






Línguas
Páginas
Legal

Teoria de Sistemas Lineares I
Teoria de Sistemas Lineares I
Prof. Aguinaldo S.e Silva, Universidade Federal de SantaCatarina

Teoria de Sistemas Lineares I
Realizacoes Irredutıveis de Matrizes de Transferencia Racionais Proprias
Realizacoes Irredutıveis de Matrizes de Transferencia
Racionais Proprias
Neste capıtulo utilizaremos os conceitos de observabilidade econtrolabilidade para estudarmos caracterısticas de uma dadarealizacao. Vamos considerar realizacoes de matrizes de funcoes detransferencia racionais e proprias.
G(s) =⇒
{
x = Ax + Bu
y = Cx + Du
onde G(s) e a funcao de transferencia e a representacao de estadose a realizacao.

Teoria de Sistemas Lineares I
Realizacoes Irredutıveis de Matrizes de Transferencia Racionais Proprias
Grau de uma funcao de transferencia
Polinomios coprimosDois polinomios N(s) e D(s) sao coprimos se eles nao tem termosem comum.Seja a funcao de transferencia escalar
g(s) =N(s)
D(s)
O grau da funcao de transferencia g(s) e o grau de D(s) se N(s) eD(s) sao coprimos.

Teoria de Sistemas Lineares I
Realizacoes Irredutıveis de Matrizes de Transferencia Racionais Proprias
Funcao de transferencia propria
g(s) = g(∞) + gsp(s)
onde gsp(s) estritamente propria e g(∞) e uma constante(corresponde a D).Desde que D nao tem nenhum papel no que sera discutido,considera-se apenas funcoes de transferencia estritamente proprias.Na discussao a seguir sera considerada a funcao de transferencia
g(s) =N(s)
D(s)=
β1 s3 + β2 s2 + β3 s + β4
s4 + α1 s3 + α2 s2 + α3 s + α4

Teoria de Sistemas Lineares I
Realizacoes Irredutıveis de Matrizes de Transferencia Racionais Proprias
Forma canonica de controlabilidade
Sejay(s) = N(s)D−1(s) u(s)
Definindo-se uma nova variavel v(t) tal que
v(s) = D−1(s) u(s)
tem-seD(s) v(s) = u(s)
ey(s) = N(s) v (s)

Teoria de Sistemas Lineares I
Realizacoes Irredutıveis de Matrizes de Transferencia Racionais Proprias
Definindo-se as variaveis de estado
x(t) =
x1(t)x2(t)x3(t)x4(t)
=
v (3)(t)v(t)v(t)v(t)
ou
x(s) =
x1(s)x2(s)x3(s)x4(s)
=
s3
s2
s
1
v(s)

Teoria de Sistemas Lineares I
Realizacoes Irredutıveis de Matrizes de Transferencia Racionais Proprias
Com estas definicoes tem-se
x2 = x1, x3 = x2, e x4 = x3
Usando-se x(s) em D(s) v(s) = u(s) tem-se
(s4 + α1 s3 + α2 s2 + α3 s + α4) v(s) = u(s)
ou ainda
sx1(s) = −α1 x1(s) + α2 x2(s) + α3 x3(s) + α4) x4(s) + u(s)
No domınio do tempo
x1(t) = [−α1 − α2 − α3 − α4] x(t) + 1 . u(t)
Usando-se x(s) em y(s) = N(s) v (s) tem-se
y(s) = (β1 s3 + β2 s2 + β3 s + β4) v(s)
= β1 x1(s) + β2 x2(s) + β3 x3(s) + β4 x4(s)
= [β1 β2 β3 β4] x(t)

Teoria de Sistemas Lineares I
Realizacoes Irredutıveis de Matrizes de Transferencia Racionais Proprias
Com as definicoes anteriores
x = Ax + b u =
−α1 −α2 −α3 −α4
1 0 0 00 1 0 00 0 1 0
+
1000
u
y = c x = [β1 β2 β3 β4]x
Esta e a forma canonica de controlabilidade.A matriz de controlabilidade e dada por
C =
1 −α1 α21 − α2 −α3
1 + 2α1α2 − α3
0 1 −α1 α21 − α2
0 0 1 −α1
0 0 0 1
Portanto det C = 1 e o sistema e sempre controlavel.

