





Línguas
Páginas
Legal

Roberto Panerai Velloso Página 1 25/7/2004 Protótipo de um EMG Digital.doc
UNIVERSIDADE REGIONAL DE BLUMENAU
CENTRO DE CIÊNCIAS EXATAS E NATURAIS
CURSO DE CIÊNCIAS DA COMPUTAÇÃO – BACHARELADO
PROTÓTIPO DE UM ELETROMIÓGRAFO DIGITAL
ROBERTO PANERAI VELLOSO
BLUMENAU 2004
2004/1-XX

ROBERTO PANERAI VELLOSO
PROTÓTIPO DE UM ELETROMIÓGRAFO DIGITAL
Trabalho de Conclusão de Curso submetido à Universidade Regional de Blumenau para a obtenção dos créditos na disciplina Trabalho de Conclusão de Curso II do curso de Ciências da Computação — Bacharelado.
Prof. Antonio Carlos Tavares - Orientador
BLUMENAU 2004
2004/2-XX
PROTÓTIPO DE UM ELETROMIÓGRAFO DIGITAL
Por
ROBERTO PANERAI VELLOSO
Trabalho aprovado para obtenção dos créditos na disciplina de Trabalho de Conclusão de Curso II, pela banca examinadora formada por:
______________________________________________________ Presidente: Prof. Antonio Carlos Tavares – Orientador, FURB
______________________________________________________ Membro: Prof. Francisco Adel Péricas, FURB
______________________________________________________ Membro: Prof. Miguel Alexandre Wisintainer, FURB
Blumenau, 14 de maio de 2004

Se o conhecimento causa problemas, não é através da ignorância que podemos solucioná-los.
Isaac Asimov
AGRADECIMENTOS
À minha família pelo suporte e pela motivação incondicionais.
Aos meus orientadores pelo subsídio fornecido de diversas formas.
Aos meus amigos e colegas, principalmente àqueles que ajudaram, direta ou
indiretamente, no desenvolvimento deste trabalho.

RESUMO
Este trabalho apresenta o desenvolvimento de um protótipo de um aparelho de eletromiografia (EMG) digital assim como os fundamentos e teorias utilizadas no seu desenvolvimento. A eletromiografia é o estudo do sinal bioelétrico muscular. O sinal muscular é adquirido através de eletrodos de superfície. É utilizado um circuito de condicionamento de sinais analógicos para preparar o sinal para ser convertido para digital. O sinal, em sua forma digital, é processado por um software que é executado por um DSP e os resultados são exibidos em uma tela gráfica de cristal líquido. As técnicas de processamento de sinais digitais utilizadas são: filtros digitais do tipo FIR e a transformada rápida de Fourier para análise de espectro do sinal muscular.
Palavras chaves: Engenharia Biomédica; Eletrônica; DSP; EMG.

ABSTRACT
This work presents the development of a digital electromyography (EMG) device as well as the beddings and theories used in its development. The electromyography is the study of the muscular bioelectrical signal. The muscular signal is acquired through surface electrodes. It is used an analog signal conditioning circuit to prepare the signal to be converted to digital. The signal, in its digital form, is processed by the software that is executed by a DSP and the results are shown in a graphical liquid crystal display. The digital signal processing techniques used are: FIR digital filters and the fast Fourier transform for analysis of muscular signal specter.
Key-Words: Biomedical engineering; Electronics; DSP; EMG.
LISTA DE ILUSTRAÇÕES
Figura 1 - Eletrodos de superfície descartáveis, com gel e adesivo ........................................... 6 Figura 2 - Op amp ideal.............................................................................................................. 7 Figura 3 - Amplificador inversor................................................................................................ 8 Figura 4 - Esquemático do amplificador de instrumentação ...................................................... 9 Figura 5 - Resposta em freqüência ideal .................................................................................. 10 Figura 6 - Esquemático de um filtro ativo inversor de 1ª ordem.............................................. 11 Figura 7 - Aliasing. Freqüência do sinal superior à metade da freqüência de amostragem ..... 13 Figura 8 - Diagrama de blocos de um ADC............................................................................. 13 Figura 9 – O plano complexo ................................................................................................... 17 Figura 10 - Convolução entre sinal amostrado e coeficientes (resposta no tempo) do filtro ... 19 Figura 11 - Resposta e coeficientes de um filtro FIR com 64 coeficientes .............................. 19 Figura 12 - Diagrama de um filtro IIR de 2ª ordem ................................................................. 21 Figura 13 - Resposta de um filtro IIR de 10ª ordem butterworth passa-baixa ......................... 22 Figura 14 - Diagrama simplificado do protótipo do aparelho de eletromiografia.................... 23 Figura 15 - Componentes do circuito de aquisição de sinal ..................................................... 24 Figura 16 - Pré-amplificador formado por in amps.................................................................. 25 Figura 17 - Disposição dos componentes na placa de circuito impresso ................................. 27 Figura 18 – Placa de circuito impresso para aquisição de sinal ............................................... 27 Figura 19 - LCD gráfico 128x64 pixels monocromático.......................................................... 30 Figura 20 - Esquema de endereçamento do LCD Tech12864G............................................... 30 Figura 21 - Fluxograma do software ........................................................................................ 32 Figura 22 - Resposta do filtro implementado ........................................................................... 33
LISTA DE TABELAS
Tabela 1 - Etapas do desenvolvimento de um filtro FIR.......................................................... 20 Tabela 2 - Comparativo entre filtros IIR e FIR ........................................................................ 22 Tabela 3 - Conexão dos periféricos com o microcontrolador .................................................. 28 Tabela 4 - Pinagem do módulo LCD........................................................................................ 29 Tabela 5 - Comandos do LCD.................................................................................................. 31
LISTA DE QUADROS
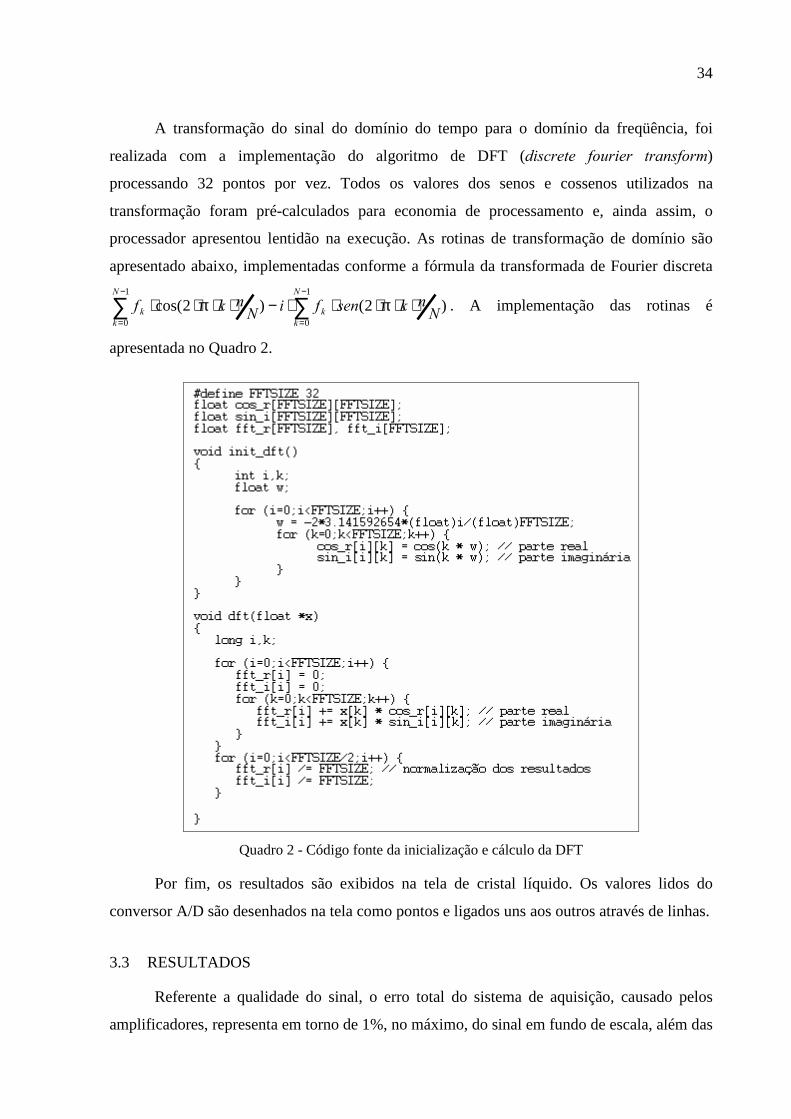
Quadro 1 - Código fonte para calibragem e leitura do ADC.................................................... 33 Quadro 2 - Código fonte da inicialização e cálculo da DFT .................................................... 34
SUMÁRIO
1 INTRODUÇÃO.................................................................................................................... 3
1.1 OBJETIVO DO TRABALHO ............................................................................................ 4
1.2 ESTRUTURA DO TRABALHO........................................................................................ 4
2 FUNDAMENTAÇÃO TEÓRICA...................................................................................... 5
2.1 ELETROMIOGRAFIA ....................................................................................................... 5
2.2 SENSORES......................................................................................................................... 5
2.2.1 Tipos de sensores .............................................................................................................. 5
2.2.2 Eletrodos ........................................................................................................................... 6
2.3 TRATAMENTO E CONDICIONAMENTO DE SINAIS ANALÓGICOS ...................... 6
2.3.1 Amplificadores operacionais............................................................................................. 7
2.3.2 Amplificadores de instrumentação.................................................................................... 8
2.3.3 Filtros analógicos .............................................................................................................. 9
2.3.4 Teorema de Nyquist ........................................................................................................ 12
2.3.5 Conversores de analógico para digital ............................................................................ 13
2.4 PROCESSAMENTO DE SINAIS DIGITAIS .................................................................. 14
2.4.1 Transformada de Fourier................................................................................................. 15
2.4.1.1 Transformada discreta de Fourier (DFT)...................................................................... 16
2.4.1.2 Transformada rápida de Fourier (FFT)......................................................................... 17
2.4.2 Filtros digitais ................................................................................................................. 18
2.4.2.1 Filtros FIR..................................................................................................................... 18
2.4.2.2 Filtros IIR ..................................................................................................................... 21
3 DESENVOLVIMENTO DO TRABALHO..................................................................... 23
3.1 HARDWARE.................................................................................................................... 23
3.1.1 Entrada de sinal e configuração dos eletrodos ................................................................ 23
3.1.2 Circuito de aquisição de sinal ......................................................................................... 24
3.1.3 Circuito digital microcontrolado..................................................................................... 28
3.1.4 Recursos do microcontrolador ........................................................................................ 28
3.1.5 Dispositivo de visualização............................................................................................. 29
3.2 SOFTWARE ..................................................................................................................... 31
3.2.1 Levantamento de requisitos ............................................................................................ 31
3.2.2 Desenvolvimento do software......................................................................................... 32
3.3 RESULTADOS ................................................................................................................. 34

