validação metodológica VantS
11
Validação Metodológica da Utilização de Veículos Aéreos Não Tripulados no Planejamento Territorial Cristhyano Cavali da Luz 1 , Claudio Kapp Junior 2 1 Departamento de Ciências Geodésicas, Universidade Federal do Paraná, Curitiba, Paraná, Brasil, [email protected] 2 Departamento de Agronomia, Universidade Estadual de Ponta Grossa, Ponta Grossa, Paraná, Brasil, [email protected] RESUMO O desenvolvimento de plataformas e sensores para a aquisição de informação espacial, com vistas à elaboração de produtos cartográficos, fotointerpretação e atualização de bases cadastrais, teve um grande avanço a partir do século XXI. Este trabalho teve como objetivo validar qualitativamente os produtos cartográficos oriundos de um VANT, a partir dos dados brutos adquiridos por um voo autônomo. A metodologia baseou-se na elaboração do plano de voo a ser seguido pelo VANT; a aquisição dos dados e das fotografias aéreas; o processamento das imagens, através de algoritmos computacionais de classificações de padrões e reconstrução tridimensional do terreno, através das operações de aerotriangulação, geração do Modelo Digital de Elevação e ortofoto. As fotografias aéreas foram automaticamente obtidas com uma câmera Sony NEX-3 16Mp, com resolução espacial no terreno de 9 cm. A ortofoto gerada possibilitou a fotointerpretação da rede de drenagem local, da caracterização geomorfológica e geológica, bem como da definição das melhores alternativas para a definição de uma diretriz rodoviária. Os resultado são promissores e mostram que os VANT’s de baixo custo podem ser utilizados em mapeamentos temáticos. PALAVRAS-CHAVE: Veículos Aéreos Não Tripulados (VANT’s), atualização cartográfica, mapeamento. ABSTRACT The development of boarding sensors in Unmanned Aerial Vehicles (UAV's) for the acquisition of spatial information have been used lately in cartography. This was carried out to qualitatively validate the cartographic products from a UAV, from the raw data acquired by an autonomous flight. The methodology of the study predicted the specific elaboration of the flight plan to be followed by the UAV; the acquisition of data and aerial photographs; processing the images through computer algorithms ratings patterns and three-dimensional reconstruction of the ground, through the operations of aerial triangulation, Digital Elevation Model and orthophoto generation. Aerial photographs were automatically taken with a Sony NEX-3 16MP camera, with a spatial resolution on the ground of 9 cm. The generated orthophoto enabled the photo-interpretation of the local drainage network, the geomorphological and geological characterization and definition of the best alternatives for the definition of a road guideline. Thus, it can be concluded that the low cost UAV's can be used in thematic mapping, in order to update cartographic databases. KEYWORDS: Unmanned Aerial Vehicle (UAV); Update Cartography, Mapping.
-
Upload
junior-kapp -
Category
Technology
-
view
137 -
download
0
Transcript of validação metodológica VantS

Validação Metodológica da Utilização de Veículos Aéreos Não Tripulados
no Planejamento Territorial
Cristhyano Cavali da Luz1, Claudio Kapp Junior
2
1 Departamento de Ciências Geodésicas, Universidade Federal do Paraná, Curitiba, Paraná,
Brasil, [email protected] 2 Departamento de Agronomia, Universidade Estadual de Ponta Grossa, Ponta Grossa,
Paraná, Brasil, [email protected]
RESUMO
O desenvolvimento de plataformas e sensores para a aquisição de informação espacial, com vistas à elaboração de produtos cartográficos, fotointerpretação e atualização de bases cadastrais, teve um grande avanço a partir do século XXI. Este trabalho teve como objetivo validar qualitativamente os produtos cartográficos oriundos de um VANT, a partir dos dados brutos adquiridos por um voo autônomo. A metodologia baseou-se na elaboração do plano de voo a ser seguido pelo VANT; a aquisição dos dados e das fotografias aéreas; o processamento das imagens, através de algoritmos computacionais de classificações de padrões e reconstrução tridimensional do terreno, através das operações de aerotriangulação, geração do Modelo Digital de Elevação e ortofoto. As fotografias aéreas foram automaticamente obtidas com uma câmera Sony NEX-3 16Mp, com resolução espacial no terreno de 9 cm. A ortofoto gerada possibilitou a fotointerpretação da rede de drenagem local, da caracterização geomorfológica e geológica, bem como da definição das melhores alternativas para a definição de uma diretriz rodoviária. Os resultado são promissores e mostram que os VANT’s de baixo custo podem ser utilizados em mapeamentos temáticos. PALAVRAS-CHAVE: Veículos Aéreos Não Tripulados (VANT’s), atualização cartográfica, mapeamento.
ABSTRACT
The development of boarding sensors in Unmanned Aerial Vehicles (UAV's) for the acquisition of spatial information have been used lately in cartography. This was carried out to qualitatively validate the cartographic products from a UAV, from the raw data acquired by an autonomous flight. The methodology of the study predicted the specific elaboration of the flight plan to be followed by the UAV; the acquisition of data and aerial photographs; processing the images through computer algorithms ratings patterns and three-dimensional reconstruction of the ground, through the operations of aerial triangulation, Digital Elevation Model and orthophoto generation. Aerial photographs were automatically taken with a Sony NEX-3 16MP camera, with a spatial resolution on the ground of 9 cm. The generated orthophoto enabled the photo-interpretation of the local drainage network, the geomorphological and geological characterization and definition of the best alternatives for the definition of a road guideline. Thus, it can be concluded that the low cost UAV's can be used in thematic mapping, in order to update cartographic databases. KEYWORDS: Unmanned Aerial Vehicle (UAV); Update Cartography, Mapping.
