
UNIVERSIDADE CATÓLICA DE PELOTAS - projeto.unisinos.br · RST - Recrutamento, Seleção e...
164
UNIVERSIDADE CATÓLICA DE PELOTAS ESCOLA DE INFORMÁTICA CURSO DE ANÁLISE DE SISTEMAS E CIÊNCIA DA COMPUTAÇÃO Automação Hospitalar aplicando a Computação Móvel com a utilização do Holoparadigma por Eduardo da Silva Möller Sandra Moura Kunde Nunes Trabalho de conclusão submetido como requisito parcial para a obtenção do grau de Bacharel em Análise de Sistemas e Ciência da Computação Prof. Dr.Jorge Luis Victória Barbosa Orientador Prof. Guilherme Tomaschewski Netto Co-Orientador Pelotas, Dezembro de 2002
-
Upload
duongtuyen -
Category
Documents
-
view
216 -
download
0
Transcript of UNIVERSIDADE CATÓLICA DE PELOTAS - projeto.unisinos.br · RST - Recrutamento, Seleção e...

UNIVERSIDADE CATÓLICA DE PELOTAS
ESCOLA DE INFORMÁTICA
CURSO DE ANÁLISE DE SISTEMAS E CIÊNCIA DA COMPUTAÇÃO
Automação Hospitalar aplicando a
Computação Móvel com a utilização do Holoparadigma
por
Eduardo da Silva Möller Sandra Moura Kunde Nunes
Trabalho de conclusão submetido como requisito
parcial para a obtenção do grau de Bacharel em
Análise de Sistemas e Ciência da Computação
Prof. Dr.Jorge Luis Victória Barbosa
Orientador
Prof. Guilherme Tomaschewski Netto
Co-Orientador
Pelotas, Dezembro de 2002

UNIVERSIDADE CATÓLICA DE PELOTAS
Reitor: Alencar de Mello Proença
Pró-Reitor Administrativo: Carlos Ricardo Gass Sinnotti
Pró-Reitor de Graduação: Dr. Gilberto de Lima Garcias
Diretora do Instituto de Informática: Regina Trilho Otero Xavier
Bibliotecária-Chefe: Cristiane de Freitas Chim
Agradecimentos
A Deus por nos mostrar o caminho para a realização dos nossos sonhos, e por ter nos
dado força ao longo de nossa caminhada.
Aos nossos pais e as nossas famílias, pelo exemplo de amor, união e dignidade.
Aos nossos companheiros pelo apoio, incentivo, compreensão e paciência.
Aos nossos amigos pelo espírito solidário e incentivo nos momentos difíceis.
Aos nossos professores e aos que nos orientaram neste trabalho Prof. Guilherme
Tomaschewski Netto, e em especial ao Dr. Prof. Jorge Luiz Victória Barbosa por ter
acreditado no nosso trabalho, e ter sido acima de tudo amigo, guia e companheiro nesta
caminhada.
Ao Prof. Luiz Antônio Moro Palazzo, pela amizade e o exemplo de dedicação e
dignidade pessoal.
Aos colaboradores da Fundação de Apoio Universitário e a todas as pessoas que de
forma direta ou indireta, contribuíram para a realização deste trabalho.
E a nós por todo o trabalho de dedicação, esforço e aprimoramento. Que esta marca
permaneça sempre um exemplo para tudo aquilo que ainda viveremos, lutaremos e com
certeza venceremos.
2
SUMÁRIO
Lista de Figuras ..................................................................................................... 04 Lista de Abreviaturas ............................................................................................ 06 Resumo ................................................................................................................... 07 Abstract .................................................................................................................. 08 1. Introdução .......................................................................................................... 09 1.1 Tema ................................................................................................................. 09 1.2 Motivação ......................................................................................................... 09 1.3 Contexto e Histórico ........................................................................................ 11 1.4 Objetivos ........................................................................................................... 12 1.5 Estrutura do Texto .......................................................................................... 13 2. Holoparadigma .................................................................................................. 15 2.1 Gênese do Holo ................................................................................................ 15 2.2 Holossemântica ................................................................................................ 16 2.3 Tipos de Entes .................................................................................................. 19 2.4 Holoclonagem ................................................................................................... 21 2.5 Hololinguagem ................................................................................................. 22 2.6 Holoplataforma ................................................................................................ 24 2.7 HML .................................................................................................................. 26 3. Mobilidade .......................................................................................................... 39 3.1 Conceitos .......................................................................................................... 39 3.2 Mecanismos ..................................................................................................... 40 3.3 Tecnologia e Equipamentos para Suporte à Mobilidade ............................. 41 3.4 Mobilidade no Holoparadigma ...................................................................... 49 3.5 Mobilidade Hospitalar .................................................................................... 53 4. Automação Hospitalar ...................................................................................... 55 4.1 HoloTree ........................................................................................................... 58 4.2 Extensão ............................................................................................................ 60 4.2.1 Holo-Parte ..................................................................................................... 61 4.3 Diagrama de Entes Dinâmicos ....................................................................... 65 4.4 Diagrama de Mobilidade Individual .............................................................. 66 4.5 Diagrama de Mobilidade Coletiva ................................................................. 67 4.6 Diagrama de Visão do Sistema ....................................................................... 69 4.7 Diagrama de Interação .................................................................................... 70 5. Implementação ................................................................................................... 71 5.1 Introdução ........................................................................................................ 73 5.2 Simulação do ente móvel Médico ................................................................... 74 5.3 Simulação do ente móvel Enfermeiro ............................................................ 80 5.4 Simulação do ente móvel Paciente ................................................................. 87 5.5 Simulação do ente móvel Assistente Social.................................................... 94 5.6 Simulação do ente móvel Nutricionista ......................................................... 98 5.7 Simulação do ente móvel Psicólogo ............................................................... 102 5.8 Simulação do ente móvel Farmacêutico / Químico ...................................... 106
3
5.9 Simulação do ente móvel Técnico de Manutenção ....................................... 110 6. Conclusão ........................................................................................................... 114 Anexo I – Diagramas de Mobilidade Individual ................................................ 116 Anexo II – Diagramas de Mobilidade Coletiva .................................................. 131 Anexo III – Diagramas de Visão do Sistema ...................................................... 145 Anexo IV – Diagramas de Interação ................................................................... 153 Bibliografia ............................................................................................................ 160
4
LISTA DE FIGURAS Figura 2.1 - Gênese do Holoparadigma ......................................................... 15 Figura 2.2 - Gap Semântico ........................................................................... 17 Figura 2.3 - Holosemântica Aplicada a Modelagem ..................................... 18 Figura 2.4 - Característica dos Entes ............................................................. 19 Figura 2.5 - Ente Elementar, Composto e Composição de Três Níveis ........ 21 Figura 2.6 - Descrição de um Ente ................................................................. 23 Figura 2.7 - Holoplataforma – Versão 1.0 ..................................................... 25 Figura 2.8 - Notação de Ente na HML ........................................................... 27 Figura 2.9 - Notação de Ente Dinâmico ......................................................... 28 Figura 2.10 - Representação da Afirmação na HML ....................................... 29 Figura 2.11 - Representação de Pergunta na HML .......................................... 29 Figura 2.12 - Exemplo de Clonagem Estática ................................................. 30 Figura 2.13 - Representação da Mobilidade Lógica Adaptativa ...................... 31 Figura 2.14 - Representação da Mobilidade Lógica Não Bloqueante ............. 32 Figura 2.15 - Representação da Mobilidade Lógica Bloqueante ..................... 32 Figura 2.16 - Representação do Elemento de Modelagem Diag. de Interação 32 Figura 2.17 - Diagrama de Interação ............................................................... 33 Figura 2.18 - Diagrama de Interação ............................................................... 35 Figura 2.19 - Diagrama de Mobilidade Individual .......................................... 36 Figura 2.20 - Diagrama de Mobilidade Coletiva ............................................. 37 Figura 2.21 - Visão Dinâmica do Sistema ....................................................... 38 Figura 3.1 - Antena Parabólica ...................................................................... 46 Figura 3.2 - Antena Parabólica ...................................................................... 46 Figura 3.3 - Antena Direcional ...................................................................... 46 Figura 3.4 - Antena Omnidirecional .............................................................. 46 Figura 3.5 - Comunicação de Dados Sem Fio ............................................... 47 Figura 3.6 - Sistema de Antenas Interligadas Via Ondas de Rádio .............. 48 Figura 3.7 - Coletores de Dados .................................................................... 49 Figura 3.8 - Mobilidade Lógica no Holoparadigma ...................................... 50 Figura 3.9 - Mobilidade Física no Holoparadigma ........................................ 51 Figura 3.10 - Ente Distribuído ......................................................................... 52 Figura 4.1 - Organograma da FAU ................................................................ 56 Figura 4.2 - Àrvore de Entes (Holotree)......................................................... 58 Figura 4.3 - Equipamentos Instalados ............................................................ 60 Figura 4.4 - Notação da Estrutura Holo-Parte ............................................... 61 Figura 4.5 - Estrutura Holo-Parte Recipiente-Conteúdos .............................. 62 Figura 4.6 - Estrutura Holo-Parte Conjunto Membros .................................. 62 Figura 4.7 - Estrutura Holo-Parte Montagem Partes ..................................... 62 Figura 4.8 - Diagrama de Entes Estáticos com a Extensão ........................... 63 Figura 4.9 - Diagrama de Entes Dinâmicos ................................................... 65 Figura 4.10 - Diagrama de Mobilidade Individual .......................................... 67 Figura 4.11 - Diagrama de Mobilidade Coletiva ............................................. 68 Figura 4.12 - Diagrama de Visão do Sistema – Tec. de Manipulação ............. 70 Figura 4.13 - Diagrama de Interações .............................................................. 72 Figura 5.1 - Holoprogramas ........................................................................... 73 Figura 5.2 - Resultado da Movimentação do Ente Móvel Médico................. 77

5
Figura 5.3 - Passos da movimentação do ente Médico ................................. 79 Figura 5.4 - Resultado da simulação do ente móvel Enfermeiro .................. 84 Figura 5.5 - Passos da movimentação do ente Enfermeiro ........................... 86 Figura 5.6 - Resultado da simulação do ente móvel Paciente ....................... 91 Figura 5.7 - Passos da movimentação do ente Paciente ................................. 93 Figura 5.8 - Resultado da simulação do ente móvel Assistente Social .......... 96 Figura 5.9 - Passos da movimentação do ente Assistente Social ................... 97 Figura 5.10 - Resultado da simulação do ente móvel Nutricionista ................ 100 Figura 5.11 - Passos da movimentação do ente Nutricionista...... ................... 101 Figura 5.12 - Resultado da simulação do ente móvel Psicólogo ..................... 104 Figura 5.13 - Passos da movimentação do ente Psicólogo .......... ................... 105 Figura 5.14 - Resultado da simulação do ente móvel Farmacêutico ............... 108 Figura 5.15 - Passos da movimentação do ente Farmacêutico......................... 109 Figura 5.16 - Resultado da simulação do ente móvel Técnico ........................ 112 Figura 5.17 - Passos da movimentação do ente Técnico ................................. 113
6
LISTA DE ABREVIATURAS
AJ - Assessoria Jurídica Cirur - Cirurgia CLEI - Cláusula Lógica com Extensão não Imperativa CM - Clínica Médica CPD - Centro de Processamento de Dados Dholo - Distributed Holo DI - Identificador de Destino DP - Departamento de Pessoal DSSS - Direct Sequence Spread Spectrum EIC - Estrutura de Configuração de Invocação Elet - Eletroeletrônica Endos - Endoscopia Enfer - Enfermagem Far - Farmacêutico FAU - Fundação de Apoio Universitário Fisiat - Fisiatria HML - Holo Modeling Language Holo - Holoparadigma HoloEnv - Holo Environment Holo-Tree - Árvore de níveis LA - Logic Action LAB - Laboratório LAN - Local Area Network MA - Multiparadigm Action Man - Manipulação MIA - Modular Imperative Action MLA - Modular Logic Action MT - Medicina do Trabalho OMG - Object Management Group PC - Psicologia Clínica PC - Psicóloga PT - Psicología do Trabalho Radiol - Radiologia RH - Recursos Humanos RP - Relações Públicas RST - Recrutamento, Seleção e Treinamento SEP - Serviço de Estatística e Projetos SPP - Serviço de Prontuário de Pacientes TM - Técnico de Manutenção UFRGS - Universidade Federal do Rio Grande do Sul UML - Unified Modeling Language UTI - Unidade de Tratamento Intensivo WAN - Wide Area Network

7
RESUMO
Este trabalho propõe o Estudo da Automação Hospitalar aplicando Computação
Móvel com a utilização do Holoparadigma, modelo multiparadigma orientado ao
desenvolvimento de software distribuído, obter a criação de uma extensão do Holo,
descobrindo novas aplicações e novos conceitos. Utilizando para modelagem de dados a
HML(Holo Modeling Language), uma linguagem de modelagem para representar
visualmente os conceitos propostos pelo Holoparadigma e a Hololinguagem para a
programação, que integra paradigmas em lógica, imperativo e orientado a objetos,
suportando assim os conceitos da computação móvel. Este texto apresenta conceitos de
mobilidade e a capacidade das entidades computacionais deslocar-se de um ambiente
para outro, através de um sistema distribuído na automação hospital , uma visão geral de
HML e Holoparadigma.
Palavras-Chave: Mobilidade, Holoparadigma, Agentes Móveis, Ente

8
ABSTRACT This work proposes the study of Hospital Automation applying Movable Computation
with the use of Holoparadigm, a multiparadigm model guided to the development of
distributed software, obtaining the creation of an extension of Holo, discovering new
applications and new concepts. Using for modelling of data HML (Holo Modelling
Language), a modelling language to represent the concepts visually proposed by
Holoparadigm and Hololanguage for the programming that integrates paradigms in
logic, imperative and guided to objects, though supporting the concepts of the movable
computation. This text presents mobility concepts and the capacity of the computing
entities to move from an atmosphere to another through a system distributed in the
hospital automation, ageneral vision os HML and Holoparadigm.
keywords: Mobility, Holoparadigm, Movable Agents, Being
9
1. Introdução
Este capítulo contém uma introdução sobre o trabalho proposto. As próximas
seções apresentam o tema pesquisado, a motivação, o contexto e o histórico do trabalho,
os objetivos e a estrutura do texto.
1.1 Tema
Este texto apresenta a proposta da criação de uma extensão do Holoparadigma
[BAR 99], BAR[2000], [BAR 2000a], [BAR 2001], [BAR 2001a], [BAR 2001b],
utilizando-a para o sistema Hospital do Hospital Escola Universitário de Pelotas (FAU),
como também a utilização da HML( Holo Modeling Language)[LAE 2002], para a
modelagem deste sistema e a Hololinguagem[BAR 2002] para sua implementação.
Todos estes conceitos aplicados à computação móvel, define como a habilidade
de mover-se independentemente de um dispositivo para outro em um sistema
distribuído.
1.2 Motivação
A evolução das novas tecnologias está provocando mudanças significativas no
relacionamento entre as pessoas e, conseqüentemente nas suas relações com o ambiente
de trabalho. O conhecimento é móvel por natureza e dispõe de meios para exercer sua
função. A sociedade atual está evoluindo para a mobilidade.
Acredita-se que este trabalho possa contribuir para a utilização de novos
conceitos na área da automação hospitalar ligada à computação móvel e que através da
qual gerou um interesse muito grande pela exploração do Holoparadigma (software
multiparadigma distribuído), por ser algo inovador e com grandes possibilidades de
superar os nossos objetivos.
Unir a mobilidade computacional com o Holoparadigma é algo que representa a
realidade de um futuro muito próximo.
10
Acreditamos em novas tecnologias e na busca de superações. A cada dia
realizam-se novas conquistas e descobertas dentro da informática, e uma busca
incessante do novo .
A mobilidade irá proporcional ao hospital racionalização de procedimentos
facilitando os profissionais do corpo clínico o acesso rápido às informações.
Acredita-se em uma forte tendência em se desenvolver aplicações para
ambientes de computação móvel, envolvendo pesquisa, modelagem e programação.
De certa forma as plataformas computacionais vêm migrando de sua natureza
centralizada para uma distribuída. Os sistemas distribuídos tem recebido cada vez mais
atenção tornando-se a base para o desenvolvimento de sistemas computacionais.
A concepção e desenvolvimento de software baseado na comunicação entre
processos tem vindo a aumentar continuamente acompanhando o florescimento e
crescimento das redes de comunicação e da Internet. Aplicações como: protocolos,
sistemas cliente-servidor, sistemas distribuídos, interacção entre robots, transacções
bancárias e agentes inteligentes que baseiam o seu funcionamento numa comunicação
complexa e recíproca entre vários processos.
Paralelamente a estes desenvolvimentos surge um conceito geral - mobilidade -
que consiste na capacidade de processos, objetos ou computações mudarem a sua
localização consoante a evolução do sistema.
A capacidade de alterar dinamicamente a topologia de uma rede será uma das
capacidades mais interessantes do ponto de vista teórico e prático pela aplicabilidade
imediata a resolução de problemas. Simultaneamente a esta característica, a introdução
de concorrência entre processos permite melhorar os tempos de resposta, uma vez que
"períodos mortos" ocupados com operações de Input/Output passarão a ser ocupados
com o processamento de outras threads de execução. Contudo, estas características são
precisamente as grandes responsáveis por um aumento da complexidade nos programas
11
em sistemas distribuídos e pela dificuldade em garantir que o comportamento do
sistema corresponda à sua especificação.
A Computação Móvel representa um novo paradigma computacional, ampliando
o conceito de computação distribuída. Visa disponibilizar informações em qualquer
lugar e a qualquer tempo, caracterizando também conceitos de computação nômade.
Neste contexto, os serviços podem ser classificados em diversas formas, uma delas por
grandes áreas : comunicação pessoal, celular, móvel, redes locais e comunicação via
satélite.
Em sua grande maioria, os sistemas de comunicação sem fio se baseiam na
comunicação via rádio e na alocação de frequências.
Para suportar a mobilidade de forma transparente para o usuário, a noção de
ambiente computacional deve estar presente, ele será o elemento principal no suporte à
mobilidade das entidades envolvidas.
O Holoparadigma possui uma semântica simples e distribuída. Desta forma,
estimula-se a exploração da distribuição implícita desde a modelagem dos sistemas
computacionais, contemplando as vantagens introduzidas pela arquitetura de software e
pelos modelos multiparadigma.
1.3 Contexto e Histórico
O Holo foi desenvolvido por três projetos: Opera [OPE 2001], onde teve sua
origem, Appelo[APE 2001] e Holoparadigma [Hol 2001]. O projeto Opera iniciou suas
atividades no laboratório de Génie Informatique (universidade de Joseph Fournier em
Grenoble /França). Atualmente, encontra-se em fase de aperfeiçoamento na
universidade Federal do Rio Grande do Sul- UFRGS, uma ramificação deste projeto.
Estudos e testes já estão sendo feito com relação a sua utilização, alguns
usuários já encontram-se utilizando a Hololinguagem. Atualmente foi elaborado um
suporte para a modelagem e desenvolvimento de programas em Holo denominado
HML(Holo Modeling Language)[LAE 2002], que permitirá ao usuário modelar
sistemas em Holo facilitando a documentação e compreensão dos mesmos, futuramente
será desenvolvida uma ferramenta denominada HoloCase que permitirá ao usuário

12
representar graficamente na tela a utilização da HML, permitindo a definição das
características de cada um dos entes modelados, esta ferramenta será integrada ao
ambiente de desenvolvimento HoloEnv e permitirá ao usuário a criação de soluções
na Hololinguagem usando HML(Holo Modeling Language).
1.4 Objetivos 1.4.1 Objetivo Geral
O presente projeto tem por objetivo realizar estudos sobre Automação Hospital
aplicando a computação móvel, utilizando um modelo multiparadigma orientado ao
desenvolvimento de software distribuído denominado Holoparadigma. Assim como
também a possibilidade de uma nova extensão do Holoparadigma e suas aplicabilidades
dentro da Automação Hospital, através da realização de novas pesquisas e tendo como
base os modelos já existentes. Por conseqüência usar este estudo para propor o
desenvolvimento de um sistema hospitalar utilizando o Holoparadigma, baseado
também nos conceitos da extensão.
1.4.2 Objetivos Específicos
Este trabalho tem como objetivos específicos.
� Estudar modelos existentes aplicados à computação móvel;
� Realizar pesquisas em busca de novas atuações da computação móvel;
� Realizar o estudo do Holoparadigma;
� Utilizar a pesquisa para a possibilidade do desenvolvimento de uma extensão do
Holoparadigma;
� Realizar estudo de caso para uma automação hospitalar usando mobilidade e
holoparadigma baseados na nova extensão do Holo;
� Modelar este estudo de caso;
� Realizar testes utilizando a Hololinguagem.
13
1.5 Estrutura do Texto
O texto está organizado em seis capítulos e quatro anexos. Os anexos
constituem uma extensão do capítulo quatro, contendo toda a modelagem proposta para
a execução deste trabalho.
O segundo capítulo apresenta o estudo do Holoparadigma, que é uma nova
proposta para o desenvolvimento de software, sua aplicação, sua semântica, a aplicação
em sistemas distribuídos, e uma linguagem de modelagem projetada para suporte ao
Holoparadigma, a HML( Holo Modeling Language), que tem por objetivo apresentar as
representações criadas para os elementos definidos pelo Holo. Este estudo tem por
objetivo demonstrar sua aplicabilidade que através da qual, dará suporte a este trabalho
podendo representar toda a mobilidade da FAU, por intermédio de seus conceitos e sua
programação. O terceiro capítulo apresenta os conceitos de mobilidade, os mecanismos,
as tecnologias e equipamentos de suporte à mobilidade, ambientes que permitem a
exploração da mobilidade, e a mobilidade representada através do Holoparadigma. Este
capítulo tem como principal objetivo, mostrar toda a tecnologia utilizada através de
equipamentos sem fios, utilizando toda a tecnologia de ponta para total informatização
de um sistema hospitalar.
O quarto capítulo representa a essência deste trabalho, ele apresenta toda a
especificação do sistema utilizado para a Automação Hospitalar, como também os
equipamentos instalados, o organograma da FAU, e também toda a especificação que
gerou uma extensão do HML (Holo Modeling Language), aplicada a FAU e
incorporada ao diagrama de entes estáticos representando toda a estrutura, apresenta a
mobilidade no hospital, o diagrama de entes dinâmicos representando a execução de
entes dentro do sistema hospitalar e o diagrama de interação representando a interação
dos entes que fazem parte do setor de Recursos Humanos da FAU.
O quinto capítulo apresenta a implementação em alguns módulos do sistema,
contém os testes gerados utilizando a Hololinguagem, linguagem de programação
suportada pelo Holoparadigma.
O sexto capítulo contém uma conclusão geral, e nossas considerações contendo
também as principais contribuições para trabalhos futuros. Visto que este trabalho é o
14
pioneiro para a automação de um sistema que utiliza uma nova proposta de um software
multiparadigma, introduzindo uma modelagem até então recém criada e ainda não
utilizada por outros trabalhos, integrados aos conceitos de computação móvel.
O primeiro anexo contém a representação gráfica da modelagem do diagrama de
mobilidade individual referenciado no capítulo quatro, que descreve toda a mobilidade
dos entes móveis.
O segundo anexo contém a representação gráfica da modelagem do diagrama de
mobilidade coletiva referente ao capítulo quatro, representando os entes dentro do
sistema de forma concorrente.
O terceiro anexo contém a representação gráfica da modelagem do diagrama de
visão do sistema referenciado no capítulo quatro, onde conta os aspectos estáticos e
dinâmicos do sistema.
O quarto anexo contém a representação gráfica do diagrama de interação,
referenciado no capítulo quatro, onde um ente tem a capacidade de interagir com outros
entes. Neste anexo representa-se a interação de todos os entes do sistema.
15
2. Holoparadigma
É um modelo multiparadigma que possui uma semântica simples e distribuída.
Através dessa semântica, o modelo estimula a exploração automática da distribuição
(distribuição implícita). O estímulo à distribuição implícita é seu principal objetivo. Os
princípios gerais do modelo foram publicados em [BAR 99a], [BAR 2000a], [BAR
2000e] e [BAR 2001]. Além disso, os aspectos específicos relacionados com
paralelismo e distribuição foram analisados em [BAR 2000c], [BAR 2001b].
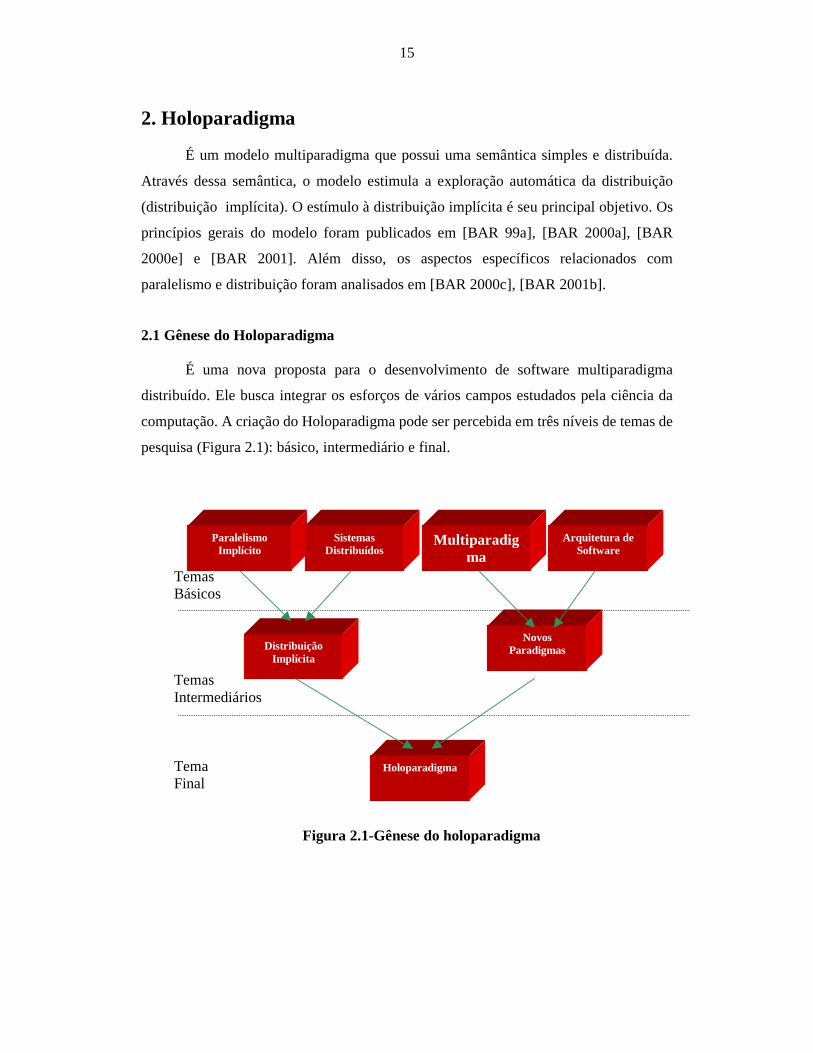
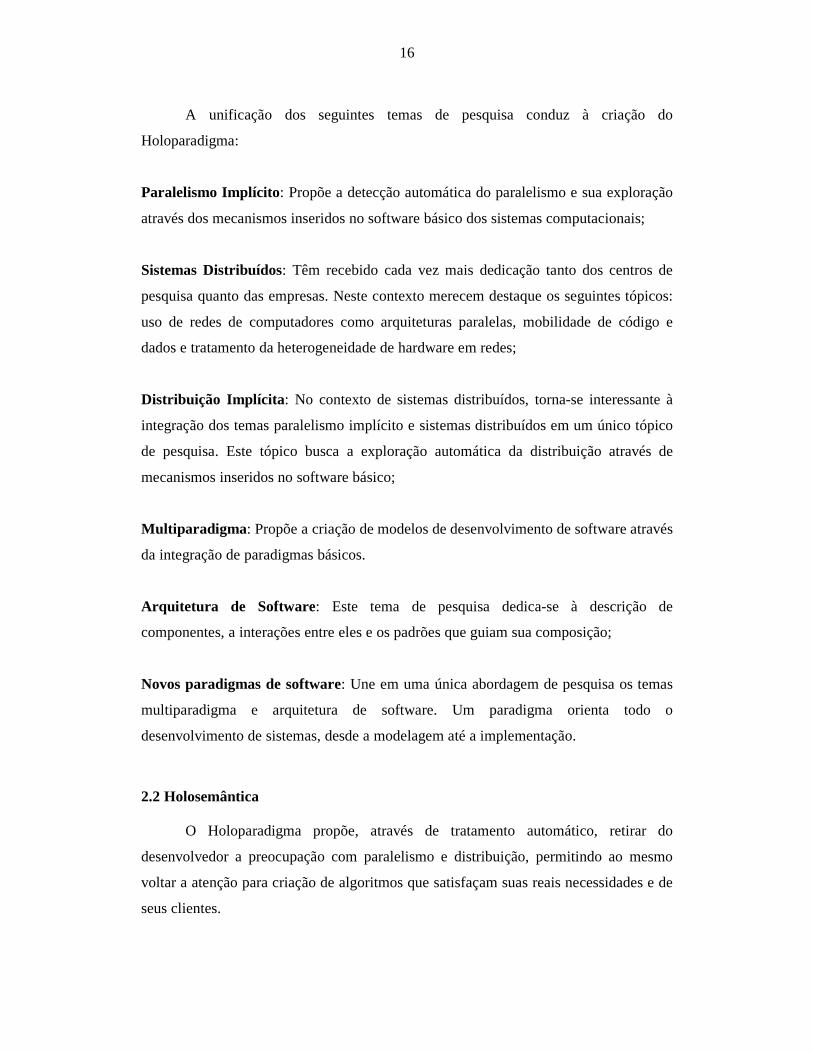
2.1 Gênese do Holoparadigma
É uma nova proposta para o desenvolvimento de software multiparadigma
distribuído. Ele busca integrar os esforços de vários campos estudados pela ciência da
computação. A criação do Holoparadigma pode ser percebida em três níveis de temas de
pesquisa (Figura 2.1): básico, intermediário e final.
Temas Básicos Temas Intermediários Tema Final
Figura 2.1-Gênese do holoparadigma
Paralelismo Implícito
Sistemas Distribuídos
Multiparadigma
Arquitetura de Software
Distribuição Implícita
Novos Paradigmas
Holoparadigma
16
A unificação dos seguintes temas de pesquisa conduz à criação do
Holoparadigma:
Paralelismo Implícito: Propõe a detecção automática do paralelismo e sua exploração
através dos mecanismos inseridos no software básico dos sistemas computacionais;
Sistemas Distribuídos: Têm recebido cada vez mais dedicação tanto dos centros de
pesquisa quanto das empresas. Neste contexto merecem destaque os seguintes tópicos:
uso de redes de computadores como arquiteturas paralelas, mobilidade de código e
dados e tratamento da heterogeneidade de hardware em redes;
Distribuição Implícita: No contexto de sistemas distribuídos, torna-se interessante à
integração dos temas paralelismo implícito e sistemas distribuídos em um único tópico
de pesquisa. Este tópico busca a exploração automática da distribuição através de
mecanismos inseridos no software básico;
Multiparadigma: Propõe a criação de modelos de desenvolvimento de software através
da integração de paradigmas básicos.
Arquitetura de Software: Este tema de pesquisa dedica-se à descrição de
componentes, a interações entre eles e os padrões que guiam sua composição;
Novos paradigmas de software: Une em uma única abordagem de pesquisa os temas
multiparadigma e arquitetura de software. Um paradigma orienta todo o
desenvolvimento de sistemas, desde a modelagem até a implementação.
2.2 Holosemântica
O Holoparadigma propõe, através de tratamento automático, retirar do
desenvolvedor a preocupação com paralelismo e distribuição, permitindo ao mesmo
voltar a atenção para criação de algoritmos que satisfaçam suas reais necessidades e de
seus clientes.

17
Um paradigma suporta a modelagem de sistemas computacionais. Com esse
intuito, estabelece um conjunto de abstrações que serão utilizadas para criação dos
modelos. A eficiência do paradigma está relacionada com a distância entre o significado
dessas abstrações e os conceitos existentes no domínio modelado. No âmbito da
engenharia de software, essa distância é denominada gap semântico (Figura 2.2) Um
pequeno gap semântico significa que as abstrações são adequadas.
A semântica está relacionada com o significado. No caso dos paradigmas, a
semântica estabelece o significado de suas abstrações. Por exemplo, o paradigma
orientado a objetos possui como principal abstração o objeto. No âmbito deste
paradigma, objeto é a unidade de modelagem e significa qualquer realidade que possa
ser organizada em uma unidade que encapsule atributos e métodos.
Gap Semântico Modelagem
Figura 2.2-Gap semântico
A semântica do Holo é denominada Holosemântica. A Holosemântica estabelece
a utilização de duas unidades de modelagem:
Unidade de existência – ENTE: a existência é modelada através de um ente; Unidade de informação – SÍMBOLO: a informação é modelada através de símbolos.
REALIDADE
Domínio
Modelo Computacional

18
A modelagem em Holo utiliza somente essas unidades. Sendo assim, a criação
de modelos computacionais é simplificada. A figura 2.3 mostra a aplicação da
Holosemântica.
Fontes de Distribuição Ente: Unidade de Existência gap Símbolo: Unidade de informação semântico Holosemântica Distribuição Implícita Exploração automática da distribuição
O ente é a principal abstração do Holoparadigma. Toda existência é um ente,
desde a mais simples até a mais complexa. O ente possui duas características básicas:
Distinção: um ente existe de forma distinta, ou seja, pode ser distinguido do
restante da realidade. Sendo assim, a existência de um ente depende da percepção de
quem distingue. Se uma distinção é percebida, existe um ente. A distinção está
relacionada com níveis de abstração. Por exemplo, um texto é um ente. No entanto, em
níveis mais baixos de abstração existem vários outros entes (capítulos, seções,
subseções, parágrafos, frases e caracteres).
Figura 2.3-Holosemântica aplicada à modelagem
REALIDADE
Domínio
Modelo Computacional
Arquitetura Distribuída
19
A existência deles depende do nível de abstração com que o leitor percebe o
texto. Um ente pode ser um objeto, um ser vivo, um software, um modelo
computacional, uma organização, um grupo de entes e outras existências;
História: um ente possui história. Sendo assim, o ente é uma existência
temporal, possuindo passado, presente e futuro. Desde sua criação inicia a construção de
uma história, a qual evolui até sua extinção. A história é o passado do ente. Algumas
constatações realizadas no presente entram para a história. Além disso, alterações na sua
história o afetam de diversas formas.
Distinção
Figura 2.4 -Características dos entes
2.3 Tipos de Entes
O bloco principal de construção no Holoparadigma é o ente. Todos os elementos
até os mais básicos são considerados entes. Em Holo existem duas classificações
básicas para os entes.
Classificação organizacional:
Ente Elementar: ente sem níveis de composição;
Ente Composto: ente formado pela composição de outros entes. Não existe limite para
níveis de composição.
REALIDADE
História História
20
Classificação funcional:
Ente Estático: definição estática de um ente. São utilizados como matrizes estáticas
para criação de outros entes. Além disso, estabelecem um estado inicial para execução
de programas. Um ente estático equivale a uma classe no paradigma Orientado a
Objetos.
Ente Dinâmico: ente em execução. Um programa em execução é composto de entes
dinâmicos. Podem ser comparadas com objetos na Orientação a Objetos. Entes
dinâmicos são provenientes de estáticos.
Um ente elementar é organizado em três partes:
Interface: descreve suas possíveis relações com os demais entes. Comportamento: contém ações que implementam a funcionalidade de um ente. O Holo
não estabelece os tipos de ações a serem utilizadas, no entanto, estabelece que existem
dois tipos básicos de comportamento:
• Imperativo: o comportamento imperativo é composto de ações imperativas que
descrevem os caminhos para solução de um problema (enfoque no controle, ou
seja, como deve ser realizada a ação);
• Lógico: o comportamento lógico é composto de ações lógicas que expressam
um problema de forma declarativa (enfoque no que deve ser realizado).
• História: é um espaço de armazenamento compartilhado no interior de um ente.
O símbolo é o átomo de informação no Holoparadigma. O Holo propõe a
utilização do processamento simbólico como principal instrumento para o
tratamento de informações. Esta características é herdada do paradigma em
lógica. O Holo estabelece que a história deve ser direcionada para
armazenamento e gerenciamento de símbolos. Portanto, o paradigma em lógica
torna-se uma alternativa adequada para sua implementação.

21
Um ente composto possui a mesma organização de um ente elementar, no entanto,
suporta a existência de outros entes na sua composição (entes componentes).
Cada ente possui uma história. A história fica encapsulada no ente e, no caso dos
entes compostos, é compartilhada pelos entes componentes. Os entes componentes
participam do desenvolvimento da história compartilhada e sofrem os reflexos das
mudanças históricas. Sendo assim, podem existir vários níveis de encapsulamento da
história. Os entes acessam somente a história em um nível. A figura 2.5 mostra dois
níveis de história encapsulada em um ente composto organizado em três níveis.
Figura 2.5 – Ente elementar e composto e composição de 3 níveis
2.4 Holoclonagem
O Holoparadigma estabelece que um software pode ser percebido através de dois
domínios:
22
Estático: é realizada na descrição dos entes, ou seja, durante a especificação em
nível de modelagem e programação. A clonagem estática permite a descrição de entes
através da extensão de especificações de outros entes;
Dinâmico: ocorre em tempo de execução. Esta clonagem cria uma cópia de um
ente em execução. Neste caso, o clone possui a estrutura (interface e comportamento) e
o estado (história e composição) do clonado. O clone é criado no mesmo nível e passa a
acessar a mesma história que ele acessa.
A clonagem sintetiza 3 operações utilizadas na orientação a objetos:
Clonagem Estática: assemelha-se à herança.
Clonagem de Transição: equivale à instanciação de objetos usando classes.
Clonagem dinâmica: corresponde a criação de clones suportada por algumas
linguagens orientadas a objetos.
A possibilidade da existência de características não-deterministas nos entes
permite ainda que a clonagem possa ser de dois tipos:
Construtiva: estabelece que as especificações do clone e dos clonados são
combinadas de forma construtiva. Esta combinação é uma união das especificações não-
deterministas, por exemplo o comportamento lógico. A união pode seguir diversas
políticas.
Destrutiva: estabelece que as especificações do clone e dos clonados são
combinadas de forma destrutiva. As especificações mais recentes sobrepõem as
anteriores (padrão utilizado na herança da orientação a objetos).
2.5 Hololinguagem
A Hololinguagem [BAR 99a], [BAR 2001], [BAR 2001a], [BAR 2001b], é uma
linguagem multiparadigma direcionada para o desenvolvimento de sistemas
distribuídos.
2.5.1 Descrição de entes na Hololinguagem
O programa em HOLO é formado por descrições de entes (entes estáticos).
23
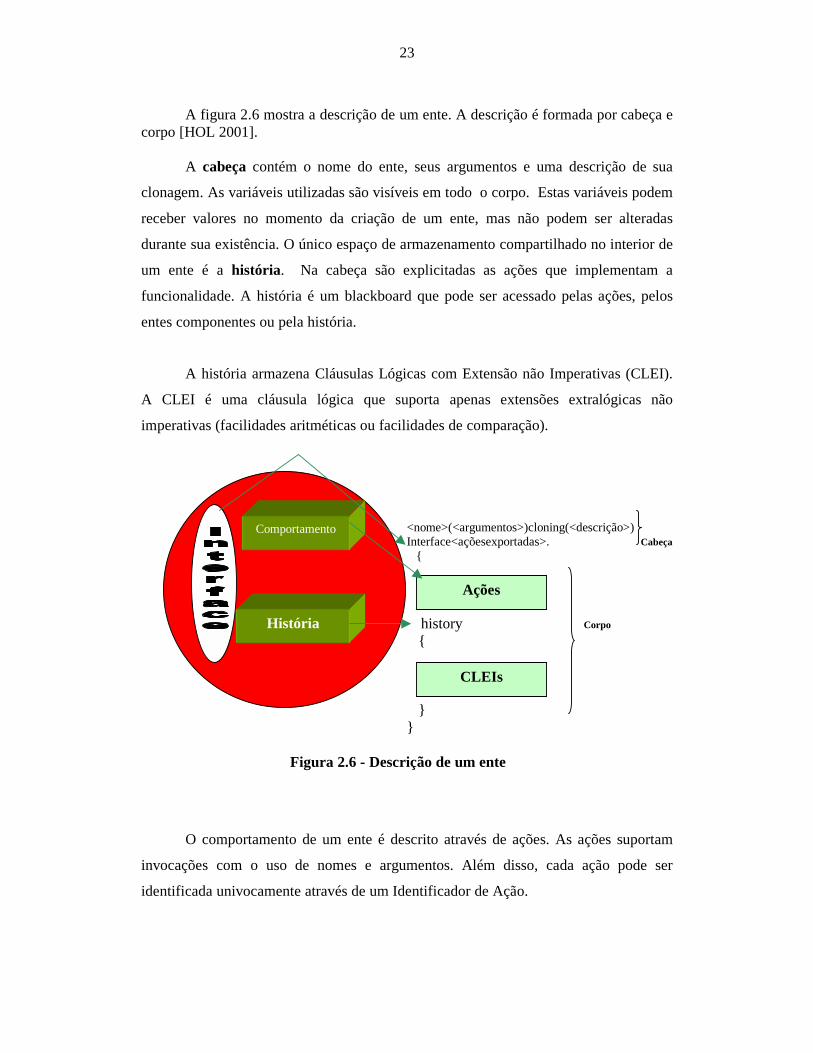
A figura 2.6 mostra a descrição de um ente. A descrição é formada por cabeça e corpo [HOL 2001].
A cabeça contém o nome do ente, seus argumentos e uma descrição de sua
clonagem. As variáveis utilizadas são visíveis em todo o corpo. Estas variáveis podem
receber valores no momento da criação de um ente, mas não podem ser alteradas
durante sua existência. O único espaço de armazenamento compartilhado no interior de
um ente é a história. Na cabeça são explicitadas as ações que implementam a
funcionalidade. A história é um blackboard que pode ser acessado pelas ações, pelos
entes componentes ou pela história.
A história armazena Cláusulas Lógicas com Extensão não Imperativas (CLEI).
A CLEI é uma cláusula lógica que suporta apenas extensões extralógicas não
imperativas (facilidades aritméticas ou facilidades de comparação).
<nome>(<argumentos>)cloning(<descrição>) Interface<açõesexportadas>. Cabeça {
history Corpo { } }
Figura 2.6 - Descrição de um ente
O comportamento de um ente é descrito através de ações. As ações suportam
invocações com o uso de nomes e argumentos. Além disso, cada ação pode ser
identificada univocamente através de um Identificador de Ação.
Comportamento
História
Ações
CLEIs
24
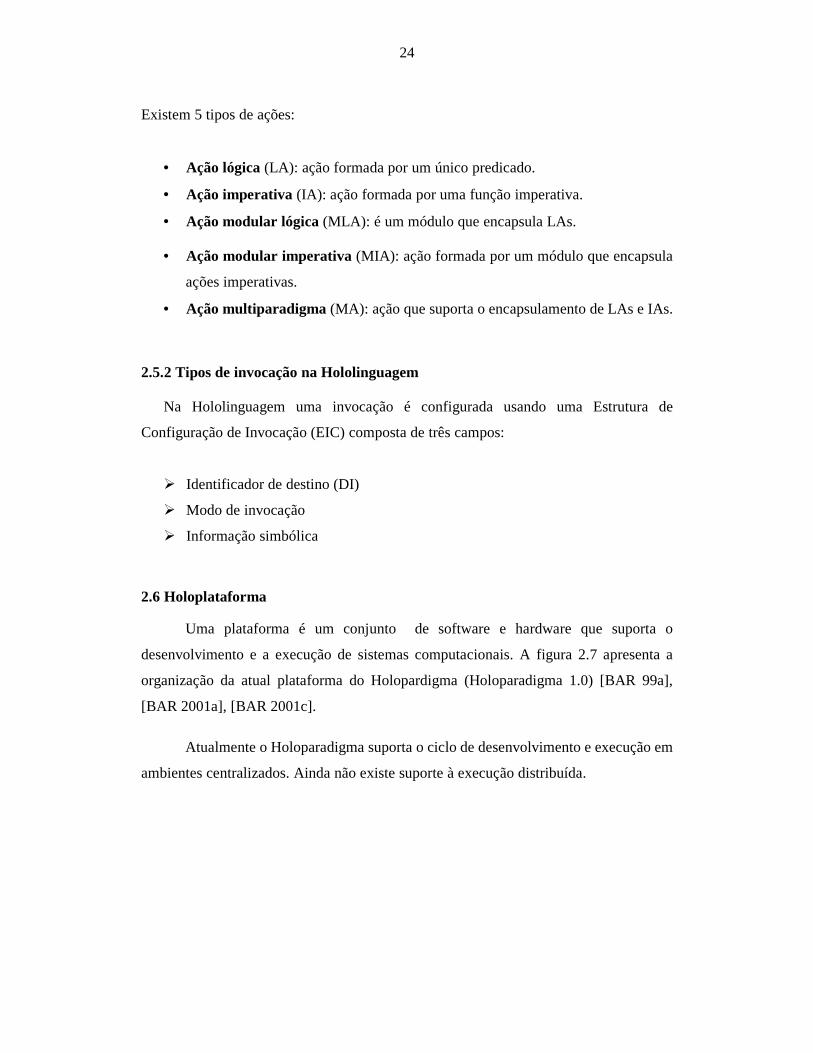
Existem 5 tipos de ações:
• Ação lógica (LA): ação formada por um único predicado.
• Ação imperativa (IA): ação formada por uma função imperativa.
• Ação modular lógica (MLA): é um módulo que encapsula LAs.
• Ação modular imperativa (MIA): ação formada por um módulo que encapsula
ações imperativas.
• Ação multiparadigma (MA): ação que suporta o encapsulamento de LAs e IAs.
2.5.2 Tipos de invocação na Hololinguagem
Na Hololinguagem uma invocação é configurada usando uma Estrutura de
Configuração de Invocação (EIC) composta de três campos:
� Identificador de destino (DI)
� Modo de invocação
� Informação simbólica
2.6 Holoplataforma
Uma plataforma é um conjunto de software e hardware que suporta o
desenvolvimento e a execução de sistemas computacionais. A figura 2.7 apresenta a
organização da atual plataforma do Holopardigma (Holoparadigma 1.0) [BAR 99a],
[BAR 2001a], [BAR 2001c].
Atualmente o Holoparadigma suporta o ciclo de desenvolvimento e execução em
ambientes centralizados. Ainda não existe suporte à execução distribuída.
25
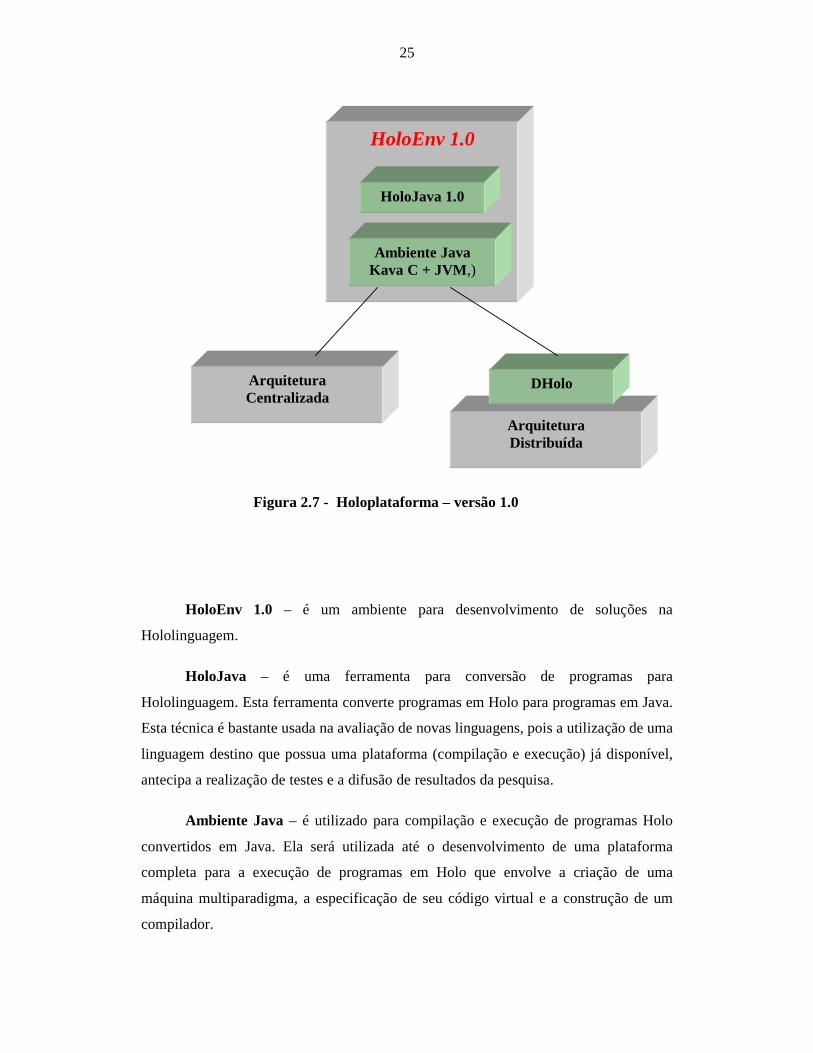
Figura 2.7 - Holoplataforma – versão 1.0
HoloEnv 1.0 – é um ambiente para desenvolvimento de soluções na
Hololinguagem.
HoloJava – é uma ferramenta para conversão de programas para
Hololinguagem. Esta ferramenta converte programas em Holo para programas em Java.
Esta técnica é bastante usada na avaliação de novas linguagens, pois a utilização de uma
linguagem destino que possua uma plataforma (compilação e execução) já disponível,
antecipa a realização de testes e a difusão de resultados da pesquisa.
Ambiente Java – é utilizado para compilação e execução de programas Holo
convertidos em Java. Ela será utilizada até o desenvolvimento de uma plataforma
completa para a execução de programas em Holo que envolve a criação de uma
máquina multiparadigma, a especificação de seu código virtual e a construção de um
compilador.
HoloEnv 1.0
HoloJava 1.0
Ambiente Java Kava C + JVM,)
Arquitetura Centralizada
Arquitetura Distribuída
DHolo
26
Distributed Holo (DHolo): é um ambiente para execução distribuída de
Holoprogramas. O seu desenvolvimento depende da implementação de suporte para
mobilidade física e história distribuída. Para isso, torna-se necessário à utilização de
bibliotecas especiais. Estas bibliotecas devem estar disponíveis para a HoloJava.
2.7 HML (Holo Modeling Language)
É uma modelagem proposta para o Holoparadigma. Inicialmente será dada uma
visão geral da linguagem, suas características básicas e aplicação, em seguida é
abordada a notação de entes , sua estrutura e representação na linguagem. Por fim são
discutidos os diagramas básicos inicialmente propostos pela linguagem [LAE 2002].
2.7.1 Visão Geral
O Holoparadigma propõe uma visão de software diferente das conhecidas
atualmente. Por ser o ente um bloco básico da construção de qualquer aplicativo em
Holo, merece uma atenção especial, que não pode ser dada pelos métodos de
modelagem conhecidos.
Neste contexto surge a HML (Holo Modeling Language), uma linguagem de
modelagem projetada para visualização, especificação, implementação e documentação
de programas em Holo.
A HML está sendo especificada para auxiliar o desenvolvedor na criação de
soluções na Hololinguagem. Estas podem ser modeladas por representações gráficas
trazidas pela linguagem de modelagem, facilitando assim o entendimento do projeto e a
comunicação entre as pessoas envolvidas no mesmo. A HML possui muitas
características da UML. Podem ser citados, por exemplo, o diagrama de ente que na
HML este diagrama define quais os entes estáticos devem pertencer ao sistema. Em
UML existe o diagrama de classes, cuja finalidade é representar as estruturas estáticas
de objetos. A partir dessa definição são criadas instâncias de objetos em tempo de
execução (teoria de clonagem dinâmica de entes).

