4-3 - Sensores temperatura.pdf
26
Instrumentação Industrial Sensores (Temperatura) ºF/C In/Out Sensmann Sensmann Sensmann Sensmann
-
Upload
franciscooliveira -
Category
Documents
-
view
35 -
download
1
Transcript of 4-3 - Sensores temperatura.pdf
Instrumentação Industrial
Sensores (Temperatura)
ºF/C In/Out
SensmannSensmannSensmannSensmann
Instrumentação Industrial
Dep. Eng.
Electrotécnica
Dep. Eng.
Electrotécnica
2 / 26
1. Temperatura
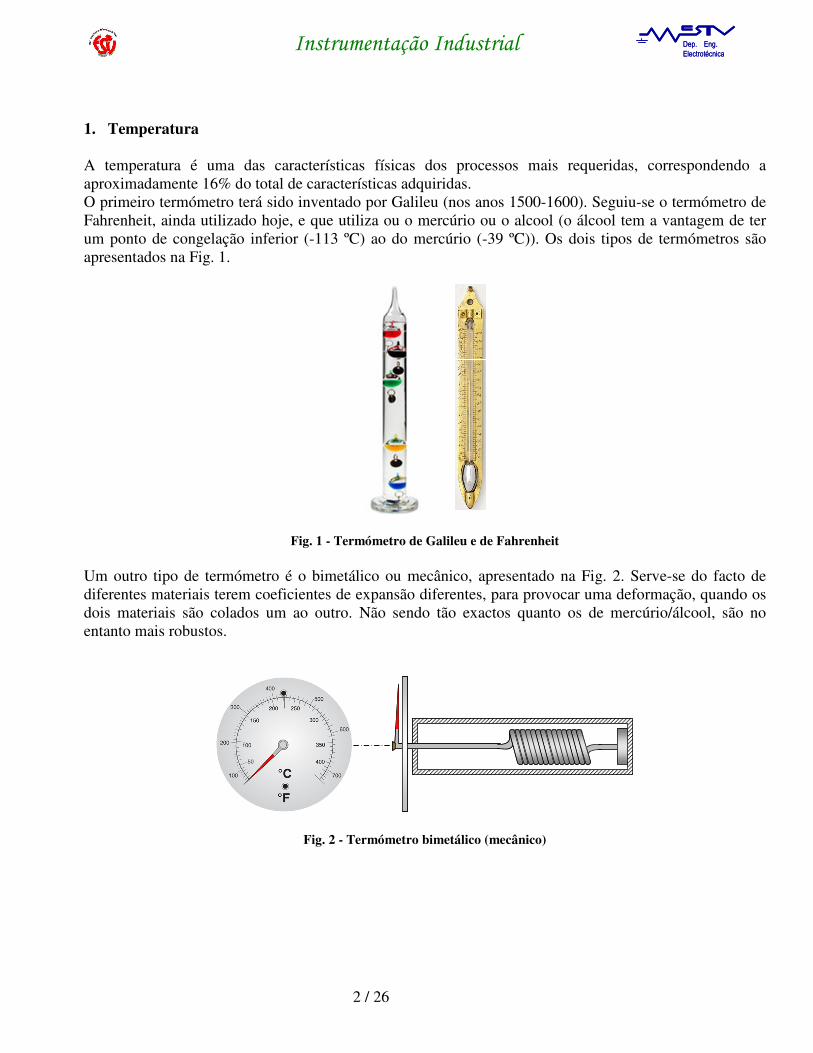
A temperatura é uma das características físicas dos processos mais requeridas, correspondendo a aproximadamente 16% do total de características adquiridas. O primeiro termómetro terá sido inventado por Galileu (nos anos 1500-1600). Seguiu-se o termómetro de Fahrenheit, ainda utilizado hoje, e que utiliza ou o mercúrio ou o alcool (o álcool tem a vantagem de ter um ponto de congelação inferior (-113 ºC) ao do mercúrio (-39 ºC)). Os dois tipos de termómetros são apresentados na Fig. 1.
Fig. 1 - Termómetro de Galileu e de Fahrenheit Um outro tipo de termómetro é o bimetálico ou mecânico, apresentado na Fig. 2. Serve-se do facto de diferentes materiais terem coeficientes de expansão diferentes, para provocar uma deformação, quando os dois materiais são colados um ao outro. Não sendo tão exactos quanto os de mercúrio/álcool, são no entanto mais robustos.
Fig. 2 - Termómetro bimetálico (mecânico)
Instrumentação Industrial
Dep. Eng.
Electrotécnica
Dep. Eng.
Electrotécnica
3 / 26
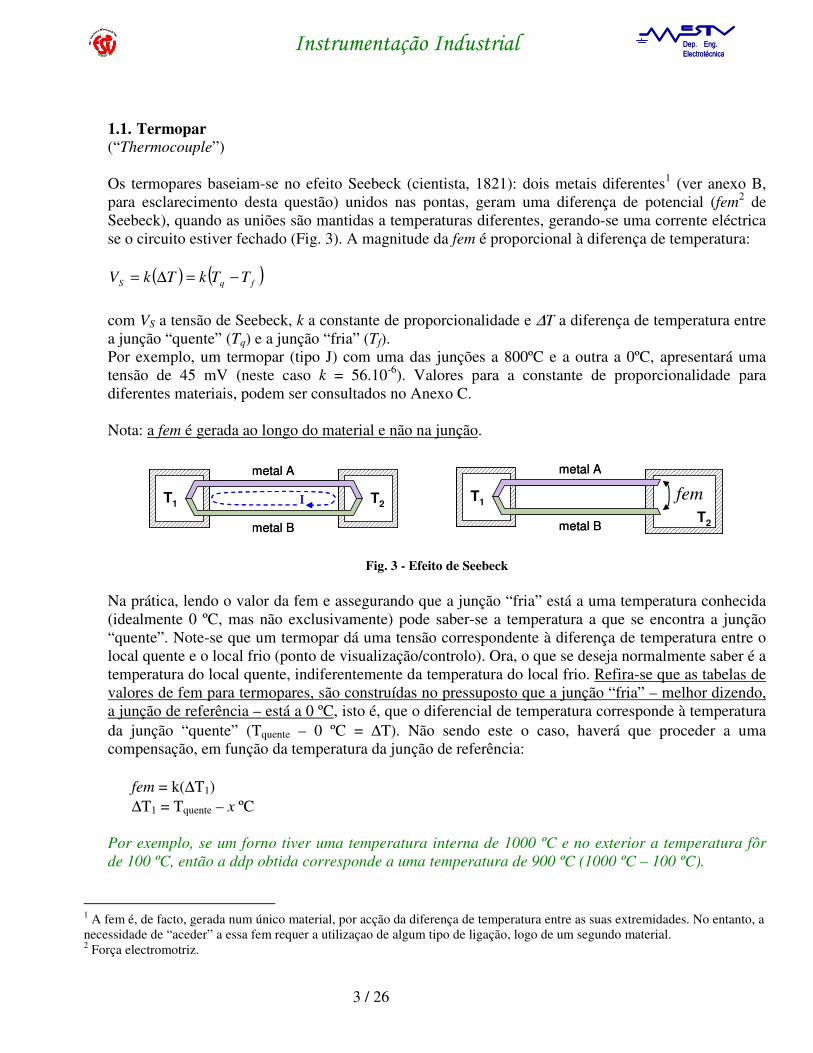
1.1. Termopar (“Thermocouple”) Os termopares baseiam-se no efeito Seebeck (cientista, 1821): dois metais diferentes1 (ver anexo B, para esclarecimento desta questão) unidos nas pontas, geram uma diferença de potencial (fem2 de Seebeck), quando as uniões são mantidas a temperaturas diferentes, gerando-se uma corrente eléctrica se o circuito estiver fechado (Fig. 3). A magnitude da fem é proporcional à diferença de temperatura:
( ) ( )fqS TTkTkV −=∆=
com VS a tensão de Seebeck, k a constante de proporcionalidade e ∆T a diferença de temperatura entre a junção “quente” (Tq) e a junção “fria” (Tf). Por exemplo, um termopar (tipo J) com uma das junções a 800ºC e a outra a 0ºC, apresentará uma tensão de 45 mV (neste caso k = 56.10-6). Valores para a constante de proporcionalidade para diferentes materiais, podem ser consultados no Anexo C. Nota: a fem é gerada ao longo do material e não na junção.
T1 T2I
metal A
metal B
T1 T2I
metal A
metal B
T1
T2
metal A
metal B
femT1
T2
metal A
metal B
fem
Fig. 3 - Efeito de Seebeck Na prática, lendo o valor da fem e assegurando que a junção “fria” está a uma temperatura conhecida (idealmente 0 ºC, mas não exclusivamente) pode saber-se a temperatura a que se encontra a junção “quente”. Note-se que um termopar dá uma tensão correspondente à diferença de temperatura entre o local quente e o local frio (ponto de visualização/controlo). Ora, o que se deseja normalmente saber é a temperatura do local quente, indiferentemente da temperatura do local frio. Refira-se que as tabelas de valores de fem para termopares, são construídas no pressuposto que a junção “fria” – melhor dizendo, a junção de referência – está a 0 ºC, isto é, que o diferencial de temperatura corresponde à temperatura da junção “quente” (Tquente – 0 ºC = ∆T). Não sendo este o caso, haverá que proceder a uma compensação, em função da temperatura da junção de referência:
fem = k(∆T1) ∆T1 = Tquente – x ºC
Por exemplo, se um forno tiver uma temperatura interna de 1000 ºC e no exterior a temperatura fôr de 100 ºC, então a ddp obtida corresponde a uma temperatura de 900 ºC (1000 ºC – 100 ºC).
1 A fem é, de facto, gerada num único material, por acção da diferença de temperatura entre as suas extremidades. No entanto, a necessidade de “aceder” a essa fem requer a utilizaçao de algum tipo de ligação, logo de um segundo material. 2 Força electromotriz.

Instrumentação Industrial
Dep. Eng.
Electrotécnica
Dep. Eng.