4 CONCLUSÕES.................................................................................................................. 36
REFERÊNCIAS BIBLIOGRÁFICAS ................................................................................. 37
APÊNDICE A – Esquemático do circuito de aquisição de sinal ............................................. 39
3
1 INTRODUÇÃO
A eletromiografia (EMG) é o estudo da função muscular através da interpretação do
sinal bioelétrico circulante no músculo (WEBSTER, 2004). Os equipamentos de EMG são
utilizados na Medicina para diagnóstico de problemas neuromusculares e na Fisioterapia
como equipamentos de biofeedback para reeducação e treinamento muscular.
Através da medição e estudo do sinal muscular e de seu espectro de freqüência são
avaliadas características tais como o potencial de ativação das unidades motoras musculares,
recrutamento de unidades motoras, tempo de ativação muscular, trabalho muscular realizado
entre outras (RASH, 2004).
Este trabalho apresenta a construção de um protótipo de um aparelho de
eletromiografia digital composto por sensores, circuito de aquisição de sinal, processador de
sinais digitais, software e dispositivo de visualização.
Os sensores utilizados são eletrodos de superfície em contato com o músculo do
indivíduo e ligados às entradas do circuito de aquisição. O circuito de aquisição prepara o
sinal para conversão de analógico para digital e após a conversão, este é processado pelo
software e exibido em uma tela de cristal líquido (LCD).
O circuito de tratamento do sinal analógico é simples e realiza poucas manipulações no
sinal original, apenas filtra e amplifica o sinal para que este possa ser quantizado. Foi adotada
esta abordagem para minimizar as distorções causadas pela manipulação analógica, pois nesta
aplicação a forma do sinal deve ser preservada o mais próximo possível do original, e já que o
processamento do sinal digital não causa distorções definitivas, a maior parte da manipulação
de sinal é realizada pelo software.
Para realizar o processamento do sinal digital, foi desenvolvido um circuito
microcontrolado, que tem como entrada a saída do circuito de aquisição de sinal, e um
software que é executado pelo microcontrolador. Algumas das atribuições do software são:
filtragem digital, conversão de domínio e exibição dos gráficos de amplitude, freqüência e
potência do sinal.
4
1.1 OBJETIVO DO TRABALHO
O objetivo deste trabalho é desenvolver um protótipo de um aparelho (hardware e
software) de eletromiografia digital. O dispositivo possui apenas um canal de aquisição de
sinal, que é realizada com três eletrodos, e efetua a medição de sinal apenas dos músculos
esqueléticos (superficiais) exibindo a saída do sistema em um LCD gráfico, utilizando um
microcontrolador para controlar todo o sistema.
1.2 ESTRUTURA DO TRABALHO
Este trabalho está organizado em três partes que serão detalhadas na fundamentação
teórica e no desenvolvimento do trabalho na ordem em que cada componente do sistema foi
desenvolvido.
Primeiro serão apresentadas as características do sensor utilizado para captura do sinal.
A segunda parte detalhará o circuito que realiza o condicionamento analógico do sinal
que compreende a amplificação, filtragem e preparação do sinal para quantização. A teoria
sobre amplificadores operacionais (o principal componente deste circuito) será apresentada,
assim como o teorema de Nyquist sobre amostragem de sinais.
A última etapa do trabalho descreve o circuito digital, o microcontrolador utilizado, as
ferramentas e a plataforma de desenvolvimento do software que controla o conversor de sinal
e o dispositivo de visualização. Serão apresentadas as teorias sobre processamento digital de
sinais, filtros digitais, transformações de sinais discretos, requisitos e modelo do software.
5
2 FUNDAMENTAÇÃO TEÓRICA
As teorias estudadas e utilizadas na implementação deste trabalho são revistas e
descritas a seguir. Em alguns casos é enfocada sua aplicação específica com a intenção de
tornar mais clara sua utilidade e o papel que desempenha dentro do protótipo desenvolvido
neste trabalho.
2.1 ELETROMIOGRAFIA
Segundo Rodriguez-Añez (2000), existem dois tipo de eletromiografia: a
eletromiografia de superfície que utiliza eletrodos de superfície para aquisição do sinal e a de
profundidade que utiliza eletrodos de agulha em contato direto com o tecido muscular. O
primeiro tipo de aparelho é o mais amplamente utilizado por se tratar de um método não
invasivo.
O sinal muscular quando medido com eletrodos de superfície apresenta amplitudes de
até 5mV e de até 10mV com eletrodos de agulha. A banda de freqüência do sinal muscular se
encontra, geralmente, entre 0Hz e 1kHz (WEBSTER, 1998).
A aquisição do sinal muscular pode ser realizada utilizando-se um eletrodo ativo e um
de referência ou então com dois ou três eletrodos ativos e um eletrodo de referência. Com dois
eletrodos ativos já é possível realizar a aquisição diferencial do sinal, eliminando grande parte
da interferência comum aos dois eletrodos, o que resulta em um sinal de qualidade satisfatória
(RASH, 2004).
2.2 SENSORES
A seguir é apresentada uma breve descrição sobre o que são sensores e os tipos
existentes. Logo após, os sensores utilizados para aquisição de sinal muscular, os eletrodos,
são detalhados.
2.2.1 Tipos de sensores
De acordo com Analog Devices (2002, p. 4.2), os sensores podem ser classificados de
acordo com a grandeza que medem. Existem sensores de pressão, luminosidade, movimento,
entre outros. Os sensores que transformam um tipo de energia em outro são chamados de
transdutores.
6
Outra forma de se classificar os sensores é quanto à excitação. Sensores ativos
requerem uma fonte externa de excitação para que funcionem e sensores passivos não.
O sinal de saída da grande maioria dos sensores é relativamente pequeno, sendo
necessário tratar esta saída antes que se possa processar o sinal através de um circuito
analógico ou digital. Estes circuitos são chamados de condicionadores de sinais e são
específicos para cada tipo de sinal e sensor.
2.2.2 Eletrodos
Um tipo de sensor existente é o eletrodo, geralmente feito de prata (Ag/AgCl), pode
ser de superfície ou em forma de agulha (WEBSTER, 1998). O eletrodo é utilizado em
aparelhos de eletromiografia, eletroencefalograma e eletrocardiograma para medir os sinais
elétricos dos músculos, cérebro e coração. É um sensor passivo e não se trata de um
transdutor, pois o sinal de entrada é elétrico e o sinal de saída também, não há transformação.
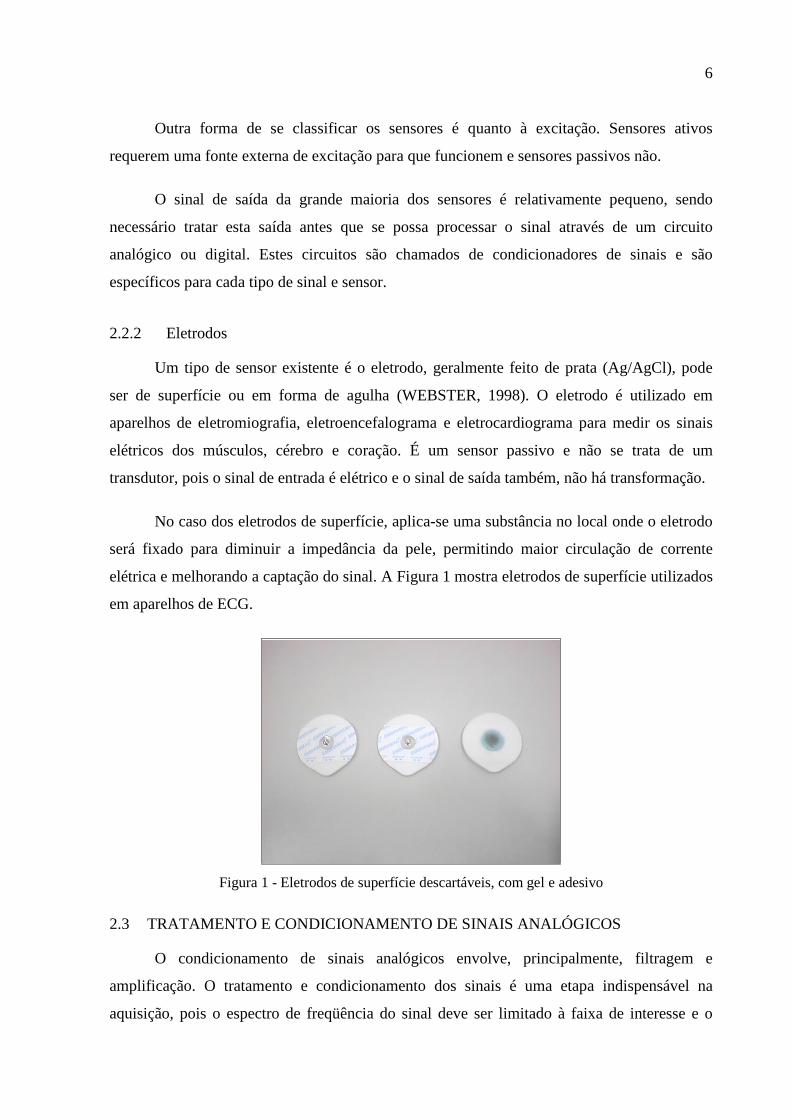
No caso dos eletrodos de superfície, aplica-se uma substância no local onde o eletrodo
será fixado para diminuir a impedância da pele, permitindo maior circulação de corrente
elétrica e melhorando a captação do sinal. A Figura 1 mostra eletrodos de superfície utilizados
em aparelhos de ECG.
Figura 1 - Eletrodos de superfície descartáveis, com gel e adesivo
2.3 TRATAMENTO E CONDICIONAMENTO DE SINAIS ANALÓGICOS
O condicionamento de sinais analógicos envolve, principalmente, filtragem e
amplificação. O tratamento e condicionamento dos sinais é uma etapa indispensável na
aquisição, pois o espectro de freqüência do sinal deve ser limitado à faixa de interesse e o

7
nível do sinal deve ser ajustado de forma que a aquisição seja realizada da melhor forma
possível, introduzindo o mínimo possível de erro ao processo (ANALOG DEVICES, 2002).
2.3.1 Amplificadores operacionais
O amplificador operacional, ou op amp, é utilizado na construção de amplificadores de
instrumentação, buffers, filtros ativos, amplificadores inversores, amplificadores não-
inversores, comparadores, somadores e integradores. São, portanto, a base dos circuitos de
condicionamento de sinais analógicos.
O op amp possui duas entradas e uma saída, uma das entradas é não-inversora e a outra
é inversora de sinal. A saída do amplificador, efeito sobre as entradas, depende da
configuração dos componentes passivos do circuito.
Para simplificação dos cálculos de demonstração do funcionamento do op amp, será
utilizado um amplificador “ideal” (Figura 2). No amplificador operacional ideal assume-se
que sua impedância de entrada iZ é infinita (não consome corrente), o ganho de sinal é
infinito, a resposta em qualquer freqüência é linear, a diferença de potencial EV (offset) entre
as entradas é nula e a impedância de saída OZ também é nula, isto é, fornece qualquer
corrente necessária. Mesmo com estas simplificações, na maioria dos casos os cálculos se
aproximam muito da realidade, pois os parâmetros dos op amps modernos são próximos dos
ideais.
Fonte: adaptado de Texas Instruments (2002b, p. 42)
Figura 2 - Op amp ideal
O exemplo abaixo é o cálculo de ganho de um amplificador inversor (Figura 3).

8
Fonte: adaptado de Texas Instruments (2002b, p. 44)
Figura 3 - Amplificador inversor
Como a impedância de entrada do amplificador é infinita, pode-se utilizar a lei de
Kirchoff no circuito acima: saídaentrada II ∑=∑ , ou seja, a soma das correntes que entram é
igual a soma das correntes que saem de um junção. A corrente de entrada, pela lei de Ohm, é
G
entrada
RV
I =1 e a corrente de saída é F
saída
RV
I =2 . Como a realimentação está ligada à entrada
inversora, então 21 II −= , já que a diferença de potencial entre as entradas é igual a zero.
Igualando as duas equações F
saída
G
entrada
RV
RV
−= a voltagem de saída do amplificador fica sendo
G
Fentradasaída R
RVV ⋅−= , logo, o ganho do amplificador é G
F
RR
− .
2.3.2 Amplificadores de instrumentação
O amplificador de instrumentação, ou in amp, é um dos circuitos construídos a partir
do amplificador operacional. São utilizados três op amps no circuito e o resultado é uma alta
taxa de rejeição de modo comum1 e impedâncias de entrada bem próximas uma da outra, o
que resulta numa maior precisão na aquisição do sinal, pois reduz o offset. Este tipo de
amplificador é especialmente útil, devido as suas características, na aquisição de sinais
reduzidos e quando a interferência se sobrepõe de forma significativa ao sinal.
O in amp é um tipo especial de amplificador diferencial e o circuito possui dois
estágios. No primeiro estágio cada uma das entradas é amplificada, em cada entrada existe um
amplificador não-inversor. A segunda etapa consiste em um amplificador diferencial onde as
entradas são as saídas dos amplificadores não-inversores.
1 Rejeição de modo comum é atenuação do sinal comum às duas entradas do amplificador.

