





Línguas
Páginas
Legal


Jean M.S.C Yabarrena – J.A.F. Herrera
17 de Abril de 2009
Barometric Altimeter & Inertial Navigation System & GPS - J.S.C.
Yabarrena - J.A.F. Herrera 1
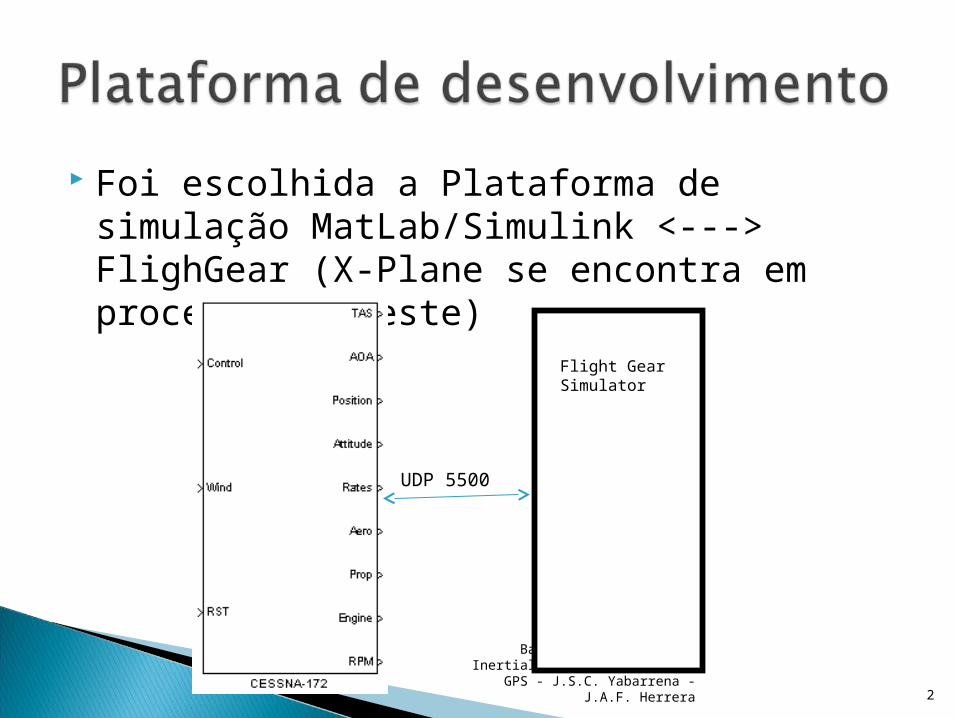
Foi escolhida a Plataforma de simulação MatLab/Simulink <---> FlighGear (X-Plane se encontra em processo de teste)
Barometric Altimeter & Inertial Navigation System & GPS - J.S.C.
Yabarrena - J.A.F. Herrera 2
Flight Gear Simulator
UDP 5500
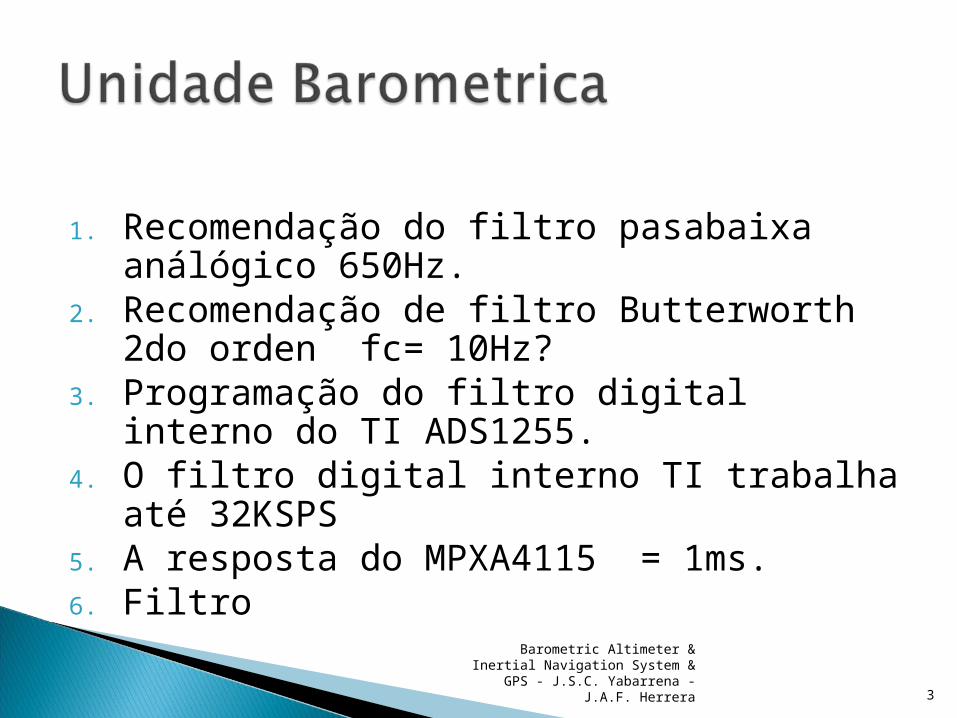
1. Recomendação do filtro pasabaixa análógico 650Hz.
2. Recomendação de filtro Butterworth 2do orden fc= 10Hz?
3. Programação do filtro digital interno do TI ADS1255.
4. O filtro digital interno TI trabalha até 32KSPS
5. A resposta do MPXA4115 = 1ms.6. Filtro
Barometric Altimeter & Inertial Navigation System & GPS - J.S.C.
Yabarrena - J.A.F. Herrera 3
No modelo foi considerada a função de transferencia do datasheet.
Barometric Altimeter & Inertial Navigation System & GPS - J.S.C.
Yabarrena - J.A.F. Herrera 4

