UNIVERSIDADE FEDERAL DO PARANÁ DEPARTAMENTO DE … · 7.1 circuito de alimentaÇÃo de 5 v ........
66
UNIVERSIDADE FEDERAL DO PARANÁ DEPARTAMENTO DE ENGENHARIA ELÉTRICA CURSO DE ENGENHARIA ELÉTRICA Sidney Fernando Chila PROJETO DE DATALOGGER COM TRANSMISSÃO DE DADOS VIA SATÉLITE PARA ESTAÇÃO HIDROLÓGICA CURITIBA 2013
Transcript of UNIVERSIDADE FEDERAL DO PARANÁ DEPARTAMENTO DE … · 7.1 circuito de alimentaÇÃo de 5 v ........

UNIVERSIDADE FEDERAL DO PARANÁ DEPARTAMENTO DE ENGENHARIA ELÉTRICA
CURSO DE ENGENHARIA ELÉTRICA
Sidney Fernando Chila
PROJETO DE DATALOGGER COM TRANSMISSÃO DE DADOS VIA SATÉLITE PARA ESTAÇÃO HIDROLÓGICA
CURITIBA 2013

Sidney Fernando Chila
PROJETO DE DATALOGGER COM TRANSMISSÃO DE DADOS VIA SATÉLITE PARA ESTAÇÃO HIDROLÓGICA
Trabalho de Conclusão de curso de Engenharia Elétrica, Departamento de Engenharia Elétrica, Setor de Tecnologia, Universidade Federal do Paraná. Orientador: Prof. Dr. Oscar da Costa Gouveia Filho
CURITIBA 2013

Sidney Fernando Chila
PROJETO DE DATALOGGER COM TRANSMISSÃO DE DADOS VIA SATÉLITE PARA ESTAÇÃO HIDROLÓGICA
TRABALHO APRESENTADO AO CURSO DE ENGENHARIA ELÉTRICA, DA UNIVERSIDADE FEDERAL DO PARANÁ, COMO REQUISITO À OBTENÇÃO DO TÍTULO DE GRADUAÇÃO.
COMISSÃO EXAMINADORA
PROF. DR. OSCAR DA C. GOUVEIA FILHO
PROF. M.SC. ADEMAR LUIZ PASTRO
PROF. PH.D. ANDRÉ AUGUSTO MARIANO
CURITIBA 2013

AGRADECIMENTOS
Agradeço primeiramente a Deus. À minha família e namorada pelo apoio e
paciência durante essa etapa da minha vida. Ao Prof. Dr. Oscar Gouveia Filho por ter
aceitado me orientar nesse trabalho e aos amigos que me auxiliaram de forma direta ou
indireta na elaboração desse projeto.
RESUMO
As empresas que operam usinas hidrelétricas são obrigadas a monitorar e
fornecer à Agência Nacional de Águas informações referentes ao nível do reservatório e
quantidade de chuva que incide sobre a região. Dois dos equipamentos responsáveis por
automatizar essa tarefa são o datalogger e o transmissor de dados.
Esse trabalho de conclusão de curso tem por objetivo construir o projeto de um
equipamento capaz de coletar as informações dos sensores de nível e chuva, armazenar
esses dados e transmiti-los via satélite.
Palavras chave: datalogger, ORBCOMM, satélite, transmissor.

ABSTRACT
Companies that operate hydroelectric power plants are required to monitor and
provide the National Water Agency information regarding the reservoir level and amount
of rain falling on the region. Two equipment, which are responsible for automating this
task, are the datalogger and data transmitter.
This work aims to build the design of a device able to collect the information of
level and rain sensors, store this data and transmit it via satellite.
Keywords: datalogger, ORBCOMM, satellite, transmitter.

LISTA DE FIGURAS
Figura 1 - Linímetros ........................................................................................................ 5
Figura 2 - Báscula de um pluviômetro. ............................................................................. 6
Figura 3 - Topologia da interface SDI-12.......................................................................... 8
Figura 4 - Kit EVAL - ADuC 834. .................................................................................... 10
Figura 5 - Modem GPRS modelo SIM 900 ..................................................................... 11
Figura 6 - Rede ORBCOMM .......................................................................................... 12
Figura 7 - Interface do Digi m10. .................................................................................... 13
Figura 8 - Disposição de satélites mostrada pelo software ............................................ 14
Figura 9 - Kit de Desenvolvimento m10. ........................................................................ 15
Figura 10 – Interface I²C................................................................................................. 16
Figura 11 - Interface SPI. ............................................................................................... 16
Figura 12 - Topologia inicial. .......................................................................................... 18
Figura 13 - Segunda topologia. ...................................................................................... 18
Figura 14 - Topologia final. ............................................................................................. 19
Figura 15 - Topologias para DVDD e AVDD. ................................................................. 21
Figura 16 - Fluxograma básico do programa executado pelo microcontrolador. ............ 31
Figura 17 - Menu exibido pelo programa. ....................................................................... 33
Figura 19 - Circuito do protótipo da fonte de 5V ............................................................. 34
Figura 18 - Protótipo da fonte de 5 V ............................................................................. 34
Figura 20 - Medição de corrente. ................................................................................... 35
Figura 21 - Multímetro de bancada. ............................................................................... 36
Figura 22 – Fonte de alimentação .................................................................................. 36
Figura 23 - Protótipo do circuito de alimentação de 12 V. .............................................. 37
Figura 24 - Circuito conversor bidirecional 5/3,3 V ......................................................... 38
Figura 25- Circuito SDI-12 .............................................................................................. 40
Figura 26 - Circuito de multiplexação. ............................................................................ 41
Figura 27 - Circuito RTC (I²C) ........................................................................................ 42
Figura 28 - Fonte de tensão de precisão. ....................................................................... 43

LISTA DE TABELAS
Tabela 1 - Pacote de Dados Transmitido .......................................................... 17
Tabela 2 - Tabela verdade do CI 4052. ............................................................. 25
Tabela 3 - Periféricos e portas. .......................................................................... 26
Tabela 4 - Níveis TTL e RS-232 ........................................................................ 26
Tabela 5 - Níveis SDI-12 e TTL ......................................................................... 27
Tabela 6 - Resultados de ensaio para a fonte de 5 V. ....................................... 35
Tabela 7 - Resultados do ensaio para o circuito de alimentação de 12 V. ........ 38

ABREVIAÇÕES
ANEEL – Agência Nacional de Energia Elétrica
ANA – Agência Nacional de Águas
PCH – Pequena Central Hidrelétrica
UHE – Usina Hidrelétrica de Energia
CI – Circuito Integrado
RS-485 - Recommended Standard 485
SDI-12 - Serial Data Interface at 1200 Baud
GSM - Groupe Spécial Mobile
A/D – Refere-se ao circuito conversor Analógico para Digital
ADC – Analogic to Digital Converter
RTC – Real Time Clock
CTS – Clear To Send
RTS – Request To Send
UART – Universal Asynchronous Receiver/Transmitter
GPRS - General Packet Radio Service
PWM – Pulse Width Modulator
DAC – Digital to Analogic Converter
I²C – Inter-Integrated Circuit
SPI – Serial Peripheral Interface
VHF - Very High Frequency
UHF - Ultra High Frequency

SUMÁRIO
1 INTRODUÇÃO .............................................................................................. 1
1.1 OBJETIVO ............................................................................................. 2
2 RECURSOS E METODOLOGIA .................................................................. 2
3 EMBASAMENTO TEÓRICO ......................................................................... 3
3.1 DATALOGGER ...................................................................................... 3
3.2 ESTAÇÃO HIDROLÓGICA .................................................................... 3
3.3 LINÍMETRO ............................................................................................ 4
3.3.1 Sensor de nível baseado em célula de pressão ................................ 4
3.3.2 Sensor de nível por deslocamento de roldana .................................. 4
3.3.3 Sensor por radar ............................................................................... 5
3.4 PLUVIÔMETRO ..................................................................................... 5
3.4.1 Contador de amostras ....................................................................... 6
3.4.2 Sensor de massa .............................................................................. 6
3.5 SDI-12 .................................................................................................... 7
3.6 CONVERSÃO A/D ................................................................................. 8
3.7 MICROCONTROLADOR ADUC 834 ..................................................... 9
3.7.1 Kit de Desenvolvimento EVAL-ADuC834 .......................................... 9
3.8 GPRS ................................................................................................... 10
3.9 SIM900 ................................................................................................. 11
3.10 REDE ORBCOMM ............................................................................... 11
3.11 MODEM M10 ....................................................................................... 12
3.11.1 Kit de Desenvolvimento Digi m10 ................................................. 13
3.12 SPI e I²C .............................................................................................. 15
4 ESPECIFICAÇÕES DO EQUIPAMENTO .................................................. 16
5 PROJETO E DESENVOLVIMENTO DO CIRCUITO .................................. 17
5.1 CIRCUITO DE ALIMENTAÇÃO ........................................................... 19

5.2 MICROCONTROLADOR ..................................................................... 23
5.3 CIRCUITO DE COMUNICAÇÃO .......................................................... 25
5.3.1 Comutação da UART ...................................................................... 25
5.3.2 Comunicação com computador e GPS ........................................... 26
5.3.3 Comunicação com Modem Satelital ................................................ 27
5.3.4 Comunicação com o Barramento SDI-12 ........................................ 27
5.3.5 Comunicação I²C e SPI ................................................................... 28
5.4 CIRCUITO do Modem .......................................................................... 28
5.5 CIRCUITO SDI-12 ................................................................................ 29
5.6 CIRCUITO RTC ................................................................................... 29
5.7 CIRCUITO A/D ..................................................................................... 30
5.8 CIRCUITO CONTADOR ...................................................................... 30
6 PROGRAMA DO MICROCONTROLADOR ................................................ 31
7 TESTES E RESULTADOS ......................................................................... 34
7.1 CIRCUITO DE ALIMENTAÇÃO DE 5 V ............................................... 34
7.2 CIRCUITO DE ALIMENTAÇÃO 12 V ................................................... 37
7.3 REGULADOR DE 3,3 V ....................................................................... 38
7.4 CIRCUITO DE REFERÊNCIA DE 2,5 V............................................... 39
7.5 CIRCUITO SDI-12 ................................................................................ 39
7.6 CIRCUITO DE COMUTAÇÃO DA UART ............................................. 40
7.7 CIRCUITO RTC ................................................................................... 41
7.8 CIRCUITO A/D ..................................................................................... 42
7.9 CIRCUITO CONTADOR ...................................................................... 43
7.10 TRANSMISSÃO DE DADOS ............................................................... 44
8 CONSIDERAÇÕES FINAIS SOBRE O PROJETO ..................................... 44
CONCLUSÕES ................................................................................................. 46
REFERÊNCIAS BIBLIOGRÁFICAS .................................................................. 47

1
1 INTRODUÇÃO
Existe uma resolução1 da Agência Nacional de Energia Elétrica (ANEEL) e da
Agência Nacional de Águas (ANA) que estabelece condições e procedimentos a serem
observados pelos concessionários e autorizados de geração de energia hidrelétrica para
a instalação, operação e manutenção de estações hidrométricas visando ao
monitoramento pluviométrico, linimétrico, fluviométrico, sedimentométrico e de qualidade
da água associado a aproveitamentos hidrelétricos.
Um dos serviços de monitoramento necessário para operar Usinas Hidrelétricas
(UHE) e Pequenas Centrais Hidrelétricas (PCH) consiste na coleta, armazenamento e
disponibilização para a ANA dos dados de precipitação e nível do reservatório, e
dependendo do caso deve-se ainda monitorar as mesmas variáveis em um ponto da
jusante e/ou montante do rio ligado ao reservatório. Esse monitoramento é feito por
estações hidrológicas.
Após quase três anos em contato direto com prestação de serviço de
monitoramento hidrológico e pluviométrico em usinas do Paraná, Santa Catarina,
Tocantins, Mato Grosso e Espírito Santo, pode-se notar uma carência do mercado
nacional em equipamentos que componham soluções para o referido serviço. Dessa
forma, a maior parte dos equipamentos usados hoje são importados, o que implica em
elevados custos e dificuldade ou até mesmo impossibilidade de manutenção.
Paralelamente a isso, a crescente demanda por energia o mercado passou a ser
muito atrativo para investimentos no setor, sendo as PCHs um deles.
Dado o cenário citado percebe-se que o desenvolvimento de um equipamento
capaz de atuar na coleta e envio de dados é, no mínimo, interessante, principalmente se
o efeito no custo for vantajoso, aos que devem cumprir a regulamentação já citada.
1 Resolução Conjunta ANEEL/ANA nº 03, de 10 de agosto de 2010, publicada em 20 de outubro
de 2010 [1]