Teoria de Sistemas Lineares I
Realizacoes Irredutıveis de Matrizes de Transferencia Racionais Proprias
Outra forma canonica controlavelSe for usada adicionalmente a transformacao de equivalenciax = Px onde
P =
0 0 0 10 0 1 00 1 0 01 0 0 0
(note que P = P−1) tem-se que a forma canonica decontrolabilidade fica
x = Ax + b u =
0 1 0 00 0 1 00 0 0 1
−α4 −α3 −α2 −α1
+
0001
u
y = c x = [β1 β2 β3 β4]x
Esta e uma outra forma canonica de controlabilidade.

Teoria de Sistemas Lineares I
Realizacoes Irredutıveis de Matrizes de Transferencia Racionais Proprias
Teorema
A forma canonica controlavel e observavel se e somente D(s) eN(s) sao coprimos.Necessidade: Se observavel entao D(s) e N(s) sao coprimos.A demonstracao e por contradicao. Supondo que D(s) e N(s) naosao coprimos.Entao existe λ1 (raiz comum) tal que
N(λ1) = β1 λ31 + β2 λ2
1 + β3 λ1 + β4 = 0
D(λ1) = λ41 + α1 λ3
1 + α2 λ21 + α3 λ1 + α4 = 0
Sejav = [λ3
1 λ21 λ1 1]
Entaoc v = 0

Teoria de Sistemas Lineares I
Realizacoes Irredutıveis de Matrizes de Transferencia Racionais Proprias
Pode-se verificar que
Av =
−α1 −α2 −α3 −α4
1 0 0 00 1 0 00 0 1 0
λ31
λ21
λ1
1
=
λ41
λ31
λ21
λ1
= λ1 v
Portanto:
O v =
c
cA
cA2
cA3
v =
c
cAv
cA2v
cA3v
=
cv
λ1 cv
λ21cv
λ31cv
= 0
o que implica que a matriz de observabilidade nao tem postocompleto por colunas, o que e uma contradicao.

Teoria de Sistemas Lineares I
Realizacoes Irredutıveis de Matrizes de Transferencia Racionais Proprias
Suficiencia: Se D(s) e N(s) sao coprimos entao o sistema eobservavel.Supondo que o sistema nao e observavel. Entao existe umautovalor λ1 de A e um vetor nao nulo v tal que (ver teorema decondicoes de controlabilidade)
[
A − λ1 I
c
]
v = 0
entaoAv = λ1 v e cv = 0
Portanto v e um autovetor de A. Mas foi mostrado quev = [λ3
1 λ21 λ1 1] e um autovetor de A.

Teoria de Sistemas Lineares I
Realizacoes Irredutıveis de Matrizes de Transferencia Racionais Proprias
Substituindo-se v e c em cv = 0 segue que
N(λ1) = β1 λ31 + β2 λ2
1 + β3 λ1 + β4 = 0
e portanto λ1) e uma raiz de N(s). Como λ1 tambem e uma raizde D(s) seque que N(s) e D(s) nao sao coprimos o que e umacontradicao.

Teoria de Sistemas Lineares I
Realizacoes Irredutıveis de Matrizes de Transferencia Racionais Proprias
Forma canonica de observabilidadeConsidere a primeira forma canonica de controlabilidade de
g(s) = c(sI − A)b
Tomando a transposta
g ′(s) = g(s) = [c(sI − A)b]′ = b′(sI − A′)−1c′
Portanto
x = A′ + c′u =
−α1 1 0 0−α2 0 1 0−α3 0 0 1−α4 0 0 0
x +
β1
β2
β3
β4
u
y = b′ x = [1 0 0 0] x
e uma outra realizacao de funcao de transferencia g(s).