Teste da US Standard Atmosphere 1976 Logo de verificar os limites da função no Wolfram Mathematica para achar
os coeficientes da equação: Unidades SI; TROPOSPHERE 0 11 Km; dTH=-0.0065; R=287.052; g= 9.80665; T0=288.15; P0=101325; a=T0/-dTH b=-dTH*R/g 44330.8 0.190263 h[p_]=a (1- (p/P0)b) 44330.76923076923` (1-0.11158343153792875` p0.19026252593903117`) 44330.8 (1-0.111583 p0.190263) h[0] h[101325] 44330.8 0.
Barometric Altimeter & Inertial Navigation System & GPS - J.S.C.
Yabarrena - J.A.F. Herrera 5

As dificuldades na derivação da altitude para achar a RoC fazerm necessário a escolha de um filtro.
Foi escolhido o filtro Washout
Roc[s]=s/((1+T1s)(1+T2s))fa <1/T1 e 1/T2 < N (largura de banda do ruido do sensor)
Barometric Altimeter & Inertial Navigation System & GPS - J.S.C.
Yabarrena - J.A.F. Herrera 6

Foram estudadas as equaçoes e relação de IAS, CAS, EAS e TAS.
Foram estudiados os filtros de Media Ponderada Móvel e algoritmo de Savitsky-Golay.
A melhor metodologia proposta é fazer a FFT do sinal e fazer o corte das frequências espúreas, logo fazer a FFT Inversa.
Barometric Altimeter & Inertial Navigation System & GPS - J.S.C.
Yabarrena - J.A.F. Herrera 7

Barometric Altimeter & Inertial Navigation System & GPS - J.S.C.
Yabarrena - J.A.F. Herrera 8

Barometric Altimeter & Inertial Navigation System & GPS - J.S.C.
Yabarrena - J.A.F. Herrera 9

1. Definir os passos de propagação e atualização.(asíncrono ou síncrono) Exemplo 85Hz propagação e 20Hz atualização.
2. O algoritmo de inversão de matrizes (erros por determinantes muito pequenos, precisão) Exemplo: Gauss Jordan
3. Desempenho esperado: Attitude , Latitude, Longitude e Altura.
Barometric Altimeter & Inertial Navigation System & GPS - J.S.C.
Yabarrena - J.A.F. Herrera 10

