UNIVERSIDADE ESTADUAL DO SUDOESTE DA BAHIA · 2 FOLHA DE APROVAÇÃO ARYEL SILAS SANTOS FERRAZ ......
70
VITÓRIA DA CONQUISTA – BAHIA 2018 UNIVERSIDADE ESTADUAL DO SUDOESTE DA BAHIA DEPARTAMENTO DE CIÊNCIAS EXATAS E TECNOLÓGICAS – DCET CURSO DE LICENCIATURA EM MATEMÁTICA ARYEL SILAS SANTOS FERRAZ MÉTODOS NUMÉRICOS PARA APROXIMAÇÃO DE INTEGRAIS COM APLICAÇÕES
Transcript of UNIVERSIDADE ESTADUAL DO SUDOESTE DA BAHIA · 2 FOLHA DE APROVAÇÃO ARYEL SILAS SANTOS FERRAZ ......

VITÓRIA DA CONQUISTA – BAHIA
2018
0
UNIVERSIDADE ESTADUAL DO SUDOESTE DA BAHIA
DEPARTAMENTO DE CIÊNCIAS EXATAS E TECNOLÓGICAS – DCET
CURSO DE LICENCIATURA EM MATEMÁTICA
ARYEL SILAS SANTOS FERRAZ
MÉTODOS NUMÉRICOS PARA APROXIMAÇÃO
DE INTEGRAIS COM APLICAÇÕES

VITÓRIA DA CONQUISTA – BA
2018
1
ARYEL SILAS SANTOS FERRAZ
MÉTODOS NUMÉRICOS PARA APROXIMAÇÃO
DE INTEGRAIS COM APLICAÇÕES
Trabalho de conclusão de curso
apresentado ao colegiado do curso de
Licenciatura em Matemática da
Universidade Estadual do Sudoeste da
Bahia – UESB / Campus de Vitória da
Conquista - BA, para obtenção do título
de Licenciada em Matemática sob
orientação do Professor Dr. André
Nagamine.

2
FOLHA DE APROVAÇÃO
ARYEL SILAS SANTOS FERRAZ
MÉTODOS NUMÉRICOS PARA APROXIMAÇÃO
DE INTEGRAIS COM APLICAÇÕES
Trabalho de conclusão de curso apresentado como requisito para obtenção do
título de Licenciada em Matemática no curso de Licenciatura em Matemática da
Universidade Estadual do Sudoeste da Bahia – UESB.
Aprovado em de de
Componentes da banca examinadora:
Prof. Dr. André Nagamine
Orientador
Prof. Júlio Cézar dos Reis
Prof. Sérgio da Silva Aguiar

3
Jamais considere seus estudos como
uma obrigação, mas como uma
oportunidade invejável para
aprender a conhecer a influência
libertadora da beleza do reino do
espírito, para seu próprio prazer
pessoal e para proveito da
comunidade à qual seu futuro
trabalho pertencer.
Albert Einstein.

4
Agradecimentos
Agradeço primeiramente a Deus, por me guiar e auxiliar em todas as fases
de minha vida, me protegendo, dando saúde, sabedoria, disposição e paciência
para completar mais essa jornada.
Aos meus pais Marcos e Dalvaci, e minha irmã Kezia, por sempre me apoiar
e cuidar nos momentos difíceis.
Ao meu professor orientador Dr. André Nagamine, que sempre teve paciência
e compressão em todas as reuniões, pelo apoio, por me inspirar e incentivar a
escrever sobre o tema proposto e por estar sempre disponível para me ajudar e
sanar minhas duvidas.
Agradeço também a todos os meus amigos e colegas de graduação que direta
ou indiretamente participaram da minha jornada, sempre me apoiando e me
ajudando a prosseguir.
Agradeço também a todos os professores do curso de licenciatura em
matemática, pois cada um me ajudou de certa forma para chegar neste momento,
mostrando que a matemática é muito mais do que se pode imaginar, e que a
relação entre aluno e professor pode ser muito mais que só profissional.
Por fim agradeço a todos meus familiares, amigos, e a todos que me
ajudaram e sempre estiveram ao meu lado nesses quatro anos de curso, muito
obrigado a todos vocês.

5
Resumo
Neste trabalho é apresentado primeiramente um contexto histórico sobre as
integrais, como se deu a construção da resolução da integral definida inspirada
na soma de Riemann, é abordado também um pouco sobre interpolação
polinomial, um conteúdo base para o principal objetivo do trabalho, que é a
utilização de métodos numéricos na resolução de integrais definidas de funções
que não possuem primitiva, ou seja, que são difíceis de resolverem
analiticamente. Muitas vezes essas integrais são obtidas em experimentos, dessa
forma veremos algumas aplicações onde para resolve-las precisaremos dos
métodos numéricos, como a Regra do Trapézio, Regra ⁄ de Simpson e a
Quadratura Gaussiana, todos os algoritmos feitos em FORTRAN. Também é feita
uma simples comparação dos métodos em questão de eficiente e velocidade nas
resolução de integrais.
Palavras chaves: Integrais Definidas. Métodos Numéricos. Regra do
Trapézio. Regra de ⁄ de Simpson. Quadratura Gaussiana.

6
Sumário
Introdução .................................................................................................................. 7
Capítulo 1 - Aspectos Históricos ................................................................................ 9
Capítulo 2 - Interpolação Numérica ....................................................................... 16
2.1. Considerações Iniciais ........................................................................ 16
2.2. Polinômios de Lagrange ..................................................................... 16
2.3. Erro na Interpolação ........................................................................... 22
Capítulo 3 - Integração Numérica ........................................................................... 26
3.1. Fórmulas de Newton-Cotes ................................................................ 27
3.1.1. Regra do Trapézio ........................................................................... 29
3.1.2. Regra ⁄ de Simpson ..................................................................... 34
3.1.3. Quadratura De Gauss..................................................................... 41
Capítulo 4 - Aplicações de Integração Numérica..................................................... 50
4.1 Área de Uma Superfície de Revolução ............................................... 50
4 . 2. Momentos e Centros de Massa ........................................................... 55
Considerações Finais ............................................................................................... 63
Referências Bibliográficas ........................................................................................ 64
Anexos ...................................................................................................................... 65

7
Introdução
O cálculo integral sem dúvida é uma das ferramentas mais poderosas da
matemática, e ele está intimamente ligado ao cálculo diferencial, com seu
surgimento nos primórdios do desenvolvimento da matemática. Uma das
primeiras aparições do conceito de integral foi através do método de exaustão
criado na Grécia Antiga, desenvolvido por Arquimedes (287 – 212 a.C.) e outros
matemáticos da época. Segundo Boyer sobre o Método de exaustão.
Desenvolveu também o método de exaustão, creditado a Eudoxo, pelo qual
se aproxima a quantidade desejada pelas somas parciais de uma série ou
pelos termos de uma sequência. Obteve aproximações da área de um
círculo comparando-a com as áreas de polígonos regulares inscritos e
circunscritos. (Boyer, 1995).
A motivação pelo tema surgiu com o interesse de analisar os métodos de
integração numérica, para integrais definidas de funções contínuas em que o
resultado, ou não é possível ou extremamente difícil de se obter por meios
analíticos, ao passo que com métodos numéricos é possível estimar esses
resultados. A proposta do tema foi sugerida pelo orientador, cuja ideia é analisar
estes métodos e suas aplicações em outras áreas.
Como objetivo principal, neste trabalho, esta o desenvolvimento de
algoritmos para a resolução de problemas de alguns campos de estudos, que
podem ser resolvidos através dos métodos de integração numérica, mas antes
disto, é necessário abordar alguns tópicos sobre esses métodos.
O trabalho foi organizado em quatro capítulos. O primeiro capítulo
descreve a origem das integrais e o impasse na resolução de algumas integrais
que não podem ser resolvidas analiticamente. O segundo capítulo descreve a
interpolação numérica, pois é um conteúdo base para a integração numérica, onde
utilizaremos os Polinômios de Lagrange. O terceiro capítulo traz a integração
numérica, com as fórmulas de Newton-Cotes, Regra do trapézio, Regra 1/3 de

8
Simpson e a Quadratura Gaussiana, com seus respectivos algoritmos. O capítulo
quatro contará com algumas aplicações que utilizam a integração numérica,
mostrando sua grande importância. Por fim, as considerações finais com algumas
ponderações.

