Tese_MSc_Leonardo_Almeida - Controle a Geracao

of 183
Transcript of Tese_MSc_Leonardo_Almeida - Controle a Geracao
-
8/17/2019 Tese_MSc_Leonardo_Almeida - Controle a Geracao
1/183
-
8/17/2019 Tese_MSc_Leonardo_Almeida - Controle a Geracao
2/183
ii
ALMEIDA, LEONARDO PINTO DE
Análise de Desempenho do Controle
Automático de Geração e do Controle
Secundário de Tensão [Rio de Janeiro] 2004
XVII, 166 p. 29,7 cm (COPPE/UFRJ,
M.Sc., Engenharia Elétrica, 2004)
Tese – Universidade Federal do Rio de
Janeiro, COPPE1. Operação de Sistemas de Potência
2. Controle Automático de Geração
3. Controle Secundário de Tensão
I. COPPE/UFRJ II. Título ( série )
-
8/17/2019 Tese_MSc_Leonardo_Almeida - Controle a Geracao
3/183
iii
Dedico esta tese aos meus pais, Waldir e Sônia
e a minha avó, Aurélia
-
8/17/2019 Tese_MSc_Leonardo_Almeida - Controle a Geracao
4/183
iv
Agradecimentos
Agradeço acima de tudo a Deus, por estar sempre presente de uma forma ou de
outra em todo lugar, iluminando e guiando meus passos.
Agradeço também a minha família; meu pai Waldir e minha mãe Sônia, a
quem devo o que sou hoje. Além de me darem a vida me incentivaram nos
momentos mais difíceis me dando apoio incondicional e pela participação na
minha formação não só profissional e racional, mas também moral. Agradeçotambém a minha avó Aurélia que sempre me concedeu seu total carinho
durante toda minha vida.
Agradeço a todos os meus professores tanto da UFRJ como da COPPE/UFRJ e
ao meu orientador Professor Glauco Nery Taranto, que contribuíram na minha
formação.
Aos colegas e amigos do CEPEL aos quais expresso meu muito obrigado pelacompanhia e amizade, especialmente aos amigos Ricardo Henriques, João
Alberto e Ricardo Diniz pelas modificações feitas nos programas e aos amigos
Júlio Cezar e Camilo Braga pelas discussões técnicas.
-
8/17/2019 Tese_MSc_Leonardo_Almeida - Controle a Geracao
5/183
v
Resumo da Tese apresentada à COPPE/UFRJ como parte dos requisitos necessários
para a obtenção do grau de Mestre em Ciências (M.Sc.)
ANÁLISE DE DESEMPENHO DO CONTROLE AUTOMÁTICO DE GERAÇÃO E
DO CONTROLE SECUNDÁRIO DE TENSÃO
Leonardo Pinto de Almeida
Março/2004
Orientador: Glauco Nery Taranto
Programa: Engenharia Elétrica
Esta tese aborda principalmente o problema do Controle Carga-Frequência em
Sistemas Elétricos de Potência, voltando o seu enfoque para o controle da malha de
regulação secundária, mais comumente denominado Controle Automático de Geração(CAG). O objetivo primordial deste tipo de controle é de restabelecer a freqüência ao
seu valor de referência. No sistema elétrico brasileiro a freqüência de referência é
fixada em 60 HZ. É feita uma revisão dos conceitos básicos dos controles responsáveis
pela regulação primária e secundária.
Esta tese também trata de assuntos relacionados ao problema de estabilidade de
tensão, enfocando principalmente o Controle Secundário de Tensão (CST), controle este
responsável pela regulação da tensão ao nível da transmissão.
Os controles, tanto o CAG como o CST, são implementados em um programa
comercial de análise de transitórios eletromecânicos. As simulações são realizadas
utilizando-se dois sistemas, a saber: um sistema teste de pequeno porte e outro real de
grande porte. Estas simulações visam à fixação dos conceitos e a avaliação do
comportamento dos controles secundários de freqüência e tensão.
-
8/17/2019 Tese_MSc_Leonardo_Almeida - Controle a Geracao
6/183
vi
Abstract of Thesis presented to COPPE/UFRJ as a partial fulfillment of the
requirements for the degree of Master of Science (M.Sc.)
PERFORMANCE ANALISYS OF AUTOMATIC GENERATION CONTROL AND
SECONDARY VOLTAGE CONTROL
Leonardo Pinto de Almeida
March/2004
Advisor: Glauco Nery Taranto
Department: Electrical Engineering
This thesis mainly approaches the problem of Load-Frequency Control in
Electric Power Systems, emphasizing the secondary control, more commonly
denominated as Automatic Generation Control (AGC). The primordial objective of thistype of control is to restore the frequency to its reference value. In the Brazilian electric
system the reference frequency is set to 60 HZ. A revision of the basic concepts of the
primary and secondary controls is made.
This thesis also deals with matters related to voltage stability problem, focusing
mainly the Secondary Voltage Control (SVC), which is responsible for the voltage
regulation at the transmission level.
The controls, both AGC and SVC, are implemented in a transient stability
program. The simulations are accomplished using two systems, namely: a small test
system and a large interconnected one. These simulations intend to the fixation of the
concepts and the evaluation of the secondary controls’ behavior of frequency and
voltage.
-
8/17/2019 Tese_MSc_Leonardo_Almeida - Controle a Geracao
7/183
Sumário vii
Sumário
Lista de Figuras ............................................................. ........................................................................ ......ix
Lista de Tabelas.........................................................................................................................................xiv
Lista de Símbolos .............................................................. .............................................................. ...........xv
Capítulo I Introdução...................................................................................................................................1
I.1 Considerações Gerais.....................................................................................................................1
I.2 Estrutura da Tese............................................................................................................................8
Capítulo II Modelagens Específicas............................................................ ............................................. 10
II.1 Modelo de Máquina Síncrona .................................................... ............................................. 10
II.2 Modelos de Turbinas...............................................................................................................15 II.2.1 Modelo para Turbinas Térmicas.........................................................................................16
II.2.2 Modelo para Turbinas Hidráulicas ............................................................. ........................18
Capítulo III Controle Carga-Freqüência........................................................... ........................................ 21
III.1 Introdução................................................................................................................................21
III.2 Regulação Própria .......................................................... ......................................................... 22
III.3 Regulação Primária ................................................................ ................................................. 25
III.3.1 Reguladores de Velocidade Isócronos...........................................................................26
III.3.2 Reguladores de Velocidade com Queda de Velocidade.................................................29
III.4 Regulação Secundária .......................................................... ................................................... 35
III.5 Operação em Sistemas Interligados.........................................................................................42
III.5.1 Operação sem regulação secundária ...................................................................... ........42
III.5.2 Operação com regulação secundária..............................................................................48
III.5.2.1 Ajuste do Bias (B).....................................................................................................50
Capítulo IV Controle Coordenado de Tensão ..................................................................... .....................53
IV.1 Introdução................................................................................................................................53
IV.2 Níveis Hierárquicos............................... ................................................................ ..................54
IV.2.1 Controle Primário de Tensão (CPT) ................................................................... ...........55 IV.2.2 Controle Secundário de Tensão (CST) ................................................................ ..........55
IV.2.3 Controle Terciário de Tensão (CTT) ....................................................... ......................56
IV.3 Implementação do Controle Secundário de Tensão (CST) ..................................................... 57
Capítulo V Simulações............................................................... ............................................................. .60
V.1 Sistema teste de pequeno porte................................................................................................60
V.1.1 Dados do sistema................................................................................................................61
V.1.2 Sistema sem regulação secundária......................................................................................63
V.1.3 Inclusão do CAG ............................................................. ................................................... 67
V.1.3.1 Aumento de 40MW na carga da barra 5 – operação em modo TLB......................... 70
-
8/17/2019 Tese_MSc_Leonardo_Almeida - Controle a Geracao
8/183
Sumário viii
V.1.3.2 Aumento de 40MW na carga da barra 5 – operação em modo FF............................73
V.1.3.3 Mudança na referência de potência do intercâmbio – operação em modo TLB .......76
V.1.3.4 Abertura da interligação............................................................................................78
V.1.3.5 Sensibilidade quanto ao ajuste do bias......................................................................84
V.1.4 Inclusão do CAG e do CST............................................................... .................................87 V.1.4.1 Chaveamento de um banco de capacitores................................................................90
V.1.4.2 Mudança na referência de tensão da barra piloto......................................................93
V.1.4.3 Mudança na referência de potência do intercâmbio..................................................94
V.1.4.4 Abertura da interligação............................................................................................96
V.1.4.5 Aumento em rampa no carregamento do sistema ..................................................... 99
V.2 Sistema de grande porte ................................................................ ........................................ 103
V.2.1 Interligações Inter-regionais................................................................... ..........................108
V.2.1.1 Interligação entre as regiões SUL e SUDESTE ...................................................... 109
V.2.1.2 Interligação entre as regiões Norte, Nordeste e Sudeste ......................................... 111 V.2.2 Dados do Sistema ............................................................... .............................................. 113
V.2.3 Ajuste do ganho do CAG..................................................................................................116
V.2.3.1 CAG da Área Norte.................................................................................................117
V.2.3.2 CAG da Área Nordeste ................................................................. ..........................121
V.2.3.3 CAG da Área Sul ............................................................... ..................................... 124