INTRODUÇÃO
A definição dos Veículos Aéreos Não Tripulados (VANT’s) vem sendo atualizada
constantemente em paralelo com sua normatização perante os órgãos oficiais reguladores. De
acordo com a Instrução Suplementar (IS) Nº 21/2012 – Revisão A (ANAC, 2012), a
tecnologia VANT é composta por uma aeronave, projetada para operar sem piloto a bordo e
que não seja utilizada para fins meramente recreativos, e pelos seus componentes associados.
Nesta definição, incluem-se todos os aviões, helicópteros e dirigíveis controláveis nos três
eixos, excluindo-se, portanto, os balões tradicionais e os aeromodelos. A principal
característica do SISVANT é a possibilidade de embarcar sensores (e.g.: câmera fotográfica
digital) e equipamentos (e.g.: receptores GNSS - Global Navigation Satellite System), e, com
isso, extrair as informações espaciais de interesse (LUZ, 2015).
O embarque de sensores em Veículos Aéreos Não Tripulados (VANT’s) para a
aquisição de informação espacial com vistas ao planejamento territorial avançou
consideravelmente a partir do século XXI, através do processamento digital entre fotografias
aéreas adquiridas com câmeras digitais convencionais. Os VANT’s realizam missões pré-
estabelecidas, recobrindo determinada área de interesse através do imageamento de áreas
necessárias e posterior fotointerpretação do solo.
De maneira análoga, a utilização das fotografias aéreas reduz os custos dos
aerolevantamentos, uma vez que sua aquisição se traduz em missões menos onerosas,
comparando às a empresas de aerolevantamento convencional, nas quais encontram-se
inseridos os altos custos da utilização de câmeras aerofotogramétricas métricas.
A aplicação da presente geotecnologia trata-se de um tema atual e em conformidade
com o estado-da-arte para estudos de ordenamento territorial e viabilidade técnica, econômica
e ambiental de futuros empreendimentos. A representação gráfica, resultante da captação das
imagens aéreas e do processamento dos dados, possui uma estrutura de dados gráficos que
contribui sobremaneira na atualização de bases de dados cartográficas, no que tange as
modificações decorrentes do processo natural do uso do solo, e que poderão compor um
Sistema de Informação ou servir de fonte de informação às diversas organizações de
planejamento territorial.
Dessa forma, pela facilidade de utilização de um VANT, tanto na tomada das
fotografias ou no processamento digital para a obtenção da ortofoto, vários profissionais de
distintas áreas têm aproveitado dessa ferramenta para a confecção de produtos cartográficos
de interesse (LUZ et al., 2015). Porém, qual é a viabilidade operacional no desenvolvimento
destes produtos? Qual a qualidade da informação extraída?
Sendo assim, este trabalho tem como objetivo validar qualitativamente os produtos
cartográficos oriundos de um VANT, a partir dos dados brutos adquiridos por um voo
autônomo,
MATERIAL E MÉTODOS
Área de Estudo
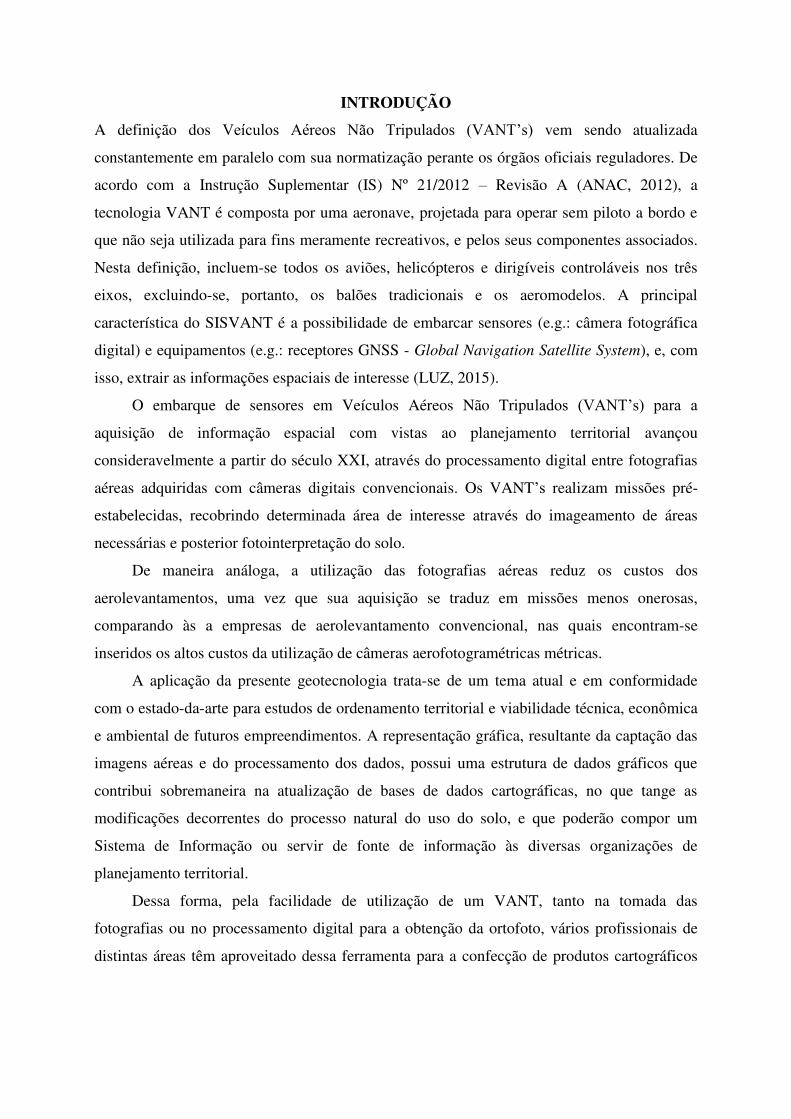
A Figura 1 apresenta a localização da área de estudo.
