SUPERVISIONADA DE MAMAS EM IMAGENS TÉRMICAS · 2018-02-28 · com o Sistema de Diagnóstico...
57
Transcript of SUPERVISIONADA DE MAMAS EM IMAGENS TÉRMICAS · 2018-02-28 · com o Sistema de Diagnóstico...

INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E
TECNOLOGIA DO SUDESTE DE MINAS GERAIS - CAMPUS RIO
POMBA
DEIVISON JUNIOR MARTINS CHELONI
UM MÉTODO PARA A SEGMENTAÇÃO NÃOSUPERVISIONADA DE MAMAS EM IMAGENS
TÉRMICAS
RIO POMBA
2016

INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA ETECNOLOGIA DO SUDESTE DE MINAS GERAIS - CAMPUS RIO
POMBA
DEIVISON JUNIOR MARTINS CHELONI
UM MÉTODO PARA A SEGMENTAÇÃO NÃOSUPERVISIONADA DE MAMAS EM IMAGENS
TÉRMICAS
Monogra�a submetida ao corpo docente doDepartamento Acadêmico de Ciência daComputação do Instituto Federal de Educa-ção, Ciência e Tecnologia do Sudeste de Mi-nas Gerais - Campus Rio Pomba como parteintegrante dos requisitos necessários para ob-tenção do grau de Bacharel em Ciência daComputação.
Orientador:
LUCAS GRASSANO LATTARI
RIO POMBA
2016

Ficha Catalográfica elaborada pela Biblioteca Jofre Moreira – IFET/RP Bibliotecária: Ana Carolina Souza Dutra CRB 6 / 2977
C516m Cheloni, Deivison Junior Martins.
Um método para a segmentação não supervisionada de mamas em
imagens térmicas. / Deivison Junior Martins Cheloni. – Rio Pomba,
2016.
56f. : il.
Orientador: Prof. Lucas Grassano Lattari.
Trabalho de Conclusão de Curso - Graduação em Ciência da
Computação - Instituto Federal do Sudeste de Minas Gerais -
Campus Rio Pomba.
1. Diagnóstico por imagem – imagem térmica. 2. Câncer de mama.
3. Segmentação de imagem médica. I. Lattari, Lucas Grassano. II.
Título.
CDD: 006.3
DEIVISON JUNIOR MARTINS CHELONI
UM MÉTODO PARA A SEGMENTAÇÃO NÃO SUPERVISIONADA DE MAMAS
EM IMAGENS TÉRMICAS
Monogra�a apresentada ao Programa de De-
partamento Acadêmico de Ciência da Com-
putação do Instituto Federal de Educação,
Ciência e Tecnologia do Sudeste de Minas
Gerais - Campus Rio Pomba como parte in-
tegrante dos requisitos necessários para ob-
tenção do grau de Bacharel em Ciência da
Computação.
Aprovado em 15 de janeiro de 2016.
BANCA EXAMINADORA
Prof. Dr. Lucas Grassano Lattari - Orientador
Prof. Dr. João Paulo Campolina Lamas
Profa. Dra. Alessandra Martins Coelho
RIO POMBA
2016

"Nunca avalie a altura de uma montanha até que atinja o cume. Quando atingir seu
objetivo, verá então como a montanha era baixa."
(Dag Hammarskjöld)

Agradecimentos
Agradeço primeiramente a Deus que permitiu que tudo isso acontecesse, por ter me
dado saúde e força para superar todos os obstáculos.
Agradeço a minha avó Francisca, in memoriam, por todos ensinamentos que me deu.
Aos meus pais, Pompeu e Graça, por toda determinação e luta na minha formação,
por não ter medido esforços para me ajudar em tudo que precisei durante a graduação.
À minha irmã, meus tios, tias primos e primas pela convivência e apoio.
À minha namorada Gabrieli, pela paciência nas vezes que estive ausente devido aos
horários de estudo, e pela força que tem me dado sempre.
A todos os professores do DACC que contribuíram diretamente na minha formação,
em especial ao Prof. Dr. Lucas Lattari por con�ar em mim e compartilhar comigo suas
experiências e conhecimentos na tarefa de orientar-me.
Aos membros e ex-membros da Emcomp, por todos os momentos convividos, pelos
sonhos compartilhados e pela experiência adquirida ao longo dos anos.
Aos amigos de república, Luiz Gustavo (Magrelo), Lucas Fonseca (Matuzim), Marcos,
Elder, Vitor Rubim, Heudes, Heuler, Kleber, Angelo, Adalberto, por toda a convivência
do dia-a-dia, pelas experiências vividas, por todos os momentos de alegria e até mesmo
alguns desentendimentos.
A todos colegas do curso de Ciência da Computação e de todos outros cursos do
campus Rio Pomba, pelo convívio e pelo companheirismo.
Aos funcionários da Diretoria de Extensão, pela oportunidade e con�ança que me
deram.
Aos ex-colegas de graduação e atuais colegas de trabalho, Leandro, Marlon e Ulysses,
pela oportunidade de emprego na Lab Cinco.
A todos que direta ou indiretamente �zeram parte da minha formação, o meu sincero
muito obrigado.

Resumo
Este trabalho fundamenta-se em um novo método de segmentação de imagens médicas nãosupervisionadas obtidas através de bases públicas da área. Este baseia-se em um métodoque consiste em termogra�a, em que o câncer possa ser diagnosticado mediante o uso deindicadores termais em imagens infravermelhas, por ser uma solução de baixo custo, nãoinvasiva e que fornece informações su�cientes para a detecção de uma eventual anormali-dade na mama. É possível construir uma abordagem híbrida que englobe vários métodoscom o Sistema de Diagnóstico Auxiliado por Computador (CAD). Para a construção deum software capaz de realizar a atividade de CAD com e�cácia, é comum utilizar-se desegmentação de imagem para identi�car os elementos que pertencem a uma certa Regiãode Interesse (ROI). O principal objetivo deste trabalho é desenvolver uma solução para oproblema de segmentação não supervisionada da ROI. Para os experimentos, foram uti-lizadas uma base de dados de imagens térmicas da mama, em que o método proposto foicapaz de identi�car a área em que o seio se localiza. Este trabalho é o primeiro passo paraa construção de um arcabouço completo para o diagnóstico de doenças desse porte, quepossa também ser fundamentado para a detecção de câncer para outros órgãos do corpohumano. Os testes realizados demonstraram resultados positivos e bastante promissores.
Palavras-chave: aprendizagem de máquina, câncer de mama, imagens térmicas, regiãode interesse, segmentação de imagem.

Abstract
This work is based on a new method of unsupervised segmentation of medical imagesobtained from public data bases of the area. This is based on a method of thermography,in which cancer can be diagnosed by use of infrared thermal images in indicators, beinga low-cost, non invasive and provides su�cient information for detecting an eventualabnormalities in the breast. It is possible to build a hybrid approach that encompassesseveral methods with the Computer-Aided Diagnosis (CAD). To build software capable ofperforming the activity of CAD e�ectively, it is common to use the image segmentation toidentify the elements that belong to a certain region of interest (ROI). The main objectiveof this work is to develop a solution to the problem of unsupervised segmentation of ROI.For the experiments, a database of thermal images of the breast, in which the proposedmethod was able to identify the area within which it is located. This work is the �rststep to building a complete framework for the diagnosis of diseases of this size, which canalso be justi�ed for the detection of cancer to other organs of the human body. Testsperformed have shown positive and promising results.
Keywords: machine learning, breast cancer, thermal images, region of interest, imagesegmentation.
Lista de Figuras
1.1 Exemplo de um exame de mamogra�a. A paciente coloca o seio entre duas
placas de acrílico onde é feita uma pequena compressão, a câmera aplica
uma dose mínima de raios X permitindo a extração das informações em
um �lme fotográ�co. Fonte: Meira [21]. . . . . . . . . . . . . . . . . . . . . 2
1.2 Exemplo de uma imagem térmica da mama. As cores vermelhas represen-
tam temperaturas mais elevadas e as cores amarelas, azuis e roxas descre-
vem temperaturas mais baixas. Fonte: Silva [31]. . . . . . . . . . . . . . . 3
1.3 Exemplo de resultado �nal do método proposto: (a) Imagem térmica da
mama utilizada como entrada, (b) Imagem contendo a detecção das mamas
apresentadas como o resultado de saída. Fonte: Elaborada pelo autor. . . . 4
2.1 Segmentação manual realizada por Lipari e Head [18]: (a) Termograma
da Paciente (b) Esquema de determinação dos pontos de referências e seg-
mentação (c) Imagem segmentada em quadrantes para mama esquerda e
direita. Fonte: Lipari e Head [18]. . . . . . . . . . . . . . . . . . . . . . . . 6
3.1 Exemplo da anatomia da mama: (1) Parede Torácica: abrange a caixa
torácica óssea, os músculos da caixa torácica, o diafragma e o abdome. (2)
Músculos Peitorais. (3) Lobo Mamário: conjunto de ácinos (menor parte
da glândula, responsável pela produção de leite na lactação). (4) Mamilo:
junção dos ductos mamários, a abertura para saída do leite e a aréola. (5)
Aréola: área circular que envolve o mamilo. (6) Ductos Mamários: em
número de 10 a 20 canais, conduzem a secreção (leite) até a papila. (7)
Tecido Adiposo: todo o restante da mama é preenchido por tecido adiposo,
cuja quantidade varia com as características físicas, estado nutricional e
idade da mulher. (8) Prega Inframamária: ponto de junção da porção
inferior da mama com a parede anterior do tórax. Fonte: Winnikow [34]. . 10

Lista de Figuras vii
3.2 Exemplo de câncer de mama in situ (A) e câncer de mama invasivo (B).
Note que o câncer invasivo rompe a base do ducto, chamada membrana
basal, e adentra o tecido ao seu redor, enquanto o câncer in situ não rompe
a membrana. Fonte: Buzaid [7]. . . . . . . . . . . . . . . . . . . . . . . . . 11
3.3 Exemplo de imagem digital representada num plano cartesiano com coor-
denadas espaciais (x,y), sendo os pixels representados em cada quadrado e
os números dentro dos pixels, o valor da cor. Fonte: Rogério [28]. . . . . . 12
3.4 Exemplo da utilização da equalização de histograma: (a) imagem original,
(b) resultado da equalização de histograma, (c) histograma correspondente.
Fonte: Gonzalez e Woods [12]. . . . . . . . . . . . . . . . . . . . . . . . . . 12
3.5 Exemplo de primeira e segunda derivadas de duas imagens. Fonte: Aze-
vedo, Conci e Letta [3]. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
3.6 Exemplo de utilização do �ltro laplaciano: (a) imagem original, (b) imagem
após a aplicação do �ltro laplaciano. Fonte: Filho e Neto [11]. . . . . . . . 16
3.7 Exemplo da utilização do �ltro de dilatação: (a) imagem original, (b) ima-
gem após a aplicação do �ltro de dilatação. Fonte: Gonzalez e Woods
[12]. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
3.8 Exemplo da utilização do �ltro de erosão: (a) imagem original, (b) imagem
após a aplicação do �ltro de erosão. Fonte: Gonzalez e Woods [12]. . . . . 19
3.9 Exemplo da utilização do �ltro de abertura: (a) imagem original, (b) ima-
gem após a aplicação do �ltro de abertura, (c) imagem após a aplicação do
�ltro de fechamento. Fonte: Gonzalez e Woods [12]. . . . . . . . . . . . . . 19
3.10 Exemplo de uma imagem antes e após passar pelo algoritmo Suzuki-Kamasi:
os contornos podem ser de dois tipos, tracejados ou pontilhados. Fonte:
Bradski e Kaehler [6]. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
3.11 Exemplo de uma imagem após interpolação por Spline Cúbica Natural para
algumas imagens. (a) Após ajuste por aproximação, (b) Após ajuste por
interpolação dos pontos faltantes. Fonte: Marques [19]. . . . . . . . . . . . 22
4.1 Etapas do método proposto. Fonte: Elaborada pelo autor. . . . . . . . . . 23
4.2 Exemplo de uma imagem após a aplicação do algoritmo de Equalização de
Histograma. Fonte: Elaborada pelo autor. . . . . . . . . . . . . . . . . . . 25

