Uma Abordagem Inspirada no Recozimento Determin´ıstico para … · 2017. 11. 28. · Uma...
129
Universidade Federal de Sergipe Programa de P´ os-Gradua¸c˜ ao em Engenharia El´ etrica Uma Abordagem Inspirada no Recozimento Determin´ ıstico para Escapar de M´ ınimos Locais em Navega¸ c˜ ao por Campos Potenciais Artificiais Nara Strappa Facchinetti Doria Orientador: Prof. Eduardo Oliveira Freire Co-orientador: Prof. Jo˜ ao Carlos dos Santos Bas´ ılio S˜ ao Crist´ ov˜ ao, Fevereiro de 2013
Transcript of Uma Abordagem Inspirada no Recozimento Determin´ıstico para … · 2017. 11. 28. · Uma...

Universidade Federal de Sergipe
Programa de Pos-Graduacao em Engenharia Eletrica
Uma Abordagem Inspirada no Recozimento
Determinıstico para Escapar de Mınimos
Locais em Navegacao por Campos
Potenciais Artificiais
Nara Strappa Facchinetti Doria
Orientador: Prof. Eduardo Oliveira Freire
Co-orientador: Prof. Joao Carlos dos Santos Basılio
Sao Cristovao, Fevereiro de 2013

Uma Abordagem Inspirada no Recozimento
Determinıstico para Escapar de Mınimos
Locais em Navegacao por Campos
Potenciais Artificiais
Nara Strappa Facchinetti Doria
Orientador: Prof. Eduardo Oliveira Freire
Co-orientador: Prof. Joao Carlos dos Santos Basılio
Dissertacao apresentada ao programa de Pos Graduacao em Engenharia Eletrica da
Universidade Federal de Sergipe, como parte dos requisitos necessarios a obtencao do
grau de Mestre em Engenharia Eletrica.
Sao Cristovao, fevereiro de 2013

Dedicatoria
A vovo Valdo (in memorian), por ter sido o comeco de tudo.

Agradecimentos
Primeiramente, agradeco ao meu orientador Eduardo Freire, por sua dedicacao e
competencia na minha orientacao, por toda sua paciencia e por ter me feito continuar.
Agradeco ainda por sua preocupacao em me proporcionar uma formacao completa, tanto
na pesquisa, como no estagio docencia, sempre com grande disponibilidade e boa vontade
ao me ajudar e por todo o conhecimento que compartilhou comigo. Agradeco ate mesmo
pelas conversas difıceis que tivemos, pois, sem duvida, elas me fizeram crescer bastante.
Muito obrigada por tudo. Sem voce, eu nao teria conseguido.
Agradeco ao Prof. Basılio, meu co-orientador, por ter aceitado nosso convite e por
todas as sugestoes valiosas para meu trabalho. Gostaria de agradecer tambem ao Prof.
Jugurta, por ter participado de toda a evolucao deste trabalho desde a ideia inicial, na
escolha do tema, passando tambem pela minha banca de qualificacao e de defesa final. Ao
prof. Pablo, por ter participado de minha banca e pelas sugestoes para esta dissertacao.
Agradeco a Elyson e Lucas, por terem contribuıdo com ideias de toda a parte inicial
do desenvolvimento deste trabalho, e a todo o pessoal do GPRUFS, pela companhia no
Labic. Agradeco a secretaria do PROEE, Mayane, por toda ajuda e amizade durante o
meu perıodo do mestrado.
Agradeco a minha famılia, por todo apoio. A minha mae, Isaura, por todo amor
e confianca e por ter compreendido a minha ausencia em casa durante esses anos de
mestrado. Ao meu pai, por acreditar em mim e por estar junto de mim na fase mais
difıcil deste trabalho. A minha avo Norma e a Tia Nida, por serem meu porto seguro,
pelo amor e carinho sempre. A minha irma Francis, por toda sua preocupacao e confianca,
por compreender meu distanciamento nos momentos de casulo, enquanto terminava meu
trabalho e pelas ilustracoes do recozimento determinıstico. A minha irma Lua, por estar
ao meu lado em Aracaju, por me lembrar a todo instante que eu tinha que terminar meu
mestrado e pela dica do ∆θ - nao esquecerei disso :). Ao meu namorado Davi, pelo amor
e companheirismo sempre, por estar sempre disposto a me ajudar e por entender meus
momentos de estresse.
Ao restante da minha famılia em Aracaju, Nilo, Re e Nicolas, por fazerem com que eu

me sentisse em casa, esquecendo um pouco da saudade e por me cobrarem constantemente
com a velha frase: “E o mestrado? Cade? Acabou?” Aos meus primos chegados, Barbara,
Clara e Breno, por completarem a famılia em terras sergipanas. Em especial a Breno, por
ter sido de tudo um pouco: primo, amigo, medico e psicologo.
A Sandy, por mesmo de longe se fazer presente, me apoiando sempre e por ter divido
comigo o desespero dos momentos finais da entrega da minha dissertacao.
Aos meus colegas do Ifs, por todo apoio na fase final deste trabalho. Em especial, a
Leila e Dany por estarem vivendo o mesmo drama, dividindo aflicoes. A Tania e Edson,
por tornarem os cafezinhos muito mais agradaveis. E a Fabio e Pipoca, pelas constantes
“ameacas”, me fazendo correr contra o tempo.
Aos meus caes, Sushi e Tio, pela companhia e alegria incondicionais, me fazendo
relaxar, ainda que nos momentos mais difıceis.
A Capes, pelo apoio financeiro durante o desenvolvimento deste trabalho.
Muito obrigada a todos voces.

“Do or do not! There is no try.”
Yoda

Sumario
Lista de Tabelas
Resumo
Abstract
1 Introducao p. 20
2 Algoritmos de Otimizacao p. 25
2.1 Recozimento simulado . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 25
2.2 Recozimento determinıstico . . . . . . . . . . . . . . . . . . . . . . . . p. 27
3 Metodo de Campos Potenciais Artificiais com LME inspirado no
recozimento determinıstico p. 35
3.1 Metodo dos Campos potenciais artificiais . . . . . . . . . . . . . . . . . p. 35
3.2 Trabalhos Correlatos - LME . . . . . . . . . . . . . . . . . . . . . . . . p. 38
3.2.1 Obstaculo virtual . . . . . . . . . . . . . . . . . . . . . . . . . . p. 38
3.2.2 Campos potenciais com LME inspirado no recozimento simulado p. 39
3.3 Campos Potenciais com LME inspirado no recozimento determinıstico . p. 42
4 Experimentos por simulacao p. 45
4.1 Ambiente utilizado nas simulacoes . . . . . . . . . . . . . . . . . . . . . p. 45
4.2 Simulacoes no ambiente de teste . . . . . . . . . . . . . . . . . . . . . . p. 49
4.3 Ambiente A1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 52
4.3.1 Simulacoes com o metodo dos Campos Potenciais Artificiais puro p. 52

4.3.2 Simulacoes com Campos Potenciais em conjunto com o metodo
inspirado no Recozimento Simulado . . . . . . . . . . . . . . . . p. 55
4.3.3 Simulacoes com Campos Potenciais com o Metodo do Obstaculo
Virtual . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 59
4.3.4 Simulacoes com Campos Potenciais com o metodo inspirado no
Recozimento Determinıstico . . . . . . . . . . . . . . . . . . . . p. 61
4.3.5 Comparativo dos resultados para o ambiente A1 . . . . . . . . . p. 65
4.4 Ambiente A2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 66
4.4.1 Simulacoes com o metodo dos Campos Potenciais Artificiais puro p. 66
4.4.2 Simulacoes com Campos Potenciais em conjunto com o metodo
inspirado no Recozimento Simulado . . . . . . . . . . . . . . . . p. 69
4.4.3 Simulacoes com Campos Potenciais em conjunto com o metodo
inspirado no Obstaculo Virtual . . . . . . . . . . . . . . . . . . p. 73
4.4.4 Simulacoes com Campos Potenciais em conjunto com o metodo
inspirado no Recozimento Determinıstico . . . . . . . . . . . . . p. 75
4.4.5 Comparativo dos resultados para o ambiente A2 . . . . . . . . . p. 79
4.5 Ambiente A3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 81
4.5.1 Simulacoes com Campos Potenciais Puro . . . . . . . . . . . . . p. 81
4.5.2 Simulacoes com Campos Potenciais em conjunto com o metodo
inspirado no Recozimento Simulado . . . . . . . . . . . . . . . . p. 83
4.5.3 Simulacoes com Campos Potenciais em conjunto com o Obstaculo
Virtual . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 87
4.5.4 Simulacoes com Campos Potenciais em conjunto com o metodo
inspirado no Recozimento Determinıstico . . . . . . . . . . . . . p. 89
4.5.5 Comparativo dos resultados para o ambiente A3 . . . . . . . . . p. 93
4.6 Ambiente A4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 95
4.6.1 Simulacoes com Campos Potenciais Puro . . . . . . . . . . . . . p. 95
4.6.2 Simulacoes com Campos Potenciais em conjunto com o metodo
inspirado no Recozimento Simulado . . . . . . . . . . . . . . . . p. 97

4.6.3 Simulacoes com Campos Potenciais em conjunto com o Obstaculo
Virtual . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 100
4.6.4 Simulacoes com Campos Potenciais em conjunto com o metodo
inspirado no Recozimento Determinıstico . . . . . . . . . . . . . p. 103
4.6.5 Comparativo dos resultados para o ambiente A4 . . . . . . . . . p. 106
4.7 Ambiente A5 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 108
4.7.1 Simulacoes com Campos Potenciais Puro . . . . . . . . . . . . . p. 108
4.7.2 Simulacoes com Campos Potenciais em conjunto com o metodo
inspirado no Recozimento Simulado . . . . . . . . . . . . . . . . p. 111
4.7.3 Simulacoes com Campos Potenciais em conjunto com o Obstaculo
Virtual . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 112
4.7.4 Simulacoes com Campos Potenciais em conjunto com o metodo
inspirado no Recozimento Determinıstico . . . . . . . . . . . . . p. 115
4.7.5 Comparativo dos resultados para o ambiente A5 . . . . . . . . . p. 118
4.8 Analise dos resultados . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 120
5 Conclusoes e trabalhos futuros p. 124
Referencias p. 126

Lista de Figuras
1 Recozimento determinıstico - explicacao grafica . . . . . . . . . . . . . p. 29
2 Mapa do ambiente (a) e campos potenciais correspondentes (b) . . . . p. 36
3 Explicacao grafica do obstaculo virtual . . . . . . . . . . . . . . . . . . p. 40
4 Ambientes com temperaturas diferentes . . . . . . . . . . . . . . . . . . p. 43
5 Posicionamento dos sensores . . . . . . . . . . . . . . . . . . . . . . . . p. 46
6 Resultado da simulacao . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 47
7 Posicao do robo nos eixos x e y e θ . . . . . . . . . . . . . . . . . . . . p. 48
8 Velocidades em x, y e θ . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 48
9 Velocidades desejada (em azul) e real (em vermelho) para cada roda . . p. 49
10 Resultado da simulacao . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 50
11 Posicao do robo nos eixos x e y e θ . . . . . . . . . . . . . . . . . . . . p. 51
12 Velocidades em x, y e θ . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 51
13 Velocidades desejada (em azul) e real (em vermelho) para cada roda . . p. 52
14 Resultado da simulacao - Campos potenciais puros no Ambiente A1 . . p. 53
15 Posicao do robo nos eixos x e y e θ - Campos potenciais puros no
Ambiente A1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 53
16 Velocidades em x, y e θ - Campos potenciais puros no Ambiente A1 . . p. 54
17 Velocidades desejada (em azul) e real (em vermelho) para cada roda -
Campos potenciais puros no Ambiente A1 . . . . . . . . . . . . . . . . p. 54
18 Resultado da simulacao - Recozimento Simulado no Ambiente A1 . . . p. 56
19 Posicoes em x, y e θ - Recozimento Simulado no Ambiente A1 . . . . . p. 57
20 Velocidades em, x, y e θ - Recozimento Simulado no Ambiente A1 . . . p. 57

21 Velocidades desejada (em azul) e real (em vermelho) para cada rodas -
Recozimento Simulado no Ambiente A1 . . . . . . . . . . . . . . . . . . p. 58
22 Resultado da simulacao - Obstaculo Virtual no Ambiente A1 . . . . . . p. 59
23 Posicoes em x, y e θ - Obstaculo Virtual no Ambiente A1 . . . . . . . . p. 60
24 Velocidades em x, y e θ - Obstaculo Virtual no Ambiente A1 . . . . . . p. 60
25 Velocidades desejada (em azul) e real (em vermelho) para cada roda -
Obstaculo Virtual no Ambiente A1 . . . . . . . . . . . . . . . . . . . . p. 61
26 Resultado da simulacao - Recozimento Determinıstico no Ambiente A1 p. 62
27 Posicoes em x, y e θ - Recozimento Determinıstico no Ambiente A1 . . p. 63
28 Velocidades em x, y e θ - Recozimento Determinıstico no Ambiente A1 p. 63
29 Velocidades desejada (em azul) e real (em vermelho) para cada roda -
Recozimento Determinıstico no Ambiente A1 . . . . . . . . . . . . . . . p. 64
30 Comparativo de caminhos para o ambiente A1 . . . . . . . . . . . . . . p. 65
31 Resultado da simulacao - Campos potenciais puros no Ambiente A2 . . p. 67
32 Posicoes em x e y e θ - Campos potenciais puros no Ambiente A2 . . . p. 67
33 Velocidades em x, y e θ - Campos potenciais puros no Ambiente A2 . . p. 68
34 Velocidades desejada (em azul) e real (em vermelho) para cada roda -
Campos potenciais puros no Ambiente A2 . . . . . . . . . . . . . . . . p. 68
35 Resultado da simulacao - Recozimento Simulado no Ambiente A2 . . . p. 70
36 Posicoes em x, y e θ - Recozimento Simulado no Ambiente A2 . . . . . p. 71
37 Velocidades em x, y e θ - Recozimento Simulado no Ambiente A2 . . . p. 71
38 Velocidades desejada (em azul) e real (em vermelho) para cada roda -
Recozimento Simulado no Ambiente A2 . . . . . . . . . . . . . . . . . . p. 72
39 Resultado da simulacao - Obstaculo Virtual no Ambiente A2 . . . . . . p. 73
40 Posicoes em x, y e θ - Obstaculo Virtual no Ambiente A2 . . . . . . . . p. 74
41 Velocidades em x, y e θ - Obstaculo Virtual no Ambiente A2 . . . . . . p. 74
42 Velocidades desejada (em azul) e real (em vermelho) para cada roda -
Obstaculo Virtual no Ambiente A2 . . . . . . . . . . . . . . . . . . . . p. 75

43 Resultado da simulacao - Recozimento Determinıstico no Ambiente A2 p. 76
44 Posicoes em x, y e θ - Recozimento Determinıstico no Ambiente A2 . . p. 77
45 Velocidades em x, y e θ - Recozimento Determinıstico no Ambiente A2 p. 77
46 Velocidades desejada (em azul) e real (em vermelho) para cada roda -
Recozimento Determinıstico no Ambiente A2 . . . . . . . . . . . . . . . p. 78
47 Velocidades desejada (em azul) e real (em vermelho) para cada roda -
Recozimento Determinıstico no Ambiente A2 . . . . . . . . . . . . . . . p. 79
48 Comparativo de caminhos para o ambiente A2 . . . . . . . . . . . . . . p. 80
49 Resultado da simulacao - Campos potenciais puros no Ambiente A3 . . p. 81
50 Posicoes em x, y e θ - Campos potenciais puros no Ambiente A3 . . . . p. 82
51 Velocidades em x, y e θ - Campos potenciais puros no Ambiente A3 . . p. 82
52 Velocidades desejada (em azul) e real (em vermelho) para cada roda -
Campos potenciais puros no Ambiente A3 . . . . . . . . . . . . . . . . p. 83
53 Resultado da simulacao - Recozimento Simulado no Ambiente A3 . . . p. 84
54 Posicoes em x, y e θ - Recozimento Simulado no Ambiente A3 . . . . . p. 85
55 Velocidades em x, y e θ - Recozimento Simulado no Ambiente A3 . . . p. 85
56 Velocidades desejada (em azul) e real (em vermelho) para cada roda -
Recozimento Simulado no Ambiente A3 . . . . . . . . . . . . . . . . . . p. 86
57 Resultado da simulacao - Obstaculo Virtual no Ambiente A3 . . . . . . p. 87
58 Posicoes em x, y e θ - Obstaculo Virtual no Ambiente A3 . . . . . . . . p. 88
59 Velocidades em x, y e θ - Obstaculo Virtual no Ambiente A3 . . . . . . p. 88
60 Velocidades desejada (em azul) e real (em vermelho) para cada roda -
Obstaculo Virtual no Ambiente A3 . . . . . . . . . . . . . . . . . . . . p. 89
61 Resultado da simulacao - Recozimento Determinıstico no Ambiente A3 p. 90
62 Posicoes em x, y e θ - Recozimento Determinıstico no Ambiente A3 . . p. 91
63 Velocidades em x, y e θ - Recozimento Determinıstico no Ambiente A3 p. 91
64 Velocidades desejada (em azul) e real (em vermelho) para cada roda -
Recozimento Determinıstico no Ambiente A3 . . . . . . . . . . . . . . . p. 92

65 Comparativo de caminhos no ambiente A3 . . . . . . . . . . . . . . . . p. 94
66 Resultado da simulacao - Campos potenciais puros no Ambiente A4 . . p. 95
67 Posicoes em x, y e θ - Campos potenciais puros no Ambiente A4 . . . . p. 96
68 Velocidades em x, y e θ - Campos potenciais puros no Ambiente A4 . . p. 96
69 Velocidades desejada (em azul) e real (em vermelho) para cada roda -
Campos potenciais puros no Ambiente A4 . . . . . . . . . . . . . . . . p. 97
70 Resultado da simulacao - Recozimento Simulado no Ambiente A4 . . . p. 98
71 Posicoes em x, y e θ - Recozimento Simulado no Ambiente A4 . . . . . p. 99
72 Velocidades em, x, y e θ - Recozimento Simulado no Ambiente A4 . . . p. 99
73 Velocidades desejada (em azul) e real (em vermelho) para cada roda -
Recozimento Simulado no Ambiente A4 . . . . . . . . . . . . . . . . . . p. 100
74 Resultado da simulacao - Obstaculo Virtual no Ambiente A4 . . . . . . p. 101
75 Posicoes em x, y e θ - Obstaculo Virtual no Ambiente A4 . . . . . . . . p. 101
76 Velocidades em x, y e θ - Obstaculo Virtual no Ambiente A4 . . . . . . p. 102
77 Velocidades desejada (em azul) e real (em vermelho) para cada roda -
Obstaculo Virtual no Ambiente A4 . . . . . . . . . . . . . . . . . . . . p. 102
78 Resultado da simulacao - Recozimento Determinıstico no Ambiente A4 p. 104
79 Posicoes em x,y e θ - Recozimento Determinıstico no Ambiente A4 . . . p. 105
80 Velocidades em x, y e θ - Recozimento Determinıstico no Ambiente A4 p. 105
81 Velocidades desejada (em azul) e real (em vermelho) para cada - roda
Recozimento Determinıstico no Ambiente A4 . . . . . . . . . . . . . . . p. 106
82 Comparativo de caminhos no ambiente A4 . . . . . . . . . . . . . . . . p. 107
83 Resultado da simulacao - Campos potenciais puros no Ambiente A5 . . p. 109
84 Posicoes em x, y e θ - Campos potenciais puros no Ambiente A5 . . . . p. 109
85 Velocidades em x, y e θ - Campos potenciais puros no Ambiente A5 . . p. 110
86 Velocidades desejada (em azul) e real (em vermelho) para cada roda -
Campos potenciais puros no Ambiente A5 . . . . . . . . . . . . . . . . p. 110