27
2.7.2 Elementos de Modelagem da HML
São todos os elementos que constituem um diagrama. Podem ser entes estáticos,
entes dinâmicos, notas, representação de diagramas, clonagens, afirmações, perguntas,
etc...
2.7.2.1 Notação de ente estático na HML
No Holoparadigma, o elemento fundamental para construção de programas é o
ente. A importância do ente no Holo pode ser comparada a do objeto na orientação a
objetos.
O ente é representado na sua forma estática por um retângulo com quadro
divisões que corresponde cada uma as partes de um ente estático:
<nome>(<argumentos>)cloning(<descrição>) Interface<açõesexportadas>. Cabeça {
history Corpo { } }
Figura 2.8 – Notação de ente na HML
O ente possui as seguintes características:
Nome: é um identificador único para o ente dentro do sistema.
História: é um espaço de armazenamento compartilhado no interior de um ente. Ela
armazena Cláusulas Lógicas com Extensões não Imperativas (CLEI), que representam o
conhecimento inicial do ente.
Nome do ente
Interface
Comportamento
História
Ações
CLEIs

28
Comportamento: armazena as ações executadas pelo ente em determinado momento
de sua existência. Pode-se comparar o comportamento de um ente com os métodos de
um objeto na orientação a objetos.
2.7.2.2 Notação de ente dinâmicos
É um ente em execução. Durante sua existência um ente dinâmico pode executar
ações ou interagir com outros entes de acordo com seus comportamentos e histórias.
Um ente dinâmico sempre é clonado de um ente estático, esta clonagem pode ser
comparada à instanciação de um objeto na orientação a objetos, onde o ente estático é a
classe e o ente dinâmico o objeto. Na HML um ente dinâmico é representado por um
círculo e seu nome é colocado logo abaixo.
Mineiro
Figura 2.9 - Notação de ente dinâmico
2.7.2.3 Notação de modos de invocação
No Holoparadigma existem dois modos de invocação para a interação entre
entes de um sistema: a afirmação e a pergunta. Ha HML, cada um destes modos possui
uma representação gráfica que permite a identificação do mesmo.
Afirmação: É representada por uma linha com uma seta partindo da origem, que
esta afirmando, chegando até o ente ou parte do ente que recebe a afirmação. Uma
afirmação é sempre não bloqueante, ou seja, não estabelece sincronismo e permite a
concorrência máxima. A seta possui uma Informação Simbólica, que representa o que se
esta afirmando. No caso de uma afirmação para a história, a informação simbólica é
29
uma tupla, que será adicionada a história. Uma afirmação segue todas as regras
definidas pela configuração de invocações do Holoparadigma.
Informação Simbólica
Figura 2.10 – Representação de afirmação na HML
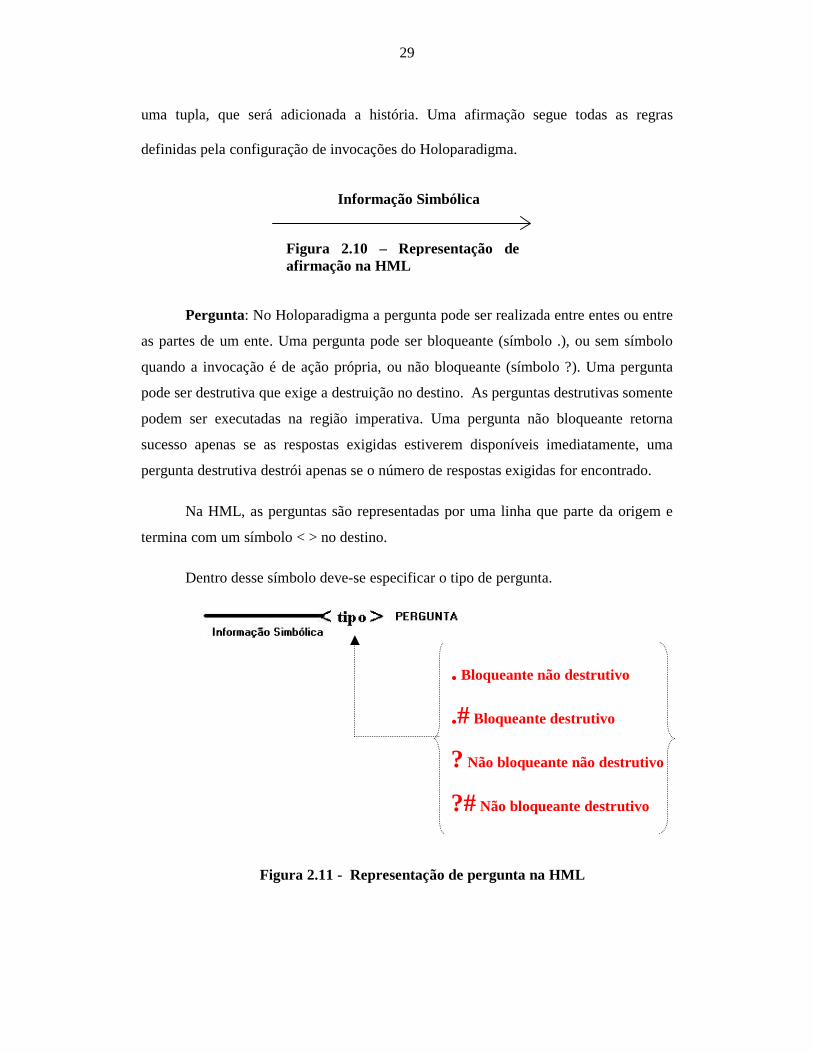
Pergunta: No Holoparadigma a pergunta pode ser realizada entre entes ou entre
as partes de um ente. Uma pergunta pode ser bloqueante (símbolo .), ou sem símbolo
quando a invocação é de ação própria, ou não bloqueante (símbolo ?). Uma pergunta
pode ser destrutiva que exige a destruição no destino. As perguntas destrutivas somente
podem ser executadas na região imperativa. Uma pergunta não bloqueante retorna
sucesso apenas se as respostas exigidas estiverem disponíveis imediatamente, uma
pergunta destrutiva destrói apenas se o número de respostas exigidas for encontrado.
Na HML, as perguntas são representadas por uma linha que parte da origem e
termina com um símbolo < > no destino.
Dentro desse símbolo deve-se especificar o tipo de pergunta.
. Bloqueante não destrutivo
.# Bloqueante destrutivo
? Não bloqueante não destrutivo
?# Não bloqueante destrutivo
Figura 2.11 - Representação de pergunta na HML
30
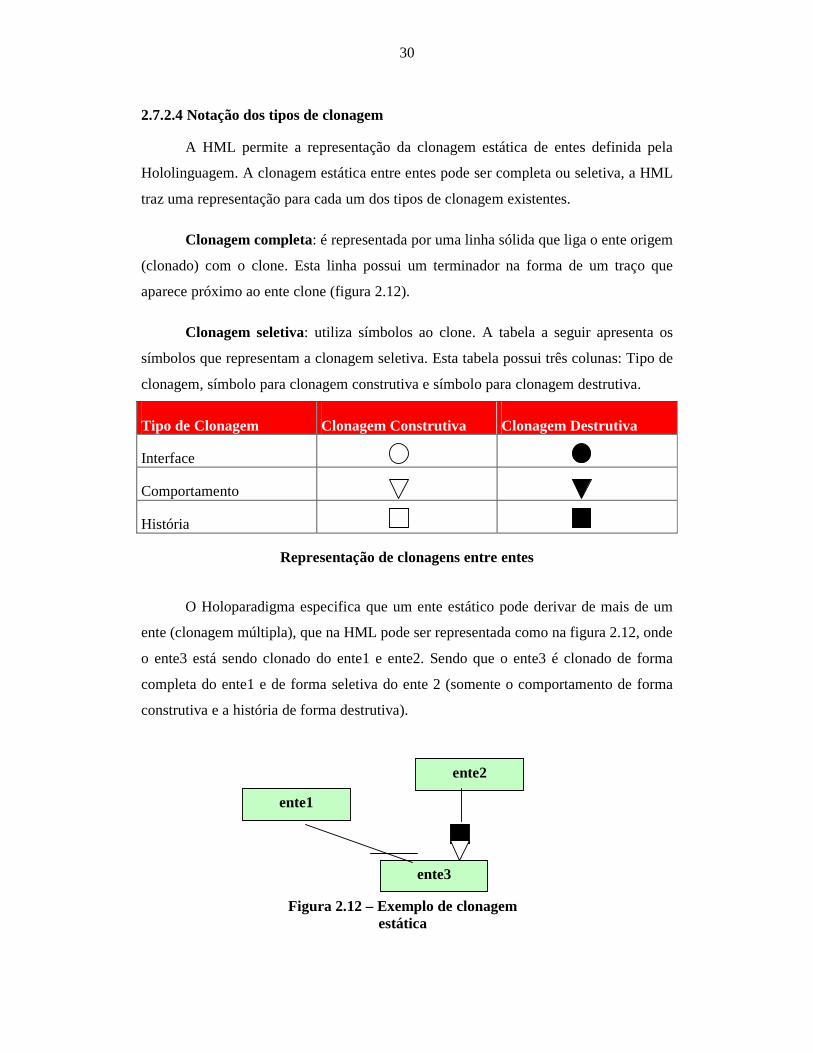
2.7.2.4 Notação dos tipos de clonagem
A HML permite a representação da clonagem estática de entes definida pela
Hololinguagem. A clonagem estática entre entes pode ser completa ou seletiva, a HML
traz uma representação para cada um dos tipos de clonagem existentes.
Clonagem completa: é representada por uma linha sólida que liga o ente origem
(clonado) com o clone. Esta linha possui um terminador na forma de um traço que
aparece próximo ao ente clone (figura 2.12).
Clonagem seletiva: utiliza símbolos ao clone. A tabela a seguir apresenta os
símbolos que representam a clonagem seletiva. Esta tabela possui três colunas: Tipo de
clonagem, símbolo para clonagem construtiva e símbolo para clonagem destrutiva.
Tipo de Clonagem Clonagem Construtiva Clonagem Destrutiva
Interface
Comportamento
História
Representação de clonagens entre entes
O Holoparadigma especifica que um ente estático pode derivar de mais de um
ente (clonagem múltipla), que na HML pode ser representada como na figura 2.12, onde
o ente3 está sendo clonado do ente1 e ente2. Sendo que o ente3 é clonado de forma
completa do ente1 e de forma seletiva do ente 2 (somente o comportamento de forma
construtiva e a história de forma destrutiva).
Figura 2.12 – Exemplo de clonagem
estática
ente2
ente3
ente1
31
No exemplo acima o quadrado preenchido representa a clonagem destrutiva da
história e o triângulo representa a clonagem construtiva do comportamento, portando o
ente3 vai receber todas as informações da história do ente2. O comportamento do ente3
vai receber todas as ações do ente2, seguindo as políticas para clonagem definidas pelo
Holoparadigma.
2.7.2.5 Notação dos tipos de Mobilidade Lógica
A Hololinguagem permite ao programador definir explicitamente as mobilidades
lógicas executadas pelos entes. As mobilidades físicas ficam implícitas para o
programador sendo realizadas automaticamente pela plataforma de execução, no
balanceamento da carga ou em uma mobilidade lógica cujo ente destino esteja em outro
modo da rede.
A mobilidade na HML é representada por uma seta ligando o ente móvel ao seu
destino. Para que haja a mobilidade o ente destino deve existir no ambiente. No entanto,
a definição da Hololinguagem permite que um ente mova-se para dentro de outro ente
mesmo que este não esteja visível.
Há três tipos de mobilidade lógica definida pela Hololinguagem:
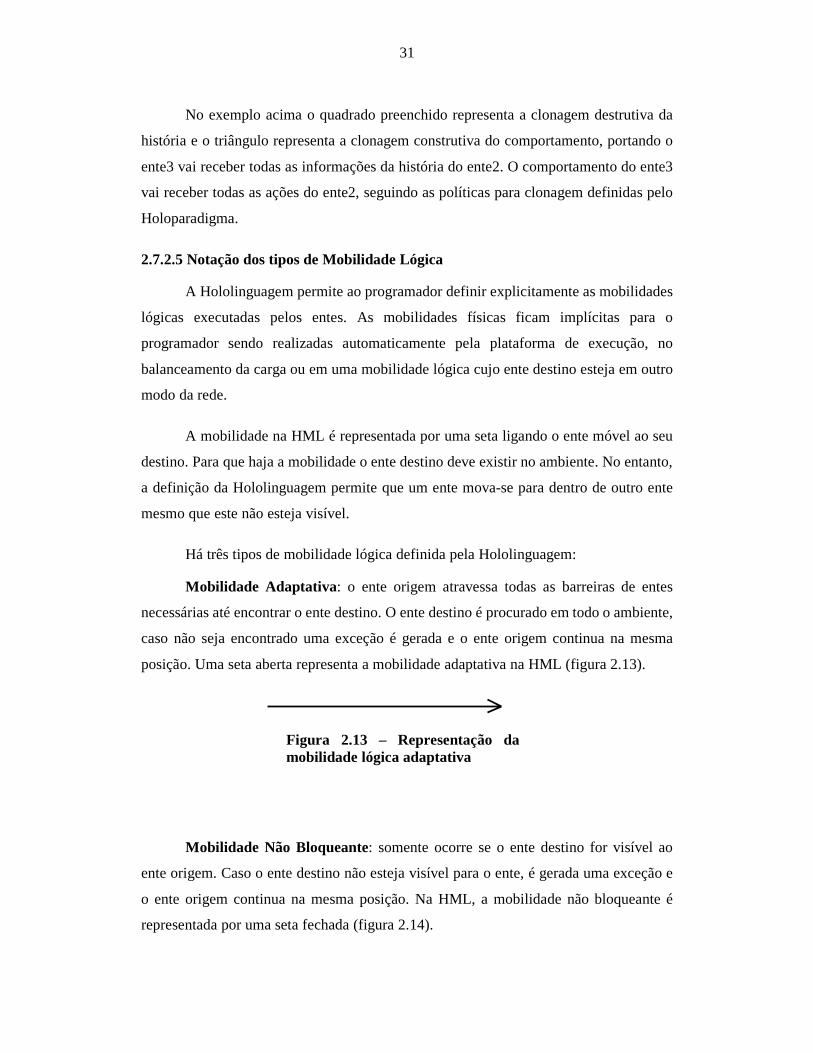
Mobilidade Adaptativa: o ente origem atravessa todas as barreiras de entes
necessárias até encontrar o ente destino. O ente destino é procurado em todo o ambiente,
caso não seja encontrado uma exceção é gerada e o ente origem continua na mesma
posição. Uma seta aberta representa a mobilidade adaptativa na HML (figura 2.13).
Figura 2.13 – Representação da mobilidade lógica adaptativa
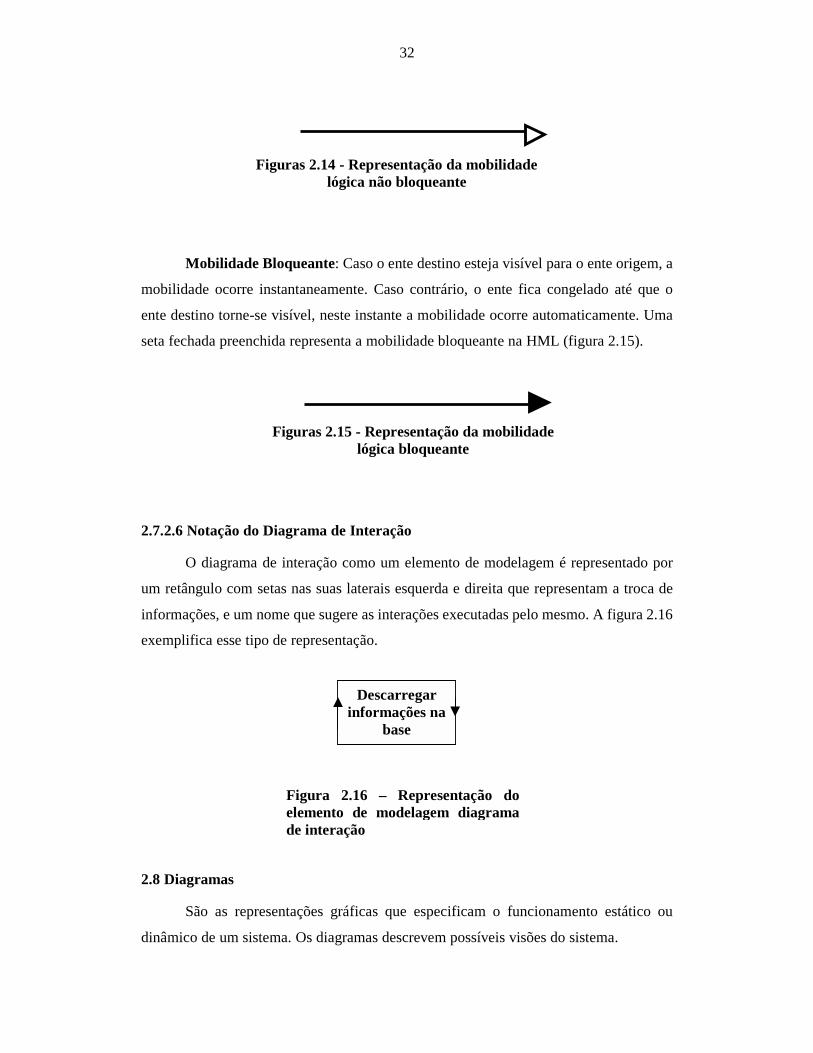
Mobilidade Não Bloqueante: somente ocorre se o ente destino for visível ao
ente origem. Caso o ente destino não esteja visível para o ente, é gerada uma exceção e
o ente origem continua na mesma posição. Na HML, a mobilidade não bloqueante é
representada por uma seta fechada (figura 2.14).
32
Figuras 2.14 - Representação da mobilidade
lógica não bloqueante
Mobilidade Bloqueante: Caso o ente destino esteja visível para o ente origem, a
mobilidade ocorre instantaneamente. Caso contrário, o ente fica congelado até que o
ente destino torne-se visível, neste instante a mobilidade ocorre automaticamente. Uma
seta fechada preenchida representa a mobilidade bloqueante na HML (figura 2.15).
Figuras 2.15 - Representação da mobilidade
lógica bloqueante
2.7.2.6 Notação do Diagrama de Interação
O diagrama de interação como um elemento de modelagem é representado por
um retângulo com setas nas suas laterais esquerda e direita que representam a troca de
informações, e um nome que sugere as interações executadas pelo mesmo. A figura 2.16
exemplifica esse tipo de representação.
Figura 2.16 – Representação do elemento de modelagem diagrama de interação
2.8 Diagramas
São as representações gráficas que especificam o funcionamento estático ou
dinâmico de um sistema. Os diagramas descrevem possíveis visões do sistema.
Descarregar informações na
base

33
2.8.1 Diagrama de Entes Estáticos
Este diagrama é utilizado para descrever os entes que fazem parte de um
programa em Holo. Ele é composto por descrições de entes estáticos, as quais
estabelecem interfaces, comportamentos e histórias. Um ente estático possui um nome
para identificá-lo, uma interface que permite aos outros entes interagirem com o mesmo,
os comportamentos e a história inicial, que poderá ser alterada quando o mesmo torna-
se um ente dinâmico através da clonagem de transição. O diagrama de entes estáticos
pode ser considerado como o estado inicial de um programa Holo antes de sua
execução. Ele pode ser comparado com um diagrama de classes na orientação a objetos.
Também pode representar os tipos de clonagem definidos no Holoparadigma. O
diagrama de ente estático da HML foi desenvolvido para permitir ao projetista criar a
estrutura de um programa em Holo, definindo comportamentos e conhecimentos iniciais
de todos os entes do sistema antes de sua execução. Este diagrama possibilita a geração
automática de código na Hololinguagem.
2.8.2 Diagramas de Interação
Este diagrama apresenta uma visão interna de um determinado ente, sendo
formado pela história do ente, sua interface e seu comportamento e os entes que estão
inseridos dentro deste ente composto (representação de ente dinâmico).
Figura 2.17 – Diagrama de interação
Ente1 Ente2
tupla1 tupla1
HISTÓRIA

34
O objetivo do diagrama de interação é permitir a visualização interna do ente em
determinado instante de tempo dentro do sistema.
Na figura 2.17, o ente1 e o ente2 fazem uma pergunta bloqueante destrutiva a
história e os dois ficam bloqueados esperando que esta informação seja adicionada na
história do ente composto. Devido ao tipo de pergunta efetuado, os entes 1 e 2 somente
poderão continuar sua execução após obterem o valor solicitado na história. Em seguida
poderia ser modelado um diagrama, como na figura 2.18, onde o ente3 faz uma
afirmação à história, inserindo um valor, esperando pelos entes 1 e 2, porém somente
um destes entes poderá prosseguir a execução, pois ambas as perguntas são destrutivas.
Neste caso, o primeiro ente que obter a informação exclui a mesma da história e
o outro continuará esperando até que a informação seja novamente inserida na história.
O critério a ser utilizado para controle de concorrência é o mesmo definido nas
estruturas do tipo fila, onde o primeiro ente que solicitará a informação recebe a
prioridade.
(a) Ente3 faz afirmação à história
Ente3 Ente1 Ente2
tupla1 tupla1
HISTÓRIA
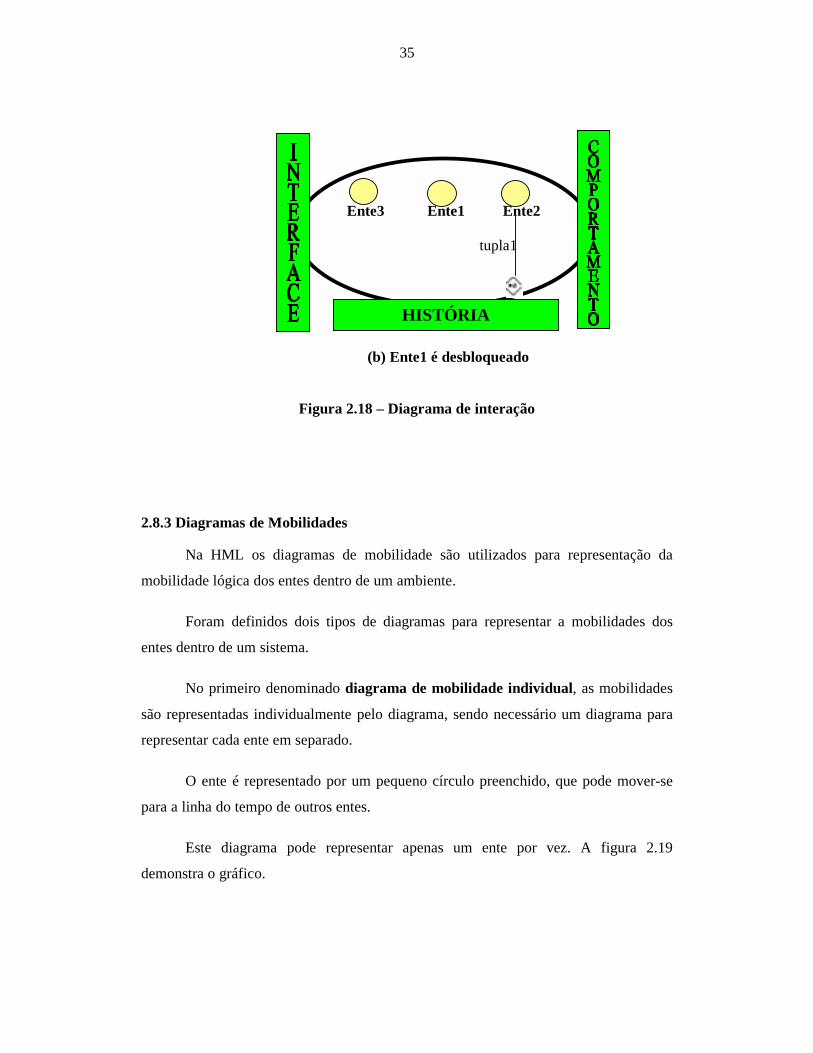
35
(b) Ente1 é desbloqueado
Figura 2.18 – Diagrama de interação
2.8.3 Diagramas de Mobilidades
Na HML os diagramas de mobilidade são utilizados para representação da
mobilidade lógica dos entes dentro de um ambiente.
Foram definidos dois tipos de diagramas para representar a mobilidades dos
entes dentro de um sistema.
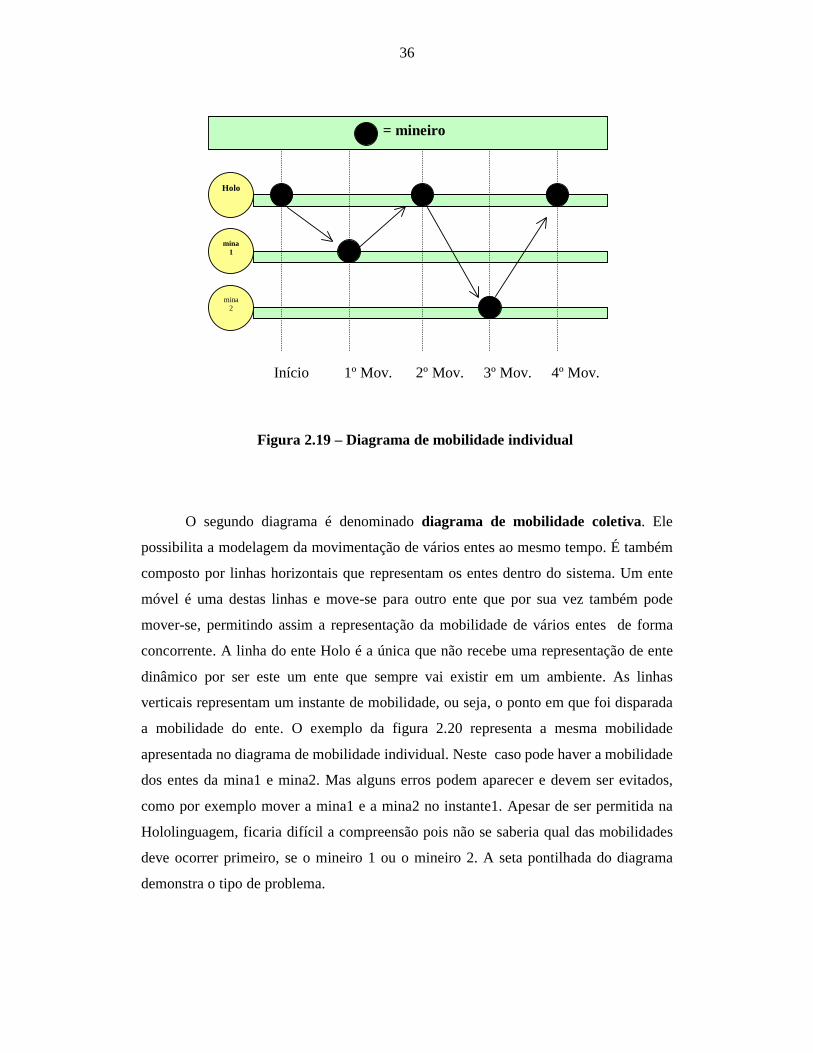
No primeiro denominado diagrama de mobilidade individual, as mobilidades
são representadas individualmente pelo diagrama, sendo necessário um diagrama para
representar cada ente em separado.
O ente é representado por um pequeno círculo preenchido, que pode mover-se
para a linha do tempo de outros entes.
Este diagrama pode representar apenas um ente por vez. A figura 2.19
demonstra o gráfico.
Ente3 Ente1 Ente2
tupla1
HISTÓRIA
36
Início 1º Mov. 2º Mov. 3º Mov. 4º Mov.
Figura 2.19 – Diagrama de mobilidade individual
O segundo diagrama é denominado diagrama de mobilidade coletiva. Ele
possibilita a modelagem da movimentação de vários entes ao mesmo tempo. É também
composto por linhas horizontais que representam os entes dentro do sistema. Um ente
móvel é uma destas linhas e move-se para outro ente que por sua vez também pode
mover-se, permitindo assim a representação da mobilidade de vários entes de forma
concorrente. A linha do ente Holo é a única que não recebe uma representação de ente
dinâmico por ser este um ente que sempre vai existir em um ambiente. As linhas
verticais representam um instante de mobilidade, ou seja, o ponto em que foi disparada
a mobilidade do ente. O exemplo da figura 2.20 representa a mesma mobilidade
apresentada no diagrama de mobilidade individual. Neste caso pode haver a mobilidade
dos entes da mina1 e mina2. Mas alguns erros podem aparecer e devem ser evitados,
como por exemplo mover a mina1 e a mina2 no instante1. Apesar de ser permitida na
Hololinguagem, ficaria difícil a compreensão pois não se saberia qual das mobilidades
deve ocorrer primeiro, se o mineiro 1 ou o mineiro 2. A seta pontilhada do diagrama
demonstra o tipo de problema.
= mineiro
Holo
mina 1
mina 2

37
Instante Instante Instante Instante Instante
1 2 3 4 5
Figura 2.20 – Diagrama de mobilidade coletiva
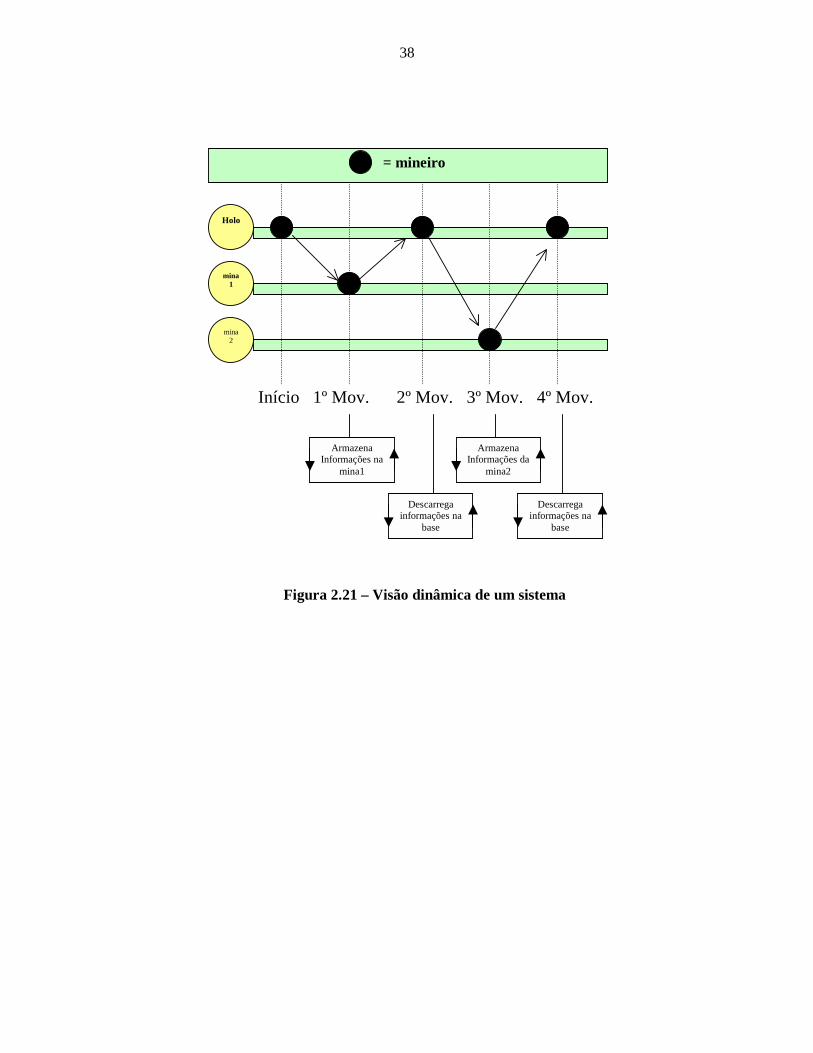
2.8.4 Diagramas de Visões do Sistema
Este diagrama é equivalente ao diagrama de mobilidade individual apresentado na figura 2.19, porém ele permite a visualização das interações que ocorrem durante a movimentação do ente minerador.
Isso é possível pois o diagrama exibe alguns elementos de modelagem que são ligações para os diagramas de invocação correspondentes. A figura 2.21.
HOLO
Minei- ro
mina 1
mina 2
38
Início 1º Mov. 2º Mov. 3º Mov. 4º Mov.
Figura 2.21 – Visão dinâmica de um sistema
= mineiro
Holo
mina 1
mina 2
Armazena Informações na
mina1
Armazena Informações da
mina2
Descarrega informações na
base
Descarrega informações na
base
39
3. Mobilidade
Define-se mobilidade como a capacidade das entidades computacionais
deslocar-se de um ambiente para outro, através do sistema distribuído.
Atualmente, a maioria das aplicações de mobilidade são desenvolvidas
utilizando ou baseando-se nos paradigmas de orientação a objetos ou de agentes. Pode-
se observar que estes dois paradigmas, estão cada vez mais presentes no
desenvolvimento destas aplicações [DÖM 2002].
Os sistemas distribuídos apresentam várias características que são objetos de
constante pesquisa na busca de soluções, tais como: afastamento, concorrência, ausência
de estado global, ocorrência de falhas parciais, assincronismo, heterogeneidade,
autonomia e mobilidade.
3.1. Conceitos
As pesquisas que envolvem mobilidade conceituam este termo de várias formas.
A maioria refere-se à mobilidade através do termos código móvel (mobile code) e
agentes móveis (mobile agent).
• Mobilidade é a habilidade de mover-se independentemente de um dispositivo para
outro através da rede.
• Código móvel pode ser definido como a capacidade de dinamicamente trocar as
ligações entre os fragmentos de código e a localização onde o código é executado.
• Código móvel é um software que viaja através de redes heterogêneas, atravessando
vários domínios, sendo que é automaticamente executado quando chega em seu destino.
• Agentes móveis são programas que podem ser disparados de um computador cliente e
transportado para um computador remoto para ser executado.
40
• Agentes móveis são programas que podem se mover através de uma rede de
computadores conforme queiram seus usuários.
• Agentes móveis são programas “inteligentes” que podem ser transmitidos entre os
diversos computadores de um sistema distribuído.
Podemos notar um elemento presente em todos os conceitos:
O deslocamento das entidades envolvidas (objetos ou agentes). Pode-se dizer
que mobilidade é a capacidade das entidades envolvidas na computação deslocarem-se
através de um sistema distribuído [COM 2002].
Mobilidade não é uma concepção nova. Um exemplo é a migração, pois migrar
processos ou objetos é uma forma de mobilidade que já é usada em pequena escala. As
pesquisas em mobilidade vem crescendo muito atualmente devido principalmente a
possibilidade de explorar código móvel em grande escala, onde as redes interligadas são
heterogêneas e gerenciadas por organizações diferentes.
3.2. Mecanismos
Tecnologias que exploram mobilidade devem prover mecanismos que suportem
o deslocamento de suas entidades. Estes mecanismos necessitam de uma estrutura
computacional que suporte à mobilidade. Sendo assim, a concepção de um ambiente
computacional (Computational Environment) deve ser introduzida para suportar os
diversos mecanismos necessários à mobilidade. Um ambiente computacional retêm a
identidade do nodo onde está localizado dando suporte para que as aplicações tenham a
capacidade de recolocar dinamicamente seus componentes em diferentes ambientes
computacionais. Um exemplo de ambiente computacional é a máquina virtual Java
(Java Virtual Machine).
À mobilidade é determinada pela característica do sistema. Por exemplo, em
Java é possível mover somente o código de um Applet. Já em Java Aglet, tanto o código
quanto o estado são movidos [INF 2002].
41
Podem ser identificadas duas formas de mobilidade: mobilidade forte e
mobilidade fraca.
A Mobilidade forte permite que a unidade de execução possa mover seu código
e o estado da computação para diferentes ambientes computacionais.
Neste caso, a execução é suspensa, transmitida para o ambiente computacional
destino, e sua execução é retomada. Mobilidade fraca permite transferir código de um
ambiente computacional para outro. O código pode conter alguns dados inicializados,
mas o estado da unidade de execução não é movido.
A mobilidade forte pode ser explorada através de dois mecanismos: migração
(migration) e clone remoto (remote cloning). O mecanismo de migração suspende a
execução de uma unidade de execução, transmite para o ambiente computacional
destino e retoma sua execução. Mecanismos que suportam mobilidade fraca têm a
capacidade de transferir código através de ambientes computacionais e ligar-se
dinamicamente com uma unidade de execução ativa ou criar uma nova unidade de
execução no ambiente remoto para a execução.
Estes mecanismos podem ser classificados de acordo com a direção da
transferência do código, a natureza do código movido, a sincronização envolvida e o
momento em que o código é executado no ambiente remoto.
3.3. Tecnologias e equipamentos para suporte à mobilidade
Apresentamos algumas ferramentas usadas para desenvolver sistemas que
suportam mobilidade e alguns ambientes que permitem explorar mobilidade, tais como
Java, Obliq e Oz Distribuído , que são linguagens de programação que permitem
implementar mobilidade. Apresentamos também o CORBA, destacando sua
contribuição para exploração da mobilidade e alguns ambientes que suportam
mobilidade, tais como Voyager, Aglets e Concórdia.
42
•••• JAVA
Java é uma linguagem orienta a objetos, baseada em classes, criada pela Sun
Microsystems, com ênfase em portabilidade e segurança. O compilador Java transforma
programas fontes em uma linguagem independente de plataforma chamada Java Byte
Code.
Um dos fatores de sucesso de Java é o seu uso na Internet. Browsers suportam
JVM e carregam classes chamadas Applet. Java provê suporte aos mecanismos da
linguagem que permitem implementar mobilidade. A sua entidade computacional é o
objeto. Além disso, Java explora mobilidade fraca, do tipo autônoma, pois permite que
os programas sejam carregados dinâmicamente pela rede, através do ClassLoader. Java
é uma das linguagem mais usada para implementar mobilidade. Ainda pode-se observar
que aplicações móveis desenvolvidas através do paradigma de Código em demanda
podem ser desenvolvidas utilizando Java.
•••• OBLIQ Obliq, é uma linguagem com um escopo léxico, e dinamicamente tipada,
baseada em protótipo, projetada para computação distribuída orientada a objeto e
pertence a uma classe de linguagens orientada a objetos. Nestas linguagens não existem
classes e objetos são criados por cópia (clone) de objetos existentes (os protótipos),
Obliq é tipada dinamicamente, suporta o paradigma de avaliação remota e objetos
serializados.
Obliq suporta mobilidade forte, tanto através de migração quanto através de
clone remoto, Além disso, a máquina de execução Obliq oferece um ambiente
computacional propício a exploração da mobilidade e sua entidade base é o objeto.
•••• OZ DISTRIBUÍDO
A linguagem Oz distribuída é uma linguagem projetada para processamento
simbólico concorrente. O Oz integra vários paradigmas de programação, incluindo
orientação a objetos, funcional e de restrições lógicas em um único modelo.

