
TESE SUBMETIDA AO CORPO DOCENTE DA...
106
CONCATENAÇÃO DOS MOVIMENTOS DO MANIPULADOR E DA CÂMERA DE UM ROV Alexandre Silva de Lima TESE SUBMETIDA AO CORPO DOCENTE DA COORDENAÇÃO DOS PROGRAMAS DE PÓS-GRADUAÇÃO DE ENGENHARIA DA UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COMO PARTE DOS REQUISITOS NECESSÁRIOS PARA A OBTENÇÃO DO GRAU DE MESTRE EM CIÊNCIAS EM ENGENHARIA MECÂNICA. Aprovada por: ________________________________________________ Prof. Max Suell Dutra, Dr.-Ing. ________________________________________________ Prof. Vitor Ferreira Romano, Dott. Ric. ________________________________________________ Luciano Santos Constantin Raptopoulos, D. Sc. ________________________________________________ Prof. Cyro Alves Borges Júnior, D.Sc. RIO DE JANEIRO, RJ - BRASIL JULHO DE 2005
Transcript of TESE SUBMETIDA AO CORPO DOCENTE DA...
CONCATENAÇÃO DOS MOVIMENTOS DO MANIPULADOR
E DA CÂMERA DE UM ROV
Alexandre Silva de Lima
TESE SUBMETIDA AO CORPO DOCENTE DA COORDENAÇÃO DOS
PROGRAMAS DE PÓS-GRADUAÇÃO DE ENGENHARIA DA UNIVERSIDADE
FEDERAL DO RIO DE JANEIRO COMO PARTE DOS REQUISITOS NECESSÁRIOS
PARA A OBTENÇÃO DO GRAU DE MESTRE EM CIÊNCIAS EM ENGENHARIA
MECÂNICA.
Aprovada por:
________________________________________________
Prof. Max Suell Dutra, Dr.-Ing.
________________________________________________
Prof. Vitor Ferreira Romano, Dott. Ric.
________________________________________________
Luciano Santos Constantin Raptopoulos, D. Sc.
________________________________________________
Prof. Cyro Alves Borges Júnior, D.Sc.
RIO DE JANEIRO, RJ - BRASIL
JULHO DE 2005

ii
LIMA, ALEXANDRE SILVA DE Concatenação dos movimentos do
manipulador e da câmera de um ROV [Rio de
Janeiro] 2005
XII, 94 p. 29,7 cm (COPPE/UFRJ, M.Sc.,
Engenharia Mecânica, 2005)
Tese - Universidade Federal do Rio de
Janeiro, COPPE
1. Robótica
2. Robótica submarina
3. Automação
I. COPPE/UFRJ II. Título (série)

iii
Dedico essa tese aos meus pais, Aroldo e Aracy (in memoriam),
ao meu irmão, Aroldo Jr.,
e a minha afilhada, Luiza.
iv
AGRADECIMENTOS
Agradeço
a Deus;
aos professores Max Suell Dutra e Vitor Romano, Luciano Santos Constantin
Raptopoulos, e ao Ney Robinson Salvi dos Reis pelo entusiasmo e dedicação com que
participaram deste trabalho;
à minha família que sempre me apoiou;
aos amigos Auderi Vicente dos Santos, Breno Bonfatti, Fabrício Lopes e Silva,
Eugenia Trindade, Pedro Eduardo Gonzales, Jose Almir Sena e Leonardo Pessoa
Dias, que muito colaboraram para este trabalho;
a todos os amigos do Laboratório de Robótica pela convivência amigável e pelo
companheirismo e a todos que de uma forma ou de outra contribuíram para a
execução deste trabalho;
ao Programa de Engenharia Mecânica;
ao Centro de Pesquisas da Petrobras (CENPES) por toda infra-estrutura fornecida
para o desenvolvimento dessa pesquisa;
v
Resumo da Tese apresentada à COPPE/UFRJ como parte dos requisitos necessários
para a obtenção do grau de Mestre em Ciências (M.Sc.)
CONCATENAÇÃO DOS MOVIMENTOS DO MANIPULADOR
E DA CÂMERA DO ROV
Alexandre Silva de Lima
Julho/2005
Orientador: Max Suell Dutra
Programa: Engenharia Mecânica
Os ROVs (Veículos Remotamente Operados) são largamente utilizados para
instalação e manutenção de sistemas para exploração submarina de petróleo em todo
o mundo. Estes sistemas são operados a distância sendo de essencial importância a
utilização de uma câmera para a visualização da área de trabalho. A sincronização na
realização das tarefas de operação do manipulador e a movimentação da câmera pelo
operador são tarefas complexas. Neste trabalho, é apresentado um sistema que
interliga a câmera com o manipulador. A concatenação dos sistemas é feita através da
interligação dos sinais dos potenciômetros das juntas do manipulador com os sinais
das válvulas proporcionais dos atuadores da câmera. Um sistema de controle proposto
nesse estudo permite alcançar o objetivo que é através de um sistema de
movimentação da câmera (pan e tilt), acompanhar o movimento do manipulador,
buscando manter o objeto da visualização dentro do campo de visão do operador do
ROV.

vi
Abstract of Thesis presented to COPPE/UFRJ as a partial fulfillment of the
requirements for the degree of Master of Science (M.Sc.)
CONCATENATION OF THE MOVEMENTS OF THE MANIPULATOR
AND THE CAMERA OF ROV
Alexandre Silva de Lima
July/2005
Advisor: Max Suell Dutra
Department: Mechanical Engineering
ROVs are largely used for installing and maintaining underwater exploration
systems in the oil industry. These systems are remote controlled with the help of a
camera that provides a detailed view of the work area. Synchronizing manipulator
operation with the camera movement is a complex task. This work presents a system
that links camera and manipulator. The concatenation of the systems is made through
the interconnection of the signals of the potentiometer of manipulator joints with the
signals of the proportional valves of camera actuators. A control system proposed in
this thesis allows to acompany manipulator movements by the use of a camera
movement system (pan and tilt), trying to maintain target object inside ROV operator
field of vision.
vii
ÍNDICE ANALÌTICO
1 Introdução .......................................................................................................... 1
1.1. Manipuladores Robóticos ................................................................................... 1
1.2. Tipos Básicos de Manipuladores........................................................................ 2 1.2.1 . Manipulador Antropomórfico (RRR)............................................................ 2 1.2.2 . Manipulador Esférico (RRP)......................................................................... 4 1.2.3 . Manipulador SCARA (RRP)......................................................................... 4 1.2.4 . Manipulador Cilíndrico (RPP) ...................................................................... 5 1.2.5 . Manipulador Cartesiano (PPP) ...................................................................... 6
1.3. ROV ...................................................................................................................... 7
1.4. Tipos Principais de ROVs................................................................................. 10
1.5. Objetivo da Tese ................................................................................................ 12
1.6. Histórico da Exploração Submarina ............................................................... 12
1.7. Apresentação do Trabalho ............................................................................... 21 2 Equipamentos .................................................................................................. 22
2.1. Manipulador Robótico ...................................................................................... 22 2.1.1 . Manipulador escravo ................................................................................... 23 2.1.2 . Manipulador mestre..................................................................................... 28 2.1.3 . Sistema eletrônico de controle..................................................................... 29
2.2. Especificações do manipulador ........................................................................ 31
2.3. Espaço de trabalho do manipulador................................................................ 32
2.4. Sistema de movimentação da câmera .............................................................. 33 3 Método .............................................................................................................. 36
3.1. Solução hidráulica ............................................................................................. 36 3.1.1 . Escolha dos graus de liberdade do manipulador ......................................... 36 3.1.2 . Tipo de ligação hidráulica ........................................................................... 36 3.1.3 . Cálculo do volume de óleo dos atuadores ................................................... 38
3.2. Solução Eletro-hidráulica ................................................................................. 43 3.2.1 . Protocolo de comunicação RS-232 ............................................................. 44 3.2.2 . Protocolo de comunicação RS-485 ............................................................. 45 3.2.3 . Transdutores ................................................................................................ 46 3.2.4 . Potenciômetros ............................................................................................ 50
viii
3.2.5 . Drive da solenóide....................................................................................... 52 3.2.6 . Aquisição e transmissão de dados ............................................................... 53 3.2.7 . Programação e visualização ........................................................................ 55
3.3. Montagem experimental ................................................................................... 59 4 Modelagem ....................................................................................................... 65
4.1. Cinemática do manipulador ............................................................................. 65
4.2. Cinemática do sistema de movimentação da câmera ..................................... 69
4.3. Manipulador com sistema de movimentação da câmera ............................... 70
4.4. Modelagem Hidráulica...................................................................................... 71 4.4.1 . Servoválvula proporcional........................................................................... 71 4.4.2 . Atuador........................................................................................................ 76
4.5. Controle.............................................................................................................. 79 5 Discussão, Conclusão e Futuros Trabalhos................................................. 89 6 Referências Bibliográficas.............................................................................. 91
ix
ÍNDICE DE FIGURAS
Figura 1.1 - Manipulador robótico submarino modelo TA40 [1]. ............................................... 2 Figura 1.2 - Manipulador antropomórfico [2]. ............................................................................ 3 Figura 1.3 - Volume de trabalho do manipulador antropomórfico [3]. ....................................... 3 Figura 1.4 - Manipulador esférico [2].......................................................................................... 4 Figura 1.5 - Volume de trabalho do manipulador esférico [3]. ................................................... 4 Figura 1.6 - Manipulador SCARA [2]. ......................................................................................... 5 Figura 1.7 - Volume de trabalho do manipulador SCARA [3]. .................................................... 5 Figura 1.8 - Manipulador cilíndrico [2]....................................................................................... 6 Figura 1.9 - Volume de trabalho do manipulador cilíndrico [3].................................................. 6 Figura 1.10 - Manipulador cartesiano [2]. .................................................................................. 7 Figura 1.11 - Volume de trabalho do manipulador cartesiano[3]. .............................................. 7 Figura 1.12 - Veículo de Operação Remota Eletro-Hidráulico [4]. ............................................ 8 Figura 1.13 - Sala de Controle do ROV [5].................................................................................. 9 Figura 1.14 - ROV em Intervenção Submarina [5]. ..................................................................... 9 Figura 1.15 - a) ROV tipo nado livre b) ROV tipo garagem [5]. ............................................... 10 Figura 1.16 - Desenho esquemático da estrutura de um AUV [7]. ............................................ 11 Figura 1.17 - AUV desenvolvido pelo MIT [8]. .......................................................................... 11 Figura 1.18 - Traje de mergulho utilizado por John Lethbridge [7]. ......................................... 13 Figura 1.19 - Turtle [7]. ............................................................................................................. 13 Figura 1.20 - Nautilus [7]........................................................................................................... 14 Figura 1.21 - Primeiro torpedo automático [7].......................................................................... 14 Figura 1.22 - USS Holland I [7]. ................................................................................................ 15 Figura 1.23 - Argonaut [7]. ........................................................................................................ 15 Figura 1.24 - Torpedo Humano [7]. ........................................................................................... 16 Figura 1.25 - Esfera de mergulho [7]......................................................................................... 17 Figura 1.26 - Conshelf [7]. ......................................................................................................... 18 Figura 1.27 - Newtsuit [7]. ......................................................................................................... 19 Figura 1.28 - Deep Flight [7]. .................................................................................................... 20 Figura 2.1 - Sistema do manipulador [12]. ................................................................................ 23 Figura 2.2 - Manipulador escravo Kraft (Cortesia CENPES/Petrobras). ................................. 24 Figura 2.3 - Identificação dos sete graus de liberdade do manipulador Kraft. ......................... 24 Figura 2.4 - Símbolo do atuador rotativo [13]. .......................................................................... 25 Figura 2.5 - Atuador rotativo tipo pinhão-cremalheira de corpo simples [13].......................... 25 Figura 2.6 - Atuador do tipo pinhão-cremalheira de corpo duplo [14]. .................................... 26 Figura 2.7 - Atuador hidráulico do tipo pinhão-cremalheira (Cortesia CENPES/Petrobras)... 26
x
Figura 2.8 - Cilindro de dupla ação do tipo diferencial [13]..................................................... 27 Figura 2.9 - Localização e identificação das servoválvulas (Cortesia CENPES/Petrobras)..... 28 Figura 2.10 - Braço mestre [12]................................................................................................. 29 Figura 2.11 - Placa e vaso de eletrônica (Cortesia CENPES/Petrobras). ................................. 30 Figura 2.12 - Estrutura de um mecanismo eletro-hidráulico de controle de posição [15]. ....... 30 Figura 2.13 - Dimensões do manipulador em metros................................................................. 32 Figura 2.14 - Envelope de trabalho (quadrado = 0,10 m) [12]. ................................................ 33 Figura 2.15 - Visão geral do sistema de movimentação da câmera (Cortesia
CENPES/Petrobras).................................................................................................................... 33 Figura 2.16 - Atuador do movimento horizontal (Cortesia CENPES/Petrobras). ..................... 34 Figura 2.17 - Atuador do movimento vertical (Cortesia CENPES/Petrobras)........................... 34 Figura 3.1 - Esquema da ligação em paralelo dos atuadores. ................................................... 37 Figura 3.2 - Esquema da ligação em série dos atuadores. ......................................................... 37 Figura 3.3 - Camisa do atuador da rotação do ombro do manipulador (Cortesia
CENPES/Petrobras).................................................................................................................... 38 Figura 3.4 - Camisa do atuador da elevação do ombro do manipulador (Cortesia
CENPES/Petrobras).................................................................................................................... 38 Figura 3.5 - Camisa do atuador do horizontal da câmera (Cortesia CENPES/Petrobras). ...... 39 Figura 3.6 - Cilindro de duplo efeito do atuador do vertical da câmera (Cortesia
CENPES/Petrobras).................................................................................................................... 39 Figura 3.7 - Volumes do atuador vertical da câmera, onde VVC1 é a área interna da camisa do
atuador e o VVC2 é a área da coroa circular (área interna da camisa menos a área da haste).. 40 Figura 3.8 - Acumulador hidráulico de bexiga [20]................................................................... 41 Figura 3.9 - Esquema hidráulico com o emprego de acumuladores. ......................................... 41 Figura 3.10 - Esquema da válvula reguladora de vazão [13]. ................................................... 42 Figura 3.11 - Simbologia da válvula reguladora de vazão com válvula unidirecional [13]...... 42 Figura 3.12 - Esquema hidráulico com o emprego de válvulas de vazão. ................................. 43 Figura 3.13 - Esquema elétrico................................................................................................... 44 Figura 3.14 - Balança de peso morto (Cortesia CENPES/Petrobras). ...................................... 47 Figura 3.15 - Gráfico Pressão x Corrente. Desvio padrão = 0,11005 e coeficiente de
correlação = 0,99974. Método dos mínimos quadrados. ........................................................... 49 Figura 3.16 - Potenciômetro [28]............................................................................................... 50 Figura 3.17 - Modelo do Kraft (Cortesia CENPES/Petrobras).................................................. 51 Figura 3.18 - Potenciômetro da elevação do ombro no modelo do braço (Cortesia
CENPES/Petrobras).................................................................................................................... 51 Figura 3.19 - Potenciômetro da rotação do ombro no modelo do braço (Cortesia
CENPES/Petrobras).................................................................................................................... 51
xi
Figura 3.20 - Drive de controle da solenóide da válvula (Cortesia CENPES/Petrobras). ........ 53 Figura 3.21 - Tela do software do conversor RS-232/RS-485. ................................................... 54 Figura 3.22 - Tela de calibração. ............................................................................................... 57 Figura 3.23 - Tela de leitura....................................................................................................... 58 Figura 3.24 - Diagrama de blocos da tela de leitura. ................................................................ 59 Figura 3.25 - Diagrama de blocos da tela de calibração........................................................... 59 Figura 3.26 - Válvula direcional usada no ensaio experimental (Cortesia CENPES/Petrobras).
..................................................................................................................................................... 60 Figura 3.27 - Válvula de 4 vias [35]........................................................................................... 60 Figura 3.28 - Manifold da válvula direcional (Cortesia CENPES/Petrobras)........................... 61 Figura 3.29 - Parte frontal da bancada onde podemos visualizar as válvulas esfera e ............. 61 Figura 3.30 - Parte traseira da bancada (Cortesia CENPES/Petrobras). ................................. 62 Figura 3.31 - Desenho do circuito hidráulico da bancada......................................................... 62 Figura 3.32 - Unidade hidráulica (Cortesia CENPES/Petrobras). ............................................ 63 Figura 3.33 - Sistema de movimentação da câmera conectado a bancada (Cortesia
CENPES/Petrobras).................................................................................................................... 64 Figura 4.1 - Cinemática direta de coordenadas [9]. .................................................................. 65 Figura 4.2 - Desenho esquemático do manipulador................................................................... 66 Figura 4.3 - Esquema da posição da câmera em relação ao manipulador. ............................... 69 Figura 4.4 - Conjunto servoválvula interligada ao atuador [34]............................................... 71 Figura 4.5 - Escoamento em um orifício [36]............................................................................. 73 Figura 4.6 - Vazão nominal com diferencial de pressão em função do sinal de tensão [38] .... 75 Figura 4.7 - Esquema da modelagem ao atuador [35]............................................................... 77 Figura 4.8 - Diagrama de blocos do controle proporcional do atuador da câmera. ................. 79 Figura 4.9 - Diagrama de blocos do controle do atuador da câmera, feito no SIMULINK®..... 80 Figura 4.10 - Resposta ao degrau do sistema de primeira ordem.............................................. 80 Figura 4.11 - Resposta a rampa do sistema de primeira ordem................................................. 81 Figura 4.12 - Resposta ao senoidal do sistema de primeira ordem............................................ 81 Figura 4.13 - Controle proporcional com feedforward da cinemática do atuador da câmera. . 83 Figura 4.14 - Diagrama de blocos do novo método de controle do atuador da câmera, feito no
SIMULINK®. ............................................................................................................................... 83 Figura 4.15 - Resposta ao degrau do novo sistema de primeira ordem. .................................... 85 Figura 4.16 - Resposta a rampa do novo sistema de primeira ordem. ....................................... 86 Figura 4.17 - Resposta ao senoidal do novo sistema de primeira ordem................................... 87 Figura 5.1 - Diagrama de blocos do sistema de controle de feedforward.................................. 90
xii
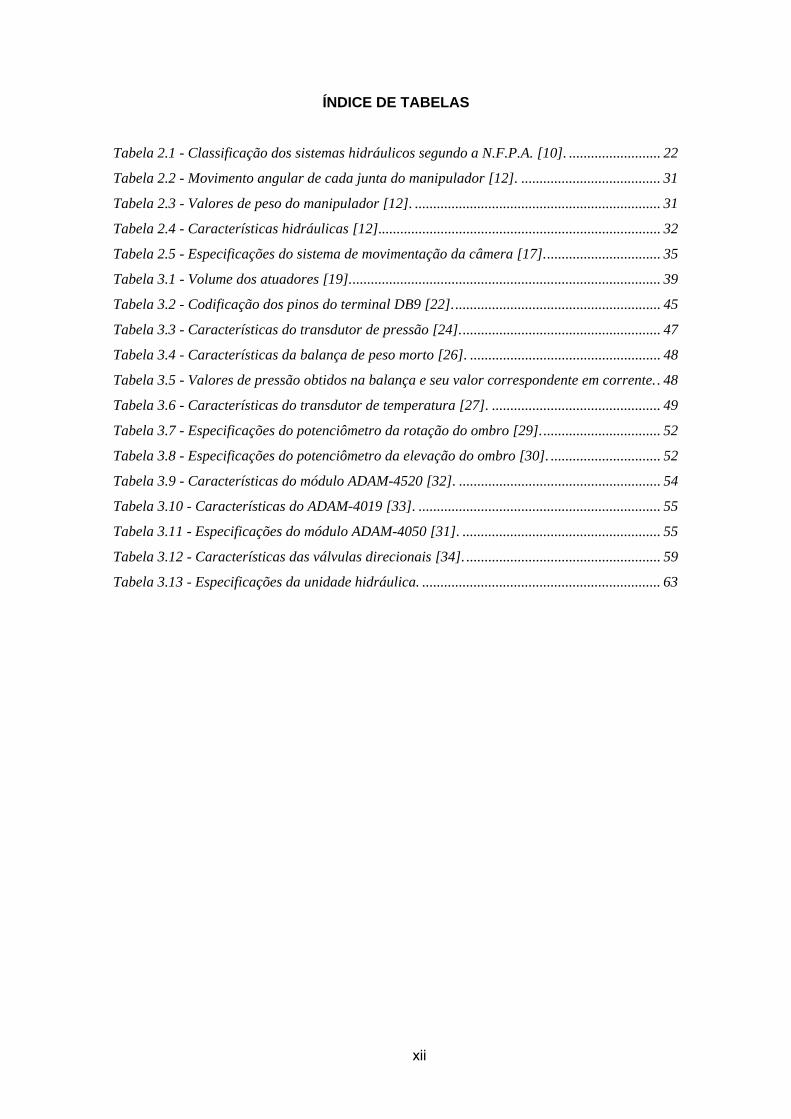
ÍNDICE DE TABELAS
Tabela 2.1 - Classificação dos sistemas hidráulicos segundo a N.F.P.A. [10]. ......................... 22 Tabela 2.2 - Movimento angular de cada junta do manipulador [12]. ...................................... 31 Tabela 2.3 - Valores de peso do manipulador [12]. ................................................................... 31 Tabela 2.4 - Características hidráulicas [12]............................................................................. 32 Tabela 2.5 - Especificações do sistema de movimentação da câmera [17]................................ 35 Tabela 3.1 - Volume dos atuadores [19]..................................................................................... 39 Tabela 3.2 - Codificação dos pinos do terminal DB9 [22]......................................................... 45 Tabela 3.3 - Características do transdutor de pressão [24]....................................................... 47 Tabela 3.4 - Características da balança de peso morto [26]. .................................................... 48 Tabela 3.5 - Valores de pressão obtidos na balança e seu valor correspondente em corrente.. 48 Tabela 3.6 - Características do transdutor de temperatura [27]. .............................................. 49 Tabela 3.7 - Especificações do potenciômetro da rotação do ombro [29]................................. 52 Tabela 3.8 - Especificações do potenciômetro da elevação do ombro [30]. .............................. 52 Tabela 3.9 - Características do módulo ADAM-4520 [32]. ....................................................... 54 Tabela 3.10 - Características do ADAM-4019 [33]. .................................................................. 55 Tabela 3.11 - Especificações do módulo ADAM-4050 [31]. ...................................................... 55 Tabela 3.12 - Características das válvulas direcionais [34]. ..................................................... 59 Tabela 3.13 - Especificações da unidade hidráulica. ................................................................. 63
1
1 Introdução
Desde a pré-história o homem tem procurado desenvolver utensílios e
ferramentas que o auxiliem na realização de diversas atividades relacionadas ao seu
dia-a-dia. Ao longo dos anos diversas invenções permitiram a substituição gradual do
homem pela máquina como em 1769 quando a máquina a vapor desenvolvida por
James Watt acentuou o progresso da automação dos processos produtivos.
Nas últimas décadas, o avanço tecnológico teve reflexo direto na organização
das indústrias, pela adoção de modelos de produção que minimizaram custos e
aumentaram a produtividade, se constituindo nos alicerces da automação e robótica.
Cada vez mais os robôs estão sendo empregados para substituir o homem em
ambientes pouco estruturados ou perigosos para o ser humano. Como por exemplo a
utilização de ROVs - Remote Operated Vehicles - nas intervenções submarinas. Esse
tipo de robô substitui o mergulhador em operações de inspeção, instalação e
manutenção de equipamentos responsáveis pela produção de petróleo, como árvores
de natal e manifolds, em qualquer profundidade, notadamente naquelas onde o ser
humano não pode trabalhar (aproximadamente a partir de 350 metros de coluna
d’água).
1.1. Manipuladores Robóticos
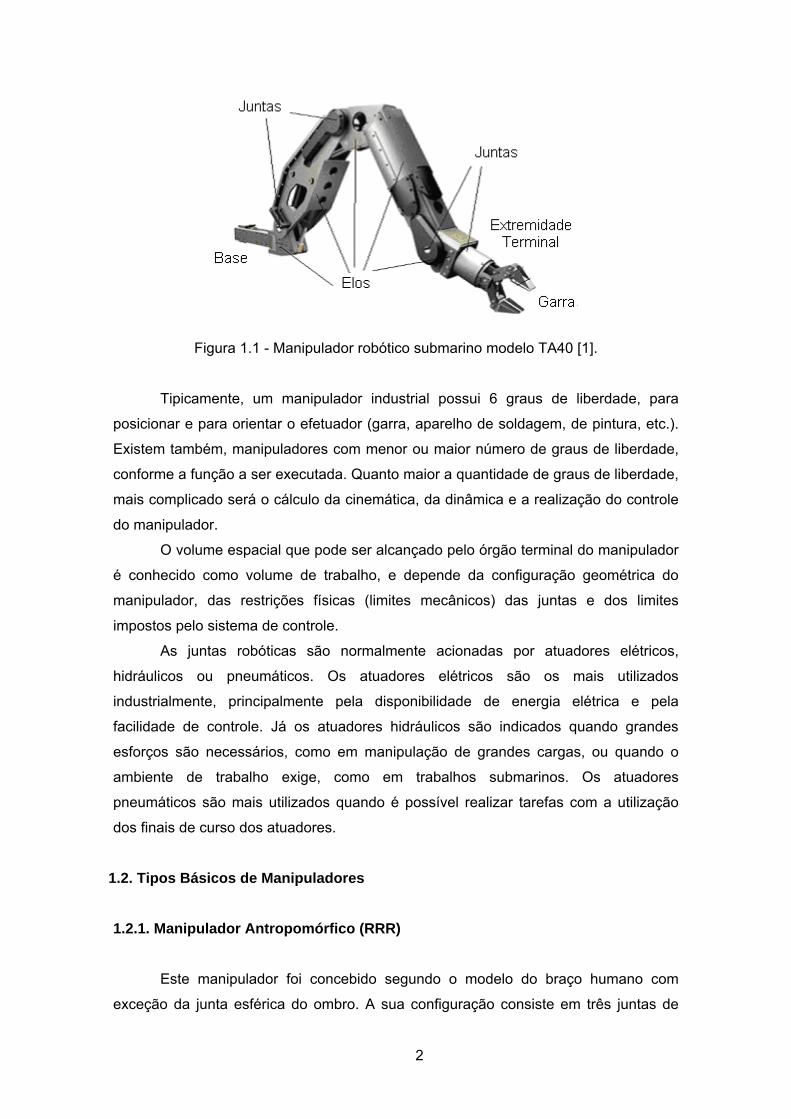
Os manipuladores consistem na combinação de elementos estruturais (elos),
conectados entre si através de articulações (juntas) em uma cadeia cinemática, sendo
o primeiro corpo chamado de base e o último de extremidade terminal, onde será
vinculado o componente efetuador, que pode ser uma garra ou uma ferramenta, como
é detalhado na Fig. 1.1. As juntas podem ser de revolução, permitindo apenas rotação
relativa entre dois elos, representadas pela letra R, ou prismáticas, que permitem
apenas a translação linear, simbolizadas pela inicial P.
2
Figura 1.1 - Manipulador robótico submarino modelo TA40 [1].
Tipicamente, um manipulador industrial possui 6 graus de liberdade, para
posicionar e para orientar o efetuador (garra, aparelho de soldagem, de pintura, etc.).
Existem também, manipuladores com menor ou maior número de graus de liberdade,
conforme a função a ser executada. Quanto maior a quantidade de graus de liberdade,
mais complicado será o cálculo da cinemática, da dinâmica e a realização do controle
do manipulador.
O volume espacial que pode ser alcançado pelo órgão terminal do manipulador
é conhecido como volume de trabalho, e depende da configuração geométrica do
manipulador, das restrições físicas (limites mecânicos) das juntas e dos limites
impostos pelo sistema de controle.
As juntas robóticas são normalmente acionadas por atuadores elétricos,
hidráulicos ou pneumáticos. Os atuadores elétricos são os mais utilizados
industrialmente, principalmente pela disponibilidade de energia elétrica e pela
facilidade de controle. Já os atuadores hidráulicos são indicados quando grandes
esforços são necessários, como em manipulação de grandes cargas, ou quando o
ambiente de trabalho exige, como em trabalhos submarinos. Os atuadores
pneumáticos são mais utilizados quando é possível realizar tarefas com a utilização
dos finais de curso dos atuadores.
1.2. Tipos Básicos de Manipuladores
1.2.1. Manipulador Antropomórfico (RRR)
Este manipulador foi concebido segundo o modelo do braço humano com
exceção da junta esférica do ombro. A sua configuração consiste em três juntas de
3
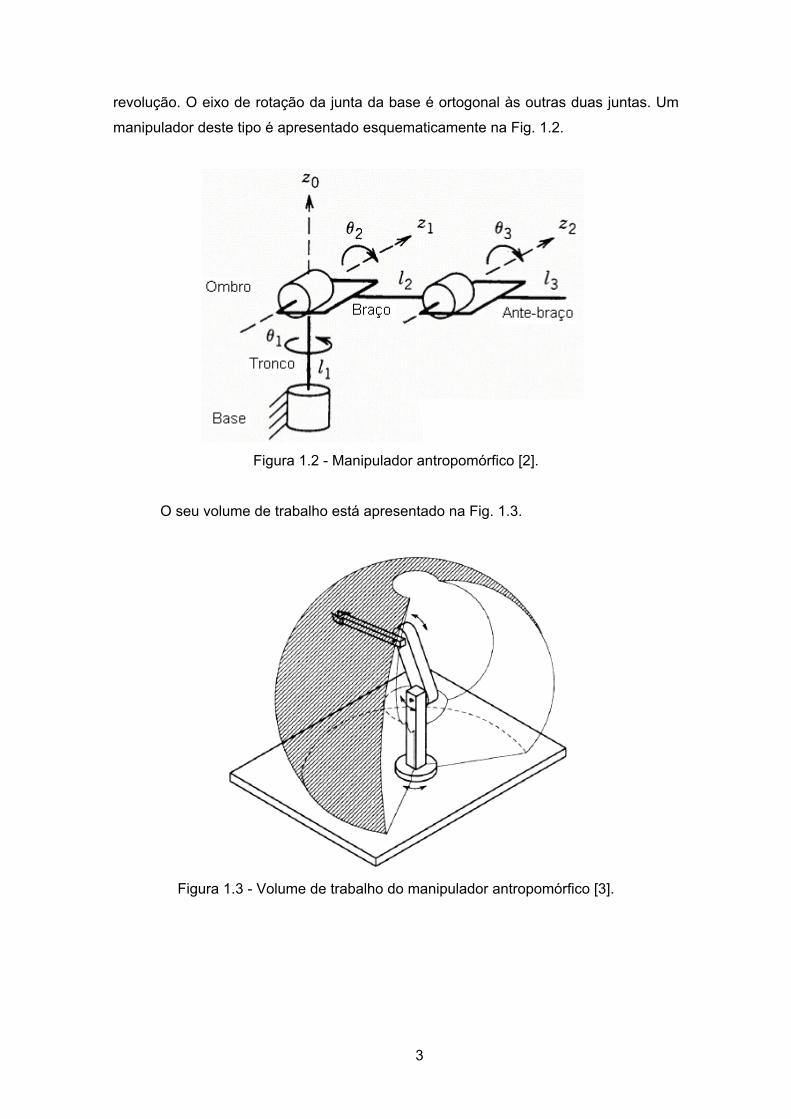
revolução. O eixo de rotação da junta da base é ortogonal às outras duas juntas. Um
manipulador deste tipo é apresentado esquematicamente na Fig. 1.2.
Figura 1.2 - Manipulador antropomórfico [2].
O seu volume de trabalho está apresentado na Fig. 1.3.
Figura 1.3 - Volume de trabalho do manipulador antropomórfico [3].
4
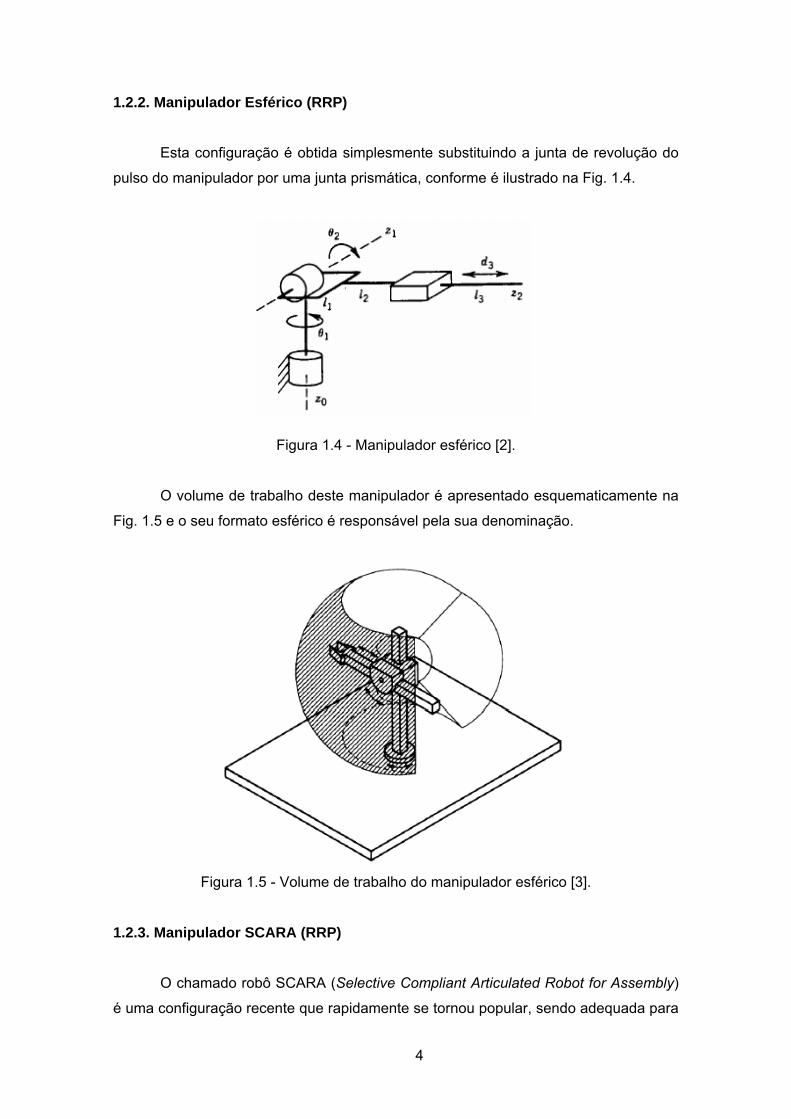
1.2.2. Manipulador Esférico (RRP)
Esta configuração é obtida simplesmente substituindo a junta de revolução do
pulso do manipulador por uma junta prismática, conforme é ilustrado na Fig. 1.4.
Figura 1.4 - Manipulador esférico [2].
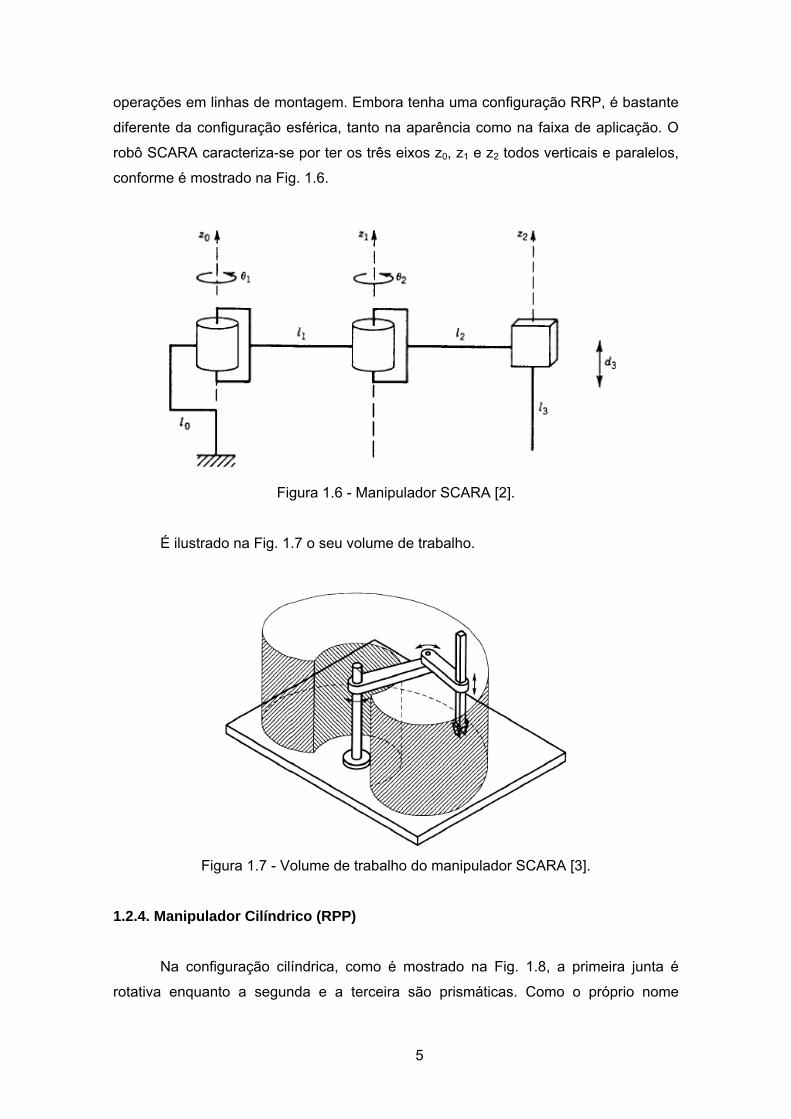
O volume de trabalho deste manipulador é apresentado esquematicamente na
Fig. 1.5 e o seu formato esférico é responsável pela sua denominação.
Figura 1.5 - Volume de trabalho do manipulador esférico [3].
1.2.3. Manipulador SCARA (RRP) O chamado robô SCARA (Selective Compliant Articulated Robot for Assembly)
é uma configuração recente que rapidamente se tornou popular, sendo adequada para
5
operações em linhas de montagem. Embora tenha uma configuração RRP, é bastante
diferente da configuração esférica, tanto na aparência como na faixa de aplicação. O
robô SCARA caracteriza-se por ter os três eixos z0, z1 e z2 todos verticais e paralelos,
conforme é mostrado na Fig. 1.6.
Figura 1.6 - Manipulador SCARA [2].