9
Capítulo 1
Aspectos Históricos
Abordando um pouco sobre a historia do cálculo diferencial e integral, nos
deparamos com muitos matemáticos, cada um deles com sua parcela de
contribuição para essa ferramenta bastante utilizada atualmente. Provavelmente
uma das melhores e mais completas técnicas desde a era de ouro da Geometria
Grega, foi com o matemático grego Arquimedes, no século III a.C, onde ele
conseguiu calcular a área sob curvas no plano e o volume de alguns sólidos pelo
método da exaustão, também chamado de Princípio de Eudoxo Arquimedes, que
consiste em utilizar áreas e volumes conhecidos, como, retângulos, discos, cubos,
entre outros, inscrevendo dentro dela uma sequência dessas figuras ou sólidos,
de forma que a soma dessas áreas convergem para o valor da área desejada.
Segundo Boyer:
Para achar áreas e volumes, o versátil Arquimedes usou sua própria
versão primitiva do cálculo integral, que, de alguma maneira, é muito
semelhante, quanto ao espírito, ao cálculo atual. Numa carta a
Eratóstenes, Arquimedes expôs seu “método da alavanca” para descobrir
fórmulas de áreas e volumes. Mas, quando publicava provas para essas
fórmulas, ele utilizava o método de exaustão para se ajustar aos padrões
de rigor da época. (Boyer, 1995).
O método Princípio de Eudoxo é o alicerce de um dos procedimentos
essenciais do cálculo infinitesimal, mas enquanto no cálculo atual se pode
calcular a soma de um número infinito de parcelas, na época antiga, os
matemáticos e sábios nunca avaliaram essa hipótese, dessa forma o método da
exaustão não pode ser considerado como um conceito de limite, pois eles não
possuíam a ideia de infinito, mas ele teve uma grande contribuição para que a
ideia de infinito fosse concretizada futuramente.
Um dos exemplos mais conhecidos do método da exaustão é o cálculo da área

10
Fonte: Elaborado pelo Autor
Figura 0.2
Fonte: Elaborado pelo Autor
Figura 0.1
de um círculo de raio .
A ideia de Arquimedes era aproximar a área de um círculo de raio
utilizando polígonos regulares inscritos no círculo. Dessa forma teremos que a
soma das áreas dos polígonos tendem para o valor “ ” da área do círculo.
Figura 0.0
Fonte: Elaborado pelo Autor
Tome a primeira aproximação de com um polígono regular de 4 lados
inscrito no círculo.
Seja a área do quadrado inscrito no círculo,
considere o triângulo isósceles de base , teremos sua
área como
, logo:
Do mesmo modo seja a área do polígono regular
com 8 lados inscrito no círculo, considere o triângulo
isósceles de base , teremos sua área como
, logo:

11
Fonte: Elaborado pelo Autor
Figura 0.3
Fonte: Elaborado pelo Autor
Figura 0.4
Do mesmo modo seja a área de do polígono
regular, com 16 lados, inscrito no círculo, considere o
triângulo isósceles de base , teremos sua área
como:
, sabendo que
(
) , teremos:
Considerando agora um polígono regular
com 32 lados de área podemos concluir sobre o
triangulo isósceles de base que sua área é dada
por:
, sabendo que
(
) , teremos:
Portanto se continuarmos com este mesmo processo de indução, teremos a
seguinte sequência:
(
)
(
)
(
)
E assim sucessivamente, podemos concluir que a área do círculo vai ser
dada pela seguinte expressão (
) , com tendendo ao infinito.
Usando as nossas ferramentas modernas do cálculo vamos calcular o limite dessa

12
expressão.
(
)
(
) (
)
( )
(
)
(
)
Aplicando a adaptação da regra de L'Hospital para esse tipo de limite
teremos que
( )
(
)
(
)
(
)
Portando , mas como , concluímos que
A partir do Século XVII vários matemáticos da época como, Pierre de
Fermat, René Descartes, Jonh Wallis, entre outros já estavam aplicando os
resultados com expressões que tendiam para o infinito, mas quando falamos de
cálculo diferencial integral é quase impossível não associar a sua criação aos dois
matemáticos Isaac Newton e Gottfried Leibniz. Com interesses parecidos,
Newton e Leibniz estavam estudando sobre os objetos que estão em movimento,
mas cada um observou de uma forma diferente. Newton mais interessado na
velocidade que um objeto apresentava ao cair e Leibniz em diferencial, que para
ele significava a diferença entre dois valores a e b muito próximos de um valor x
variável, mesmo avaliando coisas distintas, eles chegaram ao mesmo resultado,
desse fato que surgiu às acusações em que um tinha plagiado as ideias do outro.
Mas hoje sabemos que o cálculo foi criado com a combinação de suas ideias e
resultados, um teorema que evidencia isso é o Teorema Fundamental do cálculo,
que relaciona integração com derivação.
Agora sabemos que Newton e Leibniz criaram as bases do Cálculo, mas,
apenas com Riemann e Cauchy foi que o conceito de cálculo integral foi bem
formado, com teoremas e resoluções rígidas. Essa teoria foi denominada Integral
de Riemann. Por volta de 1854, após Riemann realizar um estudo bem profundo
sobre a ela, e este nome também serve para diferenciar a Integral de Riemann de

13
Fonte: Elaborado pelo Autor
Figura 1.0
outros estudos de matemáticos da época, como a Integral de Lebesgue. A forma
em que hoje é abordada a integral nos cursos de Cálculo deve se muito a Riemann
e Cauchy.
“O método de Riemann consiste em produzir sucessões refinando a
quantidade de retângulos de forma que, em alguns casos, pode-se descobrir uma
expressão cujo limite é possível calcular” (GUIDORIZZI, 2008)
Para entender sobre a integral de Riemann precisamos falar um pouco sobre
a soma de Riemann, um método muito utilizado para calcular áreas sob curvas,
que consiste em repartir um intervalo qualquer em vários intervalos
menores, que sejam suficientemente pequenos para que a função possa ser
considerada constante neste subintervalo, dessa forma teremos ótima
aproximação da área sob o gráfico de neste pequeno subintervalo, que
poderemos calcular a área aproximada deles por um retângulo, pois consideramos
constante, finalmente ao somar todas as áreas desses subintervalos teremos
a área total aproximada como o valor desta soma.
Guidorizzi (2008) Defini a soma de Riemann da seguinte forma:
“Sejam uma função definida em e P uma partição tal que
uma partição de . Para cada índice
seja um número em escolhido arbitrariamente”

14
Fonte: Elaborado pelo Autor
Figura 1.2
Figura 1.1
Fonte: Elaborado pelo Autor
Figura 1.0.1
Fonte: Elaborado pelo Autor
Tome , pois bem, o número:
∑
Denomina-se soma de Riemann de , relativa a partição e aos números .
Agora podemos definir a Integral de Riemann, que informalmente é o limite
da soma de Riemann em que .
Guidorizzi (2008) define “Sejam uma função em e um número real.
Dizemos que ∑ tende a , quando , onde
representa a amplitude da partição , ou seja o maior dos números , então
escrevemos

15
∑
Se para todo dado, existir que só dependa de mas não
particular escolha dos , tal que
|∑
|
Para toda partição de , com .
Tal número , que quando existe é único, denomina-se integral de Riemann
de em e indica-se por ∫
. Então por definição,
∫
∑
Se ∫
existe, então diremos que é (Segundo Riemann) em
. É comum referirmo-nos a ∫
como de em .”
O cálculo diferencial e integral possui uma vasta gama de aplicações, da
física moderna a economia neoclássica. Atualmente várias disciplinas utilizam o
cálculo, e isso se deve aos muitos matemáticos que desenvolveram esse estudo ao
longo dos tempos, e dessa forma hoje possuímos uma ferramenta poderosa na
resolução de problemas.

