





Línguas
Páginas
Legal


Desempenho de Sistemas de Controle Realimentados
1. Sinais de teste
2. Desempenho de sistemas de segunda ordem
3. Efeitos de um terceiro polo e um zero na resposta de um sistema de segunda
ordem
4. Estimacao do Coeficiente de Amortecimento
5. Localizacao das raızes no plano-s e sua relacao com a resposta transitoria
c©Reinaldo M. Palharespag.1 Controle de Sistemas Lineares – Aula 3
Desempenho de Sistemas Realimentados
Analise da Resposta Temporal de Sistemas de Controle
A resposta temporal de um sistema de controle e dividida em duas partes: a
resposta transitoria, yt(t), e a resposta de regime permanente ou estado
estacionario (“steady-state”), y(∞):
y(t) = yt(t) + y(∞)
c©Reinaldo M. Palharespag.2 Controle de Sistemas Lineares – Aula 3

Desempenho de Sistemas Realimentados
Analise da Resposta Temporal de Sistemas de Controle
B A resposta transitoria e definida como a parte da resposta que tende a zero
quando o tempo tende a infinito:
limt→∞
yt(t) = 0
B A resposta de estado estacionario e a parte da resposta que permanece quando
a resposta transitoria iguala a zero, podendo ser constante ou podendo ser um
sinal que varia no tempo com padrao constante, como um sinal senoidal de
amplitude, frequencia e fase constante, ou um sinal tipo rampa com inclinacao
constante.
c©Reinaldo M. Palharespag.3 Controle de Sistemas Lineares – Aula 3

Desempenho de Sistemas Realimentados
Especificacoes de Desempenho ?
B Pode-se incluir varios ındices de resposta temporal para uma entrada de
comando especıfica bem como uma precisao em regime permanente esperado
B Especificacoes concorrentes ? No geral sim...
B O que fazer ? Compromisso entre caracterısticas desejadas que e obtido apos
ajustes sucessivos
B No controle classico: tentativa e erro...
c©Reinaldo M. Palharespag.4 Controle de Sistemas Lineares – Aula 3

Sinais de Teste
Impulso Unitario, δ(t)
Propriedades∫ ∞
−∞δ(t)dt = 1 e
∫ ∞
−∞g(t − τ )δ(τ )dτ = g(t)
Considerando um diagrama de bloco padrao com entrada r(t) = δ(t)
G(s)
g(t)r(t) y(t) =
R t
0g(t − τ )r(τ )dτ
R(s) Y (s) = G(s)R(s)
entao a integral tem um valor apenas em τ = 0 e portanto y(t) = g(t), sendo
g(t) (G(s)) a resposta impulsiva
c©Reinaldo M. Palharespag.5 Controle de Sistemas Lineares – Aula 3
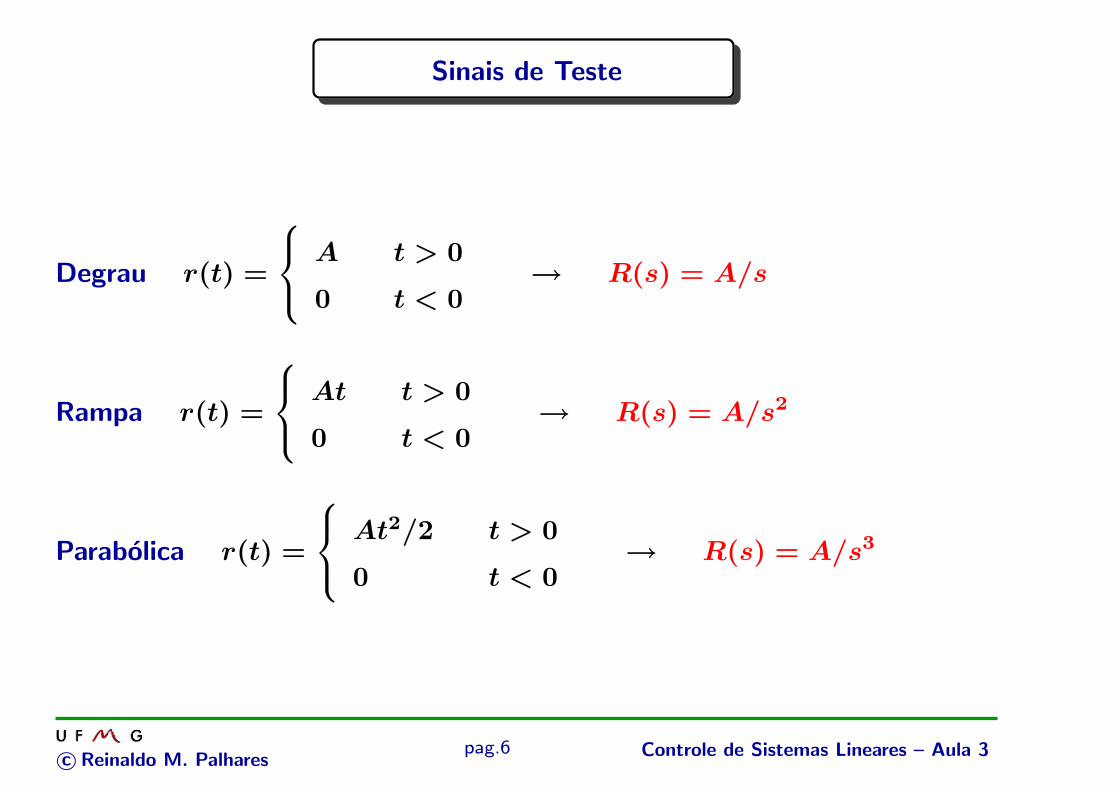
Sinais de Teste
Degrau r(t) =
A t > 0
0 t < 0→ R(s) = A/s
Rampa r(t) =
At t > 0
0 t < 0→ R(s) = A/s2
Parabolica r(t) =
At2/2 t > 0
0 t < 0→ R(s) = A/s3
c©Reinaldo M. Palharespag.6 Controle de Sistemas Lineares – Aula 3
Desempenho de Sistemas
Resposta Transitoria do Sistema de Primeira Ordem
Considere o sistema de primeira ordem G1(s) = Y (s)R(s)
= ks+a
Para uma entrada tipo impulso unitario, a saıda do sistema e
Y (s) = G1(s)R(s) =k
s + a1 ⇒ y(t) = L−1{Y (s)} = g1(t) = ke−at
Considere p = −a o polo de G1(s)
Importancia da localizacao do polo e especificacao da resposta temporal?
Se p < 0, entao limt→∞ y(t) = 0. Se p = 0, entao y(t) = 1. Se p > 0,
entao limt→∞ y(t) = ∞
c©Reinaldo M. Palharespag.7 Controle de Sistemas Lineares – Aula 3