43
A mobilidade em OZ é a habilidade que uma entidade stateful, que pode mudar
seu estado, tem de migrar entre os sites ou de permanecer estacionária entre os sites, sua
entidade base é o objeto, seu ambiente computacional é a Oz Virtual Machine que,
como em Java, é portável, podendo executar tanto em Unix como em Windows.
•••• CORBA
A organização OMG (Object Management Group) estabeleceu a arquitetura
CORBA como uma forma de especificar um middleware aberto composto de objetos
distribuídos. O objetivo primário é alcançar sistemas baseados em objetos em ambientes
distribuídos heterogêneos com características de reusabilidade, portabilidade e
interoperabilidade.
O CORBA permite que diferentes objetos escritos em diferentes linguagens,
sejam auto-documentáveis e possam interoperar através das redes e de sistemas
operacionais.
3.3.1 Ambientes que permitem explorar a mobilidade •••• VOYAGER
O Voyager consiste de uma plataforma ORB implementado em Java e com
suporte a agentes. É uma plataforma que integra computação distribuída com tecnologia
de agentes, suportando objetos móveis e agentes autônomos.
Permite que objetos e agentes possam enviar mensagens padrão Java para um
agente mesmo sem saber sua localização.
Um pacote adicional Java permite ao Voyager criar uma interface para ser usada
em um cliente ou servidor CORBA.
O voyager permite balanceamento dinâmico de carga.
44
Um objeto Voyager é um componente de software que tem um conjunto bem
definido de funções e dados encapsulados.
Quando um programa Voyager inicia, ele automaticamente cria threads que
provêem algum serviço, como garbage collection e verificação do tráfego da rede. Cada
programa Voyager tem um endereço na rede consistindo no nome da máquina e o
número da porta de comunicação, que é um inteiro único para a máquina.
Voyager suporta agentes móveis, sua filosofia é que o agente é simplesmente
uma espécie especial de objeto que pode mover-se independentemente, podendo
continuar sua execução ao se mover, e no entanto comportar-se exatamente como
qualquer outro objeto.
•••• AGLETS
Aglets são objetos Java com a capacidade de se mover de uma máquina para
outra em uma rede, levando consigo o código de programa e o estado dos objetos que
compõe o Aglet. Este é um agente móvel porque suporta a idéia de execução autônoma
e rota dinâmica de seu etinerário.
O modelo Aglet provê comportamentos essenciais com relação a um agente tais
como: criação, clonagem, envio, retirada, desativação, ativação, liberação, mensagem e
nomeação.
Aglets são objetos Java que podem migrar de uma máquina para outra, eles tem
um potencial de acesso para todos os recursos da máquina.
Eles também confiam na segurança do interpretador Java para sua própria
execução. Assim, segurança em Aglet e segurança em Java andam juntas.
•••• CONCORDIA
O Concordia, concebido pela Mitsubishi constitui-se de um framework para o
desenvolvimento e gerenciamento de aplicações de agentes móveis.
45
O Concordia compreende múltiplos componentes, todos escritos em Java, na
qual são combinados para prover um ambiente para aplicações distribuídas.
Este sistema é simples, e requer somente uma implementação padrão do servidor
Concordia, feito em cima da máquina virtual Java, e seu ambiente é composto de um
servidor e um conjunto de agentes.
Quanto a arquitetura do sistema, cada nodo num sistema Concordia consiste em
um servidor Concordia e provê serviços básicos para criação, migração, execução,
comunicação e administração de agentes móveis.
3.3.2 Equipamentos para suporte à mobilidade •••• WIRELESS
Através de plataformas, muito além de dispositivos e ao redor do mundo, o
próximo avanço da revolução do mercado de e-business vem tomando forma.
O panorama da tecnologia de informação já está mudando, passando da
computação estática para o acesso móvel e inopresente, da relevância limitada para o
usuário, para informações verdadeiramente personalizadas.
O nome wireless vem do inglês, significando “sem fio” (wire=fio, less=sem), ou
seja acesso sem fio, sendo comumente utilizado no meio da informática para designar as
tecnologias que permitem comunicação sem conexão física direta entre os
equipamentos. A primeira idéia que vem a cabeça é a utilização de radio para
comunicação, que é realmente o meio mais popular, entretanto, é importante lembrar
que wireless engloba outros meios de comunicação, como uso de raios de luz infra-
vermelha, menos popular devido a limitações como: não haver qualquer tipo de barreira
física entre os pontos de comunicação.
Mas a utilização do radio é o meio mais difundido para comunicação de dados
sem fio.
46
O funcionamento do sistema é muito simples. Podemos compará-lo ao do celular
da seguinte maneira: Existe uma antena (figura 3.4), num ponto central e estratégico.
Esta antena esta conectada a uma rede local, onde existe um cachê e este conecta-se
diretamente a um backbone [MOV 2001]. Esta antena emite um sinal na freqüência de
mais ou menos 2.4 GHz utilizando talves o sistema chamado Direct Sequence Spread
Spectrum (DSSS). Este sinal é captado por antenas (figuras 3.1, 3.2 e 3.3) instaladas na
casa ou na empresa do usuário e é levada até uma placa especial que é instalada dentro
de seu computador (esta placa substituí seu FAX Modem), e a partir daí você estará
conectado. Basta ligar seu computador para a conexão estar ativa.
Figura 3.1 - Parabólica Figura 3.2 – Parabólica
Figura 3.3 - Direcional
Figura 3.4 - Omnidirecional
47
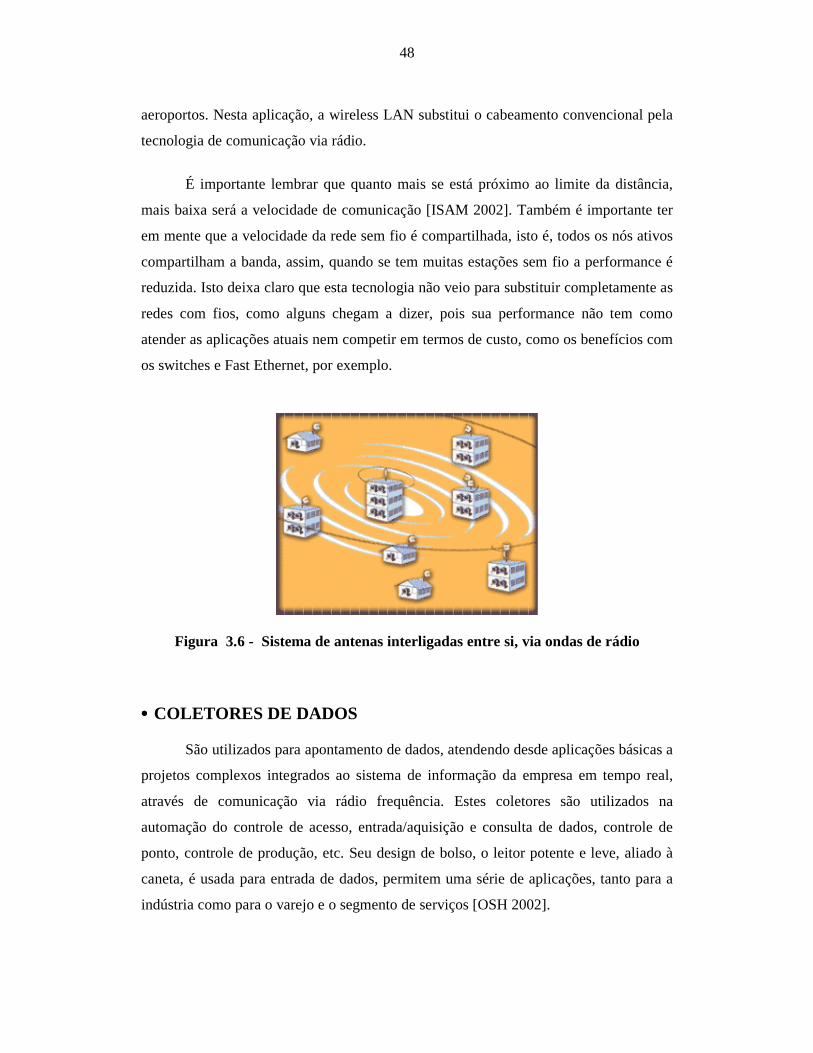
Requisitos mínimos para a instalação do nosso sistema Wireless:
• Pentium 100 com 32 Mbytes de memória RAM ou melhor.
• Um slot ISA ou PCI vazio
• 3 Mbytes de espaço disponível em disco.
• Um ponto com visada direta à antena
• Windows 95, 98, NT ou Windows 2000.
Figura 3.5 - Comunicação de dados sem fio
•••• WIRELESS LANS (REDES SEM FIO)
Esta é uma das aplicações mais populares para a tecnologia wireless, em que se
utiliza ondas de rádio para interligação de pontos de redes locais (LANs). Basicamente
existem 2 configurações mais comuns:
- Interligação de 2 redes locais (ponto-a-ponto), normalmente entre edificações
distantes desde algumas centenas de metros até alguns kilometros [INT 2002]. A maior
limitação desta aplicação, além da distância, é a necessidade de se ter uma visada direta
entre os 2 pontos, sendo como solução de contorno a utilização de repetidores no meio
do caminho.
- Interligação de estações de redes locais (multi-ponto), normalmente em
ambientes fechados, incluindo-se galpões, escritórios e até locais públicos como
48
aeroportos. Nesta aplicação, a wireless LAN substitui o cabeamento convencional pela
tecnologia de comunicação via rádio.
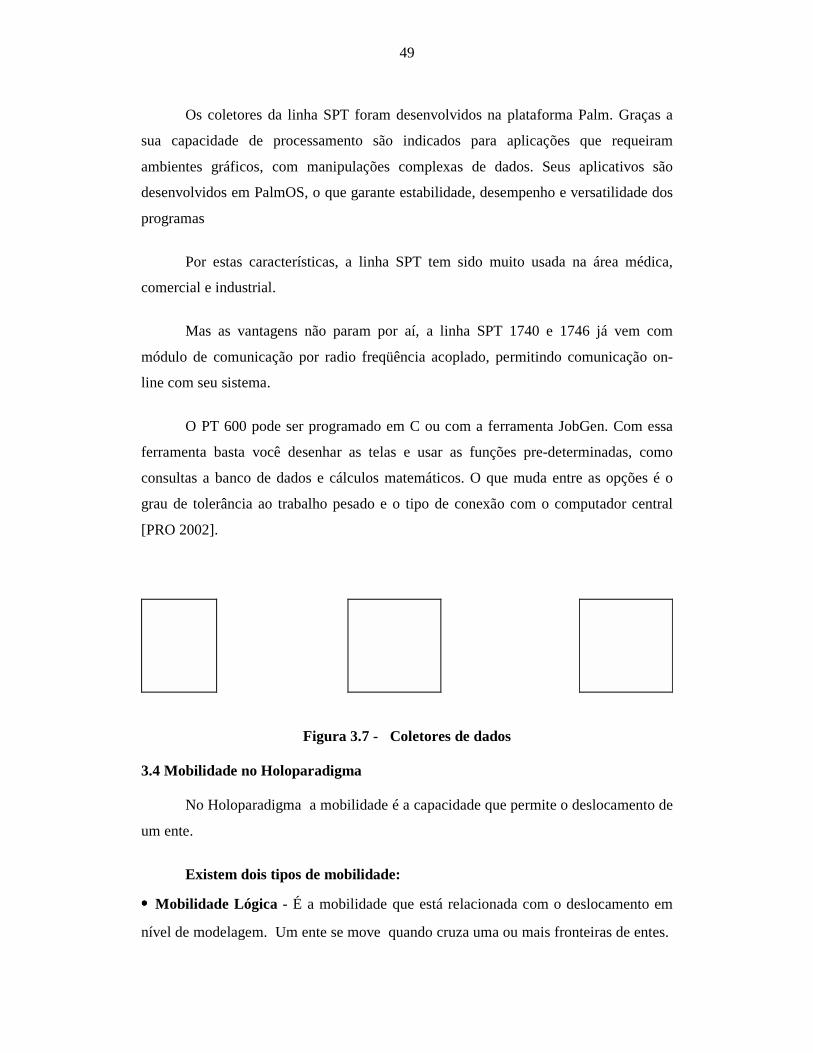
É importante lembrar que quanto mais se está próximo ao limite da distância,
mais baixa será a velocidade de comunicação [ISAM 2002]. Também é importante ter
em mente que a velocidade da rede sem fio é compartilhada, isto é, todos os nós ativos
compartilham a banda, assim, quando se tem muitas estações sem fio a performance é
reduzida. Isto deixa claro que esta tecnologia não veio para substituir completamente as
redes com fios, como alguns chegam a dizer, pois sua performance não tem como
atender as aplicações atuais nem competir em termos de custo, como os benefícios com
os switches e Fast Ethernet, por exemplo.
Figura 3.6 - Sistema de antenas interligadas entre si, via ondas de rádio
•••• COLETORES DE DADOS
São utilizados para apontamento de dados, atendendo desde aplicações básicas a
projetos complexos integrados ao sistema de informação da empresa em tempo real,
através de comunicação via rádio frequência. Estes coletores são utilizados na
automação do controle de acesso, entrada/aquisição e consulta de dados, controle de
ponto, controle de produção, etc. Seu design de bolso, o leitor potente e leve, aliado à
caneta, é usada para entrada de dados, permitem uma série de aplicações, tanto para a
indústria como para o varejo e o segmento de serviços [OSH 2002].
49
Os coletores da linha SPT foram desenvolvidos na plataforma Palm. Graças a
sua capacidade de processamento são indicados para aplicações que requeiram
ambientes gráficos, com manipulações complexas de dados. Seus aplicativos são
desenvolvidos em PalmOS, o que garante estabilidade, desempenho e versatilidade dos
programas
Por estas características, a linha SPT tem sido muito usada na área médica,
comercial e industrial.
Mas as vantagens não param por aí, a linha SPT 1740 e 1746 já vem com
módulo de comunicação por radio freqüência acoplado, permitindo comunicação on-
line com seu sistema.
O PT 600 pode ser programado em C ou com a ferramenta JobGen. Com essa
ferramenta basta você desenhar as telas e usar as funções pre-determinadas, como
consultas a banco de dados e cálculos matemáticos. O que muda entre as opções é o
grau de tolerância ao trabalho pesado e o tipo de conexão com o computador central
[PRO 2002].
Figura 3.7 - Coletores de dados
3.4 Mobilidade no Holoparadigma
No Holoparadigma a mobilidade é a capacidade que permite o deslocamento de
um ente.
Existem dois tipos de mobilidade:
•••• Mobilidade Lógica - É a mobilidade que está relacionada com o deslocamento em
nível de modelagem. Um ente se move quando cruza uma ou mais fronteiras de entes.
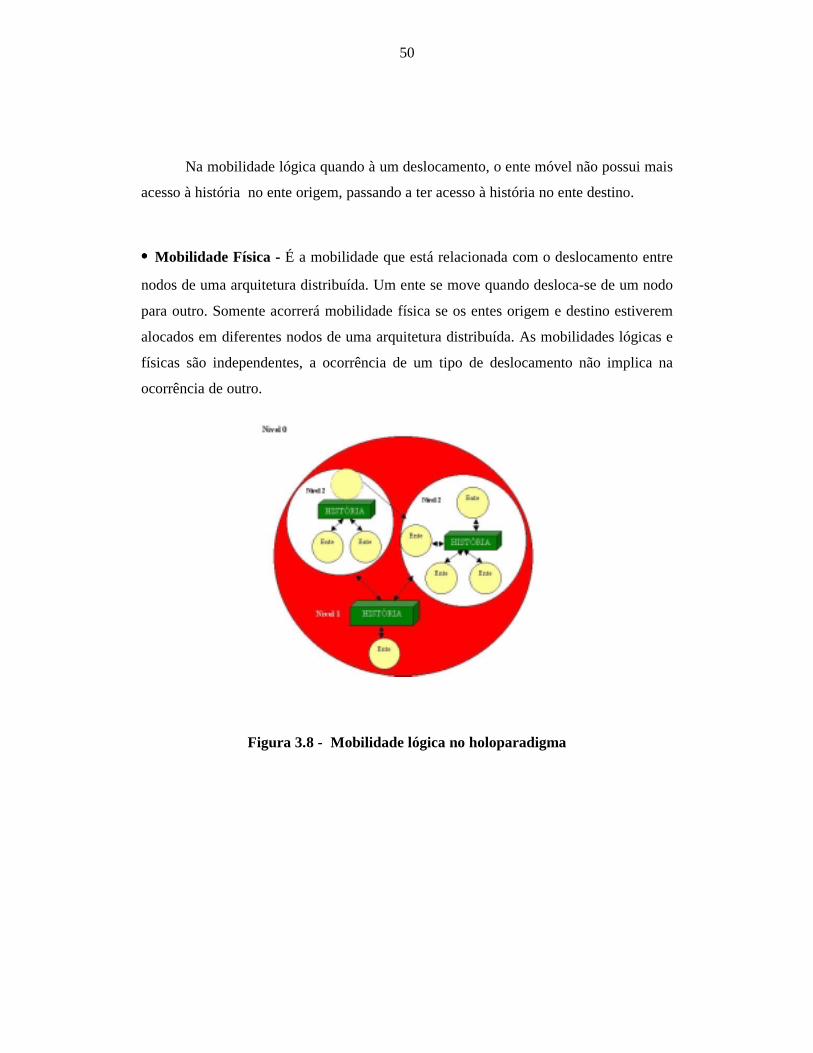
50
Na mobilidade lógica quando à um deslocamento, o ente móvel não possui mais
acesso à história no ente origem, passando a ter acesso à história no ente destino.
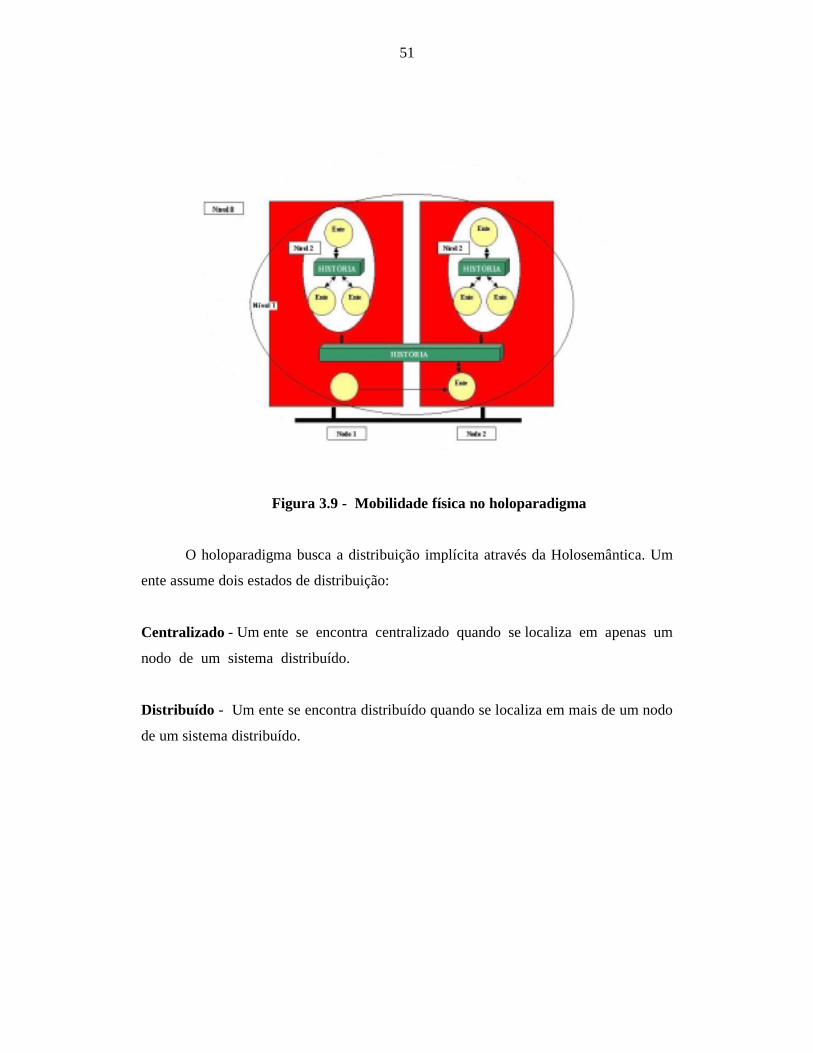
•••• Mobilidade Física - É a mobilidade que está relacionada com o deslocamento entre
nodos de uma arquitetura distribuída. Um ente se move quando desloca-se de um nodo
para outro. Somente acorrerá mobilidade física se os entes origem e destino estiverem
alocados em diferentes nodos de uma arquitetura distribuída. As mobilidades lógicas e
físicas são independentes, a ocorrência de um tipo de deslocamento não implica na
ocorrência de outro.
Figura 3.8 - Mobilidade lógica no holoparadigma
51
Figura 3.9 - Mobilidade física no holoparadigma
O holoparadigma busca a distribuição implícita através da Holosemântica. Um
ente assume dois estados de distribuição:
Centralizado - Um ente se encontra centralizado quando se localiza em apenas um
nodo de um sistema distribuído.
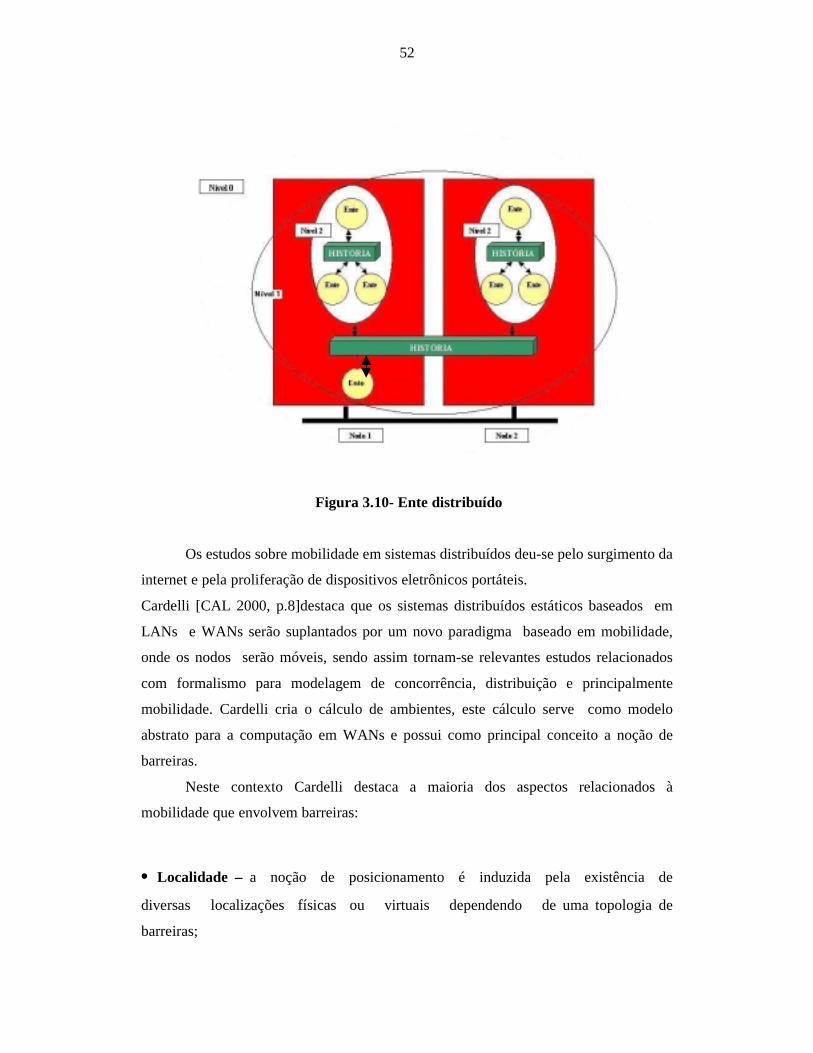
Distribuído - Um ente se encontra distribuído quando se localiza em mais de um nodo
de um sistema distribuído.
52
Figura 3.10- Ente distribuído
Os estudos sobre mobilidade em sistemas distribuídos deu-se pelo surgimento da
internet e pela proliferação de dispositivos eletrônicos portáteis.
Cardelli [CAL 2000, p.8]destaca que os sistemas distribuídos estáticos baseados em
LANs e WANs serão suplantados por um novo paradigma baseado em mobilidade,
onde os nodos serão móveis, sendo assim tornam-se relevantes estudos relacionados
com formalismo para modelagem de concorrência, distribuição e principalmente
mobilidade. Cardelli cria o cálculo de ambientes, este cálculo serve como modelo
abstrato para a computação em WANs e possui como principal conceito a noção de
barreiras.
Neste contexto Cardelli destaca a maioria dos aspectos relacionados à
mobilidade que envolvem barreiras:
•••• Localidade – a noção de posicionamento é induzida pela existência de
diversas localizações físicas ou virtuais dependendo de uma topologia de
barreiras;
53
•••• Mobilidade - deslocamento entre posições envolve a travessiade barreiras;
•••• Composição – controlada pelas barreiras, comunicações locais que ocorrem no
escopo de uma barreira e remotas dependem de mobilidade comunicações locais.
3.5 Mobilidade Hospitalar O Sistema integrado Hospitalar possibilita trabalhar com dispositivos sem fios,
tais como computadores de mão e coletores de dados conectados à rede hospitalar por
rádio freqüência agregando mobilidade e racionalização.
Por esse processo opcional, os profissionais do corpo clínico e do quadro
administrativo do Hospital, como médicos, enfermeiros, farmacêuticos, técnicos, e
auxiliares, podem usar estes equipamentos que são conectados a rede de computadores
do Hospital sem o uso de fios, ou seja a conexão é feita por rádio. Esses dispositivos são
conectados ao sistema central de computação através de conexões de rádio, por onde
enviam e recebem informações.
Essa tecnologia proporciona grande racionalização de procedimentos, facilidades
e mobilidade para os profissionais e acesso rápido às informações.
O Sistema Hospitalar utilizará tecnologia de ponta para a total informatização do
Hospital, englobando todos os seus setores.
Essas tecnologias melhoram o atendimento ao paciente e apóiam a
administração com informações precisas.
Algumas dessas tecnologias são parte do núcleo do sistema, enquanto outras
podem ser selecionadas livremente pelo cliente, utilizando-se dos melhores recursos de
tecnologia de informação, desde a metodologia de desenvolvimento até o uso das
melhores linguagens e banco de dados, proporcionando confiabilidade.

54
As principais são:
� Sistema de código de barras, que traz agilidade e segurança na identificação de
pacientes, medicamentos e procedimentos profissionais etc.
� Computadores e dispositivos sem fio, conectados à rede hospitalar porrádio
freqüência, agregando mobilidade e racionalização;
� O sistema é relevante na Automação Hospitalar por ser aderente aos principais
“Standards” internacionais e incorpora forte especialização em protocolos
clínicos;
� O sistema abrange e integra completamente os assuntos que envolvem a
administração hospitalar.
55
4. Automação Hospitalar
A Automação Hospitalar abrange setores como centro cirúrgico, internação,
UTI, enfermagem, farmácia hospitalar, imagens, radiologia, setores administrativos,
RH, nutrição e os demais setores que compõe a FAU. Isto possibilita o uso de coletores
de dados, ou seja, computadores móveis sem fio, para identificação de pacientes,
medicamentos, prontuário e prescrição eletrônica.
É um sistema que permite customização às necessidades específicas da
Instituição. Ele irá proporcionar a FAU, qualidade e rapidez de atendimento para o
paciente, modernização, controle adequado e rentabilidade para a instituição, segurança,
racionalização de atividades e evolução para os profissionais. Irá abranger todas as áreas
do hospital, como controlar e racionalizar os procedimentos desde a entrada do paciente,
consultas, internações, centro cirúrgico, enfermagem e também irá apoiar e automatizar
as atividades administrativas como faturamento, compras, estoques e custos dentro da
área Administração Financeira.
Os médicos poderão usar coletores de dados para consultar prontuários e
registrar procedimentos e resultados, logo que entrarem no hospital. Todas as
informações sobre pacientes podem ser acessadas via terminal eletrônico, e ou coletores
de dados, de forma rápida e eficiente, pois o prontuário eletrônico integra as
informações sobre pacientes.
O Sistema Hospitalar da FAU possibilitará trabalhar com dispositivos sem fios,
tais como computadores portáteis e coletores de dados. Os profissionais do corpo
clínico e do quadro administrativo do Hospital, como médicos, enfermeiros,
farmacêuticos, técnicos e auxiliares podem usar computadores portáteis e coletores de
dados que são conectados à rede de computadores do Hospital sem o uso de fios, ou seja
a conexão é feita por rádio. Esses dispositivos são conectados ao sistema central de
computação através de conexões de rádio, e por antenas onde enviam e recebem
informações, por meio de ondas de rádiofreqüência. Essa tecnologia proporciona grande
racionalização de procedimentos, facilidades e mobilidade para os profissionais e acesso
rápido às informações.

56
Esta é uma solução que compreende todos os processos administrativos e
clínicos do paciente, e vem ao encontro das aspirações do Administrador Hospitalar e
do Corpo Clínico, proporcionando eficácia, segurança, qualidade e racionalização de
procedimentos. O ponto fundamental é o prontuário eletrônico que se interliga com
todos os outros módulos do sistema, tanto nas funções de apoio e controle clínico
quanto nas funções administrativas. Esta funcionalidade pode ser complementada pela
adoção de tecnologias modernas de computação e telecomunicações. Destacam-se os
computadores portáteis e wireless, que se comunicam com a rede de dados e com os
bancos de dados via rádiofreqüência, permitindo que o prontuário seja consultado e
atualizado pelos profissionais do corpo clinico.
Hoje a FAU é composta por um conselho e uma direção formada por médicos, e
uma diretoria executiva composta por dezenove (19) departamentos, sendo que fazem
parte da Administração Financeira e do Apoio mais oito departamentos para cada um, e
o Recursos Humanos composto por quatro (4) departamentos. A direção conta ainda
com uma Assessoria Jurídica, Relações Públicas, e uma Secretaria.
4.1 Visão Geral dos Equipamentos Instalados na FAU
Figura 4.1- Organograma da FAU
57
A árvore de entes (HOLOTREE) é uma estrutura hierárquica de entes, criada na
execução de um programa.
A Holotree implementa e encapsulamento de entes em níveis de composição,
além disso a Holotree suporta o aspecto dinâmico da política em grupos, mudando
durante a execução do programa através das ações de clonagem e mobilidade.
Um ente composto possui ligações com seus entes componentes, localizados nos
níveis abaixo. Os entes componentes possuem acesso à história e ao comportamento do
ente composto, no qual estão inseridos. O ente composto possui acesso aos
comportamentos dos demais entes no mesmo nível. A mobilidade é implementada
através de gerenciamento de grupo. Quando a mobilidade ocorre, torna-se necessária a
mudança de visão do grupo, o ente movido possui uma nova visão. Se o movido for um
ente composto, a visão dos seus componentes não muda. A mobilidade implica na
atualização de composição dos entes origem e destino. A mobilidade de um ente
elementar equivale a realocação de uma folha da árvore e a mobilidade de um composto
transfere um ramo contendo vários entes.
A Holotree deste sistema mostra o nível zero, sendo representado pelo ente
FAU. O nível um representado pelo ente conselho da FAU. No nível dois representa-se
a direção da FAU, e o nível três formado pelos seus entes componentes.
O nível quatro é formado pelos entes componentes do ente Diretoria Executiva.
Sucessivamente o próximo nível será formado pelos entes componentes que fazem
parte dos entes Adm. Financeira, RH e Apoio.
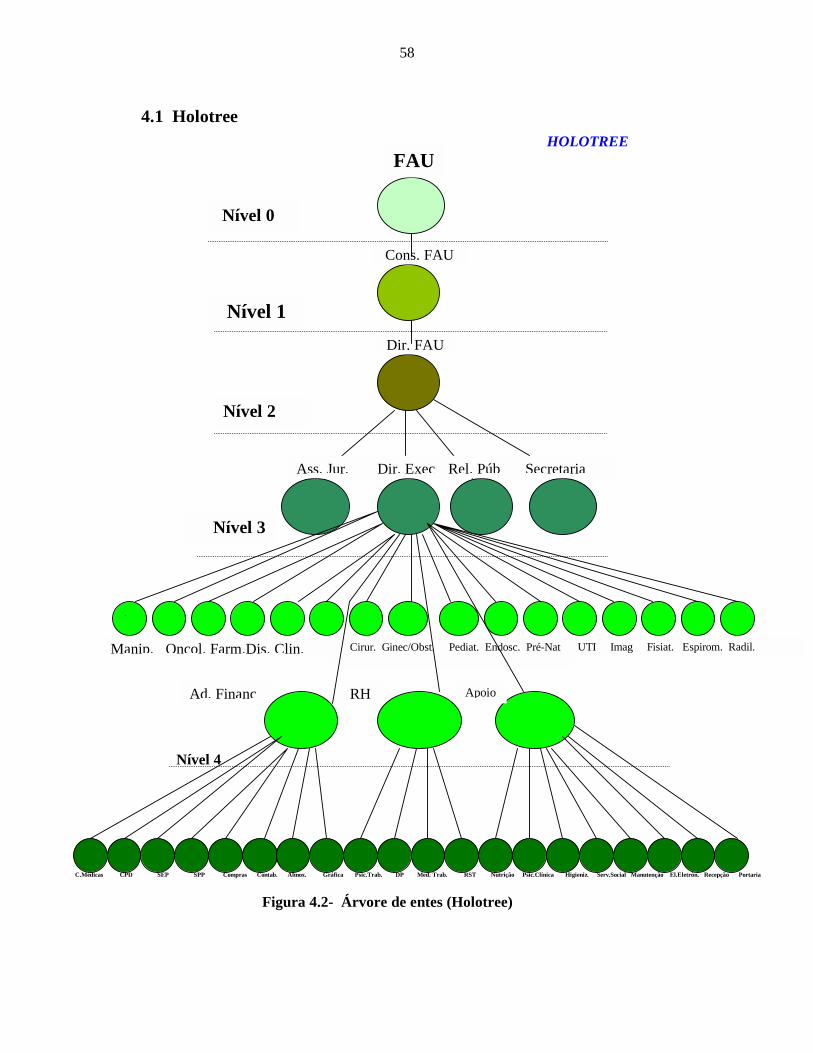
58
4.1 Holotree HOLOTREE
Nível 4
C.Médicas CPD SEP SPP Compras Contab. Almox. Gráfica Psic.Trab. DP Med. Trab. RST Nutrição Psic.Clínica Higieniz. Serv.Social Manutenção El.Eletrôn. Recepção Portaria
Figura 4.2- Árvore de entes (Holotree)
FAU
Cons. FAU
Dir. FAU
Ass. Jur. Dir. Exec Rel. Púb Secretaria
.
Nível 0
Nível 1
Nível 2
Nível 3
RHAd. Financ Apoio
UTI Imag Fisiat. Espirom. Radil. Cirur. Ginec/Obst. Pediat. Endosc. Pré-Nat Manip. Oncol. Farm.Dis. Clin.

59
Atualmente a FAU contém em suas instalações um número de 140 (cento e
quarenta) computadores ligados em rede e 5 (cinco) servidores, sendo que 4 (quatro)
estão instalados no Centro de Processamento de Dados, onde podemos constatar um
com o sistema operacional Linux, (2) dois com o sistema operacional Windows NT e
um Netware. Na Faculdade de Medicina está sendo utilizado um servidor com o sistema
operacional Linux.
Já encontra-se instalados em alguns pontos da FAU, 4 (quatro) antenas, sendo
que uma do tipo Omnidirecional que capta o sinal através de um ângulo de 360º em um
plano horizontal, com um peso de menos de 1 kg, uma altura de 1,56 m, resistência ao
vento de 100 km/h e polarização vertical, elas trabalham excepcionalmente bem em
áreas amplas ou em aplicações multiponto.
Usualmente, esse tipo de antena é utilizada em estações de base, com estações
remotas colocadas ao seu redor, localizada no prédio do Santa Tereza e as direcionais,
concentram o sinal em uma única direção, seus sinais podem ter um alcance longo e
estreito ou curto e amplo, quanto maior e estreito o sinal, maiores distâncias ele
alcançará.
Normalmente este tipo de antena é utilizada com uma ou mais estações bases.
Uma localizada no prédio do Centro de Processamento de Dados, outra na Faculdade de
Medicina e a última no prédio central da FAU. Futuramente irão ser instaladas mais
duas antenas do tipo direcional, sendo uma na Casa de Coleta e a última no
Departamento de
Pessoal da FAU. Futuramente será instalada mais duas antenas do tipo
direcional, uma na Casa de Coleta e outra no Departamento Pessoal da FAU.

60
Figura 4.3- FAU - Equipamentos instalados 4.2. Extensão
O modelo proposto, foi pensando em simplificar e representar as partes de entes
integrantes de um sistema, e especificar seus relacionamentos através da simbologia
criada e integrada ao HML (Holo Modeling Language), para facilitar o entendimento da
modelagem do projeto num todo e suas partes. A idéia é que se tenha um símbolo, que
represente algo físico no ambiente, ou seja, através do diagrama de entes estáticos
podemos visualizar toda a estrutura do ambiente de modelagem, no caso à FAU,
podemos saber de que forma os entes estão sendo clonados, se de maneira total ou
seletiva através de seus componentes interface, história e comportamento, mas não se
tinha uma maneira de representar de que partes o principal ente era composto, ele
poderia ser clonado, mas na sua estrutura faltava um complemento que pudesse
representar as partes deste ente, e de certa forma, poderia ser representado para todos os
outros entes. Assim nasceu o Holo-Parte, uma simbologia que mostra o relacionamento
entre um ente composto (todo) e os entes que o compõem (partes ou componentes). Foi
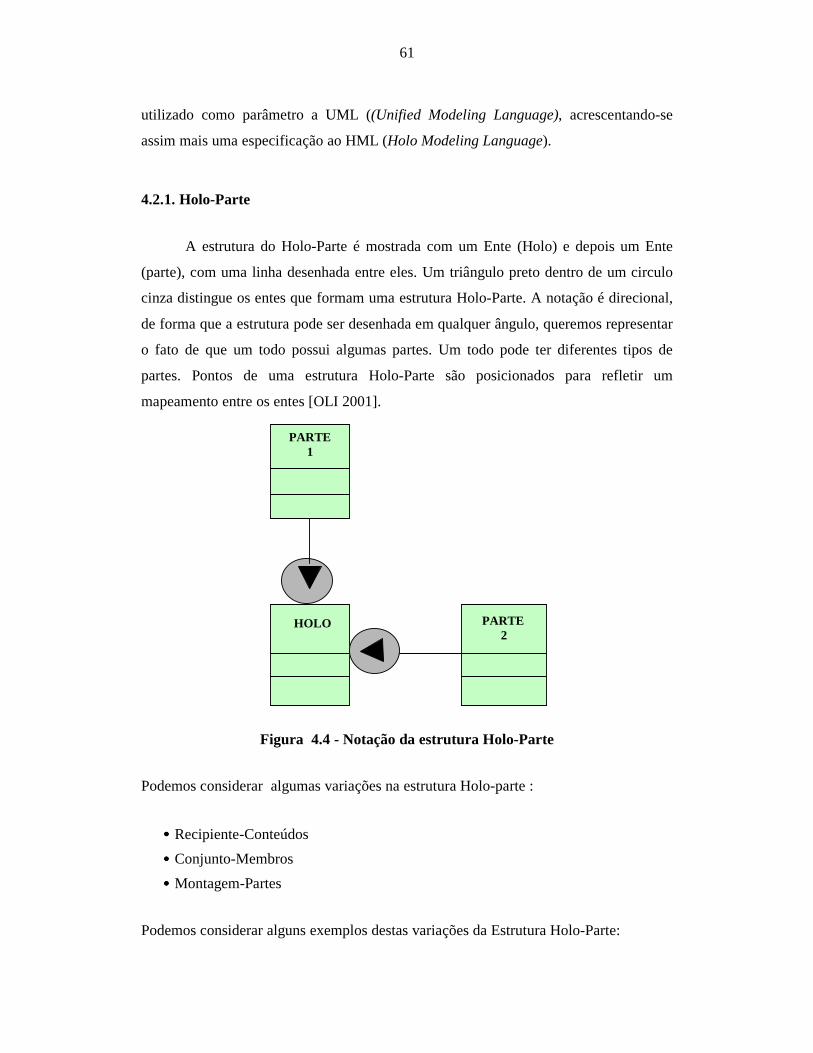
61
utilizado como parâmetro a UML ((Unified Modeling Language), acrescentando-se
assim mais uma especificação ao HML (Holo Modeling Language).
4.2.1. Holo-Parte
A estrutura do Holo-Parte é mostrada com um Ente (Holo) e depois um Ente
(parte), com uma linha desenhada entre eles. Um triângulo preto dentro de um circulo
cinza distingue os entes que formam uma estrutura Holo-Parte. A notação é direcional,
de forma que a estrutura pode ser desenhada em qualquer ângulo, queremos representar
o fato de que um todo possui algumas partes. Um todo pode ter diferentes tipos de
partes. Pontos de uma estrutura Holo-Parte são posicionados para refletir um
mapeamento entre os entes [OLI 2001].
Figura 4.4 - Notação da estrutura Holo-Parte
Podemos considerar algumas variações na estrutura Holo-parte :
•••• Recipiente-Conteúdos •••• Conjunto-Membros •••• Montagem-Partes
Podemos considerar alguns exemplos destas variações da Estrutura Holo-Parte:
PARTE 1
PARTE2
HOLO
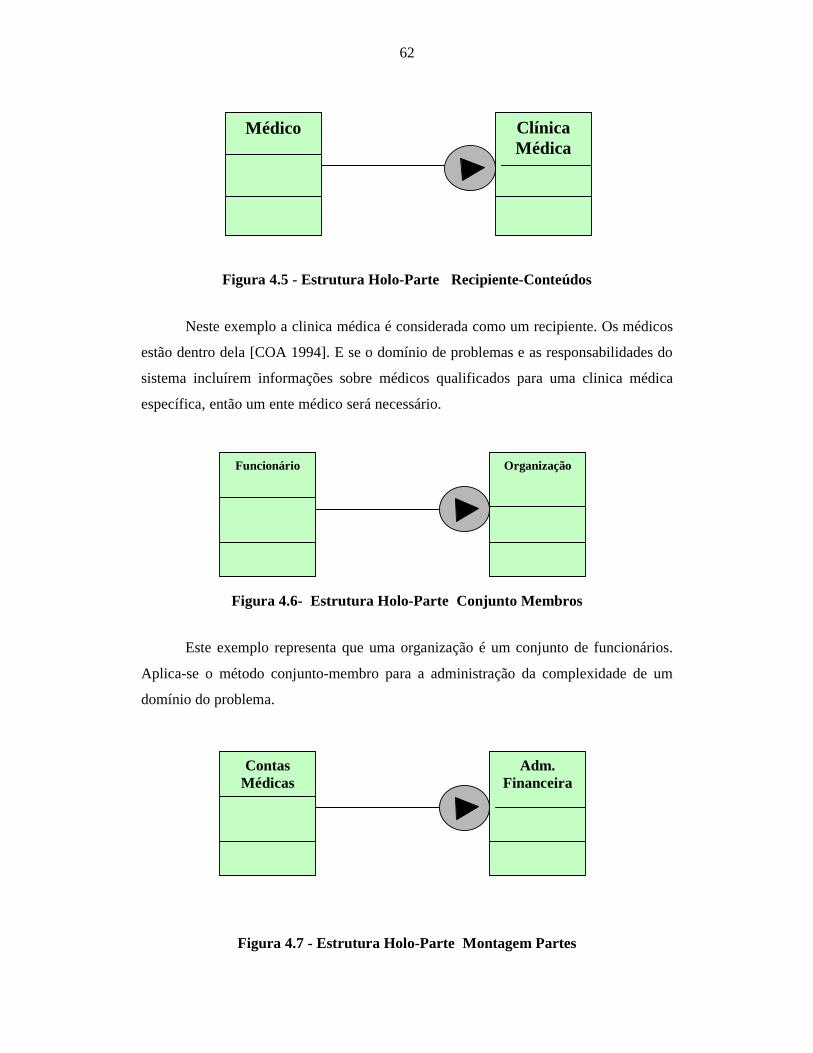
62
Figura 4.5 - Estrutura Holo-Parte Recipiente-Conteúdos
Neste exemplo a clinica médica é considerada como um recipiente. Os médicos
estão dentro dela [COA 1994]. E se o domínio de problemas e as responsabilidades do
sistema incluírem informações sobre médicos qualificados para uma clinica médica
específica, então um ente médico será necessário.
Figura 4.6- Estrutura Holo-Parte Conjunto Membros
Este exemplo representa que uma organização é um conjunto de funcionários.
Aplica-se o método conjunto-membro para a administração da complexidade de um
domínio do problema.
Figura 4.7 - Estrutura Holo-Parte Montagem Partes
Médico Clínica Médica
Funcionário Organização
Contas Médicas
Adm. Financeira