2
1.1 OBJETIVO
O objetivo desse trabalho é desenvolver o projeto de um equipamento capaz de
coletar dados de sensores de nível de água (linímetro) e precipitação (pluviômetro),
armazenar esses dados e transmití-los com uma frequência que atenda à resolução
pertinente.
2 RECURSOS E METODOLOGIA
Para o desenvolvimento desse projeto foram usados os seguintes itens:
1 Notebook;
1 Kit de desenvolvimento para o microcontrolador usado;
1 Kit de desenvolvimento para o transmissor usado;
1 Osciloscópio;
1 Multímetro de bancada;
1 Gerador de sinais de referência;
Protoboards;
Placas protótipo;
Componentes que compõem o hardware;
Sensores analógicos e digitais diversos para testes;
Softwares diversos que serão citados nesse trabalho.
O projeto foi desenvolvido principalmente baseado nos kits de desenvolvimento
do microcontrolador (EVAL-ADuC834) e do transmissor satelital (Digi m10). Usando os
kits citados e montando pequenas placas de circuito impresso e alguns circuitos em
protoboards foi possível testar os recursos implementados no projeto sem a necessidade
de confeccionar a placa de circuito impresso do projeto, o que elevaria o custo de
desenvolvimento do projeto.
Assim, a metodologia usada foi de desenvolvimento do projeto em blocos,
aliando composição de código e implementação em hardware, quase que de forma
simultânea, garantindo assim o funcionamento de cada bloco inserido no projeto.

3
3 EMBASAMENTO TEÓRICO
Neste item será abordado de forma resumida o estudo teórico necessário para
entendimento e desenvolvimento do projeto.
3.1 DATALOGGER
É um equipamento eletrônico responsável por armazenar dados ao longo do
tempo, em geral atribuindo um horário às variáveis armazenadas. Estes dados podem
ser tanto internos (proveniente de sensores embarcados como temperatura por exemplo)
quanto externos (sensores analógicos e digitais externos, conectados ao datalogger).
Existem vários tipos de sensores e, consequentemente, várias interfaces para
conexão com o equipamento. Dentre as mais usadas estão as entradas contadoras,
analógicas, e seriais, especialmente RS-485 (Recommended Standard 485) e SDI-12
(Serial Data Interface at 1200 Baud).
O datalogger pode ainda realizar operações sobre os dados coletados, efetuando
por exemplo a média de uma certa variável.
3.2 ESTAÇÃO HIDROLÓGICA
Chama-se de estação hidrológica o conjunto de equipamentos necessários para
coletar, armazenar e transmitir dados referentes ao nível de um rio, ou reservatório, e a
quantidade de chuva que incide na localidade da estação.
As estações hidrológicas, de modo geral, são alimentadas por bateria e painel
solar, uma vez que são instaladas em regiões remotas onde não costuma haver outra
fonte de energia.
Um controlador de carga é responsável por gerenciar a energia proveniente do
painel e da bateria para alimentar os equipamentos da estação e ainda fornecer carga à
bateria quando a energia proveniente do painel solar permitir.
Para a aquisição dos dados de nível e chuva a estação hidrológica possui um
linímetro e um pluviômetro que são ligados a um datalogger.
O datalogger é responsável por coletar e armazenar os dados provenientes dos
sensores e enviar esses dados a um transmissor com uma frequência predefinida. O

4
datalogger deve ainda permitir que o usuário defina os valores de slope e offset a serem
aplicados sobre o sinal recebido do sensor de nível. Em outras palavras, o valor
armazenado será a medida obtida processada da seguinte forma:
𝑣𝑎𝑙𝑜𝑟 𝑎𝑟𝑚𝑎𝑧𝑒𝑛𝑎𝑑𝑜 = 𝑚𝑒𝑑𝑖𝑑𝑎 × 𝑠𝑙𝑜𝑝𝑒 + 𝑜𝑓𝑓𝑠𝑒𝑡
A transmissão de dados basicamente é feita de três formas nas estações, por
cabo, por satélite ou por rede GSM (Groupe Spécial Mobile). A transmissão por cabo é
incomum, pela questão de localização das estações, na maioria dos casos, é inexistente
um cabeamento e inviável a instalação do mesmo. Desse modo, a transmissão mais
adotada é a sem fio.
3.3 LINÍMETRO
O linímetro é um sensor destinado a medir o nível de água em um rio ou
reservatório.
Esse tipo de equipamento está disponível no mercado, em sua maior parte, em
versões com saídas analógicas de tensão (0 a 5 V) ou corrente (4 a 20 mA) e via
interfaces RS-485 e SDI-12.
Para atender à resolução pertinente, o sensor de nível usado nas estações de
medição devem possuir resolução de pelo menos 0,01 m, com incerteza de 0,005 m, para
mais ou para menos.
Há no mercado diversos tipos diferentes de sensores desse tipo, sendo os mais
comuns citados nos subitens a seguir e ilustrados na Figura 1.
3.3.1 Sensor de nível baseado em célula de pressão
Este sensor possui uma célula de pressão, que pode ser capacitiva ou resistiva,
e que gera uma tensão proporcional à pressão sobre ela exercida. Assim, de acordo com
a pressão exercida pela coluna da água situada acima do ponto onde o sensor está
posicionado, obtêm-se um valor de tensão que pode então ser usado para determinar o
nível do rio ou reservatório.
3.3.2 Sensor de nível por deslocamento de roldana
Este sensor possui uma bóia e um contra-peso interligados por um fio que por
sua vez apoia-se sobre uma roldana. Quando o nível do reservatório varia, a roldana

5
sofrerá uma rotação proporcional a essa variação. Desse modo, registrando o
deslocamento (rotação) da roldana o sensor permite determinar a variação do nível de
água medido.
3.3.3 Sensor por radar
Este sensor fica acima do nível da água, em um ponto fixo, e mede, por meio de
ondas ultrassônicas, a distância entre o ponto em que está e a superfície da água. Seu
ponto positivo consiste em não ficar submerso, entretanto, fica sujeito a interferências
externas, como folhas de árvores em suspensão, objetos flutuantes na superfície da água
etc.
3.4 PLUVIÔMETRO
Esse tipo de sensor mede a quantidade de chuva que incide sobre uma
determinada área. Diversos mecanismos são usados para isso, dentre os quais os
principais são citados a seguir.
A resolução que deve ser atendida determina que a resolução da medida de
chuva deve ser de 0.2 mm de chuva2.
2 1 mm de chuva equivale à quantidade de chuva capaz de preencher um recipiente com volume
de 10-3 m³, ou seja, corresponde a uma “lâmina” de água com 1mm de altura em uma área de 1 m².
Figura 1 - Linímetros

6
3.4.1 Contador de amostras
Neste tipo de sensor existe uma espécie de gangorra, chamada de báscula,
contendo um recipiente em cada lado. Acima dessa gangorra há um funil que direciona a
água coletada da chuva para o recipiente que está mais alto na gangorra. Quando esse
recipiente atinge determinada massa, volume de água, ele provoca o desequilíbrio da
gangorra, fazendo com que o recipiente que estava cheio desça e esvazie-se, deixando
assim o recipiente que estava vazio na posição de captação de água. Baseado na área
de captação do funil e no volume de água necessário para movimentar a balança, é
possível determinar quantos mm de chuva cada movimentação da báscula representa.
Assim, registrando quantas vezes a balança se movimentou é possível determinar
quantos mm de chuva caíram naquela área.
Esse tipo de sensor possui um reed switch (chave magnética), que permite
registrar a movimentação da gangorra por meio de um imã.
Devido à sua simplicidade apresenta o menor custo no mercado em relação aos
outros tipos de pluviômetros. É também o mais empregado atualmente.
A Figura 2 ilustra o sistema basculante deste tipo de pluviômetro.
3.4.2 Sensor de massa
Nesse tipo de pluviômetro um recipiente é colocado sobre uma balança. Esse
recipiente, por sua vez, fica abaixo de um funil para captação da água da chuva. Baseado
no incremento da massa do recipiente medida é possível determinar a quantidade de
Figura 2 - Báscula de um pluviômetro.

7
água que entrou no recipiente. Juntando essa informação à área de captação do funil é
possível converter o valor de massa em mm² de chuva.
Este pluviômetro deve ser esvaziado manualmente caso seu reservatório atinja
o volume máximo.
3.5 SDI-12
SDI-12 é uma interface de comunicação serial desenvolvido para e amplamente
utilizado em sistemas microprocessados destinados à aquisição de dados. É também
recomendado para sistemas de baixo consumo alimentados por bateria.
Os equipamentos de aquisição de dados (sensores) que utilizam essa interface
fornecem, em geral, dados de forma dita inteligente, pois são capazes de processar os
sinais do sensor e entrega-los em unidades de engenharia e em formato de valor médio.
É composta por três fios, sendo um para alimentação com tensão de 9,6 a 16V,
um para sinal de potencial 0 V (GND) e outro para o tráfego de dados com baudrate de
1200.
Nota-se desde já que o tráfego de dados é bidirecional e feito por um único fio.
Assim, a comunicação é half-duplex.
A cada dispositivo conectado à interface SDI-12 é atribuído um identificador
diferente, assim, é possível que vários sensores sejam conectados em uma mesma linha,
sendo essa uma das grandes vantagens desse tipo de interface.
Apenas um dispositivo pode ser o mestre nessa interface. No caso desse trabalho
será o microcontrolador.
Existem comandos definidos para a comunicação entre o dispositivo mestre e
seus escravos, a lista com todos os comandos pode ser encontrada no documento de
especificações dessa interface [2]. Da mesma forma, mais detalhes sobre as tensões,
temporização e outros detalhes técnicos dessa interface devem ser consultados.
Nesse projeto foram adicionados ao programa do microcontrolador apenas os
comandos necessários para leitura de um sensor de nível modelo PLS da OTT3. Ou seja,
3Pressure Level Meter model PLS http://www.ott.com/web/ott_de.nsf/id/pa_ott_pls_product_e.html

8
a porta SDI-12 disponibilizada nesse projeto pode não ser compatível com todos os
sensores existentes no mercado.
Os comandos implementados foram “Address Query [?!]”, “Start Measurement
[aM!]”, e “Acknowledge Active [a!]”.
A topologia de um circuito SDI-12 pode ser observada na Figura 3.
3.6 CONVERSÃO A/D
Trata-se da atribuição de um valor digital a um sinal analógico, sendo esse valor
proporcional à amplitude do sinal em questão.
A principal característica de um conversor A/D (Analógico/Digital) é a sua
resolução. A resolução do conversor indica a quantidade de valores que poderão ser
atribuídos ao sinal analógico dentro de uma determinada faixa. Como o valor atribuído
em geral tem formato binário a resolução é definida em bits. Por exemplo, um conversor
de 8 bits de resolução poderá atribuir um valor de 0 a 255 dependendo da amplitude do
sinal de entrada.
Figura 3 - Topologia da interface SDI-12
9
Há muitos mecanismos que podem ser usados para implementar um circuito A/D,
dentre os quais estão integrador, aproximações sucessivas, comparador de rampa,
Wilkinson, codificador delta etc. Nesse trabalho o microcontrolador escolhido possui um
circuito conversor que usa a topologia chamada de sigma-delta.
Existem muitos fatores que influenciam na precisão e no funcionamento de um
conversor A/D tais como linearidade, taxa de amostragem, ruídos, variação da resolução
por meio de altas frequências de amostragem etc. Por ser um assunto muito denso foi
abordado aqui apenas o básico, mas é de vital importância para o desenvolvimento desse
projeto um estudo mais profundo do funcionamento dos circuitos A/D.
3.7 MICROCONTROLADOR ADUC 834
O microcontrolador escolhido para esse projeto foi o ADuC 834 da Analog
Devices. Trata-se de um microcontrolador baseado na arquitetura 8052, com 62 kB de
memória flash, possui um conversor A/D integrado com resolução de até 24 bits, com
auto-calibração. Possui ainda diversos periféricos como interface SPI (Serial Peripheral
Interface), I²C (Inter-Integrated Circuit), UART (Universal Asynchronous Receiver
Transmitter), PWM (Pulse Width Modulation), DAC (Digital-to-Analog Converter) entre
outros. Maiores informações podem ser encontradas no datasheet do componente.
O principal motivo para o uso deste microcontrolador foi a familiaridade que o
autor desse trabalho possui com a família de microcontroladores 8052.
Além da leitura do datasheet do microcontrolador [3] em si, é de grande
importância para o desenvolvimento e melhor entendimento desse projeto tomar
conhecimento das literaturas AN-1139 [4], AN-1074 [5], UC-018 [6], UC-001 [7], UC-007
[8], AN-282 [9], UC-006 [10] e UC-008 [11], sendo ainda recomendável a leitura de UC-
002 [12]. Tratam-se de especificações, recomendações e notas de aplicações de
software e hardware para o ADuC 834.
3.7.1 Kit de Desenvolvimento EVAL-ADuC834
O microcontrolador ADuC834 possui um kit para auxiliar no desenvolvimento de
projetos e protótipos baseados nesse microcontrolador. O kit disponibiliza todos os pinos
do microcontrolador e possui ainda uma área destinada à montagem de circuitos. É

