





Línguas
Páginas
Legal


PROJETO DE CONTROLADOR ROBUSTO H∞ EM UM SISTEMA DE POTÊNCIA DE CARGA-
FREQUÊNCIA
BETANIA G. DA S. FILHA1,2, ALEXANDRE C. DE CASTRO
3, FERNANDO A. MOREIRA1, JOSÉ MÁRIO ARAÚJO
4
1- Programa de Pós-Graduação em Engenharia Elétirca, Universidade Federal da Bahia
R. Prof Aristides Nóvis, 2 – Federação, 40210-630, Salvador, BA.
SALVADOR, BRASIL
2 - Grupo de Pesquisa no Desempenho dos Sistemas Elétricos de Potência, Departamento de Eltrotécnica,
Instituto Federal da Bahia
Campus Salvador, Salvador – BA.
SALVADOR, BRASIL
3 - Departamento de Engenharia Elétrica, Universidade Federal da Paraíba
Campus universitário I, João Pessoa – PB.
JOÃO PESSOA, BRASIL
4 - Grupo de Pesquisa em Sinais e Sistemas, Departamento de Automação e Sistemas,
Instituto Federal da Bahia
Campus Salvador, Salvador – BA.
SALVADOR, BRASIL
E-mails: [email protected], [email protected], [email protected],
Abstract Techniques for the analysis and design of multivariable system controllers in the frequency domain are used for verify-
ing the possibility of obtaining robust control with reduced order decentralized controllers aiming at the robust stability of the power
system. In order to reach the robustness, the selection of the most effective signals and inputs for the application of controllers is es-
sential. With this purpose, two frequency analysis techniques were used: Relative Gain Matrix (RGM) and singular value analysis.
The proposed techniques are applied to a three area load-frequency system. At the end, it was possible to find a first order efficient
controller that remains robust, even in the presence of faults or disturbances. The controller used was of the type H∞ and the optimiza-
tion method applied was Genetic Algorithms.
Keywords Power systems, load-frequency, robust control, genetic algorithms.
Resumo Técnicas de análise e projeto de controladores de sistemas multivariáveis no domínio de frequência são usadas para veri-
ficar a possibilidade de se obter controle robusto com controladores de ordem reduzida descentralizados, visando a estabilidade ro-
busta do sistema de potência. Para que a robustez possa ser atingida, é imprescindível a seleção dos sinais e as entradas mais eficazes
para aplicação dos controladores. Para tanto, foi utilizada duas técnicas de análise frequenciais: Matriz de Ganhos Relativos (MGR) e
análise dos valores singulares. As técnicas propostas são aplicadas em um sistema de carga-frequência de três áreas. Ao final, foi
possível encontrar um controlador eficaz já em primeira ordem, que se mantém robusto, mesmo com a presença de faltas ou per-
turbações. O controlador utilizado foi do tipo H∞ e o método de otimização aplicado foi Algoritmos Genéticos
Palavras-chave sistemas de potência, carga-frequência, controle robusto, algoritmos genéticos
1 Introdução
Desde a criação dos primeiros sistemas elétri-
cos, dois aspectos devem ser observados para se ob-
ter estabilidade. O primeiro se refere às variações
bruscas na tensão e corrente do sistema. Denomina-
se Estabilidade Transitória. O segundo trata-se das
variações ocorridas no sistema em regime perma-
nente, ocasionadas por pequenas perturbações que
ocorrem durante a operação do Sistema. A expansão
econômica e o desenvolvimento industrial, que per-
mitiram a construção de sistemas elétricos interliga-
dos, favoreceram o aparecimento de oscilações ele-
tromecânicas de baixa frequência fracamente ou não
amortecidas. Estas oscilações são prejudiciais, pois
diminuem as margens de estabilidade do sistema de
potência, podendo limitar a potência de transmissão.
Portanto, o amortecimento dessas oscilações tornou-
se o pré-requisito para uma operação segura de um
sistema elétrico e a preocupação de engenheiros e
operadores (Rogers, 2000; Tortelli , 2010).