Electrotécnica
4 / 26
1000 ºC100 ºC0 ºC
Cu
C
Cu
Cu
VCu(T)
VC(T)
b
VCu(T)
VCu(T)
Erro
aa
tens
ão
temperatura
Tve
rdad
eira
= f(d
dp li
da)
ddp
(lida
)
T = k x ddp0ºC ≠ k x ddp100ºC
aa
Fig. 4 - Junção "fria" a 100 ºC e erro cometido A Fig. 4 evidencia o problema de junções que não estão a 0 ºC, quando é realizada a ligação dos terminais do termopar a intrumentos de medida. No caso, supõe-se que o instrumento de medida tem cablagem em Cobre (Cu) e que o termopar utilizado é do tipo T (Cobre-Constantan (C)). Desta forma, quando os terminais do termopar são ligados ao instrumento de medida, formam-se duas novas junções: Cu-Cu e C-Cu. Supondo que a temperatura da junção é de 100 ºC, e que o instrumento está a 0 ºC, a fem gerada no troço junção–instrumento, seguirá o mesmo declive no que respeita à secção Cu-Cu, ao passo que o declive se altera na secção C-Cu (dado que o material é agora Cu e não C). Esta diferença de declive, introduz um erro, provocado pela mudança de material, sujeito ao mesmo gradiante de temperatura. Se o termopar utilizado fosse do tipo J (Fe-C) seriam duas, as junções a introduzir erro (Fig. 5), no pressuposto que existe um gradiante de temperatura entre os pontos de junção (Fe-Cu e C-Cu) e o ponto de leitura da ddp. Não existindo esse gradiante, o erro reduzir-se-á ao erro provocado pelo facto da temperatura da junção “fria” não ser de 0ºC.
Instrumentação Industrial
Dep. Eng.
Electrotécnica
Dep. Eng.
Electrotécnica
5 / 26
Tquente = 1000 ºCT = 100 ºCT = 0 ºC
Fe
C
Cu
Cu
VFe(T)
VC(T)VCu(T)
VCu(T)ddp
(med
ida)
ddp
(rep
rese
ntat
iva
de T
quen
te)
erro
erro
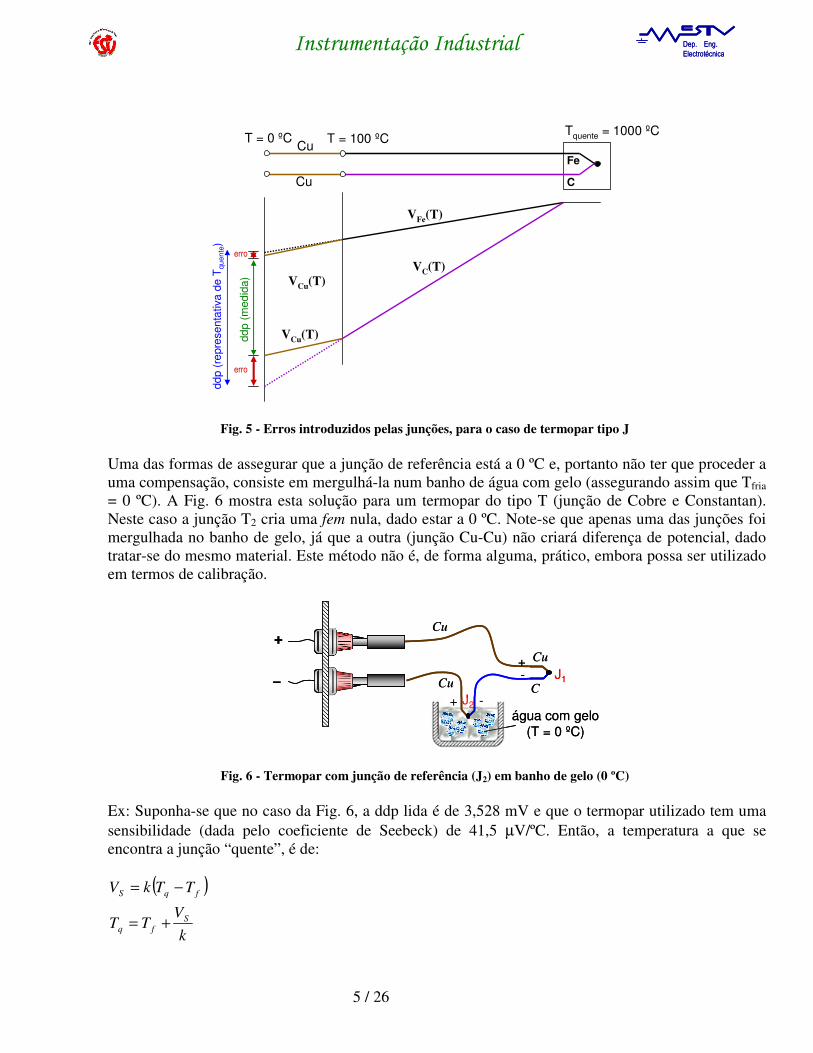
Fig. 5 - Erros introduzidos pelas junções, para o caso de termopar tipo J Uma das formas de assegurar que a junção de referência está a 0 ºC e, portanto não ter que proceder a uma compensação, consiste em mergulhá-la num banho de água com gelo (assegurando assim que Tfria = 0 ºC). A Fig. 6 mostra esta solução para um termopar do tipo T (junção de Cobre e Constantan). Neste caso a junção T2 cria uma fem nula, dado estar a 0 ºC. Note-se que apenas uma das junções foi mergulhada no banho de gelo, já que a outra (junção Cu-Cu) não criará diferença de potencial, dado tratar-se do mesmo material. Este método não é, de forma alguma, prático, embora possa ser utilizado em termos de calibração.
Cu
C
Cu
CuJ1
J2
+
+
-
-
+
–
água com gelo(T = 0 ºC)
Cu
C
Cu
CuJ1
J2
+
+
-
-
+
–
água com gelo(T = 0 ºC)
Fig. 6 - Termopar com junção de referência (J2) em banho de gelo (0 ºC) Ex: Suponha-se que no caso da Fig. 6, a ddp lida é de 3,528 mV e que o termopar utilizado tem uma sensibilidade (dada pelo coeficiente de Seebeck) de 41,5 µV/ºC. Então, a temperatura a que se encontra a junção “quente”, é de:
( )fqS TTkV −=
k
VTT S
fq +=
Instrumentação Industrial
Dep. Eng.
Electrotécnica
Dep. Eng.
Electrotécnica
6 / 26
CTq º 8510.5,41
10.528,3º0
6
3
=+=−
−
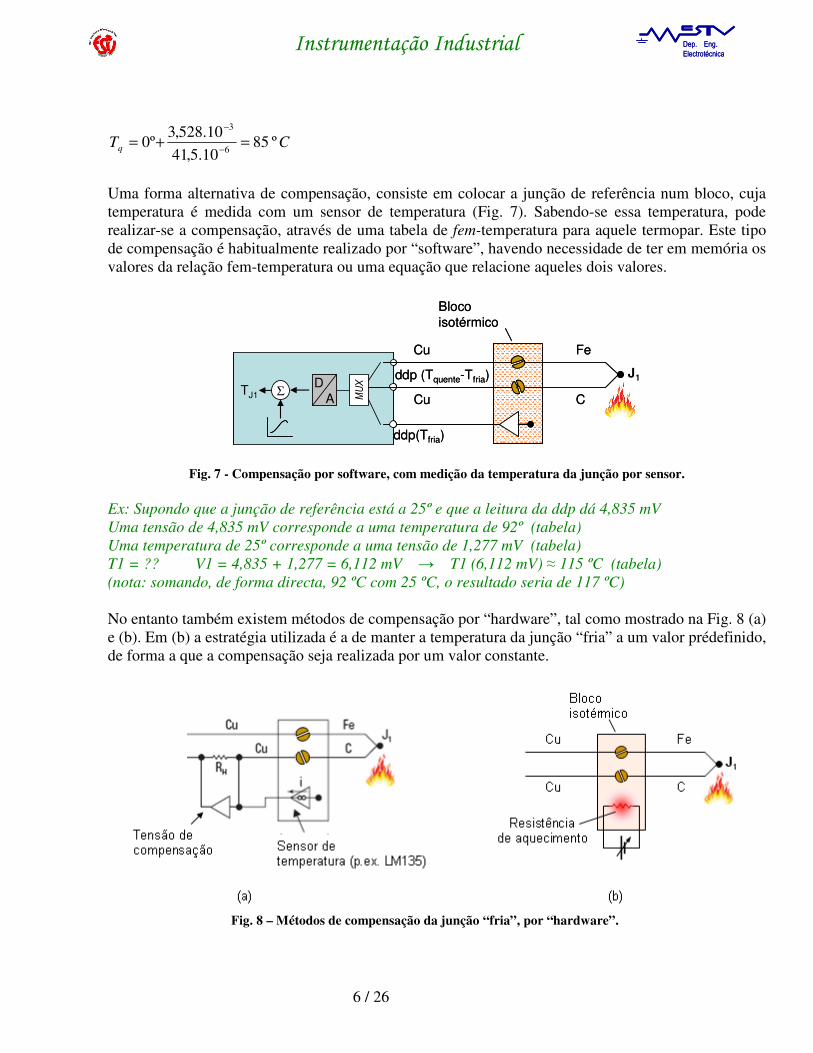
Uma forma alternativa de compensação, consiste em colocar a junção de referência num bloco, cuja temperatura é medida com um sensor de temperatura (Fig. 7). Sabendo-se essa temperatura, pode realizar-se a compensação, através de uma tabela de fem-temperatura para aquele termopar. Este tipo de compensação é habitualmente realizado por “software”, havendo necessidade de ter em memória os valores da relação fem-temperatura ou uma equação que relacione aqueles dois valores.