87 Resultado da simulacao - Campos potenciais com recozimento simulado
no Ambiente A5 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 111
88 Resultado da simulacao - Obstaculo Virtual no Ambiente A5 . . . . . . p. 113
89 Posicoes em x, y e θ - Obstaculo Virtual no Ambiente A5 . . . . . . . . p. 113
90 Velocidades em x, y e θ - Obstaculo Virtual no Ambiente A5 . . . . . . p. 114
91 Velocidades desejada (em azul) e real (em vermelho) para cada roda.-
Obstaculo Virtual no Ambiente A5 . . . . . . . . . . . . . . . . . . . . p. 114
92 Resultado da simulacao - Recozimento Determinıstico no Ambiente A5 p. 116
93 Posicoes em x, y e θ - Recozimento Determinıstico no Ambiente A5 . . p. 116
94 Velocidades em x, y e θ - Recozimento Determinıstico no Ambiente A5 p. 117
95 Velocidades desejada (em azul) e real (em vermelho) para cada roda -
Recozimento Determinıstico no Ambiente A5 . . . . . . . . . . . . . . . p. 117
96 Comparativo de caminhos no ambiente A5 . . . . . . . . . . . . . . . . p. 119
97 Comparativo de caminhos no ambiente A5 reduzido. . . . . . . . . . . . p. 122

Lista de Tabelas
1 Parametros utilizados na simulacao do Metodo dos Campos Potenciais
Puro, para o ambiente A1. . . . . . . . . . . . . . . . . . . . . . . . . . p. 55
2 Parametros de desempenho medidos na simulacao do Metodo dos
Campos Potenciais Puro, para o ambiente A1. . . . . . . . . . . . . . . p. 55
3 Parametros utilizados na simulacao do Metodo dos Campos Potenciais
com o recozimento simulado, para o ambiente A1. . . . . . . . . . . . . p. 58
4 Parametros de desempenho medidos na simulacao do Metodo dos
Campos Potenciais com o recozimento simulado, para o ambiente A1. . p. 58
5 Parametros utilizados na simulacao do Metodo dos Campos Potenciais
com o obstaculo virtual, para o ambiente A1. . . . . . . . . . . . . . . . p. 61
6 Parametros de desempenho medidos na simulacao do Metodo dos
Campos Potenciais com o obstaculo virtual, para o ambiente A1. . . . . p. 61
7 Parametros utilizados na simulacao do Metodo dos Campos Potenciais
com o recozimento determinıstico, para o ambiente A1. . . . . . . . . . p. 64
8 Parametros de desempenho medidos na simulacao do Metodo dos
Campos Potenciais com o recozimento determinıstico, para o ambiente A1. p. 64
9 Parametros de desempenho obtidos com o Ambiente A1 . . . . . . . . . p. 66
10 Parametros utilizados na simulacao do Metodo dos Campos Potenciais
Puro, para o ambiente A2. . . . . . . . . . . . . . . . . . . . . . . . . . p. 69
11 Parametros de desempenho medidos na simulacao do Metodo dos
Campos Potenciais Puro, para o ambiente A2. . . . . . . . . . . . . . . p. 69
12 Parametros utilizados na simulacao do Metodo dos Campos Potenciais
com o recozimento simulado, para o ambiente A2. . . . . . . . . . . . . p. 72
13 Parametros de desempenho medidos na simulacao do Metodo dos
Campos Potenciais com o recozimento simulado, para o ambiente A2. . p. 73

14 Parametros utilizados na simulacao do Metodo dos Campos Potenciais
com o obstaculo virtual, para o ambiente A2. . . . . . . . . . . . . . . . p. 75
15 Parametros de desempenho medidos na simulacao do Metodo dos
Campos Potenciais com o obstaculo virtual, para o ambiente A2. . . . . p. 75
16 Parametros utilizados nas simulacoes para o metodo do Recozimento
Determinıstico no Ambiente A2. . . . . . . . . . . . . . . . . . . . . . . p. 78
17 Parametros de desempenho medidos na simulacao do Metodo dos
Campos Potenciais com o recozimento determinıstico, para o ambiente A2. p. 79
18 Parametros obtidos com o Ambiente A2 . . . . . . . . . . . . . . . . . p. 81
19 Parametros utilizados na simulacao do Metodo dos Campos Potenciais
Puro, para o ambiente A3. . . . . . . . . . . . . . . . . . . . . . . . . . p. 83
20 Parametros de desempenho medidos na simulacao do Metodo dos
Campos Potenciais Puro, para o ambiente A3. . . . . . . . . . . . . . . p. 83
21 Parametros utilizados na simulacao do Metodo dos Campos Potenciais
com o recozimento simulado, para o ambiente A3. . . . . . . . . . . . . p. 86
22 Parametros de desempenho medidos na simulacao do Metodo dos
Campos Potenciais com o recozimento simulado, para o ambiente A3. . p. 87
23 Parametros utilizados na simulacao do Metodo dos Campos Potenciais
com o obstaculo virtual, para o ambiente A3. . . . . . . . . . . . . . . . p. 89
24 Parametros de desempenho medidos na simulacao do Metodo dos
Campos Potenciais com o recozimento simulado, para o ambiente A3. . p. 89
25 Parametros utilizados nas simulacoes para o metodo do Recozimento
Determinıstico no Ambiente A3. . . . . . . . . . . . . . . . . . . . . . . p. 92
26 Parametros de desempenho medidos na simulacao do Metodo dos
Campos Potenciais com o recozimento determinıstico, para o ambiente A3. p. 93
27 Parametros obtidos com o Ambiente A3 . . . . . . . . . . . . . . . . . p. 93
28 Parametros utilizados na simulacao do Metodo dos Campos Potenciais
Puro, para o ambiente A4. . . . . . . . . . . . . . . . . . . . . . . . . . p. 97
29 Parametros de desempenho medidos na simulacao do Metodo dos
Campos Potenciais Puro, para o ambiente A4. . . . . . . . . . . . . . . p. 97

30 Parametros utilizados na simulacao do Metodo dos Campos Potenciais
com o recozimento simulado, para o ambiente A4. . . . . . . . . . . . . p. 100
31 Parametros de desempenho medidos na simulacao do Metodo dos
Campos Potenciais com o recozimento simulado, para o ambiente A4. . p. 100
32 Parametros utilizados na simulacao do Metodo dos Campos Potenciais
com o obstaculo virtual, para o ambiente A4. . . . . . . . . . . . . . . . p. 103
33 Parametros de desempenho medidos na simulacao do Metodo dos
Campos Potenciais com o obstaculo virtual, para o ambiente A4. . . . . p. 103
34 Parametros utilizados nas simulacoes para o metodo do Recozimento
Determinıstico no Ambiente A4. . . . . . . . . . . . . . . . . . . . . . . p. 104
35 Parametros de desempenho medidos nas simulacoes para o metodo do
Recozimento Determinıstico no Ambiente A4. . . . . . . . . . . . . . . p. 104
36 Parametros obtidos com o Ambiente A4 . . . . . . . . . . . . . . . . . p. 108
37 Parametros utilizados na simulacao do Metodo dos Campos Potenciais
Puro, para o ambiente A5. . . . . . . . . . . . . . . . . . . . . . . . . . p. 108
38 Parametros de desempenho medidos na simulacao do Metodo dos
Campos Potenciais Puro, para o ambiente A5. . . . . . . . . . . . . . . p. 108
39 Parametros utilizados na simulacao do Metodo dos Campos Potenciais
com o recozimento simulado, para o ambiente A5. . . . . . . . . . . . . p. 112
40 Parametros de desempenho medidos na simulacao do Metodo dos
Campos Potenciais com o recozimento simulado, para o ambiente A5. . p. 112
41 Parametros utilizados na simulacao do Metodo dos Campos Potenciais
com o obstaculo virtual, para o ambiente A5. . . . . . . . . . . . . . . . p. 115
42 Parametros de desempenho medidos na simulacao do Metodo dos
Campos Potenciais com o recozimento simulado, para o ambiente A5. . p. 115
43 Parametros utilizados nas simulacoes para o metodo do Recozimento
Determinıstico no Ambiente A5. . . . . . . . . . . . . . . . . . . . . . . p. 118
44 Parametros de desempenho medidos na simulacao do Metodo dos
Campos Potenciais com o recozimento determinıstico, para o ambiente
A5.. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 118

45 Parametros de desempenho obtidos com o Ambiente A5 . . . . . . . . . p. 118
46 Resumo dos resultados . . . . . . . . . . . . . . . . . . . . . . . . . . . p. 122

Resumo
O Metodo dos Campos Potenciais Artificiais e amplamente utilizado para navegacaode robos moveis por sua facilidade de implementacao e baixo custo computacional. Nessaabordagem, o ambiente e modelado com base em campos potenciais. Pontos de destinosao modelados como atratores, ao passo que obstaculos sao vistos como repulsores e umafuncao e usada para modelar o campo potencial gerado por cada um dos obstaculos edestinos e a sua influencia sobre o robo. Sendo o gradiente negativo do campo a forcaque impulsiona o movimento do robo, ha a possibilidade de surgimento de pontos demınimos, onde a forca se anula, diferentes do mınimo global. Este e um problemaexistente no metodo, que pode impedir que o robo chegue ao seu ponto de destino.Nesse contexto, o presente trabalho apresenta uma nova abordagem para escapar depontos de mınimos locais por sistemas autonomos que implementam o metodo doscampos potenciais artificiais, inspirada no recozimento determinıstico. E apresentado umestudo comparativo entre a tecnica desenvolvida neste trabalho e mais dois metodos jaconhecidos: recozimento simulado para escapar de mınimos locais e o metodo do obstaculovirtual. Os resultados obtidos mostram que o algoritmo inspirado no recozimentodeterminıstico pode ser usado para escapar de mınimos locais, pois esse metodo foicapaz de produzir resultados satisfatorios quando comparado com outras solucoes classicasexistentes.
Palavras-chave: Robotica movel, Campos Potenciais Artificiais, Mınimos Locais,Recozimento Determinıstico.

Abstract
The Artificial Potential Fields approach is widely used in mobile robot navigation dueto its easy implementation and low computational cost. In this approach, the environmentis seen as a potential surface, where the goal point is modeled as an attractor point andthe obstacles are considered repulsor points. A potential field function is used to modelall the environment, calculating the influence over the robot. The force that moves therobot is the descendent gradient of the field. Local minima appear when this gradient(the force) becomes equal to zero. This situation prevents the robot from arriving at thegoal point. This work presents a new algorithm to escape from local minima points in theenvironment. This new algorithm is inspired in the deterministic annealing algorithm.A comparative study between the developed method and two known methods, simulatedannealing to escape from local minima, and the method of virtual obstacle, is carriedout. The results show that the proposed algorithm can be used to perform local minimaescape, since this approach was capable to produce satisfactory results when comparedwith other classical existent solutions.
Key words: Mobile robots, Artificial Potential Fields, Local Minima, DeterministicAnnealing.

20
1 Introducao
Em sistemas roboticos autonomos, e essencial que o robo possa se deslocar do seu
ponto inicial para seu objetivo, sendo capaz de desviar de obstaculos que venham a surgir
no caminho. Para isso, e necessario que o robo tenha a capacidade de decisao de qual sera
a proxima atitude a ser tomada. Surge, portanto, o Problema de Selecao de Atitude. Aos
esquemas de controle capazes de solucionar esse problema, e dado o nome de Mecanismos
de Selecao de Atitude, ou Arquiteturas de Navegacao.
Diferentes formas de implementacao de arquiteturas de navegacao surgiram nas
ultimas decadas. Em algumas dessas arquiteturas, a tarefa de navegacao e feita por
meio da minimizacao de uma funcao de custo. Como exemplo, ha o Metodo dos Campos
Potenciais Artificiais (Khatib, 1986), onde o ambiente e modelado com base em campos
potenciais. Pontos de destino sao modelados como atratores, ao passo que obstaculos sao
vistos como repulsores e uma funcao e usada para modelar o campo potencial gerado por
cada um dos obstaculos e destinos e a sua influencia sobre o robo. Sendo o gradiente
negativo do campo a forca que impulsiona o movimento do robo, ha a possibilidade de
surgimento de pontos de mınimos, onde a forca se anula, diferentes do mınimo global.
Este e um problema existente no metodo, que impede que o robo chegue ao seu ponto de
destino e, para contorna-lo, diferentes abordagens foram propostas.
Em linhas gerais, as diferentes abordagens utilizadas para solucionar o problema dos
mınimos locais em sistemas que implementam o Metodo dos Campos Potenciais Artificiais
podem ser classificadas em tres categorias:
- Evitar mınimos locais (LMA - Local Minima Avoidance),
- Escapar dos mınimos locais (LME - Local Minima Escape),
- Remover mınimos locais (LMR - Local Minima Removal).
Um estudo comparativo entre essas tres classificacoes de solucoes pode ser visto em
Zhang et al. (2010), no qual as principais diferencas entre elas sao salientadas. As

1 Introducao 21
solucoes baseadas na remocao dos mınimos locais, apesar de solucionarem completamente
o problema dos mınimos locais, apresentam alguns problemas, entre eles, esta a restricao
a certos tipos de obstaculos, o alto custo computacional para navegacao em tempo real
e a necessidade de algum conhecimento inicial a respeito do ambiente. As abordagens
baseadas em evitar os pontos de mınimos locais necessitam de uma disponibilidade de
informacoes previas sobre o ambiente e geralmente sao implementadas em esquemas
hierarquicos, por exemplo o metodo dos campos potenciais artificiais representa uma
camada em baixo nıvel com o objetivo de evitar colisoes em obstaculos, enquanto uma
outra camada em nıvel mais alto deve ser adicionada a fim de estabelecer objetivos
intermediarios ate o ponto de destino. Para a determinacao de objetivos intermediarios,
geralmente e necessario um conhecimento previo do ambiente. Chang e Yamamoto (2009)
desenvolveram um algoritmo classificado como LMA e sem necessidade de conhecimento
previo do ambiente. No entanto, este algoritmo constroi um mapa de forma incremental,
a medida em que planeja um caminho a seguir. A construcao incremental desse mapa e
responsavel por um alto custo computacional. A outra abordagem, baseada em escape
dos pontos de mınimos locais, ao contrario das outras duas, permitem que o robo fique
preso em um ponto de mınimo local e, apos isto, e acionado algum mecanismo de
escape deste ponto. No entanto, essa categoria nao evita que o robo caia em pontos de
mınimos. Contudo, por conta do seu baixo custo computacional e por nao necessitarem
de conhecimento previo do ambiente, abordagens de escape ainda sao bastante utilizadas.
Entre as diversas solucoes encontradas na literatura, tem-se a de Cen et al. (2007),
em que e utilizada uma coordenacao de campos potenciais com a qual e possıvel
resolver alguns dos problemas do Metodo dos Campos Potenciais Artificiais, tais como
o de mınimos locais, oscilacao entre multiplos obstaculos e a navegacao em ambientes
dinamicos. Para isso, foi desenvolvida uma funcao com parametros sintonizaveis, atraves
da qual e feita uma coordenacao dos campos potenciais existentes na “janela”atual.
Entende-se por janela atual o conjunto dos obstaculos detectados no momento e o objetivo
local estabelecido. Para a otimizacao dos parametros, sao usados Algoritmos Geneticos. A
funcao de coordenacao representa uma equacao em funcao das velocidades linear e angular
do robo e dos angulos entre a direcao atual e as direcoes do i-esimo caminho possıvel e da
direcao do objetivo. E feita, entao, uma soma ponderada e o caminho referente ao menor
valor desta soma e seguida. Apos a escolha do melhor caminho a ser seguido, um objetivo
local e estabelecido. A partir da velocidade para o caminho otimo, dois fatores usados no
calculo do vetor de coordenacao (substituto das forcas atratoras, na abordagem original)
sao configurados, de forma a permitir a atracao do robo pelo objetivo, evitando que o

1 Introducao 22
mesmo fique preso em mınimos locais.
Ja em Kim e Khosla (1992) e apresentada uma implementacao dos Campos Potenciais
Artificiais por meio de funcoes harmonicas. Tais funcoes sao capazes de construir um
campo potencial sem mınimos locais no ambiente. Dessa forma, o unico ponto de mınimo
passa a ser o mınimo global, fazendo com que o robo seja direcionado ao seu objetivo sem
que fique preso em um ponto de mınimo local. No entanto, essa abordagem possui um
elevado custo computacional, o que faz com que nao seja uma abordagem amplamente
utilizada.
Em Velagic et al. (2006) e mostrada uma forma de escapar dos mınimos locais com uma
adaptacao dos Campos Potenciais Artificiais, onde nao ha a necessidade de armazenar
informacoes sobre o ambiente ja visitado. O robo reconhece se ira oscilar entre dois
pontos e ficar, portanto, em loop, por meio da orientacao da forca resultante. Caso a
forca resultante atual possua mesma direcao e sentido oposto a anterior, o que significa
que o robo sera empurrado para o ponto de onde veio, esse ponto pode ser reconhecido
como um mınimo local no ambiente e o sistema mudara a forma de controle. Quando
isso ocorre, as forcas atrativas sao desprezadas para que as acoes de desviar do obstaculo,
e nao cair no ponto de mınimo, possuam maior prioridade que a acao de atingir o alvo,
e o sistema considera apenas a forca repulsiva do obstaculo mais proximo. Dessa forma,
ha a tentativa de escapar dos mınimos locais, que em algumas configuracoes pode vir a
falhar, como por exemplo, no caso em que, ao escapar de um ponto de mınimo, o robo
passa a perceber dois obstaculos, posicionados um em cada lado do robo, a uma mesma
distancia, fazendo com que este fique preso em um novo ponto de mınimo.
Iraji e Manzuri-Shalmani (2007) usam um conceito de obstaculo virtual localizado no
ponto de mınimo, fazendo com que o robo se sinta repelido por este ponto. Esse conceito
ja havia sido apresentado anteriormente em Lee e Park (2003) e baseia-se em estabelecer
um campo potencial com valor maximo no ponto de mınimo. Com isso, quando o robo
encontra-se preso, o valor total do campo potencial e dado pela soma do campo potencial
da configuracao original e do valor estabelecido para o ponto de mınimo.
O recozimento simulado1 (Kirkpatrick et al., 1983) e usado em Janabi-Sharifi e Vinke
(1993b) e Park e Lee (2002) para fazer com que o robo escape do mınimo local. Quando o
robo esta preso em um ponto de mınimo, o algoritmo do recozimento simulado e executado.
Nessa execucao, e verificado o valor do campo potencial em uma posicao da vizinhanca.
Caso o valor seja menor que o valor atual, o robo passa para essa nova posicao. Caso
1Simulated Annealing