4. Erros de integração fixed-step, fazem diverger rapidamente o INS sem KF.
5. Definição da arquitetura do filtro (centralizado, desacoplado).
6. Definição do vetor de estados.7. Definição do tipo de filtro: KF Linear, EKF,
UKF, CKF.8. No caso de usar um EKF, avaliar o metodo
Bierman-Thornton.
Barometric Altimeter & Inertial Navigation System & GPS - J.S.C.
Yabarrena - J.A.F. Herrera 11

Barometric Altimeter & Inertial Navigation System & GPS - J.S.C.
Yabarrena - J.A.F. Herrera 12

Barometric Altimeter & Inertial Navigation System & GPS - J.S.C.
Yabarrena - J.A.F. Herrera 13
Barometric Altimeter & Inertial Navigation System & GPS - J.S.C.
Yabarrena - J.A.F. Herrera 14
Barometric Altimeter & Inertial Navigation System & GPS - J.S.C.
Yabarrena - J.A.F. Herrera 15

Barometric Altimeter & Inertial Navigation System & GPS - J.S.C.
Yabarrena - J.A.F. Herrera 16

9. Specification of the initial error covariance matrix P is often a cause of difficulties. Being careless in the definition of P, especially the portions of P related to the attitude errors, can have serious detrimental effects on the performance of the system. It is often best to use the sensor readings during a short period at the start of operation to initialize the state vector. Based on the statistics of the sensor measurements and the initialization period duration, the error covariance matrix P can be specified reasonably.
Barometric Altimeter & Inertial Navigation System & GPS - J.S.C.
Yabarrena - J.A.F. Herrera 17
Barometric Altimeter & Inertial Navigation System & GPS - J.S.C.
Yabarrena - J.A.F. Herrera 18

Barometric Altimeter & Inertial Navigation System & GPS - J.S.C.
Yabarrena - J.A.F. Herrera 19

Barometric Altimeter & Inertial Navigation System & GPS - J.S.C.
Yabarrena - J.A.F. Herrera 20

Barometric Altimeter & Inertial Navigation System & GPS - J.S.C.
Yabarrena - J.A.F. Herrera 21

