







Línguas
Páginas
Legal


CURSO DE QUALIFICAÇÃO EM AUTOMAÇÃO INDUSTRIAL
Eng Marcio Cardoso
Rio Verde/GO
2015

Objetivo do curso
• Qualificar profissional para atuar no segmento da automação para conhecer dispositivos utilizados no processo de manufatura;
• Fazer com que o profissional conheça os dispositivos sensores;
• Capacitar o profissional a programar os controladores lógicos programáveis e suas comunicações.

Sensores
• São dispositivos construídos para detectar a presença ou a passagem de materiais metálicos ou não, por proximidade ou aproximação, sem contato físico;
• Esta detecção é feita pela face sensora do sensor, que ao serem acionados ativam as entradas do controlador lógico programável para a automação da planta industrial;
• As operações indireta alteram suas propriedades, como resistência, capacitância, indutância;
Características fundamentais dos sensores
• Linearidade– É o grau de proporcionalidade entre o sinal gerado e a grandeza física. Quanto
maior , mais fiel é a resposta do sensor ao estímulo. Os mais utilizados são os lineares, conferindo precisão ao sistema de controle.
• Faixa de atuação– É o intervalo de valores da grandeza em que pode ser usado o sensor, sem
destruição ou imprecisão.
• Histerese– É a distância entre os pontos de comutação do sensor, quando um atuador
dele se aproxima e se afasta.
• Sensibilidade– É a distância entre a face do sensor e o atuador no instante em que ocorre a
comutação.
• Superfície Ativa– É a superfície através da qual o campo eletromagnético de alta freqüência se
irradia no meio externo.

Características fundamentais dos sensores
• Fator de correção– Fornece a redução da distância sensora em presença de materiais
cujas características apresentam desvios em relação ao ferro Fe 360 (definido pela ISO 630).
• Frequência de comutação– Corresponde à quantidade máxima de comutações por segundo.
Transdutores utilizados em processo, Sensores utilizados em manufatura
• Distância Sensora– Distância em que aproximando-se o acionador da face sensora, o
sensor muda o estado da saída.
• Distância Sensora nominal– Distância sensora teórica, a qual utiliza um alvo padrão como
acionador e não considera as variações causadas pela industrialização, temperatura de operação e tensão de alimentação.

Visão Geral das famílias de sensores e seus princípios ativos
SENSORES
FAMÍLIA TIPO PRINCIPIO DE
FUNCIONAMENTO
INDUTIVOS PROXIMIDADE
Geração de campo
eletromagnético em alta
frequencia.
CAPACITIVOS PROXIMIDADE
Geração de campo
eletromagnético desenvolvido
por oscilação.
ÓPTICOS
DIFUSÃO
Transmissão e recepção de
luz infravermelha que pode
ser refletida ou interrompida
por um objeto a se detectadoRETROREFLEXIVO
BARREIRA
ULTRA-SÔNICO
DIFUSÃO
Transmissão ou recepção de
ondas sonoras que pode ser
refletida ou interrompida
por um objeto a ser
detectado.
REFLEXIVO
BARREIRA

Sensores indutivos
• Geração de um campo eletromagnético de alta frequência, que é desenvolvido por uma bobina ressonante instalada na face sensora.
• Vem substituir os fim de curso, não há contato físico.

Característica de resposta de um sensor indutivo

Zona livre na montagem em metal
• FACE SENSORA– É a superfície onde emerge o campo eletromagnético.
• DISTÂNCIA SENSORA (S)– É a distância em que aproximando-se o acionador da face sensora, o
sensor muda o estado da saída.
• DISTÂNCIA SENSORA NOMINAL (Sn)– É a distância sensora teórica, a qual utiliza um alvo padrão como
acionador. É o valor em que os sensores de proximidade são especificados. Como utiliza o alvo padrão metálico, a distância sensoranominal informa também a máxima distância que o sensor pode operar.

Zona livre na montagem em metal
Características fundamentais de um sensor indutivo
• DISTÂNCIA SENSORA OPERACIONAL (So)– É a distância em que seguramente pode-se operar, considerando-se
todas as variações de industrialização, temperatura e tensão de alimentação.
– S0 = Fr x 0,8 x Sn
• FATORES DE REDUÇÃO– São fatores que devem ser aplicados em função do tipo de sensor e
atuador que por sua vez pode ter alta ou baixa permeabilidade magnética, influenciando na distância de atuação do dispositivo.

Tabela do fator de redução
INFLUÊNCIA DO ATUADOR
A distância sensora operacional varia ainda com o tipo de metal, ou seja, é especificada para o ferro ou
aço e necessita ser multiplicada pelo fator de redução.
HISTERESE
É a diferença entre o ponto de acionamento (quando o alvo metálico aproxima-se da face sensora) e o
ponto de desacionamento (quando o alvo afasta-se do sensor). Este valor é importante, pois garante uma
diferença entre o ponto de acionamento e desacionamento, evitando que em uma possível vibração do
sensor ou acionador, a saída oscile.

Sensores indutivos faceados (Blindados)
• Quando faceados concentra-se mais o campo magnético;
• Deste modo aumenta-se a precisão, a direcionalidade e a distância de operação do sensor.
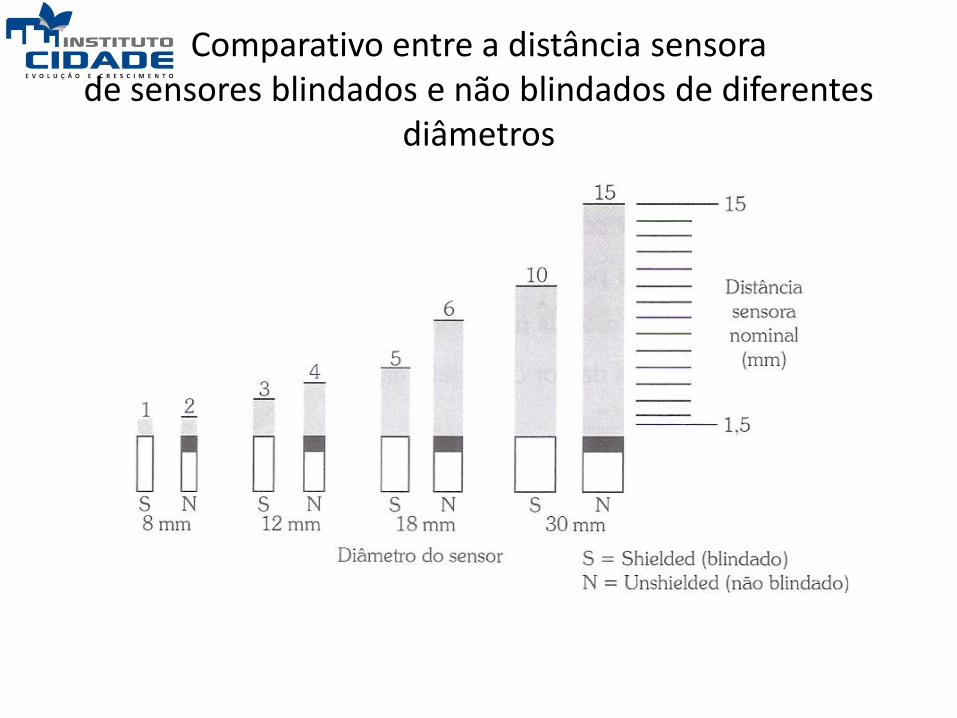
Comparativo entre a distância sensorade sensores blindados e não blindados de diferentes
diâmetros

Vantagens e desvantagem dos
sensores de proximidade indutivo
• Vantagens– Não são afetados por poeira ou ambientes que contenham
sujeiras;
– Não são prejudicados pela umidade;
– Não possuem partes móveis nem contatos mecânicos;
– Não são dependentes da cor do objeto alvo.
• Desvantagens– Somente detectam objetos metálicos;
– A distância sensora é menor que em outras tecnologias de sensores de proximidade;
– Podem ser afetados por fortes campos eletromagnéticos.

