





Línguas
Páginas
Legal

UNIVERSIDADE FEDERAL DE OURO PRETO
ESCOLA DE MINAS
COLEGIADO DO CURSO DE ENGENHARIA DE CONTROLE
E AUTOMAÇÃO - CECAU
LOGOMARCA ESCOLA DE MINAS – VERSÃO MÍDIA IMPRESSA - CORES FORMULADAS EM CMYK
VINÍCIUS ALMEIDA DE MATTOS
BANCADA DE TRANSFERÊNCIA DE CALOR PARA PRÁTICAS DETEORIA DE CONTROLE
MONOGRAFIA DE GRADUAÇÃO EM ENGENHARIA DE CONTROLE E
AUTOMAÇÃO
Ouro Preto, 2020

VINÍCIUS ALMEIDA DE MATTOS
BANCADA DE TRANSFERÊNCIA DE CALOR PARA PRÁTICAS DETEORIA DE CONTROLE
Monografia apresentada ao Curso de Enge-nharia de Controle e Automação da Universi-dade Federal de Ouro Preto como parte dosrequisitos para a obtenção do Grau de Enge-nheiro de Controle e Automação.
Orientador: Prof. Dr. Alan Kardek Rêgo Segundo
Coorientador: Prof. M.e Diógenes Viegas Mendes Ferreira
Ouro Preto, 2020

Mattos, Vinicius Almeida de . Bancada de transferência de calor para práticas de teoria decontrole. [manuscrito] / Vinicius Almeida de Mattos. - 2020. 104 f.
Orientador: Prof. Dr. Alan Kardek Rêgo Segundo. Coorientador: Prof. Me. Diógenes Viegas Mendes Ferreira. Monografia (Bacharelado). Universidade Federal de Ouro Preto.Escola de Minas. Graduação em Engenharia de Controle e Automação .
1. Controle de temperatura. 2. Identificação de sistemas. 3.Sintonia de controladores PI. 4. Sistema supervisório. 5. Educação. I.Ferreira, Diógenes Viegas Mendes . II. Segundo, Alan Kardek Rêgo. III.Universidade Federal de Ouro Preto. IV. Título.
Bibliotecário(a) Responsável: Maristela Sanches Lima Mesquita - CRB:1716
SISBIN - SISTEMA DE BIBLIOTECAS E INFORMAÇÃO
M444b
CDU 681.5
Este trabalho é dedicado aos alunos do curso de Engenharia de Controle e Automação da
Escola de Minas para que possam aprender a teoria junto com a prática e tenham cada vez
mais interesse pela área de Teoria de Controle.
AGRADECIMENTOS
Agradeço a Deus pelo dom da vida e por mais esta graça e vitória. Aos meus pais, Elton e Luciana,
por se doarem, serem exemplos de vida e apoio para mim. À minha namorada Dayane, pelo
amor, carinho e suporte. Aos meus avós pelas orações, ensinamentos e constantes incentivos. Aos
meus tios(as), primos(as), amigos(as) e a todos que de alguma forma contribuíram para o meu
êxito acadêmico. Ao meu início de graduação no Instituto Federal do Sudeste de Minas Gerais -
campus de Juiz de Fora, pelos colegas e profissionais que contribuíram bastante para a minha
vida acadêmica. À Universidade Federal de Ouro Preto por me proporcionar a oportunidade
de aprender e conviver com professores do curso de Engenharia de Controle e Automação, em
especial a Alan Kardek Rêgo Segundo, Paulo Marcos de Barros Monteiro, José Alberto Naves
Cocota Júnior, Agnaldo José da Rocha Reis, Sávio Augusto Lopes da Silva, Karla Boaventura
Pimenta Palmieri, Diógenes Viegas Mendes Ferreira e a todos os que facilitaram e possibilitaram
os meus aprendizados. Aos meus colegas que me apoiaram ao longo do curso e pela amizade. À
Empresa Júnior de Controle e Automação (Automic Jr), pelas amizades e pela oportunidade de
enxergar a Engenharia de uma forma prática, inovadora e bem próxima do mercado de trabalho.
Dedico a todos vocês este presente que me foi dado por Deus: tornar-me Engenheiro de Controle
e Automação! Muito obrigado por tudo! Viva a Escola de Minas!

"O conhecimento é um tesouro, mas a prática é a chave para ele."(Thomas Fuller)
RESUMO
Este trabalho consiste no desenvolvimento e aperfeiçoamento de uma bancada didática de baixo
custo para auxiliar os alunos no processo de aprendizagem na disciplina de Teoria de Controle.
O sistema é constituído de um túnel de ventilação, construído de acrílico, com 4 sensores de
temperatura e uma lâmpada em seu interior, cuja intensidade pode ser alterada de forma manual.
Na entrada do túnel, a ventilação é forçada com o auxílio de um miniventilador, resfriando o
sistema, que pode ter sua rotação alterada de forma manual ou automática. Uma placa Arduino
realiza a aquisição, o processamento e a transmissão dos dados para um sistema de supervisão,
que permite visualizar as variáveis, alterar a intensidade da lâmpada, a rotação do miniventilador
e ajustar os parâmetros do controlador Proporcional Integral (PI). O sistema possui dois modos
de operação: manual e automático. No modo manual, o usuário pode selecionar os níveis de
tensão aplicados na lâmpada e no miniventilador, por meio de duas barras de rolagem do sistema
supervisório. Esse modo foi utilizado na construção da curva de reação de Ziegler-Nichols, que
foi a abordagem utilizada na identificação do sistema, possibilitando o projeto do controlador
PI nos quatro métodos de sintonia utilizados (Ziegler-Nichols, Cohen-Coon, Chien, Hrones
e Reswick e Modelo de controle interno). No modo automático, o controlador PI é ativado
e ajusta automaticamente o nível de tensão aplicado no miniventilador, que atua regulando
a temperatura do sistema. Neste trabalho realizou-se o desenvolvimento de uma plataforma
didática de fácil manuseio, de código e hardware abertos para que o estudante possa explorar
conceitos de Engenharia de Controle por meio de atividades práticas. O preço médio gasto com
o material utilizado na construção da bancada didática foi de aproximadamente 130 reais, logo
foi possível construí-la com um preço muito menor e com função bastante similar ao sistema
proposto pela empresa Quanser.
Palavras-chave: Controle de temperatura. Identificação de sistemas. Sintonia de controladores
PI. Sistema supervisório. Educação.

ABSTRACT
This work consists of the development and improvement of a low-cost teaching bench to assist
students in the learning process in the Control Theory discipline. The system consists of a
ventilation tunnel, built of acrylic, with 4 temperature sensors and a lamp inside of it. The lamp
intensity can be changed manually. At the inlet fo the tunnel, ventilation is forced with the aid of
a mini-fan, cooling the system, which can be rotated manual or automatically. An Arduino board
performs the acquisition, processing and transmission of data to a supervisory system, which
allows you to view variables, change lamp intensity, mini-fan rotation and adjust the parameters
of the Proportional Integral (PI) controller. The system has two modes of operation: manual
and automatic. In manual mode, the user can select the voltage levels applied to the lamp and
the mini-fan, using the two trackbars of the supervisory system. This mode was used in the
construction of the Ziegler-Nichols reaction curve, which was the approach used to identify the
system, enabling the design of the PI controller in four tuning methods used (Ziegler-Nichols,
Cohen-Coon, Chien, Hrones and Reswick and Internal Control Model). In automatic mode, the
PI controller is activated and automatically adjusts the voltage level applied to the mini fan,
which acts by regulating the system temperature. In this work, the development of an easy to
use didactic platform, with open source and hardware, was carried out so that the student can
explore concepts of Control Engineering through practical activities. The average price spent
on the material used in the construction of the didactic bench was approximately 130 reais, so
it was possible to build it at a much lower price and with a function very similar to the system
proposed by the Quanser company.
Keywords: Temperature control. System identification. Tuning PI controllers. Supervisory
system. Education.
LISTA DE ILUSTRAÇÕES
Figura 1 – Exemplos de sistemas embarcados. . . . . . . . . . . . . . . . . . . . . . . 29
Figura 2 – Diagrama de blocos básico de um sistema que possui um microcontrolador
realizando o monitoramento do ambiente. . . . . . . . . . . . . . . . . . . 30
Figura 3 – Arduino Uno. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
Figura 4 – Arduino Mega. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
Figura 5 – Arduino Nano. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
Figura 6 – Sinal PWM. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
Figura 7 – PWM em um circuito com LED. . . . . . . . . . . . . . . . . . . . . . . . 34
Figura 8 – Tipos de transistor: a) pnp; b) npn. . . . . . . . . . . . . . . . . . . . . . . 36
Figura 9 – Modelo do Transistor Darlington. . . . . . . . . . . . . . . . . . . . . . . . 37
Figura 10 – Modelo do Transistor Darlington TIP 122. . . . . . . . . . . . . . . . . . . 38
Figura 11 – Circuito de um transistor utilizado como chave para controlar os estados
ligado e desligado de uma lâmpada. . . . . . . . . . . . . . . . . . . . . . . 38
Figura 12 – Lâmpada halógena da marca OSRAM modelo K5618 12 V 10 W. . . . . . . 39
Figura 13 – Cooler de 4 fios 12 V 0.5 A da marca Foxconn DC modelo PVA070G12Q. . 40
Figura 14 – Exemplo de LM35. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
Figura 15 – LM7805 com encapsulamento TO-220. . . . . . . . . . . . . . . . . . . . . 43
Figura 16 – Comunicação paralela. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
Figura 17 – Comunicação serial. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
Figura 18 – Representação da palavra de dados na porta serial. . . . . . . . . . . . . . . 47
Figura 19 – Esquema do funcionamento do módulo UART. . . . . . . . . . . . . . . . . 48
Figura 20 – Implementação do UART. . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
Figura 21 – Formato de dados UART. . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
Figura 22 – Diagrama de blocos do sistema em malha aberta filtrado. . . . . . . . . . . 53
Figura 23 – Diagrama de blocos do sistema em malha fechada filtrado. . . . . . . . . . 54
Figura 24 – Controlador PID de sistema de tempo contínuo. . . . . . . . . . . . . . . . 55
Figura 25 – Curva de reação de um sistema de 1a ordem. . . . . . . . . . . . . . . . . . 58
Figura 26 – Microcontrolador ATMega 328 da plataforma Arduino Nano no software
Proteus. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
Figura 27 – Esquema da ligação dos 4 LM35 no software Proteus. . . . . . . . . . . . . 64

Figura 28 – Exemplo de diagrama interno de um miniventilador de 4 fios, com circuito
externo. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
Figura 29 – Circuito do cooler implementado no software Proteus. . . . . . . . . . . . . 66
Figura 30 – Circuito da lâmpada implementado no software Proteus. . . . . . . . . . . . 68
Figura 31 – Circuito de alimentação do sistema implementado no software Proteus. . . . 69
Figura 32 – Circuito completo do sistema implementado no software Proteus. . . . . . . 70
Figura 33 – Vista superior da placa de circuito impresso do sistema implementado no
software Proteus. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
Figura 34 – Vista lateral da placa de circuito impresso do sistema implementado no
software Proteus. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
Figura 35 – Pacotes de transmissão e recepção do Arduino, em que o pacote à esquerda é
o de transmissão e o da direita o de recepção. . . . . . . . . . . . . . . . . . 72
Figura 36 – Diagrama de blocos do funcionamento do programa principal. . . . . . . . . 73
Figura 37 – Tela do sistema supervisório na aba inicial. . . . . . . . . . . . . . . . . . . 75
Figura 38 – Tela do sistema supervisório na aba de sintonia do controlador PID. . . . . . 76
Figura 39 – Diagrama de blocos do funcionamento do supervisório. . . . . . . . . . . . 77
Figura 40 – Vista frontal do túnel de vento de acrílico construído. . . . . . . . . . . . . 78
Figura 41 – Vista lateral do túnel de vento de acrílico construído. . . . . . . . . . . . . . 78
Figura 42 – Vista superior do túnel de vento de acrílico construído. . . . . . . . . . . . 79
Figura 43 – Gráfico da temperatura durante o experimento da curva de reação no software
Matlab. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
Figura 44 – Cálculo do ponto de inflexão no software Matlab. . . . . . . . . . . . . . . 82
Figura 45 – Curva de reação para o cálculo das constantes de atraso (θ) e de tempo (τ ) no
matlab. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
Figura 46 – Tela do supervisório durante o experimento de Ziegler-Nichols. . . . . . . . 84
Figura 47 – Gráfico da temperatura durante o experimento do método de Ziegler-Nichols. 85
Figura 48 – Gráfico do erro da temperatura durante o experimento do método de Ziegler-
Nichols. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
Figura 49 – Gráfico da velocidade do miniventilador durante o experimento do método
de Ziegler-Nichols. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
Figura 50 – Tela do supervisório durante o experimento de Cohen-Coon. . . . . . . . . 87
Figura 51 – Gráfico da temperatura durante o experimento do método de Cohen-Coon. . 87
Figura 52 – Gráfico do erro da temperatura durante o experimento do método de Cohen-
Coon. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 88
Figura 53 – Gráfico da velocidade do miniventilador durante o experimento do método
de Cohen-Coon. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 88
Figura 54 – Tela do supervisório durante o experimento de Chien, Hrones e Reswick. . . 89
Figura 55 – Gráfico da temperatura durante o experimento do método de Chien, Hrones e
Reswick. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
Figura 56 – Gráfico do erro da temperatura durante o experimento do método de Chien,
Hrones e Reswick. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
Figura 57 – Gráfico da velocidade do miniventilador durante o experimento do método
de Chien, Hrones e Reswick. . . . . . . . . . . . . . . . . . . . . . . . . . 91
Figura 58 – Tela do supervisório durante o experimento do Modelo interno. . . . . . . . 92
Figura 59 – Gráfico da temperatura durante o experimento do método do Modelo interno. 92
Figura 60 – Gráfico do erro da temperatura durante o experimento do método do Modelo
interno. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93
Figura 61 – Gráfico da velocidade do miniventilador durante o experimento do método
do Modelo interno. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 94
LISTA DE TABELAS
Tabela 1 – Pinos funcionais do UART. . . . . . . . . . . . . . . . . . . . . . . . . . . 50
Tabela 2 – Métodos de sintonia de ZN, CHR e IMC. . . . . . . . . . . . . . . . . . . . 61
Tabela 3 – Método de sintonia de CC. . . . . . . . . . . . . . . . . . . . . . . . . . . 61
Tabela 4 – Especificação do sinal de controle PWM. . . . . . . . . . . . . . . . . . . . 65
Tabela 5 – Parâmetros dos métodos de sintonia do controlador PI. . . . . . . . . . . . 83
Tabela 6 – Resultados dos métodos de sintonia do controlador PI. . . . . . . . . . . . . 95
LISTA DE ABREVIATURAS E SIGLAS
CdS Sulfeto de cádmio
CLP Controlador Lógico Programável
CNC Comando numérico computadorizado
CPU Central Processing Unit
DCS Distributed Control System
ECP Extended Capabilities Mode
EPP Enhanced Parallel Port
FACIT Faculdade de Ciência e Tecnologia de Montes Claros
FET Field Effect Transistor
GaAs Arseneto de gálio
GaAsP Fosfeto de arseneto de gálio
GaN Nitreto de gálio
Ge Germânio
GND Ground
HFE Heat Flow Experiment
IDE Integrated Development Environment
IEEE Institute of Electrical and Electronic Engineers
IHM Interface Homem Máquina
I/O Input/Output
I2C Inter-Integrated Circuit
Kdc Ganho Direto
Kd Ganho Derivativo do controlador PID
Ki Ganho Integral do controlador PID
Kp Ganho Proporcional do controlador PID
LABCAM Laboratório de Controle e Automação
LED Light-Emitting Diode
LEENER Laboratório de Eficiência Energética
LSB Less Significant Bit
MIT Massachusetts Institute of Technology
MOSFET Metal Oxide Semiconductor Field Effect Transistor
MUX Multiplexador
m.s.t. maximum slope tangent
NPA Network Printer Alliance
PBL Problem Based Learning
PCB Placa de Circuito Impresso
PI Proporcional Integral
PID Proporcional Integral Derivativo
PWM Pulse Width Modulation
P&D Planejamento e Desenvolvimento
Ra Reprodução de cor
ROM Read Only Memory
rps Rotações por segundo
SCADA Supervisory Control and Data Acquisition
Si Silício

SISO Single Input Single Output
SMD Surface Mount Device
SPI Serial Peripheral Interface
TBJ Transistor Bipolar de Junção
UART Universal Asynchrounous Receiver/Transmiter
UFOP Universidade Federal de Ouro Preto
UNIFEI Universidade Federal de Itajubá
USB Universal Serial Bus
UTS Unidade de tratamento do sinal
Von Estado ligado da lâmpada
Voff Estado desligado da lâmpada

LISTA DE SÍMBOLOS
cm3 centímetro(s) cúbico(s)
oC Grau(s) Celsius
g grama(s)
kb kilobit(s)
kB kiloByte(s)
λ Lambda
mm milimetro(s)
MB/s MegaByte(s)/segundo
τ Tau
θ Teta
SUMÁRIO
1 INTRODUÇÃO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
1.1 Objetivos gerais e específicos . . . . . . . . . . . . . . . . . . . . . . . . . 20
1.2 Justificativa do trabalho . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
1.3 Estrutura do trabalho . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
2 ESTADO DA ARTE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
3 REVISÃO DA LITERATURA . . . . . . . . . . . . . . . . . . . . . . . . 28
3.1 Sistemas Embarcados . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
3.2 Arduino . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
3.3 PWM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
3.4 Transistor Darlington TIP 122 . . . . . . . . . . . . . . . . . . . . . . . . . 34
3.5 Lâmpada Halógena . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
3.6 Cooler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
3.7 Sensor de temperatura LM35 . . . . . . . . . . . . . . . . . . . . . . . . . 41
3.8 Regulador de Tensão LM7805 . . . . . . . . . . . . . . . . . . . . . . . . . 42
3.9 Proteus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
3.10 Visual Studio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
3.11 Tipos de Comunicação . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
3.11.1 Comunicação paralela . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
3.11.2 Comunicação serial . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
3.12 Sistemas de controle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
3.12.1 Sistemas de controle digital . . . . . . . . . . . . . . . . . . . . . . . . . . 54
3.13 Controlador PID . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
3.14 Identificação de sistemas . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
3.14.1 Identificação pelo método da curva de reação . . . . . . . . . . . . . . . . . 58
3.15 Métodos de Sintonia para Controladores PI . . . . . . . . . . . . . . . . . . 59
3.15.1 Método Ziegler-Nichols . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
3.15.2 Método Cohen-Coon . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
3.15.3 Método CHR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60

3.15.4 Método IMC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
4 MATERIAIS E MÉTODOS . . . . . . . . . . . . . . . . . . . . . . . . . 62
4.1 Projeto do circuito eletrônico . . . . . . . . . . . . . . . . . . . . . . . . . 62
4.1.1 Plataforma Arduino . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
4.1.2 Sensores de temperatura LM35 . . . . . . . . . . . . . . . . . . . . . . . . 63
4.1.3 Circuito eletrônico do cooler . . . . . . . . . . . . . . . . . . . . . . . . . 64
4.1.4 Circuito eletrônico de aquecimento . . . . . . . . . . . . . . . . . . . . . . 67
4.1.5 Circuito de alimentação do sistema . . . . . . . . . . . . . . . . . . . . . . 69
4.1.6 Placa de circuito impresso . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
4.2 Programação da plataforma Arduino Nano . . . . . . . . . . . . . . . . . . 71
4.2.1 Modo manual . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
4.2.2 Modo automático . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
4.3 O sistema supervisório . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
4.4 Construção física da bancada . . . . . . . . . . . . . . . . . . . . . . . . . 77
5 RESULTADOS E TESTES DO SISTEMA . . . . . . . . . . . . . . . . . 80
5.1 Identificação do sistema e sintonia de controladores . . . . . . . . . . . . . 80
5.1.1 Construção da curva de reação . . . . . . . . . . . . . . . . . . . . . . . . . 81
5.1.2 Identificação do sistema e projeto do controlador PI . . . . . . . . . . . . . 83
5.2 Teste e validação do sistema . . . . . . . . . . . . . . . . . . . . . . . . . . 84
5.2.1 Método de Ziegler-Nichols . . . . . . . . . . . . . . . . . . . . . . . . . . 84
5.2.2 Método de Cohen-Coon . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
5.2.3 Método de Chien, Hrones e Reswick . . . . . . . . . . . . . . . . . . . . . 89
5.2.4 Método do Modelo interno . . . . . . . . . . . . . . . . . . . . . . . . . . 91
5.2.5 Validação do sistema . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 94
5.3 Comparação dos resultados . . . . . . . . . . . . . . . . . . . . . . . . . . 95
6 CONSIDERAÇÕES FINAIS . . . . . . . . . . . . . . . . . . . . . . . . 97
REFERÊNCIAS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 99
APÊNDICE A – DESENHO TÉCNICO DO TÚNEL DE ACRÍLICO . 104
19
1 INTRODUÇÃO
Para Filho e Ribeiro (2009), o Problem Based Learning (PBL) é o método de aprendizado
baseado em problemas que se fundamenta no pressuposto de que o conhecimento é construído
a partir da participação ativa do estudante durante o processo de resolução de problemas,
e não simplesmente a partir da memorização e acumulação de conteúdo. Além disso, ele é
fundamentado nos resultados de pesquisas educacionais, principalmente na área da psicologia
cognitiva, que indicam que o trabalho dos alunos com problemas reais, favorece a aprendizagem.
Essa abordagem, que teve origem na Escola de Medicina da Universidade McMaster do Canadá,
na década de 60, é resumidamente uma técnica de ensino-aprendizagem que utiliza problemas
da vida cotidiana (reais ou simulados) para estimular, iniciar, enfocar e motivar a aprendizagem
de teorias, habilidades e atitudes.
Atualmente, as dificuldades do modelo de formação dos profissionais estão sendo bastante
discutidas. Elas vão desde o desinteresse e a apatia dos alunos no ambiente de sala de aula até a
ausência de iniciativa e o comportamento inadequado dos egressos. Isso mostra que parece haver
um consenso de que o modelo educacional utilizado, baseado na transmissão de conhecimento
fixo e acabado, é ineficiente para preparar os profissionais no mundo de hoje (FILHO; RIBEIRO,
2009).
Nesse contexto, surge a oportunidade de se utilizar essa metodologia em prol da educação,
transformando os estudantes nos principais agentes de seu aprendizado. Para que isso ocorra, os
alunos devem aplicar os conhecimentos teóricos adquiridos em sala de aula na prática. Logo, ao
executar as atividades propostas pelo docente, o discente estará pensando em suas ações, sendo
estimulado à crítica e à reflexão (MORESI; BRAGA; BARBOSA, 2018).
Segundo Melo et al. (2017), para que essa abordagem seja aplicada, é necessário que haja:
(I) formação de pequenos grupos de alunos que trabalharão juntos na solução de um problema
sob a orientação de um professor (ou tutor); (II) apresentação de uma situação problema; (III)
estudo e análise da situação; (IV) formação de hipóteses de trabalho; (V) formação de questões de
aprendizagem; e (VI) compartilhamento e avaliação das habilidades adquiridas pelos estudantes
durante o processo.
De acordo com Segundo et al. (2015), o uso de ferramentas educacionais na condução
20
das aulas práticas de laboratório pode estimular o interesse dos alunos. Isto acontece, pois, as
questões teóricas observadas na sala de aula são apresentadas na prática. Algumas instituições
de ensino de graduação, ou de pós-graduação, utilizam bancadas didáticas como uma das
ferramentas educacionais. O grande problema delas é o alto custo e o fato de possuírem uma
arquitetura fechada de hardware e software (COCOTA et al., 2014). Dessa forma, no presente
projeto tem-se como objetivo a construção de uma bancada didática de baixo custo, utilizando
a plataforma de prototipagem Arduino, que é de código aberto. Assim, os estudantes podem
encontrar uma variedade de materiais e códigos na internet, estimulando a pesquisa (JAMIESON,
2011).
A ferramenta didática proposta neste trabalho consiste em: um túnel de acrílico de seção
retangular, em que a ventilação é forçada por meio de um miniventilador (cooler); uma lâmpada
halógena; quatro sensores de temperatura; e um circuito eletrônico com uma placa de desenvol-
vimento Arduino Nano, que se comunica de forma serial com um sistema supervisório para a
realização de práticas de controle de temperatura em malha fechada por meio da manipulação da
velocidade do cooler.
1.1 Objetivos gerais e específicos
O objetivo geral deste trabalho consiste no desenvolvimento de uma plataforma didática
de baixo custo, de fácil manuseio e código aberto para a edição dos usuários (open-source) para
auxiliar no ensino de Teoria de Controle por meio de aulas práticas em diversas disciplinas
do curso de Engenharia de Controle e Automação, com auxílio de um sistema supervisório.
A plataforma utiliza um sistema supervisório implementado no software Visual Studio em
conjunto com um Arduino Nano visando a aferição dos sensores de temperatura, o controle do
aquecimento da lâmpada halógena e da rotação do miniventilador, por meio de um controlador
PI e a comunicação serial entre eles. Os objetivos específicos são:
a) Realizar estudo teórico sobre a plataforma Arduino Nano e os sistemas de controle
em malha fechada;
b) Aprimorar o protótipo didático de controle de temperatura automático para auxiliar
os estudantes do curso de Engenharia de Controle e Automação no entendimento
sobre o assunto;
c) Adaptar o software supervisório desenvolvido por Ferreira (2014) para a comunicação
21
serial UART de dados;
d) Identificar a função de transferência do sistema, em malha aberta, e do controlador,
por meio dos métodos de sintonia abordados neste projeto;
e) Fazer o projeto e a sintonia de um controlador PI por meio do método da curva de
reação de Ziegler-Nichols;
f) Discretizar a saída do controlador por meio do método da Aproximação Trapezoidal;
g) Implementar o controlador na plataforma Arduino Nano;
h) Discutir os resultados obtidos nos ensaios realizados, comparando-os com os resulta-
dos do trabalho de Gomide (2015).
1.2 Justificativa do trabalho
O trabalho apresenta aos discentes a oportunidade de encontrar a solução de um problema
real, baseado nos conceitos abordados em sala de aula, possibilitando uma melhoria na eficiência
cognitiva dos alunos. Para fins de comparação, o sistema didático de controle de temperatura
fabricado pela empresa Quanser custa em torno de 40.000,00 reais. Já o sistema proposto, com
função muito similar, custa cerca de 100,00 reais. O projeto proposto difere dos demais por
apresentar maior liberdade de escolha em relação à estratégia de controle a ser aplicada no
sistema, além de soluções para ser intuitivo e de fácil manuseio. Além disso, o projeto apresenta
um baixo custo, é de código e de hardware abertos e de fácil implementação e replicação. Diante
da preocupação em aumentar o acervo didático prático dos laboratórios da Escola de Minas da
Universidade Federal de Ouro Preto (UFOP), este trabalho visa também enriquecer a qualidade
das aulas práticas e dos projetos científicos desenvolvidos na instituição.
1.3 Estrutura do trabalho
O trabalho está organizado da seguinte forma: na Seção 2 será realizada uma discussão
sobre trabalhos desenvolvidos na área de estudo deste projeto; na Seção 3 serão apresentados
alguns conceitos iniciais e uma revisão sucinta sobre a teoria abordada de forma a contribuir no
embasamento do trabalho; na Seção 4 será apresentada a metodologia empregada no projeto;
na Seção 5 serão discutidos os resultados experimentais obtidos; e, por fim, na Seção 6 serão
apresentadas as considerações finais e as ideias para trabalhos futuros.