63
O setor administração financeira é uma montagem. Outros setores fazem parte
do ente administração financeira, fazendo com que ele exista, contas médicas é apenas
um dos entes que o formam, ou seja é uma das partes deste ente que foi usada para esta
representação.
Figura 4.8 - Diagrama de entes estáticos com a extensão
Este diagrama representa a clonagem dos entes de maneira múltipla, seletiva e
física. A Diretoria Executiva está sendo clonado de forma múltipla por todos os entes
que o compõem. Onde existe uma clonagem da história dos entes de forma construtiva e
uma interface destrutiva e fisicamente ele está sendo representado pelo Holo-Parte que
na sua estrutura executa a clonagem somente física do ente, não clonando os elementos
que constituem o ente (comportamento, história e interface) [RUM 1994].
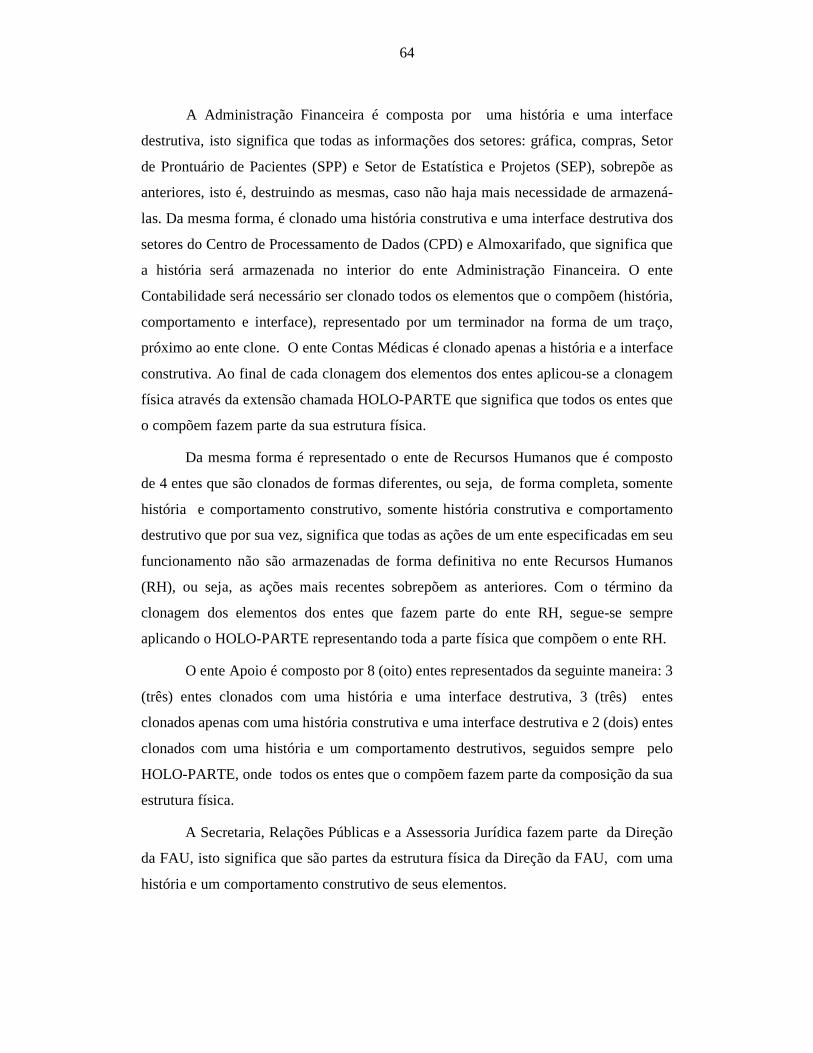
64
A Administração Financeira é composta por uma história e uma interface
destrutiva, isto significa que todas as informações dos setores: gráfica, compras, Setor
de Prontuário de Pacientes (SPP) e Setor de Estatística e Projetos (SEP), sobrepõe as
anteriores, isto é, destruindo as mesmas, caso não haja mais necessidade de armazená-
las. Da mesma forma, é clonado uma história construtiva e uma interface destrutiva dos
setores do Centro de Processamento de Dados (CPD) e Almoxarifado, que significa que
a história será armazenada no interior do ente Administração Financeira. O ente
Contabilidade será necessário ser clonado todos os elementos que o compõem (história,
comportamento e interface), representado por um terminador na forma de um traço,
próximo ao ente clone. O ente Contas Médicas é clonado apenas a história e a interface
construtiva. Ao final de cada clonagem dos elementos dos entes aplicou-se a clonagem
física através da extensão chamada HOLO-PARTE que significa que todos os entes que
o compõem fazem parte da sua estrutura física.
Da mesma forma é representado o ente de Recursos Humanos que é composto
de 4 entes que são clonados de formas diferentes, ou seja, de forma completa, somente
história e comportamento construtivo, somente história construtiva e comportamento
destrutivo que por sua vez, significa que todas as ações de um ente especificadas em seu
funcionamento não são armazenadas de forma definitiva no ente Recursos Humanos
(RH), ou seja, as ações mais recentes sobrepõem as anteriores. Com o término da
clonagem dos elementos dos entes que fazem parte do ente RH, segue-se sempre
aplicando o HOLO-PARTE representando toda a parte física que compõem o ente RH.
O ente Apoio é composto por 8 (oito) entes representados da seguinte maneira: 3
(três) entes clonados com uma história e uma interface destrutiva, 3 (três) entes
clonados apenas com uma história construtiva e uma interface destrutiva e 2 (dois) entes
clonados com uma história e um comportamento destrutivos, seguidos sempre pelo
HOLO-PARTE, onde todos os entes que o compõem fazem parte da composição da sua
estrutura física.
A Secretaria, Relações Públicas e a Assessoria Jurídica fazem parte da Direção
da FAU, isto significa que são partes da estrutura física da Direção da FAU, com uma
história e um comportamento construtivo de seus elementos.
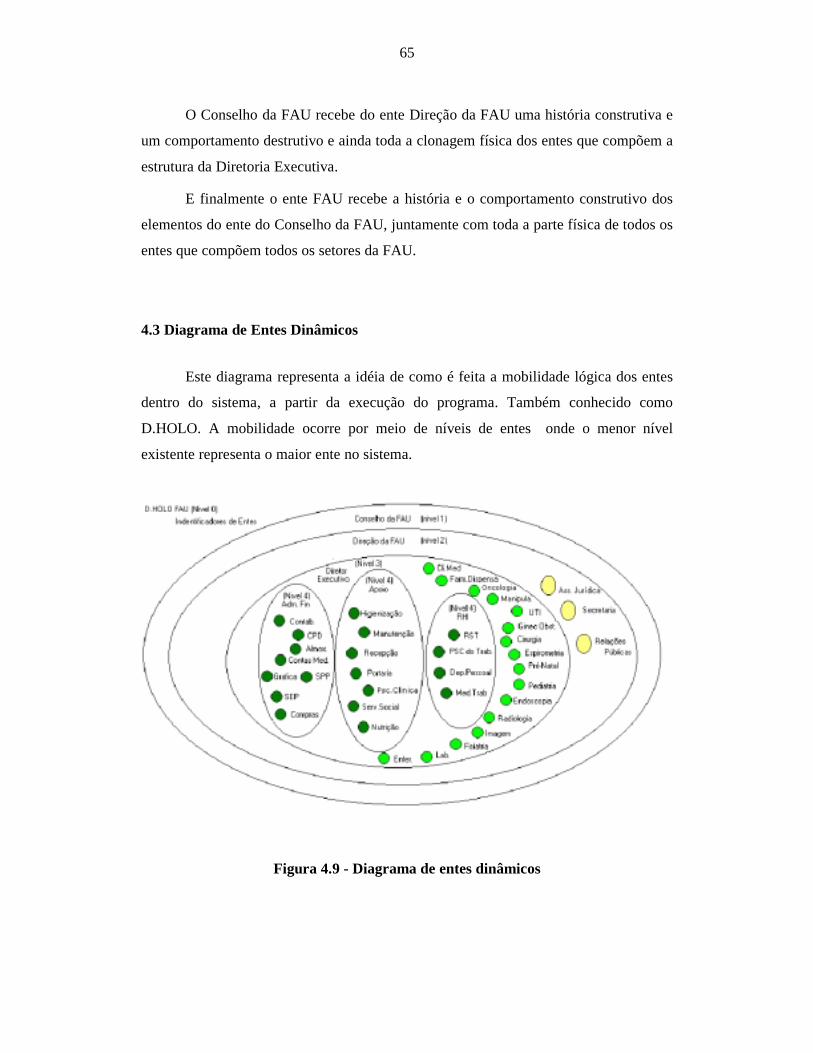
65
O Conselho da FAU recebe do ente Direção da FAU uma história construtiva e
um comportamento destrutivo e ainda toda a clonagem física dos entes que compõem a
estrutura da Diretoria Executiva.
E finalmente o ente FAU recebe a história e o comportamento construtivo dos
elementos do ente do Conselho da FAU, juntamente com toda a parte física de todos os
entes que compõem todos os setores da FAU.
4.3 Diagrama de Entes Dinâmicos Este diagrama representa a idéia de como é feita a mobilidade lógica dos entes
dentro do sistema, a partir da execução do programa. Também conhecido como
D.HOLO. A mobilidade ocorre por meio de níveis de entes onde o menor nível
existente representa o maior ente no sistema.
Figura 4.9 - Diagrama de entes dinâmicos
66
4.4 Diagrama de Mobilidade Individual
No Diagrama de Mobilidade Individual, as mobilidades são representadas
individualmente pelo diagrama, sendo necessário um diagrama para representar cada
ente em separado.
Este diagrama é representado na HML por um cabeçalho contendo o nome do
ente móvel, as linhas horizontais representam os entes que fazem parte do ambiente e
irão receber o ente móvel definido no cabeçalho, as linhas verticais representam o
tempo em passos de mobilidade, cada uma das linhas verticais pode receber uma
descrição do passo de mobilidade para melhor ilustrar o diagrama, esta descrição ficará
contida na parte inferior de cada uma das linhas.
O ente move-se da esquerda para a direita e cada seta representa um tipo de
mobilidade lógica. A figura 4.9 traz um exemplo de diagrama de mobilidade individual
para o ente médico clínico geral.
O médico clínico geral está localizado no ente principal Holo FAU, em uma
primeira movimentação o ente move-se para dentro da Clínica Médica, esta mobilidade
é não bloqueante, ou seja, no caso da Clínica Médica não esteja visível para o ente, uma
exceção será gerada e o ente vai permanecer na mesma posição.
Em um segundo momento o ente médico clínico geral volta ao ente Holo FAU,
esta mobilidade por sua vez é adaptativa, isso significa que o mesmo ente Holo FAU
não estando visível ao ente médico clínico geral, este vai varrer todo o sistema a procura
do destino, por fim o ente médico clínico geral move-se para o ente cirurgia e em
seguida volta ao ente Holo FAU, e sucessivamente este processo se estenderá ao ente
UTI, Imagem, Radiologia, Laboratório e Medicina do Trabalho, até terminar a
representação da mobilidade.
A posição do ente no sistema é exibida o tempo todo no diagrama. O ente é
representado por um pequeno círculo preenchido, que pode mover-se para a linha do
tempo de outros entes. Este diagrama pode representar a mobilidade de apenas um ente
por vez.
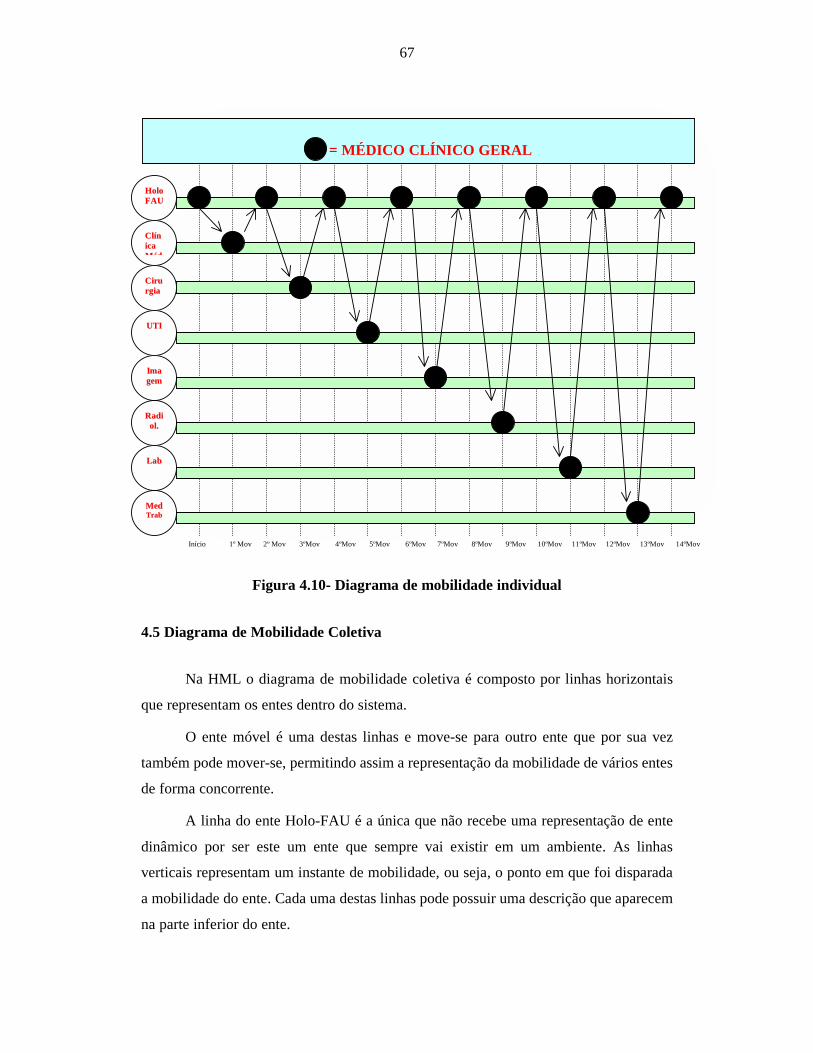
67
Figura 4.10- Diagrama de mobilidade individual 4.5 Diagrama de Mobilidade Coletiva Na HML o diagrama de mobilidade coletiva é composto por linhas horizontais
que representam os entes dentro do sistema.
O ente móvel é uma destas linhas e move-se para outro ente que por sua vez
também pode mover-se, permitindo assim a representação da mobilidade de vários entes
de forma concorrente.
A linha do ente Holo-FAU é a única que não recebe uma representação de ente
dinâmico por ser este um ente que sempre vai existir em um ambiente. As linhas
verticais representam um instante de mobilidade, ou seja, o ponto em que foi disparada
a mobilidade do ente. Cada uma destas linhas pode possuir uma descrição que aparecem
na parte inferior do ente.
= MÉDICO CLÍNICO GERAL
HHoollooFFAAUU
CCllíínniiccaa MMéédd
CCiirruurrggiiaa
UUTTII
RRaaddiiooll..
MMeedd TTrraabb
IImmaaggeemm
LLaabb
Início 1º Mov 2º Mov 3ºMov 4ºMov 5ºMov 6ºMov 7ºMov 8ºMov 9ºMov 10ºMov 11ºMov 12ºMov 13ºMov 14ºMov

68
Na figura 4.10 representa a mesma mobilidade representada no diagrama de
mobilidade individual. Porém, neste caso, o ente móvel Auxiliar Administrativo sai do
Holo-FAU e percorre todo o caminho que ele executa diariamente dentro da FAU.
Em um primeiro momento ele sai do Holo-FAU e desloca-se até o ente
Secretaria e retorna ao ente Holo-FAU.
Em um segundo momento o mesmo ente móvel desloca-se para o ente Apoio e
logo a seguir retornando ao Holo-FAU.
No terceiro momento ele desloca-se para o ente Recursos Humanos retornando a
base. O término de sua mobilidade se dará no ente Administração Financeira, onde o
ente móvel auxiliar administrativo desloca-se até ele retornando a base, ou seja, o Holo-
FAU.
Instante Instante Instante Instante Instante Instante Instante Instante Instante
1 2 3 4 5 6 7 8 9
Figura 4.11- Diagrama de mobilidade coletiva
HOLO FAU
AUX. ADM.
Sec.
RH
Apoio
Adm. Finan
69
4.5 Diagrama de Visão do Sistema Visões representam os aspectos estáticos e dinâmicos de um sistema. Uma visão
é formada por diagramas.
No caso para representação da visão estática pode-se utilizar o diagrama de entes
estáticos e para a representação da visão dinâmica, utilizam-se os diagramas de
interação e mobilidade.
Existem ainda a possibilidade de unir diagramas para formar uma visão mais
detalhada da solução.
A figura 4.11 demonstra um diagrama de mobilidade que contém em cada uma
das movimentações uma ligação para um determinado diagrama de interação,
permitindo a melhor compreensão do diagrama.
O diagrama de visões do sistema é equivalente ao diagrama de mobilidade
individual, porém ele permite a visualização das interações que ocorrem durante a
movimentação do ente paciente.
Isto é possível, pois o diagrama possui alguns elementos de modelagem que são
ligações para os diagramas de invocação correspondente.
Cada elemento de modelagem representa um diagrama de invocação, ligando-se
a uma movimentação no diagrama de mobilidade individual.
A HML permite ainda que vários destes elementos apareçam interligados, a
ordem com que eles aparecem é a ordem com que serão executados. Porém o primeiro
elemento deve estar ligado a uma movimentação.
A idéia de visão pode ser aplicada também nos diagramas de mobilidade
coletiva, onde os elementos que representam os diagramas de interação, estarão ligados
aos instantes de tempo do diagrama de mobilidade coletiva, e seguem as mesmas regras
definidas para o diagrama de mobilidade individual.
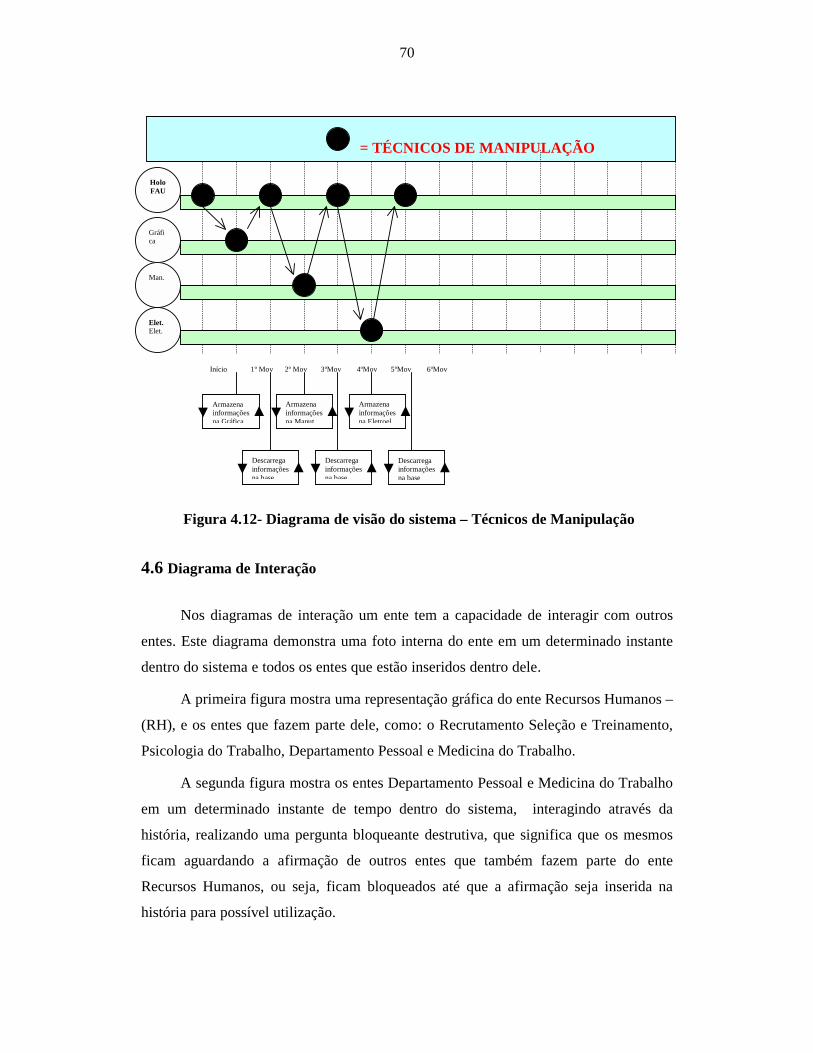
70
Início 1º Mov 2º Mov 3ºMov 4ºMov 5ºMov 6ºMov
Figura 4.12- Diagrama de visão do sistema – Técnicos de Manipulação
4.6 Diagrama de Interação Nos diagramas de interação um ente tem a capacidade de interagir com outros
entes. Este diagrama demonstra uma foto interna do ente em um determinado instante
dentro do sistema e todos os entes que estão inseridos dentro dele.
A primeira figura mostra uma representação gráfica do ente Recursos Humanos –
(RH), e os entes que fazem parte dele, como: o Recrutamento Seleção e Treinamento,
Psicologia do Trabalho, Departamento Pessoal e Medicina do Trabalho.
A segunda figura mostra os entes Departamento Pessoal e Medicina do Trabalho
em um determinado instante de tempo dentro do sistema, interagindo através da
história, realizando uma pergunta bloqueante destrutiva, que significa que os mesmos
ficam aguardando a afirmação de outros entes que também fazem parte do ente
Recursos Humanos, ou seja, ficam bloqueados até que a afirmação seja inserida na
história para possível utilização.
= TÉCNICOS DE MANIPULAÇÃO
Holo FAU
Man.
Gráfi ca
Elet. Elet.
Armazena informações na Gráfica
Armazena informações na Manut.
Armazena informações na Eletroel.
Descarrega informações na base
Descarrega informações na base
Descarrega informações na base

71
A última figura é mostra o ente Departamento Pessoal acessando a história do
ente Recursos Humanos, através da qual de forma concorrente, ele busca a resposta
relativa a sua pergunta e obtém através de uma estrutura do tipo FILA, onde o primeiro
ente que solicitara a informação recebe a prioridade, e os entes concorrentes que
realizaram a mesma pergunta, ficam aguardando até que seja inserida novamente na
história do ente RH uma nova afirmação.
.
HISTÓRIA
.
HISTÓRIA
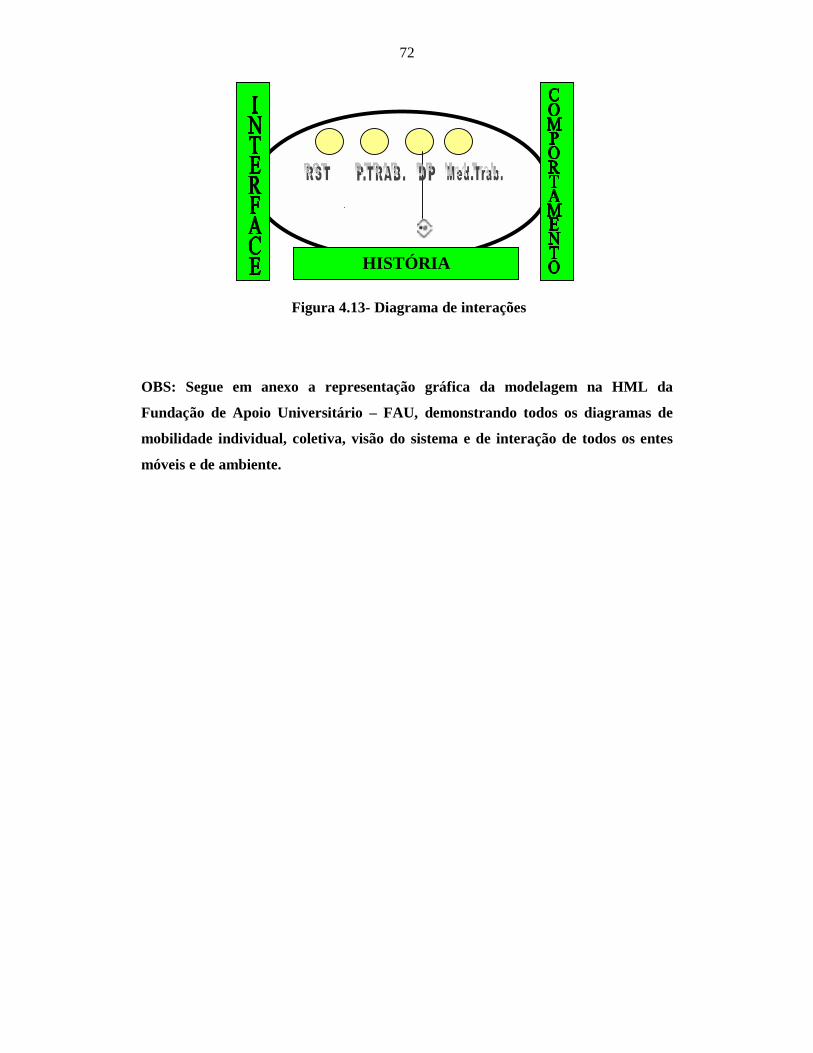
72
Figura 4.13- Diagrama de interações
OBS: Segue em anexo a representação gráfica da modelagem na HML da
Fundação de Apoio Universitário – FAU, demonstrando todos os diagramas de
mobilidade individual, coletiva, visão do sistema e de interação de todos os entes
móveis e de ambiente.
.
HISTÓRIA
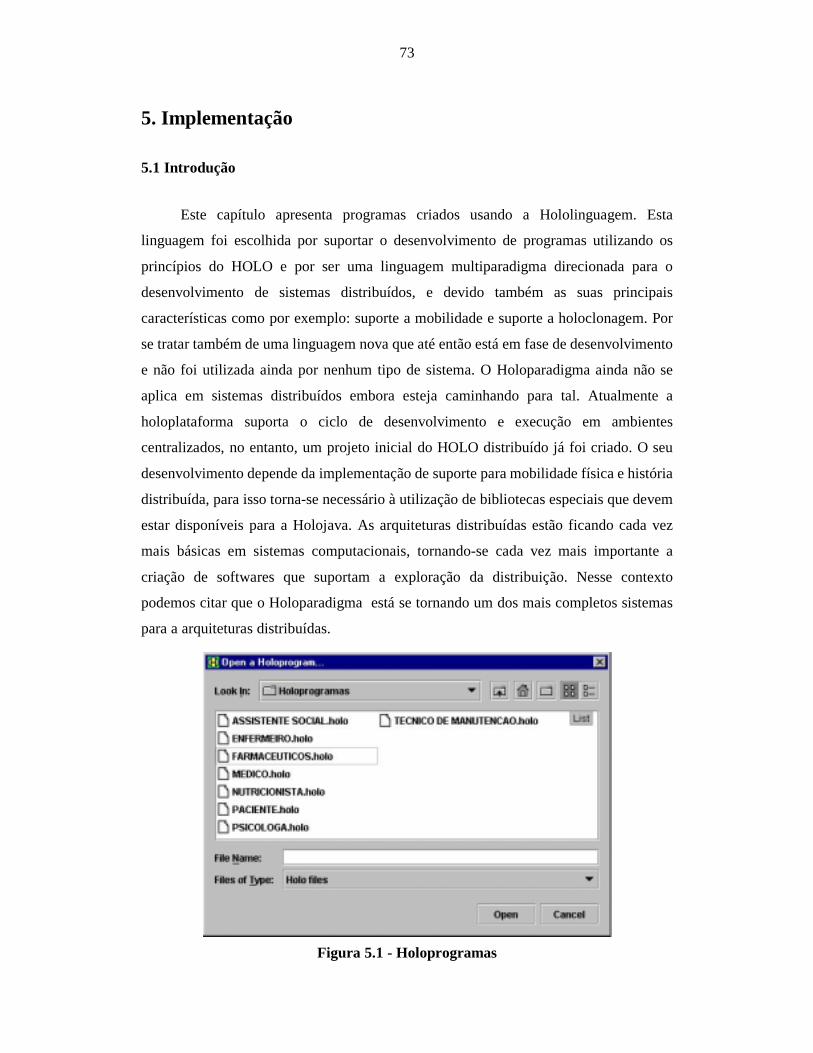
73
5. Implementação 5.1 Introdução Este capítulo apresenta programas criados usando a Hololinguagem. Esta
linguagem foi escolhida por suportar o desenvolvimento de programas utilizando os
princípios do HOLO e por ser uma linguagem multiparadigma direcionada para o
desenvolvimento de sistemas distribuídos, e devido também as suas principais
características como por exemplo: suporte a mobilidade e suporte a holoclonagem. Por
se tratar também de uma linguagem nova que até então está em fase de desenvolvimento
e não foi utilizada ainda por nenhum tipo de sistema. O Holoparadigma ainda não se
aplica em sistemas distribuídos embora esteja caminhando para tal. Atualmente a
holoplataforma suporta o ciclo de desenvolvimento e execução em ambientes
centralizados, no entanto, um projeto inicial do HOLO distribuído já foi criado. O seu
desenvolvimento depende da implementação de suporte para mobilidade física e história
distribuída, para isso torna-se necessário à utilização de bibliotecas especiais que devem
estar disponíveis para a Holojava. As arquiteturas distribuídas estão ficando cada vez
mais básicas em sistemas computacionais, tornando-se cada vez mais importante a
criação de softwares que suportam a exploração da distribuição. Nesse contexto
podemos citar que o Holoparadigma está se tornando um dos mais completos sistemas
para a arquiteturas distribuídas.
Figura 5.1 - Holoprogramas
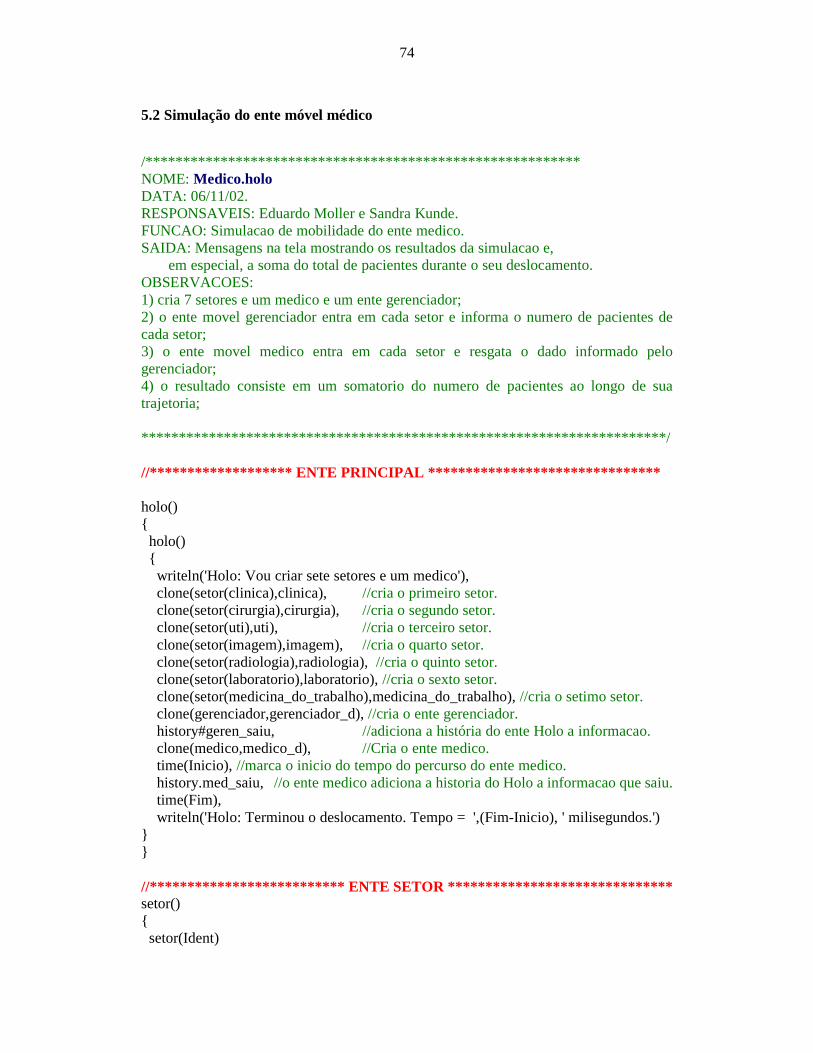
74
5.2 Simulação do ente móvel médico /********************************************************** NOME: Medico.holo DATA: 06/11/02. RESPONSAVEIS: Eduardo Moller e Sandra Kunde. FUNCAO: Simulacao de mobilidade do ente medico. SAIDA: Mensagens na tela mostrando os resultados da simulacao e, em especial, a soma do total de pacientes durante o seu deslocamento. OBSERVACOES: 1) cria 7 setores e um medico e um ente gerenciador; 2) o ente movel gerenciador entra em cada setor e informa o numero de pacientes de cada setor; 3) o ente movel medico entra em cada setor e resgata o dado informado pelo gerenciador; 4) o resultado consiste em um somatorio do numero de pacientes ao longo de sua trajetoria; **********************************************************************/ //******************* ENTE PRINCIPAL ******************************* holo() { holo() { writeln('Holo: Vou criar sete setores e um medico'), clone(setor(clinica),clinica), //cria o primeiro setor. clone(setor(cirurgia),cirurgia), //cria o segundo setor. clone(setor(uti),uti), //cria o terceiro setor. clone(setor(imagem),imagem), //cria o quarto setor. clone(setor(radiologia),radiologia), //cria o quinto setor. clone(setor(laboratorio),laboratorio), //cria o sexto setor. clone(setor(medicina_do_trabalho),medicina_do_trabalho), //cria o setimo setor. clone(gerenciador,gerenciador_d), //cria o ente gerenciador. history#geren_saiu, //adiciona a história do ente Holo a informacao. clone(medico,medico_d), //Cria o ente medico. time(Inicio), //marca o inicio do tempo do percurso do ente medico. history.med_saiu, //o ente medico adiciona a historia do Holo a informacao que saiu. time(Fim), writeln('Holo: Terminou o deslocamento. Tempo = ',(Fim-Inicio), ' milisegundos.') } } //************************** ENTE SETOR ****************************** setor() { setor(Ident)

75
{ writeln('SETOR ',Ident,': Fui criada') } } //******************** ENTE GERENCIADOR *************************** gerenciador() { gerenciador() { writeln('Gerenciador foi criado'), writeln('Ele tem a funcao de inserir o numero de pacientes em cada setor'), writeln('---------------------------------------------------------------'), move(self,clinica), //Passo 1 - Entra na clínica out(history)!pacientes(10), //Passo 2 - Insere na historia do ente clinica o numero de pacientes. move(self,out), //Passo 3 - Sai da clinica move(self,cirurgia), //Passo 4 - Entra na cirurgia out(history)!pacientes(20), //Passo 5 - Insere na historia do ente cirurgia o numero de pacientes. move(self,out), //Passo 6 - Sai da cirurgia move(self,uti), //Passo 7 - Entra na uti out(history)!pacientes(30), //Passo 8 - Insere na historia do ente uti o numero de pacientes. move(self,out), //Passo 9 - Sai da uti move(self,imagem), //Passo 10 - Entra na imagem out(history)!pacientes(40), //Passo 11 - Insere na historia do ente imagem o numero de pacientes. move(self,out), //Passo 12 - Sai da imagem move(self,radiologia), //Passo 13 - Entra na radiologia out(history)!pacientes(10), //Passo 14 - Insere na historia do ente radiologia o numero de pacientes. move(self,out), //Passo 15 - Sai da radiologia move(self,laboratorio), //Passo 16 - Entra no laboratorio out(history)!pacientes(10), //Passo 17 - Insere na historia do ente laboratorio o numero de pacientes. move(self,out), //Passo 18 - Sai do laboratorio move(self,medicina_do_trabalho), //Passo 19 - Entra na medicina_do_trabalho out(history)!pacientes(10), //Passo 20 - Insere na historia do ente medicina_do_trabalho o numero de pacientes. move(self,out), //Passo 21 - Sai da medicina_do_trabalho writeln('Gerenciador: Termino da movimentacao.'), out(history)!geren_saiu //Insere na historia do Holo que o gerenciador saiu. } }

76
//*********************** ENTE MEDICO ******************************* medico() { medico() { writeln('Medico foi criado'), writeln('Tem a funcao de resgatar a informacao ao longo de sua trajetoria'), writeln('----------------------------------------------------------------'), Soma := 0, move(self,clinica), //Passo 1 - Entra na clínica out(history).pacientes(#X), //Passo 2 - Acessa a historia do ente clinica e obtem o numero de pacientes de forma bloqueante. move(self,out), //Passo 3 - Sai da clinica Soma := Soma + X, //Passo 4 - Adiciona o numero de pacientes e acumula em uma variavel soma. move(self,cirurgia), //Passo 5 - Entra na cirurgia out(history).pacientes(#X), //Passo 6 - Acessa a historia do ente cirurgia e obtem o numero de pacientes de forma bloqueante. move(self,out), //Passo 7 - Sai da cirurgia Soma := Soma + X, //Passo 8 - Adiciona o numero de pacientes e acumula em uma variavel soma. move(self,uti), //Passo 9 - Entra na uti out(history).pacientes(#X), //Passo 10 - Acessa a historia do ente uti e obtem o numero de pacientes de forma bloqueante. move(self,out), //Passo 11 - Sai da uti Soma := Soma + X, //Passo 12 - Adiciona o numero de pacientes e acumula em uma variavel soma. move(self,imagem), //Passo 13 - Entra na imagem out(history).pacientes(#X), //Passo 14 - Acessa a historia do ente imagem e obtem o numero de pacientes de forma bloqueante. move(self,out), //Passo 15 - Sai da imagem Soma := Soma + X, //Passo 16 - Adiciona o numero de pacientes e acumula em uma variavel soma. move(self,radiologia), //Passo 17 - Entra na radiologia. out(history).pacientes(#X), //Passo 18 - Acessa a historia do ente radiologia e obtem o numero de pacientes de forma bloqueante. move(self,out), //Passo 19 - Sai da radiologia. Soma := Soma + X, //Passo 20 - Adiciona o numero de pacientes e acumula em uma variavel soma. move(self,laboratorio), //Passo 21 - Entra no laboratorio. out(history).pacientes(#X), //Passo 22 - Acessa a historia do ente laboratorio e obtem o numero de pacientes de forma bloqueante. move(self,out), //Passo 23 - Sai do laboratorio. Soma := Soma + X, //Passo 24 - Adiciona o numero de pacientes e acumula em uma variavel soma. move(self,medicina_do_trabalho), //Passo 25 - Entra na medicina do trabalho.

77
out(history).pacientes(#X), //Passo 26 - Acessa a historia do ente medicina do trabalho e obtem o numero de pac. de forma bloqueante. move(self,out), //Passo 27 - Sai da medicina_do_trabalho. Soma := Soma + X, //Passo 28 - Adiciona o numero de pacientes e acumula em uma variavel soma. writeln('Medico obteve a soma de ', Soma,' pacientes em todo o seu percurso'), writeln('----------------------------------------------------------------'), writeln('Medico: Termino da movimentacao.'), out(history)!med_saiu //informa que o ente medico saiu do Holo. } RESULTADO
Figura 5.2 - Resultado da simulação do ente móvel médico

78
MÉDICO
O programa é composto por sete Entes Estáticos: Clínica Médica, Cirurgia,
UTI, Imagem, Radiologia, Laboratório e Medicina do Trabalho. O Ente Dinâmico D-
HOLO (criado automaticamente para o Ente HOLO) cria sete setores e um ente móvel
médico. Logo a seguir aguarda os dados serem colocados na história pelo gerenciador.
Os setores notificam sua criação e aguardam a entrada do médico. O médico entra em
um setor, realiza o processamento dos dados, sai do setor e insere o resultado na história
do D-HOLO. Estes passos são executados para cada setor. A figura 5.3 mostra os vinte
e oito passos do médico. O cálculo é realizado pelo médico usando uma FILA. O Ente
Médico é responsável pelo controle de sua mobilidade. Os passos 2, 6, 10, 14, 18, 22 e
26 do médico utilizam o acesso a história externa. Este acesso é realizado na ação
mining. O código mining apesar de ser o mesmo nos sete passos, o out(history) é
sensível ao contexto (setor).

79
Figura 5.3- Passos da movimentação do ente médico
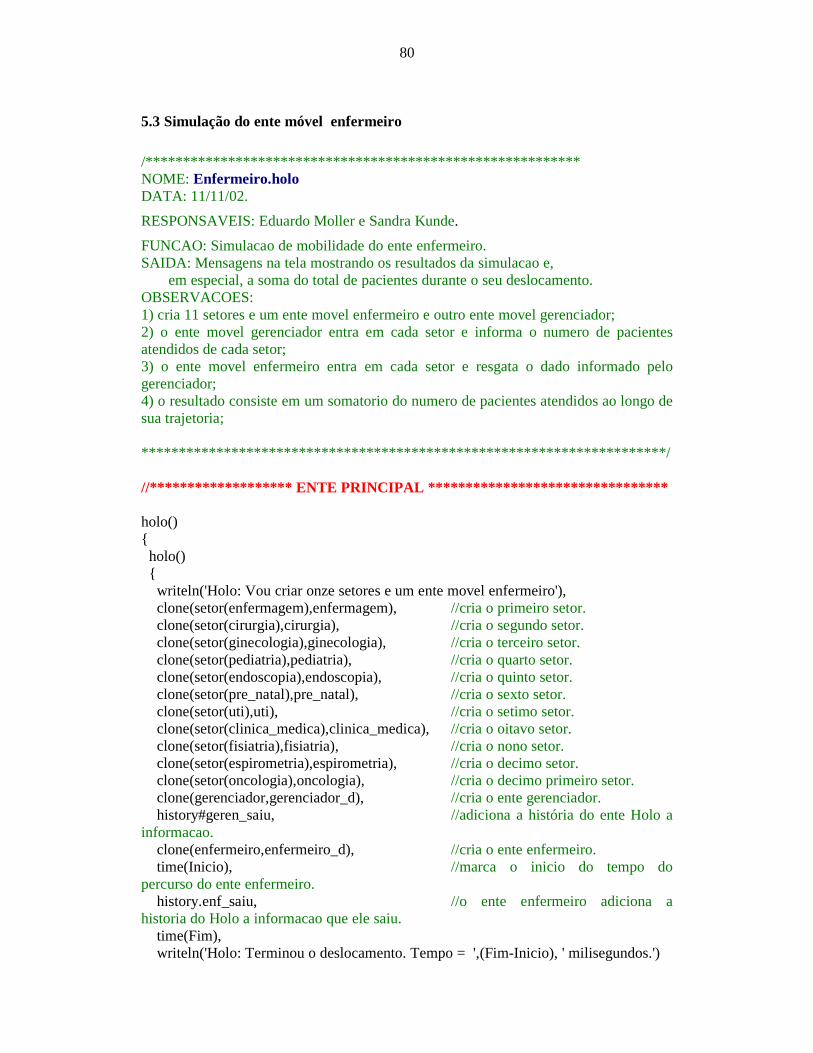
80
5.3 Simulação do ente móvel enfermeiro /********************************************************** NOME: Enfermeiro.holo DATA: 11/11/02.
RESPONSAVEIS: Eduardo Moller e Sandra Kunde.
FUNCAO: Simulacao de mobilidade do ente enfermeiro. SAIDA: Mensagens na tela mostrando os resultados da simulacao e, em especial, a soma do total de pacientes durante o seu deslocamento. OBSERVACOES: 1) cria 11 setores e um ente movel enfermeiro e outro ente movel gerenciador; 2) o ente movel gerenciador entra em cada setor e informa o numero de pacientes atendidos de cada setor; 3) o ente movel enfermeiro entra em cada setor e resgata o dado informado pelo gerenciador; 4) o resultado consiste em um somatorio do numero de pacientes atendidos ao longo de sua trajetoria; **********************************************************************/ //******************* ENTE PRINCIPAL ******************************** holo() { holo() { writeln('Holo: Vou criar onze setores e um ente movel enfermeiro'), clone(setor(enfermagem),enfermagem), //cria o primeiro setor. clone(setor(cirurgia),cirurgia), //cria o segundo setor. clone(setor(ginecologia),ginecologia), //cria o terceiro setor. clone(setor(pediatria),pediatria), //cria o quarto setor. clone(setor(endoscopia),endoscopia), //cria o quinto setor. clone(setor(pre_natal),pre_natal), //cria o sexto setor. clone(setor(uti),uti), //cria o setimo setor. clone(setor(clinica_medica),clinica_medica), //cria o oitavo setor. clone(setor(fisiatria),fisiatria), //cria o nono setor. clone(setor(espirometria),espirometria), //cria o decimo setor. clone(setor(oncologia),oncologia), //cria o decimo primeiro setor. clone(gerenciador,gerenciador_d), //cria o ente gerenciador. history#geren_saiu, //adiciona a história do ente Holo a informacao. clone(enfermeiro,enfermeiro_d), //cria o ente enfermeiro. time(Inicio), //marca o inicio do tempo do percurso do ente enfermeiro. history.enf_saiu, //o ente enfermeiro adiciona a historia do Holo a informacao que ele saiu. time(Fim), writeln('Holo: Terminou o deslocamento. Tempo = ',(Fim-Inicio), ' milisegundos.')
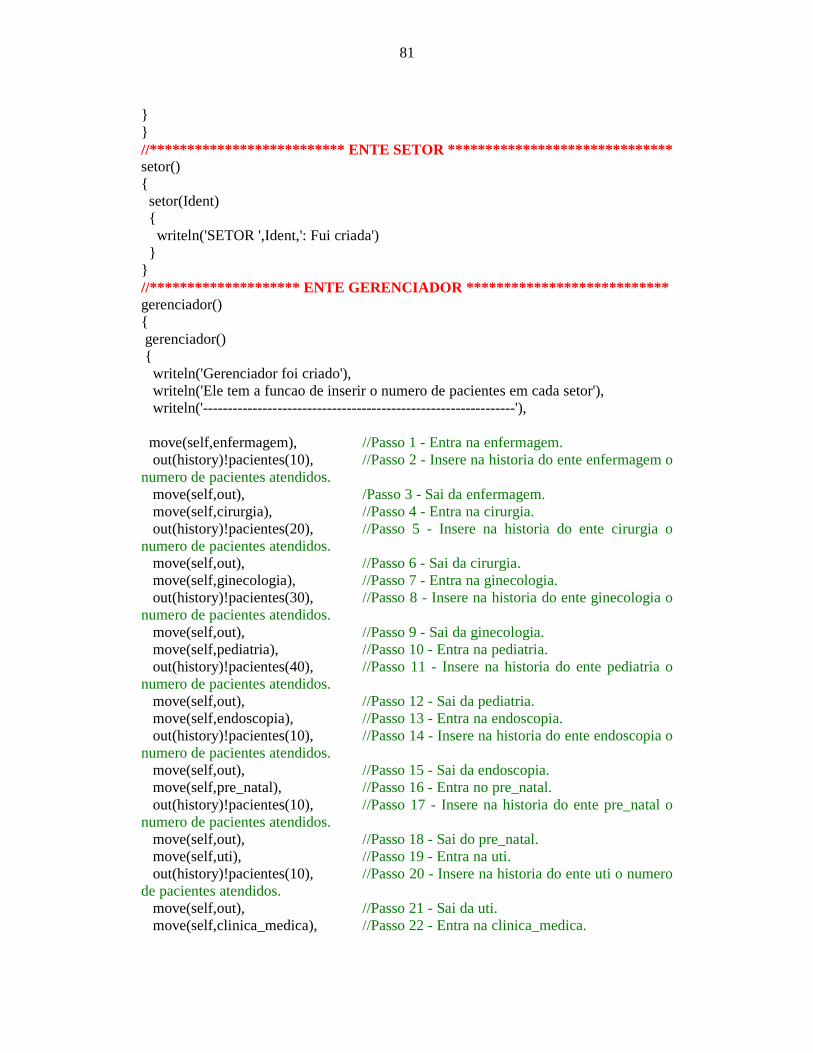
81
} } //************************** ENTE SETOR ****************************** setor() { setor(Ident) { writeln('SETOR ',Ident,': Fui criada') } } //******************** ENTE GERENCIADOR *************************** gerenciador() { gerenciador() { writeln('Gerenciador foi criado'), writeln('Ele tem a funcao de inserir o numero de pacientes em cada setor'), writeln('---------------------------------------------------------------'), move(self,enfermagem), //Passo 1 - Entra na enfermagem. out(history)!pacientes(10), //Passo 2 - Insere na historia do ente enfermagem o numero de pacientes atendidos. move(self,out), /Passo 3 - Sai da enfermagem. move(self,cirurgia), //Passo 4 - Entra na cirurgia. out(history)!pacientes(20), //Passo 5 - Insere na historia do ente cirurgia o numero de pacientes atendidos. move(self,out), //Passo 6 - Sai da cirurgia. move(self,ginecologia), //Passo 7 - Entra na ginecologia. out(history)!pacientes(30), //Passo 8 - Insere na historia do ente ginecologia o numero de pacientes atendidos. move(self,out), //Passo 9 - Sai da ginecologia. move(self,pediatria), //Passo 10 - Entra na pediatria. out(history)!pacientes(40), //Passo 11 - Insere na historia do ente pediatria o numero de pacientes atendidos. move(self,out), //Passo 12 - Sai da pediatria. move(self,endoscopia), //Passo 13 - Entra na endoscopia. out(history)!pacientes(10), //Passo 14 - Insere na historia do ente endoscopia o numero de pacientes atendidos. move(self,out), //Passo 15 - Sai da endoscopia. move(self,pre_natal), //Passo 16 - Entra no pre_natal. out(history)!pacientes(10), //Passo 17 - Insere na historia do ente pre_natal o numero de pacientes atendidos. move(self,out), //Passo 18 - Sai do pre_natal. move(self,uti), //Passo 19 - Entra na uti. out(history)!pacientes(10), //Passo 20 - Insere na historia do ente uti o numero de pacientes atendidos. move(self,out), //Passo 21 - Sai da uti. move(self,clinica_medica), //Passo 22 - Entra na clinica_medica.
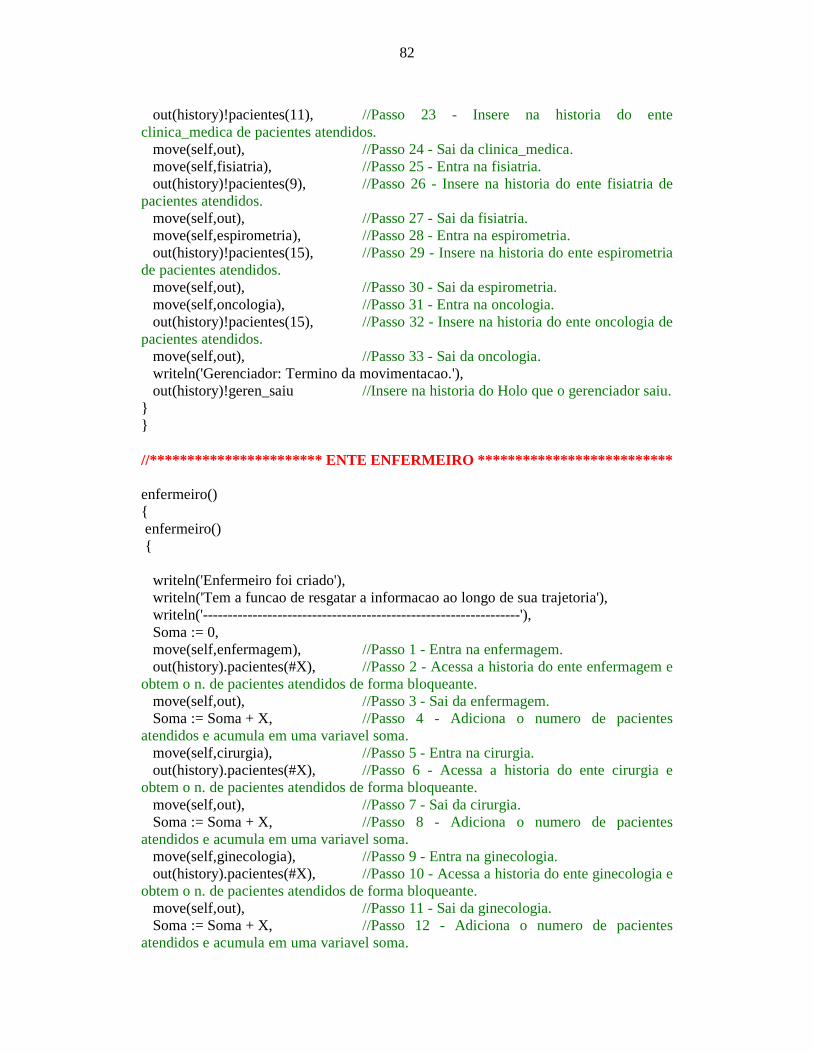
82
out(history)!pacientes(11), //Passo 23 - Insere na historia do ente clinica_medica de pacientes atendidos. move(self,out), //Passo 24 - Sai da clinica_medica. move(self,fisiatria), //Passo 25 - Entra na fisiatria. out(history)!pacientes(9), //Passo 26 - Insere na historia do ente fisiatria de pacientes atendidos. move(self,out), //Passo 27 - Sai da fisiatria. move(self,espirometria), //Passo 28 - Entra na espirometria. out(history)!pacientes(15), //Passo 29 - Insere na historia do ente espirometria de pacientes atendidos. move(self,out), //Passo 30 - Sai da espirometria. move(self,oncologia), //Passo 31 - Entra na oncologia. out(history)!pacientes(15), //Passo 32 - Insere na historia do ente oncologia de pacientes atendidos. move(self,out), //Passo 33 - Sai da oncologia. writeln('Gerenciador: Termino da movimentacao.'), out(history)!geren_saiu //Insere na historia do Holo que o gerenciador saiu. } } //*********************** ENTE ENFERMEIRO ************************** enfermeiro() { enfermeiro() { writeln('Enfermeiro foi criado'), writeln('Tem a funcao de resgatar a informacao ao longo de sua trajetoria'), writeln('----------------------------------------------------------------'), Soma := 0, move(self,enfermagem), //Passo 1 - Entra na enfermagem. out(history).pacientes(#X), //Passo 2 - Acessa a historia do ente enfermagem e obtem o n. de pacientes atendidos de forma bloqueante. move(self,out), //Passo 3 - Sai da enfermagem. Soma := Soma + X, //Passo 4 - Adiciona o numero de pacientes atendidos e acumula em uma variavel soma. move(self,cirurgia), //Passo 5 - Entra na cirurgia. out(history).pacientes(#X), //Passo 6 - Acessa a historia do ente cirurgia e obtem o n. de pacientes atendidos de forma bloqueante. move(self,out), //Passo 7 - Sai da cirurgia. Soma := Soma + X, //Passo 8 - Adiciona o numero de pacientes atendidos e acumula em uma variavel soma. move(self,ginecologia), //Passo 9 - Entra na ginecologia. out(history).pacientes(#X), //Passo 10 - Acessa a historia do ente ginecologia e obtem o n. de pacientes atendidos de forma bloqueante. move(self,out), //Passo 11 - Sai da ginecologia. Soma := Soma + X, //Passo 12 - Adiciona o numero de pacientes atendidos e acumula em uma variavel soma.

