Vendo através das paredes com Wi-Fi -...
17
Vendo através das paredes com Wi-Fi Rafael Brito de Oliveira 29 de junho de 2014 Professor responsável: Dr. Alfredo Goldman MAC5743 - Computação Móvel
Transcript of Vendo através das paredes com Wi-Fi -...
Vendo através das paredes com Wi-Fi
Rafael Brito de Oliveira
29 de junho de 2014
Professor responsável:Dr. Alfredo Goldman
MAC5743 - Computação Móvel
Sumário
1 Introdução 3
2 Uma Visão Geral do Wi-Vi 4
3 Eliminando o Efeito de Flash 5
4 Processo de Anulação 6
5 Identificando e Rastreando Pessoas 85.1 Rastreando uma Única Pessoa . . . . . . . . . . . . . . . . . . . . . . . . . . 85.2 Rastreando Várias Pessoas . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
6 Comunicação Através de uma Parede Baseada em Gestos 126.1 Codificação do Gesto . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 126.2 Decodificação do Gesto . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
7 Resultados 14
8 Conclusões 15
9 Referências 16
1

Resumo
O sinal Wi-Fi pode ser entendido como um sinal enviado de um transmissor, paraum receptor. O objetivo deste trabalho é extender este conceito, utilizando o mesmopara permitir que vejamos objetos se movendo através de uma parede ou uma porta.Podemos também utilizar os sinais do Wi-Fi para identificar a quantidade de pessoasem um sala fechada. Podemos ainda identificar gestos feito atrás de uma porta ecombina-los em uma sequência de gestos para comunicar alguma mensagem para umreceptor wireless. Este trabalho, primeiramente demonstrará como alguém pode utilizara interface MIMO para anular as reflexões de objetos estáticos e focar em receber areflexão de objetos em movimento. Na segunda parte deste trabalho, será demonstradocomo alguém pode rastrear o movimento de uma pessoa em forma de um conjunto deantenas justapostas. E por fim a validade deste trabalho será demonstrada com aconstrução de um software de rádio USRP e será realizado testes com o mesmo emalguns ambientes fechados.
2
1 Introdução
Pode o sinal do Wi-Fi possibilitar ver através de uma parede? Por muitos anos o serhumano fantasiou inspirado por histórias em quadrinhos, ter uma visão de raio-x. Estetrabalho explora o potencial do uso de sinais de Wi-Fi em conjunto com os recentes avançosem comunicação MIMO para construir um dispositivo que consiga capturar o movimentode uma pessoa atrás de uma parede e uma sala fechada. A utilização dessa tecnologiapossui várias aplicações, como por exemplo detectar se existe algum sobrevivente debaixo deescrombos, detectar se existe alguém sendo mantido como vítima dentro de algum prédio.
O conceito de ver através de obstáculos opacos, é similar ao que é feito com radares.Quando o sinal vai de encontro com obstáculos não-metálicos, uma fração do sinal de Wi-Ficonsegue atravessar uma parede, refletir em algum objeto ou uma pessoa e voltar, podendoser possível deduzir que existem objetos do outro lado de uma parede. Construir um dis-positivo que consiga capturar essas reflexões é complicado, por que a força do sinal depoisque fazer o trajeto de ida e volta é reduzido em 3 dB ou 5 dB em ordem de magnitude. Umdesafio ainda maior são os próprios sinais refletidos diretamente da parede para o receptor,como esses sinais voltam mais rápidos do que os outros que conseguiram atravessar a paredee por terem um sinal mais forte, acabam escondendo a atrapalhando a detecção dos sinaisque atravessaram a parede. Este comportamento é chamado de "Efeito de Flash", pois ésemelhante ao efeito causado quando se tira uma foto em frente a um espelho.
Então como podemos superar essas dificuldades? A comunidade da tecnologia de radartem realizado estudos a fim de resolver essas dificuldades, e introduziu recentemente algunssistemas de ultra banda larga que conseguem detectar pessoas se movimentando atrás deuma parede, e mostra eles em forma de figuras retangulares em um fundo preto. O estadoda arte dos sistemas de hoje, requerem basicamente 2 GHz de banda larga, um consumoalto de energia, e 2.4 metros de antenas justapostas para detectar o movimentos de objetos.Estes equipamentos além de serem caros, hoje são comuns somente no meio militar.
O objetivo deste trabalho é demonstrar que é possível construir um dispositivo queconsiga ver objetos atrás de uma parede, que consuma pouca banda, pouca energia, queseja compacto e o melhor de tudo acessível a todos. Este trabalho introduz o Wi-Vi, umdispositivo que consegue ver através de paredes, que emprega sinais de Wi-Fi na frequênciade 2.4 GHz, limitando-se a 20MHz do canal, e que dispensa a utilização de soluções de ultrabanda larga, que são usadas hoje para resolver os problemas de efeito de flash.
3

2 Uma Visão Geral do Wi-Vi
O Wi-Vi é um dispositivo wireless que consegue detectar movimento de objetos atrás de umaparede. Ele se aproveita de características de um chipset de Wi-Fi para tornar a tecnologiade ver através de paredes possível, com baixo consumo de energia, baixo custo, pouca bandae acessível a todos.
Ele utiliza um software para rádio USRP N210 com uma placa Daughter SBX. O Wi-Vi é essencialmente composto de 3 antenas MIMO, onde: duas destas são usadas paratransmissão e a outra para recepção. Ele ainda emprega antenas direcionais LP0965, parafocar no sinal refletido em determinada parede ou sala de interesse. O processo de anulaçãode sinais de objetos estáticos é implementado diretamente usando as antenas MIMO e é feitodiretamente no driver UHD.
Foram também utilizados o Matlab R2012a sob o sistema operacional Ubuntu 11.10 emum máquina de 64-bit, e processador Intel i7.
O Wi-Vi pode ser usado em duas modalidades, dependendo da necessidade do usuário.No primeiro modo, ele pode ser usada para capturar o movimento de objetos atrás de umaparede e rastreá-los. No segundo modo, pode-se utilizar uma interface baseada em gestosonde uma pessoa do outro lado de uma parede, pode compor mensagens e envia-las a umreceptor do Wi-Vi.
