Top Mec Clas

of 305
-
Upload
pauliana-wellington-prado -
Category
Documents
-
view
342 -
download
0
Transcript of Top Mec Clas
Tpicos de Mecnica Clssica o a aMarcus A. M. de Aguiar 11 de Novembro de 2010
ii
Conte do uPrefcio a Agradecimentos 1 Mecnica Newtoniana a 1.1 O princ pio determin stico de Newton . . . . . . . . . . . . 1.2 O grupo de Galileo . . . . . . . . . . . . . . . . . . . . . . 1.3 Exemplos elementares . . . . . . . . . . . . . . . . . . . . 1.4 Movimento de uma part cula . . . . . . . . . . . . . . . . . 1.5 Movimento em uma dimenso . . . . . . . . . . . . . . . . a 1.5.1 Osciladores anarmnicos . . . . . . . . . . . . . . . o 1.6 Sistemas de part culas . . . . . . . . . . . . . . . . . . . . 1.7 O problema de Kepler . . . . . . . . . . . . . . . . . . . . 1.7.1 Equaes de movimento e quantidades conservadas co 1.7.2 Soluo da equao radial . . . . . . . . . . . . . . ca ca 1.7.3 A equao da elipse . . . . . . . . . . . . . . . . . . ca 1.7.4 As trs leis de Kepler . . . . . . . . . . . . . . . . . e 1.8 Exerc cios . . . . . . . . . . . . . . . . . . . . . . . . . . . 2 As 2.1 2.2 2.3 2.4 2.5 Equaes de Euler-Lagrange co V nculos e graus de liberdade . . . . . . . . . . . . . O princ pio de DAlembert: caso esttico . . . . . . . a O princ pio de DAlembert e as equaes de Lagrange co Lagrangeana para a fora de Lorentz . . . . . . . . . c Exerc cios . . . . . . . . . . . . . . . . . . . . . . . . vii ix 1 5 6 8 11 13 14 17 21 21 25 28 30 31 33 33 35 38 45 47
. . . . . . . . . . . . .
. . . . . . . . . . . . .
. . . . .
. . . . .
. . . . .
. . . . .
. . . . .
3 Princ pios Variacionais 51 3.1 O princ pio de Fermat . . . . . . . . . . . . . . . . . . . . . . 51 iii
iv 3.2
CONTEUDO
3.3 3.4 3.5
3.6 3.7
3.8 3.9
O mtodo variacional de Euler-Lagrange . . . . . . . . . . . . e 3.2.1 A catenide . . . . . . . . . . . . . . . . . . . . . . . . o 3.2.2 A braquistcrona . . . . . . . . . . . . . . . . . . . . . o O princ pio de Hamilton . . . . . . . . . . . . . . . . . . . . . Multiplicadores de Lagrange . . . . . . . . . . . . . . . . . . . Coordenadas c clicas e leis de conservao . . . . . . . . . . . ca 3.5.1 Conservao dos momentos linear e angular . . . . . . ca 3.5.2 Conservao da energia . . . . . . . . . . . . . . . . . . ca Sobre a unicidade da Lagrangeana . . . . . . . . . . . . . . . . O teorema de Morse . . . . . . . . . . . . . . . . . . . . . . . 3.7.1 Variao segunda da ao para sistemas simples . . . . ca ca 3.7.2 Demonstrao do teorema de Morse . . . . . . . . . . . ca O problema da causalidade e as integrais de caminho de Feynman Exerc cios . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
54 58 60 62 63 70 71 73 74 76 79 82 85 88 91 91 93 97 100 101 103 106 107 115 117
4 As Equaes de Hamilton co 4.1 A transformada de Legendre . . . . . . . 4.2 As equaes de Hamilton . . . . . . . . . co 4.3 Hamiltoniana versus Energia . . . . . . . 4.4 Notao simpltica . . . . . . . . . . . . ca e 4.5 O Princ pio de Hamilton Modicado . . 4.6 Propriedades da Ao . . . . . . . . . . . ca 4.7 O princ pio de Maupertuis . . . . . . . . 4.8 Espao de Fases e Superf de Energia . c cie 4.9 Seoes de Poincar . . . . . . . . . . . . c e 4.10 Exerc cios . . . . . . . . . . . . . . . . .
. . . . . . . . . .
. . . . . . . . . .
. . . . . . . . . .
. . . . . . . . . .
. . . . . . . . . .
. . . . . . . . . .
. . . . . . . . . .
. . . . . . . . . .
. . . . . . . . . .
. . . . . . . . . .
. . . . . . . . . .
. . . . . . . . . .
5 Transformaes Cannicas co o 5.1 Funes Geratrizes . . . . . . . . . . . . . . . . . . . . co 5.2 Exemplos de Transformaes Cannicas . . . . . . . . . co o 5.3 Formulao Simpltica . . . . . . . . . . . . . . . . . . ca e 5.4 O Grupo Simpltico . . . . . . . . . . . . . . . . . . . . e 5.5 Transformaes Innitesimais e a Identidade de Jacobi co 5.6 Equaes de Movimento e Leis de Conservao . . . . . co ca 5.7 Invariantes Cannicos . . . . . . . . . . . . . . . . . . . o 5.7.1 Os Colchetes de Poisson . . . . . . . . . . . . . 5.7.2 O invariante de Poincar-Cartan . . . . . . . . . e 5.8 O teorema de Liouville . . . . . . . . . . . . . . . . . .
. . . . . . . . . .
. . . . . . . . . .
. . . . . . . . . .
. . . . . . . . . .
121 122 128 131 135 135 137 140 140 141 146
CONTEUDO
v
5.9 O teorema de Liouville para sistemas gerais . . . . . . . . . . 151 5.10 O teorema de recorrncia de Poincar . . . . . . . . . . . . . . 153 e e 5.11 Exerc cios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 157 6 Integrabilidade 6.1 Equao de Hamilton-Jacobi . . . . . . . ca 6.2 Soluao formal de Hamilton-Jacobi . . . c 6.3 Hamilton-Jacobi independente do tempo 6.4 Interpretao geomtrica . . . . . . . . . ca e 6.5 Limite Semiclssico . . . . . . . . . . . . a 6.6 Teorema de Arnold-Liouville . . . . . . . 6.7 Variveis de Ao e Angulo . . . . . . . a ca 6.7.1 Um grau de liberdade . . . . . . . 6.7.2 Vrios graus de liberdade . . . . a 6.7.3 Exemplos . . . . . . . . . . . . . 6.8 Super-integrabilidade . . . . . . . . . . . 6.8.1 O vetor de Laplace-Runge-Lenz . 6.9 O teorema de Bertrand . . . . . . . . . . 6.10 Exerc cios . . . . . . . . . . . . . . . . . 159 . 160 . 164 . 165 . 166 . 169 . 173 . 180 . 182 . 183 . 184 . 189 . 189 . 190 . 193 197 197 201 203 205 208 210
. . . . . . . . . . . . . .
. . . . . . . . . . . . . .
. . . . . . . . . . . . . .
. . . . . . . . . . . . . .
. . . . . . . . . . . . . .
. . . . . . . . . . . . . .
. . . . . . . . . . . . . .
. . . . . . . . . . . . . .
. . . . . . . . . . . . . .
. . . . . . . . . . . . . .
. . . . . . . . . . . . . .
7 Estabilidade 7.1 Pontos de Equil brio em 1 grau de liberdade . 7.1.1 Exemplo . . . . . . . . . . . . . . . . . 7.2 Pontos de Equil brio em n graus de liberdade . 7.3 Pontos xos nas Sees de Poincar . . . . . . co e 7.4 Variedades Estveis e Instveis . . . . . . . . a a 7.5 Exerc cios . . . . . . . . . . . . . . . . . . . . 8 Teoria de Perturbao ca 8.1 Um grau de liberdade . . . . . . . . 8.1.1 Exemplo: o pndulo simples e 8.2 Dois ou mais graus de liberdade . . 8.2.1 Prembulo . . . . . . . . . . a 8.2.2 O Caso no-ressonante . . . a 8.2.3 O Caso ressonante . . . . . 8.2.4 Estruturas fractais . . . . . 8.3 Exerc cios . . . . . . . . . . . . . .
. . . . . .
. . . . . .
. . . . . .
. . . . . .
. . . . . .
. . . . . .
. . . . . .
. . . . . .
. . . . . .
. . . . . . . .
. . . . . . . .
. . . . . . . .
. . . . . . . .
. . . . . . . .
. . . . . . . .
. . . . . . . .
. . . . . . . .
. . . . . . . .
. . . . . . . .
. . . . . . . .
. . . . . . . .
. . . . . . . .
. . . . . . . .
213 . 213 . 216 . 219 . 219 . 222 . 225 . 229 . 231
vi
CONTEUDO
9 O Teorema KAM 9.1 O mtodo superconvergente de Newton . e 9.2 Perturbaes singulares . . . . . . . . . . co 9.3 Fraes cont co nuas . . . . . . . . . . . . . 9.4 O teorema KAM . . . . . . . . . . . . . 9.5 Aplicaes em astronomia . . . . . . . . co 9.5.1 O problema de trs corpos em um e 9.5.2 Falhas no cinturo de asterides . a o 9.5.3 Falhas nos anis de Saturno . . . e 9.6 Exerc cios . . . . . . . . . . . . . . . . . 10 Caos Hamiltoniano 10.1 O mapa de toro . . . . . . . . . . . ca 10.2 O teorema de Poincar-Birkho . . . e 10.3 O emaranhado homocl nico . . . . . 10.4 Caos: o mapa de Ferradura de Smale 11 Simetrias e Meios Cont nuos 11.1 Simetrias e Leis de Conservao . . ca 11.2 Meios cont nuos e campos . . . . . 11.3 Generalizao para campos em 1-D ca 11.4 Mltiplos campos em 3-D . . . . . u 11.5 Correntes conservadas . . . . . . .
. . . . . . . . . . . . . . . . . . . . plano . . . . . . . . . . . .
. . . . . . . . .
. . . . . . . . .
. . . . . . . . .
. . . . . . . . .
. . . . . . . . .
. . . . . . . . .
. . . . . . . . .
233 . 233 . 236 . 238 . 243 . 246 . 246 . 248 . 249 . 251 253 . 253 . 256 . 259 . 262 269 . 269 . 272 . 274 . 276 . 276 279 283 285 289 293
. . . .
. . . .
. . . .
. . . .
. . . .
. . . .
. . . .
. . . .
. . . .
. . . .
. . . .
. . . .
. . . .
. . . . .
. . . . .
. . . . .
. . . . .
. . . . .
. . . . .
. . . . .
. . . . .
. . . . .
. . . . .
. . . . .
. . . . .
. . . . .
. . . . .
A Mudana de variveis em integrais multidimensionais c a B Comutador dos Campos Vetoriais C Comutao dos Fluxos em Mf ca D Variveis de ao e ngulo para o problema de Kepler a ca a Bibliograa
Prefcio aNovos livros de f sica bsica continuam a ser escritos e publicados todos os a anos. Isso parece um tanto paradoxal, pois no pode haver mais nada de a novo para se dizer sobre esses temas. De fato, a Mecnica, a Termodinmica a a e o Eletromagnetismo so teorias bem estabelecidas h muitos anos, e tanto a a j se escreveu sobre elas, que no claro porque tantos autores insistem em a a e re-apresentar esses contedos de sua prpria maneira. u o No entanto, para quem faz pesquisa, ou se interessa pelos avanos da c cincia, bastante claro que no existe assunto encerrado. Novas descobere e a tas sempre nos fazem repensar conceitos que pareciam intocveis para rea interpret-los e re-adapt-los `s novas situaes. A Mecnica Clssica um a a a co a a e timo exemplo desse processo constante de re-descoberta. No in dos anos o cio 1800 Laplace armou que se algum pudesse conhecer todas as foras agindo e c sobre todas as part culas existentes, assim como suas condies inicias, podeco ria calcular todo o futuro e o passado do universo. Esse pensamento determinista, no entanto, cairia por terra com os trabalhos de Poincar, que e demonstrou a instabilidade intr nseca do movimento no problema gravitacional de trs corpos, fundando as bases do que seria conhecido mais tarde e como Teoria do Caos. Simultaneamente aos trabalhos de Poincar, apareciam os primeiros ine d cios da inadequao da mecnica e do eletromagnetismo clssicos para exca a a plicar certos fenmenos microscpicos, como o efeito fotoeltrico e a quano o e tizao dos n ca veis de energia atmicos. Surgiria em breve a teoria quntica o a e, junto com ela, a dif tarefa de compatibiliz-la com a mecnica clssica. cil a a a Clssico versus quntico emaranhou-se com caos versus regularidade, e o esa a tudo dessas questes estende-se at os dias de hoje. E com esse esp o e rito que esse livro foi escrito, tendo como base textos clssicos como Goldstein e a tantos outros, mas sempre procurando contato com elementos novos, particularmente com caos Hamiltoniano e limite semiclssico. a vii
viii
PREFACIO
Esse livro foi preparado a partir de notas de aula para a disciplina Mecnica a Avanada, que lecionei vrias vezes na ps-graduao do Instituto de F c a o ca sica da Unicamp. Os primeiros cinco cap tulos contm uma breve reviso da e a mecnica Newtoniana, apresentando em seguida as equaes de Lagrange, os a co princ pios variacionais e o formalismo de Hamilton, enfatizando o teorema de Liouville, o teorema de recorrncia de Poincar e o tratamento dinmico de e e a ensembles. Em seguida apresento a teoria de transformaes cannicas, inco o cluindo a equao de Hamilton-Jacobi e sua relao com o limite semiclssico ca ca a da equao de Schrdinger. Os cap ca o tulos seis a nove discutem o teorema de integrabilidade de Arnold e Liouville, as variveis de ao e ngulo e a teoria de a ca a perturbaes cannicas, onde apresento os teoremas KAM, Poincar-Birkho co o e e os emaranhados homocl nicos, discutindo o aparecimento de caos Hamiltoniano. Finalmente apresento brevemente o limite do cont nuo, a equao ca da corda vibrante e o teorema de Nther. Espero que o livro possa ser o util como complemento nos cursos de ps-graduao em mecnica clssica e o ca a a tambm aos estudantes interessados em aprender sobre caos Hamiltoniano e e sua conexo com o limite semiclssico da teoria quntica. a a a
Marcus A.M. de Aguiar Campinas, 11 de novembro de 2010.
