UNIVERSIDADE TECNOLOGICA FEDERAL DO PARAN´ A´...
112
UNIVERSIDADE TECNOL ´ OGICA FEDERAL DO PARAN ´ A PROGRAMA DE P ´ OS-GRADUAC ¸ ˜ AO EM ENGENHARIA EL ´ ETRICA ODILIO DE SOUZA DUARTE ALGORITMO MPPT PARA SISTEMA DE GERAC ¸ ˜ AO DE ENERGIA E ´ OLICA DE PEQUENO PORTE COM PMSG DISSERTAC ¸ ˜ AO PATO BRANCO 2017
Transcript of UNIVERSIDADE TECNOLOGICA FEDERAL DO PARAN´ A´...

UNIVERSIDADE TECNOLOGICA FEDERAL DO PARANA
PROGRAMA DE POS-GRADUACAO EM ENGENHARIA ELETRICA
ODILIO DE SOUZA DUARTE
ALGORITMO MPPT PARA SISTEMA DE GERACAO DE ENERGIAEOLICA DE PEQUENO PORTE COM PMSG
DISSERTACAO
PATO BRANCO
2017

ODILIO DE SOUZA DUARTE
ALGORITMO MPPT PARA SISTEMA DE GERACAO DE ENERGIAEOLICA DE PEQUENO PORTE COM PMSG
Dissertacao apresentada ao Programa de Pos-
graduacao em Engenharia Eletrica da Universidade
Tecnologica Federal do Parana como requisito
parcial para obtencao do grau de “Mestre em
Engenharia Eletrica” – Area de Concentracao:
Sistemas e Processamento de Energia.
Orientador: Jean Patric da Costa
PATO BRANCO
2017

Ficha Catalográfica elaborada por Suélem Belmudes Cardoso CRB9/1630 Biblioteca da UTFPR Campus Pato Branco
D812a Duarte, Odilio de Souza. Algoritmo MPPT para sistema de geração de energia eólica de
pequeno porte com PMSG / Odilio de Souza Duarte. -- 2017. 110 f. : il. ; 30 cm Orientador: Prof. Dr. Jean Patric da Costa Dissertação (Mestrado) - Universidade Tecnológica Federal do
Paraná. Programa de Pós-Graduação em Engenharia Elétrica. Pato Branco, PR, 2017.
Bibliografia: f. 85 – 88.
1. Energia eólica. 2. Energia - Fontes alternativas. 3. Conversores de corrente elétrica. I. Costa, Jean Patric da, orient. II. Universidade Tecnológica Federal do Paraná. Programa de Pós-Graduação em Engenharia Elétrica. III. Título. CDD 22. ed. 621.3
Ministério da Educação Universidade Tecnológica Federal do Paraná
Câmpus Pato Branco Diretoria de Pesquisa e Pós-Graduação
Programa de Pós-Graduação em Engenharia Elétrica
UNIVERSIDADE TECNOLÓGICA FEDERAL DO PARANÁ
PR
TERMO DE APROVAÇÃO
Título da Dissertação n.° 056
“ALGORITMO MPPT PARA SISTEMA DE GERAÇÃO DE ENERGIA EÓLICA DE
PEQUENO PORTE COM PMSG”
por
Odilio de Souza Duarte
Dissertação apresentada às treze horas e trinta minutos, do dia seis de setembro de dois mil e dezessete, como requisito parcial para obtenção do título de MESTRE EM ENGENHARIA ELÉTRICA. Programa de Pós-Graduação em Engenharia Elétrica, Universidade Tecnológica Federal do Paraná, Câmpus Pato Branco. O candidato foi arguido pela Banca Examinadora composta pelos professores abaixo assinados. Após deliberação, a Banca Examinadora considerou o trabalho APROVADO. Banca examinadora:
Prof. Dr. Jean Patric da Costa (orientador) - UTFPR/PB
Prof. Dr. Marconi Januário UNOESC/Joaçaba
Prof. Dr. Emerson Giovani Carati UTFPR/PB
Prof. Dr. Jorge Luis Roel Ortiz UTFPR/PB
Prof. Dr. Gustavo Weber Denardin
Coordenador Substituto do Programa
de Pós-Graduação em Engenharia
Elétrica - PPGEE/UTFPR
A via original, devidamente assinada, encontra-se na Biblioteca da UTFPR – Câmpus Pato Branco.

RESUMO
DUARTE, Odilio de Souza. ALGORITMO MPPT PARA SISTEMA DE GERACAO DE
ENERGIA EOLICA DE PEQUENO PORTE COM PMSG. 110 f. Dissertacao – Programa
de Pos-graduacao em Engenharia Eletrica, Universidade Tecnologica Federal do Parana. Pato
Branco, 2017.
Este trabalho tem como objetivo desenvolver um algoritmo MPPT para otimizar a energia
extraıda do vento por um gerador sıncrono de ıma permanente (PMSG) em um sistema de
geracao de energia eolica de velocidade variavel. A proposta do algoritmo e de encontrar o
ponto de maxima extracao de potencia sem precisar de um sistema de medicao de velocidade
do vento, nem das caracterısticas construtivas da turbina eolica que descreve seu coeficiente de
potencia (CP). A base do desenvolvimento do algoritmo MPPT, esta em combinar os metodos
OTC (Optimal Torque Control) e HCS (Hill Climb Searching). Com o metodo HCS, o algoritmo
rastreia o MPPT e define o valor do ganho aqui chamado de Kotm. Esse ganho carrega de forma
indireta caracterısticas construtivas da turbina eolica relacionadas a extracao de potencia, sendo
utilizado para gerar a referencia de torque ao sistema de controle pelo Metodo OTC. Resultados
experimentais sao apresentados com auxılio de uma plataforma de testes, com uso de um PMSG
de 5 kW com 36 polos.
Palavras-chave: Energia Eolica, MPPT, PMSG.

ABSTRACT
DUARTE, Odilio de Souza. ALGORITHM MPPT FOR SMALL SISE WIND POWER
GENERATION SYSTEM WITH PMSG. 110 f. Dissertation – Eletrical Engineering Graduate
Program, Federal Technology University of Parana. Pato Branco, 2017.
This work aims to develop an MPPT algorithm to optimize the energy extracted from the wind
by a permanent magnet synchronous generator (PMSG) in a wind energy generation system
with variable speed. The algorithm proposes to find the point of maximum power extraction
without requiring a wind speed measurement system, nor of the constructive characteristics
of the wind turbine that describes its power coefficient (CP). The basis for the development
of the MPPT algorithm lies in combining the OTC (Optimal Torque Control) and HCS (Hill
Climb Searching) methods. With the HCS method, the algorithm traces the MPPT and sets the
gain value here called Kotm. This gain indirectly carries constructive characteristics of the wind
turbine related to power extraction, being used to generate the torque reference to the control
system by the OTC Method. Experimental results are presented with the aid of a test platform,
using a PMSG of 5 kW with 36 poles.
Keywords: Wind Energy, MPPT, PMSG.

LISTA DE FIGURAS
–FIGURA 1 Sistema de geracao eolico para estudo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
–FIGURA 2 Linha do tempo no desenvolvimento dos moinhos de vento do seculo XI ao
seculo XIX . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
–FIGURA 3 Moinho de vento holandes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
–FIGURA 4 Aerogerador de Bruch em 1888. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
–FIGURA 5 Linha de tempo do desenvolvimento dos aerogeradores entre os anos 1900
a 2000. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
–FIGURA 6 Previsao de Acumulado de Geracao Eolica entre 2014 a 2019 . . . . . . . . . . . 25
–FIGURA 7 Distribuicao vertical da velocidade do vento . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
–FIGURA 8 Turbinas eolicas: a)Eixo Vertical, b) Eixo Horizontal . . . . . . . . . . . . . . . . . . . 27
–FIGURA 9 Massa de ar se deslocando no espaco . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
–FIGURA 10 Representacao da transformacao de energia . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
–FIGURA 11 Coeficiente de potencia teorico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
–FIGURA 12 Relacao entre coeficiente de potencia e velocidade especıfica . . . . . . . . . . . . 34
–FIGURA 13 Potencia da turbina em relacao a velocidade do gerador . . . . . . . . . . . . . . . . . 37
–FIGURA 14 Grafico Curva Torque X Velocidade . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
–FIGURA 15 Velocidade do gerador versus potencia de saıda. . . . . . . . . . . . . . . . . . . . . . . . 39
–FIGURA 16 Representacao de um PMSG de fluxo Radial. . . . . . . . . . . . . . . . . . . . . . . . . . . 41
–FIGURA 17 Representacao de um PMSG de fluxo axial com varias camadas. . . . . . . . . 42
–FIGURA 18 Gerador do tipo Torus sem ranhuras. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
–FIGURA 19 Direcoes dos fluxos magneticos no gerador do tipo Torus. . . . . . . . . . . . . . . 43
–FIGURA 20 Modelo gerador polos lisos. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
–FIGURA 21 Transformacao de coordenadas abc para qd. . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
–FIGURA 22 Diagrama completo do sistema de controle. . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
–FIGURA 23 Diagrama de blocos representando dinamica do PMSG. . . . . . . . . . . . . . . . . 56
–FIGURA 24 Diagrama de blocos para o controle das correntes. . . . . . . . . . . . . . . . . . . . . . 57
–FIGURA 25 Resposta ao degrau unitario para malha de corrente. . . . . . . . . . . . . . . . . . . . . 59
–FIGURA 26 Diagrama de bode para a malha de corrente. . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
–FIGURA 27 Diagrama de blocos controle de torque eletromagnetico. . . . . . . . . . . . . . . . . 60
–FIGURA 28 Diagrama de blocos para controle da malha de torque eletromagnetico. . . 61
–FIGURA 29 Resposta ao degrau unitario para malha de torque eletromagnetico. . . . . . . 61
–FIGURA 30 Diagrama de bode para malha de torque eletromagnetico. . . . . . . . . . . . . . . . 62
–FIGURA 31 Controle convencional algoritmo MPPT HCS. . . . . . . . . . . . . . . . . . . . . . . . . . 65
–FIGURA 32 Representacao do passe torque eletromagnetico. . . . . . . . . . . . . . . . . . . . . . . . 66
–FIGURA 33 Representacao do passe torque eletromagnetico. . . . . . . . . . . . . . . . . . . . . . . . 68
–FIGURA 34 Grafico para Sign=1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
–FIGURA 35 Fluxograma do algoritmo MPPT. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
–FIGURA 36 Curvas de referencia de MPPT. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
–FIGURA 37 Sistema operando com o algoritmo MPPT. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
–FIGURA 38 Referencia “Curva P1” : a) Curva de potencia; b) Curva de velocidade. . . 75
–FIGURA 39 Referencia “Curva P1” : a) Curva de potencia; b) Curva de velocidade. . . 76
–FIGURA 40 Curvas de potencia em funcao do tempo. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
–FIGURA 41 Curvas de velocidade em funcao do tempo. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
–FIGURA 42 Curvas potencia em funcao da velocidade de P3 a P7. . . . . . . . . . . . . . . . . . . 78
–FIGURA 43 Grafico demostracao do funcionamento do algoritmo MPPT. . . . . . . . . . . . . 79
–FIGURA 44 Rastreando perfil de potencia frente a variacao de torque. . . . . . . . . . . . . . . . 80
–FIGURA 45 Resposta do sistema frente a variacao de velocidade caracterıstica da turbina
eolica. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
–FIGURA 46 Plataforma Experimental. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
–FIGURA 47 Plataforma Experimental: a) Bancada de simulacao eolica; b) Bancada de
conversao e armazenamento de energia. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
–FIGURA 48 Componentes parte frontal do painel geral do simulador eolico. . . . . . . . . . 91
–FIGURA 49 Inversor de Frequencia comercial marca Schneider. . . . . . . . . . . . . . . . . . . . . 92
–FIGURA 50 Motor de inducao trifasico marca SEW. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92
–FIGURA 51 Dados do PMSG, do encoder, da placa de isolacao e do torquımetro. . . . . . 93
–FIGURA 52 Fotografia do PMSG, do encoder, da placa de isolacao e do torquımetro. . 94
–FIGURA 53 Fotografia painel de comando. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 94
–FIGURA 54 Detalhes do banco de bateria e resistencia. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
–FIGURA 55 Detalhes do retificador e barramento CC. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 96
–FIGURA 56 Banco de Informacao de Geracao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 98
–FIGURA 57 Banco de Informacao de Geracao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 99
–FIGURA 58 Esquema eletrico para determinacao da Resistencia Rs. . . . . . . . . . . . . . . . . . 101
–FIGURA 59 Alinhamento do rotor com os eixos d e q. a) Circuito eletrico, b)
Representacao da orientacao do fluxo magnetico . . . . . . . . . . . . . . . . . . . . . . . 102
–FIGURA 60 a) Circuito eletrico, b) Representacao da orientacao do fluxo magnetico . . 103
–FIGURA 61 Circuito eletrico representativo para alinhamento com o eixo d . . . . . . . . . . 103
–FIGURA 62 Grafico retirado osciloscopio no momento do ensaio Ld . . . . . . . . . . . . . . . . . 105
–FIGURA 63 Esquema de ligacao eletrica para determinacao da constante de fluxo λm . 106

LISTA DE TABELAS
–TABELA 1 Evolucao dos aerogeradores . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
–TABELA 2 Distribuicao da potencia instalada em 2014 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
–TABELA 3 Dados Projeto dos Controladores . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
–TABELA 4 Dados nominais da turbina eolica emulada. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
–TABELA 5 Valores de referencia. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
–TABELA 6 Dados das curvas de referencia para variacao de torque. . . . . . . . . . . . . . . . . . 76
–TABELA 7 Dados das curvas de referencia com variacao de velocidade. . . . . . . . . . . . . . 78
–TABELA 8 Tabela de tensoes de pico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 97
–TABELA 9 Ensaio - Numero de Polos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101
–TABELA 10 Relacao de tensao por velocidade mecanica do PMSG . . . . . . . . . . . . . . . . . . 107
–TABELA 11 Dados do ensaio do potenciometro . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 108
LISTA DE SIGLAS
ANEEL Agencia Nacional de Energia Eletrica
BIG Banco de Informacoes de Geracao
HCS Hill Climb SearchingHP Horse Power - Cavalo Forca
IGBT Insulated Gate Bipolar Transitor - Transistor Bipolar de Porta Isolada
ISA International Society of AutomationMPPT Maximum Power Point Tracking - Rastreamento de Ponto de Maxima Potencia
OTC Optimal Torque ControlPI Proporcional e Integral
PMSG Permanent Magnet Synchronous Generator - Gerador Sıncrono de Ima PermanentePROINFA Programa de Incentivo as Fontes Alternativas de Energia Eletrica
PSF Power Signal FeedbackPWM Pulse Width Modulation - Modulacao por largura de pulso
P&O Pertub and ObservationSIN Sistema Interligado Nacional
SVM Space Vector Modulation - Modulacao por Vetor de EstadosTSR Tip Speed Ratio

LISTA DE SIMBOLOS
Hm Altitude
β Angulo de ataque das pas da turbina eolica
θe Angulo eletrico
θm Angulo mecanico
A Area
C Capacitor
Cp Coeficiente de potencia da turbina
Cpmax Coeficiente de potencia da turbina maximo teorico
τ Constante de tempo
Kotm Constante de torque otimo
Icc Corrente continua
id,q Correntes sincronas
ia,b,c Correntes trifasicas
ρ Densidade do ar
d Distancia
ed,eq Eixos sıncronos direto e de em quadratura
E Energia cinetica
λma,mb,mc Fluxo magnetico em cada fase do estator
λa,b,c Fluxo magnetico no estator de cada fase
λm Fluxo magnetico permanente
fe Frequecia eletrica
kic Ganho do integrador da malha de corrente
kiT Ganho do integrador da malha de torque
kpc Ganho proporcional da malha de corrente
kpT Ganho proporcional da malha de torque
Mab,bc,ca Indutancia mutua entre bobinas do estator
Laa,bb,cc Indutancia propria de cada fase do estator
Ld,q Indutancia sıncrona eixo direto e em quadratura
Ls Indutancias sıncronas
m Massa de ar
N Numero de par de polos
Np Numero de polos
Pe Potencia eletrica
pabc Potencia instantanea
pe Potencia instantanea eletrica
pm Potencia instantanea mecanica
pmag Potencia instantanea perdida na magnetizacao do estator
pecu Potencia instantanea perdida no cobre
Pmax Potencia maxima
Pm Potencia mecanica
Pret Potencia retida
R Raio da pa da turbina eolica
λ Razao de velocidade
λotm Razao de velocidade otima
Rs Resistencia do estator
RT Resistencia total
Sign Sınal do passo de torque
ta Tempo de assentamento
tp Tempo de permanencia
ud,q Tensao de eixo direto e quadratura
uabp Tensao de pico de linha
va,b,c Tensao trifasica alternada
Vcc Tesnsao continua
Tg Torque do gerador
Te∗ Torque eletrico de referencia
Te Torque eletromagnetico
Tm Torque mecanico
Totm Torque otimo
ΔP Variacao de potencia
Δω Variacao de velocidade angular
Δt Variacao do tempo
v Velocidade
vw Velocidade do vento
ω Velocidade angular
ωe Velocidade angular eletrica
ωm Velocidade angular mecanica
ωotm Velocidade angular otima
vu Velocidade de rotacao da ponta da pa
ns Velocidade do eixo
vw Velocidade do vento
v0 Velocidade inicial
vmed Velocidade media
Vol Volume da massa de ar
SUMARIO
1 INTRODUCAO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 131.1 MOTIVACAO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
1.2 OBJETIVOS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
1.2.1 Objetivo Geral . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
1.2.2 Objetivos Especıficos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
1.3 CONTRIBUICOES DESTE TRABALHO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
1.4 ORGANIZACAO DO TRABALHO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
2 REVISAO BIBLIOGRAFICA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 182.1 EVOLUCAO DOS SISTEMAS EOLICOS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
2.1.1 Aerogeradores no Seculo XX . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
2.1.2 Cenario Mundial da Geracao Eolica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
2.1.3 Cenario Brasileiro na Geracao Eolica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
2.2 APROVEITAMENTO NA ENERGIA EOLICA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
2.3 MODELO AERODINAMICO DA TURBINA EOLICA . . . . . . . . . . . . . . . . . . . . . . . . . 35
2.4 RASTREAMENTO DO PONTO DE MAXIMA POTENCIA - MPPT . . . . . . . . . . . . . 36
2.4.1 Controle na Relacao de Velocidade Otima (TSR) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
2.4.2 Controle pelo Feedback da Potencia (PSF) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
2.4.3 Controle de Torque Otimo (OTC) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
2.4.4 Controle de Busca por Escaladas (HCS) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
2.4.5 Controle Perturba e Observa (P&O) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
2.5 GERADOR SINCRONO DE IMA PERMANENTE - PMSG . . . . . . . . . . . . . . . . . . . . . 40
2.5.1 Fluxo Radial . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
2.5.2 Fluxo Axial . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
2.6 CONSIDERACOES FINAIS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
3 MODELO DINAMICO DO PMSG . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 443.1 MODELO EM COORDENADAS ABC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
3.2 MODELO EM COORDENADAS SINCRONAS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
3.3 CONSIDERACOES FINAIS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
4 PROJETO DOS CONTROLADORES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 554.1 DEFINICOES DO PROJETO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
4.2 CONSIDERACOES FINAIS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
5 ALGORITMO MPPT PROPOSTO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 645.1 DESENVOLVIMENTO DO ALGORITMO MPPT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
5.2 RESULTADOS DE SIMULACAO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
5.3 CONSIDERACOES FINAIS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
6 RESULTADOS EXPERIMENTAIS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 746.1 ENSAIO 1: DETERMINACAO DE CURVAS DE POTENCIA PARA
COMPARACOES COM O ALGORITMO MPPT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
6.2 ENSAIO 2: DEMONSTRACAO ALGORITMO MPPT . . . . . . . . . . . . . . . . . . . . . . . . . . 78
6.3 ENSAIO 3: ALGORITMO MPPT APLICADO FRENTE A VARIACAO DE
DEGRAU DE TORQUE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80

6.4 ENSAIO 4: ALGORITMO MPPT APLICADO FRENTE A VARIACAO DAS
CARACTERISTICAS DA TURBINA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
6.5 CONSIDERACOES FINAIS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
7 CONCLUSAO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 837.1 SUGESTOES DE TRABALHOS FUTUROS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84
REFERENCIAS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85Apendice A -- PLATAFORMA EXPERIMENTAL . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89A.1 LIMITACOES EM FUNCAO DA TENSAO DO BARRAMENTO CC . . . . . . . . . . . . 96
Apendice B -- BIG - CAPACIDADE DE GERACAO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 98Apendice C -- BIG - FONTES DE ENERGIA EXPLORADAS NO BRASIL . . . . . . . . 99Apendice D -- ENSAIO PARA OBTENCAO DOS PARAMETROS ELETRICOS DO
PMSG . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 100D.1 DETERMINACAO EXPERIMENTAL DO NUMERO DE POLOS . . . . . . . . . . . . . . . 100
D.2 DETERMINACAO DA RESISTENCIA DO ENROLAMENTO DO ESTATOR . . . . 101
D.3 DETERMINACAO DAS INDUTANCIAS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102
D.4 DETERMINACAO DA CONSTANTE DE FLUXO MAGNETICO . . . . . . . . . . . . . . . 106
D.5 DETERMINACAO DA CONSTANTE DE TENSAO POR VELOCIDADE . . . . . . . . 106
Apendice E -- ENSAIO PARA OBTENCAO DE REFERENCIA DE VELOCIDADE
DO POTENCIOMETRO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 108Apendice F -- EXEMPLO COEFICIENTE DE POTENCIA . . . . . . . . . . . . . . . . . . . . . . . . 109
13
1 INTRODUCAO
Com o crescimento do consumo de energia eletrica, surgem polıticas de prevencao
dos recursos energeticos nao renovaveis e incentivos na exploracao por fontes de energia com
menos agressoes ao meio ambiente. Neste contexto, o Brasil vem apresentando crescimento
significativo na diversificacao de sua matriz energetica com a insercao de fontes de energia
renovaveis, isso pode ser evidenciado observando o crescimento da representatividade da
geracao de energia eolica, que saiu de 4.8% em 2015 para 6.9% ate inıcio do mes de Junho
de 2017 (Apendice B) (ANEEL, 2017).
Segundo Eletrobras (2015), benefıcios ao crescimento tecnologico e preservacao do
meio ambiente sao os principais motivadores para o estudo e desenvolvimento das pesquisas
voltadas a energia renovaveis, o que sao abalizadas por programas como PROINFA (Programa
de Incentivo as Fontes Alternativas de Energia Eletrica) e pela Resolucao No 482 da Agencia
Nacional de Energia Eletrica (ANNEL), em que define regras e incentivo a microgeracao de
energia no paıs.
A geracao de energia eolica, por ser economicamente competitiva e apresentar uma
tecnologia solida, vem sendo apontada como uma das principais fontes de energia renovaveis
com destaque no uso de geradores sıncronos a ıma permanente denominado de PMSG
(Permanent Magnet Synchronous Generator). Estes geradores por operarem em velocidade
variavel, geram 10 a 15% mais energia eletrica que sistemas de velocidade constante e, se
destacam por terem elevados numeros de polos permitindo operar em sistemas conectado direto
com a turbina eolica, eliminando o uso de caixas de engrenagens diminuindo manutencoes e
peso nas estruturas. Ainda, o PMSG pode operar com velocidade variavel em uma ampla faixa
de velocidade sem diminuir a eficiencia (BIM, 2013; MOJTABA, 2015).
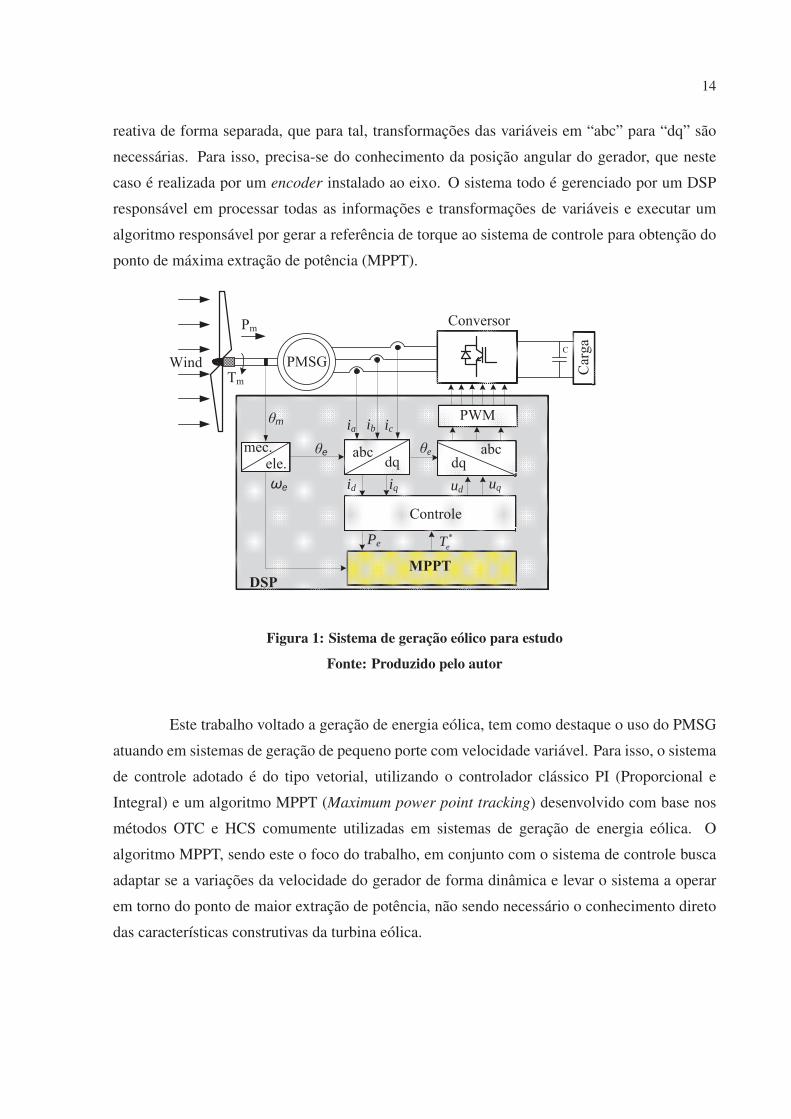
Na Figura 1 e apresentado de forma simplificada um sistema de geracao de energia
eolica utilizando um PMSG conectado a um conversor estatico de potencia, este realiza o
estagio de retificacao da energia gerada atraves do sinal de PWM fornecida pelo sistema de
controle. O controle e realizado em eixos sıncrono permitindo controlar energia ativa e energia
14
reativa de forma separada, que para tal, transformacoes das variaveis em “abc” para “dq” sao
necessarias. Para isso, precisa-se do conhecimento da posicao angular do gerador, que neste
caso e realizada por um encoder instalado ao eixo. O sistema todo e gerenciado por um DSP
responsavel em processar todas as informacoes e transformacoes de variaveis e executar um
algoritmo responsavel por gerar a referencia de torque ao sistema de controle para obtencao do
ponto de maxima extracao de potencia (MPPT).
ia ib icm
id iqe
e
uqud
Pe
e
eT
Figura 1: Sistema de geracao eolico para estudo
Fonte: Produzido pelo autor
Este trabalho voltado a geracao de energia eolica, tem como destaque o uso do PMSG
atuando em sistemas de geracao de pequeno porte com velocidade variavel. Para isso, o sistema
de controle adotado e do tipo vetorial, utilizando o controlador classico PI (Proporcional e
Integral) e um algoritmo MPPT (Maximum power point tracking) desenvolvido com base nos
metodos OTC e HCS comumente utilizadas em sistemas de geracao de energia eolica. O
algoritmo MPPT, sendo este o foco do trabalho, em conjunto com o sistema de controle busca
adaptar se a variacoes da velocidade do gerador de forma dinamica e levar o sistema a operar
em torno do ponto de maior extracao de potencia, nao sendo necessario o conhecimento direto
das caracterısticas construtivas da turbina eolica.