V.2.3.4 CAG da Área Sudeste ............................................................... .............................. 128
V.2.4 Degrau de -10% na carga do sistema................................................................................131
V.2.5
Perda da Interligação SE-NE............................................................................................133 V.2.6 Perda das Interligações N-SE e SE-NE........................................................... .................135
V.2.7 Degrau de 600MW na Referência da Interligação SE-N..................................................137
V.2.8 Rampa de 600MW na Referência da Interligação SE-N .................................................. 139
V.2.9 Perda de uma Unidade Geradora ........................................................... ...........................140
V.2.10 Variação de Carga em Rampa......................................................................................141
V.2.11 Variação da Carga na Área Rio ............................................................... ....................143
V.3 Tempo computacional...........................................................................................................147
Capítulo VI Conclusão ........................................................ ................................................................... 148
VI.1 Considerações Gerais ........................................................... ................................................. 148 VI.2 Sugestões para Trabalhos Futuros.........................................................................................150
Referências Bibliográficas........................................................................................................................152
Apêndice A ............................................................. ........................................................... .................155
A.1 Dados para Estudo de Fluxo de Potência ............................................................... ...............155
A.2 Dados para Estudo de Transitórios Eletromecânicos ............................................................ 156
A.3 Controlador Definido pelo Usuário do CAG.........................................................................160
A.4 Controlador Definido pelo Usuário do CST..........................................................................164
-
8/17/2019 Tese_MSc_Leonardo_Almeida - Controle a Geracao
9/183
Lista de Figuras ix
Lista de Figuras
Figura I.1: Estrutura funcional de um SEP...................................................................................................1
Figura I.2: Integração EletroEnergética........................................................................................................3
Figura I.3: Principais malhas de controle associadas a um SEP...................................................................5
Figura II.1: Máquina Síncrona ............................................................. ...................................................... 11
Figura II.2: Diagrama de blocos da equação swing....................................................................................14
Figura II.3: Diagrama de blocos da equação swing com desvios de potência ........................................... 15
Figura II.4: Percurso do vapor em uma unidade com reaquecimento .................................................. ......16
Figura II.5: Diagrama esquemático para uma unidade com reaquecimento...............................................17 Figura II.6: Diagrama de blocos para uma unidade com reaquecimento.................................................... 17
Figura II.7: Diagrama de blocos reduzido para uma unidade com reaquecimento.................................... 18
Figura II.8: Diagrama de blocos para uma unidade sem reaquecimento................................................... 18
Figura II.9: Representação esquemática de uma unidade hidráulica..........................................................19
Figura II.10: Função de transferência para turbinas hidráulicas.................................................................20
Figura II.11: Resposta à um degrau unitário aplicado à função de transferência de uma turbina hidráulica
..........................................................................................................................................................20
Figura III.1: Resultado de uma análise de fluxo de potência......................................................................21
Figura III.2: Curva diária de carga ............................................................... .............................................. 22
Figura III.3: Curva Carga x Freqüência......................................................................................................23
Figura III.4: Diagrama de blocos com amortecimento...............................................................................24
Figura III.5: Diagrama de blocos do sistema..............................................................................................24
Figura III.6: Regulador de Velocidade Isócrono .................................................... .................................... 26
Figura III.7: Diagrama de blocos de um regulador de velocidade isócrono...............................................27
Figura III.8: Reposta no tempo de uma unidade geradora com regulado de velocidade isócrono ............28
Figura III.9: Regulador com queda de velocidade......................................................................................29
Figura III.10: Diagrama de blocos de um regulador de velocidade com queda de velocidade...................30 Figura III.11: Resposta no tempo de uma unidade geradora com regulador de velocidade com estatismo31
Figura III.12: Característica Freqüência x Potência ..................................................................................32
Figura III.13: Ajuste do parâmetro R .................................................... ..................................................... 33
Figura III.14: Característica Freqüência x Potência para R=0...................................................................34
Figura III.15: Divisão de carga por duas unidades geradoras dotadas de reguladores com estatismo .......35
Figura III.16: Dispositivo de variação de velocidade.................................................................................37
Figura III.17: Sinal de Controle Secundário...............................................................................................37
Figura III.18: Malha de Controle Secundário.............................................................................................38
Figura III.19: Característica P f × com Regulação Secundária ............................................................ ..39
-
8/17/2019 Tese_MSc_Leonardo_Almeida - Controle a Geracao
10/183
Lista de Figuras x
Figura III.20: Diagrama de blocos com regulação primária e secundária .................................................. 41
Figura III.21: Diagrama de blocos com regulação primária e secundária e com controle de intercâmbio.42
Figura III.22: Representação esquemática de um sistema com com duas áreas interligadas .....................43
Figura III.23: Diagrama de blocos para sistema de duas áreas interligadas sem regulação secundária......44
Figura III.24: Sistema com três áreas de controle interligadas...................................................................47 Figura III.25: Diagrama de blocos para sistema de duas áreas interligadas com regulação secundária..... 48
Figura III.26: Relação T F ∆×∆ ..............................................................................................................49 Figura IV.1: Níveis Hierárquicos ........................................................... .................................................... 54
Figura IV.2: Estrutura hierárquica do Controle Coordenado de Tensão .................................................... 56
Figura IV.3: Controle de Tensão e Repartição de Potência Reativa...........................................................58
Figura IV.4: Malha de controle de tensão da barra piloto .................................................................. ........58
Figura IV.5: Malha de controle de repartição de reativo............................................................................59
Figura V.1: Sistema Teste de Pequeno Porte..............................................................................................60
Figura V.2: Regulador de Tensão...............................................................................................................63 Figura V.3: Regulador de Velocidade e Turbina........................................................................................63
Figura V.4: Carregamento do Sistema ....................................................... ................................................ 64
Figura V.5: Tensão nas barras 4 e 5 .................................................................... ....................................... 64
Figura V.6: Freqüência do Sistema ................................................................ ............................................ 65
Figura V.7: Potência ativa dos geradores ........................................................ ........................................... 65
Figura V.8: Potência reativa dos geradores................................................................................................66
Figura V.9: Fluxo de potência na interligação............................................................................................66
Figura V.10: Freqüência do sistema com e sem CAG................................................................................68 Figura V.11: Fluxo de potência na interligação com e sem CAG.............................................................. 68
Figura V.12: Potência ativa dos geradores .................................................................. ............................... 69
Figura V.13: Erro de controle de área (ECA).............................................................................................69
Figura V.14: Integral do ECA ............................................................. ....................................................... 70
Figura V.15: Carregamento do sistema ............................................................ .......................................... 70
Figura V.16: Freqüência do sistema...........................................................................................................71
Figura V.17: Fluxo de potência na interligação..........................................................................................71
Figura V.18: Potência ativa dos geradores .................................................................. ............................... 71
Figura V.19: Erro de controle de área ............................................................. ........................................... 72 Figura V.20: Integral do ECA ............................................................. ....................................................... 72
Figura V.21: Carregamento do sistema ............................................................ .......................................... 74
Figura V.22: Freqüência do sistema...........................................................................................................74
Figura V.23: Fluxo de potência na interligação..........................................................................................74
