






Línguas
Páginas
Legal

FACULDADE DE MEDICINA DA UNIVERSIDADE DE COIMBRA
TRABALHO FINAL DO 6º ANO MÉDICO COM VISTA À ATRIBUIÇÃO DO GRAU DE
MESTRE NO ÂMBITO DO CICLO DE ESTUDOS DE MESTRADO INTEGRADO EM
MEDICINA
MANUEL DE ALMEIDA FERREIRA GONÇALVES
O ESTADO DA ARTE DA ROBÓTICA NA
NEUROCIRURGIA
ARTIGO DE REVISÃO
ÁREA CIENTÍFICA DE NEUROCIRURGIA
TRABALHO REALIZADO SOB A ORIENTAÇÃO DE:
PROF. DOUTOR MARCOS BARBOSA
DR. RICARDO PEREIRA
MARÇO/2014

O Estado da Arte da Robótica na Neurocirurgia
1
Índice
Resumo______________________________________________________________________3
Abstract_____________________________________________________________________ 4
Lista de Abreviaturas__________________________________________________________ 5
Introdução___________________________________________________________________ 6
Definição________________________________________________________________6
Classificação_____________________________________________________________ 7
Componentes_____________________________________________________________7
Neurocirurgia_____________________________________________________________8
Objectivo________________________________________________________________9
Materiais e Métodos___________________________________________________________ 9
Resultados___________________________________________________________________10
Cirurgia Estereotáxica____________________________________________________11
NeuroMate________________________________________________________ 11
PathFinder_________________________________________________________14
SurgiScope________________________________________________________ 15
Tabela 1__________________________________________________________ 17
Microcirurgia___________________________________________________________18
NeuRobot_________________________________________________________ 19
Sistema de Mitsuishi e colaboradores______________________________________ 22
neuroArm_________________________________________________________ 26
Tabela 2__________________________________________________________ 32
Cirurgia Raquidiana_____________________________________________________ 33

O Estado da Arte da Robótica na Neurocirurgia
2
SpineAssist________________________________________________________33
Tabela 3__________________________________________________________ 38
Radiocirurgia___________________________________________________________38
CyberKnife________________________________________________________38
Tabela 4__________________________________________________________ 42
Discussão e Conclusão_________________________________________________________42
Referências__________________________________________________________________49
O Estado da Arte da Robótica na Neurocirurgia
3
Manuel de Almeida Ferreira Gonçalves
Faculdade de Medicina da Universidade de Coimbra
Resumo
Introdução: A cirurgia assistida pela robótica é uma tecnologia recente com grande potencial,
particularmente na neurocirurgia. Os sistemas robotizados colmatam algumas das limitações
próprias do ser humano, como o tremor fisiológico e a incapacidade de realizar movimentos
precisos em microescala e, simultaneamente, beneficiam da capacidade de discernimento e
adaptabilidade humanas inigualáveis. Na neurocirurgia, a estreita margem de erro e a necessidade
de precisão e segurança na manipulação de estruturas delicadas, colocam um grande peso sobre
as capacidades do cirurgião. Objectivo: revisão de alguns dos principais sistemas robotizados
neurocirúrgicos utilizados actualmente, apresentando as suas vantagens e limitações actuais.
Materiais e Métodos: Revisão de artigos pesquisados através do motor de pesquisa da
PubMed, com as palavras-chave robotics, neurosurgery, haptics, NeuroMate, PathFinder,
SurgiScope, NeuRobot, neuroArm, SpineAssist e CyberKnife. Os estudos foram seleccionados por
relevância de tema.
Resultados: É apresentado um conjunto de sistemas robotizados neurocirúrgicos representativo
do estado da arte actual, com uma descrição breve dos seus componentes e características
mecânicas, seguida de resultados de alguns estudos realizados com o respectivo sistema. São
descritos sistemas desenhados para cirurgia estereotáxica (NeuroMate, PathFinder e SurgiScope),
microcirurgia (NeuRobot, o sistema de Mitsuishi et al. e neuroArm), cirurgia raquidiana
(SpineAssist) e radiocirurgia (CyberKnife).

O Estado da Arte da Robótica na Neurocirurgia
4
Discussão e Conclusão: Os estudos sugerem que o desempenho destes sistemas é, geralmente,
comparável ao das técnicas convencionais. O outcome deve ser sempre a primeira prioridade na
escolha de novas tecnologias e técnicas. Assim, são necessários estudos controlados e
aleatorizados que comparem directamente o gold standard actual e a cirurgia robótica no sentido
de perceber qual é o seu verdadeiro grau de benefício, a despeito do custo. No entretanto, novos
avanços, quer na correcção de falhas, quer na optimização das vantagens, poderão permitir que
esta tecnologia promissora deixe, a médio prazo, de ter apenas o potencial de revolucionar a
neurocirurgia, para poder fazê-lo todos os dias no bloco operatório.
Abstract
Introduction: Robotic surgery is a promising cutting-edge technology, particularly in
neurosurgery. Robotic systems balance out some limitations inherent to humans, such as hand
tremor and the inability to execute precise microscale movements, and simultaneously benefit
from the unmatched human judgment and adaptability. In neurosurgery, the slim margin for
error and the need for precision and safety in handling delicate structures, places a heavy burden
on the surgeon's abilities. Objective: to review some of the leading neurosurgical robotic systems
currently in use, as well as to highlight their present advantages and limitations.
Materials and Methods: Studies were searched on the MEDLINE database through the
PubMed search engine using the following keywords: robotics, neurosurgery, haptics,
NeuroMate, PathFinder, SurgiScope, NeuRobot, neuroArm, SpineAssist, CyberKnife. Relevant
publications were subsequently selected.
O Estado da Arte da Robótica na Neurocirurgia
5
Results: An illustrative set of the current state-of-the-art neurosurgical robotic systems is
presented, including a brief description of their components and mechanical features, followed
by the findings of a few studies on each system. Systems designed for stereotactic surgery
(NeuroMate, PathFinder, SurgiScope), microsurgery (NeuRobot, system by Mitsuishi et al.,
neuroArm), spinal surgery (SpineAssist) and radiosurgery (CyberKnife) are reported.
Discussion and Conclusion: Studies suggest performance is, in general, equivalent to that of
conventional techniques. Patient outcome should always be paramount when implementing new
technologies or methods. Therefore, randomized controlled trials directly comparing the current
gold standard of treatment with robot-assisted surgery are mandatory in order to realize its true
benefit, despite the expenses. Meanwhile, new progress, whether rectifying flaws, or honing
assets, may, in the near future, turn the revolutionizing potential of this rising technology, into an
operating room routine.
Palavras-Chave/Keywords: Robótica; neurocirurgia; robotics; neurosurgery; NeuroMate;
PathFinder; SurgiScope; NeuRobot; neuroArm; SpineAssist; CyberKnife
Lista de Abreviaturas:
CRW – Cosman-Roberts-Wells
CT – computed tomography
DBS – deep brain stimulation
DOF – degrees-of-freedom
iMRI – intraoperative magnetic resonance imaging
KTP – potassium titanyl phosphate
O Estado da Arte da Robótica na Neurocirurgia
6
LINAC – linear accelerator
RAS – robot-assisted surgery
RCM – remote center of motion
SEEG – stereoelectroencephalography
ZD – Zamorano-Duchovny
Introdução
O avanço tecnológico nas últimas décadas tem sido marcante, particularmente na área biomédica.
No caso da imagem médica permitiu a criação de tecnologias de localização e orientação espacial
extremamente precisas, como a neuronavegação e estereotaxia frameless. Estas tecnologias
vieram aproveitar ao máximo a cirurgia assistida por computador, permitindo um melhor
planeamento e localização precisa de estruturas a intervencionar. Naturalmente o posicionamento
e a actuação assistidos por computador foi o passo seguinte. Nasceu o conceito de cirurgia
assistida pela robótica (robot-assisted surgery, RAS).
Definição
De acordo com a definição de Davies,(1)
um sistema robotizado cirúrgico (ou simplesmente,
sistema) é um manipulador controlado por computador equipado com sensores, que pode ser
reprogramado para mover e posicionar instrumentos para executar uma variedade de tarefas
cirúrgicas.
O Estado da Arte da Robótica na Neurocirurgia
7
Classificação
De forma simplificada, os sistemas robotizados podem ser classificados como activos, passivos
ou semi-activos.(2)
Os activos são mais independentes, recolhem e analisam informação do meio
envolvente e autonomamente realizam as tarefas para que foram programados. Por outro lado, os
passivos são totalmente controlados pelo cirurgião através de uma consola. Um sistema que
assuma automaticamente uma posição fixa e que desta forma guie o cirurgião ao longo de um
procedimento, é um exemplo de um sistema semi-activo.
Componentes
Seguindo a definição de Davies, um sistema é constituído por 3 componentes principais:
sensores, manipulador e computador.(3)
Os sensores são vitais para o funcionamento do sistema e podem ser de vários tipos. Sensores
posicionais para controlo interno, câmaras de vídeo e sensores de infravermelho ou de campo
electromagnético,(4)
que fornecem informação visual ao cirurgião através da consola, sensores
hápticos que transmitem, através dos controlos manuais, estímulos tácteis e cinestéticos, e
sensores dedicados ao registo posicional no teatro operatório.
O manipulador é a parte executora, e inclui, principalmente, os efectores finais (instrumentos
cirúrgicos), e os actuadores, que permitem o movimento das articulações. Estas definem o
número de graus de liberdade (degrees-of-freedom, DOF) que o manipulador tem para
movimentar e posicionar o efector final no espaço tridimensional.

O Estado da Arte da Robótica na Neurocirurgia
8
O computador é o elemento que desempenha o papel de processar o enorme volume de dados
inerente a todas estas funções.
Estas características estruturais dos sistemas robotizados proporcionam-lhes um conjunto de
capacidades muito úteis para os cirurgiões. Simultaneamente, colmatam algumas das limitações
próprias do ser humano,(5)
como o tremor fisiológico, a incapacidade de realizar movimentos
precisos em microescala,(6)
limitações de memória e fadiga, e beneficiam da capacidade de
discernimento e adaptabilidade humanas(5)
inigualáveis.
Assim, os sistemas robotizados conseguem eliminar o tremor através de filtros de software(2, 5-9)
podem reduzir movimentos a uma escala variável(2)
permitindo acções diminutas pelos efectores
finais,(9)
processam grandes volumes de dados simultaneamente(5)
e podem realizar movimentos
repetitivos(5-8)
e fixar instrumentos indefinidamente,(5, 8, 9)
para além de muitas outras funções.
Neurocirurgia
Este sinergismo entre homem e máquina tem particular interesse no campo da neurocirurgia,
onde os avanços na área da imagem médica, das técnicas minimamente invasivas e na
miniaturização dos instrumentos, assim como a estreita margem de erro, colocam um grande peso
sobre a destreza, precisão e habilidade do cirurgião.(9)
Além disso, a RAS adapta-se bem à realidade neurocirúrgica. A rigidez do crânio(8)
facilita o
processo de registo pré-operatório, e a necessidade de precisão e segurança na manipulação(8)
de
O Estado da Arte da Robótica na Neurocirurgia
9
estruturas delicadas para evitar morbilidade cirúrgica, são apenas duas questões que tornam a
neurocirurgia assistida pela robótica uma linha de evolução natural.
Objectivo
Este trabalho tem como objectivo fazer uma revisão sobre os principais sistemas robotizados
neurocirúrgicos utilizados actualmente, assim como alguns dos protótipos que estão a ser
actualmente desenvolvidos, dar a conhecer as vantagens e as limitações actuais desta tecnologia,
e perceber como poderá evoluir num futuro próximo.
Materiais e Métodos
A base de dados escolhida foi a MEDLINE, e a pesquisa foi feita através do motor de pesquisa da
PubMed. Os termos de pesquisa utilizados foram: robotics, neurosurgery, haptics, neuroArm
para artigos publicados desde 2008. Os estudos foram seleccionados por relevância de tema.
Subsequentemente foram escolhidos alguns artigos considerados importantes através de
referências de artigos seleccionados originalmente. Foi ainda realizada uma outra pesquisa com
os termos robot, neurosurgery, NeuroMate, PathFinder, SurgiScope, NeuRobot, neuroArm,
SpineAssist, CyberKnife, após a selecção dos sistemas a apresentar.
O Estado da Arte da Robótica na Neurocirurgia
10
Resultados
Kwoh e colegas foram os pioneiros na utilização de um sistema robotizado em cirurgia.(3)
Adaptaram um sistema industrial produzido pela Unimation, o PUMA 200, que tinha como
função posicionar e alinhar a trajectória de uma cânula de biópsia estereotáxica.(3)
Seguiu-se o desenvolvimento de vários sistemas para cirurgia estereotáxica, um deles um
precursor do NeuroMate por Benabid e colegas em 1987.(9)
Posteriormente, devido à necessidade
de precisão e ao potencial impacto da deslocação de estruturas intracranianas durante o
procedimento cirúrgico, surgiram sistemas compatíveis com a aquisição de imagem
intraoperatória. O Minerva (Universidade de Lausanne, Suíça) foi criado com o propósito de
operar no interior de um aparelho de tomografia computorizada (CT, computed tomography),
permitindo a aquisição de imagens intraoperatórias em tempo real.(9)
Subsequentemente foram
criados sistemas compatíveis com ressonância magnética intraoperatória (iMRI, intraoperative
magnetic resonance imaging) pelas Universidades de Harvard, Tokyo e Calgary.(9)
Mais recentemente, para além de novos sistemas de cirurgia estereotáxica como o NeuroMate e o
PathFinder, também têm sido desenvolvidos sistemas com outras aplicações neurocirúrgicas,
como a microcirurgia (ex: NeuRobot e neuroArm), cirurgia raquidiana (SpineAssist) e
radiocirurgia (CyberKnife).
De seguida será feita uma apresentação mais detalhada sobre um conjunto de sistemas para estas
aplicações.
O Estado da Arte da Robótica na Neurocirurgia
11
Cirurgia Estereotáxica
Em cirurgia estereotáxica, os sistemas utilizados são geralmente do tipo semi-activo, em que o
sistema é programado para alinhar o efector final com uma trajectória previamente planeada
através de software apropriado. São sistemas guiados por imagem. É este o caso do
NeuroMate,(10, 11)
PathFinder,(12)
e SurgiScope,(13)
que foram testados e utilizados primariamente
como suporte para biópsia estereotáxica(8, 12, 14, 15)
, colocação de eléctrodos de DBS (deep brain
stimulation)(8, 10, 16)
e de SEEG (stereoelectroencephalography) para estudo de epilepsia.(17, 18)
Já
foram também feitas experiências com o PathFinder quanto à sua utilização para segurar e alinhar
com maior estabilidade e precisão o drill de trepanação.(19)
O SurgiScope tem também, para além
do modo de biópsia, um modo em que funciona como um microscópio cirúrgico, que consegue
posicionar automaticamente o eixo óptico em linha com a trajectória desejada.(13)
NeuroMate
O NeuroMate (Renishaw, Gloucestershire, Reino Unido) (Figura 1) inclui um braço robotizado
com 5 DOF e software de posicionamento cinemático que permite um planeamento cirúrgico
preciso, baseado em imagem pré-operatória (CT ou MRI), assim como a visualização de
múltiplas trajectórias e de imagens tridimensionais.(20)
O sistema pode ser utilizado com ou sem frame.(10, 20)
No modo frameless, o NeuroMate utiliza
um sistema de registo inovador através de ultrassons.(10, 20)
Uma base é implantada no crânio,
sendo depois ligada a um dispositivo em forma de hélice com marcadores visíveis em CT e MRI,
para a aquisição de imagem pré-operatória. No bloco operatório, o sistema de ultrassons colhe os
O Estado da Arte da Robótica na Neurocirurgia
12
dados posicionais deste dispositivo e o computador calcula a informação de registo necessária.(10,
20)
No entanto, neste modo frameless o erro de posicionamento foi considerado substancialmente
superior, embora aceitável, por Li e colaboradores(20)
com um erro médio de 1,95 mm,
comparado com um erro médio de 0,86 mm com frame. Neste último modo, o NeuroMate foi
comparável aos testes com o sistema estereotáxico Zamorano-Duchovny (ZD) (erro médio de
1,17 mm).(20)
Figura 1 - O NeuroMate num estudo de precisão em modelo (adaptado com autorização da revista).(10)