Agradecimentos E um grande prazer agradecer a todos os alunos que estudaram pelas diversas verses anteriores das notas de aula que originaram esse livro e que, o pacientemente, me apontaram erros de todos os tipos: de gramtica e graa, a nas equaes, trechos com explicaes obscuras ou confusas, etc. Gostaria de co co agradecer particularmente aos alunos Douglas Delgado de Souza, Eric Perim Martins, Murilo Neves Martins, Ceno P. Magnaghi e Thiago Visconti. Um agradecimento especial ao aluno Wendell Pereira Barreto que fez uma reviso a geral em todo o texto, ajudou nas guras e na compilao das referncias. ca e
ix
x
AGRADECIMENTOS
Cap tulo 1 Mecnica Newtoniana aA mecnica um ramo da F a e sica que tem grande apelo prtico. O movimento a de corpos sob a ao da gravidade, de foras elsticas e de atrito so exemca c a a plos intuitivos de sistemas dinmicos presentes no nosso dia-a-dia. Embora a seja dif precisar quando a mecnica comeou a ser descrita em termos de cil a c princ pios fundamentais, um marco importante a descrio de Aristteles e ca o (384-322 AC) do movimento dos corpos. Para ele, todos os movimentos seriam retil neos, circulares, ou uma combinao dos dois, pois esses eram os ca unicos movimentos perfeitos. O estado natural de alguns corpos seria o de movimento perfeito, como os corpos celestes. Para outros, como uma pedra, o estado natural seria o de repouso, sendo seu movimento poss apenas sob vel a ao constante de foras: no momento que a fora deixasse de ser aplicada, ca c c o corpo retornaria ` sua posio natural de repouso. a ca As idias de Aristteles so questionadas por Galileo (1564-1642) que ine o a troduz o que hoje conhecemos como mtodo cient e co, que diz, basicamente, que concluses sobre o comportamento natural devem ser comprovadas por o experimentos cuidadosos e controlados que possam ser reproduzidos sob as mesmas condies. Galileo formula as leis bsicas do movimento de corpos co a sob a ao da gravidade, usa um telescpio para estudar o movimento dos ca o planetas e formula o Princ pio da Relatividade de Galileo. O princ pio diz que no poss a e vel distinguir o estado de repouso daquele em movimento retil neo uniforme. Como exemplo, Galileo observa que uma pessoa no poro a de um navio que navega em mar calmo com velocidade constante no tem a como saber se est realmente em movimento ou em repouso. Se a pessoa a no olhar pela escotilha, no haver nenhum experimento capaz de decidir a a a a questo. a 1
2
MECANICA NEWTONIANA
1.0
A conexo entre repouso e movimento retil a neo uniforme, observada por Galileo, atinge diretamente a teoria Aristotlica, pois o primeiro o estado e e natural das coisas, enquanto o segundo deveria requerer a aplicao conca stante de foras. A sa para essa contradio aparece alguns anos mais c da ca tarde com Isaac Newton (1643-1727), que generaliza os achados de Galileo e tambm organiza e unica os conceitos mais importantes da mecnica. Veja e a a referncia [1] para uma biograa recente de Newton. e Newton dene conceitos como massa, quantidade de movimento, inrcia, e fora e acelerao, discutindo tambm os conceitos de espao e tempo, conc ca e c siderados em ultima anlise absolutos. As trs leis de Newton formam a a e base da mecnica clssica. Embora tenham sido reformuladas por Lagrange, a a Hamilton e outros, essas leis so consideradas como fundamentais dentro a do contexto no-relativ a stico e no-quntico at hoje. A primeira lei dene a a e sistemas de referncia especiais, chamados de inerciais, onde o movimento e de corpos pode ser descrito em termos da segunda lei. A terceira lei, nalmente, acrescenta o importante ingrediente da ao e reao, que garante a ca ca conservao dos momentos linear e angular total de sistemas isolados. ca Discutiremos agora esses conceitos fundamentais e as trs leis de Newton, e 1 dando sua verso original e uma traduo livre para o Portugus. Cona ca e ceitos e leis so apresentados abaixo de forma misturada, que foi a que me a pareceu mais didtica: a Espao - Na mecnica clssica o espao tratado como absoluto, homogneo c a a c e e e isotrpico. A medida de distncia entre dois corpos ou dois pontos do espao o a c feita com uma rgua, escolhida como padro. Os trs adjetivos acima sige e a e nicam que medidas de distncia no dependem do estado do observador a a que as realiza (o que no mais verdade na teoria relativ a e stica) e, alm disso, e no dependem da posio absoluta desses dois pontos no espao e nem de a ca c sua orientao (os dois pontos podem estar na Terra ou na Lua, orientados ca na direo Terra-Lua ou perpendicularmente). Essas duas ultimas hipteses, ca o tambm vlidas na teoria relativ e a stica, nos permitem extrapolar resultados de experimentos realizados na Terra para outros lugares do Universo. Tempo - O tempo tambm tratado como absoluto e uniforme, e sua mee e dida feita com um relgio padro. O prprio Newton desenvolveu vrios e o a o a1
Como aparece em ingls na traduo do latim por Andrew Motte em The Principia e ca
[2]
1.0
3
relgios, particularmente relgios de gua. O tempo absoluto signica que o o a o intervalo entre dois eventos independente do estado do observador que o e mede, sendo intr nseco aos eventos. Sistemas de referncia, velocidade, acelerao e trajetria - O cone ca o ceito de sistema de referncia (SR) fundamental, embora muitas vezes no e e a lhe damos grande importncia e o consideramos impl a cito. Um SR Newtoniano deve ser pensado como um laboratrio e consiste em um sistema de o eixos e um relgio. A imagem mental de um SR de trs rguas gigantes o e e e colocadas a 90 graus umas das outras formando os trs eixos cartesianos x, y e e z e de um unico relgio vis de todos os lugares para medir a passagem do o vel tempo. Com isso, podemos anotar a cada instante t, como visto no relgio, o a posio r = (x, y, z) de uma part ca cula. A taxa com que sua posio muda ca com o tempo, e a direo em que a mudana ocorre, dar sua velocidade ca c a v = (dx/dt, dy/dt, dz/dt) = (vx , vy , vz ) e a taxa com que a velocidade muda com tempo dar sua acelerao a = (dvx /dt, dvy /dt, dvz /dt) = (ax , ay , az ). A a ca trajetria da part o cula a funo r(t). No se deve confundir o conceito de e ca a SR com o de sistemas de coordenadas. Diversos sistemas de coordenadas, como cartesianas, esfricas ou parablicas, podem ser escolhidos dentro de e o um mesmo SR. Exemplos de SR so um laboratrio xo ao cho, ou xo em a o a relao ` uma estao espacial orbitando a Terra, ou ainda xo em relao ca a ca ca a um carrossel que gira com velocidade angular constante. Fora - Fora uma ao impressa a um objeto que visa mudar seu estado c c e ca de movimento. O conceito pode ser pensado como intuitivo e um dos problemas da F sica descobrir quais as foras que atuam em determinado corpo e e c como elas se comportam em funo dos diversos parmetros do problema. A ca a fora eletrosttica entre dois objetos carregados, por exemplo, depende direc a tamente da quantidade de carga em cada um deles e do inverso do quadrado da distncia que os separa. No caso de uma mola ideal, a fora aumenta lina c earmente com a distenso provocada. Assim, foras genricas podem ser mea c e didas por comparao com uma mola padro atravs da medida da distncia ca a e a que esta deve ser distendida para compensar a fora a ser medida. c A Primeira Lei de Newton - Every body perseveres in its state of rest, or of uniform motion in a right line, unless it is compelled to change that state by forces impressed thereon. Em portugus: Todos os corpos permanecem e em seu estado de repouso, ou em movimento retil neo uniforme, a no ser a
4
MECANICA NEWTONIANA
1.0
que sejam compelidos a mudar seu estado por foras neles aplicadas. Embc ora a primeira lei parea um caso particular da segunda lei com fora nula, c c e portanto totalmente dispensvel, ela de fato uma lei por si mesma. Seu a e propsito denir uma classe especial de sistemas de referncia, chamados o e e inerciais, onde a segunda lei pode ser aplicada. Sistema Inercial de Referncia - SIR - So SR especiais onde vale a e a primeira lei de Newton. Nesses sistemas, um corpo permanece em seu estado de repouso ou em movimento retil neo uniforme se no houverem foras a c agindo sobre ele. Um SR xo em relao a um carrossel que gira no inca a e ercial, pois um corpo deixado em repouso sobre ele passar a se movimentar a em relao ao observador no carrossel assim que largado. Pode-se mostrar ca que, dado um SIR, ento qualquer outro SR que se mova em relao ` ele a ca a com velocidade constante tambm inercial. e e Massa - The quantity of matter is a measure of the same, arising from its density and bulk conjunctly. Em portugus: a quantidade de matria e e (massa) uma medida da mesma, resultante da densidade e do volume do e corpo conjuntamente. Quantidade de Movimento The quantity of motion is a measure of the same, arising from the velocity and quantity of matter conjunctly. Em portugus: a quantidade de movimento uma medida do mesmo (movimento) e e e resulta da velocidade e da massa conjuntamente. Usando m para a massa e p para a quantidade de movimento, tambm conhecido como momento, e temos p = mv. A Segunda Lei de Newton - The alteration of motion is ever proportional to the motive force impressed; and is made in the direction of the right line in which that force is impressed. Em portugus: A alterao do e ca movimento sempre proporcional ` fora motriz impressa; essa alterao e a c ca ocorre na direo em que a fora impressa. Como a ausncia de foras ca c e e c implica em repouso ou movimento retil neo uniforme, a alterao do movica mento implica em acelerao da part ca cula. Como o movimento medido em e termos da quantidade p a equao para a segunda lei F = dp/dt. Embca e ora Newton no diga explicitamente, essa lei s vale em SIRs, pois estamos a o supondo que a primeira lei valida tambm. No caso de sistemas no inercie e a ais a equao deve ser modicada com a adio das chamadas foras ct ca ca c cias.