Desempenho de Sistemas
Resposta Transitoria do Sistema de Primeira Ordem
Para uma entrada tipo degrau unitario, a resposta do sistema e
Y (s) = G1(s)R(s) =k
s + a
1
s=
k
s(s + a)=
k/a
s− k/a
s + a
⇒ y(t) = L−1{Y (s)} =k
a(1 − e−at)
Quando p = −a < 0, o valor τ = 1/a e a constante de tempo do sistema e
corresponde a 63% do transitorio, conforme mostrado na figura a seguir
c©Reinaldo M. Palharespag.8 Controle de Sistemas Lineares – Aula 3

Desempenho de Sistemas
Resposta Transitoria do Sistema de Primeira Ordem
0
0.25
0.5
0.632
0.75
1
inclinação = 1/τ
63,2%
95,0% 98,2% 99,3%
τ 2τ 3τ 4τ 5τ t
y(t)
c©Reinaldo M. Palharespag.9 Controle de Sistemas Lineares – Aula 3
Desempenho de Sistemas de Segunda Ordem
Considere um sistema de segunda ordem
G2(s) =Y (s)
E(s)=
ω2n
s2 + 2ζωns
Quando interconectado com realimentacao unitaria obtem-se
Y (s) =ω2
n
s2 + 2ζωns + ω2n
R(s)
m para R(s) = 1/s
Y (s) =ω2
n
s(s2 + 2ζωns + ω2n)
c©Reinaldo M. Palharespag.10 Controle de Sistemas Lineares – Aula 3
Desempenho de Sistemas de Segunda Ordem
A resposta temporal (aula 1) e dada por:
y(t) = 1 − e−ζωnt
β(βcos ωnβt + ζsen ωnβt)
= 1 − e−ζωnt
β(sen ωnβt + θ) , θ = cos−1ζ, 0 < ζ < 1
B Sendo β =√
1 − ζ2
• Para entrada impulso unitario (derivada da resposta a entrada degrau...):
Y (s) =ω2
n
(s2 + 2ζωns + ω2n)
e y(t) =ωn
βe−ζωnt (sen ωnβt)
c©Reinaldo M. Palharespag.11 Controle de Sistemas Lineares – Aula 3

Desempenho de Sistemas de Segunda Ordem
Para o sistema de 2a. ordem G(s) =ω2
n
s2+2ζωns+ω2n
Os polos do sistema sao dados p1, p2 = −ζωn ± jωn
√
1 − ζ2
pólo
σ
X
jω
ω = ω 1 − ζd n
2
α = −ζωn
Plano - S
θ
c©Reinaldo M. Palharespag.12 Controle de Sistemas Lineares – Aula 3

Desempenho de Sistemas de Segunda Ordem
O sistema de segunda ordem pode ser classificado de acordo com o valor de ζ que
define o tipo dos polos do sistema:
ζ = 0 ⇒ p1, p2 = ±jωn nao-amortecido
0 < ζ < 1 ⇒ p1, p2 = −ζωn ± jωn
p
1 − ζ2 = α ± jωd subamortecido
ζ = 1 ⇒ p1, p2 = ±ωn criticamente amortecido
ζ > 1 ⇒ p1, p2 = −ζωn ± ωn
p
ζ2 − 1 superamortecido
ζ < 0 ⇒ p1, p2 = −ζωn ± jωn
p
1 − ζ2 instavel (−ζωn > 0)
c©Reinaldo M. Palharespag.13 Controle de Sistemas Lineares – Aula 3