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
2652

Para um controle eficaz dessas oscilações é im-
prescindível a análise e conhecimento de fatores
como a natureza, tipos, frequências das oscilações
mais preocupantes e etc. As técnicas lineares utili-
zadas para projetar a maioria dos controladores
apresentam um baixo desempenho devido ao fato de
que esses métodos não consideram também as varia-
ções nas condições de operação, a variação de parâ-
metros do sistema devido a falhas, e também a parte
da dinâmica do sistema. Nas últimas décadas al-
guns pesquisadores passaram a utilizar técnicas de
controle robusto que consideram toda a complexida-
de inerente ao sistema (Klein et al, 1995; Boukarim
et al, 2000; Pal e Chaudhuri, 2005; Chen et al,
2006). Os controladores resultantes dessas técnicas
possuem ordem muito alta (equivalente ao número
de variáveis). Para contornar esse problema, o mode-
lo pode ser previamente reduzido e, posteriormente,
a ordem do controlador é também reduzida (Bouka-
rim et al, 2000). Daí a necessidade do aprimoramen-
to das técnicas de controle aplicadas para se obter
cada vez mais modelos de controladores com ordem
baixa e maior eficiência, contribuindo para manter a
estabilidade do sistema.
Neste artigo, é apresentado um projeto de con-
trolador robusto de baixa ordem para amortecimento
de oscilações, de baixa frequência, em um sistema
de potência de carga-frequência. Para isso, foi sele-
cionado os pares e entradas-saídas mais efetivos uti-
lizando a combinação da matriz de ganhos relativos
(MGR) com valores singulares. O método de otimi-
zação escolhido para selecionar o melhor controla-
dor robusto foi o de Algoritmos Genéticos.
2 Materiais e métodos
2.1 Análise de sinais para controle descentralizado
O sistema de potência com n unidades, m en-
tradas de controle e r sinais de saída é descrito por:
y(j) = G(j)u(j)
em que G(j) é a matriz de funções de transferência
de respostas frequênciais (MFTfr).
Pode-se definir a “controlabilidade” de um modo de
oscilação (MO) como a habilidade do sistema para
amortecer o MO para atingir um desempenho acei-
tável com entradas e saídas limitadas. Do mesmo
modo, pode-se definir a “observabilidade” de um
MO como a contribuição do MO na resposta do sis-
tema.
Para análise de controlabilidade e observabilida-
de modais de sistemas multivariáveis no domínio de
frequência são utilizados os “valores singulares” da
MFTfr, que para o caso da matriz G(j) são defini-
dos por
kiH
i
H
ii ,...,1,)()()( GGGGG
em que i é o i-ésimo autovalor da matriz, GH
é a
matriz conjugada e transposta de G e k = min(m,r).
Definindo como o maior valor singular, como
o menor e a relação / como o número de
condição as seguintes propriedades de interesse são
descritas (Cruz, 1996; Skogestad e Postlethwaite,
2005):
na frequência de um MO representa o
grau de observabilidade do modo na respos-
ta do sistema e representa o grau de con-
trolabilidade do modo. MO pouco amorte-
cidos e fortemente observáveis apresentam
grandes picos no gráfico de .
os picos de são associados à robustez do
sistema. Sistemas robustos apresentam pe-
quenos picos de .
Considere o sistema de potência G(j) com con-
troladores H(j), entradas de referência R e distúr-
bios, d, como apresentado na Fig. 1.
Figura 1. O sistema de potência com controlador
A seguinte relação é obtida da Fig. 1:
y = (I+GH)-1GR + (I+GH)-1
Gdd
em que S=(I+GH)-1 é a matriz de sensibilidade
e T = SG é a matriz de funções de transferência de
malha fechada do sistema. Essas matrizes são usadas
para análise do desempenho do sistema controlado.
2.2 Interações frequenciais
A matriz de ganhos relativos (MGR) é impor-
tante para análise de sistemas multivariáveis e será
usada para uma prévia seleção de entrada e saídas
para controle descentralizado. A MGR é definida
por:
(1)
(2)
(2)
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
2653

rm1r
m111
))j((
G
em que λij = gijbji e bji é o elemento ji de †G (ma-
triz inversa generalizada de G), definida por †G =
(GHG)-1
GH para m r, Posto(G) = m ou
†G =
GH(GG
H)-1 para r m, Posto(G) = r.
