UNIVERSIDADE DE SÃO PAULO ESCOLA DE ......À minha namorada, Camila, por ser, acima de tudo, a...
78
UNIVERSIDADE DE SÃO PAULO ESCOLA DE ENGENHARIA DE SÃO CARLOS DEPARTAMENTO DE ENGENHARIA MECÂNICA RAUL BASTON OLYMPIO MODELAGEM E VALIDAÇÃO EXPERIMENTAL DE UM GERADOR PIEZELÉTRICO DE ENERGIA EM MINIATURA São Carlos 2014
Transcript of UNIVERSIDADE DE SÃO PAULO ESCOLA DE ......À minha namorada, Camila, por ser, acima de tudo, a...

UNIVERSIDADE DE SÃO PAULO
ESCOLA DE ENGENHARIA DE SÃO CARLOS
DEPARTAMENTO DE ENGENHARIA MECÂNICA
RAUL BASTON OLYMPIO
MODELAGEM E VALIDAÇÃO EXPERIMENTAL DE UM GERADOR
PIEZELÉTRICO DE ENERGIA EM MINIATURA
São Carlos
2014

RAUL BASTON OLYMPIO
MODELAGEM E VALIDAÇÃO EXPERIMENTAL DE UM GERADOR
PIEZELÉTRICO DE ENERGIA EM MINIATURA
Trabalho de conclusão de curso
apresentado à Escola de Engenharia de São
Carlos, Universidade de São Paulo, como parte
dos requisitos para obtenção do título de
Engenheiro Mecatrônico.
Área de Concentração: Dinâmica das
Máquinas e Sistemas.
Orientador: Prof. Dr. Paulo Sergio Varoto
São Carlos
2014


Aos meus avôs, Pedro e Jerônymo, que
não puderam estar presentes nesta importante
etapa da minha jornada, e presenciar o menino
se tornar homem.

AGRADECIMENTOS
Aos meus pais, Milton e Silvana, pelo incondicional apoio e incentivo durante toda
a minha vida e pela paciência em todos os momentos. Ao meu pai, por ser o melhor
modelo que poderia ter em minha vida; à minha mãe por todo o carinho dado e por ser a
melhor confidente que poderia pedir.
Ao meu irmão, Ramon, por todos os planos que fizemos, por todas as brincadeiras,
por todas as conversas, por todos os finais de semana em que nos divertimos, e
principalmente pelo companheirismo ao longo destes anos.
Aos meus irmãos do Capítulo Marco Antonio Libano dos Santos, pela
oportunidade de conhecê-los, pelo crescimento mútuo que obtivemos dentro de nossa
Sala Capitular e por fazer com que percebesse que ainda existem muitos homens de
bem.
À minha namorada, Camila, por ser, acima de tudo, a minha melhor amiga, por ter
escolhido ficar, ser minha copiloto e voar comigo.
Ao Professor Varoto, pelos anos em que trabalhamos juntos e não ser apenas um
orientador, mas também um amigo; pela paciência durante este ano de conclusão de
curso e incentivo dado para a finalização deste trabalho.
Á Escola de Engenharia de São Carlos, por proporcionar todo os profissionais e
infraestrutura a fim de que seus alunos tenham uma formação de excelência.

Homem e natureza devem andar de
mãos dadas. Perturbar a harmonia dos recursos
naturais, perturba também a vida do homem.
Franklin Delano Roosevelt
i
SUMÁRIO
RESUMO ...................................................................................................................................................... ii
ABSTRACT ................................................................................................................................................. iii
LISTA DE FIGURAS ................................................................................................................................. iv
LISTA DE TABELAS ................................................................................................................................. vi
LISTA DE SIGLAS .................................................................................................................................... vii
LISTA DE SÍMBOLOS ............................................................................................................................ viii
1. Introdução ........................................................................................................................................... 1
1.1. Considerações Preliminares e Motivação .......................................................................... 1
1.2. Objetivos ...................................................................................................................................... 2
2. Revisão Bibliográfica ....................................................................................................................... 4
2.1. Efeito Piezelétrico ..................................................................................................................... 4
2.2. Geração de Energia Usando Materiais Piezelétricos ....................................................... 4
2.2.1. Conversores Lineares ...................................................................................................... 5
2.2.2. Conversores Não-lineares .............................................................................................. 8
2.2.3. Conversores Microeletromecânicos ..........................................................................11
3. Modelagem Analítica do Conversor ...........................................................................................14
3.1. Introdução .................................................................................................................................14
3.2. Energia Cinética.......................................................................................................................15
3.3. Energia Potencial ....................................................................................................................17
3.4. Lagrangeano .............................................................................................................................21
3.5. Potência .....................................................................................................................................23
3.6. Análise Modal ...........................................................................................................................23
4. Resultados ........................................................................................................................................25
4.1. Simulações Numéricas ..........................................................................................................25
4.1.1. Modelo Linear ...................................................................................................................27
4.1.2. Modelo Não-linear ...........................................................................................................30
4.2. Ensaios Experimentais ..........................................................................................................42
4.2.1. Ensaios sem massa na extremidade livre ................................................................45
4.2.2. Ensaios com massa na extremidade livre ................................................................49
5. Conclusão .........................................................................................................................................54
REFERÊNCIAS BIBLIOGRÁFICAS ......................................................................................................56

ii
RESUMO
OLYMPIO, R. B. Modelagem e validação experimental de um gerador piezelétrico de
energia em miniatura – Escola de Engenharia de São Carlos, Universidade de São
Paulo, São Carlos, 2014.
Geradores piezelétricos de energia são dispositivos capazes de converter a energia
cinética presente em sinais de vibração em energia elétrica a partir de transdutores
piezelétricos. Tais dispositivos têm sua eficiência máxima quando a frequência de
excitação coincide com sua frequência natural. Assim, converter sinais de vibração
ambiente não é trivial devido às suas baixas frequências características não serem
compatíveis com as altas frequências de geradores leves e pequenos, que possuem
frequências naturais relativamente altas. Para tentar contornar esse problema, sugere-se
a introdução de não linearidades no sistema que, além de alterarem a frequência natural,
tombam a curva de reposta para a esquerda ou direita, aumentando a faixa de
frequências úteis do dispositivo. Dessa maneira, será desenvolvido um modelo analítico
do conversor, o qual será simulado utilizando o software MatLab® e, por fim, ensaios
experimentais serão realizados para se validar o modelo.
Palavras chaves: geradores piezelétricos, viga engastada, vibração estrutural, geração
de energia, MatLab®, não linearidade.
iii
ABSTRACT
OLYMPIO, R. B. Modeling and experimental validation of a reduced scale
piezoelectric energy harvester – Escola de Engenharia de São Carlos, Universidade
de São Paulo, São Carlos, 2014.
Piezoelectric energy harvesters are devices capable of converting the kinetic energy
present on vibration-based motion into electrical energy by piezoelectric transducers.
Those devices have their maximum efficiency when the excitation frequency matches its
natural frequency. Thus, converting environment vibrations is not trivial because of its low
frequency characteristics are not compatible with small, lightweight harvesters, which
have relatively high natural frequencies. To overcome this problem, authors suggest
introducing nonlinearities into the system, which can change the natural frequency and
bend the response curve to the left or right, increasing the useful band frequency of the
device. Therefore, an energy harvester analytical model will be derived, which will be
simulated using the software MatLab®, and, at last, experiments will be conducted to
validate the model.
Keywords: piezoelectric energy harvester, cantilever beam, structural vibration, energy
harvesting, MatLab®, nonlinearity.
iv
LISTA DE FIGURAS
Figura 3.1: Modelo físico do conversor ..................................................................................................14
Figura 4.1: Modelo Volture V22B da Midé® Technology ................................................ 25
Figura 4.2: Deslocamento médio para vários valores de resistência. ............................ 28
Figura 4.3: Potência média para vários valores de resistência. ..................................... 28
Figura 4.4: Deslocamento x frequência – variando fator de amortecimento. ................. 29
Figura 4.5: Potência x frequência – variando fator de amortecimento. .......................... 29
Figura 4.6: Deslocamento x frequência – variando aceleração da base. ....................... 30
Figura 4.7: Potência x frequência – variando aceleração da base. ................................ 30
Figura 4.8: Potência x frequência – NLMP – variando aceleração da base. .................. 31
Figura 4.9: Deslocamento x frequência – NLM CR – variando distância entre ímãs. ..... 32
Figura 4.10: Deslocamento x frequência – NLM CA – variando distância entre ímãs. ... 32
Figura 4.11: Potência x frequência – NLM CR – variando distância entre ímãs. ............ 33
Figura 4.12: Potência x frequência – NLM CA – variando distância entre ímãs. ............ 33
Figura 4.13: Potência x frequência – NLM CR – variando aceleração da base. ............ 34
Figura 4.14: Potência x frequência – NLM CA – variando aceleração da base.............. 34
Figura 4.15: Histórico no tempo para 𝐷 = 20 𝑚𝑚 – NL CA. ......................................... 35
Figura 4.16: Plano de fase para 𝐷 = 20 𝑚𝑚 – NL CA. ................................................. 35
Figura 4.17: Histórico no tempo para 𝐷 = 5 𝑚𝑚 – NL CA. ........................................... 36
Figura 4.18: Plano de fase para 𝐷 = 5 𝑚𝑚 – NL CA. ................................................... 36
Figura 4.19: Histórico no tempo para 𝐷 = 20 𝑚𝑚 – NL CR. ......................................... 37
Figura 4.20: Plano de fase para 𝐷 = 20 𝑚𝑚 – NL CR. ................................................. 37
Figura 4.21: Histórico no tempo para 𝐷 = 16 𝑚𝑚 – NL CR. ......................................... 38
Figura 4.22: Plano de fase para 𝐷 = 16 𝑚𝑚 – NL CR. ................................................. 38
Figura 4.23: Deslocamento x frequência – NL CR – variando distância entre ímãs. ...... 39
Figura 4.24: Deslocamento x frequência – NL CA – variando distância entre ímãs. ...... 39
Figura 4.25: Deslocamento x frequência – NL CR – variando aceleração da base. ...... 40
Figura 4.26: Deslocamento x frequência – NL CA – variando aceleração da base. ....... 40
Figura 4.27: Potência x frequência – NL CR – variando distância entre ímãs. .............. 41

v
Figura 4.28: Potência x frequência – NL CA – variando distância entre ímãs. ............... 41
Figura 4.29: Potência x frequência – NL CR – variando aceleração da base ................ 42
Figura 4.30: Potência x frequência – NL CA – variando aceleração da base. ............... 42
Figura 4.31: Ilustração do dispositivo de fixação. ........................................................... 43
Figura 4.32: Aparato experimental. ................................................................................ 43
Figura 4.33: FRF da velocidade para vários valores de resistência SM; escala linear. .. 46
Figura 4.34: FRF da velocidade para valores individuais da resistência SM; escala
logarítmica. ..................................................................................................................... 46
Figura 4.35: FRF da tensão para vários valores de resistência SM; escala linear. ........ 47
Figura 4.36: FRF da tensão para valores individuais de resistência SM; escala
logarítmica. ..................................................................................................................... 48
Figura 4.37: FRF da potência para vários valores de resistência SM; escala linear. ..... 48
Figura 4.38: FRF da potência para valores individuais de resistência SM; escala
logarítmica. ..................................................................................................................... 49
Figura 4.39: FRF da velocidade para vários valores de resistência CM; escala linear. . 50
Figura 4.40: FRF da velocidade para valores individuais de resistência CM; escala
logarítmica. ..................................................................................................................... 50
Figura 4.41: FRF da tensão para vários valores de resistência CM; escala linear. ........ 51
Figura 4.42: FRF da tensão para valores individuais de resistência CM; escala
logarítmica. ..................................................................................................................... 52
Figura 4.43: FRF da potência para vários valores de resistência CM; escala linear. ..... 52
Figura 4.44: FRF da potência para valores individuais de resistência CM; escala
logarítmica. ..................................................................................................................... 53

vi
LISTA DE TABELAS
Tabela 4.1: Propriedades da viga cantilever. ................................................................. 26
Tabela 4.2: Propriedades do material piezelétrico. ........................................................ 26
Tabela 4.3: Propriedades da massa magnética. ............................................................ 27
Tabela 4.4: Propriedades do conversor utilizado nos ensaios. ...................................... 44
Tabela 4.5: Valores de resistência utilizados nos ensaios experimentais. ..................... 45

vii
LISTA DE SIGLAS
CA Caso atrativo.
CM Com massa na ponta.
CR Caso repulsivo.
EDM Equações de Movimento.
EDO Equações Diferenciais Ordinárias.
FRF Função de resposta em frequência.
GDL Graus de Liberdade.
MEMS Micro Electromechanical Systems.
NL Não linearidade do material piezelétrico e magnética.
NLM Não linearidade magnética.
NLMP Não linearidade do material piezelétrico.
PEH Piezoelectric Energy Harvesting.
PSD Power Spectrum Density.
PZT Titanato Zirconato de Chumbo.
SM Sem massa na ponta.

viii
LISTA DE SÍMBOLOS
𝐴𝑝 Área da seção transversal do material piezelétrico [m²]
𝐴𝑣 Área da seção transversal da viga [m²]
𝑏 Largura da viga e material piezelétrico [m]
𝐵𝑟 Densidade de fluxo magnético [T]
𝑐𝑓 Coeficiente de amortecimento [Ns/m]
𝐶0 Capacitância do material piezelétrico [F]
𝑑0 Parâmetro geométrico para força magnética [ ]
𝐷 Distância entre as massas magnéticas [m]
𝐷3 Deslocamento elétrico ao longo do eixo-z [C/m²]
𝐸𝑣 Módulo de elasticidade da viga [Pa]
𝐸𝑝 Módulo de elasticidade do material piezelétrico [Pa]
𝐸3 Campo elétrico ao longo do eixo-z [N/C]
𝐹 Módulo da força de excitação externa [N]
𝐺 Rigidez não linear [Nm4]
ℎ𝑝 Espessura do material piezelétrico [m]
ℎ𝑣 Espessura da viga [m]
𝐻 Acoplamento eletromecânico não linear [Cm4/N]
𝐼𝑝 Momento de área da seção transversal do mat. piez. [m4]
𝐼𝑣 Momento de área da seção transversal da viga [m4]
𝐾 Energia cinética do sistema [J]
𝐿 Comprimento da estrutura [m]
ℒ Lagrangeano [J]
ix
𝑚 Massa concentrada [kg]
𝑚𝑝 Massa da camada de material piezelétrico [kg]
𝑚𝑡 Massa total do sistema [kg]
𝑚𝑣 Massa da viga [kg]
𝑚1 Momento magnético da massa concentrada [Am²]
𝑚2 Momento magnético da massa estacionária [Am²]
𝒫 Potência elétrica [W]
𝑟 Movimento da base [m]
𝑅 Resistência elétrica [Ω]
𝑆1 Deformação ao longo do eixo-x [ ]
𝑇1 Tensão mecânica ao longo do eixo-x [Pa]
𝑢1 Coordenada modal associada ao 1º modo de vibrar [m]
𝑈 Energia potencial do sistema [J]
𝑉 Tensão elétrica gerada pelo material piezelétrico [V]
𝑉𝑚 Volume do magneto [m³]
𝑉𝑝 Volume da camada piezelétrica [m³]
𝑤 Deslocamento transversal da viga [m]
𝜙1 Função modal associada ao 1º modo [ ]
𝜌𝑝 Densidade do material piezelétrico [kg/m³]
𝜌𝑣 Densidade da viga [kg/m³]
𝜇𝑝 Massa por unidade de comprimento do mat. piez. [kg/m]
𝜇𝑣 Massa por unidade de comprimento da viga [kg/m]
𝜇0 Constante de permeabilidade [N/A²]
𝜆 Fluxo de energia no material piezelétrico [Wb]

x
𝜗 Acoplamento eletromecânico [C]
𝜔 Frequência de excitação [rad/s]
𝜔𝑛 Frequência natural [rad/s]
𝜀33𝑠 Permissividade elétrica [F/m]