1.1
O PRINC IPIO DETERMIN ISTICO DE NEWTON
5
A Terceira Lei de Newton - To every action there is always opposed an equal reaction: or the mutual action of two bodies upon each other are always equal, and directed to contrary parts. Em portugus: A toda ao e ca corresponde sempre uma reao oposta igual, ou ainda, a ao mtua de dois ca ca u corpos, um sobre o outro, sempre igual e com direes contrrias. e co a
1.1
O princ pio determin stico de Newton
As leis de Newton so baseadas em fatos experimentais e no podem ser a a demonstradas. O fato de que foras determinam aceleraes, i.e., derivadas c co segundas da posio em relao ao tempo e no derivadas terceiras ou de ca ca a ordem maior, leva ao chamado princpio determin stico de Newton [3]. Esse princ arma que o estado de um sistema mecnico dado pelas posies e pio a e co velocidades de todos os seus pontos materiais em um dado instante de tempo e que as foras agindo sobre ele determinam unicamente seu movimento. No c caso de uma unica part cula em um sistema de referncia inercial, e supondo e que sua massa seja constante2 , a segunda lei diz que m = F(r, r, t). r (1.1)
Note que o valor de F sobre a part cula depende apenas de seu estado e no a deve envolver a acelerao ou derivadas superiores da posio em relao ao ca ca ca tempo. Assim, dados r(t0 ) e r(t0 ) calculamos (t0 ) = F(r(t0 ), r(t0 ), t0 )/m. r Com a acelerao, podemos calcular a velocidade no instante posterior t0 + ca t: r(t0 + t) = r(t0 ) + (t0 )t e, com a velocidade, calculamos a posio: r ca r(t0 + t) = r(t0 ) + r(t0 )t. Dessa forma, conseguimos calcular o estado da part cula em t0 + t. Podemos, agora, recalcular a acelerao neste instante ca e prosseguir integrando as equaes de movimento gerando a trajetria da co o part cula. O fato de podermos prever o comportamento futuro de um sistema a partir do seu estado inicial e das foras agindo sobre ele chamado de deterc e minismo. O f sico frances Pierre Simon de Laplace (1749-1827), maravilhado com as possibilidades de clculo da mecnica Newtoniana, armou que um a a demnio que pudesse conhecer as posies e velocidades de todas as part o co culasPara problemas de massa varivel, como os problemas do foguete e da esteira rolante, a veja o livro Mecnica de K. R. Symon [4] a2
6
MECANICA NEWTONIANA
1.2
do universo e as foras entre elas seria capaz de prever inequivocamente seu c futuro. Essa armativa, no entanto, mostrou-se errada mesmo dentro da teoria clssica devido a existncia de movimento catico, como veremos adiante. a e o Notamos ainda que, aplicando a mesma fora F em dois objetos diferentes, c as aceleraes (na direo da fora) sero proporcionais: co ca c a x1 m2 = . x2 m1 (1.2)
Tomando um dos objetos como padro para massa, m1 = 1 por exemplo, a podemos medir a massa dos outros objetos.
1.2
O grupo de Galileo
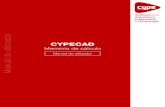
Como mencionamos anteriormente, sistemas inerciais tem a seguinte propriedade importante: se K inercial e K move-se em relao ` K com e ca a velocidade constante, ento K tambm inercial. A prova bastante sima e e e ples: Suponha, por simplicidade, que os referenciais K e K tenham eixos x, y, z e x , y , z paralelos e que em t = 0 suas origens coincidam, como ilustrado na gura 1.1. Seja V a velocidade constante da origem de K em relao ` ca a origem de K. Uma part cula m ter coordenadas r e r quando observada de a K e K respectivamente e, por construo ca r (t) = r(t) Vt. A velocidade e acelerao da part ca cula nesses referenciais sero a v (t) = v(t) V a (t) = a(t). (1.3)
Dessa forma, se no houverem foras sobre m, a = 0 pois K inercial por a c e hiptese. Como a = a, a = 0 tambm e K tambm inercial. o e e e A transformao (1.3) de um tipo bem particular, pois os eixos so ca e a paralelos e coincidem em t = 0. O conjunto geral de transformaes que leva co um referencial inercial em outro conhecido como Grupo de Transformaes e co de Galileo [3] e pode ser escrito como: r (t) = Rr(t) Vt u (1.4) t
=ts
1.2
O GRUPO DE GALILEO
7
z K m z K r r x y x V y
Figura 1.1: Os referenciais K e K so inerciais. a onde R uma matriz ortogonal de determinante 1 (matriz de rotao), V e e ca u vetores e s um parmetro escalar. As transformaes de Galileo formam a co um grupo com 10 parmetros independentes e podem ser decompostas em a trs transformaes elementares: e co - Translao das origens do espao e do tempo (4 parmetros) ca c a g1 (r, t) = (r , t ) = (r u, t s) - Rotao dos eixos (3 parmetros) ca a g2 (r, t) = (r , t ) = (Rr, t) - Movimento uniforme com velocidade constante (3 parmetros) a g3 (r, t) = (r , t ) = (r Vt, t) O requerimento de que as equaes de movimento sejam invariantes por co transformaes de Galileo impe uma srie de restries aos tipos de foras F co o e co c que esperamos encontrar na natureza. Vamos ver a invarincia por translaes a co = temporais, por exemplo. Ela implica que se m = F(r, r, t) ento mr r a F(r , r , t ) onde r = r e t = t s. Ento, a equao de movimento em K a ca pode ser reescrita como m = F(r, r, t s) = F(r, r, t), a no ser que F no r a a dependa explicitamente do tempo. A invarincia por translaes temporais a co implica que um experimento realizado hoje dever produzir os mesmos rea sultados se realizado amanh sob as mesmas condies (veja o exemplo 5 da a co prxima seo onde a invarincia quebrada pela fora F(t)=t)). o ca a e c
8
MECANICA NEWTONIANA
1.3
A invarincia por rotao dos eixos implica que se m = F(r, r) ento a ca r a = F(r , r ) onde r = Rr. Ento mr a m[R] = F(Rr, R ) = R[m] = RF(r, r). r r r A fora deve ento satisfazer a condio F(Rr, R ) = RF(r, r). c a ca r A invarincia por translaes espaciais e movimento uniforme implica que, a co para um sistema de part culas, as foras de interao s podem depender das c ca o coordenadas e velocidades relativas entre elas: mi = F({rj rk }, { j rk }). r r
1.3
Exemplos elementares
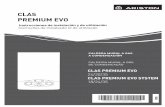
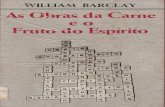
Apresentamos nesta seo alguns exemplos simples de soluo da segunda lei ca ca de Newton em referenciais inerciais e comentamos sobre as propriedades de invarincia das equaes por translaes espaciais e temporais. a co co Exemplo 1 - Queda livre de pequenas alturas - Supondo que a Terra um e referencial inercial, o que pode ser considerado uma boa aproximao em ca alguns casos, e escolhendo o eixo x na vertical, apontando para cima, a fora c gravitacional sobre uma part cula de massa m ser F = mg, onde g a x 9.8 ms2 . Podemos ento tratar o problema como se fosse unidimensional, a pois sabemos que nas direes y e z o movimento ser de repouso ou retil co a neo uniforme. A equao de movimento se reduz ` x = g e soluo ca a ca e x(t) = x0 + v0 t gt2 /2. Exemplo 2 - Queda vertical de grandes alturas - Nesse caso temos que levar em conta que a Terra nita, de raio R e massa M . Medindo x a partir e da superf cie, a distncia do objeto ao centro da Terra ser r = R + x e a a a equao de movimento ca ca GM m r2 onde G = 6.673 1011 m3 Kg 1 s2 a constante de gravitao universal. e ca 2 Substituindo r por R + x, lembrando que g = GM/R e supondo x > m2 . Exemplo 5 - Foras dependentes do tempo - Como ultimo exemplo, conc sideremos o movimento unidimensional de uma part cula sob a ao de uma ca fora dependente do tempo. Para simplicar o clculo vamos supor que c a m = 1 e que escolhemos unidades tais que F (t) = t, com t medido em horas. A equao de movimento x = t. Se zermos um experimento hoje ca e supondo que x(0) = x(0) = 0 obteremos a trajetria x1 (t) = t3 /6. Se o repetirmos o experimento amanh sob as mesmas condies teremos que a co fazer x(T ) = x(T ) = 0 onde T = 24 horas. A soluo ser x2 (t) = ca a 3 2 3 t /6 tT /2 + T /3. Vamos agora comparar as trajetrias. Para tentar o sobrep-las em um mesmo grco (gura 1.3) temos que fazer t = t T o a em x2 , o que resulta x2 (t ) = t3 /6 + t2 T /2 (veja que x(t ) = x(t ) = 0). As trajetrias no so as mesmas, como esperado, pois essa fora viola a o a a c invarincia por translaes temporais. Problemas onde aparecem foras dea co c pendentes do tempo so bastante comuns e no esto errados. Como no a a a
1.4
MOVIMENTO DE UMA PART ICULA
11
x(t')
1000
x(t)
800
600x(t'),x(t)
400
200
0
0
2
4
6
8
10
12t',t
14
16
18
20
22
24
Figura 1.3: Trajetrias para x1 (t) = t3 /6 (linha preta) e x2 (t ) = t3 /6+t2 T /2 o (linha vermelha), as trajetrias no so as mesmas como esperado. o a a exemplo 3 acima, eles descrevem apenas uma parte do sistema, no o todo, a o que pode ser conveniente em alguns casos. Incluindo na descrio a parte ca responsvel pelo aparecimento dessas foras externas, o sistema global deve a c voltar a apresentar as propriedades de invarincia desejadas. a
1.4
Movimento de uma part cula
Nesta seo vamos estudar as propriedades gerais do movimento de uma ca part cula sujeita a foras externas. Vamos supor que as observaes so c co a feitas em um SIR e que a massa da part cula constante. Alm do momento e e linear p = mv, vamos denir tambm o momento angular da part e cula em relao ` origem como ca a L=rp (1.5) e o torque da fora externa como c N = r F. Derivando L em relao ao tempo obtemos ca dL dr dp = mr + r =rF=N dt dt dt (1.7) (1.6)
12
MECANICA NEWTONIANA
1.4
Com esse resultado, e com a segunda lei de Newton, derivamos dois importantes teoremas de conservao: ca Teorema de conservao do momento linear - Se a fora total agindo ca c sobre uma part cula nula, ento p = 0 e seu momento linear permanece e a constante durante o movimento. Teorema de conservao do momento angular - Se o torque total ca agindo sobre a part cula nulo, ento L = 0 e seu momento angular pere a manece constante durante o movimento. Outro conceito extremamente util o do trabalho realizado por uma e fora. Seja r(t) a trajetria de uma part c o cula de massa m que se move sob a ao da fora externa F. O trabalho realizado por F entre os pontos ca c r1 = r(t1 ) e r2 = r(t2 ) ao longo de sua trajetria denido por o e r2 W12 = F dr (1.8)r1
onde a integral acima uma integral de linha feita ao longo da trajetria da e o part cula, isto , dr = vdt. Podemos reescrever o trabalho como e t2 t2 md 2 dv W12 = vdt = (v )dt m dt t1 t1 2 dt (1.9) 2 2 mv1 mv2 = T1 T2 . 2 22 2 2 2 onde v1 = vx + vy + vz e T (t) = mv 2 (t)/2 a energia cintica da part e e cula no instante t. Esse resultado conhecido como e
Teorema do trabalho-energia - O trabalho realizado por uma fora c externa F entre os pontos r1 e r2 igual ` variao da energia cintica da e a ca e part cula entre esses dois pontos. Consideremos agora a integral (1.8) entre os pontos r1 e r2 ao longo de um caminho arbitrrio e vamos supor que F depende apenas da posio a ca r. Se o valor da integral no depender do caminho, mas apenas dos pontos a iniciais e nais, i.e., se F dr = F dr1 2
1.5
MOVIMENTO EM UMA DIMENSAO
13
ento, o valor da integral ao longo do caminho fechado = 1 2 deve se a anular. Usando o teorema de Stokes teremos F dr = 0 = ( F) dA, S
onde S qualquer superf limitada pela curva . Se isso vale para qualquer e cie curva fechada, ento F = 0. Nesse caso podemos escrever a F(r) = V (r) (1.10) onde V chamada de energia potencial, e a fora dita conservativa. Leme c e brando que dV V (r + dr) V (r) = temos que F dr = V dr = dV e r2
V V V dx + dy + dz = V dr x y z
F dr =
r2
dV = V (r1 ) V (r2 ) V1 V2 .
r1
r1
Da equao (1.9) vem que ca T2 T1 = V1 V2 ou ainda, denindo a energia total E = T + V , vemos que E2 = E1 , i.e., o valor da energia no ponto 1 igual a seu valor no ponto 2. e Teorema de conservao da energia - Se as foras agindo sobre uma ca c part cula forem independentes da velocidade e do tempo e forem conservativas, i.e., se F = 0, ento a energia total E = mv 2 /2 + V (r) constante a e ao longo do movimento. Note que em uma dimenso toda fora da forma F = F (x) ser necesa c a sariamente conservativa. Veremos alguns exemplos desse caso a seguir.
