







Línguas
Páginas
Legal


Os robots no nosso dia-a-dia A Evolução dos Humanoides
MESTRADO INTEGRADO EM ENGENHARIA MECÂNICA
Supervisor: Teresa Duarte
Monitor: Fernando Silva
Tomás Figueiredo Marques up201403294
Pedro Manuel da Silva Oliveira Pinto up201403328
Luís Miguel Cardoso Seixas up201402833
Patrick David Roberto Mills up201403350
Paulo Jorge Leitão e Sousa up201402932
Turma 1M7, Equipa 1M7_01

A EVOLUÇÃO DOS HUMANOIDES 2
A Evolução dos Humanoides
Índice Índice de Figuras ........................................................................................................................... 4
Resumo .......................................................................................................................................... 6
Palavras-chave ............................................................................................................................... 7
Agradecimentos ............................................................................................................................ 8
Introdução ..................................................................................................................................... 9
1. Pré-Robótica ........................................................................................................................ 10
1.1. Evolução dos humanoides ........................................................................................... 10
1.1.1. O Humanoide de Da Vinci ................................................................................... 10
1.1.2. Os autómatos de Jacques Vaucanson ................................................................. 11
1.1.3. Os autómatos de Jaquet-Droz ............................................................................. 12
1.1.4. Elektro ................................................................................................................. 14
2. 30 anos de Robótica ............................................................................................................ 15
2.1. A evolução do movimento dos humanoides ............................................................... 16
2.1.1. Série E .................................................................................................................. 16
2.1.2. Série P .................................................................................................................. 17
2.2. Evolução da robótica na exploração de marte ............................................................ 17
3. Humanoides na Atualidade ................................................................................................. 19
3.1. ASIMO ......................................................................................................................... 19
3.1.1. ASIMO 2000 ......................................................................................................... 19
3.1.2. ASIMO 2002 ......................................................................................................... 22
3.1.3. ASIMO 2005 ......................................................................................................... 23
3.1.4. ASIMO 2007 ......................................................................................................... 26
3.1.5. ASIMO 2011 ......................................................................................................... 27
3.2. Twendy-One ................................................................................................................ 30
3.2.1. Cabeça ................................................................................................................. 31
3.2.2. Torso .................................................................................................................... 31
3.2.3. Braço.................................................................................................................... 32
3.2.4. Mão ..................................................................................................................... 33

A EVOLUÇÃO DOS HUMANOIDES 3
3.3. Humanoides num Contexto Militar ............................................................................. 34
3.3.1. PETMAN ............................................................................................................... 34
3.3.2. Atlas ..................................................................................................................... 36
3.4. Androides .................................................................................................................... 38
3.4.1. Actroid ................................................................................................................. 39
3.4.2. DER-2 ................................................................................................................... 40
3.4.3. Geminoid HI-4 ..................................................................................................... 41
3.4.4. HRP-4C ................................................................................................................. 41
4. Futuro da Robótica .............................................................................................................. 42
4.1. Novos Postos Automatizados ...................................................................................... 43
4.1.1. Astronautas ......................................................................................................... 43
4.1.2. Soldado ................................................................................................................ 44
4.1.3. Professor ............................................................................................................. 44
4.1.4. Baby-sitters.......................................................................................................... 45
4.1.5. Músicos ............................................................................................................... 45
4.2. Os próximos desenvolvimentos da robótica ............................................................... 46
4.2.1. Inteligência Artificial ............................................................................................ 46
4.2.2. Músculos sintéticos ............................................................................................. 47
4.3. Impacto Social ............................................................................................................. 47
Conclusão .................................................................................................................................... 48
Bibliografia .................................................................................................................................. 49

A EVOLUÇÃO DOS HUMANOIDES 4
Índice de Figuras
Figura 1 - O Homem Vitruviano ................................................................................................... 10
Figura 2 – O Humanoide de Da Vinci ........................................................................................... 10
Figura 3 - "O músico", "O pato" e "O flautista" (da esquerda para a direita) ............................ 11
Figura 4 - "O pato" ....................................................................................................................... 12
Figura 5 - "O desenhista", "O músico" e "O escritor" (da esquerda para a direita) .................... 13
Figura 6 - "Elektro" ...................................................................................................................... 14
Figura 7 – “Fredy II” ..................................................................................................................... 15
Figura 8 - "silver arm”.................................................................................................................. 15
Figura 9 - Série E (modelos 1, 2 e 3) ............................................................................................ 16
Figura 10 - Série P (modelos 1,2 e 3) ........................................................................................... 17
Figura 11 - rover Curiosity ........................................................................................................... 18
Figura 12 - Distância percorrida por cada Rover ......................................................................... 18
Figura 13 - Evolução do Humanoide ASIMO (2000-2011) ........................................................... 19
Figura 14 - ASIMO 2000 ............................................................................................................... 20
Figura 15 - Dimensões ASIMO 2000 ............................................................................................ 20
Figura 16 - Ajuste do Centro de Gravidade ................................................................................. 21
Figura 17- Reconhecimento de posturas e gestos ...................................................................... 22
Figura 18 - Reconhecimento facial .............................................................................................. 22
Figura 19 - ASIMO num escritório ............................................................................................... 23
Figura 20 - Cartão de Identificação ASIMO ................................................................................. 23
Figura 21 - Dimensões ASIMO 2005 ............................................................................................ 24
Figura 22 - Dimensões do passo do ASIMO ................................................................................ 25
Figura 23 - Força de reação ao chão ........................................................................................... 25
Figura 24 - Estação de recarga ASIMO ........................................................................................ 26
Figura 25 - demonstração ASIMO ............................................................................................... 26
Figura 26 - ASIMO 2011 ............................................................................................................... 27
Figura 27 - ASIMO 2011 (vista frontal e perfil) ............................................................................ 28
Figura 28 - ASIMO a utilizar linguagem gestual .......................................................................... 28
Figura 29 - ASIMO a abrir garrafa e a encher copo ..................................................................... 28
Figura 30 - Deslocação ASIMO .................................................................................................... 29
Figura 31 - Twendy-One .............................................................................................................. 30
Figura 32 - Cabeça Twendy-One ................................................................................................. 31
Figura 33 - Proporções Twendy-One ........................................................................................... 32
Figura 34 - Braço e ombro Twendy-One ..................................................................................... 32
Figura 35 - Mão Twendy-One ...................................................................................................... 33
Figura 36 - PETMAN .................................................................................................................... 36
Figura 37 - Atlas ........................................................................................................................... 36
Figura 38 - Atlas Cabeça e Torso ................................................................................................. 37
Figura 39 - Atlas, Graus de Liberdade ......................................................................................... 37
Figura 40 - Androides na ficcção científica (I, Robot 2004) ......................................................... 39
Figura 41 - Actroid ....................................................................................................................... 39
Figura 42 - Detalhes Actroid ........................................................................................................ 40
Figura 43 - DER-2 ......................................................................................................................... 40
Figura 44 - Geminoid HI-4 ........................................................................................................... 41
A EVOLUÇÃO DOS HUMANOIDES 5
Figura 45 - HRP-4C ....................................................................................................................... 41
Figura 46 - Vista Frontal .............................................................................................................. 42
Figura 47 - HRP-4C Vista de Trás ................................................................................................. 42
Figura 48 - Valkyrie 1 ................................................................................................................... 43
Figura 49 - Atlas ........................................................................................................................... 44
Figura 50 - Pepper ....................................................................................................................... 45
Figura 51 - Bone, baixista ............................................................................................................ 45
Figura 52 - Fingers, guitarrista ..................................................................................................... 45
Figura 53 - Stickboy, baterista ..................................................................................................... 46
A EVOLUÇÃO DOS HUMANOIDES 6
Resumo
No âmbito do Projeto FEUP foi proposto um trabalho cuja temática era a “Os robots no
nosso dia-a-dia”. Dentro deste tema, o grupo escolheu abordar “A Evolução dos Humanoides”,
pois são de grande importância no ramo da Engenharia Mecânica, uma vez que o
desenvolvimento deste tipo de robô é o que implica maior conhecimento nesta área. Será
enquadrado o desenvolvimento dos robôs humanoides num contexto histórico, científico e
técnico, com particular ênfase na atualidade e no futuro.
Serão, inicialmente, abordados os tópicos daa pré-robótica e dos autómatos mais
primitivos, os antecessores dos primeiros robôs. Estes primeiros autómatos eram movidos
através de sistemas puramente mecânicos, constituídos principalmente por molas e rodas
dentadas, e constituíram o primeiro e mais distante passo da movimentação autómata
antropomórfica.
De seguida serão mencionados os avanços mais relevantes feitos nos passados 30 anos
na robótica. Estes servirão como introdução para os desenvolvimentos mais atuais deste ramo.
Em continuação, serão explorados os robôs humanoides na atualidade, aos quais foi
dada uma elevada atenção, uma vez que o tema proposto para o trabalho era “Os robots no
nosso dia-a-dia”, e que o desenvolvimento contemporâneo destes foi o mais decisivo e
relevante. Neste trabalho, foi dada uma forte atenção ao robô ASIMO, pois este é considerado
um dos mais avançados humanoides do nosso tempo. Foram escolhidos também robôs-tipo,
isto é, robôs representativos e com qualidades bastante diferentes, que permitam mostrar os
atuais standards da robótica.
Foi feita também uma breve abordagem ao tema a partir duma perspetiva futurista,
baseada em projetos que estão a ser desenvolvidos na atualidade ou que se esperam que
sejam melhor explorados num futuro próximo. Com o desenvolvimento de novas tecnologias,
prevê-se grandes avanços nesta área, como por exemplo a evolução da Inteligência Artificial,
os quais irão tornar a vida da humanidade mais fácil e cómoda, mas que poderão ter
consequências nefastas tal como o aumento da taxa de desemprego devido à substituição das
pessoas pelos robôs.

A EVOLUÇÃO DOS HUMANOIDES 7
Palavras-chave
Robô
Humanoide
Inteligência Artificial
Sistemas Inteligentes
Pré Robótica
Androide
Ginoide
Autómatos
Pontos de mobilidade
Graus de liberdade
Software
Hardware
Servomotores
Força G
Antropomorfologia
Articulações
Fonte de alimentação
Simbiose
Atuadores
Impediência mecânica passiva
Inércia
Bio mimética

A EVOLUÇÃO DOS HUMANOIDES 8
Agradecimentos
Gostaríamos de agradecer a todos aqueles que nos apoiaram na realização deste
projeto, nomeadamente, a professora supervisora Teresa Duarte e o monitor Fernando Silva,
que nos apoiaram e sobretudo orientaram na realização do trabalho.
As visitas guiadas que os professores António Mendes Lopes e Armando Sousa nos
fizeram foram fundamentais na consolidação dos nossos conhecimentos sobre a Robótica.
Agradecemos também ao coordenador do Projeto FEUP, Armando Sousa, por nos
terem proposto este desafio, que, não só nos ajudou a conhecermo-nos melhor enquanto
trabalhámos em equipa, como também nos proporcionou a obtenção de um conhecimento
claro do tema.