Barometric Altimeter & Inertial Navigation System & GPS - J.S.C.
Yabarrena - J.A.F. Herrera 22
Barometric Altimeter & Inertial Navigation System & GPS - J.S.C.
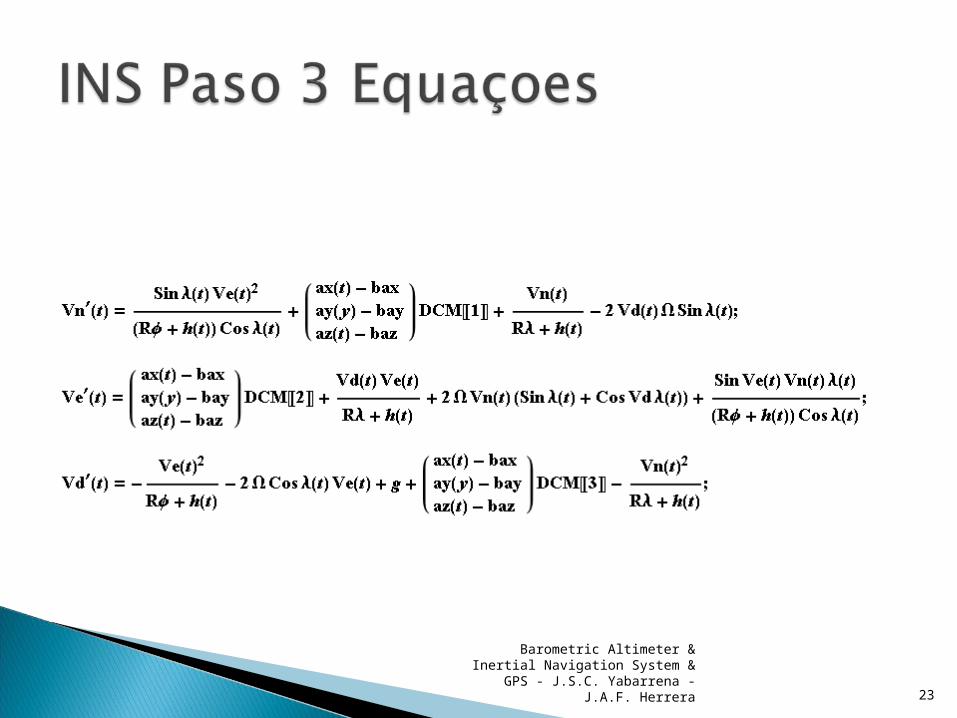
Yabarrena - J.A.F. Herrera 23
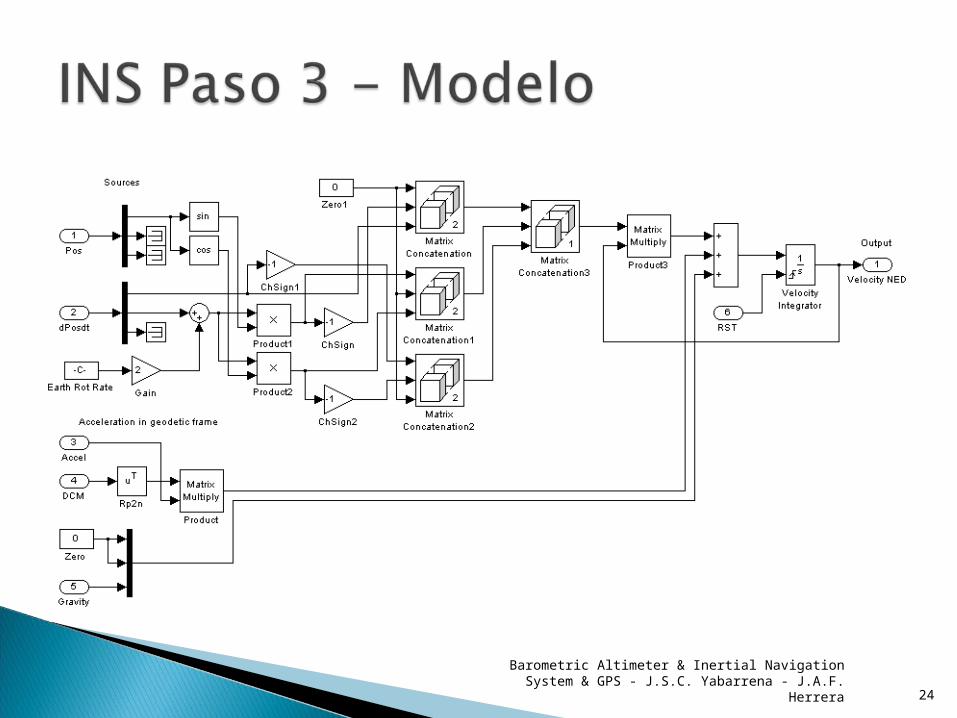
Barometric Altimeter & Inertial Navigation System & GPS - J.S.C. Yabarrena - J.A.F. Herrera 24

Barometric Altimeter & Inertial Navigation System & GPS - J.S.C.
Yabarrena - J.A.F. Herrera 25

Barometric Altimeter & Inertial Navigation System & GPS - J.S.C.
Yabarrena - J.A.F. Herrera 26
Barometric Altimeter & Inertial Navigation System & GPS - J.S.C.
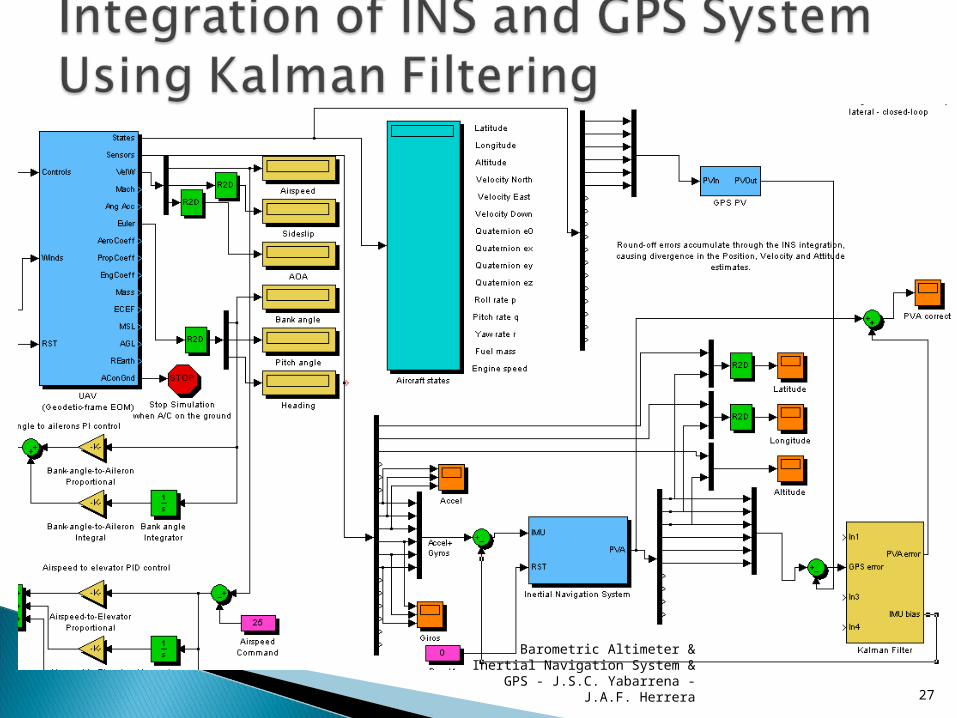
Yabarrena - J.A.F. Herrera 27

Barometric Altimeter & Inertial Navigation System & GPS - J.S.C.
Yabarrena - J.A.F. Herrera 28

Mar-2009 29Lab. Mecatrônica
Digital Clock (fixed-step)
Perfil Simulado
Statechart (controle de
eventos)

Mar-2009Lab. Mecatrônica 30
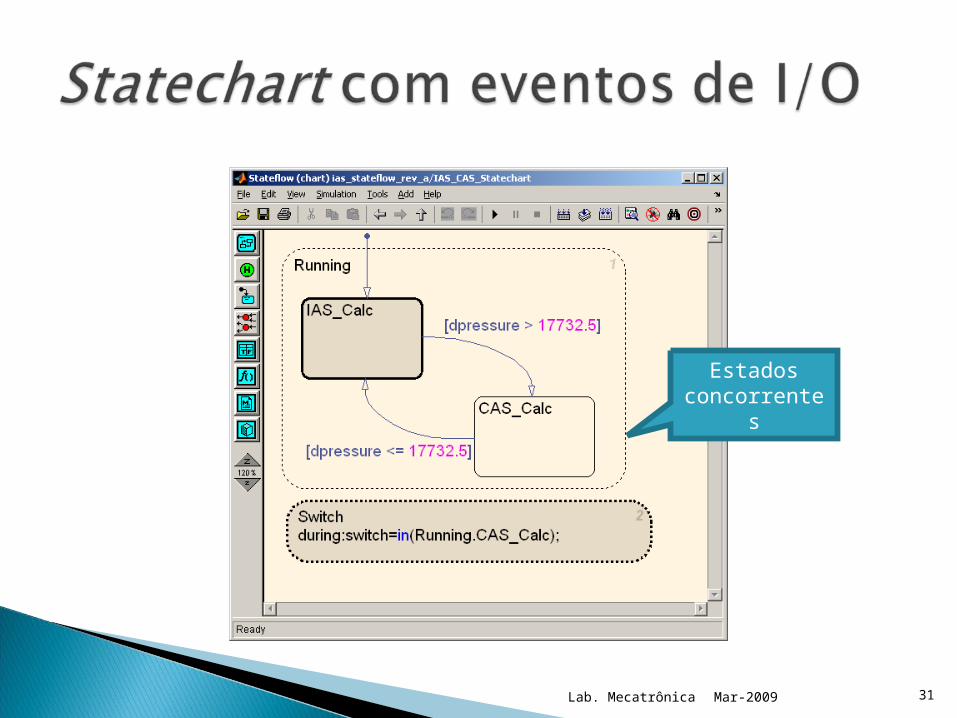
Mar-2009Lab. Mecatrônica 31
Estados concorrentes

