trabalho metodos
160
Índice Conteúdo Introdução ................................................................................................................................ 2 Modelação do problema ........................................................................................................... 4 Interpolador de Lagrange .................................................................................................. 7 Interpolador de Newton .................................................................................................... 9 Interpolador de Gregory-Newton .................................................................................... 11 Métodos dos Minímos Quadrados Polinomiais ................................................................ 12 Método dos Minímos Quadrados não Polinomiais........................................................... 14 Interpolador de Lagrange .................................................................................................... 15 Interpolador de Newton...................................................................................................... 33 Método Interpolador de Gregory-Newton........................................................................... 80 Método dos minímos quadrados polinomiais .................................................................... 102 Métodos dos Minímos Quadrados não Polinomiais ........................................................... 129 Conclusão ............................................................................................................................. 154 Bibliografia ........................................................................................................................... 156 Anexos .................................................................................................................................. 158
Transcript of trabalho metodos

Índice
Conteúdo Introdução ................................................................................................................................ 2
Modelação do problema ........................................................................................................... 4
Interpolador de Lagrange .................................................................................................. 7
Interpolador de Newton .................................................................................................... 9
Interpolador de Gregory-Newton .................................................................................... 11
Métodos dos Minímos Quadrados Polinomiais ................................................................ 12
Método dos Minímos Quadrados não Polinomiais ........................................................... 14
Interpolador de Lagrange .................................................................................................... 15
Interpolador de Newton ...................................................................................................... 33
Método Interpolador de Gregory-Newton ........................................................................... 80
Método dos minímos quadrados polinomiais .................................................................... 102
Métodos dos Minímos Quadrados não Polinomiais ........................................................... 129
Conclusão ............................................................................................................................. 154
Bibliografia ........................................................................................................................... 156
Anexos .................................................................................................................................. 158

Modelagem do controle postural humano durante postura erecta Página 2
Introdução Desde que nós humanos adoptamos a postura erecta bípede, temos sido
desafiados pela força de gravidade para manter o equilibrio do corpo sobre uma
pequena área de suporte delimitada pelos pés. Quando permanecemos parados, não
permanecemos sem movimento, óscilamos.
Este problema consiste em determinar a aproximação aos polinómios que
calculem a maneira como os seres humanos controlam o equilíbrio na postura erecta,
que se refere ao alinhamento corporal tentando manter o Centro Geométrico num limite
óptimo de equilibrio, uma vez que esta não é totalmente compreendida e tendo em conta
que esta questão constitui uma preocupação relevante.
Para o cumprimento da regulação do equilibrio, o sistema de controle postural
necessita de informações sobre as posições relativas dos segmentos do corpo e da
magnitude das forças que actuam sobre o corpo.
Tem sido reportado que durante a manutenção da postura erecta em resposta a
perturbações ou durante deslocamentos voluntários do centro de gravidade, as
estratégias de movimento e padrões de actividade muscular podem ser organizados em
estratégia do quadril, do tornozelo e do passo. Durante a tarefa de manutençao da
postura erecta em situação normal, são observados padrões de movimento articular que
envolvem uma combinação destas diferentes estratégias ao mesmo tempo. Apesar deste
factor, o entendimento do processo de controle postural através destas estratégias é
interessante e útil, por decompor movimentos complexos em estruturas mais simples
como mostra a fig1.
Fig 1 – três estratégias posturais usadas
normalmente pelos adultos no controle da
postura erecta: estratégia do tornozelo, do
quadril e do passo (da esquerda para a direita,
respectivamente).

Modelagem do controle postural humano durante postura erecta Página 3
Considerando o corpo no plano sagital representado por dois segmentos rigidos,
os pés e o resto do corpo, sendo que os pés se encontram fixos ao chão e o resto do
corpo comporta-se como um segmento rígido articulado no pé por uma articulação tipo
dobradiça. Assim é utilizado um modelo de um pêndulo simples (pêndulo invertido)
para representar a dinâmica do sistema-musculo-esqueléctico humano no plano sagital
de uma forma bastante simplificada com o intuito de mostrar os conceitos básicos da
modelagem fisico-matemática.
Simplificadamente, a tarefa de sistema de controlo postural é manter a projecção
vertical do centro de gravidade ou do centro de massa de um indivíduo dentro da base
de suporte, tratando-se no nosso caso de um indivíduo de 80kg e de 1.80m.

Modelagem do controle postural humano durante postura erecta Página 4
Modelação do problema No intuito de facilitar o diagnóstico precoce de disfunções que afectam o controle
postural humano, a modelagem teórica aliada à simulação computacional emerge como
opção utilizada pelos pesquisadores. Assim, para a resolução deste problema, utilizámos
os seguintes métodos: Polinómio Interpolador de Lagrange, Polinómio Interpolador de
Newton, Polinómio Interpolador de Gregory-Newton, Método dos mínimos quadrados
com funções polinomiais e Método dos Mínimos Quadrados com funções não
polinomiais.
Relativamente a estes métodos utilizamos diversas componentes, tal como,
Excel, CoNum, Freemat, , Matlab,Octave, Scilab e Maxima.
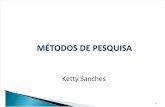
O nosso problema inciou-se com a selecção dos 40 pontos, retirados do gráfico
seguinte:
Fig2 – Sinal da excitação neural para um sistema muscular agonista-antagonista.

Modelagem do controle postural humano durante postura erecta Página 5
Deste gráfico retirámos 40 pontos igualmente espaçados e 40 pontos não espaçados,
mas optámos por utilizar os pontos de igual espaçamento devido ao facto de um dos
métodos utilizados assim o exigir.
X 1 2 3 4 5 6 7 8 9 10
f(x) 0,04 0,16 0,1
-0,08 -0,2 -0,01 0,21 0,14 0,03 0,159
X 11 12 13 14 15 16 17 18 19 20
f(x) 0,1 0,01 0,2 0,25 0,11 -0,03
-0,02 0,091 0,165 -0,05
X 21 22 23 24 25 26 27 28 29 30
f(x) -0,08 -0,18 0 0,05 -0,2 -0,31 0,16 0,3 0,02 -0,14
X 31 32 33 34 35 36 37 38 39 40
f(x) -0,07 0,109
-0,02
-0,02 0,05 0,059 -0,1 -0,04 0,12 0,015
Fig 3 – 40 pontos igualmente espaçados
X 0 0,5 1 2 4 6 7,5 7,98 8,8 10,2
f(x) -0,24 0,11 0,04 0,16 -0,08
-0,01 0,266 0,2 0,022 0,16
X 12,1 13,3 13,8 15 16 16,5 18 18,5 19,8 20
f(x) 0,011 0,2 0,27 0,11 -0,03
-0,05 0,091 0,101 0 -0,05
X 20,5 21,3 22 23,8 25 25,8 26,1 27,3 27,9 28,6
f(x) -0,05 -0,1 -0,18 0,12 -0,2
-0,34 -0,3 0,3 0,365 0,2
X 28,98 30 31 32 33,2 35 36 38 39 40
f(x) 0,1 -0,14
-0,07 0,109
-0,01 0,05 0,059 -0,04 0,12 0,015
Fig 4 – 40 pontos não igualmente espaçados

Modelagem do controle postural humano durante postura erecta Página 6
3.Métodos numéricos
Interpolação é um método que nos permite um novo conjunto de dados a partir de
um conjunto discreto de dados pontuais conhecidos. Em engenharia e ciências, dispõe-
se habitualmente de dados pontuais, obtidos a partir de uma amostragem ou
experimento. Através da interpolação pode-se construir um polinómio que
aproximadamente se “ajuste” nestes dados pontuais.
Uma outra aplicação da interpolação é aproximação de funções complexas por
funções mais simples. Suponhamos que temos uma função complicada para avaliar de
forma eficiente. Então, podemos escolher alguns dados pontuais da função complicada e
tentar interpolar esses dados para construir uma função mais simples. Também é de
salientar que quando utilizamos a função mais simples para calcular novos dados, é
normal não obter o mesmo resultado da função original, mas dependendo do domínio
do problema e do método de interpolação utilizado, o ganho de simplicidade pode
compensar o erro.
A interpolação permite fazer a reconstituição de um polinómio apenas conhecendo
algumas abcissas e as respectivas ordenadas (imagens). A função resultante passa nos
pontos fornecidos e, em relação aos outros pontos, pode ser um mero ajuste.
Fig 5 - Interpolação Polinomial de grau superior a 1

Modelagem do controle postural humano durante postura erecta Página 7
Fig 6 - Interpolação Polinomial de grau superior a 1
3.1.Interpolação Polinomial
Denomina-se por interpolação polinomial o processo matemático de
interpolação em que a função interpoladora é um polinómio. A função interpoladora é
uma função P (x).
Definidos num intervalo [a, b] contido IR e uma função f : [a, b] IR,
denomina-se interpolação um processo de avaliar f (x), qualquer que seja x Є [a, b],
substituindo-se a função f (x) pela função interpoladora P (x), de modo que P (xi) = f
(xi), qualquer que seja i Є [1, n] (contido nos números naturais). Assim, f (x) é uma
função real, definida em [a, b] contida em IR, da qual conhecemos os valores das
abcissas, assim como as suas ordenadas (imagens).
Métodos de interpolação polinomial
Interpolador de Lagrange
O método que estudei foi o método desenvolvido pelo senhor Joseph Louis
Lagrange, interpolador de LaGrange.
Interpolador está fortemente ligado ao termo interpolação.E interpolação consiste
em determinar uma função, que assume valores conhecidos (chamados nós de
interpolação).

Modelagem do controle postural humano durante postura erecta Página 8
Ou seja, significa que podemos fazer uma aproximação a uma função conhecendo
apenas algumas das coordenadas do gráfico dessa função, ou seja, utilizando as
abscissas (eixo dos xx) e as ordenadas respectivas (eixo dos yy – imagem do objecto).
Esta é uma técnica que junta esse conjunto de pontos por linhas, como mostra a fig
seguinte:
Fig 7 - Um Polinómio de 3ºgrau interpola a função em 4 pontos
A ideia base da interpolação por Lagrange é, dados n pontos, obter uma série de n
polinómios de tal forma a que cada um deles se anula em todos os pontos conhecidos
menos 1. O polinómio interpolador será a soma desses polinómios (ver figura
seguinte).
O método do interpolador permite assim construir um conjunto de dados a partir de
dados previamente conhecidos, que podem ser obtidos através de uma amostragem ou

Modelagem do controle postural humano durante postura erecta Página 9
de uma experiência. No meu caso, obtive esses dados a partir do gráfico presente no
enunciado do trabalho e foi com esses dados que trabalhei com o método acima dito.
Este tipo de método é tambem muito útil para, a partir desses dados conhecidos,
obtermos uma funçao mais simples, no caso de a funçao inicial ser demasiado complexa
para se trabalhar.
A expressão geral do método interpolador de Lagrange é:
Sabendo que:
Lk(x)= nkXnxkXkxkXkxkxxk
XnxXkxXkxxx,...,0,
))...(1)(1)...(0(
))...(1)(1)...(0(
A nova função encontrada é Pn(x), pois Pn (xi) = fi. As novas ordenadas dos pontos
encontram-se substituindo na nova função o X pela abcissa do ponto em questão.
Interpolador de Newton
O método interpolador de newton trata de uma fórmula alternativa para o cálculo do
polinómio interpolador, baseada numa construção sucessiva a partir dos polinómios de
graus inferiores. Para estabelecer essa fórmula convém introduzir a noção de diferença
dividida.
As diferenças divididas são razões incrementais e constituem aproximações
discretas de derivadas, desde que se utilizem pontos suficientemente próximos.
Fórmula de Newton
Portanto, podemos agora escrever
pn(x) = pn-1(x) + f [ x0 , ... , xn ] (x - x0) ... ( x - xn-1)
e podemos obter sucessivamente, a partir do polinómio interpolador de grau zero
p0(x)=f0 :
p1(x) = f0 + f [ x0 , x1 ] ( x - x0)

Modelagem do controle postural humano durante postura erecta Página 10
p2(x) = f0 + f [ x0 , x1 ] ( x - x0) + f [ x0 , x1, x2 ] ( x - x0) ( x - x1)
... etc ...
Deduzimos assim a Fórmula Interpoladora de Newton :
pn(x) = f0 +
n
S
k=1
f [x0 , ... , xk] (x - x0 ) ... (x - xk-1)
Para resolver este problema pelo método de interpolação de Newton, foram utilizados
os seguintes programas: Excel, freemat, conum, matlab e máxima.
Para uma melhor solução do problema em causa foi resolvido por ramos e
posteriormente por uma única função, para assim poder comparar a discrepância dos
valores e o próprio erro atribuído pelos computadores. Quanto à solução em ramos, os
pontos foram divididos nos seguintes intervalos: [1;5], [5;10], [10;15], [15;20], [20;25],
[25;30], [30;35], [35;40].

Modelagem do controle postural humano durante postura erecta Página 11
Interpolador de Gregory-Newton
Quando os valores das abcissas xi são igualmente espaçados, o interpolador de Newton
pode ser simplificado, resultando assim o interpolador de Gregory-Newton. Portanto, o
polinómio de Gregory-Newton é um caso particular do polinómio de Newton para
pontos igualmente espaçados.
Conceito de diferença finita
Considerando um conjunto de pontos {(x0,y0), (x1,y1),…,(xn,yn)}.
O conceito de diferença finita só é válido apenas quando xi-xi-1=h, i=1,…,n.
diferença finita de ordem de zero, relativamente a yi é dada pelo valor da função em yi,
ou seja, ∆0yi = yi.
A diferença finita de primeira ordem, relativamente a yi e yi+1 relaciona as diferenças
finitas anteriores, ou seja ordem zero, sendo dada por
∆1yi = yi+1-yi = ∆
0yi+1-∆
0yi.
As diferenças finitas da k-ésima ordem relaciona as diferenças finitas de ordem k-1 e
são determinadas através da seguinte fórmula
∆kyi = ∆
k-1yi+1-∆
k-1yi
É possível construir uma tabela das diferenças finitas com todas as ordens, sendo
organizada da seguinte forma,

Modelagem do controle postural humano durante postura erecta Página 12
TABELA DAS DIFERENÇAS FINITAS
i xi ∆0yi = yi = f(xi) ∆
1yi ∆
2yi … ∆
kyi
0 x0 f(x0) ∆1f(x0) ∆
2f(x0) … ∆
kf(x0)
1 x1 f(x1) ∆1f(x1) ∆
2f(x1) … -----
2 x2 f(x2) ∆1f(x2) ∆
2f(x2) … -----
… … … … … … -----
n-2 xn-2 f(xn-2) ∆1f(xn-2) ∆
2f(xn-2) ----- -----
n-1 xn-1 f(xn-1) ∆1f(xn-1) ----- ----- -----
n xn f(xn) ------ ----- -----_ -----
O polinómio de interpolação
Estabelece-se a seguinte forma para o polinómio de interpolação (Interpolador de
Gregory-Newton):
))()((!
)(...))((
!2
)()(
!1
)()()( 110
0
102
0
2
0
0
1
0 nn
n
n xxxxxxhn
xfxxxx
h
xfxx
h
xfxfxP
Observar que os pontos de interpolação devem ser igualmente espaçados, com um passo
h, ou seja:
x1 = xo+h x2 = x1+h …. xn = xn-1+h
ou, equivalentemente, xj = xo+jh, j = 0, 1, …, n
Métodos dos Minímos Quadrados Polinomiais
Teoria da aproximação - métodos dos mínimos quadrados
O método dos mínimos quadrados tem como objectivo determinar funções que
melhor aproximam um conjunto de dados (caso discreto) ou uma função definida num
intervalo (caso contínuo). Para tal, determina-se uma função p que minimize a função
erro definida por E=2 no caso discreto e E=
2dx no
caso continuo.

Modelagem do controle postural humano durante postura erecta Página 13
Caso seja um polinómio, designamos por regressão polinomial (em particular, se
for um polinómio de grau 1 designamos por regressão linear).
Um requisito implícito para o método dos mínimos quadrados trabalhar é que os
erros em cada medida sejam distribuídos aleatoriamente com função densidade
gaussiana, e que os resíduos sejam independentes. O Teorema Gauss-Markov garante
(embora indirectamente) que o estimador de mínimos quadrados EMQ é o estimador
não-viesado de variância mínima linear na variável resposta.
A técnica dos mínimos quadrados é comummente usada em ajuste de curvas.
Muitos outros problemas de optimização podem também ser expressos na forma dos
mínimos quadrados, por minimização (energia) ou maximização (entropia).
O método dos mínimos quadrados ordinários é a forma de estimação mais
amplamente utilizada na econometria. Consiste em um estimador que minimiza a soma
dos quadrados dos resíduos da regressão, de forma a maximizar o grau de ajuste do
modelo. (R²)
Caso discreto
No caso discreto é nos dado por exemplo um conjunto de pontos
{(x0,y0),(x1,y1),…,(xn,yn)}, e com estes pontos pretendemos determinar um polinómio
de grau máximo k, Pk(x)=a0+ a1x+a2x2+…+ akx
k, que minimize a função E, onde E é
dada por:
E=2
Mas para minimizar a função E é necessário resolver o sistema constituído pelas
equações normais:

Modelagem do controle postural humano durante postura erecta Página 14
=0
=0
….
=0
O que simplificando é equivalente a :
a0 0+ a1
1+…+ak
k=
0
a0 1+ a1
2+…+ak
k=
1
….
a0 k+ a1
k+1+…+ak
2k=
k
Com o sistema é possível calcular o a0,a1,....ak, e com estes valores obtemos polinómio
de grau k.
É possível substituir o polinómio Pk(x), por outras funções, como por exemplo:
h(x)=beax
, h(x)=bxa,…..Para a determinação dos coeficientes a e b devem ser feitas as
devidas alterações no sistema.
Método dos Minímos Quadrados não Polinomiais
Método dos mínimos quadrados - funções não polinomiais
O método que eu vou estudar neste trabalho é o método dos mínimos quadrados
de funções não polinomiais. Este método é devido ao ilustre matemático alemão Johann
Carl Friedrich Gauss (1777-1855), que o descreveu aos dezoito anos (1795). O
objectivo deste método é encontrar o melhor ajustamento para um conjunto de dados tentando
minimizar a soma dos quadrados das diferenças entre a curva ajustada e os dados. Assim
segundo o método dos mínimos quadrados o valor esperado ou o valor mais verosímil para a
grandeza Y a partir de N medidas yi, é aquele que minimiza a soma dos quadrados das
diferenças entre Y e yi, isto é, E = ∑ (Y-yi) 2 deve ser mínimo.

Modelagem do controle postural humano durante postura erecta Página 15
Um caso simples, em que se aplica esta teoria é o caso da regressão linear, em
que tentamos adaptar a um conjunto de pontos e valores dados, a "melhor recta", que
(neste caso) será a recta que minimiza a soma quadrática das diferenças entre os valores
dados aos valores da recta, nesses pontos.
Fig8. Regressão Linear: Neste caso pretendemos encontrar a função do tipo a + b x
(... ou seja, a recta) que "melhor se adapta" aos valores dados.
Esta é uma perspectiva discreta, em que o conjunto de valores dados é finito.
Podemos também pensar num caso contínuo, em que apesar de conhecermos a função,
não apenas em certos pontos, mas em todo um intervalo, estamos interessados em
aproximar essa função (... no sentido dos mínimos quadrados) por funções de uma outra
classe, mais adequada ao problema que pretendemos resolver.
Como utilizei o método dos mínimos quadrados de funções não polinomiais,
trabalhei quatro funções, onde as transformei em funções polinomiais e assim tornar
mais fácil a resolução ao problema.
Para tal resolução empreguei o auxílio computacional, tal como Matlab, Excel e
CoNum.
4.Resultados Computacionais
Interpolador de Lagrange Para efectuar este trabalho, utilizei o Microsoft Excel para realização de gráficos e
tabelas (apresentados em anexos). Utilizei também os programas Maxima (ver em

Modelagem do controle postural humano durante postura erecta Página 16
anexos) e Scilab para encontrar os vários polinómios de Lagrange, uma vez que dividi
os pontos de 5 em 5.
Após encontrar os polinómios no Maxima, copiei para o Excel e substitui o X pela
abcissa de cada ponto em estudo, a fim de obter a sua nova ordenada. Se o resultado
obtido com essa substituição fosse o mesmo que o teórico (igual às ordenadas retiradas
do gráfico do protocolo), o polinómio estaria corecto.
Para realizar este trabalho dividi os 40 pontos obrigatórios em ramos de 5 pontos.
Assim, obtive 8 polinómios diferentes, cada um para seu ramo. O primeiro polinómio
foi encontrado no programa Maxima e para confirmar, procurei cálculá-lo no Scilab.
O código que utilizei para utilizar o Scilab foi o seguinte:
function[P]=lagrange(X,Y)//X nodes,Y values;P is the numerical
Lagrange polynomial interpolation
n=length(X);// n is the number of nodes. (n-1) is the degree
x=poly(0,"x");P=0;
for i=1:n, L=1;
for j=[1:i-1,i+1:n] L=L*(x-X(j))/(X(i)-X(j));end
P=P+L*Y(i);
plot(X,Y);
figure;
end
endfunction

Modelagem do controle postural humano durante postura erecta Página 17
PONTOS DE 1 A 5
Programa Maxima:
L0(X)= 512
*77
24
)2^(*71
12
)3^(*7
24
4^ xxxx
L1(X)= 106
*107
6
)2^(*59
6
)3^(*13
6
4^ xxxx
L2(X)= 102
*39
4
)2^(*49)3^(*3
4
4^ xxxx
L3(X)= 56
*61
6
)2^(*41
6
)3^(*11
6
4^ xxxx
L4(X)= 112
*25
24
)2^(*35
12
)3^(*5
24
4^ xxxx
P(X)=0.0041666666666667*x^4-0.030833333333333*x^3-
0.0091666666666668*x^2+0.30083333333333*x-0.225
Programa Scilab:

Modelagem do controle postural humano durante postura erecta Página 18
Pontos de 5 a 10
Programa Maxima:
L4(X)= 25210
*1627
3
)2^(*125
24
)3^(*127
3
4^
120
5^ xxxxx
L5(X)= 105012
*8555
8
)2^(*1523
24
)3^(*601
8
)4^(*13
24
5^ xxxxx
L6(X)= 18001
*1265
3
)2^(*1048
12
)3^(*569
6
)4^(*19
12
5^ xxxxx
L7(X)= 15751
*1135
12
)2^(*3863
12
)3^(*539
12
)4^(*37
12
5^ xxxxx
L8(X)= 7006
*3085
1
)2^(*149
24
)3^(*511
2
)4^(*3
24
5^ xxxxx
L9(X)= 1266
*1879
24
)2^(*665
24
)3^(*97
24
)4^(*7
120
5^ xxxxx
P(X)= -0.0045916666666667*x^5+0.18479166666667*x^4-
2.907458333333331*x^3+22.30720833333332*x^2-83.25194999999999*x+120.666
Programa Scilab:

Modelagem do controle postural humano durante postura erecta Página 19
Pontos de 10 a 15
Programa Maxima:
L9(X)= 300320
*23379
24
)2^(*4355
24
)3^(*337
24
)4^(*13
120
5^ xxxxx
L10(X)= 136502
*10875
6
)2^(*517
24
)3^(*1631
3
)4^(*8
24
5^ xxxxx
L11(X)= 250253
*30475
4
)2^(*6559
12
)3^(*1579
4
)4^(*21
12
5^ xxxxx
L12(X)= 231001
*9525
3
)2^(*4687
12
)3^(*1529
6
)4^(*31
12
5^ xxxxx
L13(X)= 107254
*17925
24
)2^(*17891
24
)3^(*1481
24
)4^(*61
24
5^ xxxxx
L14(X)= 200230
*25381
2
)2^(*285
24
)3^(*287
2
)4^(
120
5^ xxxxx
P(X)= 0.009175*x^5-0.58095833333333*x^4+14.61904166666667*x^3-
182.7110416666667*x^2+1134.054783333334*x-2796.243
Programa scilab:

Modelagem do controle postural humano durante postura erecta Página 20
Pontos de 15 a 20
Programa Maxima:
L14(X)= 1550415
*65003
4
)2^(*1935
24
)3^(*647
4
)4^(*3
120
5^ xxxxx
L15(X)= 726754
*82465
24
)2^(*55999
24
)3^(*3161
4
)4^(*89
24
5^ xxxxx
L16(X)= 1368001
*39310
6
)2^(*27031
12
)3^(*3089
3
)4^(*22
12
5^ xxxxx
L17(X)= 1292003
*112645
4
)2^(*17411
12
)3^(*3019
4
)4^(*29
12
5^ xxxxx
L18(X)= 612001
*17965
12
)2^(*25253
24
)3^(*2951
12
)4^(*43
24
5^ xxxxx
L19(X)= 1162820
*68879
24
)2^(*9775
24
)3^(*577
24
)4^(*17
120
5^ xxxxx
P(X)= -1.9166666666666811*10^-4*x^5+0.012583333333333*x^4-
0.316375*x^3+3.786416666666582*x^2-21.61243333333368*x+48.63400000000183
Programa Scilab:

Modelagem do controle postural humano durante postura erecta Página 21
Pontos de 20 a 25
Programa Maxima:
L19(X)= 5313020
*231879
24
)2^(*24265
24
)3^(*1057
24
)4^(*23
120
5^ xxxxx
L20(X)= 2530003
*167435
4
)2^(*19669
24
)3^(*5191
4
)4^(*19
24
5^ xxxxx
L21(X)= 4830001
*107595
12
)2^(*114847
12
)3^(*5099
12
)4^(*113
12
5^ xxxxx
L22(X)= 4620001
*103830
6
)2^(*55909
12
)3^(*5009
3
)4^(*28
12
5^ xxxxx
L23(X)= 22137512
*601835
8
)2^(*36307
24
)3^(*4921
8
)4^(*37
24
5^ xxxxx
L24(X)= 425045
*48501
12
)2^(*10615
24
)3^(*967
12
)4^(*11
120
5^ xxxxx
P(X)= 0.0083083333333333*x^5-0.9455*x^4+42.94495833333334*x^3-
973.1350000000001*x^2+11001.29023333333*x-49638.186
Programa Scilab:

Modelagem do controle postural humano durante postura erecta Página 22
Pontos de 25 a 30
Programa Maxima:
L24(X)= 7125302
*255127
6
)2^(*54
24
)3^(*7835
6
)4^(*35
24
5^ xxxxx
L25(X)= 6851254
*494845
24
)2^(*214229
24
)3^(*7721
24
)4^(*139
24
5^ xxxxx
L26(X)= 13195003
*720415
1
)2^(*17461
12
)3^(*7609
2
)4^(*23
12
5^ xxxxx
L27(X)= 12723751
*233245
12
)2^(*205003
12
)3^(*7499
12
)4^(*137
12
5^ xxxxx
L28(X)= 6142502
*226715
6
)2^(*50159
24
)3^(*7391
3
)4^(*17
24
5^ xxxxx
L29(X)= 11875560
*1323137
8
)2^(*13095
24
)3^(*1457
8
)4^(*9
120
5^ xxxxx
P(X)= -0.001575*x^5+0.24675*x^4-15.242625*x^3+465.1762500000014*x^2-
7025.53780000002*x+42063.24400000001
Programa Scilab:

Modelagem do controle postural humano durante postura erecta Página 23
Pontos 30 a 35
Programa Maxima:
L29(X)= 32463260
*2956637
8
)2^(*23925
24
)3^(*2177
8
)4^(*11
120
5^ xxxxx
L30(X)= 15708002
*480255
3
)2^(*44018
24
)3^(*10751
6
)4^(*41
24
5^ xxxxx
L31(X)= 30434251
*468315
12
)2^(*345617
12
)3^(*10619
12
)4^(*163
12
5^ xxxxx
L32(X)= 29512003
*1370755
1
)2^(*28274
12
)3^(*10489
2
)4^(*27
12
5^ xxxxx
L33(X)= 14322004
*892065
24
)2^(*333151
24
)3^(*10361
24
)4^(*161
24
5^ xxxxx
L34(X)= 27825610
*435627
3
)2^(*8180
24
)3^(*2047
3
)4^(*4
120
5^ xxxxx
P(X)= -0.011291666666667*x^5+1.842291666666667*x^4-
120.1284583333333*x^3+3913.155708333333*x^2-
63679.36325*x+414140.2450000001
Programa Scilab:

Modelagem do controle postural humano durante postura erecta Página 24
Pontos de 35 a 40
Programa Maxima:
L34(X)= 65800865
*433501
12
)2^(*54815
24
)3^(*2887
12
)4^(*19
120
5^ xxxxx
L35(X)= 319865012
*5087975
8
)2^(*179753
24
)3^(*14281
8
)4^(*63
24
5^ xxxxx
L36(X)= 62244001
*829750
6
)2^(*265301
12
)3^(*14129
3
)4^(*47
12
5^ xxxxx
L37(X)= 60606001
*812225
12
)2^(*522173
12
)3^(*13979
12
)4^(*187
12
5^ xxxxx
L38(X)= 29526003
*1193075
4
)2^(*85661
24
)3^(*13831
4
)4^(*31
24
5^ xxxxx
L39(X)= 57575720
*1558379
24
)2^(*101195
24
)3^(*2737
24
)4^(*37
120
5^ xxxxx
P(X)=0.0019166666666667*x^50.37475*x^4+29.23625*x^31137.75075*x^2+22088.3
5133333333*x-171159.505
Programa Scilab:

Modelagem do controle postural humano durante postura erecta Página 25
Pode verificar-se que os polinómios encontrados quer no programa Maxima quer no
programa Scilab, são muito semelhantes. À excepção que no programa Scilab o
resultado apresenta-se com menos casas decimais.
Principais resultados
Por uma questão se facilitar o cálculo do polinómio, dividi a resoluçao por ramos, com
pontos de 5 em 5. No entanto, para se cálcular o polinómio seguinte, tem de se utilizar
sempre o último ponto do polinómio anterior, para que na elaboração do gráfico não
existisse quebra entre cada ramo, ou seja, o gráfico ser contínuo.
As tabelas seguintes apresentam o resultado dos polinómios, ou seja, a ordenada dos
pontos através do interpolador de Lagrange. Foram obtidos após a substituição dos X
nos polinómios encontrados no Maxima, calculados no Excel.
P(X) Resultado
P(0) 0,04
P(1) 0,16
P(2) 0,1
P(3) -0,075
P(4) -0,2
P(X) Resultado
P(4) -0,2
P(5) -0,012
P(6) 0,21
P(7) 0,14
P(8) 0,03
P(9) 0,159

Modelagem do controle postural humano durante postura erecta Página 26
P(X) Resultado
P(9) 0,159
P(10) 0,1
P(11) 0,01
P(12) 0,2
P(13) 0,25
P(14) 0,11
P(X) Resultado
P(14) 0,11
P(15) -0,03
P(16) -0,02
P(17) 0,091
P(18 0,165
P(19) -0,048

Modelagem do controle postural humano durante postura erecta Página 27
P(X) Resultado
P(19) -0,048
P(20) -0,08
P(21) -0,18
P(22) 0
P(23) 0,05
P(24) -0,201
P(X) Resultado
P(24) -0,201
P(25) -0,31
P(26) 0,16
P(27) 0,3
P(28) 0,02
P(29) -0,14
P(X) Resultado
P(29) -0,14
P(30) -0,07
P(31) 0,109
P(32) -0,02
P(33) -0,019
P(34) 0,05

Modelagem do controle postural humano durante postura erecta Página 28
Pode concluir-se que os pontos que obtive não são aproximações, mas sim
exactamente iguais aos retirados do gráfico original. Isto significa que os polinómios
estão correctamente calculados. No fundo,o objectivo deste método era, com a ajuda
dos programas, chegar a novas funções (os polinómios falados e apresentados
anteriormente), e cujos resultados obtidos permitissem desenhar um gráfico semelhante
ao dado do protocolo.
Segundo os 40 pontos igualmente espaçados que retirámos desse gráfico
original,obtivémos o seguinte (fig 8 ):
Fig 9 – Gráfico obtido com as ordenadas retiradas do gráfico original
-0,4
-0,3
-0,2
-0,1
0
0,1
0,2
0,3
0,4
0 5 10 15 20 25 30 35 40
P(X) Resultado
P(34) 0,05
P(35) 0,059
P(36) -0,095
P(37) -0,038
P(38) 0,12
P(39) 0,015

Modelagem do controle postural humano durante postura erecta Página 29
Finalmente, após substituir os X nos polinómios encontrados, construí o novo
gráfico com os valores encontrados com as novas funções (polinómios). O gráfico é
apresentado na fig seguinte:
Fig 10 - Gráfico obtido com as ordenadas obtidas pelos polinómios calculados
Comparação dos vários gráficos obtidos no Scilab e no Excel, respectivamente:
Os gráficos encontram-se colocados por ordem dos ramos (1-5; 5-10;10-15;15-20;
20-25;25-30;30-35;35-40).
-0,4
-0,3
-0,2
-0,1
0
0,1
0,2
0,3
0,4
0 5 10 15 20 25 30 35 40
-0,3
-0,2
-0,1
0
0,1
0,2
0 2 4 6

Modelagem do controle postural humano durante postura erecta Página 30
-0,3
-0,2
-0,1
0
0,1
0,2
0,3
0 2 4 6 8
Imag
em d
e P
(x)
Valores de P(x)
-0,1
-0,05
0
0,05
0,1
0,15
0,2
0 2 4 6 8
0
0,05
0,1
0,15
0,2
0,25
0,3
0 2 4 6 8

Modelagem do controle postural humano durante postura erecta Página 31
-0,250
-0,200
-0,150
-0,100
-0,050
0,000
0,050
0,100
0 2 4 6 8
-0,4
-0,3
-0,2
-0,1
0
0,1
0,2
0,3
0,4
0 2 4 6 8

Modelagem do controle postural humano durante postura erecta Página 32
Conclusão de resultados
Os polinómios que encontrei no Maxima são iguais aos polinómios encontrados
no Scilab. Então,través do método do interpolador de Lagrange, concluí que os
polinómios que encontrei e os resultados que obtive se aproximam muito dos valores
esperados no problema (valores reais). Quer a nivel gráfico, quer a nivel analítico os
resultados aproximam-se bastante.
-0,20
-0,15
-0,10
-0,05
0,00
0,05
0,10
0,15
0 2 4 6 8
-0,15
-0,10
-0,05
0,00
0,05
0,10
0,15
0 2 4 6 8

Modelagem do controle postural humano durante postura erecta Página 33
-0,4-0,3-0,2-0,1
00,10,20,30,4
1 2 3 4 5
Interpolador de Newton Excel:
Por ramos
x=[1;5]
difrenças divididas de:
x Y 1ª ordem
2ª ordem 3ªordem 4ªordem
1 0,04 0,12 -0,09 0,010833 0,004167
2 0,16 -0,06 -0,0575 0,0275
3 0,1 -0,175 0,025
4 -0,075 -0,125
5 -0,2
Coeficientes do polinómio:
f[xo] f[x1] f[x2] f[x3]
0,12 -0,09 0,010833 0,004167

Modelagem do controle postural humano durante postura erecta Página 34
-0,4
-0,3
-0,2
-0,1
0
0,1
0,2
0,3
0,4
5 6 7 8 9 10
x= [5;10]
Coeficientes do polinómio:
f[xo] f[x1] f[x2] f[x3] f[x4]
0,188 0,017 -0,05433 0,024083 -0,00459
difrenças divididas de:
x Y 1ª ordem
2ª ordem 3ªordem 4ªordem
5ª ordem
5 -0,2 0,188 0,017 -0,05433 0,024083 -0,00459
6 -0,012 0,222 -0,146 0,042 0,001125
7 0,21 -0,07 -0,02 0,0465
8 0,14 -0,11 0,1195
9 0,03 0,129
10 0,159

Modelagem do controle postural humano durante postura erecta Página 35
-0,4
-0,3
-0,2
-0,1
0
0,1
0,2
0,3
0,4
10 11 12 13 14 15
x=[10;15]
Coeficientes do polinómio:
f[xo] f[x1] f[x2] f[x3] f[x4]
-0,059 -0,0155 0,051833 -0,03046 0,009175
difrenças divididas de:
x Y 1ª ordem 2ª ordem 3ªordem 4ªordem 5ª ordem
10 0,159 -0,059 -0,0155 0,051833 -0,03046 0,009175
11 0,1 -0,09 0,14 -0,07 0,015417
12 0,01 0,19 -0,07 -0,00833
13 0,2 0,05 -0,095
14 0,25 -0,14
15 0,11

Modelagem do controle postural humano durante postura erecta Página 36
-0,4
-0,3
-0,2
-0,1
0
0,1
0,2
0,3
0,4
15 16 17 18 19 20
x=[15;20]
difrenças divididas de:
X Y 1ª ordem 2ª ordem 3ªordem 4ªordem
5ª ordem
15 0,11 -0,14 0,075 -0,0082 -0,00371 -0,00019
16 -0,03 0,01 0,0505 -0,023 -0,00467
17 -0,02 0,111 -0,0185 -0,04167
18 0,091 0,074 -0,1435
19 0,165 -0,213
20 -0,048
Coeficientes do polinómio:
f[xo] f[x1] f[x2] f[x3] f[x4]
-0,14 0,075 -0,0082 -0,00371 -0,00019

Modelagem do controle postural humano durante postura erecta Página 37
-0,4
-0,3
-0,2
-0,1
0
0,1
0,2
0,3
0,4
20 21 22 23 24 25
x=[20;25]
difrenças divididas de
X Y 1ª ordem 2ª ordem 3ªordem 4ªordem
5ª ordem
20 -0,048 -0,032 -0,034 0,058 -0,03158 0,008317
21 -0,08 -0,1 0,14 -0,06833 0,01
22 -0,18 0,18 -0,065 -0,02833
23 0 0,05 -0,15
24 0,05 -0,25
25 -0,2
Coeficientes do polinómio:
f[xo] f[x1] f[x2] f[x3] f[x4]
-0,032 -0,034 0,058 -0,03158 0,008317

Modelagem do controle postural humano durante postura erecta Página 38
-0,4
-0,3
-0,2
-0,1
0
0,1
0,2
0,3
0,4
25 26 27 28 29 30
x=[25;30]
difrenças divididas de
x Y 1ª ordem
2ª ordem 3ªordem 4ªordem
5ª ordem
25 -0,2 -0,11 0,29 -0,15167 0,034167 -0,00158
26 -0,31 0,47 -0,165 -0,015 0,02625
27 0,16 0,14 -0,21 0,09
28 0,3 -0,28 0,06
29 0,02 -0,16
30 -0,14
Coeficientes do polinómio:
f[xo] f[x1] f[x2] f[x3] f[x4]
-0,11 0,29 -0,15167 0,034167 -0,00158

Modelagem do controle postural humano durante postura erecta Página 39
-0,4
-0,3
-0,2
-0,1
0
0,1
0,2
0,3
0,4
30 31 32 33 34 35
x=[30;35]
difrenças divididas de
x Y 1ª ordem
2ª ordem 3ªordem 4ªordem
5ª ordem
30 -0,14 0,07 0,0545 -0,0695 0,035625 -0,01129
31 -0,07 0,179 -0,154 0,073 -0,02083
32 0,109 -0,129 0,065 -0,01033
33 -0,02 0,001 0,034
34 -0,019 0,069
35 0,05
Coeficientes do polinómio:
f[xo] f[x1] f[x2] f[x3] f[x4]
0,07 0,0545 -0,0695 0,035625 -0,01129

Modelagem do controle postural humano durante postura erecta Página 40
-0,4
-0,3
-0,2
-0,1
0
0,1
0,2
0,3
0,4
35 36 37 38 39 40
x=[35;40]
difrenças divididas de
x Y 1ª ordem
2ª ordem 3ªordem 4ªordem
5ª ordem
35 0,05 0,009 -0,0815 0,062333 -0,02017 0,001917
36 0,059 -0,154 0,1055 -0,01833 -0,01058
37 -0,095 0,057 0,0505 -0,06067
38 -0,038 0,158 -0,1315
39 0,12 -0,105
40 0,015
Coeficientes do polinómio:
f[xo] f[x1] f[x2] f[x3] f[x4]
0,009 -0,0815 0,062333 -0,02017 0,001917

Modelagem do controle postural humano durante postura erecta Página 41
-0,4
-0,3
-0,2
-0,1
0
0,1
0,2
0,3
0,4
0 5 10 15 20 25 30 35 40
Y
Polinómio completo
x=[1;40]
f[x0] f[x1] f[x2] f[x3] f[x4] f[x5] f[x6] f[x7] f[x8]
0,12 -0,09 0,010833 0,004166667 -1,66667E-05 -0,00089 0,000351786 -6,88988E-05 6,82595E-06
f[x9] f[x10] f[x11] f[x12] f[x13] f[x14] f[x15] f[x16]
3,41711E-08 -9,55487E-08 2,99373E-09 4,0358E-09 -1,24783E-09 2,2499E-10 -2,95421E-11 2,97307E-12
f[x17] f[x18] f[x19] f[x20] f[x21] f[x22] f[x23] f[x24]
-2,22633E-13 9,74925E-15 3,48949E-16 -1,37084E-16 1,91612E-17 -2,01598E-18 1,8216E-19 -1,50225E-20

Modelagem do controle postural humano durante postura erecta Página 42
f[x25] f[x26] f[x27] f[x28] f[x29] f[x30] f[x31] f[x32]
1,17978E-21 -9,11609E-23 7,06497E-24 -5,50226E-25 4,25606E-26 -3,2164E-27 2,34176E-28 -1,6278E-29
f[x33] f[x34] f[x35] f[x36] f[x37] f[x38]
1,07548E-30 -6,74552E-32 4,01993E-33 -2,28099E-34 1,23577E-35 -6,41211E-37
A tabela das difrenças divididas encontra-se em anexo.

Modelagem do controle postural humano durante postura erecta Página 43
FreeMat/Matlab
Polinómio definido por ramos
Compilador
Código da função mariline

Modelagem do controle postural humano durante postura erecta Página 44

Modelagem do controle postural humano durante postura erecta Página 45
Código da função newtondiv

Modelagem do controle postural humano durante postura erecta Página 46
Código da função difdivcoef

Modelagem do controle postural humano durante postura erecta Página 47
Resultados

Modelagem do controle postural humano durante postura erecta Página 48
Coeficientes do polinómio:
X=[0;5]
f[xo] f[x1] f[x2] f[x3]
0,12 -0,09 0,0108 0,0042
X=[5;10]
f[xo] f[x1] f[x2] f[x3] f[x4]
0,1880 0,0170 -0,0543 0,0241 -0,0046
X=[10;15]
f[xo] f[x1] f[x2] f[x3] f[x4]
-0,0590 -0,0155 0,0518 -0,0305 0,0092
X=[15;20]
f[xo] f[x1] f[x2] f[x3] f[x4]
-0,1400 0,0750 -0,0082 -0,00371 -0,0002
X=[20;25]
f[xo] f[x1] f[x2] f[x3] f[x4]
-0,032 -0,034 0,058 -0,0316 0,0083

Modelagem do controle postural humano durante postura erecta Página 49
X=[25;30]
f[xo] f[x1] f[x2] f[x3] f[x4]
-0,11 0,29 -0,1517 0,0342 -0,0016
X=[30;35]
f[xo] f[x1] f[x2] f[x3] f[x4]
0,07 0,0545 -0,0695 0,0356 -0,0113
X=[35;40]
f[xo] f[x1] f[x2] f[x3] f[x4]
0,009 -0,0815 0,0623 -0,0202 0,0019
Fig11 – Pontos de 0 a 5

Modelagem do controle postural humano durante postura erecta Página 50
Fig 12 – Pontos de 5 a 10
Fig13 – Pontos de 10 a 15

Modelagem do controle postural humano durante postura erecta Página 51
Fig14 – Pontos de 15 a 20
Fig15 – Pontos de 20 a 25

Modelagem do controle postural humano durante postura erecta Página 52
Fig15 – Pontos de 25 a 30
Fig16– Pontos de 30 a 35

Modelagem do controle postural humano durante postura erecta Página 53
Fig17 – Pontos de 35 a 40
Fig18 – Gráfico com todos os pontos

Modelagem do controle postural humano durante postura erecta Página 54
Polinómio completo
Compilador
Código da função mari_po
Código da função newtondifdiv e da função difdivcoef é igual ao do polinómio
por ramos.

Modelagem do controle postural humano durante postura erecta Página 55
Resultados

Modelagem do controle postural humano durante postura erecta Página 56

Modelagem do controle postural humano durante postura erecta Página 57
Coeficientes do polinómio
X=[1;40]
f[x0] f[x1] f[x2] f[x3] f[x4] f[x5] f[x6] f[x7] f[x8]
0,1200 -0,0900 0,0108 0,0042 -0.0000 -0,0009 0,0004 -0,0001 0,0000
f[x9] f[x10] f[x11] f[x12] f[x13] f[x14] f[x15] f[x16]
0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000

Modelagem do controle postural humano durante postura erecta Página 58
Ao contrario do que possa parecer, os coeficientes a partir do f[x8], não são zero,
apenas não foram estimadas o numero suficiente de casas decimais.
f[x17] f[x18] f[x19] f[x20] f[x21] f[x22] f[x23] f[x24]
0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000
f[x25] f[x26] f[x27] f[x28] f[x29] f[x30] f[x31] f[x32]
0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000
f[x33] f[x34] f[x35] f[x36] f[x37] f[x38]
0,0000 0,0000 0,0000 0,0000 0,0000 0,0000

Modelagem do controle postural humano durante postura erecta Página 59
Utilizando a função format long temos:

Modelagem do controle postural humano durante postura erecta Página 60

Modelagem do controle postural humano durante postura erecta Página 61

Modelagem do controle postural humano durante postura erecta Página 62

Modelagem do controle postural humano durante postura erecta Página 63
f[x10] f[x11] f[x12] f[x13] f[x14]
-0.00000009554874 0.00000000299373
0.00000000403580 -0.00000000124783 0.00000000022499
f[x15] f[x16] f[x17] f[x18] f[x19]
-0.00000000002954 0.00000000000297
-0.00000000000022
0.00000000000001 0.00000000000000
f[x20] f[x21] f[x22] f[x23] f[x24]
-0.00000000000000
0.00000000000000 -0.00000000000000 0.00000000000000
-0.00000000000000
f[x25] f[x26] f[x27] f[x28] f[x29]
0.00000000000000
-0.00000000000000 0.00000000000000 -0.00000000000000
0.00000000000000
f[x0] f[x1] f[x2] f[x3] f[x4]
0.12000000000000 -0.09000000000000 0.01083333333333 0.00416666666667 -0.00001666666667
f[x5] f[x6] f[x7] f[x8] f[x9]
-0.00088611111111 0.00035178571429 -0.00006889880952 0.00000682594797
0.00000003417108

Modelagem do controle postural humano durante postura erecta Página 64
A função format long permite-nos adquirir um maior numero de casa decimais, mas no
entanto, para este caso, continua a não ser o suficiente. No caso posterior era zero a partir de
f[x8] e devido a esta função, passou a ser zero apenas na posição f[x18].