9
As equações para cálculo de ganho são as mesmas utilizadas nos circuitos que
compõem o in amp (Figura 4), portanto, apenas a equação final de ganho do in amp será
apresentada, pois a demonstração de todas as equações dos amplificadores operacionais foge
ao escopo deste texto. Em Texas Instruments (2002b), Gayakwad (1988) e Analog Devices
(2002) encontram-se as demonstrações detalhadas das equações dos circuitos mais utilizados.
Figura 4 - Esquemático do amplificador de instrumentação
O ganho dos amplificadores não-inversores, neste circuito, é calculado por 2
121RR⋅+ e
2
321RR⋅+ . Assumindo 75 RR = e 64 RR = , para fins de simplificação, o ganho do
amplificador diferencial pode ser calculado por 4
521 )(
RR
VV ⋅− . O ganho total do circuito,
assumindo 31 RR = , é dado por 4
5
2
1 )21(RR
RR
⋅⋅+ . Com 45 RR = e fixando-se um valor para 1R ,
o ganho total do circuito pode ser controlado com apenas um resistor: )21(2R
K⋅+ .
2.3.3 Filtros analógicos
Os filtros de sinais analógicos são utilizados para filtrar as freqüências que não se quer
tratar e deixar passar somente o espectro de freqüência de interesse (TEXAS
INSTRUMENTS, 2002a). De acordo com a necessidade pode-se utilizar quatro tipos distintos
de filtros:
10
a) passa-baixa: filtra as freqüências acima da freqüência de corte;
b) passa-alta: filtra as freqüências abaixo da freqüência de corte;
c) passa-faixa: filtra as freqüências fora da faixa de interesse. É formado pela
combinação em série de um filtro passa-baixa e um passa-alta;
d) rejeita-faixa: filtra a faixa de freqüência desejada. É formado pela combinação em
paralelo de um filtro passa-baixa e um passa-alta em série com um amplificador
somador.
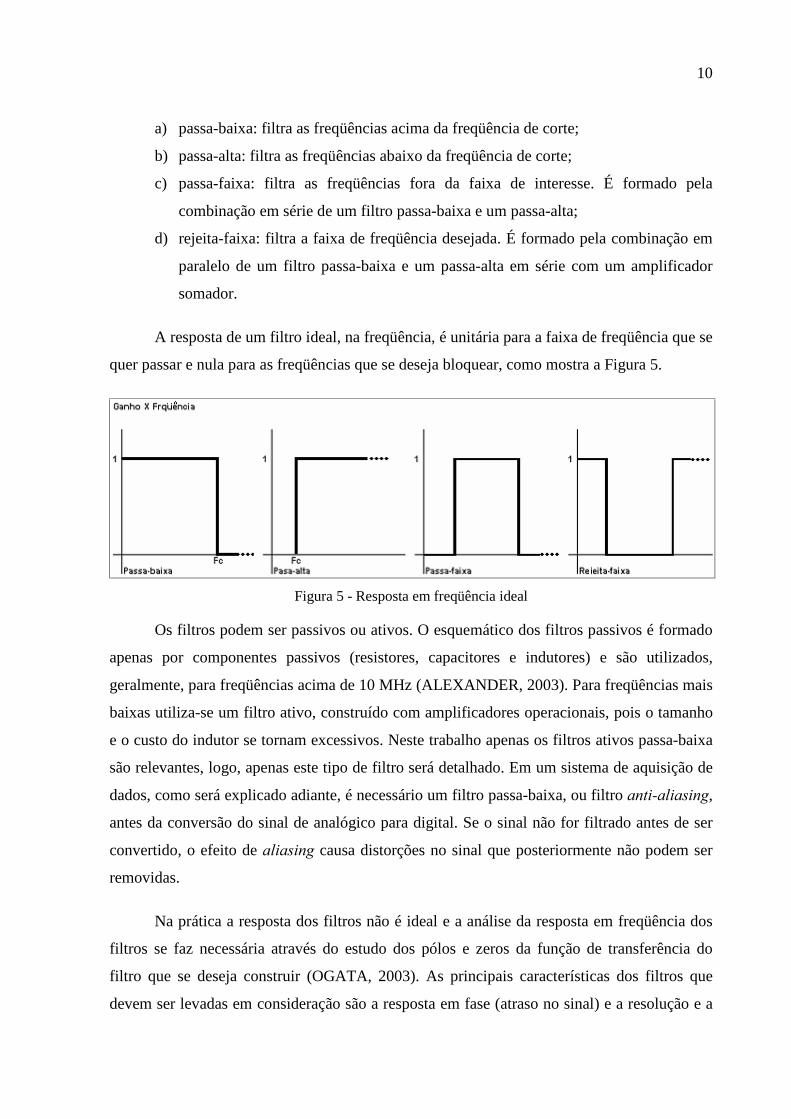
A resposta de um filtro ideal, na freqüência, é unitária para a faixa de freqüência que se
quer passar e nula para as freqüências que se deseja bloquear, como mostra a Figura 5.
Figura 5 - Resposta em freqüência ideal
Os filtros podem ser passivos ou ativos. O esquemático dos filtros passivos é formado
apenas por componentes passivos (resistores, capacitores e indutores) e são utilizados,
geralmente, para freqüências acima de 10 MHz (ALEXANDER, 2003). Para freqüências mais
baixas utiliza-se um filtro ativo, construído com amplificadores operacionais, pois o tamanho
e o custo do indutor se tornam excessivos. Neste trabalho apenas os filtros ativos passa-baixa
são relevantes, logo, apenas este tipo de filtro será detalhado. Em um sistema de aquisição de
dados, como será explicado adiante, é necessário um filtro passa-baixa, ou filtro anti-aliasing,
antes da conversão do sinal de analógico para digital. Se o sinal não for filtrado antes de ser
convertido, o efeito de aliasing causa distorções no sinal que posteriormente não podem ser
removidas.
Na prática a resposta dos filtros não é ideal e a análise da resposta em freqüência dos
filtros se faz necessária através do estudo dos pólos e zeros da função de transferência do
filtro que se deseja construir (OGATA, 2003). As principais características dos filtros que
devem ser levadas em consideração são a resposta em fase (atraso no sinal) e a resolução e a
11
velocidade de atenuação. Em um filtro ideal a resposta em fase deve ser linear para todas as
freqüências e a atenuação do sinal deve ser precisa e rápida. Existem três tipos principais de
otimizações das respostas dos filtros, que são utilizadas de acordo com a aplicação. Em cada
tipo de resposta a concessão de uma característica é feita para que outra possa ser melhorada,
como segue:
a) resposta butterworth: melhor relação entre a resposta em fase e velocidade de
atenuação. Não possui ripple na banda de passagem;
b) resposta bessel: boa resposta em fase, mas possui pouca resolução na banda de
transição;
c) resposta chebyshev: maior velocidade de atenuação, mas possui ripple na banda de
passagem.
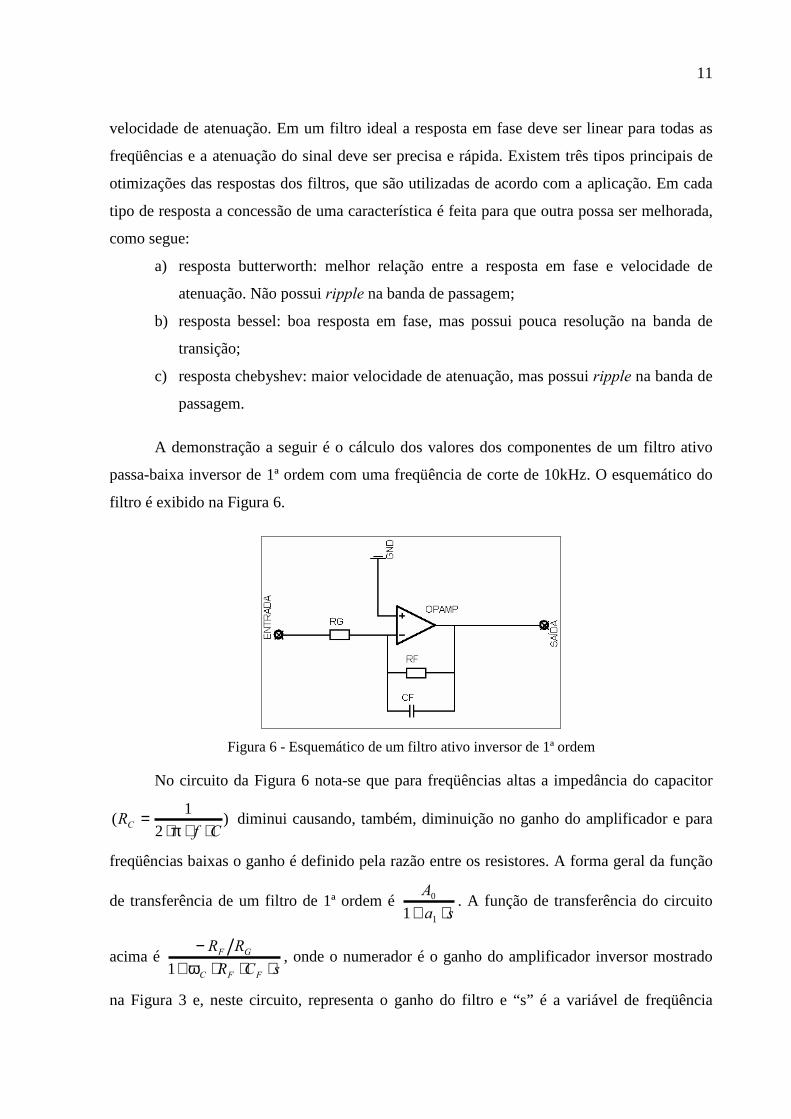
A demonstração a seguir é o cálculo dos valores dos componentes de um filtro ativo
passa-baixa inversor de 1ª ordem com uma freqüência de corte de 10kHz. O esquemático do
filtro é exibido na Figura 6.
Figura 6 - Esquemático de um filtro ativo inversor de 1ª ordem
No circuito da Figura 6 nota-se que para freqüências altas a impedância do capacitor
)2
1(Cf
RC ⋅⋅⋅=
π diminui causando, também, diminuição no ganho do amplificador e para
freqüências baixas o ganho é definido pela razão entre os resistores. A forma geral da função
de transferência de um filtro de 1ª ordem é sa
A⋅+ 1
0
1. A função de transferência do circuito
acima é sCR
RR
FFC
GF
⋅⋅⋅+−ω1
, onde o numerador é o ganho do amplificador inversor mostrado
na Figura 3 e, neste circuito, representa o ganho do filtro e “s” é a variável de freqüência