Sabe-se que ij é uma medida de interação entre a
entrada j e a saída i (Skogestad e Postlethwaite,
2005).
Utilizando as suas propriedades, a MGR pode
ser usada para seleção dos pares entrada-saída mais
efetivos. Entretanto, a utilização da MGR isolada-
mente para essa seleção tem algumas limitações. A
maior limitação é a impossibilidade de se selecionar
a saída mais efetiva entre sinais de uma mesma uni-
dade, por exemplo, velocidade e potência elétrica
num gerador (Milanovic e Duque, 2001) ou, de uma
maneira geral, sinais com alguma relação entre si.
Em (Castro e Araújo, 2002) foi proposta uma
técnica que combina MGR e valores singulares na
seleção dos pares entrada-saída mais efetivos para
aplicação de controladores descentralizados. Essa
técnica se mostra muito eficiente e confiável para
seleção de sinais.
2.3 Descentralização
Um conjunto de entradas e saídas é completamente
descentralizado se (G) = I. Entretanto, essa igual-
dade só ocorre se a matriz G for triangular, que não
é o caso de sistemas de potência. Todavia, pode-se
aceitar como descentralizado o conjunto que resultar
(G(j)) I para = c (Skogestad e Postlethwaite,
2005). Define-se a “frequência de corte”, c, como a
frequência em que =1, quando está decrescen-
do.
Quanto mais próximo da matriz identidade re-
sultar (G(jc)) mais independentes são os pares
entrada-saída e consequentemente menores intera-
ções ocorrerão entre os controladores.
2.4 Seleção de Entradas e Saídas
Inicialmente todas as entradas e sinais de saída
são usados para determinação da MGR na frequên-
cia = 0. Com essa matriz eliminam-se os sinais e
entradas pouco efetivos ou que provoquem intera-
ções indesejáveis.
A seguir, considerando que p controladores são
suficientes para amortecer os modos de oscilação
com controle robusto do sistema, formam-se todos os
conjuntos com p entradas e p saídas. Então esses
conjuntos são testados para verificação da descentra-
lização na frequência = c. Conjuntos com fortes
interações entre unidades (fraca descentralização)
são descartados.
Finalmente, os conjuntos restantes são compa-
rados, usando valores singulares, para selecionar o
conjunto com boa descentralização e com a maior
controlabilidade ( maior) na faixa dos MO. Esse
conjunto é usado para aplicação de controladores
descentralizados.
2.5 Projeto de Controladores Robustos Descentrali-
zados
Os controladores serão projetados levando em
consideração os erros de modelagem. Esses erros,
denominados incertezas, ocorrem por não se incluir
no modelo do Sistema as não linearidades, as mu-
danças dos parâmetros com as variações de carga e
devido à exclusão da dinâmica dos geradores, siste-
mas de excitação, etc. Nesse modelo, estes erros são
considerados, adotando incertezas multiplicativas
refletidas na saída, como representado na Figura 2
[8],[9], onde oWo(s)= (G´-G)G-1 é a matriz de in-
certezas relativas e G´ é a matriz de transferência do
sistema real. A matriz diagonal )(0 sW representa os
limites superiores das incertezas nos canais de con-
trole que corresponde a 12WW .
Figura 2. Diagrama de blocos do sistema de potência real
O objetivo é projetar controladores para estabi-
lizar não somente a planta nominal, G(s), mas o
conjunto de todas as plantas definido por
G´(s)=(I+oWo)G(s). S´=(I+G´H)-1, que é a matriz
de sensibilidade do sistema real.
Introduzindo as incertezas no diagrama de blo-
cos da Fig. 1 e arrumando-os para separar o bloco de
incertezas o, resulta o diagrama da Figura 3, onde
M(s) = -Wo(s)T(s)H(s). Sendo T equivalente ao
produto da Matriz de sensibilidade pelo sistema.