1
1. Introdução
1.1. Considerações Preliminares e Motivação
Engenharia é o ramo da ciência responsável por utilizar os recursos provenientes
da natureza, modificá-los e melhorar a qualidade de vida do homem. Nos dias de hoje, a
atuação do engenheiro é crucial para se manter o modo de vida moderno, sendo este o
responsável por assimilar as descobertas do meio científico e aplicá-las nos mais
diversos produtos e processos a fim de tornar a vida do ser humano mais fácil e
conveniente. Todas essas inovações, porém, possuem um grau de impacto sobre o meio
ambiente, sendo umas piores que as outras.
A busca por produtos mais rápidos, potentes, leves e principalmente menos
poluentes levaram as indústrias mundiais a adotarem novos materiais e soluções de
engenharia cada vez mais sofisticadas, que muitas vezes desafiam os limites do
conhecimento e dessa maneira incitam a pesquisa para ampliação dos atuais horizontes.
Além disso, nos últimos anos, a preocupação com o meio ambiente atingiu posição de
destaque como um dos requisitos na estratégia de crescimento dessas empresas.
Portanto, o conceito de desenvolvimento sustentável foi adotado pela maioria das
empresas multinacionais, e isso gerou uma grande demanda pelo desenvolvimento de
novas tecnologias que utilizam fontes renováveis de energia e os recursos naturais de
maneira prudente, de modo que sua utilização seja a menos nociva ao meio ambiente.
Técnicas de conversão de energia foram desenvolvidas ao longo dos anos para
que uma fonte de energia que normalmente é desperdiçada possa ser utilizada a favor
do ser humano. Aproveitamento de energia solar através da instalação de painéis
fotovoltaicos, implementação de geradores eólicos em regiões com regime de ventos
favoráveis, instalação de hidro geradores em praias para se aproveitar a energia das
marés são apenas algumas das tecnologias criadas para este fim. Nos últimos anos,
pesquisadores têm investigado o uso de materiais inteligentes para realizarem a
transdução de vibração estrutural em energia elétrica (Leo, 2007). Quando se utiliza
material piezelétrico para realizar a conversão, este processo ficou conhecido como

2
Piezoelectric Energy Harvesting (PEH); tais cristais apresentam o efeito piezelétrico, que
consiste na capacidade do material acumular cargas opostas em suas faces, gerando
assim uma tensão, quando é deformado. Devido à baixa quantidade de energia gerada,
tal processo tem como principal aplicação a alimentação de dispositivos eletrônicos de
pequeno porte, como redes de sensores sem fios utilizadas no monitoramento da
integridade de um dado sistema estrutural (Stephen, 2006).
Apesar da pouca energia gerada, utilizar vibração estrutural como fonte de energia
a ser convertida é interessante, pois o fenômeno é inerente a todas as estruturas. Todo
sistema mecânico pode ser modelado como um sistema composto por uma massa, uma
mola e um amortecedor, e a presença de inércia faz com que a estrutura apresente um
comportamento oscilatório quando excitada por uma fonte externa, gerando em cada
ciclo deformação mecânica que pode ser convertida em energia elétrica utilizando os
materiais piezelétricos. No entanto, as vibrações presentes no ambiente possuem
amplitude e frequência variantes no tempo, predominando baixas frequências. Isso
dificulta a construção de um conversor eficiente, visto que esse processo depende
diretamente da caracterização do sinal de excitação (Anton, 2007).
Existem uma gama de configurações diferentes para conversores de energia que
utilizam material piezelétrico, porém o mais difundido é a viga cantilever com pastilhas de
material piezelétrico recobrindo parcial ou totalmente a face superior e/ou inferior de uma
viga, com uma massa na ponta para ajuste da frequência natural, sendo o conjunto
excitado em sua base. Tal modelo é fácil de ser modelado para realização de simulações
e fácil de ser construído para se realizar ensaios experimentais. A análise da potência
gerada se dá ao se conectar às camadas de material piezelétrico um circuito elétrico,
normalmente um resistor, por meio de eletrodos contínuos.
1.2. Objetivos
O presente trabalho tem como principal objetivo fazer com que o aluno trabalhe os
vários ramos da engenharia mecânica, elétrica e computação, estudados durante os anos
de graduação no curso de engenharia mecatrônica; do ponto de vista da engenharia

3
mecânica e elétrica, espera-se desenvolver o modelo eletromecânico do sistema
dinâmico, realizar o projeto do gerador e dimensionamento da resistência para verificação
da potência, bem como os experimentos para obter as características do mesmo; do
ponto de vista da computação, serão feitas rotinas computacionais para se calcular
numericamente a resposta do sistema, simulando seu comportamento. Por fim, espera-
se obter uma validação experimental entre um dispositivo físico e o modelo
eletromecânico desenvolvido.

4
2. Revisão Bibliográfica
Nesta seção será apresentada uma breve revisão bibliográfica, expondo os pontos
pertinentes ao desenvolvimento do projeto.
2.1. Efeito Piezelétrico
O efeito piezelétrico é a interação eletromecânica entre os estados mecânico e
elétrico de um material cristalino sem inversão de simetria; nomeado a partir do grego
para “eletricidade resultante de pressão”, tal efeito foi descoberto em 1880 pelos irmãos
Currie. Pierre e Jacques Currie demostraram que alguns cristais, como o quartzo,
geravam um potencial elétrico quando sofriam uma deformação mecânica. Em 1881,
Lippman deduziu matematicamente a partir de princípios termodinâmicos que o efeito
contrário, a aplicação de um campo elétrico resultando em uma deformação mecânica
do cristal, também era possível, e o fato foi comprovado experimentalmente pelos irmãos
Currie (Mineto, 2011).
Devido à raridade do efeito em materiais naturais, foram desenvolvidas, a partir da
década de 50, cerâmicas sintéticas que apresentavam a piezeletricidade. Derivadas do
zirconato de chumbo (PbZrO3) e do titanato de chumbo (PbTiO3) as pastilhas são
conhecidas como PZT, e as aplicações desses materiais que possuem o efeito
aumentaram devido a sua dureza e densidade elevadas, podendo ser produzidos em
várias formas e tamanhos, ao fato de ser quimicamente inerte, e que quando o material
vibra, uma tensão elétrica surge em seus terminais. Tanto os cristais naturais como os
sintéticos são utilizados na construção de acelerômetros, sensores ultrassônicos,
motores piezelétricos, autofalantes, entre outros.
2.2. Geração de Energia Usando Materiais Piezelétricos
A utilização de materiais piezelétricos com o intuito de gerar energia iniciou-se no
fim da década de noventa (Umeda et al, 1996; Goldfarb et al, 1999). A motivação para os

5
trabalhos de Umeda foi o choque entre um corpo caindo sujeito à ação da gravidade e
uma placa de material piezelétrico, resultando na modelagem do processo mecânico de
impacto de um corpo rígido e uma placa. A seguir, o mesmo autor realizou um estudo
focando no processo de armazenamento da energia gerada decorrente do choque,
resultando em uma eficiência da capacidade de conversão de 35% (Umeda et al, 1997).
Já Goldfarb realizou a análise de um conversor eletromecânico utilizando pastilhas de
PZT vibrando no modo 3-3.
Uma extensa revisão bibliográfica a respeito das diversas técnicas de geração e
aproveitamento de energia vibratória utilizando materiais piezelétricos foi realizada por
Sodano e Anton (Sodano et al, 2004; Anton et al, 2007). Em seus textos, os autores
expõem temas que ainda são foco de discussão entre os pesquisadores como, por
exemplo, a sintonia da frequência natural do dispositivo com a frequência do sinal de
excitação. Esse é um dos maiores problemas com estes dispositivos, visto que eles
funcionam como ressonadores mecânicos, e os níveis ótimos de conversão
eletromecânica se dão quando essas frequências são iguais. Dessa forma, o ajuste entre
frequências tem recebido grande atenção dos pesquisadores de técnicas de conversão
de energia baseados em materiais piezelétricos. Como uma alternativa a essa
característica dos conversores, algumas técnicas foram propostas para se aumentar a
banda de frequências utilizáveis pelo dispositivo, conferindo uma certa forma de
adaptabilidade a tais dispositivos para situações nas quais a frequência da fonte externa
de excitação varia no tempo.
2.2.1. Conversores Lineares
O modelo de conversos piezelétrico mais difundido consiste de uma viga
engastada, ou cantilever, em uma extremidade, recoberto com material piezelétrico
parcial ou totalmente nas camadas de cima e/ou de baixo da estrutura, com uma massa
na extremidade livre para se realizar o ajuste de frequências (Erturk; Inman, 2008a,
2008b, 2008c). Em seus trabalhos, os autores identificam erros inerentes ao modelo de
um grau de liberdade (GDL) e propõem fatores de correção para os termos das equações
de movimento (EDM) do sistema acoplado. Utilizando uma viga bimorph, os autores

6
encontram uma solução analítica para as EDMs do modelo, sendo validada por ensaios
experimentais e tendo seu desempenho analisado alterando-se o circuito elétrico
acoplado aos terminais do material piezelétrico. A fim de representar o conversor mais
fielmente, desenvolvem um modelo por parâmetros distribuídos (Erturk; Inman, 2009);
este sistema é excitado em sua base por uma translação sobreposta a uma pequena
rotação, resultando num modelo de amortecimento mais sofisticado que os utilizados
normalmente.
Alguns pesquisadores fixaram o conversor em uma estrutura primária a fim de
aproveitar a vibração do sistema na conversão de energia (Cornwell et al, 2005). Em seus
trabalhos, foram desenvolvidos o modelo de dois GDL da estrutura para se encontrar a
expressão para a tensão de saída. Ensaios experimentais em uma estrutura semelhante
a uma edificação de dois andares com o conversor piezelétrico fixo em uma determinada
posição foram realizados; a estrutura foi excitada por um shaker eletromagnético
configurado para gerar sinais aleatórios de vibração. As principais conclusões do estudo
foram que as pastilhas de PZT são sensíveis ao processo de sintonia de frequências e
que a eficiência do dispositivo depende diretamente da frequência de excitação, com
frequências mais altas favorecendo a eficiência do conversor.
Outra característica importante no projeto dos conversores baseado em vigas
cantilever é a configuração geométrica da viga. Goldschimidtboeing (Goldschimidtboeing
et al, 2008) realizou uma análise de conversores piezelétricos com diferentes geometrias
para a viga baseando-se na teoria de Rayleigh-Ritz para se derivar os modelos do
sistema. Concluiu-se que a geometria da viga pouco influencia na eficiência do conversor,
mas é um fator determinante nas amplitudes de vibração da viga, que estão intimamente
ligadas com a potência máxima gerada pelo sistema. Os autores afirmam que a
configuração ótima para um conversor seria uma viga com perfil triangular, com uma
massa de considerável valor na extremidade livre a fim de se obter uma alta eficiência e
quantidade de energia disponível. Mateu (Mateu et al, 2005) analisou estrutura de viga
em flexão que podem ser utilizadas como insertos em sapatos, aproveitando a energia
cinética proveniente da caminhada. Huang (Huang et al, 2004) analisou a deflexão
estática máxima em um conversor piezelétrico utilizando o modelo original de viga
composta por múltiplas camadas de material piezelétrico.
7
Recentemente, Kim (Kim et al, 2010) propôs vários modelos de viga cantilever
para se analisar a eficiência de conversores piezelétricos de energia. Os autores
abordaram a razão largura por comprimento e a distribuição de massa na extremidade
livre para se obter as respostas elétricas. Os resultados foram validados a partir da
comparação com modelos convencionais de viga e modelos tridimensionais gerados a
partir do método dos elementos finitos. Os resultados foram satisfatórios, mostrando
melhorias no modelo de obtenção das respostas elétricas.
Além dos dispositivos convencionais, vários autores diminuíram a escala dos
conversores, caracterizando-os como sistemas micro eletromecânicos (MEMS). O
modelo de viga ainda é o mais utilizado para dispositivos miniaturas devido a sua
facilidade de fabricação (Lu; Lee; Lim, 2004); os autores encontram expressões para a
potência de saída e eficiência do conversor, e utilizam apenas um modo de vibrar para
caracterizar o comportamento do sistema. Trabalho similar é apresentado por outros
autores, porém utilizando todos os modos de vibrar (Chen; Wang; Chien, 2006), no qual
os autores deixam de simplificar o acoplamento eletromecânico, porém o representam
como um efeito de amortecimento viscoso. DuToit (DuToit; Wardle; Kim, 2005) avaliam
um conversor piezelétrico MEMS, destacando suas vantagens para uma gama de
aplicações; seus resultados são analisados comparados com outros publicados por
demais autores.
O uso de técnicas de condicionamento de potência baseadas em chaves
proporciona um aumento na performance de conversores em miniatura, mesmo com a
alta frequência natural inerente a esses sistemas (Blystad; Halvorsen; Husa, 2010). Os
autores realizam uma análise baseada em vários circuitos de condicionamento de
potência, utilização de stoppers mecânicos e vibrações harmônicas e aleatórias como
fonte de excitação. A utilização de stoppers aumentou a capacidade de geração quando
os circuitos chaveados são usados, porém introduzem alguns efeitos não lineares quando
são atingidos pela massa na extremidade livre do conversor. Miller (Miller et al, 2011)
estuda o comportamento de um conversor em miniatura em uma grande sala de
máquinas de um prédio; os autores desenvolveram um modelo que tinha como entrada
uma curva de aceleração arbitrária, capaz de gerar cerca de 10 𝑛𝑊𝑔−2.

8
2.2.2. Conversores Não-lineares
Em contrapartida ao comportamento ressonante dos conversores lineares de
energia, nos últimos cinco anos pode-se verificar um aumento no interesse pelo
aproveitamento de sinais de vibração estrutural não lineares como fonte de energia para
o processo de conversão piezelétrica (Ramlam, 2009). A vantagem dessa classe de
dispositivos sobre os lineares é que a introdução de não linearidades nas equações de
movimento do sistema eletromecânico é responsável por aumentar a largura de banda
em que o dispositivo tem uma boa eficiência e consegue converter uma quantidade
razoável de energia. Dentre as várias fontes de não linearidades, as mais estudadas são
decorrentes da introdução de efeitos elásticos não lineares e de efeitos magnéticos. Além
dessas fontes de não linearidades, esses efeitos também podem acontecer devido a não
linearidades intrínsecas ao material e da geometria adotada para a configuração do
conversor piezelétrico.
Barton (Barton; Burrow; Clare, 2010) propões um modelo de gerador
eletromagnético não linear com uma larga faixa de operações. A não linearidade é obtida
ao se adicionar ao sistema um arranjo de eletroímãs em conjunto com uma bobina. O
modelo analítico foi baseado na equação de Duffing e experimentos foram realizados no
sistema em duas situações distintas; na primeira, a excitação era harmônica com
frequência fixa e na segunda, aleatória. O resultado obtido foi que a introdução de não
linearidades, tanto teórica como experimentalmente, aumenta a tensão de saída do
dispositivo.
Erturk (Ertuk et al, 2009) analisou o comportamento dinâmico de um conversor
piezomagnetoelástico, que tinha como objetivo aumentar a quantidade de energia gerada
a partir da associação de efeitos não lineares magnéticos e elásticos. No mesmo ano,
Stanton (Stanton, 2009) discute sobre a modelagem teórica e validação experimental de
um conversor não linear de energia que apresentava um efeito histerético bidirecional,
no qual os efeitos de softening e hardening eram explorados num mesmo modelo.
Analisando ainda os efeitos magnéticos, Mann (Mann, 2009) estuda o projeto e
desempenho de um conversor de energia com frequência natural ajustável baseado no
conceito de levitação magnética. O mesmo autor (Mann, 2010) investiga a relação dos

9
efeitos magnéticos no processo de conversão de energia num sistema biestável.
Baseado em simulações e ensaios experimentais, concluiu que o fenômeno de escape,
conhecido na dinâmica de sistemas não lineares contribui para aumentar a faixa de
frequências nas quais que o conversor opera com bom desempenho.
Karami (Karami, 2010) idealiza um conversor não linear baseado no uso de ímãs
e bobinas, cuja ideia é aumentar a geração de energia, somando-se à energia convertida
pelo material piezelétrico com a da interação eletromagnética entre os componentes.
Stanton (Stanton et al, 2010) analisa o modelo de conversor não linear de energia
baseado no modelo de viga cantilever com massa concentrada na extremidade livre; o
autor observou que a inclusão dos efeitos não lineares aumenta a faixa de frequências
de operação do dispositivo quando comparado com o seu modelo linear equivalente.
Tadesse (Tadesse; Zhang; Priya, 2009) combina os mecanismos de conversa
piezelétricos e eletromagnéticos em um conversor multimodal. A massa na ponta da viga
cantilever é um ímã permanente que atua tanto para diminuir a frequência de
ressonância, como um núcleo oscilante no interior de uma bobina, gerando corrente pela
Lei de Faraday. Os autores concluíram que o efeito eletromagnético gera boa quantidade
de potência em baixas frequências, enquanto o efeito piezelétrico é melhor nas altas
frequências. Dessa maneira, aumenta-se a faixa de frequências úteis do dispositivo.
Lin (Lin; Alphenaar, 2010), a partir de experimentos, demonstra que a quantidade
de energia convertida a partir de uma fonte de excitação aleatória é aumentada quando
há presença de uma força magnética de acoplamento. Os autores observaram um
incremento de até 50% na tensão gerada quando se compara um conversor acoplado
com um não acoplado. Yang (Yang; Wen; Li, 2011) propõe um conversor composto por
duas vigas, dois transdutores magnéticos e um circuito magnético; as forças trocadas
entre os transdutores adicionam rigidez magnética na viga.
Daqaq (Daqaq et al, 2014) realiza uma revisão sobre o estado da arte em
geradores de energia que utilizam vibração estrutural como fonte de conversão de
energia. Os autores afirmam que as não linearidades, intrínsecas ou intencionais, têm
grande influência no comportamento dos dispositivos, levando a funções potenciais mono