Modelagem do controle postural humano durante postura erecta Página 65
Conum
Polinómio definido por ramos
Compilador/Resultados
Para x=[0;5]
Coeficientes do polinómio:
f[xo] f[x1] f[x2] f[x3]
0,120000 -0,090000 0,010833 0,004167

Modelagem do controle postural humano durante postura erecta Página 66
Para x=[5;10]
Coeficientes do polinómio:
f[xo] f[x1] f[x2] f[x3] f[x4]
0,188000 0,017000 -0,054333 0,024083 -0,004592

Modelagem do controle postural humano durante postura erecta Página 67
Para x=[10;15]
Coeficientes do polinómio:
f[xo] f[x1] f[x2] f[x3] f[x4]
-0,059000 -0,015500 0,051833 -0,030458 0,009175

Modelagem do controle postural humano durante postura erecta Página 68
Para x=[15;20]
Coeficientes do polinómio:
f[xo] f[x1] f[x2] f[x3] f[x4]
-0,140000 0,075000 0,075 -0,003708 -0,000192

Modelagem do controle postural humano durante postura erecta Página 69
Para x=[20;25]
Coeficientes do polinómio:
f[xo] f[x1] f[x2] f[x3] f[x4]
-0,032000 -0,034000 0,058000 -0,031583 0,008317

Modelagem do controle postural humano durante postura erecta Página 70
Para x=[25;30]
Coeficientes do polinómio:
f[xo] f[x1] f[x2] f[x3] f[x4]
-0,110000 0,290000 -0,151667 0,034167 -0,001583

Modelagem do controle postural humano durante postura erecta Página 71
Para x=[30;35]
Coeficientes do polinómio:
f[xo] f[x1] f[x2] f[x3] f[x4]
0,070000 0,054500 -0,069500 0,035625 -0,011292

Modelagem do controle postural humano durante postura erecta Página 72
Para x=[35;40]
Coeficientes do polinómio:
f[xo] f[x1] f[x2] f[x3] f[x4]
0,009000 -0,081500 0,062333 -0,020167 0,001917

Modelagem do controle postural humano durante postura erecta Página 73
Polinómio completo
Compilador/Resultados
Coeficientes do polinómio
f[x10] f[x11] f[x12] f[x13] f[x14]
-0.000000095548741 0.000000002993727
0.000000004035798 -0.000000001247834 0.000000000224990
f[x15] f[x16] f[x17] f[x18] f[x19]
-0.000000000029542 0.000000000002973
-0.000000000000223
0.000000000000010 0.00000000000000
f[x20] f[x21] f[x22] f[x23] f[x24]
-0.00000000000000
0.00000000000000 -0.00000000000000 0.00000000000000
-0.00000000000000
f[x25] f[x26] f[x27] f[x28] f[x29]
0.00000000000000
-0.00000000000000 0.00000000000000 -0.00000000000000
0.00000000000000
f[x30] f[x31] f[x32] f[x33] f[x34]
-0.00000000000000
0.00000000000000 -0.00000000000000 0.00000000000000
-0.00000000000000
f[x35] f[x36] f[x37] f[x38]
0.00000000000000
-0.00000000000000 0.00000000000000 -0.00000000000000
A tabela referente aos pontos e portanto aos coeficientes encontra-se em anexo.
f[x0] f[x1] f[x2] f[x3] f[x4]
0.12000000000000 -0.09000000000000 0.01083333333333 0.00416666666667 -0.00001666666667
f[x5] f[x6] f[x7] f[x8] f[x9]
-0.00088611111111 0.000351785714286 -0.000068898809524 0.000006825947972
0.000000034171076

Modelagem do controle postural humano durante postura erecta Página 74
Devido à mesma justificação dos casos anteriores, a partir de f[x19], os coeficientes são
lançados como zeros, embora não o sejam.
maxima
Polinómio definido por ramos
Compilador/Resultados

Modelagem do controle postural humano durante postura erecta Página 75
Simplificação dos polinómios:
x=[1;5]
P4(x)= 0.004167*x^3-0.014169*x^2-0.076662*x+0.206664
x=[5;10]
P5(x)=-0.00459*x^4+0.143423*x^3-1.639914*x^2+8.084451000000001*x-14.29553
x=[10;15]
P5(x)=0.009175*x^4-0.45251*x^3+8.314438000000001*x^2-
67.41906300000001*x +203.44783
x=[15;20]
P5(x)= -1.9000000000000001*10^-4*x^4+0.00883*x^3-0.14001*x^2
+0.88197*x-2.049800000000001
x=[20;25]
P5(x)= 0.008317*x^4-0.746842*x^3+25.093947*x^2-373.896542*x
+2084.33604
x=[25;30]
P5(x)=-0.00158*x^4+0.201647*x^3-9.470076000000001*x^2+194.685159*x-
1481.98835
x=[30;35]
P5(x)= -0.01129*x^4+1.458165*x^3-70.56941500000001*x^2+1516.70239*x-
12214.0832
x=[35;40]

Modelagem do controle postural humano durante postura erecta Página 76
P5(x)=0.001917*x^4-0.300052*x^3+17.434774*x^2-446.579589*x
+4260.72784
Os coeficientes utilizados para a obtenção destes polinómios são relativos aos
coeficientes calculados pelo Excel a quando de um polinómio por ramos.
Polinómio completo
Compilador/Resultados

Modelagem do controle postural humano durante postura erecta Página 77
P39(x)=
O polinómio teve de ser dividido por partes devido a sua grande dimensão. O polinómio
resultante de cada parte, foi posteriormente somado de modo a obtermos o nosso polinómio
final.

Modelagem do controle postural humano durante postura erecta Página 78
Os resultados referentes ao polinómio completo, também foram obtidos através do
matlab, utilizando os coeficientes que foram adquiridos no Excel.
syms x
expand(0.12-0.09*(x-1)+0.010833*(x-1)*(x-2)+0.004167*(x-1)*(x-2)*(x-3)-1.66667E-05*(x-1)*(x-2)*(x-3)*(x-4) -
0.00089*(x-1)*(x-2)*(x-3)*(x-4)*(x-5)+ 0.000351786*(x-1)*(x-2)*(x-3)*(x-4)*(x-5)*(x-6) -6.88988E-05*(x-1)*(x-2)*(x-
3)*(x-4)*(x-5)*(x-6)*(x-7)+ 6.82595E-06*(x-1)*(x-2)*(x-3)*(x-4)*(x-5)*(x-6)*(x-7)*(x-8)+ 3.41711E-08*(x-1)*(x-2)*(x-
3)*(x-4)*(x-5)*(x-6)*(x-7)*(x-8)*(x-9)-9.55487E-08*(x-1)*(x-2)*(x-3)*(x-4)*(x-5)*(x-6)*(x-7)*(x-8)*(x-9)*(x-
10)+2.99373E-09*(x-1)*(x-2)*(x-3)*(x-4)*(x-5)*(x-6)*(x-7)*(x-8)*(x-9)*(x-10)*(x-11)+ 4.0358E-09*(x-1)*(x-2)*(x-
3)*(x-4)*(x-5)*(x-6)*(x-7)*(x-8)*(x-9)*(x-10)*(x-11)*(x-12) -1.24783E-09*(x-1)*(x-2)*(x-3)*(x-4)*(x-5)*(x-6)*(x-7)*(x-
8)*(x-9)*(x-10)*(x-11)*(x-12)*(x-13)+ 2.2499E-10*(x-1)*(x-2)*(x-3)*(x-4)*(x-5)*(x-6)*(x-7)*(x-8)*(x-9)*(x-10)*(x-
11)*(x-12)*(x-13)*(x-14)-2.95421E-11*(x-1)*(x-2)*(x-3)*(x-4)*(x-5)*(x-6)*(x-7)*(x-8)*(x-9)*(x-10)*(x-11)*(x-12)*(x-
13)*(x-14)*(x-15)+ 2.97307E-12*(x-1)*(x-2)*(x-3)*(x-4)*(x-5)*(x-6)*(x-7)*(x-8)*(x-9)*(x-10)*(x-11)*(x-12)*(x-13)*(x-
14)*(x-15)*(x-16) -2.22633E-13*(x-1)*(x-2)*(x-3)*(x-4)*(x-5)*(x-6)*(x-7)*(x-8)*(x-9)*(x-10)*(x-11)*(x-12)*(x-13)*(x-
14)*(x-15)*(x-16)*(x-17)+ 9.74925E-15*(x-1)*(x-2)*(x-3)*(x-4)*(x-5)*(x-6)*(x-7)*(x-8)*(x-9)*(x-10)*(x-11)*(x-12)*(x-
13)*(x-14)*(x-15)*(x-16)*(x-17)*(x-18)+ 3.48949E-16*(x-1)*(x-2)*(x-3)*(x-4)*(x-5)*(x-6)*(x-7)*(x-8)*(x-9)*(x-10)*(x-
11)*(x-12)*(x-13)*(x-14)*(x-15)*(x-16)*(x-17)*(x-18)*(x-19) -1.37084E-16*(x-1)*(x-2)*(x-3)*(x-4)*(x-5)*(x-6)*(x-
7)*(x-8)*(x-9)*(x-10)*(x-11)*(x-12)*(x-13)*(x-14)*(x-15)*(x-16)*(x-17)*(x-18)*(x-19)*(x-20)+ 1.91612E-17*(x-1)*(x-
2)*(x-3)*(x-4)*(x-5)*(x-6)*(x-7)*(x-8)*(x-9)*(x-10)*(x-11)*(x-12)*(x-13)*(x-14)*(x-15)*(x-16)*(x-17)*(x-18)*(x-
19)*(x-20)*(x-21) -2.01598E-18*(x-1)*(x-2)*(x-3)*(x-4)*(x-5)*(x-6)*(x-7)*(x-8)*(x-9)*(x-10)*(x-11)*(x-12)*(x-13)*(x-
14)*(x-15)*(x-16)*(x-17)*(x-18)*(x-19)*(x-20)*(x-21)*(x-22)+ 1.8216E-19*(x-1)*(x-2)*(x-3)*(x-4)*(x-5)*(x-6)*(x-
7)*(x-8)*(x-9)*(x-10)*(x-11)*(x-12)*(x-13)*(x-14)*(x-15)*(x-16)*(x-17)*(x-18)*(x-19)*(x-20)*(x-21)*(x-22)*(x-23) -
1.50225E-20*(x-1)*(x-2)*(x-3)*(x-4)*(x-5)*(x-6)*(x-7)*(x-8)*(x-9)*(x-10)*(x-11)*(x-12)*(x-13)*(x-14)*(x-15)*(x-
16)*(x-17)*(x-18)*(x-19)*(x-20)*(x-21)*(x-22)*(x-23)*(x-24)+1.17978E-21*(x-1)*(x-2)*(x-3)*(x-4)*(x-5)*(x-6)*(x-
7)*(x-8)*(x-9)*(x-10)*(x-11)*(x-12)*(x-13)*(x-14)*(x-15)*(x-16)*(x-17)*(x-18)*(x-19)*(x-20)*(x-21)*(x-22)*(x-23)*(x-
24)*(x-25)-9.11609E-23*(x-1)*(x-2)*(x-3)*(x-4)*(x-5)*(x-6)*(x-7)*(x-8)*(x-9)*(x-10)*(x-11)*(x-12)*(x-13)*(x-14)*(x-
15)*(x-16)*(x-17)*(x-18)*(x-19)*(x-20)*(x-21)*(x-22)*(x-23)*(x-24)*(x-25)*(x-26)+ 7.06497E-24*(x-1)*(x-2)*(x-3)*(x-
4)*(x-5)*(x-6)*(x-7)*(x-8)*(x-9)*(x-10)*(x-11)*(x-12)*(x-13)*(x-14)*(x-15)*(x-16)*(x-17)*(x-18)*(x-19)*(x-20)*(x-
21)*(x-22)*(x-23)*(x-24)*(x-25)*(x-26)*(x-27) -5.50226E-25*(x-1)*(x-2)*(x-3)*(x-4)*(x-5)*(x-6)*(x-7)*(x-8)*(x-9)*(x-
10)*(x-11)*(x-12)*(x-13)*(x-14)*(x-15)*(x-16)*(x-17)*(x-18)*(x-19)*(x-20)*(x-21)*(x-22)*(x-23)*(x-24)*(x-25)*(x-
26)*(x-27)*(x-28)+ 4.25606E-26*(x-1)*(x-2)*(x-3)*(x-4)*(x-5)*(x-6)*(x-7)*(x-8)*(x-9)*(x-10)*(x-11)*(x-12)*(x-13)*(x-
14)*(x-15)*(x-16)*(x-17)*(x-18)*(x-19)*(x-20)*(x-21)*(x-22)*(x-23)*(x-24)*(x-25)*(x-26)*(x-27)*(x-28)*(x-29) -
3.2164E-27*(x-1)*(x-2)*(x-3)*(x-4)*(x-5)*(x-6)*(x-7)*(x-8)*(x-9)*(x-10)*(x-11)*(x-12)*(x-13)*(x-14)*(x-15)*(x-
16)*(x-17)*(x-18)*(x-19)*(x-20)*(x-21)*(x-22)*(x-23)*(x-24)*(x-25)*(x-26)*(x-27)*(x-28)*(x-29)*(x-30)+ 2.34176E-
28*(x-1)*(x-2)*(x-3)*(x-4)*(x-5)*(x-6)*(x-7)*(x-8)*(x-9)*(x-10)*(x-11)*(x-12)*(x-13)*(x-14)*(x-15)*(x-16)*(x-17)*(x-
18)*(x-19)*(x-20)*(x-21)*(x-22)*(x-23)*(x-24)*(x-25)*(x-26)*(x-27)*(x-28)*(x-29)*(x-30)*(x-31) -1.6278E-29*(x-
1)*(x-2)*(x-3)*(x-4)*(x-5)*(x-6)*(x-7)*(x-8)*(x-9)*(x-10)*(x-11)*(x-12)*(x-13)*(x-14)*(x-15)*(x-16)*(x-17)*(x-18)*(x-
19)*(x-20)*(x-21)*(x-22)*(x-23)*(x-24)*(x-25)*(x-26)*(x-27)*(x-28)*(x-29)*(x-30)*(x-31)*(x-32)+ 1.07548E-30*(x-
1)*(x-2)*(x-3)*(x-4)*(x-5)*(x-6)*(x-7)*(x-8)*(x-9)*(x-10)*(x-11)*(x-12)*(x-13)*(x-14)*(x-15)*(x-16)*(x-17)*(x-18)*(x-
19)*(x-20)*(x-21)*(x-22)*(x-23)*(x-24)*(x-25)*(x-26)*(x-27)*(x-28)*(x-29)*(x-30)*(x-31)*(x-32)*(x-33) -6.74552E-
32*(x-1)*(x-2)*(x-3)*(x-4)*(x-5)*(x-6)*(x-7)*(x-8)*(x-9)*(x-10)*(x-11)*(x-12)*(x-13)*(x-14)*(x-15)*(x-16)*(x-17)*(x-
18)*(x-19)*(x-20)*(x-21)*(x-22)*(x-23)*(x-24)*(x-25)*(x-26)*(x-27)*(x-28)*(x-29)*(x-30)*(x-31)*(x-32)*(x-33)*(x-
34)+ 4.01993E-33*(x-1)*(x-2)*(x-3)*(x-4)*(x-5)*(x-6)*(x-7)*(x-8)*(x-9)*(x-10)*(x-11)*(x-12)*(x-13)*(x-14)*(x-15)*(x-
16)*(x-17)*(x-18)*(x-19)*(x-20)*(x-21)*(x-22)*(x-23)*(x-24)*(x-25)*(x-26)*(x-27)*(x-28)*(x-29)*(x-30)*(x-31)*(x-
32)*(x-33)*(x-34)*(x-35) -2.28099E-34*(x-1)*(x-2)*(x-3)*(x-4)*(x-5)*(x-6)*(x-7)*(x-8)*(x-9)*(x-10)*(x-11)*(x-12)*(x-
13)*(x-14)*(x-15)*(x-16)*(x-17)*(x-18)*(x-19)*(x-20)*(x-21)*(x-22)*(x-23)*(x-24)*(x-25)*(x-26)*(x-27)*(x-28)*(x-
29)*(x-30)*(x-31)*(x-32)*(x-33)*(x-34)*(x-35)*(x-36)+1.23577E-35*(x-1)*(x-2)*(x-3)*(x-4)*(x-5)*(x-6)*(x-7)*(x-
8)*(x-9)*(x-10)*(x-11)*(x-12)*(x-13)*(x-14)*(x-15)*(x-16)*(x-17)*(x-18)*(x-19)*(x-20)*(x-21)*(x-22)*(x-23)*(x-
24)*(x-25)*(x-26)*(x-27)*(x-28)*(x-29)*(x-30)*(x-31)*(x-32)*(x-33)*(x-34)*(x-35)*(x-36)*(x-37) -6.41211E-37*(x-
1)*(x-2)*(x-3)*(x-4)*(x-5)*(x-6)*(x-7)*(x-8)*(x-9)*(x-10)*(x-11)*(x-12)*(x-13)*(x-14)*(x-15)*(x-16)*(x-17)*(x-18)*(x-
19)*(x-20)*(x-21)*(x-22)*(x-23)*(x-24)*(x-25)*(x-26)*(x-27)*(x-28)*(x-29)*(x-30)*(x-31)*(x-32)*(x-33)*(x-34)*(x-
35)*(x-36)*(x-37) *(x-38))

Modelagem do controle postural humano durante postura erecta Página 79
vpa(‘expressão obtida do expand’)
P39(x)=-6.4121099999549395572602297942481*10^(-37)*x^38+ 4.8749505099999998495673654798986*10^(-
34)*x^37-
0.00000000000000000000000000000017885635464158423676799932673305*x^36+0.0000000000000000000000
0000004218150611200099734497410086958*x^35-
0.0000000000000000000000000071867567599710390875419349407222*x^34+0.00000000000000000000000094
253625194345322724324790975418*x^33-
0.000000000000000000000099003766229394207431878976284566*x^32+0.000000000000000000008556666828
4192407392264269769613*x^31-
0.00000000000000000062037735171695706081433570837827*x^30+0.0000000000000000382784546720450044
16027954441581*x^29-
0.0000000000000020321975529963862035458114271153*x^28+0.00000000000009362328019846994336936775
8226052*x^27-
0.0000000000037678535274728608439089028170343*x^26+0.00000000013315350260102314440444297049713
*x^25-0.0000000041486698973110594512725413096632*x^24
+0.00000011431189459224231074815908556705*x^23-
0.0000027917019217449379198114911559969*x^22+0.000060519268938154685858951675747619*x^21-
0.0011655462068915767304133623838425*x^20+0.019946710486980861326555825030482*x^19-
0.30321701876528095453977584838867*x^18+4.0902662388918731295461839181371*x^17-
48.88482347317039966583251953125*x^16+516.47303026130032321816543117166*x^15-
4809.4081618785858154296875*x^14+39326.107558355521177873015403748*x^13-
281057.03531646728515625*x^12+ 1745593.9609296619892120361328125*x^11-9355596.303466796875*x^10+
42896073.733571380376815795898438*x^9-
166462043.37109375*x^8+539387867.47824108600616455078125*x^7-
1434390784.5625*x^6+3060146010.057552337646484375*x^5-
5077534611.375*x^4+6266174411.9303760528564453125*x^3-
5363987586.125*x^2+2810481914.86847782135009765625*x - 668855181.22037398815155029296875

Modelagem do controle postural humano durante postura erecta Página 80
Podemos concluir por tanto que os coeficientes dão igual independentemente do
método, variando apenas o número de casas decimais e portanto os arredondamentos
efectuados. Deste modo, o mesmo podemos concluir dos polinómios.
Método Interpolador de Gregory-Newton 1ªHipótese
Cálculo do Polinómio de Grau 39 usando o Excel, o software Maxima e o software
CoNum.
Aplicação do método utilizando o Excel
1. Cálculo da tabela das diferenças finitas
Fórmulas genéricas para o cálculo da tabela,
Ordem zero: ∆0yi = yi
Ordem um: ∆1yi = yi+1-yi = ∆
0yi+1-∆
0yi
Ordem dois: ∆2yi = ∆
1yi+1-∆
1yi
Ordem n: ∆kyi = ∆
k-1yi+1-∆
k-1yi
Nota: A tabela está nos anexos.
2. Cálculo do polinómio
Fórmula genérica,
h = xi+1-xi, então h=1, o passo entra as abcissas é 1.
k
k
hk
y
!
0 Para o cálculo desta fórmula usei o Excel.

Modelagem do controle postural humano durante postura erecta Página 81
∆0yi = yi = f(xi) 0,04
∆1yi 0,12
∆2yi -0,09
∆3yi 0,010833333
∆4yi 0,004166667
∆5yi -1,66667E-05
∆6yi -0,000886111
∆7yi 0,000351786
∆8yi -6,14583E-05
∆9yi 6,82595E-06
∆10
yi 3,75441E-06
∆11
yi -1,33563E-06
∆12
yi 3,13014E-07
∆13
yi -5,79682E-08
∆14
yi 9,08616E-09
∆15
yi -1,25129E-09
∆16
yi 1,54993E-10
∆17
yi -1,75309E-11
∆18
yi 1,82776E-12
∆19
yi -1,7665E-13
∆20
yi 1,58823E-14
∆21
yi -1,33195E-15
∆22
yi 1,04509E-16
∆23
yi -7,70584E-18
∆24
yi 5,37776E-19
∆25
yi -3,59411E-20
∆26
yi 2,34192E-21
∆27
yi -1,52326E-22
∆28
yi 1,01232E-23
∆29
yi -6,95858E-25
∆30
yi 4,25606E-26

Modelagem do controle postural humano durante postura erecta Página 82
Tabela 1 – Cálculos para os coeficientes do polinómial
Após as devidas substituições obteve-se o seguinte polinómio no software Maxima,
P39(x) = -6.3341300000000008*10-37
*x39
+5.063608400000001*10-34
*x38
-
1.9552057579000002*10-31
*x37
+4.8576307462300005*10-29
*x36
-
8.7274915524060219*10-27
*x35
+1.2082977825820365*10-24
*x34
-
1.3413441153933069*10-22
*x33
+1.2266738586225237*10-20
*x32
-
9.4226458806923764*10-19
*x31
+6.1681706671960292*10-17
*x30
-
3.4792468330276715*10-15
*x29
+1.7056757367945165*10-13
*x28
-
7.3168502449550121*10-12
*x27
+2.761073877027495*10-10
*x26
-
9.2037937328877545*10-9
*x25
+2.7188535377287893*10-7
*x24
-
7.1347431791208289*10-6
*x23
+1.6660216213776802*10-4
*x22
-
0.0034653920460312*x21
+0.064238774753085*x20
-
1.061145093069474*x19
+15.61006010547174*x18
-
204.2507231619518*x17
+2372.881493373544*x16
-
24417.17698941691*x15
+221859.2822737003*x14
-
1773136.590797139*x13
+1.240565954279401*107*x
12-
7.5540468647496149*107*x
11+3.9749279886124849*10
8*x
10-
1.7917413317931116*109*x
9+6.8442276425174732*10
9*x
8-
2.185699593802066*1010
*x7+5.7351774153875259*10
10*x
6-
1.2086690298915717*1011
*x5+1.9833097432591711*10
11*x
4-
2.4232362898959375*1011
*x3+2.0560067219851495*10
11*x
2-
1.068969345640426*1011
*x+2.5275771013310829*1010
∆31
yi -3,5042E-27
∆32
yi 2,46163E-28
∆33
yi -1,6278E-29
∆34
yi 1,07548E-30
∆35
yi -6,80946E-32
∆36
yi 4,03806E-33
∆37
yi -2,28156E-34
∆38
yi 1,22987E-35
∆39
yi -6,33413E-37

Modelagem do controle postural humano durante postura erecta Página 83
Por fim, substitui as minhas abcissas no polinómio para verificar se este aproxima-se
aos valores da função real.
Obteve-se o seguinte,
i xi f (xi) P39(xi)
0 1 0,04 0,040382385
1 2 0,16 0,170051575
2 3 0,1 0,240486145
3 4 -0,075 1,132575989
4 5 -0,2 11,0100174
5 6 -0,012 93,53150177
6 7 0,21 691,4836502
7 8 0,14 4173,246346
8 9 0,03 24728,75513
9 10 0,159 123419,262
10 11 0,1 561647,2317
11 12 0,01 2588745,073
12 13 0,2 10289256,76
13 14 0,25 39471041,22
14 15 0,11 138093930
15 16 -0,03 438513643,2
16 17 -0,02 1248428879
17 18 0,091 3409614313
18 19 0,165 7633878234
19 20 -0,048 17756907642
20 21 -0,08 26233704292
21 22 -0,18 26020821059
22 23 0 -5,2088E+10
23 24 0,05 -4,967E+11
24 25 -0,2 -1,7477E+12
25 26 -0,31 -6,8266E+12

