XIII Simp osio Brasileiro de Automac a~o Inteligente Porto ... · cia que desenvolve recursos e...
7
SISTEMA DE NAVEGA¸ C ˜ AO PARA UMA CADEIRA DE RODAS EL ´ ETRICA Alexandre Souza Santos *† , Gustavo Medeiros Freitas * , Thiago Antonio Melo Euz´ ebio * , Jos´ e Alberto Naves Cocota Junior † , Wilson Miola * * Instituto Tecnol´ogico Vale - Minera¸ c˜ao Ouro Preto, MG, Brasil † Escola de Minas - Universidade Federal de Ouro Preto Departamento de Engenharia de Controle e Automa¸ c˜aoeT´ ecnicas Fundamentais Ouro Preto, MG, Brasil Emails: [email protected], [email protected], [email protected], [email protected], [email protected] Abstract— Nowadays, equipment like motorized wheelchair are very useful for people with motor disability, providing greater autonomy to them. However, there are individuals not capable of controlling this kind of equipment, e.g. people with low manipulating skills or visual disability. In order to promote the inclusion of people in such equipment, this work presents a navigation control system for an electric wheelchair. This system uses the Robot Operating System (ROS) running on Linux and the hardware Kinect Xbox 360, Inertial Measurement Unit (IMU) MTi-G710, laser rangefinder Hokuyo UTM-30LX and Arduino Mega 2560. The system goal is to guide the wheelchair to follow a person and avoid collisions. This paper describes the approach to the kinematics modeling of the wheelchair and the tuning of proportional (P) and proportional-integral (PI) controllers. The control techniques are validated by means of tests in surroundings with and without obstacles, and the navigation system showed good performance. Keywords— Navigation System, Electric Wheelchair, Control Techniques, ROS. Resumo— Nos dias atuais, equipamentos como cadeiras de rodas motorizadas proporcionam maior autonomia a muitas pessoas com limita¸c˜ oes de locomo¸c˜ao. No entanto, algumas pessoas n˜ao est˜ao aptas a controlar esses equipamentos, por exemplo cadeirantes com baixa capacidade de manipula¸c˜ao ou deficiˆ encia visual. Com o intuito promover a inclus˜ao dessas pessoas a esses equipamentos, o presente artigo apresenta um sistema de controle de navega¸c˜ao para uma cadeira de rodas el´ etrica. O sistema utiliza a plataforma Robot Operating System (ROS), executada no sistema operacional Linux, junto com os componentes de hardware Kinect do Xbox 360, Unidade de Medi¸ c˜ao Inercial (IMU) MTi-G710, laser rangefinder Hokuyo UTM-30LX e Arduino Mega 2560. A finalidade do sistema ´ e guiar a cadeira de rodas para seguir uma pessoa e evitar colis˜oes. Nesse estudo´ efeitaaidentifica¸c˜ao dos modelos cinem´aticos da cadeira e sintonia de controladores proporcional (P) e proporcional-integral (PI). As estrat´ egias de controle s˜ao validadas por meio de testes em ambientes com e sem obst´aculos, e o sistema de navega¸c˜aoapresentoubomdesempenho. Palavras-chave— Sistema de Navega¸c˜ ao, Cadeira de Rodas El´ etrica, Estrat´ egias de Controle, ROS. 1 Introdu¸c˜ ao A Tecnologia Assistiva (TA) ´ e um ramo da ciˆ en- cia que desenvolve recursos e servi¸ cos para auxi- liar pessoas com deficiˆ encia em rela¸ c˜ ao ` as suas ha- bilidades funcionais. Esse campo possui recursos como talheres modificados, roupas de f´ acil manu- seio, acess´ orios para mobilidade em ve´ ıculos, equi- pamentos adaptados para pr´ atica de esportes, ca- deira de rodas manuais e el´ etricas, dentre outros. Seu objetivo maior ´ e proporcionar ` as pessoas com deficiˆ encia maior autonomia, melhor qualidade de vida e inclus˜ ao social (Bersch, 2008). Autiliza¸c˜ ao de equipamentos como cadeiras de rodas motorizadas promove maior independˆ en- cia a muitos indiv´ ıduos com limita¸c˜ oes de locomo- ¸c˜ ao. Os que possuem capacidade de manipula¸ c˜ ao intacta podem utilizar um joystick para conduzir uma cadeira de rodas el´ etrica. No entanto, con- forme o grau de limita¸ c˜ ao, alguns usu´ arios n˜ ao es- t˜ ao aptos a controlar esse equipamento (Ferreira et al., 2007). Indiv´ ıduos com baixa capacidade de manipula¸c˜ ao, deficientes visuais, crian¸ cas e ido- sos dependem de terceiros para conduzir cadeiras convencionais, que ´ e uma atividade desgastante. Com o intuito de amenizar o cen´ ario supraci- tado, permitindo que pessoas com limita¸ c˜ oes pos- sam fazer uso de cadeiras de rodas el´ etricas, este trabalho visa o aumento da acessibilidade, propor- cionando inclus˜ ao social, maior autonomia e con- forto, e melhor qualidade de vida para os usu´ arios. O objetivo desse estudo ´ e propor um sistema de navega¸ c˜ ao semiautˆ onomo para uma cadeira de rodas el´ etrica a fim de seguir uma pessoa e evi- tar colis˜ oes. Nesse trabalho ´ e feita a identifica¸ c˜ ao dos modelos cinem´ aticos da cadeira por meio da an´ alise das vari´ aveis de entrada e sa´ ıda dos sis- temas de movimentos lineares e angulares. Ap´ os a identifica¸ c˜ ao dos modelos ´ e relizada a sintonia de controladores proporcional (P) e proporcional- integral (PI). ´ E ainda desenvolvido um algoritmo que detecta obst´ aculos e atua na cadeira de modo a evitar colis˜ oes. O sistema utiliza o Robot Operating System - ROS (Quigley et al., 2009), executado no sistema operacional Linux, junto com os componentes de XIII Simp´osio Brasileiro de Automa¸ c˜ ao Inteligente Porto Alegre – RS, 1 o – 4 de Outubro de 2017 ISSN 2175 8905 621
Transcript of XIII Simp osio Brasileiro de Automac a~o Inteligente Porto ... · cia que desenvolve recursos e...