1.5
Movimento em uma dimenso a
Considere uma part cula de massa m movendo-se em uma dimenso sob a a ao de uma fora F (x). Como F = dV /dx, a energia potencial dada por ca c e x V (x) = F (x )dxx
14
MECANICA NEWTONIANA
1.5
onde a constante x pode ser escolhida conforme a convenincia do problema. e A energia total da part cula ( )2 m dx E= + V (x) (1.11) 2 dt uma constante do movimento, determinada unicamente pelas condies e co iniciais. Resolvendo essa equao para a velocidade obtemos ca dx 2 = (E V (x)), dt m que pode ser integrada diretamente. Escrevendo que x(0) = x0 encontramos x(t) m dx t= . (1.12) 2 x0 (E V (x )) Se conseguirmos resolver a integral explicitamente obteremos uma expresso a para t em funo de x, que, ao ser invertida, resultar na soluo procurada, ca a ca x = x(t). Como um exemplo simples considere o oscilador harmnico V (x) = kx2 /2 = o 2 m0 x2 /2 onde 0 = k/m. Escolhendo x0 = 0 a integral ca m x dx t= . 2 2E 0 1 m0 x2 /2E 2 Fazendo a substituio x = ca 2E/m0 sin a integral ca simplesmente 2 2E/m0 e m 2E 1 t= = , 2 2E m0 0 ou = 0 t. Substituindo de volta em x obtemos o resultado esperado x(t) = 2 2E/m0 sin (0 t).
1.5.1
Osciladores anarmnicos o
O movimento de uma part cula sob a ao de foras no harmnicas pode ser ca c a o bastante complicado e, s em casos particulares, as equaes de movimento, o co podem ser resolvidas analiticamente. Nesta seo vamos ainda nos restringir ca
1.5
MOVIMENTO EM UMA DIMENSAO
15
a sistemas unidimensionais e considerar inicialmente uma part cula sob a 4 ao de uma fora conservativa dada pelo potencial V (x) = ax /4 + bx3 /3 + ca c cx2 /2 + dx + e. A constante e pode ser eliminada pois no modica a fora a c F (x) = dV /dx. Podemos ainda eliminar d fazendo x x + e escolhendo de maneira apropriada. Fixando a = 1, o que corresponde a re-escalar a varivel x, obtemos uma expresso simplicada dada por a a V (x) = x4 bx3 cx2 + + . 4 3 2
Os pontos onde V (x) dV /dx = 0 correspondem a pontos de equil brio da part cula, pois a fora nula nesses pontos. A estabilidade do ponto de c e equil brio dada pelo valor de V (x): o ponto estvel se V (x) > 0 (m e e a nimo da energia potencial) e instvel se V (x) < 0 (mximo da energia potencial). a a Nesse caso, os pontos de equil brio so dados por a x0 = 0 , com V (x) = c 1 2 (b 2
b 1 2 x = b 4c 2 2 se x = x0 4c) b 2
b2 4c se x = x
Os pontos x s existem quando b2 > 4c. A gura (1.4) mostra um o diagrama da estabilidade dos pontos de equil brio no plano c-b. Na regio a branca, dentro da parbola, s o ponto x0 existe e estvel. Em toda regio a o e a a c < 0 x0 instvel e ambos x+ e x so estveis. Para c > 0 e ` direita da e a a a a parbola (regio escura) x0 estvel, x+ instvel e x estvel. Finalmente, a a e a e a a na regio simtrica, ` esquerda da parbola (regio escura tambm), x0 a e a a a e e estvel, x+ estvel e x instvel. A linha c = 0 uma linha cr a e a a e tica onde x0 = x+ = 0 (os pontos coalescem) sendo marginalmente instveis (V = 0) a e apenas x estvel. e a A gura (1.5) mostra alguns exemplos de V (x) para diferentes valores dos parmetros b e c. No caso da gura 1.5(a), por a exemplo, a part cula pode car connada ao poo esquerdo ou direito do c potencial, ou ainda, se tiver energia suciente, oscilar sobre os dois poos. c Nesse caso, se adicionarmos uma fora de atrito proporcional ` velocidade c a a part cula perder energia e acabar por parar em um dos m a a nimos, no a necessariamente o de menor energia. O ponto de equil brio estvel de energia a mais alta chamado de meta-estvel, pois a part e a cula pode escapar para o
16
MECANICA NEWTONIANA4 2 0 2 4 4 2 0 2 4
1.5
Figura 1.4: Diagrama da estabilidade dos pontos x no plano c-b. Na regio a branca, dentro da parbola, s o ponto x0 existe e estvel. a o e a0,5
2
0,5
0
0,4
-20,0
0,3
V(x)
V(x)-4
V(x)
0,2
0,1
-60,0 -0,5
-8-0,1 -3 -2 -1 0 1
-5
-4
-3
-2
-1
0
1
2
-1
0
1
x
x
x
Figura 1.5: Funo potencial para (a) b=3.15, c=2; (b) b=3.15, c=0; (c) ca b=0, c=2. ponto de energia mais baixa se puder absorver energia externa e transpor a barreira que separa os dois m nimos. Isso pode ocorrer, por exemplo, se o sistema estiver acoplado a um reservatrio trmico onde KB T seja da o e ordem da altura da barreira de potencial. Transies onde a estabilidade ou co o nmero de pontos de equil u brio muda, conforme um parmetro do sistema a variado, so chamadas de bifurcaes. e a co Como comentrio nal, notamos que se acrescentarmos uma fora externa a c peridica da forma F0 cos ( t), o movimento da part o cula pode tornar-se extremamente complicado e catico, sendo aprisionado temporariamente em o um dos poos, depois saindo, caindo no outro poo e assim por diante. No c c caso em que b = 0 o sistema resultante conhecido como Oscilador de Due ing. No cap tulo 7 estudaremos em mais detalhes a teoria de estabilidade linear de pontos de equil brio. Como exemplo no trivial de aplicao da equao (1.12) considere o a ca ca potencial qurtico invertido, onde escolhemos a = 1, b = 0 e c = 1: a x4 x2 V (x) = + . 4 2 Esse potencial tem um m nimo estvel em x0 = 0 e dois pontos de mximo a a
1.6
SISTEMAS DE PART ICULAS
17
simtricos em x = 1, sendo conhecido as vezes como poo duplo invertido. e c Embora o clculo da integral (1.12) no possa ser feito em geral, podemos a a resolve-la explicitamente se a energia da part cula for exatamente a energia correspondente aos pontos de mximo, i.e., E = 1/4. Supondo por simplia cidade que m = 1/2 e que inicialmente x(0) = 0, podemos calcular quanto tempo a part cula leva para atingir o ponto de equil brio em x = 1. A resposta surpreendente. Substituindo o potencial invertido com E = 1/4 e encontramos um quadrado perfeito dentro da raiz quadrada: t=0 x
dx = 1 2x2 + x4
0
x
dx . 1 x2
Fazendo x = tanh u a integral resulta exatamente u e obtemos t = u ou x(t) = tanh t. Dessa forma, o tempo necessrio para que x atinja o valor a de equil brio x = 1 innito! Esse resultado vlido sempre que temos e e a movimento sobre curvas chamadas de separatrizes, que conectam pontos de equil brio instveis. No cap a tulo 4 visitaremos alguns problemas unidimensionais, particularmente o pndulo simples, onde encontraremos as separae trizes novamente.
1.6
Sistemas de part culas
Quando estudamos o movimento de uma unica part cula, as foras que agem c sobre ela so necessariamente externas. No caso de um sistema com vrias a a part culas, temos que distinguir entre as foras internas, que uma part c cula exerce sobre a outra, e eventuais foras externas que podem agir sobre todas c as part culas ou sobre um subconjunto delas [4]. Considere, por exemplo, um tomo de vrios eltrons e suponha que seu ncleo possa ser considerado como a a e u uma unica part cula de carga positiva. Se o tomo for colocado entre as placas a paralelas de um capacitor carregado, teremos as interaes eletromagnticas co e internas entre os eltrons, e entre estes e o ncleo, e a fora externa provocada e u c pelo campo eltrico gerado pelo capacitor que age sobre todas as part e culas carregadas do sistema. Considere ento um sistema com N part a culas e seja Fij a fora exercida c e c pela part cula i sobre a part cula j. Seja ainda Fi a fora externa total que age sobre a part cula i. A segunda lei de Newton para a i-sima part e cula
18 ca
MECANICA NEWTONIANA
1.6
dpi = Fji + Fe . i dt j=i
(1.13)
A derivao das leis de conservao dos momentos linear e angular para ca ca um sistema de part culas depende explicitamente da aplicao da terceira lei ca de Newton, que obviamente no faz sentido quando consideramos uma unica a part cula sob a ao de foras externas. Como usual vamos re-enunciar a ca c e terceira lei nas suas formas fraca e forte: Ao e reao - forma fraca - A fora exercida pela part ca ca c cula i sobre a part cula j igual em mdulo, mas em sentido contrrio, ` fora exercida e o a a c pela part cula j sobre a part cula i: Fij = Fji , gura (1.6a). Ao e reao - forma forte - A fora exercida pela part ca ca c cula i sobre a part cula j igual em mdulo, mas em sentido contrrio, ` fora exercida e o a a c pela part cula j sobre a part cula i. Alm disso essas foras so exercidas e c a na direo que une as part ca culas: Fij = Fji com Fij (ri rj ), gura (1.6b). Se as foras internas satiszerem a terceira lei pelo menos em sua forma c fraca, ento a soma de todas as foras internas se anula, pois, duas a duas, a a c soma zero. Substituindo pi = mi vi em (1.13) e somando sobre i obtemos e ( ) d2 Fji + Fe = Fe Fe m i ri = i i dt2 i i i i,j=i onde Fe a soma de todas as foras externas agindo sobre as part e c culas do sistema. Denimos agora a coordenada do centro de massa do sistema por i m i ri R= (1.14) i mi onde M i mi a massa total. Em termos de R a equao de movimento e ca anterior ca d2 R M 2 = Fe (1.15) dt ou ainda, em termos do momento linear total dR dri P=M = mi (1.16) dt dt i
1.6
SISTEMAS DE PART ICULAS
19
(a)i
(b)F ijiji
Fj
Fj
i
j
F ij
Figura 1.6: Ilustrao da terceira lei de Newton nas formas (a) fraca e (b) ca forte. obtemos dP = Fe dt e a seguinte lei de conservao: ca Teorema de conservao do momento linear total - Se a fora externa ca c = 0 e o momento total agindo sobre o sistema de part culas nula, ento P e a linear total permanece constante durante o movimento. Para derivarmos a lei de conservao do momento angular total preca cisamos que as foras satisfaam a terceira lei na sua forma forte. O momento c c angular total do sistema de part culas e L= ri pi . (1.18)i
(1.17)
Derivando em relao ao tempo obtemos ca dL = ri pi dt i (note que ri pi = 0 pois esses vetores so paralelos). Substituindo pi por a (1.13) vem dL = ri F e + ri Fij . i dt i i,j=i A ultima soma dupla pode ser calculada se analisarmos a contribuio de ca cada par de part culas. Para o par k e l temos rk Fkl + rl Flk = (rk rl ) Fkl = 0
20
MECANICA NEWTONIANA
1.6
onde usamos a terceira lei fraca na primeira passagem, Fkl = Flk , e a forma forte na segunda passagem, onde a fora paralela ` linha que une as c e a part culas. Denindo o torque total externo por Ne = ri Fe (1.19) ii
obtemos eo
dL = Ne dt
(1.20)
Teorema de conservao do momento angular total - Se o torque ca externo total agindo sobre o sistema de part culas nulo, ento L = 0 e o e a momento angular total permanece constante durante o movimento. Para fechar essa seo discutimos brevemente a questo da conservao ca ca a de energia em sistemas de muitas part culas. Seja Fi = j=i Fji + Fe a fora c i total agindo sobre a i-sima part e cula. Se Fi depender apenas das posies co das part culas do sistema (e no de suas velocidades ou do tempo), Fi = a Fi (r1 , r1 , . . . , rN ), e se existir uma funo potencial V = V (r1 , r1 , . . . , rN ) tal ca que V Fi = i V = ri ento a N m 2 r2 i i E= + V (r1 , r1 , . . . , rN ) 2 i=1 permanece constante durante o movimento. A prova bastante simples. Comeamos escrevendo a equao de movie c ca mento para a componente k da i-sima part e cula (k = x,y ou z): mi dvik V = Fik = . dt xik
Nessa equao vik denota a componente k da velocidade da part ca cula i. Multiplicando os dois lados por vik obtemos ( ) 2 d mi vik V dxik dvik V = vik = . mi vik = dt dt 2 xik xik dt
1.7
O PROBLEMA DE KEPLER
21
Somando dos dois lados sobre as componentes k e sobre as part i vemos culas 2 que e aparece2 de um lado a energia cintica total do sistema, T = i mi vi /2 = a i k mi vik /2, enquanto que ` direita aparece a derivada total do potential V em relao ao tempo, pois ca V dxik dV = . dt xik dt i=1 k=1N 3
Passando o termo do potencial para direita obtemos dT dV d + = (T + V ) = 0 dt dt dt e, portanto, E = T + V constante. e Note que no estamos apresentando as condies que as Fi devem satisa co fazer para que a funo V exista. Uma discusso interessante sobre isso pode ca a ser encontrada no livro do Symon, no cap tulo 4.