A EVOLUÇÃO DOS HUMANOIDES 9
Introdução
A robótica é um ramo que envolve engenharia mecânica, eletrotécnica e informática e que lida com a conceção, construção, operação e aplicação de robôs. Esta tecnologia sofreu uma evolução exponencial no seculo XX, já que foi uma necessidade que a sociedade impôs sob o ramo da Engenharia. Nos dias de hoje, a robótica é útil em diversas áreas, por exemplo, na automação em processos de fabrico, na sua utilização em ambientes perigosos, ou mesmo na resolução dos problemas mais simples do nosso quotidiano.
Apesar de haver grande diversificação nos tipos de robôs eles todos se assemelham
em três aspetos:
Todos os robôs têm uma construção mecânica que lida com os problemas do ambiente que os rodeia. Para a resolução destes problemas utiliza-se essencialmente uma componente física que soluciona questões como a movimentação, o transporte, a elevação ou mesmo voar, nadar ou correr. Basicamente “a forma segue a função”.
Todos os robôs têm uma componente elétrica sob a forma de fios, sensores, circuitos, baterias. É sempre necessário pelo menos alguma corrente elétrica nem que seja para o iniciar e executar as funções básica. Geralmente esta funcionalidade é utlizada no controlo de motores.
Todos os robôs têm algum tipo de programação associado que permite satisfazer as necessidades do controlo humano. Mesmo com uma excelente componente elétrica/mecânica uma carência de programação levaria a um mau desempenho nas funções desejadas. Existem três tipos de programação robótica, por controlo remoto, inteligência artificial, e os híbridos. Os robôs programados por controlo remoto só realizam uma função após o sinal do controlo humano. Os robôs programados por inteligência artificial conseguem resolver os problemas por conta própria e portanto não necessitam de controlo humano. Os híbridos são um tipo de robôs tanto programados por controlo remoto como por inteligência artificial.
Um dos grandes objetivos da robótica é responder às necessidades da humanidade e
para isso é importante aproximar estas tecnologias às nossas capacidades, por esta razão
foram desenvolvidos os humanoides. O humanoide é uma espécie de robô que se assemelha á
figura humana, tendo como objetivo aproximar-se o mais possível das funções motoras,
sensoriais e psicológicas do ser humano.
A EVOLUÇÃO DOS HUMANOIDES 10
1. Pré-Robótica
1.1. Evolução dos humanoides
Desde a antiguidade grega que nos são relatados histórias da criação de mecanismos capazes de executar tarefas sozinhos e apesar de essa não ser a nossa definição de robótica nos dias de hoje continua a ser uma grande aproximação. Como esta tecnologia naquela altura não fornecia nenhum uso funcional tornou-se então simplesmente uma área que só os mais intelectos se interessavam e apenas pela curiosidade do saber. Estes mecanismos são frequentemente designados como autómatos, máquinas móveis que realizam uma certa função para o qual estão programadas de forma totalmente mecânica.
1.1.1. O Humanoide de Da Vinci
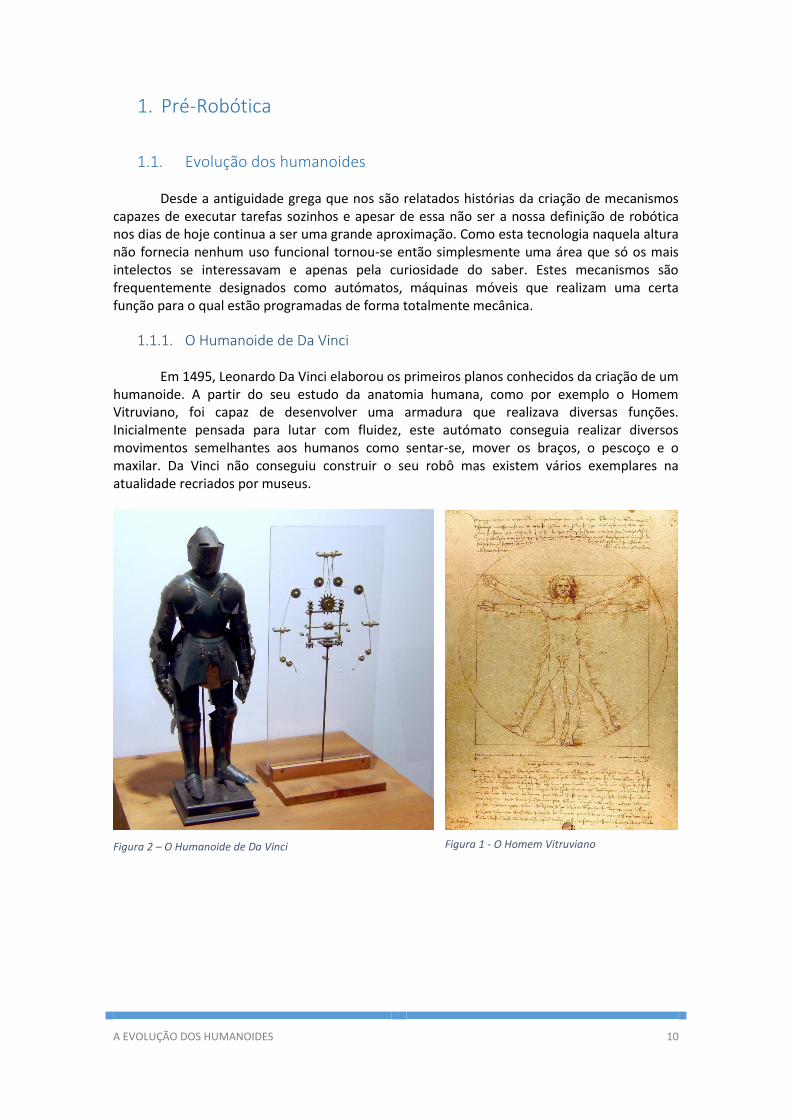
Em 1495, Leonardo Da Vinci elaborou os primeiros planos conhecidos da criação de um humanoide. A partir do seu estudo da anatomia humana, como por exemplo o Homem Vitruviano, foi capaz de desenvolver uma armadura que realizava diversas funções. Inicialmente pensada para lutar com fluidez, este autómato conseguia realizar diversos movimentos semelhantes aos humanos como sentar-se, mover os braços, o pescoço e o maxilar. Da Vinci não conseguiu construir o seu robô mas existem vários exemplares na atualidade recriados por museus.
Figura 2 – O Humanoide de Da Vinci Figura 1 - O Homem Vitruviano
A EVOLUÇÃO DOS HUMANOIDES 11
1.1.2. Os autómatos de Jacques Vaucanson
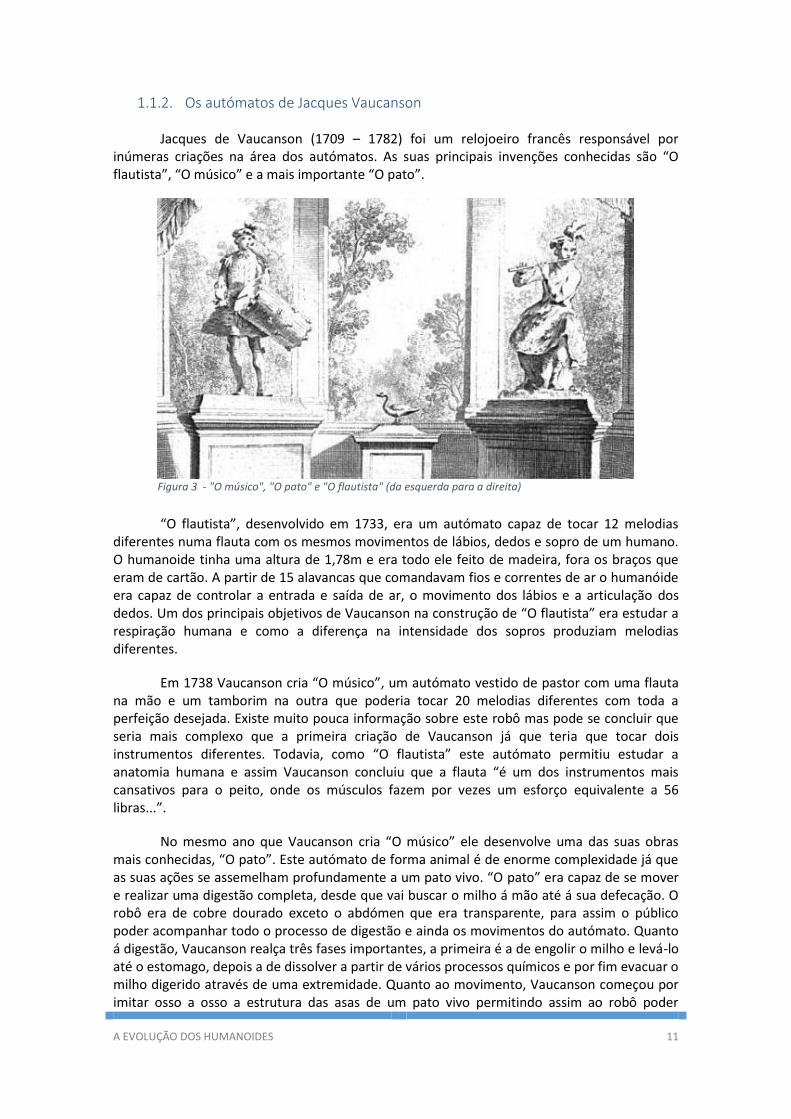
Jacques de Vaucanson (1709 – 1782) foi um relojoeiro francês responsável por inúmeras criações na área dos autómatos. As suas principais invenções conhecidas são “O flautista”, “O músico” e a mais importante “O pato”.
“O flautista”, desenvolvido em 1733, era um autómato capaz de tocar 12 melodias diferentes numa flauta com os mesmos movimentos de lábios, dedos e sopro de um humano. O humanoide tinha uma altura de 1,78m e era todo ele feito de madeira, fora os braços que eram de cartão. A partir de 15 alavancas que comandavam fios e correntes de ar o humanóide era capaz de controlar a entrada e saída de ar, o movimento dos lábios e a articulação dos dedos. Um dos principais objetivos de Vaucanson na construção de “O flautista” era estudar a respiração humana e como a diferença na intensidade dos sopros produziam melodias diferentes.
Em 1738 Vaucanson cria “O músico”, um autómato vestido de pastor com uma flauta na mão e um tamborim na outra que poderia tocar 20 melodias diferentes com toda a perfeição desejada. Existe muito pouca informação sobre este robô mas pode se concluir que seria mais complexo que a primeira criação de Vaucanson já que teria que tocar dois instrumentos diferentes. Todavia, como “O flautista” este autómato permitiu estudar a anatomia humana e assim Vaucanson concluiu que a flauta “é um dos instrumentos mais cansativos para o peito, onde os músculos fazem por vezes um esforço equivalente a 56 libras...”.
No mesmo ano que Vaucanson cria “O músico” ele desenvolve uma das suas obras mais conhecidas, “O pato”. Este autómato de forma animal é de enorme complexidade já que as suas ações se assemelham profundamente a um pato vivo. “O pato” era capaz de se mover e realizar uma digestão completa, desde que vai buscar o milho á mão até á sua defecação. O robô era de cobre dourado exceto o abdómen que era transparente, para assim o público poder acompanhar todo o processo de digestão e ainda os movimentos do autómato. Quanto á digestão, Vaucanson realça três fases importantes, a primeira é a de engolir o milho e levá-lo até o estomago, depois a de dissolver a partir de vários processos químicos e por fim evacuar o milho digerido através de uma extremidade. Quanto ao movimento, Vaucanson começou por imitar osso a osso a estrutura das asas de um pato vivo permitindo assim ao robô poder
Figura 3 - "O músico", "O pato" e "O flautista" (da esquerda para a direita)

A EVOLUÇÃO DOS HUMANOIDES 12
chapinhar na água. Um dos objetivos do criador era que o público conseguisse perceber a mecânica d´”O pato” e por isso mesmo é que permitiu aos espetadores verem o interior do robô e todo o sistema que processa as ações desejadas.
As suas criações acabaram todas por serem destruídas no seculo XIX, “O pato” foi queimado durante a sua passagem pela Rússia e os outros dois autómatos acreditasse que foram perdidos durante a revolução francesa.
Jacques de Vaucanson tinha ainda o projeto de criar um humanoide capaz de realizar todas as funções biológicas de um ser humano, tal como o movimento, a circulação de sangue, a respiração e a digestão. Infelizmente o criador acabou por falecer em 1782 sem conseguir realizar este fabuloso autómato.
1.1.3. Os autómatos de Jaquet-Droz
Os autómatos de Jaquet-Droz são três máquinas construídas entre 1768 e 1774 por Pierre Jaquet-Droz e seus filhos. Este trio é constituído por um robô capaz de desenhar, “O desenhista”, um capaz de escrever, “O escritor”, e um capaz de tocar órgão, “O músico”. Muitos consideram estes autómatos ascendentes remotos dos computadores modernos. Estes humanoides são comandados por seis grandes molas que permitiam que atuassem durante uma hora.
Figura 4 - "O pato"

A EVOLUÇÃO DOS HUMANOIDES 13
O primeiro autómato, “O escritor”, é constituído por 6000 peças e tem a aparência de
uma criança de três anos que segura na mão direita uma pena de pato e na mão esquerda segura o papel para não se mover. Também é capaz de mover a cabeça e os olhos á medida que vai escrevendo e molhar a pena no tinteiro conforme a necessidade. Este humanoide é considerado o mais próximo de um computador atual pois possui uma espécie de programa e memória que consegue imitar vários tipos de letra e gravar até 40 cartas.
O segundo autómato é “O desenhista” e a sua fisionomia é idêntica á do primeiro mas difere em que a sua função é desenhar diversas figuras para o qual está programado. Ele funciona por meio de um sistema de cames, que codifica os movimentos da mão em duas dimensões. O robô é capaz de realizar desenhos com a perfeição de um artista e ainda tem a curiosidade de soprar a grafite do papel sempre que é necessário. Tal como o primeiro, este autómato segue com a cabeça o desenho á medida que vai movendo o lápis e afasta por vezes a mão para contemplar a sua obra. “O desenhista” está programado para realizar quatro desenhos, "A borboleta guiada pelo amor", "O meu cãozinho", "O perfil de Louis XV " e "O perfil de Louis XVI e Marie-Antoinette ".
O último autómato é “O músico” e tem a particularidade de ao contrário dos dois últimos apresentar-se como uma criança do sexo feminino. Este robô tocava um órgão onde tinha a capacidade de reproduzir 18 melodias diferentes. Este humanoide é o mais natural dos três já que realizava diversas funções muito próximas da realidade, tais como, inclinar a cabeça para olhar para o publico, realizar uma vénia no fim de cada atuação e o seu peito enchia de uma maneira tão regular que se assemelhava profundamente á respiração humana.
Atualmente os três autómatos encontram-se num museu e conseguem realizar exatamente as mesmas funções para os quais estavam programados no seculo XVII.
Figura 5 - "O desenhista", "O músico" e "O escritor" (da esquerda para a direita)