SISTEMA DE NAVEGACAO PARA UMA CADEIRA DE RODAS ELETRICA
Alexandre Souza Santos∗†, Gustavo Medeiros Freitas∗, Thiago Antonio Melo Euzebio∗,Jose Alberto Naves Cocota Junior†, Wilson Miola∗
∗Instituto Tecnologico Vale - MineracaoOuro Preto, MG, Brasil
†Escola de Minas - Universidade Federal de Ouro PretoDepartamento de Engenharia de Controle e Automacao e Tecnicas Fundamentais
Ouro Preto, MG, Brasil
Emails: [email protected], [email protected],
[email protected], [email protected], [email protected]
Abstract— Nowadays, equipment like motorized wheelchair are very useful for people with motor disability,providing greater autonomy to them. However, there are individuals not capable of controlling this kind ofequipment, e.g. people with low manipulating skills or visual disability. In order to promote the inclusionof people in such equipment, this work presents a navigation control system for an electric wheelchair. Thissystem uses the Robot Operating System (ROS) running on Linux and the hardware Kinect Xbox 360, InertialMeasurement Unit (IMU) MTi-G710, laser rangefinder Hokuyo UTM-30LX and Arduino Mega 2560. The systemgoal is to guide the wheelchair to follow a person and avoid collisions. This paper describes the approach tothe kinematics modeling of the wheelchair and the tuning of proportional (P) and proportional-integral (PI)controllers. The control techniques are validated by means of tests in surroundings with and without obstacles,and the navigation system showed good performance.
Keywords— Navigation System, Electric Wheelchair, Control Techniques, ROS.
Resumo— Nos dias atuais, equipamentos como cadeiras de rodas motorizadas proporcionam maior autonomiaa muitas pessoas com limitacoes de locomocao. No entanto, algumas pessoas nao estao aptas a controlar essesequipamentos, por exemplo cadeirantes com baixa capacidade de manipulacao ou deficiencia visual. Com o intuitopromover a inclusao dessas pessoas a esses equipamentos, o presente artigo apresenta um sistema de controle denavegacao para uma cadeira de rodas eletrica. O sistema utiliza a plataforma Robot Operating System (ROS),executada no sistema operacional Linux, junto com os componentes de hardware Kinect do Xbox 360, Unidadede Medicao Inercial (IMU) MTi-G710, laser rangefinder Hokuyo UTM-30LX e Arduino Mega 2560. A finalidadedo sistema e guiar a cadeira de rodas para seguir uma pessoa e evitar colisoes. Nesse estudo e feita a identificacaodos modelos cinematicos da cadeira e sintonia de controladores proporcional (P) e proporcional-integral (PI).As estrategias de controle sao validadas por meio de testes em ambientes com e sem obstaculos, e o sistema denavegacao apresentou bom desempenho.
Palavras-chave— Sistema de Navegacao, Cadeira de Rodas Eletrica, Estrategias de Controle, ROS.
1 Introducao
A Tecnologia Assistiva (TA) e um ramo da cien-cia que desenvolve recursos e servicos para auxi-liar pessoas com deficiencia em relacao as suas ha-bilidades funcionais. Esse campo possui recursoscomo talheres modificados, roupas de facil manu-seio, acessorios para mobilidade em veıculos, equi-pamentos adaptados para pratica de esportes, ca-deira de rodas manuais e eletricas, dentre outros.Seu objetivo maior e proporcionar as pessoas comdeficiencia maior autonomia, melhor qualidade devida e inclusao social (Bersch, 2008).
A utilizacao de equipamentos como cadeirasde rodas motorizadas promove maior independen-cia a muitos indivıduos com limitacoes de locomo-cao. Os que possuem capacidade de manipulacaointacta podem utilizar um joystick para conduziruma cadeira de rodas eletrica. No entanto, con-forme o grau de limitacao, alguns usuarios nao es-tao aptos a controlar esse equipamento (Ferreiraet al., 2007). Indivıduos com baixa capacidade demanipulacao, deficientes visuais, criancas e ido-
sos dependem de terceiros para conduzir cadeirasconvencionais, que e uma atividade desgastante.
Com o intuito de amenizar o cenario supraci-tado, permitindo que pessoas com limitacoes pos-sam fazer uso de cadeiras de rodas eletricas, estetrabalho visa o aumento da acessibilidade, propor-cionando inclusao social, maior autonomia e con-forto, e melhor qualidade de vida para os usuarios.
O objetivo desse estudo e propor um sistemade navegacao semiautonomo para uma cadeira derodas eletrica a fim de seguir uma pessoa e evi-tar colisoes. Nesse trabalho e feita a identificacaodos modelos cinematicos da cadeira por meio daanalise das variaveis de entrada e saıda dos sis-temas de movimentos lineares e angulares. Aposa identificacao dos modelos e relizada a sintoniade controladores proporcional (P) e proporcional-
integral (PI). E ainda desenvolvido um algoritmoque detecta obstaculos e atua na cadeira de modoa evitar colisoes.
