ o revestimento universal de G(Γ). Seja q : Γ̄ −→ Γ a aplicação definida como
segue: sejam ṽ ∈ V (Γ̃), ã ∈ A(Γ̃) e g̃ ∈ G̃. Então,
q([ṽ, g̃]) = p(ṽ), q([ã, g̃]) = p(ã).
O seguinte lema é um resultado preliminar da prova do Teorema 3.1.
Lema 3.4. Sejam i ∈ {1, . . . , r} e v̄ ∈ V (Γ̄) tais que q(v̄) = vi, e sejam ā, b̄ ∈ A(Γ̄)
tais que t(ā) = t(b̄) = v̄ (ver Figura 3.2):
(i) Se q(ā) = q(b̄) e Isot(ā) ∩ Isot(b̄) 6= {1}, então Ni é uma faixa de Möbius.
(ii) Se q(ā) 6= q(b̄) e Isot(ā) ∩ Isot(b̄) 6= {1}, então Ni é um cilindro e ambas compo-
nentes fronteira de Ni estão contidas em N ∩Ni.
Figura 3.2:
Demonstração: (i) Suponhamos que i = 1 e que ā = [S(a1), 1]. Então,
v̄ = t(ā) = [t(S(a1)), 1] = [S(v1), 1].
Seja b̄ = [̃b, g̃]. Então,
t(b̄) = [t(b̃), g̃] = [S(v1), 1],
-
3.2 Demonstrações 33
assim b̃ = S(a1) (já que q(ā) = q(b̄) = a1), e g̃ ∈ Gv1 = G1. Notemos que g̃ 6∈ Ga1 , pois
caso contrário
b̄ = [S(a1), g̃] = [S(a1), 1] = ā.
Portanto, Isot(ā) = Ga1 e Isot(b̄) = g̃Ga1 g̃−1. Seja h1 um gerador de Ga1 . Existem
k1, k2 ∈ Z \ {0} tais que hk11 = g̃h
k21 g̃
−1.
Suponhamos que N1 não é uma faixa de Möbius. Seja F o subgrupo de G1 gerado
por h1 e g̃. A subsuperf́ıcie N1 tem bordo não vazio, assim G1 é um grupo livre e
portanto F é um grupo livre de posto 1 ou 2.
Como todo grupo livre finitamente gerado é Hopfiano, temos que F é um grupo
Hopfiano, e já que hk11 = g̃hk21 g̃
−1, o grupo F tem posto 1. Por [11, Teorema 4.2], h1
gera F . Em particular, existe l ∈ Z tal que
g̃ = hl1 ∈ Ga1 .
Isto é uma contradição. Portanto, N1 é uma faixa de Möbius.
(ii) Suponhamos que i = 1 e que ā = [S(a1), 1]. Então,
v̄ = t(ā) = [t(S(a1)), 1] = [S(v1), 1].
Sejam b̄ = [̃b, g̃] e b = q(b̄) 6= a1. Então,
t(b̄) = [t(b̃), g̃] = [S(v1), 1],
e assim b̃ = S(b) e g̃ ∈ Gv1 = G1. Logo,
Isot(ā) = Ga1 e Isot(b̄) = g̃Gbg̃−1.
Sejam h1 um gerador de Ga1 , e h um gerador Gb. Existem k1, k2 ∈ Z \ {0} tais que
hk11 = g̃hk2 g̃−1. Seja F o subgrupo de G1 gerado por h1 e g̃hg̃
−1. Como G1 é um grupo
livre, então F é um grupo livre de posto 1 ou 2. Já que F é um grupo Hopfiano, e
já que hk11 = (g̃hg̃−1)k2 , o grupo F tem posto 1. A subsuperf́ıcie N1 tem pelo menos
duas componentes fronteira, Ca1 e Cb, assim N1 não é uma faixa de Möbius. Por [11,
Teorema 4.2], h1 e g̃hg̃−1 geram F . Portanto, podemos assumir que
h1 = g̃hg̃−1.
-
3.2 Demonstrações 34
Por [11, Lema 2.4] segue que N1 é um cilindro e que Ca1 e Cb são as componentes
fronteira de N1.
Denotaremos o cilindro, a faixa de Möbius e a garrafa de Klein por S1×I, S1×̂I, S1×̂S1,
respectivamente.
Demonstração do Teorema 3.1: (i) SeM não é grande entãoM é uma das seguintes
superf́ıcies
S2, P 2, D2, T 2, S1 × I, S1×̂I, S1×̂S1.
