Transformadas S e Z (21!11!2013)
2
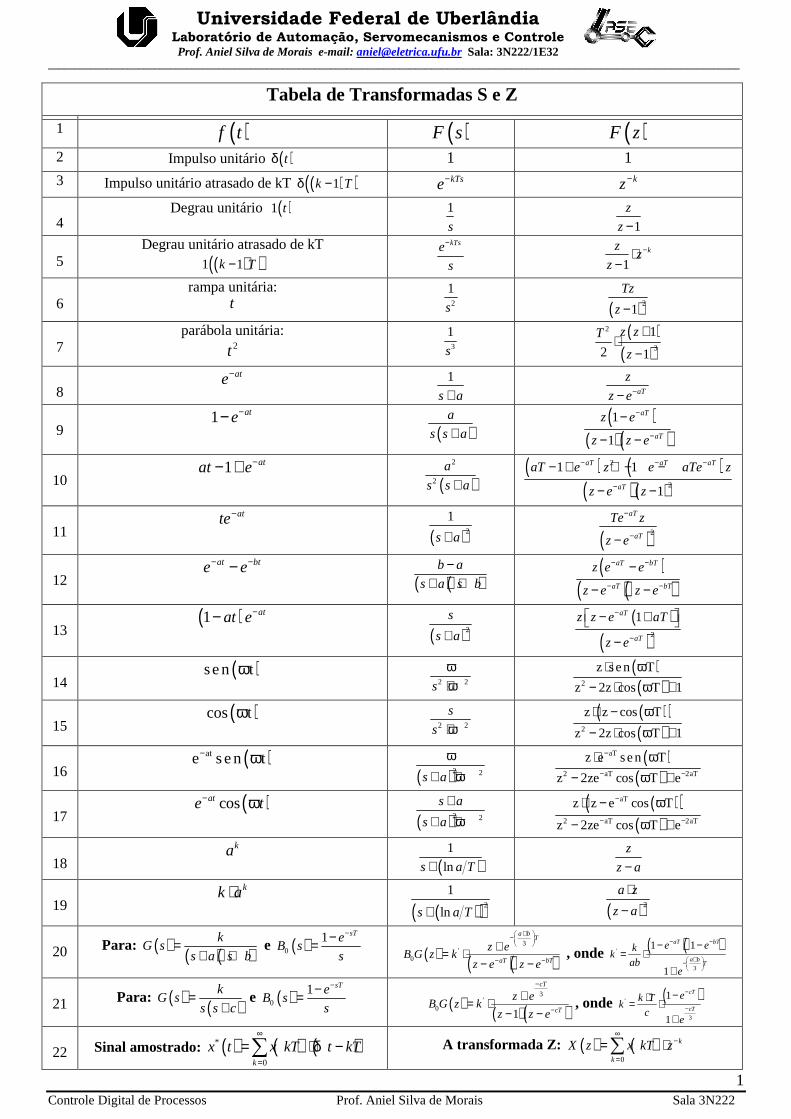
Universidade Federal de Uberlândia Laboratório de Automação, Servomecanismos e Controle Prof. Aniel Silva de Morais e-mail: [email protected] Sala: 3N222/1E32 __________________________________________________________________________________________________________________________________ 1 Controle Digital de Processos Prof. Aniel Silva de Morais Sala 3N222 Tabela de Transformadas S e Z 1 ( f t ( Fs ( Fz 2 Impulso unitário ( t δ 1 1 3 Impulso unitário atrasado de kT ( ( 1 δ - k T - kTs e - k z 4 Degrau unitário ( 1 t 1 s 1 z z - 5 Degrau unitário atrasado de kT ( 29 ( 29 1 1 - k T kTs e s - 1 k z z z - ⋅ - 6 rampa unitária: t 2 1 s ( 29 2 1 Tz z - 7 parábola unitária: 2 t 3 1 s ( ( 29 2 3 1 2 1 zz T z + ⋅ - 8 at e - 1 s a + aT z z e - - 9 1 at e - - ( 29 a ss a + ( ( 29 ( 29 1 1 aT aT z e z z e - - - - - 10 1 at at e - -+ ( 29 2 2 a s s a + ( ( ( 29 ( 29 2 2 1 1 1 aT aT aT aT aT e z e aTe z z e z - - - - -+ + - - - - 11 at te - ( 29 2 1 s a + ( 29 2 aT aT Te z z e - - - 12 at bt e e - - - ( 29( 29 b a s a s b - + + ( ( 29( 29 aT bT aT bT ze e z e z e - - - - - - - 13 ( 1 at at e - - ( 29 2 s s a + ( 29 ( 29 2 1 aT aT z z e aT z e - - - + - 14 ( sen t ϖ 2 2 s ϖ + ϖ ( ( 29 2 z sen T z 2z cos T 1 ⋅ ϖ - ⋅ ϖ + 15 ( cos t ϖ 2 2 s s + ϖ ( ( ( 29 2 z z cos T z 2z cos T 1 ⋅ - ϖ - ⋅ ϖ + 16 ( at e sen t - ϖ ( 29 2 2 s a ϖ + ϖ ( ( 29 aT 2 aT 2aT ze sen T z 2ze cos T e - - - ⋅ ϖ - ϖ + 17 ( cos - ϖ at e t ( 29 2 2 s a s a + + + ϖ ( ( ( 29 aT 2 aT 2aT z z e cos T z 2ze cos T e - - - ⋅ - ϖ - ϖ + 18 k a ( 29 1 ln s aT + z z a - 