16
Capítulo 2
Interpolação Numérica
2.1. CONSIDERAÇÕES INICIAIS
Em muitos casos vamos nos deparar com funções que são muito complicadas
para se obter a integral definida num intervalo fechado , por conta da
dificuldade de obter sua primitiva, que é uma função tal que
para todo pertencente ao domínio de , ou ainda uma situação em que temos
disponível, apenas uma tabela correspondente aos valores de uma função em
determinados pontos (por exemplo, a temperatura ao longo do tempo), mas não
temos a expressão analítica dessa função. Sabendo disso a interpolação fornece
um simples e bom modo de estimar a expressão analítica, para esses dois casos.
“A necessidade de obter um valor mediador que não consta de uma tabela
ocorre comumente. Dados experimentais, tabelas estatísticas e de funções
complexas são exemplos desta situação.” (CAMPOS, 2010)
Interpolar uma função consiste em aproximar essa função por
uma outra função , escolhida entre uma classe de funções definida a
priori e que satisfaça algumas propriedades. A função é usada em
substituição à função . (RUGGIERO, 1996)
2.2. POLINÔMIOS DE LAGRANGE
Neste capítulo veremos como aproximar uma função usando um método
de interpolação polinomial. Considere a função que está definida de ate
, ou seja, em ( ) pontos que são distintos em um certo intervalo ,

17
considere também , dessa forma a interpolação consiste em encontrar
uma função polinomial tal que:
Esta função polinomial construída para aproximar a função é
denominada polinômio interpolador, que é de extrema importância para a
interpolação numérica, pois como diz Franco:
A aproximação de funções por polinômios é uma das ideias mais
antigas da análise numérica, e ainda uma das mais usadas. É bastante
fácil entender por que razão isso acontece. Os polinômios são facilmente
computáveis, suas derivadas e integrais são novamente polinômios, suas
raízes podem ser encontradas com relativa facilidade, etc.’ (FRANCO
2006)
Joseph L. Lagrange, um dos primeiros matemáticos a conseguir demonstrar
o Teorema do Valor Médio foi o criador do polinômio de Lagrange que é uma boa
maneira de se resolver problemas de interpolação polinomial. A ideia dele foi
desenvolver um polinômio de grau cujo gráfico passa por pontos dados.

18
Fonte: Elaborado pelo Autor
Figura 2.0
Vamos considerar, por exemplo, o caso com , para isso admita as
seguintes funções:
Dessa forma o Polinômio de Lagrange linear que passa pelos pontos e
é dado por:
Podemos notar que
Dessa forma teremos que
Portando é o único polinômio linear que passa pelos pontos e
e que interpola nesses pontos, ou seja, tal que:
e
Exemplo 2.0: Vamos determinar o polinômio interpolador de Lagrange que

19
Fonte: Elaborado pelo Autor
Figura 2.2
Figura 2.1
Fonte: Elaborado pelo Autor
passa pelos pontos e .
Teremos então que:
Portanto o polinômio sera:
O gráfico de está plotado na Figura 2.1
Agora devemos generalizar o conceito de interpolação linear, pelo
interpolador de Lagrange, vamos então considerar um polinômio de grau ,
que passe por pontos como na figura 2.2.

20
Teremos então a necessidade de construir uma função para cada
com uma certa propriedade, em que quando e
quando , para satisfazer a condição é
necessário que o numerador de contenha o termo:
E para satisfazer , o denominador do quociente
tem que ser igual ao termo calculado em , dessa forma teremos que:
Este polinômio é chamado de enésimo polinômio de Lagrange. No teorema a
seguir iremos definir o polinômio .
Teorema 2.0: Se são números distintos, e é uma função
cujos valores são dados por esses números, então existe um único polinômio
de grau no máximo
para cada
Esse polinômio é dado por:
∑
Onde para cada
∑
Podemos escrever por quando não houver confusão quanto ao
seu grau.

21
Exemplo 2.1 - a) considerando
e os pontos
, vamos encontrar o polinômio interpolador de Lagrange de segundo grau para
esta função.
Num primeiro momento vamos determinar todos os coeficientes dos
polinômios , obteremos então:
Temos também que ,
,
Desta forma teremos o polinômio interpolador
∑
b) Encontre uma aproximação para com o polinômio interpolador de
Lagrange.

22
Fonte: Elaborado pelo Autor
Figura 2.3
2.3. ERRO NA INTERPOLAÇÃO
Ao observar a letra b do Exemplo 2.1 e a figura 2.3 percebemos que é preciso
encontrar um limitante para o erro envolvido nesta aproximação de por ,
polinômio interpolador, para isso temos o seguinte teorema.
Agora vamos enunciar o Teorema de Rolle generalizado que será utilizado
na demonstração do teorema 2.1.
Teorema de Rolle generalizado: Suponha que seja vezes
diferenciável em .
Se números distintos , então
existe um número em e portanto em com .
A demonstração desse teorema esta fora do intuito desse trabalho, mas ele
pode ser encontrado no livro Analise Numérica (Burden, 2008).
Teorema 2.1: Suponha que sejam números distintos no
intervalo e que . Então, para cada em , existe um
número (geralmente desconhecido) entre { }, e o
{ } e consequentemente em , com
Onde é o polinômio interpolador ∑

23
Demonstração: Se para qualquer , então teremos
que , e ao escolher pertencente a vai fazer com que a
equação
, se torne verdadeira.
Se , defina a função pertencente a como
∏
Como e , segue que . Para ,
teremos
∏
Além disso
∏
Portanto, como e nos números distintos
.
Utilizando agora o Teorema de Rolle podemos garantir a existência de um
número em que , então:
[∏
]
Como sabemos que é um polinômio de grau no máximo , a
derivada, , é identicamente nula. Além disso,*∏
+ é um
polinômio de grau , então temos que
[∏
] *
∏
+

24
[∏
]
∏
Agora podemos substituir os resultados encontrados na equação , ficando
da seguinte forma
∏
Finalmente isolando teremos a fórmula do erro
|∏
|
Essa fórmula é de grande importância, pois como os polinômios de Lagrange
são amplamente utilizados nos métodos numéricos de integração e diferenciação,
ela tem grande serventia na obtenção dos limitantes dos erros desses métodos.
Exemplo 2.2: Utilizando a função
em e os resultados obtidos
no exemplo 2.1, vamos determinar o erro máximo cometido nesta aproximação.
Como por hipótese
, temos
Como o polinômio de Lagrange é de grau dois, ou seja , obteremos a
seguinte fórmula para o erro
| ( )
| | | | ( )
| | |
Para
Vamos encontrar valor máximo de no intervalo
Agora vamos determinar o valor máximo neste intervalo do valor absoluto
do polinômio.