J1
Fe
C
Cu
Cu
Blocoisotérmico
ddp (Tquente-Tfria)D A M
UX
ddp(Tfria)
ΣTJ1
J1
Fe
C
Cu
Cu
Blocoisotérmico
ddp (Tquente-Tfria)D A
D A M
UX
ddp(Tfria)
ΣTJ1
Fig. 7 - Compensação por software, com medição da temperatura da junção por sensor. Ex: Supondo que a junção de referência está a 25º e que a leitura da ddp dá 4,835 mV Uma tensão de 4,835 mV corresponde a uma temperatura de 92º (tabela) Uma temperatura de 25º corresponde a uma tensão de 1,277 mV (tabela) T1 = ?? V1 = 4,835 + 1,277 = 6,112 mV → T1 (6,112 mV) ≈ 115 ºC (tabela) (nota: somando, de forma directa, 92 ºC com 25 ºC, o resultado seria de 117 ºC) No entanto também existem métodos de compensação por “hardware”, tal como mostrado na Fig. 8 (a) e (b). Em (b) a estratégia utilizada é a de manter a temperatura da junção “fria” a um valor prédefinido, de forma a que a compensação seja realizada por um valor constante.
Fig. 8 – Métodos de compensação da junção “fria”, por “hardware”.
Instrumentação Industrial
Dep. Eng.
Electrotécnica
Dep. Eng.
Electrotécnica
7 / 26
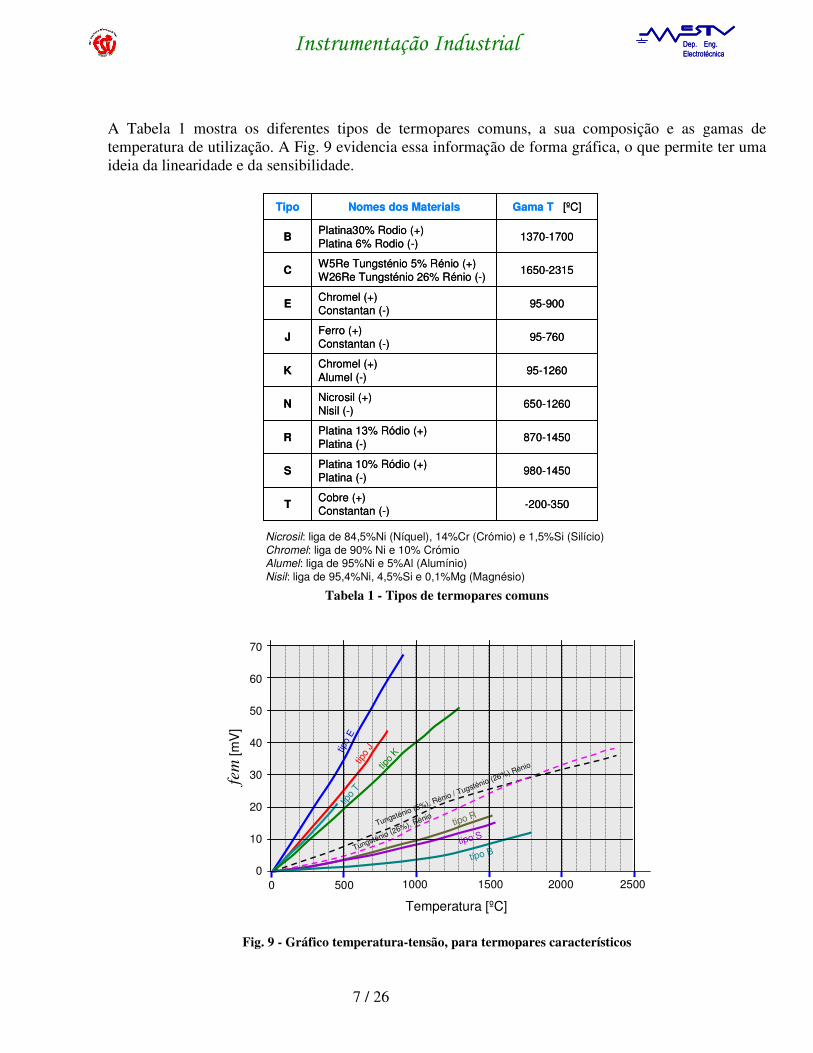
A Tabela 1 mostra os diferentes tipos de termopares comuns, a sua composição e as gamas de temperatura de utilização. A Fig. 9 evidencia essa informação de forma gráfica, o que permite ter uma ideia da linearidade e da sensibilidade.
Nicrosil: liga de 84,5%Ni (Níquel), 14%Cr (Crómio) e 1,5%Si (Silício) Chromel: liga de 90% Ni e 10% CrómioAlumel: liga de 95%Ni e 5%Al (Alumínio)Nisil: liga de 95,4%Ni, 4,5%Si e 0,1%Mg (Magnésio)
-200-350Cobre (+) Constantan (-)
T
980-1450Platina 10% Ródio (+) Platina (-)
S
870-1450Platina 13% Ródio (+) Platina (-)
R
650-1260Nicrosil (+) Nisil (-)
N
95-1260Chromel (+) Alumel (-)
K
95-760Ferro (+) Constantan (-)
J
95-900Chromel (+) Constantan (-)
E
1650-2315W5Re Tungsténio 5% Rénio (+) W26Re Tungsténio 26% Rénio (-)
C
1370-1700Platina30% Rodio (+) Platina 6% Rodio (-)
B
Gama T [ºC] Nomes dos MaterialsTipo
-200-350Cobre (+) Constantan (-)
T
980-1450Platina 10% Ródio (+) Platina (-)
S
870-1450Platina 13% Ródio (+) Platina (-)
R
650-1260Nicrosil (+) Nisil (-)
N
95-1260Chromel (+) Alumel (-)
K
95-760Ferro (+) Constantan (-)
J
95-900Chromel (+) Constantan (-)
E
1650-2315W5Re Tungsténio 5% Rénio (+) W26Re Tungsténio 26% Rénio (-)
C
1370-1700Platina30% Rodio (+) Platina 6% Rodio (-)
B
Gama T [ºC] Nomes dos MaterialsTipo
Tabela 1 - Tipos de termopares comuns
fem
[mV
]
Temperatura [ºC]
70
60
50
40
30
20
10
0
tipo
Etip
o J
tipo
K
tipo
T
tipo R
tipo S
tipo B
Tungsténio (5%), Rénio / Tugsténio (26%) Rénio
Tungsténio (26%), Rénio
0 500 1000 1500 2000 2500
Fig. 9 - Gráfico temperatura-tensão, para termopares característicos

Instrumentação Industrial
Dep. Eng.
Electrotécnica
Dep. Eng.
Electrotécnica
8 / 26
Em termos de construcção dos termopares, este são apresentados de 3 formas: isolado (“isolated”), aterrado (“grounded”) e exposto (“exposed”) - Fig. 10. Estão aqui em jogo duas características: a velocidade de resposta a variações de temperatura e o isolamento do termopar – eléctrico e ambiental3. No primeiro caso (isolado) existem dois meios entre a junção do termopar e a fonte de calor – o ar e a camisa. Desta forma, a energia térmica terá que atravessar a camisa e seguidamente o ar até chegar à junção, sendo desta forma relativamente lento a responder a variações de temperatura. Por outro lado fica eléctrica e físicamente isolado do meio envolvente, o que, particularmente num ambiente industrial, é muitas vezes vantajoso. O segundo caso (aterrado), a junção está colada à camisa, não tendo a energia térmica de atravessar o ar, mas apenas a camisa, o que o torna mais rápido a responder às variações de temperatura. No entanto a ligação física à camisa não o isola do ruído eléctrico que possa existir, embora o isolamento físico continue a existir. O último caso (exposto), constitui-se no de mais rápida resposta a variações de temperatura, já que nada o separa da fonte de calor. No entanto fica físicamente desprotegido (bem como mecânicamente, ficando directamente exposto a forças mecânicas).
isolado aterrado exposto
camisaar
Fig. 10 - Formatos construtivos dos termopares
A velocidade de resposta de um termopar (ou de outro qualquer sensor de temperatura) é caracterizado pela constante de tempo (τ), o tempo que leva, até chegar a 63,2 % da temperatura final. Esta caracterização é mostrada na Fig. 11. Em termopares comerciais típicos, o valor da constante de tempo τ, é da ordem dos 0,01 a 3 segundos.
T
tτ
100%
90%
63,2
% 63,2% = 1-e-1Tsensor
Tfonte_calorT
tττ
100%
90%
63,2
% 63,2% = 1-e-1Tsensor
Tfonte_calor
Tempo de subida a 90%
Fig. 11 - Caracterização temporal de um sensor de temperatura
3 Protecção contra corrosão e outras formas de “ataque” químico.
Instrumentação Industrial
Dep. Eng.
Electrotécnica
Dep. Eng.
Electrotécnica
9 / 26
Os critérios fundamentais de escolha de um termopar passam pela análise dos seguintes aspectos: - Duração da utilização do termopar - Gamas de temperatura a que estará exposto - Tipo de atmosfera a que estará exposto - Velocidade de resposta requerida
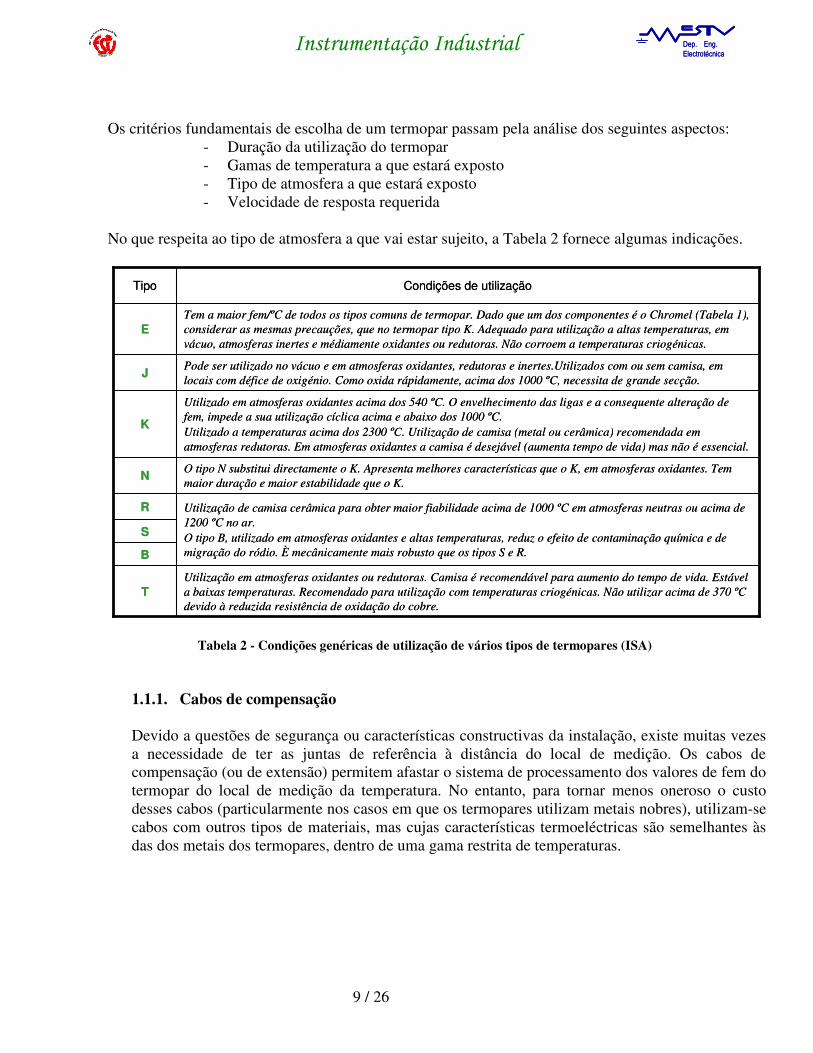
No que respeita ao tipo de atmosfera a que vai estar sujeito, a Tabela 2 fornece algumas indicações.
