





Línguas
Páginas
Legal


UNIVERSIDADE FEDERAL DA BAHIA
ESCOLA POLITÉCNICA
COLEGIADO DE ENGENHARIA DE
COMPUTAÇÃO
Sistema de Monitoramento de um Robô Móvel Para Utilização no Tratamento de Crianças
Portadoras de Autismo
Guilherme Souza Araujo
Salvador, Junho de 2016

ii
UNIVERSIDADE FEDERAL DA BAHIA
ESCOLA POLITÉCNICA
COLEGIADO DE ENGENHARIA DE COMPUTAÇÃO
Guilherme Souza Araujo
Sistema de Monitoramento de um Robô Móvel Para Utilização no Tratamento de Crianças
Portadoras de Autismo
Trabalho apresentado ao Curso de Graduação em Engenharia de Computação da Universidade Federal da Bahia como parte dos requisitos para a obtenção do título de Engenheiro da Computação.
Orientador: Jés de Jesus F. Cerqueira
Salvador, Junho de 2016

iii

iv
Dedico este trabalho especialmente a
minha esposa, que sempre me apoiou
durante toda minha formação
acadêmica.

v
AGRADECIMENTOS
Agradeço a todos os meus familiares que de certa forma contribuíram para meu
desenvolvimento como estudante, profissional e cidadão, especialmente a meus
pais, que não mediram esforços para me proporcionar a melhor educação
possível.
Também, gostaria de agradecer a todos os meus colegas que estiveram comigo
durante os bons e difíceis momentos de nossa formação.
Por fim, agradeço a todos os professores que dedicaram seu tempo e esforço
para me proporcionar um ensino de excelente qualidade, especialmente a meu
orientador prof. Jés de Jesus Fiais Cerqueira.

vi
RESUMO
Este trabalho expõe uma análise sobre o que é o autismo e demonstra alguns
dos tratamentos mais utilizados para melhoria na qualidade de vida dos
portadores deste transtorno. Na sequência, apresenta um sistema de
monitoramento de uma base robótica. Deste modo, são tratados tanto os
aspectos relevantes em relação aos sensores do robô, como câmeras e
microfones, quanto os sinais que serão utilizados nos atuadores do mesmo para
executar uma determinada ação. Esta plataforma robótica terá o propósito de
interagir com uma criança portadora de autismo. Assim as informações visuais
desta ferramenta foram projetadas de modo que o terapeuta, que estará
monitorando a interação entre a criança e o robô, tenha todos os dados
necessários para a avaliação do desenvolvimento do autista, bem como
informações relevantes para ajudá-lo na tomada de decisão para realizar uma
possível intervenção neste processo.
Palavras chave: Robótica, Autismo, Interação Humano-Computador, Sistema
de Monitoramento.

vii
ABSTRACT
This paper presents an analysis about what autism is and shows some of the
most used treatments to improve the life quality of people with this disorder.
Finally, it presents a monitoring system for a robot, that is, both the relevant
aspects in relation to the robot sensors, such as cameras and microphones, and
the signals that will be used in its actuators to perform a certain action are
presented. This robot will have the purpose of interacting with a child with
autismo. Therefore the this tool's visual information have been designed so that
the psychologist who will be monitoring the interaction between the child and the
robot has all the necessary data to evaluate the development of the autistic child,
as well as the relevant information to help him in the decision of carrying out a
possible intervention in this process.
Keywords: Robotic, Autism, Human-Computer Interaction, Monitoring System.

viii
LISTA DE SÍMBOLOS E SIGLAS
IHC Interação Humano-Computador
TEA Transtorno do Espectro Autista
ABA Applied Behavior Analysis (Análise Comportamental Aplicada)
TAA Terapia Assistida por Animais
EEG Eletroencefalográfico
Wi-Fi Wireless Fidelity (Fidelidade Sem Fio ou Conexão Sem fio)
IDE Integrated Development Environment (Ambiente de
Desenvolvimento Integrado)

ix
LISTA DE FIGURAS
Figura 1. Robô humanoide NAO ........................................................................ 3
Figura 2. Diagrama de interação entre a criança, o robô e o psicólogo. ............ 7
Figura 3. Expressões do jogo "brincando com as expressões" .......................... 9
Figura 4. Dispositivo Microsoft Kinect® ............................................................. 10
Figura 5. Classes emocionais abordadas na análise EEG ............................... 11
Figura 6. Base robótica utilizada no projeto ..................................................... 13
Figura 7. Relações entre os atores e os casos de uso ..................................... 19
Figura 8. Tela inicial do sistema. ...................................................................... 21
Figura 9. Interface principal do sistema de monitoramento do robô. ................ 22
Figura 10. Tela de cadastro de pacientes. ....................................................... 23
Figura 11. Diagrama de envio e recepção do vídeo captado pelo robô. .......... 25

x
LISTA DE TABELAS
Tabela 1 - Questionário para elaboração da interface do sistema de
monitoramento do robô móvel .......................................................................... 16

xi
SUMÁRIO
1. INTRODUÇÃO ............................................................................................ 1
1.1. SOBRE O AUTISMO ............................................................................. 1
1.2. TRATAMENTOS DO AUTISMO ........................................................... 1
1.3. OBJETIVOS .......................................................................................... 3
1.4. FERRAMENTA PROPOSTA ................................................................. 4
1.5. ESTRUTURA DO TEXTO ..................................................................... 5
2. INTERAÇÃO AUTISTA-ROBÔ ................................................................... 6
2.1. CARACTERÍSTICAS DA INTERAÇÃO ................................................. 6
2.2. CARACTERÍSTICAS DO ROBÔ ........................................................... 7
2.3. COMPORTAMENTOS ESPERADOS DA CRIANÇA .......................... 13
3. SISTEMA DE MONITORAMENTO DO ROBÔ MÓVEL ............................ 14
3.1. ANÁLISE DE REQUISITOS ................................................................ 14
3.2. METODOLOGIA ................................................................................. 19
3.3. DESENVOLVIMENTO DO SISTEMA ................................................. 20
3.4. AVALIAÇÃO DO SISTEMA ................................................................. 26
4. TRABALHOS FUTUROS .......................................................................... 29
5. CONCLUSÕES ......................................................................................... 30
6. REFERÊNCIAS BIBLIOGRÁFICAS ......................................................... 31
APÊNDICE A – CASOS DE USO .................................................................... 33

1
1. INTRODUÇÃO
1.1. SOBRE O AUTISMO
O Transtorno do Espectro Autista (TEA), ou simplesmente o autismo, é
um distúrbio neurológico que afeta principalmente a capacidade de interação
social do indivíduo, fazendo com que este possa manifestar dificuldades de
relacionamento com outras pessoas (MARTELETO et al., 2011). O autismo
também é caracterizado pelo comportamento estereotipado e repetitivo, tanto
em aspectos motores, como gestos com as mãos, quanto em aspectos verbais.
Os sintomas do autismo costumam se apresentar após os 3 anos de vida
e são percebidos através da dificuldade de comunicação da criança. Este
transtorno pode apresentar diferentes níveis de severidade, podendo, nos casos
mais graves, ocorrer um aumento significativo na agressividade do autista com
os outros e contra si mesmo (SILVA, 2012). Porém, os comportamentos mais
comuns evidenciados em todos os níveis de comprometimento do espectro
autista são: (i) dificuldades de relacionamento com outras pessoas, onde
geralmente ocorre o isolamento do autista; (ii) problemas de comunicação,
chegando nos casos mais graves ao não desenvolvimento da fala e ações
corporais repetitivas (MARTELETO et al., 2011).
Apesar dos grandes esforços da comunidade científica ao longo dos anos,
o autismo continua não tendo cura. Porém, com os desenvolvimentos em
psicologia e psiquiatria, bem como os avanços tecnológicos adquiridos nas
últimas décadas, existem diversos tratamentos que visam proporcionar uma
melhor qualidade de vida aos portadores do espectro do autismo. Veremos
alguns destes tratamentos na próxima seção.
1.2. TRATAMENTOS DO AUTISMO
Desde o início do século XX, devido ao número crescente de casos de
autismo diagnosticados em todo mundo, tem-se investido em formas de
tratamento para este transtorno. Estes tratamentos visam, principalmente,
estimular a comunicação e a interação social do autista, proporcionando uma
melhora em sua qualidade de vida. Para isto, são montadas equipes

2
multidisciplinares que devem observar individualmente o autista e definir qual a
melhor maneira de lidar com suas limitações.
Como o autismo é um transtorno que afeta a interação do indivíduo com
o ambiente, é importante a participação da família no processo de tratamento,
visto que o autista, geralmente, interage de maneira mais ampla no ambiente
familiar (SPROVIERI, 2001). Assim, existem alguns métodos de tratamento que
incluem os pais como pacientes juntamente com o autista. Desta forma, visam
que os pais compreendam a condição deste transtorno e que saibam como lidar
com a situações cotidianas que podem influenciar no desenvolvimento da
interação social do autista.
Um modelo de tratamento para o autismo bastante difundido é o
conhecido como ABA (Applied Behavior Analysis). Este tratamento consiste na
busca crescente pela autonomia do autista baseando-se análises
comportamentais e ações corretivas para comportamentos estereotipados ou
repetitivos e dificuldades na comunicação. Estas ações corretivas visam que o
autista compreenda quais tipos de comportamentos são adequados, utilizando
de recompensas caso a resposta do autista a uma determinada situação seja
adequada (LEAR, 2004).
Outro tratamento que tem demonstrado bons resultados é a Terapia
Assistidas por Animais (TAA), especialmente com a utilização de cães. Esta
terapia baseia-se na ideia de que um animal pode oferecer diversos benefícios
às pessoas, neste caso aos indivíduos portadores de autismo (MUÑOZ, 2014).
São evidenciadas diversas melhorias na comunicação e na coordenação motora
de autistas submetidos a TAA, além de uma notável diminuição na ansiedade
deles. Uma pesquisa com crianças autistas feita pela mestra em psicologia pela
Universidade de São Paulo Patrícia Oliveira L. Muñoz (2014, p. 79), mostrou que,
segundo ela, “cães bem selecionados podem ser indicados com sucesso para a
TAA, confirmando as conclusões dos relatos de casos e estudos anedóticos que
encontramos na literatura atual”.
Atualmente, existem estudos e exemplos que apontam para o sucesso da
intervenção da robótica no tratamento do autismo (KIM, 2013). Recentemente,
uma empresa francesa chamada Aldebaran Robotics®, desenvolveu o robô

3
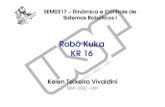
humanoide NAO (ASK... 2016) mostrado na Figura 1, que vem sendo utilizado
para ajudar jovens e crianças portadoras de autismo a desenvolverem a
capacidade de interagir com o mundo exterior e a se relacionarem com outras
pessoas.
Figura 1. Robô humanoide NAO utilizado no tratamento de crianças autistas (ASK... 2016)
Estudos feitos numa escola de Birmingham, na Inglaterra, apontam que
as crianças portadoras de autismo têm maior facilidade em lidar com os robôs
do que com professores, devido a estes apresentarem um comportamento
previsível e, portanto, se apresentarem menos “ameaçadores” para elas. Assim,
é possível notar que a intervenção da robótica no tratamento do autismo
possibilita um ganho significativo na qualidade de vida destas pessoas e que
ampliando e melhorando o processo de interação entre o robô e a criança, pode-
se conseguir ainda mais progresso no tratamento do autismo (ROBINS, 2014).
1.3. OBJETIVOS
Este projeto tem como objetivo principal a construção de um sistema que
será responsável por monitorar um robô móvel, o qual irá interagir com uma
criança portadora de autismo. Desta forma, serão abordadas todas as etapas
necessárias para construção deste software, como a análise de requisitos,
codificação e avaliação.

4
Além disso, o projeto visa fundamentar a utilização da robótica no
tratamento do autismo e apresentar uma ferramenta proposta para este fim. Esta
ferramenta, a qual será construída ao longo do tempo com o desenvolvimento
de outros projetos, irá servir como uma plataforma de experimentos para
evolução deste tipo de tratamento. Para isto, irá dispor de sensores que irão
auxiliar o terapeuta na determinação do estado emocional do autista, dentre
outras funcionalidades.
1.4. FERRAMENTA PROPOSTA
Com base no sucesso da utilização de robôs no tratamento do autismo,
foi proposta a construção de uma base robótica, a qual será responsável por
interagir com uma criança autista, captando dados relativos a seu estado
emocional e atividade cerebral (CAMADA, 2016). Estas informações, serão
utilizadas por um terapeuta que acompanhará todo o processo, para que este
possa inferir sobre o andamento do tratamento e tomar decisões acerca da forma
com que se dará a interação entre a criança e o robô.
Esta base robótica, irá possuir sensores que irão captar informações
sobre expressões faciais e corporais, analisar padrões vocais e traços
eletroencefalográficos. Desta forma, ela será capaz além de fornecer estas
informações, também deduzir sobre o estado emocional da criança, auxiliando
assim o terapeuta a tomar as devidas providências para o bom andamento do
tratamento. Para interagir com a criança, existirão dois atuadores que irão tratar
de executar alguns dos mais utilizados protocolos sociais, que são a fala e as
expressões faciais. Assim, esta base robótica será não apenas um simples robô
que irá praticar algumas atividades junto com o autista a fim de estimular sua
fala e coordenação motora. Pois, ao contrário de como ocorre em diversos outros
tratamentos nesta área, esta ferramenta busca fornecer dados importantes que
poderão contribuir para um contínuo desenvolvimento deste tipo de tratamento.
Para que o terapeuta possa monitorar o andamento da interação entre a
criança e o robô e analisar os dados captados por este de maneira mais simples
e rápida, foi desenvolvido um sistema computacional que irá servir de
comunicação entre o psicólogo e o robô. Este software, irá fornecer as
informações captadas pelo robô para análise do terapeuta e possibilitar que este

5
envie alguns comandos simples para o robô. Estas informações serão
exploradas de maneira mais detalhada no capítulo 2 deste trabalho.
1.5. ESTRUTURA DO TEXTO
O primeiro capítulo discorre sobre o autismo, definindo e apresentando a
forma como este transtorno se manifesta. Em seguida, são citados alguns
tratamentos para o autismo, enfatizando a utilização da robótica. Por fim, são
demonstrados os objetivos deste trabalho e apresentada a ferramenta proposta.
No segundo capítulo estão apresentadas as informações sobre a forma
como ocorrerá a interação entre o autista e o robô. Na sequência, são abordadas
as características físicas do robô, identificando e descrevendo o funcionamento
dos sensores e atuadores que estarão integrados a base robótica. Ao final, é
feito um breve comentário sobre como se espera que o autista se comporte
durante o tratamento.
O terceiro capítulo mostra todas as etapas que foram necessárias para a
construção do sistema de monitoramento, são elas a análise de requisitos,
desenvolvimento e avaliação. Em primeiro lugar, é demonstrada a análise de
requisitos, onde é descrito o processo de levantamento dos dados para definir o
modo com que cada informação foi disposta na interface do sistema. Em
segundo lugar, é apresentado o processo de desenvolvimento do sistema,
justificando o uso de todas as ferramentas utilizadas para este propósito. Por fim,
são mostrados os processos de avaliação realizados neste projeto, definindo-os
e expondo os resultados obtidos.
No quarto capítulo são descritas algumas melhorias futuras a serem
implementadas no projeto.
O quinto e último capítulo apresenta a conclusão deste trabalho,
discorrendo sobre o que ele representa em termos gerais e pessoais.

6
2. INTERAÇÃO AUTISTA-ROBÔ
Neste capítulo será discutido sobre como ocorrerá a interação entre o robô
móvel e a criança portadora de autismo, a fim de identificarmos todos os pontos
relevantes, como por exemplo o tipo de ambiente onde ambos ficarão, as
características físicas do robô e a importância do sistema de monitoramento do
robô para acompanhamento de todo o processo.
2.1. CARACTERÍSTICAS DA INTERAÇÃO
Inicialmente, será tratado sobre o ambiente em que ocorrerá a interação
entre a criança e o robô móvel. Observa-se que, por se tratar de uma criança, o
ambiente deve ser livre de quaisquer tipos de objetos que possam causar um
dano físico, como por exemplos mesas e cadeiras. Assim, define-se o espaço da
interação como sendo uma sala arejada, espaçosa e que possibilite a
movimentação livre tanto da criança quanto do robô. A fim de garantir uma
melhor “relação” entre a criança e o robô, o psicólogo que acompanhará o
processo, deverá estar em outra sala, longe do campo de visão da criança. A
psicóloga Marcia Regina Fumagalli Marteleto et al. (2011, p. 6) afirma que
crianças autistas preferem não ter intimidade com indivíduos com os quais têm
pouco contato.
O processo de interação entre a criança e o robô móvel se dará através
dos seus sensores, como o reconhecimento de emoções, câmeras e microfones,
e seus atuadores, como síntese de voz e projeção facial. Veremos mais detalhes
sobre os sensores e atuadores na secção 2.2. Um psicólogo irá acompanhar a
evolução da interação através do sistema alvo deste projeto, o qual irá
possibilitar o acompanhamento de todos os dados obtidos através do robô sobre
a atual condição da criança, bem como permitirá que ele realize uma
determinada interferência no processo de modo a adequar o tipo de atividade
que estará sendo praticada pela criança.
Todo o processo de interação é demonstrado na Figura 2, onde pode-se
perceber com clareza o que foi exposto acima. Os módulos dos sensores e
atuadores do robô, agem diretamente com a criança e, como back-end (termo
utilizado para expressar algo que está por trás de um processo, oculto ao
usuário), o terapeuta interage com o robô através de uma rede Wi-Fi, que irá

7
trafegar dados importantes referentes a interação autista-robô. Por fim, tem-se o
sistema de monitoramento, que irá processar estes dados a fim de demonstrar
ao psicólogo as informações de forma mais objetiva e tratar os dados de controle
de modo a fornecer ao robô um sinal já pronto para processamento e uso.
Figura 2. Diagrama de interação entre a criança, o robô e o psicólogo.
2.2. CARACTERÍSTICAS DO ROBÔ
O robô móvel será dotado de um sistema omnidirecional de
deslocamento, ou seja, poderá deslocar-se lateralmente, em linha reta ou
girando em torno do seu próprio eixo sem a necessidade de uma mudança na
sua orientação. Esta característica se deve ao uso de rodas suecas, as quais
permitem um deslocamento perpendicular a seu plano (SECCHI, 2008). O fato
de o robô móvel ser omnidirecional, é de grande importância para proporcionar

8
uma maior dinâmica na interação com a criança, pois desta forma o robô poderá
acompanhar a criança de uma maneira mais suave, sem que isto possa acarretar
numa possível reação adversa dela.
Para análise sobre o estado emocional da criança, o robô irá possuir 4
módulos sensoriais, que tratarão os seguintes pontos: (i) reconhecimento
corporal, (ii) reconhecimento da expressão facial, (iii) reconhecimento de voz e
(iv) reconhecimento de atividade cerebral através da análise dos traços
eletroencefalográficos (EEG).
O módulo de reconhecimento corporal será responsável por determinar
se a criança está se sentindo à vontade ou não com a interação com o robô. Esta
inferência irá se basear na quantificação de movimentos estereotipados
praticados pelo autista, de modo a definir um certo nível de defesa da criança
em relação a presença do robô (CAMADA, 2016). Kuhn (1999 apud CAMADA,
2016, p. 1) considera que o autista é um indivíduo dotado de uma sensibilidade
muito elevada em relação a interação com o mundo exterior, desta forma, ele
desenvolve um comportamento estereotipado como forma de defesa, ou seja,
como forma de se proteger de algo que possa parecer ameaçador a ele.
O módulo de reconhecimento facial irá contribuir para a determinação do
estado emocional da criança, indicando se ela está triste, alegre, com raiva ou
surpresa. Estes 4 níveis emocionais foram escolhidos com base no jogo
“brincando com as expressões”, da empresa fabricante de brinquedos Toyster®,
o qual é destinado para crianças maiores de 8 anos de idade e representa um
bom modelo de para os padrões emocionais de crianças. Os estados emocionais
serão estimados de acordo com o padrão facial demonstrado pela criança, onde
será feita uma avaliação através do casamento de padrões, para estabelecer em
qual nível emocional a criança mais se encaixa. Como o autista apresenta
dificuldades para expressar suas emoções (GOULART, 2015), suas expressões
faciais geralmente não serão as mesmas de pessoas não autistas, fazendo com
que os padrões emocionais adotados sejam particulares a estas pessoas. Para
representação de qual é o nível emocional da criança para exibição no sistema
de monitoramento do robô, iremos utilizar as expressões da Figura 3, extraída
do jogo da Toyster® mencionado anteriormente.

9
Figura 3. Expressões do jogo "brincando com as expressões" da Toyster®: (a). Alegria; (b).
Tristeza; (c). Raiva e (d). Surpresa (ASSUMPÇÃO, 1999).
O módulo de reconhecimento corporal, irá utilizar para captação de dados
o dispositivo Kinect®, desenvolvido pela empresa Microsoft. Este equipamento
fornece, além do sinal de vídeo, dados sobre a posição e a orientação de um
indivíduo ou até de partes do corpo dele (cabeça, braços, pernas...). Estes dados
são obtidos a partir do uso de 3 sensores e de um motor de inclinação, o qual irá
acompanhar o posicionamento de um determinado “alvo”. Os sensores utilizados
são: (i) sensor de cores, que funciona como uma câmera para captação de
imagens; (ii) o emissor e (iii) o receptor de sinais infravermelhos, que servirão
para definir a profundidade do ambiente e dos objetos (Microsoft, 2013). A
localização destes sensores poderá ser visualizada na Figura 4.
Acoplado ao robô, existirá também uma outra câmera de mais baixa
resolução, a qual servirá apenas para captação de imagens da criança. Este
equipamento irá funcionar de modo semelhante ao de um webcam, ou seja, irá
captar as imagens da criança para o envio destas informações para o sistema
de monitoramento utilizado pelo terapeuta, para que este tenha uma visão em
tempo real sobre o que está acontecendo durante a interação com o robô.

10
Figura 4. Dispositivo Microsoft Kinect® sendo destacados seus sensores (emissor e receptor de
infravermelho, cores e o conjunto de microfones) e o motor de inclinação (Microsoft, 2013).
O módulo de reconhecimento de voz irá possuir como uma de suas
funções, auxiliar no sistema de locomoção do robô. Isto se deve ao fato de que
a captação dos sinais sonoros pode ser feita de maneira precisa em algumas
situações adversas, como por exemplo baixa luminosidade e em ambientes que
possuem obstáculos grandes, como móveis ou até paredes. Este sistema de
captação de áudio foi desenvolvido para que ele se comporte de modo
semelhante a audição humana e, para isto, são utilizados 3 microfones dispostos
nos vértices de um triângulo equilátero imaginário separados por uma distância
de 13,5 centímetros (semelhante a distância entre as orelhas de um ser
humano), onde a localização do emissor sonoro poderá ser estimada a partir de
uma triangulação feita com base no tempo de recepção do som por cada
microfone (HUANG; OHNISHI; SUGIE, 1997). Deste modo, a posição da fonte
emissora de som poderá ser estimada tanto direção quanto em profundidade, o
que faz com que este sistema de microfones seja chamado de captação de áudio
em 3D.
Outra utilidade do módulo de reconhecimento de voz, será complementar
os demais sensores na determinação do estado emocional da criança, pois como
dizem as fonoaudiólogas Leilane Sena e Renata Borges (2012), “através da voz
conseguimos exprimir uma gama de sentimentos, como a raiva, alegria, tristeza,
dor, amor e nervosismo”. Assim, este sensor será, além de um complemento

11
para estudar as emoções do autista durante o tratamento, uma opção de
redundância caso haja alguma falha em algum módulo sensorial responsável
também por determinar o estado emocional da criança, dando uma robustez
maior ao processo de captação dos dados.
Por fim, tem-se o módulo que será responsável por analisar a atividade
cerebral da criança durante o processo de interação desta com o robô através
da análise EEG. Segundo a bióloga Christiane Mara Goulart (2015, p. 43), “EEG
é uma técnica que mede a atividade do cérebro provocada pelo fluxo de corrente
elétrica durante as excitações sinápticas dos dendritos dos neurônios”. Este é
um método invasivo, pois necessita que sejam colocados eletrodos fixados na
cabeça de um indivíduo para captação dos dados, porém esta fixação dos
eletrodos é feita de maneira bastante suave, minimizando quaisquer
desconfortos aos usuários. Após a captação dos dados cerebrais, ocorrerá o
processamento das informações com a utilização de um algoritmo de
classificação que determinará o estado emocional da criança (GOULART, 2015).
Estes estados emocionais são divididos em 3 categorias, indicando que a criança
está reagindo negativamente, positivamente ou passivamente a atividade
executada pelo robô naquele momento. Estes estados emocionais podem ser
visualizados na Figura 5, onde é demonstrado também o círculo classificatório
onde se encaixam estes 3 estados.
Figura 5. Classes emocionais abordadas na análise EEG (GOULART, 2015).

12
Em relação ao processo de interação com a criança autista, o robô
possuirá 2 atuadores, que servirão basicamente para aplicar as atividades
propostas e passar instruções a criança. Um dos equipamentos que irão tratar
de um desses pontos será um tablet, o qual será colocado na parte superior do
robô e irá executar jogos educativos, exibir imagens, vídeos, entre outras coisas
que irão em suma, compor boa parte do conteúdo aplicado do tratamento, sendo,
portanto, a principal via de comunicação da criança com o robô. O outro
equipamento que servirá como atuador no processo de interação, será um
emissor sonoro responsável por sintetizar uma voz a partir de um texto escrito
pelo psicólogo e enviado via rede Wi-Fi ao robô (EGASHIRA, 1992). Este
equipamento será utilizado a todo momento em que se queira passar instruções
à criança ou apenas complementar alguma atividade executada pelo tablet. A
voz reproduzida será uma voz “robotizada”, ou seja, diferente do tom de voz
humano, fazendo com que a criança perceba ainda mais que não está
interagindo com uma pessoa, mas sim com o robô, evitando assim possíveis
reações adversas da criança.
Este não será um robô humanoide, ou seja, não terá características
humanas, como braços, pernas, etc. Por este motivo, o tablet também será
responsável por executar um aplicativo que irá simular um rosto a todo momento
em que for executada a funcionalidade de síntese de voz, fazendo com que seja
passado para criança que quem está transmitindo as orientações é o robô, não
um ser humano.
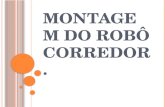
Todos estes equipamentos serão dispostos numa estrutura metálica
retangular, a qual irá comportar todo o material necessário para processamento,
manipulação e envio das informações. Para isso, o robô terá uma central de
processamento, ou seja, uma espécie de minicomputador que servirá para
integrar os sensores e atuadores do robô de modo que estes trabalhem em
conjunto. Devido aos requisitos de mobilidade, a base robótica irá contar também
com uma bateria recarregável de longa duração, pois como existem diversos
equipamentos acoplados, o consumo de energia será relativamente alto. Abaixo,
vemos na Figura 6, um modelo da base robótica que será utilizada no projeto.

13
Figura 6. Base robótica utilizada no projeto.
2.3. COMPORTAMENTOS ESPERADOS DA CRIANÇA
O principal objetivo da utilização da robótica no tratamento de crianças
portadoras de autismo, é fazer com que estas sintam-se mais à vontade para
realizar determinados tipos de exercícios mentais e comportamentais, de modo
a elevar com o tempo, a capacidade da criança de interagir com o mundo
exterior. Tal objetivo, segundo este preceito, seria alcançado de uma maneira
mais eficiente com um robô do que com um ser humano, conforme exemplificado
no Capítulo 1.2.
Com isto, espera-se que o autista apresente uma maior “abertura” para
desempenhar as atividades elaboradas pelo robô móvel, de modo que esta
apresente um comportamento que mais se assemelhe ao de uma criança não
autista. Ou seja, é esperado que a criança exerça uma atividade cerebral elevada
durante as atividades que envolvem o uso da cognição e que consiga participar,
de maneira solicita, de todas as atividades que irão requerer o uso da
comunicação oral e motora, de modo a gradualmente deixar de apresentar
comportamentos repetitivos e estereotipados.

14
3. SISTEMA DE MONITORAMENTO DO ROBÔ MÓVEL
Neste capítulo é discutido o processo de levantamento de requisitos para
a construção de um sistema capaz de atender as necessidades do psicólogo
para atingir uma experiência de uso adequada. Também serão abordadas as
fases de construção do sistema, bem como uma avaliação baseada nos
conceitos de Interação Humano-Computador a fim de verificar a usabilidade do
sistema.
3.1. ANÁLISE DE REQUISITOS
Por se tratar de um sistema interativo, esta etapa se mostra de
fundamental importância para o desenvolvimento deste sistema (BARBOSA;
SILVA, 2010). Em especial para sua interface de interação, pois é nesta fase que
iremos entender e definir as necessidades dos usuários, de modo a modelar a
interface para que esta atenda todas as suas expectativas, oferecendo uma
ferramenta que seja eficaz e que proporcione uma boa experiência de uso.
A princípio, é possível notar que existe uma grande diferença entre uma
análise de requisitos feita para o robô móvel e para a construção do sistema de
monitoramento. A começar pelo usuário final de cada um, onde tem-se que o
usuário principal do objeto robô será a criança portadora de autismo e o usuário
do sistema será um terapeuta que irá acompanhar o processo. Assim, pode-se
observar que o levantamento das informações referentes ao sistema, não levam
em consideração as necessidades do autista, mas sim as necessidades do
terapeuta.
A fim de analisar quais informações serão tratadas no sistema e como
estas informações serão exibidas ao usuário, foi elaborado um questionário
contendo cinco perguntas, sendo todas objetivas. Um questionário possui como
grande vantagem sobre os outros meios de se conseguir informações de um
determinado grupo de pessoas, a possibilidade de se conseguir chegar em
pessoas de lugares distintos com muito mais rapidez, principalmente se tratando
de um questionário online (BARBOSA; SILVA, 2010). Outra característica de um
questionário, é que este deve possuir principalmente perguntas objetivas,
preferencialmente as de uma única opção de resposta, visto que quanto mais

15
baixa for a complexidade do questionário e o tempo total para que este seja
finalizado, mais pessoas irão se dispor a respondê-lo.
As perguntas do questionário foram elaboradas de modo a esclarecer
possíveis dúvidas sobre como deverão ser exibidas as informações obtidas dos
sensores do robô. Não foram levadas em conta quais informações deveriam ser
exibidas, visto que todos os sensores do robô foram pensados de modo que o
terapeuta tenha em mãos dados essenciais para uma boa análise sobre o
andamento do tratamento. Antes de iniciar o questionário, foi feito um breve
comentário sobre o projeto, abordando principalmente os dados que serão
trabalhados a partir dos sensores do robô. Esta introdução ao questionário tem
como objetivo evitar a necessidade de explicar pessoalmente aos entrevistados
sobre o projeto, tornando assim o processo de coleta das informações mais ágil
e dinâmico, as quais inclusive são umas das premissas da elaboração de um
questionário.
O questionário foi elaborado utilizando a ferramenta de criação de
formulários online da Google®, a qual além de ser uma fermenta gratuita,
possibilita a difusão do formulário de maneira simples e ágil, bastando apenas
enviar o link da página do formulário para a pessoa que irá responde-lo. Este
levantamento de informações através do questionário, contou com a participação
de 4 psicólogos, os quais responderam a todas as perguntas.
O número de psicólogos que responderam o questionário é considerado
um número baixo se tratando de um questionário, porém, é possível ter pelo
menos uma ideia sobre o que o questionário propõe. Também não foram
levantadas informações se algum dos psicólogos que responderam o
questionaram possuem alguma experiência quanto ao tratamento do autismo.
Abaixo na tabela 1, verificamos as perguntas feitas no questionário bem como o
percentual de respostas de cada uma das alternativas.

16
Tabela 1 - Questionário para elaboração da interface do sistema de monitoramento do robô móvel
Perguntas Alternativa (a) Alternativa (b)
1. Em sua opinião, o sistema deve dar uma ênfase maior ao (a) vídeo transmitido pelo robô ou (b) as informações sobre o estado emocional da criança?
0,00% 100,00%
2. Você acha interessante existir (a) um cadastramento de usuários para controle dos pacientes ou (b) isto seria desnecessário, viso que este controle já será feito pelo psicólogo?
25,00% 75,00%
3. Para demonstrar os estados emocionais da criança, seria mais interessante (a) o uso de imagens ilustrativas ou simplesmente (b) um indicativo escrito seria suficiente?
100,00% 0,00%
4. As opções de controle do robô deverão estar contidas (a) na mesma tela que serão visualizados os dados ou (b) numa tela a parte?
100,00% 0,00%
5. Você acha mais importante as informações obtidas pelo (a) módulo de EEG ou as informações obtidas pelo (b) módulo de expressão corporal?
100,00% 0,00%
Analisando a Tabela 1, é possível notar que houve quase que uma
uniformidade nas respostas dos psicólogos. Este resultado de certa forma já era
esperado, devido ao fato de que pôde ser percebido no desenvolvimento desde
projeto, o grau de importância de cada uma das informações tratadas pelo
sistema. Porém, com o questionário estas questões foram ratificadas, apesar do
número baixo de participantes. A única questão que ouve divergência nas
respostas foi a questão 2, a qual indaga sobre a necessidade de criação da
funcionalidade de cadastramento dos pacientes. Esta divergência pode ter
ocorrido talvez por diferenças na forma com que cada psicólogo lida com seus
pacientes, ou seja, dos 4 psicólogos que responderam o questionário, 3 deles
optaram por continuar com seus processos de controle de pacientes, enquanto
apenas um deles achou que o próprio sistema realizar este cadastro seria a
melhor forma. Porém, a fim de atender a todos, foi desenvolvida a funcionalidade
de cadastro de pacientes, deixando-a como um processo alternativo ao
funcionamento do sistema.

17
Definidos então o grau de importância e, consequentemente, o destaque
na tela do sistema de cada um dos grupos de informações oriundas do robô,
precisamos agora verificar como os dados serão dispostos, ou seja, qual a forma
com que cada informação será exibida. Assim, inicialmente foi feito um
levantamento sobre a forma com que as informações dos 4 módulos sensoriais
do robô seriam organizadas na tela. Este levantamento foi realizado
considerando a affordance (o que o formato do objeto sugere que ele faça) dos
objetos e os conceitos sobre engenharia cognitiva, a qual trata de relacionar os
objetos físicos na interface (caixas de texto, botões, etc.) com os objetos
psicológicos (o que se espera que aconteça) criados pelo usuário (BARBOSA;
SILVA, 2010), de modo a harmonizar esta relação, fazendo com que o usuário
tenha uma resposta do sistema conforme era esperado por ele.
O módulo de reconhecimento corporal irá informar ao psicólogo se a
criança está executando algum movimento estereotipado em determinado
momento, assim o sistema irá tratar esta informação de modo indicativo, ou seja,
irá existir uma flag no formato de um botão circular que ascenderá na coloração
vermelha indicando que a criança está se movimentando atipicamente e caso a
movimentação dela esteja dentro do esperado, a coloração do botão será verde.
De modo semelhante, o sistema irá expor os dados obtidos do módulo de EEG
indicando, através de uma barra horizontal, o nível de satisfação da criança a
respeito da atividade atual executada pelo robô. Esta barra irá possuir 3 cores,
azul, verde e vermelho, as quais irão indicar, respectivamente, se a criança está
reagindo passivamente, positivamente ou negativamente ao exercício.
Com o objetivo de tornar a interface do sistema mais integrada ao tema
de sua utilização, a informação adquirida do sensor de reconhecimento facial
será reproduzida na interface través do uso de figuras, que irão representar os 4
estados emocionais da criança abordados neste projeto. As figuras serão
baseadas na figura 3, sendo que irá aparecer num determinado quadro da
interface a figura que representa o estado emocional obtido pelo sensor.
Os dados de localização recebidos pelo módulo de reconhecimento de
voz, serão exibidos abaixo do quadro onde estará sendo transmitido o vídeo
captado pela câmera acoplada ao robô, assim além de o psicólogo ver o que
está ocorrendo durante a interação do robô com a criança, saberá qual a

18
localização dela em relação ao ambiente. Já as informações sobre o estado
emocional da criança recebidas também através deste sensor, serão tratadas
juntamente com os dados obtidos pelo módulo de reconhecimento facial, de
modo a mesclar as informações e definir o estado emocional do autista com uma
maior precisão.
Outra etapa de extrema importância no levantamento de requisitos é a
elaboração de casos de uso, que segundo o famoso programador americano
Alistair Cockburn (2007, p. 22), “descrevem o comportamento do sistema sob
diversas condições”, ou seja, definem como serão tratadas pelo sistema todas
as ações que o usuário pode executar. A este usuário que interage com o
sistema damos o nome de ator primário, que no caso deste projeto será o
psicólogo. Os casos de uso deste sistema foram criados com base em algumas
regras, dentre elas são: apresentação dos atores de cada caso de uso, as pré-
condições do sistema para que determinada ação possa ser realizada, as pós-
condições do sistema após o término da ação, descrição da funcionalidade e os
fluxos principal e secundário demonstrando passo a passo como o sistema irá
tratar determinada ação do usuário.
Como pôde ser observado até aqui, as principais funcionalidades deste
sistema estão voltadas para a exibição de informações extraídas dos módulos
sensoriais do robô, assim a interação com o psicólogo se dará em grande parte
na observância das informações mostradas na interface. As únicas ocasiões em
que o terapeuta irá efetuar alguma ação na interface será no cadastro de
pacientes e nas opções de controle de voz, seleção de atividade e interrupção
do funcionamento do robô, as quais irão servir para que o psicólogo possa
realizar alguma alteração na interação deste com a criança. Com isto, definimos
como únicos atores do sistema, ou seja, como únicos usuários que irão fornecer
ou extrair dados dele, o robô e o terapeuta.
Assim, os casos de uso referentes ao robô são: (i) receber os dados
obtidos dos módulos sensoriais via rede e (ii) enviar os dados de controle para o
robô, que podem ser uma mensagem de texto, uma atividade a ser executada
ou um sinal para interrupção de seu funcionamento.

19
Os casos de uso que terão o terapeuta como ator, são: (i) o cadastro de
pacientes e (ii) envio de dados de controle via rede, sendo este o único a possuir
2 atores. As relações dos atores com os casos de uso podem ser visualizadas
na Figura 7 e o detalhamento dos casos de uso pode ser analisado no Apêndice
A ao final deste documento.
Figura 7. Relações entre os atores e os casos de uso do sistema de monitoramento.
3.2. METODOLOGIA
Este sistema foi desenvolvido em sua totalidade na linguagem de
programação Java, que é uma das principais linguagens de programação do
mundo no âmbito do paradigma de orientação a objetos (BORATTI, 2007). Esta
linguagem se mostrou bastante compatível com o desenvolvimento deste projeto
e, além disto, possibilitou o uso de diversas bibliotecas as quais contribuíram
muito no desenvolvimento de diversas funcionalidades do sistema, como por
exemplo o envio e recebimento de dados via rede e a transmissão das
informações de multimídia.

20
O sistema operacional onde o sistema foi desenvolvido é o Windows®, da
empresa Microsoft. Porém graças ao processo de execução da linguagem JAVA,
utilizando uma máquina virtual, este sistema poderá ser executado em qualquer
sistema operacional. No entanto, não houveram testes do funcionamento deste
software em outros sistemas operacionais.
O ambiente de desenvolvimento, ou simplesmente IDE, utilizado no
projeto foi o NetBeans versão 8.0.2, o qual é uma ferramenta gratuita e de código
aberto e, consequentemente, possui uma comunidade para suporte e
compartilhamento de informações com um número muito alto de usuários. Esta
IDE possui como principal vantagem em relação às outras, a facilidade na
criação de interfaces, pois dispõe de diversos elementos gráficos que podem ser
atribuídos ao sistema de maneira simples e rápida, sem a necessidade de
efetuar nenhuma codificação inicial.
Para armazenamento das informações, como por exemplo o cadastro de
pacientes, foi utilizado o banco de dados relacional MySQL, o qual é um
excelente banco para aplicações de pequeno e médio porte, além do fato de
também ser gratuito. Assim, foi feito um levantamento que definiu qual o banco
de dados iria ser utilizado neste projeto, considerando a facilidade no uso e as
funcionalidades. Desta forma, apesar de não ser uma das melhores ferramentas
nesta área, o MySQL apresentou um excelente custo-benefício.
Para segurança e versionamento do código fonte, foi utilizado o
repositório GitHub, o qual é um dos softwares mais conhecidos neste quesito e
apresenta uma gama enorme de funcionalidades, as quais incluem possibilidade
de desenvolvimento de projetos por diversas pessoas simultaneamente, criação
de cópias de segurança do projeto, possibilidade de armazenamento na nuvem,
entre outras. Outra facilidade adquirida com o uso desta ferramenta, foi a
viabilidade de trabalhar no projeto de diversos lugares sem correr o risco de
perder informações, o que possibilitou utilizar com segurança diversos
computadores na sua construção.
3.3. DESENVOLVIMENTO DO SISTEMA
Em primeiro lugar, foi desenvolvida a interface do sistema com base na
análise de requisitos, em especial no questionário realizado para levantamento

21
do nível de importância de cada módulo sensorial. Assim, este projeto foi
baseado na abordagem de desenvolvimento “de fora para dentro”, ou seja, foi
priorizado ambiente onde o sistema será inserido visando proporcionar uma boa
experiência de uso (BARBOSA; SILVA, 2010). O backend do projeto (estrutura
de dados, banco de dados, regra de negócio) foi desenvolvido em adequação ao
frontend (interface), buscando assim criar um meio termo entre satisfação dos
usuários finais e eficácia na execução das funcionalidades propostas.
Ao executar o sistema, é exibida uma tela inicial, onde o usuário poderá
informar o paciente que estará participando do tratamento ou apenas prosseguir
sem esta informação. Caso ele opte por informar o nome do paciente, este será
exibido na tela principal do sistema. Na Figura 8, é mostrada a tela inicial.
Figura 8. Tela inicial do sistema.
Objetivando dar uma maior autonomia ao usuário, todas as opções em
que há interação do usuário possuem tooltips, que são mensagens explicativas
exibidas assim que o usuário posiciona o mouse acima do objeto da interface.
Com isto, a utilização do sistema poderá ser realizada sem que antes haja um
treinamento, o que poderia diminuir possíveis custos adicionais ao seu
desenvolvimento e implantação. Na Figura 9, poderá ser visualizada a interface
principal do sistema.

22
Figura 9. Interface principal do sistema de monitoramento do robô.

23
Existem 3 opções na parte superior da tela principal, representadas por
símbolos que inferem sua utilidade. Da esquerda para direita, as opções servem
para sair do sistema, cadastrar um novo paciente e exibir informações sobre o
sistema. A opção de cadastro de pacientes irá abrir uma nova tela, a qual é
mostrada na Figura 10, onde o usuário poderá informar os dados de um novo
paciente ou simplesmente alterar alguma informação de um paciente já
cadastrado.
Figura 10. Tela de cadastro de pacientes.
Na tela de cadastro de pacientes, os dados obrigatórios para inserção de
um novo usuário são: nome do paciente, data de nascimento e nome do
responsável, todos os outros campos são optativos, incluindo os campos de RG

24
e CPF, visto que pelo tratamento ser com foco em crianças, algumas delas
podem não possuir estes documentos. Com relação a validação dos dados
cadastrais, temos que todos os campos que envolvem a digitação de datas e
códigos, como por exemplo o RG e o CPF, possuem uma máscara que fará com
que os dados sejam formatados de acordo com o que é previsto.
Outro ponto nesta tela, é a possibilidade de inserir uma foto do paciente,
a fim de facilitar sua identificação. Esta funcionalidade será tratada de modo que
ao usuário efetuar um click no objeto que representa a imagem, será aberta uma
tela do explorador de arquivos onde será escolhida uma foto tirada anteriormente
do paciente. Esta foto escolhida será copiada para uma pasta interna do sistema
e seu caminho será gravado juntamente com os demais dados cadastrais numa
tabela criada no banco de dados MySQL.
Retornando à tela principal, um ponto a ser destacado é o fato de que
ainda não foram criados os respectivos tratamentos para os dados obtidos dos
módulos sensoriais do robô. Isto se deve ao fato de estes ainda não terem sido
implementados, visto que o projeto integral de todas as funcionalidades do robô
ainda não está pronto. Desta forma, foram criados os objetos de tela a fim de
que a partir do momento em que os módulos sensoriais forem sendo
desenvolvidos, estes objetos possam ser reaproveitados, de modo que o
desenvolvedor necessite apenas se preocupar com o processamento das
informações de seu respectivo módulo sensorial, passando seu resultado para o
método padrão de alteração dos dados de cada bloco de exibição dos dados.
Em outras palavras, o responsável por desenvolver cada módulo sensorial, irá
fornecer as funções já criadas para alteração dos elementos visuais o resultado
de sua análise.
Além das funções de alteração dos objetos da interface, foram criados
todos os métodos básicos para comunicação via rede Wi-Fi com o robô utilizando
uma classe importada chamada “java.net”. Estes métodos servirão para
estabelecer a comunicação entre o sistema e o robô através da utilização de
sockets, que são as portas de entradas e saídas dos dados que irão trafegar na
rede.

25
Para reprodução do vídeo captado pelo robô, foi criado um método
simples e ao mesmo tempo robusto, onde o robô irá postar via streaming o vídeo
num servidor web acessível apenas na rede do local onde será realizado o
tratamento e o sistema irá acessar esta informação e transmitir na interface o
vídeo captado na página web. Este método foi criado pensando não apenas na
transmissão do vídeo pela interface, mas também nas melhorias futuras que
serão trabalhadas no sistema (tratadas no capítulo 4), especialmente na criação
de um aplicativo móvel em que os pais poderão acompanhar o processo de
interação entre a criança e o robô. Desta forma, o robô não necessitará enviar
informações para mais de um receptor, pois bastará apenas que ele envie os
dados do vídeo para o servidor web e todas as aplicações que desejarem
reproduzi-lo, irão acessá-lo. Podemos observar na Figura 11 um modelo de
como será feito o processo de envio e captação das informações de vídeo. A
biblioteca Java que irá ser utilizada para as aplicações de multimídia será a
javafx, a qual se encontra disponível no framework do NetBeans.
Figura 11. Diagrama de envio e recepção do vídeo captado pelo robô.
Com relação ao controle do robô, existem basicamente 3 funcionalidades:
envio de mensagens a serem reproduzidas pelo robô a partir da síntese de voz,

26
seleção da atividade a ser executada pelo robô e uma opção de interromper ou
simplesmente dar uma “pausa” no funcionamento do robô. Assim como no caso
anterior, os dados de controle não serão transmitidos ao robô pois este ainda
não foi integralmente desenvolvido, porém serão fornecidos os dados para que
futuramente possam ser integrados ao robô. Com relação ao envio de
mensagens de texto, foi criado, além de um campo onde o psicólogo poderá
informar um texto livre a ser posteriormente interpretado e transmitido pelo robô
à criança, uma opção de envio de mensagens rápidas. Estas mensagens visam
que o psicólogo tenha uma maior facilidade ao utilizar esta funcionalidade, pois
as mensagens incluídas esta opção provavelmente serão utilizadas em diversos
momentos durante o processo de interação entre a criança e o robô.
3.4. AVALIAÇÃO DO SISTEMA
A fim de avaliar tanto as funcionalidades do sistema quanto a usabilidade
deste, serão feitos dois tipos de avaliação, uma será a avaliação do sistema
como um todo, que irá visar a eficácia dos objetos do sistema e de suas relações.
A outra será a avaliação IHC da interface, a qual irá verificar a qualidade de uso
de seus usuários, ou seja, irá verificar se a interface atente todas as expectativas
dos usuários para com a utilização do sistema, que para o usuário, se resume a
sua interface (BARBOSA; SILVA, 2010).
Quanto a avaliação do sistema, existe um problema, pois como o robô
ainda não foi finalizado, bem como não existe a possibilidade de efetuar uma
validação do processo de interação entre a criança e o robô assistida pelo
terapeuta, a análise será deficiente de um resultado mais preciso. Outro ponto
que trará dificuldades na avaliação do sistema, é o fato de o desenvolvedor e o
avaliador serem a mesma pessoa, sendo que o ideal seria que estas etapas
fossem realizadas por pessoas diferentes.
Com relação a avaliação das funcionalidades do sistema, foram definidos
3 casos de teste, que visam avaliar o cadastro de pacientes, a exibição do vídeo
e o envio dos dados de controle do robô, sendo que este último será validado o
envio da mensagem de texto e dos controles para alterar a atividade.
Para validação do cadastro de usuários, foi elaborado um caso de testes
onde serão validados todos os campos (tamanho máximo, formato e tipos de

27
caracteres) e em seguida a gravação das informações no banco de dados. Para
a exibição do vídeo, foi analisado a forma de exibição, ou seja, se a reprodução
está sendo executada de modo contínuo e sem travamentos. Para o envio dos
dados de controle, foi criada uma outra aplicação simples a fim de simular a
recepção dos dados pelo robô e analisar se as informações enviadas estão de
acordo com os dados recebidos.
O método de avaliação que foi utilizado para a análise IHC do sistema foi
o percurso cognitivo, o qual é classificado como um método de inspeção que
visa antecipar os possíveis caminhos seguidos pelo usuário na interação com a
interface e explorar o design buscando definir a facilidade de aprendizado do
usuário ao utilizar o sistema (BARBOSA; SILVA, 2010).
O perfil do usuário que irá utilizar o sistema é de uma pessoa dotada de
conhecimento sobre todas as etapas do processo de tratamento, visto que o
único usuário deste sistema será o psicólogo. Assim, o percurso cognitivo
realizado deve ser a altura do conhecimento já adquirido pelo usuário, fazendo
com que não seja necessário um treinamento prévio para utilização do sistema.
As tarefas que fizeram parte do processo de avaliação foram o cadastro de
pacientes e o envio de dados de controle para o robô. Com relação ao cadastro
de pacientes, os passos seguidos foram: clicar na opção de cadastro do menu
da interface principal (representada por uma figura no formato de uma pessoa),
em seguida informar os dados cadastrais do paciente e por último clicar na opção
de confirmação que é representada por uma figura na cor verde. Já para a
digitação dos dados de controle, teremos apenas dois passos para o envio de
mensagens de texto e seleção de atividade, que serão basicamente informar os
dados e confirmar a escolha. Já para a opção de parada do robô, bastou apenas
um passo, que é justamente selecionar o botão maior destacado na cor
vermelha.
Durante este processo de avaliação, foi constatado que a usabilidade da
interface é bastante intuitiva, pois todas as opções apresentam mensagens (no
formato de um pop-up) explicativas sobre suas funcionalidades, tornando o
processo de interação do usuário com o sistema adequado ao seu perfil.

28
Por fim, a avaliação foi concluída definindo que o usuário deverá possuir
um conhecimento prévio a respeito da utilidade do sistema, o que abrange tanto
o conhecimento do tratamento que estará sendo realizado quanto o
conhecimento sobre os dados obtidos pelos módulos sensoriais do robô. O
usuário também deverá possui conhecimento suficiente para ser capaz de tomar
decisões a partir dos dados apresentados, visto que esta é a grande utilidade do
sistema. Logo, durante a utilização do sistema, o usuário aprenderá apenas o
que deve ser feito, ou seja, quais passos deverão ser seguidos para conseguir
usufruir de todas as funcionalidades, sendo que como vimos anteriormente, este
conhecimento será adquirido de forma autônoma e proporcional ao andamento
da interação com a interface.

29
4. TRABALHOS FUTUROS
Este projeto, faz parte de um conjunto de trabalhos que visam o
desenvolvimento por completo do robô móvel chamado HiBot, responsável por
interagir com uma criança autista e levantar dados úteis durante esta interação,
conforme foi demonstrado neste trabalho.
Um dos trabalhos que estão sendo realizados em paralelo com este, é
referente ao desenvolvimento do módulo sensorial de reconhecimento de
expressões corporais. Este trabalho, visa desenvolver o módulo sensorial por
completo, ou seja, tanto a construção (ou adaptação) da ferramenta como a
elaboração de um sistema que irá tratar do processamento das informações.
Também será responsável por ampliar este sistema para que este possa
comunicar-se corretamente com o módulo sensorial.
Com relação a este projeto, uma atualização futura que será de grande
utilidade, será a integração entre o vídeo captado pelo robô e as informações de
localização obtidas através do módulo de reconhecimento de voz. Esta melhoria
tem como objetivo, fornecer imagens de realidade aumentada, ou seja, exibir o
vídeo juntamente com a localização da criança no ambiente.
Para acompanhamento da evolução do autista durante o tratamento,
poderá ser criada uma funcionalidade para armazenamento das informações
sobre os comportamentos exercidos pela criança, como por exemplo o tempo
em que a criança deixou de apresentar movimentos estereotipados, entre outros,
a fim de gerar gráficos que informem ao psicólogo e aos responsáveis pela
criança, o quanto ela progrediu em termos de interação com outros indivíduos.
Outra melhoria que poderá ser implementada, será a construção de uma
ferramenta móvel, como por exemplo um aplicativo na plataforma Android, que
será responsável por replicar as informações do sistema de monitoramento de
maneira mais simplificada, para que os pais ou parentes do autista possam
acompanhar também a interação entre o robô e a criança. Esta ferramenta
poderá se apresentar muito importante para o progresso do tratamento, pois com
os pais visualizando as possíveis melhorias nas habilidades comunicativas da
criança, poderão dar continuidade ao que foi aprendido em casa, tornando o
tratamento ainda melhor.

30
5. CONCLUSÕES
A utilização de sistemas robóticos para aprimorar os tratamentos para o
autismo, como vimos, vem sendo bastante explorado e vem obtendo êxito no
que diz respeito a melhorar as condições de interação social dos pacientes
submetidos a este método. Assim, este projeto será de grande proveito no
âmbito social, pois irá fornecer uma nova ferramenta para este tipo de
tratamento, visando proporcionar uma melhoria na qualidade de vida aos
indivíduos portadores de autismo, em especial as crianças.
Analisando apenas o lado científico, este projeto também se mostrou de
grande utilidade, visto que serão trabalhados diversos métodos que ainda estão
em processo de melhoria, como por exemplo a análise do estado emocional a
partir de imagens ou de sons e realização de síntese de voz a partir de um texto
qualquer. Com isto, poderão ser realizadas inovações, contribuindo assim para
melhoria na robustez e na dinamicidade destas tecnologias.
Particularmente, este projeto me ofereceu uma grande oportunidade para
trabalhar os conhecimentos adquiridos durante o curso de engenharia de
computação, pois para seu desenvolvimento tive a necessidade de revisar
diversas áreas cursadas anteriormente, como por exemplo os conceitos sobre
engenharia de software, interação humano computador, redes de computadores,
programação orientada a objetos, dentre outras.
Além do ganho profissional, este projeto proporciona um ganho pessoal,
por tratar de um tema bastante presente em nossa sociedade e por buscar
soluções que irão contribuir para a melhoria na qualidade de vida de muitas
pessoas. Também, percebendo como um sistema pode interferir positivamente
na vida das pessoas, poderá ser pensado em possíveis soluções tecnológicas
para resolver ou pelo menos amenizar alguns dos principais problemas que
enfrentamos em nossa sociedade atualmente, podendo assim contribuir para a
construção de uma sociedade mais justa e inovadora.

31
6. REFERÊNCIAS BIBLIOGRÁFICAS
BARBOSA, Simone Diniz Junqueira; SILVA, Bruno Santana da. Interação
Humano-Computador. Rio de Janeiro: Campos, 2010. 365 p.
SECCHI, Humberto Alejandro. Uma Introdução aos Robôs Móveis. San
Juan: UNSJ, 2008. 81 p. Tradução Cynthia Netto de Almeida e Felipe
Nascimento Martins.
MUÑOZ, Patrícia de Oliveira Lima. Terapia Assistida por Animais:
Interação entre Cães e Crianças Autistas. 2014. 87 f. Dissertação
(Mestrado) - Curso de Psicologia, Instituto de Psicologia, Universidade de
São Paulo, São Paulo, 2014.
SILVA, Sara Isabel Azevedo da. Estudo do Efeito da Utilização de uma
Plataforma Robótica na Intervenção em Crianças com Perturbações do
Espectro do Autismo. 2012. 152 f. Dissertação (Mestrado) - Curso de
Engenharia Biomédica, Escola de Engenharia, Universidade do Minho,
Braga, 2012.
GOULART, Christiane Maria. Uma Contribuição ao Estudo de Sinais de
EEG... 2015. 143 f. Dissertação (Mestrado) - Curso de Biotecnologia,
Centro de Ciências da Saúde, Universidade Federal do Espírito Santo,
Vitória, 2015.
Kim ES, Berkovits LD, Bernier EP, Leyzberg D, Shic F, Paul R and
Scassellati. Social robots as embedded reinforcers of social behavior in
children with autism, J Autism Dev Disord. 2013; vol. 43, pp. 1038–1049.
HUANG, Jie; OHNISHI, Noboru; SUGIE, Noboru. Building ears for robots:
Sound localization and separation. Isarob, Nagoya, p.157-163, 15 jun.
1997.
COCKBURN, Alistair. Escrevendo Casos de Uso Eficazes. Porto Alegre:
Bookman, 2007. Tradução de: Roberto Vedoato.
BORATTI, Isaias Camilo. Programação Orientada a Objetos em JAVA.
Florianópolis: Visual Books, 2007. 310 p.

32
CAMADA, Marcos Yuzuru de Oliveira et al. Recognition of Affective State
in Austist from Stereotyped Gestures. Universidade Federal da Bahia,
Salvador, 2016.
MARTELETO, Márcia Regina Fumagalli et al. Problemas de
Comportamento em Crianças com Transtorno Autista. Universidade de
São Paulo, São Paulo, p.5-12, jan. 2011.
ASSUMPÇÃO JUNIOR, Francisco B. et al. Reconhecimento facial e
autismo. Arq. Neuro-psiquiatr., [s.l.], v. 57, n. 4, p.944-949, dez. 1999.
FapUNIFESP (SciELO).
SPROVIERI, Maria Helena S.; ASSUMPÇÃO JÚNIOR, Francisco B.
Dinâmica Familiar de Crianças Autistas. Instituto de Psiquiatris, São
Paulo, p.1-8, 24 nov. 2000.
SENA, Leilane; BORGES, Renata. A voz revela a identidade de uma
pessoa? 2012. Disponível em: <http://ibralc.com.br/a-voz-revela-uma-
pessoa/>. Acesso em: 12 fev. 2016.
ASK NAO: New way of teaching. New way of teaching. Disponível em:
<https://asknao.aldebaran.com/>. Acesso em: 03 fev. 2016.
GARCIA, Agnaldo. O Emprego de Animais na Terapia Infantil. Disponível
em:
<http://www.moreirajr.com.br/revistas.asp?id_materia=788&fase=imprim
e>. Acesso em: 03 mar. 2016.

33
APÊNDICE A – CASOS DE USO
1. Cadastrar Paciente
Descrição: Este caso de uso permite que sejam cadastrados pacientes para que
sejam tratados durante o processo de execução do sistema.
Atores: Terapeuta.
Pré-condições: O sistema deve estar executando a tela principal.
Pós-condições: Será efetuado o cadastro de um novo paciente.
Fluxo de eventos principal
1. O usuário acessa a opção de acesso a tela de cadastro de pacientes.
2. O sistema exibe a tela de cadastro de pacientes.
3. O usuário preenche os campos e acessa a opção de confirmar.
[FS001][FS002]
4. O sistema grava as informações no banco de dados e exibe uma
mensagem indicando que a gravação foi realizada com sucesso.
5. O sistema retorna para a tela principal.
6. O fluxo principal é finalizado.
Fluxos secundários (alternativos e de exceção)
[FS001] Campos obrigatórios não preenchidos.
1. O sistema exibe uma mensagem informando sobre os campos
obrigatórios e permanece na tela de cadastro de pacientes.
2. O usuário informa os dados obrigatórios.
3. Fim do Fluxo Secundário.
[FS002] Paciente já cadastrado
1. O sistema verifica a existência de um paciente a partir da digitação do
nome deste.
2. O sistema carrega todas as informações do usuário já cadastrado.
3. Fim do Fluxo Secundário.

34
2. Envio de Dados via Rede
Descrição: Este caso de uso permite o envio de informações do sistema para o
robô via rede.
Atores: Terapeuta e robô.
Pré-condições: O sistema deve estar executando a tela principal.
Pós-condições: Serão enviados dados via rede para o robô.
Fluxo de eventos principal
1. O usuário informa uma das 3 opções de controle do robô, que são: (i)
envio de mensagem de texto, (ii) seleção de atividade ou (iii) sinal de
interrupção do funcionamento.
2. O sistema estabelece conexão com o robô. [FS001]
3. O sistema envia os dados para o robô. [FS002]
4. O sistema exibe uma mensagem informando sobe o envio dos dados.
5. O fluxo principal é finalizado.
Fluxos secundários (alternativos e de exceção)
[FS001] Falha na conexão.
1. O sistema exibe uma mensagem informando sobre a falha na conexão.
2. Fim do Fluxo Secundário.
[FS002] Erro no envio dos dados
1. O sistema exibe uma mensagem informando sobre o erro no envio da
mensagem.
2. Fim do Fluxo Secundário.

35
3. Recepção de Dados via Rede
Descrição: Este caso de uso permite a recepção dos dados dos sensores do
robô via rede.
Atores: robô.
Pré-condições: O sistema deve estar executando a tela principal.
Pós-condições: Serão recebidos os dados enviados pelo robô.
Fluxo de eventos principal
1. O sistema de tempos em tempos verifica se existe alguma mensagem a
ser enviada pelo robô.
2. O sistema estabelece conexão com o robô. [FS001]
3. O sistema recebe os dados enviados pelo robô. [FS002]
4. O sistema processa estes dados e altera os elementos da interface de
modo a traduzir o que os dados enviados representam.
5. O fluxo principal é finalizado.
Fluxos secundários (alternativos e de exceção)
[FS001] Falha na conexão.
1. O sistema ignora o erro e tenta novamente estabelecer uma conexão.
2. Fim do Fluxo Secundário.
[FS002] Erro na recepção dos dados
1. O sistema envia uma mensagem para o robô solicitando um novo envio
dos dados.
2. Fim do Fluxo Secundário.
Top Related