






Línguas
Páginas
Legal


XIX ENEGEP, Universidade Federal do Rio de Janeiro, Rio de Janeiro, 1999 1
TOMADA DE DECISÃO EM TECNOLOGIA DE GRUPO - COMPARAÇÃO ENTRE OS
CRITÉRIOS DE DISTÂNCIA E INFERÊNCIA REVERSA FUZZY NA ATRIBUIÇÃO DE
NOVAS PEÇAS EM FAMÍLIAS PREVIAMENTE FORMADAS
José Hamilton Chaves Gorgulho Júnior Escola Federal de Engenharia de Itajubá - Departamento de Produção
Av. BPS, 1303, Itajubá, MG, CEP: 37.500-000, Cx. Postal 50
Tel.: (035) 629-1150 Fax: (035) 629-1148
e-mail: [email protected]
José Arnaldo Barra Montevechi Escola Federal de Engenharia de Itajubá - Departamento de Produção
Av. BPS, 1303, Itajubá, MG, CEP: 37.500-000, Cx. Postal 50
Tel.: (035) 629-1150 Fax: (035) 629-1148
e-mail: [email protected]
ABSTRACT: This work has the objective to deal with the inclusion of new part in a previously
formed family parts, in the Group Technology (GT) environment. The udes approach to reach the
target is the technique of artificial inteligence denominated fuzzy backward reasoning. The results
are the compared with results obtained from the criteria of distance.
KEYWORDS: fuzzy, group technology, backward reasoning
RESUMO: Este trabalho compara duas das técnicas de tomada de decisão em Tecnologia de Grupo
(TG), que são critérios de distância e inferência reversa fuzzy. O objetivo desta comparação é o de
apresentar as vantagens que o técnica baseada em lógica fuzzy possui quando deseja-se incluir
novas peças em famílias que foram formadas previamente.

XIX ENEGEP, Universidade Federal do Rio de Janeiro, Rio de Janeiro, 1999 2
1. INTRODUÇÃO
Este artigo objetiva apresentar os resultados que podem ser obtidos através de uma técnica de
inteligência artificial, denominada inferência reversa fuzzy, no processo de inclusão de novas peças
em famílias previamente formadas, em ambiente de Tecnologia de Grupo. Estes resultados são
confrontados com a técnica conhecida como critérios de distância. Para a obtenção dos resultados
foi implementado um algoritmo para a solução do problema de inferência reversa fuzzy, em um
software protótipo para ambiente Windows.
2. ATRIBUIÇÃO DE NOVAS PEÇAS EM FAMÍLIAS EXISTENTES
A inclusão de novas peças em famílias preestabelecidas normalmente depende do processo utilizado
para forma-las inicialmente. Por exemplo, no caso do uso de um SCC (Sistema de Classificação e
Codificação), basta codificar a nova peça e a determinação da família a qual ela pertencerá será uma
conseqüência. Com o uso de outras técnicas é comum a necessidade de se reaplicar toda a
metodologia inicialmente utilizada para formar novamente as famílias, contendo agora as novas
peças.
Diversas técnicas vem sendo propostas para que este processo seja otimizado e aproveite os
resultados anteriormente obtidos. Uma destas técnicas é a utilização da inferência reversa fuzzy,
proposta por Montevechi et al. (1994), que será apresentada neste trabalho. Uma outra técnica, que
será utilizada para comparar os resultados, são os critérios de distância (teoria de reconhecimento de
padrões) que são utilizados por diversos autores como Jianying (1987), Gonçalves Filho (1988) e
Montevechi (1995).
3. CRITÉRIOS DE DISTÂNCIA
Um critério de distância é simplesmente uma relação matemática que compara dois vetores. Caso os
dois vetores sejam exatamente iguais o resultado obtido pela relação é zero, ou seja, a distância
entre os dois vetores é nula. Se os vetores forem completamente diferentes o resultado obtido será 1,
ou seja, os vetores estão distanciados ao máximo (cabe lembrar que em lógica fuzzy os valores
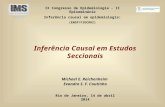
envolvidos vão de 0 até 1). Na figura 1 tem-se respectivamente as equações dos critérios de
distância Hamming, Euclidean e Minkowski, que comparam os vetores Y(i) e R(i).