1 Introducao 23
contrario, a nova configuracao e aceita sob determinada probabilidade, que e maior em
altas temperaturas, sendo que a temperatura representa um parametro do recozimento
simulado. Este algoritmo e executado ate que se consiga sair do mınimo local. Portanto,
com o uso do recozimento simulado, e possıvel que o robo siga por determinados pontos
onde a funcao de custo nao e minimizada, momentaneamente, a fim de escapar de um
mınimo local. Com base nas informacoes mostradas sobre as tres abordagens, percebe-se
que as baseadas em LME geralmente exigem menor esforco computacional, alem de nao
necessitarem de conhecimento previo do ambiente. Entre as solucoes desta classificacao,
encontra-se o metodo de Janabi-Sharifi e Vinke (1993b) baseado no recozimento simulado
para evitar mınimos locais.
Nesse contexto, o objetivo desta dissertacao de mestrado consiste no desenvolvimento
de uma nova abordagem para escapar de mınimos locais em robos moveis que
implementam o Metodo dos Campos Potenciais Artificiais, inspirada no Recozimento
Determinıstico2, que se trata de um metodo de otimizacao, desenvolvido com base no
Recozimento Simulado, cuja principal diferenca esta na forma como o ruıdo e inserido:
enquanto que no Recozimento Simulado esse ruıdo e externo a funcao de custo, no
recozimento determinıstico ele se torna um parametro interno a funcao. Uma explicacao
mais aprofundada a cerca desses metodos de otimizacao e dada no capıtulo 2.
Com a abordagem proposta, e possıvel fazer com que o robo escape de pontos de
mınimos locais no ambiente, dando a possibilidade da conclusao da tarefa de navegacao
ainda que o ambiente possua mınimos locais. Alem disso, sao mostrados os resultados de
dois outros metodos ja existentes (Campos potenciais com o recozimento simulado e com
o obstaculo virtual) e entao e feita uma comparacao entre os resultados obtidos nas tres
metodologias.
Os experimentos realizados neste trabalho levam em conta um robo movel, com
rodas, realizando um planejamento local em um ambiente previamente desconhecido.
No entanto, a solucao aqui proposta pode ser expandida para o uso em outros sistemas
roboticos que implementem o metodo dos campos potenciais artificais. Durante a
navegacao, um mapa do ambiente e armazenado em uma matriz de obstaculos a
medida que os sensores vao percebendo obstaculos, dotando o sistema de memoria, com
informacoes acerca do ambiente ja visitado. Os campos ponteciais gerados sao discretos,
uma vez que calcula-se o valor do campo potencial para cada elemento da matriz onde
foram armazenadas as posicoes dos obstaculos.
2Deterministic annealing

1 Introducao 24
Este texto esta organizado da seguinte forma. No capıtulo 2 sao apresentados
os metodos de otimizacao do Recozimento Simulado e Determinıstico. No capıtulo 3
apresenta-se o metodo dos Campos Potenciais Artificiais e o trabalho proposto. Alem
disso, sao mostrados tambem outros dois metodos LME que foram implementados neste
trabalho a fim de se fazer um estudo comparativo entre o metodo proposto e outros
existentes na literatura. No capıtulo 4 sao apresentados os resultados obtidos em
simulacoes e sao feitas consideracoes relevantes a respeito dos mesmos. No capıtulo
5 sao apresentadas as conclusoes tiradas a partir dos resultados obtidos e possıveis
direcionamentos para trabalhos futuros.

25
2 Algoritmos de Otimizacao
Neste capıtulo, serao apresentados os algoritmos de otimizacao que fazem parte do
escopo deste trabalho. Na secao 2.1 sera apresentado o Recozimento Simulado e na secao
2.2 o Recozimento Determinıstico.
2.1 Recozimento simulado
O recozimento simulado e um algoritmo de otimizacao global, proposto por
Kirkpatrick et al. (1983) que, sob certas condicoes, garante atingir uma solucao global
otima atraves da minimizacao de uma funcao de custo C. O algoritmo do recozimento
simulado foi inspirado no Algoritmo de Metropolis (Metropolis et al., 1953), mostrando
como, a partir desse ultimo, e possıvel aplicar tecnicas da Mecanica Estatıstica em
problemas de otimizacao.
O algoritmo de Metropolis simula a evolucao de um solido em equilıbrio termico e
evolui da seguinte forma: a cada passo do algoritmo e feita uma pequena modificacao na
posicao de um atomo e, como consequencia, a quantidade de energia (E) do sistema e
alterada. Analisa-se, entao, a variacao dessa energia (∆E). Se ∆E 6 0, a movimentacao
do atomo e aceita e essa nova configuracao passa a ser o ponto de partida para o proximo
passo. Caso ∆E > 0, a nova configuracao e aceita sob uma probabilidade P (∆E) =
exp(− ∆E
kBT). Um numero aleatorio de uma distribuicao uniforme e gerado no intervalo
entre (0, 1). Comparando esse numero com P (∆E), a nova configuracao e aceita se o
numero gerado for menor que P (∆E). Caso contrario, a configuracao original e usada
para o proximo passo de execucao.
Substituindo a energia do solido pela funcao de custo C e com a diminuicao progressiva
e lenta da temperatura, tem-se o recozimento simulado, proposto por Kirkpatrick et al.
(1983). As configuracoes citadas no Algoritmo de Metropolis foram substituıdas por um
conjunto de parametros ({xi}) e a temperatura passa a ser simplesmente um parametro

2.1 Recozimento simulado 26
de controle de mesma unidade que a funcao de custo. O processo do recozimento simulado
consiste em iniciar o sistema a ser otimizado com uma alta temperatura e, aos poucos, ir
diminuindo a temperatura ate que o sistema “congele” e mudancas nas configuracoes nao
ocorram mais.
O algoritmo do recozimento simulado, por ser derivado do Algoritmo de Metropolis,
segue aceitando movimentos enquanto a funcao de custo for menor do que a atual e,
em casos de um valor maior, aceita a nova configuracao sob determinada probabilidade.
Em contraste com outros algoritmos de otimizacao que executam apenas em direcoes que
reduzem a funcao de custo C, o recozimento simulado permite que uma nova configuracao
seja aceita ainda que haja o aumento momentaneo de C. A partir dessa caracterıstica,
e possıvel escapar de uma regiao de atracao de um mınimo local (Theodoridis e
Koutroumbas, 2008).
Uma implementacao em pseudo-codigo e apresentada no algoritmo 1.
Algoritmo 1: Pseudo-codigo do recozimento simulado
1 inıcio
2 k := 0;
3 Tk := Tmax;
4 enquanto Tk > Tcrit faca
5 enquanto Nao chegou ao estado de equilıbrio para T faca
6 ∆Cij = Cj − Ci;
7 //sendo i a configuracao atual e j a nova configuracao
8 se ∆Cij ≤ 0 entao
9 Aceite;
10 senao se exp (−∆Cij
Tk) > random[0, 1) entao
11 Aceite;
12 se Aceito entao
13 Atualize a configuracao para j;
14 Tk+1 := f(Tk);
15 k := k + 1;
Com a analise do algoritmo exposto, em conjunto com a funcao de probabilidades,
e possıvel perceber que para altas temperaturas a probabilidade de aceitar uma nova
configuracao e alta. A medida que a temperatura vai diminuindo, o sistema tende a

2.2 Recozimento determinıstico 27
aceitar com maior probabilidade configuracoes com menor valor de C (linha 9). Mantendo-
se T sempre maior que zero, garante-se uma probabilidade nao nula de se escapar de um
mınimo local. O valor da temperatura e atualizado apos o sistema entrar em um estado de
equilıbrio para o valor de temperatura atual (linha 13). Esse estado de equilıbrio ocorre
quando nao ha mais mudancas nas configuracoes. Em seguida, o numero de iteracoes (k)
e atualizado, na linha 15.
O recozimento simulado foi adaptado para permitir seu uso em diversas areas, entre
elas, o posicionamento de celulas (placement) em circuitos integrados, como proposto
por Kirkpatrick et al. (1983), utilizado em Rose et al. (1990), e adaptado por Mallela e
Grover (1988); nesse ultimo, o recozimento simulado e implementado em dois estagios,
melhorando o desempenho. Outros exemplos de uso ocorre na reconstrucao de imagens
com alto grau de ruıdo, como visto em Kearfott e Hill (1990); em pesquisas na area de
redes de computadores, para deteccao de intrusos (Ni e Zheng, 2007), e em agrupamentos
em redes moveis ad hoc (Turgut et al., 2003) e tambem no planejamento de caminhos em
robotica movel (Gao e Tian, 2007), (Xingce et al., 2008), (Park e Lee, 2002). Em Janabi-
Sharifi e Vinke (1993a), o recozimento simulado e utilizado em conjunto com o Metodo
dos Campos Potenciais Artificiais, que tem por objetivo fazer com que o robo escape de
pontos de mınimo locais. Nesse uso em especıfico, a funcao de custo a ser minimizada e
dada pelo campo potencial total do ambiente, que corresponde a soma de todos os campos
repulsivos (gerados pelos obstaculos) e pelo campo atrator (gerado pelo destino).
2.2 Recozimento determinıstico
O recozimento determinıstico, proposto por Rose (1991), surgiu a partir do conceito
do recozimento simulado, porem, devido a forma de implementacao, com o ruıdo inserido
na funcao de custo, evita-se a movimentacao aleatoria na superfıcie de energia.
Esse metodo possui tres caracterısticas notaveis: i) a habilidade de se
evitar muitos mınimos locais fracos1; ii) possibilidade de aplicacao em diferentes
estruturas/arquiteturas; iii) a capacidade de minimizar a funcao custo de forma correta,
mesmo quando seus gradientes se anulam em quase todos os lugares (Rose, 1998). Diante
de tais caracterısticas, surge a possibilidade de uso do recozimento determinıstico para
evitar os mınimos locais em sistemas que implementam o metodo dos campos potenciais
1Definicao: (Mınimo local fraco) Um ponto x∗ ∈ ℜ e um minimizador local fraco de uma funcaoescalar f se existe uma vizinhanca V de x∗ tal que f(x∗) 6 f(x) para todo x ∈ V . O valor f(x∗) sera omınimo local fraco.

2.2 Recozimento determinıstico 28
artificiais.
A diferenca entre o recozimento simulado e o recozimento determinıstico esta no fato
de que ao inves de se incorporar o ruıdo na movimentacao sobre a superfıcie de energia,
o ruıdo e incorporado na funcao de custo. A funcao de custo e parametrizada por meio
de uma variavel de controle β (o inverso da temperatura, 1/T ). Entende-se por ruıdo
inserido na funcao de custo, a alteracao feita nessa por meio da atualizacao constante
dos valores da temperatura. Com β = 0, a funcao de custo geralmente sera convexa
e o mınimo global da funcao sera facilmente identificado (Rose, 1991). Dessa forma,
o recozimento determinıstico pode ser visto como uma abordagem que primeiramente
localiza um mınimo global, com a temperatura infinita (β = 0) e, a medida que ocorre o
resfriamento (aumenta-se β), passa a caminhar em direcao ao mınimo, que a cada passo
de execucao, tende ao mınimo global do sistema que e alcancado em temperatura igual a
0.
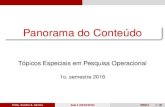
De uma forma simples, a execucao do recozimento determinıstico pode ser descrita
utilizando a seguinte analogia:
1- Considere uma superfıcie com alguns objetos posicionados sobre a mesma. Esta
representara a funcao de custo a ser minimizada por meio do recozimento determinıstico.
2- Estica-se um lencol sobre esses objetos. Essa configuracao inicial, na qual o lencol
encontra-se praticamente esticado, pode ser relacionada ao inıcio da execucao do algoritmo
do recozimento determinıstico, com a temperatura inicial elevada.
3- Uma esfera metalica e solta sobre o lencol e esta tende para o mınimo global nesta
configuracao. Com isto, concorda-se com o que foi dito anteriormente, onde o algoritmo do
recozimento determinıstico inicia sua execucao encontrando um mınimo global da funcao
de custo com um alto valor de temperatura.
4- Lentamente, o lencol vai se acomodando sobre os obstaculos. A medida que isso
ocorre, a esfera se desloca em direcao ao mınimo global de cada uma dessas configuracoes
intermediarias. Relacionando ao algoritmo do recozimento determinıstico, essa acao e
vista como o processo de resfriamento e a perseguicao do ponto de mınimo global.
5- Por fim, com o lencol acomodado sobre os objetos, fazendo com que o ambiente
tenha a mesma forma da configuracao inicial, a esfera esta no ponto de mınimo global da
superfıcie. Isso equivale a funcao de custo de volta a sua forma original, com o ponto de
mınimo localizado. Nesse ponto, tem-se T = 0.
Graficamente, esta analogia pode ser explicada de acordo com a sequencia mostrada

2.2 Recozimento determinıstico 29
na figura 1.
(a) Objetos sobre a superfıcie (b) Lencol completamente esticado -Temperatura alta
(c) Lencol se acomodando - Resfriamento (d) Lencol acomodado - temperatura baixa
Figura 1: Recozimento determinıstico - explicacao grafica
Considerando o caso em que o resfriamento nao e feito de forma suficientemente lenta,
ha a possibilidade de a esfera, em uma dada configuracao intermediaria, nao conseguir
alcancar o ponto de mınimo nessa configuracao. Com isso, a sua chegada ao mınimo
global pode ser comprometida. E possıvel observar tambem que, considerando o valor
inicial da temperatura ja em 0, a possibilidade da esfera conseguir alcancar o mınimo
global da superfıcie passa a ser muito pequena. Isso ocorre devido as grandes chances da
esfera estacionar em algum ponto de mınimo local antes de alcancar o global.
Matematicamente, o conceito do recozimento determinıstico e demonstrado em Rose
(1991) no contexto de agrupamento, onde a funcao de custo a ser minimizada e dada pela
distorcao entre o elemento a ser agrupado e o centroide de um dado grupo.
Essa demonstracao sera feita de forma a contextualizar a origem do algoritmo e mais
adiante sera mostrado como essa abordagem foi adaptada para o contexto desse trabalho.

2.2 Recozimento determinıstico 30
Considere, inicialmente, a seguinte funcao:
E =∑
x
∑
j
P (x ∈ Cj)d(x, yj) (2.1)
A equacao 2.1 representa a energia do sistema, sendo nesse caso a distorcao
esperada. O termo d(x, yj) representa a medida de distorcao de um ponto x para um
determinado vetor yj e P (x ∈ Cj) define a probabilidade de x pertencer ao grupo de
pontos representados por yj. A princıpio, quando nao ha conhecimento a respeito das
probabilidades de associacao, e aplicado o princıpio da maxima entropia para realizar a
estimacao.
O princıpio da maxima entropia, proposto por Jaynes (1957), sugere que entre todas
as distribuicoes de probabilidade que satisfazem um determinado conjunto de parametros,
escolha aquela que maximiza a entropia.
Para aplicar o princıpio da entropia, supoe-se inicialmente que o conjunto Y = {yj} e
fixo. Essa hipotese sera descartada posteriormente, a medida que o sistema for otimizado.
Com Y fixo, e possıvel assumir que as probabilidades de associacao de cada ponto sao
independentes. A entropia e representada pela seguinte equacao:
H = −∑
x
∑
j
P (x ∈ Cj)logP (x ∈ Cj). (2.2)
A fim de maximizar a entropia, utiliza-se a distribuicao de Gibbs para a distribuicao
de probabilidade. Entao, tem-se
P (x ∈ Cj) =e−βd(x,yj)
Zx
, (2.3)
sendo Zx a funcao de particionamento, dada por:
Zx =∑
k
e−βd(x,yk) (2.4)
O parametro β e o multiplicador de Lagrange e no recozimento determinıstico e
inversamente proporcional a temperatura. Esse multiplicador sera um parametro crucial
do processo de recozimento. E possıvel notar que a diminuicao da distorcao e feita com
o aumento de β. Ha tambem uma relacao entre β e a probabilidade de associacao. Para
β = 0, ha distribuicoes uniformes, nas quais cada ponto esta igualmente associado a todos

2.2 Recozimento determinıstico 31
os conjuntos. A medida em que β aumenta, a distribuicao passa a ser mais discriminatoria,
causando, em β = ∞, a associacao de cada ponto com o agrupamento mais proximo, com
probabilidade igual a 1.
Uma instancia de um dado sistema e definida como um conjunto de amostras Y = yj
e uma particao do conjunto de associacoes V = vxj, em que
vxj =
{
1, se x ∈ Cj,
0, caso contrario.(2.5)
Para cada instancia, e associada uma distorcao representada pela seguinte equacao:
D(Y, V ) =∑
x
∑
j
vxjd(x, yj), (2.6)
sendo essa uma distorcao especıfica para essa solucao de agrupamento forte. Para estimar
a distribuicao de probabilidades, e aplicado o princıpio de maximizacao da entropia na
equacao
E = 〈D(Y, V )〉 =∑
Y,V
P (Y, V )D(Y, V ), (2.7)
obtendo-se:
P (Y, V ) =e−βD(Y,V )
∑
Y ′,V ′ e−βD(Y ′,V ′). (2.8)
A instancia mais provavel e aquela que maximiza 2.8, ou seja, aquela com a menor
distorcao.
Considere a probabilidade marginal
P (Y ) =∑
V
P (Y, V ), (2.9)
como sendo o somatorio realizado em todos os conjuntos de associacao legais. Um conjunto
de associacao legal define uma particao em que cada ponto esta relacionado exatamente
a um unico agrupamento. Usando 2.4 e 2.6, obtem-se

2.2 Recozimento determinıstico 32
∑
V
e−βD(Y,V ) =∏
x
∑
k
e−βd(x,yk) =∏
x
Zz(Y ) = Z(Y ) (2.10)
Assim a probabilidade marginal (2.9), pode ser reescrita como:
P (Y ) =Z(Y )
∑
Y ′ Z(Y ′). (2.11)
Reescrevendo 2.11 sob a forma de Gibbs, obtem-se
P (Y ) =e−βF (Y )
∑
Y ′ e−βF (Y ′), (2.12)
sendo F (Y ′) dado pela seguinte equacao:
F (Y ′) = −1
βlogZ(Y ). (2.13)
A funcao F, como definida aqui, representa a energia livre na analogia com a mecanica
estatıstica. Maximizar a probabilidade P (Y ) requer minimizar a energia F .
Relacionando as equacoes 2.4 e 2.10, tem-se a funcao de custo expressa em termos da
distorcao dada por:
F = −1
β
∑
x
log(∑
k
e−βd(x,yk)). (2.14)
O conjunto Y de pontos que minimiza a energia livre satisfaz a seguinte condicao:
∂
∂yjF = 0 , ∀j. (2.15)
Derivando a equacao 2.14, obtem-se
∑
x
P (x ∈ Cj)∂
∂yjd(x, yj) = 0, (2.16)
sendo P (x ∈ Cj) a probabilidade de associacao. Normalizando 2.16, tem-se
〈∂
∂yjd(x, yj)〉j = 0. (2.17)

2.2 Recozimento determinıstico 33
Para o processo de recozimento, foram feitas algumas restricoes a respeito da distorcao,
quais sejam:
1. d : RS ×RS → [0,∞) e contınua;
2. d(x, y) e uma funcao convexa em y, para um x fixo;
3. d(x, y) → ∞ para ‖y‖ → ∞ para um x fixo.
Considerando a equacao de energia livre representada em 2.16, pode-se obter o mınimo
local desta funcao com um metodo de otimizacao escolhido (por exemplo, o gradiente
descendente). Para β = 0, as probabilidades de associacao sao uniformes e 2.16 pode ser
reescrita como:
∂
∂yj
∑
x
d(x, yj) = 0. (2.18)
Para β = 0, a funcao de custo e convexa e converge para um unico
ponto: o mınimo global nessa configuracao. A fim de evitar que a execucao
se direcione a um mınimo local, e inserido o processo do recozimento. Assim,
a execucao e feita de acordo com o algoritmo 2, apresentado a seguir.
Algoritmo 2: Pseudo-codigo do recozimento determinıstico
1 inıcio
2 QdtGrupos:= n;
3 β = 0;
4 enquanto Nao convergiu faca
5 Fixe o vetor de centroides;
6 Calcule a associacao de probabilidades;
7 Otimize o vetor de centroides;
8 Atualize o valor de β;
O recozimento determinıstico vem sendo aplicado em diversas areas, tais como
segmentacao (Mitra et al., 2000; Cho et al., 2000; Wang et al., 2006; Lee et al., 2008),
classificacao de imagens (Chitroub et al., 2000) e estimacao de parametros (Okamura
et al., 2010).
Rose (1991) sugere varias aplicacoes do seu metodo: agrupamento (tarefa para a qual
o metodo foi desenvolvido), resolucao do problema do caixeiro viajante, e aponta como

2.2 Recozimento determinıstico 34
uma direcao futura o uso na navegacao em robotica. Partindo dessa sugestao e tendo em
vista o uso do recozimento simulado em navegacao de robos moveis, surge a ideia de se
utilizar o recozimento determinıstico em conjunto com o metodo dos campos potenciais
artificiais, na resolucao do problema dos mınimos locais proposto neste trabalho.
Trazendo para o contexto da presente dissertacao, a funcao de custo a ser minimizada
passa a ser a funcao dos campos potenciais. Essa funcao sera parametrizada pela
temperatura (inverso de β). A execucao do algoritmo do recozimento determinıstico
iniciara no instante em que for percebido um ponto de mınimo local no ambiente. Dessa
forma, o sistema passara por um aumento de temperatura e logo apos, ao atingir um valor
de temperatura maximo, sera resfriado gradativamente.
Com o processo do resfriamento, a funcao de custo do sistema sera alterada a cada
iteracao, o que deve impedir que um novo ponto de mınimo seja capaz de prender o
robo novamente. As constantes alteracoes na funcao de custo (por conta da alteracao
da temperatura no processo de resfriamento) possibilitam que determinado ponto do
ambiente, onde anteriormente se formava um ponto de mınimo local, nao represente em
iteracoes subsequentes um ponto de mınimo capaz de impedir que o robo alcance o mınimo
global.