1.7
O problema de Kepler
O problema de dois corpos interagindo gravitacionalmente, ilustrado na gura (1.7), cou conhecido como Problema de Kepler (1571-1630) devido `s famosas a leis do movimento planetrio formuladas pelo astrnomo alemo. O proba o a lema foi de fato resolvido por Newton cerca de 50 anos aps seu enunciado o emp rico por Kepler. Devido sua grande importncia na F a sica e na Astronomia, e tambm por causa das aplicaes que faremos mais tarde sobre e co movimento catico no problema gravitacional de trs corpos, resolveremos o e esse problema com certo detalhe nesta seo. ca
1.7.1
Equaes de movimento e quantidades conserco vadas
As equaoes de movimento dos corpos de massa m1 e m2 , considerados ponc tuais, so dadas por a r m11 = Gm1 m2 (r2 r1 ) |r2 r1 |3 Gm1 m2 (r2 r1 ). |r2 r1 |3
r m22 =
22
MECANICA NEWTONIANA
1.7
z m1 r1 r2 r1 r2
m2
y xFigura 1.7: Interao gravitacional de dois corpos. ca Essas equaes podem ser bastante simplicadas se re-escritas em termos de co coordenadas relativa e de centro de massa r1 = R m 2 r r = r2 r1 M . (1.21) m1 R = m 1 r1 + m 2 r 2 r2 = R + r M M Somando diretamente as duas equaes de movimento obtemos co M R = 0, (1.22)
onde M = m1 + m2 a massa total, e que indica a conservao do momento e ca linear total, pois no h foras externas. Cancelando m1 nos dois lados da a a c equao de movimento para o primeiro corpo e m2 na equao para o segundo ca ca e subtraindo uma da outra obtemos ainda GM = 2 r r (1.23) r onde = m1 m2 /(m1 + m2 ) a massa reduzida. Dessa forma, o problema de e dois corpos em trs dimenses reduzido ao problema de um unico corpo em e o e 3D onde uma part cula ct de massa reduzida atra para a origem cia e da por outro corpo ct cio de massa M . Cancelando, ainda, vemos que a dinmica determinada unicamente pela massa total M . a e a E fcil ver que as foras de interao podem ser derivadas a partir do c ca potencial Gm1 m2 GM V (|r2 r1 |) = = |r2 r1 | r
1.7
O PROBLEMA DE KEPLER
23
com F12 = 1 V e F21 = 2 V . A energia total, portanto, conservada. e Alm disso, as foras satisfazem a terceira lei de Newton na forma forte, e o e c momento angular total tambm conservado. Escrevendo e e L = m 1 r1 r1 + m 2 r 2 r2 e usando as transformaes (1.21) obtemos co L = m1 (R m2 r) M
(R
m2 r) M
+ m2 (R +
m1 r) M
(R +
m1 r) M
= M R R + r r = LCM + Lr . Como R = 0 e est na direo de r ca claro que dLCM /dt = dLr /dt = r a ca 0 e os momentos angulares em relao ao centro de massa e relativo so ca a conservados independentemente. O mesmo ocorre com a energia total do sistema: 1 2 2 E = 1 m1 r2 + 1 m2 r2 + V (|r2 r1 |) 2 { =1 M R2 2
} +
{1
} 2 + V (r) ECM + Er r 2
com ECM e Er tambm conservadas independentemente. e A conservao de Lr mostra que o movimento relativo ocorre em um plano ca perpendicular ` Lr . Escolhendo o eixo z na direo de Lr , podemos resolver a ca as equaes de movimento (1.23) introduzindo coordenadas polares no plano co x-y: x = r cos r = x2 + y 2 (1.24) y = r sin tan = y/x com r = x cos + y sin (1.25) = sin + y cos . x Escrevendo r = r e derivando duas vezes em relao ao tempo obtemos r cad r r = r + r d = r + r r r
(1.26) r = ( r2 ) + (2r + r) r r
24
MECANICA NEWTONIANA
1.7
onde usamos que d/d = e d/d = . r r Multiplicando por e usando (1.23) obtemos duas equaes, uma na co direo radial e outra na direo angular. A segunda dessas equaes pode ca ca co ser escrita na forma 1 d ( 2 ) 0 = (2r + r) = r . r dt Olhando a primeira linha da equao (1.26) vemos que r = v de forma que ca a quantidade entre parntesis o momento angular na direo z: r2 = e e ca rv = Lr . Com isso temos Lr = 2 (1.27) r ou ainda Lr t dt (t) = 0 + . (1.28) 0 r2 (t ) Essa equao poder ser integrada quando a funo r = r(t) for conhecida. ca a ca A equao radial ca ca GM ( r2 ) = 2 r r e pode ser simplicada usando (1.27): ( )2 Lr GM = r r 2 r r2 GM L2 = r3 r r2 ( 2 ) d Lr GM dVef = . 2 dr 2r r dr (1.29)
Note que a energia associada ao movimento relativo tambm pode ser escrita e em termos do potencial efetivo Vef denido acima. Usando novamente a primeira das equaes (1.26) temos co Er = 1 (r2 + r2 2 ) 2GM r
= 1 r2 + Vef . 2
(1.30)
Dessa forma, o movimento radial ca equivalente ao movimento de uma part cula de massa em uma unica dimenso r (nunca negativa!) sob a ao a ca do potencial efetivo Vef . Esse potencial leva em conta implicitamente a parte angular do movimento no termo que contm o momento angular. e
1.7
O PROBLEMA DE KEPLER
25
Vef1 0 1 0
r min1 0
E>0 r E 0, hiperblica. o o o
1.7.2
Soluo da equao radial ca caVef = L2 GM r 2r2 r
O potencial efetivo
ilustrado na gura (1.8) para o caso genrico Lr = 0. O tipo de rbita e e o descrita pelo sistema de dois corpos, aqui representado em termos de sua coordenada relativa, depende do valor da energia relativa Er , que nesta seo ca chamaremos simplesmente de E. A menor energia poss vel, E = Vc , para ocorre para r = rc (veja a gura 1.8) onde L2 G2 M 2 3 r rc = Vc = . (1.31) GM 2 2L2 r Nesse ponto a fora efetiva nula e o movimento circular com r = rc . A c e e 2 equao (1.28) pode ser facilmente integrada e resulta (t) = 0 +Lr t/rc . O ca per odo deste movimento circular pode ser encontrado impondo que ( ) = 0 + 2 e resulta = 2L3 /G2 M 2 3 . r Para Vc < E < 0 o movimento apresenta dois pontos de retorno radiais, rmin e rmax , conforme ilustra a gura (1.8), e ca connado no plano x-y entre os anis denidos por esses raios. Para E > 0 o movimento tem uma e
26
MECANICA NEWTONIANA
1.7
mxima aproximao do centro de foras dado por rmin mas ilimitado, de a ca c e forma que a distncia relativa entre os dois corpos pode ir a innito. Apesar a de ser poss resolver o problema de Kepler pelo mtodo discutido na seo vel e ca 1.5 usando a equao da energia, mais fcil achar diretamente a equao da ca e a ca rbita, onde r dado em funo de . Na verdade o problema ca realmente o e ca simples se o escrevermos em termos de u() = 1/r(). Usando uma linha para indicar derivao em relao ` temos: ca ca a r= e 1 du Lr = r2 u = u 2 d u
L2 Lr r u = 2 u2 u . Multiplicando por e usando a equao de movimento radial encontramos ca r= L2 2 L2 3 r u u = r u GM u2
GM 2 u + uc L2 r onde uc = 1/rc (veja a gura 1.8). A equao acima nada menos do que a ca e equao de um oscilador harmnico de freqncia unitria submetido a uma ca o ue a fora externa constante, como no caso de uma massa presa a uma mola sob c a ao da gravidade. A soluo ca ca e u = u + u() = A cos( 0 ) + uc (1.32)
ou
onde a constante A pode ser escrita em funo da energia da trajetria. Para ca o isso notamos que os pontos de retorno rmin e rmax (este s para E < 0) so o a dados por E = Vef (gura 1.8). Em termos da varivel u temos a E= ou L2 2 r u GM u 2
2E = 0. L2 r As duas solues dessa equao devem ser comparadas com os valores mximos co ca a e m nimos atingidos por u() na equao (1.32), o que ocorre para = 0 e ca = 0 + : u = uc u2 + 2E/L2 A + uc r c u2 2uc u
1.7
O PROBLEMA DE KEPLER
27
y m1
m2
x
Figura 1.9: Orbitas el pticas no referencial do centro de massa supondo m2 > m1 . o que resulta A= u2 + 2E/L2 = uc 1 E/Vc uc c r (1.33)
onde a excentricidade da rbita. Invertendo (1.32) e usando 1/uc = rc e o dado pela equao (1.31) obtemos ca r() = rc a(1 2 ) . 1 + cos( 0 ) 1 + cos ( 0 ) (1.34)
O parmetro a denido por rc = a(1 2 ) = a(E/Vc ). Usando a equao a e ca (1.31) obtemos a = GM /2E. Se Vc < E < 0 vemos que < 1, a > 0 e a rbita ca limitada entre o rmin = a(1 ) e rmax = a(1 + ). Na prxima subseo vamos mostrar o ca que isso corresponde a uma elipse com semieixo maior a. O parmetro 0 a indica a orientao da elipse no plano e tem uma interpretao importante: ca ca quando = 0 , r atinge seu menor valor poss vel, sendo portanto a posio ca de maior aproximao dos corpos, ou perilio. Se escolhermos um SIR em ca e repouso em relao ao centro de massa, podemos tomar R = 0, de forma que, ca pelas equaes (1.21), teremos r1 = (m2 /M )r e r2 = (m1 /M )r, ou seja, co as rbitas de ambos os corpos so el o a pticas, proporcionais ` r, mas sempre a
28
MECANICA NEWTONIANA
1.7
em direes opostas. A rbita do corpo de maior massa ser sempre interna co o a `quela do corpo de menor massa. Na gura (1.9) ilustramos o movimento a supondo que m2 > m1 . No caso do sistema solar, a elipse descrita pelo Sol tem semieixo maior menor do que o raio do prprio Sol. o Se E > 0 teremos > 1 e a < 0 (de forma que a(1 2 ) > 0) e a equao representa uma hiprbole cujas ass ca e ntotas podem ser obtidas fazendo r() , o que resulta = 0 + arccos (1/) e = 0 + 2 arccos (1/). No caso cr tico E = 0 a equao da rbita pode ser reescrita como r + ca o r cos = a, onde escolhemos 0 = 0 por simplicidade. Fica como exerc cio 2 2 mostrar que essa equao pode ser colocada na forma y = a 2ax, que ca representa uma parbola deitada. a
1.7.3
A equao da elipse ca
A equao da elipse com centro na origem do sistema de coordenadas e semica eixos a e b dada por e x2 y 2 + 2 =1 a2 b e est ilustrada na gura 1.10 ` esquerda. A excentricidade da elipse a a e denida como = 1 b2 /a2 e mede o seu alongamento: = 0 corresponde ao c rculo e quanto mais prximo seu valor de 1, mais alongada a elipse ca. E conveniente usar a o e e como parmetros independentes e escrever a b = a 1 2 Os focos da elipse esto dispostos simetricamente sobre o eixo x a distncias a a a da origem. Chamando de r e r+ as distncias de um ponto arbitrrio sobre a elipse a a at cada um dos focos (veja a gura 1.10), temos a seguinte propriedade e geomtrica: e r + r+ = 2a. Podemos demonstrar essa propriedade usando a equao da elipse ou us-la ca a como denio da elipse e, a partir dela, demonstrar a equao. Vamos adotar ca ca a primeira linha de racioc nio e deixamos como exerc cio fazer o caminho contrrio. Sendo r = (x, y) o vetor posio do ponto sobre a elipse medido a a ca partir da origem, temos:
1.7y b r a r+ a a x
O PROBLEMA DE KEPLERy
29
r
r x
2a
Figura 1.10: Elipse com centro na origem e com foco na origem. r = r + a = (x + a, y) x de forma que r = (x a)2 + y 2 . Usando a equao da elipse podemos ca 2 2 2 2 2 2 2 substituir y = (1 x /a )b = (1 )(a x ): r = x2 2ax + a2 2 + (1 2 )(a2 x2 ) = a2 2ax + 2 x2 = (a x)2 r+ = r a = (x a, y) x
= a x. Somando obtemos imediatamente r + r+ = 2a. A equao da rbita que obtivemos na seo anterior tem trs diferenas ca o ca e c em relao ` equao da elipse que descrevemos acima: um de seus focos ca a ca est na origem (e no o centro); ela est escrita em coordenadas polares e; a a a sua orientao arbitrria, dada por 0 . Colocando o foco na origem temos ca e a a nova equao (veja a gura 1.10 direita) ca (x a)2 y2 + 2 = 1. a2 a (1 2 ) Usando agora (veja a gura) que r = r2a = (x2a, y) e que r = 2ar x obtemos: r 2 = (2a r)2 = (x 2a)2 + y 2 4a2 4ar + r2 = x2 + y 2 4ax + 4a2 2 4a2 (1 2 ) = 4a(r x) = 4ar(1 cos )
30
MECANICA NEWTONIANA
1.7
y r d r(t) r (t +t) x
Figura 1.11: No intervalo dt o raio vetor se move de r(t) a r(t + t) varrendo o ngulo d. a e, nalmente, cancelando o fator comum 4a e isolando r: r= a(1 2 ) 1 cos
que corresponde ` equao do movimento de Kepler para energias negativas a ca com 0 = .