Figura 1 – Organograma dos métodos empregados no presente trabalho.
Fonte: (LUZ, 2015)
A área de estudo compreendeu, aproximadamente, 3.924.000 m² (3,924 km²) de uma região
rural no município supracitado, cuja a base de dados cartográficos encontra-se defasada
temporalmente e tematicamente. A área de estudo é caracterizada por cavidades subterrâneas
(cavernas), grandes extensões de calcário e com intenso processo de dolinamento, através do
Sistema Cárstico do Rio João Rodrigues (SCJR). Portanto, o planejamento territorial
compreendeu a identificação, através de análise e fotointerpretação, do melhor traçado para a
implantação da rodovia, visto que o processo de evolução natural das feições cársticas é muito
dinâmico e as bases cartográficas não são atualizadas constantemente.
MATERIAL E MÉTODOS
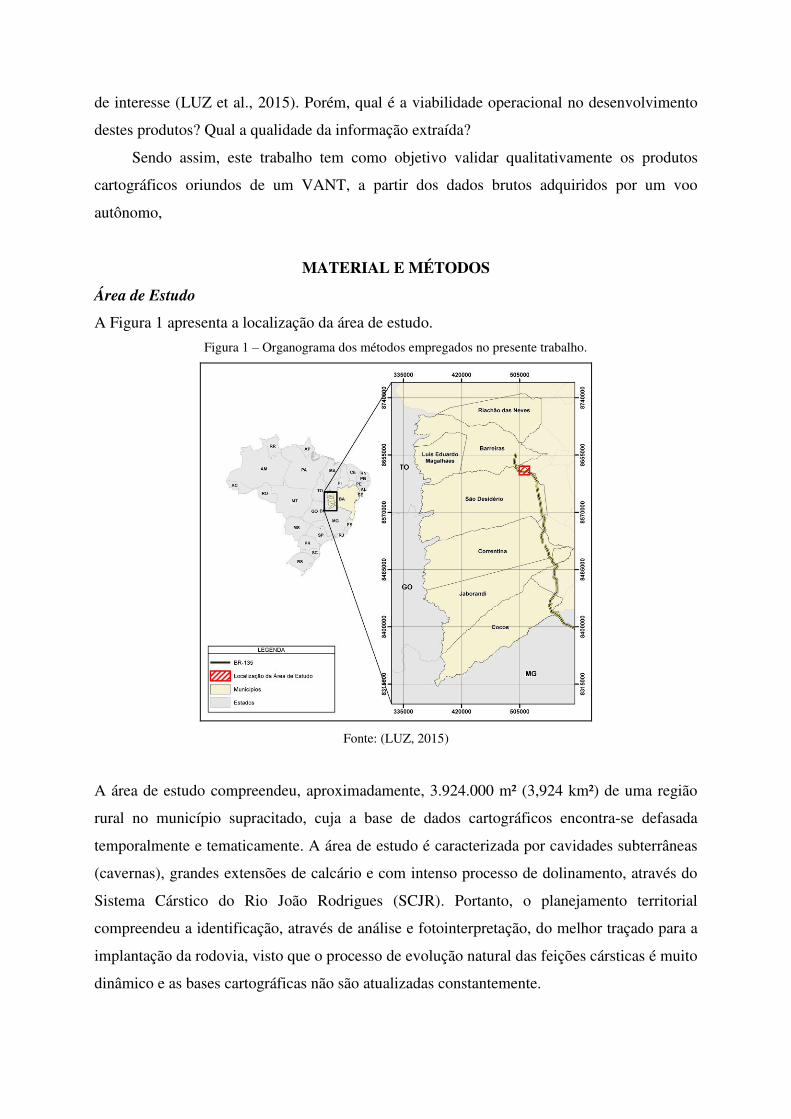
Os métodos empregados para a execução deste trabalho encontram-se descritos no
organograma da Figura 2. Em outubro de 2014 foi realizada uma campanha de campo para a
aquisição dos dados da rodovia federal BR-135/BA, entre os km 217 e 221.
Para a obtenção das fotografias foi utilizado um VANT, modelo Smartbird X-260
Softmapping & Aerial Propeller, fabricado pela Softmapping Engenharia, Cartografia e
Geoprocessamento Ltda.
Figura 2 – Organograma dos métodos empregados no presente trabalho.