35
3 Metodo de Campos Potenciais
Artificiais com LME inspirado
no recozimento determinıstico
O presente capıtulo apresenta uma nova abordagem para escapar de mınimos locais
em sistemas que implementam o Metodo dos Campos Potenciais Artificiais. Nesta
abordagem, e feita uma adaptacao do metodo de otimizacao denominado Recozimento
Determinıstico, de forma que, ao ficar preso em um ponto de mınimo local, o sistema passa
a executar o metodo desenvolvido neste trabalho, fazendo com que o robo se desprenda
desse ponto e possa continuar o seu caminho. Desta forma, e possıvel perceber que tal
solucao deve ser categorizada entre as solucoes baseadas em escape do ponto de mınimo
local. Outras solucoes dessa mesma categoria (LME) serao apresentadas neste capıtulo,
de forma a possibilitar um comparativo entre estas e a solucao proposta.
3.1 Metodo dos Campos potenciais artificiais
O Metodo dos Campos Potenciais Artificiais, proposto por Khatib (1986), e uma
abordagem utilizada para evitar obstaculos por manipuladores e robos moveis baseada no
conceito de campos potenciais artificiais. Nessa abordagem, a tarefa de evitar colisoes,
considerada um problema com alto nıvel de planejamento, pode ser distribuıda em
diferentes nıveis de controle, permitindo operacoes roboticas em tempo real em ambientes
dinamicos e complexos.
Esse metodo consiste na minimizacao de uma funcao de custo, dada pelos campos
potenciais no ambiente. Para formar a superfıcie da funcao, os pontos de destino do robo
sao definidos como regioes de atracao e os obstaculos como regioes de repulsao. A partir
dessas definicoes, funcoes para o calculo dos campos sao utilizadas e o gradiente negativo
dessas funcoes e calculado (forca eletrica), sendo essa a forca que impulsiona o movimento
do robo.

3.1 Metodo dos Campos potenciais artificiais 36
(a) Mapa do ambiente (b) Campos potenciais
Figura 2: Mapa do ambiente (a) e campos potenciais correspondentes (b)
Em Khatib (1986), e descrito o modelo de forcas para manipuladores. Para robos
moveis, a analise pode ser feita de forma analoga. Como exemplo, considere o ambiente
mostrado na figura 2(a), na qual O e o ponto de destino e xd e um obstaculo. O campo
potencial artificial resultante (Uart) para o mapa da figura 2(a) e mostrado na figura 2(b),
sendo descrito pela seguinte equacao:
Uart(x) = Uxd(x) + UO(x), (3.1)
em que Uxd(x) e UO(x) denotam respectivamente os campos potenciais do obstaculo e do
destino, e x e o vetor de coordenadas do ponto considerado.
Dessa forma, o campo resultante e a soma dos componentes de atracao e repulsao. A
equacao (3.1) pode ser reescrita como
F ∗ = F ∗
xd+ F ∗
O, (3.2)
com:
F ∗
xd= −grad[Uxd
(x)],
F ∗
O = −grad[UO(x)], (3.3)
sendo F ∗
xduma forca atratora que permite que o agente siga para o ponto de destino xd,
correspondente ao termo proporcional do controlador e definida por −k(x−xd). A partir
do obstaculo, suponha um cırculo de raio ρ, com uma barreira no limite desse cırculo.

3.1 Metodo dos Campos potenciais artificiais 37
A forca F ∗
O possui valor infinito nessa barreira, ao passo que se torna insignificante fora
dela. Por conta dessa limitacao, a forca repulsiva deve ser modelada por uma funcao que
tende ao infinito a medida que o agente se aproxima do obstaculo.
A fim de evitar perturbacoes indesejadas, a influencia dos obstaculos so deve existir
em uma area delimitada. Para tanto, Khatib (1986) propoe uma funcao de campos
potenciais na qual ha forca repulsiva apenas no interior de uma area delimitada por uma
certa distancia do obstaculo, que e dada por:
UO(x) =
{
12η(1
ρ− 1
ρO)2 se ρ ≤ ρO
0 se ρ > ρO,(3.4)
em que ρO representa a distancia limite de influencia do campo potencial e ρ representa
a menor distancia para o obstaculo.
Um problema existente no metodo dos campos potenciais e a possibilidade de o robo
ser direcionado para um ponto de mınimo local que nao o seu destino, impedindo o
robo de alcancar o seu objetivo. Na literatura, conforme mencionado na introducao, e
possıvel encontrar diferentes abordagens para solucionar o problema dos mınimos locais
em sistemas de navegacao que implementam o metodo dos campos potenciais artificiais:
Kim e Khosla (1992), Velagic et al. (2006), Cen et al. (2007), Iraji e Manzuri-Shalmani
(2007), Park e Lee (2002), Lee e Park (2003), Janabi-Sharifi e Vinke (1993b). Dentre as
abordagens citadas, algumas tentam impedir que o agente chegue ate um ponto de mınimo
local, enquanto que outras fazem com que ele escape deste ponto apos ter ficado preso.
Em particular, foi proposto em Janabi-Sharifi e Vinke (1993a) e em Lee e Park (2003),
o uso do recozimento simulado, conforme visto na secao 2.1, como uma solucao para o
problema dos mınimos locais. Nessa abordagem, o algoritmo do recozimento simulado e
executado apos ser detectado que o robo esta em um ponto de mınimo que nao o global.
Na execucao do algoritmo, ruıdos sao adicionados, fazendo com que o agente consiga se
desprender do ponto de mınimo. O recozimento simulado permite, por meio de algumas
movimentacoes aleatorias na superfıcie de custo, que pontos com maior energia possam
fazer parte dos pontos que compoem o caminho do robo ate o seu ponto de destino, em
detrimento de pontos com menor energia, sob uma certa probabilidade. E justamente
essa caracterıstica do algoritmo que permite que o robo escape de um ponto de mınimo
local.

3.2 Trabalhos Correlatos - LME 38
3.2 Trabalhos Correlatos - LME
Entre as formas de escape de pontos de mınimos locais por sistemas roboticos que
implementam o Metodo dos Campos Potenciais Artificiais, encontra-se aquela proposta
por Park e Lee (2004), segundo a qual um campo potencial repulsivo no ponto de mınimo
local e gerado seguindo o conceito de um obstaculo virtual. Em Janabi-Sharifi e Vinke
(1993b), e usado o algoritmo do recozimento simulado, fazendo com que o robo escape
do ponto de mınimo. Ambas as solucoes serao apresentadas nas secoes 3.2.1 e 3.2.2
respectivamente.
3.2.1 Obstaculo virtual
O obstaculo virtual, um metodo LME, tem por regra fazer com que o robo se afaste
do ponto de mınimo local do ambiente criando um campo repulsor nas redondezas desse
ponto. Como consequencia, e gerada uma forca repulsiva que e capaz de fazer com que o
robo se afaste do ponto de mınimo local onde ficou preso.
Essa abordagem, classificada como LME, e aplicada apenas apos o robo ter ficado
preso. Com isso, antes da criacao do campo potencial repulsivo, e necessario julgar se o
robo encontra-se preso em um ponto de mınimo local. Em Park e Lee (2004), e apresentado
um criterio para determinacao do mınimo local. Esse criterio e definido a seguir.
Sejam p(t) o vetor de posicao do robo no instante t, Ta um intervalo de tempo definido
e Sa o conjunto das mınimas distancias que o robo se move por Ta em situacoes sem
mınimos locais. E importante ressaltar que Sa e dado por uma distancia pequena, visto
que, quando preso em um ponto de mınimo local, o robo tende a percorrer distancias
curtas. Entao, para t ≥ Ta, se ‖p(t) − p(t − Ta)‖ ≤ Sa, entao o robo esta preso em um
ponto de mınimo local do ambiente, onde ‖.‖ denota a norma do vetor.
No momento em que ha a percepcao de um ponto de mınimo, um campo potencial
extra e gerado na posicao do obstaculo mais proximo do robo. O vetor de posicao deste
obstaculo e representado por pto.
A forca extra possui duas partes distintas: a primeira (ke1) e a segunda (−2ke2ρen).
A primeira parte e responsavel por direcionar a forca pelo vetor tangente de y, onde
y representa o caminho definido pelos obstaculos mais proximos ao robo enquanto este
navega em uma area de mınimo local. A segunda esta na direcao do vetor normal a
y e atrai o robo na direcao do obstaculo mais proximo, a fim de prevenir que o robo

3.2 Trabalhos Correlatos - LME 39
se distancie muito de um caminho efetivo. Essa nova forca potencial previne que novos
pontos de mınimo sejam criados.
Pontos de mınimos locais podem ser vistos como os pontos no ambiente onde a forca
se anula. Calculando a forca repulsiva resultante como sendo F = Frep + Fext, tem-se a
forca total dada por:
F =
{
(ke1et + kr(1ρ− 1
ρ0) 1ρ2
− 2ke2ρ)en ρ ≤ ρ0
ke1e1 − 2ke2ρen ρ > ρ0,(3.5)
sendo que ke1 e ke2 sao ganhos proporcionais aplicados a cada termo que compoe a forca
extra; kr e o coeficiente de repulsao; et e o vetor tangete a y; en e o vetor normal ao
caminho tracado pela interpolacao dos obstaculos mais proximos que foram detectados
pelos sensores; ρ representa a menor distancia para um obstaculo e ρo e o limite de
influencia do campo potencial repulsivo.
Observando o termo ke1et, sabendo que et e um vetor unitario e que ke1 e diferente
de 0, e possıvel ver que a forca F nunca sera igual a zero, de forma que novos pontos de
mınimo nao serao formados.
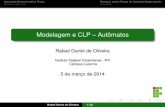
Zhang et al. (2010) explica por meio ilustrativo o metodo do obstaculo virtual na
figura 3. Na figura 3(a) e mostrado um ambiente com obstaculo em forma de U com
a existencia de um ponto de mınimo local no seu interior. Na figura 3(b) e mostrada
a modelagem do campo potencial extra gerado para suprimir o ponto de mınimo pre-
existente. Na figura 3(c) e mostrada a superposicao dos campos potenciais de 3(a) e 3(b).
E na figura 3(d) e mostrada a possiblidade da criacao de novos pontos de mınimos locais,
dependendo da modelagem matematica do campo potencial extra gerado, o que deixa
claro que este metodo tambem e passıvel de falhas.
3.2.2 Campos potenciais com LME inspirado no recozimento
simulado
A fim de solucionar o problema dos mınimos locais no Metodo dos Campos Potenciais
Artificiais, Janabi-Sharifi e Vinke (1993b) propoem escapar dos pontos de mınimo com
o uso do algoritmo do recozimento simulado para ambientes estaticos. Basicamente,
esse metodo consiste em movimentacoes aleatorias pela superfıcie, a fim de encontrar
um local com potencial menor que o potencial do ponto de mınimo local apos o robo
ter ficado preso. Considerando a temperatura como um parametro do metodo, em altas

3.2 Trabalhos Correlatos - LME 40
Figura 3: Explicacao grafica do obstaculo virtual
temperaturas, pontos com potenciais mais altos sao aceitos mais facilmente, enquanto
que, a medida que a temperatura vai diminuindo, apenas pontos com valores mais baixos
de potencial tendem a ser aceitos. Encontrado um ponto com menor potencial, o robo se
dirige ate ele e, apos isso, continua seguindo um caminho composto por pontos de menor
potencial.
No trabalho de Janabi-Sharifi e Vinke (1993b), a tarefa do planejamento de caminho
e dividido em planejamentos local e global. O planejamento de caminho e baseado
nos campos potenciais, onde o custo total e dado pela soma dos potenciais atrativos
e repulsivos presentes no ambiente.
No planejamento local, adequado para situacoes em que nao ha conhecimento previo
dos obstaculos, considera-se inicialmente o custo total como sendo o campo potencial
atrator, definido por:
Uatt = Katt.ρ2goal(q), (3.6)

3.2 Trabalhos Correlatos - LME 41
em que Katt e dado por um valor positivo e ρ2goal(q) e a distancia entre o robo e o ponto
de destino.
Os obstaculos, representados por um campo repulsivo, sao modelados de acordo com
a seguinte equacao:
UO(x) =
Krep(1
ρi(q)− 1
ρeffi)2 se ρi(q) ≤ ρeffi
0 se ρi(q) > ρeffi ,(3.7)
sendo Krep a constante de repulsao, ρi(q) a menor distancia entre o robo e um obstaculo
e ρeffi a distancia de influencia do campo potencial. Delimitando-se a area de influencia
dos campos repulsivos, diminui-se a possibilidade de ocorrencia de pontos de mınimos
locais em areas externas ao limite de influencia.
O algoritmo de planejamento local e executado da seguinte maneira: inicia-se da
posicao inicial e segue-se o gradiente negativo da funcao de custo. Quando o robo fica
preso em um mınimo local, o algoritmo do recozimento simulado e executado.
O algoritmo do recozimento simulado para o planejamento local de caminho consiste
nos passos descritos no algoritmo 3.
O procedimento descrito no algoritmo 3 e repetido sempre que o robo ficar preso em
um mınimo local, ate que a posicao de destino seja alcancada.
Janabi-Sharifi e Vinke (1993b) mostram os resultados obtidos na simulacao feita no
artigo, onde e possıvel visualizar a convergencia do algoritmo. No entanto, o ponto de
mınimo apresentado e um ponto de mınimo local fraco. Segundo os autores, a escolha
dos parametros do recozimento determinam diferencas significativas no desempenho do
algoritmo. Tal observacao pode ser vista na execucao do recozimento simulado nos
experimentos realizados que serao apresentados no capıtulo 4.

3.3 Campos Potenciais com LME inspirado no recozimento determinıstico 42
Algoritmo 3: Pseudo-codigo do recozimento simulado para o metodo dos campospotenciais artificiais - Planejamento Local
1 inıcio
2 P := S;3 //ponto inicial no recozimento simulado T := T0;4 //temperatura inicial do recozimento
5 enquanto T > Tfe ainda nao escapou faca
6 Escolha um vizinho de P de forma aleatoria (P ′);7 Calcule U(P ′), o potencial em P ′;8 Faca ∆ = U(P ′)− U(P );9 se ∆ ≤ 0 entao
10 faca P = P ′;11 //aceite a nova configuracao, com menor energia
12 se ∆ > 0 entao
13 faca P = P ′ com probabilidade exp−∆
T ;
14 se U(P ′) < U(P ) entao15 Escapou;
16 Faca T = rT ;
17 se AindaPreso entao
18 Retorne falha;
19 se escapou entao
20 Retorne P ;
3.3 Campos Potenciais com LME inspirado no
recozimento determinıstico
Nesta secao, sera apresentada uma nova abordagem de LME, que e a principal
contribuicao deste trabalho. O metodo proposto sera baseado no recozimento
determinıstico e tem como objetivo permitir que o robo escape de pontos de mınimos
locais do ambiente com a alteracao da temperatura, que e um parametro da funcao de
custo.
Para o desenvolvimento do metodo, foi usada a funcao de custo apresentada em Khatib
(1986) como o campo potencial artificial, qual seja:
Uatt(X, Y ) = Kattρ2goal, (3.8)

3.3 Campos Potenciais com LME inspirado no recozimento determinıstico 43
(a) Temperatura baixa (b) Temperatura alta
Figura 4: Ambientes com temperaturas diferentes
Urep(X, Y ) =
{
Krep(1ρo
− 1ρint
)2 se ρo ≤ ρint,
0 se ρo > ρint,(3.9)
Utot = Uatt +∑
Urep. (3.10)
Assim como no recozimento determinıstico, havera aqui a insercao do parametro da
temperatura na funcao de custo. A insercao da temperatura provoca um aumento na
area de interferencia dos obstaculos visto que altera a funcao que os representa. Como
consequencia, obtem-se as seguintes funcoes:
Uatt(X, Y ) = Katt
ρ2goalT
, (3.11)
Urep = Krep
( 1ρoT
−1
ρint
)2
, seρoT
≤ ρint. (3.12)
Com a insercao da temperatura na funcao de custo e a variacao da mesma, e possıvel
observar uma alteracao na superfıcie do campo potencial nos ambientes, como pode ser
visto nas figuras 4(a) e 4(b).
A execucao e dada da mesma forma que no Metodo dos Campos Potenciais Artificiais
puro, diferenciando-se apenas no momento em que o robo encontra-se preso no ponto de
mınimo. Nesse instante, o algoritmo implementado (algoritmo 4) e executado ate que o
robo esteja livre do ponto de mınimo local. No algoritmo 4, Tmax representa a temperatura
maxima ate onde o sistema podera esquentar, Tf e a temperatura mınima na qual o sistema
chegara apos o resfriamento, a representa a taxa de aquecimento aplicada ao sistema e r
a taxa de resfriamento.
De forma diferente do que acontece com o uso do recozimento simulado para escapar

3.3 Campos Potenciais com LME inspirado no recozimento determinıstico 44
Algoritmo 4: Pseudo-codigo do recozimento determinıstico para o metodo doscampos potenciais artificiais - Planejamento Local
1 inıcio
2 P := S; //ponto de mınimo3 T := T0; //temperatura inicial do recozimento
4 enquanto T ≤ Tmaxe ainda nao escapou faca
5 Calcule o novo potencial;6 Siga o gradiente negativo desse potencial;7 Faca T = aT ;
8 enquanto T > Tfe ainda nao escapou faca
9 Calcule o novo potencial;10 Siga o gradiente negativo desse potencial;11 Faca T = rT ;
de mınimos locais, na abordagem proposta, o sistema e iniciado com temperatura T = 1,
e no instante em que o robo fica preso no ponto de mınimo local, essa temperatura e
aumentada gradativamente ate atingir um limiar pre-definido. Apos isto, o sistema e
resfriado novamente, ate T = 1, fazendo com que a funcao de custo retorne a sua forma
original. A temperatura e iniciada com valor “1” a fim de possibilitar a execucao do
metodo dos campos potenciais artificiais com a sua funcao de custo pura, sem interferencia
do parametro da temperatura.
Observando a funcao de custo determinada por Rose (1991), apresentada na equacao
2.14, e comparando-a com a funcao de custo do campo potencial, a ser minimizada,
apresentada em 3.12, percebe que β na primeira e o denominador do expoente de e,
multiplicada pela distancia entre um ponto x e um determinado centroide yK . Desta
forma, tem-se uma divisao dessa distancia pela temperatura. A alteracao da temperatura
nessa situacao, acarreta uma mudanca na influencia de cada centroide em determinado
ponto a ser agrupado: em altas temperaturas, a influencia de todos os centroides e maior.
Na equacao 3.12, a temperatura esta inserida na funcao repulsiva, onde seu aumento
provoca uma alteracao na area de abrangencia do obstaculo, ocasionando uma forca
repulsiva maior.
Na abordagem proposta neste trabalho, o planejamento e local, reativo, sem
conhecimento previo do ambiente, porem com memoria. Todos os obstaculos ja
identificados sao armazenados em uma matriz de obstaculos que continuam a influenciar
na construcao do campo, ainda que tais obstaculos estejam fora do alcance dos sensores.