19 k ka ⋅ ( 29 ( 29 2 1 ln s aT + ( 29 2 az z a ⋅ - 20 Para: (29 ( 29( 29 k Gs s a s b = + + e (29 0 1 sT e B s s - - = (29 ( 29( 29 3 ' 0 a b T aT bT z e BG z k z e z e + - - - + = ⋅ - - , onde ( 29( 29 ' 3 1 1 1 aT bT ab T e e k k ab e - - + - - - = ⋅ + 21 Para: (29 ( 29 k Gs ss c = + e (29 0 1 sT e B s s - - = (29 ( 29 ( 29 3 ' 0 1 cT cT z e BG z k z z e - - + = ⋅ - - , onde ( 29 ' 3 1 1 cT cT e kT k c e - - - ⋅ = ⋅ + 22 Sinal amostrado: (29 ( 29 ( 29 * 0 k x t x kT t kT ∞ = = ⋅δ - ∑ A transformada Z: (29 ( 29 0 k k X z x kT z ∞ - = = ⋅ ∑
-
Upload
kaoann-martins -
Category
Documents
-
view
222 -
download
2
description
transformada
Transcript of Transformadas S e Z (21!11!2013)
Universidade Federal de Uberlândia Laboratório de Automação, Servomecanismos e Controle Prof. Aniel Silva de Morais e-mail: [email protected] Sala: 3N222/1E32
__________________________________________________________________________________________________________________________________
1 Controle Digital de Processos Prof. Aniel Silva de Morais Sala 3N222
Tabela de Transformadas S e Z
1 ( )f t ( )F s ( )F z
2 Impulso unitário ( )tδ 1 1
3 Impulso unitário atrasado de kT ( )( )1δ −k T −kTse −kz
4
Degrau unitário ( )1 t 1
s
1
z
z −
5
Degrau unitário atrasado de kT ( )( )1 1−k T
kTse
s
−
1
kzz
z−⋅
−
6
rampa unitária: t 2
1
s
( )21
Tz
z −
7
parábola unitária: 2t 3
1
s ( )
( )2
3
1
2 1
z zT
z
+⋅
−
8
ate− 1
s a+
aT
z
z e−−
9
1 ate−− ( )
a
s s a+ ( )
( )( )1
1
aT
aT
z e
z z e
−
−
−
− −
10
1 atat e−− + ( )
2
2
a
s s a+ ( ) ( )
( )( )
2
2
1 1
1
aT aT aT
aT
aT e z e aTe z
z e z
− − −
−
− + + − −
− −
11
atte− ( )2
1
s a+