Fonte: (LUZ, 2015)
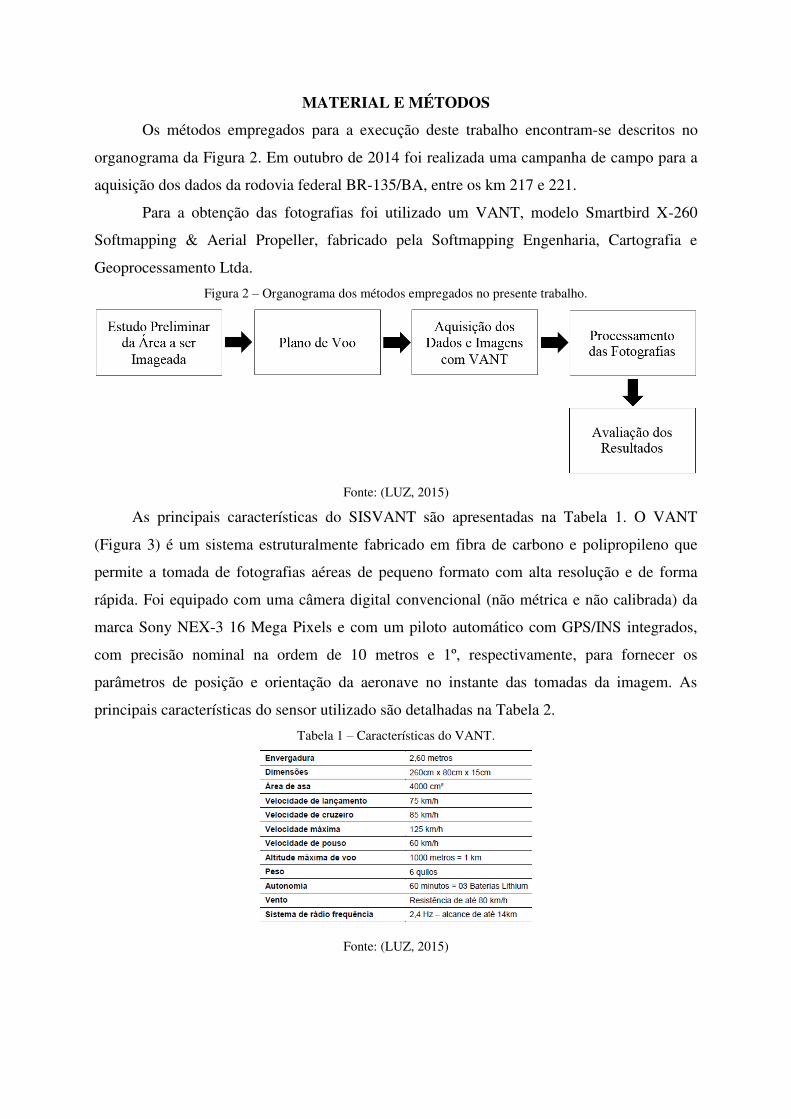
As principais características do SISVANT são apresentadas na Tabela 1. O VANT
(Figura 3) é um sistema estruturalmente fabricado em fibra de carbono e polipropileno que
permite a tomada de fotografias aéreas de pequeno formato com alta resolução e de forma
rápida. Foi equipado com uma câmera digital convencional (não métrica e não calibrada) da
marca Sony NEX-3 16 Mega Pixels e com um piloto automático com GPS/INS integrados,
com precisão nominal na ordem de 10 metros e 1º, respectivamente, para fornecer os
parâmetros de posição e orientação da aeronave no instante das tomadas da imagem. As
principais características do sensor utilizado são detalhadas na Tabela 2.
Tabela 1 – Características do VANT.
Fonte: (LUZ, 2015)
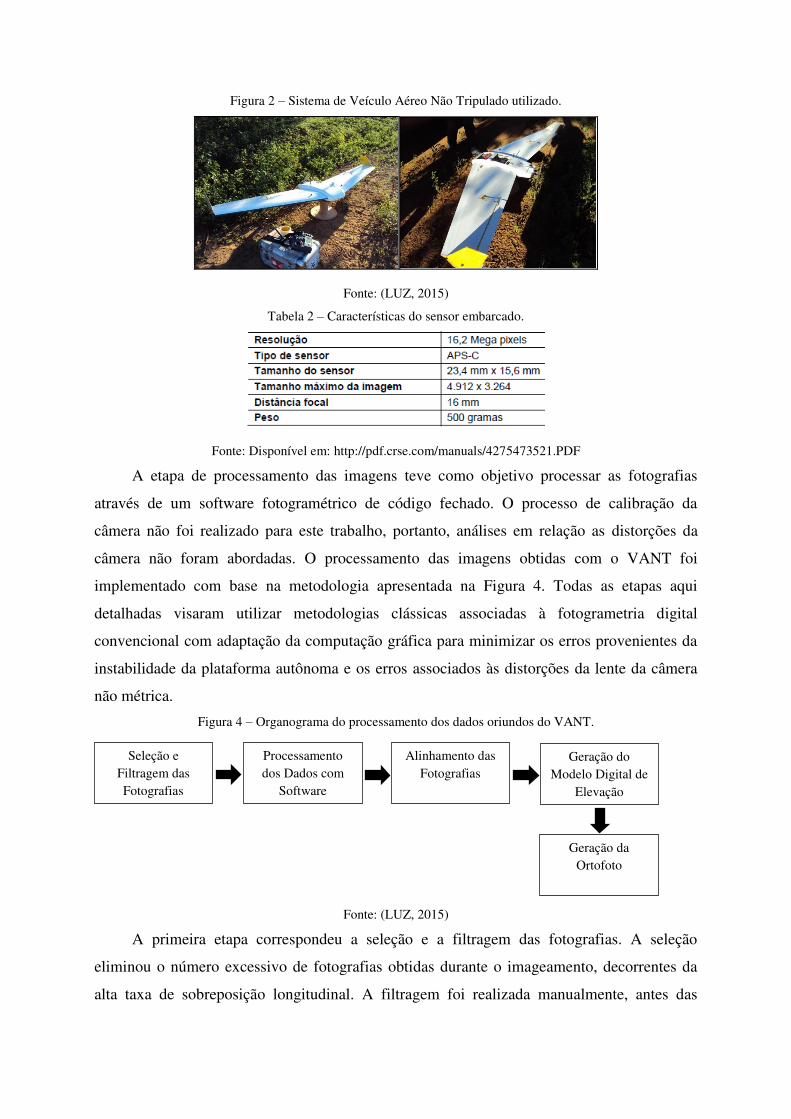
Figura 2 – Sistema de Veículo Aéreo Não Tripulado utilizado.