A EVOLUÇÃO DOS HUMANOIDES 14
1.1.4. Elektro
“Elektro” foi o primeiro robô humanoide da era moderna e ao contrário dos últimos autómatos que foram falados este robô contem várias componentes elétricas e consegue realizar diversas funções só possíveis com os avanços da ciência daquela altura. Foi construído nos Estados Unidos, mais propriamente em Mansfield na Westinghouse Electric Corporation, entre 1937 e 1938. O humanoide tinha uma imponente altura de 2,10m e cerca de 120kg. Ele conseguia realizar 26 movimentos e poderia: caminhar por comando de voz, falar cerca de 700 palavras, fumar cigarros, explodir balões, mover a cabeça e os braços e ainda distinguir cores. “Elektro” funcionava por controlo de voz, já que cada palavra emite uma certa vibração que de seguida era transformada em impulsos elétricos aos quais onze motores respondiam. O humanoide era também capaz de responder a certas cores já que poderia as distinguir através de uma célula fotoelétrica inserida nos seus olhos. Uma das maiores atrações de “Elektro” era a sua capacidade de discurso, apesar da sua compreensível dificuldade ele poderia falar durante cerca de um minuto e dizia á volta de 75 palavras. O robô ainda tinha oito discos onde poderiam ser gravadas palestras até cerca de 20 minutos e tem a particularidade de através
das vibrações do som mover os lábios á medida que ia falando.
“Elektro” foi uma das maiores atrações dos anos 30 e correu várias feiras para ter a oportunidade de mostra ao público as suas habilidades. O humanoide conseguiu sobreviver ate os dias de hoje e neste momento encontra-se no Mansfield Memorial Museum.
Figura 6 - "Elektro"
A EVOLUÇÃO DOS HUMANOIDES 15
2. 30 anos de Robótica
Os robôs existem há centenas de anos mas foi no
seculo 20 que se deu uma seria evolução dos mais
generalizados robôs, Freddy e Freddy II, criados no reino
unido pelo departamento de inteligência mecânica e
perceção, foram dos primeiros robôs a integrar visão,
manipulação e sistemas inteligentes, eram capazes de
montar blocos de madeira no período de várias horas,
foram também inovadores na utilização de comparação
de gráficos no reconhecimento de partes visuais.
Em 1974 foi construído o “the silver arm” uma mão
robótica capaz de replicar com alguma precisão os
movimentos da mão humana.
Em 1981, Takeo Kanade, construiu o primeiro
“Direct Drive Arm”, que constitui um grande avanço na
robótica devido a conter os motores do braço em si
próprio, eliminava correias e transmissões, permitindo um
movimento mais livre e preciso do robô.
Em 1984, foi lançado o Wabot-2, um robô capaz de
tocar órgão como um humano, sendo capaz de ler
partituras.
A empresa Honda, começou o seu trabalho de
criação de robôs capazes de replicar emoções humanas e interagir com estes a 1986, tendo
evoluído os seus robôs até ao conhecido ASIMO.
Em 1989, os maiores mestres de xadrez do mundo foram derrotados por programas
tecnológicos.
Em 1994 a “cyberknife” foi apresentada como uma forma eficaz de operar tumores,
com uma precisão comparável a humana. Em 1997, após 83 dias de exploração espacial o
rover “sojourner”, ficou inutilizado, superando bem a espectativa de 7 dias de funcionamento,
inicialmente definida, no período de tempo em que esteve activo, explorou a superfície da
marte tendo feito validos contributos para o conhecimento de marte.
Em 2000 Honda, revelou ASIMO o mais sofisticado robô da empresa, capaz de correr,
andar e conversar com humanos
Figura 7 – “Fredy II”
Figura 8 - "silver arm”

A EVOLUÇÃO DOS HUMANOIDES 16
2.1. A evolução do movimento dos humanoides
Existem vários criadores de robôs humanoides, entre eles destaca-se a empresa
Honda, que proporcionou uma enorme evolução ao longo de quase 2 décadas, sendo
ainda uma empresa que dedica bastante tempo a evolução da robótica ligada aos
humanoides. Entre os vários robôs e protótipos criados pela empresa destacam-se
alguns que foram cruciais para a sua evolução bem como para o nosso conhecimento
da engenharia ligada aos humanoides:
2.1.1. Série E
E1 (1987 - 1991) O primeiro protótipo, que deu origem aos posteriores, andava a uma velocidade da 0,25 km/h, com um movimento destinto sobre 2 pernas.
E2 (1987 - 1991) O primeiro movimento dinâmico a 1.2 km/h imitando o andar humano
E3 (1987 - 1991) Um aparelho semelhante a pernas anda a 3 km/h
E4 (1991 - 1993) Aumentou-se o tamanho das pernas do robô para 40 cm, para melhor imitar o andar apreçado humano.
E5 (1991 - 1993) O primeiro modelo de locomoção autónoma tinha uma grande cobertura sob a cabeça.
E6 (1991 - 1993) Controlo de equilíbrio autónomo ao descer e subir escadas, ou ultrapassar obstáculos
Figura 9 - Série E (modelos 1, 2 e 3)

A EVOLUÇÃO DOS HUMANOIDES 17
2.1.2. Série P
P1 (1993 - 1997) Primeiro protótipo de robô humanoide, com parte superior do corpo
P2 (1993 - 1997) Chocou o público com um andar muito semelhante ao humano.
P3 (1993 - 1993) A evolução em tamanho e peso marcaram este robô, em relação ao P2
2.2. Evolução da robótica na exploração de marte
Os robôs detêm um papel fundamental e obvio na exploração espacial, pela sua
resistência a condições adversas, bem como a facilidade (em relação aos humanos) no seu
transporte, na contemporaneidade atual, é importante referir o esforço na exploração
marciana, sendo a atual fronteira na humanidade. É de referir vários robôs que foram cruciais
para o nosso conhecimento do planeta vermelho, bem como a historia que levou aos robôs
mais atuais,
Mars 2 e Mars 3, foram dois rover pertencentes a União Soviética, foram dos primeiros a
serem lançados, não tendo sucesso na aterragem.
Sojourner rover, Mars Pathfinder, rover americano, aterrou com sucesso a 4 de julho de
1997, perdendo-se o contacto a 27 de Setembro de 1997
Beagle 2, Planetary Undersurface Tool, foi uma tentativa falhada de lançamento de um rover
da agência especial europeia, perdendo-se o contacto na aterragem.
Spirit (MER-A),lançado a 10 de junho de 2003 aterrou em marte a 4 de janeiro de 2004.
Spirit viajou quase 7.73 km), sobre a superfície de marte, tendo depois ficado com as rodas
presas em areia.
Opportunity (MER-B),um rover americano, lançado a 7 de julho de 2003, aterrou em marte a
25 de janeiro de 2004. Este rover bateu o recorde de longevidade á superfície de marte, e de
distância percorrida fora da terra
Figura 10 - Série P (modelos 1,2 e 3)
A EVOLUÇÃO DOS HUMANOIDES 18
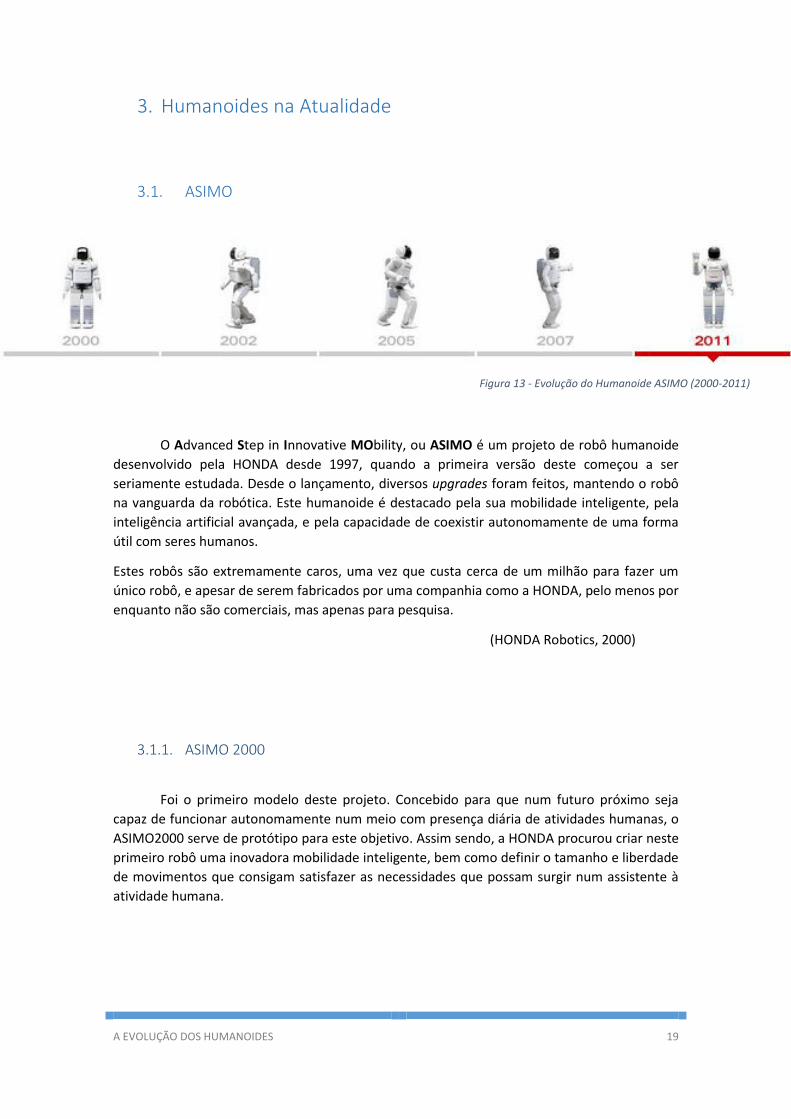
Figura 11 - rover Curiosity
O rover Americano Curiosity, aterrou em marte no dia 6 de agosto de 2012, tendo sido
lançado a 26 de novembro de 2011, estando ainda ativo e funcional.
Figura 12 - Distância percorrida por cada Rover
A EVOLUÇÃO DOS HUMANOIDES 19
Figura 13 - Evolução do Humanoide ASIMO (2000-2011)
3. Humanoides na Atualidade
3.1. ASIMO
O Advanced Step in Innovative MObility, ou ASIMO é um projeto de robô humanoide
desenvolvido pela HONDA desde 1997, quando a primeira versão deste começou a ser
seriamente estudada. Desde o lançamento, diversos upgrades foram feitos, mantendo o robô
na vanguarda da robótica. Este humanoide é destacado pela sua mobilidade inteligente, pela
inteligência artificial avançada, e pela capacidade de coexistir autonomamente de uma forma
útil com seres humanos.
Estes robôs são extremamente caros, uma vez que custa cerca de um milhão para fazer um
único robô, e apesar de serem fabricados por uma companhia como a HONDA, pelo menos por
enquanto não são comerciais, mas apenas para pesquisa.
(HONDA Robotics, 2000)
3.1.1. ASIMO 2000
Foi o primeiro modelo deste projeto. Concebido para que num futuro próximo seja
capaz de funcionar autonomamente num meio com presença diária de atividades humanas, o
ASIMO2000 serve de protótipo para este objetivo. Assim sendo, a HONDA procurou criar neste
primeiro robô uma inovadora mobilidade inteligente, bem como definir o tamanho e liberdade
de movimentos que consigam satisfazer as necessidades que possam surgir num assistente à
atividade humana.