Aplicações de sensores de proximidade indutivos

Aplicações de sensores de proximidade indutivos

Aplicações de sensores de proximidade indutivos

Classe de saída dos sensores

Configuração da saída do tipo NPN e PNP com 3 condutores

Aplicações

Sensores capacitivos
• A capacitância depende da área das placas A, da constante dielétrica do meio, εr, e da distância entre as placas, d:
• C = εr A/d
• Basea-se na geração de um campo elétrico, no qual faz a variação de um capacitância no próprio sensor alterando a constante dielétrica deste capacitor.

Sensor com constante dielétrica do ar sem detecção

Sensor com constante dielétrica do ar com detecção
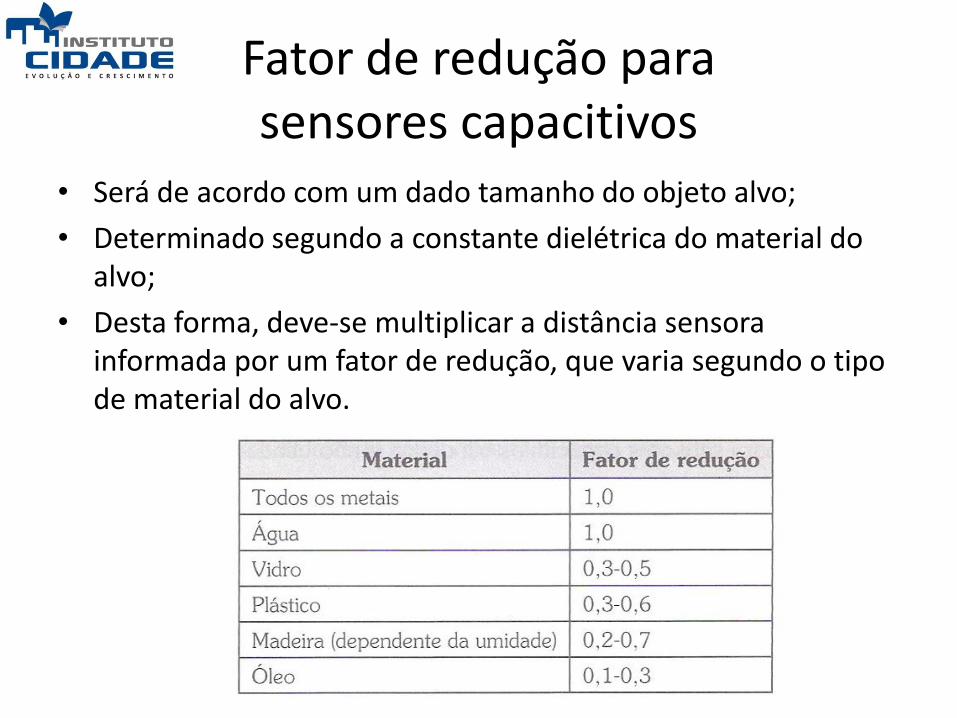
Fator de redução para sensores capacitivos
• Será de acordo com um dado tamanho do objeto alvo;
• Determinado segundo a constante dielétrica do material do alvo;
• Desta forma, deve-se multiplicar a distância sensorainformada por um fator de redução, que varia segundo o tipo de material do alvo.

Materiais com grande constante dielétrica podem ser detectados por barreiras
• Quando o outro elemento tem uma constante dielétrica pequena;

Sensores faceados (Blindados)
• São modelos cilíndricos ou retangulares;• Indicados para detecção de materiais de
constante dielétrica baixa (difícil de detectar), devido à concentração de seu campo eletrostático altamente concentrado;
• São mais suscetíveis à comutação falta devido à acumulo de sujeira ou umidade na face ativa do detector;
• Os não faceados são recomendados para aplicações para detecção do nível de líquido por meio de um suporte plástico.

Sensor faceado
Sensores não faceados
• São modelos cilíndricos (invólucro de plástico);
• Podem detectar material isolante ou condutor;
• Detecção de material a grande distância;
• Detecção de material condutor através de uma parede isolante;
• Detecção de um material não condutor colocado sobre ou diante de uma peça metálica aterrada.

Sensor não faceado
Vantagens e desvantagens dos sensores capacitivos
• Vantagens– Detectam metais e não metais, líquidos e sólidos;
– Podem detectar “através” de certos materiais com densidade menor que o objeto a ser detectado;
– Dispositivos de estado sólido que têm longa vida útil.
• Desvantagens– Pequena distância sensora (uma polegada ou menos)
que varia de acordo com o material a ser detectado;
– Muito sensível a fatores ambientais (umidade); pode afetar a distância sensora.

Aplicações dos sensores capacitivos
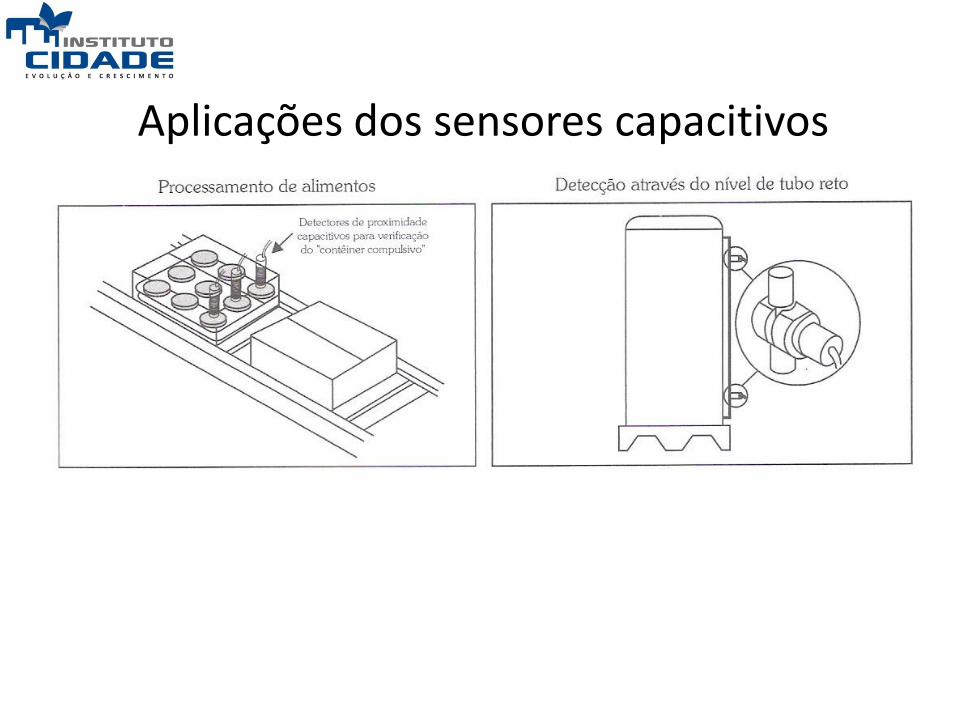
Aplicações dos sensores capacitivos
Sensores ópticos
• Baseiam-se na transmissão e recepção de luz infravermelha, que pode ser refletida ou interrompida pelo objeto a ser detectado;
• Os mesmos devem conter um emissor e um receptor, a luz gerada pelo emissor deve atingir o receptor com intensidade suficiente para fazer com que o sensor comute sua saída.
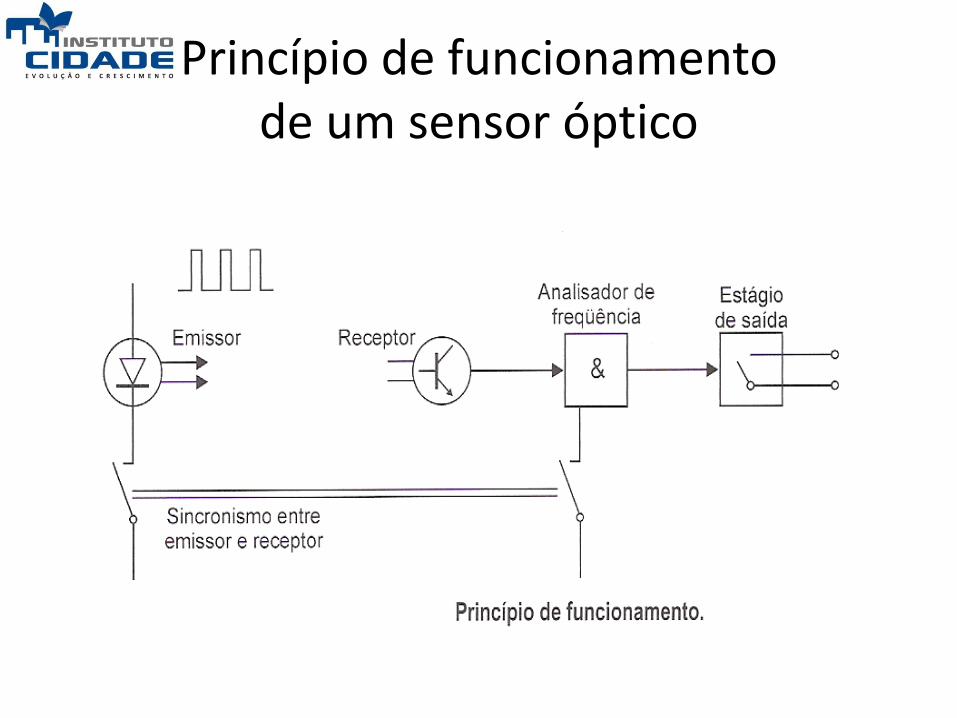
Princípio de funcionamento de um sensor óptico
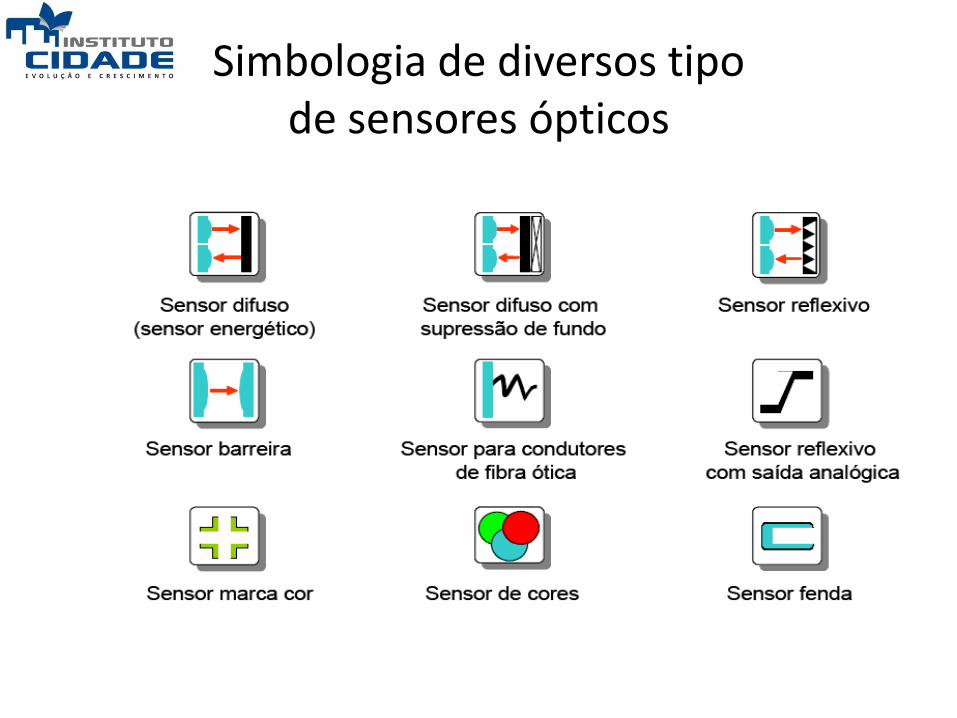
Simbologia de diversos tipo de sensores ópticos

Sensor de barreira
• Duas unidades separadas RX e TX;• Boa resposta quando o objeto a ser detectado não é
transparente;• Operam a longa distância;• Boa opção para ambiente empoeirado ou sujo;• Desvantagem é a necessidade de uma instalação elétrica
tanto no emissor quanto no transmissor.• Desvantagem de ser mais caro devido a necessidade de
duas unidades;• Desvantagem de necessitar de alinhamento;• Vantagem de poder trabalhar em ambiente sujo e de alta
confiabilidade.

Sensor óptico por reflexão difusa
• O transmissor e o receptor são montados na mesma unidade, sendo que o acionamento da saída ocorre quando o objeto a ser detectado entra na região de sensibilidade e reflete para o receptor o feixe de luz emitido pelo transmissor.

Características dos sensores reflexão difusa
• São mais convenientes nas diversas aplicações, devido ao TX e RX estarem no mesmo sensor;
• Geram bons resultados com alvo transparente ou que tenha baixa reflexibilidade (superfícies rugosas ou escuras;
• Sensor tem mais alcance para objetos com superfícies claras em comparação com as escuras.

Vantagens e desvantagens
• Vantagens– Não é necessário um refletor;– Dependendo do ajuste, diferentes objetos podem ser
detectados;– Os objetos podem ser translúcidos, transparentes ou
opacos e mesmo assim uma porcentagem da luz é refletida.
• Desvantagens– Para menores distâncias é requerida menor reflexão
das superfícies dos materiais;– Para maiores distâncias, maiores taxas de reflexão são
necessárias.

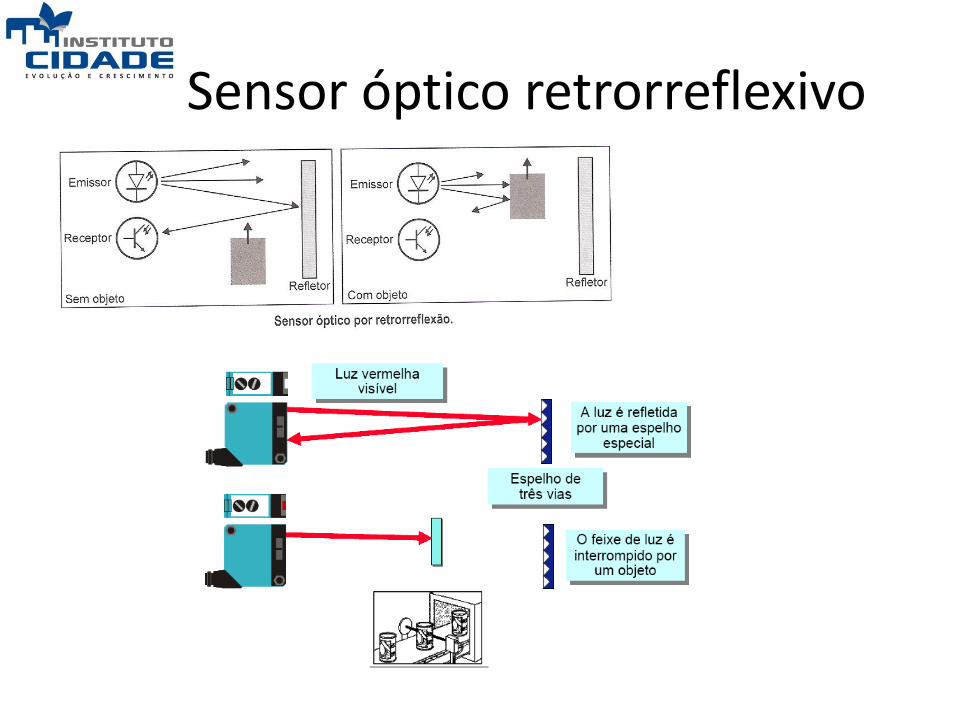
Sensor óptico retrorreflexivo
• O transmissor e o receptor são montados em uma única unidade;
• O feixe de luz chega ao receptor após a incidência em um espelho e o acionamento da saída ocorre quando o objeto interrompe o feixe;
• O objeto a ser detectado pode deixar passar uma baixa intensidade luminosa desde que o limiar de detecção seja atingido conforme observa-se na figura da próxima transparência.
Sensor óptico retrorreflexivo
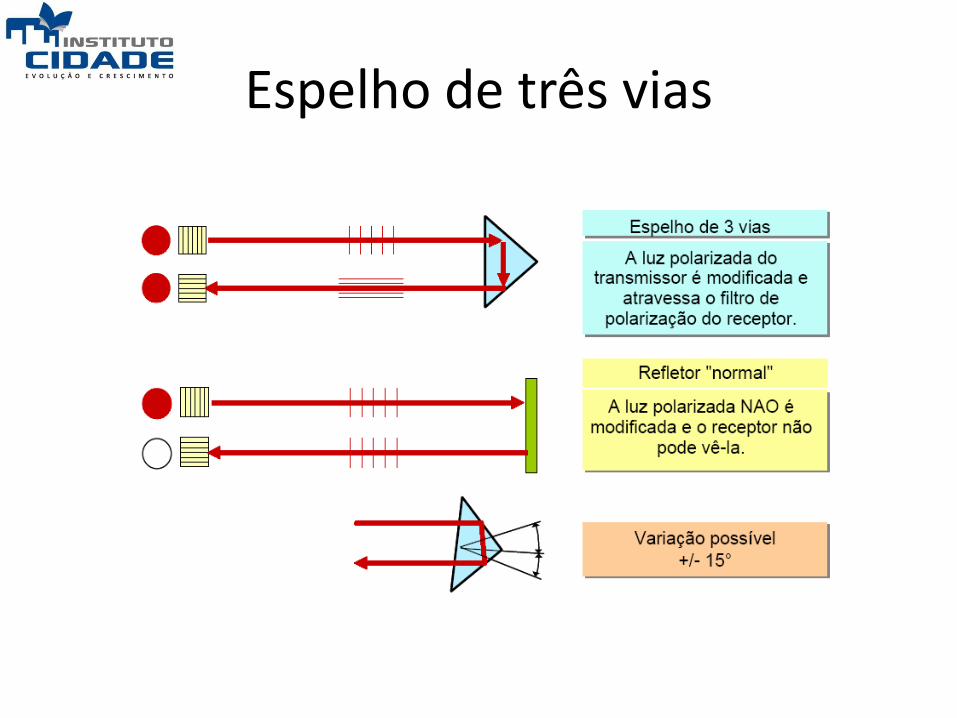
Espelho de três vias