É ilustrado na Fig. 1.7 o seu volume de trabalho.
Figura 1.7 - Volume de trabalho do manipulador SCARA [3].
1.2.4. Manipulador Cilíndrico (RPP)
Na configuração cilíndrica, como é mostrado na Fig. 1.8, a primeira junta é
rotativa enquanto a segunda e a terceira são prismáticas. Como o próprio nome
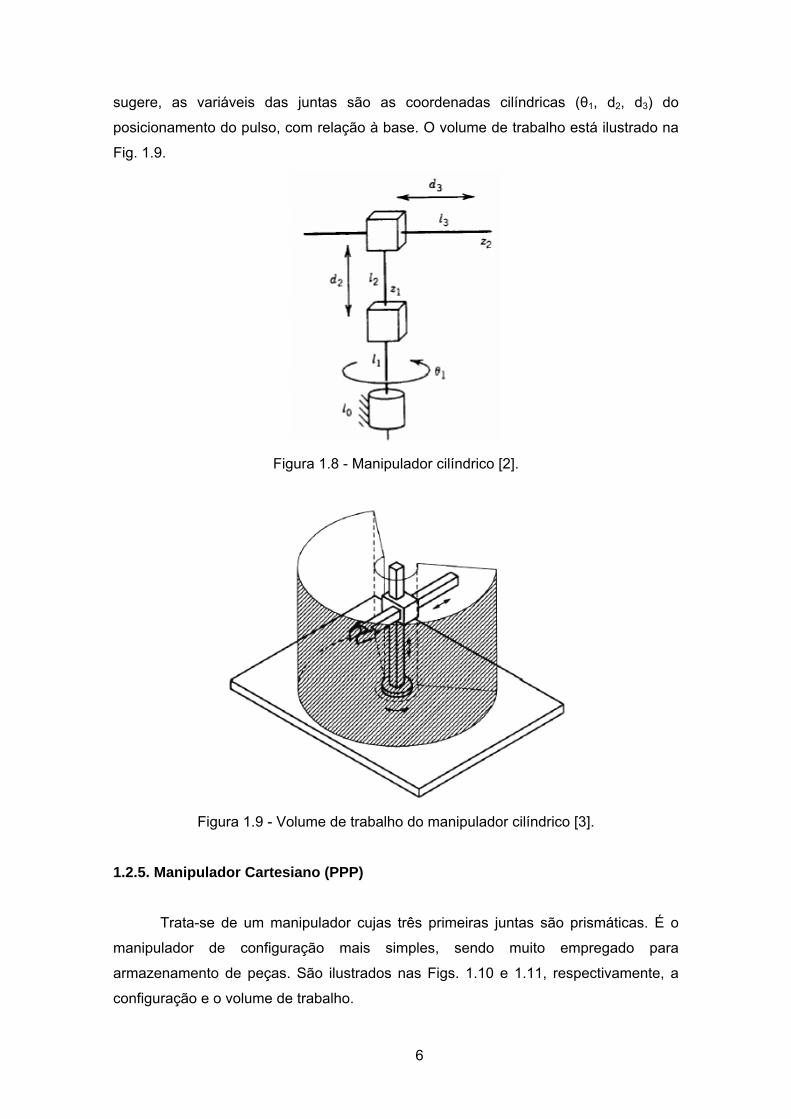
6
sugere, as variáveis das juntas são as coordenadas cilíndricas (θ1, d2, d3) do
posicionamento do pulso, com relação à base. O volume de trabalho está ilustrado na
Fig. 1.9.
Figura 1.8 - Manipulador cilíndrico [2].
Figura 1.9 - Volume de trabalho do manipulador cilíndrico [3].
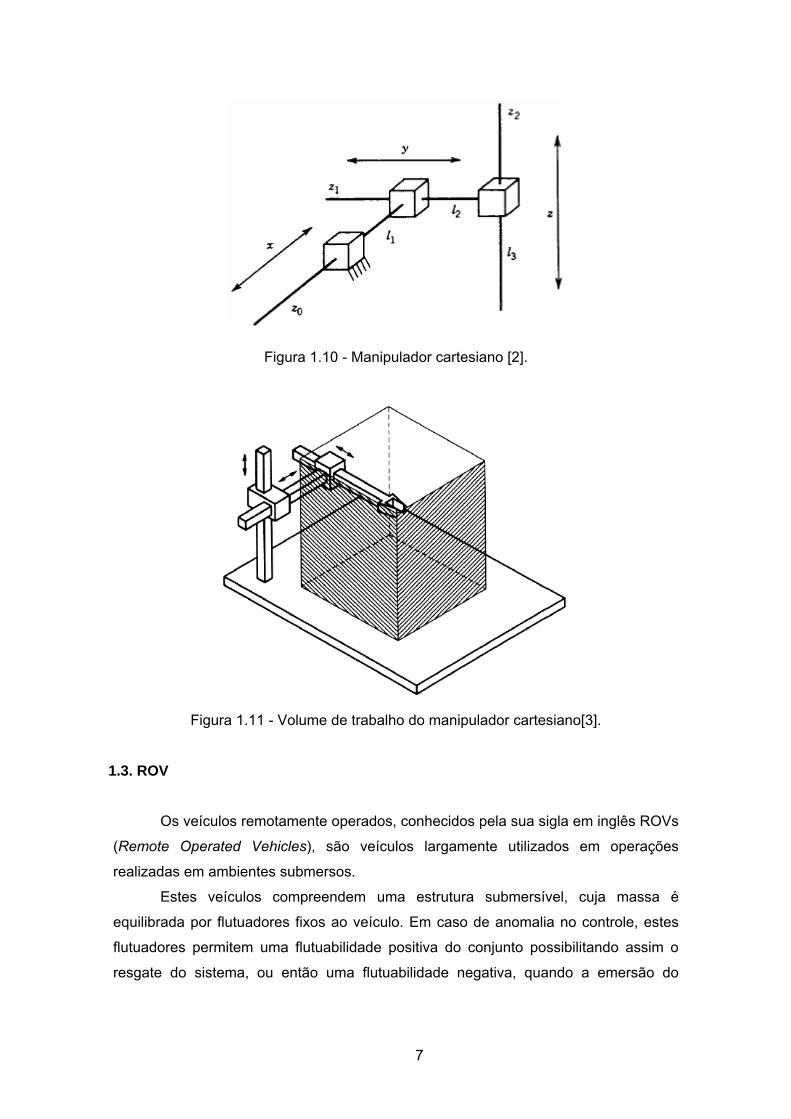
1.2.5. Manipulador Cartesiano (PPP)
Trata-se de um manipulador cujas três primeiras juntas são prismáticas. É o
manipulador de configuração mais simples, sendo muito empregado para
armazenamento de peças. São ilustrados nas Figs. 1.10 e 1.11, respectivamente, a
configuração e o volume de trabalho.
7
Figura 1.10 - Manipulador cartesiano [2].
Figura 1.11 - Volume de trabalho do manipulador cartesiano[3].
1.3. ROV
Os veículos remotamente operados, conhecidos pela sua sigla em inglês ROVs
(Remote Operated Vehicles), são veículos largamente utilizados em operações
realizadas em ambientes submersos.
Estes veículos compreendem uma estrutura submersível, cuja massa é
equilibrada por flutuadores fixos ao veículo. Em caso de anomalia no controle, estes
flutuadores permitem uma flutuabilidade positiva do conjunto possibilitando assim o
resgate do sistema, ou então uma flutuabilidade negativa, quando a emersão do
8
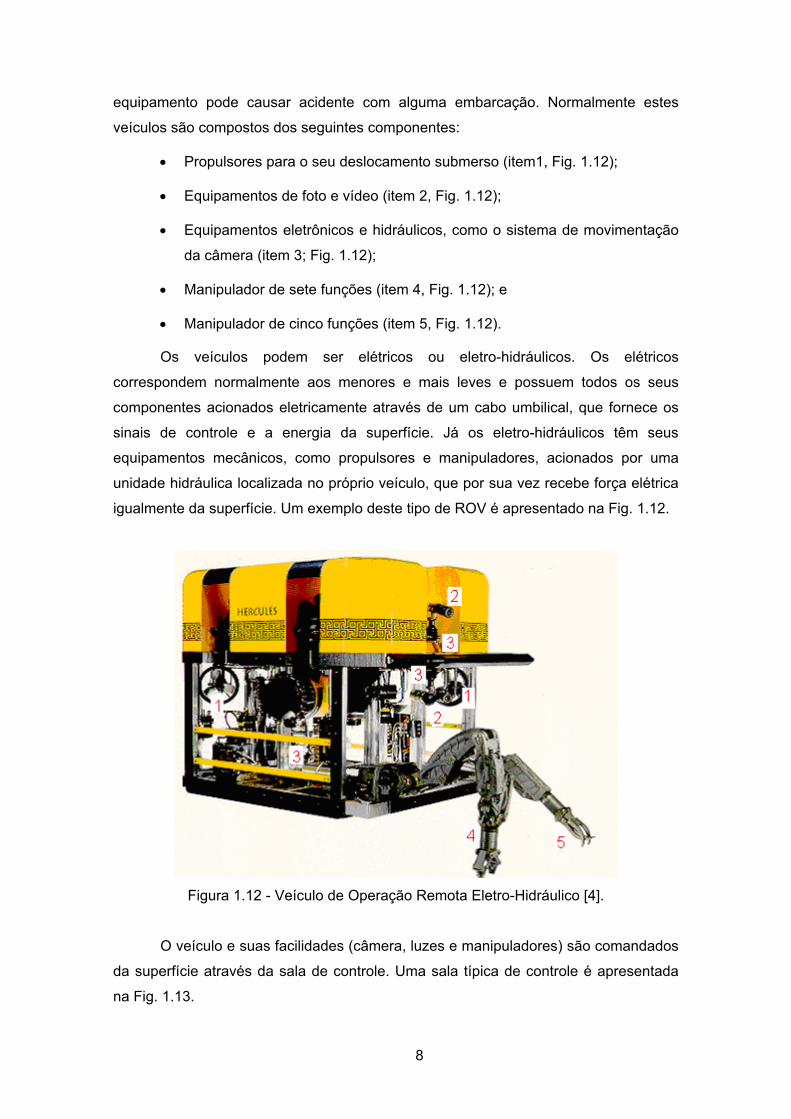
equipamento pode causar acidente com alguma embarcação. Normalmente estes
veículos são compostos dos seguintes componentes:
• Propulsores para o seu deslocamento submerso (item1, Fig. 1.12);
• Equipamentos de foto e vídeo (item 2, Fig. 1.12);
• Equipamentos eletrônicos e hidráulicos, como o sistema de movimentação
da câmera (item 3; Fig. 1.12);
• Manipulador de sete funções (item 4, Fig. 1.12); e
• Manipulador de cinco funções (item 5, Fig. 1.12).
Os veículos podem ser elétricos ou eletro-hidráulicos. Os elétricos
correspondem normalmente aos menores e mais leves e possuem todos os seus
componentes acionados eletricamente através de um cabo umbilical, que fornece os
sinais de controle e a energia da superfície. Já os eletro-hidráulicos têm seus
equipamentos mecânicos, como propulsores e manipuladores, acionados por uma
unidade hidráulica localizada no próprio veículo, que por sua vez recebe força elétrica
igualmente da superfície. Um exemplo deste tipo de ROV é apresentado na Fig. 1.12.
Figura 1.12 - Veículo de Operação Remota Eletro-Hidráulico [4].
O veículo e suas facilidades (câmera, luzes e manipuladores) são comandados
da superfície através da sala de controle. Uma sala típica de controle é apresentada
na Fig. 1.13.
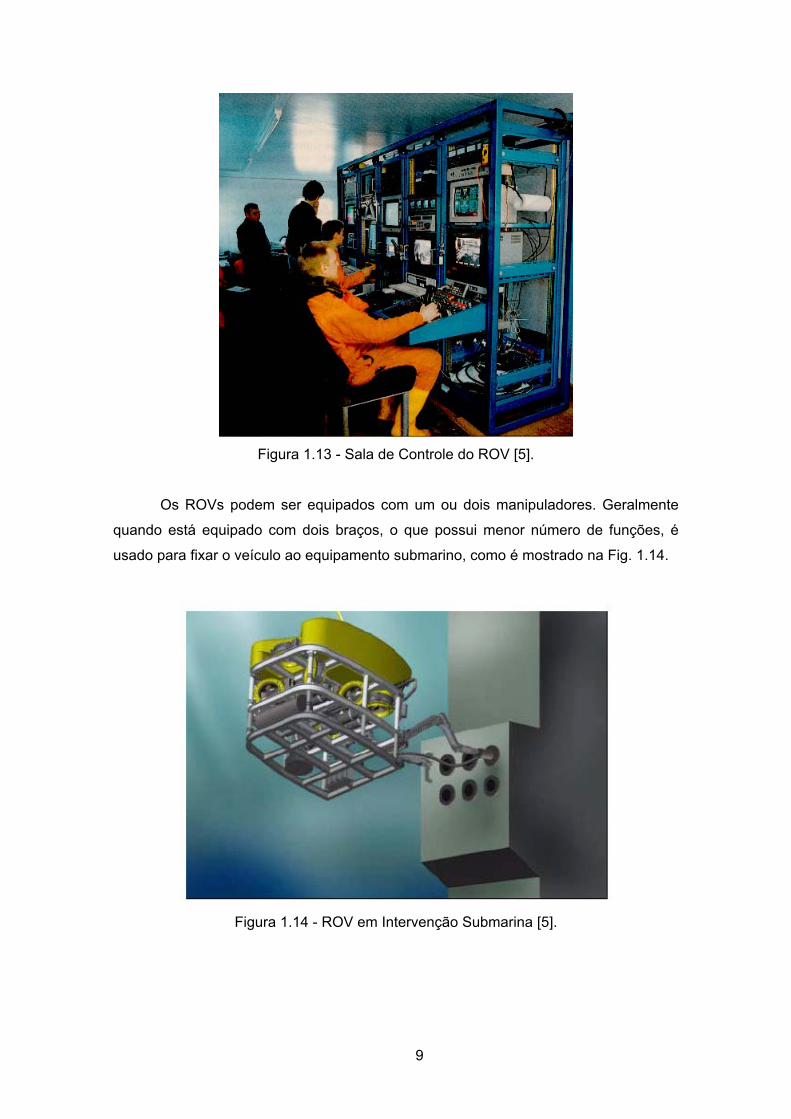
9
Figura 1.13 - Sala de Controle do ROV [5].
Os ROVs podem ser equipados com um ou dois manipuladores. Geralmente
quando está equipado com dois braços, o que possui menor número de funções, é
usado para fixar o veículo ao equipamento submarino, como é mostrado na Fig. 1.14.
Figura 1.14 - ROV em Intervenção Submarina [5].
10
1.4. Tipos Principais de ROVs
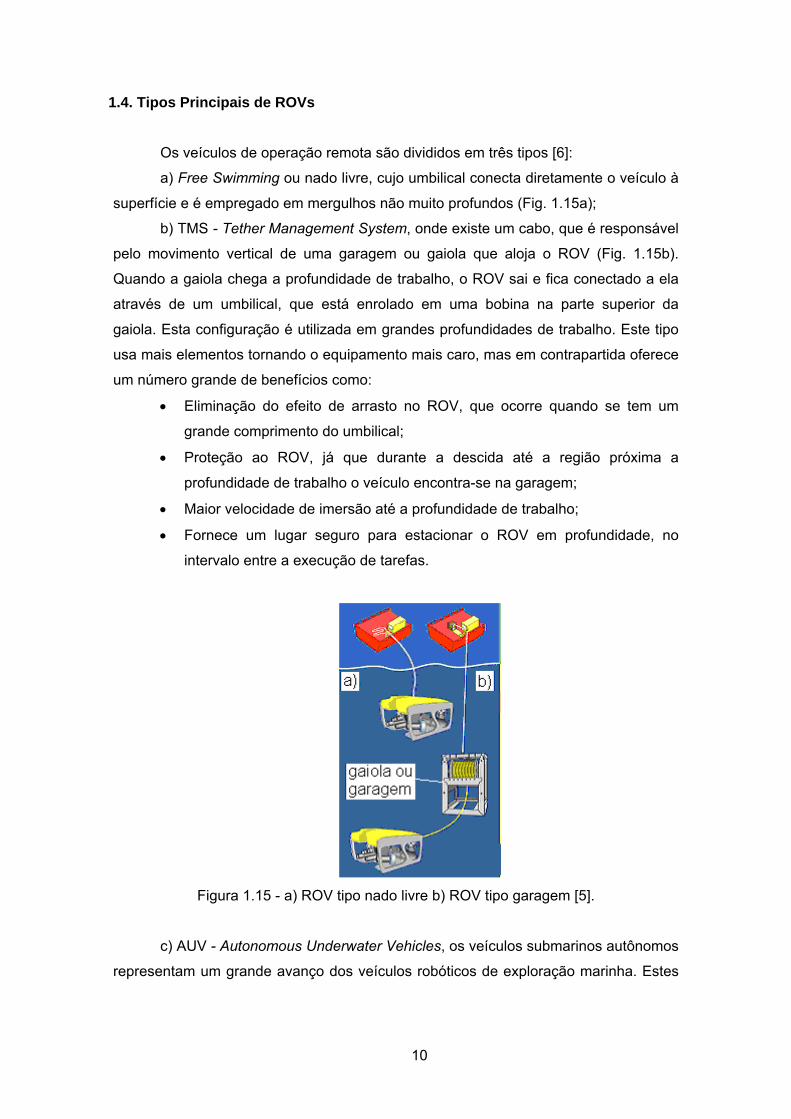
Os veículos de operação remota são divididos em três tipos [6]:
a) Free Swimming ou nado livre, cujo umbilical conecta diretamente o veículo à
superfície e é empregado em mergulhos não muito profundos (Fig. 1.15a);
b) TMS - Tether Management System, onde existe um cabo, que é responsável
pelo movimento vertical de uma garagem ou gaiola que aloja o ROV (Fig. 1.15b).
Quando a gaiola chega a profundidade de trabalho, o ROV sai e fica conectado a ela
através de um umbilical, que está enrolado em uma bobina na parte superior da
gaiola. Esta configuração é utilizada em grandes profundidades de trabalho. Este tipo
usa mais elementos tornando o equipamento mais caro, mas em contrapartida oferece
um número grande de benefícios como:
• Eliminação do efeito de arrasto no ROV, que ocorre quando se tem um
grande comprimento do umbilical;
• Proteção ao ROV, já que durante a descida até a região próxima a
profundidade de trabalho o veículo encontra-se na garagem;
• Maior velocidade de imersão até a profundidade de trabalho;
• Fornece um lugar seguro para estacionar o ROV em profundidade, no
intervalo entre a execução de tarefas.
Figura 1.15 - a) ROV tipo nado livre b) ROV tipo garagem [5].
c) AUV - Autonomous Underwater Vehicles, os veículos submarinos autônomos
representam um grande avanço dos veículos robóticos de exploração marinha. Estes
11
veículos carregam a sua própria fonte de alimentação e não possuem nenhuma
ligação física com a superfície.
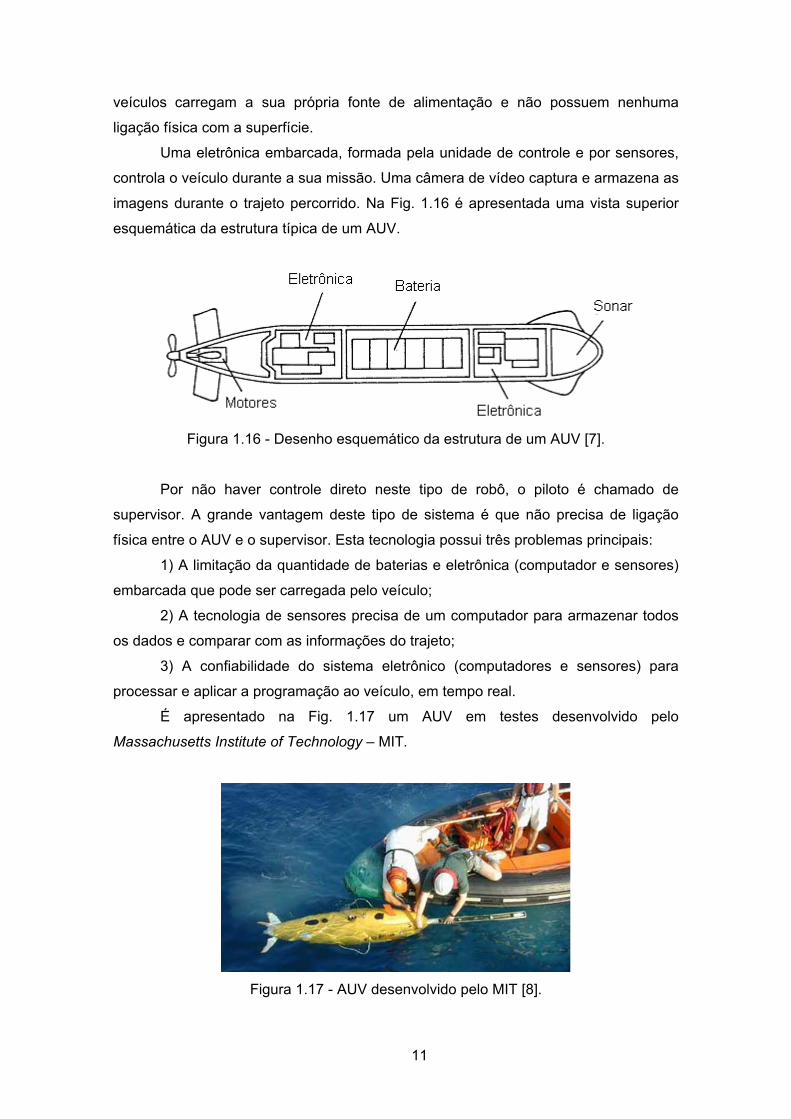
Uma eletrônica embarcada, formada pela unidade de controle e por sensores,
controla o veículo durante a sua missão. Uma câmera de vídeo captura e armazena as
imagens durante o trajeto percorrido. Na Fig. 1.16 é apresentada uma vista superior
esquemática da estrutura típica de um AUV.
Figura 1.16 - Desenho esquemático da estrutura de um AUV [7].
Por não haver controle direto neste tipo de robô, o piloto é chamado de
supervisor. A grande vantagem deste tipo de sistema é que não precisa de ligação
física entre o AUV e o supervisor. Esta tecnologia possui três problemas principais:
1) A limitação da quantidade de baterias e eletrônica (computador e sensores)
embarcada que pode ser carregada pelo veículo;
2) A tecnologia de sensores precisa de um computador para armazenar todos
os dados e comparar com as informações do trajeto;
3) A confiabilidade do sistema eletrônico (computadores e sensores) para
processar e aplicar a programação ao veículo, em tempo real.
É apresentado na Fig. 1.17 um AUV em testes desenvolvido pelo
Massachusetts Institute of Technology – MIT.
Figura 1.17 - AUV desenvolvido pelo MIT [8].
12
1.5. Objetivo da Tese
A automação permite a redução de esforços humanos para desenvolver uma
determinada tarefa. Também pode ser definida como a operação de controle
automático de um equipamento, processo ou de um sistema, por meio mecânico ou
eletrônico, substituindo a observação, os esforços e a decisão humana [9].
A motivação para o desenvolvimento desse trabalho surgiu da necessidade de
se automatizar a movimentação da câmera instalada no veículo de operação remota, a
partir dos movimentos realizados do manipulador robótico. Hoje, as movimentações da
câmera e do manipulador são realizadas por dois operadores, dificultando a operação
sincronizada dos movimentos. Aumentando a automação do sistema pode-se pensar
em apenas um operador para controlar todas as facilidades do veículo como direção,
movimento dos manipuladores e sistema de imagem.
Para que a câmera acompanhe o movimento do manipulador, este trabalho
propõe a interligação dos movimentos da câmera aos do manipulador, automatizando
assim o seu movimento.
1.6. Histórico da Exploração Submarina
No passado acreditava-se que o oceano não tinha fundo, era povoado por
monstros e regido por determinados deuses. Por mais de dois mil anos poucas
pessoas se aventuraram a explorar os mares. Os poucos exploradores, além de
anônimos, não tiveram as suas tentativas devidamente documentadas.
Alguns registros mostram que os gregos antigos exploravam o mar em busca
de esponjas e outros elementos marinhos, até então considerados tesouros. O
imperador da Grécia em 333 AC usou um sino de mergulho durante uma expedição
buscando essas riquezas [7].
A partir do século XVI iniciaram-se estudos sobre como os mergulhadores e
máquinas se comportariam debaixo d’água depois de um tempo prolongado.
A corrida da exploração submarina iniciou-se em diversos países. Com o
tempo, houve uma mudança da ênfase da exploração submarina, que migrou do uso
meramente militar para aplicações científicas e comerciais. A seguir são apresentadas
diversas invenções que foram muito importantes para se atingir o estágio atual da
exploração submarina.
13
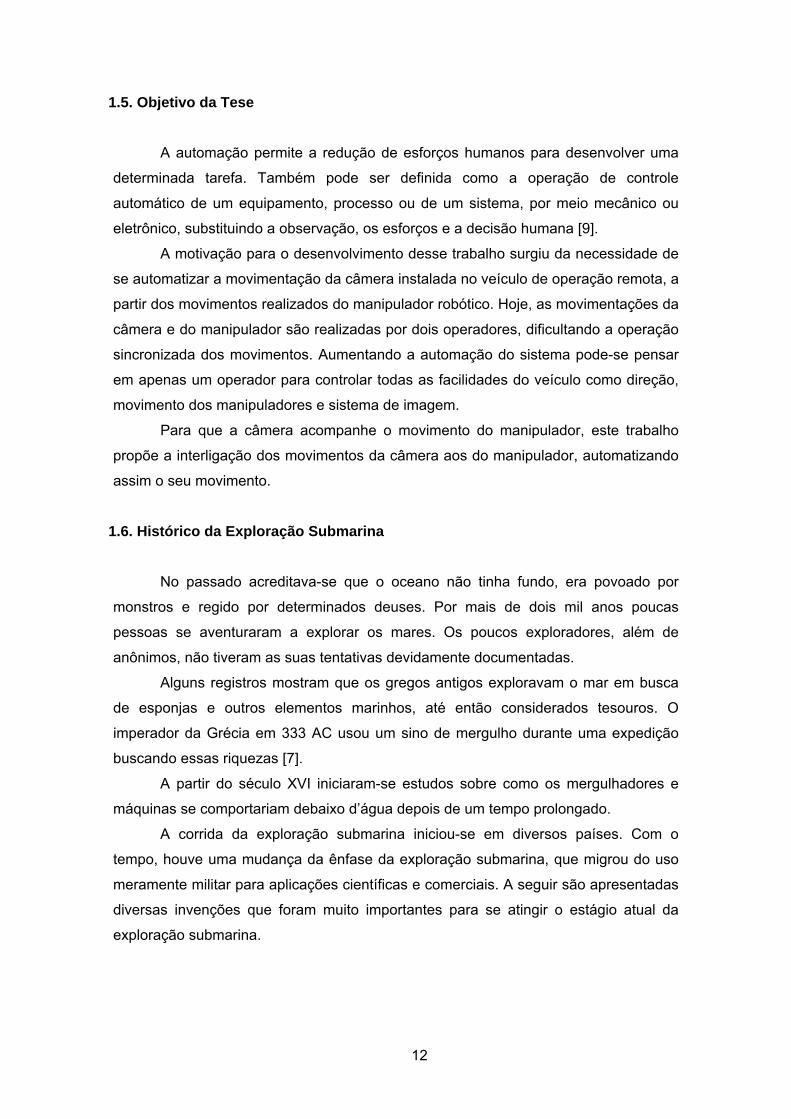
1700 - Os mergulhos bem sucedidos de John Lethbridge foram realizados a
aproximadamente 20 metros de profundidade utilizando um barril de madeira equipado
com uma portinhola (Fig. 1.18).
Figura 1.18 - Traje de mergulho utilizado por John Lethbridge [7].
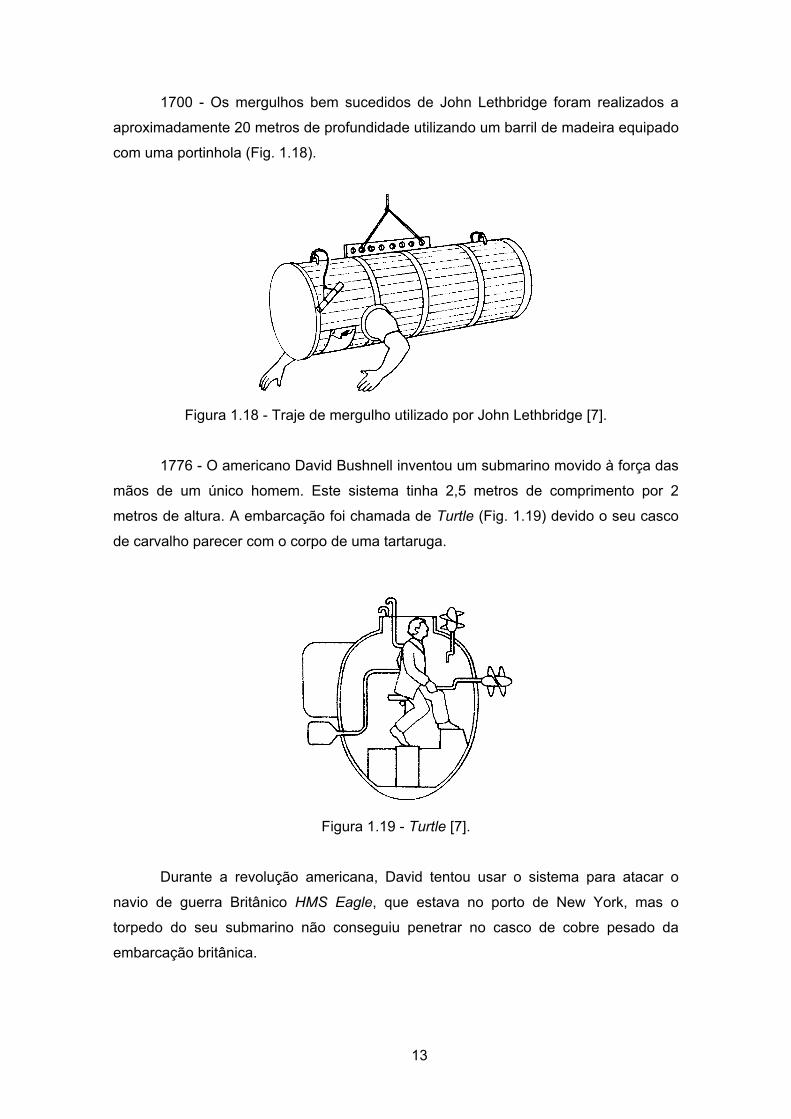
1776 - O americano David Bushnell inventou um submarino movido à força das
mãos de um único homem. Este sistema tinha 2,5 metros de comprimento por 2
metros de altura. A embarcação foi chamada de Turtle (Fig. 1.19) devido o seu casco
de carvalho parecer com o corpo de uma tartaruga.
Figura 1.19 - Turtle [7].
Durante a revolução americana, David tentou usar o sistema para atacar o
navio de guerra Britânico HMS Eagle, que estava no porto de New York, mas o
torpedo do seu submarino não conseguiu penetrar no casco de cobre pesado da
embarcação britânica.
14
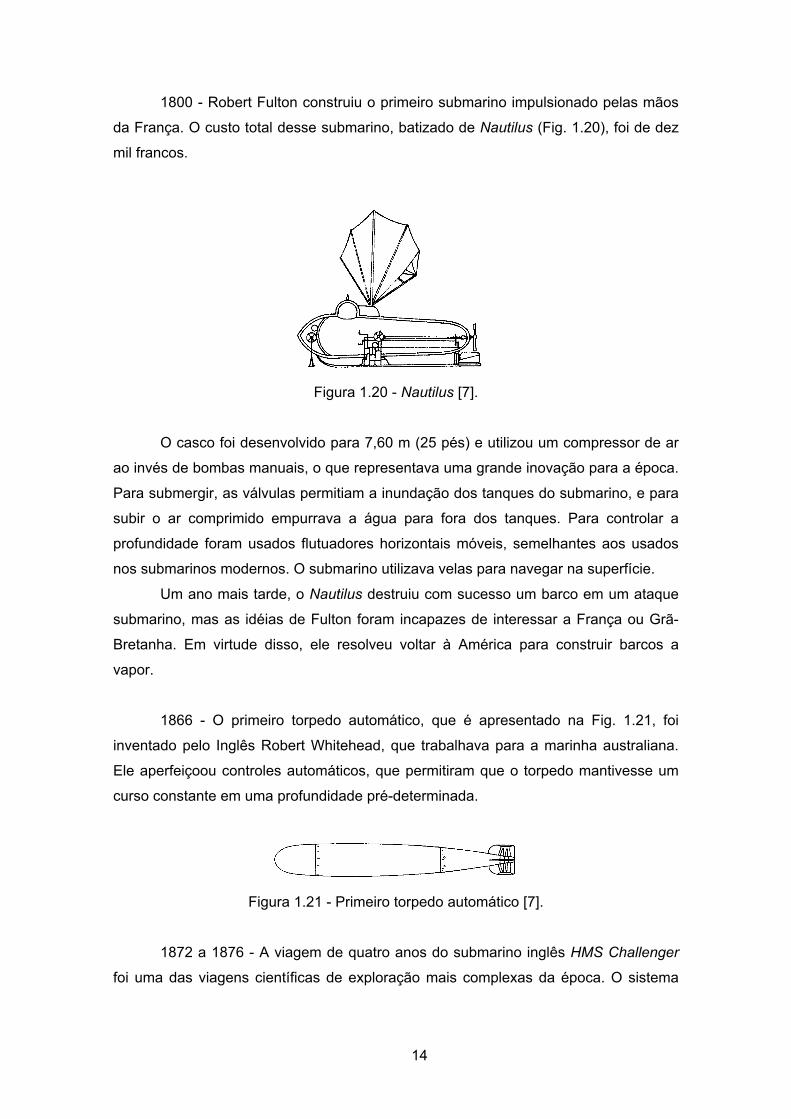
1800 - Robert Fulton construiu o primeiro submarino impulsionado pelas mãos
da França. O custo total desse submarino, batizado de Nautilus (Fig. 1.20), foi de dez
mil francos.
Figura 1.20 - Nautilus [7].
O casco foi desenvolvido para 7,60 m (25 pés) e utilizou um compressor de ar
ao invés de bombas manuais, o que representava uma grande inovação para a época.
Para submergir, as válvulas permitiam a inundação dos tanques do submarino, e para
subir o ar comprimido empurrava a água para fora dos tanques. Para controlar a
profundidade foram usados flutuadores horizontais móveis, semelhantes aos usados
nos submarinos modernos. O submarino utilizava velas para navegar na superfície.
Um ano mais tarde, o Nautilus destruiu com sucesso um barco em um ataque
submarino, mas as idéias de Fulton foram incapazes de interessar a França ou Grã-
Bretanha. Em virtude disso, ele resolveu voltar à América para construir barcos a
vapor.
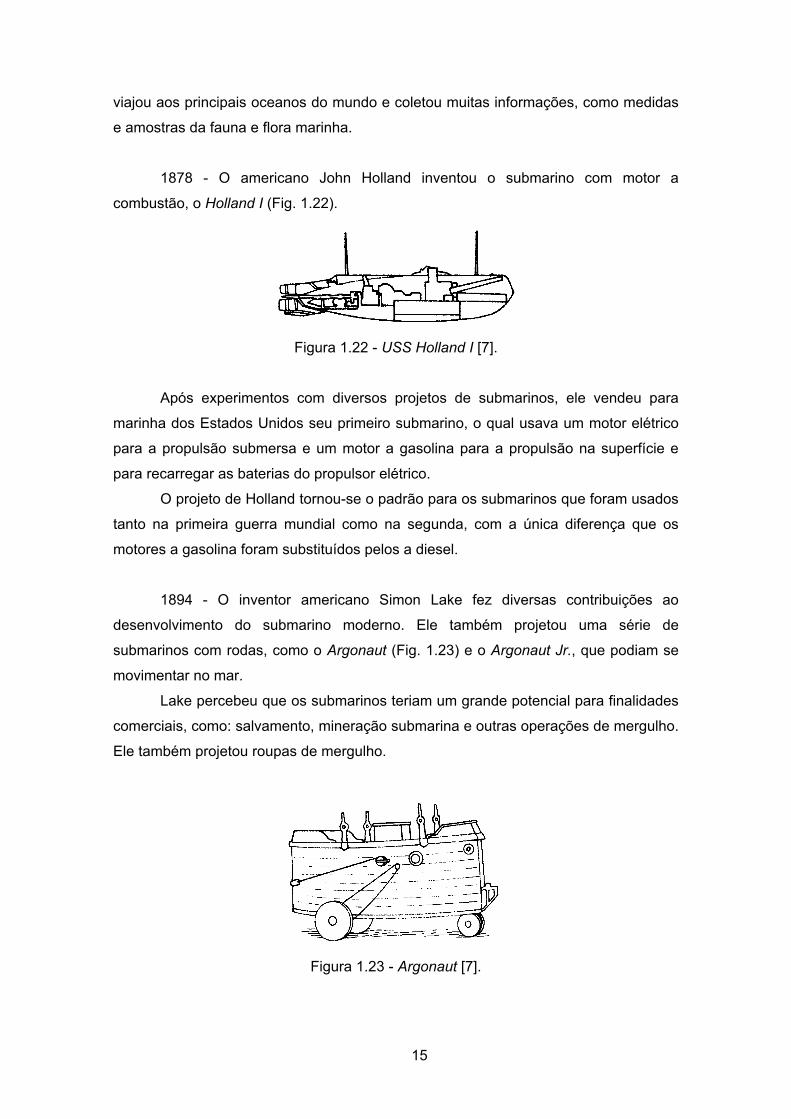
1866 - O primeiro torpedo automático, que é apresentado na Fig. 1.21, foi
inventado pelo Inglês Robert Whitehead, que trabalhava para a marinha australiana.
Ele aperfeiçoou controles automáticos, que permitiram que o torpedo mantivesse um
curso constante em uma profundidade pré-determinada.
Figura 1.21 - Primeiro torpedo automático [7].
1872 a 1876 - A viagem de quatro anos do submarino inglês HMS Challenger
foi uma das viagens científicas de exploração mais complexas da época. O sistema
15
viajou aos principais oceanos do mundo e coletou muitas informações, como medidas
e amostras da fauna e flora marinha.