A EVOLUÇÃO DOS HUMANOIDES 20
Especificações-
Peso 52 Kg Altura 120 Cm
Largura 45 Cm Profundidade 44 Cm
Velocidade Andar: 1.6 km/h Bateria 38.4 V/10 Ah/ 7.7 kg
Autonomia 30 Min. Graus de Liberdade 26 GD- cabeça: 2; braço: 5×2; mão: 1×2;
perna: 6×2 Motores 26 Servomotores Câmaras 2 câmaras na cabeça/ 1 no torso
A HONDA definiu o ASIMO como tendo um “tamanho pequeno e prático”, sendo fácil
perceber porquê. Com 120 cm de altura, 45 cm de largura e 26 graus de liberdade, o pequeno
robô apresenta o tamanho ideal e a liberdade de movimentos necessária para realizar diversas
tarefas de auxílio num ambiente executivo, uma vez que é capaz de alcançar os mais variados
objetos e auxiliar os trabalhadores humanos.
Ao apostar na construção de um robô mais pequeno, consegue-se uma otimização
tanto de custos, pois a matéria-prima a ser utilizada será menor, como de bateria, visto que
um robô pequeno consome menos, permitindo uma autonomia superior e menos tempo gasto
em recargas.
Figura 14 - ASIMO 2000 Figura 15 - Dimensões ASIMO 2000

A EVOLUÇÃO DOS HUMANOIDES 21
Figura 16 - Ajuste do Centro de Gravidade
Mobilidade i-Walk- esta tecnologia de movimento evoluída a partir dos modelos
anteriores (principalmente P2 e P4) apresenta uma capacidade de movimentação mais suave e
natural, sendo mais semelhante com a do homem. Para além de ser dotado de uma
deslocação mais articulada, o ASIMO é capaz de criar padrões de movimento em tempo real
enquanto se desloca. Assim sendo, é capaz de adequar a sua movimentação, ora andando
mais depressa, ora mais devagar, e mudar de direção sem qualquer padrão predefinido. Uma
outra capacidade revolucionária neste movimento é o “controlo e previsão do movimento”: O
autómato da HONDA, durante a própria deslocação, é capaz de se inclinar de modo a adequar
o seu próprio centro de gravidade, de uma forma fluida e natural, assemelhando o seu
caminhar ao dos seres humanos, de uma maneira nunca antes conseguida (ver figura 16).
(HONDA Robotics, 2000)

A EVOLUÇÃO DOS HUMANOIDES 22
Figura 18 - Reconhecimento facial Figura 17- Reconhecimento de posturas e gestos
3.1.2. ASIMO 2002
No ano 2002, foram feitas inúmeras melhorias ao nível ao software do robô, tornando
a sua interação com as pessoas muito mais avançada: dando à câmara localizada na cabeça do
robô novas capacidades de reconhecimento, o ASIMO passou a ser capaz de identificar caras,
gestos e posturas de humanos. Apresentam-se em seguida as principais melhorias de
inteligência feitas em 2002:
1-Reconhecimento de movimento de objetos: usando informação visual adquirida pela
câmara, o ASIMO consegue detetar os movimentos em simultâneo de múltiplos objetos;
2-Reconhecimento de posturas e gestos: usando informação visual, o robô consegue
interpretar o movimento e posicionamento de uma mão para receber ordens, como para onde
ir ou para parar (figura 17).
3-Reconhecimento do meio: usando informação visual, o robô consegue processar o que
existe no local onde se encontra, de modo a evitar obstáculos e colisões
4-Capacidade de distinguir sons: A habilidade de distinguir sons foi melhorada, tornando o
ASIMO agora capaz de identificar a voz humana, e de a separar do ruído do meio onde esteja.
5-Reconhecimento facial: mesmo com um ser humano a mover-se, o ASIMO consegue
identificar rostos (figura 18).
(HONDA Robotics, 2002)

A EVOLUÇÃO DOS HUMANOIDES 23
Figura 19 - ASIMO num escritório Figura 20 - Cartão de Identificação ASIMO
3.1.3. ASIMO 2005
O segundo modelo do projeto ASIMO surge para cumprir o principal objetivo
procurados pelo primeiro ASIMO: esta nova versão do pequeno robô é capaz de funcionar
autonomamente num ambiente com a presença normal da vida humana, nomeadamente um
escritório. Sendo prático, funcional e inteligente a cumprir as tarefas que lhe foram
programadas, também é mais apto a criar soluções automaticamente com o meio físico em
seu redor, desde que este tenha as condições para o seu funcionamento, como marcas
refratárias no chão e rede wireless com o software adequado.
Esta habilidade de interagir por si só em sintonia com as pessoas e o espaço físico em seu
redor foi inovadora. Entre outras interações, o ASIMO é capaz de:
1. Identificar uma pessoa que transporte consigo um cartão de identificação ASIMO
(figura 20), auxiliando-a ou acompanhando-a de acordo com o que foi programado no
cartão;
2. Localizar a posição exata da pessoa e movimentar-se adequadamente em relação a
esta: ao comunicar, o ASIMO desloca-se de modo a ficar cara-a-cara com a pessoa, e
ao caminhar com esta, o autómato adequa a velocidade de modo a não deixar a
pessoa para trás;
3. Cumprimentar as pessoas ao passar por elas;
4. Pegar, receber em mãos, transportar e pousar uma bandeja própria sem deixar cair ou
entornar o que se encontra nesta (figura 19);
5. Utilizar e transportar um carrinho de mão, mesmo quando o movimento deste é
perturbado (figura 19) .
(Honda Robotics, 2005)

A EVOLUÇÃO DOS HUMANOIDES 24
Figura 21 - Dimensões ASIMO 2005
Especificações-
Peso 54 Kg Altura 130 Cm
Largura 45 Cm Profundidade 37 Cm
Velocidade Andar: 2.5 km/h; Correr: 6 km/h Bateria 51.8 V/ 6 kg
Autonomia 40 a 60 Min. Graus de Liberdade 34 GD- cabeça: 3; braço: 7×2; mão: 2×2;
torso: 1; perna: 6×2 Motores 34 Servomotores Câmaras 2 Câmaras na cabeça
Outros Sensores 1 Sensor ultrassónico/ 1 Sensor terrestre
(HONDA Robotics, 2005)
Entre as diversas modificações,
é de notar a evolução de uma bateria
de níquel-hidreto metálico para uma
bateria de lítio, sendo esta mais leve,
eficiente e com maior autonomia, e o
aumento da liberdade de movimentos,
uma vez que este robô possui mais 8
servomotores, tendo mais 8 graus de
liberdade do que o seu antecessor.
Outros melhoramentos são a melhoria
das câmaras visuais, sendo que estas
fornecem mais informação e a
instalação de sensores: um
ultrassónico para detetar os obstáculos
até 3 metros, mesmo aqueles que não
são revelados visualmente como o
vidro, e um sensor terrestre, que
deteta a superfície e os obstáculos até
2 metros ao mesmo tempo que
identifica marcas no chão para ajustar
a sua velocidade e posição.
A EVOLUÇÃO DOS HUMANOIDES 25
Figura 23 - Força de reação ao chão Figura 22 - Dimensões do passo do ASIMO
Melhoria na deslocação: A funcionalidade i-Walk do anterior modelo foi superada
neste novo ASIMO. Melhorias no modo de caminhar permitiram diminuir a pressão entre o pé
e o chão, o que resultou na diminuição do risco de escorregar e cair. Este aumento de
estabilidade possibilitou programar o robô para conseguir correr, tendo 0.08 segundos entre
passos em que ambos os pés estão no ar. Para atingir tal coordenação de movimentos foi
necessário um exaustivo estudo sobre a força G exercida no robô durante todo o salto
(imagem 9). Apesar de gastar mais bateria, o robô consegue correr em linha reta até a
velocidade máxima de 6 km/h (imagem 10), sendo também possível programar o robô para
correr em círculos, até uma velocidade de 5 km/h.
Outra inovação importante foi a instalação da “Função de Desvio Automático”.
Utilizando os sensores ultrassónicos e terrestres, o robô não só é capaz de detetar obstáculos
mesmo que estes se encontrem em movimento, mas também de selecionar uma rota
alternativa para chegar a determinado local já pré-programado. Esta funcionalidade funciona
mesmo se na nova rota considerada aparecer um novo obstáculo, sendo que neste caso o robô
calcula uma terceira rota para chegar ao destino.
(HONDA Robotics, 2005)
A EVOLUÇÃO DOS HUMANOIDES 26
Figura 24 - Estação de recarga ASIMO
3.1.4. ASIMO 2007
O progresso da inteligência tecnológica da HONDA tornou possível que dois ou mais
ASIMOs atuem independentemente, e de acordo com determinada situação, juntem esforços
e colaborem para atingir determinado objetivo (figura 23). Através da ligação wireless entre
múltiplos robôs, estes são capazes de partilhar informação do progresso do trabalho para ser
processada por outros autómatos, que iram processar a informação, tendo em base a sua
atual posição e a dos outros robôs, a posição do objetivo e a bateria disponível de cada robô
para determinar que tarefas tem de ser cumpridas, e definir um padrão para as cumprir.
Outras melhorias tecnológicas foram feitas no pequeno robô em 2007. Agora, o robô
tem as aptidões de calcular autonomamente a posição e direção de uma pessoa que vai de
encontro a este, e desviar-se
automaticamente de modo a que
ambos possam continuar o seu
caminho (no caso de não haver espaço
suficiente, o ASIMO dá espaço e faz
sinal para a pessoa passar, continuando
depois o seu próprio caminho). É
também capaz de analisar a própria
bateria, e quando esta chega a um
limite pré-programado, o robô dirige-se
autonomamente para uma das
estações de recarga desenvolvidas
neste ano (figura 24), que estejam
disponíveis.
Figura 25 - demonstração ASIMO
A EVOLUÇÃO DOS HUMANOIDES 27
Figura 26 - ASIMO 2011
3.1.5. ASIMO 2011
Tal como foi definido pelos seus criadores, “O novo ASIMO avançou agora desde uma
“máquina automática” para uma “máquina autónoma”, com a capacidade de tomar decisões
que determinem o seu desempenho, de acordo com o que está ao seu redor, quer esteja
parado, quer esteja em movimento.”
(HONDA Robotics, 2011).
No início do desenvolvimento do projeto implicou um profundo estudo nos anteriores
robôs e projetos, que levou à identificação de 3 fatores necessários aperfeiçoar para
desenvolver o novo
1- Capacidade superior de equilíbrio, que permitam ao robô marchar, correr ou
caminhar, mantendo a sua postura a qualquer instante que este mexa ou levante a
perna.
2- Capacidade de reconhecimento externo, fornecido através de diversos sensores, que
possibilitem o robô de processar aquilo que acontece ao seu redor, tal como
movimento de outras pessoas à sua volta ou existência de barreiras.
3- A capacidade de gerar um comportamento autónomo, que permite que o robô faça
previsões a partir da informação adquirida e seja autonomamente capaz de
determinar o próximo comportamento sem ser controlado por um operador.
(HONDA Robotics, Novembro 2011)
Todas estas novas capacidades tornaram o novo e melhorado ASIMO num dos robôs
mais avançados dos nossos tempos, dando mais um passo na jornada dos robôs em direção à
coexistência com pessoas no dia-a-dia.

A EVOLUÇÃO DOS HUMANOIDES 28
Figura 27 - ASIMO 2011 (vista frontal e perfil)
Figura 29 - ASIMO a abrir garrafa e a encher copo Figura 28 - ASIMO a utilizar linguagem gestual
Especificações:
Peso 48 Kg Altura 130 Cm
Largura 45 Cm Profundidade 34 Cm
Velocidade Andar: 2.7 km/h; Correr: 9 km/h Bateria 51.8 V/ 6 kg
Autonomia 60 Min. Graus de Liberdade 57 GD- cabeça: 3; braço: 7×2; mão: 13×2;
torso: 2; perna: 6×2 Motores 57 Servomotores Câmaras 2 Câmaras na cabeça
Outros Sensores 1 Sensor ultrassónico/ 1 Sensor terrestre/ 1 microfone/ 12 sensores de força
O novo ASIMO (figura 27) foi renovado em
diversos aspetos, como construção de pernas mais
robustas ou instalação de novas câmaras, mas a mais
interessante melhoria foi feita nas mãos: antes, com
apenas 2 graus de liberdade por mão, o melhorado
robô tem agora 13, uma vez que os dedos são agora
completamente articulados. Na mão foram também
incorporados vários sensores de força, que atuam
independentemente para dar o máximo de informação
ao robô, dando ao robô novas capacidades: depois do
reconhecimento dos objetos, ele é capaz de abrir
garrafas e encher copos (Figura 29), conseguindo pegar
nestes sem os apertar em demasia, ou falar através de
linguagem mímica, uma vez que seja programado para
fazer determinados movimentos (Figura 28). A bateria
também foi melhorada, dando mais autonomia ao
robô mesmo quando este corre
ou carrega carga, e foram instalados microfones que fornecem ao robô informações sonoras
do meio em redor.