25
(
)
Vamos calcular a derivada de para obter os pontos críticos
Os pontos críticos acontecem em
√
√
√
√
Assim teremos que o erro máximo é
( )
( )
| |
( )
|
√
|
√

26
Capítulo 3
Integração Numérica
Sabemos que para se conseguir uma solução para uma integral definida
∫
devemos encontrar uma fórmula para uma de suas primitivas, e
então calcular , tudo isso com base no teorema fundamental do cálculo.
Mas existe certas funções que são extremamente complicadas de se encontrar sua
primitiva, ou até mesmo não existe uma primitiva em termos de funções
elementares, ou então em casos de experimentos obtidos por análises, onde temos
somente dados e não uma função que expresse esses números. Dessa forma
precisaremos de métodos de aproximação desses valores, obtidos por métodos
numéricos no cálculo de integrais definidas, chamados de Integração Numérica,
que serão apresentados no decorrer deste capítulo.
Um bom exemplo de quando é preciso utilizar métodos numéricos na
obtenção de resultados na integração se dá quando queremos calcular a área de
uma superfície de revolução, Segundo Stewart (2013), “uma superfície de
revolução é formada quando uma curva é girada em torno de uma reta. Essa
superfície é a fronteira lateral de um sólido de revolução”.
Temos que a área da superfície de revolução é dada por
∫ √
Podemos perceber que dependendo da função essa área se torna difícil
de encontrar, pela impossibilidade de se obter uma primitiva.
A integração numérica é uma técnica de aproximação de uma integral
usando métodos numéricos. O cálculo numérico de uma integral é às vezes
chamado de quadratura. Christoph W. Ueberhuber foi uns dos primeiros a usar o
nome quadratura para significar a área da computação numérica que serve para a
aproximação de uma solução de uma integral definida. Existe uma vasta gama de

27
Fonte: Elaborado pelo Autor
Figura 3.0
métodos disponíveis para integração numérica, umas das técnicas mais utilizadas,
também considerada mais completa são as fórmulas de Newton-Cotes, que
também são conhecidas como fórmulas de quadratura numérica.
Os métodos de quadratura abordados neste capítulo serão baseados nos
polinômios interpoladores de Lagrange visto anteriormente no capítulo 2.
3.1. FÓRMULAS DE NEWTON-COTES
As fórmulas de Newton-Cotes são uma família bem útil e direta para os
métodos de Integração Numérica, e são classificadas em abertas e fechadas.
Burden (2008) define fórmulas fechadas de Newton-Cotes da seguinte
forma: “A fórmula fechada de Newton-Cotes de pontos usa nós ,
para em que
. É denominada fechada porque a
extremidades do intervalo fechado são incluídas como nós”. Como na figura
3.0
A fórmula assume a forma
∫
∑
Em que
∫ ∏

28
Fonte: Elaborado pelo Autor
Figura 3.1
Ainda segundo Burden (2008), temos a definição das fórmulas abertas de
Newton-Cotes.
“As fórmulas abertas de Newton Cotes não incluem as extremidades de
como nós. Elas usam os nós , para cada , em que
e Isso implica que ”, então definiremos os extremos por
e , como na figura 3.1
Em uma fórmula aberta, todos os nós usados na aproximação estão contidos
no intervalo aberto . As fórmulas se tornam:
∫
∫
∑
Em que novamente
∫ ∏
Neste trabalho será utilizada somente as fórmulas de Newton-Cotes
fechadas, devido a melhor maneira de interpretação e aplicação de sua fórmula.

29
Figura 3.2
Fonte: Elaborado pelo Autor
3.1.1. REGRA DO TRAPÉZIO
A regra do trapézio é um método muito utilizado para estimar a área abaixo
de uma curva. Sabemos que esta área é calculada através da integração, desse
modo a regra do trapézio fornece uma maneira de estimar integrais. Ela funciona
dividindo a área sob uma curva em vários trapézios, pois sabemos como calcular a
área de um trapézio. Devido à forma como os trapézios seguem a curva, eles dão
uma estimativa do valor da área muito melhor que os retângulos vistos
anteriormente, usados por Riemann.
A figura acima mostra a aproximação pelo método dos trapézios da área sob
a curva da função .
Vejamos como definir a regra do trapézio na aproximação de ∫
,
vamos considerar o intervalo , em que e , tome ,
utilizando o polinômio linear de Lagrange teremos:
Assim pela a interpolação de ,
∫
∫ [
]
∫

30
Sabemos que no intervalo a função não altera de
sinal, pois são raízes, então podemos utilizar o Teorema do Valor Médio
com peso para integrais: Se é uma função contínua em e a integral
de Riemann de existe em e não se altera neste intervalo, então existe
um número tal que:
∫
∫
A demonstração desse teorema é avançada e será omitida, ele esta
demonstrado no livro de Advanced Calculus (Fulks, 1978).
Assim poderemos aplicar o teorema citado na parcela do erro, para nos
fornecer um número tal que
∫
∫
∫
*
+
*
+
[
]
Se tomarmos veremos que e são é raízes dessa equação e ela
pode ser reescrita como cubo perfeito, logo teremos:
[
]

31
Voltando para a equação , podemos reescrevê-la da seguinte forma:
∫
∫ [
]
∫
∫
∫
Resolvendo essas integrais pelo método da substituição
∫
*
+
*
+
Como
∫
Esta é a regra dos trapézios simples, pois, como dito anteriormente aproxima
o valor de ∫
pela a área de um trapézio.
Exemplo 3.0: Calcular ∫ √
pela regra do trapézio simples.
√ √
√ √
∫ √
[√ √ ]
Vale salientar que, como podemos observar o erro da regra do trapézio
contém uma derivada de segunda ordem , assim ela acaba fornecendo um

32
Fonte: Elaborado pelo Autor
Figura 3.3
resultado exato para funções cuja segunda derivada seja nula, assim concluímos
que para qualquer polinômio de grau menor ou igual a um a regra do trapézio é
exata.
Ainda podemos generalizar a ideia da regra do trapézio, basta escolher um
inteiro para subdividir o intervalo , ficando com subdivisões, iremos
aplicar a cada subintervalo a regra do trapézio.
Segundo Burden (2008) “a extensão da regra do trapézio é dada sem
demonstração. Como a regra do trapézio requer somente um intervalo para cada
aplicação, o inteiro pode ser tanto ímpar quanto par”.
Teorema 3.1: Sejam
para todo
. Existe um para qual a regra do trapézio composta para
subintervalos pode ser escrita com seu termo de erro como:
∫
[ ∑ ( )
]
O gráfico da figura 3.3 mostra que para cada subintervalo de ocorre
uma aproximação da curva de por uma função linear. Dessa forma
consideramos a área sob o gráfico da função afim em cada partição, sendo a soma
de todas as áreas desses trapézios calculada como aproximação da área sob o

33
Fonte: Elaborado pelo Autor
O Algoritmo 3.0 – Regra do Trapézio Composta
Fonte: Elaborado pelo Autor
Tabela 3.0
gráfico de em .
Entrada: Intervalo , Número de Subintervalos
Passo 1: Faça
Passo 2: Faça
Passo 3: Faça
Passo 4: Para , Execute os Passos 5 e 6
Passo 5: Faça ( )
Passo 6: Faça
Passo 7:
Saída:
O resultado da Integral de será o valor de
As variáveis , são do tipo reais.
As variáveis são do tipo inteiras.
Vale salientar que no Algoritmo 3.0, se a regra do trapézio passa a ser
simples.
Exemplo 3.1: Aplique o Algoritmo da regra do trapézio na integral
∫
, com . Represente em uma tabela os valores obtidos e
o respectivo erro.
Valor da Integral Erro
02 94,5824203 14,722849675
04 83,5147629 3,655192275
08 80,7708893 0,911318675
16 80,0871735 0,227602875
32 79,9164429 0,056872275
64 79,8737946 0,014223975
128 79,8631287 0,003558075

34
Fonte: Elaborado pelo Autor
Figura 3.4
3.1.2. REGRA ⁄ DE SIMPSON
A Regra ⁄ de Simpson é um método numérico que também é usado para
encontrar ∫
, aproximando o valor dessa integral definida de , mas
diferentemente da regra do trapézio, Simpson usa polinômios quadráticos, ou seja,
arcos parabólicos, que podem apresentar melhores aproximações em relação à
regra do trapézio.
Segundo Burden (2008) “a regra de Simpson resulta da integração em
do segundo polinômio de Lagrange com nós igualmente espaçados e
em que
”. Observe a figura 3.4.
Sabendo disso precisamos somente dos três pontos para deduzir a
fórmula da regra de Simpson simples, assim poderemos calcular ∫
, pela
aproximação de um polinômio interpolador de Lagrange que interpola ,
assim teremos que ∫
∫
, onde é da seguinte forma
Onde .