( )2
aT
aT
Te z
z e
−
−−
12
at bte e− −− ( )( )
b a
s a s b
−+ +
( )( ) ( )
aT bT
aT bT
z e e
z e z e
− −
− −
−
− −
13
( )1 atat e−− ( )2
s
s a+ ( )
( )2
1aT
aT
z z e aT
z e
−
−
− +
−
14
( )sen tω 2 2s
ω+ ω
( )( )2
z sen T
z 2z cos T 1
⋅ ω− ⋅ ω +
15
( )cos tω 2 2
s
s + ω ( )( )
( )2
z z cos T
z 2z cos T 1
⋅ − ω− ⋅ ω +
16
( )ate sen t− ω ( )2 2s a
ω+ + ω
( )( )
aT
2 aT 2aT
z e sen T
z 2ze cos T e
−
− −
⋅ ω− ω +
17
( )cos− ωate t ( )2 2
s a
s a
++ + ω
( )( )( )
aT
2 aT 2aT
z z e cos T
z 2ze cos T e
−
− −
⋅ − ω
− ω +
18
ka ( )
1
lns a T+
z
z a−
19
kk a⋅ ( )( )2
1
lns a T+
( )2
a z
z a
⋅−
20 Para: ( ) ( ) ( )
kG s
s a s b=
+ + e ( )0
1 sTeB s
s
−−= ( ) ( )( )3
'0
a bT
aT bT
z eB G z k
z e z e
+ −
− −
+= ⋅− −
, onde ( )( )'
3
1 1
1
aT bT
a bT
e ekk
abe
− −
+ −
− −= ⋅
+
21 Para: ( ) ( )
kG s
s s c=
+ e ( )0
1 sTeB s
s
−−= ( ) ( )( )3
'0
1
cT
cT
z eB G z k
z z e
−
−
+= ⋅− −
, onde ( )'
3
1
1
cT
cT
ek Tk
ce
−
−
−⋅= ⋅+
22 Sinal amostrado: ( ) ( ) ( )*
0k
x t x kT t kT∞
== ⋅δ −∑ A transformada Z: ( ) ( )
0
k
k
X z x kT z∞
−
=
= ⋅∑
Universidade Federal de Uberlândia Laboratório de Automação, Servomecanismos e Controle Prof. Aniel Silva de Morais e-mail: [email protected] Sala: 3N222/1E32
__________________________________________________________________________________________________________________________________
2 Controle Digital de Processos Prof. Aniel Silva de Morais Sala 3N222
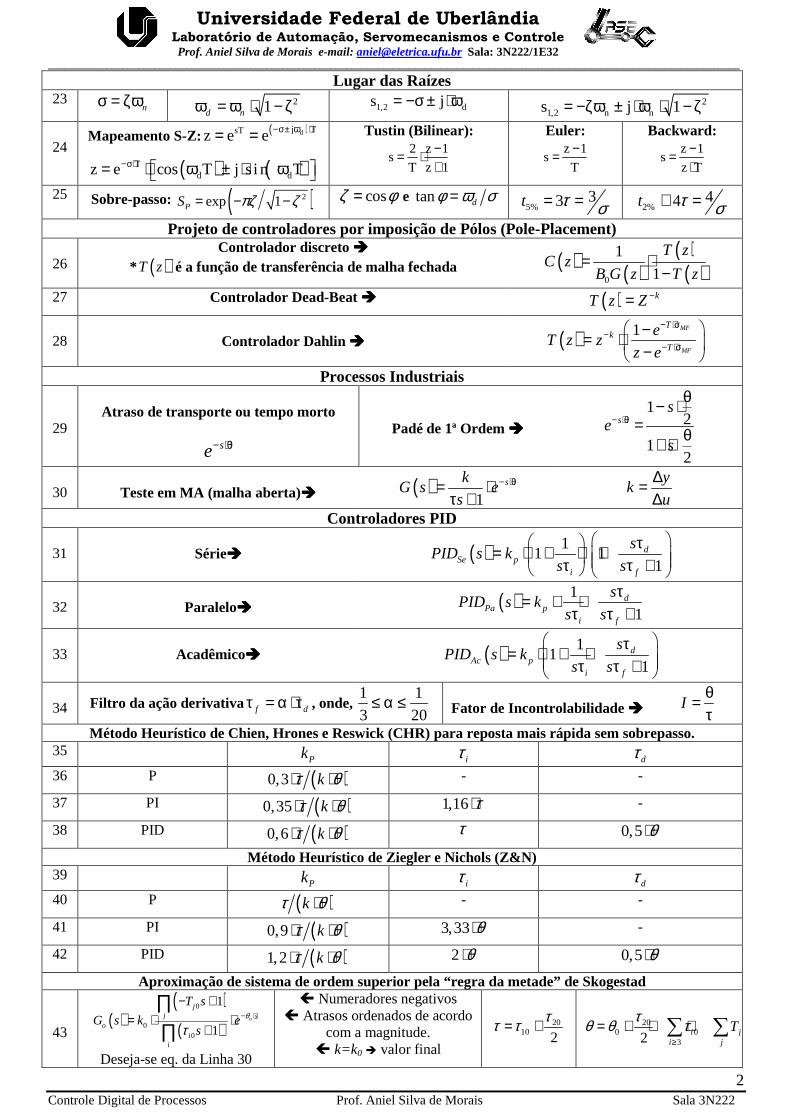
Lugar das Raízes 23
nσ = ζω 21d nω = ω ⋅ − ζ 1,2 ds j= −σ ± ⋅ω 21,2 n ns j 1= −ζω ± ⋅ω ⋅ − ζ
24
Mapeamento S-Z: ( )dj TsTz e e−σ± ω ⋅= =
( ) ( )Td dz e cos T j s i n T−σ⋅= ⋅ ω ± ⋅ ω