10
ou biestáveis e dificultando o desenvolvimento de métricas simples para avaliar os
geradores.
A não linearidade intrínseca ao material piezelétrico também pode influenciar no
desempenho do conversor (Wagner; Hagedorn, 2002). Os autores fazem uma primeira
descrição dessas não linearidades apresentadas pelo material, propondo equações
constitutivas não lineares que incluíam o módulo de Young e fator elétrico 𝑑31 não
constantes. Tais parâmetros foram determinados e comparados com os obtidos durante
experimentos. Concluiu-se que as não linearidades do material podem ter grande
influência no desempenho dos conversores piezelétricos quando eles são excitados em
frequências próximas à ressonância. Os autores atestam que as métricas usadas para
descrever os geradores lineares raramente podem descrever os modelos não lineares, e
a resposta em frequência de regime permanente destes geradores sujeitos a uma
excitação harmônica pode não ser um fator preciso a respeito do seu comportamento e,
mais importante, não é uma indicação direta de sua capacidade de transdução quando
sujeitos a diferentes tipos de excitação ambiental. Quando sujeitos a excitações
aleatórias, as métricas são mais simples de serem obtidas utilizando ferramentas
estatísticas.
Inman (Inman et al, 2010a) analisa a resposta não linear em um conversor do tipo
bimorph recoberto com PZT-5A. Os autores demonstraram os efeitos não lineares
intrínsecos ao dispositivo apesar do movimento geométrico do conversor ser
praticamente linear. A resposta obtida indica um mecanismo não linear de dissipação,
concluindo assim que o modelo linear é inadequado, e que o uso de PZT-5A apresenta
aumento do efeito de softening em relação ao uso do PZT-5H. Os autores também
propõem e validam um modelo piezelétrico não linear para a geração de energia (Inman
et al, 2010b). Neste trabalho, é analisada a importância da modelagem dos efeitos não
lineares das pastilhas piezelétricas, que não se limitam aos efeitos elásticos de ordem
superior, mas também ao acoplamento não linear do circuito. Os autores também
demonstram que um mecanismo de amortecimento não linear limita a amplitude e a
banda da resposta em frequência. Os coeficientes não lineares são encontrados
utilizando um algoritmo de otimização não linear de mínimos quadrados que utiliza uma
solução analítica aproximada obtida pelo método de balanço harmônico.

11
2.2.3. Conversores Microeletromecânicos
Outra vertente de pesquisa em conversores piezelétricos de energia concentra-se
na diminuição da escala, a fim de torna-los comerciais. Zhu (Zhu et al, 2013) fabricou um
nanogerador triboelétrico capaz de converter energia de fontes de vibração presentes no
meio ambiente. O dispositivo, que tem dimensões menores que a da palma de uma mão,
é capaz de gerar 1,2 W de potência, que corresponde a uma densidade de 313 W/m². O
dispositivo apresenta baixa eficiência, em torno de 15%, se comparado com os demais
conversores presentes na literatura. Apesar de baixa eficiência, a alta potência gerada é
atribuída à otimização da estrutura, à de materiais e as modificações da superfície em
nanoescala.
Wickenheiser (Wickenheiser; Garcia, 2010) desenvolveu um modelo de viga
cantilever miniatura para atuar em baixas frequências. A técnica, denominada de
conversão por aumento de frequência, consiste em fazer a viga vibrar em relação à uma
estrutura ferromagnética estacionária composta por sulcos e dentes; quando a massa
magnética passa por um destes dentes, a força magnética faz com que a viga seja
deslocada até o próximo dente, fazendo com que ela vibre em sua frequência
fundamental. O autor também realiza estudos para otimização de parâmetros
(Wickenheiser, 2011) que têm grande influência no comportamento do dispositivo e
verifica a quantidade de potência gerada para vários tipos de circuitos elétricos. Anderson
(Anderson; Wickenheiser, 2012) utiliza o modelo de conversão por aumento de
frequência realizando um estudo para verificar a sua eficácia no aproveitamento de
vibrações provenientes da locomoção humana e do funcionamento de um automóvel.
Seus resultados mostram que há dificuldade em prever o comportamento do dispositivo
quando ele é sujeito a uma entrada aleatória.
Lin (Lin; Gea; Liu, 2011) estuda um conversor aplicando métodos de otimização
de topologia; tais técnicas permitem, simultaneamente, determinar o layout ótimo do
gerador, bem como a posição ótima da massa que ajusta a frequência natural do sistema.
O método de pseudo excitação é adotado para analisar a resposta estrutural estacionária
e aleatória, e a estabilidade do sistema. Tal método se mostrou eficiente, resultando em
geradores de energia capazes de gerar uma considerável quantidade de energia.

12
Como a maioria dos sinais de vibração estrutural podem ser considerados como
sinais aleatórios, as análises dos conversores não deve se resumir apenas a sinais
senoidais. Renaud (Renaud et al, 2012) realiza um estudo com geradores expostos a
sinais senoidais e estende o resultado para sinais aleatórios; os autores concluíram que
o dispositivo projetado para apresentar máxima eficiência nem sempre leva à máxima
geração de energia, mas sim à máxima potência por deflexão ao quadrado. Tal resultado
permite melhor otimização quando a deformação é limitada por stoppers mecânicos. Eles
demonstraram que a potência ótima gerada é diretamente proporcional a eficiência do
conversor de energia, e que fórmulas fechadas podem ser obtidas para descrever estes
pontos ótimos de operação. Tais fórmulas dependem apenas da frequência natural,
massa efetiva, fator de qualidade e fator de acoplamento eletromecânico, e como todos
esses fatores são facilmente medidos experimentalmente, elas servem como métricas
para os geradores de energia piezelétricos.
Zhao (Zhao et al, 2013) desenvolve um modelo por parâmetros concentrados que
inclui modos de vibrar superiores. Os autores realizam uma análise baseada na
densidade espectral de potência (PSD) a qual o dispositivo é sujeito. Em uma primeira
análise, eles utilizam séries de Fourier para representar a aceleração da base em uma
EDO enquanto a segunda utiliza o método de Euler-Maruyama para resolver diretamente
as equações diferenciais estocásticas eletroelásticas. Experimentos são realizados a fim
de validar o modelo analítico, e os resultados obtidos mostram boa correlação com as
simulações numéricas para vários valores de resistência elétrica e níveis de PSD. Os
autores concluem que modos de vibrar superiores levemente amortecidos podem alterar
o valor esperado da potência gerada quando a estrutura é sujeita a vibrações aleatórias.
Cottone (Cottone et al, 2012) também realiza análise de dispositivos conversores
sujeitos a sinais de vibração aleatórios. Os autores apresentam um modelo não linear de
conversor, devido a sua largura de banda ampla e flexibilidade em converter energia
cinética a partir da frequência natural das fontes. O sistema consiste em um oscilador
biestável, que apresenta melhor performance global quando excitado por um sinal
aleatório. A biestabilidade é gerada através de uma viga sujeita a uma compressão axial
crescente. Uma vantagem deste método em relação aos demais é a não utilização de
forças magnéticas para gerar a dinâmica biestável. Os autores mostram que quando
13
sujeita a condição de flambagem, o conversor apresenta considerável geração de energia
ao longo de uma faixa larga de resistências, com ganhos até dez vezes maior se
comparado com a situação sem flambagem. Harne (Harne et al, 2013) também analisa
dispositivos geradores de energia biestáveis devido a suas características únicas; o autor
estuda sistemas que apresentam o mecanismo snap-through, que consiste na transição
entre dois estados estáveis de uma maneira abrupta. Essa transição entre estados pode
resultar em grandes amplitudes de vibração, aumentando drasticamente a geração de
potência, funcionando como um mecanismo de conversão por aumento de frequência.
Sendo melhores que os geradores lineares, os geradores biestáveis chegam a
apresentar uma ordem de magnitude a mais no quesito geração de potência.

14
3. Modelagem Analítica do Conversor
Nesta etapa será desenvolvido o modelo analítico do conversor piezelétrico de
energia, apresentando as hipóteses adotadas e o desenvolvimento matemático que
culmina nas Equações de Movimento (EDM) que representam o sistema.
3.1. Introdução
O modelo físico do sistema é apresentado na Figura 3.1; o conversor consiste de
uma viga engastada recoberta totalmente com camadas de material piezelétrico, com
uma massa na extremidade livre para se realizar o ajuste de frequência. A fim de
adicionar uma não linearidade, esta massa será magnética e interage com um segundo
ímã, estacionário; no desenvolvimento do modelo será considerada também a não
linearidade intrínseca ao material piezelétrico. A transdução dos sinais elétricos gerados
pelas camadas piezelétricas é realizada através de uma resistência; considera-se
também que os eletrodos cobrem totalmente a superfície externa de cada camada e são
conectados em série.
Figura 3.1: Modelo físico do conversor
Material piezelétrico
iezelétrico Viga
Material magnético
𝑅
𝐿
𝑟(𝑡)
𝑥
𝑧
𝑚 𝑤(𝑥, 𝑡)

15
O modelo dinâmico do sistema será derivado utilizando a mecânica lagrangeana.
Para isso, o conversor é dividido em dois subsistemas, sendo um deles a viga engastada
vibrando no plano 𝑥 − 𝑧, e o outro o circuito elétrico conectado ao material piezelétrico.
O Lagrangeano do sistema é dado por:
ℒ = 𝐾 − 𝑈 (3.1)
Assume-se que o deslocamento transversal da viga é a superposição de todos os
modos de vibrar; dessa maneira, o deslocamento de cada ponto da estrutura ao longo do
tempo é dado por:
𝑤(𝑥, 𝑡) = ∑ 𝜙𝑖(𝑥)𝑢𝑖(𝑡)
∞
𝑖=1
(3.2)
Devido ao modelo estudado apresentar apenas um GDL e o primeiro modo de
vibrar ter influência maior que os demais da dinâmica do sistema, a séria acima reduz-
se apenas ao primeiro termo do somatório para se derivar as EDM.
3.2. Energia Cinética
A energia cinética do sistema é composta pela energia cinética da viga, das
camadas de material piezelétrico e da massa magnética localizada na extremidade livre
da viga.
Energia cinética da viga
A energia cinética presente ao longo do comprimento da viga é dada por:
𝐾𝑣 =
1
2∫ [(𝑥, 𝑡) + (𝑡)]2𝑑𝑚
𝑚𝑣
=1
2𝜌𝑣𝐴𝑣 ∫ [(𝑥, 𝑡) + (𝑡)]2𝑑𝑥
𝐿
0
(3.3)
onde o ( ) representa a derivada temporal.
Substituindo a equação (3.2) em (3.3), e desenvolvendo a expressão resultante,
tem-se:

16
𝐾𝑣 =
1
2𝜌𝑣𝐴𝑣 [1
2(𝑡) ∫ 𝜙12(𝑥)𝑑𝑥
𝐿
0
+ 2(𝑡)1(𝑡) ∫ 𝜙1(𝑥)𝑑𝑥𝐿
0
+ 2(𝑡)𝐿] (3.4)
Energia cinética do material piezelétrico
Para as duas camadas de material piezelétrico coladas na viga, a energia cinética
ao longo do seu comprimento é dada por:
𝐾𝑝 = 2
1
2∫ [(𝑥, 𝑡) + (𝑡)]2𝑑𝑚
𝑚𝑝
= 𝜌𝑝𝐴𝑝 ∫ [(𝑥, 𝑡) + (𝑡)]2𝑑𝑥𝐿
0
(3.5)
A partir de um processo análogo ao realizado para a viga, segue a expressão
obtida:
𝐾𝑝 = 𝜌𝑝𝐴𝑝 [1
2(𝑡) ∫ 𝜙12(𝑥)𝑑𝑥
𝐿
0
+ 2(𝑡)1(𝑡) ∫ 𝜙1(𝑥)𝑑𝑥𝐿
0
+ 2(𝑡)𝐿] (3.6)
Energia cinética da massa magnética
A expressão para a energia cinética da massa magnética é função apenas do
tempo, visto que tem posição fixa no eixo-x, e é dada por:
𝐾𝑚 =
1
2∫ [(𝐿, 𝑡) + (𝑡)]𝑑𝑚
𝑚
(3.7)
Da mesma forma que nos casos anteriores, a substituição da equação (3.2) em
(3.6) resulta em:
𝐾𝑚 =
1
2𝑚[1
2(𝑡)𝜙12(𝐿) + 2(𝑡)1(𝑡)𝜙1(𝐿) + 2(𝑡)] (3.8)
Energia cinética total
A fim de simplificar a notação, as seguintes relações serão utilizadas:
𝑚𝑡 = 𝑚𝑣 + 2𝑚𝑝 + 𝑚 (3.9)
𝜇𝑣 = 𝜌𝑣𝐴𝑣 (3.10)
𝜇𝑝 = 𝜌𝑝𝐴𝑝 (3.11)

17
Φ1
𝑛,𝑚0𝐿 = ∫ (𝜙1
(𝑛))
𝑚(𝑥)𝑑𝑥
𝐿
0
(3.12)
onde 𝑛 representa a ordem da derivada da função modal associada ao primeiro modo de
vibrar e 𝑚 é um expoente.
Somando as equações (3.4), (3.6) e (3.8), substituindo as relações (3.9), (3.10),
(3.11) e (3.12), obtém-se a energia cinética total do sistema, que é dada por:
𝐾 =
1
2𝑚𝑡2(𝑡) + [(𝜇𝑣 + 2𝜇𝑝) Φ1
0,10𝐿 + 𝑚𝜙1(𝐿)](𝑡)1(𝑡)
+1
2[(𝜇𝑣 + 2𝜇𝑝) Φ1
0,20𝐿 + 𝑚𝜙1
2(𝐿)]12(𝑡)
(3.13)
3.3. Energia Potencial
Semelhante à energia cinética, a energia potencial presente no sistema é dada
pela soma das energias potenciais presentes ao longo do comprimento da viga, no
material piezelétrico e na interação entre os ímãs.
Energia potencial da viga
A energia potencial presente ao longo do comprimento da viga é igual ao trabalho
realizado pelo momento fletor para deformá-la, e é dado pela seguinte relação:
𝑈𝑣 =
1
2∫ 𝑀𝑑𝜃
𝜃
0
=1
2𝐸𝑣𝐼𝑣 ∫ 𝑤1
′′2(𝑥, 𝑡)𝑑𝑥𝐿
0
(3.14)
onde o operador ( )′ representa a derivada espacial, e o momento de área de viga é
dado por:
𝐼𝑣 =
𝑏ℎ𝑣3
12 (3.15)
Substituindo a equação (3.2) em (3.14), e utilizando (3.12), tem-se:
𝑈𝑣 =
1
2𝐸𝑣𝐼𝑣 Φ1
2,20𝐿 𝑢1
2(𝑡) (3.16)

