26 de maio de 2011 3 -...
61
Transcript of 26 de maio de 2011 3 -...

26 de maio de 2011 1

26 de maio de 201126 de maio de 2011
Aplicação da robótica na vida real
Professor: Anderson L. S. [email protected]
http://dase.ifpe.edu.br/~alsm
Esta apresentação está sob licençaCreative Commons

26 de maio de 2011 3

26 de maio de 2011
Sistemas ComputacionaisNotável crescimento do uso de sistemascomputacionais em diferentes tipos de aplicações
4

26 de maio de 2011
Onde mais encontramos?• Por que utilizar Sistemas de
controle automatizado?
• Cresce o número de aplicações com restrições temporais;
• Dificuldades de atender essas restrições em um SOPG;
• SOPG não são previsíveis e se preocupam em fornecer um bom desempenho médio para os usuários.
5

26 de maio de 2011
Exemplo – Direção de um carro• Missão: Alcançar um destino a salvo.
• Sistema Controlado: Carro.
• Ambiente de Operação: Condições da estrada.
• Sistema de controle- Humana: Sensores – Visão e Audição do motorista. - Computacional: Sensores - Cameras, Receptor IR e telemetria.
• Controles: Acelerador, Direção, Pedal do Freio.
• Atuadores: Rodas, Motor e Freios.
6

26 de maio de 2011
Exemplo – Direção de um carro (continuação)
• Tarefas Críticas: Dirigir e Freiar.
• Tarefas Não Críticas: Utilizar sistema de som do carro.
• Custo de execução da missão → Solução Eficiente.
• Confiança no motorista → Deve ter tolerância a falhas.
7

Robótica
• A Robótica é uma disciplina que envolve:– Desenho, manufatura, controle e
programação de robôs;– O uso de robôs para resolver problemas;– O estudo dos processos de controle,
sensores e algoritmos utilizados pelos humanos, animais e máquinas;
– A aplicação destes processos de controle e algoritmos aos robôs.
26 de maio de 2011 8

26 de maio de 2011
Onde encontramos mais?• Em projetos de robótica:
• Ex.: A Honda na área de robótica criou um aparelho mais acessível e com a tecnologia assistiva.
9

Onde Sociedade e Robótica se encontram???
26 de maio de 2011
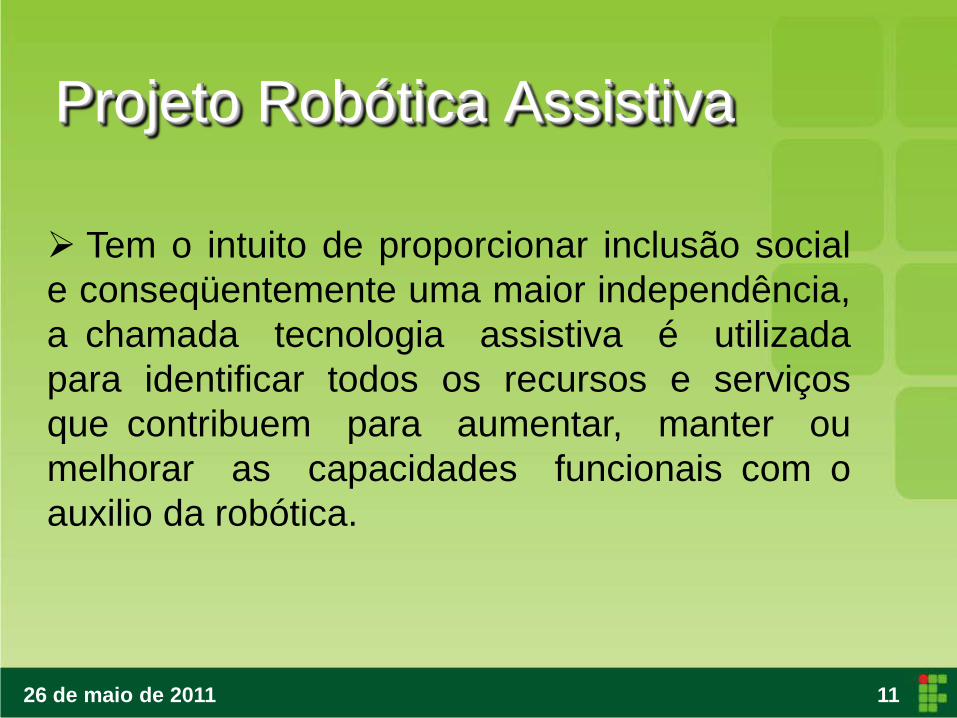
Tem o intuito de proporcionar inclusão sociale conseqüentemente uma maior independência,a chamada tecnologia assistiva é utilizadapara identificar todos os recursos e serviçosque contribuem para aumentar, manter oumelhorar as capacidades funcionais com oauxilio da robótica.
Projeto Robótica Assistiva
11