O Estado da Arte da Robótica na Neurocirurgia
13
Num outro estudo, o NeuroMate foi utilizado em modo frameless em cirurgia de doenças do
movimento, para implantação de eléctrodos de DBS em 111 doentes e em duas talamotomias,
tendo obtido resultados comparáveis aos de estudos com estereotaxia com frame convencional.(10)
O NeuroMate facilitou a biópsia de lesões no tronco cerebral por via transcerebelosa, em parte
devido à ausência de frame, o que permite um posicionamento mais fácil da cabeça do doente e
menor desconforto, com uma taxa de complicações semelhante à da via transfrontal.(14)
Um estudo testou a capacidade do NeuroMate utilizar uma broca cirúrgica para cirurgia da base
do crânio, com o auxílio de software baseado em imagem prévia, que permite estabelecer limites,
evitando assim lesão de estruturas vizinhas.(11)
No entanto, os autores reconhecem a necessidade
de melhorar a precisão do sistema, tendo obtido desvios de 1 a 2 mm, em média, chegando a 3
mm.(11)
Cardinale et al. realizaram, entre Setembro de 2009 e Julho de 2010, 26 procedimentos de SEEG
com a introdução de 324 eléctrodos com o NeuroMate.(18)
A distância média entre o ponto de
entrada cortical planeado e o real (calculada por CT ou O-arm no pós-operatório) foi de 0,73 mm,
com distância interquartil de 0,48 – 1,02. Apenas em cerca de 4% (13 de 324) foi superior a 2
mm, sendo a distância máxima de 3,27 mm.(18)
O tempo operatório não foi superior ao da técnica
convencional.(18)
Os autores afirmam não ter ocorrido nenhuma complicação major ou défice
permanente decorrente desta nova técnica, com apenas uma parésia braquial transitória por
pequena hemorragia.(18)

O Estado da Arte da Robótica na Neurocirurgia
14
PathFinder
O PathFinder (Prosurgics, Reino Unido) tem uma base móvel, que se fixa ao apoio de cabeça de
Mayfield, de forma a assegurar uma posição estável relativamente ao campo operatório.(8, 12)
O
braço robotizado está dividido em três partes. Uma proximal, com capacidade de rotação de 180°
no plano horizontal, uma porção intermédia que se move no plano vertical em 180°(8)
, e uma
distal que para além de se mover no plano vertical, também executa movimentos de
extensão/flexão de 180° e rotação de 360°. A combinação de todos os movimentos possíveis
resulta em 6 DOF (Figura 2).(8, 12, 19)
Esta porção distal segura o efector final. Para registo intra-
operatório utiliza uma câmara com capacidade de detecção de marcadores radio-opacos com
material reflector colados na cabeça do doente.(8, 12)
A comparação com a imagem de CT pré-
operatória permite a localização dos marcadores, e quer esta, quer a de MRI, podem ser utilizadas
para planeamento cirúrgico.(12)
Figura 2 - Vista lateral do PathFinder, indicando os 6 DOFs (1-6) (adaptado com autorização do autor e da
revista).(12)

O Estado da Arte da Robótica na Neurocirurgia
15
Numa experiência com uma réplica de crânio que continha 10 alvos superficiais e 9 profundos, o
PathFinder conseguiu atingir 17 em 19 alvos (89,5%), sendo que os 2 restantes foram atingidos
após reposicionamento do sistema, sem necessidade de reaquisição de imagem ou
replaneamento.(12)
Esta experiência foi também realizada com os sistemas estereotáxicos
Cosman-Roberts-Wells (CRW) e ZD, assim como com o sistema Stealth Station de estereotaxia
frameless guiada por imagem. Após comparação dos desempenhos, o PathFinder manteve uma
precisão de 0,5 mm em qualquer posição dos alvos, sendo esta de 0,98 mm com os frames e de 1-
2 mm em alvos superficiais e de 3-4,4 mm em alvos mais profundos com o Stealth Station.(12)
Num estudo com 37 doentes foram atingidos 140 alvos com o objectivo de determinar a precisão
do PathFinder.(8)
O erro mínimo foi de zero e o máximo de 0,48 mm, com uma mediana de 0,31
mm. O sistema foi sempre consistente, sem desvios ou erros de reposicionamento.
O PathFinder foi também utilizado numa experiência com réplicas de crânio, com o objectivo de
testar a sua capacidade de utilizar um craniótomo para trepanação,(19)
avaliando a precisão de
execução da tarefa. A precisão média neste estudo foi de 0,34 mm, sendo que em profundidade a
precisão foi exacta.
SurgiScope
O SurgiScope (ISIS - Intelligent Surgical Instruments & Systems, Saint Martin d’Hères, França)
é um sistema com 7 DOF, com 2 modos de operação: microscópio e biópsia, tal como descrito
anteriormente (Figura 3).(13)
O sistema está montado no tecto da sala de operações, com o
O Estado da Arte da Robótica na Neurocirurgia
16
microscópio e outros instrumentos na extremidade inferior.(15)
O sistema de registo inclui
marcadores posicionais colocados no escalpe antes da aquisição de imagem pré-operatória.(13, 15,
21)
O SurgiScope foi utilizado para colocação de catéter intraventricular para criação de um
reservatório ventricular para tratamento com quimioterapia em 11 doentes.(13)
Foi bem sucedido
em todos os casos, sem registo de hemorragia devido à inserção do catéter. A distância média da
ponta do catéter ao alvo (foramen de Monro) foi de 1,6 ± 3 mm, e o tempo médio de duração do
procedimento foi de 42.8 ± 13.2 minutos.
Figura 3 - À esquerda: Surgiscope com o braço de biópsia. À direita: Inserção de um guia para implantação de
eléctrodo de profundidade (adaptado com autorização da revista).(21)
Num estudo que investigou a exequibilidade, capacidade diagnóstica e segurança de biópsia de
lesões cerebrais do SurgiScope,(15)
que incluiu 41 doentes (50 alvos), o tempo médio de operação