83
move(self,pediatria), //Passo 13 - Entra na pediatria. out(history).pacientes(#X), //Passo 14 - Acessa a historia do ente pediatria e obtem o n. de pacientes atendidos de forma bloqueante. move(self,out), //Passo 15 - Sai da pediatria. Soma := Soma + X, //Passo 16 - Adiciona o numero de pacientes atendidos e acumula em uma variavel soma. move(self,endoscopia), //Passo 17 - Entra na endoscopia. out(history).pacientes(#X), //Passo 18 - Acessa a historia do ente endoscopia e obtem o n. de pacientes atendidos de forma bloqueante. move(self,out), //Passo 19 - Sai da endoscopia. Soma := Soma + X, //Passo 20 - Adiciona o numero de pacientes atendidos e acumula em uma variavel soma. move(self,pre_natal), //Passo 21 - Entra no pre_natal. out(history).pacientes(#X), //Passo 22 - Acessa a historia do ente pre_natal e obtem o n.de pacientes atendidos. move(self,out), //Passo 23 - Sai do pre_natal. Soma := Soma + X, //Passo 24 - Adiciona o numero de pacientes atendidos e acumula em uma variavel soma. move(self,uti), //Passo 25 - Entra na uti. out(history).pacientes(#X), //Passo 26 - Acessa a historia do ente uti e obtem o numero de pac. atendidos de forma bloqueante. move(self,out), //Passo 27 - Sai da uti. Soma := Soma + X, //Passo 28 - Adiciona o numero de pacientes atendidos e acumula em uma variavel soma. move(self,clinica_medica), //Passo 29 - Entra na clinica_medica. out(history).pacientes(#X), //Passo 30 - Acessa a historia do ente clinica_medica e obtem o n. de pac. atendidos. move(self,out), //Passo 31 - Sai da clinica_medica. Soma := Soma + X, //Passo 32 - Adiciona o numero de pacientes atendidos e acumula em uma variavel soma. move(self,fisiatria), //Passo 33 - Entra na fisiatria. out(history).pacientes(#X), //Passo 34 - Acessa a historia do ente fisiatria e obtem o n. de pacientes atendidos. move(self,out), //Passo 35 - Sai da fisiatria. Soma := Soma + X, //Passo 36 - Adiciona o numero de pacientes atendidos e acumula em uma variavel soma. move(self,espirometria), //Passo 37 - Entra na espirometria. out(history).pacientes(#X), //Passo 38 - Acessa a historia do ente espirometria e obtem o n. de pacientes atendidos. move(self,out), //Passo 39 - Sai da espirometria. Soma := Soma + X, //Passo 40 - Adiciona o numero de pacientes atendidos e acumula em uma variavel soma. move(self,oncologia), //Passo 41 - Entra na oncologia. out(history).pacientes(#X), //Passo 42 - Acessa a historia do ente oncologia e obtem o n. de pacientes atendidos. move(self,out), //Passo 43 - Sai da oncologia. Soma := Soma + X, //Passo 44 - Adiciona o numero de pacientes atendidos e acumula em uma variavel soma. writeln('Enfermeiro obteve a soma de ', Soma,' pacientes em todo o seu percurso'),
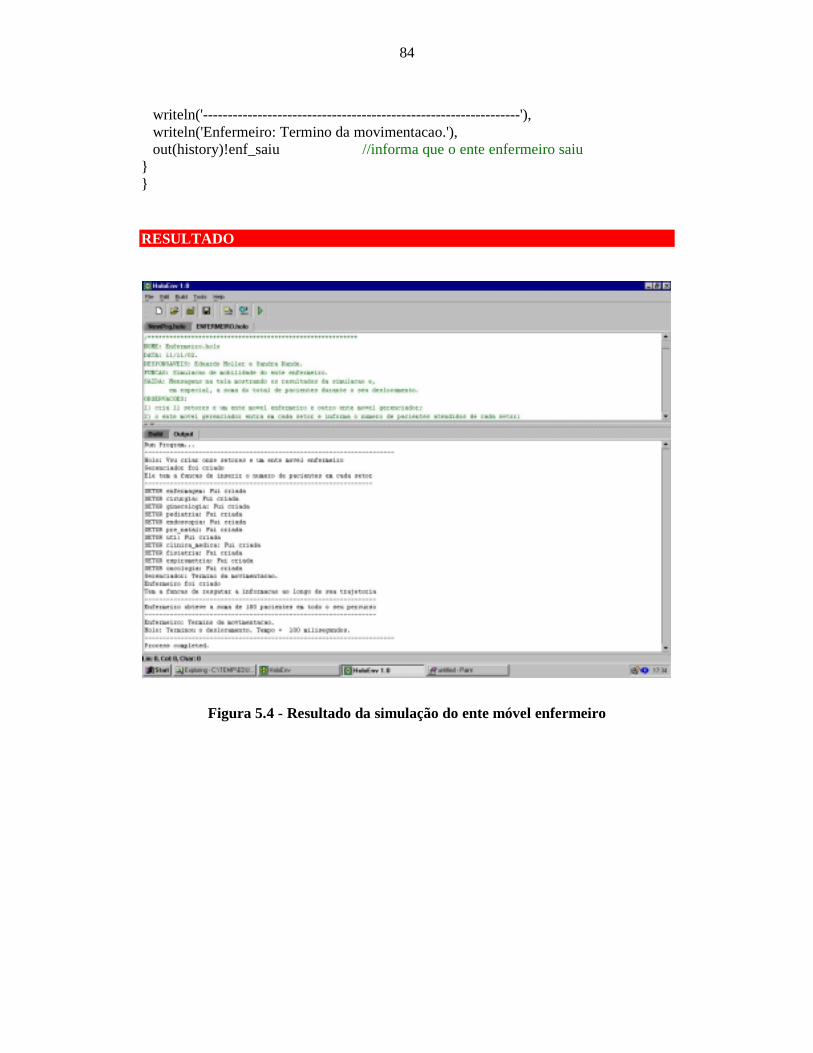
84
writeln('----------------------------------------------------------------'), writeln('Enfermeiro: Termino da movimentacao.'), out(history)!enf_saiu //informa que o ente enfermeiro saiu } }
RESULTADO
Figura 5.4 - Resultado da simulação do ente móvel enfermeiro

85
ENFERMEIRO
O programa é composto por onze Entes Estáticos: Enfermagem, Cirurgia,
Ginecologia, Pediatria, Endoscopia, Pré-Natal, UTI, Clínica Médica, Fisiatria,
Espirometria e Oncologia.. O Ente Dinâmico D-HOLO, cria automaticamente para o
Ente Holo, onze setores e um ente móvel Enfermeiro. Logo após aguarda os dados a
serem colocados na história. Os setores notificam sua criação e aguardam a
movimentação do Ente Enfermeiro. Este entra em cada setor e conta o número de
pacientes que estão internados, sai do setor e insere o resultado na história do D-HOLO.
Os passos são executados para cada setor. A figura 5.5 mostra todos os passos
do Enfermeiro dentro do hospital. O Enfermeiro é responsável pelo controle de sua
mobilidade. Os passos 2, 6, 14, 18, 22, 265, 30, 34, 38 e 42 do Enfermeiro utilizam o
acesso a história externa que é realizado pela ação mining.
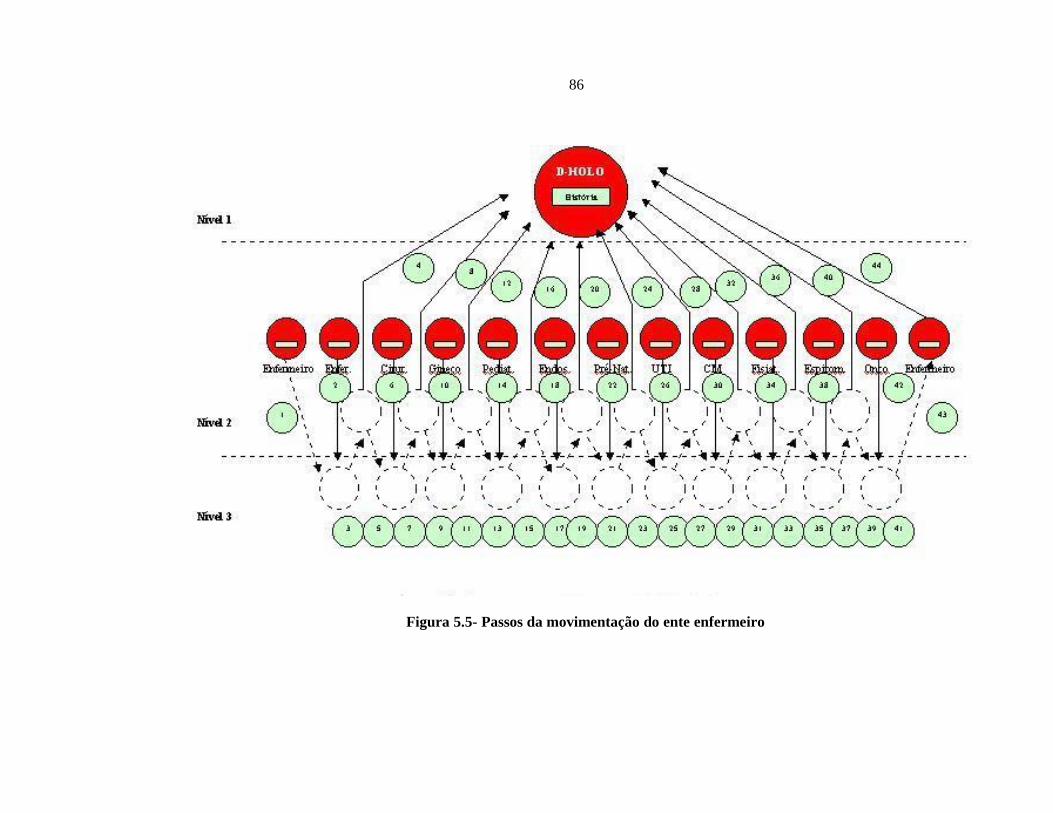
86
Figura 5.5- Passos da movimentação do ente enfermeiro
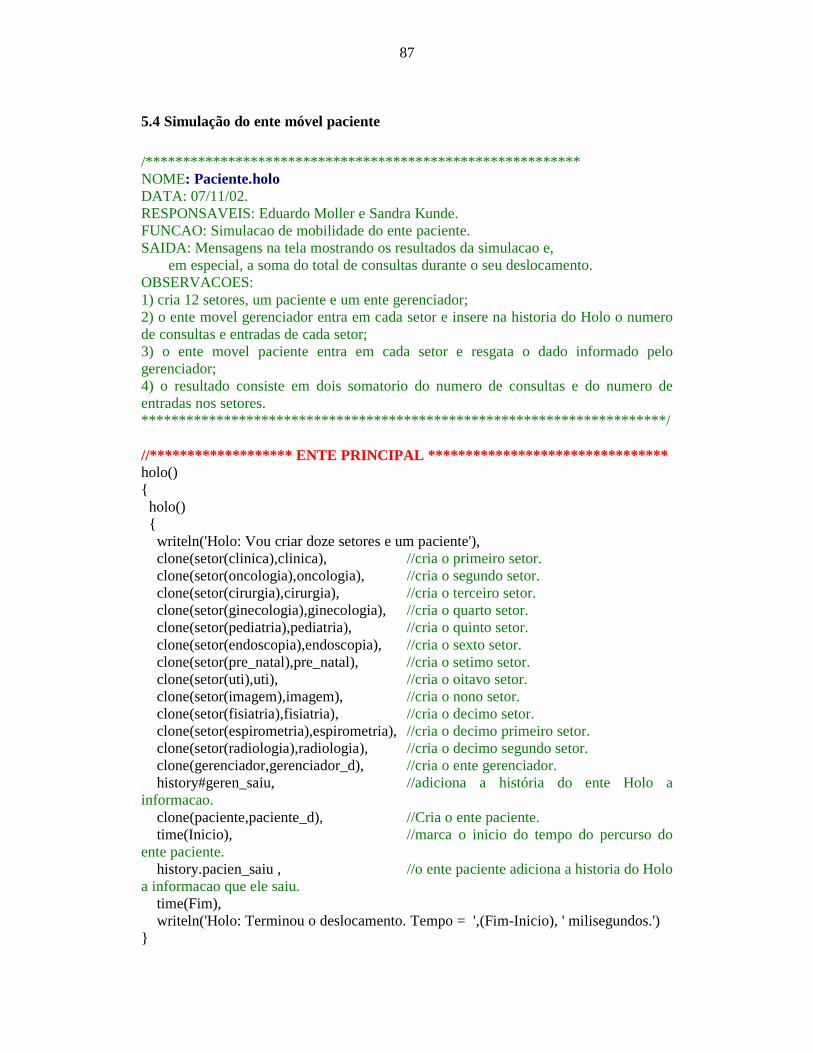
87
5.4 Simulação do ente móvel paciente /********************************************************** NOME: Paciente.holo DATA: 07/11/02. RESPONSAVEIS: Eduardo Moller e Sandra Kunde. FUNCAO: Simulacao de mobilidade do ente paciente. SAIDA: Mensagens na tela mostrando os resultados da simulacao e, em especial, a soma do total de consultas durante o seu deslocamento. OBSERVACOES: 1) cria 12 setores, um paciente e um ente gerenciador; 2) o ente movel gerenciador entra em cada setor e insere na historia do Holo o numero de consultas e entradas de cada setor; 3) o ente movel paciente entra em cada setor e resgata o dado informado pelo gerenciador; 4) o resultado consiste em dois somatorio do numero de consultas e do numero de entradas nos setores. **********************************************************************/ //******************* ENTE PRINCIPAL ******************************** holo() { holo() { writeln('Holo: Vou criar doze setores e um paciente'), clone(setor(clinica),clinica), //cria o primeiro setor. clone(setor(oncologia),oncologia), //cria o segundo setor. clone(setor(cirurgia),cirurgia), //cria o terceiro setor. clone(setor(ginecologia),ginecologia), //cria o quarto setor. clone(setor(pediatria),pediatria), //cria o quinto setor. clone(setor(endoscopia),endoscopia), //cria o sexto setor. clone(setor(pre_natal),pre_natal), //cria o setimo setor. clone(setor(uti),uti), //cria o oitavo setor. clone(setor(imagem),imagem), //cria o nono setor. clone(setor(fisiatria),fisiatria), //cria o decimo setor. clone(setor(espirometria),espirometria), //cria o decimo primeiro setor. clone(setor(radiologia),radiologia), //cria o decimo segundo setor. clone(gerenciador,gerenciador_d), //cria o ente gerenciador. history#geren_saiu, //adiciona a história do ente Holo a informacao. clone(paciente,paciente_d), //Cria o ente paciente. time(Inicio), //marca o inicio do tempo do percurso do ente paciente. history.pacien_saiu , //o ente paciente adiciona a historia do Holo a informacao que ele saiu. time(Fim), writeln('Holo: Terminou o deslocamento. Tempo = ',(Fim-Inicio), ' milisegundos.') }
88
} //************************** ENTE SETOR ****************************** setor() { setor(Ident) { writeln('SETOR ',Ident,': Fui criada') } } //******************** ENTE GERENCIADOR *************************** gerenciador() { gerenciador() { writeln('Gerenciador foi criado'), writeln('Ele tem a funcao de inserir o numero de consultas em cada setor'), writeln('---------------------------------------------------------------'), move(self,clinica), //Passo 1 - Entra na clinica. out(history)!consultas(2), //Passo 2 - Insere na historia do ente clinica o numero de consultas. move(self,out), //Passo 3 - Sai da clinica. move(self,oncologia), //Passo 4 - Entra na oncologia. out(history)!consultas(3), //Passo 5 - Insere na historia do ente oncologia o numero de consultas. move(self,out), //Passo 6 - Sai da oncologia. move(self,cirurgia), //Passo 7 - Entra na cirurgia. out(history)!entradas(5), //Passo 8 - Insere na historia do ente cirurgia o numero de entradas. move(self,out), //Passo 9 - Sai da cirurgia. move(self,ginecologia), //Passo 10 - Entra na ginecologia. out(history)!consultas(4), //Passo 11 - Insere na historia do ente ginecologia o numero de consultas. move(self,out), //Passo 12 - Sai da ginecologia. move(self,pediatria), //Passo 13 - Entra na pediatria. out(history)!consultas(5), //Passo 14 - Insere na historia do ente pediatria o numero de consultas. move(self,out), //Passo 15 - Sai da pediatria. move(self,endoscopia), //Passo 16 - Entra na endoscopia. out(history)!consultas(1), //Passo 17 - Insere na historia do ente endoscopia o numero de consultas. move(self,out), //Passo 18 - Sai da endoscopia. move(self,pre_natal), //Passo 19 - Entra no Pre_natal. out(history)!consultas(3), //Passo 20 - Insere na historia do ente pre_natal o numero de consultas. move(self,out), //Passo 21 - Sai do pre-natal. move(self,uti), //Passo 22 - Entra na uti. out(history)!entradas(1), //Passo 23 - Insere na historia do ente uti o numero de entradas.
89
move(self,out), //Passo 24 - Sai da uti. move(self,imagem), //Passo 25 - Entra na imagem. out(history)!entradas(3), //Passo 26 - Insere na historia do ente imagem o numero de entradas. move(self,out), //Passo 27 - Sai da imagem. move(self,fisiatria), //Passo 28 - Entra na fisiatria. out(history)!consultas(1), //Passo 29 - Insere na historia do ente fisiatria o numero de consultas. move(self,out), //Passo 30 - Sai da fisiatria. move(self,espirometria), //Passo 31 - Entra na espirometria. out(history)!consultas(3), //Passo 32 - Insere na historia do ente espirometria o numero de consultas. move(self,out), //Passo 33 - Sai da espirometria. move(self,radiologia), //Passo 34 - Entra na radiologia. out(history)!entradas(1), //Passo 35 - Insere na historia do ente radiologia o numero de entradas. move(self,out), //Passo 36 - Sai da radiologia. writeln('Gerenciador: Termino da movimentacao.'), out(history)!geren_saiu //informa que o ente gerenciador saiu do Holo. } } //*********************** ENTE PACIENTE ***************************** paciente() { paciente() { writeln('Paciente foi criado'), writeln('Tem a funcao de resgatar a informacao ao longo de sua trajetoria'), writeln('----------------------------------------------------------------'), Soma := 0, Ent := 0, move(self,clinica), //Passo 1 – Entra na clinica. out(history).consultas(#X), //Passo 2 – Acessa a historia do ente clinica e obtem o numero de consultas de forma bloqueante. move(self,out), //Passo 3 – Sai da clinica. Soma := Soma + X, //Passo 4 – Adiciona o numero de consultas e acumula em uma variavel soma. move(self,oncologia), //Passo 5 - Entra na oncologia. out(history).consultas(#X), //Passo 6 - Acessa a historia do ente oncologia e obtem o numero de consultas de forma bloqueante. move(self,out), //Passo 7 - Sai da oncologia. Soma := Soma + X, //Passo 8 - Adiciona o numero de consultas e acumula em uma variavel soma. move(self,cirurgia), //Passo 9 - Entra na cirurgia. out(history).entradas(#Y), //Passo 10 - Acessa a historia do ente cirurgia e obtem o numero de consultas de forma bloqueante. move(self,out), //Passo 11 - Sai da cirurgia. Ent := Ent + Y, //Passo 12 - Adiciona o numero de consultas e acumula em uma variavel soma.

90
move(self,ginecologia), //Passo 13 - Entra na ginecologia. out(history).consultas(#X), //Passo 14 - Acessa a historia do ente ginecologia e obtem o numero de consultas de forma bloqueante. move(self,out), //Passo 15 - Sai da ginecologia. Soma := Soma + X, //Passo 16 - Adiciona o numero de consultas e acumula em uma variavel soma. move(self,pediatria), //Passo 17 - Entra na pediatria. out(history).consultas(#X), //Passo 18 - Acessa a historia do ente pediatria e obtem o numero de consultas de forma bloqueante. move(self,out), //Passo 19 - Sai do ente pediatria. Soma := Soma + X, //Passo 20 - Adiciona o numero de consultas e acumula em uma variavel soma. move(self,endoscopia), //Passo 21 - Entra na endoscopia. out(history).consultas(#X), //Passo 22 - Acessa a historia do ente endoscopia e obtem o numero de consultas de forma bloqueante. move(self,out), //Passo 23 - Sai do ente endoscopia. Soma := Soma + X, //Passo 24 - Adiciona o numero de consultas e acumula em uma variavel soma. move(self,pre_natal), //Passo 25 - Entra no pre_natal. out(history).consultas(#X), //Passo 26 - Acessa a historia do ente pre_natal e obtem o numero de consultas de forma bloqueante. move(self,out), //Passo 27 - Sai do ente pre_natal. Soma := Soma + X, //Passo 28 - Adiciona o numero de consultas e acumula em uma variavel soma. move(self,uti), //Passo 29 - Entra na uti. out(history).entradas(#Y), //Passo 30 - Acessa a historia do ente uti e obtem o munero de entradas de forma bloqueante. move(self,out), //Passo 31 - Sai do ente uti. Ent := Ent + Y, //Passo 32 - Adiciona o numero de entradas e acumula em uma variavel Ent. move(self,imagem), //Passo 33 - Entra no ente imagem. out(history).entradas(#Y), //Passo 34 - Acessa a historia do ente imagem e obtem o numero de entradas de forma bloqueante. move(self,out), //Passo 35 - Sai do ente imagem. Ent := Ent + X, //Passo 36 - Adiciona o numero de entradas e acumula em uma variavel Ent. move(self,fisiatria), //Passo 37 - Entra no ente fisiatria. out(history).consultas(#X), //Passo 38 - Acessa a historia do ente fisiatria e obtem o numero de consultas de forma floqueante. move(self,out), //Passo 39 - Sai do ente fisiatria. Soma := Soma + X, //Passo 40 - Adiciona o numero de consultas e acumula em uma variavel Soma. move(self,espirometria), //Passo 41 - Entra no ente espirometria. out(history).consultas(#X), //Passo 42 - Acessa a historia do ente espirometria e obtem o numero de consultas de forma bloqueante. move(self,out), //Passo 43 - Sai do ente espirometria. Soma := Soma + X, //Passo 44 - Adiciona o numero de consultas e acumula em uma variavel Soma. move(self,radiologia), //Passo 45 - Entra no ente radiologia.
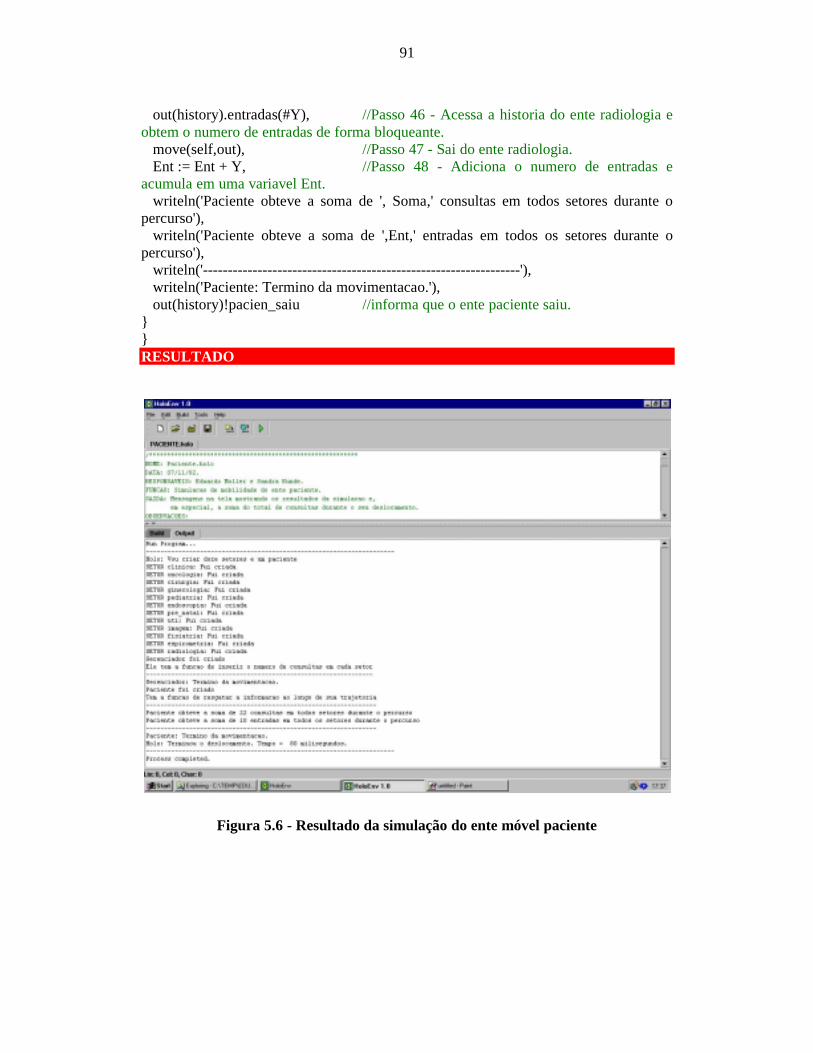
91
out(history).entradas(#Y), //Passo 46 - Acessa a historia do ente radiologia e obtem o numero de entradas de forma bloqueante. move(self,out), //Passo 47 - Sai do ente radiologia. Ent := Ent + Y, //Passo 48 - Adiciona o numero de entradas e acumula em uma variavel Ent. writeln('Paciente obteve a soma de ', Soma,' consultas em todos setores durante o percurso'), writeln('Paciente obteve a soma de ',Ent,' entradas em todos os setores durante o percurso'), writeln('----------------------------------------------------------------'), writeln('Paciente: Termino da movimentacao.'), out(history)!pacien_saiu //informa que o ente paciente saiu. } } RESULTADO
Figura 5.6 - Resultado da simulação do ente móvel paciente
92
PACIENTE
O programa é composto por doze Entes Estáticos: Clínica Médica, Oncologia,
Cirurgia, Ginecologia, Pediatria, Endoscopia, Pré-Natal, UTI, Imagem, Fisiatria,
Espirometria e Radiologia. O Ente Dinâmico D-HOLO cria doze setores e um Ente
Móvel Paciente e a seguir aguarda os resultados a serem colocados na história pelo ente
gerenciador. Os doze setores notificam sua criação e aguradam os dados e a
movimentação do Paciente. O paciente entra em um setor para a realização de consultas
ou outro procedimento, realiza o processamento de dados, ou seja, conta o número de
consultas e o número de entradas tais como: o número de entradas na Cirurgia,
Radiologia e Imagem.
No momento de sua saída insere o resultado na história do D-HOLO. Estes
passos são executados para cada um. A figura 5.7 mostra os quarenta e oito passos do
paciente. O Ente Paciente é responsável pelo controle de sua mobilidade. Os passos 2, 6,
14, 18, 22, 26, 30, 34, 38, 42 e 46 do paciente estão utilizando o acesso a história
externa.

93
Figura 5.7- Passos da movimentação do ente paciente
94
5.5 Simulação do ente móvel assistente social /********************************************************************** NOME: Assistente social.holo DATA: 07/11/02. RESPONSAVEIS: Eduardo Moller e Sandra Kunde. FUNCAO: Simulacao de mobilidade do ente assistente social. SAIDA: Mensagens na tela mostrando os resultados da simulacao e, em especial, a soma do total de pacientes durante o seu deslocamento. OBSERVACOES: 1) cria 1 setor e um ente assistente social e um gerenciador; 2) o ente movel gerenciador entra no setor e informa o numero de pacientes do mesmo; 3) o ente movel assistente social entra em cada setor e resgata o dado informado pelo gerenciador; 4) o resultado consiste em um somatorio do numero de pacientes ao longo de sua trajetoria; **********************************************************************/ //******************* ENTE PRINCIPAL ******************************* holo() { holo() { writeln('Holo: Vou criar o setor Servico Social e um ente movel Assistente Social'), clone(setor(servico_social),servico_social), //cria o setor servico social. writeln('Vou criar um ente movel GERENCIADOR'), clone(gerenciador,gerenciador_d), //cria o ente gerenciador. history#geren_saiu, //adiciona a história do ente Holo o numero de pacientes a serem atendidos. clone(assistente_social,assistente_social_d), //Cria o ente assistente social. time(Inicio), //marca o inicio do tempo do percurso do ente assistente social. history.assistente_social_saiu, //o ente assistente social adiciona a historia do Holo a informacao que ele saiu. time(Fim), writeln('Holo: Terminou o deslocamento. Tempo = ',(Fim-Inicio), ' milisegundos.') } } //************************** ENTE SETOR ****************************** setor() { setor(Ident) { writeln('SETOR ',Ident,': Fui criada') } }
95
//******************** ENTE GERENCIADOR *************************** gerenciador() { gerenciador() { writeln('Gerenciador foi criado'), writeln('O Gerenciador tem a funcao de inserir o numero de pacientes atendidos em cada setor'), writeln('---------------------------------------------------------------'), move(self,servico_social), //Passo 1 - Entra no servico social. out(history)!atendimentos(25), //Passo 2 - Insere na historia do ente servico social o numero de pacientes. move(self,out), //Passo 3 - Sai do servico social. writeln('Gerenciador: Termino da movimentacao.'), out(history)!geren_saiu //Insere na historia do Holo que o gerenciador saiu. } } //*********************** ENTE ASSISTENTE SOCIAL ******************* assistente_social() { assistente_social() { writeln('Assistente Social foi criado'), writeln('Tem a funcao de resgatar a informacao ao longo de sua trajetoria'), writeln('----------------------------------------------------------------'), Soma := 0, move(self,servico_social), //Passo 1 - Entra no servico social. out(history).atendimentos(#X), //Passo 2 - Acessa a historia do ente servico_social e obtem o numero de atendimentos de forma bloqueante. move(self,out), //Passo 3 - Sai da servico_social. Soma := Soma + X, //Passo 4 - Adiciona o numero de pacientes e acumula em uma variavel soma. writeln('Assistente Social obteve a soma de ', Soma,' de pacientes atendidos ao longo de seu percurso'), writeln('----------------------------------------------------------------'), writeln('Assistente Social: Termino da movimentacao.'), out(history)!assistente_social_saiu //informa que o ente Assistente Social saiu do Holo. } }

96
RESULTADO
Figura 5.8 - Resultado da simulação do ente móvel assistente social
ASSISTENTE SOCIAL
Este é composto por um Ente Estático Serviço Social. O ente dinâmico D-HOLO
cria este setor e um ente móvel Assistente Social depois aguarda os dados a serem
colocados na história pelo Ente Gerenciador.
O setor Serviço Social notifica a sua criação e aguarda a movimentação do Ente
Assistente Social para a realização de atendimentos, realiza o processamento de quantos
atendimentos foram feitos neste setor, o momento em que sai, insere o resultado do
cáculo na história do D-HOLO.

97
A figura 5.9 mostra esses passos a seguir.
Nível 1 Nível 2 Nível 3
Figura 5.9 - Passos da movimentação do ente assistente social
D-HOLO
História
ServiçoSocial História
Assistente Social
História
1 2 3
4

98
5.6 Simulação do ente móvel nutricionista /********************************************************************* NOME: Nutricionista.holo DATA: 07/11/02. RESPONSAVEIS: Eduardo Moller e Sandra Kunde. FUNCAO: Simulacao de mobilidade do ente Nutricionista. SAIDA: Mensagens na tela mostrando os resultados da simulacao e, em especial, a soma do total de pacientes durante o seu deslocamento. OBSERVACOES: 1) cria 1 setor e um ente nutricionista e um gerenciador; 2) o ente movel gerenciador entra no setor e informa o numero de pacientes do mesmo; 3) o ente movel nutricionista entra em cada setor e resgata o dado informado pelo gerenciador; 4) o resultado consiste em um somatorio do numero de pacientes ao longo de sua trajetoria; **********************************************************************/ //******************* ENTE PRINCIPAL ******************************* holo() { holo() { writeln('Holo: Vou criar o setor nutricao e dois entes moveis: Nutricionista e Gerenciador'), clone(setor(nutricao),nutricao), //cria o setor nutricao. writeln('Vou criar um ente movel GERENCIADOR'), clone(gerenciador,gerenciador_d), //cria o ente gerenciador. history#geren_saiu, //adiciona a história do ente Holo o numero de pacientes a serem atendidos. clone(nutricionista,nutricionista_d), //Cria o ente nutricionista. time(Inicio), //marca o inicio do tempo do percurso do ente nutricionista. history.nutricionista_saiu, //o ente nutricionista adiciona a historia do Holo a informacao que ele saiu. time(Fim), writeln('Holo: Terminou o deslocamento. Tempo = ',(Fim-Inicio), ' milisegundos.') } } //************************** ENTE SETOR ***************************** setor() { setor(Ident) { writeln('SETOR ',Ident,': Fui criada') }

99
} //******************** ENTE GERENCIADOR *************************** gerenciador() { gerenciador() { writeln('Gerenciador foi criado'), writeln('O Gerenciador tem a funcao de inserir o numero de pacientes atendidos em cada setor'), writeln('---------------------------------------------------------------'), move(self,nutricao), //Passo 1 - Entra na nutricao. out(history)!atendimentos(12), //Passo 2 - Insere na historia do ente nutricao o numero de pacientes. move(self,out), //Passo 3 - Sai da nutricao. writeln('Gerenciador: Termino da movimentacao.'), out(history)!geren_saiu //Insere na historia do Holo que o gerenciador saiu. } } //*********************** ENTE NUTRICIONISTA *********************** nutricionista() { nutricionista() { writeln('Nutricionista foi criado'), writeln('Tem a funcao de resgatar a informacao ao longo de sua trajetoria'), writeln('----------------------------------------------------------------'), Soma := 0, move(self,nutricao), //Passo 1 - Entra no nutricao. out(history).atendimentos(#X), //Passo 2 - Acessa a historia do ente nutricao e obtem o numero de atendimentos de forma bloqueante. move(self,out), //Passo 3 - Sai da nutricao. Soma := Soma + X, //Passo 4 - Adiciona o numero de pacientes e acumula em uma variavel soma. writeln('Nutricionista obteve a soma de ', Soma,' de pacientes atendidos ao longo de seu percurso'), writeln('----------------------------------------------------------------'), writeln('Nutricionista: Termino da movimentacao.'), out(history)!nutricionista_saiu //informa que o ente Nutricionista saiu do Holo. } }
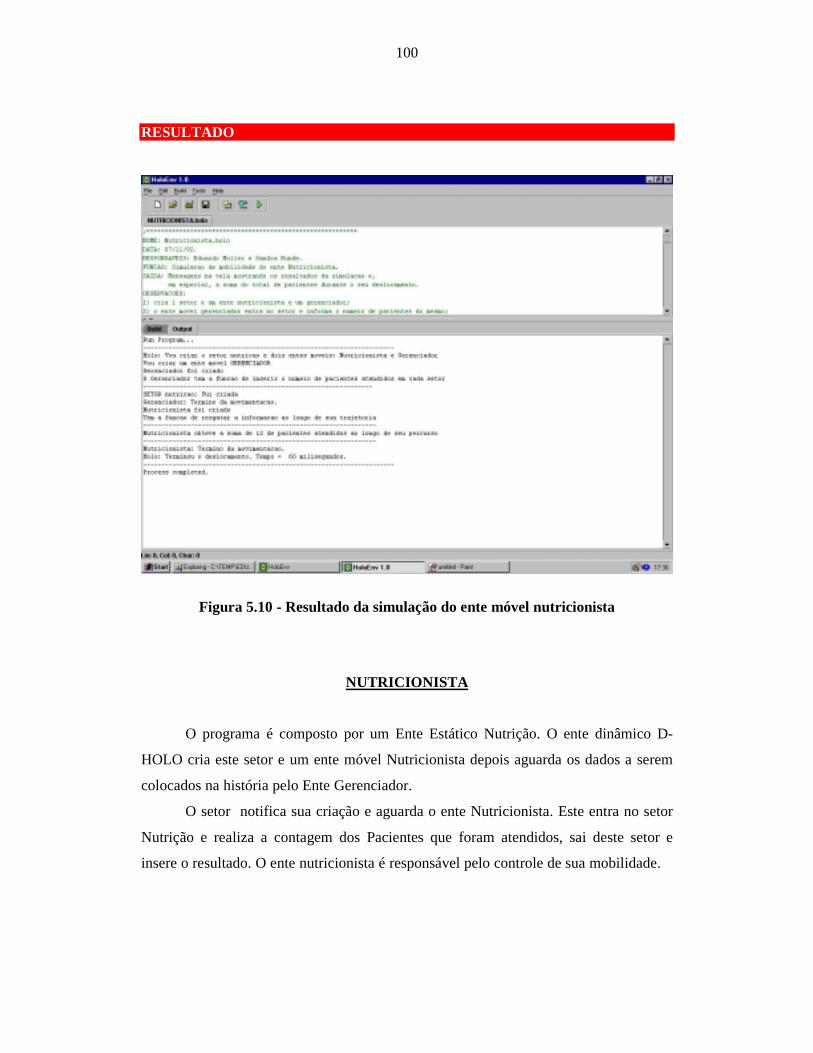
100
RESULTADO
Figura 5.10 - Resultado da simulação do ente móvel nutricionista
NUTRICIONISTA
O programa é composto por um Ente Estático Nutrição. O ente dinâmico D-
HOLO cria este setor e um ente móvel Nutricionista depois aguarda os dados a serem
colocados na história pelo Ente Gerenciador.
O setor notifica sua criação e aguarda o ente Nutricionista. Este entra no setor
Nutrição e realiza a contagem dos Pacientes que foram atendidos, sai deste setor e
insere o resultado. O ente nutricionista é responsável pelo controle de sua mobilidade.