1878 - O americano John Holland inventou o submarino com motor a
combustão, o Holland I (Fig. 1.22).
Figura 1.22 - USS Holland I [7].
Após experimentos com diversos projetos de submarinos, ele vendeu para
marinha dos Estados Unidos seu primeiro submarino, o qual usava um motor elétrico
para a propulsão submersa e um motor a gasolina para a propulsão na superfície e
para recarregar as baterias do propulsor elétrico.
O projeto de Holland tornou-se o padrão para os submarinos que foram usados
tanto na primeira guerra mundial como na segunda, com a única diferença que os
motores a gasolina foram substituídos pelos a diesel.
1894 - O inventor americano Simon Lake fez diversas contribuições ao
desenvolvimento do submarino moderno. Ele também projetou uma série de
submarinos com rodas, como o Argonaut (Fig. 1.23) e o Argonaut Jr., que podiam se
movimentar no mar.
Lake percebeu que os submarinos teriam um grande potencial para finalidades
comerciais, como: salvamento, mineração submarina e outras operações de mergulho.
Ele também projetou roupas de mergulho.
Figura 1.23 - Argonaut [7].
16
1906 - Depois da virada do século, todas as potências européias construíram
suas frotas de submarinos. O engenheiro francês d'Equevilley projetou o submarino
alemão Unterseeboot, chamado U1, com trinta e três metros de comprimento. A
Alemanha demonstrou a eficácia dos seus submarinos U utilizando como uma arma
mortal. Os alemães também adaptaram com sucesso o motor diesel ao submarino.
Os Ingleses investiram no desenvolvimento de cargas de profundidade assim
como hidrofones e pequenas embarcações anti-submarinas.
1914-1945 - Durante a primeira e segunda guerra mundial ocorreram os
principais avanços na tecnologia submarina e os submarinos se tornaram a principal
ameaça as esquadras inimigas em todo o mundo.
Dispositivos acústicos submarinos, tais como telefones e sonar subaquáticos,
foram desenvolvidos para comunicações e para a detecção de submarinos inimigos.
Os torpedos humanos (Fig. 1.24) foram usados para atacar os navios nos
portos onde os submarinos não poderiam ir.
Dispositivos de salvamento, como o chamado de pulmão de Momsen,
transformaram-se no equipamento padrão para as tripulações dos submarinos em
caso de emergência.
Figura 1.24 - Torpedo Humano [7].
1934 - Otis Barton projetou a esfera de mergulho, que é apresentada na Fig.
1.25, com o objetivo de levar cientistas de maneira segura a profundidades até aquele
momento inatingíveis, facilitando assim a pesquisa oceanográfica.
Ele, juntamente com o pioneiro explorador de águas profundas Dr. William
Bebee, desceram a uma profundidade de 3028 pés (1000 metros) na ilha de Bermuda.
17
Figura 1.25 - Esfera de mergulho [7].
1942 - Jacques Cousteau e Emile Gagnan aperfeiçoaram o regulador do Aqua
Lung ou SCUBA (Self Contained Underwater Breathing Apparatus - sistema submarino
de respiração), permitindo ao mergulhador ter mais liberdade para trabalho e
exploração submarina.
1949 - Otis Barton reprojetou a sua esfera de mergulho permitindo que ela
descesse até a profundidade de 4500 pés (1500 metros).
1954 - A aplicação da energia nuclear à propulsão submarina foi um
desenvolvimento revolucionário. O primeiro submarino nuclear foi o USS Nautilus.
1960 - Os primeiros submarinos armados com mísseis foram construídos pela
marinha dos Estados Unidos. Equipados com armamento nuclear, estes mísseis,
chamados de Polaris, eram capazes de atingir alvos a aproximadamente 2500 milhas
(4000 quilômetros) de distância. Rapidamente esses submarinos passaram a integrar
as esquadras dos Estados Unidos, União Soviética, Grã Bretanha e França.
1960 - Durante o período da revolução da pesquisa submarina, a tecnologia
dos veículos de operação remota (ROV) foi desenvolvida. Entretanto, nessa época a
indústria da tecnologia submarina estava muito mais interessada no conceito do
homem no oceano.
O desenvolvimento tecnológico permitiu que os mergulhadores desafiassem
novos limites de profundidade e de duração dos mergulhos. Muito desta revolução na
18
indústria do mergulho se originou pelas necessidades da indústria de petróleo offshore
e pelo interesse da marinha dos Estados Unidos.
1962 - O capitão Jacques Cousteau lançou uma experiência de vida
subaquática, projetando três habitats chamados Conshelf (Fig. 1.26), que foram
usados no mar do Mediterrâneo e no mar Vermelho, onde diversos homens viveram e
trabalharam por um período de até um mês.
Figura 1.26 - Conshelf [7].
1963 - O submarino atômico dos Estados Unidos, o Thresher, com cento e
vinte nove membros a bordo, desapareceu durante testes de imersão em lâminas
d’água profundas no oceano Atlântico. Localizado tempo depois ele foi trazido à
superfície. Com esse episódio os Estados Unidos perceberam que não tinham um
veículo submarino para salvamento e passaram a trabalhar num projeto batizado de
Navy´s Deep Submergence Systems Project.
1964 - Auguste Piccard construiu um submarino de passageiros com
capacidade para quarenta pessoas, para fins turísticos na Suíça.
1966 - Uma bomba de hidrogênio perdida na costa da Espanha chamou a
atenção do mundo para a importância dos veículos submarinos. Dois veículos, o
Aluminaut e o Alvin, foram utilizados nessa operação. Quando o Alvin encontrou a
bomba ele não teve a capacidade de fazer o resgate, então um terceiro veículo
operado remotamente foi enviado para trazer a bomba até a superfície. Este episódio,
juntamente com o do Thresher, citado anteriormente, acelerou significativamente o
desenvolvimento de submarinos não militares.
19
1969 - A experiência do habitat Tektite permitiu que 50 cientistas vivessem e
trabalhassem a 50 pés (15 metros) de profundidade no mar do Caribe.
1970 - O interesse comercial e o de pesquisa tecnológica em sistemas de
mergulho remotamente operados deslocaram o foco dos cientistas dos mergulhadores
para os robôs. Isto resultou em um grande desenvolvimento de ROVs. Inicialmente
eles eram utilizados para inspeção, passando logo depois a desenvolver tarefas mais
sofisticadas, como: sustentação da torre de perfuração de poços de petróleo,
construção e manutenção de equipamentos submarinos.
1972-75 - No projeto FAMOUS (French American Mid Ocean Undersea Study),
cientistas da França e dos Estados Unidos usaram submarinos para imergir de 2000 a
3000 m recolhendo informações sobre a placa tectônica.
1980 até o presente - Com exceção dos torpedos, os projetos dos veículos
submarinos autônomos (AUVs), têm sido muito desenvolvidos. Este tipo de sistema
deve continuar entusiasmando os pesquisadores devido ao seu grande potencial para
a redução de custo em tarefas como inspeções submarinas.
1984 - Phil Nuytten refinou o projeto do sistema de mergulho de uma
atmosfera, inventando a roupa chamada de Newtsuit, com juntas inteiramente
articuladas, que é mostrada na Fig. 1.27. O sistema protege o mergulhador das
pressões encontradas a 1000 pés (300 metros) de profundidade, e em algumas
aplicações o seu uso é mais econômico do que o mergulho saturado.
Figura 1.27 - Newtsuit [7].
20
1985 - Jim McFarlane e o International Submarine Engineering Research
(ISER) do Canadá desenvolveram um AUV batizado de ARCOS para inspecionar as
geleiras.
1986 - Usando um submarino e um equipamento de vídeo controlado
remotamente, Bob Ballard e equipe encontraram finalmente o navio que nunca
afundaria: o Titanic, que naufragou em 1912 depois de se chocar contra um iceberg.
1996 - Deep Flight (Fig. 1.28) é um dispositivo portátil tripulado por uma única
pessoa. Equipado com grupos de baterias esse sistema pode ser comparado no seu
desenho a um pequeno avião.
Figura 1.28 - Deep Flight [7].
1998 - Foi utilizado um veículo de operação remota para detectar um
vazamento na piscina do reator nuclear da Nuclear Radiation Center localizada em
Washington. Este procedimento foi supervisionado pela Washington State University.
1999 - Foi realizado um reparo numa linha de gás a 655 metros de
profundidade. Este procedimento se caracterizou como um recorde de profundidade
para reparos em dutos submarinos usando veículos robóticos.
2000 - O submarino russo Kursk naufragou no mar de Barents no Ártico. Uma
investigação oficial concluiu que um torpedo explodiu dentro do submarino, mas não
conseguiu descobrir por que isso aconteceu. Esse acidente chocou o mundo devido a
morte de toda a tripulação formada por 118 pessoas.
21
2001 - Uma empresa de ROV passou a disponibilizar um serviço que permite,
em tempo real, a transmissão da imagem da intervenção submarina ao cliente,
possibilitando o acompanhamento ao vivo de cada tarefa executada pelo ROV.
1.7. Apresentação do Trabalho
No primeiro capítulo são abordados a introdução, o objetivo e o histórico da
exploração submarina. No capítulo 2 são apresentados os equipamentos estudados.
No capítulo 3 são mostrados a solução hidráulica, eletro-hidráulica e o ensaio
experimental. No capítulo 4 são realizados a modelagem teórica e o sistema de
controle, enquanto que no último capítulo foram formuladas conclusão, comentários e
sugestões para futuros trabalhos.
22
2 Equipamentos
2.1. Manipulador Robótico
O manipulador GRIPS modelo DGM7A é um sistema hidráulico de uso geral,
mestre-escravo, tele-operado, projetado para executar tarefas em ambientes
submarinos ou em qualquer outro ambiente hostil, fabricado pela Kraft Ocean
Systems, Inc..
Em geral, os sistemas hidráulicos podem ser classificados [10]:
a) quanto à pressão de funcionamento, segundo a J.I.C. (Joint Industry
Conference), extinta em 1967 e a atual N.F.P.A. (National Fluid Power Association), os
sistemas hidráulicos são classificados de acordo com a pressão nominal, como é
mostrado na Tab. 2.1.
Tabela 2.1 - Classificação dos sistemas hidráulicos segundo a N.F.P.A. [10].
Pressão (MPa) Classificação
0 a 1,4 pressão baixa
1,5 a 3,5 pressão média
3,6 a 8,4 pressão média alta
8,5 a 21,2 pressão alta
> 21,2 pressão extra alta
b) quanto à aplicação, são classificados em sistemas de pressão contínua ou
em sistemas de pressão intermitente;
c) quanto ao tipo de bomba, sistemas de vazão constante ou variável, devido
ao tipo de bomba que é utilizada e denominada com o mesmo nome;
d) quanto ao controle de direção, sistemas de uma via (controlados por
válvulas) ou de duas vias (com bombas reversíveis).
De acordo com estas classificações, o sistema em questão pode ser
classificado como de alta pressão contínua com vazão constante de uma via.
Operando com uma posição controlada, o sistema de servoválvulas introduz
movimentos no braço escravo através dos deslocamentos realizados pelo operador no
manipulador mestre.
A diferença principal entre a válvula proporcional e a servoválvula é o fato
dessa última usar um motor em vez do solenóide para o seu acionamento. A diferença
de pressão em válvulas proporcionais se situa entre 0,8 e 1,0 MPa, sob vazão
23
máxima. Nas servoválvulas, a diferença de pressão aplicada é de 7 MPa. Logo, um
sistema com válvula proporcional pode realizar mais trabalho quando comparado ao
mesmo sistema empregando uma servoválvula e operando a mesma pressão de
suprimento [11]. Por outro lado, válvulas com diferença de pressão aplicada maior tem
faixa de operação mais ampla, onde a relação entre o sinal de entrada e a vazão de
saída é linear, simplificando o controle do sistema [11].
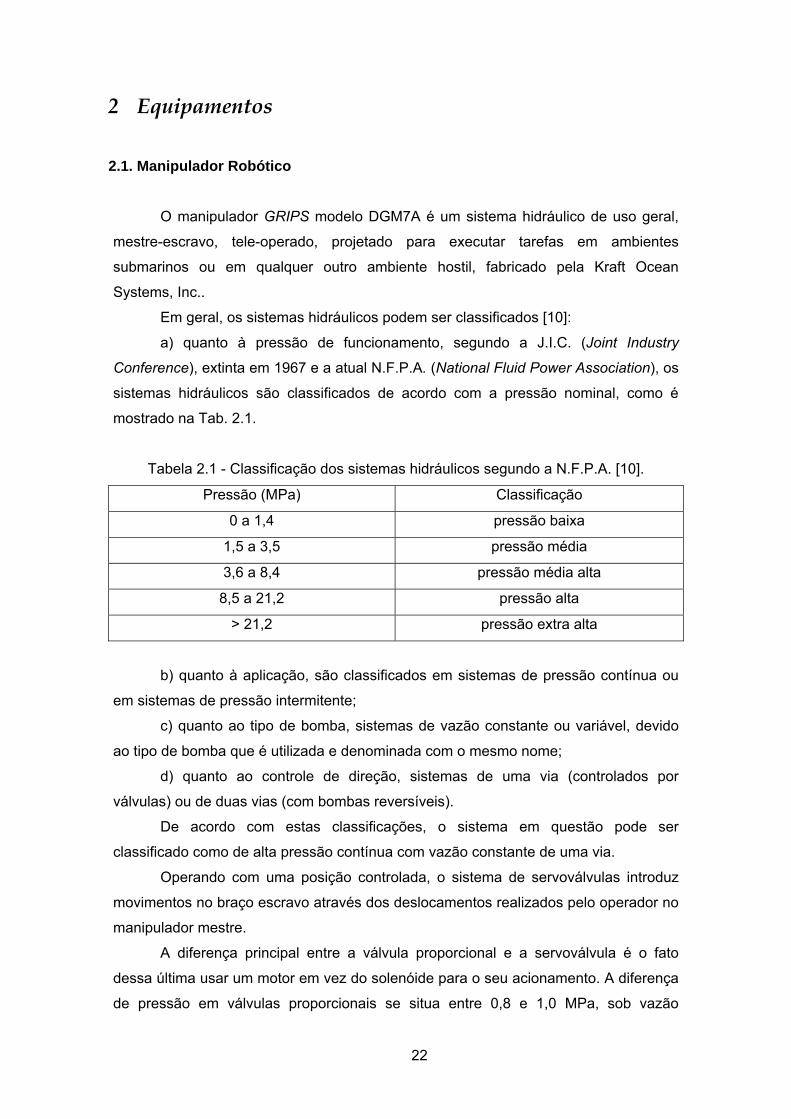
Os principais componentes do sistema, como pode ser visto na Fig. 2.1, são:
1. Manipulador escravo (slave arm);
2. Manipulador mestre (master arm);
3. Sistema eletrônico de controle modelo KMC 9000;
4. Terminal de mão (handset).
Figura 2.1 - Sistema do manipulador [12].
2.1.1. Manipulador escravo
O braço escravo (Fig. 2.2) é um manipulador eletro-hidráulico de sete graus de
liberdade. A movimentação de cada junta desse sistema é realizada através de
atuador hidráulico.
24
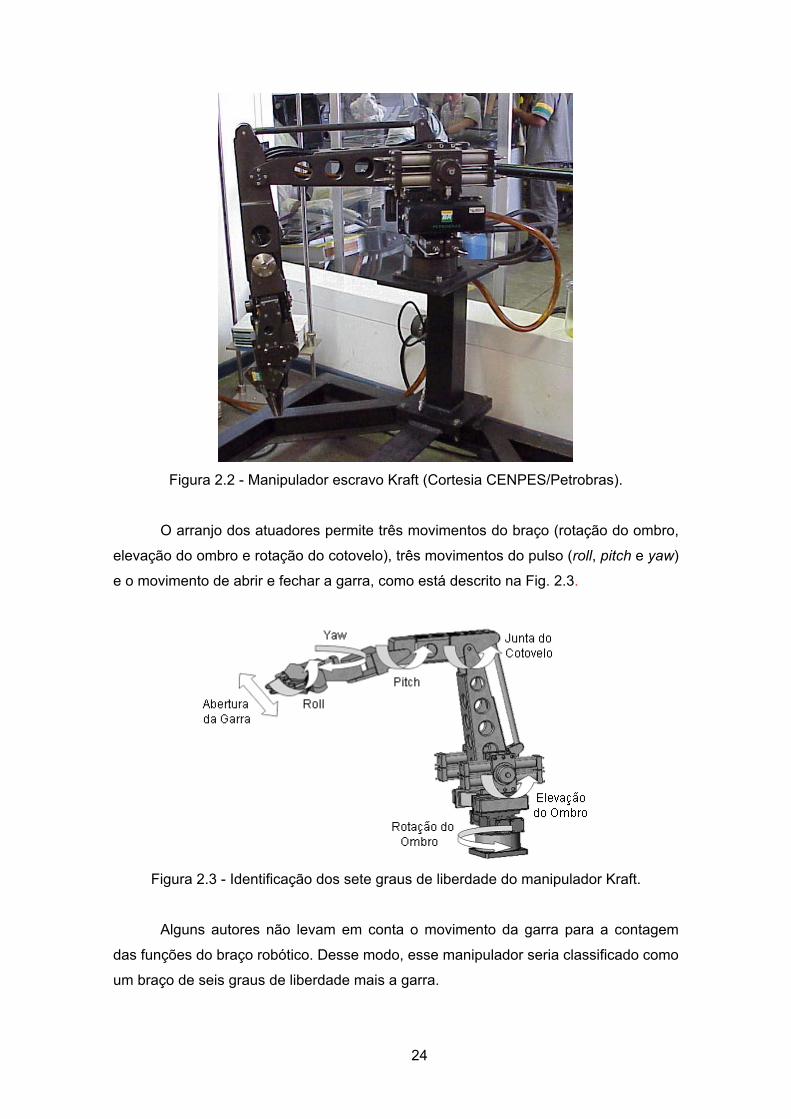
Figura 2.2 - Manipulador escravo Kraft (Cortesia CENPES/Petrobras).
O arranjo dos atuadores permite três movimentos do braço (rotação do ombro,
elevação do ombro e rotação do cotovelo), três movimentos do pulso (roll, pitch e yaw)
e o movimento de abrir e fechar a garra, como está descrito na Fig. 2.3.
Figura 2.3 - Identificação dos sete graus de liberdade do manipulador Kraft.
Alguns autores não levam em conta o movimento da garra para a contagem
das funções do braço robótico. Desse modo, esse manipulador seria classificado como
um braço de seis graus de liberdade mais a garra.
25
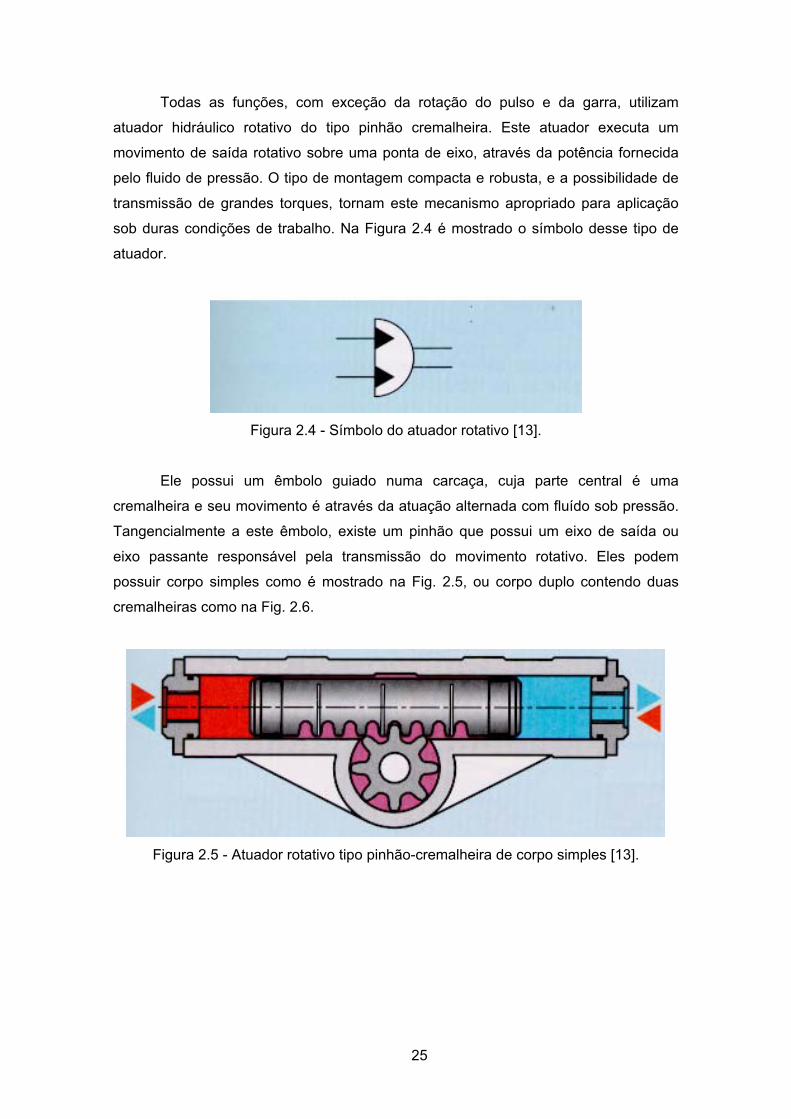
Todas as funções, com exceção da rotação do pulso e da garra, utilizam
atuador hidráulico rotativo do tipo pinhão cremalheira. Este atuador executa um
movimento de saída rotativo sobre uma ponta de eixo, através da potência fornecida
pelo fluido de pressão. O tipo de montagem compacta e robusta, e a possibilidade de
transmissão de grandes torques, tornam este mecanismo apropriado para aplicação
sob duras condições de trabalho. Na Figura 2.4 é mostrado o símbolo desse tipo de
atuador.
Figura 2.4 - Símbolo do atuador rotativo [13].
Ele possui um êmbolo guiado numa carcaça, cuja parte central é uma
cremalheira e seu movimento é através da atuação alternada com fluído sob pressão.
Tangencialmente a este êmbolo, existe um pinhão que possui um eixo de saída ou
eixo passante responsável pela transmissão do movimento rotativo. Eles podem
possuir corpo simples como é mostrado na Fig. 2.5, ou corpo duplo contendo duas
cremalheiras como na Fig. 2.6.
Figura 2.5 - Atuador rotativo tipo pinhão-cremalheira de corpo simples [13].
26
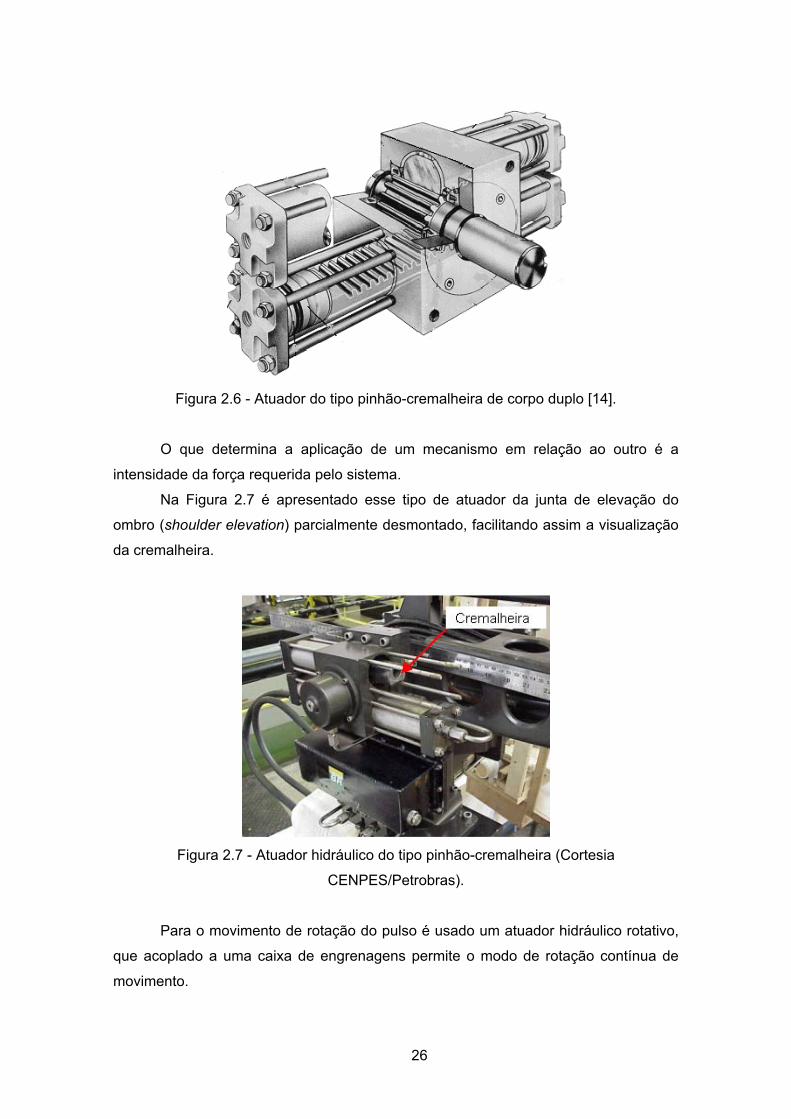
Figura 2.6 - Atuador do tipo pinhão-cremalheira de corpo duplo [14].
O que determina a aplicação de um mecanismo em relação ao outro é a
intensidade da força requerida pelo sistema.
Na Figura 2.7 é apresentado esse tipo de atuador da junta de elevação do
ombro (shoulder elevation) parcialmente desmontado, facilitando assim a visualização
da cremalheira.
Figura 2.7 - Atuador hidráulico do tipo pinhão-cremalheira (Cortesia
CENPES/Petrobras).
Para o movimento de rotação do pulso é usado um atuador hidráulico rotativo,
que acoplado a uma caixa de engrenagens permite o modo de rotação contínua de
movimento.
27
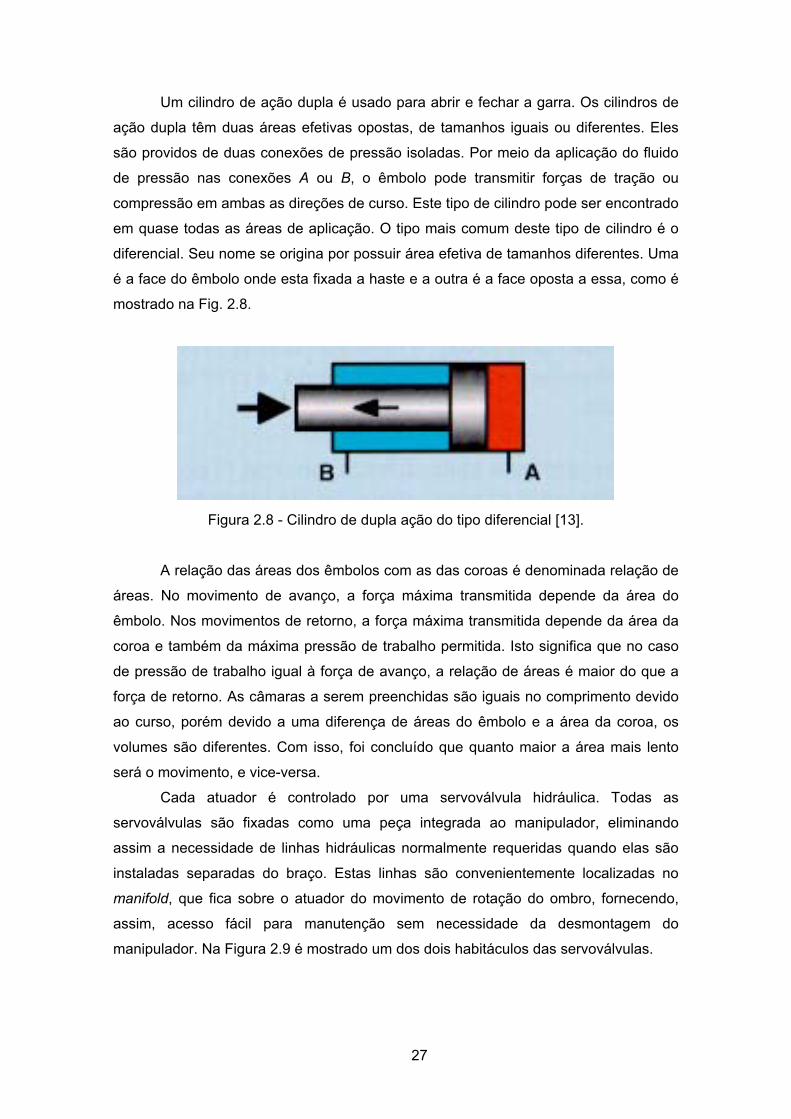
Um cilindro de ação dupla é usado para abrir e fechar a garra. Os cilindros de
ação dupla têm duas áreas efetivas opostas, de tamanhos iguais ou diferentes. Eles
são providos de duas conexões de pressão isoladas. Por meio da aplicação do fluido
de pressão nas conexões A ou B, o êmbolo pode transmitir forças de tração ou
compressão em ambas as direções de curso. Este tipo de cilindro pode ser encontrado
em quase todas as áreas de aplicação. O tipo mais comum deste tipo de cilindro é o
diferencial. Seu nome se origina por possuir área efetiva de tamanhos diferentes. Uma
é a face do êmbolo onde esta fixada a haste e a outra é a face oposta a essa, como é
mostrado na Fig. 2.8.
Figura 2.8 - Cilindro de dupla ação do tipo diferencial [13].
A relação das áreas dos êmbolos com as das coroas é denominada relação de
áreas. No movimento de avanço, a força máxima transmitida depende da área do
êmbolo. Nos movimentos de retorno, a força máxima transmitida depende da área da
coroa e também da máxima pressão de trabalho permitida. Isto significa que no caso
de pressão de trabalho igual à força de avanço, a relação de áreas é maior do que a
força de retorno. As câmaras a serem preenchidas são iguais no comprimento devido
ao curso, porém devido a uma diferença de áreas do êmbolo e a área da coroa, os
volumes são diferentes. Com isso, foi concluído que quanto maior a área mais lento
será o movimento, e vice-versa.
Cada atuador é controlado por uma servoválvula hidráulica. Todas as
servoválvulas são fixadas como uma peça integrada ao manipulador, eliminando
assim a necessidade de linhas hidráulicas normalmente requeridas quando elas são
instaladas separadas do braço. Estas linhas são convenientemente localizadas no
manifold, que fica sobre o atuador do movimento de rotação do ombro, fornecendo,
assim, acesso fácil para manutenção sem necessidade da desmontagem do
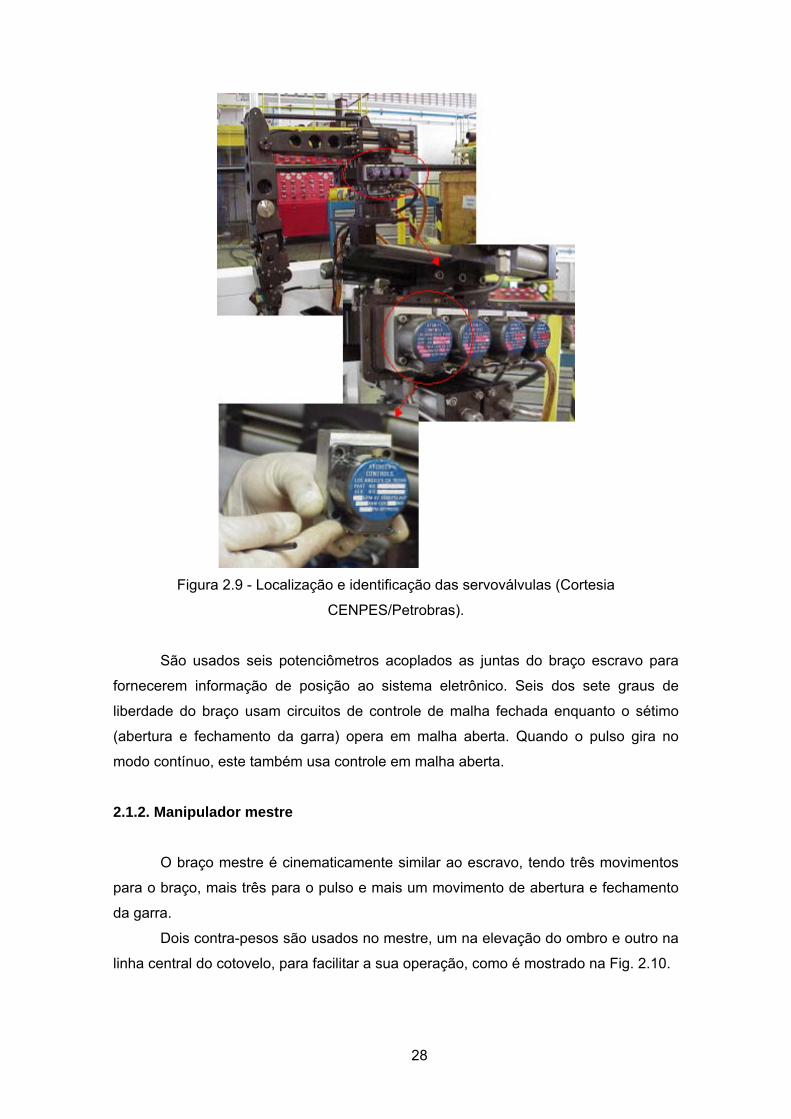
manipulador. Na Figura 2.9 é mostrado um dos dois habitáculos das servoválvulas.
28
Figura 2.9 - Localização e identificação das servoválvulas (Cortesia
CENPES/Petrobras).
São usados seis potenciômetros acoplados as juntas do braço escravo para
fornecerem informação de posição ao sistema eletrônico. Seis dos sete graus de
liberdade do braço usam circuitos de controle de malha fechada enquanto o sétimo
(abertura e fechamento da garra) opera em malha aberta. Quando o pulso gira no
modo contínuo, este também usa controle em malha aberta.
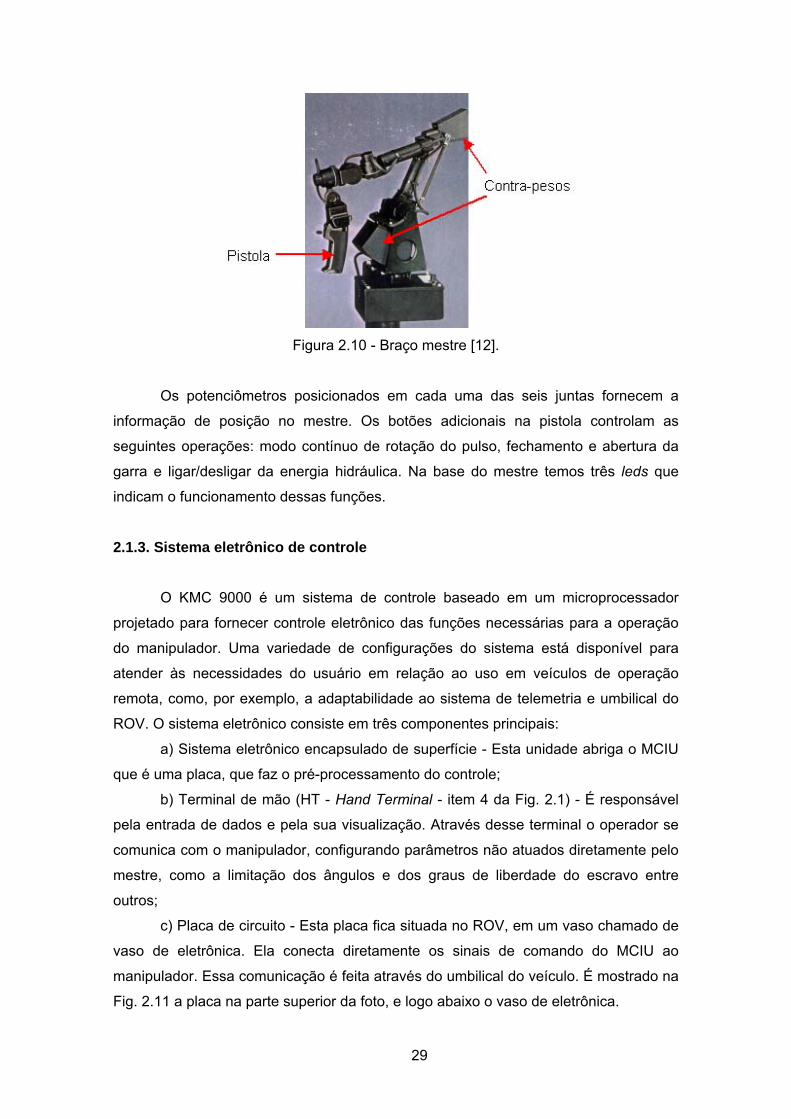
2.1.2. Manipulador mestre
O braço mestre é cinematicamente similar ao escravo, tendo três movimentos
para o braço, mais três para o pulso e mais um movimento de abertura e fechamento
da garra.
Dois contra-pesos são usados no mestre, um na elevação do ombro e outro na
linha central do cotovelo, para facilitar a sua operação, como é mostrado na Fig. 2.10.
29
Figura 2.10 - Braço mestre [12].
Os potenciômetros posicionados em cada uma das seis juntas fornecem a
informação de posição no mestre. Os botões adicionais na pistola controlam as
seguintes operações: modo contínuo de rotação do pulso, fechamento e abertura da
garra e ligar/desligar da energia hidráulica. Na base do mestre temos três leds que
indicam o funcionamento dessas funções.