35
Sabemos que e , pois o intervalo é igualmente
espaçado, dessa forma teremos ∫
∫
∫
∫
Considere
e vamos reescrever o polinômio com essa
nova variável.
( )
( )
( )
( )
(
)(
) (
)
(
)
(
)
Como foi feita a mudança de variável para calcular a integral teremos que
alterar os limites da integração.
Então
∫
∫

36
Dessa forma teremos
∫
∫ ( (
)
)
Agora vamos encontrar a solução para esta integral
∫ ( (
) (
))
* (
) (
) (
) +
[ (
) (
) (
)]
[ (
) (
) (
)]
Então temos que
∫
∫
∫
Mas ainda precisamos encontrar o erro apresentado nessa aproximação que
fizemos, vamos então considerar a que a integral ∫
possui solução
analítica e que seja igual a e então vamos subtrair a solução
aproximada que encontramos
da solução analítica.
Como é analítica podemos expandir em série de Taylor truncada
Podemos também expandir em série de Taylor truncada.

37
Então temos o erro dado por
Logo:
Sabemos que a derivada da primitiva é a própria função pelo Teorema
Fundamental do Cálculo, assim teremos .
Logo teremos
* (
)
+
Agrupando termo a termo essa expressão do erro, obteremos a seguinte
equação:
[
] *
+
*
(
)+

38
*
(
)+
*
(
)+
Podemos ver que o único termo que não se anula é o que possui ,que é
o ultimo termo, dessa forma podemos escrever a equação da seguinte forma:
*
(
)+
O valor de pode ser substituído na fórmula por . (Burden, 2008)
Então a regra de Simpson simples é dada por:
∫
Podemos observar que o termo do erro depende da quarta derivada de ,
dessa forma concluímos que teremos resultados exatos para qualquer integral de
polinômio de grau menor ou igual a 4.
Exemplo 3.2: Calcular ∫
pela regra de Simpson simples
⁄
∫
⁄
[
]

39
Fonte: Elaborado pelo Autor
Figura 3.5
Ainda podemos generalizar a ideia da regra de Simpson, Segundo Burden
(2008) “Para generalizar esse procedimento para uma integral arbitrária
∫
, escolha um inteiro par. Subdivida o intervalo em subintervalos
e aplique a regra de Simpson em cada par consecutivo de subintervalos.”
Teorema 3.2: Sejam
para todo
. Existe um para qual a regra de Simpson composta
para subintervalos pode ser escrita com seu termo de erro como:
∫
[ ∑ ( )
∑ ( )
]
O gráfico da figura 3.5 mostra que para cada subintervalo de ocorre
uma aproximação da curva de por uma função quadrática. Dessa forma
consideramos a área sob o gráfico em cada partição, sendo a soma de todas as
áreas a aproximação da área sob o gráfico de em .

40
Fonte: Elaborado pelo Autor
O Algoritmo 3.1 – Regra de Simpson Composta
Fonte: Elaborado pelo Autor
Tabela 3.1
Entrada: Intervalo , Número de Subintervalos par
Passo 1: Faça
Passo 2: Faça
Passo 3: Faça
Passo 4: Faça
Passo 5: Para , Execute os Passos 6 e 7
Passo 6: Faça
Passo 7: Se i for par, faça
Se não, faça
Passo 8:
Saída:
O resultado da Integral de será o valor de
As variáveis , são do tipo reais.
As variáveis são do tipo inteiras.
Vale salientar que no Algoritmo 3.1, se a regra de Simpson passa a ser
simples.
Exemplo 3.2: Vamos aplicar o Algoritmo da regra de Simpson na integral
∫
, com e representar em uma tabela os valores
obtidos e o respectivo erro.
Valor da Integral Erro
02 04 08 16 32 64 128

41
Fonte: Elaborado pelo Autor
Figura 3.6
3.1.3. QUADRATURA DE GAUSS
Nas seções anteriores vimos dois métodos de quadratura numérica, a regra
do trapézio e a regra de Simpson, que consistem em encontrar um valor
aproximado para uma integral definida ∫
. Obtemos, através da fórmula de
Newton-Cotes fechada, essa aproximação ∫
∫
, onde é
um polinômio de grau que interpola a função nos pontos , para
em que
e é o resto desta integração, e
pudemos notar também que essa aproximação é exata quando for um
polinômio de grau menor ou igual a , ou seja .
Todas as fórmulas de Newton-Cotes usam valores da função em
pontos igualmente espaçados. Essa restrição é conveniente quando as
fórmulas são combinadas para formar as regras compostas [...], mas isso
pode reduzir significativamente a precisão da aproximação. (Burden, 2008)
Na quadratura de Gauss vamos também aproximar ∫ ∑
,
mas os nós que utilizamos na integração não serão mais igualmente espaçados no
intervalo como nas fórmulas de Newton-Cotes. Segundo Burden (2008), “A
quadratura de Gauss escolhe os pontos para cálculo de uma forma ótima, em vez
de igualmente espaçados. O nós no intervalo e coeficientes
, são escolhidos para minimizar o erro esperado na aproximação.”
∫
∑

42
Teremos que os nós serão escolhidos arbitrariamente dentro
do intervalo e os coeficientes são todos arbitrários sem
restrição. Então teremos que escolher parâmetros, se os coeficientes do
polinômio forem classificados também como parâmetros, segundo Burden (2008)
“ a classe de polinômios de grau no máximo também contem parâmetros.
Essa, então, é a maior classe de polinômios para qual [...] a fórmula será exata ”
Para obtenção dos melhores parâmetros na quadratura Gaussiana vamos
considerar o exemplo quando e o intervalo seja .
Suponha que queremos determinar de maneira que a fórmula de
integração
∫
Forneça o resultado exato sempre que seja um polinômio de grau menor
ou igual a , ou seja, quando
Assim teremos que
∫
∫
( )
( )
( )
Podemos assim igualar os coeficientes da equação.
{
Ao resolver esse sistema veremos que

43
√
√
Então a fórmula de aproximação é
∫
( √
) (
√
)
Ela é exata para polinômios de grau menor ou igual a três.
Polinômios de Legendre
Uma maneira mais fácil de encontrar os parâmetros da quadratura de Gauss
é a utilização dos polinômios de Legendre, Segundo Burden (2008) considere
“conjuntos de polinômios ortogonais, funções que têm a propriedade de que uma
integral definida particular do produto de quaisquer delas será 0. O conjunto
relevante para o nosso problema é o conjunto dos polinômios de Legendre.”
Esse conjunto é uma coleção { } com as seguintes
propriedades:
1. Para cada , é um polinômio mônico (que possui coeficiente
dominante igual a 1) de grau
2. ∫
sempre que for de grau menor que
Primeiros polinômios de Legendre
As raízes dos polinômios de Legendre então contidas no intervalo , e
possuem simetria em relação a origem, e elas são a solução para o problema de
determinar os parâmetros na quadratura gaussiana .
“Os nós necessários para produzir uma fórmula de
aproximação integral que forneça resultados exatos para todo polinômio de grau
menor ou igual a são as raízes do polinômio de Legendre de grau .” (Burden,
2008)

44
Teorema 3.3: Suponha que sejam as raízes do -ésino
polinômio de Legendre e que para todo , os números sejam
definidos por
∫ ∏
Se é qualquer polinômio de grau menor que , então
∫
∑
Demonstração: Considere primeiramente um polinômio com grau
menor que e vamos reescrever como um -ésimo coeficientes
polinomiais de Lagrange com nós nas raízes do -ésino polinômio de Legendre
. O termo de erro para essa representação inclui a -ésima derivada de .
Uma vez que tem grau menor que , a -ésima derivada de é 0 e sua
representação é exata. Então:
∑
∑∏
∫
∫
[
∑∏
]
∑
[
∫ ∏
]
∑
Então
∫
∑
O que prova a hipótese para polinômios com grau menor que
Se dividirmos , sendo um polinômio de grau de no mínimo , mas menor
que , por um enésimo polinômio de Legendre , vamos obter quociente