18
Energia potencial do material piezelétrico
O conjunto de camadas piezelétricas mantém uma energia potencial devido tanto
à deformação mecânica e ao efeito piezelétrico. As relações constitutivas para o material
considerando suas não linearidades intrínsecas, de acordo com Inman (Inman et al,
2010b), são dadas por:
𝑇1 = 𝑐11𝑆1 + 𝑐111𝑆12 + 𝑐1111𝑆1
3 − 𝑒31𝐸3 − 𝑒311𝑆1𝐸3 − 𝑒3111𝑆12𝐸3
𝐷3 = 𝑒31𝐸3 + 𝑒311𝑆1𝐸3 + 𝑒3111𝑆12𝐸3 + 𝜀33
𝑆 𝐸3 (3.17)
onde os subscritos 1 e 3 se referem, respectivamente, às direções 𝑥 e 𝑧. As constantes
𝑐11, 𝑐111 e 𝑐1111são, respectivamente, a segunda, terceira e quarta ordem da componente
da tensão elásticas e 𝑒31, 𝑒311 e 𝑒3111são a segunda, terceira e quarta ordem da
componente da tensão eletroelástica. Devido ao campo elétrico ser fraco, pode-se
desprezar os efeitos não lineares dielétricos e eletrorresistivos, simplificando a equação
(3.17):
𝑇1 = 𝑐11𝑆1 + 𝑐111𝑆12 + 𝑐1111𝑆1
3 − 𝑒31𝐸3 − 𝑒3111𝑆12𝐸3
𝐷3 = 𝑒311𝑆1𝐸3 + 𝜀33𝑆 𝐸3
(3.18)
A energia potencial presente no volume do material piezelétrico é então dada por:
𝑈𝑝 =
1
2∫ (𝑇1𝑆1 − 𝐷3𝐸3)𝑑𝑉
𝑉𝑝
(3.19)
O campo elétrico que atua entre as camadas de material piezelétrico, ao longo de
sua espessura, pode ser escrito em função da derivada temporal do fluxo de energia:
𝐸3 = ±
(𝑡)
2ℎ𝑝 (3.20)
com o sinal positivo se referindo à camada de baixo, e o negativo à camada de cima. A
deformação da viga é dada por:
𝑆1 = −𝑧𝑤1′′2(𝑥, 𝑡) (3.21)
Como os sinais do campo elétrico são opostos para cada pastilha piezelétrica, é
conveniente dividir a energia potencial do material piezelétrico na energia potencial da

19
camada de cima (𝑈𝑝𝑐) e da de baixo (𝑈𝑝𝑏). Substituindo as equações (3.18), (3.20) e
(3.21) na equação (3.19), fazendo 𝑑𝑉 = 𝑑𝑥𝑑𝑦𝑑𝑧, e desconsiderando os termos referentes
à 𝑐111 e 𝑒311 que se cancelam devido à simetria das camadas, tem-se:
𝑈𝑝𝑐 =1
2∫ ∫ ∫ [𝑐11𝑧2𝑤1
′′2(𝑥, 𝑡) + 𝑐1111𝑧4𝑤1′′4(𝑥, 𝑡)
ℎ𝑣2
+ℎ𝑝
ℎ𝑣2
𝑏
0
𝐿
0
− 𝑒31𝑧𝑤1′′(𝑥, 𝑡)
(𝑡)
2ℎ𝑝− 𝑒3111𝑧3𝑤1
′′3(𝑥, 𝑡)(𝑡)
2ℎ𝑝
− ε33S
2(𝑡)
4ℎ𝑝2
] 𝑑𝑧𝑑𝑦𝑑𝑥
(3.22)
𝑈𝑝𝑏 =1
2∫ ∫ ∫ [𝑐11𝑧2𝑤1
′′2(𝑥, 𝑡) + 𝑐1111𝑧4𝑤1′′4(𝑥, 𝑡)
−ℎ𝑣2
−(ℎ𝑣2
+ℎ𝑝)
𝑏
0
𝐿
0
+ 𝑒31𝑧𝑤1′′(𝑥, 𝑡)
(𝑡)
2ℎ𝑝+ 𝑒3111𝑧3𝑤1
′′3(𝑥, 𝑡)(𝑡)
2ℎ𝑝
− ε33S
2(𝑡)
4ℎ𝑝2
] 𝑑𝑧𝑑𝑦𝑑𝑥
(3.23)
Substituindo a equação (3.2) e (3.12) em (3.2) e (3.23), calculando as integrais
nas expressões acima e somando a energia potencial das duas camadas, tem-se:
𝑈𝑝 =
1
2𝑏 [𝑐11 (
1
2ℎ𝑣
2ℎ𝑝 + ℎ𝑣ℎ𝑝2 +
2
3ℎ𝑝
3) 𝑢12(𝑡) Φ1
2,20
𝐿
+ 𝑐1111 (1
8ℎ𝑣
4ℎ𝑝 +1
2ℎ𝑣
3ℎ𝑝2 + ℎ𝑣
2ℎ𝑝3 + ℎ𝑣ℎ𝑝
4 +2
5ℎ𝑝
5) 𝑢14(𝑡) Φ1
2,40
𝐿
− 𝑒31(ℎ𝑣ℎ𝑝 + ℎ𝑝2)
(𝑡)
2ℎ𝑝𝑢1(𝑡) Φ1
2,10
𝐿
− 𝑒3111 (1
4ℎ𝑣
3ℎ𝑝 +3
4ℎ𝑣
2ℎ𝑝2 + ℎ𝑣ℎ𝑝
3 +1
2ℎ𝑝
4)(𝑡)
2ℎ𝑝𝑢1
3(𝑡) Φ12,3
0
𝐿
− 𝜀33𝑆
2(𝑡)
2ℎ𝑝𝐿]
(3.24)
A fim de simplificar a notação, as seguintes relações serão utilizadas:
𝑐11 = 𝐸𝑝 (3.25)
𝑏 (
1
2ℎ𝑣
2ℎ𝑝 + ℎ𝑣ℎ𝑝2 +
2
3ℎ𝑝
3) = 𝐼𝑝 (3.26)

20
1
2𝑏𝑐1111 (
1
8ℎ𝑣
4ℎ𝑝 +1
2ℎ𝑣
3ℎ𝑝2 + ℎ𝑣
2ℎ𝑝3 + ℎ𝑣ℎ𝑝
4 +2
5ℎ𝑝
5) = 𝐺 (3.27)
−𝑏𝑒31(ℎ𝑣ℎ𝑝 + ℎ𝑝
2)1
2ℎ𝑝= 𝜗 (3.28)
1
2𝑏𝑒3111 (
1
4ℎ𝑣
3ℎ𝑝 +3
4ℎ𝑣
2ℎ𝑝2 + ℎ𝑣ℎ𝑝
3 +1
2ℎ𝑝
4)1
2ℎ𝑝= 𝐻 (3.29)
𝑏𝜀33
𝑆𝐿
2ℎ𝑝= 𝐶0 (3.30)
Substituindo as relações (3.25) a (3.30) em (3.24), a expressão para a energia
potencial fica:
𝑈𝑝 =
1
2𝐸𝑝𝐼𝑝 Φ1
2,20𝐿 𝑢1
2(𝑡) + 𝐺 Φ12,4
0𝐿 𝑢1
4(𝑡) +1
2𝜗 Φ1
2,10𝐿 𝑢1(𝑡)(𝑡) − 𝐻 Φ1
2,30𝐿 𝑢1
3(𝑡)(𝑡)
−1
2𝐶02(𝑡)
(3.31)
Energia potencial da massa magnética
A força magnética que atua entre a massa magnética da extremidade livre da viga
e o ímã estacionário é dada por (Karami et al, 2011):
𝑓 = −𝐴𝑤1(𝐿, 𝑡) + 𝐵𝑤13(𝐿, 𝑡) (3.32)
assim, a energia potencial associada a esta força é dada por (Karami et al, 2011 e Daqaq,
2010):
𝑈𝑚 = −
𝐴
2𝑤1
2(𝐿, 𝑡) +𝐵
4𝑤1
4(𝐿, 𝑡)
(3.33)
e as constantes 𝐴 e 𝐵 são dadas pelas relações (Tang, Yang, Soh, 2012):
𝐴 = 3𝜇0𝑚1𝑚2
2𝜋𝑑0𝐷−5 (3.34)
𝐵 = 15𝜇0𝑚1𝑚2
4𝜋𝑑0
3𝐷−7 (3.35)
𝑚1,2 =
𝐵𝑟
𝜇0𝑉𝑚 (3.36)
Substituindo a equação (3.2) em (3.33), a energia potencial pode ser escrita como:

21
𝑈𝑚 = −
𝐴
2𝜙1
2(𝐿)𝑢12(𝑡) +
𝐵
4𝜙1
4(𝐿)𝑢14(𝑡) (3.37)
Energia potencial total
Somando as equações (3.16), (3.31) e (3.37), obtém-se a energia potencial do
sistema:
𝑈 =
1
2[(𝐸𝑣𝐼𝑣 + 𝐸𝑝𝐼𝑝) Φ1
2,20𝐿 − 𝐴𝜙1
2(𝐿)]𝑢12(𝑡) +
1
4[4𝐺 Φ1
2,40𝐿 + 𝐵𝜙1
4(𝐿)]𝑢14(𝑡)
+1
2𝜗 Φ1
2,10𝐿 𝑢1(𝑡)(𝑡) − 𝐻 Φ1
2,30𝐿 𝑢1
3(𝑡)(𝑡) −1
2𝐶02(𝑡)
(3.38)
3.4. Lagrangeano
Substituindo as equações (3.13) e (3.38) em (3.1) resulta na expressão para o
lagrangeano do sistema:
ℒ =
1
2𝑚𝑡2(𝑡) + [(𝜇𝑣 + 2𝜇𝑝) Φ1
0,10𝐿 + 𝑚𝜙1(𝐿)](𝑡)1(𝑡)
+1
2[(𝜇𝑣 + 2𝜇𝑝) Φ1
0,20𝐿 + 𝑚𝜙1
2(𝐿)]12(𝑡)
−1
2[(𝐸𝑣𝐼𝑣 + 𝐸𝑝𝐼𝑝) Φ1
2,20𝐿 − 𝐴𝜙1
2(𝐿)]𝑢12(𝑡)
−1
4[4𝐺 Φ1
2,40𝐿 + 𝐵𝜙1
4(𝐿)]𝑢14(𝑡) −
1
2𝜗 Φ1
2,10𝐿 𝑢1(𝑡)(𝑡)
+ 𝐻 Φ12,3
0𝐿 𝑢1
3(𝑡)(𝑡) +1
2𝐶02(𝑡)
(3.39)
Definindo as variáveis 𝑢1 e 𝜆 como coordenadas generalizadas, pode-se escrever
as equações de Lagrange para o conversor piezelétrico de energia:
𝑑
𝑑𝑡(
𝜕ℒ
𝜕1) −
𝜕ℒ
𝜕𝑢1= −𝑐𝑓1(𝑡)
𝑑
𝑑𝑡(
𝜕ℒ
𝜕) −
𝜕ℒ
𝜕𝜆= −
(𝑡)
𝑅
(3.40)
Realizando as derivações inerentes ao sistema de equações (3.40), obtém-se:

22
[(𝜇𝑣 + 2𝜇𝑝) Φ10,2
0𝐿 + 𝑚𝜙1
2(𝐿)]1(𝑡) + 𝑐𝑓1(𝑡)
+ [(𝐸𝑣𝐼𝑣 + 𝐸𝑝𝐼𝑝) Φ12,2
0𝐿 − 𝐴𝜙1
2(𝐿)]𝑢1(𝑡)
+ [4𝐺 Φ12,4
0𝐿 + 𝐵𝜙1
4(𝐿)]𝑢13(𝑡) + [
1
2𝜗 Φ1
2,10𝐿 − 𝐻 Φ1
2,30𝐿 𝑢1
2(𝑡)] (𝑡)
= −[(𝜇𝑣 + 2𝜇𝑝) Φ10,1
0𝐿 + 𝑚𝜙1(𝐿)](𝑡)
𝐶0(𝑡) +(𝑡)
𝑅− [
1
2𝜗 Φ1
2,10𝐿 − 𝐻 Φ1
2,30𝐿 𝑢1
2(𝑡)] 1(𝑡) = 0
(3.41)
Dividindo as equações (3.41) pelas constantes que acompanham a derivada de
maior ordem, substituindo (𝑡) = 𝑉(𝑡) e (𝑡) =𝐹
𝑚𝑡sin(𝜔𝑡), omitindo (𝑡) a fim de simplificar
a notação e rearranjando os termos, tem-se:
1 +
𝑐𝑓
𝑚𝑢1 +
[𝑘1 − 𝑘2𝑢12]
𝑚𝑢𝑢1 +
[𝜒1 − 𝜒2𝑢12]
𝑚𝑢𝑉 = −
𝑚𝑟
𝑚𝑢
𝐹
𝑚𝑡sin(𝜔𝑡)
+1
𝐶0𝑅𝑉 −
[𝜒1 − 𝜒2𝑢12]
𝐶01 = 0
(3.42)
onde
𝑚𝑢 = (𝜇𝑣 + 2𝜇𝑝) Φ10,2
0
𝐿+ 𝑚𝜙1
2(𝐿) (3.43)
𝑚𝑟 = (𝜇𝑣 + 2𝜇𝑝) Φ10,1
0𝐿 + 𝑚𝜙1(𝐿) (3.44)
𝑘1 = (𝐸𝑣𝐼𝑣 + 𝐸𝑝𝐼𝑝) Φ12,2
0𝐿 − 𝐴𝜙1
2(𝐿) (3.45)
𝑘2 = 4𝐺 Φ12,4
0𝐿 + 𝐵𝜙1
4(𝐿) (3.46)
𝜒1 =
1
2𝜗 Φ1
2,10𝐿 (3.47)
𝜒2 = 𝐻 Φ12,3
0𝐿 𝑢1
2(𝑡) (3.48)
Devido ao fato das EDM serem de segunda ordem, elas serão reescritas utilizando
a representação em espaço de estados para se transformar as equações (3.41) em um
sistema de EDO de primeira ordem. As variáveis de estado são definidas como:
𝑢1(𝑡) = 𝑞1, 1(𝑡) = 𝑞2, 𝑉(𝑡) = 𝑞3 (3.49)

23
Substituindo as relações (3.43) a (3.38) em (3.42), chega-se à representação em
espaço de estados para o conversor piezelétrico:
1 = 𝑞2
2 = −𝑐𝑓
𝑚𝑢𝑞2 −
[𝑘1 − 𝑘2𝑞12]
𝑚𝑢𝑞1 −
[𝜒1 − 𝜒2𝑞12]
𝑚𝑢𝑞3 −
𝑚𝑟
𝑚𝑢
𝐹
𝑚𝑡sin(𝜔𝑡)
3 = −1
𝐶0𝑅𝑞3 +
[𝜒1 − 𝜒2𝑞12]
𝐶0𝑞2
(3.50)
As equações (3.42) são as EDM não lineares para o conversor piezelétrico de
energia. Se desconsiderarmos os termos não lineares, representados por 𝑘2 e 𝜒2 obtém-
se o modelo linear difundido na literatura.
1 +
𝑐𝑓
𝑚𝑢1 +
𝑘1
𝑚𝑢𝑢1 +
𝜒1
𝑚𝑢𝑉 = −
𝑚𝑟
𝑚𝑢
𝐹
𝑚𝑡sin(𝜔𝑡)
+1
𝐶0𝑅𝑉 −
𝜒1
𝐶01 = 0
(3.51)
3.5. Potência
A potência elétrica gerada pela conversão de energia através do efeito piezelétrico
é calculada utilizando os valores de tensão encontrados quando se resolve o sistema de
equações dados por (3.50), e suja expressão é dada por:
𝒫 =
𝑉2
𝑅=
𝑞32
𝑅 (3.52)
3.6. Análise Modal
A função 𝜙1 que representa a forma modal do primeiro modo de vibrar é obtida a
partir da solução clássica do modelo de vibração para viga Euler-Bernoulli, e é dada por
(Rao, 2009):