12
complexa. A variável Cω é a freqüência de corte do filtro expressa como freqüência angular,
e é igual a Cf⋅⋅π2 , onde Cf é a freqüência oscilatória de corte do filtro. Substituindo a
freqüência angular na equação anterior sCRf
RR
FFC
GF
⋅⋅⋅⋅⋅+−π21
, os coeficientes ficam
FFC CRfa ⋅⋅⋅⋅= π21 , G
F
RRA −=0 , 11 =a e 10 −=A (inversor com ganho unitário). Com
estas equações já é possível calcular os valores dos componentes do filtro determinando a
freqüência de corte, o ganho do filtro (neste exemplo igual a -1), o valor do capacitor e
calculando os resistores: FC
F CfR
⋅⋅⋅=
π21 e FG RR = . Se nFCF 47= e KHzfC 10= , então
Ω=⋅⋅⋅⋅⋅
== − 338104710102
193 FHz
RR GF π. Com os componentes calculados, pode-se
substituir a variável “s” por uma freqüência qualquer (real ou complexa) e testar a resposta do
filtro para esta freqüência. Maiores detalhes sobre modelagem matemática e análise de
circuitos encontram-se disponíveis em Ogata (2003), Phillips (1996) e Alexander (2003).
Texas Instruments (2002a) apresenta uma discussão sobre filtros passa-baixa.
Na maioria das situações um filtro de 1ª ordem não fornece uma resposta em
freqüência adequada e um filtro de ordem mais elevada deve ser utilizado para melhorar esta
resposta (TEXAS INSTRUMENTS, 2002a). Este aumento é realizado com a ligação em série
de filtros de 1ª e 2ª ordem e com o ajuste dos coeficientes de cada etapa do filtro. Quanto
maior a ordem do filtro, mais este se aproxima do ideal, melhor sua resposta, mais rápida a
atenuação de sinal ocorre e para cada uma das otimizações de resposta o efeito das
características indesejáveis é atenuado.
2.3.4 Teorema de Nyquist
O teorema de Nyquist, desenvolvido por Harry Nyquist em 1928, determina que a taxa
de amostragem de um sinal deve ser no mínimo duas vezes maior que a freqüência mais alta
encontrada no sinal amostrado )2( FFS ≥ para que este possa ser reconstruído, de forma
correta, a partir das amostras (PROAKIS, 1996). O efeito causado pela amostragem imprópria
do sinal é conhecido como aliasing, ilustrado na Figura 7, que é o mascaramento de
freqüências no sinal amostrado. Por esta razão, o sinal amostrado precisa ter sua faixa de
13
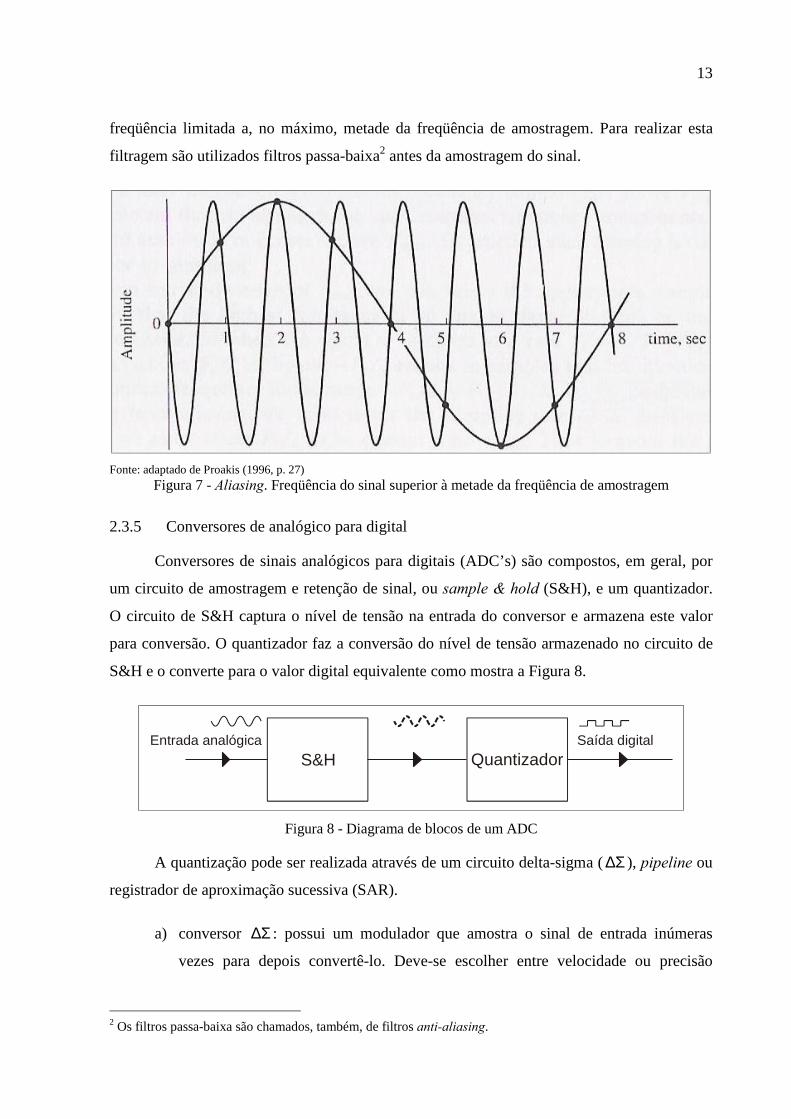
freqüência limitada a, no máximo, metade da freqüência de amostragem. Para realizar esta
filtragem são utilizados filtros passa-baixa2 antes da amostragem do sinal.
Fonte: adaptado de Proakis (1996, p. 27)
Figura 7 - Aliasing. Freqüência do sinal superior à metade da freqüência de amostragem
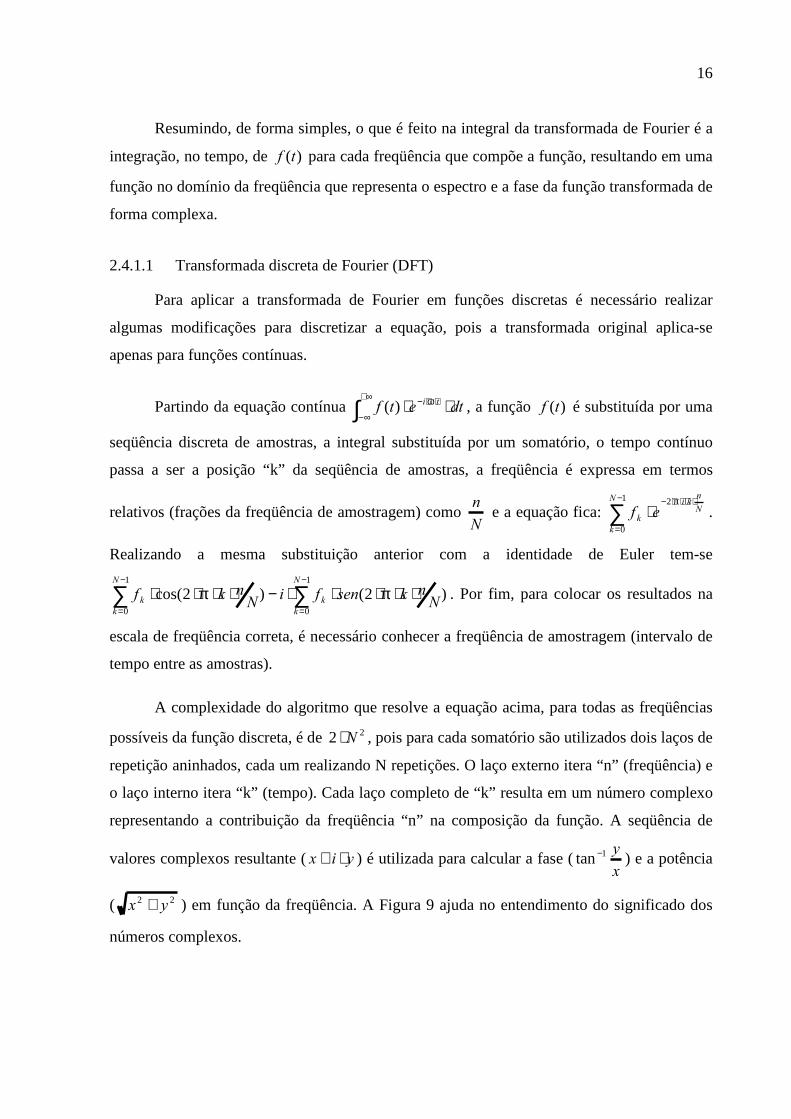
2.3.5 Conversores de analógico para digital
Conversores de sinais analógicos para digitais (ADC’s) são compostos, em geral, por
um circuito de amostragem e retenção de sinal, ou sample & hold (S&H), e um quantizador.
O circuito de S&H captura o nível de tensão na entrada do conversor e armazena este valor
para conversão. O quantizador faz a conversão do nível de tensão armazenado no circuito de
S&H e o converte para o valor digital equivalente como mostra a Figura 8.
Entrada analógica Saída digitalS&H Quantizador
Figura 8 - Diagrama de blocos de um ADC
A quantização pode ser realizada através de um circuito delta-sigma (∆Σ ), pipeline ou
registrador de aproximação sucessiva (SAR).
a) conversor ∆Σ : possui um modulador que amostra o sinal de entrada inúmeras
vezes para depois convertê-lo. Deve-se escolher entre velocidade ou precisão
2 Os filtros passa-baixa são chamados, também, de filtros anti-aliasing.

14
ajustando a taxa de conversão em relação à taxa de amostragem do conversor para
o valor ideal necessário à aplicação.
b) conversor pipeline: possui um quantizador paralelo de N estágios que são
combinados para formar a saída final. Conversores pipeline são capazes de atingir
altas taxas de conversão de dados, tornando-os ideais para sinais de alta freqüência.
São otimizados para aquisição diferencial de sinal.
c) conversor SAR: cada bit do valor de saída é calculado através da comparação
sucessiva entre o sinal amostrado e a saída de um conversor digital para analógico
(DAC) de alta velocidade e alta precisão. São ideais para sinais DC ou AC até
aproximadamente 10MHz não-contínuos e possuem pouco tempo de latência entre
a amostragem e a conversão do sinal.
O processo de quantização introduz uma certa quantidade de erro e incerteza, pois o
sinal deixa de ser contínuo e passa a ser discreto após a conversão. Para calcular a precisão de
um ADC a seguinte fórmula pode ser utilizada: NFSEntradas
2Re = , onde FSEntrada é o valor
da tensão do sinal em fundo de escala e “N” é a resolução, em bits, do conversor. Para um
conversor de 16 bits e um sinal de 5Vp-p a resolução é de VpVpµ76
655365
25
16 ≅=− que é o
valor do bit menos significativo (LSB) e é a variação necessária de sinal para causar uma
mudança na saída do conversor. O percentual de erro introduzido pelo sistema acima descrito
é de 0,00076% ou 7,6 pontos por milhão em fundo de escala (ANALOG DEVICES, 2002, p.
3.7). Para melhorar a precisão do conversor e a qualidade do sinal digital, pode-se diminuir a
faixa de tensão do sinal ou aumentar a resolução do conversor.
2.4 PROCESSAMENTO DE SINAIS DIGITAIS
O Processamento de Sinais Digitais distingui-se de outras áreas da ciência da computação pelo tipo dos dados que utiliza: sinais. Na maioria dos casos, estes sinais se originam de dados adquiridos do mundo real: vibrações sísmicas, imagens visuais, ondas sonoras, etc. DSP é a matemática, os algoritmos, e as técnicas utilizadas para manipular estes sinais após sua conversão para uma forma digital. Isto inclui uma vasta gama de possibilidades, como: realce de imagens visuais, reconhecimento e geração de fala, compressão de dados para armazenamento e transmissão, etc. Vamos supor que conectamos um conversor analógico/digital a um computador e o utilizamos para adquirir informações do mundo real. DSP responde à pergunta: E depois? (SMITH, 1999, p. 1).

15
Os algoritmos mais utilizados no processamento de sinais digitais são os filtros digitais
e a transformada de Fourier modificada para sinais discretos.
Com a aplicação de filtros digitais é possível realizar manipulações no sinal que de
outra forma teriam que ser feitas diretamente no sinal analógico através de um circuito
eletrônico e, ao contrário dos filtros analógicos, os filtros digitais podem ser facilmente
ajustados dinamicamente durante a execução do algoritmo realizando simples alterações de
valores nos parâmetros do filtro. Quanto à performance dos filtros digitais, esta é limitada
apenas pela capacidade de processamento disponível, o que hoje não representa uma séria
limitação, quando que nos filtros analógicos uma performance equivalente implicaria em um
aumento na complexidade, custo, tamanho e tempo de desenvolvimento do circuito.
A mesma praticidade e flexibilidade aplicam-se a transformada de Fourier para sinais
digitais (SMITH, 1995), que possibilita a realização da análise de espectro de um sinal sem a
necessidade de um analisador de espectro analógico.
2.4.1 Transformada de Fourier
A transformada de Fourier, desenvolvida pelo matemático francês Jean Baptiste Joseph
Fourier (1768 - 1830), é uma transformada integral que permite realizar a transformação de
funções não-periódicas do domínio do tempo para o domínio da freqüência. Algumas das
aplicações práticas da transformada de Fourier são: processamento de sinais digitais,
espectrômetros, análise de circuitos, entre outras (ALEXANDER, 2003).
A dedução da equação da transformada de Fourier é realizada a partir da identidade de
Euler e da generalização da série exponencial de Fourier. A série de Fourier é uma forma de
expressar uma função periódica não-senoidal como uma soma infinita de senos e cossenos.
A integral da transformada de Fourier é ∫+∞
∞−
⋅⋅− ⋅⋅ dtetf ti ω)( , onde ω é a freqüência
angular e “i” é o número imaginário ( 1−=i ). f⋅⋅= πω 2 e )()cos( tsenite ti ⋅⋅−⋅=⋅⋅− ωωω
pela identidade de Euler. Substituindo as equações anteriores, a integral pode ser reescrita em
termos de senos e cossenos como: ∫ ∫+∞
∞−
+∞
∞−⋅⋅⋅⋅⋅⋅−⋅⋅⋅⋅⋅ dttfsentfidttftf )2()()2cos()( ππ .
Para realizar o processo inverso, transformar uma função do domínio da freqüência de volta
para o domínio do tempo, utiliza-se a transformada inversa de Fourier: ∫+∞
∞−
⋅⋅⋅⋅ ⋅⋅ dfefF tfi π2)( .
16
Resumindo, de forma simples, o que é feito na integral da transformada de Fourier é a
integração, no tempo, de )(tf para cada freqüência que compõe a função, resultando em uma
função no domínio da freqüência que representa o espectro e a fase da função transformada de
forma complexa.
2.4.1.1 Transformada discreta de Fourier (DFT)
Para aplicar a transformada de Fourier em funções discretas é necessário realizar
algumas modificações para discretizar a equação, pois a transformada original aplica-se
apenas para funções contínuas.
Partindo da equação contínua ∫+∞
∞−
⋅⋅− ⋅⋅ dtetf ti ω)( , a função )(tf é substituída por uma
seqüência discreta de amostras, a integral substituída por um somatório, o tempo contínuo
passa a ser a posição “k” da seqüência de amostras, a freqüência é expressa em termos
relativos (frações da freqüência de amostragem) como Nn e a equação fica: ∑
−
=
⋅⋅⋅⋅−⋅
1
0
2N
k
Nnki
k efπ
.
Realizando a mesma substituição anterior com a identidade de Euler tem-se
∑∑−
=
−
=
⋅⋅⋅⋅⋅−⋅⋅⋅⋅1
0
1
0)2()2cos(
N
kk
N
kk N
nksenfiNnkf ππ . Por fim, para colocar os resultados na
escala de freqüência correta, é necessário conhecer a freqüência de amostragem (intervalo de
tempo entre as amostras).
A complexidade do algoritmo que resolve a equação acima, para todas as freqüências
possíveis da função discreta, é de 22 N⋅ , pois para cada somatório são utilizados dois laços de
repetição aninhados, cada um realizando N repetições. O laço externo itera “n” (freqüência) e
o laço interno itera “k” (tempo). Cada laço completo de “k” resulta em um número complexo
representando a contribuição da freqüência “n” na composição da função. A seqüência de
valores complexos resultante ( yix ⋅+ ) é utilizada para calcular a fase (xy1tan − ) e a potência
( 22 yx + ) em função da freqüência. A Figura 9 ajuda no entendimento do significado dos
números complexos.