1.7.4
As trs leis de Kepler e
A primeira das leis de Kepler arma que os planetas giram em torno do Sol em rbitas el o pticas. Como a elipse descrita pelo Sol muito pequena, e podemos considera-lo parado no centro de massa do sistema solar. A segunda lei de Kepler arma que o raio vetor que une os planetas ao Sol varre reas iguais em tempos iguais. De fato, a rea varrida pelo raio a a vetor no tempo dt , veja a gura 1.11, e e 1 dA = r2 d 2 ou dA 1 d 1 Lr = r2 = r2 = = constante. dt 2 dt 2 2
1.8
EXERC ICIOS
31
Finalmente, a terceira lei de Kepler diz que o quadrado do per odo orbital dos planetas proporcional ao cubo do semieixo maior de sua rbita. Para e o demonstrar esse resultado basta integrar a lei das reas sobre um per a odo para obter Lr A= = ab = a2 1 2 = a2 E/Vc . 2 Elevando os dois lados ao quadrado e usando E = GM /2a (veja o resultado abaixo da equao (1.34) e Vc dado por (1.31) obtemos, ca L2 2 L2 r r = 2 a4 . 42 GM 2 a ou 4 2 3 a. GM Finalmente, denindo a frequncia do movimento como = 2/ podee mos reescrever essa equao na forma ca [ ]1/3 G(m1 + m2 ) a= . (1.35) 2 2 =
1.8
Exerc cios
cula em queda livre vertical onde a distncia inicial a 1. Considere uma part em relao ao solo x0 no pode ser desprezada em relao ao raio da ca a ca Terra R. Mostre que no limite em que x0 /R , caso cio contrrio ocorrer difrao e no ser poss a descrio da luz por meio de a a ca a a vel ca raios. Atrs desse primeiro anteparo colocamos um segundo anteparo que, a mais uma vez, deixa passar apenas a luz que atinge o alvo, e assim sucessivamente at a fonte. Vemos que os orif e cios em cada meio se alinham, mas que h uma mudana de direo na passagem entre os meios. a c ca Em 1650 Fermat enunciou um princ pio que permitia a determinao do ca caminho da luz nessa situao: O caminho percorrido pela luz em qualquer ca combinao de meios, com quaisquer ca ndices de refrao, tal que o tempo ca e de percurso um extremo, m e nimo ou mximo. a Quando uma funo f (x) tem um ponto de extremo em x0 ento df (x0 )/dx = ca a 0. Isso implica que, para pontos x = x0 + x prximos de x0 , o valor de f (x) o aproximadamente igual ` f (x0 ): e a df f (x) f (x0 ) + dx 1 d2 f x + 2 dx2 x2x0
x0
= f (x0 ) + O(x2 ). ou seja, f f (x) f (x0 ) 0 i.e., a variao de f(x) nula em primeira ordem nas vizinhaas do ponto x0 . ca e c
3.1fonte
O PRINC IPIO DE FERMAT
53
11 x 2
n1
L1
L1
. .n2 L2
L 2
n2 > n 1
2 alvo
Figura 3.2: Minimizao do tempo de percurso. ca
Vamos mostrar que a aplicao do princ de Fermat para a refrao leva ca pio ca ` lei de Snell. A gura 3.2 mostra o caminho do raio de luz que vai da fonte, a onde o ndice de refrao n1 ao alvo, onde o ca e ndice n2 . O comprimento e dos caminhos em cada meio L1 e L2 respectivamente e os ngulos que esses e a raios fazem com a perpendicular ` superf que separa os meios 1 e 2 . a cie e A gura mostra tambm um caminho vizinho `quele percorrido pela luz. A e a idia impor que o tempo gasto no percurso do caminho correto e no caminho e e vizinho sejam iguais. O tempo de percurso no caminho correto (linha grossa) e = 1 + 2 = L1 L2 + v1 v2
onde v1 = c/n1 e v2 = c/n2 so as velocidades da luz nos respectivos meios e a c a velocidade da luz no vcuo. O caminho vizinho um pouco mais longo e a e no meio 1 e um pouco mais curto no meio 2, e o tempo de percurso sobre ele (veja a ampliao da regio prxima ` superf na gura) e ca a o a cie = L1 L2 L1 + L1 L2 L2 + =+ . v1 v2 v1 v2
54
PRINC IPIOS VARIACIONAIS
3.2
Para que = = 0 devemos ter L1 /v1 = L2 /v2 . Como L1 = x sin 1 , L2 = x sin 2 e vi = c/ni (x a diagonal do paralelogramo veja a e gura) ento a x sin 1 x sin 2 = c/n1 c/n2 ou n1 sin 1 = n2 sin 2 que a famosa Lei de Snell. e
3.2
O mtodo variacional de Euler-Lagrange e
Na mecnica o primeiro princ variacional foi aparentemente proposto pelo a pio lsofo francs Pierre-Louis Moreau de Maupertuis (1698-1759) em 1744. o e Leonhard Euler (1707-1783) o reformulou logo em seguida e, um pouco mais tarde Joseph Louis Lagrange (1736-1813) desenvolveu o clculo de variaes a co por volta de 1760. No entanto, foi apenas William Rowan Hamilton (18051865) que o modicou para sua forma atual, introduzindo a funo Laca grangeana L = T V . Nesta seo vamos introduzir o clculo de variaes ca a co de forma abstrata e aplic-lo ` mecnica na prxima seo apenas. a a a o ca O clculo de variaes se prope a encontrar certas curvas que tornem a co o extremo (m nimo, mximo ou ponto de sela) um determinado funcional. Seja a y = y(x) uma curva suave com condies de contorno y(x1 ) = y1 e y(x2 ) = y2 co xas. Denotaremos y = dy/dx. Considere agora o funcional x2 J= f (y, y , x)dxx1
onde f uma funo suave arbitrria. A pergunta que queremos responder e ca a : dada f , qual a curva y(x), com condies de contorno xas, que produz o e co menor valor poss da integral J? O clculo de variaes na verdade enconvel a co tra curvas que extremizam J. O tipo de extremo obtido, se mximo, m a nimo ou ponto de sela, deve ser vericado a posteriori. A curva que extremiza o valor de J dita estacionria, pois o valor de J xo (em primeira ordem) e a e para curvas vizinhas. O problema de raios de luz que discutimos na seo ca anterior se encaixa nesse esquema: as condies de contorno so xadas pelas co a posies da fonte e do alvo e f dx = dt = vds = [c/n(y)]ds onde ds um eleco e mento de caminho. Para cada caminho y(x) calculamos o tempo de percurso e buscamos o caminho que o extremize.
3.2
O METODO VARIACIONAL DE EULER-LAGRANGE
55
Figura 3.3: Curva estacionria (cont a nua) e curva vizinha (tracejada). O deslocamento y(x) denido para x xo e pode ser considerado virtual, no e mesmo sentido de DAlembert. Para resolver esse problema procedemos de forma anloga ao exemplo do a raio de luz da seo anterior. Seja y = y(x) a soluo procurada. Vamos ca ca construir uma fam de curvas vizinhas ` y(x) e impor que a variao de J lia a ca seja nula quando calculada para essas curvas. Seja ento a y(x, ) = y(x) + (x) y(x) + y(x) e y (x, ) = y (x) + (x) y (x) + y (x)
onde um parmetro pequeno, que faremos tender ` zero, e (x) uma e a a e funo suave qualquer com (x1 ) = (x2 ) = 0. Como isso garantimos que ca y(x, ) satisfaa as condies de contorno para todo . A gura 3.3 ilustra c co a curva estacionria procurada e uma curva da fam vizinha. Note que a a lia funo y(x) = y(x, ) y(x) denida para x xo e pode ser considerada ca e um deslocamento virtual no mesmo sentido de DAlembert. Seja ainda x2 J() = f (y(x, ), y (x, ), x)dx.x1
Expandindo J() em primeira ordem em torno de = 0 obtemos J() = J(0) + dJ d d=0
56
PRINC IPIOS VARIACIONAIS
3.2
ou ainda J = J() J(0) = dJ d d 0.=0
dJ Impomos ento que d =0 = 0 e, ao mesmo tempo, impomos que essa a condio deva ser satisfeita por qualquer curva (x) com (x1 ) = (x2 ) = 0. ca Calculando a derivada em relao ` obtemos ca a ] x2 [ dJ f y f y = + dx d y y x1
= =
x2 x1 x2 x1
[ [
f y f d + y y dx f y d y dx (
(
y )
)] dxx2 x1
(3.1)
f y
] y f y dx + y
onde zemos uma integrao por partes no segundo termo. Como y/ = ca (x) e (x1 ) = (x2 ) = 0 obtemos dJ = d ou ainda J =x1
x2
[
x1
f d y dx
(
f y
)] (x)dx
x2
[
f d y dx
(
f y
)] y(x)dx (3.2)
Como dJ/d deve ser zero sobre a curva estacionria, em = 0, para a toda funo suave (x), a curva procurada deve satisfazer ` equao ca a ca f d y dx ( f y ) =0 (3.3)
que conhecida como Equao de Euler, publicada em 1744. Para uma e ca derivao mais rigorosa dessa equao e do clculo de variaes em geral, ca ca a co veja L. Elsgolts, Dierential Equations and the Calculus of Variations, Mir Publishers. A importncia dessa equao na matemtica e na f a ca a sica enorme, e pois vrios problemas podem ser colocados na forma de uma equao de a ca extremo.