Resposta do Sistemas de Segunda Ordem
0 2 4 6 8 10 120
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
ζ = 0 ζ = 0,1
ζ = 2
ζ = 1
ζ = 0,2
ζ = 0,4
ζ = 0,7
ωn t
y(t)
c©Reinaldo M. Palharespag.14 Controle de Sistemas Lineares – Aula 3

Especificacoes de Resposta Transitoria
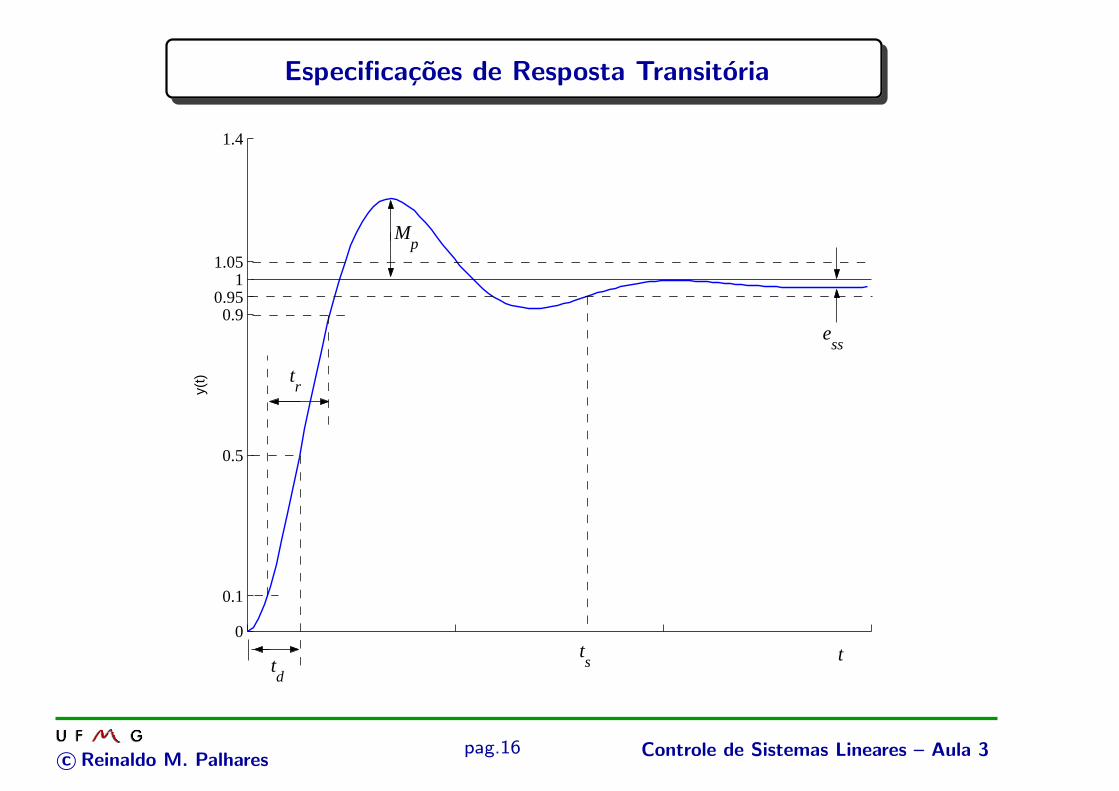
1. tempo de subida tr (“rise time”): e o tempo necessario para a sinal de saıda
variar de 10% a 90% (sistemas sobre-amortecidos) ou de 0% a 100%
(sistemas subamortecidos) do valor final
2. tempo de acomodacao ta (ou“settling time” ts): e o tempo gasto para o
sinal acomodar na faixa de ±2% a ±5%) do valor final
3. sobre-sinal maximo percentual Mp (“overshoot”): diferenca entre o valor
maximo de pico atingido e o valor final em percentual do valor final
4. tempo do primeiro pico tp: instante de tempo em que ocorre o sobre-sinal
maximo do sinal
5. tempo de atraso td (“delay time”): e o tempo para o sinal alcancar 50% do
valor final
c©Reinaldo M. Palharespag.15 Controle de Sistemas Lineares – Aula 3
Especificacoes de Resposta Transitoria
0
0.1
0.5
0.90.95
11.05
1.4
y(t)
ts
td
tr
Mp
ess
t
c©Reinaldo M. Palharespag.16 Controle de Sistemas Lineares – Aula 3