45
4 Experimentos por simulacao
Neste capıtulo sera apresentado um estudo comparativo entre os quatro algoritmos
apresentados no capıtulo 3 e ainda o metodo dos campos potenciais artificiais puro, sem
nenhum mecanismo de escape de pontos de mınimos locais. Os quatro algoritmos foram
testados por meio das simulacoes realizadas em diversos mapas a fim de determinar as
diferencas entre eles em ambientes variados.
4.1 Ambiente utilizado nas simulacoes
Para a simulacao, foi utilizado um simulador desenvolvido em Matlab, o qual inclui
os modelos cinematico e dinamico do robo simulado. Nesse simulador, supoe-se que o
robo navega em ambiente plano, representado por um mapa no qual ha areas navegaveis e
obstaculos. A representacao do mapa e feita por uma imagem no formato bitmap. Nessa
imagem, as areas brancas sao interpretadas como areas navegaveis enquanto que as areas
pretas sao vistas como obstaculos.
A proporcao utilizada entre as imagens utilizadas como mapa e o ambiente real e de 1
pixel para cada cm2. O sistema de coordenadas global do ambiente tem origem no canto
inferior esquerdo da imagem.
A implementacao do simulador esta dividida em tres blocos distintos: os sensores, a
arquitetura de controle e o modelo do robo.
No bloco responsavel pelo sensoriamento, existem o sistema de localizacao
(responsavel por informar a posicao e a orientacao do robo no sistema de coordenadas
global) e um conjunto de sensores de distancia posicionados sobre o robo, simulando um
cordao de oito sensores de ultrassom (responsavel por fornecer informacoes sobre possıveis
obstaculos proximos ao robo). Os sensores estao localizados nos seguintes angulos: 0, π/4,
π/2, 3π/4, π, 5π/4 , 3π/2 e −π/4, como pode ser visto na figura 5.

4.1 Ambiente utilizado nas simulacoes 46
Figura 5: Posicionamento dos sensores
No segundo bloco, correspondente a arquitetura de controle, e feito o calculo da
velocidade dos motores de cada uma das rodas para a execucao de uma dada tarefa. Para
isso, sao levados em consideracao os dados recebidos por meio da leitura dos sensores.
O calculo das velocidades e feito a cada perıodo de amostragem e essas velocidades sao
passadas ao modelo do robo.
No modulo do modelo do robo e feito o calculo dos valores reais de velocidade para
os motores, levando em consideracao o estado atual do motor, o modelo matematico que
representa a dinamica dos motores e a velocidade desejada. Os motores sao representados
por meio de modelos lineares de segunda ordem.
Com o calculo das velocidades reais efetuado, esses valores sao aplicados para o modelo
cinematico do robo, calculando, portanto, as velocidades reais do robo.
A posicao atual e encontrada por meio da integracao das velocidades, sendo o calculo
refeito a cada perıodo de amostragem.
Convem ressaltar que ha ainda a consideracao de erros no tamanho das rodas, nas
distancias entre as rodas e o sistema de coordenadas do robo e do centro de massa deste,
e que as dimensoes do robo simulado sao 20cm ×25cm.
Ao final de cada simulacao, sao geradas quatro imagens. As figuras 6, 7, 8 e 9
representam os resultados de uma simulacao na qual o robo foi submetido a uma funcao
degrau, considerando que este deveria sair do ponto de origem em (200, 200)cm e chegar

4.1 Ambiente utilizado nas simulacoes 47
ao seu destino em (600, 200)cm. Na figura 6 e possıvel ver o caminho seguido pelo robo.
Analisando este resultado, percebe-se que ha erros modelados, visto que o caminho nao
representa uma reta perfeita como deveria. Na figura 7 sao dadas as posicoes do robo
(em cm e radianos) em relacao ao tempo (em segundos). Na figura 8 sao mostradas
as velocidades do robo em cm/s e rad/s. Finalmente, na figura 9 sao mostradas as
velocidades de cada roda. Cabe salientar que para cada roda ha duas curvas: a azul,
representando a velocidade desejada para aquela roda, e a vermelha, representando a
velocidade real da roda, considerando o modelo dinamico. A analise dessa ultima imagem
permite verificar a existencia de uma modelagem dinamica por conta do comportamento
do grafico em vermelho.
Figura 6: Resultado da simulacao

4.1 Ambiente utilizado nas simulacoes 48
Figura 7: Posicao do robo nos eixos x e y e θ
Figura 8: Velocidades em x, y e θ

4.2 Simulacoes no ambiente de teste 49
Figura 9: Velocidades desejada (em azul) e real (em vermelho) para cada roda
Para a implementacao dos algoritmos de recozimento simulado e determinıstico,
foi desenvolvida uma matriz de obstaculos, a qual e responsavel por armazenar dados
recebidos pelos sensores. Cada celula dessa matriz mede 50 × 50cm e a quantidade de
celulas e determinada pela area do ambiente. Ao ser reconhecido um obstaculo, e feito
o calculo da celula equivalente no ambiente. Na matriz de celulas, o valor na posicao
correspondente e alterado para “1” a fim de sinalizar um obstaculo existente naquela
posicao.
4.2 Simulacoes no ambiente de teste
A fim de demonstrar o funcionamento do metodo dos campos potenciais artificiais
puro, primeiramente foram realizadas simulacoes em ambientes sem pontos de mınimo
local. Nestes ambientes, foi possıvel verificar a convergencia do algoritmo. O resultado de
uma das simulacoes e apresentado na figura 10. Nesse ambiente, ha um unico obstaculo
que provoca a variacao na direcao do robo, mas que ainda assim permite que o mesmo
atinja seu objetivo.
Nessa simulacao, o ponto de partida esta em (200, 100)cm, representado pela marcacao
em vermelho no mapa e o ponto de destino localiza-se em (500, 800)cm, destacado em
verde. A figura 11 mostra a posicao do robo (em cm, para x e y e em radianos para

4.2 Simulacoes no ambiente de teste 50
theta) em funcao do tempo (em segundos). A figura 12 mostra as velocidades em cm/s,
para x e y e em radianos/s para theta). A figura 13 mostra as velocidades para cada
roda. Note que houve o rastreamento da velocidade desejada para cada roda, conforme
se pode ver pela quase coincidencia das curvas em vermelho (velocidade desejada) e azul
(velocidade real).
Figura 10: Resultado da simulacao

4.2 Simulacoes no ambiente de teste 51
Figura 11: Posicao do robo nos eixos x e y e θ
Figura 12: Velocidades em x, y e θ

4.3 Ambiente A1 52
Figura 13: Velocidades desejada (em azul) e real (em vermelho) para cada roda
A seguir, sao apresentados os resultados das simulacoes em ambientes com pontos de
mınimo local.
4.3 Ambiente A1
4.3.1 Simulacoes com o metodo dos Campos Potenciais
Artificiais puro
O primeiro ambiente simulado (figura 14 ) possui um mınimo local no interior de um
obstaculo em formato de U . Esse tipo de mınimo local e bastante citado na literatura,
uma vez que obstaculos desse tipo sao facilmente encontrados em ambientes reais. Nesse
ambiente, fez-se uso de um U raso, o que ocasiona um ponto de mınimo local simples de
possibilitar escape.

4.3 Ambiente A1 53
Figura 14: Resultado da simulacao - Campos potenciais puros no Ambiente A1
Figura 15: Posicao do robo nos eixos x e y e θ - Campos potenciais puros no AmbienteA1

4.3 Ambiente A1 54
Figura 16: Velocidades em x, y e θ - Campos potenciais puros no Ambiente A1
Figura 17: Velocidades desejada (em azul) e real (em vermelho) para cada roda - Campospotenciais puros no Ambiente A1
Para as simulacoes nesse ambiente foram determinados como pontos de partida
e destino os pontos (400,700)cm e (800,200)cm, apresentados em verde e vermelho,
respectivamente, na figura 14. A figura 15 mostra a posicao do robo (em cm, para x
e y e em radianos para theta) em funcao do tempo (em segundos). A figura 16 mostra

4.3 Ambiente A1 55
as velocidades em cm/s, para x e y e em radianos/s para theta). A figura 17 mostra
as velocidades para cada roda. Para cada roda ha duas linhas: a azul, representando a
velocidade desejada, e a vermelha, representando a velocidade real da roda, considerando
o modelo dinamico.
Como esperado, o robo se direcionou para o ponto de mınimo presente no ambiente,
no interior do obstaculo em U . Por nao possuir nenhum mecanismo de escape para estas
situacoes, a simulacao foi interrompida sem que o objetivo fosse alcancado.
Na tabela 1 sao mostrados os parametros utilizados para Katt e para Krep. Nessa
simulacao, o ponto de mınimo local onde o robo estacionou foi x = 552, 6966cm e y =
499, 2723cm. A escolha de outro par de parametros, por vezes, ocasiona o choque entre o
robo e os obstaculos. Na tabela 2 sao mostrados os valores da velocidade media (calculado
a partir da media de todas as velocidades instantaneas durante o percurso), tempo de
execucao e suavidade do caminho para esta simulacao (calculada a partir das medias das
diferencas entre dois angulos de orientacao do robo consecutivos).
Tabela 1: Parametros utilizados na simulacao do Metodo dos Campos Potenciais Puro,para o ambiente A1.
Katt Krep
0,1 0,05
Tabela 2: Parametros de desempenho medidos na simulacao do Metodo dos CamposPotenciais Puro, para o ambiente A1.
Suavidade 0,0416rad
Tempo de execucao 14s
Velocidade media 23cm/s
4.3.2 Simulacoes com Campos Potenciais em conjunto com o
metodo inspirado no Recozimento Simulado
O metodo do recozimento simulado se mostrou bastante dependente da escolha dos
parametros (Katt, Krep, To e da taxa de resfriamento). Uma variacao pequena nesses
parametros ocasionou grande diferenca nos resultados, por vezes resultando em choque

4.3 Ambiente A1 56
entre o robo e os obstaculos e/ou a nao convergencia do algoritmo. A depender dos
parametros utilizados, o tempo de execucao aumentava bastante ate o momento da
convergencia. Janabi-Sharifi e Vinke (1993a) concluem no artigo apresentado que a
escolha otima de parametros pode influenciar drasticamente na execucao do algoritmo.
Ainda segundo Janabi-Sharifi e Vinke (1993a), caminhos razoaveis foram obtidos, ainda
que tais caminhos nao sejam otimos.
O resultado da simulacao e apresentado na figura 18. A figura 19 mostra a posicao do
robo (em cm, para x e y e em radianos para theta) em funcao do tempo (em segundos).
A figura 20 mostra as velocidades em cm/s, para x e y e em radianos/s para theta) e a
figura 21 mostra as velocidades desejada (azul) e real (vermelho) para cada roda.
A tabela 3 mostra os parametros utilizados na simulacao. Na tabela 4 sao mostrados
os valores da velocidade media, tempo de execucao e suavidade do caminho para essa
simulacao.
Figura 18: Resultado da simulacao - Recozimento Simulado no Ambiente A1

4.3 Ambiente A1 57
Figura 19: Posicoes em x, y e θ - Recozimento Simulado no Ambiente A1
Figura 20: Velocidades em, x, y e θ - Recozimento Simulado no Ambiente A1

4.3 Ambiente A1 58
Figura 21: Velocidades desejada (em azul) e real (em vermelho) para cada rodas -Recozimento Simulado no Ambiente A1
Tabela 3: Parametros utilizados na simulacao do Metodo dos Campos Potenciais com orecozimento simulado, para o ambiente A1.
Katt Krep Temperatura
inicial
Taxa de
resfriamento
0,1 0,05 10 0,99
Tabela 4: Parametros de desempenho medidos na simulacao do Metodo dos CamposPotenciais com o recozimento simulado, para o ambiente A1.
Suavidade 0,0453rad
Tempo de execucao 79s
Velocidade media 20cm/s

4.3 Ambiente A1 59
4.3.3 Simulacoes com Campos Potenciais com o Metodo do
Obstaculo Virtual
As simulacoes para o metodo do obstaculo virtual no primeiro ambiente permitiram
que o robo escapasse no ponto de mınimo local e chegasse ao seu objetivo. O resultado
e apresentado na figura 22. A figura 23 mostra a posicao do robo (em cm, para x e y
e em radianos para theta) em funcao do tempo (em segundos). A figura 24 mostra as
velocidades em cm/s, para x e y e em radianos/s para theta) e a figura 25 mostra as
velocidades desejada (azul) e real (vermelho) para cada roda. Na tabela 6 sao mostrados
os valores da velocidade media, tempo de execucao e suavidade do caminho para essa
simulacao.
Figura 22: Resultado da simulacao - Obstaculo Virtual no Ambiente A1

4.3 Ambiente A1 60
Figura 23: Posicoes em x, y e θ - Obstaculo Virtual no Ambiente A1
Figura 24: Velocidades em x, y e θ - Obstaculo Virtual no Ambiente A1

4.3 Ambiente A1 61
Figura 25: Velocidades desejada (em azul) e real (em vermelho) para cada roda -Obstaculo Virtual no Ambiente A1
Tabela 5: Parametros utilizados na simulacao do Metodo dos Campos Potenciais com oobstaculo virtual, para o ambiente A1.
Katt Krep ke1 ke2
0,1 0,05 2,3 1,2
Tabela 6: Parametros de desempenho medidos na simulacao do Metodo dos CamposPotenciais com o obstaculo virtual, para o ambiente A1.
Suavidade 0,0259rad
Tempo de execucao 59s
Velocidade media 25cm/s
4.3.4 Simulacoes com Campos Potenciais com o metodo
inspirado no Recozimento Determinıstico
Com o metodo do recozimento determinıstico implementado junto ao metodo dos
campos potenciais artificiais, foi possıvel escapar do ponto de mınimo local do Ambiente

4.3 Ambiente A1 62
A1 e chegar ao objetivo no mapa, como mostrado na figura 26. Com essa simulacao e
possıvel perceber que o algoritmo proposto resolve o problema para mınimos locais fracos
no ambiente.
A figura 27 mostra a posicao do robo (em cm, para x e y e em radianos para theta)
em funcao do tempo (em segundos). A imagem 28 mostra as velocidades em cm/s, para
x e y e em radianos/s para theta). A figura 29 mostra as velocidades desejada (azul) e
real (vermelho) para cada roda.
Figura 26: Resultado da simulacao - Recozimento Determinıstico no Ambiente A1

4.3 Ambiente A1 63
Figura 27: Posicoes em x, y e θ - Recozimento Determinıstico no Ambiente A1
Figura 28: Velocidades em x, y e θ - Recozimento Determinıstico no Ambiente A1

4.3 Ambiente A1 64
Figura 29: Velocidades desejada (em azul) e real (em vermelho) para cada roda -Recozimento Determinıstico no Ambiente A1
Para esse ambiente, os parametros utilizados estao listados na tabela 7. Na tabela 8
sao mostrados os valores da velocidade media, tempo de execucao e suavidade do caminho
para essa simulacao.
Tabela 7: Parametros utilizados na simulacao do Metodo dos Campos Potenciais com orecozimento determinıstico, para o ambiente A1.
Katt Krep Temperatura
inicial
Taxa de elevacao
da temperatura
Taxa de
resfriamento
Temperatura
maxima
0,1 0,05 1 1,011 0,9997 5
Tabela 8: Parametros de desempenho medidos na simulacao do Metodo dos CamposPotenciais com o recozimento determinıstico, para o ambiente A1.
Suavidade 0,0320rad
Tempo de execucao 96s
Velocidade media 23cm/s

4.3 Ambiente A1 65
Figura 30: Comparativo de caminhos para o ambiente A1
4.3.5 Comparativo dos resultados para o ambiente A1
Na figura 30, sao apresentados os resultados dos quatro metodos para o primeiro
ambiente, onde se pode realizar de forma mais rapida um comparativo acerca dos caminhos
e da convergencia dos metodos. Na tabela 9, ha a apresentacao dos parametros medidos
nestas simulacoes.

4.4 Ambiente A2 66
Tabela 9: Parametros de desempenho obtidos com o Ambiente A1
Parametros Campospotenciaispuro
RecozimentoSimulado
ObstaculoVirtual
RecozimentoDeterminıstico
Suavidade 0,0416rad 0,0453rad 0,0259rad 0,0320radTempo de execucao 14s 79s 59s 96sVelocidade media 23cm/s 20cm/s 25cm/s 23cm/s
4.4 Ambiente A2
4.4.1 Simulacoes com o metodo dos Campos Potenciais
Artificiais puro
Para o Ambiente A2 (figura 31), proposto por Park e Lee (2004), os pontos de partida
e destino estabelecidos foram os mesmos utilizados nas simulacoes do trabalho original,
sendo a partida em (1000, 400)cm e o destino em (100, 200)cm. Esse mapa possui um
obstaculo em forma de U , assim como o primeiro ambiente, com a diferenca de que nesse,
o obstaculo e um pouco mais comprido, o que ocasiona a formacao e um ponto de mınimo
local forte, no interior do obstaculo.
Na simulacao sem nenhum mecanismo de escape do ponto de mınimo local, foi
possıvel observar que o robo se direciona para o interior do obstaculo e fica retido no
ponto de mınimo existente. Esse ponto de mınimo estacionou o robo nas coordenadas
(498, 1947; 400, 8557)cm. O resultado dessa simulacao e apresentado na figura 31. A
figura 32 mostra a posicao do robo (em cm, para x e y e em radianos para theta) em
funcao do tempo (em segundos). A figura 33 mostra as velocidades em cm/s, para x e
y e em radianos/s para theta). A figura 34 mostra as velocidades desejada (azul) e real
(vermelho) para cada roda.