Utilizado em atmosferas oxidantes acima dos 540 ºC. O envelhecimento das ligas e a consequente alteração de fem, impede a sua utilização cíclica acima e abaixo dos 1000 ºC.Utilizado a temperaturas acima dos 2300 ºC. Utilização de camisa (metal ou cerâmica) recomendada em atmosferas redutoras. Em atmosferas oxidantes a camisa é desejável (aumenta tempo de vida) mas não é essencial.
K
Tem a maior fem/ºC de todos os tipos comuns de termopar. Dado que um dos componentes é o Chromel (Tabela 1), considerar as mesmas precauções, que no termopar tipo K. Adequado para utilização a altas temperaturas, em vácuo, atmosferas inertes e médiamente oxidantes ou redutoras. Não corroem a temperaturas criogénicas.
E
T
B
S
R
N
J
Tipo
Utilização em atmosferas oxidantes ou redutoras. Camisa é recomendável para aumento do tempo de vida. Estável a baixas temperaturas. Recomendado para utilização com temperaturas criogénicas. Não utilizar acima de 370 ºC devido à reduzida resistência de oxidação do cobre.
Utilização de camisa cerâmica para obter maior fiabilidade acima de 1000 ºC em atmosferas neutras ou acima de 1200 ºC no ar.O tipo B, utilizado em atmosferas oxidantes e altas temperaturas, reduz o efeito de contaminação química e de migração do ródio. È mecânicamente mais robusto que os tipos S e R.
O tipo N substitui directamente o K. Apresenta melhores características que o K, em atmosferas oxidantes. Tem maior duração e maior estabilidade que o K.
Pode ser utilizado no vácuo e em atmosferas oxidantes, redutoras e inertes.Utilizados com ou sem camisa, em locais com défice de oxigénio. Como oxida rápidamente, acima dos 1000 ºC, necessita de grande secção.
Condições de utilização
Utilizado em atmosferas oxidantes acima dos 540 ºC. O envelhecimento das ligas e a consequente alteração de fem, impede a sua utilização cíclica acima e abaixo dos 1000 ºC.Utilizado a temperaturas acima dos 2300 ºC. Utilização de camisa (metal ou cerâmica) recomendada em atmosferas redutoras. Em atmosferas oxidantes a camisa é desejável (aumenta tempo de vida) mas não é essencial.
K
Tem a maior fem/ºC de todos os tipos comuns de termopar. Dado que um dos componentes é o Chromel (Tabela 1), considerar as mesmas precauções, que no termopar tipo K. Adequado para utilização a altas temperaturas, em vácuo, atmosferas inertes e médiamente oxidantes ou redutoras. Não corroem a temperaturas criogénicas.
E
T
B
S
R
N
J
Tipo
Utilização em atmosferas oxidantes ou redutoras. Camisa é recomendável para aumento do tempo de vida. Estável a baixas temperaturas. Recomendado para utilização com temperaturas criogénicas. Não utilizar acima de 370 ºC devido à reduzida resistência de oxidação do cobre.
Utilização de camisa cerâmica para obter maior fiabilidade acima de 1000 ºC em atmosferas neutras ou acima de 1200 ºC no ar.O tipo B, utilizado em atmosferas oxidantes e altas temperaturas, reduz o efeito de contaminação química e de migração do ródio. È mecânicamente mais robusto que os tipos S e R.
O tipo N substitui directamente o K. Apresenta melhores características que o K, em atmosferas oxidantes. Tem maior duração e maior estabilidade que o K.
Pode ser utilizado no vácuo e em atmosferas oxidantes, redutoras e inertes.Utilizados com ou sem camisa, em locais com défice de oxigénio. Como oxida rápidamente, acima dos 1000 ºC, necessita de grande secção.
Condições de utilização
Tabela 2 - Condições genéricas de utilização de vários tipos de termopares (ISA)
1.1.1. Cabos de compensação Devido a questões de segurança ou características constructivas da instalação, existe muitas vezes a necessidade de ter as juntas de referência à distância do local de medição. Os cabos de compensação (ou de extensão) permitem afastar o sistema de processamento dos valores de fem do termopar do local de medição da temperatura. No entanto, para tornar menos oneroso o custo desses cabos (particularmente nos casos em que os termopares utilizam metais nobres), utilizam-se cabos com outros tipos de materiais, mas cujas características termoeléctricas são semelhantes às das dos metais dos termopares, dentro de uma gama restrita de temperaturas.
Instrumentação Industrial
Dep. Eng.
Electrotécnica
Dep. Eng.
Electrotécnica
10 / 26
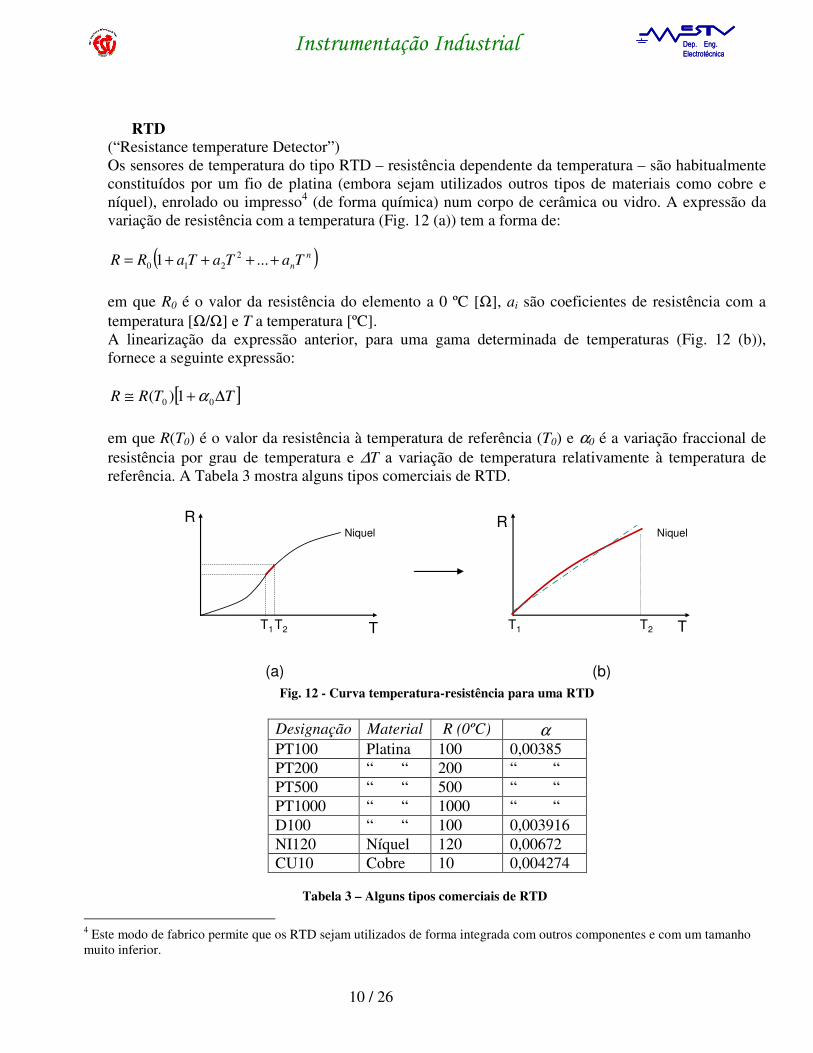
RTD (“Resistance temperature Detector”) Os sensores de temperatura do tipo RTD – resistência dependente da temperatura – são habitualmente constituídos por um fio de platina (embora sejam utilizados outros tipos de materiais como cobre e níquel), enrolado ou impresso4 (de forma química) num corpo de cerâmica ou vidro. A expressão da variação de resistência com a temperatura (Fig. 12 (a)) tem a forma de:
( )nnTaTaTaRR ++++= ...1 2
210
em que R0 é o valor da resistência do elemento a 0 ºC [Ω], ai são coeficientes de resistência com a temperatura [Ω/Ω] e T a temperatura [ºC]. A linearização da expressão anterior, para uma gama determinada de temperaturas (Fig. 12 (b)), fornece a seguinte expressão:
[ ]TTRR ∆+≅ 00 1)( α
em que R(T0) é o valor da resistência à temperatura de referência (T0) e α0 é a variação fraccional de resistência por grau de temperatura e ∆T a variação de temperatura relativamente à temperatura de referência. A Tabela 3 mostra alguns tipos comerciais de RTD.