3.2
O METODO VARIACIONAL DE EULER-LAGRANGE
57
A extenso do clculo de variaes para funcionais com vrios graus de a a co a liberdade imediata. Se f = f (y1 , . . . , yn , y1 , . . . , yn , x) denimos a familia e de curvas vizinhas por yk (x, ) = yk (x) + k (x), k = 1, . . . , n
onde as curvas k so independentes e satisfazem k (x1 ) = k (x2 ) = 0. A a derivada dJ/d nesse caso resulta ( )] x2 [ n f d dJ f = k (x)dx. (3.4) d dx y k x1 k=1 yk Para que essa derivada se anule para quaisquer funes k devemos ter co ( ) f d f =0 k = 1, . . . , n. (3.5) yk dx y k A semelhana dessa equao com a equao de Lagrange (2.10) bvia, c ca ca eo o que indica que o movimento de corpo previstos pela segunda lei de Newton deve tambm extremizar alguma quantidade. Essa quantidade, denominada e ao, tem uma importncia fundamental na f ca a sica e ser discutida de vrios a a pontos de vista durante esse curso. Antes de voltar ` mecnica, vamos ver a a trs exemplos clssicos de aplicao da equao de Euler. e a ca ca Como um primeiro exemplo simples, vamos encontrar o caminho de menor distncia entre dois pontos do plano. Sejam (x1 , y1 ) e (x2 , y2 ) as coordenadas a dos dois pontos e uma curva suave y(x) qualquer ligando esses pontos. O elemento de distncia ao longo dessa curva a e 2 + dy 2 = ds = dx y 2 + 1 dx de forma que o comprimento da curva entre os pontos e x2 J= y 2 + 1 dx.x1
A curva que minimiza a distncia entre os pontos deve ento satisfazer a a a 2 + 1. Como f /y = 0, f /y = equao de Euler com f (y, y , x) = y ca c = constante. Portanto a equao de Euler ca ca f y = 2 =c y y + 1
58
PRINC IPIOS VARIACIONAIS
3.2y y2 ds
y1 x1 x2 x
x dA = 2 x ds
ds
Figura 3.4: Superf de revoluo gerada por rotao de uma curva. A rea cie ca ca a gerada por cada elemento da curva dA = 2xds. e ou y = a = constante e y(x) = ax + b, que a linha reta. As constante a e e b devem ser encontradas de tal forma que y(x1 ) = y1 e y(x2 ) = y2 . Os prximos dois exemplos tem solues um pouco mais longas e vamos o co trat-los nas subsees seguintes. a co
3.2.1
A catenide o
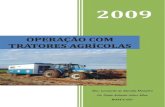
Neste exemplo procuramos a superf de revoluo de m cie ca nima rea. Cona sidere novamente dois pontos no plano x y com coordenadas (x1 , y1 ) e (x2 , y2 ) e uma curva suave y(x) qualquer ligando esses pontos. Ao rodar essa curva em torno do eixo y criamos uma superf cie, chamada de superf cie de revoluo, ilustrada na gura 3.4. Qual a forma da curva que produz a ca superf com a menor rea poss cie a vel? Cada elemento ds da curva, centrado no ponto (x, y(x)), ser rodado gera um pequeno anel de raio x e rea ao a 2 + 1dx. A rea total gerada pela curva dA = 2xds = 2x y a e x2 A = 2 x y 2 + 1 dx.x1
Agora temos f (y, y , x) = x Euler ca
y 2 + 1 e novamente f /y = 0. A equao de ca
3.2
O METODO VARIACIONAL DE EULER-LAGRANGE
59
Figura 3.5: A catenide, gerada pela rotao do cosseno hiperblico (eso ca o querda) e uma bolha gigante mostrando a superf (direita, foto: SANTOS, cie Obed Alves. CCTECA de Aracaju. 2010. color.). d dx ou ( xy
) =0
y2 + 1
xy y2 + 1
= a.
Elevando os dois lados ao quadrado e isolando y obtemos y a = x x2 a2 ou a dx + b. x 2 a2 A integral pode ser feita facilmente com a mudana de variveis x = a cosh u c a e resulta y = au + b = ou ( ) yb x = a cosh a y= que conhecida como catenria. A superf gerada a catenide, mostrada e a cie e o no lado esquerdo da gura 3.5. Essa superf aparece, por exemplo, quando cie
60
PRINC IPIOS VARIACIONAIS
3.2
uma bolha de sabo formada entre dois anis circulares paralelos, de raios a e e arbitrrios, minimizando a tenso supercial, como mostrado no lado esa a querdo da gura 3.5.
3.2.2
A braquistcrona o
O problema aqui encontrar a curva ligando dois pontos a alturas diferentes e de tal forma que uma part cula partindo do repouso do ponto mais alto atinja o ponto mais baixo no menor tempo poss vel, deslizando pela curva sob a ao da gravidade e sem atrito [10]. O ponto 1, mais alto, escolhido na ca e origem, conforme ilustra a gura 3.6. O problema foi proposto e solucionado em 1697 pelo matemtico suco Johann Bernoulli (1667-1748). O problema a e interessante pelo fato de combinar o problema variacional com a conservao ca de energia. De fato, usando E = mv 2 /2 mgy e o fato de v(0) = y(0) = 0 vemos que a energia da part cula nula. Como e E = 0, v = 2gy e o tempo de percurso, que a quantidade que queremos e minimizar, pode ser escrito como t L x2 1 + y2 ds t= dt = = dx. v 2gy 0 0 0 O funcional que teremos que usar na equao de Euler agora mais ca e complicado, dado por 1 + y2 f (y, y , x) = . 2gy As derivadas que precisamos so: a f 1 1 + y2 = y 2y 2gy f y = y 2gy(1 + y 2 )
y2 d f y = dx y 2gy (1 + y 2 )3/2 2y 2gy(1 + y 2 )
3.2
O METODO VARIACIONAL DE EULER-LAGRANGE
61
1
x2
x
v g y2 y2
Figura 3.6: O problema da braquistcrona. o onde a ultima derivada requer alguma simplicao. Substituindo na equao ca ca 2 3/2 de Euler e multiplicando tudo por 2gy (1 + y ) obtemos y 1 y2 2 2 (1 + y ) = (1 + y )2 2y 2y
que pode ser colocada na forma y 1 = . 2 2y 1+y A soluo dessa equao segue da seguinte seqencia de identidades e ca ca u transformaes: co ] 1 d [ 1 2 log (1 + y ) = dx 2y 2y ] d [ d 2 log (1 + y ) = log y dx dx ] d [ 2 log [(1 + y )y] = 0 dx y(1 + y 2 ) = c = constante. A soluo desta ultima equao pode ser nalmente resolvida em forma ca ca paramtrica. Escrevendo y = cot (2s) a equao fornece e ca y= c c = c sin2 (2s) = (1 cos (2s)). 2 1 + cot (2s) 2
62
PRINC IPIOS VARIACIONAIS
3.3
Usando agora dx = dy/y e a forma y = c sin2 (2s) obtemos dx = dy 2c sin (2s) cos (2s)ds = y cot (2s)
= 2c sin2 (2s)ds = c(1 cos (2s))ds ou x(s) = d + c (2s sin (2s)) 2
. c y(s) = (1 cos (2s)) 2 Quando s = 0, y = 0 e, de acordo com nossa escolha do ponto inicial, x(0) = 0 tambm. Isso implica que d = 0. Chamando c = 2A e reparametrizando a e curva por r = 2s encontramos x(r) = A(r sin r) . y(r) = A(1 cos r) Essa curva, que satisfaz a equao ca [x(r) Ar]2 + [y(r) A]2 = A2 conhecida como ciclide, e como um c e o e rculo cujo centro se desloca enquanto tentamos desenha-lo. A constante A obtida impondo-se a pase sagem da curva pelo ponto (x2 , y2 ). As equaes x2 = A(r2 sin r2 ) e co y2 = A(1 cos r2 ) devem ser resolvidas para A e r2 .
3.3
O princ pio de Hamilton
O princ pio de Hamilton foi inspirado por outro, publicado no mesmo ano de 1744 por Maupertuis. O princ pio de ao m ca nima de Maupertuis dizia basicamente que a quantidade de ao necessria para que qualquer mudana ca a c seja feita pela natureza sempre a menor poss e vel. No caso de uma part cula, a ao foi denida por Maupertuis como a integral de mv 2 , isto , o dobro ca e da energia cintica da part e cula. Maupertuis cou fascinado com sua descoberta e atribuiu um carter religioso ao princ a pio, como mostra a seguinte
3.4 armao [7]: ca
MULTIPLICADORES DE LAGRANGE
63
With the laws of movement thus deduced, being found to be precisely the same as those observed in nature, we can admire the application of it to all phenomena, in the movement of animals, in the vegetation of plants, in the revolution of the heavenly bodies: and the spectacle of the universe becomes so much the grander, so much the more beautiful, so much more worthy of its Author... . These laws, so beautiful and so simple, are perhaps the only ones which the Creator and Organizer of things has established in matter in order to eect all the phenomena of the visible world ... Hamilton modicou o princ pio de Maupertuis denindo a ao como a ca integral da Lagrangeana: t2 S= L(q, q, t)dt. (3.6)t1
A ao proposta inicialmente por Maupertuis hoje conhecida como ao ca e ca reduzida e voltaremos a falar dela adiante. Como vimos na seo anterior, a imposio de que a variao primeira de ca ca ca S seja nula leva naturalmente `s equaes de Lagrange na forma (2.10), como a co obtidas atravs do princ e pio de DAlembert dos deslocamentos virtuais para foras conservativas. A aplicao do princ de Hamilton requer, portanto, c ca pio que as foras aplicadas sejam derivadas de uma funo potencial e que os c ca v nculos sejam holonmicos. Repetimos as equaes aqui por completeza: o co ( ) d L L =0 (3.7) dt qk qk O princ pio de Hamilton diz que dentre todos os caminhos conectando as coordenadas iniciais qk (t1 ) `s nais qk (t2 ), aquele que de fato corresponde ` a a trajetria do sistema o que torna nula a primeira variao de S. o e ca
3.4
Multiplicadores de Lagrange
O mtodo variacional de Euler-Lagrange-Hamilton pode ser estendido de e forma a incluir v nculos escritos na forma diferencial alk dqk + alt dt = 0 l = 1, 2, . . . , m (3.8)k
64
PRINC IPIOS VARIACIONAIS
3.4
onde os coecientes alk e alt so funes de q1 , q2 , . . . , qn e t. O a co ndice l indica que podem haver vrias equaes desse tipo. V a co nculos dessa forma podem representar tanto v nculos holonmicos quanto no-holonmicos (veja o a o o exemplo 2.3.5 do cap tulo 2). De fato, v nculos holonmicos da forma o fl (q1 , q2 , . . . , qn , t) = 0 levam ` a dfl = fl fl dqk + dt alk dqk + alt dt = 0. qk t k k
O princ de Hamilton impe que a trajetria do sistema qk (t) tal que a pio o o e ao, Ldt, um extremo em relao a trajetrias vizinhas qk (t)+qk (t). Os ca e ca o deslocamentos qk (t) so virtuais, feitos com o tempo xo, conforme ilustrado a na gura 3.3. Em particular qk (t1 ) = qk (t2 ) = 0. Assim, para que os v nculos sejam satisfeitos quando calculamos a ao para uma curva vizinha, ca devemos impor que [5, 8] n alk qk = 0 (3.9)k=1
e que
t2
t1
[ d ( L ) L ] qk dt = 0 dt qk qk k
(3.10)
(compare com a equao (3.4)). ca O conjunto de coordenadas qk pode ser escolhido de vrias formas. Se a esse conjunto j satiszer todos os v a nculos automaticamente ento todos os a alk sero nulos, os qk sero independentes e (3.10) implicar nas equaes de a a a co Lagrange para cada uma das coordenadas. Esse o caso do pndulo, por e e exemplo, se escolhermos q = (veja o exemplo 2.3.2 do cap tulo 2). No entanto, podemos escolher inicialmente um conjunto maior de coordenadas, no independentes, que satisfaam equaes de v a c co nculo. No caso do pndulo, e poder amos escolher as coordenadas cartesianas x e y e o v nculo x2 +y 2 a2 = 0, ou ainda xdx + ydy = 0, que est na forma (3.9). Nesse caso as equaes a co (3.10) no implicaro em equaes de Lagrange para x e y, pois dx e dy a a co no so independentes. Teremos que combinar (3.10) e (3.9) para obter as a a equaes corretas. O mtodo dos multiplicadores de Lagrange faz exatamente co e isso. Note que, no caso de v nculos no holonmicos, essa a unica alternativa a o e poss vel, pois as equaes (3.8) no podem ser integradas para eliminarmos co a as coordenadas redundantes.