A EVOLUÇÃO DOS HUMANOIDES 29
Figura 30 - Deslocação ASIMO
Avanços de Inteligência: A HONDA desenvolveu não só um novo sistema de
programação fundamental, mas também incorporou novos sensores, já referidos acima, que
permitiu um avanço na inteligência e na perceção do ASIMO. Para além dos sensores visuais
previamente instalados, o robô agora é capaz de “ouvir”, através dos microfones incorporados,
e cruzando a informação auditiva e visual, é capaz de associar uma cara a uma voz,
possibilitando o robô reconhecer uma ordem dada oralmente, mesmo que múltiplas pessoas
estejam a falar em simultâneo.
Novas capacidades de movimento: Com a construção de novas e mais robustas
pernas, e com uma nova tecnologia de controlo de movimento instalada, o humanoide não só
anda e corre mais depressa que o seu antecessor (corre 9 km/h em linha reta, sendo o mais
rápido humanoide do mundo), como também é capaz de saltar, saltitar ou correr para trás,
sem interromper a deslocação. Mas mais interessante ainda é a capacidade de o robô
caminhar em superfícies irregulares, sem tropeçar ou desequilibrar-se (Figura 30)
Concluindo: Nestes 20 anos de desenvolvimento, o ASIMO evoluiu de um robô que
conseguia andar para muito mais do que isso: tornou-se um símbolo da robótica atual. Apesar
de a deslocação continuar a ser a principal e mais forte capacidade deste robô em comparação
com os seus contemporâneos, os desenvolvimentos da inteligência, a utilidade deste robô e
todo o investimento feito ao longo dos anos marcam a HONDA como um dos principais centros
de pesquisa e inovação do mundo da robótica moderna.
A EVOLUÇÃO DOS HUMANOIDES 30
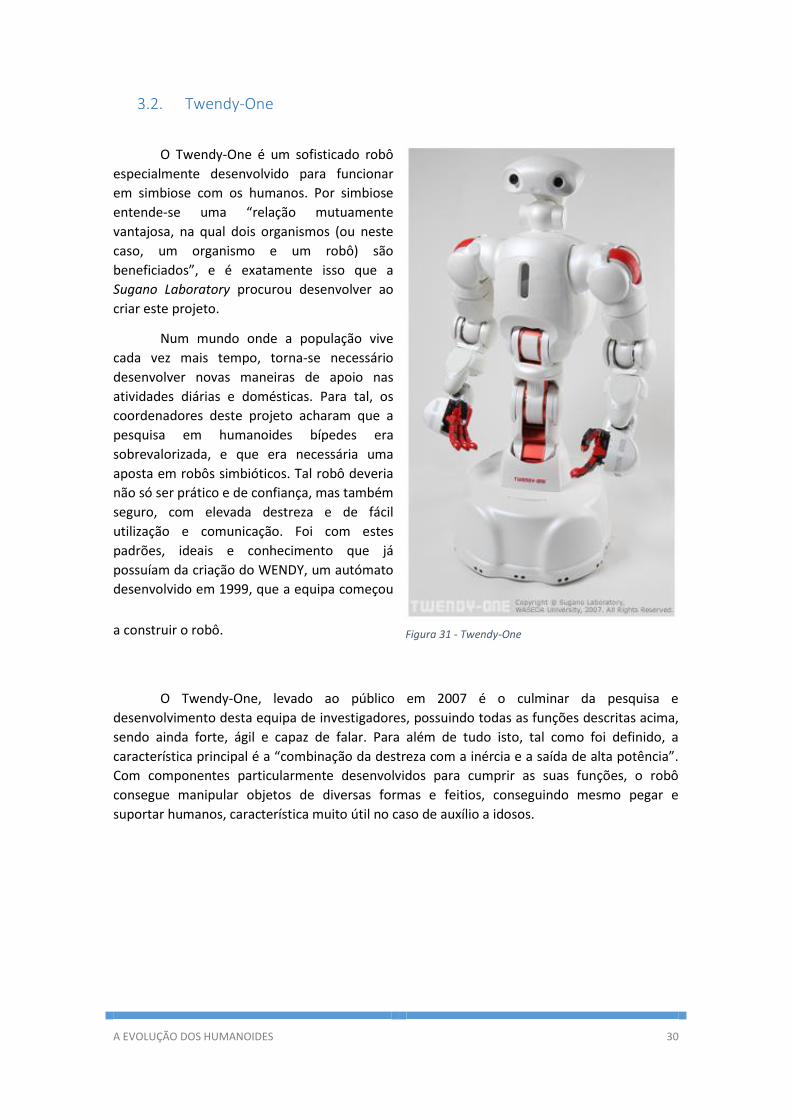
Figura 31 - Twendy-One
3.2. Twendy-One
O Twendy-One é um sofisticado robô
especialmente desenvolvido para funcionar
em simbiose com os humanos. Por simbiose
entende-se uma “relação mutuamente
vantajosa, na qual dois organismos (ou neste
caso, um organismo e um robô) são
beneficiados”, e é exatamente isso que a
Sugano Laboratory procurou desenvolver ao
criar este projeto.
Num mundo onde a população vive
cada vez mais tempo, torna-se necessário
desenvolver novas maneiras de apoio nas
atividades diárias e domésticas. Para tal, os
coordenadores deste projeto acharam que a
pesquisa em humanoides bípedes era
sobrevalorizada, e que era necessária uma
aposta em robôs simbióticos. Tal robô deveria
não só ser prático e de confiança, mas também
seguro, com elevada destreza e de fácil
utilização e comunicação. Foi com estes
padrões, ideais e conhecimento que já
possuíam da criação do WENDY, um autómato
desenvolvido em 1999, que a equipa começou
a construir o robô.
O Twendy-One, levado ao público em 2007 é o culminar da pesquisa e
desenvolvimento desta equipa de investigadores, possuindo todas as funções descritas acima,
sendo ainda forte, ágil e capaz de falar. Para além de tudo isto, tal como foi definido, a
característica principal é a “combinação da destreza com a inércia e a saída de alta potência”.
Com componentes particularmente desenvolvidos para cumprir as suas funções, o robô
consegue manipular objetos de diversas formas e feitios, conseguindo mesmo pegar e
suportar humanos, característica muito útil no caso de auxílio a idosos.

A EVOLUÇÃO DOS HUMANOIDES 31
Figura 32 - Cabeça Twendy-One
Especificações:
Peso 111 Kg Altura 146.7 Cm
Largura 73.4 Cm Graus de Liberdade 47 GD- cabeça: 3, braço: 7×2, mão: 13×2,
torso: 4 Mecanismo de deslocamento Deslocamento Omni Direcional
Autonomia 15 Minutos Sensores 10 Sensores de força de 6 eixos, 2 câmaras
CCD, centenas de sensores de força
3.2.1. Cabeça
A parte superior do Twendy-One
tem 3 graus de liberdade, que são
usados para direcionar as câmaras CCD
(charge-coupled device) que servem
como “olhos” do robô, obtendo
informação visual do meio que o rodeia.
Estas são ladeadas por LEDs, que
mostram a condição do sistema se visão.
É na cabeça que está localizado um
altifalante, que permite o robô dizer
frases simples, e um outro sensor de
força de 6 eixos, que deteta o toque de humanos.
3.2.2. Torso
O torso do Twendy-One tem 4 graus de liberdade, e liga a parte superior do robô ao
mecanismo de deslocamento deste. Nas articulações do torso foram instalados atuadores de
alta potência (tipo de motores responsáveis por mover e controlar um mecanismo ou sistema).
São estes motores que possibilitam o simbiótico robô de pegar cargas pesadas do chão e
suportar um ser humano. Toda a zona superior do tronco está equipada com sensores de
força, que permitem detetar o contacto com seres humanos ou objetos no ambiente em
redor.
A EVOLUÇÃO DOS HUMANOIDES 32
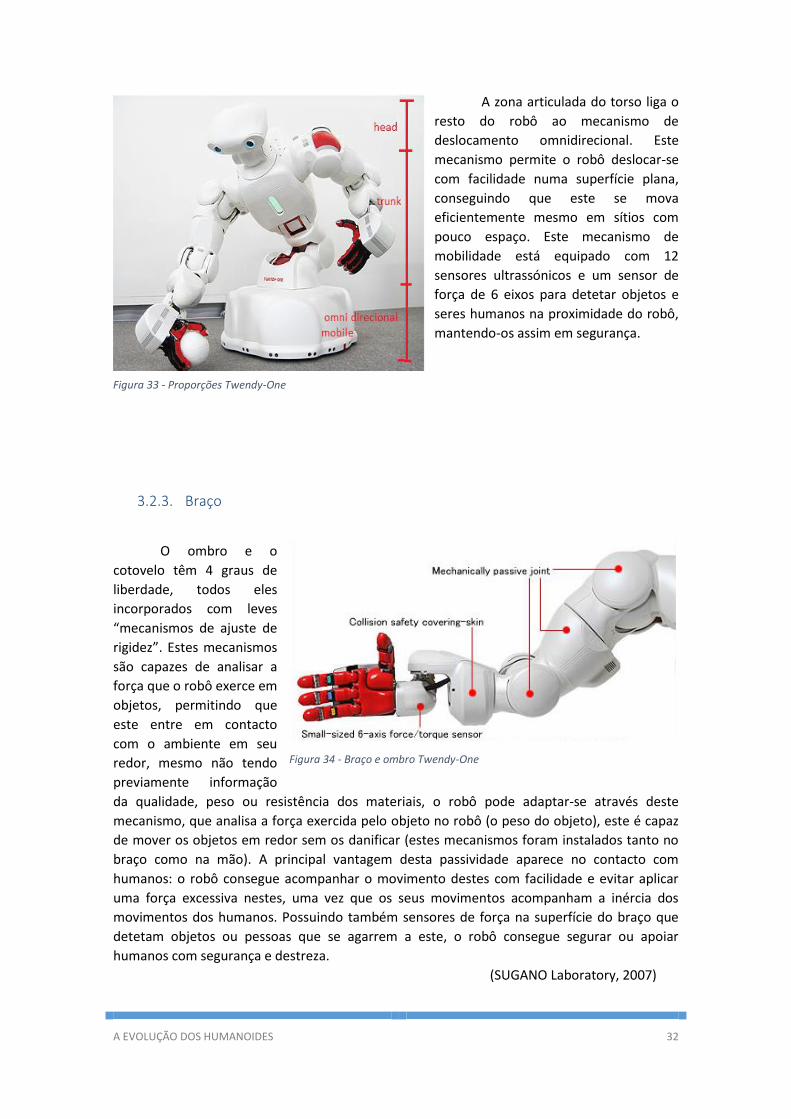
Figura 33 - Proporções Twendy-One
Figura 34 - Braço e ombro Twendy-One
A zona articulada do torso liga o
resto do robô ao mecanismo de
deslocamento omnidirecional. Este
mecanismo permite o robô deslocar-se
com facilidade numa superfície plana,
conseguindo que este se mova
eficientemente mesmo em sítios com
pouco espaço. Este mecanismo de
mobilidade está equipado com 12
sensores ultrassónicos e um sensor de
força de 6 eixos para detetar objetos e
seres humanos na proximidade do robô,
mantendo-os assim em segurança.
3.2.3. Braço
O ombro e o
cotovelo têm 4 graus de
liberdade, todos eles
incorporados com leves
“mecanismos de ajuste de
rigidez”. Estes mecanismos
são capazes de analisar a
força que o robô exerce em
objetos, permitindo que
este entre em contacto
com o ambiente em seu
redor, mesmo não tendo
previamente informação
da qualidade, peso ou resistência dos materiais, o robô pode adaptar-se através deste
mecanismo, que analisa a força exercida pelo objeto no robô (o peso do objeto), este é capaz
de mover os objetos em redor sem os danificar (estes mecanismos foram instalados tanto no
braço como na mão). A principal vantagem desta passividade aparece no contacto com
humanos: o robô consegue acompanhar o movimento destes com facilidade e evitar aplicar
uma força excessiva nestes, uma vez que os seus movimentos acompanham a inércia dos
movimentos dos humanos. Possuindo também sensores de força na superfície do braço que
detetam objetos ou pessoas que se agarrem a este, o robô consegue segurar ou apoiar
humanos com segurança e destreza.
(SUGANO Laboratory, 2007)