Especificacoes de Resposta Transitoria
B Veja que se convencionar 2% para tolerancia no tempo de acomodacao, ta, a
envoltoria da resposta e entao limitada por
e−ζωnta < 0.02
ta = 4τ =4
ζωn
c©Reinaldo M. Palharespag.17 Controle de Sistemas Lineares – Aula 3
Especificacoes de Resposta Transitoria
B Mp e tp sao pontos de“maximo”especificados em termos de ζ portanto
basta considerardy(t)
dt= 0 ...
dy(t)
dt=
1
βζωne−ζωnt [βcos(ωnβt) + ζsen(ωnβt)]
+1
ββ2ωnsen(ωnβt)e−ζωnt − 1
βζωnβcos(ωnβt)e−ζωnt
=
(
1
βζ2ωn + βωn
)
e−ζωntsen(ωnβt)
=ζ2ωn + (1 − ζ2)ωn
βe−ζωntsen(ωnβt)
=ωn
βe−ζωntsen(ωnβt)
c©Reinaldo M. Palharespag.18 Controle de Sistemas Lineares – Aula 3

Especificacoes de Resposta Transitoria
Entao
dy(t)
dt=
ωn
βe−ζωntsen(ωnβt) = 0
Logo para que dy/dt = 0, sen(ωnβt) = 0... E isto ocorre no tempo de pico...
ωnβtp = π
∴ tp =π
ωn
√1−ζ2
c©Reinaldo M. Palharespag.19 Controle de Sistemas Lineares – Aula 3
Especificacoes de Resposta Transitoria
Do mesmo modo, veja que a sobre-elevacao maxima ocorre exatamente no
instante do tempo de pico, tp, logo
Mp = 1 − 1
βe−ζωntp [βcos(ωnβtp) + ζsen(ωnβtp)]
= 1 − 1
βe
−ζωnπ
ωn
√1−ζ2 [βcos(π) + ζsen(π)]
Mp = 1 + e−ζπ/√
1−ζ2
P.O. = 100e−ζπ/√
1−ζ2
c©Reinaldo M. Palharespag.20 Controle de Sistemas Lineares – Aula 3

Efeito de um Terceiro Polo e/ou um Zero
Efeito de um Terceiro Polo na Resposta do Sistema de 2a. Ordem
B Por que analisar sistema de 2a. ordem? Pelo fato que muitos sistemas
possuem um par de polos dominantes
B Quando um sistema possui dois polos complexos (oscilacoes sub-amortecidas)
e um polo real (resposta exponencial), a resposta total sera uma combinacao das
duas, predominando aquela que for mais lenta (polos mais proximos da origem)
B Para um sistema de 3a. ordem T (s) =1
(s2 + 2ζs + 1)(γs + 1), ωn = 1
Experimentalmente verifica-se que se |1/γ| ≥ 10 |ζωn| entao o desempenho do
sistema pode ser determinado pelo desempenho de um sistema de 2a. ordem
c©Reinaldo M. Palharespag.21 Controle de Sistemas Lineares – Aula 3
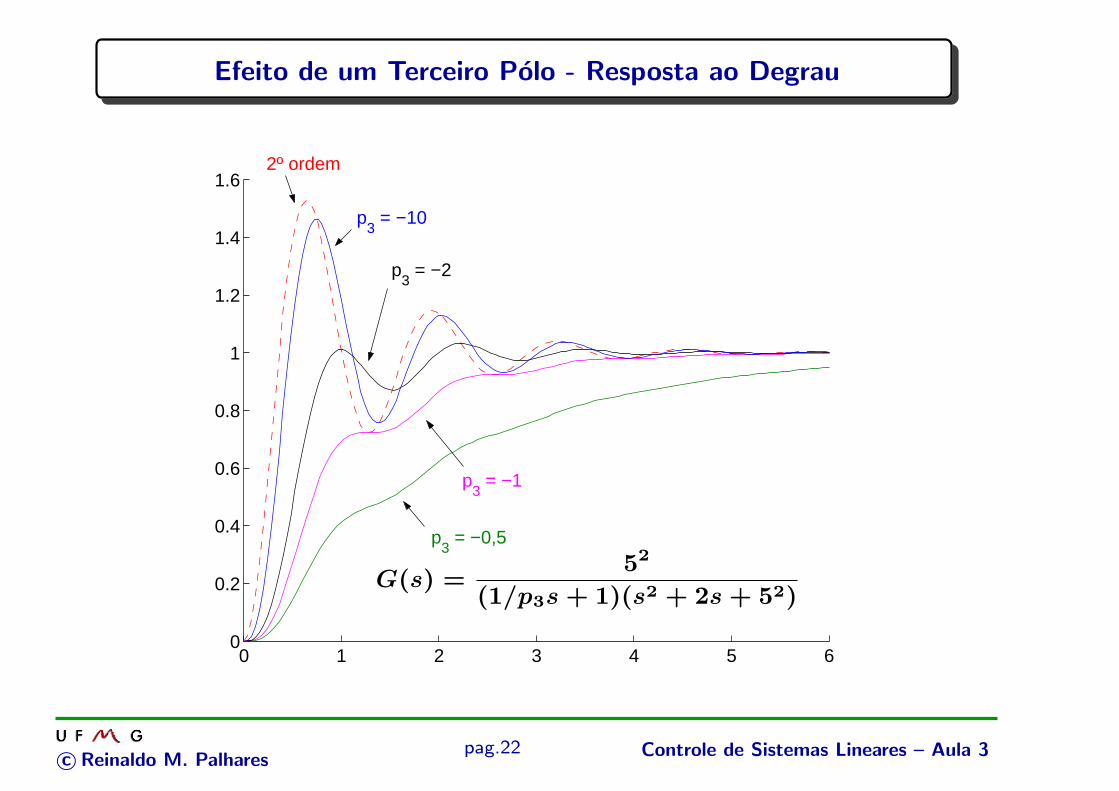
Efeito de um Terceiro Polo - Resposta ao Degrau
0 1 2 3 4 5 60
0.2
0.4
0.6
0.8
1
1.2
1.4
1.62º ordem
p3 = −10
p3 = −2
p3 = −1
p3 = −0,5
G(s) =52
(1/p3s + 1)(s2 + 2s + 52)
c©Reinaldo M. Palharespag.22 Controle de Sistemas Lineares – Aula 3
Sistemas de Ordem Superior e Efeito dos Zeros
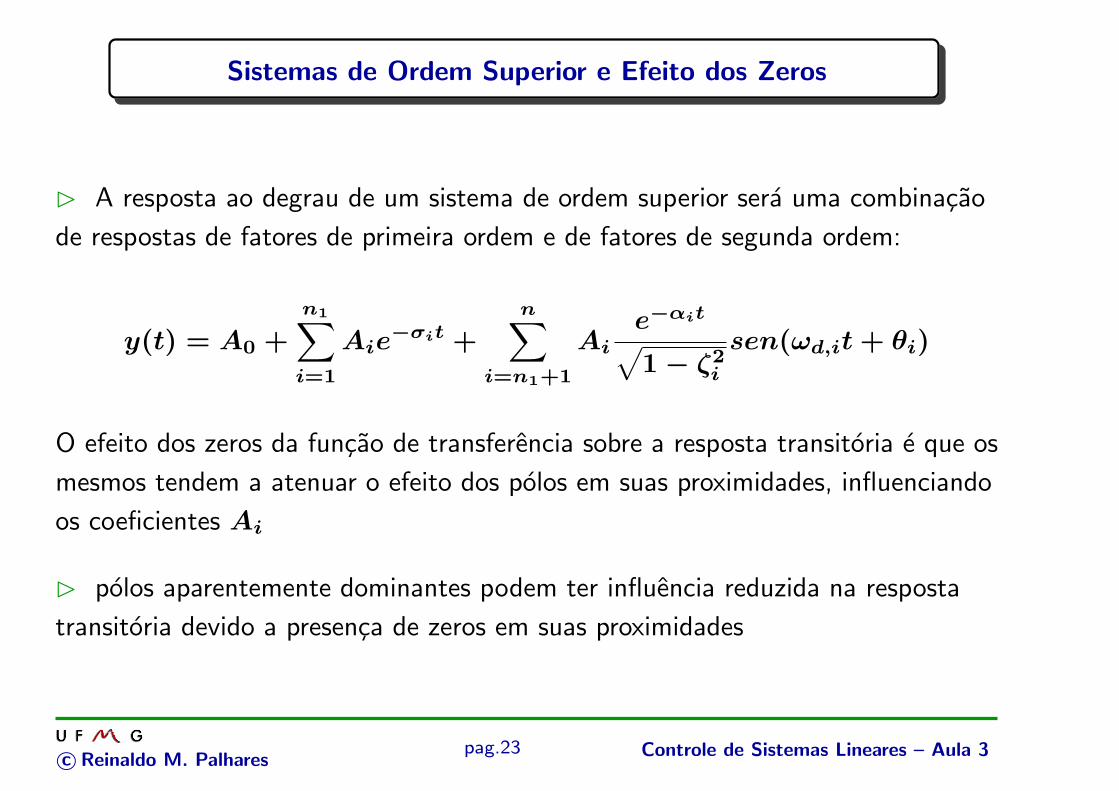
B A resposta ao degrau de um sistema de ordem superior sera uma combinacao
de respostas de fatores de primeira ordem e de fatores de segunda ordem:
y(t) = A0 +
n1∑
i=1
Aie−σit +
n∑
i=n1+1
Ai
e−αit
√
1 − ζ2i
sen(ωd,it + θi)
O efeito dos zeros da funcao de transferencia sobre a resposta transitoria e que os