101
A figura 5.11 mostra esses passos a seguir.
Nível 1 Nível 2 Nível 3
Figura 5.11- Passos da movimentação do ente nutricionista
D-HOLOHistória
Nutrição
História
Nutri- cionista
História
1 2 3
4
102
5.7 Simulação do ente móvel psicólogo /********************************************************************** NOME: Psicologo.holo DATA: 07/11/02. RESPONSAVEIS: Eduardo Moller e Sandra Kunde. FUNCAO: Simulacao de mobilidade do ente psicologa. SAIDA: Mensagens na tela mostrando os resultados da simulacao e, em especial, a soma do total de pacientes durante o seu deslocamento. OBSERVACOES: 1) cria 2 setores e um ente psicologo e um ente gerenciador; 2) o ente movel gerenciador entra em cada setor e informa o numero de pacientes de cada setor; 3) o ente movel psicologo entra em cada setor e resgata o dado informado pelo gerenciador; 4) o resultado consiste em um somatorio do numero de pacientes ao longo de sua trajetoria; **********************************************************************/ //******************* ENTE PRINCIPAL ******************************** holo() { holo() { writeln('Holo: Vou criar dois setores e dois entes moveis: Gerenciador e Psicologo'), clone(setor(psicologia_clinica),psicologia_clinica), //cria o setor psicologia clinica. clone(setor(psicologia_do_trabalho),psicologia_do_trabalho), //cria o segundo setor psicologia do trabalho. clone(gerenciador,gerenciador_d), //cria o ente gerenciador. history#geren_saiu, //Adiciona a historia do ente holo a informacao de quantos pacientes foram atendidos pelo psicologo. clone(psicologo,psicologo_d), //cria o ente movel psicologo. time(Inicio), //marca o inicio do tempo do percurso do ente movel psicologo. history.psicologo_saiu, //o ente movel psicologo adiciona a historia do Holo a informacao que ele saiu. time(Fim), writeln('Holo: Terminou o deslocamento. Tempo = ',(Fim-Inicio), ' milisegundos.') } } //************************** ENTE SETOR ****************************** setor() { setor(Ident) { writeln('SETOR ',Ident,': Fui criada')

103
} } //******************** ENTE GERENCIADOR *************************** gerenciador() { gerenciador() { writeln('Gerenciador foi criado'), writeln('Ele tem a funcao de inserir o numero de pacientes em cada setor'), writeln('---------------------------------------------------------------'), move(self,psicologia_clinica), //Passo 1 - Entra na psicologia clínica out(history)!pacientes(13), //Passo 2 - Insere na historia do ente psicologia clinica o numero de pacientes atendidos. move(self,out), //Passo 3 - Sai da psicologia clinica move(self,psicologia_do_trabalho), //Passo 4 - Entra na psicologia do trabalho. out(history)!pacientes(19), //Passo 5 - Insere na historia do ente psicologia do trabalho o numero de pacientes atendidos. move(self,out), //Passo 6 - Sai da psicologia do trabalho. writeln('Gerenciador: Termino da movimentacao.'), out(history)!geren_saiu //Insere na historia do Holo que o gerenciador saiu. } } //*********************** ENTE PSICOLOGO *************************** psicologo() { psicologo() { writeln('Psicologo foi criado'), writeln('Tem a funcao de resgatar a informacao de pacientes atendidos ao longo de sua trajetoria'), writeln('----------------------------------------------------------------'), Soma := 0, move(self,psicologia_clinica), //Passo 1 - Entra na psicologia clinica. out(history).pacientes(#X), //Passo 2 - Acessa a historia do ente psicologia clinica e obtem o numero de pacientes de forma bloqueante. move(self,out), //Passo 3 - Sai da psicologia clinica. Soma := Soma + X, //Passo 4 - Adiciona o numero de pacientes e acumula em uma variavel soma. move(self,psicologia_do_trabalho), //Passo 5 - Entra na psicologia do trabalho out(history).pacientes(#X), //Passo 6 - Acessa a historia do ente psicologia do trab. e obtem o numero de pacientes de forma bloqueante. move(self,out), //Passo 7 - Sai da psicologia do trabalho.
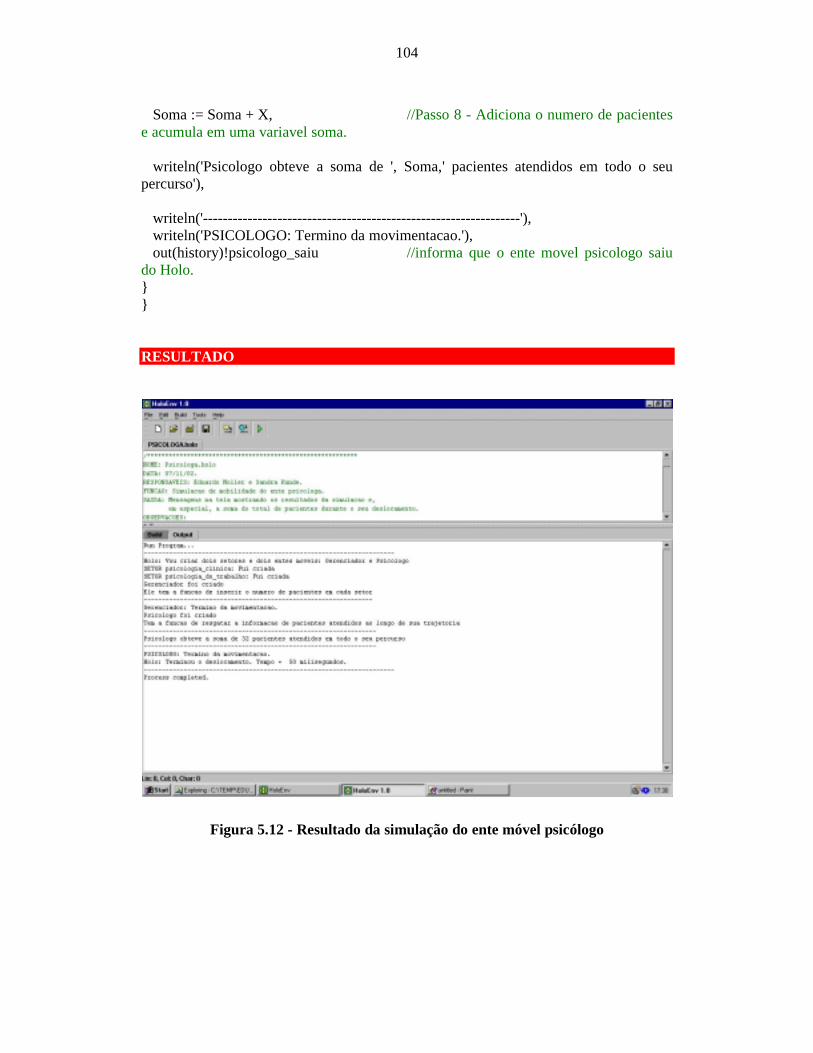
104
Soma := Soma + X, //Passo 8 - Adiciona o numero de pacientes e acumula em uma variavel soma. writeln('Psicologo obteve a soma de ', Soma,' pacientes atendidos em todo o seu percurso'), writeln('----------------------------------------------------------------'), writeln('PSICOLOGO: Termino da movimentacao.'), out(history)!psicologo_saiu //informa que o ente movel psicologo saiu do Holo. } } RESULTADO
Figura 5.12 - Resultado da simulação do ente móvel psicólogo

105
PSICOLOGO
O programa contém dois Entes Estáticos: Psicologia do Trabalho e Psicologia
Clínica.
O Ente D-HOLO cria dois setores e um ente móvel psicólogo. Os dois setores
modificam sua criação e aguardam os dados à serem alocados na história.
O Psicólogo vai até um setor e realiza o processamento da contagem do número
de pacientes atendidos.
No momento de sua saída insere o resultado na história do D-HOLO e avisa a
sua saída. Esses passos são representados na figura 5.13.
Nível 1 Nível 2 Nível 3
Figura 5.13- Passos da movimentação do ente psicólogo
D-HOLO
História
Psic. P.C. P.T. Psic.
1
T.M.
T.M.
T.M.
2 3
4
5 6 7
8
106
5.8 Simulação do ente móvel farmacêutico / químico /********************************************************************** NOME: Farmaceuticos.holo DATA: 07/11/02. RESPONSAVEIS: Eduardo Moller e Sandra Kunde. FUNCAO: Simulacao de mobilidade do ente farmaceutico quimico. SAIDA: Mensagens na tela mostrando os resultados da simulacao e, em especial, a soma do total de pacientes durante o seu deslocamento. OBSERVACOES: 1) cria 2 setores e dois entes moveis farmaceutico quimico e gerenciador; 2) o ente movel gerenciador entra em cada setor e informa o numero de pacientes de cada setor; 3) o ente movel farmaceutico quimico entra em cada setor e resgata o dado informado pelo gerenciador; 4) o resultado consiste em um somatorio do numero de pacientes ao longo de sua trajetoria; **********************************************************************/ //******************* ENTE PRINCIPAL ******************************* holo() { holo() { writeln('Holo: Vou criar dois setores e dois entes moveis: Gerenciador e Farmaceutico Quimico'), clone(setor(manipulacao),manipulacao), //cria o setor manipulacao. clone(setor(laboratorio),laboratorio), //cria o segundo setor laboratorio. clone(gerenciador,gerenciador_d), //cria o ente gerenciador. history#geren_saiu, //Adiciona a historia do ente holo a informacao de quantas manipulacoes foram feitas pelo farmaceutico quimico. clone(farmaceutico,farmaceutico_d), //Cria o ente movel farmaceutico quimico. time(Inicio), //marca o inicio do tempo do percurso do ente movel farmaceutico quimico. history.farmaceutico_saiu, //o ente movel farmaceutico quimico adiciona a historia do Holo a informacao que ele saiu. time(Fim), writeln('Holo: Terminou o deslocamento. Tempo = ',(Fim-Inicio), ' milisegundos.') } } //************************** ENTE SETOR ****************************** setor() { setor(Ident) { writeln('SETOR ',Ident,': Fui criada')
107
} } //******************** ENTE GERENCIADOR *************************** gerenciador() { gerenciador() { writeln('Gerenciador foi criado'), writeln('Ele tem a funcao de inserir o numero de manipulacoes realizadas em cada setor'), writeln('---------------------------------------------------------------'), move(self,manipulacao), //Passo 1 - Entra na manipulacao. out(history)!manipula(45), //Passo 2 – Insere na historiado ente manipulacao o numero de manipulacoes realizadas. move(self,out), //Passo 3 - Sai da manipulacao. move(self,laboratorio), //Passo 4 - Entra no laboratorio. out(history)!manipula(19), //Passo 5 - Insere na historia do ente laboratorio o numero de manipulacoes realizadas. move(self,out), //Passo 6 - Sai da laboratorio. writeln('Gerenciador: Termino da movimentacao.'), out(history)!geren_saiu //Insere na historia do Holo que o gerenciador saiu. } } //*********************** ENTE FARMACEUTICO QUIMICO ************* farmaceutico() { farmaceutico() { writeln('Farmaceutico Quimico foi criado'), writeln('Tem a funcao de resgatar a informacao de manipulacoes realizadas ao longo de sua trajetoria'), writeln('----------------------------------------------------------------'), Soma := 0, move(self,manipulacao), //Passo 1 - Entra na manipulacao. out(history).manipula(#X), //Passo 2 - Acessa a historia do ente manipulacao e obtem o numero de manipulacoes de forma bloqueante. move(self,out), //Passo 3 - Sai da manipulacao. Soma := Soma + X, //Passo 4 - Adiciona o numero de manipulacoes e acumula em uma variavel soma. move(self,laboratorio), //Passo 5 - Entra no laboratorio. out(history).manipula(#X), //Passo 6 - Acessa a historia do ente laboratorio e obtem o numero de manipulacoes de forma bloqueante. move(self,out), //Passo 7 - Sai do laboaratorio.
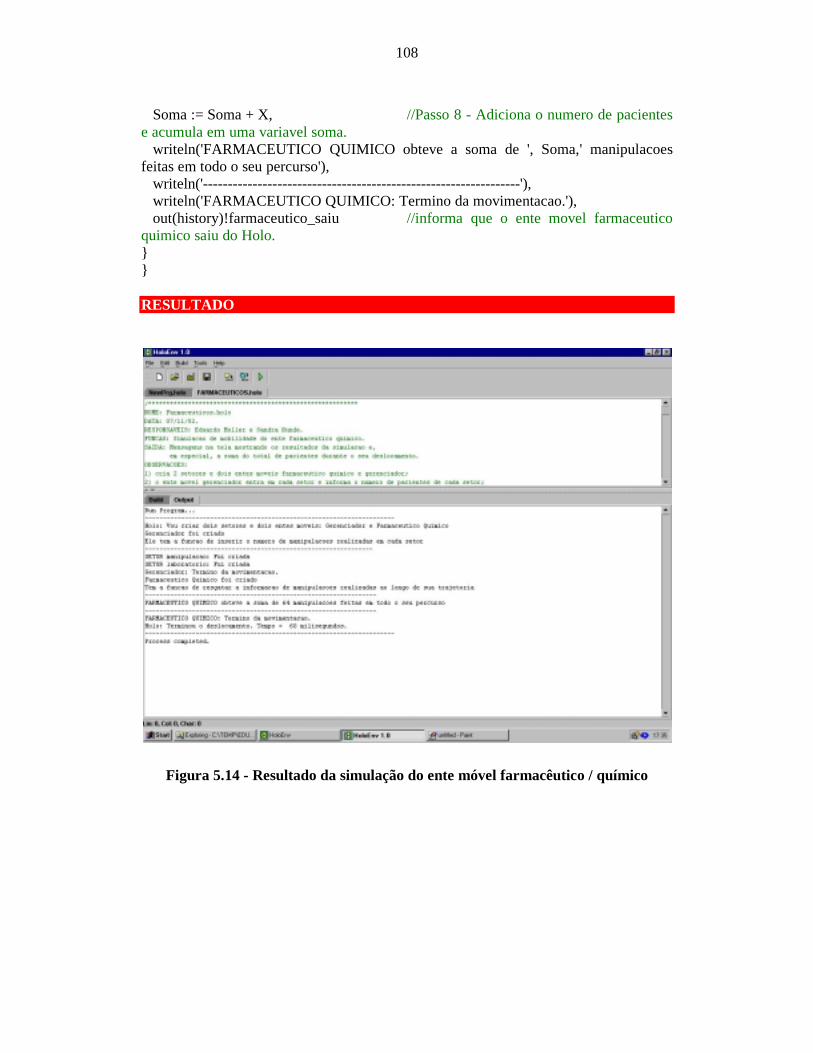
108
Soma := Soma + X, //Passo 8 - Adiciona o numero de pacientes e acumula em uma variavel soma. writeln('FARMACEUTICO QUIMICO obteve a soma de ', Soma,' manipulacoes feitas em todo o seu percurso'), writeln('----------------------------------------------------------------'), writeln('FARMACEUTICO QUIMICO: Termino da movimentacao.'), out(history)!farmaceutico_saiu //informa que o ente movel farmaceutico quimico saiu do Holo. } } RESULTADO
Figura 5.14 - Resultado da simulação do ente móvel farmacêutico / químico
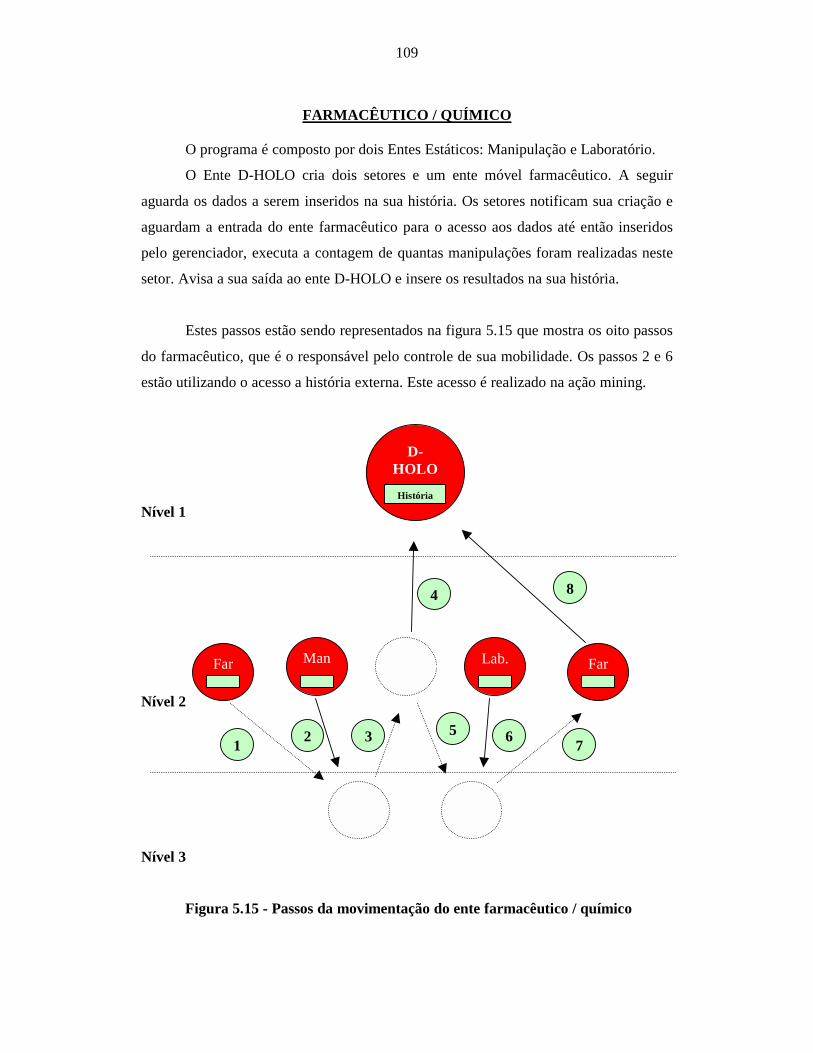
109
FARMACÊUTICO / QUÍMICO
O programa é composto por dois Entes Estáticos: Manipulação e Laboratório.
O Ente D-HOLO cria dois setores e um ente móvel farmacêutico. A seguir
aguarda os dados a serem inseridos na sua história. Os setores notificam sua criação e
aguardam a entrada do ente farmacêutico para o acesso aos dados até então inseridos
pelo gerenciador, executa a contagem de quantas manipulações foram realizadas neste
setor. Avisa a sua saída ao ente D-HOLO e insere os resultados na sua história.
Estes passos estão sendo representados na figura 5.15 que mostra os oito passos
do farmacêutico, que é o responsável pelo controle de sua mobilidade. Os passos 2 e 6
estão utilizando o acesso a história externa. Este acesso é realizado na ação mining.
Nível 1 Nível 2 Nível 3
Figura 5.15 - Passos da movimentação do ente farmacêutico / químico
D-HOLO
História
Farm.
Man.
Lab. Farm.
1
T.M.
T.M.
T.M.
2 3
4
5 6 7
8
110
5.9 Simulação do ente móvel técnico de manutenção /********************************************************************* NOME: tecnico.holo DATA: 07/11/02.
RESPONSAVEIS: Eduardo Moller e Sandra Kunde.
FUNCAO: Simulacao de mobilidade do ente tecnico de manutencao. SAIDA: Mensagens na tela mostrando os resultados da simulacao e, em especial, a soma do total de servicos realizados durante o seu deslocamento. OBSERVACOES: 1) cria 3 setores e dois entes moveis tecnico de manutencao e um gerenciador; 2) o ente movel gerenciador entra no setor e informa o numero de servicos realizados do mesmo; 3) o ente movel tecnico de manutencao entra em cada setor e resgata o dado informado pelo gerenciador; 4) o resultado consiste em um somatorio do numero de servicos realizados ao longo de sua trajetoria; **********************************************************************/ //******************* ENTE PRINCIPAL ******************************** holo() { holo() { writeln('Holo: Vou criar tres setores e um ente movel tecnico de manutencao'), clone(setor(manutencao),manutencao), //cria o setor manutencao. clone(setor(grafica),grafica), //cria o setor da grafica. clone(setor(eletroeletronica),eletroeletronica), //cria o setor eletroeletronica. writeln('Vou criar um ente movel GERENCIADOR'), clone(gerenciador,gerenciador_d), //cria o ente gerenciador. history#geren_saiu, //adiciona a história do ente Holo o numero de servicos realizados. clone(tecnico,tecnico_d), //Cria o ente tecnico de manutencao. time(Inicio), //marca o inicio do tempo do percurso do ente tecnico de manutencao. history.tec_saiu, //o ente tecnico de manutencao adiciona a historia do Holo a informacao que ele saiu. time(Fim), writeln('Holo: Terminou o deslocamento. Tempo = ',(Fim-Inicio), ' milisegundos.') } } //************************** ENTE SETOR ****************************** setor() { setor(Ident) { writeln('SETOR ',Ident,': Fui criada')

111
} } //******************** ENTE GERENCIADOR *************************** gerenciador() { gerenciador() { writeln('Gerenciador foi criado'), writeln('O Gerenciador tem a funcao de inserir o numero de servicos realizados em cada setor'), writeln('---------------------------------------------------------------'), move(self,manutencao), //Passo 1 - Entra na manutencao. out(history)!servicos(25), //Passo 2 - Insere na historia do ente manutencao o numero de servicos realizados. move(self,out), //Passo 3 - Sai da manutencao. move(self,grafica), //Passo 4 - Entra na grafica. out(history)!servicos(30), //Passo 5 - Insere na historia do ente grafica o numero de servicos realizados. move(self,out), //Passo 6 - Sai da grafica. move(self,eletroeletronica), //Passo 7 - Entra na eletroeletronica. out(history)!servicos(80), //Passo 8 - Insere na historia do ente eletroeletronica o numero de servicos realizados. move(self,out), //Passo 9 - Sai da eletroeletronica. writeln('Gerenciador: Termino da movimentacao.'), out(history)!geren_saiu //Insere na historia do Holo que o gerenciador saiu. } } //*********************** ENTE TECNICO DE MANUTENCAO *********** tecnico() { tecnico() { writeln('Tecnico de manutencao foi criado'), writeln('Tem a funcao de resgatar a informacao ao longo de sua trajetoria'), writeln('----------------------------------------------------------------'), Soma := 0, move(self,manutencao), //Passo 1 - Entra na manutencao. out(history).servicos(#X), //Passo 2 - Acessa a historia do ente manutencao e obtem o numero de servicos realizados. move(self,out), //Passo 3 - Sai da manutencao. Soma := Soma + X, //Passo 4 - Adiciona o numero de servicos realizados e acumula em uma variavel soma. move(self,grafica), //Passo 5 - Entra na grafica. out(history).servicos(#X), //Passo 6 - Acessa a historia do ente grafica e obtem o numero de servicos realizados. move(self,out), //Passo 7 - Sai da grafica. Soma := Soma + X, //Passo 8 - Adiciona o numero de servicos realizados e acumula em uma variavel soma. move(self,eletroeletronica), //Passo 9 - Entra na eletroeletronica.
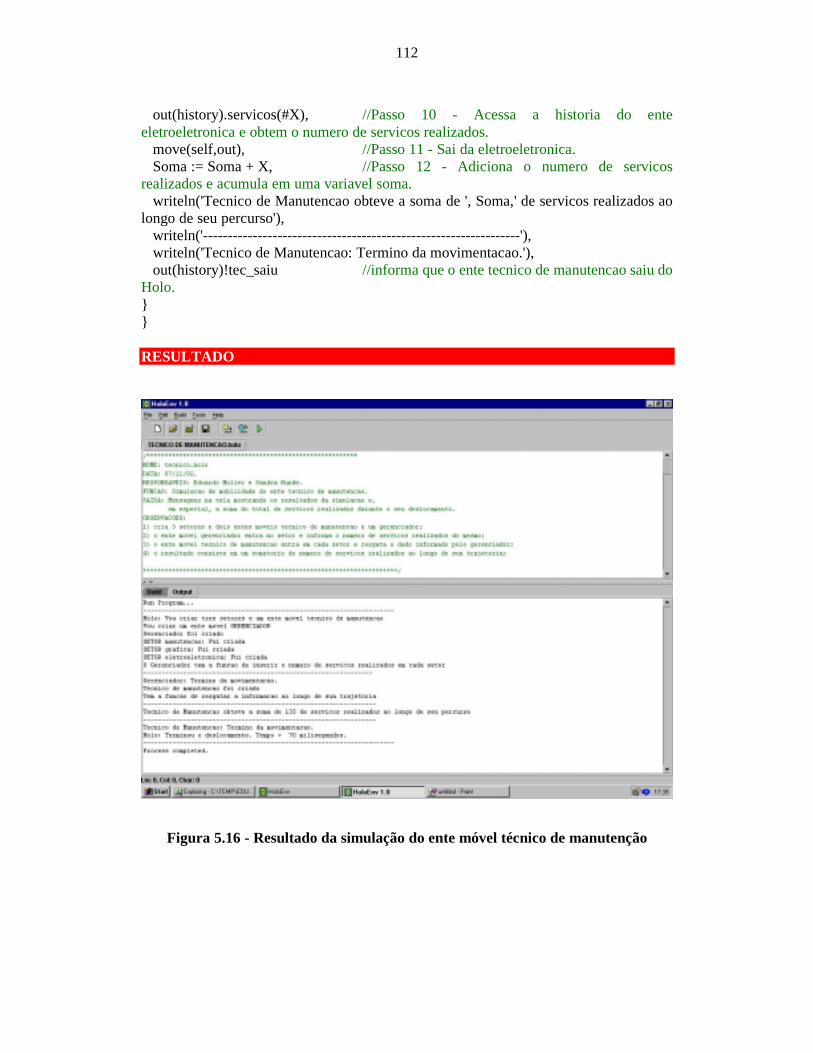
112
out(history).servicos(#X), //Passo 10 - Acessa a historia do ente eletroeletronica e obtem o numero de servicos realizados. move(self,out), //Passo 11 - Sai da eletroeletronica. Soma := Soma + X, //Passo 12 - Adiciona o numero de servicos realizados e acumula em uma variavel soma. writeln('Tecnico de Manutencao obteve a soma de ', Soma,' de servicos realizados ao longo de seu percurso'), writeln('----------------------------------------------------------------'), writeln('Tecnico de Manutencao: Termino da movimentacao.'), out(history)!tec_saiu //informa que o ente tecnico de manutencao saiu do Holo. } } RESULTADO
Figura 5.16 - Resultado da simulação do ente móvel técnico de manutenção
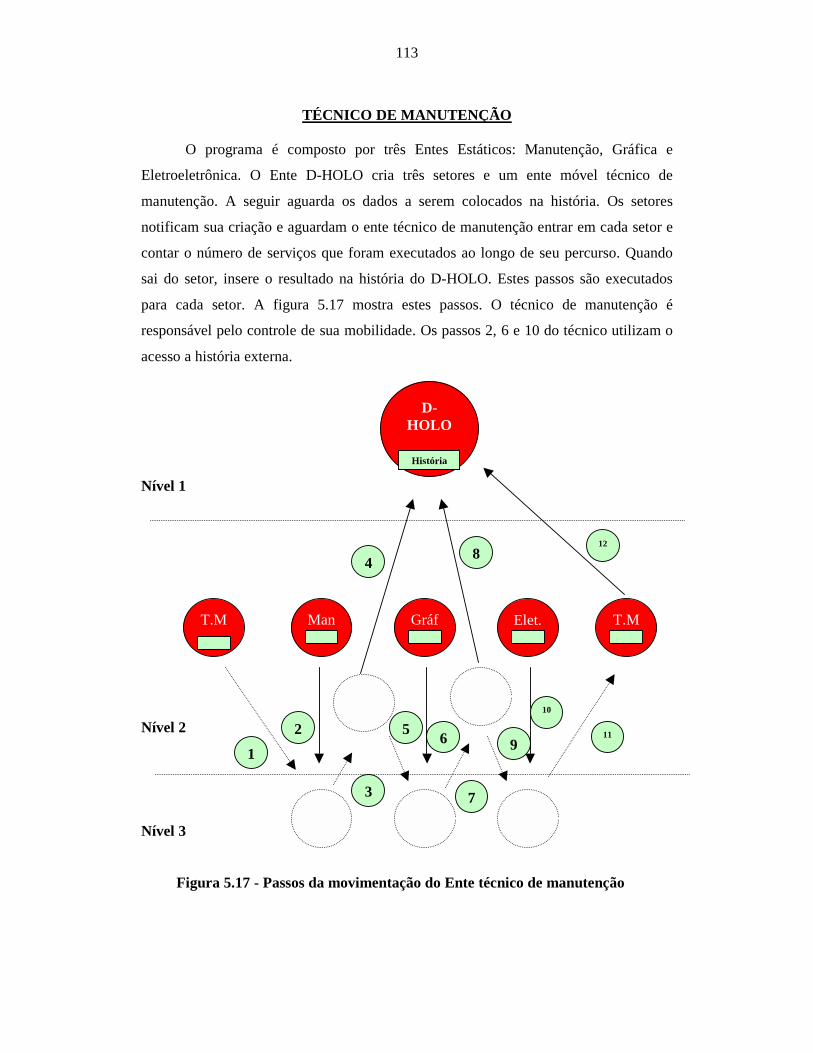
113
TÉCNICO DE MANUTENÇÃO
O programa é composto por três Entes Estáticos: Manutenção, Gráfica e
Eletroeletrônica. O Ente D-HOLO cria três setores e um ente móvel técnico de
manutenção. A seguir aguarda os dados a serem colocados na história. Os setores
notificam sua criação e aguardam o ente técnico de manutenção entrar em cada setor e
contar o número de serviços que foram executados ao longo de seu percurso. Quando
sai do setor, insere o resultado na história do D-HOLO. Estes passos são executados
para cada setor. A figura 5.17 mostra estes passos. O técnico de manutenção é
responsável pelo controle de sua mobilidade. Os passos 2, 6 e 10 do técnico utilizam o
acesso a história externa.
Nível 1 Nível 2 Nível 3
Figura 5.17 - Passos da movimentação do Ente técnico de manutenção
D-HOLO
História
T.M.
Man.
Gráf.
Elet. T.M.
T.M.
T.M.
T.M.
T.M.
T.M.
1 2
3
4
5 6
7
8
9
10
11
12
114
6. Conclusão Este trabalho apresentou um estudo sobre uma Automação Hospitalar modelando
toda a mobilidade dentro do Hospital e que através da qual conseguiu-se ajustar ao
sistema toda a implementação através do Holoparadigma. Provando que com a
utilização das ferramentas já existentes do HOLO, é possível fazer simulações que
resultam em ótimas perspectivas para um futuro próximo. Desde a elaboração de
diagramas que permitem a criação de diversas visões para soluções do HOLO até a
criação de Holoprogramas.
Foi possível também a criação e a integração junto ao HML (Holo Language
Modeling), da existência de um novo símbolo representando a clonagem física das
partes de um ente, devido a necessidade de representação no momento da modelagem
do sistema, foi um elemento facilitador para o nosso trabalho podendo assim concluir a
totalidade das necessidades da FAU.
Embora o HoloEnv esteja ainda dependente da plataforma JAVA, mostrou-se
perfeitamente capaz de superar nossas expectativas com a relação a este trabalho.
Acreditamos que novas pesquisas e trabalhos futuros possam se integrar ao universo do
HOLO, aperfeiçoando-o para o desenvolvimento de Holoprogramas em sistemas
distribuídos.
Atualmente intensificam-se cada vez mais o número de aplicações que utilizam a
mobilidade. Percebe-se que há também uma exploração da mobilidade através de redes
heterogêneas conectadas por diferentes links de comunicação e distantes uma das
outras. O conceito da mobilidade ainda não é um consenso entre a comunidade
científica, embora seja unânimes em dizer que a entidade envolvida na computação
deve ter o potencial de deslocar-se entre sistema distribuído, podendo mover-se de um
ambiente para outro.
Os estudos em mobilidade são promissores para explorar a mobilidade e
desejável que a tecnologia apresente características como: suporte a objetos, suporte a
JAVA, suporte a mobilidade forte e fraca, mecanismos de segurança, mecanismos de
transporte e interação das entidades base e mecanismos de controle de prioridade.
115
Neste contexto o Holoparadigma mostra-se um forte aliado para suporte à
mobilidade.
Futuros trabalhos poderão aperfeiçoá-lo para torná-lo a base para à mobilidade
em sistemas distribuídos, quando o Holo tiver suporte necessário para funcionar como
um sistema distribuído, visto que ele poderá se tornar um dos mais completos ambientes
para programação distribuída.
Este trabalho teve uma contribuição muito significativa, tanto para o
desenvolvimento de novos trabalhos como também para o enriquecimento de nosso
conhecimento. Visto que, até o presente momento não foi desenvolvido nenhum projeto
prático utilizando o Holoparadigma e a HML (Holo Languagem Modeling) ferramentas
de suporte para a construção de Holoprogramas. Desta forma, este projeto torna-se o
pioneiro em desenvolvimento de sistema utilizando o Holoparadigma e abre as portas
para a construção de novos sistemas que ainda estão por vir.

116
ANEXO I
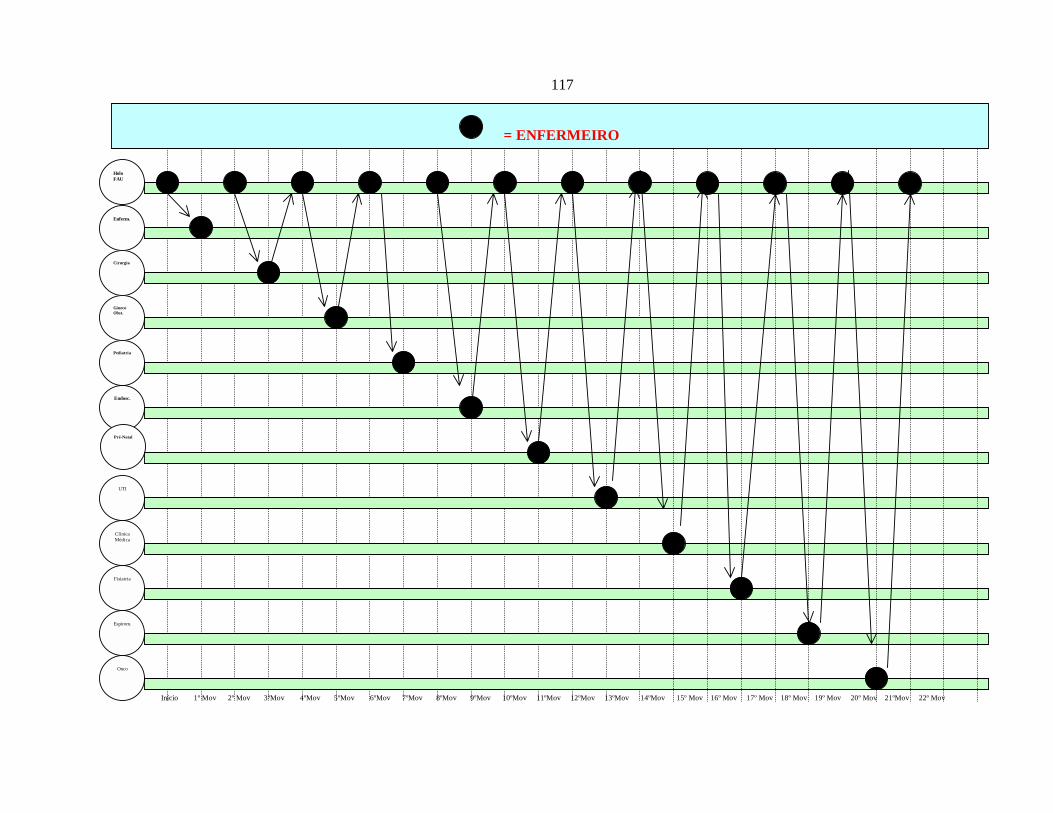
117
Início 1º Mov 2º Mov 3ºMov 4ºMov 5ºMov 6ºMov 7ºMov 8ºMov 9ºMov 10ºMov 11ºMov 12ºMov 13ºMov 14ºMov 15º Mov 16º Mov 17º Mov 18º Mov 19º Mov 20º Mov 21ºMov 22º Mov
= ENFERMEIRO
Holo FAU
Enferm.
Cirurgia
Gineco Obst.
Endosc.
UTI
Pediatria
Pré-Natal
Clínica Médica
Fisiatria
Espirom.
Onco
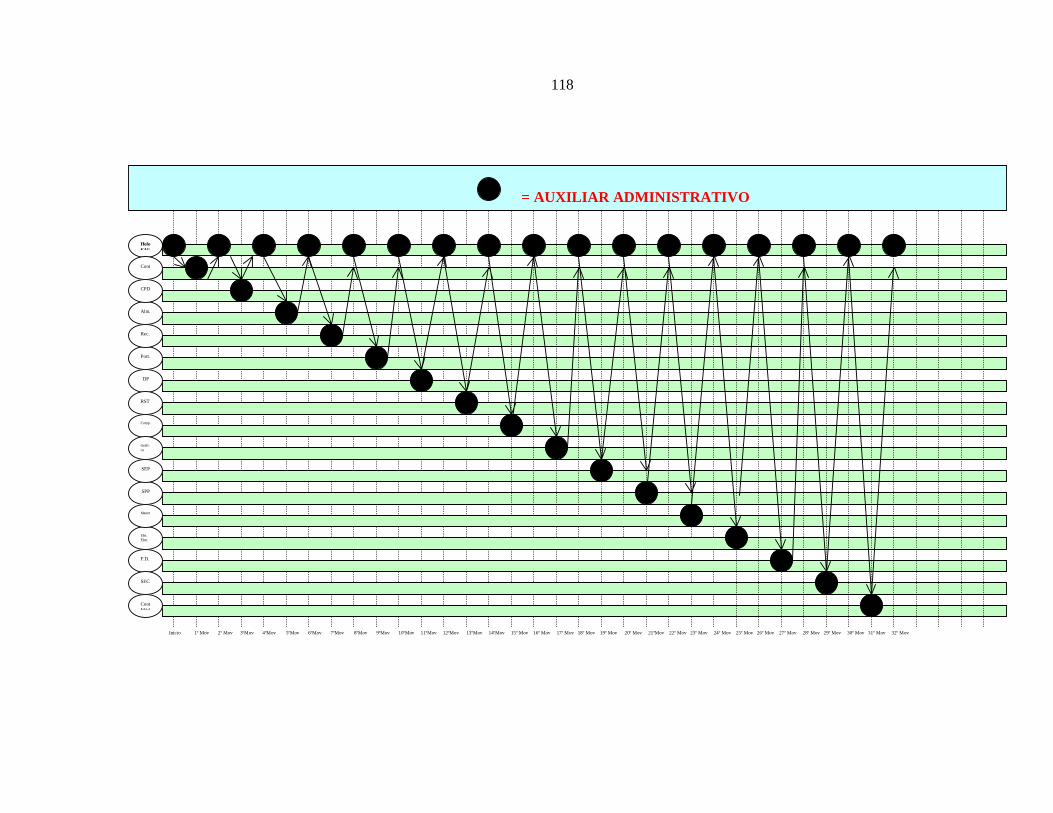
118
Início 1º Mov 2º Mov 3ºMov 4ºMov 5ºMov 6ºMov 7ºMov 8ºMov 9ºMov 10ºMov 11ºMov 12ºMov 13ºMov 14ºMov 15º Mov 16º Mov 17º Mov 18º Mov 19º Mov 20º Mov 21ºMov 22º Mov 23º Mov 24º Mov 25º Mov 26º Mov 27º Mov 28º Mov 29º Mov 30º Mov 31º Mov 32º Mov
= AUXILIAR ADMINISTRATIVO
Holo FAU
Cont
Alm.
CPD
Port.
Rec.
DP
RST
Comp.
F.D.
Elet. Eletr.
Manut
SPP
SEP
Gráfi- ca
SEC
Cont Méd

119
Início 1º Mov 2º Mov 3ºMov 4ºMov 5ºMov 6ºMov 7ºMov 8ºMov 9ºMov 10ºMov 11ºMov 12ºMov 13ºMov 14ºMov 15º Mov 16º Mov 17º Mov 8º Mov 19º Mov 20º Mov 21ºMov 22º Mov 23º Mov 24º Mov
= PACIENTES
Holo FAU
C.M.
Onc.
Cir.
Gin. Obst
Ped.
End.
Pré Nat.
UTI
Ima- gem
Fisi- atria
Esp.
Ra- diol.
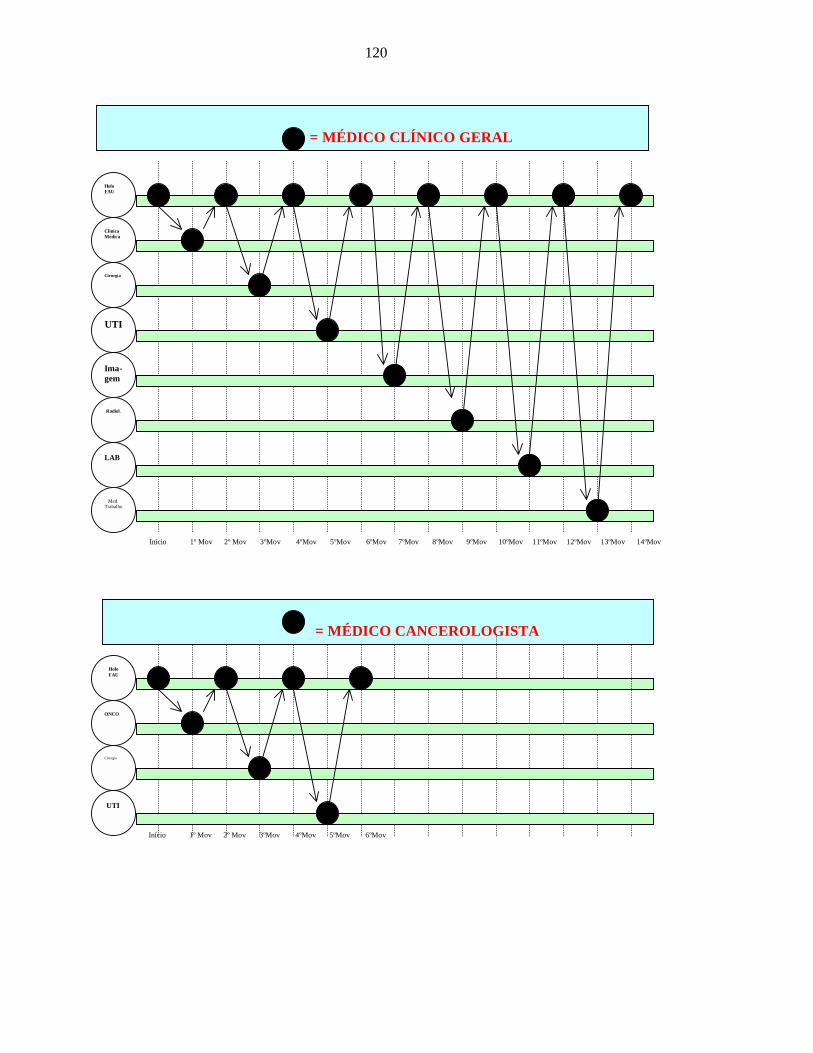
120
Início 1º Mov 2º Mov 3ºMov 4ºMov 5ºMov 6ºMov 7ºMov 8ºMov 9ºMov 10ºMov 11ºMov 12ºMov 13ºMov 14ºMov
Início 1º Mov 2º Mov 3ºMov 4ºMov 5ºMov 6ºMov
= MÉDICO CLÍNICO GERAL
Holo FAU
Clínica Médica
Cirurgia
UTI
Radiol.
Med. Trabalho
Ima-gem
LAB
= MÉDICO CANCEROLOGISTA
Holo FAU
ONCO
Cirurgia
UTI