Fonte: (LUZ, 2015)
Tabela 2 – Características do sensor embarcado.
Fonte: Disponível em: http://pdf.crse.com/manuals/4275473521.PDF
A etapa de processamento das imagens teve como objetivo processar as fotografias
através de um software fotogramétrico de código fechado. O processo de calibração da
câmera não foi realizado para este trabalho, portanto, análises em relação as distorções da
câmera não foram abordadas. O processamento das imagens obtidas com o VANT foi
implementado com base na metodologia apresentada na Figura 4. Todas as etapas aqui
detalhadas visaram utilizar metodologias clássicas associadas à fotogrametria digital
convencional com adaptação da computação gráfica para minimizar os erros provenientes da
instabilidade da plataforma autônoma e os erros associados às distorções da lente da câmera
não métrica.
Figura 4 – Organograma do processamento dos dados oriundos do VANT.
Fonte: (LUZ, 2015)
A primeira etapa correspondeu a seleção e a filtragem das fotografias. A seleção
eliminou o número excessivo de fotografias obtidas durante o imageamento, decorrentes da
alta taxa de sobreposição longitudinal. A filtragem foi realizada manualmente, antes das
Seleção e Filtragem das Fotografias
Processamento dos Dados com
Software
Alinhamento das Fotografias
Geração do Modelo Digital de
Elevação
Geração da Ortofoto
fotografias serem adicionadas à ferramenta computacional, excluindo aquelas que
apresentaram problemas de qualidade decorrentes da inclinação da aeronave no momento da
tomada da fotografia (fotografias inclinadas); da variação da altitude do VANT entre tomadas
consecutivas (escala); e da deriva da mesma provocada pelo vento (arrasto).
Para este trabalho, as fotografias foram processadas através de algoritmos
computacionais de reconhecimento de padrões e reconstrução tridimensional do terreno,
oriundos do software de código fechado Agisoft PhotoScan Professional Edition Version
1.0.4, ano de 2014.
Após a seleção e filtragem, as 600 fotografias foram adicionadas no software e
alinhadas através de um algoritmo que localiza os pontos homólogos (matching points) entre
elas.
Neste 1º processamento, os dados de entrada foram os parâmetros de orientação
exterior (POE), ou seja, as coordenadas do CP da câmera no momento da
tomada de cada fotografia. Contudo, não foram empregados os valores correspondentes às
atitudes da plataforma VANT de baixo custo ( ), em decorrência da imprecisão da
integração INS/GPS.
Para o alinhamento procurou-se, também, à similaridade entre todas as fotografias
processadas. A técnica que o software utiliza consiste em estabelecer uma relação geométrica
entre duas vistas similares, quando cada cena possui o seu centro de projeção e estes não são
coincidentes.
