





Línguas
Páginas
Legal


1
Engenharia Mecânica
COMEDOURO AUTOMATIZADO PARA CÃES
Matheus Nunes de Barcellos Almeida
Vitor Henrique Peres Martins de Almeida
William Vinícius Mendes Silveira
Campinas
2016

2
Engenharia Mecânica
COMEDOURO AUTOMATIZADO PARA CÃES
Matheus Nunes de Barcellos Almeida RA: 004201200281 Vitor Henrique Peres Martins de Almeida RA: 004201200282 William Vinícius Mendes Silveira RA: 004201200114
Projeto de Monografia apresentado à disciplina Metodologia do Trabalho Científico, do Curso de Engenharia Mecânica da Universidade São Francisco, sob a orientação metodológica do Prof. Filipe Alves Coelho, como exigência parcial para conclusão do curso de graduação. Prof.(a). Orientador(a) do Trabalho de Graduação: Filipe Alves Coelho
Campinas
2016

3
RESUMO
Hoje em dia o mercado de animais de estimação está crescendo no cenário nacional,
devido a um processo de humanização do animal de estimação, que fez as pessoas dessem
mais importância ao seu animal, investindo assim mais dinheiro e atenção ao bem-estar e
saúde do mesmo, principalmente o cachorro, o qual é a preferência da população.
Embora as pessoas gostem de seus animais de estimação, elas passam muito tempo
trabalhando e torna-se difícil cuidar deles, por isso, dão-lhes uma refeição uma vez por dia,
mas em excesso, e isso pode ocasionar alguns problemas de saúde para seu animal.
Uma maneira de resolver este problema seria usar um comedouro automático, mas é
difícil encontrar um no mercado e aqueles que existem não são completos porque não dão a
informação sobre o histórico da alimentação do cão. Para resolver este problema seria
necessário criar um projeto capaz de salvar o histórico de alimentos e mostrá-lo ao dono. Este
é o propósito deste trabalho de graduação
O protótipo de comedouro automático de cães desenvolvido e descrito neste trabalho é
capaz de se conectar a uma rede sem fio e enviar informações sobre o histórico alimentar
para o usuário, que será capaz de visualizar essa informação a qualquer hora do dia.
O comedouro também tem o potencial de ajudar o veterinário a dar diagnósticos mais
precisos sobre o cão e determinar se sua doença está associada a sua alimentação de
acordo com o histórico alimentar fornecido pelo comedouro automático.
O usuário pode escolher até cinco refeições através de um aplicativo e sua autonomia
para alimentação de cães de pequeno porte pode chegar entre 5 a 49 dias.
PALAVRAS-CHAVE: Cachorro, comedouro, alimentação, histórico alimentar, arduino.

4
ABSTRACT
Nowadays the pet market is rising in the national scenery due to a process of
humanization of pets that made people give more importance to their animals, thus investing
more money and attention to the their well-being and health, especially the dog, which is the
national preferred pet.
Although people love their pets, they spend much time working and it makes difficult to
take care of them, because of that, people give them a meal once a day, but in excess, which
can cause some health troubles to their pet.
A way to solve this problem would be using an automatic pet feeder, but it is hard to find
one on the market, and those that exist are not complete because they don't give information
about the dog's food history. To solve this issue it would be necessary to create a project able
to save the food history and show it to the pet's owner. It is the purpose of this
undergraduation work.
The prototype presented in this work is an automatic dog feeder that is able to connect
to a wireless network and send information about a dog's food history and the user will be able
to visualize that information any time of the day.
Eventually it will also help the veterinary to give a more accurate diagnosis about the
dog and assess if its illness is associated to its alimentation according to the food history
provided by the automatic feeder.
The user can choose up to five meals through an app for a dog and the food reservoir
autonomy is around 5 a 49 days for small sized dogs.
KEYWORDS: Dog, pet feeder, feeding, feeding history, arduino

5
LISTA DE FIGURAS
Figura 1 – Comedouro por gravidade. (Fonte: Azpetshop, 2016). .................................................. 22
Figura 2 – Comedouro digital. (Fonte: Azpetshop, 2016). ............................................................... 23
Figura 3-Massa específica dos materiais estudados à temperatura ambiente. (Fonte:
CALLISTER JR, 2008). ...................................................................................................................................... 28
Figura 4 – Rigidez dos materiais estudados à temperatura ambiente. (Fonte: CALLISTER JR.,
2008). ................................................................................................................................................................... 28
Figura 5 – Resistência à tração dos materiais estudados à temperatura ambiente. (Fonte:
CALLISTER JR., 2008). ..................................................................................................................................... 29
Figura 6 – Resistência à fratura dos materiais estudados à temperatura ambiente. (Fonte:
CALLISTER JR., 2008). ..................................................................................................................................... 29
Figura 7 – Olá Mundo em Assembly e C.
(Fonte: http://ratosdelaboratorio.blogspot.com.br/2009/04/assembly-hello-world.html) ........................... 31
Figura 8 – Leitura do sinal PMW pelo arduino através da largura do pulso (Fonte:
www.arduinoeletronica.com.br) ........................................................................................................................ 33
Figura 9 - RTC DS3231 ........................................................................................................................ 34
Figura 10 - modulo bluetooth hc-06..................................................................................................... 34
Figura 11 - modulo ESP8266 ............................................................................................................... 35
Figura 12 – Servomotor da marca Futaba. (Fonte: Futaba) ............................................................ 36
Figura 13 – Célula de Carga e seu funcionamento. (Fonte:
http://www.ee.co.za/article/troubleshooting-load-cell-applications.html) ..................................................... 37
Figura 14 – Funcionamento de uma ponte de Wheatstone. (Fonte:
http://www.ee.co.za/article/troubleshooting-load-cell-applications.html) ..................................................... 38
Figura 15 – Amplificador HX711(Fonte: https://www.sparkfun.com/products/13879). ................. 38
Figura 16 - Dispensador de Cereais (Fonte: http://balancassaoroque.com.br/, 2016). ............... 42
Figura 17 - Eixo e aleta. ........................................................................................................................ 44
Figura 18 - Peça de alumínio para proteção. ..................................................................................... 45
Figura 19 - Estrutura de alumínio em forma de “moldura”. .............................................................. 45
Figura 20 – Barras para fixação do reservatório e célula de carga. ............................................... 46
Figura 21 – Proteção do reservatório e célula de carga fixas a estrutura...................................... 47
Figura 22 - Cantoneira de fixação do motor na base de alumínio. ................................................. 48
Figura 23 - Caixa dos componentes fixa na base. ............................................................................ 48
Figura 24 – Site do projeto ................................................................................................................... 54
Figura 25 - Exemplo de Configuração de programa para Windows. .............................................. 55

6
Figura 26 - Exemplo de Configuração de programa para celular ................................................... 56
Figura 27 - Comedouro finalizado ....................................................................................................... 57

7
LISTA DE TABELAS
Tabela 1. Vitaminas necessárias ao cachorro. .................................................................................. 15
Tabela 2. Necessidade diária para cães de raças pequenas. ......................................................... 19
Tabela 3. Necessidade diária para cães de raças de médias, grandes e gigantes. .................... 20
Tabela 4. Necessidade diária para cães adultos de raças pequenas ............................................ 20
Tabela 5. Necessidade diária para cães adultos de raças médias, grandes e gigantes. ............ 20
Tabela 6. Necessidade para cães idosos ........................................................................................... 21

8
SUMÁRIO
Sumário
1 INTRODUÇÃO ......................................................................................................................... 9
1.1 INTRODUÇÃO AO PROJETO ................................................................................................... 9
1.1.1 JUSTIFICATIVA ..........................................................................................................................................11
1.2 OBJETIVO ................................................................................................................................ 12
1.2.1 OBJETIVO PRINCIPAL .............................................................................................................................12
1.2.2 OBJETIVOS ESPECÍFICOS .....................................................................................................................12
2 REVISÃO BIBLIOGRÁFICA ................................................................................................. 13
2.1 NUTRIÇÃO ANIMAL ................................................................................................................ 13
2.2 ALIMENTOS ............................................................................................................................. 15
2.3 MÉTODOS DE ALIMENTAÇÃO .............................................................................................. 18
2.4 QUANTIDADE E NÚMERO DE REFEIÇÕES ......................................................................... 19
2.5 COMEDOUROS EXISTENTES NO MERCADO ..................................................................... 22
2.6 MATERIAIS ADEQUADOS À CONSTRUÇÃO DO COMEDOURO ...................................... 24
2.6.1 MATERIAIS CERÂMICOS .........................................................................................................................24
2.6.2 POLÍMEROS ...............................................................................................................................................25
2.6.3 MATERIAIS METÁLICOS ..........................................................................................................................26
2.7 COMPONENTES ELETRÔNICOS .......................................................................................... 30
2.7.1 SHIELDS PARA O ARDUINO ...................................................................................................................33
2.7.2 ATUADORES ..............................................................................................................................................35
2.7.3 MOTORES ELÉTRICOS ...........................................................................................................................35
2.7.4 SENSORES ................................................................................................................................................36
2.7.5 CÉLULA DE CARGA..................................................................................................................................37
3 METODOLOGIA .................................................................................................................... 39
4 RESULTADOS E DISCUSSÕES ......................................................................................... 41
4.1 PROJETANDO O COMEDOURO ............................................................................................ 41
4.1.1 CONSTRUÇÃO DA PARTE MECÂNICA .................................................................................................42
4.1.2 MONTAGEM DA PARTE ELETRÔNICA .................................................................................................50
4.2 MELHORIAS ............................................................................................................................. 57
5 CONCLUSÃO ........................................................................................................................ 61
6 REFERÊNCIAS BIBLIOGRÁFICAS .................................................................................... 63

9
1 INTRODUÇÃO
1.1 INTRODUÇÃO AO PROJETO
Atualmente o mercado de animais de estimação, os chamados pets, tem ganhado seu
lugar de destaque na economia do país, pois com o passar dos anos se percebe o interesse
que os seus donos têm dado aos produtos e serviços disponibilizados no mercado. Essa
importância tem se expandido graças ao processo/fenômeno de humanização dos animais
domésticos o qual está diretamente ligada a evolução do consumo de produtos e serviços
voltados para este novo tipo de consumidor (ELIZEIRE, 2013).
Esse processo faz com que os proprietários dediquem atenção e empenho aos seus
animais, refletindo essa afetividade no momento da compra e com o crescimento do mercado
pet e as possibilidades oferecidas por ele, os donos vem consumindo muito nos últimos anos
para se satisfazer e para agradar seus animais de estimação.
Com isso, a indústria pet brasileira está numa crescente econômica desde o ano de
2013, quando faturou R$ 15,2 bilhões. Já em 2014 a indústria conseguiu conquistar R$ 16,7
bilhões, com o crescimento de 10% em relação ao ano de 2013, e no ano de 2015, o setor
atingiu R$ 18 bilhões em faturamento um aumento de 7,6% sobre 2014 e as previsões para
2016 é que a indústria fature R$19,2 bilhões, com isso a indústria pet obteve o terceiro lugar
no mercado mundial apenas atrás dos Estados Unidos e do Reino Unido (ABINPET, 2016).
Esses dados mostram que os donos estão gastando cada vez mais com seus animais,
tanto que a Abinpet (Associação Brasileira da Indústria de Produtos para Animais de
Estimação) estima-se que um cachorro de grande porte custe R$ 315 por mês ao dono. Do
total gasto, 66,9% foram para rações e outros tipos de alimentos; 18,8% com serviços como
consultas veterinárias, banhos, tosas, creche e passeadores; 8% com cama, roupas, coleira e
xampus e, finalmente, com 7,3% dos gastos, remédios e vacinas.
Segundo dados do IBGE (Instituto Brasileiro de Geografia e Estatística), de 2013, o
Brasil possui a quarta maior população de animais de estimação do mundo com cerca de
132,4 milhões de animais onde 52,2 milhões são de cachorros (ZUINI, 2015).
Além de ser o animal mais presente nas casas, pesquisas indicam que o cachorro é o
animal doméstico mais antigo (domesticado há 10000 anos) e hoje está presente nas casas
de muitas famílias servindo em várias utilidades como cão de guarda, caçador, puxador de

10
trenós, guiador de cegos, rastreamento de drogas e ajudando a encontrar pessoas
desaparecidas, tudo isso devido ao seu excelente olfato e audição.
Normalmente ele se alimenta de ração e deve ser bem escolhido para que o animal
receba uma dieta balanceada, recebendo todos os nutrientes necessários para uma boa
qualidade de vida.
Porém, muitos donos não sabem a quantidade ideal de ração que deve ser dada ao
cachorro e esse questionamento aumenta quando se envolve a idade que o animal está, pois
é essencial ter controle da quantidade, já que a dosagem exacerbada a um filhote pode
acarretar em risco de excesso de peso e contribuir para um desequilíbrio nutricional.
No caso de um cachorro adulto é indicado que receba de 2,5% até 4% do seu peso em
alimentos, divididos em duas porções de ração ao dia (TUBALDINI, 2014). É necessário
analisar o perfil do cachorro, pois um cão agitado e que exerce muitas atividades tem um
gasto calórico maior que um cão sedentário, assim necessitando de mais nutrientes para
repor as energias.
Porém, gerenciar de maneira eficaz a quantidade de comida e o número de refeições
diárias, não é tarefa fácil, o que tem feito algumas empresas a projetar e vender comedouros
automáticos, a fim de facilitar a vida dos donos dos animais.
Uma revisão dos produtos automáticos disponíveis no mercado permite dividi-los em
duas categorias: comedouros que funcionam com gravidade, de modo que o alimento vai
caindo para o animal conforme o reservatório for esvaziando e comedouros digitais, que
disponibilizam o alimento em horários e quantidades programadas. O primeiro, porém, não é
aconselhável visto que o cachorro estaria livre para comer de forma desregrada.
Mas isso ainda é pouco, pois muitos donos consideram seus animais de estimação
como membro da família e estão sempre buscando uma melhor forma de agradar seu animal,
portanto o projeto facilitaria a vida dos donos, pois eles teriam acesso às informações da
alimentação de seu animal onde quer que esteja sendo feito através do celular.
E com o crescente uso de celular na última década, torna-se cada vez mais
interessante o desenvolvimento de tecnologias para este dispositivo, alcançando grande parte
da população. Devido a esses motivos um sistema ideal que abrangeriam tanto o lado
fisiológico do cão quanto o lado de conforto do usuário seria um comedouro automatizado
para cães.