10
montado em PCB de 4” x 5”, alimentado por uma fonte ou bateria de 9V, possui um
regulador de 5 V, disponibiliza ainda a interface UART e um cabo conversor UART/RS-
232. Possui um oscilador de 32,768 kHz, um circuito de tensão de referência de 2,5 V
baseado no CI (Circuito Integrado) AD780. Permite ainda a conexão das portas
analógicas a circuito um RTD embarcado para medição de temperatura.
O kit possui ainda um CD com softwares que permitem escrever e compilar
códigos para o microcontrolador, pelo uVision, e gravar o arquivo correspondente (.HEX)
na memória de programa do ADuC, usando o Analog Devices Windows Serial
Downloader.
Maiores detalhes sobre esse kit podem ser vistos na Figura 4 e na literatura
disponibilizada pelo fabricante [13].
3.8 GPRS
GPRS é a sigla para General Packet Radio Service, ou seja, Serviço de Rádio
de Pacote Geral. Trata-se de uma tecnologia baseada na comutação por pacotes que
Figura 4 - Kit EVAL - ADuC 834.

11
permite o aumento das taxas de transferências de dados nas redes GSM. Sua taxa
teórica é de 170 kbps, que na prática chega próximo aos 40 kbps.
3.9 SIM900
Como inicialmente a ideia do projeto foi utilizar a transmissão de dados via GPRS,
foi definido e adquirido o módulo Sim900, da SimCom. Esse módulo, visto na Figura 5,
permite a comunicação com um microcontrolador, por meio de comandos AT,
possibilitando assim a transmissão de dados por meio da rede GSM.
3.10 REDE ORBCOMM
A Orbcomm é uma empresa que oferece serviço de monitoramento e
comunicação bidirecional por meio de sua rede de satélites. Esta rede é composta por 29
satélites de baixa órbita que possuem antenas VHF (Very High Frequency) e UHF (Ultra
High Frequency), operando em bandas de 137,0 a 150,05 MHz e 400,075 a 400,125 MHz.
Para o caso desse trabalho será utilizado a frequência VHF.
A rede da Orbcomm opera utilizando, além da rede de satélites, uma rede
terrestre de transmissão de dados. Uma breve ideia sobre a topologia dessa rede pode
ser vista na Figura 6.
Figura 5 - Modem GPRS modelo SIM 900

12
Existem três tipos de pacotes de dados que podem ser transmitidos por um
equipamento para um satélite da rede, sendo eles Data Report, Message, e Global
Gramm.
Para esse projeto utilizaremos a modalidade Data Report, por ser a mais barata,
e por consequência mais curta dentre as disponíveis, com no máximo 8 bytes.
3.11 MODEM M10
O modem Digi m10 opera dentro da faixa VHF da rede ORBCOMM. Possui uma
interface de 14 pinos, dentre os quais estão disponíveis dois pinos para comunicação
serial por uma interface UART de 3,3 V que serão usados para comunicação com o
microcontrolador. A interface do modem é mostrada na Figura 7.
Maiores detalhes sobre esse módulo devem ser consultados no datasheet do
mesmo [14].
Figura 6 - Rede ORBCOMM

13
3.11.1 Kit de Desenvolvimento Digi m10
O kit de desenvolvimento possui um modem “m10” e duas interfaces seriais RS-
232, que permitem a conexão através do computador com as portas de comunicação
serial e de debug do modem. Possui ainda, alternativamente à comunicação principal via
RS-232, uma porta USB para comunicação serial com o equipamento.
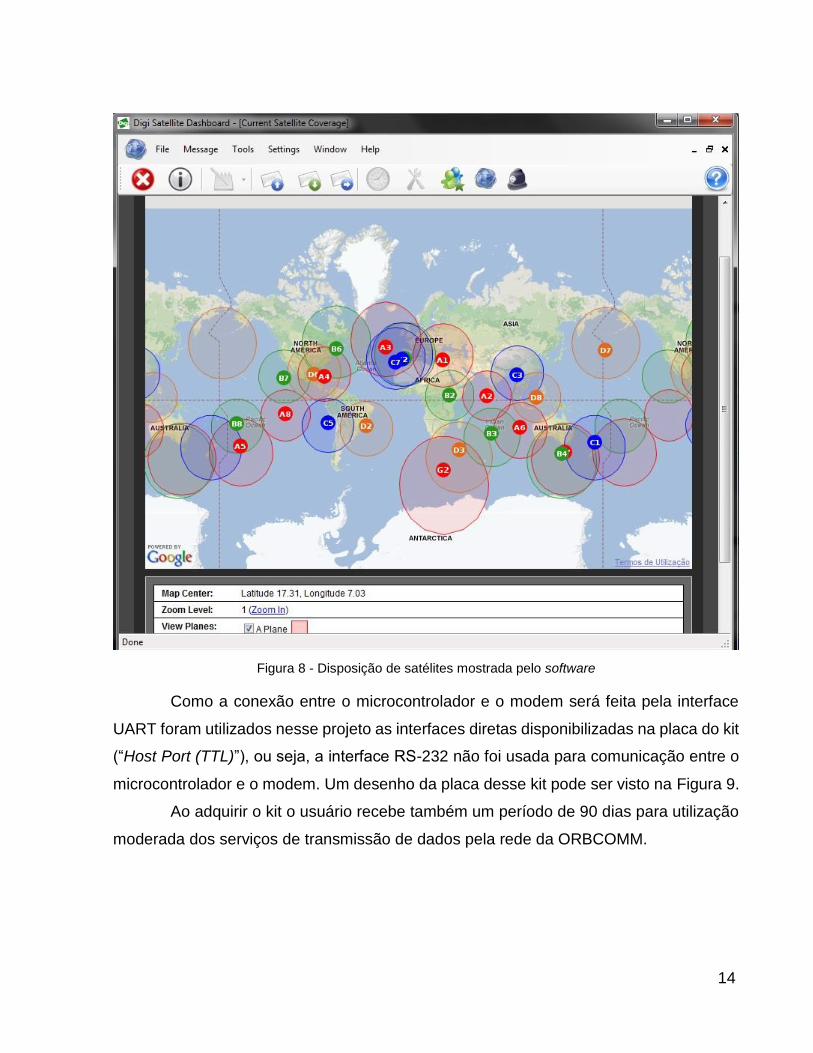
Junto com o kit é disponibilizado um software para testes de envios de dados por
meio do computador. O software, chamado de Satellite Dashboard Overview, permite
ainda observar o posicionamento dos satélites sobre o globo. A interface do programa
exibindo o posicionamento dos satélites pode ser visto na Figura 8.
Figura 7 - Interface do Digi m10.
14
Como a conexão entre o microcontrolador e o modem será feita pela interface
UART foram utilizados nesse projeto as interfaces diretas disponibilizadas na placa do kit
(“Host Port (TTL)”), ou seja, a interface RS-232 não foi usada para comunicação entre o
microcontrolador e o modem. Um desenho da placa desse kit pode ser visto na Figura 9.
Ao adquirir o kit o usuário recebe também um período de 90 dias para utilização
moderada dos serviços de transmissão de dados pela rede da ORBCOMM.
Figura 8 - Disposição de satélites mostrada pelo software

15
3.12 SPI E I²C
A interface I²C foi desenvolvida pela Philips para comunicação entre dispositivos,
de modo geral sendo um mestre e os demais escravos, utilizando apenas duas linhas.
Uma linha é responsável por comportar um sinal de clock para sincronizar a comunicação
e a outra linha para o tráfego de dados, bidirecional.
Figura 9 - Kit de Desenvolvimento m10.