15
1.1 MOTIVACAO
A necessidade da diversificacao da matriz energetica por fontes de energia renovaveis
fortalecem o crescimento da energia eolica no Brasil, conforme pode ser observado o banco
de informacoes da ANEEL em 04/06/2017, em que a potencia associada a geracao de energia
eolica e de 10.464.143 kW, em construcao sao mais 3.760.700 kW, e ainda tem mais 3.839.250
kW previstos que nao iniciaram suas construcoes (ANEEL, 2017).
Com a Resolucao No 482 da ANEEL, pessoas fısicas podem entrar no sistema de
compensacao de energia eletrica atraves de fontes de energia renovaveis conectadas em rede de
distribuicao por meio de instalacoes das proprias unidades consumidoras podendo ser de forma
compartilhada, como exemplo em condomınios diminuindo os custos na implementacao.
Com o uso do PMSG, o sistema pode operar em velocidade variavel conectado
diretamente na turbina eolica, o que reduz desgastes mecanicos e manutencoes, o que e otimo
para sistemas de pequeno porte que normalmente sao instalados em regioes de maior turbulencia
do vento.
Dos trabalhos pesquisados em que apresentam algoritmos MPPT voltado a sistemas de
geracao eolica utilizando PMSG, alguns autores utilizam de tecnicas que requerem medicao da
velocidade do vento como e caso de Kumar (2015), ja outros autores estimam a velocidade do
vento atraves dos parametros eletricos, porem necessitam do conhecimento das caracterısticas
mecanicas da turbina eolica (Moor e Beukes (2004), Guimaraes e Oliveira (2015), Haque et
al. (2010), Adhikari et al. (2015), Fazli e Siahbalaee (2017)). Em Lahari e Shetty (2015) seu
metodo MPPT requer apenas sensor de velocidade mecanica do eixo, porem sua aplicacao
responde bem apenas a sistemas de medio a grande porte.
Portanto, o desenvolvimento de um algoritmo MPPT que nao dependa diretamente das
caracterısticas da turbina eolica, que possa atuar em sistemas de pequeno porte utilizando um
PMSG, farao parte desse trabalho.
1.2 OBJETIVOS
1.2.1 Objetivo Geral
Desenvolver um algoritmo para rastrear o ponto de maxima extracao de potencia
em um sistema de geracao eolica de pequeno porte com uso de geradores sıncronos de ıma
permanente sem o uso de sensores para medicao da velocidade do vento.

16
1.2.2 Objetivos Especıficos
• Revisao do estado da arte dos MPPTs em turbinas de velocidade variavel baseadas no
PMSG.
• Modelar o sistema eolico PMSG para o projeto dos controladores de corrente em eixos
sıncronos.
• Desenvolver o algoritmo para busca do ponto de maxima extracao de potencia do sistema
eolico baseado no PMSG sem medicao de velocidade do vento.
• Validar a analise teorica atraves de resultados experimentais.
1.3 CONTRIBUICOES DESTE TRABALHO
As contribuicoes realizadas com o desenvolvimento deste trabalho foram:
• Proposta de um algoritmo MPPT para sistemas de energia eolica de pequeno porte,
baseados em PMSG sem a necessidade da medicao da velocidade do vento nem dos
parametros da turbina.
• Desenvolvimento de um prototipo para aplicacao em sistemas de geracao eolica com
tamanho proximos de uma aplicacao comercial.
Ainda, durante o desenvolvimento deste trabalho, foi publicado um artigo no XXI
Congresso Brasileiro de Automatica-CBA em Vitoria-ES em outubro 2016, com o tıtulo
“Algoritmo de Rastreamento do Ponto de Maxima Extracao de Potencia de Sistema Eolico” e,
outro artigo em Novembro de 2016 no INDUSCON (12th IEEE/IAS International Conference
on Industry Applications), na cidade de Curitiba-PR com o tıtulo “Algoritmo de Rastreamento
do Ponto de Maxima Extracao de Potencia Para Sistema de Geracao de Energia Eolica com
PMSG”.

17
1.4 ORGANIZACAO DO TRABALHO
Este trabalho esta organizado da seguinte forma:
• Capıtulo 2 compreende-se na revisao bibliografica apresentando:
– Evolucao dos sistemas eolicos e cenarios mundial e nacional;
– Conceitos basicos sobre extracao da energia eletrica em sistemas eolicos;
– Principais metodos utilizados para algoritmos MPPT;
– Caracterısticas construtivas de geradores sıncronos a ıma permanente;
• Capıtulo 3: Desenvolvimento matematico do modelo dinamico do PMSG em eixos
sıncrono;
• Capıtulo 4: Apresentadas definicoes e simplificacoes para o projeto dos controladores;
• Capıtulo 5: Descricao do algoritmo MPPT proposto e seu fluxograma;
• Capıtulo 6: Os resultados experimentais realizados em laboratorio sao apresentados;
• Capıtulo 7: Conclusao geral e sugestao de trabalhos futuros.

18
2 REVISAO BIBLIOGRAFICA
Neste capıtulo e apresentado relatos historicos do surgimento dos aerogeradores e suas
aplicacoes da epoca ligando a um cenario mais proximo do atual com projecoes do acumulado
de energia eolica esperada para 2019 no mundo e, o atual cenario brasileiro para geracao de
energia eolica. Tambem, conceitos sobre extracao de energia atraves da forca do vento, modelo
aerodinamico de turbinas eolicas, metodos MPPT OTC, HCS, PSF e P&O sao apresentados
dando suporte ao desenvolvimento dessa dissertacao.
2.1 EVOLUCAO DOS SISTEMAS EOLICOS
Segundo Dutra (2001), com a necessidade do homem buscar ferramentas que auxilia-
se nas atividades da agricultura reduzindo o esforco bracal e animal, levou ao surgimento dos
moinhos de ventos para auxiliar na moagem dos graos. Nesta primeira versao, os moinhos eram
constituıdos de eixo vertical acionado por uma haste presa a ele e era movido com auxılio da
forca do homem e/ou animal caminhando em torno do eixo. Mais tarde, este mesmo sistema foi
adaptado suprindo a forca bracal e animal por cursos d’agua como fonte de energia, mas como
nao ha rios em todos os lugares a busca por uma nova fonte de energia fez com que percebessem
a forca provinda do vento.
Tem-se registros historico pelo povo Perca, por volta de 200 a.C, da utilizacao da
energia eolica por meio de cata-ventos em bombeamento de agua e moagem de graos, sendo
disseminado esse sistema pelo povo Islamico. Acredita-se que na China ha muito mais tempo,
por volta de 2000 a.C, ja utilizava os cata-ventos para sistemas de irrigacao. Apos as Cruzadas
historicas ha mais de 900 anos, desenvolveu-se na Europa os cata-ventos, sendo muito bem
documentado e utilizados ate por volta do seculo XII, mas devido ao aparecimento de moinhos
de eixo horizontal principalmente na Inglaterra, Franca e Holanda, esses moinhos rapidamente
foram utilizados por toda Europa durante a idade Media. Por muitos seculos os moinhos
tocados por cata-ventos foram fontes decisivas na economia na Europa. Leis feudais da epoca
estabelecia concessoes para construcao de moinhos apenas para senhores feudais e forcavam
19
os camponeses a utilizacao, tambem haviam leis assegurando o “direito ao vento”, proibiam
plantacoes de arvores proximas aos moinhos (COLLIER, 2011).
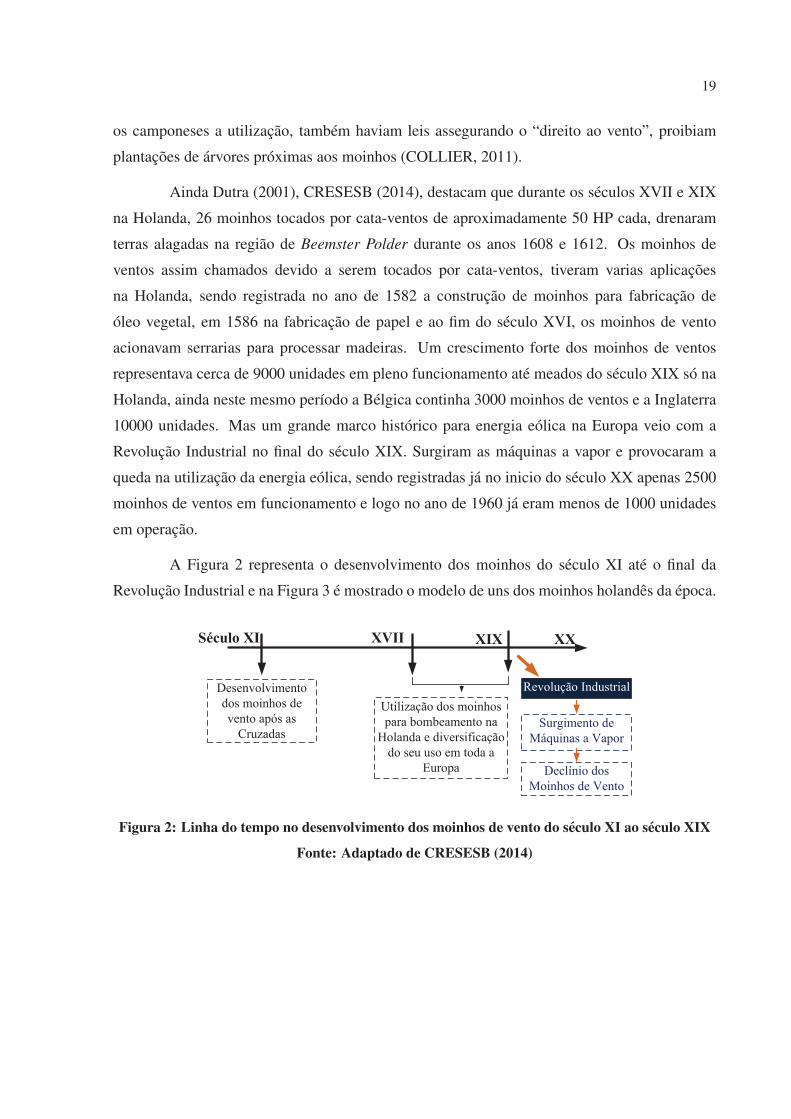
Ainda Dutra (2001), CRESESB (2014), destacam que durante os seculos XVII e XIX
na Holanda, 26 moinhos tocados por cata-ventos de aproximadamente 50 HP cada, drenaram
terras alagadas na regiao de Beemster Polder durante os anos 1608 e 1612. Os moinhos de
ventos assim chamados devido a serem tocados por cata-ventos, tiveram varias aplicacoes
na Holanda, sendo registrada no ano de 1582 a construcao de moinhos para fabricacao de
oleo vegetal, em 1586 na fabricacao de papel e ao fim do seculo XVI, os moinhos de vento
acionavam serrarias para processar madeiras. Um crescimento forte dos moinhos de ventos
representava cerca de 9000 unidades em pleno funcionamento ate meados do seculo XIX so na
Holanda, ainda neste mesmo perıodo a Belgica continha 3000 moinhos de ventos e a Inglaterra
10000 unidades. Mas um grande marco historico para energia eolica na Europa veio com a
Revolucao Industrial no final do seculo XIX. Surgiram as maquinas a vapor e provocaram a
queda na utilizacao da energia eolica, sendo registradas ja no inicio do seculo XX apenas 2500
moinhos de ventos em funcionamento e logo no ano de 1960 ja eram menos de 1000 unidades
em operacao.
A Figura 2 representa o desenvolvimento dos moinhos do seculo XI ate o final da
Revolucao Industrial e na Figura 3 e mostrado o modelo de uns dos moinhos holandes da epoca.
Figura 2: Linha do tempo no desenvolvimento dos moinhos de vento do seculo XI ao seculo XIX
Fonte: Adaptado de CRESESB (2014)

20
Figura 3: Moinho de vento holandes
Fonte: CRESESB (2014)
2.1.1 Aerogeradores no Seculo XX
Segundo Dutra (2001) em 1888, os Estados Unidos na cidade de Cleveland, estado de
Ohio, o inventor Charles Francis Bruch, pos em operacao o primeiro cata-vento gerando energia
eletrica. Este aerogerador de 12 kW de potencia em corrente contınua, carregava baterias que
posteriormente forneceriam energia para 350 lampadas incandescentes. A roda principal desse
gerador possuıa 144 pas com 17 m de diametro, montado em uma torre de 18 m de altura. Este
sistema era sustentado por um tubo de metal com diametro de 36 cm, que girava e acompanhava
o vento predominante, assim por 20 anos esse sistema esteve em operacao sendo desativado em
1908. A Figura 4 apresenta o aerogerador de Bruch com multiplas pas.
Figura 4: Aerogerador de Bruch em 1888.
Fonte: CRESESB (2014)

21
O desenvolvimento da geracao eolica apos o ano de 1900, passando por marcos
historicos como a Segunda Guerra Mundial, competicao economica entre petroleo e usinas
hidreletricas e o acidente de Chernobyl. Observa-se que ao inıcio do ano 1900, paıses
desenvolviam novos aerogeradores e utilizavam para o suprimentos de energia em comunidades
isoladas. Assim era o caso da Dinamarca, por nao ter grandes rios e, pouca reserva de petroleo
mantiveram a geracao de energia eolica em desenvolvimento construindo aerogeradores de 5 a
25 kW nesta epoca (CRESESB, 2014).
Os principais marcos historicos no desenvolvimento de aerogeradores podem ser
resumidos em uma linha de tempo representada pela Figura 5.
Figura 5: Linha de tempo do desenvolvimento dos aerogeradores entre os anos 1900 a 2000.
Fonte: Adaptada CRESESB (2014)
Seguindo a linha do tempo ao perıodo em que acontece a Segunda Guerra Mundial ate
o ano de 1945, sendo momento marcado por pesquisas e desenvolvimento de aerogeradores de
grande porte, aparece a Russia com o aerogerador conhecido como Balaclava. Sua potencia
poderia chegar aos 100 kW e possuıa controle de rotacao e posicao, sendo conectado em linha
de transmissao de 6,3 kV a 30 km de uma usina termeletrica de 20 MW. Ainda outros projetos
foram desenvolvidos para modelos de 1 MW a 5 MW, mas nao foram concluıdos devido a
concorrencia de tecnologias (CRESESB, 2014).
Tibola (2009) relata que nesta mesma epoca que os Estados Unidos em 1933 utilizava
aerogeradores de tres pas tipo helice conhecido como JACOB. Esse aerogerador produzia
energia domiciliar de potencia tıpica de 1 kW e velocidade do vento de 5,5 m/s. As helices
moviam geradores de corrente contınua com auxılio de caixas de engrenagens multiplicadoras
e armazenavam em bancos de baterias para driblar as flutuacoes do vento. Produziu-se tambem
22
nesta mesma epoca o aerogerador Smith-Putnam de 1250 kW, esse possui pas de aco de 16
toneladas com 53,3 m de diametros sustentadas por uma torre de 33,5 m de altura. Smith-
Putnam foi conectado a uma rede local de energia eletrica e mantinha velocidade constante de
28 rpm, sendo menos atrativo economicamente esse modelo foi abandonado apos a Segunda
Guerra Mundial. Na Dinamarca mesmo apos a Guerra, continuou com investimentos na
construcao de aerogeradores, pois e um paıs com poucos rios, assim, varios aerogeradores de
45 kW foram construıdos para geracao de energia eletrica.
Continuando a observar a linha do tempo apresentada na Figura 5, apos a Segunda
Guerra Mundial, os aerogeradores foram construıdos apenas para fins de pesquisa e
aprimoramento de tecnicas aeronauticas. Neste perıodo e marcado como uso intensivo de
combustıveis fosseis e chegando mais proximo do ano de 1970 aparece alguns projetos de
aerogeradores de grande porte sendo testado. Como exemplo, a Dinamarca em 1956 apresenta
aerogeradores de 200 kW em torre de concreto, a Franca de 1958 a 1966 com varios geradores
na ordem de 800 kW operando com velocidade do vento em 16,5 m/s e conectado em
redes de tensao contınua. A Alemanha tambem aparece em 1955 a 1968 com inumeras
inovacoes tecnologicas com aerogeradores de 100 kW a ventos de 8 m/s com sistema de
orientacao amortecida por rotores laterais e pas construıdas de materias compostos. Apos
o ano de 1970 muitos ou quase todos os projetos de aerogeradores foram desativados, isso
devido ao baixo preco do petroleo, expansao da rede de energia eletrica provida de usinas
hidreletricas/termeletricas e da energia nuclear com promessas de ser barata e segura (DUTRA,
2001; CRESESB, 2014).
Os projetos para energia eolica sem interesses comerciais passaram a serem objetos
de estudos academicos, porem com a grande crise do petroleo na decada de 1970 ate meados
de 1980, forcou os paıses inclusive o Brasil a desenvolver pesquisas na utilizacao da geracao
eolica como uma fonte de energia alternativa (RUNCOS et al., 2000).
O desenvolvimento de aerogeradores teve uma retomada apos o acidente nuclear em
1986 em Chernobyl. A comunidade mundial sentiu-se forcada a buscar novas fontes de energia
mais seguras e novos programas de investimentos se deram a energia eolica. A partir desta
mesma epoca, varios paıses como a Alemanha, Dinamarca e Estados Unidos com ambiente
favoravel a comercializacao de novas fontes de energia limpa, desenvolveram novos projetos
de turbinas eolicas de potencias 2 a 5 MW. Um marco historico nesta epoca fica registado
com a criacao do primeiro parque eolico comercial no mar (offshore) em Vindby na Dinamarca
iniciando suas operacoes em 1991 com 11 turbinas de 450 kW. (DUTRA, 2001).
Em Gasch e Twele (2012, p.1), relata a evolucao das turbinas eolicas desde 1982 a

23
2009, relacionando o aumento da potencia dos geradores com a altura das torres e o diametro
dos rotores. Seguindo a linha do tempo, em 2013 o fabricante Siemens lancou um aerogerador
de 6 MW com rotor de 154 metros e, em 2015 o fabricante Vestas colocou em teste uma turbina
eolica maior ainda, 164 metros de rotor com capacidade de 8 MW (GASCH; TWELE, 2012,
p.1).
A Tabela 1, apresenta de forma simplificada a evolucao dos aerogeradores de 1982 a
2015 relacionando a capacidade de extracao de potencia e o diametro dos rotores.
Tabela 1: Evolucao dos aerogeradoresAno Diametro do rotor [m] Altura [m] Potencia [kW]1982 15 25 55
1985 20 30 75
1991 30 40 300
1994 45 60 600
2000 80 100 2500
2009 125 120 5000
2013 154 - 6000
2015 164 - 8000
2.1.2 Cenario Mundial da Geracao Eolica
Segundo Council (2014), em 2014 as novas instalacoes de usinas eolicas somaram mais
de 51 GW elevando o total global em 369,6 GW, so a China instalou nesse perıodo 23 GW. De
forma geral, o cenario da energia eolica ate o final de 2014 se divide em 24 paıses com mais
de 1 GW de capacidade instalada sendo 16 na Europa, 4 na Asia-Pacıfico (China, India, Japao
e Australia), 3 na America do Norte (Canada, Mexico, EUA) e 1 na America Latina (Brasil).
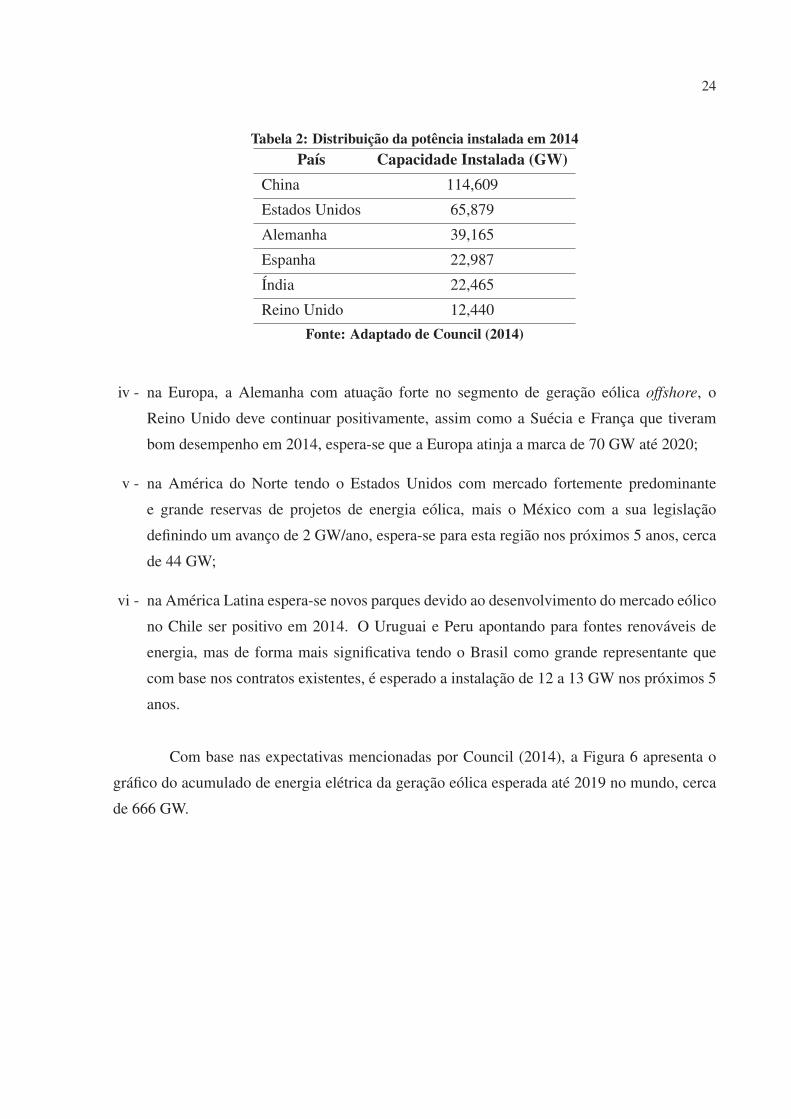
Neste mesmo perıodo, apenas 6 paıses passaram a marca de 10 GW de capacidade instalada
conforme dados mostrados na Tabela 2 (COUNCIL, 2014).
Segundo Council (2014), uma projecao do desenvolvimento do mercado de energia
eolica para 2019 pode ser apresentada com base nos relatos de polıticas e metas como:
i - governo Chines promete duplicar sua capacidade eolica para 2020 em 200 GW;
ii - o Japao de forma lenta mais continuada move-se para transformar seu sistema energetico
mais diversificado com mais geracao eolica e outras fontes renovaveis;
iii - a Coreia do Sul com estrategias no desenvolvimento de energia eolica offshore com meta
para 2019 em 2,5 GW;
24
Tabela 2: Distribuicao da potencia instalada em 2014Paıs Capacidade Instalada (GW)
China 114,609
Estados Unidos 65,879
Alemanha 39,165
Espanha 22,987
India 22,465
Reino Unido 12,440
Fonte: Adaptado de Council (2014)
iv - na Europa, a Alemanha com atuacao forte no segmento de geracao eolica offshore, o
Reino Unido deve continuar positivamente, assim como a Suecia e Franca que tiveram
bom desempenho em 2014, espera-se que a Europa atinja a marca de 70 GW ate 2020;
v - na America do Norte tendo o Estados Unidos com mercado fortemente predominante
e grande reservas de projetos de energia eolica, mais o Mexico com a sua legislacao
definindo um avanco de 2 GW/ano, espera-se para esta regiao nos proximos 5 anos, cerca
de 44 GW;
vi - na America Latina espera-se novos parques devido ao desenvolvimento do mercado eolico
no Chile ser positivo em 2014. O Uruguai e Peru apontando para fontes renovaveis de
energia, mas de forma mais significativa tendo o Brasil como grande representante que
com base nos contratos existentes, e esperado a instalacao de 12 a 13 GW nos proximos 5
anos.
Com base nas expectativas mencionadas por Council (2014), a Figura 6 apresenta o
grafico do acumulado de energia eletrica da geracao eolica esperada ate 2019 no mundo, cerca
de 666 GW.