4.4 Ambiente A2 67
Figura 31: Resultado da simulacao - Campos potenciais puros no Ambiente A2
Figura 32: Posicoes em x e y e θ - Campos potenciais puros no Ambiente A2

4.4 Ambiente A2 68
Figura 33: Velocidades em x, y e θ - Campos potenciais puros no Ambiente A2
Figura 34: Velocidades desejada (em azul) e real (em vermelho) para cada roda - Campospotenciais puros no Ambiente A2
Os valores do fator de atracao (Katt) e repulsao (Krep) utilizados na simulacao sao
mostrados na tabela 10. Na tabela 11 sao mostrados os valores da velocidade media,
tempo de execucao e suavidade do caminho para esta simulacao.

4.4 Ambiente A2 69
Tabela 10: Parametros utilizados na simulacao do Metodo dos Campos Potenciais Puro,para o ambiente A2.
Katt Krep
0,1 0,05
Tabela 11: Parametros de desempenho medidos na simulacao do Metodo dos CamposPotenciais Puro, para o ambiente A2.
Suavidade 0,0415rad
Tempo de execucao 25s
Velocidade media 22cm/s
4.4.2 Simulacoes com Campos Potenciais em conjunto com o
metodo inspirado no Recozimento Simulado
Nao foi possıvel encontrar parametros do recozimento simulado que possibilitassem
uma convergencia do algoritmo no ambiente A2. Mesmo com a alteracao desses
parametros, em nenhuma simulacao foi possıvel escapar do interior do obstaculo. Embora
o robo ainda se mova do ponto de mınimo, ele fica aprisionado em um outro ponto ainda
no interior do obstaculo.
Esta situacao ocorre pelo fato de que o criterio de escape do recozimento simulado e
feito em cima da analise do valor do potencial no novo ponto. Como o obstaculo e grande
e o valor do potencial no seu interior e alto, fica difıcil encontrar uma posicao com um
valor de potencial abaixo do ponto de mınimo local onde o robo ficou preso inicialmente.
Com isso, ainda que com as movimentacoes aleatorias no interior do obstaculo, fica difıcil
fazer com que o robo saia do obstaculo e possa seguir o caminho ate o ponto de destino.
Apesar de nao ter sido possıvel conseguir a convergencia desse metodo no ambiente
A2, esse resultado nao significa que o uso do recozimento simulado nao seja capaz de fazer
com que o ponto de mınimo global seja alcancado nessa configuracao. A conclusao tirada
do resultado e que, por nao haver uma metodologia clara na escolha dos parametros para
o recozimento simulado, nao foi possıvel conseguir um grupo de paramentros capaz de
determinar a convergencia.

4.4 Ambiente A2 70
Na tabela 12 sao apresentadas as diversas combinacoes de parametros utilizadas nas
simulacoes e na figura 35 e apresentado o resultado da simulacao feita com os parametros
da primeira linha da tabela. Na tabela 13 sao mostrados os valores da velocidade media,
tempo de execucao e suavidade do caminho para essa simulacao. A figura 36 mostra a
posicao do robo (em cm, para x e y e em radianos para theta) em funcao do tempo (em
segundos). A figura 37 mostra as velocidades em cm/s, para x e y e em radianos/s para
theta). A figura 38 mostra as velocidades desejada (azul) e real (vermelho) para cada
roda.
Figura 35: Resultado da simulacao - Recozimento Simulado no Ambiente A2

4.4 Ambiente A2 71
Figura 36: Posicoes em x, y e θ - Recozimento Simulado no Ambiente A2
Figura 37: Velocidades em x, y e θ - Recozimento Simulado no Ambiente A2

4.4 Ambiente A2 72
Figura 38: Velocidades desejada (em azul) e real (em vermelho) para cada roda -Recozimento Simulado no Ambiente A2
Tabela 12: Parametros utilizados na simulacao do Metodo dos Campos Potenciais com orecozimento simulado, para o ambiente A2.
Katt Krep Temperatura
inicial
Taxa de
resfriamento
0,1 0,05 14 0,9999
0,1 0,05 14 0,999
0,1 0,05 4 0,9999
0,1 0,05 4 0,999
0,1 0,05 54 0,9999
0,1 0,05 54 0,999
0,1 0,05 2400 0,9999
0,1 0,05 2400 0,999

4.4 Ambiente A2 73
Tabela 13: Parametros de desempenho medidos na simulacao do Metodo dos CamposPotenciais com o recozimento simulado, para o ambiente A2.
Suavidade 0,0364rad
Tempo de execucao 35s
Velocidade media 21cm/s
4.4.3 Simulacoes com Campos Potenciais em conjunto com o
metodo inspirado no Obstaculo Virtual
O resultado da simulacao no ambiente A2 com o metodo do obstaculo virtual esta
mostrado na figura 39. Nessa simulacao, e possıvel perceber que, apos o robo ter ficado
preso no ponto de mınimo no interior do obstaculo, e gerada uma forca repulsiva que
direciona o robo para fora do obstaculo. Apos isso, o robo segue o caminho para o ponto
de destino. A figura 40 mostra a posicao do robo (em cm, para x e y e em radianos para
theta) em funcao do tempo (em segundos). A figura 41 mostra as velocidades em cm/s,
para x e y e em radianos/s para theta). A figura 42 mostra as velocidades desejada (azul)
e real (vermelho) para cada roda. Na tabela 15 sao mostrados os valores da velocidade
media, tempo de execucao e suavidade do caminho para esta simulacao.
Figura 39: Resultado da simulacao - Obstaculo Virtual no Ambiente A2

4.4 Ambiente A2 74
Figura 40: Posicoes em x, y e θ - Obstaculo Virtual no Ambiente A2
Figura 41: Velocidades em x, y e θ - Obstaculo Virtual no Ambiente A2

4.4 Ambiente A2 75
Figura 42: Velocidades desejada (em azul) e real (em vermelho) para cada roda -Obstaculo Virtual no Ambiente A2
Tabela 14: Parametros utilizados na simulacao do Metodo dos Campos Potenciais com oobstaculo virtual, para o ambiente A2.
Katt Krep ke1 ke2
0,1 0,05 3,5 3
Tabela 15: Parametros de desempenho medidos na simulacao do Metodo dos CamposPotenciais com o obstaculo virtual, para o ambiente A2.
Suavidade 0,0148rad
Tempo de execucao 115s
Velocidade media 23cm/s
4.4.4 Simulacoes com Campos Potenciais em conjunto com o
metodo inspirado no Recozimento Determinıstico
No ambiente A2, o uso do Recozimento Determinıstico possibilitou a convergencia
para o ponto de destino, permitindo que o robo se desprendesse do ponto de mınimo no
interior do obstaculo e conseguisse seguir um caminho ate seu destino.

4.4 Ambiente A2 76
O resultado da simulacao e apresentado na figura 43. A figura 44 mostra a posicao do
robo (em cm, para x e y e em radianos para theta) em funcao do tempo (em segundos).
A figura 45 mostra as velocidades em cm/s, para x e y e em radianos/s para theta). A
figura 47 mostra as velocidades desejada (azul) e real (vermelho) para cada roda.
Os valores dos parametros utilizados nas simulacoes sao apresentados na tabela 16,
sendo que os resultados mostrados nessa secao correspondem aos parametros da primeira
linha da tabela. Na tabela 17 sao mostrados os valores da velocidade media, tempo de
execucao e suavidade do caminho para esta simulacao.
Figura 43: Resultado da simulacao - Recozimento Determinıstico no Ambiente A2

4.4 Ambiente A2 77
Figura 44: Posicoes em x, y e θ - Recozimento Determinıstico no Ambiente A2
Figura 45: Velocidades em x, y e θ - Recozimento Determinıstico no Ambiente A2

4.4 Ambiente A2 78
Figura 46: Velocidades desejada (em azul) e real (em vermelho) para cada roda -Recozimento Determinıstico no Ambiente A2
Tabela 16: Parametros utilizados nas simulacoes para o metodo do RecozimentoDeterminıstico no Ambiente A2.
Katt Krep Temperatura
inicial
Taxa de elevacao
da temperatura
Taxa de
resfriamento
Temperatura
maxima
0,1 0,05 1 1,11 0,9997 27
0,1 0,05 1 1,011 0,99 5
0,1 0,05 1 1,011 0,99 10
0,1 0,05 1 1,011 0,99 15
0,1 0,05 1 1,111 0,999 5
0,1 0,05 1 1,111 0,999 10
0,1 0,05 1 1,111 0,999 15

4.4 Ambiente A2 79
Figura 47: Velocidades desejada (em azul) e real (em vermelho) para cada roda -Recozimento Determinıstico no Ambiente A2
Tabela 17: Parametros de desempenho medidos na simulacao do Metodo dos CamposPotenciais com o recozimento determinıstico, para o ambiente A2.
Suavidade 0,0636rad
Tempo de execucao 536s
Velocidade media 13,68cm/s
4.4.5 Comparativo dos resultados para o ambiente A2
Na figura 48, sao apresentados os resultados dos quatro metodos para o ambiente A2,
o que permite estabelecer de forma mais rapida uma comparacao entre os caminhos e
analisar as convergencias dos metodos. Na tabela 18, sao apresentados os parametros de
desempenho medidos nas simulacoes com o Ambiente A2.
Observando a figura 48 e possıvel perceber que apenas dois metodos conseguiram
convergir nesse ambiente: o recozimento determinıstico e o obstaculo virtual. Como
esperado, pela existencia do ponto de mınimo local no interior do obstaculo, o metodo
dos campos potenciais artificais puro nao foi capaz de finalizar a tarefa de navegacao. Na
simulacao com o metodo do recozimento simulado, nao foi possıvel encontrar um conjunto
de parametros que possibilitasse a convergencia no ambiente A2.

4.4 Ambiente A2 80
Figura 48: Comparativo de caminhos para o ambiente A2
A analise da tabela permite observar que o metodo do recozimento determinıstico
se mostrou mais suave que o recozimento simulado, como era esperado, por conta das
caracterısticas de ambos os metodos.

4.5 Ambiente A3 81
Tabela 18: Parametros obtidos com o Ambiente A2
Parametros Campospotenciaispuro
RecozimentoSimulado
ObstaculoVirtual
RecozimentoDeterminıstico
Suavidade 0,0415rad 0,0364rad 0,0148rad 0,0636radTempo de execucao 25s 35s 115s 536sVelocidade media 22cm/s 21cm/s 23cm/s 13,68cm/s
4.5 Ambiente A3
4.5.1 Simulacoes com Campos Potenciais Puro
Nesse ambiente, o ponto de mınimo local (499;255)cm foi responsavel por impedir que
o robo chegasse ao seu objetivo, como pode ser visto na figura 49. O ponto de partida
se encontra no interior do obstaculo (900;300)cm e o ponto de destino em (200;100)cm,
apresentados em vermelho e verde, respectivamente. A figura 50 mostra a posicao do robo
(em cm, para x e y e em radianos para theta) em funcao do tempo (em segundos). A
figura 51 mostra as velocidades em cm/s, para x e y e em radianos/s para theta). A
figura 52 mostra as velocidades desejada (azul) e real (vermelho) para cada roda.
Os valores dos parametros utilizados nessa simulacao podem ser vistos na tabela 19.
Na tabela 20 sao mostrados os valores da velocidade media, tempo de execucao e suavidade
do caminho para esta simulacao.
Figura 49: Resultado da simulacao - Campos potenciais puros no Ambiente A3

4.5 Ambiente A3 82
Figura 50: Posicoes em x, y e θ - Campos potenciais puros no Ambiente A3
Figura 51: Velocidades em x, y e θ - Campos potenciais puros no Ambiente A3

4.5 Ambiente A3 83
Tabela 19: Parametros utilizados na simulacao do Metodo dos Campos Potenciais Puro,para o ambiente A3.
Katt Krep
0,1 0,05
Tabela 20: Parametros de desempenho medidos na simulacao do Metodo dos CamposPotenciais Puro, para o ambiente A3.
Suavidade 0,0435radTempo de execucao 25sVelocidade media 23cm/s
Figura 52: Velocidades desejada (em azul) e real (em vermelho) para cada roda - Campospotenciais puros no Ambiente A3
4.5.2 Simulacoes com Campos Potenciais em conjunto com o
metodo inspirado no Recozimento Simulado
Para o ambiente A3, assim como no ambiente A2, nao foi possıvel encontrar um
conjunto de parametros capaz de possibilitar a convergencia. Nesse ambiente tambem
ha um valor de campo potencial muito alto no interior do obstaculo, dificultando a

4.5 Ambiente A3 84
convergencia do recozimento simulado. Encontrar um campo potencial com menor valor
que o ponto de mınimo local interno do obstaculo seria possıvel na porcao do obstaculo
onde nao ha paredes. No entanto, por meio de uma movimentacao aleatoria na superfıcie
se torna difıcil direcionar o robo para essa regiao do ambiente.
Assim, percebe-se que neste ambiente o algoritmo do recozimento simulado, mais uma
vez, nao conseguiu convergencia devido a falta de uma metodologia para a escolha dos
parametros.
Na figura 53 e apresentado o resultado de uma das simulacoes realizadas. A figura
54 mostra a posicao do robo (em cm, para x e y e em radianos para theta) em funcao
do tempo (em segundos). A figura 55 mostra as velocidades em cm/s, para x e y e
em radianos/s para theta). A figura 56 mostra as velocidades desejada (azul) e real
(vermelho) para cada roda.
Na tabela 21 sao apresentados os conjuntos de parametros utilizados nas simulacoes
com este ambiente. Na tabela 22 sao mostrados os valores da velocidade media, tempo
de execucao e suavidade do caminho para esta simulacao.
Figura 53: Resultado da simulacao - Recozimento Simulado no Ambiente A3

4.5 Ambiente A3 85
Figura 54: Posicoes em x, y e θ - Recozimento Simulado no Ambiente A3
Figura 55: Velocidades em x, y e θ - Recozimento Simulado no Ambiente A3

4.5 Ambiente A3 86
Figura 56: Velocidades desejada (em azul) e real (em vermelho) para cada roda -Recozimento Simulado no Ambiente A3
Tabela 21: Parametros utilizados na simulacao do Metodo dos Campos Potenciais com orecozimento simulado, para o ambiente A3.
Katt Krep Temperatura
inicial
Taxa de
resfriamento
0,1 0,05 14 0,9999
0,1 0,05 14 0,999
0,1 0,05 4 0,9999
0,1 0,05 4 0,999
0,1 0,05 54 0,9999
0,1 0,05 54 0,999
0,1 0,05 2400 0,9999
0,1 0,05 2400 0,999

4.5 Ambiente A3 87
Tabela 22: Parametros de desempenho medidos na simulacao do Metodo dos CamposPotenciais com o recozimento simulado, para o ambiente A3.
Suavidade 0,0350rad
Tempo de execucao 36s
Velocidade media 23cm/s
4.5.3 Simulacoes com Campos Potenciais em conjunto com o
Obstaculo Virtual
O resultado da simulacao apresentado na figura 57 mostra que com o obstaculo virtual
foi possıvel escapar do ponto de mınimo local no interior do obstaculo. Ainda que dentro
de um obstaculo com grandes extensoes de paredes e com um ponto de mınimo no seu
interior, foi possıvel a convergencia do algoritmo. A figura 58 mostra a posicao do robo
(em cm, para x e y e em radianos para theta) em funcao do tempo (em segundos). A
figura 59 mostra as velocidades em cm/s, para x e y e em radianos/s para theta). A
figura 60 mostra as velocidades desejada (azul) e real (vermelho) para cada roda.
No ambiente 03, o obstaculo virtual se mostrou superior ao metodo inspirado no
recozimento simulado e ao inspirado no recozimento determinıstico, visto que foi o unico
que conseguiu convergir nesse ambiente. Na tabela 24 sao mostrados os valores da
velocidade media, tempo de execucao e suavidade do caminho para essa simulacao.
Figura 57: Resultado da simulacao - Obstaculo Virtual no Ambiente A3

4.5 Ambiente A3 88
Figura 58: Posicoes em x, y e θ - Obstaculo Virtual no Ambiente A3
Figura 59: Velocidades em x, y e θ - Obstaculo Virtual no Ambiente A3

4.5 Ambiente A3 89
Figura 60: Velocidades desejada (em azul) e real (em vermelho) para cada roda -Obstaculo Virtual no Ambiente A3
Tabela 23: Parametros utilizados na simulacao do Metodo dos Campos Potenciais com oobstaculo virtual, para o ambiente A3.
Katt Krep ke1 ke2
0,1 0,05 3,5 3
Tabela 24: Parametros de desempenho medidos na simulacao do Metodo dos CamposPotenciais com o recozimento simulado, para o ambiente A3.
Suavidade 0,0180rad
Tempo de execucao 97s
Velocidade media 23cm/s
4.5.4 Simulacoes com Campos Potenciais em conjunto com o
metodo inspirado no Recozimento Determinıstico
No ambiente A3, ainda que com o uso do recozimento determinıstico, nao foi possıvel
fazer com que o objetivo fosse atingido pelo robo. Nesse ambiente, o ponto de mınimo

4.5 Ambiente A3 90
local esta nas coordenadas (549,33; 298,2494)cm. Nesse ponto, o algoritmo do recozimento
determinıstico comeca a ser executado. Foram realizadas diversas simulacoes com valores
diferentes de Tf , taxa de aquecimento e de resfriamento. Em todas as simulacoes, no
inıcio do aquecimento, o robo comeca a se mover, ficando preso em um outro ponto de
mınimo, ainda no interior do obstaculo. Com o resfriamento, o robo tende a se movimentar
mais um pouco. No entanto, em nenhuma das simulacoes foi possıvel a convergencia do
algoritmo. Ainda que momentaneamente consiga escapar, nao foi possıvel fazer com que
o robo conseguisse sair do obstaculo e chegasse ao ponto de destino.
Observando o comportamento do sistema no ambiente A3, percebe-se que o metodo
do recozimento determinıstico, assim como o recozimento simulado, pode vir a falhar
em casos que nao seja feita uma escolha de parametros satisfatoria. Assim como no
recozimento simulado, nao ha uma metodologia para uma escolha de parametros no
recozimento determinıstico, o que contribui para a falha em algumas situacoes.
O resultado de uma das simulacoes e apresentado na figura 61. A figura 62 mostra a
posicao do robo (em cm, para x e y e em radianos para theta) em funcao do tempo (em
segundos). A figura 63 mostra as velocidades em cm/s, para x e y e em radianos/s para
theta). A figura 64 mostra as velocidades desejada (azul) e real (vermelho) para cada
roda.
Na tabela 25 sao mostrados os valores da velocidade media, tempo de execucao e
suavidade do caminho para essa simulacao.
Figura 61: Resultado da simulacao - Recozimento Determinıstico no Ambiente A3