Lista de Figuras viii
4.3 Exemplo da aplicação do algoritmo de limiarização: (a) Imagem de entrada
após o cálculo de pré-processamento (b) Imagem resultante após a limia-
rização, extraindo a região da prega inframamária. Fonte: Elaborada pelo
autor. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
4.4 Exemplo de uma imagem após a �ltragem laplaciana. Fonte: Elaborada
pelo autor. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
4.5 Exemplo de uma imagem após o ajuste das mamas. Fonte: Elaborada pelo
autor. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
4.6 Exemplo de uma imagem que apresenta o histograma de coluna calculado.
Fonte: Elaborada pelo autor. . . . . . . . . . . . . . . . . . . . . . . . . . . 30
5.1 Exemplo de imagens obtidas da base desenvolvida por Silva et al.. Fonte:
Silva [31]. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
5.2 Exemplo de avaliação de um experimento: (a) Método Proposto, (b)Ground
Truth, (c) Sobreposição de (a) e (b). Fonte: Adaptação de Marques [19]. . 32
5.3 Resultados obtidos por: (a) Motta [23], (b) Marques [19], (c) Método Pro-
posto. Fonte: Adaptação de Motta [23] e Marques [19]. . . . . . . . . . . . 37
5.4 Resultados obtidos da segmentação automática. Fonte: Elaborada pelo
autor. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
5.5 Pacientes com pouco volume mamário. Fonte: Elaborada pelo autor. . . . 38
5.6 Pacientes com assimetria acentuada entre as mamas. Fonte: Elaborada
pelo autor. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38

Lista de Tabelas
5.1 Comparação dos resultados obtidos por Motta [23] e Marques [19]. . . . . . 34
5.2 Parâmetros utilizados no experimento. . . . . . . . . . . . . . . . . . . . . 36
5.3 Melhores resultados obtidos pelo método proposto. . . . . . . . . . . . . . 36
5.4 Comparação dos resultados entre Motta [23], Marques [19] e o método
proposto. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36

Lista de Abreviaturas e Siglas
ACC Acurácia
CAD Diagnóstico Auxiliado por Computador
ESP Especi�cidade
FN Falso Negativo
FP Falso Positivo
PDN Preditividade Negativa
PDP Preditividade Positiva
ROI Região de Interesse
SEN Sensibilidade
VN Verdadeiro Negativo
VP Verdadeiro Positivo
Sumário
1 Introdução 1
1.1 De�nição do Problema . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.2 Objetivo Principal e Objetivos Especí�cos . . . . . . . . . . . . . . . . . . 4
1.3 Método de Pesquisa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.4 Organização do Trabalho . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2 Referencial Teórico 6
3 Fundamentos 9
3.1 De�nições Médicas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
3.1.1 De�nição de Câncer . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
3.1.2 Anatomia da Mama . . . . . . . . . . . . . . . . . . . . . . . . . . 10
3.1.3 Tipos de Câncer de Mama . . . . . . . . . . . . . . . . . . . . . . . 10
3.2 Conceitos de Processamento de Imagens . . . . . . . . . . . . . . . . . . . 11
3.2.1 Equalização de Histograma . . . . . . . . . . . . . . . . . . . . . . . 12
3.2.2 Filtro Laplaciano . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
3.2.3 Filtro Morfológico Matemático . . . . . . . . . . . . . . . . . . . . . 17
3.2.3.1 Dilatação . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
3.2.3.2 Erosão . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
3.2.3.3 Abertura e Fechamento . . . . . . . . . . . . . . . . . . . 18
3.2.4 Algoritmo Suzuki-Kamasi . . . . . . . . . . . . . . . . . . . . . . . 20
3.2.5 Natural Cubic Splines . . . . . . . . . . . . . . . . . . . . . . . . . 20
Sumário xii
4 Representação Computacional 23
4.1 Aquisição dos Termogramas . . . . . . . . . . . . . . . . . . . . . . . . . . 24
4.2 Etapas de Pré-Processamento . . . . . . . . . . . . . . . . . . . . . . . . . 24
4.2.1 Equalização de Histograma . . . . . . . . . . . . . . . . . . . . . . . 25
4.2.2 Limiarização (Binarização) . . . . . . . . . . . . . . . . . . . . . . . 25
4.3 Implementação da Metodologia . . . . . . . . . . . . . . . . . . . . . . . . 26
4.3.1 Filtro Morfológico de Abertura . . . . . . . . . . . . . . . . . . . . 26
4.3.2 Filtragem Laplaciana . . . . . . . . . . . . . . . . . . . . . . . . . . 27
4.3.3 Algoritmo de Detecção de Contornos (Suzuki-Kamasi) . . . . . . . 27
4.3.4 Re�namento Adaptativo . . . . . . . . . . . . . . . . . . . . . . . . 28
4.3.5 Ajuste das Mamas (Interpolação por Spline Cúbica) . . . . . . . . . 28
4.3.6 Separação das Mamas . . . . . . . . . . . . . . . . . . . . . . . . . 29
5 Análise de Resultados 31
5.1 Metodologia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
5.1.1 Medidas Estatísticas . . . . . . . . . . . . . . . . . . . . . . . . . . 32
5.2 Análise de Resultados . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
5.3 Limitações do Método . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
6 Conclusão e Trabalhos Futuros 39
Referências 40

Capítulo 1
Introdução
O câncer de mama é uma das principais causas de morte de mulheres em todo o mundo.
Além de ser o segundo tipo mais frequente do globo, é o tipo de câncer mais comum entre
as mulheres, respondendo por 22% dos casos novos a cada ano [15]. Se diagnosticado e
tratado oportunamente, o prognóstico é relativamente bom. A realização de exames pre-
ventivos é essencial para que a doença seja diagnosticada em estágios iniciais, aumentando
a chance de cura dos pacientes.
O desenvolvimento do tumor da mama exige um �uxo constante de nutrientes. Para
suprir essa exigência, as células produzem substâncias para criar novos vasos sanguíneos
ao redor do tumor, resultando em uma maior atividade sanguínea nessa região e também
aumentando a sua temperatura [35]. Esse aumento de temperatura acaba sendo uma
particularidade muito útil para auxiliar exames preventivos na detecção de câncer.
Existem muitos meios disponíveis para se detectar a presença deste tipo de câncer:
luz (óptico), som (ultrassom), calor (termograma), magnetismo, micro-ondas, raios X etc.
Também é possível construir uma abordagem híbrida que utilize os métodos anteriores
com diagnóstico auxiliado por computador [2].
É de fundamental importância que existam mecanismos preventivos para que a doença
seja rapidamente diagnosticada. Desses, um exame muito conhecido é a mamogra�a. A
mamogra�a é um exame estrutural que utiliza detectores de alta resolução e alto contraste
para gerar imagens em raios X que exibem as estruturas internas mais densas da mama,
destacando possíveis microcalci�cações [32]. As imagens obtidas exibem tumores antes
que se desenvolvam o su�ciente para que sejam percebidos de maneira mais evidente.
Este exame necessita de doses de radiação para a síntese de imagens médicas na região
da mama, tornando possível a identi�cação de massas anormais nessa área. Entretanto,