Figura V.24: Potência ativa dos geradores .................................................................. ............................... 75
Figura V.25: Erro de controle de área ............................................................. ........................................... 75
Figura V.26: Integral do ECA ............................................................. ....................................................... 75
Figura V.27: Carregamento do sistema ............................................................ .......................................... 76
Figura V.28: Freqüência do sistema...........................................................................................................77
-
8/17/2019 Tese_MSc_Leonardo_Almeida - Controle a Geracao
11/183
Lista de Figuras xi
Figura V.29: Fluxo de potência na interligação..........................................................................................77
Figura V.30: Potência ativa dos geradores .................................................................. ............................... 77
Figura V.31: Erro de controle de área ............................................................. ........................................... 78
Figura V.32: Integral do ECA ............................................................. ....................................................... 78
Figura V.33: Implementação da banda morta.............................................................................................79 Figura V.34: Fluxo de potência na interligação..........................................................................................79
Figura V.35: Variação de freqüência na área 1 .................................................................. ........................ 80
Figura V.36: Variação de tensão na barra 4 ........................................................... .................................... 80
Figura V.37: Variação da potência dos geradores da área 1.......................................................................81
Figura V.38: ECA da área 1 ......................................................... ............................................................ ..81
Figura V.39: Integral do ECA da área 1.....................................................................................................82
Figura V.40: Variação de freqüência na área 2 .................................................................. ........................ 82
Figura V.41: Variação de tensão na barra 5 ........................................................... .................................... 83
Figura V.42: Variação da potência do gerador da área 2............................................................................83 Figura V.43: ECA da área 2 ......................................................... ............................................................ ..84
Figura V.44: Integral do ECA da área 2.....................................................................................................84
Figura V.45: Freqüência do sistema para diferentes valores de Bias da Área 1......................................... 85
Figura V.46: Esforço de controle área 1 para diferentes valores de Bias da Área 1..................................86
Figura V.47: Esforço de controle área 2 para diferentes valores de Bias da Área 1..................................86
Figura V.48: Carregamento do Sistema ........................................................... .......................................... 88
Figura V.49: Freqüência do sistema...........................................................................................................88
Figura V.50: Tensão na barra 4.............................................................. .................................................... 89
Figura V.51: Tensão na barra 5.............................................................. .................................................... 89
Figura V.52: Potência reativa dos geradores 1 e 2 ............................................................... ......................90
Figura V.53: Repartição de potência reativa Q2/Q1...................................................................................90
Figura V.54: Valor do shunt da barra 4......................................................................................................91
Figura V.55: Tensão da barra 4 com e sem CST........................................................................................91
Figura V.56: Potência reativa dos geradores da área 1 (sem CST) ............................................................ 92
Figura V.57: Potência reativa dos geradores da área 1 (com CST)............................................................92
Figura V.58: Repartição de potência reativa Q2/Q1...................................................................................93
Figura V.59: Tensão da barra 4.............................................................. .................................................... 93 Figura V.60: Tensão da barra 5.............................................................. .................................................... 94
Figura V.61: Fluxo de potência na interligação..........................................................................................94
Figura V.62: Tensão da barra 4 com e sem CST........................................................................................95
Figura V.63: Tensão da barra 5 com e sem CST........................................................................................95
Figura V.64: Repartição de potência reativa Q2/Q1...................................................................................96
Figura V.65: Fluxo de potência na interligação..........................................................................................97
Figura V.66: Variação de freqüência na área 1 .................................................................. ........................ 97
Figura V.67: Variação de tesão na barra 4 .................................................................... ............................. 98
Figura V.68: Repartição de potência reativa Q2/Q1...................................................................................98
-
8/17/2019 Tese_MSc_Leonardo_Almeida - Controle a Geracao
12/183
Lista de Figuras xii
Figura V.69: Variação de freqüência na área 2 .................................................................. ........................ 99
Figura V.70: Variação de tesão na barra 5 .................................................................... ............................. 99
Figura V.71: Carregamento da barra 4 .......................................................... ........................................... 100
Figura V.72: Perfil de tensão na barra 4...................................................................................................100
Figura V.73: Perfil de tensão na barra 5...................................................................................................101 Figura V.74: Variação de freqüência........................................................................................................101
Figura V.75: Potência reativa dos geradores............................................................................................102
Figura V.76: Repartição de potência reativa Q2/Q1.................................................................................102
Figura V.77: Sistema de Transmissão do Sistema Interligado Nacional..................................................107
Figura V.78: Subsistemas do Sistema Interligado Nacional.....................................................................108
Figura V.79: Configuração da Interligação Sul/Sudeste e os principais pontos de medição do intercâmbio
........................................................................................................................................................110
Figura V.80: Configuração da Interligação Norte/Nordeste/Sudeste e os principais pontos de medição do
intercâmbio ........................................................... ................................................................... .......112 Figura V.81: Desvio de Freqüência..........................................................................................................117
Figura V.82: Desvio de Intercâmbio ...................................................................... .................................. 118
Figura V.83: Erro de Controle de Área ............................................................. ....................................... 118
Figura V.84: Desvio de Freqüência..........................................................................................................119
Figura V.85: Desvio de Intercâmbio ...................................................................... .................................. 119
Figura V.86: Erro de Controle de Área ............................................................. ....................................... 119
Figura V.87: Desvio de Freqüência..........................................................................................................120
Figura V.88: Desvio de Intercâmbio ...................................................................... .................................. 120
Figura V.89: Erro de Controle de Área ............................................................. ....................................... 120
Figura V.90: Desvio de Freqüência..........................................................................................................121
Figura V.91: Desvio de Intercâmbio ...................................................................... .................................. 121
Figura V.92: Erro de Controle de Área ............................................................. ....................................... 122
Figura V.93: Desvio de Freqüência..........................................................................................................122
Figura V.94: Desvio de Intercâmbio ...................................................................... .................................. 122
Figura V.95: Erro de Controle de Área ............................................................. ....................................... 123
Figura V.96: Desvio de Freqüência..........................................................................................................123
Figura V.97: Desvio de Intercâmbio ...................................................................... .................................. 123 Figura V.98: Erro de Controle de Área ............................................................. ....................................... 124
Figura V.99: Desvio de Freqüência..........................................................................................................124
Figura V.100: Desvio de Intercâmbio ............................................................... ....................................... 125
Figura V.101: Erro de Controle de Área ........................................................... ....................................... 125
Figura V.102: Desvio de Freqüência........................................................................................................125
Figura V.103: Desvio de Intercâmbio ............................................................... ....................................... 126
Figura V.104: Erro de Controle de Área ........................................................... ....................................... 126
Figura V.105: Desvio de Freqüência........................................................................................................126