2.1.3. Sistema eletrônico de controle
O KMC 9000 é um sistema de controle baseado em um microprocessador
projetado para fornecer controle eletrônico das funções necessárias para a operação
do manipulador. Uma variedade de configurações do sistema está disponível para
atender às necessidades do usuário em relação ao uso em veículos de operação
remota, como, por exemplo, a adaptabilidade ao sistema de telemetria e umbilical do
ROV. O sistema eletrônico consiste em três componentes principais:
a) Sistema eletrônico encapsulado de superfície - Esta unidade abriga o MCIU
que é uma placa, que faz o pré-processamento do controle;
b) Terminal de mão (HT - Hand Terminal - item 4 da Fig. 2.1) - É responsável
pela entrada de dados e pela sua visualização. Através desse terminal o operador se
comunica com o manipulador, configurando parâmetros não atuados diretamente pelo
mestre, como a limitação dos ângulos e dos graus de liberdade do escravo entre
outros;
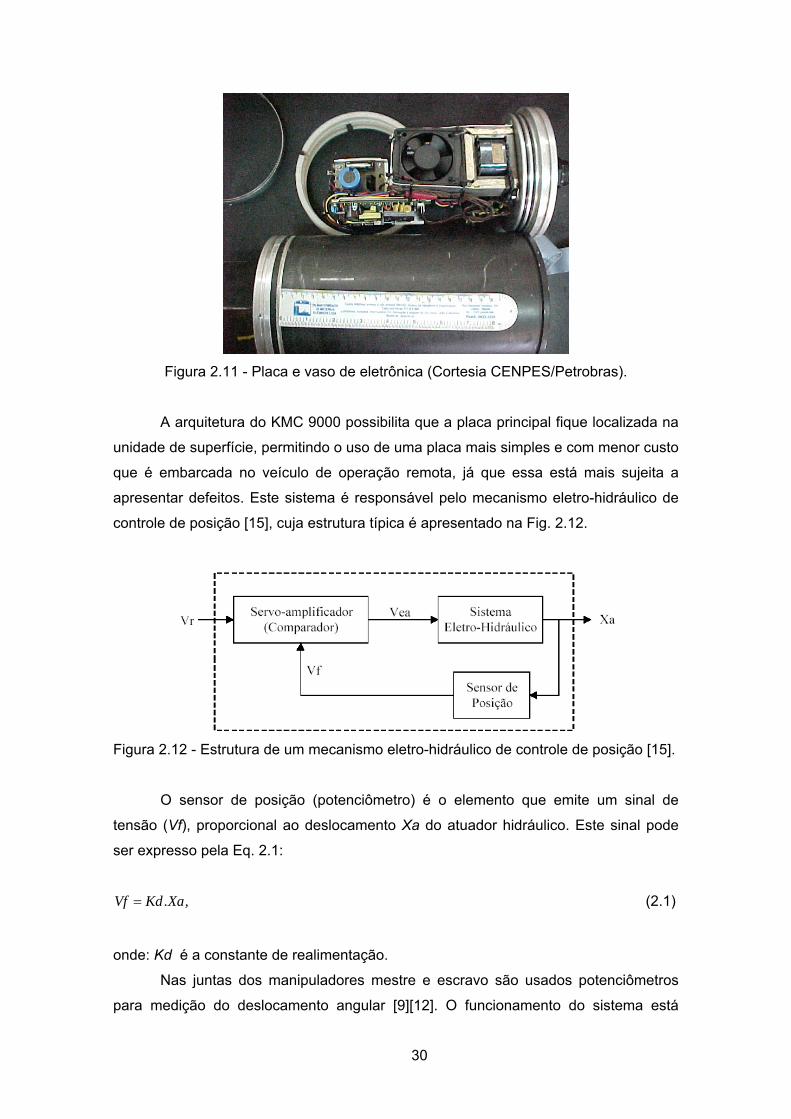
c) Placa de circuito - Esta placa fica situada no ROV, em um vaso chamado de
vaso de eletrônica. Ela conecta diretamente os sinais de comando do MCIU ao
manipulador. Essa comunicação é feita através do umbilical do veículo. É mostrado na
Fig. 2.11 a placa na parte superior da foto, e logo abaixo o vaso de eletrônica.
30
Figura 2.11 - Placa e vaso de eletrônica (Cortesia CENPES/Petrobras).
A arquitetura do KMC 9000 possibilita que a placa principal fique localizada na
unidade de superfície, permitindo o uso de uma placa mais simples e com menor custo
que é embarcada no veículo de operação remota, já que essa está mais sujeita a
apresentar defeitos. Este sistema é responsável pelo mecanismo eletro-hidráulico de
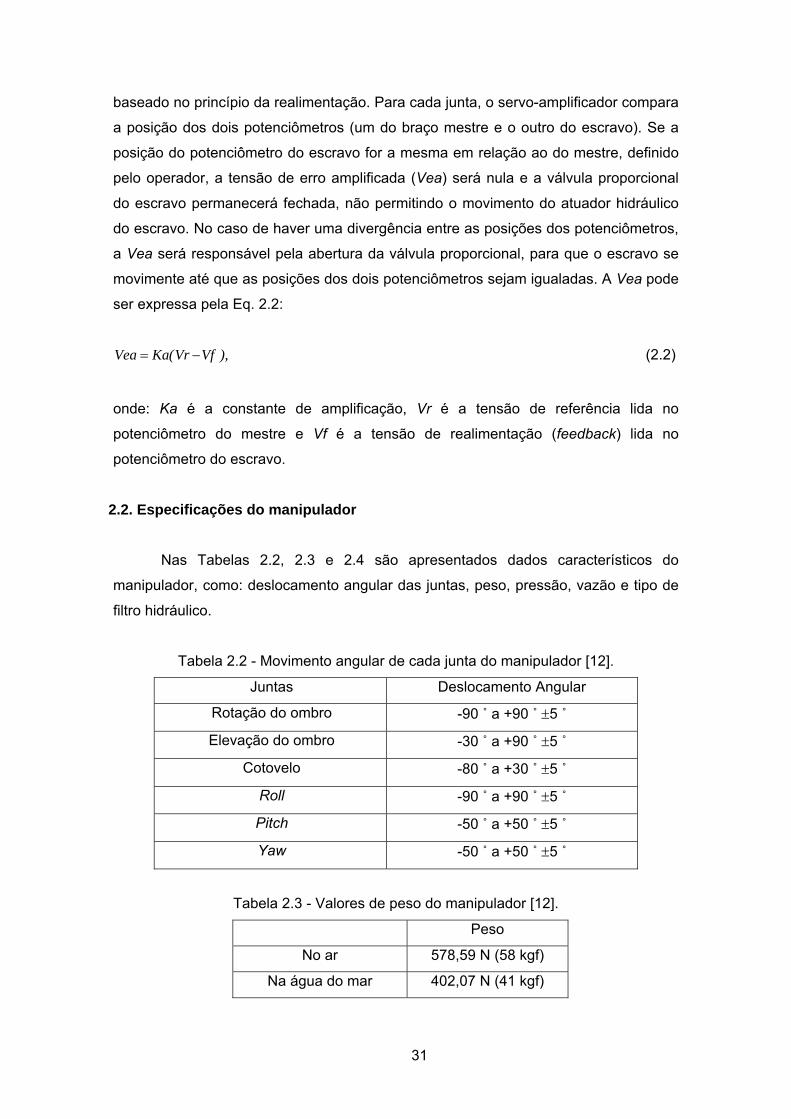
controle de posição [15], cuja estrutura típica é apresentado na Fig. 2.12.
Figura 2.12 - Estrutura de um mecanismo eletro-hidráulico de controle de posição [15].
O sensor de posição (potenciômetro) é o elemento que emite um sinal de
tensão (Vf), proporcional ao deslocamento Xa do atuador hidráulico. Este sinal pode
ser expresso pela Eq. 2.1:
Vf Kd.Xa,= (2.1)
onde: Kd é a constante de realimentação.
Nas juntas dos manipuladores mestre e escravo são usados potenciômetros
para medição do deslocamento angular [9][12]. O funcionamento do sistema está
31
baseado no princípio da realimentação. Para cada junta, o servo-amplificador compara
a posição dos dois potenciômetros (um do braço mestre e o outro do escravo). Se a
posição do potenciômetro do escravo for a mesma em relação ao do mestre, definido
pelo operador, a tensão de erro amplificada (Vea) será nula e a válvula proporcional
do escravo permanecerá fechada, não permitindo o movimento do atuador hidráulico
do escravo. No caso de haver uma divergência entre as posições dos potenciômetros,
a Vea será responsável pela abertura da válvula proporcional, para que o escravo se
movimente até que as posições dos dois potenciômetros sejam igualadas. A Vea pode
ser expressa pela Eq. 2.2:
Vea Ka(Vr Vf ),= − (2.2)
onde: Ka é a constante de amplificação, Vr é a tensão de referência lida no
potenciômetro do mestre e Vf é a tensão de realimentação (feedback) lida no
potenciômetro do escravo.
2.2. Especificações do manipulador
Nas Tabelas 2.2, 2.3 e 2.4 são apresentados dados característicos do
manipulador, como: deslocamento angular das juntas, peso, pressão, vazão e tipo de
filtro hidráulico.
Tabela 2.2 - Movimento angular de cada junta do manipulador [12].
Juntas Deslocamento Angular
Rotação do ombro -90 ˚ a +90 ˚ ±5 ˚
Elevação do ombro -30 ˚ a +90 ˚ ±5 ˚
Cotovelo -80 ˚ a +30 ˚ ±5 ˚
Roll -90 ˚ a +90 ˚ ±5 ˚
Pitch -50 ˚ a +50 ˚ ±5 ˚
Yaw -50 ˚ a +50 ˚ ±5 ˚
Tabela 2.3 - Valores de peso do manipulador [12].
Peso
No ar 578,59 N (58 kgf)
Na água do mar 402,07 N (41 kgf)
32
Tabela 2.4 - Características hidráulicas [12].
Pressão de trabalho 10 MPa (1500 PSI)
Vazão 18 x 10-5 m3/s (11 l/min)
Filtro 25 micra
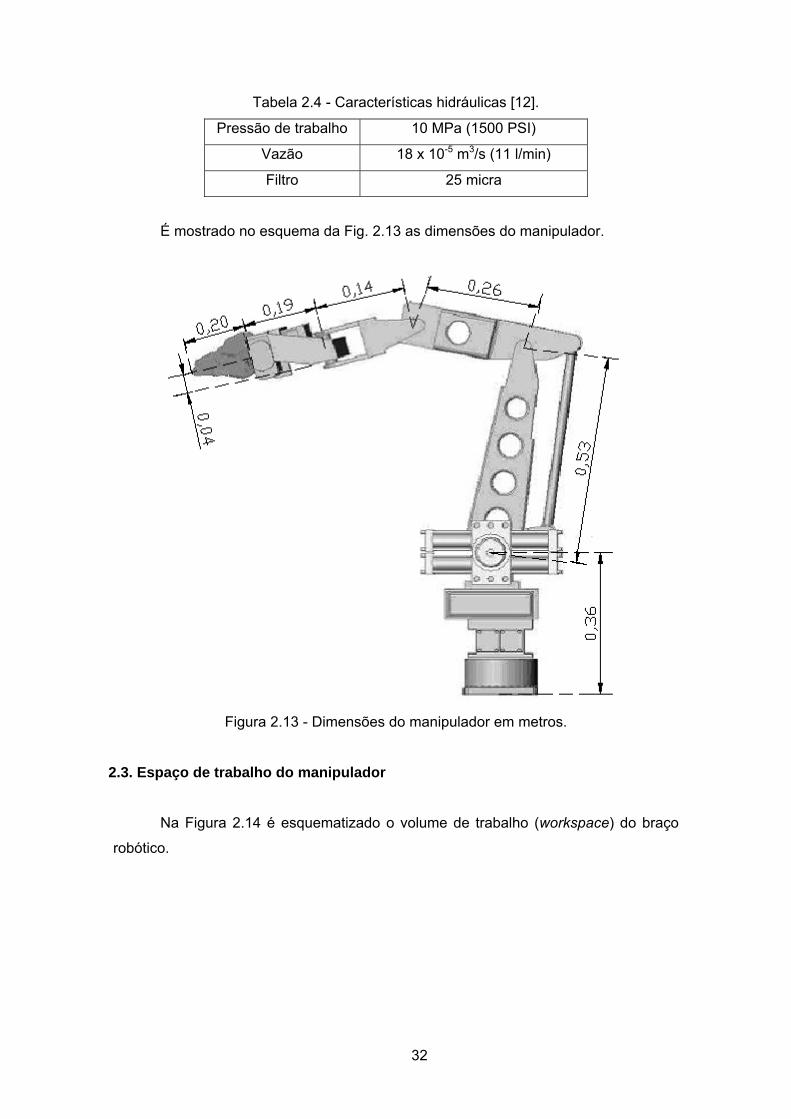
É mostrado no esquema da Fig. 2.13 as dimensões do manipulador.
Figura 2.13 - Dimensões do manipulador em metros.
2.3. Espaço de trabalho do manipulador
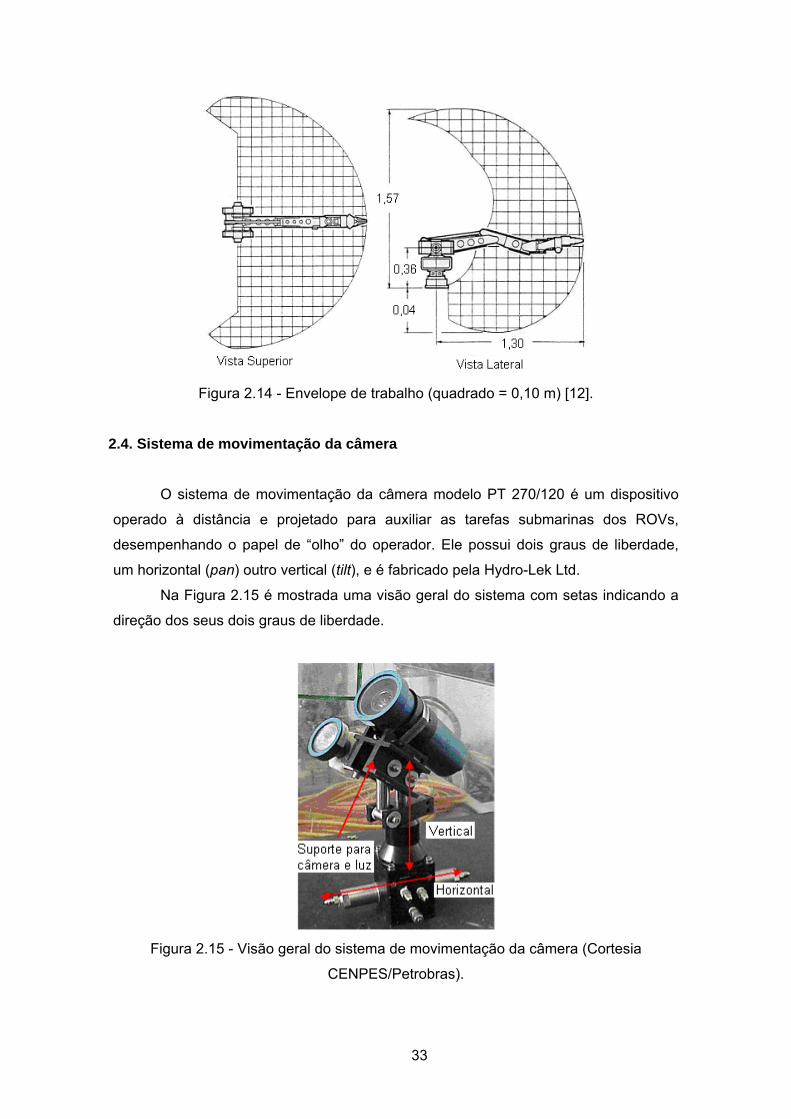
Na Figura 2.14 é esquematizado o volume de trabalho (workspace) do braço
robótico.
33
Figura 2.14 - Envelope de trabalho (quadrado = 0,10 m) [12].
2.4. Sistema de movimentação da câmera
O sistema de movimentação da câmera modelo PT 270/120 é um dispositivo
operado à distância e projetado para auxiliar as tarefas submarinas dos ROVs,
desempenhando o papel de “olho” do operador. Ele possui dois graus de liberdade,
um horizontal (pan) outro vertical (tilt), e é fabricado pela Hydro-Lek Ltd.
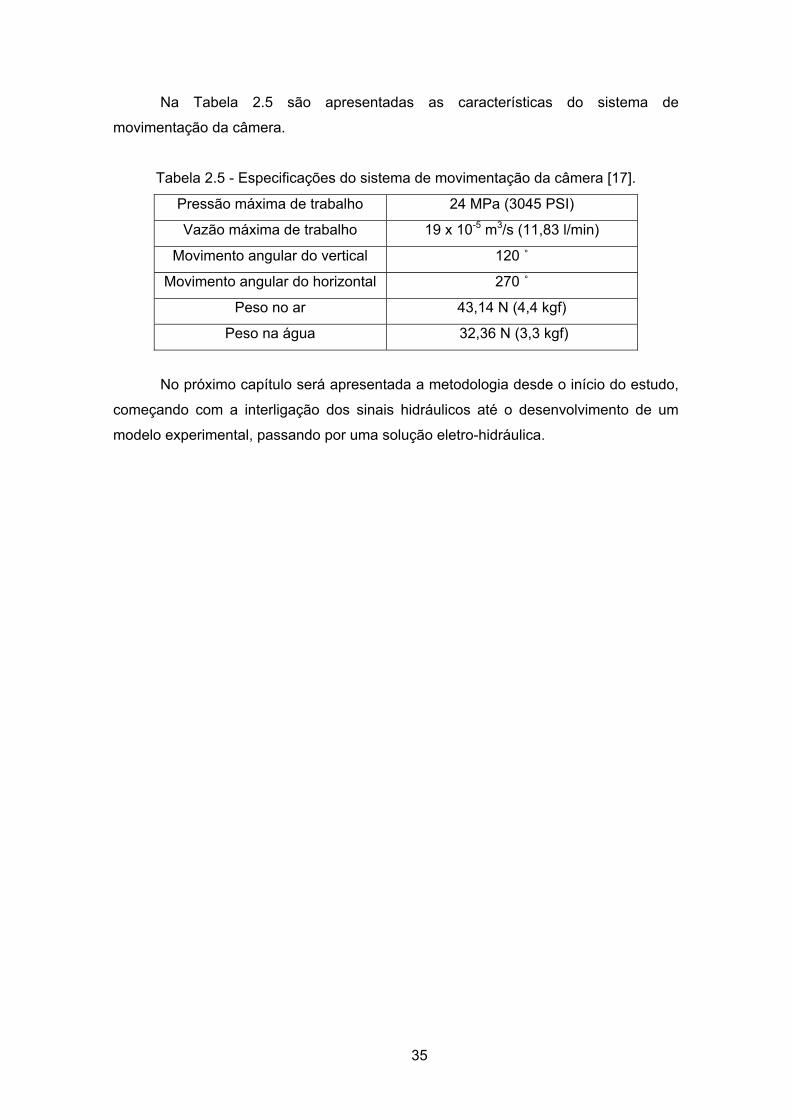
Na Figura 2.15 é mostrada uma visão geral do sistema com setas indicando a
direção dos seus dois graus de liberdade.
Figura 2.15 - Visão geral do sistema de movimentação da câmera (Cortesia
CENPES/Petrobras).

34
A câmera que aparece na Fig. 2.15 é o modelo TMC-73M fabricado pela
Pulnix. Este equipamento possui campo de visão de 51˚ na horizontal e 40˚ na vertical.
Ela está encapsulada para permitir o seu mergulho até cinqüenta metros de
profundidade [16].
A luz que faz o conjunto com a câmera, é uma lâmpada dicróica também
encapsulada. Todos os terminais elétricos são de uso submarino.
Para o movimento horizontal é utilizado um atuador hidráulico do tipo pinhão-
cremalheira (Fig. 2.16). Esse atuador é semelhante ao usado no manipulador com a
diferença deste possuir corpo simples (uma cremalheira).
Figura 2.16 - Atuador do movimento horizontal (Cortesia CENPES/Petrobras).
No movimento vertical é usado um atuador hidráulico do tipo cilindro de ação
dupla diferencial. Ele é mostrado na Fig. 2.17 onde estão em destaque, com círculos
vermelhos, os furos de entrada e saída do óleo.
Figura 2.17 - Atuador do movimento vertical (Cortesia CENPES/Petrobras).
35
Na Tabela 2.5 são apresentadas as características do sistema de
movimentação da câmera.
Tabela 2.5 - Especificações do sistema de movimentação da câmera [17].
Pressão máxima de trabalho 24 MPa (3045 PSI)
Vazão máxima de trabalho 19 x 10-5 m3/s (11,83 l/min)
Movimento angular do vertical 120 ˚
Movimento angular do horizontal 270 ˚
Peso no ar 43,14 N (4,4 kgf)
Peso na água 32,36 N (3,3 kgf)
No próximo capítulo será apresentada a metodologia desde o início do estudo,
começando com a interligação dos sinais hidráulicos até o desenvolvimento de um
modelo experimental, passando por uma solução eletro-hidráulica.
36
3 Método
Nesse capítulo são apresentadas: a solução hidráulica, eletro-hidráulica e a
montagem experimental, que não foram suficientes para atingir o objetivo do estudo,
mas serviu como alicerce para o capítulo 4 onde foi abordado a modelagem teórica
3.1. Solução hidráulica A solução hidráulica consiste na interligação dos sinais hidráulicos dos
atuadores que irão se movimentar juntos, isto é, horizontal da câmera concatenado a
rotação do ombro e vertical da câmera a elevação do ombro. São apresentadas a
seguir todas as etapas dessa metodologia.
3.1.1. Escolha dos graus de liberdade do manipulador
Como foi explanado no capítulo 2, o manipulador possui sete graus de
liberdade e o sistema de movimentação da câmera dois. Foi necessário escolher
apenas dois graus de liberdade do manipulador para serem concatenados aos da
câmera a fim de automatizar o seu movimento. Foi escolhido a rotação do ombro do
braço para ser ligado ao horizontal da câmera e a elevação do ombro do braço ao
vertical da câmera. Esses dois graus de liberdade do braço foram escolhidos por
estarem localizados na base do manipulador, e por esse motivo movimentarem o
braço como um todo independente dos outros graus de liberdade.
3.1.2. Tipo de ligação hidráulica Uma ligação hidráulica pode ser em série ou em paralelo. A fim de determinar
que tipo de ligação será utilizado, foi levado em consideração que a câmera deverá
parar toda vez que o braço também o faça, mesmo que a servoválvula do braço esteja
aberta.
Em outras palavras isso quer dizer que, se o braço esbarrar em um obstáculo
durante uma intervenção submarina e o operador da superfície continuar a tentar
movimentar o braço, a servoválvula continuará aberta mandando óleo para os seus
atuadores que não irão se movimentar. Nessa situação, se for usada uma ligação em
paralelo, o óleo irá fluir livremente para os atuadores da câmera fazendo com que
essa se movimente enquanto o braço está parado, como é visualizado no esquema da
37
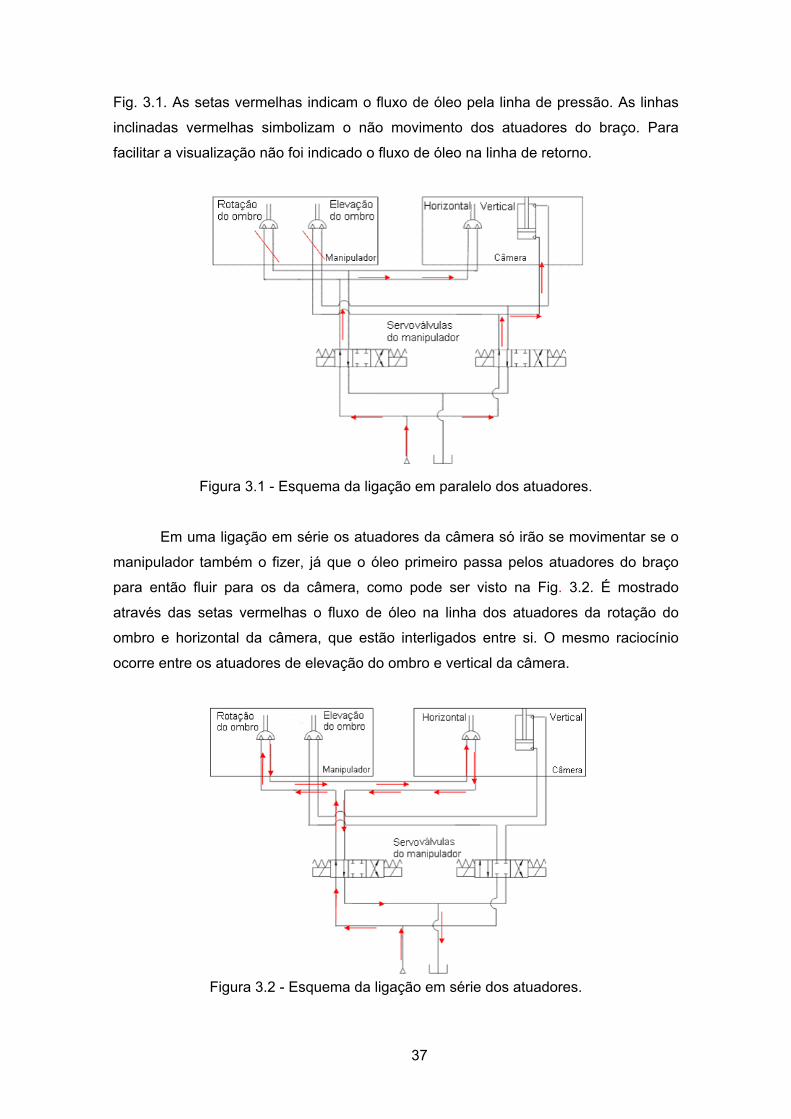
Fig. 3.1. As setas vermelhas indicam o fluxo de óleo pela linha de pressão. As linhas
inclinadas vermelhas simbolizam o não movimento dos atuadores do braço. Para
facilitar a visualização não foi indicado o fluxo de óleo na linha de retorno.
Figura 3.1 - Esquema da ligação em paralelo dos atuadores.
Em uma ligação em série os atuadores da câmera só irão se movimentar se o
manipulador também o fizer, já que o óleo primeiro passa pelos atuadores do braço
para então fluir para os da câmera, como pode ser visto na Fig. 3.2. É mostrado
através das setas vermelhas o fluxo de óleo na linha dos atuadores da rotação do
ombro e horizontal da câmera, que estão interligados entre si. O mesmo raciocínio
ocorre entre os atuadores de elevação do ombro e vertical da câmera.
Figura 3.2 - Esquema da ligação em série dos atuadores.
38
Logo, pode-se concluir que a configuração desejada é a ligação em série,
como também foi escolhida em [18].
3.1.3. Cálculo do volume de óleo dos atuadores
É apresentado nesse item o cálculo do volume de óleo dos atuadores a fim de
atestar a compatibilidade dessa interligação.
Foi observado no esquema da ligação em série, que o volume de óleo do
atuador de rotação do ombro deve ser semelhante ao volume de óleo do atuador
horizontal da câmera assim como os volumes de óleo dos atuadores da elevação do
ombro e vertical da câmera também devem ser parecidos [19].
A fim de se calcular esses volumes, os atuadores foram desmontados e
medidos, devido os fabricantes do braço e do sistema de movimentação da câmera
não terem fornecido essa informação. Para esse cálculo foi utilizada a Eq. 3.1.
2V .r .l ,= π (3.1)
onde: r é o raio interno da camisa do atuador em m e l é o comprimento útil da camisa
em m.
São observados nas Fig. 3.3, 3.4, 3.5 e 3.6 os atuadores desmontados para a
medição das suas dimensões para o cálculo do volume.
Figura 3.3 - Camisa do atuador da rotação do ombro do manipulador (Cortesia
CENPES/Petrobras).
Figura 3.4 - Camisa do atuador da elevação do ombro do manipulador (Cortesia
CENPES/Petrobras).
39
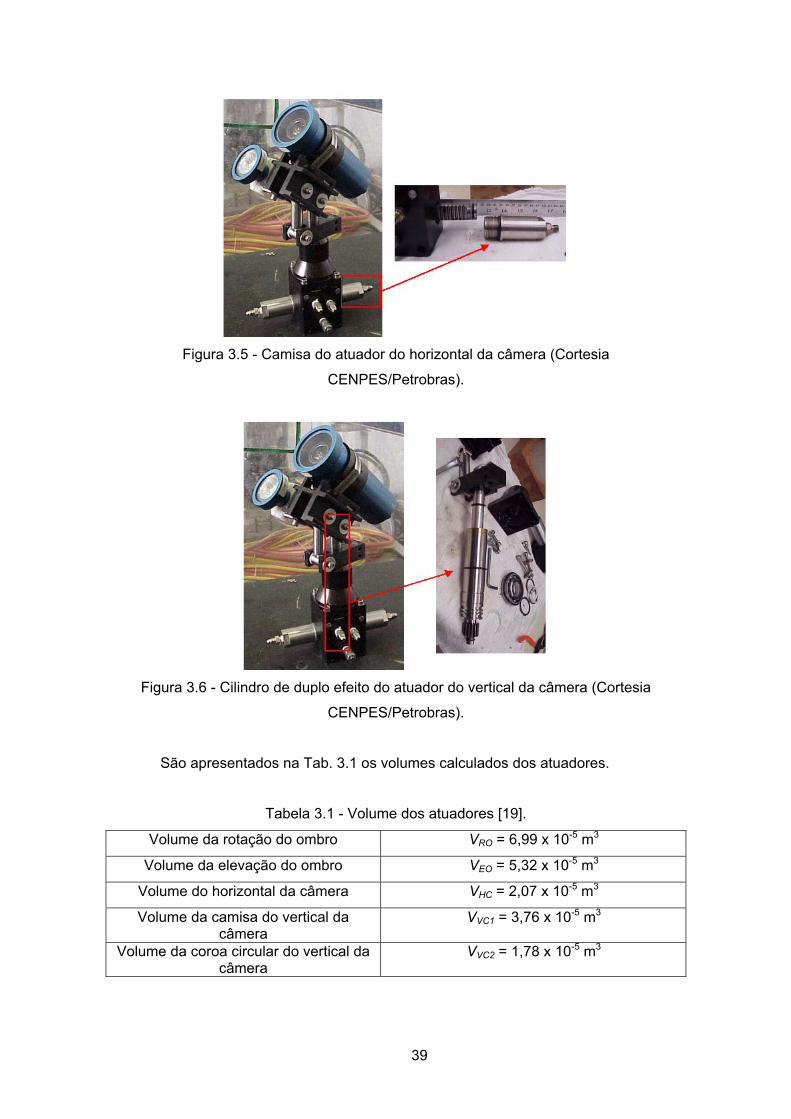
Figura 3.5 - Camisa do atuador do horizontal da câmera (Cortesia
CENPES/Petrobras).
Figura 3.6 - Cilindro de duplo efeito do atuador do vertical da câmera (Cortesia
CENPES/Petrobras).
São apresentados na Tab. 3.1 os volumes calculados dos atuadores.
Tabela 3.1 - Volume dos atuadores [19].
Volume da rotação do ombro VRO = 6,99 x 10-5 m3
Volume da elevação do ombro VEO = 5,32 x 10-5 m3
Volume do horizontal da câmera VHC = 2,07 x 10-5 m3
Volume da camisa do vertical da câmera
VVC1 = 3,76 x 10-5 m3
Volume da coroa circular do vertical da câmera
VVC2 = 1,78 x 10-5 m3
40
Apesar dos atuadores de rotação e elevação do ombro serem idênticos, o
volume calculado foi diferente devido a diferença no comprimento útil dos atuadores.
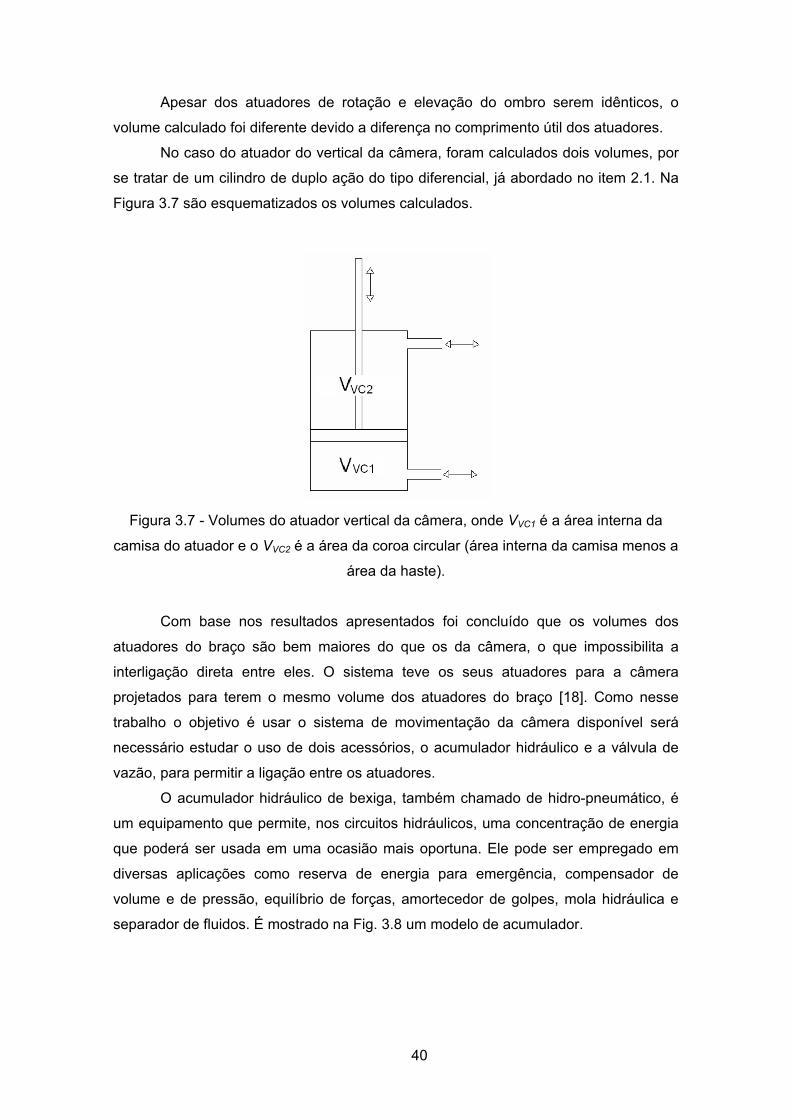
No caso do atuador do vertical da câmera, foram calculados dois volumes, por
se tratar de um cilindro de duplo ação do tipo diferencial, já abordado no item 2.1. Na
Figura 3.7 são esquematizados os volumes calculados.
Figura 3.7 - Volumes do atuador vertical da câmera, onde VVC1 é a área interna da
camisa do atuador e o VVC2 é a área da coroa circular (área interna da camisa menos a
área da haste).
Com base nos resultados apresentados foi concluído que os volumes dos
atuadores do braço são bem maiores do que os da câmera, o que impossibilita a
interligação direta entre eles. O sistema teve os seus atuadores para a câmera
projetados para terem o mesmo volume dos atuadores do braço [18]. Como nesse
trabalho o objetivo é usar o sistema de movimentação da câmera disponível será
necessário estudar o uso de dois acessórios, o acumulador hidráulico e a válvula de
vazão, para permitir a ligação entre os atuadores.
O acumulador hidráulico de bexiga, também chamado de hidro-pneumático, é
um equipamento que permite, nos circuitos hidráulicos, uma concentração de energia
que poderá ser usada em uma ocasião mais oportuna. Ele pode ser empregado em
diversas aplicações como reserva de energia para emergência, compensador de
volume e de pressão, equilíbrio de forças, amortecedor de golpes, mola hidráulica e
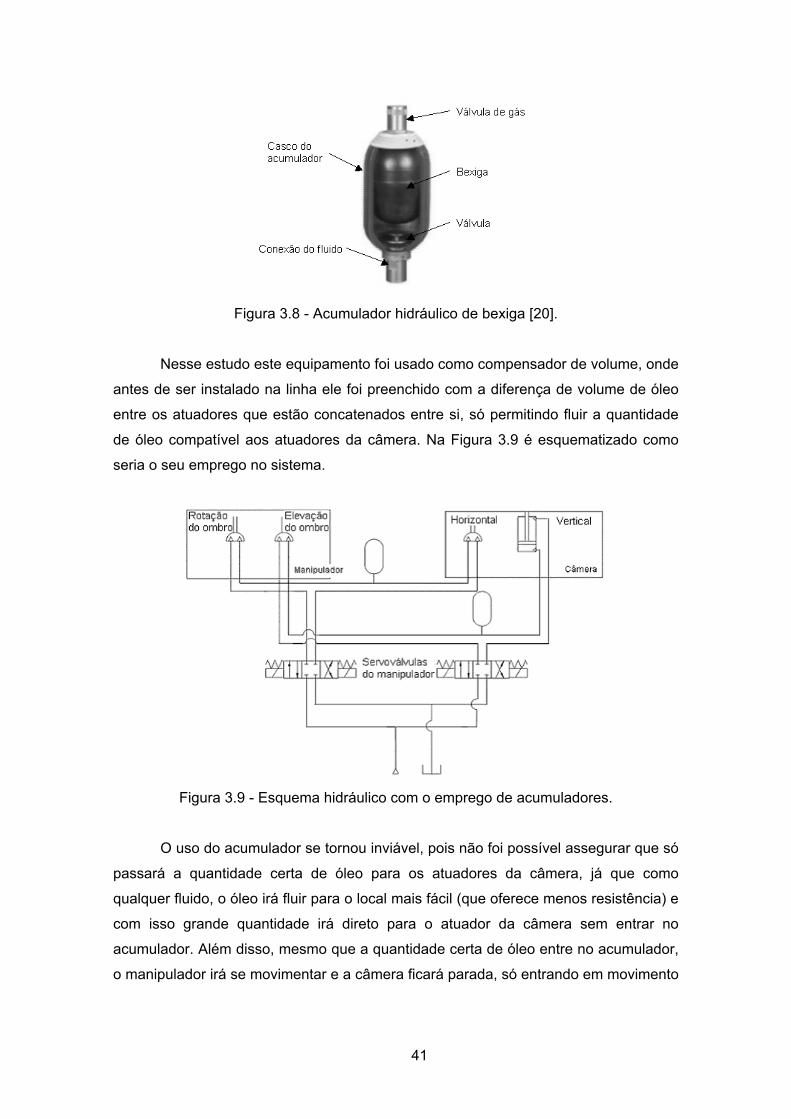
separador de fluidos. É mostrado na Fig. 3.8 um modelo de acumulador.
41
Figura 3.8 - Acumulador hidráulico de bexiga [20].