45
da divisão e o resto desta operação, e todos eles com grau menor que , então
teremos
Observe que é uma raiz de para todo , temos que
Sabendo das propriedades dos polinômios de Legendre, o grau de é
menor que , então pela segunda propriedade teremos que
∫
Agora como é um polinômio de grau menor que , pela primeira parte
da demonstração onde usamos um polinômio com grau menor que , podemos
escrever
∫
∑
Podemos então juntar todos esses resultados e verificar que a fórmula é
exata para o polinômio
∫
∫
∫
∑
∑

46
Tabela 3.2
Fonte: BURDEN (2008)
As constantes presentes na regra da quadratura gaussiana podem ser
encontradas a partir do Teorema 3.3, mas para facilitar a obtenção das constantes
as raízes dos polinômios de Legendre são tabuladas, na tabela 3.2 a seguir onde
são apresentados alguns valores com
Raízes Coeficientes
02
03
04
05
Sabemos aplicar a quadratura de Gauss no intervalo , para aplicarmos
em qualquer intervalos, basta realizar uma mudança de variável na integral,
Segundo Burden (2008) “Uma integral ∫
sobre um arbitrário pode
ser transformada em uma integral sobre utilizando a mudança de variável.”
Isso permite que a quadratura gaussiana possa ser aplicada a todo intervalo
arbitrário , pois
∫
∫ (
)

47
Exemplo 3.3: calcule pela quadratura de Gauss a integral
∫
, com
Primeiramente vamos realizar a mudança de variável, como
∫
∫ (
)
Teremos
∫
∫
Calculando esta integral com a quadratura gaussiana
∫
( √
) (
√
)
∫
[
( √
)
(√
)
]
*
( √ )
( √ )
+
∫
Atualmente os coeficientes da quadratura Gaussiana, ou seja os nós e os
pesos, já se encontram, na maioria das vezes, tabulados não sendo necessária a
dedução de cada um deles pela fórmula do Teorema 3.3, além disso nos
computadores mais atuais, o usuário não precisa nem ao menos conhecer nenhum
deles, pois já estão inseridos no código base dos programas.
O Procedimento listado no algoritmo 3.2 a seguir faz a aproximação de uma
integral definida no intervalo utilizando a Quadratura Gaussiana com
raízes e 3 coeficientes.

48
Fonte: Elaborado pelo Autor
O Algoritmo 3.2 – Quadratura de Gauss - Legendre
Entrada: Intervalo , Número de Subintervalos
Passo 1: Faça
Passo 2: Faça
Passo 3: Para , Execute os Passos 4 e 5
Passo 4: Faça
Passo 5: Faça
Passo 6: Faça
(Coeficientes por Legendre)
Faça
Faça
Passo 7: Faça √
(Raízes por Legendre)
Faça
Faça √
Passo 8: Faça
Passo 9: Para , Execute os Passos 10, 11 e 12
Passo 10: Faça
Faça
Passo 11: Faça
Faça
Faça
Passo 12: Faça ( )
Faça
Saída:
O resultado da Integral de será o valor de
As variáveis com são do tipo reais.
As variáveis são do tipo inteiras.

49
Tabela 3.3
Fonte: Elaborado pelo Autor
Exemplo 3.2: Aplique o Algoritmo da quadratura Gaussiana com raízes e
3 coeficientes na integral ∫
, com subintervalos. Represente
na Tabela 3.3.
Sub.
Intervalos
Valor da Integral Erro
02
04
08
16 2,65163493156
32 2,65163564682
64 2,65163588524

50
Fonte: STEWART (2013)
Figura 4.0
Capítulo 4
Aplicações das Integrais Numéricas
Nos capítulos anteriores conhecemos um pouco da história das integrais, os
métodos de aproximação numérica e como implementa-los para resolver uma
integral definida num intervalo .
Nesse capítulo vamos apresentar duas aplicações da teoria de integração,
que em muitos casos podem ocorrer integrais cujo resultado, ou não é possível ou
extremamente difícil de obter por meios analíticos. Dessa forma iremos
aproximar a solução com métodos numéricos vistos no capítulo 3. Os algoritmos
usados nas resoluções das integrais deste capítulo se encontram como anexos, foi
utilizada a linguagem de programação FORTRAN na construção de todos eles.
4.1. ÁREA DE UMA SUPERFÍCIE DE REVOLUÇÃO
Uma área de superfície de revolução, segundo Stewart (2013) “é formada
quando uma curva é girada em torno de uma reta. Essa superfície é a fronteira
lateral de um sólido de revolução”.
Para exemplificar melhor, veja a figura 4.0, onde temos um cilindro de
altura e raio , a área de sua superfície é dado por . Podemos obter
essa área imaginando um corte vertical em relação à base do cilindro e o
desenrolando. Teremos um lado igual a e outro igual a .

51 Fonte: Elaborado pelo Autor
Figura 4.2
Fonte: STEWART (2013)
Figura 4.1
Considerando a superfície da Figura 4.1, obtida pela rotação da curva de
, teremos a definição de área de superfície segundo Stewart:
Se é positiva e tem derivada contínua. Para definirmos sua área
de superfície, dividimos o intervalo em subintervalos com as
extremidades e largura igual a , [...]. Se , então
o ponto está sobre a curva. A parte da superfície entre e é
aproximada ao tomar o segmento da reta e girá-lo em torno do eixo
. O resultado é uma faixa com geratriz | | √ e
raio médio
; logo a área de superfície é dado pela fórmula
abaixo (Stewart 2013)
∫ √
Vajamos agora um exemplo da utilização dessa fórmula.
Exemplo 4.0: Considere a seguinte função √ e o intervalo
, tomando o sólido de revolução gerado pela rotação de (x) em torno do eixo
limitado pelo intervalo , observe a figura 4.2, Calcule a área da superfície
desse sólido.

52
Resolução: Usaremos a fórmula para encontrar a área da superfície de
revolução.
∫ √
Dessa forma teremos que e por hipótese √
vamos então derivar
√
Agora substituindo esses resultados na fórmula teremos:
∫ √ √ [
√ ]
∫ √ √ [
√ ]
∫ √ √
∫ √ √
∫ √
√
∫
∫
Então a área da superfície de revolução é .
Podemos verificar que com essa função √ foi relativamente
simples de calcular a área, mas é bem comum encontrar problemas onde o
integrando, devido a expressão de função pode ser muito difícil, nesse caso
devemos utilizar os métodos numéricos de integração. Veremos a seguir um
problema onde vamos utilizar os métodos para obter a solução.

53
Figura 4.3
Fonte: Elaborado pelo Autor
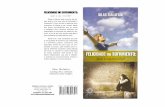
Problema 1: Dada função , no intervalo , observe
na figura 4.3 o sólido de revolução gerado pela rotação de em torno do eixo
, que é semelhante ao um vaso, sendo assim calcule a área da superfície de
revolução gerada por esta rotação.
Resolução: Primeiramente vamos encontrar a primeira derivada de
teremos então
Agora devemos utilizar a fórmula para encontrar a área da superfície de
revolução.
∫ √
∫ √
∫ √
Podemos observar que essa integral não é tão simples quanto a do exemplo
4.0 para encontrar sua primitiva, dessa forma vamos utilizar os métodos
numéricos para encontrar uma aproximação para o valor da integral que a área
da superfície de revolução.

54
Tabela 4.0 – Regra do Trapézio
Fonte: Elaborado pelo Autor
Tabela 4.1 – Regra ⁄ de Simpson
Fonte: Elaborado pelo Autor
Tabela 4.2 – Quadratura de Gauss
Fonte: Elaborado pelo Autor
Sub.
Intervalos
Valor da Integral Erro
02
04 08 16 32 64
128 256 512
Sub.
Intervalos
Valor da Integral Erro
02
04 08 16 32 64
128
Sub.
Intervalos
Valor da Integral Erro
02 04 08 16
Podemos então tomar o valor a área de superfície como aproximadamente
.
Observando e comparando os valores obtidos através dos métodos
numéricos podemos perceber que o melhor método para aplicar em integrais
desse tipo é Quadratura Gaussiana, pois com apenas 16 subintervalos já nos

55
Fonte: STEWART (2013)
Figura 4.4
concedeu um resultado bem satisfatório, com um erro muito pequeno, ao passo
que nos outros métodos foi necessário um número maior de subintervalos o
método do trapézio mesmo com 512 subintervalos, não conseguiu uma precisão
tão boa quanto a quadratura de Gauss, já a regra ⁄ de Simpson conseguiu uma
precisão parecida com a de Gauss somente com 128 subintervalos.
4.2. MOMENTOS E CENTROS DE MASSA
Nesta seção, vamos considerar o problema de encontrar o centro de massa
de uma placa fina que apresenta densidade uniforme. O centro de massa,
centroide ou centro de uma região é o ponto em que a região será perfeitamente
equilibrada na posição horizontal se for suspensa exatamente neste ponto.
Segundo Stewart (2013) “Nosso principal objetivo aqui é encontrar o ponto
no qual uma fina placa de qualquer formato se equilibra horizontalmente, [...]
Esse ponto é chamado centro de massa (ou centro de gravidade) da placa.”
Considere uma placa circular de densidade uniforme, e queremos então
equilibrar esta placa na ponta do dedo, para isso teríamos o ponto de equilíbrio da
placa, ou seja, o centro de massa. Podemos ter uma noção melhor do que foi dito
observando a figura 4.4, onde temos um bastão de massa desprezível equilibrado
num apoio.
Temos que são pesos presos nas extremidades opostas do bastão e
são as respectivas distancias entre os pesos e o ponto de apoio. Então este
bastão só ficara equilibrado no apoio se

56
Fonte: STEWART (2013)
Figura 4.5
Agora vamos supor que esse bastão esteja sobreposto no eixo , como na
figura 4.5
Assim poderemos reescrever a equação como
Onde são chamados de momentos das massas , é
centro de massa obtido com a equação acima deduzida.
Podemos generalizar para um sistema com partículas, com massas
localizadas nos pontos ao longo do eixo , da mesma
maneira, então:
Onde
∑
∑
Analogamente podemos encontrar o centro de massa em relação ao eixo y,
teremos então que:
Onde
∑
∑

57
Fonte: STEWART (2013)
Figura 4.6
Considere uma placa plana, que tenha densidade uniforme que ocupa a
região do plano, vamos determinar o centro de massa ou centroide desta placa.
Observe a figura 4.6.
Temos que a região esta entre as retas e é uma função
contínua, como na figura 4.6 (b), vamos dividir o intervalo em sub
intervalos com extremidades com uma largura . Segundo
Stewart (2013) “Escolhemos o ponto amostral como o ponto médio do
, que é
[...]. O centroide do retângulo
aproximador é seu centro
. Sua área é , assim, sua massa é”
Teremos também que o momento de em relação ao eixo será o produto
de sua massa pela distância de ao eixo , que é , Logo,
Se somarmos todos esses momentos, podemos obter uma aproximação
poligonal de então se considerarmos o limite com , vamos obter o
momento de em relação a eixo .
∑
∫
De maneira análoga podemos obter o momento de em relação ao eixo .
∑
∫

58
Como visto anteriormente o centro de massa é obtido por
Mas como também sabemos a massa é dada pelo produto da área pela
densidade, logo:
∫
Então teremos as fórmulas do centro de massa de uma placa dado por
∫
∫
∫
∫
∫
∫
∫
∫
Resumindo teremos que o centroide é dado pelo par ordenado , onde:
∫
∫
Com ∫
Segundo Stewart (2013) “Se a região está entre as curvas e
, onde , como mostrado na figura 4.7, então o mesmo tipo de
argumento que nos levou à Fórmula anterior pode ser usado para mostrar que o
centroide é .” Com ∫
, teremos:
∫
∫
{ }

59
Fonte: Elaborado pelo Autor
Figura 4.8
Figura 4.7
Fonte: Elaborado pelo Autor
Exemplo 4.0: Determine o centro de massa para a região delimitada entre
as curvas √ , no intervalo .
Resolução: Primeiramente vamos obter a área da região delimitada
entre as curvas.
∫
∫ √
[
]
Agora devemos calcular os valores das coordenadas , para obter o
centro de massa .
∫
∫ (√ )
∫
[
]
∫
{ }
∫
,
[
]
-
Logo as coordenadas do centro de massa são (
)

60
Fonte: Elaborado pelo Autor
Figura 4.9
Neste exemplo podemos verificar que com essas funções foi
relativamente simples de calcular o centro de massa, mas é bem comum
encontrar problemas onde encontrar o centroide pode ser muito difícil, nesse caso
devemos utilizar os métodos numéricos de integração. Veremos a seguir um
problema onde vamos utilizar os métodos para obter a solução.
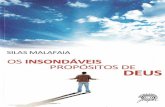
Problema 2: Uma chapa de metal com densidade constante é cortada de
no formato da figura 4.9 mostrada abaixo, sabendo que o contorno da parte
superior foi gerada pela função e da parte inferior pela função
(
) , sendo limitadas no intervalo . Determine as
coordenadas do seu centro de massa.
Resolução: Primeiramente devemos encontrar o valor da área desta
figura, utilizando somente o método numérico de integração Quadratura
gaussiana, pois é o melhor algoritmo dos três apresentados.
∫ ( (
) )
∫ (
)

61
Tabela 4.3 – Quadratura de Gauss
Fonte: Elaborado pelo Autor
Tabela 4.4 – Quadratura de Gauss
Fonte: Elaborado pelo Autor
Sub.
Intervalos
Valor da Integral Erro
02 04 08
Então teremos o valor da área aproximada
∫ (
)
Agora devemos calcular os valores das coordenadas , para obter o
centro de massa .
∫ [ (
) ]
Sub.
Intervalos
Valor da Integral
Erro
02 04 08

62
Fonte: Elaborado pelo Autor
Figura 5.0
Tabela 4.5 – Quadratura de Gauss
Fonte: Elaborado pelo Autor
∫
{ }
Sub.
Intervalos
Valor da Integral
Erro
02 04 08
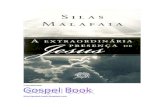
Logo as coordenadas do centro de massa são aproximadamente.
Com as coordenadas do centro de massa podemos equilibrar a placa
horizontalmente com o apoio exatamente em seu centroide, veja afigura 5.0.

63
Considerações Finais
O cálculo integral é um ramo da matemática que é aplicado em vários
problemas da vida cotidiana, através dos métodos numéricos podemos encontrar
soluções aproximadas para esses problemas. Este trabalho teve como objetivo
evidenciar algumas dessas aplicações e mostrar a importância de se usar métodos
numéricos na resolução das integrais que são de difícil solução.
Como o objetivo principal do trabalho é o desenvolver algoritmos para
resolução de integrais, foi apresentados alguns dos métodos computacionais mais
utilizados para encontrar estas soluções, onde os resultados foram obtidos com
boas aproximações e apresentando um erro mínimo. Em vários exemplos podemos
perceber que sem os métodos é praticamente impossível de se obter solução, pois
em diversas áreas, como na engenharia civil, cálculo de áreas, probabilidade,
vamos nos deparar com integrais difíceis de se resolver e o único modo de se
aproximar soluções é com o uso dos métodos numéricos.
A partir daí fica clara a importância de se conhecer os métodos, como dito
anteriormente os resultados obtidos com os métodos são aproximações, mas como
apresentam um erro mínimo, podemos utiliza-los de forma coerente sem nenhum
receio de estar cometendo erros graves.
Ao analisar os métodos e suas fórmulas podemos perceber diferenças em
cada um deles, nos três métodos do Trapézio, Simpson e quadratura Gaussiana,
quanto mais subintervalos tiver mais próxima será a aproximação da solução
real, ou seja, podemos obter uma solução tão próxima da real quanto desejarmos.
Podemos também notar que a Quadratura Gaussiana nos exemplos usados teve
um melhor resultado, pois com poucos subintervalos conseguimos resultados com
erro mínimo, ao passo que nos outros métodos teríamos que ultrapassar a
quantidade de 200 subintervalos.
As aplicações aqui apresentadas são utilizadas em muitos ramos, um deles
é a engenharia e podem aguçar no leitor o interesse pelo conteúdo.