mesmos tendem a atenuar o efeito dos polos em suas proximidades, influenciando
os coeficientes Ai
B polos aparentemente dominantes podem ter influencia reduzida na resposta
transitoria devido a presenca de zeros em suas proximidades
c©Reinaldo M. Palharespag.23 Controle de Sistemas Lineares – Aula 3
Sistemas de Ordem Superior e Efeito dos Zeros
Exemplo Este efeito pode ser visto quando se inclui um zero em z = −0.4,
proximo ao polo em p = −0.5 para o sistema considerado anteriormente:
T (s) =52
(1/ps + 1)(s2 + 2s + 52)
A resposta do sistema de terceira ordem pode se obtida como:
y(t) = 1 − 1.03e− t2 + 0.05
e−t
√1 − 0.22
sen(4.899t + 78.46◦)
e, quando incluıdo o zero proximo ao polo real, a resposta torna-se:
y(t) = 1 + 0.26e− t2 − 0.64
e−t
√1 − 0.22
sen(4.899t + 78.46◦)
onde nota-se claramente a mudanca no peso de cada termo
c©Reinaldo M. Palharespag.24 Controle de Sistemas Lineares – Aula 3
Sistemas de Ordem Superior e Efeito dos Zeros
0 1 2 3 4 5 60
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
3 pólos e 1 zero
2 pólos
3 pólos
t
y(t
)
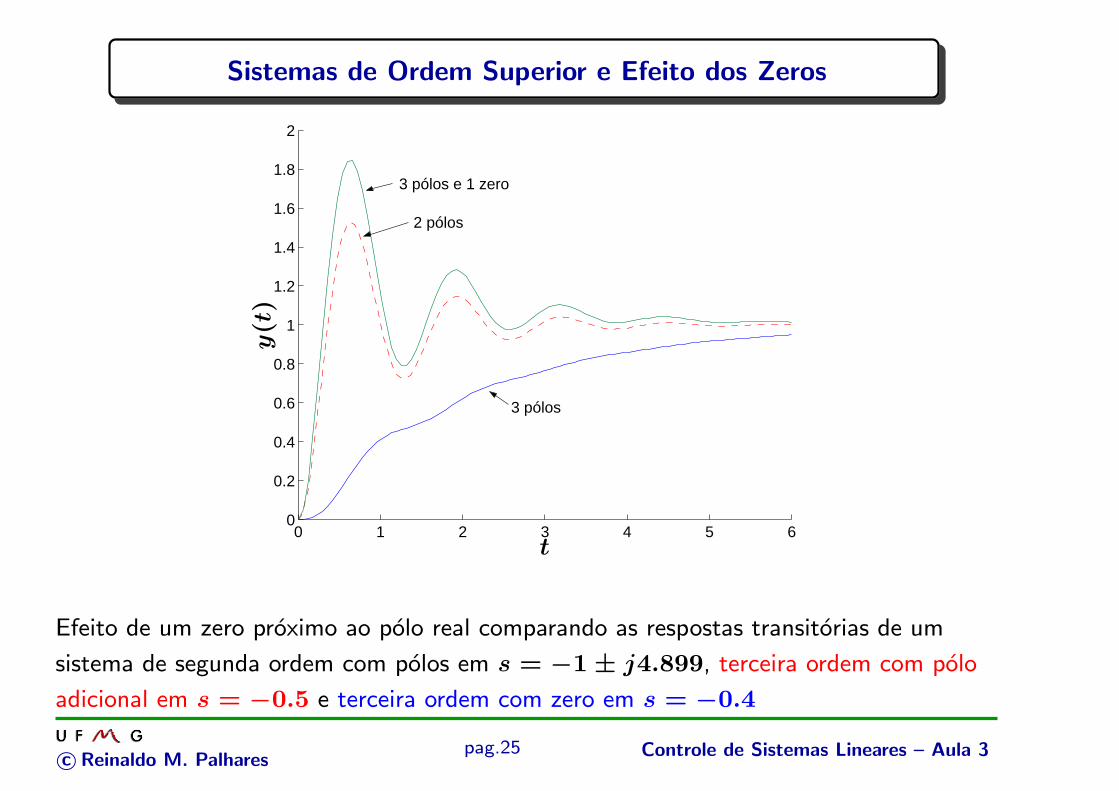
Efeito de um zero proximo ao polo real comparando as respostas transitorias de um
sistema de segunda ordem com polos em s = −1 ± j4.899, terceira ordem com polo
adicional em s = −0.5 e terceira ordem com zero em s = −0.4
c©Reinaldo M. Palharespag.25 Controle de Sistemas Lineares – Aula 3

Estimacao do Coeficiente de Amortecimento
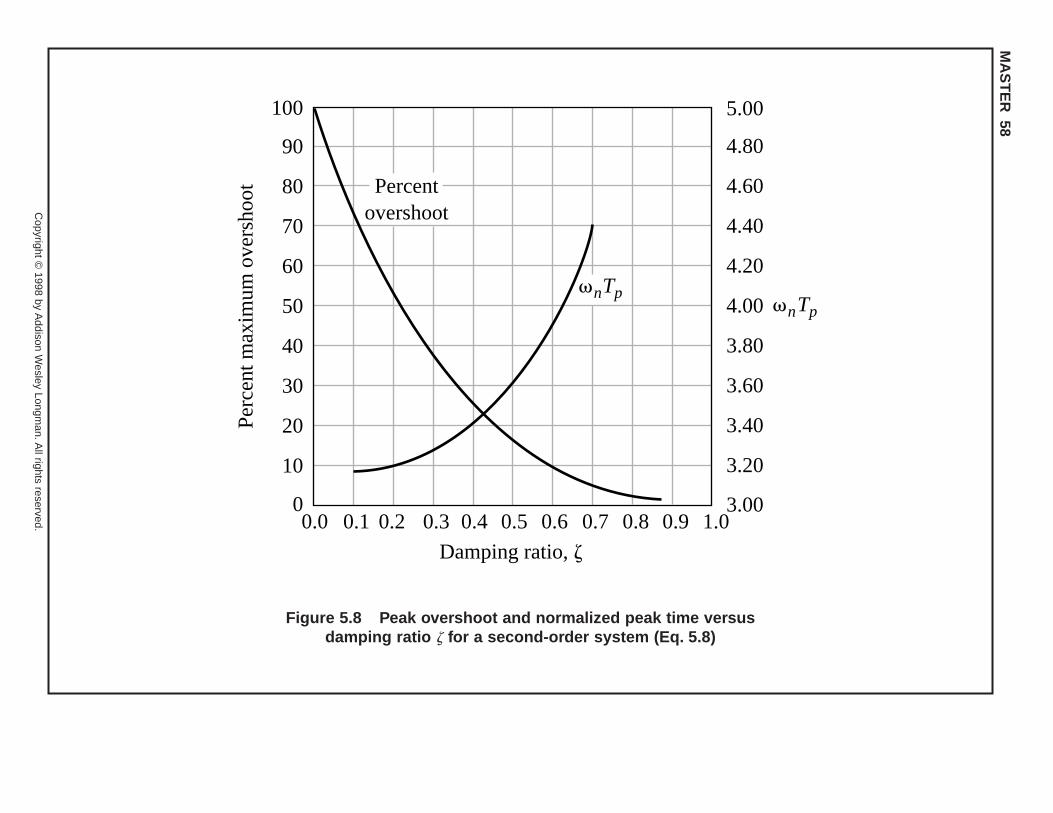
B Meca P.O. e determina-se o valor correspondente do coeficiente de
amortecimento no grafico P.O. versus ζ, ou de
P.O. = 100e−ζπ/√
1−ζ2
c©Reinaldo M. Palharespag.26 Controle de Sistemas Lineares – Aula 3
MA
ST
ER
58
Copyright ©
1998 by Addison W
esley Longman. A
ll rights reserved.
100
90
80
70
60
50
40
30
20
10
00.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0
Percentovershoot
3.40
3.20
3.00
Damping ratio, z
Perc
ent m
axim
um o
vers
hoot
vnTp
vnTp
5.00
4.80
4.60
4.40
4.20
4.00
3.80
3.60
Figure 5.8 Peak overshoot and normalized peak time versus damping ratio z for a second-order system (Eq. 5.8)
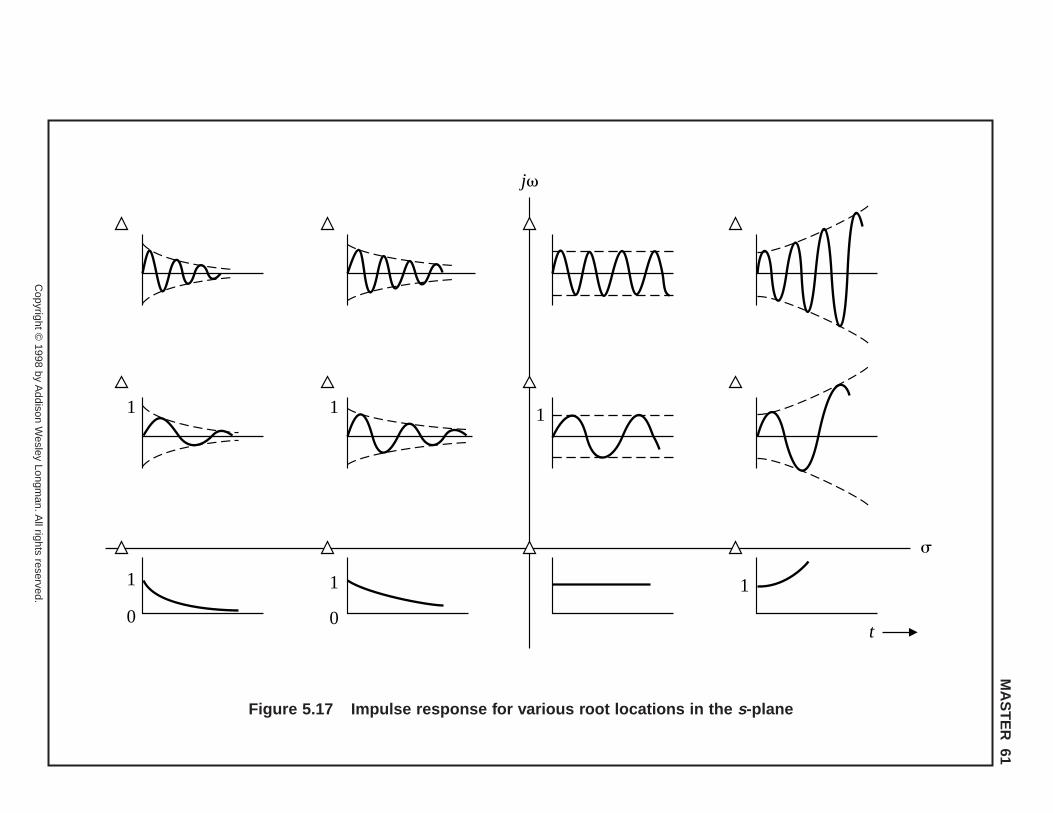
Localizacao das Raızes no Plano-s × Resposta Transitoria
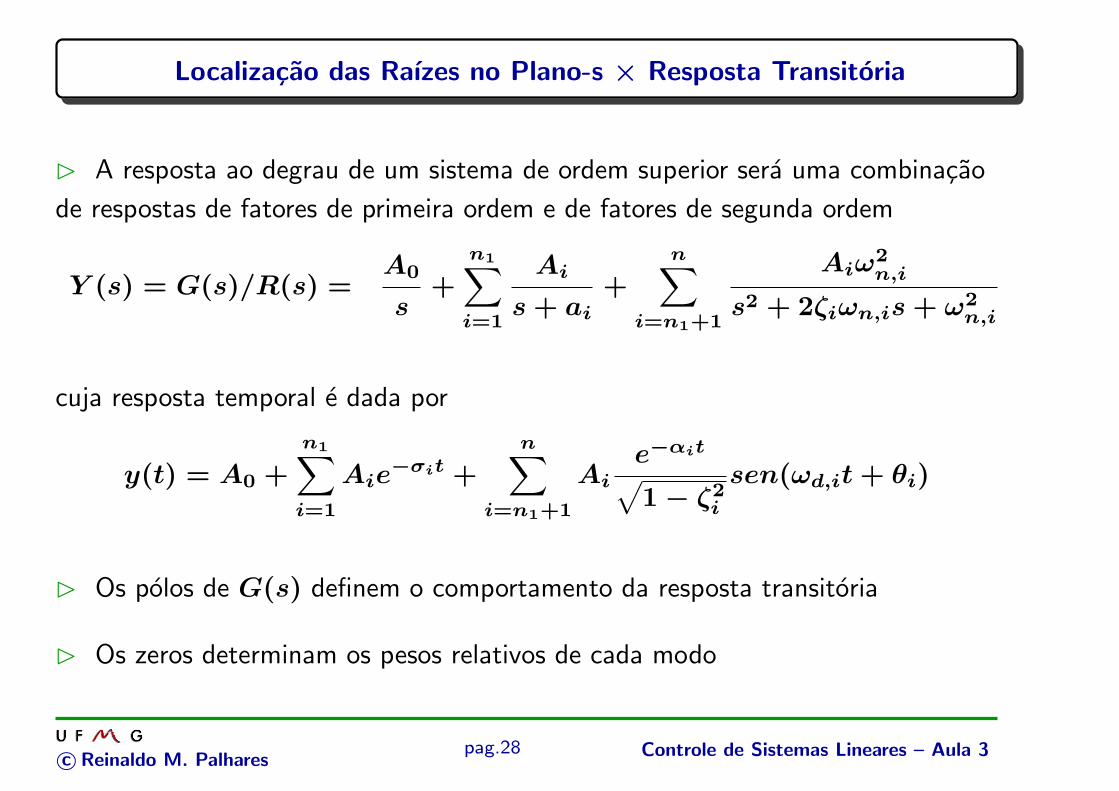
B A resposta ao degrau de um sistema de ordem superior sera uma combinacao
de respostas de fatores de primeira ordem e de fatores de segunda ordem
Y (s) = G(s)/R(s) =A0
s+
n1∑
i=1
Ai
s + ai
+n
∑
i=n1+1
Aiω2n,i
s2 + 2ζiωn,is + ω2n,i
cuja resposta temporal e dada por
y(t) = A0 +
n1∑
i=1
Aie−σit +
n∑
i=n1+1
Ai
e−αit
√
1 − ζ2i
sen(ωd,it + θi)
B Os polos de G(s) definem o comportamento da resposta transitoria
B Os zeros determinam os pesos relativos de cada modo
c©Reinaldo M. Palharespag.28 Controle de Sistemas Lineares – Aula 3
MA
ST
ER
61
Copyright ©
1998 by Addison W
esley Longman. A
ll rights reserved.
t
jv
s
1 1 1
1 1
0
1
0
Figure 5.17 Impulse response for various root locations in the s-plane
Top Related