121
Início 1º Mov 2º Mov 3ºMov 4ºMov Início 1º Mov 2º Mov 3ºMov 4ºMov Início 1º Mov 2º Mov 3ºMov 4ºMov 5ºMov 6ºMov
= MÉDICO CARDIOLOGISTA
Holo FAU
Cirurgia
UTI
= CIRURGIÃO GERAL
Holo FAU
Cirurgia
UTI
= CIRURGIÃO PEDIÁTRICO
Holo FAU
UTI
Cirurgia
Pediatria
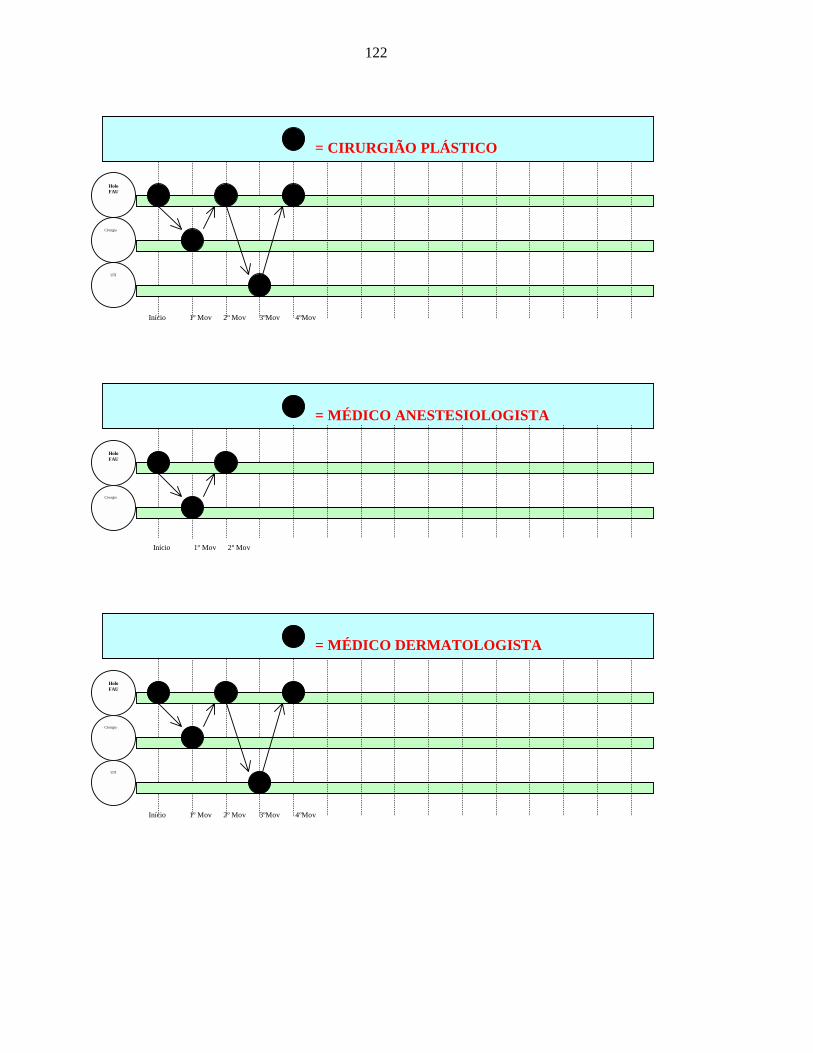
122
Início 1º Mov 2º Mov 3ºMov 4ºMov Início 1º Mov 2º Mov Início 1º Mov 2º Mov 3ºMov 4ºMov
= CIRURGIÃO PLÁSTICO
Holo FAU
Cirurgia
UTI
= MÉDICO ANESTESIOLOGISTA
Holo FAU
Cirurgia
= MÉDICO DERMATOLOGISTA
Holo FAU
Cirurgia
UTI
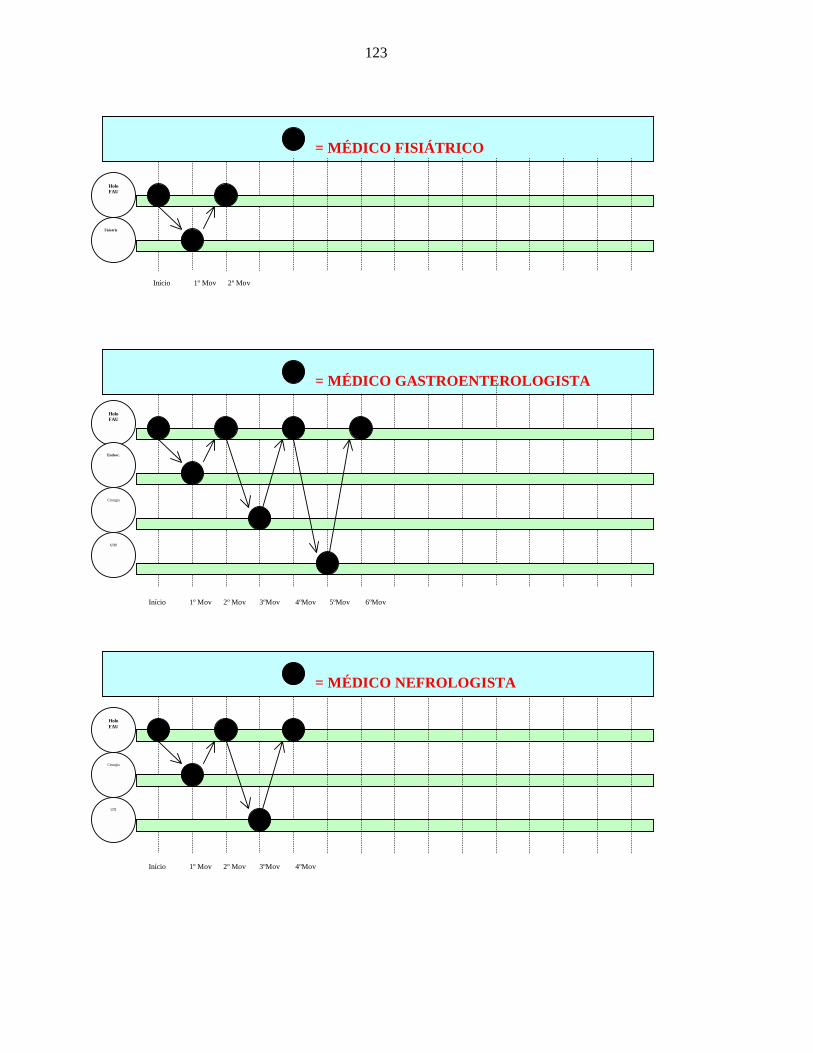
123
Início 1º Mov 2º Mov Início 1º Mov 2º Mov 3ºMov 4ºMov 5ºMov 6ºMov Início 1º Mov 2º Mov 3ºMov 4ºMov
= MÉDICO FISIÁTRICO
Holo FAU
Fisiatria
= MÉDICO GASTROENTEROLOGISTA
Holo FAU
UTI
Cirurgia
Endosc.
= MÉDICO NEFROLOGISTA
Holo FAU
Cirurgia
UTI
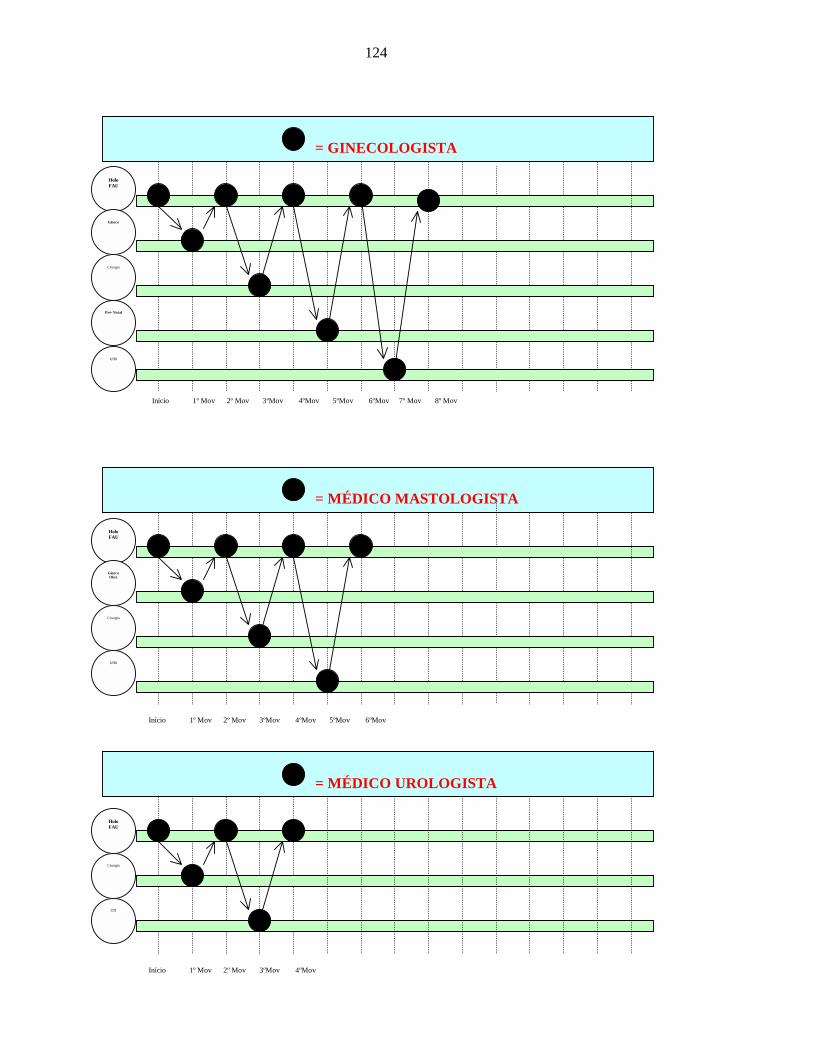
124
Início 1º Mov 2º Mov 3ºMov 4ºMov 5ºMov 6ºMov 7º Mov 8º Mov Início 1º Mov 2º Mov 3ºMov 4ºMov 5ºMov 6ºMov Início 1º Mov 2º Mov 3ºMov 4ºMov
= GINECOLOGISTA
Holo FAU
Pré- Natal
Cirurgia
Gineco
UTI
= MÉDICO MASTOLOGISTA
Holo FAU
UTI
Cirurgia
Gineco Obst.
= MÉDICO UROLOGISTA
Holo FAU
Cirurgia
UTI

125
Início 1º Mov 2º Mov 3ºMov 4ºMov 5ºMov 6ºMov Início 1º Mov 2º Mov 3ºMov 4ºMov Início 1º Mov 2º Mov 3ºMov 4ºMov 5ºMov 6ºMov
= MÉDICO INFECTOLOGISTA
Holo FAU
UTI
Cirurgia
Clínica Médica
= MÉDICO NEUROLOGISTA
Holo FAU
Cirurgia
UTI
= MÉDICO ORTOPEDISTA
Holo FAU
UTI
Cirurgia
Espirom.
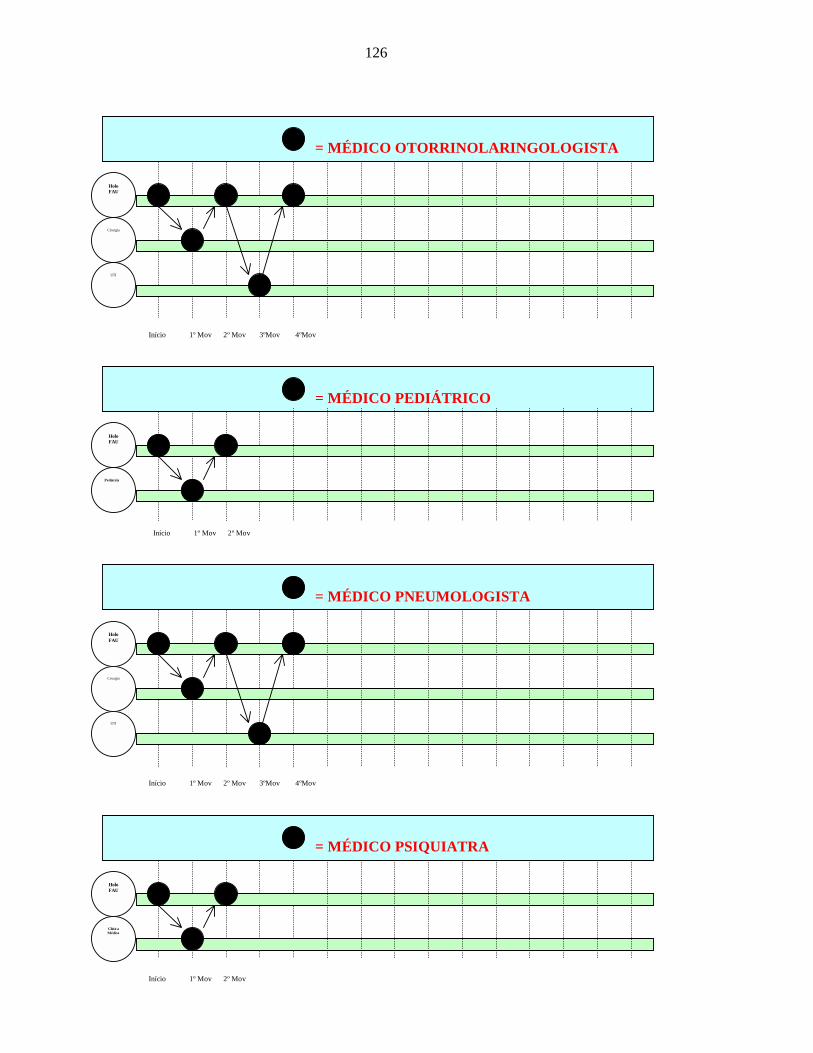
126
Início 1º Mov 2º Mov 3ºMov 4ºMov Início 1º Mov 2º Mov Início 1º Mov 2º Mov 3ºMov 4ºMov Início 1º Mov 2º Mov
= MÉDICO OTORRINOLARINGOLOGISTA
Holo FAU
Cirurgia
UTI
= MÉDICO PEDIÁTRICO
Holo FAU
Pediatria
= MÉDICO PNEUMOLOGISTA
Holo FAU
Cirurgia
UTI
= MÉDICO PSIQUIATRA
Holo FAU
Clínica Médica
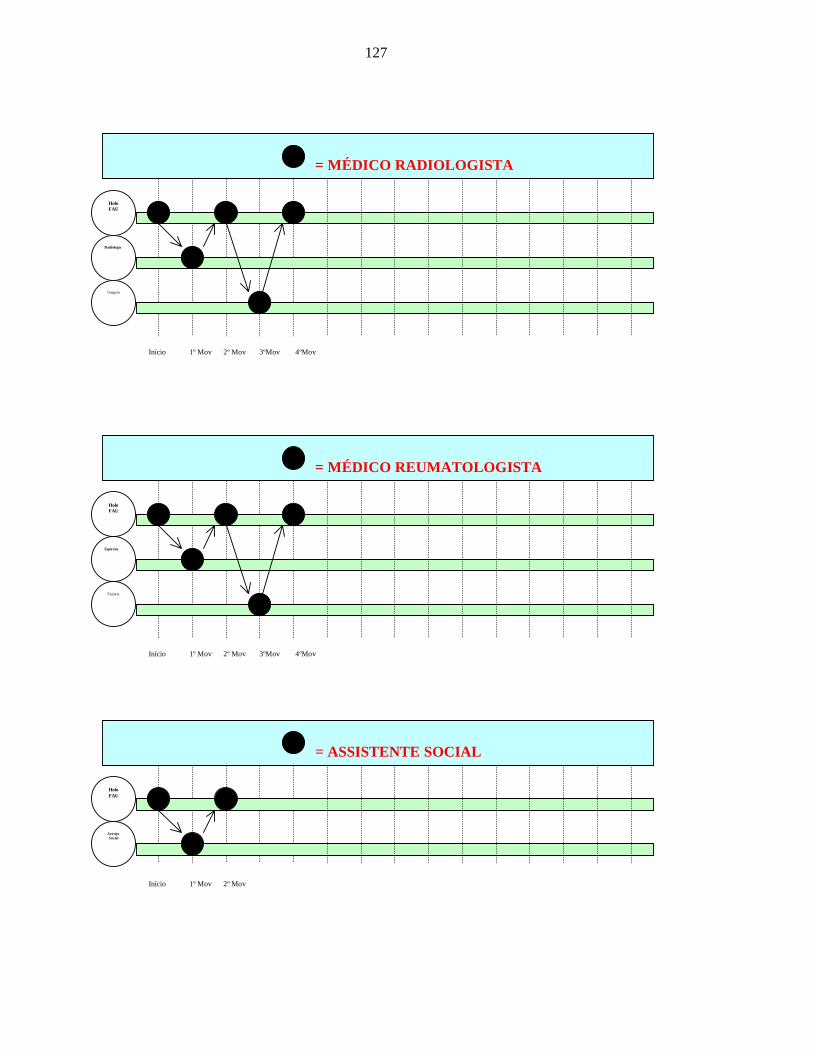
127
Início 1º Mov 2º Mov 3ºMov 4ºMov Início 1º Mov 2º Mov 3ºMov 4ºMov Início 1º Mov 2º Mov
= MÉDICO RADIOLOGISTA
Holo FAU
Radiologia
Imagem
= MÉDICO REUMATOLOGISTA
Holo FAU
Espirom.
Fisiatria
= ASSISTENTE SOCIAL
Holo FAU
Serviço Social
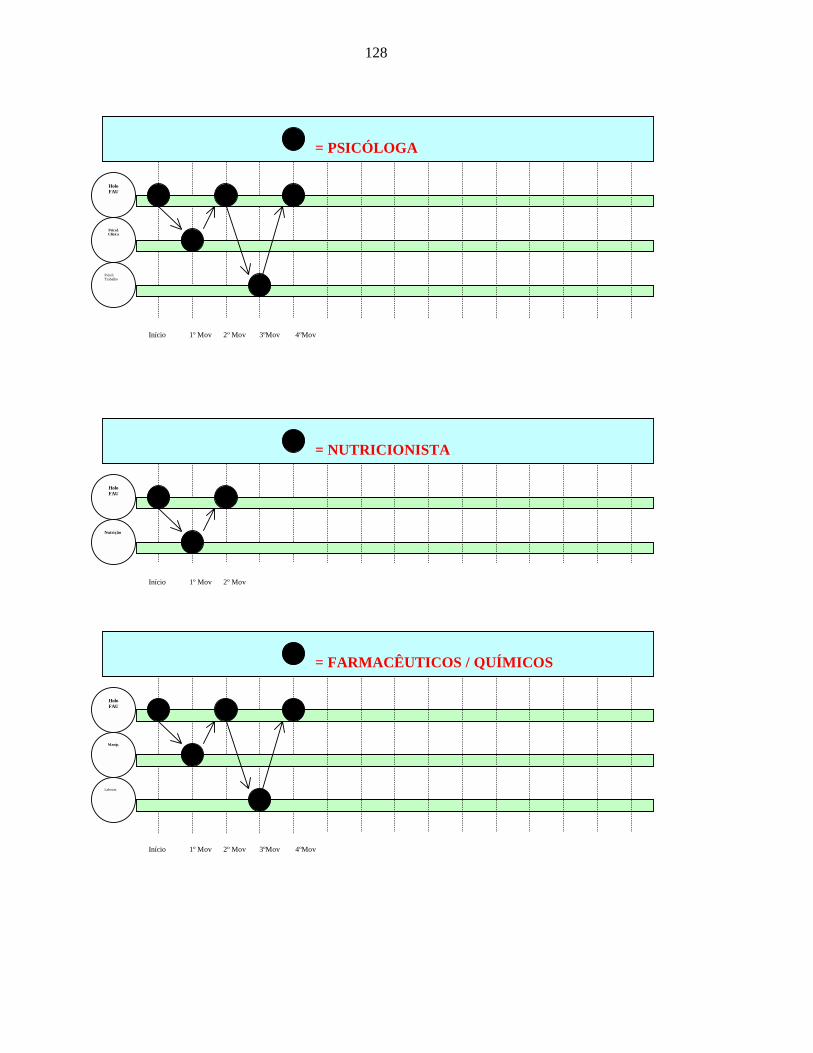
128
Início 1º Mov 2º Mov 3ºMov 4ºMov Início 1º Mov 2º Mov Início 1º Mov 2º Mov 3ºMov 4ºMov
= PSICÓLOGA
Holo FAU
Psicol. Clínica
Psicol. Trabalho
= NUTRICIONISTA
Holo FAU
Nutrição
= FARMACÊUTICOS / QUÍMICOS
Holo FAU
Manip.
Laborat.

129
Início 1º Mov 2º Mov 3ºMov 4ºMov 5ºMov 6ºMov
Início 1º Mov 2º Mov 3ºMov 4ºMov 5ºMov 6ºMov 7º Mov 8º Mov Início 1º Mov 2º Mov 3ºMov 4ºMov 5ºMov 6ºMov
= TÉCNICOS DE MANUTENÇÃO
Holo FAU
Manut.
Gráfica
Eletro Eletrôn..
= ADVOGADOS
Holo FAU
Direção FAU
Cons. da FAU
A. Jurídica
Secret.
= DIRETORES
Holo FAU
Cons. FAU
Direção FAU
A. Jurídica
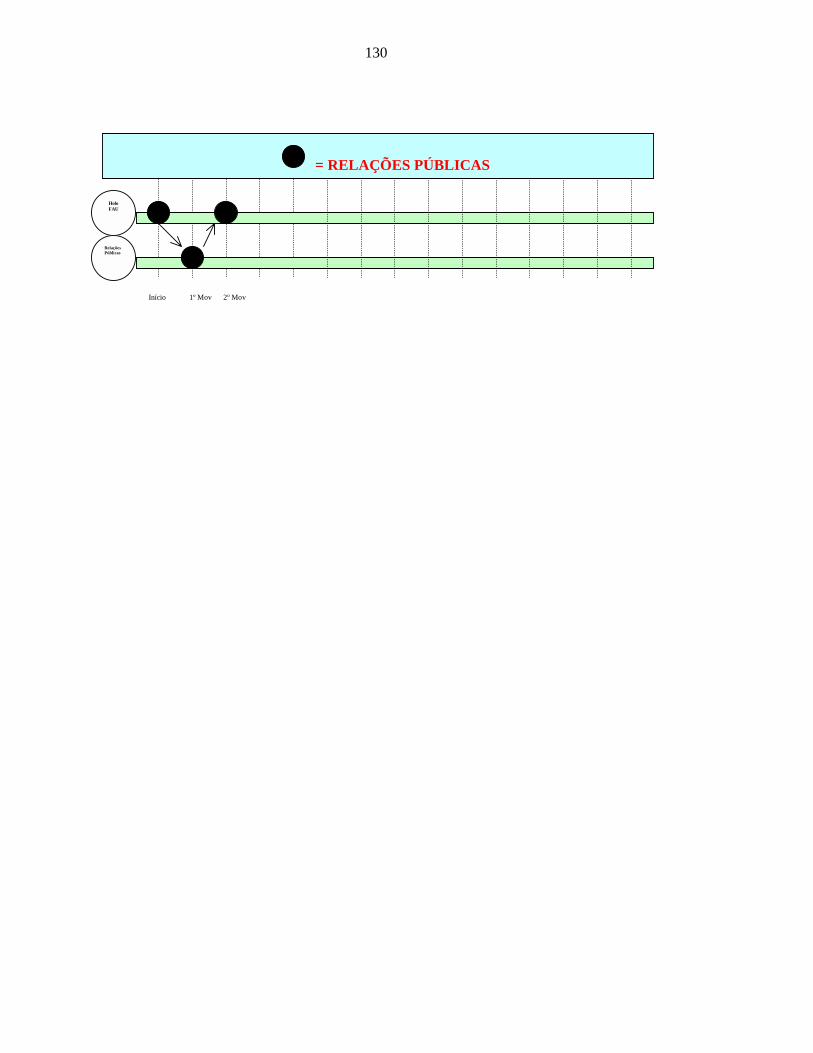
130
Início 1º Mov 2º Mov
= RELAÇÕES PÚBLICAS
Holo FAU
Relações Públicas

131
ANEXO II

132
Instante Instante Instante Instante Instante Instante Instante Instante Instante Instante Instante Instante Instante Instante Instante Instante Instante Instante Instante Instante Instante 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21
HOLO FAU
Médico
C. FAU
DIR. FAU
A. Jur~idic
R. Públicas
Sec.
Manip.
Onco
Lab.
Clín. Médica
Farm. Disp.
Enfer.
Cirur.
Gineco Obst.
Pediat.
Endosc.
Pré- Natal
UTI
Imagem
Fisiatria
Espiro.
Radiol.
Apoio
RH
Ad. Financ
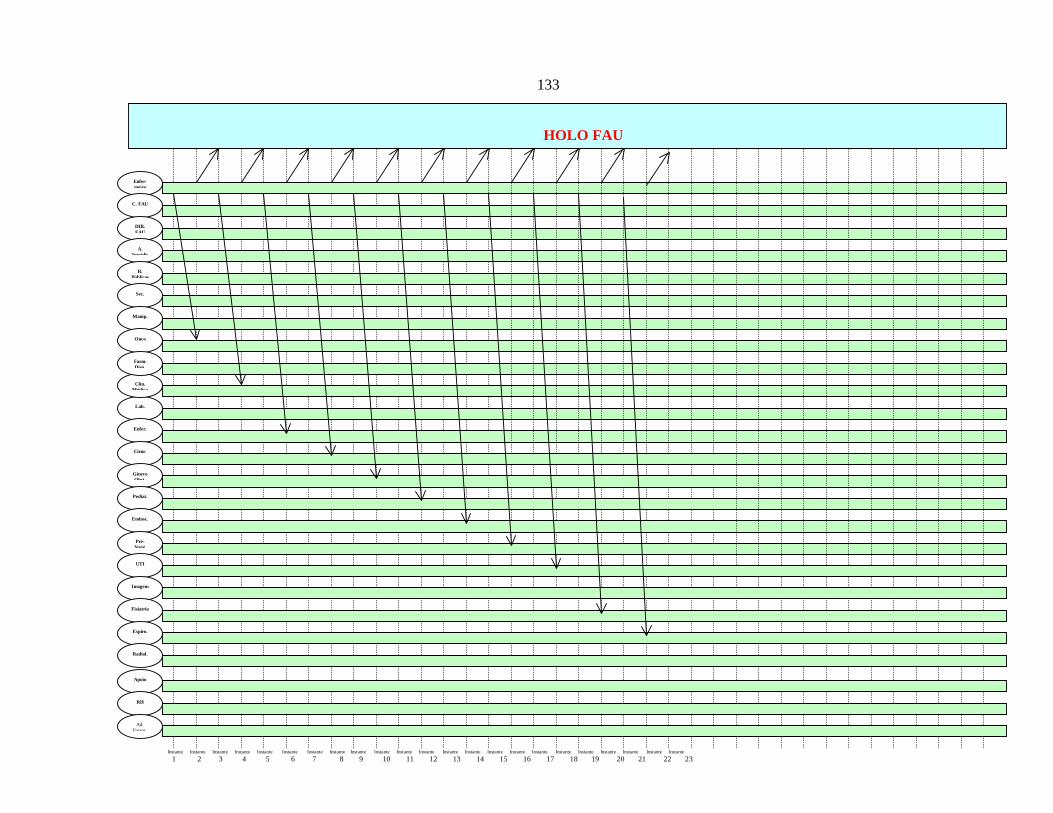
133
Instante Instante Instante Instante Instante Instante Instante Instante Instante Instante Instante Instante Instante Instante Instante Instante Instante Instante Instante Instante Instante Instante Instante
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23
HOLO FAU
Enfer- meiro
C. FAU
DIR. FAU
A. Jur~idic
R. Públicas
Sec.
Manip.
Onco
Lab.
Clín. Médica
Farm. Disp.
Enfer.
Cirur.
Gineco Obst.
Pediat.
Endosc.
Pré- Natal
UTI
Imagem
Fisiatria
Espiro.
Radiol.
Apoio
RH
Ad. Financ
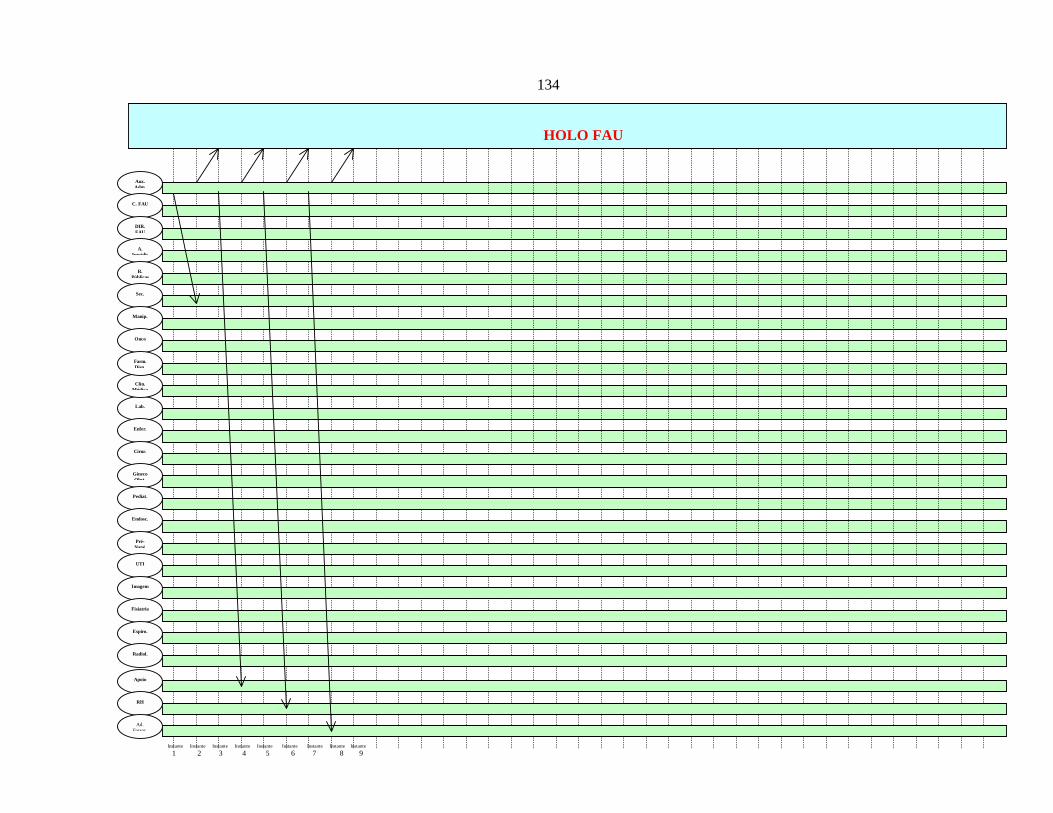
134
Instante Instante Instante Instante Instante Instante Instante Instante Instante 1 2 3 4 5 6 7 8 9
HOLO FAU
Aux. Adm.
C. FAU
DIR. FAU
A. Jur~idic
R. Públicas
Sec.
Manip.
Onco
Lab.
Clín. Médica
Farm. Disp.
Enfer.
Cirur.
Gineco Obst.
Pediat.
Endosc.
Pré- Natal
UTI
Imagem
Fisiatria
Espiro.
Radiol.
Apoio
RH
Ad. Financ
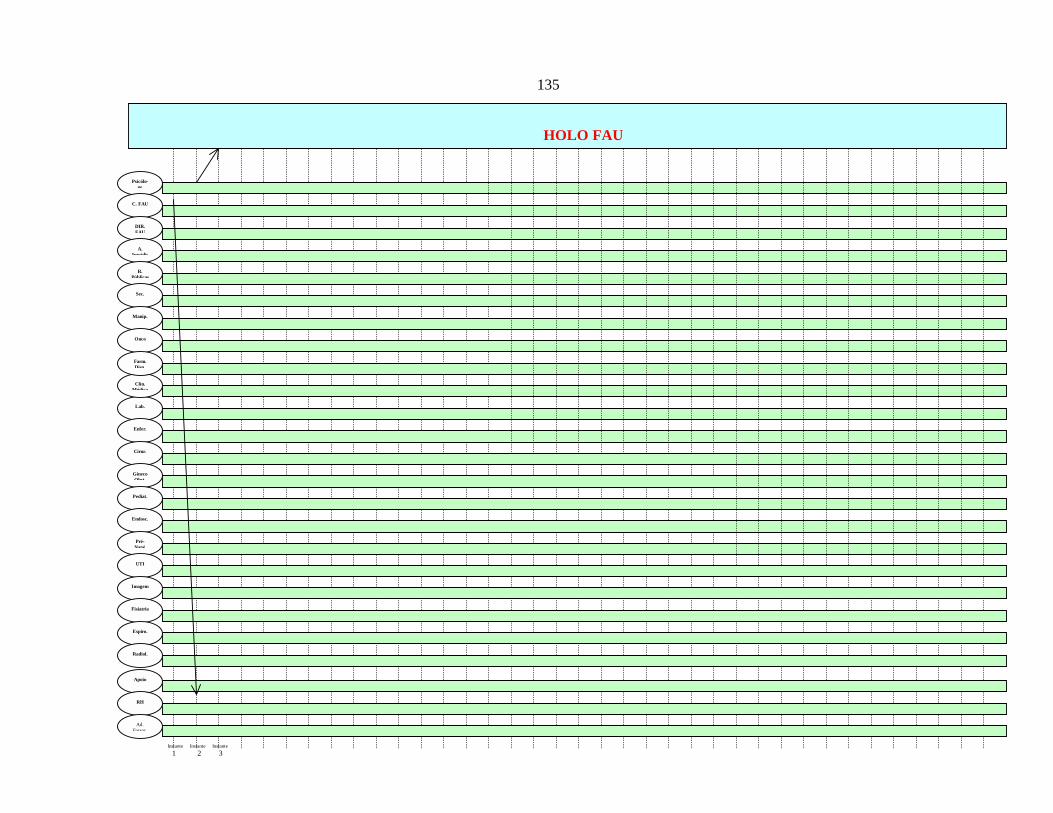
135
Instante Instante Instante 1 2 3
HOLO FAU
Psicólo- go
C. FAU
DIR. FAU
A. Jur~idic
R. Públicas
Sec.
Manip.
Onco
Lab.
Clín. Médica
Farm. Disp.
Enfer.
Cirur.
Gineco Obst.
Pediat.
Endosc.
Pré- Natal
UTI
Imagem
Fisiatria
Espiro.
Radiol.
Apoio
RH
Ad. Financ
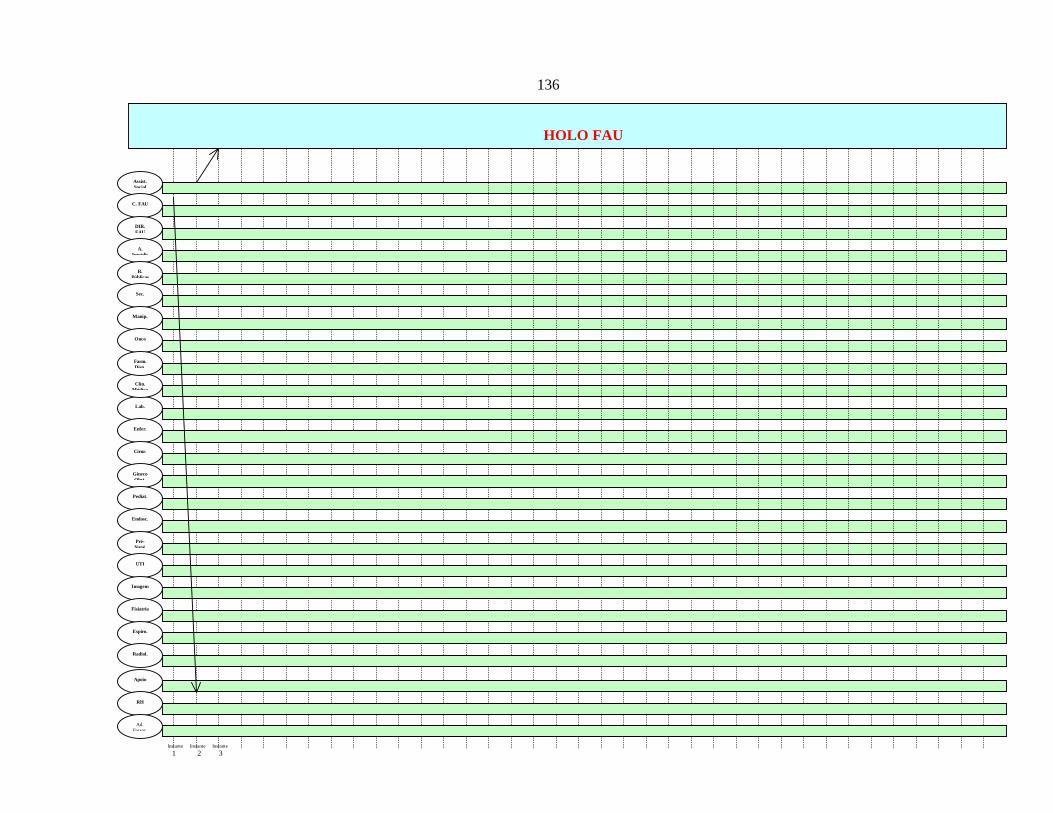
136
Instante Instante Instante 1 2 3
HOLO FAU
Assist. Social
C. FAU
DIR. FAU
A. Jur~idic
R. Públicas
Sec.
Manip.
Onco
Lab.
Clín. Médica
Farm. Disp.
Enfer.
Cirur.
Gineco Obst.
Pediat.
Endosc.
Pré- Natal
UTI
Imagem
Fisiatria
Espiro.
Radiol.
Apoio
RH
Ad. Financ
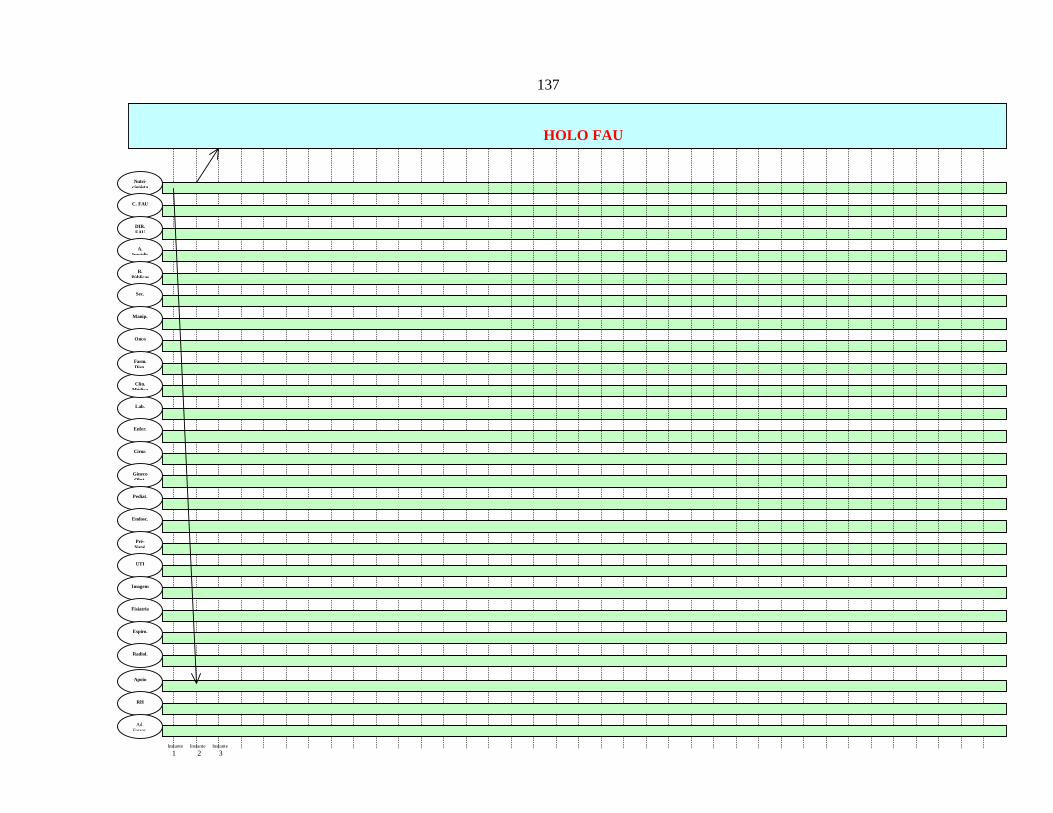
137
Instante Instante Instante 1 2 3
HOLO FAU
Nutri- cionista
C. FAU
DIR. FAU
A. Jur~idic
R. Públicas
Sec.
Manip.
Onco
Lab.
Clín. Médica
Farm. Disp.
Enfer.
Cirur.
Gineco Obst.
Pediat.
Endosc.
Pré- Natal
UTI
Imagem
Fisiatria
Espiro.
Radiol.
Apoio
RH
Ad. Financ
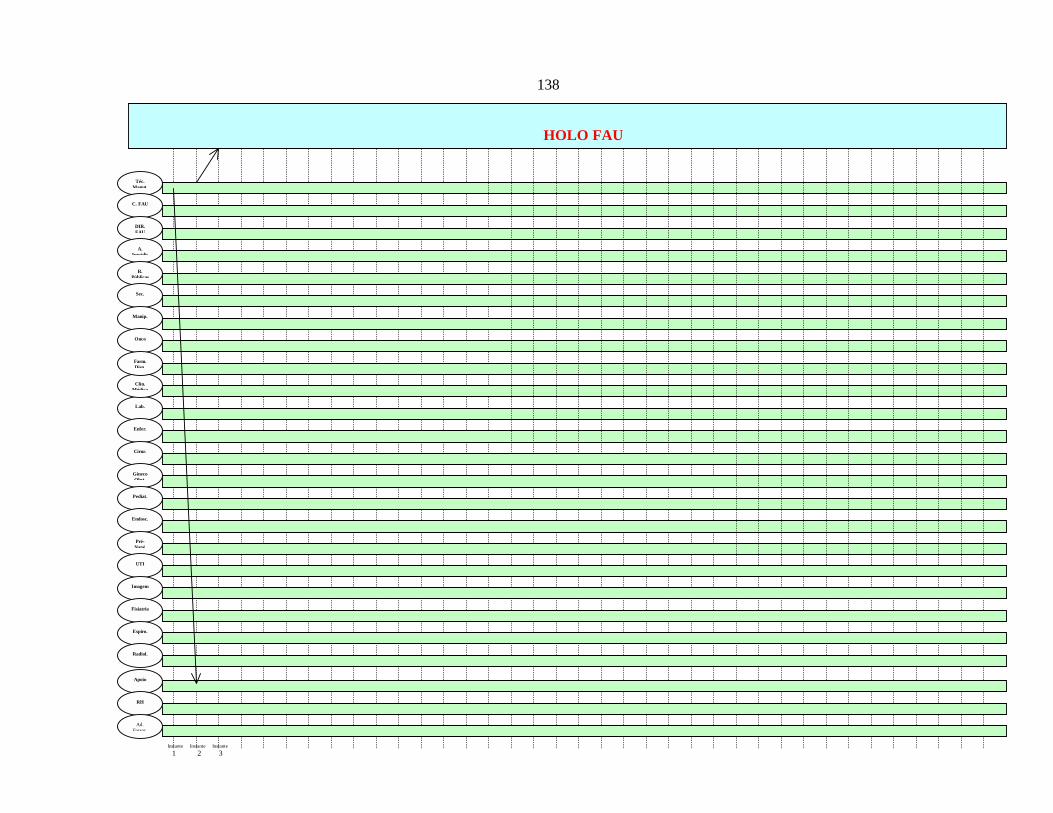
138
Instante Instante Instante 1 2 3
HOLO FAU
Téc. Manut.
C. FAU
DIR. FAU
A. Jur~idic
R. Públicas
Sec.
Manip.
Onco
Lab.
Clín. Médica
Farm. Disp.
Enfer.
Cirur.
Gineco Obst.
Pediat.
Endosc.
Pré- Natal
UTI
Imagem
Fisiatria
Espiro.
Radiol.
Apoio
RH
Ad. Financ
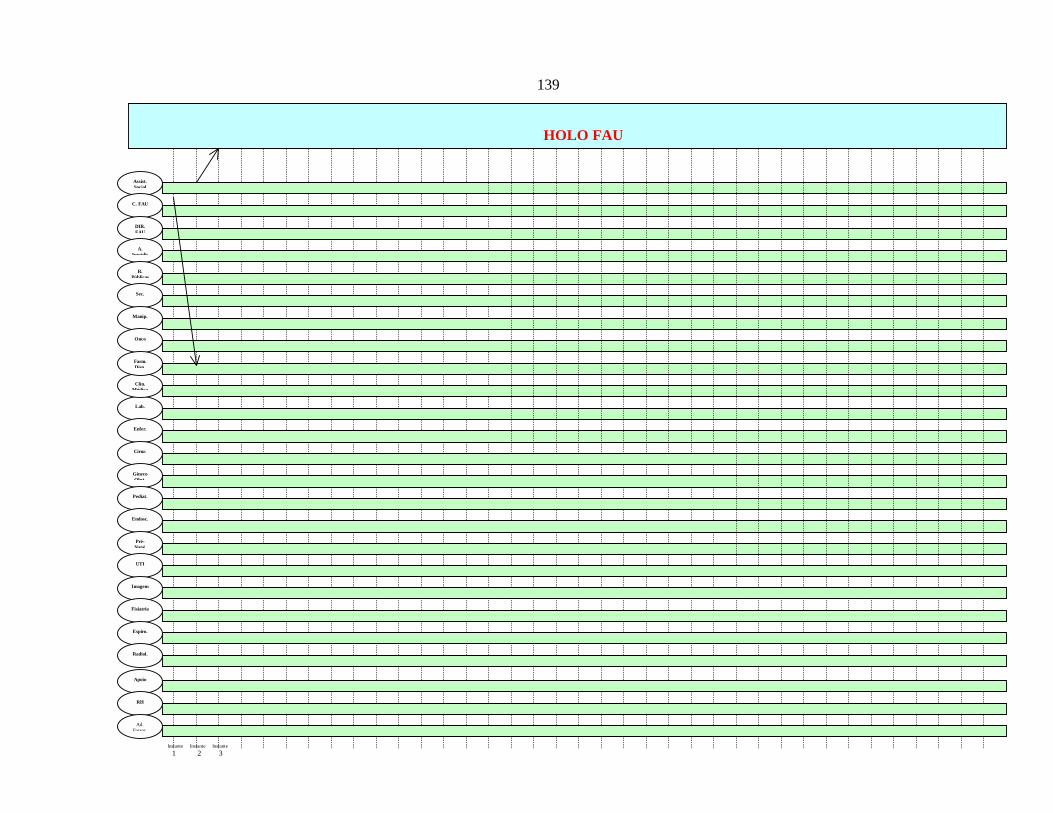
139
Instante Instante Instante 1 2 3
HOLO FAU
Assist. Social
C. FAU
DIR. FAU
A. Jur~idic
R. Públicas
Sec.
Manip.
Onco
Lab.
Clín. Médica
Farm. Disp.
Enfer.
Cirur.
Gineco Obst.
Pediat.
Endosc.
Pré- Natal
UTI
Imagem
Fisiatria
Espiro.
Radiol.
Apoio
RH
Ad. Financ
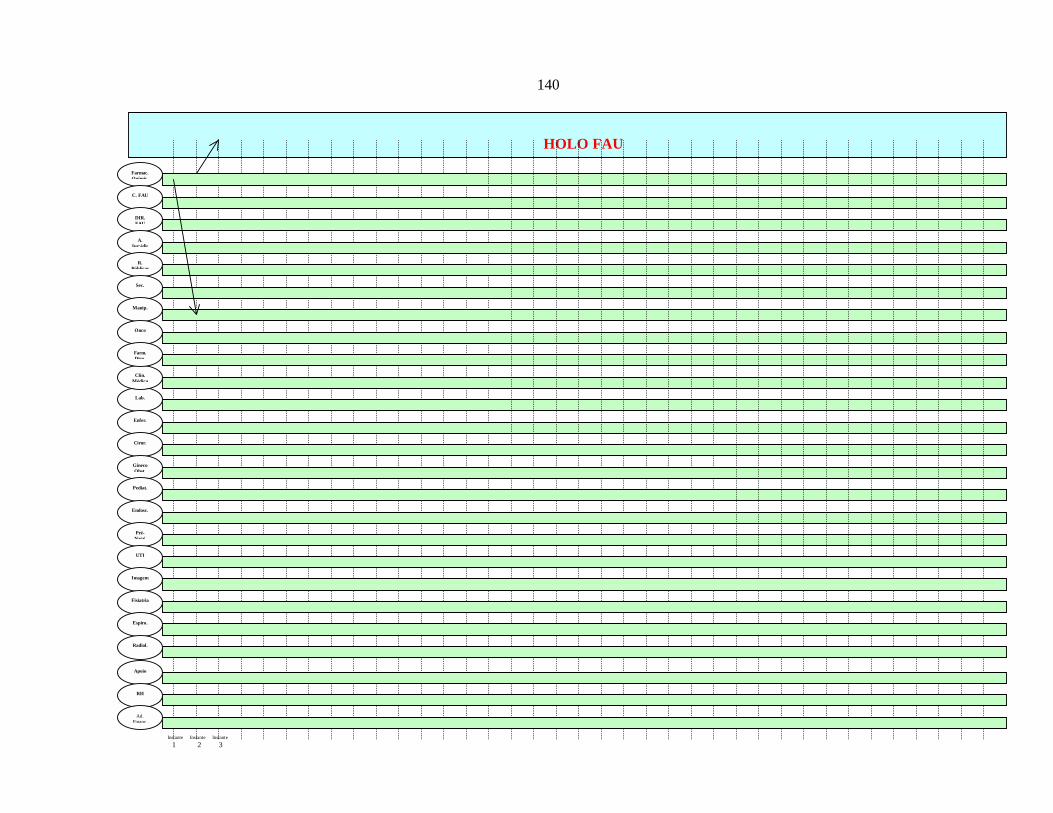
140
Instante Instante Instante 1 2 3
HOLO FAU
Farmac. Químic.
C. FAU
DIR. FAU
A. Jur~idic
R. Públicas
Sec.
Manip.
Onco
Lab.
Clín. Médica
Farm. Disp.
Enfer.
Cirur.
Gineco Obst.
Pediat.
Endosc.
Pré- Natal
UTI
Imagem
Fisiatria
Espiro.
Radiol.
Apoio
RH
Ad. Financ.