A EVOLUÇÃO DOS HUMANOIDES 33
Figura 35 - Mão Twendy-One
3.2.4. Mão
A mão do Twendy-One, com 13
graus de liberdade, foi desenhada para ser o
mais semelhante da mão humana, de modo
a ter a destreza e a agilidade de manipulação
desta. Este método de design, chamado de
biomimética, baseia-se em estudar
mecanismos e estruturas biológicas, de
modo a “aprender com a natureza
estratégias e soluções para a resolução de
problemas”. Uma vez que a evolução tornou
a mão humana uma “ferramenta” muito
eficiente, os engenheiros responsáveis por
este projeto decidiram basear-se nesta para
o desenvolvimento do robô, embora que a
mão do autómato tenha apenas 4 dedos. A
ponta do dedo é feita de um polímero suave, e tem uma superfície curvada com uma “unha”,
que imita perfeitamente o dedo humano. Em cada ponta, foi incorporado um pequeno sensor
de força de 6 eixos e sensores de forças, tendo um total de 241 destes sensores por mão.
Assim sendo, o Twendy-One pode utilizar vários objetos por mais frágeis que sejam, como
copos de papel ou plástico, palhinhas ou lápis.
(SUGANO Laboratory, 2007)
Comentários: Apesar de ser muito prático e de poder ser uma ferramenta muito útil
de auxílio diário no futuro, o Twendy-One ainda tem um longo caminho para percorrer. No ano
de 2007, depois de 7 anos de desenvolvimento e de investimento de vários milhões de
dólares, o robô tinha apenas 15 minutos de bateria, uma vez que o esforço necessário no
movimento e na agilidade (o ajuste de impediência mecânica passiva é muito complexo)
descarregam-na muito rapidamente. Tal como disse Sugano, o líder do projeto, “O robô é tão
complicado que até para nós, é complicado conseguir pô-lo a mexer”. Outro problema é a
tendência para sobreaquecer depois de cada uso, podendo derreter componentes depois de
uma utilização mais prolongada. Uma vez que este robô tem como objetivo ser vendido ao
publico em geral, o sobreaquecimento é uma grave quebra de segurança que tem de ser
resolvida.
Sem dúvida que é um projeto interessante e com imenso potencial, mas será
necessário esperar antes de podermos ter um em nossa casa. Antes, será necessário
desenvolver novos métodos e ferramentas que tornem viável a venda ao público destes
autómatos. Tal como Sugano disse: “ [nos robôs] É difícil conciliar força com flexibilidade”.
(Shigeki Sugano, Waseda University, 2007)

A EVOLUÇÃO DOS HUMANOIDES 34
3.3. Humanoides num Contexto Militar
Tal como qualquer tecnologia, a
robótica encontra utilização em
contextos militares. A sua utilização para
estes fins foi muito criticada, pois a ideia
de fornecer capacidades autónomas a
robôs armados que não têm capacidade
de julgamento sobre o certo e errado
levam o público a temer tal tecnologia,
ainda que os governos, nomeadamente o
estadunidense, afirmem que não há razões para temer.
Independentemente do que se diz, a robótica num panorama militar é uma realidade
dos nossos dias, portanto vamos falar neste trabalho dos dois humanoides atualmente
desenvolvidos pelos Estados Unidos da América: o PETMAN e o ATLAS.
3.3.1. PETMAN
O “Protection Ensemble Test Mannequin” , ou PETMAN, é um robô humanoide
antropomórfico (que tem parecenças físicas com um ser humano) desenvolvido pela Boston
Dynamics em parceria com a DARPA (Defense Advanced Research Projects Agency), que foi
levado ao público pela primeira vez em 2009. Foi especialmente desenvolvido para realizar
testes químicos de segurança em roupa e equipamento militar. Para um teste mais conclusivo,
o PETMAN é capaz de se movimentar, simulando as tensões da roupa experimentada por
soldados em situações realistas.
(Boston Dynamics, 2009)
Este robô foi desenvolvido inicialmente para desenvolvimento de fatos químicos
protetores, designados de “Hazmat suits”, que estavam a ser desenvolvidos pelo
Departamento de Defesa Norte Americano. Para tal, a DARPA contratou diversos institutos de
pesquisa, para realizar diversas partes do desenvolvimento do humanoide. A Midwest
Research Institute, sendo o principal contratante, desenvolveu a engenharia do sistema, a
deteção química, a gestão de programação e a integração de sistemas informáticos. A
Measurement Tecnology Northwest foi subcontratada para desenvolver a fisiologia do
manequim e o sistema de controlo térmico. O desenvolvimento final e a fabricação do robô
ficou ao encargo da Boston Dynamics. Todo o investimento ronda os 26.3 milhões de dólares.
(Army-technology.com, 2012)

A EVOLUÇÃO DOS HUMANOIDES 35
Especificações
Peso 80 Kg Altura 175 Cm
Largura 50 Cm
Velocidade 7.0 km/h
Fonte de energia Ligação elétrica direta por cabo Graus de Liberdade Não especificado
Outros sensores Sensores térmicos, químicos, de inércia
Funcionalidades: O PETMAN é constituído por três componentes: A sala de exposição,
onde as condições do teste são definidas e a exposição a determinados gases é feito, o robô
humanoide, equipado de diversos sensores e que é programado para realizar determinados
movimentos, e a sala de controlo, onde as condições de teste são controladas e os dados
obtidos são processados. O humanoide usa um sistema de atuação hidráulico e pernas
articuladas com amortecedores de choque. Tem um computador interno, que regista os dados
obtidos pelos diversos sensores instalados no robô.
Sendo capaz de se mexer, ao contrário de anteriores manequins de teste, e uma vez
que se equilibra e movimenta livre e autonomamente, o PETMAN é apto de executar uma
enorme variedade de movimentos: pode andar, correr, agachar, rastejar e realizar outros
movimentos necessários para um teste realista. Além disso, o robô também é capaz de simular

A EVOLUÇÃO DOS HUMANOIDES 36
Figura 37 - Atlas
a fisiologia dos seres humanos ao controlar a temperatura, humidade e o suor dentro do fato
protetor.
Figura 36 - PETMAN
3.3.2. Atlas
O Atlas é um robô humanoide de elevada
mobilidade, desenvolvido pela Boston Dynamics e
financiado pela DARPA, e em última fase será utilizado
para negociar e realizar missões no exterior, em
condições perigosas para um humano. Este foi
desenvolvido no âmbito do DRC, o DARPA Robotics
Challenge, um concurso por equipas de robótica
promovido pela agência americana, com um prémio de
2 milhões de dólares que serão dados à equipa que
melhor programar um robô de resposta a desastres
humanos ou naturais. Este concurso foi promovido
para acelerar o desenvolvimento do ATLAS, uma vez
que será este o robô que as equipas terão de
programar. A final deste enorme concurso terá lugar
em Junho de 2015.
(DARPA, 2013)

A EVOLUÇÃO DOS HUMANOIDES 37
Figura 38 - Atlas Cabeça e Torso
Figura 39 - Atlas, Graus de Liberdade
Desde que foi mostrado ao público, o
ATLAS tem sido motivo de discussões. Muitas
pessoas vêm o ATLAS como um robô criado
para combate, chamando-lhe mesmo o
Exterminador Implacável, em analogia com o
filme dos anos 80 (Figura 38). Toda esta
publicidade que tem criado um certo
frenesim nalguns americanos: estes acham
que um robô frio, calculista e completamente
racional deve ficar longe de armamento
militar, uma vez que poderia tomar decisões
perigosas num instante.
(CNET, 2013)
Especificações:
Peso 150 Kg Altura 188 Cm
Largura 76 Cm
Profundidade 56 Cm Velocidade Não especificado
Fonte de energia Ligação elétrica direta por cabo Graus de Liberdade 27 GD- pescoço: 2; braço: 5×2; mão: 1×2;
perna: 5×2; torso: 3 Outros sensores Sensores térmicos, químicos, de inércia
(Boston Dynamics, 2012)
Uma vez que ainda se encontra em
fase de desenvolvimento, as capacidades
ainda não foram totalmente reveladas. O
conhecimento das capacidades totais deste
robô apenas será revelado aquando a final
do desafio da DARPA. No entanto, é possível
encontrar alguma informação relevante
acerca deste robô. Para além da informação
revelada na tabela acima, o robô possui um
computador de bordo, com acesso a ligação
wireless para controlo remoto, ainda que
este também consiga funcionar
autonomamente. Um cabo é necessário para
fornecer energia e água de refrigeração. Os
componentes foram desenhados de modo a
que este seja resistente a impactos, e as
mãos são modulares, ou seja, podem a
A EVOLUÇÃO DOS HUMANOIDES 38
qualquer momento ser trocadas por outras que melhor se adequem ao trabalho necessário.
Estas também foram projetadas para utilizar diversas ferramentas utilizadas por humanos.
A cabeça foi criada para analisar o terreno de uma forma inteligente, dispondo para o
efeito de sensores IMU (inertial measurement unit), aparelhos eletrónicos que medem a
velocidade, orientação e força gravitacional de objetos em redor; sensores LIDAR, que medem
a distância aos objetos ao iluminar estes com um laser e analisar a luz refletida; e câmaras
stereo, que analisam visualmente o meio em redor.
3.4. Androides
Um androide é um robô ou um organismo sintético que foi desenhado para agir em
semelhança com o ser humano, sendo fisicamente parecido com um homem. No caso de ser
parecido com uma mulher, designa-se por “ginoide”, embora que atualmente, devido a filmes
e livros de ficção, a palavra Androide defina ambos os sexos. Mesmo sendo uma ideia que
parece muito futurista e distante, a tecnologia dos nossos tempos já permitiu a criação destes.
Apesar de não ser o androide inteligente e consciente que vemos em diversos filmes de ficção
científica, a utilização da palavra androide remonta a Londres, em 1728, onde Ephraim
Chambers escreveu na sua Enciclopédia a palavra “androide”, remetendo para um humanoide
que alegadamente um padre teria criado.
A EVOLUÇÃO DOS HUMANOIDES 39
Figura 41 - Actroid
Figura 40 - Androides na ficcção científica (I, Robot 2004)
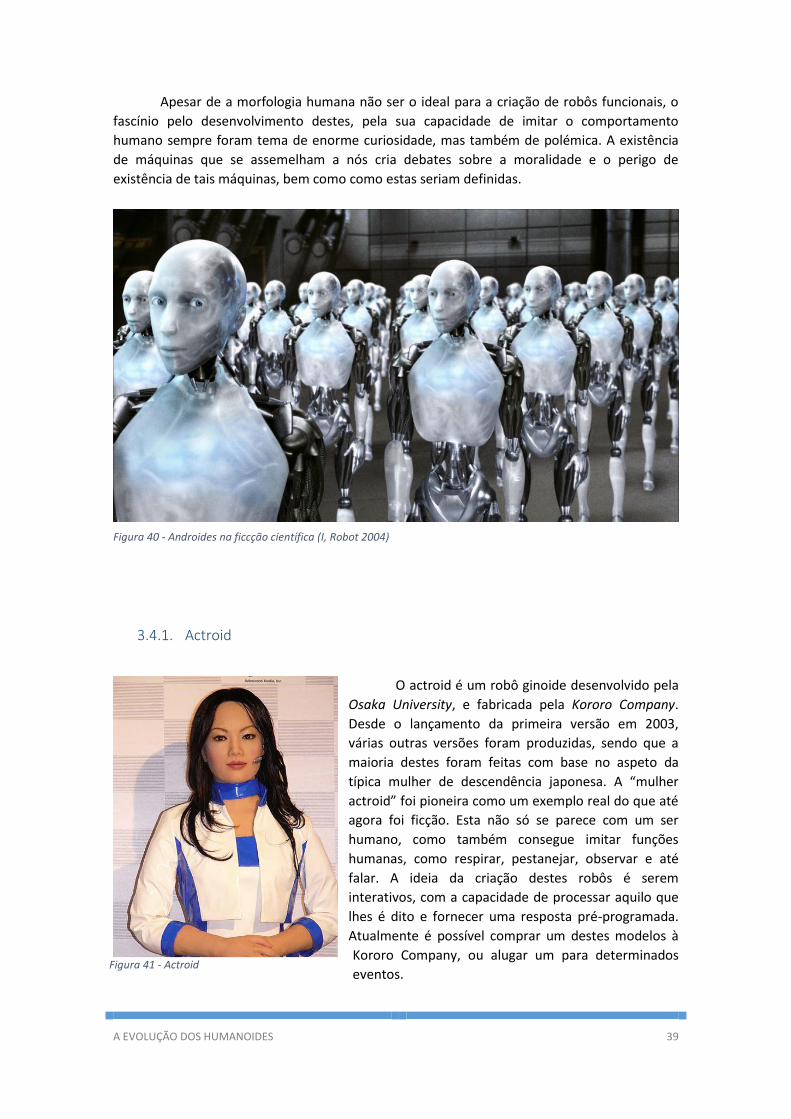
Apesar de a morfologia humana não ser o ideal para a criação de robôs funcionais, o
fascínio pelo desenvolvimento destes, pela sua capacidade de imitar o comportamento
humano sempre foram tema de enorme curiosidade, mas também de polémica. A existência
de máquinas que se assemelham a nós cria debates sobre a moralidade e o perigo de
existência de tais máquinas, bem como como estas seriam definidas.
3.4.1. Actroid
O actroid é um robô ginoide desenvolvido pela
Osaka University, e fabricada pela Kororo Company.
Desde o lançamento da primeira versão em 2003,
várias outras versões foram produzidas, sendo que a
maioria destes foram feitas com base no aspeto da
típica mulher de descendência japonesa. A “mulher
actroid” foi pioneira como um exemplo real do que até
agora foi ficção. Esta não só se parece com um ser
humano, como também consegue imitar funções
humanas, como respirar, pestanejar, observar e até
falar. A ideia da criação destes robôs é serem
interativos, com a capacidade de processar aquilo que
lhes é dito e fornecer uma resposta pré-programada.
Atualmente é possível comprar um destes modelos à
Kororo Company, ou alugar um para determinados
eventos.