T
RNiquel
T1T2 T
RNiquel
T1 T2
(a) (b) Fig. 12 - Curva temperatura-resistência para uma RTD
Designação Material R (0ºC) α PT100 Platina 100 0,00385 PT200 “ “ 200 “ “ PT500 “ “ 500 “ “ PT1000 “ “ 1000 “ “ D100 “ “ 100 0,003916 NI120 Níquel 120 0,00672 CU10 Cobre 10 0,004274
Tabela 3 – Alguns tipos comerciais de RTD
4 Este modo de fabrico permite que os RTD sejam utilizados de forma integrada com outros componentes e com um tamanho muito inferior.

Instrumentação Industrial
Dep. Eng.
Electrotécnica
Dep. Eng.
Electrotécnica
11 / 26
As RTD são, comparativamente com os termopares, mais lentos e apenas utilizáveis até temperaturas da ordem dos 850 ºC (a gama utilizável vai dos -200 ºC aos 850 ºC). Paralelamente, não necessitam de compensação e são tendencialmente mais lineares que os termopares, fornecendo uma tensão, por grau, mais elevada que aqueles. A Fig. 13 mostra um exemplo de valores de resistência com a temperatura para uma Pt100. A medição da temperatura absoluta também não requer uma referência, contráriamente aos termopares.
Fig. 13 - Exemplo de valores T-R para uma Pt100 (Gilson Engineering)
A natureza resistiva das RTD implica a sua utilização como braço de uma ponte o que implica uma estrutura mais complexa e uma alimentação. A alimentação acaba por introduzir um erro, devido ao aquecimento por efeito de Joule da RTD (ver acondicionamento/pontes para minorização destes efeitos). Apresentam uma resolução da ordem dos 0,385 Ω/ºC (Pt100) PT100

Instrumentação Industrial
Dep. Eng.
Electrotécnica
Dep. Eng.
Electrotécnica
12 / 26
1.2. Termístor (“Thermistor” ou “Thermally Sensitive Resistor”) Este tipo de sensor é realizado com base em materiais semicondutores, cuja resistência diminui com o aumento de temperatura, designadas de NTC (“negative temperature coefficient”), embora também existam sensores cuja resistência aumenta com a temperatura, designadas de PTC (“positive temperature coefficient”). A expressão da resistência com a temperatura é dada pela expressão:
−
⋅= 0
11
0TTeRR
β
com R0 a resistência à temperatura de referência (25 ºC), T a temperatura e β um coeficiente que depende do material utilizado A expressão anterior tem a seguinte resolução:
( ) ( )( )273
lnln
13
+++
=RCRBA
T
com T em ºC e R em Ω. O valores de A, B e C são determinados por calibração, medindo os valores de R para temperaturas de valor conhecido:
=
=
=
+++
=
+++
=
+++
=
−
−
8
4
3
3
3
10.304,9
10.364,2
001284,0
273))1801(ln()1801ln(
150
273))5000(ln()5000ln(
125
273))16330(ln()16330ln(
10
C
B
A
CBA
CBA
CBA
180150
500025
16,3300
R (ΩΩΩΩ)T (oC)
180150
500025
16,3300
R (ΩΩΩΩ)T (oC)
Nas NTC, sua referência indica o seu valor à temperatuta de 0 ºC: a Pt100 terá 100 Ω a 0ºC, a Pt 500, 500 Ω a 0 ºC. A dá uma ideia desses valores
0 20 40 60 80 100
40
30
20
10
0
T [ºC]
R [k
Ω]
Fig. 14 - Exemplo para um termístor (NTC de 10 kΩΩΩΩ )
Instrumentação Industrial
Dep. Eng.
Electrotécnica
Dep. Eng.
Electrotécnica
13 / 26
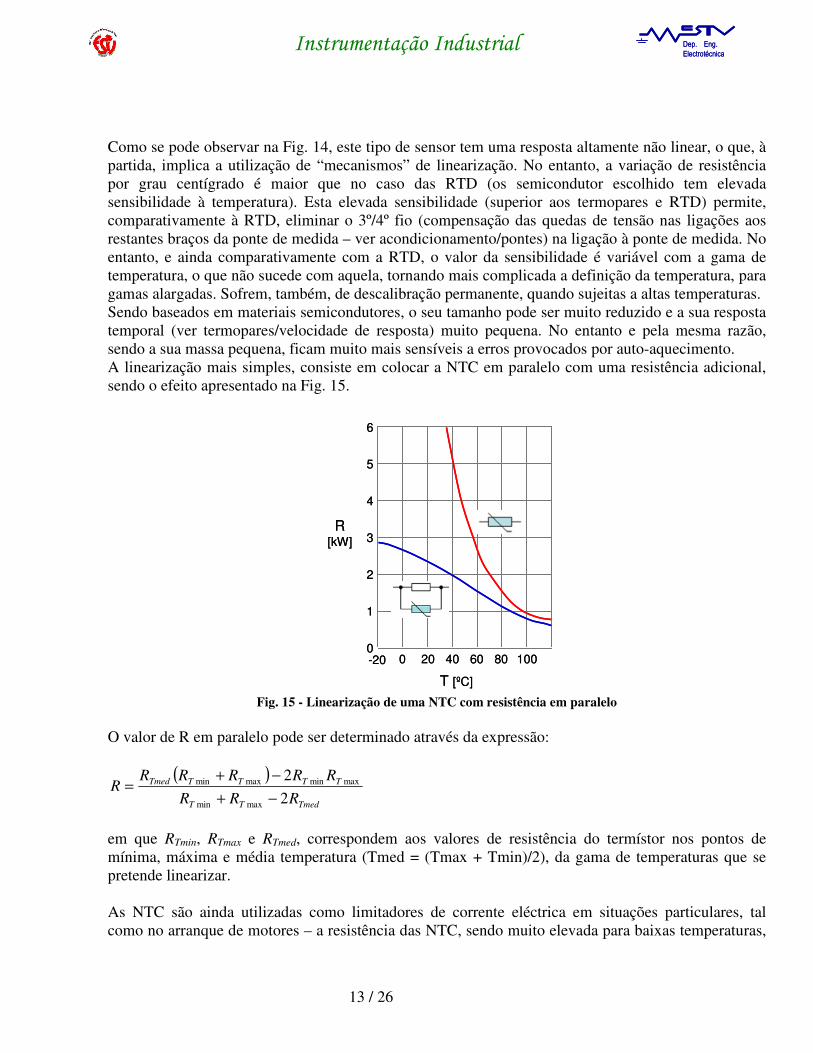
Como se pode observar na Fig. 14, este tipo de sensor tem uma resposta altamente não linear, o que, à partida, implica a utilização de “mecanismos” de linearização. No entanto, a variação de resistência por grau centígrado é maior que no caso das RTD (os semicondutor escolhido tem elevada sensibilidade à temperatura). Esta elevada sensibilidade (superior aos termopares e RTD) permite, comparativamente à RTD, eliminar o 3º/4º fio (compensação das quedas de tensão nas ligações aos restantes braços da ponte de medida – ver acondicionamento/pontes) na ligação à ponte de medida. No entanto, e ainda comparativamente com a RTD, o valor da sensibilidade é variável com a gama de temperatura, o que não sucede com aquela, tornando mais complicada a definição da temperatura, para gamas alargadas. Sofrem, também, de descalibração permanente, quando sujeitas a altas temperaturas. Sendo baseados em materiais semicondutores, o seu tamanho pode ser muito reduzido e a sua resposta temporal (ver termopares/velocidade de resposta) muito pequena. No entanto e pela mesma razão, sendo a sua massa pequena, ficam muito mais sensíveis a erros provocados por auto-aquecimento. A linearização mais simples, consiste em colocar a NTC em paralelo com uma resistência adicional, sendo o efeito apresentado na Fig. 15.
6
5
4
3
2
1
0-20 0 20 40 60 80 100
R[kW]
T [ºC]
6
5
4
3
2
1
0-20 0 20 40 60 80 100
R[kW]
T [ºC] Fig. 15 - Linearização de uma NTC com resistência em paralelo
O valor de R em paralelo pode ser determinado através da expressão:
( )
TmedTT
TTTTTmed
RRR
RRRRRR
2
2
maxmin
maxminmaxmin
−+
−+=
em que RTmin, RTmax e RTmed, correspondem aos valores de resistência do termístor nos pontos de mínima, máxima e média temperatura (Tmed = (Tmax + Tmin)/2), da gama de temperaturas que se pretende linearizar. As NTC são ainda utilizadas como limitadores de corrente eléctrica em situações particulares, tal como no arranque de motores – a resistência das NTC, sendo muito elevada para baixas temperaturas,
Instrumentação Industrial
Dep. Eng.
Electrotécnica
Dep. Eng.
Electrotécnica
14 / 26
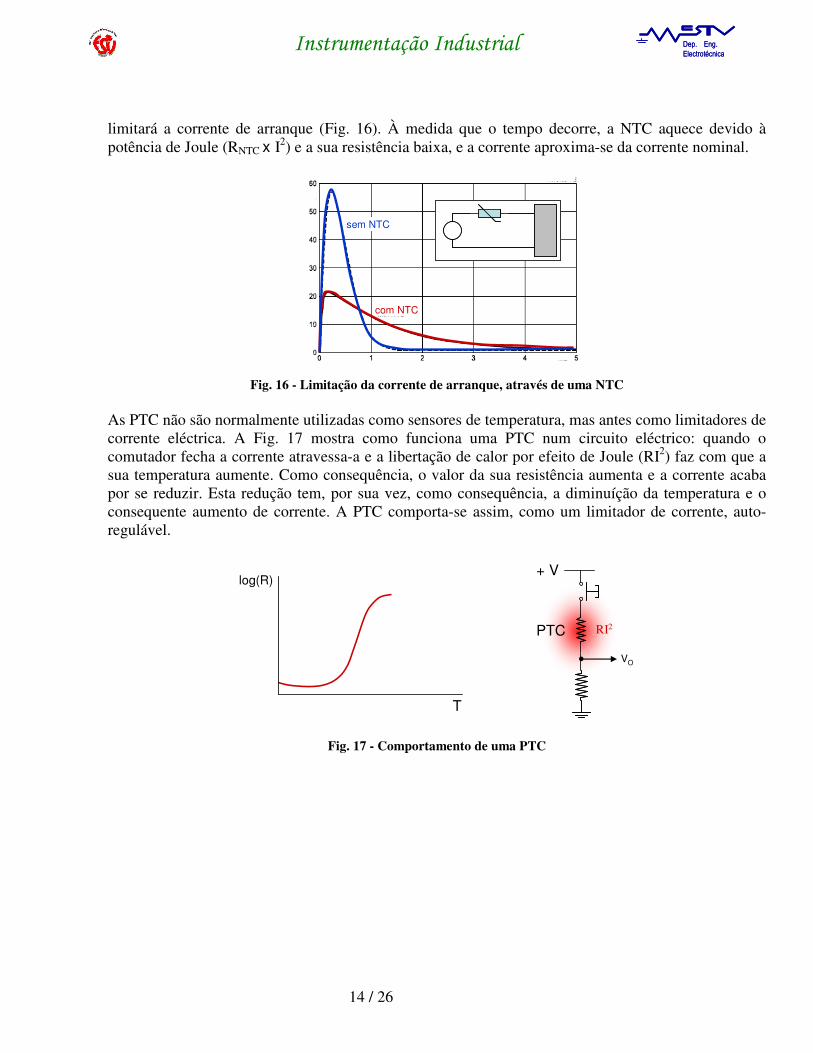
limitará a corrente de arranque (Fig. 16). À medida que o tempo decorre, a NTC aquece devido à potência de Joule (RNTC x I2) e a sua resistência baixa, e a corrente aproxima-se da corrente nominal.