1 Introdução 2
é considerado um método desconfortável, pois o seio necessita ser comprimido para que
o tecido seja achatado e, consequentemente, seja capaz de obter os melhores resultados,
como pode ser visto na Figura 1.1. Além disso, é suscetível a variabilidade da interpretação
e afetado pela densidade do tecido. Outro problema é o fato dos raios X serem prejudiciais
ao corpo humano, principalmente em mulheres acima de 40 anos [36]. Outro fator a ser
considerado é a acessibilidade do exame, pois nem sempre a máquina utilizada para fazer
o exame está disponível em cidades mais distantes dos grandes centros urbanos. Por isso é
extremamente importante desenvolver novos exames preventivos que sejam mais simples
e baratos.
Figura 1.1: Exemplo de um exame de mamogra�a. A paciente coloca o seio entre duasplacas de acrílico onde é feita uma pequena compressão, a câmera aplica uma dose mínimade raios X permitindo a extração das informações em um �lme fotográ�co. Fonte: Meira[21].
Com isso, outros métodos foram buscados por pesquisadores para solucionar esses
problemas. Um método muito popular é a termogra�a, em que o câncer é diagnosticado
pelo uso de indicadores termais em imagens infravermelhas. Nessas imagens, técnicas de
processamento de imagens e ferramentas de aprendizagem de máquina são empregadas.
A análise de imagens térmicas é útil, pois uma alta atividade metabólica é observada
em células cancerígenas, diferentemente do que ocorre em células comuns. Trata-se de
uma solução de baixo custo, não invasiva e que fornece informações su�cientes para a
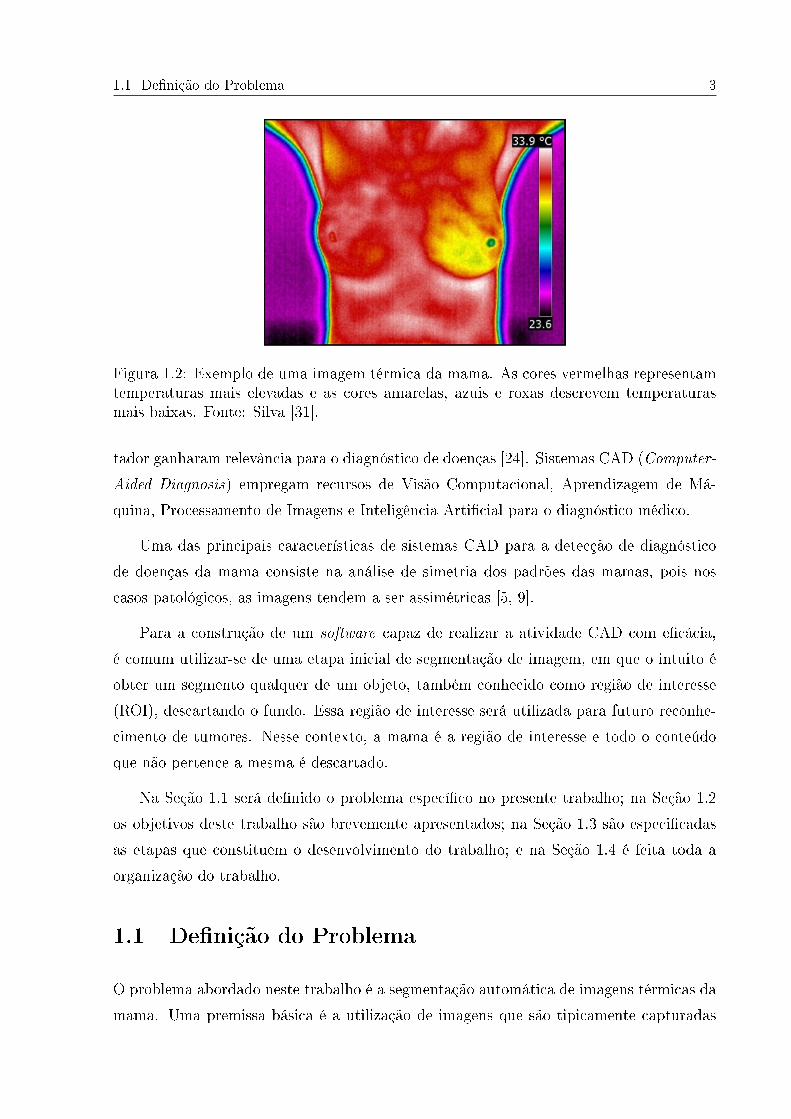
identi�cação de uma eventual anormalidade na mama [4]. Na Figura 1.2 é apresentado
um exemplo de uma imagem térmica da mama.
Com a popularização da tecnologia, os sistemas de Diagnóstico Auxiliados por Compu-
1.1 De�nição do Problema 3
Figura 1.2: Exemplo de uma imagem térmica da mama. As cores vermelhas representamtemperaturas mais elevadas e as cores amarelas, azuis e roxas descrevem temperaturasmais baixas. Fonte: Silva [31].
tador ganharam relevância para o diagnóstico de doenças [24]. Sistemas CAD (Computer-
Aided Diagnosis) empregam recursos de Visão Computacional, Aprendizagem de Má-
quina, Processamento de Imagens e Inteligência Arti�cial para o diagnóstico médico.
Uma das principais características de sistemas CAD para a detecção de diagnóstico
de doenças da mama consiste na análise de simetria dos padrões das mamas, pois nos
casos patológicos, as imagens tendem a ser assimétricas [5, 9].
Para a construção de um software capaz de realizar a atividade CAD com e�cácia,
é comum utilizar-se de uma etapa inicial de segmentação de imagem, em que o intuito é
obter um segmento qualquer de um objeto, também conhecido como região de interesse
(ROI), descartando o fundo. Essa região de interesse será utilizada para futuro reconhe-
cimento de tumores. Nesse contexto, a mama é a região de interesse e todo o conteúdo
que não pertence a mesma é descartado.
Na Seção 1.1 será de�nido o problema especí�co no presente trabalho; na Seção 1.2
os objetivos deste trabalho são brevemente apresentados; na Seção 1.3 são especi�cadas
as etapas que constituem o desenvolvimento do trabalho; e na Seção 1.4 é feita toda a
organização do trabalho.
1.1 De�nição do Problema
O problema abordado neste trabalho é a segmentação automática de imagens térmicas da
mama. Uma premissa básica é a utilização de imagens que são tipicamente capturadas
1.2 Objetivo Principal e Objetivos Especí�cos 4
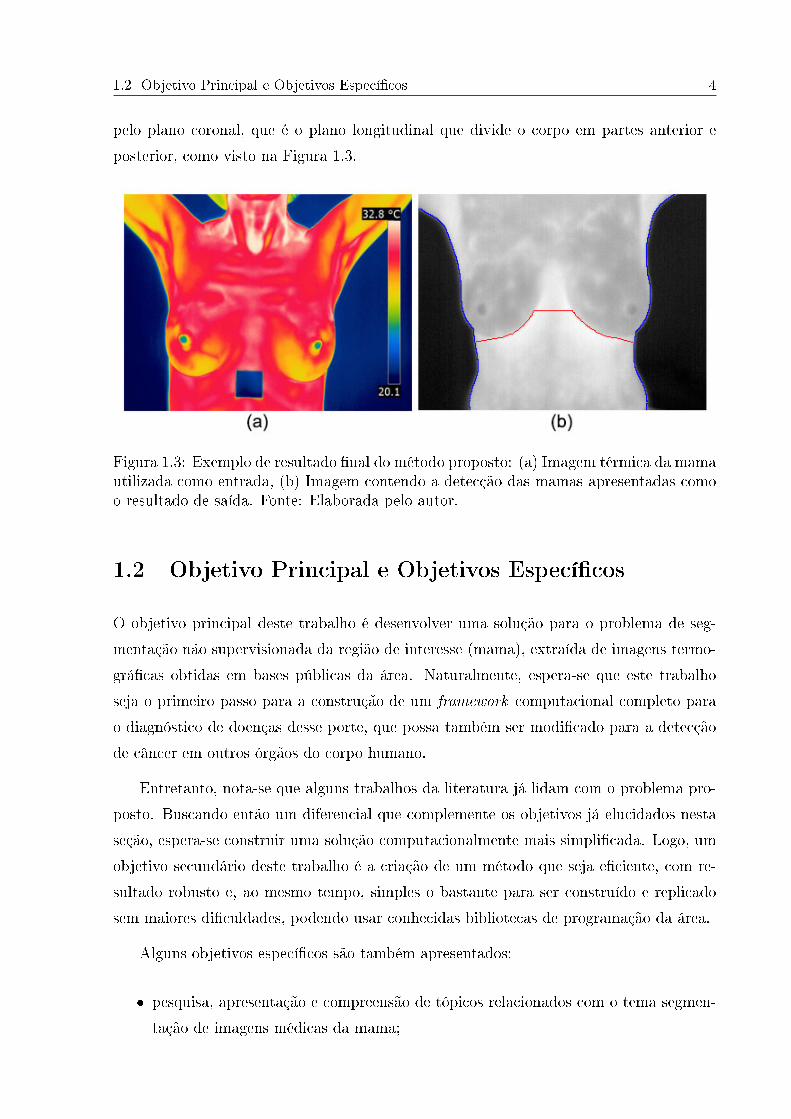
pelo plano coronal, que é o plano longitudinal que divide o corpo em partes anterior e
posterior, como visto na Figura 1.3.
Figura 1.3: Exemplo de resultado �nal do método proposto: (a) Imagem térmica da mamautilizada como entrada, (b) Imagem contendo a detecção das mamas apresentadas comoo resultado de saída. Fonte: Elaborada pelo autor.
1.2 Objetivo Principal e Objetivos Especí�cos
O objetivo principal deste trabalho é desenvolver uma solução para o problema de seg-
mentação não supervisionada da região de interesse (mama), extraída de imagens termo-
grá�cas obtidas em bases públicas da área. Naturalmente, espera-se que este trabalho
seja o primeiro passo para a construção de um framework computacional completo para
o diagnóstico de doenças desse porte, que possa também ser modi�cado para a detecção
de câncer em outros órgãos do corpo humano.
Entretanto, nota-se que alguns trabalhos da literatura já lidam com o problema pro-
posto. Buscando então um diferencial que complemente os objetivos já elucidados nesta
seção, espera-se construir uma solução computacionalmente mais simpli�cada. Logo, um
objetivo secundário deste trabalho é a criação de um método que seja e�ciente, com re-
sultado robusto e, ao mesmo tempo, simples o bastante para ser construído e replicado
sem maiores di�culdades, podendo usar conhecidas bibliotecas de programação da área.
Alguns objetivos especí�cos são também apresentados:
� pesquisa, apresentação e compreensão de tópicos relacionados com o tema segmen-
tação de imagens médicas da mama;
1.3 Método de Pesquisa 5
� estudo de métodos de processamento e análise de imagens, além de identi�cação das
técnicas estado-da-arte associadas;
� comparar os resultados da técnica proposta com outros presentes na literatura;
� descrição de uma arquitetura para a solução da técnica proposta, utilizando o fra-
mework OpenCV[1].
1.3 Método de Pesquisa
Para melhor entendimento do trabalho desenvolvido, este foi construído em várias etapas,
sendo cada uma especi�cada:
� revisão bibliográ�ca dos principais trabalhos do problema proposto;
� de�nições de termos médicos relacionados;
� demonstração das técnicas de processamento de imagens utilizadas;
� descrição de uma representação computacional que solucione o problema proposto;
� descrição dos resultados obtidos da aplicação da representação computacional pro-
posta e discussão dos resultados obtidos.
1.4 Organização do Trabalho
Este trabalho está organizado da seguinte forma: no Capítulo 2, trabalhos similares são
mostrados e discutidos como obtiveram a segmentação das imagens. No Capítulo 3, são
apresentadas as de�nições médicas, fundamentos matemáticos e computacionais neces-
sários para o entendimento do problema e da solução proposta. Uma descrição de cada
método usado para a segmentação da ROI também é exposta. No Capítulo 4, é exibida a
representação computacional desenvolvida para a solução do problema apresentado neste
trabalho. No Capítulo 5, os resultados são apresentados de maneira quantitativa e quali-
tativa, sendo comparados com outros trabalhos relevantes da literatura e com uma breve
análise dos resultados. As conclusões e trabalhos futuros são discutidos no Capítulo 6.

Capítulo 2
Referencial Teórico
Neste capítulo serão discutidas as diferentes metodologias propostas na literatura para a
solução do problema da segmentação de mamas em imagens térmicas. Os trabalhos serão
apresentados em ordem cronológica.
Em 1997, Lipari e Head [18] apresentaram um trabalho que teve por objetivo analisar a
assimetria do padrão de calor entre as mamas. Eles relatam que realizaram manualmente a
separação das mamas e as dividiram em quadrantes, uma técnica que também foi utilizada
no presente trabalho. Uma segmentação manual é realizada através da marcação de cinco
pontos de referências: o queixo, a lateral esquerda, a lateral direita, a borda inferior da
mama e o mamilo. Além de segmentar a imagem entre mama esquerda e mama direita,
ao interligar cada um dos pontos de referências encontra-se os quadrantes de cada mama.
A Figura 2.1 exempli�ca as etapas do processo.
Figura 2.1: Segmentação manual realizada por Lipari e Head [18]: (a) Termograma daPaciente (b) Esquema de determinação dos pontos de referências e segmentação (c) Ima-gem segmentada em quadrantes para mama esquerda e direita. Fonte: Lipari e Head[18].
Em 2000, Qi et al. [27] desenvolveram uma abordagem totalmente automática para
encontrar a região de interesse (as mamas) em imagens térmicas. Inicialmente utilizaram
2 Referencial Teórico 7
o detector de bordas de Canny [8], encontrando as principais bordas da imagem. Qi et
al. descreveram que utilizaram o desvio padrão igual a 2,5 para que somente as bordas
mais fortes fossem detectadas, entretanto, os autores não informam sobre o intervalo de
thresholds1 utilizado.
Em 2010, Kapoor e Prasad [16] apresentaram uma metodologia de segmentação similar
a Qi et al. [27, 26]. Kapoor e Prasad utilizaram o detector de bordas de Canny para
encontrar as bordas laterais do corpo e os limites que de�nem as mamas. Através da
transformada de Hough para detecção de parábolas, eram encontradas as curvas que
melhor de�nissem os limites inferiores das mamas. Não é citado no artigo se o intervalo
de thresholds e o desvio padrão gaussiano foram de�nidos de forma �xa ou através de
alguma regra heurística, para que se comportassem satisfatoriamente para grande parte
das imagens. Não foram apresentadas as imagens representativas dos resultados obtidos
pela segmentação automática das imagens, nem foi realizada qualquer análise qualitativa
ou quantitativa da metodologia em extração da ROI.
Em 2010, Motta et al. [22] desenvolveram uma metodologia completamente automá-
tica para extração da ROI em imagens térmicas das mamas. Foram os primeiros a utilizar
imagens em que a paciente se encontra com as mãos na cintura. Segundo Motta et al.
[22], é nessa posição em que as mamas se mostram na forma mais natural. Contudo, a
região das axilas não foram incluídas na região de interesse, diferentemente dos autores
citados anteriormente.
Em 2010, Motta [23] apresenta uma metodologia para segmentação automática da
ROI. A metodologia foi dividida em alguns passos que serão descritos à seguir.
Primeiramente é obtida a coordenada inferior da ROI através da limiarização da
imagem. O autor observou que a região das pregas inframamárias são as que apresentam
temperatura mais elevada em relação à outras partes do corpo. Foram utilizadas imagens
em tons de cinza com pixels variando de 0 a 255, em que o valor 0 representa a cor preta
e 255 a cor branca. Motta [23] adotou o valor 243 como threshold em sua limiarização.
Logo após a limiarização, são feitos alguns re�namentos para selecionar apenas os pixels
próximos à região limiarizada. Em seguida, é determinado um limite inferior que assume
o pixel da menor coordenada y e, então, uma reta horizontal é traçada.
Logo após, inicia-se a etapa de remoção do fundo da imagem limiarizada. É realizada
a limiarização de Otsu [25]. Pelo fato de algumas imagens apresentarem falhas após a
limiarização, foi de�nido um novo threshold à partir dos valores encontrados no local da
1Valores utilizados como parâmetros ou limites na operação de limiarização (ou binarização).