O Estado da Arte da Robótica na Neurocirurgia
17
foi de 44,6 minutos, sendo que houve um decréscimo significativo do tempo operatório ao longo
do estudo, de uma média de 54,7 minutos na primeira metade do estudo, para 34,5 minutos, na
segunda metade.(15)
A CT pós-operatória detectou que o procedimento resultou em hemorragia
com mais de 1 cm em 4 doentes (8% dos alvos), embora estes estivessem assintomáticos. Um
doente sofreu uma hemorragia intra-operatória que não resolveu espontaneamente, com
necessidade de conversão imediata a craniotomia para evacuação. Esta complicação resultou em
afasia motora e hemiparésia direita.(15)
A capacidade diagnóstica foi de 48 em 50 alvos (96%),
embora num mesmo procedimento tenha sido possível uma biópsia diagnóstica num dos doentes
com primeira biópsia não-diagnóstica, e no outro caso, um segundo procedimento permitiu um
diagnóstico definitivo.(15)
Este sistema foi também utilizado com sucesso na implantação de eléctrodos de profundidade
para a avaliação de 4 doentes com epilepsia medicamente intratável, num mesmo tempo
operatório da colocação de eléctrodos de monitorização subdurais.(21)
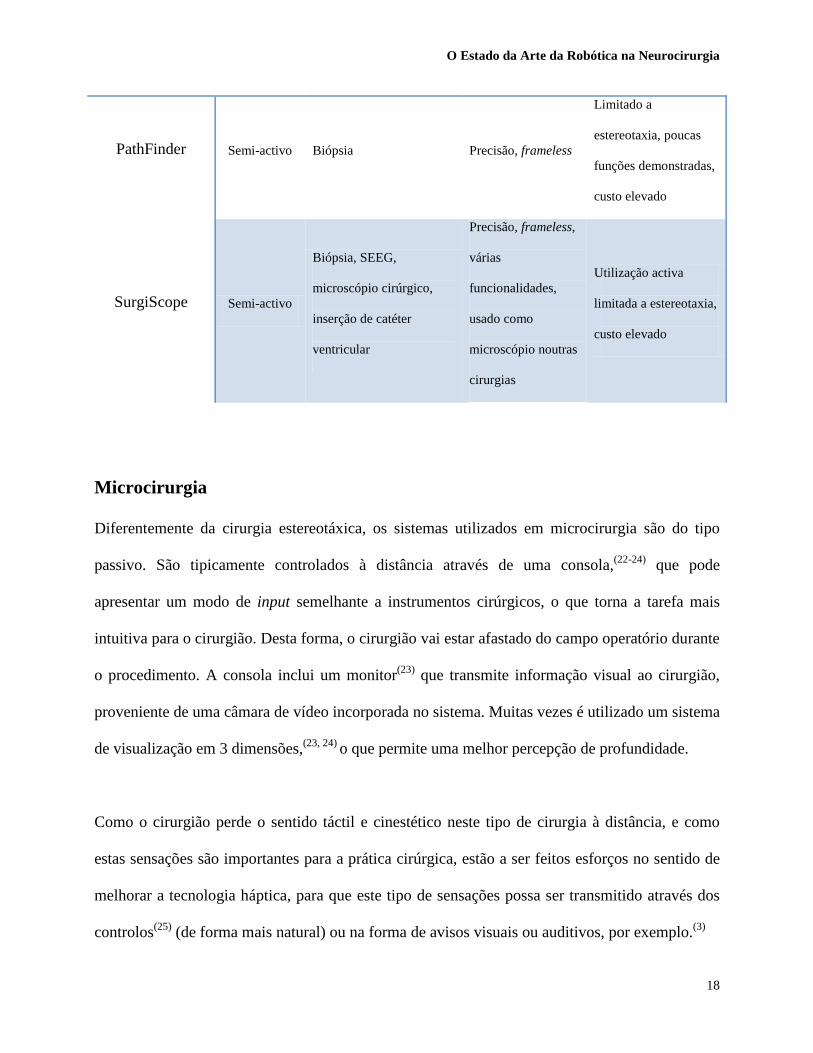
Tabela 1 - Resumo dos sistemas utilizados em cirurgia estereotáxica, com designação do tipo de sistema, e
aplicações, vantagens e limitações de cada um.
Sistemas Tipo Aplicações Vantagens Limitações
NeuroMate Semi-activo Biópsia, DBS, SEEG
Precisão, modo
frameless, várias
funcionalidades
Limitado a
estereotaxia, custo
elevado
O Estado da Arte da Robótica na Neurocirurgia
18
PathFinder Semi-activo Biópsia Precisão, frameless
Limitado a
estereotaxia, poucas
funções demonstradas,
custo elevado
SurgiScope Semi-activo
Biópsia, SEEG,
microscópio cirúrgico,
inserção de catéter
ventricular
Precisão, frameless,
várias
funcionalidades,
usado como
microscópio noutras
cirurgias
Utilização activa
limitada a estereotaxia,
custo elevado
Microcirurgia
Diferentemente da cirurgia estereotáxica, os sistemas utilizados em microcirurgia são do tipo
passivo. São tipicamente controlados à distância através de uma consola,(22-24)
que pode
apresentar um modo de input semelhante a instrumentos cirúrgicos, o que torna a tarefa mais
intuitiva para o cirurgião. Desta forma, o cirurgião vai estar afastado do campo operatório durante
o procedimento. A consola inclui um monitor(23)
que transmite informação visual ao cirurgião,
proveniente de uma câmara de vídeo incorporada no sistema. Muitas vezes é utilizado um sistema
de visualização em 3 dimensões,(23, 24)
o que permite uma melhor percepção de profundidade.
Como o cirurgião perde o sentido táctil e cinestético neste tipo de cirurgia à distância, e como
estas sensações são importantes para a prática cirúrgica, estão a ser feitos esforços no sentido de
melhorar a tecnologia háptica, para que este tipo de sensações possa ser transmitido através dos
controlos(25)
(de forma mais natural) ou na forma de avisos visuais ou auditivos, por exemplo.(3)
O Estado da Arte da Robótica na Neurocirurgia
19
Alguns dos sistemas que estão a ser desenvolvidos actualmente são o NeuRobot,(22-24)
o sistema
de Mitsuishi et al.(26, 27)
e o neuroArm.(25, 28, 29)
NeuRobot
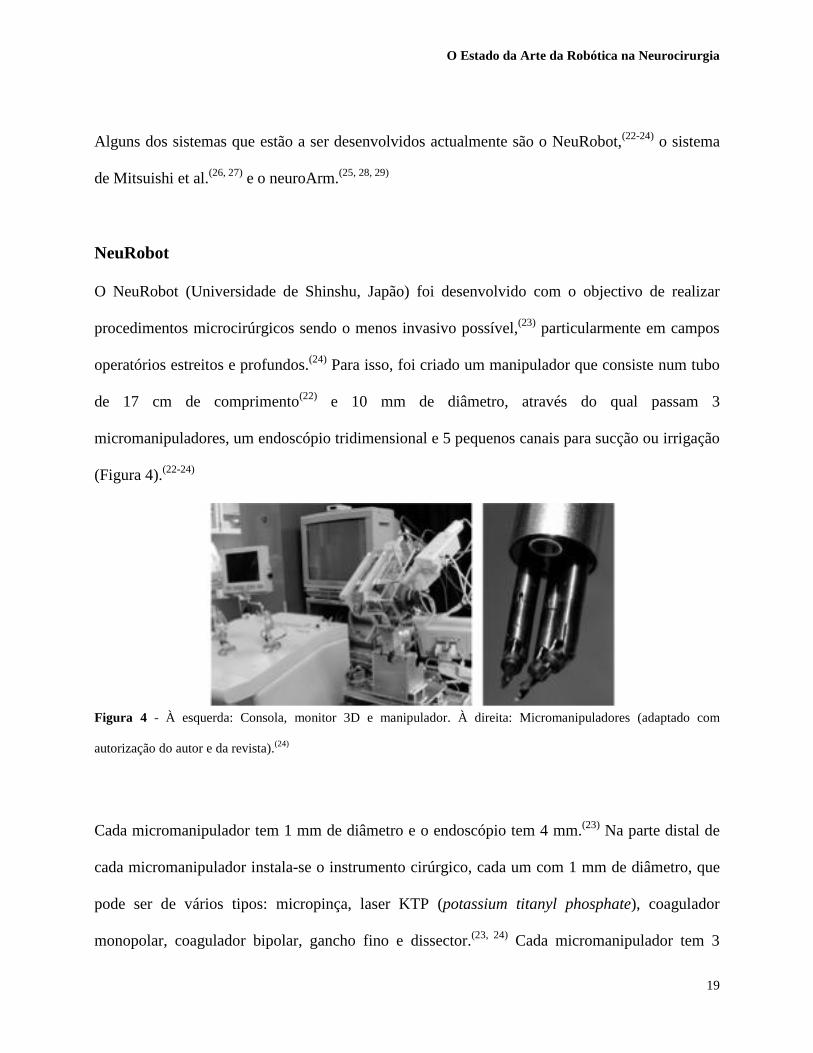
O NeuRobot (Universidade de Shinshu, Japão) foi desenvolvido com o objectivo de realizar
procedimentos microcirúrgicos sendo o menos invasivo possível,(23)
particularmente em campos
operatórios estreitos e profundos.(24)
Para isso, foi criado um manipulador que consiste num tubo
de 17 cm de comprimento(22)
e 10 mm de diâmetro, através do qual passam 3
micromanipuladores, um endoscópio tridimensional e 5 pequenos canais para sucção ou irrigação
(Figura 4).(22-24)
Figura 4 - À esquerda: Consola, monitor 3D e manipulador. À direita: Micromanipuladores (adaptado com
autorização do autor e da revista).(24)
Cada micromanipulador tem 1 mm de diâmetro e o endoscópio tem 4 mm.(23)
Na parte distal de
cada micromanipulador instala-se o instrumento cirúrgico, cada um com 1 mm de diâmetro, que
pode ser de vários tipos: micropinça, laser KTP (potassium titanyl phosphate), coagulador
monopolar, coagulador bipolar, gancho fino e dissector.(23, 24)
Cada micromanipulador tem 3
O Estado da Arte da Robótica na Neurocirurgia
20
DOF: movimento vertical ao longo do eixo longitudinal, rotação em torno deste mesmo eixo e
extensão/flexão da porção distal até 90°.(23, 24)
A base do manipulador tem 6 DOF: movimentos translacionais ao longos dos eixos x,y,z,
movimentos rotacionais no plano horizontal (esquerda/direita), movimentos rotacionais no plano
sagital (anterior/posterior) e movimento do manipulador ao longo do seu eixo longitudinal.(23)
A
base é controlada a partir de um painel de controlo, em que é possível ajustar a sua posição
manualmente através de setas direccionais, ou pela introdução de coordenadas, de acordo com o
planeamento pré-operatório.(23)
O movimento mínimo dos micromanipuladores é de 0,02 mm,
enquanto que o movimento mínimo da base do manipulador é de 0,1 mm.(23, 24)
A consola inclui os controlos dos micromanipuladores, que têm os mesmos 3 DOF que estes,
sendo as acções realizadas pelo cirurgião através dos controlos correspondidas pelos
micromanipuladores.(23, 24)
Para além disto, o cirurgião também dispõe de um monitor de imagem
tridimensional, que transmite as imagens captadas pelo endoscópio.(23)
O NeuRobot foi testado em vários procedimentos num cadáver.(23)
Foi utilizado para dissecção
através da fissura Sílvica até expor, com sucesso, o nervo óptico e a artéria carótida interna;(23)
realizou uma fenestração do pavimento do terceiro ventrículo;(23)
e expôs o quiasma óptico e a
artéria comunicante anterior adequadamente, por via interhemisférica.(23)
A sua primeira aplicação clínica foi na remoção, por via frontotemporal, de uma porção
superficial de um meningioma atípico com 6 cm localizado na fossa média esquerda com

O Estado da Arte da Robótica na Neurocirurgia
21
extensão ao seio cavernoso, sela turca e cavidade orbitária esquerdos e com uma porção
infratentorial.(22)
O sistema foi apenas utilizado após a abertura da dura, e durante um período de
cerca de 30 minutos. Entre outras tarefas realizadas, removeu 4 fragmentos de tumor, cujo
diâmetro máximo foi de 7 mm, com a utilização de laser KTP.(22)
O resto do procedimento foi
executado de forma convencional. Não se verificaram complicações devidas à utilização do
sistema.(22)
Num estudo com o objectivo de avaliar a exequibilidade do NeuRobot em neuroendoscopia,
foram realizados quatro procedimentos intraventriculares em três cadáveres.(24)
O primeiro foi
uma fenestração do pavimento do terceiro ventrículo, através da abertura de um pequeno orifício
com o auxílio de um par de micropinças. A rotação dos micromanipuladores, ao segurar as
extremidades do orifício, permitiu o aumento do seu diâmetro de forma segura, até atingir 6 mm
(Figura 5). A ventriculostomia foi feita em 35 s.(24)
Posteriormente foi realizada uma fenestração
do septum pellucidum, com o manipulador inserido no corno posterior do ventrículo lateral
esquerdo, criando uma abertura de 10 mm, de forma semelhante à anterior. A septostomia foi
realizada em 25 s.(24)
Foi também realizada uma biópsia do tálamo. Os micromanipuladores
atravessaram o foramen de Monro e utilizou-se o laser KTP para remover uma porção de 3 mm
de tecido talâmico (duração de 115 s). O foramen de Monro ficou intacto, no entanto a passagem
dos instrumentos causou uma lesão parcial da adesão intertalâmica.(24)
O último procedimento foi
uma biópsia do plexo coróide, que foi segurado com as micropinças e cortado com o laser KTP,
com obtenção de uma amostra de 3 mm (duração de 110 s). Em nenhuma das situações foi
necessário alterar a posição do manipulador durante o procedimento, nem qualquer intervenção
manual.(24)
O NeuRobot foi ainda utilizado no caso de um doente de 41 anos com hidrocefalia

O Estado da Arte da Robótica na Neurocirurgia
22
obstrutiva por estenose do aqueducto de Sylvius devido a uma anomalia venosa de
desenvolvimento. Foi realizada ventriculostomia do terceiro ventrículo de forma semelhante à
descrita anteriormente. A cirurgia foi bem sucedida, com melhoria sintomática, e não existiram
quaisquer complicações.(24)
Figura 5 – Ventriculostomia: (a) Perfuração com micropinças; (b-d) Alargamento do orifício através da rotação das
micropinças segurando as suas margens (adaptado com autorização do autor e da revista).(24)
Sistema de Mitsuishi e colaboradores
O sistema desenvolvido por Mamoru Mitsuishi e colaboradores(26, 27)
(Universidade de Tokyo,
Japão) é um sistema passivo, controlado à distância através de uma consola. A versão original foi
criada com o objectivo de melhorar a destreza e a manobrabilidade em campos cirúrgicos
profundos.(27)
No entanto, devido a algumas dificuldades, como manipuladores demasiado
grandes, e destreza não satisfatória,(27)
a versão mais recente do sistema(26)
já não é dirigida
especificamente para campos profundos, mas continua a ser aperfeiçoada para a realização de
tarefas microcirúrgicas mais finas, como a anastomose das artérias temporal superficial e cerebral
média.
O Estado da Arte da Robótica na Neurocirurgia
23
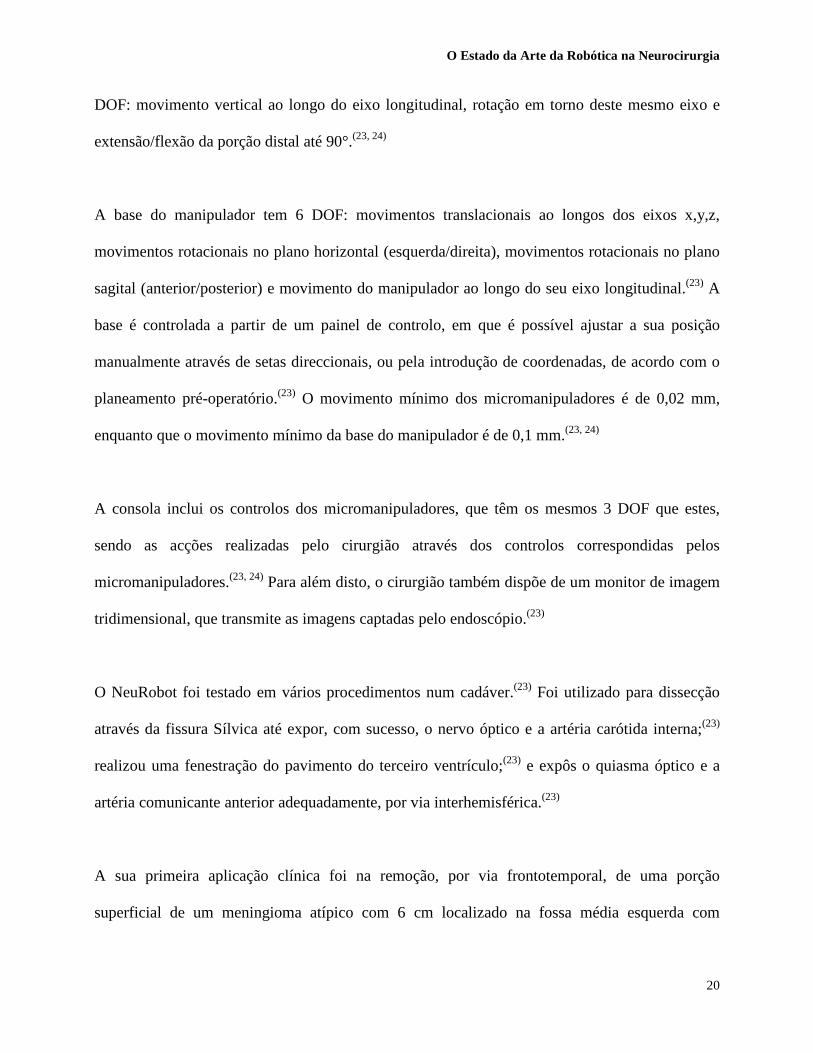
A parte efectora do sistema é constituída por 2 manipuladores (Figura 6), cada um suportado por
uma base móvel, o que permite que seja posicionado de forma a interferir o mínimo possível com
o restante equipamento. Devido ao risco de erros de posicionamento e à necessidade de precisão
em microcirurgia, assim como ao problema da complexidade do controlo do movimento de todos
os eixos simultaneamente em braços articulados, os autores preferiram utilizar uma configuração
cartesiana. Desta forma, os movimentos de translação (x,y,z) são realizados pela base do
manipulador, sendo mecanicamente separados dos movimentos de orientação angulares (, )
que são controlados por uma unidade em arco montada na base. Esta estrutura cria um centro de
movimento remoto (remote center of motion, RCM) na ponta do efector final (pinça) (Figura 7).
O volume de trabalho é o de um cubo de arestas de 150 mm, o que é adequado quer para
manipulação fina, quer para certos movimentos grosseiros.(26)
Figura 6 - Manipuladores (adaptado com autorização da revista).(26)
O Estado da Arte da Robótica na Neurocirurgia
24
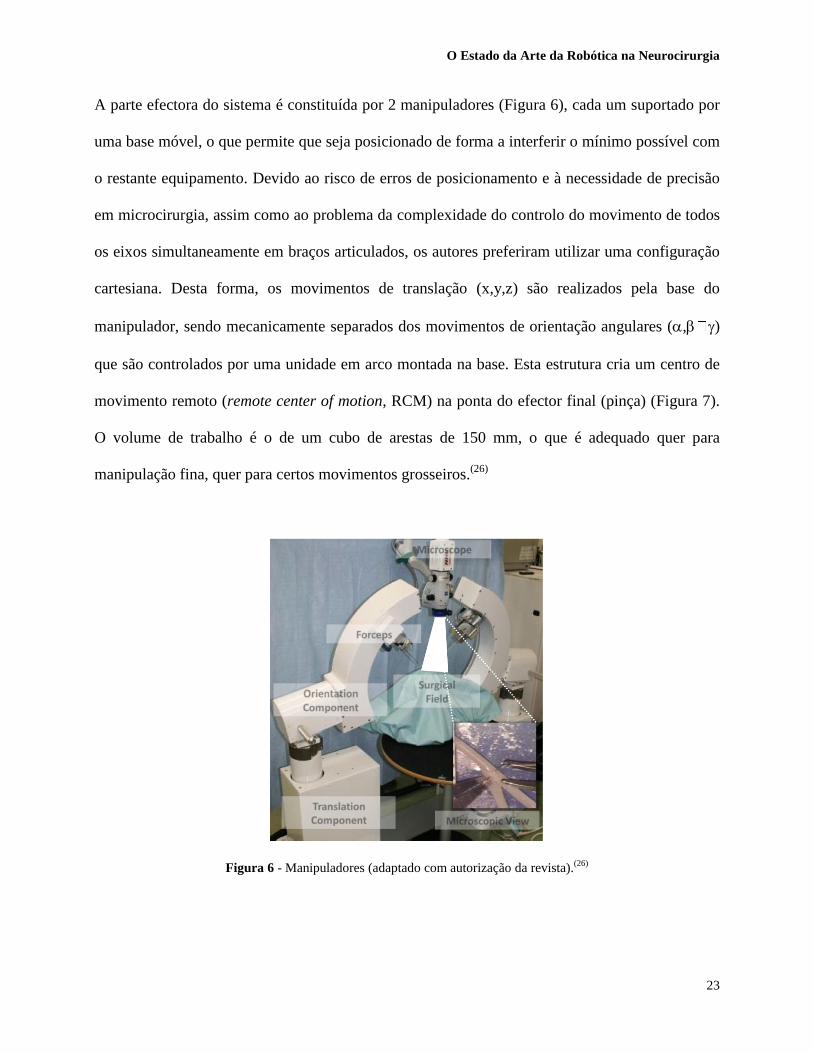
O segmento do efector final que contacta com o campo operatório é uma pinça com um cabo de
130 mm de comprimento e 3,5 mm de diâmetro. Ainda só foi desenvolvida uma pinça curva e
uma recta, embora os autores tenham intenção de desenvolver outros instrumentos.(26)
Cada
manipulador apresenta, portanto, 7 DOF, os 6 apresentados anteriormente, acrescentando a
capacidade de agarrar da pinça.
Figura 7 - Graus de liberdade do manipulador e RCM (adaptado com autorização da revista).(26)
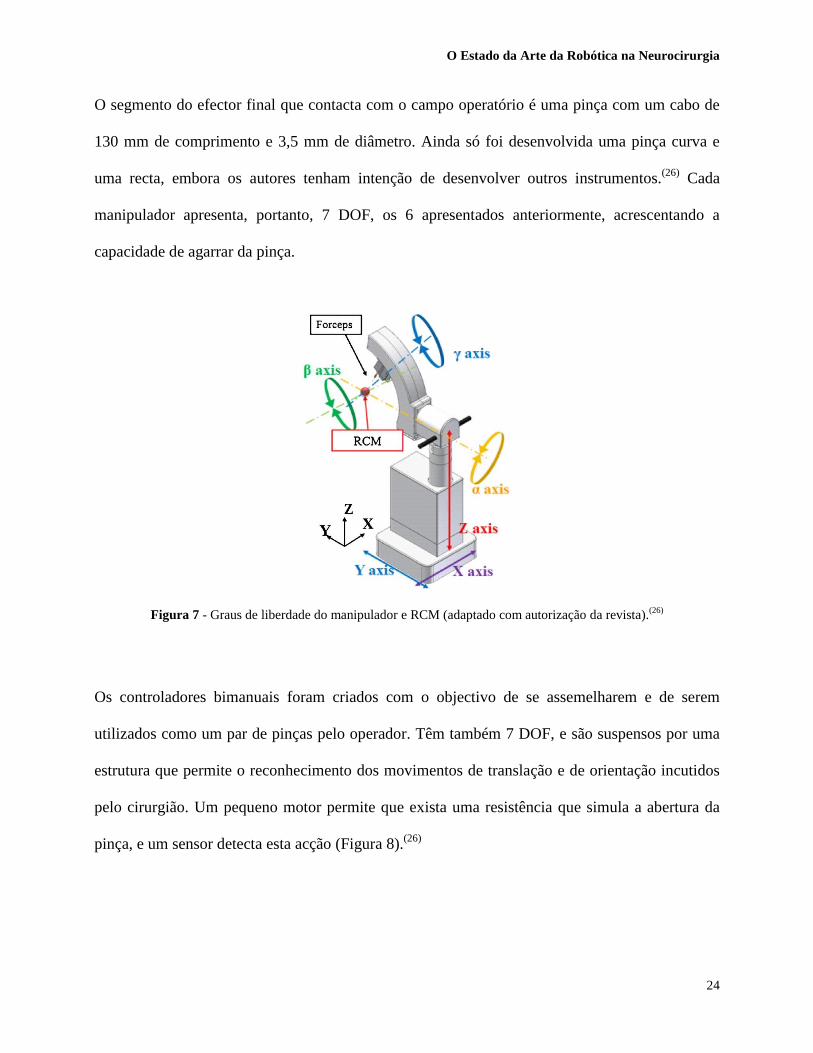
Os controladores bimanuais foram criados com o objectivo de se assemelharem e de serem
utilizados como um par de pinças pelo operador. Têm também 7 DOF, e são suspensos por uma
estrutura que permite o reconhecimento dos movimentos de translação e de orientação incutidos
pelo cirurgião. Um pequeno motor permite que exista uma resistência que simula a abertura da
pinça, e um sensor detecta esta acção (Figura 8).(26)

O Estado da Arte da Robótica na Neurocirurgia
25
Como o cirurgião está distanciado do campo operatório, é necessário que lhe seja transmitida
uma imagem. Assim, é utilizado um microscópio equipado com uma câmara de vídeo
estereoscópica de alta definição, que permite ao cirurgião uma visão tridimensional através de um
ecrã.(26)
Figura 8 - Controladores bimanuais. À esquerda: vista geral. À direita: detalhe (adaptado com autorização da
revista).(26)
O desempenho do sistema foi testado através da anastomose término-terminal de um microvaso
artificial com 0,3 mm de diâmetro (Figura 9) e de uma anastomose látero-terminal de um outro
vaso com 0,5 mm de diâmetro. Ambas as experiências foram bem sucedidas, demonstrando a
precisão e destreza do sistema. No entanto, o tempo de tarefa foi muito superior ao realizado
manualmente.(26)

O Estado da Arte da Robótica na Neurocirurgia
26
Figura 9 - Anastomose término-terminal de de microvasos artificiais com 0.3 mm de diâmetro (adaptado com
autorização da revista).(26)
neuroArm
O neuroArm (Universidade de Calgary, Alberta, Canadá) é um sistema passivo controlado à
distância, que foi desenvolvido com o objectivo de possibilitar a aquisição de imagens de
ressonância magnética em tempo real, assim como proporcionar ao cirurgião o máximo de
informação sensorial possível.(25)
Este sistema é capaz de realizar quer tarefas microcirúrgicas,
quer estereotáxicas,(25, 28)
e foi desenhado de forma a poder ser assistido por um ajudante, tal
como habitualmente acontece em cirurgia convencional (Figura 10).(25)

O Estado da Arte da Robótica na Neurocirurgia
27
Figura 10 - O neuroArm a operar em conjunto com um assistente (adaptado com autorização do autor e da
revista).(25)
Os manipuladores consistem em dois braços robotizados com 7 DOF que têm a capacidade de
utilizar instrumentos especificamente desenhados para o neuroArm, assim como outros já
existentes (Figura 11).(25, 29)
O cirurgião controla o sistema através de uma consola, que inclui
vários monitores: com transmissão de imagens tridimensionais do campo operatório, transmissão
de imagens de iMRI, e da posição dos manipuladores; assim como os controlos do sistema
(Figura 12).(25, 29)
Os controlos manuais permitem o comando dos movimentos dos
manipuladores, assim como a transmissão de feedback cinestético ao cirurgião.(25, 29)
Estes
controlos têm a capacidade de transmitir informação posicional translacional e rotacional.(25, 29)

O Estado da Arte da Robótica na Neurocirurgia
28
Figura 11 - Detalhe dos manipuladores, com pinça bipolar como efector final montada no manipulador direito
(adaptado com autorização do autor e da revista).(29)
Cada braço robotizado tem dois sensores cinestéticos que possibilitam a avaliação da força de
interacção entre o instrumento cirúrgico e o meio circundante. Esta força é subsequentemente
replicada pelos controlos hápticos, transmitindo assim esta sensação ao cirurgião.(25)
A segurança do doente é assegurada por numerosos sensores e avaliações automáticas de
software,(25, 28)
que impedem movimentos inadvertidos e acções em áreas “proibidas”. Estas
podem ser definidas previamente pelo cirurgião, de forma a que zonas e estruturas sensíveis nas
imediações do campo operatório não possam ser lesadas durante o procedimento, quer por
eventuais movimentos inapropriados do sistema que pudessem ter ultrapassado outros níveis de
segurança, quer por acções inadvertidas do cirurgião que pudessem atingir estas áreas
sensíveis.(25)
O Estado da Arte da Robótica na Neurocirurgia
29
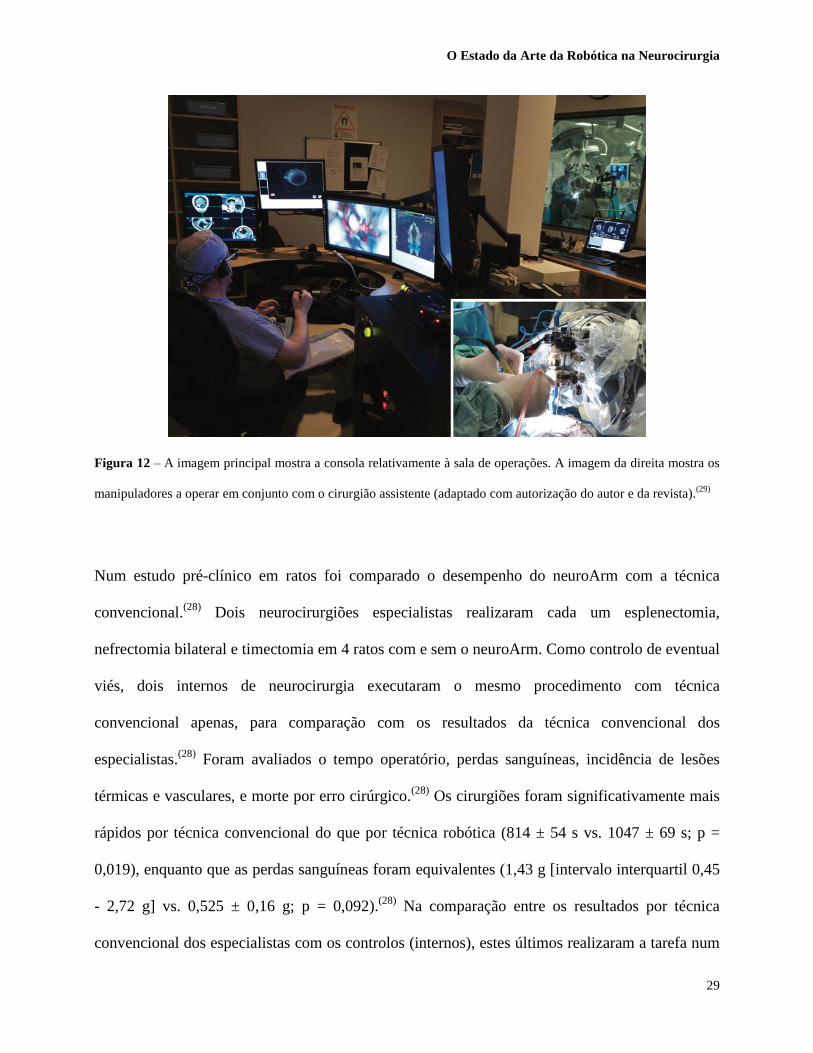
Figura 12 – A imagem principal mostra a consola relativamente à sala de operações. A imagem da direita mostra os
manipuladores a operar em conjunto com o cirurgião assistente (adaptado com autorização do autor e da revista).(29)
Num estudo pré-clínico em ratos foi comparado o desempenho do neuroArm com a técnica
convencional.(28)
Dois neurocirurgiões especialistas realizaram cada um esplenectomia,
nefrectomia bilateral e timectomia em 4 ratos com e sem o neuroArm. Como controlo de eventual
viés, dois internos de neurocirurgia executaram o mesmo procedimento com técnica
convencional apenas, para comparação com os resultados da técnica convencional dos
especialistas.(28)
Foram avaliados o tempo operatório, perdas sanguíneas, incidência de lesões
térmicas e vasculares, e morte por erro cirúrgico.(28)
Os cirurgiões foram significativamente mais
rápidos por técnica convencional do que por técnica robótica (814 ± 54 s vs. 1047 ± 69 s; p =
0,019), enquanto que as perdas sanguíneas foram equivalentes (1,43 g [intervalo interquartil 0,45
- 2,72 g] vs. 0,525 ± 0,16 g; p = 0,092).(28)
Na comparação entre os resultados por técnica
convencional dos especialistas com os controlos (internos), estes últimos realizaram a tarefa num
O Estado da Arte da Robótica na Neurocirurgia
30
intervalo de tempo significativamente mais curto (591 ± 50 s; p = 0,009). As perdas de sangue
foram mais uma vez semelhantes (1,1 g [intervalo interquartil 0,37 - 1,82 g]; p = 0,401). No
entanto, no grupo de controlo houve uma morte causada por lesão vascular.(28)
Com estes
resultados de controlo, os autores consideraram que não houve viés em favor do neuroArm pela
parte dos especialistas.(28)
As variáveis em estudo foram contabilizadas numa fórmula de
desempenho(28)
expressa em unidade de tempo. Comparando a pontuação de desempenho entre o
grupo do neuroArm com o da técnica convencional, encontrou-se resultados equivalentes (1110 ±
82 s vs. 1075 ± 136 s). Na comparação deste último grupo com o grupo de controlo, obteve-se o
mesmo resultado (1075 ± 136 s vs. 781 s [intervalo interquartil 665 - 878 s]; p = 0,141).(28)
A precisão de localização do sistema de navegação do neuroArm foi comparada à de um sistema
de navegação frameless correntemente utilizado, o VectorVision Sky Navigation System
(BrainLAB), em dois cadáveres, com a avaliação do erro de localização de 4 alvos profundos.(28)
Os erros de localização do neuroArm e do VectorVision foram de 4,35 ± 1,68 mm e 10,4 ± 2,79
mm, respectivamente. Apesar de aparentemente o neuroArm ter sido mais preciso na detecção
dos alvos, isto não foi estatisticamente significativo (p = 0,104).(28)
Subsequentemente, o neuroArm foi introduzido gradualmente na prática cirúrgica ao longo de 5
casos, o que provou ser útil para encontrar e resolver problemas menores que não tinham sido
previstos, sem que houvesse risco para o doente, assim como familiarizar a equipa cirúrgica com
o sistema.(28, 29)
Um destes problemas foi devido a uma falha mecânica de um motor durante um
procedimento, que ao ocorrer, levou a um movimento inapropriado do manipulador. Isto activou
o sistema de segurança que desligou de imediato a fonte de energia do manipulador em causa,
O Estado da Arte da Robótica na Neurocirurgia
31
sem que tivesse sido causada qualquer lesão. De certa forma, esta falha permitiu demonstrar que
o sistema de segurança é fiável.(28)
No entanto, em consequência disto, foi realizada uma revisão
de segurança.(29)
Entre outras alterações de segurança adicionadas, foi introduzido um pedal que
funciona como activador do sistema, sendo que apenas é possível ocorrer movimento dos
manipuladores quando o cirurgião pressiona o pedal.(29)
Posteriormente, este estudo foi continuado ao longo de mais 30 casos clínicos com utilização
progressiva do sistema, num conjunto variado de patologias, dando oportunidade ao cirurgião de
ganhar experiência no controlo do sistema em situações diferentes, conferindo-lhe mais confiança
para utilizar o neuroArm cada vez mais extensivamente.(29)
A conversão para cirurgia
convencional foi necessária apenas num caso, por precaução, devido ao corredor cirúrgico ser
demasiado estreito para que fosse possível que o sistema e o cirurgião assistente pudessem
trabalhar em simultâneo.(29)
No total dos 35 casos, o tempo médio no bloco operatório foi de
cerca de 7 horas. O tempo de preparação, com aquisição de imagem, planeamento cirúrgico e
registo intraoperatório, representou aproximadamente 2 horas do tempo total. O tempo desde a
primeira incisão até ao encerramento foi de cerca de 4,5 horas, sendo o tempo de utilização
médio do sistema de uma hora, o que tem relação com a introdução gradual na actividade
cirúrgica. A preparação do sistema com colocação de protecções e instrumentos estéreis foi
simples e demorou menos de 10 minutos, não tendo ocorrido nenhum episódio de infecção. A
única complicação foi uma parésia transitória do nervo facial e o tempo médio de internamento
foi de 3 dias.(29)
A pontuação na escala de Karnofsky foi também avaliada no pré e pós-
operatório, assim como às 12 semanas depois da intervenção cirúrgica. Os valores no pós-

O Estado da Arte da Robótica na Neurocirurgia
32
operatório e às 12 semanas foram significativamente superiores do ponto de vista estatístico, do
que no pré-operatório.(29)
Apesar de o neuroArm ser capaz de realizar cirurgia estereotáxica, isto não foi testado em
nenhum destes casos, devido aos manipuladores serem demasiado grandes para ambos operarem
simultaneamente dentro do aparelho de ressonância magnética, uma questão que, os autores
referem, irá ser ultrapassada no próximo modelo, cujos manipuladores serão 25% mais pequenos,
entre outras modificações.(29)
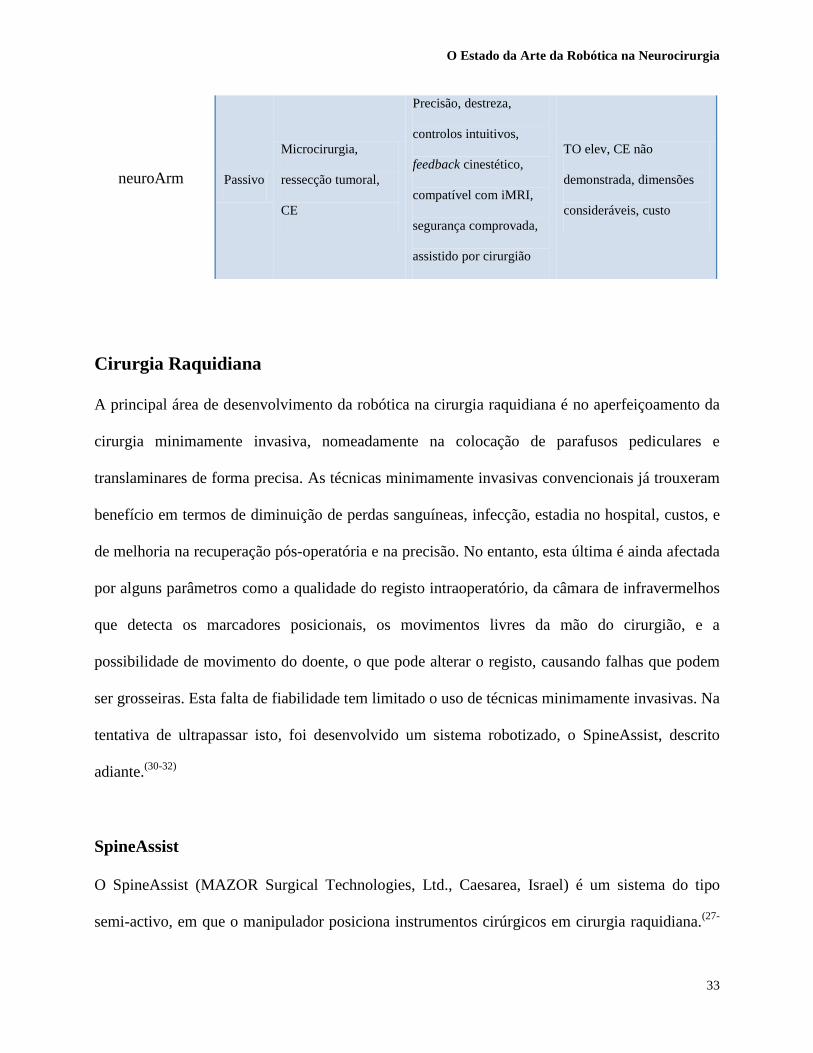
Tabela 2 - Resumo dos sistemas utilizados em microcirurgia, com designação do tipo de sistema, e aplicações,
vantagens e limitações de cada um. (CE – cirurgia estereotáxica; elev – elevado; lig – ligeiro; peq – pequeno; TO –
tempo operatório; VT – volume de trabalho)
Sistemas Tipo Aplicações Vantagens Limitações
NeuRobot Passivo
Microcirurgia,
ressecção tumoral,
neuroendoscopia
Precisão, destreza,
múltiplos instrumentos,
tamanho reduzido
Tubo rígido, diâmetro lig
elev, peq VT, falta de
feedback sensorial, custo
S. Mitsuishi et al. Passivo Microcirurgia,
anastomose vascular
Precisão, destreza,
controlos intuitivos
Poucos instrumentos
desenvolvidos, peq VT,
poucas funções
demonstradas, TO elev,
falta de feedback sensorial,
custo
O Estado da Arte da Robótica na Neurocirurgia
33
neuroArm Passivo
Microcirurgia,
ressecção tumoral,
CE
Precisão, destreza,
controlos intuitivos,
feedback cinestético,
compatível com iMRI,
segurança comprovada,
assistido por cirurgião
TO elev, CE não
demonstrada, dimensões
consideráveis, custo
Cirurgia Raquidiana
A principal área de desenvolvimento da robótica na cirurgia raquidiana é no aperfeiçoamento da
cirurgia minimamente invasiva, nomeadamente na colocação de parafusos pediculares e
translaminares de forma precisa. As técnicas minimamente invasivas convencionais já trouxeram
benefício em termos de diminuição de perdas sanguíneas, infecção, estadia no hospital, custos, e
de melhoria na recuperação pós-operatória e na precisão. No entanto, esta última é ainda afectada
por alguns parâmetros como a qualidade do registo intraoperatório, da câmara de infravermelhos
que detecta os marcadores posicionais, os movimentos livres da mão do cirurgião, e a
possibilidade de movimento do doente, o que pode alterar o registo, causando falhas que podem
ser grosseiras. Esta falta de fiabilidade tem limitado o uso de técnicas minimamente invasivas. Na
tentativa de ultrapassar isto, foi desenvolvido um sistema robotizado, o SpineAssist, descrito
adiante.(30-32)
SpineAssist
O SpineAssist (MAZOR Surgical Technologies, Ltd., Caesarea, Israel) é um sistema do tipo
semi-activo, em que o manipulador posiciona instrumentos cirúrgicos em cirurgia raquidiana.(27-
O Estado da Arte da Robótica na Neurocirurgia
34
29) Foi desenvolvido com o objectivo de assistir na colocação de parafusos pediculares e
translaminares por via percutânea de forma precisa.(31)
O manipulador tem uma forma cilíndrica, com 80 mm de altura, 50 mm de diâmetro e 250 g de
peso.(30-32)
A este cilindro central liga-se um de três tipos de braços metálicos, de acordo com a
posição do alvo, que contêm um suporte para uma cânula guia de instrumentos cirúrgicos. O
manipulador tem 6 DOF.(30-32)
A consola do SpineAssist inclui software especialmente criado
para este sistema, que permite o registo do sistema, auxilia o planeamento pré-operatório ao
facilitar a determinação da melhor trajectória, e controla o SpineAssist.(30-32)
O SpineAssist pode ser fixado ao doente através dois métodos.(31, 32)
Um deles utiliza um grampo
para se fixar a um processo espinhoso próximo do nível a ser intervencionado, o que requer
apenas uma pequena incisão. O grampo liga-se a uma pequena armação que permite a montagem
do SpineAssist numa de três posições, o que possibilita o acesso às vértebras adjacentes. O outro
método é o Hover-T frame, que é fixado por um fio de Kirschner a um processo espinhoso e por
2 cravos de Steinmann às espinhas ilíacas póstero-superiores. A estes monta-se uma armação
maior com 19 posições ao longo so seu eixo longitudinal sobre a qual se monta o SpineAssist ou
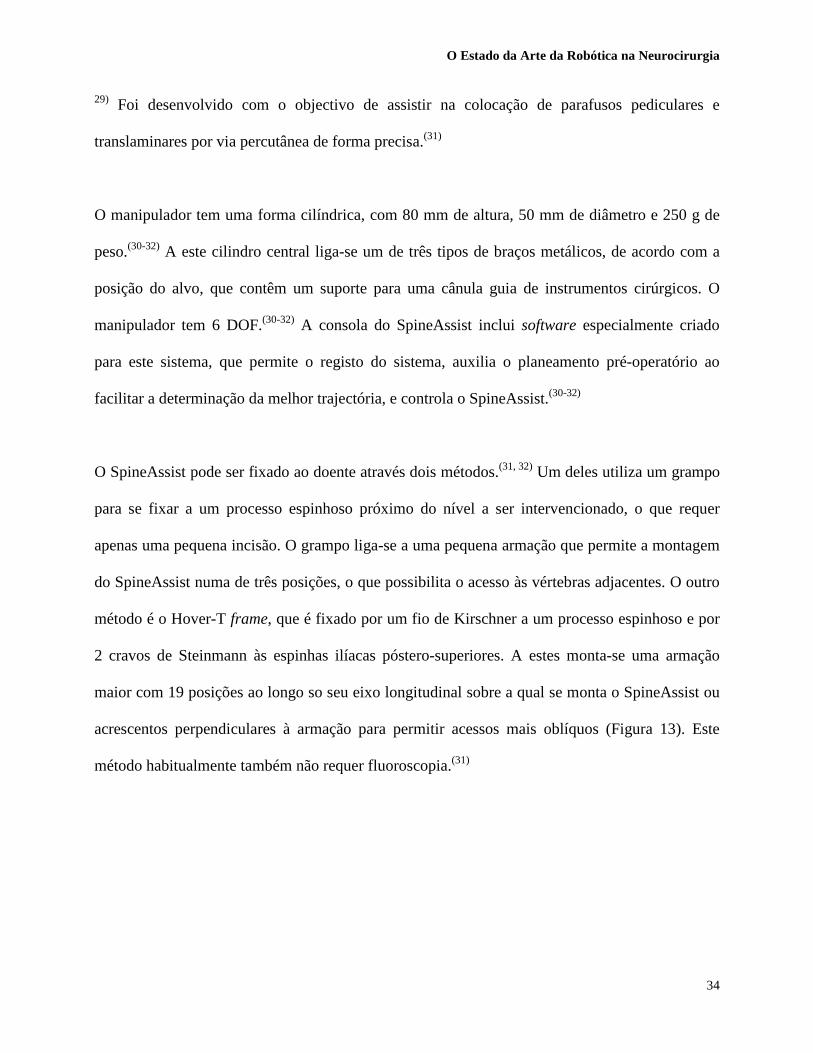
acrescentos perpendiculares à armação para permitir acessos mais oblíquos (Figura 13). Este
método habitualmente também não requer fluoroscopia.(31)
O Estado da Arte da Robótica na Neurocirurgia
35
Figura 13 - Em cima: Colocação de parafuso pedicular, utilizando a fixação com clamp. Implantação de parafuso
translaminar, com Hover-T frame (adaptado com autorização da revista).(32)
Para o planeamento pré-operatório é necessária a aquisição de imagens de CT, que são
importadas para o software do SpineAssist, onde é possível utilizar as imagens de reconstrução
tridimensional para planear os pontos de entrada e trajectória óptimos, com possibilidade de
escolher quais as dimensões mais adequadas dos parafusos e visualizar de forma facilitada a sua
localização final em várias perspectivas.(31)
O registo intraoperatório é feito através de
fluoroscopia, com e sem dispositivos de marcação, sendo estas imagens automaticamente
correlacionadas com as de CT pré-operatória pelo software do SpineAssist. O cirurgião apenas
tem de confirmar que as imagens pré e intraoperatórias estão bem alinhadas.(31)
O software
sugere, então, as combinações de posições, braço metálico e parafusos mais apropriados para o

O Estado da Arte da Robótica na Neurocirurgia
36
procedimento, e o cirurgião selecciona os que pretende.(31, 32)
Não é necessário qualquer controlo
adicional por fluoroscopia durante o resto do procedimento.(31, 32)
Numa experiência em 6 cadáveres, foram colocados 4 parafusos e 32 fios de Kirschner
pediculares(31, 32)
. Um destes últimos soltou-se após a cirurgia e não foi avaliado. A posição e
desvio relativamente ao plano pré-operatório foi avaliado por CT pós-operatória. Dos 32 fios de
Kirschner, 28 e 4 parafusos foram colocados com um desvio máximo de 1,5 mm, excepto um
com um desvio lateral de 1,7 mm. Neste grupo, o desvio médio foi de 0,87 ± 0,63 mm.(32)
Considerando apenas os 4 parafusos, o desvio médio foi de 1,03 ± 0,59 mm. Neste grupo foram
também colocadas barras de fixação posterior, com um tempo total de procedimento de 30
minutos.(31, 32)
Os restantes 3 fios de Kirschner foram colocados todos com um desvio maior do
que 4 mm.(32)
Foi também realizada uma experiência em 4 cadáveres em que foi estudada a
precisão da colocação de 19 fios de Kirschner translaminares.(32)
Destes, um quebrou-se e outro
dobrou-se durante a sua colocação. Noutra situação, houve ainda uma colisão com um fio de
Kirschner já colocado contralateralmenre no mesmo nível, o que resultou num desvio inferior de
6,5 mm no plano anteroposterior. Os restantes 16 foram inseridos com um desvio máximo de 1,5
mm, sendo o desvio médio de 0,82 ± 0,65 mm.(32)
Lieberman et al. realizaram um estudo em 12 cadáveres, com o objectivo de avaliar a precisão do
SpineAssist na colocação de parafusos pediculares, a exposição dos cirurgiões a radiação e o
tempo de procedimento.(30)
Foi criado um grupo de estudo e um de controlo. O grupo de estudo
incluiu 15 cirurgiões que utilizaram o SpineAssist para a implantação percutânea de 197
parafusos em 10 cadáveres. O grupo de controlo incluiu 2 cirurgiões, com a colocação de 27

O Estado da Arte da Robótica na Neurocirurgia
37
parafusos por via percutânea convencional em 2 cadáveres, com controlo fluoroscópico, e de 10
parafusos por via aberta num dos cadáveres, sem controlo radiológico.(30)
A precisão foi
determinada através da medição por CT pós-operatória, do desvio dos parafusos relativamente ao
plano pré-operatório. 23 implantes foram excluídos da análise, visto que 9 destes tinham um
diâmetro maior do que o pedículo, 8 foram colocados em pedículos hipoplásicos, e 6 por
planeamento pré-operatório incorrecto.(30)
O desvio médio no grupo de estudo foi de 1,1 ± 0,4
mm, enquanto que no grupo de controlo foi 2,6 ± 0,7 mm (p < 0,0001). Segundo os dados
obtidos, isto representa uma precisão e consistência 58% e 43% maiores, respectivamente.(30)
A radiação média por parafuso a que cada cirurgião foi exposto foi de 0,2 mrem (2 µSv) no grupo
de estudo, enquanto que no grupo de controlo foi de 10,1 mrem (101 µSv) (p < 0,001), uma
redução de 98,2% de exposição a radiação ionizante no grupo de estudo.(30)
Isto está relacionado
com o tempo de fluoroscopia por parafuso, que foi de 0,7 s no grupo de estudo e de 33 s no grupo
de controlo, cuja diferença, no entanto, não é considerada estatisticamente significativa (p =
0,063).(30)
O tempo operatório médio foi de 1,23 horas no grupo de estudo e de 1,98 horas no grupo de
controlo. O tempo médio por parafuso foi de 4,05 ± 1,08 minutos vs 6,27 ± 3,05 minutos, nos
grupos de estudo e controlo respectivamente. Esta diferença também não foi estatisticamente
significativa (p = 0,192). Um cirurgião experiente com o uso do SpineAssist realizou o
procedimento em 0,82 horas, com uma média de 2,75 minutos por parafuso.(23, 30)
O Estado da Arte da Robótica na Neurocirurgia
38
Tabela 3 - Resumo do SpineAssist, com designação do tipo de sistema, aplicações, vantagens e limitações.
Sistema Tipo Aplicações Vantagens Limitações
SpineAssist Semi-activo
Inserção de parafusos
pediculares e
translaminares
Precisão, tamanho reduzido,
pouco invasivo, menos
radiação, menor tempo
operatório
Poucas funcionalidades,
custo elevado
Radiocirurgia
Apesar de ser uma técnica de radioterapia, a estreita relação entre a radiocirurgia cerebral e
raquidiana e a neurocirurgia, torna relevante a inclusão desta área de aplicação da robótica neste
trabalho.
CyberKnife
O CyberKnife (Accuray Incorporated, Sunnyvale, CA, EUA) foi criado nos anos 90 como uma
alternativa frameless aos sistemas de radiocirurgia estereotáxica como o Gamma Knife e
aceleradores lineares (LINACs) convencionais, que utilizam frames e colimadores
estereotáxicos.(33)
A versão actual, CyberKnife VSI System (Figura 14), é um sistema robotizado
do tipo activo, utilizado a nível mundial no tratamento de lesões cerebrais (tumores,
malformações arteriovenosas, nevralgia do trigémio), raquidianas, pulmonares, prostáticas,
hepáticas, da cabeça e pescoço, entre outras.(33)
O Estado da Arte da Robótica na Neurocirurgia
39
O hardware executor inclui quatro partes principais. O manipulador, que posiciona um LINAC
(efector final), um sistema de imagem por radiografia, e um sistema óptico de medição de
movimento.(33)
O manipulador é um braço robotizado com 6 DOFs, com uma precisão de
movimentos de 0,12 mm, o que lhe permite uma grande flexibilidade e precisão no
posicionamento do LINAC. Assim, o sistema pode alinhar o LINAC com o alvo, em vez de
posicionar o alvo em linha com o LINAC.(33)
Este tem capacidade de emitir uma dose de
1000cGy por minuto. Pode ser utilizado um de doze colimadores circulares com diâmetros que
variam de 0,5 a 6 cm, que podem ser trocados manualmente ou de forma automática. Existe
também um colimador que permite variar a abertura com tamanhos semelhantes aos anteriores,
eliminando a necessidade de trocar de colimador durante o procedimento.(33)
O sistema de imagem inclui duas fontes de raios-X posicionados no tecto, com detectores
localizados no chão. Estes raios são emitidos a uma inclinação de 45º relativamente aos
detectores respectivos, sendo todas as posições fixas e conhecidas, com calibração adequada.(33)
Existem ainda três câmaras que detectam marcadores ópticos colocados no doente, permitindo a
medição e controlo de eventuais movimentos.(33)
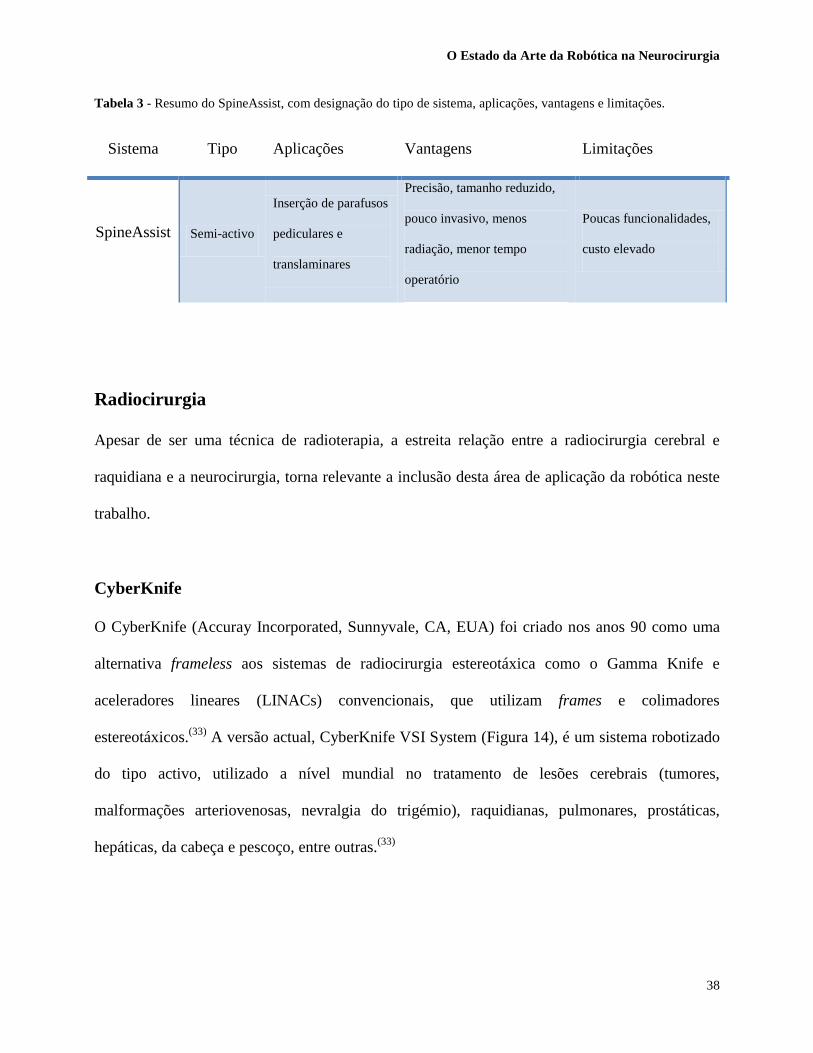
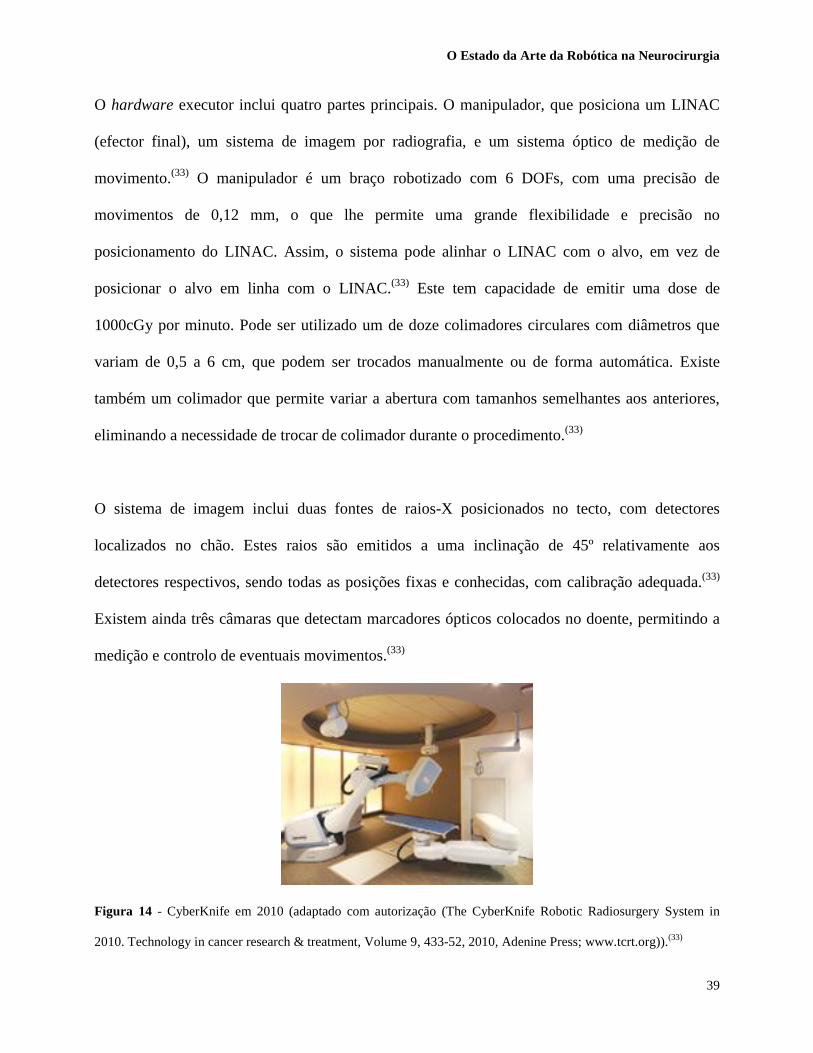
Figura 14 - CyberKnife em 2010 (adaptado com autorização (The CyberKnife Robotic Radiosurgery System in
2010. Technology in cancer research & treatment, Volume 9, 433-52, 2010, Adenine Press; www.tcrt.org)).(33)

O Estado da Arte da Robótica na Neurocirurgia
40
O planeamento exige a obtenção de imagens tridimensionais (por exemplo, CT ou MRI) para a
visualização do alvo e de eventuais órgãos em risco (isto é, tecidos que se pretende proteger de
lesão radiológica iatrogénica). A partir daqui, é criado um modelo tridimensional do doente, com
o qual se planeiam os vectores que representam a posição dos raios durante o tratamento. Com
este sistema existe a vantagem de os raios não precisarem de ser coplanares nem isocêntricos, o
que aumenta a flexibilidade na sua direcção e, consequentemente, na sua segurança para tecidos
sensíveis.(33)
O registo antes do início do procedimento é feito de forma automática, através do registo das
imagens tridimensionais utilizadas durante o planeamento, com imagens obtidas no momento
pelo sistema de imagem por radiografia instalado na sala de tratamento. Como a posição da mesa
de tratamento é ajustável automaticamente de acordo com a informação de registo de imagem, a
posição do doente pode também ser optimizada.(33)
Durante o tratamento, o manipulador move e orienta o LINAC à volta do doente, seguindo uma
trajectória optimizada, irradiando os alvos de acordo com o plano. São obtidas imagens para
controlo e correcção posicionais habitualmente a cada 30 a 60 segundos.(33)
Num estudo, o CyberKnife foi utilizado no tratamento de 333 doentes, com um total de 783
metástases cerebrais de origem variada, entre Agosto de 2005 e Outubro de 2008.(34)
No final do
estudo, 55% dos doentes tinha falecido, com taxas de sobrevivência de 69,4%, 50,2%, 36,3% e
27,7 % a 6, 12, 18 e 24 meses, respectivamente. A sobrevida mediana foi de 12,2 meses. A
resposta ao tratamento, em termos de controlo local, e nos mesmos intervalos de tempo, foi de
O Estado da Arte da Robótica na Neurocirurgia
41
98%, 95,2%, 92,1% e 86%, respectivamente, com recorrência local em apenas 25 casos. O
controlo à distância foi de 78%, 64.7%, 55.9% e 52%, respectivamente.(34)
Houve uma correlação
estatisticamente significativa entre a sobrevivência de doentes com uma pontuação da escala de
Karnofsky > 70 prévio à intervenção, e a dos doentes com pontuação < 70, sendo que os
indivíduos com doença sistémica controlada e sem metástases extracranianas tiveram uma
sobrevida mediana de 15,7 meses.(34)
Relativamente a complicações, houve agravamento de sintomas prévios em 8 doentes, e 13
doentes desenvolveram cefaleia ou crises convulsivas. Surgiram lesões imagiológicas por
radiação (edema) em 40 doentes, sem tradução clínica. Nenhum doente faleceu por complicações
devidas ao tratamento. Durante o estudo, foram feitos 41 testes de precisão periódicos com um
modelo. A precisão média do sistema foi de 0,48 ± 0,22 mm.(34)
Um grupo fez uma comparação dosimétrica de dois sistemas de radiocirurgia, BrainLAB
(acelerador linear isocêntrico) e CyberKnife.(35)
O estudo incluiu 7 doentes com schwannoma do
acústico unilateral com um volume máximo de 2,5 cm3, com hipoacúsia parcial. Foi realizado o
planeamento do procedimento para os dois sistemas e as comparações foram feitas com os
valores calculados no planeamento.
Foram comparados o índice de conformidade, a dose máxima para o tronco cerebral, os volumes
para 2,5 Gy, 5 Gy e 10 Gy, dose média para a cóclea e dose média para o lobo temporal
mesial.(35)
Houve diferença estatisticamente significativa no volume de alta dose (10Gy) (5,2 cm3
vs 3,2 cm3; p = 0,017; BrainLAB vs CyberKnife) e na dose média coclear (6,9 Gy vs 5,4 Gy; p =

O Estado da Arte da Robótica na Neurocirurgia
42
0,001, respectivamente), tendo o valor da dose média temporal mesial sido de 2,6 Gy vs 1,7 Gy;
p = 0,07, respectivamente. Não houve diferença estatisticamente significativa entre os índices de
conformidade (0,53 vs 0,58, p = 0,225; BrainLAB e CyberKnife, respectivamente), nem para
nenhum dos outros valores.(35)
Tabela 4 - Resumo do CyberKnife, com designação do tipo de sistema, aplicações, vantagens e limitações.
Sistema Tipo Aplicações Vantagens Limitações
CyberKnife Activo Radiocirurgia
Precisão elevada, menor lesão
de órgãos em risco, registo
automático, frameless
Limitado a radiocirurgia,
custo elevado
Discussão e Conclusão
Ao longo deste artigo foi apresentado um conjunto de sistemas utilizados em várias modalidades
da área neurocirúrgica. No entanto, esta revisão não é, de todo, exaustiva, representando apenas
uma parte dos sistemas actualmente em desenvolvimento. Permite, apesar disso, obter uma ideia
geral do tipo de funcionamento, componentes, aplicações, vantagens e limitações dos sistemas
robotizados neurocirúrgicos actuais.
De acordo com as descrições detalhadas dos vários sistemas, quer pelas características mecânicas
que apresentam, quer pelo objectivo da criação dos sistemas, podemos constatar que o principal
propósito da tecnologia robótica aplicada à cirurgia não é substituir o cirurgião na sala de
operações, mas sim aproveitar as melhores características do homem e da máquina, e criar um
O Estado da Arte da Robótica na Neurocirurgia
43
sinergismo que possa melhorar o desempenho do cirurgião, e consequentemente, um outcome
mais favorável para o doente.
Os sistemas do tipo activo (Tabela 4), como o CyberKnife, são autónomos na realização das suas
tarefas, sob supervisão, e seguem um plano de actuação de forma exacta. Isto é ideal para a
radiocirurgia, onde não há contacto directo com o doente, e portanto não suscita tantas questões
de segurança. Aproveita as vantagens da automação, relativamente à sua capacidade de executar
trajectórias complexas à volta do doente, permitindo alinhar a fonte de radiação de forma
extremamente precisa em vários pontos, o que vai levar a uma irradiação óptima do alvo,
causando o mínimo de lesão possível a estruturas sensíveis. O facto de não necessitar de um
frame é um importante avanço em termos de comodidade para o doente, sem prejuízo da
qualidade do tratamento. Para além disto, o registo automático diminui a probabilidade de erro
humano no processo, melhorando a fiabilidade do sistema.
Apesar de toda esta especificidade de funções simplificar o sistema e permitir que realize as suas
tarefas de forma altamente especializada, não deixa de ser um pouco limitante o facto de ter sido
desenhado para apenas realizar procedimentos radiocirúrgicos. Os estudos parecem ser favoráveis
ao CyberKnife relativamente a outros sistemas de radiocirurgia quanto à dose radiológica
aplicada a órgãos em risco, e a sua eficácia terapêutica parece ser pelo menos equivalente. É
importante ter em consideração a relação custo/benefício no momento de escolher entre
radiocirurgia robótica ou não-robótica, já que o CyberKnife, tal como todos os sistemas
robotizados, representa um investimento inicial considerável.
O Estado da Arte da Robótica na Neurocirurgia
44
No caso dos sistemas semi-activos (Tabelas 1 e 3), utilizados em cirurgia estereotáxica e
raquidiana, o princípio de posicionamento e alinhamento preciso de instrumentos cirúrgicos é
semelhante ao dos sistemas activos, sendo que, por outro lado, a utilização propriamente dita dos
instrumentos é feita pelo cirurgião, havendo aqui uma partilha de funções. Em cirurgia
estereotáxica, os sistemas robotizados são principalmente utilizados para biópsia, DBS e SEEG,
sendo que o SurgiScope já foi usado na inserção de catéteres ventriculares, para além da sua
função alternativa de microscópio cirúrgico robotizado. Esta última característica torna-o num
sistema versátil, podendo ser usado noutras cirurgias, onde à partida não estaria indicado. Tal
como o CyberKnife, estes sistemas não requerem frame, e portanto não são tão desconfortáveis
para o doente, e permitem um tempo mais alargado para o planeamento pré-operatório, entre a
aquisição de imagens e o procedimento. A precisão destes sistemas é comparável à de métodos
com frame convencionais, sendo que alguns estudos sugerem que o PathFinder possa ser
superior.
O SpineAssist tem um modo de funcionamento relativamente semelhante ao dos sistemas de
cirurgia estereotáxica, na medida em que também posiciona e alinha intrumentos com precisão. A
sua aplicação actual é na inserção de parafusos pediculares e translaminares de modo
minimamente invasivo. Este é um dos poucos sistemas em que os estudos aparentemente revelam
uma redução do tempo operatório, relativamente à cirurgia convencional. Para além disso, tem
um tamanho reduzido, o que é útil, ao reduzir o impacto sobre a organização e disposição da sala
e da equipa. Segundo os estudos apresentados, a precisão foi significativamente superior à dos
métodos convencionais, assim como foi significativa a redução da dose de radiação pelo controlo
fluoroscópico.
O Estado da Arte da Robótica na Neurocirurgia
45
Apresentando esta precisão submilimétrica, estes sistemas estão altamente especializados em
procedimentos do tipo estereotáxico, não sendo capazes de executar outro tipo de tarefas que
requeiram algum grau de destreza. Isto torna a sua utilidade mais restrita. Enquanto que o
NeuroMate e o SurgiScope já têm alguma experiência com outras aplicações, o PathFinder
apenas foi testado para biópsia estereotáxica, não tendo sido ainda demonstrado noutros
procedimentos. Mais uma vez, o custo poderá ser determinante na escolha entre sistemas
robotizados e métodos mais convencionais até que as vantagens demonstrem ser significativas
para o doente.
Os sistemas controlados à distância, a partir de uma consola com controladores manuais e
monitores que transmitem informação sensorial ao cirurgião que opera afastado do campo
operatório, são considerados passivos (Tabela 2). Estes são os sistemas que contactam de forma
mais próxima com o doente, manipulando directamente os tecidos. Por esta razão, todos os seus
movimentos são controlados pelo cirurgião, em vez de serem automatizados, e incluem sistemas
de segurança altamente complexos. Assim, as principais aplicações são na área da microcirurgia,
como a ressecção tumoral, a neuroendoscopia no caso do NeuRobot e a anastomose vascular no
caso do sistema de Mitsuishi e colaboradores. Está previsto ainda que o neuroArm venha a ser
capaz de realizar procedimentos estereotáxicos, o que seria importante em termos de
versatilidade. As principais características deste grupo de sistemas que lhes permite este tipo de
aplicações são a sua destreza de movimentos, a precisão inerente a sistemas robotizados, e a
capacidade de manusear múltiplos tipos de instrumentos microcirúrgicos já existentes (no caso do
neuroArm) ou desenhados especificamente para o sistema. Na ausência de instrumentos
dedicados isto pode, no entanto, ser uma limitação. O tamanho reduzido do manipulador do

O Estado da Arte da Robótica na Neurocirurgia
46
NeuRobot torna-o particularmente útil para procedimentos neuroendoscópicos. No entanto, num
dos estudos apresentados, constatou-se que mesmo com as dimensões actuais, existe a
possibilidade de lesões causadas pela passagem dos instrumentos. A pequena dimensão, aliada à
rigidez do tubo do manipulador, apesar da destreza dos micromanipuladores, pode ainda
restringir um pouco o volume de trabalho.
Estes sistemas, ao serem capazes de executar micromovimentos, ao diminuirem à escala o input
do cirurgião, acabam por alongar substancialmente os tempos operatórios. Uma outra
desvantagem tem a ver com as dimensões que ocupam junto ao doente, dificultando a presença
de um assistente nas imediações do campo operatório. Isto não se verifica com o neuroArm, que
foi desenhado com o intuito de ser assistido por um interno. O distanciamento do cirurgião
relativamente ao campo operatório é também um problema, já que lhe retira sensações que lhe
transmitem informação importante durante o procedimento e com as quais aprendeu a trabalhar.
A informação visual mantém-se através de monitores de imagem tridimensional, mas outros
sentidos como o tacto, ainda estão em falta na maioria dos casos. O neuroArm inclui já algum
feedback cinestético transmitido aos controladores, no entanto é importante desenvolver a
tecnologia háptica para que estes sistemas possam ser mais intuitivos e bem sucedidos. Em
termos de informação visual, o neuroArm tem uma outra vantagem. É compatível com iMRI,
pelo que é possível obter imagens intraoperatórias que o cirurgião tem ao seu dispor nos
monitores da consola. Como seria de esperar, toda esta tecnologia tem um custo extremamente
elevado.
O Estado da Arte da Robótica na Neurocirurgia
47
O benefício para o doente em termos de outcome, deve ser sempre a primeira prioridade no
desenvolvimento de novas tecnologias na área da medicina. Os estudos sugerem que o
desempenho destes sistemas é, geralmente, comparável ao das técnicas convencionais. Assim,
são necessários ainda mais estudos e de maior dimensão no sentido de perceber qual é o grau de
benefício que a tecnologia robótica poderá trazer, a despeito do custo, em particular na
neurocirurgia. Será particularmente importante a comparação directa em estudos controlados e
aleatorizados entre casos tratados pelo gold standard actual e cirurgia robótica. Poder-se-á assim
comparar directamente as relações custo/benefício e avaliar, com base na evidência, o verdadeiro
impacto, grande ou pequeno, da robótica na neurocirurgia.
Existe ainda a possibilidade de utilizar as consolas para treino, já que eventualmente será possível
gravar o que acontece durante a cirurgia, e assim recriar o mesmo ambiente numa realidade
virtual. Isto é muito importante para o cirurgião ganhar experiência em certos casos e técnicas,
sendo particularmente útil para os internos. Com a evolução da háptica, será possível, por
exemplo, o interno aprender qual a força mais adequada a aplicar em determinada situação,
obtendo feedback educativo através da consola, podendo assim aproveitar esta experiência na
prática cirúrgica.(25)
O potencial da simulação e realidade virtual na formação é considerável.
No entretanto, a tecnologia deverá, e certamente irá, continuar a evoluir no sentido de corrigir
erros e falhas, melhorar atributos recentes, como a tecnologia háptica, e aperfeiçoar e refinar a
destreza e precisão que praticamente definem a razão de existência da robótica aplicada à
cirurgia. Assim, é possível que esta tecnologia promissora deixe, a médio prazo, de ter apenas o
potencial de revolucionar a neurocirurgia, para poder fazê-lo todos os dias no bloco operatório.
O Estado da Arte da Robótica na Neurocirurgia
48
Agradecimentos
Agradeço ao Prof. Doutor Marcos Barbosa pela orientação do trabalho, ao Dr. Ricardo Pereira
pelas correcções, dicas e disponibilidade, e agradeço também a todos os outros que me apoiaram.
O Estado da Arte da Robótica na Neurocirurgia
49
Referências
1. Davies B. A review of robotics in surgery. Proc Inst Mech Eng H. 2000;214(1):129-40.
2. Sekhar LN, Tariq F, Kim LJ, Pridgeon J, Hannaford B. Commentary: Virtual reality and robotics in
neurosurgery. Neurosurgery. 2013 Jan;72 Suppl 1:1-6.
3. Ponnusamy K, Mohr C, Curet MJ. Clinical outcomes with robotic surgery. Curr Probl Surg. 2011
Sep;48(9):577-656.
4. Rosenow JM, Sootsman WK. Application accuracy of an electromagnetic field-based image guided
navigation system. Stereotact Funct Neurosurg. 2007;85(2-3):75-81.
5. Zamorano L, Li Q, Jain S, Kaur G. Robotics in neurosurgery: state of the art and future technological
challenges. The international journal of medical robotics + computer assisted surgery : MRCAS. 2004;1(1):7-22.
6. Govindarajan A. Robot-Assisted Surgery : A Review. University of Toronto Medical Journal. 2001
Mar;78(2).
7. Alric M, Chapelle F, Lemaire JJ, Gogu G. Potential applications of medical and non-medical robots for
neurosurgical applications. Minimally invasive therapy & allied technologies : MITAT : official journal of the
Society for Minimally Invasive Therapy. 2009;18(4):193-216.
8. Eljamel MS. Robotic neurological surgery applications: accuracy and consistency or pure fantasy?
Stereotact Funct Neurosurg. 2009;87(2):88-93.
9. McBeth PB, Louw DF, Rizun PR, Sutherland GR. Robotics in neurosurgery. AM J Surg. 2004 Oct;188(4A
Suppl):68S-75S.
10. Varma TR, Eldridge P. Use of the NeuroMate stereotactic robot in a frameless mode for functional
neurosurgery. The international journal of medical robotics + computer assisted surgery : MRCAS. 2006
Jun;2(2):107-13.
11. Xia T, Baird C, Jallo G, Hayes K, Nakajima N, Hata N, et al. An integrated system for planning, navigation
and robotic assistance for skull base surgery. The international journal of medical robotics + computer assisted
surgery : MRCAS. 2008;4(4):321-30.
12. Eljamel MS. Validation of the PathFinder neurosurgical robot using a phantom. The international journal of
medical robotics + computer assisted surgery : MRCAS. 2007 Dec;3(4):372-7.
O Estado da Arte da Robótica na Neurocirurgia
50
13. Lollis SS, Roberts DW. Robotic placement of a CNS ventricular reservoir for administration of
chemotherapy. British journal of neurosurgery. 2009;23(5):516-20.
14. Bekelis K, Radwan TA, Desai A, Roberts DW. Frameless robotically targeted stereotactic brain biopsy:
feasibility, diagnostic yield, and safety. Journal of neurosurgery. 2012;116(5):1002-6.
15. Haegelen C, Touzet G, Reyns N, Maurage CA, Ayachi M, Blond S. Stereotactic robot-guided biopsies of
brain stem lesions: Experience with 15 cases. Neuro-Chirurgie. 2010;56(5):363-7.
16. Varma T, Eldridge P, Forster A, Fox S, Fletcher N, Steiger M, et al. Use of the NeuroMate stereotactic
robot in a frameless mode for movement disorder surgery. Stereotact Funct Neurosurg. 2003;80(1-4):132-5.
17. Abhinav K, Prakash S, Sandeman D. Use of robot-guided stereotactic placement of intracerebral electrodes
for investigation of focal epilepsy: initial experience in the UK. British journal of neurosurgery. 2013 Oct;27(5):704-
5.
18. Cardinale F, Miserocchi A, Moscato A, Cossu M, Castana L, Schiariti MP, et al. Talairach methodology in
the multimodal imaging and robotics era. In: Scarabin J-M, editor. Stereotaxy and Epilepsy Surgery: John Libbey
Eurotext. p. 245-72.
19. Brodie J, Eljamel S. Evaluation of a neurosurgical robotic system to make accurate burr holes. The
international journal of medical robotics + computer assisted surgery : MRCAS. 2011 Mar;7(1):101-6.
20. Li QH, Zamorano L, Pandya A, Perez R, Gong J, Diaz F. The application accuracy of the NeuroMate robot-
-A quantitative comparison with frameless and frame-based surgical localization systems. Computer aided surgery :
official journal of the International Society for Computer Aided Surgery. 2002;7(2):90-8.
21. Spire WJ, Jobst BC, Thadani VM, Williamson PD, Darcey TM, Roberts DW. Robotic image-guided depth
electrode implantation in the evaluation of medically intractable epilepsy. Neurosurgical focus. 2008;25(3):E19.
22. Goto T, Hongo K, Kakizawa Y, Muraoka H, Miyairi Y, Tanaka Y, et al. Clinical application of robotic
telemanipulation system in neurosurgery. Case report. Journal of neurosurgery. 2003;99(6):1082-4.
23. Hongo K, Kobayashi S, Kakizawa Y, Koyama J, Goto T, Okudera H, et al. NeuRobot: telecontrolled
micromanipulator system for minimally invasive microneurosurgery-preliminary results. Neurosurgery.
2002;51(4):985-8; discussion 8.
24. Takasuna H, Goto T, Kakizawa Y, Miyahara T, Koyama J, Tanaka Y, et al. Use of a micromanipulator
system (NeuRobot) in endoscopic neurosurgery. J Clin Neurosci. 2012 Nov;19(11):1553-7.
O Estado da Arte da Robótica na Neurocirurgia
51
25. Sutherland GR, Wolfsberger S, Lama S, Zarei-nia K. The evolution of neuroArm. Neurosurgery. 2013;72
Suppl 1:27-32.
26. Mitsuishi M, Morita A, Sugita N, Sora S, Mochizuki R, Tanimoto K, et al. Master-slave robotic platform
and its feasibility study for micro-neurosurgery. The international journal of medical robotics + computer assisted
surgery : MRCAS. 2013;9(2):180-9.
27. Morita A, Sora S, Mitsuishi M, Warisawa S, Suruman K, Asai D, et al. Microsurgical robotic system for the
deep surgical field: development of a prototype and feasibility studies in animal and cadaveric models. Journal of
neurosurgery. 2005;103(2):320-7.
28. Pandya S, Motkoski JW, Serrano-Almeida C, Greer AD, Latour I, Sutherland GR. Advancing neurosurgery
with image-guided robotics. Journal of neurosurgery. 2009;111(6):1141-9.
29. Sutherland GR, Lama S, Gan LS, Wolfsberger S, Zareinia K. Merging machines with microsurgery: clinical
experience with neuroArm. Journal of neurosurgery. 2013;118(3):521-9.
30. Lieberman I, Hardenbrook M, Wang J, Guyer R. Assessment of pedicle screw placement accuracy,
procedure time, and radiation exposure using a miniature robotic guidance system. J Spinal Disord Tech. 2012
Jul;25(5):241-8.
31. Lieberman IH, Togawa D, Kayanja MM, Reinhardt MK, Friedlander A, Knoller N, et al. Bone-mounted
miniature robotic guidance for pedicle screw and translaminar facet screw placement: Part I--Technical development
and a test case result. Neurosurgery. 2006;59(3):641-50; discussion -50.
32. Togawa D, Kayanja MM, Reinhardt MK, Shoham M, Balter A, Friedlander A, et al. Bone-mounted
miniature robotic guidance for pedicle screw and translaminar facet screw placement: part 2--Evaluation of system
accuracy. Neurosurgery. 2007;60(2 Suppl 1):ONS129-39; discussion ONS39.
33. Kilby W, Dooley JR, Kuduvalli G, Sayeh S, Maurer CR, Jr. The CyberKnife Robotic Radiosurgery System
in 2010. Technology in cancer research & treatment. 2010;9(5):433-52.
34. Muacevic A, Kufeld M, Wowra B, Kreth FW, Tonn JC. Feasibility, safety, and outcome of frameless
image-guided robotic radiosurgery for brain metastases. Journal of neuro-oncology. 2010;97(2):267-74.
35. Dutta D, Balaji Subramanian S, Murli V, Sudahar H, Gopalakrishna Kurup PG, Potharaju M. Dosimetric
comparison of Linac-based (BrainLAB(R)) and robotic radiosurgery (CyberKnife (R)) stereotactic system plans for
acoustic schwannoma. Journal of neuro-oncology. 2012;106(3):637-42.
Top Related