A EVOLUÇÃO DOS HUMANOIDES 40
Figura 42 - Detalhes Actroid
Figura 43 - DER-2
Este robô tem sensores internos, que associados às articulações permitem o
movimento, embora que este seja feito acima de tudo na parte superior do corpo, fazendo
com que a movimentação da parte inferior do corpo seja muito limitada. Outro motivo é a
necessidade deste ficar sobre uma plataforma que lhe dê o devido apoio para as
funcionalidades, uma
vez que o ar
comprimido que
permite o movimento
dos servomotores e
grande parte do
hardware informático
se encontram fora do
robô, ocultos debaixo
de uma plataforma.
A presença de sensores à superfície da pele feita de silicone permite o robô de “sentir”
quando alguém lhe toca, e de ter certas reações, dependendo do tipo de toque. Este ginoide
também é capaz de comunicar autonomamente a um nível rudimentar com humanos, usando
para o efeito microfones e programas de reconhecimento de fala, que permitem converter o
áudio recebido em palavras e frases, e posteriormente altifalantes para dar a devida resposta.
Esta interação, para ser o mais realista possível, dispõe da informação fornecida por sensores
instalados no chão para seguir o olhar do interlocutor.
Para ensinar este robô, a principal forma é colocar este frente a frente com uma
pessoa que use pequenos pontos refletores no corpo. Ao visualizar e seguir esses pontos, a
Actroid é capaz de seguir os movimentos e memorizar estes.
3.4.2. DER-2
O segundo modelo DER (Dramatic
Entertainment Robot) Actroid é talvez o
mais icónico do mundo androide, uma
vez que foi o mais avançado no seu
tempo. O aspeto físico foi bastante
melhorado para se parecer o mais
possível com um verdadeiro ser humano
esbelto, tendo braços mais magros,
pernas mais delgadas e uma maior
variedade de expressões faciais. Com 165
cm de altura e 47 pontos de mobilidade,
este androide é capaz de mexer as mãos,
pés e cintura, e se for programado para

A EVOLUÇÃO DOS HUMANOIDES 41
Figura 44 - Geminoid HI-4
Figura 45 - HRP-4C
tal, consegue conciliar o discurso com movimentos suaves.
Pode ser usada como narradora ou modelo de moda, havendo também um modelo que
funcione como guia da empresa Sanrio headquarters, em Tóquio.
3.4.3. Geminoid HI-4
É o modelo androide mais
avançado da Hiroshi Ishiguro
Laboratories, e foi desenhado para ter a
mesma parecença que o seu criador,
Hiroshi Ishiguro. Este androide é
operado remotamente, sendo
necessário alguém que o controle nas
proximidades. Com 180 cm de altura e
100 cm de largura (incluindo o painel de
piso necessário quando se encontra em
pé) e 16 graus de liberdade, este
androide consegue realizar
determinadas tarefas de uma maneira
humana. Apesar de ser desenvolvido por uma companhia diferente da que desenvolveu a
ginoide Actroid, as especificações são muito semelhantes: este também é bastante limitado no
movimento abaixo da cintura, necessita que lhe forneçam externamente a energia e o ar
comprimido para o movimento, grande parte do hardware encontra-se fora do robô, e a pele é
feita de silicone. Este robô foi desenvolvido para pesquisa e para apresentações, uma vez que
por vezes substitui o seu humano semelhante nestas.
3.4.4. HRP-4C
O modelo de ginoide mais avançado da AIST, ou
“National Institute of Advanced Industrial Science and
Technology” é também um dos mais interessantes. Com 158
cm de altura, um peso de 43 quilo e com 42 graus de
liberdade, é capaz de fazer mais do que os outros androides.
Este é muito mais móvel, uma vez que contém uma bateria
incorporada e que tem, ao contrário dos outros, a parte
inferior do corpo perfeitamente articulada. Também tem um
software de voz mais avançado, chamado Vocaloid, que lhe
permite, após a programação necessária, de cantar músicas
completas. No entanto, o seu aspeto é bem diferente dos
outros androides. Enquanto estes são criados para imitar
totalmente um ser da raça humana, tendo a totalidade do
corpo feita em semelhança com a fisionomia humana, o HRP-
4C tem apenas a cabeça e as mãos com aspeto humano,
usando uma “pele” feita de silicone. Mas a possibilidade de
se deslocar mais livremente, associado aos dotes musicais
programados tornam as possibilidades enormes: Este

A EVOLUÇÃO DOS HUMANOIDES 42
Figura 47 - HRP-4C Vista de Trás Figura 46 - Vista Frontal
androide ficou bastante conhecido por ser usado para as mais diversas funções, como dançar,
cantar, representar em teatros e até mesmo dançar em vídeos Pop.
4. Futuro da Robótica
É muito complicado falar sobre o futuro da robótica, pois esta está sempre a avançar e é
completamente imprevisível. No entanto, existem algumas possibilidades de um futuro não
muito distante, baseadas em projetos que estão a ser desenvolvidos atualmente.
Uma suposição é a de que os robôs substituirão os humanos, que é algo que já acontece
atualmente em várias profissões. Devido à sua maior eficácia e rapidez na execução, muitos
robôs são melhores a desempenhar certas profissões que o Homem, além de não
necessitarem de salário ou de férias. Assim, vários trabalhadores poderão ser facilmente
substituídas por robôs.

A EVOLUÇÃO DOS HUMANOIDES 43
4.1. Novos Postos Automatizados
4.1.1. Astronautas O trabalho de um astronauta, apesar de ser extremamente emocionante, também é
complexo e perigoso. Cada vez mais robôs começam a participar em missões espaciais para a
realização de algumas tarefas arriscadas e a tendência será em aumentar o número de robôs,
nomeadamente os humanoides, e diminuir o número de astronautas humanos.
E foi com o
intuito de explorar
Marte que a NASA,
numa parceria com o
Governo do Texas e
duas universidades
desse estado, criou
Valkyrie 1, um robô
astronauta. Valkyrie é
um robô muito
inteligente capaz de
se deslocar em vários
tipos de terreno,
mesmo com
obstáculos, conduzir veículos, usar ferramentas e realizar várias outras tarefas que um
astronauta tem que fazer. Este robô tem 44 graus de liberdade constituídos por eixos de
rotação nas suas articulações, sendo uma máquina relativamente flexível em termos de
movimento. É alimentada por uma bateria colocada nas suas costas que lhe fornece energia
por cerca de uma hora. É um robô de fácil manutenção e operação pois os seus braços podem
ser retirados e substituídos em poucos minutos e podem ser facilmente reconfigurados para
serem esquerdos ou direitos. Tem vários sensores e camaras espalhadas pelo corpo para que
os operadores possam ver tudo o que faz a partir de múltiplos pontos de vista.
Nicolaus Radford, o criador de Valkyrie afirma que estes robôs serão muito importantes
na exploração de outros planetas.
"Queremos chegar a Marte. Provavelmente, a NASA irá enviar robôs à frente dos
astronautas para o planeta. Estes robôs irão começar a preparar o caminho para os
exploradores humanos, e quando os humanos chegam, os robôs e os seres humanos vão
trabalhar juntos." (Nicolaus Radford, 2014)
Figura 48 - Valkyrie 1
A EVOLUÇÃO DOS HUMANOIDES 44
4.1.2. Soldado Uma das profissões mais perigosas que existe é a de um
soldado, sendo muitos destes profissionais obrigados a trabalhar
contra a sua vontade. O uso de drones para ajudar os soldados
em terra já é usual em algumas missões, mas talvez um dia quase
toda a infantaria será substituída por robôs e as guerras poderão
passar a ser travadas por humanoides. O Exército dos Estados
Unidos pensa nessa substituição dos soldados, e, como tal,
planeia substituir milhares de soldados em campo por robôs,
para diminuir a quantidade de pessoas envolvidas na guerra do
país.
E já existem humanoides soldados, como o robô Atlas que já
foi referido.
4.1.3. Professor Na área do ensino, também se espera uma revolução. Prevê-se que sejam criados
humanoides que sejam capazes de ensinar, nomeadamente ensinar tarefas práticas.
Recentemente, cientistas do Instituto de Ciência da Informação da Universidade do Sul da
Califórnia criaram programas de computador muito sofisticados, capazes de imitar o modo
humano de se pensar e agir, aos quais chamaram "agentes inteligentes". Um destes, ao qual
deram o nome de Steve, um robô que está neste momento ao serviço da marinha dos Estados
Unidos da América. Steve funciona como um professor virtual capaz de assumir forma
humana, responder perguntas e mostrar ao aluno como colocar em funcionamento o motor
de um navio virtual, ensinando assim os responsáveis pela manutenção da frota de navios da
Marinha dos EUA.
Figura 49 - Atlas

A EVOLUÇÃO DOS HUMANOIDES 45
4.1.4. Baby-sitters
Esta é outra profissão que pode ter
os dias contados. A SoftBank criou, em
cooperação com a Yoshimoto Robotics
Laboratory e a Yoshimoto Kogyo Group
criou Pepper, um robô humanoide que
poderá vir a substituir as baby-sitters.
Pepper é um robô que reage pró-
ativamente usando algoritmos
proprietários. Pepper comunica
facilmente com as pessoas, e no seu
sistema inclui a mais recente tecnologia
de reconhecimento de voz, realiza gestos
graciosos e ainda reconhece emoções através das expressões e tons de voz. Com esta
tecnologia, as pessoas conversar com este robô de forma natural, tal como fariam com amigos
e familiares. Além disso, Pepper dança, “conta piadas” e entretém as pessoas, tendo um leque
abrangente de formas de entretenimento.
Os recursos deste robô ainda podem vir a evoluir pois podem ser incorporados programas
em várias capacidades de Pepper, nomeadamente no movimento, conversa e sensores.
4.1.5. Músicos
Enquanto que um humano tem que ter um dom e muita dedicação para se tornar num
músico profissional, um robô apenas precisa de ser programado, sendo menos provável que
estes cometam erros. Assim, prevê-se que muitos músicos poderão ser substituídos,
nomeadamente os que tocam instrumentos musicais poderão vir a ser substituídos por robôs.
Uma evidência disso é que actualmente já existem bandas famosas constituídas apenas por
robôs humanóides como é o caso da Compressor Head.
Figura 50 - Pepper
Figura 51 - Bone, baixista Figura 52 - Fingers, guitarrista