25
Figura 6: Previsao de Acumulado de Geracao Eolica entre 2014 a 2019
Fonte: Adaptado Council (2014, p.19)
2.1.3 Cenario Brasileiro na Geracao Eolica
Segundo Melo (2012), “o ano de 2011 foi marcado pela consolidacao da insercao da
energia eolica na matriz energetica brasileira”.
Esses fatores que levaram a essa conquista do mercado de energia eolica, teve inıcio
com a criacao do PROINFA, instituıdo pela Lei no 10.438/2002, esse programa abalizado
por modelos financeiros solidos e de polıticas regionais, com premissas de promover a
diversificacao da matriz energetica brasileira, implantou projetos de construcao de 41 eolicas
ate Dezembro de 2011 totalizando 1.152,54 MW instalados (ELETROBRAS, 2015).
O que se observa e um forte crescimento dessa matriz energetica no Brasil, segundo
a Resenha Energetica Brasileira publicada em Junho 2015 por Energia (2015), o numero de
usinas eolicas ate o final de Dezembro de 2014 eram de 228 unidades o que somavam uma
potencia instalada de 4.888 MW. Isso representava cerca de 1,4% do total gerado de energia no
SIN (Sistema Interligado Nacional). Com dados recentes do Banco de Informacoes de Geracao
(Apendice C), de Junho de 2017, o Brasil tem 429 usinas eolicas me operacao com total de
10.478 GW de potencia outorgada, e outras 161 unidades estao em construcao que ao final irao
representar mais 3,76 GW de potencia (ANEEL, 2015).
26
Com esse cenario apresentado pelo Brasil hoje, observa-se um crescimento de centrais
geradoras eolicas significativo indo de encontro ao cenario mundial apresentado na Secao
(2.1.2), em que o Brasil deve chegar de 12 a 13 GW de potencia instalada ate 2019 representando
cerca de 9% do potencial energetico no Brasil para geracao de energia eolica (COUNCIL,
2014).
Segundo Amarante et al. (2001) (Atlas do Potencial Eolico Brasileiro), o potencial
instalavel dessa energia no Brasil em 2001 era de aproximadamente 143,47 GW e, mesmo com
fortes investimentos nessa matriz energetica a principal fonte de energia eletrica ainda deva
prevalecer o potencial hidraulico provido pela abundancia das bacias hidrograficas presente no
paıs com menor custo na sua implantacao Council (2014).
2.2 APROVEITAMENTO NA ENERGIA EOLICA
O vento e resultado do deslocamento de massas de ar provocadas pela diferenca de
aquecimento entre duas regioes distintas, aquecimento este provido pela radiacao solar, que
sofre influencias dos relevos e irregularidades do solo. O vento e uma forma indireta da energia
solar provido da transformacao de energia termica em energia cinetica, desta forma, a energia
eolica e considerada uma fonte de energia proveniente do sol (CARVALHO, 2003, p.11) e
CRESESB.
Os deslocamentos de massas de ar podem ser classificados em Globais e/ou Locais.
Quando globais, a quantidade de calor que chega a superfıcie terrestre na regiao equatorial
e maior que a dos polos, fazendo que o calor se dirija do equador aos polos. No caso de
deslocamentos locais, esses sofrem muita influencia dos relevos que depende do tipo: terra-
mar e montanha-vale. Os ventos proximos aos solos sofrem grandes turbulencias e na medida
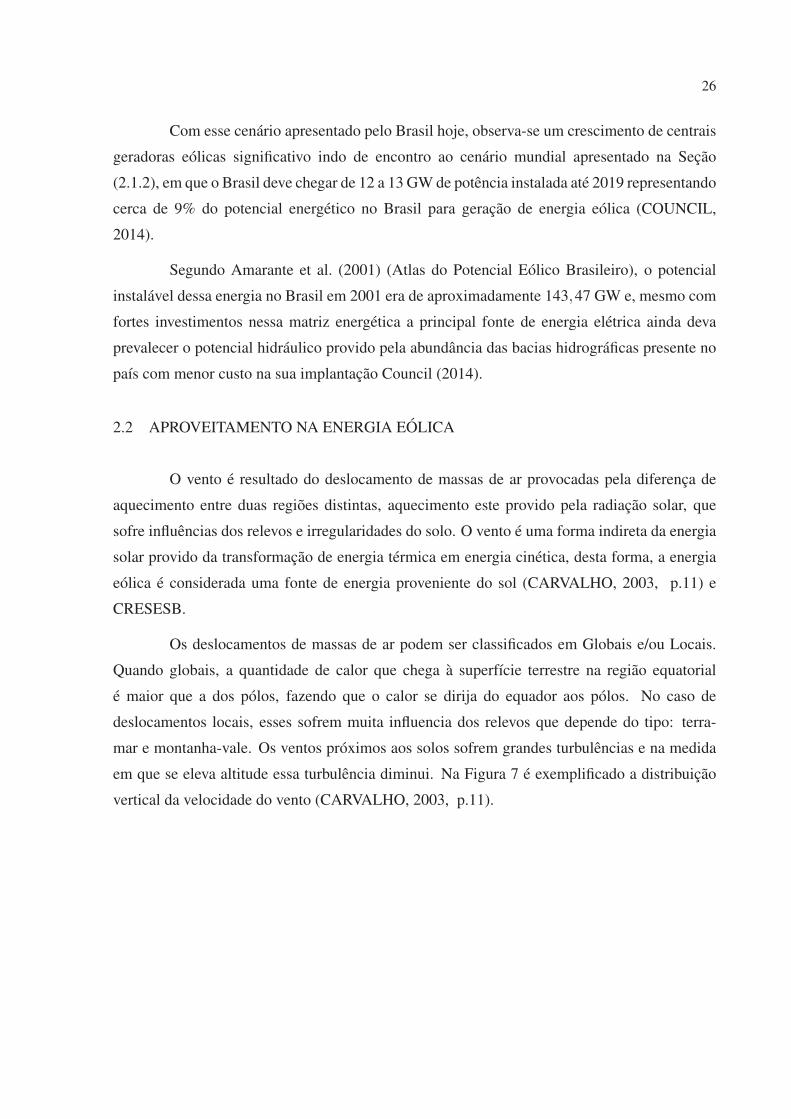
em que se eleva altitude essa turbulencia diminui. Na Figura 7 e exemplificado a distribuicao
vertical da velocidade do vento (CARVALHO, 2003, p.11).

27
Figura 7: Distribuicao vertical da velocidade do vento
Fonte: Adaptado Carvalho (2003, p.11)
Com auxılio de turbinas eolicas e possıvel transformar parte da energia cinetica dos
ventos em energia mecanica, que posteriormente pode ser transformada em energia eletrica
acoplando a um gerador por meio de um eixo. As turbinas eolicas desenvolvidas ao longo dos
anos apresentam uma serie de configuracoes diferentes para aproveitar a energia do vento, mas
uma caracterıstica principal classifica-as em modelos de eixo vertical e de eixo horizontal. Na
Figura 8 sao exemplificados esses dois modelos de turbinas (HODGE, 2011, p.42).
Figura 8: Turbinas eolicas: a)Eixo Vertical, b) Eixo Horizontal
Fonte: Cortesia Aeolos Wind Turbine
28
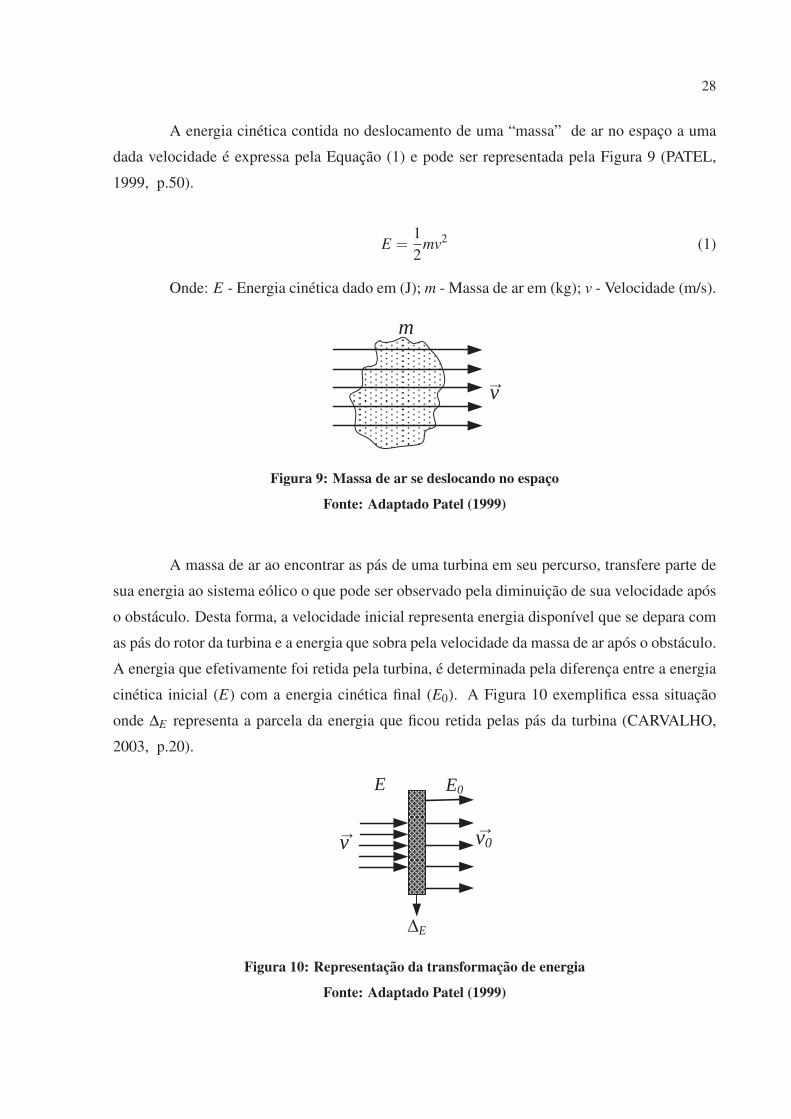
A energia cinetica contida no deslocamento de uma “massa” de ar no espaco a uma
dada velocidade e expressa pela Equacao (1) e pode ser representada pela Figura 9 (PATEL,
1999, p.50).
E =1
2mv2 (1)
Onde: E - Energia cinetica dado em (J); m - Massa de ar em (kg); v - Velocidade (m/s).
m
v
Figura 9: Massa de ar se deslocando no espaco
Fonte: Adaptado Patel (1999)
A massa de ar ao encontrar as pas de uma turbina em seu percurso, transfere parte de
sua energia ao sistema eolico o que pode ser observado pela diminuicao de sua velocidade apos
o obstaculo. Desta forma, a velocidade inicial representa energia disponıvel que se depara com
as pas do rotor da turbina e a energia que sobra pela velocidade da massa de ar apos o obstaculo.
A energia que efetivamente foi retida pela turbina, e determinada pela diferenca entre a energia
cinetica inicial (E) com a energia cinetica final (E0). A Figura 10 exemplifica essa situacao
onde ΔE representa a parcela da energia que ficou retida pelas pas da turbina (CARVALHO,
2003, p.20).
E
v0
E0
E
v
Figura 10: Representacao da transformacao de energia
Fonte: Adaptado Patel (1999)

29
Isolando a aparcela ΔE da Equacao (2) e, substituindo os termos (E) e (E0) por valores
correspondentes a Equacao (1) :
E = E0 +ΔE (2)
ΔE = E −E0 (3)
ΔE =1
2mv2 − 1
2mv2
0 (4)
ΔE =1
2m(v2 − v2
0) (5)
A potencia em Watts que fica na turbina e a energia ΔE pelo tempo (t) e dada pela
Equacao(6):
Pret =ΔE
Δt(6)
A potencia que fica na turbina entao pode ser representada pela Equacao (7):
Pret =m(v2 − v2
0)
2.Δt(7)
Onde:
Pret - Potencia retida (W); Δt - Variacao do Tempo (s).
O deslocamento da massa de ar (m) pode ser expressa pela Equacao (8) dada em
quilograma (kg), onde “ρ” representa a densidade do ar em quilograma por metro cubico
(kg/m3) e “Vol”, o volume da massa de ar em metros cubicos (m3) (PATEL, 1999, p.52).
m = ρ.Vol (8)
Substituindo a equacao (8) em (7), a potencia (Pret) pode ser reescrita conforme
Equacao (9):
Pret =ρ.Vol.(v2 − v2
0)
2Δt(9)

30
Para expressao final da potencia (Pret), a Equacao (9) pose ser reescrita determinando:
a) O volume de ar (Vol) e a area de varredura das pas do rotor (A) pela distancia (d) da coluna
de vento em metros.
Vol = A.d (10)
b) A velocidade do vento e diferente antes e depois de colidir com as pas do rotor, da mesma
forma as areas de entradas e saıdas. Assim, convem usar uma velocidade media expressa
em (11) e ainda sendo a velocidade uma relacao entre a distancia e o tempo para percorre-la.
vmed =v+ v0
2(11)
vmed =dΔt
=v+ v0
2(12)
d =(v+ v0)Δt
2(13)
c) Substituindo a Equacao (13) em (10).
Vol = A.(v+ v0)Δt
2(14)
d) A equacao final para a potencia (Pret) pode ser representada substituıdo a (14) em (9).
Pret =1
2ρ
A2(v+ v0)(v2 − v2
0) (15)
e) Rearranjando os termos da Equacao (15).
Pret =1
2ρAv3
(1+ v0/v)[1− (v0
/v)
2]
2(16)
Parte da Equacao (16) apresentado em (17), representa a fracao da potencia capturada
pela turbina chamado de “Coeficiente de Potencia” (Cp) (PATEL, 1999, p.53).
Cp =(1+ v0
/v)[1− (v0
/v)
2]
2(17)
Substituindo a Equacao (17) em (16), a potencia retida pela turbina pode ser a
apresentada por (18), o que demonstra uma relacao direta com a densidade (ρ), no caso com o

31
ar. Tambem uma relacao direta com area de varredura das pas da turbina e uma relacao cubica
com a velocidade do vento (CARVALHO, 2003; PATEL, 1999).
Pret =1
2ρAv3Cp (18)
A maxima potencia extraıda do vento pode ser determinada analisando o coeficiente
Cp dado pela Equacao (17), onde:
v0
v= α (19)
Onde (0 < α < 1).
Substituindo a Equacao (19) em (17).
Cp =(1+α)
(1−α2
)2
(20)
Expandindo a Equacao (20), tem-se a Equacao (21).
Cp =1+α −α2 −α3
2(21)
Segundo Ogata (2000, p.23), no teorema do valor final quando uma funcao tende
a um valor constante em regime, significa que sua derivada tambem sera zero em regime,
assim, aplicando o teorema do valor final na Equacao (21), a maxima potencia extraıda pode
ser determinada encontrando as raızes do polinomio apresentado em (23) e suas raızes pela
Equacao (24).
dCp
dα=
0+1−2α −3α2
2= 0 (22)
3α2 +2α −1 = 0 (23)
α1 =13
α2 =−1(24)
Sendo (α) um valor maior que zero e menor que 1, α2 pode ser descartado por nao
representar uma solucao na pratica o que torna a raiz α1 o valor que maximiza o coeficiente
32
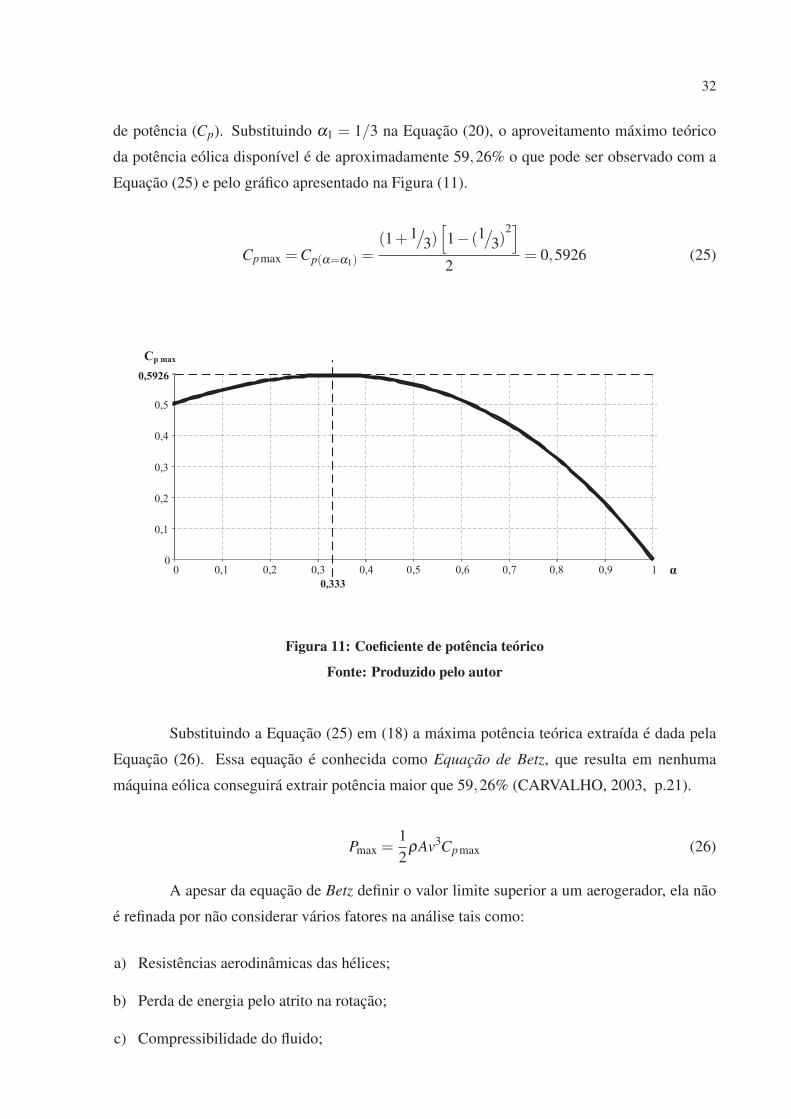
de potencia (Cp). Substituindo α1 = 1/3 na Equacao (20), o aproveitamento maximo teorico
da potencia eolica disponıvel e de aproximadamente 59,26% o que pode ser observado com a
Equacao (25) e pelo grafico apresentado na Figura (11).
Cpmax =Cp(α=α1) =(1+1
/3)[1− (1
/3)
2]
2= 0,5926 (25)
Figura 11: Coeficiente de potencia teorico
Fonte: Produzido pelo autor
Substituindo a Equacao (25) em (18) a maxima potencia teorica extraıda e dada pela
Equacao (26). Essa equacao e conhecida como Equacao de Betz, que resulta em nenhuma
maquina eolica conseguira extrair potencia maior que 59,26% (CARVALHO, 2003, p.21).
Pmax =1
2ρAv3Cpmax (26)
A apesar da equacao de Betz definir o valor limite superior a um aerogerador, ela nao
e refinada por nao considerar varios fatores na analise tais como:
a) Resistencias aerodinamicas das helices;
b) Perda de energia pelo atrito na rotacao;
c) Compressibilidade do fluido;

33
d) Interferencia das helices e da torre.
O valor de Cpmax torna-se complexo sua determinacao, mas de forma geral com boa
aproximacao, esse coeficiente se aproxima de 0,5 em turbinas de alta velocidade e de grande
porte com duas pas e, entre 0,2 e 0,4 para as turbinas de baixa velocidade com mais pas (PATEL,
1999, p.52).
Segundo Patel (1999, p.55), a densidade do ar (ρ) de acordo com as lei dos gases,
varia com a pressao e temperatura. Como referencia, a densidade do ar ao nıvel do mar com
uma pressao atmosferica de 14,7 psi ha uma temperatura de 15,55◦C e de 1,225 kg/m3. Assim,
para demais localidades pode-se utilizar desses valores como referencia e aplicar correcoes de
acordo com a temperatura e pressao do local. Porem, a temperatura e pressao variam com a
altitude e seu efeito combinado sobre a densidade do ar pode ser dado pela Equacao (27) ou
ainda de forma simplificada pela Equacao (28) validas para ate 6000 metros de altitude.
ρ = ρ0.e−( 0,297.Hm3048 ) (27)
ρ = ρ0 −1,194.10−4.Hm (28)
Onde “Hm” representa a altitude em metros.
O termo Cp e formado por um conjunto de parametros que relaciona-se com a
velocidade angular e com o angulo de ataque formado pelas pas da turbina eolica representada
pela Equacao (29) (KOUTROULIS; KALAITZAKIS, 2006).
Cp = (λ ,β ) (29)
Em que, β refere-se ao angulo de ataque das pas e λ representa uma relacao entre a
velocidade de rotacao da ponta da pa (vu) com a velocidade do vento (vw), dada pela Equacao
(30).
λ =vu
vw(30)
34
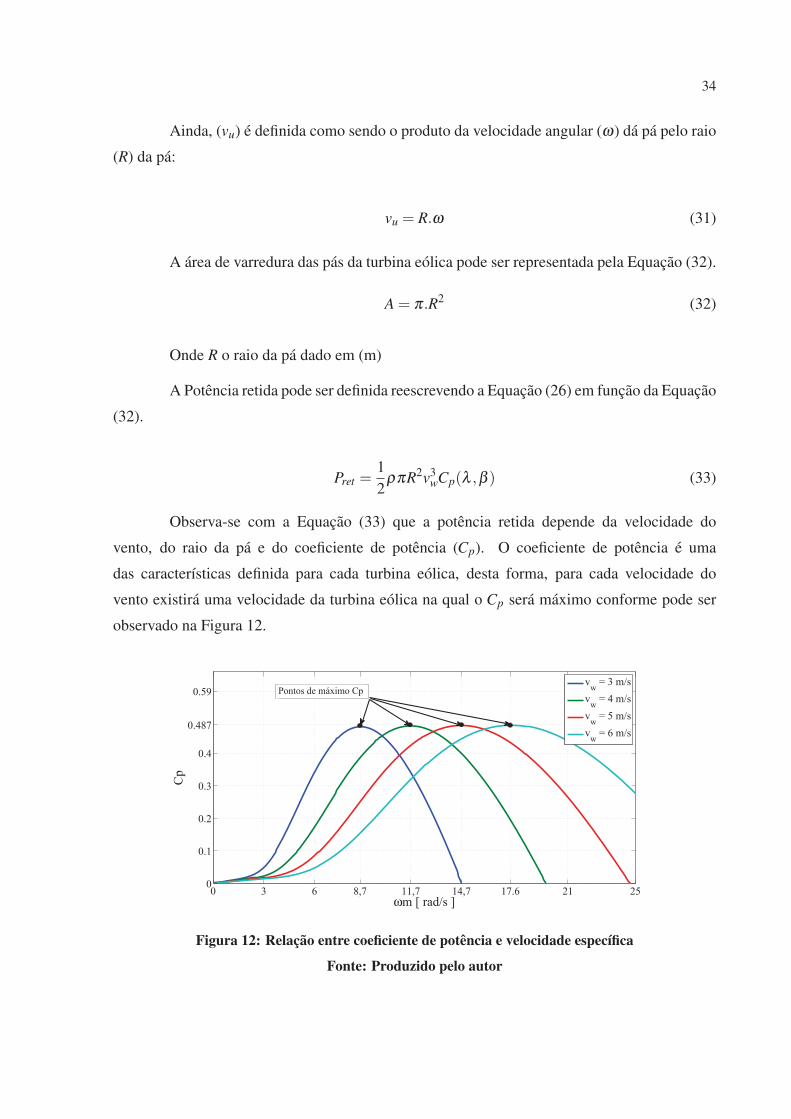
Ainda, (vu) e definida como sendo o produto da velocidade angular (ω) da pa pelo raio
(R) da pa:
vu = R.ω (31)
A area de varredura das pas da turbina eolica pode ser representada pela Equacao (32).
A = π.R2 (32)
Onde R o raio da pa dado em (m)
A Potencia retida pode ser definida reescrevendo a Equacao (26) em funcao da Equacao
(32).
Pret =1
2ρπR2v3
wCp(λ ,β ) (33)
Observa-se com a Equacao (33) que a potencia retida depende da velocidade do
vento, do raio da pa e do coeficiente de potencia (Cp). O coeficiente de potencia e uma
das caracterısticas definida para cada turbina eolica, desta forma, para cada velocidade do
vento existira uma velocidade da turbina eolica na qual o Cp sera maximo conforme pode ser
observado na Figura 12.
ω
Figura 12: Relacao entre coeficiente de potencia e velocidade especıfica
Fonte: Produzido pelo autor

35
A Figura 12 foi construıda utilizando-se do modelo de turbina eolica apresentado no
manual do software PSIM R© para ilustrar diferentes pontos de Cp maximo em funcao da variacao
da velocidade do vento. Esses graficos podem ser reproduzidos consultado o Apendice F em
que os parametros que descrevem o comportamento de uma turbina eolica sao:
Cp =C1.(C2 −C3β −C4β −C5).e−C6 +C7 (34)
Sendo: C1 = 0.5; C2 = 116.λ ′; C3 = 0.4; C4 = 0;
C5 = 5; C6 = 21.λ ′; C7 = 0.01λ
λ ′ =1
λ +0.08β− 0.035
β 3 +1(35)
2.3 MODELO AERODINAMICO DA TURBINA EOLICA
Conforme apresentado na Secao (2.2), a massa do ar e uma fonte de energia
cinetica, que parte dessa energia pode ser transformada em energia mecanica com auxılio de
turbinas eolicas onde a maxima energia cinetica convertida em energia mecanica depende das
caracterısticas construtivas da turbina definida pelo coeficiente de potencia Cp, este limitado em
teoria pela Equacao Betz em 0,5926 (CARVALHO, 2003, p.11).
A potencia mecanica extraıda e dada pela Equacao (36):
Pm = 0.5ρπR2v3wCp(λ ,β ) (36)
Onde:
Pm - Potencia mecanica extraıda [W];
ρ - Densidade do ar [kg/m3];
R - Raio da pa do rotor da turbina [m];
vw- Velocidade do vento [m/s];
Cp - Coeficiente de potencia da turbina.

36
O coeficiente de potencia Cp, depende do angulo de ataque (β = 0 para sistemas de
pequeno porte) das pas da turbina e da relacao de velocidade (λ ) dada por:
λ =ωmRvw
(37)
Em que ωm e a Velocidade angular mecanica em rad/s.
Mojtaba (2015), Chun et al. (2016), Koch et al. (2015) apresentam a potencia de uma
turbina eolica em funcao de diferentes velocidades escrita pela Equacao (38).
Pm = Kotmω3otm (38)
Em que:
Kotm =0.5ρπCpR5
λ 3otm
(39)
e,
ωotm =λotmvw
R(40)
O subscrito “otm” refere-se ao ponto otimo de operacao. Desta forma, para a maxima
extracao de potencia da turbina, deve-se encontrar a velocidade otima (ωotm) de acordo com
a velocidade do vento (v) disponıvel, atraves de um sistema de controle adequado. Ainda, a
potencia pode ser escrita em funcao da velocidade angular com o torque conforme Equacao
(41).
Pm = ωotm.Totm (41)
substituindo (38) em (41), o torque otimo pode ser dado por:
Totm = Kotm.ω2otm (42)
2.4 RASTREAMENTO DO PONTO DE MAXIMA POTENCIA - MPPT
Conforme apresentado na Secao (2.2), observa-se que a caracterıstica do vento
em regioes proximas ao solo apresenta turbulencias. Esses efeitos causam variacoes nas
grandezas eletricas e mecanicas tais como: torque mecanico, velocidade angular, potencia

37
ativa e reativa. Essas variacoes do vento dificultam sistemas de geracao para a maxima
extracao da energia cinetica do vento. Assim, tecnicas de controle e algoritmos para busca
da maxima extracao de potencia sao utilizadas para que os sistemas de geracao eolica possa
encontrar o ponto otimo de operacao comumente conhecido por MPPT (Maximum Power
Point Tracking). Para cada velocidade do vento, pontos diferentes de extracao de potencia
podem ser determinados em funcao do coeficiente de potencia (Cp), este sendo resultado da
composicao de varios parametros aerodinamicos definido pela caracterıstica de cada turbina
eolica (SRIGHAKOLLAPU; SENSARMA, 2008).
Com o exemplo de parametros do coeficiente de potencia (Cp) apresentado na Secao
(2.2) e utilizando-se das Equacoes (33), (34) e (35), curvas de potencia para diferentes
velocidades do vento podem ser obtidas, visualizando o ponto de maxima extracao de potencia,
conforme ilustrado na Figura 13, sendo considerando: β = 0, R = 2,76 m e Cp = 0.489.
ω
Figura 13: Potencia da turbina em relacao a velocidade do gerador
Fonte: Produzido pelo autor
Os metodos MPPT segundo Caixeta et al. (2011), Linus e Damodharan (2015)
desenvolvidos durante a ultima decada para turbinas eolicas de velocidade variavel sao
basicamente divididas em tres estrategias:
1. As que depende da medicao da velocidade do vento. Exemplo: metodo TSR (Tip Speed
Ratio);
2. Dependem da curva de potencia da turbina eolica tendo como exemplo os metodos PSF
(Power Signal Feedback) e OTC (Optimal Torque Control);