4
3 Eliminando o Efeito de Flash
Tipos de Materiais de Construção 2.4 GHzVidro 3 dB
Porta de Madeira Sólida com 1.75 polegadas 6 dBParede Oca de 6 polegadas 9 dB
Parede de Concreto de 18 polegadas 18 dBConcrete Reforçado 40 dB
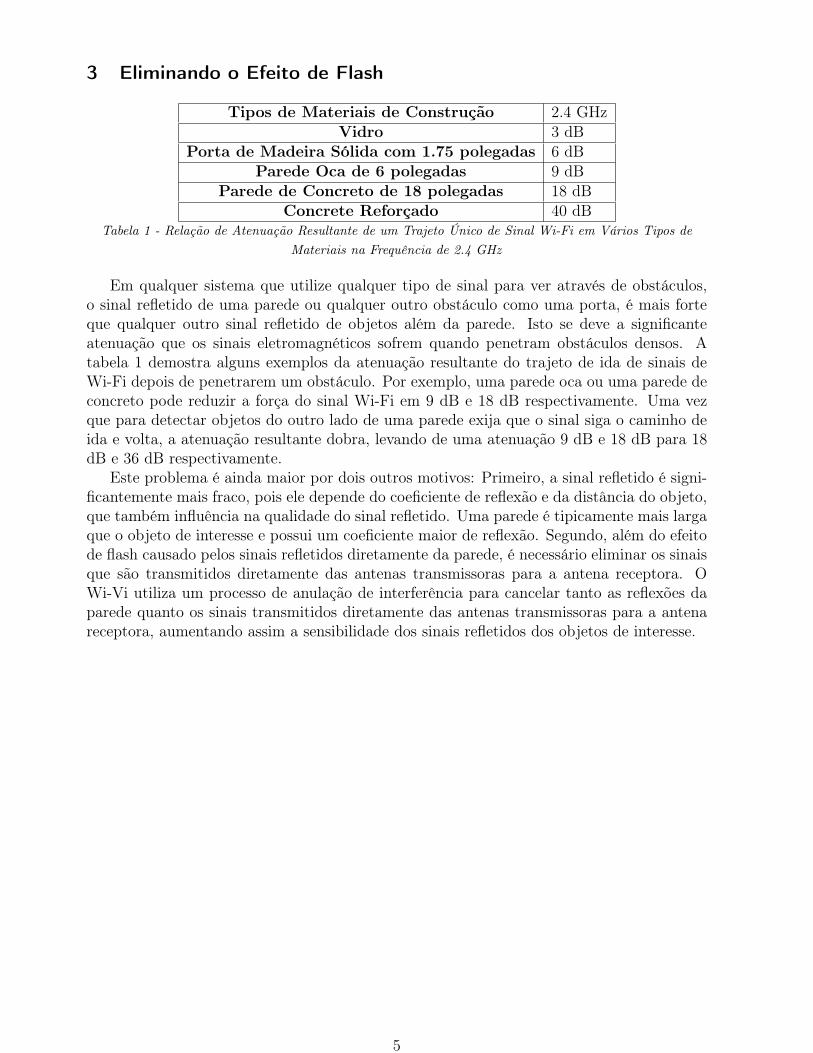
Tabela 1 - Relação de Atenuação Resultante de um Trajeto Único de Sinal Wi-Fi em Vários Tipos deMateriais na Frequência de 2.4 GHz
Em qualquer sistema que utilize qualquer tipo de sinal para ver através de obstáculos,o sinal refletido de uma parede ou qualquer outro obstáculo como uma porta, é mais forteque qualquer outro sinal refletido de objetos além da parede. Isto se deve a significanteatenuação que os sinais eletromagnéticos sofrem quando penetram obstáculos densos. Atabela 1 demostra alguns exemplos da atenuação resultante do trajeto de ida de sinais deWi-Fi depois de penetrarem um obstáculo. Por exemplo, uma parede oca ou uma parede deconcreto pode reduzir a força do sinal Wi-Fi em 9 dB e 18 dB respectivamente. Uma vezque para detectar objetos do outro lado de uma parede exija que o sinal siga o caminho deida e volta, a atenuação resultante dobra, levando de uma atenuação 9 dB e 18 dB para 18dB e 36 dB respectivamente.
Este problema é ainda maior por dois outros motivos: Primeiro, a sinal refletido é signi-ficantemente mais fraco, pois ele depende do coeficiente de reflexão e da distância do objeto,que também influência na qualidade do sinal refletido. Uma parede é tipicamente mais largaque o objeto de interesse e possui um coeficiente maior de reflexão. Segundo, além do efeitode flash causado pelos sinais refletidos diretamente da parede, é necessário eliminar os sinaisque são transmitidos diretamente das antenas transmissoras para a antena receptora. OWi-Vi utiliza um processo de anulação de interferência para cancelar tanto as reflexões daparede quanto os sinais transmitidos diretamente das antenas transmissoras para a antenareceptora, aumentando assim a sensibilidade dos sinais refletidos dos objetos de interesse.
5
4 Processo de Anulação
Avanços recentes mostraram que sistemas MIMO podem pré-codificar seus transmissoresde tal forma que os sinais recebidos em uma determinada antena podem ser cancelados.Trabalhos passados utilizando sistemas MIMO, utilizaram esta funcionalidade para habilitartransmissões concorrentes e anular interferências. Foi observado neste trabalho que a mesmatécnica pode ser utilizada para eliminar o efeito de flash, assim como também eliminar ossinais transmitidos diretamente de uma antena transmissora para uma receptora. Comisto é possível que o Wi-Vi capture reflexões de objetos de interesse com um mínimo deinterferência.
