




Línguas
Páginas
Legal

Fernanda Maria Moreira Dinis
FACULDADE DE CINCIAS UNIVERSIDADE DO PORTO
ESTUDO DE OSCILADORES - Uma reviso dos modelos -
Departamento de Fsica
Faculdade de Cincias da Universidade do Porto
Fevereiro de 2006
5 l
Z:
PI
\3 D / K U ) ;
C\M
Fernanda Maria Moreira Dinis
FACULDADE DE CINCIAS UNIVERSIDADE DO PORTO
ESTUDO DE OSCILADORES - Uma reviso dos modelos -
FacsUtJ i Cincia tio Porto
Biblioteca do Dpartaironlo de Hsica
Dissertao apresentada Faculdade de Cincias da Universidade do Porto para a
obteno do grau de mestre em Fsica para o Ensino
Fevereiro de 2006
A
Para os meus pais, com gratido, admirao
e carinho.
Agradecimentos
Este trabalho de dissertao de Mestrado em Fsica para o Ensino foi realizado
no Departamento de Fsica da Faculdade de Cincias da Universidade do Porto, sob a
orientao do Senhor Professor Doutor Joaquim Agostinho Moreira.
Desejo expressar ao meu orientador, o Professor Doutor Joaquim Agostinho
Moreira, a mais elevada considerao pelo seu humanismo profissional, a minha
admirao pela sua capacidade de trabalho e mtodo de orientao para superar
dificuldades decorrentes do trabalho realizado e, tambm, a minha gratido pela sua
disponibilidade e forma serena na exigncia do rigor e clareza no domnio pedaggico e
cientfico, que me ajudou numa perspectiva mais abrangente compreenso terica e ao
desenvolvimento das tcnicas experimentais.
Ao Senhor Professor Doutor Jos Manuel Brochado agradeo o apoio e
disponibilidade concedidos.
Agradeo tambm Comisso de Mestrado pelas facilidades concedidas para a
realizao da parte experimental desta dissertao, e a todo o pessoal do Departamento
de Fsica pela colaborao e ajuda prestada ao longo deste trabalho.
Finalmente, agradeo minha famlia e amigos pelo apoio, compreenso e
encorajamento constantes.
4
Resumo
Neste trabalho apresentamos um estudo experimental do oscilador elstico e do
pndulo fsico. Factores como a massa e a toro de uma mola do pndulo elstico, a amplitude de
oscilao e a posio do centro de massa do pndulo fsico, bem como a fora resistente
devida ao movimento do oscilador num fluido, em regimes em que o nmero de Reynolds
elevado, foram tidos em considerao.
Fez-se uma reviso dos modelos tericos elementares de modo a incluir os factores
atrs mencionados no estudo da dinmica dos osciladores. Implementou-se montagens
experimentais, baseadas em tcnicas de medida adequadas para o estudo laboratorial
pretendido.
Os resultados experimentais obtidos foram analisados no quadro terico formulado,
tendo-se verificado excelente acordo entre os resultados obtidos e as previses tericas.
5
Abstract
In this work we present na experimental study of the elastic oscilator and the
physical pendulum.
Factores like mass and torsion of a spring of the elastic pendulum, oscillation
amplitude and the position of the mass center of the psysical pendulum, as well as the
rsistent force due to the movement of the oscillator in a fluid, in regimes in which the
Reynolds' number is high, were taken in account.
A revision of the elementary models was done so as to include the facts mentioned
above in the study of oscilators dynamics. Experimental assemblies were implemented,
based in adequate measurement techiques for the intended laboratorial study.
The experimental results obtained were analised on the theorical table that was
formulated, and an excellence accordance between the results obtainde and theorical
predictions.
6
Rsum
Dans ce travail, nous prsentons une tude exprimentale de l'oscillateurlastique
et du pendule physique. Des lments comme la masse et la torsion d'un ressort du pendule
lastique, l'amplitude de l'oscillation et la position du centre de masse du pendule
physique, ainsi que la force qui rsiste cause du mouvement de l'oscillateur dans un
fluide, sous des rgimes dans lesquels le nombre de Reynolds est lv,ont t pris en
compte.
Une rvision des modles thoriques lmentaires a t faite, de faon inclure les
lments supra cits dans l'tude de la dynamique des oscillateurs. Des montages
exprimentaux ont t raliss, fonds sur des techniques de mesure adaptes l'tude en
laboratoire prtendue.
Les rsultats exprimentaux obtenus ont t analyss dans le cadre thorique
formul et on a constat une excellente conformit entre les rsultats obtenus et les
prvisions thoriques.
7
ndice
Agradecimentos 4
Resumo 5
Abstract "
Rsum '
ndice
Introduo 10
Captulo 1: Efeito da massa da mola no perodo das oscilaes lineares do pndulo
elstico 14
1.1. Anlise terica 16
1.2. Estudo experimental do efeito da massa da mola no perodo das oscilaes lineares
do pndulo elstico 24
1.2.1. Determinao experimental da constante elstica de uma mola - 25
1.2.2. Tcnica experimental para a determinao da frequncia de oscilao do pndulo
elstico em funo da massa do oscilador 26
1.2.3. Resultados e discusso 29
1.3. Concluso 31
Captulo 2: Estudo do Pndulo Fsico. Dependncia do perodo na amplitude de
oscilao e na posio do centro de massa do pndulo 32
2.1.1. Dependncia do perodo com a amplitude de oscilao 33
2.1.2. Determinao do perodo das oscilaes do pndulo utilizando uma expanso em
srie 41
2.2. Pndulo Fsico 46
2.3.1. Estudo da dependncia do perodo de oscilao do pndulo fsico na posio do
corpo 50 2.3.1.1. Procedimento experimental e anlise de resultados 51
2.3.1.2. Resultados e discusso 53
2.4.1. Estudo da dependncia do perodo de oscilao na amplitude 54
8
2.4.1.1. Procedimento experimental 54
2.4.1.2. Anlise dos resultados experimentais 55
" 2.4.1.3. Resultados e discusso 56
2.5. Concluso 58
Captulo 3: Osciladores em fluidos 59
3.1. Fora de Stokes. Movimento de um oscilador num fluido 60
3.2. Estudo do movimento de um oscilador num fluido 70
3.2.1. Montagem e tcnica experimental 70
3.2.2. Resultados experimentais 73
3.2.3. Reavalio do modelo 76
3.3. Concluses 81
Captulo 4: Oscilaes acopladas no Pndulo de Wilberforce 82
4.1.0 pndulo de Wilberforce 84
4.2. Anlise da dinmica do Pndulo de Wilberforce 84
4.3. Estudo experimental do Pndulo de Wilberforce 93
4.3.1. Tcnica experimental 93
4.3.2. Influncia do momento de inrcia no acoplamento 95
4.4. Resultados e discusso 97
4.5. Concluso 100
Consideraes finais 101
Referncias Bibliogrficas 104
9
INTRODUO
10
O movimento oscilatrio um dos tpicos principais em Fsica, abordado
actualmente, desde o Ensino Secundrio t aos anos mais avanados do Ensino Superior.
Os conceitos associados ao movimento oscilatrio aplicam-se a muitos ramos da Fsica,
como, por exemplo, circuitos elctricos oscilantes, instrumentos musicais, vibraes da
rede cristalina em slidos, vibraes moleculares, oscilaes de densidade de carga
atmica, fenmenos de disperso dielctrica, oscilaes de ies em membranas celulares
ou oscilaes neuronais de carga que do origem s ondas cerebrais. De facto, as equaes
que descrevem a dinmica de alguns destes fenmenos so formalmente idnticas s do
oscilador mecnico.
O prottipo de oscilador harmnico , geralmente, ilustrado com o movimento
linear de um corpo suspenso por uma mola elstica, de massa nula, ou com o movimento
pendular, de pequenas amplitudes de oscilao, de um corpo suspenso por um fio, no
elstico e de massa nula. O grau de complexidade do sistema oscilatrio aumenta se, para
alm da fora elstica ou restauradora, adicionarmos outras foras ao sistema, como foras
resistentes ou foras que obrigam o sistema a oscilar. A complexidade aumenta ainda mais
se admitirmos que o oscilador interage com outros, formando um sistema acoplado.
Surgem, ento, os conceitos de amortecimento, oscilao forada e ressonncia, modos
normais de vibrao e frequncias prprias. O grau de complexidade mais elevado se se
considerar efeitos no lineares no sistema, resultantes, por exemplo, de oscilaes de
elevada amplitude ou de coeficientes de amortecimento dependentes da frequncia.
De um modo geral, o estudo elementar da dinmica dos osciladores considera
foras cujas leis permitem obter solues analticas da equao do movimento. Estas
solues permitem a discusso dos conceitos e a anlise dos mecanismos associados aos
fenmenos de amortecimento, ressonncia ou de acoplamento, entre outros.
Porm, nem sempre so abordadas as situaes mais prximas da realidade, ou se o
so, procuram-se solues limites. Como exemplo, referimos o efeito da massa da mola no
perodo das oscilaes lineares do pndulo elstico. A maioria dos manuais apenas
considera o caso em que a massa da mola muito pequena em comparao com a massa
do oscilador. Neste contexto, introduz-se a noo de massa efectiva, que se obtm
adicionando massa do oscilador uma parcela iguala /3 da massa da mola. Porm,
habitual no especificar os limites de validade desta expresso. Outro exemplo ilustrado
pela fora resistente devida viscosidade do fluido por onde se move o oscilador, que se
considera proporcional velocidade do oscilador - fora de Stokes. Muitos manuais
11
apresentam este exemplo sem discutir a condies de aplicabilidade da lei de Stocks, no
explorando convenientemente o regime dinmico associado ao movimento do oscilador no
fluido.
Para finalizar estes exemplos, consideremos o caso de acoplamento. Ao referirmo-
nos ao acoplamento, a ideia que ocorre a de dois, ou mais , osciladores que interagem
entre si atravs de foras de tipo elstico. Contudo, poucas vezes referimos que um nico
oscilador pode ter vrios graus de liberdade que podem estar acoplados entre si,
significando isto, que a noo de acoplamento no tem necessariamente de envolver dois
ou mais osciladores. Neste caso, podemos citar o famoso pndulo de Wilberforce,
constitudo por um cilindro suspenso numa mola. Este sistema apresenta dois graus de
liberdade, um associado translao do centro de massa do cilindro, que executa
oscilaes lineares, e outro associado s oscilaes de toro do sistema. Verifica-se que
estes dois graus de liberdade esto acoplados entre si e todo o formalismo e conceitos do
fenmeno de acoplamento esto presentes na anlise da dinmica do sistema.
objectivo deste trabalho fazer um estudo experimental do movimento de
osciladores em condies em que no se verificam os pressupostos dos modelos
elementares. Confrontando os resultados obtidos com as previses tericas no quadro dos
modelos, pretendemos discutir os limites de validade e, quando tal for necessrio,
reanalis-los com o objectivo de descrever os resultados experimentais.
Este trabalho constitudo por quatro captulos.