O sistema utiliza o Robot Operating System -ROS (Quigley et al., 2009), executado no sistemaoperacional Linux, junto com os componentes de
XIII Simposio Brasileiro de Automacao Inteligente
Porto Alegre – RS, 1o – 4 de Outubro de 2017
ISSN 2175 8905 621
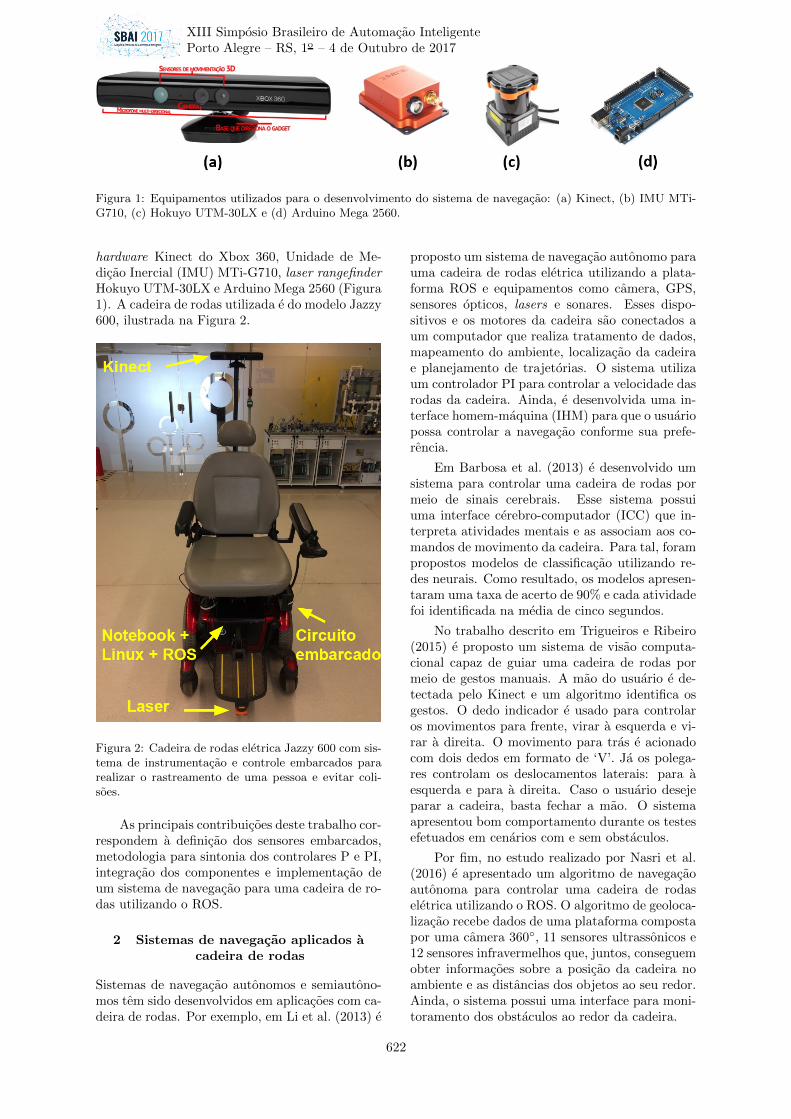
Figura 1: Equipamentos utilizados para o desenvolvimento do sistema de navegacao: (a) Kinect, (b) IMU MTi-G710, (c) Hokuyo UTM-30LX e (d) Arduino Mega 2560.
hardware Kinect do Xbox 360, Unidade de Me-dicao Inercial (IMU) MTi-G710, laser rangefinderHokuyo UTM-30LX e Arduino Mega 2560 (Figura1). A cadeira de rodas utilizada e do modelo Jazzy600, ilustrada na Figura 2.
Figura 2: Cadeira de rodas eletrica Jazzy 600 com sis-tema de instrumentacao e controle embarcados pararealizar o rastreamento de uma pessoa e evitar coli-soes.
As principais contribuicoes deste trabalho cor-respondem a definicao dos sensores embarcados,metodologia para sintonia dos controlares P e PI,integracao dos componentes e implementacao deum sistema de navegacao para uma cadeira de ro-das utilizando o ROS.
2 Sistemas de navegacao aplicados acadeira de rodas
Sistemas de navegacao autonomos e semiautono-mos tem sido desenvolvidos em aplicacoes com ca-deira de rodas. Por exemplo, em Li et al. (2013) e
proposto um sistema de navegacao autonomo parauma cadeira de rodas eletrica utilizando a plata-forma ROS e equipamentos como camera, GPS,sensores opticos, lasers e sonares. Esses dispo-sitivos e os motores da cadeira sao conectados aum computador que realiza tratamento de dados,mapeamento do ambiente, localizacao da cadeirae planejamento de trajetorias. O sistema utilizaum controlador PI para controlar a velocidade dasrodas da cadeira. Ainda, e desenvolvida uma in-terface homem-maquina (IHM) para que o usuariopossa controlar a navegacao conforme sua prefe-rencia.
Em Barbosa et al. (2013) e desenvolvido umsistema para controlar uma cadeira de rodas pormeio de sinais cerebrais. Esse sistema possuiuma interface cerebro-computador (ICC) que in-terpreta atividades mentais e as associam aos co-mandos de movimento da cadeira. Para tal, forampropostos modelos de classificacao utilizando re-des neurais. Como resultado, os modelos apresen-taram uma taxa de acerto de 90% e cada atividadefoi identificada na media de cinco segundos.
No trabalho descrito em Trigueiros e Ribeiro(2015) e proposto um sistema de visao computa-cional capaz de guiar uma cadeira de rodas pormeio de gestos manuais. A mao do usuario e de-tectada pelo Kinect e um algoritmo identifica osgestos. O dedo indicador e usado para controlaros movimentos para frente, virar a esquerda e vi-rar a direita. O movimento para tras e acionadocom dois dedos em formato de ‘V’. Ja os polega-res controlam os deslocamentos laterais: para aesquerda e para a direita. Caso o usuario desejeparar a cadeira, basta fechar a mao. O sistemaapresentou bom comportamento durante os testesefetuados em cenarios com e sem obstaculos.