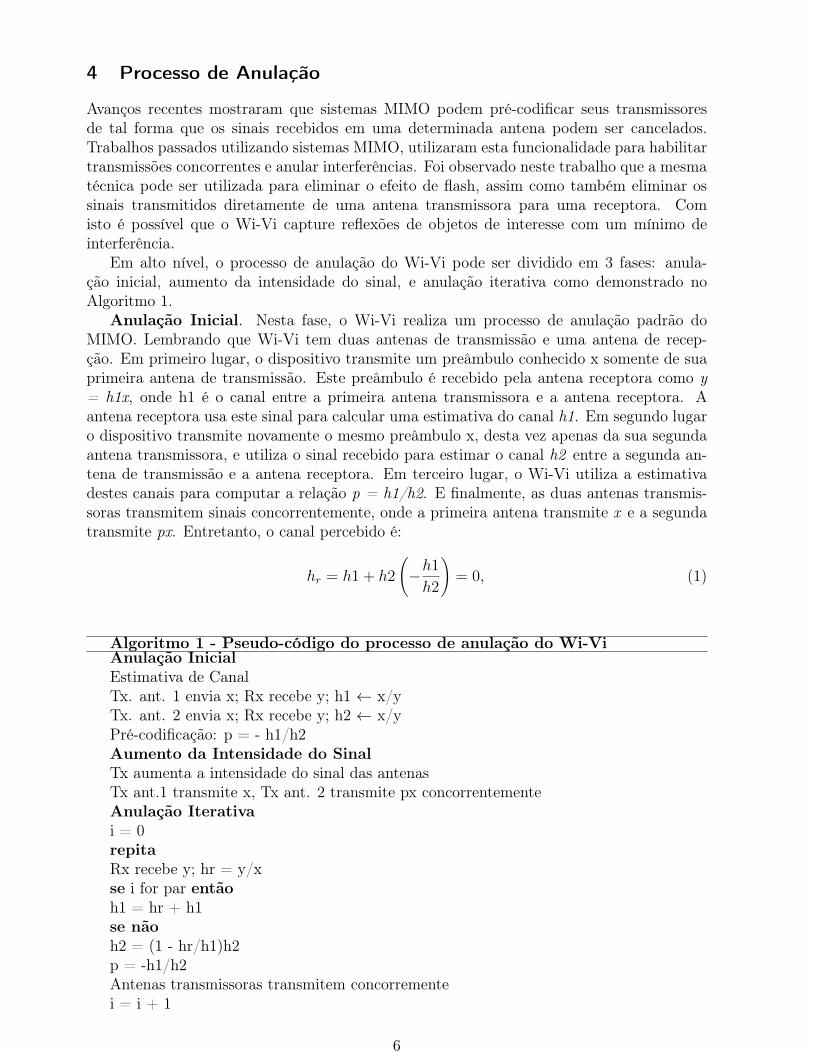
Em alto nível, o processo de anulação do Wi-Vi pode ser dividido em 3 fases: anula-ção inicial, aumento da intensidade do sinal, e anulação iterativa como demonstrado noAlgoritmo 1.
Anulação Inicial. Nesta fase, o Wi-Vi realiza um processo de anulação padrão doMIMO. Lembrando que Wi-Vi tem duas antenas de transmissão e uma antena de recep-ção. Em primeiro lugar, o dispositivo transmite um preâmbulo conhecido x somente de suaprimeira antena de transmissão. Este preâmbulo é recebido pela antena receptora como y
= h1x, onde h1 é o canal entre a primeira antena transmissora e a antena receptora. Aantena receptora usa este sinal para calcular uma estimativa do canal h1. Em segundo lugaro dispositivo transmite novamente o mesmo preâmbulo x, desta vez apenas da sua segundaantena transmissora, e utiliza o sinal recebido para estimar o canal h2 entre a segunda an-tena de transmissão e a antena receptora. Em terceiro lugar, o Wi-Vi utiliza a estimativadestes canais para computar a relação p = h1/h2. E finalmente, as duas antenas transmis-soras transmitem sinais concorrentemente, onde a primeira antena transmite x e a segundatransmite px. Entretanto, o canal percebido é:
hr = h1 + h2
�h1
h2
!
= 0, (1)
Algoritmo 1 - Pseudo-código do processo de anulação do Wi-ViAnulação InicialEstimativa de CanalTx. ant. 1 envia x; Rx recebe y; h1 x/yTx. ant. 2 envia x; Rx recebe y; h2 x/yPré-codificação: p = - h1/h2Aumento da Intensidade do SinalTx aumenta a intensidade do sinal das antenasTx ant.1 transmite x, Tx ant. 2 transmite px concorrentementeAnulação Iterativai = 0repitaRx recebe y; hr = y/xse i for par entãoh1 = hr + h1se nãoh2 = (1 - hr/h1)h2p = -h1/h2Antenas transmissoras transmitem concorrementei = i + 1
6
até convergir
Em um cenário ideal onde as estimativas de h1 e h2 sejam perfeitas, o sinal recebido hrserá igual a zero.
Assim, no final desta fase o Wi-Vi consegue eliminar os sinais refletidos de todos os ob-jetos estáticos assim como o sinal transmitido diretamente das antenas transmissoras para aantena receptora. Se não houver objeto se movendo o canal continuara sendo anulado. En-tretanto, quando um objeto começar a se mover os sinais refletidos e combinados linearmenteirão começar a aparecer no canal.
Aumento de Intensidade de Sinal. Simplesmente anulando a reflexão de objetosestáticos, não é suficiente por que o sinal dos objetos em movimento geralmente é muitofraco devido a atenuação sofrida. Por exemplo, vamos dizer que a intensidade do sinal doefeito de flash foi de 30 dB a 40 dB acima do sinal de objetos em movimento. Mesmo que seremova o efeito de flash, dificilmente poderemos discernir o sinal de objetos em movimentopois estará bem fraco.
Assim, o que é feito nessa fase é aumentar a intensidade do sinal transmitido pelas duasantenas, para que ao voltar, seja possível detectar o mesmo.
Anulação Iterativa. Depois de aumentar a intensidade do sinal transmitido, reflexõesresiduais que geralmente no processo inicial de anulação estão abaixo do nível de quantizaçãose tornam mensuráveis. Tais reflexões de objetos estáticos podem ser um problema quando seesta interessado somente em sinais de objetos em movimento. Assim em um alto nível nestafase ocorre um processo simples, dado esses sinais residuais ocorre novamente o processo deanulação de sinal como na primeira fase e novamente um aumento de intensidade do sinalcomo ocorre na segunda fase, porém o desafio nesta fase é, neste estágio não podemos estimarseparadamente o canal entre cada antena, pois após a primeira fase ocorre uma combinaçãoentre os dois canais utilizados.
Entretanto, o Wi-Vi pode considerar que erros de estimativas no canal são muito menoresque as próprias estimativas no canal em si. E utiliza esta observação para refinar suasestimativas. Especificamente, assumindo que a estimativa para o h2 é precisa. A equação 2,possui somente uma variável não conhecida h1. Resolvendo esta variável desconhecida, nósobtemos uma estimativa melhor do h1. Em particular, a nova estimativa de h1 é:
h1 = hr + h1 (2)
Similarmente, assumindo que a estimativa de h1 é precisa podemos resolver a equação 3com um melhor estimativa de h2:
h2 =
1� hr
h1
!
h2 (3)
Entrentanto, o Wi-Vi itera entre os dois passos para obter um refinamento nas estimativasde ambos h1 e h2, até que as duas estimativas h1 e h2 convirjam. Este algoritmo de anulaçãoiterativa converge exponencialmente rápido.