Mais aplicações
• Se for perigoso para os humanos– Robôs Móveis
• Espaço• Vulcões• Oceanos• Outros planetas
• Se for monótono e sujo– Robôs industriais
26 de maio de 2011 12

O que é um Robô?• É uma máquina que pode ser programada para executar
várias tarefas;• Uma máquina que recebe informação através do
ambiente que a rodeia (sensores) e usa essa informação para executar instruções para realizar determinada tarefa;
• Um robô é uma máquina que pode ser programada para realizar uma grande variedade de tarefas, da mesma forma que um computador é um circuito electrónico que pode ser programado para fazer uma variedade de tarefas (McKerrow)
26 de maio de 2011 13

Se comparado ao humano?
26 de maio de 2011 14
SensoresVisãoOlfato
PaladarAudição
Tato
EstruturaMecânicaEsqueleto
ProcessadorCérebro
SoftwareConhecimento
Rede de ComunicaçãoSistema Nervoso
Fonte de energiaAlimentação
Condutor de energiaSistema sanguíneo
AtuadoresMembros

26 de maio de 2011
1920
1985
(192
2) R
ossu
m's
U
nive
rsal
Rob
ots
(195
0) R
obót
ica
Is
aac
Asim
ov
(149
5) D
avin
ci
C
aval
eiro
Mec
ânic
o
(195
0) T
orto
ise
G
ray
Wal
ter
(195
6) I.
A.
(195
2) T
rans
isto
r
(195
9) C
.I.
(195
5) U
nim
atio
n
(196
9) S
herk
ley
(197
7) H
illar
e
Stan
ford
Car
t
(197
6) Z
80

26 de maio de 2011
1985
2006
(198
9) G
ener
al
Publ
ic L
icen
ce
(200
4)N
ASA
Mar
t Rov
er
(199
7) R
oboc
up
Ope
n Pi
no
(198
6) H
onda
As
imo
(200
0) S
ony
Qrio
(200
5)N
ASA
R
obon
aut
(199
3) C
OG
M.I.
T.
MN
erim

26 de maio de 2011
2006
2010
Ciru
rgia
s C
om
Rob
ôs
Peça
s de
Tea
tro
com
ato
res
Rob
ôs
Inte
rfac
e C
éreb
ro
Máq
uina
Rob
ô co
nduz
C
erim
ônia
de
Cas
amen
to
Prim
eira
Tur
ma
Proj
In
c R
obót
ica
MN
erim
2.0
Rob
ôs R
ealiz
am
ativ
idad
es d
omét
icas
co
mpl
exas
Rob
ôs R
ealiz
am
Con
cert
os
Nan
oBio
Tecn
olog
ia

26 de maio de 2011
2011
2050

Onde a Computação participa?

Rodas Esteiras Várias Pernas
Duas Pernas
Aquáticos Terrestres Aéreos
Infra Vrmelho
Laser EncoderVisão Computacional
Sensor de Contato
Atuador Solenóide
Servo Motor
Liga Memória de Forma
Motor de Passo
Motor Contínuo
Controle de voltagem
PWMPonte H
Giroscópio Acelerômetro Ultra Som GPS
Ambiente
Locomoção
Atuadores
Acionamento
Sensores
Estratégia de Controle
Mecânica
Eletrônica
(Controle)
(É bom saber )
Robótica(Visão Geral)
ZMP Momento de Inércia
Driver de Potência
Operados Autônomos
Controle Remoto
Joystick Processam Externo
PC Embutido
Micro Controlador
Alcalina Lithium SeladaLithium Ion Níquel Cádmio
RS 232Blue Tooth Redes Neurais
Máquina de Estados
Algoritmo Genético
Bateria Dependência
Processamento
Algoritmo
Computação(Base da Cadeia )
USB
Comando
Comunicação
Inteligentes
CPG

Histórico• A palavra robô, vem da palavra Tcheca “robota”, que significa trabalho árduo ou trabalho escravo;
• Ela foi usada pela primeira vez em uma peça de ficção (RUR) do autor KAREL CAPEK, em 1920;
• A palavra Robótica, foi citada pela primeira vez em uma história de ficção (Runaround) do autor Isaac Asimov, em 1942.

Histórico
1ªlei: "Um robô não pode ferir um ser humano ou, permanecendo passivo, deixar um ser humano exposto ao perigo".
2ª lei: "O robô deve obedecer às ordens dadas pelos seres humanos, exceto se tais ordens estiverem em contradição com a primeira lei".
3ª lei:"Um robô deve proteger sua existência na medida em que essa proteção não estiver em contradição com a primeira e a segunda leis".
0ª lei: " Um robô não pode causar mal à humanidade nem permitir que ela própria o faça".
Isaac Asimov também estabeleceu quatro leis muito simples para a robótica:

Histórico – fatos interessantes• 1250
– O Bispo Albertus Magnus organizou um banquete em que os convidados eram servidos por criados de metal. S. Tomás de Aquino chamou então ao Bispo feiticeiro.
• 1640– O filósofo e matemático françês Descartes
construiu uma mulher autómato a que chamou “Ma fille Francine.” Numa viagem que Descartes fez a bordo de um navio. Foi atirado ao mar pelo capitão que achou que a boneca era obra do diabo.
26 de maio de 2011 23

Histórico – fatos interessantes
• 1738– Jacques de Vaucanson construiu im
pato mecânico com mais de 4000 partes. O pato grasnava, tomava banho, bebia água, comia, digeria e ainda evacuava.
• 1805– Maillardet fez uma boneca que
escrevia em Françês e Inglês.
26 de maio de 2011 24

Tipos de Robôs
• Móveis• Industriais• Humanóides
26 de maio de 2011 25

Robôs móveis
26 de maio de 2011 26

Humanóides
26 de maio de 2011 27

Industriais
26 de maio de 2011 28
26 de maio de 2011
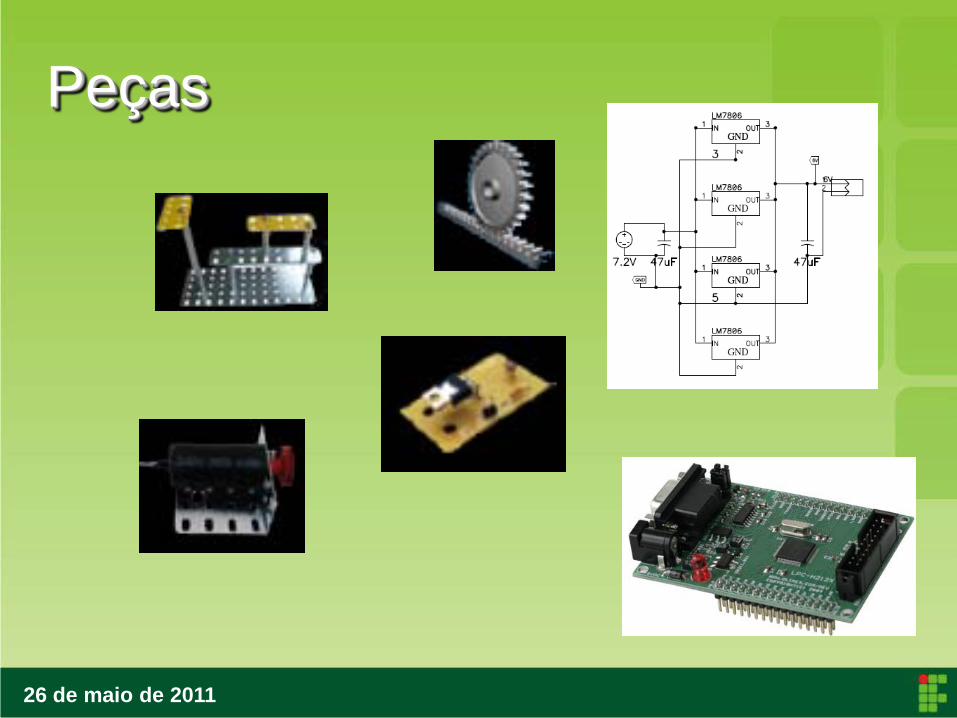
Peças
26 de maio de 2011
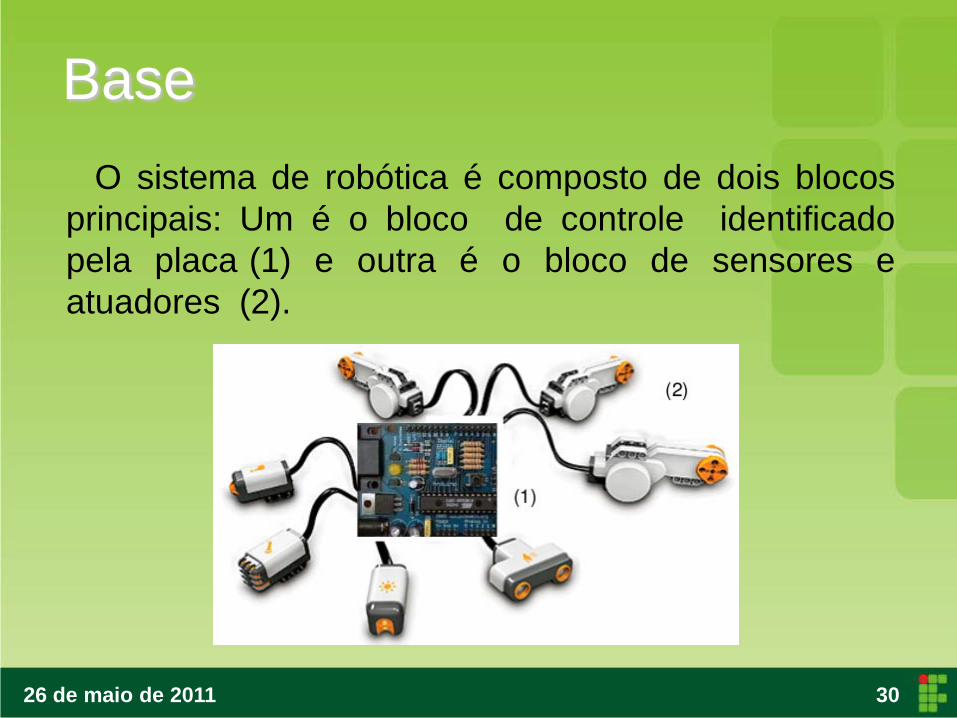
O sistema de robótica é composto de dois blocosprincipais: Um é o bloco de controle identificadopela placa (1) e outra é o bloco de sensores eatuadores (2).
Base
30

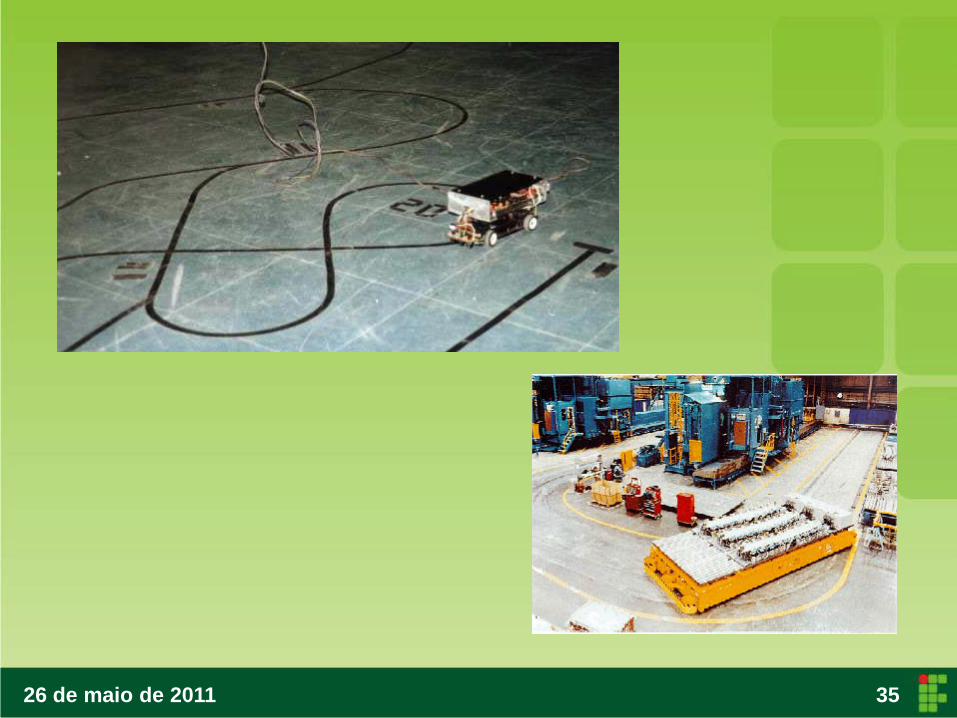
AGVs• Desde os anos 50• Controlados por computador
– Optimização da utilização do AGV– Ordens para proceder ao transporte– Gerir o tráfico de AGVs
• Vários métodos de condução– Guia indutivo ou óptico– Sistemas de navegação
• laser scanners, microwave transponders, inertia gyros, ultrasonic sensors, embedded magnets, camera vision systems
26 de maio de 2011 31

Exemplo – 3PI
26 de maio de 2011 32

Métodos de navegação
• Caminho Fixo• Caminho Livre• Guiamento Indutivo• Guiamento por Giro (magnético)
26 de maio de 2011 33

Guiamento Indutivo
• Vantagens/Desvantagens– Fácil de instalar, operar e
muito fiável– Se o fio for desligado
todos os AGVs param imediatamente
• Pode ser difícil montar os fios.
26 de maio de 2011 34
26 de maio de 2011 35

Onde comprar?
26 de maio de 2011 36

Robôs móveis
26 de maio de 2011 37

26 de maio de 2011
NXT
38

26 de maio de 2011
NXT - Sensores
39

26 de maio de 2011
NXT - Sensores
40

26 de maio de 2011
Esquema de hardware do NXT
41

Qual IDE utilizar?
26 de maio de 2011
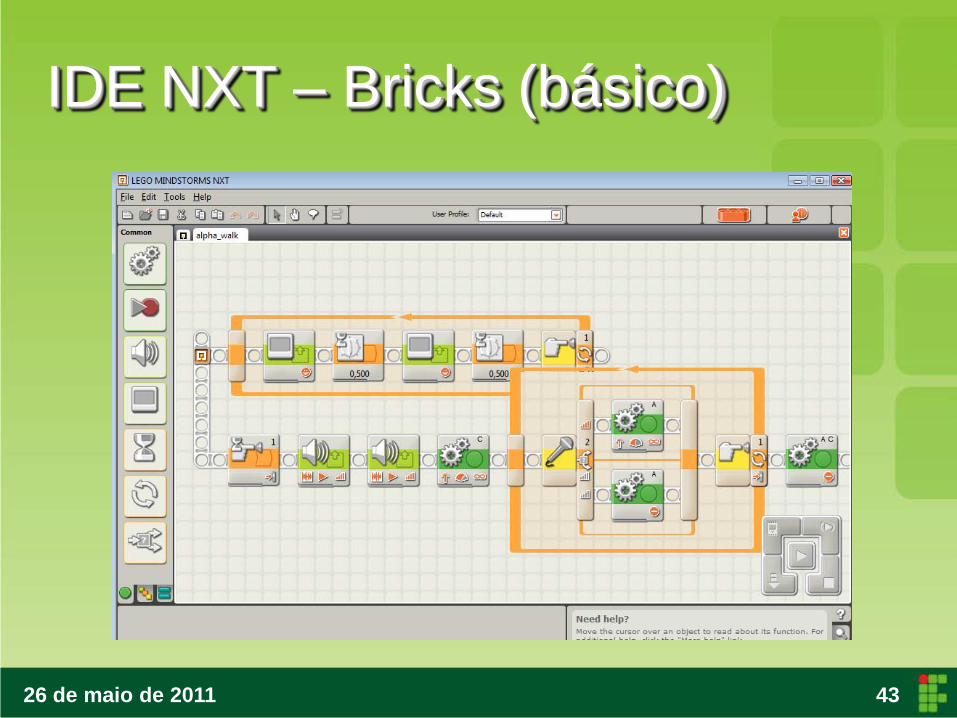
IDE NXT – Bricks (básico)
43

26 de maio de 2011
IDE Arduino (Intermediário)
44

26 de maio de 2011
IDE NXT – Bricks (Avançado)
45

26 de maio de 2011
Linguagens de Programação
• 80% dos comandos são escritos em linguagem C/C++;
• 20% outras abordagens (ADA, LISP, System NX, ...);
• Java (depende.... Se quiser algo aprimorado pode usar o java RT).

26 de maio de 2011
Essas luvas permitiram queum deficiente visual percebaos graus de temperaturaque um determinado objetoestá.
Luvas para reconhecimento de temperatura
47
26 de maio de 2011
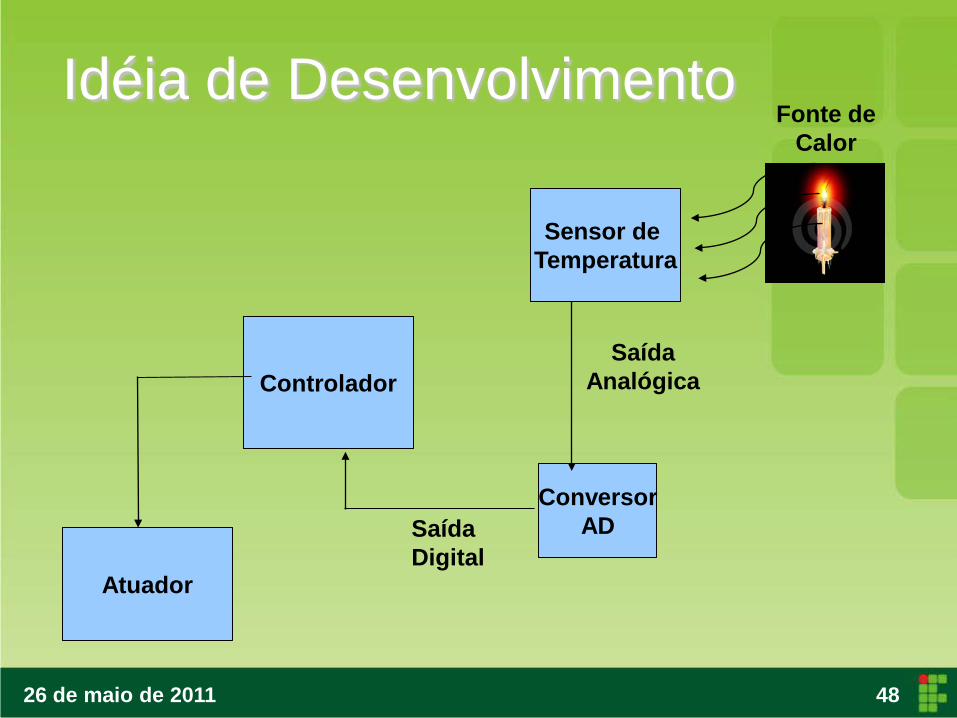
Fonte de Calor
Saída Analógica
Sensor de Temperatura
ConversorAD
Controlador
Atuador
SaídaDigital
Idéia de Desenvolvimento
48

26 de maio de 2011
Idéia de Desenvolvimento
49

26 de maio de 2011
Circuito
50

26 de maio de 2011
Protótipo

Desenvolver um protótipo de um Robô Bípede Autônomo, com um sistema de processamento capaz de executar programas de inteligência artificial, com uma interface para carregamento de algoritmos e comandos de fácil acesso, utilizando componentes de baixo custo e com bastante disponibilidade no Brasil.
Pretende-se sim disponibilizar para outros pesquisadores uma plataforma robótica de baixo custo e que possa ser utilizada para testes exaustivos
Não se pretende com este trabalho desenvolver um dispositivo robótico que desempenhará tarefas específicas.
Delimitação
Espera-se contribuir com o avanço das pesquisas na área de robótica permitindo a difusão de mecanismos robóticos em grupos de pesquisas com poucos recursos financeiros.
Projeto MNerim

MNerim 2.1

Como estudar?
• Cinemática Direta
26 de maio de 2011 54

Como estudar?
• Navegação
26 de maio de 2011 55

26 de maio de 2011
Benefícios da robótica
• Proporcionar novos conceitos teóricos/práticos aos alunos de diversos cursos;
• Desenvolver a capacidade técnica das pessoas envolvidas com sistemas assistivos;
• Auxílio direto a pessoas com deficiência, incluindo diretamente na sociedade.

Novos caminhos
• Suplantar a Humanidade?• Complementar?
- Psicologia e topologia cerebral.- Análise do Comportamento (behaviorismo).- Alternativas a criatividade.
• Continuidade da “raça” humana?- Limitações do corpo físico (tempo, mecânicas...)- “Feitos a sua imagem e semelhança.”

Novas tecnologias
• Agentes móveis- Insetos que se misturam ao ecosistema.- Outras inserções nos meios de análise.
• Cotidiano (carros, casas, wearable computers)
• Nanorobots• Realidade Virtual
- Simulações e utilidades.- Robocode

26 de maio de 2011
Dúvidas?
59

26 de maio de 2011
Mais informações?
• http://dase.ifpe.edu.br/~alsm• http://www.robolivre.org• Contato:

Obrigado pela atenção!!