Por fim, no estudo realizado por Nasri et al.(2016) e apresentado um algoritmo de navegacaoautonoma para controlar uma cadeira de rodaseletrica utilizando o ROS. O algoritmo de geoloca-lizacao recebe dados de uma plataforma compostapor uma camera 360◦, 11 sensores ultrassonicos e12 sensores infravermelhos que, juntos, conseguemobter informacoes sobre a posicao da cadeira noambiente e as distancias dos objetos ao seu redor.Ainda, o sistema possui uma interface para moni-toramento dos obstaculos ao redor da cadeira.
XIII Simposio Brasileiro de Automacao Inteligente
Porto Alegre – RS, 1o – 4 de Outubro de 2017
622
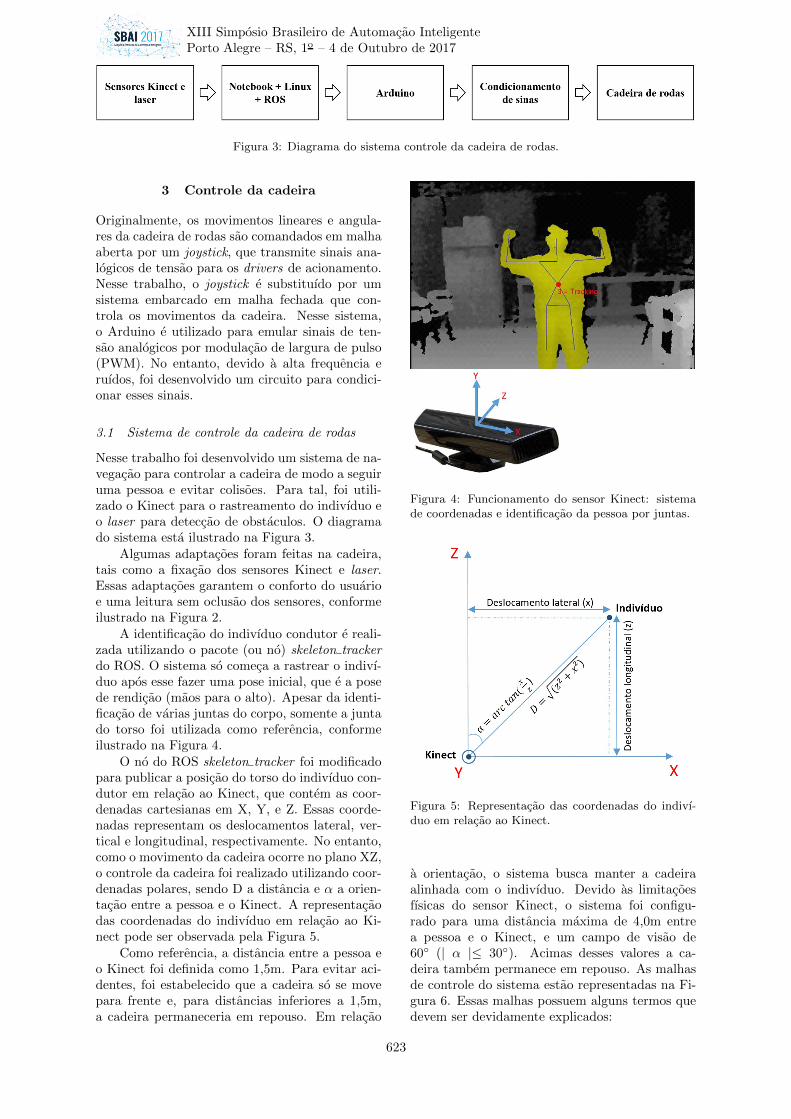
Figura 3: Diagrama do sistema controle da cadeira de rodas.
3 Controle da cadeira
Originalmente, os movimentos lineares e angula-res da cadeira de rodas sao comandados em malhaaberta por um joystick, que transmite sinais ana-logicos de tensao para os drivers de acionamento.Nesse trabalho, o joystick e substituıdo por umsistema embarcado em malha fechada que con-trola os movimentos da cadeira. Nesse sistema,o Arduino e utilizado para emular sinais de ten-sao analogicos por modulacao de largura de pulso(PWM). No entanto, devido a alta frequencia eruıdos, foi desenvolvido um circuito para condici-onar esses sinais.
3.1 Sistema de controle da cadeira de rodas
Nesse trabalho foi desenvolvido um sistema de na-vegacao para controlar a cadeira de modo a seguiruma pessoa e evitar colisoes. Para tal, foi utili-zado o Kinect para o rastreamento do indivıduo eo laser para deteccao de obstaculos. O diagramado sistema esta ilustrado na Figura 3.
Algumas adaptacoes foram feitas na cadeira,tais como a fixacao dos sensores Kinect e laser.Essas adaptacoes garantem o conforto do usuarioe uma leitura sem oclusao dos sensores, conformeilustrado na Figura 2.
A identificacao do indivıduo condutor e reali-zada utilizando o pacote (ou no) skeleton trackerdo ROS. O sistema so comeca a rastrear o indivı-duo apos esse fazer uma pose inicial, que e a posede rendicao (maos para o alto). Apesar da identi-ficacao de varias juntas do corpo, somente a juntado torso foi utilizada como referencia, conformeilustrado na Figura 4.
O no do ROS skeleton tracker foi modificadopara publicar a posicao do torso do indivıduo con-dutor em relacao ao Kinect, que contem as coor-denadas cartesianas em X, Y, e Z. Essas coorde-nadas representam os deslocamentos lateral, ver-tical e longitudinal, respectivamente. No entanto,como o movimento da cadeira ocorre no plano XZ,o controle da cadeira foi realizado utilizando coor-denadas polares, sendo D a distancia e α a orien-tacao entre a pessoa e o Kinect. A representacaodas coordenadas do indivıduo em relacao ao Ki-nect pode ser observada pela Figura 5.