2 Referencial Teórico 8
imagem que obteve maior variância dos tons de cinza.
Para obtenção da coordenada superior, o autor consegue traçar retas na imagem com
objetivo de encontrar uma reta horizontal em que haja pelo menos quatro intersecções
com as bordas do corpo da paciente. Ao encontrar o ponto da axila mais baixa, foi traçado
uma reta que de�ne o limite superior da imagem.
A separação das mamas foi de�nida por uma reta vertical traçada na coordenada x
do valor médio da maior distância horizontal entre as extremidades da ROI.
Os resultados e avaliações foram apresentados e serão comparados no Capítulo 5.
Em 2012, Marques [19] apresentou uma metodologia automática para extração da
região de interesse em imagens térmicas das mamas. Foram utilizadas imagens capturadas
do ângulo de visão perpendicular ao plano coronal, onde a paciente se apresenta com os
braços levantados. Marques [19] primeiramente utilizaram o método de limiarização Otsu
para realizar a remoção do fundo e o �ltro laplaciano para detecção dos limites laterais.
Para a remoção dos limites superiores, a imagem foi percorrida por uma scan line em que
os pontos de alternância foram identi�cados. Foi utilizada a limiarização das regiões mais
aquecidas e, posteriormente, alguns re�namentos e ajustes das curvas por aproximação e
interpolação para a detecção dos limites inferiores da imagem. Por �m, foi encontrado o
ponto mais elevado do limite inferior, que foi determinante para a separação das mamas,
concluindo a segmentação. Os resultados e avaliações foram também apresentados e serão
comparados no Capítulo 5.
Capítulo 3
Fundamentos
Este capítulo apresenta algumas de�nições médicas, noções matemáticas e computacionais
necessárias para o entendimento da solução proposta.
3.1 De�nições Médicas
Nesta seção, será discutida as de�nições médicas necessárias para o entendimento do
trabalho.
3.1.1 De�nição de Câncer
Câncer é o nome dado a um conjunto de mais de 100 doenças que têm em comum o
crescimento desordenado (maligno) de células que invadem os tecidos e órgãos, podendo
espalhar-se (metástase) para outras regiões do corpo [14].
As células cancerosas multiplicam-se de maneira descontrolada, formando tumores
que invadem o tecido vizinho; adquirem capacidade de se desprender do tumor e migrar,
atingindo órgãos distantes, constituindo as metástases; perdem sua função especializada
e, à medida que substituem as células normais, comprometem a função do órgão afetado.
Dividindo-se rapidamente, essas células tendem a ser muito agressivas e incontrolá-
veis, determinando a formação de tumores (acúmulo de células cancerosas) ou neoplasias1
malignas. Por outro lado, um tumor benigno é uma massa localizada de células que se
multiplicam vagarosamente e se assemelham ao seu tecido original, raramente constituindo
um risco de vida.1Também denominada tumor, é uma forma de proliferação celular não controlada pelo organismo,
com tendência para a autonomia e perpetuação.

3.1 De�nições Médicas 10
3.1.2 Anatomia da Mama
As mamas são formadas por um conjunto de glândulas, como ilustra a Figura 3.1, que
tem como função principal a produção de leite e é composta por: parede torácica, mús-
culos peitorais, lobo mamário, mamilo, aréola, ductos mamários, tecido adiposo e prega
inframamária.
Figura 3.1: Exemplo da anatomia da mama: (1) Parede Torácica: abrange a caixa torácicaóssea, os músculos da caixa torácica, o diafragma e o abdome. (2) Músculos Peitorais. (3)Lobo Mamário: conjunto de ácinos (menor parte da glândula, responsável pela produçãode leite na lactação). (4) Mamilo: junção dos ductos mamários, a abertura para saída doleite e a aréola. (5) Aréola: área circular que envolve o mamilo. (6) Ductos Mamários: emnúmero de 10 a 20 canais, conduzem a secreção (leite) até a papila. (7) Tecido Adiposo:todo o restante da mama é preenchido por tecido adiposo, cuja quantidade varia comas características físicas, estado nutricional e idade da mulher. (8) Prega Inframamária:ponto de junção da porção inferior da mama com a parede anterior do tórax. Fonte:Winnikow [34].
3.1.3 Tipos de Câncer de Mama
Podemos classi�car o câncer de mama em dois tipos: não invasivos (in situ) e invasivos
ou in�ltrantes, exempli�cados na Figura 3.2. Ele pode invadir vários tecidos da mama,
tais como ductos, lóbulos, e até mesmo tecidos entre ductos e lóbulos. O primeiro tipo,
não invasivo, apresenta células doentes que se originam dentro dos ductos ou dos lóbulos,
mas não invadem ou in�ltram estruturas próximas e nem são capazes de originar uma

3.2 Conceitos de Processamento de Imagens 11
metástase. Já o segundo, invasivo ou in�ltrante, pode invadir tecidos próximos ou até
mesmo órgãos distantes originando a metástase [15].
Figura 3.2: Exemplo de câncer de mama in situ (A) e câncer de mama invasivo (B).Note que o câncer invasivo rompe a base do ducto, chamada membrana basal, e adentrao tecido ao seu redor, enquanto o câncer in situ não rompe a membrana. Fonte: Buzaid[7].
3.2 Conceitos de Processamento de Imagens
Considere, inicialmente, a noção de imagem digital. Essa é a representação de um sinal
digital oriundo do espaço contínuo. Sabendo que uma imagem é um sinal bidimensional,
essa pode ser modelada como uma função f(x,y), que representa um brilho ou intensidade
em uma coordenada espacial (x,y) [28].
Computacionalmente, uma imagem digital é representada por uma matriz armazenada
em memória que representa um conjunto de pixels, de tal maneira que cada índice de�ne
o brilho luminoso em uma posição (x,y). Um exemplo é apresentado em Figura 3.3 [28].
Um dado importante que vale ser citado, é que as imagens térmicas que visualizamos,
nada mais são do que imagens em pseudo-cor geradas a partir de uma matriz de tempe-
raturas. Neste trabalho, cada imagem obtida de uma matriz de temperaturas utiliza 256
tons de cinza, ou seja, a menor temperatura registrada corresponderá ao tom 0 (preto)
e a maior temperatura corresponderá ao tom 255 (branco). Quanto aos demais valores,
esses serão representados no intervalo de 0 a 255.
Nas próximas subseções, serão apresentadas as técnicas computacionais usadas para
solucionar o problema proposto.

3.2 Conceitos de Processamento de Imagens 12
Figura 3.3: Exemplo de imagem digital representada num plano cartesiano com coordena-das espaciais (x,y), sendo os pixels representados em cada quadrado e os números dentrodos pixels, o valor da cor. Fonte: Rogério [28].
3.2.1 Equalização de Histograma
A primeira técnica de processamento de imagens estudada é a equalização de histograma.
Esta tem como objetivo melhorar o contraste das imagens através da representação dos
níveis de cinza de maneira uniforme e distribuída [3].
O histograma da imagem é uma representação grá�ca de ni ou de T (k) em função de
i, conforme ilustra a Figura 3.4.
Figura 3.4: Exemplo da utilização da equalização de histograma: (a) imagem original, (b)resultado da equalização de histograma, (c) histograma correspondente. Fonte: Gonzaleze Woods [12].
Segundo Gonzalez e Woods [12], a conversão dos níveis de cinza para valores proba-
bilísticos é realizada através da divisão de cada nível pelo número de valores possíveis.
Portanto, a conversão da escala probabilística para níveis de cinza é obtida através da
operação inversa e o nível de cinza equalizado de um pixel qualquer u da imagem original

3.2 Conceitos de Processamento de Imagens 13
é dado por:
ue = T (uo) ∗ b. (3.1)
onde ue é o pixel equalizado, u0 é o pixel original, e o parâmetro b é o número de valores
possíveis na escala de cinza.
Para a aplicação desta técnica, calcula-se inicialmente um histograma de cores, nor-
malizado entre 0 e 1, que de�ne a probabilidade P de distribuição dos níveis de cinza
presentes na imagem através da seguinte equação:
P (k) =nk
l × c. (3.2)
onde nk é a quantidade de ocorrências do nível de cinza k, e l e c são os números de linhas
e colunas da imagem, ou seja, l× c é igual ao número total n de pixels. Em seguida, para
obter o histograma acumulado normalizado, utiliza-se a seguinte função de distribuição:
T (k) =k∑
i=0
ni
n. (3.3)
O resultado da Equação 3.3 gera uma escala probabilística uniformemente distribuída
entre 0 e 1.
O Algoritmo 1 descreve como é calculada a equalização de histograma em imagens
com 256 níveis de cinza.
Algoritmo 1: Equalização de Histograma
Entrada: X: imagem, G: níveis de cinza
Saída: Histograma
1 início
2 [M,N] ← size(X)
3 para cada i de 1 ate M faça
4 para cada j de 1 ate N faça
5 Histograma[X[i,j]] ← Histograma[X[i,j]]+1
6 �m
7 �m
8 para cada k de 1 ate G faça
9 Histograma[k] ← Histograma[k]/(M*N)
10 �m
11 �m

3.2 Conceitos de Processamento de Imagens 14
3.2.2 Filtro Laplaciano
O �ltro laplaciano é utilizado como ferramenta para a detecção de contornos. Esse �ltro é
obtido a partir da segunda derivada de uma função que descreve a intensidade dos pixels
de uma imagem.
Considere uma imagem f(x, y), de forma que as bordas presentes se caracterizam por
uma mudança no nível de cinza quando há uma descontinuidade na intensidade ou quando
o gradiente da imagem tem uma variação repentina. Assim, a derivada discreta de uma
imagem funciona como um detector de bordas [3].
A derivada mede a taxa de variação instantânea de uma determinada função. No caso
das imagens, a derivada discreta é interpretada como a taxa de mudança dos níveis de
cinza, sendo mais elevada ao se aproximar das bordas e menos elevada nas regiões onde
os tons possuem variações suaves.
A Figura 3.5 mostra o uso da primeira e segunda derivadas discretas em duas imagens.
Observa-se que a primeira derivada é nula onde não há variação dos tons de cinza, sendo
positiva quando há uma transição de uma região mais escura para uma mais clara e
negativa quando ocorre uma transição para uma região mais escura. A segunda derivada
muda de sinal na transição dos níveis de cinza.
O critério para a detecção de bordas através das derivadas discretas de uma imagem
utiliza as regiões onde a primeira derivada é maior que um dado limiar ou as regiões onde
a segunda derivada possui mudança de sinal (cruzamento zero).
Como a imagem é uma função de duas dimensões, é necessário considerar as mudanças
dos níveis de cinza em muitas direções. Por esse motivo, derivadas parciais em relação à
x e y são utilizadas para as direções horizontais e verticais.
A primeira derivada de um ponto é obtida pelo operador Gradiente, o qual é de�nido
pela soma de suas primeiras derivadas parciais:
∇f(x, y) = ∂f
∂x+
∂f
∂y. (3.4)
A segunda derivada de um ponto é obtida pelo operador Laplaciano, o qual é de�nido
pela derivada de segunda ordem:
∇2f(x, y) =∂2f
∂2x+
∂2f
∂2y. (3.5)

3.2 Conceitos de Processamento de Imagens 15
Figura 3.5: Exemplo de primeira e segunda derivadas de duas imagens. Fonte: Azevedo,Conci e Letta [3].
Como as bordas podem estar na horizontal, vertical, ou qualquer direção arbitrária, o
operador laplaciano se destaca por ser isotrópico, isto é, ele destaca as bordas em qualquer
direção (diferentemente de operadores de primeira derivada) [30].
Naturalmente, uma vez que os pixels de uma imagem são descritos por elementos
matriciais bidimensionais, é possível representar de maneira discreta os efeitos da derivada
segunda por meio de uma operação de convolução em que uma máscara é aplicada em
cada elemento matricial (pixel) de uma imagem.
Considere uma janela 3× 3 de uma imagem f no ponto (x, y) como segue:
f(x− 1, y + 1) f(x, y + 1) f(x+ 1, y + 1)
f(x− 1, y) f(x, y) f(x+ 1, y)
f(x− 1, y − 1) f(x, y − 1) f(x+ 1, y − 1)

3.2 Conceitos de Processamento de Imagens 16
Logo, como descrito em [30]:
∂2f
∂2x= [f(x+ 1, y)− f(x, y)]− [f(x, y)− f(x− 1, y)]
= f(x+ 1, y) + f(x− 1, y)− 2f(x, y) (3.6)
∂2f
∂2y= [f(x, y + 1)− f(x, y)]− [f(x, y)− f(x, y − 1)]
= f(x, y + 1) + f(x, y − 1)− 2f(x, y) (3.7)
Substituindo 3.6 e 3.7 em 3.5, temos:
∇2f(x, y) = [f(x+ 1, y) + f(x− 1, y)− 2f(x, y)] +
[f(x, y + 1) + f(x, y − 1)− 2f(x, y)]
= f(x+ 1, y) + f(x− 1, y) + f(x, y + 1) + f(x, y − 1)− 4f(x, y) (3.8)
A partir da Equação 3.8, é obtido o Filtro Laplaciano utilizado neste trabalho como
uma matriz de convolução 3× 3: 0 1 0
1 −4 1
0 1 0
.
Um típico exemplo da utilização do Filtro Laplaciano pode ser visto na Figura 3.6.
Figura 3.6: Exemplo de utilização do �ltro laplaciano: (a) imagem original, (b) imagemapós a aplicação do �ltro laplaciano. Fonte: Filho e Neto [11].

3.2 Conceitos de Processamento de Imagens 17
3.2.3 Filtro Morfológico Matemático
Assim como na biologia, em que a expressão morfologia se refere ao estudo da estrutura dos
animais e plantas, a morfologia matemática, elaborada inicialmente por Georges Matheron
e Jean Serra [29], concentra seus esforços no estudo da estrutura geométrica das entidades
presentes em uma imagem. A morfologia matemática pode ser aplicada em várias áreas de
processamento e análise de imagens, com objetivos tão distintos, como realce, �ltragem,
segmentação, detecção de bordas, esqueletização, a�namento, dentre outras.
Gonzalez e Woods [12] utilizaram a teoria dos conjuntos para de�nir as operações
morfológicas. Sejam A e B conjuntos em Z2, cujos componentes são a = (a1, a2) e
b = (b1, b2), respectivamente. A translação de A por x = (x1, x2), denotada (A)x, é
de�nida como:
(A)x = {c|c = a+ x, para a ∈ A}. (3.9)
A re�exão de B, denotada por B̂, é de�nida como:
B̂ = {x|x = −b, para b ∈ B}. (3.10)
O complemento do conjunto A é:
Ac = {x|x /∈ A}. (3.11)
Finalmente, a diferença entre dois conjuntos A e B, denotada A−B, é de�nida como:
A−B = {x|x ∈ A, x /∈ B} = A ∩Bc. (3.12)
3.2.3.1 Dilatação
Dilatação é uma operação que cresce ou engrossa regiões. A maneira especí�ca com que
tais efeitos serão obtidos é controlada pelo elemento estruturante [13].
Sejam A e B conjuntos no espaço Z2 e seja ∅ o conjunto vazio. A dilatação de A por
B, denotada A⊕B, é de�nida como:
A⊕B = {x|(B̂)x ∩ A 6= ∅}. (3.13)
Portanto, o processo de dilatação consiste em obter a re�exão de B sobre sua origem

3.2 Conceitos de Processamento de Imagens 18
e depois deslocar esta re�exão de x. A dilatação de A por B é, então, o conjunto de todos
os x deslocamentos para os quais a interseção de (B̂)x e A inclui pelo menos um elemento
diferente de zero. Com base nesta interpretação, a Equação 3.13 pode ser escrita como:
A⊕B = {x|[(B̂)x ∩ A] ⊆ A}. (3.14)
O conjunto B é normalmente denominado elemento estruturante. A Figura 3.7 exem-
pli�ca a operação de dilatação.
Figura 3.7: Exemplo da utilização do �ltro de dilatação: (a) imagem original, (b) imagemapós a aplicação do �ltro de dilatação. Fonte: Gonzalez e Woods [12].
3.2.3.2 Erosão
A operação de erosão consiste em reduzir o tamanho dos objetos, eliminar objetos menores
que um elemento estruturante da imagem, aumentar os buracos e, �nalmente, permitir a
separação de objetos próximos.
Para conjuntos A e B em Z2 a erosão de A por B, denotada por AB como:
AB = {x|[(B̂)x ∩ A] ⊆ A}. (3.15)
que, em outras palavras signi�ca dizer que a erosão de A por B resulta no conjunto de
pontos x tais que B, transladado de x, está contido em A. Em Figura 3.8, observa-se o
efeito, para uma imagem de exemplo, ao aplicar o �ltro de erosão em toda a sua cena [24].
3.2.3.3 Abertura e Fechamento
Segundo Gonzalez e Woods [12] a abertura é geralmente utilizada para suavizar contornos
de uma imagem, quebrar istmos estreitos e eliminar protusões �nais. Já o fechamento é
utilizado também para suavizar contornos, mas funde as quebras em golfos �nos, elimina
pequenos buracos e preenche fendas em um contorno.

3.2 Conceitos de Processamento de Imagens 19
Figura 3.8: Exemplo da utilização do �ltro de erosão: (a) imagem original, (b) imagemapós a aplicação do �ltro de erosão. Fonte: Gonzalez e Woods [12].
A abertura de um conjunto A por um elemento estruturante B, denotada A ◦ B, éde�nida como:
A ◦B = (AB)⊕B (3.16)
o que equivale a dizer que a abertura de A por B consiste na erosão de A por B seguido
de uma dilatação do resultado por B.
O fechamento do conjunto A pelo elemento estruturante de B, denotado por A ·B, éde�nido como:
A ·B = (A⊕B)B (3.17)
o que nada mais é que a dilatação de A por B seguida da erosão do resultado pelo mesmo
elemento estruturante B. A Figura 3.9 exempli�ca os processos de abertura e fechamento.
Figura 3.9: Exemplo da utilização do �ltro de abertura: (a) imagem original, (b) imagemapós a aplicação do �ltro de abertura, (c) imagem após a aplicação do �ltro de fechamento.Fonte: Gonzalez e Woods [12].

3.2 Conceitos de Processamento de Imagens 20
3.2.4 Algoritmo Suzuki-Kamasi
Esta etapa consiste na aplicação do algoritmo de detecção de contornos descrito em Suzuki
e Abe [33]. Inicialmente, considere a de�nição de contorno. Um contorno é um conjunto
de pontos que representam, de uma forma ou de outra, uma curva em uma imagem. Há
muitas formas de se representar uma curva. Contornos são representados em OpenCV
por sequências em que cada entrada de dados do conjunto codi�ca a informação sobre a
localização do próximo ponto da curva [6].
O Algoritmo Suzuki-Kamasi é implementado na função cvFindContours() para a de-
tecção de contornos em uma imagem binária. A detecção de contornos é uma ferramenta
útil para a análise geométrica de forma, e para a detecção e reconhecimento de objetos
em imagens.
A Figura 3.10 descreve a funcionalidade da função cvFindContours(). A parte superior
da �gura mostra uma imagem de entrada que contém um certo número de regiões claras
(representadas pelas letras A, B, C, D e E) sobre um fundo escuro. A parte inferior
da �gura descreve a mesma imagem, juntamente com os contornos que serão localizados
pelo algoritmo. Esses contornos são rotulados cX ou hX, em que c signi�ca contorno, h
signi�ca buraco, e X é um valor constante qualquer. Alguns desses contornos são linhas
tracejadas, que representam os limites exteriores das regiões brancas (ou seja, regiões
diferentes de zero), e outros são linhas pontilhadas, que são as fronteiras interiores ou
com limites exteriores de buracos (ou seja, zero regiões).
3.2.5 Natural Cubic Splines
Após a detecção dos contornos, torna-se necessário unir as curvas das mamas direita e
esquerda. Para isto, realiza-se uma interpolação por Splines Cúbicas.
Dado um conjunto de n + 1 pontos (xi, yi) em um intervalo [a, b] tal que a = x0 <
x1 < x2 < ... < xn = b, uma Spline cúbica S(x) é uma função de�nida por partes onde
existem n polinômios cúbicos Si(x) com coe�cientes Si,0, Si,1, Si,2 e Si,3 que satisfazem os
seguintes critérios [10]:
� S(x) = Si(x) é um polinômio cúbico em cada intervalo [xi, xi+1]:
S(x) = Si(x) = Si,0 + Si,1(x− xi) + Si,2(x− xi)2 + Si,3(x− xi)
3,
x ∈ [xi, xi+1], i = 0, 1, ..., n− 1 (3.18)

3.2 Conceitos de Processamento de Imagens 21
Figura 3.10: Exemplo de uma imagem antes e após passar pelo algoritmo Suzuki-Kamasi:os contornos podem ser de dois tipos, tracejados ou pontilhados. Fonte: Bradski e Kaehler[6].
� A curva S(x) interpola todos os pontos:
S(xi) = yi, i = 0, 1, ..., n (3.19)
� S(x) é uma função contínua no intervalo [a, b]:
Si(xi+1) = Si+1(xi+1), i = 0, 1, ..., n− 2 (3.20)
� Possui a primeira derivada contínua:
S′
i(xi+1) = S′
i+1(xi+1), i = 0, 1, ..., n− 2 (3.21)
� Possui a segunda derivada contínua:
S′′
i (xi+1) = S′′
i+1(xi+1), i = 0, 1, ..., n− 2 (3.22)

3.2 Conceitos de Processamento de Imagens 22
Como existem n intervalos com quatro coe�cientes cada, se torna necessário de�nir 4n
parâmetros para que S(x) seja determinado. 2n parâmetros são de�nidos pelas Equações
3.19 e 3.20, já que para cada um dos n intervalos [xi, xi+1] temos que Si(xi) = yi e
Si(xi+1) = yi+1.
Como a função possui primeira e segunda derivadas contínuas para i = 0, 1, ..., n− 2,
de�ne-se mais 2(n− 1) parâmetros. As duas últimas condições podem ser dadas por [10]:
S′′
0 (x0) = S′′(a) = 0 (3.23)
S′′
n−1(xn) = S′′(b) = 0 (3.24)
Igualar a zero a segunda derivada do primeiro e último ponto de�ne S(x) como uma
Spline Cúbica Natural. Com 4n coe�cientes e 4n condições lineares basta realizar algu-
mas manipulações para se chegar a um sistema tridiagonal e encontrar os coe�cientes
desconhecidos [10].
Através da interpolação por uma Spline Cúbica Natural é possível encontrar os pontos
que se situam entre as duas mamas. O resultado desta etapa é ilustrado pela Figura 3.11.
Figura 3.11: Exemplo de uma imagem após interpolação por Spline Cúbica Natural paraalgumas imagens. (a) Após ajuste por aproximação, (b) Após ajuste por interpolação dospontos faltantes. Fonte: Marques [19].