38
3. Baseando-se em uma pesquisa sem conhecimento da curva de potencia da turbina eolica.
Exemplo: metodo P&O (Perturb and Observation) e HCS (Hill Climbing Search).
2.4.1 Controle na Relacao de Velocidade Otima (TSR)
O metodo de controle TSR, regula a velocidade do gerador para manter em um ponto
otimo (ωotm). Neste metodo, requer tanto o valor da velocidade do vento como o valor da
velocidade da turbina medida ou estimada em tempo real com precisao, o que aumenta os
custos consideravelmente em sistemas de pequeno porte. Tambem e necessario o conhecimento
do valor ωotm que se altera em funcao dos parametros da turbina eolica dado pela Equacao (40)
(MOJTABA, 2015; NAKAMURA et al., 2002).
2.4.2 Controle pelo Feedback da Potencia (PSF)
Nesse metodo conforme definicao de potencia maxima dada pela Equacao (41), a
referencia de velocidade otima ao sistema de controle, pode ser definida analisando uma curva
de potencia versus velocidade da turbina. O algoritmo MPPT pode analisar uma tabela de
dados com curvas especıficas para interpolacao entre valores ja conhecidos durante o processo
de execucao (THONGAM et al., 2011).
2.4.3 Controle de Torque Otimo (OTC)
Nesse metodo o algoritmo depende das caracterısticas da turbina eolica. Precisa
conhecer o parametro λotm que conforme Equacao (37), este parametro depende do raio das pas
da turbina eolica que esta relacionado com a velocidade da turbina pela velocidade do vento.
Segundo Adhikari et al. (2015), esse metodo e o mais apropriado para sistemas operando em
regioes onde a velocidade do vento muda rapidamente o seu tempo de convergencia.
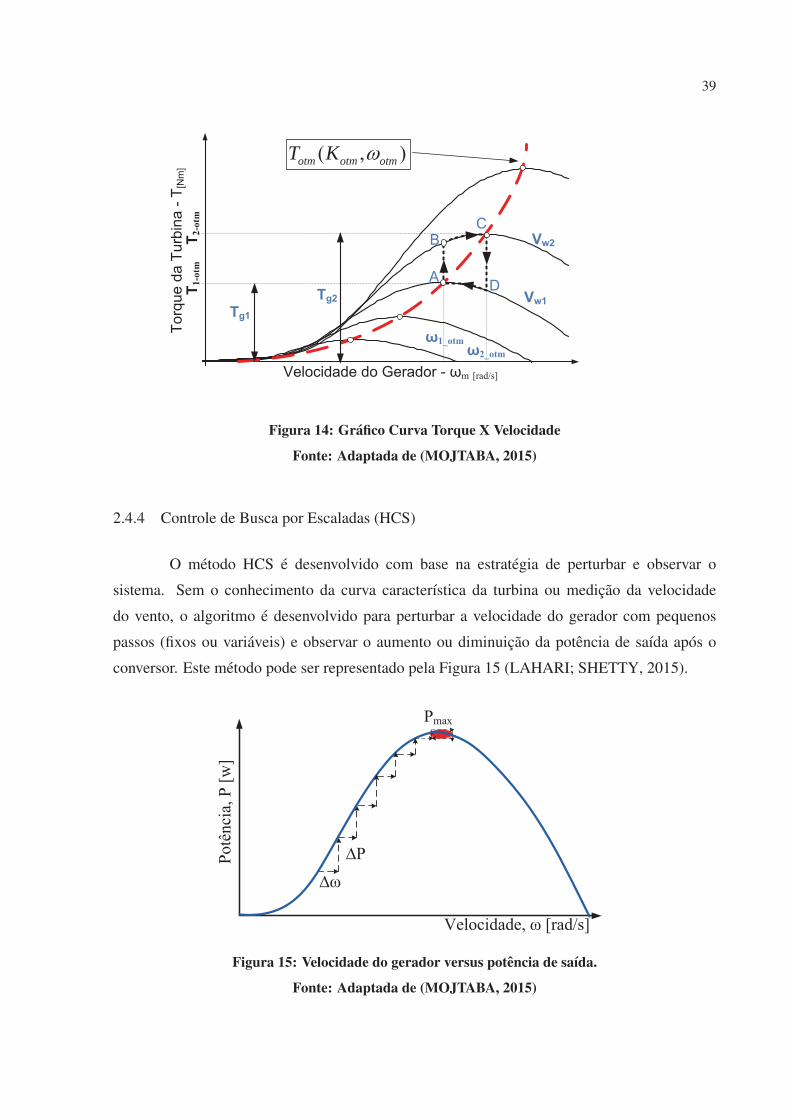
Conforme apresentado na Figura 14, assumindo que o sistema esta operando no ponto
“A” com torque do gerador em Tg1, se as alteracoes de velocidade do vento sair de vw1 para
vw2, o torque da turbina no ponto “B” torna-se maior do que o torque anterior Tg1. Conforme a
Equacao (42) o sistema de controle acelera a turbina ate o ponto “C” onde o torque da turbina
e do gerador se tornam iguais sendo este o novo ponto de operacao para a maxima extracao de
potencia (MOJTABA, 2015).
39
otm otm otmT K
Figura 14: Grafico Curva Torque X Velocidade
Fonte: Adaptada de (MOJTABA, 2015)
2.4.4 Controle de Busca por Escaladas (HCS)
O metodo HCS e desenvolvido com base na estrategia de perturbar e observar o
sistema. Sem o conhecimento da curva caracterıstica da turbina ou medicao da velocidade
do vento, o algoritmo e desenvolvido para perturbar a velocidade do gerador com pequenos
passos (fixos ou variaveis) e observar o aumento ou diminuicao da potencia de saıda apos o
conversor. Este metodo pode ser representado pela Figura 15 (LAHARI; SHETTY, 2015).
Figura 15: Velocidade do gerador versus potencia de saıda.
Fonte: Adaptada de (MOJTABA, 2015)

40
2.4.5 Controle Perturba e Observa (P&O)
Assim como o metodo HCS, esse metodo nao necessita do conhecimento das
caracterısticas da turbina eolica ou de medicoes da velocidade do vento. Assim como o HCS,
o algoritmo e baseado na estrategia de perturbar e observar, mas o que difere o metodo P&O
do metodo HCS, e que P&O nao necessita da velocidade do gerador, simplesmente perturba
a corrente eletrica alterando em pequenos passos (fixo ou variavel) a corrente de referencia
da malha de controle e observa a variacao da potencia de saıda do gerador, sendo positiva o
algoritmo continua a incrementar, caso contrario a direcao da perturbacao e revertida (LAHARI;
SHETTY, 2015; ZHAO et al., 2013).
Uma observacao importante para os metodos HCS e P&O descrita por Quincy e
Liuchen (2004), e que sistema de geracao eolica de grande porte, possuem uma inercia grande
o suficiente a nao responderem de forma rapida aos incrementos de perturbacao. Por isso
comumente e observado este metodo sendo aplicado em sistema de pequeno porte na geracao
eolica. Ainda, em Adhikari et al. (2015), Zhao et al. (2013) relatam problemas com esses
metodos quando ha uma rapida variacao na velocidade do vento, em que muitas as vezes faz
com que o algoritmo atue no sentido errado. Essas falhas se nao forem neutralizadas tornam os
metodos HCS e P&O ineficientes.
2.5 GERADOR SINCRONO DE IMA PERMANENTE - PMSG
Com a necessidade do uso de energias renovaveis por sistemas que melhor aproveitem
os recursos naturais, sistemas de geracao de energia eletrica sao desenvolvidos e aperfeicoados.
Assim, a energia eolica apresenta hoje uma tecnologia solida com varias arquiteturas de
geradores (MOJTABA, 2015).
Segundo Bim (2013, p. 416), “Em meados dos anos 1980, com o surgimento do Nd-
Fe-B, uma liga muito mais abundante, mais barata e com densidades de energia maior que a
dos ımas de SmCo [...]”, alavancou o uso de ımas na construcao de motores e geradores, pois
diminuem cerca de 10% o volume das maquinas eletricas quando comparadas a outras maquinas
de inducao com enrolamento de excitacao na mesma potencia.
Os geradores sıncronos de ıma permanente apresentam duas caracterısticas construtiva
fundamentais que determinam a forma com que o fluxo magnetico produzido pelos ımas ira
direcionar-se no entreferro. Sao denominadas de geradores de fluxos radial e fluxo axial (BIM,
2013; KRISHNAN, 2001).
41
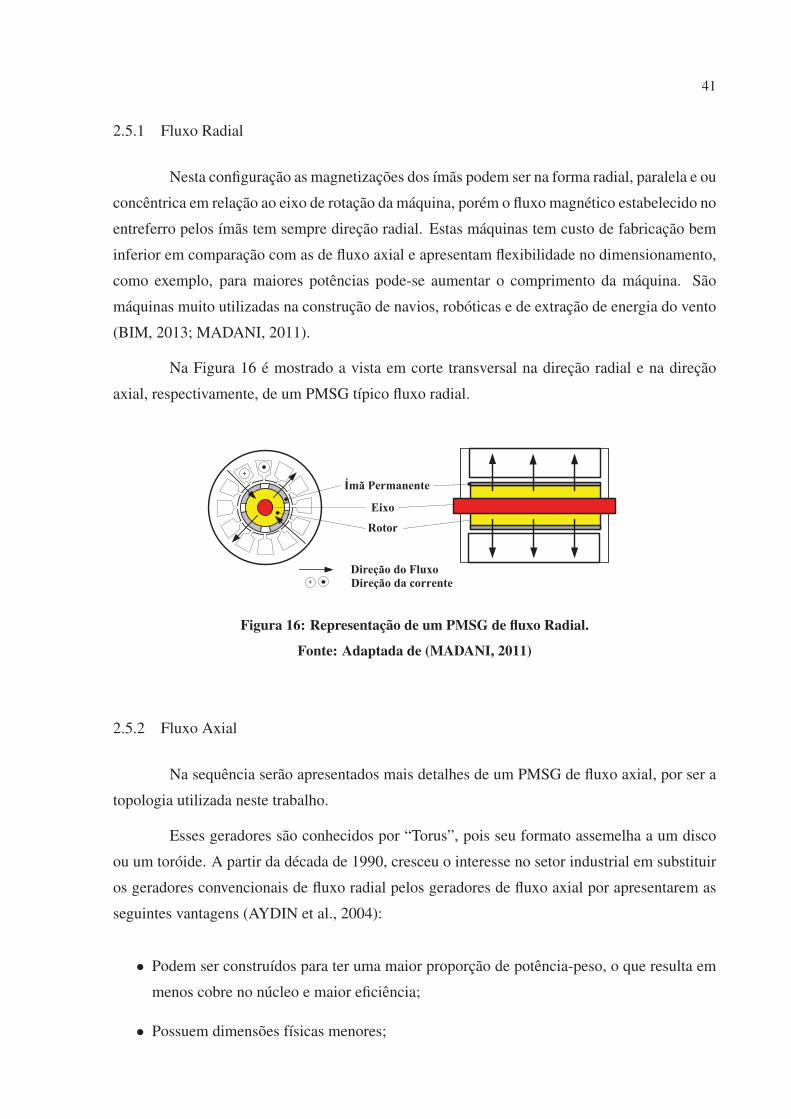
2.5.1 Fluxo Radial
Nesta configuracao as magnetizacoes dos ımas podem ser na forma radial, paralela e ou
concentrica em relacao ao eixo de rotacao da maquina, porem o fluxo magnetico estabelecido no
entreferro pelos ımas tem sempre direcao radial. Estas maquinas tem custo de fabricacao bem
inferior em comparacao com as de fluxo axial e apresentam flexibilidade no dimensionamento,
como exemplo, para maiores potencias pode-se aumentar o comprimento da maquina. Sao
maquinas muito utilizadas na construcao de navios, roboticas e de extracao de energia do vento
(BIM, 2013; MADANI, 2011).
Na Figura 16 e mostrado a vista em corte transversal na direcao radial e na direcao
axial, respectivamente, de um PMSG tıpico fluxo radial.
Figura 16: Representacao de um PMSG de fluxo Radial.
Fonte: Adaptada de (MADANI, 2011)
2.5.2 Fluxo Axial
Na sequencia serao apresentados mais detalhes de um PMSG de fluxo axial, por ser a
topologia utilizada neste trabalho.
Esses geradores sao conhecidos por “Torus”, pois seu formato assemelha a um disco
ou um toroide. A partir da decada de 1990, cresceu o interesse no setor industrial em substituir
os geradores convencionais de fluxo radial pelos geradores de fluxo axial por apresentarem as
seguintes vantagens (AYDIN et al., 2004):
• Podem ser construıdos para ter uma maior proporcao de potencia-peso, o que resulta em
menos cobre no nucleo e maior eficiencia;
• Possuem dimensoes fısicas menores;

42
• Sua estrutura em forma de disco facilita o processo de enrolamento das bobinas de cobre;
• Menor ruıdos e vibracoes acusticas durante operacao.
As maquinas de fluxo axial podem ser classificadas quanto a estrutura do rotor, em que
a combinacao entre estator e rotor pode ser feita com varias camadas conforme e apresentado
na Figura 17 (AYDIN et al., 2004).
Figura 17: Representacao de um PMSG de fluxo axial com varias camadas.
Fonte: Adaptada de (AYDIN et al., 2004)
Na Figura 18 e apresentado a topologia mais comum geradores Torus, com dois rotores
sem ranhuras e um estator.
Figura 18: Gerador do tipo Torus sem ranhuras.
Fonte: Adaptada de (AYDIN et al., 2004)
43
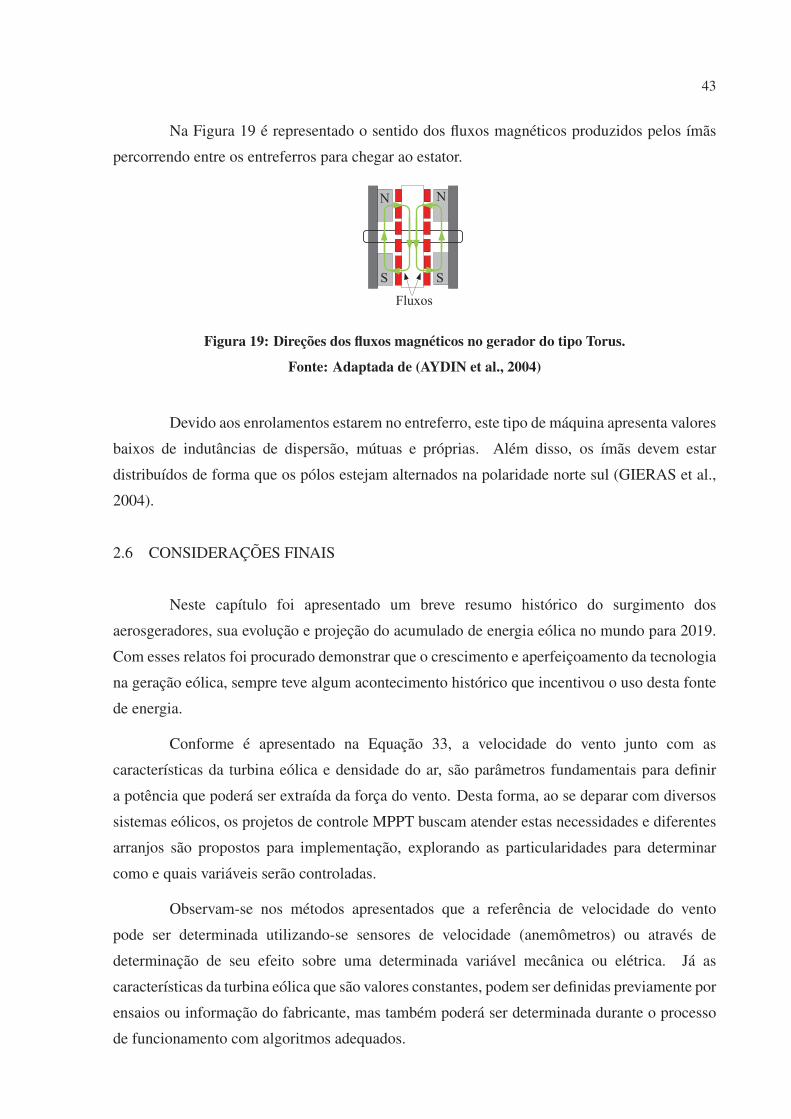
Na Figura 19 e representado o sentido dos fluxos magneticos produzidos pelos ımas
percorrendo entre os entreferros para chegar ao estator.
Figura 19: Direcoes dos fluxos magneticos no gerador do tipo Torus.
Fonte: Adaptada de (AYDIN et al., 2004)
Devido aos enrolamentos estarem no entreferro, este tipo de maquina apresenta valores
baixos de indutancias de dispersao, mutuas e proprias. Alem disso, os ımas devem estar
distribuıdos de forma que os polos estejam alternados na polaridade norte sul (GIERAS et al.,
2004).
2.6 CONSIDERACOES FINAIS
Neste capıtulo foi apresentado um breve resumo historico do surgimento dos
aerosgeradores, sua evolucao e projecao do acumulado de energia eolica no mundo para 2019.
Com esses relatos foi procurado demonstrar que o crescimento e aperfeicoamento da tecnologia
na geracao eolica, sempre teve algum acontecimento historico que incentivou o uso desta fonte
de energia.
Conforme e apresentado na Equacao 33, a velocidade do vento junto com as
caracterısticas da turbina eolica e densidade do ar, sao parametros fundamentais para definir
a potencia que podera ser extraıda da forca do vento. Desta forma, ao se deparar com diversos
sistemas eolicos, os projetos de controle MPPT buscam atender estas necessidades e diferentes
arranjos sao propostos para implementacao, explorando as particularidades para determinar
como e quais variaveis serao controladas.
Observam-se nos metodos apresentados que a referencia de velocidade do vento
pode ser determinada utilizando-se sensores de velocidade (anemometros) ou atraves de
determinacao de seu efeito sobre uma determinada variavel mecanica ou eletrica. Ja as
caracterısticas da turbina eolica que sao valores constantes, podem ser definidas previamente por
ensaios ou informacao do fabricante, mas tambem podera ser determinada durante o processo
de funcionamento com algoritmos adequados.

44
3 MODELO DINAMICO DO PMSG
Para realizar estudos e projetos de controle conhecendo as caracterısticas do PMSG,
e preciso conhecer as equacoes que regem o seu funcionamento, determinando as variaveis
que influenciam no seu comportamento em regime transitorio e, em regime permanente. O
modelo e desenvolvido partindo-se do referencial abc, passando por uma transformacao de
Park, invariante em amplitude, permitindo obter um modelo no referencial dq, em que o eixo
direto e alinhado com o fluxo magnetico produzido pelos ımas permanentes no rotor.
3.1 MODELO EM COORDENADAS ABC
A partir das teorias basicas de maquinas sıncronas e possıvel construir o modelo do
PMSG substituindo, os enrolamentos do rotor por elementos magneticos, ou seja, a excitacao
de campo e mantida constante (FITZGERALD et al., 2006).
Para a modelagem sera considerado uma maquina simetrica com tres fases no estator
identicas e espacadas de forma a produzir entre elas um angulo eletrico de 2π/3 radianos.
Tambem considera-se a distribuicao da intensidade de fluxo magnetico no entreferro de forma
senoidal. Desta forma, tomando a fase “a” como exemplo, o fluxo no enrolamento do estator e
produzido pela corrente que circula nele mesmo, mais os fluxos concatenados produzidos pelos
enrolamentos das fases “b” e “c”, mais o fluxo produzido pelos ımas do rotor. (KRAUSE et
al., 2013).
As equacoes para o fluxo no estator sao apresentadas em (43):
λa = Laaia +Mabib +Mcaic +λma
λb = Mabia +Lbbib +Mbcic +λmb
λc = Mcaia +Mbcib +Lccic +λmc
(43)
Onde, λi fluxo magnetico no estator, Lii indutancia propria, Mi j indutancia mutua entre
duas bobinas do estator, λmi fluxo magnetico gerado pelos ımas e ii as correntes no estator.

45
Ao considerar a teoria das maquinas sıncronas de polos salientes contidas em Bim
(2013), Fitzgerald et al. (2006) e Krause et al. (2013), observa-se que o entreferro depende da
posicao do rotor com o estator. Desta forma, as indutancias proprias e mutuas ficam dependentes
do angulo que o eixo “d” do rotor faz com o eixo do estator. Assim, as indutancias podem ser
definidas nas Equacoes (44) e (45). Onde, L0 indutancia propria, Ll indutancia de dispersao e
Lm indutancia de magnetizacao e θe o angulo eletrico entre o eixo direto do rotor com o eixo do
estator.
Laa = L0 +Ll +Lm cos(2θe)
Lbb = L0 +Ll +Lm cos(2θe − 2π
3
)Lcc = L0 +Ll +Lm cos
(2θe +
2π3
) (44)
Mab =−12L0 +Lm cos
(2θe +
2π3
)Mbc =−1
2L0 +Lm cos(2θe)
Mca =−12L0 +Lm cos
(2θe − 2π
3
) (45)
Ao definir o gerador como uma maquina de polos lisos, as indutancias proprias e
mutuas nao dependem do angulo θe, desta forma pode-se considerar:
Laa = Lbb = Lcc = LL
Mab = Mbc = Mca = M(46)
Os fluxos magneticos concatenados gerados pelos ımas do rotor tambem sao
dependentes do angulo eletrico θe:
λma = λm cos(θe)
λmb = λm cos(θe − 2π
3
)λmc = λm cos
(θe +
2π3
) (47)
Onde λm, e o fluxo magnetico maximo gerado pelos ımas do rotor.
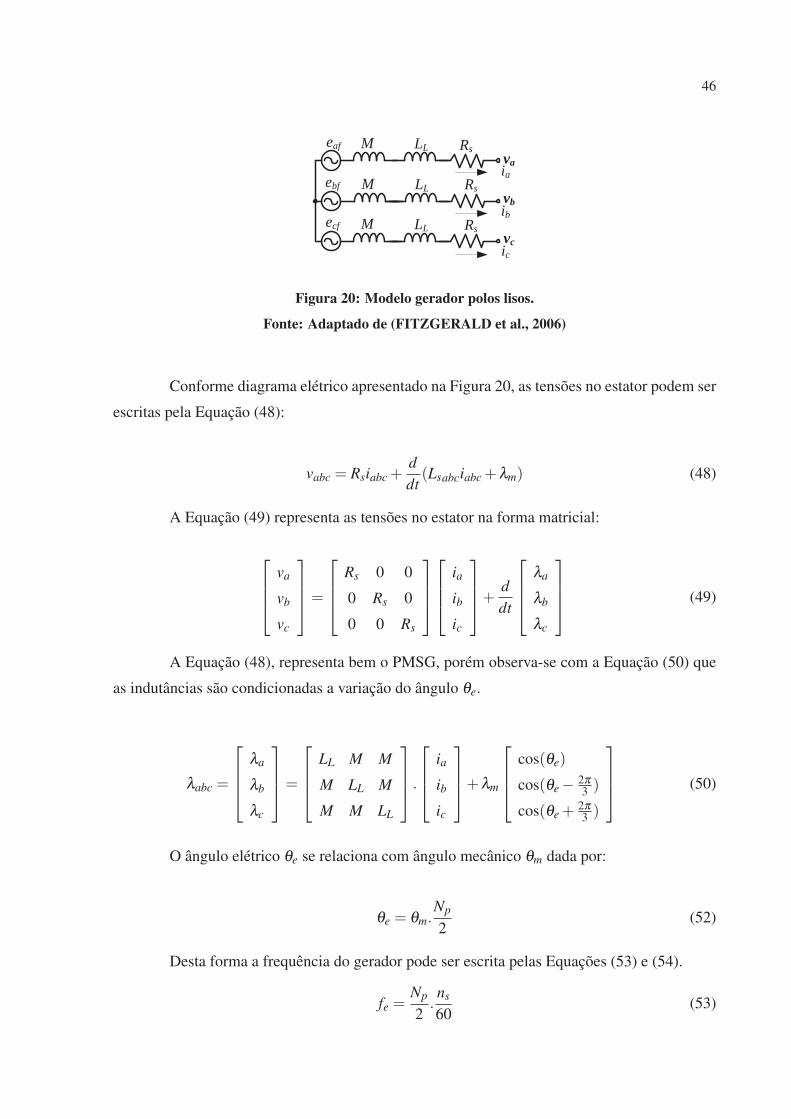
Um circuito equivalente e mostrado na Figura 20, em que e f sao as tensoes induzidas
pela variacao do fluxo magnetico gerado pelos ımas do rotor, Rs a resistencia dos enrolamentos
do estator, LL e M as indutancias propria e mutua respectivamente no estator e va,vb,vc
representam as tensoes terminais (FITZGERALD et al., 2006).
46
ia
eaf
ebf
ecf
M LL Rs
M LL
M LL
va
vb
vc
ib
ic
Rs
Rs
Figura 20: Modelo gerador polos lisos.
Fonte: Adaptado de (FITZGERALD et al., 2006)
Conforme diagrama eletrico apresentado na Figura 20, as tensoes no estator podem ser
escritas pela Equacao (48):
vabc = Rsiabc +ddt(Lsabciabc +λm) (48)
A Equacao (49) representa as tensoes no estator na forma matricial:
⎡⎢⎢⎣
va
vb
vc
⎤⎥⎥⎦=
⎡⎢⎢⎣
Rs 0 0
0 Rs 0
0 0 Rs
⎤⎥⎥⎦⎡⎢⎢⎣
iaibic
⎤⎥⎥⎦+
ddt
⎡⎢⎢⎣
λa
λb
λc
⎤⎥⎥⎦ (49)
A Equacao (48), representa bem o PMSG, porem observa-se com a Equacao (50) que
as indutancias sao condicionadas a variacao do angulo θe.
λabc =
⎡⎢⎢⎣
λa
λb
λc
⎤⎥⎥⎦=
⎡⎢⎢⎣
LL M M
M LL M
M M LL
⎤⎥⎥⎦ .
⎡⎢⎢⎣
iaibic
⎤⎥⎥⎦+λm
⎡⎢⎢⎣
cos(θe)
cos(θe − 2π3 )
cos(θe +2π3 )
⎤⎥⎥⎦ (50)
O angulo eletrico θe se relaciona com angulo mecanico θm dada por:
θe = θm.Np
2(52)
Desta forma a frequencia do gerador pode ser escrita pelas Equacoes (53) e (54).
fe =Np
2.ns
60(53)

47
ωe =Np
2ωm (54)
Em que, θm angulo mecanico, θe angulo eletrico, Np numero de polos, fe frequencia
eletrica em Hz, ωe frequencia eletrica em rad/s e ωm frequencia mecanica em rad/s.
3.2 MODELO EM COORDENADAS SINCRONAS
O gerador sıncrono de ıma permanente pode ser representado por coordenadas qd0
com o emprego das Transformadas de Park. Desta forma, ao ser aplicado a transformada de
Park, o modelo do gerador passa a ter dois eixos de coordenadas que giram com uma dada
velocidade angular (ωe). Ao alinhar o eixo direto do sistema de coordenadas no fluxo magnetico
do rotor, leva a uma simplificacao ao modelo da maquina, mantendo o eixo de quadratura
adiantado em 90◦, o que anula o fluxo magnetico produzido pelo rotor. O fluxo magnetico
(λm) reflete todo no eixo direto, ou seja, o fluxo magnetico no eixo direto (λmd) fica sendo igual
ao fluxo maximo produzido pelos ımas no rotor (λmd = λm) (BIM, 2013).
Na Figura 21 e representado a relacao entre o plano de coordenadas sıncronas dq o
plano de coordenadas abc. Sendo, ed eixo sıncrono direto e, eq eixo sıncrono de quadratura.
Figura 21: Transformacao de coordenadas abc para qd.
Fonte: Adaptado de (MARQUES, 2004)

48
Matriz de transformacao de coordenadas abc para qd0 e apresentada na Equacao (55)
e sua inversa e dada pela Equacao (56).
K =2
3
⎡⎢⎢⎣
cos(θe) cos(θe − 2π
3
)cos
(θe +
2π3
)sen(θe) sen
(θe − 2π
3
)sen
(θe +
2π3
)12
12
12
⎤⎥⎥⎦ (55)
K−1 =
⎡⎢⎢⎣
cos(θe) sen(θe) 1
cos(θe − 2π
3
)sen
(θe − 2π
3
)1
cos(θe +
2π3
)sen
(θe +
2π3
)1
⎤⎥⎥⎦ (56)
Aplicando a transformada de Park na Equacao (48), as tensoes terminais do gerador
podem ser representadas em coordenadas sıncronas (qd0).
A seguir e apresentado parcialmente a aplicacao da transformada de Park.
a) Parte dos elementos resistivos:
Em um sistema trifasico resistivo equilibrado tem-se:
vabc = Rsiabc (57)
Logo a tensao em eixo sıncrono pode ser dado por:
K−1vqd0 = vabc (58)
Da mesma forma para corrente em abc pode ser representado por:
K−1iqd0 = iabc (59)
Isso nos permite escrever a tensao em coordenadas abc em funcao de coordenadas
sıncronas representada pela Equacao (60).
vabc = RsK−1iqd0 (60)

49
Aplicando a Equacao (60) na (58), tem-se a tensao representada em eixo sıncrono dada
pela Equacao (61):
K−1vqd0 = RsK−1iqd0
vqd0 = KRsK−1iqd0 (61)
Os enrolamentos dos estatores de maquinas sıncronas sao projetadas para terem as
mesmas resistencias, logo isso significa que a matriz [Rs] sera uma matriz diagonal, desta
forma a transformada da parte resistiva da Equacao (48) podera ser realizada fazendo
KRsK−1iqd0 (KRAUSE et al., 2013).
K
⎡⎢⎢⎣
Rs 0 0
0 Rs 0
0 0 Rs
⎤⎥⎥⎦K−1=
⎡⎢⎢⎣
Rs 0 0
0 Rs 0
0 0 Rs
⎤⎥⎥⎦ (62)
logo:
Rqd0 =
⎡⎢⎢⎣
Rs 0 0
0 Rs 0
0 0 Rs
⎤⎥⎥⎦ (63)
b) Parte dos elementos indutivos:
K−1vqd0 =ddt
λabc (64)
K−1vqd0 =ddt[K−1λqd0] =
ddt[K−1]λqd0 +K−1 d
dt[λqd0] (65)
vqd0 = Kddt[K−1]λqd0 + KK−1︸ ︷︷ ︸
Matriz
Identidade[I]
ddt[λqd0] (66)
vqd0 = Kddt[K−1]λqd0 +
ddt[λqd0] (67)

50
Aplicando θe = ωet na matriz K−1:
K−1 =
⎡⎢⎢⎣
cos(ωet) sen(ωet) 1
cos(ωet − 2π
3
)sen
(ωet − 2π
3
)1
cos(ωet + 2π
3
)sen
(ωet + 2π
3
)1
⎤⎥⎥⎦ (68)
Derivada de K−1 ja ajustado novamente para dependencia do angulo eletrico θe = ωet:
K−1 =
⎡⎢⎢⎣
−ωesen(θe) ωe cos(θe) 0
ωesen(θe +
π3
) −ωe cos(θe +
π3
)0
−ωe cos(θe +
π6
) −ωesen(θe +
π6
)0
⎤⎥⎥⎦ (69)
O produto de K ddt [K
−1] pode ser deduzido para:
Kddt[K−1] =
⎡⎢⎢⎣
0 ωe 0
−ωe 0 0
0 0 0
⎤⎥⎥⎦= ωe
⎡⎢⎢⎣
0 1 0
−1 0 0
0 0 0
⎤⎥⎥⎦ (70)
O primeiro termo parte da Equacao (67), sera representado pela Equacao 71.
ddt[K−1]λqd0 = ωe
⎡⎢⎢⎣
0 1 0
−1 0 0
0 0 0
⎤⎥⎥⎦⎡⎢⎢⎣
λq
λd
λ0
⎤⎥⎥⎦ (71)
A forma final da Equacao (67) sera:
vqd0 = ωe
⎡⎢⎢⎣
0 1 0
−1 0 0
0 0 0
⎤⎥⎥⎦⎡⎢⎢⎣
λq
λd
λ0
⎤⎥⎥⎦+
ddt
⎡⎢⎢⎣
λq
λd
λ0
⎤⎥⎥⎦ (72)
A Equacao (72) na forma expandida e dada pela Equacao (73).
vqd0 = ωeλdq +ddt[λqd0] (73)
Conforme a Equacao (73) apresenta, “ωeλdq” refere-se ao termo que depende da
velocidade (tensoes de velocidade) e ddt [λqd0], o termo que depende da derivada do fluxo.