4.5 Ambiente A3 91
Figura 62: Posicoes em x, y e θ - Recozimento Determinıstico no Ambiente A3
Figura 63: Velocidades em x, y e θ - Recozimento Determinıstico no Ambiente A3

4.5 Ambiente A3 92
Figura 64: Velocidades desejada (em azul) e real (em vermelho) para cada roda -Recozimento Determinıstico no Ambiente A3
Tabela 25: Parametros utilizados nas simulacoes para o metodo do RecozimentoDeterminıstico no Ambiente A3.
Katt Krep Temperatura
inicial
Taxa de elevacao
da temperatura
Taxa de
resfriamento
Temperatura
maxima
0,1 0,05 1 1,011 0,99 5
0,1 0,05 1 1,011 0,99 10
0,1 0,05 1 1,011 0,99 15
0,1 0,05 1 1,001 0,9999 50
0,1 0,05 1 1,111 0,999 50
0,1 0,05 1 1,111 0,999 15

4.5 Ambiente A3 93
Tabela 26: Parametros de desempenho medidos na simulacao do Metodo dos CamposPotenciais com o recozimento determinıstico, para o ambiente A3.
Suavidade 0,0604rad
Tempo de execucao 85s
Velocidade media 13cm/s
4.5.5 Comparativo dos resultados para o ambiente A3
Na figura 65, sao apresentados os resultados dos quatro metodos para o ambiente A3,
de onde se pode realizar de forma mais rapida um comparativo acerca dos caminhos e
da convergencia dos metodos e na tabela 27 sao apresentados os parametros obtidos das
simulacoes neste ambiente.
E possıvel observar que apenas o obstaculo virtual conseguiu finalizar a tarefa de
navegacao, chegando ao ponto de destino no ambiente. No entanto, cabe ressaltar que as
falhas nos metodos do recozimento simulado e recozimento determinıstico se deram por
conta da ausencia de uma metodologia para encontrar um conjunto de parametros que
fosse capaz de possibilitar a convergencia.
Tabela 27: Parametros obtidos com o Ambiente A3
Parametros Campospotenciaispuro
RecozimentoSimulado
ObstaculoVirtual
RecozimentoDeterminıstico
Suavidade 0,0435rad 0,035rad 0,018rad 0,0604radTempo de execucao 25s 36s 97s 85sVelocidade media 23cm/s 23cm/s 23cm/s 13cm/s

4.5 Ambiente A3 94
Figura 65: Comparativo de caminhos no ambiente A3

4.6 Ambiente A4 95
4.6 Ambiente A4
4.6.1 Simulacoes com Campos Potenciais Puro
No Ambiente A4, proposto por Janabi-Sharifi e Vinke (1993a), a simulacao foi
realizada tendo como ponto de partida (500;0)cm e como ponto de destino (100; 500)cm,
apresentados em vermelho e verde, respectivamente, na figura 66. A figura 67 mostra a
posicao do robo (em cm, para x e y e em radianos para theta) em funcao do tempo (em
segundos). A figura 68 mostra as velocidades em cm/s, para x e y e em radianos/s para
theta). A figura 69 mostra as velocidades desejada (azul) e real (vermelho) para cada
roda.
Como esperado, por existir um ponto de mınimo local no ambiente, o robo ficou preso
nesse ponto de mınimo (43; 252)cm, nao conseguindo convergir e chegar ao seu ponto de
destino. O valor do Krep para este ambiente foi de 0, 03. Neste caso, optou-se por diminuir
um pouco o valor do Krep por conta da parede horizontal existente no inıcio do caminho.
Um valor mais alto do Krep provocava oscilacoes na movimentacao. Com a reducao desse
valor, foi possıvel obter um resultado mais suave.
A tabela 29 mostra os valores medidos na simulacao.
Figura 66: Resultado da simulacao - Campos potenciais puros no Ambiente A4

4.6 Ambiente A4 96
Figura 67: Posicoes em x, y e θ - Campos potenciais puros no Ambiente A4
Figura 68: Velocidades em x, y e θ - Campos potenciais puros no Ambiente A4

4.6 Ambiente A4 97
Figura 69: Velocidades desejada (em azul) e real (em vermelho) para cada roda - Campospotenciais puros no Ambiente A4
Tabela 28: Parametros utilizados na simulacao do Metodo dos Campos Potenciais Puro,para o ambiente A4.
Katt Krep
0,1 0,03
Tabela 29: Parametros de desempenho medidos na simulacao do Metodo dos CamposPotenciais Puro, para o ambiente A4.
Suavidade 0,0418rad
Tempo de execucao 42s
Velocidade media 17cm/s
4.6.2 Simulacoes com Campos Potenciais em conjunto com o
metodo inspirado no Recozimento Simulado
As simulacoes feitas com o recozimento simulado em conjunto com o metodo dos
campos potenciais artificiais no ambiente A4 obtiveram resultados positivos quanto a

4.6 Ambiente A4 98
convergencia. Foram simulados com diversos valores de temperatura inicial e taxa de
resfriamento e, ainda assim, o algoritmo convergiu em todas as simulacoes realizadas.
Nao houve alteracoes significativas. A alta taxa de convergencia se da pelo fato de o
ponto de mınimo local existente no ambiente nao ser um ponto de mınimo forte.
O resultado, apesar de diferenciar-se do apresentado em Janabi-Sharifi e Vinke
(1993a), foi considerado satisfatorio. Tal divergencia se da pelo fato do recozimento
simulado ser um metodo com escolhas nao determinısticas.
Na figura 70 e apresentado o resultado da simulacao. A figura 71 mostra a posicao do
robo (em cm, para x e y e em radianos para theta) em funcao do tempo (em segundos).
A figura 72 mostra as velocidades em cm/s, para x e y e em radianos/s para theta). A
figura 73 mostra as velocidades desejada (azul) e real (vermelho) para cada roda.
A tabela 31 mostra os valores medidos na simulacao.
Figura 70: Resultado da simulacao - Recozimento Simulado no Ambiente A4

4.6 Ambiente A4 99
Figura 71: Posicoes em x, y e θ - Recozimento Simulado no Ambiente A4
Figura 72: Velocidades em, x, y e θ - Recozimento Simulado no Ambiente A4

4.6 Ambiente A4 100
Figura 73: Velocidades desejada (em azul) e real (em vermelho) para cada roda -Recozimento Simulado no Ambiente A4
Tabela 30: Parametros utilizados na simulacao do Metodo dos Campos Potenciais com orecozimento simulado, para o ambiente A4.
Katt Krep Temperatura
inicial
Taxa de
resfriamento
0,1 0,05 4 0,999
Tabela 31: Parametros de desempenho medidos na simulacao do Metodo dos CamposPotenciais com o recozimento simulado, para o ambiente A4.
Suavidade 0,0453rad
Tempo de execucao 43s
Velocidade media 23cm/s
4.6.3 Simulacoes com Campos Potenciais em conjunto com o
Obstaculo Virtual
No ambiente A4, o metodo do obstaculo virtual se mostrou satisfatorio, permitindo o
escape do ponto de mınimo e a convergencia ate o ponto de destino. O resultado para essa

4.6 Ambiente A4 101
simulacao e mostrado na figura 74. A figura 75 mostra a posicao do robo (em cm, para x
e y e em radianos para theta) em funcao do tempo (em segundos). A figura 76 mostra
as velocidades em cm/s, para x e y e em radianos/s para theta). A figura 77 mostra
as velocidades desejada (azul) e real (vermelho) para cada roda. A tabela 33 mostra os
valores medidos na simulacao.
Figura 74: Resultado da simulacao - Obstaculo Virtual no Ambiente A4
Figura 75: Posicoes em x, y e θ - Obstaculo Virtual no Ambiente A4

4.6 Ambiente A4 102
Figura 76: Velocidades em x, y e θ - Obstaculo Virtual no Ambiente A4
Figura 77: Velocidades desejada (em azul) e real (em vermelho) para cada roda -Obstaculo Virtual no Ambiente A4

4.6 Ambiente A4 103
Tabela 32: Parametros utilizados na simulacao do Metodo dos Campos Potenciais com oobstaculo virtual, para o ambiente A4.
Katt Krep ke1 ke2
0,1 0,03 0,1 0,3
Tabela 33: Parametros de desempenho medidos na simulacao do Metodo dos CamposPotenciais com o obstaculo virtual, para o ambiente A4.
Suavidade 0,0384rad
Tempo de execucao 54s
Velocidade media 17cm/s
4.6.4 Simulacoes com Campos Potenciais em conjunto com o
metodo inspirado no Recozimento Determinıstico
Na simulacao no ambiente A4, com o metodo do recozimento determinıstico, foi
possıvel escapar do ponto de mınimo (43,64, 252,3)cm. As simulacoes realizadas com
varios valores para a temperatura maxima, para as taxas de aquecimento e resfriamento,
mostraram que, para ambientes mais simples como este, a temperatura maxima pode
ser baixa (4 - para a simulacao com melhor resultado) e o sistema pode ser aquecido e
resfriado de forma mais rapida, como mostrado na tabela 34. Com valores mais altos para
a temperatura maxima e com aquecimento e resfriamento mais lento tambem possibilitou
a convergencia do algoritmo. No entanto, o robo tendia a se afastar mais do ponto de
mınimo antes de retornar para o seu caminho. Isso pode ser justificado pelo fato de que
com a temperatura final mais alta, a forca repulsiva passa a ter valores mais altos, visto
que a temperatura influencia diretamente no modulo da forca.
O resultado da simulacao e apresentado na figura 78. A figura 79 mostra a posicao do
robo (em cm, para x e y e em radianos para theta) em funcao do tempo (em segundos).
A figura 80 mostra as velocidades em cm/s, para x e y e em radianos/s para theta).
A figura 81 mostra as velocidades desejada (azul) e real (vermelho) para cada roda. A
tabela 35 mostra os valores medidos na simulacao.

4.6 Ambiente A4 104
Tabela 34: Parametros utilizados nas simulacoes para o metodo do RecozimentoDeterminıstico no Ambiente A4.
Katt Krep Temperatura
inicial
Taxa de elevacao
da temperatura
Taxa de
resfriamento
Temperatura
maxima
0,1 0,03 1 1,01 0,99 4
Tabela 35: Parametros de desempenho medidos nas simulacoes para o metodo doRecozimento Determinıstico no Ambiente A4.
Suavidade 0,0189rad
Tempo de execucao 53s
Velocidade media 24cm/s
Figura 78: Resultado da simulacao - Recozimento Determinıstico no Ambiente A4

4.6 Ambiente A4 105
Figura 79: Posicoes em x,y e θ - Recozimento Determinıstico no Ambiente A4
Figura 80: Velocidades em x, y e θ - Recozimento Determinıstico no Ambiente A4

4.6 Ambiente A4 106
Figura 81: Velocidades desejada (em azul) e real (em vermelho) para cada - rodaRecozimento Determinıstico no Ambiente A4
4.6.5 Comparativo dos resultados para o ambiente A4
Na figura 82, sao apresentados os resultados dos quatro metodos para o ambiente A4,
de onde pode-se realizar de forma mais rapida um comparativo acerca dos caminhos e da
convergencia dos metodos, enquanto que na tabela 36 e possıvel verificar os parametros
extraıdos a partir das simulacoes no ambiente A4.
Exceto pelo metodo dos campos potenciais artificiais puro, os outros tres conseguiram
fazer com que o robo escapasse do ponto de mınimo local existente no ambiente,
possibilitando que o ponto de destino fosse alcancado. E possıvel perceber que dentre
os quatro metodos, o recozimento determinıstico possibilitou um caminho mais suave que
os demais, o que pode ser confirmado na tabela 36.

4.6 Ambiente A4 107
Figura 82: Comparativo de caminhos no ambiente A4

4.7 Ambiente A5 108
Tabela 36: Parametros obtidos com o Ambiente A4
Parametros Campospotenciaispuro
RecozimentoSimulado
ObstaculoVirtual
RecozimentoDeterminıstico
Suavidade 0,0418rad 0,0453rad 0,0384rad 0,0189radTempo de execucao 42s 43s 54s 53sVelocidade media 17cm/s 23cm/s 17cm/s 24cm/s
4.7 Ambiente A5
4.7.1 Simulacoes com Campos Potenciais Puro
No ambiente A5, proposto em Park e Lee (2002), assim como nos outros quatro
ambientes apresentados anteriormente, o metodo dos campos potenciais artificiais, por si
so, nao foi capaz de garantir que o robo chegasse ao seu destino. O robo ficou preso em
um ponto de mınimo local provocado pelo arranjo de obstaculos, como pode ser visto na
figura 83.
A figura 84 mostra a posicao do robo (em cm, para x e y e em radianos para theta)
em funcao do tempo (em segundos). A figura 85 mostra as velocidades em cm/s, para
x e y e em radianos/s para theta). A figura 86 mostra as velocidades desejada (azul) e
real (vermelho) para cada roda. Os parametros utilizados sao mostrados na tabela 37 e
os parametros de desempenho medidos sao mostrados na tabela 38.
Tabela 37: Parametros utilizados na simulacao do Metodo dos Campos Potenciais Puro,para o ambiente A5.
Katt Krep
0,1 0,03
Tabela 38: Parametros de desempenho medidos na simulacao do Metodo dos CamposPotenciais Puro, para o ambiente A5.
Suavidade 0,0082rad
Tempo de execucao 232s
Velocidade media 27cm/s

4.7 Ambiente A5 109
Figura 83: Resultado da simulacao - Campos potenciais puros no Ambiente A5
Figura 84: Posicoes em x, y e θ - Campos potenciais puros no Ambiente A5

4.7 Ambiente A5 110
Figura 85: Velocidades em x, y e θ - Campos potenciais puros no Ambiente A5
Figura 86: Velocidades desejada (em azul) e real (em vermelho) para cada roda - Campospotenciais puros no Ambiente A5

4.7 Ambiente A5 111
4.7.2 Simulacoes com Campos Potenciais em conjunto com o
metodo inspirado no Recozimento Simulado
Para o ambiente A5, foram realizadas diversas simulacoes, com os parametros
mostrados na tabela 39. Em algumas destas simulacoes, houve inclusive o choque entre
o robo e o obstaculo. Nao foi possıvel conseguir a convergencia desse algoritmo para o
ambiente A5, ainda que usando os parametros apresentados em Park et al. (2001) (linha
02 da tabela). A falha pode ser justificada pela falta de uma metodologia clara para a
escolha dos parametros do recozimento simulado.
A tabela 40 mostra os valores obtidos com a simulacao.
Figura 87: Resultado da simulacao - Campos potenciais com recozimento simulado noAmbiente A5

4.7 Ambiente A5 112
Tabela 39: Parametros utilizados na simulacao do Metodo dos Campos Potenciais com orecozimento simulado, para o ambiente A5.
Katt Krep Temperatura
inicial
Taxa de
resfriamento
0,1 0,05 10 0,9999
0,1 0,05 10 0,999
0,1 0,05 10 0,99
0,1 0,05 4 0,9999
0,1 0,05 4 0,999
0,1 0,05 4 0,99
Tabela 40: Parametros de desempenho medidos na simulacao do Metodo dos CamposPotenciais com o recozimento simulado, para o ambiente A5.
Suavidade 0,0166rad
Tempo de execucao 92s
Velocidade media 27cm/s
4.7.3 Simulacoes com Campos Potenciais em conjunto com o
Obstaculo Virtual
No ambiente A5, nao foi possıvel a convergencia deste algoritmo. Nas diversas
simulacoes realizadas, o robo chocou-se contra os obstaculos, ainda que fosse alterado
o valor da constante de repulsao para a forca extra criada.
O resultado de uma das simulacoes e apresentado na figura 88. A figura 89 mostra a
posicao do robo (em cm, para x e y e em radianos para theta) em funcao do tempo (em
segundos). A figura 90 mostra as velocidades em cm/s, para x e y e em radianos/s para
theta). A figura 91 mostra as velocidades desejada (azul) e real (vermelho) para cada
roda.
A tabela 42 mostra os valores obtidos com a simulacao.

4.7 Ambiente A5 113
Figura 88: Resultado da simulacao - Obstaculo Virtual no Ambiente A5
Figura 89: Posicoes em x, y e θ - Obstaculo Virtual no Ambiente A5

4.7 Ambiente A5 114
Figura 90: Velocidades em x, y e θ - Obstaculo Virtual no Ambiente A5
Figura 91: Velocidades desejada (em azul) e real (em vermelho) para cada roda.-Obstaculo Virtual no Ambiente A5

4.7 Ambiente A5 115
Tabela 41: Parametros utilizados na simulacao do Metodo dos Campos Potenciais com oobstaculo virtual, para o ambiente A5.
Katt Krep ke1 ke2
0,1 0,05 2 2,5
Tabela 42: Parametros de desempenho medidos na simulacao do Metodo dos CamposPotenciais com o recozimento simulado, para o ambiente A5.
Suavidade 0,0087rad
Tempo de execucao 78s
Velocidade media 29cm/s
4.7.4 Simulacoes com Campos Potenciais em conjunto com o
metodo inspirado no Recozimento Determinıstico
Na simulacao do metodo em conjunto com o recozimento determinıstico, executada
sobre o ambiente A5, o robo conseguiu escapar do ponto de mınimo local encontrado no
ambiente e chegar ao seu destino, como pode ser visto na figura 92. A figura 93 mostra a
posicao do robo (em cm, para x e y e em radianos para theta) em funcao do tempo (em
segundos). A figura 94 mostra as velocidades em cm/s, para x e y e em radianos/s para
theta). A figura 95 mostra as velocidades desejada (azul) e real (vermelho) para cada
roda.
Os parametros utilizados sao apresentados na tabela 43 e os parametros obtidos com
a simulacao, na tabela 44.
Nesse ambiente, simulacoes com valores mais baixos de temperatura ocasionaram um
afastamento menor do robo em relacao ao grupo de obstaculos. Isto se da pela influencia
direta do parametro da temperatura na forca repulsiva.