Nos primeiros seis casos π1M é abeliano, logo
Cπ1M(π1N) = π1M.
Falta então examinar o caso M = S1×̂S1. Notemos que as subsuperf́ıcies da garrafa
de Klein são o disco, o cilindro e a faixa de Möbius. No caso do disco é claro que
Cπ1M(π1N) = π1M. Consideremos agora o grupo fundamental da garrafa de Klein
dado pela seguinte apresentação π1(S1×̂S1, q) =< a, b : abab−1 = 1 >. No caso do
cilindro tomamos o subgrupo gerado por a, < a >, que é normal em π1(S1×̂S1, q). já
no caso da faixa de Möbius tomamos o subgrupo gerado por b, < b >. Nos dois casos
verifica-se que
Cπ1M(π1N) = π1M.
(ii) Claramente π1N é subgrupo de Cπ1M(π1N), basta mostrar então que Cπ1M(π1N)
é subgrupo de π1N . Suponhamos que existe g ∈ Cπ1M(π1N) tal que g 6∈ π1N , e prove-
mos que M não é grande ou que N é um colarinho de Möbius em M .
Seja v̄0 = [S(v0), 1] ∈ V (Γ̄). Temos que g(v̄0) 6= v̄0, pois g 6∈ π1N = Isot(v̄0). Seja
āε11 āε22 · · · ā
εℓℓ (ai ∈ A(Γ̄) e εi ∈ {±1})
o (único) caminho reduzido de Γ̄ de v̄0 até g(v̄0) (ver Figura 3.3). Para j = 1, . . . , ℓ
denotemos por v̄j o final do caminho āε11 · · · ā
εjj . Observemos que ℓ ≥ 2, já que
q(g(v̄0)) = q(v̄0) = v0.
-
3.2 Demonstrações 35
Se h ∈ G0 ∩ gG0g−1, então h ∈ Isot(v̄0) e h ∈ Isot(g(v̄0)), assim h ∈ Isot(v̄j) e
h ∈ Isot(āj), para todo j ∈ {1, . . . , ℓ}. Suponhamos que q(v̄1) = v1. Pelo anterior
temos que
{1} 6= G0 ∩ gG0g−1 ⊆ Isot(ā1) ∩ Isot(ā2).
Assim pelo Lema 3.4, N1 é uma faixa de Möbius, ou N1 é um cilindro e ambas compo-
nentes de fronteira de N1 estão contidas em N ∩N1.
Figura 3.3:
O grupo G0 ∩ gG0g−1 tem ı́ndice finito em G0 = π1N , ele está contido em Isot(ā1),
e Isot(ā1) é um grupo ćıclico infinito. Portanto, π1N tem um subgrupo ćıclico infinito
de ı́ndice finito. Assim N é um cilindro, ou uma faixa de Möbius.
Se N é uma faixa de Möbius, então N1 também é uma faixa de Möbius, e M =
N ∪N1 é uma garrafa de Klein (ver Figura 3.4).
Figura 3.4:
Se N e N1 são ambos cilindros, então M = N ∪N1 é um toro (ver Figura 3.5).
Se N é um cilindro e se N1 é uma faixa de Möbius, então N é um colarinho de
Möbius em M (ver Figura 3.6).
(iii) Suponhamos que N é um cilindro, que N1 é uma faixa de Möbius, e que M é
superf́ıcie grande (ver Figura 3.6). Seja M0 = N ∪ N1 a faixa de Möbius tendo como
-
3.2 Demonstrações 36
Figura 3.5:
Figura 3.6:
colarinho N em M . A subsuperf́ıcie M0 não é um colarinho de Möbius em M , assim,
por (ii),
Cπ1M(π1M0) = π1M0.
O grupo π1N tem ı́ndice finito em π1M0. Logo,
Cπ1M(π1N) = Cπ1M(π1M0) = π1M0.
Demonstração do Corolário 3.2: (i) Se M = S1×I, ou T 2, ou S1×̂I, pelo Teorema
3.1, temos que Cπ1M(π1N) = π1M e como M é superf́ıcie abeliana, então Z(π1M) =
π1M . Logo,
Cπ1M(π1N) = Nπ1M(π1N) = Zπ1M(π1N) = π1M.
-
3.2 Demonstrações 37
(ii) Pelo Teorema 3.1 temos que Cπ1M(π1N) = π1N . Como N não é superf́ıcie
grande e N 6= S1×̂S1, então π1N é abeliano. Logo,
Cπ1M(π1N) = Nπ1M(π1N) = Zπ1M(π1N) = Z(π1N) = π1N.