No primeiro captulo, apresentamos uma anlise terica das oscilaes lineares do
pndulo elstico, em que se considera o efeito da massa da mola na dinmica do sistema,
em particular, no perodo das oscilaes lineares. De seguida, apresentamos o estudo
experimental da dependncia do perodo das oscilaes do pndulo elstico em funo da
razo entre as massas do oscilador e da mola. Os resultados experimentais obtidos so
analisados com base nos resultados obtidos no estudo da dinmica do sistema e discutem-
se os limites de validade das expresses obtidas para o perodo de oscilao a partir dos
modelos elementares.
No segundo captulo, apresentamos um estudo experimental das oscilaes do
pndulo fsico, considerando o efeito da posio do centro de massa do sistema e da
amplitude das oscilaes no perodo do movimento. Desenvolve-se o formalismo terico
que permite descrever os resultados obtidos.
O terceiro captulo dedicado ao estudo do oscilador fracamente amortecido por
uma fora resistente com origem na viscosidade do fluido por onde se move o oscilador.
12
Mostraremos que a lei da viscosidade de Stoks nem sempre adequada para a descrio do
movimento do oscilador, em particular, nas condies em que foram realizadas as
experincias que aqui iremos descrever. Reavaliamos a anlise do problema tendo em
ateno o regime de movimento do oscilador no fluido, caracterizado pelo nmero de
Reynolds.
Finalmente, no quarto captulo, fazemos o estudo do movimento do pndulo de
Wilberforce, explorando o acoplamento entre as oscilaes lineares e de toro,
procurando demonstrar a importncia do momento de inrcia do oscilador na eficincia
deste acoplamento.
Em todo este trabalho, a anlise dos resultados experimentais foi feita com o
programa KaleidaGraph. Este programa de anlise permite criar pequenos programas de
ajuste de funes especficas, que sero oportunamente definidas ao longo do texto.
No final de cada captulo expomos as principais concluses obtidas e apresentamos
algumas reflexes decorrentes do trabalho realizado, sugerindo, de igual modo, outras
temticas a estudar.
13
CAPTULO 1
Efeito da massa da mola no perodo das oscilaes lineares do pndulo elstico
Nos cursos introdutrios de Fsica, a noo de oscilador harmnico linear
frequentemente ilustrada com o movimento de um corpo de massa m suspenso numa mola
elstica, que se admite ter massa nula (M=0), constante elstica K e que satisfaz a Lei de Hooke.
Nestas condies, o perodo das oscilaes lineares do pndulo elstico dado por :
r.-2-Jf-
apresentada uma anlise mais geral, em que a massa da mola pode tomar qualquer valor em
relao massa do oscilador.
Neste captulo, ser apresentada uma anlise das oscilaes lineares do pndulo elstico,
em que se considera o efeito da massa da mola na dinmica do sistema. Seguidamente, ser
descrita uma montagem laboratorial que permite o estudo experimental da dependncia do
perodo das oscilaes do pndulo elstico em funo da razo entre as massas do oscilador e da
mola:
p=M. (1.4) m
A anlise dos resultados experimentais ser feita com base nos resultados obtidos no
estudo da dinmica do sistema e sero discutidos os limites de validade das expresses (1.1) e
(1.3).
/ . / . Anlise terica
Consideremos uma mola elstica suspensa por uma das suas extremidades. Seja Ka.
constante elstica da mola e M a respectiva massa, que se admite estar uniformemente
distribuda, i representa o comprimento natural da mola, enquanto que L o comprimento da
mola quando se suspende, na sua extremidade livre, um corpo de massa m, ficando o sistema em
equilbrio esttico. Consideremos um sistema de referncia Ox cuja origem coincide com o
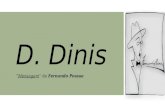
ponto de fixao da mola ao suporte. A figura 1.1 mostra o esquema do sistema que ser
analisado.
16
T X
Figura 1.1: Esquema representando um corpo suspenso numa mola elstica, de constante elstica K e massa M. L representa o comprimento da mola quando o sistema se encontra em repouso.
A elongao dos diversos elementos da mola que possamos definir depende da respectiva
posio na mola. Devido massa da mola no ser nula, os elementos de mola mais prximos do
local de encastramento estaro mais esticados do que os elementos que se encontram prximos
da massa suspensa. Consideremos um elemento de mola, de comprimento dx e que ocupa a
posio x. Suponhamos que se estica a mola. A nova posio que ocupa um elemento de mola
funo da sua posio inicial. Seja y(x) a posio que o elemento de mola ocupa devido ao facto
da mola ter sido esticada. Nestas circunstncias, o novo comprimento da mola ser Y = y\L),
verificando-se que y(x = O) = 0. Os movimentos da mola e do corpo podem ser descritos atravs
da dependncia temporal de y. Neste trabalho, iremos considerar apenas oscilaes de todos os
elementos da mola em fase, de modo que o comprimento de onda, X, da onda elstica que se
propaga na mola muito maior do que y\L) - Y.
Fixemos agora a ateno num elemento de mola, localizado em x, e cujo comprimento
inicial, quando o sistema est em equilbrio, dx. Ao variar o comprimento da mola, o
comprimento do elemento considerado passa para dy, sofrendo uma deformao igual a dy-dx. A
figura 1.2 ilustra o que acabamos de descrever.
M
m
17
~x+dx
X
Figura 1.2: Elemento de mola de comprimento inicial dx distendido para o comprimento c/v, quando a mola esticada para o comprimento Y.
A constante elstica do elemento de mola considerado, de comprimento dx, dada pela
expresso:
K'=K , L
dx (1.5)
Tendo em ateno (1.5), a intensidade da fora elstica que actua no ponto x, devido
deformao do elemento de mola, pode ser escrita do seguinte modo:
F(x) = K\dy -dx) = {dy - dx) = KL\^-dx \dx
(1.6)
A fora total que actua no elemento de mola considerado igual ao seu peso e
diferena das foras elsticas que actuam nas suas extremidades. A equao do movimento do
M elemento de mola, de massa dm = dx , :
18
(^dX).^ = (^dx)g + [F(x + dx)-F(x)] L at L
(1.7)
A fora elstica elstica no ponto x + dx pode ser expandida em srie em torno de x.
Retendo os dois primeiros termos da expanso, obtemos:
dF F{x + dx)& F(X)-\ dx =
dx
= F(x)+KL dx dx
dx
= F(x)+KL^-dx, dx (1.8)
Inserindo (1.8) na equao (1.7), obtemos:
dx . L
d2y ( \4 \
de M_
U dx g + KL^-dx. dx2 (1.9)
A equao (1.9) pode ser reescrita na seguinte forma:
d1 y KL1 d1 y _ dt1 M dx2 ~g'
(1.10)
que corresponde equao da onda longitudinal que se propaga na mola e que vlida em todos
os seus pontos, excepto em x = L, onde se suspende o oscilador de massa m. O movimento
desse ponto o mesmo do corpo, sendo por isso necessrio determinar a equao do movimento
do oscilador.
Sendo a fora que actua no corpo dada por:
fv \ FR(L) = mg-F{L) = mg-K(Y-L)=mg-KL 1 =mg-KL
\^ )
dy - 1 , (1.11)
19
a equao do movimento do oscilador :
dlY vi m = mg- KL
dt
'\ -i dx x=L (1.12)
Esta ltima expresso uma das condies que devem impor-se soluo y(x,t) da
equao (1.10), para obter uma descrio do movimento da mola. A outra condio a impor
corresponde estacionaridade do ponto de encastramento da mola:
)/(0)=0. (1.13)
De seguida, iremos procurar solues da equao (1.10) que satisfaam as condies
(1.12) e (1.13). Considerando a situao particular em que todos os elementos de mola vibram
em fase, com frequncia a, as solues procuradas podem escrever-se do seguinte modo:
y(x, t) = y0 (x) + u(x)cos(a>t) , (1.14)
sendo y0(x) a posio de equilbrio do elemento de mola na posio x e u(x) a respectiva
amplitude de oscilao. De seguida vamos calcular o valor de y0(x). Sob a aco do peso do
corpo suspenso na extremidade livre da mola, um elemento de mola localizado na posio x fica
sujeito aco do peso da parte do sistema que lhe fica por baixo:
F= M T \ L V ' g
(1.15)
Por aco desta fora, o elemento de mola passa a ocupar outra posio, dada por:
:voM= P' D. X
x+=x+P K' KL
= x + x m + M L
g KL'
20
Mg-x\ KL1
(1.16)
Inserindo (1.16) em (1.14), obtemos uma expresso para a soluo geral que descreve o
movimento da mola nas condies anteriormente impostas:
y (x,t) = x , m + M 1 + g
KL
^- x2 + u(x)cos(a>t). KL
(1.17)
Inserindo (1.17) nas equaes (1.10) e (1.12), obtemos, aps alguma manipulao de clculo, as
seguintes expresses:
du M +J)2U(X) = 0,
dx1 KL (1.18)
du\ ma> _dx)x=L KL
U{L)=0 (1.19)
A soluo geral de (1.18) da forma:
u(x) = u0 cos(ax + p), (1.20)
sendo a = a] M_ LHK e J3 uma constante. O valor de j3 calcula-se considerando que a
amplitude de oscilao do ponto de encastramento da mola nula (condio (1.13)) conduzindo
71 a B = . Deste modo a soluo geral de (1.18) toma a forma: 2
u{x) = uQsen(ox). (1.21)
21
A soluo (1.21) deve ainda satisfazer a condio definida pela equao (1.19). Inserindo
(1.21) em (1.19) obtemos a condio:
tg(aL) = aKL (coA M
mco (1.22)
KG) j m
sendo a)0 a frequncia de oscilao do pndulo elstico quando a massa da mola nula 'o
co, = J ,M = 0 m
A equao (1.22) pode ainda ser escrita na forma:
[ / CD | i co0 V ^o J
(1.23) y
sendo:
M
m (1.24)
A equao (1.23) permite determinar os possveis valores da frequncia de oscilao do
pndulo para cada valor do quociente . Graficamente, as solues da equao (1.23) m
( i \
correspondem aos pontos de interseco da curva v = cot g ^ p V^o com a recta y co
co, 4P .A
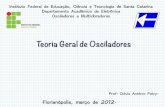
M figura (1.3) ilustra a resoluo grfica da equao (1.23), para diversos valores de p - .
m
22
p = 0.5
(a) (b)
p = 2
( C )
Figura 13: Resoluo grfica da equao (1.23). Os pontos de interseco correspondem aos diferentes modos de vibrao do
M sistema para diferentes valores de p = . m
Para cada valor considerado de , existe um conjunto de solues que correspondem m
aos diferentes modos de vibrao do sistema. A soluo para a> de menor valor corresponde
frequncia do modo fundamental do sistema. Quando a massa da mola muito pequena em
comparao com a massa do oscilador (Mm), os valores de tendem para a unidade, ou
seja:
a> = co0 = (1.25)
Pelo contrrio, quando Mm, obtemos de (1.22):
23
JmtgjaL) ( 1 2 6 ) eq aL '
onde Meqa massa equivalente do sistema, que pode ser expressa custa da soma da massa do
M oscilador m e de uma fraco da massa da mola :
Me=m + , (1-27) eq D
sendo D uma constante.
Igualando os segundos membros de (1.26) e (1.27), obtemos:
aL (tgaL)-aL
(1.28)
Dado que a uma funo de , os valores de D dependem da razo das massas da m
mola e do oscilador.
Conclumos que quando a massa da mola no desprezvel em relao massa do
, M oscilador, o seu efeito na dinmica do sistema traduz-se por uma parcela que deve ser
M adicionada massa do oscilador. No caso em que pequeno mas no nulo, o parmetro e
m
M n1 D = 3,Q quando oo, D = = 2.47.
m 4
1.2. Estudo experimental do efeito da massa da mola no perodo das oscilaes lineares do pndulo elstico
De seguida, apresentaremos um estudo experimental do efeito da massa da mola no perodo
das oscilaes do pndulo elstico.
24
1.2.1. Determinao experimental da constante elstica de uma mola
Para determinar experimentalmente a constante elstica da mola utilizada neste estudo,
recorreu-se a um mtodo esttico. A figura 1.4 mostra um esquema da montagem experimental
utilizada.
Legenda:
1. suporte fixo; 2. mola elstica de massa M; 3. corpo de massa, m (constitudo pelo
disco e prato onde so colocadas as massas);
4. sistema automtico de aquisio de dados, constitudo por sensor de movimento Motion Sensor II, interface Science Workshop 500. computador com software DataStudio, que permite medir as elongaes em funo do tempo, e(t).
Figura 1.4: Esquema da montagem laboratorial utilizada para estudar o efeito da massa de uma mola no perodo das oscilaes lineares do pndulo elstico (os elementos representados no se apresentam escala).
Suspendemos uma mola a um sistema rigidamente fixo de modo a evitar oscilaes. Na
extremidade livre da mola colocamos um prato associado a um disco furado. A massa deste
conjunto (39,09 0,0\)g . Com a ajuda de um sensor de movimento. Paso C1-6762 Motion
Sensor He de uma interface Science Workshop 500 medimos a posio da base do prato, aps o
sistema mola+prato ter atingido o equilbrio. Esta posio servir como origem para a medida
das elongaes. Seguidamente acrescentamos ao prato um corpo de massa conhecida que foi
determinada numa balana analtica de preciso 0,01 g. Medimos a nova posio da base do
prato quando o sistema atingiu o novo estado de equilbrio. Com os dois valores da posies
inicial e final, calculamos a elongao sofrida pela mola devido ao acrscimo de massa no prato
suspenso. A elongao sofrida pela mola deve-se ao peso do corpo acrescentado, igual a mg,
sendo m a massa acrescentada ao prato, uma vez que o peso. Mg, da mola no contribui para
essa elongao. Repetimos este procedimento, acrescentando ao prato mais corpos de massas
conhecidas, medindo-se para cada acrscimo de massa, a respectiva elongao da mola. sempre
com o sistema em repouso.
O grfico da figura 1.5 mostra a dependncia da elongao A/ sofrida pela mola no peso
dos corpos que foram colocados no prato, F. 25
Un
O 0.005 0.01 0.015 0.02 0.025 0.03 0.035 Al (m)
Figura L5: Grfico que mostra a relao entre a elongao sofrida pela mola devido ao acrscimo de peso no prato suspenso.
A linha contnua corresponde ao melhor ajuste da equao:
F = KA, (1.29)
aos resultados experimentais. Na equao ( 1.29), F corresponde ao acrscimo de peso no prato
e M respectiva elongao da mola. O declive da recta de ajuste igual constante elstica da
mola. O valor experimental obtido para a constante elstica da mola :
= (29,9 0,2)JV.T'
1.2.2. Tcnica experimental para a determinao da frequncia de oscilao do pndulo elstico em funo da massa do oscilador
A montagem experimental utilizada no estudo da dependncia da frequncia das
M oscilaes lineares do pndulo elstico na razo . igual que loi descrita anteriormente, e m
utilizada para a determinao da constante elstica da mola (figura 1.4). 26
Suspendemos a mola, cuja constante elstica foi anteriormente determinada, num suporte
rigidamente fixo. A massa da mola utilizada (l40,690,0l)ge a sua constante elstica
K = (29,90,2)iV.tfr\ Na extremidade livre da mola suspendemos um prato ao qual
associamos um disco furado, cuja massa do conjunto (39,09 + 0,0l)g . O disco necessrio na
montagem para facilitar a deteco pelo sensor de movimento. No prato colocamos um corpo
cilndrico de massa conhecida. Quando os valores das massas em oscilao se tornam inferiores
massa do prato+disco, passamos a utilizar um carto perfurado, colado na parte inferior do
corpo suspenso. Deste modo resolvemos dois problemas: o primeiro, foi facilitarmos a deteco
pelo sensor; o segundo, foi termos conseguido obter valores de massas em oscilao pequenas (o
valor da menor massa utilizada foi igual a (0,61 0,0l)g).
Uma vez suspensa a massa na mola, deslocou-se o oscilador da sua posio de equilbrio e
abandonou-se. Esperamos algum tempo para que o sistema oscilasse no seu modo fundamental.
A elongao em funo do tempo, foi medida com o auxlio de um sensor de movimento Paso
C1-6762 Motion Sensor II e de uma interface Science Workshop 500. O sensor emite um impulso
ultrasnico que se propaga at atingir disco furado, onde reflectido. O mesmo sensor detecta o
impulso reflectido, determinando o intervalo de tempo entre a emisso de um impulso e a
recepo do respectivo eco. Este sensor comunica com um computador atravs de uma interface
Science Workshop 500. O programa DataStudio permite o controlo das aquisies e calcula a
posio do objecto a partir do intervalo de tempo medido e da velocidade de propagao do
impulso ultrasnico no ar. O sensor utilizado pode fazer 5 aquisies por segundo para registar
eventos relativamente lentos a grandes distncias e fazer 120 aquisies por segundo para
eventos rpidos e relativamente prximos do sensor. A distncia mnima que se pode medir com
este sensor de 0,15 m, sendo a distncia mxima de 8 m. A taxa de amostragens utilizada neste
trabalho foi de 80 aquisies por segundo. O grfico da figura 1.6 mostra a elongao em funo
do tempo, para trs valores de massa em oscilao, registada no caso em que a massa suspensa
na mola igual a (l 199,7 0,0l)g em (a), quando igual a (570,9 0,0l)# em (b) e quando
igual a (105,64 0,0 \)g em c).
27
0.48
0.47
0.46
.0.45
0.44
0.43
0.42
A A A A A : ' ' ' ? : . i : : ; .
* # i i i *
; V V v V
m=1199.7.g
y = ml + m2 * sin(m3*t+m4) Value Error
m l 0.44683 0.00002 m2 002442 0.00002 m3 4.9814 0.0004 m4 10.760 0.002
Chisq 7.874e-05 NA R 0.99975 NA
t ( s )
0.36
0.26 v v v v y v i
, , i _J_I , i , , , , 1
t (s)
0.49 I I i U U U H U i * ; f t : * . " .
m=570 9g
y = m l + m2 *sin(m3*t+m4) Value Error
m l 0.30986 0.00002 m 2 0.04312 0.00002 m 3 7.0573 0.0002 m 4 0446 0.001
Chisq 0.00015471 N A R 0.9999 N A
m=105.64u
y = m l + m2 *sin(m3*t+m4) Value Error
m l 0.45856 000003 m2 0.02876 000004 m3 14.0150 0.0008 m 4 4.918 0.003
Chisq 0.00027204 NA R 0.99945 NA
a)
b)
c)
t(s)
Figura J.6: Elongao em funo do tempo (crculos vermelhos) para trs valores de massa em
oscilao. A linha contnua azul representa o melhor ajuste da equao y\t) = yQ + Asen\tot + )
aos resultados experimentais. Nas tabelas, ml y0, m1 = A, m3 = ) e m4 = (j). O significado
destes smbolos dado no texto.
28
Verificamos dos grficos da figura 1.6 que o efeito das foras dissipativas desprezvel.
Para determinar o valor da frequncia de oscilao do sistema, para cada valor da massa do
oscilador, fizemos um ajuste aos resultados experimentais, da funo:
y(t) = yQ + Asen{cot + ), (1.30)
em que y0 corresponde ao valor da posio de equilbrio do oscilador, A amplitude de
oscilao, co frequncia angular e fase inicial do movimento . Com o valor de co
determinamos o valor do perodo de oscilao, T.
1,2.3, Resultados e discusso
A figura 1.7 mostra = J em funo de (Jp) '. TM o perodo das oscilaes TM 2\M
da mola livre dado por Tu = 4 J .
T m A vantagem de estudar a razo em funo da razo reside no facto de tornar as
TM M concluses independentes dos reais valores d e m e M, podendo definir-se intervalos de valores
tn T m . para os quais o comportamento de em funo de pode ser descrito custa dos M Tu M
modelos que conduzem s equaes (1.1), (1.3) e (1.23).
29
f. I _ J ! i i I i L _ _ J i . ; : ; ; ! : : i i 1 i J _i i I i i i i I i [ i ! 1
0 0.5 1 1.5 2 2.5 3 3.5
(m/M) i :
Figura 1.7: Grfico de T/TM em funo de (y]p)~]. Os crculos vermelhos correspondem aos
resultados obtidos experimentalmente. A linha verde corresponde s previses da equao (1.3),
em que se considera o contributo da massa da mola, e a linha azul, corresponde s previses da
equao (1.1), considerando desprezvel a massa da mola. No pormenor apresentado, os crculos
azuis correspondem aos valores calculados usando a equao ( 1.23).
A linha azul, apresentada na figura 1.7 foi obtida utilizando a equao (1.1) para definir o
perodo do oscilador, admitindo que a massa da mola nula (M=0). Podemos observar que a
equao (1.1), descreve bem o comportamento do perodo das oscilaes lineares do pndulo
tn elstico quando a razo > 6, ou seja, quando a massa do oscilador to grande que se pode
M
\ m desprezar a massa da mola. Na gama 0,6 < J < 1,4, a equao (1.3) mais adequada para
\ M
descrever a dependncia do perodo de oscilao com as massas do oscilador e da mola. De
facto, a linha verde, calculada a partir da equao (1.3) ajusta-se muito bem aos resultados
experimentais quando 0,6 < J < 1,4, ou seja, quando 0,5 lm < M < 2,8m . Reparemos que a
V M
equao (1.3) ainda satisfatria mesmo quando a massa da mola se torna superior massa do
oscilador, podendo tomar valores at 2,8 . 30
Quando M>3m, observamos um afastamento entre os resultados experimentais e o
comportamento previsto pelo modelo (1.3). Nesta gama de valores da massa da mola, o modelo
desenvolvido anteriormente descreve satisfatoriamente o comportamento do perodo das
tn oscilaes fundamentais do sistema, na razo , como se pode observar no pormenor da figura M
1.7. Na realidade, encontramos um ligeiro afastamento entre os valores calculados atravs da
equao (1.23) e os valores experimentais. Tal discrepncia devida a erros na determinao do
perodo das oscilaes lineares, por ser difcil manter oscilaes puramente lineares do sistema
quando a massa do oscilador se torna muito menor do que a massa da mola. Nesses casos,
pequenas perturbaes ao abandonar o sistema geram oscilaes transversais e, por conseguinte,
introduzem erros na determinao do perodo das oscilaes lineares. Contudo, como
observamos do pormenor do grfico 1.7, as discrepncias so pequenas.
i.J. Concluso
Neste captulo discutimos o efeito da massa da mola na dinmica do pndulo elstico, em
particular, no perodo das oscilaes lineares. Fizemos o estudo da dependncia do perodo do
I YYi \ tn modo fundamental em J no intervalo 0 < J < 3,5 .