XIX ENEGEP, Universidade Federal do Rio de Janeiro, Rio de Janeiro, 1999 3
∑=
−=ρj
1i)i(R)i(Y
j
1)R,Y( ( )
∑=
−=ρ
21j
1i
2)i(R)i(Y
j
1)R,Y( ( ) 1p e
p1j
1i
p)i(R)i(Y
j
1)R,Y( >∑
=−=ρ
Figura 1 – Critérios de distância Hamming, Euclidean e Minkowski.
Para tornar os resultados dos critérios de distância compatíveis com os que serão obtidos pelo
método de inferência reversa, deve-se calcular, como feito por Jianying (1987), o complemento de
1, definindo assim a similaridade entre os vetores Y(j) e R(j). Isto é, quando se obtiver um valor
próximo a zero então a similaridade entre os vetores será quase nula. Se o resultado for próximo a 1
conclui-se que a similaridade é altamente relevante.
4. INFERÊNCIA REVERSA FUZZY
A técnica de inferência reversa fuzzy é, na realidade, um sistema de diagnóstico, ou seja, um
mecanismo de inteligência artificial capaz de identificar causas a partir da análise de seus efeitos.
Em diagnóstico médico, de onde originou-se esta técnica, o objetivo é identificar a doença (causa)
através da observação de seus sintomas (efeitos apresentados pelo paciente). A proposta de
aplicação desta técnica em Tecnologia de Grupo foi apresentada por Montevechi et al. (1994), onde
os sintomas/efeitos serão características geométricas das peças e as doenças/causas serão as famílias
de peças.
As técnicas de diagnósticos desenvolvidas e estudadas pelo ramo da inteligência artificial são
classificadas como sistemas especialistas, e todo sistema especialista possui uma base de
conhecimento. Em inferência reversa fuzzy a base de conhecimento consiste em uma matriz onde
cada coluna representa uma família e cada elemento desta coluna (ou seja, linha) representa o grau
de pertinência de cada característica geométrica (pertinência é a quantidade, de 0 a 1, de uma
característica que a peça possui). Esta abordagem foi formulada por Sanchez (1979). Esta matriz é
conhecida como matriz de relação fuzzy, e será representada por R(i,j).
A representação matemática deste sistema é apresentada na figura 2. O símbolo “ο” indica o uso de
uma regra de composição de inferência. O vetor Y(j) recebe as pertinências das características da
nova peça. A incógnita do sistema é o vetor X(i), que representará a similaridade entre a nova peça
(vetor Y) e cada família (cada coluna de R).

XIX ENEGEP, Universidade Federal do Rio de Janeiro, Rio de Janeiro, 1999 4
Y(j) = R(i, j) ο X(i)
Figura 2 – Sistema de diagnóstico.
Das metodologias propostas para se trabalhar com este sistema, foi utilizada a inferência reversa
(backward reasoning), apresentada por Terano et al. (1994). As abordagens iniciais de
desenvolvimento de um algoritmo para sua solução foram propostas por Montevechi, Gorgulho
Júnior (1996) e depois por Gorgulho Júnior, Montevechi (1997). A proposta apresentada neste
trabalho, e que se baseia nos trabalhos citados, foi apresentada por Gorgulho Júnior (1998).
A figura 3 apresenta um fluxograma geral do algoritmo utilizado. As etapas para sua utilização,
podem ser resumidas em 6 passos:
Passo 1 – Entrada dos dados
Nesta etapa do algoritmo deve-se entrar com os dados que irão compor o sistema. Os dados são:
número de causas (representado por i), número de efeitos (representado por j), vetor com as
pertinências dos efeitos (representado por Y(j)) e a matriz de relação entre causas e efeitos,
(representada por R(i,j))
Passo 2 – Verificação de Y(j)
Esta verificação consiste em analisar todos os elementos de Y(j) com relação à matriz R(i,j). Se um
elemento de Y(j) for maior que todos os elementos da linha correspondente de R(i,j) então o sistema
não terá solução e o algoritmo chega ao seu final. Pode-se, neste caso analisar o vetor Y(j),
verificando se foram corretamente avaliadas as suas pertinências. Outra opção possível é a de que a
matriz de relação R(i,j) não possua uma causa relacionada aos efeitos verificados.
