





Línguas
Páginas
Legal


Universidade Federal de Santa Catarina
Departamento de Engenharia Elétrica
Estabilidade de Sistemas Elétricos de Potência
Curso Ministrado para Engenheiros do
ONS - Operador Nacional do Sistema Elétrico
Professores:
Ildemar Cassana Decker
Aguinaldo Silveira e Silva
Colaboradores:
Adriano de Souza
Marcelo Neujahr Agostini
Juliana Gubert Ehrensperger
Florianópolis, 16 – 23 de outubro de 2002.

ii

iii
ÍNDICE
1.Capítulo 1. Introdução.........................................................................................1
1.1 Aspectos Gerais sobre a Dinâmica de Sistemas Elétricos de Potência ........................ 1
1.2 Objetivo do Curso............................................................................................................... 6
1.3 Estrutura do Trabalho........................................................................................................ 6
2.Capítulo 2. Estabilidade de Sistemas Dinâmicos.............................................9
2.1 Estabilidade ......................................................................................................................... 9
2.1.1 Descrição Matemática de Sistemas Físicos........................................................... 10
2.1.2 Equilíbrio de um Sistema ....................................................................................... 11
2.1.3 Definições de Estabilidade ..................................................................................... 12
2.1.4 Teoremas de Estabilidade....................................................................................... 14
2.1.5 Domínio de Estabilidade ........................................................................................ 16
2.2 Comentários Finais........................................................................................................... 19
3.Capítulo 3. Estabilidade de Sistemas Elétricos de Potência.........................21
3.1 Introdução.......................................................................................................................... 21
3.2 O Problema da Estabilidade............................................................................................ 22
3.2.1 Potência Ativa Transferida do Gerador para o Motor ....................................... 23
3.2.2 Curva Potência - Ângulo do Sistema .................................................................... 24
3.3 Definições de Estabilidade .............................................................................................. 26
3.4 Modelagem de um Sistema Máquina - Barra Infinita ................................................. 27
3.5 Estabilidade de Regime Permanente ............................................................................. 31
3.5.1 Análise de um Sistema Máquina – Barra Infinita ............................................... 31
3.5.2 Compensação Reativa e Limites de Estabilidade................................................ 37
3.6 Estabilidade Transitória................................................................................................... 51
3.6.1 Análise de um Sistema Máquina - Barra Infinita ................................................ 51
3.6.2 O Critério de Áreas Iguais...................................................................................... 54
3.6.3 Modelagem Multimáquina..................................................................................... 66
4.Capítulo 4. Modelagem dos Componentes de SEPs .....................................71
4.1 Introdução.......................................................................................................................... 71
4.2 Máquinas Síncronas ......................................................................................................... 71
4.2.1 Descrição Física ........................................................................................................ 71
4.2.2 Descrição Matemática ............................................................................................. 75
4.2.3 A Transformação dq0............................................................................................... 82

iv
4.2.4 Representação Por Unidade (pu) .......................................................................... 85
4.2.5 Circuitos Equivalentes para os Eixos Direto e Quadratura............................... 90
4.2.6 Análise de Regime Permanente............................................................................. 91
4.2.7 Análise de Regime Transitório .............................................................................. 93
4.2.8 Parâmetros Operacionais ....................................................................................... 97
4.2.9 Representação em Estudos de Estabilidade ...................................................... 104
4.3 Sistemas de Excitação .................................................................................................... 111
4.3.1 Funções Básicas ..................................................................................................... 111
4.3.2 Requisitos do Sistema de Excitação .................................................................... 112
4.3.3 Elementos do Sistema de Excitação .................................................................... 112
4.3.4 Tipos de Sistemas de Excitação ........................................................................... 113
4.3.5 Modelagem do Sistema de Excitação ................................................................. 114
4.3.6 Modelos para Estudos de Estabilidade .............................................................. 118
4.4 Modelos de Cargas em Estudos de Estabilidade ....................................................... 119
4.4.1 Representação Polinomial.................................................................................... 121
4.4.2 Representação Exponencial ................................................................................. 121
4.5 Equipamentos FACTS.................................................................................................... 122
4.5.1 Introdução .............................................................................................................. 122
4.5.2 Princípios e Dispositivos ...................................................................................... 123
4.5.3 Compensadores Estáticos de Reativo................................................................. 125
5.Capítulo 5. Estabilidade Transitória.............................................................. 139
5.1 Introdução ....................................................................................................................... 139
5.2 Simulação da Dinâmica de um Sistema de Potência................................................. 140
5.2.1 Estrutura Analítica do Modelo Matemático ...................................................... 140
5.2.2 Aspectos Adicionais da Modelagem Global...................................................... 143
5.2.3 Esquemas Básicos de Solução.............................................................................. 151
5.2.4 Análise de Faltas Assimétricas ............................................................................ 159
5.3 Software para a Análise da Estabilidade Transitória ................................................ 160
5.3.1 Representação dos Elementos do Sistema Elétrico de Potência ..................... 161
5.3.2 Métodos de Solução .............................................................................................. 162
5.4 Critérios de Análise de Estabilidade ........................................................................... 162
5.4.1 Critério do Extinto GCOI ..................................................................................... 163
5.4.2 Critérios dos Procedimentos de Rede................................................................. 163
5.5 Estudo de Casos.............................................................................................................. 167
5.5.1 Estudo de Caso 1 ................................................................................................... 167
5.5.2 Estudo de Caso 2 ................................................................................................... 171

v
6.Capítulo 6. Estabilidade para Pequenas Perturbações: Caso MS – BI ......173
6.1 Introdução........................................................................................................................ 173
6.2 Efeito do Sistema de Excitação na Estabilidade de Sistemas Elétricos de Potência
173
6.3 Análise do Comportamento Dinâmico de uma Máquina Contra Barra Infinita ... 176
6.3.1 Modelo de Heffron-Phillips para Pequenas Perturbações............................... 176
6.3.2 Desempenho com Fluxo de Campo Constante ................................................. 178
6.3.3 Análise com a Tensão de Campo Constante...................................................... 180
6.3.4 Análise com a Inclusão do Regulador de Tensão ............................................. 183
6.3.5 Análise do Efeito dos Sinais Estabilizadores ..................................................... 191
6.4 Características dos Sinais Adicionais e dos ESPs Associados .................................. 196
6.4.1 Introdução............................................................................................................... 196
6.4.2 A função de Transferência ( )GEP s .................................................................. 196
6.4.3 Características de Sinais Adicionais.................................................................... 202
6.4.4 Potência de Aceleração ......................................................................................... 206
6.5 Projeto de Estabilizadores de Sistemas de Potência .................................................. 209
6.5.1 Resposta em Freqüência ....................................................................................... 210
6.5.2 Lugar das Raízes.................................................................................................... 211
7.Capítulo 7. Estabilidade para Pequenas Perturbações: Sistemas
Multimáquinas .............................................................................................213
7.1 Introdução........................................................................................................................ 213
7.2 Modelos............................................................................................................................ 213
7.3 Modos de Oscilação Eletromecânicos.......................................................................... 223
7.4 Análise por Autovalores................................................................................................ 225
7.5 Localização dos Controladores..................................................................................... 226
7.5.1 Fatores de Participação ......................................................................................... 227
7.5.2 Índices de Controlabilidade e Observabilidade ................................................ 231
7.6 Projeto Coordenado de Controladores ........................................................................ 232
7.6.1 Posicionamento de Pólos ...................................................................................... 233
7.6.2 Controle Ótimo ...................................................................................................... 234
7.6.3 Resposta em Freqüência Multivariável .............................................................. 234
7.6.4 Software para a Análise da Estabilidade para Pequenas Perturbações ......... 234
Referências Bibliográficas...............................................................................237

vi

vii
LISTA DE FIGURAS
Figura 1.1: Representação esquemática dos sistemas de controle de um gerador síncrono ................ 4
Figura 2.1: Representação gráfica de trajetória e movimento................................................................. 10
Figura 2.2: Representação gráfica de equilíbrio........................................................................................ 11
Figura 2.3: Estabilidade no sentido de Liapunov..................................................................................... 12
Figura 2.4: Estabilidade assintótica no sentido de Liapunov ................................................................. 13
Figura 2.5: Estabilidade assintótica global no sentido de Liapunov ..................................................... 13
Figura 2.6: Região de estabilidade assintótica .......................................................................................... 17
Figura 2.7: Curvas de nível da Função de Liapunov e trajetórias do sistema...................................... 19
Figura 2.8: Movimento do sistema ............................................................................................................. 19
Figura 3.1: Sistema gerador síncrono alimentando um motor síncrono ............................................... 22
Figura 3.2: Circuito equivalente do sistema gerador - motor síncrono................................................. 22
Figura 3.3: Diagrama fasorial do sistema gerador - motor síncrono ..................................................... 23
Figura 3.4: Curva potência - ângulo para o sistema gerador - motor síncrono.................................... 24
Figura 3.5: Representação esquemática dos torques que atuam sobre o eixo da máquina síncrona 27
Figura 3.6: Representação esquemática do ângulo mecânico θ.............................................................. 28
Figura 3.7: Circuito equivalente de um sistema máquina – barra infinita............................................ 32
Figura 3.8: Curva potência - ângulo para o sistema máquina – barra infinita ..................................... 32
Figura 3.9: Localização dos autovalores do sistema no plano complexo.............................................. 35
Figura 3.10: Diagrama de blocos do sistema............................................................................................. 36
Figura 3.11: Diagrama de blocos com a inclusão do coeficiente de amortecimento ........................... 36
Figura 3.12: Circuito elétrico equivalente para o caso 1 .......................................................................... 38
Figura 3.13: Circuito elétrico equivalente para o caso 2 .......................................................................... 39
Figura 3.14: Diagrama fasorial para o caso 2 ............................................................................................ 40
Figura 3.15: Circuito elétrico equivalente para o caso 3 .......................................................................... 43
Figura 3.16: Diagrama fasorial para o caso 3 ............................................................................................ 43
Figura 3.17: Circuito elétrico equivalente para o caso 5 .......................................................................... 45
Figura 3.18: Ganho de potência relativo para o caso 5 ............................................................................ 46
Figura 3.19: Circuito elétrico equivalente para o caso 6 .......................................................................... 46
Figura 3.20: Circuito elétrico equivalente para os casos 7 e 8................................................................. 47

viii
Figura 3.21: Curvas de potência transmitida em função da defasagem angular para os casos 1 e 7 e
potência reativa suprida pelo compensador shunt para o caso 7 ................................................ 48
Figura 3.22: Família de curvas potência-ângulo para o caso 8............................................................... 49
Figura 3.23: Circuito elétrico equivalente para o caso 9.......................................................................... 49
Figura 3.24: Família de curvas potência-ângulo para o caso 9............................................................... 50
Figura 3.25: Representação esquemática do sistema máquina - barra infinita .................................... 51
Figura 3.26: Circuito elétrico equivalente ................................................................................................. 52
Figura 3.27: Interpretação gráfica do critério de áreas iguais ................................................................ 56
Figura 3.28: Sistema exemplo para a aplicação do critério de áreas iguais.......................................... 56
Figura 3.29: Circuito elétrico equivalente para o sistema exemplo ....................................................... 57
Figura 3.30: Circuito elétrico equivalente sob defeito para o caso 1 ..................................................... 57
Figura 3.31: Circuito elétrico equivalente sob defeito após a transformação ∆-Y para o caso 1 ....... 57
Figura 3.32: Circuito elétrico equivalente sob defeito final para o caso 1 ............................................ 58
Figura 3.33: Curvas potência–ângulo antes do defeito e sob defeito para o caso 1 ............................ 58
Figura 3.34: Curvas potência–ângulo antes do defeito, sob-defeito e pós-defeito para o caso 2 ...... 59
Figura 3.35: Circuito elétrico equivalente antes do defeito para o caso 2............................................. 60
Figura 3.36: Circuito elétrico equivalente sob defeito para o caso 2 ..................................................... 60
Figura 3.37: Circuito elétrico equivalente pós defeito para o caso 2 ..................................................... 60
Figura 3.38: Sistema multimáquinas generalizado.................................................................................. 66
Figura 3.39: Sistema multimáquinas reduzido às barras internas de geração..................................... 67
Figura 4.1: Representação esquemática de uma máquina síncrona trifásica com um par de polos. 72
Figura 4.2: Estruturas de rotor de pólos salientes.................................................................................... 73
Figura 4.3: Estrutura de rotor de pólos lisos............................................................................................. 74
Figura 4.4: Caminhos das correntes no rotor de pólos lisos ................................................................... 74
Figura 4.5: Circuitos do rotor e do estator da máquina síncrona .......................................................... 76
Figura 4.6: Circuito magnético simples excitado ..................................................................................... 77
Figura 4.7: Circuitos magneticamente acoplados .................................................................................... 78
Figura 4.8: Circuitos equivalentes para os eixos d e q ............................................................................. 91
Figura 4.9: Diagrama fasorial com a saliência síncrona desprezada..................................................... 93
Figura 4.10: Circuito equivalente com a saliência síncrona desprezada .............................................. 93
Figura 4.11: Circuito RL equivalente ......................................................................................................... 94
Figura 4.12: Correntes trifásicas da máquina síncrona durante um curto-circuito............................. 95

ix
Figura 4.13: Corrente de campo da máquina síncrona durante um curto-circuito ............................. 96
Figura 4.14: Corrente de curto-circuito resultante de armadura............................................................ 96
Figura 4.15: Relação entre os valores incrementais das quantidades terminais .................................. 98
Figura 4.16: Magnitude da função de transferência ( )dL s em função da freqüência...................... 103
Figura 4.17: Magnitude da função de transferência ( )G s em função da freqüência........................ 104
Figura 4.18: Componentes do sistema de excitação............................................................................... 113
Figura 4.19: Representação esquemática do sistema de excitação tipo DC ........................................ 113
Figura 4.20: Representação esquemática do sistema de excitação tipo AC........................................ 114
Figura 4.21: Diagrama de blocos de uma excitatriz DC ........................................................................ 115
Figura 4.22: Diagrama de blocos de uma excitatriz AC ........................................................................ 115
Figura 4.23: Modelo de retificador de regulação.................................................................................... 115
Figura 4.24: Modelo de amplificador ....................................................................................................... 116
Figura 4.25: Representação em digrama de blocos do circuito de estabilização................................ 116
Figura 4.26: Bloco integrador com limitador windup ........................................................................... 117
Figura 4.27: Bloco integrador com limitador non-windup ................................................................... 117
Figura 4.28: Representação esquemática do transdutor de tensão terminal e compensador de carga
.............................................................................................................................................................. 117
Figura 4.29: Representação esquemática do sistema de excitação modelo DC1................................ 118
Figura 4.30: Representação esquemática do sistema de excitação modelo AC4................................ 119
Figura 4.31: Representação esquemática do sistema de excitação modelo ST1A.............................. 119
Figura 4.32: Sistema com duas barras e fluxo de potência associado.................................................. 124
Figura 4.33: Esquema do RCT................................................................................................................... 125
Figura 4.34: Ângulo de disparo e de condução ...................................................................................... 126
Figura 4.35: Característica tensão – corrente do RCT ............................................................................ 127
Figura 4.36: Compensador com capacitor ............................................................................................... 128
Figura 4.37: Característica tensão – corrente com capacitor ................................................................. 129
Figura 4.38: Característica tensão – corrente do compensador e sistema de potência ...................... 129
Figura 4.39: Equivalente Thevenin do sistema ....................................................................................... 130
Figura 4.40: Capacitor chaveado por tiristor........................................................................................... 131
Figura 4.41: Característica tensão – corrente do TSC............................................................................. 131
Figura 4.42: Modelo do compensador estático para estudos dinâmicos............................................. 132

x
Figura 4.43: Compensador série com reator controlado ....................................................................... 133
Figura 4.44: Compensador série com capacitores chaveados .............................................................. 134
Figura 4.45: Controle para potência constante ....................................................................................... 136
Figura 4.46: Controle para corrente constante........................................................................................ 136
Figura 4.47: Controle para amortecimento ............................................................................................. 136
Figura 4.48: Estrutura do controlador para amortecimento................................................................. 137
Figura 5.1: Estrutura usual das equações envolvidas no modelo matemático para estudos de
estabilidade transitória..................................................................................................................... 141
Figura 5.2: Diagrama composto de transformação de coordenadas d q− → ℜ − ℑ e vice-versa.... 145
Figura 5.3: Circuito equivalente Norton do estator ............................................................................... 147
Figura 5.4: Circuito equivalente Norton para o modelo de carga polinomial composto................. 149
Figura 5.5: Representação gráfica da solução do problema exemplo ................................................. 152
Figura 5.6: Sistema máquina - barra infinita........................................................................................... 167
Figura 5.7: Abertura angular da MS sem o RAT, somente com o RAT e com o RAT e o PSS......... 168
Figura 5.8: Potência elétrica da MS sem o RAT, somente com o RAT e com o RAT e o PSS........... 169
Figura 5.9: Tensão terminal da MS sem o RAT, somente com o RAT e com o RAT e o PSS ........... 169
Figura 5.10: Tensão de campo da MS sem o RAT, somente com o RAT e com o RAT e o PSS....... 170
Figura 5.11: Esforço de controle do PSS .................................................................................................. 170
Figura 6.1: Gerador síncrono conectado à barra infinita....................................................................... 176
Figura 6.2: Modelo de Heffron-Phillips................................................................................................... 177
Figura 6.3: Modelo de Heffron-Phillips para fluxo constante.............................................................. 178
Figura 6.4: Modelo de Heffron-Phillips considerando a reação da armadura .................................. 181
Figura 6.5: Comportamento do sistema para um degrau no torque mecânico ................................. 182
Figura 6.6: Modelo de Heffron-Phillips com regulador de tensão ...................................................... 184
Figura 6.7: Diagrama de blocos para o gerador em vazio .................................................................... 184
Figura 6.8: Diagrama de bode do compensador de atraso de fase...................................................... 186
Figura 6.9: Diagrama desprezando a contribuição de 5K ................................................................... 187
Figura 6.10: Diagrama equivalente sem a contribuição de 5K ........................................................... 187
Figura 6.11: Diagrama equivalente sem a contribuição de 4K ........................................................... 189
Figura 6.12: Torque produzido pelo ESP ................................................................................................ 191
Figura 6.13: Esquema de atuação do ESP................................................................................................ 192

xi
Figura 6.14: Torque obtido a partir de um sinal de velocidade ........................................................... 193
Figura 6.15: Diagrama das componentes do torque devido ao ESP.................................................... 194
Figura 6.16: Diagrama da função GEP..................................................................................................... 197
Figura 6.17: Diagrama da função GEP para o caso máquina - barra infinita ..................................... 198
Figura 6.18: Diagrama obtido do modelo de Heffron-Phillips com ângulo constante ..................... 198
Figura 6.19: Diagrama de bode da malha do regulador de tensão...................................................... 200
Figura 6.20: Sistema com regulador de tensão ....................................................................................... 200
Figura 6.21: Esquema do ESP com sinal de potência elétrica ............................................................... 205
Figura 6.22: Relação entre as grandezas básicas..................................................................................... 208
Figura 6.23: Síntese do sinal de potência elétrica ................................................................................... 208
Figura 7.1: Sistema usado para ilustrar a formação da matriz Jacobiana ........................................... 216
Figura 7.2: Sistemas de referência da rede e da máquina síncrona ..................................................... 217
Figura 7.3: Sistema para descrição dos modos de oscilação ................................................................. 224

xii

1
CAPÍTULO 1
1.INTRODUÇÃO
1.1 Aspectos Gerais sobre a Dinâmica de Sistemas
Elétricos de Potência
Os sistemas elétricos de potência são complexos sistemas, que cobrem áreas
geográficas de dimensões continentais, onde a energia proveniente de várias
fontes é convertida em energia elétrica e transmitida às cargas situadas muitas
vezes a milhares de quilômetros das usinas geradoras. As fontes primárias de
energia podem ser de origem hidráulica, fóssil, nuclear, ou alternativa como vento,
solar, biomassa ou marés. A conversão da energia primária para energia elétrica é
realizada por geradores síncronos ou de indução e painéis fotovoltaicos. A energia
elétrica é transmitida por linhas de alta tensão, de corrente alternada ou contínua,
que requerem avançadas tecnologias de materiais para isolamento e o uso de
eletrônica de alta potência para estações conversoras de CA para CC ou vice-versa.
Controladores nos geradores e dispositivos controláveis na rede permitem a
automatização de muitas funções de controle do sistema. Os equipamentos
controláveis da rede são muitas vezes baseados em dispositivos de eletrônica de
alta potência, permitindo o controle rápido de grandezas do sistema. Os
equipamentos que compõem os sistemas elétricos sofrem um processo contínuo
de incorporação de novas tecnologias visando aumentar a eficiência e a
confiabilidade destes sistemas. A operação destes sistemas requer o uso de
sofisticadas técnicas de monitoração e controle, que incorporam os mais recentes
avanços na tecnologia de computadores e transmissão de dados.
Uma visão macro do sistema elétrico, leva a uma descrição de um complexo
sistema dinâmico, que pode ser analisado como um todo ou desacoplado no

Capítulo 1: Introdução
2
espaço ou no tempo (freqüência). Por outro lado, os componentes do sistema em
si, podem ser estudados em separado ou em subsistemas, em termos das suas
funções.
A operação do sistema de potência requer a alimentação das cargas dentro
de certas exigências de qualidade do suprimento. Dado que as cargas variam
aleatoriamente (embora dentro de ciclos diários, semanais e sazonais) e que a
energia elétrica não pode ser armazenada, há a necessidade de que esta seja
gerada no instante em que for requerida pela carga. Além disso a operação deve
ser tal que a capacidade nominal dos componentes do sistema (geradores, linhas
de transmissão, transformadores, etc) seja respeitada. O estado no qual a demanda
é satisfeita e o sistema está operando dentro dos limites de capacidade é chamado
estado normal de operação.
O sistema deve ser mantido no estado normal de operação, mesmo diante
de perturbações, por meio da atuação de controladores nos geradores ou outros
equipamentos controláveis localizados na rede. Os controladores de tensão e
freqüência tem por objetivo manter o sistema no estado normal de operação
através do controle de tensão nas barras terminais e da freqüência dos geradores.
O controle da freqüência em especial é importante desde que a freqüência é uma
medida do balanço de potência ativa do sistema. Se a carga do sistema cresce e a
potência gerada não aumenta, a diferença de potência é obtida da energia cinética
das máquinas e a freqüência decresce. Portanto a igualdade entre carga e geração é
necessária para a operação estável e a freqüência é uma medida de desbalanço.
Além disso é uma exigência de muitas cargas a manutenção de variações da
freqüência entre limites estreitos. A tensão deve ser mantida constante
principalmente porque o desempenho de diversos componentes de carga
dependem da mesma.
O controle da freqüência e tensão é facilitado pelo fato de que há um
desacoplamento entre os pares de variáveis potência ativa - ângulo de tensão nas
barras e potência reativa - magnitude de tensão. Embora este desacoplamento não
seja completo e decresça durante transitórios no sistema, pode-se considerar este

Capítulo 1: Introdução
3
efeito como apenas marginal na faixa usual de operação. Assim, controlando-se o
torque entregue pelas máquinas primárias aos geradores controla-se a potência
ativa e consequentemente a freqüência, cujas variações estão ligadas às variações
do ângulo. Da mesma forma, através da variação da excitação de campo do
gerador controla-se a potência reativa gerada e, consequentemente, a tensão
terminal da máquina.
Os três principais sistemas de controle que atuam sobre o gerador síncrono
são:
• controle primário de carga - freqüência;
• controle suplementar de carga - freqüência (ou CAG - Controle
Automático de Geração);
• controle de excitação.
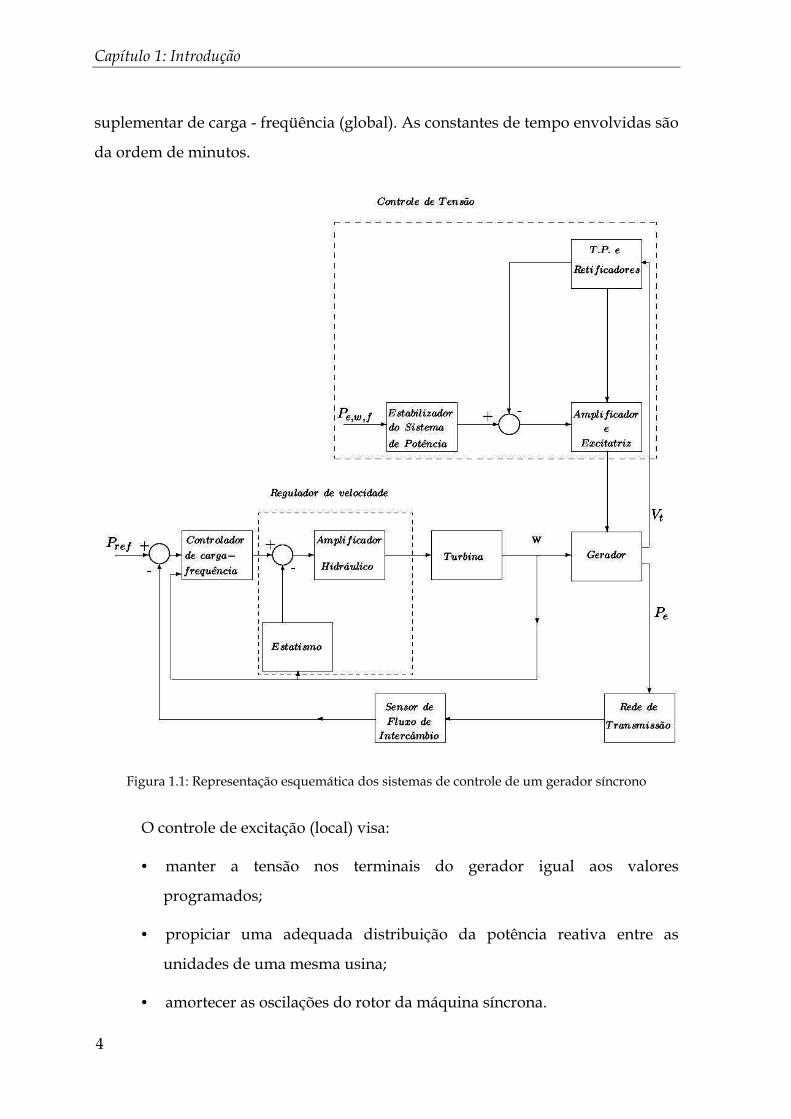
Um diagrama de blocos simplificado mostrando os sistemas de controle de
um gerador síncrono é apresentado na Figura 1.1.
O controle de velocidade envolve uma faixa de baixas freqüências e além de
geradores, cargas e turbinas, outros dispositivos de dinâmica lenta como caldeiras
podem ser modelados para estes estudos. O regulador de velocidade é um
dispositivo que além de atuar nas malhas de controle primário e secundário exerce
outras funções no sistema de potência.
O controle primário de carga - freqüência (local) basicamente monitora a
velocidade do eixo do conjunto turbina - gerador e controla o torque mecânico da
turbina de modo a fazer com que a potência elétrica gerada pela unidade se
adapte às variações de carga. As constantes envolvidas são da ordem de segundos.
As variações de geração resultantes se dão às custas de desvios de freqüência.
O restabelecimento da freqüência para valores nominais, assim como a
manutenção dos fluxos de potência nas linhas de interligação conforme os valores
programados requer a atuação de um outro sistema de controle, que é o controle
Capítulo 1: Introdução
4
suplementar de carga - freqüência (global). As constantes de tempo envolvidas são
da ordem de minutos.
Figura 1.1: Representação esquemática dos sistemas de controle de um gerador síncrono
O controle de excitação (local) visa:
• manter a tensão nos terminais do gerador igual aos valores
programados;
• propiciar uma adequada distribuição da potência reativa entre as
unidades de uma mesma usina;
• amortecer as oscilações do rotor da máquina síncrona.

Capítulo 1: Introdução
5
Esta última função do regulador de tensão advém do fato de que a tensão
de campo do gerador afeta o torque elétrico da máquina. As constantes de tempo
envolvidas são da ordem de milisegundos.
Os controles descritos atuam diretamente no gerador síncrono. No entanto
o desenvolvimento da eletrônica de alta potência permitiu o aparecimento de uma
geração de dispositivos controláveis, localizados na rede, que podem ter uma
influência considerável no comportamento dinâmico do sistema. Estes
dispositivos estão associados ao conceito de FACTS.
Além do desempenho em regime permanente, os controladores do sistema
elétrico atuam no regime transitório, e portanto tem influência direta no
desempenho dinâmico do sistema. De maneira simplificada pode-se reduzir a
questão do desempenho dinâmico do sistema ao comportamento do mesmo entre
o ponto de equilíbrio antes da atuação da perturbação e o ponto de equilíbrio após
a atuação da perturbação.
A complexidade do sistema de potência faz com que os fenômenos
dinâmicos abarquem uma faixa ampla de freqüências. Embora a análise da
dinâmica do sistema e a síntese de controladores possa ser feita de uma maneira
global, uma abordagem deste tipo exige uma modelagem detalhada o que, para
sistemas elétricos de grande porte, leva a um problema de alta dimensão. É
preferível então separar os fenômenos segundo a faixa de freqüências onde eles
ocorrem. Com isto modelos adequados para representar os componentes em cada
uma destas faixas podem ser usados para fins de análise e controle.
A análise dos fenômenos na faixa de freqüências eletromecânicas,
associadas à oscilações do eixo do gerador, constitui uma parte importante na
análise global da dinâmica e especialmente da estabilidade de sistemas de
potência. No presente curso o maior interesse é na estabilidade transitória e na
análise para pequenas perturbações, que envolvem a dinâmica eletromecânica. A
estabilidade para pequenas perturbações está relacionada à caracterização do
ponto de equilíbrio do sistema em termos de estabilidade e amortecimento, o que

Capítulo 1: Introdução
6
determina o comportamento do sistema frente a pequenas perturbações, como
pequenas variações de carga. A estabilidade transitória está relacionada ao
domínio de estabilidade do sistema, o que determina o comportamento do sistema
frente a grandes perturbações, como a perda de linhas de transmissão e grandes
variações de carga.
1.2 Objetivo do Curso
O objetivo deste curso é apresentar a natureza dos problemas de
estabilidade transitória e para pequenas perturbações, os fenômenos físicos
subjacentes, a modelagem dos diversos equipamentos para estes estudos e as
técnicas de análise utilizadas.
O curso é desenvolvido com ênfase nos aspectos conceituais e de
modelagem para a simulação computacional.
1.3 Estrutura do Trabalho
A estrutura do trabalho é descrita a seguir. O capítulo 2 apresenta uma
introdução ao problema de estabilidade de sistemas dinâmicos. Os conceitos e
resultados apresentados são usados nos capítulos seguintes para fundamentar o
estudo da estabilidade de sistemas elétricos de potência. O capítulo 3 aborda os
conceitos básicos de estabilidade de sistemas elétricos de potência. O caso
máquina - barra infinita é estudado em detalhe e a abordagem clássica para
sistemas multimáquinas é apresentada. O capítulo 4 apresenta a modelagem dos
equipamentos que tem influência direta na estabilidade de sistemas elétricos. A
máquina síncrona, o sistema de excitação, cargas e dispositivos FACTS são
modelados. No capítulo 5, a formulação completa para o estudo da estabilidade
transitória de sistemas multimáquinas é apresentada. A formulação das equações
do sistema, a solução destas equações, critérios para estudos de estabilidade e
aplicações constituem os objetivos do capítulo. O capítulo 6 apresenta o problema
da estabilidade para pequenas perturbações. O caso máquina - barra infinita é

Capítulo 1: Introdução
7
apresentado através do modelo de Heffron-Phillips. Os conceitos de torque de
sincronização e de amortecimento são apresentados. O uso de sinais
estabilizadores é abordado neste capítulo. No capítulo 7 a estabilidade para
pequenas perturbações de sistemas multimáquinas é apresentada. A formulação
das equações e o uso de autovalores são discutidos. Os conceitos de fatores de
participação, índices de controlabilidade e observabilidade são introduzidos.


9
CAPÍTULO 2
2.ESTABILIDADE DE SISTEMAS DINÂMICOS
O comportamento dinâmico de sistemas elétricos de potência é descrito, em
geral, por alguns milhares de equações diferenciais ordinárias e algébricas não-
lineares. Consequentemente, o conhecido de elementos da teoria de sistemas
dinâmicos, lineares e não-lineares, é essencial para o estudo da estabilidade desses
sistemas. Diante desse fato, o propósito do presente capítulo é realizar uma
abordagem sintética dos conceitos de estabilidade de sistemas dinâmicos
considerados de maior relevância para o entendimento da modelagem e dos
métodos de análise tratados nos demais capítulos desse trabalho. Visando tornar a
abordagem didática, a apresentação de alguns dos conceitos é acompanhada de
exemplo ilustrativo.
2.1 Estabilidade
A idéia intuitiva de estabilidade de um sistema físico é a seguinte: considere
que o sistema esteja em algum estado de equilíbrio. Se, após a ocorrência de
alguma perturbação, o sistema retornar a posição de equilíbrio, diz-se que o
mesmo é estável. Por outro lado, se determinadas variáveis físicas do sistema
tendem a manter um crescimento sustentado quando t → ∞ , afastando-se do
equilíbrio, diz-se que o sistema é instável. Portanto, a idéia intuitiva de
estabilidade está diretamente ligada a propriedade que um sistema possui, ou não,
de recuperar um equilíbrio perdido por ação de uma influência externa. Embora
essa idéia intuitiva seja relativamente simples, o estudo da estabilidade de
sistemas físicos exige o uso de definições precisas e uma formalização matemática
rigorosa.

Capítulo 2: Estabilidade de Sistemas Dinâmicos
10
2.1.1 Descrição Matemática de Sistemas Físicos
Os sistemas físicos são, em geral, descritos matematicamente por um
sistema de equações diferenciais ordinárias (EDOs) de 1a ordem do tipo:
( )uxtfx , , = (2.1)
onde x representa o vetor de estados de dimensão n , u representa o vetor de
entradas de dimensão r e t representa a variável independente tempo.
Considerando-se atendidas as condições de unicidade da solução para uma
dada condição inicial ( 0 0,x t ), a solução para ( ), ,x f t x u = é descrita por
( )0 00x t,x ,t t t∀ ≥ . A representação dessa solução pode ser feita explicitamente
em função do tempo, denominada de movimento, ou no espaço de estados,
denominada de trajetória. A Figura 1.1 ilustra a representação de trajetória e
movimento para um sistema hipotético de duas dimensões.
Figura 2.1: Representação gráfica de trajetória e movimento
Muitos sistemas físicos podem ser representados matematicamente por
modelos com entrada nula e parâmetros independentes do tempo. Neste caso a
equação (2.1) assume a forma:
)(xfx = (2.2)
Esses sistemas são denominados de sistemas autônomos e serão o objeto da
abordagem realizada no presente capítulo.

Capítulo 2: Estabilidade de Sistemas Dinâmicos
11
2.1.2 Equilíbrio de um Sistema
Para o sistema autônomo da equação (2.2), equilíbrio é o conjunto dado por:
( ) / 0e eE x f x= = (2.3)
Portanto, podem ser definidos um movimento de equilíbrio e um ponto de
equilíbrio para esse sistema, conforme ilustrado na Figura 2.2.
1x
2x
t0t
ex
0( )ex t
2x
1x
(a) Movimento de Equilíbrio (b) Ponto de Equilíbrio
Figura 2.2: Representação gráfica de equilíbrio
A determinação e o estudo das características dos pontos de equilíbrio
constituem o núcleo base da análise da estabilidade de sistemas dinâmicos. Os
sistemas lineares podem conter um ou uma infinidade de pontos de equilíbrio,
respectivamente, para os sistemas constituídos de equações linearmente
independentes ou de equações linearmente dependentes. Por outro lado, nos
sistemas não-lineares o conhecimento preciso do número de pontos de equilíbrio
pode ser uma tarefa muito complexa ou até mesmo impossível do ponto de vista
prático. Esses sistemas podem conter nenhum, um, um número finito ou infinito
de pontos de equilíbrio isolados ou um número infinito de pontos de equilíbrio
não isolados. Um ponto de equilíbrio ex é caracterizado como ponto de equilíbrio
isolado se, na vizinhança ν de raio ε de ex , não existe qualquer outro ponto de
equilíbrio.

Capítulo 2: Estabilidade de Sistemas Dinâmicos
12
Para fins de exemplificação, considere o seguinte sistema:
1 2
2 2 1
x xx a x senx
= = − −
Os pontos de equilíbrio são:
12 12 1
0 00 0
ex x sen xax senx
− = =⇒ = = − − ; ,...,, , 210nnx1 =±= π
Note que esse sistema possui uma infinidade de pontos de equilíbrio
isolados.
2.1.3 Definições de Estabilidade
Considere o sistema autônomo da equação (2.4), em que a origem do
sistema de coordenadas, representando um movimento não perturbado, é um
estado de equilíbrio:
0 0x f (x ) , f ( )= = (2.4)
• Estabilidade: a origem do sistema (2.4) é estável se, para todo 0, ε ε> ∈ ℜ ,
existe um ( ) 0, δ ε δ> ∈ ℜ , tal que para qualquer condição inicial
0 0 00 0( , ) , ) ,x x t x(t;x t t tδ ε< ⇒ < ∀ ≥ ;
Figura 2.3: Estabilidade no sentido de Liapunov
Se não existir ( )δ ε , o ponto de equilíbrio (origem) é instável. Os valores
numéricos de ε e ( )δ ε são irrelevantes para a caracterização da estabilidade do
ponto de equilíbrio.

Capítulo 2: Estabilidade de Sistemas Dinâmicos
13
• Estabilidade Assintótica: a origem do sistema (2.4) é dita ser
assintoticamente estável, se ela é estável e todo movimento começando
suficientemente próximo da origem, converge para a origem quando
t→∞, ou seja, 00l im ( , , ) 0 x t x t
t
→
→ ∞;
Figura 2.4: Estabilidade assintótica no sentido de Liapunov
• Estabilidade Assintótica Global: a origem do sistema (2.4) é dita ser
assintoticamente estável globalmente, se ela é estável e todo movimento
começando em qualquer ponto do espaço de estados converge para a
origem quando t→∞;
Figura 2.5: Estabilidade assintótica global no sentido de Liapunov
Note que as definições de estabilidade e de estabilidade assintótica são
conceitos locais, pois não especificam a dimensão da perturbação que pode ser
suportada pelo sistema. Em muitas situações físicas, a origem não é
assintoticamente estável para todas as condições iniciais possíveis, mas somente
para as condições iniciais contidas em uma região em torno da origem. Tal região

Capítulo 2: Estabilidade de Sistemas Dinâmicos
14
é denominada de região de estabilidade assintótica ou região finita de atração. A
determinação dessa região é de grande interesse na análise da estabilidade de
sistemas não-lineares, tais como os sistema elétricos de potência.
2.1.4 Teoremas de Estabilidade
Nesta seção são apresentados os principais teoremas relacionados ao estudo
da estabilidade da origem de sistemas autônomos do tipo:
0 0x f (x ) , f ( )= = (2.5)
onde: e :n n nx f ∈ ℜ ℜ → ℜ .
2.1.4.1 Teorema da Estabilidade
Se existe uma função : nV ℜ → ℜ tal que:
0 0
0 0
0 0
0 0
V( x ) , x , x D
V ( ) ; e.
V ( x ) , x , x D.
V ( )
> ∀ ≠ ∈
=
≤ ∀ ≠ ∈
=
(2.6)
então a origem de (2.5) é estável no sentido de Liapunov.
A função ( )V x é denominada como Função de Liapunov para a estabilidade
da origem de (2.5).
Exemplo:
Para fins de ilustração, considere o seguinte sistema exemplo:
1 2
2 1
x xx x
= = −
O ponto de equilíbrio é 0 00
x
=
.
Propõe-se como Função de Liapunov:

Capítulo 2: Estabilidade de Sistemas Dinâmicos
15
2 21 2( )V x x x= +
(0) 0( ) 0 0
V
V x x=
⇒ > ≠
A verificação do atendimento às condições do teorema imposta a ( )V x é
feita como segue:
1 21 1 2 2
1 2( ) 2 2dx dx V VV x x x x x
x dt x dt∂ ∂∂ ∂
= + = +
Substituindo-se 1x e 2x das equações diferenciais na equação de ( )V x , tem-
se:
1 2 2 1( ) 2 2 0V x x x x x= − =
Portanto, a origem do sistema acima é estável e 2 21 2( )V x x x= + é uma Função
de Liapunov para o sistema em análise.
2.1.4.2 Teorema da Estabilidade Assintótica
Se existe uma função : nV ℜ → ℜ tal que:
0 0
0 0;
0 0
0 0
V( x ) , x , x D
V ( ) e.
V ( x ) , x , x D.
V ( )
> ∀ ≠ ∈
=
< ∀ ≠ ∈
=
(2.7)
então a origem de (2.5) é assintoticamente estável no sentido de Liapunov e a
função ( )V x é denominada como Função de Liapunov para a estabilidade
assintótica da origem de (2.5).
Exemplo:
Para fins de ilustração, considere o sistema de equações:
31 1 1
32 2 2
x x x
x x x
= − +
= − +

Capítulo 2: Estabilidade de Sistemas Dinâmicos
16
Pontos de equilíbrio:
0 0 0 1 1 1 1 1 1 , , , , , , , ,
0 1 1 0 0 1 1 1 1− − −
− − −
Considera-se a estabilidade do equilíbrio localizada na origem [ ]0 0 tx = .
Propõe-se como Função de Liapunov:
2 21 2
1( ) ( )2
V x x x= + ⇒(0) 0( ) 0, 0( ) positiva - definida
V V x x V x
=> ≠
A verificação do atendimento às condições do teorema imposta a ( )V x é
feita como segue:
1 1 2 2( )V x x x x x= + ou 2 4 2 41 1 2 2( )V x x x x x= − + − + .
Portanto, ( ) 0V x < para 1 1x < e 2 1x < .
Então, ( )V x é uma Função de Liapunov para o sistema e a origem é
assintoticamente estável.
Os teoremas apresentados fornecem apenas condições suficientes para a
estabilidade e não indicam como encontrar as Funções de Liapunov. Na literatura
pertinente podem ser encontrados procedimentos sistemáticos de obtenção de
Funções de Liapunov, porém, não de aplicação geral. Os resultados da aplicação
desses teoremas garantem a estabilidade da origem numa vizinhança e, em geral,
pode-se obter informações sobre o domínio de estabilidade do ponto de equilíbrio
de interesse. Poderá existir mais de uma Função de Liapunov para um
determinado sistema e, consequentemente, diferentes domínios de estabilidade,
definidos como subconjuntos do domínio exato.
2.1.5 Domínio de Estabilidade
Nesta seção apresenta-se o teorema que suporta a caracterização de um
domínio de estabilidade para um sistema autônomo com o equilíbrio na origem e,

Capítulo 2: Estabilidade de Sistemas Dinâmicos
17
também, um exemplo de aplicação a um sistema elementar. Ressalte-se que o
domínio de estabilidade é também denominado de região de estabilidade
assintótica ou região de atração da origem.
2.1.5.1 Teorema da Região de Estabilidade Assintótica
Considere ( )V x uma função escalar. Suponha que a região
R x/V( x ) K , R D= < ⊂ seja limitada e aberta. Considere ( )V x ser a derivada
total de ( )V x ao longo das trajetórias do sistema 0 0x f ( x ) , f ( )= = .
Se:
a) ( ) 0V x p/ x 0 0 R= = ∈
b) ( ) 0V x p/ x 0 x R> ≠ ∈
c) ( ) 0V x p/ x 0 x R< ≠ ∈
d) ( ) 0V x p/ x 0 0 R= = ∈
então a origem é um estado de equilíbrio assintoticamente estável e todas as
trajetórias partindo em R convergem para a origem quando t → ∞ . A Figura 2.6
ilustra a região de estabilidade assintótica para um sistema hipotético de duas
dimensões.
A condição (c) acima pode ser relaxada para 0V( x ) , x R≤ ∈ , desde que o
conjunto 0y x/V( x ) = = não contenha nenhuma solução de x f ( x )= , exceto a
origem.
Figura 2.6: Região de estabilidade assintótica

Capítulo 2: Estabilidade de Sistemas Dinâmicos
18
2.1.5.2 Exemplo de Aplicação
Considere o sistema:
1 2
2 1 2
x xx senx x
= = − −
o qual possui os pontos de equilíbrio …,, , e 21n0n
00
=
±
π.
Propõe-se a seguinte Função de Liapunov para a determinação de uma
região de atração para o ponto de equilíbrio localizado na origem, [ ]0 0 tx = :
22
1( ) (1 )2xV x cosx = + −
(0) 0
( ) 0 0VV x x
=> ≠
Note quepara
.
A determinação do sinal de ( )V x é feita como segue:
1 1 2 22
2 1 2 1 222
( )
( )
( )
V x senx x x x
V x x senx x senx x
V x x
= +
= − −
= −
Note que ( )V x = 0 em [ ]0 0 tx = e em todo eixo 1x , porém este não é
trajetória do sistema.
Portanto, a origem do sistema sob análise é assintoticamente estável e o
domínio de estabilidade é dado pela região:
( ) ( ,0) 2V x V π< = , já que [ ]( ) 0 0 tV x x π= =para .
Na Figura 2.7 apresentam-se as curvas de nível da Função de Liapunov
( )V x e as trajetórias do sistema para diversas condições iniciais. Essas trajetórias
descrevem o sistema autônomo, ou seja, a partir do momento em que cessa a
perturbação que desloca o sistema do equilíbrio localizado na origem.
Capítulo 2: Estabilidade de Sistemas Dinâmicos
19
-6 -4 -2 0 2 4 6
-6
-4
-2
0
2
4
6
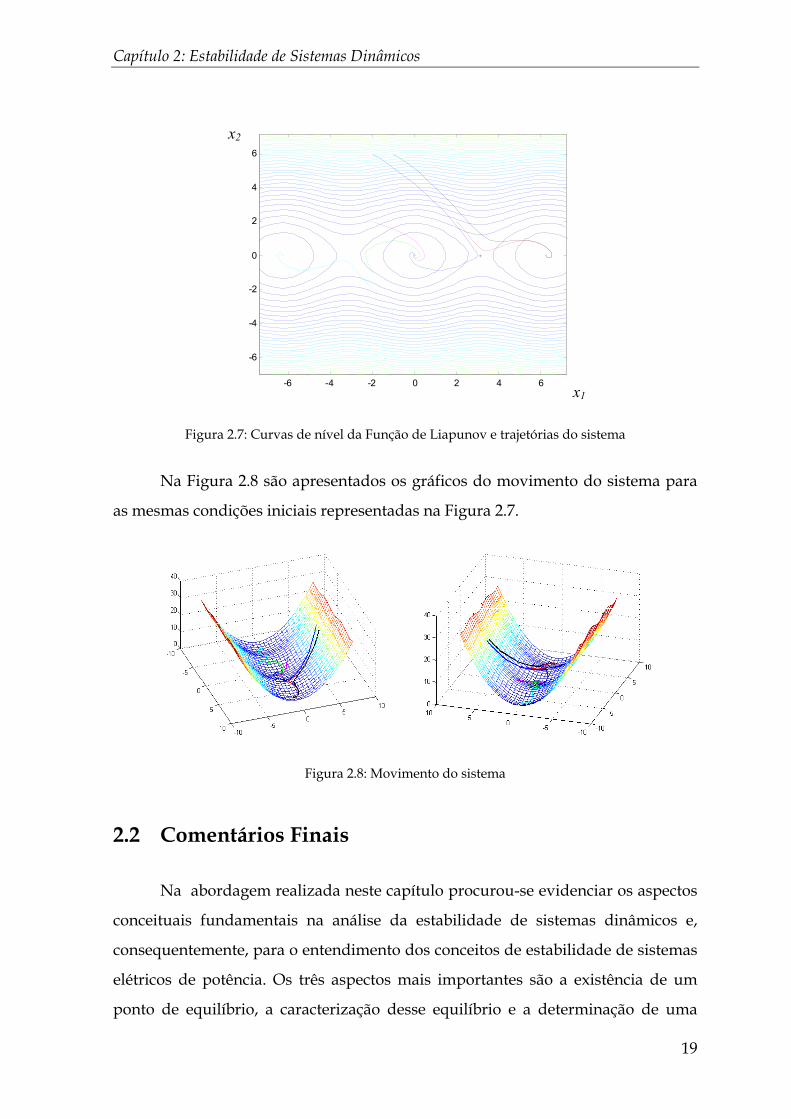
Figura 2.7: Curvas de nível da Função de Liapunov e trajetórias do sistema
Na Figura 2.8 são apresentados os gráficos do movimento do sistema para
as mesmas condições iniciais representadas na Figura 2.7.
Figura 2.8: Movimento do sistema
2.2 Comentários Finais
Na abordagem realizada neste capítulo procurou-se evidenciar os aspectos
conceituais fundamentais na análise da estabilidade de sistemas dinâmicos e,
consequentemente, para o entendimento dos conceitos de estabilidade de sistemas
elétricos de potência. Os três aspectos mais importantes são a existência de um
ponto de equilíbrio, a caracterização desse equilíbrio e a determinação de uma
x2
x1

Capítulo 2: Estabilidade de Sistemas Dinâmicos
20
região de atração para o equilíbrio sob análise. A existência de um ponto de
equilíbrio é condição sine qua non para a análise de estabilidade. Os sistemas não-
lineares em geral e os sistemas de potência, em particular, possuem um número
elevado de pontos de equilíbrio. Assim, a determinação do ponto de equilíbrio de
interesse deve ser a primeira tarefa a ser desenvolvida em um determinado
estudo.
A caracterização do equilíbrio de interesse é de fundamental importância. O
objetivo é determinar se esse equilíbrio é do tipo estável ou instável. No caso de
sistemas lineares , a caracterização do equilíbrio também define a estabilidade do
sistema para qualquer condição inicial. Desse modo, estudar a estabilidade de
sistemas elétricos representados por modelos lineares, significa verificar a
natureza de seu ponto de equilíbrio. Os instrumentos para a realização desses
estudos são as técnicas de análise de sistemas lineares.
A determinação de uma região de atração em torno de um ponto de
equilíbrio estável de interesse é o principal desafio na análise de estabilidade de
sistemas não-lineares, tais como os modelos que representação a dinâmica de
sistemas elétricos de potência, quando submetidos à grandes perturbações. Essa
região de atração, limitada e fechada em torno do equilíbrio, descreve o conjunto
dos estados, a partir dos quais, o sistema deixado livre seguramente recuperará o
equilíbrio perdido por ação de uma perturbação. Embora de aplicação limitada
em sistemas de potência de grande porte, o conceito de região de atração, ou
domínio de estabilidade, é de fundamental importância para o entendimento dos
estudos de estabilidade desses sistemas, abordados nos demais capítulos desse
trabalho.

21
CAPÍTULO 3
3.ESTABILIDADE DE SISTEMAS ELÉTRICOS DE
POTÊNCIA
3.1 Introdução
Os estudos da estabilidade de sistemas elétricos de potência estão
diretamente relacionados à análise do comportamento dinâmico dos mesmos após
a ocorrência de perturbações. O tipo de perturbação e a natureza dos fenômenos
que se deseja analisar definem o grau de detalhamento e as características da
modelagem que se deve usar na representação de seus elementos físicos.
A abordagem do problema da estabilidade realizada no capítulo anterior,
baseada na teoria de sistemas não-lineares, é genérica e, portanto, os conceitos
envolvidos são aplicáveis a qualquer sistema dinâmico. No entanto, o estudo da
estabilidade de sistemas elétricos de potência envolve, além da base conceitual
estabelecida, muitos desenvolvimentos relacionados ao entendimento de
fenômenos físicos complexos, técnicas de modelagem e metodologias específicas
de análise. Ressalte-se ainda que a representação de sistemas reais resulta em
modelos matemáticos de grande porte, cuja solução implica em elevada
complexidade computacional.
Diante dessas características, o presente capítulo é dedicado,
principalmente, ao estudo do problema da estabilidade de sistemas elétricos de
potência com modelagem simplificada. Dessa forma, é dado ênfase ao
entendimento da natureza do problema de estabilidade para pequenas e grandes
perturbações, nas principais abordagens de análise utilizadas, nos diversos

Capítulo 3: Estabilidade de Sistemas Elétricos de Potência
22
aspectos que influenciam o comportamento do sistema e, consequentemente, nos
limites de estabilidade do mesmo.
3.2 O Problema da Estabilidade
Considere um sistema constituído de um único gerador alimentando um
motor síncrono, ligados através de uma reatância lx , conforme ilustra o diagrama
esquemático da Figura 3.1.
Glx
M
Figura 3.1: Sistema gerador síncrono alimentando um motor síncrono
Representando-se cada uma das máquinas síncronas por uma fonte de
tensão constante em série com uma reatância constante, obtém-se o circuito
equivalente representado na Figura 3.2.
~ ~gE gtE mtE mE
gx lx mx
I
Figura 3.2: Circuito equivalente do sistema gerador - motor síncrono
Nesta figura gE e mE são tensões induzidas pelos enlaces de fluxo
produzidos pelos enrolamentos de campo dos rotores das máquinas síncronas.
Define-se ainda a reatância equivalente eq g l mx x x x= + + .
Para o circuito equivalente da Figura 3.2 pode-se construir o diagrama
fasorial apresentado na Figura 3.3, em que δ é o ângulo elétrico relacionado
diretamente com a posição relativa entre os rotores das máquinas.

Capítulo 3: Estabilidade de Sistemas Elétricos de Potência
23
gE
.eqx I
mEI
δ
ϕ
Figura 3.3: Diagrama fasorial do sistema gerador - motor síncrono
3.2.1 Potência Ativa Transferida do Gerador para o Motor
A potência ativa fornecida pelo gerador pode ser obtida pela expressão:
*.e gP e E I = ℜ
(3.1)
onde:
g m
eq
E EI
jx−
= (3.2)
Substituindo-se a equação (3.2) na equação (3.1) resulta:
0.
90
og m
e g oeq
E EP e E
x
δδ
∠ − − ∠ = ℜ ∠ ∠ −
(3.3)
ou:
. . (90 )og m
eeq
E E cosP
xδ+
= (3.4)
Usando-se identidades trigonométricas a equação (3.4) pode ser escrita na
seguinte forma:
g me
eq
E EP sen
xδ= (3.5)
onde:

Capítulo 3: Estabilidade de Sistemas Elétricos de Potência
24
g mmax
eq
E EP
x= (3.6)
é a potência ativa máxima que pode ser transmitida entre as máquinas.
3.2.2 Curva Potência - Ângulo do Sistema
A partir da equação (3.5) que descreve a potência transferida entre as
máquinas em função do ângulo de carga δ , pode-se realizar uma representação
gráfica para a potência elétrica em função do ângulo δ , conhecida como Curva
Potência - Ângulo do sistema, ilustrada na Figura 3.4.
A
B
C
eP
maxP
1eP
0eP
0δ 90o 180o
90o−180o−0 δ
Figura 3.4: Curva potência - ângulo para o sistema gerador - motor síncrono
3.2.2.1 Comportamento do Sistema para Pequenas Variações na Carga do Motor
Considere inicialmente o sistema operando no ponto A da curva potência–
ângulo da Figura 3.4, onde a potência elétrica ( eP ) de entrada do motor é igual a
potência mecânica ( mP ) de saída, corrigida para as perdas rotacionais. Suponha
um pequeno aumento da carga no eixo do motor. A potência de saída do motor
aumenta enquanto que, por um instante, o ângulo entre as tensões permanece
constante, e consequentemente, também a potência elétrica ( eP ).

Capítulo 3: Estabilidade de Sistemas Elétricos de Potência
25
Essa diferença de potência tende a retardar o motor, diminuindo a
velocidade e aumentando o ângulo de carga. Com o aumento do ângulo de carga,
aumenta a potência transmitida e o sistema passa a operar no ponto B da curva
potência - ângulo.
Se o sistema estiver operando no ponto C, um pequeno aumento na carga
do eixo do motor implicará em uma diminuição da potência elétrica transmitida
entre as máquinas. Neste caso, o ângulo de carga aumentará cada vez mais, sem
aumentar a potência elétrica de entrada e o motor perderá o sincronismo com o
gerador.
Portanto, maxP é denominado o Limite de Estabilidade em Regime Permanente
do sistema e representa a máxima capacidade de transferência de potência do
mesmo.
3.2.2.2 Comportamento do Sistema para Grandes Perturbações
No caso de variações bruscas de carga, o sistema pode perder o sincronismo
para valores da nova carga inferiores a maxP . Quando um grande aumento de
carga é aplicado ao eixo do motor, a potência mecânica ( mP ) de saída do motor
excede em muito a potência elétrica ( eP ) de entrada, gerando uma deficiência de
potência que é suprida pelo decréscimo de energia cinética. O motor perde
velocidade, a defasagem angular δ aumenta e, consequentemente, a potência
elétrica ( eP ) de entrada também. Supondo que a nova carga não excede maxP , o
ângulo de carga aumenta até que o equilíbrio entre a potência mecânica ( mP ) e a
potência elétrica ( eP ) é alcançado. Entretanto, por ter uma velocidade muito baixa
e como a velocidade do motor não pode variar instantaneamente, o ângulo
continua a aumentar produzindo um torque maior que o da saída, a fim de
aumentar a velocidade do motor. Contudo, o ângulo δ pode ter aumentado muito
além do ponto C da Figura 3.4, fazendo diminuir a potência de entrada e,
consequentemente, diminuir ainda mais a velocidade. Neste caso o sistema

Capítulo 3: Estabilidade de Sistemas Elétricos de Potência
26
perderá o sincronismo. Se o aumento súbito da carga não for muito grande, o
motor voltará à velocidade normal sem perder o sincronismo.
Portanto, o maior aumento súbito de carga que não provoca perda do
sincronismo constitui-se no Limite de Estabilidade Transitória do sistema para uma
determinada condição de operação.
Assim, o Limite de Estabilidade Transitória depende da natureza e
magnitude da perturbação, a qual, por exemplo, pode ser uma grande variação da
carga, uma grande variação na reatância por chaveamento de uma linha de
transmissão ou um curto-circuito.
Finalmente, conclui-se que a estabilidade ou não de um sistema deve estar
relacionada as condições em que esta estabilidade foi examinada (condições de
operação e tipo de perturbação).
3.3 Definições de Estabilidade
A estabilidade de sistemas elétricos de potência tem sido classificada de
diversas maneiras. Entre as classificações mais utilizadas destacam-se as
definições propostas por uma Força Tarefa do IEEE, em 1982, baseadas no tipo de
perturbação:
• Pequena Perturbação em um Sistema Elétrico de Potência: Uma pequena
perturbação é uma perturbação para a qual as equações que descrevem a
dinâmica do sistema podem ser linearizadas para a análise;
• Grande Perturbação em um Sistema Elétrico de Potência: Uma grande
perturbação é uma perturbação para a qual as equações que descrevem a
dinâmica do sistema não podem ser linearizadas para a análise;
• Estabilidade de Regime Permanente: Um sistema elétrico de potência é
estável em regime permanente, para uma condição de operação em
regime permanente, se, após a ocorrência de qualquer pequena
perturbação, ele encontra uma condição de operação em regime

Capítulo 3: Estabilidade de Sistemas Elétricos de Potência
27
permanente a qual é idêntica ou aproximada a condição de operação
anterior a perturbação (estabilidade para pequenas perturbações);
• Estabilidade Transitória: Um sistema elétrico de potência é estável
transitoriamente para uma condição de operação particular se, após a
ocorrência de uma perturbação, ele alcança uma condição de operação
em regime permanente aceitável (conhecida como estabilidade
assintótica).
3.4 Modelagem de um Sistema Máquina - Barra Infinita
Considere um sistema constituído de uma única máquina síncrona
conectada diretamente à uma barra infinita. Os torques que atuam sobre o eixo da
máquina síncrona são representados esquematicamente na Figura 3.5.
MS
mT
dT eT iT
Figura 3.5: Representação esquemática dos torques que atuam sobre o eixo da máquina síncrona
A equação do balanço de torque, desprezando-se o torque de
amortecimento dT , é:
i m eT T T= − (3.7)
ou:
..m e aJ T T Tθ = − = (3.8)
onde:
J : momento de inércia (Kg.m2);
iT : torque inercial (N.m ou J/rad);

Capítulo 3: Estabilidade de Sistemas Elétricos de Potência
28
mT : torque mecânico (N.m ou J/rad);
eT : torque elétrico (N.m ou J/rad);
aT : torque acelerante (N.m ou J/rad);
.2r mt πθ ω δ= + + : ângulo mecânico (rad).
A representação esquemática do ângulo θ é apresentada na Figura 3.6.
Ref. fixa
Ref. móvel
d
q
θ
rtω
mδ
Figura 3.6: Representação esquemática do ângulo mecânico θ
Definindo-se . .
mm rω θ ω δ= = + e, consequentemente, . .. ..
m mω θ δ= = e
substituindo-se na equação (3.8), resulta:
... m aJ Tδ = (J/rad) (3.9)
Multiplicando-se (3.9) por mω em rad/s, obtém-se:
... . .mm a mJ Tω δ ω= (w) (3.10)
onde . mM J ω= é conhecido como momento angular.
Ressalte-se que para pequenas variações de velocidade considera-se
. mrM J ω= = constante , passando a ser denominado de constante de inércia, cuja
unidade é (J.s/rad).

Capítulo 3: Estabilidade de Sistemas Elétricos de Potência
29
Assim, a equação (3.9) pode ser escrita na seguinte forma:
..m m eM P Pδ = − (3.11)
Definindo-se um ângulo elétrico, onde p é igual ao número de pólos da
máquina síncrona, tem-se:
..2m e
M P Pp
δ = − (3.12)
com δ em (rad elétricos) e .
ω δ= em (rad elétricos/s).
Se M for expresso em (J.s/rad. elétricos), a equação (3.12) pode ser rescrita
na seguinte forma:
..m e aM P P Pδ = − = (3.13)
Normalizando a equação (3.13) por uma potência base trifásica 3bS , obtém-
se a seguinte expressão:
..
3 3
a
b b
PMS S
δ = (3.14)
ou:
..aM Pδ = (pu) (3.15)
onde M é dado em
ˆpu de potenciarad/s . Logo:
..m eM P Pδ = − (3.16)
A equação (3.16) é conhecida como a equação de oscilação da máquina
síncrona e suas grandezas estão representadas em (pu) de uma base de potência
trifásica.
Por outro lado, considere a equação:

Capítulo 3: Estabilidade de Sistemas Elétricos de Potência
30
..m aJ Tδ = (J/rad) (3.17)
E o torque base:
3 /b b mrT S ω= (3.18)
Normalizando a equação (3.17) pelo torque base (3.18), resulta:
..
3 /m a
b mr b
TJS T
δω
= (pu) (3.19)
ou:
..
3
. . mmr a
b b
J TS T
ω δ = (pu) (3.20)
Substituindo-se 21 . .2 mrW J ω= , que corresponde a energia cinética da
máquina síncrona à velocidade nominal, na equação (3.20), obtém-se:
..
3
2. ..
ma
mr b
W TSδ
ω= (3.21)
Definindo-se 3b
WHS
= como a energia armazenada em (J/VA nominal),
pode-se rescrever a equação (3.21) na seguinte forma:
..2. . m amr
H Tδω
= (pu) (3.22)
Se mδ for expresso em (rad elétricos) e mrω em (rad elétricos/s) a equação
(3.22) assume a seguinte forma:
..2. . ar
H Tδω
= (pu) (3.23)
Considerando-se que .a a mP T ω= e que 3 .b b mrS T ω= , pode-se escrever:

Capítulo 3: Estabilidade de Sistemas Elétricos de Potência
31
3
..
a a m
b b mr
P TS T
ωω
= (3.24)
Portanto, para m mrω ω≅ , tem-se a aP T= em (pu) e, consequentemente, a
equação da oscilação assume a seguinte forma:
..2. . ar
H Pδω
= (3.25)
onde H é dado em (s), rω em (rad elétricos/s) e δ em (rad elétricos).
Note que a constante H , dada em (s), é definida em função da base de
potência 3bS , normalmente a potência aparente nominal da máquina síncrona.
Valores típicos de H encontram-se entre um e cinco segundos. No caso de se
considerar a máquina ligada a um sistema com base de potência definida, deve-se
normalizar o valor de H para esta base, conforme a equação 3
3. b maq
sis maqb sis
SH H
S= .
3.5 Estabilidade de Regime Permanente
Nesta seção são apresentados os elementos básicos para a análise da
estabilidade de regime permanente e discutida a influência de diversos tipos e
localizações de compensação reativa no limite de estabilidade de regime
permanente.
3.5.1 Análise de um Sistema Máquina – Barra Infinita
Considere a configuração ilustrada na Figura 3.7 representando a
modelagem matemática de uma máquina síncrona conectada a uma barra infinita,
através de uma linha de transmissão representada apenas pela sua reatância série
lx .
Supondo-se a tensão qE constante e tomando-se como referência o sistema
gerador síncrono alimentando um motor síncrono, apresentado anteriormente, a
potência elétrica fornecida pelo sistema da Figura 3.7 é dada por:

Capítulo 3: Estabilidade de Sistemas Elétricos de Potência
32
qe
d l
E VP sen
x xδ=
+(3.26)
ou:
e maxP P senδ= (3.27)
onde:
qmax
d l
E VP
x x=
+(3.28)
~ IqE δ∠
lxdxtV β∠ 0oV ∠
P
Figura 3.7: Circuito equivalente de um sistema máquina – barra infinita
A curva potência – ângulo é representada na Figura 3.8, considerando-se
uma condição de operação em regime permanente 0 0m eP P= em que 0δ δ= .
0 0m eP P=
0δ2π δ
P
0π δ−
Figura 3.8: Curva potência - ângulo para o sistema máquina – barra infinita
3.5.1.1 Análise pelo Coeficiente de Potência Sincronizante
Suponha que o ângulo δ sofra uma pequena variação δ∆ em relação ao
valor inicial 0δ , ou seja, 0δ δ δ= + ∆ . Neste caso a potência elétrica será dada por:

Capítulo 3: Estabilidade de Sistemas Elétricos de Potência
33
( )0 0e e e maxP P P P sen δ δ= + ∆ = + ∆ (3.29)
ou:
( )0 0e maxP P sen cos cos senδ δ δ δ= ∆ + ∆ (3.30)
Para valores pequenos de δ∆ resulta 1,0cos δ∆ ≅ e sen δ δ∆ ≅ ∆ .
Consequentemente, pode-se escrever:
( )0 0 0e e max maxP P P sen P cosδ δ δ+ ∆ ≅ + ∆ (3.31)
Portanto:
( )0e maxP P cosδ δ∆ = ∆ (3.32)
A quantidade entre parênteses na equação (3.32) é conhecida como
Coeficiente de Potência Sincronizante e denotada por SP .
Note da equação (3.32) que:
0
0e
S maxPP P cos
δ δδ
δ =
∂=∂ (3.33)
Assim, a equação (3.32) pode também ser escrita como segue:
ee S
PP P δ δδ
∂∆ = ∆ = ∆∂
(3.34)
Comentários:
Considere que o sistema da Figura 3.7 esteja operando em regime
permanente para 0δ δ= , conforme representado na Figura 3.8, e que a potência
mecânica de entrada mP da máquina síncrona seja mantida constante. Suponha
que o ângulo δ sofra uma perturbação positiva δ∆ em relação a 0δ . O resultado é
um aumento na potência elétrica gerada eP que provocará uma desaceleração no
rotor da máquina no sentido de fazer com que δ retorne ao valor 0δ . Se ocorrer
uma perturbação negativa δ∆ em relação a 0δ , surgirá uma ação acelerante no

Capítulo 3: Estabilidade de Sistemas Elétricos de Potência
34
rotor no sentido de fazer com que δ retorne ao valor 0δ , caracterizando este
ponto de operação como um ponto de equilíbrio estável.
Por outro lado, fazendo-se uma análise semelhante para o ponto de
operação 0π δ− verifica-se o surgimento de ações no sentido de afastar o sistema
desse ponto de operação, caracterizando-o como um ponto de equilíbrio instável.
Portanto, para 02πδ< < tem-se coeficientes de potência sincronizante
positivos ( 0SP > ) e pontos de operação estáveis. Por outro lado, para 2π δ π< <
tem-se coeficientes de potência sincronizante negativos ( 0SP < ) e pontos de
operação instáveis.
3.5.1.2 Análise pela Teoria de Sistemas Lineares
A caracterização do equilíbrio do sistema máquina - barra infinita sob
análise também pode ser realizada usando os elementos da teoria de sistemas
lineares. Considere a equação de oscilação do sistema representada pelo sistema
de equações diferenciais de primeira ordem (3.35):
1 ( )2.
( 1)
..
m e
r
qe
d l
d P Pdt Hddt
E VP sen
x x
ω
δ ω ω
δ
= −
= −
=+
(3.35)
A metodologia de análise requer a linearização das equações (3.35) em
torno do ponto de operação 0 0 0, , ,r e mP Pω δ .
Assim, definindo-se:
( ) ( )0
0 0
0
. .
1,0
ee e e S
PP P P Pδ δ
δ δ δ δ δδ
δ δ δω ω
=
∂+ ∆ ≅ + ∆ ⇒ ∆ = ∆∂
= + ∆= + ∆
(3.36)

Capítulo 3: Estabilidade de Sistemas Elétricos de Potência
35
e substituindo-se nas equações (3.35) resulta:
1 .( )2
.
m e
r
d P Pdt H
ddt
ω
δ ω ω
∆ = ∆ − ∆
∆ = ∆(3.37)
ou:
1 .( . )2
.
m S
r
d P Pdt H
ddt
ω δ
δ ω ω
∆ = ∆ − ∆
∆ = ∆(3.38)
As equações (3.37) e (3.38) podem ser escritas na seguinte forma matricial:
0.2 2
0 0
S m
r
d P Pdt H H
ddt
ωω
δ δω
∆ − ∆ ∆ = + ∆ ∆
(3.39)
A estabilidade do sistema de equações (3.39) pode ser analisada calculando-
se os autovalores da matriz de coeficientes, conforme descrito a seguir:
2 .det( . ) 0 det 0 022
SS r
r
PPI A H
Hλ ωλ λω λ
− = ⇒ = ⇒ + =
−
(3.40)
Consequentemente, os autovalores do sistema são: 1,2 2S rj P Hλ ω= ± .
Na Figura 3.9 apresenta-se a localização dos autovalores no plano complexo
para valores de SP positivos e negativos.
Para 0SP > Para 0SP <
x
x
2S rPHω
2S rPHω
−
jω
σ x x
jω
σ
2S rPHω
2S rPHω−
Figura 3.9: Localização dos autovalores do sistema no plano complexo

Capítulo 3: Estabilidade de Sistemas Elétricos de Potência
36
Note que para 0SP > o sistema é marginalmente estável, contudo o
amortecimento proporcional a ω∆ não foi considerado e tem um efeito positivo.
Para 0SP < o sistema terá um autovalor positivo, caracterizando um ponto de
equilíbrio instável.
Na Figura 3.10 apresenta-se um diagrama de blocos do modelo linearizado
do sistema máquina - barra infinita.
12H
1s
1s
rω
SP
+
−δ∆mP∆
eP∆ω∆
Figura 3.10: Diagrama de blocos do sistema
Considerando-se a existência de um torque de amortecimento proporcional
à variação de velocidade do rotor ( dT D ω= ∆ ), o diagrama de blocos da Figura 3.10
assume a forma apresentada na Figura 3.11.
12Hs
rs
ω
SP
+
−
D
−
δ∆ω∆eP∆
mP∆
Figura 3.11: Diagrama de blocos com a inclusão do coeficiente de amortecimento
Consequentemente, o modelo matemático considerando-se o torque de
amortecimento proporcional a ω∆ ( 0D ≠ ), passa a ser:

Capítulo 3: Estabilidade de Sistemas Elétricos de Potência
37
.2 2 20 0
S m
r
d P PDdt H H H
ddt
ωω
δ δω
∆ − ∆− ∆ = + ∆ ∆
(3.41)
Para 0D > os autovalores desse sistema situam-se no semiplano esquerdo
do plano complexo e, portanto, a resposta do sistema a uma perturbação será
estável e amortecida.
Finalmente, observe-se que no estudo realizado foram utilizadas duas
metodologias para a caracterização do equilíbrio do sistema máquina - barra
infinita da Figura 3.7. A primeira baseada na análise do sinal do coeficiente de
potência sincronizante e a segunda na análise dos autovalores do modelo
linearizado da dinâmica do sistema. Independente da metodologia utilizada, os
resultados obtidos permitem concluir apenas sobre a caracterização do estado de
equilíbrio do sistema. O entendimento dessa peculiaridade é de fundamental
importância para se entender o escopo da análise da estabilidade de regime
permanente, também denominada de estabilidade para pequenas perturbações.
Uma abordagem desse problema usando modelagem detalhada, inclusive para
sistemas multimáquinas, é objeto dos dois últimos capítulos desse trabalho.
3.5.2 Compensação Reativa e Limites de Estabilidade
Nesta seção analisa-se a influência de capacitores série, shunt e dispositivos
estáticos, formados por capacitores e indutores shunt na estabilidade de sistemas
elétricos de potência constituídos por longas linhas de transmissão (KIMBARK,
1977).
Para tanto, considera-se um sistema elétrico simples formado por duas
máquinas síncronas, um gerador e um motor, interligados por uma linha de
transmissão representada apenas por uma indutância série, com capacitância shunt
distribuída negligenciada. Por simplicidade de análise todos os componentes do
sistema são considerados sem perdas e as tensões terminais são consideradas com
magnitudes iguais e constantes, E , mas com defasagens angular variáveis.

Capítulo 3: Estabilidade de Sistemas Elétricos de Potência
38
3.5.2.1 Caso 1: Linha de Transmissão sem Compensação Reativa
Análise da freqüência forçada:
Este caso serve de referência para a comparação com os demais casos
apresentados na seqüência.
Considere o circuito elétrico equivalente apresentado na Figura 3.12.
Figura 3.12: Circuito elétrico equivalente para o caso 1
Tomando-se o ponto médio da linha de transmissão como referência
angular, as tensões terminais são dadas por:
22 2
22 2
S
R
E E E cos jsen
E E E cos jsen
δ δδ
δ δδ
= ∠ = + = ∠ − = −
(3.42)
A tensão no ponto médio da linha de transmissão é dada por:
( ) ( )1 0 2 2m m S RV V E E Ecos δ= ∠ = + = (3.43)
onde o subscrito numérico indica o número do caso.
As correntes em ambos os terminais das máquinas síncronas e no ponto
médio da linha de transmissão é dada por:
1 11 1 1 1
2S RS R m
L L
E E EI I I I senjX X 2
δ−= = = = = (3.44)
Devido a ausência de perdas, a potência ativa é a mesma em qualquer
ponto do circuito. Contudo, é conveniente calculá-la no ponto médio da linha,
onde a tensão mV está em fase com a corrente mI :

Capítulo 3: Estabilidade de Sistemas Elétricos de Potência
39
2 21 1 1
2m m
L L
E EP V I cos sen senX 2 2 X
δ δ δ= = = (3.45)
A potência máxima ocorre em 90oδ = e é dada por:
21m
L
EPX
= (3.46)
A potência reativa de entrada em cada terminal é dada por:
( )22 2
1 1 12 1
2S RL L
E EQ Q EI sen sen cos2 X Xδ δ δ = − = = = −
(3.47)
A potência reativa absorvida na linha de transmissão é dada por:
( )2 2
2 2 2 12L L L
L L
E EQ X I X sen cosX X
δ δ
= = = −
(3.48)
Análise da freqüência natural:
Neste caso, não existe freqüência natural de oscilação do sistema.
3.5.2.2 Caso 2: Linha de Transmissão com Capacitor Série
Análise da freqüência forçada:
O circuito equivalente e o digrama fasorial considerando a adição de um
capacitor série ao circuito original são apresentados na Figura 3.13 e na Figura
3.14, respectivamente.
Figura 3.13: Circuito elétrico equivalente para o caso 2

Capítulo 3: Estabilidade de Sistemas Elétricos de Potência
40
Figura 3.14: Diagrama fasorial para o caso 2
O capacitor série é dividido em duas partes de mesma reatância 2CX . A
reatância equivalente é reduzida de LX para um valor dado por:
( )1L C LX X X X s= − = − (3.49)
onde:
C
L
XsX
= (3.50)
é o grau de compensação série, variando entre 0 e 1.
Para efeito de comparação entre os diversos casos, define-se os seguintes
ganhos em termos de quantidades no ponto médio da linha de transmissão e para
os mesmos valores de defasagem angular em todos os casos:
1
kIk
IGI
= (3.51)
1
mkVk
m
VGV
= (3.52)
1
kPk
PGP
= (3.53)
onde:

Capítulo 3: Estabilidade de Sistemas Elétricos de Potência
41
IkG : ganho de corrente;
VkG : ganho de tensão;
PkG : ganho de potência;
kI : corrente do caso k;
mkV : tensão no ponto médio do caso k;
kP : potência do caso k;
1I : corrente do caso 1;
1mV : tensão no ponto médio do caso 1;
1P : potência do caso 1;
Desenvolvendo-se as equações para o caso 2, de modo análogo ao realizado
no caso 1, obtém-se os seguintes ganhos com a adição do capacitor série:
2 1VG = ,
( )2 2 1 1I PG G s= = − .
Considerando, por exemplo, uma compensação série de 40% ( 0,4s = ) tem-
se:
2 2 1 0,6 1,667I PG G= = = .
Análise da freqüência natural:
A freqüência natural é dada por:
121 .s C
n s C s sL L
XX sX XLCωω ω ω ω
= = = =
(3.54)
Em termos da freqüência do sistema, tem-se:
n n
s s
f sf
ωω
= = (3.55)

Capítulo 3: Estabilidade de Sistemas Elétricos de Potência
42
Se 0s = não existe compensação série. Se 1s = tem-se 100% de
compensação ou ressonância série. Neste caso a linha de transmissão se comporta
como se não tivesse reatância e sua resistência (a qual foi negligenciada)
predomina. Então a potência é transmitida apenas pela diferença de magnitude
das tensões, não pelas defasagens angulares, e o sistema é instável. As únicas
regiões de operação estável estão na vizinhança de nδ π= ± radianos (onde n é um
número ímpar). Em tais pontos de operação, a corrente é elevada, sendo da ordem
da corrente de curto-circuito.
Se 0 1s< < , então 0 1s< < e pela equação (3.55) tem-se n sf f< , ou seja, a
freqüência natural do sistema é inferior a freqüência síncrona. Assim, o uso de
compensação série representa um potencial de risco de ressonância subsíncrona na
presença de turbogeradores.
3.5.2.3 Caso 3: Linha de Transmissão com Capacitor Shunt
Análise da freqüência forçada:
O circuito equivalente e o diagrama fasorial são apresentados na Figura 3.15
e na Figura 3.16, respectivamente. A corrente no ponto médio mI é definida como
aquela entre os dois capacitores em paralelo.
Os ganhos são dados por:
31
1 4VC L
GB X
=−
,
3 1IG = ,
3 31
1 4P VC L
G GB X
= =−
.
Enquanto um capacitor série proporciona um ganho de potência,
aumentando a corrente para uma dada defasagem angular δ , o capacitor shunt
aumenta a tensão no ponto médio. Isto não é desejável em sistemas de potência

Capítulo 3: Estabilidade de Sistemas Elétricos de Potência
43
usuais com tensões constantes e, portanto, apenas ganhos moderados de potência
podem ser obtidos, a menos que o nível de isolamento seja elevado.
Figura 3.15: Circuito elétrico equivalente para o caso 3
Figura 3.16: Diagrama fasorial para o caso 3
Análise da freqüência natural:
O circuito da Figura 3.15 tem duas malhas, mas como os dois ramos 2LX
estão em paralelo quando as tensões terminais são igualadas a zero, ele reduz-se a
uma malha com reatância indutiva 4LX e susceptância capacitiva CB .
A freqüência natural, em radianos, é dada por:
124 21 .s s s
nL C C LX BLC B X
ω ω ωω
= = =
(3.56)
Em termos da freqüência do sistema, tem-se:

Capítulo 3: Estabilidade de Sistemas Elétricos de Potência
44
2n n
s s C L
ff B X
ωω
= = (3.57)
Define-se:
3'4
C LB Xs = (3.58)
como o grau de compensação shunt, variando entre 0 e 1.
Substituindo-se a equação (3.58) na equação (3.57) tem-se:
3 1'
n
s
ff s
= (3.59)
Então pela equação (3.59) e para 0 ' 1s< < tem-se n sf f> , o que significa
que a ressonância subsíncrona não pode ocorrer. Esta é uma das principais
vantagens dos capacitores shunt sobre os capacitores série.
3.5.2.4 Caso 4: Linha de Transmissão com Capacitor Série e Capacitor Shunt
Análise da freqüência forçada:
Neste caso obtém-se os seguintes ganhos:
41 ,
1 4V L CC
G X X XB X
= = −−
onde ,
41 ,
1C
IL
XG ss X
= =−
onde ,
4 4 4P V IG G G= .
Análise da freqüência natural:
Existem dois modos de operação, sendo um com S RI I= e o outro com
S RI I= − . As freqüências naturais correspondentes são dadas por:
n
s
f sf
= (3.60)

Capítulo 3: Estabilidade de Sistemas Elétricos de Potência
45
( )1 / 4' C Cn
s C L
B Xff B X
+= (3.61)
onde CX é a reatância equivalente dos dois capacitores série e CB é a susceptância
do capacitor shunt.
A freqüência da equação (3.60) é subsíncrona e é equivalente a freqüência
para o caso com compensação série somente.
A freqüência dada na equação (3.61) é supersíncrona e é levemente superior
a freqüência dada na equação (3.57), correspondente ao caso com compensação
shunt somente.
Dependendo da relação entre o grau de compensação série e shunt existe o
risco de ressonância subsíncrona.
3.5.2.5 Caso 5: Linha de Transmissão com Capacitor Shunt Fora do Centro
Análise da freqüência forçada:
O circuito equivalente é apresentado Figura 3.17.
Figura 3.17: Circuito elétrico equivalente para o caso 5
Utiliza-se um parâmetro k para ilustrar a variação da reatância da linha de
transmissão em função da localização do capacitor shunt. Por exemplo, se k=0,5 o
capacitor está localizado no centro da linha.
O ganho de potência em relação ao ganho de potência com o capacitor
localizado no centro (ponto médio) da linha de transmissão é dado por:

Capítulo 3: Estabilidade de Sistemas Elétricos de Potência
46
( )5
3
1 0, 251 1
P C L
P C L
G B XG k k B X
−=
− − (3.62)
A Figura 3.18 ilustra essa relação entre os ganhos de potência em função do
parâmetro k.
Figura 3.18: Ganho de potência relativo para o caso 5
Análise da freqüência natural:
A freqüência natural é equivalente ao caso 3 com o capacitor localizado no
centro da linha de transmissão.
3.5.2.6 Caso 6: Linha de Transmissão com Dois Capacitores Shunt
Análise da freqüência forçada:
Os capacitores shunt são dispostos de modo a dividir a linha de transmissão
em três partes, conforme ilustrado na Figura 3.19.
Figura 3.19: Circuito elétrico equivalente para o caso 6

Capítulo 3: Estabilidade de Sistemas Elétricos de Potência
47
Para 90oδ = e ganhos de potência entre 1,2 e 2,0, equivalentes ao caso com
um capacitor localizado no centro da linha de transmissão, a potência reativa
suprida pelos dois capacitores neste caso é levemente menor do que a potência
reativa suprida no caso com um capacitor no centro.
Análise da freqüência natural:
Neste caso, considerando os parâmetros CB e LX iguais ao do caso 3 com o
capacitor no centro da linha, existem duas freqüências naturais. Elas são 1,22 e 2,12
vezes maior que a freqüência natural do caso 3 com um único capacitor shunt no
centro da linha e, portanto, são freqüências supersíncronas.
3.5.2.7 Caso 7: Linha de Transmissão com Compensador Shunt no Centro
O circuito equivalente é apresentado na Figura 3.20. Considere que a
reatância do compensador é nula e a fonte de tensão kE é constante. Os dois
círculos concêntricos são uma simbologia para representar a restrição de não
fornecimento ou absorção de potência ativa, de modo que somente potência
reativa pode ser suprida ou absorvida.
Figura 3.20: Circuito elétrico equivalente para os casos 7 e 8
A potência ativa é dada por:
7 12 2
2 2k k
mL
E E EP sen P senX E
δ δ = =
(3.63)
A curva potência-ângulo é apresentada na Figura 3.21, onde é comparada a
curva de potência do caso base sem compensação.
O ganho de potência é dado por:

Capítulo 3: Estabilidade de Sistemas Elétricos de Potência
48
72 k
PEGE
=
Ângulo δ
Figura 3.21: Curvas de potência transmitida em função da defasagem angular para os casos 1 e 7 e
potência reativa suprida pelo compensador shunt para o caso 7
3.5.2.8 Caso 8: Linha de Transmissão com Compensador Shunt Fora do Centro
O circuito equivalente é o mesmo da Figura 3.20, porém com k<0,5.
A potência é dada por:
( )8 1k k
S RL L
E E E EP sen sen
kX k Xδ δ= =
− (3.64)
O ganho de potência é dado por:
81
1k
PEG
k E = −
Uma família de curvas potência-ângulo para vários valores do parâmetro k
é apresentada na Figura 3.22.

Capítulo 3: Estabilidade de Sistemas Elétricos de Potência
49
Ângulo δ
Figura 3.22: Família de curvas potência-ângulo para o caso 8
3.5.2.9 Caso 9: Linha de Transmissão com Compensador Shunt e Reatância no
Centro
O circuito equivalente á apresentado na Figura 3.23.
Figura 3.23: Circuito elétrico equivalente para o caso 9
A potência é dada por:
9 1
242
1 4
k
m
ER sen senEP PR
δδ + =
+(3.65)
onde:
S
L
XRX
= (3.66)
Uma família de curvas potência-ângulo para vários valores do parâmetro R
é apresentada na Figura 3.24.

Capítulo 3: Estabilidade de Sistemas Elétricos de Potência
50
Ângulo δ
Potê
ncia
Figura 3.24: Família de curvas potência-ângulo para o caso 9
3.5.2.10 Comentários
A partir dos resultados apresentados anteriormente faz-se os seguintes
comentários gerais:
• o limite de estabilidade de sistemas de potência com longas linhas de
transmissão pode ser melhorado pela adição de capacitores em série,
capacitores shunt ou dispositivos estáticos que incluem capacitores e
indutores em série e shunt;
• nas compensações série as freqüências naturais do circuito são
subsíncronas e nas compensações shunt as freqüências naturais são
supersíncronas;
• a compensação shunt é mais efetiva quando conectada ao centro elétrico
da linha de transmissão;
• os capacitores shunt fixos não podem aumentar muito o limite de
estabilidade sem causar problemas de sobretensão em cargas leves;
• o melhor método é usar um capacitor shunt fixo e um indutor variável
controlado automaticamente;
• capacitores série são preferidos onde a geração é hidrelétrica, porque a
ressonância subsíncrona produz sérios danos em turbogeradores a
vapor.

Capítulo 3: Estabilidade de Sistemas Elétricos de Potência
51
3.6 Estabilidade Transitória
Nesta seção realiza-se uma abordagem do problema da estabilidade
transitória de sistemas elétricos de potência baseada na metodologia clássica de
análise. A modelagem matemática adotada considera as seguintes hipóteses
simplificadoras:
• as máquinas síncronas são representadas por uma fonte de tensão
constante em série com a reatância transitória de eixo direto 'dx , ou seja,
considera-se constante o fluxo concatenado com os enrolamentos de
campo do rotor durante o transitório;
• a potência mecânica aplicada ao rotor da máquina síncrona é
considerada constante durante o transitório, ou seja, desprezam-se os
efeitos do regulador de velocidade;
• os torques de amortecimento são desprezados;
• as cargas são representadas por impedâncias constantes;
• a posição angular do rotor coincide com o ângulo da tensão atrás da
reatância transitória 'dx .
3.6.1 Análise de um Sistema Máquina - Barra Infinita
Considere um sistema elétrico constituído de uma máquina síncrona
conectado a uma barra infinita através de uma linha de transmissão representada
somente pela sua reatância série lx , conforme ilustra a Figura 3.25.
~lx
0oV∞∠
Figura 3.25: Representação esquemática do sistema máquina - barra infinita

Capítulo 3: Estabilidade de Sistemas Elétricos de Potência
52
Assumindo-se as hipóteses de modelagem apresentadas anteriormente, o
sistema da Figura 3.25 pode ser descrito pelo circuito equivalente da Figura 3.26.
~
'dx lx
E δ∠ 0oV∞∠~
Figura 3.26: Circuito elétrico equivalente
Portanto, a equação da potência ativa transferida à barra infinita é dada por:
. .eeq
E VP senx
δ∞= (3.67)
ou por:
.e maxP P senδ= (3.68)
onde .max
eq
E VPx
∞= e 'eq d lx x x= + .
Desse modo a equação de oscilação do sistema assume a forma:
.. . .meq
E VM P senx
δ δ∞= − (3.69)
3.6.1.1 Coeficiente de Potência Sincronizante
O coeficiente de potência sincronizante SP para esse modelo do sistema é,
então:
0
0.eS max
PP P cosδ δ
∂ δ∂δ =
= = (3.70)
Consequentemente, a forma linearizada da equação de potência elétrica é:
.e SP P δ∆ = ∆ (3.71)

Capítulo 3: Estabilidade de Sistemas Elétricos de Potência
53
Note que os pontos de equilíbrio da região onde 0SP > caracterizam-se
como estáveis e os pontos de equilíbrio da região onde 0SP < caracterizam-se
como pontos de equilíbrio instáveis.
3.6.1.2 Freqüência Natural de Oscilação do Sistema
Considere a equação (3.72), a qual descreve o modelo linearizado da
equação de oscilação (3.69):
... . 0SM Pδ δ∆ + ∆ = (3.72)
Aplicando-se a Transformada de Laplace à equação (3.72), obtém-se:
( ) ( ) ( ) ( )2. . . 0 0 . 0SM s s s P s ∆ − ∆ − ∆ + ∆ = δ δ δ δ (3.73)
De (3.73) extrai-se a equação característica e as raízes correspondentes
apresentadas em (3.74):
21,2. 0 S
S oscPM s P j jM
+ = ∴ ∆ = ± = ± ω (3.74)
Portanto, a freqüência de oscilação é:
0. .1 1 2 2 .
S Sosc osc
eq
P P E V cosfM M M x
δωπ π
∞= ∴ = = (3.75)
Finalmente, faz-se os seguintes comentários resultantes da análise da
equação (3.75):
• valores pequenos para M e eqx resultam em altas freqüências de
oscilação e pequenos períodos de oscilação (≈ 1,0 s). Essas eram as
característica predominantes nos primeiros sistemas elétricos de
potência, constituídos de unidades geradoras de pequeno porte,
localizadas próximas aos centros de carga;
• valores elevados de M e eqx resultam em baixas freqüências e longos
períodos de oscilação. Essas são as características comuns de sistemas

Capítulo 3: Estabilidade de Sistemas Elétricos de Potência
54
elétricos de potência com unidades geradoras de grande porte e
afastadas dos centros de carga. Nesse caso, a hipótese de enlace de fluxo
constante no rotor fica comprometida. O tempo de observação do
desempenho dinâmico para o estudo da estabilidade transitória desses
sistemas deve ser maior que no caso anterior.
3.6.2 O Critério de Áreas Iguais
Considere a equação de oscilação (3.76) representando um sistema
máquina-barra infinita:
( ) ( )..2 . m e a
r
H P P Pδ δ δω
= − = (3.76)
Multiplicando-se (3.76) por ddtδ tem-se:
2
22 . . .a
r
H d d dPdt dtdt
δ δ δω
= (3.77)
ou:
2. a
r
H d d dPdt dt dt
δ δω
=
(3.78)
A equação (3.78) pode ser integrada em relação ao tempo como segue:
0 0
2. . .
t t
art t
H d d ddt P dtdt dt dt
δ δω
= ∫ ∫ (3.79)
Considerando-se que em 0 0 0dt tdtδδ δ= = =, e (Regime Permanente) a
equação (3.79) pode ser rescrita como em (3.80):
0
2. .a
r
H d P ddt
δ
δ
δ δω
= ∫ , ou (3.80)
Então:

Capítulo 3: Estabilidade de Sistemas Elétricos de Potência
55
0
.ra
d P ddt H
δ
δ
ωδ δ= ∫ (3.81)
em que 'rddtδ ω ω ω= − = é o desvio de velocidade em relação à velocidade
síncrona.
Portanto, para que o sistema seja estável é necessário que os seguintes
requisitos sejam atendidos:
(a) 2
2' 0 0; e ddt
δω = = ou
(b) 2
2' 0 ddt
δω = e opondo-se ao movimento do rotor.
Do requisito (b), para um rotor que esteja acelerando, a condição de
estabilidade do sistema exige que exista um δ máximo tal que 0
. 0max
aP dδ
δδ =∫ .
Interpretação Gráfica:
Considere a condição de operação hipotética 0mP representada na Figura
3.27. Suponha que essa condição de operação seja alterada para
0m m m mP P P P= + ∆ ∆, onde é uma perturbação introduzida no sistema. Usando-se
o requisito (b) definido anteriormente, obtém-se:
0
. 0max
aP dδ
δδ =∫ , ou ( ) ( )
1
0 1
. . 0max
m e m eP P d P P dδδ
δ δδ δ δ δ − + − = ∫ ∫
ou ainda:
[ ] ( )1
0 1
( ) . .max
m e e mP P d P P dδδ
δ δδ δ δ δ − = − ∫ ∫
que corresponde a 1 2A A= .

Capítulo 3: Estabilidade de Sistemas Elétricos de Potência
56
0mP
mP
eP
0δ 1δ maxδ uδ δ
1A
2A
Figura 3.27: Interpretação gráfica do critério de áreas iguais
Note que o limite de estabilidade transitória ocorre para
1 2 e max uA A δ δ= = e depende do ponto de operação inicial, da perturbação e dos
parâmetros do sistema.
Se para uma dada situação de operação e para uma determinada
perturbação a área de aceleração for maior que a máxima área de desaceleração
possível, a máquina perde o sincronismo com a barra infinita e o comportamento
do sistema é denominado instável. Caso contrário o sistema será estável com a
máquina mantendo o sincronismo com a barra infinita.
3.6.2.1 Aplicação do Critério de Áreas Iguais
Considere o sistema elétrico de potência representado na Figura 3.28, cujo
circuito equivalente é apresentado na Figura 3.29.
~
txtx lx
lx
E δ∠
0oV ∠
Figura 3.28: Sistema exemplo para a aplicação do critério de áreas iguais

Capítulo 3: Estabilidade de Sistemas Elétricos de Potência
57
~ ~
lx
lxtx tx
E δ∠ 0oV ∠
'dx
Figura 3.29: Circuito elétrico equivalente para o sistema exemplo
Caso 1: Estudar as implicações da ocorrência de um curto-circuito trifásico
(cc3φ) sólido e permanente no meio de uma das linhas de transmissão.
Na condição de operação em regime permanente antes da perturbação tem-
se:
0 0 00
. .m eeq
E VP P senx
δ= = (3.82)
onde 0 ' 22l
eq d txx x x= + + .
Na condição de operação sob defeito o circuito equivalente passa a ser:
~ ~
'dx tx lx tx
0oV ∠E δ∠
2lx
2lx
Figura 3.30: Circuito elétrico equivalente sob defeito para o caso 1
Realizando-se uma transformação ∆-Y, obtém-se:
~ ~E δ∠ 0oV ∠
'dx Yax∆tx txYbx∆
Ycx∆
Figura 3.31: Circuito elétrico equivalente sob defeito após a transformação ∆-Y para o caso 1

Capítulo 3: Estabilidade de Sistemas Elétricos de Potência
58
Realizando-se uma nova transformação, desta vez Y-∆, obtém-se o circuito
equivalente representado na Figura 3.32.
~ ~E δ∠ 0oV ∠1x 2x
1eqx
Figura 3.32: Circuito elétrico equivalente sob defeito final para o caso 1
Portanto, a potência transferida para a barra infinita durante o defeito é:
11
. .eeq
E VPx
δ= sen (3.83)
As curvas potência-ângulo para as duas condições de operação descritas
são representadas na Figura 3.33.
mP
00
.e
eq
E VP senx
δ=eP
11
.e
eq
E VP senx
δ=
0δ 1δ maxδ δ
2A1A
Figura 3.33: Curvas potência–ângulo antes do defeito e sob defeito para o caso 1
Note que existe um 1m mP P= a partir do qual a área de desaceleração não
poderá igualar a área de aceleração ( )2 1A A< e o sistema será instável. Assim 1mP
é o limite de estabilidade transitória para o defeito sob análise. Para 1m mP P> o
sistema será instável e para 1m mP P< o sistema será estável.

Capítulo 3: Estabilidade de Sistemas Elétricos de Potência
59
Caso 2: Estudar as implicações da ocorrência de um cc3φ no meio de uma
das linhas de transmissão, eliminado posteriormente pelo desligamento total da
linha de transmissão afetada (defeito temporário):
Neste caso tem-se três configurações diferentes para a rede:
• antes do defeito;
• durante o defeito;
• após a retirada do defeito.
A Figura 3.34 apresenta a curva potência - ângulo para essas três
configurações. Nessa mesma figura crδ , denominado de ângulo crítico, representa
o ângulo limite para a eliminação do defeito, a partir do qual o sistema será
instável. Ao ângulo crδ está associado um determinado tempo de permanência do
defeito, denominado de tempo crítico para a eliminação do defeito, crt .
2m mP P=
00
.e
eq
E VP senx
δ=eP
11
.e
eq
E VP senx
δ=
22
.e
eq
E VP senx
δ=
0δ 2δ crδ uδ δ
1A2A
a
bc
de
Figura 3.34: Curvas potência–ângulo antes do defeito, sob-defeito e pós-defeito para o caso 2
Na forma sintética, apresenta-se a seguir os circuitos equivalentes para
essas três configurações.
a) Antes do defeito:

Capítulo 3: Estabilidade de Sistemas Elétricos de Potência
60
~ ~E δ∠ 0oV ∠
0eqx
Figura 3.35: Circuito elétrico equivalente antes do defeito para o caso 2
onde 0 ' 22l
eq d txx x x= + + .
b) Durante o defeito:
~ ~E δ∠ 0oV ∠1x 2x
1eqx
Figura 3.36: Circuito elétrico equivalente sob defeito para o caso 2
onde 1 0eq eqx x> .
c) Após o defeito:
~ ~E δ∠ 0oV ∠
2eqx
Figura 3.37: Circuito elétrico equivalente pós defeito para o caso 2
onde 2 ' 2eq d t lx x x x= + + . Note também que 1 2 0eq eq eqx x x> > .

Capítulo 3: Estabilidade de Sistemas Elétricos de Potência
61
3.6.2.2 Determinação do Ângulo Crítico Usando o Critério de Áreas Iguais
Considere o caso 2 estudado anteriormente. Em relação à potência elétrica
fornecida à barra infinita pode-se escrever o seguinte:
( )00
.. e max maxeq
E VP P sen Px
δ δ= ∴ = (3.84)
( ) 01 1 1
1. . eq
e maxeq
xP R P sen R
xδ δ= ∴ = (3.85)
( ) 02 2 2
2. . eq
e maxeq
xP R P sen R
xδ δ= ∴ = (3.86)
O ângulo crítico ( crδ ) é definido para 1 2 e max uA A δ δ= = . Assim, pode–se
escrever o que segue:
( ) ( )0
1 1 2 2. .cr u
cr
m e e mA P P d A P P dδ δ
δ δδ δ δ δ = − = − ∫ ∫e
Fazendo-se 1 2A A= , resulta:
( ) ( )0
1 2. .cr u
cr
m e e mP P d P P dδ δ
δ δδ δ δ δ − = − ∫ ∫
ou:
[ ] [ ]0
1 2. . . . . .cr u
cr
m max max mP R P sen d R P sen P dδ δ
δ δδ δ δ δ− = −∫ ∫
ou ainda:
( ) ( ) ( )( )
0 1 0 2. . . .
m cr max cr max u cr
m u cr
P R P cos cos R P cos cos
P
δ δ δ δ δ δδ δ
− + − = − − −
− −
Consequentemente:
( ) ( ) ( ) ( )1 2 0 1 0 2. . . .max cr m u max uP cos R R P P R cos R cosδ δ δ δ δ− = − + −
Portanto:

Capítulo 3: Estabilidade de Sistemas Elétricos de Potência
62
( )10 1 0 2
1 2
1 . .mcr u u
max
Pcos R cos R cosR R P
δ δ δ δ δ− = − + − − (3.87)
em que:
10 0 0. ,
2m
m maxmax
PP P sen senP
πδ δ δ− = ∴ = <
(3.88)
12
2. . ,
. 2m
m max u u umax
PP R P sen senR P
πδ δ δ− = ∴ = >
(3.89)
3.6.2.3 Determinação do Tempo Crítico a partir do Ângulo Crítico usando Série
de Taylor
Considere as equações do sistema:
.
.m e a
r
M P P Pω
δ ω ω
= − =
= −
(3.90)
Por Série de Taylor, para 0t t= , tem-se:
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )2 30 0
0 0 0 0 0. .. ...
. . . ...2! 3!
t t t tt t t t t t tδ δ δ δ δ
− −= + − + + + (3.91)
Tomando-se a equação de oscilação:
.. .. m e
m e aP PM P P P
Mδ δ −= − = ∴ = (3.92)
os coeficientes da série são dados por:
( )
( ) ( )
( ) ( )( )
( ) ( )
( ) ( )
0 0
0 0
0 0
0 0
0 0
.0
..
... .
.... ..
r
m e
e
e
t
t t
t P P t M
t P t M
t P t M
δ δ
δ ω ω
δ δ
δ
δ
=
= − =
= −
= −
= −
(3.93)

Capítulo 3: Estabilidade de Sistemas Elétricos de Potência
63
Caso 1: Potência Acelerante Constante ( aP = constante )
Neste caso os coeficientes da Série de Taylor apresentados nas equações
(3.93) passam a ser:
( )
( )
( ) ( )
( )
( )
0 0
0
0 0
0
0
.0
../
...0
....0
a
t
t
t P t M
t
t
δ δ
δ
δ
δ
δ
=
=
=
=
=
(3.94)
Portanto, para 0 0t = tem-se:
( )2
0 .2
aP ttM
δ δ= + (3.95)
Considerando-se que para crt t= resulta ( ) crtδ δ= , pode-se escrever a
equação (3.95) como segue:
20 .
2a cr
crP tM
δ δ= + (3.96)
e consequentemente:
( )02.cr cra
MtP
δ δ= − (3.97)
Note que o tempo crítico de eliminação do defeito dado pela equação (3.97)
é exato para a condição de potência acelerante constante durante a permanência
do curto-circuito.
Caso 2: Potência Acelerante Não-Constante
Neste caso, os coeficientes da série de Taylor podem ser rescritos na
seguinte forma:

Capítulo 3: Estabilidade de Sistemas Elétricos de Potência
64
( )
( )
( )
( )
( ) ( )
0 0
0
00 0
0
00 0 02
.0
..
...0
.....
m max
maxm max
t
t
P P sent AM
t
P cost P P sen BM
δ δ
δ
δδ
δ
δδ δ
=
=
−= =
=
= − − =
(3.98)
Portanto, usando-se uma expansão em série de Taylor de 4a ordem e 0 0t = ,
obtém-se:
( )2 4
0 0 02 24t tt A Bδ δ= + + (3.99)
ou:
2 40 0 02 24
cr crcr
t tA Bδ δ= + + (3.100)
ou ainda:
( )4 20 0 0. 12. . .24 0cr cr crB t A t δ δ+ + + = (3.101)
Note que resolvendo-se a equação biquadrada (3.101) obtém-se o tempo
crítico de eliminação do defeito ( crt ) com a precisão dada pela Série de Taylor de
4a ordem.
3.6.2.4 Fatores que Influenciam a Estabilidade Transitória
Uma análise dos fatores que influenciam a estabilidade transitória pode ser
realizada a partir da observação da resposta do sistema máquina-barra infinita
representada na Figura 3.34. Inicialmente o sistema está operando em regime
permanente com as duas linhas de transmissão conectadas, tal que 0e mP P= e
0δ δ= . No momento da ocorrência da falta o ponto de operação passa de a para
b sem que o ângulo varie instantaneamente em razão da inércia da máquina.
Nesta condição de operação mP é maior que 1eP e o rotor acelera até o ponto c ,

Capítulo 3: Estabilidade de Sistemas Elétricos de Potência
65
quando ocorre a eliminação da falta por meio do desligamento da linha de
transmissão sob falta. O ponto de operação altera-se instantaneamente para o
ponto d , onde 2eP é maior que mP causando uma desaceleração do rotor. Como,
neste ponto, a velocidade do rotor é maior que a velocidade síncrona, δ continua
a aumentar até que a energia cinética adquirida durante a falta (representada pela
área 1A ) seja transferida para o sistema, ou seja, até o ponto e em que a área 2A
iguala-se à área 1A . Se o instante de eliminação da falta for levemente inferior ao
instante correspondente a crδ o rotor desacelerará a partir do instante em que
ocorrer a igualdade das áreas e, na ausência de amortecimento, ficará oscilando
em torno do ponto de operação definido pelo ângulo 2δ . A partir desta análise e
da observação da Figura 3.34, pode-se concluir que a estabilidade transitória
depende de diversos fatores, descritos a seguir:
• do nível de carregamento representado pelo ponto de operação em
regime permanente pré-falta. Quanto menor o nível de carragamento,
menor será a área 1A ;
• da localização da falta, a qual define a amplitude da curva P δ−
correspondente e, consequentemente, da potência ativa entregue
durante a falta;
• do tempo de eliminação da falta. Quanto menor for esse tempo, menor
será a área 1A ;
• da reatância do sistema de transmissão pós-falta. Quanto menor for essa
reatância, maior será a amplitude da curva P δ− correspondente e
maior será a área 2A ;
• da inércia do gerador. Inércia elevada implica em menor aceleração e,
consequentemente, reduz a energia cinética adquirida durante a falta,
reduzindo a área 1A ;
• da reatância do gerador. Reatância de valor baixo aumenta a amplitude
da curva P δ− e reduz o ângulo inicial do rotor;

Capítulo 3: Estabilidade de Sistemas Elétricos de Potência
66
• da magnitude da tensão interna, a qual depende da tensão de excitação.
3.6.3 Modelagem Multimáquina
Nesta seção apresenta-se brevemente a modelagem clássica de sistemas
multimáquinas com o objetivo didático de ilustrar as principais etapas de um
estudo de estabilidade transitória.
A formulação considera as mesmas hipóteses simplificadoras do caso
máquina-barra infinita, acrescida da escolha de um movimento de referência que
gira com velocidade igual à velocidade angular nominal do sistema.
A representação esquemática do sistema é então dada pela Figura 3.38.
Sistemade
Transmissão
~
~
~
1
2
n
n+1
n+2
n+n
1
2
n
1 1E δ∠
1I
2'dx
n nE δ∠
2 2E δ∠
'dnx
1'dx
2I
nI
1Z
2Z
nZ
Figura 3.38: Sistema multimáquinas generalizado
As equações para as potências injetadas são dadas por:
*1 11 1
*2 22 2
*
.
.
.n nn n
P jQ E I
P jQ E I
P jQ E I
+ = + = + =
(3.102)
Transforma-se a rede elétrica original em uma rede elétrica equivalente
reduzida, contendo somente as barras internas das máquinas síncronas, conforme
apresentada na Figura 3.39.

Capítulo 3: Estabilidade de Sistemas Elétricos de Potência
67
RedeElétrica
Equivalente
~
~
~
1 1E δ∠
2 2E δ∠
n nE δ∠
1I
2I
nI
Figura 3.39: Sistema multimáquinas reduzido às barras internas de geração
As equações de injeções de correntes para a rede equivalente são dadas por:
1 11 1 12 2 1 11
2 21 1 22 2 2 21
1 1 2 21
. . . .
. . . .
. . . .
nn n k k
kn
n n k kk
nn n n nn n nk k
k
I Y E Y E Y E Y E
I Y E Y E Y E Y E
I Y E Y E Y E Y E
=
=
=
= + + + =
= + + + = = + + + =
∑
∑
∑
…
…
…
(3.103)
onde:
iiY : admitância própria para a i-ésima barra da rede equivalente;
ijY : admitância de transferência entre as barras i e j da rede equivalente.
Substituindo-se (3.103) em (3.102), obtém-se:
* *1 11 1
1
* *2 22 2
1
* *
1
. .
. .
. .
nk k
kn
k kk
nn nk kn n
k
P jQ E Y E
P jQ E Y E
P jQ E Y E
=
=
=
+ =
+ = + =
∑
∑
∑
(3.104)

Capítulo 3: Estabilidade de Sistemas Elétricos de Potência
68
Definindo-se:
ii ii ii ii ii
ik ik ik ik ik
i i i
Y Y G jB
Y Y G jB
E E
θ
θ
δ
= ∠ − = −
= ∠ − = −
= ∠
(3.105)
e substituindo-se (3.105) em (3.104), resulta:
( )1
. ; 1, 2, ,n
i i i i ik ik k kk
P jQ E Y E i nδ θ δ=
+ = ∠ ∠ ∠ − =∑ … (3.106)
Portanto, a potência ativa fornecida pelas máquinas síncronas é dada por:
( ) ( ) ( )1
. . . ; 1, 2, ,n
i i i i k ik ik i kk
P e P jQ E E Y cos i nθ δ δ=
= ℜ + = + − =∑ … (3.107)
ou:
( ) ( ) ( )2
1. . . . . ; 1, 2, ,
ni i ii ii i k ik ik i k
kk i
P E Y cos E E Y cos i nθ θ δ δ=≠
= + + − =∑ … (3.108)
Usando-se ik ik ikY G jB= − , obtém-se:
( ) ( )2
1. . . . . ,
( 1, 2, , ).
ni i ii i k ik i k ik i k
kk i
P E G E E G cos B sen
i n
δ δ δ δ=≠
= + − − −
=
∑(3.109)
Portanto, desprezando-se os torques de amortecimento, as equações que
descrevem o comportamento dinâmico de um sistema multimáquina são as
seguintes:
( ).
.2 . ; 1, 2, ,ii mi ei
r
i i r
H P P i nωω
δ ω ω
= − =
= −
…(3.110)
onde:

Capítulo 3: Estabilidade de Sistemas Elétricos de Potência
69
( ) ( )2
1. . . . .
nei i i ii i k ik i k ik i k
kk i
P P E G E E G cos B senδ δ δ δ=≠
= = + − − − ∑ (3.111)
O sistema de equações (3.110) é formado por 2n equações diferenciais
ordinárias não-lineares de 1a ordem, genericamente representáveis por:
( ) ( )( )0, ,x f t x t x t= (3.112)
onde:
0 0( )x t x= : vetor de condições iniciais;
[ ]1 1 2 2, , , , , , tn nx ω δ ω δ ω δ= … : vetor de variáveis de estado;
[ ]1 2 2, , , tnf f f f= … : vetor de funções não-lineares.
3.6.3.1 Etapas Principais para o Estudo de Estabilidade
As etapas principais para a realização de um estudo de estabilidade com
modelagem clássica são apresentadas a seguir:
1. Obter os dados dos elementos do sistema, referidos a uma base comum
de potência (em geral 100MVA):
• geração e carga em todas as barras;
• impedâncias dos elementos da rede elétrica;
• reatância transitória e constante de inércia das máquinas síncronas.
2. Resolver um problema de fluxo de carga para determinar as condições de
operação em regime permanente (antes de qualquer perturbação);
3. Calcular as admitâncias (ou impedâncias) constantes correspondentes as
cargas do sistema na condição de operação antes de qualquer perturbação:
2 2Li Li
Li LiLi LiLi Li
P Qy g jb y jV V
= − ⇒ = −Li LiP jQ+
LiI

Capítulo 3: Estabilidade de Sistemas Elétricos de Potência
70
4. Calcular as tensões e os ângulos atrás da reatância 'dx das máquinas
síncronas:
~ 0iE δ∠i iP jQ+
i iV γ∠'dix
*
0
' 0 ' .
( ' )
o i ii i i di
i
i i i i i
P jQE V jxV
E E
δ
δ δ γ
−∠ = ∠ +
∠ = ∠ +
5. Formar as matrizes de admitância nodal para todas as configurações que
o sistema assumir durante o período de estudo, como por exemplo antes, durante
e após a eliminação de defeitos;
6. Determinar as matrizes de admitância nodal das redes reduzidas
equivalentes para cada uma das configurações do item anterior;
7. Formar as equações dinâmicas do sistema:
( ).
.2 . ; 1, 2, ,ii mi ei
r
i i r
H P P i nωω
δ ω ω
= − =
= −
…;
8. Especificar os dados relativos ao tipo de perturbação a ser estudada
(duração e localização do defeito, elementos chaveados, etc.) e resolver as
equações diferencias durante o período de interesse;
9. Analisar a evolução dos ângulos das máquinas síncronas no tempo, para
realizar o diagnóstico sobre a estabilidade do sistema.

71
CAPÍTULO 4
4.MODELAGEM DOS COMPONENTES DE
SISTEMAS ELÉTRICOS DE POTÊNCIA
4.1 Introdução
Este capítulo é dedicado à descrição da modelagem matemática dos
principais componentes de um sistema elétrico de potência para fins de simulação
do seu comportamento dinâmico. Especificamente, são tratadas as máquinas
síncronas, os sistemas de excitação, as cargas e os equipamentos FACTS.
A abordagem adotada concentra-se nos fenômenos físicos que se quer
representar e na interpretação física do modelo matemático resultante.
4.2 Máquinas Síncronas
O problema da estabilidade em sistemas de potência aborda principalmente
a manutenção do sincronismo entre as máquinas síncronas interligadas. Portanto,
o entendimento de suas características e a modelagem adequada de seu
comportamento dinâmico são de fundamental importância para o estudo da
estabilidade em sistemas de potência.
4.2.1 Descrição Física
A Figura 4.1 apresenta, através da seção em corte, a representação
esquemática de uma máquina síncrona trifásica com um par de pólos. A máquina
é constituída de dois elementos essenciais: o campo e a armadura. No enrolamento
de campo circula corrente contínua, que produz um campo magnético, o qual
induz tensões alternadas nos enrolamentos da armadura.

Capítulo 4: Modelagem dos Componentes de Sistemas Elétricos de Potência
72
Figura 4.1: Representação esquemática de uma máquina síncrona trifásica com um par de polos
4.2.1.1 Estrutura do Campo e da Armadura
Os enrolamentos da armadura geralmente operam a uma tensão muito
maior do que os enrolamentos de campo e, portanto, precisam de maior espaço
para isolamento. Esses enrolamentos também estão sujeitos as maiores correntes
transitórias, sendo prática normal alocá-los no estator.
Os enrolamentos trifásicos da armadura estão espacialmente deslocados de
120o entre si de modo que, com a rotação uniforme do campo magnético, tensões
defasadas de 120o no tempo são produzidas nesses enrolamentos.
Além disso, quando circulam correntes trifásicas balanceadas pela
armadura, estas produzem no entreferro um campo magnético girante à
velocidade síncrona. Por outro lado, o campo produzido pela corrente contínua
nos enrolamentos do rotor gira acompanhando este. Para a produção de um
torque constante, os campos do estator e rotor devem girar à mesma velocidade,
ou seja, o rotor deve se movimentar à velocidade síncrona.
O número de pólos do rotor é função da velocidade mecânica que o mesmo
deve girar e da freqüência elétrica das correntes do estator. Assim, a velocidade
síncrona é dada por:
120
f
fnp
= (4.1)
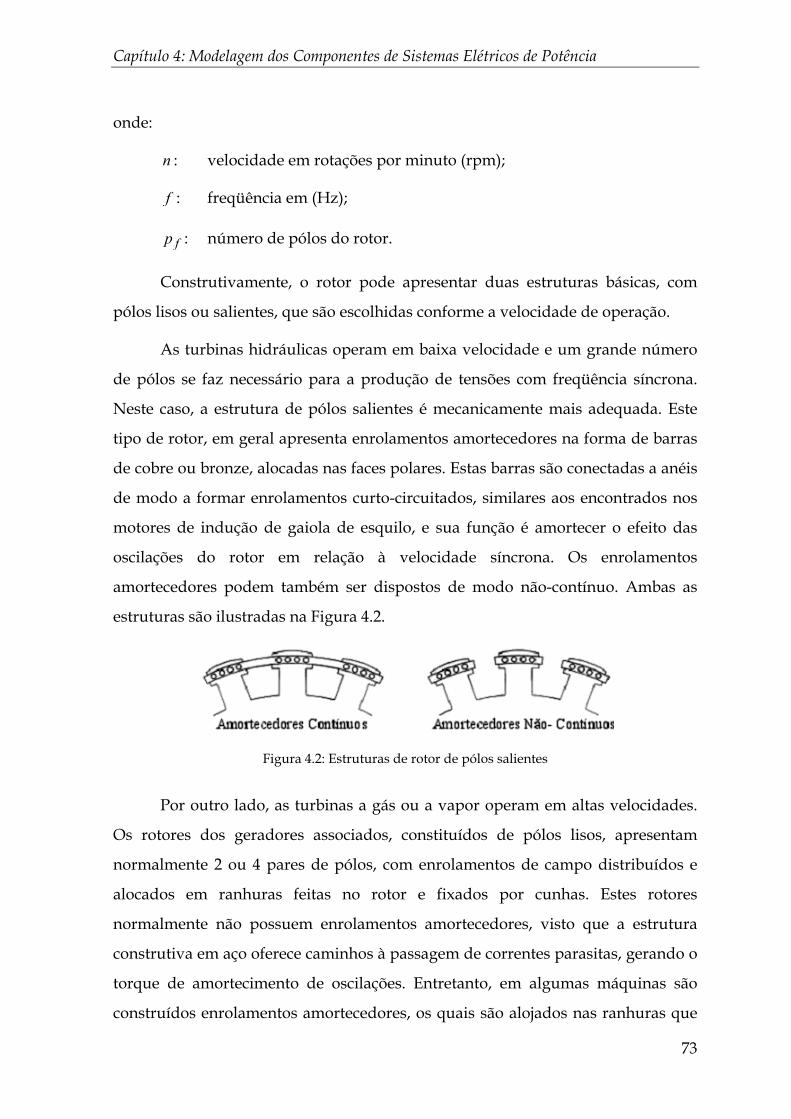
Capítulo 4: Modelagem dos Componentes de Sistemas Elétricos de Potência
73
onde:
n : velocidade em rotações por minuto (rpm);
f : freqüência em (Hz);
fp : número de pólos do rotor.
Construtivamente, o rotor pode apresentar duas estruturas básicas, com
pólos lisos ou salientes, que são escolhidas conforme a velocidade de operação.
As turbinas hidráulicas operam em baixa velocidade e um grande número
de pólos se faz necessário para a produção de tensões com freqüência síncrona.
Neste caso, a estrutura de pólos salientes é mecanicamente mais adequada. Este
tipo de rotor, em geral apresenta enrolamentos amortecedores na forma de barras
de cobre ou bronze, alocadas nas faces polares. Estas barras são conectadas a anéis
de modo a formar enrolamentos curto-circuitados, similares aos encontrados nos
motores de indução de gaiola de esquilo, e sua função é amortecer o efeito das
oscilações do rotor em relação à velocidade síncrona. Os enrolamentos
amortecedores podem também ser dispostos de modo não-contínuo. Ambas as
estruturas são ilustradas na Figura 4.2.
Figura 4.2: Estruturas de rotor de pólos salientes
Por outro lado, as turbinas a gás ou a vapor operam em altas velocidades.
Os rotores dos geradores associados, constituídos de pólos lisos, apresentam
normalmente 2 ou 4 pares de pólos, com enrolamentos de campo distribuídos e
alocados em ranhuras feitas no rotor e fixados por cunhas. Estes rotores
normalmente não possuem enrolamentos amortecedores, visto que a estrutura
construtiva em aço oferece caminhos à passagem de correntes parasitas, gerando o
torque de amortecimento de oscilações. Entretanto, em algumas máquinas são
construídos enrolamentos amortecedores, os quais são alojados nas ranhuras que

Capítulo 4: Modelagem dos Componentes de Sistemas Elétricos de Potência
74
contém os enrolamentos de campo, posicionados entre estes e a cunha de fixação.
A Figura 4.3 ilustra a estrutura construtiva de um rotor de pólos lisos.
Figura 4.3: Estrutura de rotor de pólos lisos
Em regime permanente, a única corrente que circula pelo rotor é a corrente
contínua de seus enrolamentos de campo. Entretanto, sob perturbações na
velocidade do rotor, correntes parasitas são induzidas em sua superfície, bem
como na cunha e através das ranhuras, conforme ilustrado na Figura 4.4.
Figura 4.4: Caminhos das correntes no rotor de pólos lisos

Capítulo 4: Modelagem dos Componentes de Sistemas Elétricos de Potência
75
4.2.2 Descrição Matemática
O desenvolvimento das equações da máquina síncrona é baseado nas
seguintes hipóteses:
• os enrolamentos do estator são distribuídos senoidalmente ao longo do
entreferro;
• as ranhuras do estator não provocam variação considerável das
indutâncias do rotor em relação à sua posição;
• a histerese magnética é desprezível;
• os efeitos da saturação magnética são desprezíveis.
A Figura 4.5 apresenta os circuitos envolvidos na análise da máquina
síncrona. Os circuitos do estator consistem nos enrolamentos trifásicos de
armadura, em que fluem correntes alternadas. Os circuitos do rotor compreendem
os enrolamentos de campo e amortecedores. O enrolamento de campo é conectado
a uma fonte contínua. Para efeitos de análise, assume-se que as correntes dos
enrolamentos amortecedores circulam através de dois circuitos fechados: um
circuito no qual o fluxo está alinhado com o campo do eixo direto d, localizado
magneticamente no centro do pólo norte; e o outro no qual o fluxo encontra-se
alinhado com o eixo em quadratura q, adiantado de 90o elétricos em relação ao
eixo d. Os circuitos que representam os enrolamentos amortecedores, conforme
discutido anteriormente, são formados por diversos caminhos de circulação de
fluxo magnético e, em análise de projeto de máquinas síncronas, um grande
número destes são utilizados para representar os efeitos amortecedores. Para
estudos de estabilidade do sistema, raramente representa-se mais do que dois ou
três circuitos de rotor em cada eixo. Na Figura 4.5, por simplicidade, apenas um
circuito amortecedor é representado em cada eixo e as equações da máquina são
apresentadas segundo esta consideração. Entretanto, implicitamente considera-se
um número arbitrário de circuitos, através da utilização do índice subscrito k .

Capítulo 4: Modelagem dos Componentes de Sistemas Elétricos de Potência
76
Figura 4.5: Circuitos do rotor e do estator da máquina síncrona
A nomenclatura empregada na Figura 4.5 é definida a seguir:
a , b , c : enrolamentos de fase do estator;
df : enrolamento de campo;
dk : circuito amortecedor de eixo direto;
qk : circuito amortecedor de eixo quadratura;
1,2, ,k m= … : número de circuitos amortecedores;
θ : ângulo no qual o eixo direto está adiantado do eixo magnético
do enrolamento da fase a ;
rω : velocidade angular do rotor em (rad elétricos/s).
As equações que descrevem o comportamento elétrico da máquina síncrona
podem ser desenvolvidas a partir das equações dos circuitos acoplados
identificados na Figura 4.5. Entretanto, anteriormente a isto, faz-se uma revisão de
como são escritas as equações de circuitos magnéticos simples.

Capítulo 4: Modelagem dos Componentes de Sistemas Elétricos de Potência
77
4.2.2.1 Revisão sobre Circuitos Magnéticos
Circuito magnético simples excitado:
Considere primeiramente o circuito elementar representado pela Figura 4.6.
Este compreende uma única bobina com N espiras e resistência r . Assume-se
ainda que o fluxo relaciona-se com a força magneto-motriz de modo linear. De
acordo com a Lei de Faraday a tensão induzida ie é:
idedtψ= (4.2)
onde ψ é o valor instantâneo de fluxo concatenado no tempo t .
Figura 4.6: Circuito magnético simples excitado
A tensão terminal é dada por:
1de ridtψ= + (4.3)
O fluxo concatenado pode ser expresso em termos da indutância L do
circuito em que:
Liψ = (4.4)
A indutância, por definição, é igual ao fluxo concatenado por unidade de
corrente. Portanto:
2L N N Piφ= = (4.5)
onde P é a permeância do caminho magnético, e φ o fluxo magnético.

Capítulo 4: Modelagem dos Componentes de Sistemas Elétricos de Potência
78
Circuitos magnéticos acoplados:
Considere agora o circuito ilustrado pela Figura 4.7, que consiste em dois
enrolamentos magneticamente acoplados, possuindo 1N e 2N espiras e
resistências 1r e 2r , respectivamente. As tensões terminais são dadas por:
11 11
de r idtψ= + (4.6)
22 2 2
de r idtψ= + (4.7)
Figura 4.7: Circuitos magneticamente acoplados
O campo magnético é determinado pelas correntes em ambos
enrolamentos. Portanto, 1ψ e 2ψ são os fluxos concatenados com os respectivos
enrolamentos, produzidos pelo efeito total de ambas correntes. Então:
1 1 1 1 1 2( )m l mN Nψ φ φ φ= + + (4.8)
2 2 2 2 2 1( )m l mN Nψ φ φ φ= + + (4.9)
onde:
1mφ : fluxo mútuo nos enrolamentos devido ao efeito da corrente no
enrolamento 1;
1lφ : fluxo de dispersão no enrolamento 1;
2mφ : fluxo mútuo nos enrolamentos devido ao efeito da corrente no
enrolamento 2;

Capítulo 4: Modelagem dos Componentes de Sistemas Elétricos de Potência
79
2lφ : fluxo de dispersão no enrolamento 2.
Os fluxos concatenados podem ser expressos em termos de indutâncias
próprias e mútuas entre os enrolamentos 1 e 2, cujas expressões são dadas por:
11 1 1m lL L L= + (4.10)
22 2 2m lL L L= + (4.11)
12 21 1 2L L N N P= = (4.12)
onde:
11L e 22L : indutâncias próprias dos enrolamentos 1 e 2, respectivamente;
12L e 21L : indutâncias mútuas entre os enrolamentos 1 e 2;
1mL e 2mL : indutâncias de magnetização dos enrolamentos 1 e 2,
respectivamente;
1lL e 2lL : indutâncias de dispersão dos enrolamentos 1 e 2,
respectivamente.
Neste caso, os fluxos concatenados são dados por:
1 111 12 2L i L iψ = + (4.13)
2 21 1 22 2L i L iψ = + (4.14)
4.2.2.2 Equações Básicas da Máquina Síncrona
A metodologia de obtenção das equações gerais de circuitos
magneticamente acoplados, apresentada na seção anterior, pode ser aplicada aos
circuitos acoplados da Figura 4.5. Entretanto, além do grande número de circuitos
envolvidos, o fato das indutâncias próprias e mútuas variarem de acordo com a
posição do rotor, tornam estas equações mais complexas. Essa característica das
indutâncias é devido ao fato do entreferro ser construtivamente não-uniforme,
resultando em uma permeância não-uniforme do caminho de fluxo magnético.
Este fato é ainda mais pronunciado no caso de rotores de pólos salientes, em que a

Capítulo 4: Modelagem dos Componentes de Sistemas Elétricos de Potência
80
diferença na permeância entre os dois eixos é ainda mais significativa. Entretanto,
mesmo em rotores de pólos lisos este efeito pode ser observado, devido ao grande
número de ranhuras associadas aos enrolamentos de campo.
Na definição das equações da máquina síncrona, as seguintes notações são
utilizadas:
ae , be , ce : tensões instantâneas entre fase e neutro do estator;
ai , bi , ci : correntes instantâneas de fase do estator;
fde : tensão de campo;
fdi , kdi , kqi : correntes dos circuitos de campo e amortecedores;
fdR , kdR , kqR : resistências dos circuitos do rotor;
aal , bbl , ccl : indutâncias próprias dos enrolamentos do estator;
abl , bcl , cal : indutâncias mútuas entre os enrolamentos do estator;
afdl , akdl , akql : indutâncias mútuas entre os enrolamentos do estator e
rotor;
ffdl , kkdl , kkql : indutâncias próprias dos circuitos do rotor;
aR : resistência de armadura por fase;
i: operador diferencial d dt .
A seguir apresenta-se o conjunto de equações que descrevem o
comportamento da máquina síncrona. Este conjunto compreende as equações de
tensões e fluxos dos circuitos do rotor e estator. Ressalte-se que as equações de
fluxo e, consequentemente, de tensões apresentam valores de indutâncias que,
conforme citado anteriormente, variam ao longo do tempo, em função da posição
angular do rotor. Detalhes relativos a essas indutâncias podem ser encontrados em
(KUNDUR, 1993).

Capítulo 4: Modelagem dos Componentes de Sistemas Elétricos de Potência
81
Equações dos circuitos do estator:
As equações de tensão destes circuitos são:
aa a a a a a
de R i R idtψ ψ= − = − (4.15)
b b a be R iψ= − (4.16)
c c a ce R iψ= − (4.17)
em que o fluxo concatenado relativo a fase a é dado pela equação (4.18). As
expressões referentes as fases b e c podem ser facilmente obtidas.
a aa a ab b ac c afd fd akd kd akq kql i l i l i l i l i l iψ = − − − + + + (4.18)
As expressões de aψ , bψ e cψ com as indutâncias explicitadas em função de
θ , são apresentadas nas equações (4.19), (4.20) e (4.21). Nestas equações 0aaL ,
2aaL , 0abL , afdL , akdL e akqL são constantes.
0 2 0 2
0 2
[ 2 ] [ (2 )]3
[ (2 )]3
a a aa aa b ab aa
c ab aa
fd afd kd akd kq akq
i L L cos i L L cos
i L L cos
i L cos i L cos i L sen
πψ θ θ
πθ
θ θ θ
= − + + + +
+ + −
+ + −
(4.19)
0 2 0 2
0 2
2[ (2 )] [ 2( )]3 3
2[ (2 )] ( )3
2 2( ) ( )3 3
b a ab aa b aa aa
c ab aa fd afd
kd akd kq akq
i L L cos i L L cos
i L L cos i L cos
i L cos i L sen
π πψ θ θ
πθ π θ
π πθ θ
= + + − + −
+ + − + −
+ − − −
(4.20)
0 2 0 2
0 2
[ (2 )] [ (2 )]3
2 2[ 2( ] ( )3 3
2 2( ) ( )3 3
c a ab aa b ab aa
c aa aa fd afd
kd akd kq akq
i L L cos i L L cos
i L L cos i L cos
i L cos i L sen
πψ θ θ π
π πθ θ
π πθ θ
= + − + + −
− + + + +
+ + − +
(4.21)

Capítulo 4: Modelagem dos Componentes de Sistemas Elétricos de Potência
82
Equações dos circuitos do rotor:
As equações de tensão destes circuitos são:
fd fd fd fde R iψ= + (4.22)
0 kd kd kdR iψ= + (4.23)
0 kq kq kqR iψ= + (4.24)
em que os fluxos concatenados são dados por:
2 2[ ( ) ( )]3 3fd ffd fd fkd kd afd a b cL i L i L i cos i cos i cosπ πψ θ θ θ= + − + − + + (4.25)
2 2[ ( ) ( )]3 3kd fkd fd kkd kd akd a b cL i L i L i cos i cos i cosπ πψ θ θ θ= + − + − + + (4.26)
2 2[ ( ) ( )]3 3kq kkq kq akq a b cL i L i sen i sen i senπ πψ θ θ θ= + + − + + (4.27)
4.2.3 A Transformação dq0
As equações (4.15) a (4.27) descrevem completamente o comportamento da
máquina síncrona. Entretanto, estas equações contêm indutâncias que variam com
o ângulo θ que, por sua vez, varia com o tempo. Este fato introduz uma
considerável complexidade na resolução de problemas ligados à máquina
síncrona.
Com o intuito de se obter uma descrição da máquina síncrona com
indutâncias independentes de θ , aplica-se uma transformação matemática às
equações supracitadas, denominada de transformação de Park ou transformação
dq0. Essa transformação é definida pela equação (4.28), em termos das correntes de
armadura.

Capítulo 4: Modelagem dos Componentes de Sistemas Elétricos de Potência
83
0
2 2( ) ( )3 3
2 2 2( ) ( ) .3 3 3
1 1 12 2 2
d a
q b
c
cos cos cosi ii sen sen sen i
ii
π πθ θ θ
π πθ θ θ
− + = − − − − +
(4.28)
A transformação inversa é apresentada na equação (4.29).
0
12 2 2( ) ( ) 1 .3 3 3
2 2( ) ( ) 13 3
a d
b q
c
cos seni ii cos sen ii i
cos sen
θ θπ πθ θ
π πθ θ
− = − − − + − +
(4.29)
De forma análoga podem ser estabelecidas as equações de transformação
em variáveis dq0 para os fluxos concatenados e para as tensões ae , be e ce .
4.2.3.1 Aplicação às Equações da Máquina Síncrona
Aplicando-se essa transformação às equações de tensão e de fluxo
concatenado da máquina síncrona, obtém-se:
Equações de tensão:
0 0 0
00
d d r q a d
q q r d a q
a
fd fd fd fd
kd kd kd
kq kq kq
e R i
e R i
e R ie R i
R iR i
ψ ω ψψ ω ψψ
ψψψ
= − −
= + −
= −= +
= += +
(4.30)
Note que as equações de de e qe apresentam termos de tensão variacional
dψi
e qψi
, associados aos transitórios de estator, e termos de tensão rotacional,
função da velocidade angular do rotor. Os termos de tensão rotacional são
predominantes. Em regime permanente, os termos de tensão variacional são nulos.
Equações de fluxo concatenado:

Capítulo 4: Modelagem dos Componentes de Sistemas Elétricos de Potência
84
0 0 03232
32
d d d afd fd akd kd
q q q akq kq
fd ffd fd fkd kd afd d
kd fkd fd kkd kd akd d
kq kkq kq akq q
L i L i L i
L i L i
L i
L i L i L i
L i L i L i
L i L i
ψψψ
ψ
ψ
ψ
= − + +
= − +
= −
= + −
= + −
= −
(4.31)
em que:
0 0 2
0 0 2
0 0 0
3232
2
d aa ab aa
q aa ab aa
aa ab
L L L L
L L L L
L L L
= + +
= + −
= −
(4.32)
Note que nas equações (4.31) as indutâncias mútuas não são recíprocas.
4.2.3.2 Aplicação a Correntes Trifásicas Equilibradas
As equações de correntes de estator de uma máquina síncrona, para
condições de operação em regime permanente equilibrado, podem ser escritas
como segue:
( )23
23
a m s
b m s
c m s
I I sen t
I I sen t
I I sen t
ω φπω φ
πω φ
= +
= + − = + +
(4.33)
onde 2s fω π= é a freqüência angular das correntes, e φ um valor constante de
ângulo.
A aplicação da transformada dqo às equações (4.33) conduz ao seguinte
resultado:

Capítulo 4: Modelagem dos Componentes de Sistemas Elétricos de Potência
85
constanteconstante
d m
q m
i I seni I cos
φφ
= →= → (4.34)
Note que, para condições de operação em regime permanente equilibrado,
as correntes id e iq são constantes, ou seja, correntes alternadas na referência a,b,c
são representadas por correntes contínuas na referência dqo.
4.2.3.3 Comentários
A análise das equações da máquina síncrona, descritas em variáveis dq0, é
consideravelmente mais simples pelas seguintes razões:
• as equações que descrevem o comportamento dinâmico da máquina
síncrona apresentam indutâncias constantes;
• as quantidades de seqüência 0 (zero) são nulas para condições de
operação balanceada;
• as quantidades do estator apresentam valores constantes para a
operação balanceada em regime permanente. Para outros modos de
operação, estas são variáveis;
• os parâmetros associados com os eixos d e q podem ser diretamente
medidos por meio de ensaios.
A transformação dq0 pode ser vista como um modo de se transferir as
grandezas do estator para o rotor. Fazendo uma analogia com o transformador,
isto seria equivalente a referir as quantidades do lado secundário para o lado
primário. Da mesma forma, a transformação inversa eqüivale a transferir as
quantidades do rotor para o estator.
4.2.4 Representação Por Unidade (pu)
Na análise de sistemas elétricos de potência é conveniente utilizar-se
grandezas por unidade (pu) a fim de normalizar as variáveis do sistema.
Comparadas com as grandezas físicas, as grandezas em valor pu oferecem maior

Capítulo 4: Modelagem dos Componentes de Sistemas Elétricos de Potência
86
simplicidade computacional, a medida que eliminam as unidades e expressam as
quantidades do sistema em proporções adimensionais.
Um sistema em valores pu bem escolhido pode minimizar os esforços
computacionais, simplificar a avaliação e facilitar o entendimento das
características do sistema físico. Na definição das grandezas de referência
(grandezas base), algumas são escolhidas de forma independente e arbitrária,
enquanto outras são determinadas automaticamente, através das relações
fundamentais entre as variáveis do sistema. Normalmente, as grandezas base são
escolhidas de modo que as variáveis principais são iguais a um pu sob condições
nominais.
No caso das máquinas síncronas, o sistema pu é utilizado para remover
constantes arbitrárias e simplificar as equações matemáticas de modo que estas
possam ser representadas por meio de circuitos equivalentes. Neste caso
específico, deseja-se que todas as indutâncias mútuas possam ser representadas
por um circuito T , após a normalização. A seleção das grandezas de referência do
sistema pu para o estator é direta e segue os seguintes critérios:
• a mesma base de potência (em VA) deve ser usada em todos os
enrolamentos;
• a mesma base de tempo deve ser usada em todos os enrolamentos.
Na escolha das grandezas de referência do rotor são necessárias algumas
considerações adicionais, as quais tem como objetivos principais fazer com que:
• as indutâncias mútuas sejam recíprocas;
• as indutâncias mútuas entre o estator e o rotor sejam iguais.
O detalhamento do processo de definição das grandezas base para o rotor
será omitido por não fazer parte dos objetivos principais desse trabalho. Detalhes
podem ser encontrados em (KUNDUR, 1993).
Capítulo 4: Modelagem dos Componentes de Sistemas Elétricos de Potência
87
4.2.4.1 Síntese das Grandezas Base
O conjunto de todas as grandezas base, para o estator e rotor, utilizadas
nesta modelagem, é apresentado a seguir:
Estator:
3 baseS φ : potência aparente trifásica nominal da máquina síncrona
(VA);
sbasee : valor de pico da tensão de fase nominal (V);
sbasei : valor de pico da corrente de linha nominal (A);
basef : freqüência nominal (Hz);
sbaseZ : impedância nominal (Ω);
baseω : velocidade angular nominal (rad elétricos/s);
mbaseω : velocidade mecânica nominal (rad mecâncios/s);
sbaseL : indutância (H);
sbaseψ : fluxo (Wb.espira);
onde:
( )3
3 2base
sbasesbase
Si
eφ= (4.35)
sbasesbase
sbase
eZi
= (4.36)
2base basefω π= (4.37)
2mbase base
fpω ω= (4.38)
sbasesbase
base
ZLω
= (4.39)

Capítulo 4: Modelagem dos Componentes de Sistemas Elétricos de Potência
88
.sbase sbase sbaseL iψ = (4.40)
Rotor:
adfdbase sbase
afd
Li iL
= (A) (4.41)
adkdbase sbase
akd
Li iL
= (A) (4.42)
aqkqbase sbase
akq
Li i
L= (A) (4.43)
3 basefdbase
fdbase
Se
iφ= (V) (4.44)
32
fdbase basefdbase
fdbase fdbase
e SZ
i iφ= = (Ω) (4.45)
32
basekdbase
kdbase
SZ
iφ= (Ω) (4.46)
32
basekqbase
kqbase
SZ
iφ= (Ω) (4.47)
fdbasefdbase
base
ZL
ω= (H) (4.48)
kdbasekdbase
base
ZLω
= (H) (4.49)
kqbasekqbase
base
ZL
ω= (H) (4.50)
Capítulo 4: Modelagem dos Componentes de Sistemas Elétricos de Potência
89
1base
baset
ω= (s) (4.51)
3 basebase
mbase
ST φ
ω= (N.m) (4.52)
O sistema de grandezas de referência escolhido, visando a obtenção de
indutâncias mútuas recíprocas e a igualdade nas indutâncias entre estator e rotor,
conduz às seguintes relações matemáticas:
afd fda akd kda ad
akq kqa aq
fkd kdf
L L L L L
L L L
L L
= = = =
= =
=(4.53)
4.2.4.2 Equações da Máquina Síncrona em Por Unidade
Nesta seção apresenta-se o conjunto completo de equações de tensão e fluxo
concatenado de uma máquina síncrona, para a representação de um enrolamento
amortecedor no eixo d e dois enrolamentos amortecedores no eixo q.
Equações de tensão do estator:
0 0 0
d d q r a d
q q d r a q
a
e R i
e R i
e R i
ψ ψ ωψ ψ ωψ
= − −
= + −
= −(4.54)
Equações de tensão do rotor:
1 1 1
1 1 1
2 2 2
00
0
fd fd fd fd
d d d
q q q
q q q
e R i
R iR i
R i
ψψψψ
= +
= += +
= +
(4.55)
Equações de fluxo concatenado do estator:
1
1 2
0 0 0
d d d ad fd ad d
q q q aq q aq q
L i L i L i
L i L i L i
L i
ψψψ
= − + +
= − + +
= −(4.56)

Capítulo 4: Modelagem dos Componentes de Sistemas Elétricos de Potência
90
Observe-se que d ad lL L L= + e q aq lL L L= + , onde Ll é a indutância de
dispersão dos circuitos de eixo d e q.
Equações de fluxo concatenado do rotor:
1 1
1 1 11 1
1 11 1 2
2 1 22 2
fd ffd fd f d d ad d
d f d fd d d ad d
q q q aq q aq q
q aq q q q aq q
L i L i L i
L i L i L i
L i L i L i
L i L i L i
ψψψψ
= + −
= + −
= + −
= + −
(4.57)
Torque de entreferro:
e d q q dT i iψ ψ= − (4.58)
Note que, se a freqüência das grandezas do estator for igual a freqüência
base ( basef ), então o valor da reatância em pu é igual ao valor da indutância
também em pu. Portanto, se basef f= , dX e dL são iguais em pu.
4.2.5 Circuitos Equivalentes para os Eixos Direto e Quadratura
Embora as equações apresentadas na seção anterior sejam utilizadas
diretamente para se determinar o comportamento da máquina síncrona, é prática
comum usar circuitos equivalentes para obter uma descrição visual do modelo.
Os circuitos que representam as equações da máquina síncrona são
apresentados a seguir, considerando-se:
1
1 11 1
1 11
2 22
fd ffd f d
d d f d
q q aq
q q aq
L L L
L L L
L L L
L L L
= −
= −
= −
= −
(4.59)
Os circuitos equivalentes representam completamente todas as
características descritas pelas equações de tensão e de fluxo concatenado que,
neste caso, são apresentados em termos de suas derivadas.
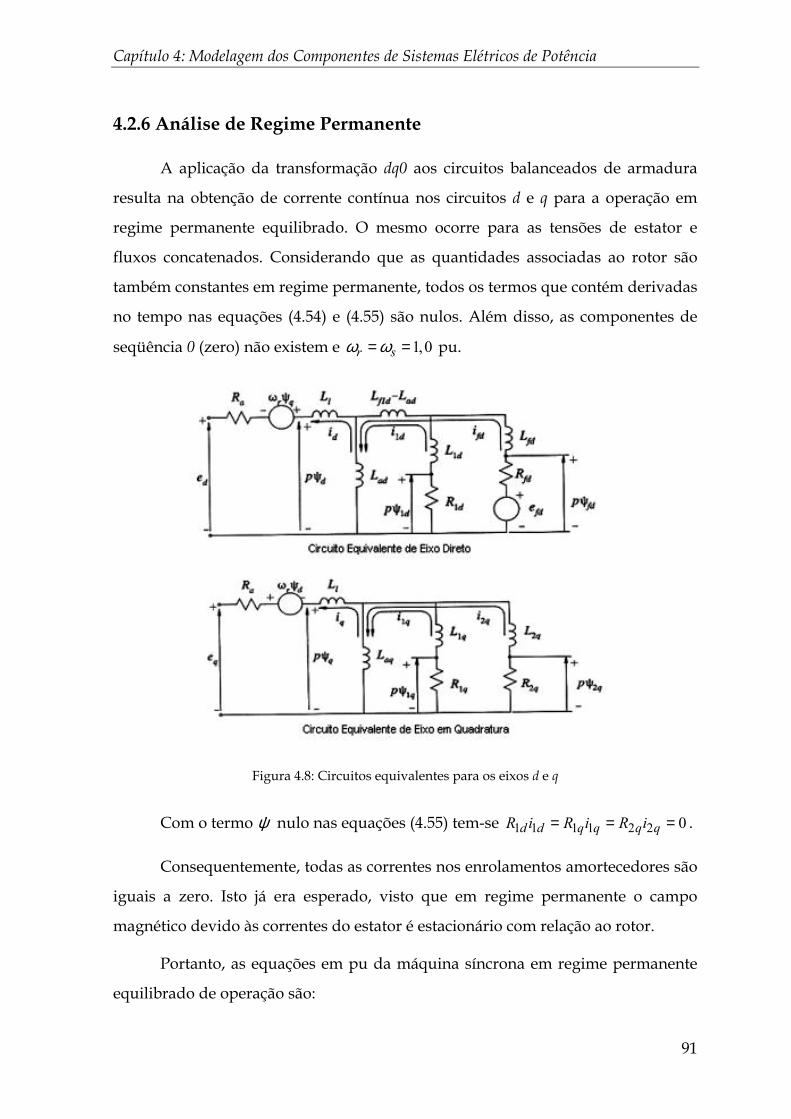
Capítulo 4: Modelagem dos Componentes de Sistemas Elétricos de Potência
91
4.2.6 Análise de Regime Permanente
A aplicação da transformação dq0 aos circuitos balanceados de armadura
resulta na obtenção de corrente contínua nos circuitos d e q para a operação em
regime permanente equilibrado. O mesmo ocorre para as tensões de estator e
fluxos concatenados. Considerando que as quantidades associadas ao rotor são
também constantes em regime permanente, todos os termos que contém derivadas
no tempo nas equações (4.54) e (4.55) são nulos. Além disso, as componentes de
seqüência 0 (zero) não existem e 1,0r sω ω= = pu.
Figura 4.8: Circuitos equivalentes para os eixos d e q
Com o termo ψ nulo nas equações (4.55) tem-se 1 1 1 1 2 2 0d d q q q qR i R i R i= = = .
Consequentemente, todas as correntes nos enrolamentos amortecedores são
iguais a zero. Isto já era esperado, visto que em regime permanente o campo
magnético devido às correntes do estator é estacionário com relação ao rotor.
Portanto, as equações em pu da máquina síncrona em regime permanente
equilibrado de operação são:

Capítulo 4: Modelagem dos Componentes de Sistemas Elétricos de Potência
92
1 1
1 2
d r q a d
q r d a q
fd fd fd
d d d ad fd
q q q
fd ffd fd ad d
d f d fd ad d
q q aq q
e R i
e R i
e R i
L i L i
L i
L i L i
L i L i
L i
ω ψω ψ
ψψψψψ ψ
= − −
= −
=
= − +
= −
= −
= −
= = −
(4.60)
Da segunda e quarta equações acima, considerando-se 1,0rω = pu, pode-se
obter:
q a q d dfd
ad
e R i X ii
X+ +
= (4.61)
Note que essa equação é útil na determinação da corrente de campo para
qualquer condição de regime permanente especificada.
Para a operação em regime permanente, pode-se estabelecer uma
representação fasorial das grandezas do estator da máquina síncrona utilizando-se
os eixos d e q. Desta forma, a relação entre os fasores de tensão e corrente terminais
e suas correspondentes componentes nos eixos d e q são dados por:
~
~
( )( )
t d q
d t i
q t i
t d q
d t i
q t i
E e je
e E sene E cos
I i ji
i I seni I cos
δδ
δ φδ φ
= +
==
= +
= += +
(4.62)
sendo iδ o ângulo de carga.
Substituindo-se as equações (4.60) em (4.62), realizando-se as reduções
necessárias, e desprezando-se a saliência síncrona (xd = xq = xs), obtém-se:

Capítulo 4: Modelagem dos Componentes de Sistemas Elétricos de Potência
93
( )~ ~ ~
q t ta sE E R jX I= + + (4.63)
onde ~
| |qq ad fdE E X i= = .
A partir da equação (4.63) pode-se construir o circuito equivalente e
diagrama fasorial apresentados, respectivamente, na Figura 4.9 e na Figura 4.10.
Figura 4.9: Diagrama fasorial com a saliência síncrona desprezada
Figura 4.10: Circuito equivalente com a saliência síncrona desprezada
4.2.7 Análise de Regime Transitório
Nesta seção são analisadas as características elétricas transitórias da
máquina síncrona, quando da ocorrência de um curto-circuito em seus terminais.
Tal análise, além de prover um entendimento sobre o comportamento transitório
da máquina, é útil na identificação das aproximações necessárias para os estudos
de estabilidade para grandes sistemas. Primeiramente, será considerado um

Capítulo 4: Modelagem dos Componentes de Sistemas Elétricos de Potência
94
circuito RL simples, de modo a possibilitar uma melhor compreensão da natureza
da resposta transitória.
Considere então o circuito apresentado na Figura 4.11, em que a fonte de
tensão é descrita pela equação (4.64).
( )me E sen tω α= + (4.64)
Figura 4.11: Circuito RL equivalente
Se a chave s é fechada em 0t = , a corrente i é dada por:
die L Ridt
= + (4.65)
que resulta em:
12 2 2
R t mL E Li Ke sen t tanRR L
ωω αω
−− = + + − +
(4.66)
onde:
12 2 2
mE LK sen tanRR L
ωαω
− = − − +
(4.67)
Note que a corrente da equação (4.66) apresenta duas componentes: uma
componente unidirecional transitória e uma componente alternada de regime
permanente.
No caso de uma máquina síncrona, a aplicação de um curto-circuito
trifásico em seus terminais resulta no comportamento típico ilustrado pela Figura
4.12.

Capítulo 4: Modelagem dos Componentes de Sistemas Elétricos de Potência
95
Figura 4.12: Correntes trifásicas da máquina síncrona durante um curto-circuito
Em geral, essas correntes de falta apresentam as seguintes componentes:
• uma componente de freqüência fundamental, que decai inicialmente de
modo rápido e, passados os ciclos iniciais, tende lentamente ao regime
permanente;
• uma componente contínua unidirecional, que decai exponencialmente
após alguns ciclos.
Este comportamento é similar ao da corrente de curto-circuito no circuito
RL considerado anteriormente. Entretanto, no caso da máquina síncrona, a
amplitude da componente de freqüência fundamental CA não é constante, visto
que a tensão interna varia, uma vez que a mesma é função dos fluxos
concatenados no rotor.
O decaimento inicialmente acentuado da componente de freqüência
fundamental CA é devido ao rápido decremento dos fluxos concatenados nos
circuitos amortecedores, enquanto que a parcela de decaimento lento desta
componente é devido ao gradativo decaimento dos fluxos concatenados no
circuito de campo.
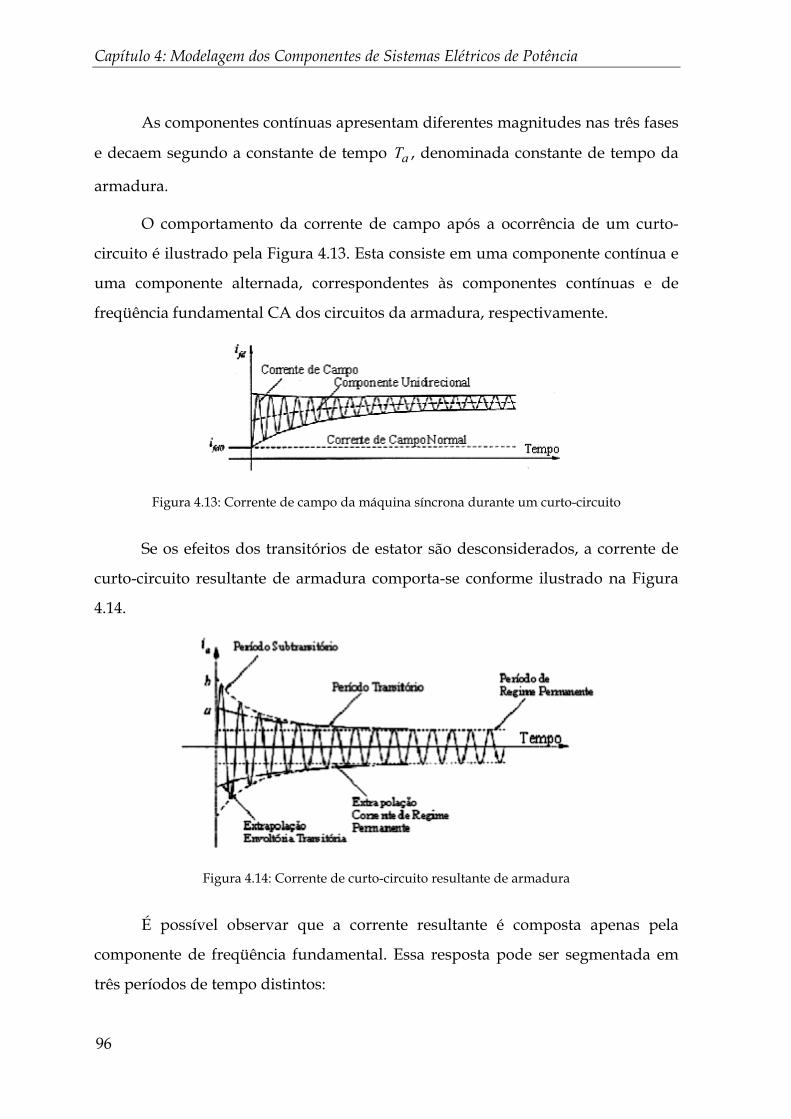
Capítulo 4: Modelagem dos Componentes de Sistemas Elétricos de Potência
96
As componentes contínuas apresentam diferentes magnitudes nas três fases
e decaem segundo a constante de tempo aT , denominada constante de tempo da
armadura.
O comportamento da corrente de campo após a ocorrência de um curto-
circuito é ilustrado pela Figura 4.13. Esta consiste em uma componente contínua e
uma componente alternada, correspondentes às componentes contínuas e de
freqüência fundamental CA dos circuitos da armadura, respectivamente.
Figura 4.13: Corrente de campo da máquina síncrona durante um curto-circuito
Se os efeitos dos transitórios de estator são desconsiderados, a corrente de
curto-circuito resultante de armadura comporta-se conforme ilustrado na Figura
4.14.
Figura 4.14: Corrente de curto-circuito resultante de armadura
É possível observar que a corrente resultante é composta apenas pela
componente de freqüência fundamental. Essa resposta pode ser segmentada em
três períodos de tempo distintos:

Capítulo 4: Modelagem dos Componentes de Sistemas Elétricos de Potência
97
• Período Subtransitório: composto apenas pelos primeiros ciclos, durante
os quais ocorre um rápido decaimento da amplitude da corrente,
associado ao decaimento dos fluxos concatenados com os circuitos
amortecedores;
• Período Transitório: compreendendo um maior espaço de tempo, no qual
a amplitude decai a uma taxa menos acentuada, associado ao
decaimento dos fluxos concatenados com o circuito de campo;
• Período de Regime Permanente: durante o qual a amplitude da corrente se
mantém constante.
Na próxima seção são definidos os parâmetros que determinam as
amplitudes dessa resposta nos três períodos identificados, bem como a razão de
decaimento dessas amplitudes.
4.2.8 Parâmetros Operacionais
As equações desenvolvidas para a máquina síncrona são apresentadas
segundo os parâmetros de indutâncias e resistências dos circuitos do estator e
rotor, chamados parâmetros fundamentais ou parâmetros básicos. Entretanto, apesar
dos parâmetros fundamentais especificarem completamente o comportamento
elétrico da máquina, estes não podem ser obtidos através de ensaios
experimentais. Portanto, os dados das máquinas tem sido levantados em termos
de parâmetros derivados, relacionados com o comportamento observado nos
terminais da máquina em condições adequadas de teste. A seguir, são
apresentados tais parâmetros e suas relações com os parâmetros fundamentais.
Um método conveniente de se identificar as características elétricas da
máquina é em termos dos parâmetros operacionais relacionando as quantidades
terminais de armadura e campo. De acordo com as figuras abaixo, a relação entre
os valores incrementais das quantidades terminais são expressas na forma
operacional da seguinte forma:

Capítulo 4: Modelagem dos Componentes de Sistemas Elétricos de Potência
98
( ) ( ) ( ) ( ) ( )( ) ( ) ( )
d fd d d
q q q
s G s e s L s i s
s L s i s
ψ
ψ
∆ = ∆ − ∆
∆ = − ∆(4.68)
Figura 4.15: Relação entre os valores incrementais das quantidades terminais
onde:
( )G s : função de transferência entre o estator e o campo;
( )dL s : indutância operacional do eixo d;
( )qL s : indutância operacional do eixo q.
Nas equações acima, s representa o operador de Laplace e o prefixo ∆
denota valores incrementais ou perturbados.
Os parâmetros operacionais ( )G s e ( )dL s , relativos à rede de eixo direto,
são obtidos a partir da substituição das equações gerais da máquina síncrona para
o eixo direto, em pu e na forma operacional, na equação (4.68) do sistema. Após o
desenvolvimento adequado, as expressões resultantes são dadas por:
( ) ( )( )
( ) ( )( )
24 5 4 6
21 2 1 3
0 21 2 1 3
1
1
1
1
d d
kd
T T s T T sL s L
T T s T T s
sTG s G
T T s T T s
+ + +=
+ + +
+=
+ + +
(4.69)
onde:

Capítulo 4: Modelagem dos Componentes de Sistemas Elétricos de Potência
99
0
1
1
1
12
1
3 11
4
5 11
6 11
1
1
1
1
ad
fd
dkd
d
ad fd
fd
ad d
d
ad fdd
d ad fd
ad lfd
fd ad l
ad ld
d ad l
ad fd ld
d ad l ad fd fd l
LGR
LTR
L LT
R
L LTR
L LT L
R L L
L LT LR L L
L LT LR L L
L L LT L
R L L L L L L
=
=
+=
+=
= + +
= + +
= + +
= + + +
(4.70)
Na forma fatorada, as equações (4.69) são dadas por:
( ) ( ) ( )( ) ( )
( ) ( )( ) ( )
0 0
00 0
1 ' 1 ''1 ' 1 ''
11 ' 1 ''
d dd d
d d
kd
d d
sT sTL s L
sT sT
sTG s G
sT sT
+ +=
+ +
+=
+ +
(4.71)
De modo similar, para o eixo q, tem-se:
( ) ( ) ( )( ) ( )0 0
1 ' 1 ''
1 ' 1 ''q q
q qq q
sT sTL s L
sT sT
+ +=
+ +(4.72)
onde:
10
1
10 2
2 1
'
1''
aq qq
q
aq qq q
q aq q
L LT
R
L LT L
R L L
+=
= + +
(4.73)

Capítulo 4: Modelagem dos Componentes de Sistemas Elétricos de Potência
100
As constantes de tempo empregadas nas equações (4.71) e (4.72) são
definidas a seguir:
0'dT : constante de tempo transitória de eixo direto em circuito aberto;
0''dT : constante de tempo subtransitória de eixo direto em circuito aberto;
0'qT : constante de tempo transitória de eixo quadratura em circuito aberto;
0''qT : constante de tempo subtransitória de eixo quadratura em circuito
aberto;
'dT : constante de tempo transitória de eixo direto em curto-circuito;
''dT : constante de tempo subtransitória de eixo direto em curto-circuito;
'qT : constante de tempo transitória de eixo quadratura em curto-circuito;
''qT : constante de tempo subtransitória de eixo quadratura em curto-
circuito.
Os valores dessas constantes de tempo, em termos dos parâmetros
fundamentais da máquina síncrona, são dados na tabela abaixo. Nesta tabela, a
segunda coluna contém os valores aproximados, normalmente empregados, e a
terceira coluna contém os valores precisos.
Parâmetros Expressão Clássica Expressão Precisa
0'dT 1T 1 2T T+
'dT 4T 4 5T T+
0''dT 3T ( )3 1 1 2T T T T +
''dT 6T ( )6 4 4 5T T T T +
'dL ( )4 1dL T T ( ) ( )4 5 1 2dL T T T T+ +
''dL ( ) ( )4 6 1 3dL T T T T ( ) ( )4 6 1 3dL T T T T

Capítulo 4: Modelagem dos Componentes de Sistemas Elétricos de Potência
101
onde:
1ad fd
fd
L LT
R+
= 12
1
ad d
d
L LTR
+=
3 11
1 ad fdd
d ad fd
L LT L
R L L
= + +
41 ad l
fdfd ad l
L LT LR L L
= + +
5 11
1 ad ld
d ad l
L LT LR L L
= + +
6 11
1 ad fd ld
d ad l ad fd fd l
L L LT L
R L L L L L L
= + + +
4.2.8.1 Parâmetros Padrão
No decorrer de uma perturbação são induzidas correntes nos circuitos do
rotor das máquinas síncronas. No caso de um curto-circuito, algumas destas
correntes decaem mais rapidamente do que outras. Os parâmetros da máquina
que influenciam no decaimento rápido são os chamados parâmetros
subtransitórios, enquanto aqueles que influenciam as componentes de decaimento
lento são chamados parâmetros transitórios. Os parâmetros que determinam a
resposta das componentes de regime são chamados parâmetros síncronos.
As características de interesse da máquina síncrona são as indutâncias
efetivas vista dos terminais e associadas com as correntes de freqüência
fundamental, durante os períodos subtransitórios, transitórios e de regime
permanente. Juntamente com estas indutâncias, as constantes de tempo que
determinam a taxa de decaimento das correntes e tensões formam o conjunto dos
parâmetros padrão, utilizados na determinação das características elétricas da
máquina síncrona. Estes parâmetros podem ser determinados a partir das
expressões de ( )dL s , ( )qL s e ( )G s .
Conforme apresentado na tabela anterior, as constantes de tempo 'dT ,
0'dT , ''dT e 0''dT , podem ser determinadas de modo exato ou aproximado.

Capítulo 4: Modelagem dos Componentes de Sistemas Elétricos de Potência
102
Na função de transferência ( )G s , as constantes de tempo 0'dT e 0''dT estão
relacionadas com os parâmetros transitórios e subtransitórios, respectivamente. O
mesmo pode se afirmar das constantes de tempo 'dT e ''dT em ( )dL s .
Examinando então os valores efetivos de ( )dL s sob condições de regime
permanente, transitório e subtransitório, com base na função de transferência
relativa à essa variável, obtém-se:
(0)d dL L= (4.74)
ou seja, em regime permanente 0s = e então (0)dL representa a indutância síncrona
de eixo direto.
Durante um transitório rápido, como s tende ao infinito, o valor limitante
de ( )dL s é dado por:
0 0
' '''' ( )' ''
d dd d d
d d
T TL L L
T T
= ∞ =
(4.75)
que representa a indutância subtransitória.
Na ausência de enrolamentos amortecedores, o valor limitante da
indutância é:
0
'' ( )'d
d d dd
TL L L
T
= ∞ =
(4.76)
que representa a indutância transitória.
De modo análogo obtém-se (0)qL , 'qL e ''qL .
4.2.8.2 Características da Resposta em Freqüência
Na análise da máquina síncrona é interessante examinar as características
da resposta em freqüência dos parâmetros operacionais, pois estas proporcionam
uma percepção sobre as características dinâmicas da máquina e podem ser
facilmente esboçadas usando-se uma aproximação assintótica.

Capítulo 4: Modelagem dos Componentes de Sistemas Elétricos de Potência
103
Considere uma máquina síncrona particular, com os parâmetros
operacionais predefinidos. A Figura 4.16 ilustra as assíntotas da função de
transferência ( )dL s em função da freqüência.
Figura 4.16: Magnitude da função de transferência ( )dL s em função da freqüência
As constantes de tempo transitórias e subtransitórias, bem como as
indutâncias foram utilizadas como os pontos de quebra para a aproximação
assintótica. A indutância efetiva é igual à indutância síncrona dL nas freqüências
menores que 0.02 (Hz), igual à indutância transitória 'dL entre 0.2 (Hz) e 2 (Hz) e
igual à reatância subtransitória ''dL em freqüências maiores que 10 (Hz). No
estudo de estabilidade, o intervalo de freqüência de interesse é o correspondente à
'dL .
A Figura 4.17 apresenta a magnitude das assíntotas de ( )G s em função da
freqüência para a mesma máquina, com 0G normalizado de modo a ser igual a
um. A partir do diagrama, percebe-se que o ganho efetivo diminui
consideravelmente em altas freqüências. Isto indica que variações de alta
freqüência na tensão de campo não são refletidas no fluxo concatenado do estator
e nas demais quantidades deste.

Capítulo 4: Modelagem dos Componentes de Sistemas Elétricos de Potência
104
Figura 4.17: Magnitude da função de transferência ( )G s em função da freqüência
4.2.9 Representação em Estudos de Estabilidade
As equações em pu, apresentadas na seção 4.2.4.2, descrevem
completamente o comportamento da máquina síncrona. Entretanto, exceto para
sistemas de pequeno porte, estas equações não podem ser utilizadas diretamente
para estudos de estabilidade. No caso de sistemas de grande porte, são feitas as
seguintes simplificações nas equações referentes às tensões de estator de e qe :
• desprezam-se os termos de tensão variacional dψ e qψ ;
• desprezam-se o efeito das variações de velocidade.
Os termos de tensão variacional dψ e qψ representam os efeitos
transitórios do estator. Ao desprezá-los, as quantidades relacionadas a este contém
apenas componentes de freqüência fundamental e as equações de tensão do
estator tornam-se equações algébricas.
4.2.9.1 Modelos Simplificados
Uma simplificação usual do modelo da máquina síncrona é a
desconsideração dos efeitos dos enrolamentos amortecedores. Com isso,
minimiza-se a quantidade de dados necessários à análise. Além disso, contribui-se
para a redução do esforço computacional, a medida que a ordem do modelo

Capítulo 4: Modelagem dos Componentes de Sistemas Elétricos de Potência
105
matemático é reduzida, permitindo o uso de passos de integração maiores nas
simulações no domínio do tempo.
Desprezado-se os efeitos dos enrolamentos amortecedores, as equações de
fluxo concatenado e tensão no rotor são dadas por:
Tensão no rotor:
fd fd fd fde R iψ= + (4.77)
Neste caso, esta é a única equação diferencial associada às características
elétricas da máquina síncrona.
Fluxo concatenado:
d d d ad if
q q q
fd ad d ffd fd
L i L i
L i
L i L i
ψψψ
= − +
= −
= − +(4.78)
Estas equações são muitas vezes escritas em termos das seguintes variáveis
padrão:
'
I ad fd
adq fd
ffd
adfd fd
fd
E L i
LEL
LE eR
ψ
=
=
=
(4.79)
onde:
IE : tensão proporcional a fdi ;
'qE : tensão proporcional a fdψ ;
fdE : tensão proporcional a fde ;
Manipulando-se matematicamente as equações anteriores, as equações de
fluxo e de tensão podem ser apresentadas na seguinte forma:

Capítulo 4: Modelagem dos Componentes de Sistemas Elétricos de Potência
106
0
' ( ' )
1' ( )'
d d d I
q q q
q I d d d
q fd Id
L i EL i
E E L L i
E E ET
ψψ
= − += −
= − −
= −
(4.80)
em que:
0'
'
ad fd pld
fd
ad fdd l
ad fd
L L LT
R
L LL L
L L
+ +=
= ++
(4.81)
Note que, nas equações (4.80) , a máquina síncrona está descrita em termos
de tensões e parâmetros padrão.
4.2.9.2 Síntese dos Modelos Simplificados Usuais
Nesta seção são reproduzidos os cinco modelos de máquinas síncronas
apresentados em ARRILLAGA et al. (1983), comumente empregados em
programas de análise da estabilidade transitória e em programas da análise de
estabilidade para pequenas perturbações. Nesta reprodução preserva-se a
nomenclatura original (ARRILLAGA et al., 1983), cujas diferenças em relação aos
desenvolvimentos apresentados neste capítulo são:
• o eixo d é considerado adiantado em relação ao eixo q;
• as tensões terminais são simbolizadas por dV e qV nas variáveis de Park
e V na representação fasorial. Da mesma forma, as correntes são
representadas por dI , qI e I .
Na descrição de cada modelo são apresentadas as hipóteses simplificadoras
adotadas em adição às hipóteses gerais para estudos de estabilidade, descritas no
início da seção 4.2.9; as equações diferenciais que representam o comportamento
do rotor; e as equações que representam o comportamento do estator, em
variáveis dq0 e na forma fasorial.

Capítulo 4: Modelagem dos Componentes de Sistemas Elétricos de Potência
107
Modelo 1 – Clássico
Neste modelo desprezam-se os efeitos dos enrolamentos amortecedores,
considera-se constante o enlace de fluxo com o enrolamento de campo
( qE =′ constante) e despreza-se a saliência transitória, ou seja, considera-se
q EE ′| |=| |′ e o ângulo do eixo q , em relação a referência síncrona, igual ao ângulo
de E′ ( q dqxx x≈ ≈′ ′ e 0dE =′ ).
Equações do rotor:
[ ( )]2
rm e r
d P P Ddt H
ωω ω ω= − − −
rddtδ ω ω= −
(4.82)
Equações do estator:
Em variáveis de Park:
q dq q dV rI IxE − = − ′′
qd d qV rI Ix− = + ′(4.83)
Na forma fasorial (referência síncrona):
dq V rI j IxE = + + ′′ (4.84)
Note que esse modelo não permite a representação do efeito do regulador
de tensão. Ressalte-se ainda que para defeitos severos e de longa duração, a
hipótese do enlace de fluxo constante é, freqüentemente, otimista.
Modelo 2 - Máquina Síncrona de Pólos Salientes (Efeitos Transitórios)
Neste modelo desprezam-se todos os enrolamentos amortecedores e/ou
correntes no ferro do rotor e seus efeitos ( q dx x=′ ′ , 0dE =′ ).

Capítulo 4: Modelagem dos Componentes de Sistemas Elétricos de Potência
108
Equações do rotor:
0
1 [ ( ) ]qqdfd d d
d
d EE x Ix Edt T
′= + − −′ ′
′
[ ( )]2
rm e r
d P P Ddt H
ωω ω ω= − − −
rddtδ ω ω= −
(4.85)
Equações do estator:
Em variáveis de Park:
q dq q dV rI IxE − = − ′′
qd d qV rI Ix− = + ′(4.86)
Na forma fasorial (referência síncrona):
( )d dqq qV rI j I j xx xE I= + + + −′ ′′ (4.87)
Note que este é o modelo mais simples que inclui os transitórios de campo
e, portanto, adequado para uma variedade maior de estudos que o modelo
clássico.
Modelo 3 - Máquina Síncrona de Rotor Liso (Efeitos Transitórios)
Neste modelo consideram-se os efeitos transitórios nos eixos d e q,
representando-se as correntes no ferro do rotor por um enrolamento em curto-
circuito no eixo q. Os parâmetros qx′ e 0qT ′ são, em geral, definidos para correntes
no rotor com freqüência de 1,0 (Hz).
Equações do rotor:
0
1 [ ( ) ]qqdfd d d
d
d EE x Ix Edt T
′= + − −′ ′
′
0
1 [ ( ) ]ddqq q
q
d E x Ix Edt T′ = − − −′ ′
′
(4.88)

Capítulo 4: Modelagem dos Componentes de Sistemas Elétricos de Potência
109
[ ( )]2
rm e r
d P P Ddt H
ωω ω ω= − − −
rddtδ ω ω= −
Equações do estator:
Em variáveis de Park:
q dq q dV rI IxE − = − ′′
d qd d qV rI IxE − = + ′′(4.89)
Na forma fasorial (referência síncrona):
( )d q dq d qE V rI j I jx x xE E I′ = + = + + + −′ ′ ′′ ′ (4.90)
Este modelo é adequado para representar a máquina síncrona de pólos lisos
onde o efeito do campo e o amortecimento assíncrono, provocado pelas correntes
no ferro do rotor, devam ser considerados. Os efeitos dos enrolamentos
amortecedores e das correntes induzidas no ferro do rotor, devido a interação
campo - estator, não são representados.
Modelo 4 - Máquina Síncrona de Pólos Salientes (Efeitos Subtransitórios)
Neste modelo consideram-se os efeitos subtransitórios representando-se
um enrolamento amortecedor em cada eixo (d e q).
Equações do rotor:
0
1 [ ( ) ]qqdfd d d
d
d EE x Ix Edt T
′= + − −′ ′
′
0
1 ( ( ) ]qq qd d d
d
d EIx xE Edt T
′′= + − −′ ′′′ ′′
′′
0
1 [ ( ) )ddqq q
q
d E x Ix Edt T′′ = − − −′′ ′′
′′
(4.91)

Capítulo 4: Modelagem dos Componentes de Sistemas Elétricos de Potência
110
( ( )]2
rm e r
d P P Ddt H
ωω ω ω= − − −
rddtδ ω ω= −
Equações do estator:
Em variáveis de Park:
q dq q dV rI IxE − = − ′′′′
d qd d qV rI IxE − = + ′′′′(4.92)
Na forma fasorial (referência síncrona):
( )d q dq d qE V rI j I jx x xE E I′′ = + = + + + −′′ ′′ ′′′′ ′′ (4.93)
Este modelo é adequado para representar uma máquina síncrona de pólos
salientes em que os efeitos dos enrolamentos amortecedores devem ser
considerados.
Modelo 5 - Máquina Síncrona de Rotor Liso (Efeitos Subtransitórios)
Neste modelo consideram-se os efeitos subtransitórios representando-se um
enrolamento amortecedor no eixo d e dois enrolamentos amortecedores
no eixo q.
Equações do rotor:
0
1 ( ( ) ]qqdfd d d
d
d EE x Ix Edt T
′= + − −′ ′
′
0
1 [ ( ) ]ddqq q
q
d E x Ix Edt T′ = − − −′ ′
′
0
1 [ ( ) )qq qd d d
d
d EIx xE Edt T
′′= + − −′ ′′′ ′′
′′
0
1 ( ( ) ]dd dq q q
q
d E Ix xE Edt T′′ = − − −′ ′′′ ′′
′′
(4.94)

Capítulo 4: Modelagem dos Componentes de Sistemas Elétricos de Potência
111
[ ( )]2
rm e r
d P P Ddt H
ωω ω ω= − − −
rddtδ ω ω= −
Equações do estator:
Em variáveis de Park:
q dq q dV rI IxE − = − ′′′′
d qd d qV rI IxE − = + ′′′′(4.95)
Na forma fasorial (referência síncrona):
( )d q d qE V rI j I jx x x I′′ = + + + −′′ ′′ ′′ (4.96)
Este modelo é adequado para representar uma máquina síncrona de pólos
lisos em que os efeitos dos enrolamentos amortecedores devem ser considerados.
4.3 Sistemas de Excitação
Esta seção descreve os objetivos, funções básicas, tipos e modelagem dos
sistemas de excitação. A ênfase da seção é nos aspectos dos sistemas de excitação
relacionados à estabilidade transitória e para pequenos sinais, especialmente os
modelos usados nestes estudos.
4.3.1 Funções Básicas
O objetivo do sistema de excitação é prover corrente contínua para o campo
da máquina síncrona. Além disso o sistema de excitação realiza uma série de
funções de controle e proteção. Entre as funções de controle estão o controle da
tensão terminal, do fluxo de potência reativa e a melhoria da estabilidade do
sistema. As funções de proteção visam assegurar que os limites de capacidade da
máquina não sejam excedidos.

Capítulo 4: Modelagem dos Componentes de Sistemas Elétricos de Potência
112
4.3.2 Requisitos do Sistema de Excitação
Com relação ao gerador o principal requisito do sistema de excitação é a
manutenção automática da tensão terminal, através do ajuste da corrente de
campo do gerador, mantendo a máquina dentro dos seus limites de capabilidade.
Com relação ao sistema elétrico de potência, o sistema de excitação deve contribuir
para o controle de tensão e a melhoria da estabilidade do sistema de potência.
4.3.3 Elementos do Sistema de Excitação
Os principais componentes do sistema de excitação, os quais são ilustrados
na Figura 4.18, são:
1. Excitatriz: fornece a potência CC ao campo da máquina síncrona,
constituindo o estágio de amplificação de potência do sistema de
excitação;
2. Regulador: gera o sinal de controle para a excitatriz, a partir dos sinais
de entrada;
3. Transdutor de tensão terminal e compensador de carga: mede, retifica e filtra
a tensão terminal e compara com a referência de tensão desejada. O
compensador de carga é usado para manter a tensão em um ponto
eletricamente distante da barra terminal;
4. Estabilizador do sistema de potência: visa amortecer as oscilações
eletromecânicas, introduzindo amortecimento adicional ao sistema;
5. Limites e circuitos de proteção: entre estes limitadores estão os limitadores
de sub e sobre-excitação, limitador volt por Hertz e limitador de tensão
terminal.

Capítulo 4: Modelagem dos Componentes de Sistemas Elétricos de Potência
113
Figura 4.18: Componentes do sistema de excitação
4.3.4 Tipos de Sistemas de Excitação
Os sistemas de excitação podem ser:
• Sistemas de excitação tipo DC: estes sistemas usam um gerador de corrente
contínua para fornecer corrente ao campo do gerador síncrono através
de anéis coletores. Estes são sistemas mais antigos que tendem a
desaparecer. Um típico sistema deste tipo é apresentado na Figura 4.19.
Figura 4.19: Representação esquemática do sistema de excitação tipo DC
• Sistemas de excitação tipo AC: estes sistemas utilizam um gerador de
corrente alternada para alimentar o campo do gerador principal. A
corrente alternada de saída do gerador é retificada por retificadores
controlados ou não. Estes retificadores podem ser estacionários ou

Capítulo 4: Modelagem dos Componentes de Sistemas Elétricos de Potência
114
rotativos. Os sistemas de excitação tipo AC foram desenvolvidos para
substituir os sistemas DC, mas foram superados pelos sistemas de
excitação estáticos. A Figura 4.20 ilustra um sistema de excitação tipo AC
típico.
Figura 4.20: Representação esquemática do sistema de excitação tipo AC
• Sistemas de excitação estáticos: estes sistemas usam retificadores
alimentados a partir da barra terminal do gerador ou uma barra auxiliar
através de um transformador abaixador. Os sistemas de excitação
estáticos apresentam uma resposta muito rápida e são amplamente
usados atualmente.
4.3.5 Modelagem do Sistema de Excitação
Os elementos que compõem o sistema de excitação devem ser modelados
para formar o modelo completo do sistema. A seguir são apresentados elementos
do sistema de excitação e os modelos associados. Os modelos dos componentes
são usados para a construção dos modelos usados nos estudos de estabilidade.
• Excitatriz DC: A excitatriz DC pode ser representada pelo diagrama de
blocos apresentado na Figura 4.21.

Capítulo 4: Modelagem dos Componentes de Sistemas Elétricos de Potência
115
EK
+
−
ef RE V= 1
EsT
( ).x x E xV E S E=
x FDE E=
+
+
xV
Figura 4.21: Diagrama de blocos de uma excitatriz DC
• Excitatriz AC e Retificadores: A excitatriz AC pode ser representada pelo
digrama de blocos apresentado na Figura 4.22. A modelagem dos efeitos
de regulação dos retificadores é apresentada na Figura 4.23.
EK
+
−RV 1
EsT
( ).x E E EV V S V=
EV
++
xV
DK FDI
+
Figura 4.22: Diagrama de blocos de uma excitatriz AC
π
.C FDN
E
K IIV
=
EV FDE
FDI ( )EX NF f I=NI
EXF
Figura 4.23: Modelo de retificador de regulação
• Amplificadores: podem ser representados pelo diagrama de blocos
representado na Figura 4.24.

Capítulo 4: Modelagem dos Componentes de Sistemas Elétricos de Potência
116
( ) ( )1 21 1K
sT sT+ +iV oV
Figura 4.24: Modelo de amplificador
• Circuito de Estabilização: este circuito visa melhorar a resposta do sistema
de excitação, especialmente com a máquina desconectada do sistema.
Uma representação em diagrama de blocos é dada na Figura 4.25.
Sistema de Excitação
1F
F
sKsT+
Figura 4.25: Representação em digrama de blocos do circuito de estabilização
• Limitadores Windup e Non-Windup: estes limitadores são encontrados com
blocos integradores, blocos apenas de constante de tempo e blocos lead-
lag. A diferença entre o limitador windup e o non-windup quando
aplicados a um bloco integrador é apresentada na Figura 4.26 e Figura
4.27, respectivamente.
→ Windup:
Equação do sistema:
d udtν =
Ação do limitador:
Se , entãoN XL L yν ν< < = ;
Se , entãoX XL y Lν ≥ = ;
Se , entãoN NL y Lν ≤ = .

Capítulo 4: Modelagem dos Componentes de Sistemas Elétricos de Potência
117
Figura 4.26: Bloco integrador com limitador windup
→ Non-Windup:
Equação do sistema:
dy udt
=
Ação do limitador:
Se , entãoN XdyL y L udt
< < = ;
Se 0 , então faça 0 ,X Xdy dyy L e y Ldt dt
≥ > = = ;
Se 0 , então faça 0 ,N Ndy dyy L e y Ldt dt
≤ < = = .
Figura 4.27: Bloco integrador com limitador non-windup
• Transdutor de Tensão Terminal e Compensador de Carga: estes elementos são
representados pela Figura 4.28.
( )Cl t C C tV E R jX I= + +tE
CVtI
11 RT+
ClV
Compensador de Carga Transdutor de Tensão
Figura 4.28: Representação esquemática do transdutor de tensão terminal e compensador de carga

Capítulo 4: Modelagem dos Componentes de Sistemas Elétricos de Potência
118
4.3.6 Modelos para Estudos de Estabilidade
O sistema de excitação é formado de muitos elementos e a modelagem
detalhada de todos os componentes pode levar a modelos bastante complexos.
Para estudos de análise do sistema usam-se modelos de ordem reduzida, que
retêm as características do sistema de excitação na faixa desejada de freqüências (0
a 3,0 (Hz) para estudos de estabilidade eletromecânica).
O IEEE padronizou uma série de modelos para representar uma ampla
gama de tipos de sistemas de excitação. Estes modelos são adequados para
estudos de estabilidade transitória e para pequenas perturbações.
Nas figuras a seguir são apresentados um modelo para cada tipo de sistema
de excitação discutidos na seção 4.3.4.
4.3.6.1 Modelo DC1
Este modelo é usado para representar alguns sistemas de excitação mais
antigos do tipo DC. O modelo é apresentado na Figura 4.29.
EK
Σ+
−
RV 1
EsT
( ).x FD E FDV E S E=
Σ
FDE
+
+
xV
− ++
+ FEV1
A
A
KsT+
RmaxV
RminV
HVGate
11
C
B
sTsT
++ΣΣCV
refV
SV UELV
+
−
FV
*UELV
1F
F
sKsT+
* Ponto de entrada alternada
Figura 4.29: Representação esquemática do sistema de excitação modelo DC1
4.3.6.2 Modelo AC4
Este modelo representa sistemas de excitação com excitatrizes do tipo AC e
é apresentado na Figura 4.30.

Capítulo 4: Modelagem dos Componentes de Sistemas Elétricos de Potência
119
RVFDE−
+
+1
A
A
KsT+
( )Rmax C FDV K I−
RminV
HVGate
11
C
B
sTsT
++ΣCV
refV
SV
IV
UELVImaxV
IminV
Figura 4.30: Representação esquemática do sistema de excitação modelo AC4
4.3.6.3 Modelo ST1A
Este modelo representa sistemas de excitação estáticos e é apresentado na
Figura 4.31.
AVFDE−
++
1A
A
KsT+
AmaxV
AminV
HVGate
( ) ( )( ) ( )
1
1
1 11 1
C C
B B
sT sTsT sT
+ ++ +
ΣCV
refV
SV
IV
*UELVImaxV
IminV
FV
1F
F
sKsT+
+ −
UELV
HVGate
*UELV
+
Σ
*SV
+ −
LVGate
OELV
( )t Rmax C FDE V K I−
t RminE V
LRK
0
+Σ
−
LRI
FDI* Pontos de entrada alternada
Figura 4.31: Representação esquemática do sistema de excitação modelo ST1A
4.4 Modelos de Cargas em Estudos de Estabilidade
Em geral a representação das cargas para estudos de estabilidade é feita
usando-se modelos que refletem o comportamento de impedância constante,
corrente constante e potência constante, ou uma combinação de parcelas destes
tipos. Estas parcelas estão baseadas nas hipóteses seguintes:
• Potência constante: a potência da carga é constante independentemente
da tensão nodal;
• Corrente constante: o módulo da corrente solicitada pela carga não varia
durante o transitório, podendo ser calculado a partir da potência

Capítulo 4: Modelagem dos Componentes de Sistemas Elétricos de Potência
120
complexa S , que varia com o módulo da tensão ( 0 0S S V V= / ), e da
tensão complexa;
• Impedância constante: a carga é representada por uma impedância
constante para a terra, calculada em função das condições nominais de
operação.
Matematicamente, as três parcelas do modelo de carga são dadas por:
Parcela de potência constante:
1 0 2 0s sP jQ a P ja Q+ = + (4.97)
Parcela de corrente constante:
[ ]1 0 2 0
0I I
b P jb Q VP jQ
V+ .
+ = (4.98)
Parcela de impedância constante:
21 0 2 02 2
0 0z z
c P c QP jQ j VV V
+ = + | |
| | | | (4.99)
onde:
0P : potência ativa no regime permanente pré-perturbação (em pu);
0Q : potência reativa no regime permanente pré-perturbação (em p.u.);
0V : tensão na barra de carga no regime permanente pré-perturbação (em
pu);
V : tensão na barra de carga ao longo da simulação (em pu);
1a , 1b , 1c : constantes que especificam a percentagem de potência
constante, corrente constante e impedância constante,
respectivamente, para a carga ativa;

Capítulo 4: Modelagem dos Componentes de Sistemas Elétricos de Potência
121
2a , 2b , 2c : constantes que especificam a percentagem de potência
constante, corrente constante e impedância constante,
respectivamente, para a carga reativa;
s I zP P P, , : potências ativas associadas, respectivamente as parcelas de
carga do tipo potência constante, corrente constante e impedância
constante;
s I zQ Q Q, , : potências reativas associadas, respectivamente as parcelas de
carga do tipo potência constante, corrente constante e impedância
constante.
4.4.1 Representação Polinomial
Neste caso, as parcelas ativa e reativa de cada carga são representadas por
polinômios da forma:
2
0 1 1 10 0
2
0 2 2 20 0
V VP P a b cV V
V VQ Q a b cV V
= + +
= + +
(4.100)
Uma desvantagem desta representação relaciona-se com a parcela
representada por potência constante. Para baixas tensões, que aparecem no caso
de defeitos do tipo curto-circuito ou perda de sincronismo de alguma máquina, a
corrente do modelo tende a um valor elevado, fato que não ocorre no sistema real.
Por isso é comum se colocar um limite de tensão, abaixo do qual as cargas passam
a ser representadas pelo modelo de impedância constante.
4.4.2 Representação Exponencial
Neste caso as cargas são representadas pelas equações:

Capítulo 4: Modelagem dos Componentes de Sistemas Elétricos de Potência
122
0 0
0 0
kp
kq
P VP V
Q VQ V
=
=
(4.101)
onde kp e kq variam, normalmente, de 0 a 3 e 0P , 0Q e 0V , são os valores de
regime permanente inicial, respectivamente, para a potência ativa, potência reativa
e tensão na barra em que a carga está conectada.
Esta representação tem a vantagem de que a potência é nula para tensão
nula na barra em que a carga esta conectada. Para 0kp kq= = , 1kp kq= = e
2kp kq= = , tem-se, respectivamente, a carga representada por potência constante,
corrente constante e impedância constante.
Uma característica geral para a carga pode ser estabelecida considerando
também a variação da carga com a freqüência. Assim:
( ) ( )
( ) ( )
pv pfp
qv qfq
P K V f
Q K V f
=
=(4.102)
onde pK e qK são constantes que dependem dos valores nominais das variáveis
P e Q .
Cargas estáticas são pouco afetadas por variações na freqüência, ou seja,
0pf qf= = , e para cargas que se comportam como impedâncias constantes tem-se
2pv qv= = .
4.5 Equipamentos FACTS
4.5.1 Introdução
Os avanços da eletrônica de alta potência permitiu o desenvolvimento de
uma série de dispositivos controláveis, com alta velocidade de resposta, e que
podem contribuir significativamente para o desempenho dinâmico do sistema.

Capítulo 4: Modelagem dos Componentes de Sistemas Elétricos de Potência
123
Entre tais dispositivos pode-se citar o compensador estático de reativo (CER), o
capacitor série controlado (CSC), o defasador controlado a tiristor (DCT), o UPFC
(Unified Power Flow Controller), o STATCOM e o amortecedor de ressonância
subsíncrona. Outros dispositivos são citados mais adiante.
O desenvolvimento desta tecnologia originou o conceito de FACTS (Flexible
AC Transmission System), associado a uma filosofia de operação do sistema na qual
os novos dispositivos permitem uma grande flexibilidade no controle.
O objetivo deste capítulo é descrever alguns dos dispositivos mais comuns
associados ao conceito de FACTS. Os seguintes dispositivos são considerados:
compensadores estáticos de reativo e capacitores série controlados.
4.5.2 Princípios e Dispositivos
Os objetivos relacionados ao conceito de FACTS são:
• controle rápido dos fluxos de potência;
• carregamento seguro das linhas até a capacidade térmica máxima.
A tecnologia FACTS deriva-se principalmente da eletrônica de alta
potência, e usa como suporte o controle digital, a proteção digital, facilidades de
comunicação baseadas em fibra ótica e os centros de controle modernos.
Entre os dispositivos associados ao conceito de FACTS pode-se citar:
• compensador estático de potência reativa;
• capacitor série controlado;
• defasador eletrônico;
• amortecedor de ressonância subsíncrona;
• amortecedor de ferroressonância;
• limitador de corrente de falta;
• pára-raios de alta energia;

Capítulo 4: Modelagem dos Componentes de Sistemas Elétricos de Potência
124
• freio dinâmico.
Alguns destes elementos tem aplicações bem específicas, como o
amortecedor de ressonância subsíncrona e o amortecedor de ferroressonância.
Outros são elementos de proteção como o limitador de corrente de falta e o pára-
raios de alta energia.
Dispositivos como os compensadores estáticos de reativo, capacitores série
controlados, STATCOM, UPFC e defasadores eletrônicos são, no entanto,
essencialmente dispositivos de controle de fluxo de potência.
Um sistema constituído de duas barras, mostrado na Figura 4.32, pode ser
usado para ilustrar as variáveis que podem modificar o fluxo de potência.
Figura 4.32: Sistema com duas barras e fluxo de potência associado
A potência elétrica de transferência é dada por:
1 212 12
12
E EP senX
δ= (4.103)
O fluxo de potência pode então ser variado modificando:
• os módulos das tensões terminais 1E e 2E ;
• a reatância da linha 12X ;
• o ângulo 12δ entre as tensões terminais.
O compensador estático de reativo opera essencialmente sobre as tensões
terminais. O capacitor série controlado modifica a reatância série da linha
permitindo o controle do fluxo de potência. O defasador eletrônico altera o ângulo
entre as tensões terminais permitindo o controle do valor do fluxo e ainda o
sentido do mesmo. Portanto, o defasador eletrônico permite o controle

Capítulo 4: Modelagem dos Componentes de Sistemas Elétricos de Potência
125
bidirecional rápido do fluxo. O UPFC combina a ação do controle paralelo com o
controle série.
4.5.3 Compensadores Estáticos de Reativo
4.5.3.1 Introdução
A denominação de compensadores estáticos de reativo engloba uma série
de dispositivos de controle de potência reativa que, ao contrário de condensadores
síncronos, não possuem partes móveis. A maior parte destes dispositivos utilizam
tiristores de alta potência. Dois tipos de compensadores estáticos são considerados
nesta seção: o reator controlado por tiristor (RCT ou TCR - Thyristor Controlled
Reactor) e o capacitor chaveado por tiristor (CCT ou TSC - Thyristor Switched
Capacitor) .
4.5.3.2 Tipos e Princípios dos Compensadores Estáticos
Reator Controlado por Tiristor:
O esquema básico deste dispositivo é mostrado na Figura 4.33.
Figura 4.33: Esquema do RCT
Seja mv V sen tω= a tensão aplicada ao RCT, α o ângulo de disparo do
tiristor (medido a partir da passagem da tensão por zero), e σ o ângulo de
condução (Figura 4.34). Observa-se que:
2σα π+ = (4.104)

Capítulo 4: Modelagem dos Componentes de Sistemas Elétricos de Potência
126
Desde que:
div Ldt
= (4.105)
onde a corrente é dada por:
( )tmVi sen t d t
Lω
αω ω
ω= ∫ (4.106)
ou:
( ) param
L
Vi cos cos t tX
α ω α ω α σ= − < < + (4.107)
0 parai tα σ ω α π= + < < + (4.108)
onde LX Lω= .
Figura 4.34: Ângulo de disparo e de condução
A corrente pode ser analisada em termos de série de Fourier. Desde que
( ) ( )i t i t= − (simetria par) e ( ) ( 2)i t i t T= − + / (simetria de meia onda) segue que a
série só tem termos ímpares em coseno.
Os coeficientes são dados por:

Capítulo 4: Modelagem dos Componentes de Sistemas Elétricos de Potência
127
2
04 ( ) 1 3
T
nI i t cosn t dt n …T
ω= , = , ,∫ (4.109)
O coeficiente do termo fundamental ( 1)n = , calculado usando (4.109) é:
1 mL
senI VX
σ σπ−= − (4.110)
A componente fundamental é, então:
( 90 )om
L
seni V sen tX
σ σ ωπ−= − (4.111)
A susceptância equivalente considerando apenas a componente
fundamental da corrente é, portanto, dada por:
LL
senBX
σ σπ−= (4.112)
ou seja, uma susceptância variável controlada pelo ângulo de condução σ . Para
0σ = , ou seja α π= , o compensador não absorve nenhuma potência reativa
( 0)LminB = . Para σ π= , ou seja 2α π= / cada tiristor conduz durante meio ciclo e a
situação é equivalente a se ter o reator conectado 1( )LL
BX
= . A absorção de
potência reativa é máxima neste caso.
Característica Tensão – Corrente:
A característica tensão - corrente do RCT é mostrada na Figura 4.35.
Figura 4.35: Característica tensão – corrente do RCT

Capítulo 4: Modelagem dos Componentes de Sistemas Elétricos de Potência
128
Esta característica relaciona o módulo da tensão aplicada e o módulo da
corrente. Ela depende essencialmente do controle do disparo dos tiristores. Para
sV V= o controle é tal que os tiristores não conduzem (e portanto I O= ). Se a
tensão aumenta os tiristores são disparados e uma susceptância 10 L LmaxB B< <
correspondente a reta od é estabelecida. Se a tensão aumenta ainda mais o ângulo
de condução aumenta (susceptância 1 2L L LmaxB B B< < correspondente a reta oe ).
Se a tensão continua a aumentar eventualmente atinge-se o ângulo máximo de
condução o que corresponde a LmaxB (reta oc ). Deve-se destacar que a reta ab
depende da característica do sistema de controle do compensador estático.
A configuração considerada torna possível apenas a absorção de potência
reativa. Para que o compensador estático possa absorver ou fornecer potência
reativa a configuração mostrado na Figura 4.36 é usada.
Figura 4.36: Compensador com capacitor
O capacitor fixo permite a variação da potência reativa nos dois sentidos.
Em regime permanente escolhe-se geralmente o ângulo de condução 0σ tal que
0( )L CB Bσ = , onde 1CB j Cω= . Isto assegura que nesta condição o compensador
não fornece ou absorve reativo. A característica tensão - corrente é dada na Figura
4.37.

Capítulo 4: Modelagem dos Componentes de Sistemas Elétricos de Potência
129
Figura 4.37: Característica tensão – corrente com capacitor
A linha oa corresponde a 0LB = , ou seja a susceptância do compensador é
CB B= . A linha ob corresponde a C LmaxB B B= − , ou 1B j Lj C
ωω
= − . A região ab
depende da característica de controle do compensador.
O ponto de operação de um compensador estático de reativo conectado a
um sistema de potência é a intercessão da característica V I− do compensador e
da característica V I− do sistema de potência (Figura 4.38).
Figura 4.38: Característica tensão – corrente do compensador e sistema de potência
Esta última pode ser determinada através do equivalente Thevenin a partir
da barra à qual está conectado o compensador (Figura 4.39).

Capítulo 4: Modelagem dos Componentes de Sistemas Elétricos de Potência
130
Figura 4.39: Equivalente Thevenin do sistema
A reta a na Figura 4.38 representa uma condição do sistema para a qual o
compensador não injeta ou absorve potência reativa.
A característica do sistema (reta a ) é dada por:
THV E X I= − (4.113)
com sV E= .
Se o sistema sofre uma mudança de configuração tal que a tensão passa de
E para 'E e a impedância de Thevenin é 'THX , então a característica (reta b ) é
dada por:
'THV E X I= − (4.114)
Sem o compensador a nova tensão do sistema seria 1 'V E= . Com o
compensador estático o ponto de operação é a intercessão da característica do
compensador estático com a característica do sistema e a tensão da barra na nova
configuração é 2 1V V> .
Capacitor Chaveado por Tiristor:
O princípio do capacitor chaveado por tiristor é ilustrado na Figura 4.40.

Capítulo 4: Modelagem dos Componentes de Sistemas Elétricos de Potência
131
Figura 4.40: Capacitor chaveado por tiristor
A susceptância é ajustada controlando o número de capacitores em
condução. Cada capacitor conduz por um número inteiro de meio ciclos.
A susceptância equivalente varia em degraus. A característica tensão -
corrente é apresentada na Figura 4.41.
Figura 4.41: Característica tensão – corrente do TSC
Para maior flexibilidade no controle deve-se ter um número elevado de
capacitores que permitam reduzir o valor dos degraus.
A questão de transitórios no chaveamento do TSC é importante neste tipo
de compensador estático, limitando os instantes em que os tiristores podem ser
chaveados sem transitórios.

Capítulo 4: Modelagem dos Componentes de Sistemas Elétricos de Potência
132
4.5.3.3 Modelagem de Compensadores Estáticos para a Dinâmica de Sistemas de
Potência
O controle de potência reativa através de compensadores estáticos permite
um espectro amplo de aplicações em sistemas de potência. A velocidade de
resposta destes dispositivos os torna especialmente adequados com relação ao
desempenho dinâmico do sistema. Pode-se citar como possíveis aplicações:
• controle de tensão;
• controle do fator de potência;
• aumento de potência de transferência;
• aumento das margens de estabilidade transitória;
• amortecimento de oscilações eletromecânicas;
• amortecimento de oscilações subsíncronas.
Em estudos de estabilidade modelos razoavelmente simples são usados
para representar os compensadores estáticos. O modelo mostrado na Figura 4.42
tem sido usado em muitos trabalhos.
( )LB s−
ΣrefV
( )TV s
5
11 sT+
+
−+
Σ−
( )cG s Sinal Suplementar
( )1
2
11
K sTsT
++ LminB
LmaxB
( )CB s
( )B s
Figura 4.42: Modelo do compensador estático para estudos dinâmicos
Na Figura 4.42, CB representa a susceptância fixa do capacitor, LB a
susceptância variável do indutor, LminB e LmaxB as susceptâncias mínimas e
máximas respectivamente, 5T é uma constante de tempo associada ao retardo do
disparo dos tiristores e K , 1T e 2T são associados ao controle de tensão. A função
( )cG s corresponde ao controle suplementar para o amortecimento de oscilações.

Capítulo 4: Modelagem dos Componentes de Sistemas Elétricos de Potência
133
Entre os sinais usados como sinal suplementar pode-se citar:
• freqüência em uma barra;
• velocidade de um gerador;
• potência ativa em uma linha;
• aceleração de um gerador.
O sinal escolhido deve ser processado através de um controlador com os
parâmetros convenientemente sintonizados para produzir torque de
amortecimento adequado.
4.5.3.4 Compensador Série Controlado
Princípios de Operação:
O compensador série controlado (CSC) ou TCSC (Thyristor Controlled
Capacitor) consiste de módulos, onde cada módulo é constituído de um capacitor
fixo e de uma indutância em série com uma ponte de tiristores, em um arranjo
anti-paralelo. Para efeito de análise do princípio de operação, apenas um módulo
será considerado na seqüência (Figura 4.43). Algumas vezes o CSC consiste apenas
de capacitores chaveados por tiristores (Figura 4.44). Neste caso, a compensação
série é controlada aumentando ou diminuindo o número de bancos de capacitores
em série. Os tiristores, quando em condução, atuam como bypass dos capacitores.
O chaveamento dos tiristores deve ser coordenado com a passagem por zero da
tensão e da corrente. Esta configuração, menos comum, não será estudada nesta
seção.
Figura 4.43: Compensador série com reator controlado

Capítulo 4: Modelagem dos Componentes de Sistemas Elétricos de Potência
134
Figura 4.44: Compensador série com capacitores chaveados
No caso do capacitor fixo, o grau de compensação capacitiva (supondo a
admitância do reator abaixo daquela do capacitor) é controlada pelo maior ou
menor ângulo de condução dos tiristores, com um reator controlado por tiristores.
Seja CjX− a reatância do capacitor, ou seja, 1CX
Cω= e ( )LjX σ a reatância
do ramo indutivo que, de acordo com o desenvolvimento anterior, é função do
ângulo de condução dos tiristores σ . A reatância equivalente do CSC é dada por:
( )( )1
LCSC
L
C
XjX j XX
σσ=
− (4.115)
ou:
( )( )1
LCSC
L
C
XX XX
σσ=
− (4.116)
A reatância do ramo indutivo varia com o ângulo de condução. Para um
ângulo de condução máximo σ π= , tem-se 0L LX X= , onde 0LX é o valor da
reatância do indutor. Portanto o valor mínimo desta reatância é dado por
0Lmin LX X= . Para um ângulo de condução zero, 0σ = e LX = ∞ , ou seja, o ramo
indutivo é um circuito aberto. Portanto o valor máximo desta reatância é dado por
LmaxX = ∞ . A análise seguinte mostra o comportamento da reatância do CSC para
um ângulo de disparo entre 0σ = e σ π= . Para σ π= (plena condução) tem-se:

Capítulo 4: Modelagem dos Componentes de Sistemas Elétricos de Potência
135
001
LCSC
L
C
XX XX
=− (4.117)
e como 0L CX X< , tem-se 0CSCX > , ou seja, indutivo. Diminuindo-se σ , LX
aumenta, ou seja ( )L LminX Xσ > , mas se ( )L CX Xσ < , tem-se ainda CSCX
indutivo, com maior valor de reatância. Para σ tal que L CX X= , tem-se uma
condição de ressonância, onde o denominador da equação é zero e CSCX = ∞ .
Diminuindo-se ainda mais o ângulo de condução, tem-se ( )L CX Xσ > . Logo, da
equação (4.116), tem-se 0CSCX < e a reatância do CSC é capacitiva. Para um
ângulo de condução zero ( 0σ = ) tem-se L LmaxX X= = ∞ . Logo CSC CX X= − , ou
seja, a reatância do CSC é a própria reatância do capacitor.
Observa-se que, para um ângulo de disparo tal que ( )L CX Xσ = , o CSC
tem reatância infinita, e portanto esta é uma região em que o CSC não pode
operar. A região de ressonância corresponde a passagem da região de reatância
capacitiva para a indutiva ou vice-versa. O sistema de controle não permite a
operação nesta região.
Modelagem do Compensador Série Controlado para Estudos da
Dinâmica:
O uso do compensador série controlado visa, em geral, as funções de
manutenção de potência ou corrente constante. O controlador é então especificado
para alcançar um destes objetivos.
Controle de Potência:
Neste caso o objetivo é manter constante a potência ativa na linha de
transmissão. Com este propósito usa-se em geral um controlador PI (Figura 4.45).

Capítulo 4: Modelagem dos Componentes de Sistemas Elétricos de Potência
136
−
ΣrefP
P
+
iKs
pK
Σ+
+CSCB
Figura 4.45: Controle para potência constante
Controle de Corrente:
O objetivo é manter constante a corrente na linha de transmissão. Um
controlador PI pode também ser usado neste caso (Figura 4.46).
−
ΣrefI
I
+
iKs
pK
Σ+
+CSCB
Figura 4.46: Controle para corrente constante
Amortecimento de Oscilações:
Além das funções descritas anteriormente, o compensador série controlado
pode ter um efeito significativo no amortecimento de oscilações eletromecânicas.
Para isto o modelo mostrado na Figura 4.47 pode ser usado.
−
ΣrefX
X
+
iKs
pK
Σ+
+
B+
estX
Figura 4.47: Controle para amortecimento

Capítulo 4: Modelagem dos Componentes de Sistemas Elétricos de Potência
137
Na Figura 4.47, X é a variável controlada (potência ativa ou corrente), refX
é a referência correspondente e pK e iK são os ganhos proporcional e integral,
respectivamente.
O sinal estX opera apenas em transitórios, e é a saída de um controlador
cuja estrutura é mostrada na Figura 4.48.
( ) ( )( ) ( )
1 3
2 4
1 11 1
sT sTsT sT
+ ++ +1
sTsT+ estXSinal
Suplementar
Figura 4.48: Estrutura do controlador para amortecimento
O sinal suplementar pode ser, por exemplo:
• potência ativa na linha;
• freqüência de uma das barras terminais da linha;
• velocidade de um gerador.

Capítulo 4: Modelagem dos Componentes de Sistemas Elétricos de Potência
138

139
CAPÍTULO 5
5.ESTABILIDADE TRANSITÓRIA
5.1 Introdução
A análise da estabilidade transitória de sistemas elétricos de potência visa,
principalmente, verificar a capacidade dos mesmos em manter o sincronismo
entre às máquinas após a ocorrência de uma grande perturbação. Entende-se por
grande perturbação a ocorrência de faltas em linhas de transmissão e uma grande
alteração no equilíbrio operacional entre geração e carga, provocada pela perda de
uma grande unidade geradora ou de um grande bloco de carga. No capítulo 3 o
problema da estabilidade transitória foi abordado considerando-se uma
modelagem simplificada, denominada de modelagem clássica, a qual resulta na
representação da dinâmica desses sistemas por um sistema de equações
diferenciais ordinárias e não-lineares.
Neste capítulo apresenta-se uma abordagem do problema da estabilidade
transitória de sistemas elétricos de potência considerando-se a modelagem
detalhada desenvolvida no capítulo anterior. Inicialmente aborda-se o problema
da simulação do comportamento dinâmico considerando-se essa modelagem. São
tratados a estrutura analítica geral do modelo matemático resultante, os aspectos
mais relevantes para a constituição do modelo matemático global, as metodologias
de solução normalmente empregadas e a representação de faltas desequilibradas.
Posteriormente, apresenta-se uma descrição dos critérios de análise de
estabilidade constantes dos procedimentos de rede do sistema elétrico brasileiro e
faz-se uma breve descrição das características principais do programa
computacional Anatem, desenvolvido pelo CEPEL e utilizado pelos agentes do
setor elétrico nacional.
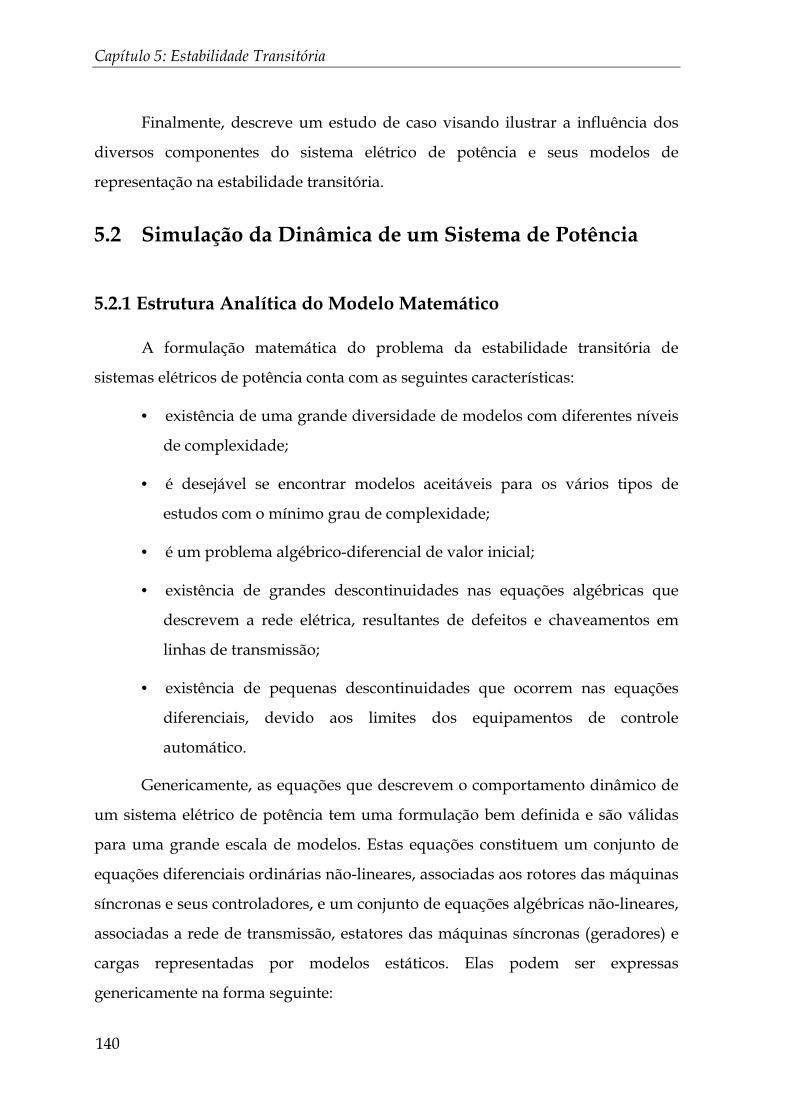
Capítulo 5: Estabilidade Transitória
140
Finalmente, descreve um estudo de caso visando ilustrar a influência dos
diversos componentes do sistema elétrico de potência e seus modelos de
representação na estabilidade transitória.
5.2 Simulação da Dinâmica de um Sistema de Potência
5.2.1 Estrutura Analítica do Modelo Matemático
A formulação matemática do problema da estabilidade transitória de
sistemas elétricos de potência conta com as seguintes características:
• existência de uma grande diversidade de modelos com diferentes níveis
de complexidade;
• é desejável se encontrar modelos aceitáveis para os vários tipos de
estudos com o mínimo grau de complexidade;
• é um problema algébrico-diferencial de valor inicial;
• existência de grandes descontinuidades nas equações algébricas que
descrevem a rede elétrica, resultantes de defeitos e chaveamentos em
linhas de transmissão;
• existência de pequenas descontinuidades que ocorrem nas equações
diferenciais, devido aos limites dos equipamentos de controle
automático.
Genericamente, as equações que descrevem o comportamento dinâmico de
um sistema elétrico de potência tem uma formulação bem definida e são válidas
para uma grande escala de modelos. Estas equações constituem um conjunto de
equações diferenciais ordinárias não-lineares, associadas aos rotores das máquinas
síncronas e seus controladores, e um conjunto de equações algébricas não-lineares,
associadas a rede de transmissão, estatores das máquinas síncronas (geradores) e
cargas representadas por modelos estáticos. Elas podem ser expressas
genericamente na forma seguinte:
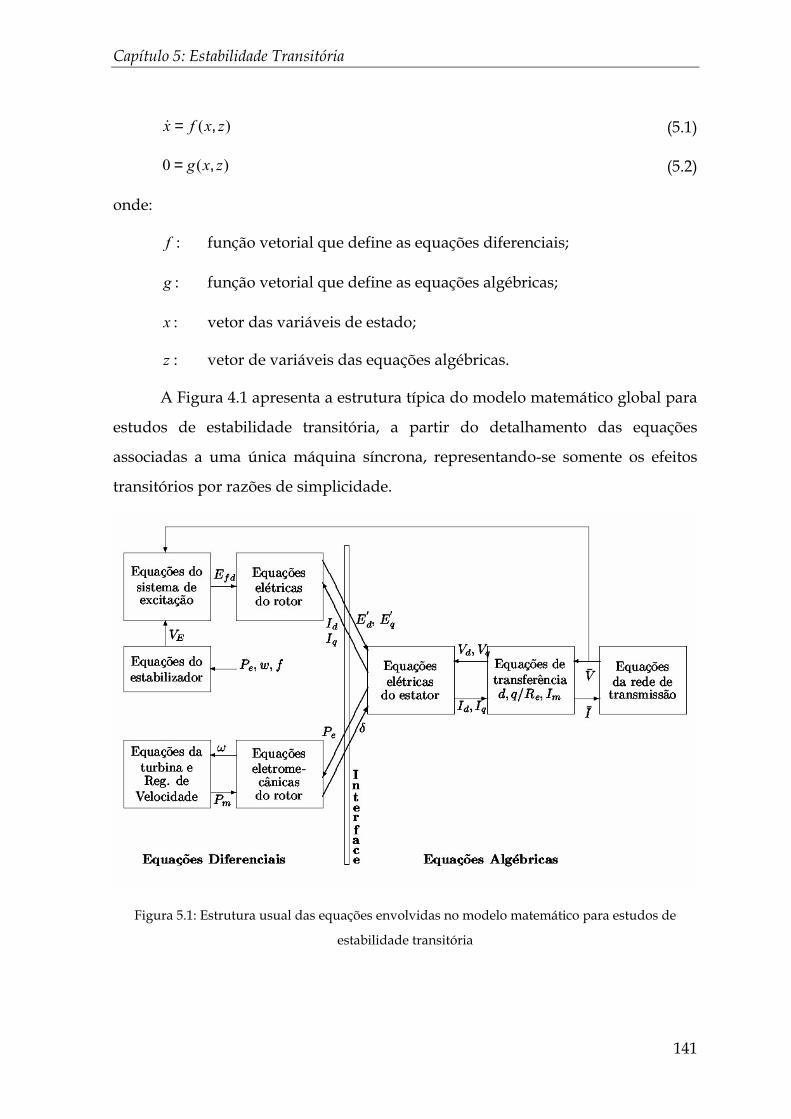
Capítulo 5: Estabilidade Transitória
141
( )x f x z= , (5.1)
0 ( )g x z= , (5.2)
onde:
f : função vetorial que define as equações diferenciais;
g : função vetorial que define as equações algébricas;
x : vetor das variáveis de estado;
z : vetor de variáveis das equações algébricas.
A Figura 4.1 apresenta a estrutura típica do modelo matemático global para
estudos de estabilidade transitória, a partir do detalhamento das equações
associadas a uma única máquina síncrona, representando-se somente os efeitos
transitórios por razões de simplicidade.
Figura 5.1: Estrutura usual das equações envolvidas no modelo matemático para estudos de
estabilidade transitória

Capítulo 5: Estabilidade Transitória
142
As variáveis que aparecem na Figura 4.1 têm o seguinte significado:
mP : potência mecânica aplicada ao eixo do gerador;
ω : velocidade angular do eixo do gerador;
EV : tensão na saída do estabilizador;
eP : potência elétrica de entreferro;
δ : posição angular do rotor em relação a uma referência síncrona;
fdE : tensão na saída do sistema de excitação aplicada ao enrolamento de
campo do gerador;
d qV V, :componentes de eixo direto e quadratura da tensão terminal do
gerador;
' 'd qE E, : componentes de eixo direto e quadratura da tensão transitória
interna do gerador;
d qI I, : componentes de eixo direto e quadratura da corrente de estator do
gerador;
I : corrente complexa de estator do gerador;
V : tensão complexa terminal do gerador.
As variáveis que aparecem tanto nas equações diferenciais como nas
equações algébricas, são denominadas variáveis de interface e assim definidas:
u : subconjunto do vetor de variáveis algébricas que aparecem nas
equações diferenciais ( d q eI I P V, , , );
E : subconjunto do vetor de variáveis de estado que aparecem nas
equações algébricas ( ' 'd qE E δ, , ).

Capítulo 5: Estabilidade Transitória
143
5.2.2 Aspectos Adicionais da Modelagem Global
Nesta seção são descritos alguns aspectos adicionais de modelagem
necessários para o estabelecimento do modelo analítico global de representação da
dinâmica dos sistemas elétricos de potência. Especificamente, são abordados a
modelagem do sistema de transmissão e o acoplamento das máquinas síncronas e
das cargas ao modelo de representação dos sistema de transmissão.
5.2.2.1 Representação do Sistema de Transmissão
O sistema de transmissão é descrito usando-se a matriz admitância nodal
na formulação de injeções de correntes, conforme a equação abaixo:
( )I E V YV, = (5.3)
onde:
I : vetor de injeções de correntes nodais;
Y : matriz admitância nodal;
V : vetor de tensões nodais;
E : subvetor de variáveis de estado formado por 'dE , 'qE e δ , quando
os efeitos subtransitórios são desprezados, ou por ''dE , ''qE e δ ,
quando os referidos efeitos são considerados.
O sistema de equações (5.3), normalmente não-linear, poderá aparecer na
forma compacta (complexa) ou na forma expandida, nas parcelas real e imaginária
de cada elemento. Na forma compacta, o sistema de equações (5.3) pode ser
resolvido iterativamente para V , através da fatoração LU de Y .
A forma expandida é necessária quando a resolução de (5.3) é feita usando-
se o método de Newton, e é dada por:
( )e e e eI E V Y V, = (5.4)

Capítulo 5: Estabilidade Transitória
144
onde eI é o vetor de injeções de correntes nodais e eV é o vetor de tensões nodais,
ambos expandidos nas parcelas real e imaginária de seus elementos.
Neste caso pode-se escrever:
0e e e eF I Y V= − = (5.5)
sendo que eF é zero na solução.
5.2.2.2 Acoplamento das Máquinas Síncronas ao Sistema de Transmissão
As grandezas utilizadas na modelagem de máquinas síncronas são dadas
em termos de valores eficazes equivalentes de estator e em relação a referência d-q.
Por outro lado, as grandezas do sistema de transmissão estão relacionadas a um
sistema de referência complexo (real e imaginário). Ambos os sistemas de
referência giram a velocidade síncrona, porém, estão defasados de um ângulo δ .
Então, para realizar o acoplamento das equações da máquina síncrona com as
equações da rede de transmissão, é necessário definir um sistema de equações
adicionais que representa uma transformação de coordenadas por rotação de
eixos. Adicionalmente, é também muito utilizada a representação das equações do
estator de máquinas síncronas por um equivalente Norton. Estes dois aspectos são
abordados a seguir.
Transformação de Coordenadas
As equações que descrevem a transformação de coordenadas por rotação de
eixos são obtidas, para o caso de tensões, conforme ilustra a Figura 5.2.
Desta figura obtém-se:
d r m
q r m
V V sen V cosV V cos V sen
δ δδ δ
= − + = +
(5.6)
As equações (5.6) podem ser rescritas na seguinte forma matricial:
d r
q m
V Vsen cosV Vcos sen
δ δδ δ
− =
(5.7)

Capítulo 5: Estabilidade Transitória
145
Note que essa transformação é igualmente válida para correntes, e sua
inversa é dada por:
dr
qm
VV sen cosVV cos sen
δ δδ δ
− =
(5.8)
ou:
1 dr
qm
VVT
VV−
=
(5.9)
onde T é a matriz de transformação.
Figura 5.2: Diagrama composto de transformação de coordenadas d q− → ℜ − ℑ e vice-versa
Equivalente Norton para o Estator
O equivalente Norton para o estator de uma máquina síncrona é obtido
aplicando-se a transformação de coordenadas (d - q) → ( ℜ − ℑ ) às variáveis 'dE ,
'qE , dV , qV , dI e qI , nos modelos que consideram apenas os efeitos transitórios,
ou às variáveis ''dE , ''qE , dV , qV , dI e qI , nos modelos que consideram os efeitos
subtransitórios. A seguir é feito o desenvolvimento de obtenção do equivalente
para modelos que consideram apenas os efeitos transitórios.

Capítulo 5: Estabilidade Transitória
146
Na forma matricial, as equações do estator são:
''' '
dq
qd d d
q q qdZ
r xE V IE V Ix r
− = − − (5.10)
Aplicando-se a transformação T nas equações (5.10), obtém-se:
1 ''' '
s
qr r r
m m mdZ
r xE V IT T
E V Ix r− −
= − − (5.11)
onde sZ é a impedância do estator vista da referência que gira à velocidade
síncrona.
Manipulando-se a equação (5.11) de modo a explicitar a injeção de corrente
na forma complexa, obtém-se:
12
2 2
( ' ' ) ' '1' exp 2'2' ' ' 'd q d q
gd q d q
r j x x x xE V j jVI E
r x x r x xδ∗∗
− + − = − − − + +
(5.12)
onde r mg I jII = + .
Note que todas as quantidades da equação (5.12) são fasores referidos à
referência síncrona, e o símbolo (*) indica complexo conjugado. A diferença
( ' 'd qx x− ) é conhecida como saliência transitória.
Assim, a injeção de corrente que representa o comportamento do estator de
uma máquina síncrona, no sistema de referência complexo, constitui-se de uma
parcela dependente exclusivamente da tensão interna 'E , uma parcela
dependente exclusivamente da tensão terminal V , e uma terceira parcela que
depende da saliência transitória, das tensões 'E e V , e do ângulo δ . No caso de
saliência transitória desprezível, o terceiro termo anula-se.
Simbolicamente, pode-se escrever a equação (5.12) na forma seguinte:
( )' eqg eq depE y VI I I= − + (5.13)

Capítulo 5: Estabilidade Transitória
147
onde:
12
2
( ' ' )'
' 'd q
eqd q
r j x xEI
r x x
− + = +
(5.14)
12
2
( ' ' )
' 'd q
eqd q
r j x xy
r x x
− + = +
(5.15)
' '1 exp 2'2 ' 'd q
depd q
x xj jVI Ex x
δ∗∗ − = −
(5.16)
Note que depI é dependente da saliência transitória.
A Figura 5.3 representa o circuito elétrico equivalente para a equação (5.13),
e consequentemente, para o estator da máquina síncrona.
Figura 5.3: Circuito equivalente Norton do estator
Observe-se que, para os modelos que levam em conta os efeitos
subtransitórios nos circuitos do rotor, também pode ser obtido um equivalente
Norton para o estator. Porém, na equação (5.12), deve-se substituir a tensão
transitória 'E pela sua correspondente tensão subtransitória ''E , as reatâncias
transitórias 'dx e 'qx por reatâncias subtransitórias ''dx e ''qx e,
consequentemente, a saliência transitória pela saliência subtransitória, de efeito
muito menos significativo e, em geral, desprezível.

Capítulo 5: Estabilidade Transitória
148
No que se refere ao acoplamento da máquina síncrona ao sistema de
transmissão, as parcelas de corrente do equivalente Norton, eqI e depI , são
tratadas como injeções de correntes, e a admitância eqy é incorporada à matriz
admitância nodal Y .
5.2.2.3 Acoplamento das Cargas à Rede de Transmissão
Semelhantemente ao caso dos estatores das máquinas síncronas, os modelos
de representação da carga podem ser transformados em um equivalente Norton,
de modo a compatibilizá-los com a representação nodal da rede elétrica. A
admitância do equivalente é incluída diretamente na matriz admitância nodal. Nas
barras em que a carga se comporta como impedância constante, toda a carga é
transformada em admitância e a injeção de corrente é nula. Por outro lado, nas
barras em que a carga tem parcelas que se comportam diferentemente de
impedância constante, obtém-se uma admitância equivalente ( 0y ), para as
condições de operação em regime permanente pré-perturbação, que é incluída na
matriz admitância nodal conforme a equação (5.17).
0 00 0 0 2 2
0 0
P Qy g jb jV V
= + = −| | | |
(5.17)
Ao longo da simulação e em função da tensão na barra e do modelo de
carga especificado, calcula-se o valor atual da admitância da carga, isto é:
2SyV
∗=
| |(5.18)
Assim, a fonte de corrente do equivalente Norton representa o desvio do
comportamento da carga em relação ao de impedância constante, e é dada por:
0( )eqI y y V= − (5.19)
A expressão geral para eqI , no caso do modelo de carga polinomial descrito
no capítulo anterior, é apresentado a seguir.

Capítulo 5: Estabilidade Transitória
149
2 20 0 0 0
1 1 1 0 2 2 2 02 21 1eqV V V VI a b c g V j a b c b V
V VV V
| | | |= − − − + − − −| | | |
(5.20)
A representação gráfica do equivalente Norton é dada na Figura 5.4.
eqI 0y
V
Figura 5.4: Circuito equivalente Norton para o modelo de carga polinomial composto
5.2.2.4 Equações de Interface
Na modelagem matemática apresentada até então, a rede de transmissão, as
cargas e os estatores das máquinas síncronas, são representados pela equação (5.3),
segundo um sistema de referência complexo (real e imaginário). Por outro lado, as
equações diferenciais que descrevem os rotores das máquinas síncronas utilizam
variáveis de Park, definidas em relação a um sistema de referência d - q. Há,
portanto, a necessidade de realizar uma compatibilização desses dois sistemas de
referência para as equações do rotor, a semelhança do que foi feito para as
equações do estator. Neste sentido, deve-se estabelecer uma relação entre a tensão
V da barra onde a máquina estiver conectada, e as correntes de estator, dI e qI ,
além de uma expressão para a potência elétrica, eP . Esta relação é obtida
aplicando-se a transformação de coordenadas d – q → ℜ − ℑ às variáveis dV e qV
das equações do estator. Assim, as equações resultantes para dI , qI e eP são
conhecidas como equações de interface, e dadas por:

Capítulo 5: Estabilidade Transitória
150
[ ]
'
''
'
' ' ( ' ' )
q r md
d
d r mq
q
e d d q q q d d q
E V cos V sinI
xE V sin V cos
Ix
P E I E I x x I I
δ δ
δ δ
− + + =
+ −=
= + − −
(5.21)
5.2.2.5 Síntese da Modelagem Global
A partir dos aspectos complementares de modelagem apresentados, as
equações (5.1) e (5.2) podem ser rescritas na forma seguinte:
x Ax Bu= + (5.22)
( )I E V YV, = (5.23)
( )u h E V= , (5.24)
A equação (5.22) é apenas uma forma mais conveniente de se expressar a
equação (5.1), onde:
A : matriz quadrada, esparsa e bloco-diagonal;
B : matriz retangular esparsa e formada por blocos;
x : vetor de variáveis de estado associadas as máquinas elétricas,
máquinas primárias e a dinâmica de seus controladores;
u : vetor de variáveis algébricas que aparecem nas equações diferenciais.
Desprezando-se os efeitos da saturação magnética, as matrizes A e B são
constantes para os modelos mais comumente empregados.
A equação (5.23) representa a descrição nodal da rede elétrica, onde:
Y : matriz admitância nodal, esparsa, complexa e simétrica;
I : vetor de injeções de correntes nodais complexas associadas as cargas
e aos estatores das máquinas síncronas;
V : vetor de tensões nodais complexas;

Capítulo 5: Estabilidade Transitória
151
E : subvetor de x , constituído das variáveis de estado necessárias para o
cálculo das injeções de correntes dos estatores das máquinas
síncronas.
Para uma carga, a injeção de corrente é função da tensão na barra, e para
um gerador, ela é a corrente de estator, relacionada à referência síncrona
(complexa) e função das tensões interna e terminal da máquina.
A equação (5.24) serve exclusivamente como interface para o cálculo dos
componentes do vetor u , em que h é um vetor de funções não-lineares.
5.2.3 Esquemas Básicos de Solução
Historicamente diversos esquemas tem sido utilizados na resolução das
equações diferenciais algébricas (EDAs) (5.1) e (5.2), ou equivalentemente (5.22),
(5.23) e (5.24). A caracterização destes esquemas baseia-se no método de
integração numérica aplicado às equações diferenciais, no método de solução das
equações algébricas e no modo de interação entre os sistemas algébrico e
diferencial ao longo do processo de resolução. Métodos de integração numérica
explícitos definem esquemas explícitos e métodos de integração numérica
implícitos definem esquemas implícitos. Dois esquemas básicos, alternado e
simultâneo, têm sido suficientes para classificar os modos de interação utilizados
entre as soluções dos sistemas algébrico e diferencial. O esquema alternado consiste
em resolver separadamente, em cada passo de integração, os sistemas diferencial e
algébrico, alternando-se as respectivas soluções. No esquema simultâneo, as
equações diferenciais são transformadas em equações algébricas a diferenças,
através da aplicação de um determinado método de integração numérica, e
resolvidas simultaneamente com as equações algébricas como um único sistema
de equações. Este sistema de equações algébricas e algébricas a diferenças é
resolvido, em geral, pelo método de Newton ou um método do tipo Newton. A
combinação desses esquemas básicos, alternado e simultâneo, com os métodos de
integração numérica explícitos e implícitos, define quatro esquemas de solução
ilustrados na tabela abaixo.

Capítulo 5: Estabilidade Transitória
152
Esquemas BásicosMétodos de
Integração Alternado (A) Simultâneo (S)
Explícito (E) AE SE
Implícito (I) AI SI
As fórmulas implícitas de integração numérica tem apresentado melhores
resultados, sendo o método trapezoidal implícito um dos mais utilizados, em
razão de suas características de estabilidade e precisão. Este é também o método
de integração utilizado no programa Anatem - Análise de Transitórios
Eletromecânicos, desenvolvido pelo CEPEL.
5.2.3.1 Solução de Equações Diferenciais
A solução de uma equação diferencial ordinária é representada por uma
família de funções. A especificação de uma condição inicial define uma função
particular dentre as funções da referida família. Na solução numérica são obtidos
os valores aproximados dessa função em pontos definidos pelo passo de
integração adotado. Como exemplo, considere a equação diferencial ordinária:
( )( ) ( ) 0, , 0x f t x t x x= = (5.25)
cuja solução hipotética é representada graficamente na Figura 5.5.
t1 t20 tnt5t3 t4t
x(t)
x(t1) x(t2) x(t3)x(t4)
x(t5)
x(tn)
Figura 5.5: Representação gráfica da solução do problema exemplo

Capítulo 5: Estabilidade Transitória
153
A notação ( ) , 0,1, 2, ,jx t j n= … , representa a solução exata dessa equação
diferencial ordinária nos pontos 0 1 2, , , , nt t t t… , enquanto que a notação
, 0,1, 2, ,jx j n= … , representa a solução aproximada obtida por métodos
numéricos. Portanto, com a solução numérica obtém-se uma aproximação de
( ) ( ) ( ) ( )0 1 2, , , , nx t x t x t x t… , respectivamente, para os pontos 0 1 2, , , , nt t t t… , ou seja,
os valores tabelados abaixo:
t 0t 1t 2t ... nt
x 0x 1x 2x ... nx
A escolha de um método numérico para a solução de um sistema de
equações diferencias deve levar em conta as suas propriedades de precisão e
estabilidade, bem como a stiffness do sistema. Na análise da precisão de um dado
método numérico, o fundamental é a sua ordem, definida em termos do erro por
passo de integração, erro local de truncamento, tendo como referência a solução
por Série de Taylor. Por exemplo, um método de segunda ordem apresenta erro
local equivalente a realização da solução por Série de Taylor desprezando-se os
termos de ordem superior a 2. A estabilidade de um método numérico é uma
propriedade relacionada a propagação do erro local. Se os erros locais não causam
erros significativos ao longo dos demais passos de integração o método é
numericamente estável. Se, por outro lado, os erros locais causam grandes erros ao
longo dos demais passos de integração o método é numericamente instável.
A estabilidade numérica está relacionada a stiffness do sistema de equações
diferencias que, por sua vez, está relacionada a faixa de constantes de tempo do
sistema físico representado. Especificamente, ela é medida pela razão entre o
maior e o menor autovalor do sistema de equações linearizado. Nos estudos de
estabilidade transitória, a stiffness do sistema aumenta com o aumento do
detalhamento da modelagem, sendo um problema complexo a sua determinação
para sistemas de grande porte.
Os métodos de integração explícitos têm estabilidade numérica fraca e, para
a obtenção de solução estável, exigem que o passo de integração seja menor que a

Capítulo 5: Estabilidade Transitória
154
menor constante de tempo do sistema, mesmo que a mesma tenha pouca
influência na resposta do sistema. Os métodos de integração implícitos são mais
estáveis e, por essa razão, são preferidos. Em estudos de estabilidade transitória o
método trapezoidal implícito é o que tem apresentado os melhores resultados. A
aplicação do método trapezoidal implícito é ilustrada a seguir.
Suponha a seguinte equação diferencial:
( )x f x= (5.26)
A aplicação do método trapezoidal implícito à equação (5.26), resulta:
( ) ( ) [ ( ( )) ( ( ))]2tx t x t t f x t t f x t ∆− − ∆ = − ∆ + (5.27)
ou:
( ) ( ) [ ( ( )) ( ( ))]2tx t x t t f x t t f x t ∆= − ∆ + − ∆ + (5.28)
As equações (5.27) e (5.28) são equações algébricas a diferenças e
representam a equação diferencial (5.26) no intervalo de tempo t t− ∆ a t .
Embora seja um método de segunda ordem, este método é classificado
como A-estável. Isto significa que o sistema algébrico terá o mesmo
comportamento do sistema diferencial. Se o sistema diferencial for estável, o
sistema algébrico será estável. Por outro lado, se o sistema diferencial for instável,
o sistema algébrico será instável. Essa característica é especialmente atraente para
a aplicação em programas de estabilidade de sistemas elétricos de potência. No
caso da utilização de passos de integração maiores que constantes de tempo do
sistema, os transitórios rápidos são filtrados e a resposta para os modos mais
lentos é precisa.
5.2.3.2 Esquema Alternado Implícito
O esquema Alternado Implícito (AI) consiste basicamente em transformar as
equações diferenciais em equações algébricas a diferenças, através de um método
de integração implícito, e resolvê-las iterativamente e alternadamente com as

Capítulo 5: Estabilidade Transitória
155
equações originalmente algébricas. Aplicando-se o método trapezoidal implícito a
equação (5.22) o comportamento dinâmico do sistema é então representado pelas
equações:
( ) ( ( ), ( ), ( ), ( ))( ( ), ( )) ( )( ) ( ( ), ( ))
x t H x t x t t u t u t tI E t V t YV tu t h E t V t
= − ∆ − ∆ = =
(5.29)
A partir das equações (5.29) e definindo-se k como o contador de iterações
e ε como uma tolerância de convergência para as variáveis de estado, o esquema
AI segue basicamente o seguinte algoritmo:
Algoritmo AI
Inicialização
Para 1,2, ,t T= …
Calcule *( )u t , por extrapolação, e faça 0k ←
Calcule 0 * *( ) [ ( ), ( ), ( 1), ( 1)]x t H x t u t x t u t= − − (* - valor extrapolado)
Enquanto 2
2( )kx t ε∆ > , faça
Resolva ( ( ), ( )) ( )I E t V t YV t=
Calcule ( ) ( ( ), ( ))ku t h E t V t=
Calcule 1( ) [ ( ), ( ), ( 1), ( 1)]k k kx t H x t u t x t u t+ = − −
Calcule 1 1( ) ( ) ( )k k kx t x t x t+ +∆ = −
Faça 1k k← +
Fim-Enquanto
Fim-Para
O processo de cálculo de ( )x t é iterativo devido a adoção de um método de
integração implícito. As injeções de correntes são, em geral, funções não-lineares
de ( )V t e, portanto, a equação da rede elétrica também deve ser resolvida
iterativamente. Os valores extrapolados de ( )u t∗ , para a primeira iteração,
representam, em geral, melhores condições iniciais que os valores do instante

Capítulo 5: Estabilidade Transitória
156
t t− ∆ . Somente nos instantes de descontinuidades, em que não é possível realizar
a extrapolação, é que são utilizados, como condição inicial, os valores do instante
de tempo t t− ∆ .
O algoritmo AI representa a forma clássica do esquema alternado implícito
de resolução das EDAs que descrevem a dinâmica de sistemas elétricos de
potência. Uma alternativa a este esquema é obtida relaxando-se os requisitos de
convergência na solução das equações da rede elétrica, por exemplo, realizando-se
somente uma iteração. Neste caso os processos iterativos diferencial e algébrico
são entrelaçados, ora realizando-se uma iteração em um, ora em outro. O teste de
convergência é feito nas variáveis de estado, que determinam a precisão da
solução final. Este esquema é denominado Alternado Entrelaçado Implícito (AEI) e
tem apresentado desempenho superior ao AI clássico.
5.2.3.3 Esquema Simultâneo Implícito
No esquema Simultâneo Implícito (SI), as equações diferenciais são
transformadas em equações algébricas a diferenças através de um método
implícito de integração numérica. Estas equações são reunidas com as equações
originalmente algébricas, para constituírem um único sistema de equações
algébricas, geralmente resolvido pelo método de Newton-Raphson. A
representação matemática é, normalmente, feita como segue:
( ) 0
( ) 0
e
e
F x V
G x V
, =
, =(5.30)
onde:
1 2[ ]tmF F F … F= , , , : vetor de funções algébricas a diferenças não-
lineares para o sistema;
1 2[ ]tnG G G … G= , , , : vetor de funções algébricas não-lineares para o
sistema;
Capítulo 5: Estabilidade Transitória
157
1 2[ ]tmx x x … x= , , , : vetor de variáveis de estado do sistema ( m
máquinas síncronas);
1 2[ ]e e e e tnV V V … V= , , , : vetor de tensões nodais do sistema;
[ ]e ti mi riV V V= , : vetor das parcelas imaginária e real da i-ésima
tensão nodal do sistema;
1 2 6( ) [ ]e ti i iF x V f f … f, = , , , : vetor de funções algébricas a diferenças não-
lineares para a i-ésima máquina síncrona;
1 2( ) [ ]e ti i iG x V g g, = : vetor de funções algébricas não-lineares para o i-
ésimo nó;
[ ' ' ]ti e fd d qx V E E E δ ω= , , , , , : vetor de variáveis de estado para a i-ésima
máquina síncrona;
Método de Solução:
O sistema de equações (5.30) descreve o comportamento dinâmico do
sistema elétrico de potência no intervalo de tempo t t− ∆ a t , podendo ser rescrito
na seguinte forma compacta:
( ( )) 0H y t = (5.31)
onde [ ]e ty x V= e [ ]tH F G= .
A resolução de (5.31) para ( )y t , é comumente realizada pelo método de
Newton. Definindo-se 0y como condição inicial, a constante ε como a tolerância
para a convergência e k como o contador de iterações, o método de Newton
aplicado às equações (5.31), e consequentemente, à solução para um passo de
integração, segue o seguinte algoritmo:
Algoritmo de Newton
Faça 0k = e especifique 0y

Capítulo 5: Estabilidade Transitória
158
Enquanto 2
2( )kH y ε> , faça
Calcule ( )kH y
Resolva:
1( ) 0k
k k
y y
HH y yy
+
=
∂+ ∆ =∂ (5.32)
Calcule:
1 1k k ky y y+ += + ∆ (5.33)
Faça 1k k← +
Fim-Enquanto
A equação matricial (5.32) é linear e deve ser resolvida, em geral, várias
vezes para cada passo de integração, pois os elementos do Jacobiano ( H y∂ /∂ )
devem ser recalculados para cada ky y= ( 1 2k …= , , , até a convergência). Note que
o maior esforço computacional no algoritmo de Newton e, consequentemente,
para o esquema SI, concentra-se na resolução de (5.32). A matriz de coeficientes de
(5.32) é, para sistemas elétricos de potência reais, muito esparsa e essa
característica deve ser explorada para uma eficiente implementação
computacional. A fim de minimizar o esforço despendido na fatoração dessa
matriz, muitos trabalhos usam a matriz Jacobiana calculada na primeira iteração,
para as iterações subsequentes, no mesmo passo de integração, ou até mesmo para
vários passos de integração. Desse modo a equação matricial (5.32) assume a
forma seguinte:
0
1( ) 0k k
y y
HH y yy
+
=
∂+ ∆ =∂ (5.34)
5.2.3.4 Comentários
Nas seções anteriores foram abordados vários aspectos relacionados com a
representação e simulação da dinâmica de sistemas de elétricos de potência.
Considerou-se os esquemas Alternado Implícito (AI) e Simultâneo Implícito (SI) de

Capítulo 5: Estabilidade Transitória
159
resolução das equações diferencias e algébricas que descrevem esse
comportamento. O esquema AI é sensivelmente mais simples e oferece maiores
facilidades para a incorporação e tratamento de novos e sofisticados modelos de
elementos dos sistemas elétricos de potência. Além disso, ele utiliza a matriz
admitância nodal (Y ) na forma compacta (complexa), cujos elementos são
constante entre chaveamentos na rede elétrica de transmissão. Portanto, os fatores
LU de Y somente devem ser recalculados nos instantes em que ocorrem alterações
estruturais na rede elétrica.
O esquema SI é mais atrativo sob o ponto de vista da formalização
matemática, já que está baseado no método de Newton. Entretanto, a matriz
admitância nodal deve ser utilizada em sua forma expandida, nas parcelas real e
imaginária de seus elementos, e, rigorosamente, a matriz Jacobiana e seus fatores
LU devem ser recalculados a cada iteração. Por outro lado, um significativo ganho
é obtido mantendo-se o Jacobiano constante por várias iterações, ou até mesmo
vários passos de integração. Essa metodologia é conhecida como “Very Dishonest
Newton” (VDHN).
5.2.4 Análise de Faltas Assimétricas
A análise de redes elétricas operando sob condições desequilibradas é,
normalmente, realizada utilizando-se a decomposição da mesma em componentes
simétricas. Neste caso o sistema trifásico original desequilibrado passa a ser
representado por três sistemas equilibrados denominados, respectivamente, de
componentes de seqüência positiva, seqüência negativa e seqüência zero. Essa
metodologia requer a definição de modelos matemáticos de representação dos
elementos do sistema para cada uma das componentes de seqüência. A aplicação
dessa metodologia é predominantemente realizada em estudos de curto-circuito,
cujo objetivo principal é a determinação das correntes e tensões no sistema
durante o defeito. A representação de um tipo específico de defeito é feita pela
forma como são conectadas as redes de seqüência.

Capítulo 5: Estabilidade Transitória
160
Nos estudos de estabilidade a ação sincronizante entre as máquinas é
afetada principalmente pelas componentes de seqüência positiva sendo, em geral,
de pouco interesse o conhecimento das tensões e correntes de seqüência negativa e
zero ao longo do sistema. Assim, não é necessário representar em detalhes as redes
de seqüência negativa e zero em estudos de estabilidade, somente os seus efeitos é
que são de interesse. Esses efeitos podem ser representados por impedâncias
equivalentes obtidas a partir do ponto da falta. Especificamente, são obtidas uma
impedância equivalente para a rede de seqüência zero ( 0Z ) e uma impedância
equivalente de seqüência negativa ( 2Z ). Essas impedâncias são combinadas
apropriadamente, em função do tipo da falta, e inseridas como uma impedância
de falta ( fZ ) na rede de seqüência positiva. A tabela abaixo apresenta a forma de
associação dessas impedâncias para cada tipo de falta.
Tipo da Falta Impedância de Falta ( fZ )
Curto-circuito trifásico 0
Curto-circuito entre uma fase e a terra 2 0Z Z+
Curto-circuito entre duas fases 2Z
Curto-circuito entre duas fases e a terra ( )2 0 2 0Z Z Z Z+
Essa representação fornece os valores corretos de correntes e tensões de
seqüência positiva no sistema. As potências de seqüência positiva assim
determinadas representam precisamente as potências fornecidas pelas máquinas
síncronas. Consequentemente, trata-se de um modelo adequado para o estudo da
estabilidade de sistemas elétricos sob faltas desequilibradas.
5.3 Software para a Análise da Estabilidade Transitória
Os estudos de estabilidade transitória de sistemas elétricos de potência são,
normalmente, realizados por meio de programas computacionais de simulação do
comportamento dinâmico do sistema frente a grandes perturbações. Programas
computacionais baseados em métodos diretos e híbridos também são encontrados,

Capítulo 5: Estabilidade Transitória
161
mas, em geral, são aplicados em estudos de avaliação global e com modelos
simplificados.
No âmbito do setor elétrico brasileiro utiliza-se, predominantemente, o
programa Anatem – Análise de Transitórios Eletromecânicos, desenvolvido pelo
CEPEL. Os módulos que compõem o programa estão codificados em FORTRAN e
foram desenvolvidos de modo que este possa ser executado em plataformas
computacionais do tipo Windows e Unix. A capacidade do programa é definida
através de um arquivo de parâmetros que facilita o seu redimensionamento de
acordo com as necessidades e instalações computacionais específicas de cada
usuário. Na seqüência, são apresentados, sucintamente, alguns detalhes
específicos da representação dos elementos do sistema elétrico de potência e dos
métodos de solução utilizados pelo Anatem.
5.3.1 Representação dos Elementos do Sistema Elétrico de Potência
O Anatem dispõem de uma grande variedade de modelos predefinidos
para representar os elementos e controladores que constituem os sistema elétricos
de potência. Especificamente, existem modelos predefinidos para máquinas
síncronas e seus controladores (reguladores de tensão e excitatrizes, reguladores
de velocidade e turbinas, e estabilizadores aplicados em reguladores de tensão),
motores de indução, elos CC e conversores, transformadores com mudança de tap
em carga, equipamentos FACTS, cargas estáticas e dinâmicas, e relés.
Além desta variedade de modelos, o usuário poderá definir modelos de
controladores para as unidades de geração, bem como modelos de compensadores
estáticos e seus controladores.
Detalhes sobre os modelos predefinidos e sobre a definição de modelos pelo
usuário são encontrados no Manual do Usuário do programa.

Capítulo 5: Estabilidade Transitória
162
5.3.2 Métodos de Solução
O programa Anatem utiliza o esquema de solução Alternado Entrelaçado
Implícito na resolução do sistemas de equações diferenciais e algébricas que
descrevem a dinâmica do sistema elétrico de potência. O método de integração
trapezoidal implícito é empregado na solução das equações diferenciais, por ser
numericamente estável e não introduzir amortecimentos espúrios na solução,
propriedades adequadas para programas de análise da estabilidade transitória.
Na solução das equações da rede elétrica é utilizado o método direto de
solução de sistemas lineares, baseado na fatoração LU de matrizes simétricas e
esparsas. A rede CA é descrita pelo sistema linear do tipo:
( )I E V YV, = (5.35)
onde I é o vetor de correntes injetadas nos nós, E é o vetor de variáveis
diferencias necessárias para o cálculo da injeção de corrente, V é o vetor de
tensões nodais e Y é a matriz admitância nodal na forma complexa. Nas barras
onde existam cargas funcionais ou outros elementos não-lineares (como
conversores CA-CC, compensadores estáticos, motores de indução, etc.) as
correntes destes elementos são consideradas no vetor I e a solução da rede será
necessariamente iterativa, pois estas correntes dependem do vetor de tensão V a
ser calculado. As barras de geração consideradas como barras infinitas (tensão e
freqüência constantes) têm as variáveis correspondentes eliminadas do sistema,
sendo suas contribuições incluídas no termo independente das equações do
sistema, ou seja, no vetor de injeções de correntes. Com essa metodologia, a matriz
admitância nodal é mantida constante nos intervalos de tempo entre variações na
topologia da rede elétrica. Somente para estes instantes de tempo é que se faz
necessária a refatoração da matriz admitância nodal.
5.4 Critérios de Análise de Estabilidade
Nesta seção apresenta-se uma síntese dos critérios de análise de
estabilidade estabelecidos pelo extinto Grupo Coordenador para Operação

Capítulo 5: Estabilidade Transitória
163
Interligada (GCOI), relatório SCEL-GTPO-25/95 – “Critérios, Filosofias e
Procedimentos Utilizados nos Estudos do Grupo de Trabalho de Planejamento da
Operação a Curto Prazo”, e nos procedimentos de rede do sistema elétrico
brasileiro. Observe-se que os procedimentos de rede estão aprovados pelo
Conselho de Administração do Operador Nacional do Sistema Elétrico (ONS),
porém, não estão homologados em caráter definitivo pela Aneel.
5.4.1 Critério do Extinto GCOI
O item 5.2, Critérios Gerais para Análise, estabelece que:
“O sistema deve suportar um curto-circuito monofásico em uma linha, seguido da abertura
desta pela proteção. Não é considerada a atuação do religamento automático das linhas de
transmissão, mesmo para aquelas que possuam este dispositivo. E no caso de transformação, o
sistema deve suportar a perda simples da transformação. Em ambos os casos, a simulação
deverá apresentar comportamento estável, ou seja, as oscilações angulares entre os rotores das
máquinas dos grupos de usinas e as potências acelerantes deverão ser amortecidas.”
Note que o critério estabelece apenas que as oscilações angulares das
máquinas devem ser amortecidas sem definir os parâmetros mínimos para esse
amortecimento.
5.4.2 Critérios dos Procedimentos de Rede
5.4.2.1 Submódulo 6.5 - Programa de Intervenções em Instalações da Rede de
Operação
Este submódulo, aprovado em caráter provisório pela resolução da Aneel
no 140 de 25/03/2002, tem o propósito de estabelecer os procedimentos para a
elaboração do Programa de Intervenções em Instalações da Rede de Operação,
estabelecendo prioridades entre solicitações, visando garantir a integridade dos
equipamentos e minimizar os riscos para o sistema. O item 4.3.13.1 estabelece:
“Deverá ser avaliado o comportamento do sistema, em condições de rede incompleta, quando da
saída forçada de um ou mais elementos, tanto em regime permanente quanto dinâmico.
Deverão ser analisados os seguintes aspectos:

Capítulo 5: Estabilidade Transitória
164
Verificação da capacidade do sistema de se manter em sincronismo e estável quando da
ocorrência de curtos-circuitos monofásicos em elementos simples – ou em linhas de transmissão
em circuito duplo compartilhando as mesmas estruturas – e sua posterior eliminação, através
da abertura dos circuitos pelo sistema de proteção, sem religamento; verificação, ainda, do
desempenho dinâmico do sistema quando de emergências cuja probabilidade se torna apreciável
em função das próprias intervenções solicitadas, com base na caracterização de risco informada
pelos Agentes responsáveis pelas intervenções.
Restrições dos despachos das usinas para que não haja risco de que eventuais contingências
venham a acarretar perda de carga ou ter repercussões de caráter sistêmico;”
5.4.2.2 Submódulo 6.6 – Diretrizes Energéticas
Este submódulo, aprovado em caráter provisório pela resolução da Aneel
no 420 de 31/10/2000, tem o propósito de estabelecer as diretrizes energéticas
considerando a rede incompleta. O item 4.3.3 estabelece:
“Determinação dos níveis de risco:
Serão simuladas as contingências, a partir das premissas consideradas no escopo do estudo, que
definiram os equipamentos a serem considerados indisponíveis;
Esta análise deverá avaliar o comportamento do sistema quando da saída forçada de um ou
mais elementos em regime dinâmico. Deverão ser verificadas as condições necessárias para o
sistema manter-se em sincronismo (comportamento estável) na ocorrência da abertura de um
transformador ou após a aplicação de um curto-circuito monofásico no circuito em análise e
sua posterior eliminação pelo sistema de proteção avaliando também a atuação dos ECE
(Esquemas de Controle de Emergência);”
5.4.2.3 Submódulo 2.2 - Padrões de Desempenho da Rede Básica
Este submódulo, aprovado pelo Conselho de Administração do ONS em
9/10/2000, tem, dentre outros, o propósito de subsidiar os estudos de
planejamento e programação da operação, bem como a própria operação em
tempo real do sistema de transmissão. Na seqüência são destacados os itens
pertinentes aos estudos de estabilidade.
a) O item 8.1 estabelece:
“A operação confiável de um sistema elétrico de potência no que tange à estabilidade
eletromecânica implica na manutenção de condições operativas estáveis tanto em regime

Capítulo 5: Estabilidade Transitória
165
permanente quanto em resposta a impactos de médio porte em qualquer ponto do sistema.
Entende-se por desempenho em regime permanente a resposta do sistema a pequenos distúrbios
derivados da variação do carregamento do sistema e de chaveamentos de elementos de
compensação de potência reativa (bancos de capacitores/reatores). Entende-se por impactos de
médio porte aqueles causados por curto-circuito e desligamentos de linhas, geradores e blocos
de carga.”
b) O item 8.2 estabelece o seguinte indicador:
“O Coeficiente de Amortecimento das oscilações eletromecânicas é o indicador utilizado na
avaliação da condição de estabilidade eletromecânica do sistema. O Coeficiente de
Amortecimento reflete a taxa de decaimento entre um pico de oscilação e o pico imediatamente
anterior.”
c) O item 8.3 estabelece:
“O Coeficiente de Amortecimento dos diversos modos de oscilação do sistema pode ser
calculado através de simulações e também pode ser obtido a partir dos registros das oscilações
de potência verificadas no sistema real.”
d) O item 8.5 estabelece:
“Uma forma mais prática de se medir e avaliar o amortecimento é através do SPR (Sucessive
Peak Ratio), fator que traduz a relação entre um determinado pico de oscilação e o pico
imediatamente anterior. O SPR é determinado a partir do coeficiente de amortecimento através
da seguinte equação:
. 2.1SPR
e ξ π= (5.36)
e) O item 8.7 estabelece o seguinte padrão:
“O Coeficiente de Amortecimento é considerado adequado se, em qualquer condição de carga e
geração, o mesmo for superior a:
- 5% (cinco por cento) para modos de oscilação inferiores a 0,4 Hz;
- 10 % (dez por cento) para modos de oscilação iguais ou superiores a 0,4 Hz.”
f) O item 8.8 define a seguinte atribuição:
“Em caso de violação destes padrões, o ONS deve coordenar o processo de análise de forma a
indicar as medidas necessárias para garantir que, em condições normais de operação ou após a
ocorrência de defeitos no sistema:
- O sistema permaneça em sincronismo;

Capítulo 5: Estabilidade Transitória
166
- O amortecimento das oscilações angulares entre os geradores do sistema seja adequado.”
5.4.2.4 Submódulo 23.3 - Diretrizes e Critérios para Estudos Elétricos
Este submódulo, aprovado em caráter provisório pela resolução da Aneel
no 140 de 25/03/2002, tem o propósito de estabelecer as diretrizes e critérios para
a realização de estudos elétricos. Na seqüência são destacados os itens pertinentes
aos estudos de estabilidade.
a) O item 8.3.3 estabelece:
“No caso de linhas de transmissão de circuito duplo deverá ser adotada como filosofia a perda
de apenas um circuito. A perda do circuito duplo poderá ser adotada no caso de circuitos em
uma mesma torre ou na mesma faixa de passagem quando, em função de dados estatísticos ou
da relevância dos circuitos.”
b) O item 8.3.10 estabelece:
“Em estudos especiais, para avaliação da segurança do sistema, resultando o sistema estável
para curtos-circuitos monofásicos, a título de verificar a suportabilidade adicional do sistema
poderá ser considerada a incidência de curto-circuito monofásico com falha de abertura de
disjuntor. Os tempos de isolamento dos defeitos deverão ser avaliados considerando os tempos
dos elementos manobrados pela atuação da proteção, que dependem do arranjo físico da
subestação, e do tempo de atuação da proteção em si. Tempos típicos de isolamento do defeito
são mostrados na Tabela 4. Estes valores são puramente indicativos, devendo ser utilizados
somente quando da falta de informações no Banco de Dados do ONS ou por parte dos Agentes.
Caso haja necessidade de elaborar estudos específicos, solicitar aos agentes os dados de tempo de
eliminação de defeitos.”
Tabela 4 – Tempos de Eliminação de Defeitos (da citação)
Tempos de eliminação (milisegundos)Tensão (kV) sem falha no disjuntor com falha no disjuntor750 80 200500 100 250440 100 250345 100 400230 150 500138 150 50069 800 1000
c) O item 8.3.11 estabelece:

Capítulo 5: Estabilidade Transitória
167
“Nos estudos de estabilidade dinâmica, os seguintes critérios deverão ser adotados nas
simulações:
a) Em qualquer condição de carga, o sistema deverá ser estável para curtos-circuitos
monofásicos, sem religamento, considerada a perda de um de seus elementos (carga, gerador,
linha de transmissão ou transformador). O curto monofásico é usado como critério por ser,
dentre os defeitos, o de mais alta probabilidade de ocorrência. Além de ser estável, o
desempenho do sistema não deverá implicar em riscos de sobrecarga inadmissíveis em
equipamentos nem tampouco desligamentos adicionais incontroláveis e indesejáveis. Deverá
ser avaliado o carregamento dos equipamentos principais de transmissão em função das
características dos mesmos e também de equipamentos terminais.”
5.5 Estudo de Casos
Nesta seção são apresentados dois estudos de caso visando ilustrar a
influência da forma de representação das máquinas síncronas e seus controladores
no comportamento dinâmico de um sistema elétrico de potência, especificamente
no sistema máquina-barra infinita da Figura 5.6. Os parâmetros do sistema são:
0,7lx = pu, 0,12tx = pu, 1 1,02V = pu. e 1,00V∞ = pu. Todas as reatâncias estão em
pu da potência nominal da máquina síncrona, equivalente a uma unidade da usina
de G.B.M. Rocha, cujos dados podem ser encontrados no arquivo de dados de
máquinas e reguladores do programa Anatem. Na seqüência são descritos os
detalhes dos estudos realizados, bem como os resultados obtidos.
~
tx
lx
lx
V∞tV 1V
lx
lx
( )A ( )B
( )C ( )D
Figura 5.6: Sistema máquina - barra infinita
5.5.1 Estudo de Caso 1
Considera-se o sistema operando inicialmente em regime permanente e
fornecendo 320 MW à barra infinita. Nestas condições de operação aplica-se uma

Capítulo 5: Estabilidade Transitória
168
perturbação representada pelo desligamento permanente da linha de transmissão
(C). O estudo constitui-se da simulação, verificação e análise do comportamento
dinâmico do sistema após a ocorrência da perturbação mencionada, considerando
os seguintes modelos para a máquina síncrona:
• modelo 4 (modelo 02 no Anatem) sem o regulador automático de tensão
(RAT) – fdE constante;
• modelo 4 com o RAT;
• modelo 4 com o RAT e o estabilizador do sistema de potência (ESP ou
PSS - Power System Stabilizer);
Os resultados obtidos são apresentados nas figuras a seguir.
Figura 5.7: Abertura angular da MS sem o RAT, somente com o RAT e com o RAT e o PSS

Capítulo 5: Estabilidade Transitória
169
Figura 5.8: Potência elétrica da MS sem o RAT, somente com o RAT e com o RAT e o PSS
Figura 5.9: Tensão terminal da MS sem o RAT, somente com o RAT e com o RAT e o PSS

Capítulo 5: Estabilidade Transitória
170
Figura 5.10: Tensão de campo da MS sem o RAT, somente com o RAT e com o RAT e o PSS
Figura 5.11: Esforço de controle do PSS
Finalmente, faz-se os seguintes comentários:
• na simulação com fdE constante o sistema é transitoriamente estável,
porém, com amortecimento reduzido;
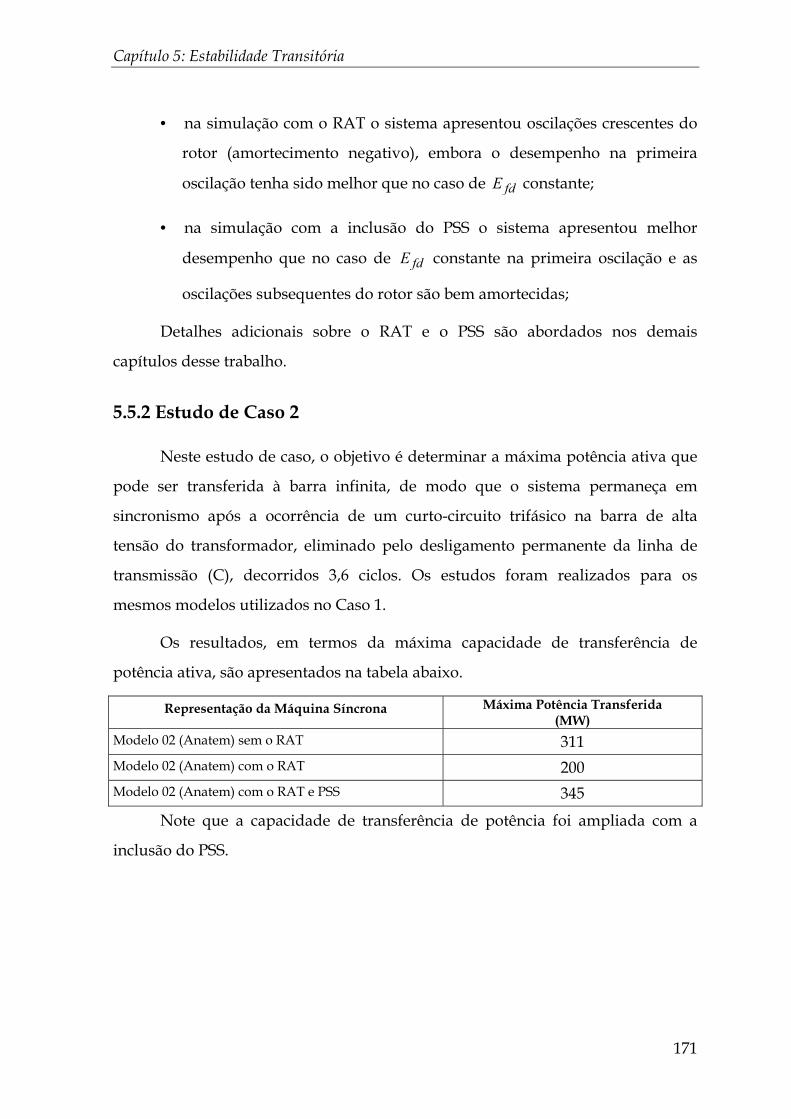
Capítulo 5: Estabilidade Transitória
171
• na simulação com o RAT o sistema apresentou oscilações crescentes do
rotor (amortecimento negativo), embora o desempenho na primeira
oscilação tenha sido melhor que no caso de fdE constante;
• na simulação com a inclusão do PSS o sistema apresentou melhor
desempenho que no caso de fdE constante na primeira oscilação e as
oscilações subsequentes do rotor são bem amortecidas;
Detalhes adicionais sobre o RAT e o PSS são abordados nos demais
capítulos desse trabalho.
5.5.2 Estudo de Caso 2
Neste estudo de caso, o objetivo é determinar a máxima potência ativa que
pode ser transferida à barra infinita, de modo que o sistema permaneça em
sincronismo após a ocorrência de um curto-circuito trifásico na barra de alta
tensão do transformador, eliminado pelo desligamento permanente da linha de
transmissão (C), decorridos 3,6 ciclos. Os estudos foram realizados para os
mesmos modelos utilizados no Caso 1.
Os resultados, em termos da máxima capacidade de transferência de
potência ativa, são apresentados na tabela abaixo.
Representação da Máquina Síncrona Máxima Potência Transferida(MW)
Modelo 02 (Anatem) sem o RAT 311Modelo 02 (Anatem) com o RAT 200Modelo 02 (Anatem) com o RAT e PSS 345
Note que a capacidade de transferência de potência foi ampliada com a
inclusão do PSS.

Capítulo 5: Estabilidade Transitória
172

173
CAPÍTULO 6
6.ESTABILIDADE PARA PEQUENAS
PERTURBAÇÕES:
CASO MÁQUINA – BARRA INFINITA
6.1 Introdução
Neste capítulo analisa-se o problema da estabilidade para pequenas
perturbações, através do estudo de um sistema constituído de uma máquina
síncrona conectada a uma barra infinita. O estudo deste sistema máquina – barra
infinita permite o entendimento da natureza dos torques desenvolvidos na
máquina e a relação com o comportamento em uma vizinhança do ponto de
equilíbrio. O uso de sinais estabilizadores e os problemas associados a escolha dos
diversos sinais são discutidos neste capítulo.
6.2 Efeito do Sistema de Excitação na Estabilidade de
Sistemas Elétricos de Potência
O sistema de excitação afeta diretamente a estabilidade do sistema elétrico
de potência e no caso da estabilidade para pequenas perturbações pode ser
deletério para o desempenho dinâmico do sistema.
Esta seção analisa o efeito do sistema de excitação na estabilidade de
sistemas elétricos. Em seções subseqüentes, o efeito do sistema de excitação na
estabilidade para pequenas perturbações é analisada em detalhe.

Capítulo 6: Estabilidade para Pequenas Perturbações: Caso Máquina – Barra Infinita
174
A estabilidade transitória está relacionada a grandes perturbações que
levam as variáveis do sistema a uma excursão tal que as não-linearidades devem
ser consideradas.
Para uma única máquina ligada a uma barra infinita através de uma
impedância eX , a potência elétrica transmitida é dada por:
te
e
VVP senX
δ∞= (6.1)
onde tV é a tensão terminal da máquina, V∞ é a tensão da barra infinita e δ é o
ângulo do rotor medido, por exemplo, com relação á barra infinita.
Durante uma perturbação, por exemplo um curto-circuito, pode haver uma
considerável redução da tensão terminal, e portanto da potência elétrica
transmitida eP . Esta redução em eP pode ser limitada pela ação rápida do sistema
de excitação, forçando a tensão de campo para o valor máximo ("ceiling").
Do ponto de vista da estabilidade transitória os atributos desejáveis do
sistema de excitação são:
• rapidez de resposta, o que implica em baixas constantes de tempo do
regulador de tensão e altos ganhos;
• alto valor de "ceiling".
Na estabilidade transitória, está-se interessado em saber se o sistema é
capaz de manter o sincronismo durante e logo após a perturbação. O primeiro
ciclo é muito importante. Como os reguladores de velocidade não tem tempo de
atuar, o sistema de excitação deve tentar tanto quanto possível manter a potência
elétrica de saída no período de interesse, de modo a reduzir a potência de
aceleração.
Assim, o sistema de excitação pode ajudar a manter a estabilidade
transitória de dois modos:

Capítulo 6: Estabilidade para Pequenas Perturbações: Caso Máquina – Barra Infinita
175
• reduzindo a magnitude da primeira oscilação. Mesmo um sistema de
excitação muito rápido apresenta um efeito limitado sobre a primeira
oscilação;
• amortecendo oscilações subseqüentes. A perda de sincronismo pode, em
alguns casos, ocorrer em oscilações subseqüentes pelo batimento de
curvas de ângulos. O sistema de excitação, através do uso de sinais
estabilizadores, pode aumentar o amortecimento e evitar a perda de
sincronismo.
A estabilidade para pequenas perturbações está relacionada ao
comportamento da trajetória do sistema em uma vizinhança do ponto de
equilíbrio. As perturbações consideradas são pequenas e as equações do sistema
podem ser linearizadas.
Um estudo de estabilidade para pequenas perturbações deve indicar se
variações de carga ou variações na topologia do sistema resultam em um ponto de
equilíbrio para o qual o sistema se ajusta com amortecimento suficiente. Serão
mostrados neste capítulo os fatores que afetam as características do ponto de
equilíbrio. Em determinadas configurações, o sistema apresenta pequeno
amortecimento ou até amortecimento negativo. Neste último caso variações muito
pequenas da carga levam a oscilações que crescem no tempo.
Os sistemas de excitação modernos podem se adicionar aos fatores que
conduzem a baixos amortecimentos do sistema. Assim se por um lado eles são
benéficos do ponto de vista da estabilidade transitória, estes sistemas de excitação
podem ser prejudiciais do ponto de vista da estabilidade para pequenas
perturbações, como será visto nas seções subseqüentes.

Capítulo 6: Estabilidade para Pequenas Perturbações: Caso Máquina – Barra Infinita
176
6.3 Análise do Comportamento Dinâmico de uma
Máquina Contra Barra Infinita
6.3.1 Modelo de Heffron-Phillips para Pequenas Perturbações
Embora o estudo da estabilidade para pequenas perturbações possa ser
feito diretamente a partir das equações linearizadas do sistema, a análise de um
sistema simplificado consistindo somente de um gerador conectado a uma barra
infinita permite obter uma visão clara dos fatores que contribuem para o
aparecimento de amortecimento reduzido no sistema e a conseqüente emergência
de oscilações que se sustentam por longos períodos ou crescem com o tempo. A
análise desenvolvida a seguir usa o modelo de Heffron-Phillips. Este modelo
representa um gerador síncrono conectado a uma barra infinita através de uma
linha de transmissão (Figura 6.1). O gerador é representado por um modelo de
terceira ordem (modelo 2). O modelo completo é mostrado na Figura 6.2.
Figura 6.1: Gerador síncrono conectado à barra infinita
As constantes 1K até 6K são calculadas por:
0
0 0 ' 01
0 ' 0 0
[ ( ) ( ) ( )]
( )[( ) ( ) ( )]I qa e d e
I qa q d e q eq
K K V E R sen X X cos
K V E I X X X X sen R cos
δ α δ α
δ α δ α∞
∞
= − + + −
+ − + − − −(6.2)
0 0 2 22 [ ( ) ]I e qa q e q eK K R E I R X X= + + + (6.3)
' 13 [1 ( )( )]I d d q eK K X X X X −= + − + (6.4)
' 0 04 ( )[( ) ( ) ( )]I d d q e eK V K X X X X sen R cosδ α δ α∞= − + − − − (6.5)

Capítulo 6: Estabilidade para Pequenas Perturbações: Caso Máquina – Barra Infinita
177
' 00 0
5 0
0' 0 0
0
[ ( ) ( ) ( )]
[( ) ( ) ( )]
I d qe q e
t
I q dd e e
t
K V X VK R cos X X sen
V
K V X VX X cos R sen
V
δ α δ α
δ α δ α
∞
∞
= − − + −
− + − + −(6.6)
0 0'
6 0 0[1 ( )] ( )q dI d q e I q e
t t
V VK K X X X K X RV V
= − + − (6.7)
onde: 2 ' 1[ ( )( )]I e q e d eK R X X X X −= + + +
0 '0 ' 0( )qa q q d dE E X X I= − −
e α é o ângulo da barra infinita com relação a uma referência (se a barra infinita é
a referência então 0α = ).
As equações anteriores tornam-se bastante simplificadas fazendo-se 0eR = .
Esta hipótese facilita a análise do efeito do carregamento (ângulo 0δ ) e
impedância externa sobre os valores das constantes.
Figura 6.2: Modelo de Heffron-Phillips

Capítulo 6: Estabilidade para Pequenas Perturbações: Caso Máquina – Barra Infinita
178
A constante 3K não depende do carregamento enquanto que todas as
outras dependem dos parâmetros da máquina e do carregamento.
Estudos realizados mostram que quando e eR X , o que é normalmente o
caso quando não há carga local, todas as constantes são positivas com exceção de
5K , que pode se tornar negativa para valores elevados de eX e alto carregamento
(δ elevado).
Quando eR é da ordem de eX , o que ocorre quando existe carga local, então
2K , 5K e 6K são positivos e 1K e 4K podem se tornar negativos quando a potência
reativa fornecida pela máquina aumenta. Estas observações são importantes para a
análise a ser desenvolvida, a qual segue de perto a referência (DE MELLO et al.,
1969).
6.3.2 Desempenho com Fluxo de Campo Constante
Desprezando-se a variação do fluxo concatenado com o campo (a reação da
armadura não é considerada) tem-se que 'qE , que é proporcional àquele fluxo, é
constante. Portanto ' 0qE∆ = e o modelo de Heffron-Phillips se reduz ao diagrama
mostrado na Figura 6.3.
Figura 6.3: Modelo de Heffron-Phillips para fluxo constante

Capítulo 6: Estabilidade para Pequenas Perturbações: Caso Máquina – Barra Infinita
179
Desta figura tem-se:
0
0 12M
KDm M MT s s
ω
ωδ∆ =
∆ + +(6.8)
Comparando-se com a forma padrão do sistema de segunda ordem obtêm-
se:
1 0n
KM
ωω = (6.9)
e:
1 02D
K Mζ
ω= (6.10)
A freqüência própria é dada por 21nω ω ζ= − . Para valores usuais de
parâmetros esta freqüência é da ordem de 0,5Hz a 2Hz .
O torque elétrico desenvolvido pela máquina em qualquer instante é dado
por:
1 2eT K Kδ ω∆ = ∆ + ∆ (6.11)
Observa-se que há uma componente em fase com δ∆ e outra componente
em fase com ω∆ . Se o coeficiente 1K for positivo então um aumento do ângulo
(causado, por exemplo, por uma potência 0mT∆ > ) origina um maior torque
elétrico, o que tende a diminuir o torque acelerante. Se 1 0K < então o torque
elétrico diminui com o aumento do ângulo e a tendência é um aumento
monotônico do ângulo.
A componente 1K δ∆ é então chamada de torque de sincronização. Se
1 0K > o sistema é estável e se 1 0K < o sistema é instável.
A componente D ω∆ é chamada de torque de amortecimento. Se o
amortecimento for negativo, mesmo com 1 0K > , o sistema apresentará oscilações

Capítulo 6: Estabilidade para Pequenas Perturbações: Caso Máquina – Barra Infinita
180
crescentes com o tempo. Uma forma de instabilidade oscilatória se manifesta neste
caso.
Os conceitos de torque de sincronização e de torque de amortecimento,
desenvolvidos para este modelo simplificado, podem ser generalizados para
modelos mais complexos de geradores. A qualquer freqüência de oscilação
desenvolvem-se torques de frenagem em fase com o ângulo do rotor da máquina e
em fase com a velocidade do rotor da máquina. Os primeiros são chamados de
torques de sincronização e os últimos torques de amortecimento.
Qualquer que seja o modelo pode-se obter a função de transferência:
( )eT F sδ
∆ =∆
(6.12)
Para uma freqüência de oscilação ω , tem-se s ω= e:
( )eT F ω δ∆ = ∆ (6.13)
ou ainda:
( ) ( )e s dT K Kω δ ω ω δ∆ = ∆ + ∆ (6.14)
onde ( ) ( ) ( )s dF K Kω ω ω ω= + .
Define-se então:
( )s sT K ω δ∆ = ∆ (6.15)
como o torque de sincronização e:
( )d dT K ω ω∆ = ∆ (6.16)
como o torque de amortecimento.
6.3.3 Análise com a Tensão de Campo Constante
Esta análise inclui o efeito da reação da armadura, ou seja, a variação de 'qE .
A tensão de campo é constante, pois não existe o regulador de tensão e portanto
0FDE∆ = . O termo de amortecimento D não é levado em conta.

Capítulo 6: Estabilidade para Pequenas Perturbações: Caso Máquina – Barra Infinita
181
O diagrama do sistema é dado pela Figura 6.4.
Figura 6.4: Modelo de Heffron-Phillips considerando a reação da armadura
O torque elétrico tem duas componentes. Uma componente, dada por
1K δ∆ , é puramente de sincronização.
A segunda componente é dada por:
2 3 4'
31e
do
T K K KsT Kδ
∆ −=∆ + (6.17)
No regime permanente ( 0s = ):
' 2 3 4qE
T K K K δ∆ = − ∆ (6.18)
e o torque é puramente de sincronização e de sinal contrário a 1 1sT K δ∆ = ∆ .
O torque de sincronização total é dado por:

Capítulo 6: Estabilidade para Pequenas Perturbações: Caso Máquina – Barra Infinita
182
1 2 3 4( )sT K K K K δ= − ∆ (6.19)
e a condição para estabilidade, no sentido de existir um torque de sincronização
positivo é 1 2 3 4 0K K K K− > .
Para altas freqüências, onde '3
1doK T
w , sendo '3
1doK T
a freqüência de corte da
função de transferência, a fase é aproximadamente 90o . O torque é, portanto,
quase que completamente de amortecimento. No entanto a magnitude se atenua
com a freqüência.
Para freqüências ao redor de 1Hz (típica das oscilações reais), 'EqT∆ possui
uma componente de sincronização e uma componente de amortecimento. Esta
última, para a faixa de valores usual dos parâmetros, contribui com uma razão de
amortecimento entre 0,03 e 0,05.
O comportamento do sistema após uma variação em degrau de mT∆ é
ilustrado pelas curvas de ângulo mostradas na Figura 6.5.
Figura 6.5: Comportamento do sistema para um degrau no torque mecânico
(a) Efeito desmagnetizante da armadura desprezado, 0D = e 1 0K > . O
ângulo oscila com amortecimento nulo ao redor do novo ponto de
operação;
(b) Efeito desmagnetizante da armadura considerado, 0D = e
1 2 3 4 0K K K K− > . A máquina atinge um novo ponto de operação, com o
ângulo apresentado um baixo amortecimento, conforme visto acima;

Capítulo 6: Estabilidade para Pequenas Perturbações: Caso Máquina – Barra Infinita
183
(c) Efeito desmagnetizante da armadura considerado, 0D = e
1 2 3 4 0K K K K− < . O ângulo apresenta uma componente monotônica
devida ao coeficiente de torque sincronizante negativo. A ação do
regulador de tensão pode adicionar torque sincronizante ao sistema
(estabilidade condicional);
(d) Efeito desmagnetizante desconsiderado e 1 0K < . O sistema perde a
estabilidade sem oscilações (aumento monotônico do ângulo).
6.3.4 Análise com a Inclusão do Regulador de Tensão
A inclusão do regulador de tensão altera os torques desenvolvidos pela
máquina. Para analisar estes torques é adicionado ao modelo de Heffron-Phillips
um regulador de tensão com um modelo simplificado representado pela função de
transferência:
1fd
t
E KV sT
ε
ε
∆=
∆ +(6.20)
onde Kε é um ganho e Tε uma constante de tempo pequena. Este modelo é
adequado para se representar sistemas de excitação a tiristores. Obtém-se então o
diagrama de blocos da Figura 6.6.
Uma restrição inicial ao ganho do regulador de tensão é imposta pela
condição de operação em vazio. Nesta condição deve-se garantir além da
estabilidade uma boa resposta do sistema de excitação tanto na partida quanto aos
comandos do operador ou sincronizador automático, visando a colocação da
máquina em paralelo com o sistema de potência.
Para a máquina a vazio pode-se fazer 0δ∆ = e eX → ∞ o que resulta em
3 1K = e 6 1K = .
O diagrama de blocos da malha de controle de tensão para a máquina em
vazio (Figura 6.7) pode então ser obtido da Figura 6.6 usando-se estas
simplificações.

Capítulo 6: Estabilidade para Pequenas Perturbações: Caso Máquina – Barra Infinita
184
Figura 6.6: Modelo de Heffron-Phillips com regulador de tensão
Figura 6.7: Diagrama de blocos para o gerador em vazio
A função de transferência é dada por:
2 ' '
( )( ) ( ) ( 1)
t
ref do do
V s KV s s T T T T s K
ε
ε ε ε
∆ =∆ + + + + (6.21)
ou:

Capítulo 6: Estabilidade para Pequenas Perturbações: Caso Máquina – Barra Infinita
185
'
'
' '12
( )( )
do
do
do do
KT Tt
T T Kref T T T T
V sV s s s
ε
ε
ε ε
ε ε
+ +
∆ =∆ + +
(6.22)
Para assegurar um sistema bem amortecido com uma ultrapassagem de 5%
pode-se escolher um amortecimento 0,707ζ = .
Comparando o denominador da função de transferência anterior com a
forma padrão tem-se:
'
' '
12 2 don
do do
K T TT T T T
ε ε
ε ε
ζω ζ + += =+
(6.23)
Então:
' ' '
' '
1 12 1 2 1
do do do
do do
T T T T T TK T T K T T
ε ε ε
ε ε ε ε
ζ + += =+ +
(6.24)
Desde que Kε é elevado e Tε é baixo, pode-se fazer:
1K Kε ε+ ≈ (6.25)
' 'do doT T Tε + ≈ (6.26)
Portanto:
'
'
12
do
do
TK T Tε ε
ξ ≈ (6.27)
e:
'
24do
e
TKTε ξ
≈ (6.28)
Para assegurar 220,707ξ > = deve-se ter:
'
2doTKTε
ε
< (6.29)
Para valores típicos 0,05T sε = e ' 5doT s= tem-se 50Kε < .
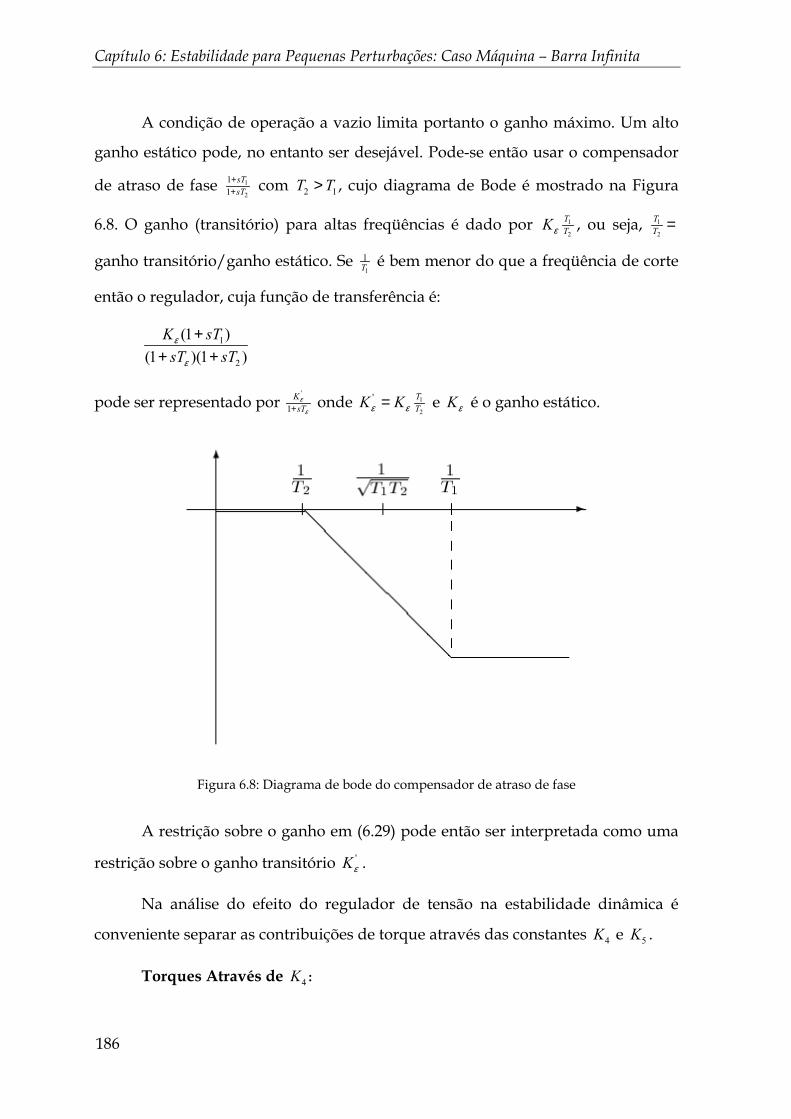
Capítulo 6: Estabilidade para Pequenas Perturbações: Caso Máquina – Barra Infinita
186
A condição de operação a vazio limita portanto o ganho máximo. Um alto
ganho estático pode, no entanto ser desejável. Pode-se então usar o compensador
de atraso de fase 1
2
11
sTsT
++ com 2 1T T> , cujo diagrama de Bode é mostrado na Figura
6.8. O ganho (transitório) para altas freqüências é dado por 1
2
TTKε , ou seja, 1
2
TT =
ganho transitório/ganho estático. Se 1
1T é bem menor do que a freqüência de corte
então o regulador, cuja função de transferência é:
1
2
(1 )(1 )(1 )
K sTsT sT
ε
ε
++ +
pode ser representado por '
1KsT
ε
ε+ onde 1
2
' TTK Kε ε= e Kε é o ganho estático.
Figura 6.8: Diagrama de bode do compensador de atraso de fase
A restrição sobre o ganho em (6.29) pode então ser interpretada como uma
restrição sobre o ganho transitório 'Kε .
Na análise do efeito do regulador de tensão na estabilidade dinâmica é
conveniente separar as contribuições de torque através das constantes 4K e 5K .
Torques Através de 4K :

Capítulo 6: Estabilidade para Pequenas Perturbações: Caso Máquina – Barra Infinita
187
O efeito de δ∆ sobre tV (através de 5K ) é desprezado. Apenas a
componente desmagnetizante 4K δ∆ é considerada. O diagrama de blocos é
mostrado na Figura 6.9. Esta simplificação permite comparar os torques com os
desenvolvidos no caso sem regulador de tensão.
Figura 6.9: Diagrama desprezando a contribuição de 5K
Mudando o ponto de soma, obtém-se o diagrama equivalente da Figura
6.10.
Figura 6.10: Diagrama equivalente sem a contribuição de 5K

Capítulo 6: Estabilidade para Pequenas Perturbações: Caso Máquina – Barra Infinita
188
Supondo Tε desprezível face a '3doT K e 6 3 1K K Kε tem-se:
'
6
'4
6 (1 )do
q
TK K
E KK K s
εεδ
∆ −=∆ +
(6.30)
e:
'
6
2 4
6 (1 )doTK K
T K KK K s
ε
φ
εδ
∆ −=∆ +
(6.31)
Verifica-se que, em baixas freqüências, o torque de sincronização é:
1 2
6
K KTK Kε
δ∆ = − ∆ (6.32)
que se reduz com o aumento do ganho do regulador de tensão.
No caso sem regulador este torque é:
2 3 4T K K K δ∆ = − ∆ (6.33)
Para freqüências mais elevadas tem-se:
'
6
2 4
6 (1 )doTK K
T K KK K s
ε
φ
εδ
∆ −=∆ +
(6.34)
para o caso com regulador e:
2 3 4'
31e
do
T K K KsT Kδ
∆ −=∆ + (6.35)
para o caso sem regulador.
Como '
6
'3
doTdoK K T K
ε< a componente de torque de amortecimento é bastante
reduzida no caso com regulador, já que o atraso de fase tende a 090 em
freqüências bem mais altas.
As seguintes conclusões sobre a componente de desmagnetização através
de 4K seguem da análise precedente:

Capítulo 6: Estabilidade para Pequenas Perturbações: Caso Máquina – Barra Infinita
189
• A componente negativa de torque de sincronização devida a 4K é
praticamente eliminada por ação do alto ganho e baixa constante de
tempo do sistema de excitação.
• Em compensação, a componente de torque de amortecimento devida à
reação de armadura é também significativamente reduzida.
Assim, a contribuição de torque de amortecimento através de 4K é pequena
quando o regulador de tensão está presente, e pode ser desprezada.
Torques Através de 5K :
A função de transferência Tδ
∆∆ é dada neste caso, por:
3 3
2 5' 2 '1
6( ) ( )Tdo doK K
K K KTK K s T s T Tε
ε
ε εδ∆ = −∆ + + + + (6.36)
Se as simplificações consideradas no item anterior forem usadas obtém-se o
diagrama de blocos da Figura 6.11, e a função de transferência é:
'
6
2 5
6 (1 )(1 )doTK K
K KTK s sT
ε εδ
∆ = −∆ + + (6.37)
Figura 6.11: Diagrama equivalente sem a contribuição de 4K
As componentes de torque de sincronização e amortecimento podem, no
entanto, ser calculadas diretamente a partir da função de transferência dada em
(6.36).
A contribuição de torque sincronizante calculada a partir de (6.36) é:
3
3 3
2 '12 5 6
2 ' 2 2 ' 216
( )( ) ( )
doKs T
do doK K
K K K K K T TT
K K T T Tε
ε ε ε
ε ε
ω δω ω
+ − ∆∆ = −
+ − + +(6.38)
Capítulo 6: Estabilidade para Pequenas Perturbações: Caso Máquina – Barra Infinita
190
Para baixas freqüências tem-se:
3
2 5 2 51
6 6s
K
K K K K KTK K K
ε
ε
δ δ∆ ≈ − ∆ ≈ − ∆+ (6.39)
para altos valores de Kε .
Quando 5 0K > , tem-se 0sT∆ < . Isto não causa problema pois as situações
em que 5 0K > (impedância externa baixa ou média e carregamento baixo a médio)
são as mesmas em que 1K é elevado. Portanto 2 5
61K K
KK − é ainda significativamente
maior que zero.
Quando 5 0K < (impedância moderada a alta e alto carregamento) tem-se
0sT∆ > , o que ajuda a manter a estabilidade quando 1K é pequeno ou negativo, ou
quando 1 2 4 3 0K K K K− < (esta é a componente de torque sincronizante no caso sem
regulador).
A componente de torque amortecimento pode ser calculada a partir de
(6.36):
3
3 3
'2 5
2 ' 2 2 ' 216
( )( ) ( )
TdoK
d Tdo doK K
K K K TT
K K T T T
ε
ε
ε
ε ε
ωω ω
+∆ =
+ − + +(6.40)
Se 5 0K > então 0dT∆ > . Se 5 0K < então 0dT∆ < e a componente de torque
através de 5K contribui com amortecimento negativo. Além disso quanto maior
Kε maior será o torque de amortecimento negativo. Por outro lado sem o
regulador de tensão o amortecimento é pequeno, como descrito anteriormente.
Quando 5 0K < o regulador de tensão é de muita ajuda neste caso para
fornecer torque de sincronização, mas por outro lado ele destrói o amortecimento
natural da máquina, que já é pequeno.
Antes do uso de sinais estabilizantes, a solução era usar um valor baixo de
Kε para fornecer torque de sincronização sem cancelar inteiramente o

Capítulo 6: Estabilidade para Pequenas Perturbações: Caso Máquina – Barra Infinita
191
amortecimento natural das máquina. Contudo, a operação em certos casos pode
ser tornar extremamente oscilatória.
A solução é se fornecer amortecimento por outros meios, como por exemplo
através de sinais estabilizantes. Estes sinais são obtidos a partir de sinais
adicionais como velocidade da máquina, freqüência e potência elétrica, que são
usados como entrada de um controlador denominado estabilizador do sistema de
potência (ESP). Esta abordagem, proposta na década de 60 , foi adotada pela
indústria como a solução para os problemas de estabilidade dinâmica em sistemas
de potência e é examinada a seguir.
6.3.5 Análise do Efeito dos Sinais Estabilizadores
A análise apresentada abaixo segue a referência (LARSEN et al., 1981), e
expõe o princípio básico do estabilizador do sistema de potência.
O ESP deve produzir um torque ESPT em fase com a velocidade. O diagrama
da Figura 6.12 ilustra esta situação. Nesta figura dT representa o torque total de
amortecimento e sT o torque de sincronismo do gerador. As componentes destes
torques foram analisadas nas seções anteriores. O torque adicionado pelo
estabilizador é, idealmente, ESP ESPT D ω= ∆ , onde ESPD é um fator de
amortecimento.
Figura 6.12: Torque produzido pelo ESP

Capítulo 6: Estabilidade para Pequenas Perturbações: Caso Máquina – Barra Infinita
192
O sinal de saída do ESP é aplicado ao ponto de soma do regulador de
tensão. A tensão terminal é portanto modulada por este sinal variando a potência
terminal, e produzindo, se a fase for correta, torque de amortecimento. A Figura
6.13 mostra esta esquema.
Figura 6.13: Esquema de atuação do ESP
O candidato natural para sinal adicional a ser usado como entrada do ESP
é o sinal de velocidade. O uso deste sinal é analisado nesta seção para ilustrar
alguns requisitos sobre o sinal a ser usado e sobre a função de transferência do
estabilizador de sistemas de potência.
Para sinal estabilizante derivado da velocidade está-se interessado em
determinar a função de transferência entre o sinal de desvio de velocidade, ω∆ , e
o componente de torque correspondente. O diagrama de blocos, obtido a partir do
modelo de Heffron-Phillips, relacionando esta componente de torque e ω∆ está
mostrado na Figura 6.14.

Capítulo 6: Estabilidade para Pequenas Perturbações: Caso Máquina – Barra Infinita
193
Figura 6.14: Torque obtido a partir de um sinal de velocidade
Com as simplificações usadas na obtenção da equação (6.30), tem-se:
'
6
2
6
( )(1 )(1 )do
ESPT
K K
T K ESP sK s sT
ε εω
∆ ≈∆ + + (6.41)
onde ( )ESP s é a função de transferência do estabilizador.
Para que ESPT seja puramente de amortecimento sobre todo o espectro de
freqüências, deve-se ter:
'
6
( ) 1 (1 )doTESP s K s sTK K ε
ε
= + +
Esta função de transferência, contudo, não é realizável. Portanto ( )ESP s
deve ser um compromisso de modo a fornecer amortecimento sobre o espectro de
freqüências de oscilações esperadas, isto é, uma função com suficiente avanço de
fase para compensar uma parte significativa do atraso de fase devido à máquina e
regulador de tensão.

Capítulo 6: Estabilidade para Pequenas Perturbações: Caso Máquina – Barra Infinita
194
Além disso, o sinal estabilizador não deve produzir efeitos em regime
permanente, ou seja, ( )ESP s deve tender a um sinal derivativo a baixas
freqüências.
A função de transferência (6.41) pode ser escrita como:
( ) ( ) ( ) ( ) ( )refESP ESP
ref
VT T GEP ESP GEP ESPV
ω ω ω ω γ θω ω
∆∆ ∆= = = ∠ −∆ ∆ ∆
(6.42)
onde:
'
6
2
6
1( )(1 )(1 )doT
K K
KGEP sK s sT
ε ε
=+ +
e:
( )GEPγ ω= ∠ (6.43)
( )ESPθ ω= −∠ (6.44)
Pode-se representar esta relação pelo diagrama da Figura 6.15.
Figura 6.15: Diagrama das componentes do torque devido ao ESP
Tem-se desta figura que:

Capítulo 6: Estabilidade para Pequenas Perturbações: Caso Máquina – Barra Infinita
195
( )( )
s
d
T senT cos
γ θγ θ
−=−
(6.45)
Para que o torque seja integralmente de amortecimento deve-se ter
0γ θ− = . É muito difícil achar um ( )ESP s tal que γ θ= , qualquer que seja ω .
Assim, é preferível que γ seja escolhido de modo a se obter também uma
componente positiva de torque sincronizante. Desta análise pode-se concluir que:
• Para baixas freqüências de oscilações deve-se manter θ γ< ou no
mínimo γ próximo a γ . Como a essas freqüências γ é pequeno, θ deve
portanto ser um ângulo de avanço de fase pequeno. Isto é, deve-se
procurar fornecer amortecimento sem prejudicar o torque de
sincronização.
• Para altas freqüências γ aumenta com w e θ cessa de fornecer avanço
de fase, devido a limitações do "hardware", de modo que γ θ> .
Contudo, se γ θ , sT pode aumentar muito, o que provoca o aumento
de nω . A diferença ( )γ θ− deve ficar na faixa de 30o± .
As seguintes restrições devem ser colocadas com relação ao sinal
estabilizador:
• O sinal não deve produzir efeitos ("offset") em regime permanente.
Portanto ( )ESP s∠ deve tender a um sinal derivativo a baixas
freqüências.
• Há um limite para a constante de tempo τ do atraso de fase associado
ao avanço de fase ( 0,05 )sτ ≈ .
Embora o sinal de velocidade tenha sido inicialmente empregado para
derivar um sinal estabilizante, outros sinais podem ser usados. Como discutido a
seguir o sinal de velocidade apresenta problemas e embora a sua escolha pareça
natural há razões para considerar outros sinais. A seção seguinte faz uma análise
detalhada dos diversos sinais adicionais e das características das funções de
transferência que processam estes sinais afim de produzir sinais estabilizantes.
Capítulo 6: Estabilidade para Pequenas Perturbações: Caso Máquina – Barra Infinita
196
6.4 Características dos Sinais Adicionais e dos ESPs
Associados
6.4.1 Introdução
Esta seção analisa com mais detalhes o uso de estabilizadores de sistemas
de potência. A função de transferência através da qual atua o sinal de saída do ESP
é analisada em termos do efeito do carregamento e reatância externa nas suas
características de magnitude e fase. Estas características são importantes para o
entendimento da ação e limitações dos ESPs. As vantagens e problemas associados
aos diversos sinais adicionais propostos são descritos nesta seção assim como os
requisitos impostos aos ESPs que processam estes sinais.
6.4.2 A função de Transferência ( )GEP s
A função básica dos sinais estabilizadores é estender os limites de
estabilidade através da modulação da excitação do gerador de modo a fornecer
amortecimento para as oscilações dos rotores das máquinas.
Para fornecer amortecimento, o estabilizador deve produzir uma
componente de torque elétrico em fase com variações de velocidade ω∆ .
Para fazer isso, a função de transferência do estabilizador deve compensar
as características de ganho e fase do sistema de excitação gerador e sistema de
potência. A função de transferência que inclui o gerador, sistema de excitação e
sistema de potência será denotada por ( )GEP s . O diagrama de blocos da Figura
6.16 mostra as relações entre os torques aplicados no eixo do conjunto turbina-
gerador e ω∆ e δ∆ . Neste diagrama supõe-se que o sinal estabilizador é derivado
da velocidade do eixo.

Capítulo 6: Estabilidade para Pequenas Perturbações: Caso Máquina – Barra Infinita
197
Figura 6.16: Diagrama da função GEP
Do diagrama de blocos tem-se:
( ) ( ) ( ) ( ) ( )refESP ESPw
ref
VT s T s GEP s ESP s P sVω ω
∆∆ ∆= =∆ ∆ ∆
(6.46)
O diagrama de blocos de ( )GEP s detalhado para o caso de uma única
máquina conectada a uma barra infinita é apresentado na Figura 6.17, onde
( )EXC s denota a função de transferência do sistema de excitação. Na análise
desenvolvida nas seções anteriores considerou-se:
( )1
KEXC ssTε
ε
=+
Por outro lado, do diagrama de blocos do modelo de Heffron-Phillips,
supondo 0δ∆ = (o que implica '6t qV K E∆ = ∆ ) obtém-se o diagrama da Figura 6.18.
Esta é a malha fechada de regulação de tensão com a máquina em carga, levando
em conta apenas os efeitos de variação de fluxo, ou seja, com 0δ∆ = .

Capítulo 6: Estabilidade para Pequenas Perturbações: Caso Máquina – Barra Infinita
198
Figura 6.17: Diagrama da função GEP para o caso máquina - barra infinita
Figura 6.18: Diagrama obtido do modelo de Heffron-Phillips com ângulo constante
Comparando os dois diagramas de bloco, é fácil se concluir que:
2
6
( )( )( )
t
ref
V sKGEP sK V s
∆=∆ (6.47)
Isto é, as características de fase de ( )GEP S assemelham-se aquelas do
regulador em malha fechada. A importância desta associação deve-se ao fato que a
função de transferência ( )( )
t
ref
V sV s
∆∆ é que é acessível a medições.

Capítulo 6: Estabilidade para Pequenas Perturbações: Caso Máquina – Barra Infinita
199
Para fins de ajuste do estabilizador, é necessário saber-se como ( )GEP s
varia com o ganho da excitatriz, com a carga do gerador e com a capacidade de
transmissão do sistema externo.
Antes de iniciar esta análise, é importante que se faça a seguinte
consideração: será suposto que o ganho transitório do regulador (isto é, o ganho'Kε definido na seção anterior, e que corresponde a faixa de freqüências entre
2,0Hz a 2,5Hz) é de aproximadamente 20 fd tpuE puV/ . Verifica-se que este valor de
ganho transitório é satisfatório para uma faixa bastante ampla de condições de
operação.
As características de ganho e fase da malha do regulador de tensão são
analisadas a seguir:
Ganho:
Com a condição sobre 'Kε acima, a freqüência de cruzamento de ganho cω
da malha do regulador será menor do que as freqüências de oscilação de interesse,
e a freqüência '3
1doK T
será menor do que a freqüência de cruzamento, como mostra o
diagrama de Bode da função ( ) |t
ref
VcteVG s δ
∆=∆= , mostrado na Figura 6.19.
Nestas condições, a função de transferência em malha fechada do regulador
pode ser aproximada por:
( ) ( )1 ( )
G s G sG s
≈+ (6.48)
se ( ) 1G s , ou seja, se int cω ω , onde intω denota as freqüências de interesse.
Então:
62'
6
( ) ( )intint do
KKGEP EXC sK T
ωω
≈
(6.49)
onde considerou-se que '3 1int doT Kω .

Capítulo 6: Estabilidade para Pequenas Perturbações: Caso Máquina – Barra Infinita
200
Figura 6.19: Diagrama de bode da malha do regulador de tensão
Obtém-se então:
2'( ) ( )int
int do
KGEP jw EXC sTω
≈ (6.50)
Fase:
Para efeito de análise o sistema de excitação é representado por um ganho e
uma constante de tempo. O diagrama de blocos apresentado na Figura 6.18 pode
então ser representado pelo diagrama da Figura 6.20.
Figura 6.20: Sistema com regulador de tensão

Capítulo 6: Estabilidade para Pequenas Perturbações: Caso Máquina – Barra Infinita
201
Fazendo as aproximações de que 0Tε ≈ (na malha de realimentação)
quando comparado com '3doT K e que '
3 1doT K , obtém-se a função de transferência:
6 3'
3
6 3'
3(1 )(1 )
do
do
K KsT Kt
K Kref sT K
KVV sT K
ε
ε ε
∆ ≈∆ + +
(6.51)
ou:
'
6
1(1 )(1 )do
tT
ref K K
VV sT s
εε
∆ ≈∆ + + (6.52)
Portanto:
'1 1
6
doTGEP tan tan TK K ε
ε
ω ω− −∠ ≈ − − (6.53)
Nas equações (6.50) e (6.53) observa-se que 2K e 6K influenciam,
respectivamente o ganho e a fase de GEP .
Das equações para o cálculo das constantes do modelo de Heffron-Phillips
tem-se que:
0 02 '
e d
E senKX x
δ=+ (6.54)
e:
0
0
6 'qe
e d t
eXKX x V
=+ (6.55)
Analisando-se as equações anteriores, chega-se às seguintes conclusões
sobre o efeito do carregamento e reatância externa sobre o ganho e a fase de
( )GEP s .
Ganho:
• Carregamento: 2K aumenta com a carga e 6K é pouco sensível a
variação de carga. Logo GEP é máximo na condição de carga pesada.

Capítulo 6: Estabilidade para Pequenas Perturbações: Caso Máquina – Barra Infinita
202
• Reatância externa: quando eX diminui (sistema mais forte), 2K aumenta
e 6K diminui. Logo, GEP aumenta quando o sistema se torna mais
forte.
Fase:
O ângulo de GEP depende de 6K o qual é pouco sensível a variação de
carga. No entanto, quando eX diminui, 6K diminui e portanto aumenta o atraso
de fase introduzido por ( )GEP s .
Conclusão:
• Como o ganho e o atraso de fase de ( )GEP s são máximos para a
condição de sistema externo forte (baixo eX ), é nesta condição que a
malha do estabilizador é menos estável. Logo, esta é a condição que
impõe o máximo ganho admissível para o estabilizador. Assim, o ganho
não pode ser tão alto quanto o desejado para sistemas fracos, que é
quando mais se necessita do estabilizador.
• O fato de que GEP aumenta com a carga é desejável porque os
problemas de estabilidade para os quais se requer o ESP aumentam para
carga alta.
6.4.3 Características de Sinais Adicionais
Nesta subseção os seguintes sinais adicionais são considerados:
• velocidade angular do eixo;
• freqüência terminal;
• potência elétrica;
• potência de aceleração.

Capítulo 6: Estabilidade para Pequenas Perturbações: Caso Máquina – Barra Infinita
203
As características destes sinais e da função de transferência do estabilizador
para cada um deles são analisadas. Os problemas associados a estes sinais também
são discutidos.
Velocidade do Eixo:
O estabilizador deve compensar o atraso de fase ( )GEP s de modo a
produzir uma componente de torque em fase com a velocidade para aumentar o
amortecimento das oscilações do rotor. O estabilizador ideal é da forma:
( )( )
ESPDESP sGEP sω = (6.56)
onde ESPD dá a contribuição desejada de amortecimento suprida pelo
estabilizador.
Este estabilizador não é praticável, pois para compensar o atraso de fase de
( )GEP s são requeridos derivadores puros, o que introduz o problema de altos
ganhos a altas freqüências.
Na prática, utilizam-se blocos de avanço-atraso de fase ("lead-lag") que
compensam os atrasos de fase de ( )GEP s na faixa de freqüências de interesse. O
ganho deve ser atenuado a altas freqüências para limitar o efeito de ruído, e
também para minimizar a interação torsional. Consequentemente, requer-se o uso
de filtros passa-baixa e passa-faixa.
Também é necessário se usar um bloco tipo "washout" para evitar o efeito
do sinal estabilizador na tensão quando há um desvio permanente de freqüência
(por exemplo, em uma condição de ilhamento).
Assim a função de transferência é:
1 3
2 4
(1 )(1 )( ) ( )1 (1 )(1 )
ww
w
T s sT sTESP s K FILT sT s sT sT
+ +=+ + + (6.57)
com 1 2T T> e 3 4T T> . A função de transferência:
1w
w
T sT s+

Capítulo 6: Estabilidade para Pequenas Perturbações: Caso Máquina – Barra Infinita
204
corresponde ao filtro "washout" e ( )FILT s representa o filtro para minimizar
interações torsionais.
Freqüência:
A principal diferença no uso da freqüência como sinal de entrada para o
ESP ao invés de ω é que a sensibilidade do sinal de freqüência a oscilações do
rotor aumenta quando o sistema de transmissão torna-se mais fraco (ou seja, eX
aumenta). Isto tende a compensar a redução em ganho de ( )GEP s para sistemas
de transmissão mais fracos.
Assim, com sinal derivado da freqüência é mais viável se ajustar o ganho do
estabilizador para conseguir melhor desempenho para condições de alto eX , que é
quando mais se necessita do ESP.
Além dessa vantagem, o sinal de freqüência é mais sensível a modos que
envolvem unidades individuais. Em conseqüência, é provável se obter maior
contribuição de amortecimento para modos de oscilação interáreas com freqüência
do que com velocidade.
Potência Elétrica:
Se a potência mecânica for considerada constante na equação de oscilação:
edM P
dtω∆ = −∆ (6.58)
tem-se que a potência elétrica é proporcional a aceleração.
O sinal de aceleração está adiantado de 90o com relação ao sinal de
velocidade e o mesmo ocorre com relação ao sinal de potência elétrica (a menos do
sinal negativo em (6.58) que pode ser levado em conta com uma realimentação
negativa no ponto de soma do regulador de tensão). No caso do sinal de
velocidade foi observada a necessidade de o ESP apresentar avanço de fase. O uso
de potência elétrica como sinal adicional elimina a necessidade de grandes
avanços de fase exigidos pelo sinal de velocidade. Geralmente um ESP com um

Capítulo 6: Estabilidade para Pequenas Perturbações: Caso Máquina – Barra Infinita
205
único estágio é usado apresentando atraso de fase. O esquema é mostrado na
Figura 6.21.
Figura 6.21: Esquema do ESP com sinal de potência elétrica
O sinal de potência elétrica é pouco sensível a modos torsionais,
dispensando o uso de filtros. Também como o ESP apresenta atraso de fase, não há
problemas com ruídos em altas freqüências. Por outro lado o sinal de potência
elétrica apresenta problemas devido ao fato de que a potência mecânica não é
constante, e a variação desta provoca variações na potência elétrica. Os problemas
associados aos sinais estabilizadores derivados da potência elétrica são listados a
seguir:
• Oscilações locais na tensão terminal e potência reativa dos geradores,
causadas por oscilações de origem hidráulica. Estas oscilações aparecem
no tubo de sucção quando o gerador opera em carga baixa, próxima ao
seu limite de cavitação. Estas oscilações são inerentes ao projeto de
turbinas hidráulicas (especialmente turbinas do tipo Francis). Mesmo
fora da faixa de cavitação, as oscilações de pressão provocam variações
indesejáveis na tensão, restringindo o ganho do ESP. O mecanismo de
atuação se dá através das oscilações hidráulicas que causam variações da
potência mecânica e portanto da potência elétrica. Este sinal atuando
através do ESP causa sobremodulação da tensão terminal do gerador.

Capítulo 6: Estabilidade para Pequenas Perturbações: Caso Máquina – Barra Infinita
206
• Em situações de subfreqüências há elevação rápida de geração devido a
atuação dos reguladores de velocidade. Nesta situação deve-se esperar
redução de tensão do sistema. A variação rápida de potência (tomada de
carga) pode, devido à realimentação negativa do sinal de potência
elétrica, reduzir ainda mais a tensão (sinal estabilizador pode atingir o
seu limite inferior). Produz-se assim um efeito desestabilizante. Além
disso, variações rápidas de geração podem provocar transitórios na
tensão terminal do gerador.
• O ESP pode apresentar interação com modos de baixa freqüência do
regulador de velocidade, associados a ciclos limite causados por folgas e
zonas morta nas válvulas dos servomotores. Um sinal com baixos ganhos
em baixas freqüências, o que não é o caso da potência elétrica, poderia
resolver este problema. Usam-se então filtros passa-alta, de freqüência de
corte elevada, para rejeitar estes modos. Isto, no entanto, traz
dificuldades para o amortecimento do modo interárea, que se caracteriza
por baixas freqüências.
6.4.4 Potência de Aceleração
O uso de sinais baseados na potência de aceleração são mais vantajosos que
os derivados da velocidade e freqüência, principalmente porque não exigem o uso
de funções com avanço de fase.
Na seção anterior discutiu-se o uso do sinal de potência elétrica que
aproxima o sinal de potência acelerante se as variações de potência mecânica
forem pequenas. Se existirem variações significativas da potência mecânica
devidas a fatores tais como ação do regulador de velocidade, "fast valving" ou
controle automático ou manual da geração então o sinal de potência elétrica pode
trazer alguns problemas. Por exemplo, tomadas de carga ativa provocam grandes
excursões da carga reativa devido a depressão de tensões causada pelo sinal de
potência elétrica. Este e outros problemas foram discutidos anteriormente. Todas

Capítulo 6: Estabilidade para Pequenas Perturbações: Caso Máquina – Barra Infinita
207
estas razões sugerem o uso da potência acelerante como uma alternativa vantajosa
em relação ao sinal de potência elétrica.
Para se obter a potência de aceleração torna-se necessário tanto a medição
da potência elétrica quanto a da potência mecânica. A medição da potência
mecânica é difícil. O desenvolvimento a seguir mostra dois método utilizados para
a síntese do sinal de potência acelerante.
Síntese do Sinal de Potência Acelerante a Partir de Grandezas Elétricas:
O esquema apresentado fundamenta-se nas seguintes considerações:
• A medida direta da potência mecânica é difícil.
• Os efeitos da potência mecânica são significativos somente a baixas
freqüências, de modo que não é necessário se produzir a mesma faixa
passante para potência mecânica que é usada para potência elétrica. Ou
seja, as variações de potência mecânica embora possam ser substanciais
são em geral lentas.
• A razão principal de se usar a potência elétrica ao invés da velocidade
do eixo do rotor é que, para as freqüências de interesse, a potência
elétrica é proporcional à velocidade do rotor. Assim não há a necessidade
de derivar o sinal de velocidade para se obter o avanço de fase
necessário.
O esquema básico que mostra a relação entre as potências elétrica, mecânica
e de aceleração e a velocidade é dado na Figura 6.22, onde:
mP : potência mecânica;
eP : potência elétrica;
aP : potência acelerante;
ω : velocidade do rotor;
M : inércia.
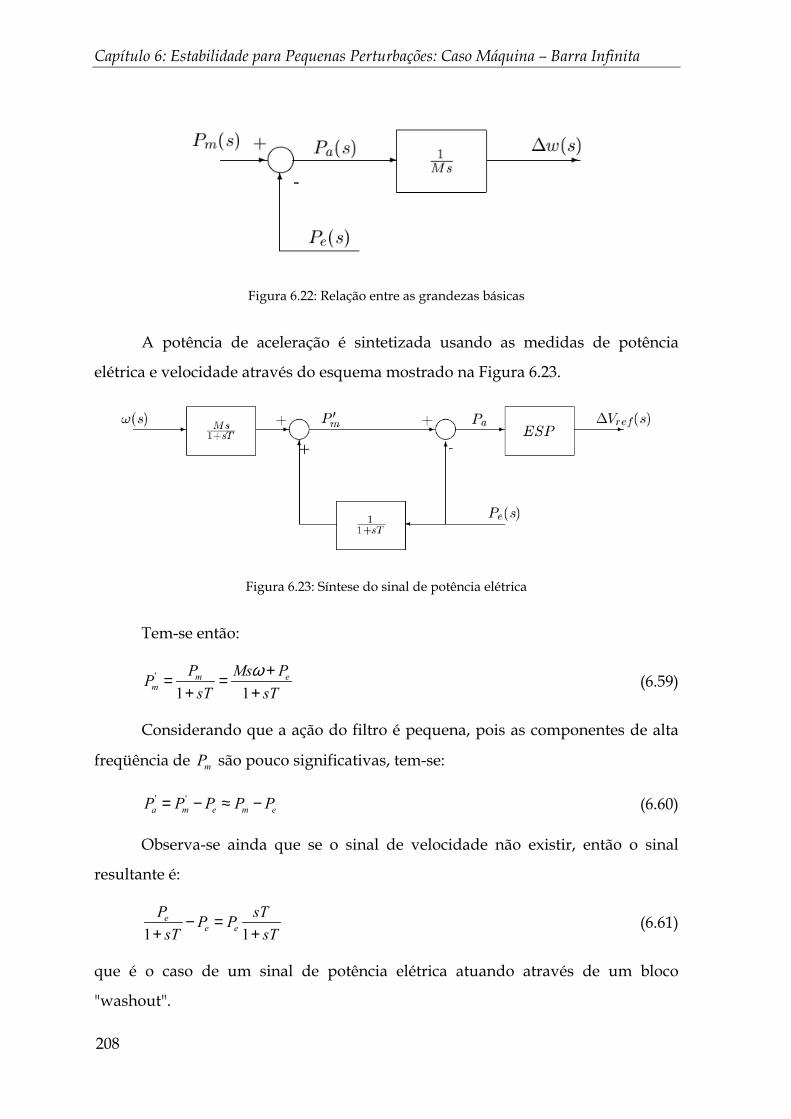
Capítulo 6: Estabilidade para Pequenas Perturbações: Caso Máquina – Barra Infinita
208
Figura 6.22: Relação entre as grandezas básicas
A potência de aceleração é sintetizada usando as medidas de potência
elétrica e velocidade através do esquema mostrado na Figura 6.23.
Figura 6.23: Síntese do sinal de potência elétrica
Tem-se então:
'
1 1m e
mP Ms PP
sT sTω += =
+ +(6.59)
Considerando que a ação do filtro é pequena, pois as componentes de alta
freqüência de mP são pouco significativas, tem-se:
' 'a m e m eP P P P P= − ≈ − (6.60)
Observa-se ainda que se o sinal de velocidade não existir, então o sinal
resultante é:
1 1e
e eP sTP PsT sT
− =+ +
(6.61)
que é o caso de um sinal de potência elétrica atuando através de um bloco
"washout".

Capítulo 6: Estabilidade para Pequenas Perturbações: Caso Máquina – Barra Infinita
209
As vantagens deste esquema são:
• Como a medida de velocidade pode ser obtida eletricamente, os efeitos
da potência mecânica podem ser simulados a partir de grandezas
puramente elétricas.
• A taxa de variação de velocidade não necessita ter a precisão a altas
freqüências exigidas quando a velocidade é usada como sinal
estabilizador.
• Não há necessidade de se usar função do tipo "washout" para anular o
sinal em regime permanente.
6.5 Projeto de Estabilizadores de Sistemas de Potência
A ação efetiva dos estabilizadores de sistemas de potência depende do
ajuste adequado dos parâmetros. Estes parâmetros são determinados visando
conseguir um coeficiente de amortecimento mínimo para os modos pouco
amortecidos do sistema. Além do amortecimento, outros fatores devem ser
considerados no projeto, tais como a manutenção do torque de sincronização, a
limitação do efeito do ESP no controle de tensão e a interação com modos
torsionais.
A saída do ESP é limitada dentro de uma faixa de valores que se situam
entre 0,05pu± a 0,10 pu± . Os limitadores evitam a interferência excessiva dos
ESPs no controle de tensão.
A interação torsional, no caso de sinal derivado da velocidade é evitada
com o uso de sinais fortemente filtrados.
As técnicas usuais de projeto não são coordenadas. Isto significa que o
ajuste do ESP de cada gerador é realizado isoladamente, considerando em geral o
resto do sistema como uma barra infinita. Usualmente o modo local, associado a
oscilação da máquina ao resto do sistema, é o modo de interesse, que deve ter seu
amortecimento aumentado.

Capítulo 6: Estabilidade para Pequenas Perturbações: Caso Máquina – Barra Infinita
210
As técnicas de projeto comumente usadas na indústria são baseadas em
controle clássico. Duas destas técnicas são apresentadas resumidamente a seguir.
6.5.1 Resposta em Freqüência
A função de transferência do ESP deve compensar o atraso de fase da
função ( )GEP s que relaciona a variação da tensão de referência refV∆ e a variação
do torque elétrico eT∆ (ou a variação da potência elétrica eP∆ ). O diagrama de
blocos para esta função de transferência é apresentado na Figura 6.17. A função de
transferência considerando o sistema de excitação representado por um ganho Kε
e uma constante de tempo Tε e fazendo 3 6 1K K Kε é:
2'
2 2
( )( ) 2
e do
ref n n
K KT s T T
V s s s
ε
ε
ζω ω∆ =
∆ + +
com:
6'n
do
K KT T
ε
ε
ω =
e:
'3
'32
do
n do
T K TK T T
ε
ε
ζω
+=
Para valores típicos da freqüência de oscilação tem-se um atraso de fase.
Para um sinal derivado da velocidade deve-se posicionar os pólos e zeros do
estabilizador de modo a compensar este atraso. Normalmente é necessário um
duplo avanço (dois pólos e dois zeros). Se os mesmos pólos e zeros forem
escolhidos para cada estágio tem-se a função ( )H s do estabilizador dada por:
2
1
2
1( )1
sH s K ττ
+= +
onde é comum fazer 2 0,05τ = , fixando-se a posição dos pólos. Os zeros são então
posicionados de modo a assegurar o avanço de fase necessário.

Capítulo 6: Estabilidade para Pequenas Perturbações: Caso Máquina – Barra Infinita
211
Um ajuste conveniente do ganho é então necessário. Algumas vezes este
ajuste é realizado a partir de ensaios de campo. Um valor elevado do ganho pode
levar a um deslocamento para a direita dos modos associados a excitatriz. Uma
regra usada na indústria é fixar o ganho em 2/3 (ou 1/2) do valor do ganho que
levaria à instabilidade os modos da excitatriz.
6.5.2 Lugar das Raízes
Neste caso supõe-se que a função de transferência ( )G s entre refV e o sinal a
ser usado como sinal suplementar (por exemplo, velocidade) está disponível, e
portanto a configuração dos pólos e zeros da mesma no plano complexo é
conhecida. Esta função pode ser determinada analiticamente ou por ensaios de
campo, usando um modelo de ordem reduzida.
Para ilustrar a aplicação do método considera-se o projeto de um ESP
usando velocidade como sinal suplementar. Fixando-se a estrutura como um
duplo avanço de fase tem-se:
2
1
2
1( )1
sH s K ττ
+= +
O pólo do ESP é fixado tal que 2 0,05τ = . O zero do ESP é então fixado de tal
maneira que o ângulo de partida do lugar das raízes no par de pólos pouco
amortecido seja 180o (o lugar tende a se deslocar para a esquerda do plano
complexo).
Tomando-se um ponto de teste na vizinhança do pólo 1p , o qual deve ser
deslocado para a direita, a condição para que este ponto pertença ao lugar das
raízes é que:
180p p c c oz p z pθ θ θ θ− + − = −∑ ∑ ∑ ∑ (6.62)
onde pzθ , p
pθ , czθ∑ e c
pθ são os ângulos dos vetores que ligam os zeros do
processo, pólos do processo, zeros do controlador e pólos do controlador,

Capítulo 6: Estabilidade para Pequenas Perturbações: Caso Máquina – Barra Infinita
212
respectivamente, ao pólo 1p . Esta aproximação é válida desde que o ponto testado
está próximo deste pólo. Apenas o ângulo 1pθ na equação (6.62) é o ângulo do
vetor que liga o pólo 1p ao ponto de teste. Este ângulo vale 180o desde que esta é a
direção desejada para o lugar das raízes.
Tem-se então:
p p c cz p p zθ θ θ θ− = −∑ ∑ ∑ ∑
onde o ângulo de 1pθ não está incluído em p
pθ . Esta expressão permite calcular 2τ .
O ganho é fixado pelo valor de ganho correspondente ao máximo
deslocamento para a esquerda dos ramos que partem dos pólos pouco
amortecidos.

213
CAPÍTULO 7
7.ESTABILIDADE PARA PEQUENAS
PERTURBAÇÕES:
SISTEMAS MULTIMÁQUINAS
7.1 Introdução
No Capítulo 6 a estabilidade para pequenas perturbações foi estudada do
ponto de vista do gerador conectado a uma barra infinita. No entanto, no caso de
sistema multimáquinas, deve-se considerar a dinâmica de todos os geradores e
controladores associados aos mesmos. Além disso, outros equipamentos presentes
na rede podem ter influência direta no comportamento do sistema. Em especial os
equipamentos associados ao conceito de FACTS, conforme discutido no Capítulo
4, podem ser usados para amortecer oscilações no sistema. Para a análise do
sistema e síntese de controladores deve-se considerar o efeito de todos estes
componentes. Em sistemas de grande porte a modelagem pode envolver milhares
de equações diferenciais e algébricas. Além disso muitos controladores podem ter
seus parâmetros ajustados, o que envolve além do problema de dimensionalidade,
o problema de coordenação entre os diversos controladores.
Este capítulo desenvolve os modelos e alguns métodos de análise e síntese
de controladores, adequados para aplicação a sistemas de grande porte.
7.2 Modelos
De maneira genérica o sistema de potência pode ser descrito por um
conjunto de equações diferenciais e um conjunto de equações algébricas da forma:

Capítulo 7: Estabilidade para Pequenas Perturbações: Sistemas Multimáquinas
214
( )x f x z= , (7.1)
0 ( )g x z= , (7.2)
onde:
x é um vetor de variáveis de estado;
z é um vetor de variáveis algébricas;
f é um campo vetorial;
g é um vetor de funções.
As equações (7.1) representam as equações diferenciais dos geradores e
respectivos controladores, dispositivos FACTS e cargas dinâmicas (motores de
indução, etc. ).
Nas equações (4.115) estão incluídas:
• As equações da rede:
I YV= (7.3)
onde:
I : são as injeções de correntes nas barras;
V : são as tensões nas barras;
Y : é a matriz de admitâncias.
• As equações de conexão de componentes como geradores, motores de
indução e compensadores estáticos de reativo à rede. Estas equações
relacionam variáveis de estado dos componentes com a tensão e a
corrente injetada nas barras às quais estes equipamentos estão
conectados.
As equações (7.1) e (4.115) podem ser linearizadas, obtendo-se:
0 0 0 0( ) ( )| |
x z x z
f fx x zx z, ,
∂ ∂∆ = ∆ + ∆∂ ∂
(7.4)

Capítulo 7: Estabilidade para Pequenas Perturbações: Sistemas Multimáquinas
215
0 0 0 0( ) ( )0 | |
x z x z
g gx zx z, ,
∂ ∂= ∆ + ∆∂ ∂
(7.5)
Denotando:
0 0 0 0
0 0 0 0
1 2( ) ( )
3 4( ) ( )
| |
| |
x z x z
x z x z
f fJ Jx z
g gJ Jx z
, ,
, ,
∂ ∂= =∂ ∂
∂ ∂= =∂ ∂
(7.6)
as equações (7.4) e (7.5) podem ser escritas como:
1 2x J x J z∆ = ∆ + ∆ (7.7)
3 40 J x J z= ∆ + ∆ (7.8)
Da equação (7.8) obtém-se:
14 3z J J x−∆ = ∆
Substituindo-se na equação (7.7) tem-se:
11 2 4 3( )x J J J J x−∆ = − ∆
A matriz 11 2 4 3A J J J J−= − é a matriz de estados. Uma forma alternativa de
se obter A é usar eliminação de Gauss. Aplicando-se a eliminação à equações (7.7)
e (7.8) obtém-se:
00x A x
z∆ ∆
= ∆
A análise da estabilidade dinâmica pode ser feita através do estudo dos
autovalores de A . Em muitos trabalhos encontrados na literatura a matriz A é
usada explicitamente, sendo determinada a partir da matriz jacobiana aumentada,
como mostrado anteriormente, ou construída diretamente usando, por exemplo, o
modelo Heffron-Phillips generalizado. Neste último caso há necessidade de
simplificações que tornam o modelo pouco flexível.

Capítulo 7: Estabilidade para Pequenas Perturbações: Sistemas Multimáquinas
216
A matriz A apresenta, no entanto, a desvantagem de não ser esparsa. Em
contraste, a matriz jacobiana aumentada J é altamente esparsa (tipicamente 4% a
6% de elementos não nulos). Além disso é muito fácil incluir componentes como
compensadores estáticos de reativo, cargas dinâmicas, etc. na matriz jacobiana.
A construção da matriz jacobiana é exemplificada para o sistema da Figura
3.38.
Figura 7.1: Sistema usado para ilustrar a formação da matriz Jacobiana
A máquina síncrona é representada pelo modelo 2 , e tem as seguintes
equações:
' '' ( )q d d d FDq `
do
E X X I EE
T− − −
= − (7.9)
m eP Pω = − (7.10)
δ ω= (7.11)
' '( )e q q q d d qP E I X X I I= − − (7.12)
As equações algébricas de conexão da máquina ao sistema são dadas por:
'
'ds qd q
qd sq
IR XV EIX RV
− = −−
(7.13)
A solução do fluxo de carga fornece as condições iniciais da rede e fixa o
sistema de referência re im, em relação ao qual são representados os fasores. Por
exemplo, se a barra k é a barra de folga e a tensão nessa barra for especificada

Capítulo 7: Estabilidade para Pequenas Perturbações: Sistemas Multimáquinas
217
como 0oV V= ∠ , então o fasor V está sobre o eixo real. Todas as grandezas da
equação da rede (7.3) são referidas a este sistema de coordenadas. Por outro lado,
as grandezas de cada máquina síncrona são referidas aos eixos d q, desta
máquina. A relação entre estes sistemas de referência é ilustrada na Figura 4.33.
Figura 7.2: Sistemas de referência da rede e da máquina síncrona
O ângulo δ mede a posição do eixo q com relação ao eixo re . Uma
grandeza F expressa nos eixos d q, pode ser expressa nos eixos re im, e vice-
versa. A mudança de coordenadas é feita pela matriz de transformação ortogonal:
1 coscossen
T Tsen
δ δδ δ
− − = =
(7.14)
tal que:
dre
qim
FFT
FF
= (7.15)
ou:
d re
q im
F FT
F F
= (7.16)
Para formar a matriz jacobiana aumentada é necessário calcular a injeção de
corrente da máquina, a qual é usada na equação da rede (7.3). Esta injeção pode
ser calculada a partir da equação (7.13), que portanto não entraria no jacobiano

Capítulo 7: Estabilidade para Pequenas Perturbações: Sistemas Multimáquinas
218
com esta forma. No entanto, é mais conveniente manter estas equações e as
variáveis dI e qI no jacobiano, e usar as equações:
coscos
G
G
re d
qim
I IsenII sen
δ δδ δ
− =
(7.17)
para calcular a injeção de corrente G GG re imI I I= + do gerador em termos de dI e qI .
O regulador de tensão é representado por um modelo de primeira ordem:
1 1FD
ref
E KV V sT
=− + (7.18)
ou:
11 ( )FD FD ref
KE E V VT T
= − + − (7.19)
onde:
1 1
2 21 re imV V V= + (7.20)
Não se considera a atuação do regulador de velocidade, e portanto mP é
constante.
As equações da rede são:
1 11 1 12 2I Y V Y V= +
2 21 1 22 2I Y V Y V= +
onde:
11 11 11 12 12 12
21 21 21 22 22 22
Y G B Y G B
Y G B Y G B
= + = +
= + = +
(7.21)
são os elementos da matriz de admitância do sistema.
Esta equações podem ser desdobradas nas partes real e imaginária:
1 1 1 1 2 2
1 1 2 2
11 11 12 12
11 11 12 12( )re im re im re im
re im re im
I I G V B V G V B V
B V G V B V G V
+ = − + −
+ + + −

Capítulo 7: Estabilidade para Pequenas Perturbações: Sistemas Multimáquinas
219
2 2 1 1 2 2
1 1 2 2
21 21 22 22
21 21 22 22( )re im re im re im
re im re im
I I G V B V G V B V
B V G V B V G V
+ = − + −
+ + + −
ou, em forma matricial:
1 1
1 1
2 2
2 2
11 11 12 12
11 11 12 12
21 21 22 22
21 21 22 22
re re
im im
re re
im im
I VG B G BI VB G B G
G B G BI VB G B GI V
− −
=− −
(7.22)
Para simplificar a análise, a carga é considerada como potência constante. A
injeção de corrente da carga pode ser calculada por:
2
L LL
P jQIV ∗
−= − (7.23)
ou, desdobrando nas componentes real e imaginária:
2 2
22
L
L re L imre
P V Q VI
V+
= − (7.24)
2 2
22
L
L im L reim
P V Q VI
V−
= − (7.25)
Todas as equações do sistema devem ser linearizadas. Linearizando-se as
equações do gerador, tem-se:
' ''
'
( )q d d d FDq
do
E X X I EE
T∆ − − ∆ − ∆
∆ = − (7.26)
ePω∆ = −∆ (7.27)
δ ω∆ = ∆ (7.28)
'0 0 ' ' 0 ' 0( ) ( )e q q q q q d d q q d d dP E I I E X X I I X X I I∆ = ∆ + ∆ − − ∆ − − ∆ (7.29)
1 1 1
0 01 1T re imV V V V V∆ = ∆ + ∆ (7.30)

Capítulo 7: Estabilidade para Pequenas Perturbações: Sistemas Multimáquinas
220
A equação (7.13) contém as tensões terminais da barra 1 referidas aos eixos
d q, . É conveniente representá-las nos eixos re im, . Para isto usa-se a matriz de
transformação T .
1''
0 d ds q
q qd sq
V IR XT T
V IX RE
−
− =−
(7.31)
ou:
1
1
''
0 re ds q
qd sq im
V IR Xsen cosIX RE cos sen V
δ δδ δ
− − = −
(7.32)
A linearização destas equações resulta em:
1 1 1 1
0 0 0 0 0 0
'
0 ( )re im re im
s d q q
V cos V sen sen V cos V
R I X I
δ δ δ δ δ= + ∆ + ∆ − ∆
− ∆ − ∆(7.33)
1 1 1 1
0 0 0 0 0
' '
0 ( )re im re im
d d s q q
V sen V cos cos V sen V
X I R I E
δ δ δ δ δ= − ∆ − ∆ − ∆
+ ∆ − ∆ + ∆(7.34)
As equações (7.17) linearizadas resultam em:
0 0 0 00 0
0 0 0 00 0G
G
re d d q
q d qim
I I cos I sen Isen cosI sen I cos II cos sen
δ δδ δ δδ δδ δ
∆ ∆ −−= + ∆
∆ − +∆(7.35)
A linearização das equações da rede é trivial.
A linearização das equações da carga leva a:
2 2 2 2 2 2
2 2
2 2
2 4 4 2 4 42 2 2 2 2 2
2 22 2( ) ( )
L
o o o o o ore L re im im L re imL LL L
re re imo o o o o o
V Q V V V P V VP QP QI V VV V V V V V
∆ = − + + ∆ + + + ∆
2 2 2 2 2 2
2 2
2
2 4 4 2 4 42 2 2 2 2 2
2 2 22( ) ( )
L
o o o o o ore L re im L im L re imLL L
im re imo o o o o o
V P V V P V Q V VQQ PI V VV V V V V V
∆ = − + ∆ + − + − ∆
(7.36)
A injeção de corrente na barra 1 é:
1 G Gre imI I I∆ = ∆ + ∆ (7.37)
onde GreI e
GimI são dadas por (7.35) e a injeção na barra 2 é:

Capítulo 7: Estabilidade para Pequenas Perturbações: Sistemas Multimáquinas
221
2 L Gre imI I I∆ = ∆ + ∆ (7.38)
com LreI e
LimI dadas por (7.36).
Para formar a matriz jacobiana, a seqüência escolhida para as variáveis, a
qual determina a seqüência das colunas da matriz, é:
1 1 2 2
'q FD d q re im re imE E I I V V V Vω δ
A seqüência das equações, a qual determina a ordem das linhas da matriz
jacobiana, é:
• equações do gerador;
• equações dos controladores associados ao gerador (no caso apenas o
regulador de tensão);
• equações de conexão do gerador a rede - equações da rede.
A equação matricial do sistema é:
1
1
2
2
''
000000
FDFD
d
q
re
im
re
im
EE
EE I
J IV
V
V
V
ωωδδ
=
i
i
(7.39)
com:
A B
C D
J JJ
J J
=
onde:
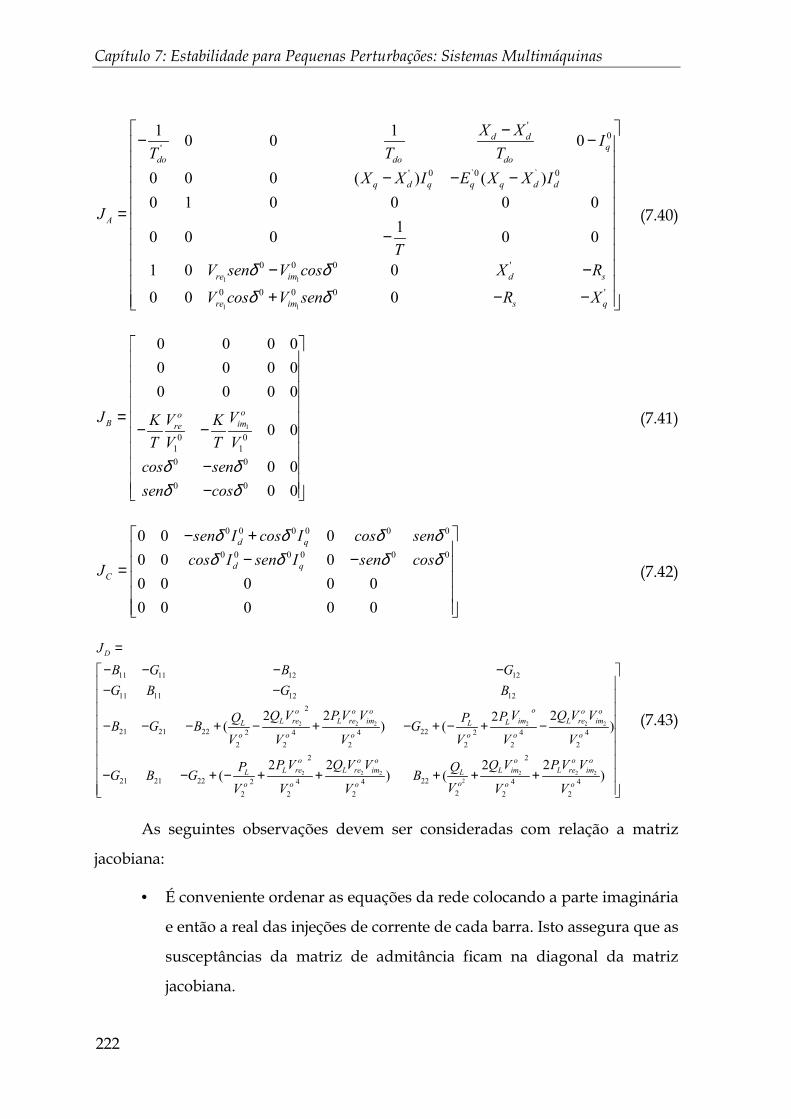
Capítulo 7: Estabilidade para Pequenas Perturbações: Sistemas Multimáquinas
222
1 1
1 1
'0
'
' 0 0 0
0 0 0 '
0 0 0 0 '
1 10 0 0
0 0 0 ( ) ( )0 1 0 0 0 0
10 0 0 0 0
1 0 0
0 0 0
d dq
do do do` `
q d q q q d d
A
re im d s
re im s q
X X IT T T
X X I E X X I
J
TV sen V cos X R
V cos V sen R X
δ δδ δ
−− − − − − =
− − −
+ − −
(7.40)
1
0 01 10 0
0 0
0 0 0 00 0 0 00 0 0 0
0 0
0 00 0
ooB imre
J VVK KT V T V
cos sensen cos
δ δδ δ
= − −
− −
(7.41)
0 0 0 0 0 0
0 0 0 0 0 0
0 0 00 0 00 0 0 0 00 0 0 0 0
d q
d qC
sen I cos I cos sencos I sen I sen cos
J
δ δ δ δδ δ δ δ
− + − − =
(7.42)
2 2 2 2 2 2
2 2 22
11 11 12 12
11 11 12 122
21 21 22 222 4 4 2 4 42 2 2 2 2 2
2 2
21 21 22 222 4 422 2 2
2 22 2( ) ( )
22 2( ) (
D
oo o o o ore L re im im L re imL LL L
o o o o o o
o o ore L re imL LL L
oo o o
JB G B GG B G B
V P V V V Q V VQ PQ PB G B GV V V V V V
V Q V VP QP QG B G BVV V V
=− − − −− −
− − − + − + − + − + −
− − + − + + + + 2 2 24 4
2 2
2)
o o oim L re im
o o
V P V V
V V
+
(7.43)
As seguintes observações devem ser consideradas com relação a matriz
jacobiana:
• É conveniente ordenar as equações da rede colocando a parte imaginária
e então a real das injeções de corrente de cada barra. Isto assegura que as
susceptâncias da matriz de admitância ficam na diagonal da matriz
jacobiana.

Capítulo 7: Estabilidade para Pequenas Perturbações: Sistemas Multimáquinas
223
• No caso de cargas representadas por admitância constante pode-se
proceder como no exemplo acima, ou incorporar as cargas diretamente
na matriz de admitância.
7.3 Modos de Oscilação Eletromecânicos
As equações linearizadas do sistema podem ser escritas como:
x Ax= (7.44)
Seja 1 n…λ λ, , os autovalores da matriz A . A solução da equação (7.44) é
dada por:
1( ) i
nt
i ii
x t c e vλ
=
=∑ (7.45)
onde iv é o autovetor a direita associado a iλ e 1ic i … n, = , , são constantes que
dependem das condições iniciais. Os termos do tipo itic eλ constituem modos do
sistema. Se i i iλ σ ω= + é complexo conjugado então iλ ∗ também é um autovalor,
com coeficiente ic∗ . Se ii ic e φρ= então a combinação dos termos it
ic eλ e i tic eλ ∗∗
fornece um termo do tipo 2 ( )iti ie cos tσρ ω φ+ .
O sistema (7.44) é estável se e somente se todos os autovalores de A estão
no semiplano esquerdo aberto do plano S . No caso de sistemas de potência,
conforme visto no Capítulo 6, ocorrem configurações para as quais o sistema é
instável ou fracamente amortecido. Mesmo este último caso é inaceitável, pois as
flutuações de potência e tensão degradariam a qualidade do fornecimento de
energia.
Os modos que predominam na resposta das variáveis ω e δ são
conhecidos como modos eletromecânicos. O fraco amortecimento dos autovalores
associados é o responsável pelo aparecimento de oscilações no sistema. Os modos
de oscilação eletromecânicos aparecem em um espectro de freqüências que varia
geralmente de 0,2Hz a 2,5Hz. Pode-se dividir este espectro em três faixas, cada

Capítulo 7: Estabilidade para Pequenas Perturbações: Sistemas Multimáquinas
224
uma das quais associada à participação de partes do sistema. A Figura 7.3
apresenta um sistema constituído de duas áreas conectadas por uma interligação,
que ilustra os diferentes modos:
• Modo de oscilação interárea, associado a oscilação do conjunto das
máquinas da área 1 contra o conjunto de máquinas da área 2. Como
grandes massas estão envolvidas as freqüências são baixas, na faixa de
0,2Hz a 0,5Hz. Os enrolamentos amortecedores tem pouca atuação neste
modo.
• Modo de oscilação local, que corresponde a uma planta oscilando com
relação ao conjunto das demais plantas da mesma área. As freqüências
envolvidas estão na faixa de 1Hz a 2Hz.
• Modo intraplanta, associado a oscilações entre as unidades de uma
mesma usina. Normalmente estes modos são bem amortecidos. Como
massas reduzidas estão envolvidas a faixa de freqüências envolvidas
situa-se entre 2,0Hz a 2,5Hz.
Figura 7.3: Sistema para descrição dos modos de oscilação

Capítulo 7: Estabilidade para Pequenas Perturbações: Sistemas Multimáquinas
225
A resposta de cada máquina do sistema é a soma de todos estes modos, mas
em geral um único modo, local ou interárea, é o modo problemático. Os modos de
baixa freqüência são em geral mais propensos a apresentarem baixo
amortecimento.
7.4 Análise por Autovalores
As considerações anteriores demonstram a importância do cálculo dos
autovalores para a análise da estabilidade para pequenas perturbações de sistemas
de potência. Além de informações sobre a estabilidade do sistema, modos
problemáticos, etc., pode-se ainda, a partir do cálculo dos autovetores,
desenvolver métodos para escolha de localização e malhas de controle a serem
fechadas visando atuar sobre modos selecionados.
Técnicas de cálculo de autovalores estão bem estabelecidas e, em especial, o
algoritmo QR apresenta características de robustez e rapidez de convergência.
Este algoritmo está implementado em pacotes padrão como o EISPACK e a NAG .
Para o caso de sistemas de grande porte este método apresenta a desvantagem de
não preservar a esparsidade. Mesmo que a matriz de estados seja esparsa as
operações necessárias a aplicação do método leva ao enchimento da matriz.
Para sistemas de potência seria desejável que, além de levar em conta a
esparsidade, também fosse possível usar a matriz jacobiana aumentada, evitando
o uso da matriz de estados, já que esta não é esparsa. Recentemente alguns
métodos tem sido pesquisados que permitem o uso de esparsidade e da matriz
jacobiana aumentada. Entre eles os seguintes podem ser citados:
• iteração inversa;
• iteração simultânea;
• método de Arnoldi;
• método de Lanczos.

Capítulo 7: Estabilidade para Pequenas Perturbações: Sistemas Multimáquinas
226
Estes métodos pertencem a classe de métodos conhecidos como método de
Krylov. Este método usa um subespaço de Krylov 1[ ]ix Ax A x−… para aproximar
o subespaço invariante dominante da matriz A .
Os métodos citados tem em comum duas características:
• eles visam determinar alguns dos autovalores dominantes (ou seja, autovalores
com os maiores módulos);
• a única operação envolvida nos métodos é do tipo Ay (multiplicação de matriz
por vetor).
A primeira característica é adequada para sistemas de potência desde que
apenas alguns autovalores são requeridos. A dominância dos mesmos pode ser
obtida por uma transformação. A segunda implica que não é necessário se ter a
matriz A explicitamente desde que o produto Ay possa ser obtido.
7.5 Localização dos Controladores
Os controladores utilizados para aumentar o amortecimento em sistemas
de potência só são efetivos se forem posicionados em lugares adequados do
sistema. No caso de estabilizadores de sistemas de potência a questão é
determinar em que máquinas consegue-se uma atuação mais efetiva do
controlador sobre o modo ou os modos que se deseja amortecer. No caso de
compensadores estáticos ou outros equipamentos FACTS a escolha é mais difícil
pois deve-se escolher a barra do sistema (ou linha, no caso de capacitor série
controlado) na qual o equipamento será instalado. Uma questão relacionada é a
escolha do sinal suplementar a ser utilizado. Este sinal deve conter informação
sobre os modos a serem amortecidos. Estas questões foram abordados na
literatura e métodos apresentados para indicar tanto a questão do posicionamento
dos controladores quanto a determinação de sinais adicionais convenientes. Nesta
seção dois métodos encontrados na literatura são apresentados: os fatores de
participação e os índices de controlabilidade e observabilidade.

Capítulo 7: Estabilidade para Pequenas Perturbações: Sistemas Multimáquinas
227
O sistema de potência é representado pelas equações de estado:
x Ax bu= + (7.46)
Ty c x= (7.47)
onde x tem dimensão nx1 , u e y são escalares, tendo as matrizes A , b e c
dimensões convenientes.
7.5.1 Fatores de Participação
Sejam iv e iw respectivamente os i -ésimos autovetores a direita e a
esquerda da matriz A , correspondentes ao i -ésimo autovalor iλ .
Então:
i i iAv v λ= (7.48)
T Ti i iw A wλ= (7.49)
e pode ser mostrado que:
0 seTi jw v i j≠ =
0 seTi jw v i j= ≠
Com uma normalização conveniente pode-se fazer:
1, seTi iw v i j= =
Pode-se então definir as matrizes de autovetores a direita:
11 1
1 2
1
[ ]n
n
n nn
v vV v v …v
v v
= =
e a esquerda:
11 1
1 2
1
[ ]n
n
n nn
w wW w w …w
w w
= =

Capítulo 7: Estabilidade para Pequenas Perturbações: Sistemas Multimáquinas
228
onde:
1TW V −=
A matriz de participação é definida como:
11 11 12 12 1 1
21 21 22 22 2 2
1 1 2 2
n n
n n
n n n n nn nn
w v w v w vw v w v w v
P
w v w v w v
=
……
ou:
11 12 1
21 22 2
1 2
n
n
n n nn
p p pp p p
P
p p p
=
……
O significado da matriz de participação é explorado no desenvolvimento a
seguir.
Seja a equação:
x Ax= (7.50)
cuja solução pode ser expressa por:
1( ) i
nt
i ii
x t c e vλ
=
=∑ (7.51)
onde 1ic i …n= são constantes que dependem das condições iniciais.
Para 0t = tem-se de (7.51):
1 11 1 1
1
(0)(0)
(0)
n
n n nn n
x v v cx
x v v c
= =
Portanto:

Capítulo 7: Estabilidade para Pequenas Perturbações: Sistemas Multimáquinas
229
11 11 1 1
1
(0)
(0)
n
n n nn n
c v v x
c v v x
− =
ou usando a relação entre autovetores a direita e a esquerda:
1 11 1 1
1
(0)
(0)
Tn
n n nn n
c w w x
c w w x
=
e portanto:
(0)Ti ic w x=
Supondo que a condição inicial é dada por:
0
0(0) 1
0
0
kx e
= =
com 1 na k -ésima posição então (0)Ti kiw x w= e segue que:
1( ) i
nt
ki ii
x t w e vλ
=
=∑
Para o k -ésimo estado tem-se:
1 1( ) i i
n nt t
k ki ki kii i
x t w e v p eλ λ
= =
= =∑ ∑
O termo kip da matriz de participação mede a participação do i -ésimo
modo na resposta do k -ésimo estado.
Supondo agora que a condição inicial é tal que (0) ix v= . Então:
( ) ( ) itTi i ix t w v e vλ=
desde que 0Ti jw v = se i j≠ .

Capítulo 7: Estabilidade para Pequenas Perturbações: Sistemas Multimáquinas
230
Considerando que:
1 1
n nTi i ki ki ki
k kw v w v p
= =
= =∑ ∑
segue que:
1( ) ( ) i
nt
ki ik
x t p v eλ
=
= ∑
Para o j -ésimo estado tem-se que:
1( ) ( ) i
nt
j ki jik
x t p v eλ
=
= ∑
ou:
1( ) i i it t tj i ji ki ji ni jix t p v e … p v e … p v eλ λ λ= + + + +
O fator de participação kip mede a participação relativa do k -ésimo estado
na construção da resposta no tempo do i -ésimo modo.
A partir da matriz de participação pode-se associar estados do sistema com
os autovalores. O arranjo seguinte ilustra este ponto.
1 2
1 11 12 1
2 21 22 2
1 2
n
n
n
n n n nn
x p p px p p p
x p p p
λ λ λ| | | | | || | | | | |
| | | | | |
Os módulos dos fatores de participação permitem facilmente associar um
modo eletromecânico pouco amortecido com as variáveis de estado δ e ω dos
geradores. O gerador que tiver os maiores valores dos fatores de participação na
intercessão da coluna correspondente ao modo com as linhas correspondentes a
estas variáveis estará mais fortemente associado a este modo. Pode-se então
considerar este gerador como apropriado para posicionar um controlador. Deve-se
observar que, embora fornecendo uma indicação sobre o local a ser instalado o
controlador, os fatores de participação não levam em conta as matrizes de entrada

Capítulo 7: Estabilidade para Pequenas Perturbações: Sistemas Multimáquinas
231
b e de saída c do sistema. Portanto os índices de controlabilidade e
observabilidade, descritos a seguir, parecem mais adequados. Ainda assim os
fatores de participação podem fornecer informações importantes sobre a relação
entre os diversos modos e as partes do sistema associados aos mesmos.
7.5.2 Índices de Controlabilidade e Observabilidade
Aplicando ao sistema (7.50) a transformação de similaridade:
x V x=
onde V é a matriz de autovalores a direita, tem-se:
1 1x V AV x V bu− −= +
Ty c Vx=
ou:
x Ax bu= +
Ty xc=
onde 1A V AV−= é uma matriz diagonal dada por 1( nA diag …λ λ= ) , o que resulta:
11
1 0 0
( ) 0 0 010 0
n
ssI A
s
λ
λ
−
−
− = −
e:
1,TT c V b V bc −= =
A função de transferência entre u e y é:
1( ) ( )( )
Ty s sI A bcu s−= −
ou:

Capítulo 7: Estabilidade para Pequenas Perturbações: Sistemas Multimáquinas
232
1
( )( )
nk k
k k
b cy su s s λ=
=−∑
onde kb e kc são os k -ésimos componentes de b e c sendo o produto k kb c o
resíduo associado ao autovalor kλ .
O resíduo k kb c é uma medida da sensibilidade do autovalor kλ a uma
realimentação adicionada à função de malha aberta entre ( )u s e ( )y s .
Os termos kb e kc são chamados de índices de controlabilidade e
observabilidade, respectivamente. O índice kb está associado à entrada escolhida
para adicionar o controlador, enquanto que o índice kc está associado ao sinal
suplementar escolhido. Algumas vezes apenas o índice de controlabilidade é
usado para determinar a localização do controlador, considerando que em geral é
possível achar um sinal suplementar adequado uma vez que o controlador tenha
sido posicionado.
A abordagem baseada nos índices de controlabilidade e observabilidade
tem sido utilizadas para a localização de estabilizadores de sistemas de potência,
compensadores estáticos de reativo e capacitores série controlados. É possível o
cálculo destes índices a partir da matriz jacobiana aumentada preservando a
esparsidade. Portanto o método pode ser aplicado a sistemas de grande porte.
7.6 Projeto Coordenado de Controladores
No Capítulo 6 o projeto de estabilizadores de sistemas de potência foi
abordado, considerando o gerador conectado a uma barra infinita. A aplicação
desta metodologia, embora comum na indústria, é essencialmente seqüencial. A
consideração de que o sistema é constituído de muitos geradores com seus
respectivos controladores e que, portanto, existe interação entre os mesmos, não é
levada em conta explicitamente no projeto. No Capítulo 4 outros dispositivos
controláveis foram introduzidos. A necessidade de projeto de controladores
adequados para os mesmos e a possibilidade de interação entre os diversos

Capítulo 7: Estabilidade para Pequenas Perturbações: Sistemas Multimáquinas
233
controladores adiciona-se ao problema do projeto dos ESPs . Nesta seção uma
breve revisão de alguns métodos adequados para o projeto de controladores para
sistemas de potência é apresentada. Alguns destes métodos são recentes e ainda
objeto de pesquisas. O objetivo é, portanto, apenas indicar algumas linhas de
desenvolvimento nesta área. Para facilitar a exposição os métodos abordados são
agrupados de acordo com a teoria subjacente em:
• posicionamento de pólos;
• controle ótimo;
• resposta em freqüência multivariável.
Uma descrição sumária de cada uma destas abordagens é apresentada a
seguir.
7.6.1 Posicionamento de Pólos
Embora a teoria de controle linear apresente vários métodos de
posicionamento de pólos, a aplicação a sistemas de potência apresenta restrições
que tornam muitos destes métodos pouco atrativos.
Uma primeira restrição diz respeito a necessidade de realimentação de
estados na qual muitos métodos são baseados. Deve-se observar ainda que no caso
de sistemas de potência não há a necessidade de realocar todos os pólos, mas
apenas os pólos associados aos modos eletromecânicos pouco amortecidos. O
posicionamento de pólos usando realimentação de saída é uma possibilidade mais
promissora.
Uma segunda restrição é a necessidade que muitos métodos impõem de
obtenção da matriz de estado do sistema, a qual, no caso de sistemas de potência,
pode ser de grande porte e não esparsa. É possível, no entanto, o uso de técnicas
de posicionamento de pólos usando realimentação das saídas, sem usar
explicitamente a matriz de estado. Apenas a matriz jacobiana aumentada é
utilizada (FREITAS et al., 1995).

Capítulo 7: Estabilidade para Pequenas Perturbações: Sistemas Multimáquinas
234
7.6.2 Controle Ótimo
As restrições que limitam o uso de muitos métodos de posicionamento a
sistemas de potência se repetem para o caso de controle ótimo na sua formulação
tradicional. Novamente neste caso há a necessidade de utilização explícita da
matriz de estado e realimentação de todas as variáveis de estado. A estes
problemas adiciona-se a necessidade de determinar matrizes de peso adequadas.
Uma abordagem promissora é a aplicação do controle ótimo
descentralizado das saídas. Esta abordagem tem as seguintes características:
• permite usar a estrutura do controlador empregada na indústria, sendo
os parâmetros determinados a partir dos ganhos do controle ótimo;
• permite formular o problema em termos da matriz jacobiana aumentada
e portanto aproveitar a esparsidade.
A referência (SIMÕES COSTA et al., 1997) descreve esta abordagem.
7.6.3 Resposta em Freqüência Multivariável
Esta abordagem considera a aplicação do método generalizado de Nyquist
para sistemas multivariáveis. As aplicações ao problema de estabilidade dinâmica
são ainda restritas. Algumas vezes o método é usado para o projeto simultâneo de
estabilizadores e reguladores de velocidade. Existem poucos trabalhos que usam
uma abordagem no domínio da freqüência multivariável para o projeto
coordenado de estabilizadores de sistemas de potência e outros controladores
(HUGHES et al., 1976). É mais comum o uso do método de Nyquist na sua forma
monovariável para o projeto seqüencial de controladores (MARTINS et al.,1989).
7.6.4 Software para a Análise da Estabilidade para Pequenas
Perturbações
A análise da estabilidade para pequenas perturbações e a síntese de
controladores é realizada por programas desenvolvidos em centros de pesquisa da

Capítulo 7: Estabilidade para Pequenas Perturbações: Sistemas Multimáquinas
235
indústria e universidades. Atualmente no Brasil, o software mais completo na área
de análise é o PACDYN, desenvolvido no CEPEL. As informações dadas aqui se
referem a versão 4.5.
O PACDYN permite a modelagem de máquinas síncronas, sistemas de
excitação, dispositivos FACTS, elos de corrente contínua e controladores
associados a sinais suplementares dos geradores e dispositivos FACTS.
O PACDYN permite a determinação dos autovalores do sistema, usando
vários métodos escolhidos pelo usuário. Fatores de participação e índices de
controlabilidade e observabilidade podem ser calculados. Isto permite determinar
as localizações e os sinais estabilizadores mais eficazes para o amortecimento de
modos eletromecânicos do sistema.
Para uma função de transferência qualquer, definida a partir de um sinal de
entrada e um sinal de saída do sistema, o programa permite a determinação dos
pólos e zeros da função de transferência.
O PACDYN permite ainda o traçado do diagrama de Bode e do diagrama
de Nyquist a partir de qualquer função de transferência do sistema. Estes
diagramas podem ser usados para a análise do sistema e para alguns métodos de
síntese de controladores.
Na versão atual o PACDYN permite o projeto de controladores apenas por
métodos freqüências, a partir dos diagramas de Bode e Nyquist. Em futuras
versões outros métodos de projeto deverão possivelmente ser implementados.

Capítulo 7: Estabilidade para Pequenas Perturbações: Sistemas Multimáquinas
236

237
REFERÊNCIAS BIBLIOGRÁFICAS
ARRILLAGA, J.; ARNOLD, C. P.; HARKER, B. J.; 1983. Computer Modeling ofElectrical Power Systems : Great Britain : John Wiley & Sons Ltd.
CEPEL - Centro de Pesquisas de Energia Elétrica; 1999b. Programa de Análise deTransitórios Eletromecânicos – ANATEM : Manual do Usuário. Rio de Janeiro,RJ.
DE MELLO, F. P.; CONCORDIA, C.; 1969. Concepts of Synchronous MachineStability as Affected by Excitation Control. IEEE Transactions on PowerApparatus and Systems, (April), p. 316-327.
FREITAS, F. D.; SILVA, A. S.; SIMÕES COSTA, A. J. A.; 1995. Coordinated Settingof Stabilizers for Synchronous Generators and FACTS Devices in PowerSystems. CIGRÉ Symposium on Power Electronics in Electric Power Systems,Tokyo, Japan, (May).
HUGHES, F. M.; HAMDAN, A. M. A.; 1976. Design of Turboalternator ExcitationControllers Using Multivariable Frequency-Response Methods, Proceedings ofIEE, (September), p. 901-905.
KIMBARK, E. W.; 1977. How to Improve System Stability Without RiskingSubsynchronous Resonance, IEEE Transactions on Power Apparatus and Systems,(September/October), p. 1608-1619.
KUNDUR, P.; 1993. Power System Stability and Control : McGraw-Hill Inc. : EPRIEditors.
LARSEN, E. V.; SWANN, D. A.; 1981. Applying Power System Stabilizers – Parts1/3, IEEE Transactions on Power Apparatus and Systems, (June), p. 3017-3046.
MARTINS, N.; LIMA, L. T. G.; 1989. Eigenvalue and Frequency Domain Analysisof Small-Signal Electromechanical Stability Problems, IEEE/PES Symposium onApplications of Eigenanalysis and Frequency Domain Methods.
SIMÕES COSTA, A. J. A.; FREITAS, F. D.; SILVA, A. S.; 1997. Design ofDecentralized Controllers for Large Power Systems Considering Sparsity,IEEE Transactions on Power Systems, (February), p. 144-152.
Top Related