Como referencia, a distancia entre a pessoa eo Kinect foi definida como 1,5m. Para evitar aci-dentes, foi estabelecido que a cadeira so se movepara frente e, para distancias inferiores a 1,5m,a cadeira permaneceria em repouso. Em relacao
Figura 4: Funcionamento do sensor Kinect: sistemade coordenadas e identificacao da pessoa por juntas.
Figura 5: Representacao das coordenadas do indivı-duo em relacao ao Kinect.
a orientacao, o sistema busca manter a cadeiraalinhada com o indivıduo. Devido as limitacoesfısicas do sensor Kinect, o sistema foi configu-rado para uma distancia maxima de 4,0m entrea pessoa e o Kinect, e um campo de visao de60◦ (| α |≤ 30◦). Acimas desses valores a ca-deira tambem permanece em repouso. As malhasde controle do sistema estao representadas na Fi-gura 6. Essas malhas possuem alguns termos quedevem ser devidamente explicados:
XIII Simposio Brasileiro de Automacao Inteligente
Porto Alegre – RS, 1o – 4 de Outubro de 2017
623
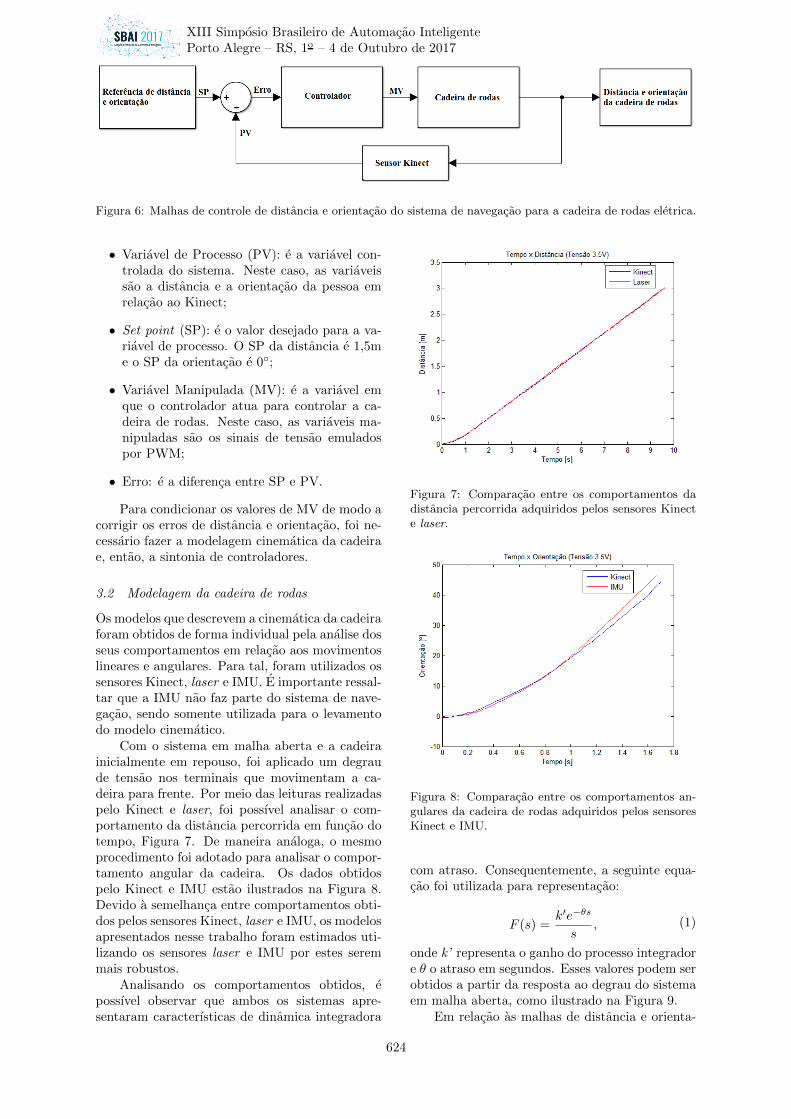
Figura 6: Malhas de controle de distancia e orientacao do sistema de navegacao para a cadeira de rodas eletrica.
• Variavel de Processo (PV): e a variavel con-trolada do sistema. Neste caso, as variaveissao a distancia e a orientacao da pessoa emrelacao ao Kinect;
• Set point (SP): e o valor desejado para a va-riavel de processo. O SP da distancia e 1,5me o SP da orientacao e 0◦;
• Variavel Manipulada (MV): e a variavel emque o controlador atua para controlar a ca-deira de rodas. Neste caso, as variaveis ma-nipuladas sao os sinais de tensao emuladospor PWM;
• Erro: e a diferenca entre SP e PV.
Para condicionar os valores de MV de modo acorrigir os erros de distancia e orientacao, foi ne-cessario fazer a modelagem cinematica da cadeirae, entao, a sintonia de controladores.
3.2 Modelagem da cadeira de rodas
Os modelos que descrevem a cinematica da cadeiraforam obtidos de forma individual pela analise dosseus comportamentos em relacao aos movimentoslineares e angulares. Para tal, foram utilizados ossensores Kinect, laser e IMU. E importante ressal-tar que a IMU nao faz parte do sistema de nave-gacao, sendo somente utilizada para o levamentodo modelo cinematico.
Com o sistema em malha aberta e a cadeirainicialmente em repouso, foi aplicado um degraude tensao nos terminais que movimentam a ca-deira para frente. Por meio das leituras realizadaspelo Kinect e laser, foi possıvel analisar o com-portamento da distancia percorrida em funcao dotempo, Figura 7. De maneira analoga, o mesmoprocedimento foi adotado para analisar o compor-tamento angular da cadeira. Os dados obtidospelo Kinect e IMU estao ilustrados na Figura 8.Devido a semelhanca entre comportamentos obti-dos pelos sensores Kinect, laser e IMU, os modelosapresentados nesse trabalho foram estimados uti-lizando os sensores laser e IMU por estes seremmais robustos.