4.7 Ambiente A5 116
Figura 92: Resultado da simulacao - Recozimento Determinıstico no Ambiente A5
Figura 93: Posicoes em x, y e θ - Recozimento Determinıstico no Ambiente A5

4.7 Ambiente A5 117
Figura 94: Velocidades em x, y e θ - Recozimento Determinıstico no Ambiente A5
Figura 95: Velocidades desejada (em azul) e real (em vermelho) para cada roda -Recozimento Determinıstico no Ambiente A5

4.7 Ambiente A5 118
Tabela 43: Parametros utilizados nas simulacoes para o metodo do RecozimentoDeterminıstico no Ambiente A5.
Katt Krep Temperatura
inicial
Taxa de elevacao
da temperatura
Taxa de
resfriamento
Temperatura
maxima
0,1 0,03 1 1,011 0,9999 4
Tabela 44: Parametros de desempenho medidos na simulacao do Metodo dos CamposPotenciais com o recozimento determinıstico, para o ambiente A5..
Suavidade 0,134rad
Tempo de execucao 238s
Velocidade media 27cm/s
4.7.5 Comparativo dos resultados para o ambiente A5
Na figura 96, sao apresentados os resultados dos quatro metodos para o ambiente A5,
de onde pode-se realizar de forma mais rapida um comparativo acerca dos caminhos e
da convergencia dos metodos e na tabela 45 sao mostrados os parametros extraıdos das
simulacoes no ambiente A5.
E possıvel perceber que apenas o metodo do recozimento determinıstico possibilitou
que o robo escapasse do ponto de mınimo local e chegasse ao ponto de destino.
Tabela 45: Parametros de desempenho obtidos com o Ambiente A5
Parametros Campospotenciaispuro
RecozimentoSimulado
ObstaculoVirtual
RecozimentoDeterminıstico
Suavidade 0,0082rad 0,166rad 0,0087rad 0,134radTempo de execucao 232s 92s 78s 238sVelocidade media 27cm/s 27cm/s 29cm/s 27cm/s

4.7 Ambiente A5 119
Figura 96: Comparativo de caminhos no ambiente A5

4.8 Analise dos resultados 120
4.8 Analise dos resultados
Neste trabalho foi proposta uma nova abordagem para escapar de pontos de mınimos
locais que surgem frequentemente quando se usa o metodo dos campos potenciais
artificiais.
A metodologia desenvolvida foi inspirada no metodo de otimizacao de Rose (1991), o
recozimento determinıstico, de forma similar a adaptacao feita por Janabi-Sharifi e Vinke
(1993a) para o recozimento simulado para a navegacao de robos moveis.
Com as simulacoes realizadas, foi possıvel perceber que, em quase todos os casos, ha a
convergencia do algoritmo do recozimento determinıstico e que essa convergencia depende
muito da escolha dos parametros do metodo (temperatura inicial, temperatura final, taxa
de resfriamento e taxa de aquecimento). Esta observacao ja havia sido feita por Rose
(1991), em sua tese de doutorado e, no campo da navegacao de robos moveis, havia sido
citada por Janabi-Sharifi e Vinke (1993a) para o caso do recozimento simulado. A escolha
de parametros ineficientes pode provocar tanto a nao-convergencia do metodo como
tambem uma significativa queda de desempenho, aumentando o tempo de convergencia.
Os resultados das simulacoes mostram que o metodo baseado no uso do recozimento
determinıstico apresenta resultados superiores ao recozimento simulado, quando analisado
o tipo de ambiente onde esta sendo feita a navegacao. Observando a qualidade dos
resultados, o recozimento determinıstico tambem mostrou-se superior ao recozimento
simulado ao tracar caminhos mais suaves. Esse fato ocorre gracas a forma como o
metodo e implementado: ruıdo inserido na funcao de custo. Com essa insercao, evita-se a
movimentacao aleatoria pela superfıcie da funcao de custo. E perceptıvel tambem, como
mostrado nas figuras de representacao grafica das velocidades em funcao do tempo, que
a variacao de velocidades e mais suave no metodo do recozimento determinıstico. Os
resultados de ambos os metodos deixam claro que a causa da nao-convergencia desses
metodos em determinado ambiente e a escolha de parametros, que precisa ser alterada
para a cada configuracao. No entanto, nao existe uma metodologia clara para realizar a
escolha desses parametros de forma otima, o que acaba por diminuir a eficiencia desses
metodos.
Quando comparado ao obstaculo virtual, o recozimento determinıstico se mostrou
inferior em obstaculos com superfıcies extensas como e o caso do ambiente A3. Isto se
da pelo fato de que o metodo do obstaculo virtual cria um novo campo repulsivo em
um unico ponto do ambiente. Com isto e criada uma forca repulsiva no sentido oposto

4.8 Analise dos resultados 121
ao do ponto do obstaculo, conduzindo o robo para fora do ponto de mınimo local. No
recozimento determinıstico, com a insercao da temperatura na funcao de custo, durante o
aquecimento, ha um aumento no valor da forca repulsiva. No entanto, este aumento e feito
em todas as forcas. Com isso, o processo de fuga do interior do obstaculo e dificultado.
No entanto, as simulacoes realizadas com o metodo do obstaculo virtual conseguiram
mostrar algumas das desvantagens desse metodo, apresentadas em Zhang et al. (2010):
• Dificuldades na escolha dos parametros do campo potencial extra.
• Determinados parametros sao adequados apenas para alguns ambientes,
• Rota de fuga do ponto de mınimo local pode ser muito longa.
No ambiente A5, o algoritmo proposto neste trabalho se mostrou superior ao metodo
do obstaculo virtual, visto que esse ultimo nao convergiu neste ambiente. Por nao possuir
um mınimo local forte neste ambiente, suspeitou-se que as falhas do recozimento simulado
e do obstaculo virtual poderiam ter sido causadas por sua grande dimensao, visto que este
mede aproximadamente o triplo dos demais. Com isso, o ambiente A5 foi reduzido a um
terco de sua dimensao e novos testes foram executados. Nestes novos testes, as tres
abordagens de escape conseguiram finalizar a tarefa de navegacao, como pode ser visto
na figura 97.
Ainda que nao seja possıvel provar a causa da falha no ambiente A5 com base nos
resultados obtidos, pode-se dizer que ha um forte indıcio que a dimensao do ambiente
contribuiu para esta falha. E importante salientar que a abordagem proposta nesse
trabalho nao sofreu influencia por conta da dimensao do ambiente, tendo convergido
nos dois experimentos.
Durante a realizacao dos experimentos foi possıvel perceber que a escolha de
parametros e crucial para a convergencia dos tres metodos de escape. No obstaculo
virtual, por exemplo, o parametro do campo potencial repulsivo deve ser ajustado a cada
ambiente. Park e Lee (2004) nao apresentam em seu trabalho uma forma efetiva para a
escolha desses parametros. Alem disso, por conta do campo potencial repulsivo extra, e
possıvel que o robo necessite realizar um caminho maior que o habitual, a fim de escapar
da regiao de mınimo local.
Na tabela 46 e mostrado um resumo das convergencias de cada metodo por ambiente.
Nas linhas estao listados os quatro metodos implementados. Nas colunas sao citados os

4.8 Analise dos resultados 122
(a) Recozimento Simulado (b) Obstaculo virtual
(c) Recozimento determinıstico
Figura 97: Comparativo de caminhos no ambiente A5 reduzido.
cinco ambientes utilizados nas simulacoes e na interseccao linha × coluna e indicado se
houve ou nao a convergencia dos metodos para cada ambiente. Essa sinalizacao e feita
por um X quando nao houve convergencia e por X quando foi possıvel escapar do ponto
de mınimo local e chegar ao ponto de destino.
Tabela 46: Resumo dos resultados
Metodos/Ambientes
Campos potenciais X X X X X
Recozimento simulado X X X X X
Obstaculo virtual X X X X X
Recozimento determinıstico X X X X X

4.8 Analise dos resultados 123
Conclui-se, portanto, que e valido utilizar o metodo proposto para escapar de pontos
de mınimos locais, visto que este metodo foi capaz de produzir resultados satisfatorios
quando comparados com outras solucoes ja existentes. Convem ressaltar que a escolha de
parametros se mostrou um fator determinante para a convergencia do metodo proposto.
Assim, nos ambientes onde o algoritmo do recozimento determinıstico nao conseguiu
finalizar a tarefa de navegacao, o fracasso do algoritmo pode ser justificado pelo fato
de nao ter encontrado um conjunto de parametros ideais para aqueles ambientes. Uma
possıvel solucao para este problema pode estar no trabalho de Nooraliei e Altun (2009),
que mostra a utilizacao de automatos de aprendizado, uma abordagem adaptativa, para
a selecao de parametros no recozimento simulado.

124
5 Conclusoes e trabalhos futuros
O desenvolvimento desse trabalho resultou em uma nova abordagem possıvel de ser
utilizada em conjunto com o metodo dos campos potenciais artificiais. Esta abordagem
e classificada como uma abordagem LME (Local Minima Escape), visto que e acionada
apos o robo ter ficado preso em um ponto de mınimo local do ambiente. A solucao
aqui proposta foi capaz de resolver muitos dos possıveis problemas de mınimos locais do
ambiente, permitindo que o robo escapasse de um ponto de mınimo, apos ter ficado preso,
e chegasse ao seu ponto de destino, cumprindo assim a tarefa de navegacao.
O algoritmo falhou em apenas um dos ambientes testados. Com isso, os resultados
obtidos sao encorajadores e a falha se deve a dificuldade de se encontrar um conjunto de
parametros ideais a cada ambiente. Este problema na sintonia de parametros ja havia
sido citado por Rose (1991) e por Kirkpatrick et al. (1983), como sendo um fator com
grande influencia na convergencia dos metodos.
A inspiracao para este trabalho surgiu a partir do trabalho desenvolvido por Janabi-
Sharifi e Vinke (1993a), porem, como visto, o metodo aqui desenvolvido se mostrou
superior nas simulacoes: a taxa de convergencia foi maior e os resultados dos caminhos
foram melhores com o metodo inspirado no recozimento determinıstico.
Alem disso, com a abordagem aqui proposta foi possıvel resolver alguns problemas
existentes no trabalho de Janabi-Sharifi e Vinke (1993a), inerentes ao proprio recozimento
simulado, tais como movimentacao aleatoria na superfıcie de energia, que ocasiona uma
movimentacao aleatoria sobre o ambiente ate que o robo esteja completamente livre do
ponto de mınimo local. Essa movimentacao aleatoria pode, inclusive, provocar o choque
entre o robo e um obstaculo, visto que, por conta do algoritmo do recozimento simulado,
configuracoes com valores mais altos de energia podem ser aceitas. Assim, uma posicao
no ambiente com alto valor de campo potencial, como um obstaculo, pode ser aceita
em altas temperaturas, o que resulta no choque entre robo e obstaculo. Com o metodo
inspirado no recozimento determinıstico, nao ha movimentacao aleatoria pelo ambiente,

5 Conclusoes e trabalhos futuros 125
fazendo com que o caminho se torne mais suave.
Quando comparado ao obstaculo virtual, o algoritmo inspirado no recozimento
determinıstico falhou em um ambiente onde o metodo do obstaculo virtual obteve
convergencia. No entanto, conseguiu convergir em um ambiente onde o obstaculo virtual
falhou, possivelmente pela disposicao dos obstaculos e pelo tamanho do ambiente. Com as
observacoes feitas em cima dos resultados obtidos neste trabalho, sugere-se que o metodo
do obstaculo virtual nao se mostrou eficiente em ambientes mais extensos, ao passo que
o recozimento determinıstico nao sofreu influencia direta da dimensao do ambiente.
Pode-se classificar o trabalho aqui desenvolvido como exploratorio, uma vez que nao
fez uso rigoroso da teoria apresentada em Rose (1991). Como trabalho futuro, pode-
se desenvolver uma outra solucao para o problema dos mınimos locais, seguindo toda a
teoria do recozimento determinıstico. Dessa forma, e possıvel obter uma solucao LMA,
baseada na teoria do recozimento determinıstico, buscando assim uma abordagem capaz
de evitar mınimos locais mais complexos, possivelmente, obtendo resultados satisfatorios
nas situacoes em que a abordagem proposta neste trabalho nao funcionou adequadamente.
Ainda como trabalho futuro, sugere-se o uso de algum metodo para a escolha de
parametros de forma otimizada, o que pode determinar um aumento na taxa de sucesso
do algoritmo; por exemplo, ha os automatos de aprendizado, uma abordagem adaptativa,
ja utilizados por Nooraliei e Altun (2009) como forma de otimizacao de parametros no
recozimento simulado.
Uma outra possibilidade para trabalhos futuros, e mudar o espaco de execucao do
recozimento determinıstico: ao passo em que no presente trabalho o espaco e dado
pelas coordenadas x e y, ha a possibilidade do uso de funcoes polinomiais representando
o caminho entre o ponto de partida e destino do robo. Com isto, o recozimento
determinıstico pode ser utilizado na otimizacao dos coeficientes destas funcoes.

126
Referencias
Cen, Y., Wang, L. e Zhang, H. (2007). Real-time obstacle avoidance strategy for mobilerobot based on improved coordinating potential field with genetic algorithm, ControlApplications, 2007. CCA 2007. IEEE International Conference on, pp. 415 –419.
Chang, Y.-C. e Yamamoto, Y. (2009). Path planning of wheeled mobile robot withsimultaneous free space locating capability, Intelligent Service Robotics 2(1): 9–22.
Chitroub, S., Houacine, A., Allaoua, A., Aroua, M. e Sansal, B. (2000). A newdeterministic annealing for image contextual classification, Acoustics, Speech,and Signal Processing, 2000. ICASSP ’00. Proceedings. 2000 IEEE InternationalConference on, Vol. 6, pp. 2243 –2246 vol.4.
Cho, W. H., Park, S. Y. e Park, J. H. (2000). Segmentation of color imageusing deterministic annealing em, Pattern Recognition, 2000. Proceedings. 15thInternational Conference on, Vol. 3, pp. 642 –645 vol.3.
Gao, M. e Tian, J. (2007). Path planning for mobile robot based on improved simulatedannealing artificial neural network, Natural Computation, 2007. ICNC 2007. ThirdInternational Conference on, Vol. 3, pp. 8 –12.
Iraji, R. e Manzuri-Shalmani, M. (2007). A new fuzzy-based spatial model for robotnavigation among dynamic obstacles, Control and Automation, 2007. ICCA 2007.IEEE International Conference on, pp. 1323 –1328.
Janabi-Sharifi, F. e Vinke, D. (1993a). Integration of the artificial potential fieldapproach with simulated annealing for robot path planning, Intelligent Control,1993., Proceedings of the 1993 IEEE International Symposium on, pp. 536 –541.
Janabi-Sharifi, F. e Vinke, D. (1993b). Robot path planning by integrating the artificialpotential field approach with simulated annealing, Systems, Man and Cybernetics,1993. ’Systems Engineering in the Service of Humans’, Conference Proceedings.,International Conference on, pp. 282 –287 vol.2.
Jaynes, E. T. (1957). Information theory and statistical mechanics, Phys. Rev .
Kearfott, K. e Hill, S. (1990). Simulated annealing image reconstruction method fora pinhole aperture single photon emission computed tomograph (spect), MedicalImaging, IEEE Transactions on 9(2): 128 –143.
Khatib, O. (1986). Real-time obstacle avoidance for manipulators and mobile robots, TheInternational Journal of Robotics Research 5(1): 90–98.
Kim, J. e Khosla, P. (1992). Real-time obstacle avoidance using harmonic potentialfunctions, Robotics and Automation, IEEE Transactions on 8(3): 338–349.

Referencias 127
Kirkpatrick, S., C. D. Gelatt, J. e Vecchi, M. P. (1983). Optimization by simulatedannealing, Science 220(4598): 671–680.
Lee, M. C. e Park, M. G. (2003). Artificial potential field based path planning for mobilerobots using a virtual obstacle concept, Advanced Intelligent Mechatronics, 2003.AIM 2003. Proceedings. 2003 IEEE/ASME International Conference on, Vol. 2,pp. 735 – 740 vol.2.
Lee, M.-E., Kim, S.-H., Cho, W.-H. e Zhao, X. (2008). Segmentation of medical imagebased on mean shift and deterministic annealing em algorithm, Computer Systemsand Applications, 2008. AICCSA 2008. IEEE/ACS International Conference on,pp. 937 –938.
Mallela, S. e Grover, L. (1988). Clustering based simulated annealing for standard cellplacement, Design Automation Conference, 1988. Proceedings., 25th ACM/IEEE,pp. 312 –317.
Metropolis, N., Rosenbluth, A. W., Rosenbluth, M. N., Teller, A. H. e Teller, E. (1953).Equation of state calculations by fast computing machines, Journal of ChemicalPhysics 21: 1087–1092.
Mitra, S., Castellanos, R. e Joshi, S. (2000). An adaptive deterministic annealingapproach for medical image segmentation, Fuzzy Information Processing Society,2000. NAFIPS. 19th International Conference of the North American, pp. 82 –84.
Ni, L. e Zheng, H.-Y. (2007). An unsupervised intrusion detection method combinedclustering with chaos simulated annealing, Machine Learning and Cybernetics, 2007International Conference on, Vol. 6, pp. 3217 –3222.
Nooraliei, A. e Altun, A. (2009). Temperature determination in simulated annealing usinglearning automata, Computer and Electrical Engineering, 2009. ICCEE ’09. SecondInternational Conference on, Vol. 1, pp. 114 –117.
Okamura, H., Kishikawa, H. e Dohi, T. (2010). Application of deterministic annealing emalgorithm to markovian arrival process parameter estimation, Ubiquitous IntelligenceComputing and 7th International Conference on Autonomic Trusted Computing(UIC/ATC), 2010 7th International Conference on, pp. 352 –357.
Park, M. G., Jeon, J. H. e Lee, M. C. (2001). Obstacle avoidance for mobile robots usingartificial potential field approach with simulated annealing, Industrial Electronics,2001. Proceedings. ISIE 2001. IEEE International Symposium on, Vol. 3, pp. 1530–1535 vol.3.
Park, M. G. e Lee, M. C. (2004). Real-time path planning in unknown environment anda virtual hill concept to escape local minima.
Park, M. e Lee, M. (2002). Experimental evaluation of robot path planning by artificialpotential field approach with simulated annealing, SICE 2002. Proceedings of the41st SICE Annual Conference, Vol. 4, pp. 2190 – 2195 vol.4.
Rose, J., Klebsch, W. e Wolf, J. (1990). Temperature measurement and equilibriumdynamics of simulated annealing placements, Computer-Aided Design of IntegratedCircuits and Systems, IEEE Transactions on 9(3): 253 –259.

Rose, K. (1991). Deterministic Annealing, Clustering, and Optimization, PhD thesis,California Institute of Technology.
Rose, K. (1998). Deterministic annealing for clustering, compression, classification,regression, and related optimization problems, Proceedings of the IEEE 86(11): 2210–2239.
Theodoridis, S. e Koutroumbas, K. (2008). Pattern Recognition, Fourth Edition, 4th edn,Academic Press.
Turgut, D., Turgut, B., Elmasri, R. e Le, T. (2003). Optimizing clustering algorithm inmobile ad hoc networks using simulated annealing, Wireless Communications andNetworking, 2003. WCNC 2003. 2003 IEEE, Vol. 3, pp. 1492 –1497 vol.3.
Velagic, J., Lacevic, B. e Osmic, N. (2006). Efficient path planning algorithm for mobilerobot navigation with a local minima problem solving, Industrial Technology, 2006.ICIT 2006. IEEE International Conference on, pp. 2325 –2330.
Wang, Z. M., Song, Q. e Soh, Y. C. (2006). Mri brain image segmentation by adaptivespatial deterministic annealing clustering, Biomedical Imaging: Nano to Macro,2006. 3rd IEEE International Symposium on, pp. 299 –302.
Xingce, W., Mingquan, Z., Xinyu, L. e Yachun, F. (2008). The research on robotglobal path planning based on simulated annealing dissipative ant system, IntelligentControl and Automation, 2008. WCICA 2008. 7th World Congress on, pp. 5764 –5769.
Zhang, T., Zhu, Y. e Song, J. (2010). Real-time motion planning for mobile robots bymeans of artificial potential field method in unknown environment, Industrial Robot:An International Journal 37(4): 384–400.






![Tratamentos de Recozimento [20] - feis.unesp.br · • Remoção do encruamentoRemoção do encruamento • Esferoidização deEsferoidização de carbonetos de liga Diagrama de equilíbrio](https://static.fdocumentos.com/doc/165x107/5c031ad209d3f290408b9760/tratamentos-de-recozimento-20-feisunespbr-remocao-do-encruamentoremocao.jpg)