Figura 3. Estrutura M do sistema
(3)
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
2654

Usualmente, a matriz Wo(s) é representada por
o(s)I, onde o(s) é um peso, considerando um úni-
co limite superior, representando o pior caso, associ-
ado a todos os canais de controle. Esse peso é des-
crito por o(s) = (s + o)/[(/)s + 1], onde o é a
incerteza relativa no estado estacionário, 1/ é apro-
ximadamente a frequência onde a incerteza relativa
atinge 100% e é a magnitude do peso em altas
frequências.
Assumindo que a matriz M e as perturbações se-
jam estáveis, então o sistema M da Fig. 3 é estável
para todas perturbações com 1)( Δ , , se e só
se (Skogestad e Postlethwaite, 2005):
(M(j)) < 1,
onde (M) é o valor singular estruturado de M.
Sabe-se que (M) (M) e que a igualdade
ocorre quando a matriz de incertezas, , é cheia, que
deve ocorrer com erros de modelagem e exclusão de
dinâmica dos geradores, rede de transmissão, etc.
Sendo assim, considera-se como condição necessária
e suficiente para estabilidade robusta do sistema,
com (∆)≤1, , a condição:
1))(( jM
Assume-se que o controlador é de estrutura co-
nhecida (descentralizado e de ordem reduzida). Para
atingir a robustez, os parâmetros do controlador
H(s) são ajustados para solução do seguinte proble-
ma de otimização:
min[Sup( (M(jω))]
Se, após a minimização, a robustez es-
tabelecida pelo Teorema 6 não for atingida, ou seja,
se o valor mínimo do maior resultar igual ou maior
que um, então aumenta-se a ordem de cada e
repete-se o problema de otimização. É importante
salientar que ))M(sup(σ significa o valor superior
ou pico máximo de )M(σ .
Algumas restrições poderão ser introduzidas no
problema de otimização. Entre elas cita-se que os
parâmetros dos controladores devem ser ajustados
entre limites práticos. Por exemplo, neste trabalho,
os parâmetros são sempre positivos, e a relação de-
les, nos estágios de avanço-atraso, deverá satisfazer:
0,1 ≤ T1/T2 ≤ 10.
Considere M=oTH (o sinal negativo não afeta
o resultado). Então, (6) reduz-se a (M)=
o (TH) o
(H) (T)< 1, ou
)(
11)(
Ho
T
Para o caso particular com controladores idênti-
cos, (H)= (H)= 1/ (H-1), que substituído em (8),
resulta:
o
)()(
1HT
que é a condição mais fácil de ser verificada.
Observe que para controladores idênticos
ou não, a verificação de robustez é realizada tra-
çando dois gráficos diferentes na mesma escala e
verificando se o gráfico de )T(σ permanence abaixo
do gráfico de
o
)( 1H , para qualquer valor de ω .
O procedimento computacionalmente mais prá-
tico para projetar o controlador robusto descentrali-
zado, consiste em ajustar os parâmetros dos
)s(hi , p,......,i 1 , para minimizar )T(σ . Depois
verifica-se se a (7) ou (8) foram satisfeitas. Se sim,
obtemos o controle robusto descentralizado, se não,
aumentamos a ordem. Foi utilizado, nesse caso, Al-
goritmos Genéticos para fazer a busca dos melhores
resultados, por se encaixar perfeitamente às condi-
ções propostas no problema, além da possibilidade
de se obter um mínimo global para a função objeti-
vo, o que garante maior robustez. Ao aplicar o mé-
todo, viu-se a necessidade impor uma limitação ao
valor da constante K em T, permitindo que ele só
variasse entre 0,4 e 1, para garantir que todos os
autovalores sejam negativos, resultando na estabili-
dade do sistema em malha fechada.
Os Algoritmos Genéticos são algoritmos de
busca baseados nos mecanismos de Seleção Natural
e Genética, aplicando operadores genéticos como
seleção, recombinação e mutação nos indivíduos, até
encontrar a combinação solução para o problema.
Trata-se de técnicas heurísticas de otimização glo-
bal, opondo-se a métodos como o do Gradiente (Hill
Climbing), que seguem a derivada de uma função
para encontrar seu máximo, ficando facilmente reti-
do em máximos locais (Linden, 2008).