7
5 Identificando e Rastreando Pessoas
Agora que nós já eliminamos o impacto de objetos estáticos com o ambiente, nós podemosfocar em rastrear objetos em movimento. Como o objetivo deste trabalho é rastrear pessoasiremos considerar objetos em movimento como seres humanos em movimento. Porém omesmo conceito pode ser aplicado a qualquer objeto em movimento.
5.1 Rastreando uma Única Pessoa
A maioria dos sistemas existentes que rastreiam os movimentos de seres humanos usam umconjunto de antenas justapostas. Esta configuração de antenas permite que se determine osentido dos sinais que estão sendo recebidos. Esta direção corresponde ao ângulo espacial dechegada do sinal. Rastreando o ângulo resultante das medições no tempo é possível inferira direção do objeto no espaço.
O Wi-Vi entretanto, evita a utilização deste conjunto de antenas por duas razões: Pri-meiro, para se obter um ângulo preciso é necessário muitas antenas justapostas, e isso invi-abiliza o quesito compacto e baixo custo. Segundo, como o Wi-Vi utiliza o antenas MIMOque realizam parte do processo de anulação, adicionando várias antenas desse tipo serianecessário pelo menos triplicar a quantidade de antenas necessárias, pois no experimentoforam usadas 3 antenas.
Porém para obter os mesmos benefícios que a técnica de colocar várias antenas justapos-tas, o Wi-Vi utiliza uma técnica chamada de radar de abertura sintética inversa (ISAR). OISAR explora o movimento do objeto de interesse para simular o conceito de conjunto deantenas justapostas. Basicamente, com uma única antena receptora e em qualquer pontona linha do tempo que houver um sinal recebido, eles vão sendo armazenados por algumasiterações e a medida que o objeto se move esses sinais de posições diferentes recebidos, sãoarmazenados e comparados com os anteriores. Com isso é possível estimar qual a direçãodo objeto.
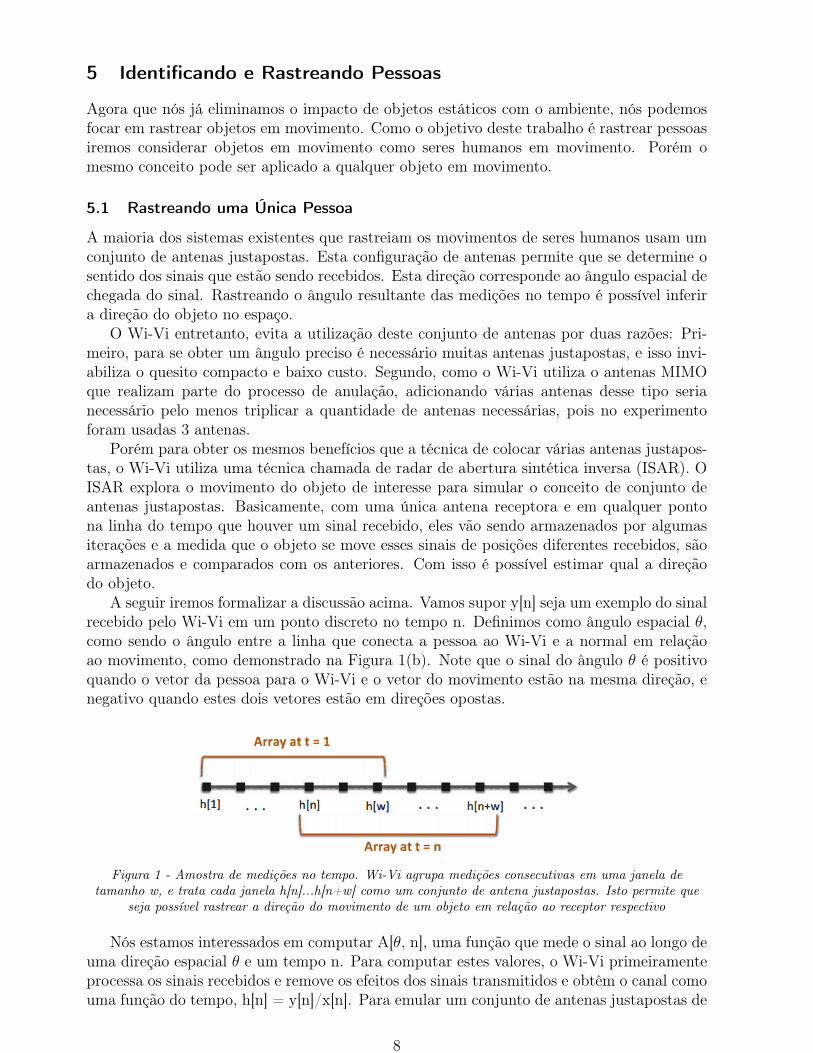
A seguir iremos formalizar a discussão acima. Vamos supor y[n] seja um exemplo do sinalrecebido pelo Wi-Vi em um ponto discreto no tempo n. Definimos como ângulo espacial ✓,como sendo o ângulo entre a linha que conecta a pessoa ao Wi-Vi e a normal em relaçãoao movimento, como demonstrado na Figura 1(b). Note que o sinal do ângulo ✓ é positivoquando o vetor da pessoa para o Wi-Vi e o vetor do movimento estão na mesma direção, enegativo quando estes dois vetores estão em direções opostas.
Figura 1 - Amostra de medições no tempo. Wi-Vi agrupa medições consecutivas em uma janela detamanho w, e trata cada janela h[n]...h[n+w] como um conjunto de antena justapostas. Isto permite que
seja possível rastrear a direção do movimento de um objeto em relação ao receptor respectivo
Nós estamos interessados em computar A[✓, n], uma função que mede o sinal ao longo deuma direção espacial ✓ e um tempo n. Para computar estes valores, o Wi-Vi primeiramenteprocessa os sinais recebidos e remove os efeitos dos sinais transmitidos e obtêm o canal comouma função do tempo, h[n] = y[n]/x[n]. Para emular um conjunto de antenas justapostas de
8
tamanho w, o Wi-Vi considera w como um canal contendo consecutivas medições, h[n]...h[n+ w], como demonstrado na fig.1. O Wi-Vi então computa A[✓, n] aplicando equaçõescomumente aplicadas em sistemas que utilizam o conjunto de antenas justapostas como aseguir:
A[✓, n] =wX
i=1
h[n+ i]e2⇡� i�sin✓ (4)
Onde � é o tamanho, e � é a separação espacial entre sucessivas antenas justapostas.Em algum ponto no tempo n, o valor de ✓ produz um valor mais alto em A[✓, n] que irácorresponder a direção que o objeto esta se movendo.