Figura V.106: Desvio de Intercâmbio ............................................................... ....................................... 127
-
8/17/2019 Tese_MSc_Leonardo_Almeida - Controle a Geracao
13/183
Lista de Figuras xiii
Figura V.107: Erro de Controle de Área ........................................................... ....................................... 127
Figura V.108: Desvio de Freqüência........................................................................................................128
Figura V.109: Desvio de Intercâmbio ............................................................... ....................................... 128
Figura V.110: Erro de Controle de Área ........................................................... ....................................... 129
Figura V.111: Desvio de Freqüência........................................................................................................129 Figura V.112: Desvio de Intercâmbio ............................................................... ....................................... 129
Figura V.113: Erro de Controle de Área ........................................................... ....................................... 130
Figura V.114: Desvio de Freqüência........................................................................................................130
Figura V.115: Desvio de Intercâmbio ............................................................... ....................................... 130
Figura V.116: Erro de Controle de Área ........................................................... ....................................... 131
Figura V.117: Desvio de Freqüência........................................................................................................132
Figura V.118: Desvio de Intercâmbio ............................................................... ....................................... 132
Figura V.119: Erro de Controle de Área ........................................................... ....................................... 133
Figura V.120: Intercâmbio entre as áreas.................................................................................................134 Figura V.121: Geração na área Nordeste..................................................................................................134
Figura V.122: Freqüência em Itumbiara e Luiz Gonzaga ............................................................. ...........135
Figura V.123: Fluxo no intercâmbio Norte-Nordeste...............................................................................136
Figura V.124: Freqüência em Tucuruí ............................................................. ........................................ 136
Figura V.125: Freqüência em Itumbiara...................................................................................................136
Figura V.126: Geração nas áreas Nordeste e Norte..................................................................................137
Figura V.127: Fluxo nos Intercâmbios.....................................................................................................138
Figura V.128: Geração da área norte........................................................................................................138
Figura V.129: Fluxo nos Intercâmbios.....................................................................................................139
Figura V.130: Geração da área norte........................................................................................................140
Figura V.131: Geração da área norte........................................................................................................140
Figura V.132: Intercâmbio da área norte..................................................................................................141
Figura V.133: Erro de controle da área norte ........................................................... ................................ 141
Figura V.134: Carregamento do Sistema .................................................................... ............................. 142
Figura V.135: Freqüência do Sistema ......................................................... ............................................. 142
Figura V.136: Variação de potência das áreas de controle.......................................................................143
Figura V.137: Erro de Controle de Área ........................................................... ....................................... 143 Figura V.138: Carregamento da Área Rio................................................................................................144
Figura V.139: Perfil de tensão da barra de Jacarepaguá 345kV...............................................................144
Figura V.140: Freqüência do Sistema ......................................................... ............................................. 145
Figura V.141: Potência reativa gerada ................................................................... .................................. 145
Figura V.142: Variação de potência ativa gerada.....................................................................................146
Figura V.143: Intercâmbio líquido da área sudeste..................................................................................146
-
8/17/2019 Tese_MSc_Leonardo_Almeida - Controle a Geracao
14/183
Lista de Tabelas xiv
Lista de Tabelas
Tabela III.1: Desvio de freqüência e intercâmbio para uma variação de carga .......................................... 46
Tabela V.1: Dados de linha utilizados no estudo de fluxo de potência ...................................................... 61
Tabela V.2: Resultados obtidos no estudo de fluxo de potência (dados de barra)..................................... 61
Tabela V.3: Resultados obtidos no estudo de fluxo de potência (dados de geração) ................................62
Tabela V.4: Resultados obtidos no estudo de fluxo de potência (dados de carga) .................................... 62
Tabela V.5: Dados dinâmicos dos geradores..............................................................................................62
Tabela V.6: Dados do CAG........................................................................................................................67
Tabela V.7: Valores de ganhos para os CSTs.............................................................................................87 Tabela V.8: Modelagem de Carga do SIN................................................................................................105
Tabela V.9: Pontos de medição dos intercâmbios considerados (S/SE)...................................... .............110
Tabela V.10: Pontos de medição dos intercâmbios considerados ............................................................ 112
Tabela V.11: Carga própria das áreas de controle....................................................................................113
Tabela V.12: Geração Sincronizada das áreas de controle.......................................................................114
Tabela V.13: Valores de bias adotados nas simulações ............................................................. ..............115
Tabela V.14: Usinas sob atuação do CAG ................................................................ ............................... 115
Tabela V.15: Intercâmbios líquidos de cada área.....................................................................................116
Tabela V.16: Locais de medição de freqüência........................................................................................116
Tabela V.17: Tempo Computacional – Sistema de Pequeno Porte .......................................................... 147
Tabela V.18: Tempo Computacional – Sistema de Grande Porte ............................................................ 147
-
8/17/2019 Tese_MSc_Leonardo_Almeida - Controle a Geracao
15/183
Lista de Símbolos xv
Lista de Símbolos
AP: Alta Pressão
B: Bias
BP: Baixa Pressão
CA: Corrente Alternada
CAG: Controle Automático de Geração
CC: Corrente Contínua
CCF: Controle Carga-Freqüência
CCT: Controle Coordenado de Tensão
CPT: Controle Primário de Tensão
CST: Controle Secundário de Tensão
CTT: Controle Terciário de Tensão
D: Coeficiente de Amortecimento
fdE : Tensão de campo
EAT: Extra Alta Tensão
ECA: Erro de Controle de Área
ESP: Estabilizador de Sistema de Potência
f: Freqüência da Tensão
FF: Flat Frequency
FTL: Flat Tie Line Control
H: Constante de Inércia
J: Momento de Inércia Combinado
GiIK : Ganho do integrador associado ao gerador i
GiPK : Ganho proporcional associado ao gerador i
VIK : Ganho do integrador da malha de controle de tensão
VPK : Ganho proporcional da malha de controle de tensão
P: Potência Elétrica Ativa
PI: Pressão Intermediária
-
8/17/2019 Tese_MSc_Leonardo_Almeida - Controle a Geracao
16/183
Lista de Símbolos xvi
Q: Potência Elétrica Reativa
R: Estatismo
ar : Resistência de armadura
RAT: Regulador Automático de TensãoRAV: Regulador Automático de Velocidade
NS : Potência Elétrica Aparente
SEP: Sistema Elétrico de Potência
SIN: Sistema Interligado Nacional
t : Tempo
aT : Torque Acelerante
mT : Torque Mecânico
eT : Torque Elétrico
NT : Torque Nominal Elétrico
TLB: Tie Line Bias Control
V: Magnitude da Tensão
bV : Tensão terminal do gerador
piloto barraV :
Tensão da barra pilotoTV : Tensão terminal da máquina
CSTV : Tensão de referência para a malha de controle de tensão
shr V : Tensão de referência para a malha de controle de potência reativa
ref V : Referência de tensão para o regulador automático de tensão
CSTref V : Tensão de referência da barra piloto
dX : Reatância de eixo diretoqX : Reatância de eixo de quadratura
'dX : Reatância transitória de eixo direto
'qX : Reatância transitória de eixo de quadratura
''dX : Reatância sub-transitória de eixo de quadratura
lX : Reatância de dispersão
α : Fator de Participação
-
8/17/2019 Tese_MSc_Leonardo_Almeida - Controle a Geracao
17/183
Lista de Símbolos xvii
β : Característica Natural
δ : Posição Angular do Rotor
m0ω : Velocidade Angular Nominal do Rotor em Radianos Mecânicos
mω : Velocidade Angular do Rotor em Radianos Mecânicos
r ω : Velocidade Angular do Rotor em Radianos Elétricos
0ω : Velocidade Angular Nominal do Rotor em Radianos Elétricos
A∆ : Variação da Abertura da Admissão
F∆ : Variação da Freqüência
mP∆ : Variação de Potência Mecânica
e
P∆ : Variação de Potência Elétrica
DP∆ : Variação da Carga (parcela variante com a freqüência)
LP∆ : Variação da Carga (parcela invariante com a freqüência)
GP∆ : Variação da Geração
shr Q∆ : Erro de repartição de potência reativa
T∆ : Variação de Intercâmbio
CSTV∆ : Erro de tensão da barra piloto
γ∆ : Sinal do Controle Secundário
-
8/17/2019 Tese_MSc_Leonardo_Almeida - Controle a Geracao
18/183
Capítulo I - Introdução 1
I
Capítulo I
Introdução
I.1 Considerações Gerais
A função principal de um Sistema Elétrico de Potência (SEP) é de converter
formas de energia presentes na natureza em forma de eletricidade, e de
transportá-la até os centros consumidores. Por exemplo, converter e
transportar até os centros consumidores a energia potencial da água ou a
energia liberada na queima de combustíveis fósseis. A energia, contudo, é
raramente consumida sob a forma de eletricidade sendo convertida em calor,
luz ou energia mecânica. A grande vantagem da energia elétrica é que podemos transportá-la e controlá-la com relativa facilidade e com alto grau de
eficiência e confiabilidade [Kundur 1994].
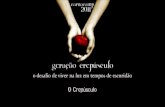
Como descrito em [Falcão 2000] de um ponto de vista funcional, os SEPs
apresentam uma estrutura como mostrado na Figura I.1.
Geração DistribuiçãoTransmissãoEnergiaPrimária
Consumidores
Transmissão
Interligação comoutros Sistemas
Figura I.1: Estrutura funcional de um SEP
-
8/17/2019 Tese_MSc_Leonardo_Almeida - Controle a Geracao
19/183
Capítulo I - Introdução 2
Seus principais componentes são os subsistemas de:
• Geração: composto pelas usinas ou centrais geradoras. Estas
centrais podem ser do tipo hidrelétrica, térmica (carvão, óleo, gás
natural, etc...), nuclear ou eólica. Ao final de 2002 a capacidade
de geração instalada no Sistema Interligado Nacional (SIN)
correspondia à aproximadamente 73 GW sendo 80% de origem
hidráulica. Em um sistema hidrotérmico com predominância
hidráulica, como o brasileiro, as usinas são construídas onde
melhor se pode aproveitar as afluências e os desníveis dos rios,
geralmente distantes dos centros consumidores. Neste contexto
grandes blocos de energia precisam ser transmitidos das regiões de produção para as regiões de consumo sendo necessário
desenvolver um extenso, e portanto complexo, sistema de
transmissão.
• Transmissão: constituído pelas linhas de transmissão e
equipamentos auxiliares necessários para transmitir a potência
produzida nas centrais geradoras até os centros consumidores. Os
sistemas de transmissão podem ser em corrente alternada (CA) ou
em corrente contínua (CC), sendo os últimos utilizados apenas no
caso de transmissão de grandes blocos de potência a distâncias
muito elevadas. Ao final de 2002, a rede de transmissão do SIN
era formada por mais de 72.000 Km de linhas de transmissão em
tensões superiores a 230 kV. Formando caminhos alternativos, a
rede de transmissão permite transportar a energia produzida até os
consumidores com um maior grau de confiabilidade. Mais ainda,
as grandes interligações possibilitam a troca de energia entre
regiões, permitindo obter benefícios a partir da diversidade de
comportamento das vazões entre rios de diferentes bacias
hidrográficas.
• Distribuição: constituído pelas subestações e alimentadores
responsáveis pela distribuição da energia elétrica aosconsumidores industriais, comerciais e residenciais. Em geral,
-
8/17/2019 Tese_MSc_Leonardo_Almeida - Controle a Geracao
20/183
Capítulo I - Introdução 3
incluem também uma parte local do sistema de transmissão, em
tensões mais baixas (geralmente 69 kV e 138 kV), o qual recebe a
denominação de subtransmissão.
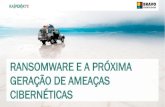
A Figura I.2 ilustra as principais bacias hidrográficas utilizadas nos
aproveitamentos hidrelétricos do sistema elétrico brasileiro, assim como as
grandes distâncias a serem percorridas pelas linhas de transmissão em extra
alta tensão (EAT) para atender a carga dos grandes centros consumidores.
Figura I.2: Integração EletroEnergética
Um SEP devidamente projetado e operado deve satisfazer os seguintes
requisitos fundamentais:
-
8/17/2019 Tese_MSc_Leonardo_Almeida - Controle a Geracao
21/183
Capítulo I - Introdução 4
• O sistema deve ser capaz de suprir as contínuas mudanças na
carga. A eletricidade não pode ser armazenada de maneira
conveniente em grandes quantidades, portanto, uma adequada
reserva girante de potência ativa e reativa deve ser mantida e
apropriadamente controlada.
• O sistema deve suprir energia com o menor custo econômico e
impacto ecológico possível.
• A qualidade no suprimento de energia deve atender um
desempenho mínimo em relação à variação de freqüência, à
variação de tensão e ao nível de confiabilidade.
Vários níveis de controle, com inúmeros dispositivos, são utilizados para fazer
com que os SEPs sejam capazes de atender aos requisitos acima citados. Os
objetivos destes controles dependem do estado de operação em que se
encontram os SEPs. Em condições normais, o objetivo dos controles é
basicamente de manter a tensão e a freqüência próximas de seus valores
nominais da maneira mais eficiente possível. Quando em condições adversas,novos objetivos devem ser alcançados fazendo com que o SEP retorne para sua
condição normal de operação [Kundur 1994].
O controle de SEPs é facilitado pela aplicação da propriedade de
desacoplamento entre os pares de variáveis: potência ativa ( P ) – freqüência da
tensão nas barras ( f ) e potência reativa ( Q ) – magnitude da tensão nas barras
(V ). Ou seja, os fluxos de potência ativa e potência reativa em um SEP são
razoavelmente considerados independentes um do outro e influenciados por
diferentes ações de controle [Kundur 1994]. Embora variações em P possam
afetar V e mudanças em Q possam influenciar f , dentro da faixa normal de
operação estes efeitos cruzados são apenas marginais. Assim, controlando-se o
torque entregue pelas máquinas primárias aos geradores controla-se
essencialmente a potência ativa e conseqüentemente a freqüência. Da mesma
forma, através de variações apropriadas da excitação de campo dos geradores
-
8/17/2019 Tese_MSc_Leonardo_Almeida - Controle a Geracao
22/183
Capítulo I - Introdução 5
controla-se a potência reativa e conseqüentemente a tensão terminal da
máquina.
Na Figura I.3 são identificadas as principais malhas de controle associadas aum sistema de potência.
Sistema Elétrico
(rede / carga)
GrupoTurbina - Gerador
Sistema de Excitação
Sistema de Regulação Primária( Regulador de Velocidade )
Controle Secundário de Tensão
Sistema de Regulação Secundária( Controle Automático de Geração )
correntede campo
tensão
potência
velocidade
potênciamecânica
velocidade
potência
elétrica
tensão de
referência
potência de
referência
tensão da barra piloto
frequência
intercâmbio
geraçãocontroles de uma
unidade geradora
Figura I.3: Principais malhas de controle associadas a um SEP
-
8/17/2019 Tese_MSc_Leonardo_Almeida - Controle a Geracao
23/183
Capítulo I - Introdução 6
O controle do sistema de excitação consiste, basicamente, da atuação do
regulador automático de tensão (RAT). Esse controle procura manter a tensão
terminal da máquina igual ao valor de referência definido pelos operadores do
sistema ou por controles de nível mais elevado. O sistema de excitação,
através de estabilizadores de sistema de potência (ESP), ainda auxilia no
amortecimento das oscilações do rotor da máquina quando da ocorrência de
perturbações no sistema. Esta última função advém do fato de que a tensão de
campo do gerador afeta significativamente o torque de amortecimento da
máquina. As constantes de tempo do sistema de excitação são da ordem de
milisegundos.
O Controle Secundário de Tensão (CST) consiste de uma malha de controle
mais externa que regula a tensão do lado da transmissão através de barras
chamadas barras piloto. Isso é feito através do ajuste das tensões de referência
do RAT. Trata-se de um sistema de controle centralizado e cujas constantes de
tempo são da ordem de poucos minutos.
O controle do sistema de regulação primária consiste, basicamente, da atuação
do regulador automático de velocidade (RAV). Esse controle monitora a
velocidade do eixo do conjunto turbina-gerador e controla o torque mecânico
da turbina de modo a fazer com que a potência elétrica gerada pela unidade se
adapte às variações de carga. As constantes de tempo do controle primário são
da ordem de alguns segundos.
Como a atuação do controle primário normalmente resulta em desvios de
freqüência, é necessário que se conte com a atuação de um outro sistema de
controle para restabelecer a freqüência ao seu valor nominal. Este sistema é
chamado de Sistema de Regulação Secundária ou Controle Automático de
Geração (CAG). No caso de sistemas interligados este controle secundário tem
ainda a incumbência de manter o intercâmbio de potência entre regiões
vizinhas tão próximo quanto possível dos valores previamente programados.
Atualmente os CAGs são baseados em integrais do erro de controle, definidos
-
8/17/2019 Tese_MSc_Leonardo_Almeida - Controle a Geracao
24/183
Capítulo I - Introdução 7
mais comumente como Erro de Controle de Área (ECA). As empresas que
operam o CAG são denominadas controladoras de área e as outras empresas
controladas. Trata-se de um sistema de controle centralizado e cujas
constantes de tempo são da ordem de minutos.
O projeto de um sistema de potência de grande porte, como o brasileiro, que
assegure uma operação estável a um baixo custo é um problema bastante
complexo. Os SEPs são sistemas extremamente não lineares. Para executar as
tarefas relacionadas ao planejamento e operação dos SEPs os engenheiros
necessitam de ferramentas computacionais para análise, simulação e controle.