141
Instante Instante Instante Instante Instante Instante Instante Instante Instante 1 2 3 4 5 6 7 8 9
HOLO FAU
Advo- gados
C. FAU
DIR. FAU
A. Jur~idic
R. Públicas
Sec.
Manip.
Onco
Lab.
Clín. Médica
Farm. Disp.
Enfer.
Cirur.
Gineco Obst.
Pediat.
Endosc.
Pré- Natal
UTI
Imagem
Fisiatria
Espiro.
Radiol.
Apoio
RH
Ad. Financ
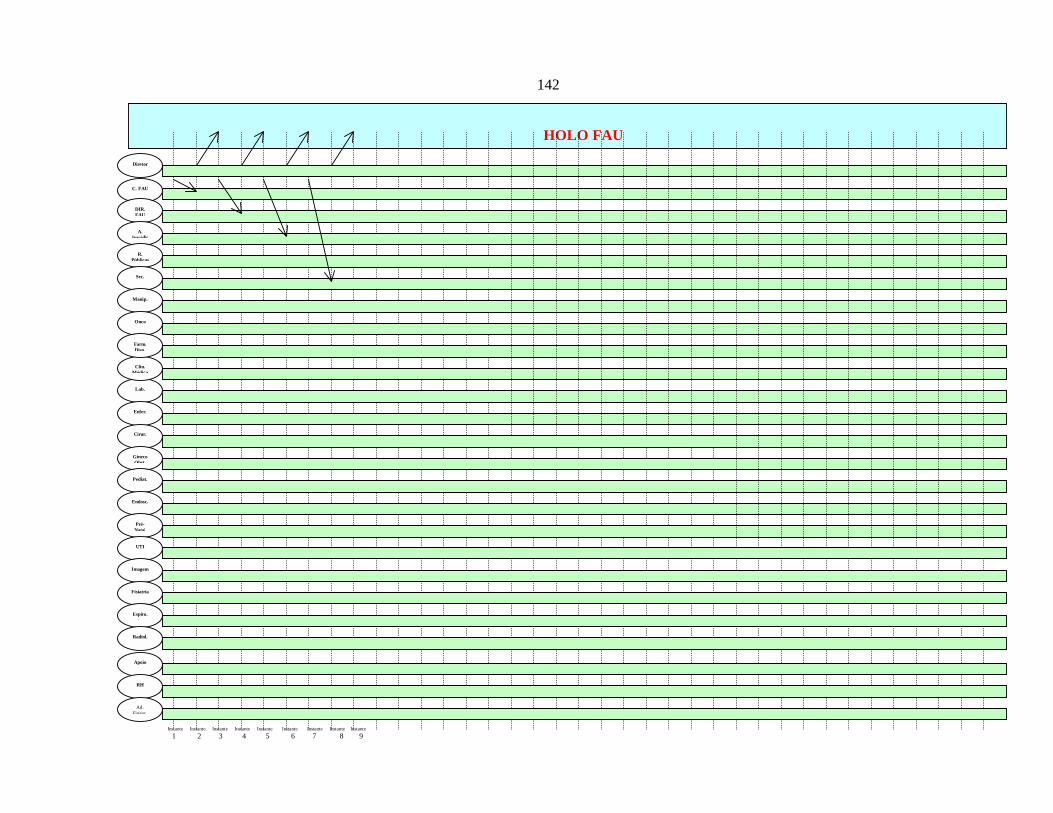
142
Instante Instante Instante Instante Instante Instante Instante Instante Instante 1 2 3 4 5 6 7 8 9
HOLO FAU
Diretor
C. FAU
DIR. FAU
A. Jur~idic
R. Públicas
Sec.
Manip.
Onco
Lab.
Clín. Médica
Farm. Disp.
Enfer.
Cirur.
Gineco Obst.
Pediat.
Endosc.
Pré- Natal
UTI
Imagem
Fisiatria
Espiro.
Radiol.
Apoio
RH
Ad. Financ
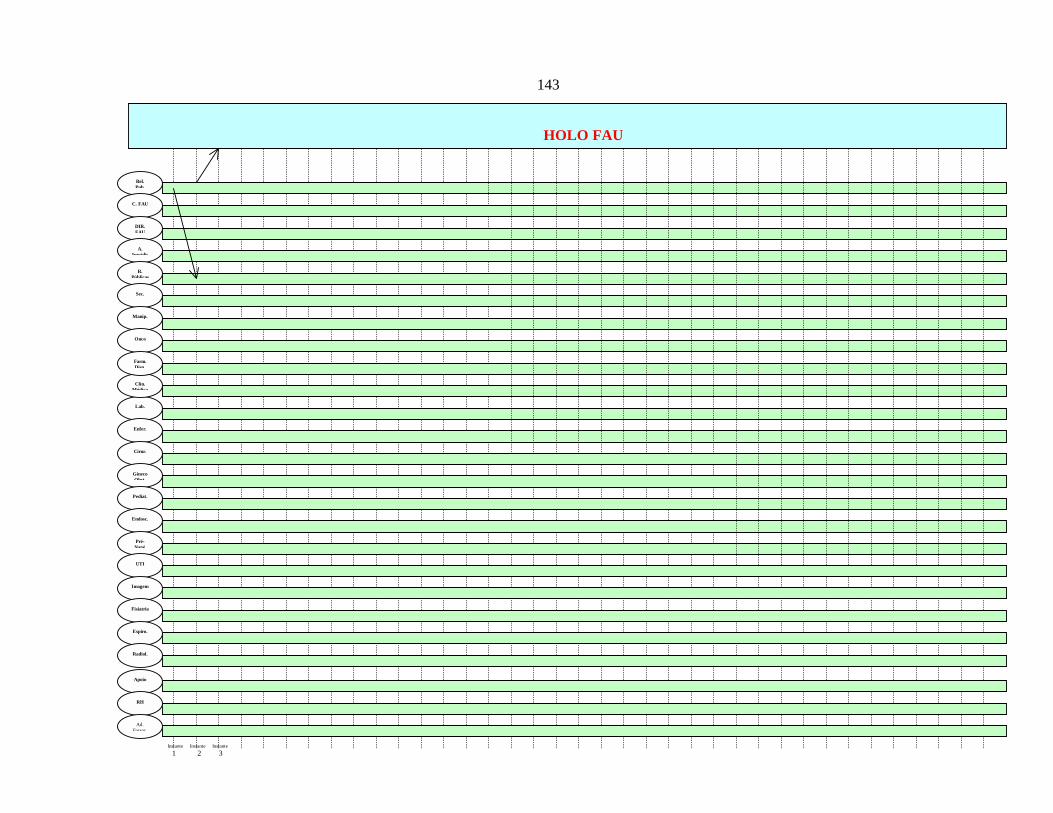
143
Instante Instante Instante 1 2 3
HOLO FAU
Rel. Pub.
C. FAU
DIR. FAU
A. Jur~idic
R. Públicas
Sec.
Manip.
Onco
Lab.
Clín. Médica
Farm. Disp.
Enfer.
Cirur.
Gineco Obst.
Pediat.
Endosc.
Pré- Natal
UTI
Imagem
Fisiatria
Espiro.
Radiol.
Apoio
RH
Ad. Financ
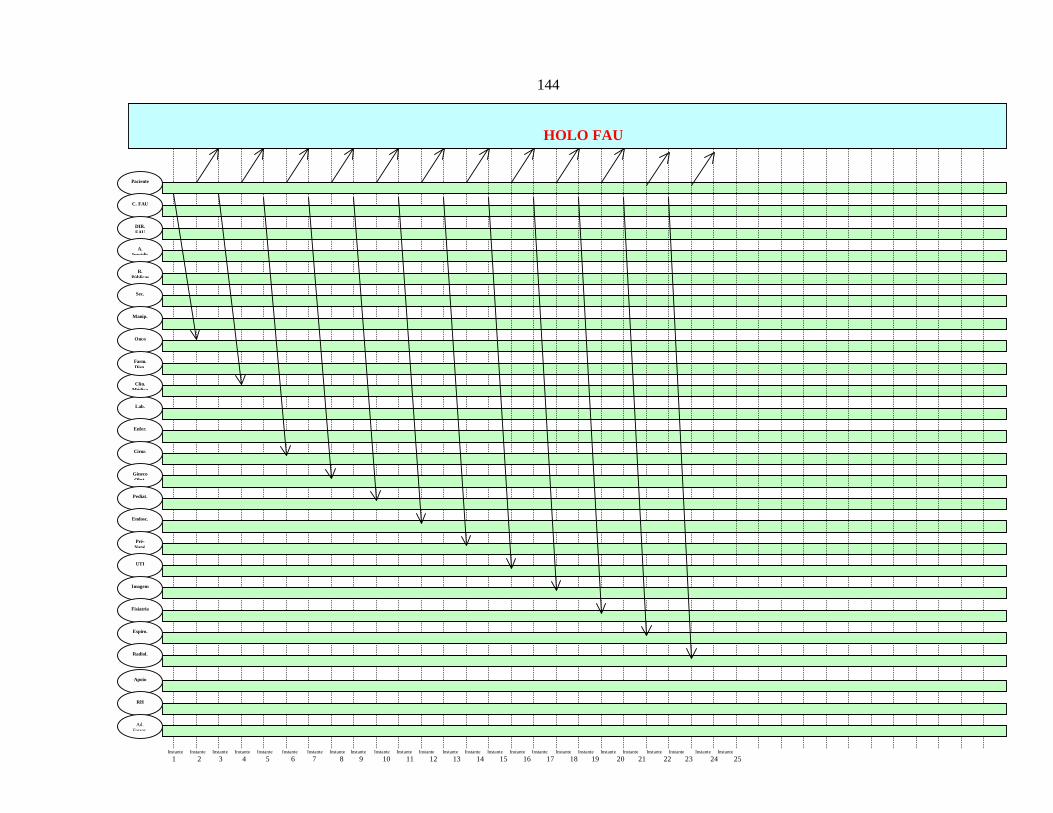
144
Instante Instante Instante Instante Instante Instante Instante Instante Instante Instante Instante Instante Instante Instante Instante Instante Instante Instante Instante Instante Instante Instante Instante Instante Instante
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25
HOLO FAU
Paciente
C. FAU
DIR. FAU
A. Jur~idic
R. Públicas
Sec.
Manip.
Onco
Lab.
Clín. Médica
Farm. Disp.
Enfer.
Cirur.
Gineco Obst.
Pediat.
Endosc.
Pré- Natal
UTI
Imagem
Fisiatria
Espiro.
Radiol.
Apoio
RH
Ad. Financ

145
ANEXO III
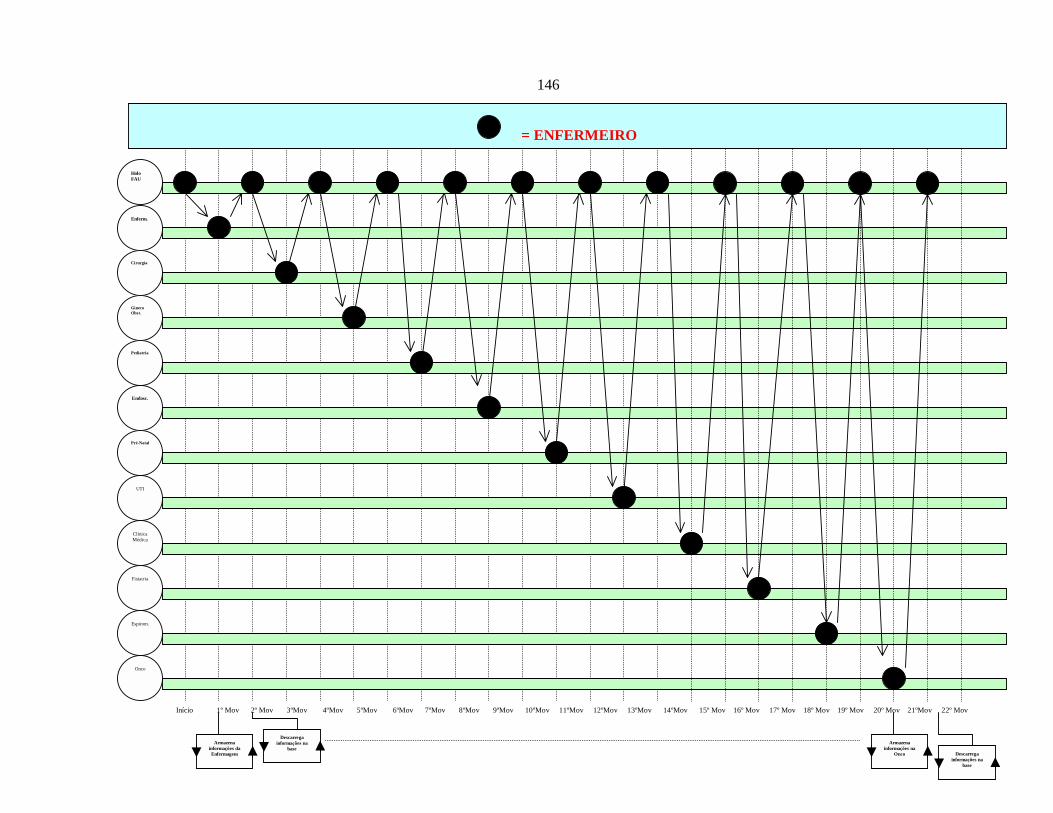
146 Início 1º Mov 2º Mov 3ºMov 4ºMov 5ºMov 6ºMov 7ºMov 8ºMov 9ºMov 10ºMov 11ºMov 12ºMov 13ºMov 14ºMov 15º Mov 16º Mov 17º Mov 18º Mov 19º Mov 20º Mov 21ºMov 22º Mov
= ENFERMEIRO
Holo FAU
Enferm.
Cirurgia
Gineco Obst.
Endosc.
UTI
Pediatria
Pré-Natal
Clínica Médica
Fisiatria
Espirom.
Onco
Descarrega informações na
base Armazena
informações da Enfermagem Descarrega
informações na base
Armazena informações na
Onco
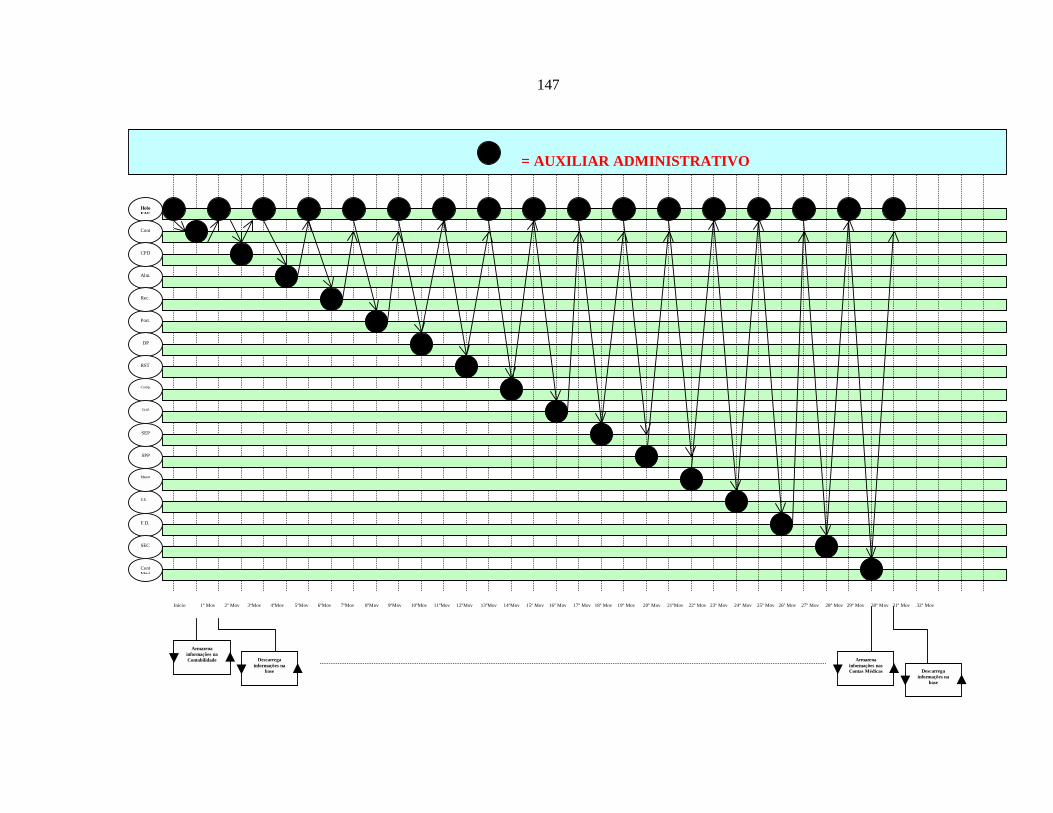
147
Início 1º Mov 2º Mov 3ºMov 4ºMov 5ºMov 6ºMov 7ºMov 8ºMov 9ºMov 10ºMov 11ºMov 12ºMov 13ºMov 14ºMov 15º Mov 16º Mov 17º Mov 18º Mov 19º Mov 20º Mov 21ºMov 22º Mov 23º Mov 24º Mov 25º Mov 26º Mov 27º Mov 28º Mov 29º Mov 30º Mov 31º Mov 32º Mov
= AUXILIAR ADMINISTRATIVO
Holo FAU
Cont
Alm.
CPD
Port.
Rec.
DP
RST
Comp.
F.D.
E.E.
Manut
SPP
SEP
Gráf.
SEC
Cont Méd
Armazena informações na Contabilidade Descarrega
informações na base
Armazena informações nas Contas Médicas Descarrega
informações na base

148 Início 1º Mov 2º Mov 3ºMov 4ºMov 5ºMov 6ºMov 7ºMov 8ºMov 9ºMov 10ºMov 11ºMov 12ºMov 13ºMov 14ºMov 15º Mov 16º Mov 17º Mov 18º Mov 19º Mov 20º Mov 21ºMov 22º Mov 23º Mov 24º Mov
= PACIENTES
Holo FAU
C.M.
Onc.
Cir.
Gin. Obst
Ped.
End.
Pré Nat.
UTI
Ima- gem
Fisi- atria
Esp.
Ra- Diol.
Armazena informações na Clínica Médica
Descarrega informações na
base
Armazena informações nas
Radiologia
Descarrega informações na
base
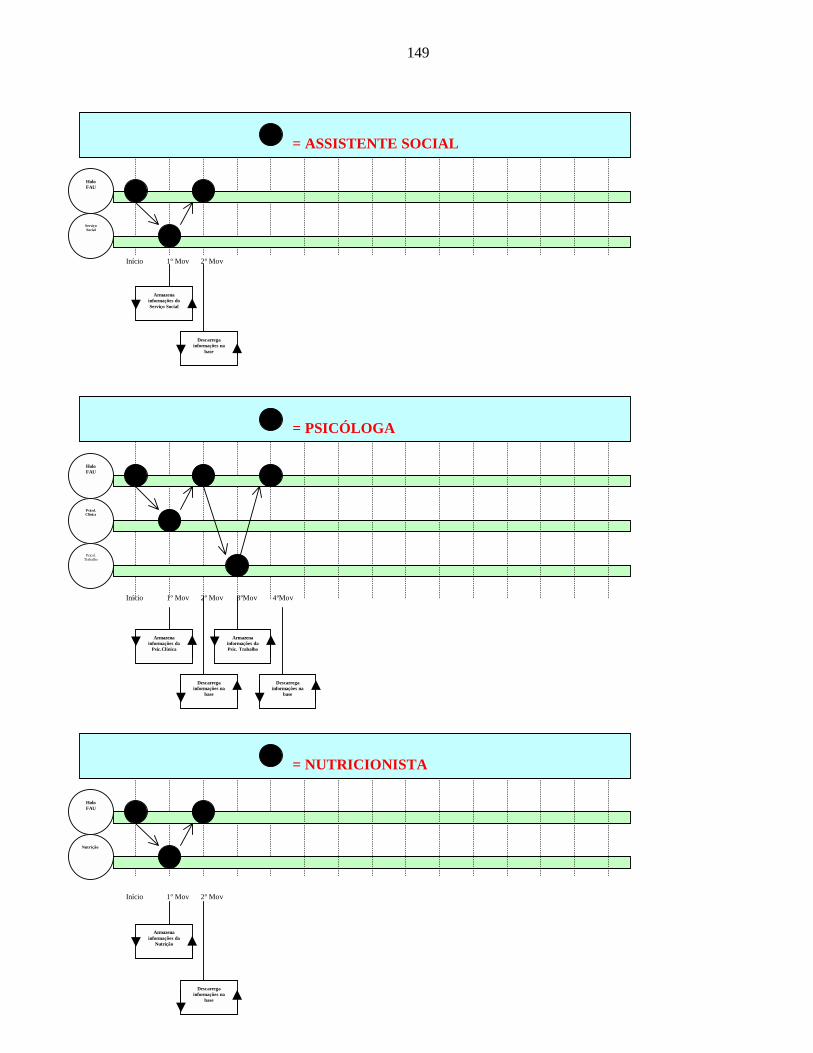
149 Início 1º Mov 2º Mov Início 1º Mov 2º Mov 3ºMov 4ºMov Início 1º Mov 2º Mov
= PSICÓLOGA
Holo FAU
Psicol. Clínica
Psicol. Trabalho
= NUTRICIONISTA
Holo FAU
Nutrição
Descarrega informações na
base
Armazena informações da
Psic.Clínica
Descarrega informações na
base
Armazena informações da Psic. Trabalho
Descarrega informações na
base
Armazena informações da
Nutrição
= ASSISTENTE SOCIAL
Holo FAU
Serviço Social
Armazena informações do Serviço Social
Descarrega informações na
base
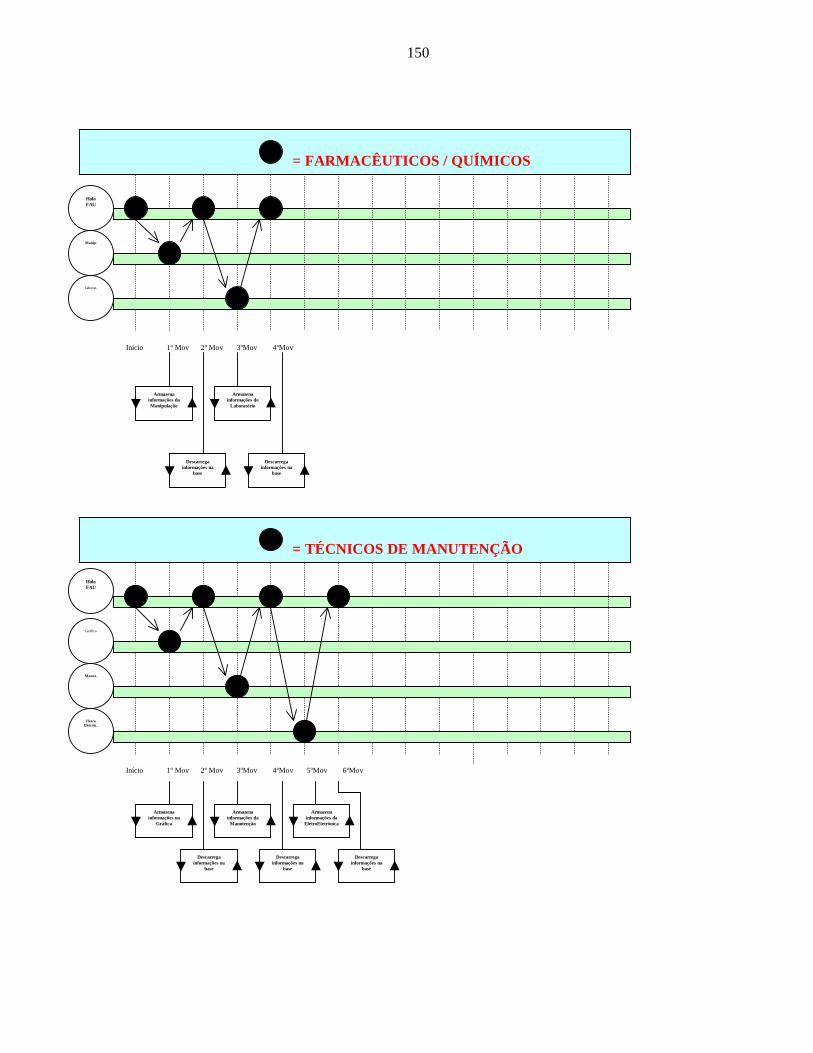
150 Início 1º Mov 2º Mov 3ºMov 4ºMov Início 1º Mov 2º Mov 3ºMov 4ºMov 5ºMov 6ºMov
= FARMACÊUTICOS / QUÍMICOS
Holo FAU
Manip.
Laborat.
= TÉCNICOS DE MANUTENÇÃO
Holo FAU
Manut.
Gráfica
Eletro Eletrôn..
Descarrega informações na
base
Descarrega informações na
base
Armazena informações da Manipulação
Armazena informações do
Laboratório
Descarrega informações na
base
Descarrega informações na
base
Descarrega informações na
base
Armazena informações na
Gráfica
Armazena informações da
Manutenção
Armazena informações da
EletroEletrônica
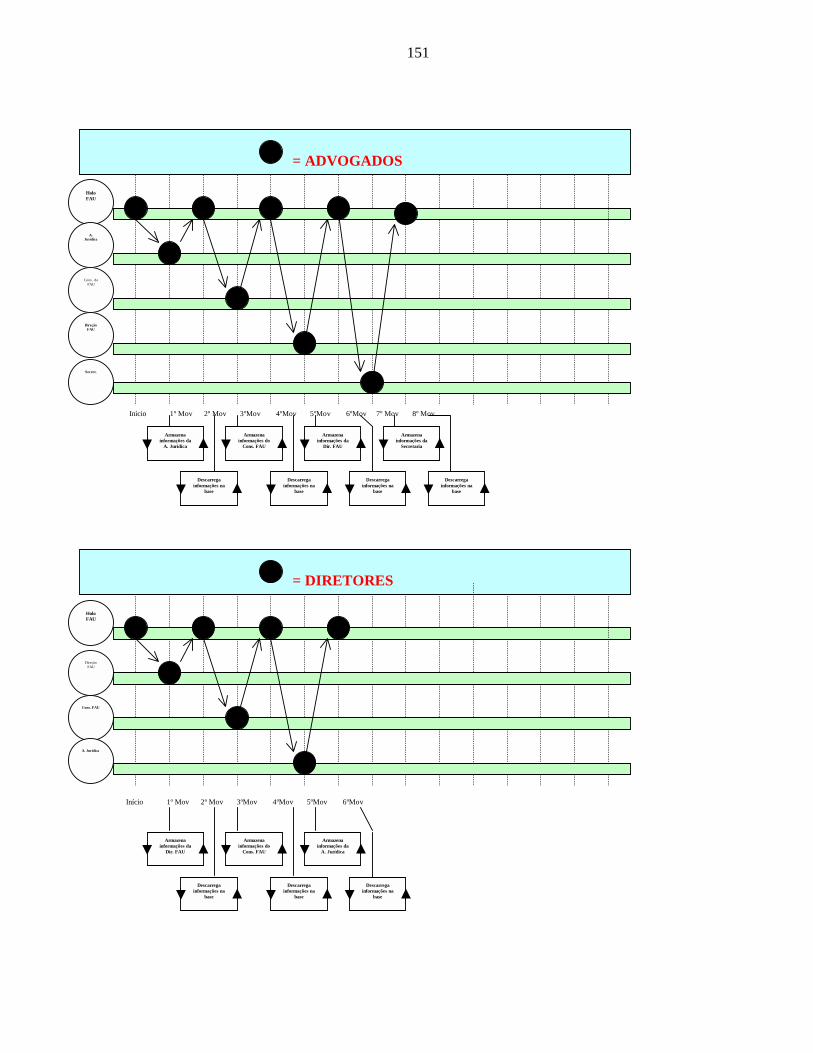
151 Início 1º Mov 2º Mov 3ºMov 4ºMov 5ºMov 6ºMov 7º Mov 8º Mov Início 1º Mov 2º Mov 3ºMov 4ºMov 5ºMov 6ºMov
= ADVOGADOS
Holo FAU
Direção FAU
Cons. da FAU
A. Jurídica
Secret.
= DIRETORES
Holo FAU
Cons. FAU
Direção FAU
A. Jurídica
Descarrega informações na
base
Descarrega informações na
base
Descarrega informações na
base
Descarrega informações na
base
Armazena informações da
A. Jurídica
Armazena informações do
Cons. FAU
Armazena informações da
Dir. FAU
Armazena informações da
Secretaria
Descarrega informações na
base
Descarrega informações na
base
Descarrega informações na
base
Armazena informações da
Dir. FAU
Armazena informações do
Cons. FAU
Armazena informações da
A. Jurídica

152 Início 1º Mov 2º Mov
= RELAÇÕES PÚBLICAS
Holo FAU
Relações Públicas
Descarrega informações na
base
Armazena informações das
Relações Públicas
153
ANEXO IV
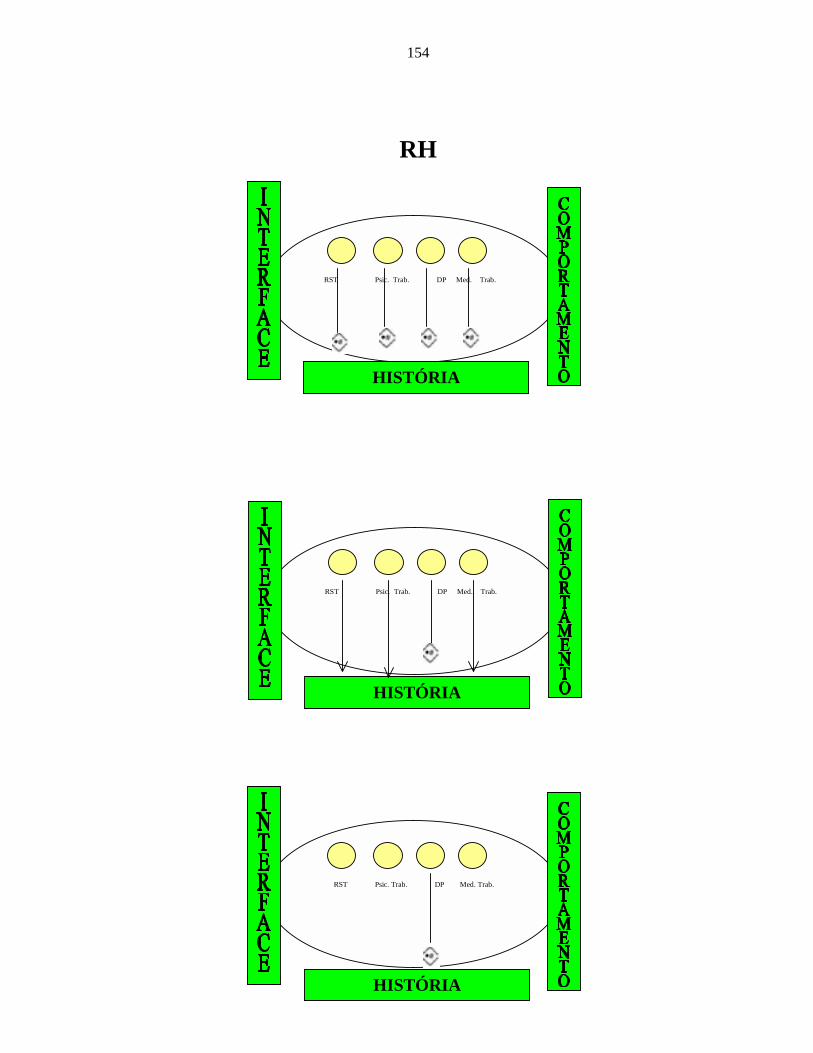
154
RH
RST Psic. Trab. DP Med. Trab.
HISTÓRIA
RST Psic. Trab. DP Med. Trab.
HISTÓRIA
RST Psic. Trab. DP Med. Trab.
HISTÓRIA
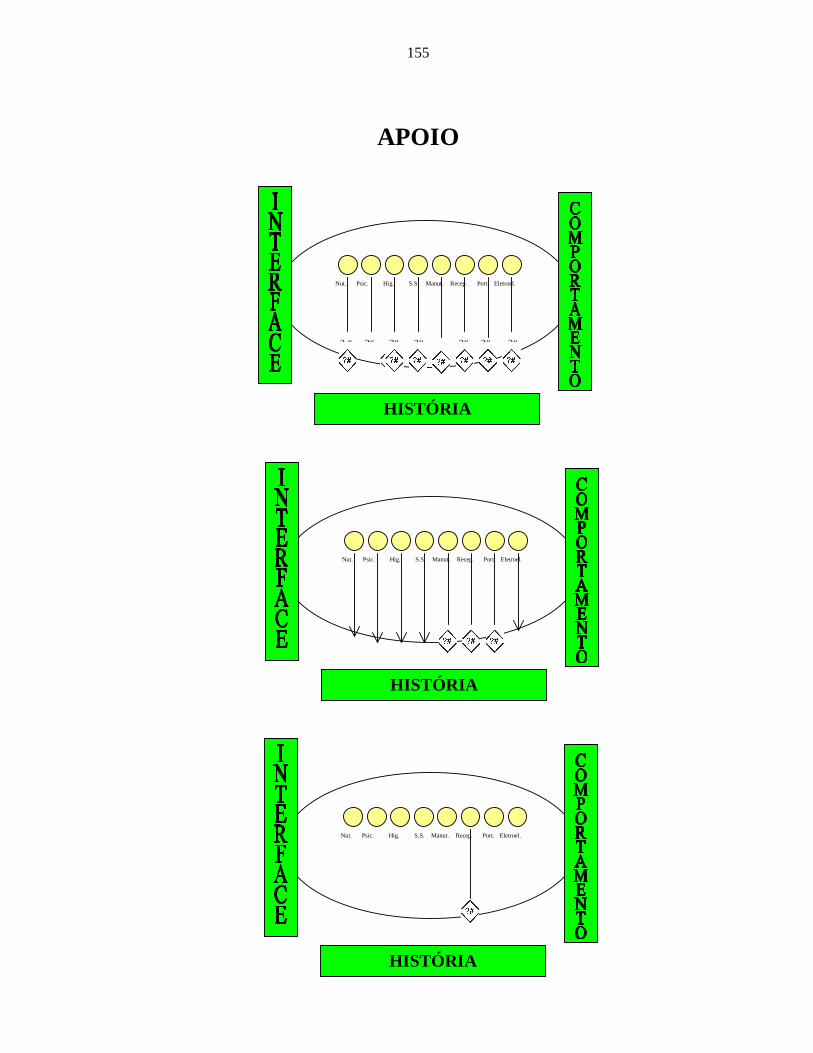
155
APOIO
Nut. Psic. Hig. S.S. Manut. Recep. Port. Eletroel.
HISTÓRIA
Nut. Psic. Hig. S.S. Manut. Recep. Port. Eletroel.
HISTÓRIA
Nut. Psic. Hig. S.S. Manut. Recep. Port. Eletroel.
? # ?# ?# ?# ?# ?# ?#
HISTÓRIA

156
ADM. FINANCEIRA
Cont.. CPD SEP SPP Compras CM Almox. Gráfica.
HISTÓRIA
Cont.. CPD SEP SPP Compras CM Almox. Gráfica.
HISTÓRIA
Cont.. CPD SEP SPP Compras CM Almox. Gráfica.
HISTÓRIA

157
DIRETORIA EXECUTIVA
Apoio RH Ad.F Man. Onco CM Lab Farm Enf. Cir. Gin. Ped. End. Pré-N UTI Imag. Fis. Esp. Radiol.
HISTÓRIA
Apoio RH Ad.F. Man. Onco CM Lab Enf. Cir Ginec. Ped. End. Pré-N. UTI Imag. Fis. Esp. Radiol.
HISTÓRIA
Apoio RH Ad.F. Man. Onco CM Lab Enf. Cir Ginec. Ped. End. Pré-N. UTI Imag. Fis. Esp. Radiol.
HISTÓRIA
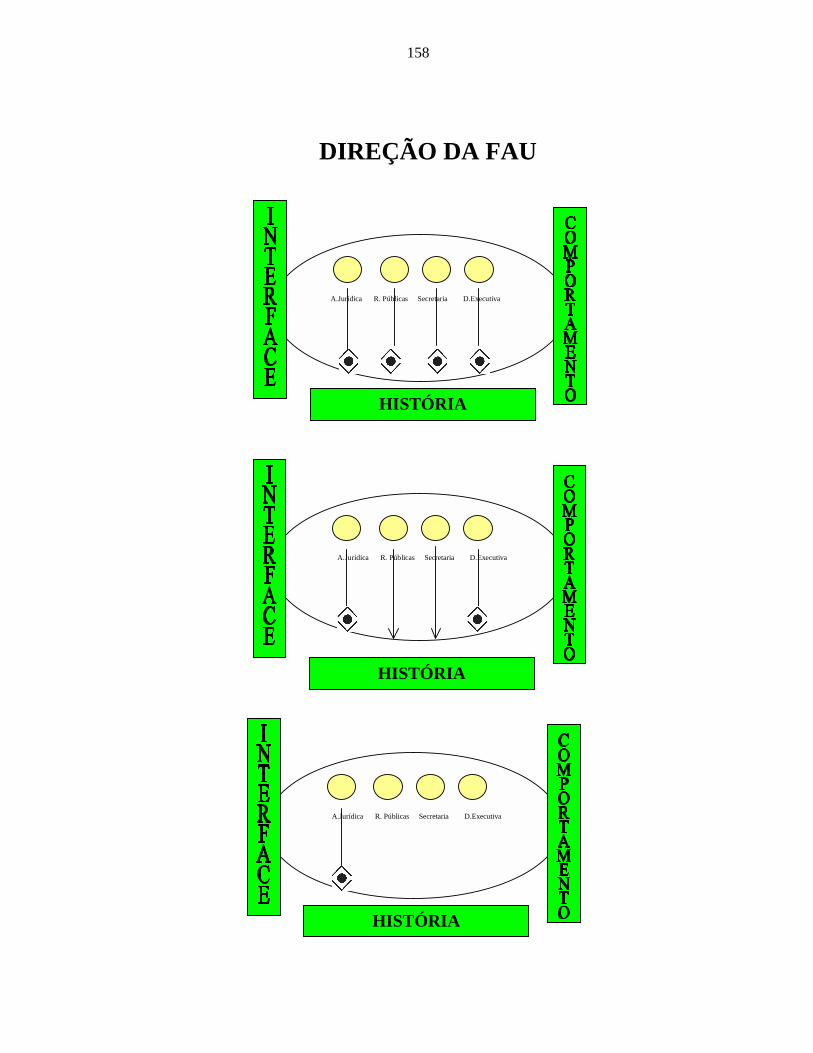
158
DIREÇÃO DA FAU
A.Jurídica R. Públicas Secretaria D.Executiva
HISTÓRIA
A.Jurídica R. Públicas Secretaria D.Executiva
HISTÓRIA
A.Jurídica R. Públicas Secretaria D.Executiva
HISTÓRIA

159
CONSELHO DA FAU
A comunicação é feita somente através da história destes entes.
FAU
obs: .# - bloqueante destrutivo . – bloqueante não destrutivo ? - Não bloqueante e não destrutivo ?# - Não bloqueante e destrutivo Informção simbólica < > Tipo
Direção da FAU
HISTÓRIA
Conselho da FAU
HISTÓRIA

160
Bibliografia
[APE 2001] APPELO - Ambiente de Programação Paralela em Lógica. Disponível em http://www.inf.ufrgs.br/procpar/opera/APPELO/. [BAR 99a ] BARBOSA, Jorge L. V.; GEYER, Cláudio F. R. Software Multiparadigma Distribuído. Revista de Informática Teórica e Aplicada (RITA), Porto Alegre, v.6, n.2, p.67-87, dezembro 1999. [BAR 2000] BARBOSA, Jorge L. V.; Software Multiparadigma Paralelo e Distribuído. 2000. 104p. Exame de Qualificação (PPGC-
UFRGS) – Instituto de Informática, Universidade Federal do Rio Grande do Sul, Porto Alegre.
[BAR 2000a] BARBOSA, Jorge L. V.; GEYER, Cláudio F. R. Princípios do Holoparadigma. In: ARGENTINE SYMPOSIUM ON COMPUTING TECHNOLOGY, AST, 1., 2000, Tandil. Proceedings... Tandil: SADIO,
2000. [BAR 2000c]BARBOSA, Jorge L. V.; GEYER, Cláudio F. R. Um Modelo Multiparadigma para Desenvolvimento de Software Paralelo e Distribuído. In: WORKSHOP ON HIGH PERFORMANCE COMPUTING SYSTEMS, WSCAD, 1., 2000, São Pedro. Proceedings... São Pedro: [s.n], 2000. [BAR 2000e] BARBOSA, Jorge L. V.; GEYER, Cláudio F. R. Holoparadigma: Desenvolvimento de Software Multiparadigma. In: CONGRESSO ARGENTINO DE CIÊNCIA DA COMPUTAÇÃO CACIC Ushuaia, 2000. Proceedings... Ushuaia: [s.n], 2000. [BAR 2001] BARBOSA, Jorge L. V.; GEYER, Cláudio F. R. Integrating Logic Blackboards and Multiple Paradigms for Distributed Software Development. In: INTERNATIONAL CONFERENCE ON PARALLEL, AND DISTRIBUTED PROCESSING TECHNIQUES AND APPLICATIONS, PDPTA, Las Vegas, 2001. Proceedings.... Curitiba: SBC, 2001. [BAR 2001a] BARBOSA, Jorge L. V.; GEYER, Cláudio F. R. Uma Linguagem Multiparadigma Orientada ao Desenvolvimento de Software Distribuído. In: SIMPÓSIO BRASILEIRO DE LINGUAGENS DE PROGRAMAÇÃO, SBLP, 5., 2001, Curitiba. Proceedings.... Curitiba: SBC, 2001. [BAR 2001b]BARBOSA, Jorge Luis Victória; et al. Using Mobility and Blackboards to Support a Multiparadigm Model Oriented to Distributed. Processing. In: SYMPOSIUM ON COMPUTER ARCHITECTURE AND HIGH PERFORMANCE COMPUTING, 13., 2001. Pirenópolis, Brasil. Proceedings.... Brasília: UNB, 2001. p.187 – 194.
161 [BAR 2001c] BARBOSA, Jorge Luis Victória; DU BOIS, André; PAVAN, Altino; GEYER, Cláudio Fernando Resin. HoloJava: Translating a Distributed Multiparadigm Language into Java. In: CONFERENCIA LATINOAMERICANA DE INFORMÁTICA, 27., 2001, Mérida, Venezuela. Proceedings..... Mérida: Universidad de Los Andes, septiembre 2001. 1 CD. [BAR 2002] BARBOSA, Jorge L. V. – Programa de Pós-Graduação em Computação Holoparadigma: Um modelo Multiparadigma Orientado ao
Desenvolvimento de Software Distribuído.
[CAL 2000] CARDELLI, Luca. Mobility and Security. In: BAUER, Friedrich L.; STEINBRÜGGEN, Ralf (Ed.). Foundations of Secure Computation. Marktoberdorf: IOF Press, 2000. p.3-37. [COA 1994] COAD, Peter; YOURDON Edward – Análise Baseada à Objetos –
Editora: Campos, Vol. 1- Rio de Janeiro/RJ – 1994. [COM 2002] UMA CONTRIBUIÇÃO à Mobilidade Física de Entes no Holoparadig- ma em: http://atlas.ucpel.tche.br/~projgrad/2002-1/antejose.htm . Aces- so em junho 2002. [DÖM 2002] DÖMEL, P.; LINGNAU, A.; DROBNIK, O. Mobile Agent Interaction in Heterogeneous Environments. Mobile Object. [HOL 2001] Holoparadigma: Software multiparadigma distribuído http://www.inf.ufrgs.br/~holo/ [INF 2002] A INFORMÁTICA Brasileira em Análise – Computação Móvel – O Mundo sem Fio em: http://www.cesar.org.br/analise/n_26/n_html . Acesso em julho 2002. [INT 2002] INTRODUÇÃO a Computação Móvel – Equipamentos sem fio em
http://www-di.inf.puc-rio.br/~endler/courses/Mobile/ . Acesso em julho 2002.
[ISAM 2002] Tools to support distributed mobil applications with wireless em http://www.inf.unisinos.br/~gersonc/projects/isam.html . Acesso em julho 2002. [LAE 2002] FRANCO, Laerte Kerber – Suporte para Desenvolvimento de Progra- gramas em Holo. Centro Universitário La Salle – UNILASSALLE - Trabalho de Conclusão de Curso de Graduação. Porto Alegre /RS – 2002. [MOVI 2001]Soluções e Equipamentos para a Computação Móvel em: http://www.movisoft.com.br/centro.html . Acesso em julho 2002.
162 [OLI 2001] OLIVEIRA, Adelize Generini; Análise Projeto e Programação Orientado a Objetos. [OPE 2001] OPERA- Prolog Paralelo. Disponível em:
http://www.inf.ufrgs.br/procpar/opera/OPERA/index.html>. Acesso em: novembro 2001. [OSH 2002] OSHIMA, M. ; LANGE, D. Mobile Agentes with Java: The Aglet API. [PRO 2002] PROGRAMMING LANGUAGES for Mobile Code. INRIA Technical Report 3134, France, Mar 1997 [RUM 1994] RUMBAUGH, James; BLAHA Michael; PREMERLANI Willian, EDDY Frederick; LORENSEN Willian – Modelagem e Projetos baseados em Objetos – Editora: Campos; Vol. 1 – Rio de Janeiro/RJ –
1994.

![arXiv:1909.05542v1 [econ.EM] 12 Sep 2019 · 2019-09-13 · A previous version of this paper has been circulated under the title "Quantile regression methods for rst-price auction:a](https://static.fdocumentos.com/doc/165x107/5e8bb4a58da28b302c78b54d/arxiv190905542v1-econem-12-sep-2019-2019-09-13-a-previous-version-of-this.jpg)
















