![Boniteza de Um Sonho - Moacir Gadotti[1]](https://static.fdocumentos.com/doc/165x107/5571fb2d4979599169942507/boniteza-de-um-sonho-moacir-gadotti1.jpg)





Línguas
Páginas
Legal

MOACIR JOSÉ QUINTINOLicenciado em Física
ESTUDO MATEMÁTICO E COMPARATIVO DOS MÉTODOS DE ORIENTAÇÃO RELATIVA
Tese de Grau de Mestre em Ciências apresentada ao Curso de Pós-Graduação em Ciências Geodésicas do Departamento de Geociências, Setor de Tecnologia da Universidade Federal do Paraná.
CURITIBA — PARANÁ
1975

à MINHA FAMÍLIA

AGRADECIMENTOS
Ao professor Placidino Machado Fagundes por sua valiosa orientação e incentivos ,
ao professor Camil Gemael pelos incenti^ vos e colaboração ,
ao Conselho Nacional de Pesquisas pela bolsa de estado concedida ,
ao Banco Nacional do Desenvolvimento Econômico (BNDE) pela complementação do suporte financeiro ,
â firma Serviços Aerofotogramêtricos Cruzeiro do Sul pelos elementos bibliogrãficoa e fotográficos fornecidos ,
aos demais colegas que direta ou indire tamente contribuiram para o êxito deste trabalho .
iii
SINOPSE
O presente trabalho ê um estudo matemático comparativo da precisão dos métodos de orienta-' ção relativa . Como nos últimos anos surgiu uma grande variedade de processos de orientação rela tiva , para este estudo foram escolhidos , den-' tre eles , os seguintes : Schut , Thompson, U.S. Coast & Geodetic Survey , British Ordnance Sur-' vey , Van Der Weele e Herget , sendo que o pri-' meiro deles é descrito com maior minudência . Co mo a fotogrametria analítica i bastante precisa' e faz uso de matrizes , são apresentados , nos ' capítulos iniciais , alguns tópicos sobre correções das coordenadas fotogramêtricas e sobre al- gebra matricial , respectivamente .

RÉSUMÉ
La présente monographie est une étude mathématique comparative de la précision des méthodes d'orientation relative . Comme pendant' ces dernierês années a surgi une grande variété1 de méthodes d'orientation , les suivantes d'en-' tre elles ont été choisies pour cette étude ; ' Schut , Thompson , U.S. Coast & Geodetic Survey, Van Der Weele et Herget , la première est décrite en détail . Comme la photogrammétrie analytique est assez précise et fait emploi de matri- ' ces , quaiques données à propos de corrections ' des coordonnées photogrammétriques et d'algèbre matricielle sont fournies aux chapitres du début.
v

SUMÃRIO
TÍTULO................... ........................ iDEDICATÓRIA.................... . .iiAGRADECIMENTOS.................................... iiiSINOPSE.......................................... ivRÊSUMÊ........................................... vSUMÃRIO. ......................................... vi
CAPÍTULO 1INTRODUÇÃO....................................... 01
CAPÍTULO 2 MATRIZES ORTOGONAIS
2.1 - Introdução..... .................... ...... 0 32.2 - Definição......... 042.3 - Propriedades das matrizes ortogonais.........062.4 - Raízes características das matrizes
ortogonais.................................. 082.5 - Formula de Cayley ......................11
v:

CAPÍTULO 3ROTAÇÃO NO ESPAÇO TRI-DIMENSIONAL
3.1 - Introdução................................. 133.2 - Teorema de Euler................. 153.3 - Rotação com três eixos fixos............... 183.4 - Resultante de várias rotações.............. 213.5 - Matrizes de rotação........................ 223.6 - Ângulos de Euler....................... 273.7 - Matriz de Euler............................ 283.8 ~ Pequenas rotações.......................... 303.9 - Matriz de Rodrigues........................ 32
CAPÍTULO 4CORREÇÕES DAS COORDENADAS FOTOGRÁFICAS
4.1 - Introdução................................. 364.2 - Reduções das medidas do comparador........ 374.3 - Correções das distorções do filme.......... 384.4 - Correções das distorções das-lentes........ 414.5 - Refração atmosférica....................... 45
CAPÍTULO 5 ORIENTAÇÃO RELATIVA
5.1 - Introdução................................. 515.2 - Método preconizado por Schut............... 5 35.3 - Método preconizado por Thompson............ 6 45.4 - Método do U.S. Coast & Geodetic Survey..... 705.5 - Método de Van Der Weele....... 805.6 - Métodos diversos..................... 8 6
vii

CAPITULO 6CONCLUS&O.......... 88
CAPÍTULO 7REFERÊNCIAS BIBLIOGRÁFICAS...................... 93
vi 11.
CAPÍTULO 1
INTRODUÇÍO

INTRODUÇÃO
Os princípios da fotogrametria ' analítica foram estabelecidos bem antes do aparecimento da fotografia , com os estudos geométricos das leis da perspectiva e da goemetria projetiva . A aplicação a fotografias aéreas , da foto grametrla analítica foi iniciada por S. Finsterwalder por voltâ' d© 1900 , com a publicação de uma série de trabalhos j 1 | , cón tendo os princípios da moderna fotogrametria , incluindo os meto de§ d© orientação relativa e absoluta em notação vetorial .
A fotogrametria analítica perma»- nec©u esquecida por várias décadas , ressurgindo quase sessenta' an©i apôs os trabalhos de Finsterwalder . Com o aparecimento dos computadores eletrônicos , tomou novo impulso e surgiram vários'trabalhos de diversos autores
Dentre os vários trabalhos publi eados neste campo , a aerotriangulação foi e continua sendo oassunto de maior importância e sobre ele se tem desenvolvido os mais variados estudos . A aerotriangulação analítica compreende* vários passos | 2 I , dentre os quais a ORIENTAÇÃO RELATIVA io mais importante . Registra-se especificamente neste campo ,umagrande quantidade de trabalhos, resultando o aparecimento de
1
diversos métodos e procedimentos .
Quando se realiza a orientação ' relativa de um par de fotografias , adota-se um sistema de eixos fixos . Esta orientação ê então executada efetuando rotações em torno de três eixos fixos . Estas rotações podem ser traduzidas por matrizes de transformação , as quais são matrizes ortogonais,, Por isso , são apresentados nos capítulos dois e três , alguns ' tópicos sobre matrizes ortogonais e sobre rotações no espaço ' tri-dimensional .
Como podemos depreender da farta literatura j 2 j sobre o assunto , a fotogrametria analítica * atinge grande precisão por que as coordenadas medidas nas foto-5 grafias podem ser corrigidas dos erros sistemáticos de que es- v tão eivadas , tais como : deformações do suporte da emulsão , distorções das lentes da câmara , refração atmosférica e curvatu ra da Terra , para torná-las tão precisas quanto possível . No capítulo quatro , ê apresentado um estudo resumido de tais correções , mas não com o rigor com que ê analisada em | 4 |, to-’ mando como exemplo a refração atmosférica , mas pelo menos , 'apresentando as principais fórmulas e algumas deduções delas, pa ra poderem ser melhor compreendidas .
No presente trabalho, são dados' os principais métodos dos diversos existentes ou , pelo menos, ' os mais difundidos . A finalidade a que se propoe é a de ofere-' cer a formulação matemática da orientação relativa e proceder' uma análise comparativa dos principais métodos , com o propósito de desenvolver pesquisas no campo da aerotriangulação analítica.
2

CAPÍTULO 2
MATRIZES ORTOGONAIS

MATRIZES ORTOGONAIS
2.i - INTRODUÇÃO
No passado , vãrios matemáticos 8 dedicaram ingentes esforços ao estudo das matrizes ortogonais 0 primeiro a formular ao propriedades das matrizes de transforma ção no espaço tri-dimensional foi Leonid Euler , em um trabalho publicado por volta de 1770 e apresentado na Academia de Ciências de Petersburg | 5 | . Outros grandes matemáticos , dentre ' eles : Cayley , Rodrigues e Hamilton também contribuiram para o desenvolvimento da teoria das matrizes ortogonais .
Todos esses estudos foram dirigidos principalmente para as transformações ortogonais no espaço • tri-dimensionais . As transformações no espaço bi-dimensionais 8 não apresentam qualquer dificuldade e os casos de transformações em espaços a mais de três dimensões foge do escopo do presente 8 trabalho .
A aplicação prática das transformações ortogonais ê de grande importância em levantamentos , di-

retos ou indiretos , como sejam , os geodésicos e os fotogramê- 8 tricos. Nestes dois campos , deparamo-nos com o problema de trans formações de coordenadas, pois as coordenadas medidas ou calcula das em um sistema local , frequentemente, tem de ser transforma- das para um outro sistema , e estas transformações são acompanhadas por uma matriz ortogonal . Por isso , serão abordados , a seguir , alguns tópicos sobre essas matrizes .
2.2 - DEFINIÇÃO
Uma transformação linear
S = X1 + *12 V i+ a, x i n n
y 2 = S l Xj + a22 X2 + + S n x n(2 . 2 . 1)
y m = *mi x i + *m2 X a+ .......................+ *mn X n
estabelece uma relação entre dois conjuntos de variáveis Yj....y e xx onde m não i , necessariamente , igual a n .
A matriz
m
A
*11 *12' “i n
a a.21 2 2
azn(2 . 2 . 2 )
ml m 2 mn
4
e una matriz de transformaçao * Em notação matricial , o sistema {2.2*1} serã escrito assim :
y - A x (2.2.3}
A matriz A , definida na equação 1(2.2*2) e arbitraria . Podemos obter tipos especiais de transformações lineares , necessitando apenas que a matriz de transforma çao preencha certas condições. Então , as transformações são orto gonais se;
a} - a matriz A for uma matriz quadrada ,b) - o modulo de um vetor x for igual ao modulo
do vetor y .
Para uma transformaçao do tipo (2.2.3)satisfazer as duas condições acima , ê necessário também, que resulte inalterado a norma dos vetores ,, ou seja :
yTy = ( A x )T A x « X T A1 A x (2.2.4)
impondo a condição de que ;
y 1y - X T x (2.2.5)
comparando a (2.2.4) com a (2.2.5) , vemos que esta só serâ satisfeita se ;
A1 A = I (2.2.6)
onde I representa a matriz unitária de mesma ordem que A . En-‘ tão podemos dizer que uma matriz é ortogonal se satisfizer a condição (2.2.6) .
Se t na equação (2.2.6) , põs-multiplí carmos ambos os membros por A teremos j
5

aj /\ /\-1 - /\~
A1 * A“1 (2.2.7)
donde concluímos que a inversa de una matriz ortogonal ê igual a sua transposta.
Se , na equação (2.2.7) , pre-multi-,plicarmos ambos os membros por A , teremos ;
A A = I (2.2.8)
que ê uma definição equivalente a anterior , para uma matriz orto gonal . Donde podemos tirar que : o produto de uma matriz ortogonal por sua transposta ê igual ã matriz unitária de mesma ordem .
Quando o determinante de A , repre-'sentado por | A j, for igual a +1 , a matriz é chamada de ortogonal própria ; quando j A | for igual a -1 , ela ê chamada de 1ortogonal imprópria . Qualquer matriz ortogonal imprópria pode 'ser expressa como o produto de uma rotação por tuna reflexão 16 | .
2.3- PROPRIEDADES DAS MATRIZES ORTOGONAIS
2.3.1 - A soma dos quadrados dos elementos em cada fila èigual a 1 .
2.3.2 - A soma dos produtos dos elementos nas posições correspondentes a cada duas colunas e igual a zero .
Estas duas propriedades são facil mente demonstradas . Se tomarmos, por exemplo ; uma matriz ortogo nal de terceira ordem , pela eauaçlo (2.2.6) , teremos ;
6
- —a 1 2 a\ 3 n -— i a2 1 3 1 *1X n n
a2 1 a22 a2 3 a1 2 a22 a32 = u ]. ri
31 a 3 2 rt3 3 «i 3 a2 3 tf 3 3 0 0 1
a igualdade podemos obter que:
2*11
2+ *11 + 2a1 1 = 1
2ai 1
2+ *11 + 2.
*1 1 = "1
a a + a o. + a a - 011 12 21 22 31 32 V
a, , a, „ + ao, a „ + a a = 01 1 1 3 2 1 2 3 3 1 3 3
2.3.3 - Um elemento de uma natriz ortogonal própria é igualao seu cofator .
2.3.4 - 0 produto de duas ou mais matrizes ortogonais demesma ordem e. uma matriz ortogonal .
T -l2.3.5 - Se A e ortogonal entao A e A ~ tamben o são .
As propriedades (2.3.3) , (2.3.4) e (2.3.5) não serão demonstradas aoui , pois; suas demonstrações' são fãeej.s e encontradas na maioria dos livros de algebra linear, como ror exemplo . | 7 J
7

2.4 - RAÍZES CARACTERÍSTICAS DAS MATRIZES ORTOGONAIS
Podemos enunciar e demonstrar alguns lemas simples | 8 | sobre a natureza das raízes características das matrizes ortogonais .
2.4.1 - 0 módulo de toda raíz característica real de uma matriz ortogonal A é unitário .
Se A i uma raíz característica ,então existirá um vetor x , não nulo , tal que ;
A x = A x
Representando por x e à o complexo conjugado de x e A respectivamente , teremos :
se A for real , então à = A
consequentemente
de modo que; T r -T -T „T -TA A x x = x A A x = x x
- -TComo x e um vetor nao nulo , consequentemente , x x i 0deste modo teremos :
A X = 1
como A é real A = A
Se for não singular , teremos :
8
A x = A x
implica que A 1 x = x
Donde se infere que , se A for 8 uma raiz característica de A , A será uma raiz característica' de A . Deste modo teremos ;
| A-1 I - A | = |( A I - A )T| = j A I - AT I = 0 (2.4,1)
as expressões entre barras da equação (2.4.1) e das equações se-'guintes representam um determinante e não modulo como vinhamos ' representando
Como A é a outra raíz caracte-ríatica de A . Mas A = A , e tanto A como A são raízes 'características .
As raízes características complexas das matrizes ortogonais ocorrem em pares de complexos conjuga dos os quais podem ser expressos por ;
A = cosa + isena = zLa(2.4.2)
= cosa - isena = 2. 'ca
2.4.2 - Uma matriz ortogonal real de terceira ordem tem , no mínimo , uma raíz característica real .
0 auto valor da equação y = A x pode ser escrito da seguinte maneira :
í A - A I | x = 0 (2.4.3)
ou , na forma expandida ;
9

( a n - x ) x + a1 2 y + a 1 3 z = 0
a2i X + ( a22 " À 5 + a23 z = 0
a 3 1 X + a 3 2 y + ( a 3 3 " X ) Z = Q
(2.4.4)
onde x , y e z são as connonentes do auto vetor x .
Era qualquer caso , sendo homogênea a equação (2.4.4), pode ter uma solução somente quando o determinante dos coeficientes se anula . Ou sejéi :
A - X I
( a
21
, ,— X ) + o. + a11 12 13+ ( 2 2 — X ) + A
2 3
a.. + a :■ + ( a — X ) 3 1 3 2 3 3
= 0 (2.4.5)
/ eauacão cúbica nara tena forma convencional ;
+ b X + c x + d = 0 (2.4.6)
Pelo gráfico do polinómio cúbico, o mesmo deve atravessar os eixos pelo menos uma vez entreX = - o o e X = + « , provando, desta maneira, o lema
Vimos, pelo lema anterior (2.4.1), que estas raízes podem ser somente + 1 ou - 1
10
Fig. 2.4.1 - 0 determinante característico em função de X .
2,5 - FORMULA de cayley
A importância da fórmula de !Cayley está em permitir que os elementos sejam expressos por vima matriz ortogonal em termos de um conjunto de elementos arbitrária mente escolhidos , os quais sejam „ os da matriz antí-simêtrica«,
A fórmula de Cayley diz que , se’ S ê uma matriz antí-simétrica , então :
( I - S ) ( I + S )_1 (2.5.1)
ê ortogonal ,
Uma matriz S ê antí-simêtrica *yI 5 I , se S = - S , isto ê 6 . . - - ò . .
J*-
11