Capítulo 4
Representação Computacional
Após fundamentar os conceitos necessários para a compreensão da problemática proposta,
no Capítulo 3, espera-se neste momento solucionar o problema abordado neste trabalho
com a proposição de um novo método. Serão detalhados os procedimentos para aquisição
dos termogramas, as etapas de pré-processamento dos mesmos, assim como a implemen-
tação das etapas auxiliares envolvidas. A implementação de todo o método foi feita
utilizando a linguagem de programação Python e uma biblioteca multiplataforma, com
funções e metodologias próprias para Visão Computacional, denominada OpenCV [1].
A Figura 4.1 resume os passos usados para alcançar os objetivos deste trabalho.
Figura 4.1: Etapas do método proposto. Fonte: Elaborada pelo autor.
Todas as imagens utilizadas para a avaliação do método apresentado foram obtidas
através de uma base pública da área. O primeiro passo deste trabalho consiste na aplica-
ção de etapas de pré-processamento nas imagens de entrada para que possam ter certos
atributos realçados, melhorando o reconhecimento das mamas identi�cadas no método.
Este pré-processamento é iniciado pela equalização de histograma, que possui o intuito
de melhorar o contraste da imagem. A seguir, é aplicado um algoritmo de limiarização

4.1 Aquisição dos Termogramas 24
com o objetivo de obter a segmentação da região que �ca abaixo da região das mamas
(prega inframamária). Na próxima etapa, utiliza-se o �ltro morfológico de abertura com
o objetivo de remover pequenos ruídos resultantes da imagem após a binarização. Logo
a seguir, torna-se necessário extrair a informação geométrica para que seja reconhecido
o torso da pessoa analisada, bem como as formas das mamas. Isto é feito utilizando o
conceito de �ltragem laplaciana. O próximo passo consiste na utilização do algoritmo
Suzuki-Kamasi para obter o contorno da região da prega inframamária limiarizada e cal-
cular a área da mesma. A penúltima etapa consiste em um re�namento adaptativo para
veri�car se a área da região da prega inframamária é maior ou igual a um certo limiar. Por
�m, a última etapa do método utiliza a técnica de interpolação por splines cúbicas, que
tem como �nalidade encontrar os pontos situados entre as duas mamas e interpolá-los,
�nalizando assim a segmentação.
Nas próximas seções serão detalhadas cada uma das técnicas de processamento de
imagens utilizadas, bem como a aplicação de cada uma para o desenvolvimento deste
trabalho.
4.1 Aquisição dos Termogramas
Os termogramas utilizados neste trabalho foram adquiridos de uma base de dados de
imagens mastológicas desenvolvida por Silva et al. [31]. Todos experimentos foram feitos
por pesquisadores do Instituto de Computação da Universidade Federal Fluminense -
UFF e as imagens foram capturadas utilizando a câmera FLIR SC-620 com resolução de
640×480 pixels.
4.2 Etapas de Pré-Processamento
O primeiro passo da solução computacional apresentada consiste em aplicar pequenas
técnicas de processamento de imagens, com o intuito de destacar o contorno de uma
imagem termográ�ca da mama.
Para dar continuidade aos próximos passos, é necessário transformar as imagens co-
loridas (RGB) para o espaço de cor de tons de cinza, com 256 tons variando de 0 (cor
escura) a 255 (cor clara). Para isso, foi utilizada a função cv::cvtColor() da biblioteca
OpenCV.

4.2 Etapas de Pré-Processamento 25
4.2.1 Equalização de Histograma
A primeira técnica de processamento de imagens empregada é a equalização de histograma.
Essa técnica consiste em aumentar o grau de variância entre os elementos de uma imagem,
fato que se re�ete diretamente no histograma de cores da mesma. Este tipo de método
tem como intuito aumentar o contraste de uma imagem.
Considere uma região anatômica, denominada prega inframamária. Esta é conside-
rada a região que subdivide a parte inferior da mama com a parede anterior do tórax. Essa
região tem uma característica importante: apresenta um aumento de temperatura ligei-
ramente superior em relação a outras partes do corpo humano. Ao aumentar o contraste
da cena, cria-se uma maior separação da prega inframamária com relação ao restante do
corpo. Esta característica é registrada com maior relevância na Figura 4.2, destacada no
brilho mais acentuado logo abaixo das mamas.
Figura 4.2: Exemplo de uma imagem após a aplicação do algoritmo de Equalização deHistograma. Fonte: Elaborada pelo autor.
4.2.2 Limiarização (Binarização)
A limiarização é um processo que pode ser adaptativo, e no contexto da metodologia
apresentada, possui como objetivo extrair a região da prega inframamária. Considerando
que esta é uma das regiões de maior temperatura do corpo feminino, ao fazer a limiarização
com um limiar alto, é esperado que a região da prega seja segmentada em relação ao corpo.
O estágio de limiarização é implementado pela função cv2.threshold(), que realiza
a classi�cação de pixels em dois conjuntos distintos, separados a partir de um limiar
considerado. Se o valor de cor pixel é menor que o limiar, o pixel de mesma posição
bidimensional na imagem resultante é rotulado como 0 (preto), caso o valor do pixel seja

4.3 Implementação da Metodologia 26
maior ou igual do que o limiar, a imagem resultante será rotulada como 1 (branco).
A Figura 4.3 exempli�ca o resultado obtido para uma imagem de entrada qualquer,
após a aplicação do algoritmo de limiarização.
Figura 4.3: Exemplo da aplicação do algoritmo de limiarização: (a) Imagem de entradaapós o cálculo de pré-processamento (b) Imagem resultante após a limiarização, extraindoa região da prega inframamária. Fonte: Elaborada pelo autor.
4.3 Implementação da Metodologia
Nas próximas subseções serão demonstrados como cada algoritmo apresentado no Capítulo
3 e seus devidos parâmetros foram utilizados.
4.3.1 Filtro Morfológico de Abertura
É possível notar que, após a limiarização, são adicionados diversos ruídos na �gura, que
não serão parte da região de interesse (mama). Por isto, aplica-se uma operação morfoló-
gica de abertura, para remover esses pequenos artefatos sem perder a massa que compõe
a mama.
Para o dado sistema computacional, foi utilizada uma máscara de 3×3 como a descritaabaixo:
0 1 0
1 −4 1
0 1 0
.

4.3 Implementação da Metodologia 27
O �ltro morfológico de abertura possui o objetivo de remover pequenas regiões que
não podem ser consideradas como parte dos seios. Então após esta etapa, é esperado que
a imagem de entrada contenha apenas o torso da foto analisada.
Este �ltro foi implementado pela função cv2.morphologyEx(), onde foi utilizado o
parâmetro MORPH_OPEN como operação de abertura, a kernel aplicada foi 3 × 3.
4.3.2 Filtragem Laplaciana
Após a etapa da �ltragem de abertura, aplica-se o operador de �ltro laplaciano na imagem.
Naturalmente, uma vez que os pixels de uma imagem são descritos por elementos
matriciais bidimensionais, é possível produzir de maneira discreta os efeitos da derivada
segunda por meio de uma operação de convolução, em que uma máscara prévia é aplicada
em cada elemento matricial (pixel) de uma imagem. Um típico exemplo de uma operação
desse porte, aplicada na imagem representada pela Figura 4.2, é visível na Figura 4.4.
Figura 4.4: Exemplo de uma imagem após a �ltragem laplaciana. Fonte: Elaborada peloautor.
Após a utilização do �ltro laplaciano, é possível notar que os contornos da �gura
ganham maior relevância. Considerando que o objetivo é detectar a região mamária,
torna-se de fundamental importância reconhecer geometricamente a localização destes
elementos.
4.3.3 Algoritmo de Detecção de Contornos (Suzuki-Kamasi)
O Algoritmo Suzuki-Kamasi é utilizado de tal maneira que os contornos da região limia-
rizada (prega inframamária) são obtidos e a área deles é calculada. Se a área for menor

4.3 Implementação da Metodologia 28
do que um determinado limiar, o processo de limiarização continua.
É implementado pela função cv2.�ndContours(), que extrai o contorno da imagem
binarizada e armazena a posição (x, y) de cada elemento do contorno em uma lista. Isso se
torna necessário para que as bordas das mamas sejam obtidas e futuramente reajustadas.
No método em questão, foram utilizados: o parâmetro CV_RETR_EXTERNAL, que
identi�ca apenas os contornos extremos do objeto analisado; e o parâmetro
CV_CHAIN_APPROX_NONE, que armazena absolutamente todos os pontos relativos
ao contorno.
4.3.4 Re�namento Adaptativo
Após a obtenção de contornos da região da prega inframamária, é constatado que, para
a maioria das imagens amostrais, a área da mesma tornou-se muito pequena. Isso ocorre
pois após testes iniciais, o limiar da binarização era muito elevado. Dessa forma, utiliza-se
uma estratégia adaptativa: se após computar o fecho convexo1, for constatado que a área
da prega inframamária é menor que um limiar de�nido empiricamente, então diminui-se
o limiar da binarização em uma unidade: 253.
Esse processo é repetido continuamente até a área da prega inframamária atender ao
limiar sugerido para o ajuste das mamas.
4.3.5 Ajuste das Mamas (Interpolação por Spline Cúbica)
Finalmente, o ajuste de mamas é necessário para que o contorno obtido no estágio anterior
seja interpolado em um polinômio cúbico, e assim, tenha uma aparência similar ao de duas
mamas.
Para isto, foram utilizadas as bibliotecas Numpy e Scipy. Elas são utilizadas quando
é necessário executar alguma operação matemática de forma rápida em uma matriz. O
Numpy é uma biblioteca do Python que introduz funções numéricas utilizando vetores e
matrizes, enquanto Scipy oferece uma coleção de algoritmos construídos sobre a biblioteca
Numpy para as aplicações cientí�cas.
As funções utilizadas para fazer o cálculo da interpolação foram: linspace(), do Numpy,
que obtém uma sequência de pontos amostrados de um dado intervalo mínimo e máximo;
e a função interp1d(), do Scipy, que realiza a interpolação da dimensão y a partir dos
1Menor polígono convexo que envolve todos os pontos de um objeto.

4.3 Implementação da Metodologia 29
pontos amostrados em x, de tal maneira que seja obtido um polinômio cúbico.
Na Figura 4.5, é apresentado um exemplo de resultado da operação, em que a linha
vermelha apresenta o contorno que delimita a região das mamas obtido pela etapa da
seção 4.3.5. Similarmente, a linha azul descreve o contorno obtido pelo �ltro laplaciano
da seção 4.3.2.
Figura 4.5: Exemplo de uma imagem após o ajuste das mamas. Fonte: Elaborada peloautor.
4.3.6 Separação das Mamas
Nesta etapa calcula-se o histograma de coluna da imagem na coordenada y de cada pixel
P (x, y) do contorno da região (linha vermelha) obtida na Seção 4.3.5. De todas as posições
obtidas pelo histograma, é veri�cado qual pixel P (x, y) possui o menor valor para y,
sendo essa a posição de menor frequência. Nessa posição, é esperado que existam menos
amostras da mama em si, uma vez que se trata da região entre os seios. Nesse local é
traçado um histograma de coluna, efetuando a separação das mamas. Um exemplo pode
ser visualizado na Figura 4.6.
Esta é uma etapa teórica a ser implementada em um futuro trabalho, pois não é um
fator relevante para a avaliação dos resultados.

4.3 Implementação da Metodologia 30
Figura 4.6: Exemplo de uma imagem que apresenta o histograma de coluna calculado.Fonte: Elaborada pelo autor.
Capítulo 5
Análise de Resultados
É importante analisar os resultados numéricos da metodologia desenvolvida para que se
possa veri�car a qualidade da mesma. Assim é possível comparar os resultados obtidos
no presente trabalho com outros da literatura, com o intuito de demonstrar a e�cácia do
método proposto.
5.1 Metodologia
O método apresentado neste trabalho foi implementado na linguagem Python versão 2.7,
utilizando a biblioteca OpenCV versão 2.3.7 [1]. Foi utilizado um notebook Asus N46V
com processador Intel I7 e 8GB de memória RAM e sistema operacional Windows 8.1.
Foram utilizadas 282 imagens de pacientes obtidas na base de dados desenvolvida por
Silva et al. [31], conforme apresentado na Seção 4.1. Um exemplo de imagens da base
pode ser observada na Figura 5.1.
Para a avaliação dos resultados, foram utilizadas as imagens resultantes do método
automático (ground truth) desenvolvido por Marques [19], na qual, cada pixel foi classi�-
cado como pertencente ou não à ROI. Alguns exemplos de imagens ground-truth utilizadas
para a avaliação de resultados são demonstradas na Figura 5.2.
O algoritmo proposto neste trabalho será analisado quantitativamente e numerica-
mente nas seções a seguir.