22
2 ESTADO DA ARTE
Segundo Unity (2015), no início da história do controle de processos, os indicadores, os
elementos de controle e também as válvulas eram monitoradas por um operador que passava em
todas as malhas de controle e regulava a abertura ou o fechamento das válvulas a fim de obter
a variável desejada (temperatura, pressão e vazão). Com o passar dos anos, surgiu uma nova
tecnologia: o Distributed Control System (DCS), que permitiu a reunião de várias malhas de
controle em estações de controle. Assim, esse sistema possibilita que em uma estação seja feito
o controle de várias salas de controle, mesmo se elas estiverem a quilômetros de distância uma
da outra. Nesse contexto, o operador possui uma enorme quantidade de malhas de controle e a
opera por meio de uma tela de computador. Nos dias atuais, existem muitos equipamentos que
trabalham por meio de redes industriais, como por exemplo: AS-Interface, Profibus, Fieldbus
Foundation e Modbus. Lembrando que em algumas plantas industriais utilizam-se equipamentos
de medição e controle que se comunicam por meio de redes wireless.
Ferreira (2006) elaborou um trabalho que teve como objetivo a implantação de um
sistema simples e eficiente, que permitiu a realização de experiências de malhas de controle
à distância, utilizando bancadas didáticas de sistemas de controle de processos contínuos, por
meio do uso de recursos de comunicação de dados, como a internet. Ele possibilita a execução
remota de experiências reais de sistemas de controle, como por exemplo: as plantas de nível,
vazão, posição e temperatura. O sistema possui uma câmera digital (webcam) que possibilita
a observação visual das experiências realizadas de forma remota. A vantagem dele é o fato
de vários usuários poderem compartilhar uma única bancada de laboratório, independente de
sua localização física. Assim, eles podem acessar o sistema por meio de microcomputadores
ligados em rede de outros ambientes da instituição ou até mesmo externamente. Isso gera
a redução de custos na aquisição de equipamentos para os laboratórios de ensino, além de
proporcionar a otimização do uso das salas destinadas aos laboratórios. Na pesquisa foram
utilizados recursos cliente/servidor de ambiente de redes de comunicação de dados, linguagens
de programação orientada a objetos e recursos de softwares de sistemas de aquisição de dados
comerciais. Para exemplificar os processos controlados foi elaborada uma proposta de projeto que
possibilitou o uso de uma ou mais plantas didáticas em escala reduzida. As interfaces utilizadas
com as instrumentações foram realizadas por meio da aquisição de dados de baixo custo. Para
23
controlar as variáveis do processo foram utilizados algoritmos de controle clássicos do tipo
PID implementados via software. As práticas feitas em uma planta didática de nível geraram
resultados promissores. O sistema implementado foi de simples utilização, de funcionamento
bem eficiente e está sendo empregado em outras plantas de vazão, pressão, temperatura e posição
do Laboratório de Processos Contínuos Industriais da Universidade Federal de Itajubá (UNIFEI).
Logo, os resultados dos experimentos se mostraram compatíveis com as previsões esperadas.
No projeto de Gomes e Pinto (2008) realizado nos Laboratórios integrados de processos
contínuos e de sistemas motrizes, ligados ao Laboratório de Eficiência Energética (LEENER),
da Universidade Federal de Juiz de Fora, foi feito um sistema de tanques duplo, elaborado para
a planta didática de processos contínuos, com aquecimento e resfriamento, o que possibilitou
o controle das quatro variáveis desejadas no processo, em um único circuito (configurado de
acordo com topologias distintas), que são: vazão; nível; temperatura; e pressão. O sistema
possibilita o ajuste das variáveis de controle e controladas, para cada malha distinta, utilizando-se
o controle por realimentação ("feedback") ou por antecipação ("feedforward"). Ele opera baseado
na padronização de sinais de 4 a 20 mA, junto com o protocolo digital Profibus PA. Essa operação
fica a cargo do usuário, que pode escolher entre a utilização simultânea ou não de dois padrões
de instrumentação, em malhas distintas. A planta também possui um sistema supervisório, que
monitora em tempo real e trabalha com as redes de dados ModBus, Profibus PA e Ethernet. Ele
fornece a opção de configuração e utilização de um Controlador Lógico Programável (CLP), que
fica a cargo dos algoritmos de controle, tornando possível o estudo dos comportamentos servo
(entrada do tipo degrau, rampa e parábola) e regulatório (entrada tipo degrau) dos controladores.
Também existem malhas adicionadas individualmente das variáveis controladas de processo,
como o nível, a pressão, a temperatura e a vazão, que podem ser comandadas por meio de um
PID analógico com os modos ON-OFF, P+I+D, sintonia automática e programação de referência.
Essa planta ainda disponibiliza placas de aquisição adequadas para o software LabVIEW de
modo a permitir a utilização desse ambiente para o controle do sistema, de forma adicional ao
software fornecido.
Visando melhorar a qualidade das aulas práticas do laboratório da Faculdade de Ciência e
Tecnologia de Montes Claros (FACIT), Silva, Lopes e Amaral (2012) propuseram uma pesquisa
de construção e desenvolvimento de uma planta didática para o ensino das estratégias de controle
de nível, vazão e temperatura. Esse projeto foi dividido nas seguintes etapas: planejamento e
projeto da estrutura física; especificação dos atuadores, controladores e instrumentos de medição;
24
realização de orçamentos e aquisição de equipamentos; instalação dos equipamentos na estrutura
física; configuração dos instrumentos de medição e dos controladores; testes; estudo sobre as
mais diversas estratégias de controle; planejamento dos experimentos didáticos para o ensino
da instrumentação e do controle; e a documentação da planta e dos experimentos didáticos
desenvolvidos.
Ainda de acordo com Silva, Lopes e Amaral (2012), esse trabalho indicou um grande
avanço no desenvolvimento de diversas disciplinas dos cursos de engenharia, permitindo a inte-
gração entre teorias como: Controladores Lógicos Programáveis; Acionamento; Instrumentação;
Eletrônica de Potência; e Controle de Processos. Assim, a planta desenvolvida e instalada no
Laboratório Integrador do curso de Engenharia de Controle e Automação da FACIT possibilitou
aos alunos a oportunidade de realizar estudos na área de controle e regulagem de nível, vazão e
temperatura, de forma a simular as operações que acontecem na indústria. Algumas das aplica-
ções possíveis desta planta são: o estudo do processo e dos componentes industriais empregados;
o controle manual de processos; a determinação das características de um sistema de controle em
malha aberta ou em malha fechada com controle PID; a análise da estabilidade do sistema em
várias situações e calibração em diversas ações de controle; a determinação das características
do sistema em malha aberta com a sintonia ON-OFF juntamente com as variáveis de regulagem;
a análise da resposta dos sistemas aos sinais de interferência indesejados periódicos ou não de
variados tipos; e a demonstração do uso de um controlador local eletrônico com entrada por
sinal de referência do sistema (setpoint) remoto. Os resultados encontrados foram satisfatórios,
e pode-se acreditar que com a aplicação dessa planta didática no ensino, os estudantes terão a
oportunidade de estar cada vez mais perto da sua realidade futura de trabalho.
Existem algumas abordagens de sistemas de controle que foram propostas na área de
sistemas térmicos como o trabalho desenvolvido por Estrella-España et al. (2014), que consistiu
em um sistema de controle com reciclagem e atraso na medição aplicada a um determinado
processo térmico. Foi feito um estudo dentro de uma classe específica de sistemas com reciclagem,
instável e com um determinado tempo de atraso. Para melhorar a estabilidade implementou-se
um controlador do tipo Proporcional Integral Derivativo (PID) modificado. Ao longo desse
trabalho foram fornecidas as condições necessárias e suficientes para que ele fosse sintonizado
adequadamente. No fim da pesquisa, tendo como resultado o projeto do controlador, ele foi
aplicado a um protótipo de laboratório de um sistema de reciclagem construído com base
em um sistema de fluxo térmico da marca Quanser Heat Flow Experiment (HFE), que mede
25
aproximadamente 60 · 15 · 10 cm3 e é constituído por uma câmara de fibra de vidro equipada com
um aquecedor, que funciona por meio de um resistor, e um ventilador, na mesma extremidade da
câmara. Ela também possui três sensores de temperatura igualmente espaçados entre si, ao longo
do ducto.
Ambos os trabalhos realizados por Estrella-España et al. (2014) e Gomes e Pinto (2008)
abordam estratégias de controle em malha fechada para monitorar as grandezas físicas estudadas
por meio da sintonia de controladores PID, visando à estabilidade e o controle automático de seus
sistemas. No caso dos projetos propostos por Ferreira (2006) e Gomes e Pinto (2008), busca-se a
utilização de redes de dados para otimizar a comunicação entre os dispositivos de suas plantas
de controle.
Os projetos desenvolvidos por Silva, Lopes e Amaral (2012) e Ferreira (2006), assim
como os demais trabalhos citados anteriormente, buscam a criação de bancadas didáticas de
sistemas de controle para que os alunos possam realizar experimentos e entender de forma mais
prática a teoria abordada.
Ferreira (2014) construiu um dispositivo para auxiliar o aluno a visualizar um controle de
temperatura utilizando-se um controlador do tipo PID e, assim, consolidar cada vez mais o apren-
dizado dos conceitos das disciplinas em sala de aula. O sistema foi desenvolvido, principalmente,
utilizando-se um microcontrolador PIC18F4550, um miniventilador (cooler de computador),
um resistor de aquecimento, sensores de temperatura LM35, display de cristal líquido, conector
Universal Serial Bus (USB), transistores, Light-Emitting Diod (LEDs), potenciômetros, resis-
tores e capacitores. A conexão USB é responsável por gravar o firmware do microcontrolador
(modo bootloader), realizar a comunicação com um computador e fornecer energia para o
sistema. A resistência de calor tem a função de aquecer o sistema. Por outro lado, o cooler tem
a função de ventilá-lo. O display de cristal líquido ajuda o aluno a verificar a temperatura, os
parâmetros do controlador PID (Kp - Ganho Proporcional, Ki - Ganho Integral e Kd - Ganho
Derivativo), a referência de temperatura e a tensão aplicada no miniventilador. Os potenciômetros
proporcionam a opção de executar o sistema em malha aberta, ou seja, eles servem para controlar
de forma manual as tensões aplicadas na resistência de calor e no cooler, que são ajustadas por
meio de transistores comutados por Pulse Width Modulation (PWM), refletindo no aquecimento
dela e na velocidade dele. Também foi desenvolvido um programa de computador em linguagem
de programação C# para o usuário poder realizar: (I) a visualização e aquisição de dados da
evolução ao longo do tempo da temperatura medida, do sinal do controlador e do erro do sistema;
26
(II) a parametrização das constantes Kp, Ki e Kd do controlador; e (III) a definição do setpoint
de temperatura do sistema. O programa do microcontrolador desempenha duas funções, que
são: o controle manual, por meio dos potenciômetros, das tensões aplicadas na resistência de
aquecimento e no cooler; e o controle automático da temperatura do sistema atuando na tensão
aplicada sobre o miniventilador e mantendo uma tensão constante sobre a resistência de aqueci-
mento. O trabalho permitiu ao estudante visualizar as ações de controle quando os parâmetros
do controlador são alterados, contribuindo assim para a que teoria seja mais bem compreendida.
A pesquisa desenvolvida por Gomide (2015), que visou aliar o ensino à prática, teve
um efeito multiplicador sobre o processo de aprendizado. Porém, no Brasil, a reduzida oferta
no mercado de bancadas didáticas para o controle de sistemas, aliado ao seu alto custo, gera
dificuldade em adquirir os sistemas. Assim, o desenvolvimento de bancadas didáticas tornou-
se uma metodologia indispensável na motivação dos estudantes de graduação, já que associa
a aplicação dos conceitos teóricos para desenvolver ferramentas práticas de aprendizado a
baixo custo. Nesse projeto foi desenvolvido um sistema de controle de temperatura automático
de baixo custo para auxiliar no ensino de Teoria de Controle, por meio de aulas práticas na
disciplina Microcontroladores Aplicados à Engenharia de Controle e Automação, utilizando
um controlador PI com auxílio de um sistema supervisório. O trabalho foi realizado segundo
recomendações de Ferreira (2014) para trabalhos futuros, envolvendo conceitos de sistemas
embarcados, microcontroladores, programação em linguagem C para microcontroladores e C#
para sistemas Supervisory Control and Data Acquisition (SCADA), além de teoria de controle e
eletrônica analógica/digital. Com esses conceitos, montou-se um sistema de medição e controle
de temperatura, isolado do ambiente externo por uma caixa de acrílico, em que foram utilizados
um cooler de computador de 12 V, uma resistência de chuveiro elétrico, uma conexão USB,
transistores, um regulador de tensão e três sensores de temperatura LM35. Além disso, o projeto
contém um sistema de medição de velocidade das pás do cooler com a utilização de um sistema
de emissão/recepção de sinal infravermelho. O controlador foi projetado por meio do método da
curva de reação de Ziegler-Nichols, tendo sua saída discretizada pelo método da Aproximação
Trapezoidal. Por meio do aperfeiçoamento do sistema supervisório desenvolvido por Ferreira
(2014), pôde-se analisar os dados em tempo real do sistema de controle, assim como ajustar uma
temperatura de setpoint e parâmetros para sintonia do controlador projetado. Com o sistema
criado, conseguiu-se aperfeiçoar o sistema desenvolvido por Ferreira (2014), obtendo-se uma
menor variação nas temperaturas avaliadas.
27
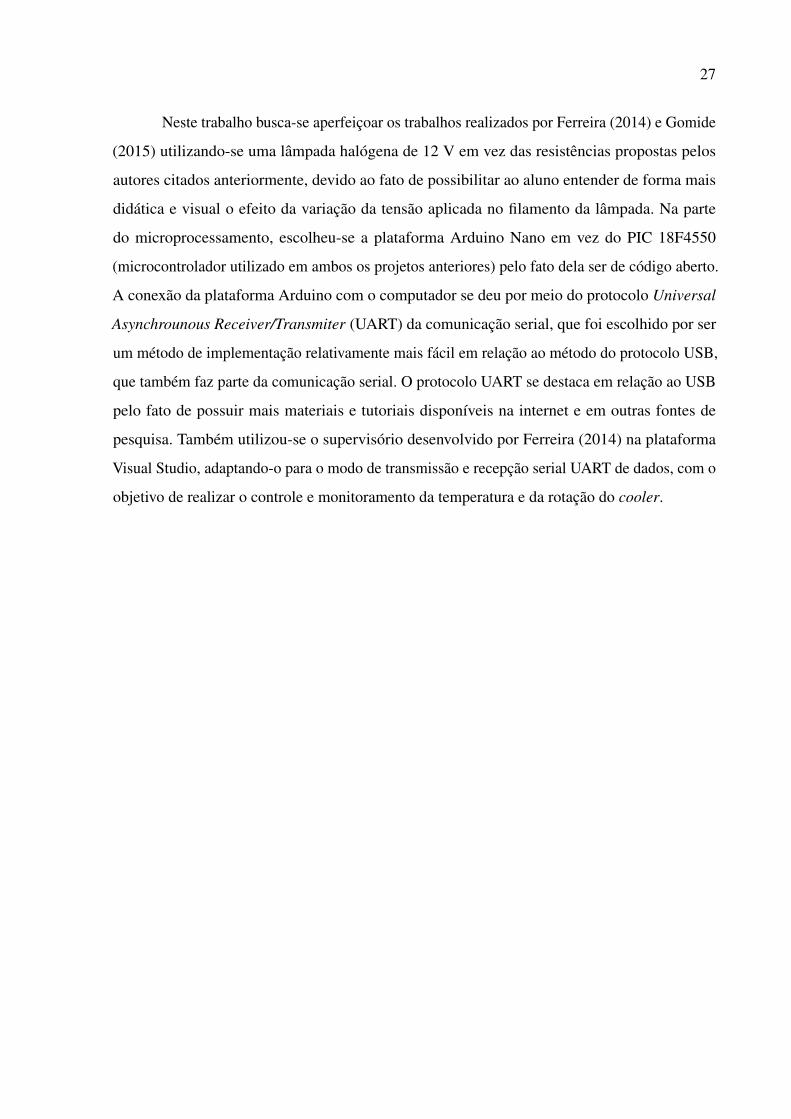
Neste trabalho busca-se aperfeiçoar os trabalhos realizados por Ferreira (2014) e Gomide
(2015) utilizando-se uma lâmpada halógena de 12 V em vez das resistências propostas pelos
autores citados anteriormente, devido ao fato de possibilitar ao aluno entender de forma mais
didática e visual o efeito da variação da tensão aplicada no filamento da lâmpada. Na parte
do microprocessamento, escolheu-se a plataforma Arduino Nano em vez do PIC 18F4550
(microcontrolador utilizado em ambos os projetos anteriores) pelo fato dela ser de código aberto.
A conexão da plataforma Arduino com o computador se deu por meio do protocolo Universal
Asynchrounous Receiver/Transmiter (UART) da comunicação serial, que foi escolhido por ser
um método de implementação relativamente mais fácil em relação ao método do protocolo USB,
que também faz parte da comunicação serial. O protocolo UART se destaca em relação ao USB
pelo fato de possuir mais materiais e tutoriais disponíveis na internet e em outras fontes de
pesquisa. Também utilizou-se o supervisório desenvolvido por Ferreira (2014) na plataforma
Visual Studio, adaptando-o para o modo de transmissão e recepção serial UART de dados, com o
objetivo de realizar o controle e monitoramento da temperatura e da rotação do cooler.
28
3 REVISÃO DA LITERATURA
3.1 Sistemas Embarcados
De acordo com Cunha (2007), embarcar inteligência nos dispositivos é a tendência
do futuro. Os sistemas embarcados são definidos como circuitos integrados, equipamentos ou
sistemas em que é possível colocar capacidade computacional. Este sistema deve ser mais do
que um simples computador, pois, é completo, independente e próprio para a realização de
apenas uma determinada tarefa. O usuário final, geralmente, não tem acesso ao programa que foi
embutido no equipamento, mas consegue interagir com o mesmo por meio de interfaces como
teclados, displays etc. desde que tenha sido projetado para isso.
Para o entendimento de um sistema embarcado, pode-se tomar como exemplo um forno
de micro-ondas. Ao pressionar uma tecla como "PIPOCA", o sistema interno deve ser capaz
de ajustar a potência adequada, selecionar e medir o tempo necessário que o forno deve ficar
acionado, e emitir um sinal assim que a tarefa for concluída. Para que o forno consiga executar
esta simples operação, o "cérebro"do forno deve receber sinais provenientes de sensores (como
por exemplo, o sensor da porta, para verificar se ela está fechada), realizar o acionamento
do equipamento de potência, calcular o tempo do processo, acionar o motor responsável por
rotacionar o prato, permitir que o usuário interrompa a operação a qualquer instante, atualizar o
display, medir o tempo que passou desde o início da operação etc. Diferente dos computadores,
que são capazes de rodar sistemas operacionais como base para que outros aplicativos diversos
sejam instalados e utilizados (cada um deles com uma determinada aplicação diferente), os
sistemas embarcados são desenvolvidos para executar somente uma função pré-determinada. A
maioria das vezes, eles não possuem flexibilidade (de software e hardware) que faça com que
sejam capazes de realizar qualquer outra tarefa além da qual eles foram projetados. A única
flexibilidade permitida e desejada é quando os mesmos realizam um upgrade de novas versões,
permitindo que o sistema possa ser programado novamente, geralmente realizando as correções
ou trazendo novas funções que os tornam melhores. Mas esse processo geralmente é feito pelos
fabricantes e raramente pelos próprios usuários finais (CUNHA, 2007).
Segundo Chase e Almeida (2007), o telefone celular é um exemplo de sistema embarcado
que sofre constantemente vários upgrades e que já possui recursos como máquina fotográfica,

29
agendas telefônica e de compromissos, navegador de internet etc. Na Figura 1 são apresentados
alguns exemplos de sistemas embarcados.
Figura 1 – Exemplos de sistemas embarcados.
Fonte: (CHASE; ALMEIDA, 2007).
Pode-se dizer que existe a necessidade de um "cérebro"que controle todo o funcionamento
deste sistema. Para isso, indica-se a utilização de um microprocessador ou um microcontrolador,
já que ambos possuem a capacidade de realizar a leitura de sinais externos, executar os programas
com as suas respectivas tarefas, processar os sinais e enviar os resultados esperados para os
atuadores. Os programadores e desenvolvedores de sistemas embarcados geralmente pensam
em entradas, saídas, processamento, memórias e no ambiente em que eles serão utilizados. Ao
passo que o usuário final se preocupa apenas no modo de utilização desses sistemas e o valor
que eles podem agregar a um determinado produto, pensando na redução de custos, no aumento
da funcionalidade, desempenho etc (CUNHA, 2007). Na Figura 2 é apresentado o diagrama de
blocos básico de um sistema embarcado, que controla uma determinada variável ambiente como
temperatura, umidade ou o pH do ar de uma estufa, sala ou armazém (CHASE; ALMEIDA,
2007).
30
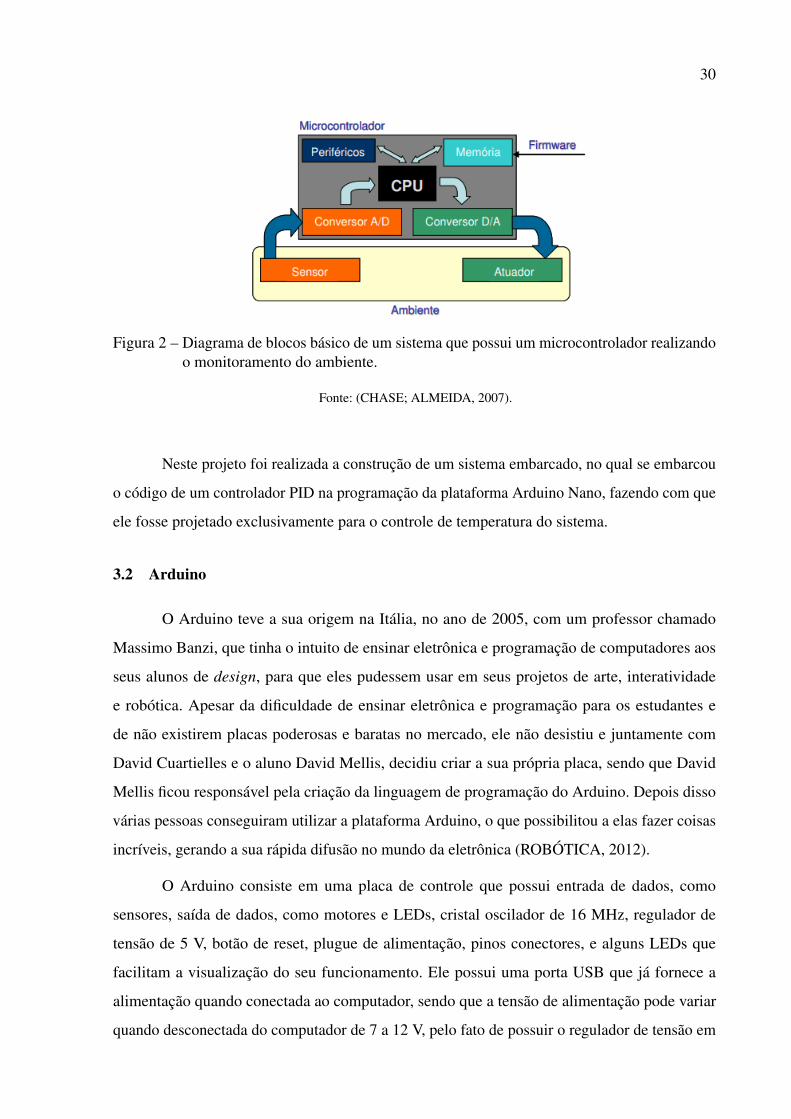
Figura 2 – Diagrama de blocos básico de um sistema que possui um microcontrolador realizandoo monitoramento do ambiente.
Fonte: (CHASE; ALMEIDA, 2007).
Neste projeto foi realizada a construção de um sistema embarcado, no qual se embarcou
o código de um controlador PID na programação da plataforma Arduino Nano, fazendo com que
ele fosse projetado exclusivamente para o controle de temperatura do sistema.
3.2 Arduino
O Arduino teve a sua origem na Itália, no ano de 2005, com um professor chamado
Massimo Banzi, que tinha o intuito de ensinar eletrônica e programação de computadores aos
seus alunos de design, para que eles pudessem usar em seus projetos de arte, interatividade
e robótica. Apesar da dificuldade de ensinar eletrônica e programação para os estudantes e
de não existirem placas poderosas e baratas no mercado, ele não desistiu e juntamente com
David Cuartielles e o aluno David Mellis, decidiu criar a sua própria placa, sendo que David
Mellis ficou responsável pela criação da linguagem de programação do Arduino. Depois disso
várias pessoas conseguiram utilizar a plataforma Arduino, o que possibilitou a elas fazer coisas
incríveis, gerando a sua rápida difusão no mundo da eletrônica (ROBÓTICA, 2012).
O Arduino consiste em uma placa de controle que possui entrada de dados, como
sensores, saída de dados, como motores e LEDs, cristal oscilador de 16 MHz, regulador de
tensão de 5 V, botão de reset, plugue de alimentação, pinos conectores, e alguns LEDs que
facilitam a visualização do seu funcionamento. Ele possui uma porta USB que já fornece a
alimentação quando conectada ao computador, sendo que a tensão de alimentação pode variar
quando desconectada do computador de 7 a 12 V, pelo fato de possuir o regulador de tensão em

31
sua placa (ROBÓTICA, 2012).
Para Robótica (2012), as vantagens da utilização do Arduino são:
a) baixo custo;
b) software disponível para várias plataformas e livre para edição e construção;
c) linguagem de programação simples;
d) comunidade ativa para usuários que visa auxiliar os programadores na hora da
implementação de seus códigos.
Os três tipos principais de Arduino são: Uno, Mega e Nano (plataforma utilizada nesse
trabalho). O Arduino Uno consiste em uma placa com microcontrolador ATMega328. Ele possui
14 entradas/saídas digitais, 6 entradas analógicas, cristal oscilador de 16 MHz, conexão USB,
entrada para fonte, botão de reset etc. A utilização da placa é simples, pois basta conectá-la a um
computador com o cabo USB ou ligá-la com uma fonte de corrente alternada-contínua, ou uma
bateria. Na Figura 3 é apresentado o Arduino Uno (ROBÓTICA, 2012).
Figura 3 – Arduino Uno.
Fonte: (ROBÓTICA, 2012).
Já o Arduino Mega possui como principal vantagem uma considerável quantidade de
portas, o que torna viável a implementações de projetos mais complexos sem deixar a desejar
no quesito da eficiência e do baixo custo. O Arduino Mega é exibido na Figura 4 (ROBÓTICA,
2012).
32
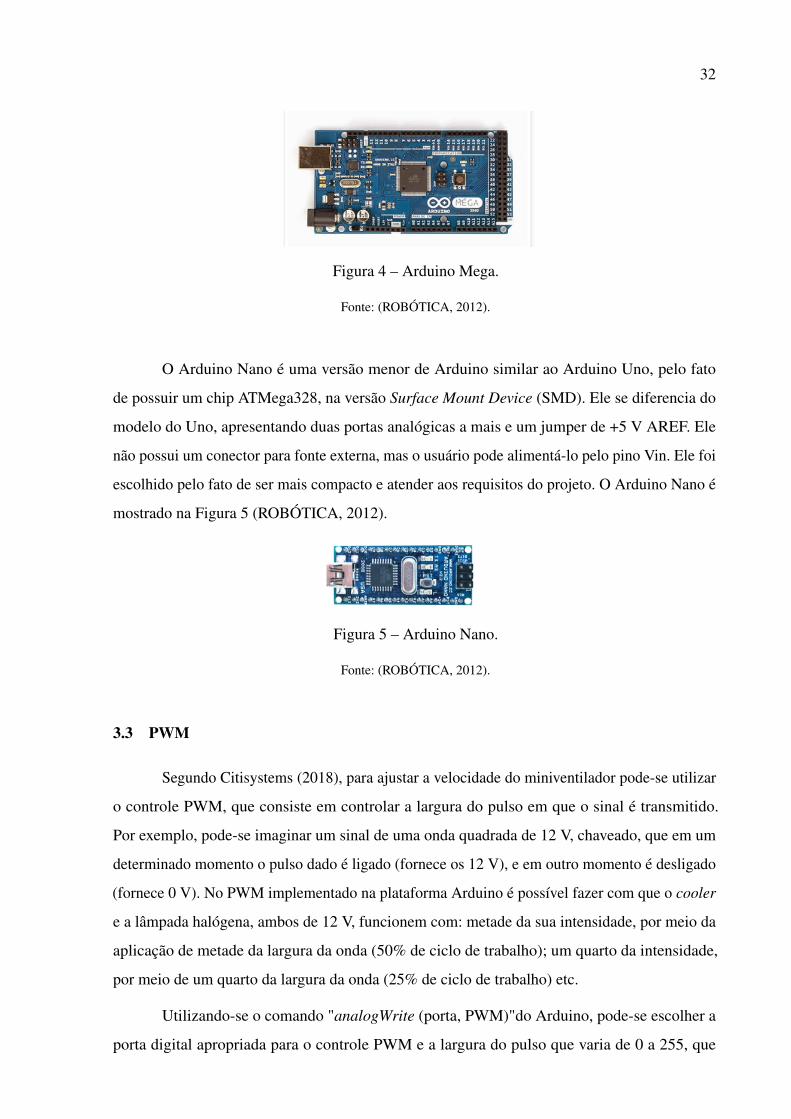
Figura 4 – Arduino Mega.
Fonte: (ROBÓTICA, 2012).
O Arduino Nano é uma versão menor de Arduino similar ao Arduino Uno, pelo fato
de possuir um chip ATMega328, na versão Surface Mount Device (SMD). Ele se diferencia do
modelo do Uno, apresentando duas portas analógicas a mais e um jumper de +5 V AREF. Ele
não possui um conector para fonte externa, mas o usuário pode alimentá-lo pelo pino Vin. Ele foi
escolhido pelo fato de ser mais compacto e atender aos requisitos do projeto. O Arduino Nano é
mostrado na Figura 5 (ROBÓTICA, 2012).
Figura 5 – Arduino Nano.
Fonte: (ROBÓTICA, 2012).
3.3 PWM
Segundo Citisystems (2018), para ajustar a velocidade do miniventilador pode-se utilizar
o controle PWM, que consiste em controlar a largura do pulso em que o sinal é transmitido.
Por exemplo, pode-se imaginar um sinal de uma onda quadrada de 12 V, chaveado, que em um
determinado momento o pulso dado é ligado (fornece os 12 V), e em outro momento é desligado
(fornece 0 V). No PWM implementado na plataforma Arduino é possível fazer com que o cooler
e a lâmpada halógena, ambos de 12 V, funcionem com: metade da sua intensidade, por meio da
aplicação de metade da largura da onda (50% de ciclo de trabalho); um quarto da intensidade,
por meio de um quarto da largura da onda (25% de ciclo de trabalho) etc.
Utilizando-se o comando "analogWrite (porta, PWM)"do Arduino, pode-se escolher a
porta digital apropriada para o controle PWM e a largura do pulso que varia de 0 a 255, que
33
em 0 o dispositivo conectado recebe 0 V (fica desligado) e em 255 ele recebe a sua tensão
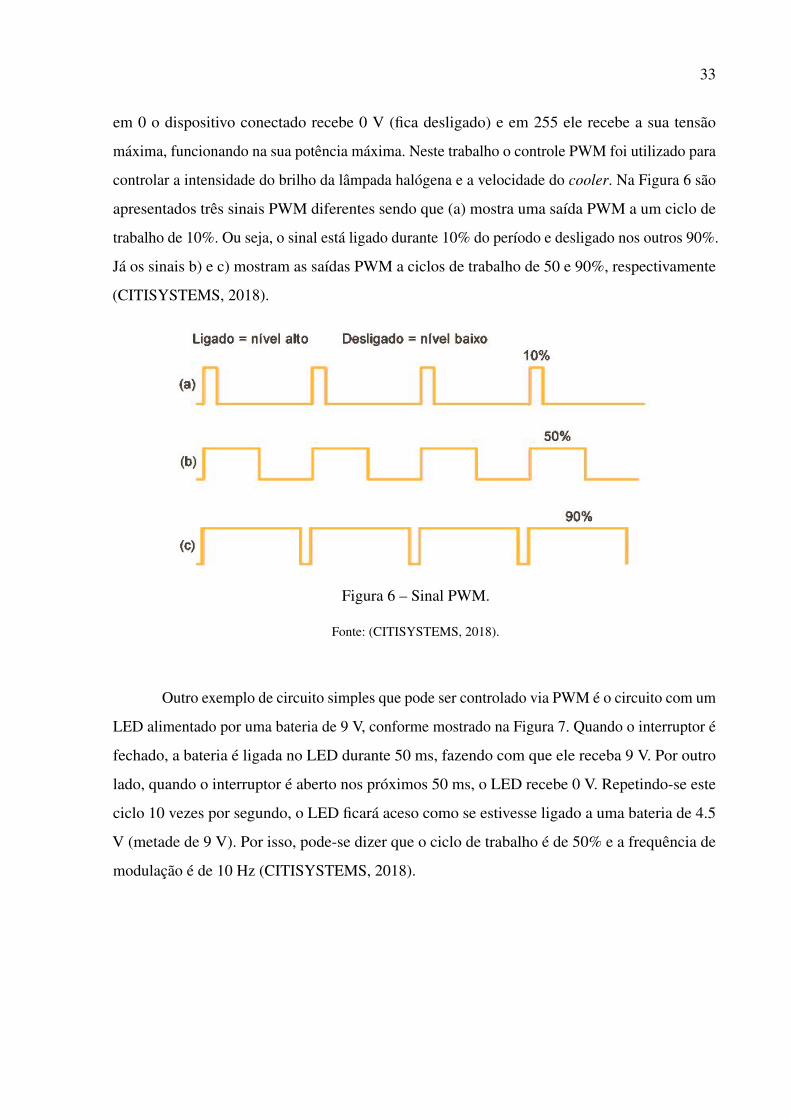
máxima, funcionando na sua potência máxima. Neste trabalho o controle PWM foi utilizado para
controlar a intensidade do brilho da lâmpada halógena e a velocidade do cooler. Na Figura 6 são
apresentados três sinais PWM diferentes sendo que (a) mostra uma saída PWM a um ciclo de
trabalho de 10%. Ou seja, o sinal está ligado durante 10% do período e desligado nos outros 90%.
Já os sinais b) e c) mostram as saídas PWM a ciclos de trabalho de 50 e 90%, respectivamente
(CITISYSTEMS, 2018).
Figura 6 – Sinal PWM.
Fonte: (CITISYSTEMS, 2018).
Outro exemplo de circuito simples que pode ser controlado via PWM é o circuito com um
LED alimentado por uma bateria de 9 V, conforme mostrado na Figura 7. Quando o interruptor é
fechado, a bateria é ligada no LED durante 50 ms, fazendo com que ele receba 9 V. Por outro
lado, quando o interruptor é aberto nos próximos 50 ms, o LED recebe 0 V. Repetindo-se este
ciclo 10 vezes por segundo, o LED ficará aceso como se estivesse ligado a uma bateria de 4.5
V (metade de 9 V). Por isso, pode-se dizer que o ciclo de trabalho é de 50% e a frequência de
modulação é de 10 Hz (CITISYSTEMS, 2018).

34
Figura 7 – PWM em um circuito com LED.
Fonte: (CITISYSTEMS, 2018).
3.4 Transistor Darlington TIP 122
A construção do dispositivo eletrônico discreto (individual) de estado sólido (estrutura
de cristal rígido) ou circuito integrado inicia-se com um material semicondutor da mais alta
qualidade. Os semicondutores consistem numa classe especial de elementos cuja condutividade
está entre a de um bom condutor e a de um isolante. Geralmente, o material semicondutor é
classificado como: cristal singular ou composto. Os semicondutores de cristal singular, como
o Germânio (Ge) e o Silício (Si), possuem uma estrutura de cristal repetitiva, enquanto os
semicondutores compostos, como Arseneto de gálio (GaAs), Sulfeto de cádmio (CdS), Nitreto
de gálio (GaN) e o Fosfeto de arseneto de gálio (GaAsP), são compostos por dois ou mais
materiais semicondutores de estruturas atômicas diferentes. Os três semicondutores utilizados
com mais frequência na construção de dispositivos eletrônicos são Ge, Si e GaAs (BOYLESTAD;
NASHELSKY, 2013, p. 2).
De acordo com Boylestad e Nashelsky (2013, p. 7–8), as características de um material
semicondutor podem ser alteradas significativamente por meio da adição de átomos específicos
de impureza ao material semicondutor relativamente puro. Essas impurezas, embora apenas
adicionadas na proporção de uma parte em 10 milhões (processo de dopagem), são capazes de
alterar a estrutura de banda a ponto de modificar completamente as propriedades elétricas do
material. Um material semicondutor que tenha sido submetido ao processo de dopagem é deno-
minado de material extrínseco. Já o termo intrínseco aplica-se a qualquer material semicondutor
que tenha sido refinado com bastante cuidado para reduzir o número de impurezas a um nível
35
muito baixo — essencialmente, com o grau máximo de pureza disponibilizado pela tecnologia
moderna. Existem dois materiais extrínsecos de elevada importância para a fabricação de um
dispositivo semicondutor: os materiais do tipo n e os do tipo p. Ambos os materiais do tipo n e
do tipo p são formados pela adição de um número predeterminado de átomos de impureza a uma
base de Silício. Um material do tipo n é criado por meio da introdução de elementos de impureza
que têm cinco elétrons de valência (pentavalentes), como por exemplo: o Antimônio, o Arsênio
e o Fósforo. Cada um deles faz parte de um subgrupo de elementos na Tabela Periódica dos
Elementos denominado de Grupo V, porque cada um tem cinco elétrons de valência. Já o material
do tipo p é formado pela dopagem de um cristal puro de Germânio ou Silício com átomos de
impureza que possuem três elétrons de valência. Os elementos mais comumente utilizados para
esse fim são: o Boro, o Gálio e o Índio. Cada um deles faz parte de um subgrupo dos elementos
na Tabela Periódica dos Elementos chamado de Grupo III, por terem, cada um, três elétrons de
valência.
O transistor é um dispositivo semicondutor constituído de três camadas, sendo que duas
delas podem ser do material do tipo n e uma do tipo p ou duas do tipo p e uma do tipo n. O
primeiro é denominado transistor npn e o outro, pnp. Esse dispositivo possui três terminais, que
são denominados de base (B), coletor (C) e emissor (E). A camada do emissor é fortemente
dopada, enquanto a base e o coletor possuem uma leve dopagem. As camadas externas possuem
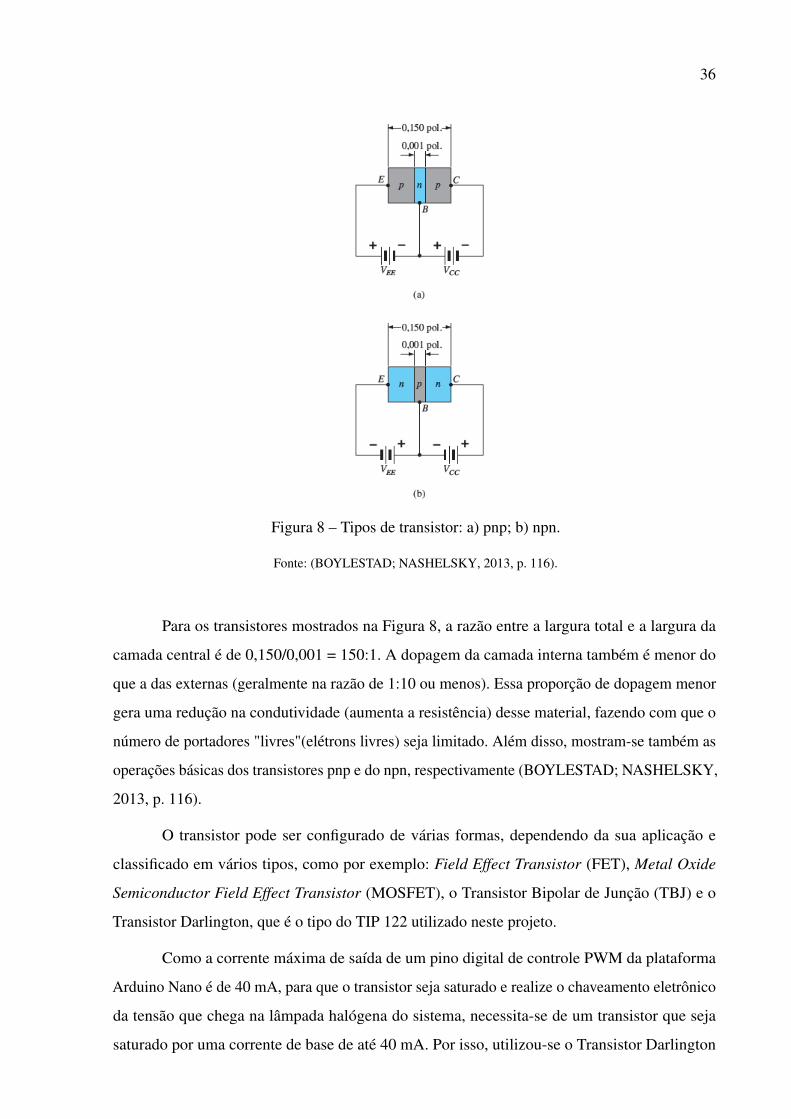
larguras muito maiores do que as internas de material do tipo p ou n. Na Figura 8 são apresentados
os dois tipos de transistor com a polarização em corrente contínua apropriada (BOYLESTAD;
NASHELSKY, 2013, p. 116).
36
Figura 8 – Tipos de transistor: a) pnp; b) npn.
Fonte: (BOYLESTAD; NASHELSKY, 2013, p. 116).
Para os transistores mostrados na Figura 8, a razão entre a largura total e a largura da
camada central é de 0,150/0,001 = 150:1. A dopagem da camada interna também é menor do
que a das externas (geralmente na razão de 1:10 ou menos). Essa proporção de dopagem menor
gera uma redução na condutividade (aumenta a resistência) desse material, fazendo com que o
número de portadores "livres"(elétrons livres) seja limitado. Além disso, mostram-se também as
operações básicas dos transistores pnp e do npn, respectivamente (BOYLESTAD; NASHELSKY,
2013, p. 116).
O transistor pode ser configurado de várias formas, dependendo da sua aplicação e
classificado em vários tipos, como por exemplo: Field Effect Transistor (FET), Metal Oxide
Semiconductor Field Effect Transistor (MOSFET), o Transistor Bipolar de Junção (TBJ) e o
Transistor Darlington, que é o tipo do TIP 122 utilizado neste projeto.
Como a corrente máxima de saída de um pino digital de controle PWM da plataforma
Arduino Nano é de 40 mA, para que o transistor seja saturado e realize o chaveamento eletrônico
da tensão que chega na lâmpada halógena do sistema, necessita-se de um transistor que seja
saturado por uma corrente de base de até 40 mA. Por isso, utilizou-se o Transistor Darlington
37
TIP 122 do tipo npn, que de acordo com Farias et al. (2016), é um dispositivo semicondutor
também denominado de transistor de potência, pelo fato de ser a combinação de dois transistores
bipolares em um único encapsulamento, no qual um dá o ganho de corrente e o outro aumenta o
ganho de tensão. Na Figura 9 é apresentado o modelo do Transistor Darlington.
Figura 9 – Modelo do Transistor Darlington.
Fonte: (SANTOS, 2008).
Segundo Cavalcanti (2018), o transistor equivalente possui como ganho de corrente o
produto entre o ganho dos dois transistores. Ele pode ser utilizado em fontes de alimentação e
em qualquer aplicação que necessite do fornecimento de correntes elevadas.
De acordo com Alldatasheet (1997), as especifiçações do TIP 122, na temperatura de
25 oC são:
a) potência de 65 W;
b) corrente de saturação da base de 12 mA e de 20 mA, que geram correntes de coletor
de 3 A e 5 A, respectivamente;
c) corrente máxima de coletor de 5 A;
d) ganho mínimo de corrente (β) de 1000 quando a tensão do coletor-emissor for de
3 V e a corrente do coletor for de 0,5 A ou 3 A.
Na Figura 10 é exibido o transistor TIP 122, com encapsulamento TO-220, em que o ter-
minal da base é indicado por B (1), o coletor por C (2) e o emissor por E (3) (ALLDATASHEET,
1997).
38
Figura 10 – Modelo do Transistor Darlington TIP 122.
Fonte: (ALLDATASHEET, 1997).
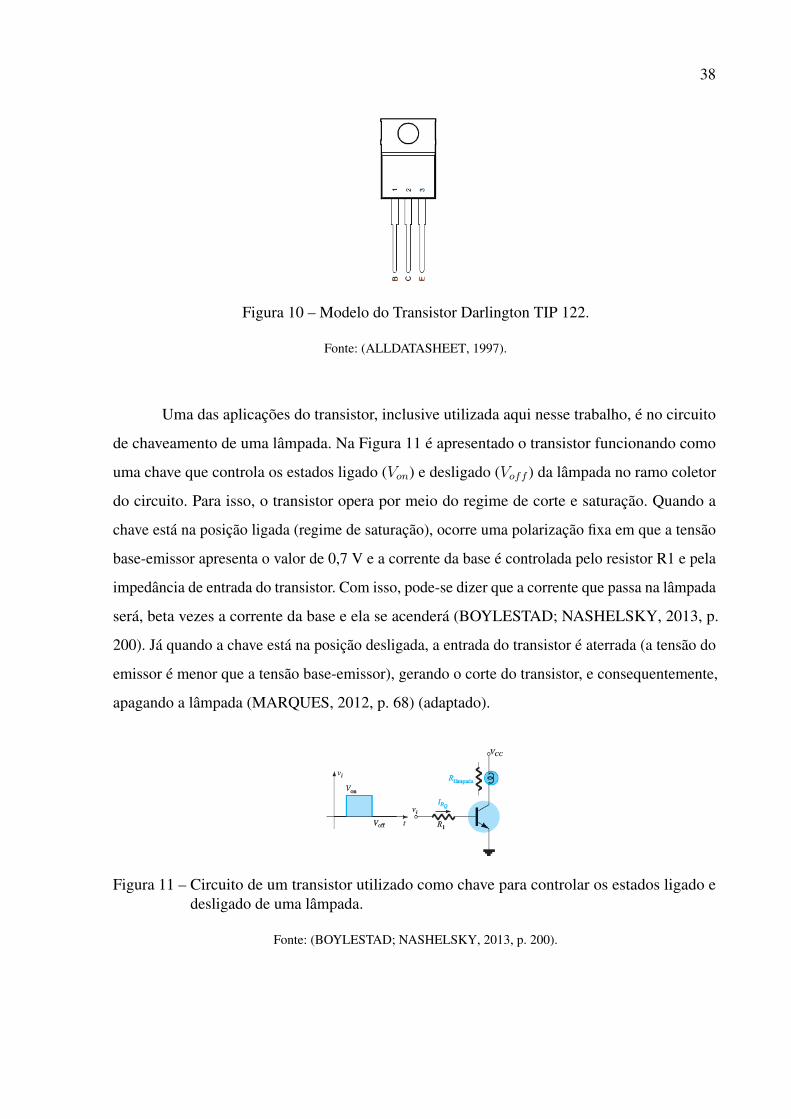
Uma das aplicações do transistor, inclusive utilizada aqui nesse trabalho, é no circuito
de chaveamento de uma lâmpada. Na Figura 11 é apresentado o transistor funcionando como
uma chave que controla os estados ligado (Von) e desligado (Voff ) da lâmpada no ramo coletor
do circuito. Para isso, o transistor opera por meio do regime de corte e saturação. Quando a
chave está na posição ligada (regime de saturação), ocorre uma polarização fixa em que a tensão
base-emissor apresenta o valor de 0,7 V e a corrente da base é controlada pelo resistor R1 e pela
impedância de entrada do transistor. Com isso, pode-se dizer que a corrente que passa na lâmpada
será, beta vezes a corrente da base e ela se acenderá (BOYLESTAD; NASHELSKY, 2013, p.
200). Já quando a chave está na posição desligada, a entrada do transistor é aterrada (a tensão do
emissor é menor que a tensão base-emissor), gerando o corte do transistor, e consequentemente,
apagando a lâmpada (MARQUES, 2012, p. 68) (adaptado).
Figura 11 – Circuito de um transistor utilizado como chave para controlar os estados ligado edesligado de uma lâmpada.
Fonte: (BOYLESTAD; NASHELSKY, 2013, p. 200).