16
Vários dispositivos podem ser ligados na mesma linha. Isso é possível graças a
um identificador único para cada um. Esse identificador é transmitido na mensagem,
fazendo com que o dispositivo que possui tal identificador passe a comunicar-se com o
mestre, enquanto os outros permanecem estáticos.
A topologia dessa interface pode ser vista na Figura 10.
Figura 10 – Interface I²C.
Desenvolvida pela Motorola, a interface de comunicação SPI utiliza linhas
auxiliares destinadas à seleção do dispositivo com o qual deseja-se estabelecer uma
comunicação.
Outro aspecto dessa interface reside em sua comunicação ser full-duplex.
Sua topologia é mostrada na Figura 11.
Figura 11 - Interface SPI.
4 ESPECIFICAÇÕES DO EQUIPAMENTO
Baseado no objetivo do projeto, resolução a ser atendida, sensores disponíveis
e demais fatores abordados, definiu-se que o equipamento deve possuir as seguintes
características:
Armazenar dados e transmiti-los em intervalos de uma hora;
17
Permitir a definição de slope e offset para os valores lidos pelo sensor
analógico;
Efetuar leituras de um sensor de nível pela interface SDI-12;
Registrar em um contador os dados de um pluviômetro do tipo contador
de amostras;
Operar com tensão de alimentação de 10,5 a 18 V;
Efetuar a leitura da tensão de alimentação.
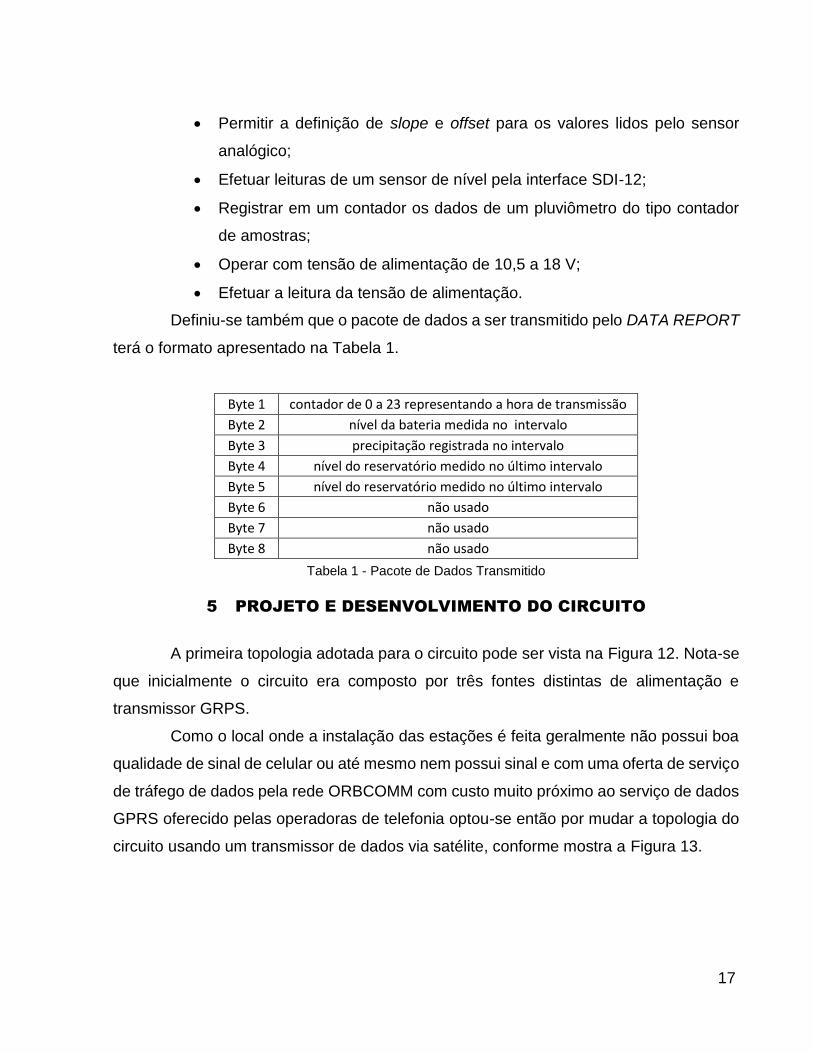
Definiu-se também que o pacote de dados a ser transmitido pelo DATA REPORT
terá o formato apresentado na Tabela 1.
Byte 1 contador de 0 a 23 representando a hora de transmissão
Byte 2 nível da bateria medida no intervalo
Byte 3 precipitação registrada no intervalo
Byte 4 nível do reservatório medido no último intervalo
Byte 5 nível do reservatório medido no último intervalo
Byte 6 não usado
Byte 7 não usado
Byte 8 não usado
Tabela 1 - Pacote de Dados Transmitido
5 PROJETO E DESENVOLVIMENTO DO CIRCUITO
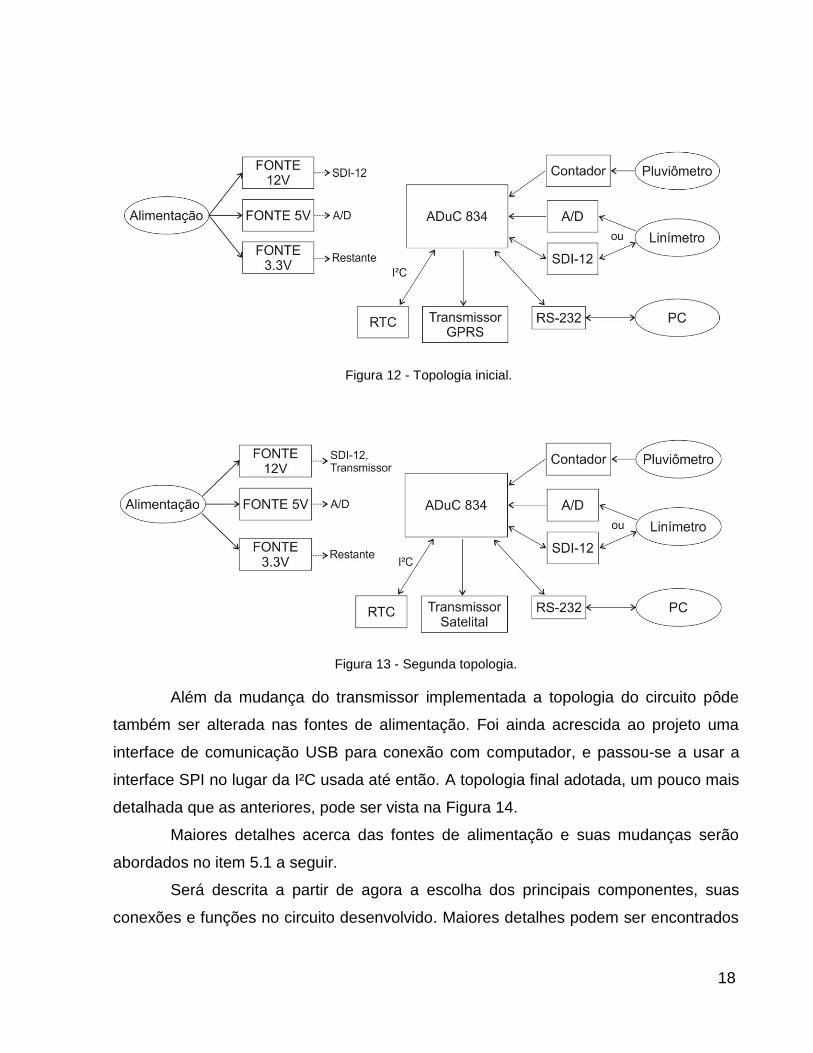
A primeira topologia adotada para o circuito pode ser vista na Figura 12. Nota-se
que inicialmente o circuito era composto por três fontes distintas de alimentação e
transmissor GRPS.
Como o local onde a instalação das estações é feita geralmente não possui boa
qualidade de sinal de celular ou até mesmo nem possui sinal e com uma oferta de serviço
de tráfego de dados pela rede ORBCOMM com custo muito próximo ao serviço de dados
GPRS oferecido pelas operadoras de telefonia optou-se então por mudar a topologia do
circuito usando um transmissor de dados via satélite, conforme mostra a Figura 13.
18
Além da mudança do transmissor implementada a topologia do circuito pôde
também ser alterada nas fontes de alimentação. Foi ainda acrescida ao projeto uma
interface de comunicação USB para conexão com computador, e passou-se a usar a
interface SPI no lugar da I²C usada até então. A topologia final adotada, um pouco mais
detalhada que as anteriores, pode ser vista na Figura 14.
Maiores detalhes acerca das fontes de alimentação e suas mudanças serão
abordados no item 5.1 a seguir.
Será descrita a partir de agora a escolha dos principais componentes, suas
conexões e funções no circuito desenvolvido. Maiores detalhes podem ser encontrados
Figura 13 - Segunda topologia.
Figura 12 - Topologia inicial.

19
no diagrama esquemático do projeto e nos datasheets de cada componente, anexados a
este trabalho ou referenciados nele.
5.1 CIRCUITO DE ALIMENTAÇÃO
Resumidamente o circuito necessita de duas tensões de alimentação distintas,
11 e 5 V. Essas foram escolhidas de acordo com o cenário apresentado a seguir.
Inicialmente o projeto foi pensado para fornecer três níveis de tensão distintas,
sendo elas 3,3 V, 5 V e 12 V que alimentariam, respectivamente, os circuitos digitais,
analógicos, e transmissor+SDI-12. Essa ideia, entretanto, foi alterada para otimizar o
projeto, eliminando-se a fonte de 3,3 V e reduzindo a tensão da outra fonte, de 12 para
10,8 V, garantindo maior estabilidade.
Os fatores que determinaram a alimentação necessária para todo o circuito do
projeto são apresentados a seguir.
Figura 14 - Topologia final.

20
Foi definido que o equipamento será alimentado por bateria com tensão nominal
de 12 V, que na prática varia entre 11,2 e 13,8 V, e a bateria por sua vez será conectada
a um controlador de carga alimentado por painel solar com uma tensão de saída máxima
de 17 V.
Com isso determinara-se a faixa de tensão de entrada para a qual o circuito fonte
foi projetado como sendo de 11,5 a 18 V.
O circuito correspondente ao transmissor satelital opera, conforme citado
anteriormente, em uma faixa de 9 a 18 V, com picos de consumo de até 2 A.
O circuito para conexão de sensores com protocolo de comunicação tipo SDI-12
necessita, de acordo com a padronização do referido protocolo, de uma linha alimentada
por uma tensão entre, com extremos incluídos, 9,6 a 16V.
Definiu-se então que uma mesma fonte forneceria energia aos dois circuitos
supracitados, com uma tensão de 12 V.
O microcontrolador possui duas entradas de alimentação denominadas de AVDD
e DVDD, que podem operar em tensões de 3,3 e 5V, sendo sua faixa de operação de 2
a 7 V. Essa separação é feita entre o bloco analógico e o bloco digital do microcontrolador.
De acordo com as recomendações do fabricante é desejável que essa separação seja
respeitada para evitar interferências entre os blocos, sendo principalmente para que
ruídos do circuito digital não interfiram na leitura do conversor A/D do microcontrolador.
No datasheet do ADuC834, na seção “Hardware Design Considerations”, é
possível observar duas soluções propostas para a alimentação dos referidos blocos. A
melhor solução para esse caso é que cada bloco possua um circuito de alimentação
independente. Alternativamente uma mesma fonte pode ser utilizada, desde que haja um
filtro entre AVDD e DVDD, as duas topologias podem ser observadas na Figura 15.

21
É importante notar ainda que a alimentação analógica (AVDD) do
microcontrolador definirá a faixa de operação do seu conversor A/D (tensão de entrada
permitida), que varia entre -0,3 V e AVDD+0,3 V. Com isso foi determinado que a tensão
AVDD seria de 5,0 V, para melhor atender aos sensores analógicos que já são
conhecidos como tendo esse range de saída de tensão.
Considerou-se ainda que a comunicação serial do modem satelital é feita em
3,3V. O que implicaria que alimentar DVDD com 3,3 V permitiria uma comunicação direta
entre o microcontrolador e o modem, sem representar, a princípio, prejuízos aos demais
componentes do projeto.
Com base nesse quadro de informações decidiu-se que o circuito fonte teria 3
blocos, sendo um para alimentar o circuito digital em 3,3V, outra para alimentar o circuito
analógico com 5,0 V e a terceira para alimentar o modem e a linha de alimentação do
barramento SDI-12. Todos operando com uma entrada de tensão de 12 V.
Dentre as topologias de fontes de tensão existentes optou-se por utilizar os
modelos de fontes chaveadas, por apresentarem melhor eficiência (devido à menor perda
térmica) se comparadas aos modelos dissipativos. Exigindo apenas um maior cuidado
com relação à interferência de ruídos sobre circuito analógico.
Durante o desenvolvimento do circuito de alimentação notou-se que para melhor
atender à faixa de operação de entrada definida, em especial no que diz respeito ao seu
valor mínimo de 11,5 V, seria possível e até mesmo aconselhável, que a alimentação do
barramento SDI-12 e do modem fosse feito com tensão de 10,8 V.
Figura 15 - Topologias para DVDD e AVDD.

22
Notou-se também que seria melhor optar por alimentar todo o circuito restante
com tensão de 5 V e converter a tensão de 5V para 3,3 V apenas no barramento de
comunicação entre microcontrolador. Adotando assim a topologia alternativa para
alimentação do ADuC834, com uma mesma fonte de tensão, ou seja, implementando um
filtro entre DVDD e AVDD.
Observou-se que os demais componentes operam tanto com tensões de 3,3V
quanto 5V, embora em alguns casos seja necessário a escolha de um modelo específico
conforme cada alimentação, entretanto essa mudança não afetaria o layout do circuito
uma vez que sua “pinagem” é compatível entre os modelos.
Assim foi possível eliminar a fonte de alimentação de 3,3 V.
A fonte chaveada de 10,8 V foi projetada com base no CI XL4005 da XLSEMI,
operando a 300 kHz. Os demais componentes do circuito foram dimensionados de acordo
com o guia apresentado no datasheet do XL4005. Com isso, a fonte deve suportar picos
de corrente de até 4 A, fornecendo uma tensão de saída de 10,80 V +/- 0,01 V, com uma
alimentação de entrada de 11,4 a 32 V. A saída desta fonte foi denominada como SVDD
e SGND, conforme mostrado no esquemático.
A fonte de 5 V foi projetada com base no CI LM2596-5.0 da Texas Instruments,
que opera a 150kHz. Os demais componentes do circuito foram selecionados de acordo
com orientações contidas no datasheet do LM2596. Desse modo o circuito deve operar
em uma faixa de tensão de 5,4 a 30 V com uma saída de 5,000 +/- 0,002 V, para uma
corrente máxima de até 1 A. o circuito no entanto suporta correntes de até 3 A, afetando
porém a precisão da tensão de saída. A saída desta fonte foi denominada como DVDD e
DGND (que na prática está conectado a SGND), conforme mostrado no esquemático.
Ao DVDD foi inserido um filtro, conforme recomendação contida no datasheet do
microcontrolador, cuja saída é a tensão de alimentação do circuito analógico, chamado
de AVDD. O terra do circuito analógico foi chamado de AGND, entretanto, o mesmo é
conectado a DGND.
Para fins de estudo e para flexibilizar o uso de um protótipo, o circuito da fonte
de 10,8 V foi projetado usando um resistor variável, que permite assim regular a tensão
de saída da fonte. Além disso, foi implementado um pequeno circuito limitador de

23
corrente, utilizando-se outro resistor variável e o CI LM358, constituído por amplificadores
operacionais de baixo consumo.
Seguindo a mesma tendência, circuito da fonte de 5 V também foi projetado
usando-se a versão ajustável do LM2596, contando com um resistor variável, permitindo
assim maior flexibilidade para outras aplicações.
O desenvolvimento das fontes em uma versão ajustável foi subsidiado por uma
empresa que está interessada em atuar na produção de lâmpadas a LED em Curitiba.
Com isso, foi possível produzir protótipos das duas fontes de modo mais rápido e com
custo reduzido.
Percebeu-se também que seria interessante que mesmo as versões definitivas a
serem implementadas no circuito possuam um resistor variável, permitindo assim futuros
ajustes nas tensões de alimentação.
Além da alimentação, o circuito analógico do microcontrolador pode contar com
uma tensão de referência de 2,5V, caso contrário o mesmo pode utilizar uma referência
interna de 1,25V, entretanto, para maior precisão é recomendado o uso de uma fonte
externa de referência. Com isso foi também projetado um circuito de 2,5 V de referência,
utilizando-se o CI AD780 da Analog Devices, alimentado por AVDD.
O circuito de conversão bidirecional de 3,3 para 5 V para ser usado entre a
comunicação do microcontrolador e do modem foi projetado baseado em um regulador
passivo de 5 para 3,3 V e transistores PNP, fazendo com que os pinos de RX e TX
estejam sempre em pull-up quando não utilizados. Este mesmo circuito pode ser usado
como interface entre o microcontrolador e um dispositivo que opere sob protocolo de
comunicação I²C em 3,3 V.
5.2 MICROCONTROLADOR
Aqui serão citadas as principais considerações no que se refere às conexões
usadas no microcontrolador.
Os pinos 32 e 33 do microcontrolador são destinados à conexão de um circuito
oscilador externo para referência de clock. Nesses pinos foi conectado um cristal
ressonador de 32,768 kHz. Conforme descrito na seção “Hardware Design
Considerations” do datasheet do microcontrolador, existem dois capacitores internos de

24
12 pF eliminando a necessidade de capacitores externos para o circuito contendo o cristal
acima descrito.
Todos os pinos do port 2 do microcontrolador são bidirecionais, permitindo assim
seu uso como entrada ou saída de sinal. Deve-se ficar atento durante o desenvolvimento
das conexões com esse port quando o mesmo for utilizado como entrada de sinal, pois
nessa situação os pinos configurados como entradas são atados à alimentação DVDD
por meio de um resistor interno, configuração essa denominada de pull-up. Isso implica
que os pinos em questão não devem ser conectados a um potencial de tensão mais baixo
por meio de cargas resistivas pois isso implicaria em um canal de dreno constante de
corrente.
O port 0 também é bidirecional, entretanto não possui resistores internos de pull-
up nem pull-down, sendo assim, podem ser usados como entradas de alta impedância, e
nesse caso é altamente recomendado o uso de resistores externos de pull-up quando um
sinal de nível alto for desejado.
Os pinos P1.0 e P1.1 podem fornecer correntes de até 10 mA sendo P1.0 ainda
responsável por incrementar o contador 2 quando habilitado. Por essa característica P1.0
foi escolhido como entrada para o circuito contador.
Os pinos de P1.2 a P1.3 constituem as entradas dos conversor A/D do
microcontrolador.
P3.0 e P3.1 foram usados como recepção e transmissão da porta serial UART.
O pino P3.5 também pode ser usado como contador, incrementando o contador
1.
Os pinos destinados à interface de comunicação SPI foram usados diretamente
a esse propósito, somente deixando o pino SS desconectado, considerando que o
mesmo possui um resistor de pull-up interno, já que o ADuC neste caso será o dispositivo
mestre desse barramento.
Os pinos P0.2 e P0.3 foram usados para selecionar periféricos que venham a ser
conectados no barramento SPI.

25
5.3 CIRCUITO DE COMUNICAÇÃO
O circuito de comunicação principal utiliza os pinos P3.0 e P3.1 do
microcontrolador, que representam, nessa ordem, os pinos receptor (RX) e transmissor
(TX) da porta de comunicação UART.
Alguns fatores da comunicação, tal como baudrate, serão de preocupação
apenas durante a escrita do programa para o microcontrolador, sendo assim vários
fatores que envolvem a comunicação entre os dispositivos serão deixados de lado nessa
seção enquanto não influenciarem o desenvolvimento do hardware.
Outro protocolo de comunicação utilizado foi o I²C, em um primeiro momento,
que logo após foi substituído pela comunicação SPI.
5.3.1 Comutação da UART
Inicialmente foi definido que 3 dispositivos utilizariam a porta de comunicação
UART, sendo eles o modem, a porta para comunicação com computador e o barramento
SDI-12. Posteriormente iniciou-se também a implementação de um dispositivo de GPS
(Global Positioning System) nessa mesma porta de comunicação.
Como o microcontrolador possui apenas uma porta de comunicação serial desse
tipo, para permitir a ligação de mais de um dispositivo foi necessário implementar um
circuito de multiplexação. Para isso foi utilizado o circuito integrado da série “4052”, que
permite a multiplexação de duas entradas em até oito saídas, sendo quatro para cada
entrada. A seleção é feita por meio dos pinos 9 e 10 desse CI, de acordo com a
combinação do estado lógico dos referidos pinos, conforme mostrado na Tabela 2.
Pino 9 Pino 10 Saídas Ativadas
0 0 X0 e Y0
0 1 X1 e Y1
1 0 X2 e Y2
1 1 X3 e Y3
Tabela 2 - Tabela verdade do CI 4052.
Desse modo foram então conectados os pinos P2.0 e P2.1 do microcontrolador
aos pinos 10 e 9, respectivamente, do CI 4052, permitindo assim a seleção via software

26
do periférico a ser conectado na UART do microcontrolador. Os pinos referidos foram
nomeados como UART_SL_A e UART_SL_B.
As portas de saída do 4052 foram nomeadas como uC_RXn e uC_TXn, onde n
representa um número de 0 a 3. A Tabela 3 mostra o periférico que foi conectado a cada
porta.
n periférico
0 RS-232/USB
1 modem
2 SDI-12
3 RS-232
Tabela 3 - Periféricos e portas.
5.3.2 Comunicação com computador e GPS
Para permitir a comunicação entre o equipamento e um computador, bem como
outro dispositivo que utilize o protocolo de comunicação RS-232, foi necessário
implementar um circuito para realizar a conversão de nível tensão TTL (Transistor-
Transistor Logic) da UART para RS-232. A representação de bits em níveis de tensão
para cada um é mostrado na Tabela 4.
Bit RS-232 TTL
0 +12 V 0 V
1 -12 V + 5 V
Tabela 4 - Níveis TTL e RS-232
Para essa tarefa foi utilizado o CI MAX3232 da MAXIM, que, com o auxílio de
alguns capacitores, realiza essa tarefa, permitindo a conversão de até dois dispositivos.
No MAX3232 foram conectados os pinos nomeados uC_RX0 e uC_TX0,
correspondente à conexão com o computador (RS232A), e posteriormente uC_RX3 e
uC_TX3, para comunicação com um GPS, ou outro dispositivo futuramente (RS232B).
Juntamente com a comunicação via RS-232 foi desenvolvido um circuito para
comunicação via USB entre o equipamento e o computador. Para essa comunicação
foram testados dois CIs distintos, o FT232RL da FTDI e o CP2102 da SILABS. Para
ambos foi possível encontrar placas de protótipo prontas, com custo baixo, que foram
importadas da China.

27
Devido ao menor custo e menor dimensão física, e dado que o funcionamento de
ambos foi satisfatório, foi optado por aplicar no projeto o CI da SILABS, CP2102.
A ideia inicial era substituir a comunicação via RS-232 pela USB, caso essa fosse
implementada com sucesso, entretanto, após o início dos testes que utilizariam o mesmo
CI MAX3232 para comunicação com o GPS foi decidido manter as duas opções de
comunicação.
Para que o microcontrolador reconheça que um computador foi conectado ao
equipamento foi utilizado o pino P0.0, chamado de PCC_DTC, conforme pode ser visto
no esquemático, quando a tensão desse pino é nula, significa que o pino 7 do DB9 (RTS)
foi ativado por um dispositivo nessa porta, nesse caso um computador. Ou ainda que a
porta USB foi energizada. Essa funcionalidade de detecção foi implementada
tardiamente, mas otimizou o código na parte de programação.
5.3.3 Comunicação com Modem Satelital
Conforme dito anteriormente, a comunicação serial com o modem Digi m10 é
feita em nível TTL de 3,3 V. Assim, foi utilizado o circuito conversor de tensão descrito na
subseção “Circuito de Alimentação” desse trabalho.
Os pinos RX e TX do modem foram conectados aos pinos uC_TX2 e uC_RX2,
nesta ordem, usando o conversor supracitado como interface entre os sinais.
5.3.4 Comunicação com o Barramento SDI-12
A comunicação no barramento SDI-12 ocorre por meio de uma única linha para
dados, assim é necessário que os pinos RX e TX do microcontrolador sejam comutados
para essa linha de dados. Além disso, é necessário que o nível do sinal seja convertido,
conforme mostra a Tabela 5.
Bit SDI-12 TTL
0 +5 V 0 V
1 0 V + 5 V
Tabela 5 - Níveis SDI-12 e TTL
Para isso foi desenvolvido um circuito utilizando os CIs 74LS126 e 74HC14 ou
similares.

28
Para adequar o circuito aos requisitos estabelecidos no protocolo SDI-12, foi
inserida uma resistência de 510 Ω em série com a linha de dados, linha esta denominada
no projeto como SDI_DATA.
Os pinos utilizados a partir do CI 4052 foram os denominados como uC_TX1 e
uC_RX1.
A comutação dos canais de recepção e transmissão do microcontrolador com a
linha bidirecional de dados do barramento SDI-12 é feita por meio dos pinos de enable
existentes no CI 74LS126. O controle da comutação é comandado por software pelo
microcontrolador e através do pino P2.3.
5.3.5 Comunicação I²C e SPI
O microcontrolador ADuC834 compartilha os mesmos pinos para serem usados
como interface SPI ou I²C, sendo assim, não é viável utilizar as duas ao mesmo tempo.
Inicialmente foi escolhido usar a interface I²C para interagir com o circuito RTC
(Real Time Clock). Posteriormente foi escolhido usar um circuito RTC com interface SPI,
para permitir uma futura utilização de cartão de memória que utiliza também a interface
SPI.
A comunicação, tanto para I²C quanto para SPI é feita diretamente pelos pinos
SCLOCK e MOSI/SDATA e ainda pelos pinos SS e MISO para a interface SPI.
5.4 CIRCUITO DO MODEM
O modem Digi m10 possui uma interface constituída por 14 pinos já citada.
Os pinos 1 e 3 foram conectados ao SVDD e os pinos 2, 4, e 6 foram conectados
à SGND. Entre SVDD e SGND, posicionado o mais próximo possível da interface do
modem, foi inserido um capacitor de 0.1 uF.
O pino 5, PWR_EN, tem como função habilitar o modem quando o referido pino
é energizado com uma tensão entre 3 V e 18 V. No circuito fio habilitado por meio de um
jumper a escolha entre conectar esse pino ao SVDD, deixando assim o modem sempre
ligado, ou conectá-lo ao pino P.0.1 do microcontrolador, permitindo assim ligar e desligar
o modem via programa. Um circuito RC garante que a tensão em PWR_EN leve pelo