sem NTC
com NTC
sem NTC
com NTC
Fig. 16 - Limitação da corrente de arranque, através de uma NTC
As PTC não são normalmente utilizadas como sensores de temperatura, mas antes como limitadores de corrente eléctrica. A Fig. 17 mostra como funciona uma PTC num circuito eléctrico: quando o comutador fecha a corrente atravessa-a e a libertação de calor por efeito de Joule (RI2) faz com que a sua temperatura aumente. Como consequência, o valor da sua resistência aumenta e a corrente acaba por se reduzir. Esta redução tem, por sua vez, como consequência, a diminuíção da temperatura e o consequente aumento de corrente. A PTC comporta-se assim, como um limitador de corrente, auto-regulável.
T
log(R)
VO
RI2
+ V
PTC
Fig. 17 - Comportamento de uma PTC

Instrumentação Industrial
Dep. Eng.
Electrotécnica
Dep. Eng.
Electrotécnica
15 / 26
1.3. Termotransístor Os sensores de temperatura baseados em transístor têm uma relação entre a tensão base-emissor e a corrente no colector (), dada por:
=
S
CBE I
I
q
kTV ln
com k a constante de Boltzmann, T a temperatura absoluta, q a carga de um electrão, IC a corrente no colector e IS uma corrente relacionada com a geometria e a temperatura do transístor.
VBE = f (T)
Fig. 18 – Sensor de temperature simplificado, baseado num transístor
Este tipo de sensores de temperatura tem no entanto uma gama mais reduzida – na ordem dos -50 ºC aos 150 ºC. No entanto a sua constituíção permite a integração electrónica, o que simplifica a sua utilização, sendo normal uma resolução calibrada de 10 mV/ºC.
Instrumentação Industrial
Dep. Eng.
Electrotécnica
Dep. Eng.
Electrotécnica
16 / 26
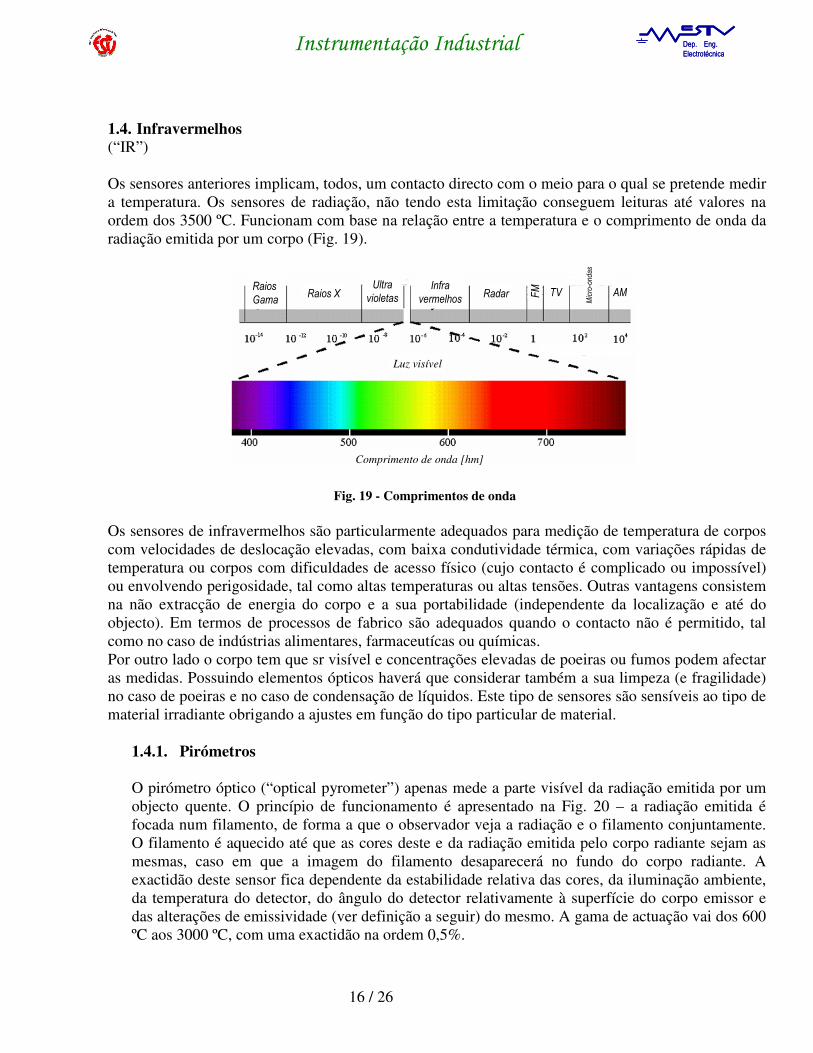
1.4. Infravermelhos (“IR”) Os sensores anteriores implicam, todos, um contacto directo com o meio para o qual se pretende medir a temperatura. Os sensores de radiação, não tendo esta limitação conseguem leituras até valores na ordem dos 3500 ºC. Funcionam com base na relação entre a temperatura e o comprimento de onda da radiação emitida por um corpo (Fig. 19).
Comprimento de onda [hm]
Luz visível
Raios
GamaRaios X
Ultra
violetas
Infra
vermelhos Radar F
M
TV
Mic
ro-o
nd
as
AM
Fig. 19 - Comprimentos de onda Os sensores de infravermelhos são particularmente adequados para medição de temperatura de corpos com velocidades de deslocação elevadas, com baixa condutividade térmica, com variações rápidas de temperatura ou corpos com dificuldades de acesso físico (cujo contacto é complicado ou impossível) ou envolvendo perigosidade, tal como altas temperaturas ou altas tensões. Outras vantagens consistem na não extracção de energia do corpo e a sua portabilidade (independente da localização e até do objecto). Em termos de processos de fabrico são adequados quando o contacto não é permitido, tal como no caso de indústrias alimentares, farmaceutícas ou químicas. Por outro lado o corpo tem que sr visível e concentrações elevadas de poeiras ou fumos podem afectar as medidas. Possuindo elementos ópticos haverá que considerar também a sua limpeza (e fragilidade) no caso de poeiras e no caso de condensação de líquidos. Este tipo de sensores são sensíveis ao tipo de material irradiante obrigando a ajustes em função do tipo particular de material.
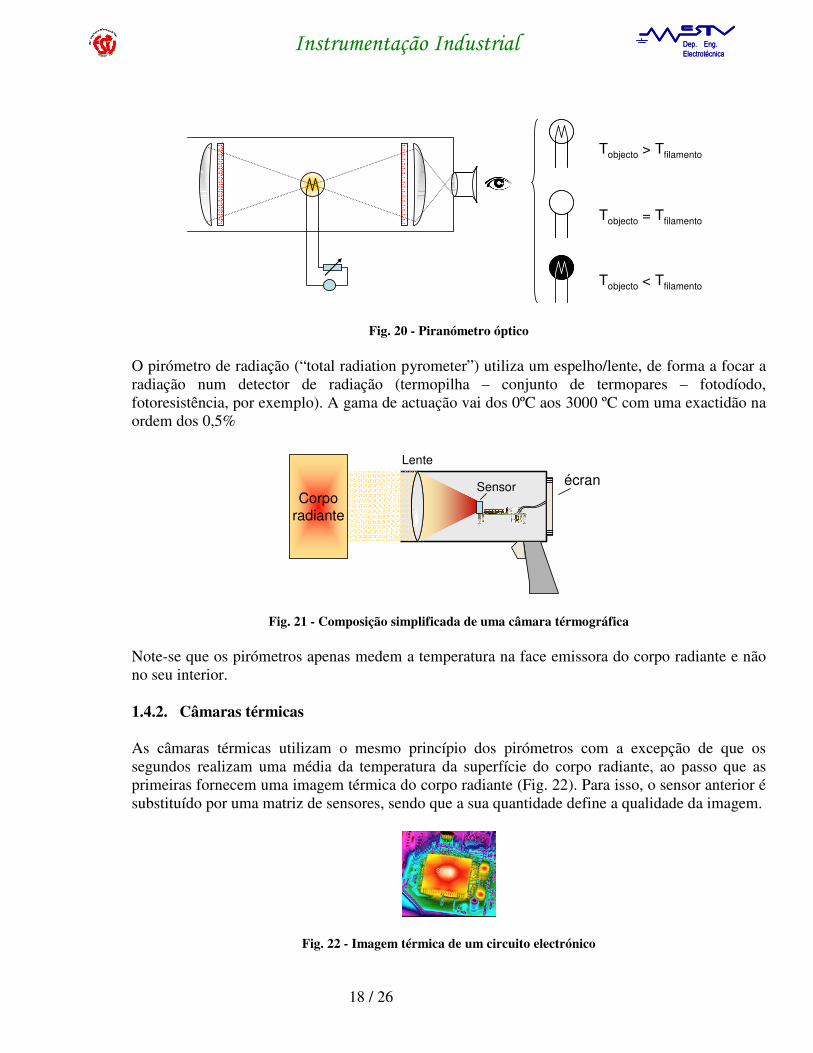
1.4.1. Pirómetros O pirómetro óptico (“optical pyrometer”) apenas mede a parte visível da radiação emitida por um objecto quente. O princípio de funcionamento é apresentado na Fig. 20 – a radiação emitida é focada num filamento, de forma a que o observador veja a radiação e o filamento conjuntamente. O filamento é aquecido até que as cores deste e da radiação emitida pelo corpo radiante sejam as mesmas, caso em que a imagem do filamento desaparecerá no fundo do corpo radiante. A exactidão deste sensor fica dependente da estabilidade relativa das cores, da iluminação ambiente, da temperatura do detector, do ângulo do detector relativamente à superfície do corpo emissor e das alterações de emissividade (ver definição a seguir) do mesmo. A gama de actuação vai dos 600 ºC aos 3000 ºC, com uma exactidão na ordem 0,5%.