Sensor óptico por transmissão

Sensores de proximidade ultrassônico

Alinhamento angular
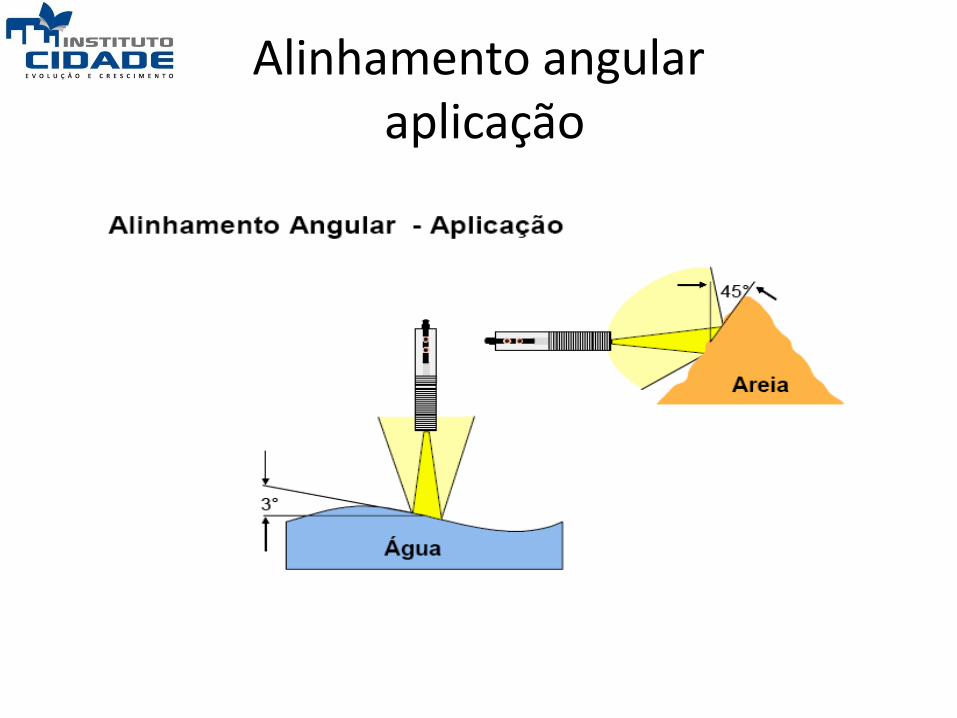
Alinhamento angular aplicação