29
menos 10 ms para atingir a tensão de 3,3 V a partir do momento em que SVDD é
estabelecida, tempo esse recomendado pelo fabricante.
O pino 8 foi conectado ao pino uC_RX1 e o pino 7 ao uC_TX1, por meio dos
quais é feita a comunicação entre o modem e o microcontrolador.
O pino 9 determina se o modem está conectado a um satélite. Esse pino foi
conectado ao pino P2.6 do microcontrolador para fins de controle dessa informação no
programa.
O pino 10 determina se existem dados disponíveis no modem provenientes da
rede, e foi conectado ao pino P2.7 do ADuC834 para aplicações futuras, já que em um
primeiro momento o uso do modem será apenas como transmissor.
Os pinos 12 e 13 são para debug do modem, e foram apenas deixados como
disponíveis na placa, sem uso no presente momento.
Os pinos 13 e 14, CTS e RTS foram conectados aos pinos P2.4 e P2.5,
respectivamente, passando por um jumper que permite ligar CTS com RTS, opção tida
como padrão nesse trabalho.
5.5 CIRCUITO SDI-12
O circuito SDI-12 é constituído, além do circuito de comunicação já relatado neste
trabalho, por uma linha de alimentação e uma de aterramento, sendo assim então
realizado sobre 3 fios.
A linha de alimentação é mantida sempre ativa enquanto o equipamento estiver
energizado. Futuramente pretende-se estudar a possibilidade e viabilidade de controlar o
tempo em que a linha de alimentação permanece ativa.
5.6 CIRCUITO RTC
Em um primeiro momento foi escolhido um circuito RTC composto pelo CI
DS1307, que é um circuito integrado destinado a esse propósito e que possui
comunicação via protocolo I²C. Posteriormente foi pensado para o projeto a utilização do
mesmo circuito, entretanto com interface SPI, com o CI DS1305. Essa mudança foi feita
para permitir uma futura implementação de circuito para gravar e ler dados em cartão de
memória SD.
30
O circuito RTC ficou então conectado diretamente aos pinos SCLOCK que
fornece, controlado por software, o clock para a comunicação, MOSI/SDATA responsável
pela transmissão de dados do dispositivo mestre para seus escravos, e MISO que realiza
a operação oposta ao MOSI/SDATA.
O pino 7 do DS1305 foi conectado ao pino P3.3 do microcontrolador para permitir
que um determinado estado do relógio dispare a interrupção 1 do ADuC834. Para fins de
controle em implementações futuras, o pino 6 do DS1305 foi conectado ao pino P0.4 do
microcontrolador, sendo possível assim identificar se o alarme 0 do RTC foi acionado.
A seleção do CI do RTC para comunicação serial é feita pelo pino P0.2 do
microcontrolador, chamado aqui de SPI_CS0.
Ao DS1305 é recomendado conectar um cristal oscilador com capacitância de 6
pF e frequência de 32.678 kHz. Desse modo foi escolhido o ABS25-32.678-6-1-T, que
possui as características citadas.
5.7 CIRCUITO A/D
O circuito A/D foi projetado para disponibilizar duas entradas analógicas cuja
faixa no microcontrolador foi ajustada para operar em modo diferencial de ±2,56 V.
As duas entradas diferenciais passam por um circuito ajustável divisor de tensão,
possibilitado a leitura de tensões superiores à faixa de ±2,56 V, entretanto deve-se levar
em conta que para esses casos a resolução da leitura será alterada e sua precisão
reduzida.
A quinta entrada analógica com faixa de 0 a 2,5 V foi conectada à alimentação
do equipamento, permitindo assim a leitura de sua alimentação, também sendo
intermediada por um resistor variável para permitir o ajuste da faixa de operação,
entretanto, não permitindo uma divisão maior que 1/4 da entrada, garantindo assim que
a tensão que vai para o microcontrolador seja inferior a 2,5 V.
5.8 CIRCUITO CONTADOR
Para registrar contagens foi utilizado o pino P1.0 do ADuC834. O circuito
contador é composto basicamente por uma porta lógica inversora, um resistor de pull-up

31
e um capacitor. Assim o circuito incrementará o contador a cada curto circuito que for
aplicado na entrada contadora, sem gerar contagens falsas por bouncing.
6 PROGRAMA DO MICROCONTROLADOR
Lado a lado à definição do hardware e dos circuitos foi iniciada a escrita do
programa para o microcontrolador. A programação foi feita em linguagem C com auxílio
da interface do programa uVision 4, para programação, compilação, debug e criação do
arquivo “.HEX” a ser gravado no microcontrolador.
Um diagrama simplificado com a estrutura de funcionamento do programa pode
ser visto na Figura 16.
Durante o desenvolvimento do programa foi atingido o limite de memória de
programa do ADuC 834. Com isso foi necessário separar o programa em duas versões,
uma para sensor de nível analógico e outra para sensor de nível com interface SDI-12,
pois não há memória suficiente para executar os códigos das duas funções.
Figura 16 - Fluxograma básico do programa executado pelo microcontrolador.

32
Após configurar os registradores do microcontrolador (direção das portas,
entradas analógicas, timers, watchdog, etc) o programa verifica, pelo estado do pino P0.0
do microcontrolador, se um dispositivo (um computador) foi conectado ao equipamento.
Em caso negativo o próximo passo é a leitura do horário. Essa leitura é feita pela
interface I²C/SPI, pela função “v_rtc_get_time()”, que converte os valores lidos do formato
hexadecimal para BCD e os armazena em uma struct chamada “rtc_lido”.
Após isso o programa analisa o valor dos minutos e segundos, tomando as ações
descritas a seguir.
Caso o valor correspondente aos segundos do relógio esteja entre 0 e 10 o
programa efetuará a leitura do nível, fará a média entre esse valor e o último valor lido
dentro do intervalo de 1h, e armazenará esse valor médio.
Caso o valor dos minutos do relógio seja igual a 2 e dos segundos maior que 29
o programa efetua a transmissão dos dados sujo “índice” é igual a hora atual decrescida
de uma unidade. Essa transmissão é comandada por meio da interrupção externa do
microcontrolador, que é acionada pelo circuito RTC. É também setado um “flag” indicando
que a transmissão foi ordenada, evitando assim que outra transmissão ocorra em caso
de um sinal falso de interrupção externa. Esse “flag” é resetado quando o relógio atinge
59 minutos e 30 segundos, momento no qual é realizada também uma leitura do nível de
tensão da alimentação do equipamento.
Conforme foi definido no projeto, o equipamento deve registrar os dados dos
sensores e separá-los em intervalos de 1 hora, iniciando-se em hora cheia. Deve ainda
transmitir esses dados também a cada hora. Assim, foi necessário criar uma “tabela” para
armazenar os dados separadamente de acordo com seu intervalo. Para isso foi criada
uma struct nomeada “dados”.
Os elementos da estrutura “dados” são vetores de tamanho 24, onde “n” é
numericamente igual ao índice, e são mostrados a seguir:
“índice[n]”: índice numérico (de 0 a 23);
“time[n]": hora correspondente ao intervalo de medição (0 a 23);
“prec[n]”: contador que representa a precipitação, em binário (0 a 11111111);
“nivelhigh[n]”: valor mais significativo da leitura do sensor de nível (metros);
“nivellow[n]”: valor menos significativo da leitura de nível (centímetros);

33
“bat[n]”: valor da leitura da alimentação do equipamento (0 a 255).
A quantidade de dados armazenados, conforme sugerido pelo campo “índice” foi
fixada em 24, após esse valor os dados passam a ser sobrescritos sobre os mais antigos.
O campo “time” recebe um valor de 0, para 00:00h, até 23, para 23:00h, sendo
que 0 por exemplo representa que os dados correspondem ao intervalo entre 00:00h até
00:59h.
A variável de precipitação é incrementada por meio da interrupção do contador
habilitada no microcontrolador e é armazenada em base binária para que valores de até
256 contagens possam ser transmitidas usando um único byte.
Caso as condições do relógio não se enquadrem nas ações descritas acima o
programa retorna ao ponto de leitura do relógio, reiniciando o ciclo.
Caso um computador seja detectado o equipamento passa então a usar a
comunicação exclusivamente para esse fim, ou seja, tanto a transmissão quanto a
interface SDI-12 permanecem desabilitadas enquanto o computador estiver conectado
ao equipamento.
Após executar as funções para configurar a comunicação com o computador o
equipamento exibe (envia para o computador) um menu, que pode ser visto na Figura 17.
Figura 17 - Menu exibido pelo programa.

34
7 TESTES E RESULTADOS
Conforme foi determinado na metodologia, o circuito foi testado separadamente
por blocos à medida em que foram desenvolvidos. Os circuitos usados nos principais
testes serão apresentados a seguir.
7.1 CIRCUITO DE ALIMENTAÇÃO DE 5 V
O circuito de alimentação de 5 V foi basicamente projetado conforme orientação
do datasheet do seu componente principal. Por ter ficado parecido com um circuito padrão
foi fácil encontrar um protótipo já pronto muito similar ao circuito projetado, apenas não
possuindo proteção contra inversão de polaridade na entrada do circuito.
O protótipo custou 4 dólares, e é mostrado na Figura 19, e seu esquema elétrico
na Figura 18.
Figura 18 - Circuito do protótipo da fonte de 5V
Figura 19 - Protótipo da fonte de 5 V

35
Ligando-se a entrada do circuito em uma fonte de tensão e a saída em cargas
ajustáveis foram realizados testes para medir a tensão e corrente de saída fornecida
pelas fontes em diferentes situações cujos resultados podem ser vistos na Tabela 6.
Tensão de Entrada (V) Tensão de Saída (V) Corrente de Saída (A)
12,0 5,000 0
12,0 5,000 0,504
12,0 5,000 1,022
12,0 4,999 2,205
12,0 4,998 3,015
5,4 5,000 0
5,4 4,999 0,508
5,4 4,998 1,002
5,4 4,852 2,301
30,0 5,000 0
30,0 5,000 0,507
30,0 4,999 1,015
Tabela 6 - Resultados de ensaio para a fonte de 5 V.
Desse modo pode-se afirmar que a fonte atende aos requisitos do projeto,
possuindo uma saída de 5,000 ± 0,001 V para correntes de saída até 1 A.
Para medição de corrente foi usado um multímetro Meterman 37XR, para medir a tensão
de saída foi usado um multímetro de bancada HP 34401A, e para medição da tensão de
entrada foi usada a própria medição da fonte de tensão usada para alimentar o circuito.
Fotos dos equipamentos usados foram tiradas durante a segunda medição mostrada na
Tabela 6 e são apresentadas na Figura 20, Figura 21 e Figura 22.
Figura 20 - Medição de corrente.

36
Figura 21 - Multímetro de bancada.
Figura 22 – Fonte de alimentação

37
7.2 CIRCUITO DE ALIMENTAÇÃO 12 V
Esse circuito, que na verdade deve fornecer 10,8 V, foi encomendado e teve sua
PCB produzida na China, os demais componentes também foram importados diretamente
desse mesmo país. Chegando aqui foram montados por uma empresa que está
começando a fabricar lâmpadas com LEDs em Curitiba. Esta empresa mostrou interesse
no circuito dessa fonte e subsidiou o custo de fabricação de 25 placas de protótipo. A
placa produzida é mostrada na Figura 23.
Como foi dito na seção “Hardware e Circuito”, esse circuito possui um controlador
de corrente, mas que nesse projeto não foi utilizado, assim seu ajuste, por meio de um
dos potenciômetros, foi colocado de modo a não limitar a corrente.
Da mesma forma como foi feito para o circuito de alimentação de 5 V os
resultados dos testes para esse protótipo são mostrados na Tabela 7.
Desse modo pode-se afirmar que a fonte atende aos requisitos do projeto,
possuindo uma saída de 10,80 ± 0,01 V para correntes de saída até 3 A.
Figura 23 - Protótipo do circuito de alimentação de 12 V.

38
Tensão de Entrada (V) Tensão de Saída (V) Corrente de Saída (A)
12,0 10,80 0
12,0 10,80 0,508
12,0 10,80 1,030
12,0 10,80 2,018
12,0 10,79 3,032
11,4 10,80 0
11,4 10,80 1,007
11,4 10,80 2,012
11,4 10,79 3,007
32,0 10,80 0
32,0 10,80 2,012
32,0 10,79 3,050
Tabela 7 - Resultados do ensaio para o circuito de alimentação de 12 V.
7.3 REGULADOR DE 3,3 V
O circuito regulador de 3,3 V foi encontrado pronto para venda, sendo um circuito
destinado à aplicações com Arduino, entretanto, pôde ser usado para esse projeto de
maneira satisfatória. O protótipo é mostrado na Figura 24.
Figura 24 - Circuito conversor bidirecional 5/3,3 V

39
Este circuito não foi testado separadamente em todos os aspectos desejáveis
tais como velocidade de atuação e capacidade de corrente, apenas mediu-se as tensões
de 3,3 V quando um sinal de 5 V era aplicado e vice-versa. Após isso foi conectado
diretamente entre o microcontrolador e o modem m10. Como a comunicação entre os
dois dispositivos ocorreu de forma satisfatória assumiu-se então que o circuito funcionou
adequadamente.
7.4 CIRCUITO DE REFERÊNCIA DE 2,5 V
Este circuito foi feito, em termos de diagrama elétrico, exatamente igual ao
circuito de referência presente no kit de desenvolvimento do microcontrolador, assim, não
foi necessário produzi-lo. Uma medição foi feita na placa de desenvolvimento e o
resultado da leitura foi de 2,5002 V. Ou seja, o circuito opera de modo adequado.
7.5 CIRCUITO SDI-12
O circuito SDI-12 foi montado em protoboard usando os componentes 74HC14N
da Philips e MC74HC126AN da ON Semi.
Do mesmo modo como ocorreu para o circuito conversor de 5 para 3,3 V, esse
circuito foi testado em aplicação, ou seja, nenhuma medição foi efetuada para garantir
todos os níveis necessários. Como o circuito SDI-12 funcionou de forma adequada
(apresentando apenas problemas devido à programação), assume-se aqui que este
circuito está apto a exercer a função a ele dedicada.
Uma foto do circuito pode ser visto na Figura 25.

40
7.6 CIRCUITO DE COMUTAÇÃO DA UART
O circuito de multiplexação da UART foi testada com auxílio do kit LaunchPad
com o microcontrolador MSP430G2553, que foi programado para executar o
chaveamento das portas e transmitir a cada 1s a string “Teste Serial Pela Porta
Multiplexadora”, com um baudrate de 9600. Nas 4 saídas do multiplexador foi conectado
um conversor UART/USB para que a mensagem pudesse ser lida no PC através de um
programa de comunicação serial, nesse caso foi usado o TeraTerm. O programa rodando
no microcontrolador executava o chaveamento das portas a cada 20 s, e a cada 2 s um
LED conectado na placa à porta P1.0, piscava de uma a quatro vezes com frequência de
0.25 s, de acordo com a combinação dos pinos de chaveamento, ou seja, quando as
portas X0 e Y0 estavam ativas o LED piscava uma vez, 2 vezes para portas X1 e Y1, três
para as portas X2 e Y2 e quatro para as portas X3 e Y3. Desse modo foi possível garantir
que as portas estavam ativas ou inativas de acordo com o esperado do circuito.
O teste foi feito usando esse microcontrolador porque o kit de desenvolvimento
do ADuC834 estava sendo usado no teste de transmissão de dados juntamente com o
kit do modem m10.
Figura 25- Circuito SDI-12
41
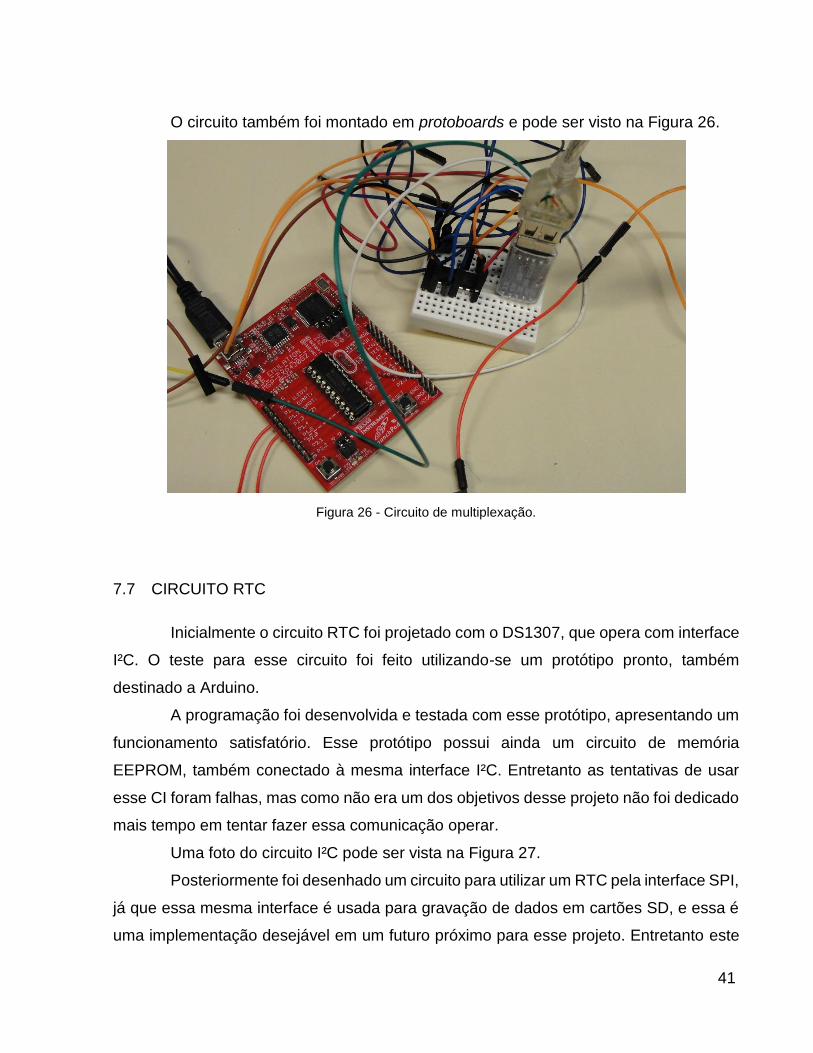
O circuito também foi montado em protoboards e pode ser visto na Figura 26.
7.7 CIRCUITO RTC
Inicialmente o circuito RTC foi projetado com o DS1307, que opera com interface
I²C. O teste para esse circuito foi feito utilizando-se um protótipo pronto, também
destinado a Arduino.
A programação foi desenvolvida e testada com esse protótipo, apresentando um
funcionamento satisfatório. Esse protótipo possui ainda um circuito de memória
EEPROM, também conectado à mesma interface I²C. Entretanto as tentativas de usar
esse CI foram falhas, mas como não era um dos objetivos desse projeto não foi dedicado
mais tempo em tentar fazer essa comunicação operar.
Uma foto do circuito I²C pode ser vista na Figura 27.
Posteriormente foi desenhado um circuito para utilizar um RTC pela interface SPI,
já que essa mesma interface é usada para gravação de dados em cartões SD, e essa é
uma implementação desejável em um futuro próximo para esse projeto. Entretanto este
Figura 26 - Circuito de multiplexação.

42
circuito não foi implementado nem testado. Todas as funções dentro do programa que
dependem do RTC foram testadas usando o RTC através da interface I²C.
7.8 CIRCUITO A/D
O circuito A/D foi um dos mais trabalhosos de colocar em funcionamento,
principalmente em termos de programação. Quanto ao hardware foi usado basicamente
o kit de desenvolvimento do microcontrolador e uma fonte de tensão de precisão modelo
DVC-350A, que pode ser vista na Figura 28.
O circuito foi testado fazendo com que o microcontrolador enviasse pela porta
UART os valores obtidos pela conversão A/D, e o valor após processado o
equacionamento de slope e offset, que podiam ser alterados por meio de comando do
teclado, digitando-se “s” para alterar slope e “o” para offset. Os valores de leitura eram
vistos na tela do computador.
Figura 27 - Circuito RTC (I²C)

43
7.9 CIRCUITO CONTADOR
O circuito contador foi testado também através do kit de desenvolvimento do
microcontrolador, por meio de um botão simples.
O teste também junto com o teste de transmissão de dados e disponibilidade de
satélites. Para isso, foi conectado à entrada contadora de pulsos uma das saídas P1.0
do MSP430 já citado nesse texto, e uma saída do ADuC834 foi conectada à uma entrada
(P1.6) do MSP430. Utilizando-se o RTC conectado ao kit do ADuC834, o mesmo foi
programado para emitir um pulso para o pino P1.6 do MSP a cada 10, 20, 38, e 59 minutos
cheios do relógio. Ao receber esse pulso o MSP430 gerava então um pulso negativo na
entrada contadora do ADuC834. Desse modo era possível verificar se todos os pulsos
estavam sendo corretamente adquiridos e tratados pelo ADuC. E ainda foi possível
verificar se a transmissão desses dados estava correta.
Figura 28 - Fonte de tensão de precisão.

44
7.10 TRANSMISSÃO DE DADOS
Conforme citado anteriormente, a transmissão de dados foi testada junto a um
circuito contador. Além do circuito contador foi também conectado um sensor de
temperatura analógico LM35 à entrada analógica do ADuC834.
O microcontrolador foi programado para transmitir os dados coletados 4 vezes a
cada hora, quando o relógio marcasse 2, 3, 4, e 5 minutos cheios. Após 1 dia operando
dessa forma essa configuração foi alterada para monitorar o pino Satellite Available, pois
supôs-se que as falhas de transmissão ocorridas durante o primeiro teste foram causadas
pela ausência de satélite no momento da transmissão. Nessa nova configuração foi
inserido no programa do microcontrolador uma função para que, a cada envio de dados
para o modem fosse impresso na tela de um computador o status do pino Satellite
Available. Com esse teste foi possível confirmar que a falha realmente ocorria devido à
falta de satélites.
Os dados transmitidos chegaram via email, como anexo, em arquivos com
extensão “att”. O remetente, conforme especificado nos manuais de referência da
ORBCOMM, é o número de série do modem que transmite os dados, com domínio
“orbcomm.net”. No caso desse projeto o remetente é [email protected].
O resultado do teste para o segundo modelo, no que se refere à transmissão,
pode ser observado na tabela anexada a esse trabalho.
8 CONSIDERAÇÕES FINAIS SOBRE O PROJETO
O circuito apresenta ainda alguns erros e principalmente vulnerabilidades em seu
programa, como por exemplo a inserção de um caractere não numérico durante a
definição do slope, offset, ou horário do equipamento. Outro exemplo de vulnerabilidade
consiste na falta de uma rotina para identificar falhas na transmissão de um pacote para
posterior tentativa de re-envio do mesmo.
Durante a implementação de uma rotina de calibração das entradas analógicas
cometeu-se um erro na magnitude de tensão aplicada, sendo que um valor de 10 V foi
aplicado acidentalmente ao invés de um valor de 1V como era desejado. O resultado foi

45
a queima do microcontrolador do kit. Com isso percebeu-se a importância de implementar
um circuito de proteção nas entradas analógicas do microcontrolador.
Várias outras implementações ainda precisam ser feitas no projeto para que na
prática o produto seja mais versátil, robusto e confiável. Entretanto, e já percebendo
limitações do microcontrolador usado, o projeto começou a ser migrado para uma nova
versão, utilizando um microcontrolador com maior capacidade de processamento e
memória. Por esse motivo deixou-se de investir em melhorias do circuito até aqui
desenvolvido.
A nova versão não será detalhada nesse trabalho pois não faz parte do escopo
original e também por não estar concluída em termos de programa. Entretanto, o layout
e esquemático do novo circuito podem ser visualizados nos apêndices desse trabalho. É
possível perceber que o modem foi colocado em uma placa separada do datalogger na
nova versão do projeto. Outra novidade no novo projeto é a existência de mais interfaces
disponíveis, sendo 4 entradas analógicas, 3 entradas digitais, além das interfaces SDI-
12 e agora também RS-485, o que possibilitará a conexão de mais sensores ao
equipamento, tornando o mesmo mais versátil.