3.4
MULTIPLICADORES DE LAGRANGE
65
O truque para incorporarmos as equaes de v co nculo (3.9) no problema variacional o seguinte: comeamos introduzindo m variveis auxiliares l , e c a uma para cada equao de v ca nculo, conhecidos como multiplicadores de Lagrange e re-escrevemos (3.9) como l alk qk = 0.k
Integrando dos dois lados no tempo e somando sobre l obtemos t2 l alk qk dt = 0.t1 k,l
Finalmente, como essa integral nula, podemos subtra da equao (3.10) e -la ca para obter ] ) t2 [ ( m n d L L l alk qk dt = 0. qk qk t1 k=1 dt l=1 Como existem m equaes de v co nculo, apenas n m dos qk s originais so a independentes. Escolhemos esses como q1 , q2 , . . . , qnm . No entanto, os m valores dos l s podem ser escolhidos a vontade. Escolhemos ento os valores a de 1 , 2 , . . . , m de tal forma que ( ) m d L L l alk = 0 dt qk qk l=1 para k = n m + 1, n m + 2, . . . , n. Temos aqui m equaes que resolvemos co para os m l s. Com essa escolha a equao variacional acima pode ser reduzida para ca ] t2 nm [ ( m d L ) L l alk qk dt = 0. dt qk qk t1 k=1 l=1 Note que a soma agora s vai de k = 1 at n m e s aparecem os qk o e o correspondentes. Mas esses so independentes por escolha e, portanto, a ) ( m d L L l alk = 0 (3.11) dt qk qk l=1
66
PRINC IPIOS VARIACIONAIS
3.4
para k = 1, 2, . . . , n m. Como escolhemos os l de modo que a mesma equao fosse satisfeita para k = n m + 1, n m + 2, . . . , n, ela vale para ca todo k, de 1 a n! Assim temos n equaes para n + m variveis: os n qs e os m s. As co a m equaes restantes so as equaes de v co a co nculo (3.8). Dividindo-as por dt podemos reescreve-las na forma de equaes diferenciais co nk=1
alk qk + alt = 0 (3.12)
ou fl (q1 , . . . , qn , t) = 0
para l = 1, 2, . . . , m, onde a segunda forma s poss se os v oe vel nculos forem holonmicos. O conjunto de n +m equaes (3.11) e (3.12) fecha o problema. o co A interpretao dos multiplicadores de Lagrange pode ser percebida da ca seguinte forma: se removermos os v nculos e aplicarmos foras externas de c forma a obter o mesmo movimento, ento poder a amos usar as equaes de co Lagrange na forma (2.9): d dt ( L qj ) L = Qj qj
onde L contm as foras aplicadas, derivveis de um potencial, e os Qk seriam e c a as foras generalizadas de v c nculo. Comparando com (3.11) vemos que Qk =m l=1
l alk .
(3.13)
Assim o clculo dos multiplicadores de Lagrange permite o clculo das foras a a c de v nculo, que tinham sido eliminadas do problema por DAlembert e Hamilton. Exemplo 3.4.1 O pndulo simples em coordenadas polares. Usando as e variveis r e e a equao de v a ca nculo r a = 0, ou dr = 0, temos L= ) m( 2 r + r2 2 + mgr cos . 2
3.4
MULTIPLICADORES DE LAGRANGE
67
As trs incgnitas so r, e e os coecientes da equao de v e o a ca nculo so a ar = 1, a = 0, at = 0. As equaes (3.11) e (3.12) cam co m mr2 mg cos = 0 r m(2rr + r2 ) + mgr sin = 0 r a = 0. Usando r = a vem que r = r = 0 e obtemos Qr = = ma2 mg cos a = g sin . Vemos que Qr a tenso no o. Compare essa soluo com o exemplo 2.3.2 e a ca do cap tulo anterior. Exemplo 3.4.2 A barra girando gura 2.2 e exemplo 2.3.3. Em vez de usarmos apenas a coordenada generalizada r, usamos r e e a equao de ca v nculo = t, ou d dt = 0. Aqui temos ar = 0, a = 1 at = . As equaes (3.11) e (3.12) cam co m mr2 = 0 r m(2rr + r2 ) = 0 t = 0. Substituindo = t nas outras encontramos r = r 2 Q = = 2mrr. A primeira equao j foi resolvida no exemplo 2.3.3 e a segunda segue desta. ca a Escolhendo v0 = 0 r(t) = r0 cosh (t)2 Q = = 2mr0 cosh (t) sinh (t) 2 mr0 2t e . 2
68
PRINC IPIOS VARIACIONAIS
3.4
z y a dr /2Figura 3.7: Disco rolando sem deslizar. Exemplo 3.4.2 Disco rolando sem deslizar. Um disco de raio a e massa M , concentrada na sua borda como um aro, rola sem deslizar no plano x-y, conforme ilustra a gura 3.7. Precisamos de 4 coordenadas para posicionar o sistema: as coordenadas (x, y) do centro do disco, a orientao do disco ca em relao ao eixo x e outro ngulo para dar a orientao do disco em ca a ca relao ao seu prprio eixo. O v ca o nculo dado pelo mdulo da velocidade do e o centro: v = a. O sinal de menos indica que v e tem direes contrrias co a (veja a gura). Como o vetor velocidade sempre paralelo ao plano do disco e suas componentes so: a x = v cos (/2 ) = v sin y = v sin (/2 ) = v cos . ou, como v = a, dx + a sin d = 0 dy a cos d = 0. Temos ento duas equaes de v a co nculos no-holonmicos, como o leitor pode a o facilmente demonstrar. A Lagrangeana a prpria energia cintica, dada e o e por M a2 2 M a2 2 M 2 (x + y 2 ) + + , L= 2 2 4
v x
3.5
MULTIPLICADORES DE LAGRANGE
69
onde os momentos de inrcia do disco em relao ao eixo perpendicular a e ca 2 seu plano M a e em relao a um eixo paralelo a seu plano passando pelo e ca centro M a2 /2. As quatro equaes de Lagrange mais as duas equaes de e co co v nculo so: a M x 1 = 0 M y 2 = 0 M a2 1 a sin + 2 a cos = 0 M a2 = 0 x = a sin y = a cos .
Embora a soluo geral dessas equaes seja dif podemos usar nossa inca co cil, tuio para encontrar pelo menos trs solues que representam movimentos ca e co simples. 1 - disco rodando em torno de seu eixo: x = x0 , y = y0 , = 0 , 1 = 2 = 0 e = 0 + t. 2 - disco rolando na mesma direo: = 0 , = 0 + t, 1 = 2 = 0, ca x = x0 at sin 0 e y = y0 + at cos 0 . 3 - disco descrevendo movimento circular: = t, x = x0 + R cos (t), y = y0 +R cos (t), = 0 +Rt/a, 1 = M R 2 cos (t), 2 = M R 2 sin (t). Fazendo R = 0 recuperamos a soluo 1. Sero essas as unicas solues ca a co poss veis? Note que o torque do campo gravitacional no est sendo levado em a a considerao, o que faz com que o disco no se incline. Alm disso, a energia ca a e total conservada. Quando esses ingredientes so adicionados ao problema e a vrias complicaes interessantes aparecem e ele recebe o nome de Disco do a co Euler [11].
70
PRINC IPIOS VARIACIONAIS
3.5
3.5
Coordenadas c clicas e leis de conservao ca1i
Para Lagrangeanas do tipo L= i mi r2 V (r1 , . . . , rn )
2
a derivada em relao ` velocidade que aparece nas equaes de Lagrange ca a co tem um signicado simples: L = mx k xk o momento da k-sima part e e cula na direo x. E natural ento denirmos ca a o momento generalizado L pk = (3.14) qk conjugado ` coordenada generalizada qk . a Um exemplo importante e no trivial aparece j com a Lagrangeana de a a uma part cula sujeita a campos eletromagnticos externos. Para e 1 L = m 2 e + e A r r 2 obtemos p = m + eA, que tem uma parte mecnica e uma parte devido ao r a campo. Suponha que a Lagrangeana de um sistema com n graus de liberdade seja tal que a coordenada qk no aparea explicitamente em L. Nesse caso temos a c ( ) d L dpk L = = 0. dt qk dt qk A varivel qk dita c a e clica e seu momento conjugado pk uma constante do e movimento. Em geral, leis de conservao esto associadas ` simetrias do sistema. ca a a De fato, se a Lagrangeana independente de uma coordenada qk , podemos e deslocar o sistema na direo de qk que as equaes de movimento no vo ca co a a se alterar. Assim, a conservao do momento linear est associada ` simetria ca a a de translao; a conservao do momento angular ` simetria de rotao; a ca ca a ca conservao de energia ` translao temporal. ca a ca
3.5
COORDENADAS C ICLICAS E LEIS DE CONSERVACAO
71
3.5.1
Conservao dos momentos linear e angular ca
Vamos ilustrar as conservaes de momento linear e angular com um sistema co de apenas duas part culas onde 1 1 1 2 L = m1 r2 + m2 r2 V (|r1 r2 |). 2 2 Veja que nenhuma das coordenadas c e clica. No entanto, usando como coordenadas generalizadas as coordenadas relativas e de centro de massa (veja o cap tulo 1, seo 1.7) ca r1 = R m 2 r r = r2 r1 M R = m 1 r1 + m 2 r2 r2 = R + m 1 r M M onde M = m1 + m2 e = m1 m2 /M , obtemos 1 1 L = M R2 + 2 V (r). r 2 2 A coordenada R c e clica, pois Rx , Ry e Rz no aparecem em L. Ento a a e P = L/ R = M R, que representa o momento linear total m1 r1 + m2 r2 , constante. A simetria associada a essa conservao a translao do sistema: ca e ca se deslocarmos o centro de massa para R R + dR ento, de acordo com a as equaes de transformao, co ca r1 r1 + dR r2 r2 + dR e cada part cula do sistema deslocada da mesma quantidade. Mostramos e ento que o deslocamento de todo o sistema no afeta sua dinmica e essa a a a invarincia est por trs da conservao de P. a a a ca Tomando agora R = R = 0, que poss e vel no referencial do centro de massa, podemos olhar a parte relativa. Como vimos no cap tulo 1 o movimento relativo ocorre no plano perpendicular ao momento angular, que conservado. Tomando o plano como x-y e usando coordenadas polares r e e fcil ver que a coordenada c e a e clica e que a quantidade conservada o e mdulo do momento angular. A simetria associada a de rotaes em torno o e co do eixo z.
72
PRINC IPIOS VARIACIONAIS
3.5
E interessante, no entanto, esquecer por um momento da conservao do ca momento angular e escrever o problema diretamente em coordenadas esfricas e r, e . Os vetores posio e velocidade em coordenadas esfricas so dados ca e a por r = r e v = r + r + r sin e a Lagrangeana ca r r 1 L = (r2 + r2 2 + r2 2 sin2 ) V (r). 2 A coordenada c e clica e portanto p = L = mr2 sin2
constante. Como r sin a distncia ao eixo z e r sin = v , p a e e a e componente z do momento angular. Por outro lado, o momento na direo ca 2 p = mr e a equao para pode ser escrita como e ca dp mr2 2 sin cos = 0 dt ou ainda p2 cos dp = 0. dt mr2 sin3 Multiplicando dos dois lados por 2mr2 = 2p obtemos 2p dp 2p2 cos =0 dt sin3 ( 2 ) p dp2 d + =0 dt dt sin2 d dt ( p2 p2 + sin2 ) =0
e temos outra constante de movimento L2 p2 + p2 . sin2
Para ver que L2 representa o mdulo do momento angular total ao quadrado o = mr v = mr2 mr2 sin = p (p / sin ). Outra calculamos L
3.5
COORDENADAS C ICLICAS E LEIS DE CONSERVACAO
73
maneira de ver escrevendo a energia cintica em termos de p e p : e e T = 1 r2 + 2 = 1 r2 + 22 1 p ( 2 r 2
+
p2 r 2 sin2
)
L2 . 2r 2
3.5.2
Conservao da energia ca
A derivada total da Lagrangeana em relao ao tempo ca e ) ( L dL L L = qk + qk + dt qk qk t k ] [ d ( L ) L L = qk + qk + dt qk qk t k d = dt ou ainda ( ) L L qk + qk t k
( ) L d L qk L = . dt qk t k L p k qk L qk L = qk k k
(3.15)
A funo ca h(q, q, t) =
(3.16)
onde q = (q1 , . . . , qn ) e q = (q1 , . . . , qn ), a energia do sistema. A equao e ca (3.15) mostra que h constante se L no depender explicitamente do tempo. e a No caso de Lagrangeanas quadrticas nas velocidades, h pode ser simplia cada. Se 1 aij (q)qi qj V (q) L=T V = 2 i,j com aij = aji , ento a pk = L = aki (q)qi qk i
74 e
PRINC IPIOS VARIACIONAIS
3.6
h = =
i,k
aki (q)qi qk
1 i,j 2 aij (q)qi qj
+ V (q)
1 i,j 2 aij (q)qi qj
+ V (q) = T + V.
Lagrangeanas quadrticas nas velocidades aparecem em situaes basa co tante gerais. Suponha por exemplo que o sistema de part culas tenha um potencial V (r1 , . . . , rn ) e que a transformao das coordenadas cartesianas ca para as generalizadas seja independente do tempo: ri = ri (q1 , q2 , . . . , qn ). Ento a ri = e T = onde akl (q) = mi ( rii
ri qk . qk k ) qk ql 1 akl (q)qk ql 2 kl
2
kl
ri qk ql i
mi
ri ri . qk ql
Portanto, se V no depende das velocidades e se as coordenadas generala izadas se relacionam com as cartesianas por transformaes independentes do co tempo, ento a funo h identicada com T +V , que a energia do sistema. a ca e e Quando essas condies no so satisfeitas, h ainda pode ser denida, mas co a a no necessariamente coincide com a energia usual T + V . Se a transformao a ca depender do tempo, por exemplo, teremos r