Instrumentação Industrial
Dep. Eng.
Electrotécnica
Dep. Eng.
Electrotécnica
17 / 26
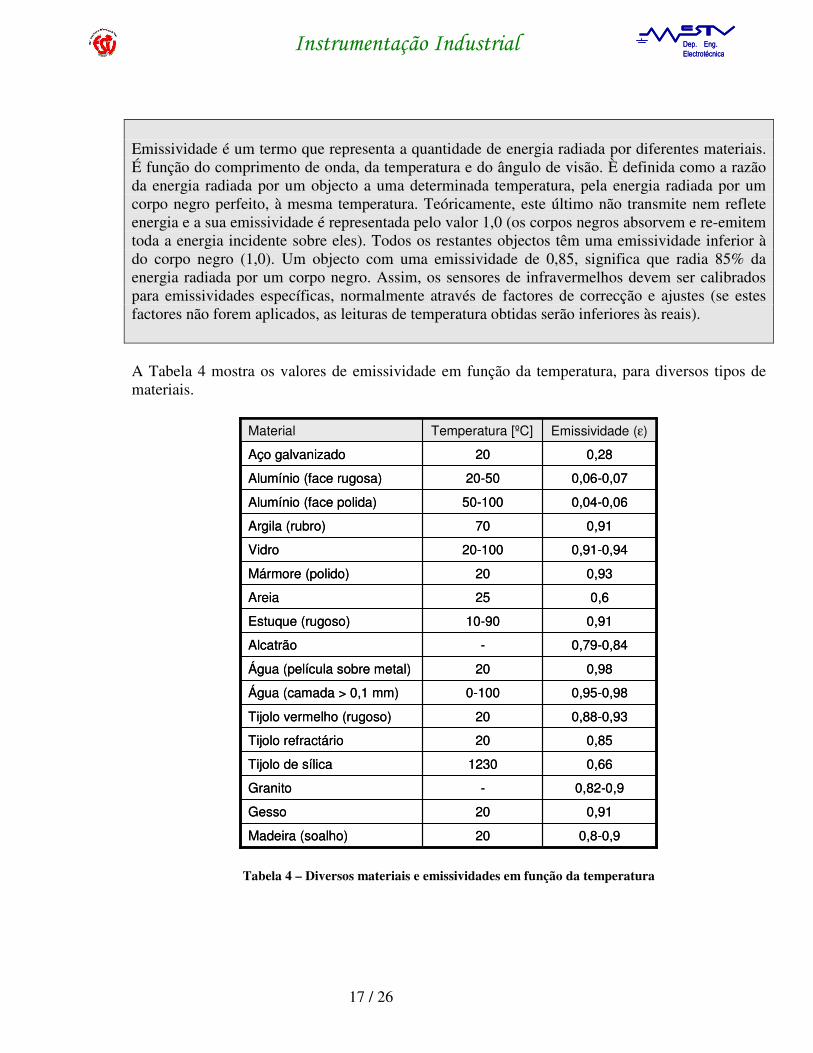
Emissividade é um termo que representa a quantidade de energia radiada por diferentes materiais. É função do comprimento de onda, da temperatura e do ângulo de visão. È definida como a razão da energia radiada por um objecto a uma determinada temperatura, pela energia radiada por um corpo negro perfeito, à mesma temperatura. Teóricamente, este último não transmite nem reflete energia e a sua emissividade é representada pelo valor 1,0 (os corpos negros absorvem e re-emitem toda a energia incidente sobre eles). Todos os restantes objectos têm uma emissividade inferior à do corpo negro (1,0). Um objecto com uma emissividade de 0,85, significa que radia 85% da energia radiada por um corpo negro. Assim, os sensores de infravermelhos devem ser calibrados para emissividades específicas, normalmente através de factores de correcção e ajustes (se estes factores não forem aplicados, as leituras de temperatura obtidas serão inferiores às reais). A Tabela 4 mostra os valores de emissividade em função da temperatura, para diversos tipos de materiais.
0,8-0,920Madeira (soalho)
0,9120Gesso
0,82-0,9-Granito
0,661230Tijolo de sílica
0,8520Tijolo refractário
0,88-0,9320Tijolo vermelho (rugoso)
0,95-0,980-100Água (camada > 0,1 mm)
0,9820Água (película sobre metal)
0,79-0,84-Alcatrão
0,9110-90Estuque (rugoso)
0,625Areia
0,9320Mármore (polido)
0,91-0,9420-100Vidro
0,9170Argila (rubro)
0,04-0,0650-100Alumínio (face polida)
0,06-0,0720-50Alumínio (face rugosa)
0,2820Aço galvanizado
Emissividade (ε)Temperatura [ºC]Material
0,8-0,920Madeira (soalho)
0,9120Gesso
0,82-0,9-Granito
0,661230Tijolo de sílica
0,8520Tijolo refractário
0,88-0,9320Tijolo vermelho (rugoso)
0,95-0,980-100Água (camada > 0,1 mm)
0,9820Água (película sobre metal)
0,79-0,84-Alcatrão
0,9110-90Estuque (rugoso)
0,625Areia
0,9320Mármore (polido)
0,91-0,9420-100Vidro
0,9170Argila (rubro)
0,04-0,0650-100Alumínio (face polida)
0,06-0,0720-50Alumínio (face rugosa)
0,2820Aço galvanizado
Emissividade (ε)Temperatura [ºC]Material
Tabela 4 – Diversos materiais e emissividades em função da temperatura
Instrumentação Industrial
Dep. Eng.
Electrotécnica
Dep. Eng.
Electrotécnica
18 / 26
Tobjecto > Tfilamento
Tobjecto = Tfilamento
Tobjecto < Tfilamento
Fig. 20 - Piranómetro óptico O pirómetro de radiação (“total radiation pyrometer”) utiliza um espelho/lente, de forma a focar a radiação num detector de radiação (termopilha – conjunto de termopares – fotodíodo, fotoresistência, por exemplo). A gama de actuação vai dos 0ºC aos 3000 ºC com uma exactidão na ordem dos 0,5%
Lente
SensorCorpo
radiante
écran
Fig. 21 - Composição simplificada de uma câmara térmográfica Note-se que os pirómetros apenas medem a temperatura na face emissora do corpo radiante e não no seu interior.
1.4.2. Câmaras térmicas As câmaras térmicas utilizam o mesmo princípio dos pirómetros com a excepção de que os segundos realizam uma média da temperatura da superfície do corpo radiante, ao passo que as primeiras fornecem uma imagem térmica do corpo radiante (Fig. 22). Para isso, o sensor anterior é substituído por uma matriz de sensores, sendo que a sua quantidade define a qualidade da imagem.
Fig. 22 - Imagem térmica de um circuito electrónico
Instrumentação Industrial
Dep. Eng.
Electrotécnica
Dep. Eng.
Electrotécnica
19 / 26
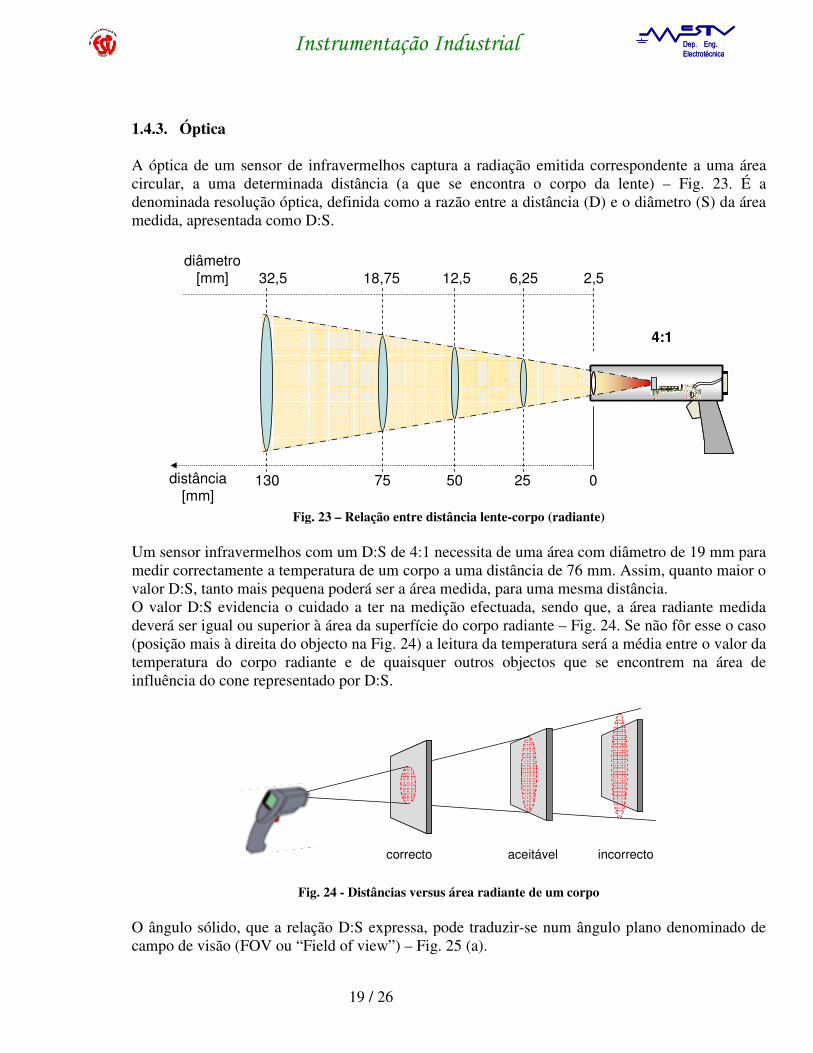
1.4.3. Óptica A óptica de um sensor de infravermelhos captura a radiação emitida correspondente a uma área circular, a uma determinada distância (a que se encontra o corpo da lente) – Fig. 23. É a denominada resolução óptica, definida como a razão entre a distância (D) e o diâmetro (S) da área medida, apresentada como D:S.