Modelagem do controle postural humano durante postura erecta Página 84
26 27 0,16 -1,8724E+13
27 28 0,3 -5,4492E+13
28 29 0,02 -1,3409E+14
29 30 -0,14 -3,6321E+14
30 31 -0,07 -8,5765E+14
31 32 0,109 -2,0194E+15
32 33 -0,02 -4,6754E+15
33 34 -0,019 -1,0276E+16
34 35 0,05 -2,2486E+16
35 36 0,059 -4,8994E+16
36 37 -0,095 -9,9344E+16
37 38 -0,038 -2,0886E+17
38 39 0,12 -4,077E+17
39 40 0,015 -7,854E+17
Tabela 2 – Substituição dos pontos no polinómio e a aquisição da aproximação ao valor
da função no ponto interpolador
Utilizando o software CoNum
1. Ponto interpolador para x0=1
Início do algoritmo
DIFDIR
Interpolação Polinomial - Diferenças Ascendentes/Descendentes/Centrais - Int.
Directa
Ponto Valores da Função
1.000.000 0.040000
2.000.000 0.160000
3.000.000 0.100000
4.000.000 -0.075000
5.000.000 -0.200000
6.000.000 -0.012000

Modelagem do controle postural humano durante postura erecta Página 85
7.000.000 0.210000
8.000.000 0.140000
9.000.000 0.030000
10.000.000 0.159000
11.000.000 0.100000
12.000.000 0.010000
13.000.000 0.200000
14.000.000 0.250000
15.000.000 0.110000
16.000.000 -0.030000
17.000.000 -0.020000
18.000.000 0.091000
19.000.000 0.165000
20.000.000 -0.048000
21.000.000 -0.080000
22.000.000 -0.180000
23.000.000 0.000000
24.000.000 0.050000
25.000.000 -0.201000
26.000.000 -0.310000
27.000.000 0.160000
28.000.000 0.300000
29.000.000 0.020000
30.000.000 -0.140000
31.000.000 -0.070000
32.000.000 0.109000
33.000.000 -0.020000
34.000.000 -0.019000
35.000.000 0.050000
36.000.000 0.059000
37.000.000 -0.095000
38.000.000 -0.038000
39.000.000 0.120000

Modelagem do controle postural humano durante postura erecta Página 86
40.000.000 0.015000
Tabela 1– Pontos introduzidos no CoNum para obter a aproximação ao valor da função
no ponto interpolador
Ponto Interpolador = 1.000000
Grau do Polinómio = 39
Posição do Ponto Interpolador => Início
Tabela das Diferenças Finitas (está nos anexos)
Aproximação ao Valor da Função no Ponto Interpolador = 0.040000
Fim do algoritmo
Após ter repetido este processo para todos os meus pontos interpoladores (abcissas), ou
seja, de x0 a x39. Obtive a seguinte tabela,
Ponto ou xi Valor da função ou
f (xi)
Aproximação ao valor da
função no ponto interpolador
ou P39 (xi)
1 0,04 0,04
2 0,16 0,16
3 0,1 0,1
4 -0,075 -0,075
5 -0,2 -0,2
6 -0,012 -0,012
7 0,21 0,21
8 0,14 0,14
9 0,03 0,03
10 0,159 0,159
11 0,1 0,1
12 0,01 0,01
13 0,2 0,2
14 0,25 0,25

Modelagem do controle postural humano durante postura erecta Página 87
15 0,11 0,11
16 -0,03 -0,03
17 -0,02 -0,02
18 0,091 0,091
19 0,165 0,165
20 -0,048 -0,048
21 -0,08 -0,08
22 -0,18 -0,18
23 0 0
24 0,05 0,05
25 -0,2 -0,201
26 -0,31 -0,31
27 0,16 0,16
28 0,3 0,3
29 0,02 0,01998
30 -0,14 -0,140001
31 -0,07 -0,07002
32 0,109 0,109035
33 -0,02 -0,020087
34 -0,019 -0,019014
35 0,05 0,050441
36 0,059 0,062558
37 -0,095 -0,098029
38 -0,038 -0,03515
39 0,12 0,12
40 0,015 0,015
Tabela 2 – Aproximação ao valor da função no ponto interpolador
Graficamente obteve-se,

Modelagem do controle postural humano durante postura erecta Página 88
Gráfico 1 - Aproximação do polinómio aos valores reais da função (Excel)
Gráfico 2 – Aproximação do polinómio aos valores reais da função (CoNum)
Breve conclusão
Perante os resultados obtidos tanto analiticamente como graficamente, podemos
concluir que o polinómio de grau 39 não é a melhor aproximação para estudo em
questão. Isto relativamente, ao caso do cálculo da aproximação no Excel. Tal facto
deve-se à memória insuficiente do Excel pois, não consegue armazenar todos os
-0,4
-0,3
-0,2
-0,1
0
0,1
0,2
0,3
0,4
0 10 20 30 40
Aproximação ao valor da função nos ponto interpoladores
f (xi)
P39(xi)
-0,4
-0,3
-0,2
-0,1
0
0,1
0,2
0,3
0,4
0 5 10 15 20 25 30 35 40
Aproximação ao valor da função nos pontos interpoladores
f (xi)
P39(xi)

Modelagem do controle postural humano durante postura erecta Página 89
algarismos necessários para obter sucesso. Ou seja, faz arredondamentos ou trunca a
cinco algarismos significativos o que nos conduz a um elevado erro de aproximação,
assim levando-nos a resultados inválidos.
No entanto, utilizando o software CoNum é possível obter uma aproximação por
um polinómio de grau 39, à nossa função. Assim, concluímos que o CoNum é um
software mais abrangente pois, consegue armazenar todos os algarismos necessários
para que haja sucesso no decorrer do estudo.
2ªHipótese
Cálculo de Polinómios que se aproximem dos meus valores reais da função, usando
o Excel, o software Maxima e o software CoNum. Nesta hipótese dividiu-se os pontos
de 5 em 5, ou seja, fizemos os polinómios por ramos. Daí obtermos 7 polinómios de
grau 5 e 1 polinómio de grau 4.
Aplicação do método utilizando o Excel
1. Cálculo das tabelas das diferenças finitas no Excel para os oito polinómios.
Fórmulas genéricas para o cálculo da tabela,
Ordem zero: ∆0yi = yi
Ordem um: ∆1yi = yi+1-yi = ∆
0yi+1-∆
0yi
Ordem dois: ∆2yi = ∆
1yi+1-∆
1yi
Ordem n: ∆kyi = ∆
k-1yi+1-∆
k-1yi
Nota: As tabelas das diferenças finitas encontram-se nos anexos.
2. Cálculo do polinómio
Fórmula genérica,
h = xi+1-xi, então h=1, o passo entra as abcissas é 1.

Modelagem do controle postural humano durante postura erecta Página 90
k
k
hk
y
!
0 Para o cálculo desta fórmula usei o Excel.
Para o 1º Polinómio P4 (x)
∆0yi = yi = f(xi) 0,04
∆1yi 0,12
∆2yi -0,09
∆3yi 0,010833333
∆4yi 0,004166667
Tabela 3 – Cálculo dos coeficientes do polinómio
Após as devidas substituições obteve-se o seguinte polinómio no software Maxima,
P4 (x) = 0.0040166667*x4-0.029333334*x
3-0.0144166635*x
2+0.308333328*x-
0.2285999972
De seguida substituímos o x pelos pontos (abcissas) no polinómio para verificar se este
aproxima-se da minha função.
Obteve-se o seguinte,
xi f(xi) P4(xi)
1 0,04 0,04
2 0,16 0,16
3 0,1 0,1
4 -0,075 -0,075000002
5 -0,2 -0,203600007
Tabela 4– Substituição dos pontos no polinómio

Modelagem do controle postural humano durante postura erecta Página 91
Para o 2º Polinómio P5 (x)
∆0yi = yi = f(xi) -0,2
∆1yi 0,188
∆2yi 0,017
∆3yi -0,054333333
∆4yi 0,024083333
∆5yi -0,004591667
Tabela 5– Cálculo dos coeficientes do polinómio
Após as devidas substituições obteve-se o seguinte polinómio no software Maxima,
P5 (x) = -0.004591667*x5+0.184791678*x
4-2.907458486*x
3+22.307209352*x
2-
83.251953367*x+120.66600441
Substituímos novamente o x pelos pontos (abcissas) no polinómio para verificarmos se
este aproxima-se aos valores reais.
Obteve-se o seguinte,
xi f(xi) P5(xi)
5 -0,2 -0,2
6 -0,012 -0,012
7 0,21 0,21
8 0,14 0,140000002
9 0,03 0,03
10 0,159 0,15899994
Tabela 6 – Substituição dos pontos no polinómio

Modelagem do controle postural humano durante postura erecta Página 92
Para o 3º Polinómio P5 (x)
∆0yi = yi = f(xi) 0,159
∆1yi -0,059
∆2yi -0,0155
∆3yi 0,051833333
∆4yi -0,030458333
∆5yi 0,009175
Tabela 7 – Cálculo dos coeficientes do polinómio
Após as devidas substituições obteve-se o seguinte polinómio no software Maxima,
P5 (x) = 0.009175*x5-0.580958333*x
4+14.619041651*x
3-
182.711041392*x2+1134.054781204*x-2796.24299384
Substituímos o x pelos pontos iniciais (abcissas) no polinómio para se verificar se existe
aproximação aos valores função, os reais.
Obteve-se o seguinte,
xi f(xi) P5(xi)
10 0,159 0,159
11 0,1 0,1
12 0,01 0,01
13 0,2 0,199999998
14 0,25 0,25
15 0,11 0,11000002
Tabela 8 – Substituição dos pontos no polinómi

Modelagem do controle postural humano durante postura erecta Página 93
Para o 4º Polinómio P5 (x)
∆0yi = yi = f(xi) 0,11
∆1yi -0,14
∆2yi 0,075
∆3yi -0,008166667
∆4yi -0,003708333
∆5yi -0,000191667
Tabela 9 – Cálculo dos coeficientes do polinómio
Após as devidas substituições obteve-se o seguinte polinómio no software Maxima,
P5 (x) = -1.9166699999999999*10^-4*x^5+0.012583362*x^4-
0.316375984*x^3+3.786433518*x^2-21.612577309*x+48.63449096000002
Substituímos o x pelos pontos (xi) no polinómio para verificar se há uma aproximação
aos pontos iniciais (ordenadas).
Obteve-se o seguinte,
xi f(xi) P5(xi)
15 0,11 0,11
16 -0,03 -0,03
17 -0,02 -0,02
18 0,091 0,090999998
19 0,165 0,165
20 -0,048 -0,04800002
Tabela 10 – Substituição dos pontos no polinómio

Modelagem do controle postural humano durante postura erecta Página 94
Para o 5º Polinómio P5 (x)
∆0yi = yi = f(xi) -0,048
∆1yi -0,032
∆2yi -0,034
∆3yi 0,058
∆4yi -0,031583333
∆5yi 0,008316667
Tabela 11 – Cálculo dos coeficientes do polinómio
Após as devidas substituições obteve-se o seguinte polinómio no software Maxima,
P5 (x) = 0.008316667*x5-0.946416703*x
4+42.98525158299999*x
3-
974.019617793*x2+11010.990808126*x-49680.69162932
Substituímos o x pelos pontos iniciais no polinómio para ver se este aproxima-se aos
valores da função.
Obteve-se o seguinte,
xi f(xi) P5(xi)
20 -0,048 -0,048000001
21 -0,08 -0,080000001
22 -0,18 -0,180000001
23 0 -1,18598E-09
24 0,05 0,050000007
25 -0,2 -0,199999922
Tabela 12 – Substituição dos pontos no polinómio

Modelagem do controle postural humano durante postura erecta Página 95
Para o 6º Polinómio P5 (x)
∆0yi = yi = f(xi) -0,2
∆1yi -0,11
∆2yi 0,29
∆3yi -0,151666667
∆4yi 0,034166667
∆5yi -0,001583333
Tabela 13 – Cálculo dos coeficientes do polinómio
Após as devidas substituições obteve-se o seguinte polinómio no software Maxima,
P5 (x) = -0.001583333*x5+0.247916622*x
4-15.307914274*x
3+467.002019288*x
2-
7051.049643353*x+42205.74541945
Voltamos a substituir os pontos iniciais no polinómio para verificar se há uma
aproximação aos meus valores da função.
Obteve-se o seguinte,
xi f(xi) P5(xi)
25 -0,2 -0,2
26 -0,31 -0,31
27 0,16 0,16
28 0,3 0,299999998
29 0,02 0,02
30 -0,14 -0,13999994
Tabela 14 – Substituição dos pontos no polinómio
Para o 7º Polinómio P5 (x)
∆0yi = yi = f(xi) -0,14
∆1yi 0,07
∆2yi 0,0545
∆3yi -0,0695
∆4yi 0,035625
∆5yi -0,011291667
Tabela 15 – Cálculo dos coeficientes do polinómio

Modelagem do controle postural humano durante postura erecta Página 96
Após as devidas substituições obteve-se o seguinte polinómio no software Maxima,
P5 (x) = -0.011291667*x5+1.84229172*x
4-120.128461745*x
3+3913.1558174*x
2-
63679.364992508*x+414140.25613024
Seguidamente substituímos o x pelos pontos iniciais, as abcissas, para verificar se o
polinómio obtido aproxima-se aos valores da função real.
Obteve-se o seguinte,
xi f(xi) P5(xi)
30 -0,14 -0,14
31 -0,07 -0,07
32 0,109 0,109
33 -0,02 -0,019999999
34 -0,019 -0,019
35 0,05 0,049999961
Tabela 16 – Substituição dos pontos no polinómio
Para o 8º Polinómio P5 (x)
∆0yi = yi = f(xi) 0,05
∆1yi 0,009
∆2yi -0,0815
∆3yi 0,062333333
∆4yi -0,020166667
∆5yi 0,001916667
Tabela 17 – Cálculo dos coeficientes do polinómio
Após as devidas substituições obteve-se o seguinte polinómio no software Maxima,
P5 (x) = 0.001916667*x5-0.374750062*x
4+29.23625461*x
3-
1137.750921286*x2+22088.354513571*x-171159.52860526
Substituímos o x pelos pontos iniciais no polinómio para verificar se há uma
aproximação dos valores da função real.
Obteve-se o seguinte,

Modelagem do controle postural humano durante postura erecta Página 97
xi f(xi) P5(xi)
35 0,05 0,05
36 0,059 0,059
37 -0,095 -0,095
38 -0,038 -0,038000002
39 0,12 0,119999984
40 0,015 0,01499998
Tabela 18 – Substituição dos pontos no polinómio
Utilizando o software CoNum
1. Ponto interpolador para x0=1
Início do algoritmo
DIFDIR
Interpolação Polinomial - Diferenças Ascendentes/Descendentes/Centrais - Int.
Directa
Ponto Valores da Função
1.000.000 0.040000
2.000.000 0.160000
3.000.000 0.100000
4.000.000 -0.075000
5.000.000 -0.200000
6.000.000 -0.012000
7.000.000 0.210000
8.000.000 0.140000
9.000.000 0.030000
10.000.000 0.159000
11.000.000 0.100000
12.000.000 0.010000
13.000.000 0.200000
14.000.000 0.250000
15.000.000 0.110000

Modelagem do controle postural humano durante postura erecta Página 98
16.000.000 -0.030000
17.000.000 -0.020000
18.000.000 0.091000
19.000.000 0.165000
20.000.000 -0.048000
21.000.000 -0.080000
22.000.000 -0.180000
23.000.000 0.000000
24.000.000 0.050000
25.000.000 -0.201000
26.000.000 -0.310000
27.000.000 0.160000
28.000.000 0.300000
29.000.000 0.020000
30.000.000 -0.140000
31.000.000 -0.070000
32.000.000 0.109000
33.000.000 -0.020000
34.000.000 -0.019000
35.000.000 0.050000
36.000.000 0.059000
37.000.000 -0.095000
38.000.000 -0.038000
39.000.000 0.120000
40.000.000 0.015000
Tabela 19 – Pontos introduzidos no CoNum para obter a aproximação ao valor da
função no ponto interpolador

Modelagem do controle postural humano durante postura erecta Página 99
Ponto Interpolador = 1.000000
Grau do Polinómio = 4
Posição do Ponto Interpolador => Início
Tabela das Diferenças Finitas (está nos anexos)
Aproximação ao Valor da Função no Ponto Interpolador = 0.040000
Fim do algoritmo
Após ter repetido este processo para todos os meus pontos interpoladores (abcissas), ou
seja, de x0 a x39. Obtive a seguinte tabela,
Ponto
ou xi
Valor da função
ou f (xi)
Aproximação ao valor da
função no ponto interpolador ou
aos vários polinómios
1 0,04 0,04
2 0,16 0,16
3 0,1 0,1
4 -0,075 -0,075
5 -0,2 -0,2
6 -0,012 -0,012
7 0,21 0,21
8 0,14 0,14
9 0,03 0,03
10 0,159 0,159
11 0,1 0,1
12 0,01 0,01
13 0,2 0,2
14 0,25 0,25
15 0,11 0,11
16 -0,03 -0,03
17 -0,02 -0,02
18 0,091 0,091
19 0,165 0,165
20 -0,048 -0,048
21 -0,08 -0,08
22 -0,18 -0,18
23 0 0

Modelagem do controle postural humano durante postura erecta Página 100
24 0,05 0,05
25 -0,2 -0,2
26 -0,31 -0,31
27 0,16 0,16
28 0,3 0,3
29 0,02 0,02
30 -0,14 -0,14
31 -0,07 -0,07
32 0,109 0,109
33 -0,02 -0,02
34 -0,019 -0,019
35 0,05 0,05
36 0,059 0,059
37 -0,095 -0,095
38 -0,038 -0,038
39 0,12 0,12
40 0,015 0,015
Tabela 20 – Aproximação ao valor da função no ponto interpolador
Graficamente obteve-se,
Gráfico 4 - Aproximação do polinómio aos valores reais da função (Excel)
-0,4
-0,3
-0,2
-0,1
0
0,1
0,2
0,3
0,4
0 5 10 15 20 25 30 35 40
Representação dos pontos e as respectivas aproximações
f(x)
P4(xi)
P5(xi)
P5(xi)
P5(xi)
P5(xi)
P5(xi)
P5(xi)
P5(xi)

Modelagem do controle postural humano durante postura erecta Página 101
Gráfico 5 – Aproximação do polinómio aos valores reais da função (CoNum)
Breve conclusão
Perante os resultados obtidos, podemos concluir que tanto graficamente como
analiticamente, alcançamos o objectivo. Conseguimos obter polinómios que se
aproximassem de igual modo aos pontos reais, tanto no excel como no software
CoNum. Também é de referir, que fazer os polinómios por ramos facilita o cálculo e
para além disso obtemos resultados mais exactos, ou seja, arredondamentos
consideráveis, pois não nos leva a resultados inválidos.
Conclusão Geral
Após aplicação do método ao problema em estudo, chego à conclusão que a 2ª hipótese
é a que apresenta melhores resultados. Ou seja, que se aproxima mais dos valores reais
da função, tanto no Excel como no CoNum. Tal sucesso, deve-se ao facto do estudo ser
analisado por ramos pois, para além de facilitar os cálculos, também não nos conduz a
aproximações inválidas, visto que não há arredondamentos dos algarismos.
-0,4
-0,3
-0,2
-0,1
0
0,1
0,2
0,3
0,4
0 10 20 30 40
Aproximações dos polinómios aos pontos reais
f(xi)
P4(xi)
P5(xi)
P5(xi)
P5(xi)
P5(xi)
P5(xi)
P5(xi)
P5(xi)

Modelagem do controle postural humano durante postura erecta Página 102
Método dos minímos quadrados polinomiais Comecei por calcular os polinómios de grau 1, grau 2, grau 3, grau5 e grau 10,
utilizando o Excel, com os coeficientes a1,a2,...,na obtidos no Matlab.
Nota: todos os outros valores utilizados nos sistemas de equações fôramos calculados
no Excel e estes valores vão ser colocados em anexo.
Polinómio de grau 1
P1(x)=a1x+a0
a0 + a1 i = i
a0 i+ a1 i2 = i
a0+ a1* 820=1,111
a0*820 + a1*22140=11,508
a1=-0,0021139774859287
a0=0,0711115384615384
Com a resolução do sistema cheguei a conclusão que o polinómio de grau 1 (P1(x)) é:
P1(x)= (-0,0021139774859287*x)+ 0,0711115384615384
O erro da aproximação é:
E= 2
E2= 0,643599734
Polinómio de grau 2
P2(x)= a2x2+a1x+ a0
a0 + a1 i+ a2 i2 = i
a0 i+ a1 i2+ a2 i
3 = ixi
a0 i2+ a1 i
3+ a2 i
4 = ixi
2

Modelagem do controle postural humano durante postura erecta Página 103
a0+ a1*820+ a2*22140=1,111
a0*820+ a1*22140+ a2*672400=11,508
a0*22140+ a1*672400+ a2*21781332=184,416
a0=0,087025
a1=-0,00438739134280357
a2=0,0000554476011793085
Com a resolução do sistema cheguei a conclusão que o polinómio de grau 2 (P2(x)) é:
P2(x)= (0,0000554476011793085*x2)+( -0,00438739134280357*x)+ 0,087025
O erro da aproximação é:
E2= 0,641856184
Polinómio de grau 3
P3(x)= a3x3 +a2x
2+a1x+ a0
a0 + a1 i+ a2 i2+ a3 i
3= i
a0 i+ a1 i2+ a2 i
3+ a3 i
4= ixi
a0 i2+ a1 i
3+ a2 i
4+ a3 i
5= ixi
2
a0 i3+ a1 i
4+ a2 i
5+ a3 i
6= ixi
3

Modelagem do controle postural humano durante postura erecta Página 104
a0+ a1* 820+ a2* 22140+ a3* 672400= 1,111
a0* 820+ a1* 22140+ a2* 672400+ a3*21781332=11,508
a0* 22140+ a1* 672400+ a2*21781332+ a3*734933200=184,416
a0* 672400+ a1*21781332+ a2*734933200+ a3*25504903620=5001,714
a0=0,00419450705766376
a1=0,0184574474487677
a2= -0,00132047420849404
a3=0,0000223727123524121
Com a resolução do sistema cheguei a conclusão que o polinómio de grau 3 (P3(x)) é:
P3(x)= (0,0000223727123524121*x3) +(-0,00132047420849404*x
2)+
( 0,0184574474487677*x)+ 0,00419450705766376
O erro da aproximação é:
E3= 0,61282326
Polinómio de grau 5
P5(x)= a5x5+ a4x
4+a3x
3 +a2x
2+a1x+ a0
a0 + a1 i+ a2 i2+ a3 i
3+ a4 i
4+ a5 i
5= i
a0 i+ a1 i2+ a2 i
3+ a3 i
4+ a4 i
5+ a5 i
6= ixi
a0 i2+ a1 i
3+ a2 i
4+ a3 i
5+ a4 i
6+ a5 i
7= ixi
2
a0 i3+ a1 i
4+ a2 i
5+ a3 i
6+ a4 i
7+ a5 i
8= ixi
3
a0 i4+ a1 i
5+ a2 i
6+ a3 i
7+ a4 i
8+ a5 i
9= ixi
4
a0 i5+ a1 i
6+ a2 i
7+ a3 i
8+ a4 i
9+ a5 i
10= ixi
5