51
Para um sistema linear, os enlaces de fluxo podem ser expressos por:
λabc = Lsiabc (74)
Em que:
Ls =
⎡⎢⎢⎣
LL M M
M LL M
M M LL
⎤⎥⎥⎦ (75)
Logo aplicando a transformada de Park na parte das indutancias de forma analoga a parte
resistiva tem-se:
λqd0 = KLLK−1iqd0 (76)
K
⎡⎢⎢⎣
LL M M
M LL M
M M LL
⎤⎥⎥⎦K−1 =
⎡⎢⎢⎣
LL −M 0 0
0 LL −M 0
0 0 2LL +M
⎤⎥⎥⎦ (77)
Alinhando o fluxo do rotor com a fase “a” do estator, todo fluxo concatenado reflete no
eixo direto.
λm
⎡⎢⎢⎣
cos(θm)
cos(θm − 2π3 )
cos(θm + 2π3 )
⎤⎥⎥⎦ >>>>> λm =
⎡⎢⎢⎣
0
λm
0
⎤⎥⎥⎦ (78)
Tem-se entao os enlaces do fluxo em eixos sıncronos dado pela Equacao (79):
λqd0 =
⎡⎢⎢⎣
LL −M 0 0
0 LL −M 0
0 0 2LL +M
⎤⎥⎥⎦ .
⎡⎢⎢⎣
iqidi0
⎤⎥⎥⎦+
⎡⎢⎢⎣
0
λm
0
⎤⎥⎥⎦ (79)
Conforme apresentacao das indutancias na Equacao (79), as mesmas podem ser
definidas pela Equacao (80):
Ld = LL −M
Lq = LL −M
L0 = 2LL +M
(80)

52
Aplicando a Equacao (80) em (79) tem-se:
λqd0 =
⎡⎢⎢⎣
Lq 0 0
0 Ld 0
0 0 L0
⎤⎥⎥⎦ .
⎡⎢⎢⎣
iqidi0
⎤⎥⎥⎦+
⎡⎢⎢⎣
0
λm
0
⎤⎥⎥⎦ (81)
Unindo as Equacoes (63) e (73), as tensoes terminais do gerador em qd0 pode ser
expressa pela Equacao (82):
uqd0 = Rsqd0iqd0 +ωeλdq +
ddt (λqd0) (82)
λdq vale:
λdq =
⎡⎢⎢⎣
λd
−λq
0
⎤⎥⎥⎦
A Equacao (82) na forma matricial pode ser representada pela Equacao (83):
⎡⎢⎢⎣
uq
ud
u0
⎤⎥⎥⎦=
⎡⎢⎢⎣
Rs ωeLd 0
−ωeLq Rs 0
0 0 Rs
⎤⎥⎥⎦ .
⎡⎢⎢⎣
iqidi0
⎤⎥⎥⎦+
⎡⎢⎢⎣
0
ωeλm
0
⎤⎥⎥⎦+
⎡⎢⎢⎣
Lq 0 0
0 Ld 0
0 0 L0
⎤⎥⎥⎦ .
ddt
⎡⎢⎢⎣
iqidi0
⎤⎥⎥⎦ (83)
O modelo do gerador em coordenadas qd0 em funcao da derivada das correntes:
•⎡⎢⎢⎣
iqidi0
⎤⎥⎥⎦=
⎡⎢⎢⎣
−RsLq
−ωe.LdLq
0ωe.Lq
Ld−Rs
Ld0
0 0 −RsL0
⎤⎥⎥⎦⎡⎢⎢⎣
iqidi0
⎤⎥⎥⎦+
⎡⎢⎢⎣
0
−ωeλmLd
0
⎤⎥⎥⎦+
⎡⎢⎢⎣
1Lq
0 0
0 1Ld
0
0 0 1L0
⎤⎥⎥⎦ .
⎡⎢⎢⎣
uq
ud
u0
⎤⎥⎥⎦ (84)
O torque eletromagnetico pode ser obtido a partir da relacao de potencias no referencial
abc e qd0 em que:
pabc =3
2pqd0 (85)
pabc =3
2pe (86)
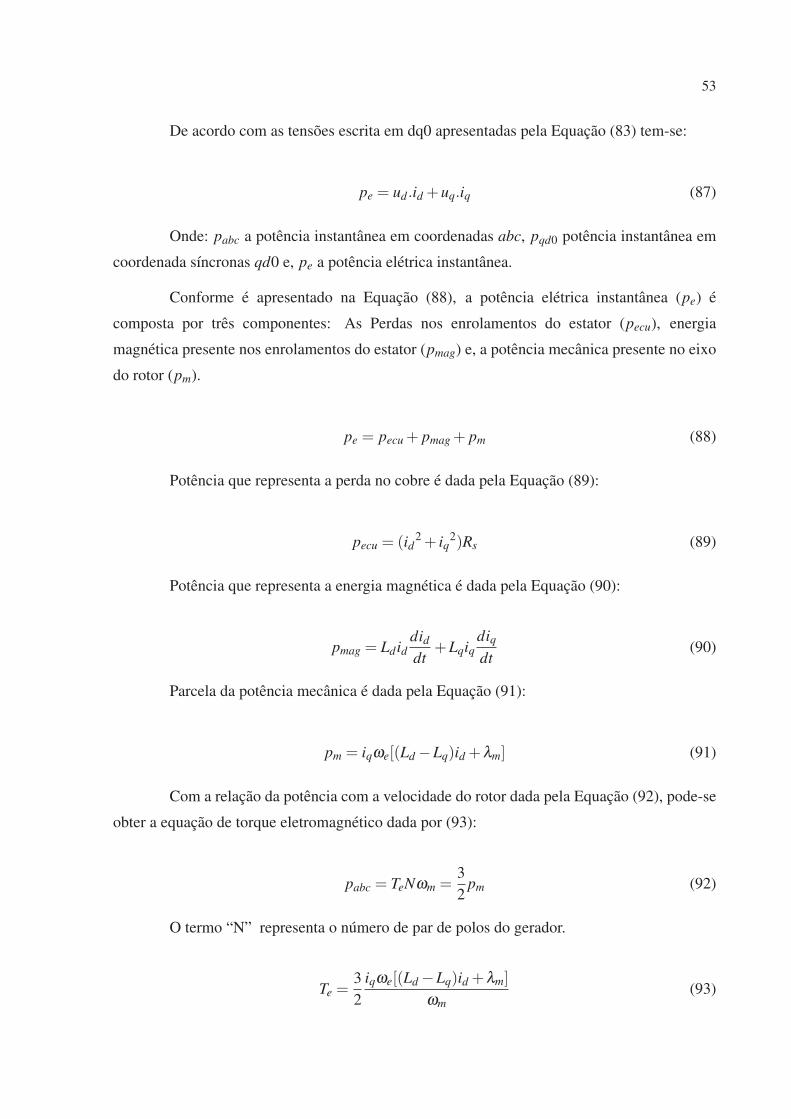
53
De acordo com as tensoes escrita em dq0 apresentadas pela Equacao (83) tem-se:
pe = ud.id +uq.iq (87)
Onde: pabc a potencia instantanea em coordenadas abc, pqd0 potencia instantanea em
coordenada sıncronas qd0 e, pe a potencia eletrica instantanea.
Conforme e apresentado na Equacao (88), a potencia eletrica instantanea (pe) e
composta por tres componentes: As Perdas nos enrolamentos do estator (pecu), energia
magnetica presente nos enrolamentos do estator (pmag) e, a potencia mecanica presente no eixo
do rotor (pm).
pe = pecu + pmag + pm (88)
Potencia que representa a perda no cobre e dada pela Equacao (89):
pecu = (id2 + iq2)Rs (89)
Potencia que representa a energia magnetica e dada pela Equacao (90):
pmag = Ldiddiddt
+Lqiqdiqdt
(90)
Parcela da potencia mecanica e dada pela Equacao (91):
pm = iqωe[(Ld −Lq)id +λm] (91)
Com a relacao da potencia com a velocidade do rotor dada pela Equacao (92), pode-se
obter a equacao de torque eletromagnetico dada por (93):
pabc = TeNωm =3
2pm (92)
O termo “N” representa o numero de par de polos do gerador.
Te =3
2
iqωe[(Ld −Lq)id +λm]
ωm(93)

54
Para o caso em que Ld = Lq e, ωe = N.ωm, o torque eletromagnetico pode ser
simplificado dado pela Equacao (94).
Te =3λmiq
2(94)
3.3 CONSIDERACOES FINAIS
Neste capıtulo foram apresentados modelos dinamicos para analise do funcionamento
de turbinas eolicas e do PMSG, onde o detalhamento do assunto e utilizado para determinar os
pontos de operacao e prever o comportamento dinamico do sistema. O ensaio para determinacao
dos parametros eletricos do gerador sao apresentados no Apendice D.

55
4 PROJETO DOS CONTROLADORES
4.1 DEFINICOES DO PROJETO
O retificador a ser aplicado na saıda do gerador, deve operar de forma a controlar a
potencia extraıda do PMSG, conforme a velocidade do vento e as limitacoes da turbina eolica.
Este retificador composto por chaves semicondutoras do tipo IGBT (Insulated Gate Bipolar
Transitor), com frequencia de chaveamento escolhida em 10 kHz, nele e aplicado a tecnica de
modulacao do tipo vetorial (SVM - Space Vector Modulation) por melhor aproveitar a energia
do barramento CC (SANTOS, 2015).
Na Figura 22 e apresentado o diagrama completo do sistema de controle. Nesta
estrutura, o controlador classico PI e aplicado nas malhas de corrente interna e externa por
possuir comportamento dinamico satisfatorio em sistemas com tensoes equilibradas e disturbios
nulos (MARQUES, 2004).
iq
MPPT
ia ib ic
id
c
Figura 22: Diagrama completo do sistema de controle.
Fonte: O autor

56
Na Figura 23 e representada a dinamica eletrica do PMSG em diagrama de blocos
e observa-se a existencia de acoplamentos entre o eixo direto e o eixo de em quadratura
representados pelos termos (ωeiq/Lq) e (−ωeid/Ld).
Figura 23: Diagrama de blocos representando dinamica do PMSG.
Fonte: Adaptado de (BERNARDES, 2009)
Para o projeto de controle uma simplificacao e aplicada em que os termos de
acoplamento (ωeiq/Lq), (−ωeid/Ld) e, a tensao induzida (ωeλm/Ld), sao considerados
disturbios a serem compensados pelo sistema.
Outra simplificacao do projeto de controle se da pela semelhanca das indutancias Ld e
Lq. Essa semelhanca permite replicar os valores dos ganhos calculados para o controlador da
malha de corrente do eixo de em quadratura ao controlador da malha de corrente de eixo direto.
A aplicacao dessas simplificacoes para o projeto dos controladores, permitem
representar as funcoes de transferencia para as correntes deixo direto id e em quadratura iq como
dinamicas de primeira ordem, sendo descritas pelas Equacoes (95) e (96), respectivamente.
GCid =Id(s)Ud(s)
=1
Lds+Rs(95)
GCiq =Iq(s)Uq(s)
=1
Lqs+Rs(96)
O metodo adotado para a sintonia do controlador PI consiste no cancelando do polo
dominante do sistema. Este cancelamento permite que a planta responda em dinamica de
primeira ordem com tempo de resposta conforme banda passante desejada e, ganho de malha
fechada unitario. A funcao de transferencia do controlador PI utilizado possui formato paralelo

57
ideal conforme e apresentado pela Equacao (97) (PINTO, 2014).
GPIidq = Kp +Ki
s(97)
Os ganhos proporcional e integral para as malhas de correntes sao definidos Kpiq e Kiiq
para malha de corrente de eixo em quadratura e Kpid e Kiid para malha de corrente de eixo direto.
A referencia para o controle da corrente do eixo direto id e mantida em zero para que o sistema
opere com fator de potencia unitario.
Na Figura 24 representa o diagrama de blocos para o controle das correntes.
q sL s R
q sL s Rid
id
ip
KK
s
iq
iq
ip
KK
s
Figura 24: Diagrama de blocos para o controle das correntes.
Fonte: Produzido pelo autor
Conforme a Figura 24, a funcao de transferencia de malha fechada incluindo o
controlador de corrente do tipo PI para o eixo em quadratura, pode ser escrita em (98).
Tiq(s) =
(KpiqLq
)s+
KiiqLq
s2 +(Rs+Kpiq
Lq
)s+
KiiqLq
(98)
Outra hipotese simplificadora pode ser considerada em que a resistencia de estator
Rs e muito menor que o ganho proporcional do controlador Kpiq e com essa simplificacao
reescrevemos a Equacao (98) sem o termo “Rs” na Equacao (99). A validade dessa hipotese
e demostrada apos a definicao dos valores dos ganhos dos controladores (CAMARA, 2007).
Tiq(s) =
(KpiqLq
)s+
KiiqLq
s2 +(Kpiq
Lq
)s+
KiiqLq
(99)

58
A funcao de transferencia apresentada na Equacao (99) pode ser comparada com a
funcao de transferencia de um sistema de segunda ordem com um zero e dois polos, dada por
(100):
G( jωb) =2ξ ωn( jωb)+ω2
n
( jωb)2 +2ξ ωn( jωb)+ω2
n(100)
A banda passante ωb definida pelo valor em que o ganho do sistema diminui −3,01 dB,
esta relacionada com a frequencia natural (ωn), por meio da Equacao (101) (CAMARA, 2007).
ωn =ωb√
2ξ 2 +1+
√(1+2ξ )2 +1
(101)
As expressoes para os ganhos proporcional e integral sao determinadas como uma
funcao da banda passante logo, comparando as Equacoes (99) e (100) pode-se escrever:
2ξ ωn =Kpiq
Lq(102)
ω2n =
Kiiq
Lq(103)
O coeficiente de amortecimento (ξ ) pode ser escolhido e, segundo Ogata (2000),
valores de amortecimento entre 0,4 e 0,8 correspondem a sistemas que toleram oscilacoes
e necessitam de respostas rapida. Para sistemas que nao aceitam respostas transitorias
oscilatorias, deve ser suficientemente amortecidos o que corresponde a valores de ξ > 0,8
porem, as respostas comecam ser mais lentas (Amortecimento escolhido ξ = 2.3).
Segundo Camara (2007), os ganhos dos controladores sao obtidos a partir de uma
banda passante (ωb) definida em torno de 5 a 10 vezes o valor da frequencia do sinal de entrada.
A frequencia do sinal de entrada e definida pela frequencia da tensao eletrica do gerador que
esta limitada pelo nıvel de tensao eletrica do barramento CC. Conforme Apendice (A.1), o valor
da frequencia eletrica que limita a tensao de saıda do gerador corresponde a fe = 57 Hz.
Se as tensoes eletricas de saıda do gerador forem maiores que o nıvel de tensao do
barramento CC, os diodos encapsulados juntos as chaves IGBT’s polarizam configurando um
retificador nao controlado. A fim de se evitar a polarizacao desses diodos, a frequencia adotada
como sinal de entrada no sistema de controle e de 50 Hz, logo a banda passante (ωb) para o

59
projeto dos controladores das malhas de corrente e definida por:
ωbc = 2π fe.5 (104)
As Equacoes (105) e (106) definem os ganhos proporcional e integral em funcao da
banda passante ωbc:
Kpiq =ξ ωbc2Lq√
2ξ 2 +1+
√(1+2ξ )2 +1
(105)
Kiiq =Lqωbc
2
2ξ 2 +1+
√(1+2ξ )2 +1
(106)
Os valores correspondente ao ganho proporcional e integral dos controladores sao:
Kpiq = Kpid = 78,2 e, Kpiq = Kpid = 6429,8 respectivamente.
A resposta ao degrau para funcao de transferencia a malha fechada do sistema nas
malhas de correntes pode ser observado na Figura 25 e, na Figura 26 o diagrama de Bode
ilustrando a banda passante projetada.
Figura 25: Resposta ao degrau unitario para malha de corrente.
Fonte: Produzido pelo autor
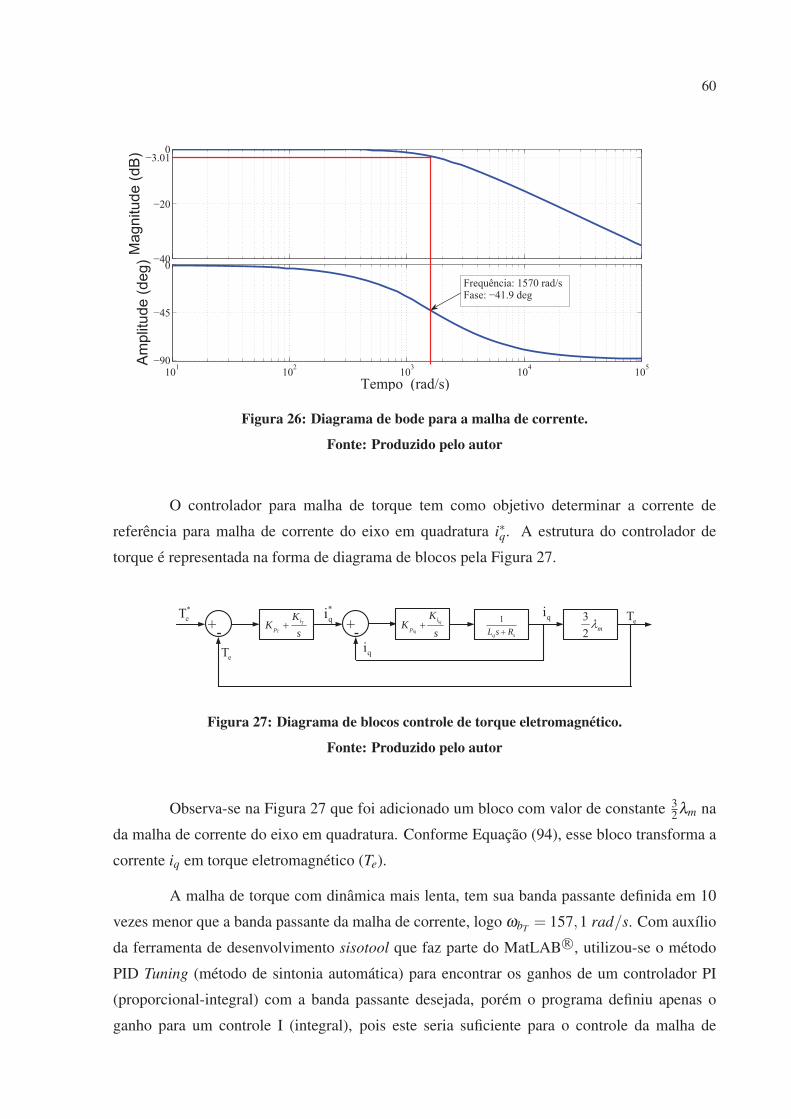
60
Figura 26: Diagrama de bode para a malha de corrente.
Fonte: Produzido pelo autor
O controlador para malha de torque tem como objetivo determinar a corrente de
referencia para malha de corrente do eixo em quadratura i∗q. A estrutura do controlador de
torque e representada na forma de diagrama de blocos pela Figura 27.
q sL s Riq
iq
ip
KK
sT
T
ip
KK
s m
Figura 27: Diagrama de blocos controle de torque eletromagnetico.
Fonte: Produzido pelo autor
Observa-se na Figura 27 que foi adicionado um bloco com valor de constante 32λm na
da malha de corrente do eixo em quadratura. Conforme Equacao (94), esse bloco transforma a
corrente iq em torque eletromagnetico (Te).
A malha de torque com dinamica mais lenta, tem sua banda passante definida em 10
vezes menor que a banda passante da malha de corrente, logo ωbT = 157,1 rad/s. Com auxılio
da ferramenta de desenvolvimento sisotool que faz parte do MatLAB R©, utilizou-se o metodo
PID Tuning (metodo de sintonia automatica) para encontrar os ganhos de um controlador PI
(proporcional-integral) com a banda passante desejada, porem o programa definiu apenas o
ganho para um controle I (integral), pois este seria suficiente para o controle da malha de

61
torque eletromagnetico. A Figura 28 apresenta com diagramas de blocos a estrutura de controle
redefinida.
iq iq
iq iq
p i
q q
p i
q q
K Ks
L LK K
s sL L
iTKs m
Figura 28: Diagrama de blocos para controle da malha de torque eletromagnetico.
Fonte: Produzido pelo autor
A resposta ao degrau para funcao de transferencia a malha fechada do sistema para
malha de torque eletromagnetico pode ser observado na Figura 29 e, na Figura 30 o diagrama
de Bode ilustrando a banda passante projetada.
Figura 29: Resposta ao degrau unitario para malha de torque eletromagnetico.
Fonte: Produzido pelo autor
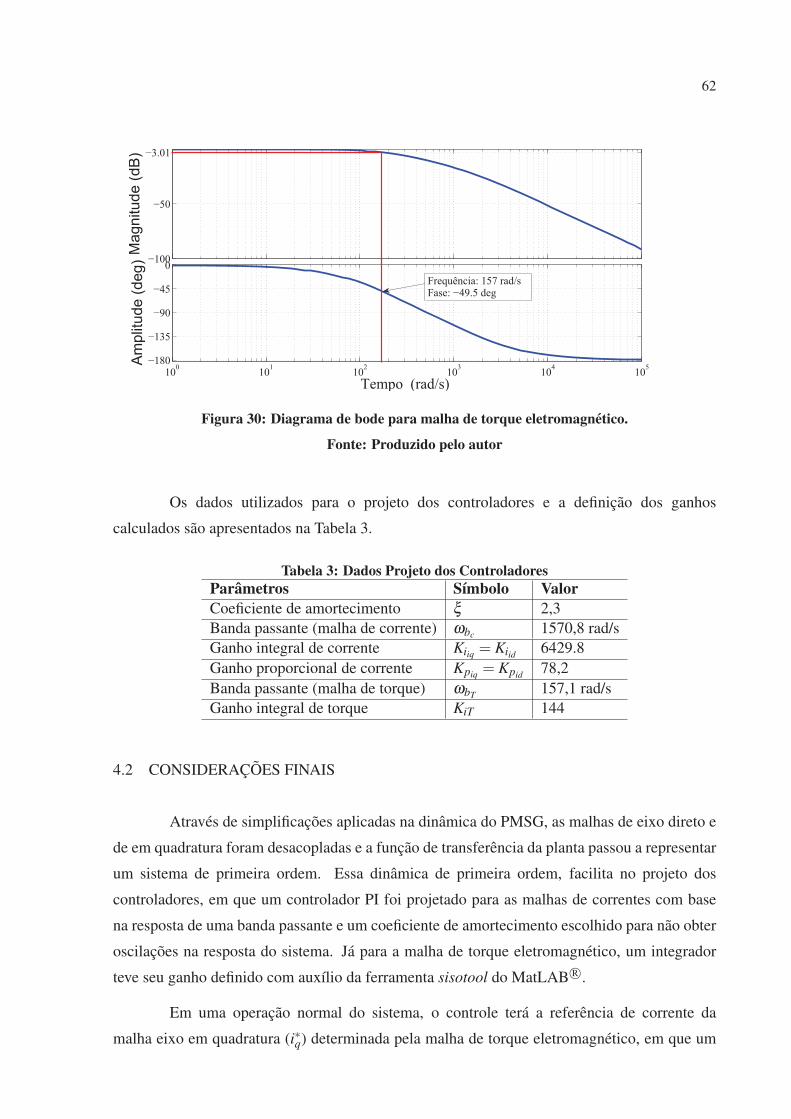
62
Figura 30: Diagrama de bode para malha de torque eletromagnetico.
Fonte: Produzido pelo autor
Os dados utilizados para o projeto dos controladores e a definicao dos ganhos
calculados sao apresentados na Tabela 3.
Tabela 3: Dados Projeto dos ControladoresParametros Sımbolo ValorCoeficiente de amortecimento ξ 2,3
Banda passante (malha de corrente) ωbc 1570,8 rad/s
Ganho integral de corrente Kiiq = Kiid 6429.8
Ganho proporcional de corrente Kpiq = Kpid 78,2
Banda passante (malha de torque) ωbT 157,1 rad/s
Ganho integral de torque KiT 144
4.2 CONSIDERACOES FINAIS
Atraves de simplificacoes aplicadas na dinamica do PMSG, as malhas de eixo direto e
de em quadratura foram desacopladas e a funcao de transferencia da planta passou a representar
um sistema de primeira ordem. Essa dinamica de primeira ordem, facilita no projeto dos
controladores, em que um controlador PI foi projetado para as malhas de correntes com base
na resposta de uma banda passante e um coeficiente de amortecimento escolhido para nao obter
oscilacoes na resposta do sistema. Ja para a malha de torque eletromagnetico, um integrador
teve seu ganho definido com auxılio da ferramenta sisotool do MatLAB R©.
Em uma operacao normal do sistema, o controle tera a referencia de corrente da
malha eixo em quadratura (i∗q) determinada pela malha de torque eletromagnetico, em que um

63
algoritmo MPPT sera responsavel por determinar sua referencia de torque. Este procedimento
sera discutido no proximo capıtulo.