Passo 3 – Montagem das matrizes XT(i,j) e MA(i,j)
Para a montagem das matrizes XT(i,j) e MA(i,j) deve-se comparar os valores de Y(j) e R(i,j)
seguindo as regras abaixo, cuja origem e utilização não são comentadas neste trabalho.
• Se R(i,j) < Y(j) então XT(i,j) = 0,1 e MA(i,j) = 0
• Se R(i,j) = Y(j) então XT(i,j) = [ Y(j) * 10 ] + 0,1 e MA(i,j) = 1
• Se R(i,j) > Y(j) então XT(i,j) = [ Y(j) * 10 ] + [ Y(j) / 10 ] e MA(i,j) = 2

XIX ENEGEP, Universidade Federal do Rio de Janeiro, Rio de Janeiro, 1999 5
Fim
Solução suspeita
SoluçãoSoluçãoinconsistente
Verificação da soluçãosuspeita nas equações
Ocorreramincompatibilidades?
S
N
Fim daanálise de XT(i,j)?
S
N
AtualizaP, Pli, Pls, pp,
S, Sli, Sls e ps
Alterar XT(i,j) e MA(i,j)
Inicio
Recebe os dados:Vetor de efeitos Y(j);
Matriz de conhecimento R(i,j).
Verificação de Y(j)
Montagem das matrizesXT(i,j) e MA(i,j)
Comparar P e S, gerando C
incompatibilidade?
S
N
Vetor Y(j) está OK?
S
N
Equações foramsatisfeitas?
SN
Análise de XT(i,j)
Verificação da solução suspeita
Sem solução
Figura 3 – Algoritmo para solução do problema de inferência reversa fuzzy.
XIX ENEGEP, Universidade Federal do Rio de Janeiro, Rio de Janeiro, 1999 6
Passo 4 – Análise da matriz XT(i,j)
Esta etapa contém várias funções que realizam a comparação dos elementos da matriz XT(i,j), e
definem um valor que represente cada coluna da matriz. Compara-se P (através de Pli e Pls) com S
(através de Sli e Sls), utilizando um conjunto de regras. Este processo ocorre até que todas as
colunas sejam analisadas. Caso seja detectada uma incompatibilidade um outro conjunto de regras
definirá uma alteração dos valores de XT(i,j) e MA(i,j) que tente solucionar a situação.
Passo 5 – Análise da solução
Se a análise da matriz XT(i,j) ocorreu sem que fosse detectada nenhuma incompatibilidade então a
solução obtida é a solução do sistema. Mas, se ocorreram incompatibilidades então tem-se uma
solução suspeita, e neste caso deve-se realizar a verificação da solução suspeita.
Passo 6 – Verificação da solução suspeita
Esta fase aplica a solução suspeita no sistema de equações original do problema. Se as equações
forem satisfeitas então a solução suspeita passa a ser considerada uma boa solução. Caso o sistema
original não seja satisfeito a solução suspeita passa a ser considerada como solução inconsistente,
ou seja, o algoritmo não pode solucionar o problema.
5. ESTUDOS DE CASOS
Foi criado um conjunto de seis famílias de peças baseadas em dez características, que estão
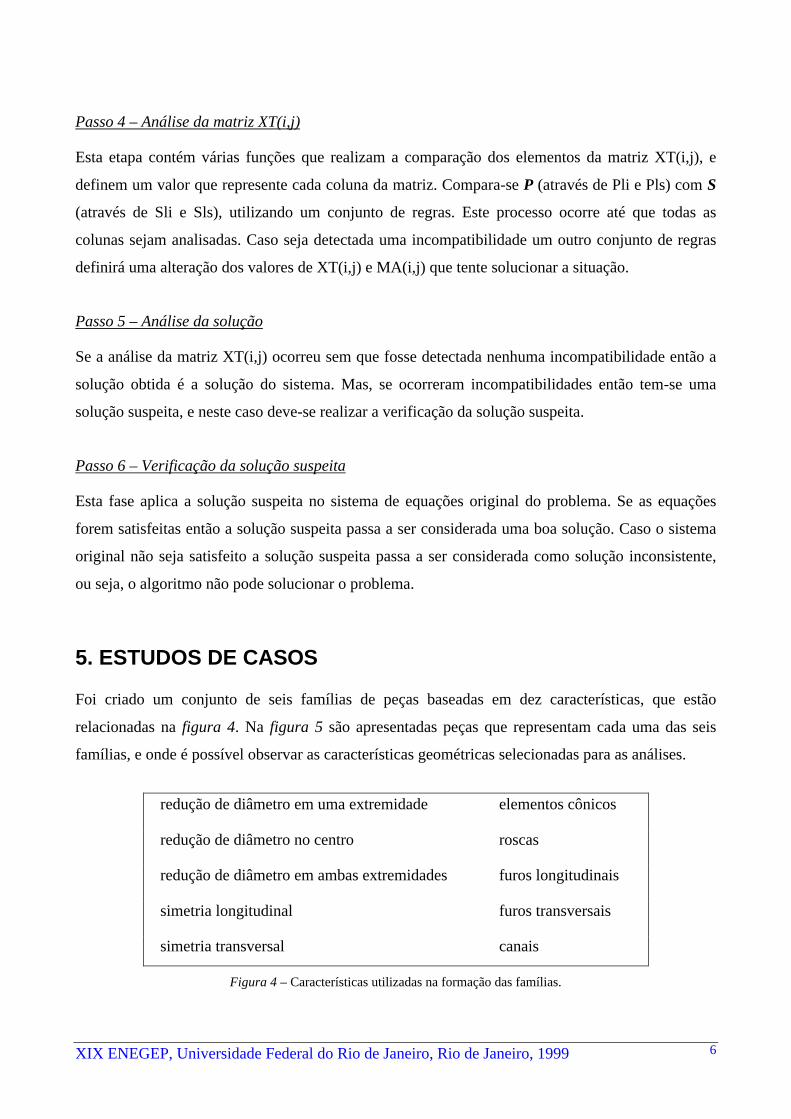
relacionadas na figura 4. Na figura 5 são apresentadas peças que representam cada uma das seis
famílias, e onde é possível observar as características geométricas selecionadas para as análises.
redução de diâmetro em uma extremidade elementos cônicos
redução de diâmetro no centro roscas
redução de diâmetro em ambas extremidades furos longitudinais
simetria longitudinal furos transversais
simetria transversal canais
Figura 4 – Características utilizadas na formação das famílias.
XIX ENEGEP, Universidade Federal do Rio de Janeiro, Rio de Janeiro, 1999 7
As características fundamentais da família 1 são a redução de diâmetro em uma extremidade e
simetria longitudinal. A família 2 possui redução de diâmetro em uma extremidade, simetria
longitudinal, elementos cônicos e roscas. A família 3 é caracterizada por redução de diâmetro
central e simetria longitudinal. Para definir a família 4 observa-se redução de diâmetro central,
simetria longitudinal, simetria transversal, elementos cônicos e canais. A família 5 possui redução
de diâmetro em ambas extremidades, simetria longitudinal e elementos cônicos. Finalmente, a
família 6 apresenta redução de diâmetro em ambas extremidades, simetria longitudinal, simetria
transversal, elementos cônicos e canais. A matriz R gerada é apresentada na figura 6.
Figura 5 – Famílias de peças.

XIX ENEGEP, Universidade Federal do Rio de Janeiro, Rio de Janeiro, 1999 8
=
0.800.8000
000000
000000
0.10.1000.60
0.90.70.700.80.1
0.800.8000.1
0.50.80.50.60.50.7
0.90.90000
000.90.900
00000.90.9
R
Figura 6 – Matriz de relação características x famílias.
As primeiras análises que serão apresentadas tem o objetivo de avaliar o comportamento da
metodologia quando da inclusão de peças que possuem correspondência direta com uma família. A
figura 7 apresenta, do lado esquerdo, uma peça a ser incluída em uma das famílias. Pela simples
observação é fácil verificar que esta peça deverá fazer parte da família 2. Do lado direito tem-se a
tela do software protótipo com o resultado obtido através da inferência reversa fuzzy. A parte
inferior apresenta os resultados obtidos através dos critérios de distância. Todos os resultados
indicam que a nova peça deve fazer parte da família 2.
Figura 7 – Peça a ser incluída e as telas com os resultados obtidos.

XIX ENEGEP, Universidade Federal do Rio de Janeiro, Rio de Janeiro, 1999 9
Os seguintes itens são importantes na tela do software protótipo. Do lado esquerdo tem-se as
características geométricas da peça e suas pertinências (vetor Y). Ao lado de cada barra deslizante,
que alteram os valores das pertinências, há um indicador luminoso (se estiver branco então a
pertinência está sem problemas e se ficar cinza significa que o valor deve ser alterado). Do lado
direito superior tem-se o diagnóstico, ou seja, a indicação da família que receberá a nova peça, e a
indicação de consistência da solução (branco indica consistência e cinza não). As barras luminosas
do lado direito inferior mostram a pertinência de cada família, possibilitando uma comparação. Os
quatro botões inferiores selecionam a técnica de solução.
Um detalhe importante é que os critérios de distância não observam as características marcantes da
peça e das famílias, ou seja, apenas realizam cálculos que indicam a similaridade matemática entre
vetores. A técnica de inferência reversa leva em consideração as características mais importantes da
peça, indicando apenas as famílias que realmente tem similaridade forte com a nova peça.
De forma similar, a figura 8 apresenta os resultados para uma peça que deverá integrar a família 4,
devido aos seus elementos cônicos, canais, e simetrias. É possível observar que a família 3 também
é indicada pela técnica de inferência reversa fuzzy, e isto se deve a forte similaridade entre as duas
famílias. Os critérios de distância também indicam a família 4 como sendo a família mais indicada a
receber a peça, mas nota-se que como segunda opção há um empate entre a família 3 e a família 6.
Figura 8 – Peça da família 4 e as telas com os resultados obtidos.
XIX ENEGEP, Universidade Federal do Rio de Janeiro, Rio de Janeiro, 1999 10
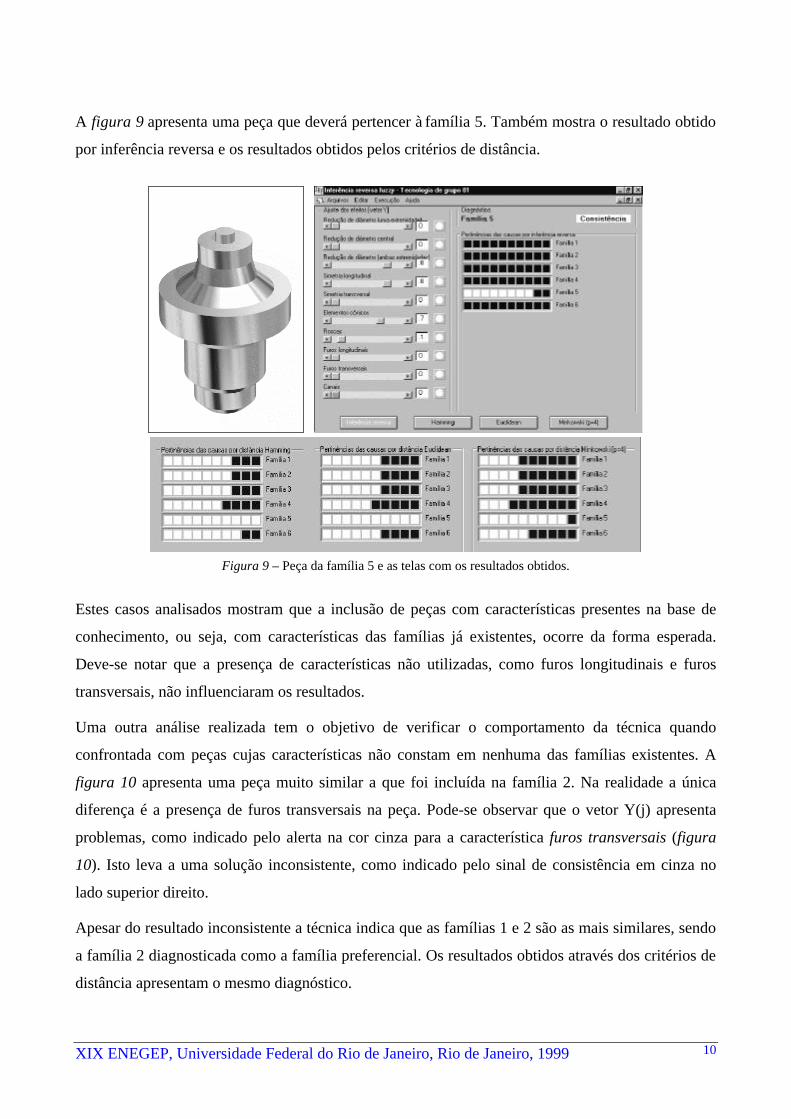
A figura 9 apresenta uma peça que deverá pertencer à família 5. Também mostra o resultado obtido
por inferência reversa e os resultados obtidos pelos critérios de distância.
Figura 9 – Peça da família 5 e as telas com os resultados obtidos.
Estes casos analisados mostram que a inclusão de peças com características presentes na base de
conhecimento, ou seja, com características das famílias já existentes, ocorre da forma esperada.
Deve-se notar que a presença de características não utilizadas, como furos longitudinais e furos
transversais, não influenciaram os resultados.
Uma outra análise realizada tem o objetivo de verificar o comportamento da técnica quando
confrontada com peças cujas características não constam em nenhuma das famílias existentes. A
figura 10 apresenta uma peça muito similar a que foi incluída na família 2. Na realidade a única
diferença é a presença de furos transversais na peça. Pode-se observar que o vetor Y(j) apresenta
problemas, como indicado pelo alerta na cor cinza para a característica furos transversais (figura
10). Isto leva a uma solução inconsistente, como indicado pelo sinal de consistência em cinza no
lado superior direito.
Apesar do resultado inconsistente a técnica indica que as famílias 1 e 2 são as mais similares, sendo
a família 2 diagnosticada como a família preferencial. Os resultados obtidos através dos critérios de
distância apresentam o mesmo diagnóstico.

XIX ENEGEP, Universidade Federal do Rio de Janeiro, Rio de Janeiro, 1999 11
Figura 10 – Peça com furos transversais e a tela com o resultado obtido.
Para solucionar a inconsistência apresentada pela técnica de inferência reversa fuzzy tem-se
duas opções. A primeira considera que a base de conhecimento utilizada está incompleta, ou seja,
não possui uma causa para os efeitos verificados. No caso de tecnologia de grupo pode-se entender
isto como analisar uma peça que não possui similaridades com nenhuma das famílias existentes.
Neste caso a solução seria criar uma nova família com as pertinências desta nova peças, como
mostra a figura 11.
Figura 11 – Matriz R(i,j) alterada e os resultados obtidos.

XIX ENEGEP, Universidade Federal do Rio de Janeiro, Rio de Janeiro, 1999 12
A figura 11 ilustra, em seu lado esquerdo, a matriz de relação fuzzy R(i,j) alterada, pois recebeu
uma nova coluna, ou seja, as pertinências de uma nova família. Do lado direito tem-se o resultado
obtido por inferência reversa com esta nova matriz. A figura 12 apresenta os resultados para os
critérios de distância. Verifica-se que os resultados são os mesmos por qualquer um dos métodos.
Figura 12 – Resultados obtidos pelos critérios de distância com a matriz R(i,j) alterada.
Observa-se agora que o resultado obtido através da inferência reversa é consistente. A nova família,
denominada de família 7 é indicada pela técnica como a família que receberia esta peça. Além disto,
continua indicando que as famílias 1 e 2 possuem grande similaridade com esta peça, da mesma
forma como os critérios de distância. Mas, apesar de tudo isto, esta solução para a inconsistência,
não é a mais adequada.
A outra possibilidade para solucionar o problema de inconsistência do vetor Y(j) seria considerar
que a base de conhecimento deva sofrer alterações em seus valores para se adequar a nova situação.
Em tecnologia de grupo este caso seria alterar as pertinências de uma ou mais características de uma
ou mais famílias de modo a receber a nova peça. Este caso é ilustrado pela figura 13, onde pode-se
observar que a característica furo transversal da família 2 foi alterada. O resultado obtido nesta
situação indica que a família 2 deve receber a nova peça, como era a suposição inicial.
Figura 13 – Matriz R(i,j) alterada e os resultados obtidos.
XIX ENEGEP, Universidade Federal do Rio de Janeiro, Rio de Janeiro, 1999 13
6. LIMITAÇÕES
A técnica de inferência reversa possui basicamente duas limitações. A primeira já foi citada no item
anterior, e está relacionada com os problemas de inconsistência obtidos em algumas situações. A
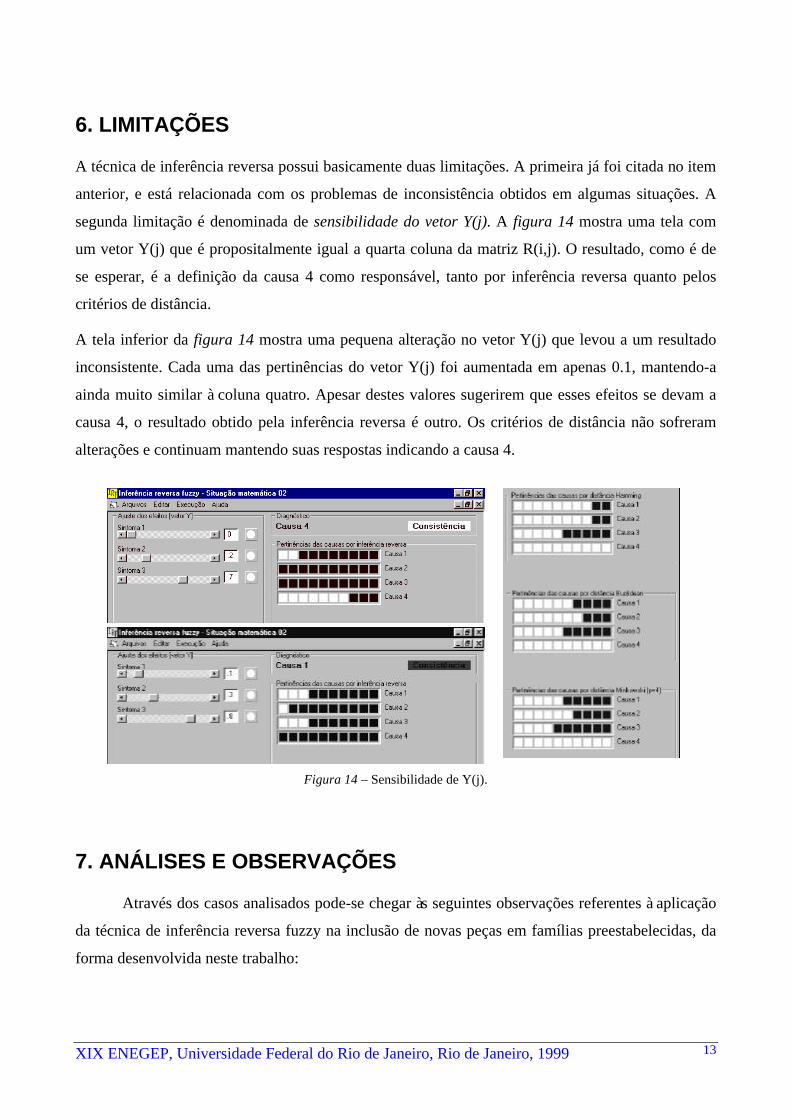
segunda limitação é denominada de sensibilidade do vetor Y(j). A figura 14 mostra uma tela com
um vetor Y(j) que é propositalmente igual a quarta coluna da matriz R(i,j). O resultado, como é de
se esperar, é a definição da causa 4 como responsável, tanto por inferência reversa quanto pelos
critérios de distância.
A tela inferior da figura 14 mostra uma pequena alteração no vetor Y(j) que levou a um resultado
inconsistente. Cada uma das pertinências do vetor Y(j) foi aumentada em apenas 0.1, mantendo-a
ainda muito similar à coluna quatro. Apesar destes valores sugerirem que esses efeitos se devam a
causa 4, o resultado obtido pela inferência reversa é outro. Os critérios de distância não sofreram
alterações e continuam mantendo suas respostas indicando a causa 4.
Figura 14 – Sensibilidade de Y(j).
7. ANÁLISES E OBSERVAÇÕES
Através dos casos analisados pode-se chegar às seguintes observações referentes à aplicação
da técnica de inferência reversa fuzzy na inclusão de novas peças em famílias preestabelecidas, da
forma desenvolvida neste trabalho:

XIX ENEGEP, Universidade Federal do Rio de Janeiro, Rio de Janeiro, 1999 14
• Há grande facilidade de manipulação da base de conhecimento, permitindo-se corrigir ou até
mesmo incorporar novas informações com grande simplicidade. Pode-se trabalhar com
características que ainda não são utilizados por nenhuma família sem que isto afete seu
desempenho.
• Pequenas variações na atribuição das pertinências do vetor Y(j) podem trazer grandes
alterações na resposta, podendo fazer até com que deixe de ser consistente ou fazendo com que
obtenha-se um resultado que leva a um diagnóstico completamente errôneo (figura 14). Esta
situação ocorreu dentro de uma análise matemática específica.
• Os critérios de distância possuem a vantagem de indicarem respostas válidas em qualquer
situação, mas não levam em consideração as características relevantes das peças e famílias,
sendo esta a principal vantagem da técnica de inferência reversa.
Conclui-se que a técnica de inferência reversa fuzzy, da maneira como foi proposta, apresenta-se
como uma ferramenta alternativa para sistemas de diagnóstico. Os resultados de sua aplicação em
Tecnologia de Grupo mostraram que esta ferramenta permite atingir os objetivos propostos com
pequenas restrições, abordadas em exemplos específicos.
8. CONSIDERAÇÕES FINAIS
Fez-se um estudo detalhado da técnica de inferência reversa fuzzy e em seguida desenvolveu-se um
algoritmo que levasse a resolução do problema de forma sistemática. Este algoritmo foi
posteriormente implementado computacionalmente, possibilitando, dessa forma, realizar diversas
análises. Estes testes permitiram concluir que esta técnica realmente realiza a tarefa proposta, apesar
de possuir ainda algumas limitações, que poderão ser alvo de novas pesquisas.
As limitações da inferência reversa são a ocorrência de inconsistências em algumas situações e a
sensibilidade do vetor Y(j). Seu diferencial com relação a técnica dos critérios de distância é a
consideração das características relevantes das peças e famílias envolvidas.
Como sugestão final pode-se propor o desenvolvimento de uma ferramenta que utilize os critérios
de distância juntamente com a inferência reversa fuzzy, criando uma solução que poderá contar com
as vantagens das duas técnicas.

XIX ENEGEP, Universidade Federal do Rio de Janeiro, Rio de Janeiro, 1999 15
9. BIBLIOGRAFIA
Gonçalves Filho, E. V., Computer-aided group technology part family formation based on
pattern recognition techniques, tese de doutoramento, Universidade da Pennsylvania, USA,
1988.
Gorgulho Júnior, J. H. C.; Montevechi, J. A. B., Abordagem baseada nos conceitos de
inteligência artificial para algoritmo de inferência reversa fuzzy, XVI ENEGEP, UNIMEP,
Piracicaba, São Paulo, 1996.
Gorgulho Júnior, J. H. C., Desenvolvimento e aplicação do algoritmo de inferência reversa
fuzzy para problemas de obtenção de similaridades em tecnologia de grupo, dissertação de
mestrado, EFEI, Itajubá, M.G., Brasil, 1998.
Gupta, M. M., Ragade, R. K., Yager, R. R., Advances in fuzzy set theory and applications,
North-Holland, New York, 1979.
Jianying, Z.; Application of the fuzzy clustering analysis and the fuzzy pattern recognition to
group technology, Journal of Nanjing Aeronautical Institute, Vol. 4, No. 1, Outubro, 1987.
Montevechi; J. A. B.; Miyagi; P. E.; Barretto, M. P. R.; Torres, G. L., Inferência reversa fuzzy
para classificação de novas peças em famílias pré-estabelecidas, XV CILAMCE, Belo
Horizonte, Minas Gerais, Brasil, 1405-1412, 1994.
Montevechi, J. A. B.; Gorgulho Júnior, J. H. C.; Uma proposta computacional para inferência
reversa fuzzy, XV ENEGEP, UFSCar, São Carlos, SP, Brasil, 1995.
Montevechi; J. A. B., Contribuição para identificação de similaridades entre peças –
abordagem baseada na lógica fuzzy em sistemas de apoio computadorizados, tese de
doutoramento, Escola Politécnica da Universidade de São Paulo, Brasil, 1995.
Sanchez, E., Medical diagnosis and composite fuzzy relations, in: Gupta, M. M., Ragade, R. K.,
Yager, R. R., 1979.
Terano, T., Asai, K., Sugeno, M., Applied fuzzy systems, Academic Press, Inc., Cambridge,
United Kingdom, 1994.
Top Related