Teoria de Sistemas Lineares I
Realizacoes Irredutıveis de Matrizes de Transferencia Racionais Proprias
Outra forma canonica observavelUsando a mesma transformacao de equivalencia usada para aforma canonica de controlabilidade x = Px onde
P =
0 0 0 10 0 1 00 1 0 01 0 0 0
obtem-se
0 0 0 −α4
1 0 0 −α3
0 1 0 −α2
0 0 1 −α1
x +
β1
β2
β3
β4
u
y = b′ x = [1 0 0 0] x
que e uma outra forma canonica de observabilidade.
Teoria de Sistemas Lineares I
Realizacoes Irredutıveis de Matrizes de Transferencia Racionais Proprias
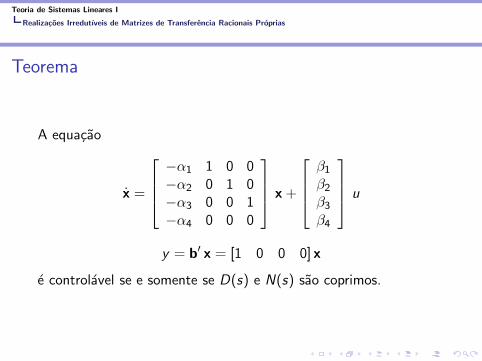
Teorema
A equacao
x =
−α1 1 0 0−α2 0 1 0−α3 0 0 1−α4 0 0 0
x +
β1
β2
β3
β4
u
y = b′ x = [1 0 0 0] x
e controlavel se e somente se D(s) e N(s) sao coprimos.
Teoria de Sistemas Lineares I
Realizacoes Irredutıveis de Matrizes de Transferencia Racionais Proprias
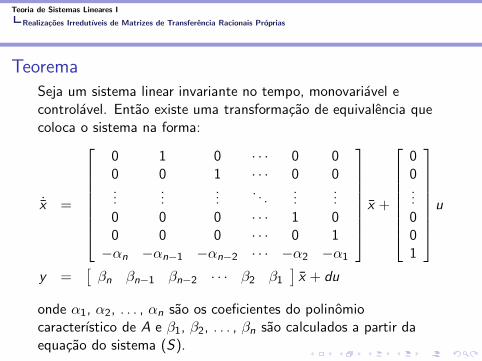
TeoremaSeja um sistema linear invariante no tempo, monovariavel econtrolavel. Entao existe uma transformacao de equivalencia quecoloca o sistema na forma:
˙x =
0 1 0 · · · 0 00 0 1 · · · 0 0...
......
. . ....
...0 0 0 · · · 1 00 0 0 · · · 0 1
−αn −αn−1 −αn−2 · · · −α2 −α1
x +
00...001
u
y =[
βn βn−1 βn−2 · · · β2 β1
]
x + du
onde α1, α2, . . . , αn sao os coeficientes do polinomiocaracterıstico de A e β1, β2, . . . , βn sao calculados a partir daequacao do sistema (S).
Teoria de Sistemas Lineares I
Realizacoes Irredutıveis de Matrizes de Transferencia Racionais Proprias
A representacao anterior e conhecida como Forma CanonicaControlavel e a funcao de transferencia do sistema e dada por:
g(s) =β1s
n−1 + β2sn−2 + · · · + βn
sn + α1sn−1 + · · · + αn−1s + αn
+ d
Teoria de Sistemas Lineares I
Realizacoes Irredutıveis de Matrizes de Transferencia Racionais Proprias
Prova
Vamos definir:
qn , b
qn−1 , Aqn + α1qn = Ab + α1b
qn−2 , Aqn−1 + α2qn = A(Ab + α1b) + α2q
n = A2b + α1Ab + α2b
...
q1 , Aq2 + αn−1qn = An−1b + α1A
n−2b + · · · + αn−1b
mas,QA = AQ = A
[
q1 q2 · · · qn]

Teoria de Sistemas Lineares I
Realizacoes Irredutıveis de Matrizes de Transferencia Racionais Proprias
Aq1 = A(
An−1b + α1An−2b + · · · + αn−1b
)
= Anb + α1An−1b + · · · + αn−1Ab
= Anb + α1An−1b + · · · + αn−1Ab + αnb − αnb
=(
An + α1An−1 + · · · + αn−1A + αnI
)
b − αnb
Aq1 = −αnb
Aq1 =[
q1 q2 · · · qn−1 qn]
00...0
−αn
Teoria de Sistemas Lineares I
Realizacoes Irredutıveis de Matrizes de Transferencia Racionais Proprias
Aq2 = A(
An−2b + α1An−3b + · · · + αn−2b
)
= An−1b + α1An−2b + · · · + αn−2Ab
= An−1b + α1An−2b + · · · + αn−2Ab + αn−1b − αn−1b
=(
An−1 + α1An−2 + · · · + αn−2A + αn−1I
)
b − αn−1b
Aq2 = q1 − αn−1b = q1 − αn−1qn
Aq2 =[
q1 q2 · · · qn−1 qn]
10...0
−αn−1
Teoria de Sistemas Lineares I
Realizacoes Irredutıveis de Matrizes de Transferencia Racionais Proprias
Aqn = qn−1 − α1qn =
[
q1 q2 · · · qn−1 qn]
00...1
−α1
b = Pb =⇒ Qb = b =⇒[
q1 q2 · · · qn−1 qn]
b = b =⇒
b =
00...01
c = cP−1 = c[
q1 q2 · · · qn−1 qn]
,[
βn βn−1 · · · β2 β1
]

Teoria de Sistemas Lineares I
Realizacoes Irredutıveis de Matrizes de Transferencia Racionais Proprias
Teorema
Se um sistema linear invariante no tempo e observavel, entao existeuma transformacao de equivalencia que coloca o sistema na forma:
˙x =
0 0 · · · 0 0 −αn
1 0 · · · 0 0 −αn−1
0 1 · · · 0 0 −αn−2...
.... . .
......
...0 0 · · · 1 0 −α2
0 0 · · · 0 1 −α1
x +
βn
βn−1
βn−2...
β2
β1
u
y =[
0 0 · · · 0 0 1]
x + du
Esta forma e denominada Forma Canonica Observavel.

Teoria de Sistemas Lineares I
Realizacoes Irredutıveis de Matrizes de Transferencia Racionais Proprias
Exemplo
x =
1 2 03 −1 10 2 0
x +
211
u
y =[
0 0 1]
x
Solucao:
∆(λ) =
∣
∣
∣
∣
∣
∣
λ − 1 −2 0−3 λ + 1 −10 −2 λ
∣
∣
∣
∣
∣
∣
= 0 =⇒ (λ−1)(λ+1)λ−2(λ−1)−6λ = 0
∆(λ) = λ3 − 9λ + 2 = 0 =⇒ α3 = 2 ; α2 = −9 ; α1 = 0

Teoria de Sistemas Lineares I
Realizacoes Irredutıveis de Matrizes de Transferencia Racionais Proprias
U =
2 4 161 6 81 2 12
∼
1 2 80 4 00 0 4
=⇒ rank(U) = 3
q3 = b =
211
; q2 = Ab+α1b =
462
+0
211
=
462
q1 = A2b+α1Ab+α2b =
16812
+0
462
−9
211
=
−2−1
3

Teoria de Sistemas Lineares I
Realizacoes Irredutıveis de Matrizes de Transferencia Racionais Proprias
Q =
−2 4 2−1 6 1
3 2 1
[
β3 β2 β1
]
= cQ =[
0 0 1]
−2 4 2−1 6 1
3 2 1
=[
3 2 1]
Forma Canonica Controlavel:
˙x =
0 1 00 0 1
−2 9 0
x +
001
u
y =[
3 2 1]
x
Teoria de Sistemas Lineares I
Realizacoes Irredutıveis de Matrizes de Transferencia Racionais Proprias
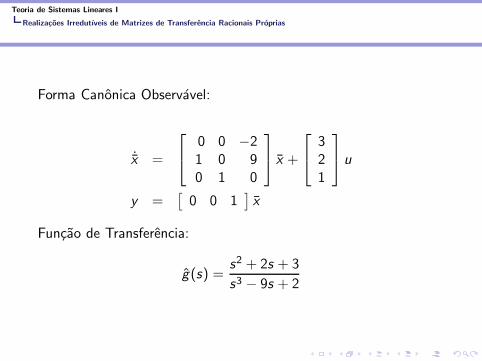
Forma Canonica Observavel:
˙x =
0 0 −21 0 90 1 0
x +
321
u
y =[
0 0 1]
x
Funcao de Transferencia:
g(s) =s2 + 2s + 3
s3 − 9s + 2