(iii) Se M e N são superf́ıcies grandes, então pelo Teorema 3.1 temos
Cπ1M(π1N) = π1N,
e como π1N é subgrupo do normalizador Nπ1M(π1N), então temos
Cπ1M(π1N) = Nπ1M(π1N) = π1N,
que é um grupo não abeliano.
Por [23, Teorema 4.4] temos que Z(π1N) = Z(π1M) = {1}. Como Zπ1M(π1N) é
subgrupo de Nπ1M(π1N), então Zπ1M(π1N) ⊆ π1N . Logo,
Zπ1M(π1N) = Z(π1N) = Z(π1M) = {1}.
(Notemos que Zπ1M(π1N) = {1} implica em Z(π1N) = {1}.)
(iv) Se M é uma superf́ıcie grande e se N é um colarinho de Möbius, então
Cπ1M(π1N) = π1M0, onde M0 é a faixa de Möbius tendo como colarinho N em M .
Agora, Zπ1M(π1N) ⊆ π1M0. Como π1N ⊆ π1M0, e este último é abeliano, então
π1N ⊆ Zπ1M(π1N). Mas, π1N = π1M0 já que M0 = N ∪ N1 tem o mesmo tipo de
homotopia de N . Logo,
π1M0 ⊆ Zπ1M(π1N).
-
Caṕıtulo 4
Comensurador, normalizador, e
centralizador de BnD em BmM
Seja M uma superf́ıcie orientada distinta da esfera, e seja D ⊆M um disco mergulhado
em M . Sejam m ≥ n ≥ 2, P1, . . . , Pn ∈ D, e Pn+1, . . . , Pm ∈ M \D. O objetivo deste
caṕıtulo é descrever o comensurador, o normalizador, e o centralizador de BnD em
BmM . Para descrever estes grupos usaremos a noção de túnel sobre uma superf́ıcie,
estes objetos geométricos formam um grupo, com uma construção análoga à feita em
grupos de tranças. Notemos que, se n = 1, então B1D = {1}, assim
CBmM(B1D) = NBmM(B1D) = ZBmM(B1D) = BmM.
4.1 Definições e resultados
Um túnel sobre M baseado em (D;Pn+1, . . . , Pm) é uma aplicação
H : D ∪ {Pn+1, . . . , Pm} × [0, 1] −→M
tal que
1. H(x, 0) = H(x, 1) = x, para todo x ∈ D,
2. H(Pi, 0) = Pi e H(Pi, 1) ∈ {Pn+1, . . . , Pm}, para todo Pi ∈ {Pn+1, . . . , Pm},
38
-
4.1 Definições e resultados 39
3. H(x, t) 6= H(y, t), para todo x, y ∈ D ∪ {Pn+1, . . . , Pm}, x 6= y, e para todo
t ∈ [0, 1].
Dado um túnel H podemos associar claramente uma permutação, similar ao que
foi feito em tranças. Existe uma noção natural de homotopia de túneis como descrita
na sequência. Sejam H1, H2 : D ∪ {Pn+1, . . . , Pm} × [0, 1] −→ M túneis com mesma
permutação γ. Dizemos que H1, H2 são homotópicos se existem m− n + 1 aplicações
cont́ınuas,
F0 : D × [0, 1] × [0, 1] −→M , tal que
• F0(x, s, 0) = H1(x, s), F0(x, s, 1) = H2(x, s), para todo x ∈ D e para todo
s ∈ [0, 1],
• F0(x, 0, t) = F0(x, 1, t) = x, para todo x ∈ D e para todo t ∈ [0, 1],
Fi : {Pn+i} × [0, 1] × [0, 1] −→ M , para todo i = 1, . . . , m− n, tais que
• Fi(Pn+i, s, 0) = H1(Pn+i, s), Fi(Pn+i, s, 1) = H2(Pn+i, s), para todo s ∈ [0, 1],
• Fi(Pn+i, 0, t) = Pn+i, Fi(Pn+i, 1, t) = H1(Pn+i, 1) = H2(Pn+i, 1), para todo t ∈
[0, 1],
e tais que se definimos
H t0 : D ∪ {Pn+1, . . . , Pm} × [0, 1] −→M, por
• H t0(x, s) = F0(x, s, t), para todo x ∈ D e para todo s ∈ [0, 1], e
• H t0(Pn+i, s) = Fi(Pn+i, s, t), para todo s ∈ [0, 1], e para todo i = 1, . . . , m− n,
então H t0 é um túnel geométrico (com permutação γ) para cada 0 ≤ t ≤ 1.