17
yixz
θ⋅⋅=⋅+
+=iezyix
yxz
||
|| 22
|| z
θ
Figura 9 – O plano complexo
2.4.1.2 Transformada rápida de Fourier (FFT)
Embora a transformada discreta realize o trabalho de transformação através de um
algoritmo relativamente simples, sua complexidade exponencial torna sua aplicação lenta para
seqüências longas de amostras e para processamento em tempo real. O tempo de
processamento necessário se torna longo demais.
O algoritmo da transformada rápida de Fourier obtém os mesmos resultados da
transformada discreta, mas reduz a complexidade exponencial de 22 N⋅ para NN 2log⋅
através da fatoração da seqüência de valores que deve ser transformada (SMITH, 1995). A
fatoração consiste na subdivisão sucessiva da seqüência de amostras que deve ser
transformada e causa a alteração na posição dos resultados forçando a reordenação destes. A
reordenação das amostras pode ser realizada antes da transformação (fatoração no tempo) ou
depois da transformação (fatoração na freqüência) e os resultados obtidos das duas formas são
os mesmos.

18
2.4.2 Filtros digitais
Os filtros digitais são poderosas ferramentas no processamento de sinais digitais, pois
realizam a filtragem de sinais de forma semelhante aos filtros analógicos implementados em
hardware, mas sem apresentar os problemas relacionados a imperfeições dos componentes,
variações com a temperatura, etc. Desta forma é possível alcançar níveis de performance
dificílimos, se não impossíveis, de serem alcançados com filtros analógicos (SMITH, 1999).
Os dois tipos básicos de filtros digitais existentes são FIR (finite impulse response) e
IIR (infinite impulse response). Filtros FIR são implementados através de convolução e filtros
IIR são implementados através de recursão.
2.4.2.1 Filtros FIR
Filtros FIR são implementados através da aplicação direta da operação de convolução.
A resposta em freqüência desejada é calculada, quantizada e depois transformada para o
domínio do tempo. O resultado da transformação, a resposta no tempo, são os coeficientes do
filtro ou filter kernel.
No domínio da freqüência a multiplicação de sinais é o equivalente da convolução no
domínio do tempo e é desta forma que funcionam os filtros FIR, realizando a convolução de
sinais no domínio do tempo. Sendo )(tf a função no domínio do tempo, )(ωF a função
transformada para o domínio da freqüência, )(th a resposta do filtro no domínio do tempo e
)(ωH a resposta do filtro no domínio da freqüência, então: )()()()( ωω HFthtf ⋅=∗
(SMITH, 1999).
A principal característica de um filtro FIR é que sua resposta em fase é completamente
linear.
A Figura 10 ilustra o funcionamento de um filtro FIR com quatro coeficientes. As
amostras do sinal são colocadas em um buffer circular, multiplicadas pelos respectivos
coeficientes do filtro e somadas para formar a saída do filtro. De forma semelhante aos filtros
analógicos, quanto maior a quantidade de coeficientes, melhor a resolução e a precisão do
filtro, mas no caso dos filtros digitais apenas o tempo de processamento é comprometido pelo
aumento na ordem do filtro.
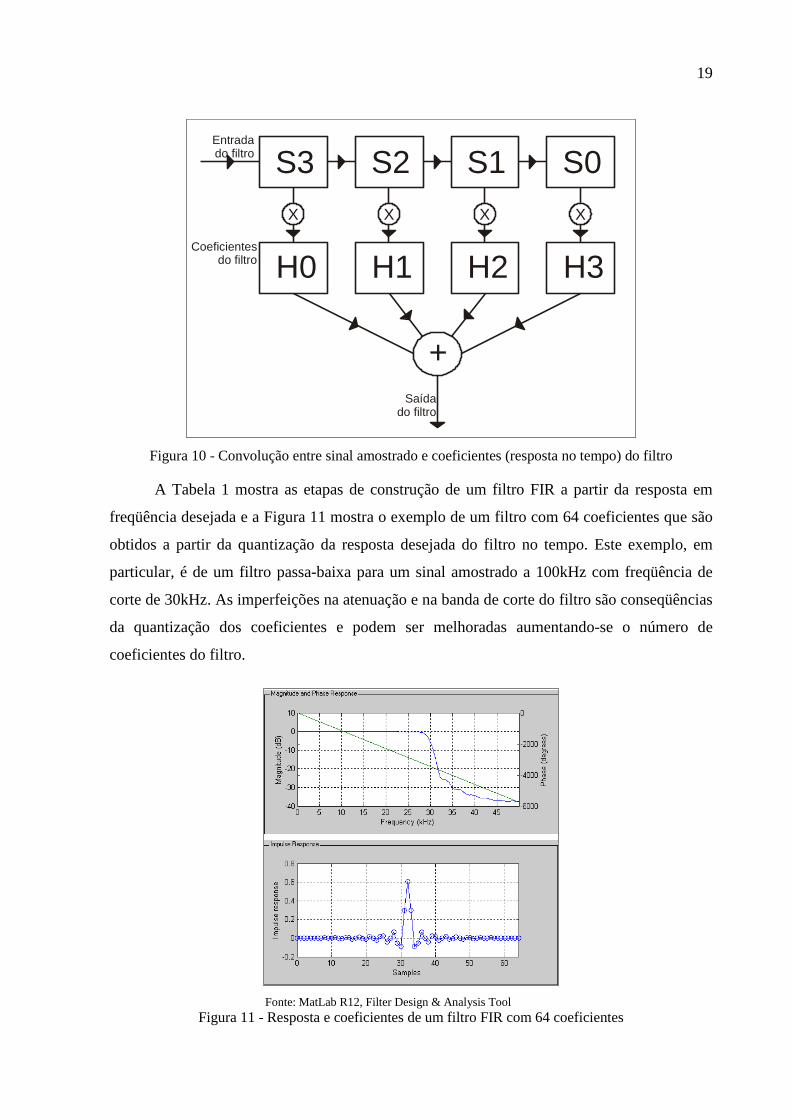
19
S3
H0
X
S2
H1
X
S1
H2
X
S0
H3
X
Entradado filtro
Coeficientesdo filtro
+Saída
do filtro
Figura 10 - Convolução entre sinal amostrado e coeficientes (resposta no tempo) do filtro
A Tabela 1 mostra as etapas de construção de um filtro FIR a partir da resposta em
freqüência desejada e a Figura 11 mostra o exemplo de um filtro com 64 coeficientes que são
obtidos a partir da quantização da resposta desejada do filtro no tempo. Este exemplo, em
particular, é de um filtro passa-baixa para um sinal amostrado a 100kHz com freqüência de
corte de 30kHz. As imperfeições na atenuação e na banda de corte do filtro são conseqüências
da quantização dos coeficientes e podem ser melhoradas aumentando-se o número de
coeficientes do filtro.
Fonte: MatLab R12, Filter Design & Analysis Tool
Figura 11 - Resposta e coeficientes de um filtro FIR com 64 coeficientes

20
Tabela 1 - Etapas do desenvolvimento de um filtro FIR Fonte: Imagens adaptadas de Smith (1999). Etapa Ilustração Primeiro defini-se qual a resposta ideal, em freqüência, desejada para o filtro.
Depois de definida a resposta, esta é transformada para o domínio do tempo através da transformada inversa de Fourier e depois amostrada.
A resposta no domínio do tempo é, então, truncada de forma simétrica para a quantidade de amostras desejada e deslocada para a direita para que a primeira amostra fique na posição zero. Estes são os coeficientes do filtro.
Para determinar qual a resposta resultante, os coeficientes do filtro são transformados de volta para o domínio da freqüência através da transformada rápida de Fourier. Esta etapa é necessária, pois o truncamento altera a resposta do filtro, que agora é apenas uma aproximação da resposta ideal.
21
2.4.2.2 Filtros IIR
Os filtros IIR são a versão digital dos filtros analógicos discutidos anteriormente e seus
coeficientes são calculados diretamente da função de transferência do circuito. Os coeficientes
de entrada são os zeros do numerador da função de transferência e os coeficientes de
realimentação (recursão) são os pólos do denominador da função de transferência.
A performance dos filtros IIR é a mesma dos filtros analógicos, não apresentando
nenhuma vantagem sobre os filtros FIR. Além disso, sua resposta em fase não é linear. A
única vantagem dos filtros recursivos sobre os filtros FIR é que o tempo computacional gasto
na sua execução é inferior ao que seria necessário para um filtro FIR equivalente.
Filtros recursivos devem ser utilizados apenas quando a fase do sinal não for
importante ou o tempo de processamento for crítico ou então para duplicar as respostas dos
filtros analógicos.
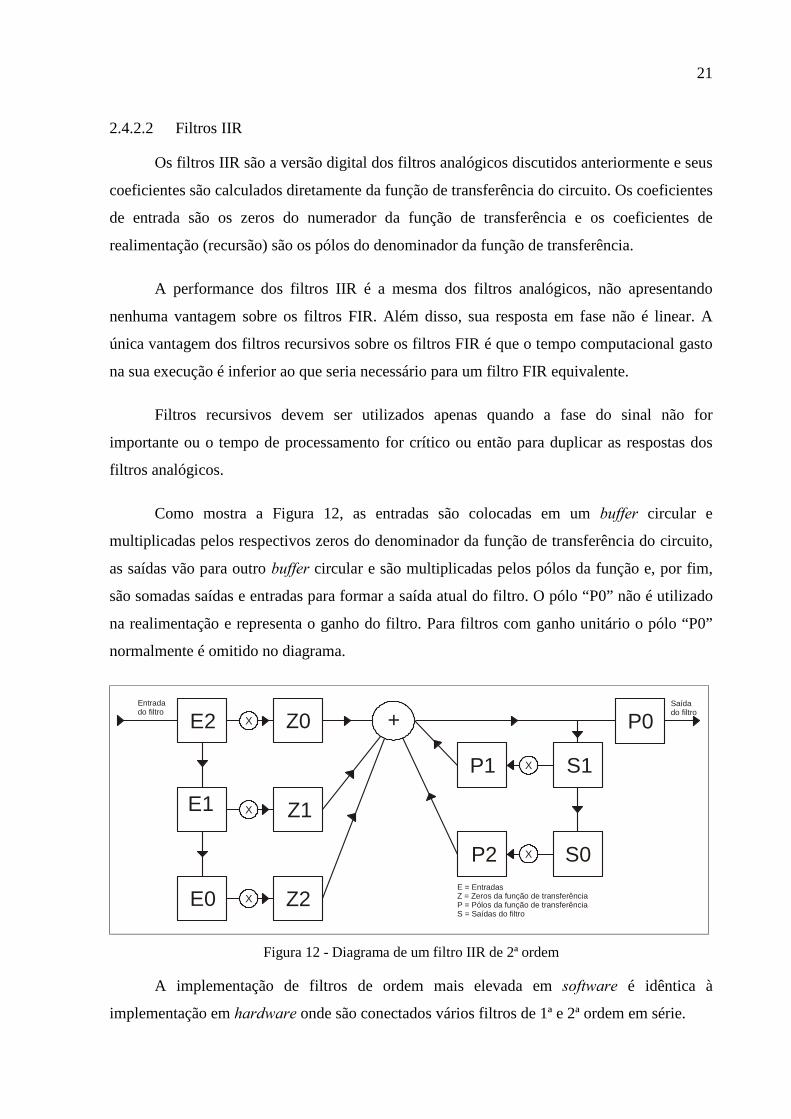
Como mostra a Figura 12, as entradas são colocadas em um buffer circular e
multiplicadas pelos respectivos zeros do denominador da função de transferência do circuito,
as saídas vão para outro buffer circular e são multiplicadas pelos pólos da função e, por fim,
são somadas saídas e entradas para formar a saída atual do filtro. O pólo “P0” não é utilizado
na realimentação e representa o ganho do filtro. Para filtros com ganho unitário o pólo “P0”
normalmente é omitido no diagrama.
+X
X
X
X
X
E2
E1
E0
Z0
Z1
Z2
P2
P1 S1
S0
Entradado filtro
Saídado filtro
E = EntradasZ = Zeros da função de transferênciaP = Pólos da função de transferênciaS = Saídas do filtro
P0
Figura 12 - Diagrama de um filtro IIR de 2ª ordem
A implementação de filtros de ordem mais elevada em software é idêntica à
implementação em hardware onde são conectados vários filtros de 1ª e 2ª ordem em série.
22
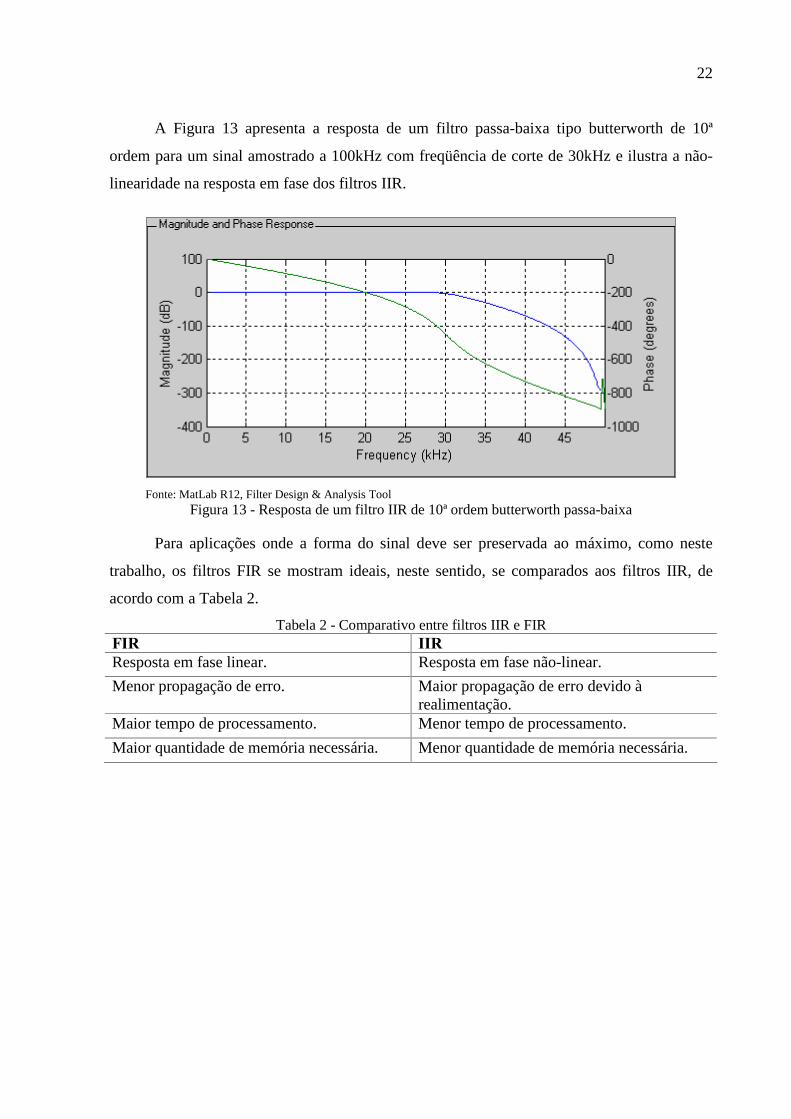
A Figura 13 apresenta a resposta de um filtro passa-baixa tipo butterworth de 10ª
ordem para um sinal amostrado a 100kHz com freqüência de corte de 30kHz e ilustra a não-
linearidade na resposta em fase dos filtros IIR.
Fonte: MatLab R12, Filter Design & Analysis Tool
Figura 13 - Resposta de um filtro IIR de 10ª ordem butterworth passa-baixa
Para aplicações onde a forma do sinal deve ser preservada ao máximo, como neste
trabalho, os filtros FIR se mostram ideais, neste sentido, se comparados aos filtros IIR, de
acordo com a Tabela 2.
Tabela 2 - Comparativo entre filtros IIR e FIR FIR IIR Resposta em fase linear. Resposta em fase não-linear. Menor propagação de erro. Maior propagação de erro devido à
realimentação. Maior tempo de processamento. Menor tempo de processamento. Maior quantidade de memória necessária. Menor quantidade de memória necessária.

23
3 DESENVOLVIMENTO DO TRABALHO
O desenvolvimento do protótipo do aparelho de eletromiografia digital está
subdividido em três partes: desenvolvimento do hardware, desenvolvimento do software e
resultados. No desenvolvimento do hardware é detalhada a aquisição de sinal através dos
eletrodos, o esquemático do circuito de aquisição de sinal, o circuito microcontrolado, as
características do microcontrolador utilizado e o dispositivo de visualização (módulo LCD).
No desenvolvimento do software são apresentados os requisitos, a especificação e a
modelagem do software. A organização e a relação entre os componentes do protótipo são
mostrados na Figura 14.
Eletrodosde aquisição
Eletrodode referência
Aquisiçãode sinal DSP LCD
Software
EMG
Figura 14 - Diagrama simplificado do protótipo do aparelho de eletromiografia
3.1 HARDWARE
A descrição do hardware desenvolvido e utilizado neste trabalho compreende os
sensores utilizados, o circuito eletrônico analógico desenvolvido, o circuito digital, o
microcontrolador e o dispositivo de visualização.
3.1.1 Entrada de sinal e configuração dos eletrodos
Os eletrodos, como mostra a Figura 14, possuem duas funções: os eletrodos de
aquisição, que são colocados sobre o músculo esquelético de interesse e o eletrodo de
referência, que é colocado em uma parte do corpo sem atividade muscular e é utilizado para
referenciar o sinal muscular e colocá-lo no mesmo plano de terra do circuito de aquisição de
sinal.

24
Ambos eletrodos de aquisição devem estar situados sobre o mesmo músculo para que o
sinal adquirido possua sentido, pois a medição realizada com os eletrodos é diferencial, logo,
os sinais captados por cada um dos eletrodos de aquisição devem ser relativos ao mesmo
músculo.
O sinal elétrico muscular captado pelos eletrodos é bipolar e se encontra na faixa de
Vµ25 até mV5 p-p, conforme medido em laboratório com a utilização de um osciloscópio.
Para realizar os testes e medições do aparelho foram utilizados eletrodos de superfície
descartáveis de ECG devido ao valor elevado dos eletrodos específicos para EMG.
O principal problema na aquisição de sinais através de eletrodos ocorre com os cabos
que conectam os eletrodos ao circuito de aquisição de sinal. Os cabos devem estar o mais
próximo possível uns dos outros para que a interferência captada em cada um dos cabos seja a
mesma e possa ser propriamente eliminada durante a amplificação diferencial. Se a
interferência captada for muito diferente de um cabo para outro, então a amplificação
diferencial acaba por amplificar a diferença entre a interferência de cada cabo, ocasionando
perda de sinal.
3.1.2 Circuito de aquisição de sinal
A Figura 15 mostra as etapas do circuito de aquisição de sinal muscular que foi
desenvolvido neste trabalho.
Amplicaçãodiferencial
Filtroinversor
Amplificadorinversor ADC
Circuito deaquisição de sinal
Entradade sinal
Saídadigital
Figura 15 - Componentes do circuito de aquisição de sinal

25
A etapa de amplificação diferencial consiste de três amplificadores de instrumentação
iguais que eliminam a interferência comum aos dois eletrodos de sinal e aplicam um ganho de
V1/2 (duas vezes) no sinal resultante (Figura 16). Esta é a etapa de pré-amplificação, onde o
sinal diferencial é “limpo” e preparado para ser filtrado. As principais fontes de interferência
neste estágio da aquisição de sinal são: campos eletromagnéticos captados pelos cabos que
conectam os eletrodos ao circuito de aquisição e a interferência induzida da própria rede
elétrica (60Hz). Os amplificadores utilizados podem ser o AD620 da Analog Devices
(ANALOG DEVICES, 1999), o INA114 da Texas Instruments (TEXAS INSTRUMENTS,
1998a) ou quaisquer outros amplificadores de instrumentação compatíveis, desde que todos
do mesmo modelo. O ganho aplicado ao sinal, nesta etapa, pode ser aumentado com resistores
opcionais que ajustam o ganho de cada amplificador. As principais características levadas em
consideração na escolha dos amplificadores foram a taxa de rejeição de modo comum
(CMRR) e o offset das entradas de sinal. Além da função que desempenham no circuito, os in
amps também satisfazem o requisito da entrada de alta impedância necessária para aquisição
de sinais de baixa corrente elétrica.
A+X
B+X
B+X
A+X
(A+X)-(B+X)+z = (A-B)+z
(B+X)-(A+X)+z=(B-A)+z
((A-B)+z)-((B-A)+z)=2(A-B)
A e B = Sinais de entradaX=Interferência comum inicialZ=Interferência comum X atenuada
Figura 16 - Pré-amplificador formado por in amps
Após a pré-amplificação, o sinal resultante é filtrado através de um filtro passa-baixa
inversor de 2ª ordem com resposta butterworth, freqüência de corte de 10kHz e ganho de
V1/1− (inversor com ganho unitário). O componente utilizado para construção do filtro é o
UAF42 (Universal Active Filter) da Texas Instruments (TEXAS INSTRUMENTS, 1998b). O
UAF42 possui capacitores de precisão e quatro op amps integrados, além de um software
próprio de auxílio ao desenvolvimento de filtros até 10ª ordem com este componente (TEXAS
INSTRUMENTS, 2000). Este é o filtro de anti-aliasing do circuito de aquisição de sinal que