Modelagem do controle postural humano durante postura erecta Página 105
a0 + a1* 820+ a2* 22140+ a3*672400+ a4*21781332 + a5*734933200=1,111
a0*820+a1* 22140+ a2*672400+ a3*21781332 + a4*734933200 + a5*25504903620=11,508
a0*22140+a1*672400+a2*21781332+a3*734933200+a4*25504903620+a5*9,03509E+11=
184,416
a0*672400+a1*21781332+a2*734933200+a3*25504903620+a4*9,03509E+11+a5*3,25131E+
13= 5001,714
a0*21781332+a1*734933200+a2*25504903620+a3*9,03509E+11+a4*3,25131E+13+a5*1,184
56E+15= 187661,3
a0*734933200+a1*25504903620+a2*9,03509E+11+a3*3,25131E+13+a4*1,18456E+15+a5*4,
35912E+16=7642772
a0=0,0973811740890774
a1= -0,0456504539373944
a2=0,00988509013389859
a3= -0,000732224699448302
a4=0,0000214309910189404
a5=-2,15875963778772E-07
Com a resolução do sistema cheguei a conclusão que o polinómio de grau 5 (P5(x)) é:
P5(x)=(-2,15875963778772E-07*x5)+(0,0000214309910189404*x
4)+
(-0,000732224699448302*x3)+(0,00988509013389859*x
2)+
(-0,0456504539373944*x)+ 0,0973811740890774
O erro da aproximação é:
E5= 0,582964031

Modelagem do controle postural humano durante postura erecta Página 106
Polinómio de grau 10
P10(x)= a10x10
+a9x9+ a8x
8+ a7x
7+ a6x
6 +a5x
5+ a4x
4+a3x
3 +a2x
2+a1x+ a0
a0 +a1 i+ a2 i2+a3 i
3+ a4 i
4+a5 i
5+a6 i
6+
a7 i7+ a8 i
8+ a9 i
9+ a10 i
10 = i
a0 i+a1 i2+ a2 i
3+a3 i
4+ a4 i
5+a5 i
6+a6 i
7+
a7 i8+ a8 i
9+ a9 i
10+ a10 i
11 = ixi
a0 i2+a1 i
3+ a2 i
4+a3 i
5+ a4 i
6+a5 i
7+a6 i
8+
a7 i9+ a8 i
10+ a9 i
11+ a10 i
12 = ixi
2
a0 i3+a1 i
4+ a2 i
5+a3 i
6+ a4 i
7+a5 i
8+a6 i
9+
a7 i10
+ a8 i11
+ a9 i12
+ a10 i13
= ixi3
a0 i4+a1 i
5+ a2 i
6+a3 i
7+ a4 i
8+a5 i
9+a6 i
10+
a7 i11
+ a8 i12
+ a9 i13
+ a10 i14
= ixi4
a0 i5+a1 i
6+ a2 i
7+a3 i
8+ a4 i
9+a5 i
10+a6 i
11+
a7 i12
+ a8 i13
+ a9 i14
+ a10 i15
= ixi5
a0 i6+a1 i
7+ a2 i
8+a3 i
9+ a4 i
10+a5 i
11+a6 i
12+
a7 i13
+ a8 i14
+ a9 i15
+ a10 i16
= ixi6
a0 i7+a1 i
8+ a2 i
9+a3 i
10+ a4 i
11+a5 i
12+a6 i
13+
a7 i14
+ a8 i15
+ a9 i16
+ a10 i17
= ixi7
a0 i8+a1 i
9+ a2 i
10+a3 i
11+ a4 i
12+a5 i
13+a6 i
14+
a7 i15
+ a8 i16
+ a9 i17
+ a10 i18
= ixi8
a0 i9+a1 i
10+ a2 i
11+a3 i
12+ a4 i
13+a5 i
14+a6 i
15+
a7 i16
+ a8 i17
+ a9 i18
+ a10 i19
= ixi9
a0 i10
+a1 i11
+ a2 i12
+a3 i13
+ a4 i14
+a5 i15
+a6 i16
+
a7 i17
+ a8 i18
+ a9 i19
+ a10 i20
= ixi10

Modelagem do controle postural humano durante postura erecta Página 107
a0+ a1*820+ a2*22140+ a3*672400+ a4*21781332+ a5*734933200+ a6*25504903620+
a7*9,03509E+11+ a8*3,25131E+13+ a9*1,18456E+15+ a10*4,35912E+16=1,111
a0*820+ a1*22140+ a2*672400+ a3*21781332+ a4*734933200+ a5*25504903620+
a6*9,03509E+11+ a7*3,25131E+13+ a8*1,18456E+15+ a9*4,35912E+16+
a10*1,61742E+18=11,508
a0*22140+ a1*672400+ a2*21781332+ a3*734933200+ a4*25504903620+ a5*9,03509E+11+
a6*3,25131E+13+ a7*1,18456E+15+ a8*4,35912E+16+ a9*1,61742E+18+
a10*6,04298E+19=184,416
a0*672400+ a1*21781332+ a2*734933200+ a3*25504903620+ a4*9,03509E+11+
a5*3,25131E+13+ a6*1,18456E+15+ a7*4,35912E+16+ a8*1,61742E+18+ a9*6,04298E+19+
a10*2,27109E+21=5001,714
a0*21781332+ a1*734933200+ a2*25504903620+ a3*9,03509E+11+ a4*3,25131E+13+
a5*1,18456E+15+ a6*4,35912E+16+ a7*1,61742E+18+ a8*6,04298E+19+ a9*2,27109E+21+
a10*8,57862E+22=187661,3
a0*734933200+ a1*25504903620+ a2*9,03509E+11+ a3*3,25131E+13+ a4*1,18456E+15+
a5*4,35912E+16+ a6*1,61742E+18+ a7*6,04298E+19+ a8*2,27109E+21+ a9*8,57862E+22+
a10*3,25472E+24=7642772
a0*25504903620+ a1*9,03509E+11+ a2*3,25131E+13+ a3*1,18456E+15+ a4*4,35912E+16+
a5*1,61742E+18+ a6*6,04298E+19+ a7*2,27109E+21+ a8*8,57862E+22+ a9*3,25472E+24+
a10*1,23961E+26=311029140
a0*9,03509E+11+ a1*3,25131E+13+ a2*1,18456E+15+ a3*4,35912E+16+ a4*1,61742E+18+
a5*6,04298E+19+ a6*2,27109E+21+ a7*8,57862E+22+ a8*3,25472E+24+ a9*1,23961E+26+
a10*4,73744E+27=12486572953
a0*3,25131E+13+ a1*1,18456E+15+ a2*4,35912E+16+ a3*1,61742E+18+ a4*6,04298E+19+
a5*2,27109E+21+ a6*8,57862E+22+ a7*3,25472E+24+ a8*1,23961E+26+ a9*4,73744E+27+
a10*1,81602E+29=4,95964E+11
a0*1,18456E+15+ a1*4,35912E+16+ a2*1,61742E+18+ a3*6,04298E+19+ a4*2,27109E+21+
a5*8,57862E+22+ a6*3,25472E+24+ a7*1,23961E+26+ a8*4,73744E+27+ a9*1,81602E+29+
a10*6,98041E+30=1,95779E+13
a0*4,35912E+16+ a1*1,61742E+18+ a2*6,04298E+19+ a3*2,27109E+21+ a4*8,57862E+22+
a5*3,25472E+24+ a6*1,23961E+26+ a7*4,73744E+27+ a8*1,81602E+29+ a9*6,98041E+30+
a10*2,68971E+32=7,7059E+14

Modelagem do controle postural humano durante postura erecta Página 108
a0= -0,273426245597017
a1=0,610065002067481
a2= -0,339817914107435
a3=0,0838118106417761
a4= -0,0112016632629837
a5=0,000901520126802521
a6= -0,0000458605563276692
a7=1,48706170003384E-06
a8= -2,98010849826842E-08
a9=3,36217954370576E-10
a10= -1,63194988599778E-12
Com a resolução do sistema cheguei a conclusão que o polinómio de grau 10 (P10(x)) é:
P10(x)=(-1,63194988599778E-12*x10
)+(3,36217954370576E-10*x9)+
(-2,98010849826842E-08*x8)+(1,48706170003384E-06*x
7)+
(-0,0000458605563276692*x6)+(0,000901520126802521*x
5)+
(-0,0112016632629837*x4)+(0,0838118106417761*x
3)+
(-0,339817914107435*x2)+( 0,610065002067481*x) -0,273426245597017
O erro da aproximação é:
E10= 0,507997123
Depois de ter determinado os polinómios de grau 1, grau 2, grau 3, grau 5 e grau 10 e
os respectivos erros, construi um gráfico onde representei todos os polinómios acima indicado
e os pontos do sinal de excitação neural em função do tempo em segundo.
A representação gráfica obtida foi a seguinte:

Modelagem do controle postural humano durante postura erecta Página 109
Os pontos pretos representam a função do sinal da excitação neural, a linha
vermelha representa a função do polinómio de grau 1,a linha verde representa a função
do polinómio de grau 2, a linha roxo representa a função de polinómio de grau 3, a linha
amarela representa a função do polinómio de grau 5 e a linha azul claro representa a
função do polinómio de grau 10.
O calculo destes polinómios foi feito com a intenção de ver qual deles se aproximam
melhor aos nossos pontos. Depois da visualização gráfica cheguei a conclusão que dos 5
polinómios que eu calculei o que se aproxima melhor dos nossos pontos é o polinómio
de grau 10. E isto já seria de se esperar pois teoricamente quando maior for o grau do
polinómio melhor é a sua aproximação aos pontos.
Depois calculei os polinómios de grau 1, grau 2, grau 3, grau5 e grau 10, utilizando o
Excel, com os coeficientes a1,a2,...,na obtidos no octave.
Polinómio de grau 1
P1(x)=a1x+a0
a0 + a1 i = i
a0 i+ a1 i2 = i
-0,4
-0,3
-0,2
-0,1
0
0,1
0,2
0,3
0,4
0 10 20 30 40 50
P5(x)
p3(x)
P1(x)
P2(x)
y
P10(x)
Aproximação dos polinómios aos pontos

Modelagem do controle postural humano durante postura erecta Página 110
a0+ a1* 820=1,111
a0*820 + a1*22140=11,508
a1=-0,00211397748592871
a0=0,0711115384615385
Com a resolução do sistema cheguei a conclusão que o polinómio de grau 1 (P1(x)) é:
P1(x)= (-0,00211397748592871*x)+ 0,0711115384615385
O erro da aproximação é:
E= 2
E1= 0,643599734
Polinómio de grau 2
P2(x)= a2x2+a1x+ a0
a0 + a1 i+ a2 i2 = i
a0 i+ a1 i2+ a2 i
3 = ixi
a0 i2+ a1 i
3+ a2 i
4 = ixi
2
a0+ a1*820+ a2*22140=1,111
a0*820+ a1*22140+ a2*672400=11,508
a0*22140+ a1*672400+ a2*21781332=184,416
a0=0,08702500000000000
a1=-0,0043873913428035
a2=0,000055447601179308
Com a resolução do sistema cheguei a conclusão que o polinómio de grau 2 (P2(x)) é:
P2(x)= (0,000055447601179308*x2)+( -0,0043873913428035*x)+ 0,08702500000000000

Modelagem do controle postural humano durante postura erecta Página 111
O erro da aproximação é:
E2= 0,641856184
Polinómio de grau 3
P3(x)= a3x3 +a2x
2+a1x+ a0
a0 + a1 i+ a2 i2+ a3 i
3= i
a0 i+ a1 i2+ a2 i
3+ a3 i
4= ixi
a0 i2+ a1 i
3+ a2 i
4+ a3 i
5= ixi
2
a0 i3+ a1 i
4+ a2 i
5+ a3 i
6= ixi
3
a0+ a1* 820+ a2* 22140+ a3* 672400= 1,111
a0* 820+ a1* 22140+ a2* 672400+ a3*21781332=11,508
a0* 22140+ a1* 672400+ a2*21781332+ a3*734933200=184,416
a0* 672400+ a1*21781332+ a2*734933200+ a3*25504903620=5001,714
a0=0,00419450705766478
a1=0,0184574474487677
a2= -0,00132047420849404
a3=0,0000223727123524121
Com a resolução do sistema cheguei a conclusão que o polinómio de grau 3 (P3(x)) é:
P3(x)= (0,0000223727123524121*x3) +(-0,00132047420849404*x
2)+
( 0,0184574474487677*x)+ 0,00419450705766478
O erro da aproximação é:
E3= 0,61282326

Modelagem do controle postural humano durante postura erecta Página 112
Polinómio de grau 5
P5(x)= a5x5+ a4x
4+a3x
3 +a2x
2+a1x+ a0
a0 + a1 i+ a2 i2+ a3 i
3+ a4 i
4+ a5 i
5= i
a0 i+ a1 i2+ a2 i
3+ a3 i
4+ a4 i
5+ a5 i
6= ixi
a0 i2+ a1 i
3+ a2 i
4+ a3 i
5+ a4 i
6+ a5 i
7= ixi
2
a0 i3+ a1 i
4+ a2 i
5+ a3 i
6+ a4 i
7+ a5 i
8= ixi
3
a0 i4+ a1 i
5+ a2 i
6+ a3 i
7+ a4 i
8+ a5 i
9= ixi
4
a0 i5+ a1 i
6+ a2 i
7+ a3 i
8+ a4 i
9+ a5 i
10= ixi
5
a0 + a1* 820+ a2* 22140+ a3*672400+ a4*21781332 + a5*734933200=1,111
a0*820+a1* 22140+ a2*672400+ a3*21781332 + a4*734933200 + a5*25504903620=11,508
a0*22140+a1*672400+a2*21781332+a3*734933200+a4*25504903620+a5*9,03509E+11=
184,416
a0*672400+a1*21781332+a2*734933200+a3*25504903620+a4*9,03509E+11+a5*3,25131E+
13= 5001,714
a0*21781332+a1*734933200+a2*25504903620+a3*9,03509E+11+a4*3,25131E+13+a5*1,184
56E+15= 187661,3
a0*734933200+a1*25504903620+a2*9,03509E+11+a3*3,25131E+13+a4*1,18456E+15+a5*4,
35912E+16=7642772
a0=-0.00113143191534158
a1= -0,00200899606911325
a2=0,00406186767856080
a3= -0,000405951629890303
a4=0,0000133251931806477
a5=-1.42138122693752E-07
Com a resolução do sistema cheguei a conclusão que o polinómio de grau 5 (P5(x)) é:
P5(x)=( -1.42138122693752E-07*x5)+( 0,0000133251931806477*x
4)+

Modelagem do controle postural humano durante postura erecta Página 113
(-0,000405951629890303*x3)+( 0,00406186767856080*x
2)+
(-0,00200899606911325*x)-0.00113143191534158
O erro da aproximação é:
E5= 0,589739802

Modelagem do controle postural humano durante postura erecta Página 114
Polinómio de grau 10
P10(x)= a10x10
+a9x9+ a8x
8+ a7x
7+ a6x
6 +a5x
5+ a4x
4+a3x
3 +a2x
2+a1x+ a0
a0 +a1 i+ a2 i2+a3 i
3+ a4 i
4+a5 i
5+a6 i
6+
a7 i7+ a8 i
8+ a9 i
9+ a10 i
10 = i
a0 i+a1 i2+ a2 i
3+a3 i
4+ a4 i
5+a5 i
6+a6 i
7+
a7 i8+ a8 i
9+ a9 i
10+ a10 i
11 = ixi
a0 i2+a1 i
3+ a2 i
4+a3 i
5+ a4 i
6+a5 i
7+a6 i
8+
a7 i9+ a8 i
10+ a9 i
11+ a10 i
12 = ixi
2
a0 i3+a1 i
4+ a2 i
5+a3 i
6+ a4 i
7+a5 i
8+a6 i
9+
a7 i10
+ a8 i11
+ a9 i12
+ a10 i13
= ixi3
a0 i4+a1 i
5+ a2 i
6+a3 i
7+ a4 i
8+a5 i
9+a6 i
10+
a7 i11
+ a8 i12
+ a9 i13
+ a10 i14
= ixi4
a0 i5+a1 i
6+ a2 i
7+a3 i
8+ a4 i
9+a5 i
10+a6 i
11+
a7 i12
+ a8 i13
+ a9 i14
+ a10 i15
= ixi5
a0 i6+a1 i
7+ a2 i
8+a3 i
9+ a4 i
10+a5 i
11+a6 i
12+
a7 i13
+ a8 i14
+ a9 i15
+ a10 i16
= ixi6
a0 i7+a1 i
8+ a2 i
9+a3 i
10+ a4 i
11+a5 i
12+a6 i
13+
a7 i14
+ a8 i15
+ a9 i16
+ a10 i17
= ixi7
a0 i8+a1 i
9+ a2 i
10+a3 i
11+ a4 i
12+a5 i
13+a6 i
14+
a7 i15
+ a8 i16
+ a9 i17
+ a10 i18
= ixi8
a0 i9+a1 i
10+ a2 i
11+a3 i
12+ a4 i
13+a5 i
14+a6 i
15+
a7 i16
+ a8 i17
+ a9 i18
+ a10 i19
= ixi9
a0 i10
+a1 i11
+ a2 i12
+a3 i13
+ a4 i14
+a5 i15
+a6 i16
+
a7 i17
+ a8 i18
+ a9 i19
+ a10 i20
= ixi10

Modelagem do controle postural humano durante postura erecta Página 115
a7*9,03509E+11+ a8*3,25131E+13+ a9*1,18456E+15+ a10*4,35912E+16=1,111
a0*820+ a1*22140+ a2*672400+ a3*21781332+ a4*734933200+ a5*25504903620+
a6*9,03509E+11+ a7*3,25131E+13+ a8*1,18456E+15+ a9*4,35912E+16+
a10*1,61742E+18=11,508
a0*22140+ a1*672400+ a2*21781332+ a3*734933200+ a4*25504903620+ a5*9,03509E+11+
a6*3,25131E+13+ a7*1,18456E+15+ a8*4,35912E+16+ a9*1,61742E+18+
a10*6,04298E+19=184,416
a0*672400+ a1*21781332+ a2*734933200+ a3*25504903620+ a4*9,03509E+11+
a5*3,25131E+13+ a6*1,18456E+15+ a7*4,35912E+16+ a8*1,61742E+18+ a9*6,04298E+19+
a10*2,27109E+21=5001,714
a0*21781332+ a1*734933200+ a2*25504903620+ a3*9,03509E+11+ a4*3,25131E+13+
a5*1,18456E+15+ a6*4,35912E+16+ a7*1,61742E+18+ a8*6,04298E+19+ a9*2,27109E+21+
a10*8,57862E+22=187661,3
a0*734933200+ a1*25504903620+ a2*9,03509E+11+ a3*3,25131E+13+ a4*1,18456E+15+
a5*4,35912E+16+ a6*1,61742E+18+ a7*6,04298E+19+ a8*2,27109E+21+ a9*8,57862E+22+
a10*3,25472E+24=7642772
a0*25504903620+ a1*9,03509E+11+ a2*3,25131E+13+ a3*1,18456E+15+ a4*4,35912E+16+
a5*1,61742E+18+ a6*6,04298E+19+ a7*2,27109E+21+ a8*8,57862E+22+ a9*3,25472E+24+
a10*1,23961E+26=311029140
a0*9,03509E+11+ a1*3,25131E+13+ a2*1,18456E+15+ a3*4,35912E+16+ a4*1,61742E+18+
a5*6,04298E+19+ a6*2,27109E+21+ a7*8,57862E+22+ a8*3,25472E+24+ a9*1,23961E+26+
a10*4,73744E+27=12486572953
a0*3,25131E+13+ a1*1,18456E+15+ a2*4,35912E+16+ a3*1,61742E+18+ a4*6,04298E+19+
a5*2,27109E+21+ a6*8,57862E+22+ a7*3,25472E+24+ a8*1,23961E+26+ a9*4,73744E+27+
a10*1,81602E+29=4,95964E+11
a0*1,18456E+15+ a1*4,35912E+16+ a2*1,61742E+18+ a3*6,04298E+19+ a4*2,27109E+21+
a5*8,57862E+22+ a6*3,25472E+24+ a7*1,23961E+26+ a8*4,73744E+27+ a9*1,81602E+29+
a10*6,98041E+30=1,95779E+13
a0*4,35912E+16+ a1*1,61742E+18+ a2*6,04298E+19+ a3*2,27109E+21+ a4*8,57862E+22+
a5*3,25472E+24+ a6*1,23961E+26+ a7*4,73744E+27+ a8*1,81602E+29+ a9*6,98041E+30+
a10*2,68971E+32=7,7059E+14

Modelagem do controle postural humano durante postura erecta Página 116
a0= -1.11446748492739E-18
a1=1.33660424890572E-16
a2= -3.90750755359475E-16
a3= -7.03805317798808E-15
a4= -1.18966141263576E-13
a5= -1.79900219759302E-12
a6= -2.21744373893939E-11
a7= -1.73264721060618E-10
a8= -1.5110506538498E-11
a9= -4.34739569854072E-13
a10= 4.14510957075940E-15
Com a resolução do sistema cheguei a conclusão que o polinómio de grau 10 (P10(x)) é:
P10(x)=( 4.14510957075940E-15*x10
)+( -4.34739569854072E-13*x9)+
(-1.5110506538498E-11*x8)+(-1.73264721060618E-10*x
7)+
(-2.21744373893939E-11*x6)+(-1.79900219759302E-12*x
5)+
(-1.18966141263576E-13*x4)+(-7.03805317798808E-15*x
3)+
(-3.90750755359475E-16*x2)+(1.33660424890572E-16*x) -1.11446748492739E-18
O erro da aproximação é:
E10= 0,691500837
Depois de ter determinado os polinómios de grau 1, grau 2, grau 3, grau 5 e grau 10 e
os respectivos erros, construi um gráfico onde representei todos os polinómios acima indicado
e os pontos do sinal de excitação neural em função do tempo em segundo.
A representação gráfica obtida foi a seguinte:

Modelagem do controle postural humano durante postura erecta Página 117
Os triângulos verdes representam a função do sinal da excitação neural, a linha
vermelha representa a função do polinómio de grau 1,a linha azul representa a função
do polinómio de grau 2, a linha castanha representa a função de polinómio de grau 3, a
linha laranja representa a função do polinómio de grau 5 e a linha preta representa a
função do polinómio de grau 10.
Depois da visualização gráfica cheguei a conclusão que o polinómio que melhor
se aproxima dos pontos é o polinómio de grau 5. Neste caso teoricamente o polinómio
que deveria aproximar melhor dos pontos era o polinómio de grau 10, mas isso não se
verificou na pratica devido a acumulação de erro por causa das casas decimais
consideradas no octave.
Depois calculei os polinómios de grau 15, grau 21 e grau 39, utilizando o Matlab.
Relativamente ao método dos mínimos quadrados, o software Matlab está equipado
com o comando polyfit().
Este comando fornece os coeficientes do polinómio a determinar.
Neste âmbito é útil o comando polyval (p,x) que nos fornece o valor do polinómio em
x.
Na janela dos comandos do Matlab:
-0,4
-0,3
-0,2
-0,1
0
0,1
0,2
0,3
0,4
0 10 20 30 40 50
y
P1(x)
P2(x)
p3(x)
P5(x)
P10(x)

Modelagem do controle postural humano durante postura erecta Página 118
x=1:1:40;
y=[0.04 0.16 0.1 -0.075 -0.2 -0.012 0.21 0.14 0.03 0.159 0.1 0.01 0.2 0.25 0.11 -0.03 -0.02
0.091 0.165 -0.048 -0.08 -0.18 0 0.05 -0.2 -0.31 0.16 0.3 0.02 -0.14 -0.07 0.109 -0.02 -0.019
0.05 0.059 -0.095 -0.038 0.12 0.015];
p=polyfit(x,y,n)
y2=polyval(p,x);
res=sum((y-y2).^2)
xi=1:0.5:40;
y3=polyval(p,xi);
plot(x,y,'o',xi,y3,'-r')
format long E
Este foi o código dos mínimos quadrados que eu utilizei no Matlab.
O polyfit vai nos dar o polinómio de grau n, o polyval o valor do polinómio de grau n no
ponto x, o res da o valor do erro da aproximação, o plot danos o gráfico da função do
polinómio e os pontos o que nos permite visualizar a aproximação do polinómio aos
pontos.
Nota: o xi foi colocado no código com o único objectivo de melhorar o aspecto visual
do gráfico em vez dos valores variarem de 1 em 1 com acontece em x vão variar de 0.5
em 0.5.
Polinómio de grau 15
P15(x)=a15x15
+a14x14
+a13x13
+a12x12
+a11x11
+a10x10
+a9x9+a8x
8+a7x
7+ a6x
6 +a5x
5+ a4x
4+a3x
3
+a2x2+a1x+ a0
Para o polinómio de grau 15 obtivemos os seguintes resultados no Matlab:
p =
Columns 1 through 3
-2.400207847591189e-017 7.153934649225487e-015 -9.623262621127127e-013
Columns 4 through 6