A EVOLUÇÃO DOS HUMANOIDES 46
Esta banda é constituída por
Fingers, um guitarrista com 78 dedos
hidráulicos, Stickboy, um baterista
com 4 braços e Bone, um baixista
com 10 dedos.
4.2. Os próximos desenvolvimentos da robótica
Como já foi referido, existem vários projetos de humanoides que estão a ser
desenvolvidos atualmente, mas para tais projetos serem concluídos, é necessário que sejam
desenvolvidas partes integrantes dos robôs.
4.2.1. Inteligência Artificial
Ao falar do futuro dos humanoides, é importante também falar de Inteligência Artificial. A
inteligência artificial é um ramo da Ciência da Computação que tem como objetivo fazer com
que sistemas eletrónicos pensem ou se comportem de forma inteligente. Este conceito, por
ser muito amplo e complexo, incorpora várias áreas, como a engenharia, matemática, lógica,
psicologia, biologia e até mesmo linguística.
Estes sistemas que possuem inteligência artificial podem ser divididos em quatro tipos:
- Sistemas que pesam como seres humanos
- Sistemas que atuam como seres humanos
- Sistemas que pensam racionalmente
- Sistemas que atuam racionalmente
Figura 53 - Stickboy, baterista
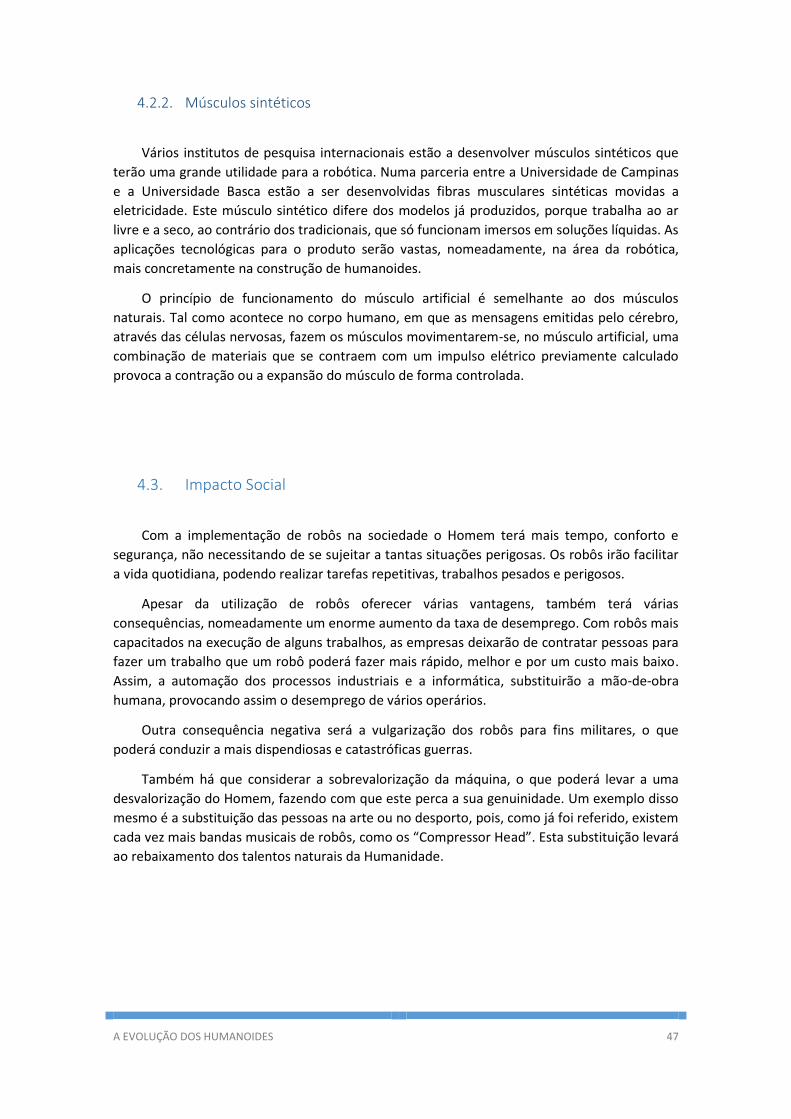
A EVOLUÇÃO DOS HUMANOIDES 47
4.2.2. Músculos sintéticos
Vários institutos de pesquisa internacionais estão a desenvolver músculos sintéticos que
terão uma grande utilidade para a robótica. Numa parceria entre a Universidade de Campinas
e a Universidade Basca estão a ser desenvolvidas fibras musculares sintéticas movidas a
eletricidade. Este músculo sintético difere dos modelos já produzidos, porque trabalha ao ar
livre e a seco, ao contrário dos tradicionais, que só funcionam imersos em soluções líquidas. As
aplicações tecnológicas para o produto serão vastas, nomeadamente, na área da robótica,
mais concretamente na construção de humanoides.
O princípio de funcionamento do músculo artificial é semelhante ao dos músculos
naturais. Tal como acontece no corpo humano, em que as mensagens emitidas pelo cérebro,
através das células nervosas, fazem os músculos movimentarem-se, no músculo artificial, uma
combinação de materiais que se contraem com um impulso elétrico previamente calculado
provoca a contração ou a expansão do músculo de forma controlada.
4.3. Impacto Social
Com a implementação de robôs na sociedade o Homem terá mais tempo, conforto e
segurança, não necessitando de se sujeitar a tantas situações perigosas. Os robôs irão facilitar
a vida quotidiana, podendo realizar tarefas repetitivas, trabalhos pesados e perigosos.
Apesar da utilização de robôs oferecer várias vantagens, também terá várias
consequências, nomeadamente um enorme aumento da taxa de desemprego. Com robôs mais
capacitados na execução de alguns trabalhos, as empresas deixarão de contratar pessoas para
fazer um trabalho que um robô poderá fazer mais rápido, melhor e por um custo mais baixo.
Assim, a automação dos processos industriais e a informática, substituirão a mão-de-obra
humana, provocando assim o desemprego de vários operários.
Outra consequência negativa será a vulgarização dos robôs para fins militares, o que
poderá conduzir a mais dispendiosas e catastróficas guerras.
Também há que considerar a sobrevalorização da máquina, o que poderá levar a uma
desvalorização do Homem, fazendo com que este perca a sua genuinidade. Um exemplo disso
mesmo é a substituição das pessoas na arte ou no desporto, pois, como já foi referido, existem
cada vez mais bandas musicais de robôs, como os “Compressor Head”. Esta substituição levará
ao rebaixamento dos talentos naturais da Humanidade.

A EVOLUÇÃO DOS HUMANOIDES 48
Conclusão
Os desenvolvimentos na área da robótica acompanharam e dependeram da evolução de
diversas tecnologias, nomeadamente, nas disciplinas da Engenharia Mecânica, Eletrónica e
Informática. Este progresso conduziu ao crescimento e desenvolvimento exponencial da
utilização de robôs nas mais diversas áreas.
Embora os humanoides estejam cada vez mais avançados, o seu elevado custo e potencial
para erros, tanto de hardware como de software, tornam muito difícil disponibiliza-los para o
uso doméstico. No entanto, prevê-se que os avanços tecnológicos permitam que num futuro
próximo estes cheguem às mãos do público em geral.
Com o desenrolar do nosso trabalho, tornou-se fácil concluir que o desenvolvimento dos
humanoides é algo muito complexo. A sua evolução é demorada e dispendiosa, mas é
indiscutível que esta conduzirá a um aumento do conforto para o Homem, facilitando a
realização de inúmeras tarefas em diversos panoramas, tanto doméstico como industrial. No
entanto, esta poderá trazer consequências negativas, tal como o exacerbar do desemprego, a
sua utilização descontrolada para fins bélicos e uma vulgarização que pode levar à perda da
identidade e desvalorização da raça Humana.
O que é indiscutível é que a robótica é um ramo em crescimento, e que os humanoides
surgiram, muito provavelmente, para ficar.

A EVOLUÇÃO DOS HUMANOIDES 49
Bibliografia
ASIMO
HONDA Worldwide, News Releases 2011- http://world.honda.com/news/2011/c111108All-
new-ASIMO/index.html
HONDA Worldwide, ASIMO- http://world.honda.com/ASIMO/index.html
ASIMO. Wikipedia, a enciclopédia livre- http://en.wikipedia.org/wiki/ASIMO
HONDA, ASIMO Specifications 2000- http://asimo.honda.com/downloads/pdf/honda-asimo-
robot-fact-sheet.pdf
HONDA, ASIMO Specifications 2005- http://asimo.honda.com/downloads/pdf/asimo-
technical-faq.pdf
HONDA, ASIMO Specifications 2011- http://asimo.honda.com/asimo_specifications.html
HORNYAK, Tim- CNET, Asimo does bottles, lovely-dovey hand gestures-
http://www.cnet.com/news/asimo-does-bottles-lovey-dovey-hand-gestures/
Bloomberg TV, ASIMO 2011 Video- http://www.bloomberg.com/video/world-s-fastest-
humanoid-robot-beats-own-record-ACHU_qQcRZWW1MdRq5Nh8w.html
The Engineer, ASIMO 2000- http://www.theengineer.co.uk/in-depth/two-legs-
good/271850.article#ixzz1TF8K9jyc
TWENDY-ONE
TWENDY-ONE, Sugano Laboratory- http://twendyone.com/tech2_e.html
SUGANO Laboratory, Waseda University- http://www.sugano.mech.waseda.ac.jp/
Youtube, Twendy-One Press Demonstration- https://www.youtube.com/watch?v=Dwxsz-o0li0
Dicionário online de Português, Simbiose- http://www.dicio.com.br/simbiose/
SUGANO, Shigeki- Design of Passive Impedance Joint Arm and Fingers for Human-Symbiotic
Robot- http://www.viactors.org/viaicraworkshop/sub/sugano_viaworkshop.pdf
KUBOTA, Yoko- Canada.com, Japanese robot “Twendy-One” gets more life-like-
http://www2.canada.com/story.html?k=59131&id=ebc37908-628c-4c8f-951f-74a9edbae736
Wikipedia, a Enciclopédia livre, Mechanical Impedance-
http://en.wikipedia.org/wiki/Mechanical_impedance

A EVOLUÇÃO DOS HUMANOIDES 50
ANDROIDES
Wikipedia, a Enciclopédia livre, Android- http://en.wikipedia.org/wiki/Android_(robot)
KORORO Company, Actroid- http://www.kokoro-dreams.co.jp/english/rt_rent/actroid.html
Wikipedia, a Enciclopédia livre, Actroid- http://en.wikipedia.org/wiki/Actroid
Technovelgy.com, Actroid DER2 Late Model Fembot- http://www.technovelgy.com/ct/Science-
Fiction-News.asp?NewsNum=877
Youtube, HRP-4C Dance- https://www.youtube.com/watch?v=xcZJqiUrbnI
HIROSHI ISHIGURO Laboratories, Robot models- http://www.geminoid.jp/en/robots.html
MINATO, Takashi; SHIMADA, Michihiro; ISHIGURO, Hiroshi; ITAKURA, Shoji- Development of an
Android Robot for Studying Human-Robot Interaction-
http://www.geminoid.jp/~minato/papers/Minato04b.pdf
PETMAN
BOSTON Dynamics, PETMAN- http://www.bostondynamics.com/robot_petman.html
ARMY-Technology, PETMAN (Protection Ensemble Test Mannequin) Humanoid Military Robot,
United States of America- http://www.army-technology.com/projects/petman/
Wikipedia, a Enciclopédia Livre, Boston Dynamics-
http://en.wikipedia.org/wiki/Boston_Dynamics
ATLAS
BOSTON Dynamics, ATLAS- http://www.bostondynamics.com/robot_Atlas.html
BOSTON Dynamics, The Robotics Challenge- http://www.theroboticschallenge.org/files/ATLAS-
Datasheet_v15_DARPA.PDF
DARPA, DARPA’S Atlas Robot is Unveiled-
http://www.darpa.mil/NewsEvents/Releases/2013/07/11.aspx
BOSTON Dynamics, Atlas Robot Overview for DARPA Robotics Challenge-
http://www.cs.cmu.edu/~cga/drc/pdfs/bdi.pdf
CASS, Stephen, IEEE Spectrum- DARPA Unveils Atlas DRC Robot-
http://spectrum.ieee.org/automaton/robotics/humanoids/darpa-unveils-atlas-drc-robot
HORNYAK, Tim- CNET, Be afraid: DARPA unveils Terminator-like Atlas robot-
http://www.cnet.com/news/be-afraid-darpa-unveils-terminator-like-atlas-robot/

A EVOLUÇÃO DOS HUMANOIDES 51
O Futuro da Robótica
http://www.cnet.com/news/nasa-unveils-6-foot-superhero-robot-valkyrie/
http://singularityhub.com/2013/12/20/nasa-unveils-valkyrie-a-humanoid-robot-destined-for-
space-exploration/
http://www.publico.pt/tecnologia/noticia/um-robo-pode-roubarlhe-o-emprego-1665071
http://lyceumonline.usf.edu.br/salavirtual/documentos/1654.pdf
http://www.clickestudante.com/o-futuro-da-robotica.html
http://www.olharcientifico.kinghost.net/index.php/olhar/article/viewFile/49/37
http://ws2.din.uem.br/~ia/vida/robomedicina/futuro_da_robotica.htm
http://rockntech.com.br/10-profissoes-que-provavelmente-serao-dominadas-por-robos-no-
futuro/
http://servix.com/nasa-atualiza-robo-humanoide-no-espaco/
Pré-Robótica
https://cienciasetecnologia.com/robotica-historia/
http://robotics.dem.uc.pt/norberto/nova/pdfs/gregosxxi.pdf
http://www.citi.pt/educacao_final/trab_final_inteligencia_artificial/historia_da_robotica.html
http://artselectronic.wordpress.com/2013/09/18/leonardo-da-vinci-and-robots/
http://guiadoestudante.abril.com.br/aventuras-historia/inteligencia-artificial-robos-ja-existiam-mitologia-classica-435546.shtml
http://en.wikipedia.org/wiki/Robotics
http://www.automates-anciens.com/versao_+portuguesa/paginas_principais/automatas_vaucanson.htm
http://www.automates-anciens.com/versao_+portuguesa/paginas_principais/androides_jaquet_droz.htm
http://www.desenhoonline.com/site/conheca-os-curiosos-bonecos-automatos-com-mais-de-240-anos-que-escrevem-tocam-musica-e-desenham/
http://history-computer.com/Dreamers/Elektro.html
http://www.historyofinformation.com/expanded.php?id=3570
Top Related