Nesse estudo este equipamento foi usado como compensador de volume, onde
antes de ser instalado na linha ele foi preenchido com a diferença de volume de óleo
entre os atuadores que estão concatenados entre si, só permitindo fluir a quantidade
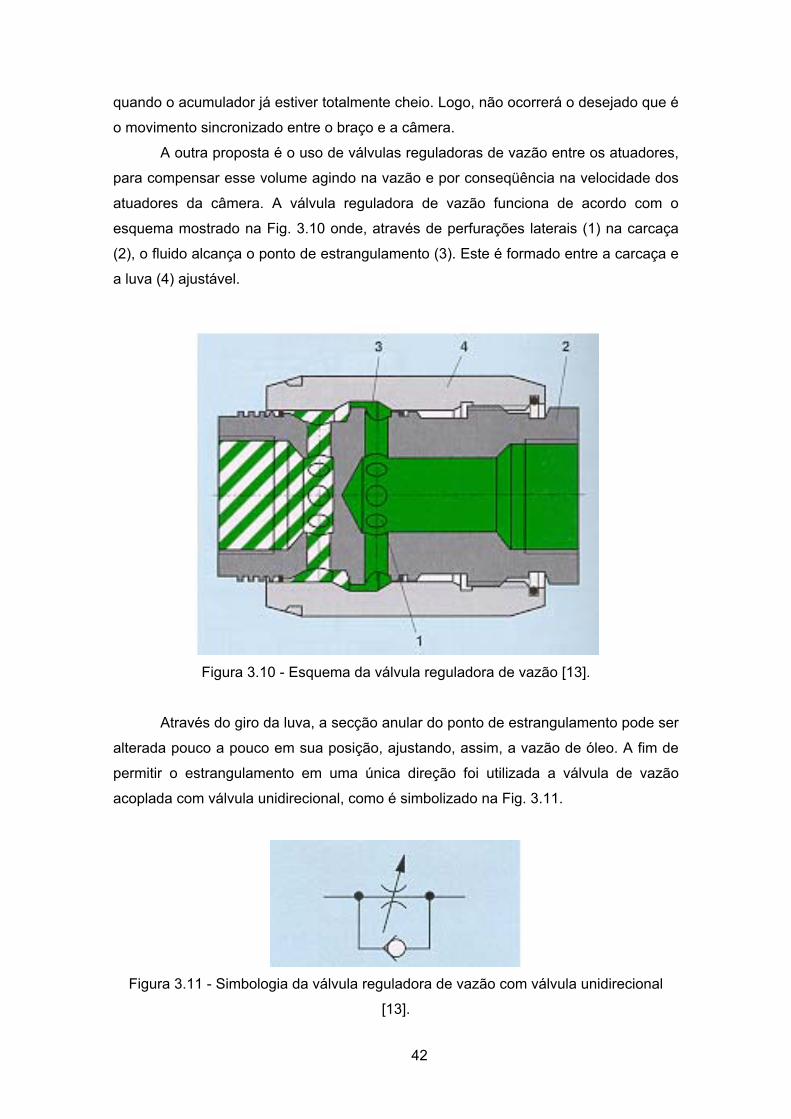
de óleo compatível aos atuadores da câmera. Na Figura 3.9 é esquematizado como
seria o seu emprego no sistema.
Figura 3.9 - Esquema hidráulico com o emprego de acumuladores.
O uso do acumulador se tornou inviável, pois não foi possível assegurar que só
passará a quantidade certa de óleo para os atuadores da câmera, já que como
qualquer fluido, o óleo irá fluir para o local mais fácil (que oferece menos resistência) e
com isso grande quantidade irá direto para o atuador da câmera sem entrar no
acumulador. Além disso, mesmo que a quantidade certa de óleo entre no acumulador,
o manipulador irá se movimentar e a câmera ficará parada, só entrando em movimento
42
quando o acumulador já estiver totalmente cheio. Logo, não ocorrerá o desejado que é
o movimento sincronizado entre o braço e a câmera.
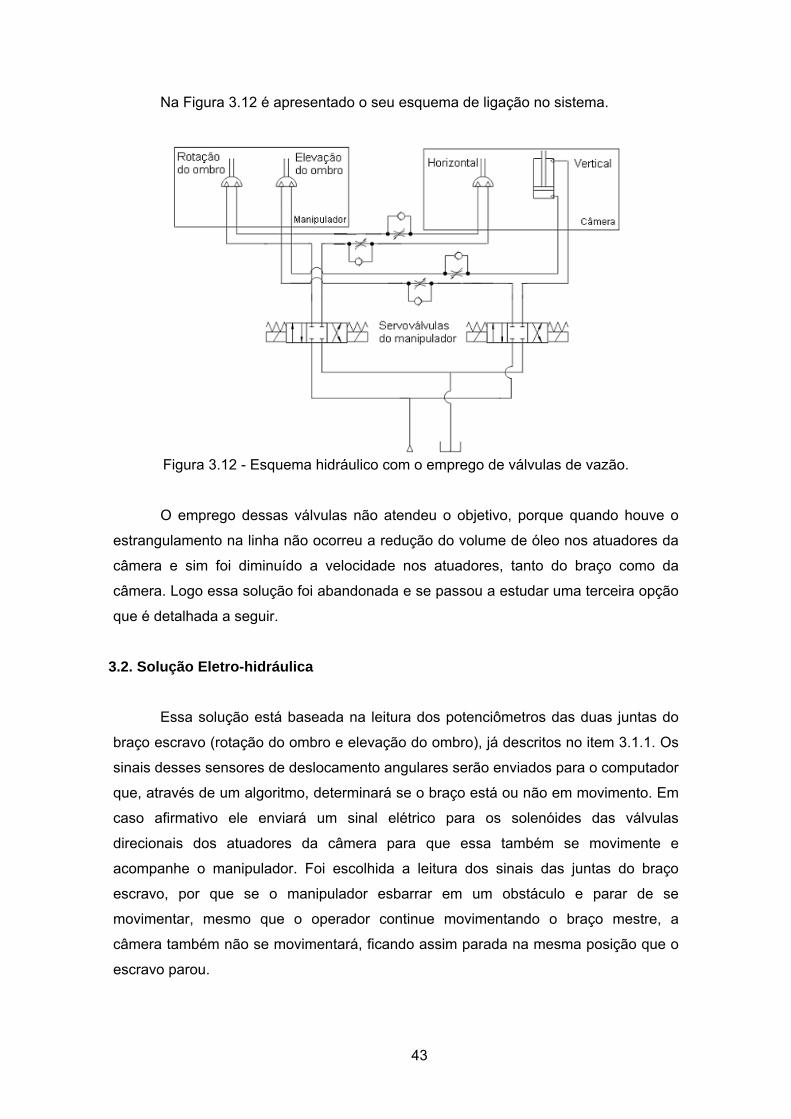
A outra proposta é o uso de válvulas reguladoras de vazão entre os atuadores,
para compensar esse volume agindo na vazão e por conseqüência na velocidade dos
atuadores da câmera. A válvula reguladora de vazão funciona de acordo com o
esquema mostrado na Fig. 3.10 onde, através de perfurações laterais (1) na carcaça
(2), o fluido alcança o ponto de estrangulamento (3). Este é formado entre a carcaça e
a luva (4) ajustável.
Figura 3.10 - Esquema da válvula reguladora de vazão [13].
Através do giro da luva, a secção anular do ponto de estrangulamento pode ser
alterada pouco a pouco em sua posição, ajustando, assim, a vazão de óleo. A fim de
permitir o estrangulamento em uma única direção foi utilizada a válvula de vazão
acoplada com válvula unidirecional, como é simbolizado na Fig. 3.11.
Figura 3.11 - Simbologia da válvula reguladora de vazão com válvula unidirecional
[13].
43
Na Figura 3.12 é apresentado o seu esquema de ligação no sistema.
Figura 3.12 - Esquema hidráulico com o emprego de válvulas de vazão.
O emprego dessas válvulas não atendeu o objetivo, porque quando houve o
estrangulamento na linha não ocorreu a redução do volume de óleo nos atuadores da
câmera e sim foi diminuído a velocidade nos atuadores, tanto do braço como da
câmera. Logo essa solução foi abandonada e se passou a estudar uma terceira opção
que é detalhada a seguir.
3.2. Solução Eletro-hidráulica Essa solução está baseada na leitura dos potenciômetros das duas juntas do
braço escravo (rotação do ombro e elevação do ombro), já descritos no item 3.1.1. Os
sinais desses sensores de deslocamento angulares serão enviados para o computador
que, através de um algoritmo, determinará se o braço está ou não em movimento. Em
caso afirmativo ele enviará um sinal elétrico para os solenóides das válvulas
direcionais dos atuadores da câmera para que essa também se movimente e
acompanhe o manipulador. Foi escolhida a leitura dos sinais das juntas do braço
escravo, por que se o manipulador esbarrar em um obstáculo e parar de se
movimentar, mesmo que o operador continue movimentando o braço mestre, a
câmera também não se movimentará, ficando assim parada na mesma posição que o
escravo parou.
44
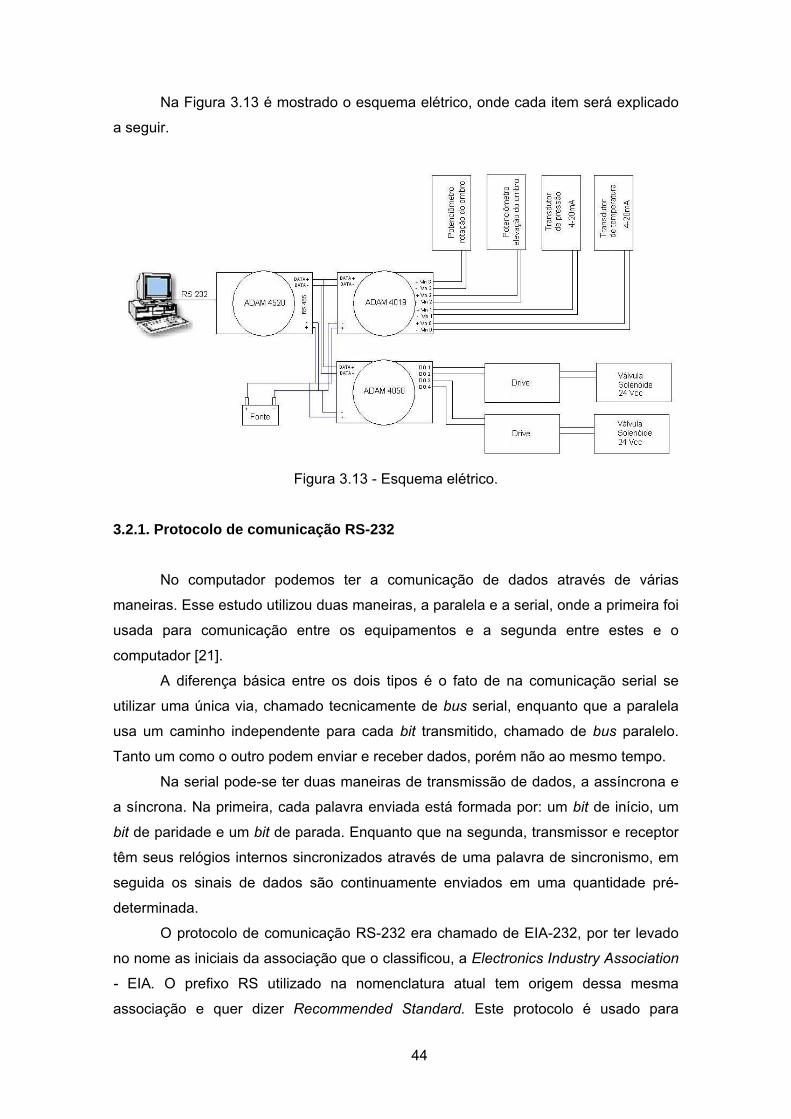
Na Figura 3.13 é mostrado o esquema elétrico, onde cada item será explicado
a seguir.
Figura 3.13 - Esquema elétrico.
3.2.1. Protocolo de comunicação RS-232
No computador podemos ter a comunicação de dados através de várias
maneiras. Esse estudo utilizou duas maneiras, a paralela e a serial, onde a primeira foi
usada para comunicação entre os equipamentos e a segunda entre estes e o
computador [21].
A diferença básica entre os dois tipos é o fato de na comunicação serial se
utilizar uma única via, chamado tecnicamente de bus serial, enquanto que a paralela
usa um caminho independente para cada bit transmitido, chamado de bus paralelo.
Tanto um como o outro podem enviar e receber dados, porém não ao mesmo tempo.
Na serial pode-se ter duas maneiras de transmissão de dados, a assíncrona e
a síncrona. Na primeira, cada palavra enviada está formada por: um bit de início, um
bit de paridade e um bit de parada. Enquanto que na segunda, transmissor e receptor
têm seus relógios internos sincronizados através de uma palavra de sincronismo, em
seguida os sinais de dados são continuamente enviados em uma quantidade pré-
determinada.
O protocolo de comunicação RS-232 era chamado de EIA-232, por ter levado
no nome as iniciais da associação que o classificou, a Electronics Industry Association
- EIA. O prefixo RS utilizado na nomenclatura atual tem origem dessa mesma
associação e quer dizer Recommended Standard. Este protocolo é usado para
45
comunicação entre o computador e equipamentos externos e no caso desse estudo
serviu como a comunicação entre o computador e os módulos de aquisição e
transmissão de sinais dos transdutores de pressão e temperatura, dos drivers
controladores das válvulas e os dos potenciômetros do manipulador.
Essa comunicação é do tipo assíncrona e se dá através da porta serial do
computador, que utiliza o terminal DB9. O comprimento máximo permitido de cabo é
de 15 m e a velocidade máxima de transmissão é de 20 Kbps (kilobits por segundo).
Na Tabela 3.2 é mostrada a codificação dos seus pinos.
Tabela 3.2 - Codificação dos pinos do terminal DB9 [22].
Pino 01 Não conectado
Pino 02 RX
Pino 03 TX
Pino 04 Não conectado
Pino 05 GND
Pino 06 Não conectado
Pino 07 Não conectado
Pino 08 Não conectado
Pino 09 Não conectado
Através do protocolo RS-232 se padronizam as velocidades de transferência de
dados, a forma de controle dessa transferência, os níveis de voltagem utilizados, o tipo
de cabo utilizado, as distâncias entre equipamentos, os conectores e etc. A partir das
duas linhas de dados, transmissão (Tx) e recepção (Rx), o protocolo usa as linhas de
controle de fluxo handshake para conseguir uma comunicação eficiente.
Os padrões que se configuram por meio do software deste protocolo são a
velocidade em bps, a verificação de paridade, os bits de parada, logo depois da
transmissão de uma palavra, e a quantidade de bits por palavra.
3.2.2. Protocolo de comunicação RS-485
Este tipo de protocolo utiliza apenas um par de cabos para a transmissão de
dados, o que é uma grande vantagem para equipamentos tele-operados a distância,
pois diminui o número de fios no umbilical. Ele pode se comunicar com até trinta e dois
equipamentos por segmento, que faz desse protocolo o mais usado na indústria.
46
Devido à sua transmissão diferencial de dados, é muito usado para transmissão em
altas velocidades e longas distâncias podendo atingir a distância de 1200 m [23].
Este protocolo padroniza o modo de transmissão diferencial, as impedâncias
máximas e mínimas de entrada e saída dos dispositivos, e os níveis de tensão
aceitáveis na rede, além de deixar em aberto os tipos de cabos e conectores, técnicas
de terminação, taxas de transmissão, distâncias máximas e protocolos de
comunicação digital.
O seu nome assim, como o do RS-232, se originou a partir do EIA-485 isto é, à
associação que o classificou.
Em uma transmissão a uma distância de 1200 m, este protocolo permite atingir
cerca de 115,2 Kbps de velocidade. A topologia multiponto permite que só um nó
transmita dados e tenha o controle da rede e os outros passem a ser receptores.
Quando esses dados chegam ao nó referenciado, este responde a todos os nós da
rede, sendo que só o nó transmissor interpreta esse sinal.
Como foi citado no item anterior, o computador utiliza o protocolo RS-232, e os
equipamentos (sensores e atuadores) utilizam o protocolo RS-485. Logo é necessário
o uso de um conversor RS-232/RS-485. Este conversor está projetado para
compatibilizar a comunicação RS-232, que é full-duplex e topologia ponto a ponto,
com a do protocolo RS-485, que é half-duplex e multiponto. Nesse estudo foi utilizado
um conversor modelo 4520 do fabricante Advantech, que será abordado mais adiante.
Um canal half-duplex é um canal físico simples no qual a direção pode ser
revertida. As mensagens podem fluir nas duas direções, mas nunca ao mesmo tempo.
Um canal full-duplex permite que mensagens sejam trocadas simultaneamente em
ambas as direções. Ele pode ser visto como dois canais simplex, um direto e um
reverso, conectados nos mesmos pontos.
Um canal no qual a direção de transmissão é inalterada é chamado de canal
simplex. Por exemplo, uma estação de rádio é um canal simplex porque ela sempre
transmite o sinal para os ouvintes e não é permitida a transmissão inversa.
3.2.3. Transdutores
Os transdutores são dispositivos que transformam uma grandeza física captada
por um sensor, como temperatura, em um sinal elétrico analógico ou digital
compreensível por outros dispositivos.
Os transdutores podem ser classificados, segundo o tipo de saída do seu sinal,
em:
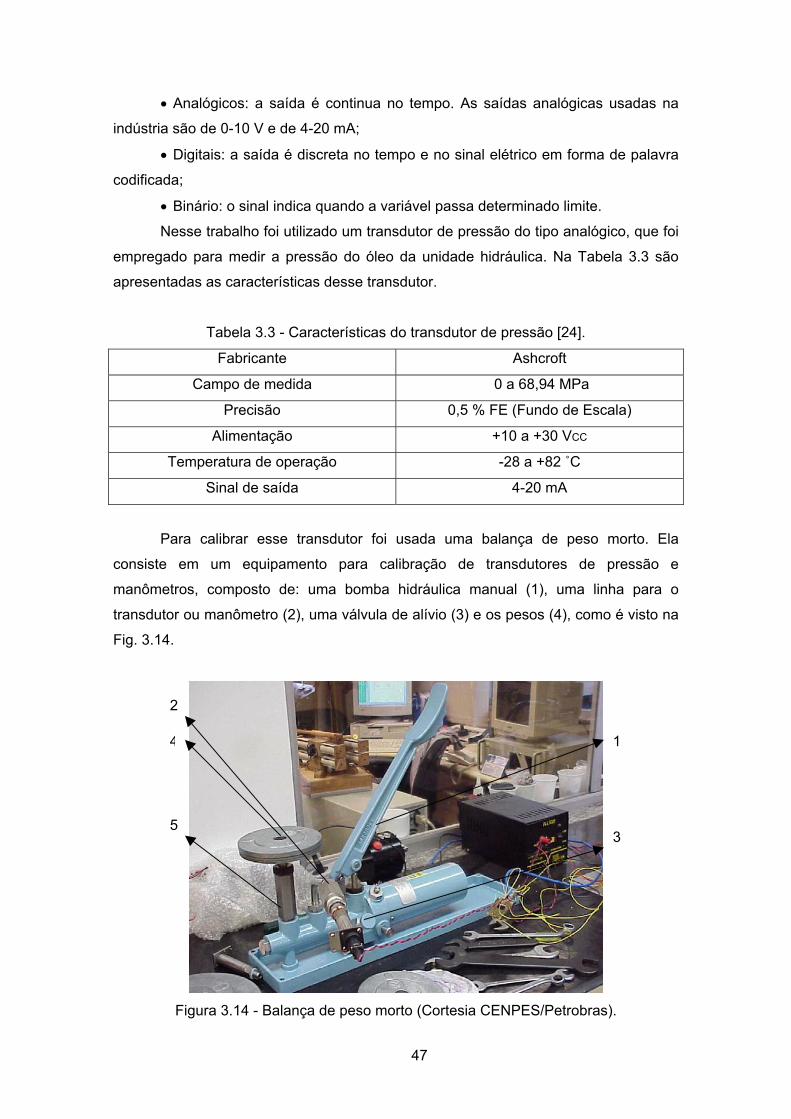
47
• Analógicos: a saída é continua no tempo. As saídas analógicas usadas na
indústria são de 0-10 V e de 4-20 mA;
• Digitais: a saída é discreta no tempo e no sinal elétrico em forma de palavra
codificada;
• Binário: o sinal indica quando a variável passa determinado limite.
Nesse trabalho foi utilizado um transdutor de pressão do tipo analógico, que foi
empregado para medir a pressão do óleo da unidade hidráulica. Na Tabela 3.3 são
apresentadas as características desse transdutor.
Tabela 3.3 - Características do transdutor de pressão [24].
Fabricante Ashcroft
Campo de medida 0 a 68,94 MPa
Precisão 0,5 % FE (Fundo de Escala)
Alimentação +10 a +30 VCC
Temperatura de operação -28 a +82 ˚C
Sinal de saída 4-20 mA
Para calibrar esse transdutor foi usada uma balança de peso morto. Ela
consiste em um equipamento para calibração de transdutores de pressão e
manômetros, composto de: uma bomba hidráulica manual (1), uma linha para o
transdutor ou manômetro (2), uma válvula de alívio (3) e os pesos (4), como é visto na
Fig. 3.14.
Figura 3.14 - Balança de peso morto (Cortesia CENPES/Petrobras).
1
2
3 5
4
48
Os pesos, em função da sua massa e da área do pistão do cilindro hidráulico
(item 5, Fig. 3.14), fornecem ao fluido uma pressão conhecida. Esse sistema é usado
e recomendado pela Rede Brasileira de Calibração – Inmetro [25]. É apresentado na
Tab. 3.4 as características da balança utilizada.
Tabela 3.4 - Características da balança de peso morto [26].
Fabricante Ashcroft
Modelo 1305D
Precisão 0,1 % do valor da pressão lida
Pressão de operação 0,1 a 70 MPa
Os dados referentes à calibração se encontram na Tab. 3.5.
Tabela 3.5 - Valores de pressão obtidos na balança e seu valor correspondente em
corrente.
Pressão (MPa) Corrente (mA) Pressão (MPa) Corrente (mA)
0,68 4,78 7,58 12,80
1,38 5,56 8,27 13,51
2,06 6,36 8,96 14,30
2,76 7,13 9,65 15,06
3,44 7,87 10,34 15,82
4,13 8,66 11,03 16,87
4,82 9,42 11,72 17,36
5,52 10,27 12,41 18,18
6,20 11,01 13,10 18,92
6,89 11,96 13,78 19,76
É observado na Fig. 3.15 o gráfico pressão versus corrente.
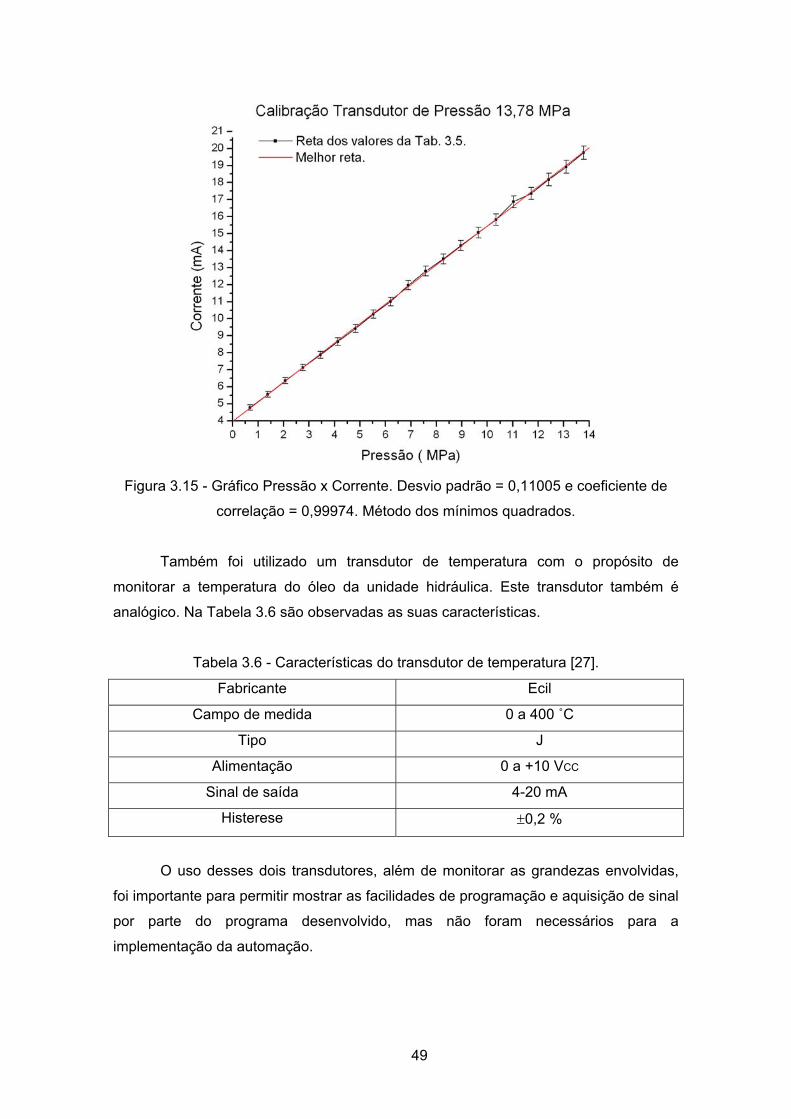
49
Figura 3.15 - Gráfico Pressão x Corrente. Desvio padrão = 0,11005 e coeficiente de
correlação = 0,99974. Método dos mínimos quadrados.
Também foi utilizado um transdutor de temperatura com o propósito de
monitorar a temperatura do óleo da unidade hidráulica. Este transdutor também é
analógico. Na Tabela 3.6 são observadas as suas características.
Tabela 3.6 - Características do transdutor de temperatura [27].
Fabricante Ecil
Campo de medida 0 a 400 ˚C
Tipo J
Alimentação 0 a +10 VCC
Sinal de saída 4-20 mA
Histerese ±0,2 %
O uso desses dois transdutores, além de monitorar as grandezas envolvidas,
foi importante para permitir mostrar as facilidades de programação e aquisição de sinal
por parte do programa desenvolvido, mas não foram necessários para a
implementação da automação.
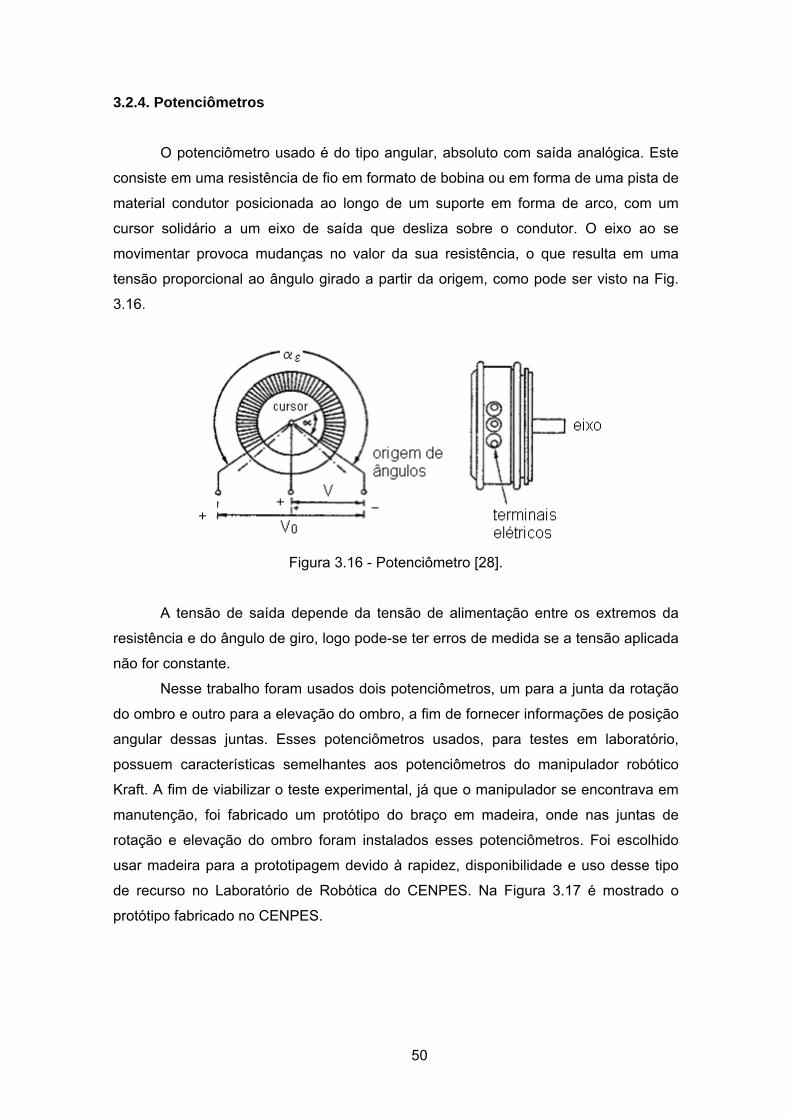
50
3.2.4. Potenciômetros
O potenciômetro usado é do tipo angular, absoluto com saída analógica. Este
consiste em uma resistência de fio em formato de bobina ou em forma de uma pista de
material condutor posicionada ao longo de um suporte em forma de arco, com um
cursor solidário a um eixo de saída que desliza sobre o condutor. O eixo ao se
movimentar provoca mudanças no valor da sua resistência, o que resulta em uma
tensão proporcional ao ângulo girado a partir da origem, como pode ser visto na Fig.
3.16.
Figura 3.16 - Potenciômetro [28].
A tensão de saída depende da tensão de alimentação entre os extremos da
resistência e do ângulo de giro, logo pode-se ter erros de medida se a tensão aplicada
não for constante.
Nesse trabalho foram usados dois potenciômetros, um para a junta da rotação
do ombro e outro para a elevação do ombro, a fim de fornecer informações de posição
angular dessas juntas. Esses potenciômetros usados, para testes em laboratório,
possuem características semelhantes aos potenciômetros do manipulador robótico
Kraft. A fim de viabilizar o teste experimental, já que o manipulador se encontrava em
manutenção, foi fabricado um protótipo do braço em madeira, onde nas juntas de
rotação e elevação do ombro foram instalados esses potenciômetros. Foi escolhido
usar madeira para a prototipagem devido à rapidez, disponibilidade e uso desse tipo
de recurso no Laboratório de Robótica do CENPES. Na Figura 3.17 é mostrado o
protótipo fabricado no CENPES.
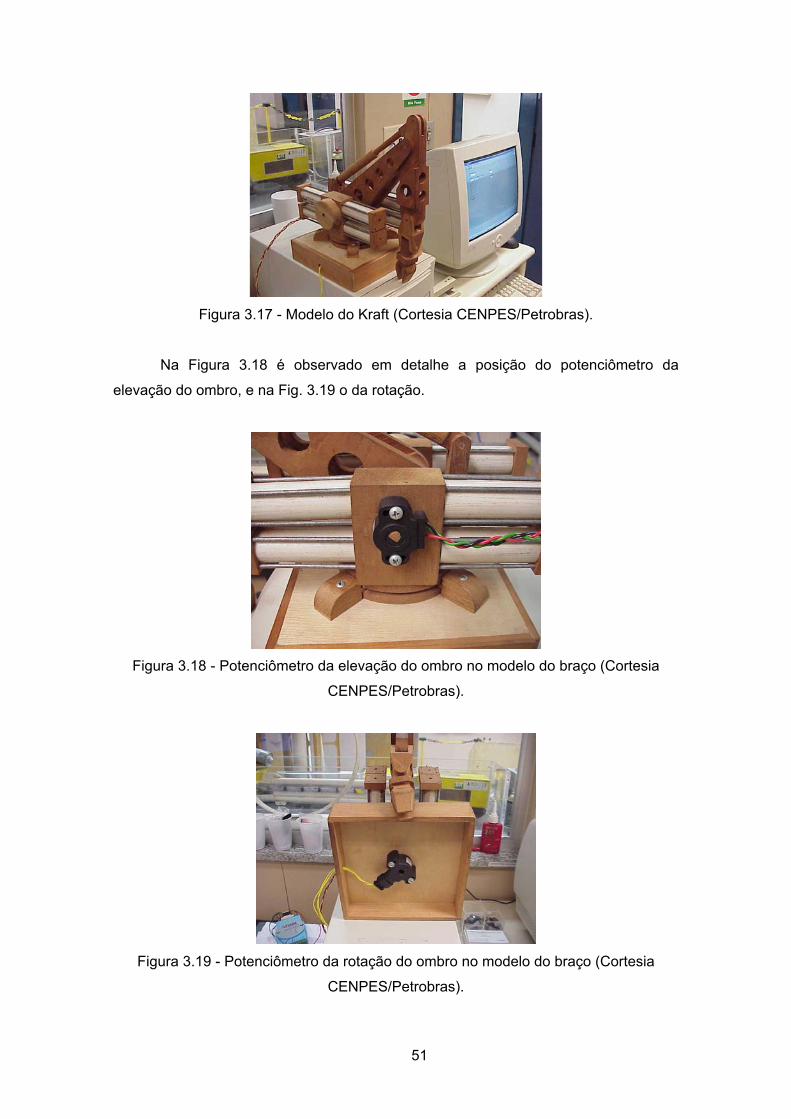
51
Figura 3.17 - Modelo do Kraft (Cortesia CENPES/Petrobras).
Na Figura 3.18 é observado em detalhe a posição do potenciômetro da
elevação do ombro, e na Fig. 3.19 o da rotação.
Figura 3.18 - Potenciômetro da elevação do ombro no modelo do braço (Cortesia
CENPES/Petrobras).
Figura 3.19 - Potenciômetro da rotação do ombro no modelo do braço (Cortesia
CENPES/Petrobras).
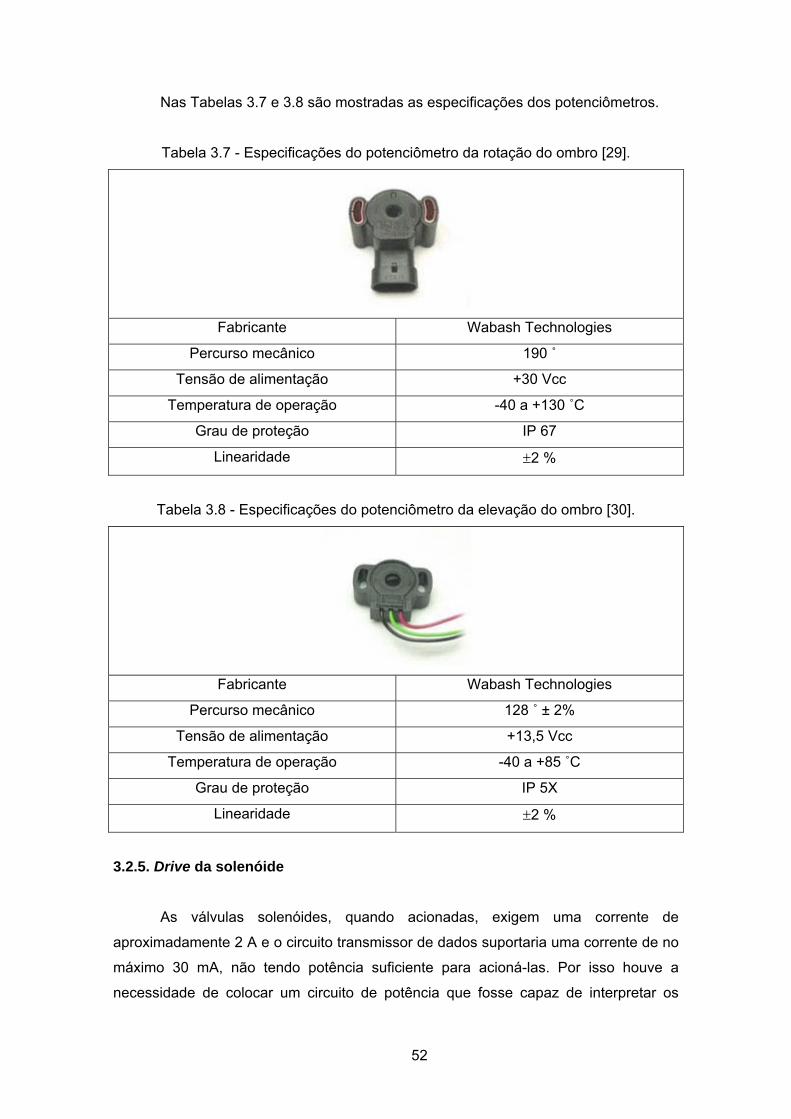
52
Nas Tabelas 3.7 e 3.8 são mostradas as especificações dos potenciômetros.
Tabela 3.7 - Especificações do potenciômetro da rotação do ombro [29].
Fabricante Wabash Technologies
Percurso mecânico 190 ˚
Tensão de alimentação +30 Vcc
Temperatura de operação -40 a +130 ˚C
Grau de proteção IP 67
Linearidade ±2 %
Tabela 3.8 - Especificações do potenciômetro da elevação do ombro [30].
Fabricante Wabash Technologies
Percurso mecânico 128 ˚ ± 2%
Tensão de alimentação +13,5 Vcc
Temperatura de operação -40 a +85 ˚C
Grau de proteção IP 5X
Linearidade ±2 %
3.2.5. Drive da solenóide
As válvulas solenóides, quando acionadas, exigem uma corrente de
aproximadamente 2 A e o circuito transmissor de dados suportaria uma corrente de no
máximo 30 mA, não tendo potência suficiente para acioná-las. Por isso houve a
necessidade de colocar um circuito de potência que fosse capaz de interpretar os
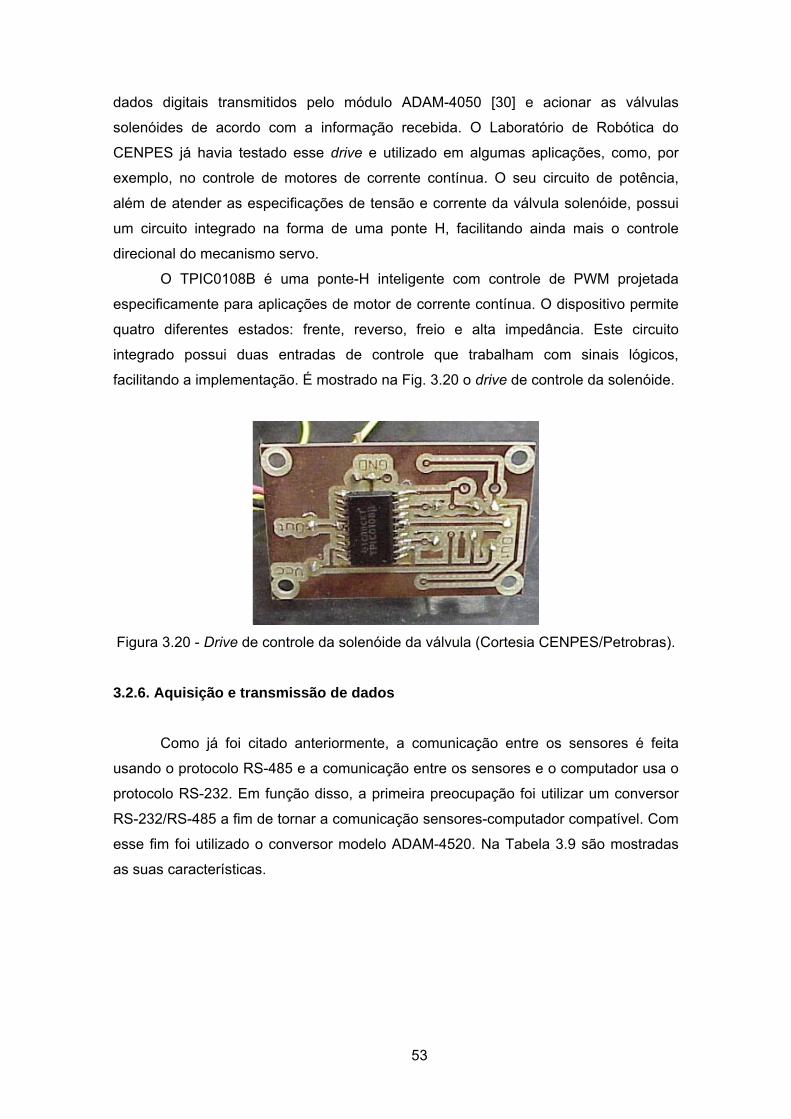
53
dados digitais transmitidos pelo módulo ADAM-4050 [30] e acionar as válvulas
solenóides de acordo com a informação recebida. O Laboratório de Robótica do
CENPES já havia testado esse drive e utilizado em algumas aplicações, como, por
exemplo, no controle de motores de corrente contínua. O seu circuito de potência,
além de atender as especificações de tensão e corrente da válvula solenóide, possui
um circuito integrado na forma de uma ponte H, facilitando ainda mais o controle
direcional do mecanismo servo.
O TPIC0108B é uma ponte-H inteligente com controle de PWM projetada
especificamente para aplicações de motor de corrente contínua. O dispositivo permite
quatro diferentes estados: frente, reverso, freio e alta impedância. Este circuito
integrado possui duas entradas de controle que trabalham com sinais lógicos,
facilitando a implementação. É mostrado na Fig. 3.20 o drive de controle da solenóide.
Figura 3.20 - Drive de controle da solenóide da válvula (Cortesia CENPES/Petrobras).
3.2.6. Aquisição e transmissão de dados
Como já foi citado anteriormente, a comunicação entre os sensores é feita
usando o protocolo RS-485 e a comunicação entre os sensores e o computador usa o
protocolo RS-232. Em função disso, a primeira preocupação foi utilizar um conversor
RS-232/RS-485 a fim de tornar a comunicação sensores-computador compatível. Com
esse fim foi utilizado o conversor modelo ADAM-4520. Na Tabela 3.9 são mostradas
as suas características.
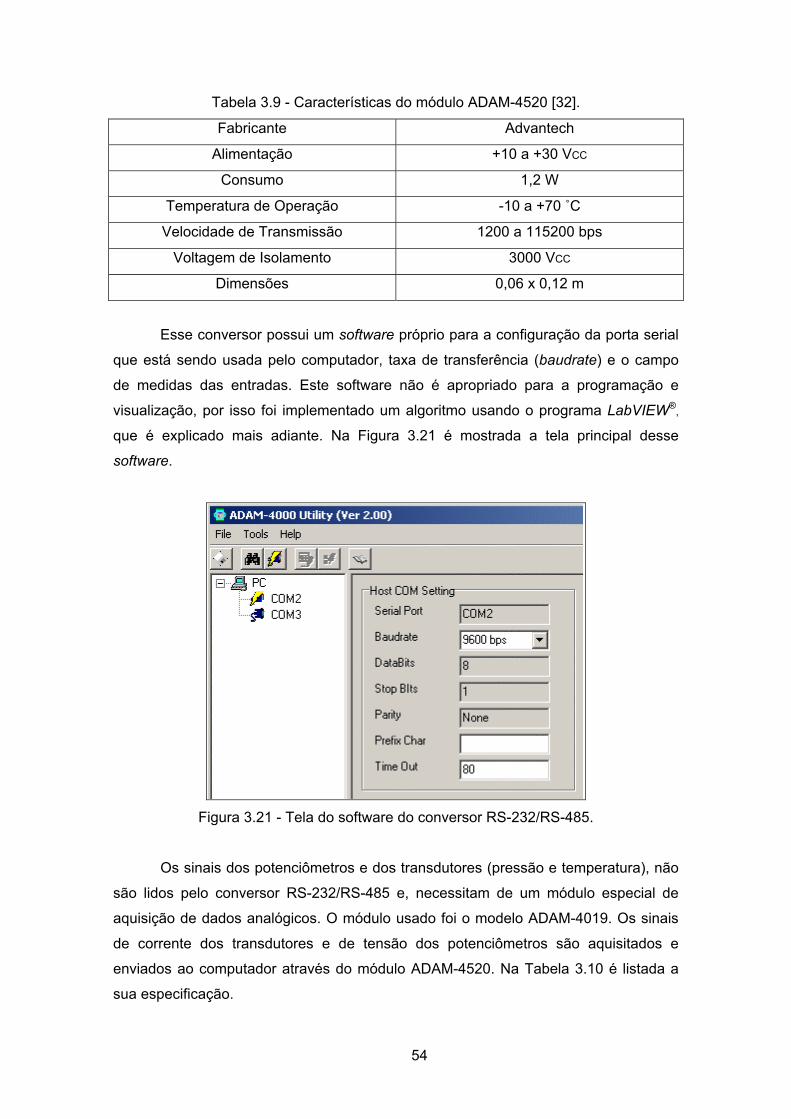
54
Tabela 3.9 - Características do módulo ADAM-4520 [32].
Fabricante Advantech
Alimentação +10 a +30 VCC
Consumo 1,2 W
Temperatura de Operação -10 a +70 ˚C
Velocidade de Transmissão 1200 a 115200 bps
Voltagem de Isolamento 3000 VCC
Dimensões 0,06 x 0,12 m
Esse conversor possui um software próprio para a configuração da porta serial
que está sendo usada pelo computador, taxa de transferência (baudrate) e o campo
de medidas das entradas. Este software não é apropriado para a programação e
visualização, por isso foi implementado um algoritmo usando o programa LabVIEW®,
que é explicado mais adiante. Na Figura 3.21 é mostrada a tela principal desse
software.
Figura 3.21 - Tela do software do conversor RS-232/RS-485.
Os sinais dos potenciômetros e dos transdutores (pressão e temperatura), não
são lidos pelo conversor RS-232/RS-485 e, necessitam de um módulo especial de
aquisição de dados analógicos. O módulo usado foi o modelo ADAM-4019. Os sinais
de corrente dos transdutores e de tensão dos potenciômetros são aquisitados e
enviados ao computador através do módulo ADAM-4520. Na Tabela 3.10 é listada a
sua especificação.
55
Tabela 3.10 - Características do ADAM-4019 [33].
Fabricante Advantech
Resolução 16 bit
Canais 8 diferenciais para entradas individuais
Campo de Medida ±100 mV, ±500 mV, ±1 V, ±2.5 V, ±5 V, ±10 V, ±20 mA
Voltagem de Isolamento 3000 VCC
Impedância de Entrada 20 mΩ
Exatidão ±0,1 % da voltagem de entrada
Alimentação +10 a +30 VCC
Consumo de Potência 1,2 W
Dimensões 0,06 x 0,12 m
As especificações dos módulos ADAM são suficientes para as necessidades do
sistema de aquisição de dados. São compactos, de fácil configuração e programação,
além de confiáveis.
A partir dos dados lidos nos potenciômetros, o programa envia sinais para
comutar as válvulas solenóides. Para isso foi usado o drive de controle, já citado, e o
módulo modelo 4050. Esse módulo trabalha com sinais digitais. Na Tabela 3.11 são
mostrada as suas caracteríticas.
Tabela 3.11 - Especificações do módulo ADAM-4050 [31].
Fabricante Advantech
Número de canais 7
Nível lógico 0 +1 V máximo
Nível lógico 1 +3,5 V a +30 V
Alimentação +10 a +30 VCC
Consumo de potência 0,4 W
Dimensões 0,06 x 0,12 m
3.2.7. Programação e visualização
O programa desenvolvido usando o software LabVIEW® tem como função
monitorar os movimentos do braço através dos sinais elétricos enviados pelos
potenciômetros de rotação e elevação do ombro do escravo. Com isso o programa
pode ou não enviar sinais elétricos para as solenóides das válvulas direcionais do
horizontal e vertical da câmera através da seguinte lógica:
56
• Lê o sinal recebido do potenciômetro de cada grau de liberdade do braço
escravo (rotação do ombro e elevação do ombro), e armazena estes valores na
memória;
• Aguarda um tempo pré-programado e faz novamente a leitura destes sinais;
• Compara os valores armazenados com os últimos valores lidos:
1. Caso os valores sejam iguais, significando que a junta do braço não está se
movimentando, o programa não enviará sinal elétrico para a solenóide da válvula
direcional da câmera, isto quer dizer que a câmera continuará parada igual ao braço;
2. Caso os valores sejam diferentes, significando que a junta está em
movimento, o programa enviará o sinal de comando para a solenóide da válvula
proporcional da câmera, fazendo com que a câmera se movimente junto com o braço;
Obs.: esta lógica se aplica para cada um dos dois graus de liberdade do braço.
No início, foi optado por trabalhar com um microcontrolador PIC ao invés do
programa em LabVIEW®. Mas depois de alguns testes se resolveu não usá-lo pois
cada ajuste que era necessário fazer na lógica do controlador obrigava a programá-lo
novamente, enquanto que usando a programação em LabVIEW® os ajustes se
tornaram muito mais rápidos e fáceis de serem introduzidos, pois bastava entrar no
diagrama de blocos do programa e efetuar a mudança, mesmo quando o programa
estava rodando.
O programa desenvolvido também forneceu informações de temperatura e
pressão de óleo da unidade hidráulica usada para o teste experimental. Para isso
foram usados os transdutores de pressão e temperaturas já mencionados.
Outra facilidade do programa desenvolvido é o fato de apresentar uma tela
para calibração dos limites angulares de cada uma das duas juntas do braço escravo.
Com isso, antes de se iniciar o programa, são feitas as calibrações e ajustes dos
ângulos das duas juntas do braço. Quando o programa é colocado para rodar, o
sistema de movimentação da câmera procura a posição inicial do braço para, a partir
desse momento, iniciar o movimento do braço e o acompanhamento por parte da
câmera. Na Figura 3.22 é mostrada essa tela do programa.
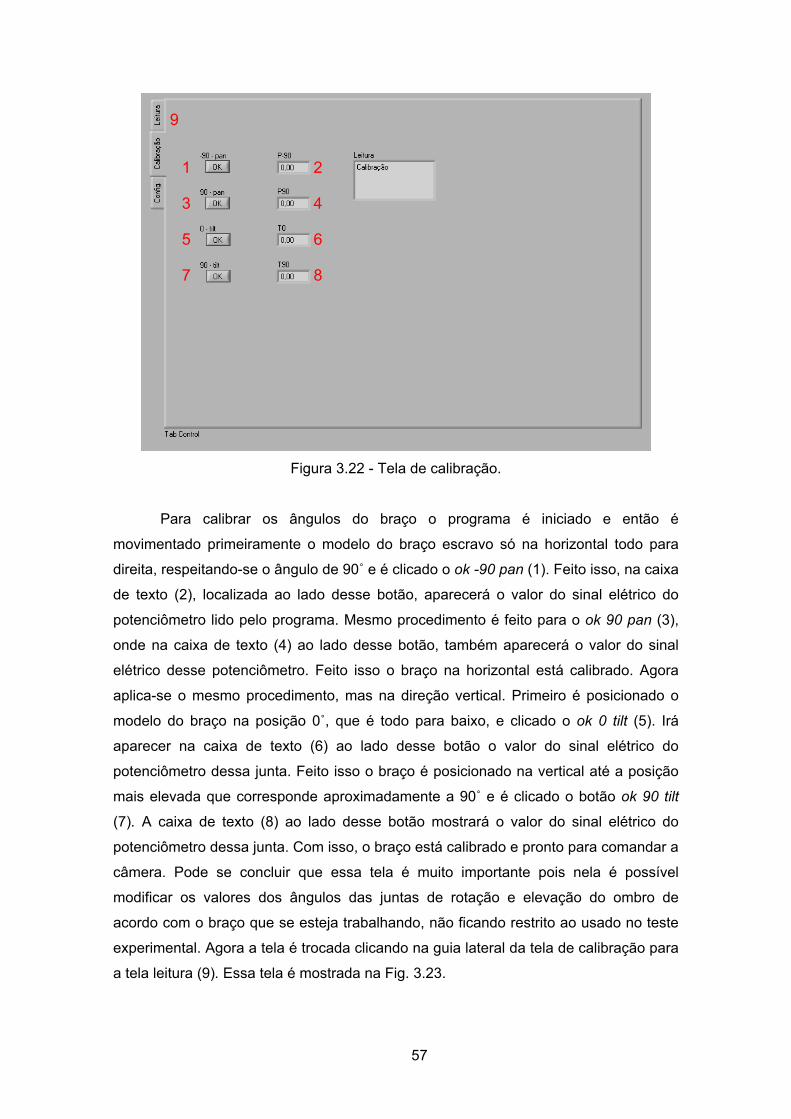
57
Figura 3.22 - Tela de calibração.
Para calibrar os ângulos do braço o programa é iniciado e então é
movimentado primeiramente o modelo do braço escravo só na horizontal todo para
direita, respeitando-se o ângulo de 90˚ e é clicado o ok -90 pan (1). Feito isso, na caixa
de texto (2), localizada ao lado desse botão, aparecerá o valor do sinal elétrico do
potenciômetro lido pelo programa. Mesmo procedimento é feito para o ok 90 pan (3),
onde na caixa de texto (4) ao lado desse botão, também aparecerá o valor do sinal
elétrico desse potenciômetro. Feito isso o braço na horizontal está calibrado. Agora
aplica-se o mesmo procedimento, mas na direção vertical. Primeiro é posicionado o
modelo do braço na posição 0˚, que é todo para baixo, e clicado o ok 0 tilt (5). Irá
aparecer na caixa de texto (6) ao lado desse botão o valor do sinal elétrico do
potenciômetro dessa junta. Feito isso o braço é posicionado na vertical até a posição
mais elevada que corresponde aproximadamente a 90˚ e é clicado o botão ok 90 tilt
(7). A caixa de texto (8) ao lado desse botão mostrará o valor do sinal elétrico do
potenciômetro dessa junta. Com isso, o braço está calibrado e pronto para comandar a
câmera. Pode se concluir que essa tela é muito importante pois nela é possível
modificar os valores dos ângulos das juntas de rotação e elevação do ombro de
acordo com o braço que se esteja trabalhando, não ficando restrito ao usado no teste
experimental. Agora a tela é trocada clicando na guia lateral da tela de calibração para
a tela leitura (9). Essa tela é mostrada na Fig. 3.23.
1
3
5
7
2
4
6
8
9
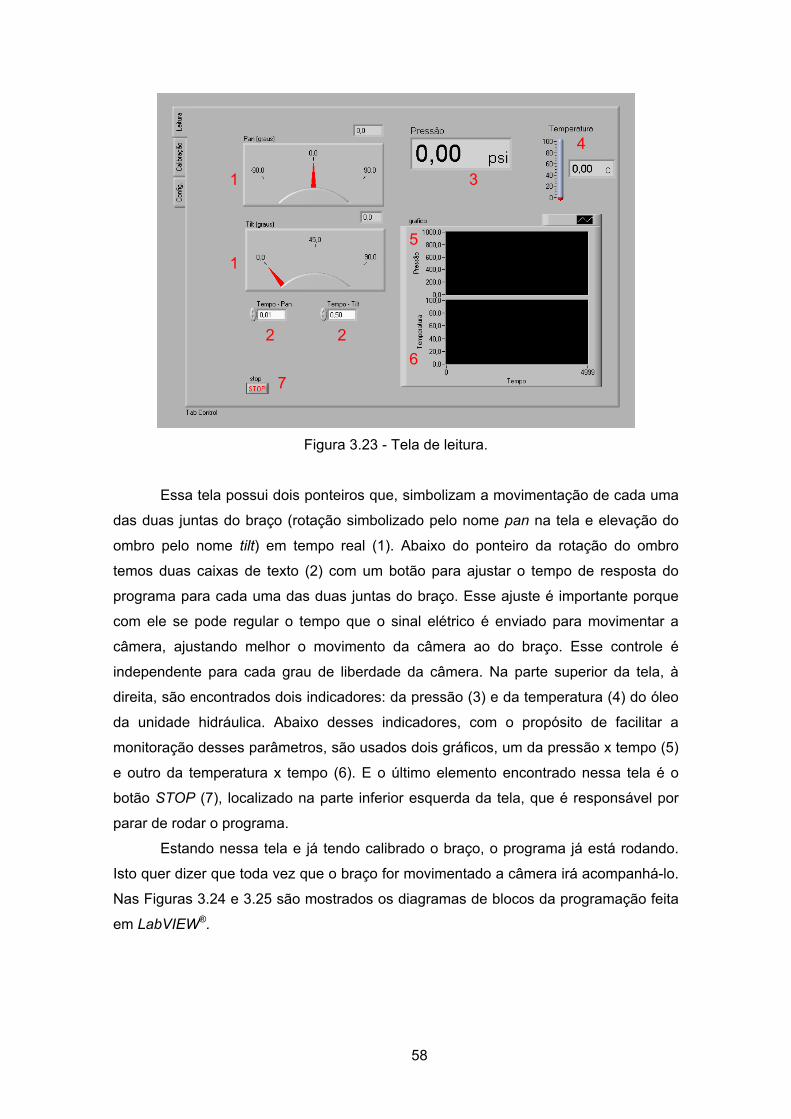
58
Figura 3.23 - Tela de leitura.
Essa tela possui dois ponteiros que, simbolizam a movimentação de cada uma
das duas juntas do braço (rotação simbolizado pelo nome pan na tela e elevação do
ombro pelo nome tilt) em tempo real (1). Abaixo do ponteiro da rotação do ombro
temos duas caixas de texto (2) com um botão para ajustar o tempo de resposta do
programa para cada uma das duas juntas do braço. Esse ajuste é importante porque
com ele se pode regular o tempo que o sinal elétrico é enviado para movimentar a
câmera, ajustando melhor o movimento da câmera ao do braço. Esse controle é
independente para cada grau de liberdade da câmera. Na parte superior da tela, à
direita, são encontrados dois indicadores: da pressão (3) e da temperatura (4) do óleo
da unidade hidráulica. Abaixo desses indicadores, com o propósito de facilitar a
monitoração desses parâmetros, são usados dois gráficos, um da pressão x tempo (5)
e outro da temperatura x tempo (6). E o último elemento encontrado nessa tela é o
botão STOP (7), localizado na parte inferior esquerda da tela, que é responsável por
parar de rodar o programa.
Estando nessa tela e já tendo calibrado o braço, o programa já está rodando.
Isto quer dizer que toda vez que o braço for movimentado a câmera irá acompanhá-lo.
Nas Figuras 3.24 e 3.25 são mostrados os diagramas de blocos da programação feita
em LabVIEW®.
1
1
2 2
3
4
5
6 7
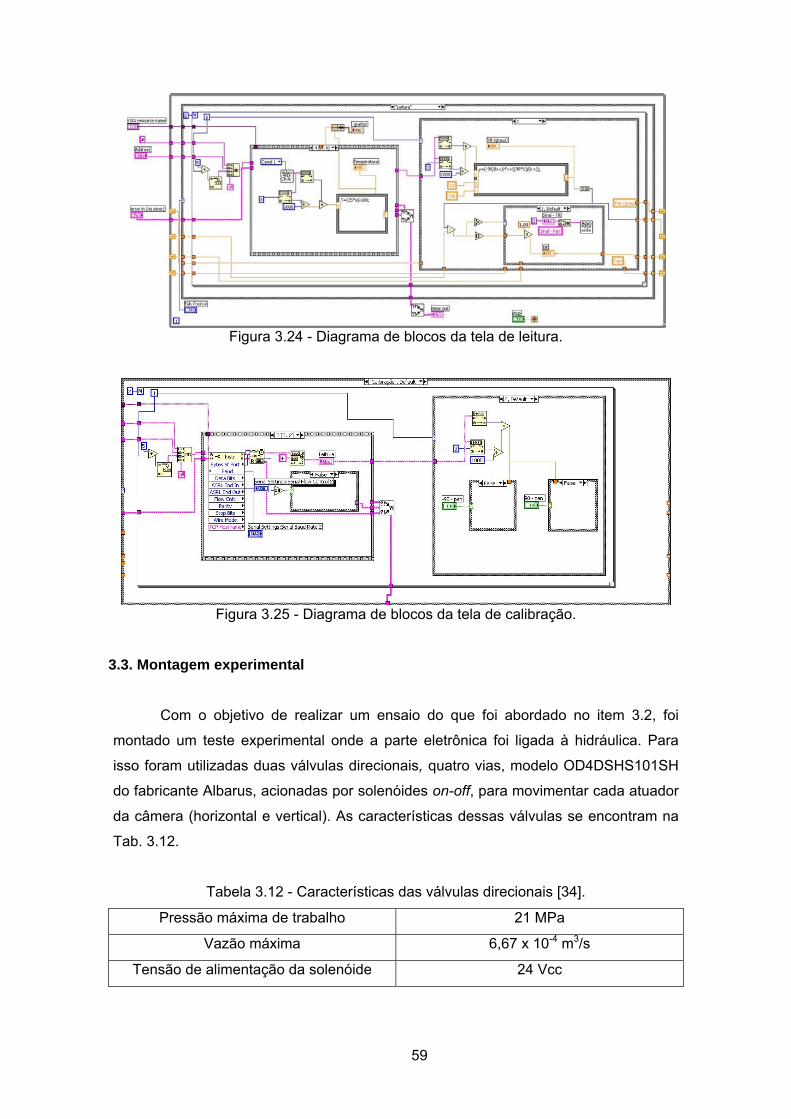
59
Figura 3.24 - Diagrama de blocos da tela de leitura.
Figura 3.25 - Diagrama de blocos da tela de calibração.
3.3. Montagem experimental
Com o objetivo de realizar um ensaio do que foi abordado no item 3.2, foi
montado um teste experimental onde a parte eletrônica foi ligada à hidráulica. Para
isso foram utilizadas duas válvulas direcionais, quatro vias, modelo OD4DSHS101SH
do fabricante Albarus, acionadas por solenóides on-off, para movimentar cada atuador
da câmera (horizontal e vertical). As características dessas válvulas se encontram na
Tab. 3.12.
Tabela 3.12 - Características das válvulas direcionais [34].
Pressão máxima de trabalho 21 MPa
Vazão máxima 6,67 x 10-4 m3/s
Tensão de alimentação da solenóide 24 Vcc
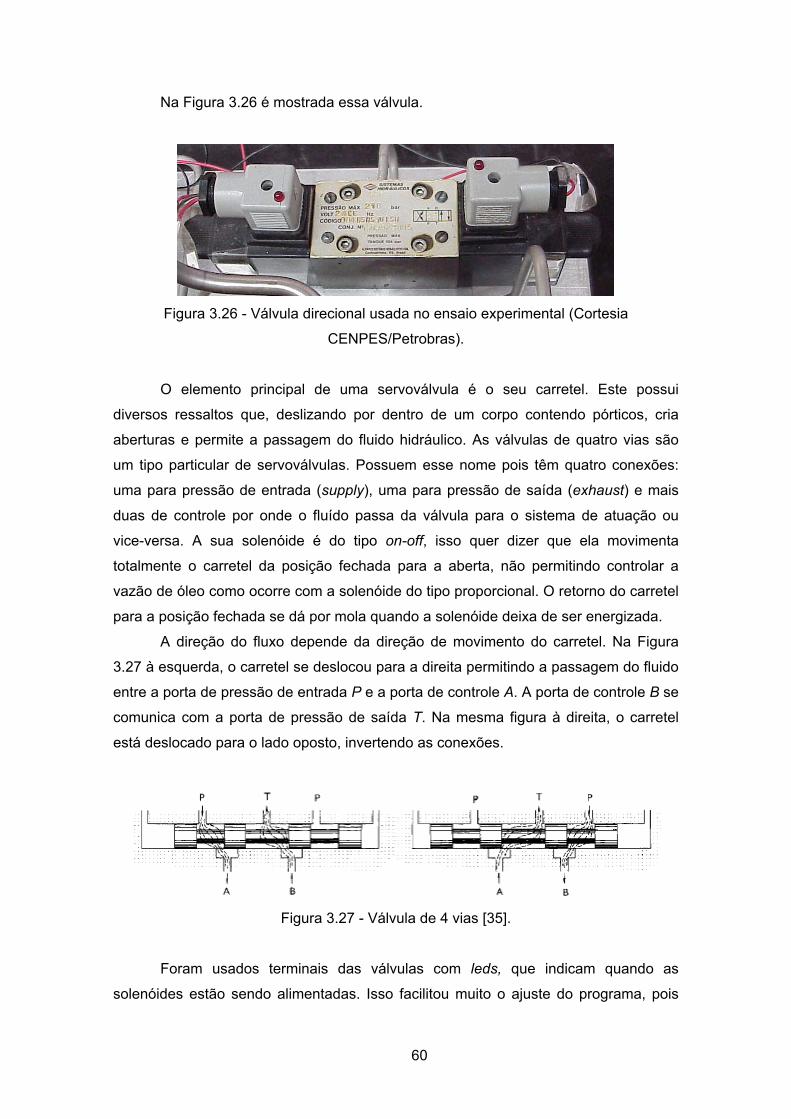
60
Na Figura 3.26 é mostrada essa válvula.
Figura 3.26 - Válvula direcional usada no ensaio experimental (Cortesia
CENPES/Petrobras).
O elemento principal de uma servoválvula é o seu carretel. Este possui
diversos ressaltos que, deslizando por dentro de um corpo contendo pórticos, cria
aberturas e permite a passagem do fluido hidráulico. As válvulas de quatro vias são
um tipo particular de servoválvulas. Possuem esse nome pois têm quatro conexões:
uma para pressão de entrada (supply), uma para pressão de saída (exhaust) e mais
duas de controle por onde o fluído passa da válvula para o sistema de atuação ou
vice-versa. A sua solenóide é do tipo on-off, isso quer dizer que ela movimenta
totalmente o carretel da posição fechada para a aberta, não permitindo controlar a
vazão de óleo como ocorre com a solenóide do tipo proporcional. O retorno do carretel
para a posição fechada se dá por mola quando a solenóide deixa de ser energizada.
A direção do fluxo depende da direção de movimento do carretel. Na Figura
3.27 à esquerda, o carretel se deslocou para a direita permitindo a passagem do fluido
entre a porta de pressão de entrada P e a porta de controle A. A porta de controle B se
comunica com a porta de pressão de saída T. Na mesma figura à direita, o carretel
está deslocado para o lado oposto, invertendo as conexões.
Figura 3.27 - Válvula de 4 vias [35].
Foram usados terminais das válvulas com leds, que indicam quando as
solenóides estão sendo alimentadas. Isso facilitou muito o ajuste do programa, pois

61
assim foi fácil distinguir qual solenóide estava sendo energizada quando se
movimentava o braço escravo.
A fim de ligar cada uma das duas válvulas à unidade hidráulica e ao sistema de
movimentação da câmera, foram fabricados dois blocos manifolds, como é mostrado
na Fig. 3.28.
Figura 3.28 - Manifold da válvula direcional (Cortesia CENPES/Petrobras).
Para permitir uma montagem hidráulica com menos mangueiras, foi projetado
uma bancada para as válvulas, onde as tomadas de pressão (P) e tanque (T) são
comuns as duas válvulas, e as posições A e B são individuais. É observada na Fig.
3.29 a parte frontal da bancada.
Figura 3.29 - Parte frontal da bancada onde podemos visualizar as válvulas esfera e
agulha, o manômetro, o transdutor de pressão e as linhas P, T, A e B (Cortesia
CENPES/Petrobras).
Manômetro Válvula Agulha Válvula Esfera Transdutor de pressão
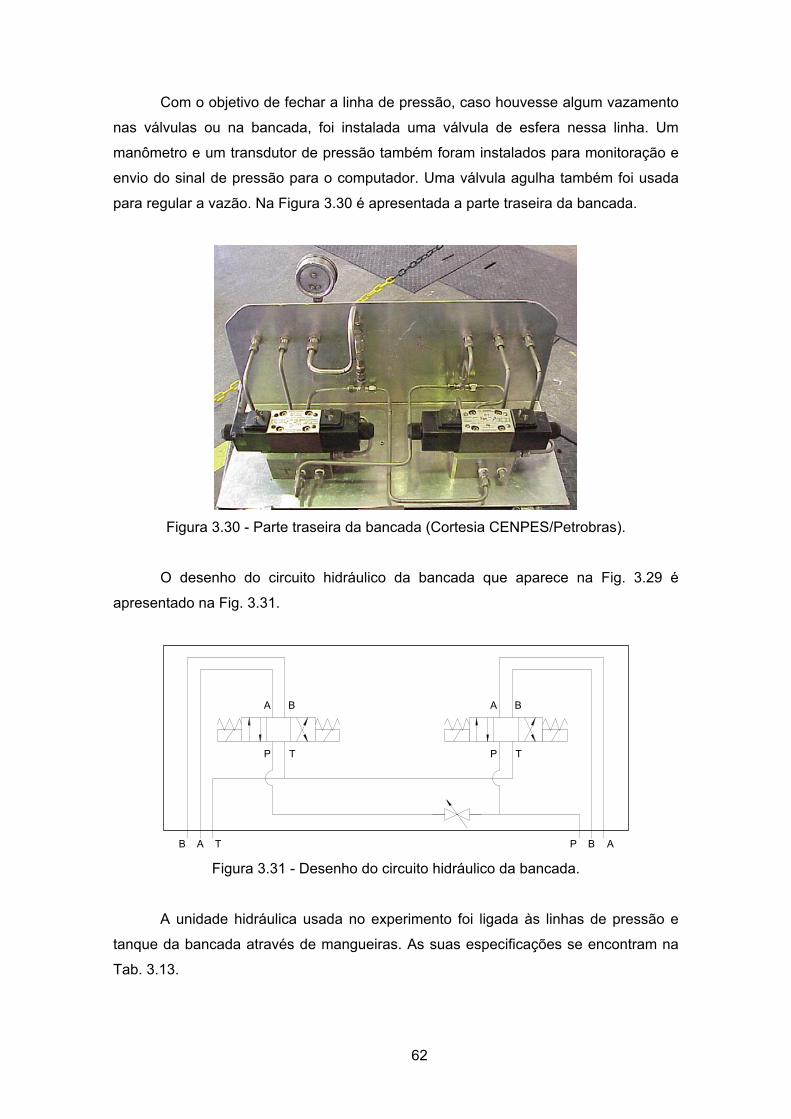
62
Com o objetivo de fechar a linha de pressão, caso houvesse algum vazamento
nas válvulas ou na bancada, foi instalada uma válvula de esfera nessa linha. Um
manômetro e um transdutor de pressão também foram instalados para monitoração e
envio do sinal de pressão para o computador. Uma válvula agulha também foi usada
para regular a vazão. Na Figura 3.30 é apresentada a parte traseira da bancada.
Figura 3.30 - Parte traseira da bancada (Cortesia CENPES/Petrobras).
O desenho do circuito hidráulico da bancada que aparece na Fig. 3.29 é
apresentado na Fig. 3.31.
B A T B AP
B A BA
P T P T
Figura 3.31 - Desenho do circuito hidráulico da bancada.
A unidade hidráulica usada no experimento foi ligada às linhas de pressão e
tanque da bancada através de mangueiras. As suas especificações se encontram na
Tab. 3.13.
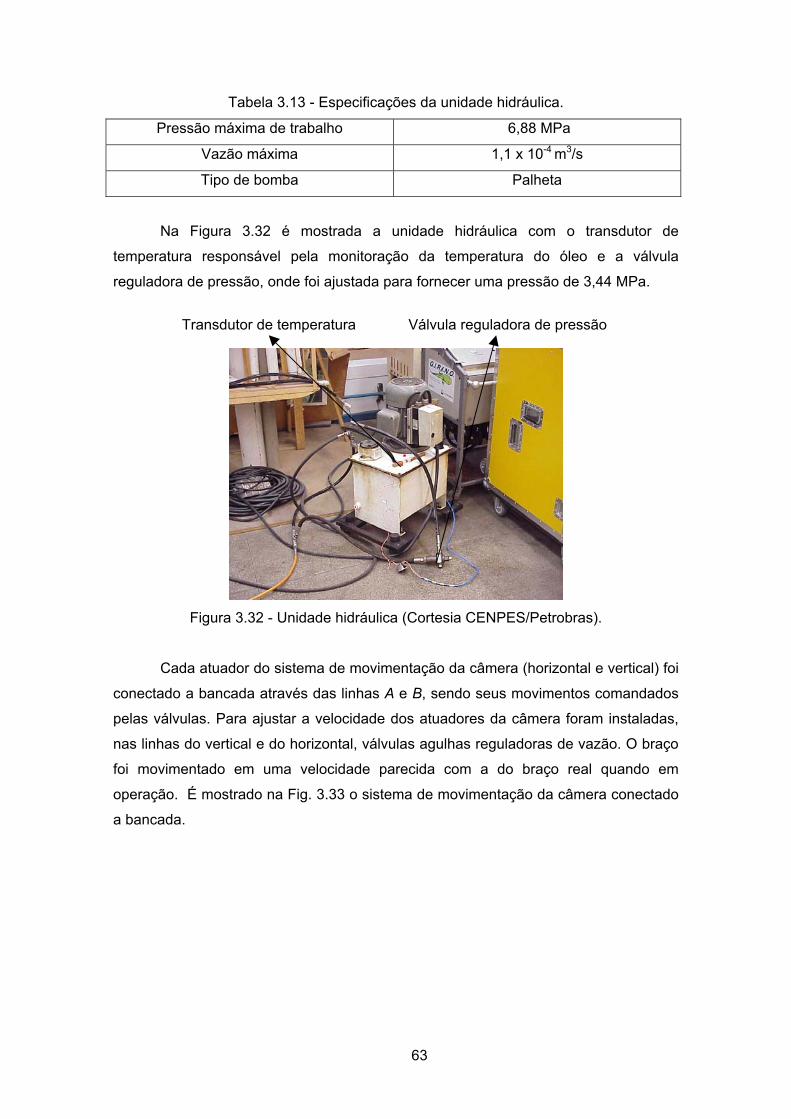
63
Tabela 3.13 - Especificações da unidade hidráulica.
Pressão máxima de trabalho 6,88 MPa
Vazão máxima 1,1 x 10-4 m3/s
Tipo de bomba Palheta
Na Figura 3.32 é mostrada a unidade hidráulica com o transdutor de
temperatura responsável pela monitoração da temperatura do óleo e a válvula
reguladora de pressão, onde foi ajustada para fornecer uma pressão de 3,44 MPa.
Figura 3.32 - Unidade hidráulica (Cortesia CENPES/Petrobras).
Cada atuador do sistema de movimentação da câmera (horizontal e vertical) foi
conectado a bancada através das linhas A e B, sendo seus movimentos comandados
pelas válvulas. Para ajustar a velocidade dos atuadores da câmera foram instaladas,
nas linhas do vertical e do horizontal, válvulas agulhas reguladoras de vazão. O braço
foi movimentado em uma velocidade parecida com a do braço real quando em
operação. É mostrado na Fig. 3.33 o sistema de movimentação da câmera conectado
a bancada.
Transdutor de temperatura Válvula reguladora de pressão
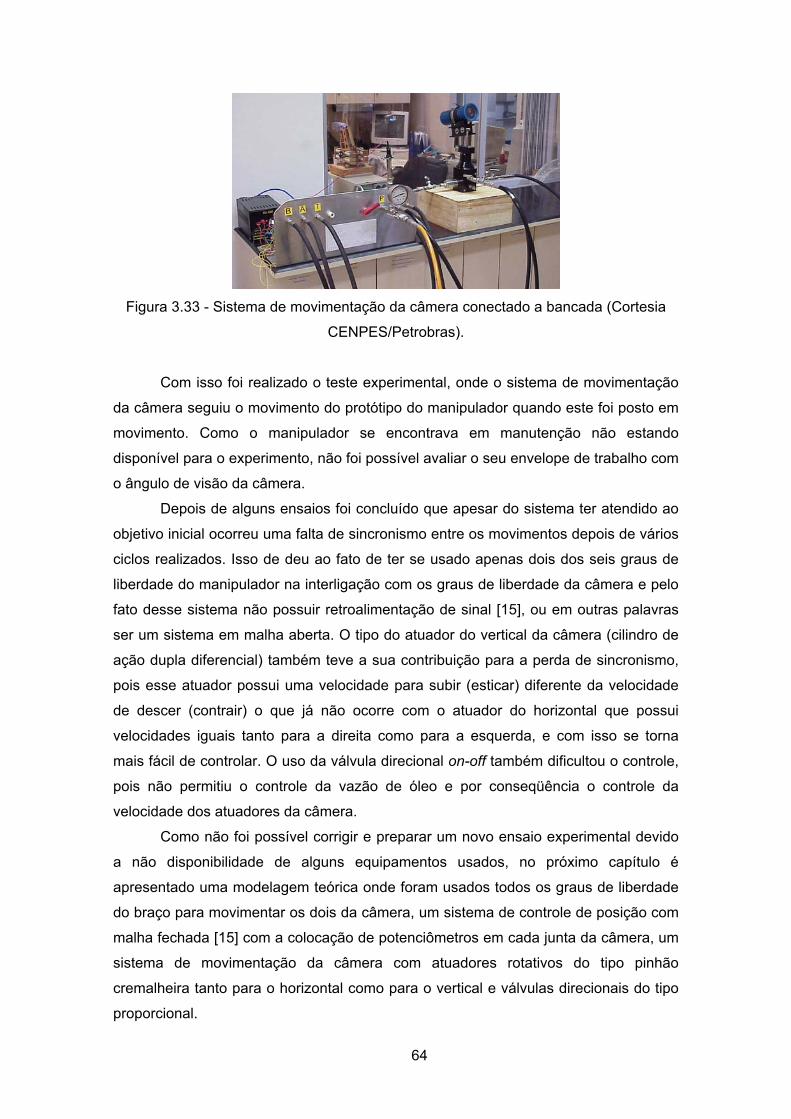
64
Figura 3.33 - Sistema de movimentação da câmera conectado a bancada (Cortesia
CENPES/Petrobras).