26
elimina demais ruídos em alta freqüência que ainda possam existir e limita a banda de
freqüência do sinal entre 0Hz e 10kHz.
Depois da pré-amplificação e filtragem, a inversão do sinal, realizada pelo filtro, é
desfeita e o nível do sinal é ajustado ao fundo de escala do conversor A/D através de um
amplificador inversor construído com um op amp. O op amp utilizado nesta etapa deve ter o
mínimo de offset possível pois o ganho aplicado neste estágio é de V1/500 (quinhentas
vezes) e um op amp com offset muito alto pode terminar por deslocar o nível DC do sinal
consideravelmente. O componente utilizado foi o OP270 da Analog Devices (ANALOG
DEVICES, 2003b), que é um op amp duplo com offset máximo em torno de Vµ75 . Apenas
um dos dois op amps do componente é utilizado, o segundo é aterrado e não desempenha
nenhuma função no circuito. O ganho total do circuito até esta etapa é de V1/1000 (mil
vezes) sobre o sinal original e como o sinal muscular possui uma amplitude máxima de
pmVp −5 , então a amplitude máxima final é de pVp −5 , com a banda de freqüência limitada
entre 0Hz e 10kHz. O mesmo amplificador da Figura 3 é utilizado aqui.
Com o sinal filtrado e amplificado, agora já é possível convertê-lo para digital. Esta é
última etapa da aquisição de sinal, onde se dá a conversão do sinal analógico de pVp −5 em
um sinal digital de 16 bits sinalizado com valores variando entre 32767− e 32767+ . O
conversor utilizado foi o ADC AD677 da Analog Devices (ANALOG DEVICES, 1995), que
é um conversor de 16 bits serial, bipolar e com autocalibragem interna. O AD677 necessita de
voltagem de referência (VREF) externa e para isto foi utilizado o AD586 da Analog Devices
(ANALOG DEVICES, 2004), que é uma voltagem de referência de 5V de alta precisão. O
fundo de escala do AD677 é definido por VREF−+ , podendo variar entre 5V e 10V, e a taxa
de conversão utilizada é de 100.000 amostras por segundo (100 kSPS), para um sinal limitado
a 10kHz a condição definida pelo teorema de Nyquist é satisfeita, pois o sinal está sendo
amostrado a uma taxa 10 vezes maior que a maior freqüência encontrada no sinal. A taxa de
amostragem utilizada é cinco vezes maior que a mínima necessária, pois algumas freqüências
acima de 10kHz talvez ainda estejam presentes no sinal devido à baixa ordem do filtro de
anti-aliasing, entretanto, dificilmente existirão freqüências acima de 50kHz no sinal.
O apêndice A mostra o esquemático do circuito de aquisição de sinal e a Figura 17
mostra a disposição dos componentes na placa de circuito impresso, ambos desenvolvidos no
Eagle PCB Layout Editor. Este software permite a criação de placas de circuito impresso de
27
duas camadas a partir do esquemático do circuito e realiza o roteamento automático das
trilhas. O Figura 18 apresenta a placa de circuito impresso já com os componentes e
conectores soldados.
Figura 17 - Disposição dos componentes na placa de circuito impresso
Figura 18 – Placa de circuito impresso para aquisição de sinal
28
3.1.3 Circuito digital microcontrolado
Para o circuito digital microcontrolado foi utilizado um microcontrolador 8051 modelo
AT89C51RD2, fabricado pela empresa Atmel (ATMEL, 2004).
Para desenvolvimento de software para o microcontrolador, o fabricante fornece,
também, um ambiente integrado de desenvolvimento (IDE) em C/C++/ASM, depurador,
emulador, desmontador de código e várias outras ferramentas que agilizam e aceleram o
desenvolvimento. O IDE é executado em plataforma Windows e se comunica com o
microcontrolador através da interface serial do microcomputador, que é utilizada para
depuração e upload do software que é executado pelo microcontrolador.
Todo o protótipo de EMG digital é controlado pelo microcontrolador 8051. Os pinos
de controle do conversor A/D da placa de aquisição e os pinos de entrada e saída e de controle
do dispositivo de visualização são conectados diretamente as portas de entrada e saída do
microcontrolador, como mostra a Tabela 3. Tabela 3 - Conexão dos periféricos com o microcontrolador
Periférico Porta de E/S do microcontrolador AD677 PORT1 (CLK, SAMPLE, CAL, SDATA) LCD – Dados PORT2 (DB0~DB7) LCD – Controle PORT3 (RS, R/W, E, CS1, CS2)
3.1.4 Recursos do microcontrolador
O microcontrolador que foi utilizado possui as seguintes características listadas abaixo:
a) conjunto de instruções CISC compatível com modelo 8051;
b) 64K bytes de memória flash reprogramável utilizada para dados e programa;
c) 1792 bytes de RAM;
d) 2K bytes de memória EEPROM para armazenamento de dados;
e) 2K bytes de ROM contendo boot loader serial e rotinas de baixo nível para leitura
e gravação em memória flash;
f) três temporizadores de 16 bits;
g) quatro portas de entrada e saída de 8 bits;
29
h) freqüência de funcionamento de até 60MHz;
i) interface UART full-duplex.
3.1.5 Dispositivo de visualização
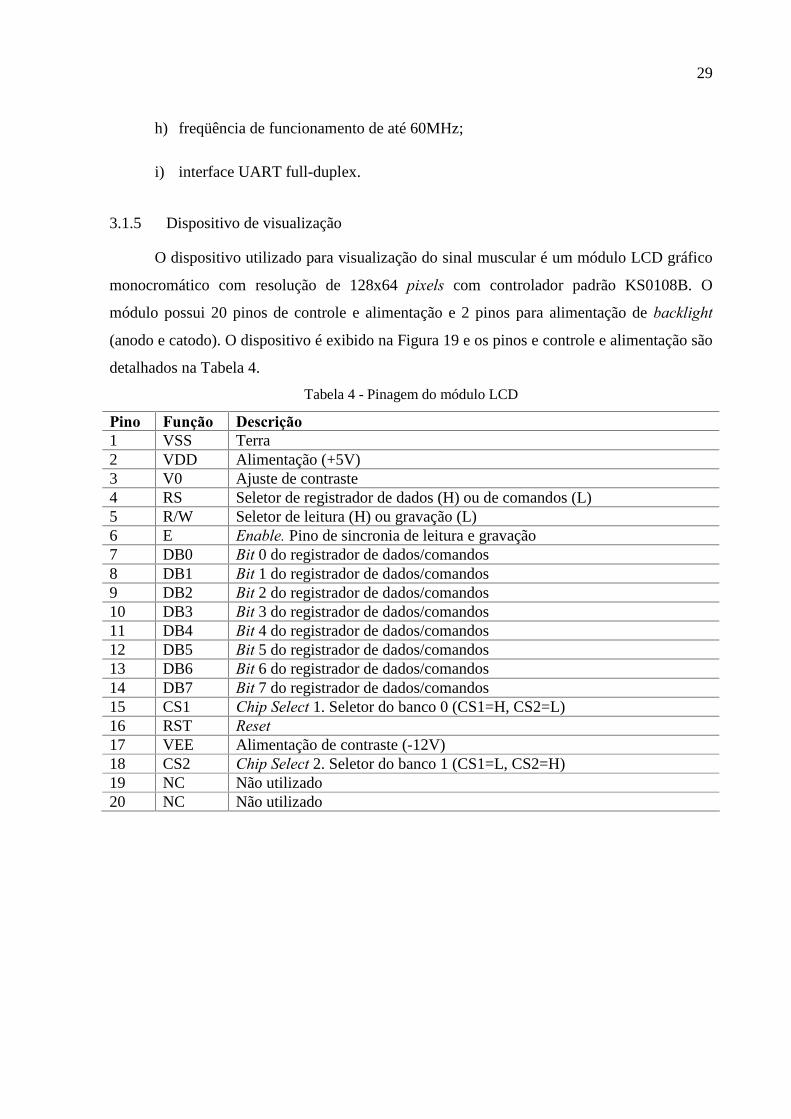
O dispositivo utilizado para visualização do sinal muscular é um módulo LCD gráfico
monocromático com resolução de 128x64 pixels com controlador padrão KS0108B. O
módulo possui 20 pinos de controle e alimentação e 2 pinos para alimentação de backlight
(anodo e catodo). O dispositivo é exibido na Figura 19 e os pinos e controle e alimentação são
detalhados na Tabela 4.
Tabela 4 - Pinagem do módulo LCD
Pino Função Descrição 1 VSS Terra 2 VDD Alimentação (+5V) 3 V0 Ajuste de contraste 4 RS Seletor de registrador de dados (H) ou de comandos (L) 5 R/W Seletor de leitura (H) ou gravação (L) 6 E Enable. Pino de sincronia de leitura e gravação 7 DB0 Bit 0 do registrador de dados/comandos 8 DB1 Bit 1 do registrador de dados/comandos 9 DB2 Bit 2 do registrador de dados/comandos 10 DB3 Bit 3 do registrador de dados/comandos 11 DB4 Bit 4 do registrador de dados/comandos 12 DB5 Bit 5 do registrador de dados/comandos 13 DB6 Bit 6 do registrador de dados/comandos 14 DB7 Bit 7 do registrador de dados/comandos 15 CS1 Chip Select 1. Seletor do banco 0 (CS1=H, CS2=L) 16 RST Reset 17 VEE Alimentação de contraste (-12V) 18 CS2 Chip Select 2. Seletor do banco 1 (CS1=L, CS2=H) 19 NC Não utilizado 20 NC Não utilizado
30
Figura 19 - LCD gráfico 128x64 pixels monocromático
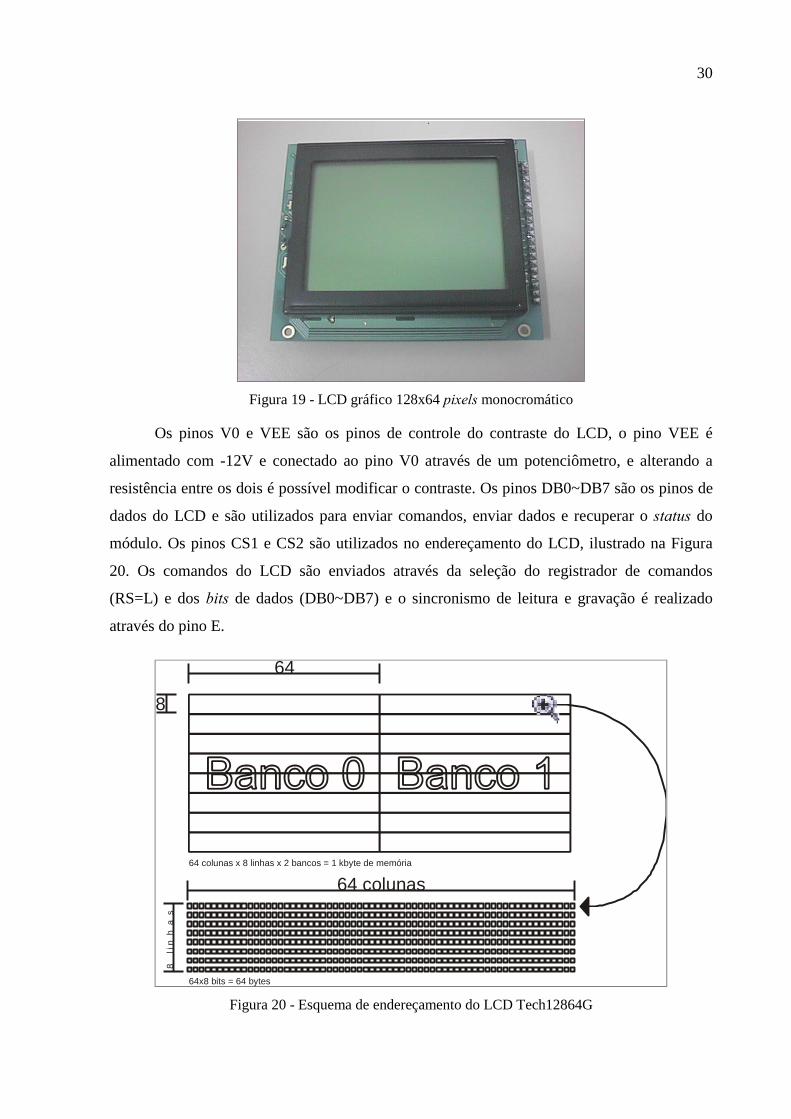
Os pinos V0 e VEE são os pinos de controle do contraste do LCD, o pino VEE é
alimentado com -12V e conectado ao pino V0 através de um potenciômetro, e alterando a
resistência entre os dois é possível modificar o contraste. Os pinos DB0~DB7 são os pinos de
dados do LCD e são utilizados para enviar comandos, enviar dados e recuperar o status do
módulo. Os pinos CS1 e CS2 são utilizados no endereçamento do LCD, ilustrado na Figura
20. Os comandos do LCD são enviados através da seleção do registrador de comandos
(RS=L) e dos bits de dados (DB0~DB7) e o sincronismo de leitura e gravação é realizado
através do pino E.
8
64
64 colunas x 8 linhas x 2 bancos = 1 kbyte de memória
8 l
inh
as
64 colunas
64x8 bits = 64 bytes Figura 20 - Esquema de endereçamento do LCD Tech12864G