Essas ferramentas permitem aos engenheiros a tomada de decisão com relaçãoao planejamento da expansão, à melhor estratégia de operação e ao efetivo
controle do sistema. No Brasil da mesma forma que em diversos países, o
sistema é projetado para atender o critério N-1, ou seja, no caso de falta
temporária de um elemento de geração ou transmissão, outras fontes ou
caminhos alternativos de suprimento existem, de forma a permitir a
continuidade do fornecimento de energia aos centros de consumo.
Nos estudos convencionais de desempenho dinâmico à freqüência fundamental
não são levadas em consideração as variações lentas que ocorrem com a carga,
preocupando-se apenas com o comportamento do sistema frente a defeitos de
rápida duração, como por exemplo, curto-circuito seguido da abertura de
linhas.
Esta tese aborda principalmente o problema do Controle Carga-Frequência
(CCF) em SEPs, voltando o seu enfoque para o controle da malha de regulação
secundária, mais comumente denominado Controle Automático de Geração
(CAG). O objetivo primordial deste tipo de controle, como citado
anteriormente, é de restabelecer a freqüência ao seu valor de referência. No
Sistema Interligado Nacional a freqüência de referência é fixada em 60 HZ.
-
8/17/2019 Tese_MSc_Leonardo_Almeida - Controle a Geracao
25/183
Capítulo I - Introdução 8
É feita uma revisão dos conceitos básicos dos controles responsáveis pela
regulação primária e secundária. Esta tese também trata de assuntos
relacionados ao problema de estabilidade de tensão, enfocando principalmente
o Controle Secundário de Tensão (CST), controle este responsável pela
regulação da tensão ao nível da transmissão. Os controles, tanto do CAG como
do CST, são implementados em um programa comercial de análise de
transitórios eletromecânicos. Um sistema fictício e outro real são simulados.
Diversas simulações dinâmicas são efetuadas com o objetivo de fixação dos
conceitos e validação dos modelos de CAG e CST.
I.2 Estrutura da Tese
Esta tese esta organizada da seguinte forma.
O Capítulo I apresenta a introdução deste trabalho.
O Capítulo II apresenta o desenvolvimento das equações diferenciais que
descrevem o comportamento dinâmico do sistema e suas respectivas funções
de transferência. São apresentadas modelagens específicas para máquinas
síncronas e as funções de transferência que regem o comportamento das
turbinas.
O Capítulo III aborda os aspectos teóricos do problema de controle carga-
freqüência. São discutidos os níveis de controle de freqüência e apontadas as
suas deficiências. O enfoque maior incide sobre a malha de regulação
secundária e seu comportamento na operação de sistemas interligados. A
utilização de bias diferente da característica da área é apresentada.
O Capítulo IV trata de questões relacionadas ao problema de estabilidade de
tensão, enfocando principalmente o Controle Secundário de Tensão (CST). Aimplementação de um CST é apresentada.
-
8/17/2019 Tese_MSc_Leonardo_Almeida - Controle a Geracao
26/183
Capítulo I - Introdução 9
O Capítulo V apresenta as simulações feitas com dois sistemas: um sistema de
pequeno porte, sendo utilizado um sistema de 6 barras com duas áreas, e um
sistema de grande porte, sendo utilizado o Sistema Interligado Nacional (SIN).
Estas simulações visam avaliar o comportamento dos controles secundários de
freqüência e tensão.
O Capítulo VI apresenta as conclusões deste trabalho e sugestões para
trabalhos futuros.
O programa utilizado para a implementação dos controles e para a realização
das simulações foi o Programa de Análise de Transitórios Eletromecânicos
ANATEM do CEPEL [CEPEL 2002]. Foram também utilizados os programas
ANAREDE (Programa de Análise de Redes) e PlotCEPEL (Programa de
Visualização de Gráficos), desenvolvidos pelo CEPEL [CEPEL
2003a][CEPEL 2003b].
-
8/17/2019 Tese_MSc_Leonardo_Almeida - Controle a Geracao
27/183
Capítulo II – Modelagens Específicas 10
II
Capítulo II
Modelagens Específicas
II.1 Modelo de Máquina Síncrona
Para estudar um sistema, é necessário que este seja convenientemente descrito
através de equações matemáticas. As equações diferenciais que descrevem o
comportamento dinâmico do sistema podem ser obtidas através de um balanço
de potência em cada máquina do sistema.
Seja a máquina síncrona representada na Figura II.1, a segunda Lei de Newton
em sua forma rotacional fornece:
am T
dt
d J = (1)
Onde:
→ J momento de inércia combinado (gerador-turbina), [2
mkg ⋅ ].
→m velocidade angular do rotor em radianos mecânicos, [ srad ].
→aT torque acelerante, [ m N ⋅ ].
→t tempo, [ s ].
-
8/17/2019 Tese_MSc_Leonardo_Almeida - Controle a Geracao
28/183
Capítulo II - Modelagens Específicas 11
Figura II.1: Máquina Síncrona
O torque acelerante ( aT ) é o torque resultante da diferença entre o torque
mecânico e o torque elétrico.
ema T T T −= (2)
Onde:
→mT torque mecânico, [ m N ⋅ ].
→eT torque elétrico, [ m N ⋅ ].
Em regime esta diferença é nula e não há aceleração ( 0=aT ). Durante perturbações, contudo, 0≠aT .
Definindo-se a constante de inércia H como:
máquinadanominal aparente potência
nominal velocidadeàarmazenadacinéticaenergia H = (3)
Tem-se:
N
m
S
J H
20
2
1 ω = (4)
Onde:
-
8/17/2019 Tese_MSc_Leonardo_Almeida - Controle a Geracao
29/183
Capítulo II - Modelagens Específicas 12
→m0 velocidade angular nominal do rotor em radianos mecânicos, [ srad ].
→ N S potência aparente nominal da máquina, [VA ].
O momento de inércia J em termos de H fica:
N m
S H
J 20
2
ω = (5)
Substituindo as Equações (2) e (5) na Equação (1) tem-se:
emm
N m
T T dt
d S
H −=
ω 20
2 (6)
m
N
em
m
m
S T T
dt
d H
0
0
2
ω ω
ω −=⎟⎟
⎠
⎞⎜⎜⎝
⎛ (7)
Notando-se que:
N m
N T S
=0ω
(8)
r r
r
m
m
np
npω
ω
ω
ω ω
ω ===
000
(9)
Onde:
→ N T torque nominal da máquina, [ m N ⋅ ].
→r velocidade angular do rotor em radianos elétricos, [ srad ].
→0 velocidade angular nominal do rotor em radianos elétricos, [ srad ].
-
8/17/2019 Tese_MSc_Leonardo_Almeida - Controle a Geracao
30/183
Capítulo II - Modelagens Específicas 13
→r ω velocidade angular do rotor em radianos elétricos, [ pu ].
→np número de par de pólos
Substituindo-se as Equações (8) e (9) na Equação (7) tem-se:
emr T T
dt
d H −=
ω 2 (10)
Onde:
→mT torque mecânico, [ pu ].
→eT torque elétrico, [ pu ].
Ao invés de medir a posição angular em relação a um eixo fixo, é mais
conveniente fazê-lo em relação a um eixo de referência que gira à velocidade
síncrona em relação ao eixo fixo. Seja δ a posição angular do rotor, emradianos elétricos, em relação ao eixo de referência que gira à velocidade
síncrona, e 0δ , a sua posição em t igual a zero, tem-se:
)( 00 δ ω δ +−= t t r (11)
Derivando-se a Equação (11) em relação ao tempo, duas vezes consecutivas,obtém-se:
r sr dt
d ω ω ω
δ ∆=−= (12)
dt
d
dt
d
dt
d r r ω ω δ ∆==2
2
(13)
-
8/17/2019 Tese_MSc_Leonardo_Almeida - Controle a Geracao
31/183
Capítulo II - Modelagens Específicas 14
dt
d
dt
d
dt
d r r ω ω ω
ω δ ∆
== 0022
(14)
Substituindo-se dt d r ω na Equação (10) tem-se:
em T T dt
d H −=
2
2
0
2 δ
ω (15)
A Equação (15) representa a equação de movimento de uma máquina síncrona,
comumente chamada de equação swing .
A Figura II.2 mostra o diagrama de blocos das Equações (10) e (15).