Modelagem do controle postural humano durante postura erecta Página 119
7.722817531583136e-011 -4.117642788702165e-009 1.537061084407710e-007
Columns 7 through 9
-4.122745809897392e-006 8.022500336630519e-005 -1.128852173926465e-003
Columns 10 through 12
1.130141128877906e-002 -7.792461313808693e-002 3.491901673576439e-001
Columns 13 through 15
-9.128146819093970e-001 1.087996485164354e+000 -1.245119174058816e-001
Column 16
-2.981017494199316e-001
Logo:
P15(x)=(-2.400207847591189e-017*a15x15
)+(7.153934649225487e-015*a14x14
)+
( -9.623262621127127e-013*a13x13
)+(7.722817531583136e-011*a12x12
)+
( -4.117642788702165e-009* a11x11
)+( 1.537061084407710e-007* a10x10
)+
( -4.122745809897392e-006*a9x9 )+( 8.022500336630519e-005*a8x
8)+
( -1.128852173926465e-003*a7x7)+( 1.130141128877906e-002*a6x
6)+
( -7.792461313808693e-002*a5x5)+( 3.491901673576439e-001*a4x
4)+
( -9.128146819093970e-001*a3x3)+( 1.087996485164354e+000*a2x
2 )+
( -1.245119174058816e-001*a1x1) -2.981017494199316e-001
O erro da aproximação é:
res =4.142073597554822e-001
Logo:

Modelagem do controle postural humano durante postura erecta Página 120
E15=4.142073597554822e-001
O gráfico obtido no Matlab a partir do polinómio 15 foi o seguinte:
Com este gráfico é possível visualizar a aproximação do polinómio de grau 15 aos
pontos.
Polinómio de grau 21
P21(x)=a21x21
+a20x20
+a19+x19
+a18x18
+a17x17
+a16x16
+a15x15
+a14x14
+a13x13
+a12x12
+a11x11
+a1
0x10
+a9x9+a8x
8+a7x
7+ a6x
6 +a5x
5+ a4x
4+a3x
3 +a2x
2+a1x+ a0
Para o polinómio de grau 21 obtivemos os seguintes resultados no Matlab:
p =
Columns 1 through 3
4.479021283983404e-023 -1.953480318482420e-020 3.972570472319410e-018
Columns 4 through 6
0 5 10 15 20 25 30 35 40-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3

Modelagem do controle postural humano durante postura erecta Página 121
-5.002831968230849e-016 4.370386556106082e-014 -2.811424001809262e-012
Columns 7 through 9
1.379843488617204e-010 -5.282445720686985e-009 1.599235877578163e-007
Columns 10 through 12
-3.859108032966014e-006 7.447488318701490e-005 -1.148800979530270e-003
Columns 13 through 15
1.410473995194722e-002 -1.367424206490423e-001 1.034083244012457e+000
Columns 16 through 18
-5.995261558556245e+000 2.601959427852558e+001 -8.179349315908129e+001
Columns 19 through 21
1.776988656827544e+002 -2.483278647827897e+002 1.965970377657449e+002
Column 22
-6.509015004202422e+001
Logo o polinómio de grau 21 é:
P21(x)=(4.479021283983404e-023*x21
)+(-1.953480318482420e020*x20
)+
( 3.972570472319410e-018*x19
)+( -5.002831968230849e-016*x18
)+
( 4.370386556106082e-014*x17
)+( -2.811424001809262e-012*x16
)+
( 1.379843488617204e-010*x15
)+( -5.282445720686985e-009*x14
)+
(1.599235877578163e-007*x13
)+(-3.859108032966014e-006*x12
)+
(7.447488318701490e-005*x11
)+( -1.148800979530270e-003*x10
)+
( 1.410473995194722e-002*x9 )+( -1.367424206490423e-001*x
8 )+
( 1.034083244012457e+000*x7)+( -5.995261558556245e+000* x
6 )+
( 2.601959427852558e+001* x5 )+( -8.179349315908129e+001* x
4)+
( 1.776988656827544e+002* x3)+( -2.483278647827897e+002* x
2)+
( 1.965970377657449e+002* x) -6.509015004202422e+001

Modelagem do controle postural humano durante postura erecta Página 122
O erro da aproximação é:
res =3.435626000787108e-001
Logo:
E21=3.435626000787108e-001
O gráfico obtido no Matlab a partir do polinómio 21 foi o seguinte:
Com este gráfico é possível visualizar a aproximação do polinómio de grau 21 aos
pontos.
Polinómio de grau 39
P39(x)=a39x39
+a38x38
+a37x37
+a36x36
+a35x35
+a34x34
+a33x33
+a32x32
+a31x31
+a30x30
+a29x29
+a28
x28
+a27x27
+a26x26
+a25x25
+a24x24
+a23x23
+a22x22
+a21x21
+a20x20
+a19+x19
+a18x18
+a17x17
+a16x1
6+a15x
15+a14x
14+a13x
13+a12x
12+a11x
11+a10x
10+a9x
9+a8x
8+a7x
7+a6x
6+a5x
5+a4x
4+a3x
3+a2x
2+
a1x+ a0
0 5 10 15 20 25 30 35 40-0.4
-0.2
0
0.2
0.4
0.6
0.8
1

Modelagem do controle postural humano durante postura erecta Página 123
Para o polinómio de grau 39 obtivemos os seguintes resultados no Matlab:
p =
Columns 1 through 3
-4.602130353045147e-043 1.869551602827223e-040 -3.343861436223763e-038
Columns 4 through 6
3.376776816610010e-036 -1.996940484978362e-034 5.692606888000355e-033
Columns 7 through 9
6.513245430382636e-032 -1.123285169599799e-029 2.837878047314462e-028
Columns 10 through 12
6.051700740348345e-027 -5.038252040901514e-025 7.077160059598566e-024
Columns 13 through 15
2.755697283740089e-022 -1.242231593389173e-020 1.651141166958552e-019
Columns 16 through 18
-4.659176773109096e-019 1.604414069007948e-017 1.037353355176492e-015
Columns 19 through 21
-1.182208321218839e-013 2.104543336620609e-012 1.019598329532672e-010
Columns 22 through 24
-6.412556338327579e-009 1.618000775661306e-007 -2.097274332038829e-006
Columns 25 through 27
8.745832397698545e-006 2.749014367194476e-005 5.648324995591375e-003
Columns 28 through 30
-2.575214650804855e-001 5.673762630243613e+000 -8.243461111593265e+001
Columns 31 through 33
8.673350759925289e+002 -6.859831251617518e+003 4.140905868623522e+004
Columns 34 through 36
-1.919326494501575e+005 6.871687481825632e+005 -1.930053435088424e+006

Modelagem do controle postural humano durante postura erecta Página 124
Columns 37 through 39
4.366611124962583e+006 -7.958629865987805e+006 1.044668697318008e+007
Column 40
-6.991922176399165e+006
Logo:
P39(x)=( -4.602130353045147e-043*x39
)+(1.869551602827223e-040*x38
)+
( -3.343861436223763e-038*x37
)+( 3.376776816610010e-036*x36
)+
( -1.996940484978362e-034*x35
)+( 5.692606888000355e-033*x34
)+
(6.513245430382636e-032*x33
)+( -1.123285169599799e-029*x32
)+
( 2.837878047314462e-028* x31
)+( 6.051700740348345e-027*x30
)+
( -5.038252040901514e-025*x29
) +(7.077160059598566e-024*x28
)+
( 2.755697283740089e-022*x27
)+( -1.242231593389173e-020*x26
)+
( 1.651141166958552e-019*x25
)+( -4.659176773109096e-019* x24
)+
( 1.604414069007948e-017* x23
)+( 1.037353355176492e-015* x22
)+
(-1.182208321218839e-013*x21
)+( 2.104543336620609e-012*x20
)+
( 1.019598329532672e-010*x19
)+( -6.412556338327579e-009* x18
)+
( 1.618000775661306e-007* x17
)+( -2.097274332038829e-006* x16
)+
(8.745832397698545e-006* x15
)+( 2.749014367194476e-005*x14
)+
( 5.648324995591375e-003*x13
)+( -2.575214650804855e-001*x12
)+
( 5.673762630243613e+000* x11
)+( -8.243461111593265e+001* x10
)+
(8.673350759925289e+002* x9)+( -6.859831251617518e+003* x
8)+
( 4.140905868623522e+004*x7)+( -1.919326494501575e+005* x
6)+
( 6.871687481825632e+005* x5)+( -1.930053435088424e+006* x
4)+
(4.366611124962583e+006*x3)+( -7.958629865987805e+006* x
2)+
( 1.044668697318008e+007*x) -6.991922176399165e+006

Modelagem do controle postural humano durante postura erecta Página 125
O erro da aproximação é:
res =4.998636411804590e+013
Logo:
E39=4.998636411804590e+013
O gráfico obtido no Matlab a partir do polinómio 39 foi o seguinte:
Fiz a representação deste três polinómios obtidos através do Matlab para
fazermos um estudo do valor do erro da aproximação de cada um dos polinómios acima
indicados.
No polinómio de grau 15 temos um erro de 4.142073597554822e-001, para o
polinómio de grau 21 temos um erro de 3.435626000787108e-001 e o polinómio de
grau 39 tem um erro de 4.998636411804590e+013. Com estes valores do erro da
aproximação cheguei a conclusão que o erro diminui do polinómio de grau15 para o
polinómio de grau 21 mas aumenta brutalmente do polinómio de grau 21 para o
polinómio de grau 39. Teoricamente o valor do erro da aproximação tinha que ir
0 5 10 15 20 25 30 35 40-8
-6
-4
-2
0
2
4
6x 10
6

Modelagem do controle postural humano durante postura erecta Página 126
diminuindo com o aumento do grau do polinómio, isto é, quando maior for o grau do
polinómio menor será o erro da aproximação, mas isto não se verificou na pratica. Este
aumento do erro foi devido a acumulação de vários erros e chega uma hora que o erro
“explode”.
Por isso o polinómio de grau 39 não é o polinómio que melhor se aproxima aos
nossos pontos como se esperava teoricamente.
A tabela que segue vai mostrar a partir de que grau de polinómio o erro começa
a explodir.
P(x) E(x)
P(1) 0,643599734
P(2) 0,641856184
P(3) 0,61282326
P(4) 0,609995029
P(5) 0,582964031
P(6) 0,534523979
P(7) 0,532636286
P(8) 0,52091928
P(9) 0,520777187
P(10) 0,507997115
P(11) 0,479776206
P(12) 0,454591941
P(13) 0,446400931
P(14) 0,430012159
P(15) 0,41420736
P(16) 0,367457259
P(17) 0,363882375
P(18) 0,361068385
P(19) 0,361053961
P(20) 0,355444055
P(21) 0,3435626
P(22) 0,364734582
Do polinómio de grau 1 ate ao polinómio de grau 21 o erro vai diminuindo a partir do
polinómio de grau 22 o erro começa a aumentar. Então o polinómio que melhor se
aproxima dos nossos pontos é o polinómio de grau 21.

Modelagem do controle postural humano durante postura erecta Página 127
Utilizando o Conum
No Conum comecei por introduzir a grau do polinómio que no meu caso foi o grau 39,
depois introduzi o numero de pontos que no meu caso é 40.
Em seguida tive que introduzir os pontos e os valores da função que serão representados
na tabela que se segue:
Pontos Valores da função
1 0,04
2 0,16
3 0,1
4 -0,075
5 -0,2
6 -0,012
7 0,21
8 0,14
9 0,03
10 0,159
11 0,1
12 0,01
13 0,2
14 0,25
15 0,11
16 -0,03
17 -0,02
18 0,091
19 0,165
20 -0,048
21 -0,08
22 -0,18
23 0
24 0,05
25 -0,2
26 -0,31
27 0,16
28 0,3
29 0,02
30 -0,14
31 -0,07
32 0,109
33 -0,02
34 -0,019
35 0,05

Modelagem do controle postural humano durante postura erecta Página 128
36 0,059
37 -0,095
38 -0,038
39 0,12
40 0,015
Depois por fim introduzi o meu ponto interpolador que neste caso foi 20.
Neste caso o valor do polinómio no ponto interpolador aproxima-se do valor real, pois o
valor do polinómio no ponto interpolador foi igual a -0.048.
Mas no meu caso o que me interessa é saber o polinómio, e reactivamente a isto não
pode concluir nada pois o conum dá-me os coeficientes mas com só pode ter no máximo
15 casas decimais a maior parte dos meus coeficientes da zero logo não posso concluir
nada acerca do polinómio nem calcular o erro da aproximação.
Por isso não resolvi o conum para mais nenhum ponto interpolador.
Os valores que apresentei neste relatório vão ser todos dispostos em anexo para a
visualização da forma como foram calculados.
Conclusão
A tabela que se segue mostra o valor do erro da aproximação dos polinómios
calculados no Excel, com os valores dos coeficientes obtidos através do matlab e do
octave.
Polinómios Erro de aproximação
(coeficientes calculados no
matlab)
Erro de aproximação
(coeficientes calculados no
octave)
P1(x) E1= 0,643599734 E1=0,643599734
P2(x) E2=0,641856184 E2=0,641856184
P3(x) E3=0,61282326 E3=0,61282326
P5(x) E5=0,589739802 E5=0,589739802
P10(x) E10=0,507997123 E10= 0,691500837

Modelagem do controle postural humano durante postura erecta Página 129
Com esta tabela cheguei a conclusão que os valores dos coeficientes obtidos no matlab
são melhores que os obtidos no octave pois os erros da aproximação dos polinómios
cujos coeficientes foram obtidos no matlab são mais baixos do que os erros dos
polinómios cujos coeficientes foram obtidos no octave. Por isso neste caso o programa
que “funciona melhor” é o matlab, isto significa que no matlab a propagação do erro e
menor.
Relativamente aos polinómios e os erros da aproximação calculados no matlab podemos
ver perfeitamente que o erro vai diminuindo ate ao polinómio de grau grau21 e depois
começa a aumentar. Também com isto cheguei a conclusão que o meu polinómio que
melhor se aproxima aos pontos, ao contrario do que se esperava teoricamente é o
polinómio de grau 21.
Enquanto que no octave o polinómio que melhor se aproxima aos pontos é o polinómio
de grau 5, isto foi devido a acumulação de erro. E isto confirma mais ainda o que eu já
tinha referido anteriormente, o matlab funciona neste caso melhor que o octave.
No CoNum nada se pode concluir acerca do polinómio devido ao seu numero reduzido
de casas decimais.
Métodos dos Minímos Quadrados não Polinomiais
Como já referi anteriormente o meu método é mínimos quadrados para funções
não polinomiais. Para tal usei quatro funções não polinomiais e através de uma
mudança de variável transformei-as em polinómios para assim poder ter uma mais
simples resolução do problema:
;
w a0 a1 z
;
w a0 a1 z

Modelagem do controle postural humano durante postura erecta Página 130
w a0 a1 z
;
w a0 a1 z
Comecei por fazer a mudança de variável em todas as funções, em seguida
calculei os meus novos valores em função da mudança no Excel, para no final calcular o
polinómio respectivo e o erro de aproximação do mesmo.
1ª Função estudada:
O meu objectivo inicial era descobrir os coeficientes a0 e a1, para tal utilizei o
programa computacional Matlab, onde inseri o seguinte código:
Obtive os seguintes resultados:
format long
z = 1:1:40;
z1=1./z
w = [1/0.04 1/0.16 1/0.1 1/-0.075 1/-0.2 1/-0.012 1/0.21 1/0.14 1/0.33 1/0.159 1/0.1
1/0.01 1/0.2 1/0.25 1/0.11 1/-0.03 1/-0.02 1/0.091 1/0.165 1/-0.048 -1/0.08 1/-0.18
1/0.00001 1/0.05 1/-0.2 1/-0.31 1/0.16 1/0.3 1/0.02 1/0.14 1/-0.07 1/0.109 1/0.02
1/0.019 1/0.05 1/0.059 1/-0.095 1/-0.038 1/0.12 1/0.015];
p = polyfit(z1,w,1)
zi= 1:0.5:40;
w2=polyval(p,zi);
plot(z1,w,'o',zi,w2,'-r');

Modelagem do controle postural humano durante postura erecta Página 131
a0 3,0897E+03
a1 -5.458,20569594473000
b=1/a0 3,2366E-04
a=b*a1 -1,7666E+00
No final peguei nestes valores e coloquei-os no Excel, para deste modo calcular
o meu polinómio e sucessivamente o erro de aproximação.

Modelagem do controle postural humano durante postura erecta Página 132
No Excel:
i xi yi zi wi zi2 wizi y=bx/(x+a) (yi-(bx/(x+a)))^2
0 1 0,04 1 25 1 25 -4,2221E-04 0,001633955
1 2 0,16 0,5 6,25 0,25 3,125 2,7732E-03 0,024720275
2 3 0,1 0,333333333 10 0,111111111 3,333333333 7,8722E-04 0,009843176
3 4 -0,075 0,25 -13,33333333 0,0625 -3,333333333 5,7966E-04 0,005712285
4 5 -0,2 0,2 -5 0,04 -1 5,0049E-04 0,040200445
5 6 -0,012 0,166666667 -83,33333333 0,027777778 -13,88888889 4,5872E-04 0,00015522
6 7 0,21 0,142857143 4,761904762 0,020408163 0,680272109 4,3291E-04 0,043918366
7 8 0,14 0,125 7,142857143 0,015625 0,892857143 4,1538E-04 0,019483866
8 9 0,03 0,111111111 33,33333333 0,012345679 3,703703704 4,0270E-04 0,000876
9 10 0,159 0,1 6,289308176 0,01 0,628930818 3,9310E-04 0,025156149
10 11 0,1 0,090909091 10 0,008264463 0,909090909 3,8558E-04 0,009923033
11 12 0,01 0,083333333 100 0,006944444 8,333333333 3,7953E-04 9,25535E-05
12 13 0,2 0,076923077 5 0,00591716 0,384615385 3,7455E-04 0,039850318
13 14 0,25 0,071428571 4 0,005102041 0,285714286 3,7039E-04 0,06231494
14 15 0,11 0,066666667 9,090909091 0,004444444 0,606060606 3,6686E-04 0,012019425
15 16 -0,03 0,0625 -33,33333333 0,00390625 -2,083333333 3,6383E-04 0,000921962
16 17 -0,02 0,058823529 -50 0,003460208 -2,941176471 3,6119E-04 0,000414578
17 18 0,091 0,055555556 10,98901099 0,00308642 0,610500611 3,5888E-04 0,008215813
18 19 0,165 0,052631579 6,060606061 0,002770083 0,318979266 3,5683E-04 0,027107372
19 20 -0,048 0,05 -20,83333333 0,0025 -1,041666667 3,5501E-04 0,002338207
20 21 -0,08 0,047619048 -12,5 0,002267574 -0,595238095 3,5338E-04 0,006456666
21 22 -0,18 0,045454545 -5,555555556 0,002066116 -0,252525253 3,5191E-04 0,032526813
22 23 0,00001 0,043478261 100000 0,001890359 4347,826087 3,5058E-04 1,15997E-07
23 24 0,05 0,041666667 20 0,001736111 0,833333333 3,4937E-04 0,002465185
24 25 -0,2 0,04 -5 0,0016 -0,2 3,4827E-04 0,040139428
25 26 -0,31 0,038461538 -3,225806452 0,00147929 -0,124069479 3,4725E-04 0,096315416
26 27 0,16 0,037037037 6,25 0,001371742 0,231481481 3,4631E-04 0,025489299
27 28 0,3 0,035714286 3,333333333 0,00127551 0,119047619 3,4545E-04 0,089792849
28 29 0,02 0,034482759 50 0,001189061 1,724137931 3,4465E-04 0,000386333
29 30 -0,14 0,033333333 -7,142857143 0,001111111 -0,238095238 3,4391E-04 0,019696412
30 31 -0,07 0,032258065 -14,28571429 0,001040583 -0,460829493 3,4321E-04 0,004948168
31 32 0,109 0,03125 9,174311927 0,000976563 0,286697248 3,4257E-04 0,011806438
32 33 -0,02 0,03030303 -50 0,000918274 -1,515151515 3,4196E-04 0,000413795
33 34 -0,019 0,029411765 -52,63157895 0,000865052 -1,547987616 3,4139E-04 0,00037409
34 35 0,05 0,028571429 20 0,000816327 0,571428571 3,4086E-04 0,00246603
35 36 0,059 0,027777778 16,94915254 0,000771605 0,470809793 3,4036E-04 0,003440954
36 37 -0,095 0,027027027 -10,52631579 0,00073046 -0,284495021 3,3988E-04 0,009089693
37 38 -0,038 0,026315789 -26,31578947 0,000692521 -0,692520776 3,3944E-04 0,001469912
38 39 0,12 0,025641026 8,333333333 0,000657462 0,213675214 3,3901E-04 0,014318752
39 40 0,015 0,025 66,66666667 0,000625 1,666666667 3,3861E-04 0,000214956
∑ 820 1,11101 4,278543039 100045,6078 1,620243963 4372,556445 E= 0,696709243
Tabela 21 – cálculo do polinómio para a 1ª função e do erro para a mesma.