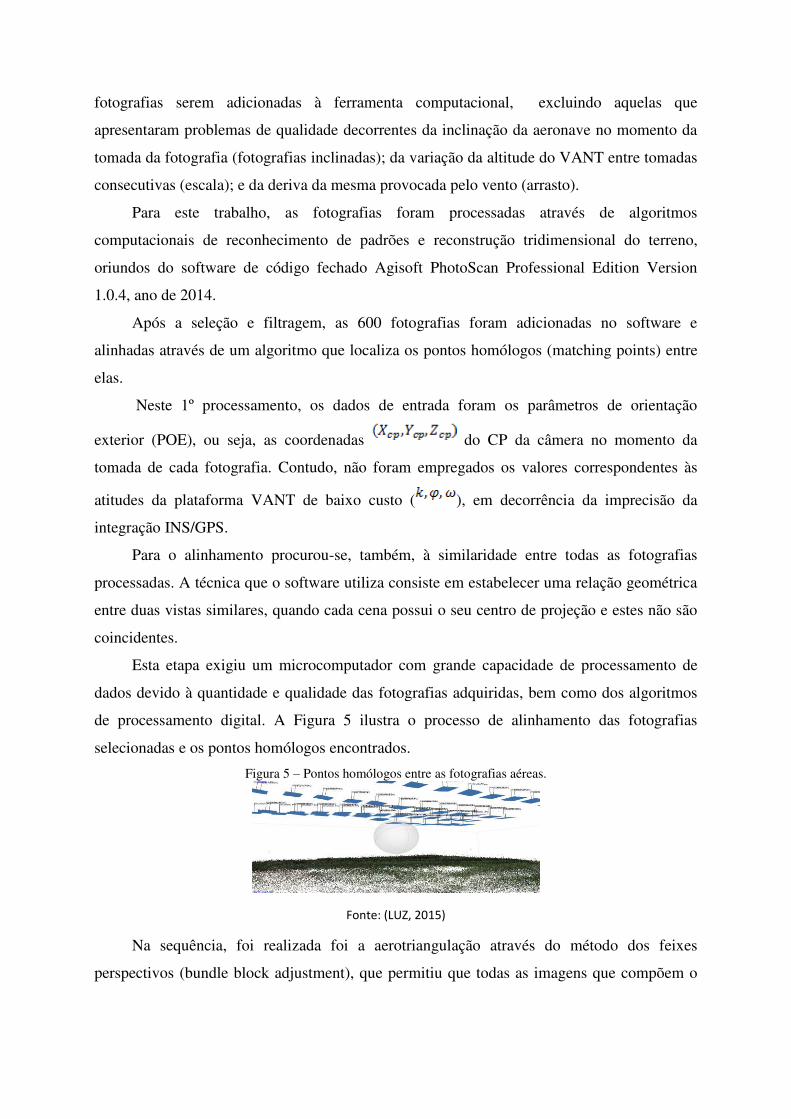
Esta etapa exigiu um microcomputador com grande capacidade de processamento de
dados devido à quantidade e qualidade das fotografias adquiridas, bem como dos algoritmos
de processamento digital. A Figura 5 ilustra o processo de alinhamento das fotografias
selecionadas e os pontos homólogos encontrados.
Figura 5 – Pontos homólogos entre as fotografias aéreas.
Fonte: (LUZ, 2015)
Na sequência, foi realizada foi a aerotriangulação através do método dos feixes
perspectivos (bundle block adjustment), que permitiu que todas as imagens que compõem o
espaço imagem e todos os pontos fotogramétricos contidos nestas imagens fossem
processados em um único processo. Este método utiliza o modelo de colinearidade para
relacionar o espaço-imagem com o espaço-objeto por meio de alguns pontos de apoio
conhecidos no objeto e medidos nas imagens, e muitos outros de ligação medidos apenas nas
imagens, ou seja, a geometria de um par de fotografias, com sobreposição adequada, permite
a formação de um modelo estereoscópico, por interseção de raios homólogos.
Com a nuvem de pontos determinada pela aerotriangulação, foi estabelecida uma grade
triangular irregular (TIN - Triangulated Irregular Network). Este método de estruturação dos
dados cria uma superfície a partir de pontos espaçados irregularmente. Os triângulos que
formaram a TIN adequaram-se à densidade de pontos detectados no processamento anterior.
Quanto maior a irregularidade do relevo, maior a densidade de pontos e, consequentemente,
maior a densidade de triângulos da grade.
Para a criação do MDE (Figura 6), foi utilizada a rotina do software que permitiu
escolher o tipo de superfície que se deseja modelar e a quantidade de pontos para se formar a
malha, constituída por pequenos polígonos. O fluxo de trabalho compreendeu a escolha do
algoritmo para criação da superfície como sendo o de “Mapas de Altura / Terreno”, otimizado
para a modelagem de superfícies planas e fotografias aéreas, com uma densa nuvem de pontos
de malha máxima de 200.000 polígonos gerados por interpolação.
Dessa forma, aplicou-se o algoritmo “ortofoto”, que utiliza o processo direto para se
efetuar a transformação de uma foto original, que é uma perspectiva central do terreno, em
uma projeção ortogonal sobre um plano da projeção ortogonal. Este modo utiliza novamente
as equações de colinearidade para se obter as coordenadas altimétricas do MDT e, em
seguida, calcula as coordenadas planimétricas.
O tamanho do pixel (GSD - Ground Sample Distance) foi determinado em função da
qualidade esperada para os produtos cartográficos. A altitude média de voo foi estabelecida
em 300 metros. Para calcular o GSD se considerou os seguintes elementos: o tamanho do
pixel, a distância focal da câmera e altura de voo. De acordo com Santos (2014), a distância
focal da câmera é a distância entre o sensor e o centro óptico da câmera e a altura de voo é a
distância entre o sensor e a superfície física da Terra, conforme equação (01). O tamanho do
pixel foi estabelecido pela razão entre as dimensões físicas do CCD (em mm) e o número total
de colunas e linhas do sensor embarcado. Para o presente estudo utilizou-se uma câmera
digital convencional de 16 Megapixel e distância focal de 16mm.
Onde:
tamanho físico do pixel no CCD (mm);
distância focal da câmera (mm);
altura de voo (m).
Com tais características determinou-se a dimensão de um pixel em 0,00477mm².
Aplicando-se, então, os parâmetros determinados na equação (01) obteve-se o valor do GSD
igual a 9 cm. Foram definidas, ainda, 10 faixas de voo (60 fotografias por faixa, em média),
com comprimento aproximado de 2.000 metros e 218 metros de largura cada, contemplando-
se, assim, toda a área de estudo.