46
CONCLUSÕES
O projeto conseguiu cumprir os requisitos exigidos para o equipamento, sendo
capaz de coletar e transmitir variáveis de nível e chuva em intervalos de 1h, entretanto o
equipamento ainda não atingiu um nível satisfatório de robustez e operação prática.
Alguns itens não previstos nas especificações desse equipamento devem ser
implementadas para que tal nível seja alcançado.
Esse projeto foi considerado como finalizado no estado aqui atingido, mesmo
com todas as vulnerabilidades e limitações constatadas. Entretanto, foi de suma
importância toda a experiência adquirida durante esse projeto para a criação do novo
projeto que começou a ser executado. Tal experiência é indescritível, e todas as
incontáveis horas investidas nesse projeto, desde a leitura incessável de documentações
até o desenvolvimento de circuitos elétricos, passando, claro, por todas as dificuldades
encontradas durante a programação do microcontrolador, com certeza contribuíram, e
muito, para o desenvolvimento pessoal e profissional do autor desse trabalho.
Esse trabalho comprovou ainda a possibilidade concreta de desenvolver um
produto nacional para atender ao monitoramento e transmissão de dados em estações
hidrológicas.

47
REFERÊNCIAS BIBLIOGRÁFICAS
1. Agência Nacional De Energia Elétrica – ANEEL & Agência Nacional De
Águas – ANA - RESOLUÇÃO CONJUNTA Nº 3, DE 10 DE AGOSTO DE 2010 -
Disponível em:
http://arquivos.ana.gov.br/infohidrologicas/cadastro/ResolucaoConjunta_n_003-
2010.pdf
2. SDI-12 Support Group (Technical Committee) - SDI-12 A Serial-Digital
Interface Standard for Microprocessor-Based Sensors - Version 1.3 -January
26, 2013 - Disponível em:
http://www.sdi-12.org/current%20specification/SDI-
12_version1_3%20January%2026,%202013.pdf
3. Analog Devices - ADUC834 Data Sheet Rev A, 04/2003 - Disponível em:
http://www.analog.com/static/imported-files/data_sheets/ADUC834.pdf
4. AN-1139: Understanding the Parallel Programming Protocol – Disponível em:
http://www.analog.com/static/imported-files/application_notes/AN-1139.pdf
5. AN-1074: Understanding the Serial Download Protocol (Formerly uC004) -
Disponível em: http://www.analog.com/static/imported-
files/application_notes/AN-1074.pdf
6. UC-018: Uses of the Time Interval Counter - Disponível em:
http://www.analog.com/static/imported-
files/application_notes/uC018_Uses_of_the_Time_Interval_Counter.pdf
7. UC-001: MicroConverter® 2C® Compatible Interface - Disponível em:
http://www.analog.com/static/imported-files/application_notes/uC001_-
_MicroConverter_I2C_Compatible_Interface.pdf
8. UC-007: User Download (ULOAD) Mode - Disponível em:
http://www.analog.com/static/imported-
files/application_notes/uC007___ULOAD_Example_for_ADuC834__ADuC832.
9. AN-282: Fundamentals of Sampled Data Systems - Disponível em:
http://www.analog.com/static/imported-

48
files/application_notes/604524360052208598727001151598293532572069742
59641368301086579520703792632610264805090AN282.pdf
10. UC-006: A 4-wire UART-to-PC Interface - Disponível em:
http://www.analog.com/static/imported-
files/application_notes/uC006___A_4_wire_UART_to_PC_Interface.pdf
11. UC-008: Using the ADuC834 C-library - Disponível em:
http://www.analog.com/static/imported-files/application_notes/UC-008.pdf
12. UC-002: Developing in C with the Keil uVision2 IDE - Disponível em:
http://www.analog.com/static/imported-
files/application_notes/uC002___Developing_in_C_with_the_Keil_uVision2_IDE
13. UG-041 ADuC8xx Evaluation Kit Getting Started User Guide – Disponível
em: http://www.analog.com/static/imported-files/user_guides/UG-041.pdf
14. Digi m10 Satellite Modem Hardware Reference, 24 September 2009
ORBCOMM Messaging Services Description Rev_E
ORBCOMM Serial Specification Rev G
ORBCOMM System Overview Rev G

49
APÊNDICES
Apêndice 1 - Tabela com resultado do teste de transmissão de dados.
Hora Minuto Hora Minuto Hora Minuto Hora Minuto
16 2 2 22 6 2 4 2 - 10 2 1
16 3 3 22 6 - 4 3 2 10 3 2
16 4 1 22 6 - 4 4 1 10 4 0
16 5 2 22 6 2 4 5 1 10 5 1
17 2 2 23 7 2 5 2 3 11 2 3
17 3 3 23 7 1 5 3 2 11 3 3
17 4 1 23 7 0 5 4 2 11 4 2
17 5 1 23 7 4 5 5 4 11 5 3
18 2 3 0 8 3 6 2 2 12 2 3
18 3 4 0 8 3 6 3 4 12 3 6
18 4 2 0 8 2 6 4 3 12 4 8
18 5 5 0 8 1 6 5 2 12 5 5
19 2 2 1 9 2 7 2 1 13 2 1
19 3 1 1 9 2 7 3 2 13 3 0
19 4 2 1 9 2 7 4 2 13 4 0
19 5 3 1 9 6 7 5 3 13 5 1
20 2 2 2 10 2 8 2 3 14 2 2
20 3 2 2 10 3 8 3 2 14 3 3
20 4 3 2 10 3 8 4 2 14 4 -
20 5 4 2 10 1 8 5 1 14 5 -
21 2 3 3 11 0 9 2 0 15 2 3
21 3 2 3 11 0 9 3 0 15 3 3
21 4 2 3 11 1 9 4 1 15 4 3
21 5 1 3 11 1 9 5 3 15 5 4
Transmissão Latência
(minutos)
Transmissão Latência
(minutos)
Transmissão Latência
(minutos)
Transmissão Latência
(minutos)
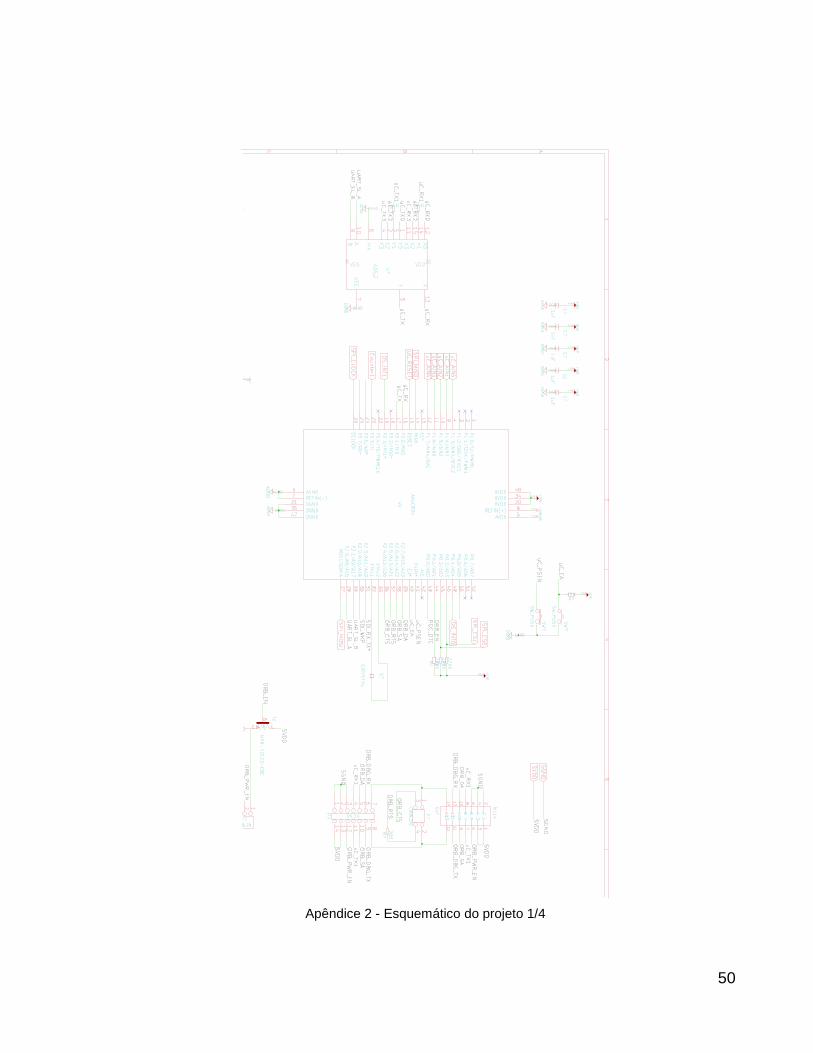
50
Apêndice 2 - Esquemático do projeto 1/4

51
Apêndice 3 - Esquemático do projeto 2/4

52
Apêndice 4 - Esquemático do circuito 3/4

53
Apêndice 5 - Esquemático do circuito 4/4

54
Apêndice 6 - PCB versão atual - Transmissor.
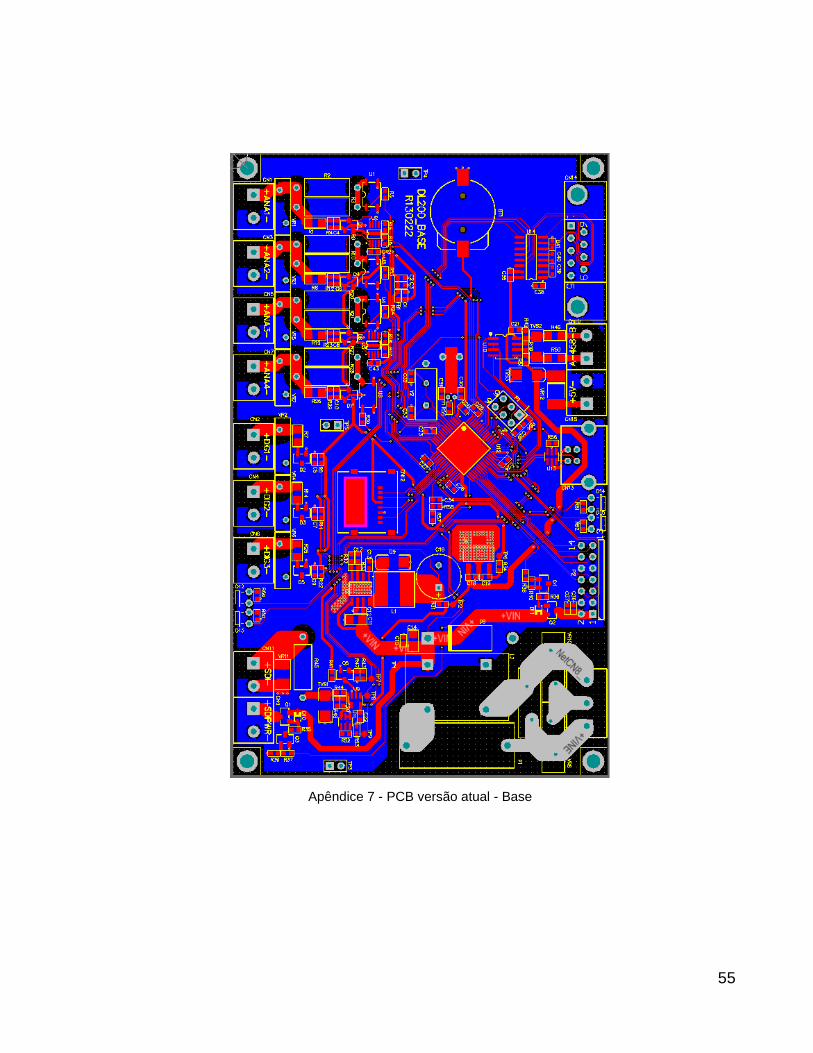
55
Apêndice 7 - PCB versão atual - Base


![XIV Circuito Divina Pastora - Amazon S3 · } o ( v r y/s ] µ ] } ] À ] v W } ^ P µ } W } µ o ] µ s o v ]](https://static.fdocumentos.com/doc/165x107/5fad692e21900c71907cf896/xiv-circuito-divina-pastora-amazon-s3-o-v-r-ys-v-w-p.jpg)