5.1 Metodologia 32
Figura 5.1: Exemplo de imagens obtidas da base desenvolvida por Silva et al.. Fonte:Silva [31].
Figura 5.2: Exemplo de avaliação de um experimento: (a) Método Proposto, (b) GroundTruth, (c) Sobreposição de (a) e (b). Fonte: Adaptação de Marques [19].
5.1.1 Medidas Estatísticas
A matriz de confusão [17] dispõe de informações sobre o número de classi�cações corretas
em oposição às classi�cações preditas para cada classe. Neste trabalho, são utilizadas
duas classes: Positivo e Negativo [19].

5.1 Metodologia 33
Considere que cada pixel da imagem resultante será representado com a cor branca
(255 ) se este for pertencente à ROI. Caso contrário, este terá a cor preta (0 ).
A avaliação de resultados consistiu do seguinte procedimento: cada pixel da imagem
resultante Ir será comparado com o pixel de mesma posição da imagem ground truth Ig.
Se ambos os pixels forem representados como Ir(x, y) = 255 e Ig(x, y) = 255, então o
pixel Ir(x, y) será considerado como verdadeiro positivo (VP). Caso sejam classi�cados
como Ir(x, y) = 0 e Ig(x, y) = 0, então o pixel Ir(x, y) será considerado como verdadeiro
negativo (VN). Se os pixels forem representados como Ir(x, y) = 0 e Ig(x, y) = 255, então
o pixel Ir(x, y) será considerado como falso negativo (FN). Caso contrário, o pixel será
julgado como falso positivo(FP).
Para a avaliação quantitativa, as medidas estatísticas utilizadas para avaliação do
método foram: acurácia, sensibilidade, especi�cidade, preditividade positiva e negativa.
Tais medidas são de�nidas pelas equações:
Acurácia (ACC) =V P + V N
V P + V N + FP + FN(5.1)
Sensibilidade (SEN) =V P
V P + FN(5.2)
Especi�cidade (ESP) =V N
V N + FP(5.3)
Preditividade Positiva (PDP) =V P
V P + FP(5.4)
Preditividade Negativa (PDN) =V N
V N + FN· (5.5)
A acurácia representa a taxa de acertos do algoritmo em relação à quantidade de
pixels. A sensibilidade avalia a capacidade do algoritmo de identi�car corretamente os
resultados positivos, ou seja, encontrar a região de interesse; enquanto a especi�cidade
veri�ca quanto a metodologia identi�ca adequadamente os resultados negativos, isto é,
tudo aquilo que não faz parte da região de interesse. O cálculo da preditividade positiva
(ou negativa) objetiva mostrar a taxa de acertos positivos (ou negativos) em relação ao
total de classi�cações positivas (ou negativas) fornecidas pelo algoritmo desenvolvido.

5.2 Análise de Resultados 34
5.2 Análise de Resultados
Os experimentos gerados no método proposto foram comparados com os trabalhos de
Marques [19] e Motta [23], conforme apresentados na Tabela 5.1, pois foram os únicos que
avaliaram quantitativamente os métodos por eles desenvolvidos.
ACC SEN ESP PDP PDN
Motta 0,96 0,88 0,99 0,96 0,96Marques 0,97 0,97 0,97 0,97 0,98
Tabela 5.1: Comparação dos resultados obtidos por Motta [23] e Marques [19].
Os experimentos foram computados considerando três parâmetros distintos: param-
SingleArea, paramDoubleArea, paramInitialO�set. O motivo para a existência desses pa-
râmetros é a constatação de que o segmento que representa a prega inframamária e que
é obtido durante a etapa de limiarização pode ser um único segmento conexo ou duas
regiões conexas. Como não é possível deduzir o limiar a ser usado na etapa de limiari-
zação, então é utilizada uma proposta adaptativa: o método inicia com limiar = 254 e
a cada iteração é veri�cado se a área que representa a prega inframamária é maior do
que o paramSingleArea. Caso seja maior, a área extraída torna-se a prega inframamária
detectada.
Da mesma maneira, a prega inframamária de uma imagem de entrada qualquer pode
ser composta por duas regiões conexas. Nesse caso, é veri�cado se a imagem limiarizada
é composta por duas regiões distintas e se a soma delas é superior ao limiar paramDou-
bleArea. O pseudocódigo é descrito abaixo:
5.2 Análise de Resultados 35
Algoritmo 2: Veri�car regiões conexas
1 início
2 limiar ← 254
3 totalSegmentos ← CalculoDeTotaldeSegmentosConexos(imagemEntrada)
4 area = area(imagemEntrada)
5 enquanto 1 faça
6 se totalSegmentos == 1 e area > paramSingleArea então
7 parar
8 �m
9 se totalSegmentos == 2 e area > paramDoubleArea então
10 parar
11 �m
12 copiaDaImagemEntrada ←cv2.threshold(imagemEmTonsDeCinza,limiar,255,cv2.THRESH_BINARY)
13 �m
14 �m
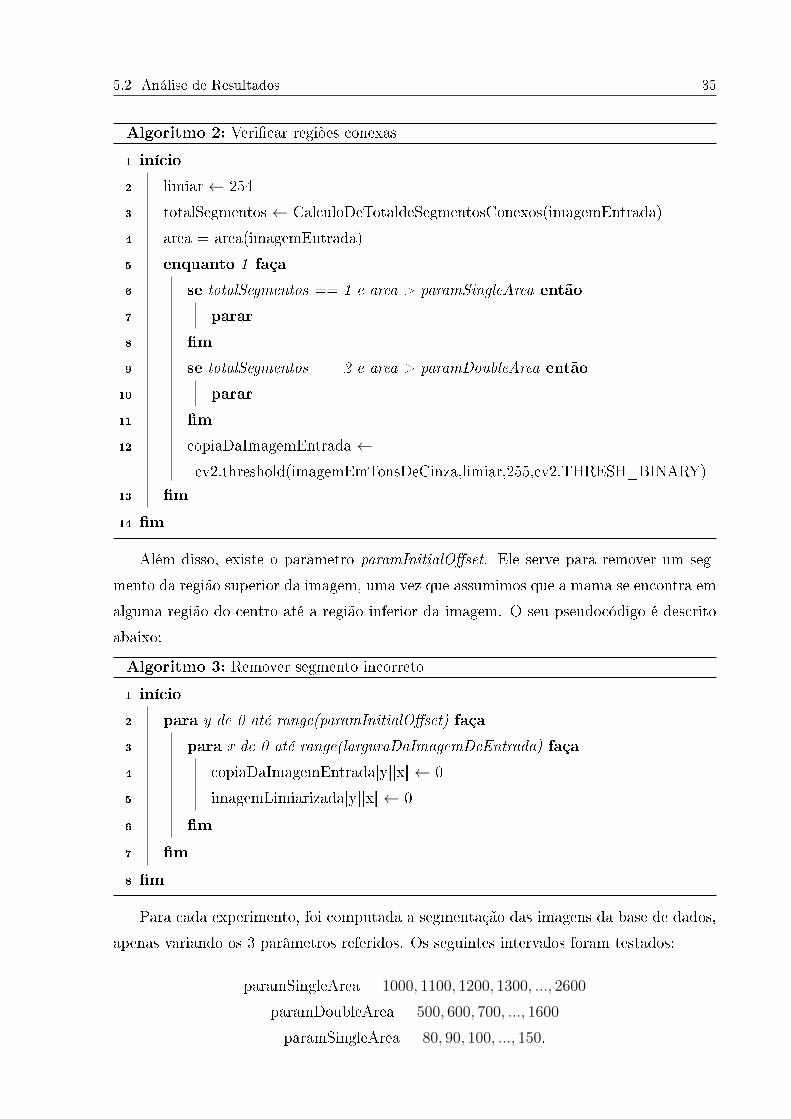
Além disso, existe o parâmetro paramInitialO�set. Ele serve para remover um seg-
mento da região superior da imagem, uma vez que assumimos que a mama se encontra em
alguma região do centro até a região inferior da imagem. O seu pseudocódigo é descrito
abaixo:
Algoritmo 3: Remover segmento incorreto
1 início
2 para y de 0 até range(paramInitialO�set) faça
3 para x de 0 até range(larguraDaImagemDeEntrada) faça
4 copiaDaImagemEntrada[y][x] ← 0
5 imagemLimiarizada[y][x] ← 0
6 �m
7 �m
8 �m
Para cada experimento, foi computada a segmentação das imagens da base de dados,
apenas variando os 3 parâmetros referidos. Os seguintes intervalos foram testados:
paramSingleArea = 1000, 1100, 1200, 1300, ..., 2600
paramDoubleArea = 500, 600, 700, ..., 1600
paramSingleArea = 80, 90, 100, ..., 150.

5.2 Análise de Resultados 36
Os intervalos testados foram avaliados empiricamente, na qual foram testadas dife-
rentes combinações para cada parâmetro descrito no conjunto acima e selecionados o que
obtiveram os melhores resultados.
Na Tabela 5.4, é apresentada uma comparação entre os resultados obtidos por Marques
[19] e o método proposto no presente trabalho. O melhor resultado obtido, apresentado
na Tabela 5.3, foi para o conjunto de parâmetros descritos na Tabela 5.2:
Parâmetro Valor
paramSingleArea 2200paramDoubleArea 1500paramInitialO�set 130
Tabela 5.2: Parâmetros utilizados no experimento.
Medida Valor
Acurácia Média (ACC) 0,96Sensibilidade Média (SEN) 0,98Especi�cidade Média (ESP) 0,95
Preditividade Positiva Média (PDP) 0,95Preditividade Negativa Média (PDN) 0,98
Tabela 5.3: Melhores resultados obtidos pelo método proposto.
ACC SEN ESP PDP PDN
Motta 0,96 0,88 0,99 0,96 0,96Marques 0,97 0,97 0,97 0,97 0,98Prop. 0,96 0,98 0,95 0,95 0,98
Tabela 5.4: Comparação dos resultados entre Motta [23], Marques [19] e o método pro-posto.
Assim como Motta [23] e Marques [19], foi feita a segmentação automática respeitando
os limites de curvatura das mamas, método no qual possui uma complexidade considerável
e muita probabilidade de erro, se comparado às metodologias apresentadas no Capítulo
2. Na Figura 5.3 é feita uma comparação visual dos resultados do método proposto neste
trabalho e dos métodos desenvolvidos por Motta [23] e Marques [19].
Os resultados obtidos do método desenvolvido foram similares aos de Motta [23] e
Marques [19]. Apesar da especi�cidade média e preditividade negativa média se apresen-
tarem pouco abaixo do método desenvolvido por Motta [23] e Marques [19], observa-se
uma igualdade no resultado de preditividade negativa média. Além disso, houve melhoria
de 10% na sensibilidade média se comparado ao trabalho de Motta [23].
5.3 Limitações do Método 37
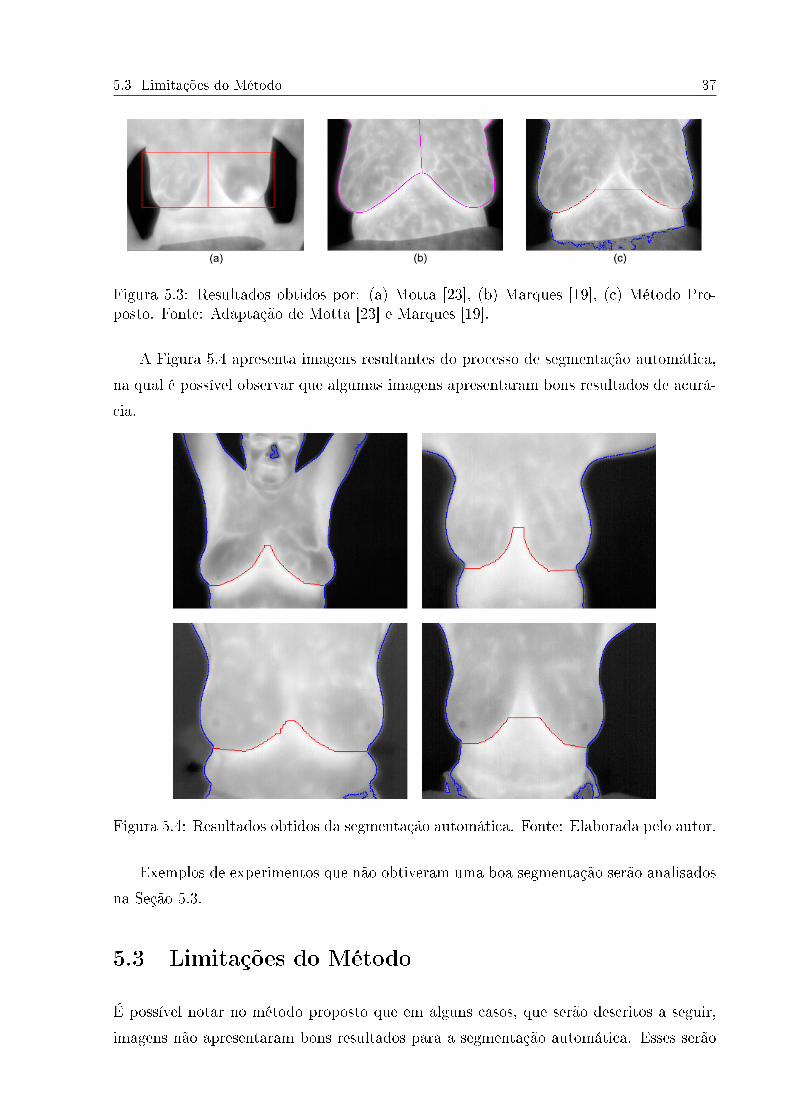
Figura 5.3: Resultados obtidos por: (a) Motta [23], (b) Marques [19], (c) Método Pro-posto. Fonte: Adaptação de Motta [23] e Marques [19].
A Figura 5.4 apresenta imagens resultantes do processo de segmentação automática,
na qual é possível observar que algumas imagens apresentaram bons resultados de acurá-
cia.
Figura 5.4: Resultados obtidos da segmentação automática. Fonte: Elaborada pelo autor.
Exemplos de experimentos que não obtiveram uma boa segmentação serão analisados
na Seção 5.3.
5.3 Limitações do Método
É possível notar no método proposto que em alguns casos, que serão descritos a seguir,
imagens não apresentaram bons resultados para a segmentação automática. Esses serão

5.3 Limitações do Método 38
apresentados em forma de imagem da segmentação do mesmo.
Um caso observado de má segmentação ocorre quando a paciente possui pouco volume
mamário, fato que in�uencia diretamente na identi�cação da prega mamária. Se a prega
inframamária não for identi�cada corretamente, o resultado irá falhar.
Como o método proposto se baseia na limiariazação de regiões mais aquecidas, quando
não há sobreposição das mamas sobre o corpo, o algoritmo não consegue efetuar uma boa
segmentação. Um exemplo é apresentado na Figura 5.5.
Figura 5.5: Pacientes com pouco volume mamário. Fonte: Elaborada pelo autor.
Outro caso observado são de pacientes que possuem assimetria acentuada entre as
mamas, em que o problema também ocorre na identi�cação das regiões mais aquecidas
do corpo. Esse caso pode ser visto na Figura 5.6.
Figura 5.6: Pacientes com assimetria acentuada entre as mamas. Fonte: Elaborada peloautor.

Capítulo 6
Conclusão e Trabalhos Futuros
Neste trabalho foi apresentado um novo método para o problema de segmentação auto-
mática das mamas em imagens térmicas. A extração da ROI é uma etapa fundamental
para a construção de um software capaz de realizar a atividade de CAD com e�cácia.
Para alcançar os objetivos de�nidos no trabalho, foram utilizadas as seguintes técnicas
de processamento de imagens: equalização de histograma, limiarização e detecção de
contornos. Também foram utilizados os métodos matemáticos: �ltragem laplaciana e
morfológica e ajuste de curvas. A combinação de todas estas técnicas foi fundamental
para concluir o objetivo �nal deste trabalho.
De acordo com os resultados avaliados, o método proposto se mostrou muito e�caz
ao ser comparado com outros trabalhos, apresentando uma boa segmentação automática,
com acurácia média de 96%. Foi mostrado também casos de erro devido a pacientes
com pouco volume mamário e pelo fato de algumas pacientes apresentarem uma elevada
assimetria entre os seios. A partir da análise dos erros foi possível concluir que a etapa
fundamental para o sucesso do método proposto consiste na identi�cação correta da região
das pregas inframamárias.
Quanto aos trabalhos futuros, é interessante apresentar aprimoramentos do método,
como também o desenvolvimento de trabalhos complementares, alguns citados abaixo:
� separação automática das mamas;
� aprimoramento do método para detecção de câncer;
� uso de outros métodos computacionais para proporcionar correções nas imagens que
apresentaram falha na segmentação;
� desenvolvimento de um sistema CAD para detecção de doenças na mama.

Referências
[1] Open source computer vision library.
[2] Acharya, U. R.; Ng, E. Y. K.; Tan, J.; Sree, S. V. Thermography basedbreast cancer detection using texture features and support vector machine. J. MedicalSystems 36, 3 (2012), 1503�1510.
[3] Azevedo, E.; Conci, A.; Letta, F. Computação Grá�ca, V.2 - Teoria e Prática.Elsevier, Rio de Janeiro, 2008.
[4] Borchartt, T. B. Análise de imagens termográ�cas para classi�cação de alte-rações na mama. Master's thesis, Instituto de Computação, Universidade FederalFluminense, Niterói, RJ, Brasil, 2013.
[5] Borchartt, T. B.; Conci, A.; Lima, R. C.; Resmini, R.; Sanchez, A. A breastthermography from an image processing viewpoint: A survey. In Signal Processing(2013).
[6] Bradski, G.; Kaehler, A. Learning OpenCV: Computer Vision with the OpenCVLivrary. O'Reilly Media, 2008.
[7] Buzaid, A. C. Tipos de câncer de mama. disponível em,http://vencerocancer.com.br/tipos-de-cancer/cancer-de-mama-tipos-de-cancer/cancer-de-mama-tipos-2/. Acesso em: 18 de outubro de 2015.
[8] Canny, J. A computational approach to edge detection. Pattern Analysis andMachine Intelligence, IEEE Transactions on PAMI-8 6 (1986), 679�698.
[9] Conceicao, J. C. J. Ginecologia Fundamental. Atheneu Editora, Rio de Janeiro,2006.
[10] Faires, J.; Burden, R. Numerical Methods. Brooks Cole, 2003.
[11] Filho, O. M.; Neto, H. V. Processamento Digital de Imagens. Brasport, Rio deJaneiro, 1999.
[12] Gonzalez, R. C.; Woods, R. E. Digital Image Processing. Pearson Prentice HallInc, 2008.
[13] Gonzalez, R. C.; Woods, R. E.; Eddins, S. Digital Image Processing: usingMatlab. Pearson Prentice Hall Inc, 2004.
[14] INCA. O que é câncer. disponível em,http://www2.inca.gov.br/wps/wcm/connect/cancer/site/oquee.

Referências 41
[15] INCA. Tipos de câncer. disponível em,http://www2.inca.gov.br/wps/wcm/connect/tiposdeca-ncer/site/home/mama.
[16] Kapoor, P.; Prasad, S. Image processing for early diagnosis of breast cancerusing infrared images. 2nd International Conference on Computer and AutomationEngineering 3 (2010), 564�566.
[17] Kohavi, R.; Provost, F. Glossary of terms. Machine Learning 30 (1998), 271�274.
[18] Lipari, C.; Head, J. Advanced infrared image processing for breast cancer riskassessment. Proceeding of the 19th Annual International Conference of the IEEEEngineering in Medicine and Biology Society 2 (1997), 673�676.
[19] Marques, R. S. Segmentação automática das mamas em imagens térmicas. Mas-ter's thesis, Instituto de Computação, Universidade Federal Fluminense, Niterói, RJ,Brasil, 2012.
[20] Marques, R. S.; Resmini, R.; Conci, A.; Fontes, C. A. P.; Lima, R. C. F.Método para segmentação manual de imagens térmicas para geração de ground truth.Proceedings of XII Workshop em Informática Médica (Curitiba, PR, Brasil, 2012).
[21] Meira, F. Mamogra�a: diagnosticando o câncer de mama precocemente. dis-ponível em, http://saudeparamim.com.br/mamogra�a-diagnosticando-o-cancer-de-mama-precocemente/. Acesso em: 24 de setembro de 2015.
[22] Motta, L.; Conci, A.; Lima, R.; Diniz, E. Automatic segmentation on thermo-grams in order to aid diagnosis and 2d modeling. Proceedings of 10th Workshop emInformática Médica 1 (2010), 1610�1619.
[23] Motta, L. S. Obtenção automática da região de interesse em termogramas frontaisda mama para o auxílio à detecção precoce de doenças. Master's thesis, Instituto deComputação, Universidade Federal Fluminense, Niterói, RJ, Brasil, 2010.
[24] Neves, S. R. Algoritmos para segmentação de imagens infravermelhas.
[25] Ostu, N. A threshold selection method from gray-level histograms. IEEE Transac-tions on Systems, Man and Cybernetics 9, 1 (1979), 62�66.
[26] Qi, H.; Head, J. Asymmetry analysis using automatic segmentation and classi�ca-tion for breast cancer detection inthermograms. Proceeding of the 23rd IEEE AnnualInternational Conference on Engineering in Medicine and Biology Society 3 (2001),2886�2869.
[27] Qi, H.; Snyder, W.; Head, J.; Elliott, R. Detecting breast cancer from infraredimages by asymmetry analisis. Proceeding of the 22nd Annual International Confe-rence of the IEEE Engineering in Medicine and Biology Society 2 (2000), 1227�1227.
[28] Rogério, H. E. Um novo método para o reconhecimento de pessoas em bases deimagens e vídeos, 2013.
[29] Serra, J.; Cressie, N. Image analysis and mathematical morphology. AcademicPress.
Referências 42
[30] Shih, F. Image Processing and Pattern Recognition: Fundamentals and Techniques.John Wiley & Sons, Piscataway, 2010.
[31] Silva, L. F.; Saade, D. C. M.; Sequeiros-Oliveira, G. O.; Silva, A. C.;Bravo, R. S.; Conci, A. A new database for breast research with infrared image.Journal of Medical Imaging and Health Informatics 4, 1 (2014), 92�100.
[32] Sree, S. V.; NG, E. Y.-K.; Acharya, R. U.; Tan, W. Breast imaging systems:A review and comparative study. Journal of Mechanics in Medicine and Biology 101 (2010), 5�34.
[33] Suzuki, S.; Abe, K. Topological structural analysis of digitized binary images byborder following. Computer Vision Graphics and Image Processing 30, 1 (1985),32�46.
[34] Winnikow, E. P. Anatomia da mama. disponível em,http://www.centrodemama.com.br/paginas/pacientes-e-publico/anatomia-da-mama. Acesso em: 24 de setembro de 2015.
[35] Yahara, T.; Koga, T.; Yoshida, S.; Nakagawa, S.; Deguchi, H.; Shirouzo,K. Relationship between microvessel density and thermographic hot areas in breastcancer. 243�248.
[36] Yasmin, M.; Sharif, M.; Mohsin, S. Survey paper on diagnosis of breast cancerusing image processing technique. Research Journal of Recent Sciences 2, 10 (2013),60�74.