




Línguas
Páginas
Legal

Exerccio 1
Projeto dos controladores de corrente, velocidade e posio de um motor de corrente
contnua de ims permanentes ou campo bobinado.
a) Escolha de maneira aleatria um modelo de motor de corrente contnua disponvel
no programa PSIM ou na toolbox Simscape. A Figura 1 mostra um detalhe da janela
da toolbox Simscape que roda sobre o Matlab/Simulink.
Figura 1 Vista da janela da toolbox Simscape.
Para a realizao do presente trabalho optou-se pela adoo do modelo 13 de
mquina CC presente no simulink
b) De posse dos parmetros (velocidade nominal), (torque nominal),
(constante de torque), (constante eletromecnica), (constante de inrcia da
carga) determine as constantes de tempo eltrica ( ) e mecnica ( ) do motor em
questo.
Parmetros:
Clculo do Torque:
Clculo da Constante Eletromecnica:
No Sistema Internacional (SI) tem-se que, numericamente, .
Clculo da Constante de Tempo Eltrica:
Clculo da Constante de Tempo Mecnica:
c) Construa e simule o diagrama de blocos do motor CC no programa Simulink quando
o mesmo alimentado por uma fonte de tenso CC. Aplique degraus e tenso no
diagrama da Figura 2 e investigue o comportamento dinmico da velocidade de
sada.
Figura 2 Diagrama de blocos do motor CC.
Diagrama de Blocos montado no Simulink:
Condies de Simulao:
o Degrau de Tenso de 300 V para 330 V no tempo de 2s.
o Motor a vazio
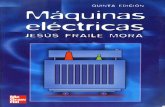
Grfico 1 Resultado da simulao do diagrama de blocos acima para um degrau
de tenso de 300 V para 330 V Comportamento da velocidade da Mquina CC.
Como o fluxo magntico manteve-se constante, o aumento da tenso terminal
( ) e, consequentemente, da tenso interna ( ), proporcionou a acelerao da
mquina, como era de se esperar validando a equao abaixo:
Lembrando que o transitrio inicial observado no Grfico 1 deve-se a partida do
motor ao ser aplicado 300 V.
d) Valide as respostas do modelo dinmico do motor CC comparando as respostas
obtidas com aquelas obtidas com o modelo aproximado do motor no Simscape ou
PSIM mostrado na Figura 3. Caso voc tenha feito a opo por utilizar um motor
CC de campo bobinado use uma fonte CC independente para alimentar o circuito de
campo.
0 0.5 1 1.5 2 2.5 3 3.5 40
200
400
600
800
1000
1200
1400
X: 3.323
Y: 1257
Velocidade Mquina CC
Time[s]
n[r
pm
]X: 1.488
Y: 1143
Figura 3 Modelo aproximado do motor CC alimentado por uma fonte de tenso.
Diagrama de Blocos montado no Simulink:
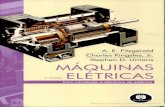
Grfico 2 - Resultado da simulao do modelo da mquina CC do Simscape para
um degrau de tenso de 300 V para 330 V Comportamento da velocidade da
Mquina CC.
0 0.5 1 1.5 2 2.5 3 3.5 40
200
400
600
800
1000
1200
1400
X: 3.452
Y: 1252
Velocidade Mquina CC
Time[s]
n[r
pm
]
X: 1.147
Y: 1138
Comparando as simulaes referentes aos grficos 1 e 2, percebe-se um leve
desvio (5 rpm) no valor obtido da velocidade de regime. Tal fato pode ser explicado
pela aproximao dos valores dos parmetros e tambm do modelo da mquina CC
adotada. Essa pequena diferena entre as duas simulaes, no entanto, no invalida os
resultados.
e) Construa o modelo de um conversor CCCC no Simscape ou PSIM mostrado na
Figura 4 para ser usado na alimentao do motor anterior. Considere uma tenso de
entrada = 311 V e uma frequncia de chaveamento = 5 kHz. Derive o
modelo do conversor CC para ser usado na alimentao do motor.
Figura 4 Modelo chaveado do conversor CC-CC.
No modelo de mquina adotado a tenso de entrada de 500 V, portanto, o
conversor foi projetado de forma a fornecer a tenso nominal.
Diagrama de Blocos montado no Simulink:
Exemplo: Chaveamento do conversor disponibilizando o valor mdio de 300 V na
sada.
Onde:
(razo cclica)
Figura 5 - Tenso Chaveada na sada do Conversor CC - CC.
4 5 6 7 8 9 10 11 12
x 10-4
0
50
100
150
200
250
300
350
400
450
500
Time[s]
Vt[
A]
f) Usando tcnicas lineares de projeto de controladores no domnio da frequncia e os
critrios discutidos e apresentados nas aulas, projete os controladores de posio,
velocidade e corrente mostrados na Figura 5. Obtenha as funes de transferncia
,
e
trace os diagramas de Bode das funes de transferncia de malha
aberta. Projete as margens de fase, margem de ganho das ,
e e
frequncias de corte das funes de transferncia de malha fechada de maneira a
garantir estabilidade e uma boa resposta dinmica das funes de transferncia de
malha fechada ,
e .