Analisando os comportamentos obtidos, epossıvel observar que ambos os sistemas apre-sentaram caracterısticas de dinamica integradora
Figura 7: Comparacao entre os comportamentos dadistancia percorrida adquiridos pelos sensores Kinecte laser.
Figura 8: Comparacao entre os comportamentos an-gulares da cadeira de rodas adquiridos pelos sensoresKinect e IMU.
com atraso. Consequentemente, a seguinte equa-cao foi utilizada para representacao:
F (s) =k′e−θs
s, (1)
onde k’ representa o ganho do processo integradore θ o atraso em segundos. Esses valores podem serobtidos a partir da resposta ao degrau do sistemaem malha aberta, como ilustrado na Figura 9.
Em relacao as malhas de distancia e orienta-
XIII Simposio Brasileiro de Automacao Inteligente
Porto Alegre – RS, 1o – 4 de Outubro de 2017
624
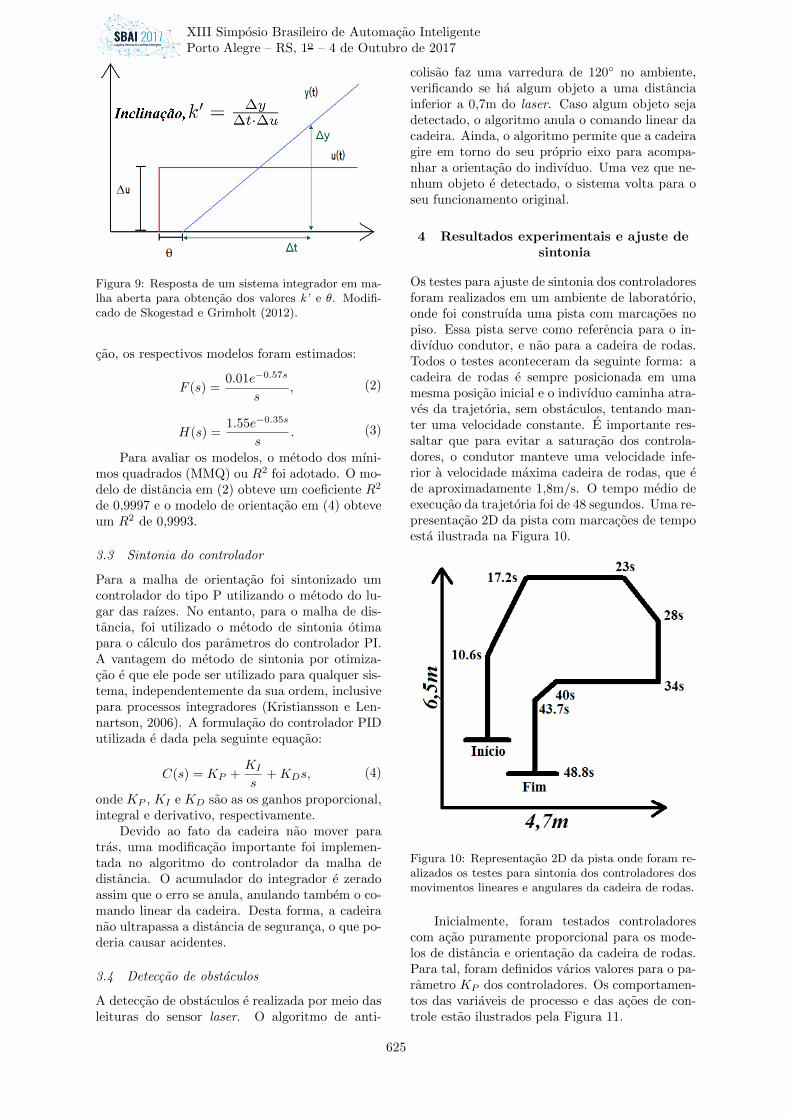
Figura 9: Resposta de um sistema integrador em ma-lha aberta para obtencao dos valores k’ e θ. Modifi-cado de Skogestad e Grimholt (2012).
cao, os respectivos modelos foram estimados:
F (s) =0.01e−0.57s
s, (2)
H(s) =1.55e−0.35s
s. (3)
Para avaliar os modelos, o metodo dos mıni-mos quadrados (MMQ) ou R2 foi adotado. O mo-delo de distancia em (2) obteve um coeficiente R2
de 0,9997 e o modelo de orientacao em (4) obteveum R2 de 0,9993.
3.3 Sintonia do controlador
Para a malha de orientacao foi sintonizado umcontrolador do tipo P utilizando o metodo do lu-gar das raızes. No entanto, para o malha de dis-tancia, foi utilizado o metodo de sintonia otimapara o calculo dos parametros do controlador PI.A vantagem do metodo de sintonia por otimiza-cao e que ele pode ser utilizado para qualquer sis-tema, independentemente da sua ordem, inclusivepara processos integradores (Kristiansson e Len-nartson, 2006). A formulacao do controlador PIDutilizada e dada pela seguinte equacao:
C(s) = KP +KI
s+KDs, (4)
onde KP , KI e KD sao as os ganhos proporcional,integral e derivativo, respectivamente.
Devido ao fato da cadeira nao mover paratras, uma modificacao importante foi implemen-tada no algoritmo do controlador da malha dedistancia. O acumulador do integrador e zeradoassim que o erro se anula, anulando tambem o co-mando linear da cadeira. Desta forma, a cadeiranao ultrapassa a distancia de seguranca, o que po-deria causar acidentes.
3.4 Deteccao de obstaculos
A deteccao de obstaculos e realizada por meio dasleituras do sensor laser. O algoritmo de anti-
colisao faz uma varredura de 120◦ no ambiente,verificando se ha algum objeto a uma distanciainferior a 0,7m do laser. Caso algum objeto sejadetectado, o algoritmo anula o comando linear dacadeira. Ainda, o algoritmo permite que a cadeiragire em torno do seu proprio eixo para acompa-nhar a orientacao do indivıduo. Uma vez que ne-nhum objeto e detectado, o sistema volta para oseu funcionamento original.
4 Resultados experimentais e ajuste desintonia
Os testes para ajuste de sintonia dos controladoresforam realizados em um ambiente de laboratorio,onde foi construıda uma pista com marcacoes nopiso. Essa pista serve como referencia para o in-divıduo condutor, e nao para a cadeira de rodas.Todos o testes aconteceram da seguinte forma: acadeira de rodas e sempre posicionada em umamesma posicao inicial e o indivıduo caminha atra-ves da trajetoria, sem obstaculos, tentando man-ter uma velocidade constante. E importante res-saltar que para evitar a saturacao dos controla-dores, o condutor manteve uma velocidade infe-rior a velocidade maxima cadeira de rodas, que ede aproximadamente 1,8m/s. O tempo medio deexecucao da trajetoria foi de 48 segundos. Uma re-presentacao 2D da pista com marcacoes de tempoesta ilustrada na Figura 10.
Figura 10: Representacao 2D da pista onde foram re-alizados os testes para sintonia dos controladores dosmovimentos lineares e angulares da cadeira de rodas.
Inicialmente, foram testados controladorescom acao puramente proporcional para os mode-los de distancia e orientacao da cadeira de rodas.Para tal, foram definidos varios valores para o pa-rametro KP dos controladores. Os comportamen-tos das variaveis de processo e das acoes de con-trole estao ilustrados pela Figura 11.
XIII Simposio Brasileiro de Automacao Inteligente
Porto Alegre – RS, 1o – 4 de Outubro de 2017
625
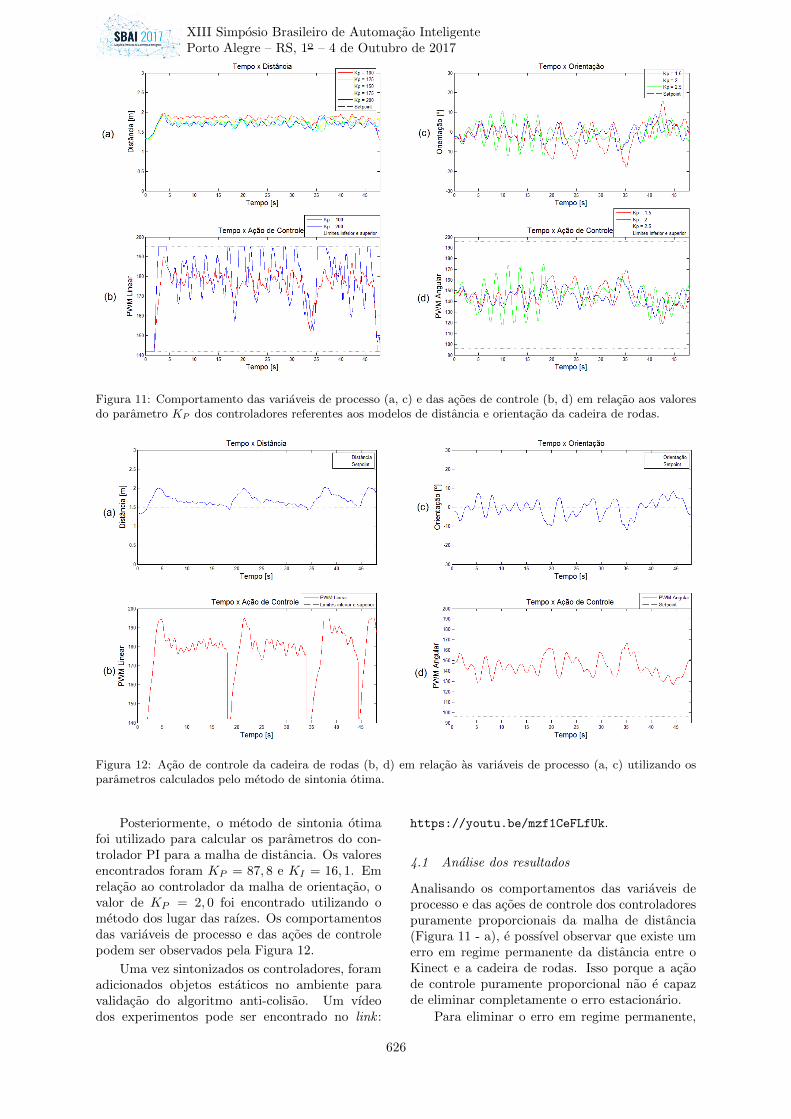
Figura 11: Comportamento das variaveis de processo (a, c) e das acoes de controle (b, d) em relacao aos valoresdo parametro KP dos controladores referentes aos modelos de distancia e orientacao da cadeira de rodas.
Figura 12: Acao de controle da cadeira de rodas (b, d) em relacao as variaveis de processo (a, c) utilizando osparametros calculados pelo metodo de sintonia otima.
Posteriormente, o metodo de sintonia otimafoi utilizado para calcular os parametros do con-trolador PI para a malha de distancia. Os valoresencontrados foram KP = 87, 8 e KI = 16, 1. Emrelacao ao controlador da malha de orientacao, ovalor de KP = 2, 0 foi encontrado utilizando ometodo dos lugar das raızes. Os comportamentosdas variaveis de processo e das acoes de controlepodem ser observados pela Figura 12.
Uma vez sintonizados os controladores, foramadicionados objetos estaticos no ambiente paravalidacao do algoritmo anti-colisao. Um vıdeodos experimentos pode ser encontrado no link :
https://youtu.be/mzf1CeFLfUk.
4.1 Analise dos resultados
Analisando os comportamentos das variaveis deprocesso e das acoes de controle dos controladorespuramente proporcionais da malha de distancia(Figura 11 - a), e possıvel observar que existe umerro em regime permanente da distancia entre oKinect e a cadeira de rodas. Isso porque a acaode controle puramente proporcional nao e capazde eliminar completamente o erro estacionario.
Para eliminar o erro em regime permanente,
XIII Simposio Brasileiro de Automacao Inteligente
Porto Alegre – RS, 1o – 4 de Outubro de 2017
626

foi adicionada uma acao integradora ao controla-dor da malha de distancia. Essa acao atua na acu-mulacao dos erros passados, aumentando a acaode controle ate que o erro seja zerado. Devido amodificacao feita no algoritmo do controlador PI,acao de controle de distancia tambem e anuladanesses momentos. Logo, e possıvel observar que oerro foi zerado nos instantes T = 17,2s, T = 34se T = 43,7s da pista (Figura 12 - a). Quando issoocorre, a velocidade linear da cadeira de rodas enula, mantendo-a em repouso. Isso explica por-que logo apos esses instantes o valor da distanciacresce ate um valor maximo de 2,0m, pois a ca-deira tem que novamente vencer a inercia.
Em relacao a malha de orientacao, foram tes-tados outros valores de KP de alem do valor ob-tido pelo metodo do lugar das raızes. O valor deKP = 1, 5 resultou em uma acao de controle lenta,onde o erro maximo de orientacao foi de 18◦. Ovalor de KP = 2, 5 resultou em uma acao de con-trole agressiva, onde o erro maximo foi de 13◦. Porfim, o valor de KP = 2, 0 resultou em uma acaode controle intermediaria, onde o erro maximo foide 10◦. Os comportamentos da orientacao e acaode controle podem ser observados pela Figura 11.
E importante ressaltar que o sensor Kinect emuito sensıvel a vibracoes e possui um campo devisao estreito. Logo, acoes de controle lentas eagressivas eventualmente causam a perda de ras-treamento da pessoa seguida. Tendo em menteessas restricoes, o valor de KP = 2, 0 foi mantidopara o controlador da malha de orientacao.
5 Conclusao
A aplicacao desenvolvida neste trabalho visa pro-mover o acesso de cadeirantes com limitacoes acadeira de rodas eletrica, proporcionando maiorconforto e melhor qualidade de vida tanto para osusuarios, quanto para as pessoas que os assistem.
Com os resultados obtidos, foi concluıdo queo sistema de controle de navegacao desenvolvidoobteve bom desempenho. Os controladores refe-rentes as malhas de distancia e orientacao mostra-ram ser eficazes na tarefa de seguir uma pessoa. Oalgoritmo de anti-colisao implementado conseguiudetectar obstaculos e evitar colisoes com eficien-cia. Ainda, o sistema desenvolvido pode ser im-plementado em qualquer cadeira de rodas eletricaque seja comandada por sinais de tensao.
O ROS e os dispositivos utilizados tambemmostraram ser eficazes. Porem, algumas limita-coes foram observadas quando o sistema foi tes-tado em ambientes com exposicao a luz solar esolos irregulares, ja que o Kinect foi desenvolvidopara funcionar de maneira estatica em ambientescom ausencia de luz solar.
Como trabalhos futuros ha duas linhas possı-veis de pesquisa. A primeira seria o desenvolvi-mento de um produto comercial de baixo custo.
A outra consiste em desenvolver um sistema denavegacao totalmente autonomo.
Agradecimentos
Os autores gostariam de agradecer a equipe doLaboratorio de Robotica do Instituto TecnologicoVale. Este trabalho foi parcialmente financiadopela CAPES, Vale S.A., FAPEMIG e CNPq.
Referencias
Barbosa, A. O. G., Freitas, D. Z., de Moura Gue-des, J. Q. e Meggiolaro, M. A. (2013). Im-plementation of a wheelchair control using afour-command brain computer interface.
Bersch, R. (2008). Introducao a tecnologia assis-tiva, Porto Alegre: CEDI .
Ferreira, A., Silva, R. L., Bastos Filho, T. F. eSarcinelli Filho, M. (2007). Cadeira de RodasRobotica com Interface de Comunicacao porPDA Comandada por Sinais Cerebrais, Anaisdo VIII Simposio Brasileiro de AutomacaoInteligente, UFSC, Florianopolis .
Kristiansson, B. e Lennartson, B. (2006). Robusttuning of pi and pid controllers: using deriva-tive action despite sensor noise, IEEE controlsystems 26(1): 55–69.
Li, R., Oskoei, M. A., McDonald-Maier, K. D. eHu, H. (2013). Ros based multi-sensor navi-gation of intelligent wheelchair, Emerging Se-curity Technologies (EST), 2013 Fourth In-ternational Conference on, IEEE, pp. 83–88.
Nasri, Y., Vauchey, V., Khemmar, R., Ragot,N., Sirlantzis, K. e Ertaud, J.-Y. (2016).Ros-based Autonomous Navigation Wheel-chair using Omnidirectional Sensor, Inter-national Journal of Computer Applications133(6): 12–17.
Quigley, M., Conley, K., Gerkey, B., Faust, J.,Foote, T., Leibs, J., Wheeler, R. e Ng, A. Y.(2009). Ros: an open-source Robot Opera-ting System, ICRA workshop on open sourcesoftware, Vol. 3, Kobe, p. 5.
Skogestad, S. e Grimholt, C. (2012). The simcmethod for smooth pid controller tuning,PID Control in the Third Millennium, Sprin-ger, pp. 147–175.
Trigueiros, P. e Ribeiro, A. F. (2015). Vision-based hand Wheel-chair control, Revista Ro-botica 97: 8–11.
XIII Simposio Brasileiro de Automacao Inteligente
Porto Alegre – RS, 1o – 4 de Outubro de 2017
627