64
Referências Bibliográficas
[1] BOYER, Carl B. Cálculo - tópicos de história da matemática para uso
em sala de aula. São Paulo: Atual Editora Ltda, 1995. v.6.
[2] BURDEN, Richard L; FAIRES, Douglas. Análise Numérica. São Paulo:
Cengage, 2008.
[3] CAMPOS FILHO; FERREIRA, Frederico. Algoritmos Numéricos. 2.ed. Rio
de Janeiro: Ltc, 2010.
[4] FRANCO, Neide Bertold. Cálculo Numérico. São Paulo: Prentice Hall,
2006.
[5] RUGGIERO, Márcia A. Gomes; LOPES, Vera Lúcia da Rocha. Cálculo
Numérico: Aspectos Teóricos e Computacionais. 2. ed. São Paulo:
Makron Books, 1996.
[6] GUIDORIZZI, Hamilton Luiz. Um curso de cálculo. 5. ed. Rio de Janeiro:
Ltc, 2008.
[7] STEWART, James. Cálculo. 7.ed. São Paulo: Cengage Learning, 2013.
[8] FULKS, Watson. Advanced Calculus: An Introduction to Analysis.
University of Colorado. Jhon Wiley & Sons, 1978.

65
O Algoritmo 4.0 – Regra do Trapézio Composta
Anexos
Algoritmos utilizados na linguagem FORTRAN.
c Regra do trapézio - Aryel Silas
program Regra do Trapézio
Real,dimension(9)::t
real a,b,v,x,s,h,r
integer n,i,j
Print*,'---------------------------------------------------------'
Print*,'Regra do Trapézio Composta - por Aryel Silas'
Print*,'---------------------------------------------------------'
a=4 !Limitantes do intervalo
b=8
if (a.gt.b) then
v=a
a=b
b=v
end if
n=1 ! Número inicial de Subintervalos
Print*,'| N Resultado Erro |'
Print*,'| |'
j=0
t=0
do j=1,9,1
n=2*n ! Aumenta os subintervalos a cada repetição
h=(b-a)/n
x=a+h
s=0
do i=1,(n-1),1
s=s+(2*f(x))
x=x+h
end do

66
Fonte: Elaborado pelo Autor
O Algoritmo 4.1 – Regra 1/3 de Simpson Composta
t(j)=(h/2)*(f(a)+f(b)+s)
r=abs(6.03436-t(j))
write(*,110)n,t(j),r
end do
Print*,'---------------------------------------------------------'
Print*,'O Resultado da Integral Aproximado e ',t(9)
Print*,'---------------------------------------------------------'
Print*,'/\/\/\/\/\/\/\/\/\/\/\/\/\/\/\/\/\/\/\/\/\/\/\/\/\/\/\/\/'
Print*,'\/\/\/\/\/\/\/\/\/\/\/\/\/\/\/\/\/\/\/\/\/\/\/\/\/\/\/\/\'
110 format(' | ',i3,' ',f10.7,' ',f11.8,' |')
end
real function f(x)
real x,y
y=cos(x)-sin(x/2)*cos(2*x)+1 ! Função para integrar
f=y
end function f
c Regra 1/3 de Simpson Integração - Aryel Silas
program 1/3 de Simpson
real a,b,v,x,s,t,nj,r,sp,si,h2,h,ji
integer n,i
Print*,'---------------------------------------------------------'
Print*,'Regra 1/3 de Simpson Composta - Por Aryel Silas'
Print*,'---------------------------------------------------------'
a=4 ! Limitantes do intervalo
b=8
h=1 ! Número inicial de Subintervalos
Print*,'| N Resultado Erro |'
Print*,'| |'
do m=1,9
h=2*h ! Aumenta os subintervalos a cada repetição

67
Fonte: Elaborado pelo Autor
h2=mod(h,2.0)
if (h2.ne.0)then
nj=h+1
else
nj=h
end if
r=(b-a)/nj
x=a+r
sp=0
si=0
do i=1,(nj-1)
ji=mod(i,2)
if (ji.eq.0)then
sp=sp+f(x)
else
si=si+f(x)
end if
x=x+r
end do
t=(r/3)*(f(a)+f(b)+4*si+2*sp)
t1=abs(6.03436-t)
write(*,110)h,t,t1
end do
Print*,'---------------------------------------------------------'
Print*,'O Resultado da Integral Aproximado e ',t
Print*,'---------------------------------------------------------'
110 format(' | ',f4.0,' ',f10.7,' ',f11.8,' |')
end
real function f(x)
real x,y
y=cos(x)-sin(x/2)*cos(2*x)+1 ! Função para integrar
f=y
end function f

68
O Algoritmo 4.2 – Quadratura Gaussiana de Grau 3
c Quadratura de Gauss - Aryel Silas
program QuadGauss
implicit none
real,allocatable,dimension(:)::x,r,t
real a,b,pw,x1,x2,x3,q1,q2,h,S,S1,S2,f,f2,f3,err
integer n,i,j,k,m
Print*,'---------------------------------------------------------'
Print*,'Quadratura de Gaussiana de Grau 3 - Por Aryel Silas'
Print*,'---------------------------------------------------------'
Print*,'| N Resultado Erro |'
Print*,'| |'
n=1
do m=1,5
a=4 !Limitantes do intervalo
b=8
n=2*n ! Número de vezes que o intervalo será repartido
allocate (x(n),t(n),r(n))
x(1)=a
h=(b-a)/n
do j=2,n+1
k=j-1
x(j)=x(k)+h
end do
r(1)=5.0/9.0 ! Valores fornecidos por Legendre
r(2)=8.0/9.0
r(3)=5.0/9.0
t(1)=-sqrt(3.0/5.0) ! Valores fornecidos por Legendre
t(2)=0.0
t(3)=sqrt(3.0/5.0)
S=0
do i=1,n
q1=(x(i+1)-x(i))/2.0
q2=(x(i+1)+x(i))/2.0
x1=(q1*t(1))+q2

69
Fonte: Elaborado pelo Autor
x2=(q1*t(2))+q2
x3=(q1*t(3))+q2
pw=(r(1)*f(x1)+r(2)*f(x2)+r(3)*f(x3))*(h/2.0)
S=S+pw
end do
err=abs(6.03436-S)
write(*,110)n,S,err
deallocate(x,t,r)
end do
Print*,' '
Print*,'O Resultado da Integral Aproximado e ', S
Print*,'---------------------------------------------------------'
Print*,'/\/\/\/\/\/\/\/\/\/\/\/\/\/\/\/\/\/\/\/\/\/\/\/\/\/\/\/\/'
Print*,'\/\/\/\/\/\/\/\/\/\/\/\/\/\/\/\/\/\/\/\/\/\/\/\/\/\/\/\/\'
110 format(' | ',i3,' ',f14.11,' ',f14.11,' |')
end
real function f(x)
real x,y
y=cos(x)-sin(x/2)*cos(2*x)+1 ! Função para integrar
f=y
end function f