11
Assim, o presente trabalho teve por finalidade a construção de um protótipo de
comedouro automático digital com capacidade de sincronização e armazenamento de
informações na internet para acompanhamento da alimentação do cachorro fazendo com que
ele se alimente na quantidade correta e no horário estipulado pelo seu dono ou pelo
veterinário. Com isso o sistema envia informações através de um aplicativo para o celular
criando um histórico onde poderá ser visualizado pelo seu dono e se tornar útil para possíveis
consultas veterinárias.
Para abordar de forma mais clara o projeto, ele foi divido em capítulos onde no capítulo
II foi apresentado à revisão bibliográfica no qual foram apresentadas informações sobre a
nutrição animal, os nutrientes que os animais necessitam, quantidade e número de refeições,
importância do horário na alimentação, sobre automatizar os horários da alimentação canina,
sobre comedouros existentes no mercado, os materiais, os componentes eletrônicos,
atuadores e sensores envolvidos na construção do comedouro.
Capítulo III é a metodologia em si, onde foi apresentado tudo o que foi utilizado no
projeto e como foi desenvolvido o protótipo do comedouro automatizado, sobre o aplicativo,
sobre dimensionamento do reservatório, como seria o comportamento do sistema de uma
forma geral.
Finalmente o Capitulo IV contém os resultados e as discussões.
1.1.1 JUSTIFICATIVA
A alimentação canina é uma das questões mais importantes se tratando em cuidados
com animal de estimação, assim como no ser humano, a alimentação inadequada e em
horário errado pode gerar doenças relacionadas com a obesidade, tais como diabetes, maior
pressão sobre o coração devido ao peso excessivo, pulmões, enfraquecimento do sistema
imunológico, problemas gastrointestinais, entre outras doenças.
A diferença entre o cachorro e o ser humano na questão da obesidade, é que o homem
é responsável pela sua alimentação, enquanto o animal come o que é dado para ele, muitas
vezes o dono não tem tempo ou disponibilidade suficiente para alimentar seu animal de
estimação de forma correta, e pensando nisto, o projeto de comedouro para cachorro tem
como prioridade controlar a dieta canina de forma adequada, pois a ração exposta o dia todo
pode acumular umidade podendo desenvolver fungos e bactérias e por consequência do

12
cachorro ter acesso à comida durante o dia todo, ele está propenso a ingerir mais do que o
necessário podendo acarretar na obesidade do cachorro.
O projeto também tem como prioridade dosar a quantidade e os horários das refeições
do animal, visto que o fato de você controlar o horário que o seu cachorro se alimenta e
dando a ração sempre nos mesmos horários estipulados e na mesma quantidade, é possível
perceber que o seu cachorro estará se alimentando regularmente ou não, podendo assim
ajudar a identificar alguma alteração de apetite mais rapidamente. Funcionando também
como um recurso importante durante uma visita ao veterinário com registros no aplicativo do
equipamento.
1.2 OBJETIVO
1.2.1 OBJETIVO PRINCIPAL
Este trabalho visou à construção de um protótipo de um comedouro automático de
ração para cães de pequeno porte, cujo foi possível programar o horário e quantidade de
ração e cujas informações nutricionais (histórico de alimentação) ficariam disponíveis para o
dono através de aplicativo para celular.
1.2.2 OBJETIVOS ESPECÍFICOS
Dimensionamento do reservatório para ração.
Construção do sistema de monitoramento e sistema de atuação para transporte da ração
do reservatório para o prato do animal.
Planejamento e construção de uma interface física/software para configuração do
equipamento via internet.

13
2 REVISÃO BIBLIOGRÁFICA
2.1 NUTRIÇÃO ANIMAL
A relação entre o homem e os animais de estimação vem de muitos anos e nas últimas
décadas se intensificou tornando-os cada vez mais uma parte importante da família. Esse
processo de importância dada ao animal está ocorrendo devido ao fato deles suprirem a
carência de algumas pessoas que vivem sozinhas e também desempenham um papel
importante na qualidade de vida de seus proprietários.
Assim, os donos estão se preocupando cada vez mais com a alimentação e nutrição de
seu animal para que ele tenha uma vida longa. A alimentação é um dos fatores mais
importantes para o crescimento e desenvolvimento do seu animal de estimação, mas não é
suficiente dar ração a ele desregrado ao dia, é necessário conhecer quais os tipos de
nutrientes seu animal precisa e selecionar a ração adequada que os contenham.
A nutrição é a ciência que estuda os fenômenos físicos, químicos e biológicos pelos
quais os nutrientes provenientes dos alimentos são digeridos e assimilados por um organismo
vivo, utilizando-os como matéria-prima para seu crescimento, reposição ou regeneração dos
tecidos corporais (MACIEL, 2016).
Um dos fatores principais para a nutrição do animal são os nutrientes presentes nos
alimentos, representando uma entidade química, que entra no metabolismo celular e concorre
para a manutenção da vida.
Uma nutrição adequada é a base para um correto desenvolvimento do animal e
proporciona condições para uma ótima saúde geral e desempenho futuro. Caso a nutrição
seja inadequada, tanto sofrendo excesso ou deficiência de nutrientes, pode resultar em
alterações fisiológicas, podendo causar sérios problemas aos animais, como mau
desenvolvimento corporal, obesidade, alterações reprodutivas e má constituição óssea.
Portanto para que um animal tenha uma alimentação balanceada, deve conter uma
relação correta entre lipídeos, proteínas, carboidratos, minerais e vitaminas.
Os lipídeos são importantes na nutrição, pois concentram 2,25 vezes mais energia do
que as proteínas ou carboidratos. Por ser abundante em animais, sua obtenção na dieta
natural é facilitada e, na dieta industrializada, o custo para sua adição é reduzido. Além de

14
serem excelentes fontes de energia, os lipídeos são importantes também na alimentação por
estarem diretamente relacionados com o aroma e paladar do alimento (ALBANO, 2016).
As fontes lipídicas podem ser de origem animal e vegetal e as principais fontes
utilizadas nas rações são normalmente óleo de aves, óleo de peixe, gordura bovina e gordura
suína, já na vegetal podem ser óleo de alecrim, óleo de arroz, de linhaça e de soja
(ANFALPET, 2008).
As proteínas também são um dos componentes essenciais que os animais necessitam,
pois exercem um papel indispensável no crescimento do pelo, das unhas e da pele e também
é uma parte imprescindível para os músculos, tendões e ligamentos.
As fontes proteicas podem ser de origem vegetal, que incluem os grãos e os farelos, e
os de origem animal são provenientes de tecidos animais ou de subprodutos de abatedouros
(bovinos, frangos, suínos, ovinos e peixes) (ANFALPET, 2008).
Os carboidratos representam a maior parte de ingestão calórica dos animais. São
considerados fontes de energia rápidas enquanto os lipídeos são a principal reserva
energética. Os carboidratos atuam no revestimento celular, lubrificam as juntas esqueléticas e
promovem adesão entre as células (ALBANO, 2016).
Algumas das fontes de carboidratos podem ser citadas tais como a fécula de
mandioca, milho (grão integral), amido de milho, farelos de gérmen de milho, arroz (grão
integral), sorgo e farinha de trigo (ANFALPET, 2008).
Os minerais também são nutrientes essenciais na dieta dos animais para manter
adequadamente seu crescimento e suas funções biológicas. Eles podem ser divididos em
dois grupos: macroelementos e microelementos. Nos macroelementos os principais minerais
incluem cálcio, magnésio, sódio, potássio, fósforo, enxofre, cloro. Já nos microelementos
incluem ferro, iodo, cobre manganês, zinco, cobalto, molibdênio, selênio, vanádio, níquel,
cromo, estanho, flúor, silício e arsênio (ALBANO, 2016).
As vitaminas assumem um papel importante na nutrição do animal, pois são
encarregadas de proteger o seu animal de infecções e doenças, além de contribuírem para o
funcionamento correto do organismo. O cão necessita de treze tipos de vitaminas como
mostra a tabela 1.

15
Tabela 1. Vitaminas necessárias ao cachorro.
Tipo de vitamina Onde é encontrada Função
Vitamina A Óleos de fígado de peixe, em fígado e em ovos.
É importante para uma boa visão, ajuda no crescimento e na resistência a doenças.
Vitamina B1 Cereais, em farelos e em levedura.
Contribui para o metabolismo energético e funcionamento do sistema nervoso.
Vitamina B2 Cereais, de leite e de levedura.
Ajuda no metabolismo dos aminoácidos e das gorduras.
Vitamina B3 Leveduras e em fígados. Serve para melhorar o metabolismo das proteínas e na síntese da hemoglobina.
Vitamina B4 Ingredientes naturais. Contribui para o metabolismo das gorduras e fornece uma proteção maior ao fígado.
Vitamina B5 Fígado, peixes, laticínios e arroz.
Ajuda na integridade dos tecidos.
Vitamina B6 Cereais, leite, peixe e levedura.
Essa vitamina serve para contribuir com o metabolismo das proteínas, das gorduras, dos glicídios e do ferro.
Vitamina B12 Fontes de ferro, em peixes e em laticínios.
Ajuda no metabolismo das proteínas e na síntese da hemoglobina.
Vitamina D Óleo de fígado de peixe e ovos.
Ajuda no equilíbrio do metabolismo fosfocálcio e melhora significativamente a absorção de cálcio por parte do organismo.
Vitamina E Leite e ovos. Serve como antioxidante, além de prevenir a patologia muscular.
Vitamina H Leveduras e Ingredientes Naturais.
Colabora no metabolismo dos glicídios, na integridade dos tecidos, no metabolismo de lipídios e de protídeos.
Vitamina K Peixe, fígados e grãos. Aumenta a produção de fatores de coagulação.
Vitamina PP Cereais, leveduras, peixes e ovos.
Essa vitamina ajuda a manter e melhorar a integridade dos tecidos.
(Fonte: http://www.naturalistotalalimentos.com.br/info/vitaminas-para-caes-quais-sao-as-vitaminas-essenciais-
para-seu-cao/)
2.2 ALIMENTOS
O alimento é toda a matéria suscetível a ser transformada e aproveitada pelos animais,
é capaz de contribuir para assegurar o ciclo regular da vida e a sobrevivência da espécie e
são constituídos de elementos chamados nutrientes ou princípios nutritivos que exercem um
papel particular no organismo.

16
Geralmente o alimento dado aos animais domésticos é chamado de ração onde é a
quantidade total de alimento fornecido e consumido por um animal num período de 24 horas
(MACIEL, 2016). Para determinar a qualidade da ração ou dos alimentos comerciais, existem
algumas classificações de modo a facilitar o entendimento por parte do nutricionista e do
proprietário nas quais são: o teor de umidade (úmido, semiúmido e seco), as indicações no
rotulo (alimentos completos, alimentos específicos e alimentos coadjuvante) e segundo a
indústria (standard, Premium e superpremium) (Saad et al., 2005).
Segundo a Abinpet (2016) há diferenças entre os tipos de alimento para os animais de
estimação onde se subdividem em:
Alimento Natural: derivado de ingredientes vegetais, animais ou minerais no seu
estado natural. O principal motivo de se usar esse tipo de alimento é que uma maior
quantidade de nutrientes pode ser absorvida e utilizada pelo organismo do animal. Porem
muitos donos não optam por essa alimentação, pois muitos deles não dispõem de tempo e da
atenção que a dieta exige. Para que a dieta natural funcione, o dono do animal precisa
estudar muito e seguir à risca as instruções do médico veterinário, sem substituir ingredientes.
Alimento Industrializado: é todo alimento que sofreu qualquer tipo de processamento
em ambiente industrial e que atende a todas as regulamentações específicas do setor.
Segundo Carciofi (2007) os alimentos industrializados se subdividem pela classificação
comercial em:
Alimentos econômicos: Utilizam ingredientes de baixo custo, onde suas
concentrações nutricionais aproximam-se dos limites mínimos ou máximos
permitidos. As fontes proteicas são misturas de origem vegetal e animal, onde
os farelos vegetais são fontes de carboidratos, os teores de extrato etéreo são
reduzidos e as fibras e a matéria mineral são elevadas.
Alimentos standard: Sua formulação é variável, pois os ingredientes dependem
do preço e da disponibilidade do mercado. Possuem concentração nutricional
melhor, com mais proteínas e extrato etéreo, menos fibras e elevada matéria
mineral.
Alimentos Premium: O produto visa melhor atendimento das necessidades
nutricionais com foco na digestibilidade e na palatabilidade dos produtos com
base em ingredientes diferenciados e nutracêuticos.