Para computar A[✓, n] da equação acima, nós precisamos estimar �, que é o espaçamentoda antena no conjunto emulado. Com o movimento de uma pessoa conseguimos emular ocomportamento obtido com o conjunto de antenas justapostas, � = vT, onde T é a amostrade um período, e v é a velocidade do movimento. Claro que o Wi-Vi não consegue sabera exata velocidade que o objeto esta se movendo. Entretanto, o variação de velocidadeda pessoa em um sala segue um valor padrão (na média v = 1ms/s). Note que erros naestimativa de T pode levar a super estimações o sub estimações, já erros na estimativa dev não impede que o Wi-Vi rastrei que uma pessoa esta se movendo perto do dispositivo.Em outras palavras mesmo que não saibamos exatamente valor de v, nós não podemoslocalizar exatamente onde a pessoa esta do outro lado da parede, mas podemos rastrear seusmovimentos relativos.
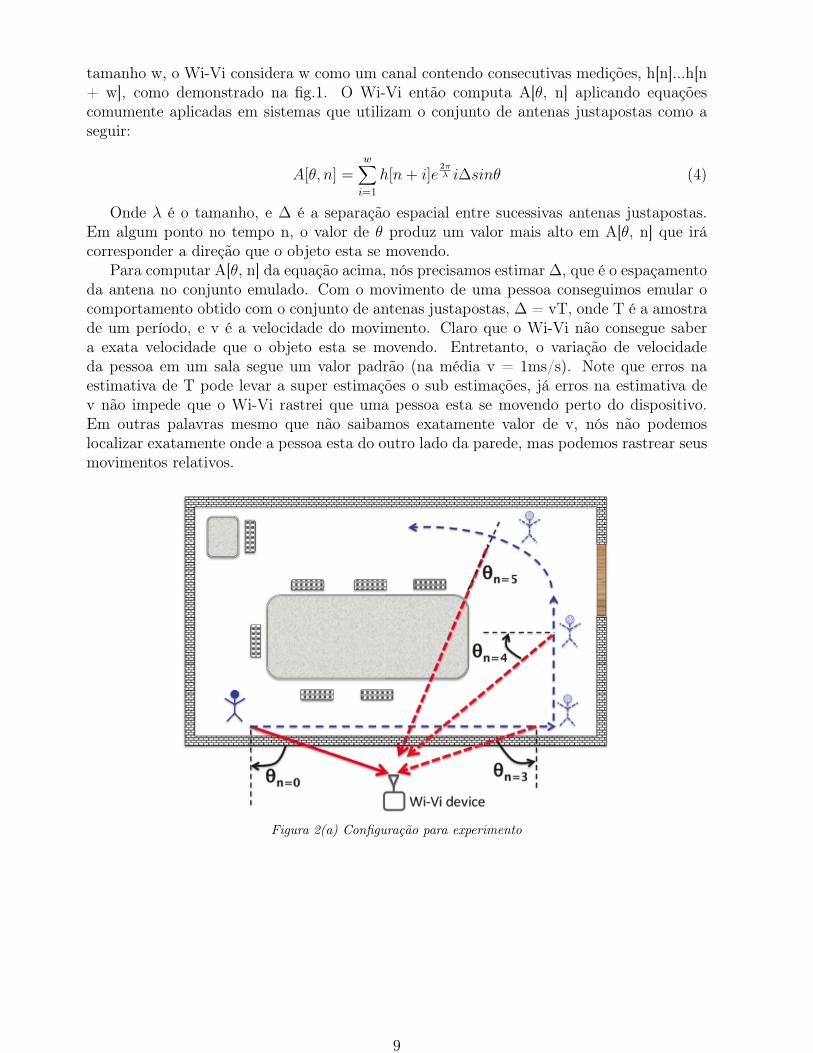
Figura 2(a) Configuração para experimento
9
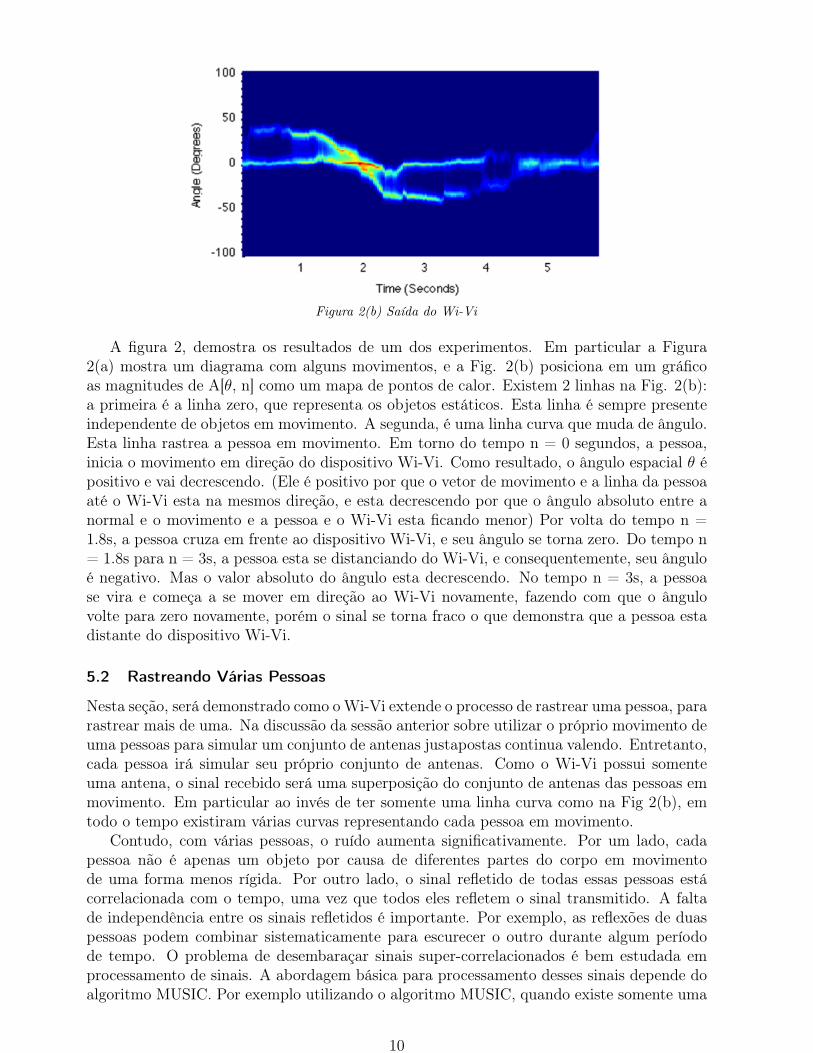
Figura 2(b) Saída do Wi-Vi
A figura 2, demostra os resultados de um dos experimentos. Em particular a Figura2(a) mostra um diagrama com alguns movimentos, e a Fig. 2(b) posiciona em um gráficoas magnitudes de A[✓, n] como um mapa de pontos de calor. Existem 2 linhas na Fig. 2(b):a primeira é a linha zero, que representa os objetos estáticos. Esta linha é sempre presenteindependente de objetos em movimento. A segunda, é uma linha curva que muda de ângulo.Esta linha rastrea a pessoa em movimento. Em torno do tempo n = 0 segundos, a pessoa,inicia o movimento em direção do dispositivo Wi-Vi. Como resultado, o ângulo espacial ✓ épositivo e vai decrescendo. (Ele é positivo por que o vetor de movimento e a linha da pessoaaté o Wi-Vi esta na mesmos direção, e esta decrescendo por que o ângulo absoluto entre anormal e o movimento e a pessoa e o Wi-Vi esta ficando menor) Por volta do tempo n =1.8s, a pessoa cruza em frente ao dispositivo Wi-Vi, e seu ângulo se torna zero. Do tempo n= 1.8s para n = 3s, a pessoa esta se distanciando do Wi-Vi, e consequentemente, seu ânguloé negativo. Mas o valor absoluto do ângulo esta decrescendo. No tempo n = 3s, a pessoase vira e começa a se mover em direção ao Wi-Vi novamente, fazendo com que o ângulovolte para zero novamente, porém o sinal se torna fraco o que demonstra que a pessoa estadistante do dispositivo Wi-Vi.
5.2 Rastreando Várias Pessoas
Nesta seção, será demonstrado como o Wi-Vi extende o processo de rastrear uma pessoa, pararastrear mais de uma. Na discussão da sessão anterior sobre utilizar o próprio movimento deuma pessoas para simular um conjunto de antenas justapostas continua valendo. Entretanto,cada pessoa irá simular seu próprio conjunto de antenas. Como o Wi-Vi possui somenteuma antena, o sinal recebido será uma superposição do conjunto de antenas das pessoas emmovimento. Em particular ao invés de ter somente uma linha curva como na Fig 2(b), emtodo o tempo existiram várias curvas representando cada pessoa em movimento.
Contudo, com várias pessoas, o ruído aumenta significativamente. Por um lado, cadapessoa não é apenas um objeto por causa de diferentes partes do corpo em movimentode uma forma menos rígida. Por outro lado, o sinal refletido de todas essas pessoas estácorrelacionada com o tempo, uma vez que todos eles refletem o sinal transmitido. A faltade independência entre os sinais refletidos é importante. Por exemplo, as reflexões de duaspessoas podem combinar sistematicamente para escurecer o outro durante algum períodode tempo. O problema de desembaraçar sinais super-correlacionados é bem estudada emprocessamento de sinais. A abordagem básica para processamento desses sinais depende doalgoritmo MUSIC. Por exemplo utilizando o algoritmo MUSIC, quando existe somente uma
10
pessoa o mesmo irá produzir um único alto-vetor principal. Por outro lado quando existemmais de uma pessoa, mais de um alto-vetor será descoberto.
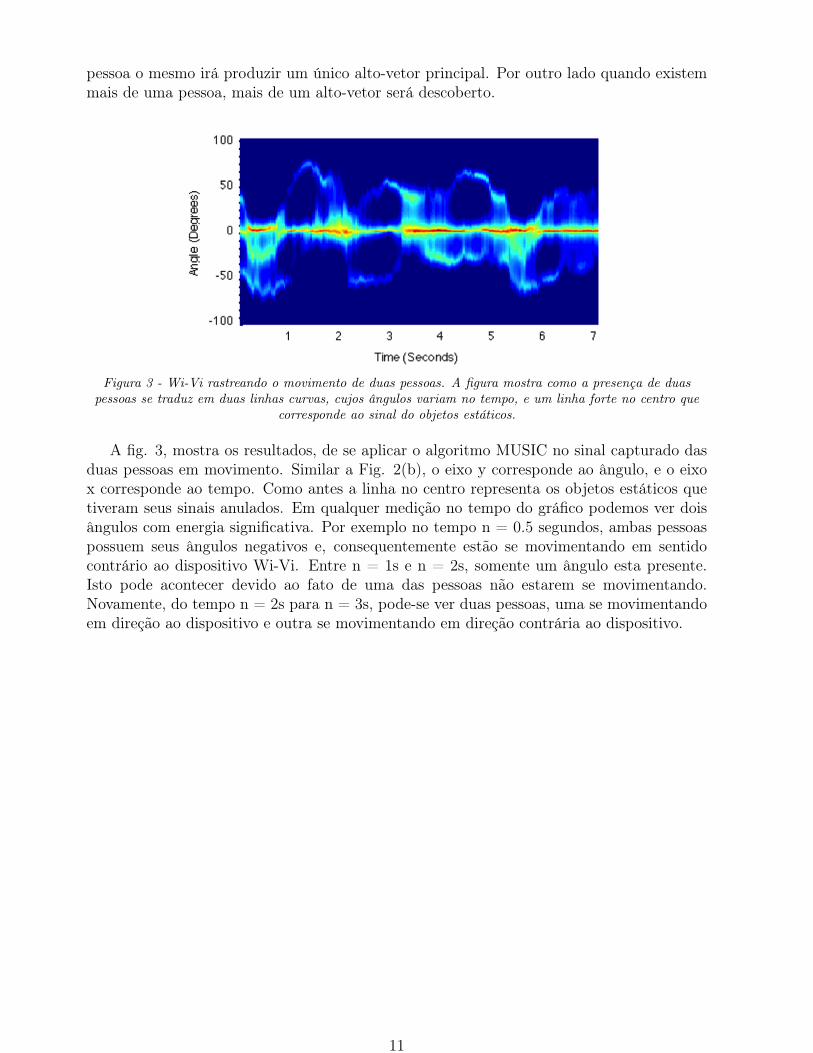
Figura 3 - Wi-Vi rastreando o movimento de duas pessoas. A figura mostra como a presença de duaspessoas se traduz em duas linhas curvas, cujos ângulos variam no tempo, e um linha forte no centro que
corresponde ao sinal do objetos estáticos.
A fig. 3, mostra os resultados, de se aplicar o algoritmo MUSIC no sinal capturado dasduas pessoas em movimento. Similar a Fig. 2(b), o eixo y corresponde ao ângulo, e o eixox corresponde ao tempo. Como antes a linha no centro representa os objetos estáticos quetiveram seus sinais anulados. Em qualquer medição no tempo do gráfico podemos ver doisângulos com energia significativa. Por exemplo no tempo n = 0.5 segundos, ambas pessoaspossuem seus ângulos negativos e, consequentemente estão se movimentando em sentidocontrário ao dispositivo Wi-Vi. Entre n = 1s e n = 2s, somente um ângulo esta presente.Isto pode acontecer devido ao fato de uma das pessoas não estarem se movimentando.Novamente, do tempo n = 2s para n = 3s, pode-se ver duas pessoas, uma se movimentandoem direção ao dispositivo e outra se movimentando em direção contrária ao dispositivo.
11
6 Comunicação Através de uma Parede Baseada em Gestos
Para uma pessoa consiga transmitir alguma mensagem para um computador utilizando sinalde Wi-Fi, ela precisa estar carregando também algum dispositivo com Wi-Fi. Em contraste,o Wi-Vi pode permitir que pessoas que não estejam carregando nenhum dispositivo Wi-Fi,consigam enviar comandos ou pequenas mensagens para um receptor usando simplesmentegestos. o Wi-Vi designa um par de gestos como bit ’0’ e bit ’1’. Uma pessoa pode comporestes gestos a fim de criar mensagens que possam ter interpretações diferentes. Abaixo serádemonstrado como o sistema de comunicação baseado em gesto funciona.
6.1 Codificação do Gesto
Do lado do transmissor, o ’0’ e ’1’ devem ser codificados, usando algum esquema de modula-ção. O Wi-Vi implementa esta codificação usando gestos. Este mecanismo deixa a cargo daimaginação de qualquer pessoa qual mensagem será transmitida utilizando estes dois bits.Entretanto, para demonstrar esse sistema foi imposto algumas regras: 1) os gestos devemser passíveis de composição, ou seja seja o bit ’0’ ou ’1’ após realizar a composição de cadabit a pessoa deve voltar para a posição inicial. Isto permite que a pessoa componha váriosbits, comunicando assim uma mensagem mais longa. 2) O gesto deve ser simples, assimserá fácil compor o mesmo. 3) O gesto deve ser fácil de detectar e decodificar sem requerersofisticados decodificadores, como classificadores de aprendizagem de máquina.
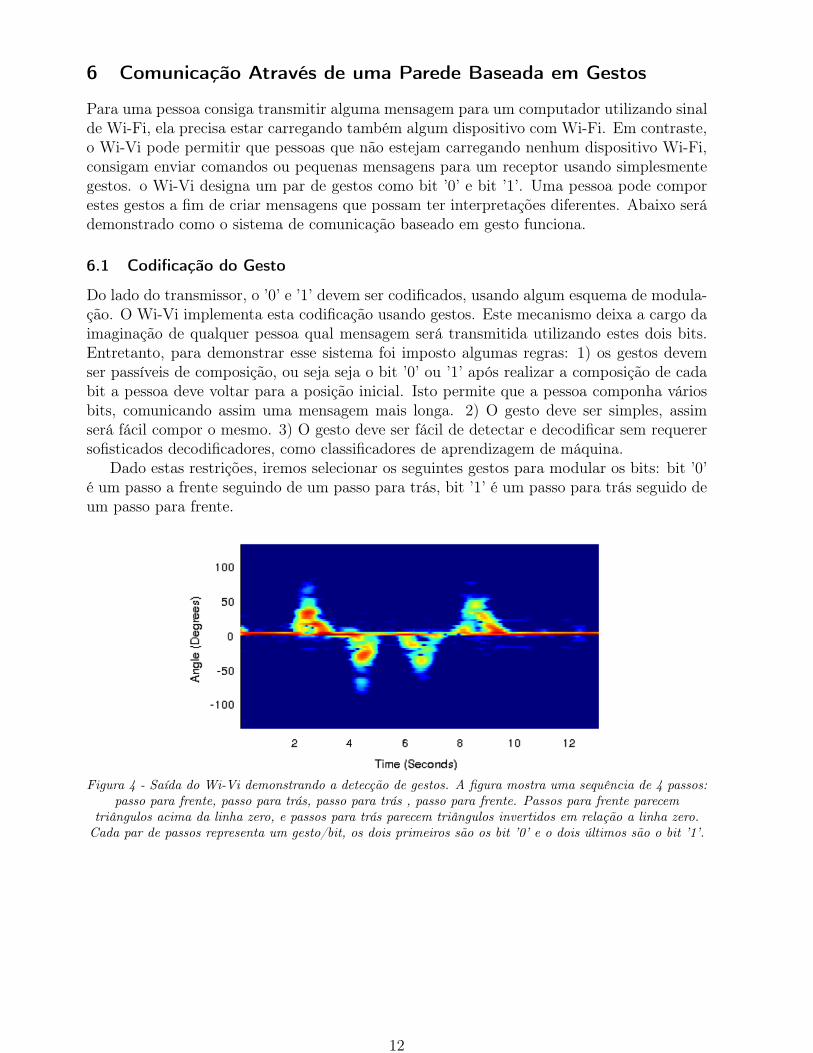
Dado estas restrições, iremos selecionar os seguintes gestos para modular os bits: bit ’0’é um passo a frente seguindo de um passo para trás, bit ’1’ é um passo para trás seguido deum passo para frente.
Figura 4 - Saída do Wi-Vi demonstrando a detecção de gestos. A figura mostra uma sequência de 4 passos:passo para frente, passo para trás, passo para trás , passo para frente. Passos para frente parecem
triângulos acima da linha zero, e passos para trás parecem triângulos invertidos em relação a linha zero.Cada par de passos representa um gesto/bit, os dois primeiros são os bit ’0’ e o dois últimos são o bit ’1’.
12
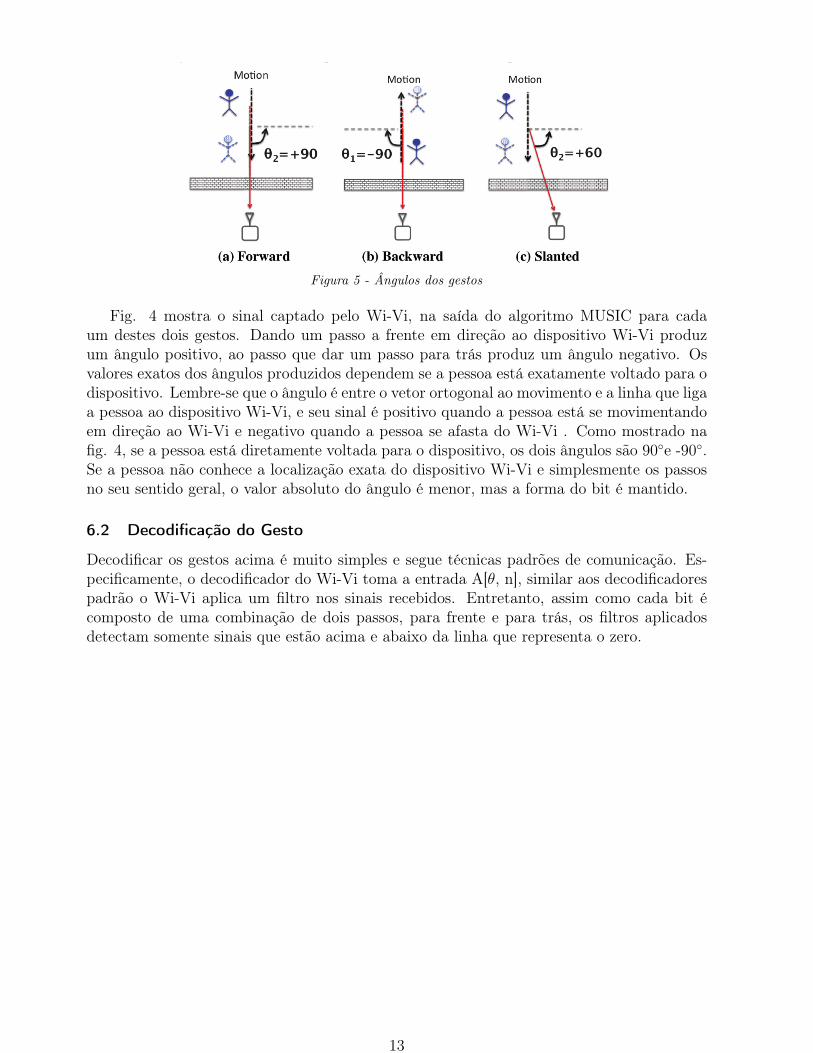
Figura 5 - Ângulos dos gestos
Fig. 4 mostra o sinal captado pelo Wi-Vi, na saída do algoritmo MUSIC para cadaum destes dois gestos. Dando um passo a frente em direção ao dispositivo Wi-Vi produzum ângulo positivo, ao passo que dar um passo para trás produz um ângulo negativo. Osvalores exatos dos ângulos produzidos dependem se a pessoa está exatamente voltado para odispositivo. Lembre-se que o ângulo é entre o vetor ortogonal ao movimento e a linha que ligaa pessoa ao dispositivo Wi-Vi, e seu sinal é positivo quando a pessoa está se movimentandoem direção ao Wi-Vi e negativo quando a pessoa se afasta do Wi-Vi . Como mostrado nafig. 4, se a pessoa está diretamente voltada para o dispositivo, os dois ângulos são 90�e -90�.Se a pessoa não conhece a localização exata do dispositivo Wi-Vi e simplesmente os passosno seu sentido geral, o valor absoluto do ângulo é menor, mas a forma do bit é mantido.
6.2 Decodificação do Gesto
Decodificar os gestos acima é muito simples e segue técnicas padrões de comunicação. Es-pecificamente, o decodificador do Wi-Vi toma a entrada A[✓, n], similar aos decodificadorespadrão o Wi-Vi aplica um filtro nos sinais recebidos. Entretanto, assim como cada bit écomposto de uma combinação de dois passos, para frente e para trás, os filtros aplicadosdetectam somente sinais que estão acima e abaixo da linha que representa o zero.
13
7 Resultados
Dentre os resultados obtidos e mensurados, temos:O Wi-Vi conseguiu detectar objetos e pessoas em movimento atrás de uma estrutura
opaca. Isto vale para paredes de concreto de até 8 polegadas, paredes ocas de até 6 polegadas,e porta de madeira maciça de 1.75 polegadas.
Um dispositivo Wi-Vi apontado diretamente para uma sala trancada com paredes de 6polegadas, conseguiu distinguir entre 0, 1, 2, 3 pessoas em movimento.
Na mesma sala, usada nos testes anteriores, e dada uma única pessoa enviando mensa-gens em forma de gestos, o Wi-Vi conseguiu decodificar corretamente todas as mensagensrealizadas em distâncias menores que 5 metros. A precisão da decodificarão diminuiu para75% em distâncias de 8 metros e não conseguiu mais detectar em distâncias superiores a 8metros.
Em comparação ao sistemas que hoje compõem o estado da arte em mecanismos de de-tecção baseados em radar, o Wi-Vi é limitado de duas formas. Primeiramente que substituirum conjunto de antenas pela técnica ISAR significa que a resolução do ângulo depende daquantidade de movimentos. E diferente dos sistemas que existem hoje o Wi-Vi não conseguedetectar objetos em movimento através de paredes mais grossas que 8 polegadas.
14

8 Conclusões
O que podemos notar deste trabalho é que o mesmo permitiu a utilização de dispositivosmóveis e seus dispositivos de Wi-Fi para serem usados em uma área que antes somente meiosmilitares tinham acesso devido ao alto custo principalmente. Porém ainda restam muitosavanços que precisam ser feitos para por exemplo, ser possível detectar mais de 3 pessoasfacilmente.
15

9 Referências
1. Adib, Fadel; Katabi, Dina. “Wi-Vi: See Through Walls with Wi-Fi Signals”. (acessoem 29/6/2014)
2. Adib, Fadel; Katabi, Dina: See Through Walls with Wi-Fi. Sigcomm, MassachusettsInstitute of Technology, 75, 2013.
16