Com isso foi realizado o teste experimental, onde o sistema de movimentação
da câmera seguiu o movimento do protótipo do manipulador quando este foi posto em
movimento. Como o manipulador se encontrava em manutenção não estando
disponível para o experimento, não foi possível avaliar o seu envelope de trabalho com
o ângulo de visão da câmera.
Depois de alguns ensaios foi concluído que apesar do sistema ter atendido ao
objetivo inicial ocorreu uma falta de sincronismo entre os movimentos depois de vários
ciclos realizados. Isso de deu ao fato de ter se usado apenas dois dos seis graus de
liberdade do manipulador na interligação com os graus de liberdade da câmera e pelo
fato desse sistema não possuir retroalimentação de sinal [15], ou em outras palavras
ser um sistema em malha aberta. O tipo do atuador do vertical da câmera (cilindro de
ação dupla diferencial) também teve a sua contribuição para a perda de sincronismo,
pois esse atuador possui uma velocidade para subir (esticar) diferente da velocidade
de descer (contrair) o que já não ocorre com o atuador do horizontal que possui
velocidades iguais tanto para a direita como para a esquerda, e com isso se torna
mais fácil de controlar. O uso da válvula direcional on-off também dificultou o controle,
pois não permitiu o controle da vazão de óleo e por conseqüência o controle da
velocidade dos atuadores da câmera.
Como não foi possível corrigir e preparar um novo ensaio experimental devido
a não disponibilidade de alguns equipamentos usados, no próximo capítulo é
apresentado uma modelagem teórica onde foram usados todos os graus de liberdade
do braço para movimentar os dois da câmera, um sistema de controle de posição com
malha fechada [15] com a colocação de potenciômetros em cada junta da câmera, um
sistema de movimentação da câmera com atuadores rotativos do tipo pinhão
cremalheira tanto para o horizontal como para o vertical e válvulas direcionais do tipo
proporcional.
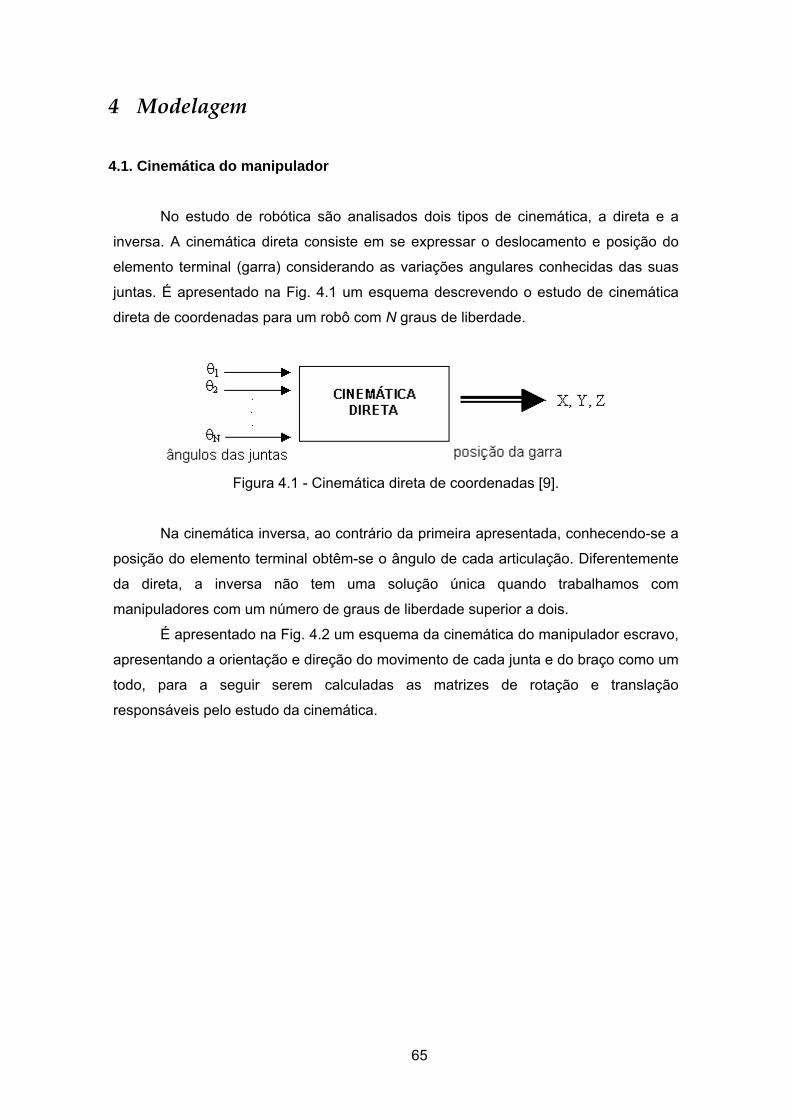
65
4 Modelagem
4.1. Cinemática do manipulador
No estudo de robótica são analisados dois tipos de cinemática, a direta e a
inversa. A cinemática direta consiste em se expressar o deslocamento e posição do
elemento terminal (garra) considerando as variações angulares conhecidas das suas
juntas. É apresentado na Fig. 4.1 um esquema descrevendo o estudo de cinemática
direta de coordenadas para um robô com N graus de liberdade.
Figura 4.1 - Cinemática direta de coordenadas [9].
Na cinemática inversa, ao contrário da primeira apresentada, conhecendo-se a
posição do elemento terminal obtêm-se o ângulo de cada articulação. Diferentemente
da direta, a inversa não tem uma solução única quando trabalhamos com
manipuladores com um número de graus de liberdade superior a dois.
É apresentado na Fig. 4.2 um esquema da cinemática do manipulador escravo,
apresentando a orientação e direção do movimento de cada junta e do braço como um
todo, para a seguir serem calculadas as matrizes de rotação e translação
responsáveis pelo estudo da cinemática.
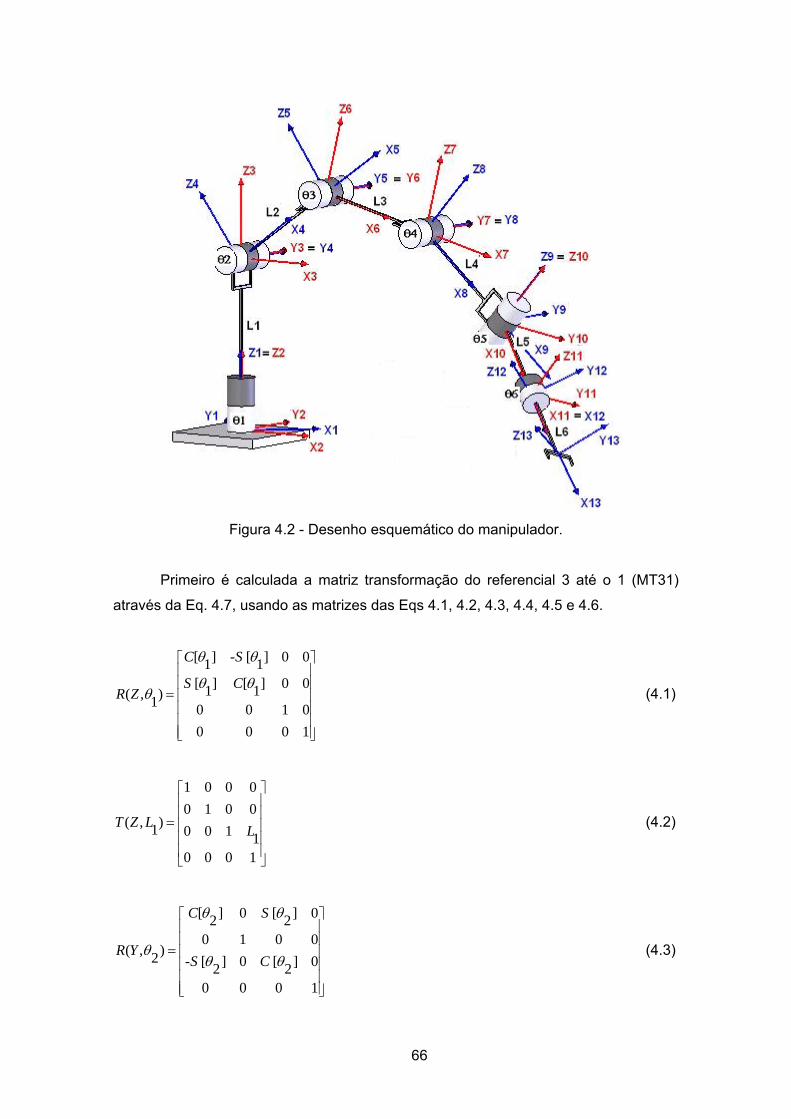
66
Figura 4.2 - Desenho esquemático do manipulador.
Primeiro é calculada a matriz transformação do referencial 3 até o 1 (MT31)
através da Eq. 4.7, usando as matrizes das Eqs 4.1, 4.2, 4.3, 4.4, 4.5 e 4.6.
[ ] - [ ] 0 01 1[ ] [ ] 0 01 1( , )1 0 0 1 00 0 0 1
C S
S CR Z
θ θ
θ θθ
⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
=
(4.1)
1 0 0 00 1 0 0
( , )1 0 0 1 10 0 0 1
T Z L L
⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
= (4.2)
[ ] 0 [ ] 02 20 1 0 0
( , )2 - [ ] 0 [ ] 02 20 0 0 1
C S
R YS C
θ θ
θθ θ
⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
= (4.3)
67
1 0 0 20 1 0 0( , )2 0 0 1 00 0 0 1
L
T X L
⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
= (4.4)
[ ] 0 [ ] 03 30 1 0 0
( , )3 - [ ] 0 [ ] 03 30 0 0 1
C S
R YS C
θ θ
θθ θ
⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
= (4.5)
1 0 0 30 1 0 0( , )3 0 0 1 00 0 0 1
L
T X L
⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
= (4.6)
31 ( , ). ( , ). ( , ). ( , ). ( , ). ( , )1 1 2 2 3 3[ ] [ ] - [ ] [ ] [ ] [ ]( [ ] [ ])1 2 3 1 1 2 3 1 2 2 3 2 3[ ] [ ] [ ] [ ] [ ] [ ]( [ ] [ ])1 2 3 1 1 2 3 1 2 2 3 2 3- [ ] 0 [ ] - [ ]-2 3 2 3 1 2 2 3
MT R Z T Z L R Y T X L R Y T X L
C C S C S C L C L C
S C C S S S L C L C
S C L L S L S
θ θ θ
θ θ θ θ θ θ θ θ θ θ θ
θ θ θ θ θ θ θ θ θ θ θ
θ θ θ θ θ
= =
+ + + +
+ + + +
+ + [ ]2 30 0 0 1
θ θ
⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
+
(4.7)
Agora é calculada a matriz transformação do referencial 6 até o 3 (MT63)
através da Eq. 4.14, usando as matrizes das Eqs. 4.8, 4.9, 4.10, 4.11, 4.12 e 4.13.
[ ] 0 [ ] 04 40 1 0 0
( , )4 - [ ] 0 [ ] 04 40 0 0 1
C S
R YS C
θ θ
θθ θ
⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
= (4.8)
1 0 0 40 1 0 0( , )4 0 0 1 00 0 0 1
L
T X L
⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
= (4.9)

68
[ ] - [ ] 0 05 5[ ] [ ] 0 05 5( , )5 0 0 1 00 0 0 1
C S
S CR Z
θ θ
θ θθ
⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
= (4.10)
1 0 0 50 1 0 0( , )5 0 0 1 00 0 0 1
L
T X L
⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
= (4.11)
1 0 0 00 [ ] - [ ] 06 6( , )6 0 [ ] [ ] 06 60 0 0 1
C SR X
S C
θ θθ
θ θ
⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
= (4.12)
1 0 0 60 1 0 0( , )6 0 0 1 00 0 0 1
L
T X L
⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
= (4.13)
63 ( , ). ( , ). ( , ). ( , ). ( , ). ( , )5 54 4 6 6[ ] [ ] - [ ] [ ] [ ] [ ] [ ] [ 6] [ 4] [ 4] [ 5] [ 6]5 54 4 6 4 6
[ ] [ ] [ ] - [ ] [ ]5 5 56 6- [ ] [ ] [ ] [ ] [ ] [ ] [ ] [ ] [ ]- [ ] [ ]5 5 54 6 4 4 6 4 6 4
MT R Y T X L R Z T X L R X T X L
C C C C S S S C S C S S
S C C C S
C S C S S C S C C S S
θ θ θ
θ θ θ θ θ θ θ θ θ θ θ θ
θ θ θ θ θ
θ θ θ θ θ θ θ θ θ θ θ
= =
+ +
+ [ ]60 0 0
[ ]( ( ) [ ])5 54 4 6( ) [ ]5 56
-( ( ) [ ]) [ ]5 54 6 41
S
C L L L C
L L S
L L L C S
θ
θ θ
θ
θ θ
⎡⎢⎢⎢⎢⎢⎢⎣
⎤⎥⎥⎥⎥⎥⎥⎦
+ +
+
+ +
(4.14)
Com as matrizes de posição e orientação calculadas, é possível chegar no
valor da matriz transformada total (MT61), do referencial 6 até o 1, através da Eq.
4.15.
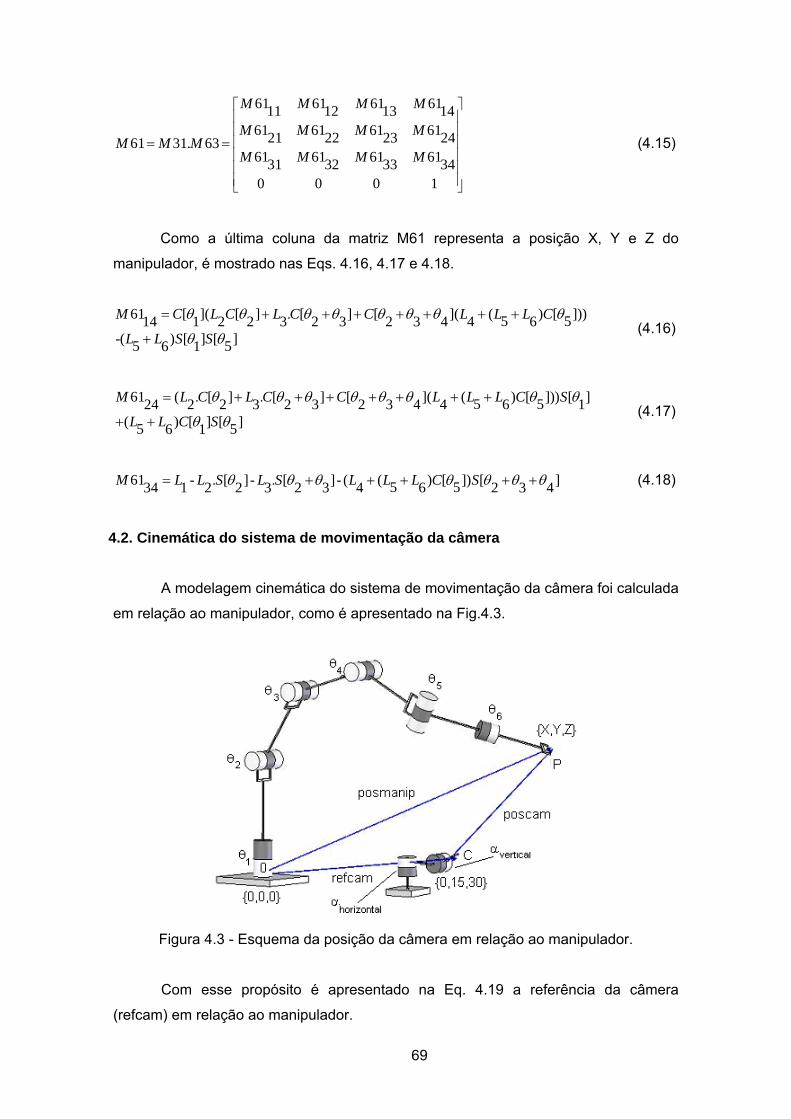
69
61 61 61 6111 12 13 1461 61 61 6121 22 23 2461 31 6361 61 61 6131 32 33 340 0 0 1
M M M M
M M M MM M .M
M M M M
⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
= = (4.15)
Como a última coluna da matriz M61 representa a posição X, Y e Z do
manipulador, é mostrado nas Eqs. 4.16, 4.17 e 4.18.
.61 [ ]( [ ] [ ] [ ]( ( ) [ ]))5 514 1 2 2 3 2 3 2 3 4 4 6-( ) [ ] [ ]5 56 1
M C L C L C C L L L C
L L S S
θ θ θ θ θ θ θ θ
θ θ
= + + + + + + +
+ (4.16)
. .61 ( [ ] [ ] [ ]( ( ) [ ])) [ ]5 524 2 2 3 2 3 2 3 4 4 6 1( ) [ ] [ ]5 56 1
M L C L C C L L L C S
L L C S
θ θ θ θ θ θ θ θ
θ θ
= + + + + + + +
+ + (4.17)
. .61 - [ ]- [ ]- ( ( ) [ ]) [ ]5 534 1 2 2 3 2 3 4 6 2 3 4M L L S L S L L L C Sθ θ θ θ θ θ θ= + + + + + (4.18)
4.2. Cinemática do sistema de movimentação da câmera
A modelagem cinemática do sistema de movimentação da câmera foi calculada
em relação ao manipulador, como é apresentado na Fig.4.3.
Figura 4.3 - Esquema da posição da câmera em relação ao manipulador.
Com esse propósito é apresentado na Eq. 4.19 a referência da câmera
(refcam) em relação ao manipulador.
70
, , =refcam Xrc Yrc Zrc (4.19)
O ponto objetivo da câmera (poscam) foi determinada usando as Eqs. 4.16,
4.17 e 4.18 e é apresentada na Eq. 4.20.
.
. .
. .
-[ ]( [ ] [ ] [ ]( ( ) [ ]))...1 2 2 3 2 3 2 3 4 4 5 6 5
( [ ] [ ] [ ]( ( ) [ ])) [ ]...2 2 3 2 3 2 3 4 4 5 6 5 11-( [ ]) [ ]- [ ] [ ] ( ( ) [ ])(- [ ]2 3 3 2 3 2 3 4 5 6 5 4
poscam posmanip refcamC L C L C C L L L CL C L C C L L L C S
L L L C S L C S L L L C C
θ θ θ θ θ θ θ θθ θ θ θ θ θ θ θ
θ θ θ θ θ θ
= =+ + + + + + +
+ + + + + + ++ + + + [ ]...2 3
-( ) [ ] [ ]-5 6 1 5( ) [ ] [ ]-5 6 1 5- [ ] [ ]-2 3 4
SL L S S XrcL L C S YrcC S Zrc
θ θθ θθ θ
θ θ θ
⎡⎢⎢⎢⎢⎢⎣
⎤⎥⎥⎥⎥⎥⎦
+
++ +
+
(4.20)
4.3. Manipulador com sistema de movimentação da câmera
Usando as modelagens apresentadas nos itens 4.1 e 4.2 é possível determinar
a relação angular entre os ângulos da câmera (αhorizontal e αvertical) e o ângulos do
manipulador (θ1, θ2, θ3, θ4 e θ5) considerando os comprimentos dos elos (L1, L2, L3, L4,
L5 e L6) como é mostrado nas Eqs. 4.21 e 4.22.
.
. .
( - [ ]( [ ] [ ] [ ]1 2 2 3 2 3 2 3 4( ( ) [ ])) ( ) [ ]. [ ]/5 5 5 54 6 6 1- ( [ ] [ ] [ ]2 2 3 2 3 2 3 4( ( ) [ ])) [ ] ( ). [ ] [ ]5 5 54 4 6 1 6 1
ArcCot Xrc C L C L C ChorizontalL L L C L L S S
Yrc L C L C C
L L L C S L L C S
α θ θ θ θ θ θ θ
θ θ θ
θ θ θ θ θ θ
θ θ θ θ
⎧⎪⎨⎪⎩
⎫⎪⎬⎪⎭
= + + + + +
+ + + +
+ + + + + +
+ + + +
(4.21)
. .
. .
. .
. . .
(2. -2. -2. [ ]- 2. [ ]-3 2 31 2 22. [ ]- [ - ]5 54 2 3 4 2 3 4- [ - ]- [ ]5 5 56 2 3 4 2 3 4- [ ]/ 2[(- [ ]. [ ] [ ]. [ ]. [ ]56 2 3 4 2 2 1 3 2 3 1
[ ].2 3
ArcTan L Zrc L S L SverticalL S L S
L S L S
L S Yrc L C S L C C S
C
α θ θ θ
θ θ θ θ θ θ θ
θ θ θ θ θ θ θ θ
θ θ θ θ θ θ θ θ θ
θ θ
⎧⎪⎨⎪⎩
= +
+ + + +
+ + + + +
+ + + + +
+ + .
. .
.
[ ]( ( ) [ ]. [ ]- [ ]. [ ]. [ ]5 54 4 6 1 3 1 2 32-( ( ) [ ]) [ ]. [ ]. [ ] ( ) [ ]. [ ])5 5 5 54 6 1 2 3 4 6 1
( - [ ]. [ ]- [ ]. [ ]. [ ]- [ ]. [ ]. [ ]2 1 2 3 1 2 3 1 2 3 4( ( ) [ ]) [ ]. [5 54 6 3 1 2
C L L L C S L S S S
L L L C S S S L L C S
Xrc L C C L C C C C C C
L L L C L C S
θ θ θ θ θ θ
θ θ θ θ θ θ θ
θ θ θ θ θ θ θ θ θ
θ θ θ
+ +
+ + + + + +
+
+ + +
12
]. [ ] [ ]( ( )53 1 4 62[ ]) [ ]. [ ] ( ) [ ]. [ ]) ]5 5 52 3 4 6 1
S C L L L
C S S L L S S
θ θ
θ θ θ θ θ θ⎫⎪⎬⎪⎭
+ + +
+ + +
(4.22)
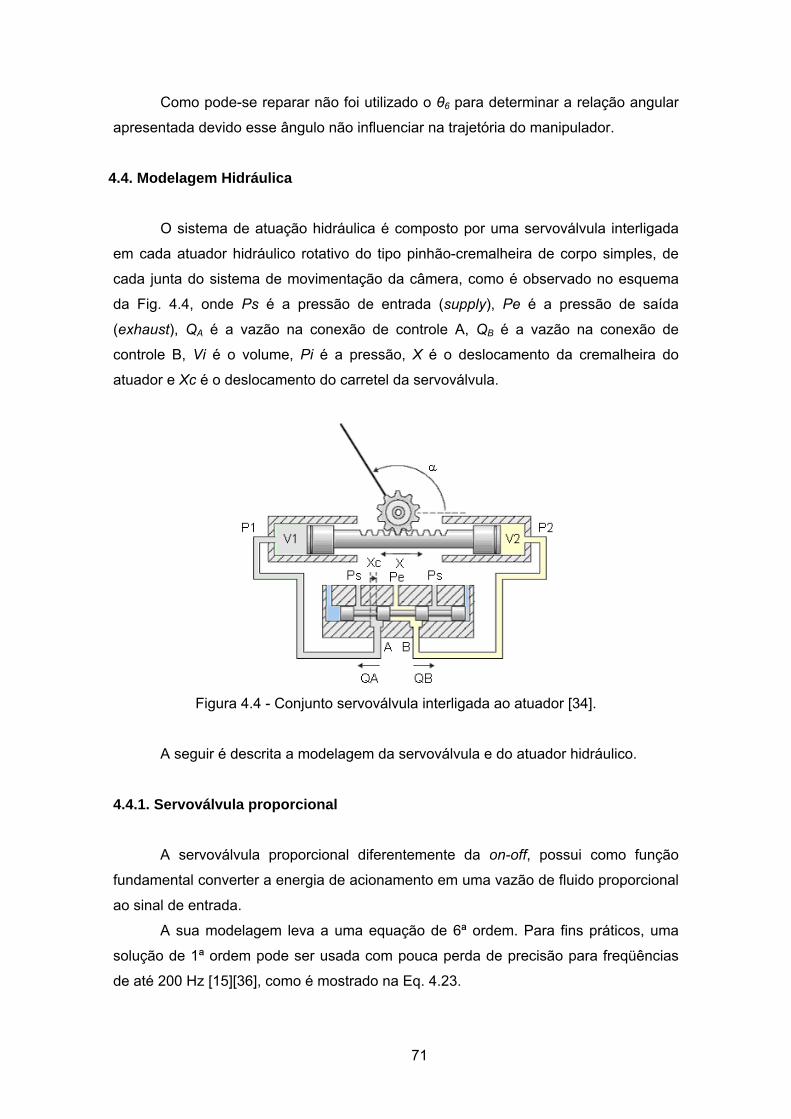
71
Como pode-se reparar não foi utilizado o θ6 para determinar a relação angular
apresentada devido esse ângulo não influenciar na trajetória do manipulador.
4.4. Modelagem Hidráulica
O sistema de atuação hidráulica é composto por uma servoválvula interligada
em cada atuador hidráulico rotativo do tipo pinhão-cremalheira de corpo simples, de
cada junta do sistema de movimentação da câmera, como é observado no esquema
da Fig. 4.4, onde Ps é a pressão de entrada (supply), Pe é a pressão de saída
(exhaust), QA é a vazão na conexão de controle A, QB é a vazão na conexão de
controle B, Vi é o volume, Pi é a pressão, X é o deslocamento da cremalheira do
atuador e Xc é o deslocamento do carretel da servoválvula.
Figura 4.4 - Conjunto servoválvula interligada ao atuador [34].
A seguir é descrita a modelagem da servoválvula e do atuador hidráulico.
4.4.1. Servoválvula proporcional
A servoválvula proporcional diferentemente da on-off, possui como função
fundamental converter a energia de acionamento em uma vazão de fluido proporcional
ao sinal de entrada.
A sua modelagem leva a uma equação de 6ª ordem. Para fins práticos, uma
solução de 1ª ordem pode ser usada com pouca perda de precisão para freqüências
de até 200 Hz [15][36], como é mostrado na Eq. 4.23.
72
,( )
( ) 1Kx sc i
i s siτ=
+ (4.23)
onde: Xc é o deslocamento do carretel, i é a corrente de entrada, Ki é o ganho; e τi é a
constante de tempo do sistema (em milisegundos).
O próximo passo é modelar o fluxo através das passagens criadas com o
deslocamento do carretel. Quando este se desloca é formado dois orifícios anulares
de área proporcional ao deslocamento (Xc) do carretel, um para cada conexão com o
sistema de atuação. Vamos chamar de P1 e P2 as pressões nas conexões de controle
A e B, respectivamente. Admitindo Pm como sendo a queda de pressão entre estas
duas conexões (Pm = P1 − P2), uma maneira de expressar o fluxo (Q) através da
válvula seria através da Eq. 4.24.
. .-Q K x K Pq c c m= , (4.24)
onde: Kq e Kc são chamados de ganho de vazão e ganho de pressão,
respectivamente.
Note-se que P1 e P2 não são necessariamente iguais às pressões de
suprimento e de saída devido à queda de pressão nas passagens da válvula. A
equação acima implica que a vazão de fluido pela válvula é proporcional à abertura
criada com o deslocamento do carretel e à queda de pressão entre as duas conexões
de controle. Pode ser elaborado um modelo mais realístico utilizando a equação de
Bernoulli para encontrar uma expressão para a vazão, como é mostrado na Eq.4.25.
Para isto será assumido que a energia do fluído, passando através de um orifício, se
conserva sendo convertida inteiramente em energia cinética.
1 12 2. . . . . . ,1 1 2 22 2p V g h p V g hρ ρ ρ ρ+ + = + + (4.25)
Esta equação tem como premissas um escoamento unidimensional,
incompressível e em regime permanente. Na passagem do fluido através do orifício as
linhas de corrente a jusante do orifício se contraem a um diâmetro inferior ao da
abertura do orifício, formando a chamada vena contracta, como é mostrado na Fig.
4.5.
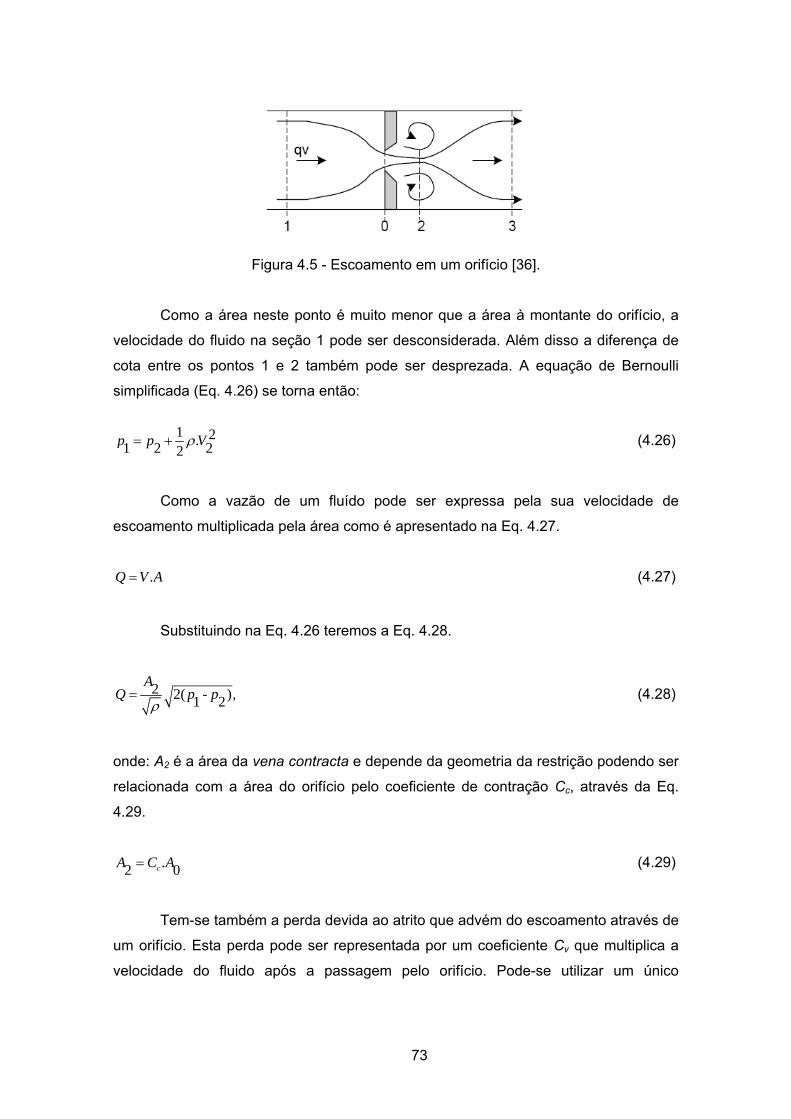
73
Figura 4.5 - Escoamento em um orifício [36].
Como a área neste ponto é muito menor que a área à montante do orifício, a
velocidade do fluido na seção 1 pode ser desconsiderada. Além disso a diferença de
cota entre os pontos 1 e 2 também pode ser desprezada. A equação de Bernoulli
simplificada (Eq. 4.26) se torna então:
1 2.1 2 22p p Vρ= + (4.26)
Como a vazão de um fluído pode ser expressa pela sua velocidade de
escoamento multiplicada pela área como é apresentado na Eq. 4.27.
.Q V A= (4.27)
Substituindo na Eq. 4.26 teremos a Eq. 4.28.
,2 2( - )1 2A
Q p pρ
= (4.28)
onde: A2 é a área da vena contracta e depende da geometria da restrição podendo ser
relacionada com a área do orifício pelo coeficiente de contração Cc, através da Eq.
4.29.
.2 0cA C A= (4.29)
Tem-se também a perda devida ao atrito que advém do escoamento através de
um orifício. Esta perda pode ser representada por um coeficiente Cv que multiplica a
velocidade do fluido após a passagem pelo orifício. Pode-se utilizar um único

74
coeficiente Cd representando tanto este efeito quanto o da vena contracta e assim
reescrever a Eq. 4.28, como é apresentando na Eq. 4.30.
. 0 2( - )1 2C AdQ p p
ρ= (4.30)
Para o caso da servoválvula, a área do orifício é função do diâmetro do carretel
e do seu deslocamento, como é visto na Eq. 4.31.
,2. . .0A R Xcπ= (4.31)
onde: R é o raio do carretel e Xc o seu deslocamento.
A variável Xc será representada pelo seu valor normalizado no intervalo [-1,1]
sendo simbolizada por cX . Com isso é definido a Eq. 4.32.
2. . . ,maxKv R Xcπ= (4.32)
Assim é reescrita a Eq. 4.30 através da Eq. 4.33
.Q K X pV C= ∆ (4.33)
Com isto é possível analisar a vazão por cada uma das portas de controle da
servoválvula. A porta de controle A pode se comunicar tanto com a conexão que
fornece a pressão de entrada (ps), como com a que fornece a pressão de saída (pe).
Portanto, para pA tem-se a seguinte expressão descrita na Eq. 4.34.
∆pA = 1p pS − , se 0X c ≥ (4.34)
1p pe − , se 0X c <
O mesmo é válido para conexão B e é mostrada na Eq. 4.35.
∆pB = 2p pe − se 0X c ≥ (4.35)
2
p pS
− se 0X c <

75
Considerando que as variáveis ∆pA e ∆pB podem assumir valores negativos, a
equação da vazão para as duas conexões de controle é mostrada nas Eqs. 4.36 e
4.37.
.sgn( ). 2Q p K X pv cA A A= ∆ ∆ (4.36)
.sgn( ). 2Q p K X pv cB B B= ∆ ∆ (4.37)
Na modelagem apresentada não foram considerados efeitos de vazamentos
internos a servoválvula. Foi considerado também que a válvula possui centro crítico,
ou seja, o comprimento do ressalto do carretel é igual ao comprimento do pórtico das
conexões de controle.
Para a modelagem do controle de seguimento da trajetória do manipulador por
parte da câmera foi considerada a zona linear (triângulo hachurado) de operação da
servoválvula como é mostrado na Fig 4.6.
Figura 4.6 - Vazão nominal com diferencial de pressão em função do sinal de tensão
[38] .
Onde a constante proporcional calculada (K2) através do triângulo hachurado é
apresentada na Eq. 4.38.
36,25 1( ) 1,30 .2 4,8mK tg as V
= = = (4.38)
76
4.4.2. Atuador
A força atuante no pistão baseada na Fig. 4.4 é apresentada na Eq. 4.39.
( - ),2 1F A p pP= (4.39)
onde: Ap é área do pistão.
A dinâmica do atuador pode ser calculada aplicando a equação da
continuidade, como apresentada por [36] aos volumes de controle V1 e V2, como é
apresentado na Eq. 4.40.
0 0- .dV V dpQ Qoutin dt dt
= +∑ ∑β
(4.40)
O primeiro termo do lado direito da equação representa a vazão causada pela
variação no volume de controle, devido ao movimento do pistão e está determinado na
Eq. 4.41.
.0 ,dV
A Xpdt= & (4.41)
onde: X& é a derivada no tempo da posição do pistão.
O segundo termo da equação representa a compressibilidade do fluido
produzida pela variação da pressão no volume de controle. O volume de controle para
cada pistão do atuador está escrito nas Eqs.4.42 e 4.43.
.1 2VTV A XP= + (4.42)
.- ,2 2VTV A XP= (4.43)
onde: VT equivale à soma do volume total dos pistões e das tubulações de conexão
entre a servoválvula e o atuador.
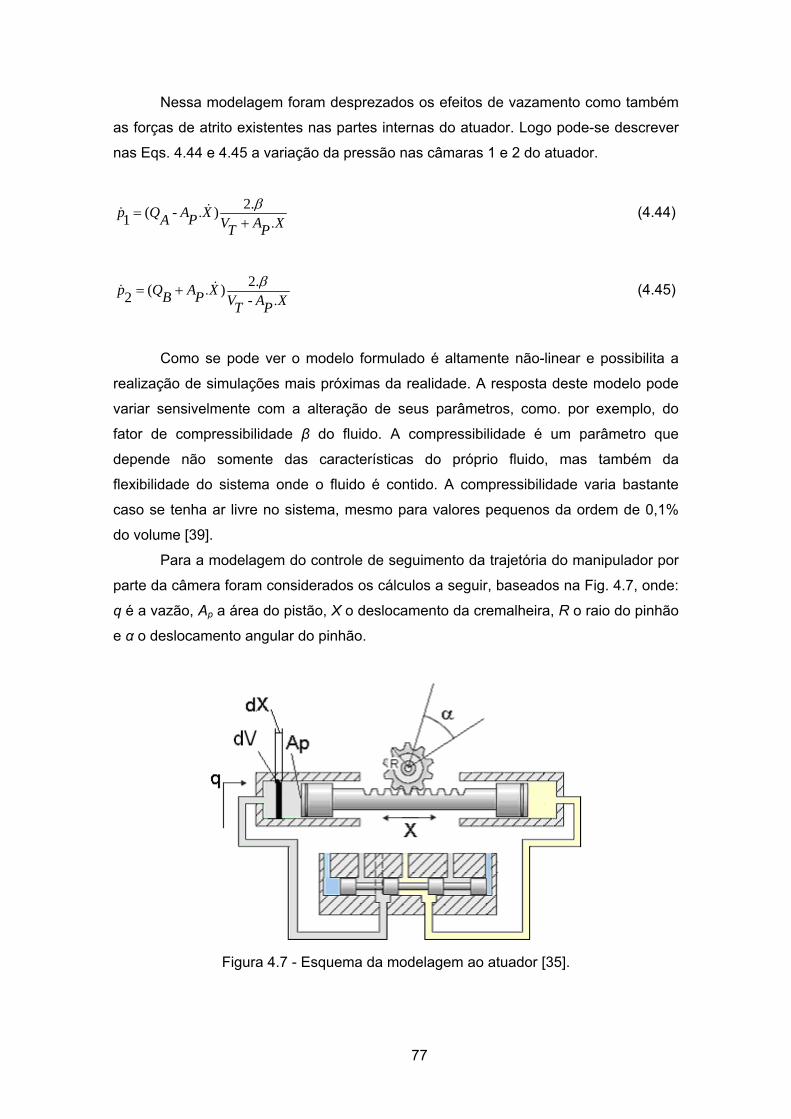
77
Nessa modelagem foram desprezados os efeitos de vazamento como também
as forças de atrito existentes nas partes internas do atuador. Logo pode-se descrever
nas Eqs. 4.44 e 4.45 a variação da pressão nas câmaras 1 e 2 do atuador.