Modelagem do controle postural humano durante postura erecta Página 133
Depois de ter calculado no Excel, utilizei de novo a linguagem no Matlab para calcular
o erro de aproximação e deste modo poder comparar ambos os valores.
Para tal apliquei o seguinte código no Matlab:
Obtive os seguintes resultados:
b = 3.236559618071866e-004
a = -1.766580814262457
res = 0.804108648544754
Como pudemos ver os resultados são muito parecidos com os do Excel, o que
significa que estão correctos.
No final da utilização destes dois métodos ainda empreguei mais um, o CoNum,
para assim ter mais uma ferramenta de comparação.
No CoNum utilizei a ferramenta do método dos mínimos quadrados para
funções polinomiais, mas com o meu x e y modificados, ou seja, o meu z e w.
format long
z = 1:1:40;
y1=[0.04 0.16 0.1 -0.075 -0.2 -0.012 0.21 0.14 0.33 0.159 0.1 0.01 0.2 0.25 0.11 -
0.03 -0.02 0.091 0.165 -0.048 0.08 -0.18 0.00001 0.05 -0.2 -0.31 0.16 0.3 0.02 0.14 -
0.07 0.109 0.02 0.019 0.05 0.059 -0.095 -0.038 0.12 0.015];
z1=1./z
w = [1/0.04 1/0.16 1/0.1 1/-0.075 1/-0.2 1/-0.012 1/0.21 1/0.14 1/0.33 1/0.159 1/0.1
1/0.01 1/0.2 1/0.25 1/0.11 1/-0.03 1/-0.02 1/0.091 1/0.165 1/-0.048 -1/0.08 1/-0.18
1/0.00001 1/0.05 1/-0.2 1/-0.31 1/0.16 1/0.3 1/0.02 1/0.14 1/-0.07 1/0.109 1/0.02
1/0.019 1/0.05 1/0.059 1/-0.095 1/-0.038 1/0.12 1/0.015];
p = polyfit(z1,w,1);
b=1/p(2)
a=b*p(1)
y=(b*z)./(z+a);
zi= 1:0.5:40;
w2=polyval(p,zi);
y2=(b*zi)./(zi+a);
plot(z,y1,'o',zi,y2,'-r');
res = sum((y1-y).^2)

Modelagem do controle postural humano durante postura erecta Página 134

Modelagem do controle postural humano durante postura erecta Página 135
Neste método obtive o valor de c0 e c1, que correspondem ao meu a0 e a1. Deste
modo, no Excel calculei o polinómio e o erro de aproximação e comparei com os
valores já calculados anteriormente, no Excel e no Matlab.
B0= 0,106965
c0=a0 2501,140194
c1=a1 -5443,772308
p0= 1
B[0] = 0.106965
Coeficientes do Polinómio
c[0] = 2501.140194
c[1] = -5443.772308
Soma dos Quadrados dos Resíduos = 9715357264.370998

Modelagem do controle postural humano durante postura erecta Página 136
Excel:
zi yi p1=(z-B0*p0) p1(z)=c0*p0+c1*p1 E=(yi-p1(zi))^2
1 25 0,893035 -2360,339009 5689842,188
0,5 6,25 0,393035 361,5471449 126236,0612
0,333333333 10 0,226368333 1268,84253 1584684,514
0,25 -13,3333 0,143035 1722,490222 3013083,415
0,2 -5 0,093035 1994,678837 3998715,452
0,166666667 -83,3333 0,059701667 2176,137914 5105210,319
0,142857143 4,761905 0,035892143 2305,751541 5294553,304
0,125 7,142857 0,018035 2402,96176 5739948,217
0,111111111 33,33333 0,004146111 2478,569709 5979180,934
0,1 6,289308 -0,006965 2539,056068 6414907,46
0,090909091 10 -0,016055909 2588,544907 6648893,839
0,083333333 100 -0,023631667 2629,785607 6399815,215
0,076923077 5 -0,030041923 2664,681583 7073906,123
0,071428571 4 -0,035536429 2694,59242 7239287,569
0,066666667 9,090909 -0,040298333 2720,515145 7351821,387
0,0625 -33,3333 -0,044465 2743,19753 7709123,633
0,058823529 -50 -0,048141471 2763,211398 7914158,372
0,055555556 10,98901 -0,051409444 2781,001504 7672969,212
0,052631579 6,060606 -0,054333421 2796,918967 7788890,39
0,05 -20,8333 -0,056965 2811,244684 8020665,894
0,047619048 -12,5 -0,059345952 2824,206046 8046901,192
0,045454545 -5,55556 -0,061510455 2835,989103 8074376,047
0,043478261 100000 -0,063486739 2846,747546 9438754462
0,041666667 20 -0,065298333 2856,609453 8046353,187
0,04 -5 -0,066965 2865,682407 8240817,48
0,038461538 -3,22581 -0,068503462 2874,057441 8278758,886
0,037037037 6,25 -0,069927963 2881,812102 8268857,404
0,035714286 3,333333 -0,071250714 2889,012859 8327146,327
0,034482759 50 -0,072482241 2895,717012 8098105,315
0,033333333 -7,14286 -0,073631667 2901,974222 8462962,18
0,032258065 -14,2857 -0,074706935 2907,827741 8538747,043
0,03125 9,174312 -0,075715 2913,315414 8434035,542
0,03030303 -50 -0,07666197 2918,470502 8811817,12
0,029411765 -52,6316 -0,077553235 2923,322349 8856301,779
0,028571429 20 -0,078393571 2927,896947 8455864,656
0,027777778 16,94915 -0,079187222 2932,217401 8498788,963
0,027027027 -10,5263 -0,079937973 2936,304318 8683810,782
0,026315789 -26,3158 -0,080649211 2940,176133 8800074,326
0,025641026 8,333333 -0,081323974 2943,849394 8617254,54
0,025 66,66667 -0,081965 2947,338991 8298273,041
∑ -5,69611E-05 100045,9178 9715359602
Tabela 22 – cálculo do polinómio do erro com dados do CoNum
No final de calcular o erro de aproximação através de Excel, comparei-o com os
valores obtidos no CoNum, cheguei a conclusão que deu uma grande diferença em
relação ao do Excel, pois eu utilizei a ferramenta destinada ao método dos mínimos
quadrados para funções polinomiais, mas com o meu x e y transformados em z e w,
através da mudança de variável, o que provavelmente não está correcto e deste modo
provocar tal discrepância entre estes.

Modelagem do controle postural humano durante postura erecta Página 137
-0,4
-0,3
-0,2
-0,1
0
0,1
0,2
0,3
0,4
0 10 20 30 40 50
Série1
Série2
fig18 gráfico da 1ª função – Excel
fig19- gráfico da 1ª função - Matlab

Modelagem do controle postural humano durante postura erecta Página 138
Agora tornei a repetir o mesmo processo de cálculo, para as restantes três funções.
2ª Função estudada:
Matlab:
Resultados:
a0 0,038737319073197
a1 0,051306539416437
b=1/a0 25,81489953
a=b*a1 1,32447316
Substituindo os valores, obtêm-se o polinómio e o erro de aproximação:
0,672577254
format long
z = 1:1:40;
z1=1./z
w = [0.04 0.16 0.1 -0.075 -0.2 -0.012 0.21 0.14 0.33 0.159 0.1 0.01 0.2 0.25 0.11 -
0.03 -0.02 0.091 0.165 -0.048 -0.08 -0.18 0.00001 0.05 -0.2 -0.31 0.16 0.3 0.02 0.14
-0.07 0.109 0.02 0.019 0.05 0.059 -0.095 -0.038 0.12 0.015];
p = polyfit(z1,w,1)
zi= 1:0.5:40;
w2=polyval(p,zi);
plot(z,w,'o',zi,w2,'-r');

Modelagem do controle postural humano durante postura erecta Página 139
No Excel:
i xi yi zi wi zi2 wizi y=(x+a)/(bx) (yi-((x+a)/(bx)))^2
0 1 0,04 1 0,04 1 0,04 0,090043858 0,002504388
1 2 0,16 0,5 0,16 0,25 0,08 0,064390589 0,00914116
2 3 0,1 0,333333333 0,1 0,111111111 0,033333333 0,055839499 0,00195015
3 4 -0,075 0,25 -0,075 0,0625 -0,01875 0,051563954 0,016018434
4 5 -0,2 0,2 -0,2 0,04 -0,04 0,048998627 0,062000316
5 6 -0,012 0,166666667 -0,012 0,027777778 -0,002 0,047288409 0,003515115
6 7 0,21 0,142857143 0,21 0,020408163 0,03 0,046066825 0,026874086
7 8 0,14 0,125 0,14 0,015625 0,0175 0,045150637 0,008996402
8 9 0,03 0,111111111 0,03 0,012345679 0,003333333 0,044438046 0,000208457
9 10 0,159 0,1 0,159 0,01 0,0159 0,043867973 0,013255384
10 11 0,1 0,090909091 0,1 0,008264463 0,009090909 0,04340155 0,003203385
11 12 0,01 0,083333333 0,01 0,006944444 0,000833333 0,043012864 0,001089849
12 13 0,2 0,076923077 0,2 0,00591716 0,015384615 0,042683976 0,024748331
13 14 0,25 0,071428571 0,25 0,005102041 0,017857143 0,042402072 0,0430969
14 15 0,11 0,066666667 0,11 0,004444444 0,007333333 0,042157755 0,00460257
15 16 -0,03 0,0625 -0,03 0,00390625 -0,001875 0,041943978 0,005175936
16 17 -0,02 0,058823529 -0,02 0,003460208 -0,001176471 0,041755351 0,003813723
17 18 0,091 0,055555556 0,091 0,00308642 0,005055556 0,041587682 0,002441577
18 19 0,165 0,052631579 0,165 0,002770083 0,008684211 0,041437663 0,015267651
19 20 -0,048 0,05 -0,048 0,0025 -0,0024 0,041302646 0,007974963
20 21 -0,08 0,047619048 -0,08 0,002267574 -0,003809524 0,041180488 0,014684711
21 22 -0,18 0,045454545 -0,18 0,002066116 -0,008181818 0,041069435 0,048871695
22 23 0,00001 0,043478261 0,00001 0,001890359 4,34783E-07 0,040968038 0,001677561
23 24 0,05 0,041666667 0,05 0,001736111 0,002083333 0,040875092 8,3264E-05
24 25 -0,2 0,04 -0,2 0,0016 -0,008 0,040789581 0,057979622
25 26 -0,31 0,038461538 -0,31 0,00147929 -0,011923077 0,040710648 0,122997958
26 27 0,16 0,037037037 0,16 0,001371742 0,005925926 0,040637561 0,014247392
27 28 0,3 0,035714286 0,3 0,00127551 0,010714286 0,040569695 0,067304083
28 29 0,02 0,034482759 0,02 0,001189061 0,000689655 0,04050651 0,000420517
29 30 -0,14 0,033333333 -0,14 0,001111111 -0,004666667 0,040447537 0,032561314
30 31 -0,07 0,032258065 -0,07 0,001040583 -0,002258065 0,040392369 0,012186475
31 32 0,109 0,03125 0,109 0,000976563 0,00340625 0,040340648 0,004714107
32 33 -0,02 0,03030303 -0,02 0,000918274 -0,000606061 0,040292063 0,003635133
33 34 -0,019 0,029411765 -0,019 0,000865052 -0,000558824 0,040246335 0,003510128
34 35 0,05 0,028571429 0,05 0,000816327 0,001428571 0,04020322 9,59769E-05
35 36 0,059 0,027777778 0,059 0,000771605 0,001638889 0,040162501 0,000354851
36 37 -0,095 0,027027027 -0,095 0,00073046 -0,002567568 0,040123982 0,018258491
37 38 -0,038 0,026315789 -0,038 0,000692521 -0,001 0,040087491 0,006097656
38 39 0,12 0,025641026 0,12 0,000657462 0,003076923 0,040052871 0,006391543
39 40 0,015 0,025 0,015 0,000625 0,000375 0,040019983 0,000626
∑ 820 1,11101 4,278543039 1,11101 1,620243963 0,203871963 E= 0,672577254
Tabela 23 – cálculo do polinómio para a 2ª função e do erro para a mesma.

Modelagem do controle postural humano durante postura erecta Página 140
Erro de aproximação no Matlab:
Resultados:
b = 25.814899531648553
a = 1.324473160351881
res = 0.724981719034330
Como pudemos ver, esta segunda função também dá valores muito parecidos
com os do Excel, logo prevemos que os resultados estejam correctos.
Resultados CoNum:
B0= 0,106964
c0=a0 0,027775
c1=a1 0,073142
p0= 1
format long
z = 1:1:40;
z1=1./z
w = [0.04 0.16 0.1 -0.075 -0.2 -0.012 0.21 0.14 0.33 0.159 0.1 0.01 0.2 0.25 0.11 -
0.03 -0.02 0.091 0.165 -0.048 -0.08 -0.18 0.00001 0.05 -0.2 -0.31 0.16 0.3 0.02 0.14
-0.07 0.109 0.02 0.019 0.05 0.059 -0.095 -0.038 0.12 0.015];
p = polyfit(z1,w,1);
b=1/p(2)
a=b*p(1)
y=(z+a)./(b*z)
zi= 1:0.5:40;
%w2=polyval(p,zi)
y2=(zi+a)./(b*zi)
plot(z,w,'o',zi,y2,'-r');
res = sum((w-y).^2)
B[0] = 0.106964
Coeficientes do Polinómio
c[0] = 0.027775
c[1] = 0.073142
Soma dos Quadrados dos Resíduos = 0.661199

Modelagem do controle postural humano durante postura erecta Página 141
Excel:
zi yi p2=(z-B0*p0) p2(z)=c0*p0+c1*p2 E=(yi-p2(zi))^2
1 0,04 0,893036 0,065318439 0,000641023
0,5 0,16 0,393036 0,028747439 0,017227235
0,333333333 0,1 0,226369333 0,016557106 0,006962717
0,25 -0,075 0,143036 0,010461939 0,007303743
0,2 -0,2 0,093036 0,006804839 0,042768241
0,166666667 -0,012 0,059702667 0,004366772 0,000267871
0,142857143 0,21 0,035893143 0,002625296 0,043004268
0,125 0,14 0,018036 0,001319189 0,019232367
0,111111111 0,03 0,004147111 0,000303328 0,000881892
0,1 0,159 -0,006964 -0,000509361 0,025443236
0,090909091 0,1 -0,016054909 -0,001174288 0,010236237
0,083333333 0,01 -0,023630667 -0,001728394 0,000137555
0,076923077 0,2 -0,030040923 -0,002197253 0,040883729
0,071428571 0,25 -0,035535429 -0,002599132 0,063806322
0,066666667 0,11 -0,040297333 -0,002947428 0,012757121
0,0625 -0,03 -0,044464 -0,003252186 0,000715446
0,058823529 -0,02 -0,048140471 -0,00352109 0,000271554
0,055555556 0,091 -0,051408444 -0,003760116 0,00897948
0,052631579 0,165 -0,054332421 -0,003973982 0,028552207
0,05 -0,048 -0,056964 -0,004166461 0,001921379
0,047619048 -0,08 -0,059344952 -0,004340609 0,005724344
0,045454545 -0,18 -0,061509455 -0,004498925 0,030800627
0,043478261 0,00001 -0,063485739 -0,004643474 2,16548E-05
0,041666667 0,05 -0,065297333 -0,004775978 0,003000408
0,04 -0,2 -0,066964 -0,004897881 0,038064837
0,038461538 -0,31 -0,068502462 -0,005010407 0,093018652
0,037037037 0,16 -0,069926963 -0,005114598 0,02726283
0,035714286 0,3 -0,071249714 -0,005211347 0,093153966
0,034482759 0,02 -0,072481241 -0,005301423 0,000640162
0,033333333 -0,14 -0,073630667 -0,005385494 0,018121065
0,032258065 -0,07 -0,074705935 -0,005464142 0,004164877
0,03125 0,109 -0,075714 -0,005537873 0,013118924
0,03030303 -0,02 -0,07666097 -0,005607137 0,000207155
0,029411765 -0,019 -0,077552235 -0,005672326 0,000177627
0,028571429 0,05 -0,078392571 -0,005733789 0,003106255
0,027777778 0,059 -0,079186222 -0,005791839 0,004197982
0,027027027 -0,095 -0,079936973 -0,00584675 0,007948302
0,026315789 -0,038 -0,080648211 -0,005898771 0,001030489
0,025641026 0,12 -0,081322974 -0,005948125 0,01586293
0,025 0,015 -0,081964 -0,005995011 0,00044079
∑= -1,69611E-05 -1,24057E-06 0,692057502
Tabela 24 – cálculo do polinómio do erro com dados do CoNum

Modelagem do controle postural humano durante postura erecta Página 142
-0,4
-0,3
-0,2
-0,1
0
0,1
0,2
0,3
0,4
0 10 20 30 40 50
Série1
Série2
Nesta segunda função os resultados obtidos no Excel com os dados do CoNum,
já dão muito parecidos com os do Matlab e Excel, o que indica que estão correctos.
Fig20 - gráfico da 2ª função - Excel
Fig21 - gráfico da 2ª função – Matlab

Modelagem do controle postural humano durante postura erecta Página 143
3ª Função estudada:
Matlab:
Resultados:
a0 0,042119570497246
a1 0,044371864889844
b=a1 0,044371864889844
a=a0 0,042119570497246
Substituindo os valores, obtêm-se o polinómio e o erro de aproximação:
0,627165556
format long
z = 1:1:40;
z1=sin(z);
w = [0.04 0.16 0.1 -0.075 -0.2 -0.012 0.21 0.14 0.33 0.159 0.1 0.01 0.2 0.25 0.11 -
0.03 -0.02 0.091 0.165 -0.048 -0.08 -0.18 0.00001 0.05 -0.2 -0.31 0.16 0.3 0.02 0.14
-0.07 0.109 0.02 0.019 0.05 0.059 -0.095 -0.038 0.12 0.015];
p = polyfit(z1,w,1)
zi= 1:0.5:40;
w2=polyval(p,zi);
plot(z,w,'o',zi,w2,'-r');

Modelagem do controle postural humano durante postura erecta Página 144
No Excel:
i xi yi zi wi zi2 wizi y=a+b*sin(x) (yi-(a+b*sin(x)))^2
0 1 0,04 0,841470985 0,04 0,708073418 0,033658839 7,9457E-02 0,001556871
1 2 0,16 0,909297427 0,16 0,82682181 0,145487588 8,2467E-02 0,006011398
2 3 0,1 0,141120008 0,1 0,019914857 0,014112001 4,8381E-02 0,002664487
3 4 -0,075 -0,756802495 -0,075 0,572750017 0,056760187 8,5388E-03 0,006978737
4 5 -0,2 -0,958924275 -0,2 0,919535765 0,191784855 -4,2969E-04 0,039828309
5 6 -0,012 -0,279415498 -0,012 0,078073021 0,003352986 2,9721E-02 0,001740674
6 7 0,21 0,656986599 0,21 0,431631391 0,137967186 7,1271E-02 0,019245655
7 8 0,14 0,989358247 0,14 0,97882974 0,138510155 8,6019E-02 0,002913922
8 9 0,03 0,412118485 0,03 0,169841646 0,012363555 6,0406E-02 0,000924527
9 10 0,159 -0,544021111 0,159 0,295958969 -0,086499357 1,7980E-02 0,019886545
10 11 0,1 -0,999990207 0,1 0,999980413 -0,099999021 -2,2519E-03 0,010455443
11 12 0,01 -0,536572918 0,01 0,287910496 -0,005365729 1,8311E-02 6,90699E-05
12 13 0,2 0,420167037 0,2 0,176540339 0,084033407 6,0763E-02 0,019386896
13 14 0,25 0,990607356 0,25 0,981302933 0,247651839 8,6075E-02 0,026871515
14 15 0,11 0,65028784 0,11 0,422874275 0,071531662 7,0974E-02 0,001523024
15 16 -0,03 -0,287903317 -0,03 0,08288832 0,008637099 2,9345E-02 0,003521801
16 17 -0,02 -0,961397492 -0,02 0,924285137 0,01922795 -5,3943E-04 0,000378714
17 18 0,091 -0,750987247 0,091 0,563981845 -0,068339839 8,7969E-03 0,006757355
18 19 0,165 0,14987721 0,165 0,022463178 0,02472974 4,8770E-02 0,013509436
19 20 -0,048 0,912945251 -0,048 0,833469031 -0,043821372 8,2629E-02 0,017063845
20 21 -0,08 0,836655639 -0,08 0,699992657 -0,066932451 7,9244E-02 0,025358505
21 22 -0,18 -0,008851309 -0,18 7,83457E-05 0,001593236 4,1727E-02 0,049162783
22 23 0,00001 -0,846220404 0,00001 0,716088972 -8,4622E-06 4,5712E-03 2,08045E-05
23 24 0,05 -0,905578362 0,05 0,82007217 -0,045278918 1,9374E-03 0,002310016
24 25 -0,2 -0,13235175 -0,2 0,017516986 0,02647035 3,6247E-02 0,055812587
25 26 -0,31 0,76255845 -0,31 0,58149539 -0,23639312 7,5956E-02 0,148961811
26 27 0,16 0,956375928 0,16 0,914654916 0,153020149 8,4556E-02 0,005691834
27 28 0,3 0,270905788 0,3 0,073389946 0,081271736 5,4140E-02 0,060447058
28 29 0,02 -0,663633884 0,02 0,440409932 -0,013272678 1,2673E-02 5,36864E-05
29 30 -0,14 -0,988031624 -0,14 0,97620649 0,138324427 -1,7212E-03 0,019121017
30 31 -0,07 -0,404037645 -0,07 0,163246419 0,028282635 2,4192E-02 0,00887207
31 32 0,109 0,551426681 0,109 0,304071385 0,060105508 6,6587E-02 0,001798829
32 33 -0,02 0,99991186 -0,02 0,999823728 -0,019998237 8,6488E-02 0,011339593
33 34 -0,019 0,529082686 -0,019 0,279928489 -0,010052571 6,5596E-02 0,007156476
34 35 0,05 -0,428182669 0,05 0,183340398 -0,021409133 2,3120E-02 0,000722518
35 36 0,059 -0,991778853 0,059 0,983625294 -0,058514952 -1,8875E-03 0,003707288
36 37 -0,095 -0,643538133 -0,095 0,414141329 0,061136123 1,3565E-02 0,011786269
37 38 -0,038 0,296368579 -0,038 0,087834334 -0,011262006 5,5270E-02 0,008699292
38 39 0,12 0,963795386 0,12 0,928901547 0,115655446 8,4885E-02 0,001233065
39 40 0,015 0,74511316 0,015 0,555193622 0,011176697 7,5182E-02 0,003621829
∑ 820 1,11101 1,898211408 1,11101 20,43713895 1,07969751 E= 0,627165556
Tabela 25– cálculo do polinómio para a 3ª função e do erro para a mesma.