Hs2
1mT
+
−
r ω ∆Σ
eT
s0 δ
Figura II.2: Diagrama de blocos da equação swing
Em estudos do tipo carga-freqüência é comum representar a relação acima em
termos de potência mecânica e elétrica ao invés do torque. A relação entre a
potência P e o torque T é dada por:
T P r ω = (16)
Considerando pequenos desvios em torno do valor nominal, e negligenciando
os termos de segunda ordem em diante tem-se:
-
8/17/2019 Tese_MSc_Leonardo_Almeida - Controle a Geracao
32/183
Capítulo II - Modelagens Específicas 15
r r
T T T
P P P
ω ω ω ∆+=
∆+=
∆+=
0
0
0
(17)
( )( )T T P P r ∆+∆+=∆+ 000 ω (18)
r T T P ∆+∆=∆ 00 (19)
r ememem T T T T P P ∆−+∆−∆=∆−∆ )()( 000 (20)
Como em regime permanente os torques elétricos e mecânicos são iguais
( 00 em T T = ), e com a velocidade expressa em pu , 10 = , tem-se:
emem T T P P ∆−∆=∆−∆ (21)
O diagrama de blocos da Figura II.2 pode ser reescrito da forma mostrada na
Figura II.3.
Hs21+
−
r ω ∆Σ
e P ∆
s0 δ m P ∆
Figura II.3: Diagrama de blocos da equação swingcom desvios de potência
II.2 Modelos de Turbinas
Neste item serão analisadas as funções de transferência que definem o
comportamento das turbinas. Uma modelagem rigorosa destas funções de
transferência necessitaria de um maior detalhamento das próprias turbinas, o
que se considera fora do escopo desta tese. Portanto serão apenas apresentados
os resultados destas modelagens.
-
8/17/2019 Tese_MSc_Leonardo_Almeida - Controle a Geracao
33/183
Capítulo II - Modelagens Específicas 16
II.2.1 Modelo para Turbinas Térmicas
Uma turbina a vapor consiste basicamente de aletas montadas sobre um eixo,
projetadas para extrair a energia térmica e de pressão do vapor superaquecido,
originário da caldeira, e converter esta energia em energia mecânica. O vapor é
admitido na turbina via válvula de controle, a alta temperatura e pressão. Na
saída, o vapor é entregue ao condensador, a baixa pressão e baixa temperatura.
Em geral, as turbinas são compostas por diferentes estágios, em função do
nível da pressão do vapor. No caso geral, uma turbina pode ter três estágios: de
alta, intermediária e baixa pressão (AP, PI e BP respectivamente). Em turbinas
com reaquecimento, o vapor que sai do estágio de AP é levado de volta à
caldeira para ter sua energia térmica aumentada antes de ser introduzido no
estágio de PI (ou BP). O objetivo é aumentar a eficiência da turbina.
O percurso do vapor em uma unidade com reaquecimento está representado na
Figura II.4. A Figura II.5 representa o diagrama de blocos relacionando a posição das válvulas de controle de admissão de vapor e a potência mecânica
da turbina.
Válvula de controlede admissão de vapor
Turbinade AP
Reaquecedor
Regulador de Velocidade
Vapor
Condensador
Turbinade BP
Figura II.4: Percurso do vapor em uma unidade com reaquecimento
-
8/17/2019 Tese_MSc_Leonardo_Almeida - Controle a Geracao
34/183
Capítulo II - Modelagens Específicas 17
Válvulade controlede admissão
de vapor
Comando doreg. de veloc.
Tubulação de entradae câmara
de vapor (AP)
AP F
Reaquecedor Câmara de
vapor de BP
∑m P ∆
Figura II.5: Diagrama esquemático para uma unidade com reaquecimento
O comportamento da válvula de controle é afetado pelo fato de que o fluxo de
vapor na válvula é uma função não-linear da posição da válvula, apresentando
efeito de saturação quando a abertura aumenta. Entre as variações de fluxo de
vapor na válvula e o fluxo de entrada na turbina de AP existe um atraso de
tempo devido às próprias tubulações de entrada e à câmara de vapor. A turbina
de AP extrai uma fração ( AP F ) da potência térmica do vapor, transformando-a
em torque mecânico. O estágio de BP (e PI, se houver), transforma a fração
restante de potência térmica em potência mecânica. Antes de o vapor chegar
aos estágios de PI e/ou BP, contudo, ele deve retornar à caldeira via
reaquecedor. Este, portanto, introduz um novo atraso no sistema térmico.
O diagrama de blocos da Figura II.6 apresenta em detalhes as funções de
transferência descritas acima.
C sT +1
1
AP F
R sT +11
A∆
AP F −1
∑
m P ∆+
+
Figura II.6: Diagrama de blocos para uma unidade com reaquecimento
Reduzindo-se este diagrama de blocos, obtém-se o diagrama de blocos
mostrado na Figura II.7.
-
8/17/2019 Tese_MSc_Leonardo_Almeida - Controle a Geracao
35/183
Capítulo II - Modelagens Específicas 18
( )( )( ) RC
R AP
sT sT
T sF
+++
11
1 A∆ m P ∆
Figura II.7: Diagrama de blocos reduzido para
uma unidade com reaquecimento
O modelo para turbinas de condensação direta, ou seja, sem reaquecimento, é
um caso particular da função de transferência de turbinas com reaquecimento,
onde 1= AP F . Para este caso teremos o diagrama de blocos mostrado na
Figura II.8.
( )C sT +11 A∆ m P ∆
Figura II.8: Diagrama de blocos parauma unidade sem reaquecimento
II.2.2 Modelo para Turbinas Hidráulicas
A Figura II.9 representa esquematicamente o reservatório, o conduto forçado, o
distribuidor e a turbina de uma unidade hidráulica. Onde H é a altura de água
do reservatório em relação ao nível do distribuidor, u é a velocidade da água
no conduto forçado e L é o comprimento do conduto forçado.
-
8/17/2019 Tese_MSc_Leonardo_Almeida - Controle a Geracao
36/183
Capítulo II - Modelagens Específicas 19
Figura II.9: Representação esquemática de uma unidade hidráulica
A representação da turbina hidráulica em estudos de estabilidade énormalmente baseada nas seguintes aproximações [Kundur 1994]:
• A tubulação do conduto forçado é inelástica e a água é
incompressível.
• A velocidade da água é diretamente proporcional a abertura da
válvula e a raiz quadrada da coluna hidráulica líquida.
• A potência da turbina é proporcional ao produto entre altura da
água e a vazão.
• As perdas de pressão no conduto forçado são desprezíveis.
Usando as hipóteses acima citadas pode-se desenvolver o modelo da turbina
apresentado em [Kundur 1994].
O diagrama de bloco que representa a função de transferência desta turbina é
mostrado na Figura II.10.
-
8/17/2019 Tese_MSc_Leonardo_Almeida - Controle a Geracao
37/183
Capítulo II - Modelagens Específicas 20
21
1
ω
ω
T s
sT
+
− A∆ m P ∆
gH
uLT =ω
Figura II.10: Função de transferência para turbinas hidráulicas
Esta função de transferência representa um sistema de fase não mínima, ou
seja, a variação inicial da potência é oposta à variação final. Pode-se observar
que, caso se aplique um degrau unitário àquela função de transferência tem-se:
sT s
sT s P m
1
21
1)( ⋅
+
−=∆
ω
ω (22)
O que passando para o domínio do tempo.
13)(2
+−=∆ − t T m et P ω (23)
A Equação (23) é representada pela curva da Figura II.11.
Figura II.11: Resposta à um degrau unitário aplicadoà função de transferência de uma turbina hidráulica
-
8/17/2019 Tese_MSc_Leonardo_Almeida - Controle a Geracao
38/183
Capítulo III – Controle Carga-Freqüência 21
III
Capítulo III
Controle Carga-Freqüência
III.1 Introdução
Os estudos elétricos de sistemas de potência que retratam o desempenho em
regime permanente analisam as condições destes sistemas para uma certa
condição específica do mesmo. Isto significa uma fotografia do sistema
naquele instante. Geralmente são analisadas as condições mais severas de
carga, como por exemplo, carga pesada e carga mínima. Uma premissa
adotada para estes estudos é considerar a freqüência do sistema constante e
igual a 60 HZ, no caso do sistema brasileiro. A Figura III.1 ilustra umresultado de uma análise de fluxo de potência.