31
Para realizar o controle, leitura, gravação e endereçamento do LCD são utilizados os
comandos listados na Tabela 5, em conjunto com os pinos CS1, CS2 e E. Tabela 5 - Comandos do LCD
Comando RS RW DB0 DB1 DB2 DB3 DB4 DB5 DB6 DB7 Leitura de dados 1 1 Dados Escrita de dados 1 0 Dados Leitura do status 0 1 Status Seleção coluna 0 0 0 1 Coluna 0~63 Seleção página 0 0 1 0 1 1 1 Página 0~7 Liga/Desliga 0 0 0 0 1 1 1 1 1 1/0
3.2 SOFTWARE
A descrição do software é realizada em duas etapas: levantamento de requisitos e
desenvolvimento. Por se tratar de um software de tamanho reduzido, direcionado para um
microcontrolador e desenvolvido de forma estruturada, apenas um fluxograma simples e o
levantamento dos requisitos já são suficientes para especificar o software que foi
desenvolvido.
3.2.1 Levantamento de requisitos
Analisando quais funcionalidades são necessárias ao protótipo e as restrições de um
sistema em tempo real, os seguintes requisitos foram levantados:
a) realizar a aquisição das amostras digitais (funcional) a uma taxa constante (não-
funcional);
b) filtrar o sinal digital (funcional) em tempo real (não-funcional);
c) transformar o sinal digital do domínio do tempo para o domínio do freqüência
(funcional) em tempo real (não-funcional);
d) exibir os gráficos de amplitude/tempo e amplitude/freqüência conforme o sinal é
processado (funcional).
Baseado nas restrições de tempo e nas funções descritas acima, foi desenvolvido o
software para o microcontrolador.
32
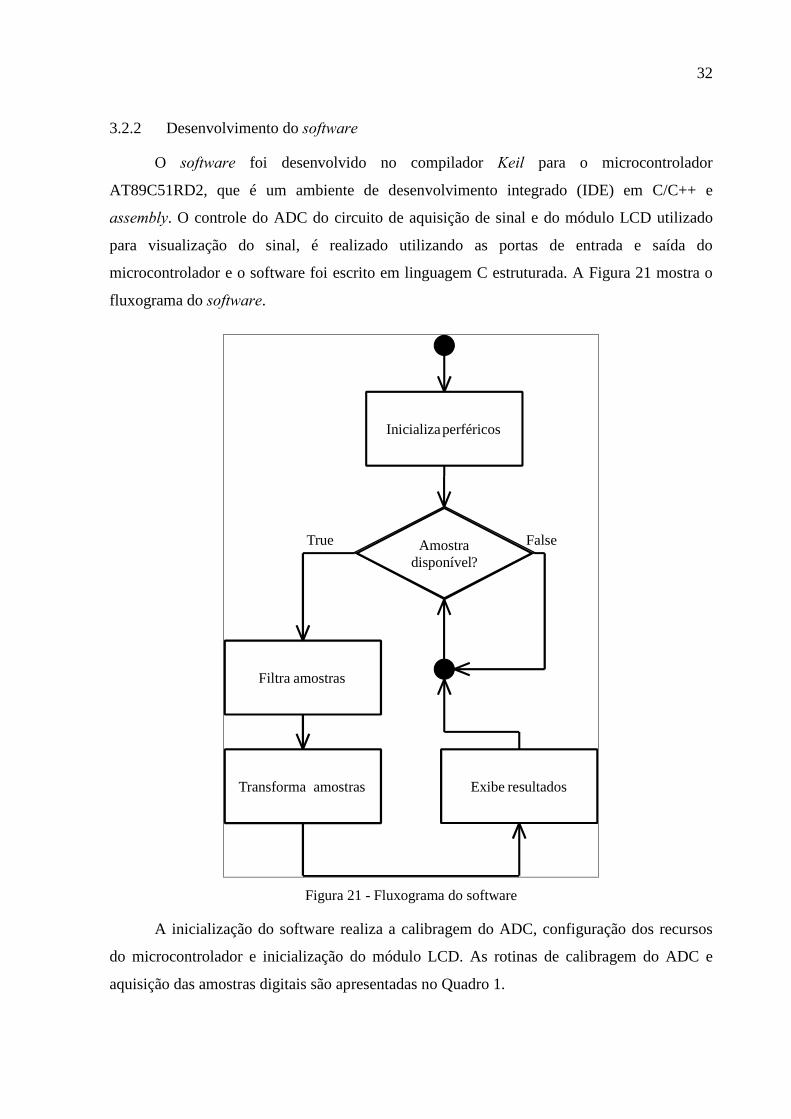
3.2.2 Desenvolvimento do software
O software foi desenvolvido no compilador Keil para o microcontrolador
AT89C51RD2, que é um ambiente de desenvolvimento integrado (IDE) em C/C++ e
assembly. O controle do ADC do circuito de aquisição de sinal e do módulo LCD utilizado
para visualização do sinal, é realizado utilizando as portas de entrada e saída do
microcontrolador e o software foi escrito em linguagem C estruturada. A Figura 21 mostra o
fluxograma do software.
Inicializaperféricos
Amostradisponível?
Filtra amostras
Transforma amostras Exibe resultados
True False
Figura 21 - Fluxograma do software
A inicialização do software realiza a calibragem do ADC, configuração dos recursos
do microcontrolador e inicialização do módulo LCD. As rotinas de calibragem do ADC e
aquisição das amostras digitais são apresentadas no Quadro 1.
33
Quadro 1 - Código fonte para calibragem e leitura do ADC
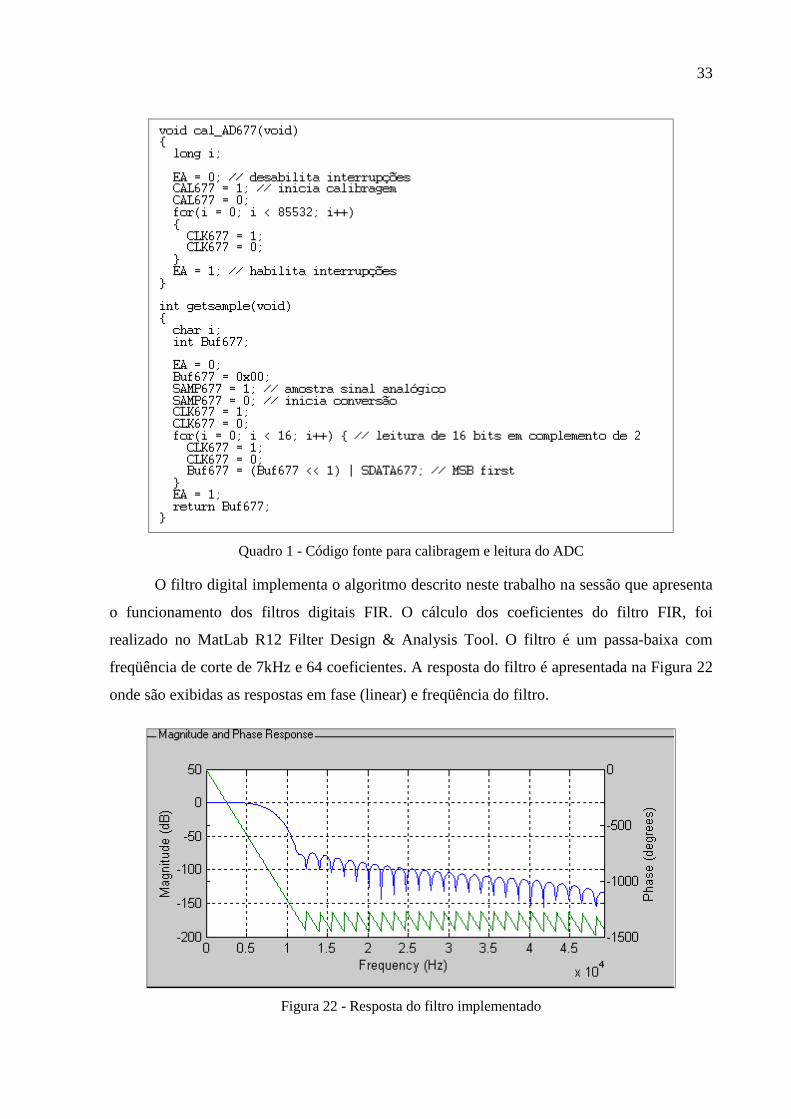
O filtro digital implementa o algoritmo descrito neste trabalho na sessão que apresenta
o funcionamento dos filtros digitais FIR. O cálculo dos coeficientes do filtro FIR, foi
realizado no MatLab R12 Filter Design & Analysis Tool. O filtro é um passa-baixa com
freqüência de corte de 7kHz e 64 coeficientes. A resposta do filtro é apresentada na Figura 22
onde são exibidas as respostas em fase (linear) e freqüência do filtro.
Figura 22 - Resposta do filtro implementado
34
A transformação do sinal do domínio do tempo para o domínio da freqüência, foi
realizada com a implementação do algoritmo de DFT (discrete fourier transform)
processando 32 pontos por vez. Todos os valores dos senos e cossenos utilizados na
transformação foram pré-calculados para economia de processamento e, ainda assim, o
processador apresentou lentidão na execução. As rotinas de transformação de domínio são
apresentado abaixo, implementadas conforme a fórmula da transformada de Fourier discreta
∑∑−
=
−
=
⋅⋅⋅⋅⋅−⋅⋅⋅⋅1
0
1
0)2()2cos(
N
kk
N
kk N
nksenfiNnkf ππ . A implementação das rotinas é
apresentada no Quadro 2.
Quadro 2 - Código fonte da inicialização e cálculo da DFT
Por fim, os resultados são exibidos na tela de cristal líquido. Os valores lidos do
conversor A/D são desenhados na tela como pontos e ligados uns aos outros através de linhas.
3.3 RESULTADOS
Referente a qualidade do sinal, o erro total do sistema de aquisição, causado pelos
amplificadores, representa em torno de 1%, no máximo, do sinal em fundo de escala, além das

35
interferências externas e do erro de quantização. Apesar de tudo, o sinal capturado apresenta
claramente a atividade muscular. Os testes realizados com o bíceps apresentaram amplitudes e
freqüências compatíveis com as descritas na literatura.
O circuito digital, entretanto, apresentou resultados precários, pois foi utilizado um
microcontrolador que não foi capaz de processar os algoritmos de DSP em tempo real. Para
contornar este problema, o uso de processadores de sinais digitais se faz necessário, pois estes
possuem arquitetura RISC, freqüência de funcionamento mais elevada e instruções próprias
para implementação das rotinas de processamento de sinais digitais apresentadas neste
trabalho e necessárias a esta aplicação.
O dispositivo de visualização apresentou resultados satisfatórios no protótipo, exibindo
os gráficos de saída do sistema. Porém, para uma melhor interface com o usuário, poderia ser
utilizada uma tela com maior resolução e, talvez, colorida, dependendo do custo benefício e
da necessidade real deste recurso.
O algoritmo de filtro digital, embora simples de ser implementado e calculado, não foi
posto em prática, pois o microcontrolador não apresentou capacidade computacional para
execução de um filtro FIR sem causar atrasos na execução do programa, alterando, assim, a
taxa de amostragem do conversor A/D que é controlada por software e impossibilitando a
aplicação do filtro.

36
4 CONCLUSÕES
O protótipo desenvolvido, embora possibilite uma visualização clara do sinal
muscular, ainda necessita de certos ajustes e melhoramentos para que possa apresentar as
visualizações do sinal com maior fidelidade e precisão.
O circuito de aquisição introduz uma certa quantidade de ruído ao sinal. Ainda que as
distorções de sinal não sejam críticas, estas podem ser reduzidas um pouco mais utilizando
amplificadores com ajuste de offset. A utilização de eletrodos pré-amplificados3 e específicos
para eletromiografia, também representaria um grande aumento na qualidade do sinal
adquirido.
Das interferências externas, que são atenuadas na fase de pré-amplificação, a que
apresenta maior amplitude é a interferência proveniente da fonte de alimentação do circuito
analógico e esta pode ser reduzida de forma drástica com o isolamento da alimentação ou
então com a substituição da fonte de alimentação por baterias.
O protótipo, no estado em que se encontra, ainda não permite sua utilização em
situações reais. Para isto, seria necessário uma maior interatividade com o usuário do
dispositivo através de funções como o ajuste de ganho do sinal, o armazenamento do sinal no
próprio dispositivo, interface do aparelho com um microcomputador para investigação,
armazenamento e pós-processamento do sinal e um dispositivo de visualização com área
maior.
O software, embora realize as manipulações mais complexas do sinal, necessita ainda
da implementação de funções mais básicas utilizadas na eletromiografia como: retificação e
integração do sinal. E o microcontrolador que executa o software deveria ser substituído por
um processador de sinais digitais, para que todo o tratamento do sinal digital possa ser
realizado em tempo real.
3 Eletrodos pré-amplificados possuem amplificadores no próprio eletrodo.

37
REFERÊNCIAS BIBLIOGRÁFICAS
ALEXANDER, Charles K.; SADIKU, Matthew N. O. Fundamentos de circuitos elétricos. Porto Alegre, RS: Bookman, 2003.
ANALOG DEVICES. AD586 high precision 5V reference, [S.l.], 2004. Disponível em: <http://www.analog.com>. Acesso em: 6 jun. 2004.
_____. AD620 low cost, low power instrumentation amplifier, [S.l.], 1999. Disponível em: <http://www.analog.com>. Acesso em: 6 jun. 2004.
_____. AD677 16-Bit, serial, 100 kSPS sampling ADC, [S.l.], 1995. Disponível em: <http://www.analog.com>. Acesso em: 6 jun. 2004.
_____. Op amp applications. Estados Unidos: Analog Devices, 2002.
_____. OP270 dual very low noise precision operational amplifier, [S.l.], 2003b. Disponível em: <http://www.analog.com>. Acesso em: 6 jun. 2004.
ATMEL. 8-bit flash microcontroller, [S.l.], 2004. Disponível em: <http://www.atmel.com/dyn/resources/prod_documents/doc4235.pdf>. Acesso em: 21 jul. 2004.
GAYAKWAD, Ramakant A. OP-AMPS and linear integrated circuits. 2. ed. Englewoods Cliffs: Prentice-Hall, 1988.
OGATA, Katsuhiko. Engenharia de controle moderno. 4. ed. São Paulo, SP: Prentice Hall, 2003.
PHILLIPS, Charles L.; HARBOR, Royce D. Sistemas de controle e realimentação. São Paulo, SP: Makron Books, 1996.
PROAKIS, John G; MANOLAKIS, Dimitris G. Digital signal processing: principles, algorithms, and applications. 3. ed. Upper Saddle River, N. J: Prentice-Hall, 1996.
RASH, Gregory S. EMG Fundamentals, [S.l.], fev. 2004. Disponível em: <http://www.gcmas.org/EMGfundamentals.pdf>. Acesso em: 06 jun. 2004.
RODRIGUEZ-AÑEZ, Ciro R. KINEIN: a eletromiografia na análise da postura, [S.l.], 2000. Disponível em: <http://www.kinein.ufsc.br/kinein/artigos/originais/cirocompl.html>. Acesso em: 6 jun. 2004.
SMITH, Steven W. The scientist and engineer’s guide to digital signal processing. 2. ed. San Francisco, CA: California Technical Publishing, 1999.
SMITH, Winthrop W; SMITH, Joanne M. Handbook of real-time fast fourier transforms: algorithms to product testing. New York: IEEE, 1995.
SOMMERVILLE, Ian. Engenharia de software. 6. ed. São Paulo: Addison Wesley, 2003.

38
TEXAS INSTRUMENTS. Active low-pass filter design, [S.l.], set. 2002a. Disponível em: <http://www-s.ti.com/sc/psheets/sloa049b/sloa049b.pdf>. Acesso em: 6 jun. 2004.
_____. FILTER42 – UAF42 design program, [S.l.], 2000. Disponível em: < http://focus.ti.com/docs/toolsw/folders/print/filter42.html>. Acesso em: 6 jun. 2004.
_____. INA114 – precision instrumentation amplifier, [S.l.], 1998a. Disponível em: < http://focus.ti.com/docs/prod/folders/print/ina114.html>. Acesso em: 6 jun. 2004.
_____. Op amps for everyone, [S.l.], ago. 2002b. Disponível em: <http://www-s.ti.com/sc/psheets/slod006b/slod006b.pdf>. Acesso em: 6 jun. 2004.
_____. UAF42 – universal active filter, [S.l.], 1998b. Disponível em: <http://focus.ti.com/docs/prod/folders/print/uaf42.html>. Acesso em: 6 jun. 2004.
WEBSTER, John G. Medical instrumentation: application and design. 3. ed. New York: John Wiley, 1998.

39
APÊNDICE A – Esquemático do circuito de aquisição de sinal
Top Related