Modelagem do controle postural humano durante postura erecta Página 145
Erro de aproximação no Matlab:
Resultados:
b = 0.044371864889844
a = 0.042119570497246
res = 0.68798153172394
Verificamos também na 3ª função que os resultados do Matlab são próximos dos
do Excel, então estão correctos.
Resultados CoNum:
B0= 0,028125
c0=a0 0,027775
c1=a1 0,056728
p0= 1
format long
z = 1:1:40;
z1=sin(z)
w = [0.04 0.16 0.1 -0.075 -0.2 -0.012 0.21 0.14 0.33 0.159 0.1 0.01 0.2 0.25 0.11 -
0.03 -0.02 0.091 0.165 -0.048 -0.08 -0.18 0.00001 0.05 -0.2 -0.31 0.16 0.3 0.02 0.14
-0.07 0.109 0.02 0.019 0.05 0.059 -0.095 -0.038 0.12 0.015];
p = polyfit(z1,w,1);
b=p(1)
a=p(2)
y=a+b*sin(z);
zi= 1:0.5:40;
w2=polyval(p,zi)
y2=a+b*sin(zi);
plot(z,w,'o',zi,y2,'-r');
res = sum((w-y).^2)
B[0] = 0.028125
Coeficientes do Polinómio
c[0] = 0.027775
c[1] = 0.056728
Soma dos Quadrados dos Resíduos = 0.599169

Modelagem do controle postural humano durante postura erecta Página 146
Excel:
zi yi p3=(z-B0*p0) p3(z)=c0*p0+c1*p3 E=(yi-p3(zi))^2
0,841470985 0,04 0,813345985 0,073914491 0,001150193
0,909297427 0,16 0,881172427 0,077762149 0,006763064
0,141120008 0,1 0,112995008 0,034184981 0,004331617
-0,756802495 -0,075 -0,7849275 -0,016752367 0,003392787
-0,958924275 -0,2 -0,98704927 -0,028218331 0,029508942
-0,279415498 -0,012 -0,3075405 0,010328843 0,000498577
0,656986599 0,21 0,628861599 0,063449061 0,021477178
0,989358247 0,14 0,961233247 0,08230384 0,003328847
0,412118485 0,03 0,383993485 0,049558182 0,000382522
-0,544021111 0,159 -0,57214611 -0,004681705 0,0267917
-0,999990207 0,1 -1,02811521 -0,030547919 0,017042759
-0,536572918 0,01 -0,56469792 -0,004259183 0,000203324
0,420167037 0,2 0,392042037 0,050014761 0,022495572
0,990607356 0,25 0,962482356 0,082374699 0,028098242
0,65028784 0,11 0,62216284 0,063069054 0,002202514
-0,287903317 -0,03 -0,31602832 0,009847346 0,001587811
-0,961397492 -0,02 -0,98952249 -0,028358632 6,98667E-05
-0,750987247 0,091 -0,77911225 -0,01642248 0,011539589
0,14987721 0,165 0,12175221 0,034681759 0,016982844
0,912945251 -0,048 0,884820251 0,077969083 0,01586821
0,836655639 -0,08 0,808530639 0,073641326 0,023605657
-0,008851309 -0,18 -0,03697631 0,025677408 0,042303196
-0,846220404 0,00001 -0,8743454 -0,021824866 0,000476761
-0,905578362 0,05 -0,93370336 -0,025192124 0,005653856
-0,13235175 -0,2 -0,16047675 0,018671475 0,047817214
0,76255845 -0,31 0,73443345 0,069437941 0,143973151
0,956375928 0,16 0,928250928 0,080432819 0,006330936
0,270905788 0,3 0,242780788 0,041547469 0,066797711
-0,663633884 0,02 -0,69175888 -0,011467098 0,000990178
-0,988031624 -0,14 -1,01615662 -0,029869533 0,01212872
-0,404037645 -0,07 -0,43216265 0,003259277 0,005366922
0,551426681 0,109 0,523301681 0,057460858 0,002656283
0,99991186 -0,02 0,97178686 0,082902525 0,01058893
0,529082686 -0,019 0,500957686 0,056193328 0,005654037
-0,428182669 0,05 -0,45630767 0,001889579 0,002314613
-0,991778853 0,059 -1,01990385 -0,030082106 0,007935622
-0,643538133 -0,095 -0,67166313 -0,010327106 0,007169499
0,296368579 -0,038 0,268243579 0,042991922 0,006559691
0,963795386 0,12 0,935670386 0,08085371 0,001532432
0,74511316 0,015 0,71698816 0,068448304 0,002856721
∑=
0,773211408 1,154862737 0,616428288
Tabela 26 – cálculo do polinómio do erro com dados do CoNum

Modelagem do controle postural humano durante postura erecta Página 147
-0,4
-0,3
-0,2
-0,1
0
0,1
0,2
0,3
0,4
0 10 20 30 40 50
Série1
Série2
Nesta 3ª função, também os resultados do Excel e Matlab dão parecidos com o
CoNum, logo estão correctos.
Fig22 - gráfico da 3ª função – Excel
Fig23 - gráfico da 3ª função - Matlab

Modelagem do controle postural humano durante postura erecta Página 148
4ª Função estudada:
Matlab:
Resultados:
a0 2714,071483790110000
a1 -4387,29095190903
b=a1 -4387,29095190903
a=a0 2714,071483790110000
Substituindo os valores, obtêm-se o polinómio e o erro de aproximação:
0,700987
format long
z = 1:1:40;
z1=sin(z);
w = [0.04 0.16 0.1 -0.075 -0.2 -0.012 0.21 0.14 0.33 0.159 0.1 0.01 0.2 0.25 0.11 -
0.03 -0.02 0.091 0.165 -0.048 -0.08 -0.18 0.00001 0.05 -0.2 -0.31 0.16 0.3 0.02 0.14
-0.07 0.109 0.02 0.019 0.05 0.059 -0.095 -0.038 0.12 0.015];
w1=1./w
p = polyfit(z1,w1,1)
zi= 1:0.5:40;
w2=polyval(p,zi);
plot(z,w,'o',zi,w2,'-r');

Modelagem do controle postural humano durante postura erecta Página 149
Excel:
i xi yi zi wi zi2 wizi y=1/(a+b*sin(x)) (yi-(1/(a+b*sin(x))))^2
0 1 0,04 0,841470985 25 0,708073418 21,03677462 -1,0228E-03 0,00168287
1 2 0,16 0,909297427 6,25 0,82682181 5,683108918 -7,8414E-04 0,02585154
2 3 0,1 0,141120008 10 0,019914857 1,411200081 4,7734E-04 0,00990476
3 4 -0,075 -0,756802495 -13,33333333 0,572750017 10,09069994 1,6572E-04 0,005649885
4 5 -0,2 -0,958924275 -5 0,919535765 4,794621373 1,4448E-04 0,040057815
5 6 -0,012 -0,279415498 -83,33333333 0,078073021 23,28462485 2,5381E-04 0,000150156
6 7 0,21 0,656986599 4,761904762 0,431631391 3,128507613 -5,9411E-03 0,046630545
7 8 0,14 0,989358247 7,142857143 0,97882974 7,066844619 -6,1481E-04 0,019772523
8 9 0,03 0,412118485 33,33333333 0,169841646 13,73728284 1,1038E-03 0,000834992
9 10 0,159 -0,544021111 6,289308176 0,295958969 -3,421516421 1,9605E-04 0,025218696
10 11 0,1 -0,999990207 10 0,999980413 -9,999902066 1,4082E-04 0,009971856
11 12 0,01 -0,536572918 100 0,287910496 -53,6572918 1,9731E-04 9,60927E-05
12 13 0,2 0,420167037 5 0,176540339 2,100835184 1,1485E-03 0,039541906
13 14 0,25 0,990607356 4 0,981302933 3,962429423 -6,1274E-04 0,062806746
14 15 0,11 0,65028784 9,090909091 0,422874275 5,911707638 -7,1978E-03 0,013735335
15 16 -0,03 -0,287903317 -33,33333333 0,08288832 9,596777222 2,5143E-04 0,000915149
16 17 -0,02 -0,961397492 -50 0,924285137 48,06987459 1,4426E-04 0,000405791
17 18 0,091 -0,750987247 10,98901099 0,563981845 -8,252607107 1,6642E-04 0,008250739
18 19 0,165 0,14987721 6,060606061 0,022463178 0,908346725 4,8626E-04 0,027064771
19 20 -0,048 0,912945251 -20,83333333 0,833469031 -19,01969272 -7,7442E-04 0,002230255
20 21 -0,08 0,836655639 -12,5 0,699992657 -10,45819548 -1,0454E-03 0,00623383
21 22 -0,18 -0,008851309 -5,555555556 7,83457E-05 0,049173941 3,6325E-04 0,032530903
22 23 0,00001 -0,846220404 100000 0,716088972 -84622,04042 1,5560E-04 2,11997E-08
23 24 0,05 -0,905578362 20 0,82007217 -18,11156724 1,4954E-04 0,002485068
24 25 -0,2 -0,13235175 -5 0,017516986 0,66175875 3,0351E-04 0,040121498
25 26 -0,31 0,76255845 -3,225806452 0,58149539 -2,459865969 -1,5835E-03 0,095120709
26 27 0,16 0,956375928 6,25 0,914654916 5,977349553 -6,7484E-04 0,025816405
27 28 0,3 0,270905788 3,333333333 0,073389946 0,903019294 6,5551E-04 0,089607123
28 29 0,02 -0,663633884 50 0,440409932 -33,18169421 1,7776E-04 0,000392921
29 30 -0,14 -0,988031624 -7,142857143 0,97620649 7,057368744 1,4187E-04 0,019639743
30 31 -0,07 -0,404037645 -14,28571429 0,163246419 5,771966362 2,2288E-04 0,004931253
31 32 0,109 0,551426681 9,174311927 0,304071385 5,058960378 3,3921E-03 0,011153027
32 33 -0,02 0,99991186 -50 0,999823728 -49,99559301 -5,9779E-04 0,000376446
33 34 -0,019 0,529082686 -52,63157895 0,279928489 -27,84645716 2,5456E-03 0,000464214
34 35 0,05 -0,428182669 20 0,183340398 -8,56365339 2,1774E-04 0,002478273
35 36 0,059 -0,991778853 16,94915254 0,983625294 -16,80981108 1,4154E-04 0,003464319
36 37 -0,095 -0,643538133 -10,52631579 0,414141329 6,774085614 1,8059E-04 0,009059344
37 38 -0,038 0,296368579 -26,31578947 0,087834334 -7,799173124 7,0731E-04 0,001498255
38 39 0,12 0,963795386 8,333333333 0,928901547 8,031628219 -6,6034E-04 0,014558917
39 40 0,015 0,74511316 66,66666667 0,555193622 49,6742107 -1,8019E-03 0,000282305
∑ 820 1,11101 1,898211408 100045,6078 20,43713895 -84640,87428 E= 0,700987
Tabela 27– cálculo do polinómio para a 4ª função e do erro para a mesma.

Modelagem do controle postural humano durante postura erecta Página 150
Erro de aproximação no Matlab:
Resultados:
b = -4.386321278157237e+003
a = 2.714650467645684e+003
res = 0.808471652401682
Nesta 4ª função, verificamos uma discrepância entre os valores dos erros de
aproximação do Excel e Matlab com os do CoNum, a explicação deve-se ao facto de
utilizar os valores de x e y alterados pela mudança de variável para z e w e usar a
ferramenta do método mínimos quadrados polinomial.
Resultados CoNum:
B0= 0,028125
c0=a0 2501,140194
c1=a1 -4123,467972
p0= 1
format long
z = 1:1:40;
y1=[0.04 0.16 0.1 -0.075 -0.2 -0.012 0.21 0.14 0.33 0.159 0.1 0.01 0.2 0.25 0.11 -
0.03 -0.02 0.091 0.165 -0.048 0.08 -0.18 0.00001 0.05 -0.2 -0.31 0.16 0.3 0.02 0.14 -
0.07 0.109 0.02 0.019 0.05 0.059 -0.095 -0.038 0.12 0.015];
w=1./y1;
z1=sin(z);
p = polyfit(z1,w,1);
b=p(1);
a=p(2);
y=1./(a+(b*sin(z)));
zi= 1:0.5:40;
w2=polyval(p,zi);
y2=1./(a+(b*sin(zi)));
plot(z,y1,'o',zi,y2,'-r');
res = sum((y1-y).^2)
B[0] = 0.028125
Coeficientes do Polinómio
c[0] = 2501.140194
c[1] = -4123.467972
Soma dos Quadrados dos Resíduos = 9389210042.268040

Modelagem do controle postural humano durante postura erecta Página 151
Excel:
zi yi p4=(z-B0*p0) p4(z)=c0*p0+c1*p4 E=(yi-p4(zi))^2
0,841470985 25 0,813345985 -852,6659245 770297,475
0,909297427 6,25 0,881172427 -1132,346086 1296401,047
0,141120008 10 0,112995008 2035,208897 4101471,078
-0,756802495 -13,33333333 -0,7849275 5737,763581 33075115,72
-0,958924275 -5 -0,98704927 6571,206265 43246488,84
-0,279415498 -83,33333333 -0,3075405 3769,273588 14842580,09
0,656986599 4,761904762 0,628861599 -91,95046714 9353,282878
0,989358247 7,142857143 0,961233247 -1462,474312 2159774,624
0,412118485 33,33333333 0,383993485 917,7553561 782202,3144
-0,544021111 6,289308176 -0,57214611 4860,366358 23562064
-0,999990207 10 -1,02811521 6740,54032 45300173
-0,536572918 100 -0,56469792 4829,653973 22369626,7
0,420167037 5 0,392042037 884,5674115 773638,8313
0,990607356 4 0,962482356 -1467,624973 2165680,062
0,65028784 9,090909091 0,62216284 -64,32835076 5390,387717
-0,287903317 -33,33333333 -0,31602832 3804,272836 14727221,11
-0,961397492 -50 -0,98952249 6581,404497 43975525,6
-0,750987247 10,98901099 -0,77911225 5713,78459 32521877,42
0,14987721 6,060606061 0,12175221 1999,098857 3972201,469
0,912945251 -20,83333333 0,884820251 -1147,387771 1269124,901
0,836655639 -12,5 0,808530639 -832,8099984 672908,4934
-0,008851309 -5,555555556 -0,03697631 2653,610821 7071165,819
-0,846220404 100000 -0,8743454 6106,475465 8815993950
-0,905578362 20 -0,93370336 6351,236103 40084550,59
-0,13235175 -5 -0,16047675 3162,860933 10035342,89
0,76255845 -3,225806452 0,73443345 -527,2726166 274625,0592
0,956375928 6,25 0,928250928 -1326,472779 1776150,006
0,270905788 3,333333333 0,242780788 1500,041389 2240135,004
-0,663633884 50 -0,69175888 5353,585797 28128022,31
-0,988031624 -7,142857143 -1,01615662 6691,229488 44868192,07
-0,404037645 -14,28571429 -0,43216265 4283,149021 18467945,3
0,551426681 9,174311927 0,523301681 343,3224717 111654,9927
0,99991186 -50 0,97178686 -1505,991799 2119912,12
0,529082686 -52,63157895 0,500957686 435,45722 238230,6756
-0,428182669 20 -0,45630767 4382,710255 19033240,77
-0,991778853 16,94915254 -1,01990385 6706,681068 44752513,1
-0,643538133 -10,52631579 -0,67166313 5270,721612 27891579,68
0,296368579 -26,31578947 0,268243579 1395,046388 2020270,441
0,963795386 8,333333333 0,935670386 -1357,066676 1864317,186
0,74511316 66,66666667 0,71698816 -455,337522 272488,373
∑=
0,773211408 96857,29529 9358843403

Modelagem do controle postural humano durante postura erecta Página 152
-0,4
-0,3
-0,2
-0,1
0
0,1
0,2
0,3
0,4
0 5 10 15 20 25 30 35 40 45
Série1
Série2
fig.24 - gráficos da 4ª função – Excel
fig.25 - gráficos da 4ª função - Matlab

Modelagem do controle postural humano durante postura erecta Página 153
Conclusão geral:
No final da realização deste trabalho cheguei à conclusão que
independentemente da utilização dos programas computacionais, Excel e Matlab, os
resultados dão os mesmos valores, tanto para os coeficientes do polinómio, quer para os
erros de aproximação, nas quatro funções.
Apliquei também as quatro funções no programa computacional CoNum, mas
neste, apenas duas das quatro funções (2ª e 3ª) deram o resultado dos erros parecidos
com os calculados anteriormente, no Excel e no Matlab, os valores do erro das outras
duas funções (1ª e 4ª) deram com uma grande diferença do erro obtido através do
Matlab e Excel. Na minha opinião esta descrepancia entre os erros deve-se ao facto de
no CoNum utilizar a ferramenta do método dos mínimos quadrados para funções
polinomiais, o que me obrigou a colocar no lugar do x e y, o meu z e w, alterados pela
mudança de variável.

Modelagem do controle postural humano durante postura erecta Página 154
5.Conclusão A estabilidade da postura erecta é alcançada gerando-se momentos de força
sobre as articulações do corpo para neutralizar o efeito da gravidade ou de qualquer
outra perturbação num processo contínuo e dinâmico durante a permanência em
determinada postura.
Os limites de estabilidade dependem da área da base de apoio, da projeção
vertical do Centro de Massa, da altura do Centro de Massa e do peso da massa que será
controlada. Os limites de estabilidade também dependem da interação entre a posição e
velocidade do Centro de Massa.
Portanto, se o indivíduo estiver muito próximo da borda da base de apoio e a
velocidade do Centro de Massa for alta, é mais difícil recuperar a estabilidade do que se
o indivíduo estiver no centro da base de apoio com velocidade igualmente alta.
Após realizarmos a modelagem computacional para este problema, que no fundo
era encontrar aproximações polinomiais para perceber a maneira como o ser humano
controla o equilibrio da postura erecta, pudemos concluir que em todos os métodos que
utilizámos, os resultados foram os esperados.
Por exemplo, nos métodos Interpolador de Gregory-Newton e Interpolador de
Newton os resultados obtidos foram idênticos. Podemos dizer que o interpolador de
Gregory-Newton é uma forma simplificada do segundo método, daí os resultados não
diferirem muito. No entanto, o polinómio de grau 39 em ambos os métodos não foi
possivel de obter aproximação correcta devido ao entruncamento dos algarismos.
No método do Interpolador de Lagrange, foram alcançados os objectivos
esperados. Ou seja, todos os polinómios encontrados por ramos se aproximaram (por
rectas) dos valores reais.
No método dos minimos quadrados não polinomiais, tambem os objectivos
esperados foram alcançados nos programas Matlab e Excel. Contudo, no CoNum dois
dos valores não deram correctos. Esses dois valores referem-se ao erro de aproximação
aos valores reias, o que significa que existiu uma margem de erro dos pontos do gráfico
inicial em relação aos pontos obtidos.

Modelagem do controle postural humano durante postura erecta Página 155
Finalmente, no Método dos minimos quadrados polinomiais obtiveram-se
resultados na sua maioria concordantes com a teoria.No entanto, a partir do polinómio
15, com o aumento do grau do polinómio, o erro de aproximaçao em vez de diminuir,
aumenta, acabando por „explodir‟ no de grau 39, tal como nos dois primeiros métodos
acima indicados. Neste método concluiu-se então que a melhor aproximação
encontrada para o problema é o polinómio de grau 21, pois a partir deste o erro começa
a aumentar, ao contrário do que deveria acontecer.

Modelagem do controle postural humano durante postura erecta Página 156
6.Bibliografia [1].Apontamentos das aulas da Prof. Ana Isabel Pereira, ESTIG, Bragança 2009-2010.
[2]. http://www.math.ist.utl.pt/~calves/cursos/Interpola.HTM (visita a 05/04/2010)
[3].http://www.geoma.lncc.br/pdfs/interpolacao.pdf (visita a 23/03/2010)
[4].http://www2.mat.ua.pt/disciplinas/mne/Documentos/Interpola%C3%A7%C3%A3o.
pdf (vista a 23/03/2010)
[5].http://www.estv.ipv.pt/PaginasPessoais/lsousa/Teoria_actualMN/Cap%C3%ADtulo
4-interpola%C3%A7%C3%A3o.pdf (visita a 24/03/2010)
[6].http://www.ipb.pt/~balsa/teaching/MN08/Inter_Pol.pdf (visita a 25/03/2010)
[7].http://ltodi.est.ips.pt/metnum/documentos/MN_CHEDAS_SAMPAIO/IntPol.pdf
(visita a 30/03/2010)
[8].http://ferrari.dmat.fct.unl.pt/services/CalNum2S0506/aproximacao.pdf (visita a
01/04/2010)
[9].http://www.univasf.edu.br/~jorge.cavalcanti/7CN_Interpolacao_Parte1.pdf (visita a
01/04/2010)
[10].http://www2.mat.ua.pt/disciplinas/mne/Documentos/Polin%C3%B3mios.pdf
(visita a 07/04/2010)
[11].http://paginas.fe.up.pt/~jmcarval/an/7/an7.html (Site que explica os métodos de
interpolação) (visita a 07/04/2010)
[12].http://www.feg.unesp.br/~gsena/Disciplinas/CCN/Turma_Civil_2005/textos_de_ap
oio_listas/calculonumerico2005/Capitulo4_Interpolacao_Rev_2005.pdf (visita a
08/04/2010)
[13].http://www.ionildo.cjb.net/metodos/ (visita a 12/04/2010)
[14].http://www.decom.cefetmg.br/docentes/flavio_cardeal/Teaching/mnc/aula_interpol
a.pdf (visita a 12/04/2010)
[15].http://hilgenstieler.com/download/apostila_metodos.pdf (visita a 12/04/2010)

Modelagem do controle postural humano durante postura erecta Página 157
[16].http://bragatel.pt/ns001105/conum.htm (visita a 12/04/2010)
[17].http://ferrari.dmat.fct.unl.pt/services/CalNum2S0506/aproximacao2.pdf (visita a
05/05/2010)
[18].http://www.uac.pt/~mdias/cap2.pdf (visita a 10/05/2010)
[19].http://nptel.iitm.ac.in/courses/Webcourse-contents/IIT-
KANPUR/Numerical%20Analysis/numerical-analysis/Rathish-kumar/rathish-
oct31/fratnode9.html (visita a 25/05/2010)
[20].http://www.diale.org/mnoctave.html (visita a 17/04/2010)
[21].http://thinkfnwiki.com/wikibolsa/M%C3%A9todo_dos_m%C3%ADnimos_quadra
dos (visita a 17/04/2010)
[22].http://www.math-linux.com/spip.php?article71; (visita a 22/05/2010)
[23].http://turing.une.edu.au/~amth247/Lectures_2003/Lecture_12/lecture/lecture.htmlS
ECTION00031000000000000000; (visita a 22/05/2010)
[24].http://www.math.ist.utl.pt/~calves/cursos/Interpola.HTM; (visita a 22/05/2010)
[25].http://www.isegi.unl.pt/docentes/vlobo/escola_naval/AnaliseNumerica/AnaliseNu
merica_5_interpolacao6.pdf; (visita a 22/05/2010)
[26].http://pt.wikipedia.org/wiki/Maxima; (visita a 28/05/2010)
27].http://ssdi.di.fct.unl.pt/~nmm/icp/material/aulas_praticas/octave/guia/guia_octave.ht
ml; (visita a 28/05/2010)
[28].http://www.baixaki.com.br/download/freemat.htm; (visita a 28/05/2010)
[29].http://bragatel.pt/ns001105/conum.htm; (visita a 28/05/2010)
[30]. http://www.ieeta.pt/~asilva/webace0809/ (visita a 23/04/2010)
[32].http://valmene.vilabol.uol.com.br/cong/Congresso.html (visita a 13/05/2010)
[33].http://www2.mat.ua.pt/disciplinas/mn/Folhas%20Praticas.htm (visita a 23/04/2010)

Modelagem do controle postural humano durante postura erecta Página 158
Anexos
Breve descrição de todos os programas utilizados na realização do trabalho:
Programa Conum:
O CoNum trata-se de um software, desenvolvido na Universidade do Minho, que
complementa o livro “Computação numérica”, Fernandes Edite Manuela da GP (1998)
Publicações Universidade do Minho”, tendo em vista a resolução de problemas de
métodos numéricos.
O campo de acção do CoNum é a análise numérica tendo como base de utilização
o algoritmo. Este software de fácil utilização é escrito na linguagem C++ para ambiente
Windows ajudando o utilizador a resolver uma grande variedade de problemas
matemáticos nos domínios da Álgebra Linear, Aproximação, Resolução de equações,
Integração, Equações Diferenciais e Optimização através da utilização dos Métodos
Numéricos.
A comunicação com o utilizador é feita através de menus, dividindo-se em quatro
janelas: Ficheiro, Problemas, Opções e Help. Estes são constituídos por cinquenta e
duas rotinas, das quais cinco são para a resolução de equações diferenciais.
Programa FreeMat
FreeMat é um ambiente de desenvolvimento voltado para cálculo numérico,
engenharia e aplicações científicas — similar ao programa comercial Matlab. Possui
suporte para várias funções do Matlab e algumas funcionalidades IDL, suporta código
de programação C, C++ e Fortran e ainda desenvolvimento de algoritimos distribuídos
paralelamente via MPI.
O programa conta ainda com alguns volumes estendidos, visualização 3D, manipulação
de imagem, plotagem e criação de gráficos. Sem dúvida, um programa completo e
indispensável para as pessoas do ramo.

Modelagem do controle postural humano durante postura erecta Página 159
Programa Maxima:
Trata-se de um software livre para cálculos matemáticos, semelhante ao Matlab e ao
Mathematica. O Maxima é um sistema para manipulação de expressões algébricas e
numéricas, incluindo integral, diferencial, sistemas de equações lineares, vetores e
matrizes. O maxima produz resultados precisos usando seu sistema especial de
"floating" e pode trabalhar com funções e dados em duas ou três dimensões. Mais
precisamente, o Maxima é um sistema de computação algébrica que possibilita a
manipulação de expressões e a análise de problemas. Baseado em um núcleo que
utiliza a linguagem LISP, o sistema permite programação por meio de uma linguagem
própria, o que aumenta as possibilidades de resolução de problemas.
Programa Octave
O Octave é uma linguagem de programação de alto nível, destinada ao tratamento de
problemas para computação numérica. O interface com o programador é efectuado
através de uma linha de comando.
O Octave pode efectuar cálculos aritméticos com reais, escalares complexos e
matrizes; resolver sistemas de equações algébricas; integrar funções sobre intervalos
finitos e infinitos e integrar sistemas de equações diferenciais ordinárias e diferenciais
algébricas.
Permite gerar para o ecrã e para a impressora gráficos 2D e 3D, utilizando o Gnuplot.
O Octave é em grande parte compatível com o MatLab.
Programa Scilab:
O Scilab é um software científico para computação numérica semelhante ao Matlab
que fornece um poderoso ambiente computacional aberto para aplicações científicas.
O Scilab inclui centenas de funções matemáticas com a possibilidade de adicionar
interativamente programas de várias linguagens ( FORTRAN, C, C++, Java ). Possui
sofisticadas estruturas de dados, incluindo listas, polinômios, sistemas lineares...), um

Modelagem do controle postural humano durante postura erecta Página 160
interpretador de linguagem de programação de alto nível. O usuário pode definir
novos tipos de informação e operações sobre esses tipos.