Figura III.1: Resultado de uma análise de fluxo de potência
Mas na realidade o comportamento do sistema elétrico é bem diferente. As
cargas nos diversos barramentos variam a cada instante fazendo com que o
estado de equilíbrio carga-geração seja sempre alterado. À medida que a carga
-
8/17/2019 Tese_MSc_Leonardo_Almeida - Controle a Geracao
39/183
Capítulo III – Controle Carga-Freqüência 22
do sistema se altera, é necessário que também se altere a potência mecânica dos
geradores do sistema, pois a variação de carga é suprida inicialmente pela
energia cinética das massas girantes provocando desvios de velocidade de
rotação das máquinas e conseqüentemente desvios de freqüência.
A Figura III.2 mostra uma curva da variação da carga diária do sistema
brasileiro.
Figura III.2: Curva diária de carga
Portanto, um SEP deve possuir um sistema de controle adequado no sentido de
fazer com que o mesmo restabeleça um estado de equilíbrio apropriado instante
a instante. O controle da geração e da freqüência é comumente denominado
Controle Carga-Freqüência (CCF).
III.2 Regulação Própria
Todo sistema de potência possui uma capacidade inerente de alcançar um novo
estado de equilíbrio carga-geração [Vieira Filho 1984][Kundur 1994]. Isto se
-
8/17/2019 Tese_MSc_Leonardo_Almeida - Controle a Geracao
40/183
Capítulo III – Controle Carga-Freqüência 23
explica pelo fato da carga ser variável com a freqüência, e portanto, em geral,
quando a freqüência decai também decai o valor absoluto da carga, indicando
uma tendência do próprio sistema de se auto-regular, ou seja, de atingir um
novo estado de equilíbrio. Esta propriedade é denominada Regulação Própria
do sistema.
A regulação própria é quantificada por meio do parâmetro D, chamado de
Coeficiente de Amortecimento.
F
P
D
D
∆
∆
= (24)
Onde:
→∆ D P representa a variação da carga sensível à freqüência.
→∆ F representa a variação da freqüência.
A Figura III.3 mostra uma curva característica da variação da carga com a
freqüência.
Figura III.3: Curva Carga x Freqüência
-
8/17/2019 Tese_MSc_Leonardo_Almeida - Controle a Geracao
41/183
Capítulo III – Controle Carga-Freqüência 24
Em um sistema de potência de grande porte como o brasileiro as variações de
carga ( D P ∆ ) podem atingir valores consideráveis. Por outro lado, valores
típicos de D para tais sistemas são relativamente baixos (variando de 1% a
2%) mostrando que variações inadmissíveis de freqüência podem seralcançadas.
O diagrama de blocos do sistema incluindo o efeito de amortecimento da carga
é mostrado na Figura III.4.
s
1
D
M P ∆
L P ∆ D P ∆
+
− − r ∆Σ
Figura III.4: Diagrama de blocos com amortecimento
Sendo:
E D L P P P ∆=∆+∆ (25)
Onde:
→∆ L P representa a variação da carga não sensível à freqüência.
O diagrama de blocos da Figura III.4 pode ser reduzido como ilustrado naFigura III.5.
D Ms +1
M P ∆
L P ∆
+
−r ∆Σ
Figura III.5: Diagrama de blocos do sistema
-
8/17/2019 Tese_MSc_Leonardo_Almeida - Controle a Geracao
42/183
Capítulo III – Controle Carga-Freqüência 25
III.3 Regulação Primária
Como visto no item anterior, um sistema de potência tem uma característica
inerente, que denominamos Regulação Própria, de alcançar um novo ponto de
equilíbrio quando de um desbalanço carga-geração. Entretanto, esta auto-
regulação pode levar o sistema a níveis operativos inaceitáveis (variações de
freqüência de grande porte). Torna-se portanto necessária a atuação de um
controle que auxilie na condução do sistema a um novo ponto de equilíbrio
mais favorável.
Por esta razão as unidades geradoras são dotadas de mecanismos de regulação
de velocidade automática que atuam no sentido de aumentar ou diminuir a
potência gerada quando a velocidade (ou freqüência) se afasta da velocidade
(ou freqüência) de referência. Este primeiro estágio de controle de velocidade
em uma unidade geradora é denominado Regulação Primária [Vieira Filho
1984].
A seguir são apresentados os tipos de reguladores de velocidade existentes.
-
8/17/2019 Tese_MSc_Leonardo_Almeida - Controle a Geracao
43/183
Capítulo III – Controle Carga-Freqüência 26
III.3.1 Reguladores de Velocidade Isócronos
Um regulador de velocidade isócrono é do tipo indicado na Figura III.6.
Figura III.6: Regulador de Velocidade Isócrono
As esferas indicadas giram em sincronismo com a turbina e a força que se
exerce sobre elas é função da velocidade de rotação. A cada valor de
velocidade (ou freqüência) da máquina corresponde uma posição do ponto B.
Dessa forma, podemos verificar que o fluxo de óleo no distribuidor será uma
função da freqüência, sendo que existe somente uma posição dos êmbolos do
distribuidor para a qual o fluxo de óleo é interrompido, e esta corresponde àvelocidade nominal da turbina (freqüência nominal).
Supondo-se uma diminuição na freqüência devido a um aumento de carga no
sistema. A tendência do ponto B, cuja posição é regida pela força centrífuga
das esferas, é elevar-se, deslocando os êmbolos e provocando a abertura da
parte superior do distribuidor, e como conseqüência uma injeção de óleo no
pistão que fará uma abertura maior na admissão da turbina. Este movimento
-
8/17/2019 Tese_MSc_Leonardo_Almeida - Controle a Geracao
44/183
Capítulo III – Controle Carga-Freqüência 27
continuará até que se atinja exatamente o valor da freqüência nominal do
sistema, única para a qual cessarão as injeções de óleo no distribuidor.
A Figura III.7 mostra o diagrama de blocos da função de transferência de umregulador de velocidade isócrono.
s
K − F ∆ A∆
Figura III.7: Diagrama de blocos de um regulador
de velocidade isócrono
Na Figura III.7, F ∆ representa a variação da freqüência do sistema em pu e
A∆ representa a variação da abertura da admissão em pu .
Somente em um caso pode-se conceber tal tipo de regulação, sem se introduzir
danos para a estabilidade do sistema. Este seria o caso simplista de uma única
máquina suprindo uma única carga [Vieira Filho 1984].
A Figura III.8 mostra a resposta no tempo de uma unidade geradora, dotada de
um regulador isócrono, quando submetida a um aumento de carga.
-
8/17/2019 Tese_MSc_Leonardo_Almeida - Controle a Geracao
45/183
Capítulo III – Controle Carga-Freqüência 28
Figura III.8: Reposta no tempo de uma unidade geradoracom regulado de velocidade isócrono
A operação em paralelo de unidades geradoras com controle do tipo isócrono,
possui uma séria dificuldade, pois é praticamente impossível estabelecer e
manter valores de referência idênticos nos diversos controladores de
velocidade do sistema. A implementação deste tipo de controle promove uma
disputa entre as unidades no sentido de cada uma buscar estabelecer para osistema a freqüência definida no seu próprio valor de referência. Como a
freqüência é única ao longo de todo o sistema, no final deste processo teríamos
um colapso, com algumas unidades tendendo ao seu despacho máximo
enquanto outras tenderiam ao seu despacho mínimo.
Portanto, em sistemas de potência com mais de uma unidade geradora suprindo
as diversas cargas, este tipo de regulador embora apresente a vantagem de fazer
com que a freqüência retorne ao seu valor original, traz sérios problemas de
instabilidade e impossibilidade de repartição adequada da carga entre as
unidades geradoras.
-
8/17/2019 Tese_MSc_Leonardo_Almeida - Controle a Geracao
46/183
Capítulo III – Controle Carga-Freqüência 29
III.3.2 Reguladores de Velocidade com Queda de Velocidade
Para que se tenha uma divisão estável da carga entre duas ou mais unidades
geradoras operando em paralelo, os reguladores destas unidades devem
apresentar uma característica de queda de velocidade. A Figura III