64
5 ALGORITMO MPPT PROPOSTO
5.1 DESENVOLVIMENTO DO ALGORITMO MPPT
Este presente trabalho propoe um algoritmo MPPT baseado nos metodos OTC e HCS
para operar em sistemas de velocidade variavel utilizando um PMSG. Em Quincy e Liuchen
(2004), o algoritmo MPPT utiliza valores de uma tabela de dados construıda por um processo de
aprendizagem que acontece durante operacao do sistema, mas os valores armazenados podem
ser imprecisos devido a manter sempre na tabela o ultimo valor de maior potencia extraıda,
o que ignora a possibilidade do sistema sofrer desgastes com acao do tempo e variacoes
climaticas. Diferente disso, o algoritmo aqui proposto nao fara uso de tabelas de dados, um
ganho denominado de Kotm, sera atualizado de forma dinamica a cada mudanca significativa do
torque disponıvel.
Em Kazmi et al. (2011) um algoritmo similar e proposto. Porem, o processo de
operacao e baseado em alterar a razao cıclica de um conversor CC/CC com passo variavel.
O autor leva seu algoritmo para o metodo HCS quando detecta o sistema estavel dentro de
um valor aceitavel, entao procura um Kotm e um ωotm, que serao comparados com dados
previamente salvos em memoria e defini se mantem os valores ja existentes ou substitui pelos
atuais.
O metodo HCS tambem adotado por Zhu et al. (2012), e responsavel por atualizar o
ganho Kotm, apos isso, o algoritmo volta a operar com o metodo OTC, sendo esse o metodo
mais adequado segundo Adhikari et al. (2015) para sistemas de pequeno porte com velocidade
variavel. A referencia de torque no metodo OTC e gerada pela Equacao (107) em que o valor
do ganho Kotm faz a representacao da caracterıstica da turbina eolica.
T ∗e = Kotmω2
e (107)
Sendo: T ∗e (Nm) a referencia de torque eletromagnetico e, ωe (rad/s) a velocidade
angular eletrica.

65
Conforme e apresentado fluxograma do algoritmo proposto na Figura 35, quando o
parametro de operacao definido em OP = 0, o sistema entra no modo de pesquisa pelo metodo
HCS para detectar o valor do ganho Kotm.
O metodo HCS pode atingir o ponto de potencia maxima sem a necessidade de
conhecer o ganho Kotm, porem, este metodo convencional de HCS nao consegue parar quando
atinge o ponto de maxima, logo a velocidade oscila entorno MPPT conforme e representado no
grafico da Figura 15 na Secao (2.4.4) reapresentada pela Figura 31.
Figura 31: Controle convencional algoritmo MPPT HCS.
Fonte: Produzido pelo autor.
No algoritmo proposto neste trabalho, o metodo HCS convencional e modificado sendo
adicionado regras para saıda do metodo e, variacao no valor do passo de torque na pertubacao do
sistema durante a pesquisa. Essas modificacoes pode ser observadas na descricao do fluxograma
apresentado na Figura 35 onde:
• Definicao do tamanho do passo de torque:
Durante a execucao do metodo HCS, o algoritmo incrementa ou decrementa um o passo
de torque eletromagnetico. Esse passo e fracionado em passos menores caracterizado
uma rampa de torque conforme e representado pela Figura 32
O tempo do passo de torque eletromagnetico e definido pelo tempo de assentamento
apresentado no Capıtulo 4 para o controle da malha de torque. Conforme Figura 29,
ΔTime ≈ 0,04 s.
O numero de incrementos (ninc) dentro do intervalo de tempo ΔTime e o valor do passo
(ΔInc) aplicado a cada amostragem do sistema e dada pelas Equacoes (108) e (109).
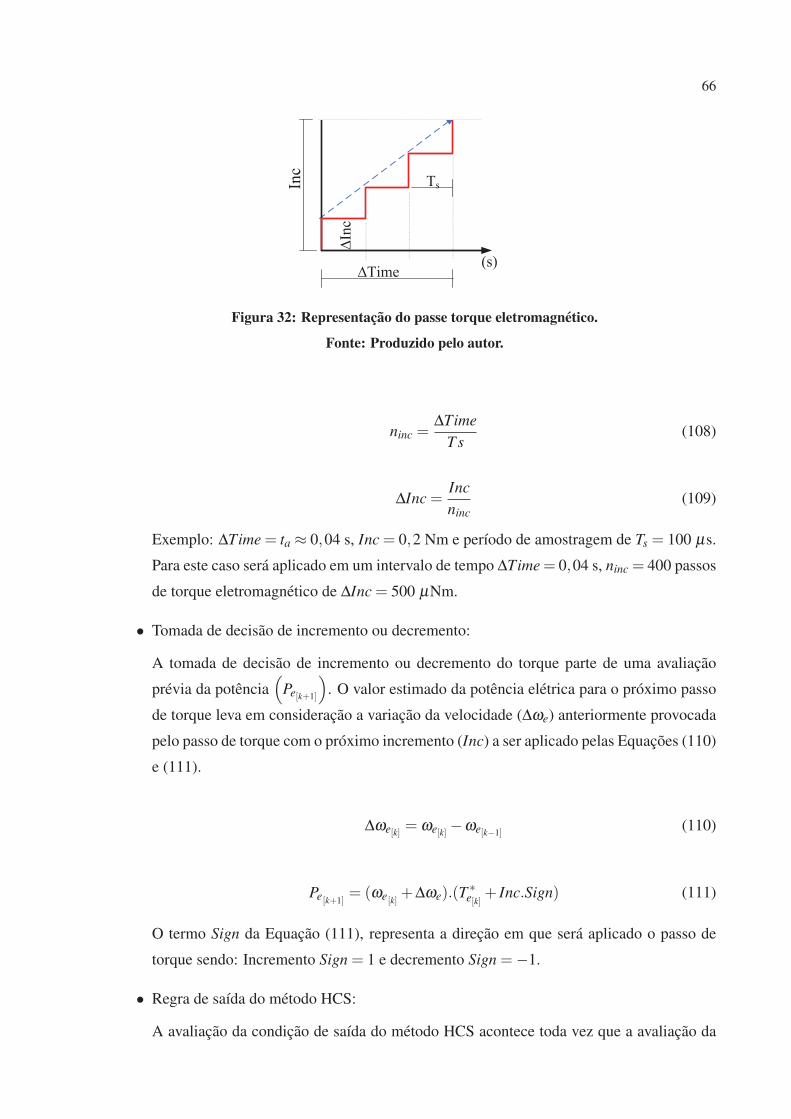
66
Figura 32: Representacao do passe torque eletromagnetico.
Fonte: Produzido pelo autor.
ninc =ΔTime
T s(108)
ΔInc =Incninc
(109)
Exemplo: ΔTime = ta ≈ 0,04 s, Inc = 0,2 Nm e perıodo de amostragem de Ts = 100 μs.
Para este caso sera aplicado em um intervalo de tempo ΔTime = 0,04 s, ninc = 400 passos
de torque eletromagnetico de ΔInc = 500 μNm.
• Tomada de decisao de incremento ou decremento:
A tomada de decisao de incremento ou decremento do torque parte de uma avaliacao
previa da potencia(
Pe[k+1]
). O valor estimado da potencia eletrica para o proximo passo
de torque leva em consideracao a variacao da velocidade (Δωe) anteriormente provocada
pelo passo de torque com o proximo incremento (Inc) a ser aplicado pelas Equacoes (110)
e (111).
Δωe[k] = ωe[k] −ωe[k−1](110)
Pe[k+1]= (ωe[k] +Δωe).(T ∗
e[k] + Inc.Sign) (111)
O termo Sign da Equacao (111), representa a direcao em que sera aplicado o passo de
torque sendo: Incremento Sign = 1 e decremento Sign =−1.
• Regra de saıda do metodo HCS:
A avaliacao da condicao de saıda do metodo HCS acontece toda vez que a avaliacao da

67
potencia estimada(
Pe[k+1]
)nao representa um aumento de potencia eletrica. Assim, uma
avaliacao da potencia atual com valores anteriores e realizado conforme Equacao (112).
Pe[k]−Pe[k−1] < 0 (112)
• Definicao do valor de Kotm:
A toda interacao em que se incremente mais potencia ao sistema, os valores dos
parametros otimos Peotm e ωeotm sao atualizados. Quando o sistema decide sair do metodo
HCS o valor do ganho Kotm e definido conforme Equacao (113).
Kotm =Peotm
ω3eotm
(113)
Com o valor do ganho Kotm definido, o sistema passa a operar atraves do metodo OTC
permanecendo nesta operacao ate que variacoes significativas de potencia sejam observadas.
Quando isso acontece, o valor do ganho Kotm precisa ser atualizado, logo o algoritmo MPPT leva
o sistema a operar no metodo HCS. Essas etapas podem ser observadas seguindo o fluxograma
do algoritmo MPPT na Figura 35 em que:
• Referencia de Torque eletromagnetico:
Enquanto o sistema opera no metodo OTC, o torque eletromagnetico de referencia e
determinado pela velocidade eletrica do gerador em funcao do ganho Kotm dado pela
Equacao (114).
T ∗e[k] = Kotmω2
e[k] (114)
• Intervalo de tempo para verificar a necessidade de atualizar o ganho Kotm:
A cada intervalo de tempo “tv” o algoritmo verifica se houve uma variacao significativa
de potencia, esse intervalo de tempo e definido em 10 vezes o tempo de assentamento
encontrado no projeto de controle para malha de torque eletromagnetico no Capitulo 4,
logo tv = 0,4 s.
• Definicao da variacao significativa de Potencia:
Conforme variacao significativa da potencia, algoritmo vai para o metodo HCS atualizar
o ganho Kotm incrementando ou decrementando o valor da referencia de torque
eletromagnetico. Essa decisao passa pela avaliacao das Equacoes (115) e (116).

68
Pe[k] > Pe[k−1]H (115)
Pe[k] < Pe[k−1]L (116)
Em que H e L sao constantes que restringe a faixa em que variacao da potencia definida
como significativa.
• Definicao do parametro Sign:
Na Figura 33 considerando o sistema operando no ponto “A”, a tendencia da turbina e
em acelerar quando a velocidade do vento aumenta, pois a potencia disponıvel tambem
aumenta. Como o sistema esta operando no modo OTC, a medida que o a velocidade do
gerador tende aumentar a referencia de torque tambem aumenta parando no ponto “B”
fora do MPPT.
ω ω
Figura 33: Representacao do passe torque eletromagnetico.
Fonte: Produzido pelo autor.
Sendo essa uma variacao significativa de potencia, o algoritmo leva o sistema a operara
no metodo HCS para rastrear o novo ganho Kotm. Inicialmente Sign =−1, o processo de
pesquisa inicia decrementando a referencia de torque levando a velocidade do gerador ate
o ponto “C” conforme apresentado no grafico da Figura (33).
Na Figura 34 considerando o sistema no ponto “A”, quando a velocidade do vento diminui
a tendencia do sistema no modo OTC e de diminuir a velocidade do gerador, pois a
potencia disponıvel diminui. A medida que o a velocidade do gerador tende diminuir a

69
referencia de torque para o controle tambem diminui e o gerador tende a operar no ponto
“B” fora do MPPT.
ωω
Figura 34: Grafico para Sign=1.
Fonte: Produzido pelo autor.
Sendo uma variacao significativa de potencia, o algoritmo passa para o metodo HCS
para atualizar o valor do ganho Kotm em que Sign = 1. Ou seja, inicia-se a pesquisa
incrementando torque levando a velocidade do gerador ate o ponto “C” conforme
apresentado no grafico da Figura 34.
A Equacao (117) estabelece uma condicao para definir o valor de Sign.
{ωe[k] > ωotm → Sign =−1
ωe[k] < ωotm → Sign = 1(117)
Uma visao geral do algoritmo MPPT proposto pode ser observado na Figura 35.

70
k
Figura 35: Fluxograma do algoritmo MPPT.
Fonte: Produzido pelo autor.
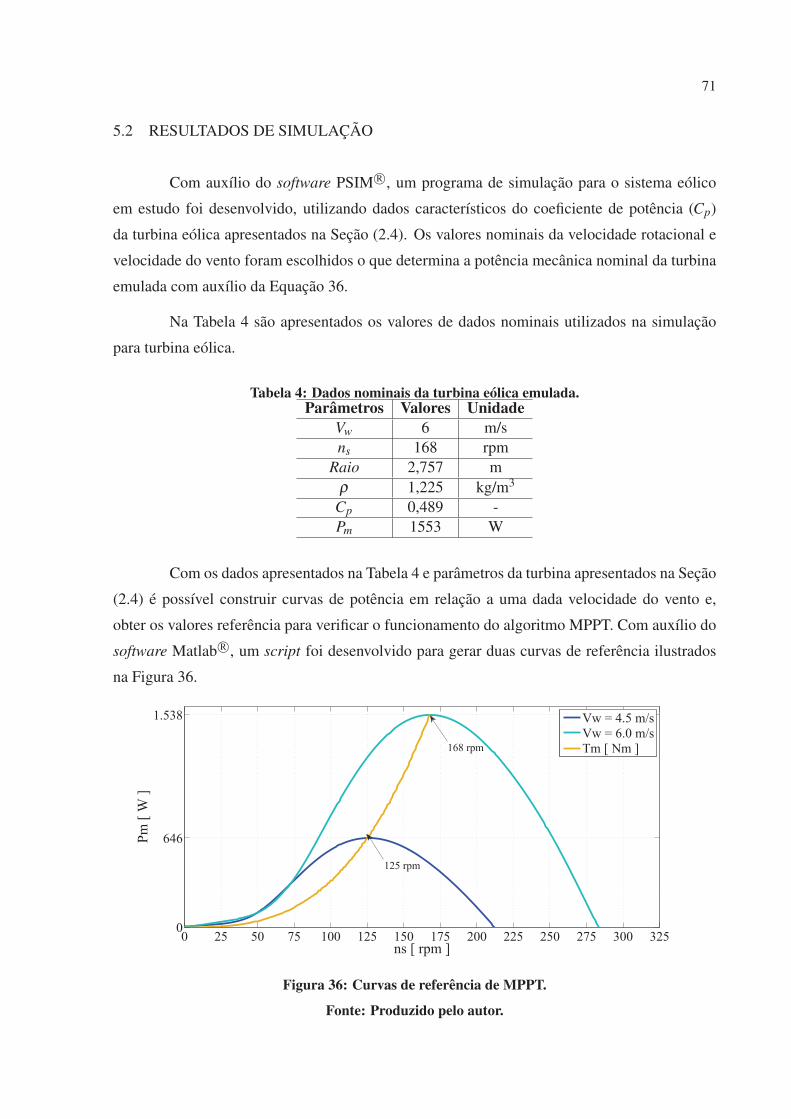
71
5.2 RESULTADOS DE SIMULACAO
Com auxılio do software PSIM R©, um programa de simulacao para o sistema eolico
em estudo foi desenvolvido, utilizando dados caracterısticos do coeficiente de potencia (Cp)
da turbina eolica apresentados na Secao (2.4). Os valores nominais da velocidade rotacional e
velocidade do vento foram escolhidos o que determina a potencia mecanica nominal da turbina
emulada com auxılio da Equacao 36.
Na Tabela 4 sao apresentados os valores de dados nominais utilizados na simulacao
para turbina eolica.
Tabela 4: Dados nominais da turbina eolica emulada.Parametros Valores Unidade
Vw 6 m/s
ns 168 rpm
Raio 2,757 m
ρ 1,225 kg/m3
Cp 0,489 -
Pm 1553 W
Com os dados apresentados na Tabela 4 e parametros da turbina apresentados na Secao
(2.4) e possıvel construir curvas de potencia em relacao a uma dada velocidade do vento e,
obter os valores referencia para verificar o funcionamento do algoritmo MPPT. Com auxılio do
software Matlab R©, um script foi desenvolvido para gerar duas curvas de referencia ilustrados
na Figura 36.
Figura 36: Curvas de referencia de MPPT.
Fonte: Produzido pelo autor.
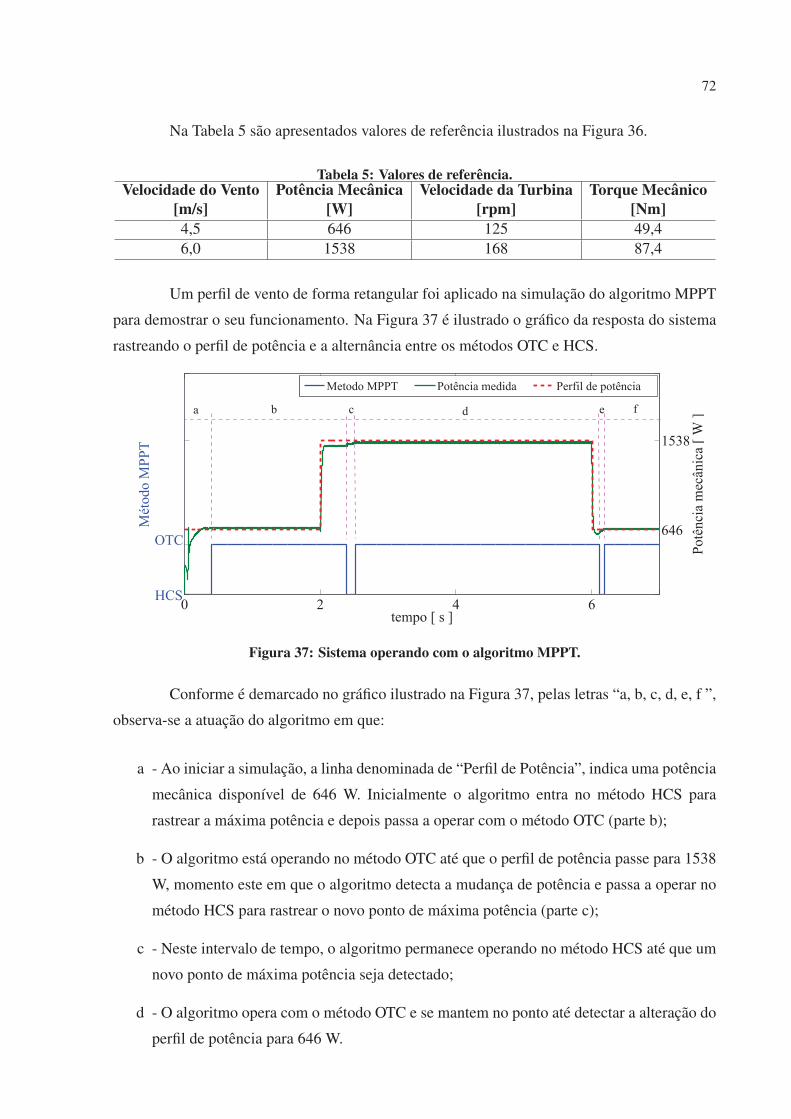
72
Na Tabela 5 sao apresentados valores de referencia ilustrados na Figura 36.
Tabela 5: Valores de referencia.Velocidade do Vento
[m/s]Potencia Mecanica
[W]Velocidade da Turbina
[rpm]Torque Mecanico
[Nm]4,5 646 125 49,4
6,0 1538 168 87,4
Um perfil de vento de forma retangular foi aplicado na simulacao do algoritmo MPPT
para demostrar o seu funcionamento. Na Figura 37 e ilustrado o grafico da resposta do sistema
rastreando o perfil de potencia e a alternancia entre os metodos OTC e HCS.
Figura 37: Sistema operando com o algoritmo MPPT.
Conforme e demarcado no grafico ilustrado na Figura 37, pelas letras “a, b, c, d, e, f ”,
observa-se a atuacao do algoritmo em que:
a - Ao iniciar a simulacao, a linha denominada de “Perfil de Potencia”, indica uma potencia
mecanica disponıvel de 646 W. Inicialmente o algoritmo entra no metodo HCS para
rastrear a maxima potencia e depois passa a operar com o metodo OTC (parte b);
b - O algoritmo esta operando no metodo OTC ate que o perfil de potencia passe para 1538
W, momento este em que o algoritmo detecta a mudanca de potencia e passa a operar no
metodo HCS para rastrear o novo ponto de maxima potencia (parte c);
c - Neste intervalo de tempo, o algoritmo permanece operando no metodo HCS ate que um
novo ponto de maxima potencia seja detectado;
d - O algoritmo opera com o metodo OTC e se mantem no ponto ate detectar a alteracao do
perfil de potencia para 646 W.

73
e - O algoritmo encontra-se operando no metodo HCS rastreando um novo ponto de
maxima potencia;
f - O algoritmo volta a operar no metodo OTC mantendo-se no ponto de maxima potencia.
5.3 CONSIDERACOES FINAIS
No capıtulo foi apresentado o algoritmo MPPT proposto, desenvolvido com base nos
metodos OTC e HCS, bem como a definicoes dos tempos de acomodacao dos passos de torque
aplicados durante a execucao do algoritmo. No proximo sao apresentados capıtulo resultados
experimentais.

74
6 RESULTADOS EXPERIMENTAIS
Para realizacao dos testes com o algoritmo proposto, uma plataforma experimental foi
utilizada em que consiste em um simulador da turbina eolica atraves de um motor de inducao
trifasico de 4 polos comandado por um inversor comercial que disponibiliza torque mecanico
ao PMSG acoplado. O PMSG tem sua energia processada por chaves IGBTs e descarregada em
um banco de resistencias conectadas ao barramento CC. Os detalhes da plataforma experimental
e apresentado no Apendice (A).
6.1 ENSAIO 1: DETERMINACAO DE CURVAS DE POTENCIA PARA COMPARACOES
COM O ALGORITMO MPPT
Antes de testar o algoritmo proposto, curvas de potencia de referencia ao sistema
eolico experimental foram levantadas para que as mesmas sirvam de comparacao na verificacao
dos testes com o algoritmo MPPT. O inversor de frequencia da plataforma experimental foi
configurado para modo torque variavel. Este mesmo inversor tem disponıvel uma funcao que
permite programar dois nıveis de correntes maximas de saıdas. Desta forma, duas curvas de
potencia distintas em funcao da variacao de torque podem ser conhecidas determinadas por
“Curva P1” e “Curva P2”. Outras curvas podem ser produzidas variando o potenciometro
instalado no inversor de frequencia, o que modifica as caracterısticas da turbina eolica simulada
no que se refere a velocidade otima de operacao mantendo o mesmo torque disponıvel. Essas
curvas foram determinada sendo “Curva P3”, “Curva P4”, “Curva P5”, “Curva P6” e “Curva
P7”.
Para determinar as curvas de referencia de MPPT, um DSP foi programado para
incrementar pequenos nıveis de torque a cada amostragem e, quando o PMSG passa do ponto
de maxima potencia, caracterizado pela diminuicao da potencia o sistema entao e deligado.

75
Primeiramente e apresentado as curvas de referencia, “Curva P1” e “Curva P2”
determinadas pela variacao do torque conforme ilustradas nas Figuras 38 e 39.
(a)
(b)
Figura 38: Referencia “Curva P1” : a) Curva de potencia; b) Curva de velocidade.

76
(a)
(b)
Figura 39: Referencia “Curva P1” : a) Curva de potencia; b) Curva de velocidade.
Os dados obtidos com levantamento das curvas de referencia para variacao de torque
sao apresentados na Tabela 6.
Tabela 6: Dados das curvas de referencia para variacao de torque.Curva Pmotm [W] nsotm [rad/s] Tmotm [Nm]
P1 750 15,1 49,7
P2 976 14,4 67,8
Alterando as caracterısticas da turbina atraves da variacao da velocidade com auxılio
do potenciometro instalado no inversor de frequencia, as curvas de potencia “P3 a P7”, sao
ilustradas na Figura 40, “potencia em funcao do ” e na Figura 41 “velocidade em funcao do
tempo”.

77
Figura 40: Curvas de potencia em funcao do tempo.
Figura 41: Curvas de velocidade em funcao do tempo.
Observa-se nas curvas ilustradas pelas Figuras 40 e 41, que para cada ponto de maxima
potencia ha uma velocidade correspondente, sendo assim, o grafico ilustrado na Figura 42
representa a relacao da curva de potencia em funcao da velocidade facilitando visualizacao
dos pontos MPPT’s a serem utilizados como referencia aos ensaios.

78
Figura 42: Curvas potencia em funcao da velocidade de P3 a P7.
Com base nas informacoes apresentadas no grafico ilustrado na Figura 42, a Tabela 7
apresenta os valores de potencia e velocidade que determinam os pontos de referencias MPPT’s.
Tabela 7: Dados das curvas de referencia com variacao de velocidade.Curva Pmotm [W] nsotm [rad/s] Tmotm [Nm]
P3 892 15,5 57,6
P4 824 14,2 58,1
P5 753 13,9 54,2
P6 702 12,6 55,7
P7 620 11,9 52,1
Analisando os valores mostrados na Tabela 7, pode ser observado que o valor do torque
mecanico (Tm) e aproximadamente o mesmo para todos os pontos. Isso porque neste ensaio
o torque disponıvel para cada curva levantada nao e alterado, o que se altera e a velocidade
caracterıstica da turbina quando a mesma esta submetida a uma velocidade do vento sem
nenhuma carga acoplada. Esse efeito e realizado no laboratorio com auxılio de um inversor
de frequencia instalado no simulador da turbina eolica conforme e apresentado no Apendice
(A).
6.2 ENSAIO 2: DEMONSTRACAO ALGORITMO MPPT
Este ensaio tem como objetivo demostrar o algoritmo detectando mudancas na potencia
disponıvel e alternando durante sua operacao entre os metodos OTC e HCS. Com auxılio da
saıda digital do DSP, a alternancia entre os metodos foram registradas no momento do ensaio em
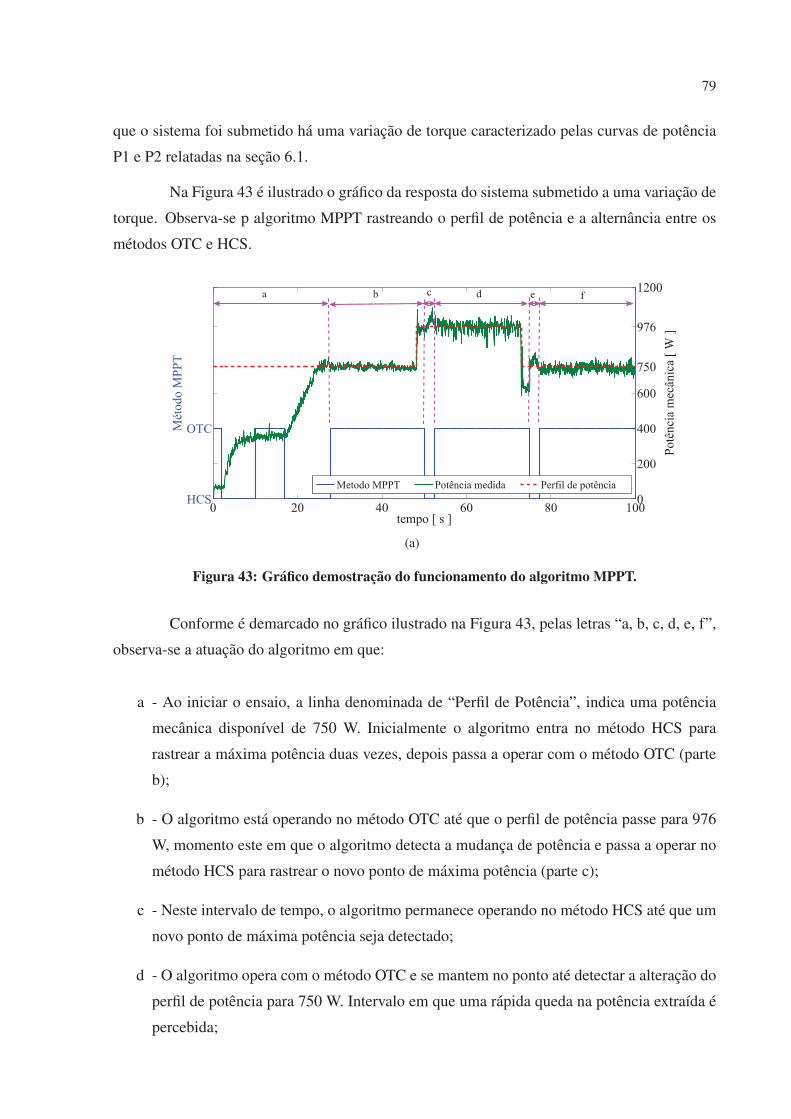
79
que o sistema foi submetido ha uma variacao de torque caracterizado pelas curvas de potencia
P1 e P2 relatadas na secao 6.1.
Na Figura 43 e ilustrado o grafico da resposta do sistema submetido a uma variacao de
torque. Observa-se p algoritmo MPPT rastreando o perfil de potencia e a alternancia entre os
metodos OTC e HCS.
(a)
Figura 43: Grafico demostracao do funcionamento do algoritmo MPPT.
Conforme e demarcado no grafico ilustrado na Figura 43, pelas letras “a, b, c, d, e, f”,
observa-se a atuacao do algoritmo em que:
a - Ao iniciar o ensaio, a linha denominada de “Perfil de Potencia”, indica uma potencia
mecanica disponıvel de 750 W. Inicialmente o algoritmo entra no metodo HCS para
rastrear a maxima potencia duas vezes, depois passa a operar com o metodo OTC (parte
b);
b - O algoritmo esta operando no metodo OTC ate que o perfil de potencia passe para 976
W, momento este em que o algoritmo detecta a mudanca de potencia e passa a operar no
metodo HCS para rastrear o novo ponto de maxima potencia (parte c);
c - Neste intervalo de tempo, o algoritmo permanece operando no metodo HCS ate que um
novo ponto de maxima potencia seja detectado;
d - O algoritmo opera com o metodo OTC e se mantem no ponto ate detectar a alteracao do
perfil de potencia para 750 W. Intervalo em que uma rapida queda na potencia extraıda e
percebida;

80
e - O algoritmo encontra-se operando no metodo HCS rastreando um novo ponto de
maxima potencia;
f - O algoritmo volta a operar no metodo OTC mantendo-se no ponto de maxima potencia.
6.3 ENSAIO 3: ALGORITMO MPPT APLICADO FRENTE A VARIACAO DE DEGRAU
DE TORQUE
A bancada eolica permite programar dois nıveis de corrente de saıda do inversor de
frequencia, sendo aqui representados pelas curvas de potencia “P1” e “P2” da Tabela 6. Neste
ensaio, o algoritmo MPPT rastrear o perfil de potencia determinados pelos pontos “P1” e “P2”.
A Figura 44 ilustra o comportamento do sistema com o algoritmo MPPT.
(a)
Figura 44: Rastreando perfil de potencia frente a variacao de torque.
6.4 ENSAIO 4: ALGORITMO MPPT APLICADO FRENTE A VARIACAO DAS
CARACTERISTICAS DA TURBINA
Neste ensaio o torque disponıvel e mantido o mesmo para todos os pontos, e uma
variacao de referencia de velocidade e aplicada ao sistema utilizando-se de um potenciometro
instalado junto ao inversor de frequencia responsavel por simular a turbina eolica. Essa variacao
altera a caracterıstica da turbina referente a velocidade quando nenhuma carga esta conectada, o
que resulta numa alteracao do coeficiente de potencia da turbina eolica. Logo diferentes pontos
MPPT sao encontrados.

81
Na Figura 45 e ilustrado o grafico do resultado experimental em que se observa-se
o sistema com o algoritmo implementado rastreando o perfil de potencia oriundo da variacao
da velocidade caracterıstica da turbina eolica. Os resultados podem ser confrontados com os
valores apresentados na Tabela 7.
Figura 45: Resposta do sistema frente a variacao de velocidade caracterıstica da turbina eolica.
6.5 CONSIDERACOES FINAIS
Os graficos apresentados neste capitulo foram produzidos a partir de dados coletados
por um osciloscopio digital, com auxılio de um script desenvolvido no software Matlab, em
que:
1. A velocidade do eixo em “rpm”, foi adquirida programando a saıda de um DSP para gerar
uma forma de onda quadrada que representa-se o inıcio e o fim do ciclo eletrico do PMSG
com auxılio do sinal lido de um encoder;
2. Os dados apresentado nas curvas de potencia “P1 a P7”, foram adquiridas obtendo-se a
velocidade do gerador em radianos (ωm) e, com aquisicao do sinal eletrico em Volts de
um torquımetro disponıvel no eixo do PMSG.
3. O perfil de potencia apresentado na Figura 44 foi construıdo a partir da aquisicao do sinal
de tensao eletrica da chave de posicao instalada no inversor de frequencia;
4. De forma similar ao item anterior, o perfil de potencia para Figura 45 foi construıdo
obtendo-se os valores de tensao eletrica do potenciometro, este responsavel por

82
dar referencia de velocidade ao inversor de frequencia (Apendice E, ensaio do
potenciometro).

83
7 CONCLUSAO
Nas ultimas decadas, a utilizacao de fontes renovaveis para geracao de energia eletrica
tem recebido atencao especial devido a escassez e encarecimento dos combustıveis fosseis e
problemas ambientais. A energia eolica por se tratar de uma energia limpa e com menores
impactos ambientais vem em crescente desenvolvimento no mundo. Assim, como qualquer
sistema de geracao de energia, a busca por um sistema que melhor aproveite os recursos naturais
e desejada.
Neste trabalho buscou-se contribuir com uma melhor compreensao do funcionamento
de um sistema de geracao de energia eolica com o uso de geradores sıncronos a ıma permanente
apresentando o desenvolvimento do modelo matematico do gerador, bem como a descricao de
suas caracterısticas construtivas e roteiro de ensaio para obtencao de seus parametros sıncronos.
O algoritmo MPPT proposto une as vantagens dos metodos HCS e OTC para sistemas
de pequeno porte com velocidade variavel. A principal vantagem do metodo HCS para o
controle da extracao de energia se da por nao precisar de medicao da velocidade do vento e,
conhecimento do coeficiente de potencia da turbina eolica. Ja com o metodo OTC sua principal
vantagem esta relacionado com a estabilidade, pois mesmo com variacoes bruscas de velocidade
do vento, o sistema tende a se manter operavel dentro de seus limites. Um dos motivos se da
pela referencia de torque na malha de controle depender diretamente do valor da velocidade do
gerador.
Essa combinacao dos dois metodos ajusta o sistema de controle para operacao do
gerador conforme as caracterısticas aerodinamicas da turbina eolica e com as variacoes
imposta pelo meio ambiente. Um dos parametros modificados pela alteracao da caracterıstica
aerodinamica se da na velocidade do eixo da turbina eolica ha uma mesma velocidade de vento.
No Ensaio 4 da Seccao (6.4), a velocidade caracterıstica do simulador da turbina eolica quando
nao esta acoplado a nenhuma carga e alterada. Com este ensaio e possıvel observar o sistema
de controle se ajustando com a mudanca da caracterıstica da velocidade representada pelo perfil
de potencia conforme e apresentado na Figura 45.

84
No Ensaio 3 da Seccao (6.3), o algoritmo rastreia o ponto de maxima extracao de
potencia determinada pela variacao de torque aplicada ao sistema conforme e apresentado pelo
grafico de perfil de potencia ilustrado na Figura 44. Analisando o grafico de “potencia medida”
ilustrado na Figura 44, observa-se a estabilidade do sistema quando o perfil de potencia reduz
de 976 W para 750 W (proximo a base de tempo de 80 segundos). Neste ponto, o sistema
se mantem em operacao fora do MPPT por aproximadamente 2 segundos e na sequencia o
algoritmo leva o sistema a operar no MPPT.
Por fim, com base nas informacoes coletadas nos ensaios em laboratorio, pode-se
concluir que o algoritmo apresentado converge o sistema ao ponto de operacao para maxima
extracao de potencia, sem a necessidade de um sistema de medicao de velocidade de vento e do
conhecimento do coeficiente de potencia da turbina eolica. Porem, este nao foram realizados
ensaios em ambiente externo, o que implica na necessidade adaptar parametros do algoritmo
para uma situacao real.
7.1 SUGESTOES DE TRABALHOS FUTUROS
Como sugestao para trabalhos futuros, podemos citar o aperfeicoamento dos ensaios
realizados, aplicando perfil de ventos com um emulador de ventos como o apresentado em
Martinello (2015).
Outras propostas para trabalhos futuros:
1. comparar diferentes topologias de retificadores PWM, identificando suas potencialidades
para o uso em sistemas de geracao de energia eolica com uo de geradores sıncronos a ıma
permanente;
2. propor um controle sensorless;
3. implementar conversor para conexao com a rede de energia eletrica externa.

85
REFERENCIAS
ADHIKARI, J.; PRASANNA, I. V.; PANDA, S. K. Maximum power-point tracking of high
altitude wind power generating system using optimal vector control technique. Proceedingsof the International Conference on Power Electronics and Drive Systems, v. 46, n. 1, p.
773–778, June 2015. Disponıvel em: <http://ieeexplore.ieee.org/document/7203477>.
AMARANTE, O. A. C. do et al. Atlas do Potencial Eolico Brasileiro.
http://www.cresesb.cepel.br/, 2001.
ANEEL, A. N. de E. E. BIG - Banco de Informacoes de Geracao. Outubro 2015. Site.
Disponıvel em: <http://www.aneel.gov.br/aplicacoes/capacidadebrasil/capacidadebrasil.cfm
Acesso em: 13/10/2015.>.
ANEEL, A. N. de E. E. BIG - Banco de Informacoes de Geracao. Maio 2017. Site. Disponıvel
em: <http://www.aneel.gov.br/aplicacoes/capacidadebrasil/capacidadebrasil.cfm Acesso em:
23/05/2017.>.
AYDIN, M.; HUANG, S.; LIPO, T. Axial flux permanent magnet disc machines: A review.
University of Wisconsin-Madison, 2004.
BERNARDES, T. A. Analise e Controle de Gerador Sıncrono a Ima Pemanente Aplicadoa Sistema de Conversao de Energia Eolica. Dissertacao (Mestrado) — Universidade Federal
de Santa Maria - UFSM, 2009.
BIM, E. Maquinas Eletricas e Acionamentos. [S.l.: s.n.], 2013.
BOBEK, V. PMSM Electrical Parameters Measurement. [S.l.], february 2013. AN4680.
CAIXETA, D. A. et al. MaximizaCAo da potEncia de uma turbina eOlica de velocidade
variAvel considerando o efeito da inErcia. IX CEEL, Outubro 2011. Disponıvel em:
<www.ceel.eletrica.ufu.br - Acesso em 26/11/15>.
CAMARA, H. T. Uma Contribuicao ao Controle de MoMotor de Inducao Trifasica Sem oUso de Sensores Mecanicos. Tese (Doutorado) — Universidade Federal de Santa Maria, 2007.
CARVALHO, P. Geracao Eolica. [S.l.: s.n.], 2003.
CHUN, W. et al. An adaptive network-based reinforcement learning method for mppt control
of pmsg wind energy conversion systems. EEE Transactions on Power Electronics, v. 8993,
p. 1–1, 2016.
COLLIER, D. A. F. Modelagem e Controle de Retificadores PWM Trifasicos Conectados aGeradores Sıncronos a Imas Permanentes em Sistemas de Conversao de Energia Eolica.
Dissertacao (Mestrado) — Universidade Federal de Santa Catarina, 2011.
COUNCIL, G. W. E. (Ed.). Global Wind Report. [S.l.], 2014.

86
CRESESB. Energia Eolica. Fevereiro 2014. Disponıvel em: <http://www.cresesb.cepel.br>.
Acesso em: 2015.07.11.
DUTRA, R. M. Viabilidade Tecnico-Economica da Energia Eolica Face ao Novo MarcoRegulatorio do Setor Eletrico Brasileiro. Tese (Doutorado) — Universidade Federal do Rio
de Janeiro, 2001. Disponıvel em: <http://www.ppe.ufrj.br/ppe/production/tesis/rmdutra.pdf>.
Acesso em: 2015.07.11.
ELETROBRAS. Programa de Incentivo as Fontes Alternativas de Energia Eletrica -PROINFA. 2015. Disponıvel em: <http://www.eletrobras.com>. Acesso em: 2015.07.15.
ENERGIA, M. de Minas e. Resenha Energetica Brasileira.
http://www.mme.gov.br/documents/1138787/1732840/Resenha+EnergJunho 2015.
FAZLI, N.; SIAHBALAEE, J. Direct torque control of a wind energy conversion system
with permanent magnet synchronous generator and matrix converter. Power Electronics,Drive Systems & Technologies Conference (PEDSTC), p. 166–171, 2017. Disponıvel em:
<http://ieeexplore.ieee.org/document/7910315/>.
FITZGERALD, A. E.; KINGSLEY, J. C.; UMANS, S. D. Maquinas Eletricas: comintroducao a eletronica de potencia. 6. ed. [S.l.]: Porto Alegre: Bookman, 2006.
GASCH, R.; TWELE, J. (Ed.). Wind Power Plants: Fundamentals, Design, Constructionand Operation. [S.l.]: Springer Berlin Heidelberg, 2012.
GIERAS, J. F.; WANG, R.-J.; KAMPER, M. J. Axial Flux Permanent Magnet BrushlessMachines. [S.l.]: Kluwer Academic Publishers, 2004. ISBN: 1-4020-2661-7.
GUIMARaES, J. S.; OLIVEIRA, D. de S. Limiting power control strategy combining spring
system and speed control feasible to small wecs. IEEE Conference Publications, 2015.
HAQUE, E.; NEGNEVITSKY, M.; MUTTAQI, K. M. A novel control strategy for
a variable-speed wind turbine with a permanent-magnet synchronous generator. IEEETransactions on Industry Applications, v. 46, n. 1, p. 331–339, 2010. Disponıvel em:
<http://ieeexplore.ieee.org/lpdocs/epic03/wrapper.htm?arnumber=5339172>.
HODGE, B. K. Sistemas e Aplicacoes de Energia Alternativa. [S.l.]: LTC, 2011.
KAZMI, S. M. R. et al. A novel algorithm for fast and efficient speed-sensorless maximum
power point tracking in wind energy conversion systems. Industrial Electronics, IEEETransactions on, v. 58, n. 1, p. Kazmi2011, January 2011.
KOCH, G. et al. Sensorless technique applied to pmsg of wecs using sliding mode observer.
IEEE Conference Publications, 2015.
KOUTROULIS, E.; KALAITZAKIS, K. Design of a maximum power
tracking system for wind-energy-conversion applications. IEEE Transactionson Industrial Electronics, v. 53, p. 486–494, Abril 2006. Disponıvel em:
<http://ieeexplore.ieee.org/lpdocs/epic03/wrapper.htm?arnumber=1614132>.
KRAUSE, P. et al. Analisis of Electricalic Machinery and Drive Systems. 3. ed. [S.l.]: John
Wiley & Sons, 2013.

87
KRISHNAN, R. Eletric Motor Drives: Modeling, Analysis, andControl@ManualFreescale2013, Title = PMSM Electrical Parameters Measurement,Author = Viktor Bobek, Month = february, Note = AN4680, Organization = FreescaleSemiconductor, Year = 2013, Owner = Odilio Duarte, Timestamp = 2016.04.09 . [S.l.: s.n.],
2001.
KUMAR, A. V. P. Implementation of mppt control using fuzzy logic in solar-wind hybrid power
system. IEEE Conference Publications, 2015.
LAHARI, N. V.; SHETTY, H. V. K. Integration of grid connected pmg wind energy and solar
energy systems using different control stratagies. International Conference on Power andAdvanced Control Engineering (ICPACE), p. 23–27, 2015.
LINUS, R. M.; DAMODHARAN, P. Maximum power point tracking of pmsg based grid
connected wecs using quadrature axis current. IEEE Conference Publications, v. 5, p. 671–
676, November 2015.
MADANI, N. Design of a Permanent Magnet Synchronous Generator for a VerticalAxis Wind Turbine. Dissertacao (Mestrado) — School of Electrical Engineering
Royal Institute of Technology Stockholm, 2011. Disponıvel em: <http://www.diva-
portal.org/smash/get/diva2:470652/fulltext01.pdf>.
MARQUES, J. Turbinas eolica: modelo, analise e controle do gerador de inducao comdupla alimentacao. Dissertacao (Mestrado) — UFSM, 2004.
MARTINELLO, D. Sistema de emulacao de aerogeradores para aplicacao em geracaodistribuida de energia eletrica. Dissertacao (Mestrado) — Universidade Tecnologica Federal
do Para - UTFPR, 2015.
MELO, E. A Perspectiva de Futuro da Energia Eolica. 2012. Disponıvel em:
<http://www.portalabeeolica.org.br>.
MOJTABA, H. Comparison of maximum power point tracking methods for medium to high
power wind energy systems. IEEE Conference Publications, p. 28–29, April 2015.
MOOR, G.; BEUKES, H. Maximum power point trackers for wind
turbines. IEEE, v. 3, p. 2044–2049, Marco 2004. Disponıvel em:
<http://ieeexplore.ieee.org/lpdocs/epic03/wrapper.htm?arnumber=1183728>.
MUSAK, M.; STULRAJTER, M. Novel methods for parameters investigation of pm
synchronous motors. Acta Techinica Corviniensis, v. 1, 2013.
NAKAMURA, T. et al. Optimum control of ipmsg for wind generation system. IEEE Trans.Ind. Application, p. 1435–1440, 2002.
OGATA, K. Engenharia de Controle Moderno. 3. ed. [S.l.]: LTC - Livros Tecnicos e
Cientıficos Editora S.A., 2000.
PATEL, M. R. Wind and Solar Power Systems. [S.l.]: CRC Press, 1999.
PINTO, J. E. M. G. Aplicacao Pratica do Metodo de Sintonia de Controaldores PIDUtilizando o Metodo do Rele com Histerese. Dissertacao (Mestrado) — Universidade Federal
do Rio Grande do Norte, Maio 2014.

88
QUINCY, W.; LIUCHEN, C. An intelligent maximum power extraction algorithm for inverter-
based variable speed wind turbine systems. Power Electronics, IEEE Transactions on, v. 19,
p. 1242–1249, 2004.
RUNCOS, F. et al. Geracao de energia eolica - tecnologias atuais e futuras. WEG Maquinas -GRUCAD-EEL-TET-UFSC, 2000.
SANTOS, G. V. Sistemas de Controle Aplicado Aerogeradores Sıncronos com ConversorBack-to-Back. Dissertacao (Mestrado) — Universidade Federal de Minas Gerais, 2015.
SRIGHAKOLLAPU, N.; SENSARMA, P. Sensorless maximum power
point tracking control in wind energy generation using permanent magnet
synchronous generator. In: . IEEE, 2008. p. 2225–2230. Disponıvel em:
<http://ieeexplore.ieee.org/lpdocs/epic03/wrapper.htm?arnumber=4084639>.
THONGAM, J. S. et al. Control of variable speed wind energy conversion system using a
wind speed sensorless optimum speed mppt control method. IECON 2011 - 37th AnnualConference of the IEEE Industrial Electronics Society, p. 855–860, 2011.
TIBOLA, G. Sitema Eolico de Pequeno Porte para Geracao de Energia Eletrica comRastreamento de Maxima Potencia. Dissertacao (Mestrado) — Universidade Federal de Santa
Catarina - UFSC, Marco 2009.
ZHAO, Y. et al. A review on position/speed sensorless control for permanent-magnet
synchronous machine-based wind energy conversion systems. IEEE Journal of OceanicEngineering, v. 1, n. 4, p. 203–216, December 2013.
ZHU, Y. et al. A novel maximum power point tracking control for permanent magnet direct
drive wind energy conversion systems. Energies, v. 5, p. 1398–1412, 2012.
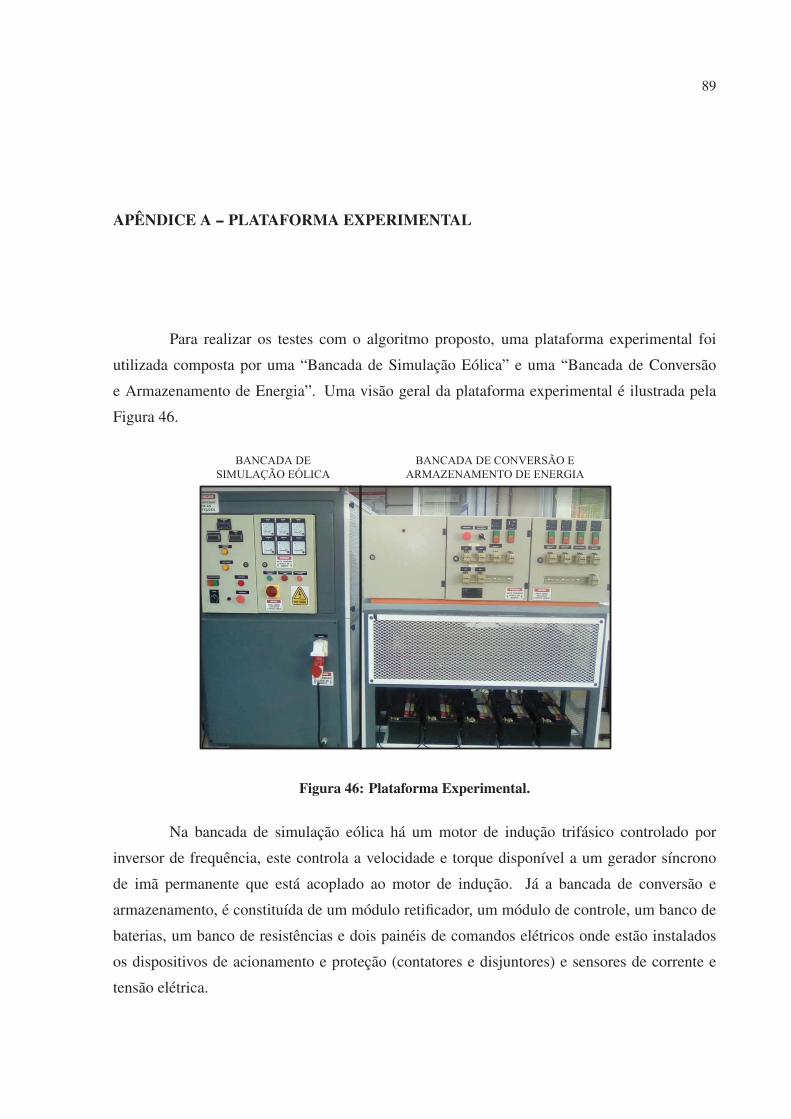
89
APENDICE A -- PLATAFORMA EXPERIMENTAL
Para realizar os testes com o algoritmo proposto, uma plataforma experimental foi
utilizada composta por uma “Bancada de Simulacao Eolica” e uma “Bancada de Conversao
e Armazenamento de Energia”. Uma visao geral da plataforma experimental e ilustrada pela
Figura 46.
Figura 46: Plataforma Experimental.
Na bancada de simulacao eolica ha um motor de inducao trifasico controlado por
inversor de frequencia, este controla a velocidade e torque disponıvel a um gerador sıncrono
de ima permanente que esta acoplado ao motor de inducao. Ja a bancada de conversao e
armazenamento, e constituıda de um modulo retificador, um modulo de controle, um banco de
baterias, um banco de resistencias e dois paineis de comandos eletricos onde estao instalados
os dispositivos de acionamento e protecao (contatores e disjuntores) e sensores de corrente e
tensao eletrica.

90
(a)
(b)
Figura 47: Plataforma Experimental: a) Bancada de simulacao eolica; b) Bancada de conversao earmazenamento de energia.
Mais detalhes da plataforma experimental sao apresentados na sequencia.
Primeiramente sao apresentados detalhes da bancada de simulacao da turbina eolica e
posteriormente os detalhes da bancada responsavel por fazer a conversao e armazenamento da
energia produzida pelo gerador.

91
Detalhes da Bancada de Simulacao Eolica:
- Painel Geral: Apresenta visores de leituras digitais da potencia fornecida pelo inversor
de frequencia, da velocidade do eixo do gerador e da leitura de torque mecanico do eixo
do gerador. Ainda contem visores analogicos para indicacao de tensao e corrente eletrica
de saıda do gerador. Contem um potenciometro analogico para ajustar a frequencia
eletrica de saıda do inversor para definir a velocidade quando o gerador esta sem
carga e botoeiras para acionamento do inversor, habilitar saıda de energia do gerador
e botao de emergencia. Para saıda de energia do gerador, esta disponıvel uma tomada
trifasica de 32 A tipo 3F1T , para interligacao com a bancada de conversao de energia e
armazenamento.
Na Figura 48 apresenta a fotografia da parte frontal do painel e a descricao dos principais
componentes.
Figura 48: Componentes parte frontal do painel geral do simulador eolico.

92
- Inversor de Frequencia: Configurado para controlar o torque do motor de inducao
acoplado a uma polia redutora de velocidade responsavel por transferir o torque mecanico
ao eixo do gerador. A Figura 49 ilustra a fotografia do inversor de frequencia da marca
Schneider.
Figura 49: Inversor de Frequencia comercial marca Schneider.
- Motor de Inducao: Utilizado para fornecer torque mecanico ao gerador. Na Figura 50
ilustra o motor de inducao fixado na base da plataforma experimental e sua descricao
tecnica.
Figura 50: Motor de inducao trifasico marca SEW.
- PMSG: O gerador sıncrono de ıma permanente e do tipo fluxo axial, com ligacao interna
do estator em estrela, sem acesso ao ponto neutro. Na Figura 51 sao apresentados detalhes
de instalacao e os dados tecnicos do PMSG.

93
- Encoder: A velocidade e posicao angular do PMSG e obtida com auxılio de um encoder
absoluto em que os dados sao transmitidos por cabo em uma interface paralela. Para tal,
uma placa com circuito de isolacao foi utilizada para estabelecer uma comunicacao entre
o DSP e o encoder. Na Figura 51 sao apresentados detalhes da placa de isolacao e do
encoder.
- Torquımetro: Utilizado para comparacao dos valores de torque mecanico registrados
pelo DSP durante os ensaios. Na Figura 51 sao apresentados detalhes da instalacao do
torquımetro bem como seus principiais dados tecnicos.
Figura 51: Dados do PMSG, do encoder, da placa de isolacao e do torquımetro.
Detalhes Bancada de Conversao e Armazenamento de Energia:
- Modulo de Controle: Na Figura 52 e apresentado a fotografia da parte interna do painel
com os componentes do modulo de controle. Um DSP Piccolo F28069, montado em
uma plataforma de desenvolvimento da Texas Instruments chamada de “Experimenter
Kit”, processa os sinais eletricos de tensao e corrente fornecidas pelas placas de
condicionamento e da placa do encoder.

94
Experimenter Kit
Figura 52: Fotografia do PMSG, do encoder, da placa de isolacao e do torquımetro.
- Paineis de comando: A Figura 53 apresenta a fotografia interna dos paineis de comando
detalhando a disposicao dos principais componentes: Placas de tensao e corrente eletrica,
disjuntores de protecao e chaves eletromagneticas (contatores).
Figura 53: Fotografia painel de comando.
- Banco de Resistencia: Um conjunto de resistencias configuradas em serie permite uma
tensao de alimentacao de 660 V e dissipa uma potencia de 3000 W. A Figura 54 apresenta
a fotografia do local de instalacao e principais dados tecnicos.

95
- Banco de Baterias: A plataforma experimental conta com um banco de baterias
compostas por 10 unidades de 24 V por 10 A/h, que permite o armazenamento de energia
produzida pelo gerador. Conforme a Figura 54, pode-se observar a instalacao do banco
de baterias e sua disposicao na bancada. OBS: Esse recurso nao foi utilizado nos ensaios
para esta dissertacao.
Figura 54: Detalhes do banco de bateria e resistencia.
- Modulo Retificador: Para o controle do retificador, 3 modulos de chaves IGBT’s de 1200
V por 150 A sao dispostos sobre o dissipador. Cada modulo utiliza um driver isolado da
Supplier, modelo DRM100D80A responsaveis por acionar as chaves IGBT’s de forma
complementar.
Entre o DSP e a placa de driver de acionamento dos IGBT’s, uma placa auxiliar foi
projetada para fazer o isolamento do sinal PWM e, converter o nıvel de tensao 3.3 V de
saıda do DSP para 15 Vcc, nıvel recomendado para o acionamento do IGBT.
Na Figura 55 sao apresentados detalhes de instalacao do modulo retificador juntos as
placas de controle e acionamento.
- Modulo Barramento CC: O nıvel de tensao ao barramento CC e mantido por duas fontes
CC da TDK-Lambda ligas em serie. Estas fontes sao iguais de capacidade de tensao CC
de 300 V e de corrente 11 A.
Junto ao barramento esta conectado seis capacitores de 450 V por 4700 μF, sendo ligados
em paralelo a cada grupo de dois capacitores em serie. Na Figura 55 sao apresentados os
detalhes da instalacao e sua disposicao na bancada.

96
Figura 55: Detalhes do retificador e barramento CC.
A.1 LIMITACOES EM FUNCAO DA TENSAO DO BARRAMENTO CC
Para controle do retificador uma das limitacoes de operacao e estabelecida pelo nıvel
de tensao do barramento CC. Logo a tensao de pico do gerador nao pode ser maior, caso
contrario os diodos internos do modulo IGBT polarizam, tornando-se um retificador trifasico
nao controlado.
Com o ensaio do gerador para determinacao da constante de tensao por velocidade, e
possıvel determinar a maxima velocidade mecanica do gerador para que nao exceda a tensao do
barramento CC. Sendo esta constante definida no Apendice D.5 dada por:
cte =uabp
ns= 2,36 (118)
Conforme apresentado os detalhes da plataforma experimental, a tensao maxima dos
capacitores, gerador e da fonte CC utilizada sao apresentadas na Tabela 8 em termos de tensao
de pico.

97
Tabela 8: Tabela de tensoes de picoDescricao Tensao RMS (V) Tensao de pico (V)
Capacitor (2 em serie) 900 1273
Gerador 500 707
Fonte CC (2 em serie) 600 848,5
Sendo definida a tensao do barramento CC em 500 V por seguranca de operacao, a
velocidade do gerador e limitada em:
ns =500
2,36= 212[rpm] (119)

98
APENDICE B -- BIG - CAPACIDADE DE GERACAO
Atualizado em: 04/06/2017BIG - Banco de Informações de Geração
O Brasil possui no total 4.667 empreendimentos em operação , totalizando 152.253.294kW de potência instalada.
Está prevista para os próximos anos uma adição de 24.530.802 kW na capacidade degeração do País, proveniente dos 270 empreendimentos atualmente em construção e mais 546em Empreendimentos com Construção não iniciada.
• Matriz de EnergiaElétrica
• Fontes de energiaexploradas no Brasil
• Usinas e CentraisGeradoras
• Co-geraçãoQualificada
Os valores de porcentagem são referentes a PotênciaFiscalizada. A Potência Outorgada é igual a consideradano Ato de Outorga. A Potência Fiscalizada é igual aconsiderada a partir da operação comercial da primeiraunidade geradora.
Potência(%)
Figura 56: Banco de Informacao de Geracao
Fonte: (ANEEL, 2017)

99
APENDICE C -- BIG - FONTES DE ENERGIA EXPLORADAS NO BRASIL
Atualizado em: 04/06/2017
BIG - Banco de Informações de Geração
» Rios
» Fontes
» EnergiaNuclear
Eólica Utiliza a força dos ventos para acionar uma usina elétrica Fotovoltaica Utiliza a energia recebida diretamente do Sol Hidrelétrica Utiliza a energia hidráulica (dos rios) na geração de energia elétrica Maré Utiliza a energia obtida pela cinética das ondas do mar
Termelétrica Utiliza a energia obtida pela combustão de combustível fóssil, biomassa ou pela energia térmicaliberada em reações nucleares
Resumo da Situação Atual dos Empreendimentos
Fonte de Energia Situação Potência Associada (kW) 168 empreendimento(s) de fonte Eólica Construção não iniciada 3.839.250 161 empreendimento(s) de fonte Eólica Construção 3.760.700 429 empreendimento(s) de fonte Eólica Operação 10.474.143 73 empreendimento(s) de fonte Fotovoltaica Construção não iniciada 1.886.997 38 empreendimento(s) de fonte Fotovoltaica Construção 1.093.400 44 empreendimento(s) de fonte Fotovoltaica Operação 23.761 176 empreendimento(s) de fonte Hidrelétrica Construção não iniciada 2.431.871 38 empreendimento(s) de fonte Hidrelétrica Construção 2.300.939 1265 empreendimento(s) de fonte Hidrelétrica Operação 98.733.053 1 empreendimento(s) de fonte Maré Construção não iniciada 50 129 empreendimento(s) de fonte Termelétrica Construção não iniciada 4.895.067 33 empreendimento(s) de fonte Termelétrica Construção 4.328.528 2929 empreendimento(s) de fonte Termelétrica Operação 43.022.337
Figura 57: Banco de Informacao de Geracao
Fonte: (ANEEL, 2017)

100
APENDICE D -- ENSAIO PARA OBTENCAO DOS PARAMETROS ELETRICOS DOPMSG
Nesta seccao, serao apesentados procedimentos experimentais adotados na
determinacao dos parametros do modelo matematico de um PMSG. Os parametros a serem
definidos sao o numero de polos, a resistencia dos enrolamentos do estator Rs, a indutancia
do eixo direto Ld , a indutancia do eixo em quadratura Lq e a constante de fluxo permanente
produzida pelos ımas λm.
D.1 DETERMINACAO EXPERIMENTAL DO NUMERO DE POLOS
Quando nao ha a informacao do numero de polos de um gerador sıncrono, sua
determinacao pode ser atraves da relacao da frequencia eletrica produzida na saıda do gerador
com a velocidade mecanica (rpm) (BOBEK, 2013):
Np = (120. fe)/ns (120)
Onde Np e o numero de polos, fe a frequencia eletrica e ns velocidade mecanica. A
medicao do parametro ns pode ser obtida atraves de um instrumento de medicao de rotacao
(Tacometro) instalado no eixo do rotor e a frequencia eletrica pode ser obtida utilizando-se um
osciloscopio.
Seguindo as orientacoes para determinacao do numero de polos, a Tabela 9 apresenta
o resultado do ensaio para o PMSG.
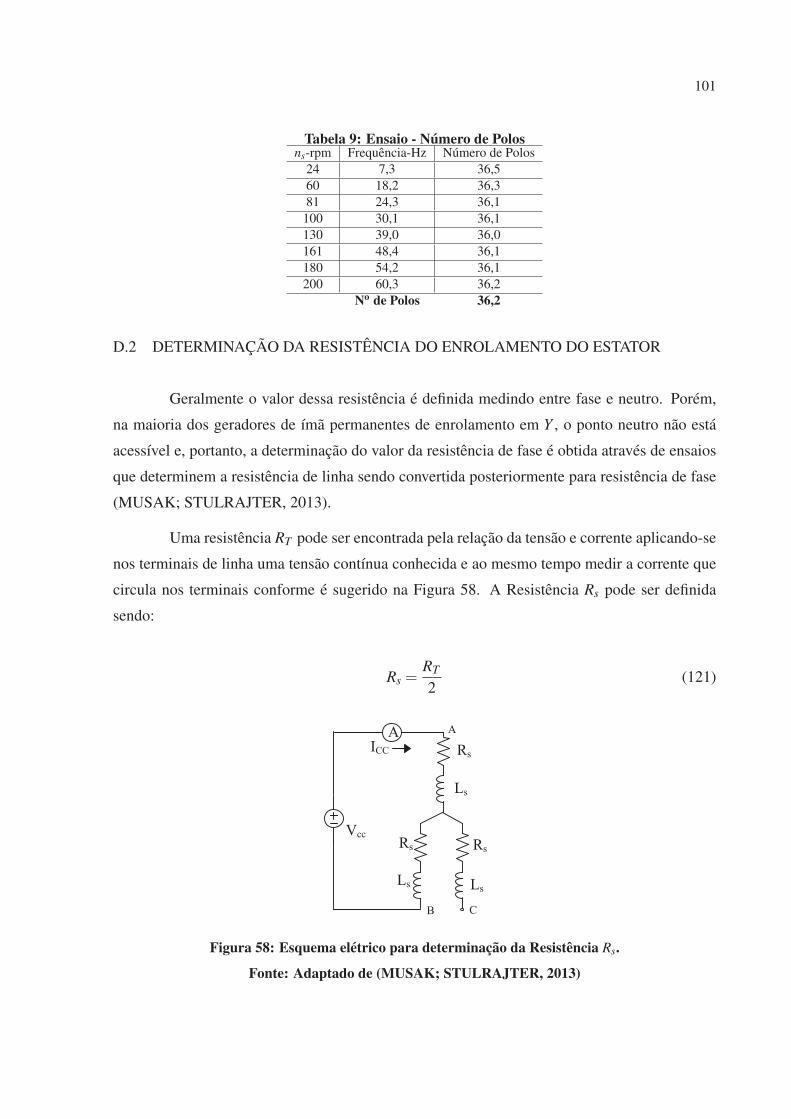
101
Tabela 9: Ensaio - Numero de Polosns-rpm Frequencia-Hz Numero de Polos
24 7,3 36,5
60 18,2 36,3
81 24,3 36,1
100 30,1 36,1
130 39,0 36,0
161 48,4 36,1
180 54,2 36,1
200 60,3 36,2
No de Polos 36,2
D.2 DETERMINACAO DA RESISTENCIA DO ENROLAMENTO DO ESTATOR
Geralmente o valor dessa resistencia e definida medindo entre fase e neutro. Porem,
na maioria dos geradores de ıma permanentes de enrolamento em Y , o ponto neutro nao esta
acessıvel e, portanto, a determinacao do valor da resistencia de fase e obtida atraves de ensaios
que determinem a resistencia de linha sendo convertida posteriormente para resistencia de fase
(MUSAK; STULRAJTER, 2013).
Uma resistencia RT pode ser encontrada pela relacao da tensao e corrente aplicando-se
nos terminais de linha uma tensao contınua conhecida e ao mesmo tempo medir a corrente que
circula nos terminais conforme e sugerido na Figura 58. A Resistencia Rs pode ser definida
sendo:
Rs =RT
2(121)
Figura 58: Esquema eletrico para determinacao da Resistencia Rs.
Fonte: Adaptado de (MUSAK; STULRAJTER, 2013)

102
D.3 DETERMINACAO DAS INDUTANCIAS
Devido ao acoplamento magnetico mutuo entre as tres fases, para a determinacao das
indutancias Ld e Lq, Gieras et al. (2004), Musak e Stulrajter (2013), sugerem a aplicacao de
uma tensao contınua entre os tres terminais do gerador. Isso fara com que o rotor siga o fluxo
resultante (ψabc) produzido pela aplicacao da tensao contınua e consequentemente o fluxo do
rotor (λm) produzido pelos ımas estara alinhado com eixo d e θ = 0◦ conforme esta ilustrado
na Figura 59.
Figura 59: Alinhamento do rotor com os eixos d e q. a) Circuito eletrico, b) Representacao daorientacao do fluxo magnetico
Fonte: Adaptado de (MUSAK; STULRAJTER, 2013)
Para medicao da indutancia Lq, o angulo entre o fluxo magnetico do rotor (λm) e o fluxo
resultante da armadura (ψabc) deve ser de 90◦ (θ = 90◦) conforme esta mostrado na Figura 60.
Uma vez que o rotor ja esta alinhado ao eixo d, o alinhamento do rotor para o eixo q e obtido
saindo da posicao atual avancando em 90◦ girando o rotor (MUSAK; STULRAJTER, 2013).
Como mostrado na Figura 60, o esquema considera apenas duas fases do motor
energizado e a fase A e desligado. Esta abordagem faz com que a geracao de fluxo na armadura
(ψbc) desloque em 90◦ em relacao ao fluxo resultante armadura (ψabc) representado na Figura
59. O rotor move-se para a posicao da armadura com fluxo (ψbc) que significa o alinhamento
do eixo q do rotor com o centro de fase A do estator. A indutancia medida no circuito sera
equivalente a indutancia Lq. Esse metodo apresentado para determinacao das indutancias Ld
e Lq so e valido quando as indutancias mutuas nao sao levadas em consideracao no modelo
matematico (MUSAK; STULRAJTER, 2013; BOBEK, 2013).

103
Figura 60: a) Circuito eletrico, b) Representacao da orientacao do fluxo magnetico
Fonte: Adaptado de (MUSAK; STULRAJTER, 2013)
A indutancia total Ls, se relaciona com a indutancia Ld e Lq dado por (122) e (123)
(KRAUSE et al., 2013; FITZGERALD et al., 2006).
Ld =2
3Ls , quando θ = 0◦ (122)
e
Lq =2
3Ls , quando θ = 90◦ (123)
Conforme ilustrado na Figura 59, quando o rotor e alinhado com a fase A (θ = 0◦) e
bloqueado, sua resposta a um degrau de tensao, equivale a um circuito de 1o ordem RL e pode
ser representado pelo circuito da Figura 61.
Figura 61: Circuito eletrico representativo para alinhamento com o eixo d
Fonte: Adaptada de (MUSAK; STULRAJTER, 2013)

104
Sendo a tensao Vd = 2/3 V, corrente id = I e a resistencia Rs corresponde a 2/3
da resistencia total do circuito RT , visto pelos terminais da fonte de tensao “V”. Conforme
mostrado no circuito esbocado na Figura 59, a corrente de eixo direto id pode ser definida por:
id =VRT
(1− e
t/τ)
(124)
Sendo τ definida pela razao entre a indutancia total Ls e a resistencia total do circuito
RT , o que representa o tempo que a corrente leva para atingir o nıvel de 63.2% do seu valor
final.
τ =Ls
RT(125)
Com o resultado da medicao da constante τ , a indutancia equivalente Ls refletida na
fonte de tensao “V” pode ser determinada por:
Ls = τ.RT (126)
Ainda,
RT =3
2Rs (127)
e,
Ld =2
3RT τ (128)
A indutancia Ld pode ser defina sendo:
Ld = τRs (129)
Para definicao da indutancia Lq, pode ser aplicado a mesma rotina de calculo que Ld ,
mantendo-se o alinhamento do eixo de em quadratura conforme esbocado na Figura 60. Na
sequencia e apresentado um roteiro dos ensaios Ld e Lq.
a) Roteiro para determinacao da indutancias Ld
Para a determinacao da indutancia Ld , deve-se:
- Aplicar tensao continua conectando o terminal positivo na fase A e o terminal

105
negativo na fase B e C do gerador.
- Bloquear o rotor.
- Inverter a polaridade da fonte CC, conectando o terminal positivo nas fases B e C, e
terminal negativo na fase A.
- Gerar um degrau de tensao CC e com auxılio do osciloscopio medir a constante de
tempo τ entre a tensao e a corrente conforme exemplo apresentado na Figura 62.
b) Roteiro para determinacao da indutancias Lq
Para determinacao da indutancia Lq, deve-se:
- Aplicar tensao continua conectando o terminal positivo na fase B e o terminal
negativo na fase C do gerador. A fase A permanece desconectada.
- Bloquear o rotor na posicao em que ele permanecer.
- Com o rotor bloqueado, conecte a fase A do gerador ao terminal positivo da fonte
de tensao CC e as fases B e C ao terminal negativo.
- Gerar um degrau de tensao CC e com auxılio do osciloscopio medir a constante de
tempo τ entre a tensao e a corrente conforme exemplo apresentado na Figura 62.
- Calculo da indutancia Lq da mesma forma que Ld .
Figura 62: Grafico retirado osciloscopio no momento do ensaio Ld
Fonte: O autor

106
D.4 DETERMINACAO DA CONSTANTE DE FLUXO MAGNETICO
A constante de fluxo magnetico criada pelos ımas que concatena no estator e
denominado de λm, pode ser determinada fazendo o sistema girar sem carga uma velocidade
constante com auxılio de um motor externo acoplado ao seu eixo. A velocidade deve ser a
maior, pois os erros de medicao da tensao estao nas baixas velocidades (BOBEK, 2013).
Na Figura 63 e esbocado o esquema de ligacao eletrica para determinacao do parametro
λm.
Figura 63: Esquema de ligacao eletrica para determinacao da constante de fluxo λm
Fonte: Adaptada de (BOBEK, 2013)
O proximo passo para obtencao do parametro λm e medir a tensao de pico (Vpk−linha)
entre os terminais de saıda do gerador com auxılio de um osciloscopio. Assumindo que as
tensoes sao senoidais, λm pode ser determinado sendo:
λm =Vpk−linha√
3.ωe(130)
Onde ωe = 2 π fe, em que fe e a frequencia eletrica da tensao (Vpk−linha) gerada que
pode ser obtida na medicao com o osciloscopio e, λm o valor de pico do fluxo magnetico gerado
pelos ımas dado em Weber (Wb).
D.5 DETERMINACAO DA CONSTANTE DE TENSAO POR VELOCIDADE
De acordo com a velocidade mecanica do gerador um nıvel de tensao eletrica
e produzido em seus terminais que depende da relacao de tensao de pico de linha pela

107
velocidade em rotacoes por minuto (Vp/rpm). Esta informacao e importante para estudos
do comportamento do gerador bem como a definicao dos limites de operacao no processo de
retificacao. O ensaio consiste em medir a tensao de pico nos terminais do gerador relacionando
a sua velocidade mecanica.
Tabela 10: Relacao de tensao por velocidade mecanica do PMSGns [rpm] uab p [V] uab p/ns
49 125 2,551
69 165 2,391
90 215 2,389
100 240 2,400
115 275 2,391
130 305 2,346
140 325 2,321
155 365 2,355
170 390 2,294
185 430 2,324
200 465 2,325
220 510 2,318
230 535 2,326
240 555 2,312
Media : 2,360

108
APENDICE E -- ENSAIO PARA OBTENCAO DE REFERENCIA DE VELOCIDADEDO POTENCIOMETRO
Este ensaio tem por finalidade relacionar o sinal de tensao eletrica do potenciometro
instalado no inversor do simulador da turbina eolica para que o mesmo possa utilizado como
referencia nas curvas de MPPT. Na Tabela 11 sao apresentados valores com os resultados
coletados para uma faixa de trabalho de 130 a 170 rpm.
Tabela 11: Dados do ensaio do potenciometro
ns
(rpm)
Tensao do
potenciometro
(V)
130 2,582
170 3,467
A relacao de tensao pela velocidade pode ser obtida por:
ra =(3,467−2,582)
(170−130)= 0,02213 (V/rpm) (131)
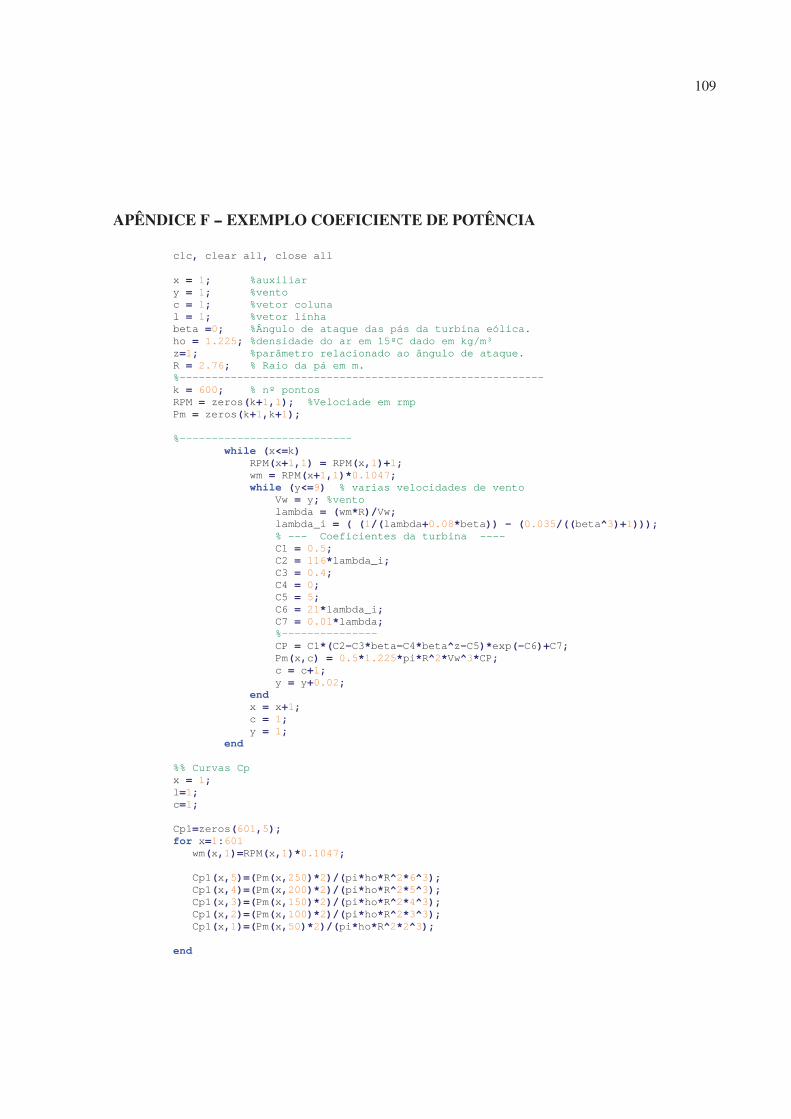
109
APENDICE F -- EXEMPLO COEFICIENTE DE POTENCIA
clc, clear all, close all
x = 1; %auxiliary = 1; %ventoc = 1; %vetor colunal = 1; %vetor linhabeta =0; %Ângulo de ataque das pás da turbina eólica.ho = 1.225; %densidade do ar em 15ºC dado em kg/m³z=1; %parâmetro relacionado ao ângulo de ataque.R = 2.76; % Raio da pá em m.%---------------------------------------------------------k = 600; % nº pontosRPM = zeros(k+1,1); %Velociade em rmpPm = zeros(k+1,k+1);%---------------------------
while (x<=k)RPM(x+1,1) = RPM(x,1)+1;wm = RPM(x+1,1)*0.1047;while (y<=9) % varias velocidades de vento
Vw = y; %ventolambda = (wm*R)/Vw;lambda_i = ( (1/(lambda+0.08*beta)) - (0.035/((beta^3)+1)));% --- Coeficientes da turbina ----C1 = 0.5;C2 = 116*lambda_i;C3 = 0.4;C4 = 0;C5 = 5;C6 = 21*lambda_i;C7 = 0.01*lambda;%---------------CP = C1*(C2-C3*beta-C4*beta^z-C5)*exp(-C6)+C7;Pm(x,c) = 0.5*1.225*pi*R^2*Vw^3*CP;c = c+1;y = y+0.02;
endx = x+1;c = 1;y = 1;
end%% Curvas Cpx = 1;l=1;c=1;Cp1=zeros(601,5);for x=1:601
wm(x,1)=RPM(x,1)*0.1047;Cp1(x,5)=(Pm(x,250)*2)/(pi*ho*R^2*6^3);Cp1(x,4)=(Pm(x,200)*2)/(pi*ho*R^2*5^3);Cp1(x,3)=(Pm(x,150)*2)/(pi*ho*R^2*4^3);Cp1(x,2)=(Pm(x,100)*2)/(pi*ho*R^2*3^3);Cp1(x,1)=(Pm(x,50)*2)/(pi*ho*R^2*2^3);
end

110
figure1 = figure('Color',[1 1 1]);% Create axesaxes1 = axes('Parent',figure1,'YTick',[0 0.1 0.2 0.3 0.4 0.487 0.59],...
'XTickLabel',{'0','3','6','8,7','11,7','14,7','17.6','21','25'},...'XTick',[0 3 6 8.7 11.7 14.7 17.6 21 25],...'FontSize',20,...'FontName','Times New Roman');
xlim(axes1,[0 25]);ylim(axes1,[0 0.65]);box(axes1,'on');grid(axes1,'on');hold(axes1,'all');X1 =[wm(:,1)];YMatrix1=[Cp1(:,2) Cp1(:,3) Cp1(:,4) Cp1(:,5)];% Create multiple lines using matrix input to plotplot1 = plot(X1,YMatrix1,'Parent',axes1,'LineWidth',3);set(plot1(1),'DisplayName','v_w = 3 m/s');set(plot1(2),'DisplayName','v_w = 4 m/s');set(plot1(3),'DisplayName','v_w = 5 m/s');set(plot1(4),'DisplayName','v_w = 6 m/s');%set(plot1(5),'DisplayName','Vw = 6 m/s');
% Create ylabelylabel('Cp','FontSize',24,'FontName','Times');% Create xlabelxlabel('\omegam [ rad/s ]','FontSize',24,'FontName','Times');% Create legendlegend(axes1,'show');