Tustin (Bilinear): 2 z 1
sT z 1
−= ⋅+
Euler: z 1
sT
−=
Backward: z 1
sz T
−=⋅
25 Sobre-passo: ( )2exp 1PS = − −πζ ζ cosζ φ= e tan dφ ω σ= 5%
33t = =τ σ 2%44t τ σ≅ =
Projeto de controladores por imposição de Pólos (Pole-Placement)
26 Controlador discreto ����
* ( )T z é a função de transferência de malha fechada ( ) ( )( )
( )0
1
1
T zC z
B G z T z= ⋅
−
27 Controlador Dead-Beat ���� ( ) kT z Z −=
28
Controlador Dahlin ���� ( ) 1 MF
MF
Tk
T
eT z z
z e
− ⋅σ−
− ⋅σ
−= ⋅ −
Processos Industriais
29
Atraso de transporte ou tempo morto
se− ⋅θ
Padé de 1ª Ordem ����
12
12
ss
es
− ⋅θ
θ− ⋅= θ+ ⋅
30
Teste em MA (malha aberta)���� ( )
1sk
G s es
− ⋅θ= ⋅τ +
y
ku
∆=∆
Controladores PID
31
Série���� ( ) 11 1
1d
Se pi f
sPID s k
s s
τ= ⋅ + ⋅ + τ τ +
32
Paralelo���� ( ) 1
1d
Pa pi f
sPID s k
s s
τ= + +τ τ +
33
Acadêmico���� ( ) 1
11
dAc p
i f
sPID s k
s s
τ= ⋅ + + τ τ +
34 Filtro da ação derivativa f dτ = α ⋅τ , onde,
1 1
3 20≤ α ≤
Fator de Incontrolabilidade ���� I
θ=τ
Método Heurístico de Chien, Hrones e Reswick (CHR) para reposta mais rápida sem sobrepasso. 35
Pk iτ dτ
36 P ( )0,3 kτ θ⋅ ⋅ - -
37 PI ( )0,35 kτ θ⋅ ⋅ 1,16⋅τ -
38 PID ( )0,6 kτ θ⋅ ⋅ τ 0,5 θ⋅
Método Heurístico de Ziegler e Nichols (Z&N) 39
Pk iτ dτ
40 P ( )kτ θ⋅ - -
41 PI ( )0,9 kτ θ⋅ ⋅ 3,33 θ⋅ -
42 PID ( )1,2 kτ θ⋅ ⋅ 2 θ⋅ 0,5 θ⋅
Aproximação de sistema de ordem superior pela “regra da metade” de Skogestad
43 ( )
( )( )
0
00
1
1o
jj s
oi
i
T s
G s k es
θ
τ− ⋅
− += ⋅ ⋅
+
∏∏
Deseja-se eq. da Linha 30
Numeradores negativos Atrasos ordenados de acordo
com a magnitude. k=k0 � valor final
2010 2
ττ τ= +
200 0 0
32 i ji j
Tτθ θ τ
≥
= + + +∑ ∑