É um método de busca aleatória e, como tal, po-
de gerar respostas diferentes para uma mesma fun-
ção, com um mesmo conjunto de condições iniciais.
Entretanto, difere-se dos demais métodos de buscas
aleatórias por considerar informações históricas para
encontrar novos pontos de busca, onde há maior
probabilidade de um bom desempenho (Carvalho et
al, 2013).
(5)
(6)
(7)
(8)
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
2655

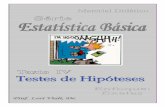
3 Resultados e Discussões
O sistema de potência de controle de carga-
frequência de três áreas equivalentes interligadas é
usado para ilustração. O modelo linearizado é apre-
sentado em (Calvet e Titli, 1989) O sistema é repre-
sentado na Figura 4.
O modelo do sistema é representado por
Figura 4. Sistema de três áreas interligadas
CXy
BuAXX
onde
XT = | f1 xE1 PG1 Ptie1 f3 xE3 PG3 Ptie2 f2 xE2PG2|
uT = | PC1 PC3 PC2 |
yT = | f1 Ptie1 f3 Ptie2 f2 |
em que fi ,xEi, PGi e Ptiei são respectivamente, fre-
quência, sinal de saída do regulador de velocidade,
potência mecânica da turbina e potência de inter-
câmbio do turbogerador da área i, em valores incre-
mentais. PCi é a entrada de controle do regulador de
velocidade da área i.
O sistema tem três MO, cujos autovalores asso-
ciados são: modo 1: -0,1759 j3,0010; modo2: -
0,1199 j4,0102 e modo 3: -0,1893 j4,6410. Foi
verificado que os três modos são do tipo interárea,
recomendando aplicar controladores nas três áreas
para amortecer os três MO.
Para melhorar a descentralização do controla-
dor, foi considerada a representação com sinais
compostos de saída, um recurso utilizado na prática,
definidos da seguinte maneira:
2232112 BfPBfPBfPy tietietie
T
O B é o fator “bias” em MW/Hz e a relação BfPtie , com variáveis incrementais, é denominada
“Erro de Controle de Área” (ECA). Tanto a ECA
quanto o “bias” são amplamente utilizados na litera-
tura como operadores do controle da frequência e do
intercâmbio de sistemas de potência. Normalmente
tem-se B maior que zero e menor que um. Tradicio-
nalmente procura-se tomar o “bias” igual à caracte-
rística natural combinada de área, isto é,
i
i
i DR
B 1 (Cohn, 1961; Elgerd, 1976; Castro et
al, 1988). Assim, adotamos um valor típico B1=
B2= B = 0,417 MW/Hz.
Com a composição de sinais a MGR, em c = 6
rad/s, resultou
142,0j063,1103,0j004,0039,0j059,0
106,0j0103,0j004,1003,0j004,0
036,0j063,00036,0j063,1
Λ
Verifica-se, então, que os sinais compostos de y2
com as entradas, u, resultam em pares com uma des-
centralização muito boa. Os gráficos de e da
descrição y2 = G2(j)u são apresentados na Fig. 5.
Figura 5. Valores de e de G2(j)
Verifica-se que para G2 é superior, em toda
faixa de frequência dos MO. Assim, os sinais de y2
são selecionados para realimentação. Observe-se
que, apesar dos sinais de y2 serem os mais efetivos,
ainda poderá haver dificuldade para atingir a robus-
tez do controle, porque (G2)<1 em toda faixa de
frequência.
As três áreas tem parâmetros com valores pró-
ximos (Calvet e Titli, 1989), justificando a utilização
de controladores idênticos. Os controladores esco-
lhidos são do tipo hi=K(1+sT1)/(1+sT2), em cada
área. Os parâmetros dos controladores são ajustados
para minimizar a função M, diminuindo também,
por consequência, o (T). Para esse problema,
foram feitas combinações de 20 indivíduos em 200
gerações, valores usuais do Matlab. Os resultados
encontrados para os parâmetros foram: K=0,4028,
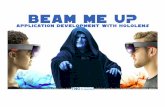
T1=0,001s e T2=0,01s. Os gráficos de (T) com o
controlador obtido e de (H-1)/o para
o1=(0,25s+0,15)/(0,5s+1) são apresentados na Fi-
gura 6.