17
Alimentos superpremium: São produtos de alta qualidade, com formulação fixa e
ingredientes de elevado valor nutricional. Suas concentrações nutricionais
empregadas visam à otimização de saúde, com controle de desbalanços e
interações.
Alimento completo: produto com características específicas, composto por
ingredientes capaz de atender integralmente às suas exigências nutricionais.
Alimento coadjuvante: produto capaz de atender integralmente as exigências
nutricionais dos animais com distúrbio fisiológicos ou metabólicos, cuja formulação é
incondicionalmente privada de qualquer agente farmacológico ativo.
Alimentos específicos: produto composto por ingredientes, matérias-primas,
destinado à alimentação de animais de estimação com finalidade de agrado, prêmio ou
recompensa, e que não se caracteriza como alimento completo.
Alimento caseiro: São produtos preparados fora dos ambientes industriais, porém a
Abinpet é contra esse tipo de alimentação, pois caso não ocorra uma manipulação correta
dos nutrientes nas quantidades mínimas recomendadas pode prejudicar o desenvolvimento
mental e físico dos pets e pode causar doenças diversas.
Os alimentos também podem ser classificados em função do seu conteúdo de água
em:
Alimentos úmidos: possuem de 70% a 85% de umidade que compreendem os
alimentos enlatados, carnes e legumes frescos.
Alimentos semiúmidos: possuem de 20% a 60% de umidade que compreendem
alimentos extrusados e estabilizados com adição de conservantes mantidos sob-
refrigeração.
Alimentos secos: possuem menos de 12% de umidade onde compreendem os
croquetes, biscoitos, flocos de cereais e massas, porém devendo ser associados
a outros alimentos para assegurar o suprimento da necessidade fisiológica
(ALVES et al., 2001)

18
2.3 MÉTODOS DE ALIMENTAÇÃO
O cachorro quando possui uma alimentação balanceada e equilibrada, a alimentação
compensa os gastos energéticos devidos a atividades físicas ou as necessidades fisiológicas,
porém quando há uma má alimentação o cachorro come mais do que gasta, sofrendo
excesso de gordura e causando algumas consequências listadas abaixo.
Risco aumentado em cirurgias
Maior pressão sobre o coração, pulmões, rim e articulações.
Agravamento de doenças articulares, como a artrite.
Desenvolvimento de problemas respiratórios em tempo quente e durante exercício
Desenvolvimento de diabetes
Aumento da pressão sanguínea que pode originar problemas cardíacos
Aumento da probabilidade de desenvolver tumores
Perda de eficácia do sistema imunológico
Problemas gastrointestinais
Atualmente existem três métodos de alimentar animais de estimação: consumo livre,
alimentação de tempo controlado e a alimentação com rações controladas (GENARO, 2016).
O método de consumo livre é quando se fornece mais alimento do que o animal
consome e sempre estando disponível no prato ou pote do animal, onde se limpa o prato todo
dia e renova-se o alimento. Esse método apresenta algumas vantagens como: diminuição da
agressividade entre os animais e desestimula a coprofagia (prática de ingestão de fezes).
Porém esse método não é muito recomendo, pois pode fazer com que o cachorro
coma mais do que precise e pode causar a obesidade, a ração quando exposta o dia inteiro
no pote pode causar acúmulo de umidade podendo devolver alguns fungos e bactérias no
alimento e também podendo atrair outros animais como ratos, baratas e formigas.
O método da alimentação de tempo controlado fornece mais alimento ao animal do que
ele consome em um determinado período de tempo, normalmente se deixa entre 5 a 30
minutos e depois se retira o alimento. Porém esse método não é muito recomendado, pois
assim como o método de consumo livre a uma alta probabilidade dos animais de estimação
de tornarem obesos.
Já o método de alimentação com rações ou porções controladas é o mais indicado
entre os três. Esse método consiste em oferecer o alimento em uma quantidade pré-

19
determinada que atenda às necessidades do animal, permita também ao criador alto grau de
controle sobre a dieta do animal e se colocando a ração sempre na mesma quantidade e nos
mesmos horários o dono perceberá se o cachorro está se alimentando normalmente,
podendo identificar alguma alteração no apetite mais rapidamente.
2.4 QUANTIDADE E NÚMERO DE REFEIÇÕES
Os principais fatores que influenciam no número de refeições são a idade (filhotes,
adultos e idosos) e animais com necessidades especiais (cadela gestante, cadela
amamentando).
Os filhotes por estarem em fase de crescimento precisam comer muito, porém como
têm o estômago pequeno não conseguem comer muito de uma vez só, portanto o ideal é que
eles se alimentem algumas vezes por dia em pequenas quantidades de no mínimo 3 a 4
vezes por dia.
As instruções que constam nas embalagens dos alimentos costumam apresentar uma
tabela na qual consta a quantidade em gramas que o animal deve comer ao dia em relação
ao peso. Denominada “Guia Alimentar”.
Tendo como referência as tabelas da PEDIGREE®, empresa no ramo de ração, são
apresentadas nas tabelas 2 e 3 a quantidade ideal em gramas por dia, que os filhotes de
raças pequenas, médias, grandes e gigantes devem consumir.
Tabela 2. Necessidade diária para cães de raças pequenas.
Peso estimado
Quando adulto
1 a 3 kg
3 a 6 kg 6 a 8 kg 8 a 10 kg 10 a 15 kg
Idade atual
do filhote
(meses) /
Necessidade
diária
(gramas)
2 30 a 65 65 a 105 105 a 130 130 a 155 155 a 210
3 35 a 80 80 a 135 135 a 165 165 a 195 195 a 265
4 40 a 90 90 a 150 150 a 185 185 a 215 215 a 295
6 40 a 90 90 a 150 150 a 190 190 a 225 225 a 305
9 PEDIGREE®
Adulto
PEDIGREE®
Adulto
150 a 190 190 a 220 230 a 300
10 PEDIGREE®
Adulto
PEDIGREE®
Adulto
PEDIGREE®
Adulto

20
Tabela 3. Necessidade diária para cães de raças de médias, grandes e gigantes.
Peso estimado
Quando adulto
Raça media
10 a 25 kg
Raça grande
25 a 45 kg
Raça gigante
Mais de 45 kg
Idade atual
do filhote
(meses) /
Necessidade
diária
(gramas)
2 155 a 295 295 a 370 370 ou mais
3 200 a 385 385 a 525 525 ou mais
4 220 a 430 430 a 695 620 ou mais
6 230 a 450 450 a 700 695 ou mais
9 225 a 450 450 a 700 700 ou mais
12 PEDIGREE®
Adulto
440 a 695 695 ou mais
Quando o cachorro chega à fase adulta a necessidade de ração (em gramas) muda
como visto nas tabelas 4 e 5 e o animal passa a ter 2 refeições ao dia, porém se o animal
participa de competições eles necessitam de rações especificas e podem ter mais de 2
refeições ao dia.
Tabela 4. Necessidade diária para cães adultos de raças pequenas
Exemplo de raças Peso do cão Necessidade de gramas/dia
Yorshire 1 a 3 kg 30 a 65 Pinscher 3 a 6 kg 65 a 105
Lhasa-apso 6 a 8 kg 105 a 130 Poodle médio 8 a 10 kg 130 a 155
Beagle 10 a 12 kg 155 a 175 Cocker spaniel 12 a 15 kg 175 a 210
Tabela 5. Necessidade diária para cães adultos de raças médias, grandes e gigantes.
Exemplo de raças Peso do cão Necessidade de gramas/dia
Yorkshire Terrier, Poodle Minim Chihuahua
1 a 5 kg 30 a 95
Schnauzer Miniatura, Poodle Miniatura, Shih Tzu
5 a 10 kg 95 a 155
Cocker Spaniel, Beagle, Schnauzer
10 a 25 kg 155 a 315
Labrador, Golden Retriever, Pastor Alemão.
25 a 45 kg 315 a 485
Dogue Alemão, São Bernardo, Rottweiler
Mais de 45 kg 485 ou mais

21
Quando o cachorro chega à fase idosa, eles se tornam menos ativos e têm uma maior
propensão para engordar e sua necessidade energética diminui por isso eles necessitam de
ração especifica. A ração deve conter maior quantidade de vitaminas e de fibras e pequena
elevação na proporção de proteínas. Portanto a quantidade de refeições que se deve dar ao
animal é de 1 ou 2 vezes ao dia e a quantidade de gramas deve ser de acordo o com o peso
do animal, como visto na Tabela 6.
Tabela 6. Necessidade para cães idosos
Tamanho da raça Peso do cão Necessidade de Gramas/dia
Mini 1 a 5 kg 30 a 95 Pequeno 5 a 10 kg 95 a 160
Médio 10 a 25 kg 160 a 315 Grande 25 a 45 kg 315 a 495 Gigante Mais de 45 kg 495 ou mais
Quando a cadela está na fase de gestação, ela tende a engordar mais, pois seus
filhotes estão crescendo cada vez mais isso faz com que a cadela necessite de um aumento
entre 10% e 15% da quinta semana de gestação em diante e chegando próximo ao parto ela
deve estar comendo aproximadamente 50% a mais do que comia. Portanto o ideal é a cadela
se alimente de 3 a 4 vezes ao dia.
Já no período de amamentação a cadela precisa de uma quantidade de nutrientes e
energia muito mais alta, pois durante o pico da lactação ela estará perdendo entre 4% a 7%
do seu peso em forma de leite. Durante a amamentação ela continuará comendo de 3 a 4
vezes por dia e a ração de adulto que estava comendo no período de gravidez pode ser
trocada por ração de filhote.
A alimentação dos cães é feita diariamente pelo dono, porém existe um produto que é
capaz de armazenar a comida ao animal e disponibiliza-lo ao animal sem que o dono
necessite de fazê-lo de forma manual e diariamente. Esse produto é o comedouro.

22
2.5 COMEDOUROS EXISTENTES NO MERCADO
Ao se tratar sobre alimentação canina é bastante comum e prático o uso de
comedouros para alimentar os cães de estimação durante certo período de tempo sem que
haja a necessidade de que o dono do animal tenha que alimentá-lo várias vezes durante o
decorrer do dia. Além de práticos, os comedouros podem auxiliar seus usuários caso os
mesmos necessitem ficar longe de suas residências por algum motivo.
Dentre os comedouros existentes no mercado se destacam dois tipos de comedouro:
os mais simples e os digitais.
Nos comedouros mais simples, e também os mais comuns de se encontrar nos pet
shops, a alimentação é feita através da aceleração da gravidade que faz com que a ração
seja reposta de forma instantânea conforme o animal vai se alimentando, como pode ser visto
na figura 1.
Porém o mesmo não é aconselhável entre os veterinários, devido ao fato de que o
animal fica livre para comer de maneira desregrada e assim ocasionando doenças
relacionadas ao excesso de peso do animal.
O outro comedouro para cães disponíveis no mercado são os digitais, que além de
distribuir o alimento ao cão, o mesmo tem a função de permitir ao dono do animal especificar
o horário da refeição canina.
Este tipo de comedouro funciona como um timer digital, geralmente o mesmo trabalha
com um número máximo de refeições que o usuário pode estabelecer, e também a
quantidade pode ser especificada pelo dono, como pode ser visto na figura 2.
Figura 1 – Comedouro por gravidade. (Fonte: Azpetshop, 2016).

23
Esta segunda opção é a mais indicada para os casos em que o dono possui uma rotina
agitada e possa trabalhar, ou realizar suas atividades, de maneira tranquila, pois além de
deixar o animal com comida, o mesmo está se alimentando da forma correta seguindo uma
dieta, e consequentemente mantendo sua saúde em dia, evitando assim possíveis doenças.
Porém este tipo de dispositivo tem um custo mais elevado e encontrá-lo em lojas
físicas não é uma tarefa fácil, pois ele é vendido em alguns sites pela internet, em uma faixa
de preço de R$ 300,00. Além da dificuldade de se encontrar, o mesmo não garante com
confiabilidade a saúde canina, visto que este produto se limita apenas em distribuir a ração ao
animal, mas não garante que o mesmo irá comer e nem o horário em que o animal irá se
alimentar e essas informações são de extrema importância para o veterinário em uma
eventual consulta, o projeto de um comedouro automatizado para cães é importante, pois ele
enviará ao dono informações sobre a alimentação de seu cão pelo celular que será
armazenada, assim auxiliará o veterinário a dar um diagnóstico mais preciso.
Um comedouro é dividido em duas partes, o reservatório de ração e sua tigela, ambos
geralmente fabricados de plástico, devido à facilidade de se trabalhar com este material.
É altamente indicado a higienização dessas suas partes, visto que pode sobrar restos
de alimento, que ao ficar velhos, se tornam um local propício ao aparecimento de fungos e
bactérias, sendo que, para a tigela é exigido um cuidado especial, visto que nela há um
Figura 2 – Comedouro digital. (Fonte: Azpetshop, 2016).
24
contato com a língua e dentes do animal, tornando-o um local úmido e intensificando assim a
cultura de bactérias que podem causar doenças ao cão.
2.6 MATERIAIS ADEQUADOS À CONSTRUÇÃO DO COMEDOURO
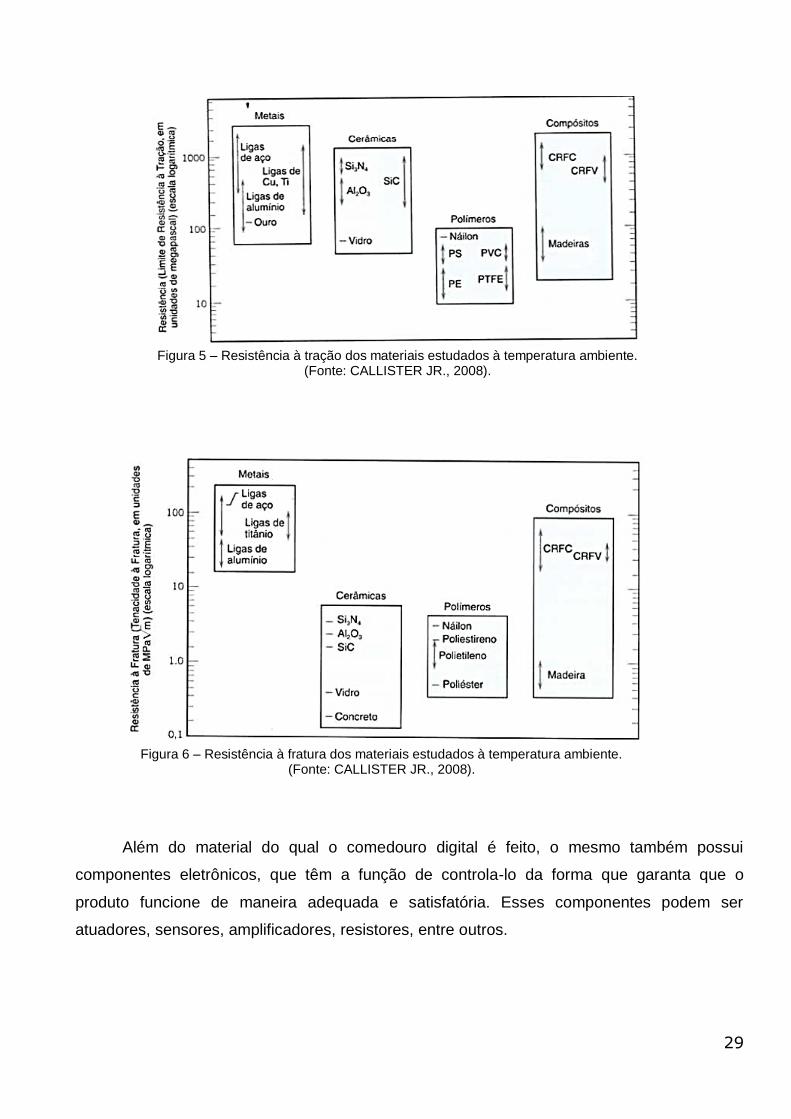
Se tratando de produtos destinados a cães é interessante que esses materiais sejam
resistentes à fratura, ou seja, tenham uma ductilidade alta, pois é extremamente necessário
considerar a possibilidade de que o cão possa derrubar e quebrar o produto. Além de
resistente à fratura, o material deve ser rígido com a finalidade dificultar a abertura de buracos
através de mordidas, pois nestes locais se torna um local propício a surgimento de bactérias.
Ao se tratar de produtos destinados para a alimentação, o mesmo não pode passar
odores e nem gosto para a comida presente nele, então é indicado evitar materiais que
sofram corrosão à temperatura ambiente, pois a corrosão interfere no sabor, além de fazer
mal para a saúde do animal.
Existem vários tipos de materiais comuns para a confecção desses componentes,
como por exemplo, o vidro, porcelana, aço inoxidável, alumínio e plástico.
2.6.1 MATERIAIS CERÂMICOS
Os materiais cerâmicos possuem em suas características mecânicas uma rigidez e
resistência elevada (podendo ser comparada com alguns metais). Apesar de a cerâmica ser
um material duro devido a seu baixo índice de ductilidade, que é a propriedade dos materiais
se deformarem antes de sofrer fratura, ou seja, materiais cerâmicos tendem a se fraturarem
com grande facilidade. Exemplos do cotidiano desse tipo de material é o vidro e a cerâmica.
O vidro é um material cerâmico composto de areia, calcário, carbonato de sódio e
óxido de alumínio cujas suas principais características é sua facilidade de fabricação e a
transparência. Como todo material cerâmico, em sua temperatura ambiente ele é um material
muito frágil, o que o torna inviável para aplicações que possuem riscos elevados de fraturas.
(CALLISTER JR, 2008.)

25
A porcelana é um material cerâmico, feito da argila, que é um material de custo
bastante baixo, pois ele é encontrado em abundância e é utilizado do mesma forma que é
extraído, não requerendo melhorias em sua matéria-prima. Além de encontrados com muita
facilidade, as argilas permitem, ao serem misturadas com a água de maneira correta, formar
uma massa plástica, sendo facilmente moldadas do melhor formato para seu uso em projetos.
(CALLISTER JR, 2008.)
A porcelana por ser um material cerâmico, possui a mesma ausência de ductilidade do
vidro, porém leva vantagem deste material devido ao fato da cerâmica ser fácil de ser
moldada, permitindo assim, um produto final mais bonito.
Devido a essas propriedades, é muito difícil encontrar tigelas para rações de vidro ou
cerâmica, pois podem quebrar facilmente podendo machucar o animal.
2.6.2 POLÍMEROS
Outro material utilizado na fabricação e confecção de tigelas e pratos caninos, e
bastante encontrado no mercado, é o plástico (nome popular referente a uma classe dos
polímeros).
Os polímeros podem ser artificiais, também conhecidos como sintéticos. Por serem
artificiais, esse tipo de material pode sofrer alterações em sua estrutura molecular provocando
melhorias em suas propriedades, e devido a isso, em alguns casos os polímeros chegam até
a substituir materiais metálicos. Devido à possibilidade de alterar a forma estrutural deste tipo
de material, os polímeros não possuem características tão definidas como as dos materiais
cerâmicos, pois eles variam de acordo com seu uso em determinada aplicação. (CALLISTER
JR, 2008.)
O termoplástico é um polímero sintético muito utilizado atualmente, pois o mesmo pode
ser produzido com um custo baixo e também sua propriedade pode ser modificada de várias
formas, de acordo com sua finalidade ao projeto.
Os polímeros com maior propriedade dúctil são os indicados para a fabricação de
pratos, tigelas e recipientes de maneira geral, pois, por serem materiais dúcteis não quebram
com tanta facilidade e também pelo baixo custo de fabricação e a pela pouca complexidade
de trabalhar com o material. Porém, a limpeza do mesmo não é muito fácil, principalmente por
entrar em contato direto com a boca de animais, especialmente os de médio a grande porte,

26
que possuem mais força em sua mordida, fazendo com que abra furos no material, que pode
ser um local propício para aparecimento de bactérias, exigindo assim um cuidado mais
cauteloso no momento da higienização de seus utensílios.
2.6.3 MATERIAIS METÁLICOS
Os outros materiais indicados para a fabricação de tigelas e reservatórios para rações
caninas pertence a outro grupo de classificação de materiais, que são as ligas metálicas, que
são subdivididas em dois grandes grupos, que são os materiais ferrosos e os não-ferrosos.
Essa divisão é feita por conta de sua composição estrutural, e como o próprio nome sugere, a
classe de materiais ferrosos é composta de um agrupamento de elementos em que o ferro
está presente em sua maior parte, dentro desta classe, se encontra os aços e os ferros
fundidos. No outro grupo, ao contrário do primeiro, é composto de materiais que não são à
base de ferro, como o alumínio, ligas de cobre, e ligas bronze, por exemplo. (CALLISTER JR,
2008.)
Os materiais ferrosos possuem grandes chances de sofrer corrosão, que ocorre
naturalmente em metais cujo seu principal componente é ferro, pois o oxigênio presente no
ar, fazendo com que o material perca elétrons. Este processo é intensificado com a umidade,
visto que a água acelera esse processo.
Ao se tratar de um produto destinado aos animais, que consequentemente entrarão em
contato com salivas e mordidas, além de ficarem normalmente expostos ao meio ambiente, o
produto tem uma chance elevada de sofrer corrosão, sendo assim, materiais ferrosos
suscetíveis a corrosão não são muito indicados para esta finalidade.
Ainda no grupo dos materiais ferrosos, na subdivisão dos aços, se encontra o aço
inoxidável. Como o próximo nome sugere, este tipo de material é altamente resistente à
corrosão graças a grande quantidade de cromo presente em sua estrutura, de no mínimo
11%. Sua resistência à corrosão pode ser aumentada através de um acréscimo de níquel e
molibdênio na sua estrutura. (CALLISTER JR, 2008.)
Na outra classe dos materiais ferrosos, se encontra o grupo de ferro fundido, que é
pouco utilizado na fabricação de utensílios para animais, devido à sua facilidade de sofrer
corrosões, e até certo ponto serem muito pesados, e de bastante dureza que pode fazer com
que o animal se machuque caso morda o produto, além da limpeza ser dificultada visto que
ao se lavar esse tipo de produto, a água pode contribuir para a corrosão do mesmo.

27
Por fim, o último grupo de materiais a ser analisado são as ligas metálicas de materiais
não ferrosos que se encontra um dos elementos indicados com o propósito de se fabricar
tigelas e reservatórios para alimentação é o alumínio.
O alumínio possui massa específica de 2,7 g/cm³, ou seja, ela é baixa se comparada
ao aço (7,9 g/cm³) além de possuir uma fina e invisível camada de óxido em sua composição
o que lhe garante uma grande resistência a corrosão em ambientes comuns, principalmente a
condições atmosféricas. (CALLISTER JR, 2008.)
Pelo fato de alumínio possuir uma estrutura cristalina Cúbica de Face Centrada (CFC),
sua propriedade dúctil se mantém presente nas temperaturas mais baixas. Pelo fato de
possuir essas características, as ligas de alumínio não precisam ser submetidas a processos
de tratamentos térmicos, principalmente se comparado aos aços, pois na fabricação destes é
necessário a realização deste tipo de procedimento, além de outros processos cuja finalidade
é de melhorar as propriedades do material. O alumínio é contraindicado para trabalhos em
temperaturas elevados, visto que seu ponto de fusão é baixo (660°C). (CALLISTER JR,
2008.)
O alumínio possui ductilidade elevada, tal característica fundamental se tratando de
animais, e possuir boa resistência mecânica. Além de suas resistências mecânicas serem
elevadas, esta característica pode ser melhorada através de tratamentos térmicos, porém
esse procedimento reduz a sua resistência a corrosão.
Outra característica importante dessa liga é resistência específica, que é uma
propriedade relacionada à resistência à tração do material pelo seu peso específico, em
outras palavras, este material possui limites inferiores aos de materiais mais pesados como
os aços, porém esta liga presente em grande quantidade será capaz de suportar cargas
maiores. (CALLISTER JR, 2008.)
Outro fator relacionado ao alumínio é sua capacidade de ser reciclável, pois este
material pode ser recuperado de forma significante após anos de uso, como exemplo latas de
alumínio que são bastante recicladas, contribuindo para melhorar o meio ambiente.
Se tratando de finalidades voltadas para alimentação, pelo fato do alumínio ser
impermeável o mesmo consegue manter o sabor e o aroma do produto sem qualquer
influência externa, permitindo assim, conservar a ração de uma melhor forma. Além disso,
pelo fato do alumínio ser resistente a corrosão e sua limpeza ser mais fácil se comparado aos

28
materiais suscetíveis e ela, torna-se assim um bom material para a confecção de pratos e
tigelas para cães.
Um comparativo entre os materiais quanto à sua massa específica (Figura 3), Rigidez
(Figura 4), resistência à tração (Figura 5) e resistência à fratura (Figura 6), estão
representados abaixo.
:
Figura 3-Massa específica dos materiais estudados à temperatura ambiente. (Fonte: CALLISTER JR, 2008).
Figura 4 – Rigidez dos materiais estudados à temperatura ambiente. (Fonte: CALLISTER JR., 2008).
29
Além do material do qual o comedouro digital é feito, o mesmo também possui
componentes eletrônicos, que têm a função de controla-lo da forma que garanta que o
produto funcione de maneira adequada e satisfatória. Esses componentes podem ser
atuadores, sensores, amplificadores, resistores, entre outros.
Figura 5 – Resistência à tração dos materiais estudados à temperatura ambiente. (Fonte: CALLISTER JR., 2008).
Figura 6 – Resistência à fratura dos materiais estudados à temperatura ambiente. (Fonte: CALLISTER JR., 2008).

30
2.7 COMPONENTES ELETRÔNICOS
Para se realizar qualquer tipo de controle é necessário o uso de componentes
eletrônicos. Além dos exemplos citados, outro exemplo de componente são os circuitos
integrados (CI’s), que é a construção de todos os elementos de um circuito no mesmo
invólucro, que juntos realizam uma determinada função, porém, existe um tipo de circuito
integrado que realiza um grupo amplo de atividades pré-determinadas pelo seu utilizador, que
é o microcontrolador.
O microcontrolador não possui uma função específica, pois sua função é alterada de
acordo com a programação que se encontra nele, que pode ser Assembly ou linguagem C.
Ele pode ser comparado a um computador, pois o microcontrolador une o processador e os
periféricos necessários para a execução de tarefas em seu encapsulamento, ou seja, este
dispositivo possui memória interna, cristal para clock (unidade de temporização),
comunicação serial e conversores de sinais, sendo capaz de realizar as atividades a ele
previamente programadas pelo programador.
O microcontrolador entende apenas código binário para se comunicar e realizar suas
operações e atividades e as linguagens de programação foram criadas de maneira a trazer
proximidade à linguagem humana da linguagem de máquina quanto mais distante for essa
interação, mais alto nível a linguagem é considerada.
Dentre as linguagens citadas, as quais o dispositivo aceita, Assembly é considerada de
baixo nível, pois esta linguagem foi feita com o propósito de comunicar com os
microprocessadores e microcontroladores, que após escrita e compilada, seus códigos são
convertidos para números hexabinários, os quais os dispositivos reconhecem.
Outra linguagem um pouco mais próxima da máquina, porém considerada de alto nível,
é a linguagem C, a qual se aproxima a linguagem humana e de máquina, e da mesma forma
que o Assembly, depois de compilada, a mesma é convertida para linguagem de máquina, um
exemplo de comparação entre linguagens podem ser visualizados na figura 7, ambos os
códigos têm a mesma função, de escrever “olá mundo” no prompt de comando do Windows.

31
Figura 7 – Olá Mundo em Assembly e C. (Fonte: http://ratosdelaboratorio.blogspot.com.br/2009/04/assembly-hello-world.html)
Embora não exista uma linguagem melhor de programação, e sim a melhor indicada
para determinada aplicação, um comparativo entre a linguagem C e Assembly, é que a
primeira é mais fácil de compreender e de escrever, porém seu programa ocupa um espaço
maior de memória, enquanto o Assembly poupa o espaço, porém o tempo de programação é
mais demorado devido a sua linguagem ser mais distante da linguagem humana.
Por não possuir uma função específica, os microcontroladores são versáteis e sua
função é definida pelo programador ao escrever o código-fonte do projeto. Um exemplo de
função pode ser dado pela leitura e armazenamento de dados obtidos através de medições
de sensores, processados pela CPU do microcontrolador, e posteriormente acionar um
atuador com base no sensor. Se tratando de um comedouro canino, a função deste
dispositivo para esse propósito seria verificar dados de um sensor que verifica se existe
alimento para o cão comer, caso não haja, o mesmo aciona um atuador que leve a comida
para a tigela. Os microcontroladores mais comuns são o 8051, o PIC e o AVR.
O AVR é o nome dos microcontroladores fabricados pela ATMEL, possuindo um núcleo
de processamento além das memórias de programa e memória de dado de forma separada
uma das outras, facilitando e agilizando o seu uso interno.

32
O AVR é subdivido em 4 grupos, Tiny, ATMega, ATxMega, e AT94k. O primeiro é o
mais simples, possuindo uma memória de programa de 0,5kbytes a 8kbytes e pode ter 6 ou
32 pinos.
O ATMega tem memória de programa de 4kbytes a 256kbytes, possui 20 ou 100 pinos,
o ATxMega possui memória de programa de 16kbytes a 384kbytes, 64 ou 100 pinos, além de
ter um desempenho melhor que o anterior. Enquanto o último possui SRAM (Memória
estática) como memória de programa.
Para utilizar esses microcontroladores é necessário ter um gravador, o qual envia as o
programa feito e compilado no computador para sua memória de programa, além de
necessário produzir todo o esquema elétrico para testes, dificultando o trabalho. Porém, uma
empresa italiana criou um dispositivo que facilita o trabalho com protótipos, chamado de
Arduino, uma placa completa para projetos eletrônicos, composta de um microcontrolador
AVR da Família Atmel chamado de ATMEGA328P.
O Arduino é uma plataforma de código aberto que é capaz de ler sinais elétricos de
sensores, como por exemplo, sinais de luz, vazão, acionamento de botões, entre outros, e
através de sua programação processar esses dados de leitura, realizar cálculos (se
necessário) e com os resultados obtidos enviar sinais elétricos também para dispositivos de
saída, também chamado de atuadores, como por exemplo, acionar motores, soar alarmes,
aceder LED’s, entre outros.
O Arduino é composto de portas que servem de entrada e saída de sinais e podem ser
analógicas ou digitais, cuja quantidade delas varia de acordo com o tipo do Arduino, e sua
função são definidas previamente pela programação. A programação do Arduino pode ser
feita através de sua linguagem própria ou através da linguagem C e quem a escolhe é o seu
programador.
As portas digitais funcionam através de níveis (alto ou baixo), no qual significam ligado
e desligado respectivamente, assumindo o valor de 1 ou 0. O Arduino trabalha com tensão de
até 5V em suas portas, no caso das portas digitais, ele está preparado para enviar e receber
informações cujo 5V representa que está ligado e 0V desligado. Porém, nem sempre os
sensores trabalham com 5V ou 0V, existem casos que o sensor precisa enviar outro tipo de
informação para o microcontrolador, e é o caso das outras portas.

33
As portas digitais podem trabalhar com um tipo de sinal chamado PWM, Pulse Width
Modulation (Modulação de Largura de Pulso), os pulsos são de ondas quadradas porém é
possível controlar a largura de pulso mantendo sua amplitude, sendo assim tendo uma opção
de sinal diferente para se trabalhar com o microcontrolador.
Nesse tipo de sinal, tenta-se simular uma porta analógica, porém a medição é feita
através do tempo em que a saída se encontra em determinado nível lógico. Em sua
programação esse valor pode variar de 0 a 255 (0 e 5V), controlando de maneira mais precisa
através do período entre os pulsos, como pode ser melhor visualizado na figura 8.
Figura 8 – Leitura do sinal PMW pelo arduino através da largura do pulso (Fonte: www.arduinoeletronica.com.br)
As portas analógicas são bastante utilizadas em sensores e atuadores que necessitam
medir tensões e resistências que variam constantemente resolução é maior que PWM sendo
0 a 1024 (0 e 5V), tendo uma precisão maior que as portas digitais.
O Arduino é capaz de trabalhar com shields (dispositivos que aumentam as
funcionalidades dessa placa de forma simples e eficaz), atuadores e sensores.
2.7.1 SHIELDS PARA O ARDUINO
Além de ser um dispositivo próprio para protótipo e testes, o Arduino traz ao usuário a
possibilidade de realizar tarefas específicas adicionando complementos a ele, esses
complementos são chamados de Shields. Os Shields funcionam como extensões ao Arduino,
fazendo com que ele realize tarefas específicas de forma eficaz, apenas conectando-o ao
microcontrolador, e na maioria dos casos substituindo outros componentes como indutores,
capacitores, resistores, entre outros.

34
O shield RTC DS3231 como visto na figura 9 é um relógio de tempo real de alta
precisão e baixo consumo de energia onde fornece informações como segundos, minutos,
dia, data, mês e ano. Em sua placa existe um cristal oscilador e um sensor de temperatura,
para melhorar sua exatidão, e uma bateria no módulo garante que as informações de data e
hora não sejam perdidas em caso de falta de alimentação do circuito.
Figura 9 - RTC DS3231
(Fonte: http://eletronicos.mercadolivre.com.br/dallas-ds3231-rtc-arduino-pic)
O shield bluetooth visto na figura 10 possui um modulo bluetooth integrado onde é
facilmente acoplado as placas Arduino para uma comunicação com outros dispositivos com
suporte a bluetooth. Assim, seria possível com esse modulo trocar informações com
smartphones e computadores sem a utilização de fios.
Figura 10 - modulo bluetooth hc-06
(Fonte: http://buildbot.com.br/blog/configuracao-do-modulo-bluetooth-hc-06-com-arduino/)

35
O modulo ESP8266 visto na figura 11 pode conectar o Arduino a uma conexão nas
redes wireless 802.11 b/g/n, podendo enviar e receber dados nos modos AP (ponto de
acesso) ou como uma STA (Estação).
Figura 11 - modulo ESP8266
(Fonte: http://www.baudaeletronica.com.br/modulo-wifi-esp8266-serial.html)
Esse módulo é bastante útil, pois pode conectar o microcontrolador na rede e enviar
informações do dispositivo para a rede, sendo possibilitado acessar em qualquer lugar que
haja conexão com a internet.
2.7.2 ATUADORES
Os atuadores podem ser definidos como toda a parte do sistema que transformam
energia elétrica em outro tipo de energia, como por exemplo, energia mecânica.
Um dos principais atuadores são os motores elétricos, que com energia podem
transmitir movimentos ao sistema, sendo bastante eficaz para se controlar o alimento em
reservatórios, que quando acionados, possam abrir o compartimento possibilitando assim,
distribuir a ração para o cão.
2.7.3 MOTORES ELÉTRICOS
Os motores elétricos são um tipo de atuador que converte energia elétrica em energia
mecânica, servem como atuadores de sistemas, pois são capazes de trazer movimentos nos
mais variados sistemas.
Se tratando de protótipos, são muito utilizados motores de passo, servomotores, e
motores CC. Os motores de passo são de alta precisão possuem solenoides alinhados dois a

36
dois, que têm a função de atrair o rotor para realizar pequenas variações angulares, que são
chamadas de passo e ele é capaz de girar 360° (CARVALHO, 2006).
Ele é energizado através de seus solenoides que são ligados separadamente, atraindo
de forma magnética, e conforme o acionamento e desligamento de cada bobina faz com que
o motor opere.
Servomotores são motores projetados para ter funções de torque, velocidade e
posicionamento, sendo mais indicados que o primeiro tipo de motor ao se tratar de
posicionamento visto que, este consegue rotacionar de forma controlada e precisa
(CARVALHO, 2006).
Na programação, a movimentação desse tipo de motor é feita através do ângulo de
rotação que se deseja obter, que varia de 0 a 180°, visto que ele é incapaz de realizar
movimento com ângulos maiores. A figura 12 exibe a imagem de um servomotor.
Figura 12 – Servomotor da marca Futaba. (Fonte: Futaba)
Também existem os motores CC alimentados por corrente continua onde a tensão
aplicada ao motor tem por finalidade energizar os enrolamentos no motor, produzindo polos
eletromagnéticos que formam a força magnetomotriz. Uma das principais aplicações do motor
CC está ligada ao controle de velocidade com necessidade crítica de torque isto significa que
os motores de corrente continua são ótimas alternativas quando necessitamos manter um
torque considerável, mesmo variando a velocidade (CARVALHO, 2006).
2.7.4 SENSORES
Os sensores ao contrário dos atuadores recebem grandezas de diversas formas, como
vazão e temperatura e a transformam em sinais elétricos para que possam ser interpretados e
exibidos por outros dispositivos.

37
2.7.5 CÉLULA DE CARGA
A célula de carga é um transdutor, ou seja, ela sensibiliza uma grandeza física, como
por exemplo força, peso e pressão, e transforma essas medidas em sinais de saída pra
serem enviados para indicadores, controladores ou a um sistema de aquisição de dados
ligado a um computador como mostra figura 13. Os sinais enviados pelos transdutores podem
ser de diversos tipos, como elétrico (analógico ou digital), pneumático, hidráulico ou
mecânico, a escolha depende da necessidade de aplicação.
Na célula de carga o sinal de saída é elétrico, esse sinal é gerado através da variação
de resistência ôhmica de um extensômetro quando se aplica força sobre ele. Um
extensômetro é uma barra fina de metal, que quando exercida uma força, ela estica um lado e
comprime outro, assim mudando sua resistência elétrica. Na célula existem 4 extensômetros
ligados na configuração de Ponte de Wheatstone, que são ideais para medir as mudanças de
resistências, como pode ser visto na figura 14. A ponte recebe uma tensão de alimentação, e
é desbalanceada proporcionalmente a deformação dos extensômetros em função da força
aplicada. Esses extensômetros são fixados em uma peça metálica, que se chama corpo da
célula de carga.
O campo de aplicação da célula de carga é normalmente em balanças comerciais e
industriais, na automatização e controle de processos industriais.
Figura 13 – Célula de Carga e seu funcionamento. (Fonte: http://www.ee.co.za/article/troubleshooting-load-cell-applications.html)

38
Como o valor medido pela célula de carga é bastante pequeno, o mesmo precisa ser
amplificado para que um microcontrolador consiga processá-lo e para isso é bastante usado o
amplificador HX7111.
O Amplificador HX711 é uma placa com componentes que permite fazer a amplificação
e conversão com precisão de um sinal analógico para digital/serial vindo dos valores de
resistência dos sensores de uma célula de carga. Foi projetado para ser usado principalmente
em balanças digitais. Mas é utilizado na indústria aeroespacial, mecânica, elétrica,
construção, química entre outros.
Para trabalhar com o Arduino e célula de carga, esse amplificador possui uma
biblioteca própria na qual suas funções já convertem o sinal elétrico em massa. A figura 15
mostra o amplificador.
Figura 14 – Funcionamento de uma ponte de Wheatstone. (Fonte: http://www.ee.co.za/article/troubleshooting-load-cell-applications.html)
Figura 15 – Amplificador HX711(Fonte: https://www.sparkfun.com/products/13879).

39
3 METODOLOGIA
O projeto de comedouro automatizado para cães foi desenvolvido com o propósito de
auxiliar os donos a cuidarem de seus animais de uma forma mais saudável, distribuindo o
alimento nos horários corretos, além de salvar informações referentes à alimentação canina
que podem ser consultados posteriormente em consultas veterinárias, ajudando o profissional
a dar um diagnóstico mais preciso durante a consulta. Além do propósito voltado para a
saúde do animal, o projeto também visa ao conforto do dono, possibilitando a este poder
realizar eventuais viagens, acompanhando a alimentação de seu animal de estimação pelo
smartphone.
Para um melhor desenvolvimento do projeto, o mesmo foi dividido em etapas visando
guiar a construção do protótipo buscando minimizar erros durante a montagem. Essas etapas
são: Dimensionamento do reservatório de ração, escolha dos materiais adequados para
fabricação do protótipo, e por fim, a programação do microcontrolador e do aplicativo para
celular.
Para dimensionar o reservatório de ração, primeiro foi escolhido o porte do animal o
qual se deseja trabalhar, pois, como previamente visto, a quantidade de ração e refeições
mudam de acordo com o tamanho do cão, e a escolha do porte é fundamental para evitar
problemas em seu uso na residência, como excesso ou falta de ração armazenada.
Nesta etapa de dimensionamento foi levado em consideração o tamanho do animal,
bem como a quantidade de refeições diárias necessárias para a alimentação adequada dele e
também um prazo de tempo que o dono possa ficar ausente da residência.
Após esta etapa inicial, a escolha do material pelo qual o comedouro foi fabricado foi
fundamental e dependendo do tipo do animal definido, foi possível analisar as vantagens e
desvantagens de cada tipo de material, como o preço, a eficiência e suas características. Os
materiais utilizados na construção da parte física foram:
Barra de perfil U de alumínio 32x32mm - 1,6 metros
Barra chata de alumínio 19mm 1,1 metros
Cantoneira 38x38x3mm 0,40 metros
16 Parafusos, 16 porcas e 16 arruelas de 6,3x19mm
4 Parafusos, 4 porcas, 4 arruelas de M6x40mm

40
1,20m de varão roscado, 16 porcas, 16 arruelas de 7,8mm
Chapa de alumínio 30x30x1mm
Assadeira alumínio redonda com aba
Recipiente de alumínio
Além dos materiais de fabricação, também foi necessário escolher os materiais
eletrônicos. Começando pela escolha do microcontrolador, pois este dispositivo é o mais
importante do projeto, visto que nele foram conectados todos os outros componentes e
dispositivos necessários para o bom funcionamento do protótipo.
Como o propósito deste projeto é distribuir o alimento ao animal em horários e
quantidades que variam para cada cão, o protótipo precisa se adequar às preferências de seu
usuário e está comunicação precisa ser feita para que o seu utilizador possa configurar o
modulo de acordo com as necessidades do cão.
As variáveis a serem configuradas desse sistema são o tempo e a quantidade de ração
e é necessário monitorá-las, a fim de garantir a alimentação adequada ao animal. Assim
como na vida real, para se monitorar o tempo é necessário o uso de relógio para saber se o
horário real é o mesmo que o usuário definiu para alimentação de seu animal.
Além de distribuir o alimento no horário indicado, o protótipo também precisa medir a
quantidade de ração que está na tigela do animal e para se fazer isso foi construída uma
balança embaixo da tigela, com o intuito de verificar constantemente a massa de comida
presente na tigela, assim acompanhando-se a variação e consequentemente, se o cão se
alimentou.
Com essas informações em mãos, o protótipo precisa entregá-las ao seu usuário, para
que este possa estar ciente de tudo que está acontecendo com seu animal, além de dar
suporte ao veterinário em uma eventual consulta. Além deste propósito o protótipo pode
informá-lo através da internet acessada por um smartphone.

41
4 RESULTADOS E DISCUSSÕES
4.1 PROJETANDO O COMEDOURO
Primeiramente, foi projetado o comedouro com todas as funções que o mesmo deveria
possuir, a fim de montar um escopo do que seria necessário para a montagem e automação
do protótipo, e foi decidido que o comedouro deveria atender a cães de pequeno e médio
porte e armazenar o histórico alimentar do animal para poder ser consultado posteriormente
pelo dono.
Como o projeto requer uma comunicação com seu usuário, o mesmo precisa de uma
interface de comunicação, e devido ao grande número de usuários que hoje possuem um
smartphone, foi decidido que o projeto iria aproveitar o avanço tecnológico, e ser um
diferencial no mercado e usar o celular para a comunicação, além de acompanhar a
tecnologia, se torna uma forma mais clara de visualização.
Para se comunicar com o celular foi pensado em criar um aplicativo que conseguisse
mostrar o histórico alimentar do cachorro e também ajustar o comedouro de acordo com a
necessidade do usuário. Como o propósito do projeto é ser acessado em qualquer localidade,
o mesmo necessita se comunicar a internet, que seria possível de duas formas, através do
cabo ethernet ou com wifi, e foi escolhida a segunda opção para dar comodidade ao usuário
que não necessitaria de deixar o produto próximo ao seu modem.
Para se conectar a uma rede wifi, é necessário fornecer ao dispositivo o usuário e
senha da rede, então seria necessária outra forma de conexão entre o comedouro e o
usuário, e aproveitando que seria desenvolvido um aplicativo, foi pensado em utilizar o
bluetooth do celular para se conectar ao comedouro, para que este receba as informações
necessárias para que consiga se conectar à internet.
Após ter as funcionalidades e características do projeto já definidas, foi escolhido o
microcontrolador a ser utilizado, pois essa escolha é a mais importante, pois de acordo com o
microcontrolador se torna mais prático projetar com mais detalhes e também pensar na parte
técnica do protótipo, bem como suas limitações, pontos positivos, e seu custo. Devido ao fato
de ser mais prático, foi definido o Arduino Uno como o microcontrolador do projeto, pois além

42
de sua praticidade o mesmo possui portas suficientes para se conectar com os outros
dispositivos do protótipo.
Outro ponto positivo do Arduino é a sua conexão direta ao computador através de
cabo USB, e aproveitando disto, foi acrescentado ao projeto a criação de um software para
computador para atender um grupo maior de usuários. Porém, uma limitação deste
microcontrolador, é que o mesmo não possui uma vasta memória para dados (2KB), então se
tornaria inviável e impossível armazenar todo o histórico alimentar do cão em sua memória.
Para solucionar este problema, foi pensado em duas opções, utilizar cartão de memória para
o Arduino, ou armazenar estas informações em um banco de dados, e foi escolhida a
segunda opção, pois ela possibilita maior praticidade ao usuário que não precisaria ficar
monitorando o cartão de memória constantemente, e também, com o banco de dados se
torna muito mais organizado as informações.
4.1.1 CONSTRUÇÃO DA PARTE MECÂNICA
O dimensionamento da estrutura do comedouro foi baseado no tamanho do pote onde
o cachorro irá comer e do reservatório de ração, pois são as duas partes que influenciam para
dimensionar a base de apoio, pois já tem características já dimensionadas. O reservatório de
ração foi reaproveitado, pois ele é geralmente usado por pessoas onde usam para cereais,
grãos, frutas secas, massas pequenas entre outros e pode ser encontrado no mercado como
dispensador de cereais como visto na figura 16.
Figura 16 - Dispensador de Cereais (Fonte: http://balancassaoroque.com.br/, 2016).

43
O material do reservatório é o plástico, pois como já o encontramos pronto e o
reaproveitamos acoplando o motor, ele também possui uma alta resistência, um baixo custo e
é uma excelente barreira a umidade preservando assim o sabor do alimento.
No dispensador foi acoplado um motor com rotação de 3rpm, torque de 15kgf.cm,
tensão de operação de 12V e de corrente de 250mA, capaz de girar rações para cães de
pequeno porte sem dificuldades porem se houver ração para cachorro de grande porte no
reservatório o motor deverá ser trocado pois com o torque de 15kgf.cm, o motor não é capaz
de girar pois a ração é maior em relação a de pequeno porte portanto é necessário um motor
com torque maior.
O eixo no qual o motor foi acoplado foi confeccionado em um torno para usinar o eixo e
a rosca e fechar a medida do comprimento, e depois foi utilizada uma fresa, onde foi feito um
chanfro no eixo com formato de D. Esse chanfro tem a função de uma chaveta em transmitir o
movimento, pois o furo onde o eixo é alocado não é inteiro redondo, tem uma parte reta,
justamente para o eixo não rodar em falso como mostra a figura 17.

44
Figura 17 - Eixo e aleta.
E para proteger o reservatório de plástico foi utilizada uma peça de alumínio como
mostra a figura 18, pois além de serem mais rígidos que os polímeros, evitando que os
animais quebrem o reservatório com mordidas ou o derrubando, ele também possui uma
resistência à fratura maior assim garantindo uma maior vida útil ao comedouro.

45
Figura 18 - Peça de alumínio para proteção.
As medidas do reservatório e do suporte do pote foram realizadas, e o primeiro
desenho da base foi confeccionado. O desenho da base tomou forma de uma moldura com
barras transversais, onde a moldura apoiara no chão para ter estabilidade, e as barras
estarão em cima da moldura para poder fazer a fixação da célula de carga e do reservatório.
Tomando referência as dimensões do desenho, a primeira parte a ser feita foi à base
de apoio. A barra de perfil U foi cortada em quatro partes com um ângulo de 45º para poder
encaixar uma na outra e assim formar 90º como mostra a figura 19.
Figura 19 - Estrutura de alumínio em forma de “moldura”.
Para fixar as 4 partes, foi retirada a medida de profundidade interna do perfil U para
saber a medida limite que a cantoneira de fixação poderia ter, a medida foi 28mm, então
foram cortados 4 pedaços da cantoneira com 26mm. Com as partes da barra de perfil U e a

46
cantoneira cortada foram feitos os puncionamentos do centro dos furos e logo depois foi feito
a furação utilizando uma broca de 6,3mm.
Com as peças furadas e também rebarbadas foi feita a fixação das mesmas através de
parafusos, porcas e arruelas dando um formato de “moldura” a base. A próxima etapa foi
cortar, puncionar centro dos furos e furar a barra chata que se fixara a base, são 2 chapas,
nas quais as duas para apoio do reservatório e para a fixação da célula de carga foi utilizado
um pedaço do perfil U como mostra a figura 20. A broca utilizada nos furos nas laterais da
barra foi de 6,5mm e nos furos do centro de 8,5mm. A barra chata com os furos foi fixada na
base através de parafuso, porca e arruela. O varão roscado foi cortado e já fixado na barra
chata também por porcas.
Figura 20 – Barras para fixação do reservatório e célula de carga.
Depois foi fixado o reservatório e o suporte do pote em uma mesma estrutura, assim
tornando um conjunto de peças fixas como visto na figura 21. A única peça móvel será o pote
por necessidade de limpeza, que poderá ser removido facilmente ficando apoiado no suporte
que possui abas laterais impedindo do pote cair.

47
Figura 21 – Proteção do reservatório e célula de carga fixas a estrutura.
O reservatório tem que ficar acima do pote, mas não pode ficar na mesma linha
vertical, pois se não os varões de fixação do reservatório atrapalhará o cachorro comer. Então
foram colocados um ao lado do outro com alturas diferentes. Como não estão na mesma linha
vertical há a necessidade de ter uma rampa para transportar a ração que sai do reservatório
até o pote.
O pote está acoplado à célula de carga, então foi necessário tomar como referência as
características da célula na qual não pode encostar-se a nenhuma parte quando fizer sua
flexão para fazer a sua medição correta e também a posição do reservatório juntamente com
o motor que está fixado no mesmo.
A peça de alumínio foi furada com uma broca 8,5mm onde encaixarão os varões e os
parafusos que prendem o suporte do motor, os furos maiores foram feitos utilizando uma
serra copo de 65mm na parte lateral, onde encaixara o motor e uma de 100mm na parte
inferior onde passara a ração do reservatório para a rampa.
Para fixação do motor, a ideia foi usar uma cantoneira de suporte, onde um lado fixará
o motor e outro fixará no reservatório. Então foi realizada a medida de centro a centro dos
furos próprios para fixação do motor em sua carcaça, e também realizada medida do centro

48
do eixo, já que o mesmo é excêntrico. Depois disso foi criado um desenho modelo para ser
colocado sobre a cantoneira para ter referência dos centros dos furos depois foi feito o
puncionamento dos centros dos furos e realizado a furação como mostra figura 22.
Figura 22 - Cantoneira de fixação do motor na base de alumínio.
Por fim foi fixada na base a caixa na qual ira os componentes eletrônicos no qual será
responsável pelo controle do comedouro como visto na figura 23.
Figura 23 - Caixa dos componentes fixa na base.
Depois do protótipo pronto e finalizado foram feitos os cálculos da dosagem com
rações para cães de pequeno porte, mostrando que a cada vez a aleta gira, ela demora
aproximadamente 3s para trocar de uma aleta para outra e em média despejando 15,5gramas
no mínimo por compartimento.
Logo após foi feito o procedimento para descobrir quanto o reservatório é capaz de
suportar de ração então ele foi inteiro completado com a ração e em seguida foi retirada a
ração para ser pesada para descobrir a massa que o reservatório suporta, o valor encontrado

49
foi de 1,474kg. Tendo como base a tabela 2 necessidade diária para cães de raças pequenas
com peso entre 1 a 3 kg com de idade de 2 meses no qual ele consume de 30 a 65g diárias
portanto o comedouro teria uma autonomia entre 21 a 49 refeições onde a ração durará de 21
dias até 1 mês e 19 dias. E para um cachorro com peso 10 a 15 kg e com 9 meses de idade
onde ele consome de 230 a 300g por dia, o comedouro teria autonomia de 6 a 5 refeições
com isso a ração durará entre 6 a 5 dias.
E para calcular o volume de ração no reservatório, foi necessário encontrar a
densidade da ração. Então foi feito procedimento de analise para encontrar uma resposta. Foi
utilizado um béquer com volume de 1000ml e uma balança de precisão.
O procedimento foi colocar o béquer vazio na balança e fazer a pesagem do mesmo, a
massa encontrada foi de 0,306kg. Foi colocado ração no béquer até atingir volume de 900ml
e foi pesado. O valor da massa encontrado foi de 0,757kg após isso descontamos a massa do
béquer e encontramos somente o valor da massa de ração o valor foi de 0,451kg. Com o
volume e a massa foi calculada a densidade e o valor encontrado foi de 501,1kg/m3 usando
como a base a ração Herói cães filhotes.
𝑀𝑎𝑠𝑠𝑎 𝐵𝑒𝑐𝑘𝑒𝑟 𝑣𝑎𝑧𝑖𝑜 = 0,306kg
𝑀𝑎𝑠𝑠𝑎 𝐵𝑒𝑐𝑘𝑒𝑟 𝑐𝑜𝑚 𝑟𝑎çã𝑜 = 0,757kg
𝑀𝑎𝑠𝑠𝑎 𝑟𝑎çã𝑜 = 0,451kg
𝐷 =0,451
0,0009(900𝑚𝑙)
𝐷𝑒𝑛𝑠𝑖𝑑𝑎𝑑𝑒 = 501,1kg/𝑚3
Com o valor da densidade e da massa foi possível encontrar o volume do reservatório
através da fórmula da densidade.

50
𝐷𝑒𝑛𝑠𝑖𝑑𝑎𝑑𝑒 = 501,1kg/𝑚3
𝑀𝑎𝑠𝑠𝑎 = 1,474kg
𝐷 =𝑚
𝑣
501 =1474
𝑣
𝑣 = 0,00294𝑚3
𝑣 = 2,94 litros
4.1.2 MONTAGEM DA PARTE ELETRÔNICA
No protótipo foi utilizado um motor DC de tensão de 12V sendo necessário o
acionamento através do módulo rele, conectado em normalmente aberto(NA), para que
quando necessário seu funcionamento, o Arduino através de uma de suas portas digitais
aciona a bobina do rele, fazendo com que exista contado no circuito NA, dessa maneira, o
alimento é distribuído para o pote de ração, que está em cima de uma célula de carga.
A célula de carga funciona como uma balança que vai medir as variações de comida
no pote através de sua massa, e enviará este sinal elétrico para o Arduíno, que irá trabalhar
estes dados com os outros componentes do circuito.
O Arduino utilizará estes dados fornecidos com a finalidade de mostrar ao usuário em
qualquer momento e lugar, e para isso utilizará o ESP8266, que é um módulo WIFI, que
possui uma antena para se conectar com as redes wifi disponíveis no local, e realiza a

51
comunicação de forma serial com o Arduino através dos pinos TX e RX. Este módulo possui
uma biblioteca própria para sua programação com o Arduino, facilitando assim a criação do
código utilizado no sistema. O ESP8266 opera com uma tensão de 3,3V e uma corrente de no
máximo 500mA e o Arduino não oferece esta corrente, então foi necessário utilizar seu
adaptador que supre as necessidades do módulo wifi.
Outro módulo que utiliza os pinos TX e RX para funcionar é o módulo Bluetooth HC-06.
O módulo bluetooth opera com uma tensão de 5V, cuja taxa de recebimento (RX) e
transmissão (TX) operam com 3,3V. Como os pinos digitais do Arduino estão preparados para
receber até 5V o mesmo pode se comunicar com este modulo, porém esses pinos podem
transmitir uma tensão de 5V que queimariam o pino RX do bluetooth, para resolver este
problema foi feito um divisor de tensão utilizando resistores de 3300Ω e 1800Ω possibilitando
sua conexão. Os cálculos da divisão de tensão podem ser visto a seguir.
𝑣𝑠 = 𝑅2
𝑅1 + 𝑅2. 𝑣𝑒
3,3 = 3300
𝑅1 + 3300 . 5
3,3
5(𝑅1 + 3300) = 3300
0,66𝑅1 + 2178 = 3300
𝑅1 = 3300 − 2178
0,66
𝑅1 = 1700𝛺
Devido ao fato deste resistor não ser comercial, foi calculado a tensão de saída para
resistores próximos a este, e por isso foi escolhido o de 1800Ω, pois a tensão de saída é
inferior à suportada pelo HC-06. Os cálculos podem ser visto a seguir.

52
𝑣𝑠 =3300
1500+3300 . 5 𝑣𝑠 =
3300
1800+3300 . 5
𝑣𝑠 = 3,4375𝑉 𝑣𝑠 = 3,23529𝑉
Ao receber um dado seja por Bluetooth ou USB, o Arduino precisa comparar o horário
de refeição com o horário atual, para fazer isto, foi utilizado o módulo relógio RTC DS3231,
que possui uma biblioteca própria de fácil utilização, cujo possui funções que atribuem os
valores da data atual através de números inteiros, tornando fácil a comparação de horários.
O circuito do projeto pode ser visto no apêndice A.
4.1.2.1 PROGRAMAÇÃO DO SISTEMA
A programação do sistema foi dividia em três etapas para melhor organização do
trabalho. A primeira consiste na programação do Arduino, com a finalidade de automatizar e
fazer o protótipo funcionar. A segunda etapa foi a criação do banco de dados, necessário para
armazenar o histórico alimentar do cachorro. A terceira foi o desenvolvimento do software e
aplicativo, responsáveis pela interface com o usuário.
4.1.2.2 PROGRAMAÇÃO DO ARDUINO
O programa contido no Arduino começa com a declaração de variáveis que
armazenarão os dados do sistema, ou seja, as informações que o usuário deverá fornecer ao
sistema. Essas variáveis começam com valores já atribuídos para horários inexistentes no
mundo real, com o propósito de identificar uma possível reinicialização do comedouro. Os
dados personalizados chegam ao Arduino através do software ou do aplicativo. O Arduino
atribui os dados responsáveis pela alimentação do animal nas variáveis necessárias.
Após ter os valores atribuídos, o comedouro passa a verificar cada posição dos vetores
para horas e minutos e compará-los ao tempo real, caso os valores sejam iguais, significa que
a ração deve ser distribuída, e assim dosada de acordo com a necessidade.
Independentemente de ser o horário de refeição ou não, o comedouro pesará o pote de
ração, e enviará as informações para o banco de dados do projeto, através do ESP8266,
sendo que caso haja modificações no peso, ele enviará a quantidade de ração em gramas, e

53
caso não haja diferença entre as pesagens, o mesmo apenas enviará o horário do sistema,
com a finalidade de que o usuário possa saber se o comedouro está funcionando ou não. E
depois de tudo isso, o programa retorna no começo da verificação, devido ao fato dele
funcionar em loop contínuo, e seu código fonte se encontra no apêndice C.
4.1.2.3 CRIAÇÃO DO BANCO DE DADOS
Para construir um banco de dados, primeiramente foi necessário abrir e configurar um
servidor que pudesse hospedá-lo. O servidor foi feito utilizando o WAMP Server, que é um
conjunto de programas necessários para criar um banco de dados (APACHE MYSQL e PHP).
Para permitir o acesso externo, foi configurada a porta de acesso e um serviço de DNS para
redirecionamento de IP.
Com o servidor permitindo o acesso externo, foi criado o banco de dados, com duas
tabelas, uma para histórico alimentar (os dados são inseridos em novos registros), e outra
para a atualização do horário do sistema (o dado é atualizado, mantendo apenas um registro)
e também um site em HTML e PHP para o cadastro de dados, onde o HTML contém um
formulário, e PHP contém os códigos necessários para gravar e recuperar dados no banco
(que pode ser acessado através do navegador, ou aplicativo/software).
A figura 24 abaixo mostra o site do projeto:

54
Figura 24 – Site do projeto
4.1.2.4 PROGRAMAÇÃO DO SOFTWARE E APLICATIVO
Para a programação do aplicativo para celulares Android e software para
computadores e notebooks foi usado à mesma lógica de programação, apenas diferindo a
linguagem. Para programar para Android, baseado em JAVA, foi utilizado o Android Studio,
enquanto para os outros dispositivos citado, feito em C#, foi utilizado o Visual Studio.
Para a interface dos programas, foi pensado em construí-los com duas abas, uma que
carrega a tabela do banco de dados através de códigos SQL e mostra ao usuário, e a outra
onde se encontra as informações que serão passadas para o comedouro, seja Bluetooth ou
USB, que, para isto, o usuário utilizará o aplicativo/software para se conectar com o produto
de acordo com o recurso de seu dispositivo (bluetooth para celulares e cabo USB para
computadores)
Tanto o software quanto o aplicativo permitem que o usuário escolha até 5 refeições
personalizáveis para o cachorro, e nessas refeições podem ser definido a quantidade de

55
ração em gramas e também o horário da alimentação para o cão. Além de definir as
informações sobre a refeição do animal, o usuário também pode atribuir o nome e senha de
sua rede para a conexão entre comedouro-servidor, como pode ser visto nas figuras 25 e 26.
Ao clicar em confirmar, o programa envia todas as escolhas para o comedouro e também o
horário atual do sistema, para que este funcione corretamente.
Figura 25 - Exemplo de Configuração de programa para Windows.

56
Figura 26 - Exemplo de Configuração de programa para celular
De maneira geral, o sistema funciona de acordo com o fluxograma disponibilizado no
apêndice b, e por fim, na figura 27 abaixo pode ser visto o comedouro concluído.

57
Figura 27 - Comedouro finalizado
4.2 MELHORIAS
Por se tratar de um produto ainda inexistente no mercado, e se tratar de um
comedouro para cães, que, como visto, ele está presente na maioria das casas brasileiras,
com certeza existirão casos em que este projeto não atenderá, e por isso, seria necessário
algumas melhorias, como pode ser visto a seguir:
Microcontrolador Nano
Utilizando um microcontrolador menor, proporcionaria a diminuição da caixa de
circuitos, podendo ocupar um espaço menor.
Sistema de dosagem por rosca sem fim

58
Alterando o sistema de dosagem atual (que utiliza o tempo como parâmetro de
distribuição de ração), por uma rosca sem fim, deixaria o comedouro com mais precisão na
distribuição de ração, pois não teria mais o sistema de aletas, e utilizaria o passo da rosca
para distribuir o alimento. Além de mais preciso, atenderia mais tipos de ração.
Sistema de reconhecimento para lares com mais de um cão
Atualmente o projeto atende apenas um cachorro, visto que ele não está apto a
identificar o cachorro que comeu a ração, e em caso de casas com mais de um cão, seria
inviável utilizar o comedouro. Para solucionar este problema, poderia colocar um leitor RFID
próximo ao pote e as tags para leitura na coleira do animal, enviando ao banco de dados à
identificação do cachorro que comeu, assim o protótipo estaria apto a atender casos como
este.
Ampliação para cães de raça maiores
O projeto poderia ser reforçado para atender cães de raças maiores, partindo na
alteração do motor atual para um cujo torque é maior (para girar rações maiores), e até
melhorar a estrutura mecânica para evitar que o cão consiga derrubar o comedouro.
Buzzer para avisar que a comida está servida
Adicionando um buzzer que emitiria um som quando a ração estivesse servida, poderia
condicionar o cão, a saber, o horário certo de comer associando o som escutado por ele (para
isso funcionar iria requerer também um adestramento para o cachorro). Este som poderia ser
em frequência escutada apenas pelo animal, para não atrapalhar ou incomodar os seres
humanos ao redor.
Monitorar o reservatório de ração
Adicionando leds infravermelhos, poderia fazer com que o sistema saiba quando a
ração do reservatório estiver no fim, assim auxiliará o dono para saber quando terá que repor
a ração no comedouro.
Ampliar o projeto para fornecer água

59
Construindo um bebedouro para o cão seria essencial para deixar o projeto completo.
A construção poderia conter válvulas de entrada e saída de água, para abastecimento e troca,
respectivamente.
O bebedouro poderia ter sensor de temperatura para água, para que quando ela
estiver muito quente, o sistema a trocaria por uma água nova. Ou também poderia ser trocada
em horários definidos pelo usuário.
Ampliar os animais atendidos pelo projeto
Por se tratar de um comedouro, o mesmo pode ser aplicado aos outros animais,
atendendo desde os outros animais domésticos (como gato, coelhos, porquinhos-da-índia),
até animais rurais (como vaca, galinha, cavalo). Para essa ampliação deveria haver algumas
adaptações físicas e lógicas para que o projeto consiga atender de forma satisfatória outros
animais. As adaptações físicas se implicam na fabricação do comedouro para cada porte de
animal e as lógicas para que o mesmo atenda as necessidades alimentícias de cada animal,
desde a quantidade e número de refeições que o mesmo pode fazer.
Personalização do comedouro
Para deixar o projeto mais barato o mesmo poderia ser criado com as funcionalidades
básicas, ou seja, o sistema de dosagem e de pesagem da ração permitindo o usuário adquirir
as peças separadamente (Wifi, bluetooth) de acordo com sua necessidade pois além deixar o
produto mais barato, o deixa customizável podendo até ser desenvolvido outros componentes
para atender a necessidade de cada tipo de pessoa.
Distribuição manual de comida
Uma melhoria possível seria possibilitar o usuário distribuir a comida de forma manual,
pois em alguma possível circunstância isso poderia ser necessário dessa maneira ele não
terá de aguardar o tempo determinado.
Programação de horário de verão

60
O comedouro poderia estar apto a alterações de horário sem necessitar reprogramá-lo
poderia ser feito com dois botões, um para subtrair e outro para adicionar uma hora, ou até
mesmo o aplicativo possuir esta função para que o usuário consiga alterar o horário sem
mexer nas suas preferências de refeição.
Sistema de Nobreak
Criando uma fonte alternativa de energia como, por exemplo, bateria deixaria o sistema
mais confiável, pois caso haja queda na rede elétrica o comedouro poderia continuar
operando não deixando o cachorro sem comida.

61
5 CONCLUSÃO
Este trabalho apresentou o desenvolvimento de um comedouro automatizado para
cães, baseado no conceito de proporcionar ao usuário o acesso ao histórico alimentar de seu
cão, bem como ter portabilidade para a maioria dos dispositivos existentes no mercado que
permitem ao usuário a configurar o comedouro e acessar as informações longe de sua casa,
permitindo assim o dono do animal se ausentar em um determinado período e manter a
saúde do seu animal.
Ao realizar este trabalho pôde-se concluir que, com o crescimento contínuo que o
mercado pet vem tendo no cenário nacional até mesmo com a crise no Brasil, a população
não deixa de ter cuidados especiais com seus cães, investir em produtos e projetos voltados
a esse público é bastante interessante, pois não faltam ideias para melhorar a vida dos
animais de estimação seja sua saúde ou conforto, e proporcionar aos donos melhores
condições para cuidar de seus animais.
E o fato de que os cães, assim como os seres humanos necessitam de uma dieta
correta para evitar problemas de saúde, e devido ao fato de que o animal age por impulso, ou
seja, sempre que houver comida, ele come, cabe aos donos cuidar e zelar pelo bem estar e
saúde do animal.
De maneira geral, se conclui também, que em um projeto longo, principalmente de
engenharia, é muito útil projetar todos os detalhes e funções que o mesmo deverá ter,
evitando problemas durante a execução do projeto. Além de projetar corretamente, deve-se
gerenciar o tempo também, para que cada etapa do projeto comece e termine de forma
ordena e coerente.
Se tratando da construção do comedouro a alteração do seu sistema de dosagem
atual, que usa o tempo como variável de controle por um sistema controlado não pelo tempo,
mas sim, por posição ou ângulo, como por exemplo a rosca sem fim, traria uma dosagem
mais eficiente e com melhor resolução, pois a densidade e o tamanho da ração alteram na
quantidade no tempo da dosagem devido a diferença do qual os grão se compactam entre si.
Construindo o site com todas as funcionalidades que o software e o aplicativo possuem
e fazendo com que estes acessem o site ao invés de possuírem uma interface gráfica própria

62
permitiu uma atualização mais adequada, pois iria atualizar apenas a programação do site,
não necessitando grandes atualizações em cada plataforma.
O comedouro automatizado para cães seria um produto muito útil no mercado, a
começar pela sua autonomia que possibilitaria os donos de cães de pequeno porte, os quais
o projeto é destinado, a viajarem no máximo cinco dias deixando o reservatório cheio.
Outra conclusão importante é a eficácia da lógica no banco de dados, que, dividido em
duas tabelas, uma para inserção de registros e a outra para atualização, faz com que o
servidor não sobrecarregue com uma tabela muito extensa para armazenar todas as
informações que o sistema atualizou, pois o importante para o usuário é saber apenas o
último horário.
Por se tratar de um produto inexistente no mercado o torna passivo de muitas
melhorias as quais resultariam em um projeto mais completo, que conseguiria atender um
maior número de donos de cães, visto que esse projeto visa proporcionar maior conforto e
comodidade ao seu usuário além de buscar melhorar a saúde e qualidade dos cães, além de
auxiliar o veterinário a dar um diagnóstico mais preciso, ou seja, esse projeto além de auxiliar
a sanar possíveis problemas, ele também ajuda a prevenção dos mesmos.

63
6 REFERÊNCIAS BIBLIOGRÁFICAS
ABINPET- Associação Brasileira da Indústria de Produtos para Animais de
Estimação. SETOR PET CHEGA A R$ 18 BILHÕES EM 2015, MAS NÃO SEM OS
EFEITOS DA CRISE. 2016. Disponível em: <http://abinpet.org.br/site/setor-pet-chega-
a-r-18-bilhoes-em-2015-mas-nao-sem-os-efeitos-da-crise/>. Acesso em: 21 abr. 2016.
ABINPET- Associação Brasileira da Indústria de Produtos para Animais de
Estimação. FATURAMENTO DO SETOR CRESCERÁ 7,4% E FECHARÁ EM R$ 17,9
BILHÕES EM 2015. 2015. Disponível em: <http://abinpet.org.br/site/faturamento-do-
setor-crescera-74-e-fechara-em-r-179-bilhoes-em-2015/>. Acesso em: 21 abr. 2016.
ABINPET- Associação Brasileira da Indústria de Produtos para Animais de
Estimação. FAQ. Disponível em: <http://abinpet.org.br/site/faq/>. Acesso em: 30 abr.
2016.
ALBANO, Luigi Leonardo Mazzucco. Aspectos Nutricionais – Os Nutrientes -
Lipídios. Disponível em:
<http://www.saudeanimal.com.br/2257/pets/caes/alimentacao-caes/alguns-aspectos-
importantes-da-nutricao-animal-os-nutrientes-3>. Acesso em: 28 abr. 2016.
ALBANO, Luigi Leonardo Mazzucco. Aspectos Nutricionais – Os Nutrientes –
Carboidratos. Disponível em:
<http://www.saudeanimal.com.br/2260/pets/caes/alimentacao-caes/alguns-aspectos-
importantes-da-nutricao-animal-os-nutrientes-4>. Acesso em: 28 abr. 2016.
ALBANO, Luigi Leonardo Mazzucco. Aspectos Nutricionais – Os Nutrientes –
Minerais. Disponível em:
<http://www.saudeanimal.com.br/2264/pets/caes/alimentacao-caes/alguns-aspectos-
importantes-da-nutricao-animal-os-nutrientes-5>. Acesso em: 28 abr. 2016.
ALVES, K,; BACQUÉ, H,; BAILLY, R. et al. Enciclopédia do cão. Royal
Canin, FRANÇA: Ed. Aniwa Publishing, 2001. 635p
ANFALPET- Associação Nacional dos Fabricantes de Alimentos para Animais
de Estimação. Manual do Programa Integrado de Qualidade Pet. 2. Ed.
São Paulo, 2008. 238p.
AZPETSHOP. Alimentador Premium. Disponível em:
<http://www.azpetshop.com.br/cachorro/comedouros-e-bebedouros/alimentador-
premium/>. Acesso em: 29 jun. 2016.

64
AZPETSHOP. Comedouros e Bebedouros. Disponível em:
<http://www.azpetshop.com.br/cachorro/comedouros-e-bebedouros/>. Acesso em: 29
jun. 2016.
CALLISTER JUNIOR, William D. CIENCIA E ENGENHARIA DOS MATERIAIS. 7. ed.
Rio de Janeiro: Ltc, 2008
CARCIOFI, A.C. classificação e avaliação de alimentos comerciais para cães e gatos.
In: SIMPOSIO DE NUTRIÇAO E ALIMENTAÇAO DE CAES E GATOS, 3., 2007,
Lavras. Anais... Lavras: UFLA, 2007. 296p.
CARVALHO, Geraldo. Maquinas elétricas: Teoria e Ensaios. 4. ed. São Paulo
Sp: Érica, 2006.
ELIZEIRE, Mariane BrÄscher. Expansão do mercado pet e a importância do
marketing na medicina veterinária. 2013. 51 f. Tese (Doutorado) - Curso de
Medicina Veterinária, Universidade Federal do Rio Grande do Sul, Porto Alegre, 2013.
GENARO, Roberta Todisco. A nutrição dos Cães nas diversas fases da
vida. Disponível em:
<http://www.petbr.com.br/A_nutricao_dos_Caes_nas_diversas_fases_da_vida.doc>.
Acesso em: 04 maio 2016.
INSTRUCTABLES. Real time clock using DS3231. Disponível em:
<http://www.instructables.com/id/Real-time-clock-using-DS3231-EASY/>. Acesso em:
08 ago. 2016.
MACIEL, Roberto. Evolução da nutrição e do uso de alimentos e
nutrientes. Disponível em:
<http://www.dzo.ufla.br/Roberto/evolucao_nutricao_alimentos.pdf>. Acesso em: 28
abr. 2016.
MECHATRONICS, Naylamp. Tutorial trasmisor de celda de carga HX711, Balanza
Digital. Disponível em: <http://www.naylampmechatronics.com/blog/25_Tutorial-
trasmisor-de-celda-de-carga-HX711-Ba.html>. Acesso em: 08 ago. 2016.
MICROCONTROLANDOS. Introdução ao AVR. Disponível em:
<http://microcontrolandos.blogspot.com.br/2013/07/introducao-ao-avr.html#more>.
Acesso em: 15 abr. 2016.
PEDIGREEŽ . PEDIGREE® Equilíbrio Natural Adulto Raças Médias e
Grandes. Disponível em: <https://www.pedigree.com.br/produtos/adultos/pedigree-
equilibrio-natural-adulto-racas-medias-e-grandes>. Acesso em: 01 maio 2016.

65
PEDIGREEŽ . PEDIGREE® Equilíbrio Natural Adulto Raças Pequenas. Disponível
em: <https://www.pedigree.com.br/produtos/adultos/pedigree-equilibrio-natural-adulto-
racas-pequenas>. Acesso em: 01 maio 2016.
PEDIGREEŽ . PEDIGREE® VITAL- PRO™ FILHOTES RAÇAS MÉDIAS E
GRANDES. Disponível em: <https://www.pedigree.com.br/produtos/filhotes/pedigree-
vital-pro-filhotes-racas-medias-e-grandes>. Acesso em: 01 maio 2016.
PEDIGREEŽ . PEDIGREE® VITAL- PRO™ FILHOTES RAÇAS
PEQUENAS. Disponível em: <https://www.pedigree.com.br/produtos/filhotes/pedigree-
vital-pro-filhotes-racas-pequenas>. Acesso em: 01 maio 2016.
PUBLISHERS, Ee. Troubleshooting load cell applications. Disponível em:
<http://www.ee.co.za/article/troubleshooting-load-cell-applications.html>. Acesso em:
15 ago. 2016.
ROQUE, Balanças São. Moinhos, Torradores, Engenhos e Dispensador:
Dispensador de Cereais Ref. DC-10 Hercules. Disponível em:
<http://balancassaoroque.com.br/flog/album/moinho-e-torradores-engenho-
dispensador-moedor-de-cana-de-pao-ceraiscafe-debulhador-de-milho-araceba-
metvisa-botini-cereal-comercio-de-balancas-sao-roque-sao-paulo/image-dispensador-
de-cereais-ref-dc-10-hercules?id=762305>. Acesso em: 05 nov. 2016.
SAAD, F. M. O. B.; DUARTE, A.; SAAF, C. E. P.; SILVA JUNIOR, J. W.; LIMA,
L. M. S.; LARA, L. B. Aspectos técnicos-comerciais e avaliação da
qualidade de alimentos para cães e gatos. Lavras: UFLA/FAEPE, 2005.
105p.
TUBALDINI, Ricardo. Quantidade de ração para cães e gatos – Quanto dar de
ração? 2014. Disponível em: <http://www.cachorrogato.com.br/cachorros/quantidade-
racao-caes-gatos/>. Acesso em: 24 abr. 2016.
ZUINI, Priscila. Mercado pet supera crise com inovação. 2015. Disponível em:
<http://revistapegn.globo.com/Banco-de-ideias/noticia/2015/10/mercado-pet-supera-
crise-com-inovacao.html>. Acesso em: 21 abr. 2016.

66
Engenharia Mecânica
APÊNDICE
Campinas
2016
Top Related