..
2.( - )1p Q A XPA V A XT P
β=+
&& (4.44)
..
2.( )2 -p Q A XB P V A XT P
β= + && (4.45)
Como se pode ver o modelo formulado é altamente não-linear e possibilita a
realização de simulações mais próximas da realidade. A resposta deste modelo pode
variar sensivelmente com a alteração de seus parâmetros, como. por exemplo, do
fator de compressibilidade β do fluido. A compressibilidade é um parâmetro que
depende não somente das características do próprio fluido, mas também da
flexibilidade do sistema onde o fluido é contido. A compressibilidade varia bastante
caso se tenha ar livre no sistema, mesmo para valores pequenos da ordem de 0,1%
do volume [39].
Para a modelagem do controle de seguimento da trajetória do manipulador por
parte da câmera foram considerados os cálculos a seguir, baseados na Fig. 4.7, onde:
q é a vazão, Ap a área do pistão, X o deslocamento da cremalheira, R o raio do pinhão
e α o deslocamento angular do pinhão.
Figura 4.7 - Esquema da modelagem ao atuador [35].
78
Sabendo que a vazão (q) é expressa pela Eq.4.46.
,dVqdt
= (4.46)
onde a derivada do volume é determinado pela Eq. 4.47.
.pdV A dX= (4.47)
Substituindo a Eq. 4.47 na Eq. 4.46 tem-se que:
,.pA dX
qdt
= (4.48)
onde: X é mostrado na Eq.4.49, e é uma relação entre o raio do pinhão (R) e o seu
deslocamento angular (α)
.X Rα= (4.49)
Substituindo a Eq. 4.49 na Eq.4.48 tem-se que:
( . ). . .p pd Rq A A R
dtα α= = & (4.50)
Aplicando Laplace:
( ) . ( . ( ))pQ s A R s sα= (4.51)
Arrumando:
,( )( ). .p
Q sss A R
α = (4.52)
onde: a constante proporcional calculada (K1) é apresentada na Eq. 4.53.
11 .p
KA R
= (4.53)
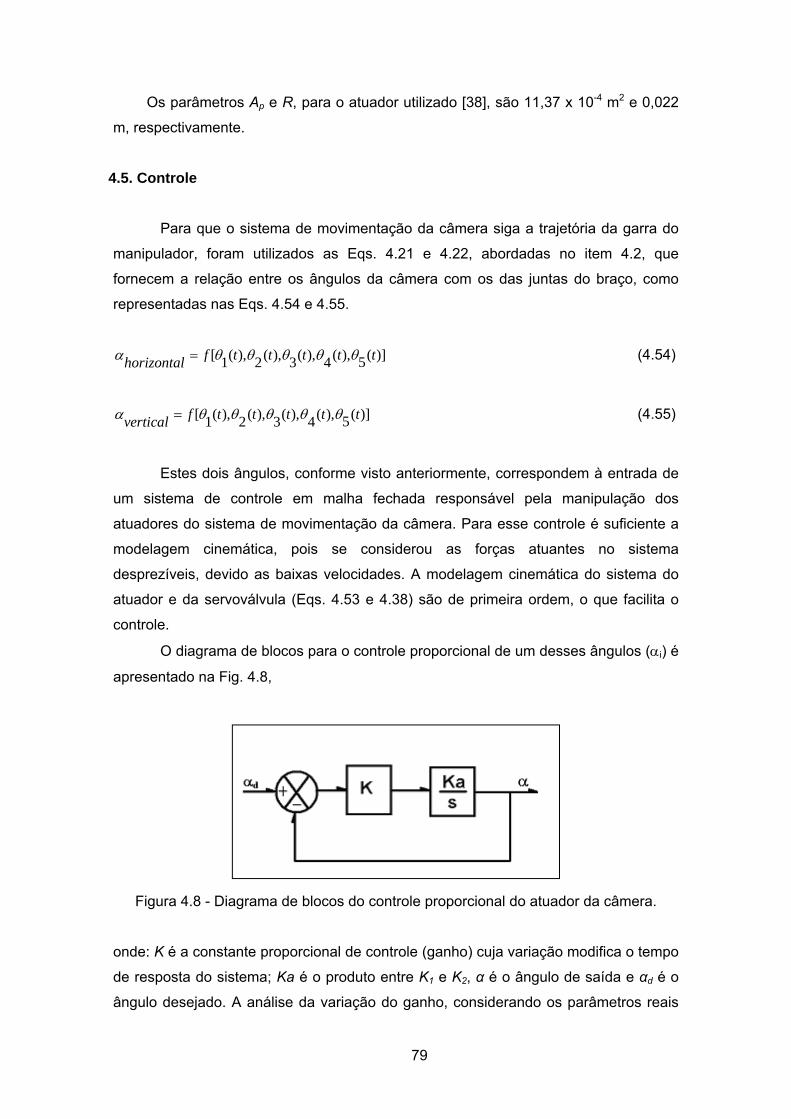
79
Os parâmetros Ap e R, para o atuador utilizado [38], são 11,37 x 10-4 m2 e 0,022
m, respectivamente.
4.5. Controle
Para que o sistema de movimentação da câmera siga a trajetória da garra do
manipulador, foram utilizados as Eqs. 4.21 e 4.22, abordadas no item 4.2, que
fornecem a relação entre os ângulos da câmera com os das juntas do braço, como
representadas nas Eqs. 4.54 e 4.55.
[ ( ), ( ), ( ), ( ), ( )]51 2 3 4f t t t t thorizontalα θ θ θ θ θ= (4.54)
[ ( ), ( ), ( ), ( ), ( )]51 2 3 4f t t t t tverticalα θ θ θ θ θ= (4.55)
Estes dois ângulos, conforme visto anteriormente, correspondem à entrada de
um sistema de controle em malha fechada responsável pela manipulação dos
atuadores do sistema de movimentação da câmera. Para esse controle é suficiente a
modelagem cinemática, pois se considerou as forças atuantes no sistema
desprezíveis, devido as baixas velocidades. A modelagem cinemática do sistema do
atuador e da servoválvula (Eqs. 4.53 e 4.38) são de primeira ordem, o que facilita o
controle.
O diagrama de blocos para o controle proporcional de um desses ângulos (αi) é
apresentado na Fig. 4.8,
Figura 4.8 - Diagrama de blocos do controle proporcional do atuador da câmera.
onde: K é a constante proporcional de controle (ganho) cuja variação modifica o tempo
de resposta do sistema; Ka é o produto entre K1 e K2, α é o ângulo de saída e αd é o
ângulo desejado. A análise da variação do ganho, considerando os parâmetros reais
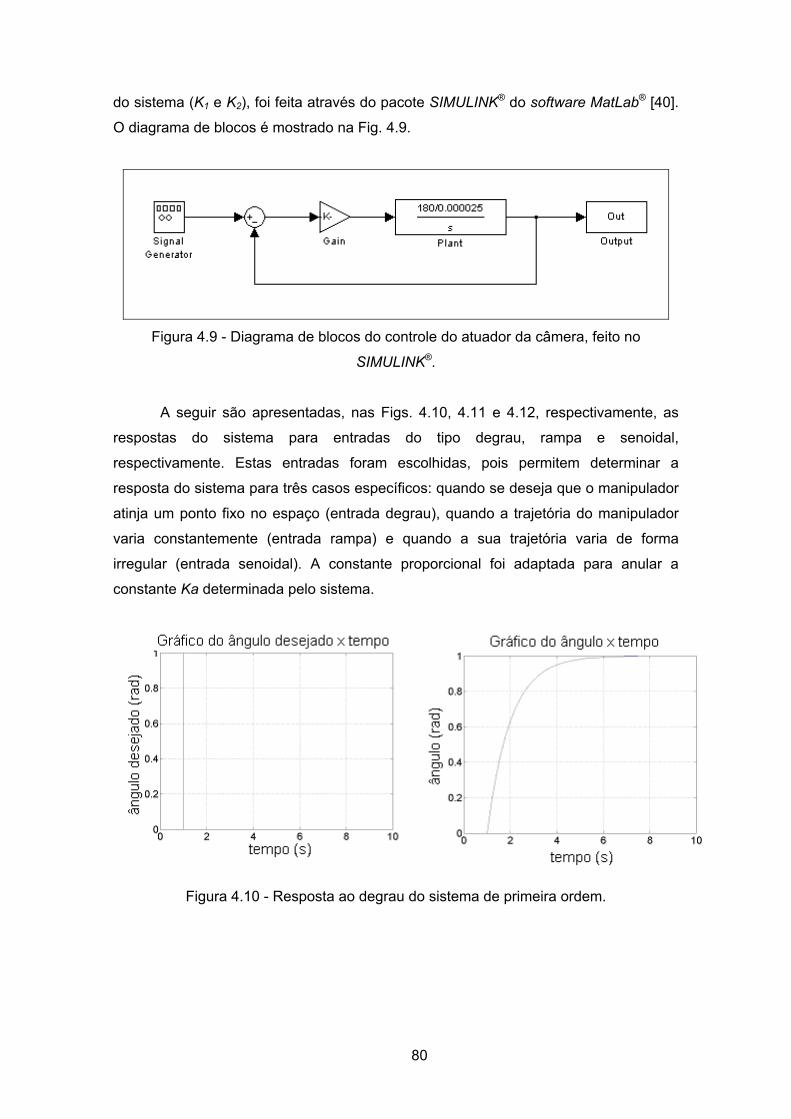
80
do sistema (K1 e K2), foi feita através do pacote SIMULINK® do software MatLab® [40].
O diagrama de blocos é mostrado na Fig. 4.9.
Figura 4.9 - Diagrama de blocos do controle do atuador da câmera, feito no
SIMULINK®.
A seguir são apresentadas, nas Figs. 4.10, 4.11 e 4.12, respectivamente, as
respostas do sistema para entradas do tipo degrau, rampa e senoidal,
respectivamente. Estas entradas foram escolhidas, pois permitem determinar a
resposta do sistema para três casos específicos: quando se deseja que o manipulador
atinja um ponto fixo no espaço (entrada degrau), quando a trajetória do manipulador
varia constantemente (entrada rampa) e quando a sua trajetória varia de forma
irregular (entrada senoidal). A constante proporcional foi adaptada para anular a
constante Ka determinada pelo sistema.
Figura 4.10 - Resposta ao degrau do sistema de primeira ordem.

81
Figura 4.11 - Resposta a rampa do sistema de primeira ordem.
Figura 4.12 - Resposta ao senoidal do sistema de primeira ordem.
Na Figura 4.10 é observado que o tempo de subida é de 2,2 s, o tempo de
assentamento é de 4 s, e a constante de tempo é igual a 1. A entrada em degrau é
cessada por que as respostas transitória e de estado estacionário são claramente
visíveis.
Para o sinal degrau, temos
ssR 1)( = (4.56)
)().()( sGsRsC = (4.57)
A resposta forçada vai alcançar o valor: 1=aK
, logo 11.1.1 === aK , assim:
82
)1(1
)(+
=ss
sC (4.58)
)1(1
)(+
=s
sG (4.59)
Na Figura 4.11 é observado que o erro de estado estacionário é permanente, e
na Fig. 4.12 ocorre uma defasagem entre a entrada e a saída e uma menor amplitude
na saída com um erro de aproximadamente 25 %.
A resposta à rampa (Fig.4.11) apresenta um erro estável próprio dos sistemas
de primeira ordem. Mas as duas primeiras respostas (degrau e rampa) não são tão
esclarecedoras como a resposta senoidal, pois neste estudo é tratado o controle para
seguimento de trajetória, onde, a referência do sistema de controle varia de forma
irregular no tempo, no pior caso considerado. Também é notada nessa resposta uma
variação na amplitude e defasagem em relação à referência.
Apesar de ter alcançado uma resposta aceitável dos ângulos do sistema da
câmera, foi concluído que não se atingiu uma operação satisfatória para o seguimento
da trajetória pois nas três entradas analisadas foram encontradas respostas onde o
tempo de resposta foi lento (sinal degrau), ou com erro estável (sinais rampa e
senoidal). Por isso é necessária uma mudança no estudo do controle.
Por se tratar de um sistema de seguimento de trajetória, foi observado que o
set point (αd) varia com o tempo. É desejado que o controlador considere a variação
do sinal de referência com o propósito de diminuir o erro de maneira mais eficaz. Isto
é, precisa-se prever a variação do sinal de referência através de uma ação do
controlador, com o intuito de gerar um sinal de controle que diminua o efeito desta
variação no sistema controlado (α se aproximando do αd). Para isso foi adicionado um
controle de feedforward, onde foi somada ao sinal de erro a derivada do sinal de
referência, como é mostrado na Fig. 4.13.
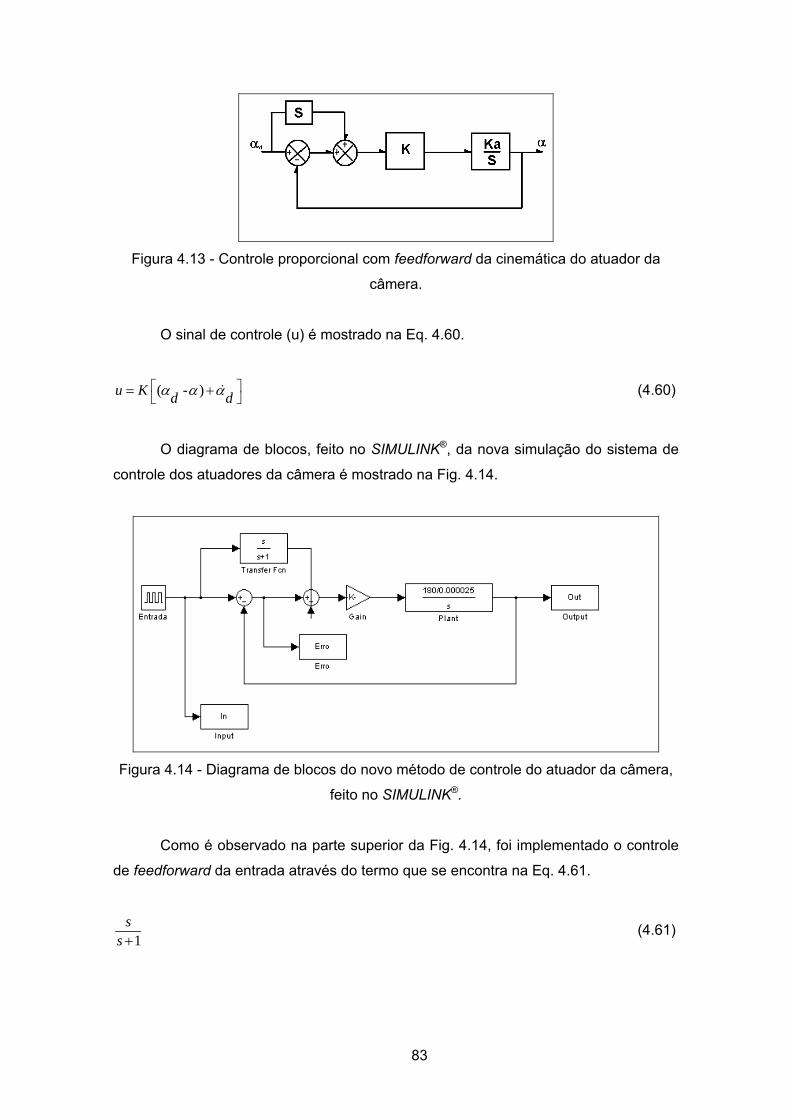
83
Figura 4.13 - Controle proporcional com feedforward da cinemática do atuador da
câmera.
O sinal de controle (u) é mostrado na Eq. 4.60.
( - )u K d dα α α⎡ ⎤⎣ ⎦
= + & (4.60)
O diagrama de blocos, feito no SIMULINK®, da nova simulação do sistema de
controle dos atuadores da câmera é mostrado na Fig. 4.14.
Figura 4.14 - Diagrama de blocos do novo método de controle do atuador da câmera,
feito no SIMULINK®.
Como é observado na parte superior da Fig. 4.14, foi implementado o controle
de feedforward da entrada através do termo que se encontra na Eq. 4.61.
1s
s + (4.61)
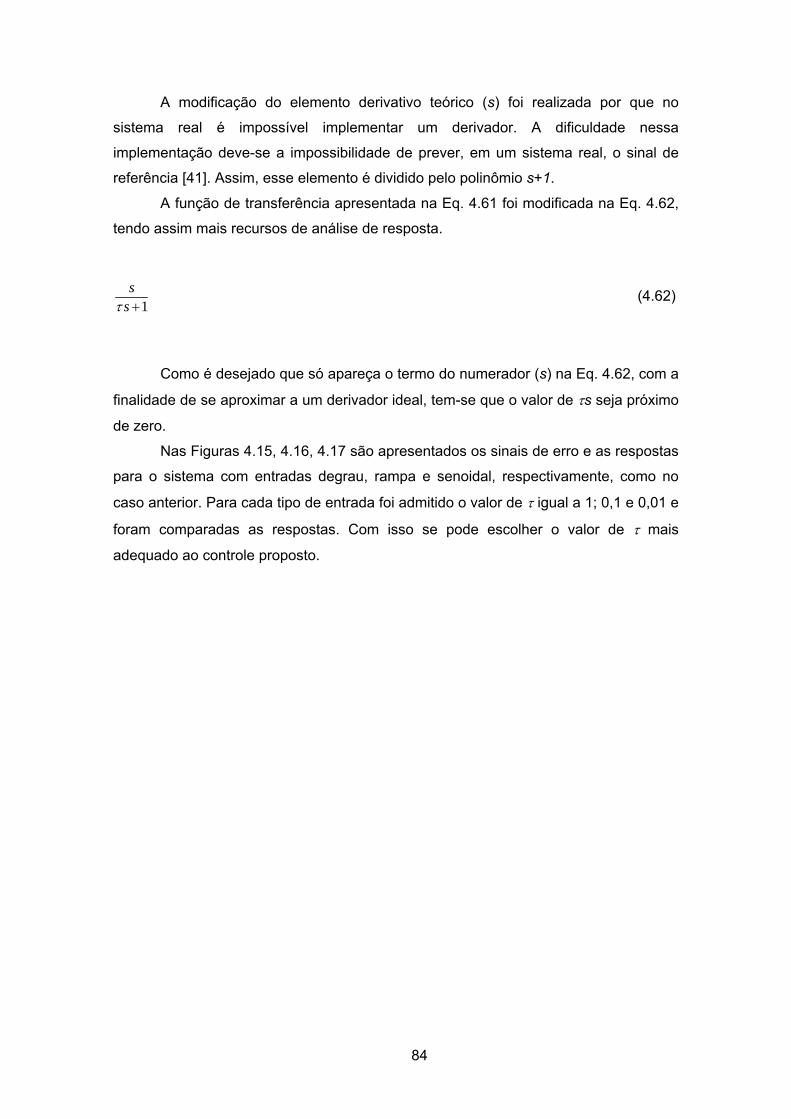
84
A modificação do elemento derivativo teórico (s) foi realizada por que no
sistema real é impossível implementar um derivador. A dificuldade nessa
implementação deve-se a impossibilidade de prever, em um sistema real, o sinal de
referência [41]. Assim, esse elemento é dividido pelo polinômio s+1.
A função de transferência apresentada na Eq. 4.61 foi modificada na Eq. 4.62,
tendo assim mais recursos de análise de resposta.
1s
sτ + (4.62)
Como é desejado que só apareça o termo do numerador (s) na Eq. 4.62, com a
finalidade de se aproximar a um derivador ideal, tem-se que o valor de τs seja próximo
de zero.
Nas Figuras 4.15, 4.16, 4.17 são apresentados os sinais de erro e as respostas
para o sistema com entradas degrau, rampa e senoidal, respectivamente, como no
caso anterior. Para cada tipo de entrada foi admitido o valor de τ igual a 1; 0,1 e 0,01 e
foram comparadas as respostas. Com isso se pode escolher o valor de τ mais
adequado ao controle proposto.
85
Degrau τ=1
Degrau τ=0,1
Degrau τ=0,01
Figura 4.15 - Resposta ao degrau do novo sistema de primeira ordem.
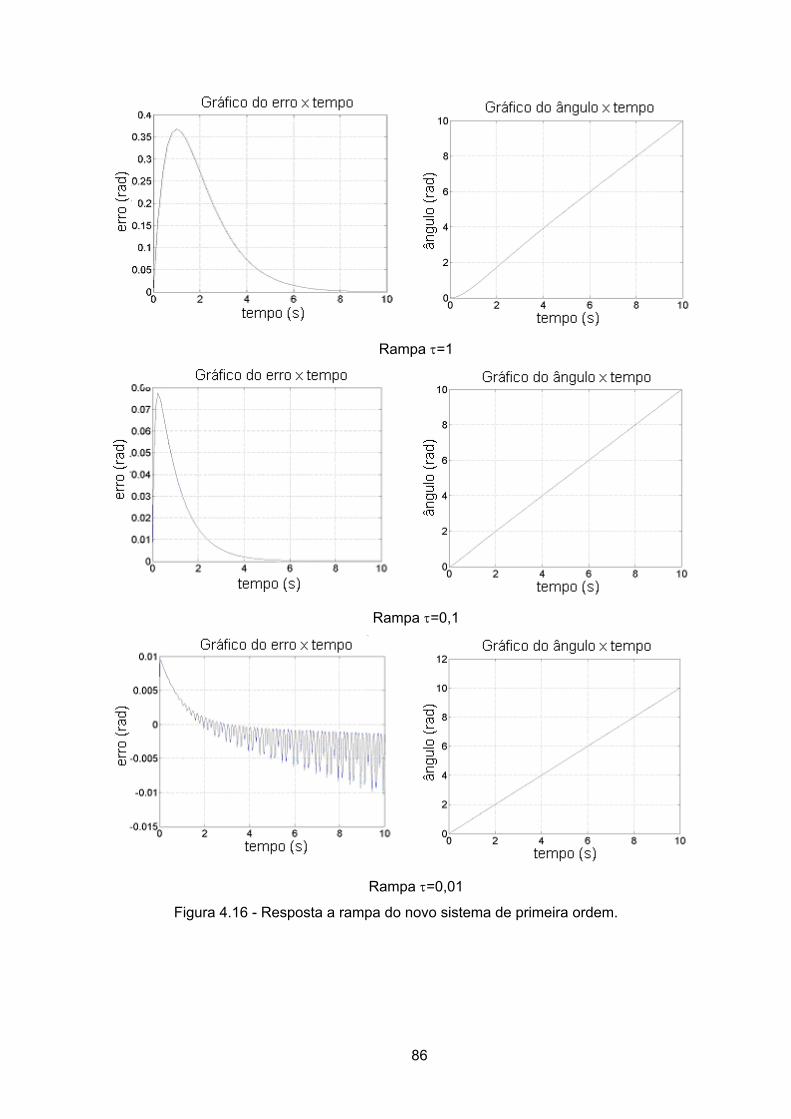
86
Rampa τ=1
Rampa τ=0,1
Rampa τ=0,01
Figura 4.16 - Resposta a rampa do novo sistema de primeira ordem.
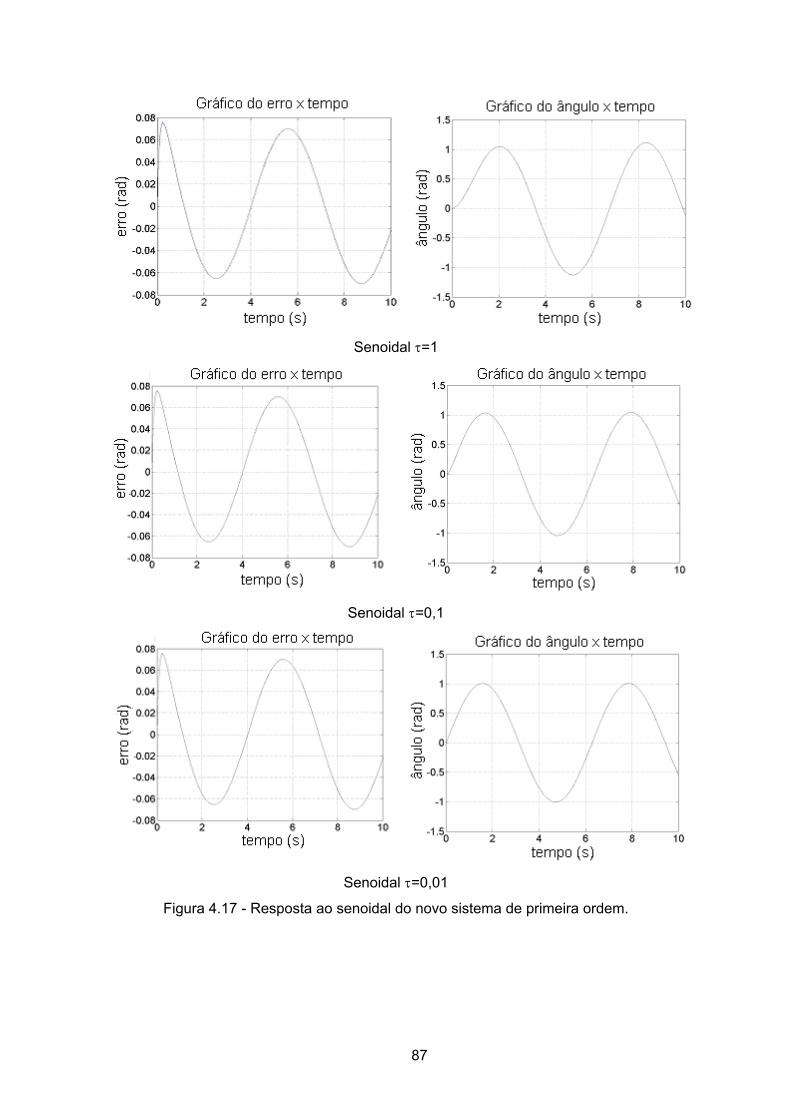
87
Senoidal τ=1
Senoidal τ=0,1
Senoidal τ=0,01
Figura 4.17 - Resposta ao senoidal do novo sistema de primeira ordem.
88
Pode se concluir com base nos gráficos apresentados, que as respostas estão
mais parecidas com a entrada de referência, o que mostra que o novo método de
controle atendeu melhor o objetivo do que o primeiro método aplicado.
No próximo capítulo são realizadas discussões sobre o estudo, é formulada a
conclusão final e indicado futuros trabalhos.
89
5 Discussão, Conclusão e Futuros Trabalhos
Na Figura 4.15 observa-se que o tempo de resposta à entrada degrau
melhorou à medida que o valor de τ diminuiu como foi previsto, pois nessa situação o
sistema se aproxima de um derivador ideal. Para o valor de τ = 0,01 foi achada uma
resposta aceitável. O tempo de resposta é quase nulo assim como o erro. O erro inicial
deve-se a que o derivador não é ideal e não pode prever a variação inicial da entrada
de referência.
Na figura 4.16 com sinal de entrada de referência do tipo rampa, o tempo de
resposta também melhorou à medida que diminui o valor de τ. Com τ igual a 0,01 a
saída ficou muito parecida ao sinal de entrada. O tempo de resposta é quase nulo
assim como o erro. O erro negativo para este valor de τ deve-se ao sistema tentar
compensar a variação positiva do sinal de entrada já que se está analisando uma
entrada de referência do tipo rampa, cuja derivada é positiva.
Na figura 4.17 com sinal de entrada de referência do tipo senoidal, foi
percebido o mesmo comportamento à medida que o valor de τ diminui. É observado
que o erro tem as mesmas características da entrada de referência pois varia de forma
senoidal como esperado, já que o erro tem que compensar constantemente as
variações da entrada.
Pode-se concluir que para todas as entradas para o controle feedforward com
um valor de τ = 0,01 (como pode ser observado da análise das Figs. 4.15, 4.16 e 4.17)
se conseguiu que os ângulos de saída seguissem o ângulo de referência. É muito
importante a análise do sinal de entrada do tipo senoidal, pois este manifesta o caráter
variacional de qualquer entrada de referência que é a característica do seguimento da
trajetória, onde o deslocamento do efetuador é imprevisível. Além disso, um sinal
linear pode ser composto por vários sinais senoidais como foi visto por Fourier.
Sabendo que o somatório desses sinais senoidais representa o sinal linear original,
conclui-se que fazendo o seguimento de cada sinal senoidal é conseguido o controle
do sinal linear original, ou melhor, se consegue o seguimento da trajetória desse sinal.
Finalmente na Fig. 5.1 é mostrado como fica o diagrama de blocos do sistema
de controle com feedforward com o valor de τ = 0,01.
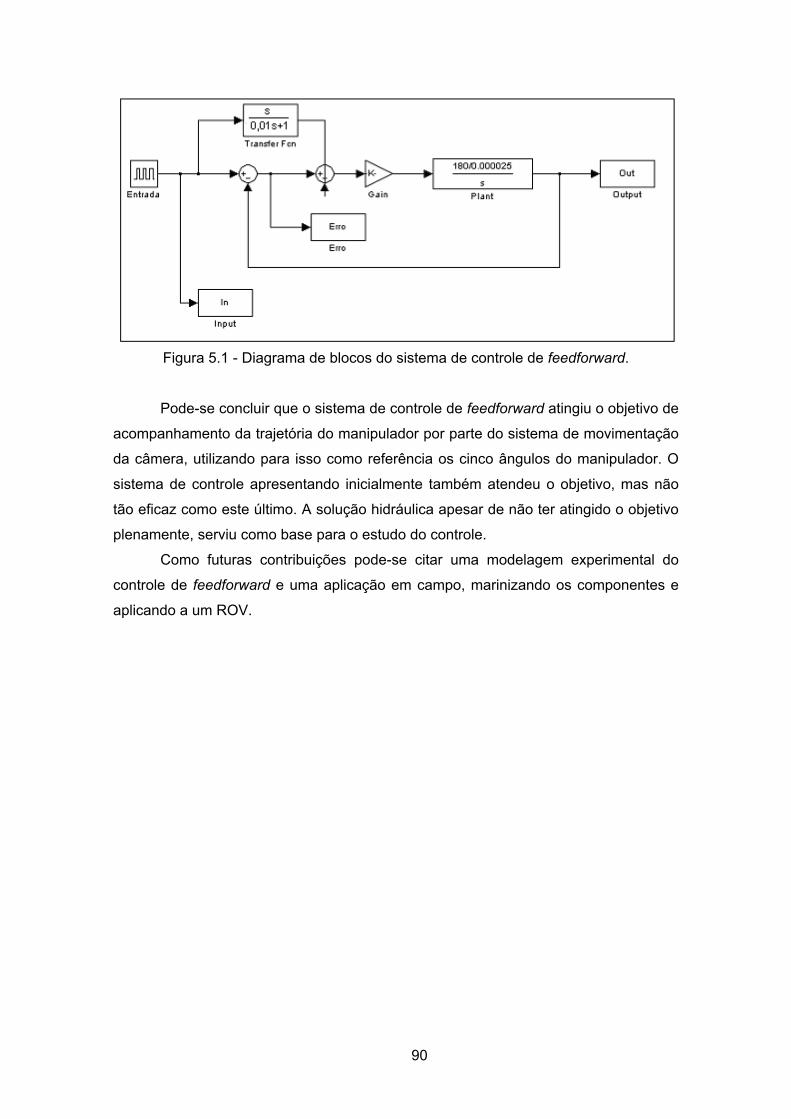
90
Figura 5.1 - Diagrama de blocos do sistema de controle de feedforward.
Pode-se concluir que o sistema de controle de feedforward atingiu o objetivo de
acompanhamento da trajetória do manipulador por parte do sistema de movimentação
da câmera, utilizando para isso como referência os cinco ângulos do manipulador. O
sistema de controle apresentando inicialmente também atendeu o objetivo, mas não
tão eficaz como este último. A solução hidráulica apesar de não ter atingido o objetivo
plenamente, serviu como base para o estudo do controle.
Como futuras contribuições pode-se citar uma modelagem experimental do
controle de feedforward e uma aplicação em campo, marinizando os componentes e
aplicando a um ROV.
91
6 Referências Bibliográficas
[1] SLINGSBY, TA 040 Catalog. Disponível em:<www.slingsby-engineering.co.uk/
os_man00.htm>. Acesso em 10 de agosto de 2004.
[2] MOLINA, R. Introdução á Dinâmica e ao Controle de Manipuladores Robóticos,
Notas de aula, Rio Grande do Sul, Brasil, 1998.
[3] TECHNIK, Robotics Catalog. Disponível em: <http://esr.e-technik.uni-dortmund.de
/downloads/robotik/folien/RoboticManipulators.pdf>. Acesso em 15 de agosto de 2004.
[4] ALSTOM, Subsea Offshore Ltd Brochure. Disponível em: <www.alstom.com>.
Acesso em 15 de agosto de 2004.
[5] SCHILING, Schiling Offshore Ltd. Brochure. Disponível em: <www.schilling.com>.
Acesso em 15 de agosto de 2004.
[6] BESSA, W. M.,Controle de Posição e Orientação de um Veículo Robótico
Submarino, Qualificação de D.Sc., COPPE/UFRJ, Rio de Janeiro, RJ, Brasil, 2004.
[7] BOHM, H.,1998, Build your Own Underwater Robot and other Wet Projects. 1 ed.
Canada, Westcoast Words, 1998.
[8] MIT, MIT Robotic Laboratory. Disponível em: <http://auvlab.mit.edu/gallery/
imagedisplay.php>. Acesso em 20 de agosto de 2004.
[9] ROMANO, V. F., Robótica Industrial – Aplicação na Indústria de Manufatura e de
Processos, São Paulo, Editora Edgard Blücher Ltda, 2002.
[10] BUSTAMANTE, A. Automação Hidráulica – Projetos, Dimensionamento e Análise
de Circuitos, São Paulo, 2003.
[11] AU, B. K.,Closing the Loop on Hydraulic Control, Cleveland, 1994.
[12] KRAFT OCEAN SYSTEMS, Grips, Underwater Manipulator System Manual, Kraft
Ocean Systems, Inc., Kansas, EUA.
92
[13] REXROTH BOSCH GROUP., Hidráulica – Princípios Básicos e Componentes da
Tecnologia dos Fluidos, Alemanha, 1991.
[14] FLO-TORK, Flo-tork Catalog Disponível em: <http://www.flo-tork.com/hydraulics/
fth_index.htm>. Acesso em 17 de maio de 2002.
[15] DE NEGRI, V. J., ATTIÉ, S.S.,TOLEDO, L.B., Controle de Posição Utilizando
Servoválvulas e Válvulas Proporcionais Eletro-hidráulicas , Notas de aula,
Florianópolis, Brasil, 1997.
[16] PULNIX, Pulnix Manual, EUA.
[17] HYDRO-LEK, Pan & Tilt Catalog,EUA.
[18] REIS, N. R. S., MESSINA, L. C. P., “Automatic Camera-Positioning System for a
ROV”, Congresso de Tecnologia Submarina, Rio de Janeiro, Brasil, 1998.
[19] LIMA, A. S., DUTRA, M. S., REIS, N. R. S., SANTOS, A. V. “Controle de
Posicionamento da Câmera de um ROV”. Rio Oil & Gas Conference, Rio de Janeiro,
Brasil, Outubro de 2004.
[20] HIDRAUTRONICA, Catálogo de Acumuladores Hidráulicos, Disponível em: <www.
hidrautronica.com.br>. Acesso em 01 de dezembro 2004.
[21] STARLIN, G.,Redes de Computadores/comunicação de Dados TCP/IP -
Conceitos, Protocolos e Uso, Alta Books, Rio de Janeiro, 2000.
[22] DIEBOLD, Pinagem do terminal DB9. Disponível em: <www.procomp.com.br
/mecaf/drivers/ Configura%E7%E3oCaboSerial_RS232.pdf >. Acesso em 10 de
dezembro de 2004.
[23] FALBRIARD, C.,Protocolos e Aplicações para Redes de Computadores, Editora
Erica, São Paulo, 2001.
[24] ASHCROFT, Pressure Transducer Catalog, EUA.
93
[25] INMETRO, RBC - Rede Brasileira de Calibração. Disponível em: <http://www.
inmetro.gov.br/laboratorios/rbc/>. Acesso em 10 de dezembro de 2004.
[26] ASHCROFT, Balance Catalog, EUA.
[27] ECIL, Catálogo de Transdutor de Temperatura, Piedade, SP, Brasil.
[28] PANTA, P. E. G., Monitoramento de um Robô de Inspeção Interna de Dutos,Tese
de M.Sc., COPPE/UFRJ, Rio de Janeiro, RJ,Brasil, 2005.
[29] WABASH TECHNOLOGIES, Potentiometer Catalog, EUA.
[30] WABASH TECHNOLOGIES, Potentiometer Catalog, EUA.
[31] ADVANTECH, ADAM-4050 Manual, EUA.
[32] ADVANTECH, ADAM-4520 Manual, EUA.
[33] ADVANTECH, ADAM-4019 Manual, EUA.
[34] ALBARUS, Catálogo da Válvula Direcional Modelo OD4DSHS101SH, São Paulo,
Brasil.
[35] TESTI, L. B.,Controlador Fuzzy com Aprendizado Aplicado em Manipuladores
Hidráulicos Submarinos, Tese de M.Sc., COPPE/UFRJ, Rio de Janeiro, RJ, Brasil,
2005.
[36] MERRITT, H. E., Hydraulic Control Systems. 1 ed., John Wiley & Sons, New York
1967.
[37] DE NEGRI, V. J. Sistemas Hidráulicos e Pneumáticos para Automação e Controle.
Parte III –Sistemas Hidráulicos para Controle, Notas de aula, Florianópolis, Brasil,
2001.
[38] BOSCH, Catálogo da Válvula Proporcional Modelo 0 811 404 125, São Paulo,
Brasil.
94
[39] STRINGER, J. D., Hydraulic Systems Analysis: An introduction. 1 ed. London, The
Macmillan Press LTD. 1976.
[40] OGATA, K., Engenharia de Controle Moderno, LTC, Rio de Janeiro, 2000.
[41] OGATA, K.,Projetos de Sistemas Lineares de Controle com MatLab, Prentice-Hall
do Brasil, Rio de Janeiro, 1996


