Vantagens e desvantagens dos sensores ultrassônicos
• Vantagens– Podem detectar objetos a distâncias de até 15m;– Têm uma resposta que independe da cor da superfície ou
reflexibilidade óptica do objeto.
• Desvantagens– Devem ser colocados perpendicularmente ao objeto a ser
detectado para que a distância sensora seja especificada;– Têm mínima distância sensora;– Mudanças no ambiente como temperatura, pressão, umidade e
turbulência no ar podem afetar a performance do sensor;– Objetos com pouca densidade, como espuma e roupas, tendem
a absorver a energia e podem causar dificuldades para detecção a longas distâncias.
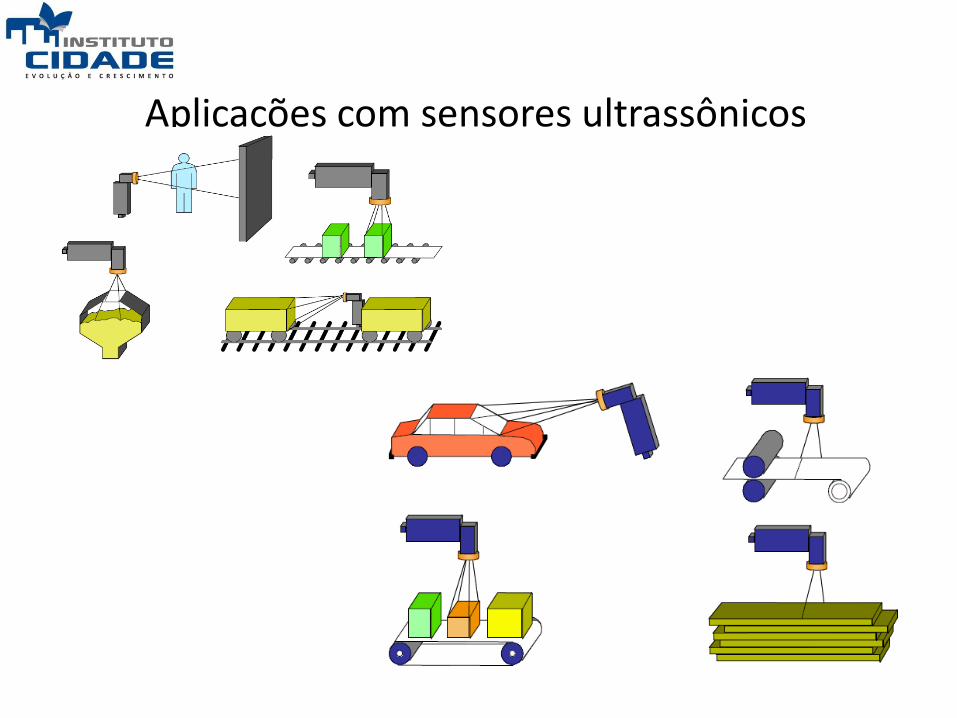
Aplicações com sensores ultrassônicos

Códigos
• Oj5084 – retroreflexivo
• Oj5031 – sensor fotoelétrico por barreira RX
• Oj5030 – sensor fotoelétrico por barreira TX
Top Related