Teoria de Sistemas Lineares I
Realizacoes Irredutıveis de Matrizes de Transferencia Racionais Proprias
Particularidades da Forma Canonica Observavel (FCO)
˙x =
0 0 · · · 0 0 −αn
1 0 · · · 0 0 −αn−1
0 1 · · · 0 0 −αn−2...
.... . .
......
...0 0 · · · 1 0 −α2
0 0 · · · 0 1 −α1
x +
βn
βn−1
βn−2...
β2
β1
u
y =[
0 0 · · · 0 0 1]
x + du
Funcao de Transferencia:
g(s) =β1s
n−1 + · · · + βn−1s + βn
sn + α1sn−1 + · · · + αn−1s + αn
+ d

Teoria de Sistemas Lineares I
Realizacoes Irredutıveis de Matrizes de Transferencia Racionais Proprias
V =
0 0 · · · 0 0 10 0 · · · 0 1 −α1
0 0 · · · 1 −α1 ∗...
.... . .
......
...0 1 · · · ∗ ∗ ∗1 −α1 · · · ∗ ∗ ∗
det(V ) 6= 0 ∀ αi
U : necessario calcular

Teoria de Sistemas Lineares I
Realizacoes Irredutıveis de Matrizes de Transferencia Racionais Proprias
Particularidades da Forma Canonica Controlavel (FCC)
˙x =
0 1 0 · · · 0 00 0 1 · · · 0 0...
......
. . ....
...0 0 0 · · · 1 00 0 0 · · · 0 1
−αn −αn−1 −αn−2 · · · −α2 −α1
x +
00...001
u
y =[
βn βn−1 βn−2 · · · β2 β1
]
x + du
Funcao de Transferencia:
g(s) =β1s
n−1 + · · · + βn−1s + βn
sn + α1sn−1 + · · · + αn−1s + αn
+ d

Teoria de Sistemas Lineares I
Realizacoes Irredutıveis de Matrizes de Transferencia Racionais Proprias
U =
0 0 · · · 0 0 10 0 · · · 0 1 −α1
0 0 · · · 1 −α1 ∗...
.... . .
......
...0 1 · · · ∗ ∗ ∗1 −α1 · · · ∗ ∗ ∗
det(U) 6= 0 ∀ αi
V : necessario calcular

Teoria de Sistemas Lineares I
Realizacoes Irredutıveis de Matrizes de Transferencia Racionais Proprias
Exemplo:
Encontrar a FCC e a FCO a partir da seguinte funcao detransferencia:
g(s) =4s3 + 25s2 + 45s + 34
2s3 + 12s2 + 20s + 16
Solucao:
Problema: grau do numerador = grau do denominador =⇒ ∃termo de transmissao direta =⇒ divisao de polinomios.
g(s) =s2 + 5s + 2
2s3 + 12s2 + 20s + 16+2 =⇒ g(s) =
0, 5s2 + 2, 5s + 1
s3 + 6s2 + 10s + 8+2

Teoria de Sistemas Lineares I
Realizacoes Irredutıveis de Matrizes de Transferencia Racionais Proprias
Forma Canonica Controlavel:
˙x =
0 1 00 0 1−8 −10 −6
x +
001
u
y =[
1 2, 5 0, 5]
x + 2u
Forma Canonica Observavel:
˙x =
0 0 −81 0 −100 1 −6
x +
12, 50, 5
u
y =[
0 0 1]
x + 2u

Teoria de Sistemas Lineares I
Realizacoes Irredutıveis de Matrizes de Transferencia Racionais Proprias
Exemplo:
Vamos considerar o sistema multivariavel:
G (s) =
[
s(s+1)(s+2)
s+2(s+1)2
]
Encontrar uma realizacao para G(s).
Solucao:
G (s) =
[
s(s+1)(s+1)2(s+2)
(s+2)2
(s+1)2(s+2)
]
G(s) =1
(s + 1)2(s + 2)
[
s(s + 1)(s + 2)2
]
=