Homotopia de túneis é uma relação de equivalência. Formamos assim o conjunto
de classes de equivalência de túneis homotópicos, vamos munir este conjunto com uma
-
4.1 Definições e resultados 40
operação dada por concatenação, como em tranças. E assim como em tranças, os axio-
mas de grupo são satisteitos. O grupo de túnel sobre M baseado em (D;Pn+1, . . . , Pm)
é o grupo
Tm−nM = Tm−nM(D;Pn+1, . . . , Pm)
de classes de homotopia de túneis sobre M baseados em (D;Pn+1, . . . , Pm).
Definimos um homomorfismo
τ : Tm−nM × BnD −→ BmM
como segue: sejam h ∈ Tm−nM e f ∈ BnD. Seja H um túnel sobre M baseado em
(D;Pn+1, . . . , Pm) que representa h, e seja b = (b1, . . . , bn) uma trança sobre D que
representa f . Seja b̃ = (b̃1, . . . , b̃n, b̃n+1, . . . , b̃m) uma trança sobre M definida por
• b̃i(t) = H(bi(t), t), para todo i ∈ {1, . . . , n} e para todo t ∈ [0, 1],
• b̃i(t) = H(Pi, t), para todo i ∈ {n+ 1, . . . , m} e para todo t ∈ [0, 1].
Então, τ(h, f) é o elemento de BmM representado por b̃.
Propriedades 4.1. Destacaremos algumas propriedades da aplicação τ definida acima.
1. Sejam 1 o elemento neutro em Tm−nM e f ∈ BnD, então τ(1, f) = f̄ , onde f̄
é a trança de BmM que pode ser representada geometricamente por uma trança
com as primeiras n cordas correspondentes a um representante de f e as últimas
m − n cordas verticais. Por simplicidade na notação, não vamos distinguir f e
f̄ .
2. Sejam 1 o elemento neutro em BnD e h ∈ Tm−nM , então τ(h, 1) é a classe de
trança em BmM correspondente ao representante de túnel restrito aos pontos Pi,
para todo i = 1, . . . , n, n+ 1, . . . , m.
3. Sejam h ∈ Tm−nM e f ∈ BnD. Então, τ(h, f)−1 = τ(h−1, f−1). Esta é uma
propriedade direta do homomorfismo entre grupos.
-
4.1 Definições e resultados 41
Denotamos por Cn,mM a imagem de τ . Seja h ∈ Tm−nM e sejam f, f′
∈ BnD.
Então,
τ(h, f) · f′
· τ(h, f)−1 = τ(1, ff′
f−1) = ff′
f−1 ∈ BnD.
Em particular,
Cn,mM ⊆ NBmM(BnD).
De fato, dado g ∈ Cn,mM existem h ∈ Tm−nM e f ∈ BnD tais que τ(h, f) = g ∈ BmM .
Seja f ′ ∈ BnD, então pelo comentado acima gf′g−1 ∈ BnD. Logo, gBnDg
−1 ⊆ BnD.
Seja agora f ′ ∈ BnD, sabemos que f′ = g(g−1f ′g)g−1 = gf̄g−1 com f̄ = (g−1f ′g) ∈
BnD. Logo, BnD ⊆ gBnDg−1. Como consequência temos que gBnDg
−1 = BnD, ou
seja, g pertence ao normalizador NBmM(BnD).
Teorema 4.2. Sejam n ≥ 2 e M uma superf́ıcie orientável, M 6= S2. Então,
CBmM(BnD) = Cn,mM.
Denotemos por Zn,mM a imagem por τ de Tm−nM × Z(BnD). Temos que,
Zn,mM ⊆ ZBmM(BnD).
De fato, dado g ∈ Zn,mM existem h ∈ Tm−nM e f ∈ Z(BnD) tais que τ(h, f) = g ∈
BmM . Seja f′ ∈ BnD, então
τ(h, f) · f ′ = τ(h, f)τ(1, f ′)
= τ(h, ff ′)
= f ′τ(h, f).
Logo, Zn,mM ⊆ ZBmM(BnD).
Corolário 4.3. Seja n ≥ 2. Então,
CBmM(BnD) = NBmM(BnD) = Cn,mM,
ZBmM(BnD) = Zn,mM.
-
4.1 Definições e resultados 42
Observação 4.4. 1. Os autores deixam aberta a questão de não saberem se um
resultado similar vale para superf́ıcies não orientáveis.
2. O Corolário 4.3 generaliza [14, Teorema 4.2].
Denotemos por
B1m−n+1M = B1m−n+1M(P1;Pn+1, . . . , Pm)
o subgrupo de Bm−n+1M = Bm−n+1M(P1, Pn+1, . . . , Pm) formado pelas tranças g ∈
Bm−n+1M tais que σ(g)(P1) = P1. Definimos um morfismo
κ : Tm−nM −→ B1m−n+1M
como segue: sejam h ∈ Tm−nM e H um túnel sobre M baseado em (D;Pn+1, . . . , Pm)
que representa h. Seja b = (b1, bn+1, . . . , bm) a trança definida por
bi(t) = H(Pi, t), para i ∈ {1, n+ 1, . . . , m} e para t ∈ [0, 1].
Então, κ(h) é o elemento de B1m−n+1M representado por b.
Observemos que para h ∈ Tm−1M temos que τ(h, P1) = κ(h) ∈ B1mM , onde P1
denota o caminho constante em P1.
Teorema 4.5. Seja n ≥ 2. Existe um morfismo δ : Cn,mM −→ B1m−n+1M tal que
δ(τ(h, f)) = κ(h),
para todo h ∈ Tm−nM e para todo f ∈ BnD. Ainda mais, temos as seguintes sequências
exatas:
1 // BnD // Cn,mMδ
// B1m−n+1M // 1 e
1 // Z(BnD) // Zn,mMδ
// B1m−n+1M // 1 .
Teorema 4.6. Seja n ≥ 2. Seja M uma superf́ıcie com bordo não vazio ou um toro.
Existe um morfismo ι : B1m−n+1M −→ Zn,mM , tal que δ ◦ ι = id. Em particular,
Cn,mM ≃ B1m−n+1M ×BnD e
Zn,mM ≃ B1m−n+1M × Z(BnD).
Observação 4.7. O Teorema 4.6 generaliza [14, Teorema 4.3] e [29, Teorema 3].
-
4.2 Demonstrações 43
4.2 Demonstrações
Nessa seção temos como objetivo provar os teoremas enunciados na seção anterior,
descrevendo assim o comensurador, normalizador e centralizador de BnD em BmM no
caso em que M é superf́ıcie orientável, distinta da esfera, e D é um disco mergulhado
em M .
Lema 4.8. Seja M uma superf́ıcie com bordo não vazio ou um toro. Existe um mor-
fismo
ι0 : B1m−n+1M −→ Tm−nM
tal que κ ◦ ι0 = id.
A demonstração deste lema involve uma passagem que precisa de teoria de varieda-
des, não vamos colocála aqui pois isto nos distanciaria do objetivo inicial. Uma prova
é encontrada em [27, Lema 5.6].
Lema 4.9. Seja M uma superf́ıcie orientada distinta da esfera. O morfismo κ :
Tm−nM −→ B1m−n+1M é sobrejetor.
Observação 4.10. Os autores deixam aberta a questão de não saberem se um resultado
similar vale para superf́ıcies não orientáveis.
Demonstração: Escolhamos um disco aberto K0 mergulhado em M \ D e que não
contém nenhum ponto Pi para i = n + 1, . . . , m. Pela Proposição 2.9, a inclusão
M \K0 ⊆M induz um epimorfismo
φ : B1m−n+1M \K0 −→ B1m−n+1M.
Assim, temos o seguinte diagrama comutativo:
Tm−nM \K0κ
//
��
B1m−n+1M \K0
φ��
Tm−nMκ
// B1m−n+1M.
-
4.2 Demonstrações 44
Como M \ K0 é superf́ıcie com bordo, então pelo Lema 4.8, κ : Tm−nM \ K0 −→
B1m−n+1M \K0 é sobrejetora. Dáı segue que κ : Tm−nM −→ B1m−n+1M é sobrejetora
também.
A partir de agora fixemos uma seção ι0 : B1m−n+1M −→ Tm−nM de κ. Ainda mais,
pelo Lema 4.8, podemos assumir que ι0 é um morfismo se M é uma superf́ıcie com
bordo não vazio ou um toro. O Teorema 4.2 é uma consequência direta do seguinte
lema, que será provado posteriormente.
Lema 4.11. Seja n ≥ 2. Seja g ∈ CBmM(BnD). Existem u ∈ B1m−n+1M e f ∈ BnD
tais que
g = τ(ι0(u), f).
Demonstração do Teorema 4.2: Já provamos que Cn,mM ⊆ NBmM(BnD) ⊆
CBmM(BnD). Sejam n ≥ 2 e g ∈ CBmM(BnD), pelo Lema 4.11 existem u ∈ B1m−n+1M
e f ∈ BnD tais que g = τ(ι0(u), f). Ou seja, g ∈ Cn,mM .
Logo, Cn,mM = CBmM(BnD).
Estamos agora em condições de provar o Corolário 4.3:
Demonstração do Corolário 4.3: Na seção anterior mostramos que Cn,mM ⊆
NBmM(BnD) ⊆ CBmM(BnD) e pelo Teorema 4.2 CBmM(BnD) = Cn,mM , portanto
temos que CBmM(BnD) = NBmM(BnD) = Cn,mM.
Também mostramos que Zn,mM ⊆ ZBmM(BnD). Seja g ∈ ZBmM(BnD), então
gf = fg, para todo f ∈ BnD. Pelo Teorema 4.2, g ∈ Cn,mM , e portanto existem
h ∈ Tm−nM e f′ ∈ BnD tais que τ(h, f
′) = g ∈ BmM . Provemos que f′ ∈ Z(BnD).
Como τ(h, f ′)τ(1, f) = τ(1, f)τ(h, f ′), então τ(h, f ′f)τ(h−1, (ff ′)−1) = 1, donde se-
gue que f ′f = ff ′, para todo f ∈ BnD. Logo, f′ ∈ Z(BnD) e como consequência
g = τ(h, f ′) ∈ Zn,mM .
Os próximos dois lemas são resultados preliminares à prova do Lema 4.11. Lem-
-
4.2 Demonstrações 45
bremos que Σm denota o grupo de permutações de {P1, . . . , Pm}, que Σn denota o
grupo de permutações de {P1, . . . , Pn} e que Σm−n denota o grupo de permutações de
{Pn+1, . . . , Pm}. Escrevemos
BnmM = σ−1(Σm−n).
Lema 4.12. Sejam n ≥ 1 e g ∈ CBnmM(PBnD). Existem u ∈ B1m−n+1M e f ∈ PBnD
tais que
g = τ(ι0(u), f).
Demonstração: Provemos o Lema 4.12 por indução sobre n. Seja n = 1. Então,
PB1D = {1}, assim
CB1mM(PB1D) = B1mM.
Por outro lado, se u ∈ B1mM , então u = τ(ι0(u), P1), onde P1 denota o caminho
constante sobre P1, pois τ(ι0(u), P1) = κ(ι0(u)).
Sejam n > 1 e g ∈ CBnmM(PBnD). Escrevemos M′ = M\{P1, . . . , Pn−1, Pn+1, . . . , Pm},
e D′ = D \ {P1, . . . , Pn−1}. Consideremos o seguinte diagrama comutativo:
1 // π1D′ //
��
PBnDρ∗
//
��
PBn−1D //
��
1
1 // π1M′ // BnmM
ρ∗// Bn−1m−1M
// 1.
Pelo Teorema 1.15, ρ∗(g) ∈ CBn−1m−1M(PBn−1D). Por indução, existem u ∈ B1m−n+1M
e f1 ∈ PBn−1D tais que
ρ∗(g) = τ(ι0(u), f1).
Escolhamos f2 ∈ PBnD tal que ρ∗(f2) = f1 e escrevamos
g′ = g · τ(ι0(u), f2)−1.
Notemos que ρ∗(τ(ι0(u), f2)) = τ(ι0(u), ρ∗(f2)), pois o seguinte diagrama é comu-
tativo:
Tm−nM × PBnDτ
//
1×ρ∗
��
BnmM
ρ∗
��
Tm−nM × PBn−1Dτ
// Bn−1m−1M.
-
4.2 Demonstrações 46
Portanto, ρ∗(g′) = ρ∗(g)ρ∗(τ(ι0(u), f2))
−1 = 1.
Agora, τ(ι0(u), f2) ∈ Cn,mM e Cn,mM ⊆ CBmM(BnD). Como [BnD : PBnD] é
finito, então pela Proposição 1.14 temos que CBmM(BnD) = CBmM(PBnD) e já que
τ(ι0(u), f2) ∈ BnmM temos que τ(ι0(u), f2) ∈ CBnmM(PBnD).
Como consequência temos que g′ ∈ π1M′, e que g′ ∈ CBnmM(PBnD), e assim, pelo
Teorema 1.15,
g′ ∈ Cπ1M ′(π1D′).
Consideremos os seguintes casos:
• se m 6= n ou M não é um disco, então M ′ é uma superf́ıcie grande e D′ não é um
colarinho de Möbius em M ′, assim, pelo Teorema 3.1, Cπ1M ′(π1D′) = π1D
′.
• Se m = n e M é um disco, então π1M′ = π1D
′, assim Cπ1M ′(π1D′) = π1D
′.
Dáı segue que g′ = f3 ∈ π1D′ ⊆ PBnD. Logo,
g = f3 · τ(ι0(u), f2) = τ(ι0(u), f3f2).
Lema 4.13. Sejam n ≥ 2 e g ∈ CBmM(BnD). Então, σ(g) é um elemento de Σn ×
Σm−n.
Demonstração: Seja g ∈ CBmM(BnD). Suponhamos que σ(g) 6∈ Σn × Σm−n, sem
perda de generalidade podemos supor que σ(g)(Pn+1) = P1. Seja f ∈ π1(D\{P2, . . . , Pn};P1),
f 6= 1. O grupo PBnD tem ı́ndice finito em BnD. Logo, CBmM(BnD) = CBmM(PBnD).
Como π1(D \ {P2, . . . , Pn}) ⊆ PBnD e como g ∈ CBmM(PBnD), temos que existe um
inteiro k > 0 tal que
gfkg−1 ∈ PBnD.
Consideremos a seguinte sequência exata:
1 // π1(M \ {P1, . . . , Pn, Pn+2, . . . , Pm) // PBmMρ∗
// PBm−1M // 1 .
-
4.2 Demonstrações 47
O homomorfismo ρ∗ envia PBnD isomorficamente sobre PBnD. Por outro lado,
gfkg−1 6= 1, pois f 6= 1 e BmM é livre de torção (M 6= S2, orientável) e ρ∗(gf
kg−1) = 1
(ver Figura 4.1). Isto é uma contradição.
Figura 4.1:
Isto prova que σ(g) ∈ Σn × Σm−n.
Demonstração do Lema 4.11: Seja g ∈ CBmM(BnD). Pelo Lema 4.13, σ(g) ∈
Σn × Σm−n. Escolhemos f1 ∈ BnD tal que σ(gf−11 ) ∈ Σm−n e escrevemos g
′ = gf−1.
Então, g′ ∈ BnmM , g′ ∈ CBmM(BnD), e CBmM(BnD) = CBmM(PBnD), assim
g′ ∈ CBnmM(PBnD).
Pelo Lema 4.12, existem u ∈ B1m−n+1M e f2 ∈ PBnD tais que
g′ = τ(ι0(u), f2).
Portanto, g = τ(ι0(u), f2) · f1 = τ(ι0(u), f2f1).
Demonstração do Teorema 4.5: A prova é dividida em cinco passos.
Passo 1. Definição de δ:
Consideremos o homomorfismo natural
δ0 : BnmM −→ B
1m−n+1M.
-
4.2 Demonstrações 48
Seja g ∈ Cn,mM. Pelo Lema 4.13, σ(g) ∈ Σn × Σm−n. Escolhemos f ∈ BnD tal que
σ(gf−1) ∈ Σm−n e então definimos
δ(g) = δ0(gf−1).
Provemos que a definição de δ(g) não depende da escolha de f . Sejam f1, f2 ∈ BnD
tais que σ(gf−11 ) ∈ Σm−n e σ(gf−12 ) ∈ Σm−n. Então,
δ0(gf−12 )
−1δ0(gf−11 ) = δ0(f2g
−1gf−11 ) = δ0(f2f−11 ) = 1,
e assim δ0(gf−11 ) = δ0(gf
−12 ).
Passo 2. A aplicação δ : Cn,mM −→ B1m−n+1M é um homomorfismo.
Sejam g1, g2 ∈ Cn,mM . Sejam f1, f2 ∈ BnD tais que σ(g1f−11 ) ∈ Σm−n e σ(g2f
−12 ) ∈
Σm−n. Pelo Corolário 4.3,
Cn,mM = NBmM(BnD),
assim existe f3 ∈ BnD tal que g−12 f1g2 = f3. Ainda mais,
σ((g1g2)(f2f3)−1) = σ(g1f
−11 g2f2)
−1 ∈ Σm−n.
Portanto,
δ(g1)δ(g2) = δ0(g1f−11 )δ0(g2f
−12 ) = δ0(g1f
−11 g2f
−12 ) = δ0((g1g2)(f2f3)
−1) = δ(g1g2).
Passo 3. Seja h ∈ Tm−nM e seja f ∈ BnD. Então,
δ(τ(h, f)) = δ(τ(h, 1)τ(1, f)) = δ(τ(h, 1)) · δ(f) = κ(h).
Passo 4. Temos a seguinte sequência exata:
1 // BnD // Cn,mMδ
// B1m−n+1M // 1 .
Seja u ∈ B1m−n+1M. Então,
δ(τ(ι0(u), 1)) = κ(ι0(u)) = u.
-
4.2 Demonstrações 49
Isto mostra que δ é sobrejetora. Seja g ∈ Cn,mM . Pelo Lema 4.11, existem u ∈
B1m−n+1M e f ∈ BnD tais que g = τ(ι0(u), f). Se g ∈ kerδ, então
1 = δ(g) = κ(ι0(u)) = u,
assim
g = τ(ι0(u), f) = τ(1, f) = f ∈ BnD.
Passo 5. Temos a seguinte sequência exata:
1 // Z(BnD) // Zn,mMδ
// B1m−n+1M // 1 .
Pelo Passo 4, é suficiente mostrar que δ : Zn,mM −→ B1m−n+1M é sobrejetora. Seja
u ∈ B1m−n+1M. Então, τ(ι0(u), 1) ∈ Zn,mM e δ(τ(ι0(u), 1)) = u.
Demonstração do Teorema 4.6: O homomorfismo ι : B1m−n+1M −→ Zn,mM é
definido por
ι(u) = τ(ι0(u), 1), para u ∈ B1m−n+1M.
Pelo Passo 4 na prova anterior, claramente, δ ◦ ι = id.
Agora, como a sequência exata
1 // Z(BnD) // Zn,mMδ
// B1m−n+1M // 1
cinde, e pelo Corolário 4.3 Zn,mM = ZBmM(BnD), temos que
Zn,mM ≃ B1m−n+1M × Z(BnD),
e já que ZBmM(BnD) ⊆ CBmM(BnD), temos também que
Cn,mM ≃ B1m−n+1M ×BnD.
-
Caṕıtulo 5
Comensurador, normalizador, e
centralizador de BnN em BmM
Sejam M uma superf́ıcie grande e N uma subsuperf́ıcie de M tal que N não é nem
um disco, nem um colarinho de Möbius em M , e tal que nenhuma das componentes
conexas de M \N é um disco. Sejam N1, . . . , Nr as componentes conexas de M \N .
Sejam P1, . . . , Pn ∈ N e Pn+1, . . . , Pm ∈M \N . Para i = 1, . . . , r escrevemos
Pi = {Pn+1, . . . , Pm} ∩Ni e BniNi = BniNi(Pi),
onde ni denota a cardinalidade de Pi. Se ni = 0, faremos a convenção que B0Ni = {1}.
O objetivo deste caṕıtulo é provar o seguinte teorema, com as hipóteses mencionadas
acima:
Teorema 5.1.
CBmM(BnN) = BnN × Bn1N1 × · · · × BnrNr.
Corolário 5.2.
CBmM(BnN) = NBmM(BnN) = BnN × Bn1N1 × · · · × BnrNr e
ZBmM(BnN) = Z(BnN) ×Bn1N1 × · · · ×BnrNr.
50
-
5.1 Ação de π1N sobre Π1(M \ {P0}) 51
Este caṕıtulo será dividido em duas seções. Na primeira seção estudaremos uma
ação de π1N sobre algum grupóide Π1(M \ {P0}). Na segunda seção aplicaremos os
resultados da primeira para provar o Teorema 5.1.
5.1 Ação de π1N sobre Π1(M \ {P0})
Durante esta seção, fixemos um ponto P0 ∈ N e um ponto Pi ∈ Ni, para todo i =
1, . . . , r. Além disso, não assumiremos que nenhuma das componentes conexas de
M \N é um disco.
Daremos uma definição de um grupóide na linguagem da Teoria de Categorias:
Definição 5.3. Um grupóide é uma pequena categoria na qual todo morfismo é um
isomorfismo. Mais precisamente, um grupóide é formado pelos seguintes dados:
• um conjunto G0 de objetos,
• para cada par de objetos x e y em G0, existe um conjunto G(x, y) de morfismos
(ou setas) de x até y. Escrevemos f : x → y para indicar que f é um elemento
de G(x, y).
• uma função, chamada composição, a qual associa a cada g ∈ G(y, z) e a cada
f ∈ G(x, y) um elemento gf ∈ G(x, z); ou seja, composição é uma função
G(x, y) ×G(y, z) −→ G(x, z).
Esses objetos e morfismos devem satisfazer os seguintes axiomas:
