





Línguas
Páginas
Legal


Geometriaanalítica
licenciatura emmatemática
LIC
EN
CIA
TU
RA
EM
MA
TE
MÁ
TIC
A - G
EO
ME
TR
IA A
NA
LÍT
ICA
VE
TO
RIA
LU
AB
/ IFC
ES
EM
ES
TR
E 3
vetorial
Ministério da Educação - MEC
Coordenação de Aperfeiçoamento de Pessoal de Nível Superior
Universidade Aberta do Brasi l
Instituto Federal de Educação, Ciência e Tecnologia do Ceará

MINISTÉRIO DA EDUCAÇÃO
Universidade Aberta do Brasil
Instituto Federal de Educação, Ciência e Tecnologia do Ceará
Diretoria de Educação a Distância
Fortaleza, CE2008
Licenciatura em Matemática
Geometria Analítica Vetorial
Marcos Antônio de Macedo

CréditosPresidenteLuis Inácio Lula da Silva
Ministro da EducaçãoFernando Haddad
Secretário da SEEDCarlos Eduardo Bielschowsky
Diretor de Educação a DistânciaCelso Costa
Reitor do IFCECláudio Ricardo Gomes de Lima
Pró-Reitor de EnsinoGilmar Lopes Ribeiro
Diretora de EAD/IFCE e Coordenadora UAB/IFCECassandra Ribeiro Joye
Vice-Coordenadora UABRégia Talina Silva Araujo
Coordenador do Curso de Tecnologia em HotelariaJosé Solon Sales e Silva
Coordenador do Curso de Licenciatura em MatemáticaZelalber Gondim Guimarães
Elaboração do conteúdoMarcos Antônio de Macedo
ColaboradorMarília Maia Moreira
Equipe Pedagógica e Design InstrucionalAna Claúdia Uchôa AraújoAndrea Maria Rocha RodriguesCristiane Borges BragaEliana Moreira de OliveiraGina Maria Porto de Aguiar Vieira Jane Fontes GuedesLívia Maria de Lima SantiagoLuciana Andrade RodriguesRegina Santos Young
Equipe Arte, Criação e Produção VisualBenghson da Silveira DantasDavi Jucimon Monteiro Diemano Bruno Lima NóbregaGermano José Barros PinheiroHommel Almeida de Barros Lima José Albério Beserra José Stelio Sampaio Bastos NetoLarissa Miranda Cunha Marco Augusto M. Oliveira Júnior Navar de Medeiros Mendonça e NascimentoRenato Furtado de Mesquita Roland Gabriel Nogueira Molina
Equipe WebAline Mariana Bispo de Lima Antonio de Pádua Madeiros Alves FilhoBenghson da Silveira Dantas Fabrice Marc Joye Luiz Alfredo Pereira LimaLucas do Amaral Saboya Marcos do Nascimento Portela Ricardo Werlang Samantha Onofre Lóssio Tibério Bezerra SoaresThuan Saraiva Nabuco
Revisão TextualAurea Suely ZavamNukácia Meyre Araujo de Almeida
Revisão WebDébora Liberato Arruda HissaSaulo Garcia
LogísticaFrancisco Roberto Dias de Aguiar
SecretáriosBreno Giovanni Silva AraújoFrancisca Venâncio da Silva
AuxiliarZuila Sâmea Vieira de AraújoMaria Tatiana Gomes da SilvaCarla Anaíle Moreira de Oliveira

Macedo, Marcos Antônio de. Geometria analítica vetorial / Marcos Antônio de Macedo; Coordena-ção Cassandra Ribeiro de Oliveira e Silva. - Fortaleza: UAB/IFCE, 2008. 123p. : il. ; 27cm.
ISBN 978-85-475-0005-4
1. GEOMETRIA ANALÍTICA 2. VETORES (MATEMÁTICA) I. Silva, Cassandra Ribeiro de Oliveira e. (Coord.) II. Instituto Federal de Educação, Ciência e Tecnologia do Ceará - IFCE III. Universidade Aberta do Brasil IV. Título.
CDD – 516.3
M141g
Catalogação na Fonte: Etelvina Marques (CRB 3 – Nº 615)

SUMÁRIO
AULA 2
AULA 3
AULA 4
Apresentação 7Referências 123
Tópico 1
Tópico 2
Tópico 3
Tópico 1
Tópico 2
Tópico 3
Tópico 1
Tópico 2
Tópico 3
Tópico 1
Tópico 2
Currículo 124
Introdução a vetores 8Sistema de coordenadas tridimensional 9Introdução a vetores 14Decomposição no plano e no espaço 21
AULA 1
Produto interno 28Representação geométrica do produto interno 29Expressão cartesiana do produto interno 33Duas aplicações tradicionais do produto interno 38
Produto vetorial 43Produto vetorial 44Produto misto 51Demonstrações das propriedades 56
Reta 61Equações da reta 62Posições relativas entre duas retas 67

6 Geomet r ia Ana l í t i ca Ve to r ia l
Plano 72Equações do plano 73Complemento sobre planos 80
AULA 6
AULA 7
AULA 8
Tópico 1
Tópico 2
Tópico 1
Tópico 2
Tópico 1
Tópico 2
Tópico 1
Tópico 2
AULA 5
Distâncias 84Distância envolvendo ponto e reta 85Distâncias envolvendo ponto e plano 91
Cônicas 96Elipse e círculo 97Hipérbole e parábola 102
Transformação de coordenadas 109Translação de eixos de coordenadas 110Rotação de eixos de coordenadas 114

7APRESENTAÇÃO
APRESENTAÇÃOCaro(a) aluno(a),
A disciplina Geometria Analítica Vetorial tem como objetivo familiarizar o aluno com os conceitos
fundamentais da Geometria Analítica e Vetores, fornecendo-lhe um conjunto de ferramentas
que permitam avançar nas disciplinas de Cálculo Diferencial e Integral, Física e Álgebra Linear.
A disciplina está estruturada em duas partes: vetores e geometria analítica. Na primeira parte,
são introduzidas as propriedades e operações com vetores de maior relevância, considerando
que o estudo desses elementos é de fundamental importância para compreensão e
entendimento da geometria analítica.
Na segunda parte, é realizado um estudo acerca das retas e dos planos no espaço
tridimensional, utilizando-se como ferramentas básicas as principais operações e
propriedades dos vetores, além de uma abordagem sobre transformação de coordenadas.
No desenvolvimento dos conteúdos, procuramos seguir sempre uma ordem lógica na
apresentação dos temas. Dessa forma, pretendemos facilitar e fornecer condições para que
os próprios alunos avancem de modo progressivo no domínio da disciplina.
Como parte de sua avaliação, você deverá resolver, ao final de cada aula, um conjunto de
exercícios cujo grau de complexidade aumenta de forma gradativa desde os conceitos mais
básicos aos mais complexos.
A partir de agora, convido-os a viajar nesse mundo da geometria analítica.
Bons estudos!
Marcos Antônio de Macedo

8 Geomet r ia Ana l í t i ca Ve to r ia l
Caro(a) aluno(a),
Nesta aula será introduzido o conceito geométrico e analítico de vetores, os
quais serão utilizados como ferramenta imprescindível nas aulas subsequentes,
permitindo a você, a formação de uma visão espacial dentro da geometria analítica
tridimensional.
Objetivos
• Introduzir a linguagem geométrica de vetores coligada às técnicas algébricas que envolvem coordenadas
• Desenvolver uma visão integrada com os problemas de geometria resolvidos por meio de técnicas algébricas
AULA 1 Introdução a Vetores

9AULA 1 TÓPICO 1
TÓPICO 1 Sistema de coordenadas tridimensionalObjetivOs
• Apresentar a ferramenta básica para o estudo da
geometria analítica e vetores
• Identificar um ponto no sistema de coordenadas
tridimensionais
Neste tópico será abordado o sistema de coordenadas retangulares
tridimensionais (ou sistema de coordenadas cartesianas), elemento
básico e ferramenta fundamental no estudo da geometria analítica.
A palavra cartesiano se deve a René Descartes, conhecido como Cartesus. No
sistema cartesiano, x recebe o nome de abscissa, y de ordenada e z o nome de cota.
1.1 SISTEMA COORDENADO RETANGULAR TRIDIMENSIONAL
Vimos na geometria analítica plana que, para localizar um ponto no plano,
são necessários dois números reais, ou seja, qualquer ponto do plano pode ser
facilmente representado como um par ordenado (a,b) de números reais, onde a é a
coordenada x e b é a coordenada y. Para localizar um ponto no espaço, precisamos
de três números reais (a, b, c).
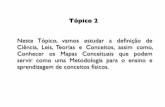
Para representar um ponto no espaço,
precisamos, primeiramente, fixar um ponto
0, chamado de origem, e três retas orientadas
ortogonais entre si passando por 0, que
denominamos eixos coordenados 0x, 0y e 0z,
como ilustrado na figura 1.
s a i b a m a i s !
Conheça mais sobre o renomado matemático
acessando o site https://educacao.uol.com.br/
biografias/rene-descartes.htm.

10 Geomet r ia Ana l í t i ca Ve to r ia l
Figura 1 – Sistema de eixos cartesianos
Cada dupla de eixos determina um plano coordenado. Portanto temos três
planos coordenados: o pano x0y ou xy, o plano x0z ou xz e o plano y0z ou yz,
como mostra a figura 2. Os três planos se interceptam dividindo o espaço em oito
regiões, cada uma delas chamada octante. O primeiro octante é determinado pelos
eixos positivos (figura 2).
Figura 2 - Planos coordenados
A cada ponto P do espaço vai corresponder uma terna (a, b, c) de números
reais, chamadas coordenadas de P e denominadas abscissa, ordenada e cota,
respectivamente. Para se determinar as coordenadas de P, procedemos da seguinte
forma:
Baixamos por P uma perpendicular ao plano xy determinando o ponto P’ (projeção
ortogonal de P sobre o plano xy). As coordenadas de P’ no plano xy representam
as duas primeiras coordenadas de P que são a e b. A terceira coordenada de P
(coordenada c) marcada no eixo z a partir da origem representa a distância de P ao
plano xy, como mostra a figura 3.
Figura 3 – Coordenadas de um ponto no espaço

11AULA 1 TÓPICO 1
O produto x x x, y, z x, y, z = ( ) ∈{ } é o conjunto de todas as
triplas ordenadas de números reais e é denotado por
3. Existe uma correspondência
bijetora entre cada ponto P do espaço e triplas ordenadas (x, y, z) no
3, que é
chamado sistema coordenado retangular tridimensional.
Note que, se um ponto pertence a um
plano coordenado, uma de suas componentes é
nula. Em particular:
• O ponto (0, y, z) pertence ao plano yz.
• O ponto (x, 0, z) pertence ao plano xz.
• O ponto (x, y, 0) pertence ao plano xy.
Se o ponto pertence a um eixo coordenado,
duas de suas componentes é nula. Em particular:
• O ponto (0, 0, z) pertence ao eixo 0z.
• O ponto (x, 0, 0) pertence ao eixo 0x.
• O ponto (0, y, 0) pertence ao eixo 0y.
Vejamos os exercícios resolvidos a seguir.
ExErcício rEsolvido
1. Que superfícies de
3 são representadas pelas seguintes equações?
a) x 4= b) z 5=
Solução:
a) a equação x 4= representa o conjunto ( ){ }x,y,z / x 4= que é o conjunto
de todos os pontos de
3 com coordenada x 4= . Isso representa um plano paralelo
ao plano yz interceptando o eixo x no ponto (x, 0, 0), como mostra a figura 4a.
b) a equação z 5= representa o todos os pontos de
3 com coordenada z 5=
. Isso representa um plano paralelo ao plano xy interceptando o eixo z no ponto (0,
0, z), como mostra a figura 4b.
Figura 4a – O plano intercepta o eixo x no ponto (4,0,0)
Figura 4b – O plano intercepta o eixo x no ponto (0,0,5)
g u a r d e b e m i s s o !
Em geometria analítica bidimensional, o gráfico
de uma equação envolvendo x e y é uma curva
em ²; na geometria analítica tridimensional,
uma equação que envolve x, y e z representa uma
superfície em ³.

12 Geomet r ia Ana l í t i ca Ve to r ia l
1.2 DISTÂNCIA DE DOIS PONTOS
A fórmula bastante conhecida para a distância entre dois pontos em um
plano pode ser estendida para a seguinte fórmula tridimensional.2 2 2d(A,B) AB x y z= = D +D +D em que 1 1 1A(x , y , z ) e 2 2 2B(x , y , z )
Para justificar esta fórmula, vamos construir um paralelepípedo, onde A e B
são vértices opostos e as faces são paralelas aos planos coordenados. Se 1 1 1A(x , y , z )
e 2 2 2B(x , y , z ) são vértices do poliedro (como indica a figura 5), então temos:
2 1 AC x - x= 2 1 CD y - y= 2 1 BD z - z=
Figura 5 – Distância entre A e B no espaço
Como os triângulos ABD e ACD são retângulos, duas aplicações do teorema
de Pitágoras nos fornecem:
AB AD BD2 2 2= +
AD AC CD 2 2 2= +
Combinando as duas equações, vem...2 2 2 2 AB AC CD BD = + +2 2 2 2
2 1 2 1 2 1 AB x - x y - y z - z = + +2 2 2
2 1 2 1 2 1 AB x - x y - y z - z = + +
fazendo 2 1 2 1 2 1x x x , y y y e z z zD = - D = - D = - temos,
2 2 2 AB x y z = D +D + D
ExErcícios rEsolvidos
1. Qual a distância do ponto A(2, -1, 7) ao ponto B(1, -3, 5)?
Solução:2 2 2 AB (2 1) ( 1 3) (7-5) = - + - + +
AB 1 4 4= + + =3

13AULA 1 TÓPICO 1
2. Determine a equação da esfera de centro no ponto C(a, b, c) e raio r.
Solução:
A esfera, por definição, é o conjunto de todos os pontos P(x, y, z) cuja
distância a um ponto fixo C é uma constante r.
O ponto C pertence à esfera se, e somente se, PC r= , ou seja2 2 2r (x a) (y b) (z c) = - + - + -
2 2 2(x a) (y b) (z c) - + - + - = r 2
Em particular, se o centro é o ponto (0, 0, 0), a equação da esfera fica2 2 2 2x y z r+ + =
Vimos como identificar um ponto no sistema de coordenadas tridimensionais
através de suas coordenadas e também como calcular a distância entre dois pontos
no espaço.
A seguir faremos uma introdução sobre o estudo de estudos.

14 Geomet r ia Ana l í t i ca Ve to r ia l
Neste tópico apresentaremos o conceito de vetor e faremos uma
abordagem, ainda que superficial, de suas operações do ponto de
vista geométrico.
O termo vetor surgiu na mecânica com o engenheiro Flamengo Simon Stevin
(O Arquimedes Holandês) quando apresentou, em 1586, o problema da composição
de forças e enunciou uma regra através de experimentos para se determinar a
soma de duas forças aplicadas a um mesmo corpo, conhecida hoje como regra do
paralelogramo.
Assim como a força, certas grandezas,
além de um número real para indicar sua
intensidade, precisam de uma direção e um
sentido (Por exemplo: velocidade, aceleração,
etc.) Tais grandezas são denominadas grandezas
vetoriais. Outras grandezas ficam bem definidas
apenas por um número real, acompanhado
logicamente de sua unidade de medida
correspondente (exemplo: 13 kg de massa, 30ºc de temperatura etc). Tais grandezas
são denominadas grandezas escalares.
TÓPICO 2 Introdução a vetoresObjetivOs
• Introduzir a noção de vetor
• Identificar e realizar operações básicas com vetores no plano
s a i b a m a i s !
Acesse ao site https://brasilescola.uol.com.br/
biografia/simon-stevin.htm para conhecer mais
sobre a vida de Simon Stevin.

15AULA 1 TÓPICO 2
2.1 DEFINIÇÕES
i) Em um segmento orientado XY, chama-
se vetor v®
(figura 6) o conjunto infinito de todos
os segmentos eqüipolentes a XY. Cada segmento
orientado do conjunto é chamado imagem
geométrica ou representante do vetor.
Figura 6 – Conjunto de segmentos eqüipolentes
Notações
1. Uma seta em cima de uma letra minúscula.
Exemplos: a,®
b®
, c®
, . . . v,®
w®
2. Uma letra minúscula sobrelinhada. Exemplos:
a, b , c, ... v , w .
3. Dois pontos que são origem e extremidade do
vetor.
Figura 7 - Na representação xy x y→
= − , x é a origem e y a extremidade do representante do vetor v
Essa última notação é devida ao matemático alemão H. Grassmann (1809-
1877) e apresenta uma certa vantagem na prática das aplicações das operações
algébricas com vetores.
4. Uma terna ordenada de números reais 1 1 1v ( x , y , z )®= que representa a
extremidade de um vetor cuja origem é o ponto 0(0, 0, 0) do sistema de coordenadas
tridimensionais.
at e n ç ã o !
Dois segmentos são equipolentes quando têm
a mesma direção, o mesmo sentido e o mesmo
comprimento.
s a i b a m a i s !
O Matemático Hermann Grassmann é conhecido
pela sua contribuição no desenvolvimento do
Cálculo Vetorial Geral, que possibilita o uso de
um número qualquer de dimensões.

16 Geomet r ia Ana l í t i ca Ve to r ia l
Figura 8 - v x y z→
= ( , , ) 1 1 1
ii) Módulo de um vetor v®
, indicado por v , representa o comprimento do
vetor. Por exemplo:
Figura 9 - v 6 u.c=
iii) Vetor nulo apresenta direção e sentido arbitrários e módulo igual a zero.
O vetor nulo tem coordenadas (0, 0, 0) e sua representação geométrica é a origem
do sistema de coordenadas.
iv) Vetor unitário é o vetor de módulo igual a 1.
v) Versor de um vetor v®
é o vetor unitário de mesma direção e sentido de
v®
.
Figura 10 – u®
é o versor de v®
Observe que v
u3
®®= . Generalizando temos: Se u
® é versor de v
®
, então
vu
v
®®= .
vi) O vetor oposto de AB®
é o vetor BA®
indicado por AB®
- . Em outras
palavras, o vetor oposto de AB®
possui mesmo comprimento e direção de AB®
,
porém sentido contrário.
Figura 11 - −→
AB é o oposto de BA®
at e n ç ã o !
Quando já estiver fixado o sistema de coordenadas,
o representante de um vetor é aquele cuja origem
coincida com a origem do sistema.

17AULA 1 TÓPICO 2
vii) Dois vetores são colineares quando apresentam mesma direção.
De acordo com o exposto até o presente momento, concluímos que podemos
associar o conceito de vetor à ideia de translação. A mesma ideia não se transfere
para retas paralelas, tendo em vista que elas apresentam posições fixas. Portanto
duas retas paralelas e distintas jamais serão colineares.
viii) Três vetores u, v e w® ® ®
são coplanares quando tiverem representantes
paralelos ao mesmo plano.
Figura 12 – u® ® ®
, v e w são coplanares. Figura 13 – u® ® ®
, v e w não são coplanares
2.2 OPERAÇÕES COM VETORES DO PONTO
DE VISTA GEOMÉTRICO
As operações envolvendo vetores são
tradicionalmente efetuadas de duas formas
equivalentes. Uma delas, mais analítica, veremos
no tópico 3 desta aula. A segunda, com um
caráter mais geométrico que apresentaremos a
seguir.
2.2.1 Multiplicação por Escalar
Seja uma constante K e um vetor v®
. O
produto da constante pelo vetor é o vetor k v®
, que possui as seguintes características:
a) Se k>0, o vetor k v®
terá a mesma direção e sentido de v e terá módulo
igual a k . v (cf. figura 14).
b) Se k<0, o vetor k v®
terá a mesma direção, porém sentido contrário de v e
terá módulo igual a k . v (cf. figura 15).
g u a r d e b e m i s s o !
Dois vetores são sempre coplanares, enquanto
três vetores podem ou não ser coplanares.
Convenção: O vetor nulo é paralelo a qualquer
vetor e coplanar a qualquer conjunto de vetores
coplanares.

18 Geomet r ia Ana l í t i ca Ve to r ia l
Figura 14 – u v→ →
= 3. Figura 15 – u v→ →
=−3.
(mesma direção e sentido) (mesma direção e sentido contrários)
2.2.2 adição dE vEtorEs
Geometricamente, a soma de dois vetores
u®
e v®
é o vetor s®
= u®
+ v®
com origem na origem
de um dos vetores e extremidade na extremidade
do outro vetor, como mostra a figura 16.
Figura 16 – A soma s®
representa a diagonal de um paralelogramo cujos lados são os vetores u e v
2.2.3 difErEnça dE vEtorEs
A diferença entre os vetores u®
e v®
é igual à soma de u®
com o oposto de v®
,
ou seja: u®
- v®
= s®
= u®
+ (- v®
). Veja o esquema na figura abaixo.
Figura 17 – Representação geométrica da diferença de dois vetores
ExErcícios rEsolvidos
1. Dados os vetores u®
e v®
da figura, mostrar um representante do vetor:
a) u®
- v®
b) v®
- u®
c) u®
- 2 v®
at e n ç ã o !
Sabemos que o paralelogramo apresenta duas
diagonais distintas. Para a regra do paralelogramo
determinado pelas representantes de e de mesma
origem A, adota-se a diagonal que contém o ponto
A. A regra do paralelogramo é muito utilizada na
composição de forças em Física.

19AULA 1 TÓPICO 2
Solução:
a) b)
c)
2. Determine o módulo do vetor soma dos vetores u®
e v®
, ortogonais, tais
que u 3®
= e v 4®
= .
Solução:
Tendo em vista que os vetores são ortogonais, consideremos dois
representantes de u®
e v®
de mesma origem e em seguida aplicamos a regra do
paralelogramo.
Aplicando o Teorema de Pitágoras no triângulo ABC, vem2 2 2u v u v
® ® ® ®+ = + Þ 2 2 2u v 4 3 25
® ®+ = + = Þ u v 25
® ®+ =

20 Geomet r ia Ana l í t i ca Ve to r ia l
Estudamos vetores do ponto de vista
geométrico, no caso, eles eram representados
por segmentos de reta orientados. A partir do
próximo tópico, apresentaremos uma outra
forma de representá-los: os segmentos orientados
estarão relacionados com os sistemas de eixos
cartesianos do espaço.
at e n ç ã o !
Quando os vetores não forem ortogonais, basta
usar a lei dos cossenos.

21AULA 1 TÓPICO 3
TÓPICO 3 Decomposição no plano e no espaçoObjetivOs
• Definir combinação linear
• Introduzir o conceito de base canônica
• Definir operações com vetores representados por ponto
no plano e no espaço
O conceito de combinação linear é central tanto na geometria analítica
quanto na álgebra linear e dele dependem vários outros conceitos,
inclusive o conceito de decomposição de vetores no plano, que
é uma ferramenta bastante utilizada na Física quando se pretende determinar as
componentes de uma força que atua num corpo.
3.1 DECOMPOSIÇÃO DE UM VETOR NO PLANO
Dados dois vetores 1v®
e 2v®
, não colineares, qualquer vetor →v do plano pode
ser decomposto segundo as direções de 1v®
e 2v®
, ou seja, existem dois números
reais 1k e 2k tais que 1 1 2 2v k v k v® ® ®= + , como mostra a figura abaixo.
Observe que v®
é uma combinação linear dos vetores 1v®
e 2v®
, e o conjunto
{ }1 2v , v® ®
é chamado de base do plano. Assim, qualquer conjunto { }1 2e , e® ®
de
vetores não colineares constitui uma base do plano.
Figura 18 – Decomposição de v®
nas direções de v v® ®
1 2 e

22 Geomet r ia Ana l í t i ca Ve to r ia l
3.2 COMBINAÇÃO LINEAR DE VETORES
Sejam os vetores 1v®
, v2
®, 3v
®, . . ., nv
® e os números reais 1k , 2k , 3k , . . . , nk .
Diz-se que v®
é combinação linear de 1v®
, v2
®, 3v
®
, . . . , nv®
se 1 1v k v® ®= + 2 2k v
®
+...+ n nk v®
. Observe que v®
representa a soma vetorial dos múltiplos escalares de
1v®
, v2
®, 3v
®
, . . . , nv®
.
Por exemplo, se 1v 2v® ®= +
23v®
- 35v
®, então v
® é combinação linear de 1v
®,
v2
® e 3v
®
.
Uma base é dita Ortonormal, se seus vetores forem ortogonais e unitários. Há
infinitas bases ortonormais no plano x0y e, vale destacar, uma delas chamada base
canônica (figura 19). A base canônica é formada por vetores cujos representantes
têm origem em 0 e extremidades nos pontos (1, 0) e (0, 1), cujas representações são
i®
e j®
, respectivamente.
Figura 19 – Base canônica
Vimos que umas das formas de se representar um vetor é através das
coordenadas do ponto de sua extremidade quando a origem é o ponto 0 do plano
cartesiano. Assim, temos i®= (1, 0) e j
®
=( 0, 1).
Seguindo essa linha de raciocínio, podemos concluir que qualquer vetor do
plano x0y é uma combinação linear dos vetores i®
e j®
. Vejamos a figura 20:
Figura 20 – ( v x i y j→ → →
= + )
x i®
é a projeção ortogonal de v®
na direção i®
e y j®
a projeção de v®
na
direção de j®
.
v x i y j® ® ®= + ( v
®como combinação linear de i
® e j
®
)
v®
=(x, y) (expressão analítica de 1v®
)

23AULA 1 TÓPICO 3
3.3 OPERAÇÕES
Seja ( )1 1 1v x ,y®
= , ( )2 2 2v x ,y®
= e k um número real diferente de zero.
a) Adição→
1v + 2v®
=( )1 1x ,y + ( )2 2x ,y = ( 1 2x x ,+ 2 2x y )+
Exemplo:
( ) ( ) ( ) ( )[ ] ( )2, -3 1, -2 2 1 , -3-2 3, -5+ = + =
b) Multiplicação por k
k x x kx kx1 2 1 2, ,( )=( )c) Igualdade
vv 2 ⇒=1 ( )1 1x ,y = ( )2 2x ,y Þ 1 2 1 2x x e y y= =
ExErcício rEsolvido
Sejam ( )1v 5, 2 ®
= e ( )2v 1, 6 ®
= , calcule 1 2s v v® ® ®= + e represente no
plano cartesiano.
Solução:
1 2s v v® ® ®= + Þ ( ) 5, 2 + ( ) 1, 6 Þ ( ) 6, 8 Þ ( )s 6, 8
®=
Figura 21 - Diagonal do paralelogramo formado pelos vetores v1
®
e v2
®
Observe que s®
é a diagonal do paralelogramo.
3.4 VETOR DEFINIDO POR DOIS PONTOS
Em algumas situações, o vetor é representado por um segmento orientado
que não parte da origem do sistema de coordenadas.
Sejam os vetores 1 1OA (x , y )
®= e
2 2OB (x , y )®
= não colineares. De acordo
com a figura abaixo, temos:
OB OA AB® ® ®
= + Þ AB OB OA® ® ®
= - Þ 2 2 1 1AB (x , y ) (x , y )®
= -
Þ 2 1 2 1AB (x x , y y )®
= - -

24 Geomet r ia Ana l í t i ca Ve to r ia l
Figura 22 – Vetor definido por dois pontos
Observe que o vetor AB®
em que A( 1, 3) e B(3, -2) não possui origem no
ponto O do sistema. Então, para se determinar um representante de v®
com origem
em O do plano cartesiano, fazemos ( )v 3 1, 2 3 ®= - - - Þ ( )v 2, 5
®= - .
Figura 23 - representação geométrica de v®
Observe que os dois segmentos representam o mesmo vetor.
ExErcícios rEsolvidos
1. Determine o vetor w®
na expressão 1
3w 2u v w2
® ® ® ®+ = + tal que u (3, 1)
®= -
e v ( 2, 4) ®= - .
Solução:
A equação 13w 2u v w
2
® ® ® ®+ = + pode ser resolvida como uma equação
numérica:
6w 4 u v 2w® ® ® ®+ = +
6w 2w v 4 u® ® ® ®- = -
4w v 4 u® ® ®= -1
w v u4
®® ®= -
Substituindo u e v® ®
na equação, temos1
w ( 2, 4) ( 3, -1)4
®= - -
1w ( , 1) ( 3, -1)
2
®= - -
7w ( , 2)
2
®= -

25AULA 1 TÓPICO 3
2. Dados os pontos A(-1, 2), B(4, 3) e C(1, 5), determine D(x, y) de tal forma
que 1CD AB
3
® ®= .
Solução:
( )CD C D (1, 5) (x, y) 1 x, 5-y ®
= - = - = -
( ) ( )AB B A (4, 3) ( 1, 2) 4 1, 3 2 5, 1 ®
= - = - - = + - =Logo
( ) ( )1
1 x, 5 y 5, 13
- - =
( ) 5 11 x, 5 y ,
3 3
æ ö÷ç- - = ÷ç ÷çè øpela condição de igualdade, vem
51 x
3
15 y
3
ìïï - =ïïïïïíïïïï - =ïïïî
Resolvendo o sistema encontramos 2
x3
=- e 14
y3
= , daí 2 14
D , 3 3
æ ö÷ç- ÷ç ÷çè ø.
3.5 DECOMPOSIÇÃO NO ESPAÇO
Vimos que qualquer conjunto { }1 2v , v® ®
de vetores, não colineares, representa uma
base do plano. Então, qualquer vetor →v do
plano é combinação linear dos vetores 1 2 3v , v e v® ® ®
e 1 2 3v , v e v® ® ®
.
No espaço, qualquer conjunto { }1 2 3˘˝˘˝® ® ®
de vetores não coplanares representa uma base,
portanto qualquer vetor v®
do espaço é uma combinação linear de 1 2 3v , v e v® ® ®
, ou
seja, sempre existem os números 1 2 3m , m e m tais que 1 2 31 2 3v m v m v m v
® ® ® ®= + + .
A base canônica { }i , j , k® ® ®
é uma base ortonormal (vetores unitários e
ortogonais entre si), cujos vetores possuem as direções dos eixos coordenados.
Assim, qualquer vetor do espaço é uma combinação linear dos vetores i , j e k® ® ®
,
como mostra a figura 24.
Figura 24 – Base canônica no espaço tridimensional
at e n ç ã o !
Coplanares - figuras geométricas que pertencem
ao mesmo plano.

26 Geomet r ia Ana l í t i ca Ve to r ia l
v x i y j z k® ® ® ®= + + (
→v como combinação linear dos vetores i , j , k
® ® ®)
v (x, y, z)®= (expressão analítica de
→v )
3.6 OPERAÇÕES
Sejam os vetores ( )1 1 1 1v x , y , z®
= , ( )2 2 2 2v x , y , z®
= em um número real
a) ( )1 2 1 2 1 2 1 2v v x x , y y , z z® ®+ = + + +
b) m. 1v®
= ( )1 1 1mx , my , mz
c) 1 2v v ® ®
= Þ 1 2 1 2 1 2x x , y y e z z= = =
ExErcício rEsolvido
1. Dados dois pontos A(0, 1, -1 ) e B(1, 2, -1 ) e os vetores u (-2, -1, 1 )®= ,
v (3, 0, -1 )®= e w (-2, 2, 2 )
®= , verifique se existem os números 1 2 3a , a e a tais
que 1 2 3w a AB a u a v® ® ® ®= + + .
Solução:
Temos: ( )AB B A 1, 2, 1®
= - = - - ( ) 0, 1, 1- = ( ) 1-0, 2 ( 1), 1 1+ - - +
= ( ) 1, 1, 0 .
Substituindo os vetores na igualdade dada, resulta:
( ) ( ) ( ) ( )1 2 3 2, 2, 2 a . 1, 1, 0 a . 2, 1, 1 a . 3, 0, 1- = + - - + -ou
( ) ( ) ( ) ( )1 1 2 2 2 3 3 2, 2, 2 a , a , 0 2a , -a , a 3a , 0, a- = + - + -Somando os três vetores do segundo membro, temos:
( ) ( )1 2 3, 1 2 2 3 2, 2, 2 a 2a 3a a a , a a- = - + - -
pela condição de igualdade de vetores, obteremos o sistema:
1 2 3
1 2
2 3
a 2a 3a 2
a a 2
a a 2
ì - + =-ïïïï - =íïï - =ïïîcuja solução é 1 2 3a 3, a 1 e a 1= = =-
3.7 VETORES COLINEARES
Em (2.2.1) vimos que os vetores k.v®
e v®
têm a mesma direção. Assim se dois
vetores ( ) ( )1 1 1 2 2 2u x , y , z e v x , y , z® ®= = são colineares (têm a mesma direção),
então u k.v® ®= em que k é um número real, ou seja:
( ) ( )1 1 1 2 2 2x , y , z k. x , y , z= ou ( ) ( )1 1 1 2 2 2x , y , z kx , ky , kz=
Assim, 1 2x kx= , 1 2y ky= e 1 2z kz= ou 11 1
2 2 2
yx zx y z
= = .

27AULA 1 TÓPICO 3
Esta é a condição de paralelismo de dois vetores, ou seja, dois vetores
são paralelos ou colineares quando suas componentes correspondentes são
proporcionais.
Exemplo:
Determine os valores de p e q para que sejam paralelos os vetores
u (p 1, 3, 1 )®= + e u (4, 2, 2q-1 )
®= .
Solução
De acordo com a condição de paralelismo de vetores, temos
p 1 3 14 2 2q 1
+= =
- ou
2(p 1) 12 3(2q 1) 2
ì + =ïïíï - =ïî resolvendo o sistema vem
5p 5 e q
6= =
Vimos, neste tópico, que qualquer vetor do plano ou do espaço pode ser
expresso como combinação linear da base canônica-elemento que estará presente
em praticamente todas as aulas do nosso curso.
A próxima aula será dedicada ao estudo do produto interno de vetores, que
representa uma outra forma de multiplicação de vetores, além desta vista nesta
aula.

28 Geomet r ia Ana l í t i ca Ve to r ia l
Caro(a) aluno(a),
Estudamos na aula anterior a multiplicação de um vetor por um número real
(multiplicação por escalar). Além desse tipo de produto, pudemos também definir
multiplicações ou produto de vetores entre si.
Nesta aula será apresentada uma nova modalidade de multiplicação entre vetores,
cujo resultado é definido como Produto escalar ou Produto interno entre dois
vetores.
O produto interno (ou escalar) entre dois vetores
u e
v , denotado por
u .
v
ou
u, v , e que nos fornece como resultado um número real, possui grande
aplicabilidade nas diversas áreas afins. Na matemática, por exemplo, entre outras
aplicações, o produto interno pode ser usado para resolver muitos problemas de
natureza geométrica.
Objetivos
• Introduzir o conceito geométrico e cartesiano de produto escalar• Apresentar aplicações do produto interno, tanto no cálculo de projeções de
vetores como no cálculo de ângulos diretores de um vetor
AULA 2 Produto Interno

29AULA 2 TÓPICO 1
TÓPICO 1 Representação geométrica do produto internoObjetivOs
• Definir produto interno sob o ponto de vista geométrico
• Usar o produto interno para resolver problemas
geométricos
Neste tópico será introduzido o conceito de produto escalar
dando-lhe um significado geométrico. Com isso pretendemos
proporcionar a você, uma visão geométrica dessa ferramenta no
intuito de facilitar suas aplicações nas diversas áreas afins.
dEfinição
Dados os vetores não nulos u®
e v®
, chama-se produto interno (ou escalar)
dos vetores u®
e v®
, denotado por u®
. v®
ou u,v
(lê-se u escalar v), o número
real obtido pela multiplicação do módulo de um dos vetores (digamos u®
) pelo
módulo da projeção ortogonal de v®
na direção de u®
(veja Figura 1).
Projeção de v®
na direção de u®
u,v
= u ®
. v ®
. cos q
Figura 1 - AC®
Projeção de v®
na direção de u®

30 Geomet r ia Ana l í t i ca Ve to r ia l
v ®
. cos q = projeção ortogonal de v®
na
direção de u®
.
AC®
é a projeção ortogonal de v®
na direção
de u®
, ou seja, AC®
= proj v®
.
Assim proj v®
= u ®
. cos q
Observe que se q é o ângulo entre u®
e v®
:
i) Se 02
< <θπ
, cos q > 0 Þ
u , v ® ®
>
0;
ii) Se πθ π
2< < , cos q < 0 Þ
u , v ® ®
< 0;
iii) Se θπ
=2
, cos 2
0π= Þ
u , v ® ®
= 0.
A partir da observação (iii), podemos
concluir que, se os vetores u®
e v®
são ortogonais,
ou se um dos vetores é nulo, o produto interno
a eles é nulo.
Por exemplo:
Os vetores i®
e j®
das bases canônicas são
unitárias e ortogonais, daí:
i®
. j®
= i ®
. j ®
. cos q , mas q = 90º (cos 90º = 0)
i®
. j®
= 1 . 1 . 0 = 0
1.2 PROPRIEDADES
Sejam u®
e v®
dois vetores e k um número real diferente de zero:
a)
u , v ® ®
=
u , v ® ®
u , v ® ®
u , v ® ®
u , v ® ®
u , v ® ®
(comutativo);
b) k.
u , v ® ®
=
k.u , v ® ®
=
u , k.v ® ®
(associativo em relação a uma
constante k);
c)
u , v w ® ®
+ =
u , v ® ®
+
u , w ® ®
;
d) u®
. u®
=2
u ®
.
Esta última pode ser facilmente demonstrada usando a definição de produto
interno
u®
. u®
= u ®
. u ®
. cos q .
Os vetores são colineares, portanto q = 0 e cos q = 1, logo:
v o c ê s a b i a?
A operação de multiplicação escalar, de
importância fundamental em muitas áreas da
Matemática e da Física, foi criada por Grassmann
e por isso leva o seu nome.
s a i b a m a i s !
Você pode conhecer um pouco da história dos
vetores e da contribuição de Hermann Grassmann
lendo o texto sobre esse assunto disponível no
site http://ecalculo.if.usp.br/historia/grassmann.
htm.

31AULA 2 TÓPICO 1
u®
. u®
= u ®
. u ®
. 1 Þ 2
u ®
= u®
. u®
ExErcícios rEsolvidos
1.Calcule
u , v ® ®
tendo em vista que u®
= (0, 3, 4) e v®
= (2, 3, 6).
Solução:
Observe que os vetores são colineares
(componentes correspondentes proporcionais),
daí q = 0 e cos q = 1.
u ®
= 2 2 22 3 6+ + = 25 = 5
v ®
= 2 2 22 3 6+ + = 49 = 7
Assim,
u®
v®
= u ®
. v ®
.cos q
u®
v®
= 5 . 7 . 1 = 35
2. Demonstre a lei dos cossenos: è2 2 2a b c 2bc.cos= + - q .
Figura 2 - a b c 2bc cos 2 2 2= + − ⋅ q (lei dos cossenos)
Solução:
Sejam a = CB ®
, b = AC ®
e c = AB ®
.
Pela definição de diferença de dois vetores (cf. Aula 1) CB AB AC® ® ®
= - .
Multiplicando os dois lados da equação por CB®
, vem:
CB®
. CB®
= ( AB®
- AC®
) . CB®
, mas CB®
= ( AB®
- AC®
), então 2
CB ®
= AB®
. AB®
-
2. AB®
. AC®
+ AC®
. AC®
2
CB ®
= 2
AB ®
+ 2
AC ®
- 2. AB®
. AC®
.
Mas, pela definição de produto interno, temos:
AB®
. AC®
= AB ®
. AC ®
. cos q , Daí:2
CB ®
=2
AB ®
+ 2
AC ®
- 2 . AB ®
. AC ®
. cos q .
Tendo em vista que a = CB ®
, b = AC ®
e c = AB ®
, temos:
è2 2 2a b c 2bc.cos = + - q .
at e n ç ã o !
u u u→ → →
⋅ ≠2
, pois u®
não é um número real,
enquanto u2→
= ⋅u u

32 Geomet r ia Ana l í t i ca Ve to r ia l
3. Se a ®
= 4 e b ®
= 10, calcule a®
. b®
, sabendo que o ângulo entre a®
e
b®
é 120.
Solução:
cos 120º = - cos (180°-120°) = - cos 60º = - 12
a®
. b®
= a ®
. b ®
. cos q Þ a®
. b®
= 4 . 10 . 12
æ ö÷ç- ÷ç ÷çè ø Þ a
® . b
® = -20.
Vimos, neste tópico, que o produto interno de dois vetores está diretamente
relacionado ao ângulo por eles formado e pode ser calculado multiplicando o
módulo de um deles pelo módulo da projeção do outro sobre ele. No próximo
tópico apresentaremos um método usado no calculo do produto interno a partir de
suas formas analíticas.

33AULA 2 TÓPICO 2
TÓPICO 2 Expressão cartesiana do produto internoObjetivO
• Definir o produto interno a partir de suas formas
cartesianas
Neste tópico mostraremos que é possível calcular o produto interno
de dois vetores sem o auxílio do ângulo entre eles, ou seja,
usando apenas os pontos do plano ou espaço que representam as
extremidades dos representantes dos vetores.
dEfinição
Sejam os vetores 1 1 1u x i y j z k® ® ® ®= + + e 2 2 2v x i y j z k
® ® ® ®= + + ,
o produto interno dos vetores u®
e v®
em termos de coordenadas é dado por
1 2 1 2 1 2x x y y z z+ + .
Observe que u, v = u . v ® ®
= ( )1 1 1x i y j z k .® ® ®+ + ( )2 2 2x i y j z k
® ® ®+ + ,
daí
u ,v
= 1 2x x i . i® ®
+ 1 2x y i . j® ®
+ 1 2x z i .k® ®
+ →→
i. jxy 21 + 1 2y y j . j® ®
+
1 2y z j. k® ®
+ z x k i1 2
× + 1 2z y k . j® ®
+ 1 2z z k .k® ®
.

34 Geomet r ia Ana l í t i ca Ve to r ia l
Tendo em vista que:
i i
i
k
Vetores coline
→ →
→ →
→ →
=
=
=
1
j 1
k 1
.
.
.
aares
i
i
j
Vetores o
→ →
→ →
→ →
=
=
=
j 0
k 0
k 0
.
.
.
rrtogonais
então:
u, v = 1 2 1 2 1 2x x y y z z+ +
Observe que, em termos de coordenadas, o produto interno é igual à soma
dos produtos das componentes correspondentes dos vetores u®
e v®
.
2.1 DEMONSTRAÇÃO DAS PROPRIEDADES
Sejam ( )1 1 1 u x , y , z®= , ( )2 2 2 v x , y , z
®= , ( )1 1 1 w x , y , z=
e k um número
real diferente de zero.
1) u, v = v, u
De fato:
1 2 1 2 1 2u,v u. v x x y y z z® ®
= = + + = 2 1 2 1 2 1x x y y z z+ + v. u v,u
® ®= =
2) k. u, v k u, v u, kv = =
De fato:
1 1 1 2 2 2 1 1 1 2 2 2k.(u. v) k.(x ,y ,z ).(x ,y ,z ) (kx ,ky ,kz ).(x ,y ,z )® ®
= = = ( k u.v® ®
).
Da mesma forma:
k u v k x y z x y z x y z kx ky kz u
⋅( )= ( )⋅( )=( )⋅( )=1 1 1 2 2 2 1 1 1 2 2 2, , , , , , , ,
,kv( )
3) u, v w u,v u,w+ = +
De fato:
u.(v w)® ® ®
+ = ( )1 1, 1x , y z .( )2 3 2 3 2 3x x , y y , z z+ + +
1 2 3 1 2 3 1 2 3x .(x x ) y .(y y ) z .(z z )= + + + + + =
x x x x y y y y z z z z1 2 1 3 1 2 1 3 1 2 1 3+( )+ +( )+ +( )x x y y z z x x y y z z1 2 1 2 1 2 1 3 1 3 1 3+ +( )⋅ + +( )
e x x y y z z x x y y z z1 2 1 2 1 2 1 3 1 3 1 3+ +( )⋅ + +( )= (u. v) (u. w)® ® ® ®
+ ou u,v u,w+

35AULA 2 TÓPICO 2
4) Deixamos a demonstração da propriedade 4 a seu cargo. Vamos lá?
ExErcícios rEsolvidos
1. Determine o produto interno u, v , sendo u 2 i 3 j 2k® ® ® ®= + - e
v i 3 j k® ® ®
= - +
.
Solução:
u, v 2, 3, 2 . 1, -3, 1= - = 2.1 3.( 3) ( 2).1+ - + - = -9
2. Calcule o ângulo entre os vetores u ( 2, 3, -1) e v ( 1, -3, 1 )® ®= =
Solução:
u. v u . v . cos ® ®® ®
= qu . v
cos u . v
Þ q=
2 2 2 2 2 2
( 2, 3, -1 ) . (1, -3, 1) cos
2 3 ( 1) . 1 ( 3) 1Þ q=
+ + - + - +2 9 1
cos 14 . 11
- -Þ q=
8 cos
151
-Þ q=
-8 arc cos
151Þ q=
3. Prove que o triângulo A( 2, 3, 1), B( 2, 1, -1 ) e C( 2, 2, -2 ) é um triângulo
retângulo.
Solução:
A forma mais simples de provar a existência de um ângulo reto no triangulo
é mostrar que o produto escalar de dois vetores que representam os lados do
triângulo é nulo.
AB ( 0, - 2, -2 )®
=
AC ( 0, -1, -3 )®
=
BC ( 0, 1, -1 )®
=
Calculemos:
AB . AC ( 0, -2, -2 ) . ( 0, -1, -3 ) 0 2 6 8 0 ® ®
= = + + = ¹
AB . BC ( 0, -2, -2 ) . ( 0, -1, -1 ) 0 2 2 0 ® ®
= = - + =
Observando que AB . BC 0 ® ®
= , o ângulo formado pelos vetores AB e BC ® ®
é reto. Logo ABCD é retângulo.
4. Determine um vetor ortogonal a u ( 1, -1, 0) e v ( 1, 0, 1)® ®= = .
Solução:
Seja w ( x, y, z)®= o vetor procurado. Para que w
seja ortogonal aos vetores
u e v® ®
, devemos ter:

36 Geomet r ia Ana l í t i ca Ve to r ia l
w . u 0® ®
= e w . v 0® ®
= . Assim:
w . u ( x, y, z ) . ( 1, -1, 0 ) 0® ®
= = Þ x y 0- =
w . v ( x, y, z ) . ( 1, 0, 1 ) 0® ®
= = Þ x z 0+ =
Podemos concluir que o sistema x y 0
x z 0
ì - =ïïíï + =ïî é indeterminado e sua solução
é:
y x
z x
==-
Isto significa que os vetores ortogonais a u e v® ®
são do tipo (x, x -x) . Para
se determinar um deles, basta atribuir um número real a x. Assim, para x=2, temos
(2, 2, -2).
5. Os vetores u
e v
são colineares. Calcule v
, conhecendo-se u 2 i j k® ® ®
= + +
e u . v 3® ®
=
Solução:
Seja v ( x, y, z )®= , então temos:
a) Se u®
e v®
são colineares suas componentes correspondentes são
proporcionais, logo:yx z
2 1 1= = Þ x 2y= , y z= e x=2z [I]
b) u . v 3® ®
= Þ ( 2, 1, 1 ) . ( x, y, z ) 3 = Þ 2x y z 3+ + = [II]
Substituindo I em II, resulta:
2. (2y) + y + y = 3 Þ 1
y2
=
De x 2y= , vem x 1=
De y = z, concluímos que 1z
2=
Portanto, 1 1
v 1, , 2 2
® æ ö÷ç= ÷ç ÷çè ø ou
→→→→
++= k21 j
21 iv
6. Ache os vetores ) z y, ,x(v =→
tais que:
i) v 6®
=ii) v
®
é ortogonal a u ( 3, -3, 0 )=
iii) v®
é ortogonal a w ( 0, 2, - 1 )=
Solução:
De (i) vem:
v v . v ®
= Þ v (x, y, z ) . ( x, y, z ) ®
= Þ 2 2 2v x y z®
= + +

37AULA 2 TÓPICO 2
Þ 2 2 26 x y z= + + Þ 2 2 26 x y z= + + [I]
De (ii) vem: v . u 0® ®
= Þ (x, y, z ) . ( 3, -3, 0 ) 0= Þ 3x 3y 0- =
Þ x y= [II]
De (iii) vem: v . w 0® ®
= Þ (x, y, z ) . ( 0, 2, -1 ) 0= Þ 2y z 0- =
Þ z 2y= [III]
Substituindo II e III em I vem:2 2 26 x y z= + + Þ 2 2 2y y (2y) 6+ + = Þ y =± 1
De I e II temos: x 1=± e z 2=±
Então: v ( 1, 1, 2 ) = ± ± ±
Observamos, neste tópico, que o produto interno de dois vetores pode ser
facilmente obtido pela soma dos produtos das componentes correspondentes dos
vetores. No próximo tópico, abordaremos duas aplicações tradicionais do produto
interno.

38 Geomet r ia Ana l í t i ca Ve to r ia l
Neste tópico daremos total atenção a duas aplicações tradicionais
do produto interno. Uma delas é o calculo dos ângulos diretores
de um vetor e a outra consiste numa ferramenta que utilizaremos
nas aulas posteriores, que é a projeção de um vetor.
3.1 ÂNGULOS DIRETORES E COSSENOS DIRETORES
Os ângulos diretores de um vetor não nulo v®
são os ângulos , e a b g no
intervalo (0, p ) que v®
forma com os eixos coordenados x, y e z (veja figura 3 ).
Os cossenos diretores desses ângulos diretores, cos , cos e cos a b g, são os
cossenos diretores de v®
.
Figura 3 - Ângulos diretores de v®
a é o ângulo entre i
e →
v b é o ângulo entre j
® e v
®
g é o ângulo entre k®
e v®
TÓPICO 3 Duas aplicações tradicionais do produto internoObjetivOs
• Determinar o ângulo diretor de um vetor, bem como conhecer
suas propriedades
• Usar o produto interno para calcular a projeção de um vetor na
direção de outro

39AULA 2 TÓPICO 3
Seja v ( x, y, z )®= e, baseando-nos na definição de ângulos diretores, temos:
i . v cos
i . v
® ®
a =
Þ (1, 0, 0) . (x, y, z )
cos v
a =
Þ x
cos v
a =
j . v cos
j . v
® ®
b=
Þ (0, 1, 0) . (x, y, z )
cos v
b=
Þ y
cos v
b=
cos j . v
j . v γ =
→ →
Þ (0, 0, 1) . (x, y, z )
cos v
g =
Þ z
cos v
g =
3.2 PROPRIEDADES
1. As componentes do versor u®
de um vetor v
são os cossenos diretores de v®
.
Seja u®
o versor de um vetor v (x, y, z ), então:®=
vu
v
®
=
Þ ( )x,y,z
u v
=
Þ yx z
u , , v v v
æ ö÷ç ÷=ç ÷ç ÷çè ø
ou seja:
( )u cos , cos e cos ®
= a b g
2. Tendo em vista que o versor de u
é um vetor unitário, então u 1®
= , ou
seja:
( ) u cos , cos e cos 1®
= a b g =
mas:2 2 2 u cos cos cos 1
®
= a + b + g =
então:2 2 2cos cos cos 1a + b + g=
ExErcícios rEsolvidos
1. Dados os pontos A(2, 2, -3 ) e B(3, 1, -3) , calcule os ângulos diretores do
vetor AB®
.
Solução:
AB B A (1, -1, 0 )®
= - =2 2 2 AB ( 1) 1 0 2
®= - + + =
x cos
AB ®
a = Þ -1 cos
2a = Þ 45a = °
y cos
AB ®
b= Þ - 1 2cos
22b= =- Þ 135b= °

40 Geomet r ia Ana l í t i ca Ve to r ia l
z cos
AB ®
g= Þ 0
cos 02
g = = Þ 90g = °
Podemos observar que, como 90g = ° , o vetor AB®
é ortogonal ao eixo z
ou ao vetor k
da base canônica. Assim, sempre que a terceira componente de um
vetor for nula, ele é ortogonal ao eixo z. De modo semelhante, o vetor do tipo (0, y,
z ) é ortogonal ao eixo x e o vetor do tipo (x, 0, z) é ortogonal ao eixo y.
2. Determine o versor de v 6 j 8k= +
Solução:
Seja u o vetor de v
, assim u (cos , cos , cos )= a b g
. Por outro lado 2 2 v 0 6 8 10= + + =
x cos
v a =
Þ 0
cos 10
a = Þ cos 0a =
y cos
v b=
Þ 6
cos 10
b= Þ 3
cos 5
b=
z cos
v g =
Þ 8
cos 10
g = Þ 4
cos 5
g =
Assim, 3 4
u 0, , 5 5
æ ö÷ç= ÷ç ÷çè ø
.
Observe que u 1=
já que u
é versor de v
. Confira você mesmo!
3.3 PROJEÇÃO DE UM VETOR
Dados dois vetores não nulos u e v® ®
e q o ângulos entre eles. O nosso
objetivo é determinar em termos de coordenadas a projeção de v®
na direção do
vetor u®
.
Figura 4 – O vetor w®
é projeção ortogonal de v®
na direção de u®
Uma vez que w®
é a projeção de v®
na direção de u®
, escrevemos U
w proj v®
® ®= .

41AULA 2 TÓPICO 3
Do triângulo retângulo ABC, vem:
w v .cos ®
= q Þ
u . v w v .
u . v
® ®® ®
® ®= Þ
u . v w .
u
® ®®
®= [I]
w®
e u®
são colineares, daí:
w®
= k u®
( k é um número real)
Segue-se que:
w ®
= . k . u ®
Þ 1
k w . u
®
®= [II]
Substituindo (I) em (II), vem:
u . v 1 k .
u u
® ®
® ®= Þ 2
u . vk
u
® ®
®=
De w®
=k u®
. vem:
2
u . vw . u
u
® ®® ®
®
æ ö÷ç ÷ç ÷ç= ÷ç ÷ç ÷ç ÷÷çè ø
ou u . vw . u
u . u
® ®® ®
® ®
æ ö÷ç ÷ç ÷=ç ÷ç ÷ç ÷è øPortanto, o vetor que representa a projeção de v
® na direção de u
® é:
U
u . vw proj v . u
u . u®
® ®® ® ®
® ®
æ ö÷ç ÷ç ÷= =ç ÷ç ÷ç ÷è ø
ExErcício rEsolvido
1. Determine o módulo do vetor projeção de v ( 2, 1, 1 )®= na direção do
vetor u ( 3 , -2, 0 )®= .
Solução:
Podemos resolver este problema de duas formas:
Determinamos a projeção de v®
sobre u®
usando a fórmula
U
u . vw proj v . u
u . u®
® ®® ® ®
® ®
æ ö÷ç ÷ç ÷= =ç ÷ç ÷ç ÷è ø, em seguida, calculamos o seu módulo. Vejamos:
U
(3, -2, 0 ) . ( 2, 1, 1)proj v . ( 3, -2, 0 )
( 3, -2, 0 ). ( 3, -2, 0 )®
® æ ö÷ç ÷=ç ÷ç ÷çè ø
Þ U
6 -2 0proj v . ( 3, -2, 4 )
9 4 0®
® æ ö+ ÷ç= ÷ç ÷çè ø+ + Þ
U
4proj v . ( 3, -2, 0 )
13®
®=
Þ U
12 8proj v , - , 0
13 13®
® æ ö÷ç= ÷ç ÷çè ø

42 Geomet r ia Ana l í t i ca Ve to r ia l
Calculando o módulo de U
proj v®
®, temos:
2 2
U
12 8 proj v 0
13 13®
® æ ö æ ö÷ ÷ç ç= + +÷ ÷ç ç÷ ÷ç çè ø è ø Þ
U
208 4 13 proj v
169 13®
®= =
b) Calculando o módulo diretamente pela fórmula
u . v w .
u
® ®®
®= ou
U
u . v proj v .
u ®
® ®®
®= , temos:
U
u . v proj v .
u ®
® ®®
®= Þ ( )U
( 3, -2, 0 ). (2, 1, 1 ) proj v .
3, -2, 0 ®
®=
U proj v ®
®=
6-2 0 4 4 13.
13 9 4 13
+= = =
+
Vimos nesta aula que o produto escalar está diretamente relacionado ao
ângulo de dois vetores. Assim, muitos problemas geométricos podem ser resolvidos
e fórmulas generalizadas, com o auxilio dessa ferramenta. Na próxima aula
estudaremos uma outra modalidade de produto entre vetores, que é o chamada
Produto vetorial.

43AULA 3
AULA 3 Produto vetorial
Caro(a) aluno(a),
Nesta aula abordaremos mais dois conceitos relacionados à multiplicação de
vetores – Produto vetorial e Produto misto –, elementos imprescindíveis ao estudo
de disciplinas posteriores e suporte necessário para o estudo do conteúdo das
aulas subsequentes.
Os tópicos 1 e 2 trazem uma análise bastante objetiva desses elementos, já o
tópico 3 volta-se para as demonstrações de algumas propriedades desses
produtos.
Objetivos
• Familiarizar o aluno com os produtos de vetores e suas aplicações práticas em cálculos de áreas e volumes
• Proporcionar ao aluno suporte para calcular o produto escalar, o produto vetorial e misto, entre vetores, bem como utilizar as respectivas interpretações geométricas

44 Geomet r ia Ana l í t i ca Ve to r ia l
No presente tópico, estudaremos uma das modalidades de produto
entre vetores que diferentemente do produto interno, é limitada
a espaços tridimensionais e tem com como representação
geométrica um vetor. O produto vetorial possui grande aplicabilidade nas áreas
afins, principalmente na Física, pelo uso frequente de grandezas vetoriais.
OBSERVAÇÕES
A multiplicação vetorial foi criada por J. Gibbs.
Os seguintes produtos vetoriais merecem atenção especial: ® ®
=u.v® ®
u . v . cos q (verdadeiro)® ®u x v = è
® ®
u . v . sen q (falso)
è® ®
=
u x v u . v . sen q (verdadeiro)
1.1 DEFINIÇÃO
O produto vetorial de dois vetores ®u
e ®v não colineares, (tomados nesta ordem)
representado por ®u x
®v , é um terceiro vetor
com as seguintes características:
i) Direção: O vetor ® ®u x v é perpendicular
aos vetores ® ®u e v simultaneamente;
ii) Sentido: Os vetores ® ® ® ®u, v e u x v ,
nesta ordem, formam um triedro positivo;
TÓPICO 1 Produto vetorialObjetivOs
• Introduzir a noção de produto vetorial do ponto de vista
geométrico e analítico
• Descrever algumas propriedades e aplicações do produto
vetorial
s a i b a m a i s !
Acesse o site http://www.fem.unicamp.
br/~em313/paginas/person/gibbs.htm e conheça
mais sobre o matemático Josiah Williard Gibbs,
criador do produto externo (ou vetorial).

45AULA 3 TÓPICO 1
iii) Módulo: ® ® ® ®
=
u x v u . v . sen q , onde q é a medida do ângulo
entre ® ®u e v .
Figura 1 – Representação geométrica do produto vetorial
u v+
1.2 PROPRIEDADES
1. ® ®
u x u = 0.
2. ® ®
=u x v 0 se:
a) um dos vetores for nulo.
b) ® ®u e v forem colineares, pois sen q = 0 quando q= 0 ou 180º.
3. O produto vetorial é anticomutativo, ou
seja, ® ® ® ®
=-u x v v x u . Porém, .u x vv x u →→→→
=4. Associativo: m (
® ®
u x v ) = (m®u ) x
®v =
® ®u x (m v).
5. Os vetores ® ® ®i , j e k , nesta ordem,
representam um triedro positivo (como mostra
a figura 2).
Figura 2 – Triedro positivo
Assim, ® ® ® ® ® ® ® ® ®= = =
k i x j , j k x i , i j x k .
Como consequência temos: -® ® ® ® ® ®= - =k j x i , j i x k e -
® ®=i k x
®j .
Casos particulares: ® ® ® ® ® ® ® ® ®
= = =
i x i 0, j x j 0 e kx k 0 .
6. ® ® ® ® ® ® ®
+ = +u x ( v w) u x v u x w.
7. ® ®
u x v é ortogonal simultaneamente a ® ®u e v.
at e n ç ã o !
As demonstrações das propriedades acima estão
no tópico 3.

46 Geomet r ia Ana l í t i ca Ve to r ia l
8. Se è® ®¹u 0 e q é ângulo dos vetores
® ®u e v , então:
® ® ® ®
=
u x v u . v . sen q .
9.® ® ® ® ® ®
¹u x ( v x w) ( u x v) x w , o produto vetorial não é associativo.
1.3 EXPRESSÃO CARTESIANA DO PRODUTO VETORIAL
Veremos, agora, como determinar o produto vetorial de dois vetores quando
são conhecidos suas expressões cartesianas.
Dados: ®u =
→
ix1 + 1y®j + 1z
®k e
®v = 2x
®i + 2y
®j + 2z
®k .
®u x
®v = (
→
ix1 + 1y®j + 1z
®k ) x ( 2x
®i + 2y
®j + 2z
®k ) Þ
®u x
®v = 1x 2x (
®i x
→
i ) + 1x 2y (®i x
®j ) + 1x
2z (®i x
→
k ) + 2x 1y (®j x
®i ) +
1y 2y (®j x
®j ) + 1y
2z (→
j x®k ) + 2x 1z (
→
k x®i ) + 2y 1z (
®k x
®j ) + 1z 2z (
®k x
®k ).
(*)
Considerando que ®i x
→
i = 0, ®i x
®j =
®k ,
®i x
®k = -
®j ,
®j x
®i = -
®k ,
®j x
®j =0,
®j x
®k =
®i ,
®k x
®i =
®j ,
®k x
®j = -
®i e
®k x
®k = 0 e colocando
®i ,
®j e
®k em evidência
na equação (*), temos:®u x
®v = ( 1y
2z - 2y 1z )®i + ( 2x 1z - 1x 2z )
®j + ( 1x 2y - 2x 1y )
®k
Observe que 1y2z - 2y 1z = 1 2
1 2
y y z z
, 2x 1z - 1x 2z = 1 2
1 2
x x
z z e
1x 2y - 2x - 1y = 1 2
1 2
x x
y y
Assim, ® ®
u x v = 1 2
1 2
y y z z
. ®i - 1 2
1 2
x x z z
. ®j +
1 2
1 2
x x y y
. ®k
Uma maneira fácil de memorizar esta fórmula é recorrer à utilização da
notação ®u x
®v =
® ® ®
1 1 1
2 2 2
i j k
x y z
x y z
Na verdade, o símbolo à direita da igualdade, baseado no Teorema de
Laplace, não representa um determinante, tendo em vista que a primeira linha não
são números reais, e sim vetores. No entanto, usaremos esta notação pela facilidade
com que a fórmula pode ser memorizada.

47AULA 3 TÓPICO 1
ExErcícios rEsolvidos
1. Sendo ®u = 2
®i + 3
®j –
®k e
®v =
→
i - ®j
+ 2®k , calcule
® ®u x v e
® ®v x u .
Solução:
a) ® ®u x v =
® ® ®i j k
2 3 -1
1 -1 2
=
-
- 3 1
1 2
.→
i - -2 1
1 2
.®j +
-2 3
1 1
. ®k
® ®u x v = (6 – 1)
→
i - (4 + 1) ®j + (-2 – 3)
®k Þ
® ®u x v = 5
→
i - 5®j - 5
®k
b) ® ®v x u =
® ® ®i j k
1 -1 2
2 3 -1
= ®-
-1 2
. i 3 1
- ®
-1 2
. j2 1
+ ®-1 1
. k2 3
® ®v x u = (1 - 6)
→
i - (-1 – 4) ®j + (3 + 2)
®k Þ
® ®v x u = -5
→
i + 5®j + 5
®k
Observe que ® ®u x v = -
® ®v x u , ou seja, os vetores
® ®u x v e
® ®v x u , são
opostos, o que significa dizer que o produto vetorial é anticomutativo como vimos
acima, na propriedade 3.
2. Calcule o versor de ® ®u x v onde
®u = (2, 3, -1) e
®v = (2, 1, 0).
Solução:
® ®u x v =
® ® ® i j k
2 3 -1
2 1 0
= æ ö÷ç ÷ç ÷ç ÷çè ø
3 -1 2 -1 2 3 , - ,
1 0 2 0 2 1
® ®u x v = (0 + 1, - (0 + 2), 2 – 6) Þ
® ®u x v = (1, -2, -4)
O versor ® ®u x v é o vetor
® ®
® ®
u x v
u x v (veja aula 1).
® ®
® ®
u x v
u x v =
( )
( ) ( )+ +2 22
1, -2, -4
1 -2 -4 =
æ ö÷ç ÷ç ÷çè ø1 -2 -4
, , 21 21 21
s a i b a m a i s !
Revise o Teorema de Laplace acessando o site
disponível em https://www.youtube.com/
watch?v=bNiw3CMGsK4.

48 Geomet r ia Ana l í t i ca Ve to r ia l
1.4 INTERPRETAÇÃO GEOMÉTRICA DO MÓDULO DO PRODUTO
VETORIAL
Geometricamente o módulo do produto vetorial de dois vetores ®u e
®v mede
a área do paralelogramo cujos lados são os vetores ® ®
=AB u e ® ®
=AD v , como mostra
a figura 3:
Figura 3 - Módulo de u x v® ®
= área do paralelogramo ABCD
Observe que a área ABCD = ®
u . h
Considerando que è®
=h v . sen q , temos: área de ABCD = è® ®
u . v . sen q
Mas è® ® ® ®
=
u x v u . v . sen q (propriedade 9), então: área de
ABCD = ® ®
u x v .
ExErcícios rEsolvidos
1. Calcule a área do paralelogramo cujos lados são os vetores ®u = (2, 3, -1) e
®v = (1, 4, 3).
Solução:
® ®u x v =
® ® ®
æ ö÷ç ÷- = ç ÷ç ÷çè ø
i j k 3 -1 2 -1 2 3
2 3 1 , - , 4 3 1 3 1 4
1 4 3
® ®u x v = (9 + 4, - (6 + 1), 8 + 3) Þ
® ®u x v = (13, -7, 11) Þ
Área = ® ®
= + + =
2 2 2u x v 13 (-7) 11 339
2. Determine a área de um triângulo cujos vértices são os pontos A (2, 1, 0),
B (-1, 3, 2) e C (0, 1, 2), como mostra a figura 4.
Figura 4 - Área do triângulo ABC = metade da área do paralelogramo ABCD

49AULA 3 TÓPICO 1
Solução:
Observe que a área do triângulo ABC é igual à metade da área do paralelogramo
ABCD.
Assim temos:
Área do triângulo = ® ® 1
. AC x AB 2
®= = =AC C - A ( 0, 1, 2 ) - ( 2, 1, 0 ) ( -2, 0, 2 )
e ®
= = =AB B - A ( -1, 3, 2 ) - ( 2, 1, 0 ) ( -3, 2, 2 )
® ®AC x AB =
® ® ®
æ ö÷ç ÷= ç ÷ç ÷çè ø
i j k 0 2 -2 2 -2 0
-2 0 2 , - , 2 2 -3 2 -3 2
-3 2 2
® ®AC x AB = (-4, -2, -4) Þ
® ®
AC x AB = + +2 2 2 (-4) (-2) (-4) =
= 36 6
Área = ® ® 1
. AC x AB 2
Þ Área = Þ1
. 6 2
Área = 3
3. Determine um vetor unitário simultaneamente ortogonal aos vetores ®u =
(2, -6, 3) e ®v = (4, 3, 1).
Solução:
Se ® ®u x v e
® ®v x w são simultaneamente ortogonais a
®u e
®v , então os
versores de ® ®u x v e de
® ®v x u constituem a solução do problema:
® ®u x v =
® ® ®
® ® ®- = +
i j k -6 3 2 3 2 -6
2 6 3 i - j .k3 1 4 1 4 3
4 3 1
ou
® ®u x v = -15
®i + 10
®j + 30
®k , isto é,
® ®u x v = (-15, 10, 30) e
® ®v x w = (15,
-10, -30).
Assim, se ®a e
®b são os versores de
® ®u x v e
® ®v x u , respectivamente, então:
®a =
® ®
® ®
u x v
u x v =
( )
( ) + +2 2 2
-15, 10, 30
-15 10 30 =
( ) -15, 10, 30
1225 = ( )
1 -15, 10, 30
35
= æ ö÷ç ÷ç ÷çè ø
3 2 6 - , ,
7 7 7

50 Geomet r ia Ana l í t i ca Ve to r ia l
®b =
® ®
® ®
v x u
v x u =
æ ö÷ç ÷ç ÷çè ø3 2 6
, - , 7 7 7
Observe que os vetores ®a e
®b são unitários.
Vimos que o produto vetorial de dois vetores é representado por um terceiro
vetor simultaneamente ortogonal a esses dois vetores e que possui sentido de um
triedro positivo. No próximo tópico, estudaremos um tipo de produto que envolve
o escalar e o vetorial numa mesma expressão.

51AULA 3 TÓPICO 2
TÓPICO 2 Produto misto
ObjetivOs
• Introduzir a noção de produto misto do ponto de vista
analítico
• Descrever algumas propriedades e aplicações do produto
misto
O produto misto é uma espécie de produto que envolve o produto
interno (estudado na aula 2) e o vetorial numa única expressão.
Tendo em vista que o produto vetorial é representado por um
vetor e o produto interno por um número real, podemos concluir que o produto
misto também é representado por um número real.
DEFINIÇÃO
Chama-se produto misto dos vetores →
u , ®v e
®w , tomados nesta ordem e rep-
resentado por ® ® ®
( u, v, w ) , o número real →
u . (®v x
®w ).
Se ®u =
→
ix1 + 1y®j + 1z
®k ,
®v = 2x
®i + 2y
®j + 2z
®k e
®w =
® ® ®+ +3 3 3x i y j z k , temos:
→
u . (®v x
®w ) = ( )1 1 1x , y , z .
® ® ®
2 2 2
3 3 3
i j k
x y z
x y z
→
u . (®v x
→
w ) = ( )1 1 1x , y , z . æ ö÷ç ÷ç ÷ç ÷çè ø
2 2 2 2 2 2
3 3 3 3 3 3
y z x z x y , - ,
y z x z x y

52 Geomet r ia Ana l í t i ca Ve to r ia l
→
u . (®v x
®w ) = 1x . 2 2
3 3
y z y z
- 1y . 2 2
3 3
x z x z
+ 1z . 2 2
3 3
x y x y
De acordo com o Teorema de Laplace, temos:
→
u . (®v x
®w ) =
1 1 1
2 2 2
3 3 3
x y z
x y z
x y z
ExErcícios rEsolvidos
1. Sejam os vetores →
u = ( 2, 1, -1 ), ®v = ( 2, 0, 4 ) e
®w = ( 1, 1, -2 ), calcule:
a) (→
u ,®v ,
®w ) b) (
®v ,
®w ,
→
u )
Solução:
a) (→
u ,®v ,
®w ) = = +
2 1 -10 4 2 4 2 0
2 0 4 2 . - 1 . (-1) . 1 -2 1 -2 1 1
1 1 -2
(→
u ,®v ,
®w ) = - 8 + 8 – 2 = - 2
b) (®v ,
®w ,
→
u ) = = +2 0 4
1 -2 1 -2 1 1 1 1 -2 2 . - 0 . 4 .
1 -1 2 -1 2 1 2 1 -1
(®v ,
®w ,
→
u ) = 2 – 0 – 4 = - 2
2. Dados os pontos A (1, 2, 3), B (-1, 0, 3) e C (4, 2, -1), calcule
(®
AB , ®
BC , ®
AC ).
Solução:®
AB = B – A = (-1, 0, 3) – (1, 2, 3) = (-2, -2, 0)®
BC = C – B = (4, 2, -1) – (-1, 0, 3) = (5, 2, -4)®
AC = C – A = (4, 2, -1) – (1, 2, 3) = (3, 2, -4)
(®
AB , ®
BC , ®
AC ) = -2 -2 0
5 2 -4
3 0 -4
= - 2 . 2 -4
0 -4
- ( - 2) . 5 -4 3 -4
+ 0 . 5 2
3 0
2.1 PROPRIEDADES
1. (→
u ,®v ,
®w ) = 0 se:
a) um dos vetores for nulo.
b) nenhum dos vetores é nulo, mas dois são colineares.

53AULA 3 TÓPICO 2
c) os três são coplanares (cf. figura 5 ).
Figura 5 - v w e u→ → →
× são coplanares
2. A ordem cíclica dos vetores não altera o produto misto. Assim, (→
u ,®v ,
®w )
= (®v ,
®w ,
→
u ) = (®w ,
→
u ,®v ).
3. (→
u ,®v ,
®w +
®r ) = (
→
u ,®v ,
®w ) + (
→
u ,®v ,
®r ) (propriedade dos determinantes).
ExErcício rEsolvido
1. Utilize o produto misto para mostrar que os vetores →
u = (1, 4, -7), ®v = (2, -1, 4) e
®w = (0, -9, 18) são coplanares.
Solução:
Tendo em vista que dois vetores não são colineares (não possuem coordenadas
correspondentes proporcionais), se (→
u ,®v ,
®w ) = 0 , então
→
u ,®v e
→
w são coplanares.
Se (→
u ,®v ,
®w ) =
1 4 -7
2 -1 4
0 -9 18
= 1 . -1 4
-9 18
- 4 . 2 4
0 18
- 7 . 2 -1
0 -9
(→
u ,®v ,
®w ) = 1 . (18) – 4 (36) – 7 (-18) = 0.
Isso significa dizer que →
u ,®v e
®w são coplanares.
Determine o volume do paralelepípedo cujas arestas são ®
AB , ®
AC , ®
AD ,
considerando A (1, 3, 4), B (-1, 2, 0), C (1, 1, 2).
Solução:
Figura 6 – Paralelepípedo para cálculo de volume
®AB = B – A = (-1, 2, 0) – (1, 3, 4) = (-2, -1, -4)®
AC = C – A = (1, 1, 2) – (1, 3, 4) = (0, -2, -2)®
AD = D – A = (-1, 2, 3) – (1, 3, 4) = (-2, -1, -1)

54 Geomet r ia Ana l í t i ca Ve to r ia l
Volume = ( )® ® ® AB , AC , AD
(®
AB ,®
AC ,®
AD ) = -2 -1 -4
0 -2 -2
-2 -1 -1
= - 2 . -2 -2
-1 -1
- (-1) . 0 -2
-2 -1
+ (-4) . 0 -2
-2 -1
(®
AB ,®
AC ,®
AD ) = -2 . 0 – 4 + 16 = 12
(®
AB ,®
AC ,®
AD ) = 12 = 12
2.2 INTERPRETAÇÃO GEOMÉTRICA DO MÓDULO DO PRODUTO MISTO
Geometricamente, o módulo do produto misto (→
u ,®v ,
®w ) é igual ao volume
de um paralelepípedo cujas arestas são representadas pelos vetores →
u , ®v e
®w ,
conforme figura 7.
Figura 7 - Paralelepípedo cujos lados são os vetores u v w� � ��
, e
Sabemos que o volume de um paralelepípedo é dado pela expressão:
V altura=( )⋅( )área da base ou = bV A . h
mas: ® ®
=
bA v x u
sendo q o ângulo entre os vetores ®u e
® ®v x w , a altura do paralelepípedo
é dada por:®
= qh u . cos .
É necessário considerar o valor absoluto de q cos , pois q pode ser obtuso.
Assim, o volume do paralelepípedo é:® ® ®
= q
V u . v x w . cos
Fazendo ® ®v x w =
®a , temos:
® ®
= qV u . a . cos (I)
mas, de acordo com a definição de produto interno:® ®® ®
= qu . a u . a . cos Þ ® ®® ®
= q u . a u . a . cos (II)

55AULA 3 TÓPICO 2
Comparando I e II, temos ® ®
=
V u. a ou ( )® ® ®
=
V u . v x w ou ® ® ®
=
V ( u, v, w ) .
Vimos neste tópico que o produto misto é uma espécie de mistura (daí o
nome) de um produto escalar (interno) com o produto vetorial e tem como resultado
uma escalar. Vimos ainda que este tipo de produto é igual, em valor absoluto, ao
volume de um paralelepípedo, cujas arestas são os vetores que compõem o produto.

56 Geomet r ia Ana l í t i ca Ve to r ia l
Reservamos este tópico para as demonstrações de algumas
propriedades dos produtos vetorial e misto considerando o grau
de sua importância.
Considerando que propriedades do
produto vetorial e produto misto estão
intimamente relacionadas com as propriedades
dos determinantes, utilizaremos, em algumas
ocasiões, os princípios do Teorema de Laplace
(pela sua praticidade), muito embora o
determinante de 3ª ordem possa ser resolvido
pela regra de Sarrus.
3.1 PROPRIEDADES DO PRODUTO VETORIAL (DEMONSTRAÇÕES)
Sejam os vetores ®u =
→
ix1 + 1y®j + 1z
®k ,
®v = 2x
®i + 2y
®j + 2z
®k e
® ® ® ®= + +3 3 3w x i y j z k e “m” um número real diferente de zero.
1. u x u�� ��
= 0
® ®
u x u =
® ® ®
1 1 1
2 2 2
i j k
x y z
x y z
= 0 (propriedade dos determinantes: duas filas
paralelas iguais) consequências: ®i x
®i = 0,
®j x
®j = 0 e
®k x
®k = 0
TÓPICO 3 Demonstrações das propriedadesObjetivO
• Realizar as demonstrações de algumas propriedades dos
produtos vetorial e misto
s a i b a m a i s !
Faça uma revisão da Regra de Sarrus,
acessando o site https://www.youtube.com/
watch?v=zp7726v2sfo.

57AULA 3 TÓPICO 3
2. u v�� �
x = 0
a) ®u = 0 ou
®v = 0
b) ®u e
®v são colineares. Assim
®u = m
®v
® ®=u x v
® ® ®
2 2 2
2 2 2
i j k
mx my mz
x y z = m
® ® ®
2 2 2
2 2 2
i j k
x y z
x y z
= m.0 = 0
3. u x v v x u�� � � ��
=−
® ®u x v =
® ® ®
1 1 1
2 2 2
i j k
x y z
x y z
= -
® ® ®
2 2 2
1 1 1
i j k
x y z
x y z
= ® ®
-v x u
Consequência:®i x
®j = -
®j x
®i ,
®i x
®k = -
®k x
®i e
®j x
®k = -
®k x
®j .
4. (m u��
) x v
= m ( u v�� �
x =)
(m®u ) = (m 1x , m 1y , m 1z )
(m®u ) x
®v =
® ® ®
1 1 1
2 2 2
i j k
mx my mz
x y z
De acordo com a propriedade dos determinantes:
(m®u ) x
®v =
® ® ®
1 1 1
2 2 2
i j k
mx my mz
x y z
= m .
® ® ®
1 1 1
2 2 2
i j k
x y z
x y z
= m (® ®
u x v )
5. O comentário sobre a propriedade 5 se encontra no tópico 1 desta aula.
6. u x v w u x v u x w�� � �� �� � �� ��
+( )= +
Tendo em vista que ® ®+ = + + +
2 3 2 3 2 3(v w) ( x x , y y , z z )
® ® ®+ =u x ( v w)
® ® ®
+ + +1 1 1
2 3 2 3 2 3
i j k
x y z
x x y y z z

58 Geomet r ia Ana l í t i ca Ve to r ia l
De acordo com a propriedade dos determinantes:® ® ®
+ + +1 1 1
2 3 2 3 2 3
i j k
x y z
x x y y z z
=
® ® ®
1 1 1
2 2 2
i j k
x y z
x y z
+
® ® ®
1 1 1
3 3 3
i j k
x y z
x y z
Assim, ® ® ® ® ® ® ®
+ = +u x ( v w) u x v u x w .
7. u v�� �
x = é ortogonal simultaneamente a u v�� �
e ® ®
u x v é ortogonal a ®v . Assim
®v . (
® ®
u x v ) = 0
®v . (
® ®
u x v ) = ( 2x , 2y , 2z ) .
® ® ®
1 1 1
2 2 2
i j k
x y z
x y z
=
( 2x , 2y , 2z ) . æ ö÷ç ÷ç ÷ç ÷çè ø
1 1 1 1 1 1
2 2 2 2 2 2
y z x z x y , - ,
y z x z x y
Þ®v .(
® ®
u x v ) = 2x 1 1
2 2
y z y z
- 2y 1 1
2 2
x z
x z + 2z 1 1
2 2
x y
x y
De acordo com o Teorema de Laplace, temos:
®v .(
® ®
u x v ) = 2 2 2
1 1 1
2 2 2
x y z
x y z
x y z
= 0
b) ® ®
u x v é ortogonal a ®u . Assim
®u . (
® ®
u x v ) = 0
®u . (
® ®
u x v ) = ( 1x , 1y , 1z ) .
® ® ®
1 1 1
2 2 2
i j k
x y z
x y z
=
( 1x , 1y , 1z ) . æ ö÷ç ÷ç ÷ç ÷çè ø
1 1 1 1 1 1
2 2 2 2 2 2
y z x z x y , - ,
y z x z x y
Þ®u . (
® ®
u x v ) = 1x 1 1
2 2
y z y z
- 1y 1 1
2 2
x z
x z + 1z 1 1
2 2
x y
x y Þ
®u . (
® ®
u x v )
= 1 1 1
1 1 1
2 2 2
x y z
x y z
x y z
= 0
8. u x v u v�� � �� �
= ⋅ ⋅ sen q
® ®
u x v =
® ® ®
1 1 1
2 2 2
i j k
x y z
x y z
= æ ö÷ç ÷ç ÷ç ÷çè ø
1 1 1 1 1 1
2 2 2 2 2 2
y z x z x y , - ,
y z x z x y

59AULA 3 TÓPICO 3
® ®
u x v = 1 2 2 1( y z - y z ) - 1 2 2 1( x z - x z ) + 1 2 2 1(x y - x y )
u x v
=→→
( ) ( ) ( )+ +2 22
1 2 2 1 1 2 2 1 1 2 2 1 y z - y z x z - x z x y - x y® ®
=
2u x v 21 2 2 1( y z - y z ) + 2
1 2 2 1( x z - x z ) + 21 2 2 1(x y - x y )
Desenvolvendo os quadrados, somando e subtraindo 2 21 1x y ,
2 22 2x y e 2 2
1 2z z no segundo membro, e considerando a relação
( )+ + = + + + + +2 2 2 2 a b c a b c 2ac 2bc 2ab , temos:® ®
=
2 u x v ( )+ +2 2 21 1 1 x y z . ( )+ +2 2 2
2 2 2 x y z - ( )+ +2
1 2 1 2 1 2 x x y y z z ,
mas ® ®
2 2 u . v = ( )+ +2 2 21 1 1 x y z . ( )+ +2 2 2
2 2 2 x y z e (®u .
®v ) 2
= ( )+ +2
1 2 1 2 1 2 x x y y z z , então: ® ® ® ®
= -
2 2 2 u x v u . v (®u .
®v ) 2 . (esta última
relação é conhecida como Identidade de
Legrange).
Observe que ®u .
®v =
® ®
u . v . cosa .
Assim,
® ® ® ®
= -
2 2 2 u x v u . v ® ®æ ö÷ç - a÷ç ÷çè ø
2
u . v cos
® ® ® ®
=
2 2 2 u x v u . v ( 1 - cos2a )
® ® ® ®
=
2 2 2 u x v u . v . sena e finalmente ® ® ® ®
=
u x v u . v . sen q .
9. Observe na figura abaixo que u x v x w�� � ��
( ) é coplanar com v
e w��
, e
u x v x w�� � ��
( ) é coplanar com u��
e v
. Assim u x v x x x w�� � �� �� � ��
w u v( )≠( ) .
Figura 8 -
u x (v x w) é coplanar a v
e w��
at e n ç ã o !
A relação u x v u v
2 2 2→ → → →
= −. ( u®
. v®
)² é
conhecida como Identidade de Lagrange. Essa
identidade é gerada a partir do produto interno
dos vetores
u x v e
u x v , ou seja:
u v,u v u,u u,v
v,u v,v
u ² . v ² -
× × = =
u,v . v,u
u ² . v ² - u.v
=
( )²

60 Geomet r ia Ana l í t i ca Ve to r ia l
3.2 PROPRIEDADES DO PRODUTO MISTO (DEMONSTRAÇÕES)
1. (®=u 0,
®v e
®w ) = 0, se:
a) um dos vetores for nulo
b) dois deles forem colineares
c) os três forem coplanares.
a) Se ®=u 0 então:
(®=u 0,
®v e
®w ) = 2 2 2
3 3 3
0 0 0
x y z
x y z
= 0 (propriedades do determinante: fila nula)
b) Supondo ®=u 0 e
®v colineares, então:
®=u 0=
®m v ou ( 1x , 1y , 1z ) = (m 2x , m 2y , m 2z )
® ® ®
( u, v, w ) = 2 2 2
2 2 2
3 3 3
mx my mz
x y z
x y z
= m . 2 2 2
2 2 2
3 3 3
x y z
x y z
x y z
= m . 0 = 0
c) Os três são coplanares
Observe na figura 5 que (®v x
®w ) é ortogonal a
®v e
®w (segundo a definição
de produto vetorial). Se ®=u 0. (
®v x
®w ) = (
®=u 0,®v ,
®w ) = 0, concluímos, pela definição
de produto interno, que ®=u 0 e
®v x
®w são ortogonais. Assim
®=u 0 está no mesmo plano
que ®v e
®w .
Com essas demonstrações, chegamos ao final do estudo de vetores. Alguns
conceitos e propriedades estudados nas aulas 1, 2 e 3 servirão como base para o
desenvolvimento do estudo de elementos abordados nas aulas subsequentes, como
reta, plano e superfícies.

61AULA 4
AULA 4 Reta
Caro(a) aluno(a),
O conhecimento que obtivemos sobre vetores nas aulas anteriores constitui parte
fundamental para o estudo das aulas subsequentes. Nesta aula iremos estudar
as equações da reta no espaço tridimensional, bem como as características e
particularidades de cada uma delas.
Objetivos
• Reconhecer, interpretar e operar com cada tipo de equação de reta no espaço bem como analisar suas posições relativas
• Resolver problemas relacionados a retas no espaço tridimensional

62 Geomet r ia Ana l í t i ca Ve to r ia l
As curvas no espaço ou no plano estão associadas a uma equação que
relaciona as coordenadas (x, y) no plano ou (x, y, z) no espaço. Tal
equação pode se apresentar sob diversos formatos e cada um com
suas características próprias. Na geometria analítica, no plano, por exemplo, vimos
que uma reta pode ser representada pelas equações reduzida, geral segmentária ou
paramétrica, porém cada uma com sua particularidade. O coeficiente angular a,
por exemplo, aparece de forma explícita no formato = +y ax b (equação reduzida
da reta no plano). Porém, se pretendemos conhecer a ordenada do ponto em que a
reta intercepta o eixo 0y, podemos recorrer à equação segmentária + =yx
1p q
em
que q é o elemento procurado.
No espaço, equações da reta vêm configuradas para três variáveis x, y e z.
São elas: equação vetorial, equações simétricas, equações paramétricas e equações
reduzidas. Construiremos os formatos das equações baseados no conhecimento de
vetores estudados na aula anterior.
1.1 EQUAÇÃO VETORIAL DA RETA
Considere uma reta r que contém o ponto 1 1 1A(x , y , z ) e tem a direção de
um vetor ®=v (a,b, c) . Para que um ponto P(x,y,z) do espaço pertença à reta r,
é necessário e suficiente que os vetores ®
AP e ®v sejam colineares, como mostra a
figura a seguir:
TÓPICO 1 Equações da retaObjetivOs
• Determinar as equações vetoriais, paramétricas e simétricas de
uma reta do espaço
• Conhecer, interpretar e operar com cada formato de equação da
reta no espaço

63AULA 4 TÓPICO 1
Figura 1 – Reta AP com ponto A e direção do vetor v®
Assim, ® ®
=AP t v ou ®
- =P A t v ( )Ît R Þ ®
= +P A t v ou ( )=x,y,z 1 1 1(x , y , z ) + ®
t v
onde o vetor ®=v (a,b, c) é chamado vetor diretor da reta r e t é chamado parâmetro.
Observe que existe uma correspondência biunívoca entre cada número real t e um
ponto da reta, ou seja, para cada número atribuído a t, temos um ponto da reta.
ExEMplo:
Vamos determinar a equação vetorial da reta que passa pelo ponto
A(2, -1, 3) e possui a direção do vetor ® ® ® ®= +v i 2 j -4 k .
Considerando que P(x,y,z) é um ponto qualquer dessa reta, temos:® ®
=AP t v Þ ( )=x,y,z -(2, 1, 3) + -t.(1, 2 , 4)
Para cada valor de t, temos um ponto da reta. Assim, para =t 2 , temos:
( )=x,y,z -(2, 1, 3) + -2.(1, 2 , 4) Þ ( )=x,y,z -(2, 1, 3) + -(2, 4 , 8)
Þ ( )=x,y,z -(2, 1, 3)
O ponto P -(2, 1, 3) é um ponto da reta r.
1.2 EQUAÇÕES PARAMÉTRICAS DA RETA
Sejam P(x,y,z) , 1 1 1A(x , y , z ) e
® ® ® ®= + +v a i b j c k um ponto genérico, um
ponto conhecido e o vetor diretor da reta r, respectivamente.
Da equação vetorial de r ® ®
=AP t v ou ( )=x,y,z 1 1 1(x , y , z ) + t.(a, b, c) ,
temos: ( )=x,y,z 1 1 1(x , y , z ) + (at, bt, ct) Þ
ì = +ïïïï = +íïï = +ïïî
1
1
1
x x at
y y bt
z z ct
Estas equações, nas quais a, b e c não são todos nulos, são chamadas equações
paramétricas da reta.

64 Geomet r ia Ana l í t i ca Ve to r ia l
ExEMplos:
As equações paramétricas da reta r, que contém o ponto -A(2, 1, 3) e
possui a direção do vetor ® ® ® ®= +v 2i 2 j -5k , são dadas por:
ì = +ïïïï =- +íïï = -ïïî
x 2 2.t
y 1 2.t
z 3 5.t
Para se obter um ponto da reta r atribui-se um valor real para t. Assim, para
t=3, temos:
ì =ïïïï =íïï =-ïïî
x 8
y 5
z 12
ou seja, -(8, 5, 12) é um ponto da reta r.
1.3 EQUAÇÕES SIMÉTRICAS DA RETA
Uma outra maneira de descrever uma reta é eliminar o parâmetro t das
equações paramétricas. Se nenhum dos números a, b ou c é 0, podemos resolver
cada uma das equações para t -
= = =11 1y-yx x z-zt , t e t
a b ce igualar o resultado, obtendo
-= =11 1y-yx x z-z
a b c
Estas equações são chamadas equações simétricas da reta que contém o ponto
1 1 1A(x , y , z ) e a direção do vetor ®=v (a,b, c) . Mesmo que um dos componentes
desse vetor seja nulo, podemos eliminar o parâmetro t. Por exemplo, se =a 0 ,
podemos escrever as equações da reta como:
= 1x x =1 1y-y z-z
b cIsso indica que a reta é paralela ao plano yz, tendo em vista que o vetor
®=v (O,b, c) é paralelo ao plano coordenado yz (veja figura 2 )
Figura 2 – Reta paralela ao plano yz

65AULA 4 TÓPICO 1
Assim, se a reta é paralela ao plano xz, seu vetor diretor é do tipo ®=v (a, o b)
e suas equações simétricas ficam:
1r =1 1x-x z-z
a c e
ì =ïïïïïíï --ïï =ïïî
1
11
z z
y yx x
a b
se a reta for paralela ao plano
coordenado xy, como mostram as figuras seguintes.
Figura 3 – Reta paralela ao plano xz Figura 4 – Reta paralela ao plano xy
Seguindo esse raciocínio, não é difícil concluir que, se a reta é paralela a
um dos eixos coordenados, o vetor diretor dessa reta possui duas componentes
nulas. Assim, por exemplo, se a reta for paralela ao eixo x, seu vetor é do tipo ®=v (a, 0, 0 ) e suas equações ficam:
ì =ïïïï =íïï = +ïïî
1
1
1
y y
z z
x x at
ExErcícios rEsolvidos
1. Determine as equações paramétricas e simétricas da reta que passa pelo
ponto -A( 2, 4, 3) e A( 3,-1, 1) .
Solução:
Não nos foi dado de forma explícita o vetor paralelo à reta (vetor diretor
da reta), mas observe que o vetor ®v com representação
®
AB é paralelo à reta e ®= -v (3 2, -1-4, 1-(-3)) ou
®=v ( 1, -5, 4 ) .
Então os componentes do vetor diretor são = =- =a 1, b 5 e c 4 . Assim,
tomando o ponto -A( 2, 4, 3) e o vetor ®=v ( 1, -5, 4 ) , as equações paramétricas
ficam:
ì = +ïïïï = -íïï =- +ïïî
x 2 t
y 4 5t
z 3 4 t

66 Geomet r ia Ana l í t i ca Ve to r ia l
e as equações simétricas são:- +
= =y-4x 2 z 3
1 -5 4
2. Qual a interseção dessa reta com o plano xy?
Solução:
A reta intercepta o plano xy quando =z 0 . Tomando =z 0 nas equações
simétricas obtemos:-
= =y-4x 2 3
1 -5 4
Resolvendo as equações, temos =11
x4
e =1
y4
. Portanto a reta intercepta
o plano xy no ponto æ ö÷ç ÷ç ÷çè ø11 1
, , 04 4
.
3. Calcule o ângulo entre as retas
ì = +ïïïï =íïï =- -ïïî
x 3 t
r : y t
z 1 2t
e
+= =
y-3x 2 zs :
-2 1 1.
Solução:
Os vetores que definem as direções de r e s são, respectivamente, ®
=1v ( 1, 1, -2 ) e ®
= - 2v ( 2, 1, 1) . Tendo em vista que o ângulo entre as retas é o
mesmo ângulo entre os vetores diretores, chegamos a:
cosθ = =
→ →
→ →
v . v
v . v
1 2
1 2+ + - + +2 2 2 2 2 2
(1, 1, -2 ) . ( -2, 1, 1 )
1 1 ( 2) x (-2) 1 1= 1
2,
logo θ =arc cos
12
.
Vimos que cada reta no espaço está relacionada a um conjunto de equações
em que figuram as variáveis x, y e z, e que traz consigo informações importantes
da reta. No próximo tópico, estudaremos as posições particulares que duas retas
assumem no espaço.

67AULA 4 TÓPICO 2
TÓPICO 2 Posições relativas entre duas retasObjetivO
• Conhecer e determinar as diversas posições
relativas entre duas retas no espaço
Uma vez que já estudamos as equações das retas, veremos, neste
tópico, como usá-las para que possamos determinar as posições
relativas que duas retas podem assumir no espaço.
2.1 CONDIÇÃO DE PARALELISMO DE DUAS RETAS
Sejam duas retas ®
1v e ®
2v cujos
vetores diretores são ( )®
=1 1 1 1v a , b , c e
( )®
=2 2 2 2v a , b , c respectivamente. Se r e s são
paralelas, seus vetores diretores são colineares.
Assim, ®
1v = k®
2v ou = = =1 1 1
2 2 2
a b ck
a b c.
ExEMplo:
A reta 1r , que passa pelos pontos
-1A (2, 2, 1) e 1B (4, 3, 2) , e a reta 2r que passa
pelos pontos -2A (-6, 1, 5) e 2B (-2, 3, 1) são
paralelas. De fato:
a) A direção de 1r é dada pelo vetor
®
1v =
1 1A B = (2, 1, 3);
b) A direção de ®
2v é dada pelo vetor ®
2v = ®
2A®
2B = (4, 2, 6);
c) De acordo com a condição de paralelismo
de duas retas 1
2
aa
= 1
2
bb
= 1
2
cc
, as retas 1 2r e r
são paralelas, pois 24
=12
=36
.
at e n ç ã o !
Seja uma reta r 1 , que contém o ponto
A ( x , y , z ) 1 1 1 1 e possui a direção de um
vetor v a b c 1 1 11
→
= ( ), , , representada pelas
equações x xa
y-yb
z-zc
1
1
1
1
1
1
−= = .
Qualquer reta r2 , paralela a r 1 , tem parâmetros
diretores a , b , c2 2 2 proporcionais aos
parâmetros diretores a , b , c1 1 1. Dessa forma,
a , b , c1 1 1 são parâmetros diretores de qualquer
reta paralela a r 1 . Assim, se A ( x , y , z )2 2 2 2
é um ponto qualquer do espaço, as equações
da reta paralela à r 1 , que passa por A2 , são:x x
a
y-yb
z-zc
2
1
2
1
2
1
−= = .

68 Geomet r ia Ana l í t i ca Ve to r ia l
2.2 CONDIÇÃO DE ORTOGONALIDADE DE DUAS RETAS
Duas retas r e s de direções ®
1v = ( 1a , 1b , 1c ) e ®
2v =( 2a , 2b , 2c ),
respectivamente, são ortogonais se os vetores ®
1v e ®
2v também o forem, ou seja, r
e s são ortogonais se ® ®
=1 2v .v 0 ou + + =1 2 1 2 1 2a . a b . b c . c 0 .
ExErcícios rEsolvidos
1. Verifique se as retas 1r :
ì =ïïïï = +íïï = +ïïî
x 3t
y -1 5t
z 3 4t
e s: ì =ïïïí +ï =ïïî
y 3
x-3 t 18 -6
são ortogonais.
Solução:
A direção de r é ®
1v = (3, 5, 4);
A direção de s é ®
2v = (8, 0, -6);
A condição de ortogonalidade de duas retas é: 1a 2b + 1b 2b + 1c 2c = 0.
Neste caso:
3 . 8 + 5 . 0 + 9 ( -6 ) = 0, que prova serem ortogonais as retas r e s.
2. Calcule o valor de k para que as retas r: ì = +ïïíï =ïî
y kx 1
z -2x e s:
ì = +ïïïï =íïï =ïïî
x 1 3t
y 2-2t
z 5tsejam ortogonais.
Solução:
Os vetores ®
1v = ( 1, k, -2 ) e ®
2v = ( 3, -2, 5 ) são vetores diretores de r e s,
respectivamente.
A condição de ortogonalidade permite escrever:
1 . 3 + k . (-2 ) + ( -2) . 5 = 0, daí -2k = 10 – 3 Þ k = - 72
.
2.3 CONDIÇÃO DE COOPLANARIDADE DE DUAS RETAS
Duas retas 1r que contêm um ponto ®
1A ( 1x , 1y , 1z ) e têm a direção de um
vetor ( )®
=1 1 1 1v a , b , c e 2r que contém o ponto ®
2A ( 2x , 2y , 2z ) e a direção
de um ( )®
=2 2 2 2v a , b , c são cooplanares se os vetores ®
1v , ®
2v e ®
1 2A A forem
cooplanares, ou seja:
(®
1v , ®
2v , ®
1A , ®
2A ) =
- - -
1 1 1
2 2 2
2 1 2 1 2 1
a b c
a b c
x x y y z z
= 0
Figura 5 – Retas r1 e r2 cooplanares (pertencem ao mesmo plano)

69AULA 4 TÓPICO 2
ExErcícios rEsolvidos
1. Verifique se 1 r e 2r são cooplanares, sendo 1r : { += =
y 1 x - 1 z - 31 2 1
e 2r :
ì =ïïïï = +íïï = +ïïî
x -5 - t
y -3 t
z 6 3t
Solução:
1. A reta 1r passa pelo ponto ®
1A ( 2, -1, 3 ) e possui a direção do vetor ®
1v =
( 2, 2, 1);
2. A reta 2r passa pelo ponto ®
2A ( -5, -3, 6 ) e o vetor diretor é ®
2v = ( -1, 1, 3 );
3. O vetor ®
1A ®
2A = -2 1A A = ( -5, -3, 6 ) – ( 1, -1, 3 ) ou ®
1A®
2A = ( -6, -2, 3);
4. A condição de cooplanaridade das retas 1r e 2r é que seja nulo o produto
misto (® ® ® ®
1 2 1 2v , v , A , A ).
Assim, (® ® ® ®
1 2 1 2v , v , A , A ) = 1 2 1
-1 1 3
-6 -2 3
= -13¹ 0 , o que prova não
serem cooplanares as retas 1 r e 2r .
2. Calcule o valor de k para que as retas r : - += =
y 2x z 1
1 k 3 e s:
ì =ïïïï = +íïï =-ïïî
x t
y 1 2t
z 2t
sejam cooplanares.
Solução:
1. A reta r é definida pelo ponto 1A ( 0, 2, -1 ) e pelo vetor ( )®=1v 1, k, 3 ;
2. A reta s é definida pelo ponto 2A ( 0, 1, 0 ) e pelo vetor ( )®
=2v 1, 2, -2 ;
3. O vetor ¾¾®
=1 2A A ( 0, -1, 1 ) ;
4. De acordo com a condição de cooplanaridade ® ® ¾¾®
=
1 2 1 2( v , v , A A ) 0 .
Assim, =1 k 3
1 2 -2 0
0 -1 1
Þ =-k 3 .
Para que as retas r e s sejam coplanares,
k= -3.
2.4 POSIÇÕES RELATIVAS DE DUAS RETAS
Duas retas r e s, no espaço podem ser:
a) cooplanares, quando estão situadas no
mesmo plano. Neste caso elas ainda podem ser:
at e n ç ã o !
Duas retas são concorrentes se elas têm um ponto
em comum. As retas perpendiculares são retas
concorrentes que formam entre si um ângulo reto.

70 Geomet r ia Ana l í t i ca Ve to r ia l
i) concorrentes, quando existe um único ponto em comum;
ii) paralelas, quando não possuem ponto comum.
Figura 6 – Retas r1 e r2 concorrentes. Figura 7 – Retas r1 e r2 paralelas
b) reversas, quando não pertencem ao mesmo plano.
Figura 8 - Retas r1 e r2 reversas
Duas retas são ditas reversas quando
uma não tem interseção com a outra e elas não
são paralelas. Isto significa que elas estão em
planos diferentes. Pode-se pensar de uma reta r
desenhada no chão de uma casa e uma reta s,
não paralela a r, desenhada no teto dessa mesma
casa.
ExErcícios rEsolvidos
1. Estude a posição relativa das retas r:
ì =ïïïï =íïï =ïïî
x 2t
y 1-t
z t
e s: = =y x-2 z-1
-4 2 -2
Solução:
( )®
=1v 2, -1, 1 e ( )®
=2v -4, 2, -2 são vetores de r e s, respectivamente.
Observe que as componentes são proporcionais, daí ® ®
1 2v // v e r // s .
2. Estude a posição relativa das retas r:
ì = +ïïïï =íïï = +ïïî
x 2 2t
y 3 t
z 5 4t
e
s: -- -
= =- -
y 2x 5 z 71 1 2
Solução:
Tendo em vista que os vetores diretores de r e s são ( )®
=1v 2, 3, 4 e
s a i b a m a i s !
- Uma reta r é paralela a um plano no espaço ³,
se existe uma reta s inteiramente contida no plano
que é paralela à reta dada.
- Uma reta é perpendicular a um plano no espaço
³, se ela intersecta o plano em um ponto P e
todo segmento de reta contido no plano que tem P
como uma de suas extremidades é perpendicular
à reta.

71AULA 4 TÓPICO 2
( )®
=2v 1, -1, -2 , as retas não são paralelas, pois - -¹ ¹
1 1 22 3 4
.
Calculemos o produto misto (® ® ® ®
1 2 1 2v , v , A , A ), sendo ( ) 1A 2, 0, 5 e
( ) 2A 5, 2, 7 .
Assim,
(® ® ® ®
1 2 1 2v , v , A , A ) = =2 3 4
1 -1 -2 0
3 2 2
, o que quer dizer que as retas são
coplanares e, portanto, concorrentes.
Vimos nesta aula que, assim como no plano, no espaço tridimensional, as
retas são representadas por equações (neste caso com três variáveis) que trazem
todas as informações da reta, como, por exemplo, direção e posição no espaço.

72 Geomet r ia Ana l í t i ca Ve to r ia l
Caro(a) aluno(a),
Na aula anterior (aula 4 – Retas), estudamos retas no espaço tridimensional e
vimos que qualquer reta pode ser representada por um conjunto de equações que
relaciona as coordenadas x, y e z de cada ponto da reta, possibilitando utilizarmos
métodos algébricos na resolução de problemas geométricos.
Nesta aula, vamos usar o mesmo raciocínio no estudo do plano no espaço
tridimensional. Veremos que qualquer plano pode, também, ser representado por
uma equação. Isso vai nos permitir, assim como no estudo das retas, analisar
e interpretar o plano através dessa equação, determinando ângulos entre dois
planos, conhecendo as posições particulares que dois planos podem assumir no
espaço tridimensional e calculando ângulo entre reta e plano.
Objetivos
• Conhecer, interpretar e analisar as equações de um plano• Resolver problemas que envolvem retas e planos
AULA 5 Plano

73AULA 5 TÓPICO 1
TÓPICO 1 Equações do planoObjetivOs
• Conhecer os vários meios de determinação de equações
do plano
• Interpretar geometricamente equações do plano quando
estes assumem posições particulares no espaço
Vimos, na aula 4, que a direção de uma reta fica perfeitamente fixada
por um vetor que indica sua direção (vetor diretor). Em relação
ao plano, um vetor paralelo a esse plano não é suficiente para
fixar a direção de um plano, tendo em vista que existem infinitos planos paralelos
a um determinado vetor, porém um vetor perpendicular a esse plano define de
modo completo sua direção. Dessa forma, um plano no espaço fica determinado se
conhecermos um ponto desse plano e um vetor que seja ortogonal ao plano.
1.1 EQUAÇÃO GERAL DO PLANO
Seja A= ( 1x , 1y , 1z ) um ponto conhecido
de um plano l e ®n = (a, b, c),
®n ¹ ( 0, 0, 0 ) ,
um vetor normal (ortogonal) ao plano. Podemos
definir o plano l como sendo o conjunto de
todos os pontos P (x, y, z) do espaço tais que ®
AP. ®n = 0 (cf. figura 1).
Figura 1 - O vetor n®
é ortogonal ao plano
v o c ê s a b i a?
Um vetor é ortogonal a um plano quando forma
com esse um ângulo reto.

74 Geomet r ia Ana l í t i ca Ve to r ia l
Tendo em vista que ®n = (a, b, c) e
®AP = P-A = (x- 1x , y- 1y , z- 1z ), a equação
® ®=AP.n 0 fica:
(a, b, c) . (x- 1x , y- 1y , z-1z ) = 0 ou ax + by + cz - a 1x - b 1y - c 1z = 0.
Tomando d = - a 1x - b 1y - c 1z , vem:
ax + by + cz + d = 0.
Esta é a equação do plano que contém o ponto 1 1 1A(x , y , z ) e é ortogonal ao
vetor ®=n (a, b, c) .
ExErcícios rEsolvidos
1. Determine a equação geral do plano l
que passa pelo ponto A(3, -1, 2), sendo ®n = (2,
1, 5) um vetor normal a p .
Solução:
Se ®n = (2, 1, 5) é normal aos planos l , sua
equação é do tipo: 2x + y 5z + d = 0.
Tendo em vista que o ponto A = (3, -1,
2. pertence ao plano, suas coordenadas devem
verificar a equação, ou seja: 2(3) + (-1) + 5(2) + d
= 0 Þ 2 – 1 + 10 + d = 0 Þ d = -11.
Assim, a equação do plano fica:
2x + y + 5z – 11 = 0
2. Escreva a equação geral do plano p1
que contém o ponto A(-2, 1, 4) e é paralelo ao
plano p2ð + - + =2 : 3x 2y 4z 1 0
Solução:
Sendo p1 //p2 , o vetor ®
2n = (3, 2, -4)
normal a p1 é também normal a p2 . Assim a equação de p1 é do tipo:
3x + 2y – 4z + d = 0
Se A(-2, 1, 4) pertence a p1 , devemos ter 3(-2) + 2(1) – 4(4) + d = 0 Þ d =
20
Assim a equação do plano p1 fica 3x + 2y – 4z + 20 = 0
3. Determine a equação geral do plano p que passa pelo ponto A = (2, 1, -2)
e é perpendicular a reta r:
ì = +ïïïï = +íïï =ïïî
x -4 3t
y 1 2t
z t
g u a r d e b e m i s s o !
a) Se um vetor n®
= (a, b, c) é normal (ortogonal) a
l , kn, kÎ IR*, é também ortogonal a esse plano.
Assim qualquer vetor do tipo kn®
= (ak, bk, ck)
com k¹ 0 é normal desse plano.
b) É importante observar, também, que
os três coeficientes a, b, c da equação
ax by cz d 0+ + + = representam as
componentes de um vetor normal ao plano.
Por exemplo: Se um plano l é dado por
2x 5y 4z 1 0+ − + = , uma de suas normais é
o vetor n ( 2, 5, 4 )→
= e qualquer vetor do tipo
(2k, 5k, -4k), K Î IR* é também normal a l .

75AULA 5 TÓPICO 1
Solução:
Um vetor normal a esse plano é o próprio
vetor diretor ®v (3, 2, 1) desta reta. Logo, a
equação do plano p é do tipo 3x + 2y + z +
d = 0. Considerando que o ponto A(2, 1, -2)
pertence ao plano, então 3(2) + 2(1) + (-2) + d
= 0 Þ d = -6. Assim, a equação fica 3x + y +
z – 6 = 0
4. Determine a equação geral do plano que
passa pelo ponto A = (2, 1, 3) e é paralelo aos
vetores ®
1v = (3, 1, 0) e ®
2v = (-1, 3, 2).
Solução:
Os vetores-base do plano são ®
1v e ®
2v , então um vetor normal ao plano é ®n =
®
1v x ®
2v .
®
1v x ®
2v =
® ® ®
-
i j k
3 1 0
1 3 2
= (2, -6, 10)
A equação do plano é do tipo 2x – 6y + 10z + d = 0.
O ponto A(2, 1, 3) pertence ao plano, assim - + + =2(2) 6(1) 10(3) d 0 Þ
d = -28. A equação do plano fica 2x – 6y + 10z – 28 = 0.
5. Estabeleça a equação geral do plano determinado pelos pontos A( 3, 1, 2 ) ,
B( -1, 4, 0 ) e C( 2, 1 , -3) .
Solução:
Observe que, de acordo com a figura 2 abaixo, um ponto P(x, y, z) pertence
ao plano l se os vetores, AB� ��
, AC� ��
e ®
AP forem cooplanares. Na aula 4, vimos que
três vetores são coplanares se o produto misto desses vetores for nulo.
Figura 2 - Os vetores AB AC e AP® ® ®
, são coplanares
s a i b a m a i s !
Para se obter pontos de um plano, basta atribuir
valores arbitrários a duas variáveis e calcular
a terceira na equação. Por exemplo, considere
x = 2 e y = 4. Calculando z na equação
3x 2y z d 0+ + + = , temos 3 .(2 ) + 2 .(4) +
z – 6 = 0; z = -8. Assim, o ponto ( , , )2 4 8 -
pertence ao plano 3x + y + z – 6 = 0.

76 Geomet r ia Ana l í t i ca Ve to r ia l
Considerando que AB� ��
= B - A = (-4, 3, -2), = C – A = (-1, 0, -5),
®= - =AP P A (x-3, y-1, z-2 ) e fazendo ( AB
� ��, AC� ��
e ®
AP ) =
- -- -- - -
4 3 2
1 0 5
x 3 y 1 z 2
= 0 chegamos à equação + + =-15x-18y 3z 57 0 .
6. Estabeleça a equação geral do plano que contém a reta r: -x 12
= +y 2
3
= -z 32
e o ponto B(-1, 3, 1).
Solução:
A reta tem direção ®v = (2, 3, 2) e contém
o ponto A(1, -2, 3). Assim a normal ®n do plano
é um vetor simultaneamente ortogonal a ®v e A,
ou seja, ®n =
®v x A (cf. figura 3).
Dessa forma, se AB� ��
= B – A = (-2, 5, -2) e
®n =
®v x A =
- -
i j k
2 3 2
2 5 2
Þ ®n = (-16, 0, 16). A
equação do plano é do tipo -16x+0y+16z+d=0,
o ponto B(-1, 3, 1) pertence ao plano. Assim, -16
(-1) + 0(3) + 16(1) + d = 0Þ d = -32. A equação
fica -16x + 16z – 32 = 0.
Observe que a variável y não figura na
equação, o que significa dizer que esse plano é
paralelo ao plano coordenado xz.
Figura 3 – A normal n®
é ortogonal simultaneamente a v®
e AB®
1.2 CASO PARTICULAR
A equação ax + by + cz + d = 0 na qual a, b e c não são todos nulos
representa a equação de um plano p cuja normal é o vetor ®n = ( a, b, c ). Quando
uma ou duas componentes de ®n são nulas ou =d 0 , estamos diante de casos
particulares descritos a seguir.
v o c ê s a b i a?
Existe uma analogia entre a reta no plano e o
plano no espaço. No plano, a equação de uma
reta pode ser determinada se conhecermos sua
inclinação e um ponto dessa reta. No espaço,
a inclinação de um plano é dada por um vetor
ortogonal a ele (normal), e a equação de um plano
pode ser determinada se forem dados a normal e
um de seus pontos.

77AULA 5 TÓPICO 1
1.2.1 plano quE passa pEla origEM
Se o plano lð + + + =:ax by cz d 0 passa pela origem, então contém o ponto
(0, 0, 0). Assim + + + =a.0 b.0 c.0 d 0 Þ d = 0. A equação fica + + =ax by cz 0 ,
que representa a equação de um plano que passa pela origem.
1.3 PLANOS PARALELOS A EIXOS COORDENADOS
Se apenas uma das componentes de ®n for nula, o vetor é ortogonal a um
dos eixos coordenados, e, portanto, o plano l é paralelo ao mesmo eixo. Se a = 0, ®n =(o, b, c), que é ortogonal ao eixo ox. Assim o plano cuja normal é
®n é paralelo
ao eixo ox. Veja alguns exemplos:
10y + 6z – 30 = 0; observe que ®n = (0, 10, 6), logo
®n é ortogonal a ox e o
plano é paralelo a ox. (cf. figura 4)
2x + 3y + 5 = 0; neste caso ®n = (2, 3, 0) é um vetor ortogonal ao eixo oz.
Assim o plano p é paralelo a oz.
3y + 4x = 0; neste caso ®n = (4, 3, 0) e além disso d = 0 , portanto o plano é
paralelo ao eixo oz e passa pela origem.
Concluímos, dessa forma, que a variável ausente na equação indica que o
plano é paralelo ao eixo dessa variável.
Figura 4 – Plano π é paralelo ao eixo x
1.4 PLANOS PARALELOS A PLANOS COORDENADOS
Se duas componentes de ®n forem nulas, o vetor
®n é ortogonal a um plano
coordenado. Assim o plano cuja normal é ®n é paralelo a esse eixo coordenado.
Observe que, se a = b = 0, ®n = (0, 0, c) é ortogonal ao plano xy. Assim o
plano cuja normal é ®n é paralelo ao plano xy.
Exemplo:
3y -15 = 0 ou y = 5; note que ®n = (0, 2, 0) é um vetor ortogonal ao plano
xz. Assim o plano l é paralelo ao plano coordenado xz e intercepta o eixo ox no
ponto (0, 5, 0). (cf. figura 5)

78 Geomet r ia Ana l í t i ca Ve to r ia l
2x + 8 = 0 ou x = -4; neste caso ®n = (2, 0, 0 ) representa um vetor ortogonal
ao plano coordenado yz. Assim o plano l é paralelo ao plano coordenado yz e
intercepta o eixo 0x no ponto (-4, 0, 0).
Figura 5 - O plano é paralelo ao plano coordenado xz
Em síntese:
ax + d = 0 ou x = -da
é equação de um plano paralelo ao plano coordenado
yz e intercepta o eixo ox no ponto (- da
, 0 , 0 ) ( a ¹ 0) (cf. figura 5).
by + d = 0 ou y = - db
representa a equação de um plano paralelo ao plano
coordenado xz e intercepta o eixo oy no ponto ( 0, - db
, 0 ) ( b¹ 0 ) (cf. figura 5).
Cz + d = 0 ou z = - dc
( c¹ 0 ) representa a equação de um plano paralelo ao
plano coordenado xy e intercepta o eixo oz no ponto ( 0, 0, - dc
)
Podemos concluir que os planos coordenados xy, yz, xz têm equações z = 0,
x = 0 e y = 0 respectivamente.
ExErcício rEsolvido
1. Determine a equação de um plano l que é perpendicular ao eixo z e que
contém o ponto -A(2, 1, 3) .
Solução:
Se o plano é perpendicular ao eixo oz, a normal é colinear ao vetor ®k = (0, 0, 1 ). Assim qualquer vetor do tipo
®v = ( 0, 0, k) é normal de p . Em
particular, seja ®n = ( 0, 0, 2 ), a equação de p é do tipo ax + by + cz + d = 0. Assim:
0 . 2 + 0 .(-1) + 2 . 3 + d = 0 Þ d = -6, então a equação fica 0x + 0y + 2z + (-6) = 0
Þ 2z – 6 = 0 ou z = 3, que representa um plano paralelo ao plano coordenado
xoy e que intercepta o eixo ou no ponto ( 0, 0, 3 ).
2. Determine a equação de um plano que contém o ponto A( 2, 3, 4 ) e
normal ®n = (2, 3, 0).

79AULA 5 TÓPICO 1
Solução:
Substituindo as componentes de ®n e as coordenadas de A na forma
ax + by + cz + d = 0, temos: + + + =2.2 3.3 0.4 d 0 Þ d = -13. Assim a equação
fica 2x + 3y – 13 = 0, que representa um plano paralelo ao eixo oz.
Neste tópico, estudamos as condições necessárias e suficientes para
determinação da equação de um plano no espaço, além de mostrar, através de suas
equações, as posições particulares que eles podem assumir no espaço. No próximo
tópico, completaremos nosso estudo sobre plano deduzindo fórmulas que nos
permitirão calcular ângulo entre reta e plano e ângulo entre dois planos.

80 Geomet r ia Ana l í t i ca Ve to r ia l
TÓPICO 2 Complemento sobre planos
ObjetivOs
• Calcular o ângulo entre dois planos e entre reta e plano
• Determinar a interseção de dois planos
Uma vez que já conhecemos as equações de um plano, focaremos, neste
tópico, alguns elementos que complementarão nosso estudo sobre
plano que são: ângulo entre dois planos, ângulo entre reta e plano e
interseção de dois planos.
2.1 ÂNGULO DE DOIS PLANOS
Consideremos dois planos quaisquer p1 e p2 de equações
+ + + =1 1 1 1a x b y c z d 0 e + + + =2 2 2 2a x b y c z d 0 , respectivamente. Dessa forma ®=1 1, 1 1n ( a b , c ) e
®=2 2, 2 2n ( a b , c ) são suas normais. O ângulo entre p1 e p2 é zero
se eles forem paralelos ou coincidentes. Caso contrário, sejam q o ângulo entre ®
1n e ®
2n e
g ângulo entre os planos p1 e p2 . De acordo com a figura 6, β θ+ = 90 º e γ β+ = 90 º,
isto é, α θ= . Assim, o ângulo entre dois planos é igual ao ângulo entre suas normais,
ou seja:
cos n .n
n n
1 2
1 2
θ =
→ →
→ →
.
ou cos a , b , c a , b , c
a b c . a b c
1 1 1 . 2 2 2
12
12
12
22
22
22
θ =( ) ( )
+ + + + ou ainda
cos a a b b c c
a b c . a b c1 2 1 2 1 2
12
12
12
22
22
22
θ =+ + +
+ + + +

81AULA 5 TÓPICO 2
Figura 6 – O ângulo entre os planos é o mesmo entre suas normais
ExErcício rEsolvido
1. Determine o ângulo entre os planos p1 e
p2 de equações 2x + 3y + 2z – 1 = 0 e x + 2y – 4z
= 0, respectivamente.
Solução:
Suas normais são: ®
1n = ( 2, 3, 2 ) e ®
2n = (1,
2, -4),
então, se q é o ângulo entre as normais,
cos n .n
n n
1 2
1 2
θ =
→ →
→ →
.
Þ
cos 2, 3, 2
2 2θ =
( ) −( )
+ + + + −
. , ,
. ( )
1 2 4
3 2 1 2 42 2 2 2 2 Þ
cos θ = 0 , ou seja, θπ
=2
. Assim, os planos p1 e
p2 são ortogonais.
2. Determine o ângulo entre os planos p1ð + - + =1:2x y 3z 1 0 e
p2ð + - + =2 : 4x 2y 6z 3 0 .
Solução:
As normais de p1 e p2 são ®
= -
1n (2, 1, 3) e ®
= -
2n (4, 2, 6) ,
respectivamente. Portanto, cos 2.4 1.2 (-3).(-6)
2 . 2θ =
+ +
+ + − + + −1 3 4 2 62 2 2 2 2( ) ( )= =
281
784,
ou seja, θ = =arc cos 1 0 o , o que significa que os planos são paralelos, ou seja, se uma
reta perpendicular aos planos p1 e p2 intercepta-os nos pontos 1A e 2A , então ¾¾®
1 2A A
representa a distância entre esses planos. Mas esse é um assunto para próxima aula.
at e n ç ã o !
A condição de paralelismo e perpendicularismo
de dois planos são as mesmas de seus respectivos
vetores normais, ou seja, considerando que
n ( a , b , c )1 1 1 1
→
= e n ( a , b , c )2 2 2 2
→
= , vetores
normais de p1 e p2 , respectivamente).
Se p1 // p2 Þaa b
cc
1
2
1
2
1
2
= =b
b) Se p1 ^ p2 :
Þ a a1 2 1 2 1 2⋅ + ⋅ + ⋅ =b b c c 0
c) Se, além da igualdade do item a, d d1 2= , p1 e
p2 são coincidentes.

82 Geomet r ia Ana l í t i ca Ve to r ia l
2.2 ÂNGULO ENTRE RETA E PLANO
Considere uma reta r com direção do vetor ®v e um plano p , sendo
®n um vetor
normal a p conforme mostra a figura 7.
Figura 7 - q é o ângulo entre a reta e o plano
O ângulo de reta r com plano p é o complemento do ângulo a que a reta forma
com a normal do plano. Tendo em vista que q + a = p2
, então cosa = sena . Assim,
se
® ®
® ®a =
v . n cos
v . n , então sen
v . n
v . n
θ =
→ →
→ → , 02
≤ ≤θπ .
ExErcício rEsolvido
Determine o ângulo que a reta r: --
x 12
= -y
1=
-z 31
forma com o plano
p : x + y – 5 = 0.
Solução:
A reta r tem direção do vetor ®v (-2, -1, 1) e
®n = (1, 1, 0) é um vetor de p . Assim,
sen v . n
v . n
θ =
→ →
→ → Þ sen q = + - + +2 2 2 2 2
(-2, -1, 1 ) (1, 1, 0 )
(-2) ( 1) 1 . 1 1 Þ
sen θ =3
2 Þ arc sen
32
θ = Þ q= p3
.
2.3 INTERSEÇÃO DE DOIS PLANOS
Sabemos que a intersecção de dois planos não paralelos é uma reta. Um ponto
pertence à reta intersecção se suas coordenadas satisfazem simultaneamente a equação
dos dois planos. Assim, a intersecção de dois planos π1 1 1 1 1a x b y c z d 0= + + + =
e π2 2 2 2 2a x b y c z d 0= + + + = é o conjunto de todos os pontos do tipo
(x, y, z ) em que
ì = +ïïïï = +íïï = +ïïî
1
1
1
x x at
y y bt
z z ct
t∈( ) , o que representa a solução do sistema
ì + + + =ïïíï + + + =ïî
1 1 1 1
2 2 2 2
a x b y c z d 0
a x b y c z d 0

83AULA 5 TÓPICO 2
ExErcício rEsolvido
1. Determine a intersecção dos planos p1 e p2 de equações - - + =2x 5y 7z 1 0
e + + =x-4y z 2 0 , respectivamente.
Solução
Vamos resolver o sistema ì - + =ïïíï - + + =ïî
2x-5y 7z 1 0
x 4y z 2 0Observe que o sistema é indeterminado, ou seja, possui infinitas soluções e
cada solução representa um ponto da reta interseção. Assim, tomando z = t com tÎ IR,
chegamos a:ì = -ïïíï - =-ïî
2x -5 y 7t 1 (I)
x 4y t-2 (II)
Multiplicando a equação (II) por (-2) e somando com a equação (I), chegamos a:
= +3y 9t 3 Þ = +y 1 3 t
Da equação (II) temos:
+ =- -x-4.(1 3t) t 2 ou = +x 2 11t
Assim, a interseção dos planos p1 e p2 é a reta de equação
ì = +ïïïï = +íïï =ïïî
x 2 11t
y 1 3t
z t
Logo, a reta interseção dos planos p1 e p2 tem direção ®v = (11, 3, 1) e contém
o ponto A( 2, 1, 0 ) . Observe que o ponto A( 2, 1, 0 ) satisfaz as duas equações
- - + =2x 5y 7z 1 0 e + + =x-4y z 2 0 .
Aprendemos nesta aula como encontrar a equação de um plano que satisfaz certas
condições geométricas e resolver problemas usando simultaneamente retas e planas no
espaço tridimensional através das técnicas estudadas.
Na próxima aula nos restringiremos ao espaço bidimensional para o estudo de
algumas curvas planas como circulo, elipse parábola e hipérbole que terá um papel
fundamental nas aulas subsequentes.

84 Geomet r ia Ana l í t i ca Ve to r ia l
Caro(a) aluno(a),
Após termos estudado as principais equações de reta e plano, vamos procurar,
nesta aula, utilizar nosso conhecimento sobre vetores e desenvolver fórmulas que
nos permitam calcular distâncias que envolvam pontos retas e planos no espaço.
Objetivo
• Calcular distâncias relacionadas a ponto reta e plano
AULA 6 Distâncias

85AULA 6 TÓPICO 1
TÓPICO 1 Distância envolvendo ponto e retaObjetivOs• Obter distâncias entre ponto e reta
• Obter distâncias entre retas paralelas e distâncias entre
retas reversas
Neste tópico abordaremos as demonstrações e aplicações de
algumas fórmulas que nos permitem calcular distâncias entre
ponto e reta e distância entre retas reversas.
1.1 DISTÂNCIA DE UM PONTO P A UMA RETA R
Dados um ponto P e uma reta r, a distância
do ponto P à reta é o menor comprimento do
segmento PQ onde Q é um ponto da reta r.
Esse menor comprimento é atingido quando o
vetor ¾¾®PQ é ortogonal ao vetor diretor da reta
r. Observe que, neste caso, considerando um
ponto R da reta r, os pontos P, Q e R formam
um triângulo retângulo em que PQ e RQ são os
catetos. Assim, se q é o ângulo entre RQ e RP ,
temos:
sen RP
θ =
→
→
PQ ou ¾¾® ¾¾®
= q PQ RP . sen
Tendo em vista que q£sen 1 , então ¾¾® ¾¾®
£ PQ RP , o que prova nossa
afirmação.
Vejamos agora como determinar a distância entre um ponto e uma reta no
espaço. Para tanto consideremos uma reta r que contém o ponto 1 1 1R ( x , y , z )
s a i b a m a i s !
Para saber mais sobre distâncias entre ponto
e reta, acesse o site disponível em http://
mundoeducacao.bol.uol.com.br/matematica/
distancia-entre-ponto-reta.htm.

86 Geomet r ia Ana l í t i ca Ve to r ia l
e direção do vetor ®
=v ( a, b, c ) e seja 0 0 0P ( x , y , z ) um ponto qualquer do
espaço. Observe na figura 1 que os vetores ®v e
®RP representam os lados de um
paralelogramo cuja altura é a distância do ponto P à reta r.
Figura 1 – PQ� ���
representa a distância entre o ponto P e a reta r
Tendo em vista que a área do paralelogramo
é dada pelo produto da base pela altura:
( I ) ®
=Área v . d
Vimos na aula 4 que a área do paralelogramo
pode ser representada pelo módulo do produto
vetorial dos vetores que representam os lados
desse polígono. Assim:
( II ) ® ®
=
Área v x RP
Comparando as expressões ( I ) e ( II ):
® ®® ® ®
®= Þ =
v x RP
v . d v x RP d v
ou
® ®
®=
v x RP d ( P, r )
v
ExErcícios rEsolvidos
1. Calcule a distância ente o ponto P ( 2, -3, 1 ) e a reta r de equação:
ì = +ïïïï =íïï =ïïî
x 2 t
y 1 - 2t
z 4
Solução:
Considere R ( 2, 1, 4 ) um ponto da reta r e ®
=v ( 1, -2, 0 ) sua direção.®
= =RP P - R ( 0, -4, -3 )
® ®= =
i j k
v x RP 1 -2 0 ( 6, 3, -4 )
0 -4 -3
s a i b a m a i s !
Relembre os conceito de paralelogramo, acessando
o site https://brasilescola.uol.com.br/matematica/
paralelogramos.htm

87AULA 6 TÓPICO 1
Assim,( )( )
= = = 6, 3, -4 61 61
d ( P, r ) 1, -2, 0 5 5
2. Calcule a área do triângulo cujos vértices são os pontos
A ( 1, 2, 3 ) , B ( -2, 0, 5 ) e C ( 2, 4, 1 ).
Solução:
A reta suporte do lado ___
BC tem direção do vetor ®
= =BC C - B ( 4, 4, -4 ) .
Assim, a equação da reta ___
BC que passa pelo ponto B e tem direção do vetor
®=BC ( 4, 4, -4 ) e
ì = +ïïïï =íïï =ïïî
x -2 4t
y 4t
z 5 - 4t
A altura h do triângulo ABC, relativa ao lado ___
BC , é a distância do ponto A
à reta ___
BC , ou seja:® ®
«
®= =
BC x BA h d ( A, BC )
BC
Considerando que ®
= =BA A - B ( 3, 2, -2 ) :
® ®= =
i j k
BC x BA 4 4 -4 ( 0, -4, -4 )
3 2 -2
Assim, ( )
( )«
= = = = 0, -4, -4 32 2
h d ( A, BC ) 3 48 4, 4, -4 )
A área do triângulo é a metade do produto da base pela altura. Considerando
a altura = 2
h 3
e a base ®
= BC 48 , temos:
Área = = =
2 2 48 . 4 3 .
3 3 2 22 2
Uma outra maneira de resolver esse problema é dividir por 2 o módulo do
produto vetorial dos vetores ®
AB e ®
AC , ou seja:® ®
D =
AB x AC Área
2, tendo em vista
que ® ®
AB x AC nos dá a área do paralelogramo
de lados ®
AB e ®
AC .
Sendo:®
= =AB B - A ( -3, -2, 2 ) , ®
= =AC C - A ( 1, 2, -2 ) , temos:
at e n ç ã o !
A distância entre dois pontos A e B corresponde ao
módulo do vetor AB →
, ou seja: d A B AB ( , )= →
.

88 Geomet r ia Ana l í t i ca Ve to r ia l
® ®= =
i j k
AB x AC -3 -2 2 ( 0, -4, -4 )
1 2 -2
Substituindo na fórmula
® ®
D =
AB x AC Área
2, chega-se a:
( )D
+= = = =
0, -4, -4 16 16 32Área 2 2
2 2 2
1.2 DISTÂNCIA ENTRE DUAS RETAS
Sejam P e Q pontos das retas r e s, respectivamente, e ®u e
®v os vetores
diretores de r e s, respectivamente.
Suponhamos, inicialmente, que as retas r e s sejam paralelas. Neste caso a
distância d entre elas é igual à distância de um ponto qualquer P de uma delas a
outra reta, isto é:
=d (r, s) d (P, s ) se ÎP r ou =d (r, s) d (P, r) se ÎP s
Observe que o cálculo da distância entre duas retas paralelas se reduz ao
cálculo de um ponto a uma reta.
ExErcício rEsolvido
Calcule a distância entre as retas
ì = +ïïïï = +íïï =ïïî
x 3 2t
r y 1 3t
z 4- t
e
ì = +ïïïï = +íïï =- -ïïî
x 1 4t
s y 2 6t
z 1 2t
Solução:
As retas são paralelas, pois um vetor diretor de r é ®= -u (2, 3, 1) e um vetor
diretor de s é v
= −( )4 6 2, , . Assim, ® ®=v 2u .
Calculemos a distância entre r e s por =d (r, s) d (P, s ) .
Um ponto de r é P ( 3, 1, 4 ) e s passa por Q ( 1, 2,- 1 ) e tem direção do
vetor v
= −( )4 6 2, , . Assim:
® ®
®=
v x QP d ( P,s )
v , como mostra a figura 2.
Tendo em vista que ®
= - = -QP P Q ( 2, 1, -5) , temos:
( ) ( )( )
= 4, 6, -2 x -2, 1, -5
d ( P,s ) 4, 6, -2
=( )
( ) -28, 16, 16
4, 6, -2
=36
2 14
ou =9 14
d ( P,s ) 7

89AULA 6 TÓPICO 1
Figura 2 – Distância do ponto P à reta s
Suponhamos agora que as retas r e s sejam reversas. Seja r definida por um
ponto 1 1 1 1Q (x , y , z ) e pelo vetor ( )
®=1 1 1 1v a , b , c e a reta s definida pelo ponto
2 2 2 2Q (x , y , z ) e pelo vetor diretor ( )®
=2 2 2 2v a , b , c . Observe na figura 3 que
os vetores ®
1v , ®
2v e ¾¾®
1 2Q Q determinam um paralelepípedo cuja base é definida
pelos vetores ®
1v , ®
2v e a altura corresponde à
distância d entre as retas r e s ou entre os planos
paralelos que as contêm.
Figura 3 - d representa a distância entre as retas reversas r e s
O volume V do paralelepípedo da figura 3 é dado por:
I ) =V (Área da abase) . ( altura )
II ) ® ® ¾¾®
=
1 2 1 2V v , v , Q Q (veja na aula 4)
Tendo em vista que ® ®
=
1 2(Área da abase) . ( altura ) v x v . d e comparando
I e II, chega-se a: ® ®
=
1 2 v x v . d® ® ¾¾®
1 2 1 2 v , v , Q Q ou
® ® ¾¾®
® ®=
1 2 1 2
1 2
v , v , Q Qd
v x v
ExErcício rEsolvido
Calcule a distância entre as retas
ì =ïïïï =íïï =ïïî
x 1-3t
r y 3-6t
z 3-4t
e
ì =- +ïïïï =íïï =- +ïïî
x 2 5t
s y 2 - t
z 1 3t
v o c ê s a b i a?
Duas retas são ditas reversas quando uma não tem
interseção com a outra e elas não são paralelas.
Neste caso elas estão em planos diferentes.
Podemos pensar em uma reta r desenhada no
chão de uma casa e uma reta s, não paralela a r,
desenhada no teto dessa mesma casa.

90 Geomet r ia Ana l í t i ca Ve to r ia l
Solução:
A reta r passa pelo ponto 1Q ( 1, 3, 3 )
e tem direção do vetor ®= - - -1v ( 3, 6, 4)
, e a reta s passa pelo ponto 2Q ( -2, 2, -1 ) e
tem direção do vetor ®
= -2v ( 5, 1, 3 ) . Assim, ¾¾®
= - = -1 2 2 1Q Q Q Q ( 3, -1, -4) .
( )® ®
= = -
1 2
i j k
v x v -3 -6 -4 22, 11, 33
5 -1 3
(I) ( )® ®
= = -
1 2
i j k
v x v -3 -6 -4 22, 11, 33
5 -1 3
= - + + = =2 2 2( 22) 11 33 1694 11 14 (II)
® ® ¾¾®
= = =
1 2 1 2
-3 -6 -4
v , v , Q Q 5 -1 3 -55 55
-3 -1 -4
( III )
Substituindo (I), ( II ), e ( III ) na fórmula
® ® ¾¾®
® ®=
1 2 1 2
1 2
v , v , Q Qd (r,s)
v x v, temos:
= = =55 5 5 14
d (r,s)1411 1 4 14
Este problema também pode ser resolvido calculando-se a distância de um
ponto qualquer de uma das retas ao plano que contém a outra reta, tendo em vista
que os planos que contêm cada uma delas são paralelos.
No caso apresentado no exercício anterior, estaríamos calculando a distância
entre ponto e reta, assunto do nosso próximo tópico.
v o c ê s a b i a?
Se calcularmos a distância entre duas retas
concorrentes, o resultado será zero, pois a
menor distância entre duas retas concorrentes é
calculada no ponto de concorrência.

91AULA 6 TÓPICO 2
TÓPICO 2 Distância envolvendo ponto e planoObjetivOs• Obter distâncias entre ponto e plano
• Obter distâncias entre retas e planos
Neste tópico focaremos nosso estudo em distâncias relacionadas a
ponto e planos e retas e planos quando os mesmos são paralelos.
2. 1 DISTÂNCIA DE UM PONTO P A UM PLANO
Considere um plano p , um ponto P fora desse plano e um vetor ortogonal
a esse plano (vetor normal ao plano). A distância entre o ponto P e o plano p é
a menor das distâncias entre P e Q, onde Q é
um ponto desse plano. Assim como no caso da
distância de um ponto a uma reta (tópico 1), essa
menor distância ocorre quando o vetor ¾¾®QP é
ortogonal ao plano, ou seja, quando o vetor ¾¾®QP
é paralelo a normal do plano p .
Assim, sejam 1 1 1 P (x , y , z ) , A (x, y, z)
e ®=n ( a, b, c ) um ponto conhecido, um ponto
qualquer e a normal do plano, respectivamente,
a distância pd (P, ) entre o ponto P e o plano p é
representada pelo módulo da projeção ortogonal
de ®
AP na direção de ®n , como mostra a figura 4.
v o c ê s a b i a?
A geodésica é uma curva de comprimento mínimo
que une dois pontos. No espaço euclidiano
(geometria plana), essa curva é um segmento de
reta, mas, na geometria riemaniana, a curva de
menor distância entre dois pontos pode não ser
uma reta.

92 Geomet r ia Ana l í t i ca Ve to r ia l
Figura 4 - PQ®
representa a distância do ponto ao plano
Assim, temos:
®
®p =
nd (P, ) proj AP =
® ®
®
AP . n
n ,
com ®
= - =AP P A - - -1 1 1( x x, y y, z z ) .
Substituindo ®
= - - -11 1 1AP ( x x, y y, z z ) e
®=n ( a, b, c ) na equação
acima, temos:- -
p = 1 1 1 (x -x, y y, z z ). ( a, b, c ) d (P, )
(a, b, c )
+ - + -p =
+ +1 1 1
2 2 2
a.( x -x ) b ( y y) c ( z z ) d (P, )
a b c
+ + - - -p =
+ +1 1 1
2 2 2
ax by cz ax by cz d (P, )
a b c
Mas - - =ax by cz d , assim + + +
p =+ +
1 1 1
2 2 2
ax by cz d d (P, )
a b c.
Observe que o numerador é o módulo do número que se obtém substituindo
x, y e z, na equação do plano, por 1 1 1x , y , e z e o denominador é o módulo do
vetor ®n (normal do plano).
ExErcícios rEsolvidos
1 Calcule a distância do ponto P ( -4, -2, 5 ) ao plano de equação
- + + =2 x y 2 z 8 0 .
Solução:
Neste caso temos:
a) As coordenadas do ponto P são: =-1x 4 , =-1y 2 e =1z 5
b) As componentes da normal ®n são: =a 2 , =-b 1 e =c 2
Substituindo esses números na equação + + +
p =+ +
1 1 1
2 2 2
ax by cz d d (P, )
a b c,
temos:

93AULA 6 TÓPICO 2
+ + +p =
+ - +2 2 2
2.(-4) (-1).(-2) 2.5 8 d (P, )
2 ( 1) 2
+ + +p = =
+ + -8 2 10 8 12
d (P, )3 4 1 4
p =d (P, ) 4
2. Calcule a distância da origem ( 0, 0, 0)
ao plano de equação + - + =2x 3y z 5 0 .
Solução:
De modo semelhante ao exemplo anterior, temos:+ + +
p =+ + -2 2 2
a.0 b.0 c.0 d d (0, )
2 3 ( 1)
p = = 5 5
d (0, )14 14
Observe que, se o ponto P for a origem ( 0, 0, 0) , a fórmula da distancia se
resume a p =+ +2 2 2
d d (P, )
a b c.
2.2 DISTÂNCIA DE UMA RETA A UM PLANO
A distância entre uma reta e um plano somente é definida quando a reta é
paralela ao plano. Assim, se uma reta é paralela a um plano, a distância d da reta
ao plano corresponde à distância de um ponto dessa reta ao plano. Dessa forma:
p = pd (r, ) d(P, ) quando ÎP r ( cf. figura 5 )
Figura 5 – A distância da reta r ao plano é a distância de P ao plano
ExErcício rEsolvido
Calcule a distância da reta
ì = +ïïïï =íïï = +ïïî
x 1 2t
r y t
z -2 4t
e o plano p + = : 3x-2y-z 3 0
Solução:
Observe que a reta r é paralela ao
plano dado, já que o vetor diretor da reta
at e n ç ã o !
Qualquer uma das alturas de um tetraedro pode
ser obtida calculando-se a distância de um dos
seus vértices ao plano da face oposta.
v o c ê s a b i a?
Se calcularmos a distância entre uma reta e um
plano não paralelos, o resultado será zero, pois a
menor distância entre uma reta e um plano não
paralelos é calculada no ponto de interseção.

94 Geomet r ia Ana l í t i ca Ve to r ia l
®=v ( 2, 1, 4 ) é ortogonal à normal
®= - -n ( 3, 2, 1 ) , ou seja,
® ®=n . v 0 .
Um ponto da reta é P (1, 0, -2 ) . Assim, calculando a distância do ponto P
ao plano p , temos:+ + +
p =+ - + -2 2 2
3 . (1) (-2 ).(0) (-1).(-2) 3 d (P, )
3 ( 2) ( 1)
+ + +p =
+ + 3 0 2 3
d (P, ) 9 4 1
, p = =8 4 14
d (P, )714
Observe que, se tomarmos um outro ponto da reta, o resultado será o mesmo.
Veja:
Substituindo =t 1 , na equação da reta, encontramos um
outro ponto 'P ( 3, 1, 2 ) que, quando substituído na equação
d P 3.(3) ( ( 3
32( ’, )
). ) ( ).( )
( ) ( )π =
+ − + − +
+ − + −
2 1 1 2
2 12 2+ - + - +
p =+ - + -
1 1 1
2 2 2
3.x ( 2)y ( 1)z 3 d (P, )
3 ( 2) ( 1), nos dá:
d P 3.(3) ( ( 3
32( ’, )
). ) ( ).( )
( ) ( )π =
+ − + − +
+ − + −
2 1 1 2
2 12 2
d P 9 2 2 3
9( ’, )π =
− − ++ +4 1
= =8 4. 14
7 14
2.3 DISTÂNCIA ENTRE DOIS PLANOS
A distância entre dois planos paralelos p1 e p2 é igual à distância de um
ponto qualquer de um dos planos ao outro. Dessa forma a distância entre dois
planos se reduz à distância de um ponto a um plano. Assim:
p p = p1 2 1 2d ( , ) d(P , ) quando Îp1 1P ou
p p = p1 2 2 1d ( , ) d(P , ) quando Îp2 2P ( cf. figura 6 )
Figura 6 – A distância entre dois planos é definida apenas para planos paralelos
ExErcícios rEsolvidos
1. Calcule a distância entre os planos:
p - + + =1 : 2x y 3z 1 0
p - + - =2 : 6 x 3y 9z 5 0

95AULA 6 TÓPICO 2
Solução:
Veja que os planos p1 e p2 são paralelos,
pois ® ®
=2 1n 3.n .
Para escolher um ponto de um dos
planos (digamos do plano p1), atribuímos dois
valores a duas variáveis quaisquer na equação
p - + + =1 : 2x y 3z 1 0 e encontramos a
terceira coordenada.
Tomando, por exemplo, =x 2 e =-z 3
e substituindo na equação do plano p1 ,
encontramos =y -4. Assim o ponto - -1P ( 2, 4, 3 ) pertence a p1 .
Calculando p p = p1 2 1 2d ( , ) d(P , ) , temos:
+ + -p =
+ - +1 2 2 2 2
6 . (2) (-3 ).(-4) 9(-3) 5 d (P , )
6 ( 3) 9
+ - -p =
+ +1 2
12 12 27 5 d (P , )
36 9 81
+ - -p =
+ +1 2
12 12 27 5 d (P , )
36 9 81
p = =1 2
8 8d (P , )
126 3 14
Nesse tópico estudamos e conhecemos as fórmulas e conceitos necessários
para o cálculo das distâncias entre ponto e reta, reta e plano. Em nossa próxima
aula, estudaremos as curvas planas.
s a i b a m a i s !
Leia o texto Retas e planos, da Universidade
Federal de Minas Gerais, e obtenha mais
informações sobre este assunto no site em http://
www.mat.ufmg.br/~rodney/notas_de_aula/
retas_e_planos.pdf.

96 Geomet r ia Ana l í t i ca Ve to r ia l
Caro(a) aluno(a),
Todas as equações que estudamos nas aulas anteriores envolvem termos do
primeiro grau nas variáveis x, y e z. Nesta aula, estudaremos as curvas planas,
representadas por equações do segundo grau apenas nas variáveis x e y,
denominadas: círculo, elipse, parábola e hipérbole.
Objetivo
• Identificar, interpretar e analisar as cônicas através de suas equações
AULA 7 Cônicas

97AULA 7 TÓPICO 1
TÓPICO 1 Elipse e círculo
ObjetivOs• Descrever a elipse e o círculo como lugar geométrico
• Esboçar o gráfico do círculo e da elipse a partir de suas
equações
• Identificar os parâmetros a, b e c, da elipse, e a sua
excentricidade
• Determinar as coordenadas dos focos e dos vértices de
uma elipse a partir de sua equação
Neste tópico estudaremos as
elipses e os círculos, através
de suas equações, quando
possuírem centro na origem do plano cartesiano.
1.1 ELIPSE
Definição
Elipse é o lugar geométrico de todos
os pontos p ( x, y ) do plano cuja soma das
distâncias a dois pontos fixos 1F e 2F do mesmo
plano é constante. Assim, se 2c for a distância
entre 1F e 1F e considerando P um ponto
qualquer do plano, a desigualdade triangular nos
garante que ¾¾® ¾¾® ¾¾®
£ +1 2 1 2 F F F P F P (veja figura
1). Dessa forma a equação ¾¾® ¾¾®
+ =1 2 F P F P 2a é
a equação de uma elipse com focos nos pontos
1F e 1F se, e somente se, >a c .
v o c ê s a b i a?
Por volta do ano 200 a.C., o matemático grego
Apolônio deixou registrado o primeiro estudo a
respeito das propriedades da elipse, hipérbole e
parábola em seu trabalho chamado As cônicas.
Apolônio chamou de cônicas as curvas que
podem ser obtidas quando um plano intercepta
um cone reto duplo. Apolônio estudou as cônicas
apenas pelo simples prazer de pesquisa. Durante
aproximadamente 18 séculos, não houve estudos
detalhado sobre aplicações das cônicas no mundo
físico. Porém, pesquisas de físicos e astrônomos
foram mostrando aplicações do estudo de
Apolônio no mundo em que vivemos.

98 Geomet r ia Ana l í t i ca Ve to r ia l
Figura 1- Elipse de focos F1 e F2
1F e 2F são os focos®
=1 2 F F 2c é a distância focal
=1 2 A A 2a é o eixo maior
=1 2 B B 2b é o eixo menor
1 2 1 2, A ,A , B e B são os vértices
=c
e a
é a excentricidade ( )< < 0 e 1
= +2 2 2a b c (triângulo 1F 0B )®
1 F P e ®
2 F P são os raios focais.
1.2 EQUAÇÕES DA ELIPSE COM EIXOS
CONTIDOS NOS EIXOS COORDENADOS E O
CENTRO NA ORIGEM
Determinaremos uma equação para elipse
no caso particular em que os eixos estão contidos
nos eixos coordenados.
Neste caso temos duas possibilidades:
a) O eixo maior está contido no eixo 0x
(cf. figura 2)
Figura 2 – Elipse com focos no eixo 0x
s a i b a m a i s !
Conheça mais sobre as Leis de Kepler acessando
o site disponível em https://www.sofisica.com.
br/conteudos/Mecanica/GravitacaoUniversal/
lk.php.
s a i b a m a i s !
Acesse o site disponível em http://www.
rc.unesp.br/tmelo/aula3.pdf e saiba mais sobre
as figuras geométricas que representam um lugar
geométrico.
v o c ê s a b i a?
A elipse está associada à órbita dos planetas em
torno do Sol. Essa figura se relaciona com as três
leis da Astronomia, as leis dos movimentos dos
planetas, que revolucionaram o pensamento
científico da época e permitiram, inclusive,
o desenvolvimento da Teoria da Gravitação
Universal por Izaac Newton. Essas leis foram
descobertas pelo matemático, físico e astrônomo
alemão Johannes Kepler (1571-1727).

99AULA 7 TÓPICO 1
Dessa forma -1F ( c, 0) e 2F ( c, 0) , e a equação ® ®
+ =1 2 F P F P 2a
pode ser escrita como + + + - + =2 2 2 2(x c) y (x c) y 2a ou
+ + = - - +2 2 2 2(x c) y 2a (x c) y .
Elevando ao quadrado os dois membros da equação, temos:
+ + = - - + + - +2 2 2 2 2 2 2(x c) y 4a 4a (x c) y (x c) y .
Simplificando, chegamos a:
- =- - +2 2 24 cx 4a 4 a (x c) y .
Dividindo os dois membros da equação por 4, elevando ao quadrado
novamente e considerando que = +2 2 2a b c ou = -2 2b a c , chegamos a
+ =2 2 2 2 2 2b x a y a b ou + =22
2 2
yx 1
a b, que representa a equação da elipse.
Examinando esta equação, concluímos que:
i) A elipse de focos nos pontos -( c , 0 ) , ( c , 0 ) é simétrica em relação
aos eixos 0x e 0y , ou seja, se (x , y) pertence à elipse, então os pontos (-x , y) ,
(x , -y) e (-x ,- y) pertencem também à elipse;
ii) Os eixos 0x e 0y interceptam a elipse nos pontos 1A ( -a , 0 ) , 2A ( a , 0 ) ,
1B ( 0 , -b ) e 2B ( 0 , b ) , respectivamente, que são os vértices da elipse;
iii) Se = =1 2F F C , então a elipse reduz-se ao círculo de centro no ponto C e
raio a. Além disso, a excentricidade =e 0 .
b) O eixo maior está contido no eixo 0y .
Neste caso os focos 1F e 2F pertencem ao eixo 0y . Assim, -1F (0, c) e
2F ( 0, c) .
De modo análogo ao anterior, substituindo 1F e 2F em
® ®
+ =1 2 F P F P 2a , chegamos a + =22
2 2
yx 1
b a.
Note que > = +2 2 2a b, pois a b c .
1.3 CÍRCULO
Definição
O círculo (ou circunferência) de raio r e
centro c ( a, b ) é o lugar geométrico dos pontos
p ( x, y ) do plano que satisfazem a equação ®
= p c r , ou seja:
( ) = x - a, y - b r
g u a r d e b e m i s s o !
Na elipse, a equação xa
yb
2
2
2
2+ se bca
= = 0 ,
então c = 0 . Assim a b= , e a equação xa
yb
2
2
2
2 1+ = fica xa
ya
2
2
2
2 1+ = ou
x y a2 2 2+ = , que representa a equação de um
círculo de raio a.

100 Geomet r ia Ana l í t i ca Ve to r ia l
ou
( ) ( )+ =22 2 x - a y - b r .
Se o centro é o ponto ( ) 0, 0 , a equação fica + =2 2 2x y r .
Se o centro do círculo é o ponto C(h, k), por meio de uma translação de eixos
(tema abordado na aula 8) chegamos à equação - + - =2 2 2(x h) (y k) r .
ExErcícios rEsolvidos
1. Encontre os centros e o raio dos seguintes círculos:
a) + + =2 2x y 6x - 8y 0
b) + =2 2x y - 6y 0
Solução:
a) ( ) ( )+ + = Þ + + + + =2 2 2 2x y 6x - 8y 0 x 6x 9 y - 8y 16 25( ) ( )+ + = Þ + + + + =2 2 2 2x y 6x - 8y 0 x 6x 9 y - 8y 16 25
( ) ( )+ + = Þ + + + + =2 2 2 2x y 6x - 8y 0 x 6x 9 y - 8y 16 25
Fatorando os trinômios, temos:
+ + =2 2 2( x 3 ) ( y - 4 ) 5 .
Portanto o centro é o ponto ( -3, 4 ) e raio =r 5 .
b) + = Þ + + =2 2 2 2x y - 6y 0 x ( y - 6x 9 ) 9
A equação acima fatorada tem a forma:
+ =2 2 2( x - 0 ) ( y - 3 ) 3 , que representa a equação de um círculo de
centro no ponto ( 0, 3 ) e raio =r 3 .
2. Seja a elipse de focos 1 F ( 6, 0 ) e 2 F ( -6, 0 ) e eixo menor de comprimento
10, obtenha a equação da elipse.
Solução:
A elipse tem equação + =22
2 2
yx 1
a b.
= Þ =2 b 10 b 5®
= Þ =1 22 c F F c 12
Tendo em vista que =2 2 2b c - a ou = +2 2 2 a b c , temos
= + Þ =2 2 2 a 5 12 a -13 ou = +a 13 ( -13 não serve, pois >a 0 ).
Então fica:
+ =22
2 2
yx 1
13 5 ou + =
22 yx 1
169 25
3. Seja a elipse com eixo maior de extremidade 1A ( 0, 10 ) e 2A ( 0, -10 )
e eixo menor de extremidade 1B ( 8, 0 ) e 2B (- 8, 0 ) , determine a equação dessa
elipse.

101AULA 7 TÓPICO 1
Solução:
1 2A A é o eixo y. Assim a elipse tem equação + =22
2 2
yx 1
b a®
= Þ = Þ =1 22a A A 2a 20 a 10®
= Þ = Þ =1 22b B B 2b 16 b 8
Então a equação da elipse é + =22 yx
164 100
.
Neste tópico focamos nosso estudo nas elipses com centro na origem do
plano cartesiano e eixos (eixo maior e eixo menor) paralelos aos eixos coordenados.
Na aula 8, veremos que podemos obter, por meio de uma translação ou rotação de
eixos, a equação de uma elipse com centro fora da origem do plano cartesiano e
eixos oblíquos aos eixos coordenados, onde suas equações se apresentam de uma
forma mais completa.

102 Geomet r ia Ana l í t i ca Ve to r ia l
TÓPICO 2 Hipérbole e parábola
ObjetivOs
• Descrever a hipérbole e a parábola como lugar geomé-
trico
• Esboçar o gráfico da hipérbole e parábola a partir de
suas equações
• Determinar as coordenadas dos focos e dos vértices de
uma hipérbole a partir de sua equação
Neste tópico estudaremos as parábolas e hipérboles, através
de suas equações nas formas mais simples, ou seja, quando
possuírem centro na origem do plano cartesiano. A forma
completa da equação do segundo grau representa uma cônica com centro fora da
origem do plano cartesiano e cujo eixo de simetria não é paralelo a nenhum dos
eixos coordenados, mas esse assunto deixaremos para próxima aula.
2.1 HIPÉRBOLE
Chama-se hipérbole com focos 1F e 2F o lugar geométrico dos pontos P do
plano, tais que ¾¾® ¾¾®
-
1 2 F P F P é uma constante (veja figura 3).
No triângulo 1 2F PF (figura 3), a desigualdade triangular nos permite concluir
que ¾¾® ¾¾® ¾¾®
+ ³
2 1 2 1 F P F F F P ou ¾¾® ¾¾® ¾¾®
- £
1 2 1 2 F P F P F F .
Fazendo ¾¾®
=1 2 F F 2c , então ¾¾® ¾¾®
- =±
1 2 F P F P 2a é a equação da hipérbole
com focos 1F e 2F se, e somente se, < <0 a c .

103AULA 7 TÓPICO 2
Figura 3 – Hipérbole de focos F1 e F2
Os elementos da hipérbole são:
1F e 2F são os focos¾¾®
1 2 F F é a distância focal
1 2 1 2, A ,A , B e B são os vértices
=1 2A A 2a é o eixo real
=1 2B B 2b é o eixo imaginário se, e somente se, = +2 2 2c a b
O ponto médio de 1 2F F é o centro da hipérbole
=c
ea
é a excentricidade > \ >( c a e 1 )
¾¾® ¾¾®
1 2 F P e F P são os raios focais.
2.2 EQUAÇÕES DA HIPÉRBOLE COM EIXOS CONTIDOS NOS EIXOS
COORDENADOS E CENTRO NA ORIGEM
Temos dois casos a considerar:
a) Os focos estão sobre o eixo 0x (cf. figura 3)
Neste caso -1F ( c , 0 ) , 2F ( c , 0 ) e P( x , y ) um ponto qualquer do plano.
A equação ¾¾® ¾¾®
- =±
1 2 F P F P 2a nos dá + + - - + =±2 2 2 2(x c) y (x c) y 2a .
Efetuando os cálculos semelhantes aos da dedução da equação da elipse e
considerando que = +2 2 2c a b , chegamos à equação - =22
2 2
yx 1
a b.
Examinando esta equação, concluímos que:
i) A hipérbole de focos nos pontos -( c , 0 ) , ( c , 0 ) é simétrica em relação
aos eixos 0x e 0y , ou seja, se (x , y) pertence à hipérbole, então os pontos (-x , y) ,
(x , -y) e (-x ,- y) pertencem também à hipérbole;
ii) O eixo 0x intercepta a hipérbole nos pontos 1A ( -a , 0 ) e 2A ( a , 0 ) ,
que são os vértices da hipérbole. O eixo 0y não intercepta a cônica, pois a equação
nos diz que ³2 2x a .
at e n ç ã o !
A hipérbole, ao rodar em torno de um dos eixos
de simetria, gera uma superfície que tem o nome
de hiperboloide de revolução.
Acesse o site https://www.youtube.com/
watch?v=IpHU_hxlvKE e obtenha mais
informações sobre as principais superfícies de
revolução.

104 Geomet r ia Ana l í t i ca Ve to r ia l
O eixo maior está contido no eixo 0y
Neste caso, os focos 1F e 2F pertencem ao eixo 0y . Assim -1F (0, c) e
2F ( 0, c) .
De modo análogo ao item a, substituindo 1F e 2F em
1 2 F P F P 2a® ®
- =± , chegamos a - =2 2
2 2
y x 1
a b0.
2.3 ASSÍNTOTAS DA HIPÉRBOLE
Considere um retângulo com centro na origem do plano cartesiano e lados
de comprimentos 2a e 2b. As retas que contêm as diagonais desse retângulo são
chamadas de assìntotas da hipérbole (veja figura 4).
Figura 4 – Representação das assíntotas da hipérbole
À medida que x cresce, a hipérbole se
aproxima de suas assíntotas, ou seja, os ramos
da hipérbole se aproximam dessas retas, mas sem tangenciá-las ou interceptá-las.
As assíntotas são retas representadas pelas equações =b
y xa
e =-b
y xa
.
ExErcícios rEsolvidos
1. Seja a hipérbole de focos 1F (-5, 0 ) e
2F ( 5, 0 ) e eixo real de
comprimento 8,
a) Determine a equação dessa hipérbole;
b) Esboce a hipérbole e obtenha os extremos dos eixos real e imaginário.
Solução:
A hipérbole tem equação do tipo - =22
2 2
yx 1
a b, pois os focos estão
contidos no eixo 0x .
Assim,¾¾®
= =1 2 2c F F 10 Þ =c 5
=2a 8 Þ =a 4
Substituindo =c 5 e =a 4 em = +2 2 2c a b , encontramos =-b 3 (não
serve, pois >b 0 ) ou =b 3 .
g u a r d e b e m i s s o !
A excentricidade da hipérbole está diretamente
relacionada com a sua abertura, ou seja, quanto
maior a excentricidade, mais abertos estarão os
ramos da hipérbole.

105AULA 7 TÓPICO 2
Logo, a hipérbole tem equação - =22 yx
116 9
.
Figura 5 – O eixo real mede 8 e o imaginário mede 6
Observe na figura que o eixo real tem extremos 1A (-4, 0) e 2A (4, 0) e o eixo
imaginário tem extremos 1B (-3, 0) e 2B (3, 0) .
2. Seja a hipérbole de equação - - =2 29x 7y 63 0 , determine:
a) a medida dos semieixos.
b) os vértices
c) os focos
d) a excentricidade
e) as equações das assíntotas
Solução:
Inicialmente vamos colocar a equação na forma - =22
2 2
yx 1
a b
ou - =2 2
2 2
y x 1
a b. Para isso dividimos todos os termos da equação
- - =2 29x 7y 63 0 por 63.
- - =22 7y9x 63
063 63 63
ou - =22 yx
17 9
, que representa a equação de uma
hipérbole com eixo real sobre o eixo x e centro na origem.
a) cálculo das medidas dos semieixos
=2a 7 \ =a 7
=2b 9 \ =b 3
b) vértices
1A ( -a , 0 ) , 2A ( a , 0 ) , 1B ( 0 , -b ) e 2B ( 0 , b ) ou 1A ( - 7 , 0 ) ,
2A ( 7, 0 ) , 1B ( 0 , -3 ) e 2B ( 0 , 3 )
c) focos
Para determinar os focos, precisamos do valor de c:
= +2 2 2c a b Þ = +2c 7 9 ou =c 4

106 Geomet r ia Ana l í t i ca Ve to r ia l
Logo, os focos são 1F (-4, 0 ) e 2F ( 4, 0 )
d) excentricidade
= =c 4
ea 7
e) equação da assíntota
=b
y xa
e =-b
y xa
\ =±3
y x7
ou ± - =3x 7y 0
2.4 PARÁBOLA
Seja uma reta r e F um ponto não situado sobre r, ambos no mesmo plano.
Chama-se parábola com diretriz r e foco F o lugar geométrico dos pontos P
equidistantes de r e F (veja figura 6). Assim, um ponto P pertence à parábola se, e
somente se,¾¾® ¾¾®
= PF PD .
Figura 6 – Parábola de foco F e vértice V
Os elementos da parábola são:
F é o foco;
D é a diretriz (reta fixa);¾¾®DV é o eixo de simetria;
V é o vértice (ponto médio de FV , FV / / r ).
2.5 EQUAÇÕES DA PARÁBOLA COM FOCO NO EIXO COORDENADO
Determinaremos uma equação no caso particular em que o eixo da parábola
está contido no eixo coordenado.Temos, então, duas possibilidades:
a) O eixo de simetria da parábola está contido no eixo 0x e o vértice é o
ponto V(0, 0), como mostra a figura 7.
g u a r d e b e m i s s o !
A parábola, ao rodar em torno do seu eixo de
simetria, gera uma superfície parabólica ou
paraboloide.

107AULA 7 TÓPICO 2
Figura 7 – Parábola de vértice na origem e foco no eixo 0x
Neste caso, F( a, 0 ) , P(x, y) e -D( a, y ) (figura 5). Da equação ¾¾® ¾¾®
= FP DP ,
temos:
- + - = + + -2 2 2 2(x a) (y 0) (x a) (y y)
- + + = + +2 2 2 2 2x 2ax a y x 2ax a
Reduzindo os termos semelhantes, chegamos à equação:
=2y 4ax
Examinando esta equação, concluímos que:
i) Se o foco está à direita da diretriz, então >a 0 e, portanto, ³x 0 . Dessa
forma a parábola está situada à direita do eixo y;
ii) Se o foco está à esquerda da diretriz, então <a 0 e, portanto, £x 0 .
Dessa forma a parábola está situada à esquerda do eixo y;
iii) O eixo x corta a parábola em seu vértice C(0, 0).
b) O eixo de simetria da parábola está contido no eixo 0y e o vértice é o
ponto V(0, 0), como mostra a figura 8.
Figura 8 – Parábola com vértice na origem e foco no eixo 0y
Neste caso F( 0, a ) , P(x, y) e D( x, -a ) (figura 8). Da equação ¾¾® ¾¾®
= FP DP ,
temos - + + = - + -2 2 2 2(x x) (y a (x 0) (y a) .
Simplificando a equação, chegamos a =2x 4ay .

108 Geomet r ia Ana l í t i ca Ve to r ia l
ExErcícios rEsolvidos
1. Determine o foco e a equação da diretriz das parábolas =2x 8y e
=-2y 2x .
Solução:
a) =2x 8y
A equação é da forma =2x 4ay . Assim =4a 8 ou =a 2 , portanto se F(0, a) ,
então F(0, 2)
diretriz: =-x 2
b) =-2y 4x
A equação é da forma =2y 4ax . Assim =4a -4 ou =a -1 , portanto se
F(a, 0) , então F(-1, 0) .
diretriz: =x 1
Observe que a equação da diretriz da
parábola com vértice na origem é do tipo =-x a
ou =-y a com eixo de simetria no eixo 0x e 0y,
respectivamente.
2. Determine a equação de cada uma das
parábolas.
a) Vértice V(0, 0) e foco F(2, 0)
b) Vértice V(0, 0) e diretriz =y 3
c) Vértice V(0, 0) , passa pelo ponto P(-2, 5) e concavidade voltada para
cima.
Solução:
a) A equação, por ter foco no eixo 0x, é do tipo =2y 4ax
Sendo =a 2 , a equação =2y 4ax fica =2y 8x .
b) A equação é do tipo =2x 4ay .
Se =-a 3 , então a equação =2x 4ay fica =2x -12y .
c) A concavidade é voltada para cima, assim a equação é do tipo =2x 4ay .
O ponto P(-2, 5) pertence à cônica. Dessa forma, substituindo =-x 2 e
=y 5 na equação =2x 4ay , temos - =2( 2) 4a(5) . Resolvendo esta última equação,
chegamos a =1
a5
. Portanto a equação desejada é æ ö÷ç= ÷ç ÷çè ø
2 1x 4 y
5 ou - =25x 4y 0 .
s a i b a m a i s !
Para aprender um pouco mais sobre as cônicas
que estudamos nesta aula, consulte o site
disponível em https://www.youtube.com/
watch?v=TSQI49vA35g.

109AULA 8
AULA 8 Transformação de coordenadas
Caro(a) aluno(a),
À medida que estudamos as propriedades e configurações geométricas das
curvas, suas equações se tornam mais complexas e menos fáceis de serem
analisadas. Assim, se faz cada vez mais necessária, em alguns casos, a utilização
de novos mecanismos que tornem menos difícil o estudo dessas curvas. Pensando
assim, introduziremos a noção de transformação de coordenadas, que consiste
em mecanismos utilizados na simplificação de equações de algumas curvas, sem,
no entanto, modificar suas características geométricas.
Objetivo
• Utilizar de forma correta as equações de rotação e translação de eixos para simplificar equações de curvas

110 Geomet r ia Ana l í t i ca Ve to r ia l
Uma translação é um
deslocamento de figuras do
plano, nas direções horizontal
e/ ou vertical, que tem a finalidade de simplificar
suas equações. Obviamente esse deslocamento
não mudará a estrutura geométrica de uma
curva, e sim da equação, tornando-a mais simples
de ser manipulada. Por exemplo: as equações
+ =2 2x y 9 e + - - - =2 2x y 4x 2y 4 0 ,
embora tenham aspectos distintos, representam uma mesma curva, que consiste
numa circunferência de raio 3. É evidente que ambas têm as mesmas propriedades
geométricas e é mais interessante trabalhar com a primeira equação pela sua
simplicidade.
1.1 EQUAÇÕES DE TRANSLAÇÃO
Considere dois sistemas de coordenadas x 0 y e x 0 y , de modo que os
eixos 0 x e 0 y tenham mesma direção e sentido de 0x e 0y , respectivamente
(ver figura 1).
TÓPICO 1 Translação de eixos de coordenadasObjetivOs
• Simplificar equação de segundo grau usando translação de
eixos coordenados
• Usar a translação de eixos para construção de gráficos de
curvas
at e n ç ã o !
O processo de translação consiste em definir um
novo sistema cartesiano mudando a origem e
conservando as direções e os sentidos dos eixos
coordenados.

111AULA 8 TÓPICO 1
Figura 1- Sistemas x 0 y e x 0 y
Observe que:
a) O ponto 0 (h , k) do sistema x 0 y é a
origem do sistema x 0 y ;
b) O ponto P tem coordenadas ( x, y ) em
relação ao sistema x 0 y e ( x, y ) em relação ao
sistema x 0 y .
Podemos observar na figura 1 que:
= +x x h e = +y y k ou =x x-h e
=y y - k
Assim,ìï = +ïíï = +ïî
x x h
y y k é a fórmula de mudanças do sistema xoy para x 0 y .
ìï =ïíï =ïî
x x - h
y y - k é a fórmula de mudança do sistema x 0 y para x 0 y .
ExErcícios rEsolvidos
1. Transforme a equação =7xy - 14x - 21y - 13 0 em outra equação sem os termos
do 1º grau e sem, obviamente, alterar a estrutura da curva, usando uma translação
de eixos.
Solução:
Substituindo = +x x h e = +y y k na equação =7xy - 14x - 21y - 13 0 ,
chegamos a:
+ + + + =7( x h )( y k ) - 14 ( x h ) - 21( y k ) - 13 0
+ + + =7( x y k x h y h k ) - 14 x - 14 h - 21 y- 21 k - 13 0
+ + + =7 x y 7 k x 7 h y 7 h k - 14 x- 14 h - 21x- 21 k - 13 0 .
at e n ç ã o !
As características geométricas ou forma de
uma curva não são afetadas pela posição dos
eixos coordenados, no entanto sua equação é
modificada.
g u a r d e b e m i s s o !
Conhecendo-se a curva dada pela equação
y f x= ( ) , um bom recurso para construção do
gráfico de curvas do tipo y k f (x h)− = − é a
translação de eixos.

112 Geomet r ia Ana l í t i ca Ve to r ia l
Pondo em evidência x e y nos termos do 1º grau:
+ + + =7 x y x ( 7k - 14) y ( 7h- 21 ) 7hk- 14h -21k - 13 0 .
Para que a equação não configure os termos do 1º grau, é necessário que:
=7k - 14 0 e =7h- 21 0 . Assim,ì - =ïï Þíï =ïî
7h 21 0
7k - 14 0 h = 3 e k = 2 ou 0 ( 3 , 2 ) .
Substituindo h = 3 e k = 2 na equação:
+ + + =7 x y x ( 7k - 14) y ( 7h- 21 ) 7hk- 14h -21k - 13 0 , temos
=7x y - 55 0 .
2. Elimine os termos do 1º grau da equação + + =2 2x y -4x - 2y 4 0
Solução:
Observe que a equação + + =2 2x y -4x - 2y 4 0 corresponde a
+ =2 2(x- 2 ) ( y - 1 ) 1 , ou seja, representa uma circunferência de centro no
ponto ( 2, 1 ) e raio =r 1 .
Substituindo = +x x h e = +y y k na equação
+ + =2 2x y -4x - 2y 4 0 , temos:
+ + + + + + =2 2( x h ) ( y k ) -4 ( x h ) - 2 ( y k ) 4 0
+ + + + + + =2 2 2 2x 2 h x h y 2 k y k - 4 x - 4 h - 2 y - 2 k 4 0 .
Pondo os termos do 1º grau em evidência, temos:
+ + + + + + =2 2 2 2x y x ( 2 h -4 ) y ( 2 k - 2 ) h k - 4 h - 2 k 4 0
Fazendo ì =ïï Þ = =íï =ïî
2 h - 4 0 h 2 e k 1
2 k - 2 0 e substituindo
=h 2 e = k 1 na equação acima, encontramos:
+ =2 2x y 1 , que representa a mesma circunferência da equação
+ =2 2(x- 2 ) ( y - 1 ) 1 , porém com centro no ponto ( 0 , 0 ) .
Figura 2 – Centro da circunferência no sistema x 0 y ( 2, 1)
Observe que, no sistema x o y , o centro é o ponto ( 2, 1 ) ; e, no sistema
x 0 y , o centro é a origem do sistema.
3. Dada a equação + - - =y 2 x 1 0 , encontre a equação da curva em relação
ao sistema x 0 y , após uma translação de eixos em que a nova origem é o ponto

113AULA 8 TÓPICO 1
= -0 ( 1 , 2 ) e esboce o gráfico.
Solução:
= + = +x x h x 1 e = + =y y k y-2
Substituindo na equação dada, temos:
+ - + - =y-2 2 x 1 1 0 ou =y x , como mostra a figura 3.
Figura 3 – Representação da curva x 0 y no sistema x 0 y
4. Obtenha a equação da curva = +y x 1 em relação ao sistema x 0 y cuja
origem é o ponto 0 (-1, 0 ).
Solução:
Substituindo = + = -x x h x 1 e = + = +y y h y 0 na equação = +y x 1 ,
temos:
+ = +y 0 x-1 1 Þ =y x (veja figura 4).
Figura 4 – Representação da curva y x= +1 no sistema xoy
Vimos neste tópico que podemos usar o recurso translação de eixos
coordenados para simplificar equações de curvas. Observamos que, geometricamente
esse processo é realizado a partir de um deslocamento de figuras do plano, nas
direções horizontal e/ ou vertical. A seguir estudaremos outro mecanismo que
também pode ser usado para simplificar equações de curvas, conhecido como
rotação de eixos coordenados.

114 Geomet r ia Ana l í t i ca Ve to r ia l
Uma rotação de eixos no
plano significa uma rotação
de figuras do plano, de um
ângulo q , em torno da origem do sistema. Por
meio de uma rotação, podemos fazer com que
os eixos de elipses, parábolas e hipérboles
fiquem paralelos aos eixos coordenados e,
desta forma, simplificamos suas equações.
Por exemplo: as equações + =22 yx
116 1
e
+ - - =2 217x 17y 30xy 32 0 representam a
mesma curva que consiste numa elipse. No primeiro caso, os eixos da elipse são
paralelos aos eixos coordenados; no segundo caso, os eixos da cônica formam um
ângulo de 45º no sentido anti-horário com os eixos coordenados.
TÓPICO 2 Rotação de eixos de coordenadasObjetivOs
• Simplificar equações do 2º grau completas eliminando o termo
cruzado por meio de uma rotação de eixos
• Utilizar a rotação de eixos para construir gráficos de curvas
at e n ç ã o !
O processo de rotação é realizado mudando a
direção dos eixos coordenados e mantendo fixa
a origem.

115AULA 8 TÓPICO 2
2.1 EQUAÇÕES DE ROTAÇÃO
Considere dois sistemas cartesianos x 0 y e x 0 y com a mesma origem, com
o sistemas x 0 y passando a ser obtido pela rotação do sistema x 0 y no sentido
anti-horário em torno da origem de um ângulo q (cf. figura 5).
Figura 5 – Sistema x 0 y obtido a partir de x 0 y por uma rotação
Se ( x, y ) são as coordenadas do sistema x 0 y e ( x, y ) são as coordenadas
do mesmo ponto no sistema x 0 y , então:
x x cos - y sen
y x sen y cos
=
= +
θ θ
θ θ
dEMonstração:
Considere o sistema x 0 y determinado a
partir do sistema x 0 y por meio de uma rotação
de q0 em torno da origem e b ângulo entre o
eixo 0 x e a reta «
OP . Considere, ainda, um
ponto P de coordenadas (x , y) no sistema x 0 y e ( x, y ) no sistema x 0 y , como
mostra a figura 5.
Assim, ( I )
cos ( )x
OP
x
OP
sen y
OP
θ β
β
β
+ =
=
=
cos
Da trigonometria, sabemos que cos ( ) cos . cos - sen . senθ β θ β θ β+ = ( II )
Substituindo ( I ) em ( II ), encontramos:
xOP
cos . x
OP - sen .
y
OP= θ θ .
s a i b a m a i s !
Relembre o assunto de adição e subtração de
arcos, acessando o site disponível em
https://www.youtube.com/watch?v=-ltpt_
pPP7c.

116 Geomet r ia Ana l í t i ca Ve to r ia l
Multiplicando os dois lados da equação por OP , chegamos à equação
x x . cos - y . sen= θ θ .
De modo semelhante, usando a relação:
sen ( ) sen . cos sen . cos θ β θ β β θ+ = + em ( ) I e tendo em vista que
sen ( ) y
OPθ β+ = , concluímos que y x . sen cos= +θ β , ou, determinando x e
y em função de x e y, temos:
x x . cos y . sen
y - x . sen y . cos
= +
= +
θ θ
θ θ
ExErcícios rEsolvidos
1. Determine a equação da elipse + =22 yx
1 4 1
após uma rotação de 45º no
sentido anti-horário em torno da origem:
Solução:
As equações de rotação ficam:
ìï = +ïíï = +ïî
x x . cos 45º y . sen 45º
y - x . sen 45º y . sen 45º ou
ìïï = +ïïïíïïï = +ïïî
2x . ( x y )
22
y . ( -x y ) 2
Substituindo estas equações na equação + =22 y x
14 1
, chega-se a:
é ù é ùê ú ê ú+ +ê ú ê úë û ë û+ =
2 22 2
( x y ) ( - x y )2 2
14 1
( )é ù+ + + + =ê ú
ê úë û2 2 2 21 2
( x 2xy y ) 4 x - 2xy y 42 4
( ) ( )+ + + + =2 2 2 21 x 2xy y 2 x - 2xy y 4
2+ + + + =2 2 2 2x 2xy y 4x - 8xy 4y 8
+ =2 25x 5y - 6xy - 8 0 .
Observe que o termo cruzado xy aparece na equação quando o eixo de
simetria da cônica não é paralelo a nenhum eixo coordenado (ver figura 6).

117AULA 8 TÓPICO 2
Figura 6 – Elipse de equação x
y 1
2 2
4 1+ = após uma rotação de 45º
2. Determine a equação da cônica + =22 y x
14 1
após um giro de 30º no sentido
anti-horário em torno da origem do sistema de coordenadas.
Solução:
A nova equação é do tipo + =22 y x
14 1
no sistema x 0 y cujo eixo 0 x
forma 30º com o eixo coordenado 0x .
Aplicando as fórmulas de rotação de eixos x x cos y sen
y x sen y cos
= +
=− +
θ θ
θ θ, temos:
ìï = +ïíï =- +ïî
x x cos 30º y sen 30º
y x sen 30º y cos 30º ou = +
3 1x x y
2 2 e =- +
1 3y x y
2 2.
Substituindo estas equações em + =22 y x
14 1
, encontramos:
æ ö æ ö÷ ÷ç ç÷ ÷+ - +ç ç÷ ÷ç ç÷ ÷ç çè ø è ø+ =
2 2 3 1 1 3
x y x y 2 2 2 2
14 1
ou
æ ö æ ö÷ ÷ç ç÷ ÷+ + - + =ç ç÷ ÷ç ç÷ ÷ç çè ø è ø
2 2 3 1 1 3
x y 4 x y 4 2 2 2 2
Desenvolvendo os quadrados, chegamos à equação:
+ + + - + =2 2 2 23 1 1x 3 xy y x 2 3 xy 3y 4
4 2 4 ou
+ + + - + =2 2 2 23x 2 3 xy y 4x 8 3 xy 12y 16
E finalmente, reduzindo os termos semelhantes, chegamos à equação:

118 Geomet r ia Ana l í t i ca Ve to r ia l
- + - =2 27x 6 3 xy 13y 16 0
2.2 SIMPLIFICANDO UMA EQUAÇÃO DO
SEGUNDO GRAU MEDIANTE ROTAÇÃO DE EIXOS
Na equação do segundo grau + + + + + =2 2Ax Bxy Cy Dx Ey F 0 em que
A, B, C, D, E e F são constantes, observe que, se =2
1A
a, =B 0 , =
2
1C
b, =D 0 ,
=E 0 e =-F 1 , obtemos + =22
2 2
yx1
a b, que representa a equação de uma elipse.
De modo semelhante, se =2
1A
a, =B 0 , =-
2
1C
b, =D 0 , =E 0 e =-F 1
, obtém-se - =22
2 2
yx1
a b, que é a equação de
uma hipérbole. E, finalmente, fazendo =A 1 ,
=B 0 , =C 0 , =D 0 , =-E 4p e =F 0 , obtém-
se =2x 4py , que representa a equação de uma
parábola.
Assim, a equação de uma cônica
é um caso específico da equação
+ + + + + =2 2Ax Bxy Cy Dx Ey F 0 . (*)
Quando o termo cruzado xy aparece
na equação do segundo grau (*) ( ¹B 0 ),
o eixo de simetria da cônica é oblíquo aos
eixos coordenados. Mostraremos a seguir que é
possível eliminar o termo cruzado xy mediante
uma rotação de eixos coordenados.
2.3 ELIMINANDO O TERMO CRUZADO
Se um sistema de coordenadas xy é
girado, em torno de sua origem, de um ângulo
q para se obter um sistema x 0 y , então a curva
de equação + + + + + =2 2Ax Bxy Cy Dx Ey F 0
terá uma nova equação
+ + + + + =2 2Ax B x y C y D.x Ey F 0 em que
=B 0 se, e somente se, B
tg 2A-C
q = .
g u a r d e b e m i s s o !
Uma equação do tipo
Ax Bxy Cy Dx Ey F 02 2+ + + + + =
dependendo dos valores que os coeficientes
A, B, C, D, E ou F assumem, pode representar
um conjunto vazio, ou uma reta, ou uma
circunferência, ou uma parábola, ou uma elipse,
ou uma hipérbole.
um conjunto vazio: x2 1 0+ = , 3 1 02x + = ,
x 2x y 6y 15 02 2− + − + = ;
uma reta: x y+ − =1 0 , x+ =2 0 , x− =3 0 ,
x 2x 1 02 − + = , x y 2xy 02 2+ + = ;
uma circunferência: x y 2x-2y 02 2+ − = ;
uma hipérbole: x y 2x-2y-1 02 2− − = ;
uma elipse: x y 2x y 13 02 2+ − + + =4 16 ;
uma parábola: x -y 02 = .
Para sabermos que tipo de curva representa
as equações acima, efetuamos uma rotação ou
translação de eixos a fim de obtermos a forma
mais simples da equação.

119AULA 8 TÓPICO 2
dEMonstração:
Substituindo as fórmulas de rotação x x cos y sen
y x sen y cos
ìï = q- qïíï = q+ qïî em
+ + + + + =2 2Ax Bxy Cy Dx Ey F 0 , obtém-se:2A( x cos y sen )q- q +
B( x cos y sen ).(x sen y cos )q- q q+ q + 2C (x sen y cos ) q+ q +
D( x cos y sen ) E( x sen y cos ) F 0q- q + q+ q + = .
Desenvolvendo os produtos acima e tendo em vista que:
2 sen cos sen 2 q q = q e 2 2cos sen cos 2q- q= q , temos:2 2 2 2A ( x cos 2 x y sen cos y sen )q - q q + q +2 2B ( x sen cos x y cos 2 - y sen cos )q q+ q q q +2 2 2 2C ( x sen x y sen 2 y cos )q + q + q +
D( x cos y sen ) q- q + E( x sen y cos ) F 0q+ q + = .
Efetuando os produtos acima, pondo xy em evidência e considerando que a
nova equação é do tipo + + + + + =2 2Ax B x y C y D.x Ey F 0 , chegamos a:
( )B x y -A sen 2 B cos 2 C sen 2 x y= q + q+ q .
Para que o termo cruzado seja eliminado, devemos ter =B 0 , ou seja:
-A sen 2 B cos 2 C sen 2 0q + q+ q= ou (A C) sen 2 B cos 2- q= q .
Dividindo os dois membros por cos 2q , encontramos:sen 2 Bcos 2 A C
q=
q - ou B
tg 2A C
q =-
.
ExErcícios rEsolvidos
1. Elimine o termo cruzado da equação + - - =2 25x 5y 6xy 8 0 por meio de uma
rotação de eixos conveniente.
Solução:
O termo cruzado xy pode ser eliminado por uma rotação do sistema, de um
ângulo (0 )2p
q <q< de modo que B
tg 2 A-C
q = Btg 2
A-Cq = ou
A-Ccotg 2
Bq = .
Considerando que = = =A 5, B -6 e C 5 , então 5-5
cotg 2 0-6
q = = .
Assim 22p
q= ou 4p
q= .
Pelas equações de rotação x x cos y sen
y x sen y cos
ìï = q- qïíï = q+ qïî, temos
ìïï = -ïïïíïïï = +ïïî
2 2x x y
2 2 2 2
y x y2 2
ou
ìïï = -ïïïíïïï = +ïïî
2x (x y )
2 2
y (x y )2
. Substituindo estas expressões na

120 Geomet r ia Ana l í t i ca Ve to r ia l
equação + - - =2 25x 5y 6xy 8 0 , temos:
( ) ( )é ù é ù é ù é ùê ú ê ú ê ú ê ú- + + - - + - =ê ú ê ú ê ú ê úë û ë û ë û ë û
2 22 2 2 2
5 (x y ) 5 (x y) 6 x y . x y 8 02 2 2 2
.
Simplificando a equação acima, encontramos:
- + + - - + - =2 25 5( x y ) ( x y ) 3 ( x y ).( x y ) 8 0
2 2.
Desenvolvendo os produtos e reduzindo os termos semelhantes, chegamos a:
+ - =2 24 x 16y 16 0 ou + =2 24 x 16 y 16 .
Dividindo os dois membros da equação acima por 16, encontramos
+ =22 y x
14 1
, que representa a equação de uma elipse de semi-eixos 2 e 1, como
mostra a figura 7.
Figura 7 - Cônica após uma rotação de 45º no sentido anti-horário
Observe que, em relação ao sistema x0y,
a equação da cônica é + - - =2 25x 5y 6xy 8 0
e, em relação ao sistema x0y , a equação é
+ =22 y x
14 1
.
2. Esboce o gráfico da cônica de equação
+ + - =2 2x 4xy y 6 0 .
Solução:
Precisamos saber de que cônica se trata, para tanto é necessário eliminar o
termo cruzado.A-C 1 1
cotg 2 0B 4
-q= = = ,ou seja, 2
2p
q= ou 4p
q= .
g u a r d e b e m i s s o !
Para visualizar uma rotação ou translação de
eixos coordenados, você pode recorrer o software
winplot, que pode ser baixado diretamente do
site http://www.mat.ufpb.br/sergio/winplot/
vetorial/conicas.html.

121AULA 8 TÓPICO 2
Pelas equações de rotação x x cos y sen
y x sen y cos
ìï = q- qïíï = q+ qïî ou
ìïï = -ïïïíïïï = +ïïî
2x (x y)
2 2
y (x y)2
Substituindo estas expressões por x e y na equação + + - =2 2x 4xy y 6 0 ,
temos ( ) ( )é ù é ù é ù é ùê ú ê ú ê ú ê ú- - - + + + - =ê ú ê ú ê ú ê úë û ë û ë û ë û
2 22 2 2 2
(x y ) 4 (x y ) . x y x y 6 02 2 2 2
.
Simplificando a equação acima, encontramos:
( ) ( ) ( ) ( )- - - + + + =2 21 1
x y 2 x y x y x y 62 2
ou
( ) ( ) ( )- + - + + + =2 2 2 2 2 2 21 1
x 2 x y y 2 x -y x 2 x y y 62 2
.
Reduzindo os termos semelhantes da equação acima, obtemos
- + = 2 2x 3 y 6 ou - =2 2y x
12 6
, que é uma hipérbole cuja representação
geométrica encontra-se representada na figura 8:
Figura 8 – Hipérbole após uma rotação de 45º no sentido anti-horário
Observe que, em relação ao sistema x0y, a equação da cônica é
+ + - =2 2x 4xy y 6 0 e, em relação ao sistema x 0 y , a equação é - =2 2y x
12 6
4.
3. Gire os eixos coordenados para eliminar o termo cruzado da cônica de equação
- + =2 28x 4xy 5y 144 .
Solução:A-C 8 5 3
cotg 2B 4 4
-q= = =-
-. Assim, da trigonometria, temos:

122 Geomet r ia Ana l í t i ca Ve to r ia l
2
cotg 2cos 2
cotg 2 1
qq =
q+=
-
æ ö÷ç +÷ç ÷çè ø
2
34
3 - 1
4
= -
+
34
91
16
= -
3
454
= -35
Tendo em vista as fórmulas do arco metade: 1 cos
sen 2 2
æ öq - q÷ç =÷ç ÷çè ø e 1 cos
cos 2 2
æ öq + q÷ç =÷ç ÷çè ø, temos:
1 cos 2cos
2+ q
q= =-
= = =
3 1 2 1 55
2 10 5 5 e
1-cos 2sen
2q
q = =+
= = =
3 1 8 4 2 55
2 10 5 5
Substituindo =5 2 5
x x - y5 5
e = +2 5 5
y x y5 5
na equação
- + =2 28x 4xy 5y 144 , temos:
85 5
2
5
5x -
2 5y 4
55
x - 2 5
y
−
+
+ +
55
x 5
y
55
x 5
y
25
52
5=
2
144
Simplificando esta equação, chegamos a + =2 24 x 9 y 144 . Dividindo os
dois membros por 144, temos a equação + =2 2y x
136 16
, que representa uma elipse.
Neste tópico, vimos que o termo kxy (k¹ 0) aparece na equação do segundo
grau quando o eixo de simetria da cônica representada por essa equação, não é
paralelo a nenhum eixo coordenado, porém tal termo pode ser eliminado mediante
uma rotação de eixos no sentido anti-horário. Como podemos observar, a equação
sofre uma alteração, mas as características geométricas da curva bem como a relação
entre as coordenadas de cada ponto dessa curva, é mantida.

123REFERÊNCIAS
REFERÊNCIASBOULOS, P. Geometria analítica: Um tratamento vetorial, 3. ed. Pearson Education do Brasil, São Paulo, 2005.
BOULOS, P.; OLIVEIRA, I. C. Geometria analítica: um tratamento vetorial. 2.ed. São Paulo: MacGraw-Hill, 2000.
IEZZI, G. Fundamentos de matemática elementar. Vol. 7. São Paulo: Atual, 1985. v.7.
MUNEM, M. A. Cálculo. Rio de Janeiro. São Paulo: LTC, 1982.
SANTOS, N. M. Vetores e matrizes: uma introdução a álgebra linear. 4. ed. rev. e amp. São Paulo: Editora Thomson, 2007.
SANTOS, R. J. Matrizes vetores e geometria analítica. Belo Horizonte: Imprensa Universitária da UFMG, 2006.
SCHWAB, C. e MIGLIANO, A. C. Geometria analítica. Disponível em: <http://www2.brazcubas.br/professores1/arquivos/9_migliano/Apostilas/Apostila_GAV_2002.pdf>. Acesso em: 17 jun. 2009.
SILVA, V. E REIS, G.L. Geometria analítica. Livros Técnicos e Científicos. Rio de Janeiro, 1985.
STEINBRUCH, A.; WINTERLE, P. Geometria analítica. 2. ed. São Paulo: Mc Graw-Hill, 1987.
VENTURI, J. J. Álgebra Vetorial e Geometria analítica. 8. ed. Curitiba.

124 Geomet r ia Ana l í t i ca Ve to r ia l
CURRÍCULOMarcos Antônio de Macedo
Possui graduação em ciências pela Universidade Regional do cariri-URCA (1997),
graduação em matemática (Licenciatura plena) pela Universidade Regional do Cariri-URCA
(2001), concluiu em 2002 especialização “Lato Sensu” (Turma I) em Matemática aplicada
pela Universidade Regional do Cariri-URCA. Atualmente é professor substituto do Instituto
Federal de Educação, Ciência e Tecnologia-IFETCE onde leciona no curso de matemática
desde agosto de 2004 e servidor público estadual pela 19ª Coordenadoria Regional de
Desenvolvimento e Educação- 19ª CREDE, onde leciona a disciplina de Matemática no
ensino médio desde 1998. Tem experiência na área de matemática, com ênfase em Cálculo
Diferencial Integral, Geometria Analítica Espacial e Álgebra Linear. Tem atuado principlamente
nos seguintes disciplinas: Calculo I, Calculo II, Álgebra Linear, Geometria Analítica e Vetores,
Geometria Descritiva, Construções Geométricas e Geometria Euclidiana.

Geometriaanalítica
licenciatura emmatemática
LIC
EN
CIA
TU
RA
EM
MA
TE
MÁ
TIC
A - G
EO
ME
TR
IA A
NA
LÍT
ICA
VE
TO
RIA
LU
AB
/ IFC
ES
EM
ES
TR
E 3
vetorial
Ministério da Educação - MEC
Coordenação de Aperfeiçoamento de Pessoal de Nível Superior
Universidade Aberta do Brasi l
Instituto Federal de Educação, Ciência e Tecnologia do Ceará
Top Related