Teoria de Sistemas Lineares I
Realizacoes Irredutıveis de Matrizes de Transferencia Racionais Proprias
1
s3 + 4s2 + 5s + 2
[
s2 + s
s2 + 4s + 4
]
˙x =
0 1 00 0 1
−2 −5 −4
x +
001
u
y =
[
0 1 14 4 1
]
x

Teoria de Sistemas Lineares I
Realizacoes Irredutıveis de Matrizes de Transferencia Racionais Proprias
Realizacoes mınimas
N(s)
D(s)e uma fracao polinomial ou simplesmente uma fracao.
Como
g(s) =N(s)
D(s)=
N(s)Q(s)
D(s)Q(s)
para qualquer polinomio Q(s), as fracoes nao sao unicas.Seja R(s) o maior divisor de N(s) e D(s). Isto significa queN(s) = N(s)R(s) e D(s) = D(s)R(s) com N(s) e D(s) coprimos.Entao toda funcao racional g(s) pode ser reduzida a
g(s) =N(s)
D(s)
que e uma fracao coprima.O polinomio D(s) e o polinomio caracterıstico de g(s).

Teoria de Sistemas Lineares I
Realizacoes Irredutıveis de Matrizes de Transferencia Racionais Proprias
Exemplo
g(s) =s2 − 1
4(s3 − 1)
O termo comum e s − 1. A fracao coprima e dada por
g(s) =s + 1
4(s2 + s + 1)
O polinomio caracterıstico e 4s2 + 4s + 4.Grau da funcao racional e 2.

Teoria de Sistemas Lineares I
Realizacoes Irredutıveis de Matrizes de Transferencia Racionais Proprias
Teorema
Uma equacao de estado (A,b, c, d) e uma realizacao mınima dafuncao racional g(s) se e somente se (A,b) e controlavel e (A, c) eobservavel ou se e somente se
dim A = grau g(s)
Necessidade: (A,b) deve ser controlavel e (A, c) deve serobservavel, para ser realizacao mınima.Se (A,b) nao for controlavel ou se (A, c) nao for observavel, entaoexiste uma realizacao com dimensao menor com a mesma funcaode transferencia (teoremas anteriores sobre decomposicao).

Teoria de Sistemas Lineares I
Realizacoes Irredutıveis de Matrizes de Transferencia Racionais Proprias
Suficiencia: Se (A,b) e controlavel e (A, c) e observavel entao arealizacao e mınima.Seja o sistema de dimensao n controlavel e observavel
x = Ax + b u
y = c x + d u
Entao as matrizes de controlabilidade
C =[
B AB A2B · · · An−1B]
e de observabilidade
O =
C
CA...
CAn−1
tem posto n.
Teoria de Sistemas Lineares I
Realizacoes Irredutıveis de Matrizes de Transferencia Racionais Proprias
Por contradicao, supondo que exista uma realizacao de g(s) comdimensao n com n < n:
˙x = A x + b u
Entao d = d e
cAm B = c Am b para m = 0, 1, 2, . . .

Teoria de Sistemas Lineares I
Realizacoes Irredutıveis de Matrizes de Transferencia Racionais Proprias
Seja o produto
OC =
C
CA...
CAn−1
[
B AB A2B · · · An−1B]
=
cb cAb cA2b . . . cAn−1b
cAb cA2b cA3b . . . cAnb
cA2b cA3b cA4b . . . cAn−1b...
......
...
cAn−1b cAnb cAn+1b . . . cA2(n−1)b
Substituindo-se cAm b por c Am b tem-se que
OC = On Cn
com Cn = [B AB An−1B] e On definida de maneira similar.

Teoria de Sistemas Lineares I
Realizacoes Irredutıveis de Matrizes de Transferencia Racionais Proprias
Como o sistema original e controlavel e observavel segue queρ(C) = n e ρ(O) = n. Entao ρ(OC) = n.Por outro lado a matriz O tem dimensao n × n e C tem dimensaon × n. Portanto o posto maximo de OC e n. Isto contradiz aafirmacao anterior e portanto (A,b, c, d) e mınima.
Segunda parte do teorema: ver C.T Chen

Teoria de Sistemas Lineares I
Realizacoes Irredutıveis de Matrizes de Transferencia Racionais Proprias
Realizacoes Irredutıveis de Funcoes (Matrizes) RacionaisProprias
Definicao: O polinomio caracterıstico de uma matriz G(s)(racional e propria) e definido como o mınimo multiplo comum detodos os menores de G (s). O grau de G (s) (denotado por δG (s))e definido como o grau do polinomio caracterıstico de G(s)(Chamado de grau de McMillan).

Teoria de Sistemas Lineares I
Realizacoes Irredutıveis de Matrizes de Transferencia Racionais Proprias
Determinantes Menores: Exemplo 1
1) Seja M =
[
M11 M12 M13
M21 M22 M23
]
Menores [1 × 1]: sao os elementos de M: M11, M12, . . . , M23
Menores [2 × 2]:
∣
∣
∣
∣
M11 M12
M21 M22
∣
∣
∣
∣
;
∣
∣
∣
∣
M11 M13
M21 M23
∣
∣
∣
∣
;
∣
∣
∣
∣
M12 M13
M22 M23
∣
∣
∣
∣

Teoria de Sistemas Lineares I
Realizacoes Irredutıveis de Matrizes de Transferencia Racionais Proprias
Determinantes menores: Exemplo 2
2) Seja M =
M11 M12 M13
M21 M22 M23
M31 M32 M33
Menores [1 × 1]: M11, . . ., M33
Menores [2 × 2]:
∣
∣
∣
∣
M11 M12
M21 M22
∣
∣
∣
∣
, . . . ,
∣
∣
∣
∣
M22 M23
M32 M33
∣
∣
∣
∣
Menores [3 × 3]: |M|Menores Principais:
|M11|;
∣
∣
∣
∣
M11 M12
M21 M22
∣
∣
∣
∣
;
∣
∣
∣
∣
M22 M23
M32 M33
∣
∣
∣
∣
; |M22|; |M33|; |M|
Menores Lıderes:
|M11|;
∣
∣
∣
∣
M11 M12
M21 M22
∣
∣
∣
∣
; |M|

Teoria de Sistemas Lineares I
Realizacoes Irredutıveis de Matrizes de Transferencia Racionais Proprias
Exemplo
Determinar a ordem das seguintes matrizes de funcoes detransferencia:
a) G1(s) =
[ 1s+1
1s+1
1s+1
1s+1
]
Menores [1 × 1]: 1s+1 ; 1
s+1 ; 1s+1 ; 1
s+1Menores [2 × 2]: 0
∆(s) = s + 1 =⇒ δG1(s) = 1
OBS: Nao existem menores [2 × 2].

Teoria de Sistemas Lineares I
Realizacoes Irredutıveis de Matrizes de Transferencia Racionais Proprias
b) G2(s) =
[ 2s+1
1s+1
1s+1
1s+1
]
Menores [1 × 1]: 2s+1 ; 1
s+1 ; 1s+1 ; 1
s+1
Menores [2 × 2]: 1(s+1)2
∆(s) = (s + 1)2 =⇒ δG2(s) = 2
OBS: No caso escalar, G (s) : [1 × 1], o polinomio caracterıstico deG (s) e o proprio denominador.

Teoria de Sistemas Lineares I
Realizacoes Irredutıveis de Matrizes de Transferencia Racionais Proprias
Exemplo:
Caso de G (s) nao quadrada:
G (s) =
[
ss+1
1(s+1)(s+2)
1s+3
−1s+1
1(s+1)(s+2)
1s
]
∆(s) = s(s + 1)(s + 2)(s + 3) =⇒ δG (s) = 4