Para exportar a ortofotocarta atribuiu o tamanho do pixel (GSD) como 8,9 cm,
conforme calculado anteriormente, pois a amostragem do produto final não pode ser maior
que a dos dados originais (LIMA et al., 2004), e exportou-se em formato TIFF.
RESULTADOS
O processo de alinhamento das fotografias resultou em um grande tempo de processamento,
através da rotina computacional. Como resultado, obteve-se uma densa nuvem de 1.374.392
pontos homólogos (tie points – pontos de ligação) entre as fotografias, sem a utilização dos
pontos de apoio.
O processo manual de identificação dos pontos de controle no terreno com 12 pontos de
apoio pré-identificados nas fotografias possibilitou o processamento completo de todas as 600
fotografias, formando um bloco único com 2.717.245 pontos homólogos entre elas. Tal
situação se justifica devido ao plano de voo ter sido estabelecido níveis de sobreposição
lateral e longitudinal bem acima dos aplicados para aerofotogrametria convencional. Esta
sobreposição se fez necessário em razão da instabilidade da plataforma no instante de tomada
de cada fotografia.
A fototriangulação, através de uma grade irregular TIN para o modelo sem pontos de
apoio, gerou triângulos com 274.813 faces, distribuídas em 137.439 vértices. Por meio da
nuvem de pontos obtida através dos pontos homólogos entre as fotografias e densificada pelo
processo manual de identificação dos pontos de apoio, a aerotriangulação gerou 543.381 faces
triangulares e 271.724 vértices.
Equação (01)
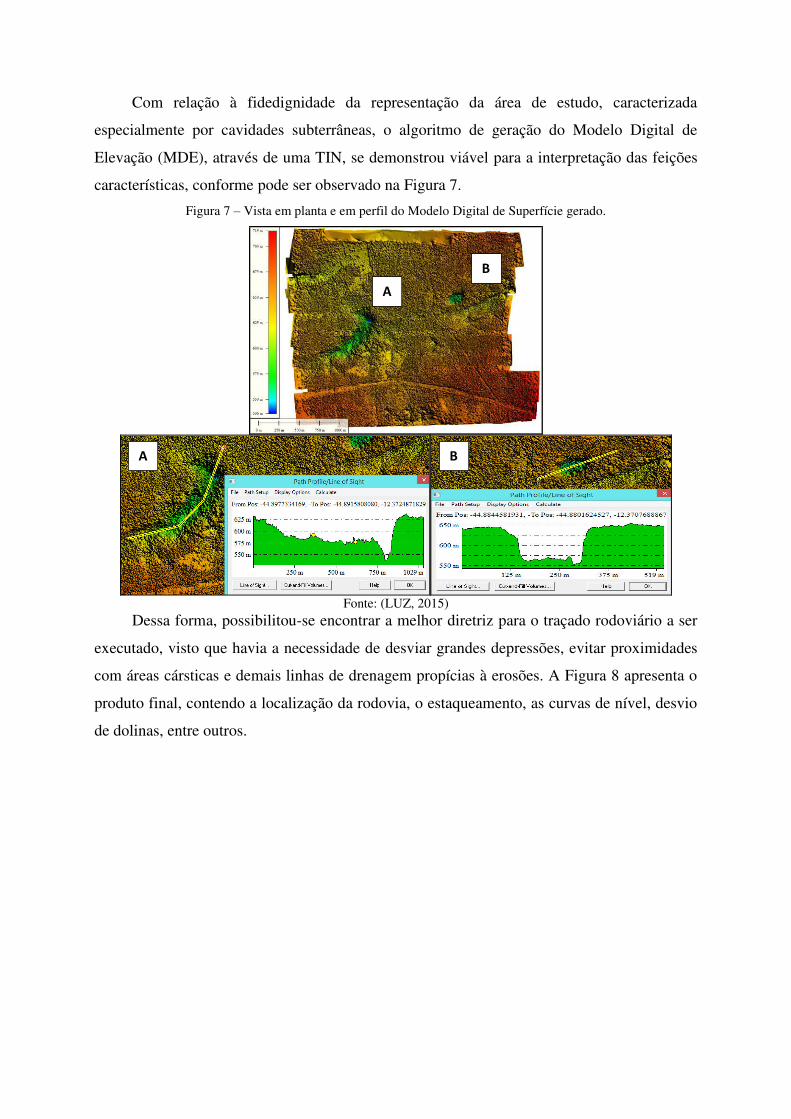
Com relação à fidedignidade da representação da área de estudo, caracterizada
especialmente por cavidades subterrâneas, o algoritmo de geração do Modelo Digital de
Elevação (MDE), através de uma TIN, se demonstrou viável para a interpretação das feições
características, conforme pode ser observado na Figura 7.
Figura 7 – Vista em planta e em perfil do Modelo Digital de Superfície gerado.
Fonte: (LUZ, 2015)
Dessa forma, possibilitou-se encontrar a melhor diretriz para o traçado rodoviário a ser
executado, visto que havia a necessidade de desviar grandes depressões, evitar proximidades
com áreas cársticas e demais linhas de drenagem propícias à erosões. A Figura 8 apresenta o
produto final, contendo a localização da rodovia, o estaqueamento, as curvas de nível, desvio
de dolinas, entre outros.