Vamos inicialmente mostrar queE ( I + S ) é não singular e consequentemente ( I + S J”1 existe t Pode ser mostrado em | 7 j que as raízes características não nulas de •uma matriz antí-simêtrica real são imaginarias e , consequentemente , as raízes características de S não podem ser unitjírias . Portanto não podemos ter :
i 1.1 - S | = 0
| I + S | . | ( I - S ) | « | I - S | ^ 0
fazendo R = ( I - S ) ( I + S ) ”^
RT= l( I - S )( I + S f 1 J T
= Q i + s r 1 ] T (i - S)T - (i + s)(i - s)"1
= ( I - S f 1 ( I + S )
R RT = (I - S)"1 (I + S) (I - S) (I + S)“1
mas como (I + S) (I - S) = I - -- (I - S) (I + S)
R RT = (I - S)“1 (I - S) (I + S) (I + S)"1
R RT = I . I = í-
logo R ê ortogonal .
12

ROTAÇÃO NO ESPAÇO TRI-DIMENSIONAL
3.1 - INTRODUÇÃO
A orientação de uma fotografia 1em relação a outra , consiste era posicionar-la de maneira 'tal que este posicionamento consiste de uma ou várias rotações . Podemos então considerã-la como sendo um corpo rígido e aplicar a teoria do deslocamento dos corpos rígidos em relação a um sistema de eixos fixos .
Podemos dizer que um corpo materi^ al ê rígido quando, nile, as distâncias mütuas de todos os pares 'de pontos específicos são invariáveis , valendo dizer que o corpo não expande , contrai ou varia a sua forma , mesmo durante o pro cesso de transposição do corpo de sua posição inicial a sua posição final .
Se um corpo rígido e levado de 'uma posição à outra , a variação da sua*posição é chamada de : 'Deslocamento do corpo. Certas especies de deslocamento recebem ' nomes específicos f 10 f ; deste modo , se as posições , no espaço , de todos os pontos do corpo que estão sobre uma reta L

nao se alteram „ o deslocamento e entao chamado de rotação sobre a linha L . Se a posição no espaço de um ponto qualquer P , do 1
corpo , e inalterada , o deslocamento ê chamado de rotação sobre' o ponto P ; e se as linhas ligando as posições, inicial e final ' de cada um dos pontos do corpo perfazem um conjunto de retas para leias de comprimento l , de modo que a orientação do corpo no es paço permaneça inalterada , o deslocamento ê entaõ chamado de ' translação paralela ã direção das linhas , ao longo de uma distân cia l
VerticalRot&çõo da 90“ sobro z
Rotação de 90° sobre y
Fig. 3.1.1 - Efeito de duas rotações realizadas em uma determinada ordem .
PosiçãoVertica l
Roíaç«.o do 90”sobre y
Rotação de 90” sobre z
Fig. 3.1.2 - As duas rotações mostradas na figura anterior ,mas na ordem, inversa .
14

3.2 - TEOREMA DE EULER
Com as bases matemáticas introduzidas no capítulo anterior , podemos agora enunciar um importan te teorema sobre o movimento dos corpos rígidos . Tal teorema' foi estabelecido por Euler e diz que : " Todos os deslocamentos' possíveis de um corpo rígido , no qual um dos pontos permaneça' fixo , se resumem numa rotação
Seja P , figura (3.2.1) , um pon to genérico de um corpo rígido com coordenadas (x , y , z) , referenciadas a um sistema fixo de eixos retangulares com a origem em O .. Seja o corpo deslocado , de modo que P se mova para 1 P' , com coordenadas ( x' , y' , z' ) , permanecendo o ponto ' origem fixo .
hz
Fig. (3.2.1)
15
Qualquer mudança nas coordenadas ’ de P resultará em um deslocamento que ê dado por :
P ' = f ( P ) ( 3 . 2 . 1 )
Onde p e p'são os vetores coluna das coordenadas de P e P1 6respectivamente , Se o ponto de origem permanecer fixo , teremos então í
f(0) = 0 (3.2.2)
Qualquer função f(p) que preserve a distância e para qual f(0) = 0 será uma transformação ortogonal , e vice-versa . Consequentemente , o deslocamento de um corpo , tal que um ponto permaneça fixo e as separações são preserva das , ê , algêbricamente representado por uma transformação linear .
A p (3.2.3)
Sendo A ortogonal
A separação deve também sor preser vada em todos os estágios do contínuo processo de levar P a P1 . Se , agora , considerarmos o deslocamento contínuo de P.* de volta a P no sentido oposto , os elementos da matriz A devem contínu amente se aproximarem daqueles de uma matriz ortogonal-, que não8 represente um deslocamento . I sta matriz será evidentemente a ma triz unitária I . Agora se A = I , então :
p1 = I p = p (3.2.4)
Qualquer outra matriz não tem a proprieâade da equação (3.2.4) .
16

0 determinante de uma matriz ortogonal pode ser +1 ou -l , e ' não admite outro valor . Enquanto que í tem apenas o determi-' nante +1 , portanto , ê impossível que A possa continuamente , se aproximar de 1 se o seu determinante for -1 . Concluímos ' que todos os deslocamentos de um corpo rígido com a origem fixa’ são representados por transformações ortogonais próprias .
Consideremos agora na fig.(3.2.2), dois pontos quaisquer A e B , sobre uma linha fixa passante por 0 . Seja P outro ponto qualquer não pertencente a esta linha.
Fig. (3.2.2)
Desde que a transformação deixe ’ AP e BP invariante e A e B fixos , o lugar de P serâ um circulo normal a AB . Analogamente , o lugar de Q é também um círculo ’ normal à AB . Mas PQ i invariante e , consequentemente , os planos ABQ e ABP giram ao redor de AB através do mesmo ângulo . ’ Desde que este argumento seja aplicado a todos os pares de pon-* tos do corpo e não sobre a linha AB , portanto deixa fixa uma 1 única linha de pontos passando pela origem .
Deste modo,mostramos que todo ’ deslocamento contínuo de um corpo rígido com um ponto fixo pode’
17

ser representado por transformações ortogonais e que estas trans formações são rotações . Podemos tirar como corolário do Teorema de Euler , o teorema de Chasle , o qual diz que : " O deslocamento geral de um corpo rígido ê uma translação mais uma rotação " , e que pode ser facilmente provado em | 11 j
3.3 - ROTAÇÃO COM TRÊS EIXOS FIXOS
üm corpo rigido com um ponto fixo{ pode ser deslocado de uma dada posição por uma simples rotação , como vimos na seção anterior , necessitando apenas encontrar um determinado eixo e uma determinada rotação » Nem todos os deslocamentos dos corpos rígidos são possíveis com um eixo fixo . 0 *caso de dois eixos fixos não apresenta dificuldades e não há gran de interesse ; portanto trataremos somente dos deslocamentos com três eixos fixos .
Vamos escolher os eixos AO , OB e OC da figura (3.3.1) , representados respectivamente pelos vetores unitários a , t e c . Sejam as rotações tomadas ao redor9 destes eixos na sequência das letras „ Primeiro vamos mostrar que se todos os deslocamentos são possíveis , então OB deve ser neces; sãriamente perpendicular a OA e OC .
Vamos , inicialmente , levar um 9 ponto de A para C . Apõs a primeira rotação A , teremos j
A a = a"
Apôs a segunda rotação B , ficara :
B a = a8
E , apôs a terceira rotação C , teremos :
18
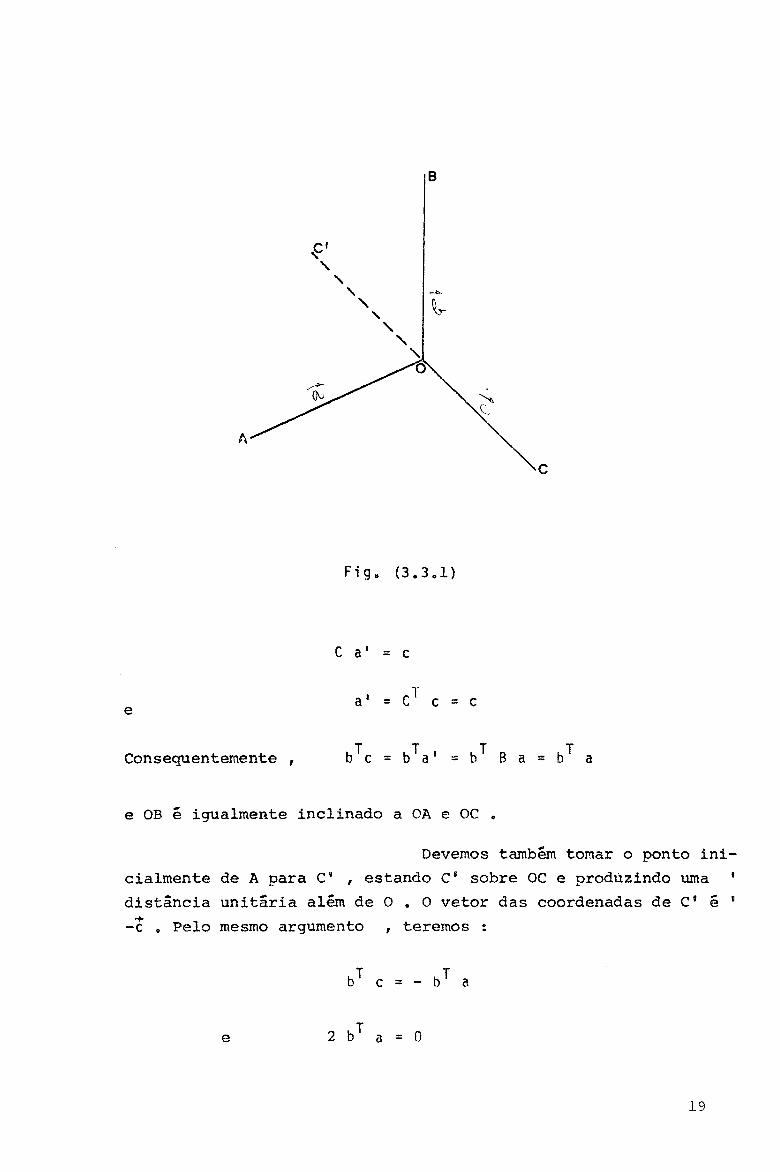
Fig . (3 .3 .1)
C a' = c
a ' = c"*" c = ce
I T T TCons e quent e ment e , b c = b a 1 = b B a = b a
e OB é igualmente inclinado a OA e OC .
Devemos também tomar o ponto inicialmente de A para C" , estando CB sobre OC e produzindo uma ’ distância unitãria além de O . O vetor das coordenadas de C' ê ' -c . Pelo mesmo argumento , teremos :
bT c = - bT a
e 2 b^ a = 0
19

A condição de perpendicularidade ' ê suficiente . Mostraremos que as rotações sobre OA , OB e OC * podem levar dois pontos inicialmente coincidirem com A e B em qualquer posição , consistentes com as distâncias da origem e se paração . Se iniciarmos com dois pontos P e Q arbitrariamente colocados , figura (3.3.2) , mas sujeito ao requesito de que OP e OQ sejam de comprimentos unitários , tal que , PQ = AB , podemos9 invertendo as rotações e as suas sequências , levar P e Q à coin cidência com A e B , respectivamente .
Deste modo , OB é perpendicular a CA e consequentemente , a OC .
Fig. (3.3.2)
20

Notamos que o plano AOC divide toctc espaço em duas partes , Se considerarmos qualquer ponto docorpo rígido , P , ele estará em qualquer lugar , ou em uma rotação através de OC , a qual estã no plano , levará de uma metade- do espaço a outra , e assim , levaremos o ponto através do plano» Quando ele está em AOC , OP será perpendicular a OB , que ê nor-' mal ao plano . Uma rotação sobre OB levará P a coincidir comA , sem afetar a coincidência de P e A . Efetuando estas rotações em sentido contrário , podemos levar os dois pontos , inici, almente coincidir com A e B , em uma posição geral P e Q .
3.4 - RESULTANTE DE VÃRIAS ROTAÇÕES
Vamos considerar agora uma exten são do que já vimos anteriormente , ou seja a resultante de vãri as rotações . Sejam as rotações representadas pelas matrizes ortogonais ; Rj Rn , tomadas na mesma ordem . Sejao vetor das coordenadas de P representado por o . Então apés a primeira rotação , teremos;
P i = R- PJw. X
apõs a segunda p 2 ~ '2 1= 2 RX
a resultante será então ;
n = Rn
Mas o deslocamento de P , de p a pn ê equivalente , pelo teorema de Euler,a uma simples rota-

çio , cuja matriz representativa R ê cada por
R ^n R-|
e como jâ vimos anteriormente , a resultante desse produto ê uma matriz ortogonal .
3 , 5 - MATRIZES DE ROTAÇAO - " — irilBTTITM— IT1I-II - II II' T ^ T '
Vamos mostrar agora as matrizes* que representam as rotações sobre os eixos 0X- , OV 3 OZ . Considerando dois sistemas de eixos cartesianos ortogonais ( X ,Y , Z ) e ( x ' , y ! , z ' ) , u m vetor unitário ao longo do
Fig. (3.5,1) - Sistemas de coordenadas Cartesianas
22

do eixo x'( t 1) ,.pode ser decomposto dos eixos ( X , Y , Z ) , pela técnica usual de mo pode se fazer para os vetores unitáriosy'( V ) e Z'( p ) t ou sej A •CÂ «
t = -V cos (X* ,X) + 5 cos ÍX •,y>
V= -*■x. cos <y' ,x) + J cos íy *,y)
p X. cos (z* ,x) + Hri cos (z •,y)
em componentes ao longo 1 projeção . 0 mes
ao longo dos eixos '
+ t cos(x1,z)
+ t cos(y',z) (3.5.1)
+ t cos (z’,z)
Por conveniência , estes co-senos , os quais são os co-senos di-* retores , serão designados por:
cos(x',x) = £ cos(y',x) = m cos(z',x) = ncos(x'»y) = V cos(y!,y) = m' cos(z',y) = w'
cos(x' ,z) = V' cos(y'rz) = m,r cos(z',z) = n* *
Podemos reescrever a equação (3.5.1) , da seguinte forma :
•4X. £ + J £ 1 + t V »
-*•X. m +
H»J m ’ + t m ' 1 (3.5.2)
- tX, n + J nf + n n’ ’
Se considerarmos um vetor V cujas ' componentes são funções da sua posição no espaço , então :
V(x,y,z) = t Vx + Jvy + t Vz = V*(x',y',z')
= V v; + p + P V* (3.5.3)
Desde que os pontos possam ser dados pelas coordenadas (x,y,z) e
pelas coordenadas (x' , y' , z' ) . A equação (3.5.3) pode ser separada em três equações escalares , ou seja ;
V*, = l V + V V + V ' Vx' x y z
Vy' = m Vx + m' vy + m'» Vz (3.5.4)
Vz' = n V + n* V + nf * Vx y z
Em particular , estas relações para as coordenadas de um ponto (x , y » z) e (x1 „ y1 , z' ) , ficarão :
x' = l x + V y + l* ’ z
y1 = m x + mr y + m* 1 z
z' = n x + n' y + z
(3.5.5)
ou , em linguagem matricial ;
— —
Xt
y 1 s
z 1
£ £'
m m' m''
n n' n ’ '
(3.5.6)
A equação (3.5.6) pode ser representada por :
x' = A x (3.5.7)
Lembramos porem que os nove co-senos diretores da matriz A não' são independentes em se tratando de eixos ortogonais .

Consideremos uma rotação em torno do eixo OX , sobre o qual um ponto P , de coordenadas ( x, y, z ) é levado a P' cujas coordenadas são ( x*, y' , z' ) . Da figura (3.5«2) , podemos tirar que :
Fig. (3.5.2) - Rotação em torno do eixo x
m = n = £ » = £ " = 0
m' = n*' = cosw
n' - - senw
m 1 9 - senw
A equação (3.5.6) pode , agora , ser expressa da seguinte forma:
x V= Rx( w ) x (3.5.8)
25

ou na forma matricial
— — —
x' 11
0 0 X
y ’ = 0 COS ü) sen co y (3.5.9)
z ' 0 -sen a) cos w z
onde a matriz Rj(CO) / ê uma matriz ortogonal representando uma rotação em torno do eixo x .
Podemos^facilmente obter as ou - tras matrizes de rotação em torno dos eixos y e z ., que são |
(3.5.10)
cos ic sen k 0
-sen k cos k 0
0 0 1
R, ( < ) =
cos <|> 0 sen <J>
sen $ o cos <j>
Lembramos que o ângulo de rotação serâ considerado positivo quando a rotação for anti-horã- ria e o sistema for dextrõgiro .
26
3.6 - ÂNGULOS DE EULER
Jã vimos na seção (3.5) , que oselementos a . . da equação (3.5.6) não são independentes , mas e
* ~ possxvel exprimi-los em funçao de três parâmetros .
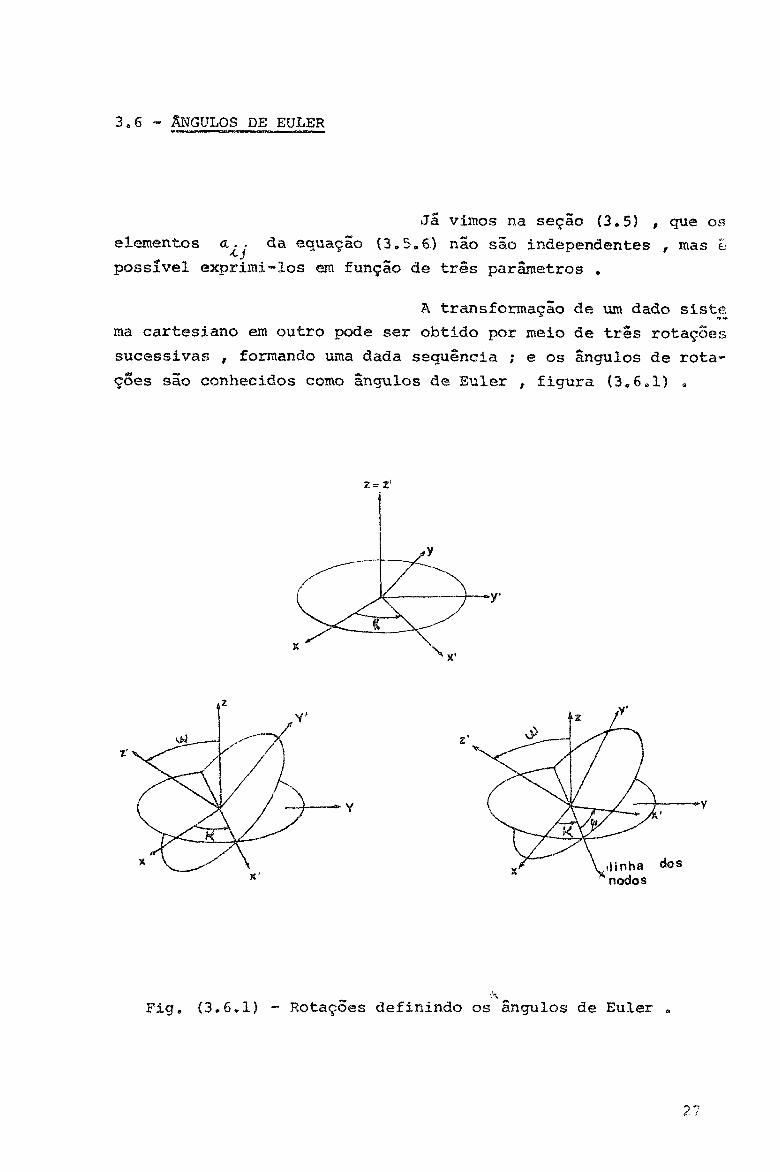
A transformação de um dado siste ma cartesiano em outro pode ser obtido por meio de três rotações sucessivas , formando uma dada sequência ; e os ângulos de rotações são conhecidos como ângulos de Euler , figura (3.6.1) .
2=2'
Fig. (3.6.1) - Rotações definindo os ângulos de Euler .
Infelizmente , não hâ uniformida de nas literaturas sobre a definição dos ângulos de Euler . As ' diferenças não são grandes , principalmente quanto a notação , * mas as vezes o suficiente para gerar certa confusão .
Os elementos de uma transforma-9 çio A , podem ser obtidos escrevendo a matriz A como o triplo produto das rotações individuais , ou seja
= R3( <j> ) Rx( ic ) R3{ a) ) x(3.6.1)
fazendo , A = R3( $ ) R^( k ) R3( w )
Teremos : x1 = A x
3.7 - MATRIZ DE EULER
Vamos agora encontrar uma matriz' devido a Euler , a qual representa uma rotação ao redor de uma ' dado eixo e segundo um dado ângulo .
Designaremos os eixos de rotação5 pelo seus três co-senos diretores e a magnetude das rotações 'por e . Na figura (3.7.1) , escolhemos um conjunto de eixos *Ox' , Oy* e Oz' , de maneira tal , que o eixo Ox1 coincida ’com o eixo de rotação , cujos co-senos diretores são (l ,m, n )*A matriz R , que define a rotação dos eixos , tem então , *{ t , m , vi ) , como primeira coluna , e formando as três co-' lunas um conjunto de vetores ortonormais .

Fig. (3.7.1)
Seja R definido por ;
R *
V > t
m m ' m ''
n n' n*’
(3.7.1)
A matriz de rotação A ‘ t relativa ao sistema grifado i igual s R,( 6 ) , como jã vimos anteriormente . Se E ê a matriz dt1 » •* %*vEuler, entao s
A’ = R1 E R (3.7.2)
29

E = R A' R‘ (3.7.3)
substituindo R » A' e R pelos seus respectivos valores efetuando a multiplicação teremos ;
2 2 t + (l-£ ) cos 0
ml(1-COS0)+nsen0
nl(1-COS0)-msene
lm (l-cos0) -wsen0 £n(l-*cos0)+ senG2 2
m + (1 - m ) cos0 mn(l-cos0)- sen©2 2
nm(l-cos0)+£sen0 n + (1-n ) cos0
*.o..e(3.7.4)
para se chegar a equação (3.7.4) foram feitas as seguintes substituiçoes ;
+ V ’ = 1 - 1
V m' + l " m l m
V *m' - V m* ' = - n
as quais nada mais são que as propriedades decorrentes das matrizes ortogonais .
3.8 - PEQUENAS ROTAÇÕES
Uma rotação infinitesimal ê uma transformação ortogonal na qual as componentes de vim vetor
30

são quase as mesmas em ambos os sistemas . A matriz de Euler ê facilmente aproximada para pequenas rotações ; fazendo sene = 0, cose = 1 , então ,■ a equação (3.7.4) , tornar-se-ã :
E = ne
-me
-ne
l e
me
T l e (3.8.1)
A qual pode ser escrita sob a forma :
E = I + 6 S (3.8.2)
Onde S ê uma matriz anti-simétrica . Considerando a resultante de duas pequenas rotações E^ e E2 . Teremos :
E 2 E1 ~ ( 1 + 02 S2 I + 61 Si ) = I + 02 S2 + 01 Si +
+ e 2 e ± S 2 S 1
Dentro de uma certa aproximação , podemos negligenciarmos o ulti mo termo e , consequentemente , teremos :
E'2 E1 = 1 + 02 S2 + 01 S1 1 + 01 S1 + 02 S2 E1 E2
Deste modo , concluímos que as pequenas rotações são comutativas. Se nõs fizermos uma aproximação , as ecfhações (3.5.10) , ficarão
31

R , ( c») ) = I + 03
(li
Analogamente , podemos proceder para Rj( ) e R^( k ). Para* pequenas rotações co , $ e k , teremos :
a = Z (ii = Z 0
4> = m <j> = m 0
te = n K = n 6
Sendo 0 uma rotação genérica . Efetuando as substituições * acima a equação (3.8.1) , ficara :
0 — K
E - I + -to (3.8.3)
to
3.9 - MATRIZ DE RODRIGUES
A matriz de Rodrigues ê muito útil porque ela ê uma matriz ortogonal de terceira ordem , em termos de três parâmetros independentes , e sem as funções trigonométricas. Esta matriz ê obtida diretamente da mátriz de Euler . Se os ' três parâmetros ( X , y , v ) forem pequenos e negligenciarmos ' os termos de segunda ordem da matriz (3.7.4) , pode-se facilmen-
32

te se provar em j 12 | , que
X 1
V o . e = 2 tg —— m2
V— — n
(3.9.1)
Tonde l m ê a primeira coluna da matriz ortogo -nal (3.7.1) . Da equação (3.9.1) podemos tirar que t
„2 2 2 X + y + v 4 tg2 0 (3.9.2)
e , da trigonometria
1 + cos 01 + tg2 -
2
(3.9.3)
Substituindo a (3.9.2) na (3.9.3) , tem-se ;
1 + cos 0 =1 + - ( X1 + y2 + v2 )
2
A
(3.9.4)
Tirando o fator ( 1 + cos 0 ) da matriz de Euler o termo , ficarã :
,2 1 - cos e cose £2ta2 — *+ — ( 1 - tg^ — ) 2 2 2
.2 01 + C O S 0 1 + C O S 0
1 + í ( X 2 - - 22 8
- v )
33

mas como hã um fator escalar 2/A fora de toda matriz ,então 'multiplicando en por 2 , teremos ;
e = 1 + i ( A 2 - u 2 - v 2 ) 4
e analogamente para e2 2 e e3 3 • Da inesma maneira podemos 'tirar ;
2 i + cose 1 + cose
!/> - 1 , 1— <L — — A y - — v2 12 4 2
- 1 * A y - v2
e analogamente para todos os termos ( -c ^ j ) . Substituindo todos os e . . por seus valores , teremos ;
R = —
A1 +-i X2 2
v + — li A 2
■y + — v A 2
- v + — A y 2
A + — v y 2
y + — A v 2
~A + ■*- y v 2
A ' + i v 22
(3.9.5)
onde a ' = 1 - — ( A2 + y2 + v2 ) = 2 - A4
34

A equação (3.9.5) ê chamada matriz de Rodrigues e, também pode ' ser colocada na forma :
— —.
A * ~ v p X
7
R = —
1<3>
V
A A
- P X A * V
—— • — . ___
X p v (3.9.6)
X
35

CAPlTULO 4
CORREÇÃO DAS COORDENADAS FOTOGRÁFICAS

CORREÇÃO DAS COORDENADAS FOTOGRÁFICAS
4.1 - INTRODUÇÃO
S sabido que os métodos analíticos são os mais precisos de todos os métodos fotogramêtricos , 'porém , o significado dos métodos analíticos ê ainda maior , pois eles constituem também as bases teóricas de outros métodos pa ra a solução de problemas fotogramêtricos , tais como ; o gráfico , o analógico e o semi-analítico .
Dentre esses métodos , o problema que nos interessa neste trabalho , é a aerotriangulação analítica . Este procedimento de aerotriangulação tem sido considerado' um método em potencial desde o início do mapeamento fotográfico, porém , antes do advento dos computadores eletrônicos , a sua 'execução era praticamente impossível porque o número de equações para solucioná-lo e o tempo de cálculo eram imensos , se execu-' tadõ manualmente ou em calculadores . Com o aparecimento dos '
36

computadoras eletrônicos a aerotr angulaçio analítica ressurgiu.Do; vários passos de uma aerotri-
angulação , o que nos interessa , particularmente , ê a orientação relativa , que é o objetivo deste trabalho . Para calcular' os parâmetros de orientação relativa ê necessário que as coordenadas dos pontos lidas no comparador , tenham sido depuradas de todos os erros sistemáticos , tais como : distorções das lentes' da eixaara , deformações do suporte da emulsão fotográfica , re~' fraçao atmosférica e curvatura da Terra .
4.2 ~ REDUÇgQ DAS MEDIDAS DO COMPARADOR A COORDENADAS FOTOGRÁFICAS
Os estereo e mono comparadores ' 3 ao os instrumentos mais indicados para obter as medidas necessá rias em aerotriangulação analítica . Na maioria desses instrumen tos | 13 | , a posição de um ponto-imagem no plano da uma fotografia pode ser determinada em relação a um sistema de coordenadas retangulares cuja origem , fica era geral , fora da fotogra-' fia .
Como a aerotriangulação analítica requer que as coordenadas tenham a origem no ponto principal , ê necessário , então reduzi-las ao sistema de coordenadas da fotografia . Estas coordenadas , por conseguinte , são obtidas sub-' traindo as coordenadas instrumento do ponto principal , das ' coordenadas instrumento do ponto-imagem. O ponto principal não ê marcado sobre a fotografia e, consequentemente , suas coordena das não são medidas . Ê necessário , então, medir as marcar, fi- duclais e calcular as coordenadas do centro fiducial como a me-' dia das correspondentes coordenadas dessas marcas . As coordenadas do ponto principal são , então , obtidas através daquelas' da do centro fiducial , com a ajuda dos dados de calibração da câmara . Na prática esses dois pontos podem ser considerados * coincidentes.
Em alguns esterec-comparadores pa ra a fotografia da direita são lidas as paralaxes em vez das pro
37

prias coordenadas dos pontos-imagem , neste caso , as paralaxes devem ser convertidas as coordenadas instrumento , adicionando ou subtraindo delas as coordenadas lidas na fotografia da esquerda.
4.3 - CORREÇÃO DAS DEFORMAÇÕES DO FILMES
Qualquer material para filmes ae- reos sofre variações de maneira não uniforme , entre o tempo ' em que a fotografia é exposta e o tempo em que a mesma ê prepara da no laboratório.
Poucas câmaras fotogramêtricas ’ são equipadas no plano focal , com uma placa de cristal dotada ' de um reticulado, o qual se reproduz em cada negativo . Câmaras' com tais dispositivo facilitam a correção das deformações dos ' filmes etconsequentemente , dos seus efeitos sobre as coordena- 1 das dos pontos , lidas no Comparador . Na ausência dessa placa' reticulada, a evidência das deformações ê revelada pela comparação das coordenadas das marcas fiduciais , medidas no comparador, com as fornecidas pelos fabricantes das câmaras, determinadas ' em laboratórios , durante a calibração .
As marcas fiduciais são numeradas no sentido horário , de 1 a 4 . As coordenadas das marcas fidu ciais e do ponto principal da câmara , constantes do certificado de calibração, serão designadas neste trabalho por ; X . , Y . ,X^ e Yp , respectivamente . As coordenadas das 4 marcas , no ' sistema de coordenadas do comparador , serão designadas pelas le tras x . , y . e os termos x . , y . , 1 = 1 ........n reprer'
J j A*sentam as coordenadas de qualquer ponto sobre a fotografia medidas no comparador .
Uma das marcas fiduciais ê arbi-r'- trãriamente escolhida como a origem do sistema de coordenadas . Nosso objetivo, agora;ê determinar os coeficientes de uma transformação que converterá as coordenadas x^ , , da imagem ,em coordenadas corrigidas, ; ao mesmo tempo em que 'converterá Xy , y j n°s correspondentes X . , Y . que são va
38

lores fixos das 4 marcas fiduciais para cada fotografia , e final mente , transladar a origem do sistema de coordenadas para o ponto principal .
« A jtfVj \a
+ x
+ x p y pponto principal
marca fiducial
L0 < 3 ____________ *2y2.
Fig.(4.3.1) Diagrama da fotografia indicando a ordem numérica das marcas fiduciais .
Para efetuar estas transformações' consideremos os seguintes passos :
0 primeiro passo ê fazer , por exemplo , a marca fiducial número 3 como a origem , então , X3 =
s 0 , posteriormente subtrair e ( valores das coordenadas do vértice 3 lido no comparador ) das coordenadas do ponto i-magem ( x., y. ) e chamar as novas coordenadas de u. e v- , casoem que teremos :
(4.3.1)V = - y3
0 segundo passo consiste em uma ro
39

tação dos eixos sobre o vértice 3 de modo que o eixo u passe pelo vértice 2 ( v2 = 0 ) ; o terceiro serã um ajustamento do ângulo ' entre os eixos u e v de modo que o eixo v passe pelo vértice 4 ( = 0 ) , o quarto serã uma variação de escala ao longo doseixos u e v , de modo que os novos valores sejam u2 = x2 e V4 = y4 . Todas estas condições podem ser satisfeitas pelo uso de ' uma transformação linear (Helmert) | 14 | , se a transformação ' não for linear não a estudaremos com minúcias , daremos somente * equações de correção para tal caso , conforme equação (4.3.6) .
u' = mu + nv(4.3.2)
v' = pu + qv
Substituindo as coordenadas conhecidas dos vértices 2 e 4 na equação (4.3.2) , teremos dois pares' de equações lineares cujas incógnitas são m, n, p, q .
X2 = u2m + v2n Y2 = u2p + v2q(4.3.3)
X4 = V + v4m Y4 “ U4P + V
Resolvendo a equação (4.3.3) , para as incógnitas teremos :
m = ( X2V4 ” X4V2 )y/ d p = ( Y2v4 - Y4v2 )/ d(4.3.4)
n = ( X4u2 - X2u4 )/ d q = ( Y2u4 - Y ^ )/ d
d = u2v4 - v2u4
Com base nos valores encontrados ' para m, n , p , q a equação (4.3.1) pode então ser aplicada ao ' vértice 1 .
U1 = mul + nVl V1 = pUl + nVl (4.3.5)40

Se as deformações do filme forem* lineares , então , uí = X ^ e v ^ = Y^ mas » normalmente , elas * não o são , exceto no caso de placas de vidro . Se as transforma çÕes no vértice 1 não for linear , as equações abaixo fornecem * vima correção .
u* = t i ' + Au * v 1(4.3.6)
I IV* = V ' + A U ' V
Calculando A e A para o vértice’1 , teremos :
* - ( X x - u* ) / u ' v*
A = ( Yi ” V | ) / U| V^[
(4.3.7)
Se substituirmos a equação (4.3.7) na equação (4.3.6) e levarmos em conta as coordenadas do ponto ■ * principal , aplicadas para trazer a origem do vértice 3 ao centro da fotografia , as novas coordenadas compensadas serão :
x ' = ( mu . + n v . ) { 1 + A ( p u . + qv , ) } - XX <4. X. 4+ 4* Jj
(4.3.8)yl = ( pu . + n v . ) { 1 + A ( mu . + n v . ) } - Y
J. Ar 4* 4r 4. ^
4.4 - CORREÇÃO DAS DISTORÇÕES DAS LENTES
Um ponto qualquer , numa fotogra-* fia , acha-se em geral deslocado de sua posição verdadeira devido ao desvio sofrido pelo raio que o produz , desvio esse provocado* por distorções das lentes que compõem a objetiva da câmara.
41

A calibração de uma câmara envolve a determinação das distorções das lentes de sua objetiva , assim9 como , das suas distâncias focal e principal . Conhecidos estes* elementos , é possível reconstruir o feixe de raios não distorcidos que produziu a imagem espacial .
As correções para as distorções ra diais das lentes são aplicadas em dois passos , a saber :
a) distorções assimétricasb) distorções radiais simétricas
4.4.1 - CORREÇÃO DA DISTORÇÃO RADIAL ASSIMfiTRICA DAS LENTES
Em todas as câmaras existentes, as distorções radiais das objetivas não são idênticas para diferen-’ tes raios , resultando uma discrepância residual em relação a uma distorção uniforme . Isto quer dizer que as linhas de igual dis torção não são simétricas ou circulares em relação ao ponto prin-i cipal . Para corrigir esta assimetria , uma falsa inclinação ê introduzida para eliminar de todos os pontos , o efeito de assime tria .
A falsa inclinação defini-se por 1 dois parâmetros , a saber : uma direção e uma grandeza . A extremidade superior do eixo da elipse ê considerado formando um ângulo 9 com o eixo x da fotografia
Vamos supor , na figura (4.4.2) ,que o ponto a* sobre o lado superior da fotografia necessita 'ser corrigido para ocupar a posição a . Sejam as coordenadas'do ponto a , xQ e yQ e de a ’ , x^ e . Do triângulo aa'ktiramos que :
ak - a1a^ = x* ( sen £ )/ & - Cx^ (4.4.1)
Da proporcionalidade dos lados nos triângulos aka* e oa^a , obtemos :
42

a'k /ak = <lcl1 /oa1 = yQ / xQ
*'k = ( Cx* ) y9 / x8 = Cxey9(4.4.2)
Fig. (4.4.1) Distorção radial assimétrica das lentes , ao longo de 4 semi-diagonais de uma fotografia' aérea .
Então,as coordenadas de ' serão:
~ a a l + " x e + Cx6 = x &( 1 + Cx0 )
* (4.4.3)y t = a * á * + a ’ fe - y 0 + C-y0x e = y 0 ( 1 + CxQ )
43
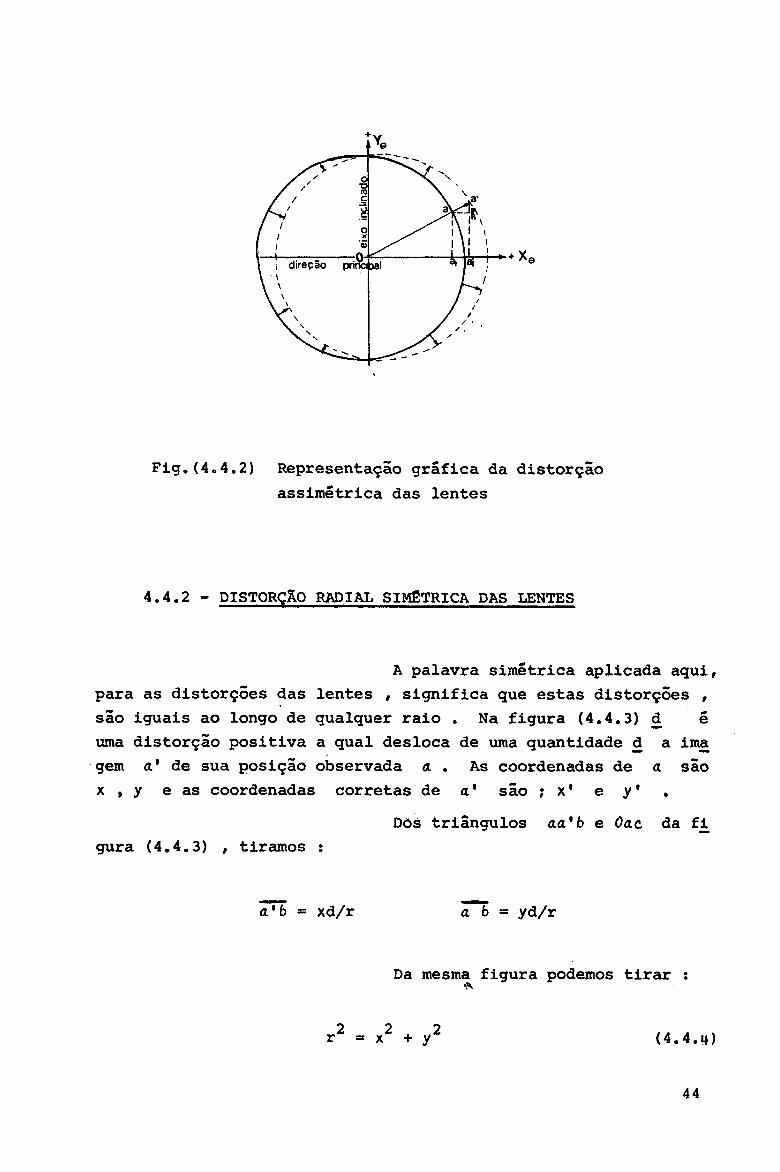
Fig.(4.4.2) Representação gráfica da distorção assimétrica das lentes
4.4.2 - DISTORÇÃO RADIAL SIMfiTRICA DAS LENTES
A palavra simétrica aplicada aqui, paxa as distorções das lentes , significa que estas distorções , são iguais ao longo de qualquer raio . Na figura (4.4.3) d êuma distorção positiva a qual desloca de uma quantidade d a imagem a' de sua posição observada a. . As coordenadas de a são x , y e as coordenadas corretas de a' são ; x' e y* .
Dõs triângulos aa*b e Õac da figura (4.4.3) , tiramos :
a'b » xd/r ctTb = yd/r
Da mesma figura podemos tirar s
2 2 2r = x^ + y* (4 .4 .1+)
44

y
Fig. (4.4.3) Diagrama mostrando a analise das distorções radiais das lentes .
Da mesma figura podemos tirar as coordenadas finais de a* , as quais serão :
x ' = x - a ' b = x - xd/r = x( 1 - d/r )(4.4.5)
Y ’ = y - a'b = y - yd/r = y( 1 - d/r )
.5 - REFRAÇÃO ATMOSFÉRICA
Enquanto predominou a fotogrametria nalôgica , os efeitos da refração e da curvatura da Terra sobre' otografias aéreas foram quase sempre considerados negligenciãve- s . Com o avanço da tecnologia as precísões também tiveram de er aumentadas , para tanto , houveram de ser levados em conslde- ação estes dois tópicos .
45

Sabemos que a geometria de uma fo tografia aérea pode ser apreciavelmente distorcidapela refração' atmosférica no momento da exposição , e que , para obter a máxima precisão ê necessário reduzir a um mínimo a grandeza dessa 'distorção .
Como mostra a figura (4.5.1) , um raio luminoso refletido num ponto M do terreno produziria sua 'imagem no ponto m , se ò índice de refração da camada atmosfê ,rica ao longo do trajeto do ralo fosse constante , mas , como oíndice de refração varia continuamente , o raio será deslocado 1
para o ponto m* .
m' m V
Fig. (4.5.1) Diagrama mostrando o efeito da refração atmosférica .
Na análise dos efeitos da refra-' ção atmosférica sobre um raio luminoso , vamos considerar que a atmosférica seja composta de uma série de camadas distintas cu-' jos limites formam um conjunto de esferas concêntricas envolvenr do a Terra , admitida aqui como esférica , cujo o centro ê o 1
centro da Terra . Vamos supor também que o raio luminoso se re-’
46

frate somente ao passar de uma camada a outra . Entio , de acordo com a Lei de Snell f teremos :
{ n + dn.)sen6 = n sen( 6 + de ) (4»5.1)
Desenvolvendo o segundo termo desta equação e levando em conta *que o ângulo de ê tio pequeno que pode ser confundido com oarco e substituindo estas aproximações na equação (4«5*1} , te remos s
dn sen6 “ n cos8 de (4.5,2)
Sendo «"ie de e expresso em radianos *
Normal
Fig. (4,5*2)
A equação (4,5.2) também pode ser colocada na seguinte formai
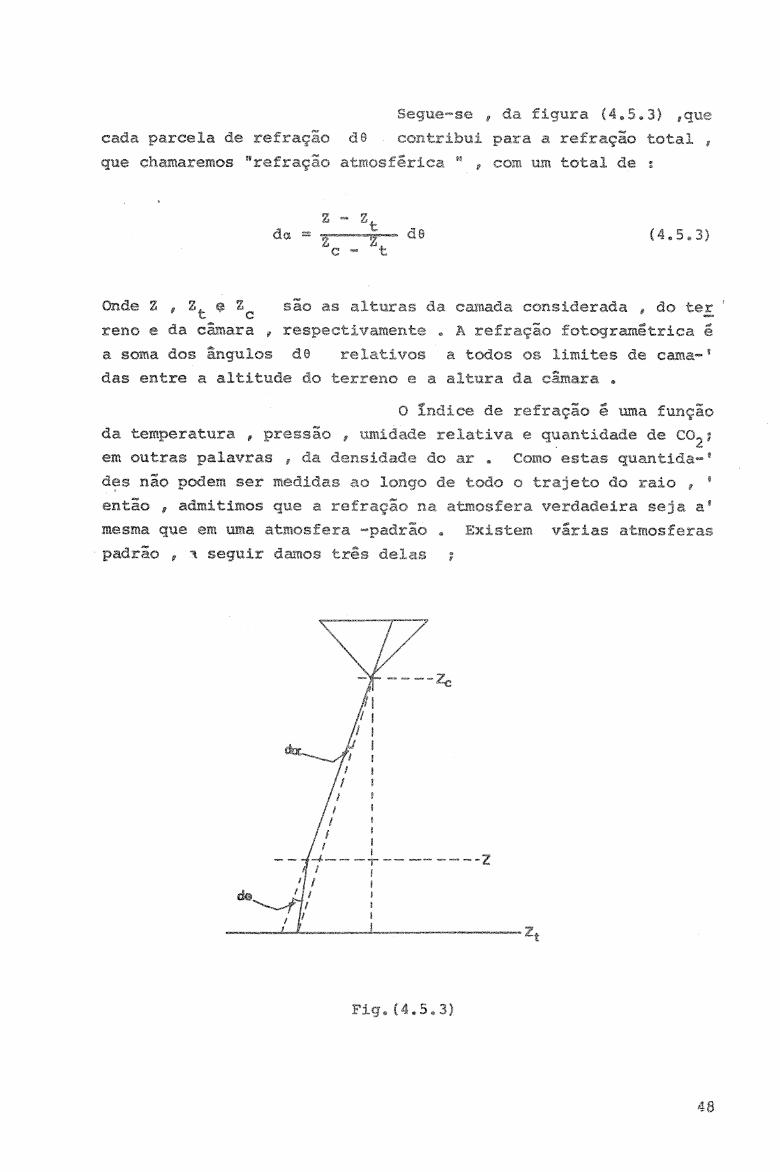
Segue~se , da figura (4*5.3) ,que cada parcela de refração de contribuí para a refraçio total , que chamaremos s,re.fraçio atmosférica 85 , com um total, de :
(4*5. 3)
Onde Z f 2, ^ %c são as alturas da camada considerada , do ter reno e da camara , respectivamente » A refraçao fotogramêtrica ê a soma dos ângulos de relativos a todos os limites de cama-* das entre a altitude do terreno e a altura da câmara .
da temperatura f pressão , umidade relativa e quantidade de COji em outras palavras , da densidade do ar . Como estas quantida-* des não podem ser medidas ao longo de todo o trajeto do raio , * então t admitimos que a refraçao na atmosfera verdadeira seja a* mesma que em uma atmosfera “padrio . Existem varias atmosferas padrão , a seguir damos tres delas i
O índice de refraçio e uma função
Fig. (4.5.3),
48

a) ICAO Standard Afcmosphere , 1952 da ICAb) ARDC Model Atmosphere , 1959c) U.S. Standard Atmosphere ,1962
Até 20 km , estas três atmosferas são praticamente idênticas . As duas últimas se extendem além de 20 km e a diferença entre suas densidades cresce com o aumento da altura na proporção de aproximadamente 3,5 % por metro .
De acordo com inúmeros livros de Meteorologia e de Ôtica , a relação entre a densidade e o índice* de refração tem sido determinada experimentalmente , e pode ser expressa por diversas fórmulas | 15 | , dentre as quais citamos;
n2 = 1 + 2Cp (4.5.4)
- < 3Onde p ê a massa específica dada em kg/m , C i uma constante ‘ dada em função do comprimento de onda da luz , daqui por diante * designado por X e n representa o índice de refração .
Diferenciando a equação (4.5.4) e 2dividindo ambos os membros por n , teremos :
dnn do
n(4.5.5)
Desde o nível do terreno até o espaço vazio , n varia de 1,00022 atê 1 . Tendo em conta esta variação e para u m X = 5 6 0 0 $ , tere mos a seguinte equação :
~ = 0,0002266 dp (4.5.6)
Combinando as equações (4.5.2) ,(4.5.3) e (4.5.6) e fazendo o somatório de todos os valores desde o nível do terreno até a altura da câmara , obtem-se , para a refração fotogramêtrica , a seguinte expressão ;
49

a * 0,0002266 -— £2®^- ^ J | f Z - } dp | (4.5.7)wt ’" u
A equação (4,5*7) permite calcular a refraçio fotogramêtrica para uma atmosfera padrio * 0 somatório da equação (4*5.7) pode * ser escrito como :
t c2 dp - ) Z dp - Z ) dp (4*5,8)
n n t
Estes três somatórios teia como li mites i o primeiro , o nível do mar e a altura de vôo , o segun do , o nível do mar e a altitude do terreno e o terceiro , a ai titude do terreno e a altura de vôo , Substituindo a equação * (4.5,8) na (4.5.7) , teremos s
c t 2,266 x 10 tge opC
Onde e a*, são as refrações fotogramêtricas na altura de 1w w-vôo e na altura do terreno , respectivamente f ambas em relação® ao nível do mar , e áp g a diferença entre as densidades na s altura de voo @ na altura do terreno .
O problema da refraçio atmosférica tratado aqui foi para .unta atmosfera-padrao . Devemos lembrar® que a temperatura , a pressão e a composição da atmosfera verdadeira nunca são conhecidas completamente , por conveniência , a diferença entre a atmosfera-padrão e a atmosfera verdadeira con- sidera-se desprezível . Entende-se por atmosfera verdadeira a at mosfera no local e no momento em que se efetua o levantamento ae rofotogramêtrico .
Quando as coordenadas da faixa , obtidas pela aerotriangulação são transformadas diretamente para o sistema de coordenadas de um mapa , sem o uso de’um sistema 9 geodésico intermediário , o modelo da Têrra apresentado por este sistema ê deformado , necessitando então t de uma correção.,0 *problema da correção para a curvatura da Terra , conforme f 16 j desaparece quando se redu todos os dados a. um sistema geocêntri co ,
5Q
CAPÍTULO 5
ORIENTAÇÃO RELATIVA
ORIENTAÇÃO RELATIVA
5.1 - INTRODUÇÃO
Como jã foi dito anteriormente , a aerotriangulação analítica de uma faixa singela compreende os seguintes passos , a saber :
a. Obtenção das coordenadas x e y dos pontos de apo io e dos pontos de passagem .
b. Aplicação das correções a estas coordenadas para - eliminar , tanto quanto possível, os erros sistemáticos .
c. Orientação relativa analítica de duas fotografias ' sucessivas .
d. Concatenação das fotos para formar a faixa.e. Orientação absoluta da f^ixa .f. Ajustamento da faixa .g. Calculo das coordenadas dos pontos de apoio e de
51
h. Calculo das discrepâncias entre as coordenadas dos pontos de apoio , determinados no terreno e resultantes do item g.
i. Cálculo do erro mêdio , com base nas discrepâncias para os pontos de apoio não utilizados no ajustamento .
Nos últimos anos , vãrios traba- 1
lhos sobre aerotriangulação foram publicados , enriquecendo a literatura fotogramêtrica . Cada qual adotando uma formulação * matemática distinta , assim como, com diferentes notações e um grande número de símbolos auxiliares .
Desses trabalhos , infere-se que a orientação relativa pode ser realizada de diferentes maneiras, a’ saber :
1)~ Impondo aos raios projetantes a condição de copla naridade.
2)- Tornando a paralaxe no modelo , igual a zero.3)- Fazendo a menor distância dos raios homólogos '
igual a zero .
Nos casos de intersecção , a equa ção de condição para a orientação relativa ê uma função não line ar dos parâmetros de orientação . Para fins de calculo , os ele mentos de orientação relativa dessa função são substituídos por uma aproximação que ê , então , linear . A intersecção dos raios homólogos ê calculada por meio de fórmulas exatas e substituí- 8
das na equação linear . Estas equações são , então , usadas para o cálculo das correções e este processo ê repetido atê con-' vergir a equação de condição para cada ponto .
Como existem dezenas de métodos 8
de orientação relativa , analisaremos apenas os principais . O primeiro método será descrito com maior minudência , os métodos * seguintes serão descritos com menos pormenores , pois muitas ' equações serão referidas ao primeiro me\odo , tais como , as 8
equações linearizadas e as matrizes de rotação .
passagem , em cada modelo .
5.2 - MÉTODO PRECONIZADO POR SCHUT DO NRC
5.2.1 - OS ELEMENTOS DE ORIENTAÇÃO RELATIVA
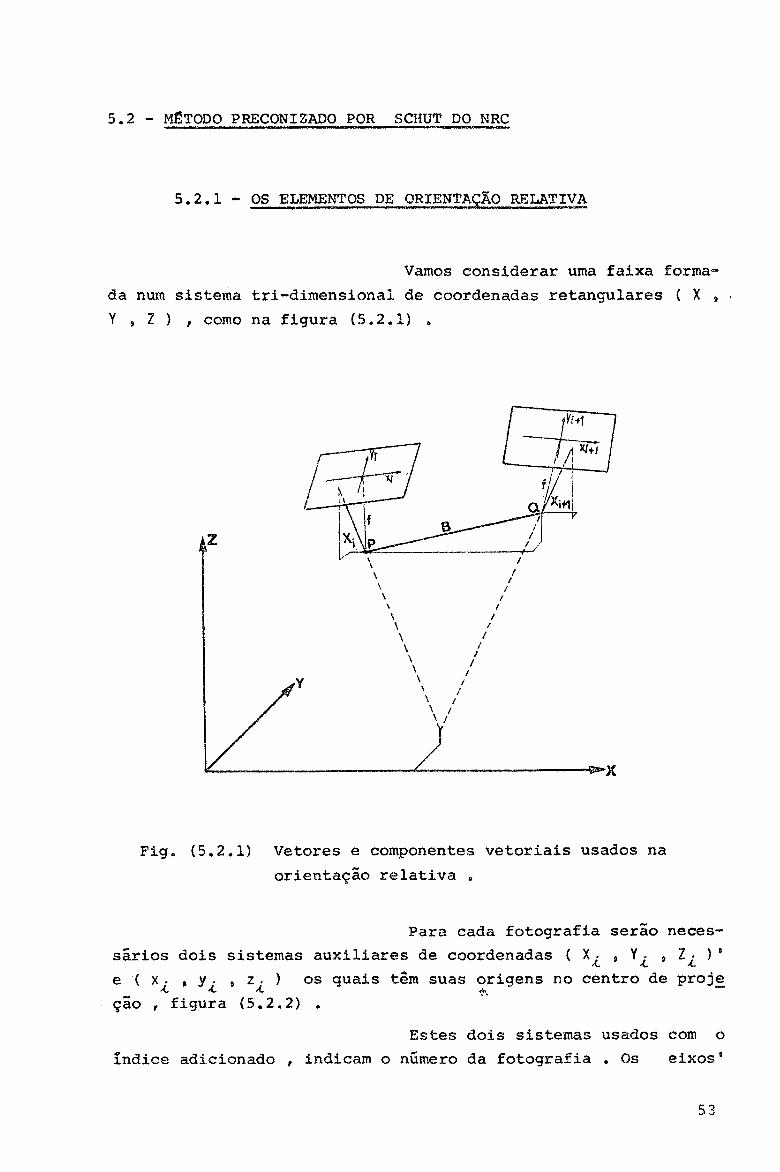
Vamos considerar uma faixa formada num sistema tri-dimensional de coordenadas retangulares ( X , Y , Z ) , como na figura (5.2.1) .
Fig. (5.2.1) Vetores e componentes vetoriais usados na orientação relativa .
Para cada fotografia serão necessários dois sistemas auxiliares de coordenadas ( X ■ , Y ■ , Z • ) 8•(. -í. -C ,e ( x - , y - » z . ) os quais têm suas origens no centro de projeX» X»ção , figura (5.2.2) .
Estes dois sistemas usados com o índice adicionado , indicam o nümero da fotografia . Os eixos9
53
C X. , Y. , 1. ) são paralelos aos eixos { X , Y , Z ) e os eixosÂ* A*
( x. , y , ) são paralelos ao plano da fotografia .«“C Ár
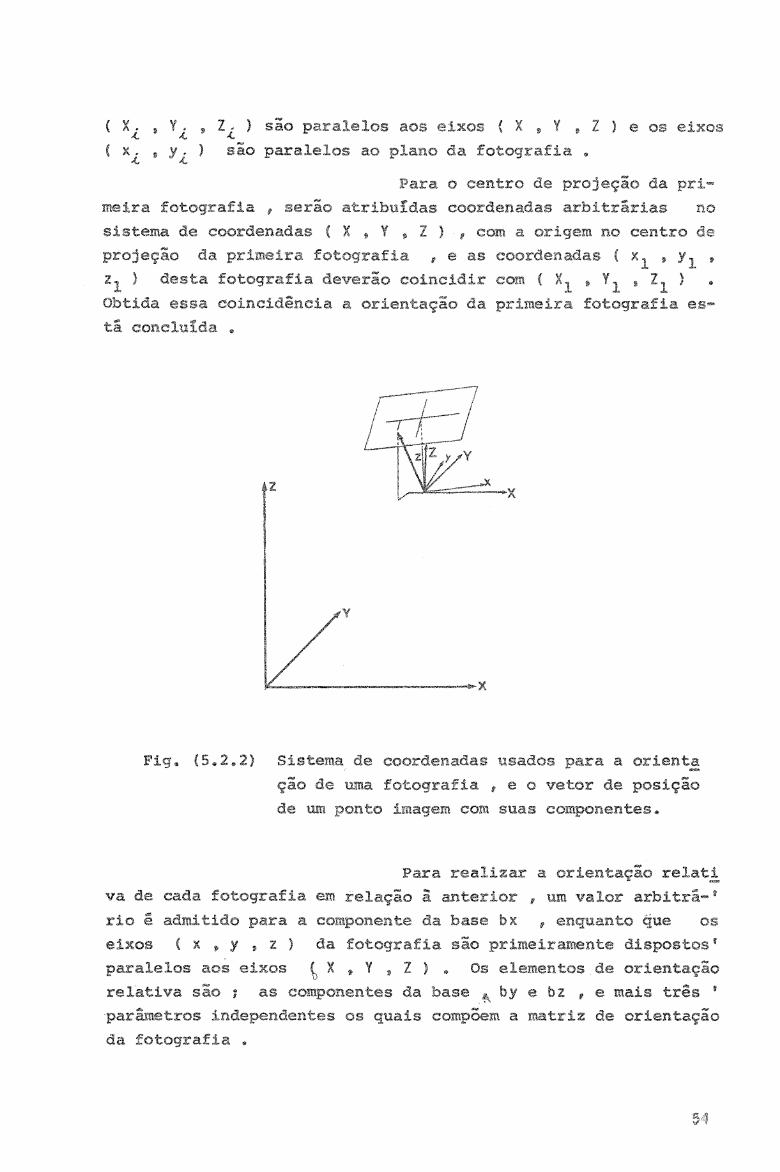
Para o centro de projeção da primeira fotografia , serio atribuídas coordenadas arbitrarias no sistema de coordenadas ( X , Y , Z } ■, com a origem no centro de projeção da primeira fotografia , e as coordenadas { x1 *
) desta fotografia deverão coincidir com ( )Obtida essa coincidência a orientação da primeira fotografia ss- tã concluída .
Fig» (5.2«, 2) Sistema de coordenadas usados para a orienta ção de uma fotografia , e o vetor de posição de um ponto imagens com suas componentes«
Para realizar a orientação relati va de cada fotografia em relação ã anterior , um valor arbitra-1 rio ê admitido para a componente da base bx , enquanto que os eixos C x „ y , z ) da fotografia sa© primeiramente dispostos® paralelos aos eixos f. X * Y s Z ) ♦ Os elementos.de orientação relativa sao t as componentes da base ^ by e bz , e mais três * ■parâmetros independentes os quais compoem a matriz de orientação da fotografia *

5.2.2 - EQUAÇÃO DE CONDIÇÃO PARA A ORIENTAÇÃO RELATIVA
A orientação relativa da fotografia ( i + 1 ) em relação a anterior ( í ) , consiste em posicio- nã-la de tal maneira que os raios dos pontos-imagens correspon-' dentes das duas fotografias , se interceptem . Esta equação de condição pode ser expressa , analiticamente , pela condição de * coplanaridade de duas retas , ou seja :
,P
rQ
XP + X - YP + Y .A, A.
rQ
Z? + Z* 0 (5.2.1)
Nesta equação , as coordenadas 1
dos centros de projeção das fotografias l e l+l são indicados pelas letras P e Q , respectivamente . A equação (5.2,1) pelo Teorema de Jacobi , fica reduzida a 5
bx by bz
X . Y . Z .A. A, a.
*í+l Zí+ 1
Esta ê a equação de condição para a orientação relativa . As componentes^da base bx , by e bz na primeira linha da equação (5.2.2) são as diferenças entre as 1
coordenadas dos centros de projeção . As segunda e terceira li

nhas são as componentes dos vetores t . e t . do centro deÀ.. -c+xprojeção ao ponto imagem nas fotografias l e l + 1 . Elas * são função das matrizes de orientação de duas fotografias .
X, = kl x.
xL+ 1 ^í+1 xl+l
(5.2,3)
Alternativamente , a equação de condição para a orientação relativa pode ser obtida partindo-se" da coplanaridade de três vetores , ou seja ; para que os vetores X, * X^+ e B sejam coplanares i necessário que seu triplo ! produto escalar seja nulo , isto ê s
t.f. x f.. = $ (5.2.4)■L -Í.+ 1
A equação (5,2.4) ê a equação de condição para a orientação relativa , em notação vetorial . Desenvolvendo o triplo produto escalar de três vetores , teremos :
b‘( V i + 1 - ti11*1 > + by< zA +i " h h +i > +
bzl ' h h * i > “ 0 (5-2-5>
Alternativamente , podemos encontrar a equação (5.2.5) desenvol /endo a equação (5.2.2) „
5.2. 3 - DIFERENCIAÇÃO DA EQUAÇÃO DE CONDIÇÃO
Podemos estabelecer uma equação 1
le condição do tipo (5.2.4) para cada par de raios homólogos . " 5ara calcular os elementos de orientação relativa devemos estabe Lecer no mínimo cinco dessas equações , obtidas de cinco ou mais

pares de pontos .
Como essas equações de condição ' para a orientação relativa não são lineares em relação aos cinco parâmetros ê impossível de resolvê-las diretamente , para tornar isto possível , as equações de condição devem ser substituídas * por uma aproximação linear . As equações de condição para a orientação relativa podem ser obtidas diferenciando as equações* de condição em relação aos cinco parâmetros de orientação .
Como as equações de condição para a orientação relativa tem como uma aproximação as equações linea rizadas , suas soluções fornecem somente valores aproximados para as correções exigidas . Adicionando estes valores aproximados nos parâmetros de orientação relativa obtêm-se uma correção a es; tes parâmetros . Substituindo estes novos parâmetros nas equa-* ções linearizadas para obter uma outra aproximação» e o processo é repitido até que as correções se tornem negligenciáveis , for
mando então , um processo iterativo .Antes de diferenciar a equação *
(5,2.4) » vamos introduzir uma modificação para simplificar a equação linear . Esta modificação consiste em prê-multiplicar a matriz por uma matriz ortogonal R . Introduzindo esta modificação na equação (5.2.4) , teremos :
x ( R Al+1 x .+ 1 ) = 0 (5.2.6)
A matriz A ..,. ê uma matriz de ,t+lorientação aproximada » a matriz R serve para corrigi-la . Deste modo os parâmetros de R serio usados como incógnitas nas 5
equações lineares em vez de correções aos parâmetrosEsta equação deve ser agora dife
renciada em relação as componentes by e bz de $ e dos três 'parâmetros de R . A diferenciação requer o uso de valores aproximados para as cinco variáveis .
A diferenciação de R darã :
57
R * I +
-a.
CL.
-a.
■a.
a,
(5.2.7)
Onde ax ' a2 ’ a3 s^° ^un<?°es ^os parâmetros da matriz ortogonal .
Seja dl um vetor correção às 3
componentés, da base e R^ uma matriz antí-simétrica , que ê uma aproximação linear da equação (5.2.7) . Introduzindo dl e R^ 3
na equação (5.2.6) , resultará :
( I + dl ) X x ( t + 1 + R t + 1 ) * 0 (5.2.8)
Esta equação pode ser desenvolvida escrevendo o triplo produto escalar como uma soma de tais * produtos ( propriedade do triplo produto escalar ) e omitindo os termos que contem dl e , teremos :
I X x + d t ! . x + I X x { R.l. , ) = 0 (5.2.9)A A + l -t X + i A. ' 1 -t+1
Podemos escrever também que
rA - i ■ * x * í+i (5-2-10>
desde que as componentes de ^i^X+ 1 ssjam as mesmas do vetor * t+ 1
% x I . . . Substituindo a equação (5.2.10) na (5.2.9) , teremos;
I X x + dl.l . x X-., + I X x ( 4 x 1. . ) = 0 (5.2.11)-C -C+l A A +.S. -C A-ri-
58

onde , t - a1 t + a2 *j + %
Fazendo uso das propriedades do triplo produto escalar , e separando os termos da equação (5.2,1 1 ) convenientemente , teremos :
t. . x ( t X f. ) . 1 + !, X I. . dí + !. X !,,, . t - 0/t+ 1 -L Á. X+l -t -t+ 1
(5,2.12)
à equação (5.2.12) pode ser escri ta com um termo específico para cada uma das cinco incógnitas . Para esta finalidade , o terno com o vetor X ê escrito da secruinte forma :
I x I, . X x f .-c -t+l
ou , t x 1 í + «2 i + ^ ) x ^x>l
efetuando o produto vetorial , tem-se:
al * x XZ+ 1 Yt+ 1 ^ “ 2l+l J ) al
ó+l ~ v "ó+l ^ ni+l K > a2 (5.2.13)
a3 ^ x Xó+1 ' X-c+l ” Y4>1 * ) a3
como dB = dby 7 + ^bz X-* . t (5.2.14)
substituindo as equações (5,2.13) e (5„<&„14) na (5.2.12) , tem-se;
59

Desenvolvendo o triplo produto ! escalar da equação (5.2.15) , obtem -se
bx by bz bx by bz
X .X. Y .4. Z . -c ai +X . Y .X. Z .-t
0 -1 ■ <C+1 Y . «c+ 1 h*i 0 -X....X.+ 1
bx by bzzí X .■c
X . Y .<L Z -X. *3 + ( by +
~Yi+1 X -0.1-t+ 1 0 ^1+1 X ■ . i-t+ 1
o
X . Y . Y . Z .4. JL A. -t{ bz + dbz ) + bx = 0
Xl+l ^l+l Y Z x+l Ll+1
(5.2.16)
60

5.2.4 - DIFERENCIAÇÃO EM RELAÇÃO AS COORDENADAS DA FOTOGRAFIA
Se cinco pontos forem medidos para a orientação relativa , as incógnitas poderão ser encontradas resolvendo a equação linear (5,2.12) .
Na pratica , para melhorar a precisão da orientação relativa , são medidos mais de cinco pontos' e ê feito o ajustamento através do Método dos Mínimos Quadrados6
(M.M.Q) . Como o M.M.Q requer que a cada equação (5.2.12) seja dado um peso próprio , a determinação do peso requer a diferen-* ciação da equação de condição (5.2.4) não so em relação âs cinco incógnitas , mas também em relação as quantidades medidas , 1
no caso , as coordenadas das fotografias .Primeiramente podemos efetuar a 1
diferenciação e em seguida adicionar as correções dx^ * dy^ 9 'dx^+i e dy^+ às coordenadas fotográficas . Deste modo , os vetorest
dx -x.
dx -t+ 1
dxí + i
d x ^ i * + d y i + i d
(5.2.17)
são adicionados aos vetores x . e x . . , na equação (5.2.3) eas expressões obtidas para e são substituídas na ‘equação (5.2.8) . Agora podemos linearizar a equação resultante1
das substituições acima , da mesma maneira que anteriormente eagrupando os termos convenientemente , teremos :
1,. x ( t x 1. ) . X + t. x 1. , . + f . x f j . . fX.+ 1 X. X. X.+ 1 X. X.X-I
[ t . x ( A . 2 ) ] d x . ♦ [ t . *t+1 X { A . 7 ) ] d y . +
61
[ S . ( Ai + 1 t ) X ] dxí + 1 + [ 8 . ( Ai + 1 ] | * 1 ] dyi + 1
(5.2.18)
O peso da equação (5.2.18) ê unta função de quatro produtos mistos ( triplo produto escalar) e da precisão da correlação das quatro coordenadas .
No caso de uma faixa de fotografi as aéreas tomadas com o eixo da câmara aproximadamente vertical' e a triangulação da faixa na direção do eixo X , as componentes da base , by e bz serio pequenas comparadas com bx . Além * disso , os eixos x e y serio , aproximadamente , paralelos aoseixos X e Y e , portanto , os elementos da diagonal princjipal de e serão , aproximadamente , iguais a unidade’e os elementos fora da mesma diagonal serio pequenos comparados’ com a unidade . Então segue-se que , em cada equação , os coefi~ cientes de dx^ e dx^+ serio , aproximadamente , iguais a ( bx . f ) . Neste caso , os pesos serio todos , aproximadamente , os mesmos e podem ser igualados â unidade .
5.2.5 - FORMAÇÃO E SOLUÇÃO DAS EQUAÇÕES NORMAIS
Cada ponto usado para realizar a orientação relativa fornece uma equação linear do tipo (5.2.12 ) No M.M.Q , estas equações são consideradas como equações de correção , que em notação matricial elas podem ser representadas pe la equação :
A x t (5.2.19)
Aqui , A e uma matriz que tem como elementos de cada linha os coeficientes de uma das equações(5.2.12) . Sendo x um vetor coluna cujas componentes são as cinco incógnitas , e í o vetor coluna cujas componentes são ter
62

mos constantes . A notação da equação (5.2.19) não tem relação3
com as anotações anteriores usadas atê aqui.De acordo com o M.M.Q , o valor 8
mais provável de x ê o valor para qual o termo quadrático
( A x + 6 ) W ( Â x + S)
ê igual a um mínimo . Sendo que W ê uma matriz cujos elementos8
da diagonal principal são os pesos ligados a equação de condição e os elementos fora desta diagonal são todos nulos. Pode ser facilmente provado que a forma quadrática atinge seu mínimo para o valor de x que satisfaça a seguinte equação matricial :
W A x = - A W b (5.2.20)
Como W e uma matriz diagonal , as contribuições de cada equação de correção a estes produtos ‘ matriciais podem ser obtidos separadamente . Seja a equação de correção representada por :
ar x + b = 0 (5.2.21)
Onde a é o vetor coluna cujos elementos são os coeficientes 'f
na equação , x ê , como já dissemos , o vetor coluna cujas componentes são as cinco incógnitas e b ê um termo constante. Sejaagora ac txm vetor coluna , que ê a transposta de a . Para cada equação de correção , a matriz w ac ar é um vetor coluna e~ w b ac pode ser calculado . Pode facilmente ser demonstrado 8
em | 20 j que a matriz dos coeficientes e o vetor da segunda 8
parte na equação (5.2.20) são simplesmente a soma das matrizes *w a a e a soma dos vetores - w b a , respectivamente . Des-
■ C 3T C
ta maneira , as equações normais são calculadas da seguinte ma-' neira s
(5.2.22)x = - w b ac
63

5.3 ” MËTQDO DE THOMPSON
5.3. 1 - CONDIÇÃO PARA A ORIENTAÇÃO RELATIVA
Vimos na secção anterior que a 1
condição necessária para que duas fotografias estejam orientadas ■ relativamente I que os pares de raios homólogos sejam coplanares com a base . Para tanto , vamos adotar os mesmos sistemas de coordenadas e as mesmas considerações iniciais da secção (5.2.1), figuras (5.2.1) e (5.2.2) .
Condição para que os tris vetores S , r e * .+ 1 com suas componentes sejam coplanares , ê neces sãrio que seu triplo produto escalar seja nulo , que em linguagem matemática pode ser expressa por :
( bx 2 + by ? + bz Ê ) . ( X . 2 + Y . ? + Z . £ ) x ( X . 2 +"t "C I X
-Z+1(5.3.1)
Por conveniência vamos expressar" a equação (5.3.1) na forma matricial e vamos representar o vetor X . 2 + Y . 7 + Z . Í como uma matriz coluna .A A J A.
X .A,
Y .A.
1 . A,
(5.3.2)
Podemos facilmente transformar a equação (5.3.2) , conforme j 7 j , em uma matriz antl-simêtrica, no que resultara :
€4

0 ~z, Y .4. 4.
z . 0 -X .<L -c
-Y . X . 0•t -t
(5.3.3)
Substituindo a equação (5.3.3) na (5.3.1) e expressando esta era notação matricial ficará :
['
0 -Z , Y .A.
bx by bz^J z .á. 0 -X .4.
-Y - á. X .A. 0
* + 1
* + 1
’.Í.+ 1
a 0 (5.3.4)
Seja uma matriz ortogonal * própria que representa a rotação da fotografia da esquerda era relação ao modelo do sistema . Da mesma maneira R2 será também' uma matriz ortogonal associada com a fotografia da direita , teremos , então :
x/+l x^+l
Y^+l = R2 ^4-1
Zi+ 1 ZM
(5.3.5)
Seja s' uma matriz antí-simétrica cujos elementos são os componentes de ura vetor referido ao
65

sistema do modelo . Seja X uma matriz coluna cujos elementos' são os componentes de um vetor arbitrário no mesmo sistema . E S’ X representa um vetor , desde que seus elementos sejam os 5
componentes do produto vetorial de dois vetores . Seja R uma ' matriz ortogonal própria . Se S e x são as transformações de S' e X sobre uma rotação de eixos , então :
mas
consequentemente ; S 1 X = R S R X
Desde que X seja arbitrário , isto implicará que ;
S* = R S R'
Substituindo as considerações feitas acima na equação (5.3.4) , esta tornar-se-ã :
D0 -2í Xt + 1
bx by bz Ri i . 0 -x.-t X. «I R2 *c+l
-y. z . 0JL X. z-t+l
(5.3.6)
tas , a saber : bx byEsta equação contêm nove incôgni-
bz , os três parâmetros independentesA equação !
(5.3.6) pode , facilmente , ser transformada em uma equação a cinco incógnitas .
de R^ e os três parâmetros independentes de R
66
Vamos primeiro escolher um siste' ma do modelo de modo que ele coincida com a fotografia da es- * querda , isto ê , - . Então a equação (5.3,6) pode ser es-'ta como :
0 -Z - A. * í Xt + 1
l ßy ßz] z .a.
0 - X -A. R 2 y^+i
x .A.
0
(5.3.7)
Onde ßy = by/bx e ßz = bz/bx , como jã vimos anteriormente na secção (5.3) os cinco parâmetros de orientação relativa são *as .incógnitas da equação (5.3.6) , as quais são ? ßy , ßz eos três parâmetros independentes de R2
Em seguida , vamos escolher o eixo X do sistema do modelo de modo a coincidir exatamente com abase , de modo que , by = bz = 0 . Se dividirmos a equação "(5.3.6) por , teremos ;
0 “ Z - A . V l
z.c 0 - x .A,
rt r 1 2 yt+l
-*c 0 z.t+ l
(5.3.8)
O produto [_ 1 0 Oj Rj ê umvetor cujas componentes são os elementos da primeira linha de R.,Tisto é , ( y-, -j_ t y12 > Yi3 9 0 Produto R2 ê uma matriz ortogonal R , cujos três elementos podem ser tomados como incógnitas . A equação (5.3.8) pode ser reduzida a:
67

Y y Y 11 12 13
0 -z .-t y.t *Z+1
z .X. 0 “X .-c R yX+l
X .<0 0 Z-t+l
= 0
(5.3.9)
Sendo que a equação (5.3.9) ê equivalente ã equação (5.3.7).
5.3.2 - EXPANSÃO DA EQUAÇÃO DE CONDIÇÃO
Uma vez que z^ = ' po"demos dividir a equação (5.3.7) por e assim obter algumas1
simplificações . Teremos i
i ey 6z
0 - 1 X*+l
1 0 “X . -t R2 y^tl
~yz x .-t 0 1
= 0
(5.3.10)
Em que , x^+i » ^ < + 1 sao as coorâenadas resultantes dadivisão .
O valor de R2 pode ser represen tado da mesma maneira que a equação (3Í9.6) , ou seja :
68

—A2 ”v2 y2 X2
R2 = A A2
V2 A2 “X2 + J L2A2
U2 _ X2 W2 V2 _
__-P2 X2 AL - V2 _
(5.3.11)
1 2 2 2Onde = 1 + ™ ( X2 + y2 + v2 ^
« 1 2 2 2
A2 = 1 ' 7 ( X2 + “ 2 + v 2 ’
Substituindo a equação (5.3.11)* na (5.3.10) e efetuando os produtos e apõs algumas simplificações , teremos :
yl ” y 2 + 1 + yi y 2 X2 " yl x 2 v 2 " X2 v 2 " X1 ' X2 ^Sy
+ ( xi y 2 - x 2 ) Sz + a1 X2 + a2 ^2 + a 3 v 2 + bl + b 2 = 0
(5.3.12)
Onde os parâmetros da equação (5.3.12) são dados por :
al “ ' \ X2 “ 2 + f *1 y 2 u 2 ' X 1 * 2 6y " X 1 8Z
a 2 = " | y 2 “ 2 ' I ( 1 ' yl y 2 > u 2 + < 1 + X1 x2 > 6y ' ylez
a3 = “ y2 3y + ( X1 x2 + yl y2 62
69

bl 4 ( X2 *2 + y 2 U2 + V2 L ( X2 X1 v 2 6y ” ( y 1 *2
x 1 Vi2 ) 3
T 2 2 2
—“ ( ^2 + ^2 * v 2 ) t- ( yi ” y2 ~ ( x]_ ” x 2 y *
( Xx y2 " x 2 yi ) 62 ]
A equação (5.3=12) ê então a * equação de correção geral , dando a paralaxe y ( y^ - y2 ) em ter mos dos elementos de orientação relativa em uma forma racional al gêbrica »
As primeiras linhas da equação*(5.3.12) contem os termos lineares , e vemos que eles correspon-* dem exatamente aos termos da formula padrão de primeira ordem * quando identificamos com u>2 , e K2 respecti~vamente . Os termos contendo , a2 e são como coeficien-' tes de segunda ordem , enquanto que, e b2 são termos de terceira ordem . A equação (5.3.12) pode ser obtida diretamente da equação (5.2.4) .
5.4 - MÉTODO DO UNITED STATES COAST & GEODETIC SURVEY
Na figura (5.4.1) os sistemas* de coordenadas são os mesmos da secção (5.2). Consideremos , ainda t que o ponto principal P , a imagem I e o objeto 0 , no espa ço , são colineares . Isto pode ser inferida da semelhança de tri_ ângulos desta figura .
*. / z. > ( X - Xp ) / ( Z - z p )

Origem
Fig. (5.4.1) - Geometria da colinearidade dos pontos
( X - X )% ' _ z . ( 5 * 4 . 1 )
Á . - t 1
í Z - Zn )
de modo anãlogo podemos ter também
Z \ P '(5.4.2)
Na seção (5.2) vimos que

a,, x . + a, 0 y ■ + a, «, z ■ 11 -t 12 •' 13 -t
a21 X-c + *22 y l + a23 Z.i ( 5 ,4.3}
a-, x . + a~~ y . + a,, z . 3x -c 32 J jl 3^ a.
Substituindo as equações (5.4,1) ,
( 5 , 4 , 2 ) na (5.4.3Í e arranjando os termos convenientemente , teremos :
( x - x p ) ( Y - Y p ) { Z - z p )X . a „ ^ 4- a 12 z . * a i 3 ^
( 1 - Zp ) ( z - Zp ) ( z - Zp )
( x - X p ) ( Y - v p ) ( Z - z p )
— ’21 zl * »22 Zx + »23 Zi( Z - Z p ) ( z - Z p ) ( z - Z „ !
( X - Xp ! ( 'f - y p ) ( z - z p )------------ a M * »32 Zí * »33 Zí{ Z - Z p ) ( z - Z p ) { z - z p >
,,,,,,,,,,,, S e 4 ® 4
Dividindo o conjunto de equações acima pela terceira delas , teremos ?
x < x - V » . . + < Y ' V * > * M Z - Z p ) a 13Z ( X - X p ) a31 * ( Y - Y P ) a32 + ( Z - Z p ) a33
y < X - X p ) ♦ < V - Y p ) a22 * ( Z - Z p ) a23(5.4.5)
2 < X - X p ) ♦ ( V - V p) , 32 + ( Z . z p ) 333
Tl

Se A ê definido como representan do os três elementos da linha da matriz da equação (2 .2 ) , teremos :
A = ( ail + 312 + 313 }
X - X.
B = V - Y.
z - z
Agora se arranjarmos a equaçao '(5.4.5) convenientemente , podemos colocar a mesma sob a forma ' de determinante , ou seja :
X z= 0 I y
1
z
a3 b | A2 B A 3 8
Na pratica , a condição de colinea- ridade não ê obtida de forma absoluta e o problema se reduz a 1 uma situação na qual se faz necessária uma correção de x e de y . Como já vimos na secção (5.2) , se mais de cinco pares deraios homólogos são considerados , a solução ê obtida através do M.M.Q.
Coroo a solução é obtida pelo método acima citado , a equação (5.4.5) deve ser linearizada . Isto pode ser feito por diversos processos com a ajuda do cálculo diferencial .

5.4.1 - EQUAÇÕES DE OBSERVAÇÃO
Nas equações (5,4.6) , x ê uma quantidade observada , z é a distancia focal da câmara e os termos'A e B são compostos de vãrios elementos angulares e pârametros lineares geométricos associados com a altitude e a posição da câmara.
A equação (5.4.6) pertence a um ponto imagem cujas coordenadas são ( x, y , z } f na fotografia . Se o numero de pontos excede o numero de parâmetros , a equação (5.* 4.6) não ê válida para todos eles , e , para se ter uma solução, serã necessário atribuir um valor residual v ao seu segundo 1 membro .
Podemos , então escrever a equação s(5.4.6) , do seguinte modo :
X y X Z
ItX
v y
A1 8 As ba 2 b A3 b
(5.4.7)
onde e sao as correções necessárias âs coordenadas de placa para satisfazer 6 procedimento adotado «
Se o lado direito da equação (5,4.7) for representado por F , como valores iniciais de A e B , então * podemos dizer que :
V = F + dF (5,4,8)
Na qual dF ê a correção necessãxia a F . A equação (5.4.8) *pode ser linearizada através da aplicação de derivadas parciais * de todos os parâmetros da foto .

dF 1 1 dw ♦ ü d + 1 1 d< + H dX - ~ dYD " 1 1 dZ +3 U) 3<f> 3k 3X P 3y P 3Z pP P Pif dX . 3L dY + 1 1 dZ (5.4.9)3 X 3Y 3Z
3 F -Substituindo F por p ^ , — por p^2 , etc. A equação acima■n 3 Ü)pode ser expressa como:
A3 B = pu + p 12 du + p13 d* + p 14 d * - p 15 d x p
p 16 dYp ' P17 dZp + p15 dX * p 16 dY + p17 dZ
A, B = p2 1 + p22 du + p,, d4> + p0A á< - p.,,. dX23 24 '25 “ "p
p27 dZp P26 dYp + p25 dX + P? * dY + P^ dZ26 27
( 5 . 4 . 1 0 )
Sendo que os coeficientes básicos usados na orientação relativa são :
X z y z
P11Ax B a3 b
P21a2 b A3 B
'12 3A.
3 a)

y Z X Z
P22 3A2
3 to
3 A - — B3 to
P 1 3 = 3 A 1
3(f)
3 A 3
34»
y z y z
P23 SA— £ B34i
9Aa B 3$
P2 l4^ 2 B
3 tcSA33k
X Z X z
Pl - 3 A
3 K
3 A g
3 K
P15 -
a n 3 3 1
y Z X Z
P2 5 =P 1 6 =
3 2 1 a 31 3 1 2 a 32
y Z X Z
P 2 6 = P 1 7 =
a 22 a 32 a 1 3 a 3 3
76
A equação (5.4.10) ê usada , neste' omêtodo para resolver três problemas diferentes ? a orientação* relativa , a tri-secção inversa no espaço e o ajustamento em blo co. Se os valores aproximados de ( X, Y, Z ) estao suficiente-' mente próximos dos valores corretos , os termos contendo dX , ‘ dY e dZ podem ser negligenciados restando , portanto , 6 incõgnitas . Na orientação relativa isto jã não acontece , e , o ter mo dXQ não tem significado. Mostraremos abaixo como os três * térmos podem ser eliminados , restando somente, cinco incógnitas.
5.4.2 - CONCEITO DE ELEVAÇÃO
Considerando um objeto , cujas coor denadas são representadas simplesmente por s X, Y, Z e resolvendo a equação (5.4.1) para X , teremos :
X ■ Xp + */< Z - Zp ) / (5.4.12)
Sendo que a equação acima pode ser adotada para ambas as foto-' grafias ; portanto , teremos :

Sendo gue os índices q e U +1 ) referem-se a segunda fotografia . Subtraindo a segunda das equações (5.4.13) da primeira , * teremos :
Xn + x , (Z - Z J / z . P X.' P ' JL \ + *1+1 (z V 7 2;l+l * 0
. (5.4.14)Isolando o valor de Z , teremos
(X - XJz. z... + Z x.z.,, - Z x.. z. v q ' JL x .-H p á. vc + l______q <.+1 n. (5.4.15)
Na orientação relativa estas equações
Z x. - Zj2 « -E— £-------- i X * x Z/ z Y = y Z / z ( 5 . 4 . 1 6 )
*í - Xz/Zi
Isto porque , a primeira fotografia é considerada sem inclinação e , a posição da primeira câmara pode ser selecionada como ori~* gem e a abcissa da segunda fotografia pode ser escolhida como * unitária .
5.4.3 - ÉQUAÇÕES DE OBSERVAÇÃO MODIFICADAS PARA A ORIENTAÇÃO RELATIVA
Visto que somente cinco parâmetros* são determinados na orientação relativa , as equações de obser-* vação podem ser modificadas . Como consequência da equação (5.4. 16) , os termos em dX t dY e dZ , na equação (5.4.10) , podem ' ser eliminados por substituição e expressos em termos de outras*
78

incógnitas : dw , d<|> , d* e dZp , teremos a equação de observa- ção , para a orientação relativa da sequinte forma :
^3 ® % * 11 + ^12 * ^1^2^ dlü * ^13 + 1* :3 d< + í
d< - P 16d Y p - ( P 17 - S 1T ? ) dZ
(5.4.17)'
^ 3 ® Vv * ^ 2 1 + ( ^ 2 2 * ^ 2X2 ) dw + ( P 2 3 + ^ 2^ 3 ) ^ + ( P2 <t"*'*2^««)
d« ~ P2 6 dYb ’ P27 " S2T7)
n a q u a l
X - 1 Z - Z.
T a 2
( â A j / 3w ) C ( 3 A , / 3ü> ) C
X - 1 z - z.
T 3 15
( 3 AY / 3* ) c ( 3Ag / 3^ ) C
X - 1 z - z.
T, *
( 3A{ / 3< ) c ( 3Ag / 3k ) C
73

Onde se tem s
\ = ( 1/U2 > < Pl5 U3 + P15 U4 + Pl7 >
S2 “ ( 1^U2 ' ' P25 ü3 + P25 U4 + P27 )
Ui - Z x* - z* U 3 = X / z
U2 = x’ - u z ’ u A * y / z
T = A! C ( = x )
x1 - AT C
z 1 = A
x .+1
■-t+ 1
z,:+i
5:5 - MÉTODO D5 VAN DER WEELE
A orientação relativa de um par de feixes de raios reconstruídos ê realizada se os correspondentes* feixes de raios projetantes se interceptam no espaço . Esta condição pode ser expressa pela anulação da paralaxe p. , ( obser-' vada em qualquer ponto arbitrariamente escolhido ) . As correções a serem aplicadas aos elementos de orientação , são estabelecidas em função da própria expressão da paralaxe .
A expressão geral da paralaxe em y conforme | 17 j , serã dada por : Â

Fig. (5.5.1)
( l2 + Y2 ) X YPy = dby^ - Y/Z dbz^ + X dk. - — .— ---- dw^ + - y — d4».
Z2 + Y2dby2 + Y/Z dbz2 - ( X - b )dk2 + —------du,
( X - b ) — Y d * -
Onde X , Y e Z são as respectivas coordenadas do ponto em ' questão .
A formula da paralaxe contêm dez * elementos de orientação , dos quais , ^cinco são necessários pa ra obter um modelo livre de paralaxe e , consequentemente , os cinco nodem ser escolhidos arbitrariamente .
81

Corao este método baseia-se na orientação relativa com apenas um projetor , admite-se , então , que seja atribuída â primeira fotografia uma matriz de rotação imitaria . Como se trata de uma orientação dependente , os movimentos serão sê com um projetor , ou seja , o projetro de vante . A equa çãó da paralaxe , neste caso , ficará :
Z2 + Y2 X - b- p = dby2 + Y/ Zdbz2 + — d « 2 ------— - Yd#2 - (X - b) dk2
Y Z Z (5.5.2)
Onde as incógnitas são dto2 9 d<|>2 , dk2 , dby2 e dbz2 , que ' são as correções aos elementos de orientação supostamente conheci^ dos da segunda foto . A determinação de tais incógnita necessi-• tarâ de cinco equações do tipo (5.5.2) para ser feito um ajusta mento através do M.M.Q .
Pode-se escrever a equação (5.5.2) ‘ como uma equação de correção , ou seja :
- u = py - dby2 + Y/Z dbz2 - (X - b) dk2 + — --- du>2 -
X - b -- d* (5.5.3)
Z
As correções angulares ( dk2 , du>2 , d4»2 ) , são em radianos .
As equações de observação são obtidas de seis pontos padrão , fig. (5.5.2) , cuja solução será :
dk2-'“ - 7 7 ( pyl + py3 + py5 * py2 ’ py4 ' py6 >
Zd *2 = 7 7 7 ( p* 3 ' p* 5 + Py6 ' Py4 1
82

dw2 = T-T2— < 2pyl ' Py3 ' Py5 - py4 - ' » 6 + 2py2 ) 4 d
dbz2 = — ( py4 - py6 )2 d
dby2 =12d“
2( 4d2 + 3z2. }Py2 + ( 2d2 + 3z2 }(2py - py.
- py5 ) + ( 2d - 3z* ),( py4 + p.y6 ) j
Para fotografias verticais temos' que considerar neste método dois casos principais , a saber : * (a)- para terrenos planos , que ê o caso até agora visto ; (b) - para terrenos montanhosos . Para o caso de fotografias convergen tes não será tratado aqui por fugir ao escopo do presente trabalho .
Em um modelo de terreno montanhoso , onde Z não ê constante , as diferenças de altitudes do ter reno terão influência na orientação relativa . Para pequenas di_ferenças de altura AZ , menor que 10% do valor médio de 1 , ométodo para terrenos planos pode ser aplicado nesse caso .
0 método de orientação relativa 'dependente , admite que Y/Z = K , seja uma constante para cada*um dos vértices do modelo (3,4,5,6) . Para terrenos montanhosos'
podemos incluir as relações :
-Y, “ Y.- K
As equações da paralaxe para os seis pontos , com a aplicação * do M.M.Q , podem ser reescrita ' da sequinte forma :
83

du)2 = -( p y x + p y 2 ) - ( p y 3 + p y 4 + p y 5 + p y 6 )
2 ( 11 + Z2 ) - K( Z-, + Zá + Z^ + Za )3 4 5 6
d* 2 =2bK
( p y 3 - p y 4 - p y 5 + p y 6 ) - K ( z q - z ^ - z fi + z 4 ) dw
2 3 b {dk„ = ■— - ( pyx .+ py3 + py5 } + ( py2 + py6 + py4 )
1| ( Z i - Z 2 ) + ( Z 3 * Z 5 - Z 4 - z 6 ) K | d « . .
J
/dbz.
4 K( p y 3 + py4 - p y 5 - p y 6 > - k ( z 5 - z 3 + z 6 - z 4 )do>2
bK d<(>.
/dby. JZ p y x + KZj l + z 2 ) + k ( z 3 + z 4 + z 5 + z 6 ) | d
l = 1
+ 3b dk.
Nestas equações são admitidos ' pesos unitários para todas as paralaxes observadas . Na figura*(5.5.3) , para o caso de um terreno plano f = Zg = Z^ = Z .
84

Fig. (5.5.3) - Secção transversal de um terreno montanhoso
5.6 - MÉTODOS DIVERSOS
5.6.1 - MÉTODO DO BRITISH ORDNANCE SURVEY
Para aplicar este método impõe-se a condição de que a paralaxe em y , entre os correspondentes 1
raios homõlogos , deva ser igual a zero o que , em linguagem matemática , se exprime por , | 19 | :

onde
, ^ + 1 ' sao os vetores áos centros de projeção a um *ponto imagem nas fotografias i e (-Í+1 ) , respectivamente .
X. , * 7-Ji » .ó+l ' sao as componentes X e Z dos vetores t . e ero relação a um ’sistema de coordenadas dextrõgiro .
5.6.2 - MËTODO DE HERGET
Tanto para este método como para ò seguinte , não serão fornecidos pormenores . Será somente apresen tada a sua equação de condição para a orientação relativa .
O método de Herget estabelece que* a menor distância entre os correspondentes raios homólogos seja * igual a zero | 18 | .
-— t . H : x $. + 1 = 0 (5.6.1)á.sen 6
onde:
1$ ê o vetor que conecta os dois centros de projeção f ^I ' s^° os vetores unitários na direção de X^ e X + 1 ,
respectivamente ,
0 é o ângulo entre X^ e X^ .
86

CAPlTULO 6
CONCLUSÃO

CONCLUSÃO
Como ja foi dito anteriormente ' foram descritos aqui os principais métodos de orientação relativa existentes » Como a diversidade de métodos ê muito grande , seria impossível descreve-los todos , pois o trabalho tornar-se-ia muito extenso e repetitivo , uma vez que muitos deles são variantes' dos aqui descritos.
Qualquer equação de condição para’ a orientação relativa não ê linear , com excessão da que se ob-’ têm no método descrito na secção (5.5) , pois nesse método obte-* mos as correções aos parâmetros de orientação , e não , os parâmetros propriamente dito , como se obtém nos outros métodos -. A linearização , excluindo a equação (5.5) , pode ser feita por derivação ou por outro processo qualquer , que os resultados não ' serão alterados . Alguns trabalhos , tal como o | 20 | , mostram'que , se a equação de condição para a orientação relativa for li nearizada. por meio da série de McLaurin , o tempo de computação ' empregado serã menor .
A convergência da equação de condicão para a orientação relativa dos diversos métodos estudados ’
-aqui , de um par de fotografias , para o metodo de Schut , como 5
mostra o trabalho j 2 1 j , duas a três iterações são suficientes, a mesma rapidez de convergência ê esperada para os métodos de
n 7KJ /

Thompson e Van Der Weele , este ultimo para o caso de um terreno plano . Para o método do U.S. Coast and Geodetic Survey como mos tra o trabalho | 26 j , são necessárias de três a quatro iterações . Tanto para o método de Herget como para o do British ' Ordnance Survey , a velocidade de convergência ê muito menor que nos outros métodos descritos aqui , devido aos fatores adicionais introduzidos nas equações de condição .
Se tomarmos , no método de Thompson , a equação (5.3.1) e ao invés de usarmos as componentes 'dos vetores t , , ^ + 1 ' usarmos os próprios vetores , aequaçao (5.3.1) ficara reduzida a equação (5.2.4) . Da mesma ma neira , a equação (5.3.12) pode ser obtida diretamente da equa- 1
ção (5.2.4) , resultando :
( Y; Y/a.i + Z. Z... Jdu.., - Y. Y . . d<|> . . - Z . Z . . dk . , +' A. X.+ 1 A. .+1 ' -t+1 A. -t+1 y>C+l A. -t+1 -Í.+ 1
+ X. Y . . . dó . + X. Z . . . dk. + Y. Z- . - Z . Y . - = 0 A. .t+1 -t A .t+1 t A. -t+1 t t+1
Podemos ver facilmente que a 1
equação de condição para a orientação relativa , proposta pelo1
método de Thompson , a euqação (5.3.1) ê facilmente reduzida aequação (5.2.4) , dò método de Schut , e vice-versa , dando , amesma precisão .
A seguir damos uma tabela mostran do os resultados dos cálculos dos elementos de orientação relativa usando os métodos descritos aqui . No cálculo desses elemen tos não foram efetuadas todas as correções dos erros sistemâti- 1
cos por falta de dados complementares . Os elementos das tabelas 1 , 2 , 3 e 4 são dados em radianos .
88
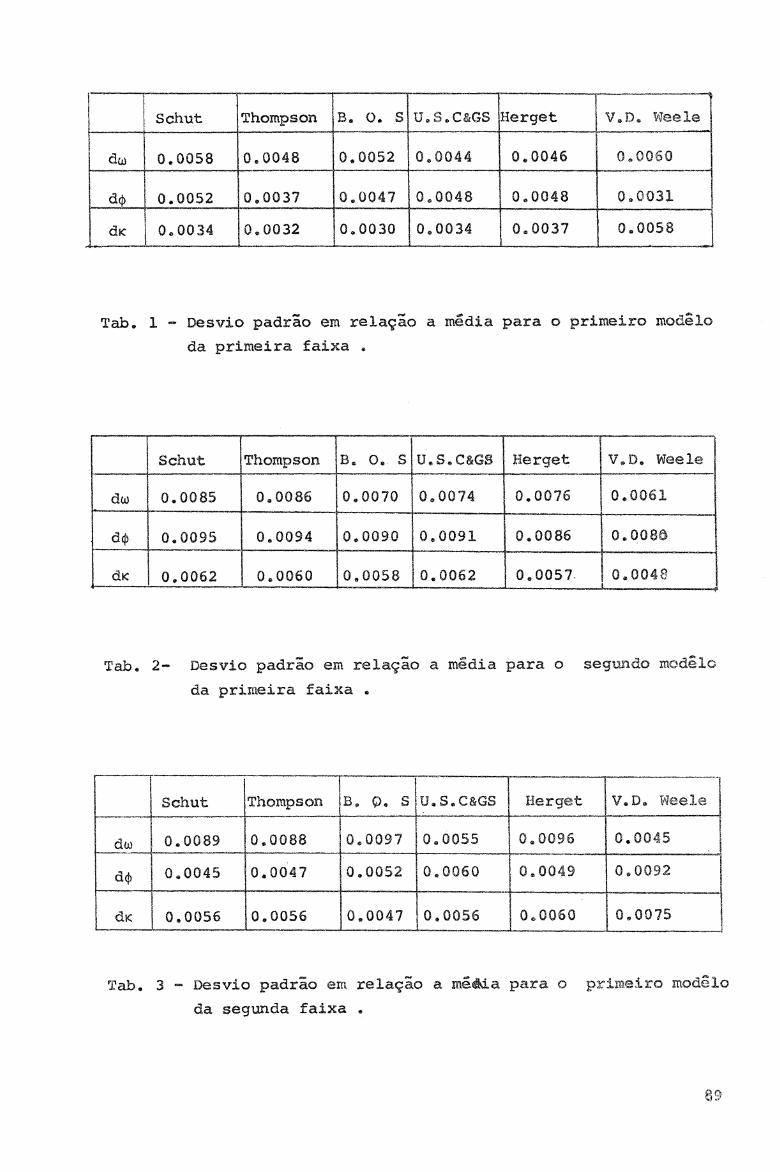
Schut Thompson B. 0. S U.S.C&GS Herget V.D. Weele
du 0.0058 0.0048 0.0052 0.0044 0.0046 0.0060
d<J> 0.0052 0.0037 0.0047 0.0048 0.0048 0.0031dsc 0.0034 0.0032 0.0030 0.0034 0.0037 0.0058
Tab. 1 - Desvio padrão em relação a media para o primeiro modelo da primeira faixa .
Schut Thompson B. 0. S U.S.C&GS Herget V.D. Weele
dw 0.0085 0.0086 0.0070 0.0074 0.0076 0.0061
d<f> 0.0095 0.0094 0.0090 0.0091 0.0086 0.0080
dK 0.0062 0.0060 0.0058 0.0062 0.0057 0.0048
Tab. 2” Desvio padrão em relação a media para o segundo modêlc da primeira faixa .
Schut Thompson B. 0. S U.S.C&GS Herget V.D. Weele
díi) 0.0089 0.0088 0.0097 0.0055 0.0096 0.00450.0045 0.0047 0.0052 0.0060 0.0049 0.0092
dK 0.0056 0.0056 0.0047 0.0056 0.0060 0.0075
Tab. 3 - Desvio padrão em relação a maêia para o primeiro modelo da segunda faixa .

Schut Thompson B. 0. S U.S.C&GSji
Herget j V.D, Weela
dw 0.0066 0.0064 0.0058 0.0070 0.0065 0.006o
d<j> 0.0038 0.0039 0.0034 0.0031 0.0040 0.0031
d< 0.0089 o . 0 0 8 8 0.0097 0.0055 0.0089 0.0080
Tab. 4 - Desvio padrão em relação a média para o segundo modelo da segunda faixa .
Tanto no método de Herget como * no do British Ordnance Survey , as equações de condição para a orientação relativa são mais complexas que as outras , por possu irem um fator adicional , o qual é vima função das coordenadas fo togrãficas e da orientação da fotografia . Como podemos ver ’ nas tabelas 1,2,3 e 4 esses métodos são de igual, precisão , con sequentemente , os fatores adicionais não afetariam o resultado* de uma aerotriangulação .
Para todos os métodos descritos 1 aqui , o resultado de uma aerotriangulação é independente do método de orientação relativa escolhido . A seguir damos o resultado de uma faixa trianguiada usando os métodos da secção (5 . 2 ) e (5.4) , extraído da |l9j .
Comparação Métodos X (pés) Y (pês) Z (pês)
1Schut 0.58 0.61 0.62
Ü.S.C & G.S. 0.60 0.64 0.58
2Schut 0.55 0.58 0.62
Ü.S.C & G.S. 0.54 A 0.51 0.48
Tab. 5 - Desvio padrão das coordenadas em relação aos pontos de apoio .

Na tabela 6 , apresentamos os resultados de uma faixa triangulada usando os métodos do British ’ Ordnance Survey (B.O.S) e ò método de Schut (N.R.C) , extraído da referência j 2 0 |
a o . s N. R. C
X 0.01Ô 0.013
Y 0.010 0.010
Z 0.60 0.60
Tab. 6 - Desvio padrão por modelo na faixa triangulada.
Como podemos inferir , das tabe-' las ( 1,2,3,4) os métodos para a orientação relativa , fornecem ’ igual precisão , portanto , o resultado de uma aerotriangulação ' independe do método de orientação relativa escolhido (Tab. 5 e 6). A diferença de um método para outro estã no tempo de computação ' requerido , donde concluimos que , a escolha de um método de orientação relativa pode ser uma função do tempo de computação .
91

CAPÍTULO 7
REFERÊNCIAS BIBLIOGRÃFICAS

REFEPflNC IAS BIBLI 00 RÄFI CAS
DOYLE, Frederick J. The historical developmente of analytical photogrammetrv . Photograirtmetrl- Enqineering , Virainia , J30 (5) : 260 - 265 ,dec. 1964 .
EL-ASSAL, A. A. Analytical aerotrianqulation at the University of Illinois . Photogrammetric - Encineering , Virginia , £9. (1) : 199 - 206 , jan. 1969 .
LOBANOV, A. N. Analytic nhotocrammetry and its - future development . C-eodesv and Aeronhotogra- nhv . Washington, D.C. , (5): 281 - 285 , 1967.
RAASTAMOINEN, J. Refraction . Photogrammetric Engineering , Virginia , 38.(8) : 799 - 810 , aug. 1972 .
TIENSTRA, M. Calculation of ortogonal matrices . Enschede , ITC ,1974 , 55n.
WELLS, E. D. Matrices. Canada, University of New Brunswick, Den. of Surveying Engineering . 1971. (Lectures notes ) 87 p.
THOMPSON, E. K. Introduction to the alaebra of matrices with some applications . London. The Universitv of Toronto Press , 1969 , 228n.

GOLDSTEIN, Herbert . Classical mechanics . London Addson - Wesley , 1950 . 398 p.
WESTLAKE, Joan R„ A handbook of numerical matrix-* inversion and solution of linear equations .New York , John Wiley & Sons, 1968 . 228 p.
WHITTAKER, E. T. A treatise on the analytical di- namics of particles and rigid bodies . Edinburg Cambridge University Press , 1950 , 230 p.
LAMB, H. Higher mechanics . London ,University Press , 1929 . 530 p .
SCHUT, G. H. Construction of ortogonal matrices - and their aplication in analytical photogramme- trv. Photogrammetria , Amsterdam , 15(4): 149 - 162 , 1959
FRITZ, Lawrence W. Evaluation of the Space Optic mónocomparator . Rockville , U. S. Department- of Commerce , jun. 1971 (NOAA Technical Memorandum NOS )
ABDEL-AZIZ, Youssef I. Lens distortion at close - range . Photogrammetric Engineering , Virginia 35(6)s 611 - 620 , 1963 .
SCHUT, G. H. Photogrammetric refraction . Photogrammetric Engineering , Virginia ,35(1): 79 -
- J ■” r _ - 111
86 , jan. 1969 .

I 16 I ANDRADE, J. B. de . 0 problema dos sistemas decoordenadas nas aerotriangulações. Curitiba , Universidade Federal do Paraná , 1973, 72 p.
I 18 I
I 19 I
I 20 I
I 21 !
I 22 I
WEELE, A. J. Van der . The relative orientation' of photographs of muontainous terrain . Photo- gramme tria , Washington, D.C. , 1£(3) : 161169 , 1959 .
HORSFALL, C. T. Eletronic computer programs for analytical photogrammetry. Photogrammetrie Engineering , Virginia , 27_(5) : 766 - 882,dec. 1961.
CHAVES, Jesse R. Two methods of analytic triangu lation for higways . Photogrammetric Engineering , Virginia, 21(7)5 697 - 706 , jul. 1968.
SCHUT, G. H. Remarks on the theory of analytical aerial triangulation . Photogrammetria . Was hington,D. C. , 16 (2): 57 - 66 , 1959 .
___________. An introduction to analytical striptriangulation with a fortran program. Natio-' nal Research Council of Canada , Ottawa, (34): 38 - 50 , dec. 1966 .
GHOSH, Sanjib K. Relative orientation improvemem te. Photogrammetric Engineering, Virginia , 32(3): 410 - 415 , may 1966 .L A
94

LUCAS, James R. Differentation of orientation matrix by matrix multipliers. Photoqrammetric ' Engineering , Virginia , 29(4): 708 - 714 ,jul. 1963 .
FRIEDMAN, S. Jack. Empirical observations on relative orientation. Photoqrammetric Engineer- 1
ing, Virginia , 33; (11) : 1282 - 1289, nov. 1967.
THOMPSON, E. H. A rational algebraic formulation of the problem of orientation. Photogrammetric Engineering . 16(3): 152 - 159, oct. 1959 .
HARRIS, W. D. et alii . Analytic aerotriangulation. Coast and Geodetic Survey Technical Bulletins ,1 (3) , 1967 .
Top Related