Teoria de Sistemas Lineares I
Realizacoes Irredutıveis de Matrizes de Transferencia Racionais Proprias
Exemplo
Achar uma realizacao irredutıvel para:
G(s) =
[
5s(s+1)(s+3)
2s(s+4)
3s+1(s+2)(s+3)2
3s2
]
Solucao: Realizacoes possıveis:a) A partir de cada elemento de G(s), funcoes de transferenciaescalares:
5s
(s + 1)(s + 3);
2
s(s + 4);
3s + 1
(s + 2)(s + 3)2;
3
s2

Teoria de Sistemas Lineares I
Realizacoes Irredutıveis de Matrizes de Transferencia Racionais Proprias
b) Por linhas:
G(s) =
[
g1(s)g2(s)
]
b) Por colunas:
G(s) =[
g1(s) g2(s)]
Teoria de Sistemas Lineares I
Realizacoes Irredutıveis de Matrizes de Transferencia Racionais Proprias
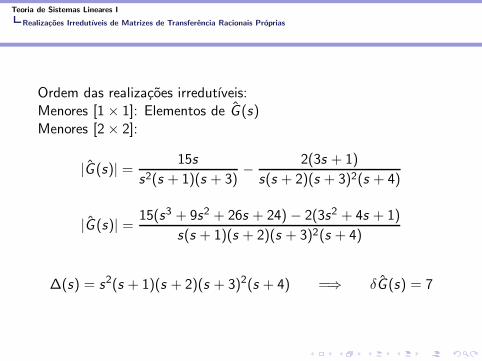
Ordem das realizacoes irredutıveis:Menores [1 × 1]: Elementos de G (s)Menores [2 × 2]:
|G (s)| =15s
s2(s + 1)(s + 3)−
2(3s + 1)
s(s + 2)(s + 3)2(s + 4)
|G (s)| =15(s3 + 9s2 + 26s + 24) − 2(3s2 + 4s + 1)
s(s + 1)(s + 2)(s + 3)2(s + 4)
∆(s) = s2(s + 1)(s + 2)(s + 3)2(s + 4) =⇒ δG (s) = 7

Teoria de Sistemas Lineares I
Realizacoes Irredutıveis de Matrizes de Transferencia Racionais Proprias
Realizacao tomando-se G(s) =[
g1(s) g2(s)]
g1(s) =
[
5s(s+1)(s+3)
3s+1(s+2)(s+3)2
]
g1(s) =1
(s + 1)(s + 2)(s + 3)2
[
5s(s + 2)(s + 3)(3s + 1)(s + 1)
]
g1(s) =1
s4 + 9s3 + 29s2 + 39s + 18
[
5s3 + 25s2 + 30s3s2 + 4s + 1
]

Teoria de Sistemas Lineares I
Realizacoes Irredutıveis de Matrizes de Transferencia Racionais Proprias
g2(s) =
[
2s(s+4)
3s2
]
g2(s) =1
s2(s + 4)
[
2s3(s + 4)
]
g2(s) =1
s3 + 4s2)
[
2s3s + 12
]

Teoria de Sistemas Lineares I
Realizacoes Irredutıveis de Matrizes de Transferencia Racionais Proprias
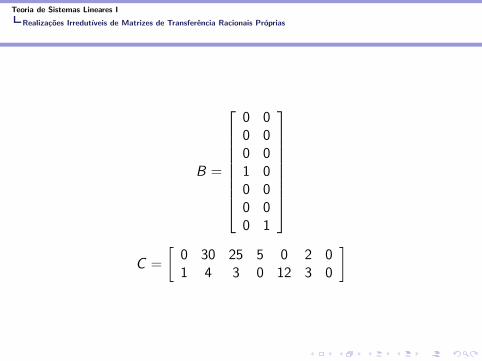
A representacao de estados e dada por:
x = Ax + Bu
y = Cx
A =
0 1 0 0 0 0 00 0 1 0 0 0 00 0 0 1 0 0 0
−18 −39 −29 −9 0 0 00 0 0 0 0 1 00 0 0 0 0 0 10 0 0 0 0 0 −4
Teoria de Sistemas Lineares I
Realizacoes Irredutıveis de Matrizes de Transferencia Racionais Proprias
B =
0 00 00 01 00 00 00 1
C =
[
0 30 25 5 0 2 01 4 3 0 12 3 0
]
Top Related