2,56,2512,518,7532,5
0255075130distância[mm]
diâmetro[mm]
4:1
Fig. 23 – Relação entre distância lente-corpo (radiante)
Um sensor infravermelhos com um D:S de 4:1 necessita de uma área com diâmetro de 19 mm para medir correctamente a temperatura de um corpo a uma distância de 76 mm. Assim, quanto maior o valor D:S, tanto mais pequena poderá ser a área medida, para uma mesma distância. O valor D:S evidencia o cuidado a ter na medição efectuada, sendo que, a área radiante medida deverá ser igual ou superior à área da superfície do corpo radiante – Fig. 24. Se não fôr esse o caso (posição mais à direita do objecto na Fig. 24) a leitura da temperatura será a média entre o valor da temperatura do corpo radiante e de quaisquer outros objectos que se encontrem na área de influência do cone representado por D:S.
correcto aceitável incorrecto
Fig. 24 - Distâncias versus área radiante de um corpo O ângulo sólido, que a relação D:S expressa, pode traduzir-se num ângulo plano denominado de campo de visão (FOV ou “Field of view”) – Fig. 25 (a).
Instrumentação Industrial
Dep. Eng.
Electrotécnica
Dep. Eng.
Electrotécnica
20 / 26
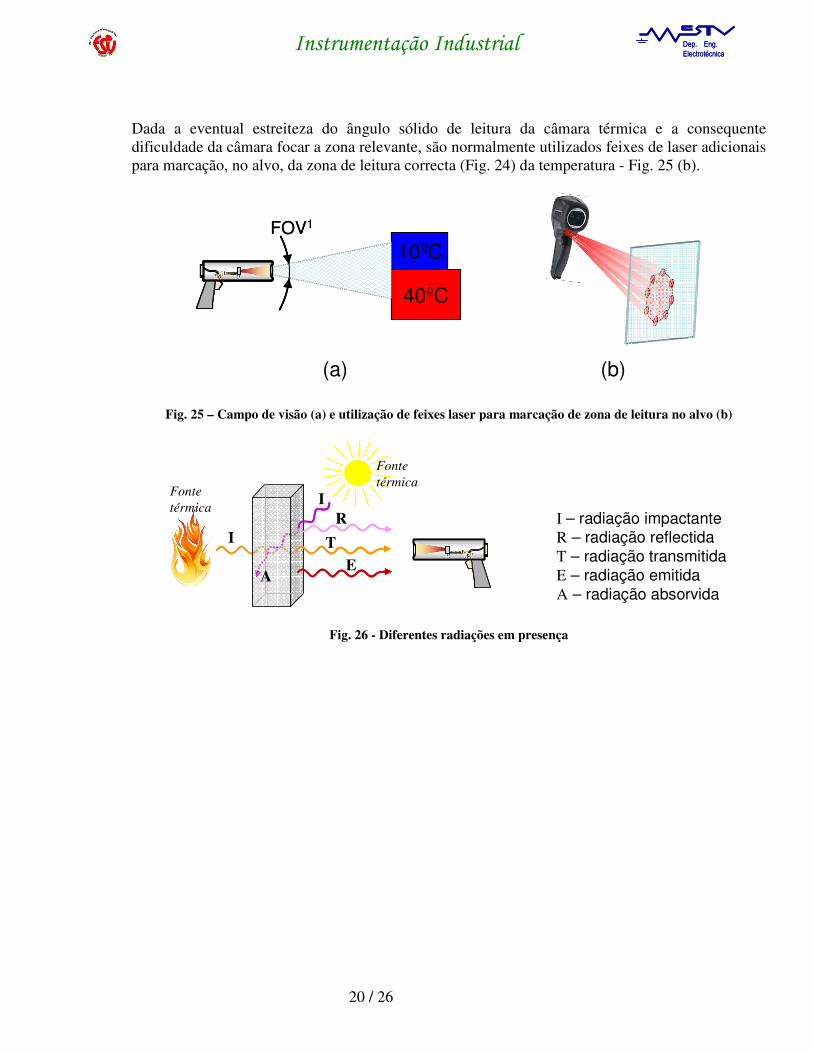
Dada a eventual estreiteza do ângulo sólido de leitura da câmara térmica e a consequente dificuldade da câmara focar a zona relevante, são normalmente utilizados feixes de laser adicionais para marcação, no alvo, da zona de leitura correcta (Fig. 24) da temperatura - Fig. 25 (b).
10ºC
40ºC
FOV1
10ºC
40ºC
FOV1
(a) (b)
Fig. 25 – Campo de visão (a) e utilização de feixes laser para marcação de zona de leitura no alvo (b)
Fontetérmica
Fontetérmica
I
IR
TE
A
I – radiação impactanteR – radiação reflectidaT – radiação transmitidaE – radiação emitidaA – radiação absorvida
Fig. 26 - Diferentes radiações em presença
Instrumentação Industrial
Dep. Eng.
Electrotécnica
Dep. Eng.
Electrotécnica
21 / 26
Anexo A
Jean Charles Athanase Peltier1785 – 1845
Thomas Johann Seebeck1770 – 1831
William Thomson (Lord Kelvin)1824 – 1907
Seebeck (Temperatura → Electricidade): Um circuito constituído por 2 metais diferentes e com junções a temperaturas diferentes, cria uma diferença de potencial (ou força electromotriz, fem). Essa fem é proporcional – (sendo a proporcionalidade dada pelo coeficiente de Seebeck: kS) – à diferença de temperatura:
( )friaquenteS TTkV −=∆
Tfria Tquente
metal A
metal Bmetal B
∆V Peltier (Electricidade → Temperatura): Uma corrente elétrica produz aquecimento ou arrefecimento na junção de 2 metais diferentes. 1838 – Lenz mostra que, dependendo da direção da corrente, calor podia ser removido (transformando água em gelo) ou gerado (derretendo o gelo), numa junção. O calor gerado/removido é proporcional à corrente elétrica, sendo a constante de proporcionalidade o coeficiente de Peltier (kP):
IkT P ×=∆ Thomson:

Instrumentação Industrial
Dep. Eng.
Electrotécnica
Dep. Eng.
Electrotécnica
22 / 26
Inter-relação (termodinâmica) entre Seebeck e Peltier:
absolutaSP Tkk ×=
Calor é absorvido ou gerado, quando uma corrente elétrica percorre um material com um gradiante de temperatura. O calor é proporcional – coeficiente de Thomson – à corrente e ao gradiante de temperatura

Instrumentação Industrial
Dep. Eng.
Electrotécnica
Dep. Eng.
Electrotécnica
23 / 26
Anexo B Formação de uma diferença de potencial, através das forças electromotrizes (fem) produzidas em dois materiais, sujeitos a um gradiante de temperatura.
T
zonas detemperatura uniforme
Tquente Tfria
fem
Mat. A
Mat. B(fio)
Mat. A
Mat. B
Junção ⇒ ddp = 0
ddp+
–

Instrumentação Industrial
Dep. Eng.
Electrotécnica
Dep. Eng.
Electrotécnica
24 / 26
fem
femfem
femfem
fem 1
fem 2
ddp = 0
ddp ≠ 0
Material A
Material A
Material A
Material B

Instrumentação Industrial
Dep. Eng.
Electrotécnica
Dep. Eng.
Electrotécnica
25 / 26
Anexo C
7,5Tungsténio-9Potássio300Germanio
500Telúrio0Platina6,5Cobre
4,5Tântalo-15Níquel-35Constantan
-2Sódio25Nicrómio*3Carbono
6,5Prata0,6Mercúrio7,5Cádmio
440Silício4Chumbo-72Bismuto
900Selénio19Ferro47Antimónio
6Ródio6,5Ouro3,5Alumínio
Coef. Seebeck µV/ºC a 0ºC
MaterialCoef. Seebeck µV/ºC a 0ºC
MaterialCoef. Seebeck µV/ºC a 0ºC
Material
7,5Tungsténio-9Potássio300Germanio
500Telúrio0Platina6,5Cobre
4,5Tântalo-15Níquel-35Constantan
-2Sódio25Nicrómio*3Carbono
6,5Prata0,6Mercúrio7,5Cádmio
440Silício4Chumbo-72Bismuto
900Selénio19Ferro47Antimónio
6Ródio6,5Ouro3,5Alumínio
Coef. Seebeck µV/ºC a 0ºC
MaterialCoef. Seebeck µV/ºC a 0ºC
MaterialCoef. Seebeck µV/ºC a 0ºC
Material
*Nicrómio = Níquel+Crómio+Ferro
Instrumentação Industrial
Dep. Eng.
Electrotécnica
Dep. Eng.
Electrotécnica
26 / 26
Referências K Ehinger et al, Industrial temperature measurement, basics and practice, ABB Thermocouple theory, SensorTec inc., (http://www.sensortecinc.com/docs/technical_resources/Thermocouple_Theory.pdf) RM Park, Thermocouple fundamentals, Marlin Manufacturing Corporation, T Montgomery, Industrial Temperature primer, Wilkerson Instrument Co, (http://www.wici.com/technical/manuals/temp_primer.pdf) Fabricantes: