
TÉCNICA DE DECOMPOSIÇÃO COM O CÁLCULO DE … · A Pesquisa Operacional e o uso racional de...
12
TÉCNICA DE DECOMPOSIÇÃO COM O CÁLCULO DE MULTIPLICADORES IMPLÍCITOS NO PLANEJAMENTO DA EXPANSÃO DE SISTEMAS ELÉTRICOS Fernanda Souza Thomé PSR – Praia de Botafogo, 228 Ala B Sala 1705, CEP 22359-900, Rio de Janeiro [email protected] Mario Veiga Ferraz Pereira PSR - [email protected] Silvio Binato PSR - [email protected] Nora Campodónico PSR - [email protected] Márcia Helena Costa Fampa Programa de Engenharia de Sistemas e Computação – COPPE/UFRJ Cidade Universitária, CT, Bloco H, CEP 21941-972, Rio de Janeiro [email protected] Luiz Carlos da Costa Júnior PSR - [email protected] RESUMO Este trabalho apresenta uma nova metodologia de decomposição aplicada à solução de problemas de planejamento da expansão de geração e rede de transmissão de sistemas elétricos. Esta metodologia utiliza a técnica de decomposição de Benders para decompor o complexo pro- blema de expansão em um subproblema de investimento e um subproblema de operação. A novi- dade desta proposta está na utilização de uma formulação compacta para o subproblema de ope- ração, onde a rede de transmissão é representada de forma implícita, resultando em importantes ganhos de tempo de CPU para a resolução deste subproblema. Esta nova metodologia é ilustrada através de um caso real de planejamento da expansão da geração e rede de transmissão do siste- ma elétrico da Bolívia. PALAVRAS CHAVE. Planejamento da expansão, multiplicadores implícitos, decomposi- ção de Benders. ABSTRACT This work presents a new decomposition methodology applied to the solution of electrical systems generation and transmission expansion planning problems. This methodology uses the Benders decomposition techinique to decompose the complex expansion problem into an invest- ment subproblem and an operation subproblem. The novelty about this proposal relies on the utilization of a compact formulation for the operation subproblem, where the transmission net- work is implicitly represented, resulting in important gains in CPU time for solving this problem. This new methodology is illustrated by a real case of generation and network transmission expan- sion planning of the Bolivian electrical system. KEYWORDS. Expansion planning, implicit multipliers, Bender’s decomposition. 460
Transcript of TÉCNICA DE DECOMPOSIÇÃO COM O CÁLCULO DE … · A Pesquisa Operacional e o uso racional de...

TÉCNICA DE DECOMPOSIÇÃO COM O CÁLCULO DE MULTIPLICADORES IMPLÍCITOS NO PLANEJAMENTO DA
EXPANSÃO DE SISTEMAS ELÉTRICOS
Fernanda Souza Thomé PSR – Praia de Botafogo, 228 Ala B Sala 1705, CEP 22359-900, Rio de Janeiro
Mario Veiga Ferraz Pereira PSR - [email protected]
Silvio Binato
PSR - [email protected]
Nora Campodónico PSR - [email protected]
Márcia Helena Costa Fampa
Programa de Engenharia de Sistemas e Computação – COPPE/UFRJ Cidade Universitária, CT, Bloco H, CEP 21941-972, Rio de Janeiro
Luiz Carlos da Costa Júnior PSR - [email protected]
RESUMO Este trabalho apresenta uma nova metodologia de decomposição aplicada à solução de
problemas de planejamento da expansão de geração e rede de transmissão de sistemas elétricos. Esta metodologia utiliza a técnica de decomposição de Benders para decompor o complexo pro-blema de expansão em um subproblema de investimento e um subproblema de operação. A novi-dade desta proposta está na utilização de uma formulação compacta para o subproblema de ope-ração, onde a rede de transmissão é representada de forma implícita, resultando em importantes ganhos de tempo de CPU para a resolução deste subproblema. Esta nova metodologia é ilustrada através de um caso real de planejamento da expansão da geração e rede de transmissão do siste-ma elétrico da Bolívia.
PALAVRAS CHAVE. Planejamento da expansão, multiplicadores implícitos, decomposi-ção de Benders.
ABSTRACT This work presents a new decomposition methodology applied to the solution of electrical
systems generation and transmission expansion planning problems. This methodology uses the Benders decomposition techinique to decompose the complex expansion problem into an invest-ment subproblem and an operation subproblem. The novelty about this proposal relies on the utilization of a compact formulation for the operation subproblem, where the transmission net-work is implicitly represented, resulting in important gains in CPU time for solving this problem. This new methodology is illustrated by a real case of generation and network transmission expan-sion planning of the Bolivian electrical system.
KEYWORDS. Expansion planning, implicit multipliers, Bender’s decomposition.
460
1 Introdução O problema de planejamento da expansão da geração se origina das mudanças necessárias
no sistema elétrico em face ao crescimento da demanda de energia, exigindo que novos geradores sejam construídos com o objetivo de atender a essas necessidades. Idealmente, poderíamos cons-truir as novas unidades geradoras sob medida para o suprimento das novas necessidades dos mer-cados consumidores. Contudo, quase sempre não é possível fisicamente, ou economicamente, construir as novas unidades geradoras próximas aos centros consumidores, de forma que muitas vezes são construídas em lugares distantes. Com isto, torna-se necessária também a construção de novas linhas de transmissão com a finalidade de transmitir a potência elétrica produzida por estas usinas.
O objetivo básico do processo de planejamento da expansão de sistemas elétricos é sele-cionar, no tempo e no espaço, o conjunto de unidades geradoras e linhas de transmissão que de-vem ser construídas para garantir o atendimento ao mercado consumidor previsto, a um custo mínimo, e sujeito a um conjunto de restrições e critérios de planejamento. Este processo de deci-são dá origem a um problema de otimização de grande porte que deve ser solucionado pelos en-genheiros de planejamento.
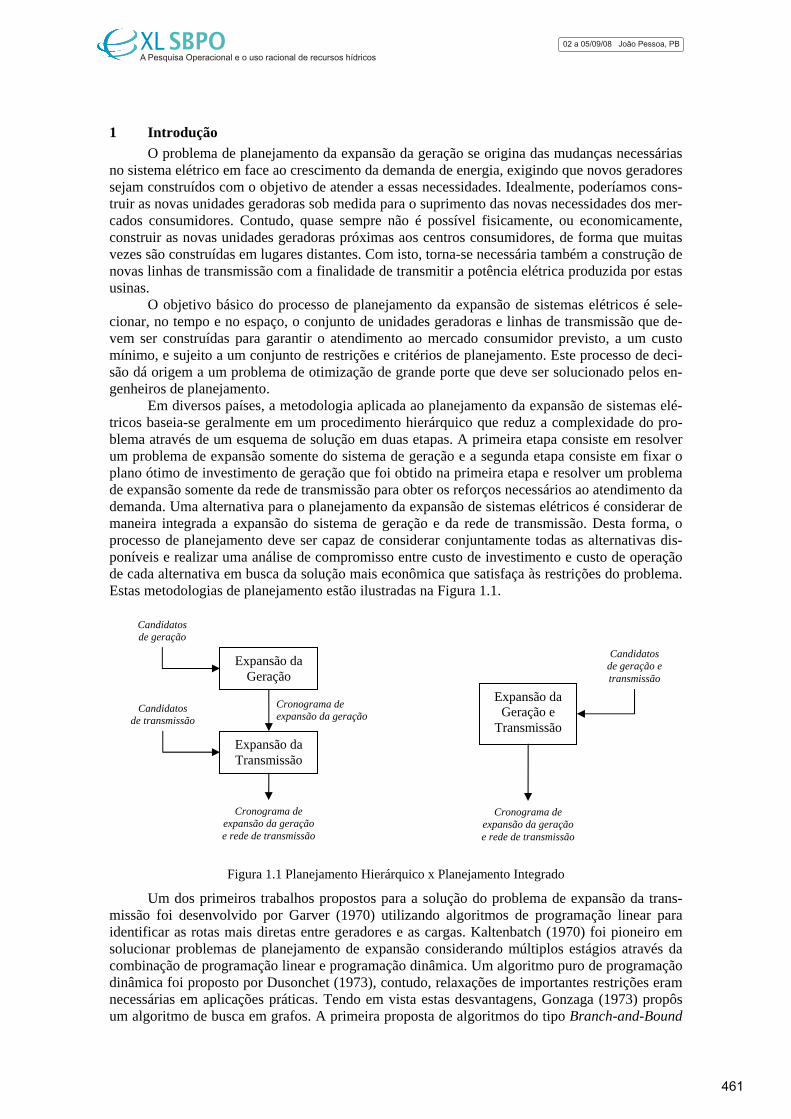
Em diversos países, a metodologia aplicada ao planejamento da expansão de sistemas elé-tricos baseia-se geralmente em um procedimento hierárquico que reduz a complexidade do pro-blema através de um esquema de solução em duas etapas. A primeira etapa consiste em resolver um problema de expansão somente do sistema de geração e a segunda etapa consiste em fixar o plano ótimo de investimento de geração que foi obtido na primeira etapa e resolver um problema de expansão somente da rede de transmissão para obter os reforços necessários ao atendimento da demanda. Uma alternativa para o planejamento da expansão de sistemas elétricos é considerar de maneira integrada a expansão do sistema de geração e da rede de transmissão. Desta forma, o processo de planejamento deve ser capaz de considerar conjuntamente todas as alternativas dis-poníveis e realizar uma análise de compromisso entre custo de investimento e custo de operação de cada alternativa em busca da solução mais econômica que satisfaça às restrições do problema. Estas metodologias de planejamento estão ilustradas na Figura 1.1.
Figura 1.1 Planejamento Hierárquico x Planejamento Integrado
Um dos primeiros trabalhos propostos para a solução do problema de expansão da trans-missão foi desenvolvido por Garver (1970) utilizando algoritmos de programação linear para identificar as rotas mais diretas entre geradores e as cargas. Kaltenbatch (1970) foi pioneiro em solucionar problemas de planejamento de expansão considerando múltiplos estágios através da combinação de programação linear e programação dinâmica. Um algoritmo puro de programação dinâmica foi proposto por Dusonchet (1973), contudo, relaxações de importantes restrições eram necessárias em aplicações práticas. Tendo em vista estas desvantagens, Gonzaga (1973) propôs um algoritmo de busca em grafos. A primeira proposta de algoritmos do tipo Branch-and-Bound
Expansão da Geração
Expansão da Transmissão
Cronograma de expansão da geração
Candidatos de geração
Candidatos de transmissão
Expansão da Geração e
Transmissão
Candidatos de geração e transmissão
Cronograma de expansão da geração e rede de transmissão
Cronograma de expansão da geração e rede de transmissão
461
para este problema é de Lee (1974), restrita a aplicações de pequeno porte. O uso de análise de sensibilidade no problema de planejamento foi inicialmente proposta pelo trabalho de De Champs (1979) e posteriormente proposto por Pereira (1985). Villasana (1984) desenvolveu um aperfeiçoamento do trabalho proposto por Garver e também elaborou uma formulação linear inteira mista para o problema de expansão da transmissão. De maneira geral, o problema de pla-nejamento pode ser formulado como a determinação de um cronograma de expansão que mini-mize o custo de investimento e operação do sistema, sujeito a um conjunto de restrições operati-vas diretamente relacionadas às decisões de investimento no sistema. Esta estrutura especial do problema sugere a utilização de técnicas de decomposição matemática conforme Benders (1962). O uso de esquemas de decomposição para este problema teve início com o trabalho de Pereira (1985) e outras diversas metodologias foram propostas, destacando-se os trabalhos de Romero (1989), Pinto (1990), Levi (1991) e Tsamasphyrou (1999).
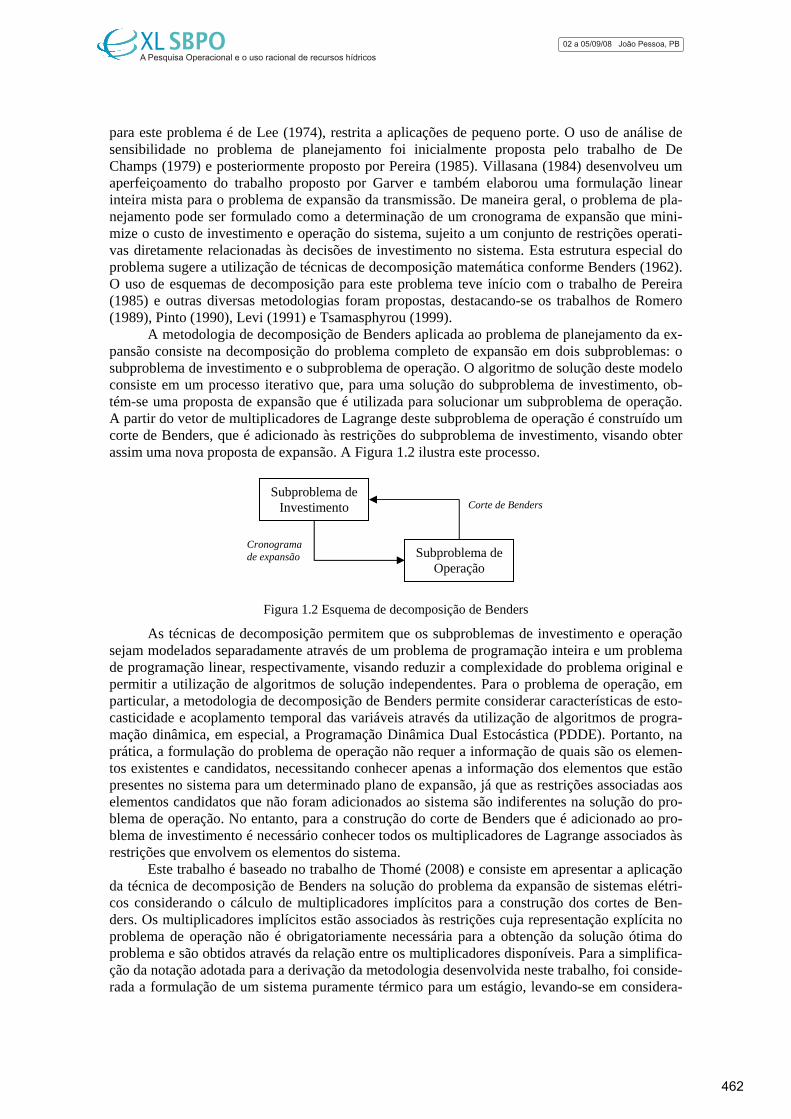
A metodologia de decomposição de Benders aplicada ao problema de planejamento da ex-pansão
Figura 1.2 Esquema de decomposição de Benders
As técnicas de dec investimento e operação sejam
é (2008) e consiste em apresentar a aplicação da téc
consiste na decomposição do problema completo de expansão em dois subproblemas: o subproblema de investimento e o subproblema de operação. O algoritmo de solução deste modelo consiste em um processo iterativo que, para uma solução do subproblema de investimento, ob-tém-se uma proposta de expansão que é utilizada para solucionar um subproblema de operação. A partir do vetor de multiplicadores de Lagrange deste subproblema de operação é construído um corte de Benders, que é adicionado às restrições do subproblema de investimento, visando obter assim uma nova proposta de expansão. A Figura 1.2 ilustra este processo.
omposição permitem que os subproblemas de modelados separadamente através de um problema de programação inteira e um problema
de programação linear, respectivamente, visando reduzir a complexidade do problema original e permitir a utilização de algoritmos de solução independentes. Para o problema de operação, em particular, a metodologia de decomposição de Benders permite considerar características de esto-casticidade e acoplamento temporal das variáveis através da utilização de algoritmos de progra-mação dinâmica, em especial, a Programação Dinâmica Dual Estocástica (PDDE). Portanto, na prática, a formulação do problema de operação não requer a informação de quais são os elemen-tos existentes e candidatos, necessitando conhecer apenas a informação dos elementos que estão presentes no sistema para um determinado plano de expansão, já que as restrições associadas aos elementos candidatos que não foram adicionados ao sistema são indiferentes na solução do pro-blema de operação. No entanto, para a construção do corte de Benders que é adicionado ao pro-blema de investimento é necessário conhecer todos os multiplicadores de Lagrange associados às restrições que envolvem os elementos do sistema.
Este trabalho é baseado no trabalho de Thomnica de decomposição de Benders na solução do problema da expansão de sistemas elétri-
cos considerando o cálculo de multiplicadores implícitos para a construção dos cortes de Ben-ders. Os multiplicadores implícitos estão associados às restrições cuja representação explícita no problema de operação não é obrigatoriamente necessária para a obtenção da solução ótima do problema e são obtidos através da relação entre os multiplicadores disponíveis. Para a simplifica-ção da notação adotada para a derivação da metodologia desenvolvida neste trabalho, foi conside-rada a formulação de um sistema puramente térmico para um estágio, levando-se em considera-
Subproblema de Operação
Subproblema de Investimento Corte de Benders
Cronograma de expansão
462

ção que não exitem maiores dificuldades para a generalização desta metodologia para um sistema hidrotérmico, cuja formulação pode ser obtida conforme o trabalho de Porto (1994).
Na próxima seção é apresentada a formulação do problema de planejamento integrado da expansão de sistemas de geração e rede de transmissão. A seção 3 descreve a aplicação da técnica de decomposição de Benders na solução deste problema utilizando o cálculo de multiplicadores implícitos para a construção dos cortes de Benders. Os resultados de um estudo de caso são apre-sentados na seção 4. Finalmente são apresentadas as conclusões deste trabalho.
2 Problema de Planejamento da Expansão de Sistemas Elétricos A formulação clássica do problema de planejamento da expansão integrada de geração e
transmissão é não-linear e não convexa, o que pode trazer sérias dificuldades para métodos de planos cortantes como o algoritmo de decomposição de Benders, pois os cortes produzidos po-dem excluir partes da região de viabilidade do problema, inclusive a região que contém a solução ótima global. Esta não-linearidade está associada à multiplicação de variáveis de decisão das restrições de segunda lei de Kirchhoff para os circuitos candidatos. Para solucionar esta questão, Villasana (1984), Granville (1985) e Sharifnia (1985) propuseram formulações lineares disjuntiva para o problema da expansão da rede de transmissão.
Neste trabalho: [ φ ] denota a matriz diagonal com os elementos do vetor φ; e | J | denota a multiplicidade do conjunto J.
2.1 Formulação Disjuntiva Sejam N o conjunto de barras do sistema, KE e KC os conjuntos de circuitos existentes e
candidatos, respectivamente, então o problema de planejamento da expansão de geração e rede de transmissão pode ser formulado pelo seguinte problema de programação linear inteira mista:
Min z = IgT xg + If
T xf + CET gE + C T gCC
(2.1) s/a: SE fE + SC fC + gE + gC = d (2.1a) fE – [ ] γE SE
T θ = 0 (2.1b) fC – [ ] γC SC
T θ ≤ M ( ) e – xf (2.1c) fC – [ ] γC SC
T θ ≥ –M ( ) e – xf (2.1d) – fE ≤ fE ≤ fE (2.1e)
fC – [ ] fC ¯ xf ≤ 0 (2.1f)
fC + [ ] fC ¯ xf ≥ 0 (2.1g) gE ≤ gE (2.1h) gC – [ ] gC xg ≤ 0 (2.1i)
xg ∈ { 0,1 }|N | (2.1j)
xf ∈ { 0,1 }|K C|
(2.1k) onde as variáveis de decisão do problema são: xf e xg vetores de decisão de investimento em cir-cuitos e geradores candidatos; fE e fC vetores de fluxo nos circuitos existentes e candidatos; gE e gC vetores de geração existente e candidata; e θ vetor de ângulo de tensão de barra. Os dados de entrada do problema são: If e Ig vetores de custo de investimento em circuitos e geradores candi-datos; CE e CC vetores de custo de operação dos geradores existentes e candidatos; d vetor de demanda das barras; γE e γC vetores de susceptância dos circuitos existentes e candidatos; SE e SC matrizes de incidência barra-circuito, para circuitos existentes e candidatos; fE e fC vetores de ca-pacidade de carregamento dos circuitos existentes e candidatos; gE e gC vetores de capacidade de geração existente e candidata; M constante disjuntiva dos circuitos candidatos.
A função objetivo do problema corresponde à minimização da soma dos custos atualizados de investimento em projetos de geração e de transmissão e o custo de operação das unidades tér-
463

micas. As restrições operativas do problema correspondem respectivamente a: (2.1a) restrição de atendimento à demanda (primeira lei de Kirchhoff); (2.1b) segunda lei de Kirchhoff para os cir-cuitos existentes; (2.1c)-(2.1d) segunda lei de Kirchhoff para os circuitos candidatos; (2.1e)-(2.1g) limite de carregamento dos circuitos existentes e candidatos; e (2.1h)-(2.1i) limite de gera-ção dos geradores existentes e candidatos. As restrições (2.1j)-(2.1k) representam a integralidade das variáveis associadas à decisão de construção de projetos de geração e transmissão. Para as restrições disjuntivas (2.1c)-(2.1d), a constante M de valor elevado permite que estas restrições estejam relaxadas quando xfk = 0, isto é, quando o circuito k não é construído, caso contrário, quando xfk = 1, ou seja, o circuito k é construído, então impõe-se que a segunda lei de Kirchhoff esteja satisfeita para este circuito.
Este problema de programação linear pode ser resolvido através de algoritmos de solução padrão (Branch-and-Bound), entretanto, nesta formulação existem três tipos de variáveis de deci-são de operação, correspondentes aos vetores g, f e θ. A formulação descrita a seguir é derivada da manipulação das equações resultando em um problema com apenas o vetor de gerações g co-mo variáveis de decisão. A formulação com representação compacta da rede de transmissão per-mite a utilização de um algoritmo de solução do problema de operação que utiliza um esquema de relaxação de restrições do problema, visando à redução do esforço computacional e do volume de dados armazenados durante o processo de solução.
2.2 Formulação Disjuntiva Compacta Sejam as equações que representam a primeira e segunda leis de Kirchhoff:
S f + g = d
(2.2) f = [ ] γ ST θ. (2.3)
Substituindo a variável f de (2.3) na equação (2.2), obtém-se a seguinte equação: B θ + g = d (2.4)
onde B = S γ ST é a matriz de susceptâncias de dimensão |N|×|N|. O vetor θ é obtido a partir da solução do sistema de equações lineares . Como o posto da matriz B é igual a (2.4) |N| – , é ne-cessário eliminar uma linha e uma coluna desta matriz, correspondentes a uma barra s, definida como a barra de referência angular.
1
θ = B )˜-1 (d – g (2.5) onde θ, g, d e B correspondem aos vetores θ, g, d e à matriz B sem a linha (e a coluna) corres-pondente à barra s. O ângulo da tensão da barra s é então fixado em θs = 0. Reescrevendo a equa-ção em termos dos vetores completos de geração e demanda, adicionando uma linha e uma coluna nulas na posição s da matriz
(2.5)B-1, tem-se:
θ = B-1 ( )d – g . (2.6) Substituindo a equação (2.6) na restrição (2.3) correspondente à segunda lei de Kirchhoff,
obtém-se a seguinte equação para o fluxo nos circuitos: f = β ( )d – g (2.7)
onde β = γ ST B-1 é uma matriz de sensibilidade de dimensão|K| ×|N|. O valor da geração da barra de referência é calculado implicitamente a partir do balanço total de geração e demanda das demais barras e, então, tem-se a seguinte equação de balanço total de demanda do sistema:
eT g = eT d (2.8) onde e é um vetor unitário de dimensão|N|.
Finalmente, substituindo as equações (2.7) e (2.8) na formulação disjuntiva do problema de planejamento da expansão (2.1) é obtida a seguinte forma compacta:
Min z = IgT xg + If
T xf + CET gE + C T gCC
(2.9) s/a: eT gE + eT gC = eT d (2.9a) – f E ≤ βE (d – gE – gC) ≤ f E (2.9b) – f Ck
≤ βCk (d – gE – gC) ≤ f Ck
, ∀ k ∈ K C | xfk = 1 (2.9c)
464

gE ≤ gE
(2.9d) gC – [ ] gC xg ≤ 0 (2.9e)
xg ∈ {0,1}|N | (2.9f)
xf ∈ {0,1}|K C|. (2.9g)
3 Decomposição de Benders no Problema de Planejamento da Expansão O problema da expansão ótima de um sistema elétrico pode ser representado, de forma ge-
ral, pelo seguinte problema de programação linear inteira mista: Min z = cT x + dT y
(3.1) s/a: E x + F y ≥ h (3.1a) x ∈ {0,1} (3.1b) y ≥ 0. (3.1c)
Neste problema, as variáveis x representam investimentos em capacidade dos equipamen-tos e assumem valores inteiros. Uma vez tomada uma decisão de investimento, os elementos do sistema são utilizadas para suprir a demanda. As variáveis y representam as variáveis operativas do sistema. As restrições nestas variáveis (atendimento da demanda, limites operativos, etc.) são expressas genericamente pelas restrições . A estrutura do problema é típica de um problema de decisão em dois estágios, onde inicialmente toma-se uma decisão de investimento e em seguida determina-se a melhor operação do sistema para esta decisão. A metodologia de de-composição de Benders aplicada ao problema de planejamento da expansão consiste em um pro-cesso iterativo, onde para cada iteração μ:
(3.1a) (3.1)
1. Resolve-se uma relaxação do problema de expansão (problema Mestre) e obtém-se uma pro-posta de investimento xμ:
Min z = cT x + α (3.2)
s/a: α + πνT E x ≥ πν
T h, ν = 1, ..., μ–1 (3.2a)
x ∈ {0,1}. (3.2b) 2. Resolve-se o subproblema de operação (problema Escravo) para x = xμ.
Min dT y (3.3) s/a: F y ≥ h – E xμ (3.3a) y ≥ 0. (3.3b)
3. Verifica-se o critério de otimalidade. Se não é ótimo, obtém-se o vetor π de multiplicadores do subproblema de operação é constrói-se um corte de Benders:
α + πμT E x ≥ πμ
T h. (3.4)
Adiciona-se o corte às restrições do problema Mestre e retorna ao passo 1.
3.1 Modelo Disjuntivo Supondo que para a iteração μ do modelo de decomposição de Benders obtém-se
( )xfμ , xg
μ como solução do problema Mestre. Fixando ( )xf , xg = ( )xfμ , xg
μ no problema (2.1), obtém-se o seguinte problema de operação (ou problema Escravo):
Min z = CET gE + C T gCC
(3.5) s/a: SE fE + SC fC + gE + gC = d (3.5a) fE – [ ] γE SE
T θ = 0 (3.5b)
– M ( )e – xfμ ≤ fC – [ ] γC SC
T θ ≤ M ( )e – xfμ (3.5c)
– f E ≤ fE ≤ f E (3.5d)
– [ ] f C xfμ ≤ fC ≤ [ ] f C xf
μ (3.5e) gE ≤ gE (3.5f)
465

gC ≤ [ ] gC xgμ. (3.5g)
Após solucionado o problema de programação linear (3.5), pode-se calcular os cortes de Benders conforme a equação (3.4) que são representados por:
α + πμT Eg xg + πμ
T Ef xf ≥ πμ
T h
(3.6)
onde πμ é o vetor de multiplicadores de Lagrange associados às restrições do problema de opera-ção obtido na μ-ésima iteração e é dado por:
πμT = ⎣⎡ ⎦⎤πd
μTπγE
μTπγC
μTπfE
μTπfC
μTπgE
μTπgC
μT.
Eg e Ef são, respectivamente, as matrizes que acoplam as restrições de investimento em ge-ração e transmissão com as restrições de operação, e são dadas por:
EgT = [ ]0 0 0 0 0 0 – [ ] gC
EfT = [ ]0 0 ± M 0 ± [ ] f C 0 0 .
O vetor h é formado por: hT = [ ]dT 0 ± eT M ± f E
T 0 gET 0 .
Substituindo Eg, Ef, h e πμ conforme a equação , obtém-se a seguinte expressão para os cortes de Benders:
(3.6)
α – ⎝⎛ ⎠⎞πgCμT
[ ] gC xg + ⎝⎛ ⎠⎞–⎪⎪ ⎪⎪πγCμT
M + ⎪⎪ ⎪⎪πfCμT
[ ] f C xf ≥ RHSμ (3.7)
RHSμ = πdμT
d – ⎪⎪ ⎪⎪πγCμT
M e – ⎪⎪ ⎪⎪πfEμT
f E + πgEμT
gE. Deve-se destacar que um valor muito elevado para a constante disjuntiva resulta em mau
condicionamento numérico dos cortes, consequentemente dificultando a convergência do método de decomposição de Benders. Uma alternativa explorada na construção dos cortes de Benders é o cálculo da constante disjuntiva M de valor significativamente reduzido, conforme proposto por Binato (2000).
3.1.1 Cálculo dos Multiplicadores Implícitos Como os modelos de investimento e operação possuem algoritmos de solução independen-
tes, na prática, a formulação do problema de operação não requer a informação de quais são os elementos existentes e candidatos, necessitando conhecer apenas a informação dos elementos que estão presentes no sistema para um determinado plano de expansão, já que as restrições associa-das aos elementos candidatos que não foram adicionados ao sistema são indiferentes na solução deste problema. Em outras palavras, uma formulação equivalente para o problema de operação (3.5) pode ser obtida sem a representação explícita das variáveis fCk
, ∀k ∈ K c | xfkμ = 0 e gCi
,
∀i ∈ N | xgiμ = 0 e suas respectivas restrições (3.5c), (3.5e) e (3.5g).
No entanto, para a construção do corte de Benders que é adicionado ao problema de inves-timento, conforme a equação (3.7), é necessário conhecer todos os multiplicadores de Lagrange associados a estas restrições, correspondentes aos vetores completos de multiplicadores πγC
, πfC e
πgC. Seja o problema dual ao problema (3.5):
Max z' = dT πd + fET πfE
+ xfμT [ ] f C πfC
+ gET πgE
+ xgμT [ ] gC πgC
(3.8) s/a: SE
T πd + πγE + πfE
= 0 (3.8a) SC
T πd + πγC + πfC
= 0 (3.8b) πd + πgE
≤ CE (3.8c) πd + πgC
≤ CC (3.8d) πd ≥ 0, πγE
, πγC, πfE
, πfC, πgE
, πgC ≤ 0.
466

Da teoria de programação linear, tem-se que na solução ótima os multiplicadores obtidos no problema (3.5) são idênticos às variáveis do problema dual (3.8). Desta forma, quando não estão sendo representadas todas as variáveis do problema, então os multiplicadores associados às suas respectivas restrições podem ser obtidos implicitamente através da relação entre os multipli-cadores disponíveis.
Quando um circuito k não é adicionado ao sistema, ou seja xfkμ = 0, então a restrição dis-
juntiva (3.5c) associada a este circuito deve estar relaxada pela constante M. Por esta razão, como esta restrição não está ativa, o multiplicador de Lagrange associado a esta restrição tem valor igual a zero. Portanto:
πγCk = 0, ∀k ∈ K c | xfk
μ = 0. (3.9) Da restrição (3.8b) tem-se que:
πfC = – SC
T πd – πγC. (3.10)
Sejam de(k) e para(k) as barras terminais do circuito k, então: πfCk
= πdde(k) – πdpara(k)
– πγCk, ∀k ∈ K c (3.11)
Substituindo (3.9) em (3.10), tem-se que: πfCk
= πdde(k) – πdpara(k)
, ∀k ∈ K c | xfkμ = 0. (3.12)
De acordo com a restrição (3.8d), como o problema (3.8) é de maximização e πgC ≤ 0, en-
tão na solução ótima deste problema tem-se que: πgC
= min{ }0 ; CC – πd . (3.13) Portanto:
πgCi = min{ }0 ; CCi
– πdi, ∀i ∈ N. (3.14)
3.2 Modelo Disjuntivo Compacto Aplicando-se a decomposição de Benders à formulação compacta do problema de plane-
jamento da expansão e lembrando que as restrições (2.9c) do problema (2.9) só existem quando xfk
μ = 1, então o problema Escravo, ou de despacho ótimo, pode ser escrito da seguinte forma
para a iteração μ: Min z = CE
T gE + C T gCC
(3.15) s/a: eT gE + eT gC = eT d (3.15a) – f E ≤ βE (d – gE – gC) ≤ f E (3.15b) – f Ck
≤ βCk (d – gE – gC) ≤ f Ck
, ∀ k ∈ K c | xfkμ = 1 (3.15c)
gE ≤ gE (3.15d) gC ≤ [ ] gC xg
μ (3.15e) onde πλ, πfE
, πfC, πgE
e πgC são os multiplicadores de Lagrange associados às restrições do pro-
blema (3.15). Em comparação com o problema que utiliza a formulação tradicional (3.5), nota-se que no problema compacto não são representados os circuitos candidatos k ∈ K c | xfk
μ = 0, que
não foram adicionados ao sistema. Como a representação destes circuitos não afeta a solução do problema pode-se garantir que os problemas de operação (3.5) e (3.15) são equivalentes.
Desta forma, como o problema Mestre de planejamento da expansão obtido a partir da formulação compacta é o mesmo da formulação tradicional, então é necessário calcular o mesmo corte de Benders para estes problemas. No entanto, para a formulação compacta não são conheci-dos explicitamente os valores para os multiplicadores πdi
∀i ∈ N, πγCk ∀k ∈ K c e
πfCk ∀k ∈ K c | xfk
μ = 0 associados, respectivamente, às restrições (3.5a), (3.5c) e (3.5e) do pro-
467

blema com formulação tradicional. Faz-se necessário então conhecer a relação entre os multipli-cadores do problema com formulação tradicional e do problema com formulação compacta para que se possam calcular os mesmos cortes de Benders (3.7) no problema Mestre do modelo com-pacto.
3.2.1 Cálculo dos Multiplicadores Implícitos Seja o problema dual ao problema (3.15):
Max z' = eT d πλ + fET πfE
+ xfμT [ ] f C πfC
+ gET πgE
+ xgμT [ ] gC πgC
(3.16) s/a: πλ e – βE
T πfE – βC
T πfC + πgE
≤ CE (3.16a) πλ e – βE
T πfE – βC
T πfC + πgC
≤ CC (3.16b) πλ ≥ 0, πfE
, πfC, πgE
, πgC ≤ 0. (3.16c)
Analogamente ao problema (3.8), a partir da restrição (3.16b) tem-se que: πgC
= min{ }0 ; C – πλ e + βET
C πfE + βC
T πfC. (3.17)
Das equações (3.13) e (3.17) pode-se chegar à seguinte relação: C – πd = CC – πλ e + βE
TC πfE
+ βCT πfC
. (3.18) Rearranjando os termos da equação (3.18) é obtida a seguinte expressão:
πd = πλ e – βET πfE
– βCT πfC
. (3.19) Portanto:
πdi = πλ – ∑
k ∈ KE
βEk,i πfEk
– ∑k ∈ KC | x
fk=1
βEk,i πfEk
, ∀i ∈ N. (3.20)
Da restrição (3.8b) tem-se que: πγC
= – SCT πd – πfC
. (3.21) Como πγCk
= 0 ∀k ∈ K c | xfkμ = 0, então:
πγCk = πdde(k)
– πdpara(k) – πfCk
, ∀k ∈ K c | xfkμ = 1. (3.22)
Uma vez calculados os multiplicadores πd para o problema com formulação compacta, os multiplicadores associados às restrições de capacidade operativa para os elementos não adiciona-dos ao sistema, fCk
∀k ∈ K c | xfkμ = 0 e gCi
, ∀i ∈ N | xgiμ = 0, também podem ser obtidos implici-
tamente através da mesma relação encontrada para o problema com formulação tradicional, equa-ções (3.12) e (3.14), por se tratarem de problemas equivalentes.
3.3 Algoritmo de Solução O algoritmo de solução do problema de planejamento da expansão de sistemas elétricos é
dividido em soluções iterativas de um módulo de investimento e um módulo de operação. O mo-delo de investimento utiliza a técnica de relaxação dos cortes de Benders, que são adicionados ao problema a cada iteração do algoritmo, a fim de obter um novo plano de expansão que é informa-do ao modelo de operação. O modelo de operação, por sua vez, é constituído por um problema de programação linear cuja solução fornece os multiplicadores de Lagrange que são utilizados na construção dos cortes de Benders.
A utilização da formulação compacta no modelo de operação permite que a solução deste problema seja obtida através de soluções alternadas do problema de operação com relaxação das restrições (3.15b)-(3.15c) de carregamento dos circuitos, e de um modelo de cálculo de fluxo de potência linearizado – Stott (1974) – que determina os circuitos cujas restrições de capacidades estão sendo violadas e, portanto, são adicionadas ao problema de operação. A solução ótima é encontrada sem que necessariamente todas as restrições de limites de carregamento sejam adicio-nadas ao problema de programação linear. Isto se deve ao fato de que nem todas as restrições de carregamento estão ativas na solução ótima do problema.
468
4 Estudo de Caso O caso exemplo apresentado é utilizado para uma comparação entre as metodologias de
planejamento hierárquico e planejamento integrado da expansão de um sistema elétrico utilizan-do os modelos disjuntivo e disjuntivo compacto para a representação da rede de transmissão. O sistema utilizado neste trabalho é um caso real do sistema elétrico da Bolívia com a rede de 69kV, 115kV e 230 kV do ano de 2004. Esta rede é formada por 46 barras e 53 circuitos existen-tes e o parque de geração existente é constituído de 28 usinas hidroelétricas e 25 usinas térmicas. Para este estudo de planejamento foram considerados 26 circuitos candidatos e 30 usinas térmi-cas candidatas à expansão em um horizonte de 7 anos (2004-2010).
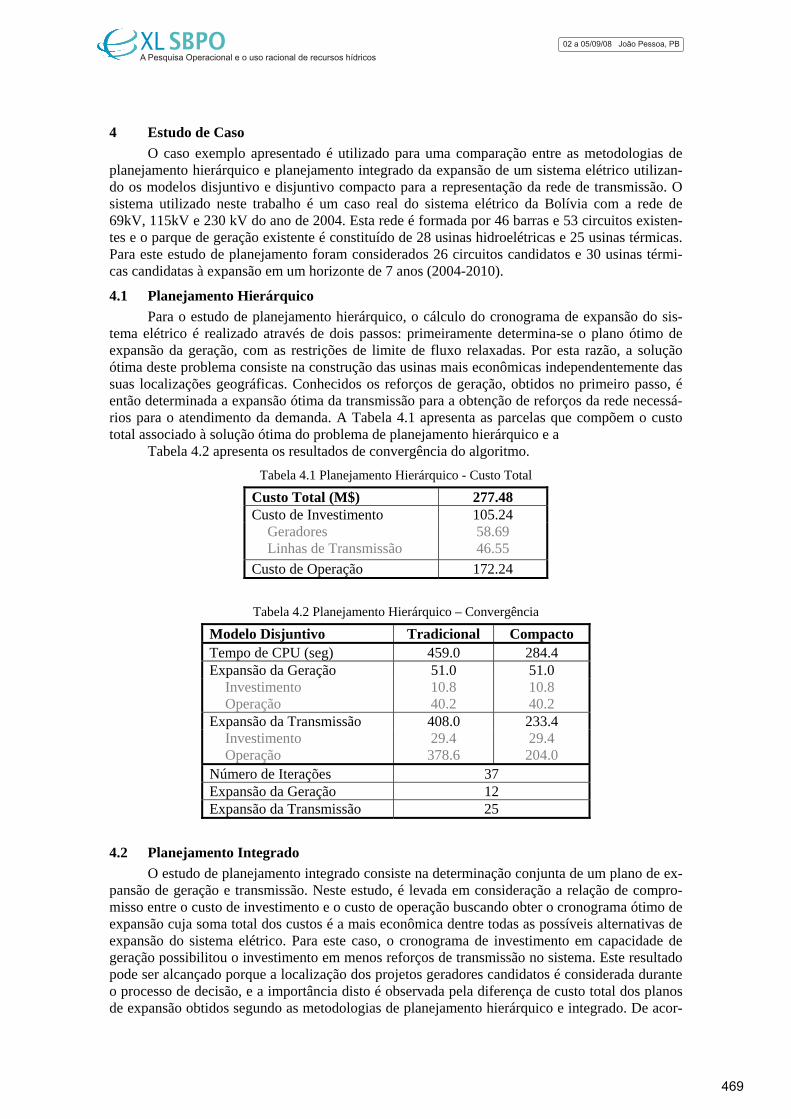
4.1 Planejamento Hierárquico Para o estudo de planejamento hierárquico, o cálculo do cronograma de expansão do sis-
tema elétrico é realizado através de dois passos: primeiramente determina-se o plano ótimo de expansão da geração, com as restrições de limite de fluxo relaxadas. Por esta razão, a solução ótima deste problema consiste na construção das usinas mais econômicas independentemente das suas localizações geográficas. Conhecidos os reforços de geração, obtidos no primeiro passo, é então determinada a expansão ótima da transmissão para a obtenção de reforços da rede necessá-rios para o atendimento da demanda. A Tabela 4.1 apresenta as parcelas que compõem o custo total associado à solução ótima do problema de planejamento hierárquico e a
Tabela 4.2 apresenta os resultados de convergência do algoritmo. Tabela 4.1 Planejamento Hierárquico - Custo Total
Custo Total (M$) 277.48 Custo de Investimento 105.24 Geradores
Linhas de Transmissão 58.69 46.55
Custo de Operação 172.24
Tabela 4.2 Planejamento Hierárquico – Convergência
Modelo Disjuntivo Tradicional Compacto Tempo de CPU (seg) 459.0 284.4 Expansão da Geração 51.0 51.0 Investimento
Operação 10.8 40.2
10.8 40.2
Expansão da Transmissão 408.0 233.4 Investimento
Operação 29.4 378.6
29.4 204.0
Número de Iterações 37 Expansão da Geração 12 Expansão da Transmissão 25
4.2 Planejamento Integrado O estudo de planejamento integrado consiste na determinação conjunta de um plano de ex-
pansão de geração e transmissão. Neste estudo, é levada em consideração a relação de compro-misso entre o custo de investimento e o custo de operação buscando obter o cronograma ótimo de expansão cuja soma total dos custos é a mais econômica dentre todas as possíveis alternativas de expansão do sistema elétrico. Para este caso, o cronograma de investimento em capacidade de geração possibilitou o investimento em menos reforços de transmissão no sistema. Este resultado pode ser alcançado porque a localização dos projetos geradores candidatos é considerada durante o processo de decisão, e a importância disto é observada pela diferença de custo total dos planos de expansão obtidos segundo as metodologias de planejamento hierárquico e integrado. De acor-
469
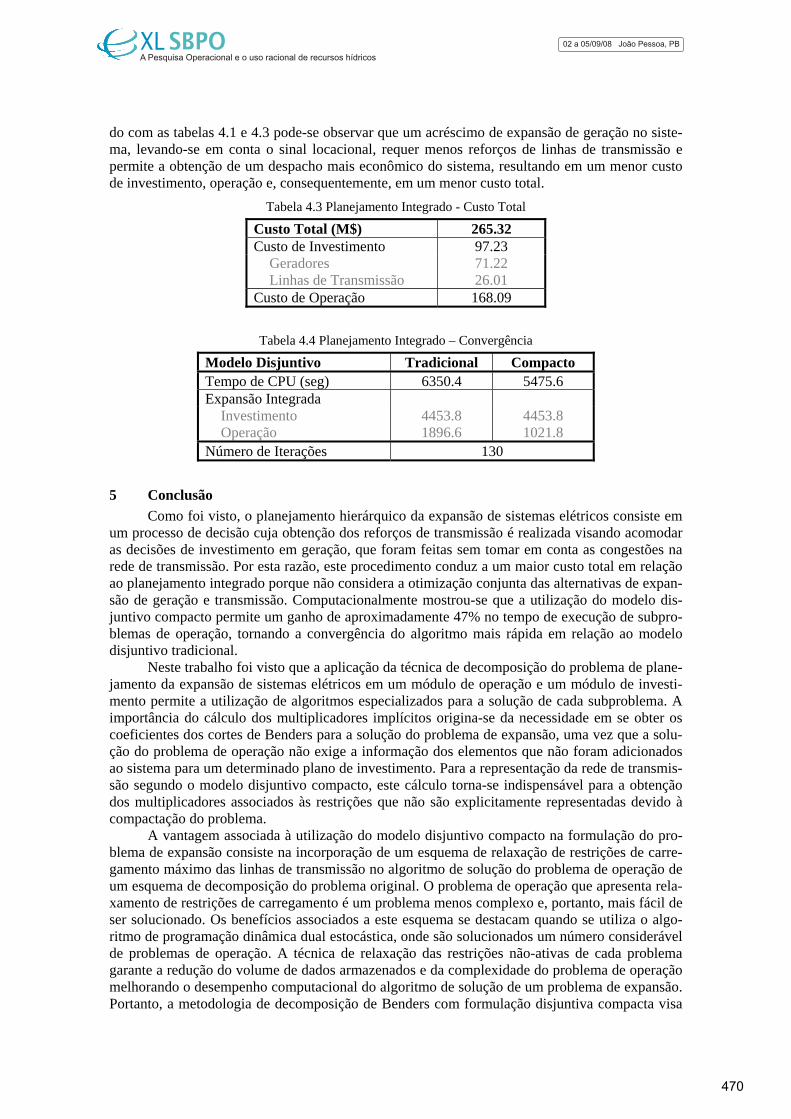
do com as tabelas 4.1 e 4.3 pode-se observar que um acréscimo de expansão de geração no siste-ma, levando-se em conta o sinal locacional, requer menos reforços de linhas de transmissão e permite a obtenção de um despacho mais econômico do sistema, resultando em um menor custo de investimento, operação e, consequentemente, em um menor custo total.
Tabela 4.3 Planejamento Integrado - Custo Total
Custo Total (M$) 265.32 Custo de Investimento 97.23 Geradores
Linhas de Transmissão 71.22 26.01
Custo de Operação 168.09
Tabela 4.4 Planejamento Integrado – Convergência
Modelo Disjuntivo Tradicional Compacto Tempo de CPU (seg) 6350.4 5475.6 Expansão Integrada Investimento
Operação 4453.8 1896.6
4453.8 1021.8
Número de Iterações 130
5 Conclusão Como foi visto, o planejamento hierárquico da expansão de sistemas elétricos consiste em
um processo de decisão cuja obtenção dos reforços de transmissão é realizada visando acomodar as decisões de investimento em geração, que foram feitas sem tomar em conta as congestões na rede de transmissão. Por esta razão, este procedimento conduz a um maior custo total em relação ao planejamento integrado porque não considera a otimização conjunta das alternativas de expan-são de geração e transmissão. Computacionalmente mostrou-se que a utilização do modelo dis-juntivo compacto permite um ganho de aproximadamente 47% no tempo de execução de subpro-blemas de operação, tornando a convergência do algoritmo mais rápida em relação ao modelo disjuntivo tradicional.
Neste trabalho foi visto que a aplicação da técnica de decomposição do problema de plane-jamento da expansão de sistemas elétricos em um módulo de operação e um módulo de investi-mento permite a utilização de algoritmos especializados para a solução de cada subproblema. A importância do cálculo dos multiplicadores implícitos origina-se da necessidade em se obter os coeficientes dos cortes de Benders para a solução do problema de expansão, uma vez que a solu-ção do problema de operação não exige a informação dos elementos que não foram adicionados ao sistema para um determinado plano de investimento. Para a representação da rede de transmis-são segundo o modelo disjuntivo compacto, este cálculo torna-se indispensável para a obtenção dos multiplicadores associados às restrições que não são explicitamente representadas devido à compactação do problema.
A vantagem associada à utilização do modelo disjuntivo compacto na formulação do pro-blema de expansão consiste na incorporação de um esquema de relaxação de restrições de carre-gamento máximo das linhas de transmissão no algoritmo de solução do problema de operação de um esquema de decomposição do problema original. O problema de operação que apresenta rela-xamento de restrições de carregamento é um problema menos complexo e, portanto, mais fácil de ser solucionado. Os benefícios associados a este esquema se destacam quando se utiliza o algo-ritmo de programação dinâmica dual estocástica, onde são solucionados um número considerável de problemas de operação. A técnica de relaxação das restrições não-ativas de cada problema garante a redução do volume de dados armazenados e da complexidade do problema de operação melhorando o desempenho computacional do algoritmo de solução de um problema de expansão. Portanto, a metodologia de decomposição de Benders com formulação disjuntiva compacta visa
470
tornar computacionalmente viável e eficiente a utilização de um modelo de programação dinâmi-ca dual estocástica em um problema de planejamento da expansão integrada de sistemas hidro-térmicos de grande porte.
Referências Benders, J. F., "Partitioning procedures for solving mixed variables programming problems". Numerische Mathematik, v. 4, pp. 238-252, 1962. Binato, S., Expansão ótima de sistemas de transmissão através de decomposição de Benders e técnicas de planos cortantes. Tese de Doutorado, COPPE/RJ, Rio de Janeiro, RJ, Brasil, 2000. De Champs, C., Vankelecom, J., Jamoulle, E., “TRANEX – An interactive computer program for transmission expansion planning”. IEEE IPES Summer Meeting, Vancouver, Canada, Jul. 1979, paper A79 476-3. Dusonchet, Y. P., El-Abiad, A. H., “Transmission planning using discrete dynamic pptimization”. IEEE Transactions on PAS, v. 92, pp. 1358-1371, Abr. 1973. Garver, L. L., “Transmission network estimation using linear programming.” IEEE Transactions on Power Apparatus and Systems, v. 89, n. 7, pp. 1688-1697, Set. 1970. Gonzaga, C. C., Estudos de algoritmos de busca em grafos e sua aplicação a problemas de planejamento. Tese de Doutorado, COPPE, Rio de Janeiro, RJ, Brasil, 1973. Granville, S., Pereira, M. V. F., Analisys of the linearized power flow in Benders decomposition. In: Report SOL 85-04, System Optimization Lab. Stanford University, 1985. Kaltenbatch, J. C., Peshon, J., Gehrig, E. H., "A mathematical optimization technique for the expansion of electrical power transmission systems". IEEE Transactions on PAS, v. PAS-89, n. 11, pp. 113-119, Jan. 1970. Lee, S. T. Y., Hicks, K. L., Hnyilicza, E., "Transmission expansion by Branch-and-Bound integer programming with optimal cost capacity curve". IEEE Transactions on PAS, v.93, n.5, pp.1390-1400, Set. 1974. Levi, V. A., Calovic, M. S., "A new decomposition based method for optimal expansion planning of large transmission networks." IEEE Transactions on Power Systems, v. 6, n. 3, pp. 937-943, Ago. 1991. Pereira, M. V. F., Aplicação de análise de sensibilidade no planejamento da expansão de sistemas de geração/transmissão. Tese de Doutorado. COPPE, Rio de Janeiro, RJ, Brasil, 1985. Pinto, L. M. V., Nunes, A., "A model for optimal transmission expansion planning". Proceedings of the 10th Power System Computation Conference (PSCC), pp. 13-23, Graz, Austria, Out. 1990. Porto, T. O., Representação de problemas estocásticos multi-estágios em decomposição: uma aplicação ao planejamento da expansão de sistemas elétricos. Dissertação de Mestrado, PUC/RJ, Rio de Janeiro, RJ, Brasil, 1994. Romero, R., Planejamento da expansão de sistemas de transmissão por decomposição de Benders hierarquisada, Dissertação de Mestrado, Universidade Estadual de Campinas (UNICAMP), Brasil, Dez 1989. Sharifnia, A., Aashtiani, M. H., “Transmission network planning: a method for synthesis of minimum cost secure networks.” IEEE Transactions on Power Apparatus and Systems, v. 104, n. 8, pp. 2025-2034, Ago.1985. Stott, B., Alsaç, O., "Fast decoupled load flow." IEEE Transactions on PAS, v.93, p.859-869, 1974. Thomé, F. S., Aplicação de técnica de decomposição com o cálculo de multiplicadores implícitos no planejamento da expansão da geração e rede de transmissão de sistemas elétricos. Dissertação de Mestrado. COPPE, Rio de Janeiro, RJ, Brasil, 2008. Tsamasphyrou, P., Renaud, A., Carpentier, P., "Transmission network planning: an efficient Benders decomposition scheme". Proceedings of the 13th Power System Computation Conference (PSCC), pp. 487-494, Trondheim, Norway, Jun.-Jul. 1999. Villasana, R., Transmission network planning using linear and linear mixed integer programming. PhD Thesis. Ressenlaer Polytechnic Institute, 1984.
471


