\M \M
Embora a anlise matemtica deste problema envolva clculos elaborados, o estudo
experimental pode ser efectuado com base numa montagem simples e a sua anlise dos
resultados pode ser feita com base nos modelos traduzidos pelas equaes (1.1) e (1.3),
acessveis a alunos de cursos introdutrios de Fsica, a nvel superior.
O modelo desenvolvido para a dependncia do perodo das oscilaes fundamentais do YI
pndulo elstico na razo capaz de descrever os resultados experimentais obtidos. A
tn expresso (1.23) converge para as expresses (1.1) e (1.3) utilizando limites adequados para .
Verificamos que a equao (1.1) descreve bem os resultados quando m > 6M, enquanto a
equao (1.3) vlida quando 0,5m < M
CAPITULO 2
Estudo do Pndulo Fsico.
Dependncia do perodo na amplitude de
oscilao e na posio do centro de massa do
pndulo
32
Chama-se pndulo a qualquer corpo que pode oscilar em torno de um eixo de suspenso que
no passe pelo seu centro de gravidade, como, por exemplo, um corpo suspenso por um fio ou
uma haste fina, encastrados num ponto fixo, que pode oscilar em torno da posio de equilbrio.
O modelo simples de pndulo ilustrado pelo pndulo gravtico simples, constitudo por
uma massa pontual, de valor m, suspensa por um fio ou uma haste que se admitem ter massa
nula, comprimento / e no elsticos. Mostra-se que quando o pndulo gravtico simples oscila
com pequenas amplitudes, o perodo dado por (Alonso, 1981):
T = 2x\, (2.1) \g
sendo g o valor da acelerao da gravidade local. Notemos que nesta condio, o perodo do
pndulo independente da amplitude das oscilaes e da massa do sistema. Este o exemplo do
pndulo que estudado no Ensino Secundrio e nos cursos introdutrios de Fsica do Ensino
Superior.
Para considerar o caso em que o perodo de oscilao se torna aprecivel, necessrio ter em
considerao o clculo de integrais elpticos ou sua expanso em srie ou utilizar mtodos
numricos para a resoluo da equao do movimento ( Marion, 1988).
O resultado apresentado na equao (2.1), para alm de constituir uma aproximao para
oscilaes de pequena amplitude, despreza o efeito da massa do fio ou da haste na dinmica do
pndulo.
Neste captulo apresentamos uma anlise terica e um estudo experimental das oscilaes do
pndulo fsico, considerando o efeito da amplitude das oscilaes no perodo do movimento e da
massa da haste na qual se suspende o oscilador.
2. /. / . Dependncia do perodo com a amplitude de oscilao
Consideremos um pndulo, constitudo por um corpo de massa m suspenso numa haste rgida
de comprimento /. Consideremos, para j, que a haste que suporta o pndulo tem massa
desprezvel em relao a m. Por simplicidade, vamos considerar desprezvel o efeito das foras 33 _ _ _ _ _ = =
dissipativas que estejam aplicadas no sistema. Deste modo, as foras que actuam no pndulo so
o seu peso (P) e a tenso (/V) da haste rgida.
A figura 2.1 mostra um esquema do pndulo e das foras aplicadas ao oscilador.
Figura 2.1: Representao de um pndulo. As foras que actuam sobre o oscilador so o peso, P, e
a tenso no fio, N.
A equao do movimento do oscilador desdobra-se em duas equaes, obtidas da sua
projeco nas direces tangencial e normal trajectria:
ml - -mgsenO (2.2)
Mi 5 = ml9' - -mgcos + N. (2.3)
Destas duas equaes interessa-nos a primeira, (2.2), pois a partir dela podemos determinar
a lei de variao de 6 no tempo e, deste, o perodo do movimento.
No que se segue, iremos admitir que a amplitude, 90, no suficientemente pequena para ser
satisfatria a aproximao: seno = 9 , \0\ < |#0|.
Multiplicando ambos os membros da equao (2.2) por 9 (derivada da funo 9 em ordem
ao tempo), obtemos a equao:
34
O + -sen00 = O, (2.4) /
cuja primitiva :
-02-^cos0 = C, (2.5) 2 /
sendo C uma constante real. Podemos determinar o valor de C atendendo a que quando \0\ = 0O,
ento 0 = 0 . Impondo esta condio equao (2.4), o valor da constante C :
C = -^cos0o. (2.6)
Ento, podemos escrever (2.5) da seguinte forma:
02 = 2 ^ ( c o s 0 - c o s 0 o ) . (2.7)
Da ltima expresso obtemos:
0 = = J--Jcos0-cos0o . (2.8) dt V /
A equao (2.8) pode ser reescrita da seguinte forma:
l dd dt= =. (2.9)
\2g ^/cos^-cos^o
Para determinar o perodo do movimento oscilatrio, basta integrar ambos os membros da
equao (2.9), atendendo ao facto de que o perodo o menor intervalo de tempo de uma
oscilao completa. Como o cosseno uma funo par do argumento, podemos escrever:
35
42g* de
ycos#-cos# 0 (2.10)
O integral da expresso (2.10) conhecido por integral elptico. Para resolver o integral, vamos
comear por fazer a seguinte transformao:
cos 0 - cos 9n = 1 - 2sen2 1 -2sen' 0,
2 y 100 2 0
sen sen 2 2
(2.11)
Tendo em considerao a equao (2.11), a equao (2.10) toma a forma que se segue:
, 2.,If. de gM \ ,e0 2e
sen -sen' 2 2
(2.12)
Faamos agora a seguinte mudana de varivel, definida por:
0 00 n sen - sensenp .
2 2 (2.13)
Diferenciando ambos os membros de (2.13) temos:
cos de = sen - cos BdB. 2 2 2
(2.14)
O domnio de integrao em /3 o intervalo
obtemos:
0. u Inserindo a igualdade (2.14) em (2.12),
Q rr 2sen cos/3d/3
T = 2 - P 2 , \gh e ff h *e
sen cos p.\\- sen 2 V 2
(2.15)
36
= 4 dfi g J) yl\-k2sen2j3
(2.16)
com k = sen 2
(2.17)
O integral (2.16) conhecido por integral elptico de primeira espcie e o seu valor, referente
a um dado valor de k, est tabelado (Sommerfeld, 1952). A forma que demos para a expresso
do perodo, T, permite-nos resolver o problema atravs da utilizao de tabelas. Conhecida a
amplitude 0O, calculamos o valor de k e, a partir deste e de tabelas, o valor do integral.
Outro mtodo de resoluo do integral (2.12) consiste na expanso em srie da funo
integranda. Para isso tomemos:
sen G
s = d (2.18)
sen
Utilizando (2.18), o integral (2.12), toma a seguinte forma:
7 - 2 M d-^\en^[l-4
(2.19)
O desenvolvimento em srie ;rie de [l-2J 2 :
1 2
[l-2]" -Y-
V 2y ?I
S +... (2.20)
Temos ento:
v s sen
,0 0 . sen -
1 + i ^ -sen
2 2 2 @o 8 4 #0 sen sen
2 2
(2.21)
37
Para simplificar mais a expresso (2.11) podemos escrever, para ngulos 0{) pequenos, mas no
to pequenos para que a simplificao senO = 0 seja vlida, a expanso em srie:
e2 o4
cos#-cos
O grfico da figura 2.2 mostra a dependncia de y na amplitude do movimento T
CD
H \ 1.2
Figura 2.2: Grfico da dependncia de y~ na amplitude do movimento. Os valores utilizados
encontram-se na tabela 2.1.
Pela anlise do grfico da figura 2.2 verificamos que T funo crescente da amplitude.
Contudo, para amplitudes angulares iguais ou inferiores a 25 verifica-se que T-Tn T
< l % . O u
seja, nestas condies a aproximao de pequenos ngulos satisfatria. Contudo, se 6>n > 60,
o erro cometido ao considerar a aproximao de pequenos ngulos superior a 7%, como
poderemos confirmar na tabela 2.2, onde se apresenta o erro relativo em funo da amplitude.
39
o, 10 20 30 40 50 60 70 80 90 100 110 120 T-T0
T0 0,2% 0,8% 2.0% 3,0% 4,8% 6,9% 9.3% 12.2% 15,4% 19,0% 23,0% 27,4%
Tabela 2.2: T -T 1 'o
T em funo da amplitude. T o perodo de oscilao com uma amplitude 0O
qualquer e To o perodo com uma amplitude muito pequena.
Como verificamos a aproximao de pequenos ngulos aceitvel at amplitudes de 25,
uma vez que o erro relativo se situa abaixo dos 2,0%. Contudo, essa aproximao deixa de ser
aceitvel para amplitudes superiores, uma vez que o erro relativo se torna considervel.
TQ \T Assim, parece-nos interessante comparar - na amplitude do movimento quando
se utiliza a equao (2.24) para calcular os perodos T(0O) e Tcom aproximaes at segunda,
quarta e sexta ordem. Essa comparao apresenta-se no grfico da figura 2.3.
0.5
0.4
^ =0.3
CD H 0.2
0 . 1 -
aproximao at 2a ordem D aproximao at 4a ordem
aproximao at 6a ordem o
0- ' O-0 20 40 60 xo 100 120
e n T(0o)-To T(On)-Tn Figura 2.3: Grfico de na amplitude do movimento. Comparao dos valores de
'o 'o
em funo da amplitude do movimento, com aproximao at segunda, quarta e sexta ordem.
40
Da anlise do grfico da figura 2.3, verificamos que para valores da amplitude at 25 h
uma excelente concordncia entre as trs aproximaes. No entanto, quando a amplitude angular
superior a 40 comea a haver uma ntida separao entre os valores obtidos pela aproximao
at segunda ordem e as aproximaes at quarta e sexta ordem, pelo que deixa de ser satisfatria
a aproximao de pequenos ngulos para valores de amplitudes angulares superiores a 40.
2.1.2. Determinao do perodo das oscilaes do pndulo utilizando uma
expanso em srie
Como j referimos, quando o perodo de oscilao se torna aprecivel necessrio ter em
considerao o clculos de integrais elpticos (equao (2.16)). Uma vez que esta abordagem se
pode tornar um pouco difcil para alunos com conhecimentos elementares de clculo,
resolvemos apresentar uma aproximao alternativa, fazendo a sua expanso em srie, que pode
ser facilmente acompanhada por qualquer aluno de um curso introdutrio de Fsica.
Consideremos a equao do movimento:
0 + ^senO = 0. (2.25)
A expanso em srie do senO :
sen0 = 6--6* +-05 - . . . , (2.26) 3! 5!
com 6 pequeno.
Neste trabalho, atendendo que a amplitude no to pequena, vamos considerar a expanso
at termos de terceira ordem (Kittel, 1980):
sen0 = 6--O:\ (2.27) 6
41
O efeito do termo em #3 o de um oscilador anarmnico ou no linear. Esta situao de
difcil resoluo exacta mas as solues aproximadas do uma boa ideia do problema em
questo. Vamos procurar essa soluo aproximada.
Consideremos ento a expanso do senO at termos de ordem em 03, como na expresso
(2.27). Por substituio desta expresso na equao do movimento (2.25), obtm-se:
0 + ^-6
= 0. (2.28)
Tomando a>0 = , a equao anterior pode adquirir a forma:
9 + a> f 1 A 0--0 (2.29)
ou:
9 + 0)19 -^-03 =0. 6
(2.30)
Vamos procurar uma soluo aproximada da equao (2.30) da forma
0 = 0asencot + s0aserucot, (2.31)
onde s uma constante adimensional, que se espera ser muito menor do que a unidade quando
0f 1. Com a expresso (2.31) pretendemos mostrar que o movimento pode ser representado
como a sobreposio de dois movimentos diferentes, um cuja dependncia no tempo em
sencot e o outro em sen3co.
A presena do termo sericot na soluo (2.31 ) sugerida pela identidade trigonomtrica:
3 3 X 1 sen x = senx sen3x.
4 4 (2.32)
42
Desta forma, o termo 0' gerar, a partir do cubo do sencot. um termo em 3). Para
satisfazer a equao diferencial necessrio adicionar ao sencot um termo como ssenScot, que
cancele exactamente, o termo em sercot gerado por 6*. Continuando este processo, o novo
termo em sercot na soluo de ensaio originar, ao ser elevado ao cubo, um termo em
s serf) cot, e assim por diante. No existe motivo aparente para que este processo pare, mas, se
1, pode-se esperar que a srie convirja rapidamente, porque so envolvidas na expanso
potncias cada vez mais altas de s, associadas aos termos de alta frequncia. Assim, conclumos
que a equao (2.31 ) s pode ser uma soluo aproximada.
A soluo do tipo que estamos a considerar para a equao diferencial (2.30), chamada
soluo perturbativa, porque cada termo da equao diferencial perturba o movimento que
ocorreria na sua ausncia.
Vamos agora determinar s e co . Embora co se deva reduzir a co0 para pequenas amplitudes,
poder diferir dele para as grandes amplitudes. Por simplicidade, vamos supor que 9 = 0 em
/ = 0.
Da equao (2.31 ). obtemos:
0 = -orQ^sencot -9co20sen3cot (2.33)
03 Ol[sen""cot + 3esen2cotsen3cot + ...). (2.34)
Notemos que em (2.34) desprezamos os termos de ordem superior primeira em e, atendendo
hiptese de que possvel encontrar uma soluo com 1. Atendendo s identidades (2.33) e
(2.34), as diversas parcelas da equao (2.30) podem escrever-se da seguinte forma:
0 = -co~Qsencot - 9co~ 0sen3cot ;
colO = col9asencot + co20Qsen3cot ;
-~colO~ = ^-O^sencot + ^-0Qsen3cot ~9lsen~cotsen3cot. (2.35) ,203 = -^LelsenaJt + ^0lsen3cot - ^ ai 6 24 24 2
Notemos que na ltima expresso de (2.35) utilizamos a identidade (2.32). Vamos agora
adicionar membro a membro os termos da expresso (2.35). A soma dos membros esquerdos
nula devido igualdade (2.30). Deste modo deve ser nula a soma dos membros da direita.
43
qualquer que seja o instante de tempo /. Deste modo necessrio que os coeficientes de sent e
sercot sejam nulos.
O requisito de que o coeficiente do termo em sencot da soma deve ser nulo conduz
seguinte equao em co :
3 >.36)
A soluo da equao (2.36) :
co = con 1 , 10 o (2.37)
Considerando 0O pequeno, podemos tomar:
co = co 16
0k (2.38)
A equao (2.38) descreve a dependncia de co em 0, que corresponde ao limite das pequenas amplitudes. Se compararmos a expresso
(2.38) com a expresso (2.24), s levando em considerao a aproximao at segunda ordem,
verificamos que chegamos ao seguinte resultado:
_2n _2K CO CO o V 16
2JL co0
2 \
i3. 16
= T i+4. 16
\ (2.39)
Esta comparao mostra que o perodo pode ser obtido a partir de duas aproximaes.
Verificamos que este tratamento conduz ao mesmo resultado da equao (2.24) quando
consideramos aproximaes at segunda ordem.
A soluo (2.31) contm tambm um termo em sercot. O peso relativo deste termo igual
a s, cujo valor dado pela condio de que o coeficiente do termo em sen3co, obtido a partir
da soma dos elementos esquerdos da igualdade (2.35), ser nulo:
44
9a2 s + cote+ ^0} = 0 . (2.40) o 2 4
G2 Tomando ar = a>l, o que equivale a desprezar o factor na expresso (2.38), ento a
16 equao (2.40) reduzir-se- a:
s = -^-\, (2.41) 192
de acordo com o que espervamos qualquer que seja o valor de 0a considerado.
O coeficiente do termo sen2cotsen3co, na soma dos membros esquerdos de (2.35) pequeno,
sendo de ordem s ou de e1, relativamente aos termos conservados; na expanso de 6
desprezamos este termo na nossa aproximao.
Na equao (2.31) no inclumos um termo em senlcot, pois para uma soluo da forma:
0 = 0osencot + r)9asen2cot (2.42)
encontramos rj = 0, significando que no desenvolvimento de 9 que consideramos s apareceu o
terceiro harmnico, ou seja, termos em 3cot, e no o segundo.
Vemos que este tratamento da equao do pndulo gravtico para amplitudes no muito
pequenas conduziu ao resultado interessante em que a elongao 0{t) descrita por uma
expanso em srie de harmnicos. Como vimos, o termo dominante em sencot, e dizemos que
co a frequncia fundamental do pndulo. Na aproximao em que 0O pequeno, mas no o
suficiente para se considerar satisfatria a aproximao sen0o =d0, C dado pela equao
(2.38). O termo em senbcot, chamado o terceiro harmnico, tem frequncia que o triplo da
fundamental. Este resultado confirma que o movimento do pndulo com amplitude elevada no
harmnico simples.
45
2.2 Pndulo Fsico
Como foi referido anteriormente, o pndulo gravtico simples constitudo por uma haste
rgida, de massa nula, na qual est suspensa a massa pontual M. Nestas condies em que as
foras dissipativas no actuam no sistema, o perodo do pndulo dado pela expresso (2.23).
TM=2fg -> 0n
-sen 9 4 # 0
sen + 64 2
]5_ 48
6 #0 , sen - + .
(equao 2.23)
Verificamos na expresso (2.23), que o perodo no depende da massa pendular. Isto
Mg acontece porque a componente tangencial trajectria da fora resultante, , que a fora
restauradora, directamente proporcional massa do pndulo. Deste modo, a massa um factor
comum em ambos os membros da equao do movimento, eliminando-se da equao.
Embora a dinmica do pndulo gravtico real (pndulo fsico) em que a massa da haste
muito pequena em relao massa do corpo suspenso, seja bem descrita pela teoria do pndulo
gravtico simples, faz sentido estudar a situao mais geral, em que tal condio no se verifica.
No que se segue, iremos considerar um pndulo gravtico real, constitudo por uma haste de
comprimento / e massa uniformemente distribuda, de valor M, qual est suspenso um corpo de
massa m. Continuaremos a admitir que o sistema est livre de foras dissipativas. A figura 2.4,
mostra um esquema do sistema mecnico que ser estudado.
46
Figura 2.4: Um pndulo fsico real. Quando 6> = 0, o centro de gravidade est directamente
abaixo do ponto de suspenso O .
corpo suspenso encontra-se distncia x do eixo de rotao do pndulo, que passa pela
extremidade O da haste rgida. As foras que actuam no pndulo e que tm interesse na
discusso que se segue so o peso da barra e o peso do corpo. O momento resultante destas
foras em relao ao eixo de rotao, :
MR=-g ML \
+ mx sen0.^ J
(2.43)
Sendo I o momento de inrcia do sistema relativamente ao eixo de rotao, dado por:
/ = mx2 +ML2, (2.44)
a equao do movimento do pndulo gravtico pode ser escrita do seguinte modo:
-g ML \
+ mx sen 6 = J
mx1 + ML2 3
\ ,^-dLe dr '
(2.45)
que pode ser reescrita da seguinte forma:
47
d-e -rr+g dt
ML + mx
_2 ML2 +mx:
send = 0 (2.46)
Considerando que o pndulo oscila com pequena amplitude (?0 muito pequeno), a
equao (2.46) toma a forma:
d-e dt
ML + mx
ML-+ mx
0 * 0 . (2.47)
Desta equao podemos concluir que o perodo das oscilaes de pequena amplitude do
pndulo funo da posio x do oscilador:
T(x)=2 71
ML-+ mx
g ML \
+ mx j
(2.48)
1.9 L= M
= lm =km
1
1.8
1.7 :
k=l k=2 k=l/2
!
1
1.6
1.5
-
-
1.4 -
1.3 , 1 , , , 1 0.2 0.4 0.6 A 0.8
0.66
Figura 2.5: Dependncia do perodo na distncia do corpo ao eixo de rotao, x.
48
O grfico da figura 2.5 mostra a dependncia de T(x), determinada a partir da equao (2.48)
na qual se tomou L = lm e M=Km. sendo K= , /, 2. 2
Podemos observar que para qualquer valor de K existe um valor de x para o qual o perodo
toma um valor mnimo. O valor mnimo do perodo depende da razo K = . Com base na m
funo (2.48), podemos calcular a posio xe do corpo para o qual T mnimo:
KL x -
' 9
( I 4T ^ 1+ 1
3K (2.49)
Outro aspecto interessante que o grfico da figura 2.5 nos revela a existncia de uma
posio do corpo para a qual o perodo de oscilao do pndulo igual ao perodo de oscilao
da barra livre (x=0):
T(x = 0)=2xM. (2.50)
O valor da posio do corpo para o qual se verifica a igualdade do perodo do pndulo com o
perodo de oscilao da barra livre T(x = 0) :
IL x = = 0,66(6)Z , (2.51)
3
que, como vemos, independente das massas da haste rgida.
De seguida, apresentaremos um estudo experimental da dependncia do perodo de oscilao
do pndulo gravtico na posio do corpo e na amplitude de oscilao.
49
23A Estudo da dependncia do perodo de oscilao do pndulo fsico na posio do corpo
A montagem experimental utilizada para o estudo da dependncia do perodo do pndulo
na posio do corpo est esquematizada na figura 2.6.
Legenda:
1. Suporte fixo; 2. Sensor de rotao, Rotary Motion Sensor CI-6538 da Paso; 3. Barra de alumnio, rgida de 1 m de comprimento e de (124,3 0,0 l)g ; 4. Cilindro de cobre de massa (189,4 0,0 \)g; 5. Sistema automtico de aquisio de dados constitudo por interface Science Workshop M 750 e computador com software DataStudio.
Figura 2.6: Esquema da montagem laboratorial utilizada para estudar a dependncia do perodo do pndulo gravtico na posio do corpo e na amplitude de oscilao (os elementos representados no se encontram escala).
A haste rgida utilizada foi feita de alumnio e tem a forma de um cilindro, de
comprimento igual a (l,0000,00l)w e dimetro (l0,000 0,00\)mm. A massa da haste igual
a (124,30 0,0%. Junto a uma das extremidades da barra fizemos um furo de modo a lix-la a
um sensor de rotao, Rotary Motion Sensor CI-6538 da Paso. O sensor utilizado um sensor
de posio bidimensional que contm um codificador ptico que permite no mximo 1440
contagens por revoluo (360). A resoluo do sensor pode ser escolhida pelo programa de
aquisio DataStudio e pode tomar valores entre 360 divises por rotao ou 1440 divises por
rotao quando se pretende uma maior resoluo. O sensor ainda sensvel ao sentido de
rotao. Com este tipo de sensor no necessrio proceder a calibrao, no entanto, antes de
iniciar as aquisies tivemos o cuidado de ajustar o zero do aparelho ligando a Science
Workshop Rotary Motion Sensor e colocando o sensor no zero. A preciso do sensor 0,09,
50
podendo efectuar 13 revolues por segundo a Io de resoluo, a 0.25 de resoluo. Podemos
obter no mnimo 10 amostragens por segundo e no mximo 1000 amostragens por segundo. A
taxa de amostragens utilizada neste trabalho foi de 360 amostragens por segundo.
O sensor foi convenientemente colocado num suporte esttico. A distncia entre o local
de encastramento da barra no sensor de rotao e a sua extremidade livre (98,l0,l)tw. O
corpo oscilante um cilindro de cobre, de altura (l,800,0l)cm. dimetro (4,00 0,0\)cm e
massa igual a (l 89,4 0,2)#, perfurado ao longo do seu eixo longitudinal, de modo a poder ser
atravessado pela haste. O dimetro da perfurao do cilindro ligeiramente superior ao dimetro
da haste. Este cilindro pode deslizar pela haste, ocupando diversas posies. As diversas
posies ocupadas pelo cilindro foram medidas com uma rgua de comprimento
(l,000 0.00l)m desde o ponto de encastramento da barra at metade da altura do cilindro. Para
fixar o cilindro numa dada posio na haste, utilizamos um pequeno parafuso, que atravessando
o cilindro, aperta-se contra a haste. Ao realizar a montagem laboratorial houve o cuidado de
minimizar o atrito no ponto de suspenso e outras foras dissipativas.
O sensor de rotao est ligado a uma interface Paso 750 que, por sua vez. comunica
com um computador. O programa de controlo e de aquisio utilizado foi o DataStudio.
2.3.1.1. Procedimento experimental e anlise de resultados
Fixamos o cilindro numa dada posio da haste, apertando o parafuso. Medimos, de
seguida, a distncia entre o local de encastramento da haste no sensor de rotao e o centro do
cilindro. Desviamos o sistema em relao posio vertical de um ngulo prximo de 20.
Consideramos que este valor de amplitude satisfatrio, pois como j vimos, podemos
considerar o movimento do pndulo como se fosse harmnico. Iniciamos a rotina de aquisio
de dados e abandonamos o sistema. O programa DataStudio regista o valor do ngulo que a
haste faz em relao vertical, em funo do tempo. Aps o pndulo ter realizado algumas
oscilaes, paramos a rotina de aquisio. Repetimos este procedimento para diversas posies
do cilindro ao longo da haste, mantendo a amplitude das oscilaes aproximadamente igual a
20.
51
A figura 2.7 mostra a elongao angular em funo do tempo registada no caso em que a
distncia do cilindro ao ponto de encastramento foi (0,572 0.00\)m .
-20
x=57.2 cm
Figura 2.7: Elongao angular em funo do tempo, no caso em que a distncia do corpo ao
ponto de encastramento igual a (0,572 0,00\)m .
No intervalo de tempo de medida (cerca de 8 s), os efeitos das foras dissipativas que
actuam no pndulo so desprezveis. Assim, para determinar o valor da frequncia de oscilao
do sistema, para cada posio do cilindro ao longo da barra, ajustamos a seguinte funo aos
resultados experimentais:
y{t)= Asen(a>t + 0), (2.52)
em que A a amplitude inicial de oscilao, a a frequncia angular e 0 a fase inicial do
movimento.
52
23.1*2 Resultados e discusso
O grfico da figura 2.8 mostra a dependncia do perodo de oscilao com a distncia do
corpo ao eixo de rotao.
-
0.66 m
Figura 2.8: Representao grfica da dependncia do perodo de oscilao com a distncia do cilindro ao eixo de rotao. A linha vermelha representa o melhor ajuste da equao (2.48) aos resultados experimentais.
Da anlise do grfico da figura 2.8 verificamos que h um excelente acordo entre a teoria
desenvolvida partindo de valores prximos de zero, e os resultados experimentais. A linha
contnua, a vermelho, corresponde ao melhor ajuste da expresso:
53
KL1 + x
T(x) = 2n\ / , , (2.53) - + JC
M M aos resultados experimentais, onde K = . O valor obtido para K = = (0,65 0,02). est
m m em excelente acordo com o valor esperado = ' = (0,65 0,02) .
[m 189,4 v )
Apesar de considerarmos que h um bom ajuste da equao (2.48) aos resultados
experimentais, verificamos que esse ajuste muito melhor para valores de x < 0,5w. Em
particular, esse ajuste no to bom quando x > 0,66?.
O valor de x determinado para o qual o perodo de oscilao do sistema igual ao
perodo das oscilaes da haste livre :
x = 0,66m , (2.54)
estando em perfeito acordo com o valor previsto. A esta distncia, o perodo tem um valor
T = L633.S dado pela equao (2.50). Tambm verificamos, atravs do grfico da figura 2.8, que
o valor mnimo do perodo ocorre parax(, =(0,240,0l)m, que est em perfeito acordo com o
valor previsto pela equao (2.49).
2.4.1. Estudo da dependncia do perodo de oscilao na amplitude
2.4.1.1. Procedimento experimental
Seguidamente apresentamos o estudo experimental da dependncia do perodo na
amplitude de oscilao. Para tal, utilizamos a montagem experimental anteriormente descrita e
cujo esquema est representado na figura 2.6 e cuja descrio foi apresentada em 2.4.1. Como o
objectivo desta parte do trabalho a de estudar a dependncia do perodo na amplitude de
oscilao, colocamos o cilindro mvel numa posio fixa, cuja distncia ao eixo de rotao
54
igual a (0,585 0,00\)m. Como anteriormente, esta distncia foi medida desde o ponto de
encastramento da haste no sensor, at ao centro do cilindro.
Afastou-se o sistema da posio de equilbrio at que o ngulo entre o eixo da haste e a
vertical tomasse determinado valor. Com o programa de aquisio e controlo DataStudio a
funcionar abandonou-se o sistema, deixando-o executar algumas oscilaes. Registou-se a
elongao angular em funo do tempo. Tambm aqui, como na primeira parte do trabalho, a
taxa de amostragem utilizada foi de 360 por segundo.
Repetiu-se este procedimento para diversos valores da amplitude entre 10 e 150.
2.4.1.2 Anlise dos resultados experimentais
A figura 2.9 mostra como exemplo a elongao angular em funo do tempo em que a
amplitude de oscilao igual a (43,70,1). Tal como no caso anterior, no intervalo de tempo
de medida, o efeito das foras dissipativas pode ser desprezado. Chamemos a ateno para o
facto de quando o pndulo oscila com grandes amplitudes, o movimento no harmnico. Por
esse facto, determinamos o perodo de oscilao a partir da determinao do intervalo de tempo
At entre n oscilaes completas. O perodo igual a :
T = . (2.55) n
A linha azul no grfico da figura 2.8 foi calculada a partir do melhor ajuste da equao
(2.55) aos dados experimentais. Este procedimento foi efectuado para analisar os grficos 0{t)
obtidos em diversos ensaios.
55
9=43.7
Figura 2.9: Elongao angular em funo do tempo no caso em que a amplitude de oscilao
iguala 43.7.
A partir do conhecimento do valor de co obtido pelo procedimento do ajuste descrito,
para cada valor da amplitude de oscilao, calculamos o perodo T.
2.4.1.3. Resultados e discusso
A figura 2.10, mostra o grfico do perodo de oscilao T em funo da amplitude
angular 00. A linha no pormenor da figura 2.10 foi determinada a partir da expresso (2.24),
truncando a srie a partir do termo de quarta ordem.
56
2.1
1.9
p 1.8
1.7
1.6
1.5
1.8
1.75
, 1 , , i 1 i i i | i , , | i i , 1 ' '
-1.8
1.75
, i , i i i i i i i i i i i i i i i i i_
1.7
1.65
'-.4
/* ' " '-- 1.6
l
- 1.55 1 , i i , i , , i , i i i j i i 1 1 "
-- 1.55 1 ) 20 30 40 50 60 70 80 90 -
-
-
-
-1 , 1 , , i , i i , i !
20 40 60 80 100 120 en
140
Figura 2J0: Dependncia do perodo de oscilao em funo da amplitude. A linha contnua apresentada no pormenor da figura foi obtida a partir da equao (2.24), truncada a partir do termo de quarta ordem.
Podemos verificar da anlise do grfico da figura (2.10) que o perodo de oscilao
funo da amplitude. Verifica-se igualmente que h um excelente acordo entre os resultados
experimentais e os valores obtidos pela equao (2.24) truncada a partir de termos de sexta
ordem (inclusive). Finalmente, tambm podemos concluir que para amplitudes angulares
inferiores a 20, a diferena entre o perodo de oscilao do pndulo fsico e o perodo do
pndulo gravtico simples muito pequena, uma vez que o erro cometido da ordem de 0,8%.
Na condio de amplitude angular inferior a 20, a aproximao ao modelo do pndulo simples
satisfatria.
57
2.5. Concluso
Neste trabalho, estudamos a dependncia do perodo do pndulo fsico na distncia e na
amplitude de oscilao, utilizando uma montagem laboratorial simples.
Apesar da anlise matemtica dos problemas em estudo envolver alguns clculos
elaborados, a execuo do trabalho, assim como a anlise dos resultados, traduzidos pelas
equao (2.48) na primeira parte do trabalho e, pela equao (2.24) na segunda parte do trabalho,
bastante acessvel a alunos dos cursos introdutrios de Fsica do ensino superior.
Verificamos que a equao (2.48) descreve bem a dependncia T(x) e os resultados
experimentais obtidos. Tambm a equao (2.24) truncada a partir de termos de sexta ordem
(inclusive), descreve bem a dependncia do perodo em funo da amplitude angular.
Para alunos que j tenham estudado o pndulo fsico, poderia ser interessante utilizar estes
trabalhos para deduzir uma expresso para T e comparar os resultados experimentais com os
valores tericos ou encontrar um valor de x que minimize T. Este trabalho tambm se enquadra
bem no estudo experimental das oscilaes amortecidas. Numa outra perspectiva, poderia ser
interessante, relacionar a variao do quadrado da velocidade com a distncia do corpo ao eixo
de rotao ou estudar a dependncia do perodo de oscilao na variao da massa do corpo.
58
CAPTULO 3
Osciladores em Fluidos
A amplitude de um oscilador harmnico constante e o seu movimento perptuo. No
entanto, quando observamos um oscilador real, no forado, como um pndulo gravtico ou a
corda de uma viola a vibrar, verificamos que a amplitude de oscilao diminui ao longo do
tempo acabando por parar.
A diminuio da amplitude de oscilao uma consequncia da degradao de energia,
devido existncia de mecanismos dissipativos no sistema. Tais mecanismos tm origens
diversas, como por exemplo, a fora de atrito entre a superfcie do oscilador e a superfcie em
que se apoia; a fora resistente devida ao fluido por onde se move o oscilador, ou a resistncia
elctrica de um circuito oscilante. Em qualquer dos casos, a energia associada oscilao vai
sendo convertida noutras formas podendo ser dissipada para o exterior.
Se em muitos casos o amortecimento um factor indesejado, por vezes introduzido
intencionalmente, como em alguns instrumentos de medida analgicos. Nestes casos pretende-se
evitar oscilaes de um ponteiro e, assim, tornar mais rpidas as leituras no aparelho. Um outro
exemplo em que desejvel o amortecimento o do sistema de suspenso de um automvel.
Neste caso, deseja-se amortecer as oscilaes na suspenso do veculo, quando este passa por
uma lomba. Importa que essa oscilao termine rapidamente; assim, a funo dos amortecedores
proporcionar uma fora resistente para que a suspenso do veculo volte, num curto intervalo
de tempo, posio de equilbrio.
Na anlise terica apresentada nos captulos anteriores, desprezamos o efeito das foras
dissipativas e procuramos minimizar esses efeitos. Neste captulo, vamos estudar o efeito dessas
foras num oscilador e, em particular, estudaremos o movimento do pndulo elstico sujeito
fora resistente com origem na viscosidade do fluido por onde se move o oscilador.
3.1. Fora de Stokes. Movimento de um oscilador num fluido
Consideremos um oscilador esfrico, de massa m e raio R, em movimento num fluido
sujeito a uma fora que satisfaz a Lei de Hooke e a uma fora resistente, com origem na
viscosidade do fluido. Para alm destas foras, temos a considerar a impulso e o peso do corpo.
A situao mais simples, e que permite que a equao do movimento tenha soluo analtica,
corresponde a admitir que a fora resistente proporcional velocidade ou proporcional ao
quadrado da velocidade. A escolha de um ou de outro modelo para descrever a fora resistente
depende do valor do nmero de Reynolds (Re):
I> PDV
K= (3.1) V
onde p a densidade do fluido, D o dimetro do corpo, v a velocidade do fluido em
relao ao corpo e r\ viscosidade do fluido.
L. D. Landau e E. M. Lifshitz propem a seguinte expresso para a intensidade da fora
resistente com origem na viscosidade de um fluido num regime estacionrio (van der
Weele,1999):
F(v) = -CdPSv2 (3.2)
sendo Cd o coeficiente de arrastamento, p a densidade do fluido, S a rea da seco transversal
do objecto ao movimento (que no caso de uma esfera KR2)Q V a velocidade do objecto. Na
situao em que a velocidade do objecto funo do tempo, preciso considerar a fora de
viscosidade de Boussinesq-Basset e o efeito de massa de fluido que se adere ao corpo
(Pozsidikes,1971).
O coeficiente de arrastamento Cd uma funo complexa do nmero de Reynolds. Uma
expresso emprica obtida a partir da anlise dos valores de Cd em funo de Re, dada por F.
M. White (White, 1974):
Q ( R e ) ^ + i7k + 0 ' 4 ' (33)
61
Figura 3.1: O coeficiente de arrastamento Cd de uma esfera funo do nmero de Reynolds,
Rc. A rpida descida em Cd para Re 2,5x10"\ (a chamada crise de arrastamento) est
associada mudana da superfcie da camada fronteira da esfera do regime laminar para o turbulento (van der Weele, 1999).
No limite em que Re < 1, o termo dominante na expresso (3.3) a primeira parcela.
Considerando apenas esta parcela, a fora resistente em (3.1) toma a forma:
F(V) = TTTJRV . (3.4)
em que:
n 2pvR
R. (3-5)
define o coeficiente de viscosidade dinmico.
A expresso (3.4) para a fora resistente conhecida por lei de Stokes. Esta expresso
aplicada com sucesso na descrio do movimento de pequenas partculas em fludos, como
sejam pequenos gros de areia, microorganismos em gua ou poeiras no ar (van der Weele,
1999).
No intervalo IO4 < Re < 2x IO5, o coeficiente de arrastamento Cd praticamente
constante, tomando o valor aproximado de 0,4 (White, 1974). Neste caso, a fora resistente (3.1)
toma a forma: 62
F(v) = 02pxR2 v2 (3.6)
A expresso (3.6) descreve bem a fora resistente que actua num paraquedista ou num objecto
em queda a grandes altitudes, excepto para os primeiros instantes do movimento.
No que se segue, iremos considerar que a fora resistente que actua no oscilador satisfaz
a lei de Stokes (3.4).
A figura 3.2 apresenta as foras aplicadas ao oscilador elstico que tm interesse para a
sua anlise dinmica. Consideremos apenas as oscilaes lineares.
F=-i
Fr = -f$
Figura 3.2: Foras que actuam num oscilador elstico que se move num fluido.
Nas condies de equilbrio (x = x0), deve satisfazer-se a condio:
mg + Kx0 -1 = 0. (3.7)
Aplicando a segunda lei de Newton ao movimento do corpo, que se movimenta na
direco x temos:
mx = mg- K(x - x0 ) - / - Fr, (3.8)
em que x corresponde distenso da mola e x0 corresponde posio de equilbrio da mola.
Substituindo a equao (3.7) em (3.8), obtemos a equao do movimento do oscilador.
63
mx = -Kx-j3x, (3.9)
sendo p = 6nr]R. (3.10)
A equao (3.9) pode ser escrita da seguinte forma:
.. P . K x + x + x = 0. (3.11)
m m
Seja y = um parmetro que designaremos por coeficiente de amortecimento e 2m
a>l = a frequncia angular das oscilaes harmnicas. Atendendo a estas definies, a m
equao do movimento (3.11) toma a forma:
x + 2yx + a>tx = 0. (3.12)
Vamos procurar solues da equao diferencial (3.12) do tipo:
$) = e*t (3.13)
sendo um parmetro a ser determinado a seguir. Substituindo (3.13) na equao (3.12).
obtemos:
^Ae* +2yAe* +colAei' = 0 , (3.14)
que, aps dividir ambos os membros por Ae&, resulta na seguinte equao de segundo grau em
^ + 2 ^ + ^ = 0 , (3.15)
cujas razes so: 64
2 2
= - r V r - < - (3.16)
A natureza das solues de (3.12) vai depender da comparao entre os valores de y2 e
)0.
1 - Caso co0 > y.
Neste caso, o radicando de (3.16) negativo, pelo que um nmero complexo, dado
por:
= - r /V^o -y2 =-y ia>. (3.17)
A soluo (3.13) da equao diferencial (3.12) a combinao linear de exponenciais:
x(t) = C\e-*+"0' +C2e-:"-"01. (3.18)
que aps alguma manipulao algbrica, conduz ao seguinte resultado:
x(t) = Ae~" cos(co( +
0.6
0.4
0.2
1 1 1 1 r
-0.2
-0.4
\ ,/
_ i i i i i i i i i _
Figura 3.3; Elongao em funo do tempo de um oscilador em regime de amortecimento fraco.
O oscilador executa diversas oscilaes em torno da posio de equilbrio antes de parar.
Por este motivo designa-se este tipo de amortecimento por amortecimento fraco.
A elongao em funo do tempo modulada pela exponencial e'*1. Os pontos onde as
curvas dos grficos x{t) e e'* se tocam no correspondem a pontos onde a elongao toma
valores extremos. Os extremos de x(t) so dados por:
x,,=Ae--(-lY-, (3.20)
e a razo entre os mdulos de duas posies extremas consecutivas :
"+] = e y " "+l ' = e (3.21)
66
Define-se decremento logartmico (/1 ) ao logaritmo natural da razo x. "n+l
>l = l n W+l
yr
O (3.22)
Quanto maior for o coeficiente de amortecimento, maior ser o decremento logartmico.
Isto significa que o decremento logartmico mede o decrscimo de amplitude de oscilao por
ciclo.
O intervalo de tempo necessrio para que o oscilador efectue um ciclo do movimento
conhecido por pseudo-perodo e dado por:
T = p
/I
CO (3.23)
Notemos que T funo de y.
O decremento logartmico e o pseudo-perodo so parmetros que caracterizam o
movimento do oscilador em regime de amortecimento fraco.
Os outros casos, que no so objecto de estudo neste trabalho, no sero expostos com
detalhe, apenas sero referidas as caractersticas principais dos respectivos movimentos.
2 - Caso o)0 < y.
Neste caso, o radicando da expresso (3.16) real. O valor de dado por:
= -yJy2 -cvl , (3.24)
e a soluo da equao do movimento toma a forma:
c{t) = e',\cie^2' +^-^-^ (3.25)
ou 67
x(t) = Ae *senh()t + ^ ), (3.26)
com co = /2 -col (3.27)
O grfico da figura 3.4 mostra a posio do oscilador em funo do tempo. Podemos
verificar que esta soluo corresponde a um movimento no vibratrio, pois x tende
assimptoticamente para zero.
0.35
0.3
0.25
0.2
0.15
0.1
0.05
-0.05
I i I 1 ' ' ' ' 1 ' 1 1 1 | 1 1 1 1 | 1 1 1 1
7 j o. (3.24) 68
e a soluo correspondente dada por:
x(/) = e- ; ' (C,+Cy). (3.25)
Este tipo de amortecimento conhecido por amortecimento crtico. O grfico da figura
3.5 mostra a posio em funo do tempo do oscilador nos regimes de amortecimento forte
(linha preta) e fraco (linha vermelha), permitindo fazer uma comparao.
Figura 3.5: Posio em funo do tempo do oscilador, em regime de amortecimento crtico a vermelho e, em regime de amortecimento forte a preto.
Como podemos observar o oscilador criticamente amortecido tambm no efectua
oscilaes, regressando posio de equilbrio num intervalo de tempo menor do que o
oscilador fortemente amortecido.
69
3.2. Estudo do movimento de um oscilador num fluido
A maioria dos manuais de Fsica Geral considera que a fora resistente que actua num
oscilador que se move num fluido satisfaz a lei de Stokes. Algumas razes para considerar o
modelo de Stokes so: 1) o modelo permite discutir o mecanismo responsvel pela dissipao da
energia mecnica do oscilador; 2) a simplicidade da equao diferencial que descreve o
movimento permite obter uma soluo analtica, utilizando mtodos de clculo elementares; 3) a
soluo obtida de fcil interpretao e, deste modo, adequada para a discusso de algumas
caractersticas do movimento amortecido.
Todavia, este modelo introduzido sem o cuidado de chamar ateno para as suas
limitaes. Deste facto, induz-se nos alunos a ideia errada de que a fora resistente que actua
num corpo em oscilao satisfaz sempre a frmula de Stokes.
De seguida, iremos apresentar um estudo experimental do movimento de um oscilador
elstico mergulhado num fluido. A anlise dos resultados obtidos permitir concluir que a
frmula de Stokes no adequada para descrever os resultados experimentais obtidos e que
necessria uma reformulao do modelo, atendendo ao regime de movimento do oscilador,
definido pelo respectivo nmero de Reynolds.
3.2J. Montagem e tcnica experimental
A montagem experimental para o estudo das oscilaes amortecidas do pndulo elstico
est esquematizada na figura 3.6.
70
8
1 1
Legenda:
1. Suporte fixo; 2. Sensor de movimento. Motion Sensor II; 3. Mola de elstica; 4. Disco perfurado para facilitar a deteco pelo sensor. 5. Esfera metlica; 6. Reservatrio cilndrico com gua; 7. Interface Science Worksop' 750; 8. Computador com software DataStudio.
TM
Figura 3.6: Esquema da montagem laboratorial utilizada para estudar as oscilaes amortecidas
num fluido (os elementos representados no se apresentam escala).
Suspendemos uma mola de constante elstica K = (29,9 0,2)Nm~] e massa
(l40,690,0l),g num suporte esttico. Na extremidade livre da mola foi colocado um disco
perfurado, de modo que o seu plano fosse perpendicular ao eixo longitudinal da mola, que se
considera vertical. Suspendeu-se na extremidade livre da mola uma esfera de ao, cujas
caractersticas sero dadas mais adiante. Para suspender a esfera, usamos um fio de nylon de
comprimento 20cm, dimetro (0,20 + 0,0l)mm e massa (0,03 0,0\)g. A esfera mergulhada
cerca de 10cm abaixo da superfcie livre da gua contida num recipiente. Este recipiente
contentor tem a forma cilndrica e o seu dimetro cerca de seis vezes o dimetro da esfera, e o
seu comprimento cerca de doze vezes o dimetro da esfera. Escolhemos este recipiente com
aquelas dimenses para podermos desprezar os efeitos de fronteira nas paredes do recipiente.
O fio de nylon foi utilizado por diversas razes. Uma delas foi para evitar que a mola
mergulhasse no lquido. Outra foi para evitar a transmisso do momento de toro que a mola em
hlice exerce no oscilador, quando distendida ou comprimida. Se a esfera estivesse rigidamente
ligada mola, o momento toror transmitir-se-ia esfera e, consequentemente, esta entraria em
oscilao rotacional em torno do eixo longitudinal da mola. Deste modo, surgiriam foras de _ y] = _
resistncia que no tendo a direco das oscilaes lineares da esfera, aumentariam a
complexidade do movimento. Para evitar isto, suspendemos a esfera atravs do lio de nylon de
modo a minimizar a transmisso do momento toro. Verificamos que, a haver oscilaes de
rotao da esfera, estas no so perceptveis e, por isso, as desprezamos. A utilizao do fio teve
ainda a vantagem de minimizar a sua superfcie de contacto com o lquido, que no constante
quando a esfera oscila. Assim, desprezamos o efeito das foras resistentes que actuam no fio
quando este se move no lquido.
Com base na equao (1.28), apresentada no Captulo 1, determinamos a fraco efectiva
de massa da mola, / = , que deve ser tida em considerao na determinao da massa
equivalente oscilante, Meq, dada por:
M, = m esfera + M mola + fio (3-26)
sendo mesfera, mmoia e mfl0, as massas da esfera, da mola e do fio, respectivamente.
Neste trabalho utilizamos duas esferas de superfcies polidas, cujas caractersticas se
encontram na tabela 3.1. A massa de cada esfera foi determinada com uma balana analtica de
preciso 0,0Ig, e o dimetro com um palmer, de preciso 0,001 cm. O fio de nylon foi encastrado
em cada esfera.
Esfera Massa (g) Raio (cm)
P 66,70 0,01 1,350 + 0,001
G 225,30 0,01 1,826 0,001
Tabela 3.1: Caractersticas das esferas utilizadas.
A posio da esfera em funo do tempo foi obtida com um sensor de movimento Paso
Motion Sensor IICI-6529. Este sensor j foi utilizado no trabalho realizado no Captulo 1, onde
se descreve em detalhe o seu funcionamento. O sensor emite um impulso ultrasnico que se
propaga at atingir o disco perfurado, onde reflectido. O mesmo sensor detecta o impulso
reflectido, determinando o intervalo de tempo entre a emisso de um impulso e a recepo do 72
respectivo eco. Este sensor comunica com um computador atravs de uma interface Paso
Science Workshop ' 750 . O programa DataStudio permite o controlo das condies de
aquisio e calcula a posio do objecto a partir do intervalo de tempo medido e da velocidade
de propagao do impulso ultrasnico no ar. A frequncia de amostragem utilizada foi de
lOOs-1 . O sensor foi colocado a cerca de 60cm do disco perfurado, na condio de equilbrio
esttico do sistema.
Iniciamos as oscilaes verticais do sistema, afastando a esfera da posio de equilbrio.
Tivemos o cuidado de garantir oscilaes verticais, de amplitude mxima no muito maior do
que o dimetro da esfera. O incio do movimento e da aquisio de dados no foi simultnea.
3.2.2. Resultados experimentais
Os grficos da figura 3.5 mostram a elongao em funo do tempo das oscilaes
lineares do pndulo elstico quando a massa pendular se move no interior da gua, nas condies
descritas anteriormente. A linha contnua representa o melhor ajuste da equao:
x(t) = x0 + Ae'11 sen{c t + >), (3.27)
aos resultados experimentais, no intervalo temporal [0,15}v. Em (3.27), x() corresponde posio
de equilbrio do pndulo, A amplitude inicial do movimento, y o coeficiente de
amortecimento, a> a frequncia angular e
(a)
: * S f i I A f I t i': ;' fi A A . * * ; A !\ A A A *
t ! : ? J l ': | ' / / t i te ' *f : U il ! *.; ;/ W Et \t :' M i t W i/ V V v U f i : l v * tf v: t v v
y
y - MI + M2 ,E\p(-M5-M(l)-sm(M! ,MlHM4l (a)
: * S f i I A f I t i': ;' fi A A . * * ; A !\ A A A *
t ! : ? J l ': | ' / / t i te ' *f : U il ! *.; ;/ W Et \t :' M i t W i/ V V v U f i : l v * tf v: t v v
y
Value In. (a)
: * S f i I A f I t i': ;' fi A A . * * ; A !\ A A A *
t ! : ? J l ': | ' / / t i te ' *f : U il ! *.; ;/ W Et \t :' M i t W i/ V V v U f i : l v * tf v: t v v
y
ml Il 2.257 0 000112(0
(a)
: * S f i I A f I t i': ;' fi A A . * * ; A !\ A A A *
t ! : ? J l ': | ' / / t i te ' *f : U il ! *.; ;/ W Et \t :' M i t W i/ V V v U f i : l v * tf v: t v v
y
m2 (1036272 (1 (100764(.5
(a)
: * S f i I A f I t i': ;' fi A A . * * ; A !\ A A A *
t ! : ? J l ': | ' / / t i te ' *f : U il ! *.; ;/ W Et \t :' M i t W i/ V V v U f i : l v * tf v: t v v
y
m.' l i . l i h 0.0026383
(a)
: * S f i I A f I t i': ;' fi A A . * * ; A !\ A A A *
t ! : ? J l ': | ' / / t i te ' *f : U il ! *.; ;/ W Et \t :' M i t W i/ V V v U f i : l v * tf v: t v v
y
Ili4 14 7SH 0 02(127')
(a)
: * S f i I A f I t i': ;' fi A A . * * ; A !\ A A A *
t ! : ? J l ': | ' / / t i te ' *f : U il ! *.; ;/ W Et \t :' M i t W i/ V V v U f i : l v * tf v: t v v
y
I I P 0.091139 0 0027113
(a)
: * S f i I A f I t i': ;' fi A A . * * ; A !\ A A A *
t ! : ? J l ': | ' / / t i te ' *f : U il ! *.; ;/ W Et \t :' M i t W i/ V V v U f i : l v * tf v: t v v
y
Chisq 11072173 NA
(a)
: * S f i I A f I t i': ;' fi A A . * * ; A !\ A A A *
t ! : ? J l ': | ' / / t i te ' *f : U il ! *.; ;/ W Et \t :' M i t W i/ V V v U f i : l v * tf v: t v v
y
II (11(72111 NA
(a)
: * S f i I A f I t i': ;' fi A A . * * ; A !\ A A A *
t ! : ? J l ': | ' / / t i te ' *f : U il ! *.; ;/ W Et \t :' M i t W i/ V V v U f i : l v * tf v: t v v
y
t(I) l 5
0.28
0 5 10 1 ( s ) 15
Figura 3.7: Elongao em funo do tempo para as duas esferas imersas no fluido. Em a)
R = (1,350 0,00l)cm e em b) R = (1,826 + 0,00\)cm. A tabela anexa a cada grfico
apresenta os valores obtidos para cada parmetro ajustvel da equao (3.27) e o respectivo erro.
Nas tabelas, mx = x0, m2 - A , m3 = co, mA-
Oscilador A (cm) Y (s'1) a>(s~l) $(rad)
P 3,63 0,07 0,092 + 0,003 4,605 + 0,003 2,19 0,02
G 2,50 0,09 0,194 0,009 7,736 0,009 2,16 0,01
Tabela 3.2: Valores dos parmetros relevantes, obtidos por ajuste da equao (3.27) elongao funo do tempo.
Podemos observar dos grficos da figura 3.7 que o modelo baseado na hiptese da fora
resistente obedecer Lei de Stokes no se adequa para a descrio dos resultados experimentais
em todo o intervalo temporal estudado. Em particular, nem a amplitude nem a frequncia do
movimento so convenientemente determinadas. Obviamente, o clculo do valor de uma
grandeza fsica, como a viscosidade da gua temperatura de trabalho, baseado nos valores da
tabela 3.2 no faz sentido.
A primeira hiptese que foi colocada para explicar a discrepncia observada entre os
resultados experimentais e o modelo teve em ateno o efeito adicional que a resistncia do
lquido exercia sobre o fio utilizado para suspender as esferas. Embora sendo um fio de nylon, de
dimetro muito pequeno, deveramos analisar com cuidado o efeito do seu movimento no
lquido. Fizemos uma consulta detalhada de diversos trabalhos experimentais envolvendo foras
de viscosidade aplicadas em osciladores e verificamos que, em geral e independentemente do
tipo de montagem experimental, os valores calculados para o coeficiente de viscosidade do
fluido utilizado so sistematicamente superiores aos tabelados, que so determinados com base
em mtodos experimentais adequados. Veja-se, por exemplo, o trabalho de David Auerbach
(Auerbach, 1988), onde se encontram desvios de 62% em alguns casos. De notar que no trabalho
de Auerbach o clculo do coeficiente de viscosidade foi feito a partir da anlise da elongao em
funo do tempo com o modelo baseado na hiptese da lei de Stokes ser vlida.
Admitimos ento que algumas das permissas em que baseamos o modelo terico
anteriormente desenvolvido no se verificam na prtica. Como o decaimento da amplitude no
tempo e o valor da frequncia angular so ambos funo do coeficiente de amortecimento y,
plausvel considerar que o erro cometido no desenvolvimento do modelo residiu no facto de
Top Related