A Figura 6 mostra que o controle robusto pode
ser obtido para incertezas não elevadas, usando con-
troladores descentralizados de 1a ordem. Melhores
resultados deverão ser obtidos com controladores de
ordem superior.
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
2656

Figura 6. Gráficos de (T) para o controle proposto e de
(H1)/o
Figura 7: Resposta ao Impulso
Figura 8: Valores Singulares do sistema com controlador obti-
do por Pattern Seach e por Algoritmos Genéticos
A eficácia do controlador pode ser demonstrada
também no domínio do tempo, para isso, foi obtida a
resposta ao impulso para o sistema e foi observado
que, ao aplicar o controlador, o sistema entra em
regime permanente mais rapidamente. Isso pode ser
observado comparando os resultados da Figura 7 que
correspondem à resposta ao impulso para o par de
entrada-saída Ptie1 e Ptie1 + Bf1, sem o controlador e
com o controlador.
Quanto ao método de otimização escolhido, a res-
posta obtida, observando os valores singulares, foi
muito semelhante ao encontrado em (Castro, 2006).,
onde foi utilizado o método “Pattern Search” de
Hooke e Jeeves (Gottfried e Weisman, 1976), como
se pode observar na Figura 8. Entretanto, o método
com algoritmos genéticos tem uma probabilidade
muito maior de encontrar o mínimo global, tornan-
do-se um método mais confiável para ser utilizado
em outros sistemas.
Além disso, o método “Pattern Search” é um
método de busca com convergência mais lenta com-
parado ao Algoritmo Genético, pois implica em
variar cada variável por vez, podendo se tornar
inviável para sistemas maiores.
Para efeito de comparação, repetiu-se o estudo,
usando integradores puros (ui =(Ki/s)yi) como con-
troladores, a exemplo do controle tradicional de in-
tercâmbio. Verificou-se, todavia, que o controle ro-
busto só pode ser atingido com valores de Ki <
0,11(Figura 9). Entretanto, com valores pequenos de
Ki, além de não amortecer os MO, o sistema resulta
com três pólos reais muito próximos da origem, dei-
xando o sistema com resposta muito lenta.
Para outros tipos de perturbação e faltas, a
metodologia também responde satisfatoriamente.
Reduzindo em 25% a potencia de intercâmbio entre
as áreas, ainda é possível atingir robustez, como é
mostrado na figura 10.
A robustez é mantida também quando se retira
um dos três controladores utilizados, como mostra a
figura 11.
4 Conclusão
Foi proposta uma metodologia para o desenvol-
vimento de um projeto de controladores robustos,
descentralizados e de pequena ordem, para sistemas
de carga-frequência.
Figura 10: Verificação da robustez utilizando PTIE =0,75.
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
2657

Figura 11: Verificação da robustez, com a ausência do contro-
lador 1.
O procedimento proposto, onde os ganhos rela-
tivos são usados para pré-seleção de saídas e entra-
das, deixando a seleção final para ser realizada com
o uso de valores singulares é adequado e eficiente
para aplicação no sistema de carga-frequência esco-
lhido, e foi fundamental para facilitar a escolha efi-
ciente de um controlador de baixa ordem e descen-
tralizado. Essa metodologia pode ser aplicada em
qualquer sistema, independente do tamanho.
Esta técnica se sobressai em relação às técnicas
tradicionais de controle robusto H∞, principalmente
em sistemas de grande porte, por resultar em um
controlador de baixa ordem, aplicado diretamente no
sistema sem nenhuma redução do modelo.
Após a aplicação da metodologia, foi verificado
que o controle gerado matém a robustez, mesmo na
presença de perturbações ou com falta em um dos
controladores.
Além disso, o método de otimização utilizado
para minimizar a norma H∞ nos garante uma proba-
bilidade muito grande de encontrar o mínimo global,
resultando em um controlador o mais ótimo possí-
vel, além de constituir uma excelente opção, pois se
adéqua a diversos modelos de Sistema Elétrico e não
só ao sistema de carga-frequência, além de ser apli-
cável utilizando diferentes tipos de controladores.
Agradecimentos
Os autores agradecem às suas Instituições pelo
apoio ao desenvolvimento do trabalho.
Referências Bibliográficas
Boukarim, G.E. Wang, S. Chow, J.H. Taranto, G.N.
e Martins, N. (2000) "A Comparison of Classi-
cal, Robust, and Decentralized Control Design
for Multiple Power System Stabilizers," IEEE
Transactions on Power Systems.
Calvet, J.L. Titli, A. (1989). Overlapping vs partiti-
oning in block-iteration methods: Application
in large-scale system theory, Automatica, Vo-
lume 25, Issue 1.
Carvalho, A. Braga, A. Ludermir. T. (2003). Com-
putação Evolutiva, In: Rezende, S. O. (Coord.),
Sistemas Inteligentes – Fundamentos e Aplica-
ções, 1ª Ed. Cap. 9, Ed. Manole, São Paulo,
Brasil.
Castro. A. C. (2006). “Projeto de controladores ro-
bustos descentralizados de ordem reduzida para
amortecimento de oscilações em sistemas elé-
tricos de potência”. Tese apresentada à Univer-
sidade Federal da Paraíba, João Pessoa, PB,
Brasil.
Castro, C. Araújo, C. S. (2002) “Análise de Sinais
para Controle Descentralizado em Sistemas de
Potência”. Anais do XIV Congresso Brasileiro
de Automática.
Castro, J.C. Catão, M.O Doraiswami, R. (1988).
“Identification of the Generating Units to Be
Equipped with Stabilizers in a Multimachine
Power Systems”, AUTOMATICA, v. 24, pp.
405-409.
Chen, H. Guo Z. e Bai H. (2006) "Wide-area ro-
bust H2/H control with pole placement for
damping inter-area oscillations", Proc. IEEE
Power Eng. Soc. General Meeting.
Cohn, N. (1961) “Control of Interconnected Power
System”. In: Ramo, S.,Wooldrige, D.E. (eds),
Handbook of Automation Computation and
Control, chapter 17, John Wiley.
Gottfried B. S. e Weisman, J. (1973) Introduction to
Optimization Theory. Prentice Hall, Englewood
Cliffs.
Cruz. J. J. (1996) Controle Robusto Multivariável.
Editora Universidade de São Paulo, São Paulo.
Elgerd, O. I. (1976) “Introdução à Teoria de Siste-
mas de Energia Elétrica”, 1ª ed., São Paulo,
McGraw-Hill do Brasil.
Klein, M. Rogers, G. J. Farrokhpay, S. Balu, N. J.
(1995) "H∞ damping controller design in large
power system", IEEE Trans. Power System,
vol. 10, No.1, pp. 158-165.
Linden, R. (2008)“Algoritmos Genéticos: Uma im-
portante ferramenta da Inteligência Computa-
cional”. 2ª Ed. Editora Brasport. Rio de Janei-
ro.
Milanovic, J. V. Duque, A. S. (2001) "The use of
relative gain array for optimal placement of
PSSs", CD ROM of the IEEE Power Eng. Soc.
Winter Meeting,
Pal, B. e Chaudhuri, B. (2005) Robust Control in
Power Systems. Ed. Springer.
Rogers, G. (2000) Power Yystem Oscillations.
Kluwer, Masssachusetts.
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
2658

Skogestad S. e Postlethwaite, I. (2005) “Multivaria-
ble Feedback Control: Analysis and Design
Wiley”, Chichester, U.K.,
Tortelli, O. L. (2010) “Alocação e operação de con-
troladores FACTS em Sistemas Elétricos de Po-
tência”. Tese de Doutorado apresentada à Fa-
culdade de Engenharia Elétrica e de Computa-
ção da Universidade Estadual de Campinas,
UNICAMP, Campinas.
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
2659
Top Related