A B
B
A
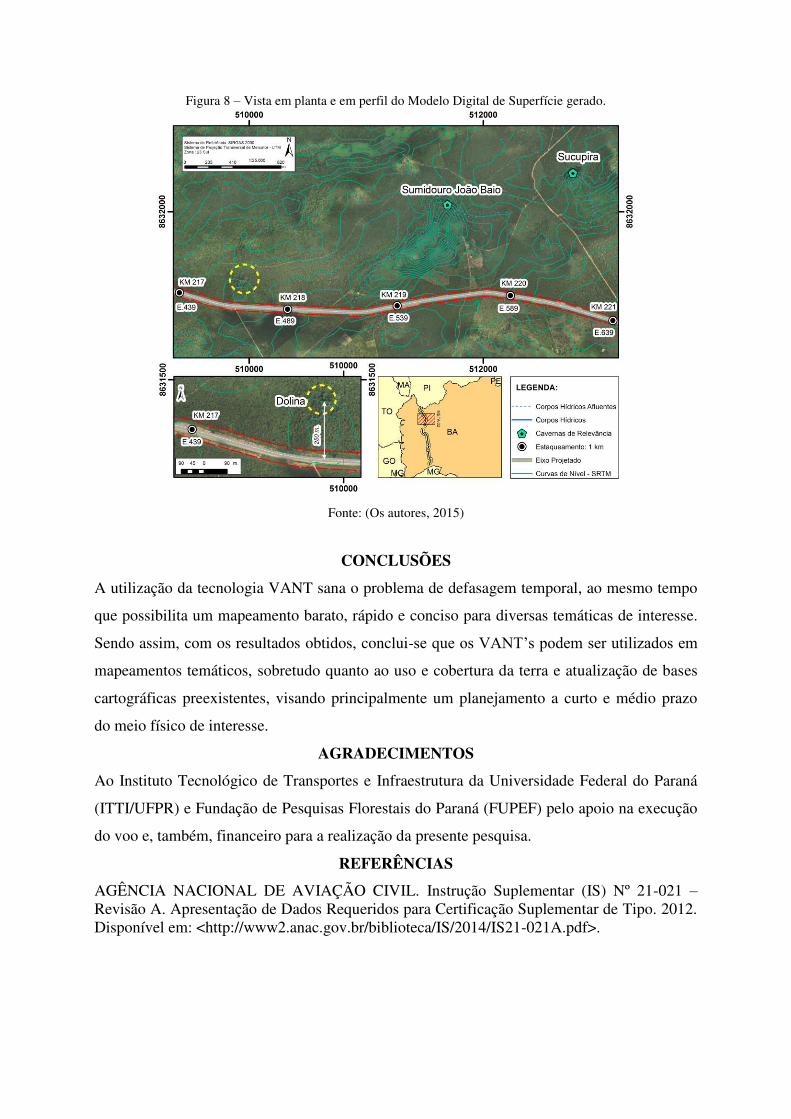
Figura 8 – Vista em planta e em perfil do Modelo Digital de Superfície gerado.
Fonte: (Os autores, 2015)
CONCLUSÕES
A utilização da tecnologia VANT sana o problema de defasagem temporal, ao mesmo tempo
que possibilita um mapeamento barato, rápido e conciso para diversas temáticas de interesse.
Sendo assim, com os resultados obtidos, conclui-se que os VANT’s podem ser utilizados em
mapeamentos temáticos, sobretudo quanto ao uso e cobertura da terra e atualização de bases
cartográficas preexistentes, visando principalmente um planejamento a curto e médio prazo
do meio físico de interesse.
AGRADECIMENTOS
Ao Instituto Tecnológico de Transportes e Infraestrutura da Universidade Federal do Paraná
(ITTI/UFPR) e Fundação de Pesquisas Florestais do Paraná (FUPEF) pelo apoio na execução
do voo e, também, financeiro para a realização da presente pesquisa.
REFERÊNCIAS
AGÊNCIA NACIONAL DE AVIAÇÃO CIVIL. Instrução Suplementar (IS) Nº 21-021 – Revisão A. Apresentação de Dados Requeridos para Certificação Suplementar de Tipo. 2012. Disponível em: <http://www2.anac.gov.br/biblioteca/IS/2014/IS21-021A.pdf>.
FERREIRA, A.M.R. Avaliação de câmara de pequeno formato transportada por veículo aéreo não tripulado – VANT, para uso em aerolevantamentos. Dissertação (Mestrado em Geociências Aplicadas). Universidade de Brasília. Brasília, 2014.
LIMA, D. L. et al. Restituição e geração de ortoimagens a partir de um estereopar EROS. In: SIMPÓSIO BRASILEIRO DE CIÊNCIAS GEODÉSICAS E TECNOLOGIAS DA GEOINFORMAÇÃO, 1, Pernambuco. Anais... Pernambuco, 2004. LUZ, C.C. Avaliação da exatidão absoluta de ortofoto obtida por meio de dados brutos oriundos de veículos aéreos não tripulados (SISVANT). Dissertação de Mestrado – Universidade Federal do Paraná. Programa de Pós Graduação em Ciências Geodésicas. Curitiba, 2015. LUZ, C.C. et al. Geração de ortofotos digitais obtidas por um Sistema de Veículo Aéreo Não Tripulado (SISVANT). In.: Anais do 9º Congresso Brasileiro de Rodovias & Concessões. Brasília, 2015.
SANTOS, D.R. Fotogrametria I. Curso de Engenharia Cartográfica. Departamento de Geomática. Universidade Federal do Paraná. Curitiba, 2014.