39
3.5 Lâmpada Halógena
Segundo Philips (2019), a lâmpada halógena é conhecida como lâmpada halógena de
quartzo e halógena de tungstênio. Ela é uma versão mais avançada da lâmpada incandescente. A
halógena possui um filamento de tungstênio parecido com o da incandescente, porém é muito
menor pela mesma potência e apresenta um gás halogênio na lâmpada. O bulbo é feito de vidro
de quartzo fundido, sílica ou aluminossilicato. Ela possui mais resistência que o vidro padrão
para conter a pressão elevada. A sua temperatura aumenta de forma bem rápida. Os halógenos
iniciam a fase de ebulição até que se obtenha um gás a temperaturas relativamente baixas. Um
halógeno é um elemento que possui um elétron na sua camada de valência, que forma íons
negativos imediatamente, como por exemplo: Flúor, Cloro, Bromo, Iodo e Astatínio. A lâmpada
halógena é compacta e possui saída elevada de fluxo luminoso.
Para Philips (2019), ela é ideal por:
a) possuir qualidade superior de luz com excelente reprodução de cor (Ra) = 100 Ω;
b) ser totalmente dimerizável para todos os níveis de brilho (0 - 100%);
c) possuir luz instantânea, sem tempo de aquecimento;
d) apresentar baixo custo de reposição graças à vida útil mais longa;
e) ter tamanho compacto e ser de fácil instalação;
f) apresentar um tempo de vida útil maior do que o das lâmpadas incandescentes.
Nesse trabalho utilizou-se uma lâmpada halógena de 12 V para realizar o aquecimento e
juntamente com o cooler promover a variação da temperatura ao longo do túnel de vento. Na
Figura 12 é exibido um exemplo de lâmpada halógena da marca OSRAM modelo K5618 12 V
10 W.
Figura 12 – Lâmpada halógena da marca OSRAM modelo K5618 12 V 10 W.
Fonte: Autoria própria.
40
3.6 Cooler
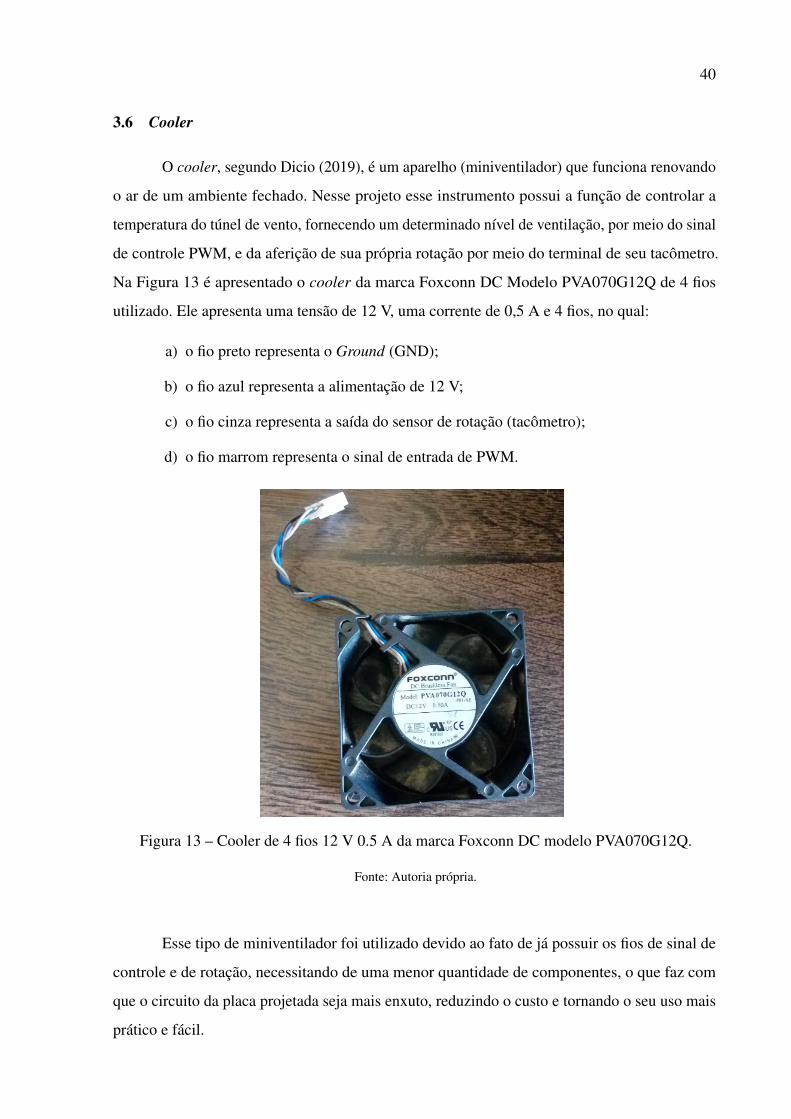
O cooler, segundo Dicio (2019), é um aparelho (miniventilador) que funciona renovando
o ar de um ambiente fechado. Nesse projeto esse instrumento possui a função de controlar a
temperatura do túnel de vento, fornecendo um determinado nível de ventilação, por meio do sinal
de controle PWM, e da aferição de sua própria rotação por meio do terminal de seu tacômetro.
Na Figura 13 é apresentado o cooler da marca Foxconn DC Modelo PVA070G12Q de 4 fios
utilizado. Ele apresenta uma tensão de 12 V, uma corrente de 0,5 A e 4 fios, no qual:
a) o fio preto representa o Ground (GND);
b) o fio azul representa a alimentação de 12 V;
c) o fio cinza representa a saída do sensor de rotação (tacômetro);
d) o fio marrom representa o sinal de entrada de PWM.
Figura 13 – Cooler de 4 fios 12 V 0.5 A da marca Foxconn DC modelo PVA070G12Q.
Fonte: Autoria própria.
Esse tipo de miniventilador foi utilizado devido ao fato de já possuir os fios de sinal de
controle e de rotação, necessitando de uma menor quantidade de componentes, o que faz com
que o circuito da placa projetada seja mais enxuto, reduzindo o custo e tornando o seu uso mais
prático e fácil.
41
3.7 Sensor de temperatura LM35
Segundo Silveira (2019), pode-se dizer, sucintamente, que um sensor é um dispositivo
que detecta e responde eficientemente a algumas entradas que "vêm"de um ambiente físico.
Alguns exemplos de entradas seriam: luz, calor, movimento, umidade, pressão ou qualquer
variável que seja possível detectar em um ambiente. Desse modo, quando um sensor recebe uma
determinada entrada do ambiente, ele gera uma saída, que costuma ser convertida e interpretada
por outros equipamentos eletrônicos como um CLP ou uma Interface Homem Máquina (IHM)
que consiga mostrar essa informação em um monitor, por exemplo. No ramo da automação
industrial, é bastante comum a interligação dos detectores nesses equipamentos, para a elaboração
de projetos, máquinas e aplicações, pois assim, pode-se fazer a leitura deste sinal e desenvolver
uma lógica de programação com o objetivo de controlar ou monitorar algo. Quando se fala em
sensores, é comum falar de transdutores, porque eles geralmente são utilizados em conjunto nos
processos de medição. O termo sensor significa "perceber"e o termo transdutor significa "levar a
frente".
O transdutor, para Junior e Sousa (2008, p. 99-100), é o módulo do sistema de medição
que está em contato com o mensurando (objeto ou grandeza de medição). Ele gera um sinal
de medição geralmente proporcional (mecânico, pneumático, elétrico ou outro) ao valor do
mensurando segundo uma função bem definida, normalmente linear, baseada em um ou mais
fenômenos físicos. Em termos gerais, um transdutor transforma um efeito físico noutro. Quando
ele é composto de vários módulos, várias transformações de efeitos podem estar presentes.
O primeiro módulo, aquele que entra em contato diretamente com o mensurando, é também
denominado de sensor. A rigor, o sensor é uma parte do transdutor. O sinal gerado pelo sen-
sor/transdutor normalmente é um sinal de baixa energia e difícil de ser diretamente indicado. A
Unidade de tratamento do sinal (UTS), além da amplificação da potência do sinal, pode assumir
funções de filtragem, compensação, integração, processamento etc. E às vezes, ela é chamada de
condicionador de sinais. Este módulo pode não estar presente em alguns sistemas de medição
mais simples.
Neste projeto, os quatro sensores de temperatura LM35 foram interligados à plataforma
Arduino Nano para a aferição da temperatura em alguns pontos ao longo do túnel de vento, devido
ao fato deles atenderem às especificações do projeto e de estarem disponíveis no Laboratório de
Controle e Automação (LABCAM) da UFOP.
42
O LM35 consiste em um sensor de precisão que gera uma saída de tensão linear propor-
cional à temperatura em que ele se encontra no momento, de forma que a sua saída seja um sinal
de 10 mV para cada 1 oC de temperatura. Esse sensor é exibido na Figura 14 (SILVEIRA, 2019).
Figura 14 – Exemplo de LM35.
Fonte: (SILVEIRA, 2019).
Não é necessário a realização de qualquer calibração externa para que o LM35 forneça
com exatidão, valores de temperatura com variações de 14
ou até mesmo 34
oC dentro da faixa
de temperatura entre -55 e 150 oC. Pode-se utilizá-lo de duas maneiras: com uma alimentação
simples ou simétrica, dependendo do objetivo desejado com o sinal de saída, mas independente
dessas maneiras, a saída continuará sendo de 10 mVoC (SILVEIRA, 2019).
De acordo com Silveira (2019), o sensor LM35 possui as seguintes especificações:
a) tensão de alimentação de 4-30 V;
b) escala linear de 10,0 mVoC ;
c) temperatura de trabalho no modo básico de 2 a 150 oC;
d) temperatura de trabalho em faixa completa de -55 a + 150 oC;
e) baixa impedância de saída.
3.8 Regulador de Tensão LM7805
De acordo com Alldatasheet (2005), a série LM78XX de reguladores com três terminais
positivos de tensão é fabricada com o encapsulamento TO-220, fazendo com que eles apresentem
várias saídas fixas de tensão, tornando-os úteis em várias aplicações. Cada tipo de regulador
utiliza limitador de corrente interno, desligamento térmico e proteção segura. Apesar de serem
projetados principalmente como reguladores de tensão, eles podem ser utilizados em conjunto
43
com outros componentes para obter tensões e correntes ajustáveis. Ele possui as seguintes
especificações:
a) para as tensões de saída de 5 a 18 e de 24 V, a tensão máxima de entrada é de 35 e 40
V, respectivamente;
b) tensões de saída de 5, 6, 8, 9, 12, 15, 18 e 24 V;
c) corrente de saída de até 1 A;
d) embora a sua tensão típica de saída seja de 5 V, ele pode apresentar tensões mínima e
máxima de 4.75 V e 5.25 V, respectivamente;
e) proteção térmica contra sobrecarga;
f) proteção contra curto-circuito.
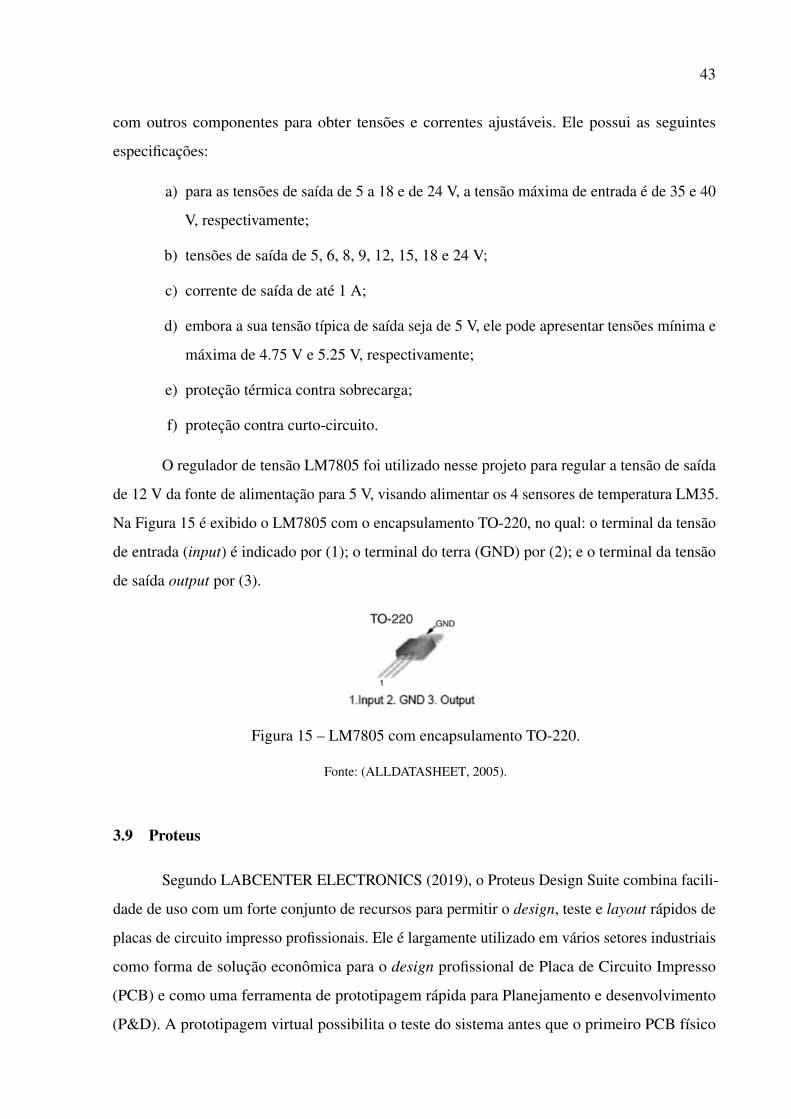
O regulador de tensão LM7805 foi utilizado nesse projeto para regular a tensão de saída
de 12 V da fonte de alimentação para 5 V, visando alimentar os 4 sensores de temperatura LM35.
Na Figura 15 é exibido o LM7805 com o encapsulamento TO-220, no qual: o terminal da tensão
de entrada (input) é indicado por (1); o terminal do terra (GND) por (2); e o terminal da tensão
de saída output por (3).
Figura 15 – LM7805 com encapsulamento TO-220.
Fonte: (ALLDATASHEET, 2005).
3.9 Proteus
Segundo LABCENTER ELECTRONICS (2019), o Proteus Design Suite combina facili-
dade de uso com um forte conjunto de recursos para permitir o design, teste e layout rápidos de
placas de circuito impresso profissionais. Ele é largamente utilizado em vários setores industriais
como forma de solução econômica para o design profissional de Placa de Circuito Impresso
(PCB) e como uma ferramenta de prototipagem rápida para Planejamento e desenvolvimento
(P&D). A prototipagem virtual possibilita o teste do sistema antes que o primeiro PCB físico
44
seja solicitado. O Proteus também é encontrado em escolas de ensino médio, faculdades e univer-
sidades de todo o mundo, por meio do ensino de eletrônica, design incorporado e layout de PCB
para dezenas de milhares de estudantes a cada ano. A simulação de circuito oferece aos alunos
uma ferramenta de praticidade no aprendizado, que ocorre de forma rápida e divertida. Ele é
uma solução de software que possibilita que os instrutores preparem e reutilizem os laboratórios
virtuais e o seu licenciamento flexível faz com que as aulas e tarefas possam ser concluídas em
qualquer local.
3.10 Visual Studio
O Visual Studio é uma plataforma de desenvolvimento que pode ser utilizada na criação
de sistemas supervisórios na linguagem C#, que consistem em interfaces utilizadas no moni-
toramento e controle das variáveis ao longo do tempo de algum determinado processo como:
temperatura, pressão, tensão, volume etc. Esse acompanhamento é feito muitas vezes sem a
interferência física do ser humano no processo e pode ser feita remotamente no ambiente ou fora
dele, fazendo com que seja possível um controle melhor, mais rápido, eficiente e amigável aos
usuários. O monitoramento feito pelo usuário da parte física (sensor de temperatura, miniventila-
dor etc.), neste projeto, foi feito por meio da plataforma Visual Studio versão 2015 devido à sua
interface, que permite a criação de gráficos e legendas que exibem e monitoram o comportamento
das variáveis envolvidas no controle de temperatura do túnel de vento. O supervisório do túnel
de vento visou o controle e o ajuste da temperatura interna de acordo com as especificações
desejadas pelo usuário. Ele também foi utilizado para se comunicar com o Arduino por meio da
comunicação serial, possibilitando o envio e a recepção de dados entre eles. O Visual Studio
é baseado na programação orientada a objetos, algo que torna a programação bem sigilosa e
com a “cara” do programador. Uma de suas grandes vantagens é a sua compatibilidade com o
sistema operacional do Windows, além de ser um software que possui versões constantemente
atualizadas, o que significa que não foi abandonado pelos usuários. De acordo com VISUAL
STUDIO (2019), essa plataforma também pode ser utilizada no desenvolvimento de aplicativos
para Android, iOS, Mac, Windows, web e nuvem. Ele possibilita que o usuário escreva o seu
código rapidamente, depure e faça o diagnóstico com facilidade, teste com frequência, estenda
e personalize de acordo com as suas especificações e colabore com eficiência nos programas
desenvolvidos.
45
3.11 Tipos de Comunicação
Segundo Reimbold, Rasia e Weber (2000), um dos maiores desafios do homem desde a
invenção das máquinas é fazê-las comunicarem entre si e para isso foram desenvolvidos dois
tipos de comunicação: a paralela e a serial.
3.11.1 Comunicação paralela
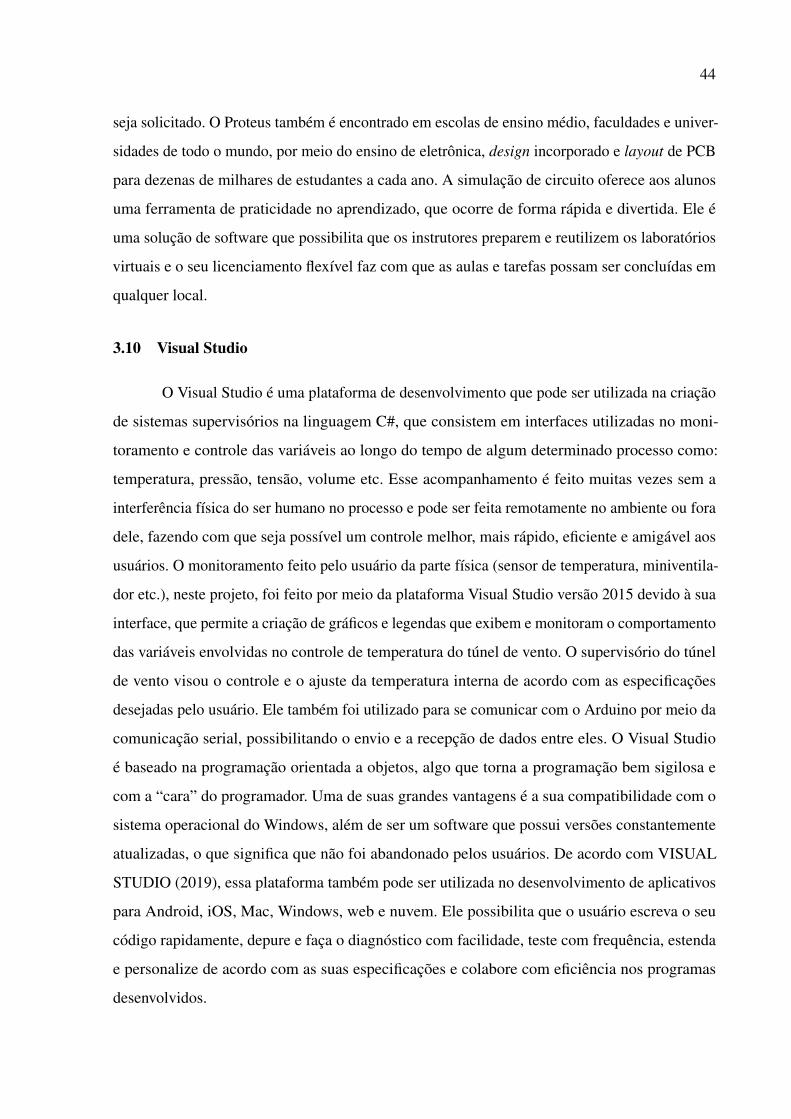
A comunicação paralela funciona por meio da transferência simultânea de todos os bits
que compõem o Byte. Esse método de transmissão e recepção de dados é utilizado nas ligações
internas dos computadores e entre o computador e os periféricos bem próximos. Na Figura 16 é
apresentado o esquema da comunicação paralela (REIMBOLD; RASIA; WEBER, 2000).
Figura 16 – Comunicação paralela.
Fonte: (REIMBOLD; RASIA; WEBER, 2000).
Para Reimbold, Rasia e Weber (2000), em 1994, a aliança Network Printer Alliance
(NPA) criou uma norma, em resposta a um convite da Institute of Electrical and Electronic
Engineers (IEEE), denominada de IEEE-1284 para estabelecer os padrões da comunicação
paralela. Nessa norma foi definido que as novas portas deveriam ser compatíveis em hardware e
software com os periféricos já existentes e deveriam comunicar dados na velocidade de 1 Mbyte/s.
Nela foram criados cinco métodos de comunicação paralela que são: o modo compatível ou
modo Centronics; o Nibble; o Byte; o Enhanced Parallel Port (EPP); e o Extended Capabilities
Mode (ECP). O modo compatível é capaz de enviar os dados somente em uma direção e numa
determinada velocidade. No modo Nibble, é possível receber dados de 4 bits. Já no modo Byte
é possível receber dados desde que a porta seja bidirecional (envia e recebe dados ao mesmo
tempo). Os modos Centronics e Byte permitem a comunicação bidirecional quando utilizados
em conjunto, considerando que o hardware da porta seja compatível com o modo Byte. Nos
46
modos EPP e ECP a comunicação é bidirecional e ambos necessitam de um hardware adicional,
o que dificulta a sua compatibilidade com os modos Centronics e Byte.
A porta paralela original apresenta 17 linhas de sinal e 8 linhas ligadas à massa do
computador. As linhas do sinal são subdivididas em 8 linhas de dados, 5 linhas de estado
e 4 linhas de controle, que permitem o fluxo de informação no sentido do computador para
o periférico conforme cada registrador seja comandado por software (REIMBOLD; RASIA;
WEBER, 2000).
3.11.2 Comunicação serial
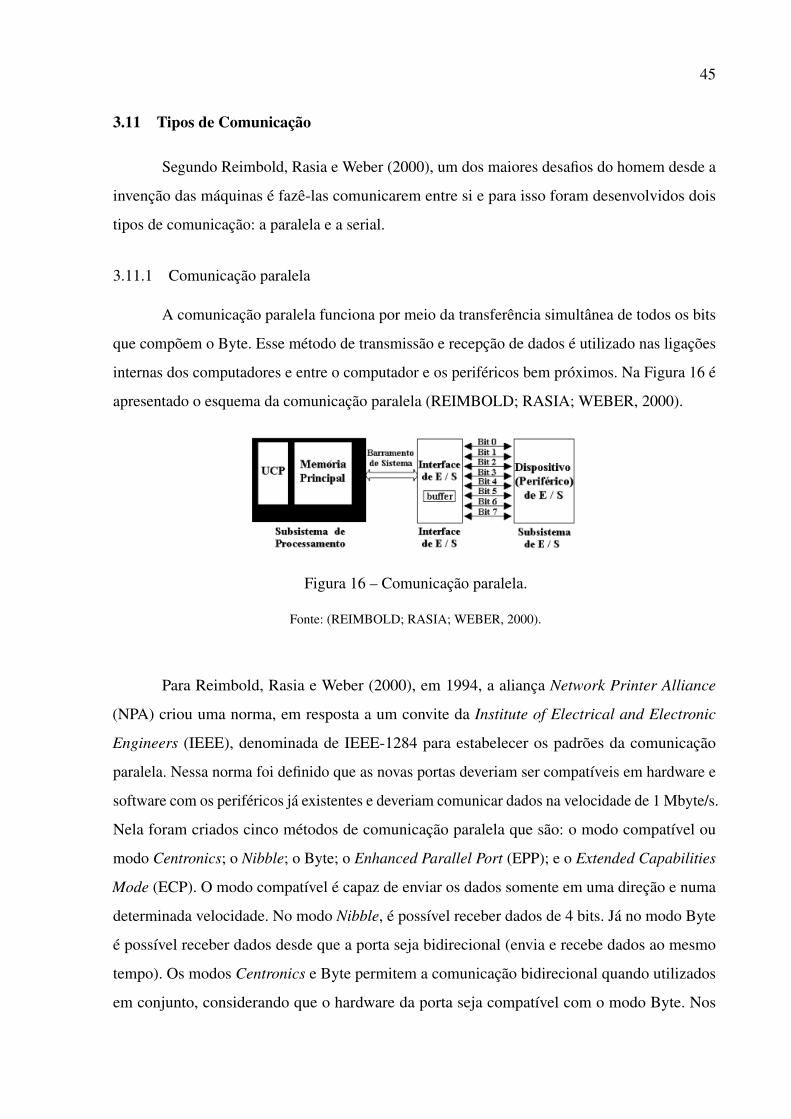
Na comunicação serial ocorre a transferência não simultânea dos bits que compõem
o byte, ou seja, um bit é transmitido depois do outro. Utiliza-se este modo de comunicação
nas ligações entre periféricos que se encontram em longas distâncias um do outro, ou que não
necessitem de uma velocidade muito alta de transmissão e recepção dos dados. Na Figura 17 é
exibido o esquema da comunicação serial (REIMBOLD; RASIA; WEBER, 2000).
Figura 17 – Comunicação serial.
Fonte: (REIMBOLD; RASIA; WEBER, 2000).
Existem três modos de comunicação serial: o Simplex, o Half-Duplex e o Full-duplex. O
método simplex funciona com apenas um dispositivo transmitindo e outro somente recebendo os
dados. No modo half-duplex ou semiduplex ocorre a recepção e transmissão de dados, mas não
simultaneamente. Já no caso do full-duplex ou duplex, é possível enviar e receber os dados ao
mesmo tempo (REIMBOLD; RASIA; WEBER, 2000).
Na serial existem dois ritmos de comunicação, que são os ritmos de transmissão: síncrono
e o assíncrono. No síncrono ocorre a necessidade de um sincronismo entre os dois sistemas
de comunicação. Esse sincronismo é produzido por um conjunto de bits, denominados de bits
de sincronismo, que quando recebidos pelo elemento receptor, regulam seu clock interno a fim
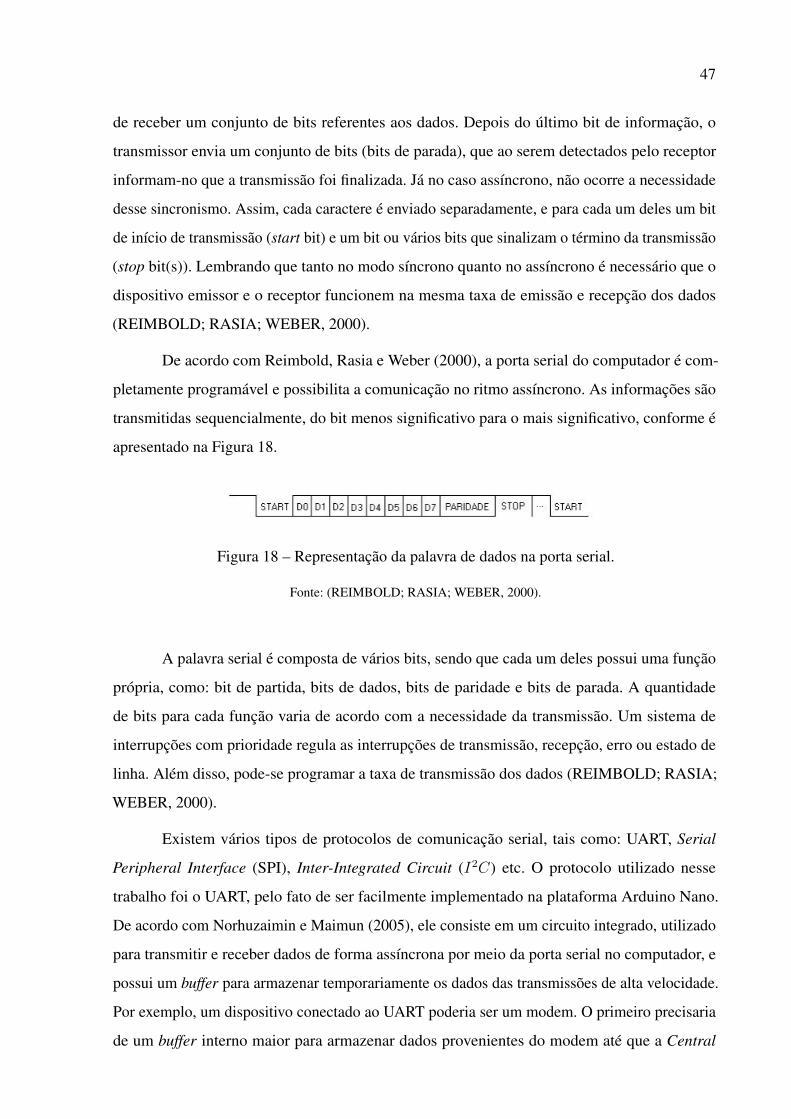
47
de receber um conjunto de bits referentes aos dados. Depois do último bit de informação, o
transmissor envia um conjunto de bits (bits de parada), que ao serem detectados pelo receptor
informam-no que a transmissão foi finalizada. Já no caso assíncrono, não ocorre a necessidade
desse sincronismo. Assim, cada caractere é enviado separadamente, e para cada um deles um bit
de início de transmissão (start bit) e um bit ou vários bits que sinalizam o término da transmissão
(stop bit(s)). Lembrando que tanto no modo síncrono quanto no assíncrono é necessário que o
dispositivo emissor e o receptor funcionem na mesma taxa de emissão e recepção dos dados
(REIMBOLD; RASIA; WEBER, 2000).
De acordo com Reimbold, Rasia e Weber (2000), a porta serial do computador é com-
pletamente programável e possibilita a comunicação no ritmo assíncrono. As informações são
transmitidas sequencialmente, do bit menos significativo para o mais significativo, conforme é
apresentado na Figura 18.
Figura 18 – Representação da palavra de dados na porta serial.
Fonte: (REIMBOLD; RASIA; WEBER, 2000).
A palavra serial é composta de vários bits, sendo que cada um deles possui uma função
própria, como: bit de partida, bits de dados, bits de paridade e bits de parada. A quantidade
de bits para cada função varia de acordo com a necessidade da transmissão. Um sistema de
interrupções com prioridade regula as interrupções de transmissão, recepção, erro ou estado de
linha. Além disso, pode-se programar a taxa de transmissão dos dados (REIMBOLD; RASIA;
WEBER, 2000).
Existem vários tipos de protocolos de comunicação serial, tais como: UART, Serial
Peripheral Interface (SPI), Inter-Integrated Circuit (I2C) etc. O protocolo utilizado nesse
trabalho foi o UART, pelo fato de ser facilmente implementado na plataforma Arduino Nano.
De acordo com Norhuzaimin e Maimun (2005), ele consiste em um circuito integrado, utilizado
para transmitir e receber dados de forma assíncrona por meio da porta serial no computador, e
possui um buffer para armazenar temporariamente os dados das transmissões de alta velocidade.
Por exemplo, um dispositivo conectado ao UART poderia ser um modem. O primeiro precisaria
de um buffer interno maior para armazenar dados provenientes do modem até que a Central
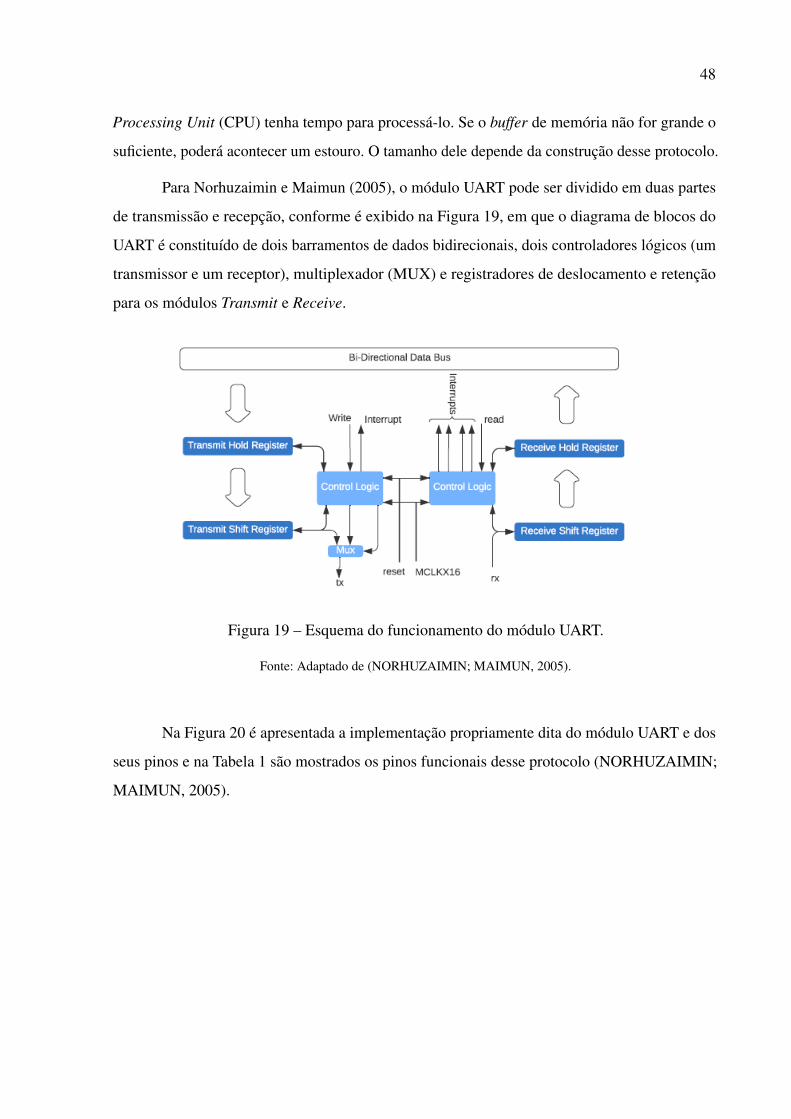
48
Processing Unit (CPU) tenha tempo para processá-lo. Se o buffer de memória não for grande o
suficiente, poderá acontecer um estouro. O tamanho dele depende da construção desse protocolo.
Para Norhuzaimin e Maimun (2005), o módulo UART pode ser dividido em duas partes
de transmissão e recepção, conforme é exibido na Figura 19, em que o diagrama de blocos do
UART é constituído de dois barramentos de dados bidirecionais, dois controladores lógicos (um
transmissor e um receptor), multiplexador (MUX) e registradores de deslocamento e retenção
para os módulos Transmit e Receive.
Figura 19 – Esquema do funcionamento do módulo UART.
Fonte: Adaptado de (NORHUZAIMIN; MAIMUN, 2005).
Na Figura 20 é apresentada a implementação propriamente dita do módulo UART e dos
seus pinos e na Tabela 1 são mostrados os pinos funcionais desse protocolo (NORHUZAIMIN;
MAIMUN, 2005).
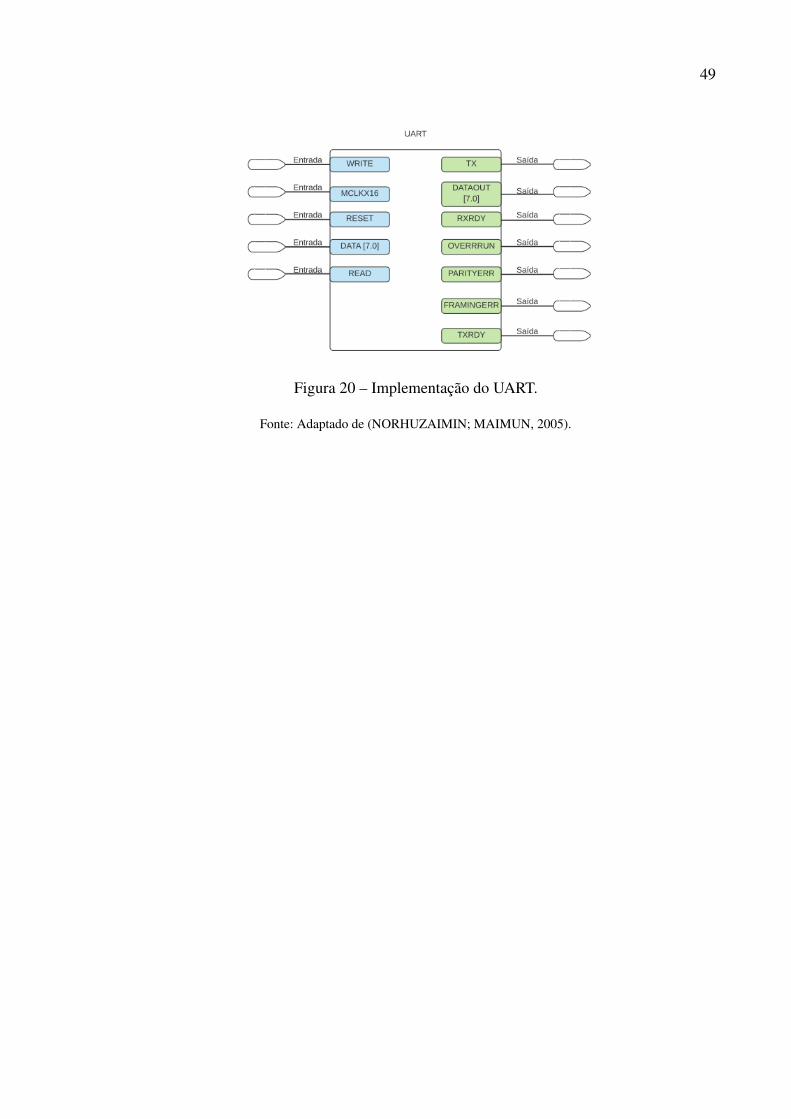
49
Figura 20 – Implementação do UART.
Fonte: Adaptado de (NORHUZAIMIN; MAIMUN, 2005).
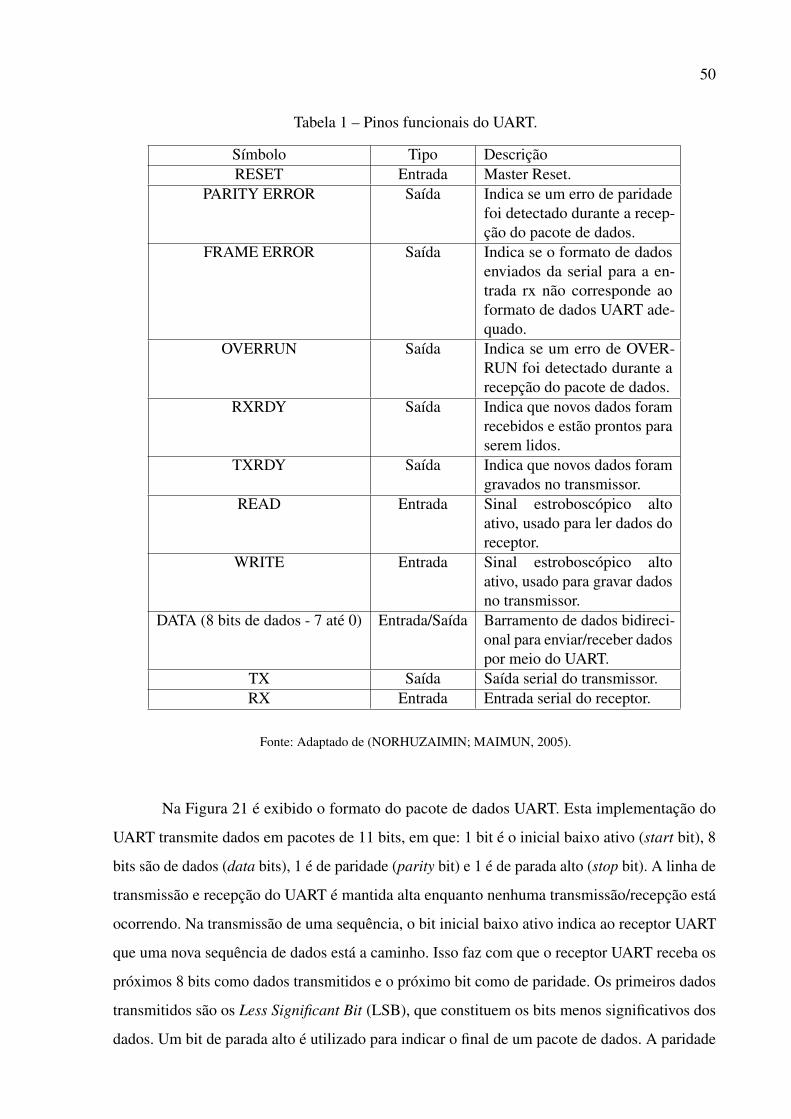
50
Tabela 1 – Pinos funcionais do UART.
Símbolo Tipo DescriçãoRESET Entrada Master Reset.
PARITY ERROR Saída Indica se um erro de paridadefoi detectado durante a recep-ção do pacote de dados.
FRAME ERROR Saída Indica se o formato de dadosenviados da serial para a en-trada rx não corresponde aoformato de dados UART ade-quado.
OVERRUN Saída Indica se um erro de OVER-RUN foi detectado durante arecepção do pacote de dados.
RXRDY Saída Indica que novos dados foramrecebidos e estão prontos paraserem lidos.
TXRDY Saída Indica que novos dados foramgravados no transmissor.
READ Entrada Sinal estroboscópico altoativo, usado para ler dados doreceptor.
WRITE Entrada Sinal estroboscópico altoativo, usado para gravar dadosno transmissor.
DATA (8 bits de dados - 7 até 0) Entrada/Saída Barramento de dados bidireci-onal para enviar/receber dadospor meio do UART.
TX Saída Saída serial do transmissor.RX Entrada Entrada serial do receptor.
Fonte: Adaptado de (NORHUZAIMIN; MAIMUN, 2005).
Na Figura 21 é exibido o formato do pacote de dados UART. Esta implementação do
UART transmite dados em pacotes de 11 bits, em que: 1 bit é o inicial baixo ativo (start bit), 8
bits são de dados (data bits), 1 é de paridade (parity bit) e 1 é de parada alto (stop bit). A linha de
transmissão e recepção do UART é mantida alta enquanto nenhuma transmissão/recepção está
ocorrendo. Na transmissão de uma sequência, o bit inicial baixo ativo indica ao receptor UART
que uma nova sequência de dados está a caminho. Isso faz com que o receptor UART receba os
próximos 8 bits como dados transmitidos e o próximo bit como de paridade. Os primeiros dados
transmitidos são os Less Significant Bit (LSB), que constituem os bits menos significativos dos
dados. Um bit de parada alto é utilizado para indicar o final de um pacote de dados. A paridade
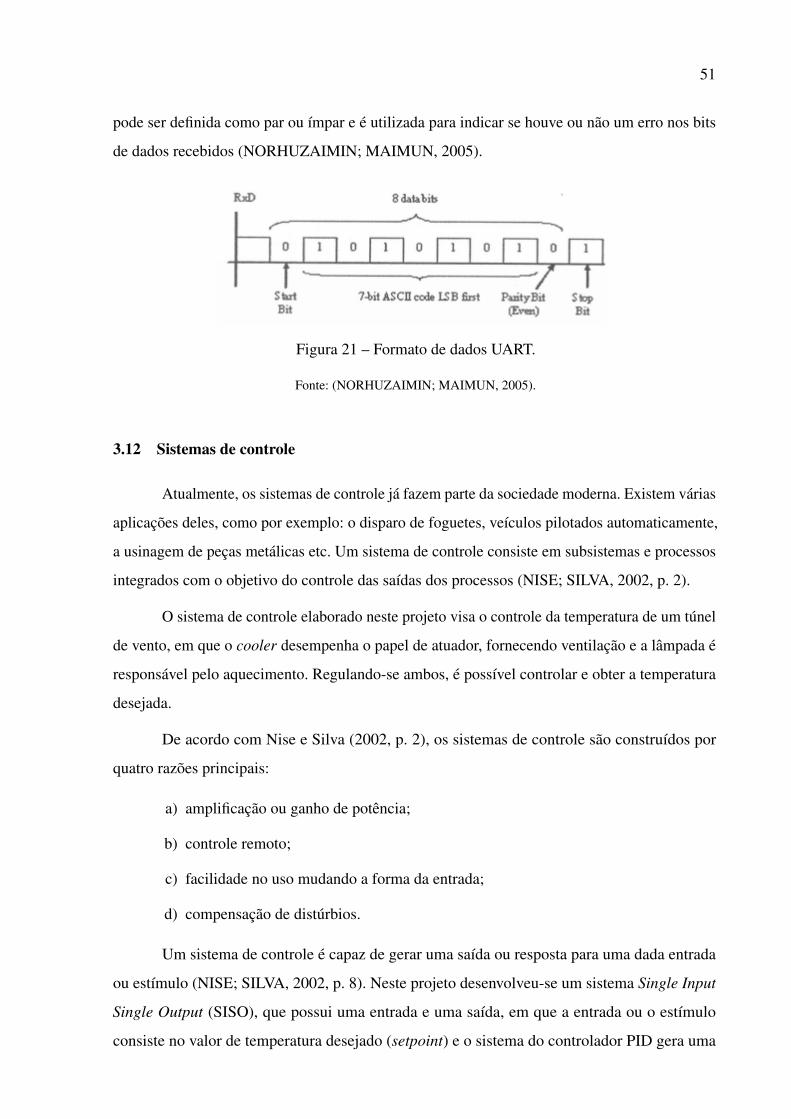
51
pode ser definida como par ou ímpar e é utilizada para indicar se houve ou não um erro nos bits
de dados recebidos (NORHUZAIMIN; MAIMUN, 2005).
Figura 21 – Formato de dados UART.
Fonte: (NORHUZAIMIN; MAIMUN, 2005).
3.12 Sistemas de controle
Atualmente, os sistemas de controle já fazem parte da sociedade moderna. Existem várias
aplicações deles, como por exemplo: o disparo de foguetes, veículos pilotados automaticamente,
a usinagem de peças metálicas etc. Um sistema de controle consiste em subsistemas e processos
integrados com o objetivo do controle das saídas dos processos (NISE; SILVA, 2002, p. 2).
O sistema de controle elaborado neste projeto visa o controle da temperatura de um túnel
de vento, em que o cooler desempenha o papel de atuador, fornecendo ventilação e a lâmpada é
responsável pelo aquecimento. Regulando-se ambos, é possível controlar e obter a temperatura
desejada.
De acordo com Nise e Silva (2002, p. 2), os sistemas de controle são construídos por
quatro razões principais:
a) amplificação ou ganho de potência;
b) controle remoto;
c) facilidade no uso mudando a forma da entrada;
d) compensação de distúrbios.
Um sistema de controle é capaz de gerar uma saída ou resposta para uma dada entrada
ou estímulo (NISE; SILVA, 2002, p. 8). Neste projeto desenvolveu-se um sistema Single Input
Single Output (SISO), que possui uma entrada e uma saída, em que a entrada ou o estímulo
consiste no valor de temperatura desejado (setpoint) e o sistema do controlador PID gera uma
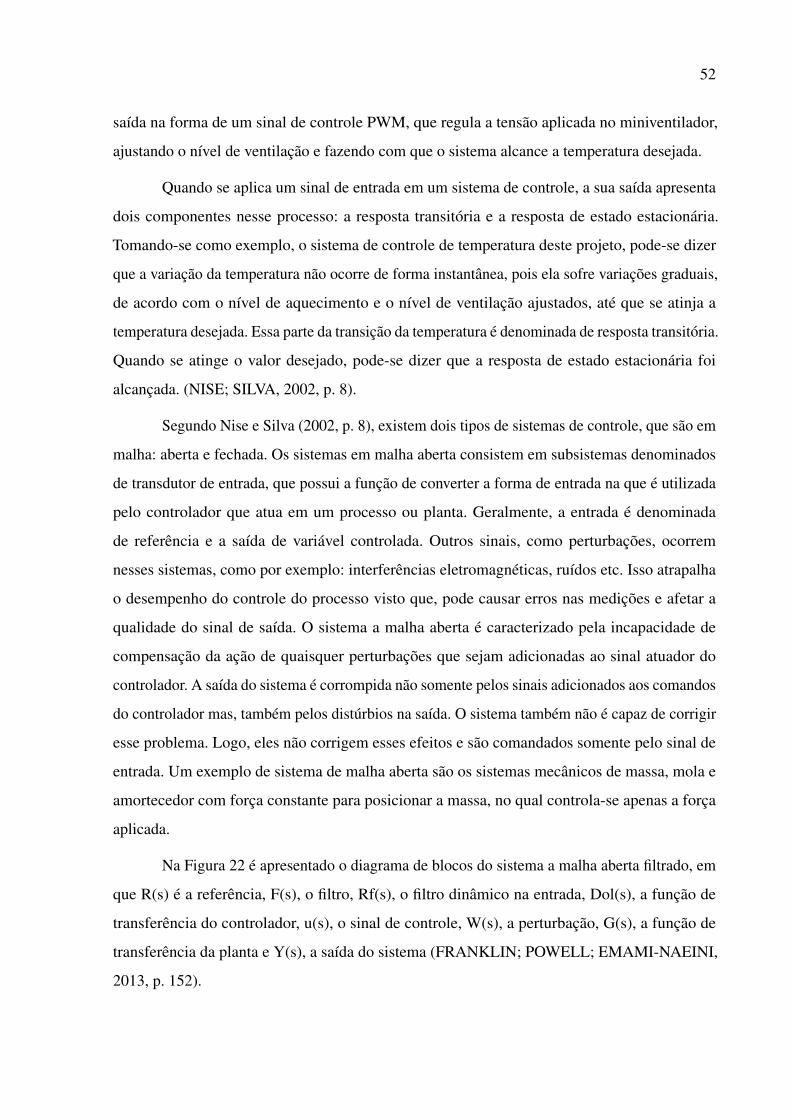
52
saída na forma de um sinal de controle PWM, que regula a tensão aplicada no miniventilador,
ajustando o nível de ventilação e fazendo com que o sistema alcance a temperatura desejada.
Quando se aplica um sinal de entrada em um sistema de controle, a sua saída apresenta
dois componentes nesse processo: a resposta transitória e a resposta de estado estacionária.
Tomando-se como exemplo, o sistema de controle de temperatura deste projeto, pode-se dizer
que a variação da temperatura não ocorre de forma instantânea, pois ela sofre variações graduais,
de acordo com o nível de aquecimento e o nível de ventilação ajustados, até que se atinja a
temperatura desejada. Essa parte da transição da temperatura é denominada de resposta transitória.
Quando se atinge o valor desejado, pode-se dizer que a resposta de estado estacionária foi
alcançada. (NISE; SILVA, 2002, p. 8).
Segundo Nise e Silva (2002, p. 8), existem dois tipos de sistemas de controle, que são em
malha: aberta e fechada. Os sistemas em malha aberta consistem em subsistemas denominados
de transdutor de entrada, que possui a função de converter a forma de entrada na que é utilizada
pelo controlador que atua em um processo ou planta. Geralmente, a entrada é denominada
de referência e a saída de variável controlada. Outros sinais, como perturbações, ocorrem
nesses sistemas, como por exemplo: interferências eletromagnéticas, ruídos etc. Isso atrapalha
o desempenho do controle do processo visto que, pode causar erros nas medições e afetar a
qualidade do sinal de saída. O sistema a malha aberta é caracterizado pela incapacidade de
compensação da ação de quaisquer perturbações que sejam adicionadas ao sinal atuador do
controlador. A saída do sistema é corrompida não somente pelos sinais adicionados aos comandos
do controlador mas, também pelos distúrbios na saída. O sistema também não é capaz de corrigir
esse problema. Logo, eles não corrigem esses efeitos e são comandados somente pelo sinal de
entrada. Um exemplo de sistema de malha aberta são os sistemas mecânicos de massa, mola e
amortecedor com força constante para posicionar a massa, no qual controla-se apenas a força
aplicada.
Na Figura 22 é apresentado o diagrama de blocos do sistema a malha aberta filtrado, em
que R(s) é a referência, F(s), o filtro, Rf(s), o filtro dinâmico na entrada, Dol(s), a função de
transferência do controlador, u(s), o sinal de controle, W(s), a perturbação, G(s), a função de
transferência da planta e Y(s), a saída do sistema (FRANKLIN; POWELL; EMAMI-NAEINI,
2013, p. 152).
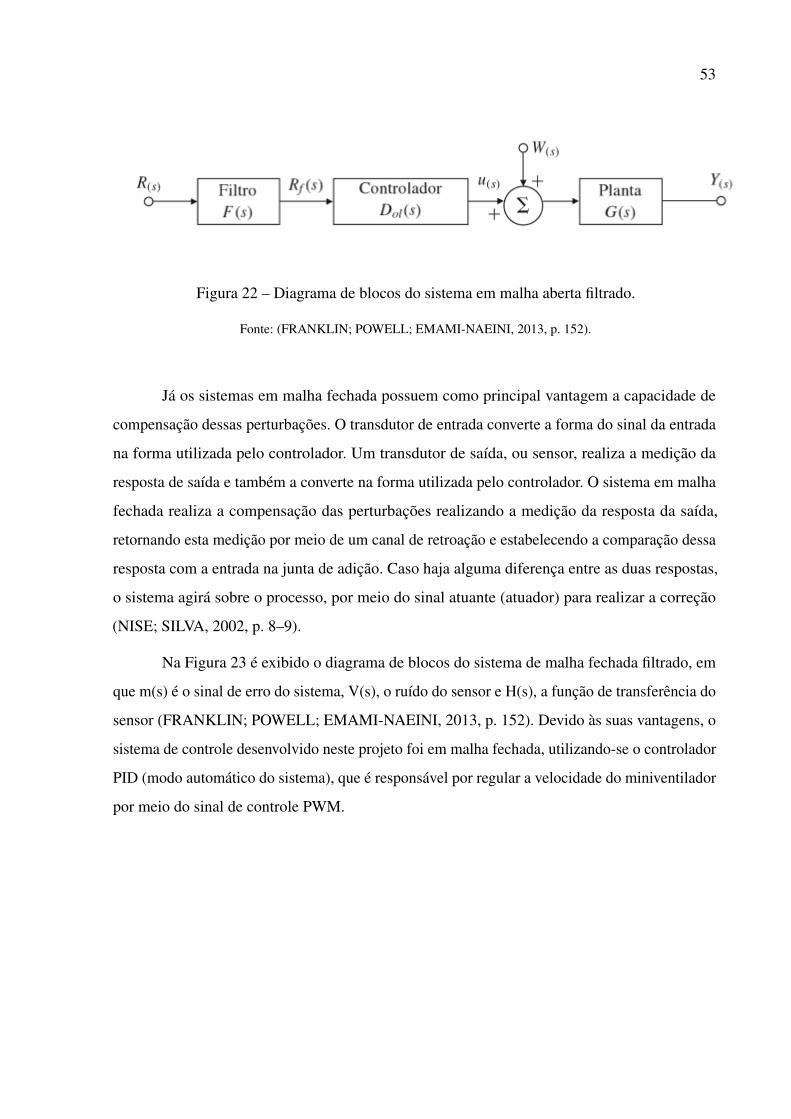
53
Figura 22 – Diagrama de blocos do sistema em malha aberta filtrado.
Fonte: (FRANKLIN; POWELL; EMAMI-NAEINI, 2013, p. 152).
Já os sistemas em malha fechada possuem como principal vantagem a capacidade de
compensação dessas perturbações. O transdutor de entrada converte a forma do sinal da entrada
na forma utilizada pelo controlador. Um transdutor de saída, ou sensor, realiza a medição da
resposta de saída e também a converte na forma utilizada pelo controlador. O sistema em malha
fechada realiza a compensação das perturbações realizando a medição da resposta da saída,
retornando esta medição por meio de um canal de retroação e estabelecendo a comparação dessa
resposta com a entrada na junta de adição. Caso haja alguma diferença entre as duas respostas,
o sistema agirá sobre o processo, por meio do sinal atuante (atuador) para realizar a correção
(NISE; SILVA, 2002, p. 8–9).
Na Figura 23 é exibido o diagrama de blocos do sistema de malha fechada filtrado, em
que m(s) é o sinal de erro do sistema, V(s), o ruído do sensor e H(s), a função de transferência do
sensor (FRANKLIN; POWELL; EMAMI-NAEINI, 2013, p. 152). Devido às suas vantagens, o
sistema de controle desenvolvido neste projeto foi em malha fechada, utilizando-se o controlador
PID (modo automático do sistema), que é responsável por regular a velocidade do miniventilador
por meio do sinal de controle PWM.
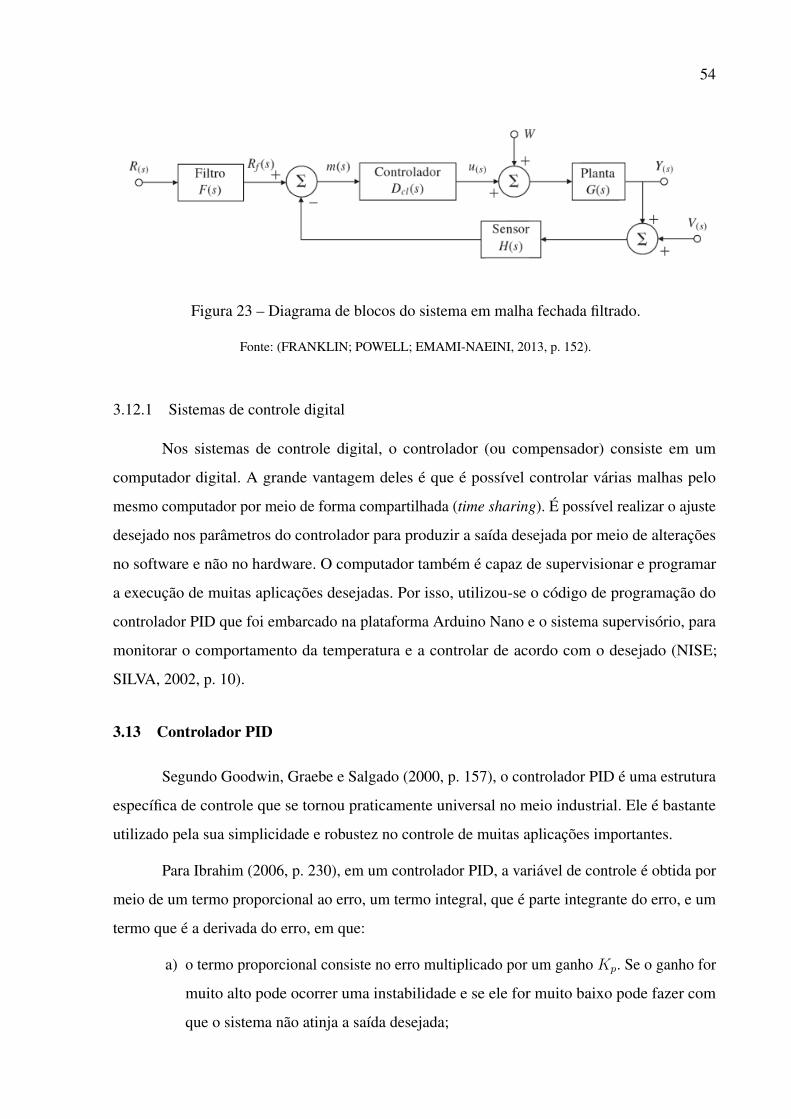
54
Figura 23 – Diagrama de blocos do sistema em malha fechada filtrado.
Fonte: (FRANKLIN; POWELL; EMAMI-NAEINI, 2013, p. 152).
3.12.1 Sistemas de controle digital
Nos sistemas de controle digital, o controlador (ou compensador) consiste em um
computador digital. A grande vantagem deles é que é possível controlar várias malhas pelo
mesmo computador por meio de forma compartilhada (time sharing). É possível realizar o ajuste
desejado nos parâmetros do controlador para produzir a saída desejada por meio de alterações
no software e não no hardware. O computador também é capaz de supervisionar e programar
a execução de muitas aplicações desejadas. Por isso, utilizou-se o código de programação do
controlador PID que foi embarcado na plataforma Arduino Nano e o sistema supervisório, para
monitorar o comportamento da temperatura e a controlar de acordo com o desejado (NISE;
SILVA, 2002, p. 10).
3.13 Controlador PID
Segundo Goodwin, Graebe e Salgado (2000, p. 157), o controlador PID é uma estrutura
específica de controle que se tornou praticamente universal no meio industrial. Ele é bastante
utilizado pela sua simplicidade e robustez no controle de muitas aplicações importantes.
Para Ibrahim (2006, p. 230), em um controlador PID, a variável de controle é obtida por
meio de um termo proporcional ao erro, um termo integral, que é parte integrante do erro, e um
termo que é a derivada do erro, em que:
a) o termo proporcional consiste no erro multiplicado por um ganho Kp. Se o ganho for
muito alto pode ocorrer uma instabilidade e se ele for muito baixo pode fazer com
que o sistema não atinja a saída desejada;

55
b) o termo integral consiste na integral do erro que é multiplicada por um ganho Ki.
Esse ganho pode ser regulado para zerar o erro em regime permanente. Se ele for
muito alto podem ocorrer oscilações e se for muito baixo pode resultar em uma
resposta lenta;
c) o termo derivativo é a derivada do erro multiplicada pelo ganho Kd. Novamente, se o
ganho apresentar um valor muito alto, o sistema pode oscilar e, se o ganho for muito
baixo, a resposta obtida pode ser lenta.
Na Figura 24 é apresentado o diagrama de blocos do controlador PID de tempo contínuo,
em que E representa o seu sinal de entrada e U o de saída (IBRAHIM, 2006, p. 230–231).
Figura 24 – Controlador PID de sistema de tempo contínuo.
Fonte: (IBRAHIM, 2006, p. 231).
Ajustar o controlador significa regular os parâmetros Kp, Ki e Kd com o objetivo de se
obter uma resposta satisfatória. A relação entre a entrada e a saída do controlador PID pode ser
descrita pela Equação 3.1 (IBRAHIM, 2006, p. 231):
u(t) = Kp
[e(t) +
1
Ti
∫ t
0
e(t)dt+ Tdde(t)
dt
], (3.1)
em que u(t) é a saída do controlador, e(t), o sinal de erro da planta (e(t) = r(t) - y(t), sendo
que r(t) é o setpoint desejado (entrada de referência) e y(t) é a saída da planta), Kp, o ganho
proporcional, Ti, o tempo integral e Td, o tempo derivativo (IBRAHIM, 2006, p. 231–232).
Segundo Ibrahim (2006, p. 232), a Equação 3.1 pode ser reescrita como a Equação 3.2:

56
u(t) = Kpe(t) +Ki
∫ t
0
e(t)dt+Kdde(t)
dt, (3.2)
na qual o ganho integral Ki e o ganho derivativo Kd são obtidos por meio das Equações 3.3 e
3.4:
Ki =Kp
Ti; (3.3)
Kd = KpTd. (3.4)
Aplicando-se a transformada de Laplace na Equação 3.1, tem-se a função de transferência
do controlador PID (IBRAHIM, 2006, p. 232):
U(s)
E(s)= Kp +
Kp
Tis+KpTds. (3.5)
Como o objetivo deste trabalho é a implementação de um controlador PI, para encontrar
a sua equação de transferência, descrita pela Equação 3.6, basta considerar Td = 0, pois o PI não
possui o ganho derivativo, o que implica na nulidade do mesmo, ou seja:
U(s)
E(s)= Kp +
Kp
Tis. (3.6)
Para implementar o controlador PID utilizando um computador digital, é necessário
a conversão da Equação 3.1 da representação contínua para a representação discreta. Para
isso, podem-se utilizar vários métodos, sendo que o mais simples é o método da aproximação
trapezoidal para a integral do erro e para a diferença retroativa da derivada da Equação 3.1,
representadas pelas Equações 3.7 e 3.8 (IBRAHIM, 2006, p. 232) (adaptado):
∫ t
0
e(t)dt ≈n∑k=1
He(kH); (3.7)
de(t)
dt≈ e(kH) − e(kH −H)
H. (3.8)
em que, H é o período de amostragem, em segundos.
Com as aproximações é possível encontrar a saída do controlador discretizada, como é
mostrado na Equação 3.9 (IBRAHIM, 2006, p. 232) (adaptado):

57
u(kH) = Kp
[e(kH) + Td
e(kH) − e(kH −H)
H+H
Ti
n∑k=1
e(kH)
]. (3.9)
A fórmula do controlador PID dada pela Equação 3.9 está pronta para ser implementada
em um computador digital. Pode-se observar que a cada tempo de amostragem uma nova ação
de controle é implementada. A forma discreta do controlador também pode ser dada por meio da
transformada Z do item 3.5, por meio da Equação 3.10 (IBRAHIM, 2006, p. 232) (adaptado):
U(z)
E(z)= Kp
[1 +
H
Ti(1 − z−1)+ Td
(1 − z−1)
H]
]. (3.10)
Expandindo a Equação 3.10, obtêm-se o modelo discreto final do controlador PID, dado
pelo item 3.11 (IBRAHIM, 2006, p. 232) (adaptado):
u(kH) = u(kH −H) +Kp [ e(kH) − e(kH −H)]
+KpH
Tie(kH) +
KpTdTi
[ e(kH) − 2e(kH −H) − e(kH − 2H)] .(3.11)
De acordo com Callai, Coelho e Coelho (2007), o controlador PI já é suficiente nos
processos típicos de controle de variáveis como: fluxo, nível etc. Fazendo novamente Td = 0,
pode-se obter o modelo discreto final do controlador PI, descrito pela Equação 3.12:
u(kH) = u(kH −H) +Kp[e(kH) − e(kH −H)] +KpH
Tie(kH). (3.12)
3.14 Identificação de sistemas
De acordo com Aguirre (2007, p. 36), a necessidade do estudo de técnicas de identificação
de sistemas surge do frequente desconhecimento das equações que descrevem o funcionamento
de um sistema, ou do fato de que elas são conhecidas, porém inviáveis, por limitação de tempo e
recursos, o que dificulta levantar tais equações e estimar os seus parâmetros.
Existem várias formas de classificação de técnicas de modelagem. Uma delas classifica
os métodos em três grupos que são: modelagem caixa branca; caixa preta; e caixa cinza. Na
modelagem caixa branca necessita-se de conhecer bem o sistema em estudo, assim como as
leis físicas que o descrevem. Por isso, essa modelagem também é conhecida como modelagem
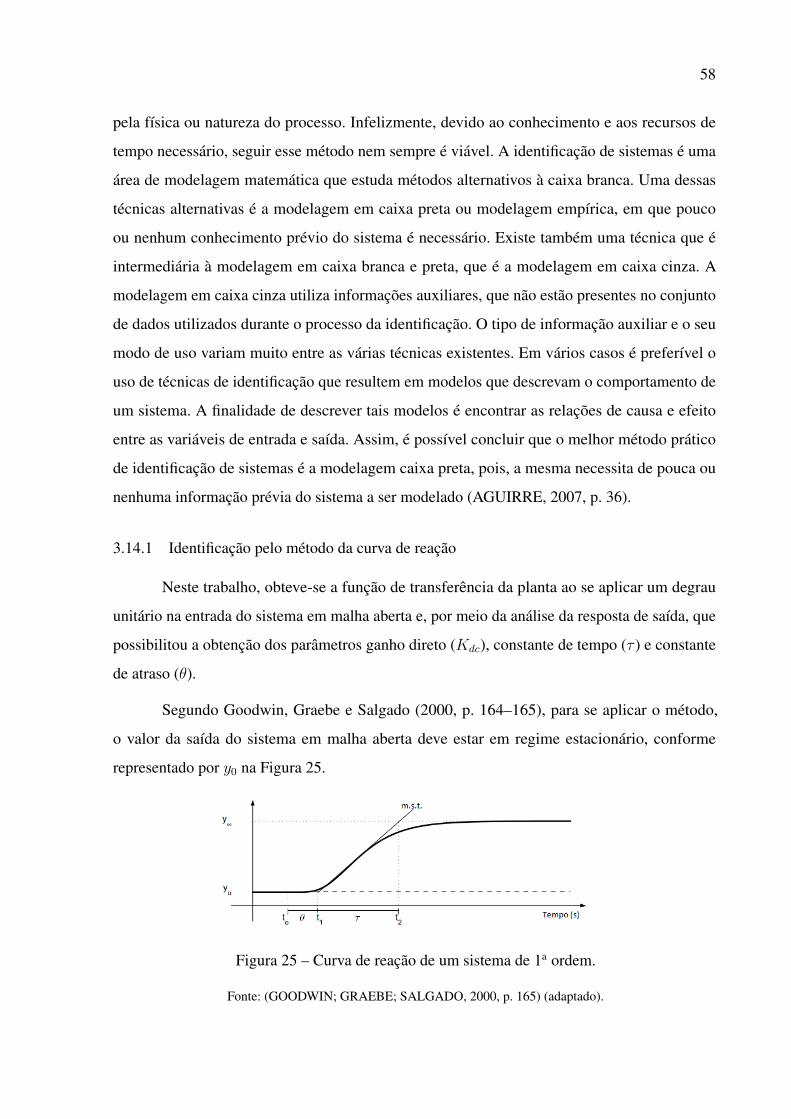
58
pela física ou natureza do processo. Infelizmente, devido ao conhecimento e aos recursos de
tempo necessário, seguir esse método nem sempre é viável. A identificação de sistemas é uma
área de modelagem matemática que estuda métodos alternativos à caixa branca. Uma dessas
técnicas alternativas é a modelagem em caixa preta ou modelagem empírica, em que pouco
ou nenhum conhecimento prévio do sistema é necessário. Existe também uma técnica que é
intermediária à modelagem em caixa branca e preta, que é a modelagem em caixa cinza. A
modelagem em caixa cinza utiliza informações auxiliares, que não estão presentes no conjunto
de dados utilizados durante o processo da identificação. O tipo de informação auxiliar e o seu
modo de uso variam muito entre as várias técnicas existentes. Em vários casos é preferível o
uso de técnicas de identificação que resultem em modelos que descrevam o comportamento de
um sistema. A finalidade de descrever tais modelos é encontrar as relações de causa e efeito
entre as variáveis de entrada e saída. Assim, é possível concluir que o melhor método prático
de identificação de sistemas é a modelagem caixa preta, pois, a mesma necessita de pouca ou
nenhuma informação prévia do sistema a ser modelado (AGUIRRE, 2007, p. 36).
3.14.1 Identificação pelo método da curva de reação
Neste trabalho, obteve-se a função de transferência da planta ao se aplicar um degrau
unitário na entrada do sistema em malha aberta e, por meio da análise da resposta de saída, que
possibilitou a obtenção dos parâmetros ganho direto (Kdc), constante de tempo (τ ) e constante
de atraso (θ).
Segundo Goodwin, Graebe e Salgado (2000, p. 164–165), para se aplicar o método,
o valor da saída do sistema em malha aberta deve estar em regime estacionário, conforme
representado por y0 na Figura 25.
Figura 25 – Curva de reação de um sistema de 1a ordem.
Fonte: (GOODWIN; GRAEBE; SALGADO, 2000, p. 165) (adaptado).
59
Nessa situação, pode-se aplicar um degrau (de 10 a 20% do fundo de escala) na entrada
em um dado instante (t0). Dessa forma, o sistema irá responder ao estímulo até atingir um novo
regime permanente (y∞) (GOODWIN; GRAEBE; SALGADO, 2000, p. 164).
Para que o método seja aplicado, a resposta deverá ter uma forma de "S", pois, caso
contrário, o método não poderá ser aplicado (SARAIVA, 2011).
De acordo com Goodwin, Graebe e Salgado (2000, p. 165), na resposta transitória é
traçada uma reta tangente, maximum slope tangent (m.s.t.), ao ponto máximo de inflexão para
se obter o valor da constante de atraso (θ), encontrando-se t1 (instante de tempo em que a
reta tangente intercepta a linha pontilhada referente ao estado estacionário y0), de forma que
θ = t1 − t0. Para a constante tempo de tempo (τ ), é encontrado t2, o instante de tempo em que
ocorre a intersecção entre a reta tangente e a linha pontilhada referente ao regime permanente
y∞, de forma que τ = t2 − t1. Feito isso, pode-se obter o ganho direto do sistema Kdc, expresso
pela Equação 3.13 (adaptado):
Kdc =y∞ − y0u∞ − u0
, (3.13)
em que y∞ é a saída em regime permanente após o degrau, y0, a saída em regime estacionário
antes do degrau, u∞, o sinal de entrada após o degrau e u0, o sinal de entrada antes do degrau.
Dessa forma, para Goodwin, Graebe e Salgado (2000, p. 161–164), é possível encontrar
a função de transferência de um sistema de primeira ordem com atraso, conforme a Equação
3.14 (adaptado):
Gp(s) =Kdce
−sθ
τs+ 1, (3.14)
em que τ > 0.
3.15 Métodos de Sintonia para Controladores PI
Nos sistemas de controle buscam-se os parâmetros que são capazes de influenciar o seu
desempenho. Estes parâmetros são geralmente definidos por meio de determinadas especifica-
ções. Pode-se dizer que um bom método de sintonia desses parâmetros considera várias destas
especificações de forma balanceada. Existem vários métodos sofisticados para realizar a sintonia
de um controlador de modo a cumprir as especificações, em regime estacionário e transitório,
60
ao mesmo tempo em que segue referências e rejeita distúrbios. Cada método possui os seus
determinados parâmetros (SARAIVA, 2011).
Neste trabalho, buscou-se a sintonia do controlador PI utilizando-se os métodos: Ziegler-
Nichols (ZN); Cohen-Coon (CC); Chien, Hrones e Reswick (CHR); e Modelo de controle interno
(IMC).
3.15.1 Método Ziegler-Nichols
Segundo Saraiva (2011), é o método de sintonia mais utilizado e provavelmente o mais
famoso, desenvolvido por J. G. Ziegler e N. B. Nichols em 1942, ambos da Taylor Instrument
Companies. Esse foi o primeiro estudo publicado que possui regras para sintonia de controladores,
por meio de ensaios práticos realizados com inovação e simplicidade. Como a empresa em que
eles trabalhavam havia lançado recentemente o primeiro controlador PID do mercado (Fulscope
da Taylor), era necessário aumentar as vendas. Isso fez com que Ziegler, do departamento
de vendas, trabalhasse em conjunto com Nichols, do departarmento de pesquisa, para juntos
desenvolverem o artigo.
3.15.2 Método Cohen-Coon
O método também conhecido como CC, foi desenvolvido pelo engenheiro G. H. Cohen
e pelo matemático G. A. Coon em 1953, também funcionários da empresa Taylor Instrument.
Este método foi desenvolvido considerando-se o critério de decaimento de 14
em resposta a uma
perturbação no processo. Ele foi elaborado visando processos com tempos mortos mais altos
(SARAIVA, 2011).
3.15.3 Método CHR
Para Saraiva (2011), este método foi criado no Massachusetts Institute of Technology
(MIT) em 1952 por K. L. Chien, J. A. Hrones e J. B. Reswick, sendo pionero na utilização de um
modelo aproximado de primeira ordem com tempo morto. Este método possui regras de ajustes
diferenciadas tanto para característica servo (ajuste do setpoint) quanto para características
regulatórias (perturbação da carga com setpoint constante).
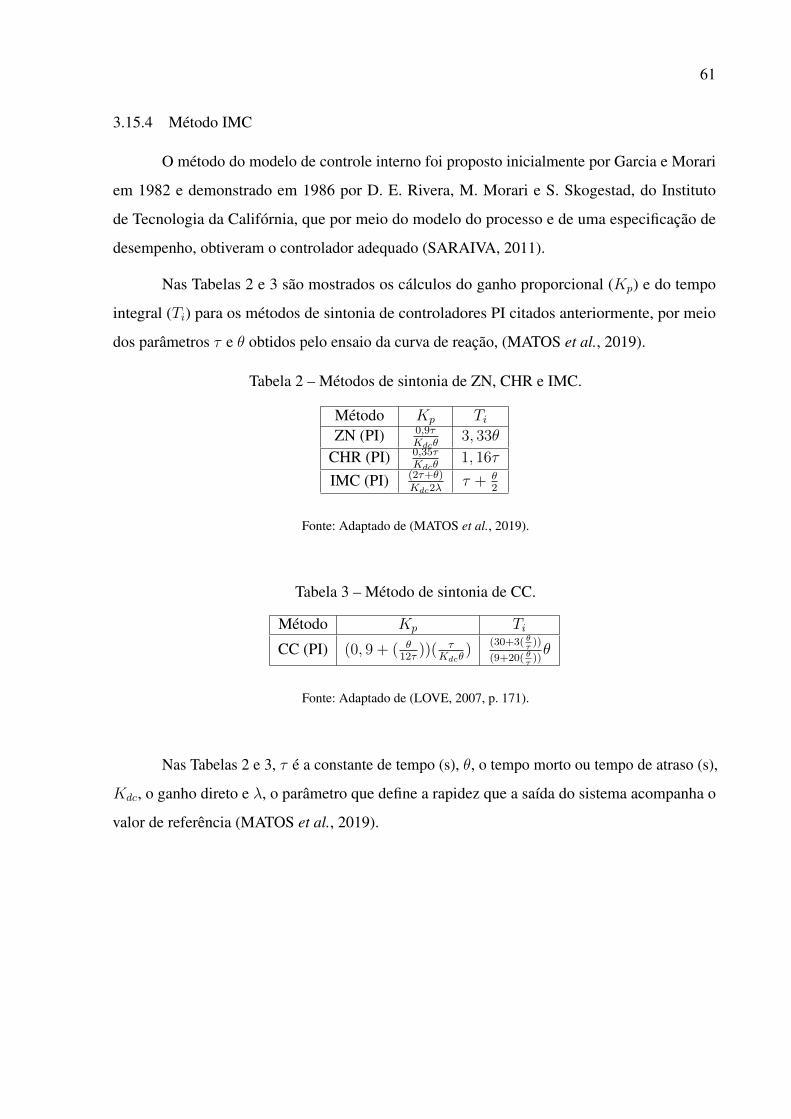
61
3.15.4 Método IMC
O método do modelo de controle interno foi proposto inicialmente por Garcia e Morari
em 1982 e demonstrado em 1986 por D. E. Rivera, M. Morari e S. Skogestad, do Instituto
de Tecnologia da Califórnia, que por meio do modelo do processo e de uma especificação de
desempenho, obtiveram o controlador adequado (SARAIVA, 2011).
Nas Tabelas 2 e 3 são mostrados os cálculos do ganho proporcional (Kp) e do tempo
integral (Ti) para os métodos de sintonia de controladores PI citados anteriormente, por meio
dos parâmetros τ e θ obtidos pelo ensaio da curva de reação, (MATOS et al., 2019).
Tabela 2 – Métodos de sintonia de ZN, CHR e IMC.
Método Kp TiZN (PI) 0,9τ
Kdcθ3, 33θ
CHR (PI) 0,35τKdcθ
1, 16τ
IMC (PI) (2τ+θ)Kdc2λ
τ + θ2
Fonte: Adaptado de (MATOS et al., 2019).
Tabela 3 – Método de sintonia de CC.
Método Kp Ti
CC (PI) (0, 9 + ( θ12τ
))( τKdcθ
)(30+3( θ
τ))
(9+20( θτ))θ
Fonte: Adaptado de (LOVE, 2007, p. 171).
Nas Tabelas 2 e 3, τ é a constante de tempo (s), θ, o tempo morto ou tempo de atraso (s),
Kdc, o ganho direto e λ, o parâmetro que define a rapidez que a saída do sistema acompanha o
valor de referência (MATOS et al., 2019).

62
4 MATERIAIS E MÉTODOS
A construção da bancada didática foi realizada no LABCAM da UFOP e foi feita de
acordo com os seguintes passos: I) projeto do circuito eletrônico do sistema; II) implementação
da programação Arduino; III) adaptação do sistema supervisório, cedido por Ferreira (2014),
para a comunicação serial de dados; e IV) construção física da bancada. Os materiais utilizados
para a elaboração da bancada didática foram:
a) um miniventilador de quatro fios (12 V);
b) uma lâmpada halógena de 12 V e 21 W de potência;
c) um Transistor Darlington TIP 122, resistores, capacitores e diodos;
d) quatro sensores de temperatura LM35;
e) uma plataforma Arduino Nano.
4.1 Projeto do circuito eletrônico
O projeto do circuito eletrônico foi desenvolvido no software Proteus e cedido pelo aluno
da Engenharia de Controle e Automação da UFOP, Rafael de Oliveira Quintão, utilizando-se a
aplicação ISIS, e foi aperfeiçoado nesse trabalho. O Proteus foi utilizado devido à sua capacidade
de desenvolvimento de PCBs e de simulação de circuitos e componentes eletrônicos de diversos
fabricantes, antes mesmo de iniciar o seu processo físico de construção, o que possibilita ao
usuário diagnosticar e prever falhas, otimizando o seu processo de desenvolvimento.
4.1.1 Plataforma Arduino
A plataforma Arduino Nano foi utilizada devido ao fato de apresentar um custo rela-
tivamente baixo, tamanho compacto, bom processamento de dados e por ser programada em
C++, que é uma das linguagens de programação mais simples. O elemento principal dessa
plataforma é o microcontrolador ATMega 328 na versão SMD da empresa Atmel, que possui
como função principal a realização do processamento dos dados do código de programação
Arduino do sistema. Nele são conectados todos os componentes eletrônicos e é realizada a
interface com o software supervisório. O microcontrolador ATMega 328 da plataforma Arduino,
os seus pinos e os componentes nele conectados são mostrados na Figura 26.
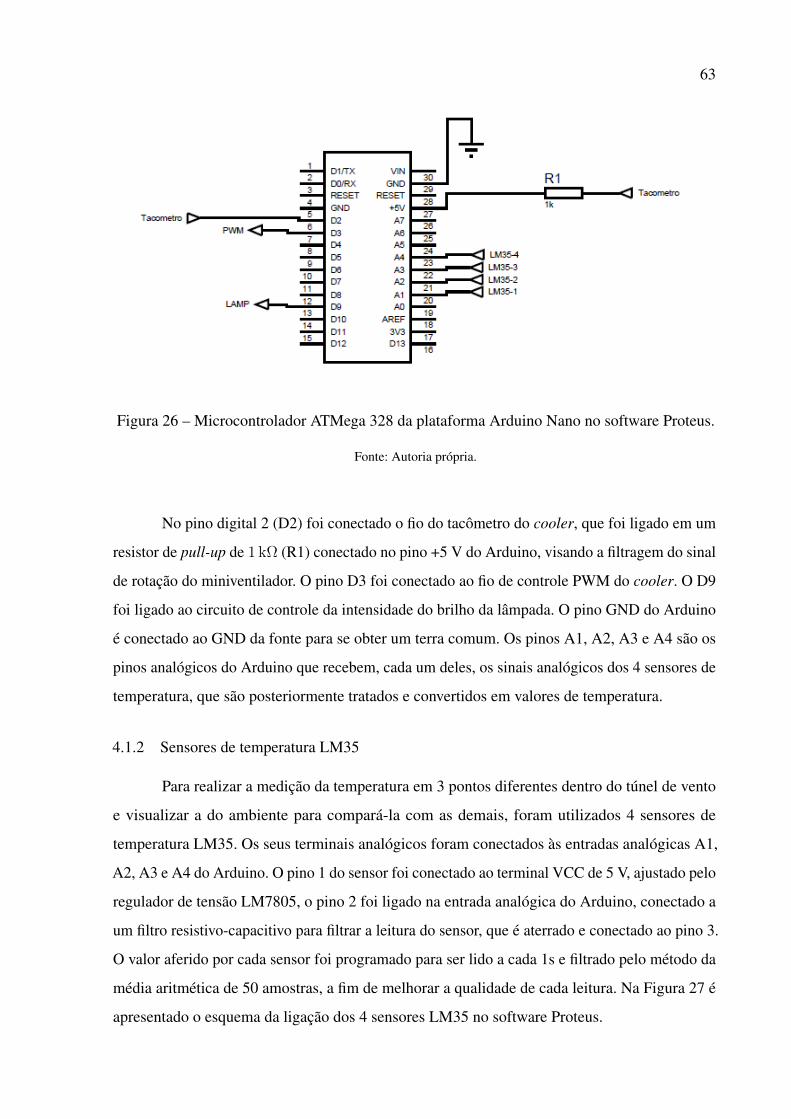
63
Figura 26 – Microcontrolador ATMega 328 da plataforma Arduino Nano no software Proteus.
Fonte: Autoria própria.
No pino digital 2 (D2) foi conectado o fio do tacômetro do cooler, que foi ligado em um
resistor de pull-up de 1 kΩ (R1) conectado no pino +5 V do Arduino, visando a filtragem do sinal
de rotação do miniventilador. O pino D3 foi conectado ao fio de controle PWM do cooler. O D9
foi ligado ao circuito de controle da intensidade do brilho da lâmpada. O pino GND do Arduino
é conectado ao GND da fonte para se obter um terra comum. Os pinos A1, A2, A3 e A4 são os
pinos analógicos do Arduino que recebem, cada um deles, os sinais analógicos dos 4 sensores de
temperatura, que são posteriormente tratados e convertidos em valores de temperatura.
4.1.2 Sensores de temperatura LM35
Para realizar a medição da temperatura em 3 pontos diferentes dentro do túnel de vento
e visualizar a do ambiente para compará-la com as demais, foram utilizados 4 sensores de
temperatura LM35. Os seus terminais analógicos foram conectados às entradas analógicas A1,
A2, A3 e A4 do Arduino. O pino 1 do sensor foi conectado ao terminal VCC de 5 V, ajustado pelo
regulador de tensão LM7805, o pino 2 foi ligado na entrada analógica do Arduino, conectado a
um filtro resistivo-capacitivo para filtrar a leitura do sensor, que é aterrado e conectado ao pino 3.
O valor aferido por cada sensor foi programado para ser lido a cada 1s e filtrado pelo método da
média aritmética de 50 amostras, a fim de melhorar a qualidade de cada leitura. Na Figura 27 é
apresentado o esquema da ligação dos 4 sensores LM35 no software Proteus.
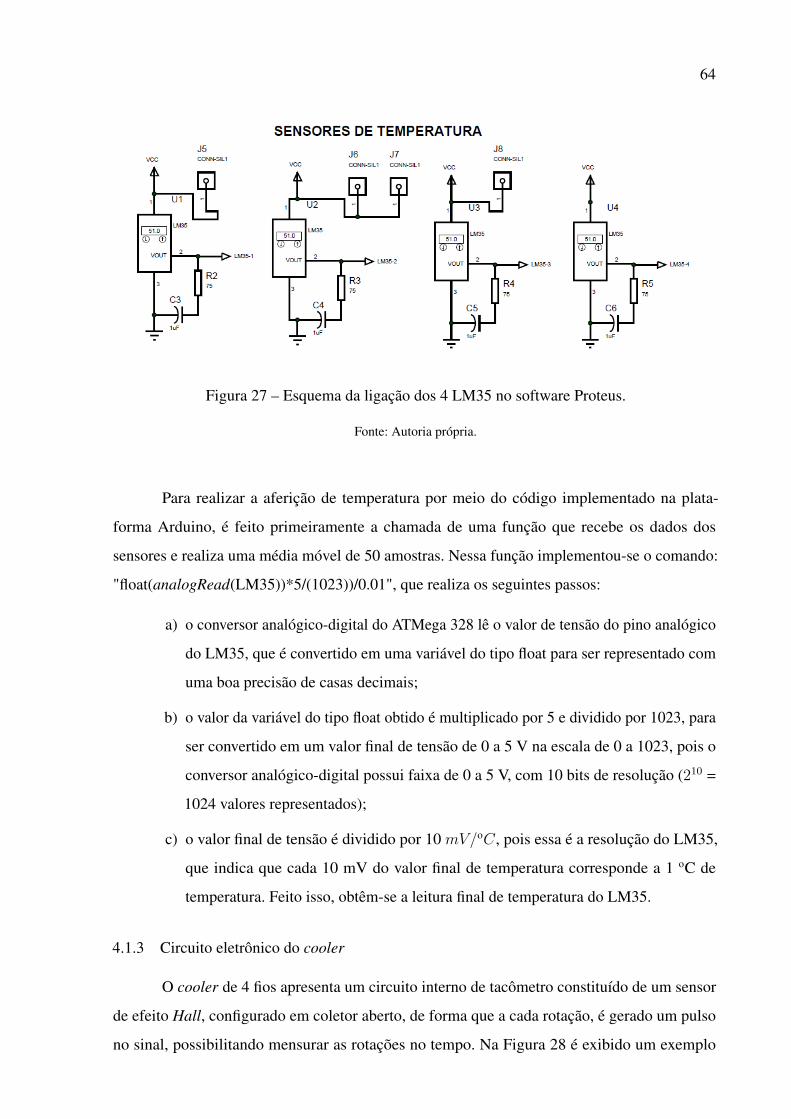
64
Figura 27 – Esquema da ligação dos 4 LM35 no software Proteus.
Fonte: Autoria própria.
Para realizar a aferição de temperatura por meio do código implementado na plata-
forma Arduino, é feito primeiramente a chamada de uma função que recebe os dados dos
sensores e realiza uma média móvel de 50 amostras. Nessa função implementou-se o comando:
"float(analogRead(LM35))*5/(1023))/0.01", que realiza os seguintes passos:
a) o conversor analógico-digital do ATMega 328 lê o valor de tensão do pino analógico
do LM35, que é convertido em uma variável do tipo float para ser representado com
uma boa precisão de casas decimais;
b) o valor da variável do tipo float obtido é multiplicado por 5 e dividido por 1023, para
ser convertido em um valor final de tensão de 0 a 5 V na escala de 0 a 1023, pois o
conversor analógico-digital possui faixa de 0 a 5 V, com 10 bits de resolução (210 =
1024 valores representados);
c) o valor final de tensão é dividido por 10 mV/oC, pois essa é a resolução do LM35,
que indica que cada 10 mV do valor final de temperatura corresponde a 1 oC de
temperatura. Feito isso, obtêm-se a leitura final de temperatura do LM35.
4.1.3 Circuito eletrônico do cooler
O cooler de 4 fios apresenta um circuito interno de tacômetro constituído de um sensor
de efeito Hall, configurado em coletor aberto, de forma que a cada rotação, é gerado um pulso
no sinal, possibilitando mensurar as rotações no tempo. Na Figura 28 é exibido um exemplo
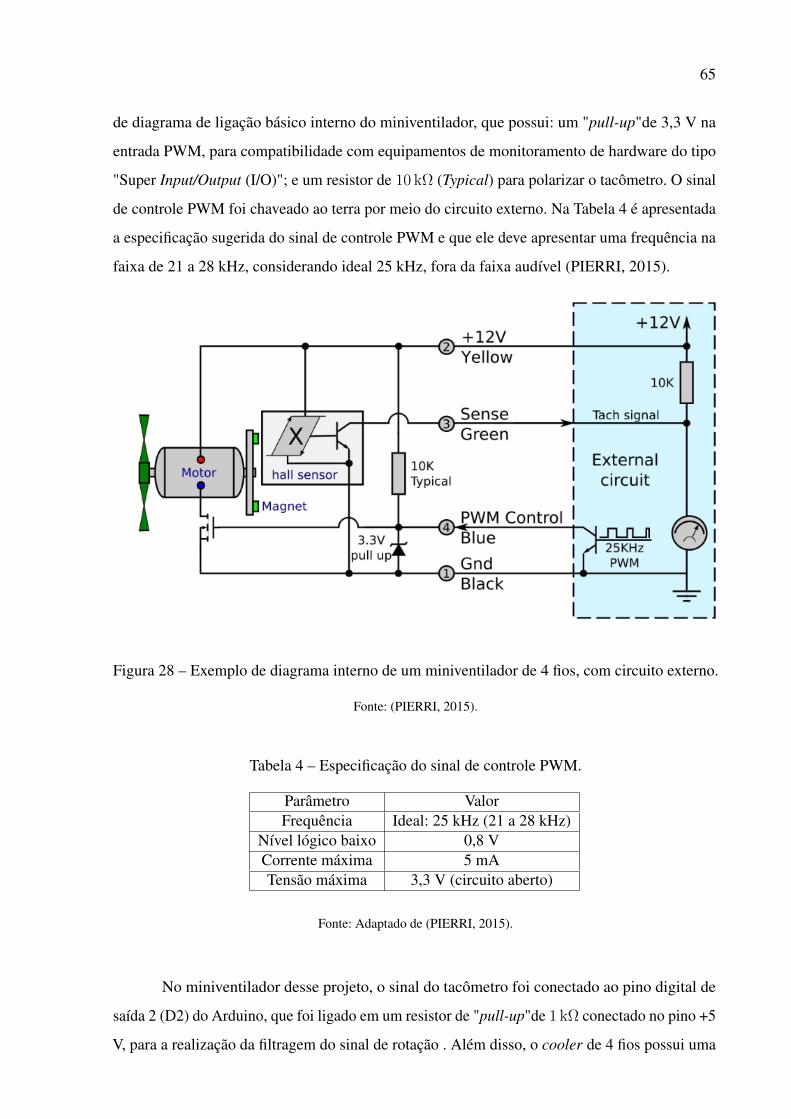
65
de diagrama de ligação básico interno do miniventilador, que possui: um "pull-up"de 3,3 V na
entrada PWM, para compatibilidade com equipamentos de monitoramento de hardware do tipo
"Super Input/Output (I/O)"; e um resistor de 10 kΩ (Typical) para polarizar o tacômetro. O sinal
de controle PWM foi chaveado ao terra por meio do circuito externo. Na Tabela 4 é apresentada
a especificação sugerida do sinal de controle PWM e que ele deve apresentar uma frequência na
faixa de 21 a 28 kHz, considerando ideal 25 kHz, fora da faixa audível (PIERRI, 2015).
Figura 28 – Exemplo de diagrama interno de um miniventilador de 4 fios, com circuito externo.
Fonte: (PIERRI, 2015).
Tabela 4 – Especificação do sinal de controle PWM.
Parâmetro ValorFrequência Ideal: 25 kHz (21 a 28 kHz)
Nível lógico baixo 0,8 VCorrente máxima 5 mATensão máxima 3,3 V (circuito aberto)
Fonte: Adaptado de (PIERRI, 2015).
No miniventilador desse projeto, o sinal do tacômetro foi conectado ao pino digital de
saída 2 (D2) do Arduino, que foi ligado em um resistor de "pull-up"de 1 kΩ conectado no pino +5
V, para a realização da filtragem do sinal de rotação . Além disso, o cooler de 4 fios possui uma
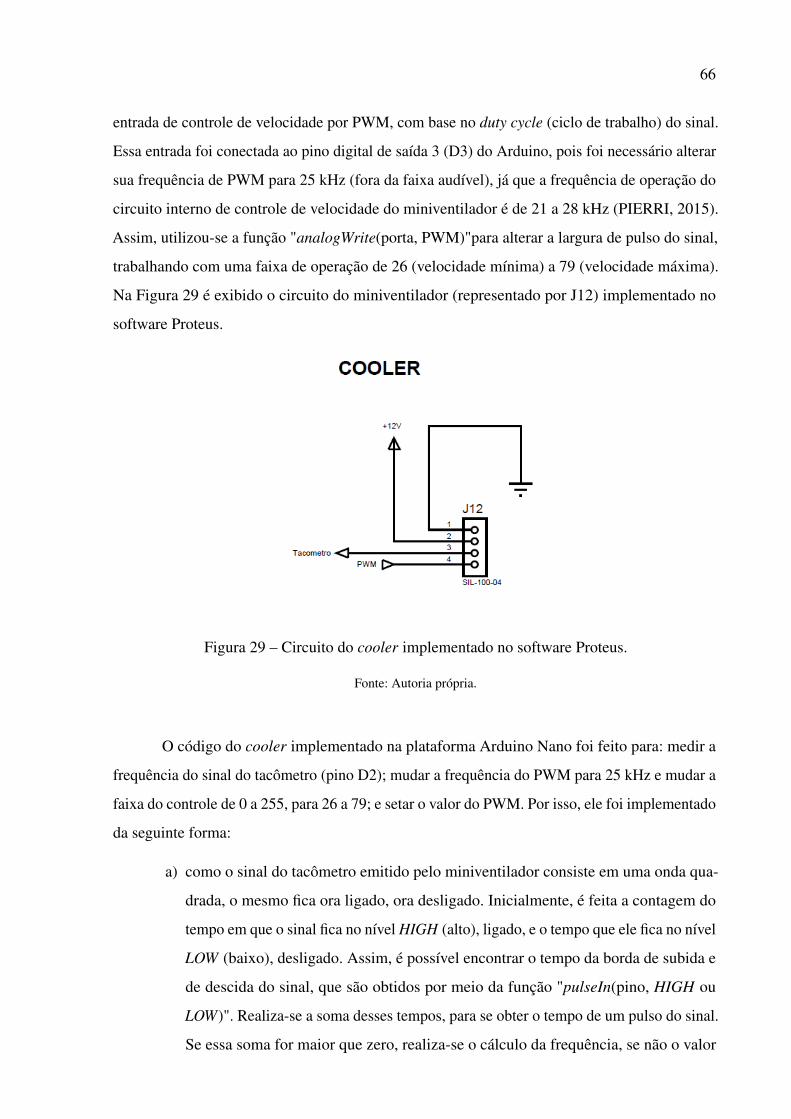
66
entrada de controle de velocidade por PWM, com base no duty cycle (ciclo de trabalho) do sinal.
Essa entrada foi conectada ao pino digital de saída 3 (D3) do Arduino, pois foi necessário alterar
sua frequência de PWM para 25 kHz (fora da faixa audível), já que a frequência de operação do
circuito interno de controle de velocidade do miniventilador é de 21 a 28 kHz (PIERRI, 2015).
Assim, utilizou-se a função "analogWrite(porta, PWM)"para alterar a largura de pulso do sinal,
trabalhando com uma faixa de operação de 26 (velocidade mínima) a 79 (velocidade máxima).
Na Figura 29 é exibido o circuito do miniventilador (representado por J12) implementado no
software Proteus.
Figura 29 – Circuito do cooler implementado no software Proteus.
Fonte: Autoria própria.
O código do cooler implementado na plataforma Arduino Nano foi feito para: medir a
frequência do sinal do tacômetro (pino D2); mudar a frequência do PWM para 25 kHz e mudar a
faixa do controle de 0 a 255, para 26 a 79; e setar o valor do PWM. Por isso, ele foi implementado
da seguinte forma:
a) como o sinal do tacômetro emitido pelo miniventilador consiste em uma onda qua-
drada, o mesmo fica ora ligado, ora desligado. Inicialmente, é feita a contagem do
tempo em que o sinal fica no nível HIGH (alto), ligado, e o tempo que ele fica no nível
LOW (baixo), desligado. Assim, é possível encontrar o tempo da borda de subida e
de descida do sinal, que são obtidos por meio da função "pulseIn(pino, HIGH ou
LOW)". Realiza-se a soma desses tempos, para se obter o tempo de um pulso do sinal.
Se essa soma for maior que zero, realiza-se o cálculo da frequência, se não o valor
67
das rotações por segundo é considerado nulo. Feito isso, para se obter a frequência, é
efetuada a divisão de 1000000 pela soma dos tempos das bordas de subida e descida,
pois, a frequência é o inverso do período e para converter o tempo de microssegundos
para Hertz, é preciso dividir 1000000 pela soma dos tempos. Ao realizar essa divisão,
obtêm-se a frequência que corresponde à quantidade de pulsos por segundo. Essa
quantidade de pulsos equivale à quantidade de rotações por segundo do cooler;
b) para mudar a frequência do PWM para 25 kHz, foi implementada uma função que
configura os registradores do microcontrolador para trabalharem nessa frequência
no pino digital de saída (D3). Ela também estabelece a faixa de valores do controle
variando de 26 a 79;
c) para setar o valor de controle PWM na faixa de 26 a 79, foi utilizada uma função que
o configura em um dos registradores programados pela função que muda a frequência
para 25 kHz.
4.1.4 Circuito eletrônico de aquecimento
O circuito eletrônico de aquecimento é composto por: um diodo de roda livre modelo
1N4007, ligado em paralelo com a lâmpada para proteger os componentes; dois terminais (J3
e J4) que representam os pinos da lâmpada; um transistor Darlington TIP 122 para realizar o
chaveamento do circuito; e um resistor de base de 1 kΩ (R6). Na Figura 30 é apresentado o
circuito da lâmpada implementado no software Proteus.

68
Figura 30 – Circuito da lâmpada implementado no software Proteus.
Fonte: Autoria própria.
O circuito funciona da seguinte forma:
a) o terminal J3 é ligado no +12 V da fonte de tensão, que também é conectado no
catodo do diodo (terminal barrado);
b) o terminal J4 é conectado no anodo do diodo e no coletor do TIP 122 para chavear o
terminal do terra para a lâmpada;
c) A entrada digital LAMP é ligada ao pino digital de saída (D9) da plataforma Arduino,
que envia uma tensão, de acordo com o valor do controle PWM setado pelo usuário
no supervisório (modo manual), para saturar a base do transistor e fazer com que
ele realize o chaveamento do circuito. O resistor de base de 1 kΩ (R6) foi utilizado
para evitar corrente de pico, pois a resistência da lâmpada aumenta bastante quando
é ligada após ficar muito tempo desligada, gerando uma corrente de pico, que pode
chegar na base do TIP 122 e na lâmpada, danificando-os, caso essa precaução não
seja tomada (BOYLESTAD; NASHELSKY, 2013, p. 200).

69
4.1.5 Circuito de alimentação do sistema
No circuito de alimentação da lâmpada conectou-se a fonte de alimentação de 12 V (J1)
em um diodo modelo 1N4007, para evitar corrente inversa, que está ligado no circuito típico
de ligação do regulador de tensão LM7805. O seu circuito consiste em dois capacitores ligados
em paralelo (C1 e C2), de forma a auxiliar no ajuste da tensão de 12 para 5 V (VCC), a fim de
alimentar os 4 sensores de temperatura LM35. Na Figura 31 é exibido o circuito de alimentação
do sistema implementado no software Proteus.
Figura 31 – Circuito de alimentação do sistema implementado no software Proteus.
Fonte: Autoria própria.
4.1.6 Placa de circuito impresso
A placa de circuito impresso desse projeto foi desenvolvida na aplicação ARES do
software Proteus. Ela serve para interligar eletricamente todos os componentes do sistema, por
meio das trilhas feitas em uma camada de um material condutor de eletricidade (cobre, por
exemplo). A largura das trilhas de cada componente eletrônico é dimensionada de acordo com as
suas respectivas necessidades de tensão e de corrente. Quanto maior a necessidade de tensão e
corrente, mais larga será a trilha. Na Figura 32 é exibido o sistema completo implementado no
software Proteus e nas Figuras 33 e 34 são apresentadas as vistas em 3 dimensões superior e
lateral da placa desenvolvida.
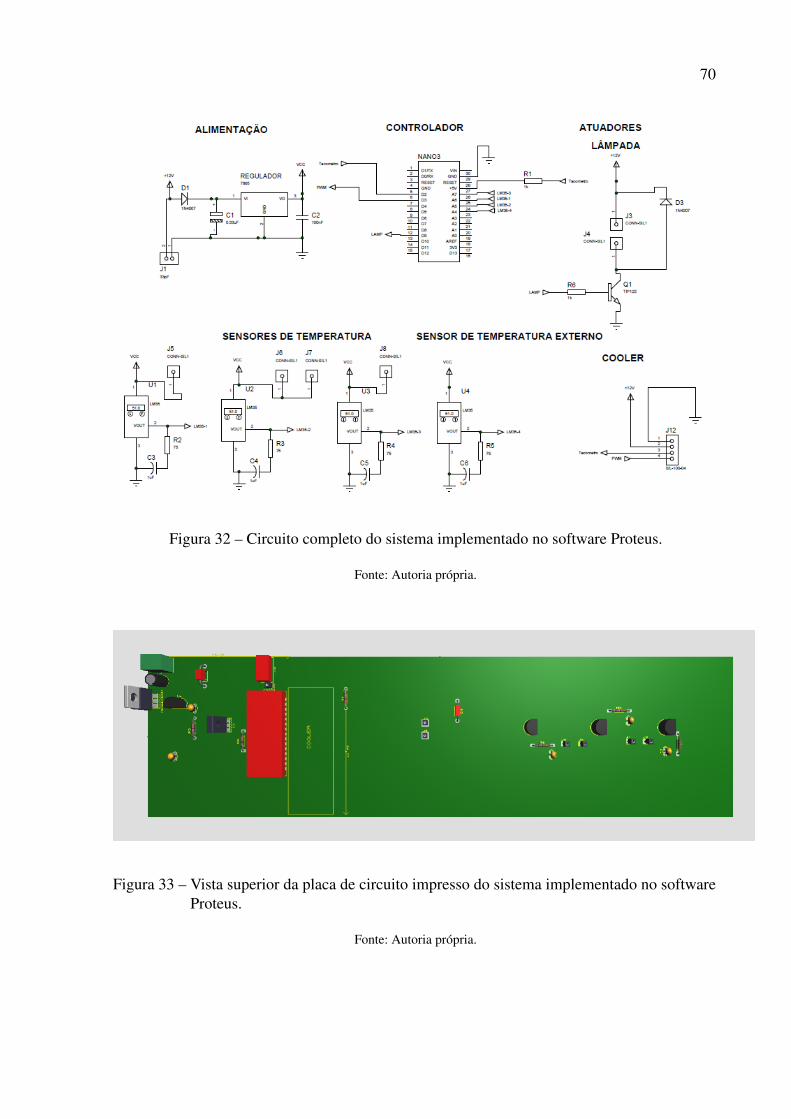
70
Figura 32 – Circuito completo do sistema implementado no software Proteus.
Fonte: Autoria própria.
Figura 33 – Vista superior da placa de circuito impresso do sistema implementado no softwareProteus.
Fonte: Autoria própria.
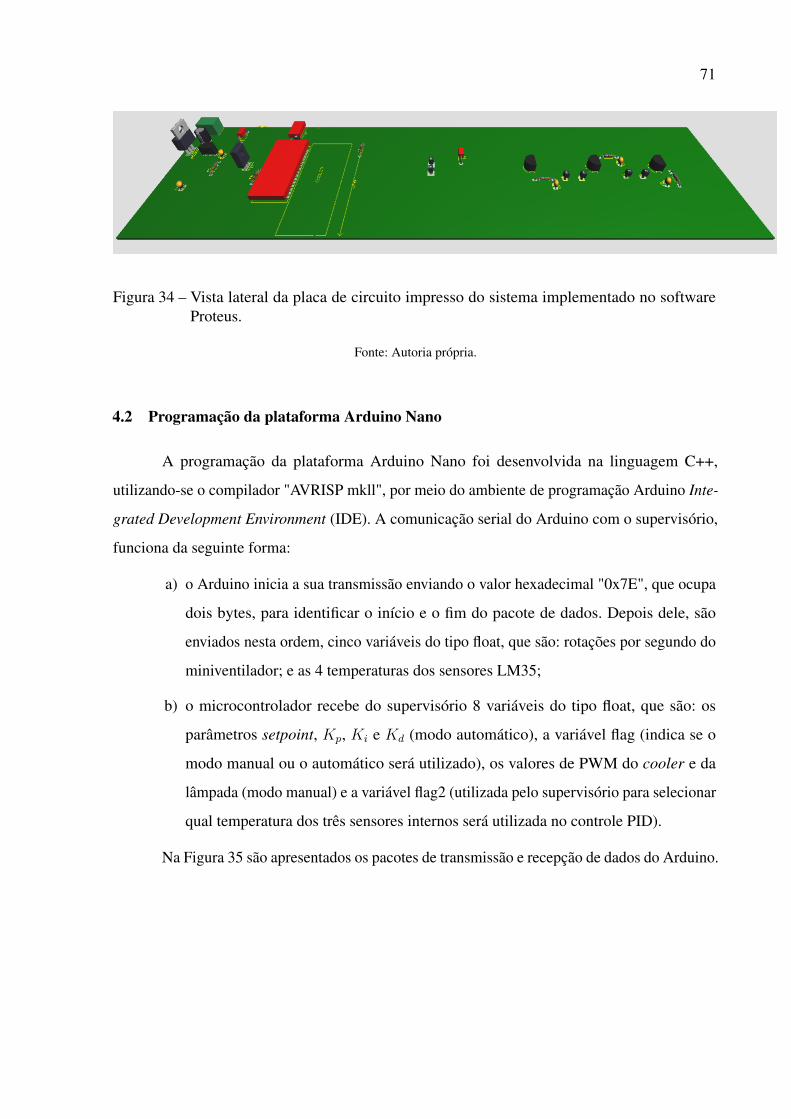
71
Figura 34 – Vista lateral da placa de circuito impresso do sistema implementado no softwareProteus.
Fonte: Autoria própria.
4.2 Programação da plataforma Arduino Nano
A programação da plataforma Arduino Nano foi desenvolvida na linguagem C++,
utilizando-se o compilador "AVRISP mkll", por meio do ambiente de programação Arduino Inte-
grated Development Environment (IDE). A comunicação serial do Arduino com o supervisório,
funciona da seguinte forma:
a) o Arduino inicia a sua transmissão enviando o valor hexadecimal "0x7E", que ocupa
dois bytes, para identificar o início e o fim do pacote de dados. Depois dele, são
enviados nesta ordem, cinco variáveis do tipo float, que são: rotações por segundo do
miniventilador; e as 4 temperaturas dos sensores LM35;
b) o microcontrolador recebe do supervisório 8 variáveis do tipo float, que são: os
parâmetros setpoint, Kp, Ki e Kd (modo automático), a variável flag (indica se o
modo manual ou o automático será utilizado), os valores de PWM do cooler e da
lâmpada (modo manual) e a variável flag2 (utilizada pelo supervisório para selecionar
qual temperatura dos três sensores internos será utilizada no controle PID).
Na Figura 35 são apresentados os pacotes de transmissão e recepção de dados do Arduino.
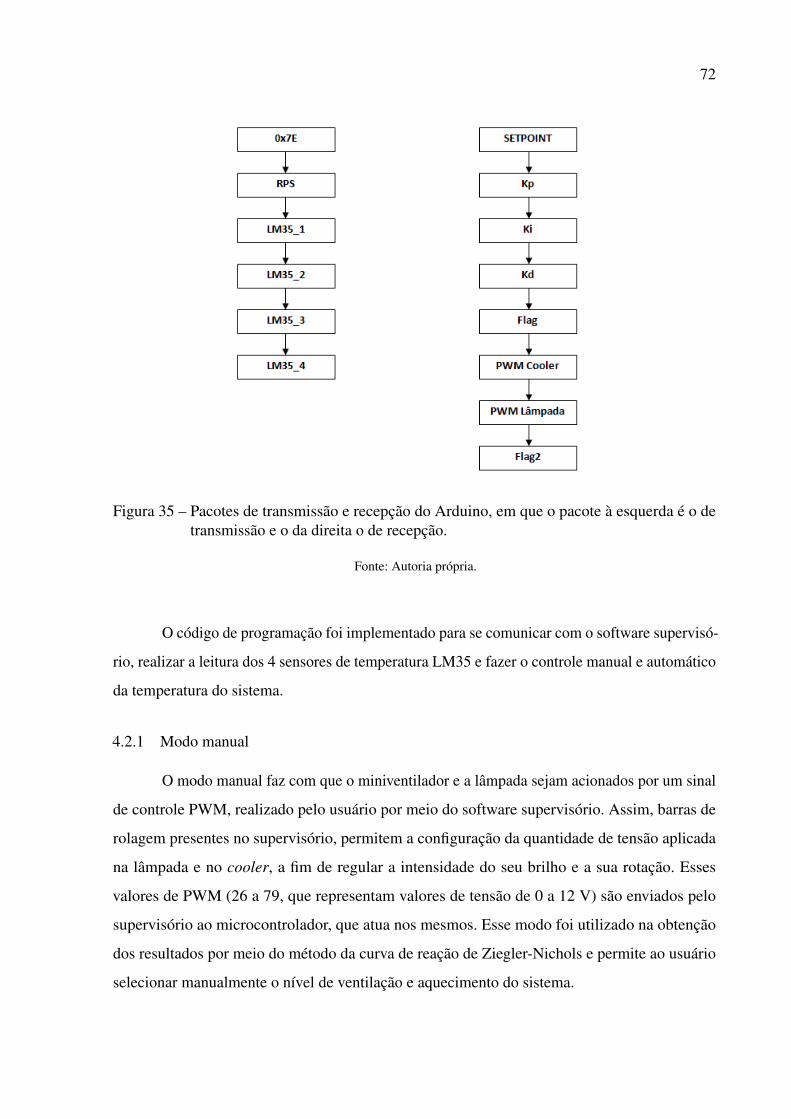
72
Figura 35 – Pacotes de transmissão e recepção do Arduino, em que o pacote à esquerda é o detransmissão e o da direita o de recepção.
Fonte: Autoria própria.
O código de programação foi implementado para se comunicar com o software supervisó-
rio, realizar a leitura dos 4 sensores de temperatura LM35 e fazer o controle manual e automático
da temperatura do sistema.
4.2.1 Modo manual
O modo manual faz com que o miniventilador e a lâmpada sejam acionados por um sinal
de controle PWM, realizado pelo usuário por meio do software supervisório. Assim, barras de
rolagem presentes no supervisório, permitem a configuração da quantidade de tensão aplicada
na lâmpada e no cooler, a fim de regular a intensidade do seu brilho e a sua rotação. Esses
valores de PWM (26 a 79, que representam valores de tensão de 0 a 12 V) são enviados pelo
supervisório ao microcontrolador, que atua nos mesmos. Esse modo foi utilizado na obtenção
dos resultados por meio do método da curva de reação de Ziegler-Nichols e permite ao usuário
selecionar manualmente o nível de ventilação e aquecimento do sistema.
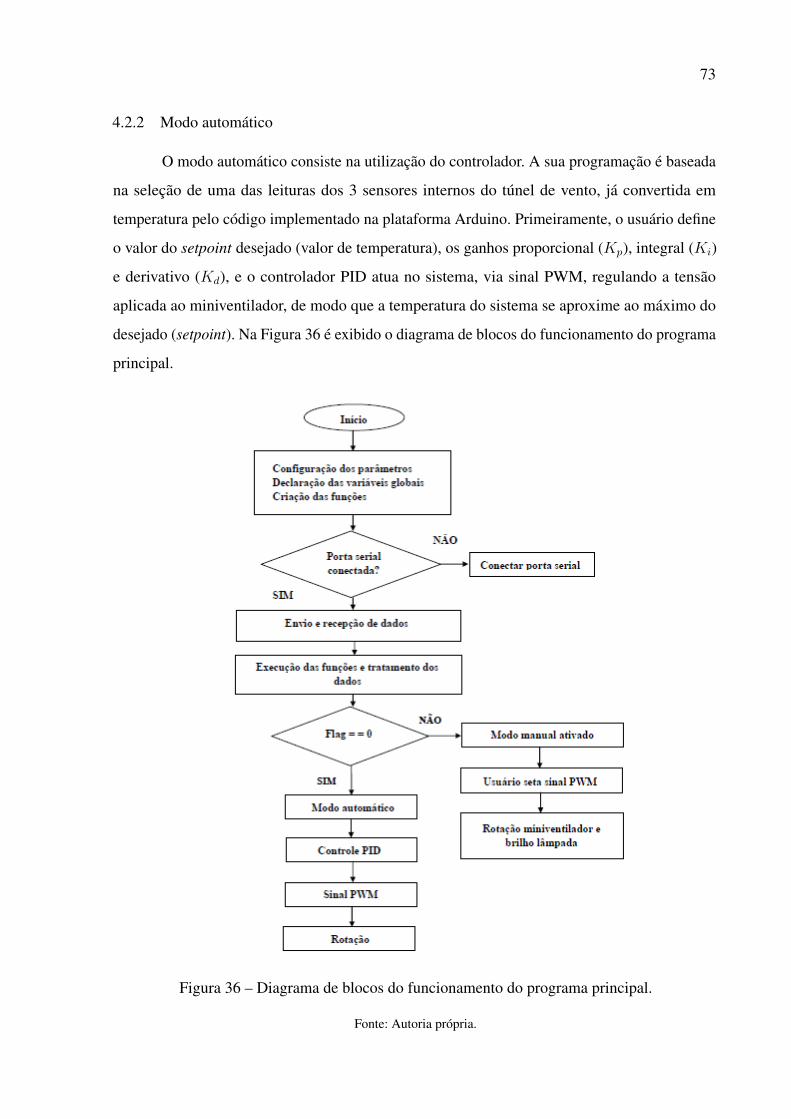
73
4.2.2 Modo automático
O modo automático consiste na utilização do controlador. A sua programação é baseada
na seleção de uma das leituras dos 3 sensores internos do túnel de vento, já convertida em
temperatura pelo código implementado na plataforma Arduino. Primeiramente, o usuário define
o valor do setpoint desejado (valor de temperatura), os ganhos proporcional (Kp), integral (Ki)
e derivativo (Kd), e o controlador PID atua no sistema, via sinal PWM, regulando a tensão
aplicada ao miniventilador, de modo que a temperatura do sistema se aproxime ao máximo do
desejado (setpoint). Na Figura 36 é exibido o diagrama de blocos do funcionamento do programa
principal.
Figura 36 – Diagrama de blocos do funcionamento do programa principal.
Fonte: Autoria própria.
74
A programação do controlador PID implementada na plataforma Arduino Nano é com-
posta dos seguintes passos:
a) recebe-se do supervisório a temperatura do sensor utilizado no controle PID;
b) calcula-se o erro da temperatura, que consiste na diferença entre o valor do setpoint e
a temperatura lida pelo sensor (Equação 4.1):
Erro = setpoint − temperatura. (4.1)
c) calculam-se os termos proporcional, integral e derivativo (P, I e D) do controlador
PID, por meio dos itens 4.2 a 4.5:
P = Kp · erro; (4.2)
I = I + (Ki · erro · variacaoTempo); (4.3)
D = (ultimaTemperatura− temperatura) ·Kd/variacaoTempo; (4.4)
ultimaTemperatura = temperatura. (4.5)
em que:
– essa implementação foi executada na função "void loop"do Arduino, para que os
laços de repetição sejam executados continuamente;
– a variável variacaoTempo mede a variação de tempo (tempo atual em que o laço
de repetição foi executado - tempo que o último laço foi executado), para que a
integral e a derivada dos ganhos integral e derivativo seja calculada;
– no termo integral é realizado o somatório do ganho integral multiplicado pela
variação do tempo e pelo erro para implementar a integral do erro;
– no termo derivativo foi feita a variação da temperatura pela variação do tempo,
que determina a derivada da temperatura em relação ao tempo e depois disso
armazena-se o último valor de temperatura lido.
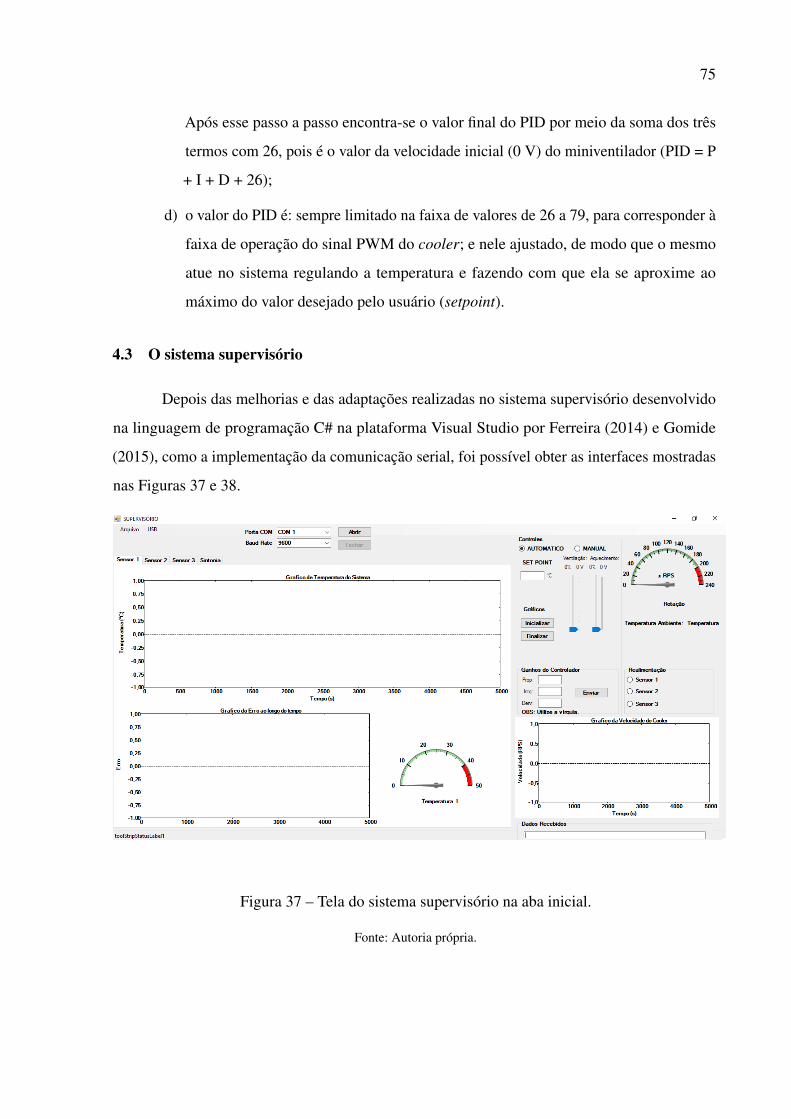
75
Após esse passo a passo encontra-se o valor final do PID por meio da soma dos três
termos com 26, pois é o valor da velocidade inicial (0 V) do miniventilador (PID = P
+ I + D + 26);
d) o valor do PID é: sempre limitado na faixa de valores de 26 a 79, para corresponder à
faixa de operação do sinal PWM do cooler; e nele ajustado, de modo que o mesmo
atue no sistema regulando a temperatura e fazendo com que ela se aproxime ao
máximo do valor desejado pelo usuário (setpoint).
4.3 O sistema supervisório
Depois das melhorias e das adaptações realizadas no sistema supervisório desenvolvido
na linguagem de programação C# na plataforma Visual Studio por Ferreira (2014) e Gomide
(2015), como a implementação da comunicação serial, foi possível obter as interfaces mostradas
nas Figuras 37 e 38.
Figura 37 – Tela do sistema supervisório na aba inicial.
Fonte: Autoria própria.
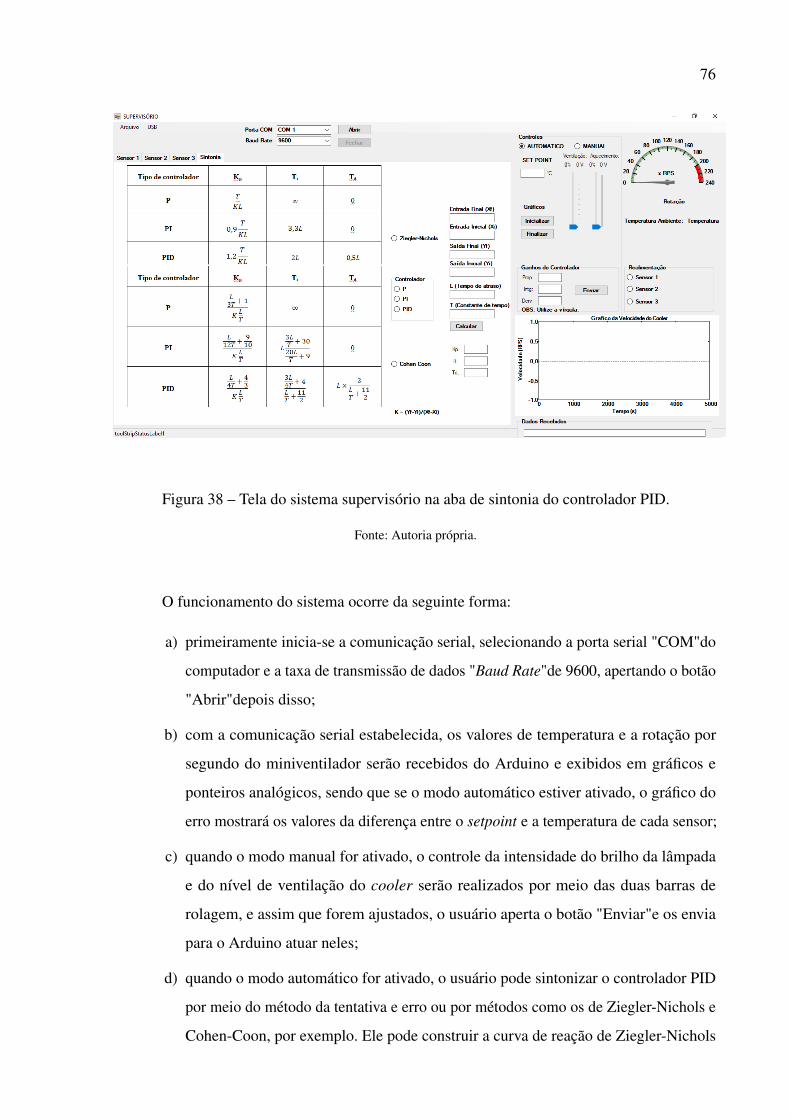
76
Figura 38 – Tela do sistema supervisório na aba de sintonia do controlador PID.
Fonte: Autoria própria.
O funcionamento do sistema ocorre da seguinte forma:
a) primeiramente inicia-se a comunicação serial, selecionando a porta serial "COM"do
computador e a taxa de transmissão de dados "Baud Rate"de 9600, apertando o botão
"Abrir"depois disso;
b) com a comunicação serial estabelecida, os valores de temperatura e a rotação por
segundo do miniventilador serão recebidos do Arduino e exibidos em gráficos e
ponteiros analógicos, sendo que se o modo automático estiver ativado, o gráfico do
erro mostrará os valores da diferença entre o setpoint e a temperatura de cada sensor;
c) quando o modo manual for ativado, o controle da intensidade do brilho da lâmpada
e do nível de ventilação do cooler serão realizados por meio das duas barras de
rolagem, e assim que forem ajustados, o usuário aperta o botão "Enviar"e os envia
para o Arduino atuar neles;
d) quando o modo automático for ativado, o usuário pode sintonizar o controlador PID
por meio do método da tentativa e erro ou por métodos como os de Ziegler-Nichols e
Cohen-Coon, por exemplo. Ele pode construir a curva de reação de Ziegler-Nichols
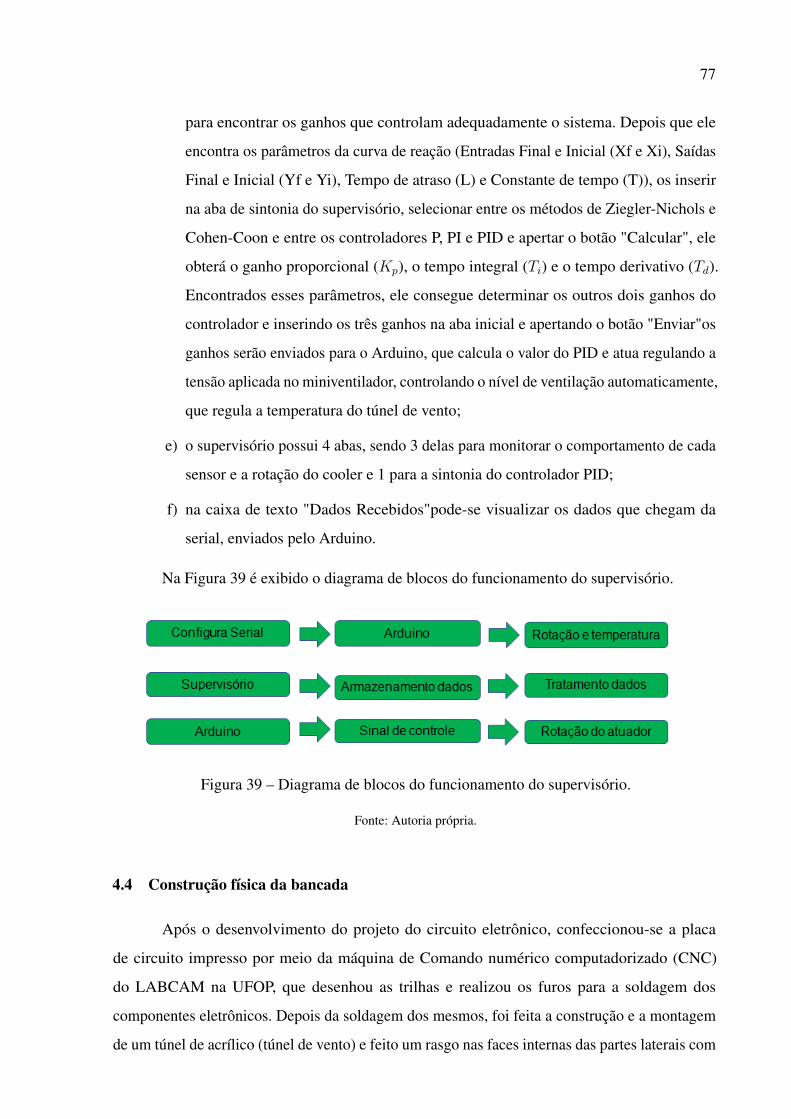
77
para encontrar os ganhos que controlam adequadamente o sistema. Depois que ele
encontra os parâmetros da curva de reação (Entradas Final e Inicial (Xf e Xi), Saídas
Final e Inicial (Yf e Yi), Tempo de atraso (L) e Constante de tempo (T)), os inserir
na aba de sintonia do supervisório, selecionar entre os métodos de Ziegler-Nichols e
Cohen-Coon e entre os controladores P, PI e PID e apertar o botão "Calcular", ele
obterá o ganho proporcional (Kp), o tempo integral (Ti) e o tempo derivativo (Td).
Encontrados esses parâmetros, ele consegue determinar os outros dois ganhos do
controlador e inserindo os três ganhos na aba inicial e apertando o botão "Enviar"os
ganhos serão enviados para o Arduino, que calcula o valor do PID e atua regulando a
tensão aplicada no miniventilador, controlando o nível de ventilação automaticamente,
que regula a temperatura do túnel de vento;
e) o supervisório possui 4 abas, sendo 3 delas para monitorar o comportamento de cada
sensor e a rotação do cooler e 1 para a sintonia do controlador PID;
f) na caixa de texto "Dados Recebidos"pode-se visualizar os dados que chegam da
serial, enviados pelo Arduino.
Na Figura 39 é exibido o diagrama de blocos do funcionamento do supervisório.
Figura 39 – Diagrama de blocos do funcionamento do supervisório.
Fonte: Autoria própria.
4.4 Construção física da bancada
Após o desenvolvimento do projeto do circuito eletrônico, confeccionou-se a placa
de circuito impresso por meio da máquina de Comando numérico computadorizado (CNC)
do LABCAM na UFOP, que desenhou as trilhas e realizou os furos para a soldagem dos
componentes eletrônicos. Depois da soldagem dos mesmos, foi feita a construção e a montagem
de um túnel de acrílico (túnel de vento) e feito um rasgo nas faces internas das partes laterais com
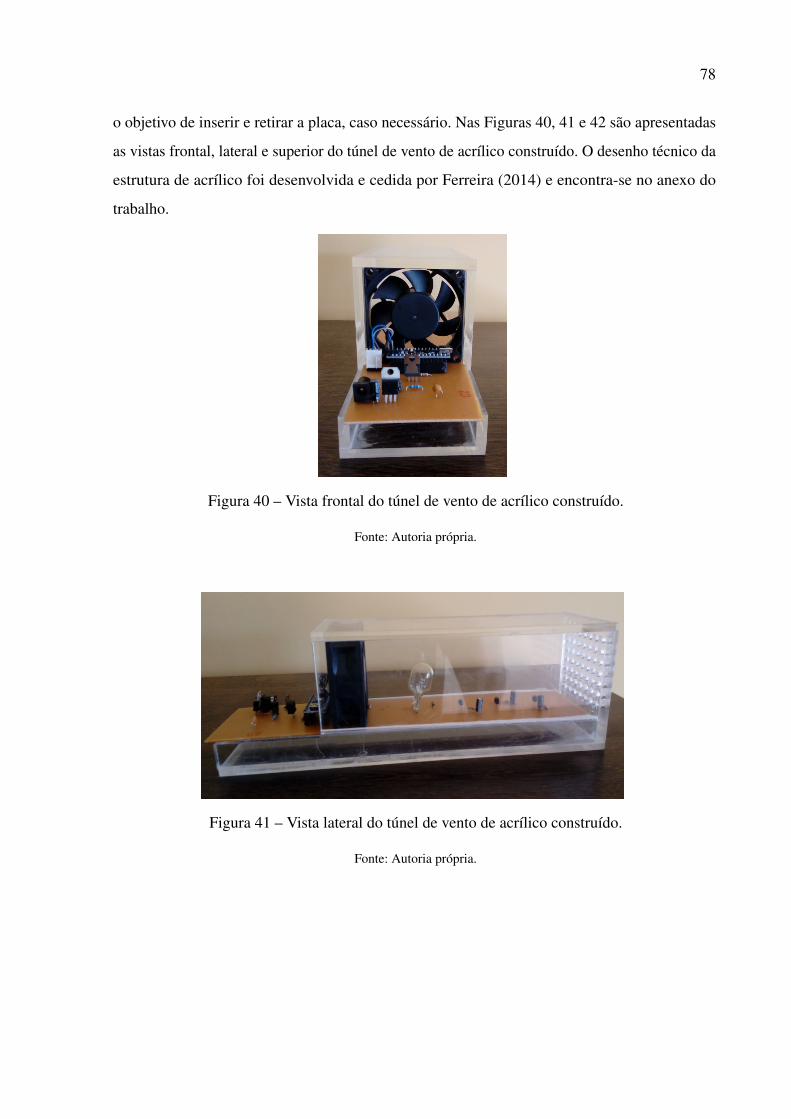
78
o objetivo de inserir e retirar a placa, caso necessário. Nas Figuras 40, 41 e 42 são apresentadas
as vistas frontal, lateral e superior do túnel de vento de acrílico construído. O desenho técnico da
estrutura de acrílico foi desenvolvida e cedida por Ferreira (2014) e encontra-se no anexo do
trabalho.
Figura 40 – Vista frontal do túnel de vento de acrílico construído.
Fonte: Autoria própria.
Figura 41 – Vista lateral do túnel de vento de acrílico construído.
Fonte: Autoria própria.
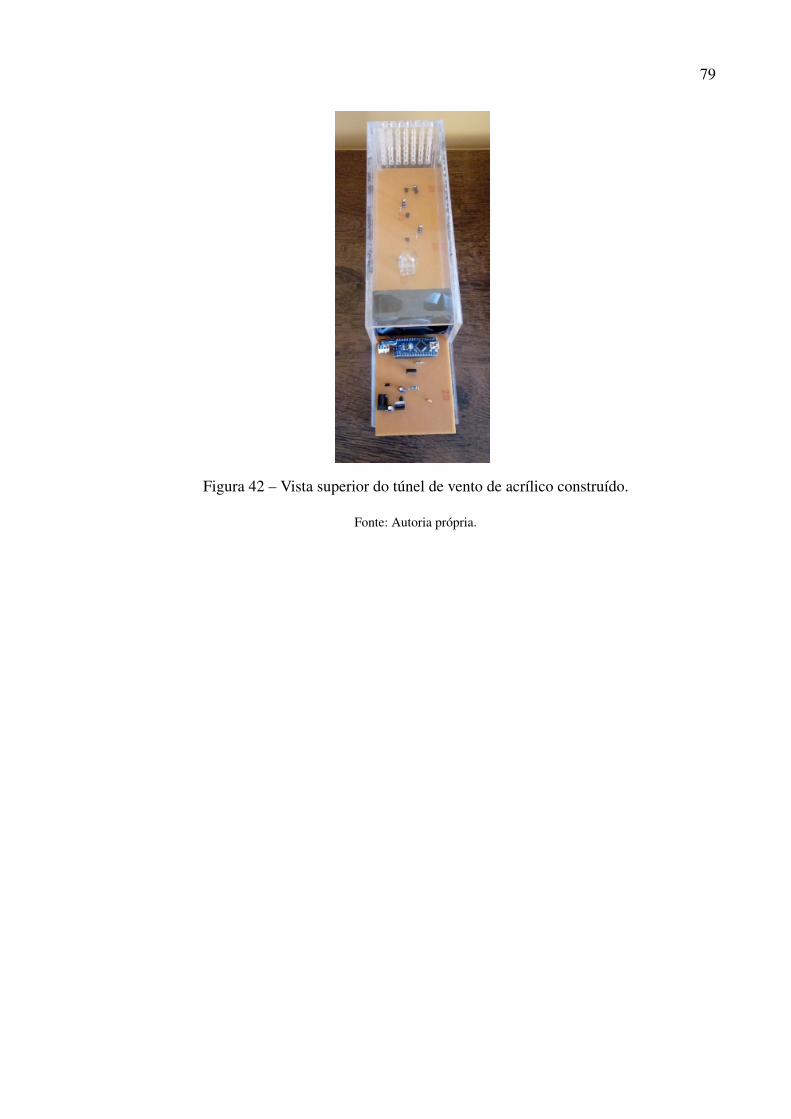
79
Figura 42 – Vista superior do túnel de vento de acrílico construído.
Fonte: Autoria própria.
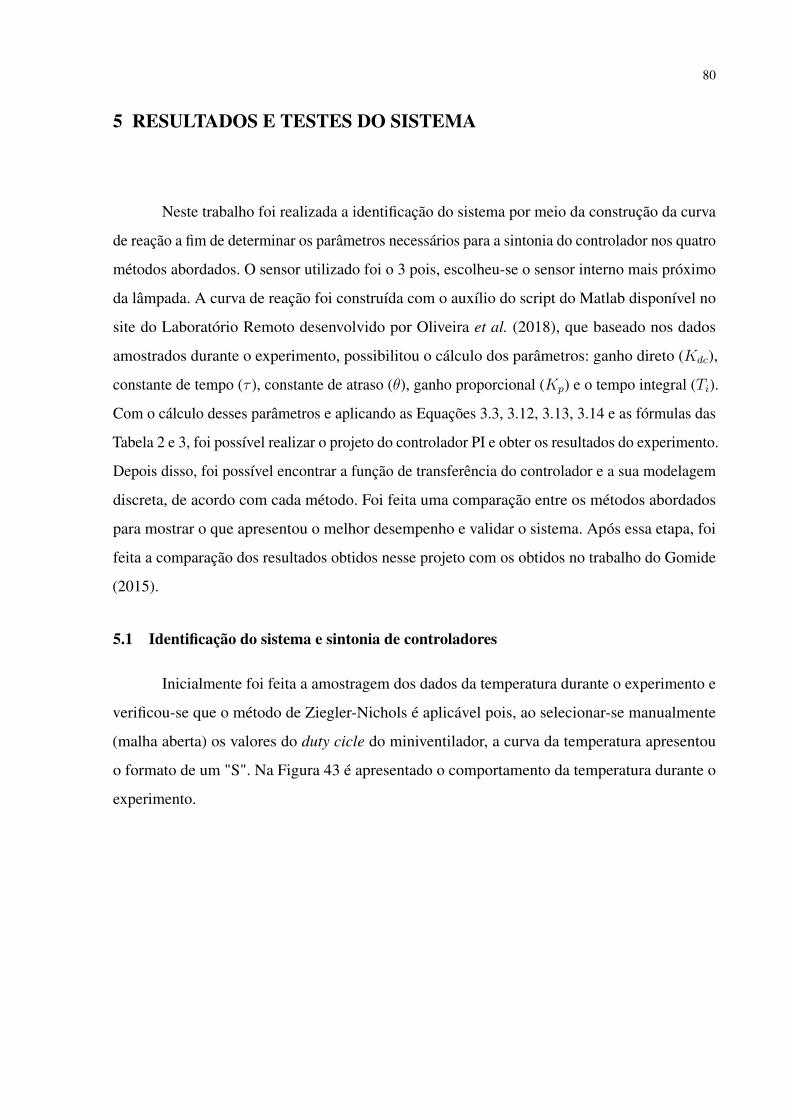
80
5 RESULTADOS E TESTES DO SISTEMA
Neste trabalho foi realizada a identificação do sistema por meio da construção da curva
de reação a fim de determinar os parâmetros necessários para a sintonia do controlador nos quatro
métodos abordados. O sensor utilizado foi o 3 pois, escolheu-se o sensor interno mais próximo
da lâmpada. A curva de reação foi construída com o auxílio do script do Matlab disponível no
site do Laboratório Remoto desenvolvido por Oliveira et al. (2018), que baseado nos dados
amostrados durante o experimento, possibilitou o cálculo dos parâmetros: ganho direto (Kdc),
constante de tempo (τ ), constante de atraso (θ), ganho proporcional (Kp) e o tempo integral (Ti).
Com o cálculo desses parâmetros e aplicando as Equações 3.3, 3.12, 3.13, 3.14 e as fórmulas das
Tabela 2 e 3, foi possível realizar o projeto do controlador PI e obter os resultados do experimento.
Depois disso, foi possível encontrar a função de transferência do controlador e a sua modelagem
discreta, de acordo com cada método. Foi feita uma comparação entre os métodos abordados
para mostrar o que apresentou o melhor desempenho e validar o sistema. Após essa etapa, foi
feita a comparação dos resultados obtidos nesse projeto com os obtidos no trabalho do Gomide
(2015).
5.1 Identificação do sistema e sintonia de controladores
Inicialmente foi feita a amostragem dos dados da temperatura durante o experimento e
verificou-se que o método de Ziegler-Nichols é aplicável pois, ao selecionar-se manualmente
(malha aberta) os valores do duty cicle do miniventilador, a curva da temperatura apresentou
o formato de um "S". Na Figura 43 é apresentado o comportamento da temperatura durante o
experimento.
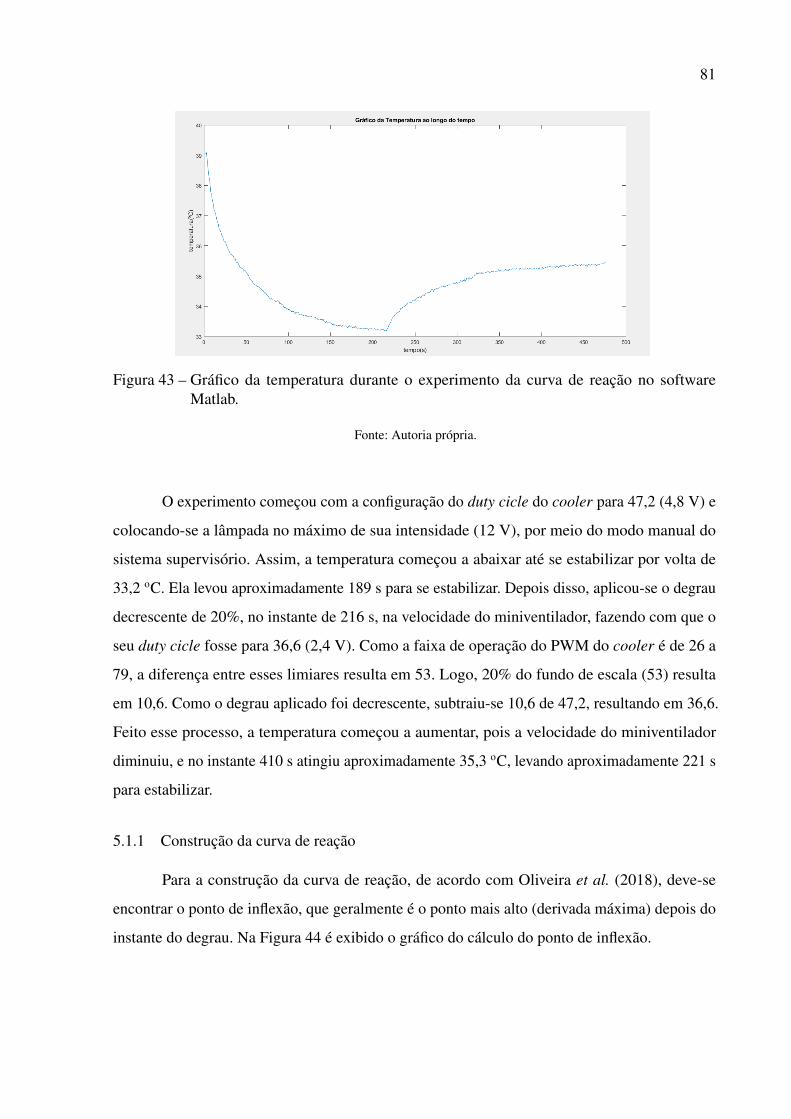
81
Figura 43 – Gráfico da temperatura durante o experimento da curva de reação no softwareMatlab.
Fonte: Autoria própria.
O experimento começou com a configuração do duty cicle do cooler para 47,2 (4,8 V) e
colocando-se a lâmpada no máximo de sua intensidade (12 V), por meio do modo manual do
sistema supervisório. Assim, a temperatura começou a abaixar até se estabilizar por volta de
33,2 oC. Ela levou aproximadamente 189 s para se estabilizar. Depois disso, aplicou-se o degrau
decrescente de 20%, no instante de 216 s, na velocidade do miniventilador, fazendo com que o
seu duty cicle fosse para 36,6 (2,4 V). Como a faixa de operação do PWM do cooler é de 26 a
79, a diferença entre esses limiares resulta em 53. Logo, 20% do fundo de escala (53) resulta
em 10,6. Como o degrau aplicado foi decrescente, subtraiu-se 10,6 de 47,2, resultando em 36,6.
Feito esse processo, a temperatura começou a aumentar, pois a velocidade do miniventilador
diminuiu, e no instante 410 s atingiu aproximadamente 35,3 oC, levando aproximadamente 221 s
para estabilizar.
5.1.1 Construção da curva de reação
Para a construção da curva de reação, de acordo com Oliveira et al. (2018), deve-se
encontrar o ponto de inflexão, que geralmente é o ponto mais alto (derivada máxima) depois do
instante do degrau. Na Figura 44 é exibido o gráfico do cálculo do ponto de inflexão.
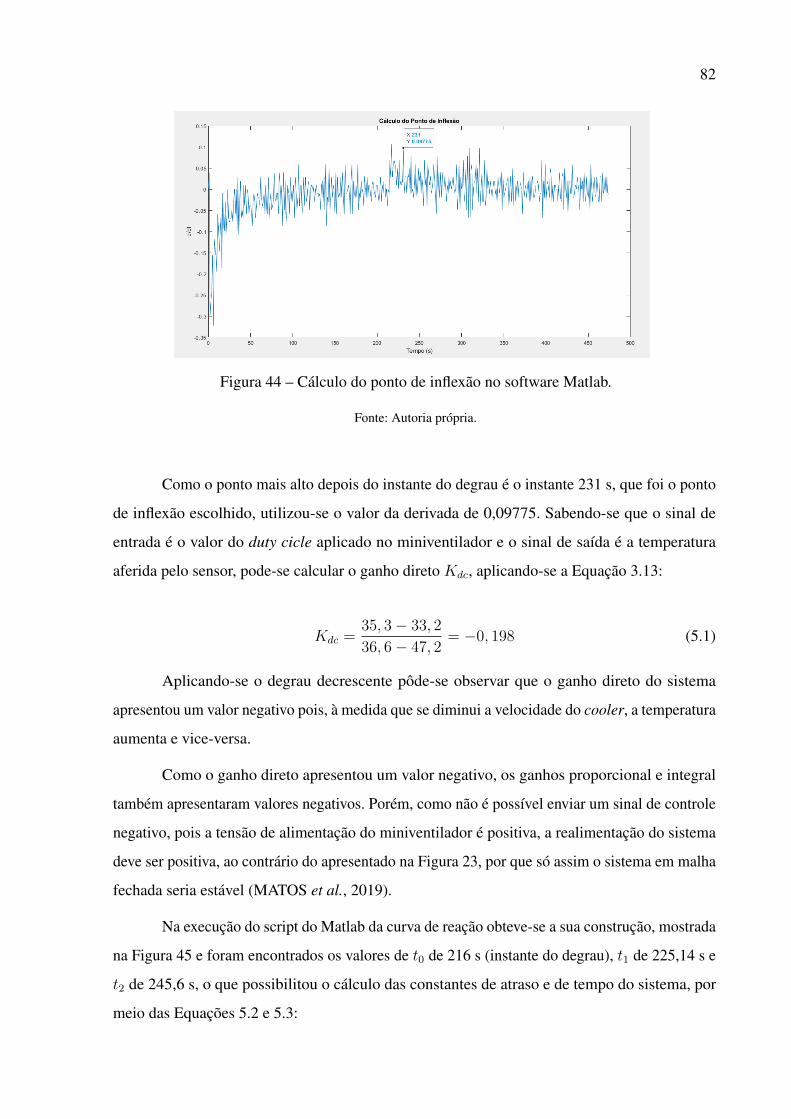
82
Figura 44 – Cálculo do ponto de inflexão no software Matlab.
Fonte: Autoria própria.
Como o ponto mais alto depois do instante do degrau é o instante 231 s, que foi o ponto
de inflexão escolhido, utilizou-se o valor da derivada de 0,09775. Sabendo-se que o sinal de
entrada é o valor do duty cicle aplicado no miniventilador e o sinal de saída é a temperatura
aferida pelo sensor, pode-se calcular o ganho direto Kdc, aplicando-se a Equação 3.13:
Kdc =35, 3 − 33, 2
36, 6 − 47, 2= −0, 198 (5.1)
Aplicando-se o degrau decrescente pôde-se observar que o ganho direto do sistema
apresentou um valor negativo pois, à medida que se diminui a velocidade do cooler, a temperatura
aumenta e vice-versa.
Como o ganho direto apresentou um valor negativo, os ganhos proporcional e integral
também apresentaram valores negativos. Porém, como não é possível enviar um sinal de controle
negativo, pois a tensão de alimentação do miniventilador é positiva, a realimentação do sistema
deve ser positiva, ao contrário do apresentado na Figura 23, por que só assim o sistema em malha
fechada seria estável (MATOS et al., 2019).
Na execução do script do Matlab da curva de reação obteve-se a sua construção, mostrada
na Figura 45 e foram encontrados os valores de t0 de 216 s (instante do degrau), t1 de 225,14 s e
t2 de 245,6 s, o que possibilitou o cálculo das constantes de atraso e de tempo do sistema, por
meio das Equações 5.2 e 5.3:
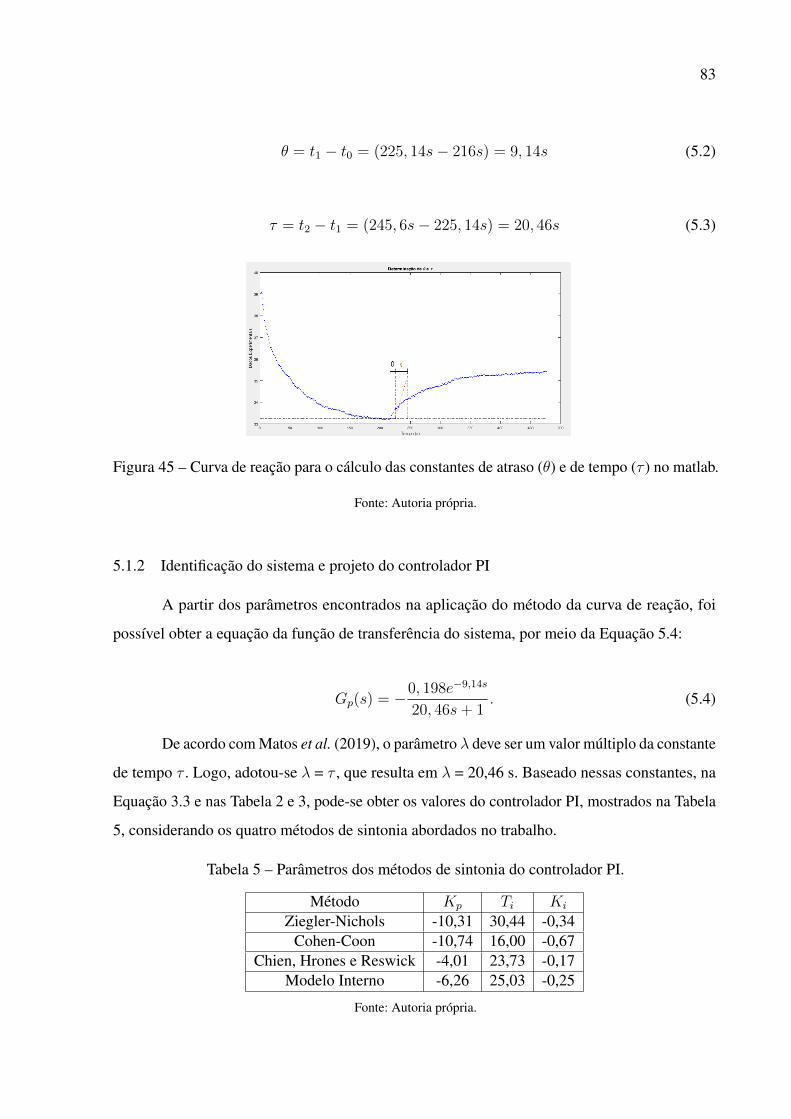
83
θ = t1 − t0 = (225, 14s− 216s) = 9, 14s (5.2)
τ = t2 − t1 = (245, 6s− 225, 14s) = 20, 46s (5.3)
Figura 45 – Curva de reação para o cálculo das constantes de atraso (θ) e de tempo (τ ) no matlab.
Fonte: Autoria própria.
5.1.2 Identificação do sistema e projeto do controlador PI
A partir dos parâmetros encontrados na aplicação do método da curva de reação, foi
possível obter a equação da função de transferência do sistema, por meio da Equação 5.4:
Gp(s) = −0, 198e−9,14s
20, 46s+ 1. (5.4)
De acordo com Matos et al. (2019), o parâmetro λ deve ser um valor múltiplo da constante
de tempo τ . Logo, adotou-se λ = τ , que resulta em λ = 20,46 s. Baseado nessas constantes, na
Equação 3.3 e nas Tabela 2 e 3, pode-se obter os valores do controlador PI, mostrados na Tabela
5, considerando os quatro métodos de sintonia abordados no trabalho.
Tabela 5 – Parâmetros dos métodos de sintonia do controlador PI.
Método Kp Ti Ki
Ziegler-Nichols -10,31 30,44 -0,34Cohen-Coon -10,74 16,00 -0,67
Chien, Hrones e Reswick -4,01 23,73 -0,17Modelo Interno -6,26 25,03 -0,25
Fonte: Autoria própria.
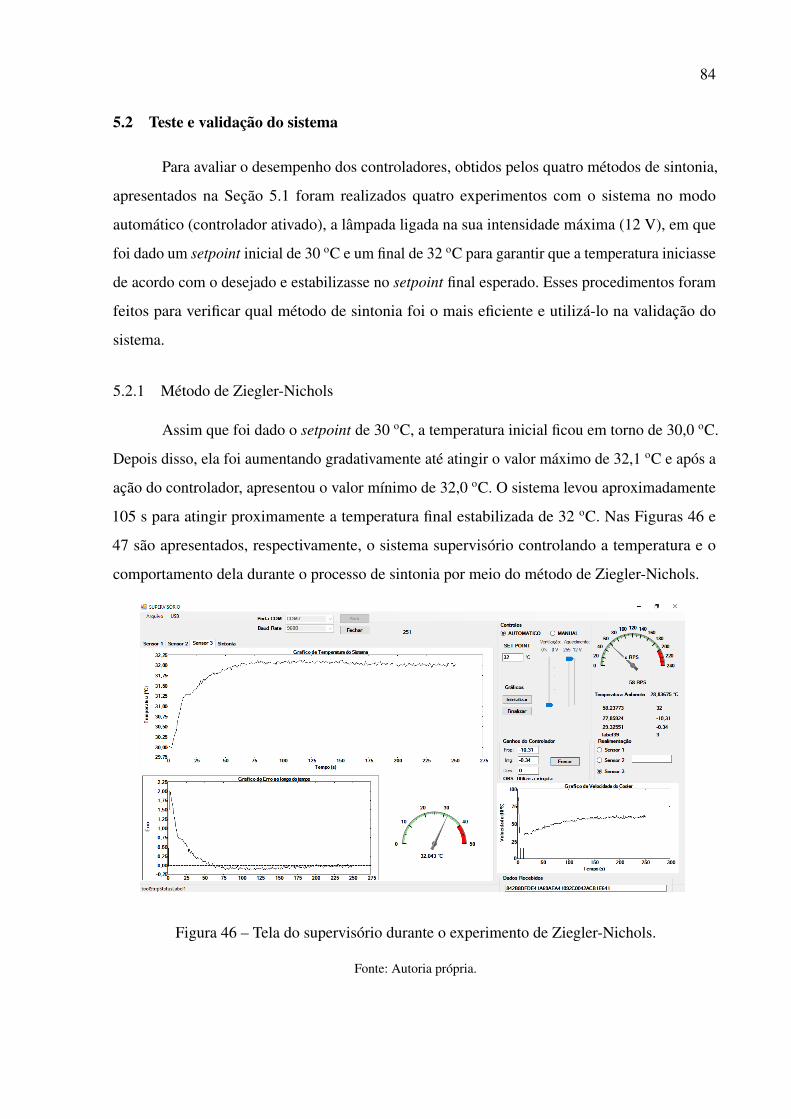
84
5.2 Teste e validação do sistema
Para avaliar o desempenho dos controladores, obtidos pelos quatro métodos de sintonia,
apresentados na Seção 5.1 foram realizados quatro experimentos com o sistema no modo
automático (controlador ativado), a lâmpada ligada na sua intensidade máxima (12 V), em que
foi dado um setpoint inicial de 30 oC e um final de 32 oC para garantir que a temperatura iniciasse
de acordo com o desejado e estabilizasse no setpoint final esperado. Esses procedimentos foram
feitos para verificar qual método de sintonia foi o mais eficiente e utilizá-lo na validação do
sistema.
5.2.1 Método de Ziegler-Nichols
Assim que foi dado o setpoint de 30 oC, a temperatura inicial ficou em torno de 30,0 oC.
Depois disso, ela foi aumentando gradativamente até atingir o valor máximo de 32,1 oC e após a
ação do controlador, apresentou o valor mínimo de 32,0 oC. O sistema levou aproximadamente
105 s para atingir proximamente a temperatura final estabilizada de 32 oC. Nas Figuras 46 e
47 são apresentados, respectivamente, o sistema supervisório controlando a temperatura e o
comportamento dela durante o processo de sintonia por meio do método de Ziegler-Nichols.
Figura 46 – Tela do supervisório durante o experimento de Ziegler-Nichols.
Fonte: Autoria própria.
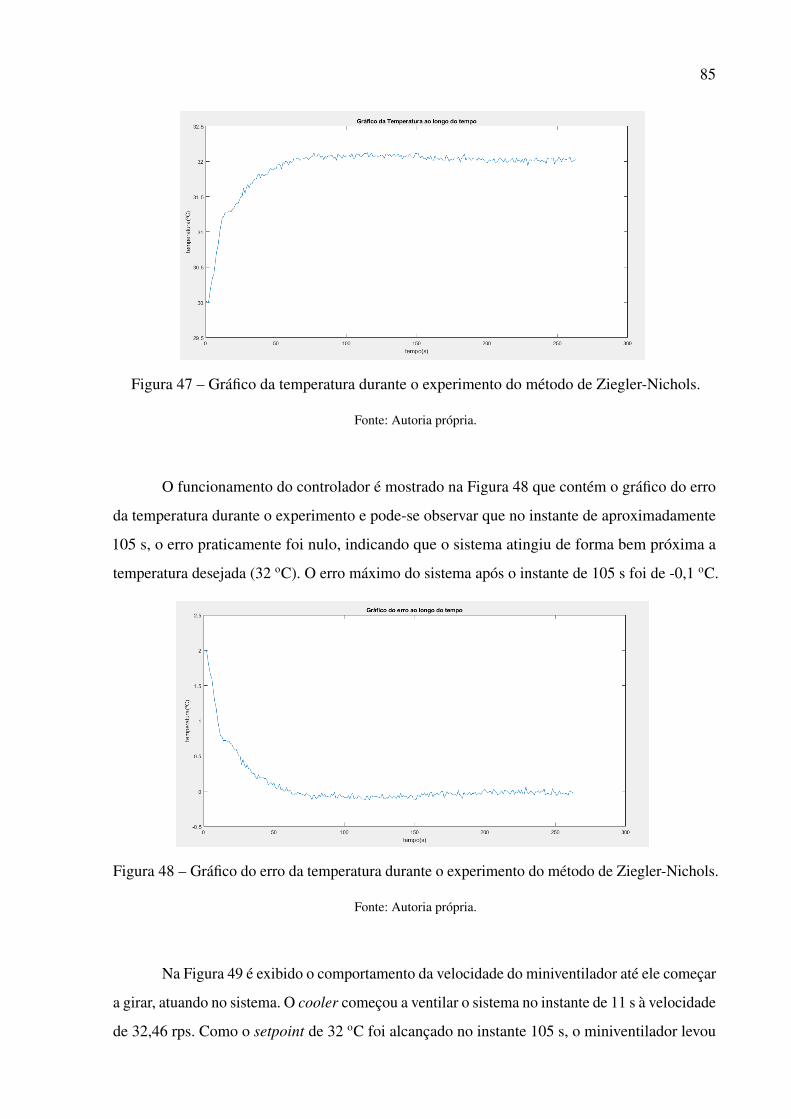
85
Figura 47 – Gráfico da temperatura durante o experimento do método de Ziegler-Nichols.
Fonte: Autoria própria.
O funcionamento do controlador é mostrado na Figura 48 que contém o gráfico do erro
da temperatura durante o experimento e pode-se observar que no instante de aproximadamente
105 s, o erro praticamente foi nulo, indicando que o sistema atingiu de forma bem próxima a
temperatura desejada (32 oC). O erro máximo do sistema após o instante de 105 s foi de -0,1 oC.
Figura 48 – Gráfico do erro da temperatura durante o experimento do método de Ziegler-Nichols.
Fonte: Autoria própria.
Na Figura 49 é exibido o comportamento da velocidade do miniventilador até ele começar
a girar, atuando no sistema. O cooler começou a ventilar o sistema no instante de 11 s à velocidade
de 32,46 rps. Como o setpoint de 32 oC foi alcançado no instante 105 s, o miniventilador levou
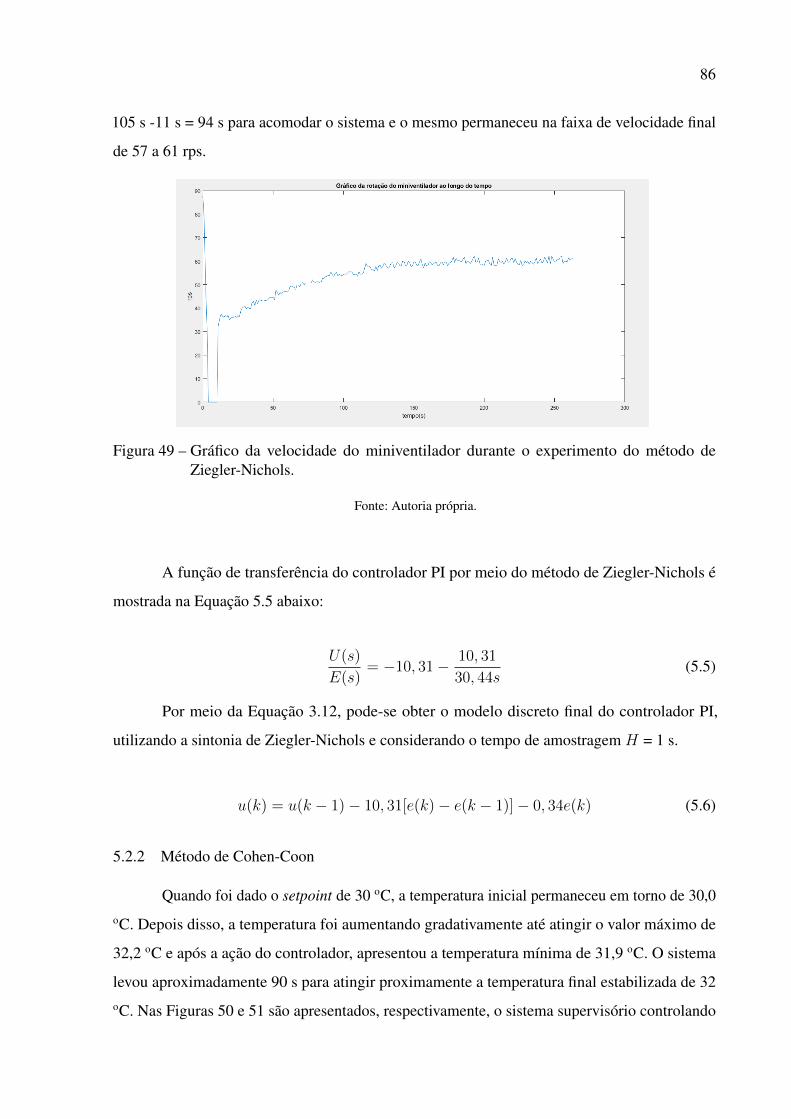
86
105 s -11 s = 94 s para acomodar o sistema e o mesmo permaneceu na faixa de velocidade final
de 57 a 61 rps.
Figura 49 – Gráfico da velocidade do miniventilador durante o experimento do método deZiegler-Nichols.
Fonte: Autoria própria.
A função de transferência do controlador PI por meio do método de Ziegler-Nichols é
mostrada na Equação 5.5 abaixo:
U(s)
E(s)= −10, 31 − 10, 31
30, 44s(5.5)
Por meio da Equação 3.12, pode-se obter o modelo discreto final do controlador PI,
utilizando a sintonia de Ziegler-Nichols e considerando o tempo de amostragem H = 1 s.
u(k) = u(k − 1) − 10, 31[e(k) − e(k − 1)] − 0, 34e(k) (5.6)
5.2.2 Método de Cohen-Coon
Quando foi dado o setpoint de 30 oC, a temperatura inicial permaneceu em torno de 30,0oC. Depois disso, a temperatura foi aumentando gradativamente até atingir o valor máximo de
32,2 oC e após a ação do controlador, apresentou a temperatura mínima de 31,9 oC. O sistema
levou aproximadamente 90 s para atingir proximamente a temperatura final estabilizada de 32oC. Nas Figuras 50 e 51 são apresentados, respectivamente, o sistema supervisório controlando
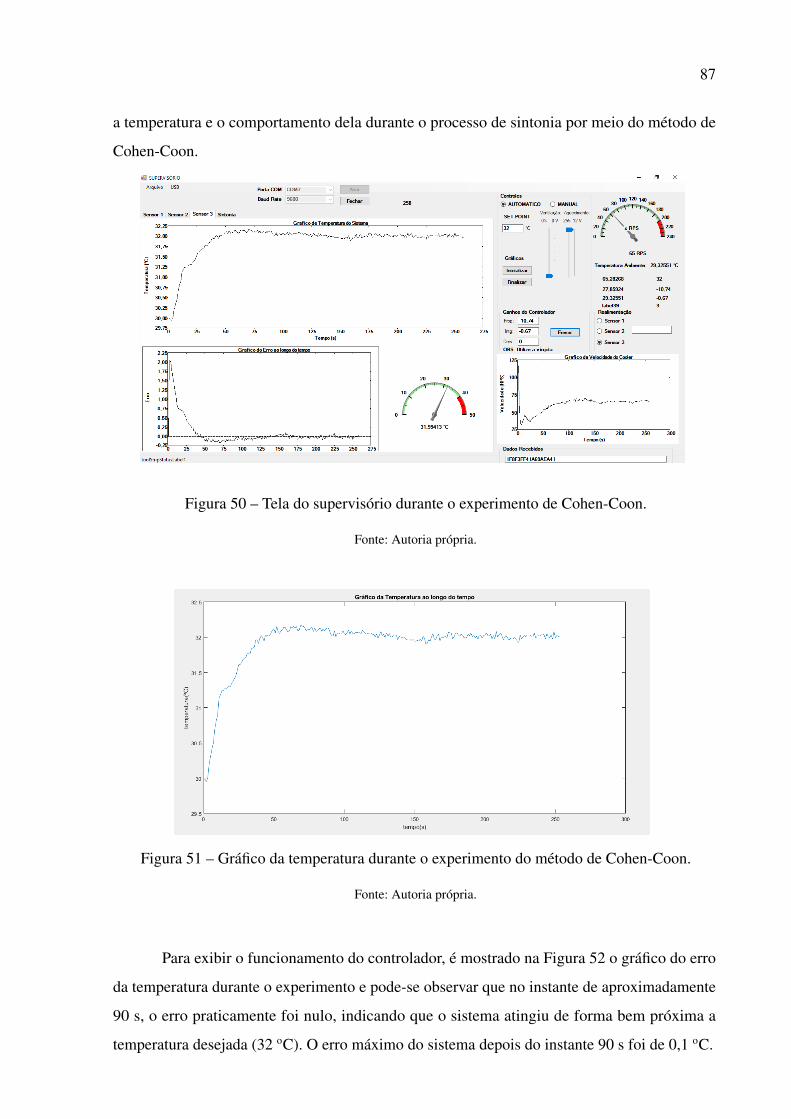
87
a temperatura e o comportamento dela durante o processo de sintonia por meio do método de
Cohen-Coon.
Figura 50 – Tela do supervisório durante o experimento de Cohen-Coon.
Fonte: Autoria própria.
Figura 51 – Gráfico da temperatura durante o experimento do método de Cohen-Coon.
Fonte: Autoria própria.
Para exibir o funcionamento do controlador, é mostrado na Figura 52 o gráfico do erro
da temperatura durante o experimento e pode-se observar que no instante de aproximadamente
90 s, o erro praticamente foi nulo, indicando que o sistema atingiu de forma bem próxima a
temperatura desejada (32 oC). O erro máximo do sistema depois do instante 90 s foi de 0,1 oC.
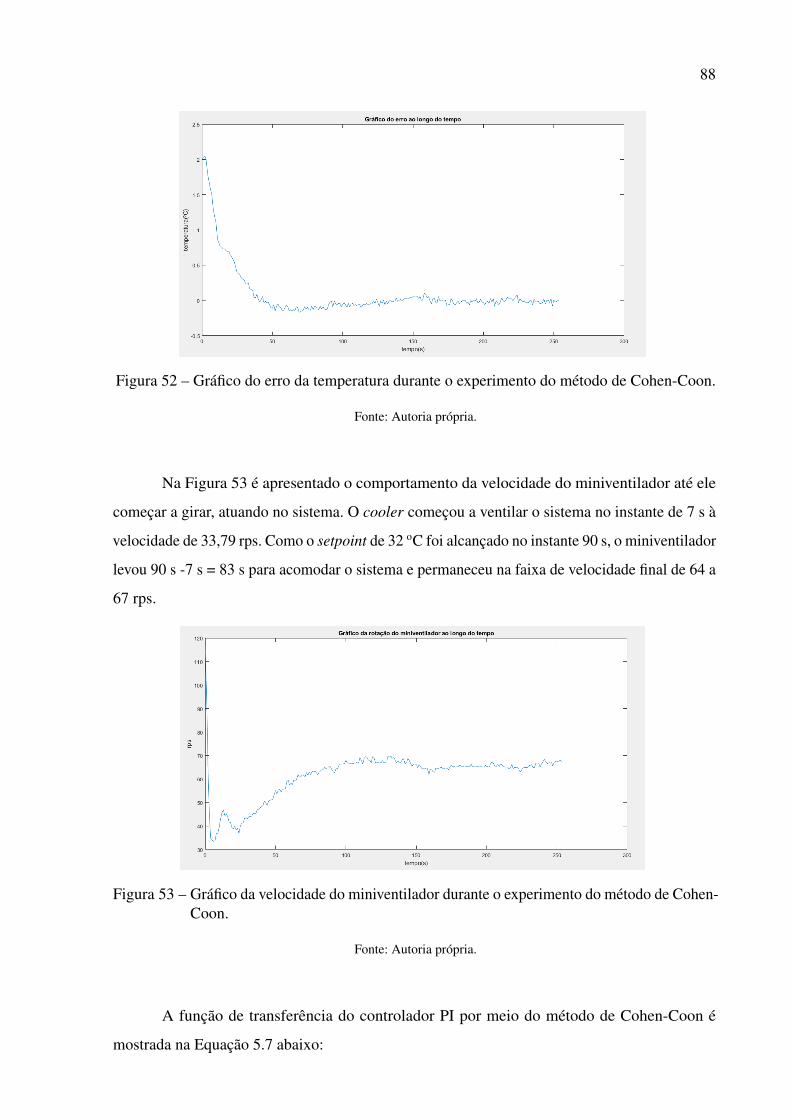
88
Figura 52 – Gráfico do erro da temperatura durante o experimento do método de Cohen-Coon.
Fonte: Autoria própria.
Na Figura 53 é apresentado o comportamento da velocidade do miniventilador até ele
começar a girar, atuando no sistema. O cooler começou a ventilar o sistema no instante de 7 s à
velocidade de 33,79 rps. Como o setpoint de 32 oC foi alcançado no instante 90 s, o miniventilador
levou 90 s -7 s = 83 s para acomodar o sistema e permaneceu na faixa de velocidade final de 64 a
67 rps.
Figura 53 – Gráfico da velocidade do miniventilador durante o experimento do método de Cohen-Coon.
Fonte: Autoria própria.
A função de transferência do controlador PI por meio do método de Cohen-Coon é
mostrada na Equação 5.7 abaixo:
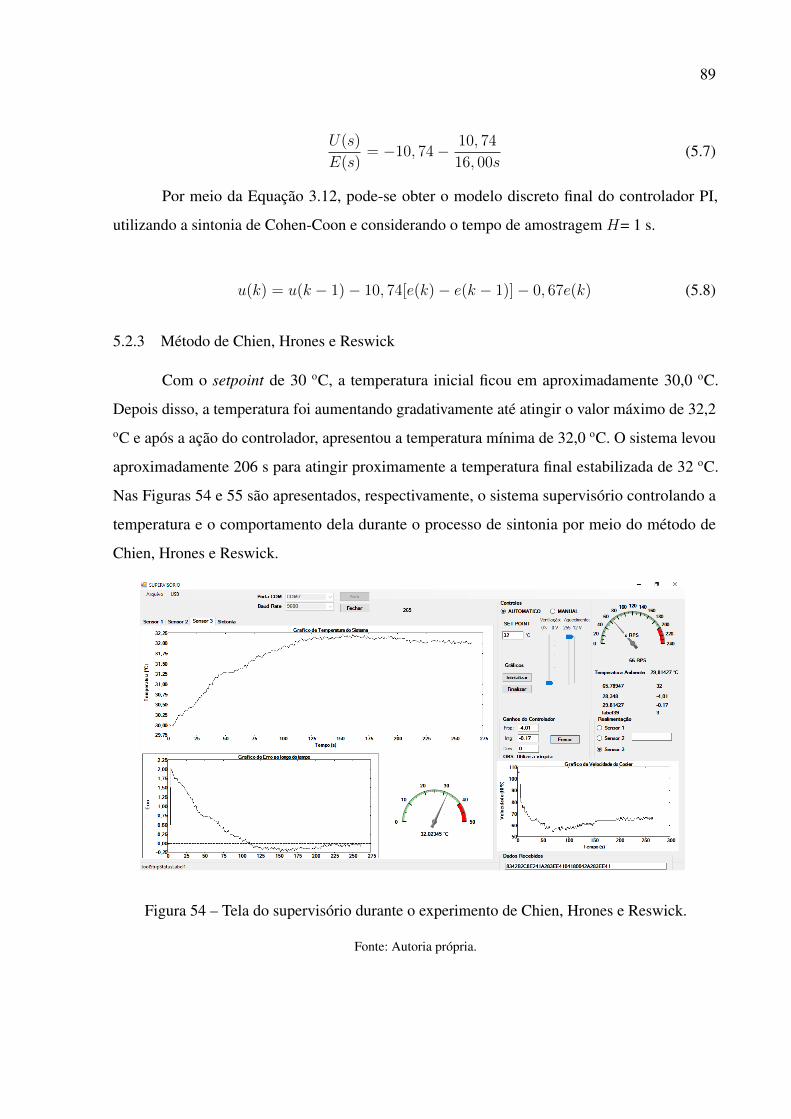
89
U(s)
E(s)= −10, 74 − 10, 74
16, 00s(5.7)
Por meio da Equação 3.12, pode-se obter o modelo discreto final do controlador PI,
utilizando a sintonia de Cohen-Coon e considerando o tempo de amostragem H= 1 s.
u(k) = u(k − 1) − 10, 74[e(k) − e(k − 1)] − 0, 67e(k) (5.8)
5.2.3 Método de Chien, Hrones e Reswick
Com o setpoint de 30 oC, a temperatura inicial ficou em aproximadamente 30,0 oC.
Depois disso, a temperatura foi aumentando gradativamente até atingir o valor máximo de 32,2oC e após a ação do controlador, apresentou a temperatura mínima de 32,0 oC. O sistema levou
aproximadamente 206 s para atingir proximamente a temperatura final estabilizada de 32 oC.
Nas Figuras 54 e 55 são apresentados, respectivamente, o sistema supervisório controlando a
temperatura e o comportamento dela durante o processo de sintonia por meio do método de
Chien, Hrones e Reswick.
Figura 54 – Tela do supervisório durante o experimento de Chien, Hrones e Reswick.
Fonte: Autoria própria.
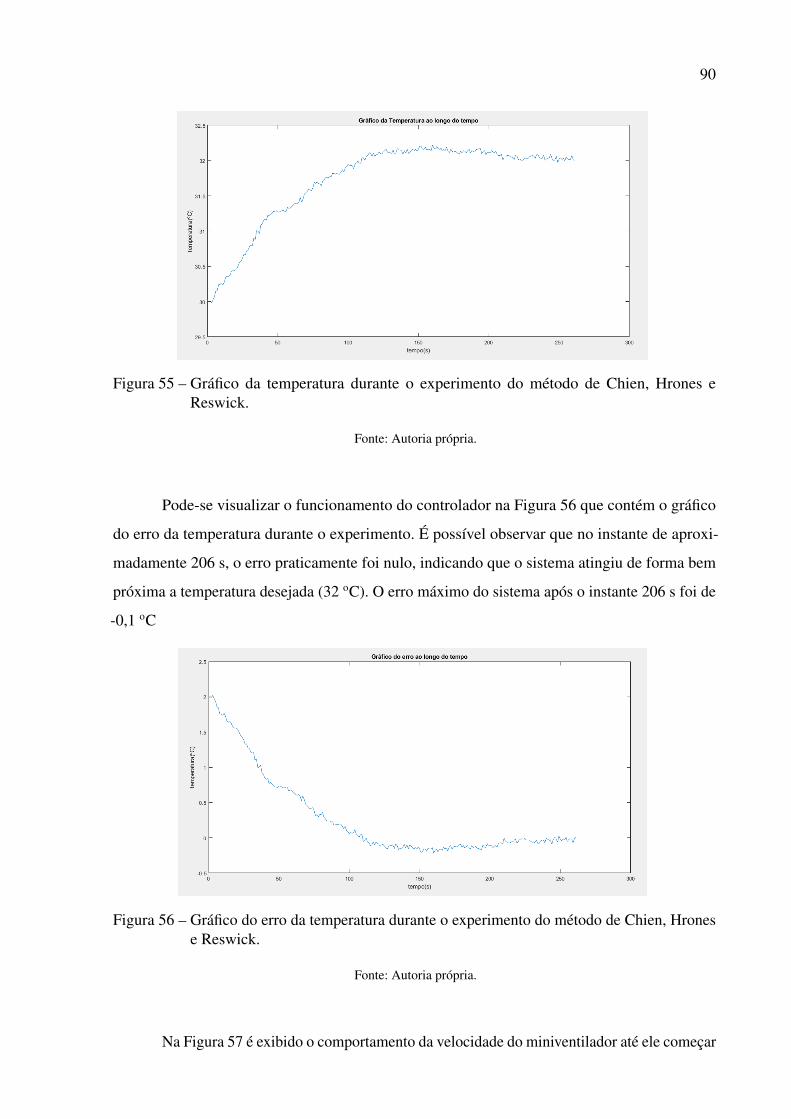
90
Figura 55 – Gráfico da temperatura durante o experimento do método de Chien, Hrones eReswick.
Fonte: Autoria própria.
Pode-se visualizar o funcionamento do controlador na Figura 56 que contém o gráfico
do erro da temperatura durante o experimento. É possível observar que no instante de aproxi-
madamente 206 s, o erro praticamente foi nulo, indicando que o sistema atingiu de forma bem
próxima a temperatura desejada (32 oC). O erro máximo do sistema após o instante 206 s foi de
-0,1 oC
Figura 56 – Gráfico do erro da temperatura durante o experimento do método de Chien, Hronese Reswick.
Fonte: Autoria própria.
Na Figura 57 é exibido o comportamento da velocidade do miniventilador até ele começar
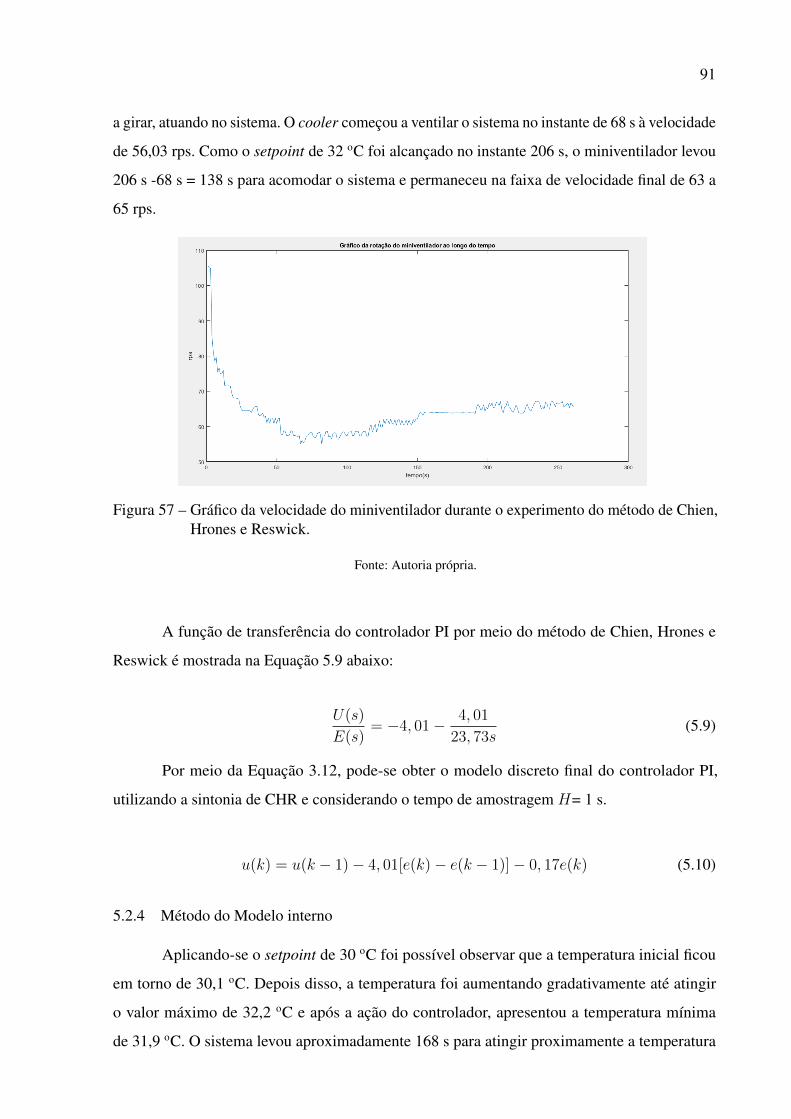
91
a girar, atuando no sistema. O cooler começou a ventilar o sistema no instante de 68 s à velocidade
de 56,03 rps. Como o setpoint de 32 oC foi alcançado no instante 206 s, o miniventilador levou
206 s -68 s = 138 s para acomodar o sistema e permaneceu na faixa de velocidade final de 63 a
65 rps.
Figura 57 – Gráfico da velocidade do miniventilador durante o experimento do método de Chien,Hrones e Reswick.
Fonte: Autoria própria.
A função de transferência do controlador PI por meio do método de Chien, Hrones e
Reswick é mostrada na Equação 5.9 abaixo:
U(s)
E(s)= −4, 01 − 4, 01
23, 73s(5.9)
Por meio da Equação 3.12, pode-se obter o modelo discreto final do controlador PI,
utilizando a sintonia de CHR e considerando o tempo de amostragem H= 1 s.
u(k) = u(k − 1) − 4, 01[e(k) − e(k − 1)] − 0, 17e(k) (5.10)
5.2.4 Método do Modelo interno
Aplicando-se o setpoint de 30 oC foi possível observar que a temperatura inicial ficou
em torno de 30,1 oC. Depois disso, a temperatura foi aumentando gradativamente até atingir
o valor máximo de 32,2 oC e após a ação do controlador, apresentou a temperatura mínima
de 31,9 oC. O sistema levou aproximadamente 168 s para atingir proximamente a temperatura

92
final estabilizada de 32 oC. Nas Figuras 58 e 59 são apresentados, respectivamente, o sistema
supervisório controlando a temperatura e o comportamento dela durante o processo de sintonia
por meio do método do Modelo interno.
Figura 58 – Tela do supervisório durante o experimento do Modelo interno.
Fonte: Autoria própria.
Figura 59 – Gráfico da temperatura durante o experimento do método do Modelo interno.
Fonte: Autoria própria.
Para exibir o funcionamento do controlador, mostra-se na Figura 60 o gráfico do erro
da temperatura durante o experimento e pode-se observar que no instante de aproximadamente
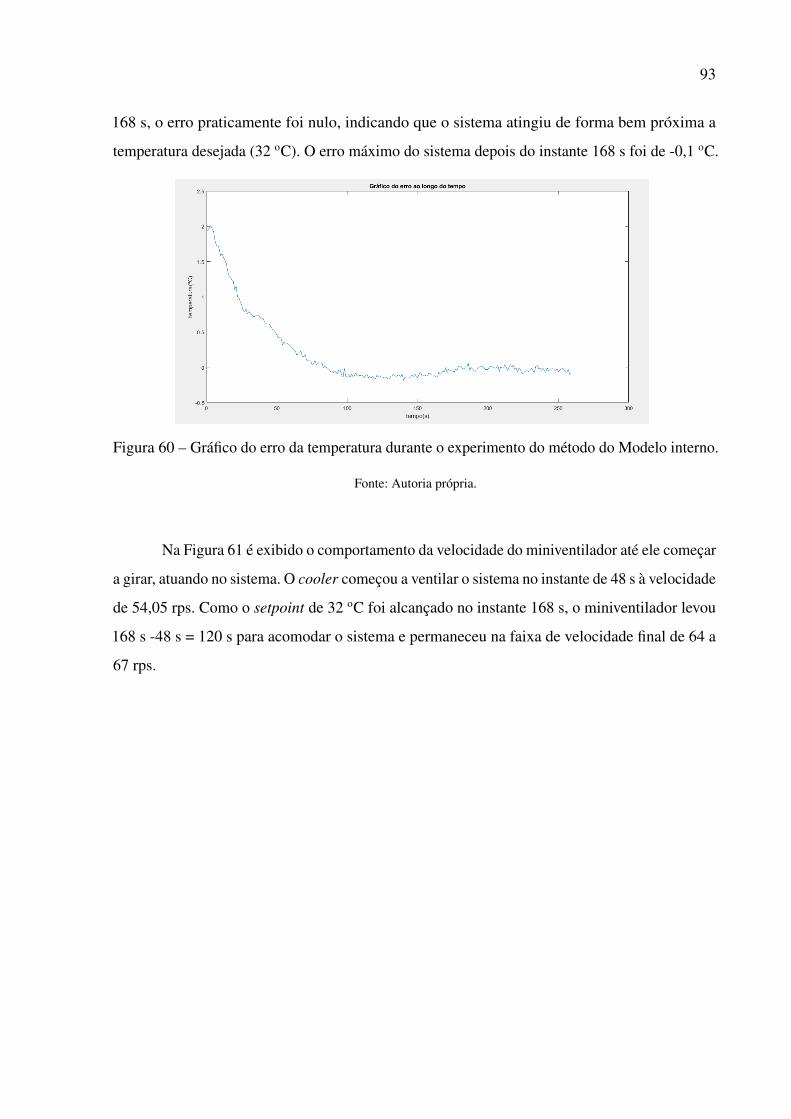
93
168 s, o erro praticamente foi nulo, indicando que o sistema atingiu de forma bem próxima a
temperatura desejada (32 oC). O erro máximo do sistema depois do instante 168 s foi de -0,1 oC.
Figura 60 – Gráfico do erro da temperatura durante o experimento do método do Modelo interno.
Fonte: Autoria própria.
Na Figura 61 é exibido o comportamento da velocidade do miniventilador até ele começar
a girar, atuando no sistema. O cooler começou a ventilar o sistema no instante de 48 s à velocidade
de 54,05 rps. Como o setpoint de 32 oC foi alcançado no instante 168 s, o miniventilador levou
168 s -48 s = 120 s para acomodar o sistema e permaneceu na faixa de velocidade final de 64 a
67 rps.
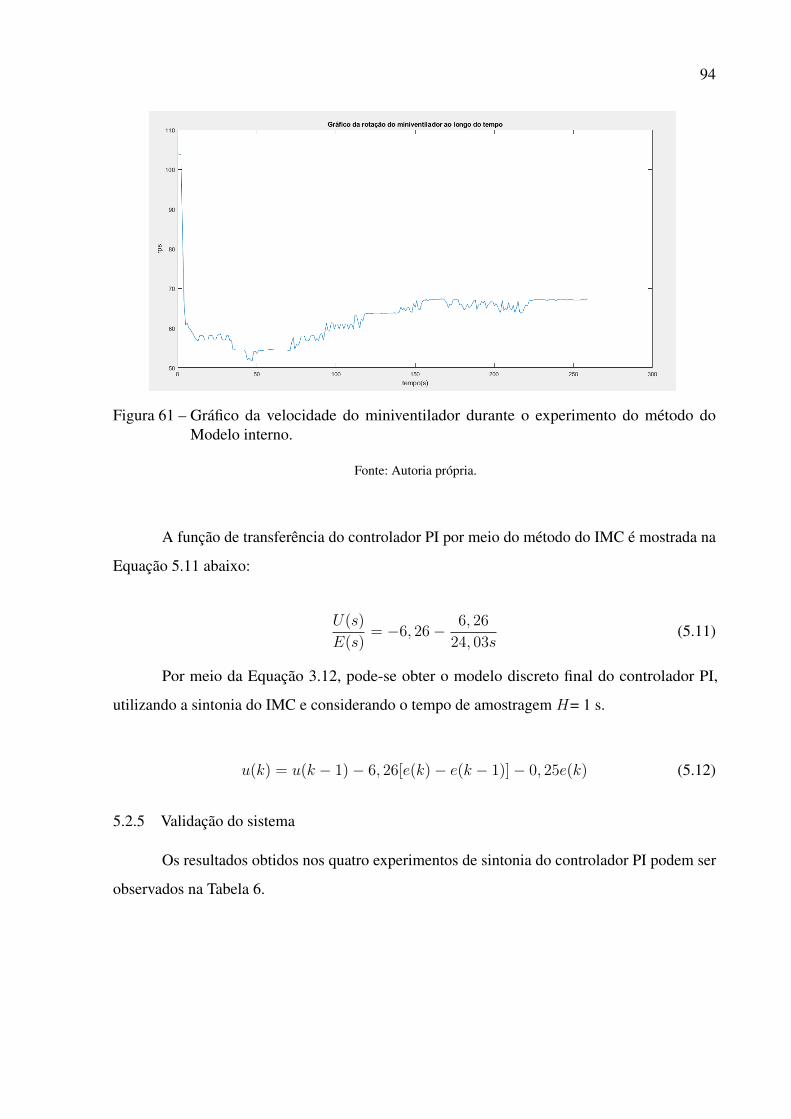
94
Figura 61 – Gráfico da velocidade do miniventilador durante o experimento do método doModelo interno.
Fonte: Autoria própria.
A função de transferência do controlador PI por meio do método do IMC é mostrada na
Equação 5.11 abaixo:
U(s)
E(s)= −6, 26 − 6, 26
24, 03s(5.11)
Por meio da Equação 3.12, pode-se obter o modelo discreto final do controlador PI,
utilizando a sintonia do IMC e considerando o tempo de amostragem H= 1 s.
u(k) = u(k − 1) − 6, 26[e(k) − e(k − 1)] − 0, 25e(k) (5.12)
5.2.5 Validação do sistema
Os resultados obtidos nos quatro experimentos de sintonia do controlador PI podem ser
observados na Tabela 6.
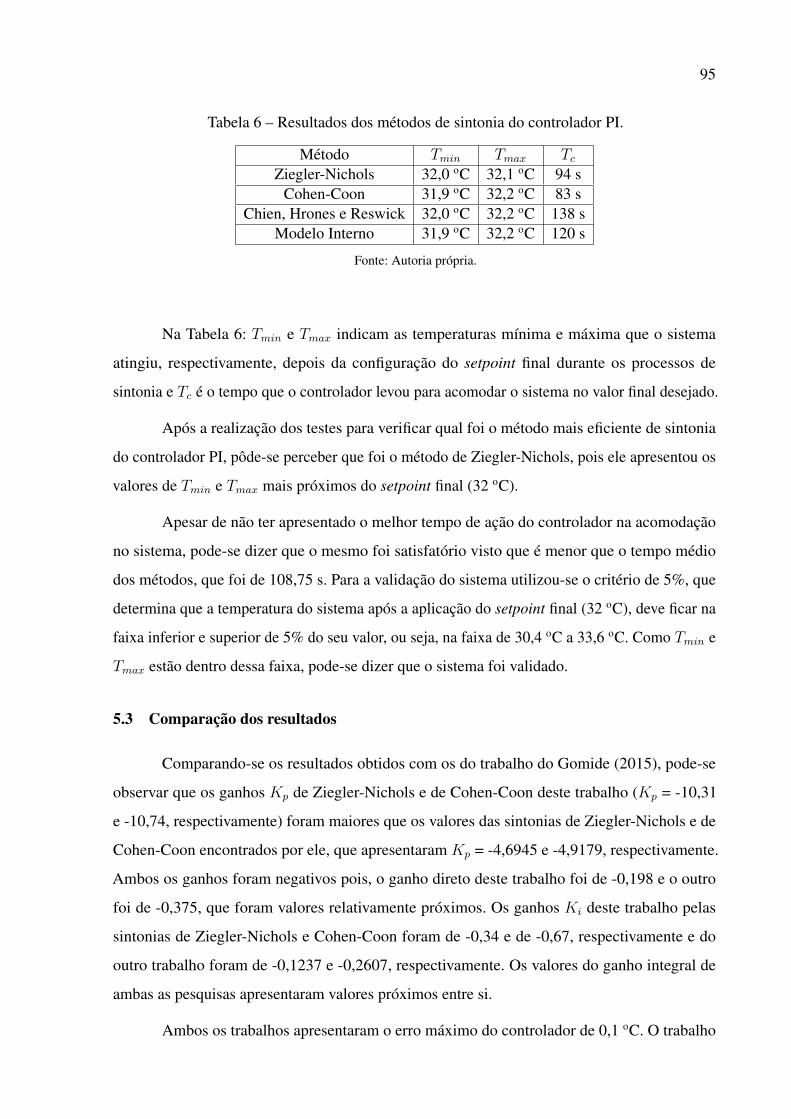
95
Tabela 6 – Resultados dos métodos de sintonia do controlador PI.
Método Tmin Tmax TcZiegler-Nichols 32,0 oC 32,1 oC 94 s
Cohen-Coon 31,9 oC 32,2 oC 83 sChien, Hrones e Reswick 32,0 oC 32,2 oC 138 s
Modelo Interno 31,9 oC 32,2 oC 120 s
Fonte: Autoria própria.
Na Tabela 6: Tmin e Tmax indicam as temperaturas mínima e máxima que o sistema
atingiu, respectivamente, depois da configuração do setpoint final durante os processos de
sintonia e Tc é o tempo que o controlador levou para acomodar o sistema no valor final desejado.
Após a realização dos testes para verificar qual foi o método mais eficiente de sintonia
do controlador PI, pôde-se perceber que foi o método de Ziegler-Nichols, pois ele apresentou os
valores de Tmin e Tmax mais próximos do setpoint final (32 oC).
Apesar de não ter apresentado o melhor tempo de ação do controlador na acomodação
no sistema, pode-se dizer que o mesmo foi satisfatório visto que é menor que o tempo médio
dos métodos, que foi de 108,75 s. Para a validação do sistema utilizou-se o critério de 5%, que
determina que a temperatura do sistema após a aplicação do setpoint final (32 oC), deve ficar na
faixa inferior e superior de 5% do seu valor, ou seja, na faixa de 30,4 oC a 33,6 oC. Como Tmin e
Tmax estão dentro dessa faixa, pode-se dizer que o sistema foi validado.
5.3 Comparação dos resultados
Comparando-se os resultados obtidos com os do trabalho do Gomide (2015), pode-se
observar que os ganhos Kp de Ziegler-Nichols e de Cohen-Coon deste trabalho (Kp = -10,31
e -10,74, respectivamente) foram maiores que os valores das sintonias de Ziegler-Nichols e de
Cohen-Coon encontrados por ele, que apresentaram Kp = -4,6945 e -4,9179, respectivamente.
Ambos os ganhos foram negativos pois, o ganho direto deste trabalho foi de -0,198 e o outro
foi de -0,375, que foram valores relativamente próximos. Os ganhos Ki deste trabalho pelas
sintonias de Ziegler-Nichols e Cohen-Coon foram de -0,34 e de -0,67, respectivamente e do
outro trabalho foram de -0,1237 e -0,2607, respectivamente. Os valores do ganho integral de
ambas as pesquisas apresentaram valores próximos entre si.
Ambos os trabalhos apresentaram o erro máximo do controlador de 0,1 oC. O trabalho
96
do Gomide (2015) apresentou uma variação maior na faixa de velocidade do miniventilador de 4
rps quando o controlador alcançou um valor próximo da temperatura desejada, ao passo que esse
trabalho apresentou um valor ainda menor, ou seja, de 2 rps. Na pesquisa do Gomide (2015), o
sistema começa a atuar no instante 230 s e estabiliza a rotação por volta de 550 s, logo o sistema
levou 550 s -230 s = 320 s para estabilizar a rotação do miniventilador. Já o miniventilador no
processo de validação deste trabalho levou 94 s para estabilizar a rotação do cooler, o que mostra
que o sistema atuou com um tempo de acomodação três vezes menor para corrigir e manter a
temperatura desejada. Logo, pode-se dizer que o sistema desenvolvido neste trabalho foi o mais
eficiente.

97
6 CONSIDERAÇÕES FINAIS
Neste trabalho foi possível aperfeiçoar e desenvolver uma bancada didática para práticas
da disciplina de Teoria de Controle, capaz de se comunicar por meio do protocolo serial UART
com o software supervisório adaptado de Ferreira (2014), apresentando uma comunicação
rápida e eficiente, visando auxiliar no entendimento dos alunos sobre o assunto. A bancada foi
construída utilizando-se as ferramentas, materiais e equipamentos disponíveis no LABCAM da
UFOP. A estrutura de acrílico do túnel de vento foi desenvolvida por Ferreira (2014). O objetivo
geral do trabalho foi alcançado pois, o preço médio gasto com o material utilizado na construção
da bancada didática foi de aproximadamente 130 reais, logo, pode-se concluir que foi possível
construí-la com um preço muito menor e com função bastante similar ao do sistema proposto
pela empresa Quanser.
Na construção da curva de reação optou-se por realizar um degrau decrescente de 20% no
ciclo de trabalho, em que obteve-se uma constante de tempo (τ = 20,46 s) duas vezes maior que
a constante de atraso (θ = 9,14 s) e um valor negativo no ganho direto do sistema (Kdc = -0,198).
Isso ocorreu devido ao fato de que quando a rotação do miniventilador aumenta, a temperatura
diminui e vice-versa. Assim, o cálculo do ganho direto do sistema sempre resultará em um valor
negativo. Nos resultados obtidos nos testes e na validação do sistema, pôde-se observar que em
cada método de sintonia do controlador PI, os valores de Kp foram bem maiores que os do Ki
e os pares de métodos de Ziegler-Nichols (Kp = -10,31 e Ki = -0,34) e de Cohen-Coon (Kp =
-10,74 e Ki = -0,67), e de Chien, Hrones e Reswick (Kp = -4,01 e Ki = -0,17) e Modelo interno
(Kp = -6,26 e Ki = -0,25) apresentaram valores similares. Comparando-se o tempo de ação de
cada controlador PI projetado pelos métodos ZN (94 s), CC (83 s), CHR (138 s) e IMC (120
s) com o tempo médio dos mesmos (108,75 s) pode-se afirmar que o método que apresentou o
menor tempo de acomodação foi o de Cohen-Coon, porém como essa sintonia apresentou uma
faixa de temperatura com maior variação do que a apresentada no método de Ziegler-Nichols, ela
não foi escolhida para a validação do sistema. O método de CHR foi o método que apresentou a
menor faixa de variação da rotação do miniventilador que foi de 2 rps (63 a 65 rps). Já os métodos
de CC e IMC apresentaram a variação de 3 rps (64 a 67 rps) e o método de ZN apresentou a
variação de 4 rps (57 a 61 rps).
Comparando-se os dados experimentais obtidos neste trabalho com os do Gomide (2015),
98
pôde-se observar que apesar de existirem algumas diferenças nas escolhas dos equipamentos,
na implementação e na construção do sistema, o comportamento foi semelhante, porém com
algumas vantagens do sistema aqui desenvolvido, como por exemplo, a menor faixa de variação
na faixa de velocidade do miniventilador (2 rps) quando o controlador alcançou um valor próximo
da temperatura desejada, o tempo de acomodação do microcontrolador, que foi pelo menos três
vezes menor, o fato de o aluno poder enxergar mais claramente o nível de aquecimento do sistema
por meio do brilho da lâmpada, a utilização de apenas uma placa de circuito impresso, em vez
das duas utilizadas no outro projeto, a facilidade de implementação e replicação, ser de código
e de hardware abertos etc. o que indica que o sistema foi realmente aprimorado, apresentando
melhores resultados, alcançando-se então um dos objetivos desse projeto.
Para trabalhos futuros sugere-se a utilização de uma lâmpada com potência maior e a
implementação da técnica anti-windup no firmware do Arduino. Outra proposta seria realizar a
sintonia do controlador por meio de outros métodos e a implementação de uma página web para
controlar e monitorar o sistema remotamente.
99
REFERÊNCIAS
AGUIRRE, L. A. Introdução à identificação de sistemas: técnicas lineares e não-linearesaplicadas a sistemas reais. 3. ed. Belo Horizonte: Editora UFMG, 2007. Disponívelem: <https://books.google.com.br/books?id=f9IwE7Ph0fYCprintsec=frontcoverhl=pt-BRsource=gbs ge summary rcad=0v=onepageqf=false>. Acesso em: 29 dez. 2019.
ALLDATASHEET. TIP122 Datasheet (PDF): power innovations ltd. 1997. Disponível em:<https://pdf1.alldatasheet.com/datasheet-pdf/view/20154/POINN/TIP122.html>. Acesso em:10 jan. 2020.
ALLDATASHEET. LM7805 Datasheet (PDF):Fairchild Semiconductor. 2005. Disponívelem: <https://pdf1.alldatasheet.com/datasheet-pdf/view/131011/FAIRCHILD/LM7805.html>.Acesso em: 24 dez. 2019.
BOYLESTAD, R. L.; NASHELSKY, L. Dispositivos Eletrônicos e teoria de circuitos. 11. ed.São Paulo: Pearson, 2013.
CALLAI, T. C.; COELHO, L. D. S.; COELHO, A. A. R. Controle nebuloso adaptativo pormodelo de referência: projeto e aplicação em sistemas não lineares. Sba: Controle & AutomaçãoSociedade Brasileira de Automatica, Natal, 2007. v. 18, n. 4, p. 479–489, 2007. Disponível em:<http://www.scielo.br/scielo.php?script=sci arttextpid=S0103-17592003000100003>. Acessoem: 22 dez. 2019.
CAVALCANTI, B. B. Avaliação de parâmetros de campo em radioterapia uti-lizando transistor bipolar de junção. Dissertação (Mestrado em TecnologiasEnergéticas e Nucleares) — Universidade Federal de Pernambuco, Recife,2018. Disponível em: <https://repositorio.ufpe.br/bitstream/123456789/32331/1-/DISSERTA%c3%87%c3%83O%20Bruna%20Barros%20Cavalcanti.pdf>. Acesso em: 22 dez.2019.
CHASE, O.; ALMEIDA, F. Sistemas embarcados. SBA Jovem 2010, 2007. v. 10, n. 11, p. 1–7,2007. Disponível em: <http://www.maxpezzin.com.br/aulas/6 EAC Sistemas Embarcados-/1 SE Introducao.pdf>. Acesso em: 23 dez. 2019.
CITISYSTEMS. O que é PWM e Para que Serve? 2018. Disponível em: <https://www-.citisystems.com.br/pwm/>. Acesso em: 23 set. 2018.
COCOTA, J. A. N. J. et al. Design and implementation of an educational robot manipulator.2014. XI Tecnologias Aplicadas a la Ensenanza de la Electronica (Technologies Applied toElectronics Teaching) (TAEE), Bilbao, p. 1–6, 6 2014. Disponível em: <https://ieeexplore-ieee-org.ez28.periodicos.capes.gov.br/stamp/stamp.jsp?tp=arnumber=6900173>. Acesso em: 23dez. 2019.
CUNHA, A. F. O que são sistemas embarcados. Saber Eletrônica, 2007. v. 43, n. 414, p. 1–6,2007. Disponível em: <http://files.comunidades.net/mutcom/ARTIGO SIST EMB.pdf>. Acessoem: 23 dez. 2019.
DICIO. Significado de ventilador. 2019. Disponível em: <https://www.dicio.com.br/ventilador-/>. Acesso em: 22 dez. 2019.
100
ESTRELLA-ESPAÑA, Y. et al. Control de sistemas con reciclo y retardo en la medición:Aplicación a un proceso térmico. 2014. In: MEMORIAS DEL XVI CONGRESOLATINOAMERICANO DE CONTROL AUTOMÁTICO (CLCA).,16, Cancún. Anales [...].Cancún, p. 536–542, 2014. Disponível em: <http://amca.mx/memorias/amca2014/media/files-/0236.pdf>. Acesso em: 23 dez. 2019.
FARIAS, E. M. B. et al. Estudo e simulação de um controlador de carga parasistema fotovoltaico off-grid. 2016. São José dos Campos, p. 6, 2016. Dis-ponível em: <https://www.researchgate.net/profile/Tatiane Costa5/publication-/325902997 ESTUDO E SIMULACAO DE UM CONTROLADOR DE CARGA PARASISTEMA FOTOVOLTAICO OFF-GRID/links/5b2baf484585150d23bbfc6d/ESTUDO-E-SIMULACAO-DE-UM-CONTROLADOR-DE-CARGA-PARA-SISTEMA-FOTOVOLTAICO-OFF-GRID.pdf>. Acesso em: 24 dez. 2019.
FERREIRA, D. V. M. Desenvolvimento de sistema educacional para teoria de controle desistemas. 48 f. Trabalho de Conclusão de Curso (Bacharelado em Engenharia de Controlee Automação) — Departamento de Engenharia de Controle e Automação, UniversidadeFederal de Ouro Preto, Ouro Preto, 2014. Disponível em: <https://www.em.ufop.br-/images/MonografiasControleAutomacao/2014/DiogenesViegas.pdf>. Acesso em: 24 dez.2019.
FERREIRA, H. C. Implementação de um sistema via internet para Experiências àdistância de malhas de controle. 82 f. Dissertação (Mestrado em Automação e SistemasElétricos Industriais) — Universidade Federal de Itajubá, Itajubá, 2006. Disponível em:<https://saturno.unifei.edu.br/bim/0030099.pdf>. Acesso em: 24 dez. 2019.
FILHO, E. E.; RIBEIRO, L. R. C. Aprendendo com PBL–aprendizagem baseada emproblemas: relato de uma experiência em cursos de engenharia da eesc-usp. Revista Minerva,2009. São Carlos, v. 6, n. 1, p. 23–30, 2009. Disponível em: <http://www.fipai.org.br-/Minerva%2006(01)%2003.pdf>. Acesso em: 24 dez. 2019.
FRANKLIN, G. F.; POWELL, J. D.; EMAMI-NAEINI, A. Sistemas de controle paraengenharia. 6. ed. Porto Alegre: Bookman Editora, 2013.
GOMES, F. J.; PINTO, D. P. Laboratórios integrados para controle de processos e análiseda eficiência energética de sistemas industriais. 2008. In: CONGRESSO BRASILEIRODE EDUCAÇÃO EM ENGENHARIA, 36., Moema. Anais [...]., 2008. Disponível em:<http://www.abenge.org.br/cobenge/arquivos/11/artigos/2214.pdf>. Acesso em: 26 dez. 2019.
GOMIDE, V. de O. Sistema didático de controle de temperatura. 79 f. Trabalho de Conclusãode Curso (Bacharelado em Engenharia de Controle e Automação) — Departamento deEngenharia de Controle e Automação, Universidade Federal de Ouro Preto, Ouro Preto, 2015.Disponível em: <https://www.em.ufop.br/images/MonografiasControleAutomacao/2014-/ViniciusGomide.pdf>. Acesso em: 30 dez. 2019.
GOODWIN, G. C.; GRAEBE, S. F.; SALGADO, M. E. Control System Design. 1. ed.Valparaíso: Prentice Hall, 2000.
IBRAHIM, D. Microcontroller based applied digital control. Chippenham: Wiley OnlineLibrary, 2006.
101
JAMIESON, P. Arduino for teaching embedded systems. are computer scientists andengineering educators missing the boat? 2011. In: INTERNATIONAL CONFERENCE ONFRONTIERS IN EDUCATION: COMPUTER SCIENCE AND COMPUTER ENGINEERING(FECS’11), 11., Las Vegas. Proceedings [...]. Las Vegas, p. 289–294, 2011. Disponível em:<http://www.drpeterjamieson.com/html papers/fecs 11.pdf>. Acesso em: 27 dez. 2019.
JUNIOR, A. A. G.; SOUSA, A. R. de. Fundamentos de metrologia científica e industrial. 1.ed. Barueri: Manole, 2008.
LABCENTER ELECTRONICS. Software de Design de PCB e Simulador de Circuitos parao desenvolvimento moderno de EDA. 2019. Disponível em: <https://www.labcenter.com/>.Acesso em: 19 out. 2019.
LOVE, J. Process automation handbook: a guide to theory and practice. 1. ed. Londres: Sprin-ger Science & Business Media, 2007. Disponível em:<https://books.google.com.br/books?hl=pt-BRlr=id=eEnobcUiXE0Coi=fndpg=PR5dq=Process+automation+handbook:+a+guide+to+theory+and+practiceots=cuHWKT3xtLsig=XRCkEC4sq86rubs0khZZgGPC tcv=onepageq=Process\%20automa-tion\%20handbook\%3A\%20a\%20guide\%20to\%20theory\%20and\%20practicef =false>.Acesso em: 27 dez. 2019.
MARQUES, A. E. B. Dispositivos semicondutores: diodos e transistores. 13. ed.São Paulo: Saraiva, 2012. Disponível em: <https://books.google.com.br/books?hl=pt-BRlr=id=GrdiDwAAQBAJoi=fndpg=PA6dq=Dispositivos++semicondutores:++diodos++e++transistoresots=lUGigYf 7xsig=XOPSmkK8obLbcvdjxh48QtW4UCcv=onepageq=Dispositivos%20%20semicondutores%3A%20%20diodos%20%20e%20%20transistoresf=false>.Acesso em: 27 dez. 2019.
MATOS, S. N. et al. Bancada de transferência de calor para práticas de teoria de controle. SBAI,2019. Ouro Preto, p. 7, 2019. Disponível em: <https://proceedings.science/sbai-2019/papers-/bancada-de-transferencia-de-calor-para-praticas-de-teoria-de-controle>. Acesso em: 28 dez.2019.
MELO, N. B. et al. Metodologia da problematização e aprendizagem baseada emproblemas na odontologia: análise bibliométrica dos trabalhos apresentados nas reuniõesda sbpqo. Revista da ABENO, 2017. Paraíba, v. 17, n. 2, p. 60–67, 2017. Disponível em:<https://revabeno.emnuvens.com.br/revabeno/article/view/413/291>. Acesso em: 28 dez. 2019.
MORESI, E. A. D.; BRAGA, F. M. O.; BARBOSA, J. A. O emprego da aprendizagembaseada em desafios para subsidiar a fundamentação de temas de pesquisa. 2018. In: 15THINTERNATIONAL CONFERENCE ON INFORMATION SYSTEMS AND TECHNOLOGYMANAGEMENT - CONTECSI, 15., São Paulo. Proceedings [...]. São Paulo: USP, 2018.Disponível em: <http://www.tecsi.org/contecsi/arquivos/15contecsi.pdf>. Acesso em: 28 dez.2019.
NISE, N. S.; SILVA, F. R. da. Engenharia de sistemas de controle. 3. ed. Rio de Janeiro: LTC,2002.
NORHUZAIMIN, J.; MAIMUN, H. The design of high speed uart. 2005. In: ASIA-PACIFICCONFERENCE ON APPLIED ELECTROMAGNETICS, Johor Bahru. Proceedings [...]. JohorBahru, p. 5, 2005. Disponível em: <https://ieeexplore-ieee-org.ez28.periodicos.capes.gov.br-/stamp/stamp.jsp?tp=arnumber=1607831>. Acesso em: 29 dez. 2019.
102
OLIVEIRA, L. O. M. et al. Bancada remota para práticas de controle de nível de tanque.2018. In: CONGRESSO BRASILEIRO DE AUTOMÁTICA, 22., João Pessoa. Anais[...]. João Pessoa: Universidade Federal da Paraíba, 2018. Disponível em: <https:/-/plataforma.swge.com.br/PROCEEDINGS/PDF/CBA2018-1425.pdf>. Acesso em: 29 dez.2019.
PHILIPS. Crie a atmosfera ideal com as lâmpadas halógenas. 2019. Disponível em:<https://www.lighting.philips.com.br/consumer/lampadas-halogenas>. Acesso em: 16 out.2019.
PIERRI, R. de. 3- Debugando um cooler de 4 fios. 2015. Disponível em: <https://nets-nuts-.com.br/industria/debugando-um-cooler-de-4-fios/>. Acesso em: 11 jan. 2020.
REIMBOLD, M. M.; RASIA, L. A.; WEBER, M. Estudo e desempenho das portas paralela eserial dos pcs como ambiente de aprendizagem. 2000. In: CONGRESSO BRASILEIRO DEENSINO DE ENGENHARIA, 28., Ouro Preto. Anais [...]. Ouro Preto, 2000. Disponível em:<http://www.abenge.org.br/cobenge/arquivos/19/artigos/177.pdf>. Acesso em: 29 dez. 2019.
ROBÓTICA, G. de. Introdução ao arduino. Notas de aula, Universidade Federal doMato Grosso do Sul, 2012. Mato Grosso do Sul, 2012. Disponível em: <http://www-.professorsergiogodoy.com.br/apostilas/arduino basico UFMS.pdf>. Acesso em: 30 dez.2019.
SANTOS, M. V. Transistores. 2008. In: MORA, N. D.; LUCAS, J. F. R.; MARAN, M. A.Materiais Elétricos: compêndio de trabalhos. Foz do Iguaçu: Universidade Estadual do Oestedo Paraná., p. 787–812, 2008. Disponível em: <http://foz.unioeste.br/˜lamat/downcompendio-/compendiov7.pdfpage=125>. Acesso em: 30 dez. 2019.
SARAIVA, F. A. Métodos de sintonia em controladores PID. 47 f. Trabalho de Conclusãode Curso (Bacharelado em Engenharia de Telecomunicações) — Unilasalle Canoas,Canoas/RS, 2011. Disponível em: <https://biblioteca.unilasalle.edu.br/docs online-/tcc/graduacao/engenharia telecomunicacoes/2011/fasaraiva.pdf>. Acesso em: 30 dez.2019.
SEGUNDO, A. K. R. et al. Low cost scada system for education. 2015. In: IEEE GLOBALENGINEERING EDUCATION CONFERENCE (EDUCON), Tallinn. Proceedings [...].Tallinn: Tallinn University of Technology, p. 536–542, 2015. Disponível em: <https://ieeexplore-ieee-org.ez28.periodicos.capes.gov.br/stamp/stamp.jsp?tp=arnumber=7096022>. Acesso em: 30dez. 2019.
SILVA, R. B.; LOPES, M. P.; AMARAL, L. S. Projeto e construção de uma plantadidática para ensino de estratégias de controle de nível, vazão e temperatura em cursos deengenharia. 2012. In: CONGRESSO BRASILEIRO DE EDUCAÇÃO EM ENGENHARIA,40., Belém. Anais [...]. Belém: Universidade Federal do Pará, 2012. Disponível em:<http://www.abenge.org.br/cobenge/arquivos/7/artigos/103776.pdf>. Acesso em: 27 dez. 2019.
SILVEIRA, C. B. Sensor: você sabe o que é quais os tipos? 2019. Disponível em:<https://www.citisystems.com.br/sensor-voce-sabe-que-quais-tipos/>. Acesso em: 14 out.2019.
UNITY. A História da Instrumentação e sua Origem. 2015. Disponível em: <https:/-/unityinstrumentos.com.br/a-historia-da-instrumentacao-e-sua-origem/>. Acesso em: 20 set.2019.
103
VISUAL STUDIO. Visual Studio: As melhores ferramentas do setor para qualquerdesenvolvedor. 2019. Disponível em: <https://visualstudio.microsoft.com/pt-br/>. Acesso em:19 out. 2019.
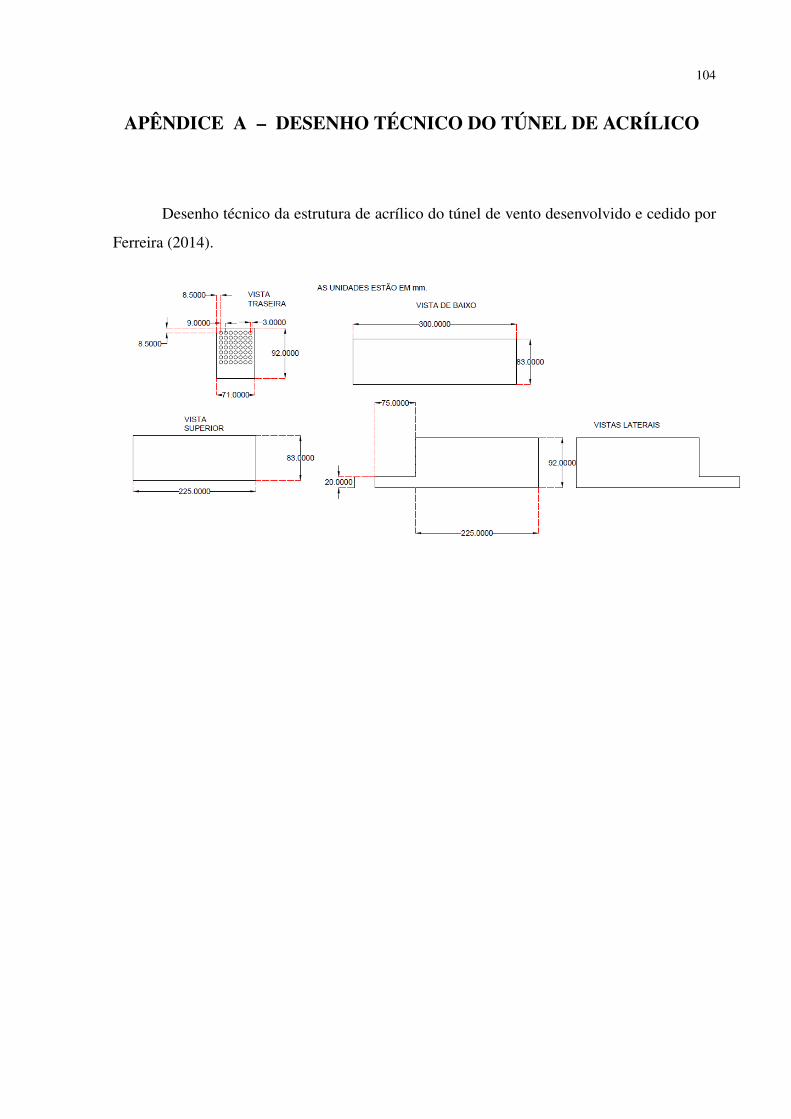
104
APÊNDICE A – DESENHO TÉCNICO DO TÚNEL DE ACRÍLICO
Desenho técnico da estrutura de acrílico do túnel de vento desenvolvido e cedido por
Ferreira (2014).
Top Related