PLANTA
Funo de Transferncia
Diagrama de Bode da Planta:
Figura 6 - Diagrama de Bode da Planta.
Frequncia de Corte = 50,3 Hz
-100
-80
-60
-40
-20
0
Magnitu
de (
dB
)
System: planta_cl
Frequency (Hz): 3.22
Magnitude (dB): -27.5
System: planta_cl
Frequency (Hz): 50.3
Magnitude (dB): -30.5
100
101
102
103
-180
-135
-90
-45
0
Phase (
deg)
Bode Diagram
Frequency (Hz)
Controlador de Corrente
Para o controle de corrente o controlador definido foi um PI. A constante de
tempo definida para tal controlador idntica a constante de tempo eltrica da mquina,
para que seja cancelado o polo da planta com o zero do controlador, dessa forma
definido:
Utilizando a opo de sintonia disponvel no bloco PID Controller, foi definido
uma margem de fase de 90 e a frequncia de corte de malha fechada igual a 4,96 Hz.
Tem-se assim: .
Funo de transferncia de Malha Aberta - :
Margem de Ganho e de Fase:
Figura 7 - Diagrama de Bode de malha aberta - Controlador de Corrente.
0
10
20
30
40
50
60
Magnitu
de (
dB
)
101
102
103
104
-91
-90.5
-90
-89.5
-89
Phase (
deg)
Bode Diagram
Gm = Inf , Pm = 90 deg (at 6.65e+03 rad/s)
Frequency (rad/s)
Funo de transferncia de Malha Fechada -
:
Diagrama de Bode Malha Fechada:
Figura 8 - Diagrama de Bode Malha Fechada - Controlador de Corrente.
Diagrama de Blocos do Simulink:
Figura 9 - Diagrama de blocos do controlador de corrente.
Exemplo:
-30
-25
-20
-15
-10
-5
0
Magnitu
de (
dB
)
System: Gcl1
Frequency (Hz): 4.96
Magnitude (dB): -3
10-1
100
101
102
-90
-45
0
Phase (
deg)
Bode Diagram
Frequency (Hz)
Degrau de corrente de 10A em 0.5s.
Figura 10 - Comportamento dinmico da Corrente em resposta ao Controlador de
Corrente.
Como pode ser verificado na figura acima, o controlador proporcionou uma resposta
rpida ao sistema e sem erro de regime.
Controlador de Velocidade
Inicialmente pensava-se em trabalhar apenas com um controlador proporcional
(P), no entanto, devido ao fato dele apresentar um erro de regime optou-se pela adoo
de controlador proporcional e integral (PI). Utilizando a opo de sintonia disponvel no
bloco PID Controller, adotada uma margem de fase de 60 e frequncia de corte de
malha fechada igual a 2,87 Hz. Tem-se assim:
. Adotando-se que a malha de controle de corrente apresenta ganho igual a
1, tem-se:
Funo de transferncia de Malha Aberta - :
0 0.5 1 1.50
2
4
6
8
10
12
Time[s]
Corr
ente
[A]
I*
I
Margem de Ganho e de Fase:
Figura 11 - Diagrama de Bode de malha aberta - Controlador de Velocidade.
Funo de transferncia de Malha Fechada -
:
Diagrama de Bode Malha Fechada:
-50
0
50
100
Magnitu
de (
dB
)
10-1
100
101
102
103
-180
-135
-90
Phase (
deg)
Bode Diagram
Gm = -Inf dB (at 0 rad/s) , Pm = 60 deg (at 18 rad/s)
Frequency (rad/s)
Figura 12 - Diagrama de Bode de malha fechada - Controlador de Velocidade.
A frequncia de corte projetada seria 2,87 Hz, no entanto, de acordo com o
diagrama de bode acima possvel perceber que para uma queda de 3 dB a frequncia
de corte foi maior que a esperada. Porm, cabe resaltar que esta manteve-se menor que a
frequncia de corte do controlador de corrente (condio necessria para realizao do
projeto do controlador de velocidade).
Diagrama de Blocos do Simulink:
Figura 13 - Diagrama de blocos do controlador de velocidade.
Exemplo:
Degrau de Velocidade de 750 rpm em 0s e 1500 rpm em 2s.
-40
-30
-20
-10
0
10
Magnitu
de (
dB
)
System: Gcl2
Frequency (Hz): 3.92
Magnitude (dB): -3
10-1
100
101
102
-90
-45
0
Phase (
deg)
Bode Diagram
Frequency (Hz)
Figura 14 - Comportamento dinmico da velocidade em resposta ao Controlador
de Velocidade.
Como ficou evidente na figura acima, o controlador projetado permitiu que o
sistema tivesse uma resposta rpida frente a uma "perturbao". Apesar do considervel
sobressinal gerado durante o perodo oscilatrio o sistema apresentou uma resposta sem
erro de regime.
Controlador de Posio
Para o projeto do controlador de posio, trabalhou-se com um controlador tipo
proporcional (P). Utilizando a opo de sintonia disponvel no bloco PID Controller,
adotada uma margem de fase de 90 e frequncia de corte de malha fechada igual a
0,397 Hz. Tem-se assim: . Adotando-se que a malha de controle de
velocidade apresenta ganho igual a 1, tem-se:
Funo de transferncia de Malha Aberta - :
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50
200
400
600
800
1000
1200
1400
1600
1800
2000
Time[s]
Velo
cid
ade[r
pm
]
n*
n
Margem de Ganho e de Fase:
Figura 15 - Diagrama de Bode de malha aberta - Controlador de Posio.
Funo de transferncia de Malha Fechada -
:
Diagrama de Bode Malha Fechada:
-15
-10
-5
0
5
10
Magnitu
de (
dB
)
100
101
-91
-90.5
-90
-89.5
-89
Phase (
deg)
Bode Diagram
Gm = Inf , Pm = 90 deg (at 2.5 rad/s)
Frequency (rad/s)
Figura 16 - Diagrama de Bode de malha fechada - Controlador de Posio.
Diagrama de Blocos do Simulink:
Figura 17 - Diagrama de blocos do controlador de posio.
Exemplo:
Degrau de Posio de 10*pi em 1s.
-30
-25
-20
-15
-10
-5
0
Magnitu
de (
dB
)
System: Gcl3
Frequency (Hz): 0.397
Magnitude (dB): -3
10-2
10-1
100
101
-90
-45
0
Phase (
deg)
Bode Diagram
Frequency (Hz)
Figura 18 - Comportamento dinmico da posio em resposta ao Controlador de
Posio.
Como pode ser observado na Figura 18, o controle de posio assim como os
demais implantados dotou o sistema de uma resposta sem erro de regime, porm, sua
atuao foi um pouco mais lenta.
g) Monte o diagrama de blocos da Figura 5 no Matlab/Simulink e verifique o
desempenho dos controladores projetados.
Figura 19 Diagrama de blocos do controle em cascata de posio, velocidade e
corrente.
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50
5
10
15
20
25
30
35
Time[s]
Posi
o[r
ad]
posio*
posio
O diagrama de blocos pode ser visto na Figura 17 e abaixo est sendo verificado
o comportamento das trs variveis controladas quando da aplicao de um degrau de
6 em 0 s na referncia de posio.
Figura 20 - Comportamento das trs variveis: Corrente, Velocidade e Posio.
Como foi discutido em cada controlador projetado, o sistema comportou-se de
maneira satisfatria, validando, portanto, os ajustes realizados nas variveis dos
controladores.
h) Valide as respostas dos controladores projetados construindo o modelo dinmico do
motor CC acionado pelo conversor CCCC no programas Simscape ou PSIM e
mostrados nas Figura 20 e Figura 21.
0 1 2 3 4 5-50
0
50
100
Time[s]
Corr
ente
[A]
I*
I
0 1 2 3 4 50
20
40
60
80
Time[s]
Velo
cid
ade[r
pm
]
n*
n
0 1 2 3 4 50
5
10
15
20
Time[s]
Posi
o[r
ad]
posio*
posio
Figura 21 Modelo desenvolvido do acionamento eletrnico do motor CC com os
controladores em cascata.
Figura 22 - Comportamento das trs variveis: Corrente, Velocidade e Posio
para o esquema da Figura 21.
0 2 4 6-20
0
20
40
60
80
Time[s]
Corr
ente
[A]
I*
I
0 2 4 6-200
0
200
400
600
Time[s]
Velo
cid
ade[r
pm
]
n*
n
0 2 4 60
5
10
15
20
Time[s]
Posi
o[r
ad]
posio*
posio
Figura 23 Modelo completo do acionamento eletrnico do motor CC com os
controladores em cascata.
Figura 24 - Comportamento das trs variveis: Corrente, Velocidade e Posio
para o esquema da Figura 23
Comparando a resposta do sistema para os esquemas montados das figuras 21 e
23 possvel verificar que eles atuaram de forma idntica e satisfatria, mostrando que
os ajustes realizados foram bem projetados. No entanto, ao comparar as respostas desses
dois esquemas utilizando-se o modelo simplificado de uma mquina CC com a
0 2 4 6-50
0
50
100
Time[s]
Corr
ente
[A]
0 2 4 6-200
0
200
400
600
Time[s]
Velo
cid
ade[r
pm
]
0 2 4 60
5
10
15
20
Time[s]
Posi
o[r
ad]
I*
I
n*
n
posio*
posio
apresentada ao simular o diagrama de blocos percebe-se que houve certa diferena no
comportamento. Tal discrepncia pode ser justificada tanto pela utilizando de um
modelo de mquina que simplificado quanto tambm adoo de aproximaes nos
parmetros.
Em complemento ao que foi falado, ao comparar as respostas de corrente nota-se
que no modelo da mquina cc esta no retornou para o zero, como ocorrido ao fazer a
simulao no diagrama de blocos, fator esse justificvel pelo fato das perdas por atrito e
ventilao no serem desprezadas quando se utilizada o modelo simplificado da
mquina. No diagrama de blocos as perdas de atrito e ventilao foram desprezadas ao
no se considerar a varivel B no bloco do modelo mecnico da mquina.