Mar-2009Lab. Mecatrônica 32
Mudança da Atitude

Mar-2009Lab. Mecatrônica 33
Ajuste de acordo com a resolução do
uP
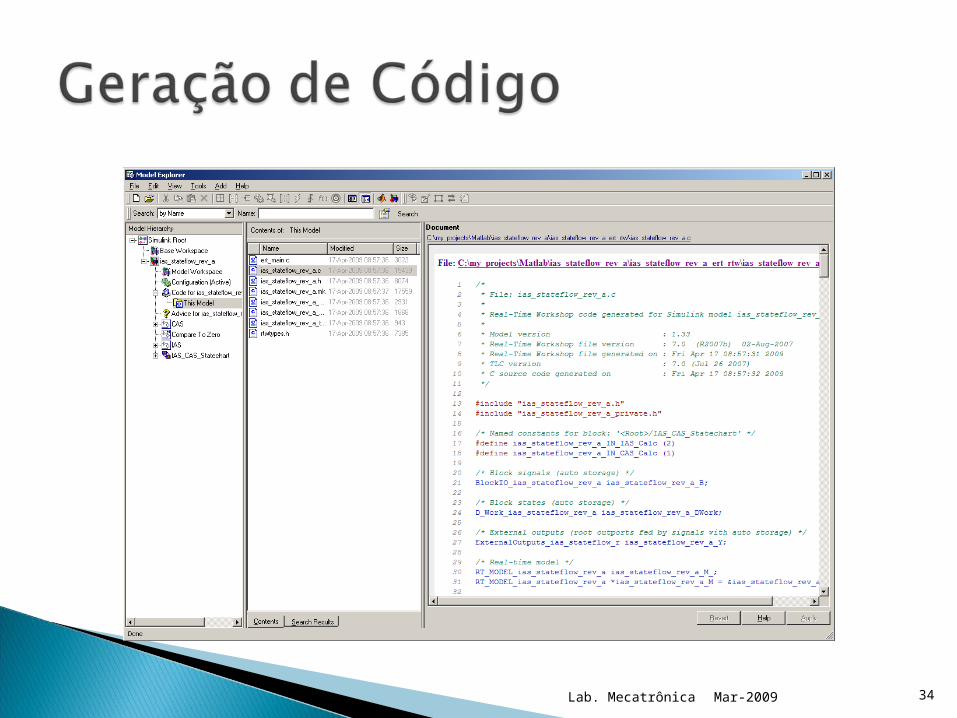
Mar-2009Lab. Mecatrônica 34
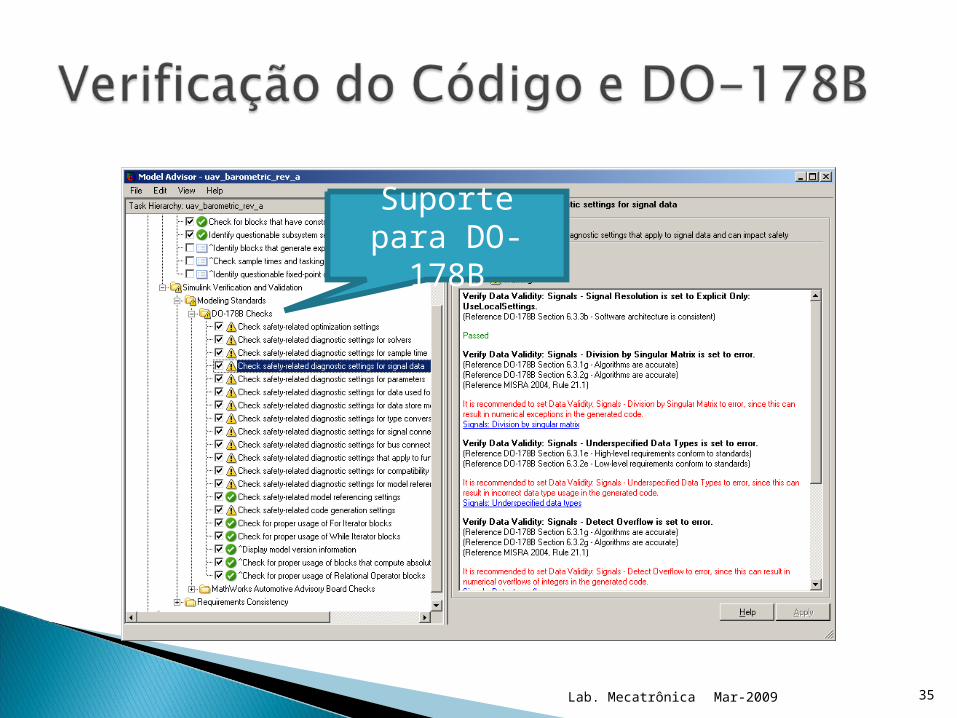
Mar-2009Lab. Mecatrônica 35
Suporte para DO-178B