24
𝜙𝑖(𝑥) = 𝐶𝑖 [cos (𝛼𝑖
𝐿𝑥) − cosh (
𝛼𝑖
𝐿𝑥) + 𝛾𝑖 (sin (
𝛼𝑖
𝐿𝑥) − sinh (
𝛼𝑖
𝐿𝑥))]
𝛾𝑖 =
sin(𝛼𝑖) − sinh(𝛼𝑖) + 𝛼𝑖𝑚
(𝜇𝑣 + 2𝜇𝑝)𝐿(cos(𝛼𝑖) − cosh(𝛼𝑖))
cos(𝛼𝑖) + cosh(𝛼𝑖) − 𝛼𝑖𝑚
(𝜇𝑣 + 2𝜇𝑝)𝐿(sin(𝛼𝑖) − sinh(𝛼𝑖))
(3.53)
Os auto valores, 𝛼𝑖, do sistema são obtidos a partir da solução da equação
característica do problema, que é obtida quando se impõe as condições de contorno de
engaste em uma extremidade da viga, e massa concentrada na extremidade livre. A
equação característica e transcendental é dada por:
1 + cos(𝛼) cosh(𝛼) + 𝛼𝑚
(𝜇𝑣 + 2𝜇𝑝)𝐿(cos(𝛼) sinh(𝛼) − sin(𝛼) cosh(𝛼))
− 𝛼3𝐼𝑡
(𝜇𝑣 + 2𝜇𝑝)𝐿3(cosh(𝛼) sin(𝛼) + sinh(𝛼) cos(𝛼))
+ 𝛼4𝑚𝐼𝑡
(𝜇𝑣 + 2𝜇𝑝)2
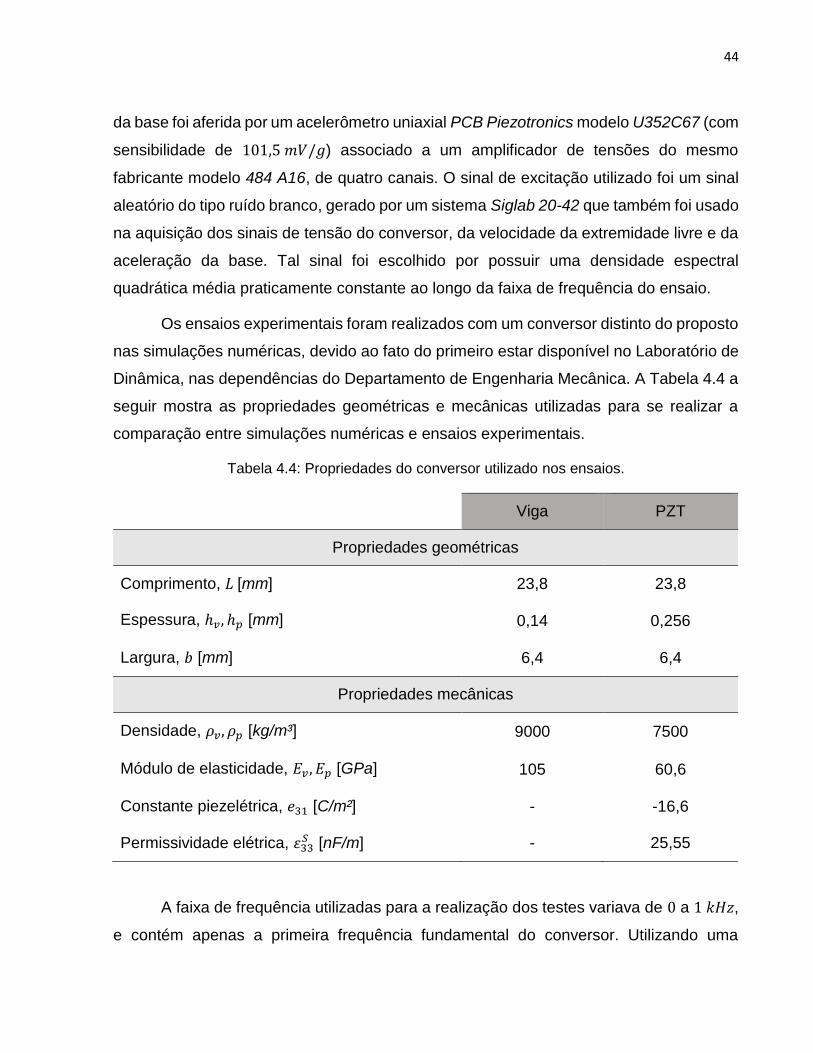
𝐿4(1 − cos(𝛼) cosh(𝛼)) = 0
(3.54)
A frequência natural do sistema é então escrita como:
𝜔𝑖
2 = 𝛼𝑖4
(𝐸𝑣𝐼𝑣 + 𝐸𝑝𝐼𝑝)
(𝜇𝑣 + 2𝜇𝑝) (3.55)

25
4. Resultados
A seguir serão mostrados os resultados obtidos durante as simulações numéricas
e os ensaios experimentais do dispositivo gerador, contemplando uma análise dinâmica
de seu comportamento no domínio do tempo e na frequência.
4.1. Simulações Numéricas
Devido à popularização de técnicas de geração de energia através do
aproveitamento de vibração estrutural, algumas empresas passaram a produzir os
conversores e comercializá-los; tais conversores são compactos e permitem o ajuste de
sua frequência natural apenas adicionando uma massa em sua extremidade livre. Para
a realização das simulações numéricas, foi utilizado as dimensões do modelo Volture
V22B da empresa Midé®. A Figura 4.1 mostra as dimensões do conversor em polegadas.
Figura 4.1: Modelo Volture V22B da Midé® Technology
As propriedades mecânicas, tanto do substrato utilizado no conversor, como do
material piezelétrico, não são disponibilizadas no website da empresa. Tais propriedades
foram obtidas de artigos publicados relacionados (Olympio; Donahue; Wickenheiser,
2014 e Stanton et al, 2010b). As propriedades da viga cantilever são mostradas abaixo.

26
Tabela 4.1: Propriedades da viga cantilever.
Propriedades geométricas
Comprimento, 𝐿 [mm] 25,4
Espessura, ℎ𝑣 [mm] 0,625
Largura, 𝑏 [mm] 6,1
Propriedades físicas
Densidade, 𝜌𝑣 [kg/m³] 8740
Módulo de Elasticidade, 𝐸𝑣 [GPa] 102
Para o material piezelétrico, têm-se as seguintes propriedades:
Tabela 4.2: Propriedades do material piezelétrico.
Propriedades geométricas
Comprimento, 𝐿 [mm] 25,4
Espessura, ℎ𝑝 [mm] 0,05
Largura, 𝑏 [mm] 6,1
Propriedades físicas
Densidade, 𝜌𝑝 [kg/m³] 7800
Módulo de Elasticidade, 𝐸𝑝 [GPa] 66
Rigidez não linear, 𝑐1111 [GPa] -3,6673x108
Constante piezelétrica, 𝑒31 [C/m²] -12,54
Constante piezelétrica não linear, 𝑒3111 [C/m²] 1,7217x108
Permissividade, 𝜀33𝑆 [F/m] 830𝜀0
Permissividade no vácuo, 𝜀0 [F/m] 8,85x1012
27
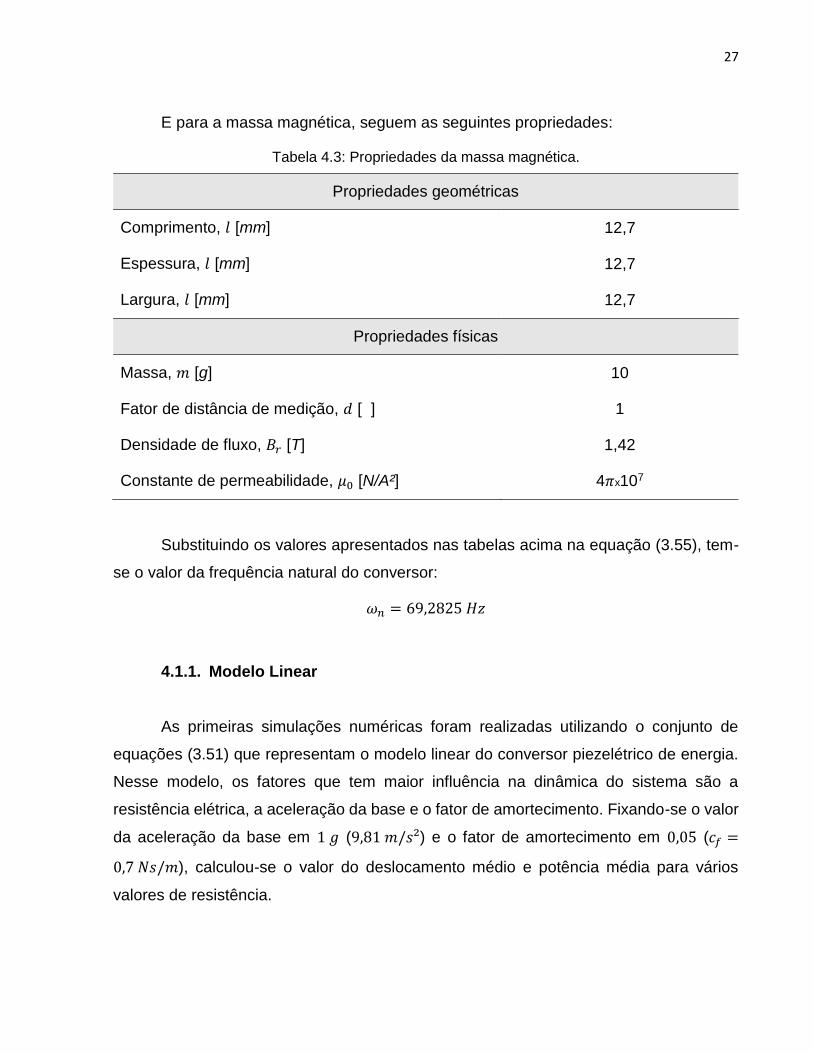
E para a massa magnética, seguem as seguintes propriedades:
Tabela 4.3: Propriedades da massa magnética.
Propriedades geométricas
Comprimento, 𝑙 [mm] 12,7
Espessura, 𝑙 [mm] 12,7
Largura, 𝑙 [mm] 12,7
Propriedades físicas
Massa, 𝑚 [g] 10
Fator de distância de medição, 𝑑 [ ] 1
Densidade de fluxo, 𝐵𝑟 [T] 1,42
Constante de permeabilidade, 𝜇0 [N/A²] 4𝜋x107
Substituindo os valores apresentados nas tabelas acima na equação (3.55), tem-
se o valor da frequência natural do conversor:
𝜔𝑛 = 69,2825 𝐻𝑧
4.1.1. Modelo Linear
As primeiras simulações numéricas foram realizadas utilizando o conjunto de
equações (3.51) que representam o modelo linear do conversor piezelétrico de energia.
Nesse modelo, os fatores que tem maior influência na dinâmica do sistema são a
resistência elétrica, a aceleração da base e o fator de amortecimento. Fixando-se o valor
da aceleração da base em 1 𝑔 (9,81 𝑚/𝑠²) e o fator de amortecimento em 0,05 (𝑐𝑓 =
0,7 𝑁𝑠/𝑚), calculou-se o valor do deslocamento médio e potência média para vários
valores de resistência.

28
Figura 4.2: Deslocamento médio para vários valores de resistência.
Figura 4.3: Potência média para vários valores de resistência.
Observa-se nas Figuras 4.2 e 4.3 um mínimo e um máximo para o deslocamento
e potência, respectivamente, em torno de 𝑅 = 200 𝑘Ω; este resistor é encontrado
comercialmente e será adotado em todas as simulações numéricas realizadas pois
otimiza as duas variáveis em análise.
Em seguida, foi analisado a influência do fator de amortecimento. Com a
aceleração da base fixada em 1 𝑔, a resistência fixa em 200 𝑘Ω, variou-se o fator de
amortecimento em três valores distintos:
29
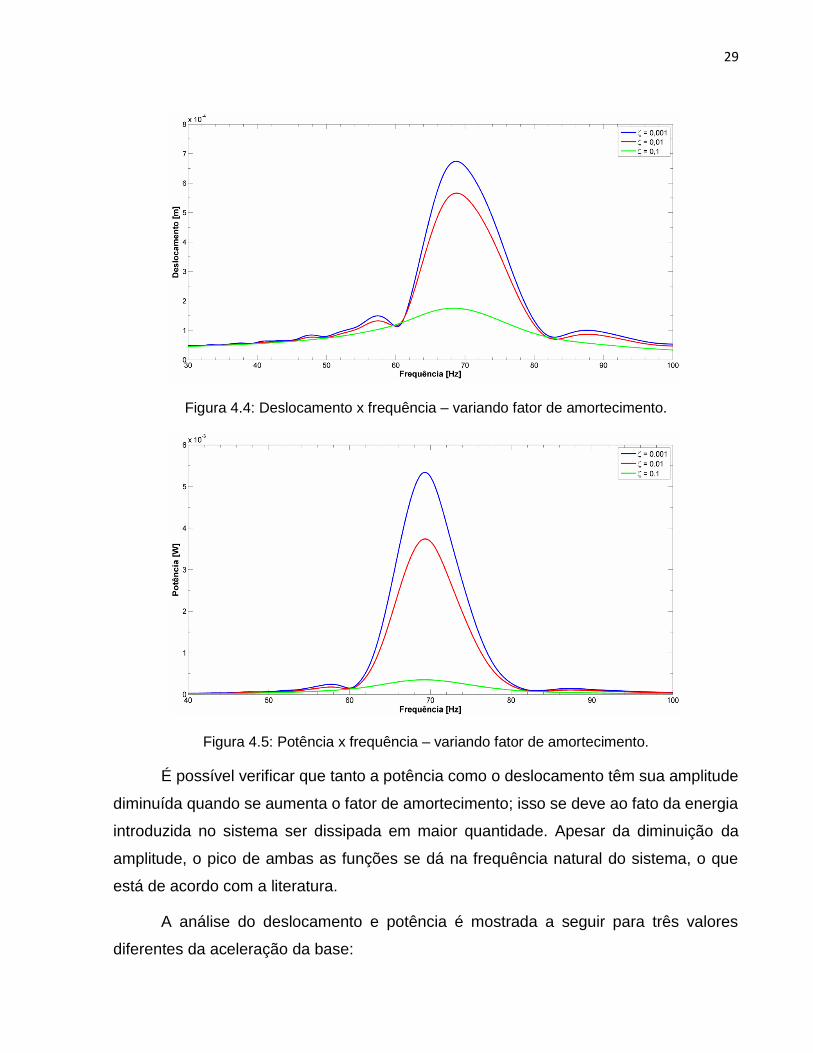
Figura 4.4: Deslocamento x frequência – variando fator de amortecimento.
Figura 4.5: Potência x frequência – variando fator de amortecimento.
É possível verificar que tanto a potência como o deslocamento têm sua amplitude
diminuída quando se aumenta o fator de amortecimento; isso se deve ao fato da energia
introduzida no sistema ser dissipada em maior quantidade. Apesar da diminuição da
amplitude, o pico de ambas as funções se dá na frequência natural do sistema, o que
está de acordo com a literatura.
A análise do deslocamento e potência é mostrada a seguir para três valores
diferentes da aceleração da base:
30
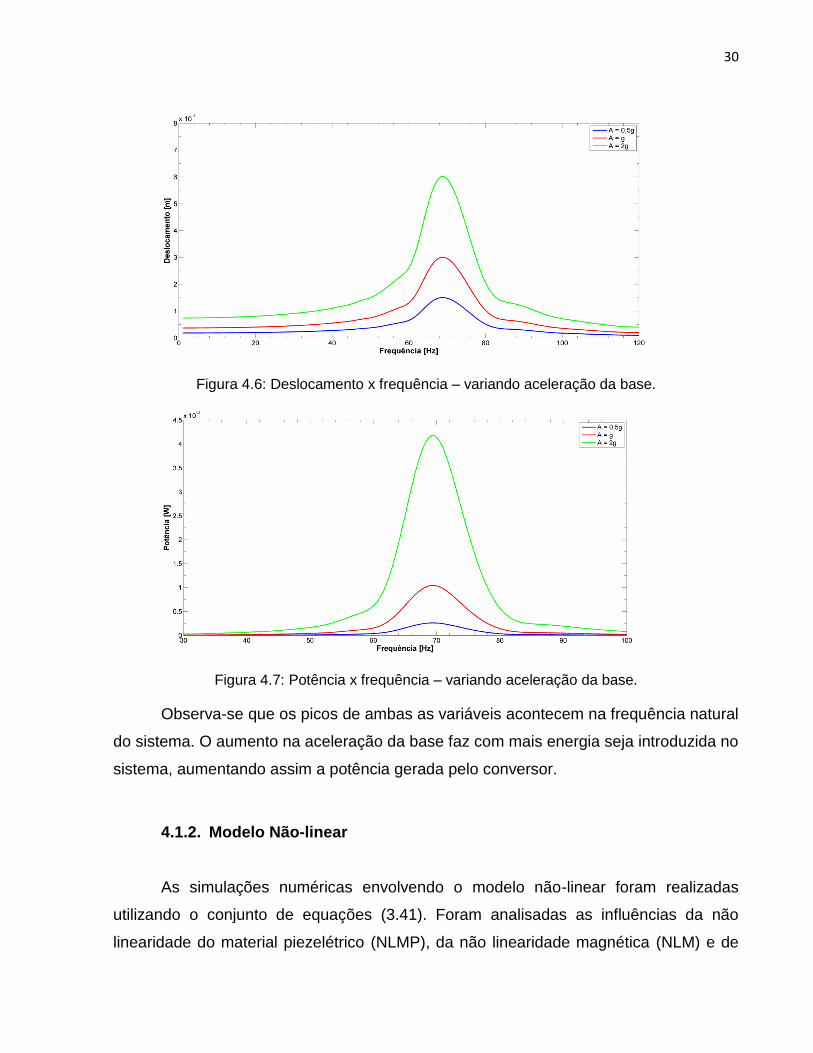
Figura 4.6: Deslocamento x frequência – variando aceleração da base.
Figura 4.7: Potência x frequência – variando aceleração da base.
Observa-se que os picos de ambas as variáveis acontecem na frequência natural
do sistema. O aumento na aceleração da base faz com mais energia seja introduzida no
sistema, aumentando assim a potência gerada pelo conversor.
4.1.2. Modelo Não-linear
As simulações numéricas envolvendo o modelo não-linear foram realizadas
utilizando o conjunto de equações (3.41). Foram analisadas as influências da não
linearidade do material piezelétrico (NLMP), da não linearidade magnética (NLM) e de

31
uma combinação de ambas (NL); foi verificada a influência da aceleração da base em
todos os casos, e nos casos onde a força magnética estava presente verificou-se também
a influência da distância entre os ímãs.
Não linearidade do material
Com o fator de amortecimento fixado em 0,07 e a resistência de carga em 200 𝑘Ω,
foi analisada a influência da aceleração da base na potência gerada pelo conversor. O
resultado é apresentado na Figura 4.8.
Figura 4.8: Potência x frequência – NLMP – variando aceleração da base.
A não linearidade do material apresenta o efeito hardening, onde a curva de
resposta em frequência é tombada para a direita; além disso há um deslocamento da
frequência natural na mesma direção. Verifica-se também que o conversor se torna mais
sensível; um aumento de fator dois é responsável por aumentar a potência em uma
ordem de grandeza.
Não linearidade magnética
Quando se adiciona a não linearidade magnética, pode-se fazer com que a força
entre os ímãs tenha uma natureza atrativa ou repulsiva; a natureza dessa força é
responsável por deslocar a curva para a direita, no caso repulsivo (CR), ou para a
esquerda, no caso atrativo (CA). Para os testes, o fator de amortecimento foi fixado em
0,07 e a resistência de carga em 200 𝑘Ω.
32
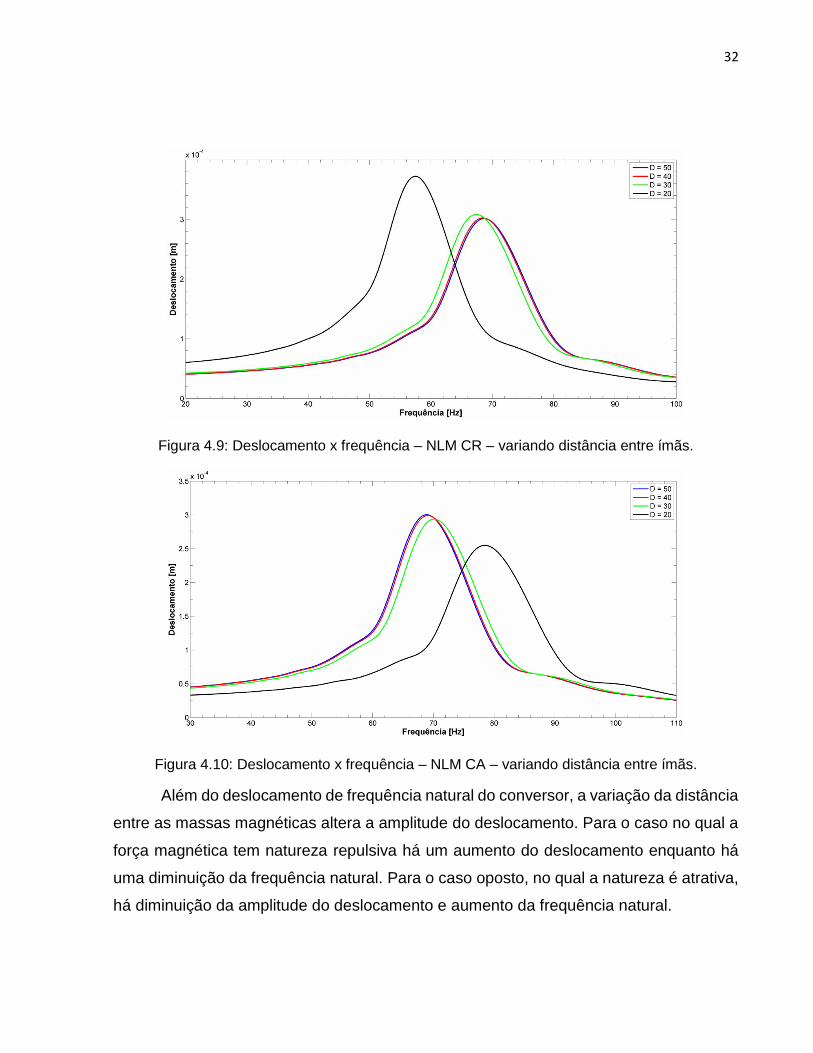
Figura 4.9: Deslocamento x frequência – NLM CR – variando distância entre ímãs.
Figura 4.10: Deslocamento x frequência – NLM CA – variando distância entre ímãs.
Além do deslocamento de frequência natural do conversor, a variação da distância
entre as massas magnéticas altera a amplitude do deslocamento. Para o caso no qual a
força magnética tem natureza repulsiva há um aumento do deslocamento enquanto há
uma diminuição da frequência natural. Para o caso oposto, no qual a natureza é atrativa,
há diminuição da amplitude do deslocamento e aumento da frequência natural.

33
Figura 4.11: Potência x frequência – NLM CR – variando distância entre ímãs.
Figura 4.12: Potência x frequência – NLM CA – variando distância entre ímãs.
O mesmo comportamento apresentado pelo deslocamento pode ser verificado nos
gráficos da potência elétrica gerada pelo conversor. No caso da força repulsiva, a
potência aumenta e a frequência natural diminui com a diminuição da distância entre os
ímãs; no caso da força atrativa, a potência diminui e a frequência natural aumenta. Esse
aumento e diminuição da amplitude se dá ao fato de que ímãs sujeitos a forças atrativas
tenderem a um estado de equilíbrio, enquanto que as forças repulsivas sujeitam os ímãs
a um movimento imprevisível.

34
Figura 4.13: Potência x frequência – NLM CR – variando aceleração da base.
Figura 4.14: Potência x frequência – NLM CA – variando aceleração da base.
Verifica-se, como nos resultados apresentados anteriormente, que o aumento da
aceleração da base é responsável pelo aumento da amplitude da potência gerada pelo
conversor piezelétrico.
Não linearidade do material e magnética
O modelo mais geral para o conversor é aquele que considera tanto a não
linearidade intrínseca ao material e a não linearidade introduzida pela interação entre as

35
massas magnéticas. Primeiramente mostra-se a dinâmica do conversor não linear,
passando de um regime estável para um que apresenta traços de regime caótico. Para
estes testes, a frequência de excitação foi mantida igual à frequência natural do sistema,
o fator de amortecimento foi mantido em 0,05, a resistência de carga em 200 𝑘Ω e a
aceleração da base em 1 𝑔. As Figuras 4.15 e 4.16 mostram o histórico no tempo e o
plano de fase, respectivamente, para D = 20 mm, quando a força magnética tem natureza
atrativa.
Figura 4.15: Histórico no tempo para 𝐷 = 20 𝑚𝑚 – NL CA.
Figura 4.16: Plano de fase para 𝐷 = 20 𝑚𝑚 – NL CA.
36
As figuras mostram um pequeno regime transiente que logo converge para um
regime permanente, mantendo a amplitude do deslocamento constante. Observa-se no
plano de fase que o regime é estável devido às curvas coincidirem e formarem um círculo.
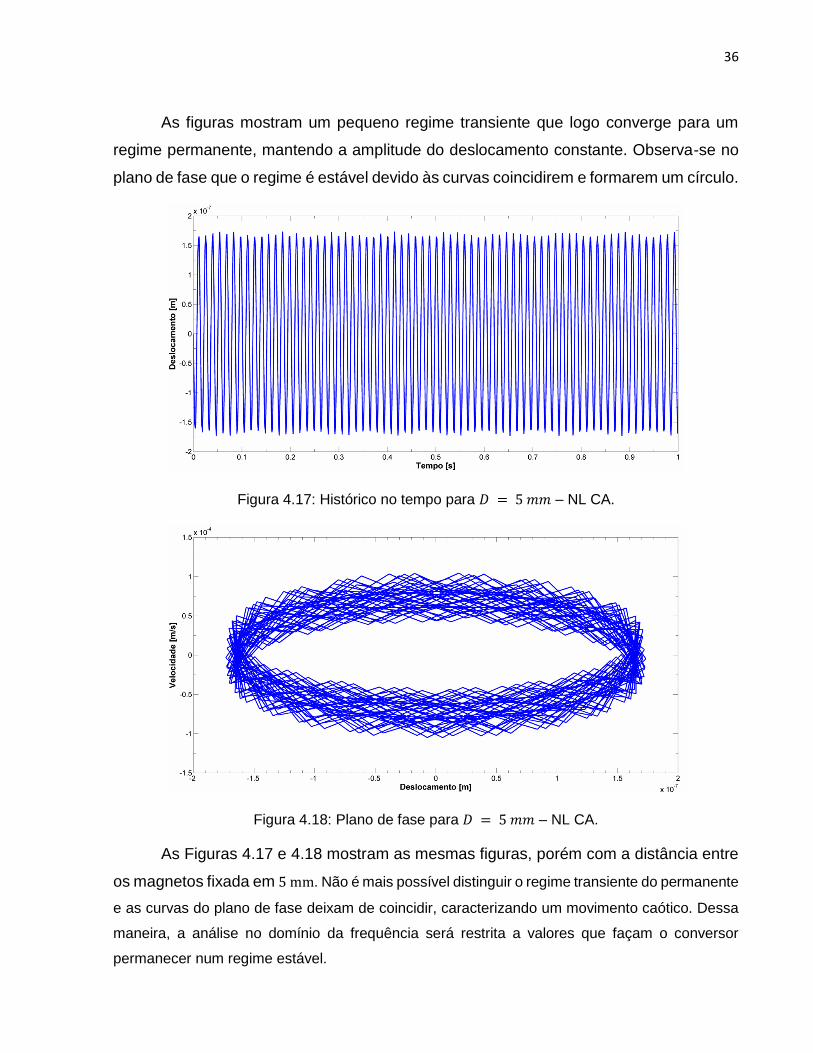
Figura 4.17: Histórico no tempo para 𝐷 = 5 𝑚𝑚 – NL CA.
Figura 4.18: Plano de fase para 𝐷 = 5 𝑚𝑚 – NL CA.
As Figuras 4.17 e 4.18 mostram as mesmas figuras, porém com a distância entre
os magnetos fixada em 5 mm. Não é mais possível distinguir o regime transiente do permanente
e as curvas do plano de fase deixam de coincidir, caracterizando um movimento caótico. Dessa
maneira, a análise no domínio da frequência será restrita a valores que façam o conversor
permanecer num regime estável.
37
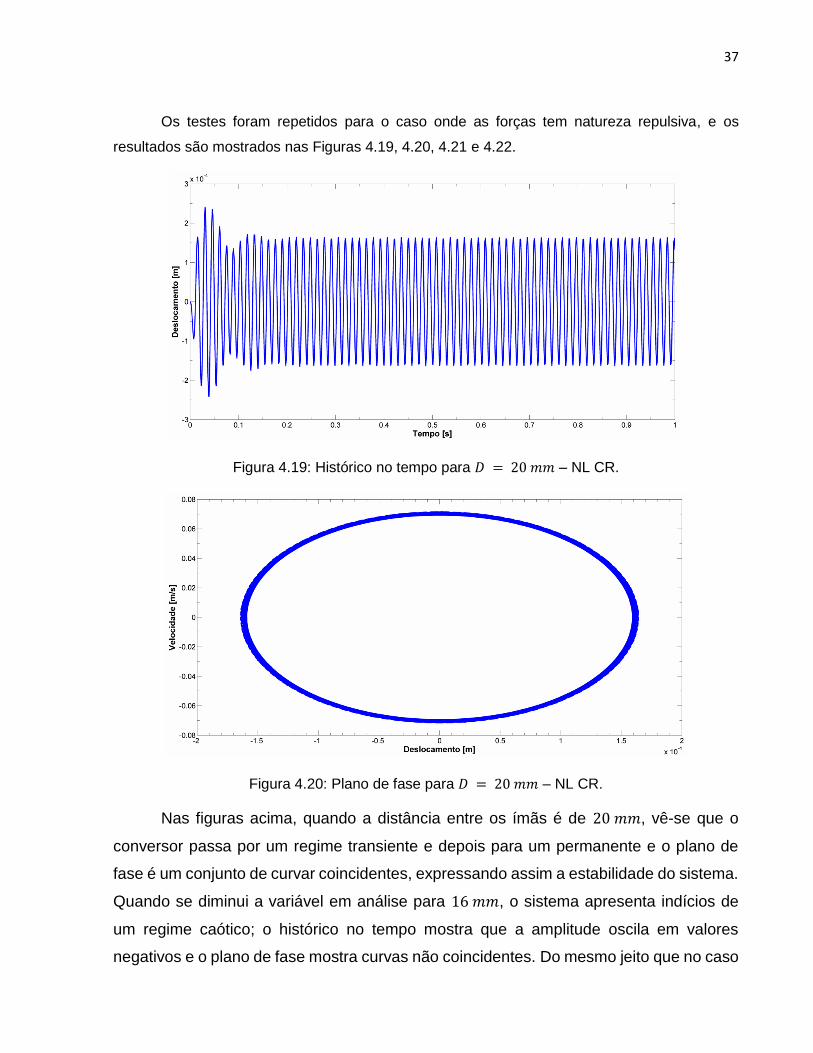
Os testes foram repetidos para o caso onde as forças tem natureza repulsiva, e os
resultados são mostrados nas Figuras 4.19, 4.20, 4.21 e 4.22.
Figura 4.19: Histórico no tempo para 𝐷 = 20 𝑚𝑚 – NL CR.
Figura 4.20: Plano de fase para 𝐷 = 20 𝑚𝑚 – NL CR.
Nas figuras acima, quando a distância entre os ímãs é de 20 𝑚𝑚, vê-se que o
conversor passa por um regime transiente e depois para um permanente e o plano de
fase é um conjunto de curvar coincidentes, expressando assim a estabilidade do sistema.
Quando se diminui a variável em análise para 16 𝑚𝑚, o sistema apresenta indícios de
um regime caótico; o histórico no tempo mostra que a amplitude oscila em valores
negativos e o plano de fase mostra curvas não coincidentes. Do mesmo jeito que no caso

38
das forças atrativas, valores da distância entre os ímãs próximos a 16 𝑚𝑚 não serão
analisados no domínio da frequência.
Figura 4.21: Histórico no tempo para 𝐷 = 16 𝑚𝑚 – NL CR.
Figura 4.22: Plano de fase para 𝐷 = 16 𝑚𝑚 – NL CR.
Para os testes no domínio da frequência com o modelo não linear, foi verificada a
influência tanto da distância entre os ímãs como da aceleração à qual o sistema é sujeito.
A resistência de carga e o fator de amortecimento foram mantidos os mesmos que nos
testes anteriores. Na análise da distância entre os magnetos, a aceleração da base foi
mantida em 1 𝑔; na análise da aceleração da base, a distância entre as massas
magnéticas foi fixada em 25 𝑚𝑚.

39
Figura 4.23: Deslocamento x frequência – NL CR – variando distância entre ímãs.
Figura 4.24: Deslocamento x frequência – NL CA – variando distância entre ímãs.
É possível observar nas Figuras 4.23 e 4.24 que o valor da distância entre os ímãs
não tem grande influência na amplitude do deslocamento; a maior contribuição das não
linearidades é de deslocar a curva no espectro da frequência. Já nas Figuras 4.25 e 4.26
percebe-se o aumento da amplitude do deslocamento bem como a acentuação das
características não lineares do conversor quando se aumenta a aceleração da base.
Como nos casos anteriores, no caso repulsivo há uma diminuição da frequência natural,
enquanto que no caso atrativo há um aumento da frequência natural.

40
Figura 4.25: Deslocamento x frequência – NL CR – variando aceleração da base.
Figura 4.26: Deslocamento x frequência – NL CA – variando aceleração da base.
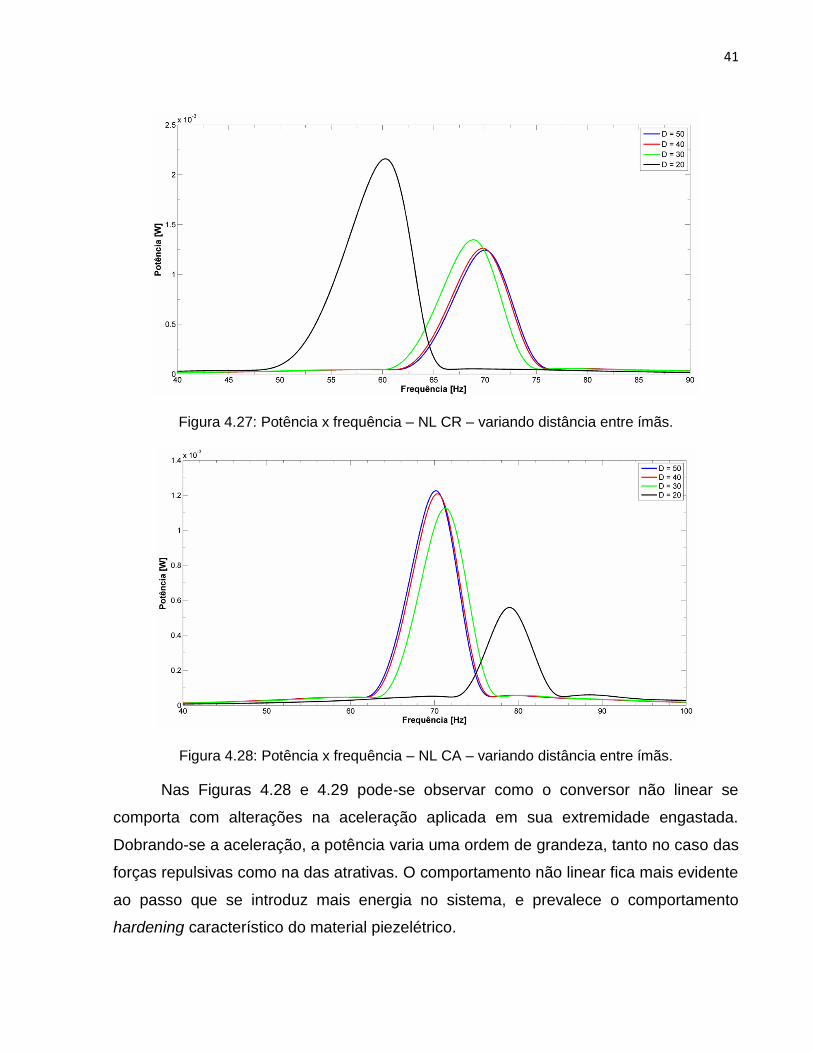
De uma maneira mais acentuada que deslocamento, a potência convertida pelo
gerador piezelétrico de energia tem sua amplitude aumentada, no caso de forças
repulsivas, ou diminuídas, no caso de forças atrativas, quando se diminui a distância entre
as duas massas magnéticas. Além da mudança de amplitude, a frequência natural é
deslocada para a esquerda no caso repulsivo, e para a direita, no atrativo. As Figuras
4.27 e 4.28 mostram os resultados descritos acima.
41
Figura 4.27: Potência x frequência – NL CR – variando distância entre ímãs.
Figura 4.28: Potência x frequência – NL CA – variando distância entre ímãs.
Nas Figuras 4.28 e 4.29 pode-se observar como o conversor não linear se
comporta com alterações na aceleração aplicada em sua extremidade engastada.
Dobrando-se a aceleração, a potência varia uma ordem de grandeza, tanto no caso das
forças repulsivas como na das atrativas. O comportamento não linear fica mais evidente
ao passo que se introduz mais energia no sistema, e prevalece o comportamento
hardening característico do material piezelétrico.

42
Figura 4.29: Potência x frequência – NL CR – variando aceleração da base
Figura 4.30: Potência x frequência – NL CA – variando aceleração da base.
4.2. Ensaios Experimentais
Na tentativa de se validar o modelo para geradores piezelétricos de energia obtido
no Capítulo 3, foram realizados ensaios experimentais para aquisição de dados
referentes à velocidade na ponta livre do conversor, à tensão nos terminais do material
piezelétrico e à potência gerada pelo conversor. Foram realizados testes com o modelo
linear, nas situações com massa na ponta (CM) e sem massa na ponta (SM), para vários
valores da resistência de carga.

43
O aparato utilizado para se realizar os testes constava de um dispositivo de fixação
bipartido, que quando unido permitia que a viga fosse engastada, garantido que o
deslocamento e o giro nesta extremidade da viga fossem sempre nulos. A Figura 4.31
mostra uma ilustração do dispositivo utilizado para se realizar os testes com a viga
cantilever. A Figura 4.32 mostra a montagem real do sistema e os equipamentos usados
nos ensaios.
Figura 4.31: Ilustração do dispositivo de fixação.
Figura 4.32: Aparato experimental.
Quando à instrumentação utilizada nos ensaios, foi usado um excitador
eletromagnético Bruel and Kjaer 4808 associado a um amplificador de potência Hewllet-
Packard 6826A para gerar o sinal de excitação. A velocidade de extremidade livre do
conversor foi medida por um vibrômetro a laser modelo Polytec PDV 100 e a aceleração
Acelerômetro
Laser
Shaker
Resistores
44
da base foi aferida por um acelerômetro uniaxial PCB Piezotronics modelo U352C67 (com
sensibilidade de 101,5 𝑚𝑉/𝑔) associado a um amplificador de tensões do mesmo
fabricante modelo 484 A16, de quatro canais. O sinal de excitação utilizado foi um sinal
aleatório do tipo ruído branco, gerado por um sistema Siglab 20-42 que também foi usado
na aquisição dos sinais de tensão do conversor, da velocidade da extremidade livre e da
aceleração da base. Tal sinal foi escolhido por possuir uma densidade espectral
quadrática média praticamente constante ao longo da faixa de frequência do ensaio.
Os ensaios experimentais foram realizados com um conversor distinto do proposto
nas simulações numéricas, devido ao fato do primeiro estar disponível no Laboratório de
Dinâmica, nas dependências do Departamento de Engenharia Mecânica. A Tabela 4.4 a
seguir mostra as propriedades geométricas e mecânicas utilizadas para se realizar a
comparação entre simulações numéricas e ensaios experimentais.
Tabela 4.4: Propriedades do conversor utilizado nos ensaios.
Viga PZT
Propriedades geométricas
Comprimento, 𝐿 [mm] 23,8 23,8
Espessura, ℎ𝑣, ℎ𝑝 [mm] 0,14 0,256
Largura, 𝑏 [mm] 6,4 6,4
Propriedades mecânicas
Densidade, 𝜌𝑣, 𝜌𝑝 [kg/m³] 9000 7500
Módulo de elasticidade, 𝐸𝑣 , 𝐸𝑝 [GPa] 105 60,6
Constante piezelétrica, 𝑒31 [C/m²] - -16,6
Permissividade elétrica, 𝜀33𝑆 [nF/m] - 25,55
A faixa de frequência utilizadas para a realização dos testes variava de 0 a 1 𝑘𝐻𝑧,
e contém apenas a primeira frequência fundamental do conversor. Utilizando uma

45
resolução de ∆𝑓 = 313 𝑚𝐻𝑧, foram analisados 3201 linhas espectrais no domínio da
frequência.
Foram analisados seis valores diferentes para a resistência de carga, variando de
100 Ω a 1𝑀Ω. O menor desses valores foi utilizado para se simular o comportamento de
curto-circuito, no qual a resistência tende a zero; o maior dos valores foi utilizado na
condição circuito aberto, na qual a resistência tende ao infinito. O valor efetivo das seis
resistências utilizadas foi aferido e são mostrados na tabela a seguir.
Tabela 4.5: Valores de resistência utilizados nos ensaios experimentais.
Valor nominal [kΩ] Valor efetivo [kΩ]
0,1 0,1
1,2 1,2
10 9,98
100 97,6
470 460
1000 1000
4.2.1. Ensaios sem massa na extremidade livre
A seguir serão apresentados os resultados obtidos quando não se inclui a massa
concentrada na extremidade livre do conversor piezelétrico de energia. Todas as funções
de resposta em frequência (FRF) têm como entrada a aceleração da base.
As Figuras 4.33 e 4.34 mostram a FRF da velocidade para vários valores de
resistência e para valores individuais de resistência, respectivamente. Vê-se na figura
4.33 que a medida que a resistência aumenta, o valor da velocidade diminui em um
primeiro momento e depois apresenta um aumento para maiores valores dessa variável;
é possível observar também que a frequência natural do sistema sofre aumento à medida
que o sistema se aproxima da condição de circuito aberto. A Figura 4.34 mostra, em
escala logarítmica, a boa concordância entre as simulações e os experimentos.

46
Figura 4.33: FRF da velocidade para vários valores de resistência SM; escala linear.
Figura 4.34: FRF da velocidade para valores individuais da resistência SM; escala logarítmica.

47
Nas Figuras 4.35 e 4.36 vê-se a FRF da tensão gerada nos terminais do conversor
de energia piezelétrico para todos os valores de resistência de carga testados e para
valores individuais de resistência, respectivamente. Nota-se que a tensão aumenta à
medida que o valor de 𝑅 também aumenta, e novamente o aumento da frequência natural
à medida que o sistema tende à condição de circuito aberto. A escala logarítmica
presente na Figura 4.36 facilita a visualização da concordância entre os dados obtidos
numericamente e os obtidos experimentalmente. A divergência entre simulação e
experimento para as altas frequências se deve ao fato de o modelo viscoso de
amortecimento adotado para a modelagem analítica do conversor ser uma aproximação
do fenômeno que rege a dissipação de energia presente no sistema.
Comportamento semelhante é observado nas Figuras 4.37 e 4.38, que apresenta
as FRF da potência gerada pelo conversor piezelétrico. À medida que a resistência de
carga aumenta, a potência também aumenta, até chegar a um valor máximo e a partir
daí começa a diminuir; tal valor é único para cada configuração do conversor,
dependendo de suas propriedades geométricas e físicas. Como apresentado nos dois
resultados anteriores, no gráfico da FRF da potência também é possível verificar o
aumento do valor da frequência natural à medida que o valor da resistência de carga
tende ao infinito.
Figura 4.35: FRF da tensão para vários valores de resistência SM; escala linear.

48
Figura 4.36: FRF da tensão para valores individuais de resistência SM; escala logarítmica.
Figura 4.37: FRF da potência para vários valores de resistência SM; escala linear.

49
Figura 4.38: FRF da potência para valores individuais de resistência SM; escala logarítmica.
4.2.2. Ensaios com massa na extremidade livre
Nesta seção são mostrados os resultados dos ensaios experimentais quando se
inclui uma massa concentrada na extremidade da viga cantilever, como no modelo
derivado no capítulo anterior. A massa utilizada foi um cubo com lado 𝑙 = 3,2 𝑚𝑚,
massa 𝑚 = 0,2 𝑔 e momento de inércia 𝐼𝑡 = 1,28 𝑥 10−9 𝑘𝑔𝑚². Os mesmos valores de
resistência utilizados no caso sem massa foram utilizados para este caso.
As Figuras 4.39 e 4.40 mostram as curvas da FRF para a velocidade da
extremidade livre do conversor. Como no caso sem massa, ocorre primeiramente uma
diminuição da magnitude da velocidade até chegar a um mínimo e posteriormente um
aumento de sua magnitude; verifica-se também o aumento da frequência natural à
medida em que a resistência de carga tem seu valor aumentado. A Figura 4.40 evidencia
que há boa concordância entre os resultados obtidos nas simulações numéricas e o os
obtidos nos ensaios experimentais.

50
Figura 4.39: FRF da velocidade para vários valores de resistência CM; escala linear.
Figura 4.40: FRF da velocidade para valores individuais de resistência CM; escala logarítmica.
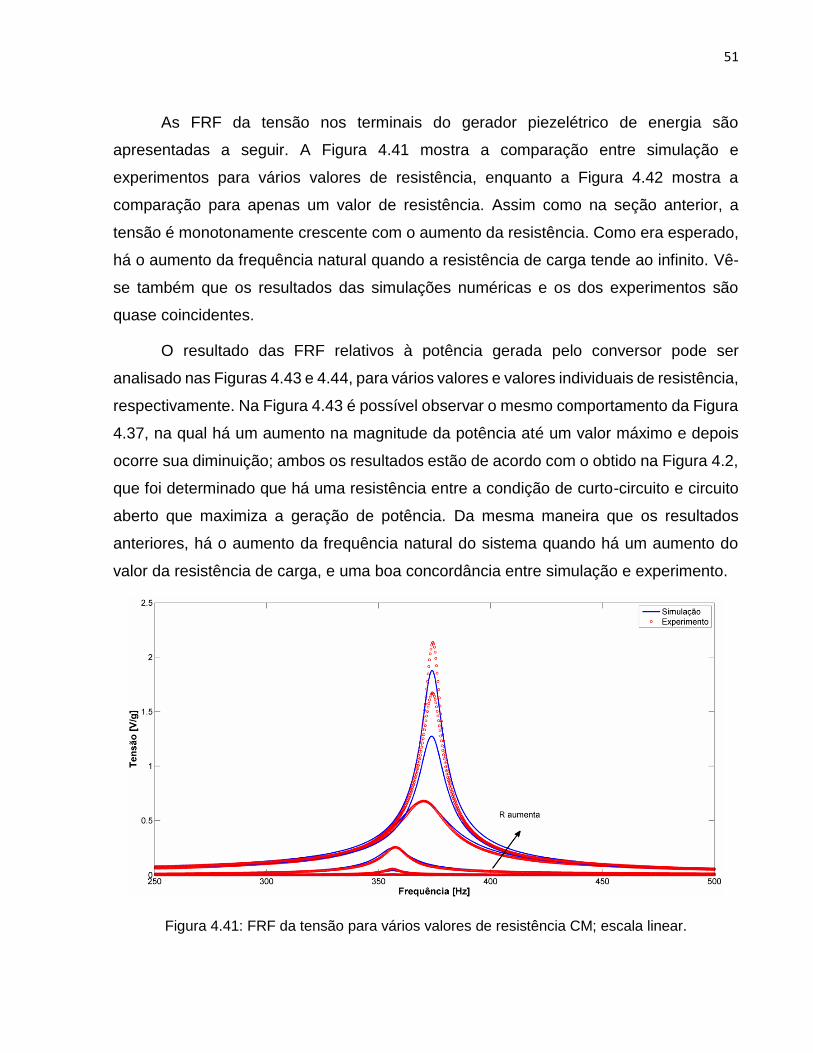
51
As FRF da tensão nos terminais do gerador piezelétrico de energia são
apresentadas a seguir. A Figura 4.41 mostra a comparação entre simulação e
experimentos para vários valores de resistência, enquanto a Figura 4.42 mostra a
comparação para apenas um valor de resistência. Assim como na seção anterior, a
tensão é monotonamente crescente com o aumento da resistência. Como era esperado,
há o aumento da frequência natural quando a resistência de carga tende ao infinito. Vê-
se também que os resultados das simulações numéricas e os dos experimentos são
quase coincidentes.
O resultado das FRF relativos à potência gerada pelo conversor pode ser
analisado nas Figuras 4.43 e 4.44, para vários valores e valores individuais de resistência,
respectivamente. Na Figura 4.43 é possível observar o mesmo comportamento da Figura
4.37, na qual há um aumento na magnitude da potência até um valor máximo e depois
ocorre sua diminuição; ambos os resultados estão de acordo com o obtido na Figura 4.2,
que foi determinado que há uma resistência entre a condição de curto-circuito e circuito
aberto que maximiza a geração de potência. Da mesma maneira que os resultados
anteriores, há o aumento da frequência natural do sistema quando há um aumento do
valor da resistência de carga, e uma boa concordância entre simulação e experimento.
Figura 4.41: FRF da tensão para vários valores de resistência CM; escala linear.

52
Figura 4.42: FRF da tensão para valores individuais de resistência CM; escala logarítmica.
Figura 4.43: FRF da potência para vários valores de resistência CM; escala linear.
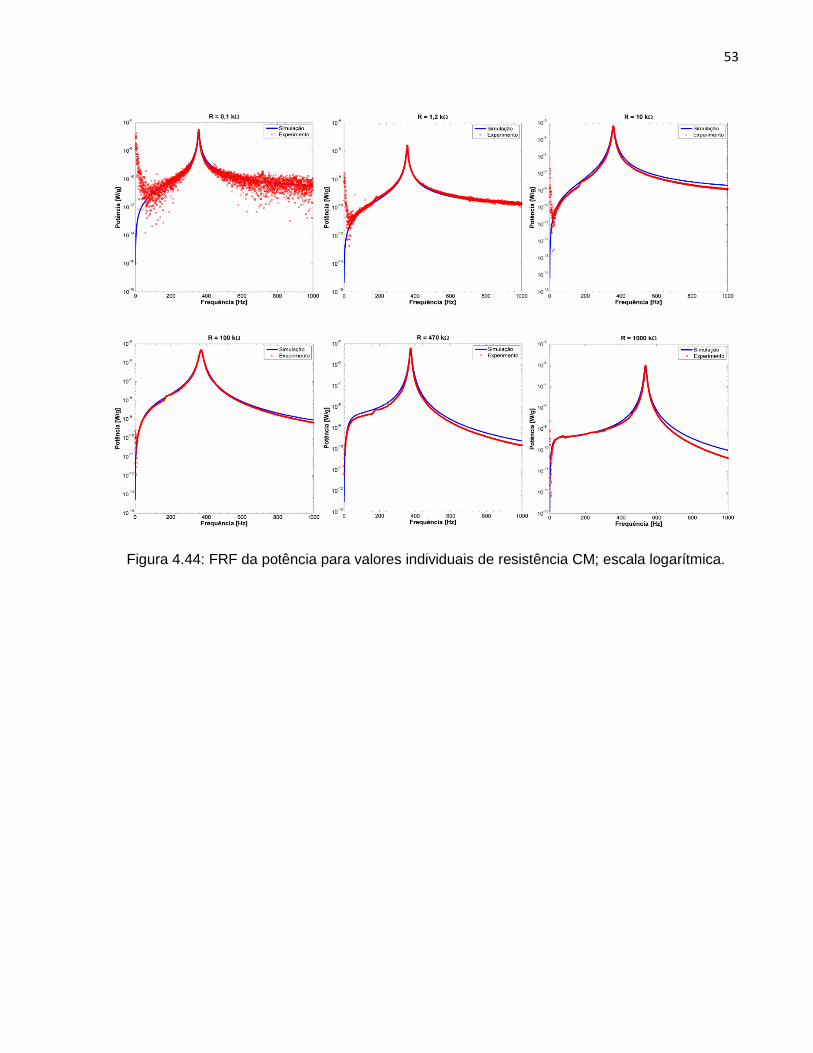
53
Figura 4.44: FRF da potência para valores individuais de resistência CM; escala logarítmica.

54
5. Conclusão
No presente trabalho foi derivado o modelo não linear de um gerador piezelétrico
de energia que converte a energia cinética presente em sinais de vibração estrutural em
energia elétrica útil. O sistema consistia de uma viga engastada em uma ponta, recoberta
totalmente por material piezelétrico em ambas as superfícies, com uma massa magnética
na extremidade livre e uma outra massa magnética, estacionária. Os termos não lineares
do modelo surgiram ao se considerar a não linearidade inerente ao material piezelétrico
e a interação magnética entre os ímãs.
Algumas simulações numéricas desconsiderando os termos não lineares foram
realizadas a fim de se observar o comportamento do dispositivo. Foi determinado que
existe um valor ótimo para o conversor de energia, que no caso estudado encontra-se
em torno de 200 𝑘Ω; este valor de resistência minimiza o deslocamento e maximiza a
potência gerada. Verificou-se também a influência do fator de amortecimento e da
aceleração da base no deslocamento e potência gerada; quanto maior o fator de
amortecimento, mais energia é dissipada e há menos energia para ser convertida em
energia elétrica, fazendo com que tanto o deslocamento como a potência sejam menores;
quanto maior a aceleração da base, maior é o deslocamento e há mais energia para ser
convertida. Em todos os resultados, o pico de deslocamento e potência se dão no valor
da frequência natural do sistema, corroborando com os resultados presentes na literatura.
As simulações com o modelo não linear foram divididas em três partes, nas quais
foram consideradas a não linearidade do material, a não linearidade magnética e uma
combinação de ambas. Nos três casos foram verificadas a influência da aceleração da
base, e, nos casos onde a força magnética estava presente, foi analisado a distância
entre os ímãs. Quando apenas a não linearidade do material é considerada, vê-se um
tombamento da curva de potência para a direita bem como um aumento na frequência
natural do sistema, caracterizando uma não linearidade do tipo hardening. Quando a não
linearidade magnética é observada, os cenários onde as forças têm natureza repulsivas
e atrativa devem ser analisados; com forças repulsivas, a amplitude do deslocamento e
potência gerada aumentam e a frequência natural do sistema diminuía à medida que há
55
diminuição da distância entre os ímãs; o oposto, diminuição da amplitude e aumento da
frequência natural, é observado quando a força tem natureza atrativa; isso se deve ao
fato de que ímãs sujeitos a forças de atração tendem a uma posição de equilíbrio,
enquanto que são sujeitos a forças de repulsão, o movimento é imprevisível, aumentando
assim o deslocamento da viga e a potência gerada. No caso mais geral, quando as duas
fontes de não linearidade são consideradas, as curvas de resposta em frequência
mantêm o comportamento hardening do material, com frequência natural menor e
amplitude maior no caso de forças repulsivas, ou com frequência natural maior e
amplitude menor no caso de forças atrativas; com o aumento da aceleração da base,
mais energia é introduzida no sistema e o comportamento não linear fica mais evidente.
Em todos os casos, é possível observar o aumento da faixa útil de frequência nas quais
o dispositivo consegue gerar uma quantidade razoável de energia.
Dessa maneira, a introdução de não linearidades no sistema é uma solução
elegante para o design de conversores de energia que utilizam sinais de vibração
estrutural como fonte excitação, pois podem ser utilizadas para realizar um ajuste na
frequência, aumentar a amplitude da potência gerada e ampliar a banda de frequências
úteis do dispositivo.
Além dos resultados numéricos, apresentou-se o resultado de ensaios
experimentais. O gerador ensaiado difere do conversor proposto apenas em relação ao
valor das propriedades geométricas e físicas. Em ambas as situações ensaiadas, sem e
com massa na extremidade livre, os resultados corroboraram o comportamento
apresentado nas simulações e foi possível verificar que há uma grande concordância
entre o modelo proposto e o sistema físico real, validando assim o modelo desenvolvido
ao longo do Capítulo 3.

56
REFERÊNCIAS BIBLIOGRÁFICAS
Anderson, B., Wickenheiser, A., 2012. Performance Analysis of Frequency Up-conversion
Energy Harvesters for Human Locomotion. Active and Passive Smart Structures and
Intelligent Systems, Vol. 8341.
Anton, S., Sodano, H., 2007. A Review of Power Harvesting Using Piezoelectric Materials
(2003-2006), Smart Materials and Structures, Vol. 16, pp. 1-21.
Barton, D. A., Burrow, S. G., Clare, L. R., 2010. Energy harvesting from vibrations with a
nonlinear oscillator. Journal of Vibration and Acoustics.
Blystad, L. C., Halvorsen, E., Husa, S., 2010. Piezoelectric MEMS energy harvesting
systems driven by harmonic and random vibrations. IEEE Transactions on Ultrasonics,
Ferroelectrics and Frequency Control, pp 908-919.
Cartmell, M. Introduction to linear, parametric and nonlinear vibration. Chapman and Hall,
London, 1990.
Chen, S. N., Wang, G. J., Chien, M. C., 2006. Analytical modeling of piezoelectric
vibration-induced micro power generator. Mechatronics, pp 379-387.
Cornwell, P.J., Goethal, J., Kowko, J., Damianakis, M., 2005. Enhancing power harvesting
using a tuned auxiliary structure. Journal of Intelligent Material Systems and Structures,
pp 825–834.
Cottone, F., Vocca, H., Gammaitoni, L., 2009. Nonlinear Energy Harvesting. Physical
Review Letters.
Cottone, F., et al., 2012. Piezoelectric Buckled Beams for Random Vibration Energy
Harvesting. Smart Materials and Structures, Vol. 21.
Daqaq, M. F., Stabler, C., Qaroush, Y.,Seuaciuc-Osório, T., “Investigation of Power
Harvesting via Parametric Excitations”, Journal of Intelligent Material Systems and
Structures,v. 20, p. 545 -557, 2009.
Daqaq, M. F., 2010, Response of Uni-Modal Duffing-Type Harvesters to Random Forced
Excitations. Journal of Sound and Vibration.

57
Daqaq, M. F., Masana, R., Erturk, A., Quinn, D. D., 2014. On the Role of Nonlinearities
Vibratory Energy Harvesting: A Critical Review and Discussion. Applied Mechanics
Review, Vol. 66.
Dutoit, N. E., Wardle, B. L., Kim, S. G., 2005. Design considerations for MEMS-scale
piezoelectric mechanical vibration energy harvesters. Integrated Ferroelectrics , pp 121-
160.
Erturk, A. and Inman, D.J.,2008a, “On Mechanical Modeling of Cantilevered Piezoelectric
Vibration Energy Harvesters”, Journal of Intelligent Material Systems and Structures, Vol.
16, pp. 1311-1325.
Erturk, A. and Inman, D.J., 2008b, Issues in Mathematical Modeling of Piezoelectric
Energy Harvesters, Smart Materials and Structures, Vol. 17, pp. 1-14.
Erturk, A. and Inman, D.J., 2008c, A Distributed Parameter Electromechanical Model for
Cantilevered Piezoelectric Energy Harvesters, ASME Journal of Vibration and Acoustics,
130, pp. 041002-1-15.
Erturk, A., Hoffmann, J., Inman, D. J., 2009a, A piezomagnetoelastic structure for
broadband vibration energy harvesting, Applied Physics Letters, Vol. 94, p. 1-3.
Erturk, A., Inman, D.J., 2001. Broadband Piezoelectric Power Generation on High-energy
Orbits of the Bistable Duffing Oscillator with Electromechanical Coupling. Journal of
Sound and Vibration, v.330, p.2339–2353.
Goldfarb, M. and Jones, L.D., 1999. On the Efficiency of Electric Power Generation with
Piezoelectric Ceramic, ASME Journal of Dynamic Systems, Measurement, and Control,
Vol. 121, pp. 566-571.
Goldschmidtboeing, F., Woias, P., 2008. Characterization of different beam shapes for
piezoelectric energy harvesting, Journal of Micromechanics and Microengineering, v.18,
p.1-7.
Harne, R. L., Wang, K. W, 2013. A Review of the Recent Research on Vibration Energy
Harvesting via Bistable Systems. Smart Materials and Structures, Vol 22.

58
Karami, M. A., Inman, D. J., 2009. Nonlinear Hybrid Energy Harvesting Utilizing a Piezo-
Magneto-Elastic Spring.
Karami, M. A., Inman, D. J., 2010, Nonlinear Hybrid Energy Harvesting Utilizing a Piezo-
magneto-elastic Spring, Proceedings of SPIE, p. 1-11.
Kim, M., Hoegen, M., Dugundji, J., Wardle, B., 2010. Modeling and experimental
verification of proof mass effects on vibration energy harvester performance. Smart
Materials and Structures.
Leo, D., 2007, Engineering Analysis of Smart Materials Systems, John Wiley & Sons, NY.
Lin, J-T., Alphenaar, B., 2010. Enhancement of Energy Harvested from a Random
Vibration Source by Magnetic Coupling of a Piezoelectric Cantilever. Journal of Intelligent
Material Systems and Structures, Vol. 21.
Lin, Z. Q., Gea, H. C., Liu, S. T., 2011. Design of piezoelectric energy harvesting devices
subjected to broadband random vibrations by applying topology optimization. Acta
Mechanica Sinica, pp 730-737.
Liu, S-T, Lin, Z-Q, Gea, H. C., 2011. Desing of Piezoelectric Energy Harvesting Devices
Subjected do Broadband Vibrations by Applying Topology Optimization. Acta Mechanica
Sinica, Vol. 27, pp 730-737.
Lu, F., Lee, H. P., LimModeling, S. P., 2004. Modeling and analysis of micro piezoelectric
power generators for micro-electromechanical-systems applications. Smart Materials and
Structures, Vol. 13.
Mann, B. P., Sims, N. D., 2009. Energy Harvesting from the Nonlinear Oscillations of
Magnetic Levitation. Journal of Sound and Vibration, Vol. 319, pp 515-530.
Mann, B. P., Sims, N. D., 2009. On the Performance and Resonant Frequency of
Electromagnetic Induction Energy Harvesters. Journal of Sound and Vibration, Vol. 329,
pp1348-1361.
Mann, B.P., Owens, B.A., 2010. Investigations of a nonlinear energy harvester with a
bistable potential well, Journal of Sound and Vibration, v. 329, p. 1215-1226.

59
Mateu, L., Moll, F., 2005. Review of energy harvesting techniques and applications for
microelectronics. Proc. SPIE 5837, VLSI Circuits and Systems II.
Miller, L. M., Halvorsen, E., Dong, T., Wright, P. K., 2011. Modeling and experimental
verification of low-frequency MEMS energy harvesting from ambient vibrations. Journal of
Micromechanics and Microengineering.
Mineto, A. T., Varoto, P. S., 2011. Geração de Energia Através da Vibração de
Dispositivos Piezelétricos Não Lineares. Qualificação de Doutorado.
Olympio, R. B., Donahue, J., Wickenheiser, A.M., 2014, Theoretical and Experimental
Analysis of Frequency Up-convesion Energy Harvesters Under Human-generated
Vibrations. Proceedings of the ASME Smart Materials, Adaptive Structures and Intelligent
Systems.
Ramlan, R., Brennan, M. J., Mace, B. R., Kovacic, I., 2009. Potencial Benefits of a
Nonlinear Stiffness in an Energy Harvesting Device. Nonlinear Dynamics, Vol.59, pp 545-
558.
Rao, S. S., 2009. Vibrações Mecânicas. 4ª Edição. PEARSON Prentice Hall.
Renaud, M., et al., 2012. Optimum Power and Efficiency of Piezoelectric Vibration Energy
Harvesters with Sinusoidal and Random Vibrations. Journal of Micromechanics and
Microengineering, Vol. 22.
Sodano, H.A. Inman, D.J., 2004. A Review of Power Harvesting from Vibration using
Piezoelectric Materials, The Shock and Vibration Digest, v.36(3), p.197-205.
Stanton, S. C., McGehee, C. C., Mann, B. P., 2009, Reversible Hysteresis for Broadband
Magnetopiezoelastic Energy Harvesting. Applied Physics Letters 95, 2009.
Stanton, S. C., McGehee, C. C., Mann, B. P., 2010, Nonlinear Dynamics for Broadband
Energy Harvesting: Investigations of a Bistable Piezoelectric Inertial Generator. Physica
D, 2010.
Stephen, N., 2006, On Energy Harvesting From Ambient Vibration, Journal of Sound and
Vibration, Vol. 293, pp. 409-425.

60
Tadesse, Y., Zhang, S., Priya, S., 2009. Multimodal energy harvesting system:
piezoelectric and electromagnetic. Journal of Intelligent Material Systems and Structures,
pp 625-632.
Triplett, A., Dane Quinn, D., 2009, The Effect of Non-linear Piezoelectric Coupling on
Vibration based Energy Harvesting, Journal of Intelligent Material Systems and
Structures, v.20, pp.1959-1967.
Umeda, M., Nakamura, K., Ueha, S., 1996, Analysis of Transformation of Mechanical
Impact Energy to Electrical Energy Using a Piezoelectric Vibrator, Japanese Journal of
Applied Physics, v. 35, Part 1, No. 5B, p. 3267-3273.
Umeda, M., Nakamura, K., Ueha, S., “Energy Storage Characteristics of a Piezo-
Generator Using Impact Induced Vibration”, Japanese Journal of Applied Physics, v. 35,
Part 1, No. 5B, p. 3146-3151, 1997.
Wagner, U.V., Hagedorn, P., 2002, Piezo-beam systems subjected to weak electric field:
experiments and modelling of non-linearities”, Journal of Sound and Vibration, v. 256(5),
p. 861-872.
Wickenheiser, A. M., Garcia, E., 2010. Broadband Vibration-based Energy Harvesting
Improvement Through Frequency Up-conversion by Magnetic Excitation. Smart Materials
Structures, Vol. 19.
Wickenheiser, A. M., 2011.Design Optimization of Linear and Nonlinear Cantilevered
Energy Harvesters for Broadband Vibrations. Journal of Intelligent Material Systems and
Structures, Vol. 22.
Yang, J., Wen, Y., Li, P., 2011. Magnetoelctric Energy Harvesting from Vibrations of
Multiple Frequencies. Journal of Intelligent Material Systems and Structures, Vol. 22.
Zhao, S., Erturk, A., 2013. Electroelastic Modeling and Experimental Validations of
Piezoelectric Energy Harvesting from Broadband Random Vibrations of Cantilevered
Bimorphs. Smart Materials and Structures, Vol. 22.
Zhu, G., Lin, Z. H., Jing, Q., Bai, P., Pan, C., Yang, Y., ... Wang, Z. L., 2013. Toward
large-scale energy harvesting by a nanoparticle-enhanced triboelectric nanogenerator.
Nano letters, pp 847-853.