Mar-2009Lab. Mecatrônica 36

Mar-2009Lab. Mecatrônica 37

Mar-2009Lab. Mecatrônica 38
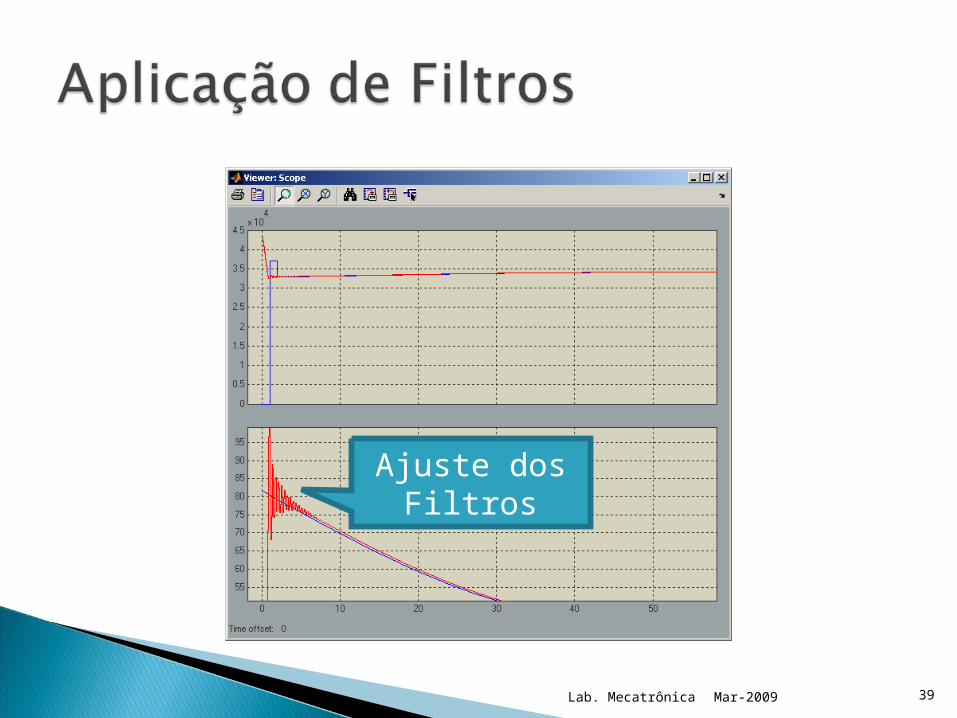
Mar-2009Lab. Mecatrônica 39
Ajuste dos Filtros
Top Related